1.1-Tec.del Dis de Comp en Serie en Dom Tiempo
138
1.1 DISEÑO DE COMPENSADORES Y CONTROLADORES EN DOMINIO DEL TIEMPO S.I.S.O La compensación es la modificación de la dinámica del sistema, realizada para satisfacer las especificaciones determinadas. El enfoque que se usa para el diseño y la compensación de un sistema de control es el lugar geométrico de las raíces(L.G.R.)
-
Upload
gisela-nateros-martinez -
Category
Documents
-
view
221 -
download
0
description
compensacion
Transcript of 1.1-Tec.del Dis de Comp en Serie en Dom Tiempo
1.1DISEÑO DE COMPENSADORES Y CONTROLADORES EN DOMINIO DEL TIEMPO S.I.S.O
La compensación es la modificación de la dinámica del sistema, realizada para satisfacer las especificaciones determinadas. El enfoque que se usa para el diseño y la compensación de un sistema de control es el lugar
geométrico de las raíces(L.G.R.)
Especificaciones de desempeño. Los sistemas de control se diseñan para
realizar tareas específicas. Los requerimientos impuestos sobre el sistema de control se detallan como especificaciones de desempeño. Por lo general se refieren a la precisión, la estabilidad relativa y la velocidad de respuesta
.Enfoque del lugar geométrico de las raíces para el diseño de un sistema de control
El método del L.G.R es un enfoque gráfico que permite determinar las ubicaciones de todos los polos en lazo cerrado a partir de las ubicaciones de los polos y ceros en lazo abierto conforme algún parámetro (por lo general la ganancia) varía de cero a infinito.
Cuando se diseña un sistema de control, si se requiere de un ajuste diferente al de la ganancia, debemos modificar los lugares geométricos de las raíces originales insertando un compensador o controlador conveniente.
Una vez comprendidos los efectos de la adición de los polos y/o ceros sobre el lugar geométrico de las raíces, podemos determinar con facilidad las ubicaciones de los polos y los ceros del compensador que volverán a dar una forma conveniente al lugar geométrico de las raíces. En esencia, en el diseño realizado mediante el método del L.G.R., los lugares geométricos de las raíces del sistema se vuelven a construir mediante el uso de un compensador, a fin de poder colocar un par de polos dominantes en lazo cerrado en la posición deseada
. Efectos de la adición de polos
La adición de un polo a la función de transferencia en lazo abierto tiene el efecto de jalar el lugar geométrico de las raíces a la derecha, lo cual tiende a disminuir la estabilidad relativa del sistema y el asentamiento de la respuesta)
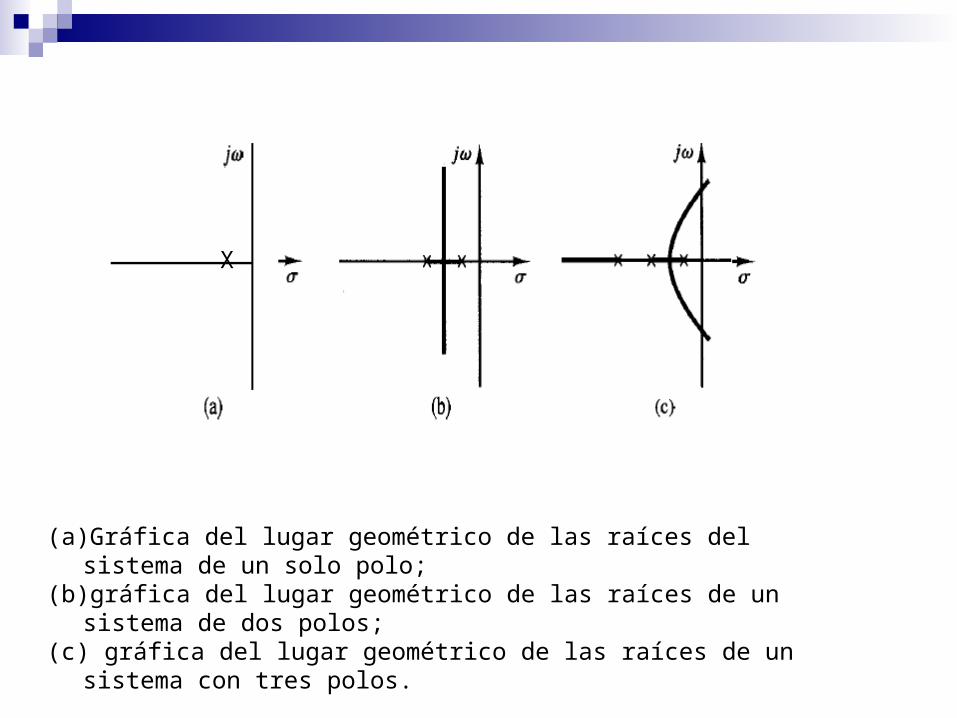
(a) Gráfica del lugar geométrico de las raíces del sistema de un solo polo; (b)gráfica del lugar geométrico de las raíces de un sistema de dos polos; (c) gráfica del lugar geométrico de las raíces de un sistema con tres polos.
X
Efectos de la adición de ceros.
La adición de un cero a la función de transferencia en lazo abierto tiene el efecto de jalar el lugar geométrico de las raíces hacia la izquierda, con lo cual el sistema tiende a ser más estable, y se acelera el asentamiento de la respuesta.
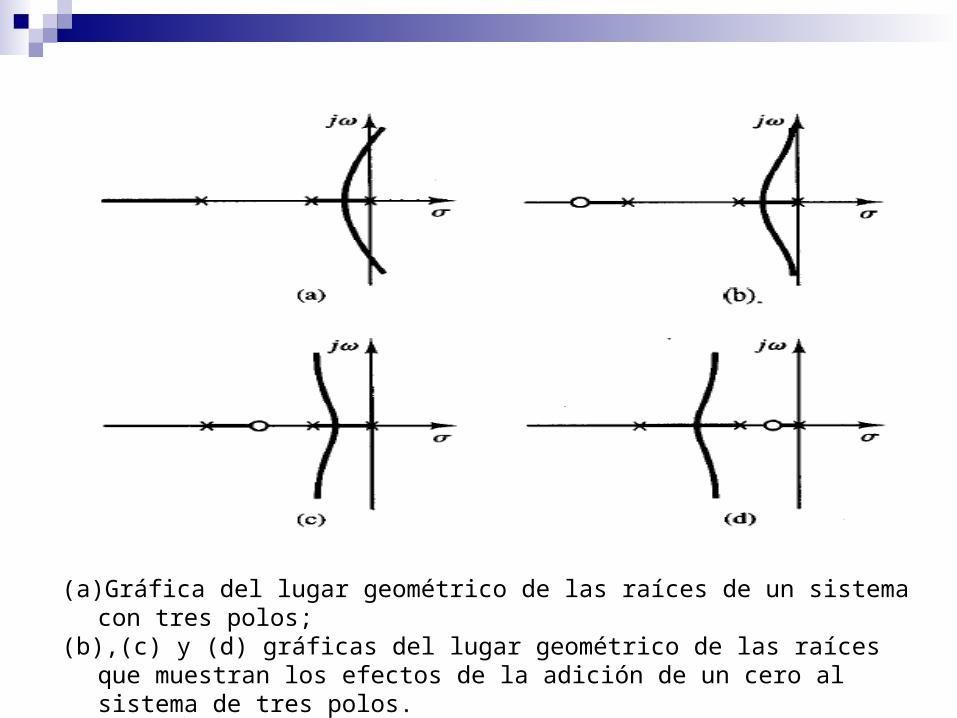
(a) Gráfica del lugar geométrico de las raíces de un sistema con tres polos;(b) ,(c) y (d) gráficas del lugar geométrico de las raíces que muestran los efectos
de la adición de un cero al sistema de tres polos.
EFECTOS DE LA ADICION DE POLOS Y
CEROS CON MATLAB
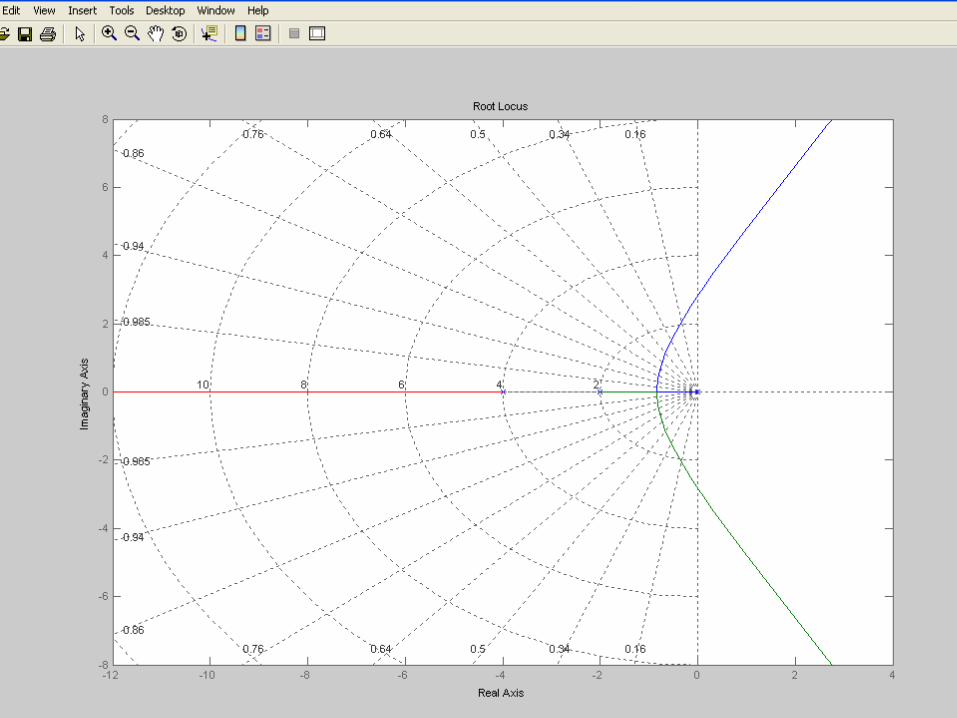
Al añadir polos a la F.T. en lazo abierto tiene el efecto de jalar el LGR a la derecha, lo cual tiende a disminuir la estabilidad del sistema y aumentar el tiempo de establecimiento
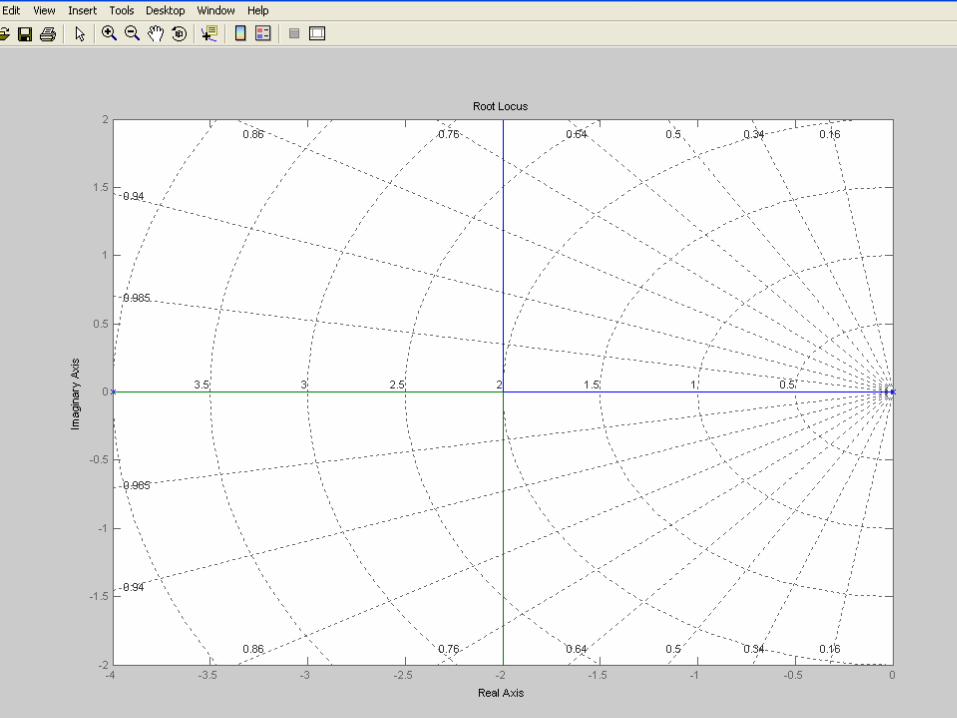
Ejemplo: sea G(s)H(S)=k/(s(s+4))Sistema original n=[0 0 1]; d=[1 4 0]; rlocus(n,d);grid
Añadimos 1 polo en s=-2 sea G(s)H(S)=k/(s(s+4)(s+2)) n=[0 0 0 1]; d=[1 6 8 0]; rlocus(n,d);grid
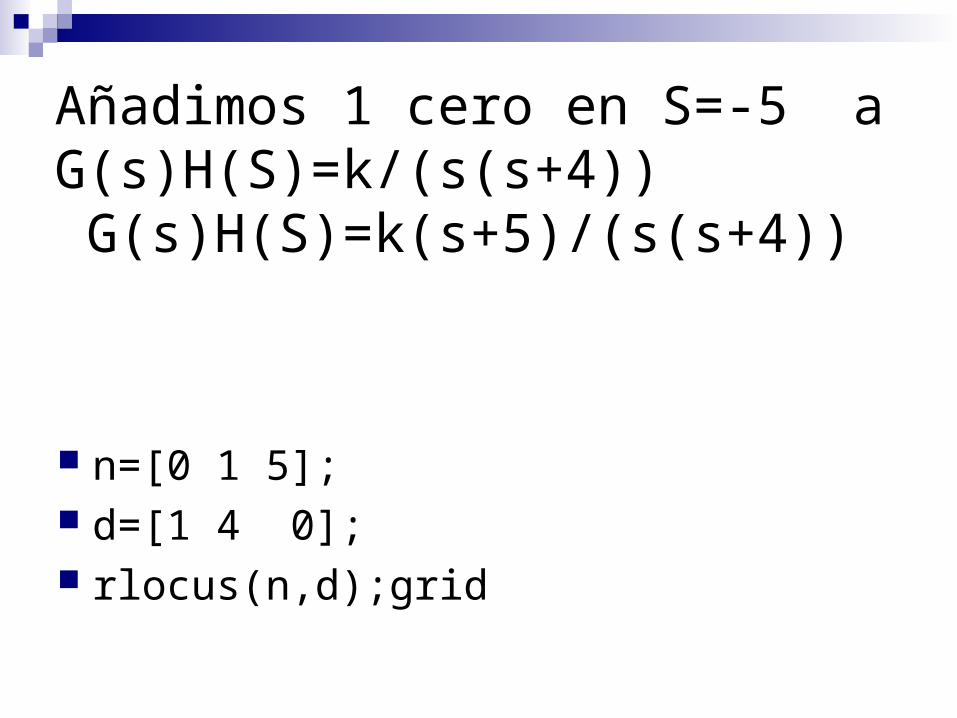
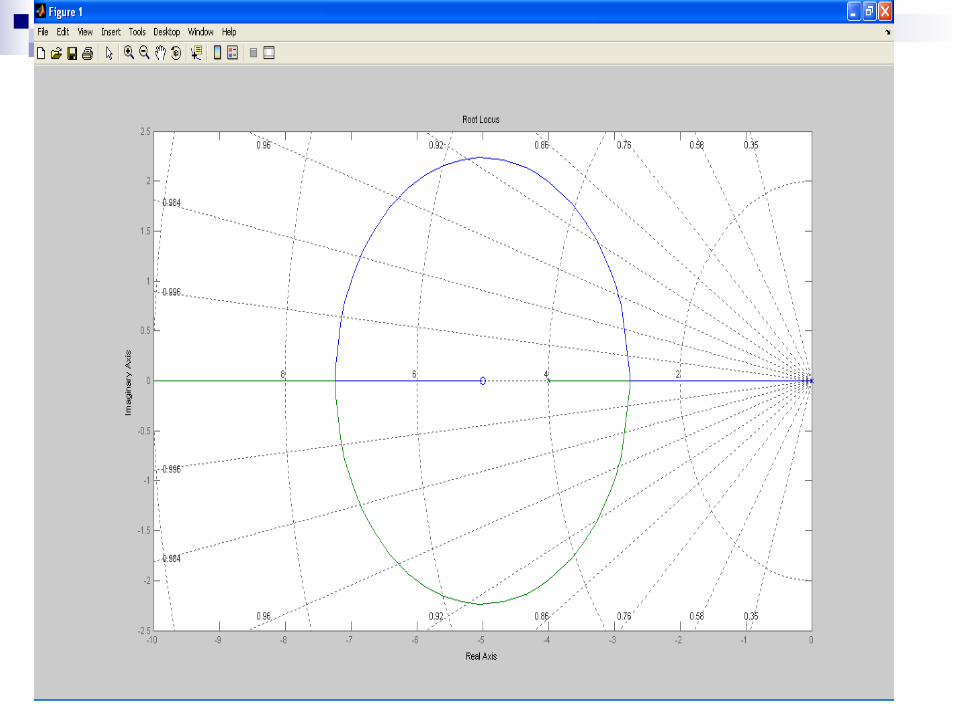
Añadimos 1 cero en S=-5 a G(s)H(S)=k/(s(s+4)) G(s)H(S)=k(s+5)/(s(s+4))
n=[0 1 5]; d=[1 4 0]; rlocus(n,d);grid
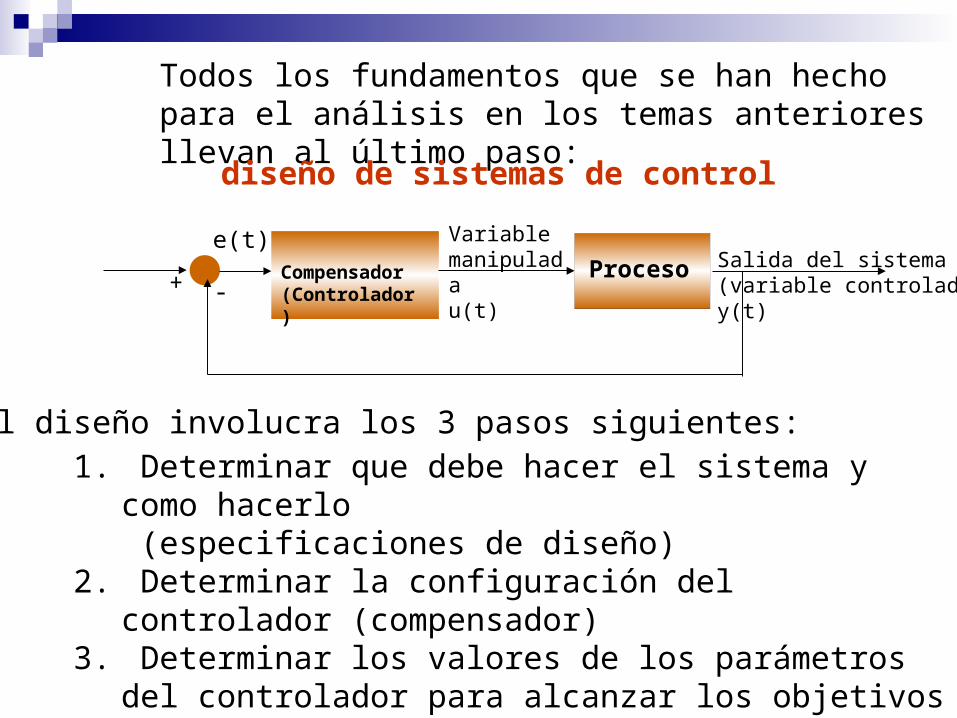
Todos los fundamentos que se han hecho para el análisis en los temas anteriores llevan al último paso:
diseño de sistemas de control
+ -Compensador(Controlador)
Proceso Salida del sistema(variable controlada)y(t)
Variable manipuladau(t)
e(t)
El diseño involucra los 3 pasos siguientes:1. Determinar que debe hacer el sistema y como hacerlo
(especificaciones de diseño)2. Determinar la configuración del controlador
(compensador)3. Determinar los valores de los parámetros del controlador
para alcanzar los objetivos de diseño.
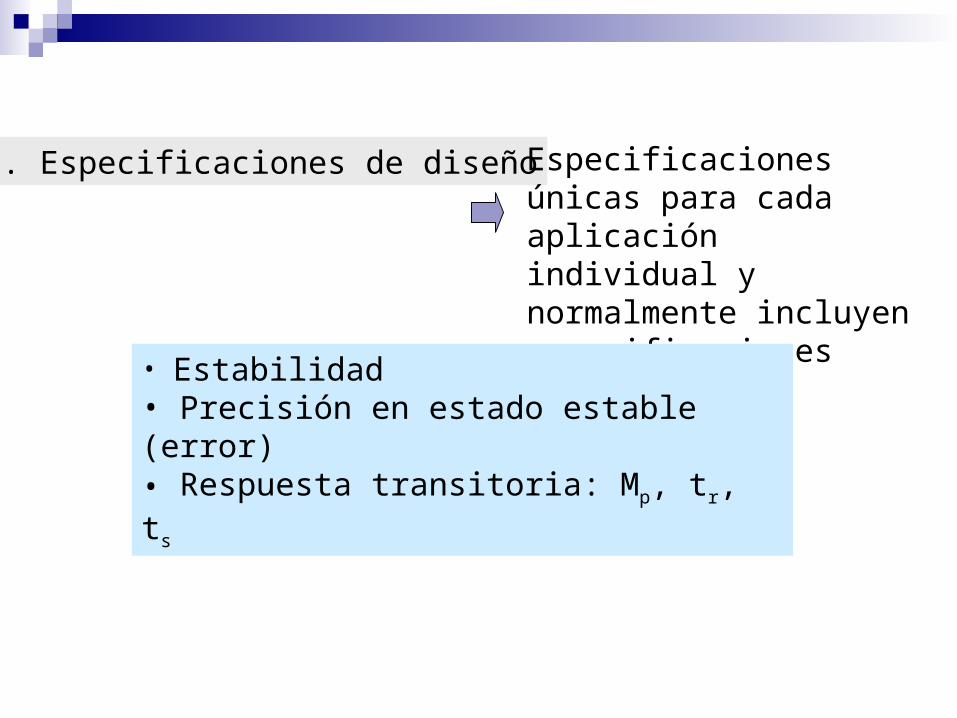
1. Especificaciones de diseño Especificaciones únicas para cada aplicación individual y normalmente incluyen especificaciones como:
• Estabilidad• Precisión en estado estable (error)• Respuesta transitoria: Mp, tr, ts
2. El objetivo de diseño es que la variable controlada, representada por la salida y(t) se comporte en cierta forma deseada. El problema esencialmente involucra el determinar de la señal de control u(t) dentro de un intervalo prescrito para que todos los objetivos de diseño sean satisfechos.
La mayoría de los métodos de diseño de sistemas de control convencionales se basan en el diseño de una configuración fija, en el que el diseñador decide la configuración básica del sistema diseñado completo y el lugar donde el controlador estará colocado en relación con el proceso controlado.
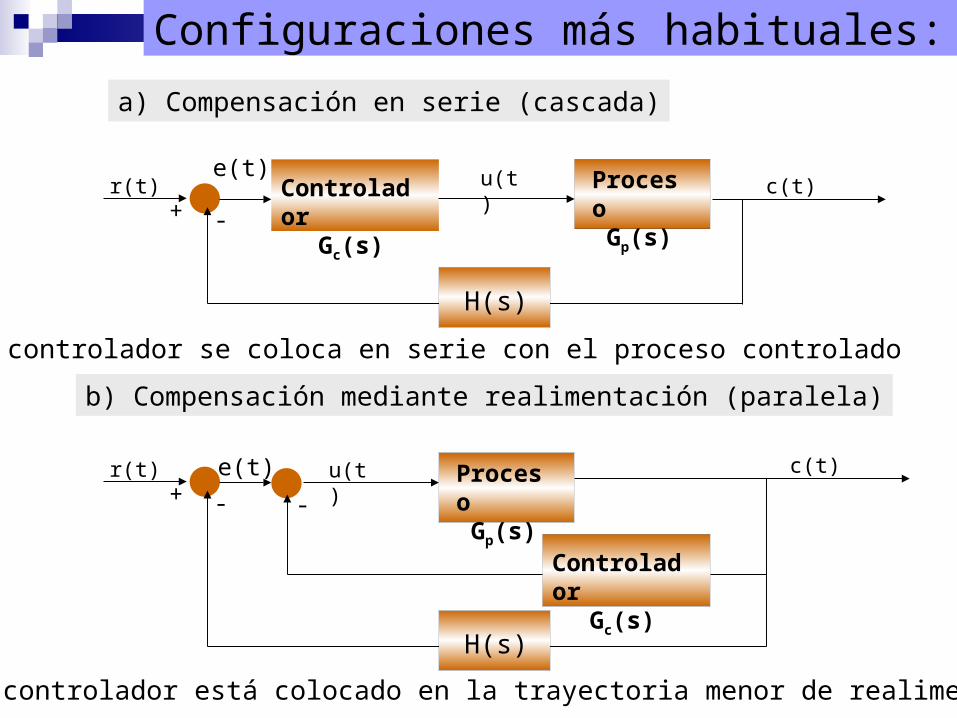
Configuraciones más habituales:
a) Compensación en serie (cascada)
+ -
r(t) ControladorGc(s)
ProcesoGp(s)
c(t)u(t)e(t)
H(s)
El controlador se coloca en serie con el proceso controlado
b) Compensación mediante realimentación (paralela)
+ -
r(t)
ControladorGc(s)
ProcesoGp(s)
c(t)u(t)e(t)
H(s)
-
El controlador está colocado en la trayectoria menor de realimentación
3. Una vez elegido el controlador, la siguiente tarea es determinar los valores de los parámetros del controlador. Estos parámetros son típicamente coeficientes de una o más funciones de transferencia que componen al controlador o el compensador.
Normalmente los parámetros del controlador o compensador interactúan unos con otros y afectan las especificaciones de diseño en formas conflictivas.Mientras más especificaciones de diseño y más parámetros haya, el proceso de diseño se vuelve más complicado.
