
1._vectores-suma
14
UNIVERSIDAD CONTINENTAL ASIGNATURA ME C A N I C A V E C T O R I AL TE MA Vectores Dr . Oma r P abl o Flores R amos Huancayo , 2011 1
-
Upload
jheremi-valladolid -
Category
Documents
-
view
129 -
download
0
Transcript of 1._vectores-suma
5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 1/14
UNIVERSIDAD
CONTINENTAL
ASIGNATURA
MECANICA VECTORIAL
TEMA
Vectores
Dr. Omar Pablo Flores Ramos
Huancayo, 2011
1
5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 2/14
Mecánica vectorial Omar Pablo Flores Ramos2
CONTENIDO
Introducción
1. Vectores y escalares
2. Suma vectorial de fuerzas
3. Componentes rectangulares de un vector
4. Suma y resta de vectores cartesianos
5. Vector de posición
6. Vector unitario
Bibliografía
4
4
6
7
7
8
8
5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 3/14
Mecánica vectorial Omar Pablo Flores Ramos3
INTRODUCCION
En estática, muchos son los temas que tienen base vectorial, lanecesidad de tener un conocimiento claro de este tema, exigeque los temas vectoriales se resuelvan al detalle. La complejidadvectorial se presenta cuando no se guarda un orden de solución,ordenándose desde un inicio se simplificará el estudio vectorial
En este capítulo se definirá el concepto de fuerza y seproporcionara los procedimientos para las suma de fuerzas,representación de las mismas por medio de sus componentes ysu proyección a lo largo de un eje. Debido a que la fuerza es unacantidad vectorial, se debe usar las reglas del algebra vectorialpara su estudio
Se empieza el presente estudio definiendo los conceptos demagnitudes escalares y vectoriales, suma vectorial de fuerzasmediante los métodos del paralelogramo, triangulo y polígono,Componentes rectangulares de un vector tanto en el plano comoen el espacio, suma y resta de vectores cartesianos, vector deposición y vector unitario
