1º I.T.I. : MECANICA I Departamento: INGENIERÍA MECÁNICA, ENERGÉTICA Y DE MATERIALES TEMA Nº...
44
1º I.T.I. : 1º I.T.I. : MECANICA I MECANICA I Departamento: INGENIERÍA MECÁNICA, ENERGÉTICA Y DE Departamento: INGENIERÍA MECÁNICA, ENERGÉTICA Y DE MATERIALES MATERIALES TEMA Nº 16: TEMA Nº 16: DINÁMICA DINÁMICA CINÉTICA DEL CUERPO RÍGIDO CINÉTICA DEL CUERPO RÍGIDO
-
Upload
basilia-salina -
Category
Documents
-
view
226 -
download
1
Transcript of 1º I.T.I. : MECANICA I Departamento: INGENIERÍA MECÁNICA, ENERGÉTICA Y DE MATERIALES TEMA Nº...

1º I.T.I. : 1º I.T.I. : MECANICA IMECANICA I
Departamento: INGENIERÍA MECÁNICA, ENERGÉTICA Y DE MATERIALESDepartamento: INGENIERÍA MECÁNICA, ENERGÉTICA Y DE MATERIALES
TEMA Nº 16: TEMA Nº 16: DINÁMICADINÁMICA
CINÉTICA DEL CUERPO RÍGIDOCINÉTICA DEL CUERPO RÍGIDO

- - 22 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
IndiceIndice Punto 16.1 Introducción Punto 16.2 Ecuaciones del movimiento plano Punto 16.3 Momentos y Productos de Inercia
Punto 16.3.1 Momento de Inercia Punto 16.3.2 Radio de giro Punto 16.3.3 Teorema de Steiner Punto 16.3.4 Producto de Inercia Punto 16.3.5 Momentos de Inercia principales
Punto 16.4 Traslación, Rotación y movimiento plano cualquiera de un cuerpo rígido Punto 16.4.1 Traslación Punto 16.4.2 Rotación en torno a un eje fijo Punto 16.4.3 Movimiento plano cualquiera

- - 33 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
16.1 Introducción
Dado que un cuerpo rígido es un conjunto de puntos materiales, podremos utilizar las relaciones desarrolladas en el capítulo anterior para el movimiento de un sistema de puntos materiales.
En este capítulo se aplicará muchas veces la ecuación: GamR
Ecuación que relaciona la resultante R de las fuerzas aplicadas exteriormente con la aceleración aG del centro de masa G del sistema.
En el caso más general en que la resultante del sistema de fuerzas exteriores consista en una fuerza resultante R que pase por el cdm G más un par de momento C, el cuerpo experimentará Rotación y Traslación.
Las leyes de Newton sólo son aplicables al movimiento de un punto material (traslación), no siendo adecuadas para describir el movimiento de un cuerpo rígido que puede ser de traslación más rotación; así pues, se necesitarán ecuaciones adicionales para relacionar los momentos de las fuerzas exteriores con el movimiento angular del cuerpo.

- - 44 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
16.2 Ecuaciones del movimiento plano
A continuación se van a extender las leyes de Newton para poder cubrir el movimiento plano de un cuerpo rígido, proporcionando así ecuaciones que relacionen el movimiento acelerado lineal y angular del cuerpo con las fuerzas y momentos que lo originan.
Dichas ecuaciones pueden utilizarse para determinar: 1.- Las aceleraciones instantáneas ocasionadas por fuerzas y momentos conocidos, o 2.- Las fuerzas y momentos que se necesitan para originar un movimiento prefijado.
En el capítulo anterior se desarrolló el “principio del movimiento del centro de masa” de un sistema de puntos materiales. Como un cuerpo rígido se puede considerar como un conjunto de puntos materiales que mantienen invariables sus distancias mutuas, el movimiento del CDM G de un cuerpo rígido vendrá dado po la ecuación:Escalarmente: GamR
GzzzGyyyGxxx amRFamRFamRF La ecuación anterior se obtuvo simplemente sumando fuerzas, con lo que no se tiene información de la situación de su recta soporte.

- - 55 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
El movimiento real de la mayoría de los cuerpos rígidos consiste en la superposición de la traslación originada por la resultante R y la rotación debida al momento de esa fuerza cuando su recta soporte no pasa por el cdm G del cuerpo.
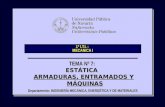
ANALISIS DE LA ROTACIÓN:Consideremos un cuerpo rígido de forma arbitraria como el de la figura.
• El sistema de coordenadas XYZ está fijo en el espacio.
• El sistema de coordenadas xyz es solidario al cuerpo en el punto A.
• El desplazamiento de un elemento de masa dm respecto al punto A viene dado por el vector ρ y respecto al origen O del sistema de coordenadas XYZ viene dado por el vector R.
• El desplazamiento del punto A respecto al origen O del sistema XYZ lo da el vector r.