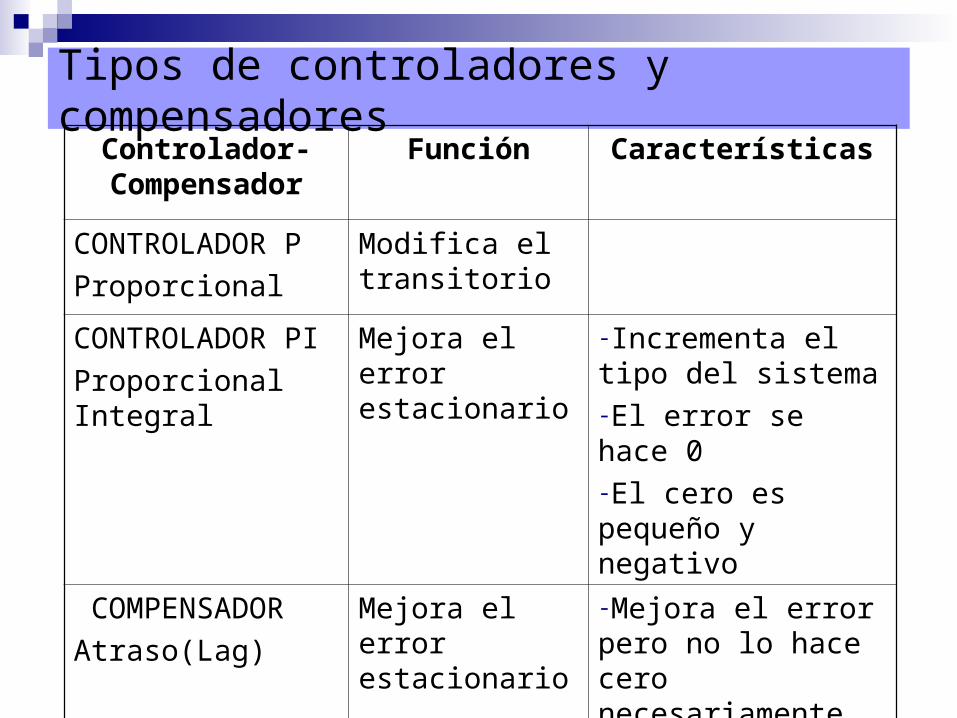
Tipos de controladores y compensadoresControlador-
CompensadorFunción Características
CONTROLADOR P
Proporcional
Modifica el transitorio
CONTROLADOR PI
Proporcional Integral
Mejora el error estacionario
-Incrementa el tipo del sistema-El error se hace 0-El cero es pequeño y negativo
COMPENSADOR
Atraso(Lag)
Mejora el error estacionario
-Mejora el error pero no lo hace cero necesariamente-El polo es pequeño y negativo
Tipos de controladores y compensadores
Controlador-Compensador
Función Características
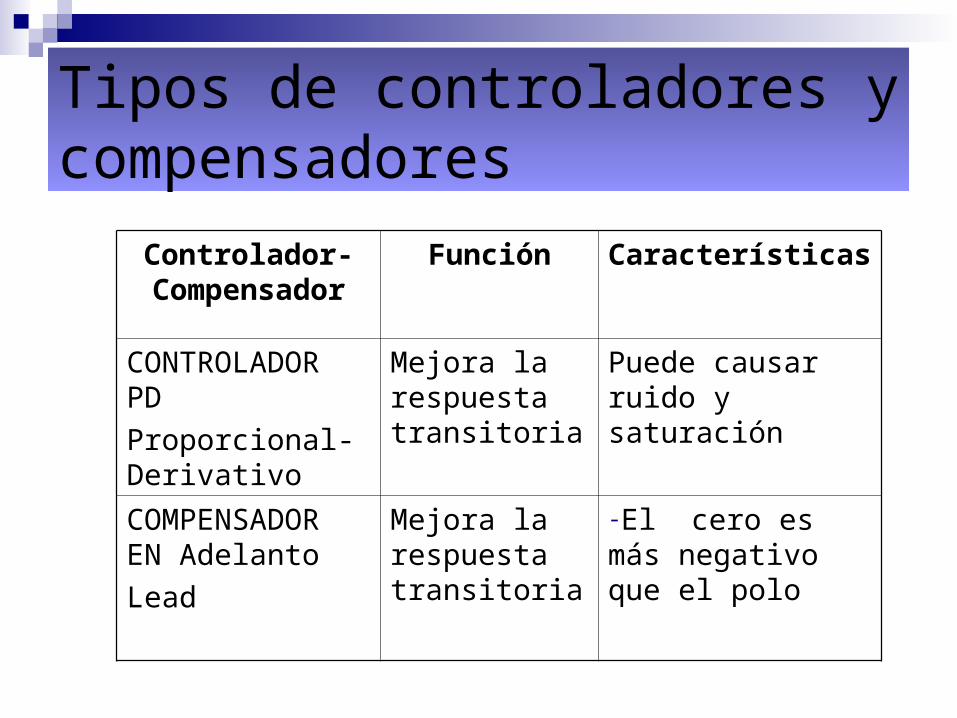
CONTROLADOR PD
Proporcional- Derivativo
Mejora la respuesta transitoria
Puede causar ruido y saturación
COMPENSADOR EN Adelanto
Lead
Mejora la respuesta transitoria
-El cero es más negativo que el polo
Tipos de Controladores y compensadores
Controlador-Compensador
Función Características
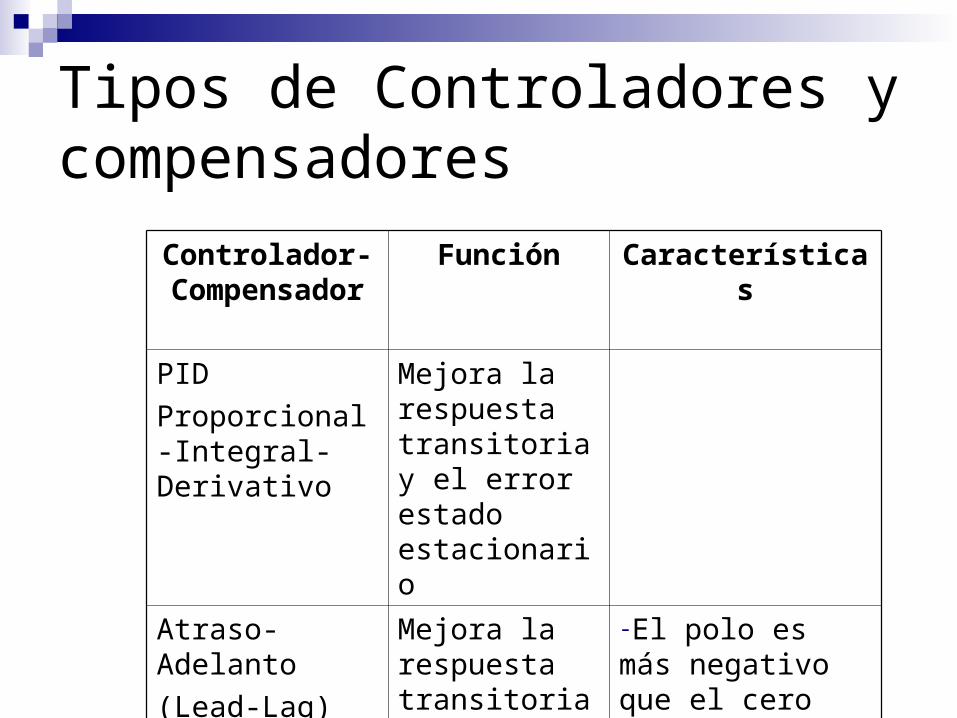
PID
Proporcional-Integral-Derivativo
Mejora la respuesta transitoria y el error estado estacionario
Atraso-Adelanto
(Lead-Lag)
Mejora la respuesta transitoria y la permanente
-El polo es más negativo que el cero
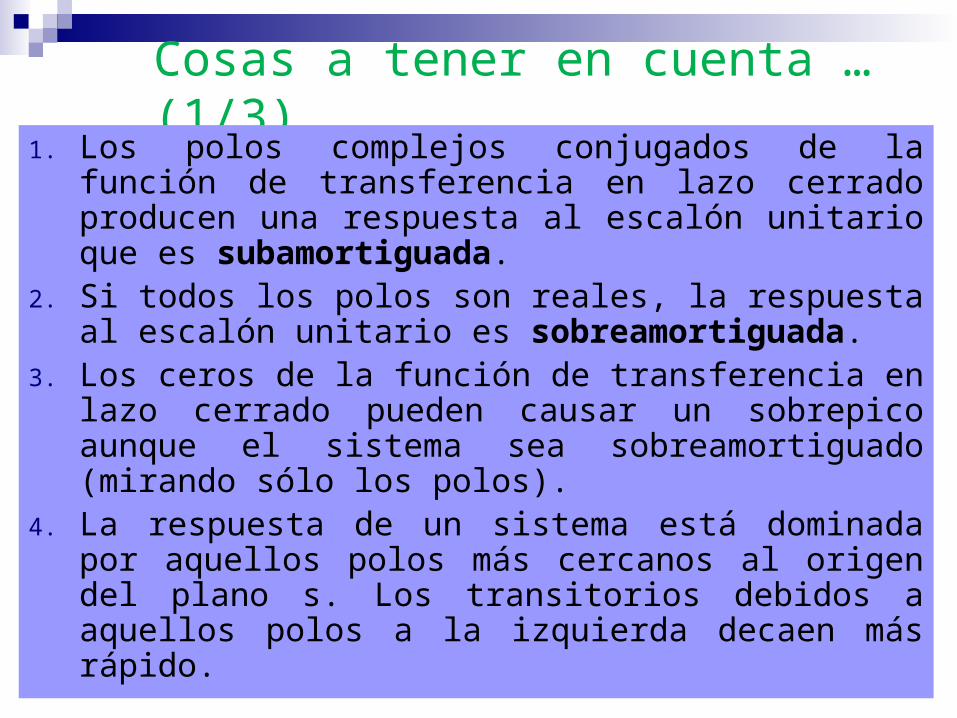
Cosas a tener en cuenta … (1/3)1. Los polos complejos conjugados de la función de
transferencia en lazo cerrado producen una respuesta al escalón unitario que es subamortiguada.
2. Si todos los polos son reales, la respuesta al escalón unitario es sobreamortiguada.
3. Los ceros de la función de transferencia en lazo cerrado pueden causar un sobrepico aunque el sistema sea sobreamortiguado (mirando sólo los polos).
4. La respuesta de un sistema está dominada por aquellos polos más cercanos al origen del plano s. Los transitorios debidos a aquellos polos a la izquierda decaen más rápido.
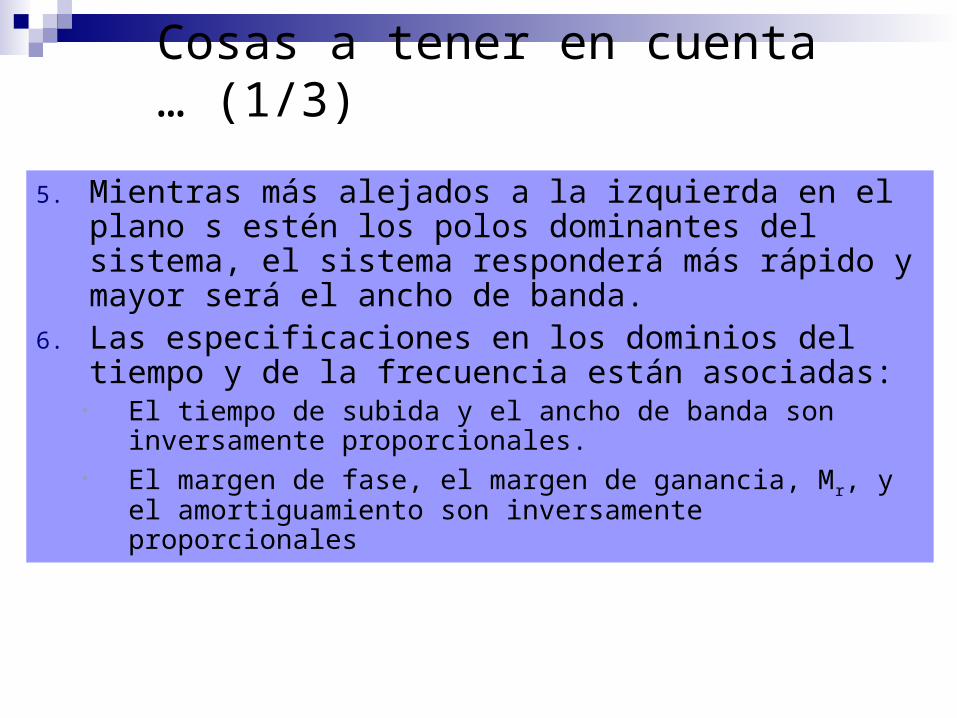
5. Mientras más alejados a la izquierda en el plano s estén los polos dominantes del sistema, el sistema responderá más rápido y mayor será el ancho de banda.
6. Las especificaciones en los dominios del tiempo y de la frecuencia están asociadas:
• El tiempo de subida y el ancho de banda son inversamente proporcionales.
• El margen de fase, el margen de ganancia, Mr, y el amortiguamiento son inversamente proporcionales
Cosas a tener en cuenta … (1/3)
Ajuste de ganancia
Este es el método más sencillo y el primero que hay que intentar utilizar.
Este método consiste en determinar la ganancia necesaria para obtener un determinado sobrepico.
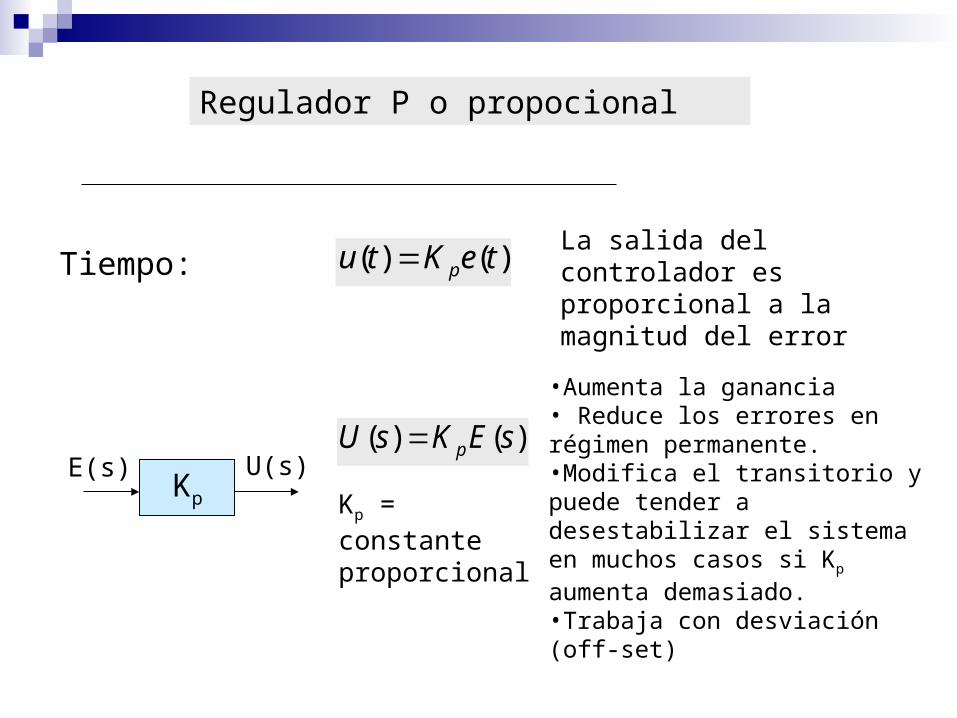
Tiempo: )()( teKtu p La salida del controlador es proporcional a la magnitud del error
Regulador P o propocional
E(s) U(s)Kp
)()( sEKsU p
Kp = constante proporcional
•Aumenta la ganancia• Reduce los errores en régimen permanente.•Modifica el transitorio y puede tender a desestabilizar el sistema en muchos casos si Kp aumenta demasiado.•Trabaja con desviación (off-set)
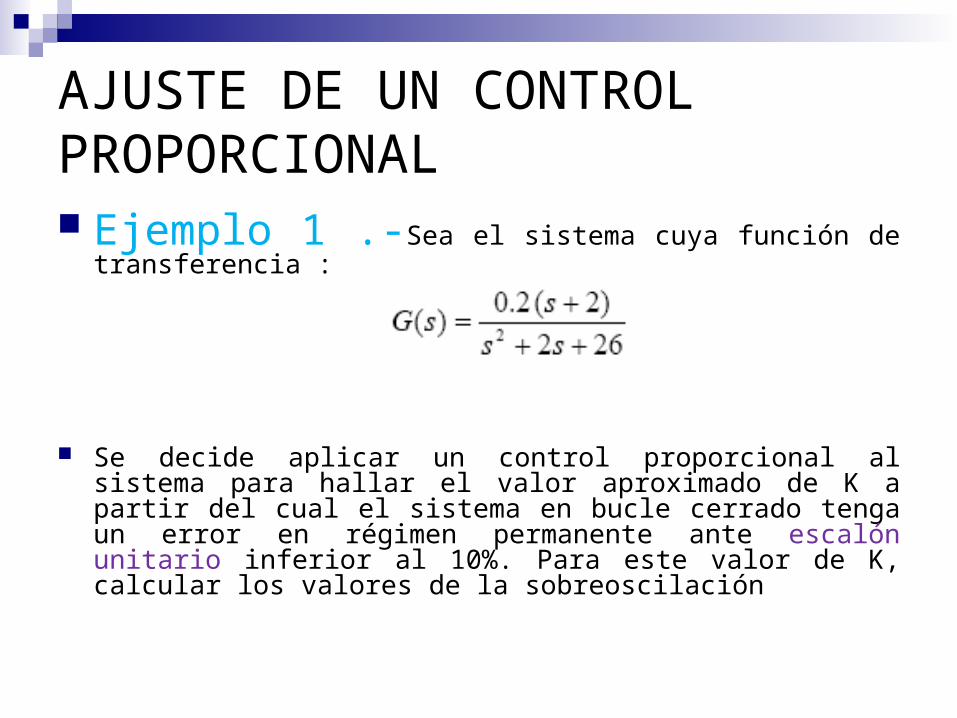
AJUSTE DE UN CONTROL PROPORCIONAL Ejemplo 1 .-Sea el sistema cuya función de transferencia :
Se decide aplicar un control proporcional al sistema para hallar el valor aproximado de K a partir del cual el sistema en bucle cerrado tenga un error en régimen permanente ante escalón unitario inferior al 10%. Para este valor de K, calcular los valores de la sobreoscilación
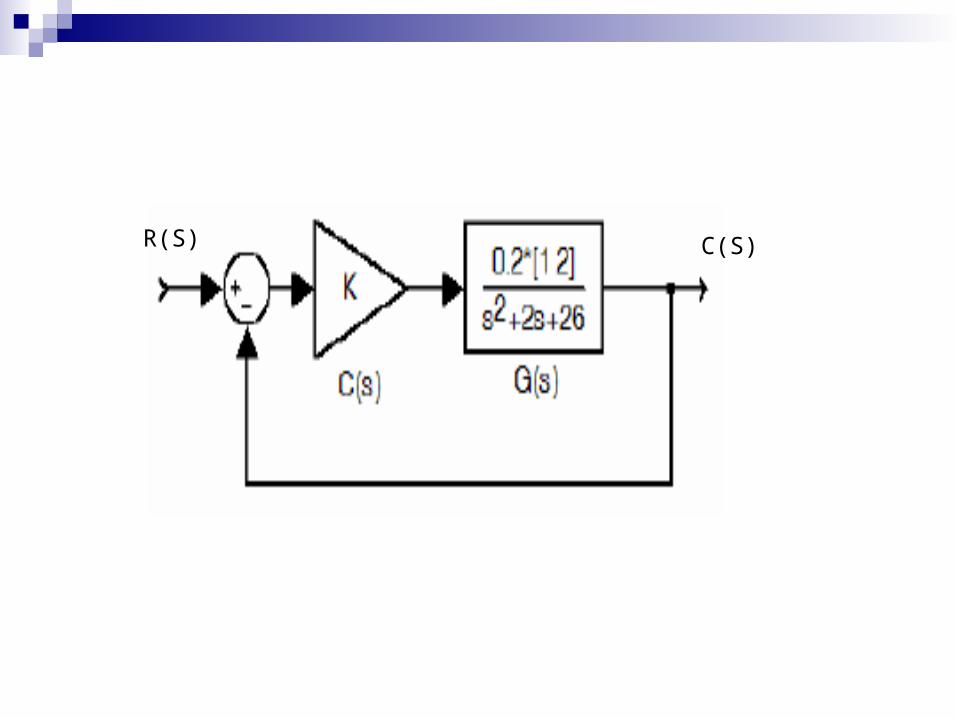
R(S) C(S)
Análisis previo:
Para especificar los parámetros del transitorio de la respuesta temporal de un sistema en bucle cerrado (tiempo de establecimiento, sobreimpulso, …) basta con definir la situación de los polos y de los ceros del sistema.
Sin embargo, el error en régimen permanente de un sistema en bucle cerrado depende de la ganancia del sistema, tanto si se analiza en bucle abierto (coeficientes estáticos de error: Kp, Kv y Ka),
Cálculo del mínimo valor de K para que el error . ante escalón sea inferior a 10%:
Nos basamos en la información de BUCLE ABIERTO (ya que K es una ganancia de bucle abierto).
s 0
ss
ss
2
1e
1
1e 0.1
0.2*K(S+2)1 lim
S 2 26585
pK
SK
Cálculo de las raíces en bucle cerrado para K=585: La ecuación característica
2
2
2
0.2*K(S+2)1 0; 585
S 2 260.2*585(S+2)
1 0S 2 26
119 260 0
y KS
S
S S
Resolviendo la ecuación se obtiene que los polos en bucle cerrado para este valor de K están localizados en y s=-2.23 y s=-116.7
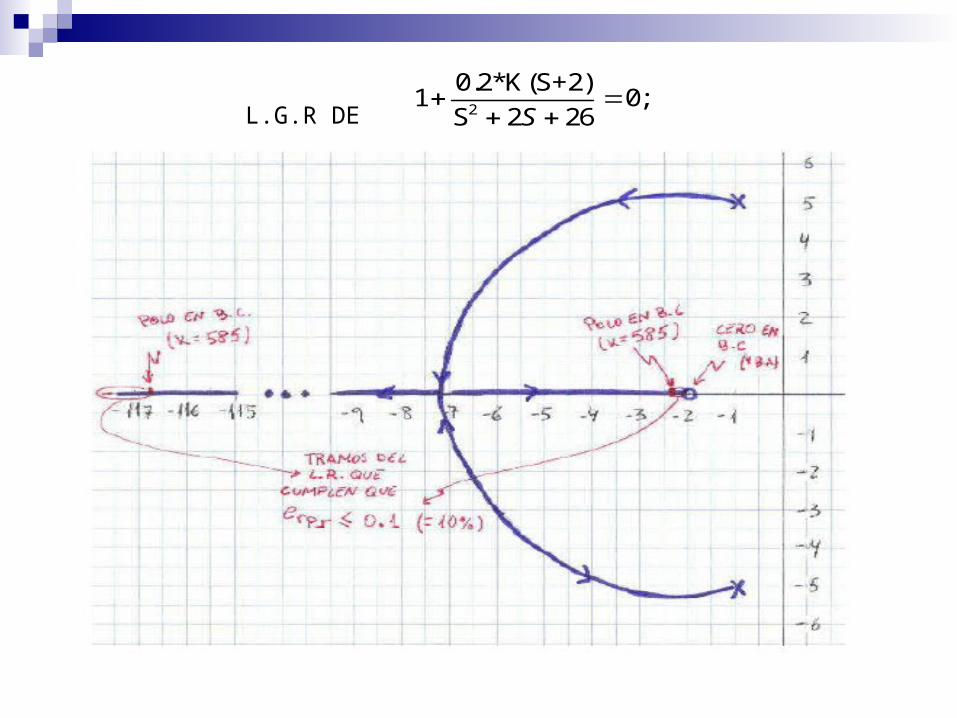
L.G.R DE 2
0.2*K(S+2)1 0;
S 2 26S
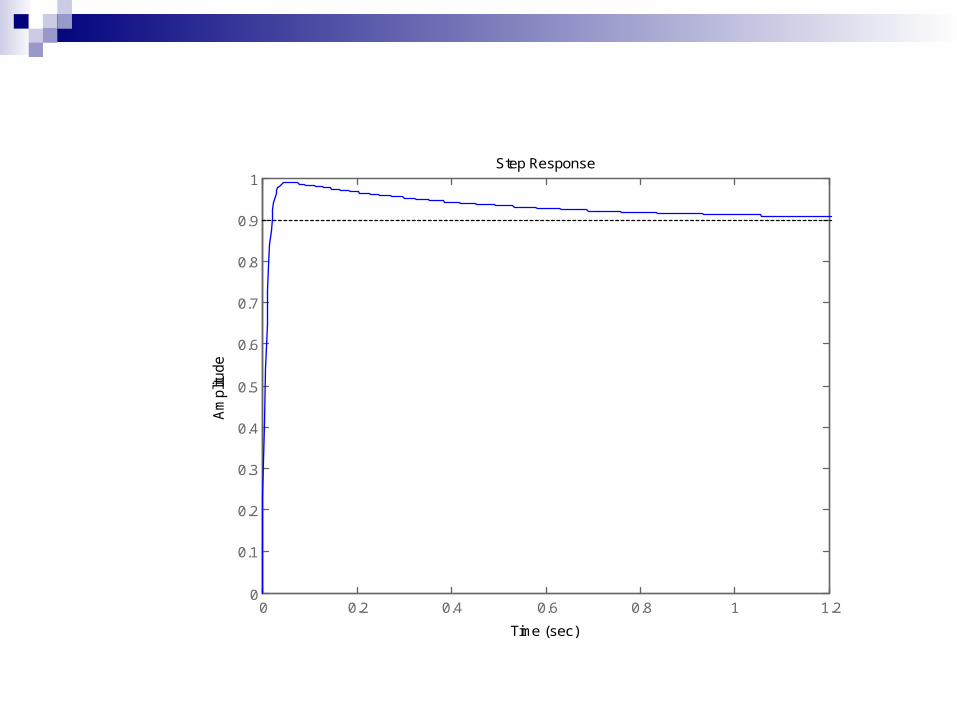
Para calcular el valor de sobreimpulso y el tiempo de establecimiento utilizamos MATLAB
C(s)/R(S)=117*(S+2)/((S2 +119*S+260) Hacemos un programa en archivo m n=[0 117 234]; d=[1 119 260]; Step(n,d)
0 0.2 0.4 0.6 0.8 1 1.20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Step Response
Time (sec)
Am
plit
ude
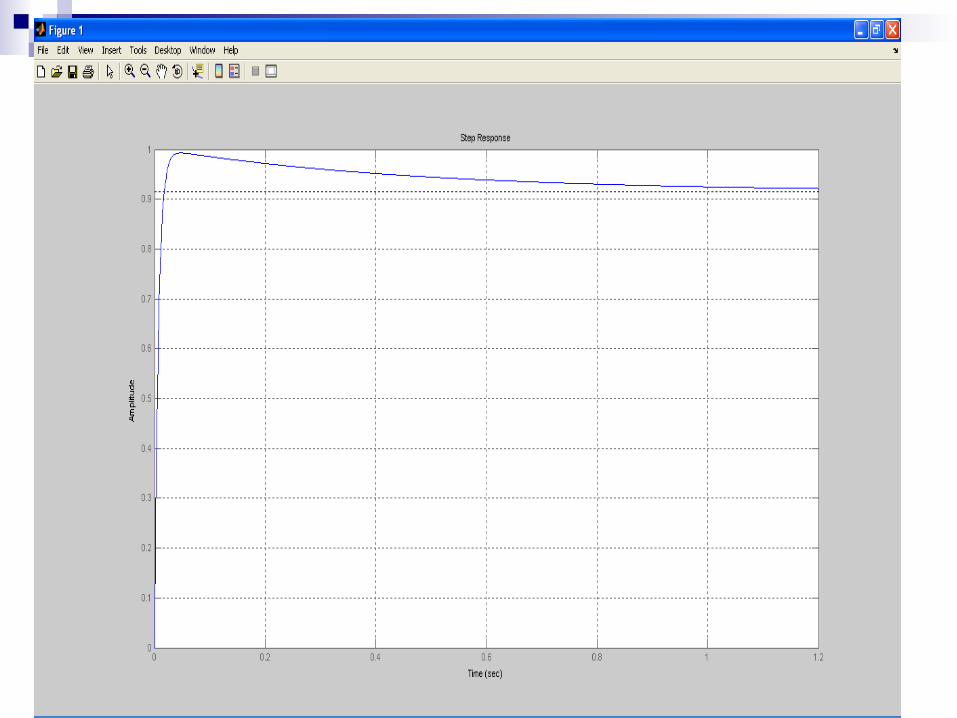
Hallamos para K=700
C(s)/R(S)=140*(S+2)/((S2 +142*S+306) Hacemos un programa en archivo m t=0:0.1=10 n=[0 140 280]; d=[1 142 306]; Step(n,d);grid
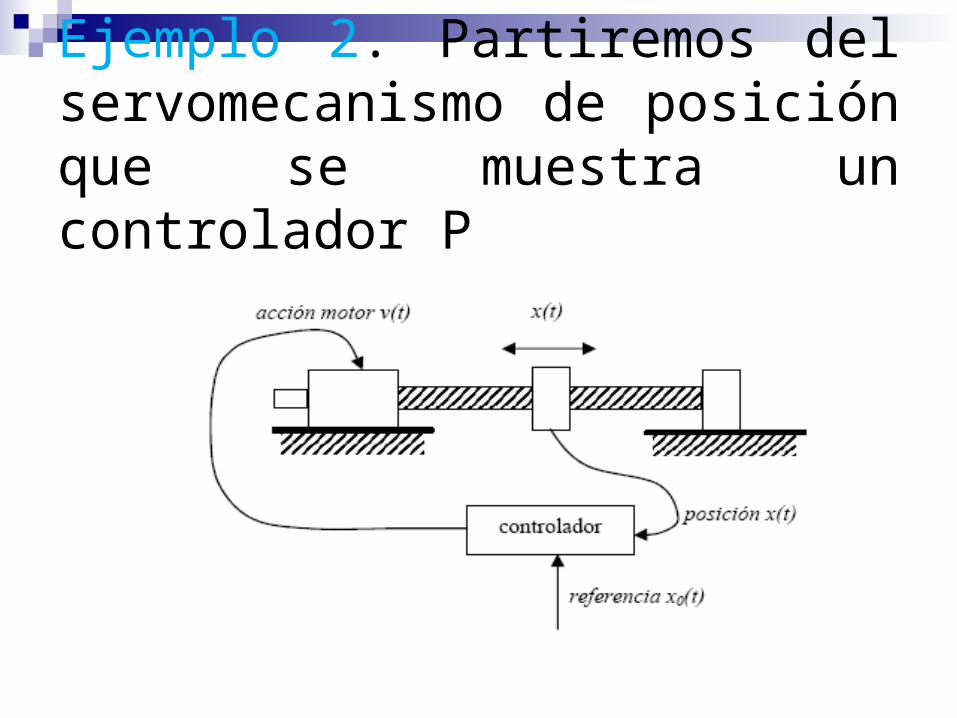
Ejemplo 2. Partiremos del servomecanismo de posición que se muestra un controlador P
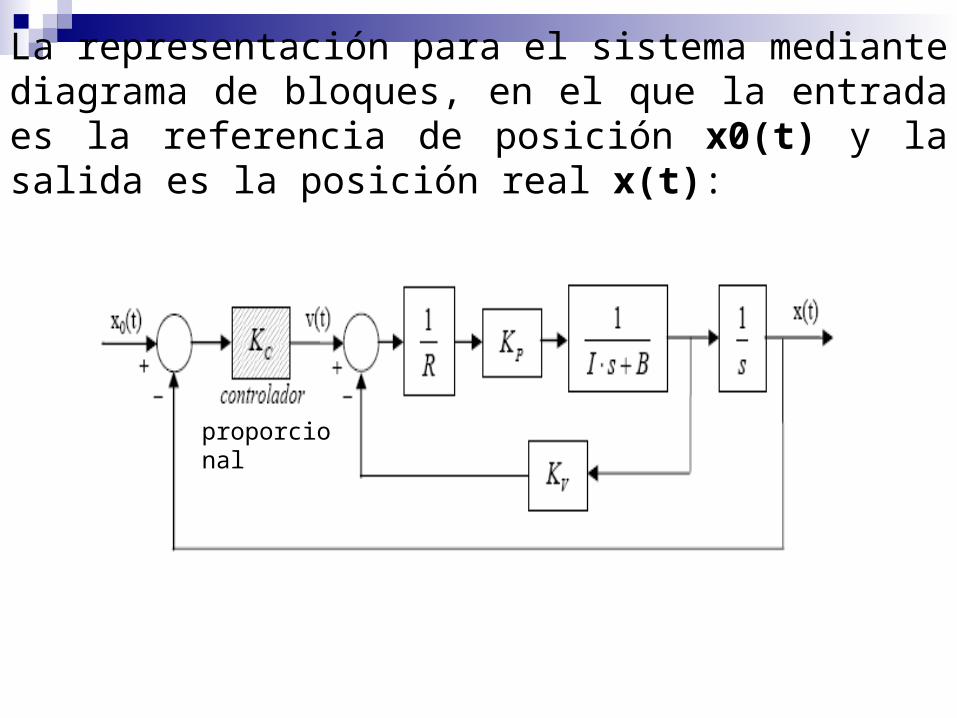
La representación para el sistema mediante diagrama de bloques, en el que la entrada es la referencia de posición x0(t) y la salida es la posición real x(t):
proporcional
Supondremos conocidos los valores de todas las constantes, a excepción de la constante del
controlador Kc, cuyo ajuste será nuestro objetivo: · R = 1.25 (resistencia de los devanados del
motor) · I = 0.8 (momento de inercia del conjunto) · B = 0.5 (coeficiente de rozamiento viscoso) · KP = 1 (constante de par del motor) · KV = 0.01 (constante de velocidad del
motor)
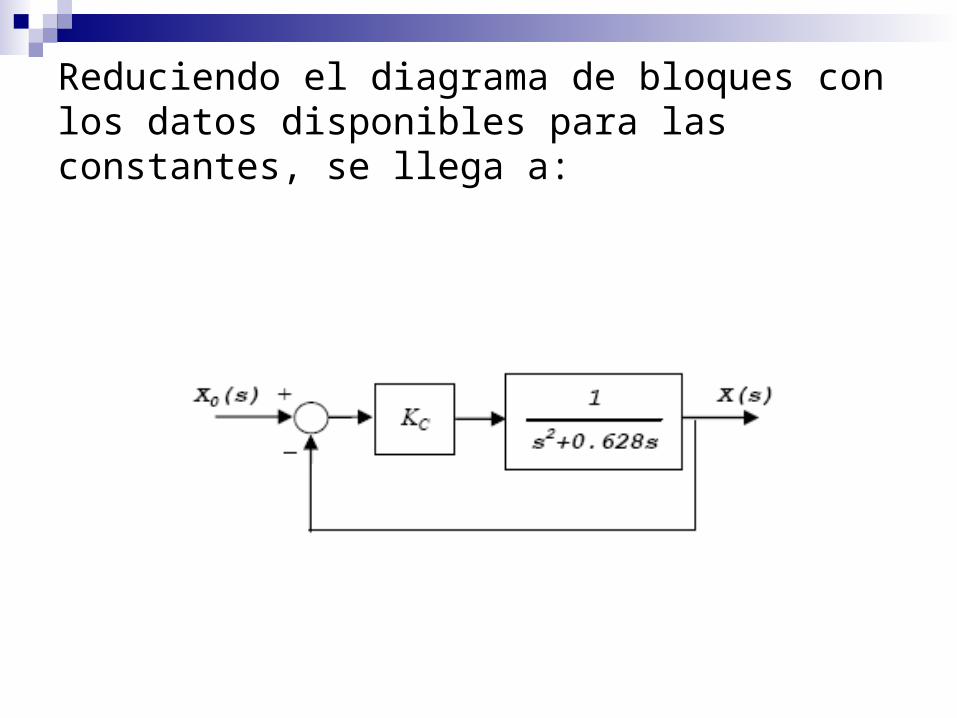
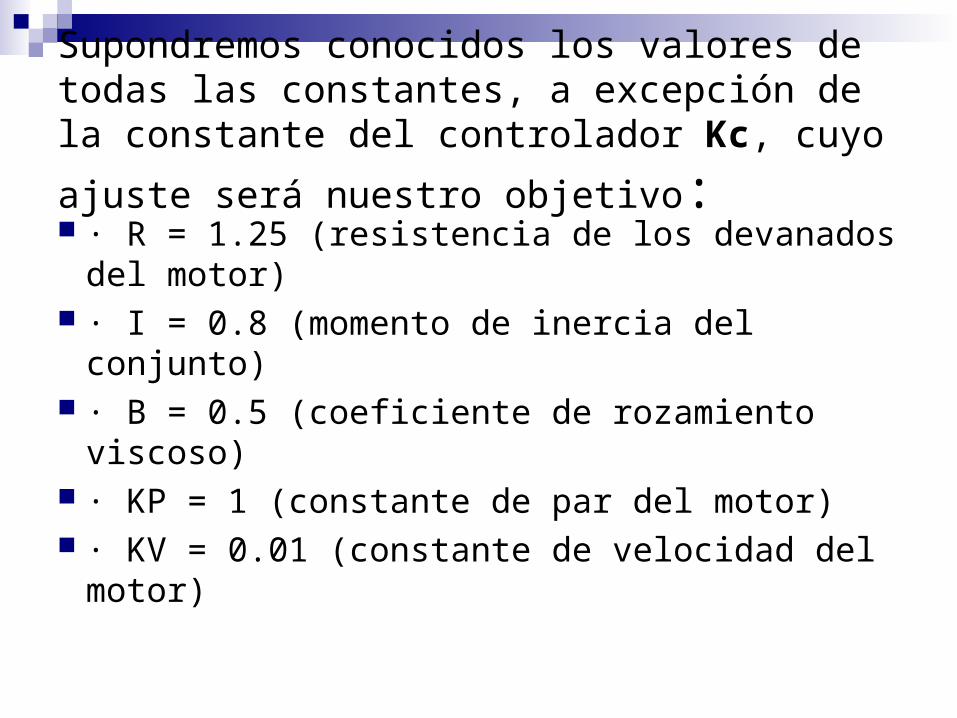
Reduciendo el diagrama de bloques con los datos disponibles para las constantes, se llega a:
DETERMINAR:
Utilizando las fórmulas anteriores, determinar Kc y qué situación de los polos del sistema corresponde a - Tiempo de pico menor o igual a 6 segundos.- Sobreimpulso menor o igual que el 25%.
