
1 Esfuerzo
33
INTRODUCCION Desde hace siglos el hombre ha construido naves, edificios, acueductos y otras obras sin necesariamente conocer los principios físicos y leyes de comportamiento, ni menos aún su representación formal en el lenguaje de las matemáticas. Muchas de las grandes obras se construyeron teniendo corno herramienta básica una intuitiva y aguda percepción de los Fenómenos junto a una serie de reglas empíricas de “buena práctica”, compiladas y perfeccionadas en sucesivas generaciones de constructores y artistas. Sin embargo, a pesar de la curiosidad científica de muchos constructores e ingenieros, tuvieron que pasar muchos siglos hasta que el conocimiento científico se desarrollara y organizara formalmente. Fue Galileo (1564-1642) el primero en reconocer el carácter imprescindible de la experimentación en muchas ramas de la ciencia. En la primera parte de su obra Dos nuevas Ciencias, Galileo describe experimentos con pilares y vigas e intenta desarrollar procedimientos de análisis Con los años y gracias al trabajo continuado de científicos e ingenieros, gran parte del conocimiento intuitivo y reglas de buena práctica se transformaron en leyes de comportamiento y procedimientos de análisis. Estas leyes y procedimientos se fueron luego organizando en diferentes disciplinas, una de las cuales es la Resistencia de materiales y que en opinión de muchos se inició con los trabajos de Galileo. Pero, ¿qué es la Resistencia de Materiales?, veamos algunas definiciones previas.
-
Upload
mario-franchescoli-buendia-valderrama -
Category
Documents
-
view
176 -
download
3
Transcript of 1 Esfuerzo

INTRODUCCION
Desde hace siglos el hombre ha construido naves, edificios, acueductos y otras obras sin necesariamente conocer los principios físicos y leyes de comportamiento, ni menos aún su representación formal en el lenguaje de las matemáticas.
Muchas de las grandes obras se construyeron teniendo corno herramienta básica una intuitiva y aguda percepción de los Fenómenos junto a una serie de reglas empíricas de “buena práctica”, compiladas y perfeccionadas en sucesivas generaciones de constructores y artistas. Sin embargo, a pesar de la curiosidad científica de muchos constructores e ingenieros, tuvieron que pasar muchos siglos hasta que el conocimiento científico se desarrollara y organizara formalmente.
Fue Galileo (1564-1642) el primero en reconocer el carácter imprescindible de la experimentación en muchas ramas de la ciencia. En la primera parte de su obra Dos nuevas Ciencias, Galileo describe experimentos con pilares y vigas e intenta desarrollar procedimientos de análisis
Con los años y gracias al trabajo continuado de científicos e ingenieros, gran parte del conocimiento intuitivo y reglas de buena práctica se transformaron en leyes de comportamiento y procedimientos de análisis. Estas leyes y procedimientos se fueron luego organizando en diferentes disciplinas, una de las cuales es la Resistencia de materiales y que en opinión de muchos se inició con los trabajos de Galileo.
Pero, ¿qué es la Resistencia de Materiales?, veamos algunas definiciones previas.
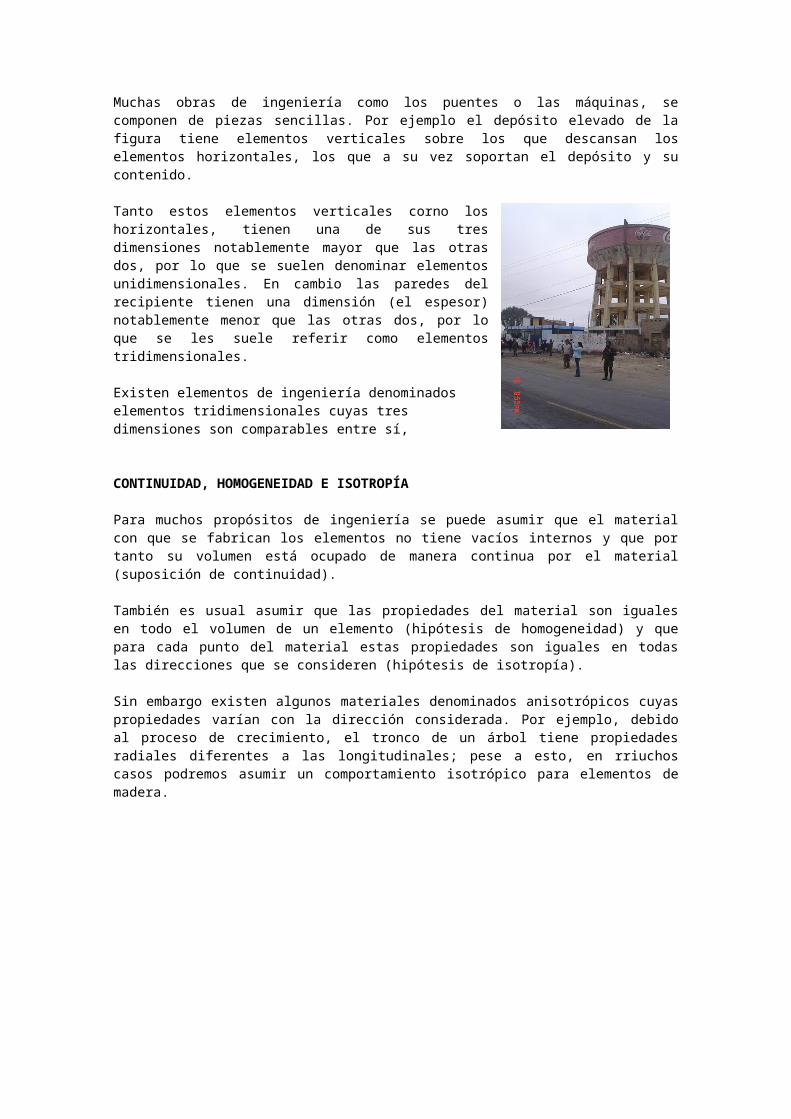
Muchas obras de ingeniería como los puentes o las máquinas, se componen de piezas sencillas. Por ejemplo el depósito elevado de la figura tiene elementos verticales sobre los que descansan los elementos horizontales, los que a su vez soportan el depósito y su contenido.
Tanto estos elementos verticales corno los horizontales, tienen una de sus tres dimensiones notablemente mayor que las otras dos, por lo que se suelen denominar elementos unidimensionales. En cambio las paredes del recipiente tienen una dimensión (el espesor) notablemente menor que las otras dos, por lo que se les suele referir como elementos tridimensionales.
Existen elementos de ingeniería denominados elementos tridimensionales cuyas tres dimensiones son comparables entre sí,
CONTINUIDAD, HOMOGENEIDAD E ISOTROPÍA
Para muchos propósitos de ingeniería se puede asumir que el material con que se fabrican los elementos no tiene vacíos internos y que por tanto su volumen está ocupado de manera continua por el material (suposición de continuidad).
También es usual asumir que las propiedades del material son iguales en todo el volumen de un elemento (hipótesis de homogeneidad) y que para cada punto del material estas propiedades son iguales en todas las direcciones que se consideren (hipótesis de isotropía).
Sin embargo existen algunos materiales denominados anisotrópicos cuyas propiedades varían con la dirección considerada. Por ejemplo, debido al proceso de crecimiento, el tronco de un árbol tiene propiedades radiales diferentes a las longitudinales; pese a esto, en rriuchos casos podremos asumir un comportamiento isotrópico para elementos de madera.
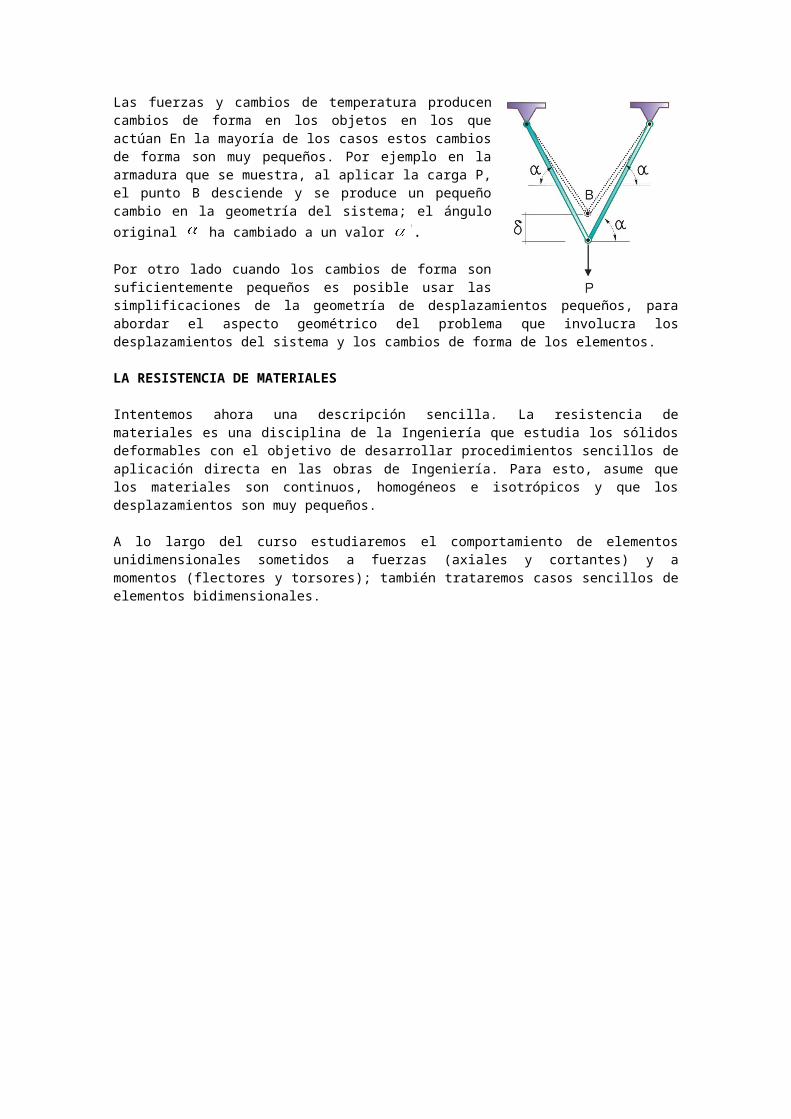
Las fuerzas y cambios de temperatura producen cambios de forma en los objetos en los que actúan En la mayoría de los casos estos cambios de forma son muy pequeños. Por ejemplo en la armadura que se muestra, al aplicar la carga P, el punto B desciende y se produce un pequeño cambio en la geometría del sistema; el ángulo original ha cambiado a un valor .