5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 4/14
Mecánica vectorial Omar Pablo Flores Ramos4
1. VECTORES DE FUERZA
2.1. VECTORES Y ESCALARES
En la mecánica, la mayoría de las cantidades físicas pueden serexpresadas matemáticamente por medio de escalares o vectores
a) Escalar: es una cantidad que se representa solo por un número,
son ejemplo de escalares; la longitud, el volumen, la masa, etc.
b) Vector: es una cantidad que posee tanto una magnitud (módulo)
una dirección, en estática las cantidades vectoriales mas
comunes son: la posición, la fuerza y el momento.
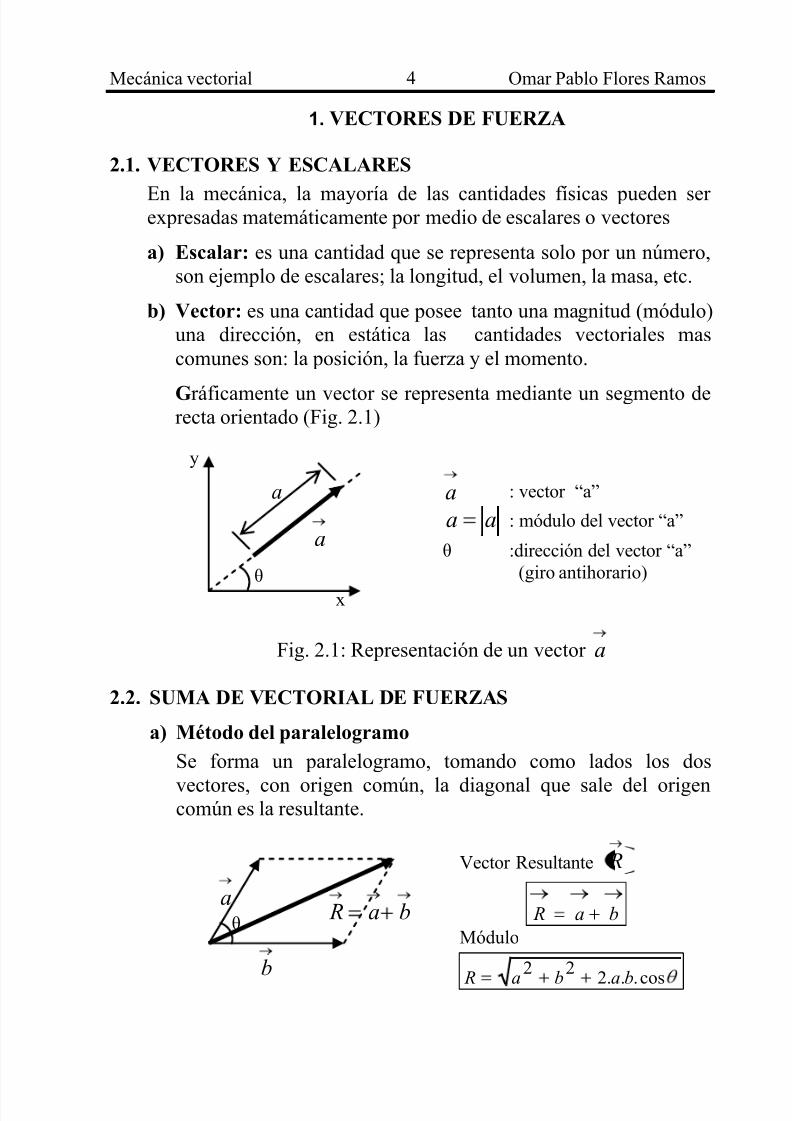
Gráficamente un vector se representa mediante un segmento derecta orientado (Fig. 2.1)
Fig. 2.1: Representación de un vector a
2.2. SUMA DE VECTORIAL DE FUERZAS
a) Método del paralelogramoSe forma un paralelogramo, tomando como lados los dos
vectores, con origen común, la diagonal que sale del origencomún es la resultante.
: vector “a”
aa : módulo del vector “a”
θ :dirección del vector “a”
(giro antihorario)
a
a
θ
a
y
x
a
b
ba R θ
Vector Resultante R
ba R
Módulo
cos...2
22
baba R
5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 5/14
Mecánica vectorial Omar Pablo Flores Ramos5
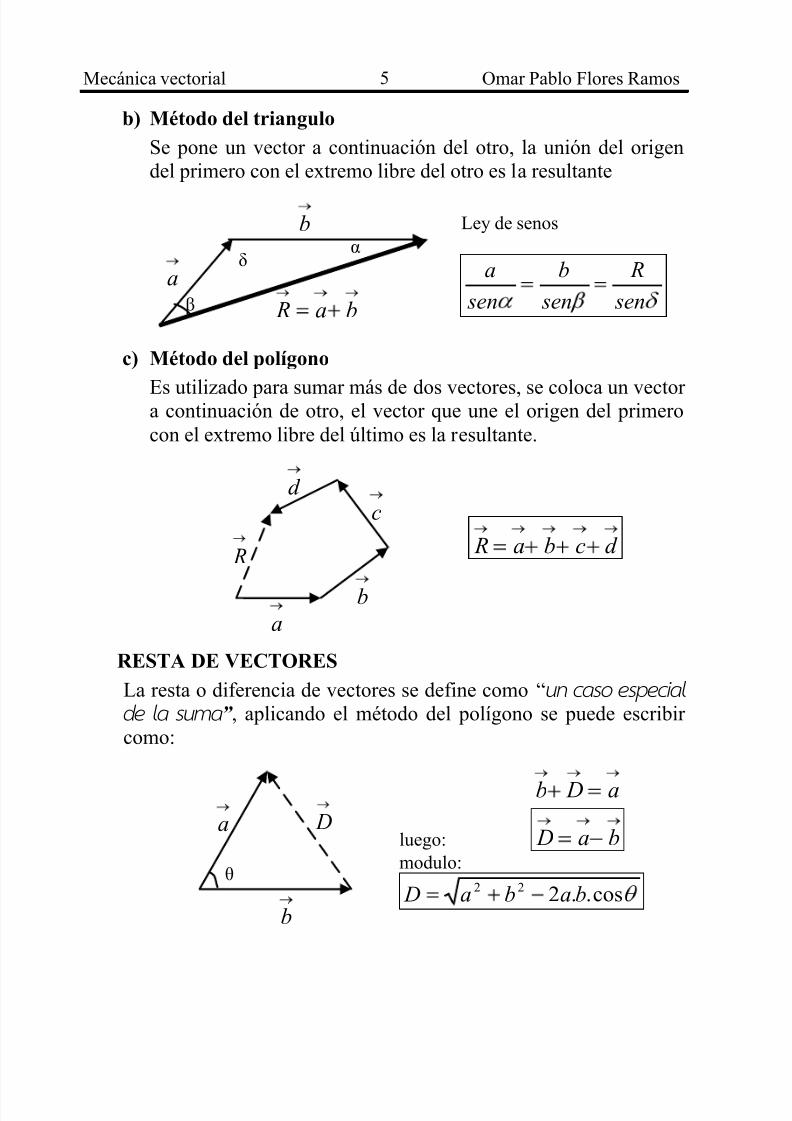
b) Método del trianguloSe pone un vector a continuación del otro, la unión del origen
del primero con el extremo libre del otro es la resultante
c) Método del polígono
Es utilizado para sumar más de dos vectores, se coloca un vectora continuación de otro, el vector que une el origen del primero
con el extremo libre del último es la resultante.