A partir del lugar de las raíces se pide utilizando MATLAB: Buscar ese punto sobre el lugar de las raíces y obtener
aproximadamente) el valor de la constante Kc para el que se produce.
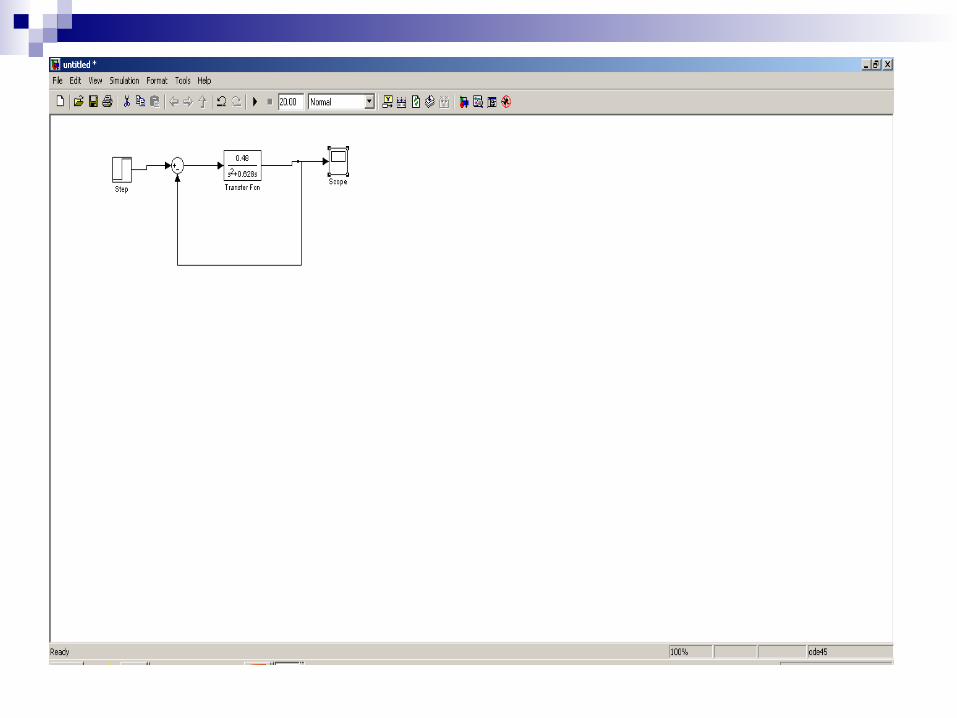
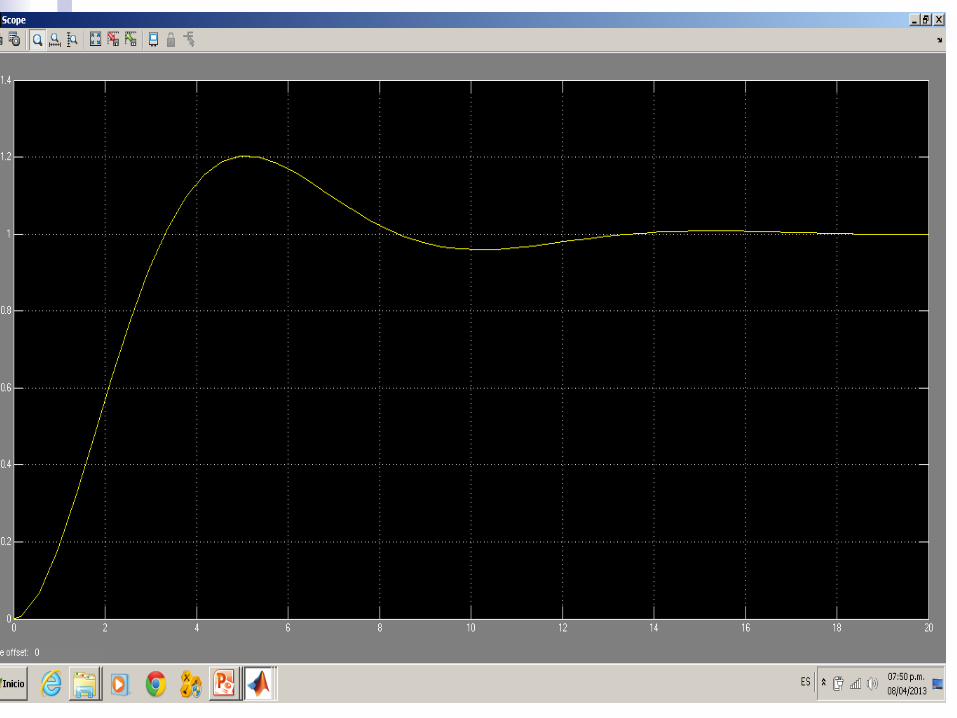
Comprobar el resultado anterior sobre Simulink (simular el comportamiento del sistema ante entrada escalón durante tanto tiempo como sea necesario).
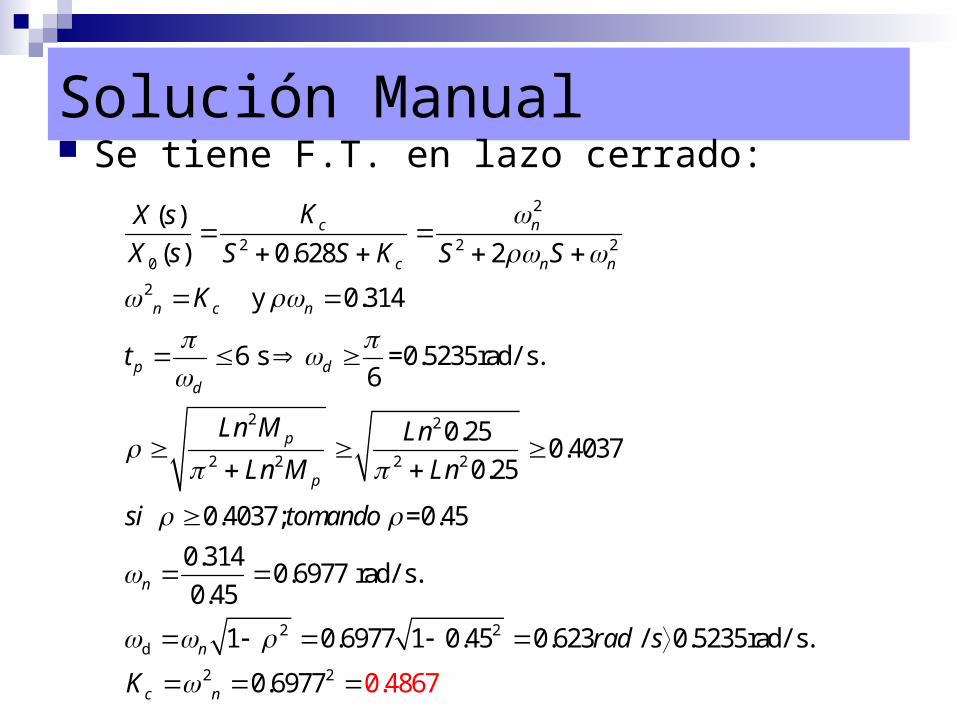
Solución Manual Se tiene F.T. en lazo cerrado:
2
2 2 20
2
2 2
2 2 2 2
2d
( )
( ) 0.628 2
y 0.314
6 s =0.5235rad/ s.6
0.250.4037
0.25
0.4037; =0.45
0.3140.6977 rad/ s.
0.45
1 0.697
c n
c n n
n c n
p dd
p
p
n
n
KX s
X s S S K S S
K
t
Ln M Ln
Ln M Ln
si tomando
2
2 2
7 1 0.45 0.623 / 0.5235rad/ s.
0.48. 60 76977c n
rad s
K
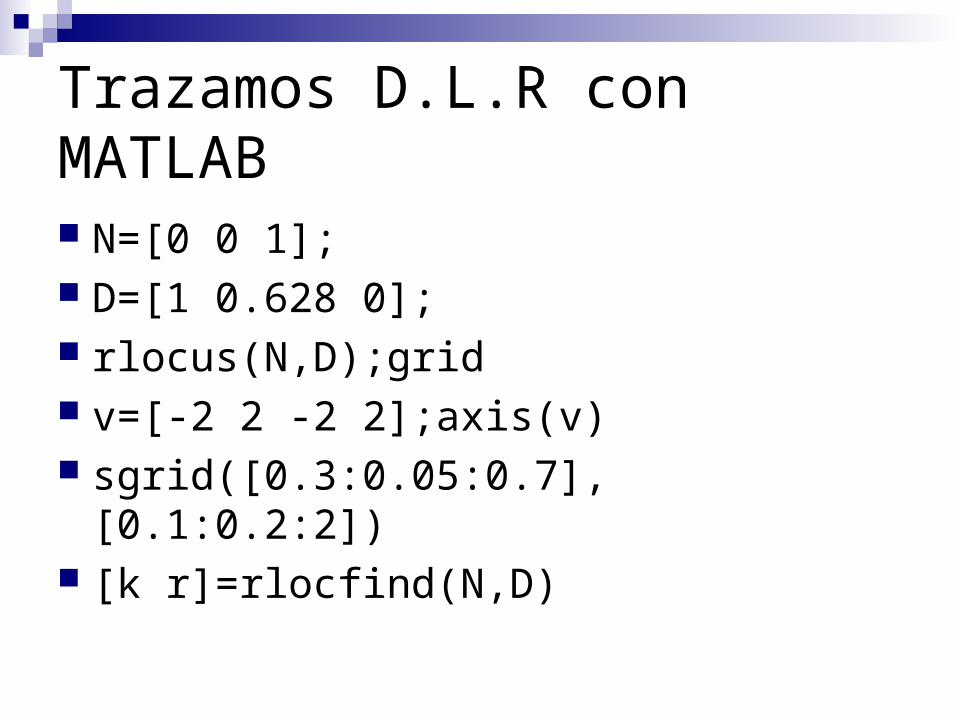
Trazamos D.L.R con MATLAB
N=[0 0 1]; D=[1 0.628 0]; rlocus(N,D);grid v=[-2 2 -2 2];axis(v) sgrid([0.3:0.05:0.7],[0.1:0.2:2]) [k r]=rlocfind(N,D)
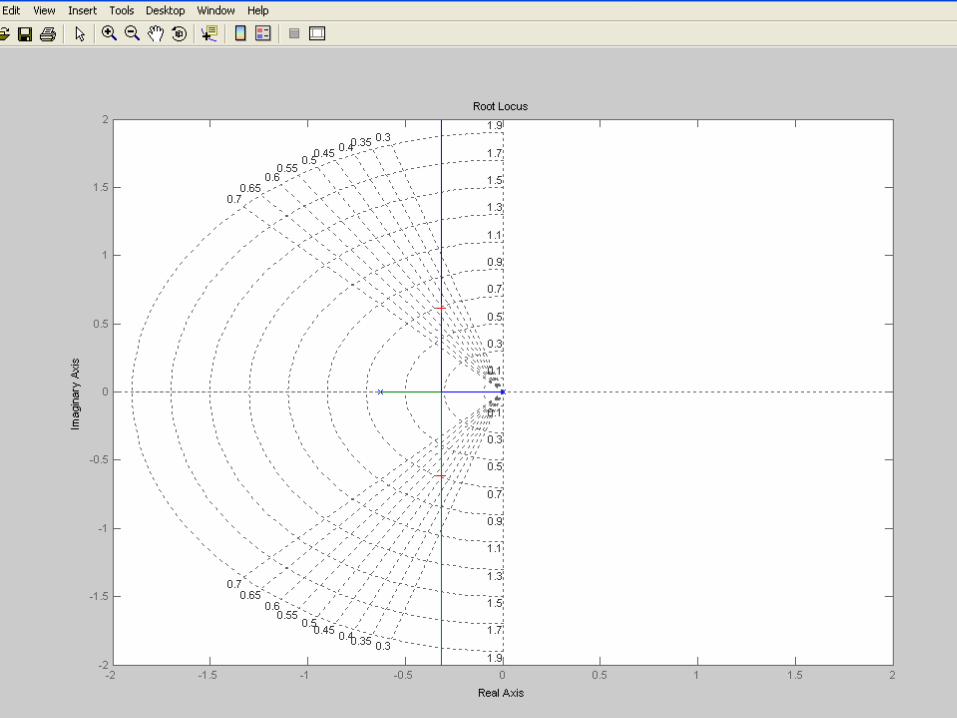
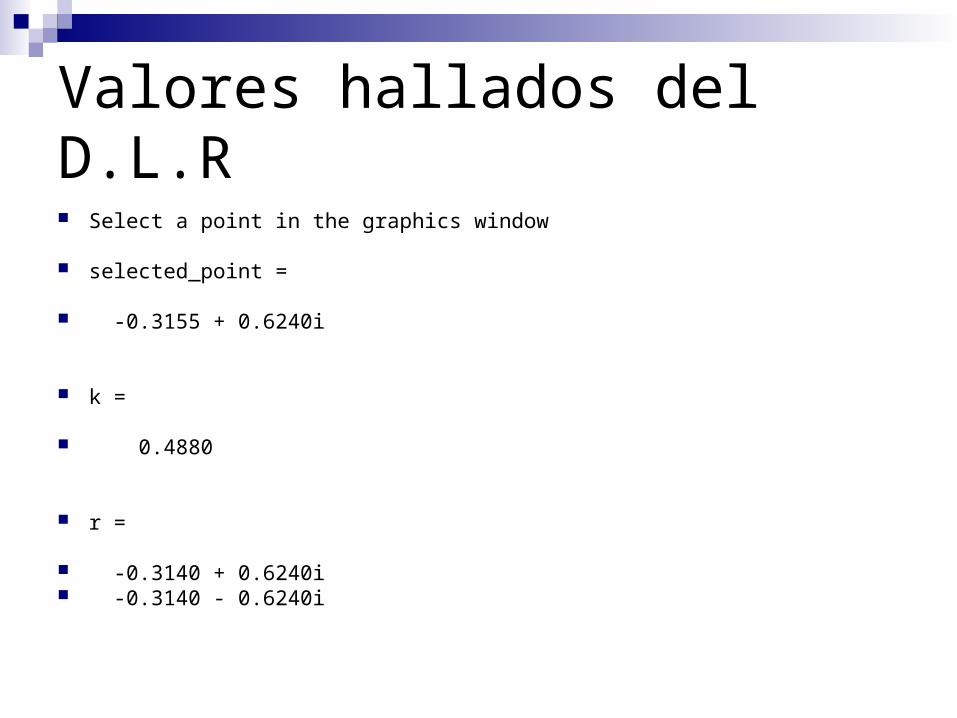
Valores hallados del D.L.R Select a point in the graphics window
selected_point =
-0.3155 + 0.6240i
k =
0.4880
r =
-0.3140 + 0.6240i -0.3140 - 0.6240i
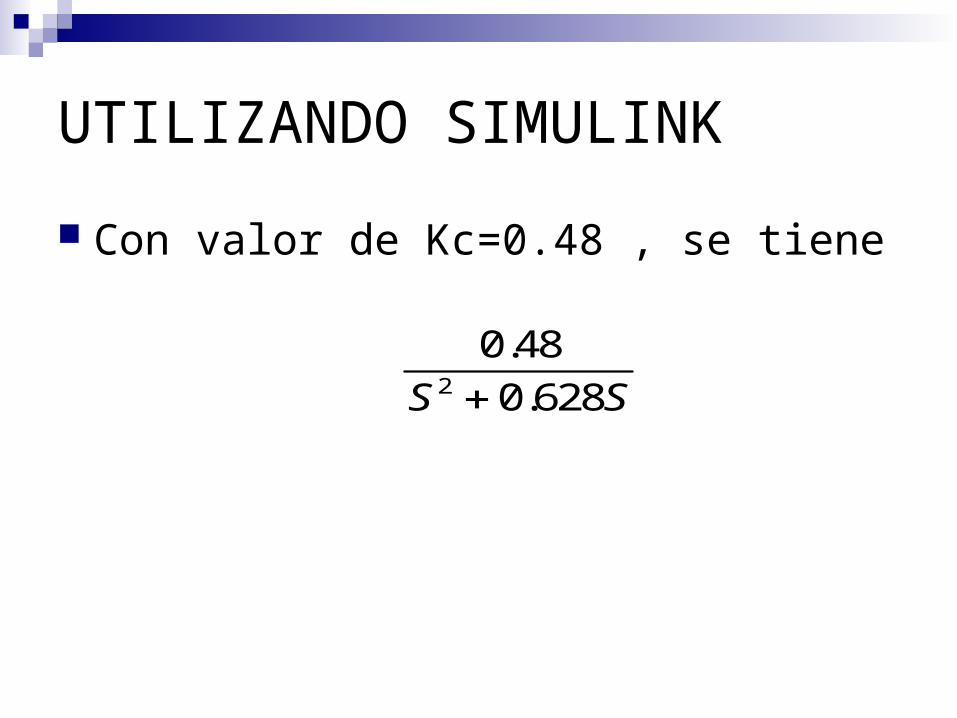
UTILIZANDO SIMULINK
Con valor de Kc=0.48 , se tiene
2
0.48
0.628S S
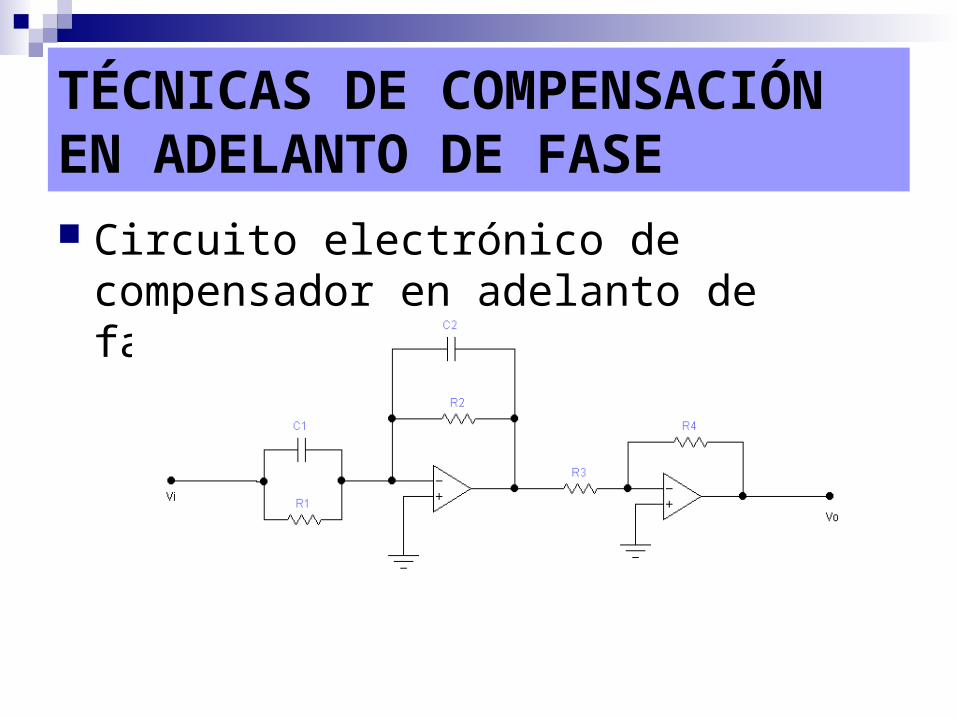
TÉCNICAS DE COMPENSACIÓN EN ADELANTO DE FASE Circuito electrónico de compensador en
adelanto de fase.
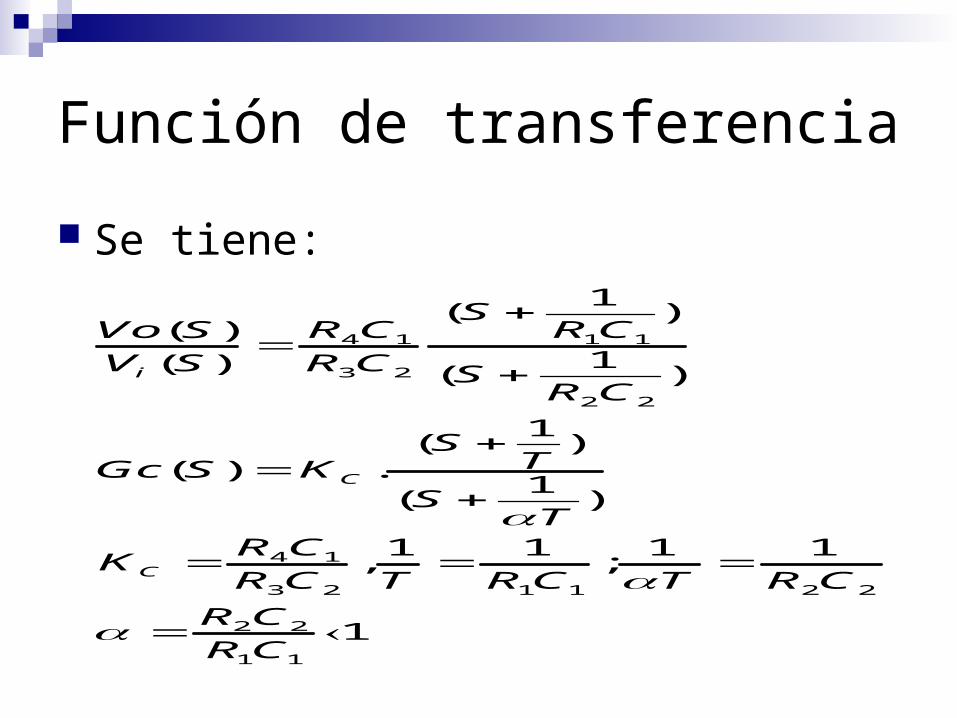
Función de transferencia
Se tiene:
4 1 1 1
3 2
2 2
4 1
3 2 1 1 2 2
2 2
1 1
1( )
( )1( ) ( )
1( )
( ) .1
( )
1 1 1 1, ;
1
i
C
C
SR C RCVo S
V S R C SR C
STGc S K
ST
R CK
R C T RC T R C
R C
RC
Considere un problema de diseño tal que el sistema original sea inestable para todos los valores de ganancia o estable pero con características inconvenientes de la respuesta transitoria. En este caso, es necesario volver a construir el lugar geométrico de las raíces en la vecindad amplia del eje jw y el origen para que los polos dominantes en lazo cerrado estén en las posiciones deseadas en el plano complejo. Este problema se soluciona insertando un compensador de adelanto apropiado en cascada con la función de transferencia de la trayectoria directa.