- - 66 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Las resultantes de las fuerzas exteriores e interiores que se ejercen sobre el elemento de masa dm son F y f, respectivamente. Así, el momento respecto al punto A de las fuerzas F y f es:
según la 2ª ley de Newton:
)(x fFMd A RdmadmfF dm
Así: dmafFMd dmA )x()(x
La aceleración adm de un cuerpo rígido en movimiento plano puede escribirse:
xxx Adm aa
Sustituyendo e integrando, tenemos:
mdmdmdaMmmm
AA xxxxx)x(

- - 77 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
El movimiento plano de un cuerpo rígido es un movimiento en el cual todos los elementos del cuerpo se mueven en planos paralelos, llamando plano del movimiento a un plano paralelo que contiene el cdm G.
Según la figura, los vectores velocidad angular y aceleración angular serán paralelos entre sí y perpendiculares al plano de movimiento.Si tomamos el sistema de coordenadas xyz de manera que el movimiento sea paralelo al plano xy, tendremos que:
zz
z
yxAza
0
Para el movimiento en el plano xy, los diferentes términos de la expresión de MA, cuando el punto A está situado en el plano de movimiento se desarrollan a continuación:

- - 88 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
mdmdmdaMmmm
AA xxxxxx
kji
0
kji
AxAyAxAy
AyAx
ayaxazaz
aa
zyx
ji00
kji
xy
zyx
ji00
kji
xy
zyx
ji
0
00
kji22
yx
xy

- - 99 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
mdmdmdaMmmm
AA xxxxxx
kji AxAyAxAy ayaxazaz
kji 22 yxzyzx
ji 22 xzzy
kji AzAyAx MMM
mm
Ax
m
AyAz
mmm
AxAy
mmm
AyAx
dmyxdmyadmxaM
dmxzdmzydmzaM
dmzydmxzdmzaM
22
2
2

- - 1010 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Az
mm
Ayz
mm
Azx
mm
Idmyxmzdmz
Idmzymydmy
Idmxzmxdmx
22
Momentos primerosProductos de Inercia
Momento de Inercia
Las integrales que aparecen en el desarrollo anterior son:
Como ya que se trata de un movimiento plano en el plano xy que pasa por el cdm G (y por el punto A) tenemos:
0z
AzAxAyAz
AzxAyzAy
AyzAzxAx
ImyamxaM
IIM
IIM
2
2

- - 1111 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Este sistema de ecuaciones relaciona los momentos de las fuerzas exteriores que se ejercen sobre el cuerpo rígido con las velocidades angulares y las propiedades inerciales del cuerpo.
AzAxAyAz
AzxAyzAy
AyzAzxAx
ImyamxaM
IIM
IIM
2
2
Los momentos de las fuerzas y los momentos y productos de inercia lo son respecto a los ejes xyz que pasan por el punto A y están fijos en el cuerpo. Si no estuvieran fijos en el cuerpo, los momentos y productos de inercia serían funciones del tiempo.
Las ecuaciones muestran que pueden ser necesarios los momentos MAx y MAy para mantener el movimiento plano en torno al eje z.
En la mayoría de los problemas de Dinámica referentes al movimiento plano, se pueden simplificar las ecuaciones anteriores.

- - 1212 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
A.- Cuando el cuerpo es simétrico respecto al plano de movimiento, los productos de inercia se anulan (IAyz = IAzx = 0) con lo que las ecuaciones anteriores se reducen a:
Casos particulares:
AzAxAyAz
Ay
Ax
ImyamxaM
M
M
0
0
B.- Si además de ser simétrico el cuerpo respecto al plano de movimiento, tomamos el origen del sistema de coordenadas xyz en el cdm G del cuerpo , las ecuaciones anteriores se reducen a:
0yx
GzAz
Ay
Ax
IM
M
M
0
0

- - 1313 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
16.3 Momentos y Productos de Inercia
En el anterior estudio del movimiento de un cuerpo rígido, hemos encontrado expresiones en las que interviene el producto de la masa de un pequeño elemento por el cuadrado de su distancia a una recta de interés. Este producto recibe el nombre de momento de inercia del elemento.
dmrdI 2El momento de inercia de todo el cuerpo respecto al eje OO es:
m
dmrI 2
Siempre será positivo dado que tanto la masa como el cuadrado de su distancia al eje son cantidades positivas y como tiene las dimensiones ML2, su unidad de medida del SI será el kg.m2
16.3.1 Momento de Inercia
Así pues, el momento de inercia dI de un elemento de masa dm respecto al eje OO es:

- - 1414 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Los momentos de inercia de un cuerpo respecto a los ejes de coordenadas de un sistema xyz se pueden determinar considerando un elemento de masa como el de la figura, así:
dmyxdmrI
dmzxdmrI
dmzydmrI
mm
zz
mm
yy
mm
xx
222
222
222
dmzydmrdI xx222
Para los ejes y y z se pueden escribir ecuaciones análogas con lo que nos quedaría:

- - 1515 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Momentos de inercia de cuerpos compuestos
Muchas veces el cuerpo de interés puede descomponerse en varias formas simples tales como cilindros, esferas, placas y varillas, para las cuales se han calculado y tabulado previamente los momentos de inercia. Ver tablas siguientes.
El momento de inercia del cuerpo compuesto respecto a un eje cualquiera es igual a la suma de los momentos de inercia de las distintas partes que lo componen respecto a dicho eje. Por ejemplo,
n
n
xxx
mmm
mm
xx
III
dmzydmzydmzy
dmzydmrI
...
...
21
21
222222
222
Cuando una de las partes componentes sea un agujero, su momento de inercia deberá restarse del momento de inercia de la parte mayor para obtener el momento de inercia del cuerpo compuesto.

- - 1616 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
16.3.2 Radio de giro
El momento de inercia (al tener las dimensiones de masa por el cuadrado de una longitud) se podrá expresar como producto de la masa m del cuerpo por el cuadrado de una longitud k llamada radio de giro. Así pues, el momento de inercia I de un cuerpo respecto a una recta dad se puede expresar en la forma
m
IkmkI seao2
El radio de giro de la masa de un cuerpo respecto a un eje cualquiera puede interpretarse que es la distancia al eje de un punto en el que habría que concentrar toda la masa del cuerpo para tener el mismo momento de inercia respecto al eje que la masa real.
No existe ninguna interpretación física útil del radio de giro; no es más que un medio conveniente de expresar el momento de inercia de masa de un cuerpo en función de su masa y una longitud.

- - 1717 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
16.3.3 Teorema de Steiner para momentos de inercia
Considérese el cuerpo representado en la figura, en cuyo centro de masa G se toma el origen del sistema de coordenadas xyz y considérese también un sistema de coordenadas x´y´z´ de origen en el punto O´y ejes paralelos a los anteriores. En la figura se observa que
zzzyyyxxx ´´´
La distancia dx que separa los ejes x´y x es
22 zyd x Así pues, el momento de inercia del cuerpo respecto al eje x´, paralelo al eje x que pasa por el centro de masa es,
m
xx dmrI 2´ desarrollando

- - 1818 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
dmzzyydmrImm
xx222
´
y como los ejes y y z pasan por el centro de masa G del cuerpo,
00 mm
dmzdmy
mmmmm
zdmzdmzydmydmydmzy 22 2222
Por tanto, mdImyxII
mdImzxII
mdImzyII
zzGzGz
yyGyGy
xxGxGx
222´
222´
222´
Ahora bien, como xG
m
Idmzy 22
Teorema de Steiner para momentos de inercia

- - 1919 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Así pues, si se conoce el momento de inercia de un cuerpo respecto a un eje que pase por su centro de masa, se podrá hallar el momento de inercia respecto a otro eje cualquiera paralelo a él, sin necesidad de integración, utilizando las ecuaciones anteriores.Entre los radios de giro respecto a estos dos ejes paralelos existe una relación similar dada por mdmkmk xxGx
222´
luego
222´
222´
222´
zzGz
yyGy
xxGx
dkk
dkk
dkk
Los dos sistemas de ecuaciones enmarcados sólo son válidos para pasar de ejes xyz que pasen por el centro de masa a otros ejes paralelos a ellos o al revés.
¡No son válidos para ejes paralelos arbitrarios!