RESTA DE VECTORESLa resta o diferencia de vectores se define como “un caso especial
de la suma” , aplicando el método del polígono se puede escribir
como:
a
ba R β
Ley de senos
sen
R
sen
b
sen
a
α δ
b
a
b
c
d
R d cba R
a
b
D
θ
a Db
luego: ba D
modulo:
cos..222 baba D
5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 6/14
Mecánica vectorial Omar Pablo Flores Ramos6
Observaciones:1
ra: La resultante máxima de dos vectores es cuando son paralelas y
del mismo sentido (θ = 0º)
R máx. = a + b
2da
: La resultante mínima de dos vectores es cuando son paralelas y
de sentido contrario (θ = 180º)
R min. = a – b
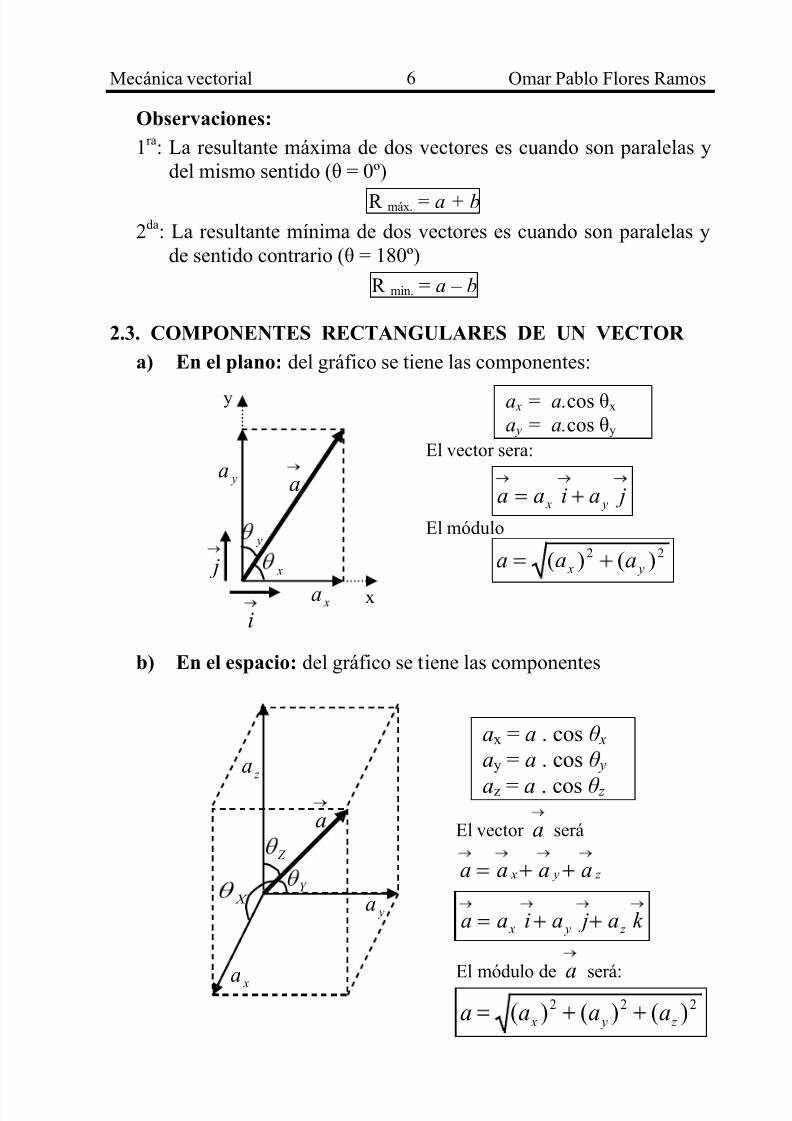
2.3. COMPONENTES RECTANGULARES DE UN VECTORa) En el plano: del gráfico se tiene las componentes:
b) En el espacio: del gráfico se tiene las componentes
y
x
a
y
x
ya
xa
i
j
a x = a.cos θx
a y = a.cos θy
El vector sera:
j
aiaa y x
El módulo
22)()( y x aaa
ax = a . cos θ x ay = a . cos θ y
az = a . cos θ z
El vector a será
z y x aaaa
k