Por otro lado cuando los cambios de forma son suficientemente pequeños es posible usar las simplificaciones de la geometría de desplazamientos pequeños, para abordar el aspecto geométrico del problema que involucra los desplazamientos del sistema y los cambios de forma de los elementos.
LA RESISTENCIA DE MATERIALES
Intentemos ahora una descripción sencilla. La resistencia de materiales es una disciplina de la Ingeniería que estudia los sólidos deformables con el objetivo de desarrollar procedimientos sencillos de aplicación directa en las obras de Ingeniería. Para esto, asume que los materiales son continuos, homogéneos e isotrópicos y que los desplazamientos son muy pequeños.
A lo largo del curso estudiaremos el comportamiento de elementos unidimensionales sometidos a fuerzas (axiales y cortantes) y a momentos (flectores y torsores); también trataremos casos sencillos de elementos bidimensionales.
En todos los capítulos se dará especial atención al entendimiento intuitivo de los fenómenos y las aplicaciones prácticas. No debemos olvidar que desde sus orígenes y hasta nuestros días, las obras de ingeniería son posibles gracias al entendimiento intuitivo de los fenómenos (mas que al conocimiento científico formal); basta con recordar que Galileo, en el S. XVII, con muy poca fortuna deducía expresiones para el análisis se vigas simples, el panteón Romano tenia ya 1500 años de construido.
ESFUERZOS Y DEFORMACIONES
1.1 Fuerzas internas y externas
Cargas
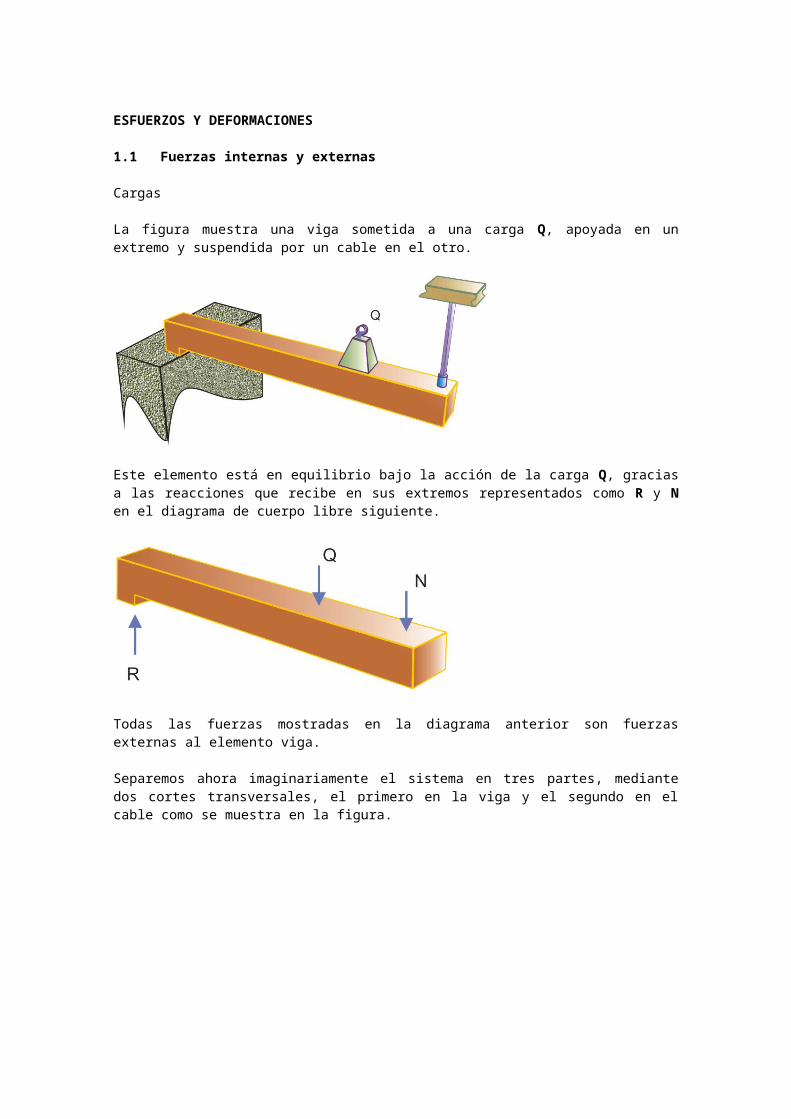
La figura muestra una viga sometida a una carga Q, apoyada en un extremo y suspendida por un cable en el otro.
Este elemento está en equilibrio bajo la acción de la carga Q, gracias a las reacciones que recibe en sus extremos representados como R y N en el diagrama de cuerpo libre siguiente.
Todas las fuerzas mostradas en la diagrama anterior son fuerzas externas al elemento viga.
Separemos ahora imaginariamente el sistema en tres partes, mediante dos cortes transversales, el primero en la viga y el segundo en el cable como se muestra en la figura.

Cada una de estas partes está en equilibrio gracias a las fuerzas y momentos que se producen en las secciones de corte imaginario. Estas acciones que aparecen en la sección de corte, actuando en sentido contrario a cada lado de ésta, se denominan fuerzas internas.
Para la viga del ejemplo, las acciones internas son la fuerza Cortante V y el Momento Flector M. Para el cable, la fuerza interna es a fuerza Normal N. Estas acciones internas se suelen referir en general como fuerzas internas o fuerzas de sección.
Convención De Signos Para Fuerzas Internas
Para precisar el signo de las fuerzas internas, emplearemos un sistema de referencia xyz, con el eje x coincidiendo con el eje longitudinal del elemento y con los ejes y y z ubicados en la sección transversal. Generalmente y y z son ejes centrales (el origen del sistema coincide con el centroide de la sección transversal) y también son ejes principales (el producto de inercia de la sección transversal es nulo).
En el caso mas general, pueden existir hasta 6 fuerzas internas en la sección transversal de un elemento. La figura que sigue muestra la convención de signos asumida como positiva para estas fuerzas internas.