- - 2020 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
16.3.4 Producto de inercia
En los estudios de movimientos de cuerpos rígidos aparecen, a veces, expresiones en las que intervienen el producto de la masa de un pequeño elemento por las distancias del mismo a un par de planos de coordenadas ortogonales. Se trata de del producto de inercia del elemento.
dmyxdI xy
Por ejemplo, el producto de inercia del elemento representado en la figura respecto a los planos xz e yz es
La suma de los productos de inercia de todos los elementos de masa del cuerpo respecto a los mismos planos ortogonales se define como el producto de inercia del cuerpo.
m
xy dmyxI

- - 2121 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Así pues, los tres productos de inercia del cuerpo representado son
m
zx
m
yz
m
xy dmxzIdmzyIdmyxI
Los productos de inercia, como los momentos de inercia, tienen las dimensiones ML2 por lo que su unidad de medida del SI será el kg.m2
El producto de inercia de un cuerpo puede ser positivo, negativo o nulo ya que las coordenadas tiene signos independientes.El producto de inercia será nulo cuando uno u otro de los planos sea un plano de simetría, ya que los pares de elementos simétricos respecto a éste tendrán productos de inercia opuestos cuya suma dará cero.Los productos de inercia de placas delgadas con densidad ρ uniforme, con grosor t uniforme y una sección de área A y suponiendo además que los ejes x e y están contenidos en el plano medio de la placa (plano de simetría), serán
00
m
zx
m
yz
xy
VAVm
xy
dmxzIydmzyI
ItdAyxtdAtyxdVyxdmyxI
mm
Am

- - 2222 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Se puede desarrollar, para los productos de inercia, un teorema de Steiner muy parecido al de los momentos segundos mixtos de superficie vistos anteriormente.
Considérese el cuerpo representado en la figura, el cual tiene un sistema de coordenadas xyz con origen en el centro de masa G del cuerpo y un sistema de coordenadas x´y´z´ con origen en el punto O´ y ejes paralelos a los anteriores. En la figura se observa que
zzzyyyxxx ´´´
mmmmmm
yx dmyxdmxydmyxdmyxdmyyxxdmyxI ´´´´
Por tanto,
0;0; mm
xyG
m
dmzdmyIdmyxcomo
tenemos que: mxzIImzyIImyxII zxGxzyzGzyxyGyx ´´´´´´

- - 2323 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
En algunos casos, en el análisis dinámico de cuerpos, hay que determinar ejes principales y momentos de inercia máximo y mínimo.
El problema estriba en transformar momentos y productos de inercia fácilmente calculables respecto a un sistema de coordenadas en los correspondientes a otro sistema x´y´z´ de igual origen O pero inclinados respecto a los ejes xyz.
Considérese el cuerpo representado en la figura, en donde el eje x´ forma los ángulos θx´x, θx´y y θx´z con los ejes x, y y z respectivamente. El momento de inercia Ix´ es, por definición:
m
x dmrI 2´
Desarrollando y realizando un análisis similar al que se realiza para localizar los ejes principales y determinar los momentos segundos de superficie máximo y mínimo, se pueden localizar los ejes principales de inercia y determinar los momentos de inercia máximo y mínimo.
16.3.5 Momentos de inercia principales

- - 2424 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
16.4 Traslación, Rotación y movimiento plano cualquiera de un
cuerpo rígido
AzAxAyAzx
AzxAyzAyyy
AyzAzxAxxx
ImyamxaMF
IIMmaF
IIMmaF
0
2
2
Los problemas de movimiento plano se pueden clasificar, según su naturaleza, en:1.- Traslación.2.- Rotación en torno a un eje fijo.3.- Movimiento plano cualquiera.
Los dos primeros son casos particulares del Movimiento plano cualquiera.
Para un cuerpo de forma arbitraria, las ecuaciones de Movimiento plano cualquiera desarrolladas anteriormente vienen dadas por las ecuaciones en la forma:
Traslación Rotación

- - 2525 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
16.4.1 Traslación
Un cuerpo rígido lleva movimiento de Traslación cuando todo segmento rectilíneo del cuerpo se mantenga paralelo a su posición inicial a lo largo del movimiento.
Durante la Traslación, no hay movimiento angular (ω = α = 0); por tanto, todas las partes del cuerpo tienen la misma aceleración lineal a.
La Traslación sólo puede tener lugar cuando la recta soporte de la resultante de las fuerzas exteriores que se ejercen sobre el cuerpo pase por su cdm G.
En el caso de Traslación, con el origen del sistema de coordenadas xyz en el cdm G del cuerpo , las ecuaciones para un movimiento plano cualquiera se reducen a: 0yx
0
Gz
Gyy
Gxx
M
amF
amF

- - 2626 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Cuando un cuerpo está animado de una traslación como la ilustrada en la 1ª figura, podemos tomar el eje x paralelo a la aceleración aG, en cuyo caso la componente aGy de la aceleración será nula.
Cuando el cdm de un cuerpo siga una curva plana, como se observa en la 2ª figura, suele ser conveniente tomar los ejes x e y en las direcciones de las componentes instantáneas normal y tangencial de la aceleración. Si se suman los momentos de las fuerzas exteriores respecto a un punto que no sea el cdm deberá modificarse la ecuación de momentos a fin de tener en cuenta los efectos de aGx y de aGy. Así,
myamxaM
amF
amF
GxGyAz
Gyy
Gxx