a jaiaa z y x
El módulo dea
será:
222)()()( z y x aaaa
a
Y
Z
X
xa
ya
za

5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 7/14
Mecánica vectorial Omar Pablo Flores Ramos7
Observaciones
1ra Ángulos directores
Son los ángulos (θ
x;θ
y;θ
z) que forma un vector con cada unode los ejes coordenados
2da
Cósenos directores
Son los cósenos de los ángulos directores
a
a x
xcos a
a y
ycos a
a z zcos
2.4. SUMA Y RESTA DE VECTORES CARTESIANOS
Se suman o restan componente por componente, por ejemplo:
k
c jcicc
k b jbibb
k a jaiaa
z y x
z y x
z y x
Resultante: k F jF iF F R z y x )()()(
Modulo222)()()( z y x F F F R
2.5. VECTOR DE POSICION (r
)Es un vector fijo, cuyo origen coincide con el origen de
coordenadas y se utiliza para ubicar un punto en el espacio, en
relación a otro punto
r
x y
z
k
z j yi xr

5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 8/14
Mecánica vectorial Omar Pablo Flores Ramos8
2.6. VECTOR UNITARIO
Es un vector que tiene por módulo la unidad e indica la dirección y
el sentido del vector dado. El vector unitario de un vector a será:
a
au a
k a
a j
a
ai
a
au z y x
a
También:
k ji z y xacoscoscos
Como el módulo del vector unitario es uno se tiene:
1coscoscos222
z y x
5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 9/14
Mecánica vectorial Omar Pablo Flores Ramos9
EJERCICIOS
Vectores en el plano
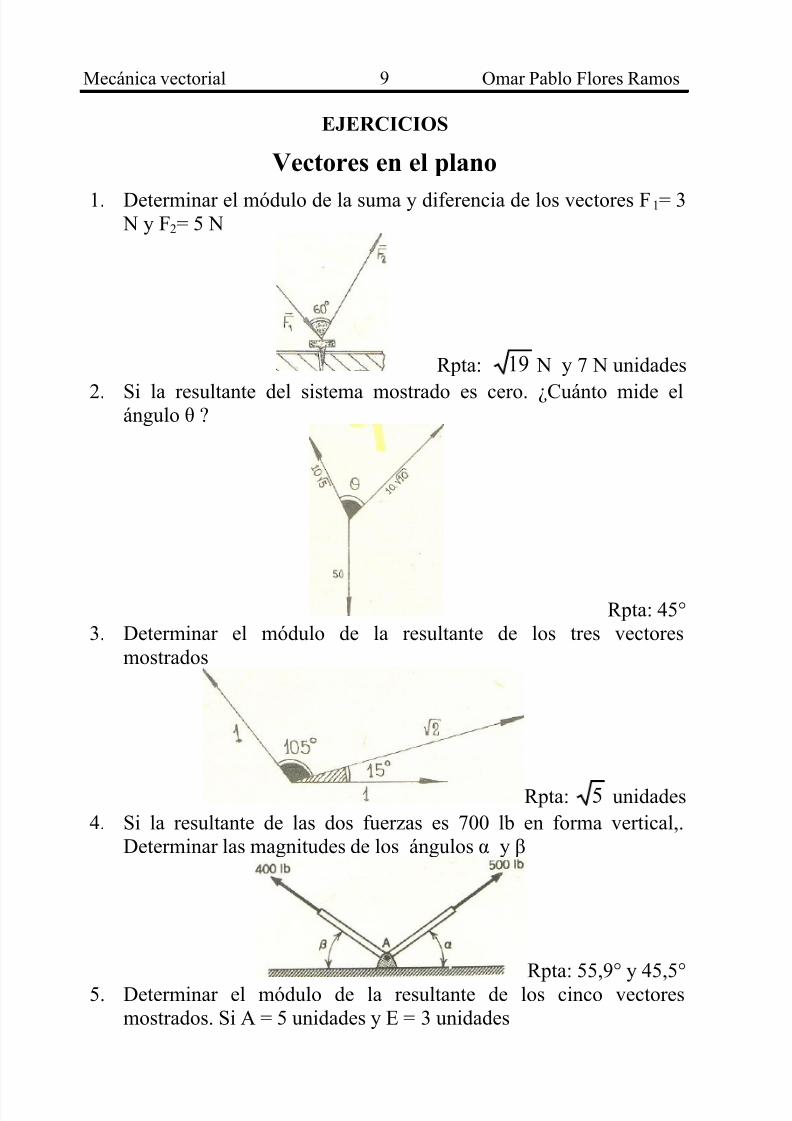
1. Determinar el módulo de la suma y diferencia de los vectores F 1= 3N y F2= 5 N
Rpta: 19 N y 7 N unidades
2. Si la resultante del sistema mostrado es cero. ¿Cuánto mide elángulo θ ?
Rpta: 45°
3. Determinar el módulo de la resultante de los tres vectores
mostrados
Rpta: 5 unidades
4. Si la resultante de las dos fuerzas es 700 lb en forma vertical,.Determinar las magnitudes de los ángulos α y β
Rpta: 55,9° y 45,5°5. Determinar el módulo de la resultante de los cinco vectores
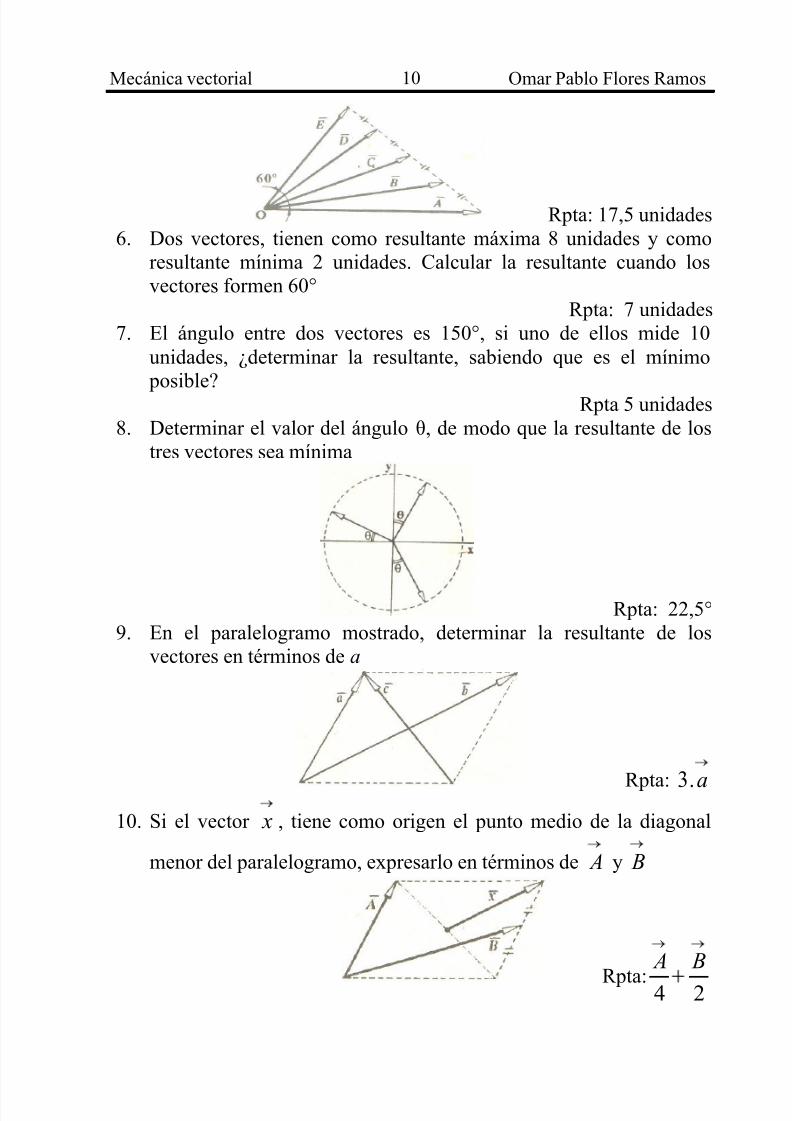
mostrados. Si A = 5 unidades y E = 3 unidades
5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 10/14