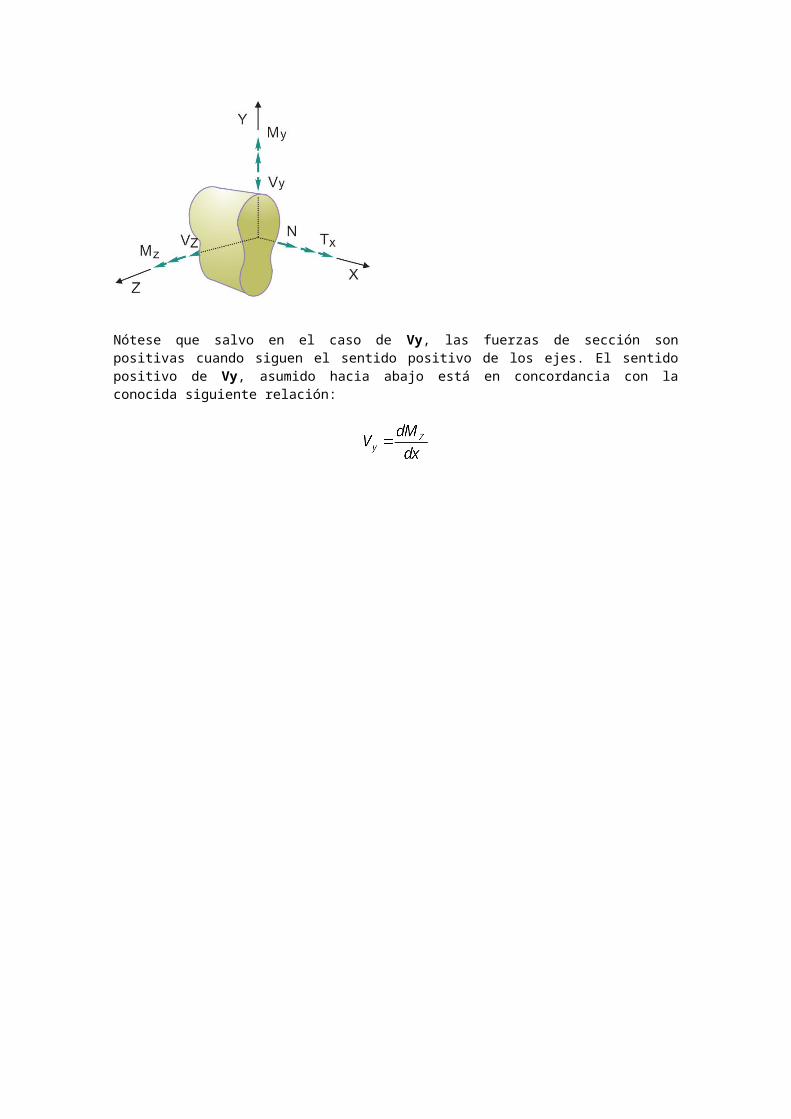
Nótese que salvo en el caso de Vy, las fuerzas de sección son positivas cuando siguen el sentido positivo de los ejes. El sentido positivo de Vy, asumido hacia abajo está en concordancia con la conocida siguiente relación:

1.2 Esfuerzos
Tijeral metálico
Tanto las fuerzas externas como las fuerzas de sección no actúan realmente sobre un punto sino que en verdad lo hacen distribuyéndose sobre un área determinada. Por ejemplo la fuerza Q actúa sobre una región rectangular de la cara superior de la viga, la reacción R se distribuye sobre la superficie rectangular de apoyo la fuerza normal N en el cable se distribuye en la sección transversal de éste y la fuerza cortante V Io hace sobre la sección transversal de la viga.
El cociente de la fuerza y el área en que se distribuye se denomine esfuerzo. Dependiendo de si la fuerza es perpendicular o paralela al área en la que actúa, se denomina esfuerzo normal (
), o esfuerzo cortante ( ).
La unidad de esfuerzo en el Sistema Internacional es el Pascal (Pa) que se expresa como:
los múltiplos más empleados y sus equivalencias son:
En el Sistema Inglés, el esfuerzo se expresa en libras (Ib) o kilo libras (kips), por pulgada cuadrada corno:
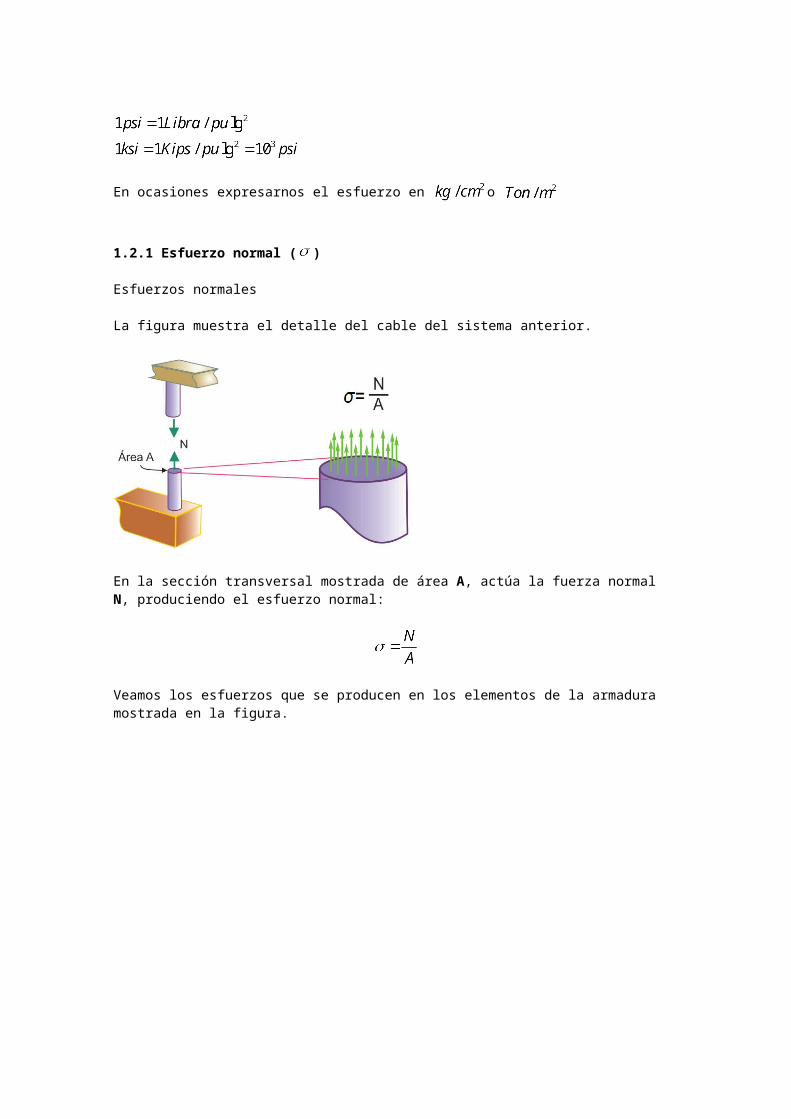
En ocasiones expresarnos el esfuerzo en o
1.2.1 Esfuerzo normal ( )
Esfuerzos normales
La figura muestra el detalle del cable del sistema anterior.
En la sección transversal mostrada de área A, actúa la fuerza normal N, produciendo el esfuerzo normal:
Veamos los esfuerzos que se producen en los elementos de la armadura mostrada en la figura.
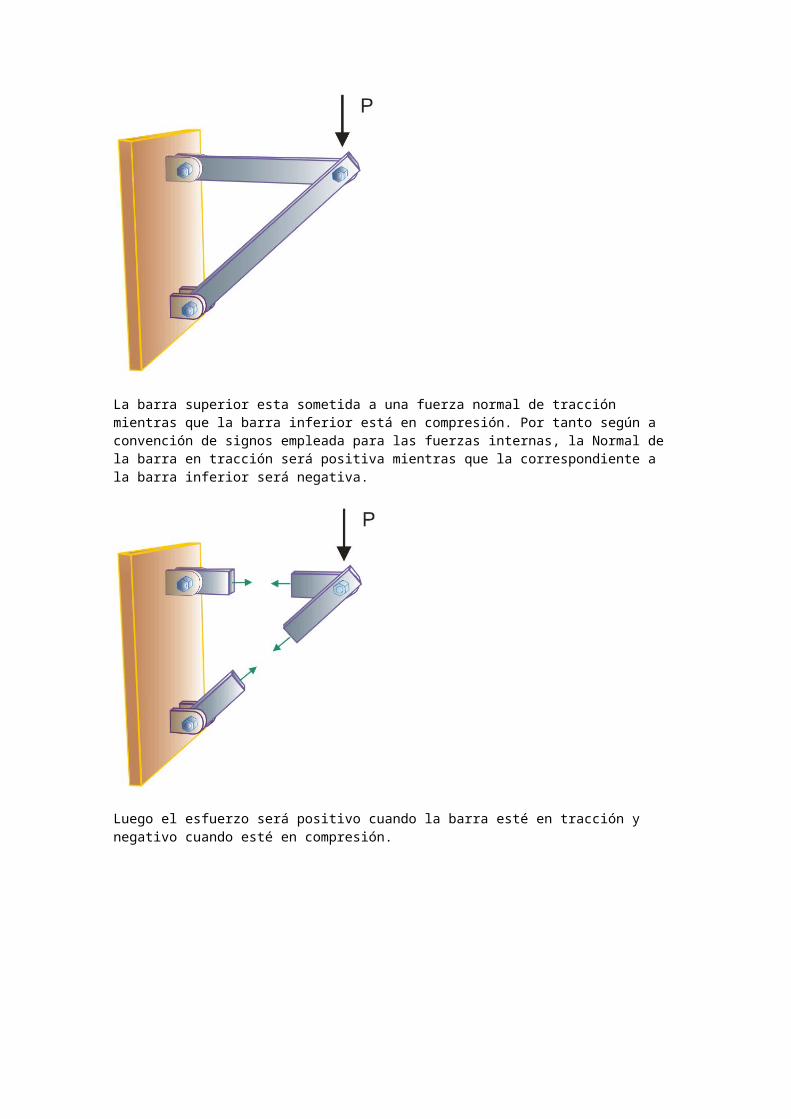
La barra superior esta sometida a una fuerza normal de tracción mientras que la barra inferior está en compresión. Por tanto según a convención de signos empleada para las fuerzas internas, la Normal de la barra en tracción será positiva mientras que la correspondiente a la barra inferior será negativa.
Luego el esfuerzo será positivo cuando la barra esté en tracción y negativo cuando esté en compresión.