¿CUANDO UTILIZAR COMPENSADOR ADELANTO DE FASE?
Procedimiento para el diseño de compensador en adelanto de fase
1.-De las especificaciones de funcionamiento se determina la ubicación deseada.
2.-Se traza aproximadamente el lugar de las raíces, si con el solo ajustar la ganancia se logra obtener los polos de lazo cerrado, deseados ahí culmina el diseño, de no ser así se calcula la deficiencia angular(Ø) lo cual lo debe proporcionar el compensador en adelanto de fase, para que el nuevo valor de las raíces pase por las ubicaciones deseadas de los polos dominantes de lazo cerrado.
3.- El compensador tendrá la siguiente función de transferencia.
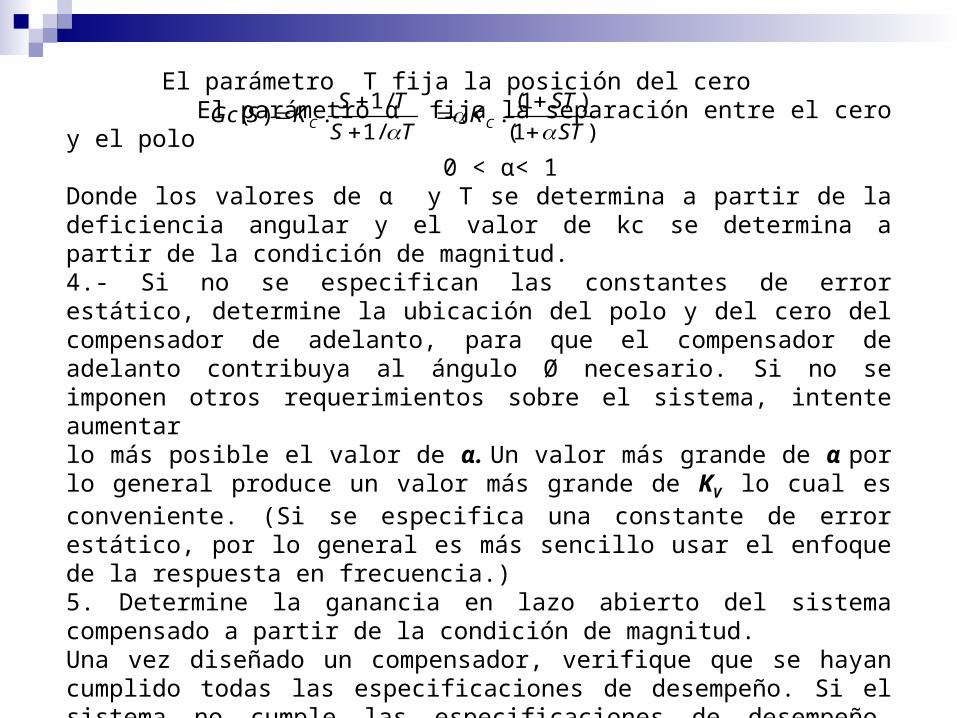
El parámetro T fija la posición del cero El parámetro α fija la separación entre el cero y el polo
0 < α< 1Donde los valores de α y T se determina a partir de la deficiencia angular y el valor de kc se determina a partir de la condición de magnitud.4.- Si no se especifican las constantes de error estático, determine la ubicación del polo y del cero del compensador de adelanto, para que el compensador de adelanto contribuya al ángulo Ø necesario. Si no se imponen otros requerimientos sobre el sistema, intente aumentarlo más posible el valor de α. Un valor más grande de α por lo general produce un valor más grande de KV lo cual es conveniente. (Si se especifica una constante de error estático, por lo general es más sencillo usar el enfoque de la respuesta en frecuencia.)5. Determine la ganancia en lazo abierto del sistema compensado a partir de la condición de magnitud.Una vez diseñado un compensador, verifique que se hayan cumplido todas las especificaciones de desempeño. Si el sistema no cumple las especificaciones de desempeño, repita el procedimiento de diseño ajustando el polo y el cero del compensador hasta cumplir con todas las especificaciones.
1/ (1 )( ) . .
1/ (1 )C C
S T STGc S K K
S T ST
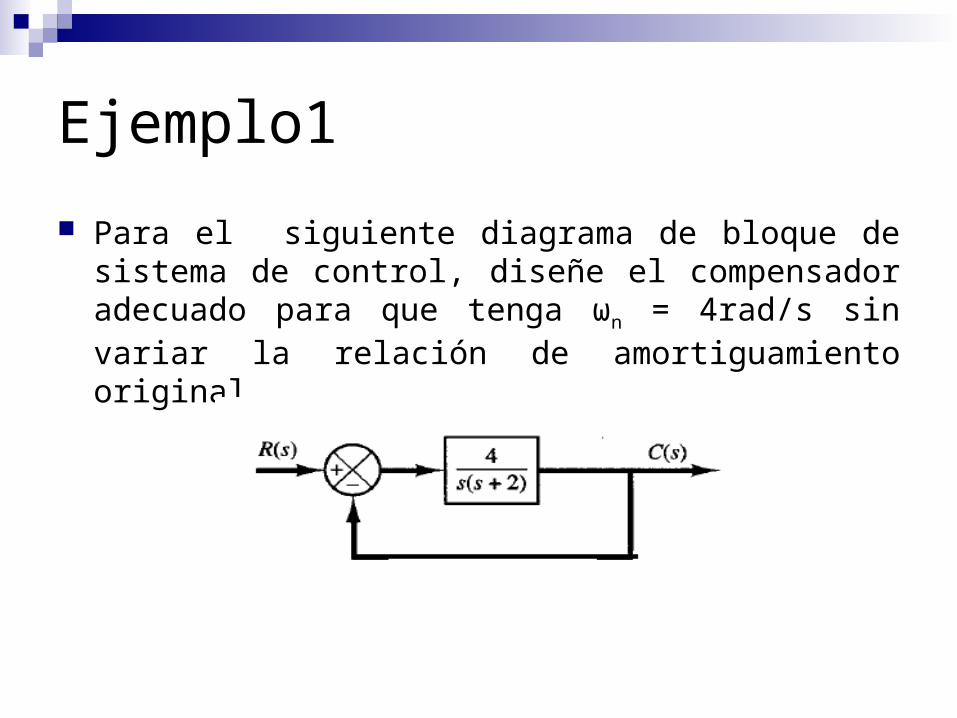
Ejemplo1
Para el siguiente diagrama de bloque de sistema de control, diseñe el compensador adecuado para que tenga ωn = 4rad/s sin variar la relación de amortiguamiento original.
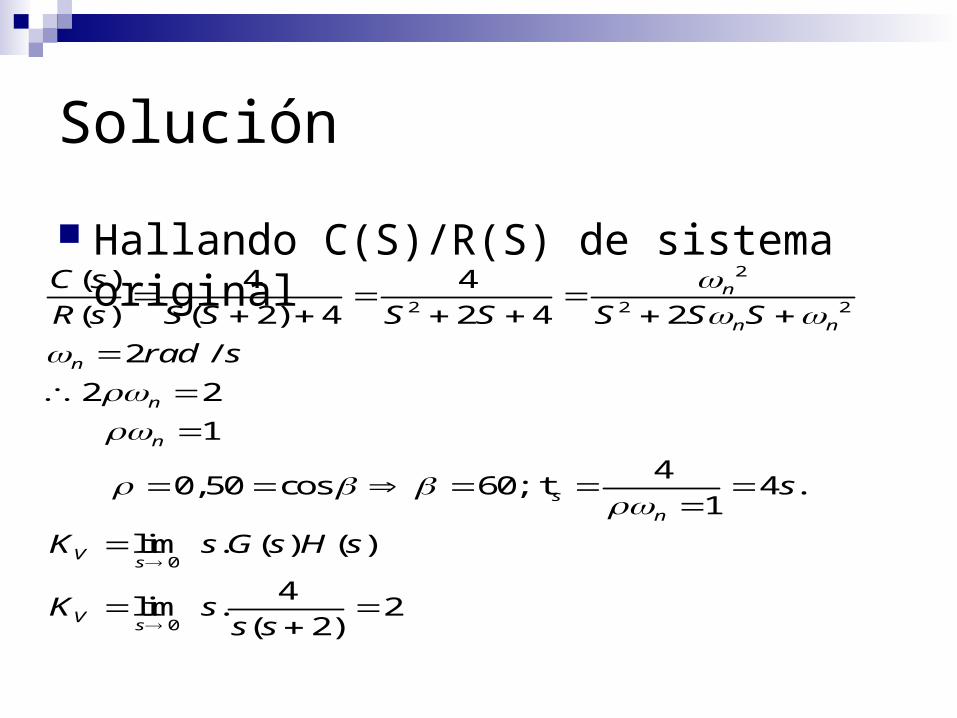
Solución
Hallando C(S)/R(S) de sistema original2
2 2 2
0
0
( ) 4 4
( ) ( 2) 4 2 4 2
2 /
2 2
1
40,50 cos 60; t 4 .
1
lim . ( ) ( )
4lim . 2
( 2)
n
n n
n
n
n
sn
V s
Vs
C s
R s S S S S S S S
rad s
s
K s G s H s
K ss s
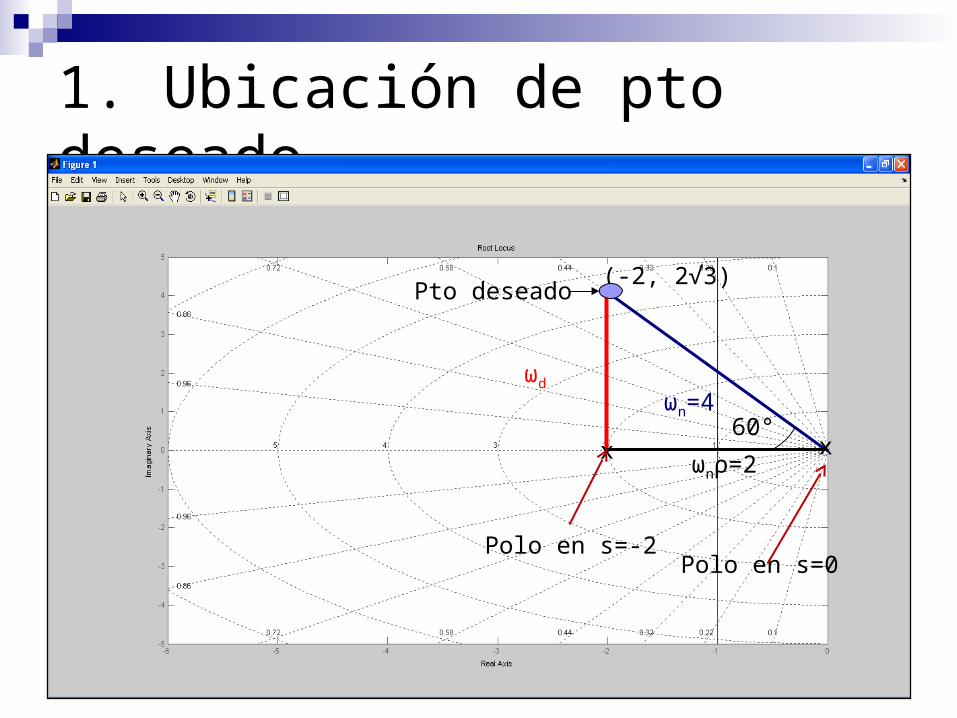
1. Ubicación de pto deseado
(-2, 2√3)
ωnρ=2
ωn=4ωd
60°
Pto deseado
xx
Polo en s=-2Polo en s=0
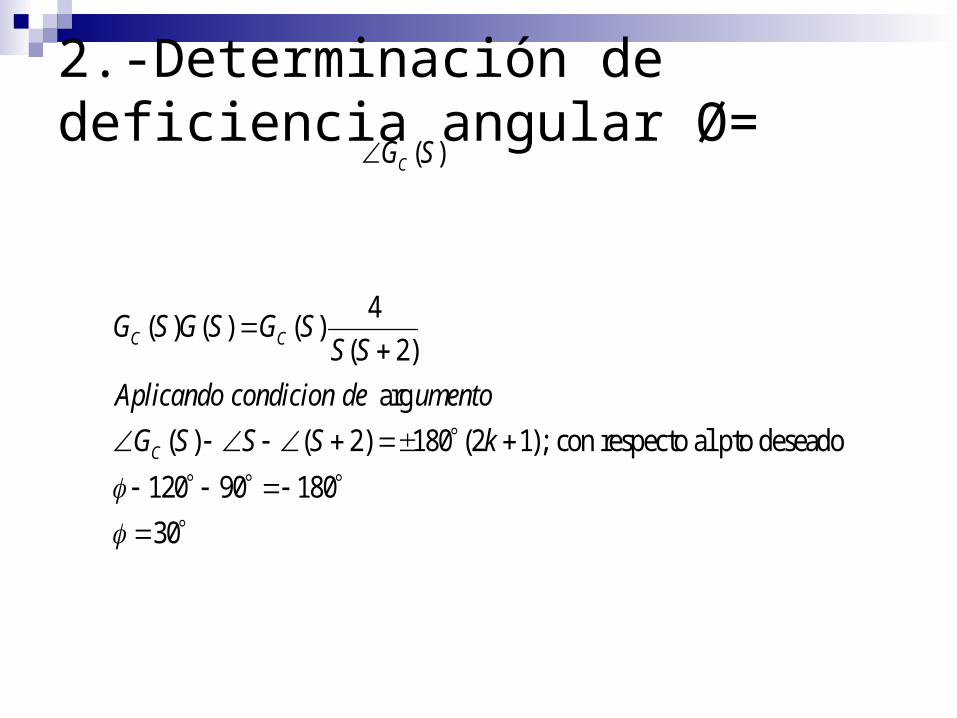
2.-Determinación de deficiencia angular Ø= ( )CG S
4( ) ( ) ( )
( 2)
arg
( ) ( 2) 180 (2 1); con respecto al pto deseado
120 90 180
30
C C
C
G S G S G SS S
Aplicando condicion de umento
G S S S k
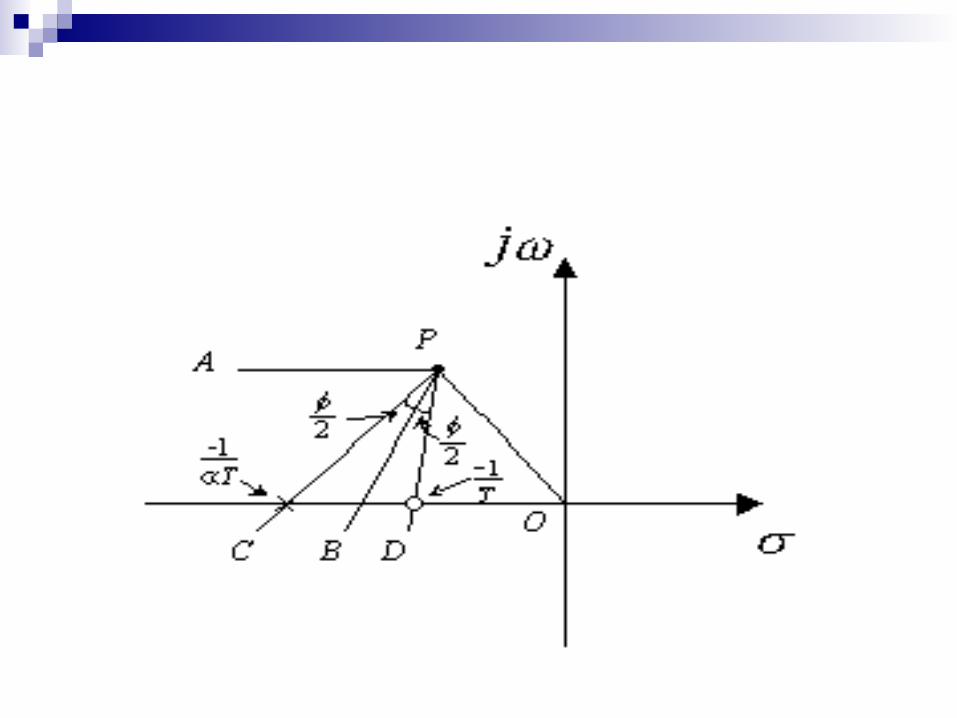
4.- Como no nos dan ninguna condición de error estático hacemos que el valor de “α” sea lo mas grande. Para lo cual se realiza el siguiente
procedimiento. 1.-Se traza una recta desde el origen al
punto deseado (OP) 2.-Se traza una recta paralela desde el
punto deseado al eje real (PA) 3.-Se traza la bisectriz de OPA , que es
la recta PB
PA
B
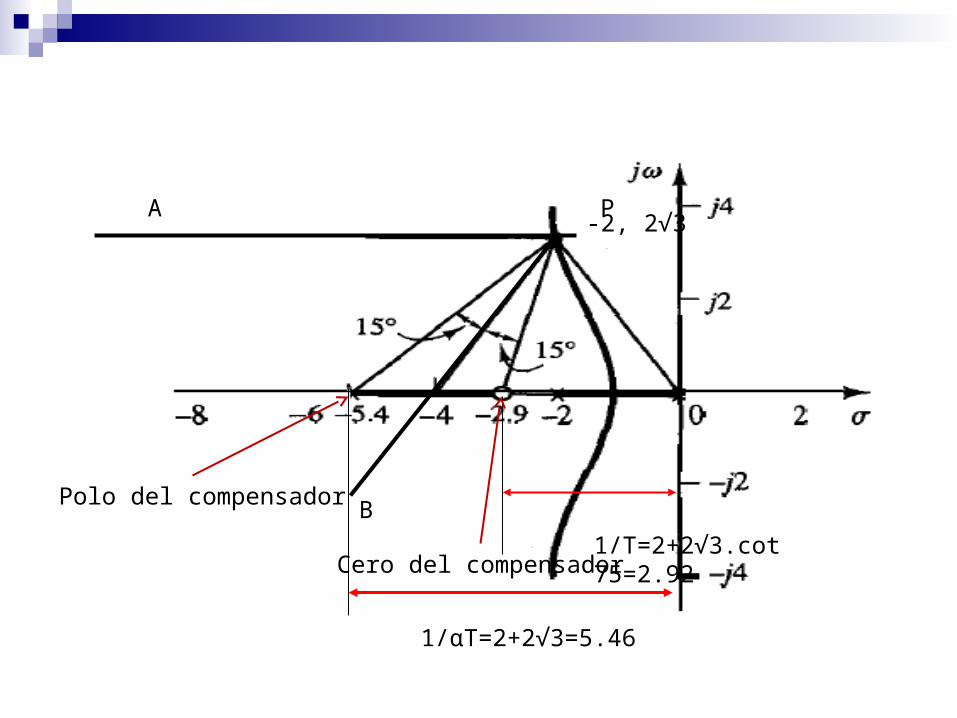
1/αT=2+2√3=5.46
1/T=2+2√3.cot 75=2.92
-2, 2√3
Polo del compensador
Cero del compensador

3.-El valor de Gc(S) tendra:
2 2 3
1/ 2.92( ) . .
1/ 5.46Por condicion de magnitud
.( 2,92) 41 . 0
( 5,46) ( 2)
( 5,46)( 2)
4( 2,92)
( 5,464)( 2)
4( 2,928)
4,73
C C
c
c
c S j
c
S T SGc S K K
S T S
K S
S S S
S S SK
S
S S SK
S
K
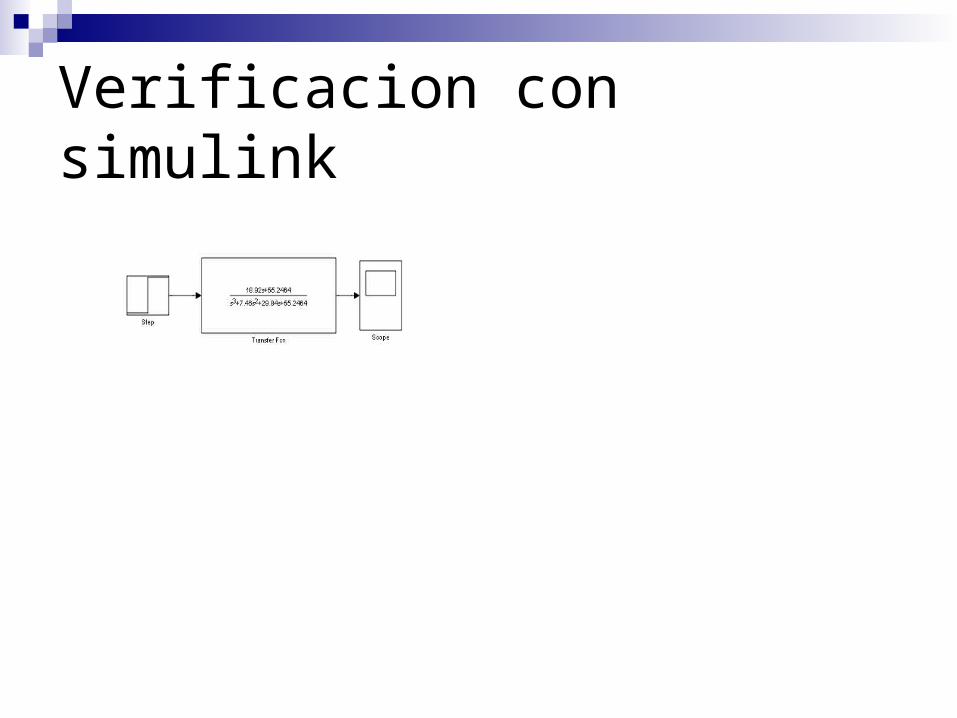
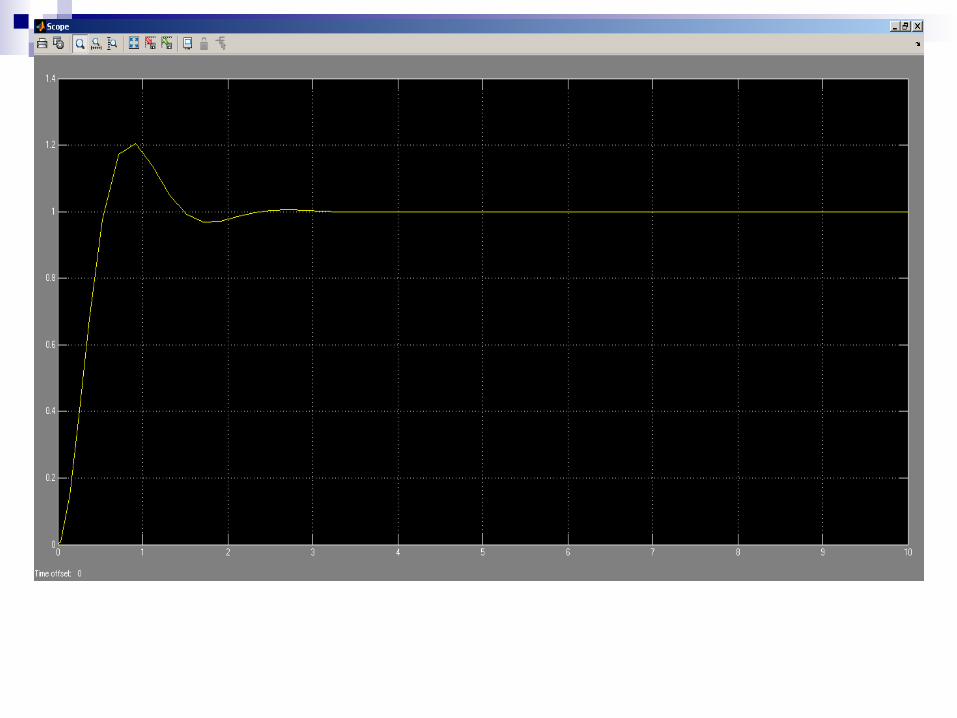
Verificacion con simulink
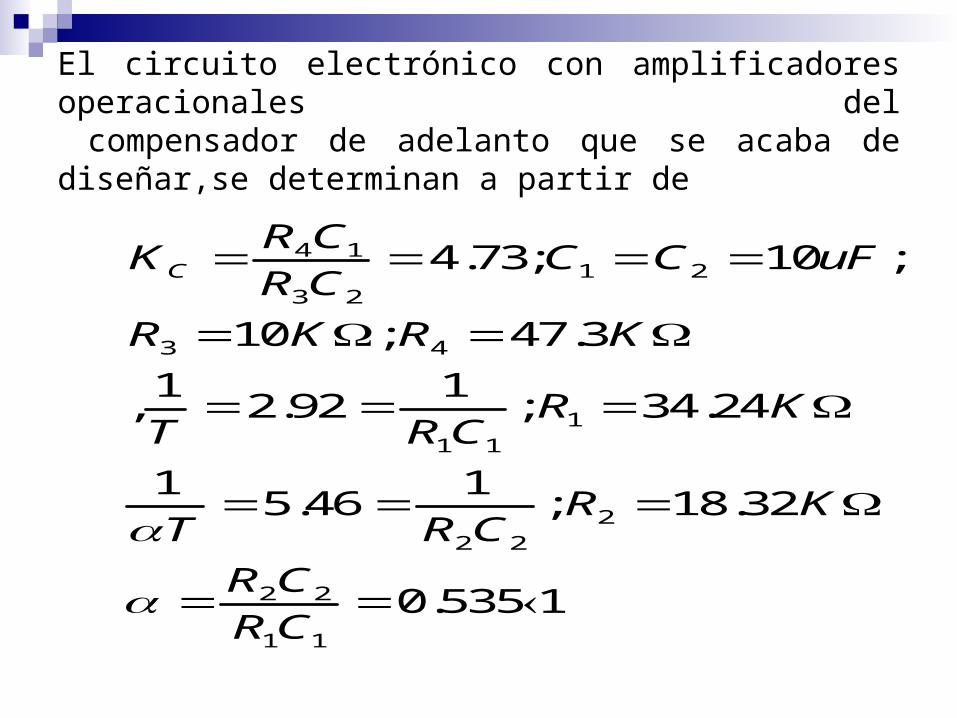
El circuito electrónico con amplificadores operacionales del compensador de adelanto que se acaba de diseñar,se determinan a partir de
4 11 2
3 2
3 4
11 1
22 2
2 2
1 1
4.73; 10 ;
10 ; 47.3
1 1, 2.92 ; 34.24
1 15.46 ; 18.32
0.535 1
C