Mecánica vectorial Omar Pablo Flores Ramos10
Rpta: 17,5 unidades
6. Dos vectores, tienen como resultante máxima 8 unidades y como
resultante mínima 2 unidades. Calcular la resultante cuando los
vectores formen 60°
Rpta: 7 unidades
7. El ángulo entre dos vectores es 150°, si uno de ellos mide 10
unidades, ¿determinar la resultante, sabiendo que es el mínimo
posible?
Rpta 5 unidades
8. Determinar el valor del ángulo θ, de modo que la resultante de los
tres vectores sea mínima
Rpta: 22,5°
9. En el paralelogramo mostrado, determinar la resultante de los
vectores en términos de a
Rpta: a.3
10. Si el vector x , tiene como origen el punto medio de la diagonal
menor del paralelogramo, expresarlo en términos de A y B
Rpta: 24
B A
5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 11/14
Mecánica vectorial Omar Pablo Flores Ramos11
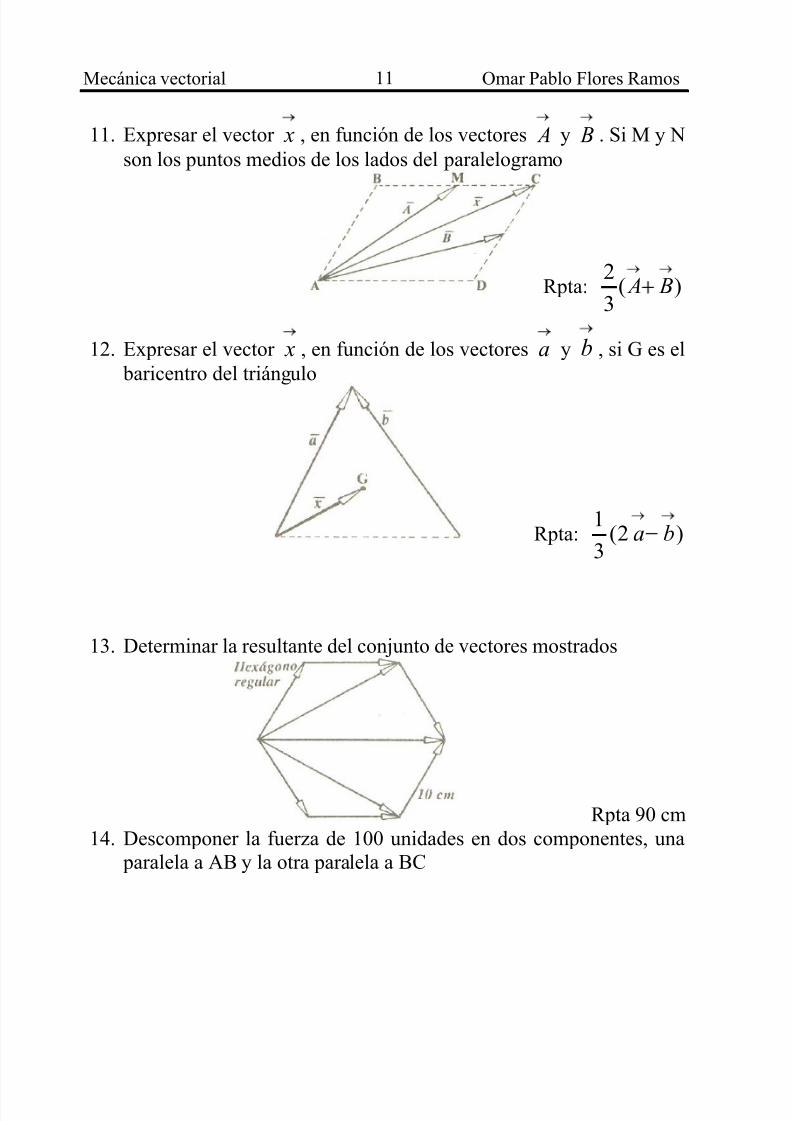
11. Expresar el vector x , en función de los vectores A y B . Si M y N
son los puntos medios de los lados del paralelogramo