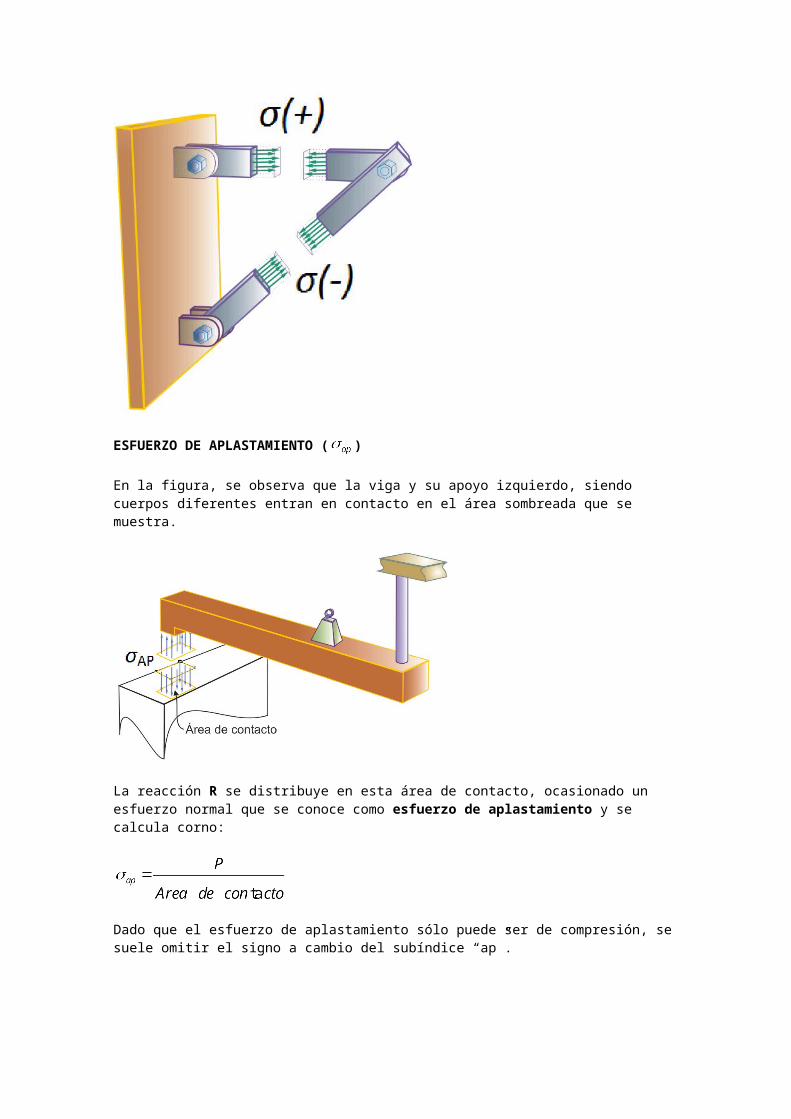
ESFUERZO DE APLASTAMIENTO ( )
En la figura, se observa que la viga y su apoyo izquierdo, siendo cuerpos diferentes entran en contacto en el área sombreada que se muestra.
La reacción R se distribuye en esta área de contacto, ocasionado un esfuerzo normal que se conoce como esfuerzo de aplastamiento y se calcula corno:
Dado que el esfuerzo de aplastamiento sólo puede ser de compresión, se suele omitir el signo a cambio del subíndice “ap”.

1.2.2 Esfuerzo de Corte ( )
Esfuerzos cortantes
La figura muestra la parte izquierda de una viga imaginariamente dividida en dos por una sección transversal de área A. Una de las fuerzas que actúan en esta sección transversal es la fuerza cortante V.
La fuerza cortante V es paralela a la sección transversal, por tanto se distribuye en ésta, produciendo esfuerzos cortantes. Estos esfuerzos varían según su ubicación en la sección transversal, sin embargo en muchos casos sólo se calcula el esfuerzo cortante medio.
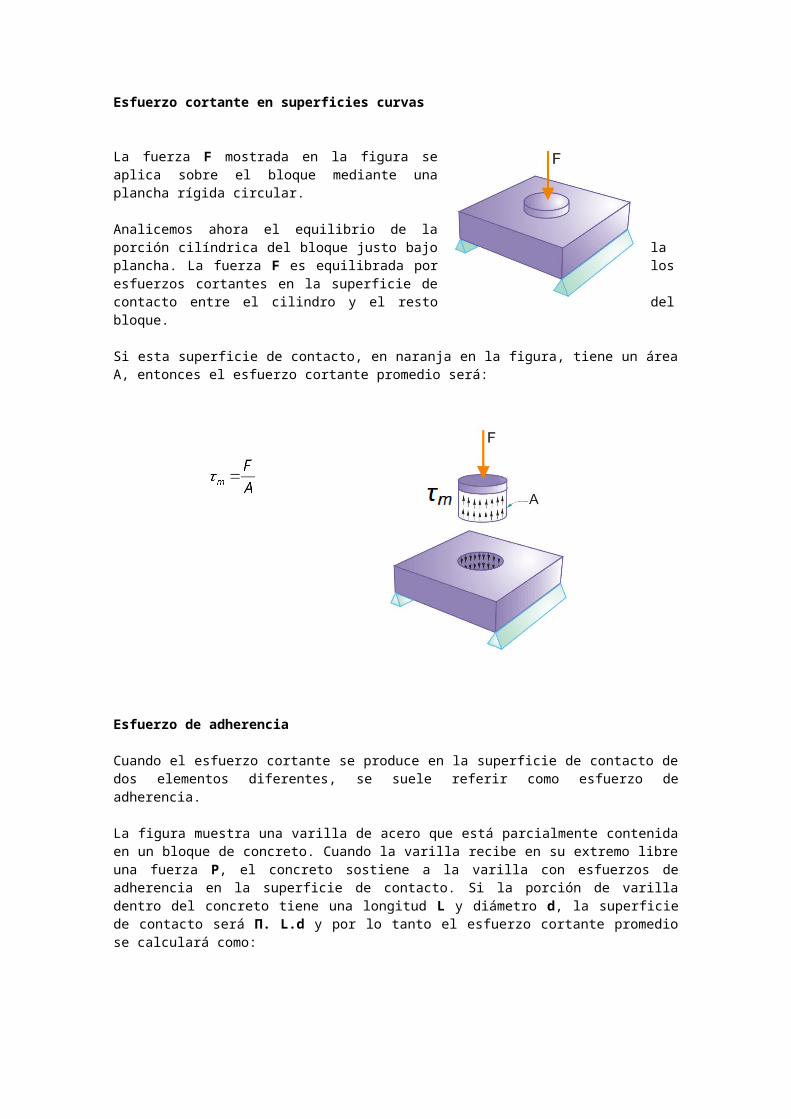
Esfuerzo cortante en superficies curvas
La fuerza F mostrada en la figura se aplica sobre el bloque mediante una plancha rígida circular.
Analicemos ahora el equilibrio de la porción cilíndrica del bloque justo bajo la plancha. La fuerza F es equilibrada por los esfuerzos cortantes en la superficie de contacto entre el cilindro y el resto del bloque.
Si esta superficie de contacto, en naranja en la figura, tiene un área A, entonces el esfuerzo cortante promedio será:
Esfuerzo de adherencia
Cuando el esfuerzo cortante se produce en la superficie de contacto de dos elementos diferentes, se suele referir como esfuerzo de adherencia.
La figura muestra una varilla de acero que está parcialmente contenida en un bloque de concreto. Cuando la varilla recibe en su extremo libre una fuerza P, el concreto sostiene a la varilla con esfuerzos de adherencia en la superficie de contacto. Si la porción de varilla dentro del concreto tiene una longitud L y diámetro d, la superficie de contacto será Π. L.d y por lo tanto el esfuerzo cortante promedio se calculará como:

Equilibrio de esfuerzos cortantes en un elemento diferencial
De un elemento sometido a cargas, tomemos un volumen diferencial que se encuentra
sometido a los esfuerzos y en dos caras paralelas al eje z como se muestran en la
figura.
Las fuerzas que actúan en las caras de este elemento diferencial serán:
Como el volumen diferencial está en equilibrio, el momento de estas fuerzas respecto del eje z debe ser nulo, es decir:
sustituyendo y :
de donde:
De manera similar las otras dos caras paralelas a z deben estar sometidas también al mismo esfuerzo cortante.