R CK C C uF
R C
R K R K
R KT RC
R KT R C
R C
RC
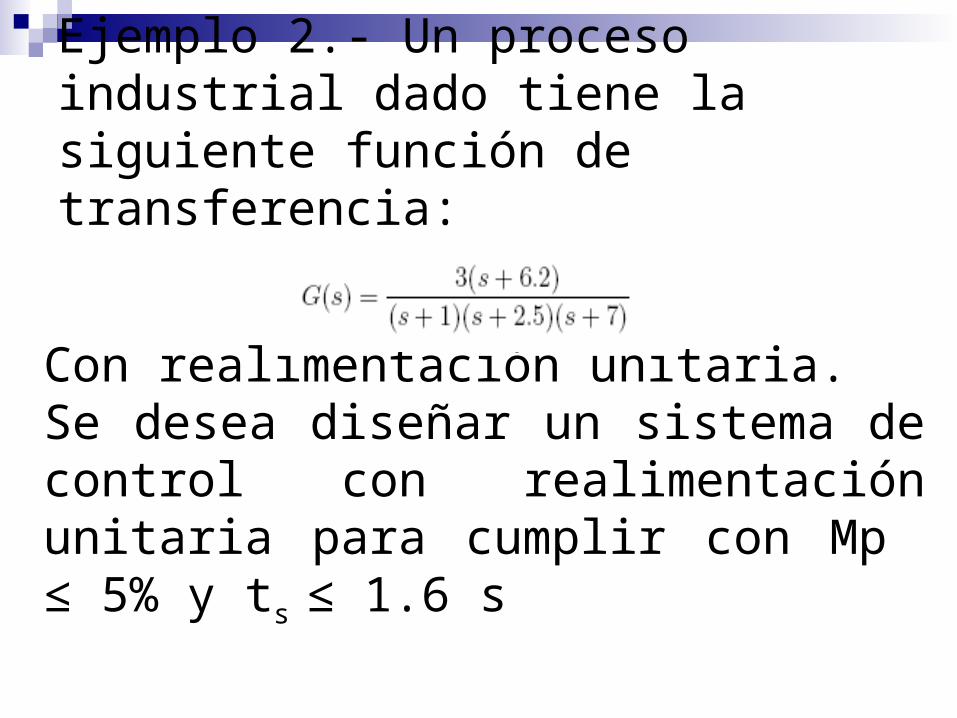
Ejemplo 2.- Un proceso industrial dado tiene la siguiente función de transferencia:
Con realimentación unitaria.Se desea diseñar un sistema de control con realimentación unitaria para cumplir con Mp ≤ 5% y ts ≤ 1.6 s
Reduciendo a sistema de segundo orden Se tiene:
( ) 3( 6.2)
( ) ( 1.79 1.42)( 1.79 1.42)( 6.92)
es posible reducir a segundo orden
C s S
R s S j S j S
No
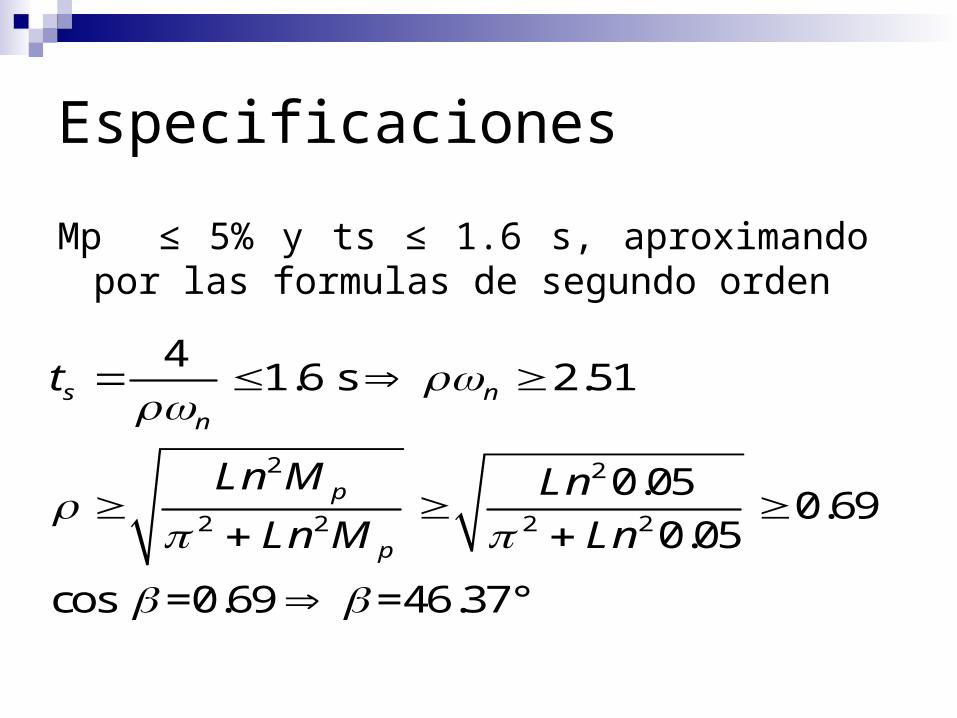
Especificaciones
Mp ≤ 5% y ts ≤ 1.6 s, aproximando por las formulas de segundo orden
2 2
2 2 2 2
41.6 s 2.51
0.050.69
0.05
cos =0.69 =46.37°
s nn
p
p
t
Ln M Ln
Ln M Ln
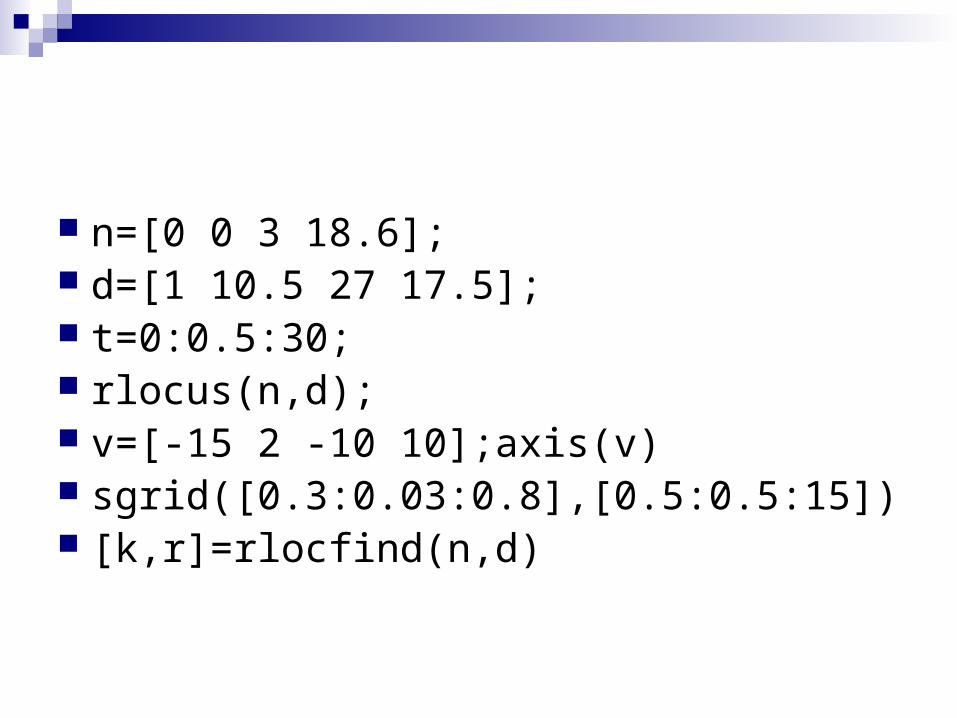
n=[0 0 3 18.6]; d=[1 10.5 27 17.5]; t=0:0.5:30; rlocus(n,d); v=[-15 2 -10 10];axis(v) sgrid([0.3:0.03:0.8],[0.5:0.5:15]) [k,r]=rlocfind(n,d)
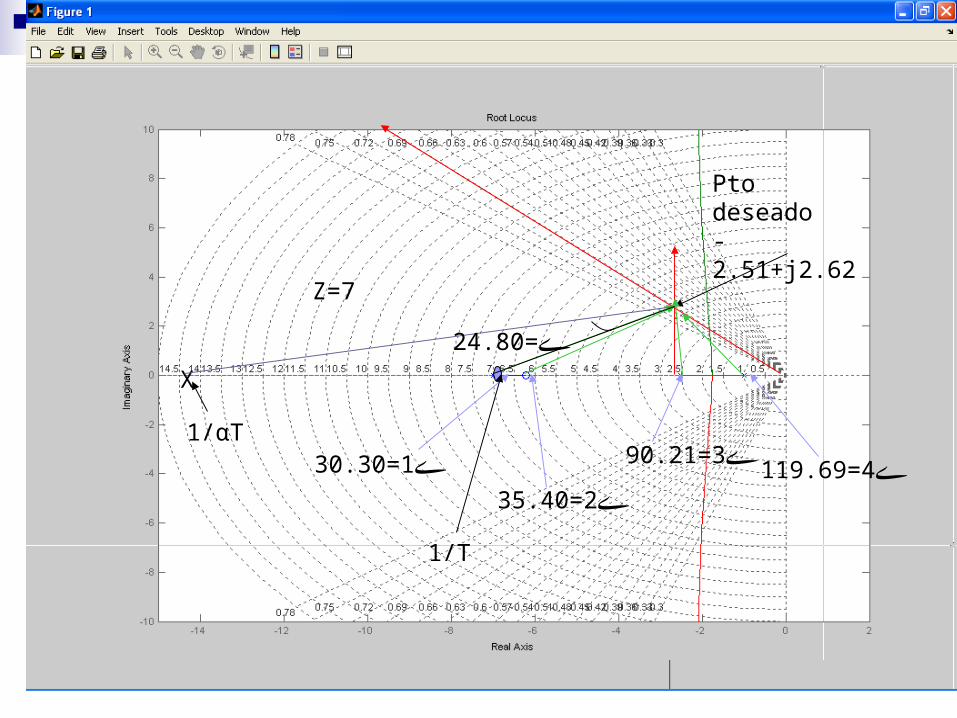
Pto deseado-2.51+j2.62
30.30=1ے
35.40=2ے119.69=4ے
90.21=3ے
Z=7
X
1/αT
1/T
24.80=ے
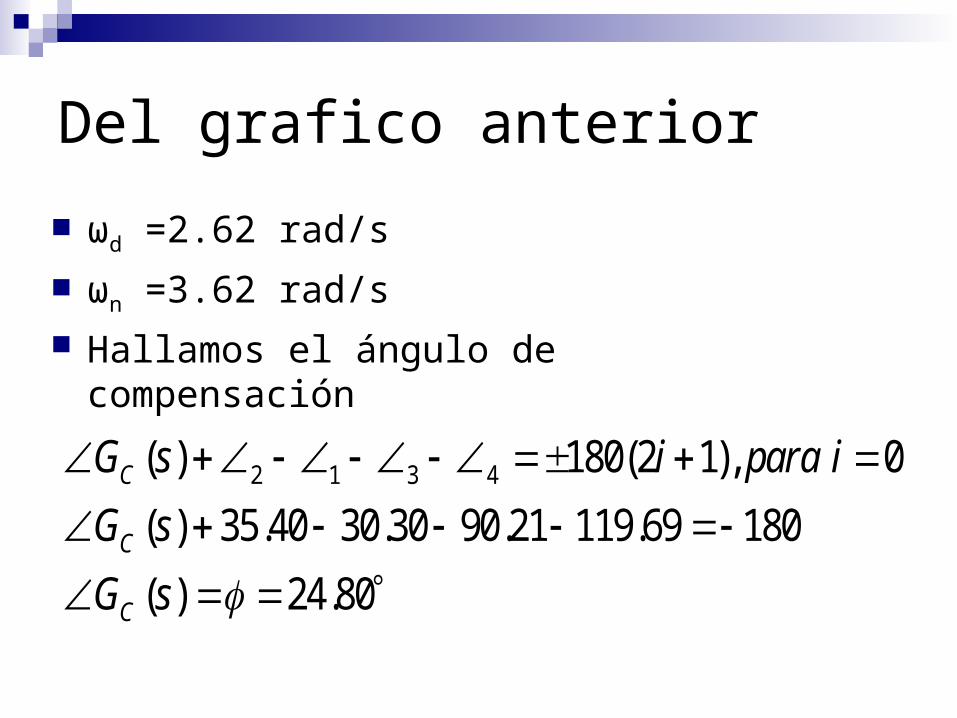
Del grafico anterior
ωd =2.62 rad/s
ωn =3.62 rad/s Hallamos el ángulo de compensación
2 1 3 4( ) 180(2 1), 0
( ) 35.40 30.30 90.21 119.69 180
( ) 24.80
C
C
C
G s i para i
G s
G s
red de adelanto realizable
Otra opción es elegir primero la posición del cero, y calcular la posición del polo de forma que el ángulo entre ambos sea de 24.80°.
Si elegimos como posición del cero Z = 7, P debe estar en una posición formando un ángulo de 24.80°. Hallando la K correspondiente mediante el criterio del argumento queda
( )C c
S ZG s K
S P
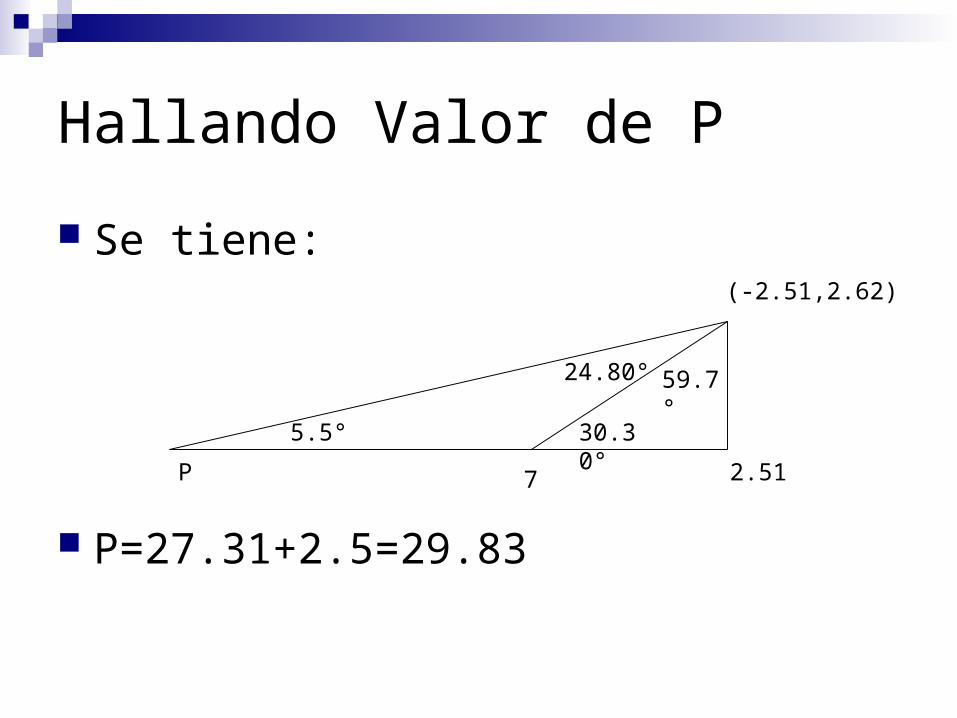
Hallando Valor de P
Se tiene:
P=27.31+2.5=29.83
2.517P
5.5°
24.80°
30.30°
59.7°
(-2.51,2.62)
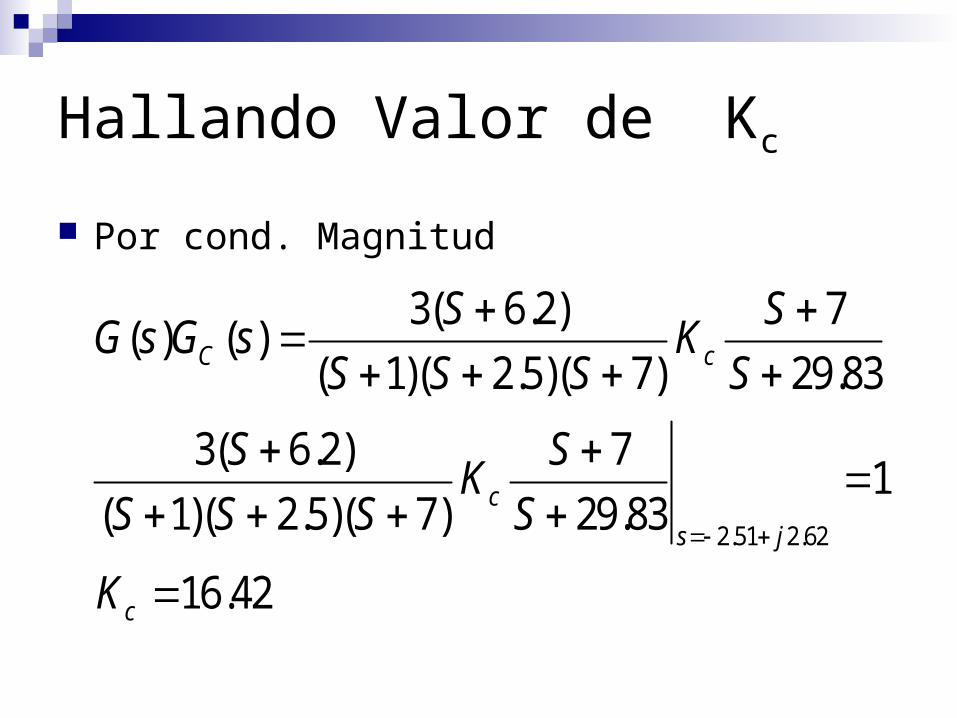
Hallando Valor de Kc
Por cond. Magnitud
2.51 2.62
3( 6.2) 7( ) ( )
( 1)( 2.5)( 7) 29.83
3( 6.2) 71
( 1)( 2.5)( 7) 29.83
16.42
C c
c
s j
c
S SG s G s K
S S S S
S SK
S S S S
K
Este regulador es realizable y su acción de control es más moderada.Este proceder da lugar a toda una familia de reguladores según elijamos la posición del cero.
Cuanto más alejado elijamos el cero, más próximo será el comportamiento al cero ideal (cuando Z = 8.16, P→∞).
En general, la versión real (valores bajos de Z) tiene como ventajas (+) y desventajas (−):
+ Menor acción de control. + Menor sensibilidad a ruidos. − Más influencia del cero en la dinámica del sistema en
bucle cerrado, y por tanto un comportamiento más oscilatorio y peores características dinámicas (principalmente, sobreoscilación)
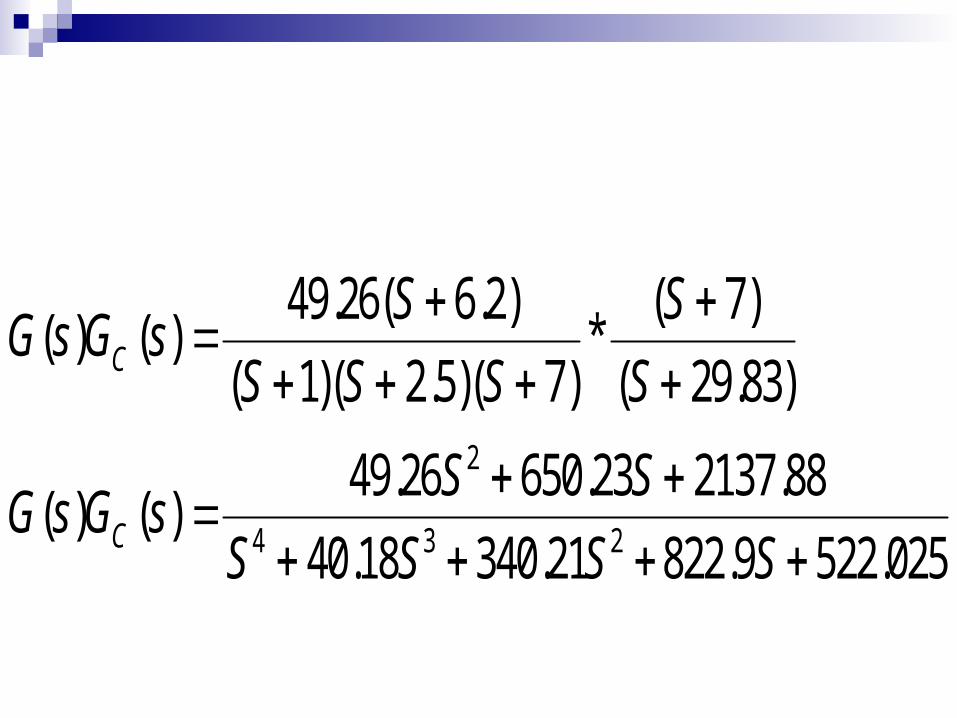
2
4 3 2
49.26( 6.2) ( 7)( ) ( ) *
( 1)( 2.5)( 7) ( 29.83)
49.26 650.23 2137.88( ) ( )
40.18 340.21 822.9 522.025
C
C
S SG s G s
S S S S
S SG s G s
S S S S
Se aplica escalón unitario a la F.T. en lazo cerrado para analizar respuesta
N=[0 0 49.26 650.23 2137.88]; D=[1 40.18 389.38 1473.20 2659.9]; T=0:0.1:10; step(N,D,T);grid
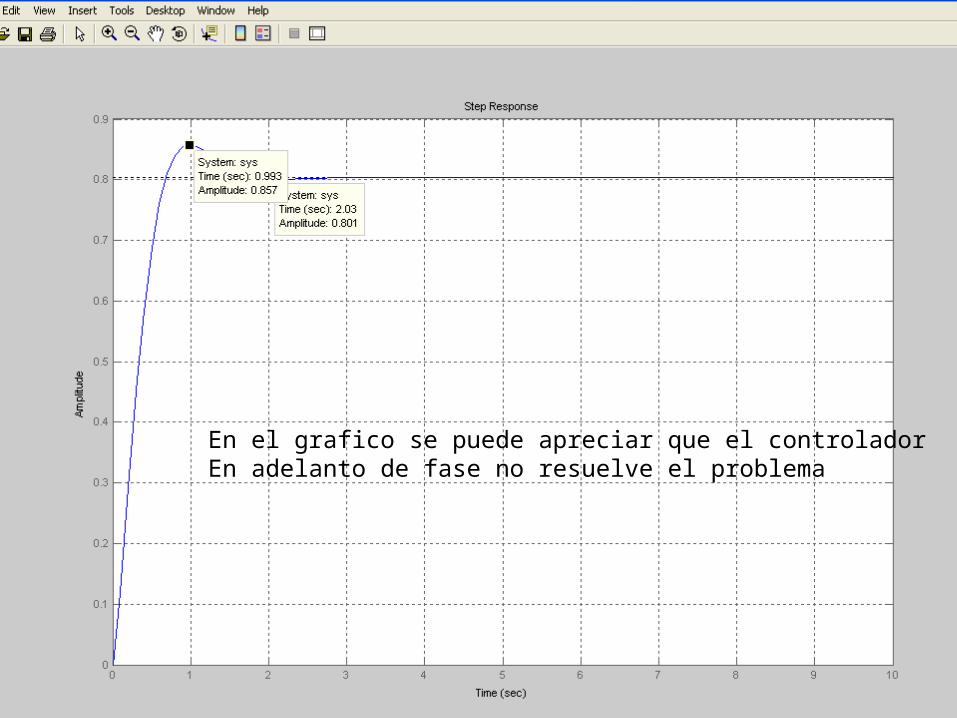
En el grafico se puede apreciar que el controladorEn adelanto de fase no resuelve el problema
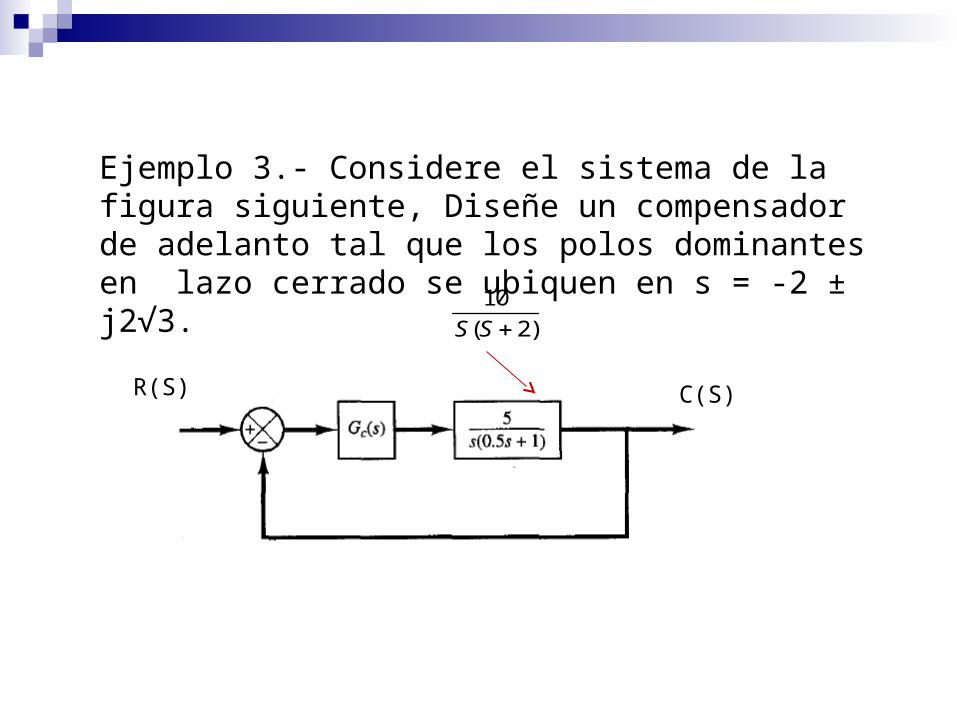
Ejemplo 3.- Considere el sistema de la figura siguiente, Diseñe un compensador de adelanto tal que los polos dominantes en lazo cerrado se ubiquen en s = -2 ± j2√3.
R(S) C(S)
10
( 2)S S
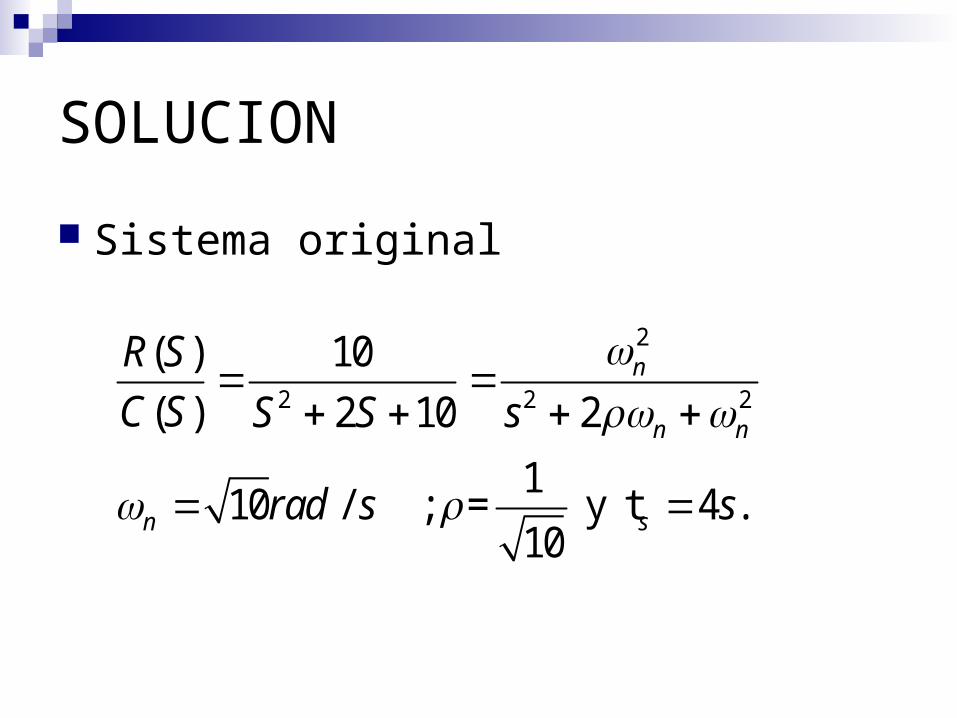
SOLUCION
Sistema original
2
2 2 2
( ) 10
( ) 2 10 2
110 / ; = y t 4 .
10
n
n n
n s
R S
C S S S s
rad s s
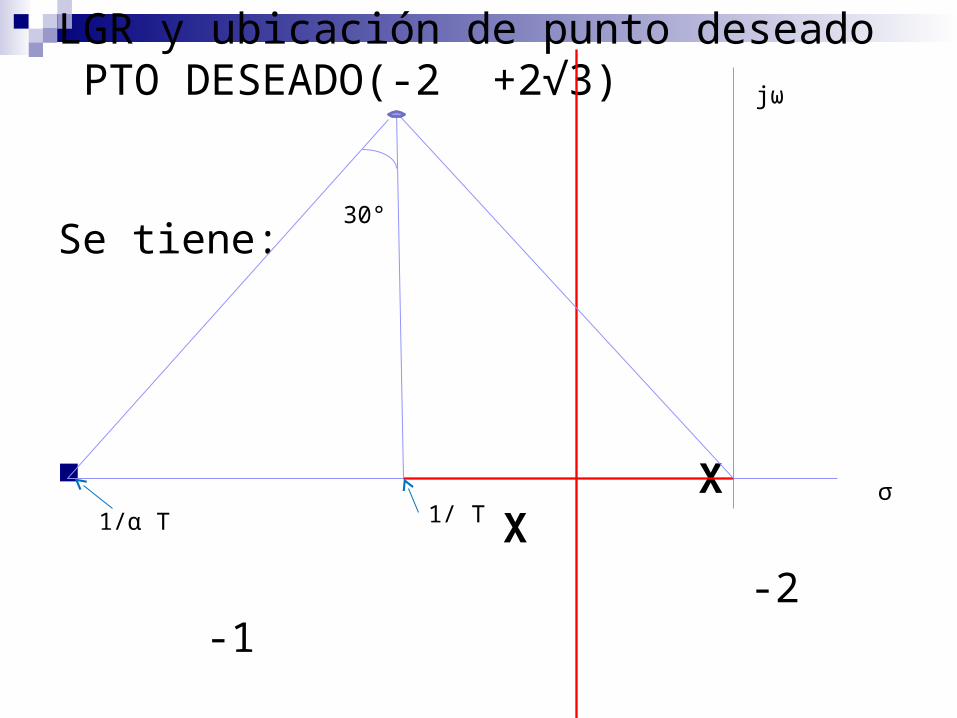
LGR y ubicación de punto deseado PTO DESEADO(-2 +2√3)
Se tiene:
X X
-2 -1
jω
σ1/α T 1/ T
30°
0 0 0
0
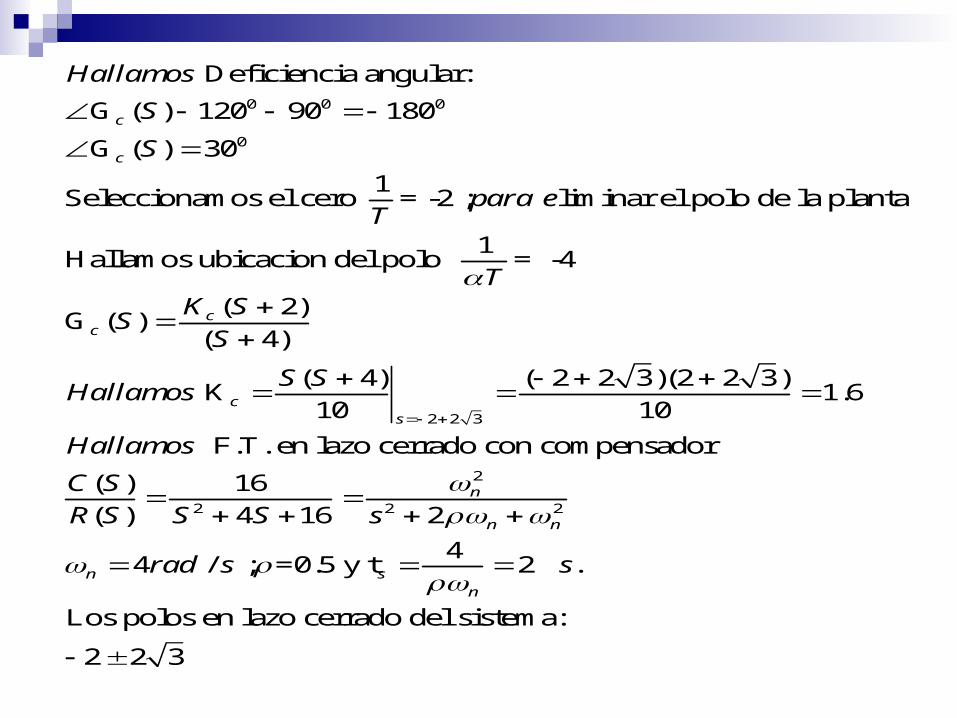
Deficiencia angular:
G ( ) 120 90 180
G ( ) 30
1Seleccionamos el cero = -2 ; liminar el polo de la planta
1Hallamos ubicacion del polo = -4
( 2)G ( )
( 4)
( 4) K
10
c
c
cc
cs
Hallamos
S
S
para eT
TK S
SS
S SHallamos
2 2 3
2
2 2 2
( 2 2 3)(2 2 3)1.6
10
F.T. en lazo cerrado con compensador
( ) 16
( ) 4 16 2
44 / ; =0.5 y t 2 .