Rpta: )(3
2 B A
12. Expresar el vector x , en función de los vectores a y b , si G es el
baricentro del triángulo
Rpta: )2(3
1ba
13. Determinar la resultante del conjunto de vectores mostrados
Rpta 90 cm
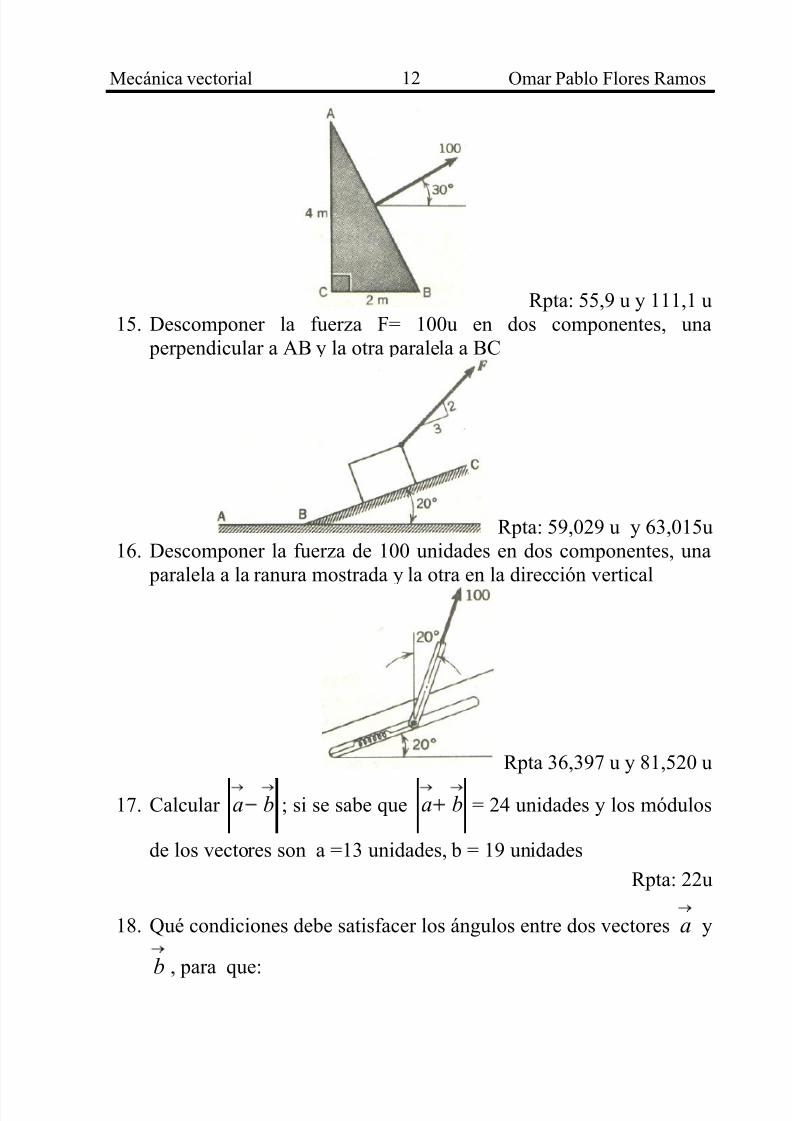
14. Descomponer la fuerza de 100 unidades en dos componentes, una
paralela a AB y la otra paralela a BC
5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 12/14
Mecánica vectorial Omar Pablo Flores Ramos12
Rpta: 55,9 u y 111,1 u
15. Descomponer la fuerza F= 100u en dos componentes, una
perpendicular a AB y la otra paralela a BC
Rpta: 59,029 u y 63,015u
16. Descomponer la fuerza de 100 unidades en dos componentes, una
paralela a la ranura mostrada y la otra en la dirección vertical
Rpta 36,397 u y 81,520 u
17. Calcular
ba ; si se sabe que ba = 24 unidades y los módulos
de los vectores son a =13 unidades, b = 19 unidades
Rpta: 22u
18. Qué condiciones debe satisfacer los ángulos entre dos vectores a y
b , para que:
5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 13/14
Mecánica vectorial Omar Pablo Flores Ramos13
a) ba = ba Rpta: θ =90°
b) ba > ba Rpta: 0 < θ < 90°
c) ba < ba Rpta: 90° < θ < 180°
19. Los módulos de dos vectores son 12 y 8 unidades respectivamente.
¿Entre cuanto estará comprendido el módulo del vector diferencia?
Rpta: entre 4 y 20 unidades
Vectores en el espacio
20. Hallar el módulo de los vectores:
a) k jia 732
b) k jib 435
c) ,c vector que une P1(3; 4; 5) con P2(1 ;-2; 3)Rpta: a) 7,874 b) 7,071 c) 6,63
21. Un vector de posición se extiende hasta el punto (3; 3; 6) m.
determine los ángulos directores respectivos
Rpta: θx = 73º23`54 θx = 73º23`54
22. Dados los vectores:
k jia 32
k jib 953
,c que une P1(3; 4; 5) con P2(1; -2 3))
a) demostrar que a y b son perpendiculares
b) hallar el menor de los ángulos formados por a y c
c) hallar el menor de los ángulos formados por b y c
d) hallar los ángulos directores de b

5/9/2018 1._vectores-suma - slidepdf.com
http://slidepdf.com/reader/full/1vectores-suma 14/14
Mecánica vectorial Omar Pablo Flores Ramos14
Rpta: b) 165°14' c) 85°10' d) 73°45', 117°47, 32°56'
23. Dado el vector k z jia .124 ; cuyo módulo es a = 13
unidades. Calcular el valor numérico de z Rpta: ± 3
24. Hallar las coordenadas del punto B que coincide con el extremo del
vector k jia 423 , si dicho vector tiene como origen el
punto A(2; 3; 1)
B(5; 5; -3)
25. Un vector, cuyo módulo es 10 unidades, forma con el eje x un
ángulo de 45° y con el eje y 120°. Determinar el ángulo que forma
con el eje z y el vector
Rpta: 60°; k ji 5525
26. Hallar la expresión cartesiana de un vector, cuyos ángulos
directores son θ x = 120°, θ z = 60°, siendo su módulo 4 unidades
Rpta: k ji 2222
27. Hallar un vector unitario con la dirección y sentido de la resultante
de los vectores k jia 525 y k jib 742
Rpta: k ji7
2
7
6
7
3
BIBLIOGRAFIA
1 BEDFORD &FOWLER
(1996)
Mecánica para ingeniería, Estática.USA
2 BEER &JHONSTON(2002)
Mecánica vectorial para ingenieros,Estática, editorial Mc Graw Hill,Bogotá, Colombia
4 HIBBELER.(2002)
Ingeniería Mecánica, Estática,editorial Prentice Hall, Séptimaedición, México
6 RILEY-
STURGES(1996)
Ingeniería Mecánica - Estática. Edit.
Reverte S.A. México







![Suma Reforma 2013[1]](https://static.fdocuments.es/doc/165x107/55cf9c8e550346d033aa3be5/suma-reforma-20131.jpg)


![Parque natural suma paz[1] (1)](https://static.fdocuments.es/doc/165x107/55b321aebb61ebb2798b4686/parque-natural-suma-paz1-1-55bd6dc3a78ef.jpg)




![Suma Y Resta De Nmeros Enteros 1193951099798872 5[1]](https://static.fdocuments.es/doc/165x107/55bff0dbbb61eb7d428b47d8/suma-y-resta-de-nmeros-enteros-1193951099798872-51.jpg)