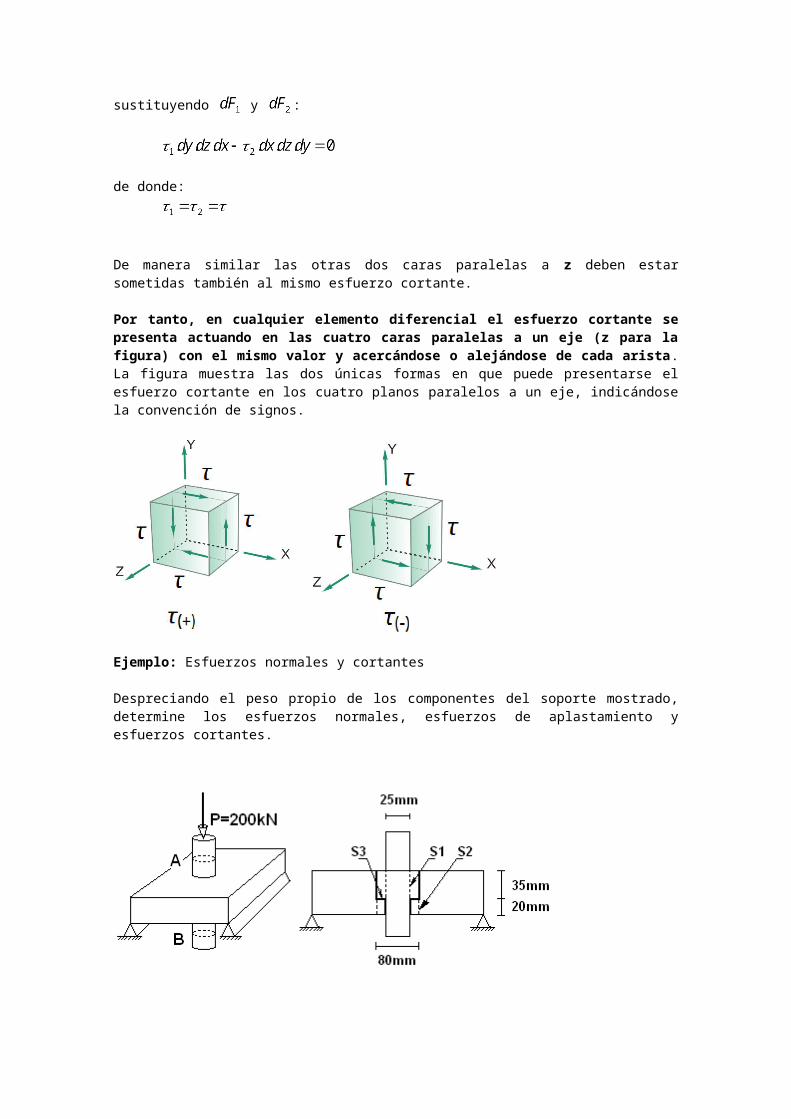
Por tanto, en cualquier elemento diferencial el esfuerzo cortante se presenta actuando en las cuatro caras paralelas a un eje (z para la figura) con el mismo valor y acercándose o alejándose de cada arista. La figura muestra las dos únicas formas en que puede presentarse el esfuerzo cortante en los cuatro planos paralelos a un eje, indicándose la convención de signos.
Ejemplo: Esfuerzos normales y cortantes
Despreciando el peso propio de los componentes del soporte mostrado, determine los esfuerzos normales, esfuerzos de aplastamiento y esfuerzos cortantes.
1.2.3 Recipientes de pared delgada
Recipientes
En este acápite estudiaremos los esfuerzos que se producen en recipientes cilíndricos y esféricos sometidos a una presión interna (p). Trabajaremos con recipientes cuyo espesor (t) es muy pequeño en comparación a las otras dimensiones.
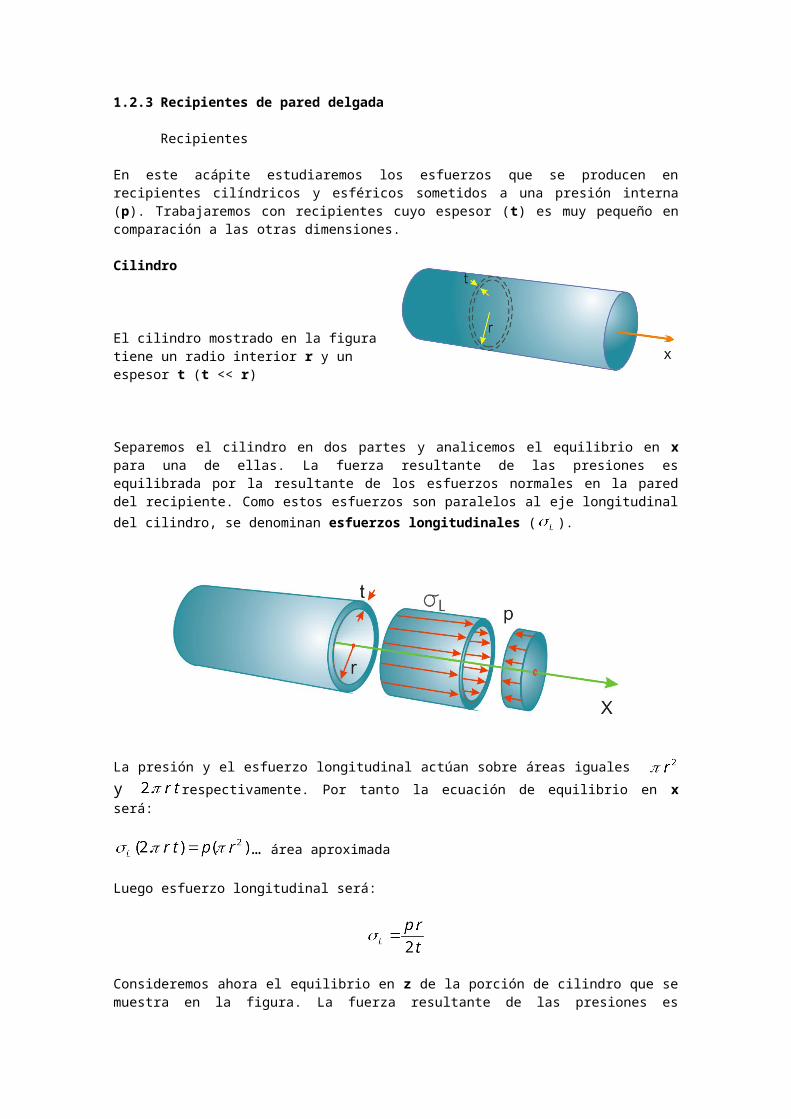
Cilindro
El cilindro mostrado en la figura tiene un radio interior r y un espesor t (t << r)
Separemos el cilindro en dos partes y analicemos el equilibrio en x para una de ellas. La fuerza resultante de las presiones es equilibrada por la resultante de los esfuerzos normales en la pared del recipiente. Como estos esfuerzos son paralelos al eje longitudinal del cilindro, se
denominan esfuerzos longitudinales ( ).
La presión y el esfuerzo longitudinal actúan sobre áreas iguales y respectivamente. Por tanto la ecuación de equilibrio en x será:
… área aproximada
Luego esfuerzo longitudinal será:
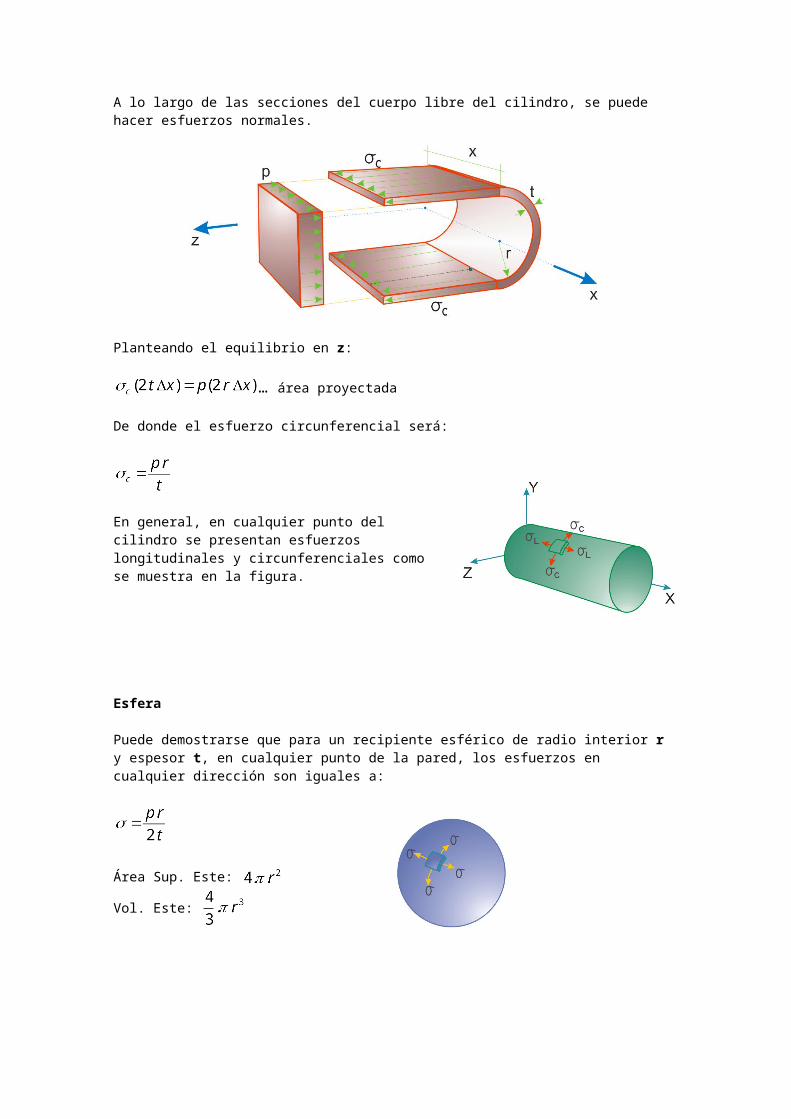
Consideremos ahora el equilibrio en z de la porción de cilindro que se muestra en la figura. La fuerza resultante de las presiones es equilibrada por la resultante de los esfuerzos normales en la pared del recipiente. Como estos esfuerzos son paralelos a la circunferencia media de la
sección transversal, se denominan esfuerzos circunferenciales ( ).