Los polos en lazo cerrado del sistema:
2 2 3
n
n n
n sn
Hallamos
C S
R S S S s
rad s s
C(s)
-
+
R(s)
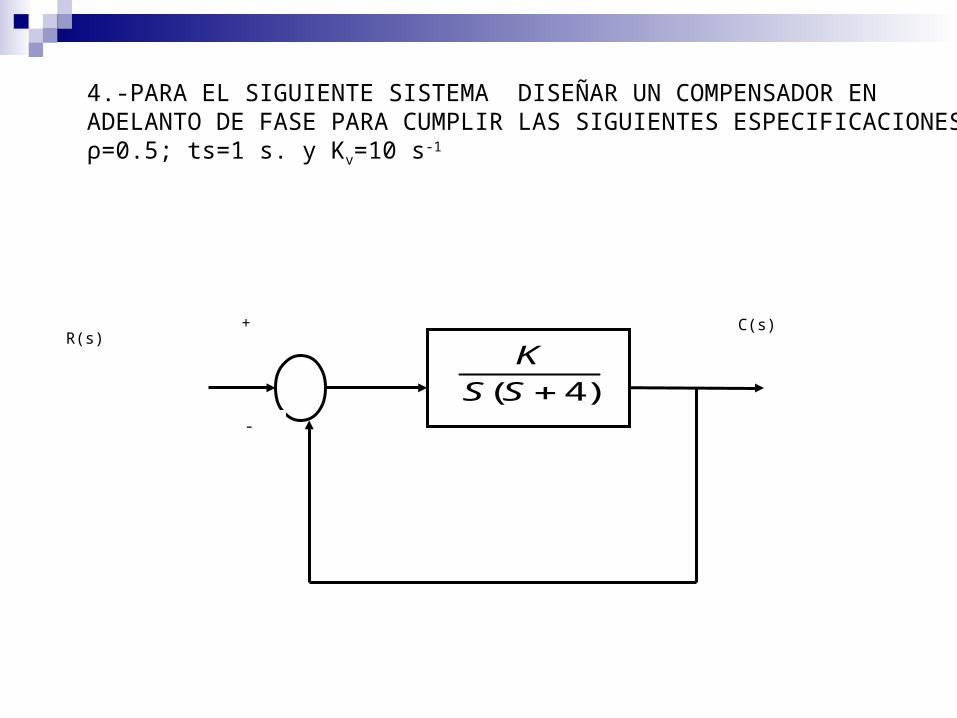
4.-PARA EL SIGUIENTE SISTEMA DISEÑAR UN COMPENSADOR EN ADELANTO DE FASE PARA CUMPLIR LAS SIGUIENTES ESPECIFICACIONESρ=0.5; ts=1 s. y Kv=10 s-1
( 4)
K
S S
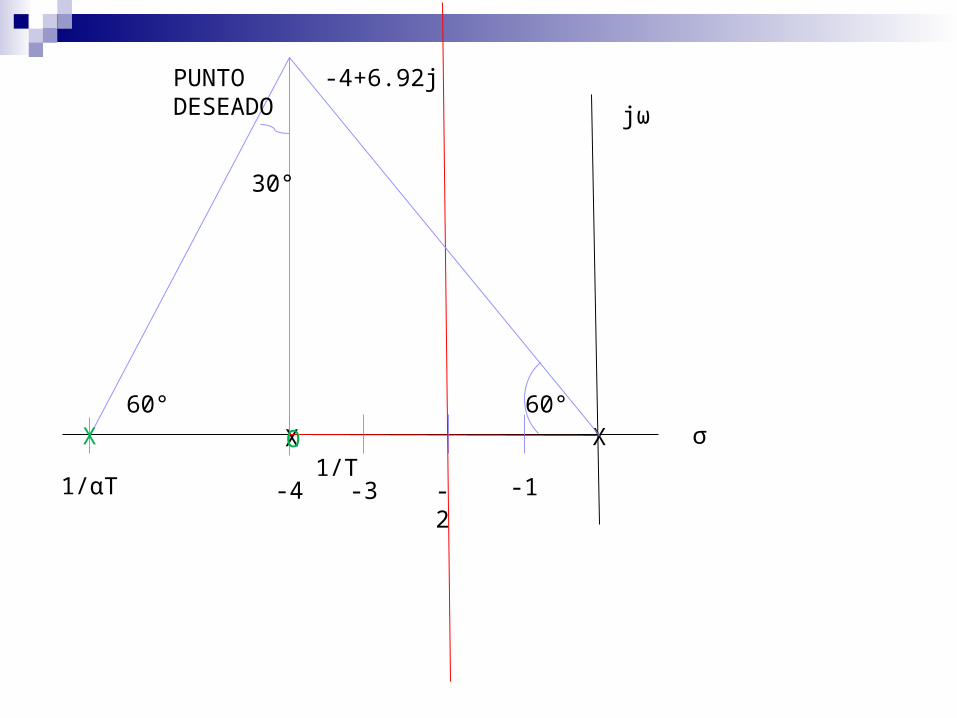
σ
jω
-1-2-3-41/αT
XX
PUNTODESEADO
-4+6.92j
60°
1/T
30°
60°X O
0lim s 10 40( 4)
4; =0.5 cos =60°
Hallamos -120°-90°= 180°(2K+1) =30°
seleccionamos el cero en S=-4;
1del grafico el polo 8
Hallamos K por condicion de magnitud
( 4)*40
( 8) (
V s
n
c
c
KK K
s s
T
K s
s s s
4 6.928
1; 1.64) c
j
K

Verificamos las especificaciones
Realizamos cálculos:
0
2
2 2 2
40*1.6( 4) K lim s 8; cercano a 10
( 4)( 8)
( ) 64;
( ) 8 64 2
8 /
40.5; 1 .
v s
n
n n
n
sn
s
s s s
bC S
R S S S S S
rad s
t s
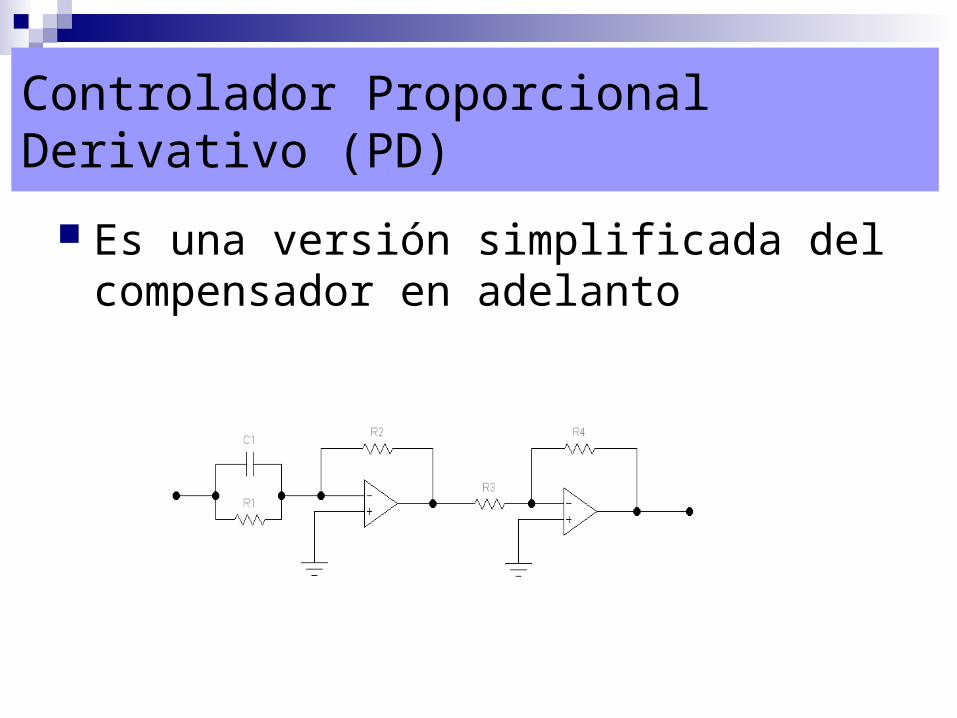
Controlador Proporcional Derivativo (PD)
Es una versión simplificada del compensador en adelanto
Función de transferencia
De grafico anterior se tiene:
Gc(S)=kp(TdS+1) Gc(S)=kpTd(S+1/Td) Gc(S)=kd(S+1/Td)= kd(S+a)
4 21 1
1 3 1
( ). ( 1)
( )
R RVo SRC S
V S R R
NOTA: Valor de kp se determina generalmente
para satisfacer requerimiento de estado estacionario.
El controlador P.D. es un filtro pasa alto. Amplifica los ruidos en alta frecuencia, por
lo que muchas veces es preferible el uso del compensador en adelanto. No hay problema si el controlador P.D. se obtiene de elementos hidráulicos y neumáticos.
R(s)C(s)
+-
2
( 2)s s
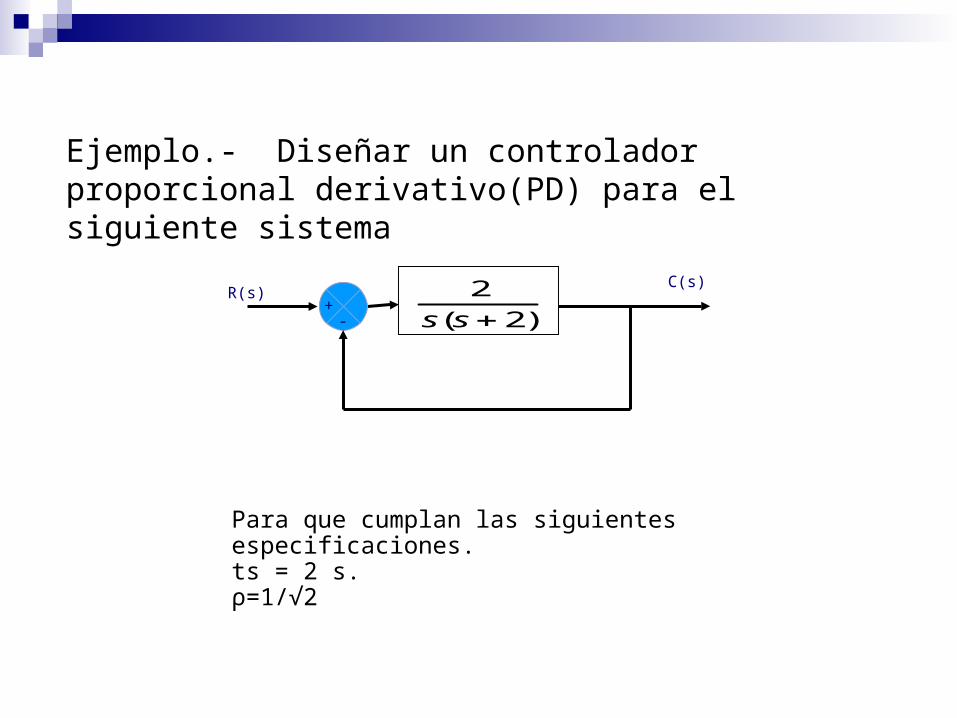
Ejemplo.- Diseñar un controlador proporcional derivativo(PD) para el siguiente sistema
Para que cumplan las siguientes especificaciones.ts = 2 s.ρ=1/√2
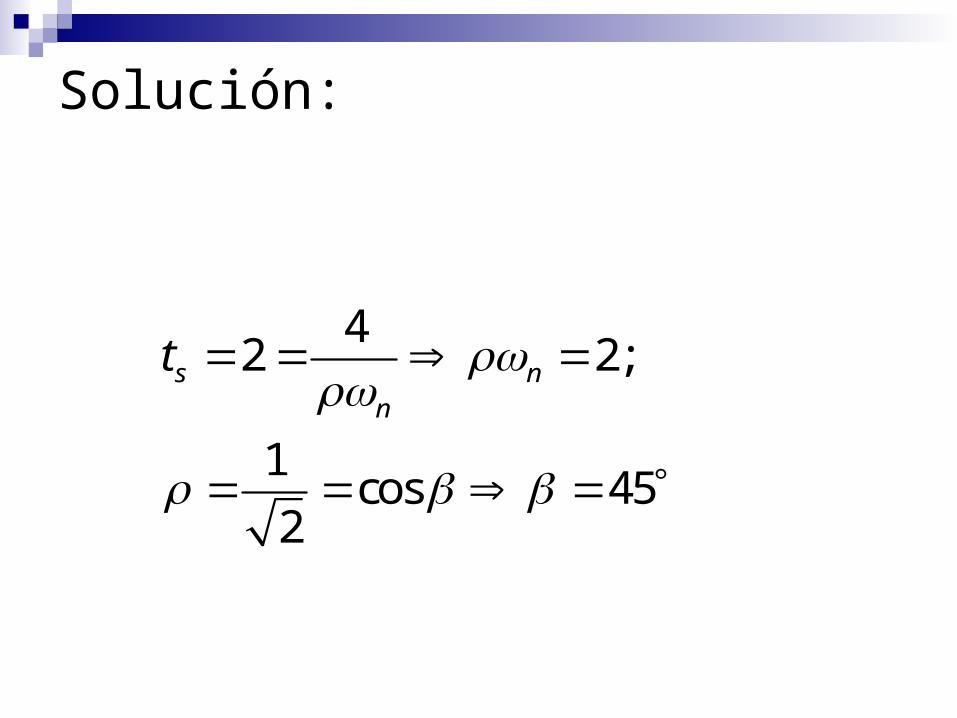
Solución:
42 2;
1cos 45
2
s nn
t
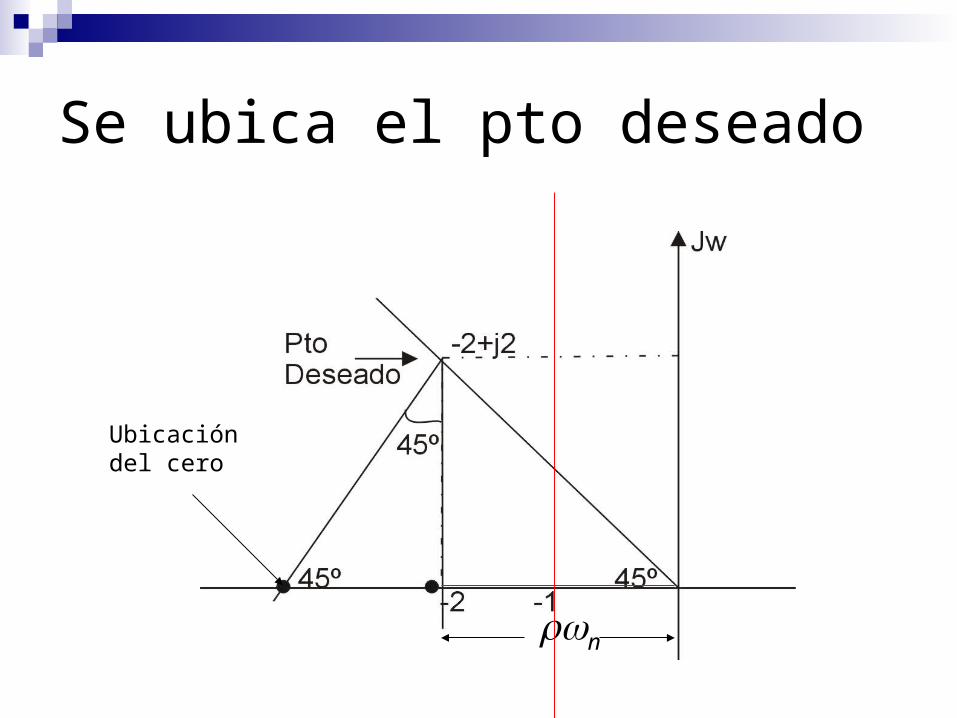
Se ubica el pto deseado
n
n
Ubicación del cero
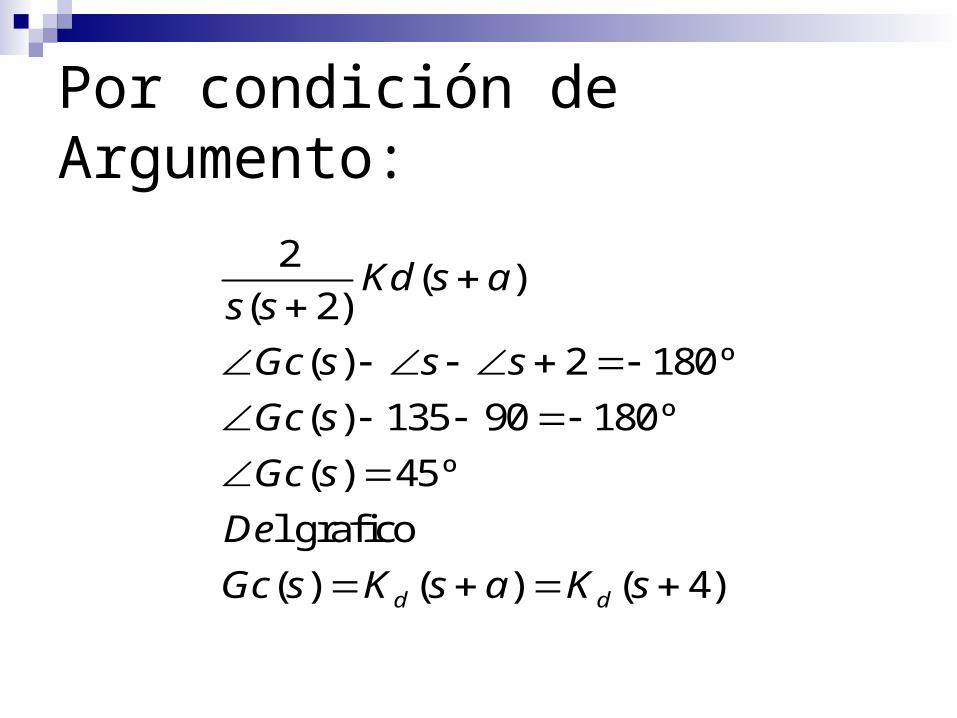
Por condición de Argumento:
2( )
( 2)
( ) 2 180º
( ) 135 90 180º
( ) 45º
l grafico
( ) ( ) ( 4)d d
Kd s as s
Gc s s s
Gc s
Gc s
De
Gc s K s a K s
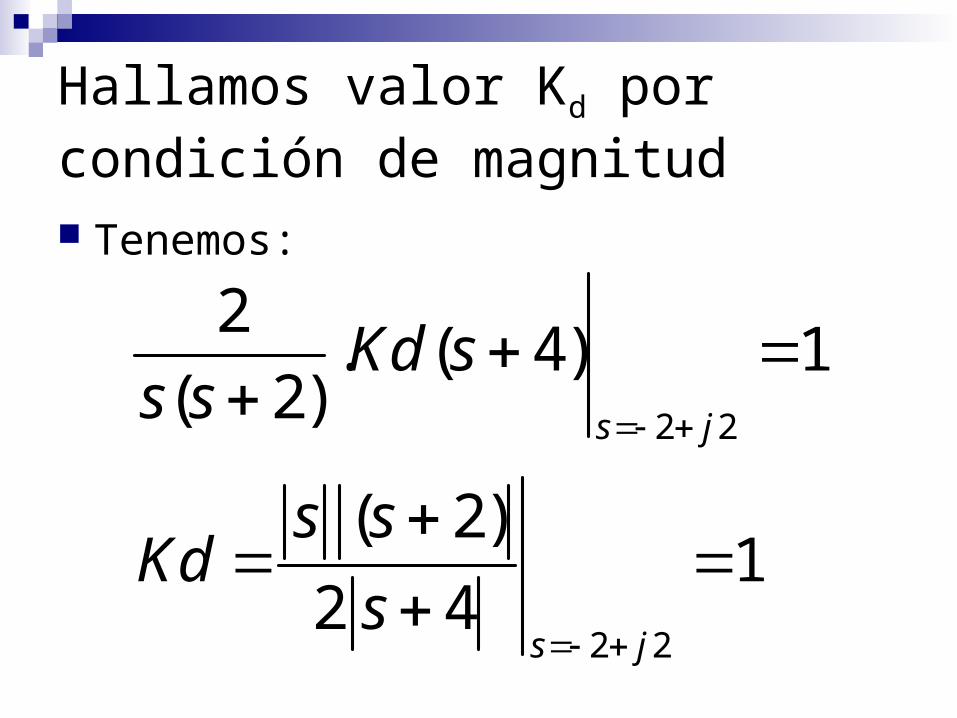
Hallamos valor Kd por condición de magnitud Tenemos:
2 2
2 2
2. ( 4) 1
( 2)
( 2)1
2 4
s j
s j
Kd ss s
s sKd
s
Kd=Kp.Td=1
Gc(s)=4(0.25*S+1)
41
Td
Kp
4 2
3 1
4 3
. 4
1
1 25
2 100
P
R RK
R R
R R K
R K
R K
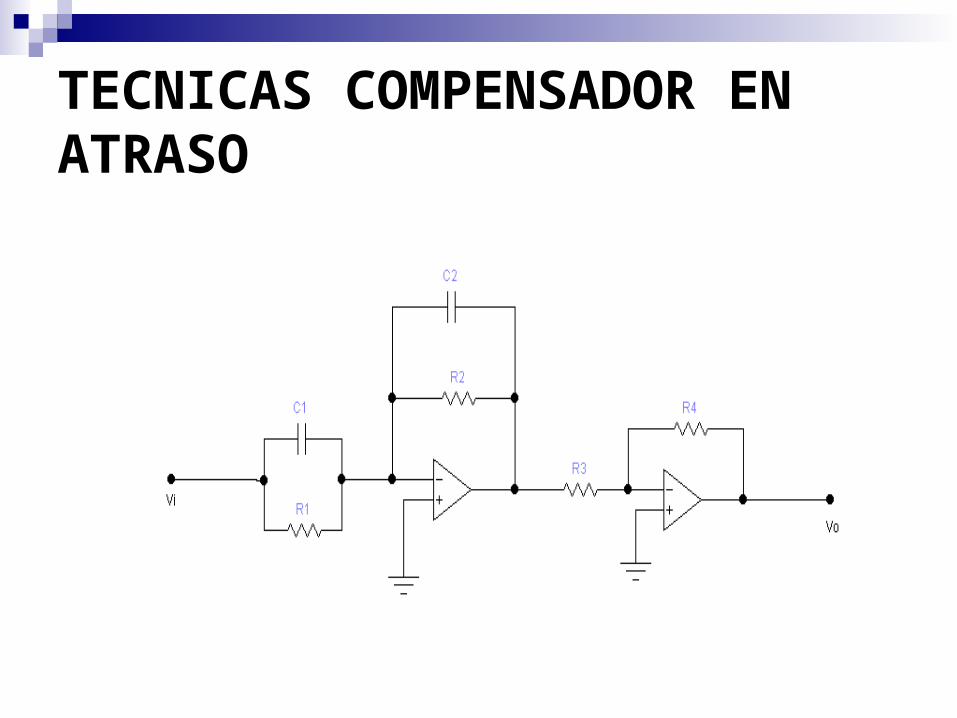
TECNICAS COMPENSADOR EN ATRASO
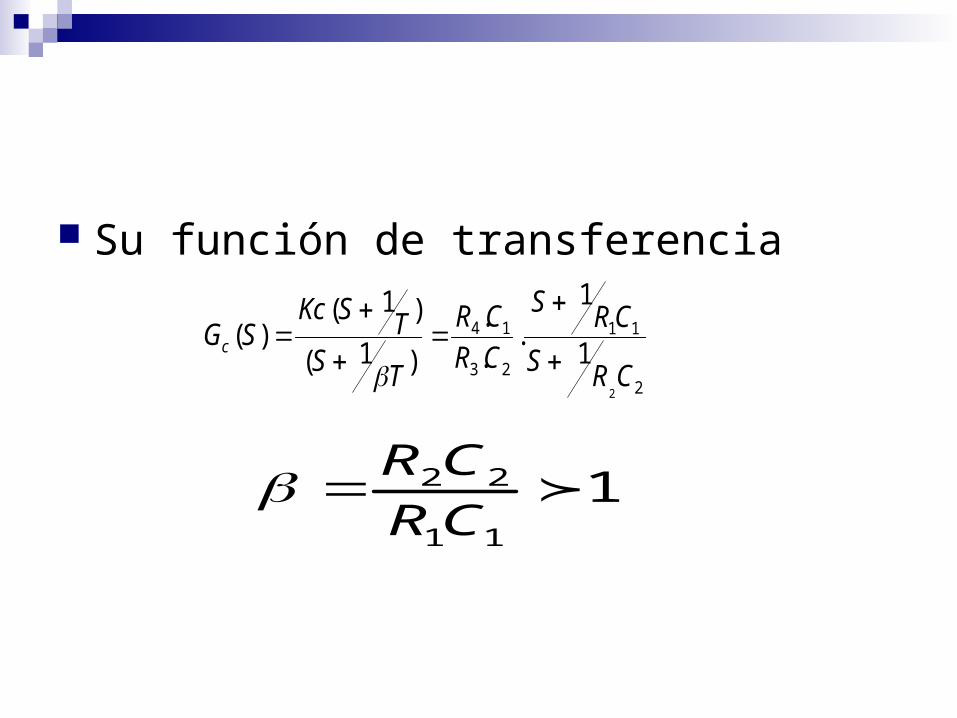
Su función de transferencia
2
11
23
14
2
1
1.
.
.