- - 2727 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 16.1PROBLEMA 16.1

- - 2828 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 16.2PROBLEMA 16.2

- - 2929 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 16.3PROBLEMA 16.3

- - 3030 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
16.4.2 Rotación en torno a un eje fijo
Este tipo de movimiento plano se produce cuando todos los elementos de un cuerpo describen trayectorias circulares alrededor de un eje fijo.
0 GyzGzx II
GzGzGyy
Gxx
IMamF
amF
0
0
La figura representa un cuerpo rígido simétrico respecto al plano de movimiento
y que gira en torno a un eje fijo que pasa por el cdm G del cuerpo 0yx
En este caso aG = 0; por tanto, las ecuaciones para un movimiento plano cualquiera se reducen a

- - 3131 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
AzAzGyy
Gxx
IMxmamF
xmamF
2
A menudo aparecen rotaciones en torno a ejes fijos que no pasan por el cdm del cuerpo.
La figura representa un cuerpo rígido simétrico respecto al plano de movimiento 0 GyzGzx II
y que gira en torno a un eje fijo que NO pasa por el cdm G del cuerpo
En este caso aA = 0; por tanto, las ecuaciones para un movimiento plano cualquiera se reducen a
AzGzGzGyGz
GxGyGzxyGzAz
ImxIxmxImaxM
maymaxMyFxFMM
2
0

- - 3232 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 16.4PROBLEMA 16.4

- - 3333 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 16.4bisPROBLEMA 16.4bis

- - 3434 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 16.5PROBLEMA 16.5

- - 3535 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 16.6PROBLEMA 16.6

- - 3636 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
16.4.3 Movimiento plano cualquiera
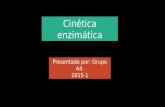
En la figura, donde un émbolo está conectado a un volante mediante una biela AB, se ilustran tres formas de movimiento plano:1.- Rotación del volante en torno a un eje fijo.2.- Traslación rectilínea del émbolo3.- Movimiento plano cualquiera de la biela AB
Cuando el volante gira un ángulo θ, el pasador A recorre una distancia sA = Rθ a lo largo de un camino circular. El movimiento del pasador B se puede considerar que es una superposición de los desplazamientos resultantes de una traslación curvilínea de la biela y de una rotación de la biela en torno al pasador A. Como resultado de estos dos desplazamientos, el pasador B recorre una distancia sB a lo largo de un camino horizontal.
Así pues, el movimiento plano de la biela AB es la superposición de una traslación y una rotación en torno a un eje fijo.

- - 3737 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
A.- Si se toma el origen de coordenadas en el pasador A y los ejes x e y están orientados según el eje de la biela y perpendicularmente a ella , respectivamente, las ecuaciones generales de movimiento plano quedan así:
0y
AzAyAzGyy
Gxx
ImxaMamF
amF
B.- Si se sitúa el origen del sistema de coordenadas en el cdm G de la biela, las ecuaciones se reducen a:
GzGzGyy
Gxx
IMamF
amF
Análisis Cinético de la Biela:
Tenemos dos posibilidades:

- - 3838 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Cuando el cuerpo no sea simétrico respecto al plano del movimiento, habrá que ir con cuidado al aplicar las ecuaciones y reducirlas adecuadamente mediante la selección del sistema de coordenadas xyz solidario al cuerpo.
Ejemplo 1: Disco macizo montado sobre un árbol que forma con el eje del disco un ángulo θ. En un sistema de coordenadas xyz de origen coincidente con el cdm G del disco.
como 00,0 GGyz ayIyxtenemos:
GzAzx
GzxAyGyy
GzxAxGxx
IMF
IMmaF
IMmaF
0
0
02
El plano xz es plano de simetría

- - 3939 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Ejemplo 2: Placa triangular de grosor uniforme solidaria a un árbol circular que gira. Para un sistema de coordenadas xyz con origen A en el eje del árbol.
como 00,0 AAyz ayIytenemos:
AzAzx
AzxAyGyy
AzxAxGxx
IMF
IMxmmaF
IMxmmaF
0
2
2
Siguiendo con el análisis de cuerpos no simétricos respecto al plano del movimiento tenemos otro ejemplo:
El plano xz es plano de simetría

- - 4040 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 16.7PROBLEMA 16.7

- - 4141 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 16.7bisPROBLEMA 16.7bis

- - 4242 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 16.8PROBLEMA 16.8

- - 4343 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 16.9PROBLEMA 16.9

- - 4444 - -
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 16.10PROBLEMA 16.10