A lo largo de las secciones del cuerpo libre del cilindro, se puede hacer esfuerzos normales.
Planteando el equilibrio en z:
… área proyectada
De donde el esfuerzo circunferencial será:
En general, en cualquier punto del cilindro se presentan esfuerzos longitudinales y circunferenciales como se muestra en la figura.
Esfera
Puede demostrarse que para un recipiente esférico de radio interior r y espesor t, en cualquier punto de la pared, los esfuerzos en cualquier dirección son iguales a:
Área Sup. Este:
Vol. Este:
1.2.3 Esfuerzos en conexiones empernadas
Conexiones
Los elementos que conforman las estructuras y los sistemas mecánicos se pueden conectar entre ellos mediante pernos o pasadores. La figura muestra dos conexiones en las cuales se ha empleado un perno de diámetro “d” pasando por un hueco de diámetro “D”.
Esfuerzo de aplastamiento
Al actuar la fuerza P, los pernos y los elementos entran en contacto en una zona de la superficie cilíndrica del agujero, apareciendo esfuerzos de aplastamiento. Las figuras muestran a los elementos ya en contacto con los pernos luego de !a aplicación de la carga.

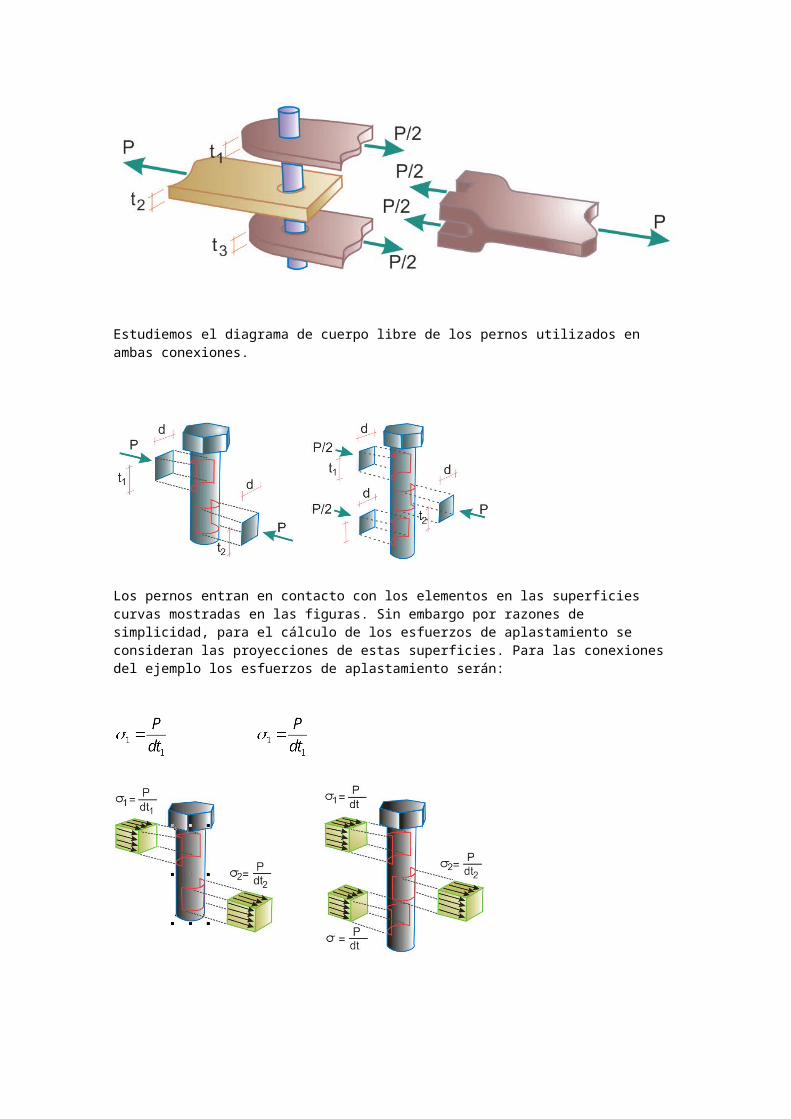
Estudiemos el diagrama de cuerpo libre de los pernos utilizados en ambas conexiones.
Los pernos entran en contacto con los elementos en las superficies curvas mostradas en las figuras. Sin embargo por razones de simplicidad, para el cálculo de los esfuerzos de aplastamiento se consideran las proyecciones de estas superficies. Para las conexiones del ejemplo los esfuerzos de aplastamiento serán:
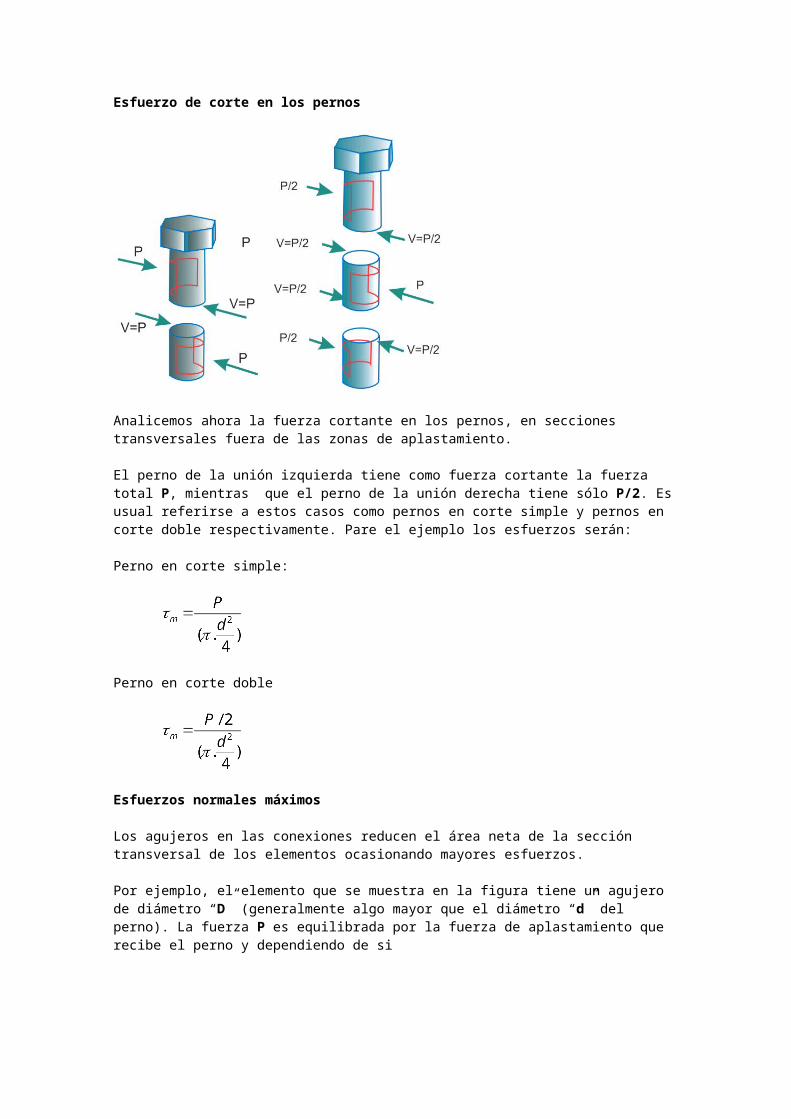
Esfuerzo de corte en los pernos
Analicemos ahora la fuerza cortante en los pernos, en secciones transversales fuera de las zonas de aplastamiento.
El perno de la unión izquierda tiene como fuerza cortante la fuerza total P, mientras que el perno de la unión derecha tiene sólo P/2. Es usual referirse a estos casos como pernos en corte simple y pernos en corte doble respectivamente. Pare el ejemplo los esfuerzos serán:
Perno en corte simple:
Perno en corte doble
Esfuerzos normales máximos
Los agujeros en las conexiones reducen el área neta de la sección transversal de los elementos ocasionando mayores esfuerzos.
Por ejemplo, el elemento que se muestra en la figura tiene un agujero de diámetro “D” (generalmente algo mayor que el diámetro “d” del perno). La fuerza P es equilibrada por la fuerza de aplastamiento que recibe el perno y dependiendo de si
P es de tracción o compresión, el perno aplica la fuerza equilibrante hacia uno u otro lado del agujero.
Separemos imaginariamente el elemento en dos partes por la sección transversal de menor área y consideremos el equilibrio de cada una de ellas. Veamos primero el caso de tracción.