)1(
)1()(
CRS
CRS
CR
CR
TSTSKc
SGc
2 2
1 1
1R C
RC
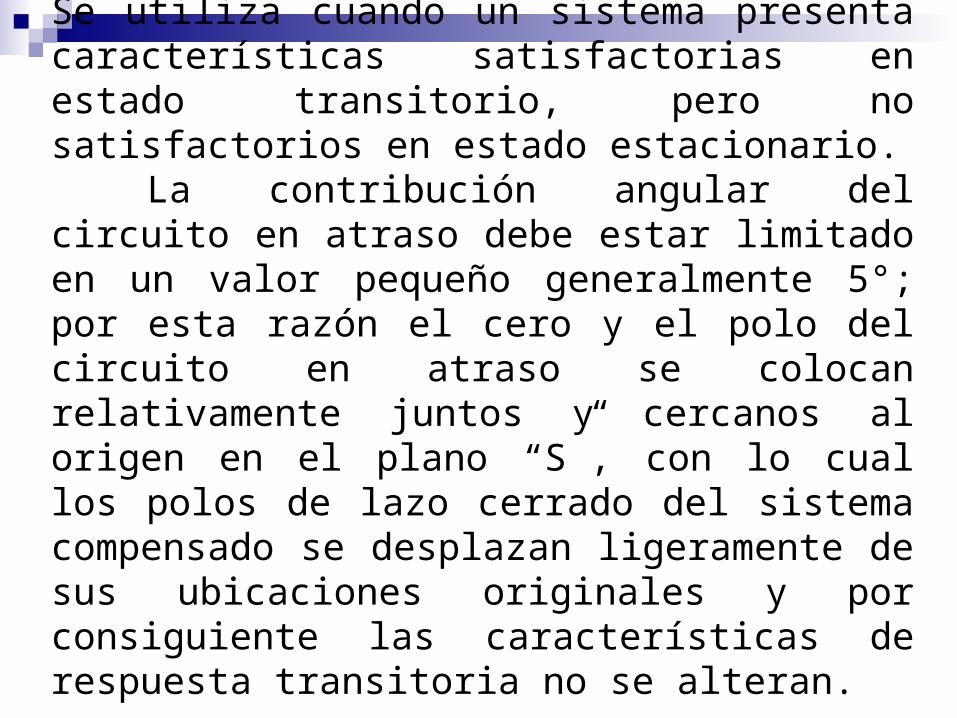
Se utiliza cuando un sistema presenta características satisfactorias en estado transitorio, pero no satisfactorios en estado estacionario.
La contribución angular del circuito en atraso debe estar limitado en un valor pequeño generalmente 5°; por esta razón el cero y el polo del circuito en atraso se colocan relativamente juntos y cercanos al origen en el plano “S”, con lo cual los polos de lazo cerrado del sistema compensado se desplazan ligeramente de sus ubicaciones originales y por consiguiente las características de respuesta transitoria no se alteran.
Suponiendo que G(S).H(S) es la función de transferencia en lazo abierto del sistema sin compensar
s 0 . ( ). ( )Kv Lim S G S H S
► Compensado s 0
( 1) . ( ). ( ). . .
( 1)
STKv Lim S G S H S Kc
S T
►sin compensar
. .Kv Kv Kc
1 no se modifican el L.G.R.Si Kc
.Kv Kv
Procedimiento:
1.-Si es necesario trace el diagrama del Lugar de las raíces para el sistema no compensado, con las especificaciones de respuesta transitoria ubique los polos en lazo cerrado dominantes en el lugar de las raíces
2.-Teniendo como F.T. del compensador
)1(
)1(.
)1(
)1()(
ST
STKc
TSTSKc
SGc
Evaluar el coeficiente de Error estático particular especificado.3.-Determine la magnitud del aumento en el coeficiente de error estático para satisfacer las especificaciones.
4.- Determine el cero y polo que produce el aumento necesario para el coeficiente de error estático particular sin alterar el lugar de las raíces.
.
tan
sin tan
valor de ganacia requerido dis cia del cero al origen
valor de ganacia del sistema compensar dis cia del polo al origen
5.-Trace el nuevo lugar de las raíces para el sistema compensado, ubique los polos en lazo cerrado en el lugar de las raíces (si la contribución angular es muy pequeño, el lugar geométrico de las raíces original y el compensado son CASI IDÉNTICOS)Ajuste el valor de Kc con la condición de magnitud en el punto deseado
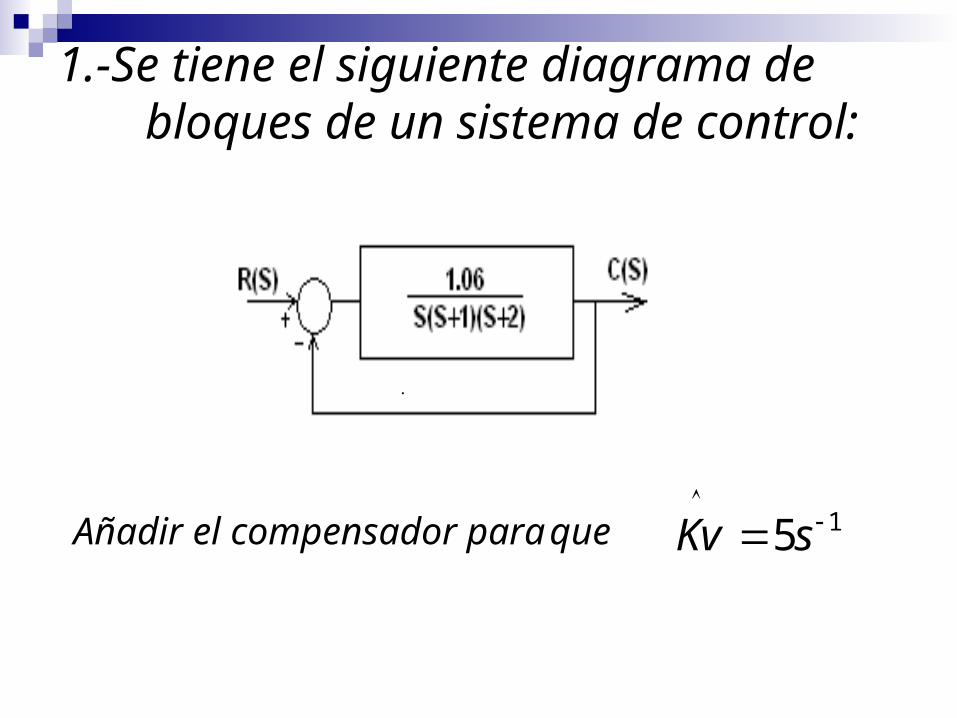
1.-Se tiene el siguiente diagrama de bloques de un sistema de control:
Añadir el compensador para que 15
sKv
.
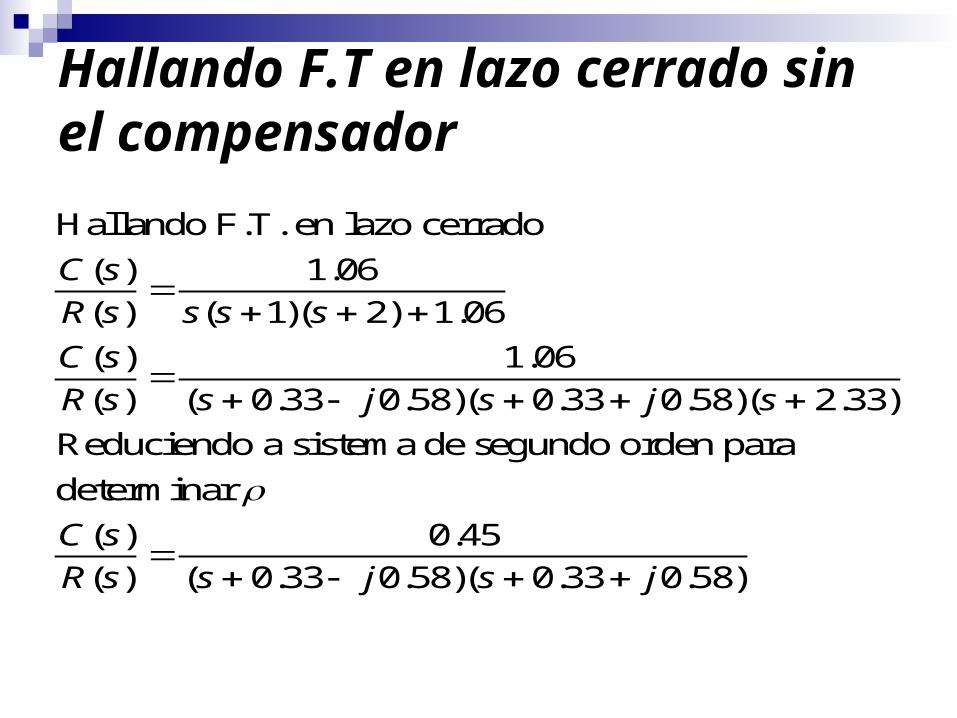
Hallando F.T en lazo cerrado sin el compensador
Hallando F.T. en lazo cerrado
( ) 1.06
( ) ( 1)( 2) 1.06
( ) 1.06
( ) ( 0.33 0.58)( 0.33 0.58)( 2.33)
Reduciendo a sistema de segundo orden para
determinar
( ) 0.45
( ) ( 0.33 0.58)( 0.33 0.5
C s
R s s s s
C s
R s s j s j s
C s
R s s j s j
8)
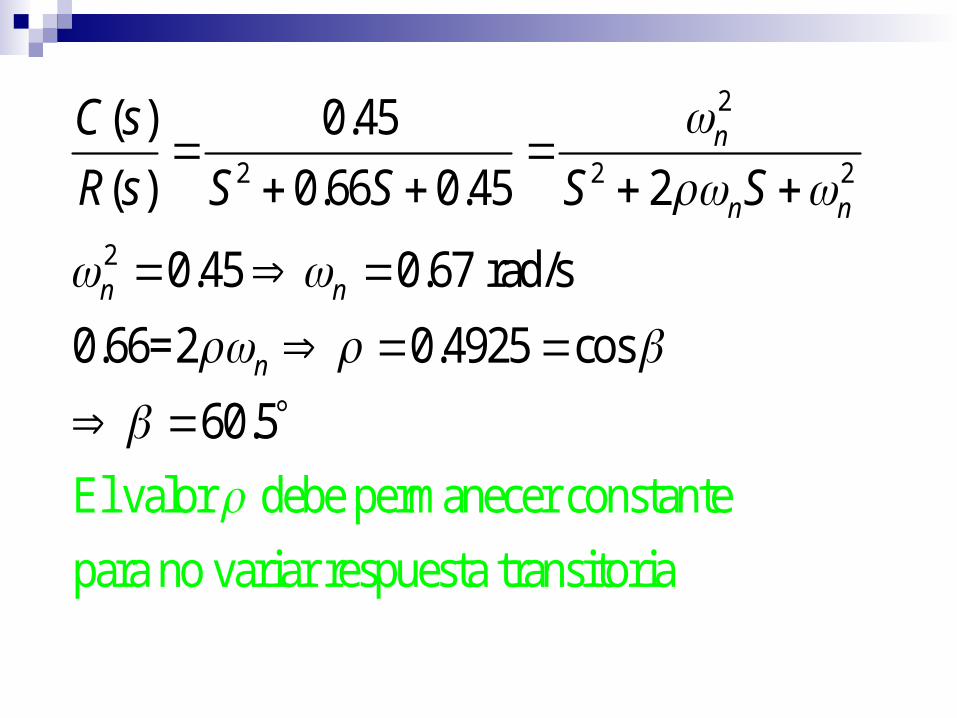
2
2 2 2
2
( ) 0.45
( ) 0.66 0.45 2
0.45 0.67 rad/s
0.66=2 0.4925 co
El valor debe permanecer constante
para no variar respuest
s
60.5
a transitoria
n
n n
n n
n
C s
R s S S S S
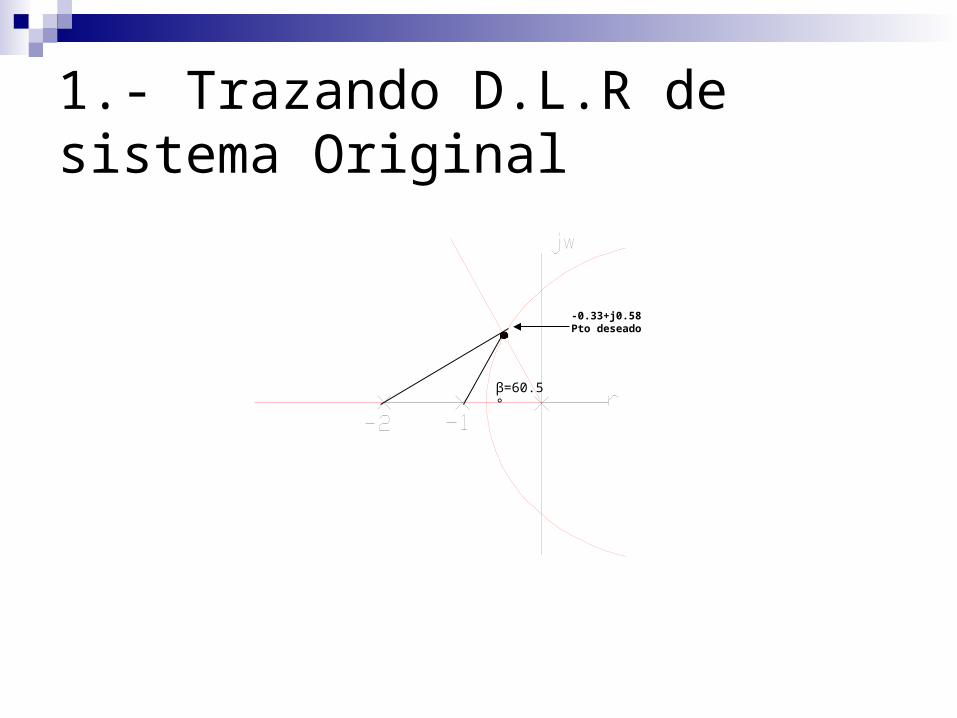
1.- Trazando D.L.R de sistema Original
-0.33+j0.58Pto deseado
β=60.5°
Por condición de Argumento hallamos ecuación geométrica de la curva:
1 1 1
2 2
1.06
( 1)( 2)
1 2 180º
tan tan tan 1801 2
3 6 2 Ec. geom. de la curva
=-1.76 Ecuacion de la recta
Resolviendo ambas ecuaciones:
=-0.33 y =0.58
s s s
s s s
2.-Evaluamos
0
1.06lim 0.53 s.
( 1)( 2)
=0.53 y K
s
vv v
Kv ss s s
K K
3ro.-Determinamos el aumento de la ganancia
K 5= 10
0.53
sin
t.
.
v
vK
valor de ganancia con compensador
valor de ganancia del sistema compensar
dis del cero al origen
dist del polo al origen

4to.-Determinamos cero y polo del Compensador Utilizamos:
10
10
t.
.
el cero en S=-0.1
0.1
.
estara ubicado en S=-0.01
dis del cero al origen
dist del polo al origen
Elegimos
dist del polo al origen
El polo
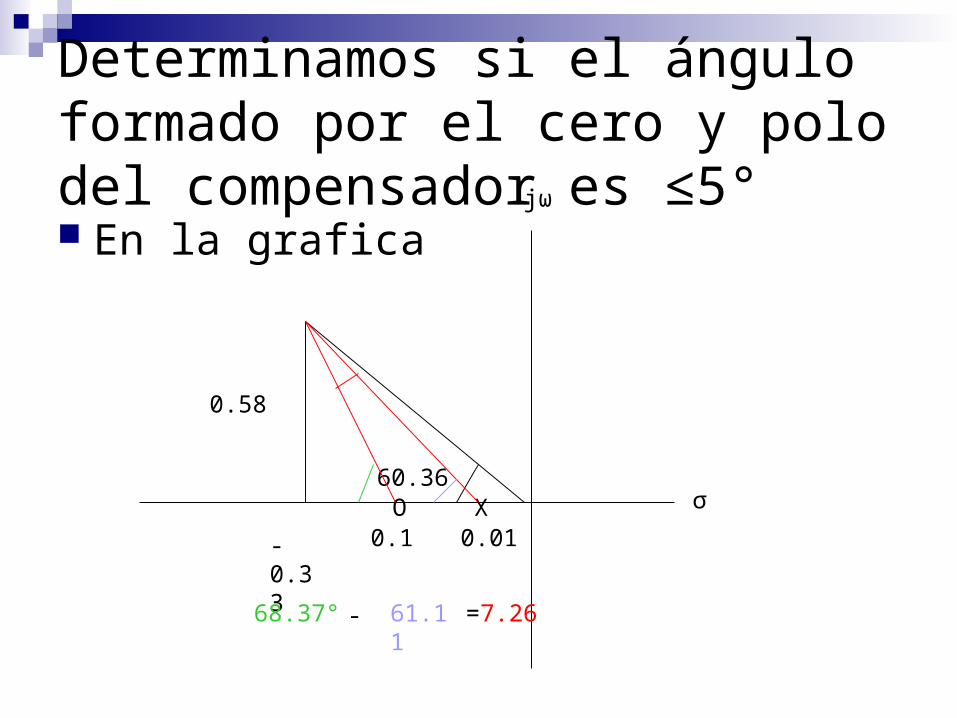
Determinamos si el ángulo formado por el cero y polo del compensador es ≤5° En la grafica
σ
jω
-0.33
0.58
60.36
0.1 0.01O X
68.37° 61.11- =7.26
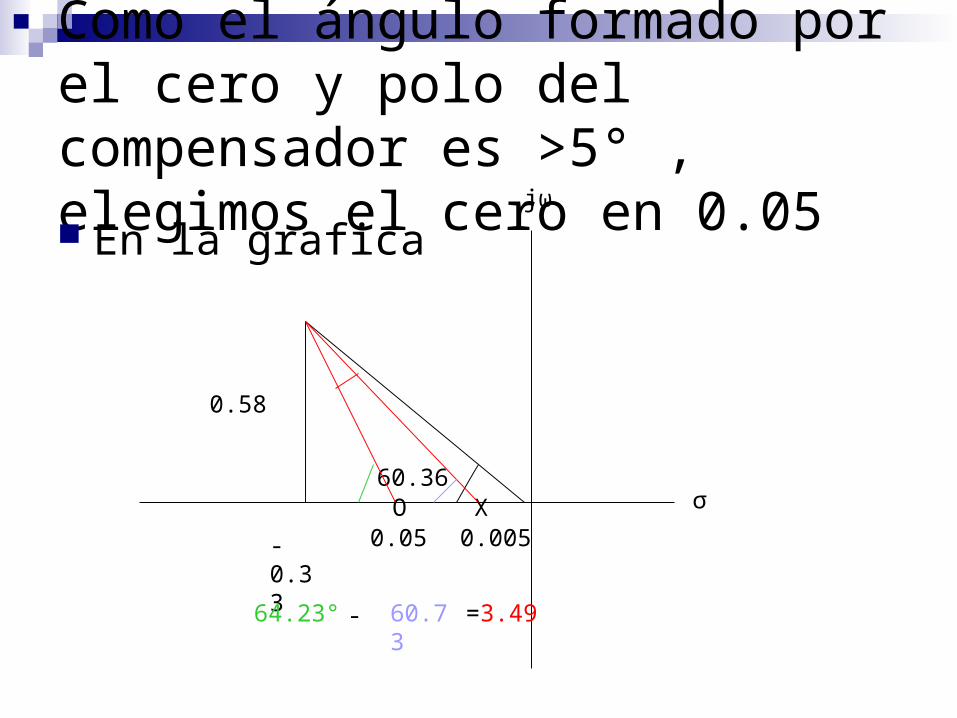
Como el ángulo formado por el cero y polo del compensador es >5° , elegimos el cero en 0.05 En la grafica
σ
jω
-0.33
0.58
60.36
0.05 0.005O X
64.23° 60.73- =3.49
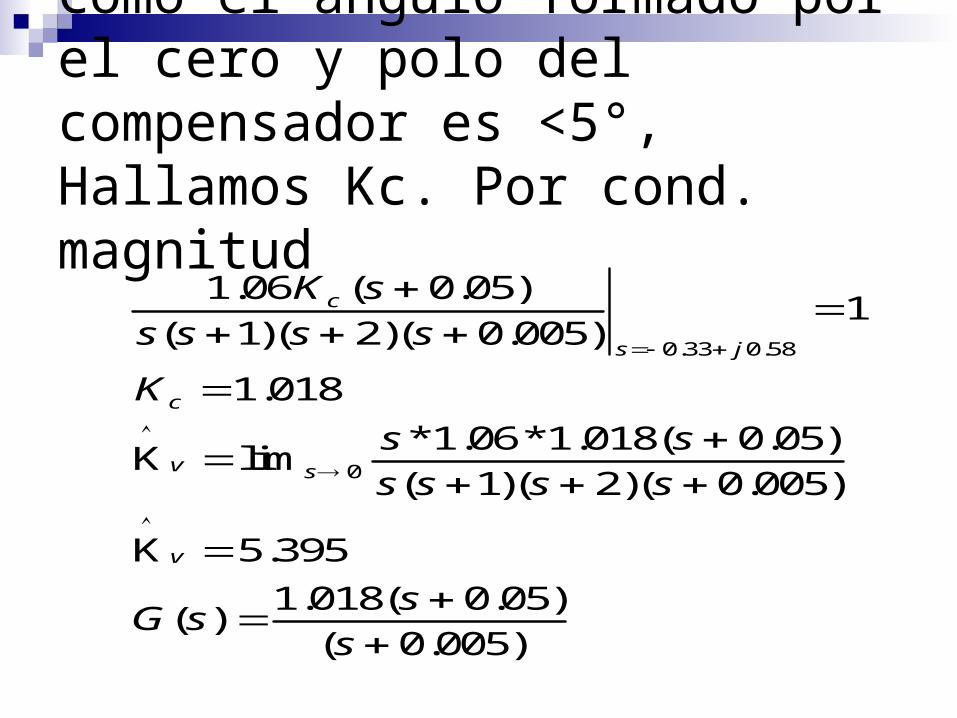
Como el ángulo formado por el cero y polo del compensador es <5°, Hallamos Kc. Por cond. magnitud
0.33 0.58
0
1.06 ( 0.05)1
( 1)( 2)( 0.005)
1.018
*1.06*1.018( 0.05)K lim
( 1)( 2)( 0.005)
K 5.395
1.018( 0.05)( )
( 0.005)
c
s j
c
v s
v
K s
s s s s
K
s s
s s s s
sG s
s
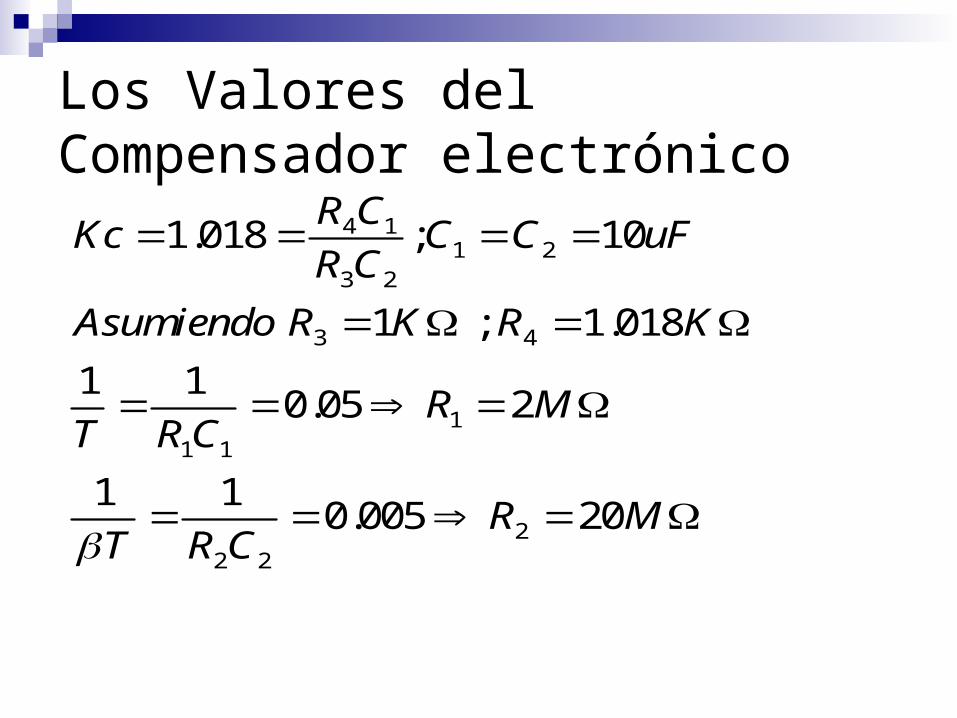
Los Valores del Compensador electrónico
4 11 2
3 2
3 4
11 1
22 2
1.018 ; 10
1 ; 1.018
1 10.05 2
1 10.005 20
R CKc C C uF
R C
Asumiendo R K R K
R MT RC
R MT R C
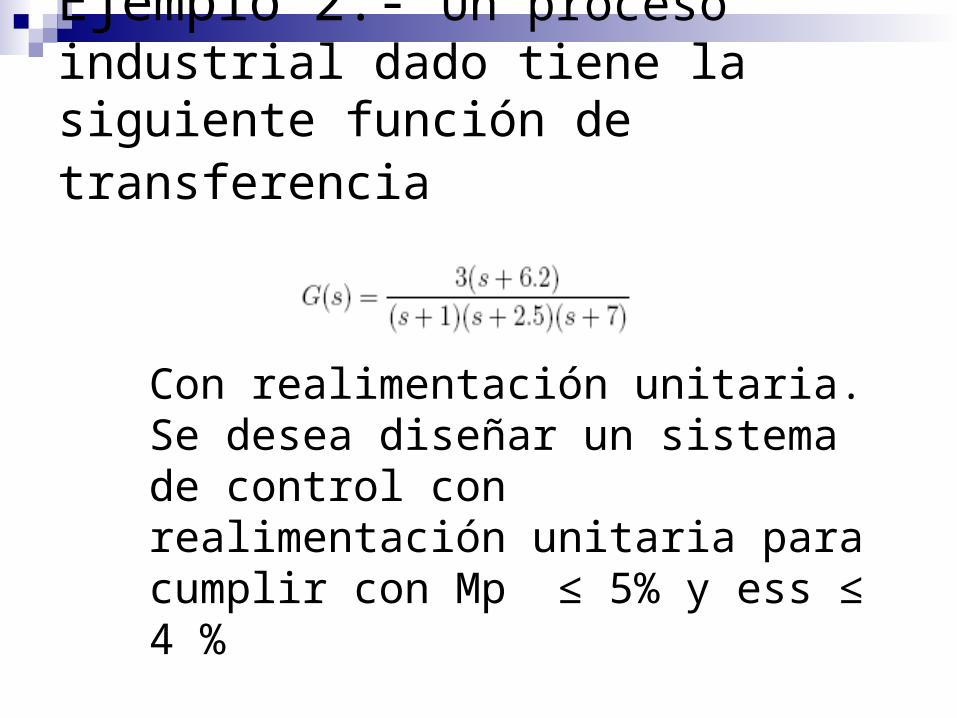
Ejemplo 2.- Un proceso industrial dado tiene la siguiente función de transferencia
Con realimentación unitaria.Se desea diseñar un sistema de control con realimentación unitaria para cumplir con Mp ≤ 5% y ess ≤ 4 %
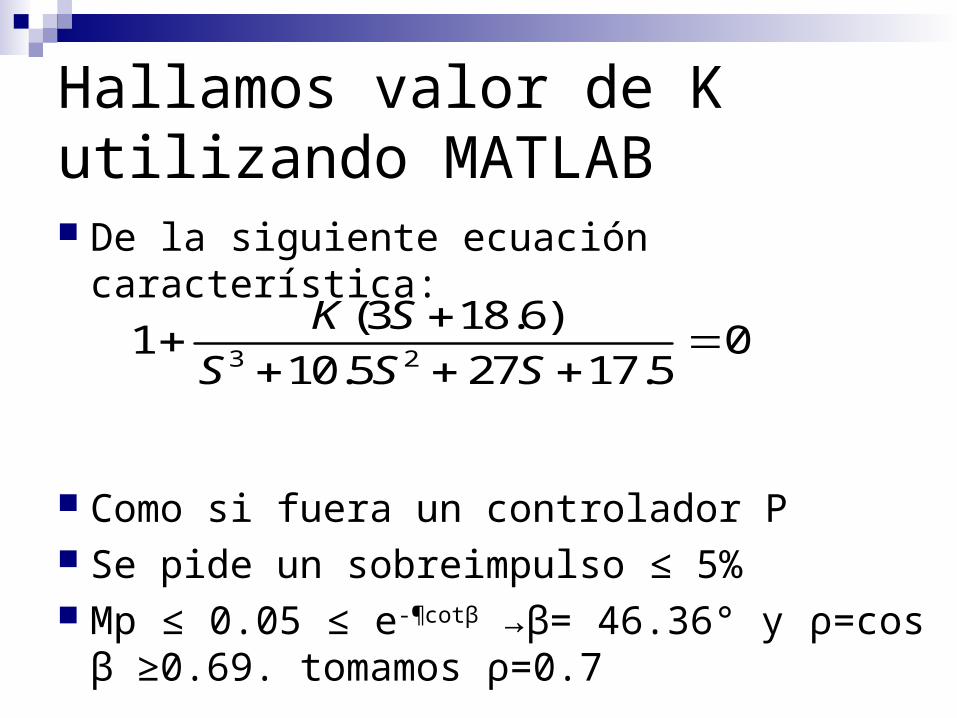
Hallamos valor de K utilizando MATLAB De la siguiente ecuación característica:
Como si fuera un controlador P Se pide un sobreimpulso ≤ 5% Mp ≤ 0.05 ≤ e-¶cotβ →β= 46.36° y ρ=cos β
≥0.69. tomamos ρ=0.7
3 2
(3 18.6)1 0
10.5 27 17.5
K S
S S S

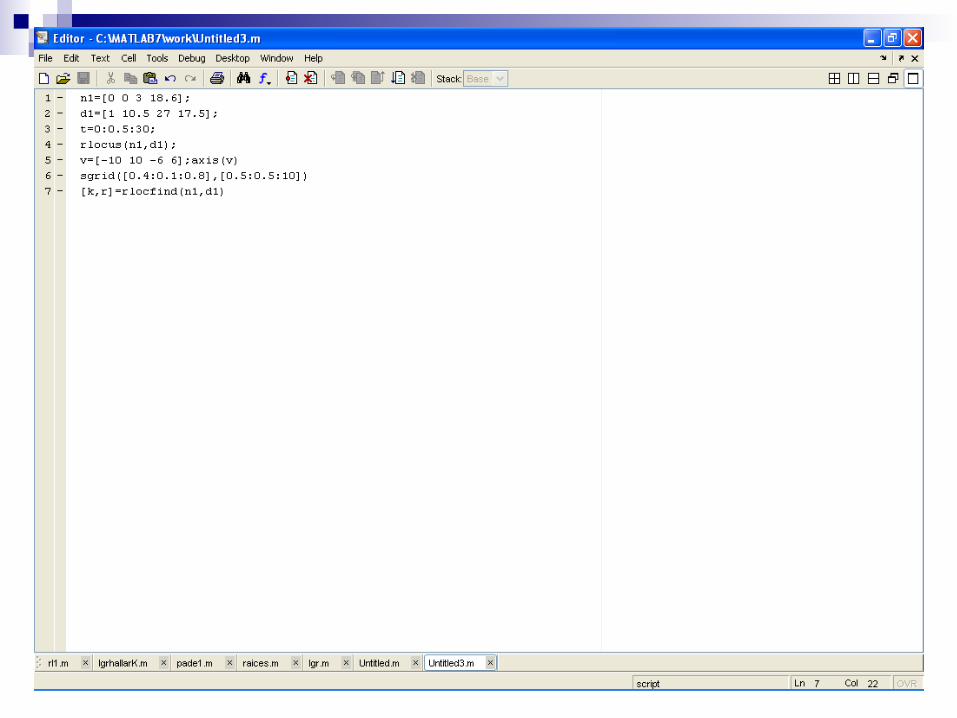
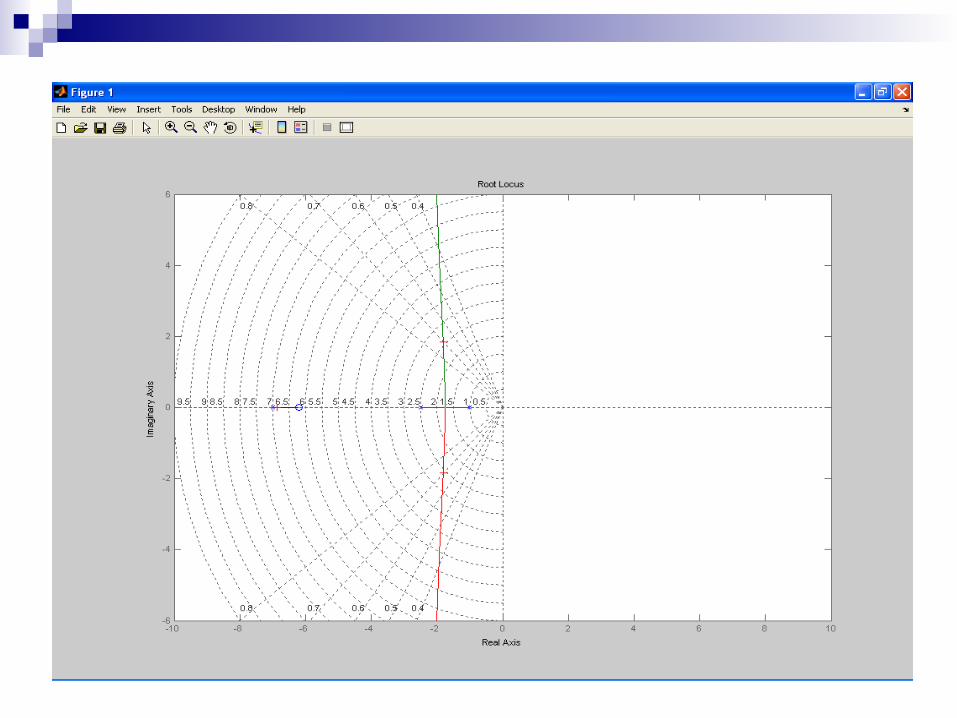
Programa en MATLAB
n1=[0 0 3 18.6]; d1=[1 10.5 27 17.5]; t=0:0.5:30; rlocus(n1,d1); v=[-10 10 -6 6];axis(v) sgrid([0.4:0.1:0.8],[0.5:0.5:10]) [k,r]=rlocfind(n1,d1)
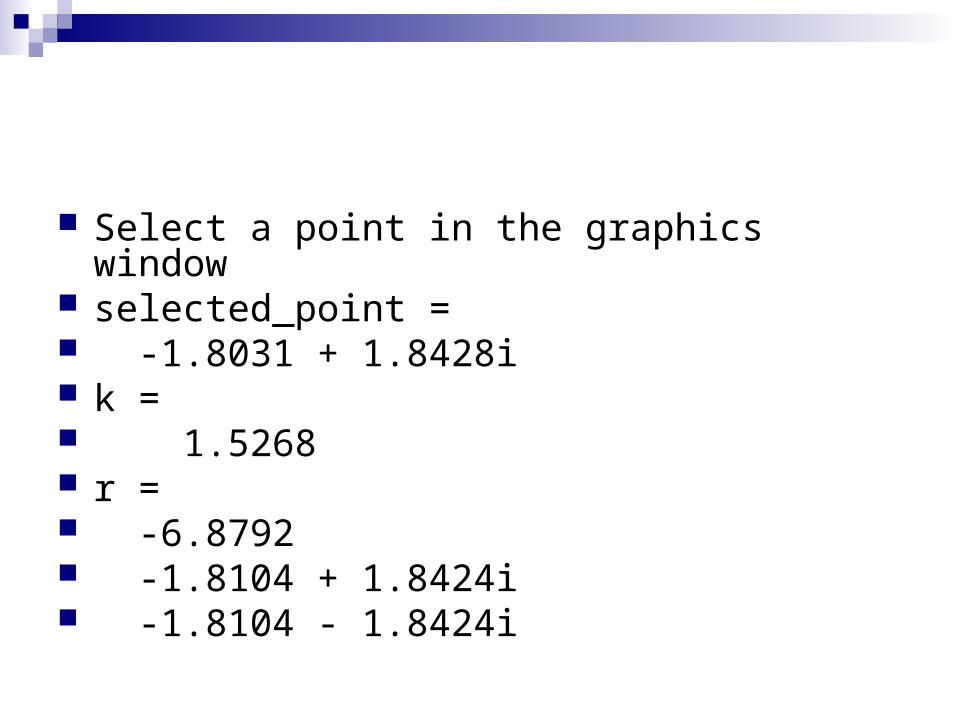
Select a point in the graphics window selected_point = -1.8031 + 1.8428i k = 1.5268 r = -6.8792 -1.8104 + 1.8424i -1.8104 - 1.8424i
Conclusion Con el valor calculado K = 1.5268 no se cumple con
requisito de régimen permanente: ess≤0.04→ 1/(1+KP ) ≤ 0.04→ KP ≥24 La constante de error actual es Kp = lim KG(s) s→0 Kp =lim(1.5268*3(s + 6.2))/((s + 1)(s + 2.5)(s + 7)) s→0 Kp ≈1.61 = 1.61<< 24 insuficiente Como se desea mejorar rpta en estado estacionario se
utiliza un compensador en atraso o controlador PI
Solución
Debemos incrementar la ganancia del regulador pasando de Kp = 1.61 a Kp = 24. Necesitamos incrementar la ganancia en cadena abierta en un factor:
24/1.61≈15.47
Para ello añadiremos a nuestro red de retraso de fase del tipo:
tal que c > p de manera que su ganancia sea c/p≥ 15.47 y tanto c como p sean pequeños (para que estén próximos).