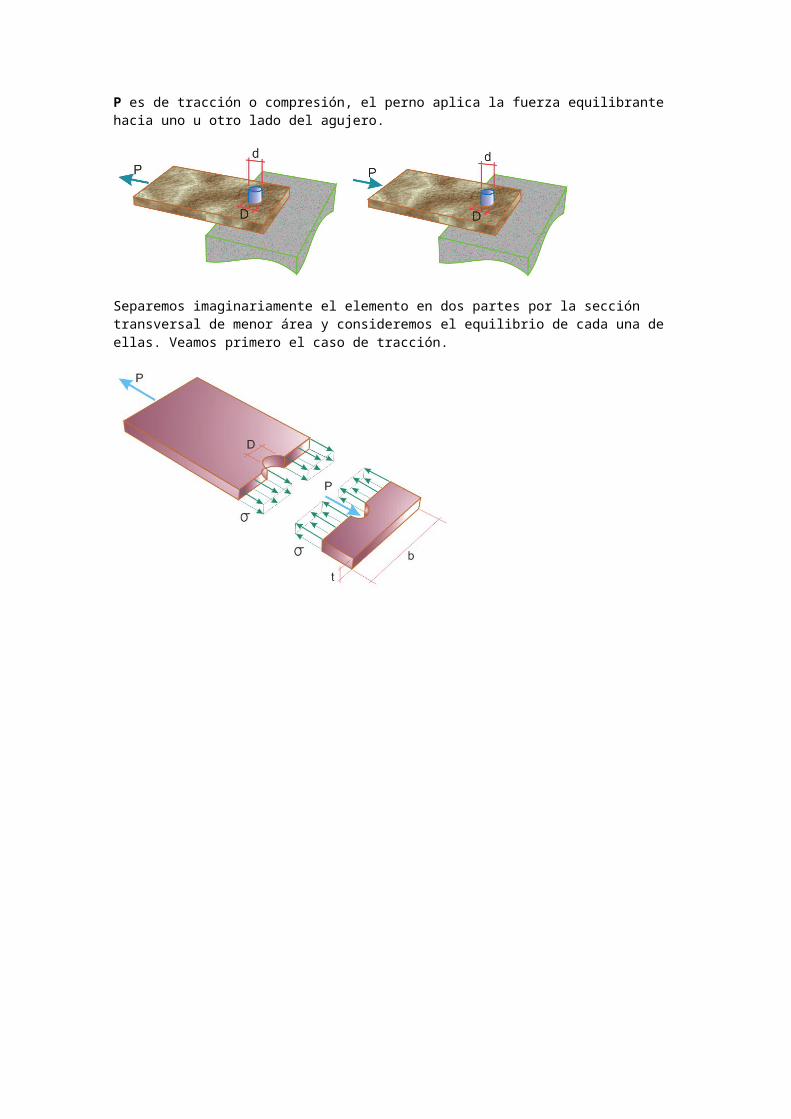
La fuerza de aplastamiento actúa sobre la parte derecha aislada cuyo equilibrio es logrado por esfuerzos normales actuando sobre el área reducida t(b - D). Por tanto el esfuerzo normal máximo en el elemento en tracción será:
En cambio al analizar el elemento a compresión, vemos que en la sección de menor área, no actúa ninguna fuerza normal y por tanto el esfuerzo en esta sección transversales nulo.
Por tanto para el cálculo del esfuerzo normal máximo en compresión se emplea el área neta del elemento t b, es decir:.
Generalmente las conexiones se hacen empleando más de un perno, en cuyo caso los esfuerzos se calcularán considerando todas las áreas de contacto para aplastamiento y todas las secciones transversales para corte.

Ejemplo: Esfuerzos en estructura simple 1
Para los elementos y pasadores de La armadura mostrada determine los esfuerzos normales, cortantes y de aplastamiento.
El diámetro de los pasadores y los agujeros es 2.5cm y 3.0cm, respectivamente.
Ejemplo: Esfuerzos en estructura simple 2
Una barra ABC se mantiene en equilibrio por medio de los soportes de pasador en A y en B. El esfuerzo cortante para ambos pasadores no debe exceder de 1000kg/cm2. Determine la máxima distancia “x” en la que se puede aplicar una fuerza de 300kg. Los pasadores tienen una sección transversal con área 0.50cm2.

1.3 Deformaciones
Neopreno
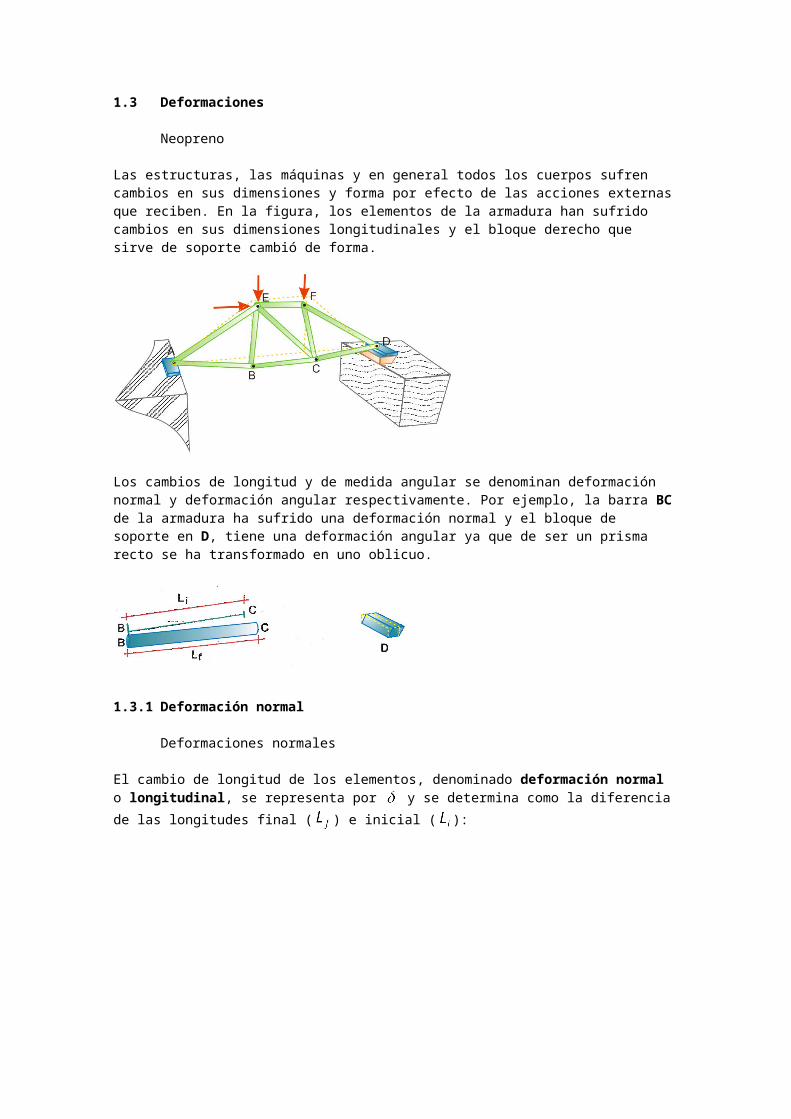
Las estructuras, las máquinas y en general todos los cuerpos sufren cambios en sus dimensiones y forma por efecto de las acciones externas que reciben. En la figura, los elementos de la armadura han sufrido cambios en sus dimensiones longitudinales y el bloque derecho que sirve de soporte cambió de forma.
Los cambios de longitud y de medida angular se denominan deformación normal y deformación angular respectivamente. Por ejemplo, la barra BC de la armadura ha sufrido una deformación normal y el bloque de soporte en D, tiene una deformación angular ya que de ser un prisma recto se ha transformado en uno oblicuo.
1.3.1 Deformación normal
Deformaciones normales
El cambio de longitud de los elementos, denominado deformación normal o longitudinal, se
representa por y se determina como la diferencia de las longitudes final ( ) e inicial ( ):
Si la longitud final es mayor a la inicial, el elemento se alarga y la deformación resulta positiva; en caso de acortamiento la deformación resulta negativa.
Por ejemplo en la figura, la barra BC se alarga ( > 0) mientras que la barra EF se acorta ( < 0).
Para determinar la importancia de una deformación normal, , es necesario relacionarla con la
longitud del elemento en que se produce. El cociente entre la deformación normal, , y la
longitud inicial, , del elemento; se denomina deformación normal unitaria media, es
adimensional y se representa con o simplemente con .

Ejemplo: Deformación normal
El punto A de unión de las barras mostradas sólo se desplaza verticalmente 2 mm. Determine las deformaciones en ambas barras.
1.3.2 Deformación angular
Deformaciones angulares
El cambio en la medida de un ángulo inicialmente recto se denomina deformación angular, se
representa por se determina como la diferencia de las medidas inicial ( /2) y final ( ).
Si la medida final del ángulo ( ) es menor al ángulo inicial ( ), la deformación angular,
, es positiva; en caso contrario será negativa.

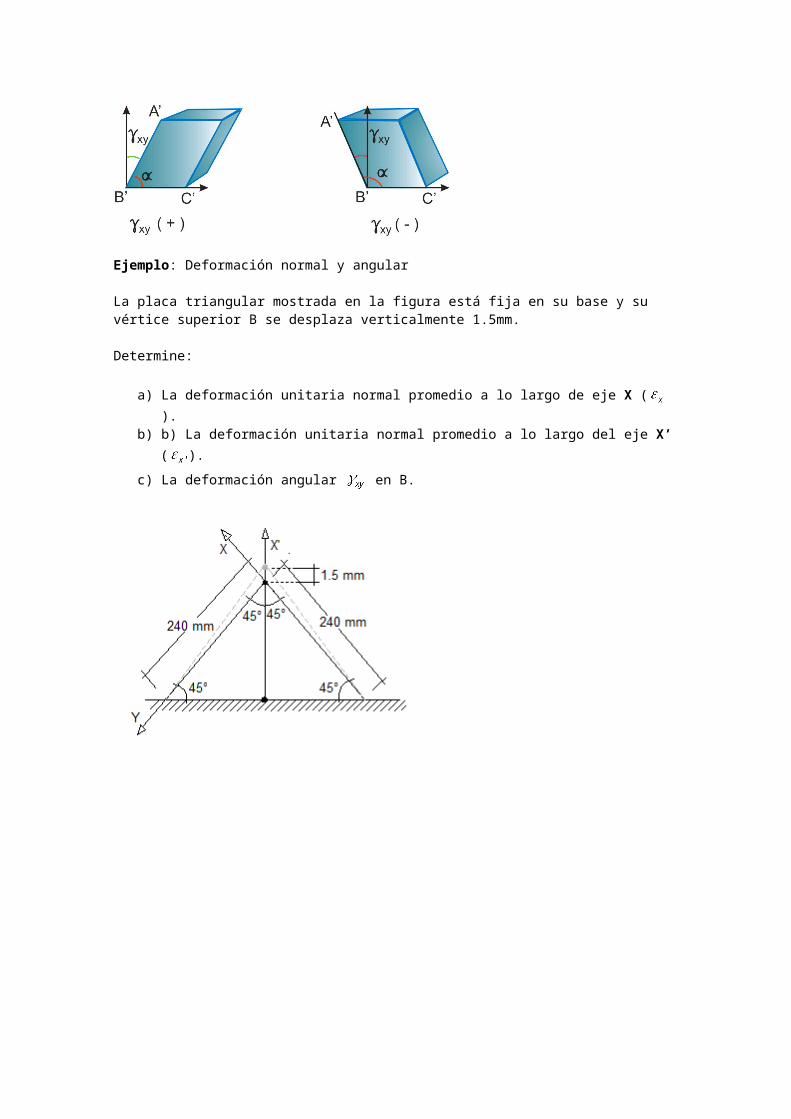
Ejemplo: Deformación normal y angular
La placa triangular mostrada en la figura está fija en su base y su vértice superior B se desplaza verticalmente 1.5mm.
Determine:
a) La deformación unitaria normal promedio a lo largo de eje X ( ).
b) b) La deformación unitaria normal promedio a lo largo del eje X’
( ).
c) La deformación angular en B.
1.4 Compatibilidad
Desplazamientos pequeños Compatibilidad
Compatibilidad
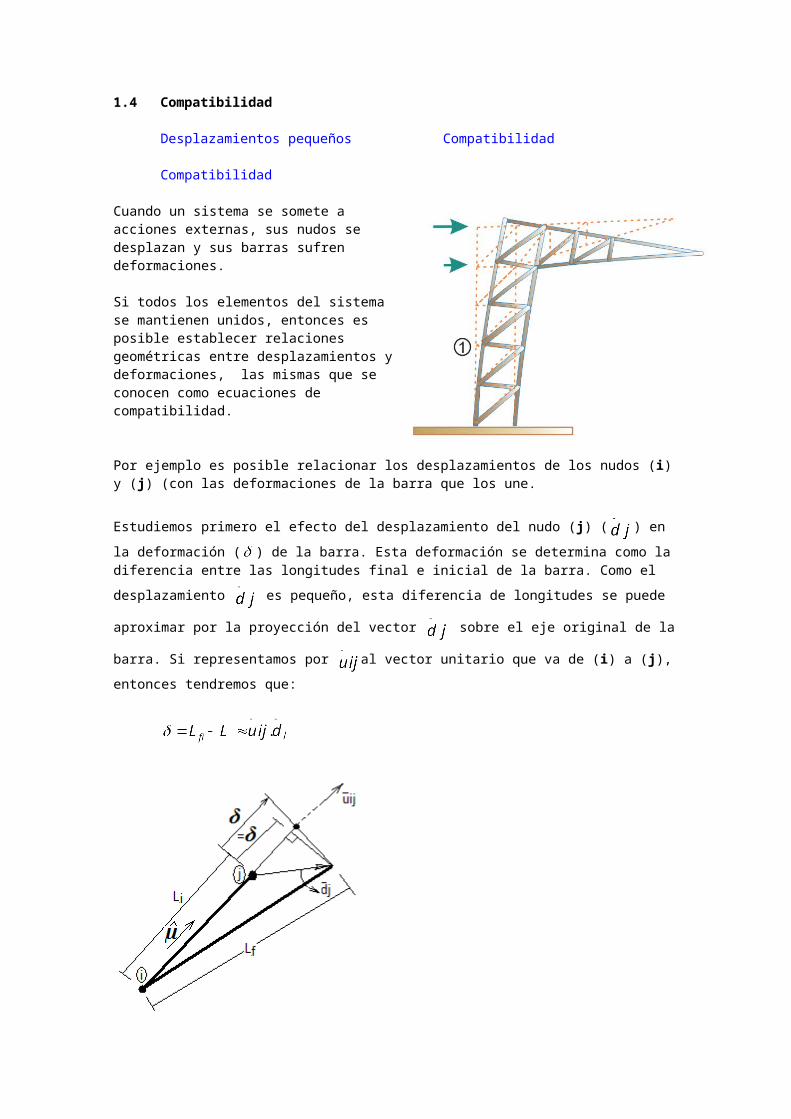
Cuando un sistema se somete a acciones externas, sus nudos se desplazan y sus barras sufren deformaciones.
Si todos los elementos del sistema se mantienen unidos, entonces es posible establecer relaciones geométricas entre desplazamientos y deformaciones, las mismas que se conocen como ecuaciones de compatibilidad.
Por ejemplo es posible relacionar los desplazamientos de los nudos (i) y (j) (con las deformaciones de la barra que los une.
Estudiemos primero el efecto del desplazamiento del nudo (j) ( ) en la deformación ( ) de
la barra. Esta deformación se determina como la diferencia entre las longitudes final e inicial de
la barra. Como el desplazamiento es pequeño, esta diferencia de longitudes se puede
aproximar por la proyección del vector sobre el eje original de la barra. Si representamos
por al vector unitario que va de (i) a (j), entonces tendremos que:
Cuando el nudo (i) es el que se desplaza, la proyección del vector sobre el eje original de
la barra, es aproximadamente igual al valor absoluto de la deformación pero con signo
contrario. Como se ve en la figura, esta
proyección ( . ) es positiva mientras que
la deformación de la barra es de acortamiento, por tanto:
Caso general I:
Por tanto en un caso general en el que los dos nudos se desplazan, la deformación de la barra será:
En algunos sistemas como el mostrado en la figura, es posible establecer relaciones directas entre las deformaciones de sus elementos. Estas relaciones constituyen también ecuaciones de compatibilidad.Para encontrar esta relación asumimos un
desplazamiento genérico del nudo B como

y calculamos las deformaciones de las barras.
Sustituyendo las dos primeras expresiones en la tercera tendremos:
La figura muestra el detalle de esta última realación.
El sistema que se muestra consiste de tres barras deformables que sostienen un sólido rígido. Como veremos a continuación, las deformaciones en las barras (1), (2) y (3) satisfacen una ecuación de compatibilidad que resulta ser independiente del movimiento que pueda tener el sólido rígido.
Para encontrar esta relación asumimos para el sólido rígido un desplazamiento genérico representado por el movimiento vertical ( ) y el giro ( )de su extremo izquierdo.

Luego las deformaciones de las barras serán:
Combinando estas tres ecuaciones obtenemos:
Como se vio, las ecuaciones de compatibilidad son relaciones puramente geométricas y no dependen de las cargas aplicadas al sistema, ni de los materiales empleados.
Desplazamientos pequeños: Ecuación de Morl.
“A”: punto de referencia
En resistencia de materiales se asume la hipótesis de pequeños desplazamientos:
Se aplica la ecuación de equilibrio en el sistema original. Se halla la deformación como la proyección de ese desplazamiento






![17Guía Didáctica [Primaria-ESO] - Buena Ortografía Sin Esfuerzo (1)](https://static.fdocuments.es/doc/165x107/577c79b01a28abe05493aa85/17guia-didactica-primaria-eso-buena-ortografia-sin-esfuerzo-1.jpg)