s c
s p
Desde el punto de vista del LGR, si c y p son próximos, no modificarán demasiado el resto del LGR, Veamos dos posibles elecciones.
Si tomamos p = 0.01, queda c = 0.01 × 15.47 = 0.1547 El punto deseado lo hallamos de la
ventana de matlab
Select a point in the graphics window
selected_point =
-1.8031 + 1.8428i PUNTO DESEADO
k =
1.5268
r =
-6.8792 -1.8104 + 1.8424i→ -1.8104 - 1.8424i
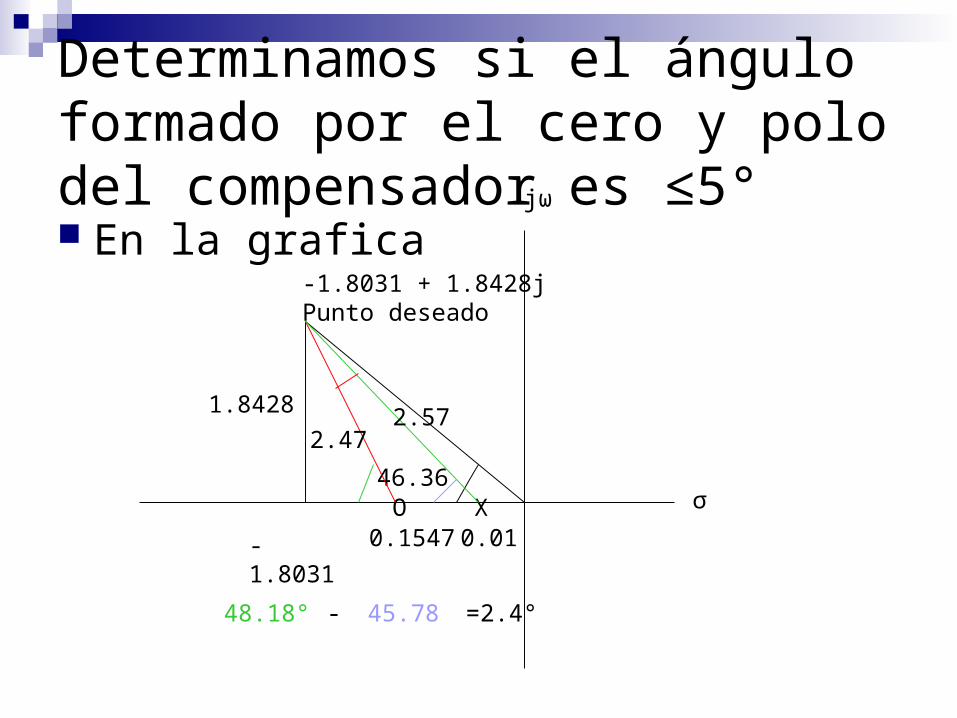
Determinamos si el ángulo formado por el cero y polo del compensador es ≤5° En la grafica
σ
jω
-1.8031
1.8428
46.36
0.1547 0.01O X
48.18° 45.78- =2.4°
-1.8031 + 1.8428jPunto deseado
2.472.57
F.T. del compensador
La diferencia de ángulos es 2.4° y la modificación en la ganancia del LGR que introducen es 2.47/2.57 = 0.961, muy próxima a 1 y por tanto casi despreciable.
Por tanto elegimos:
0.1547( ) 1.5268
0.010c
sG s
s
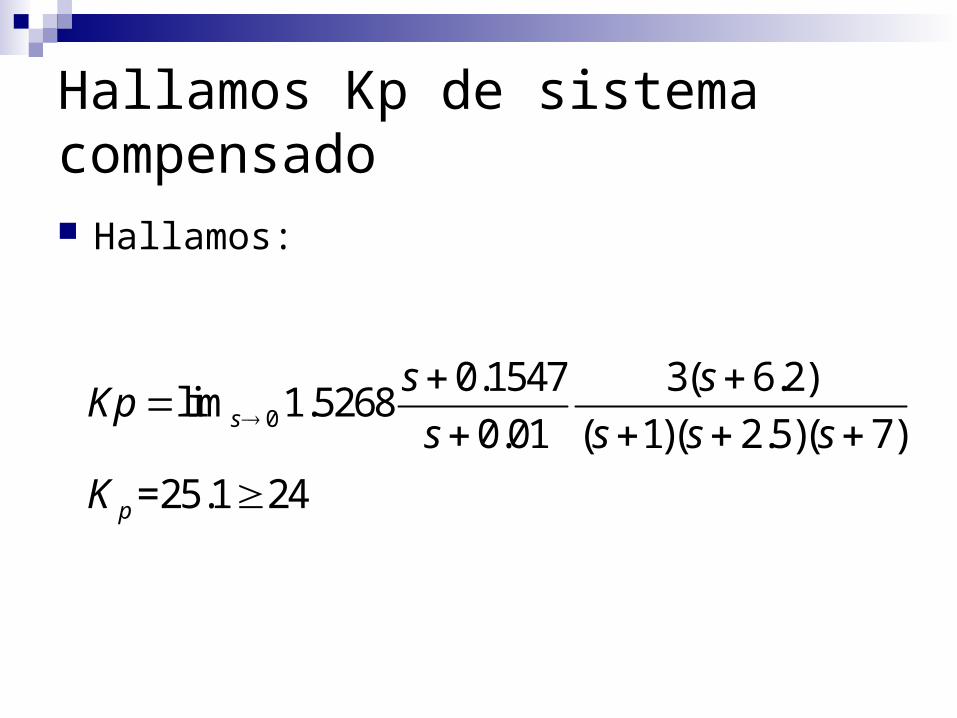
Hallamos Kp de sistema compensado Hallamos:
0
0.1547 3( 6.2)lim 1.5268
0.01 ( 1)( 2.5)( 7)
=25.1 24
s
p
s sKp
s s s s
K
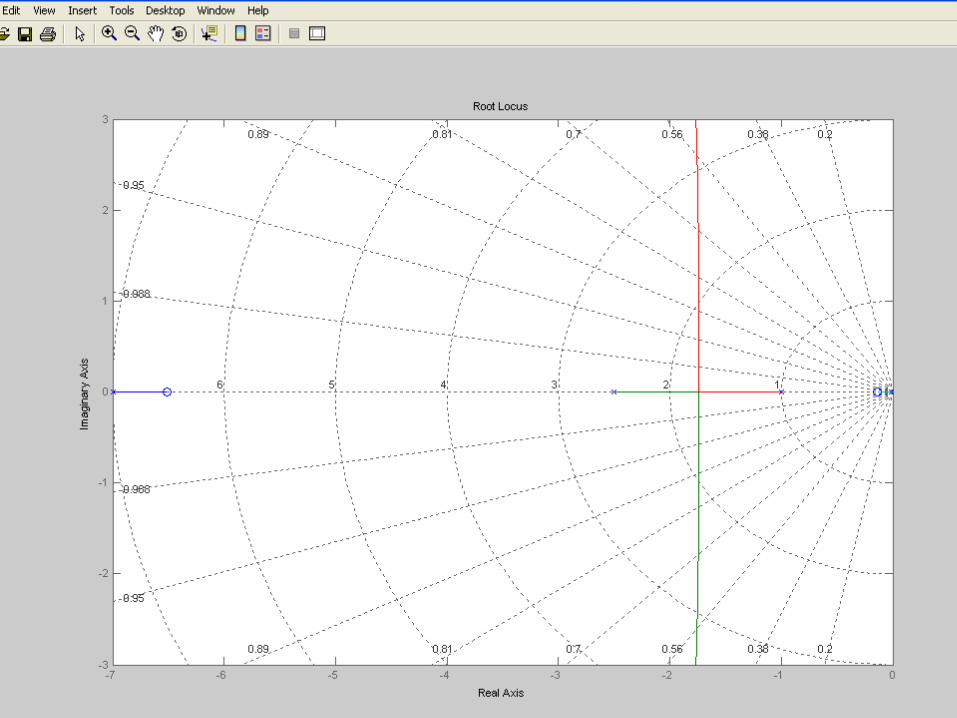
L.G:R compensado
n1=[0 0 4.58 30.47 4.2]; d1=[1 10.51 27.105 17.77 0.175]; rlocus(n1,d1);
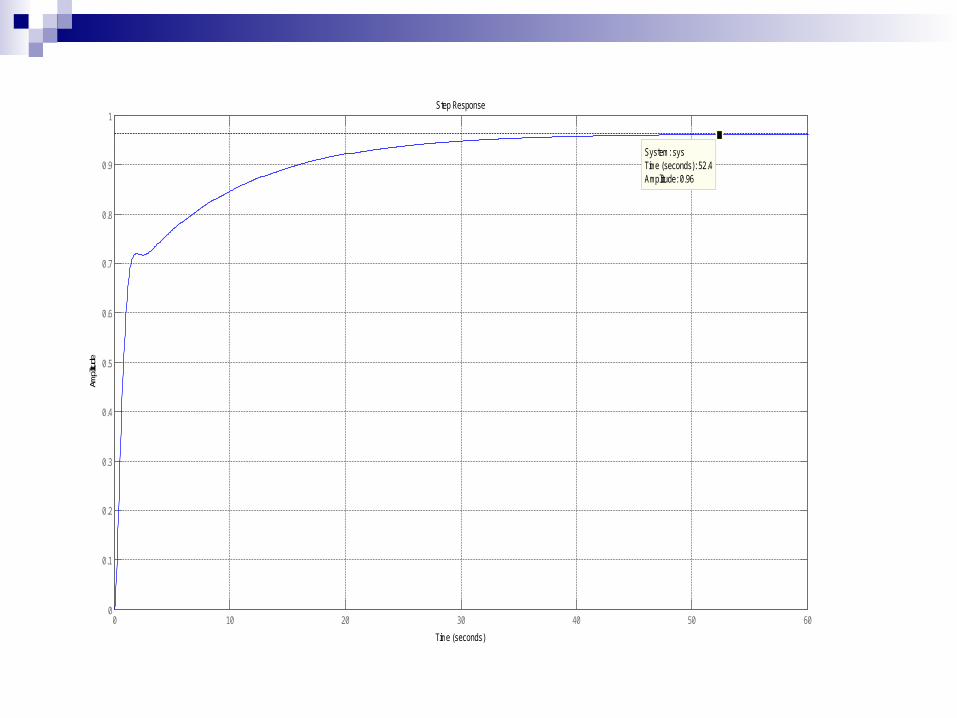
Programa con MATLAB para ver respuesta con compensador n=[0 0 4.58 29.127 4.3926];
d=[1 10.51 31.685 46.897 4.5676];
step(n,d);grid
0 10 20 30 40 50 600
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
System: sysTime (seconds): 52.4Amplitude: 0.96
Step Response
Time (seconds)
Ampli
tude

Control proporcional integral
Es un compensador en atraso el cual adiciona un cero real y un polo en el origen
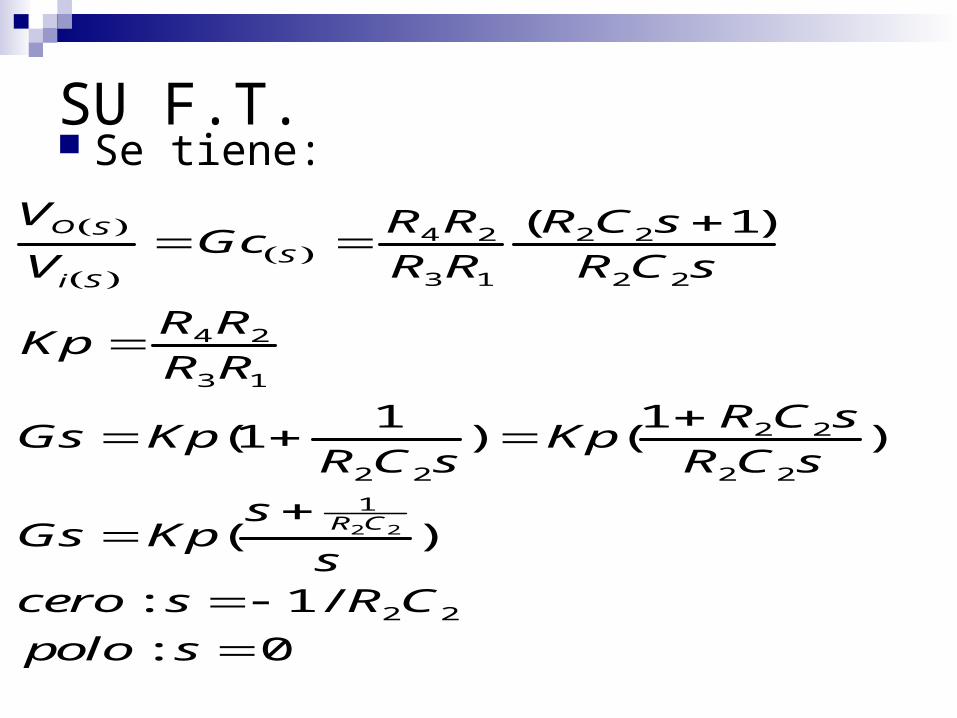
SU F.T. Se tiene:
2 2
4 2 2 2
3 1 2 2
4 2
3 1
2 2
2 2 2 2
1
2 2
( 1)
11(1 ) ( )
( )
: 1/
: 0
O S
Si S
R C
V R R R C sGc
V R R R C s
R RKp
R R
R C sGs Kp Kp
R C s R C s
sGs Kp
scero s R C
polo s
Un buen criterio de diseño para fijar el cero del proporcional integral, es decir , es tomarlo lo más pequeño posible respecto al polo dominante de la función de transferencia de lazo abierto. Téngase en cuenta que el valor más pequeño posible vendrá dado por laslimitaciones físicas a la hora de la realización práctica del control.
2 21/s R C
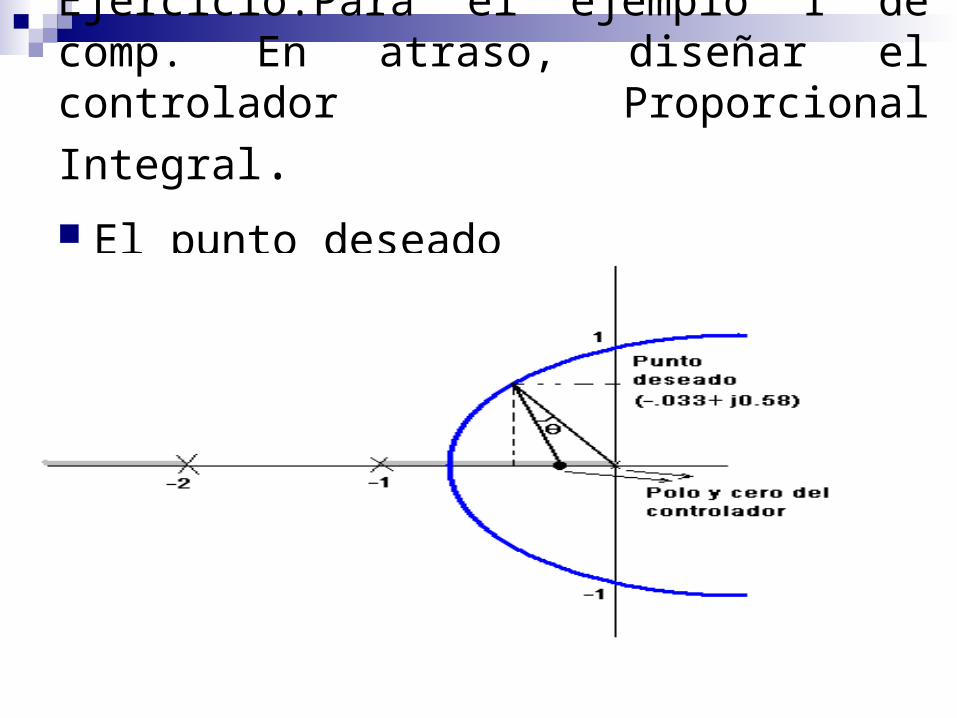
Ejercicio:Para el ejemplo 1 de comp. En atraso, diseñar el controlador Proporcional
Integral.
El punto deseado
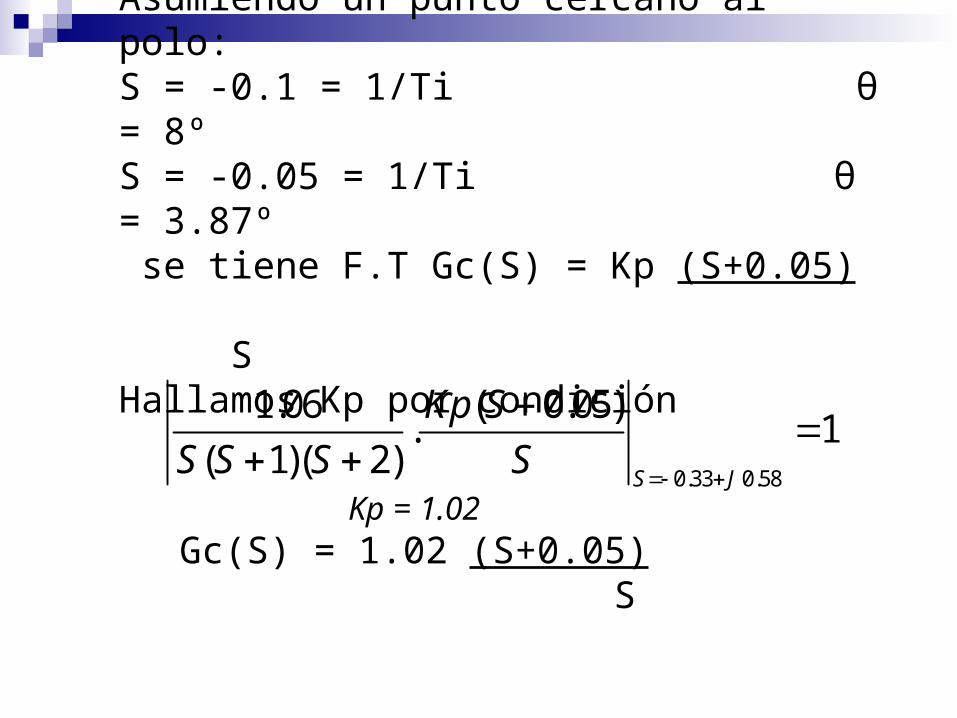
Asumiendo un punto cercano al polo:S = -0.1 = 1/Ti θ = 8ºS = -0.05 = 1/Ti θ = 3.87º se tiene F.T Gc(S) = Kp (S+0.05) SHallamos Kp por condición
0.33 0.58
1.06 ( 0.05). 1
( 1)( 2)S J
Kp S
S S S S
Kp = 1.02
Gc(S) = 1.02 (S+0.05) S
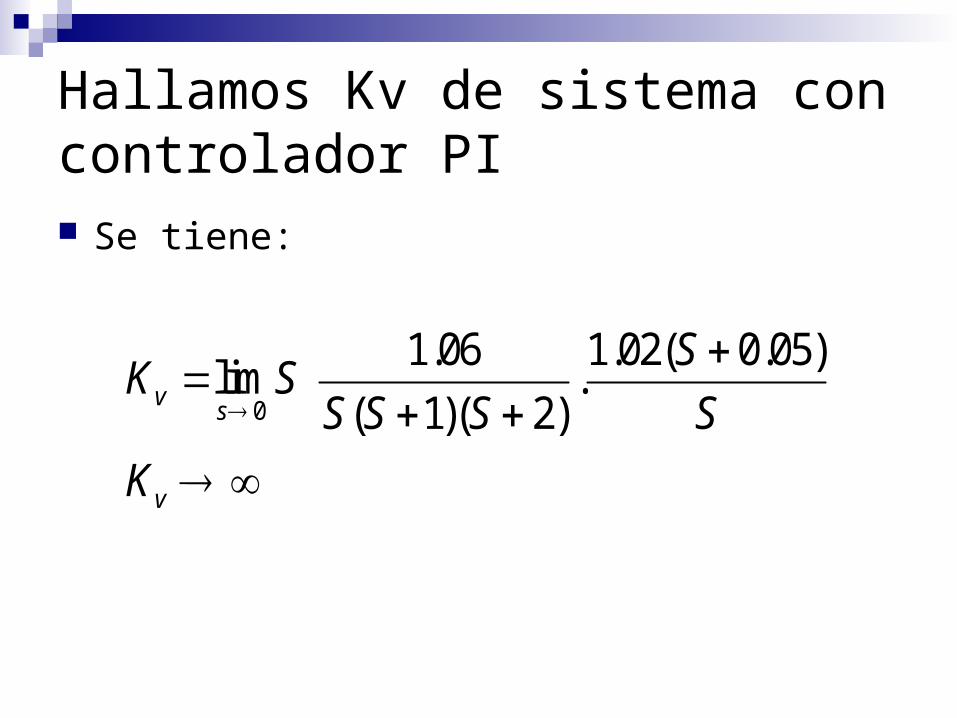
Hallamos Kv de sistema con controlador PI Se tiene:
0
1.06 1.02( 0.05)lim .
( 1)( 2)vs
v
SK S
S S S S
K