2 detalles de simulink y control
14
Click here to load reader
-
Upload
martin-carlos -
Category
Documents
-
view
315 -
download
1
Transcript of 2 detalles de simulink y control

Detalles de Simulink Orientados a Control de Sistemas ContinuosControl de Sistemas Continuos
Dr. Javier Vega Pineda

Multiplexer y WorkspaceMultiplexer y Workspace
En Simulink En Matlab

SubsistemasSubsistemas• Muy útil para crear sistemas jerárquicos,
d blagrupando bloques
• Existen dos formas de crear un subsistema:1. Insertando un bloque de subsistema y llenarlo
con los bloques
2. Agrupar bloques ya creados en un subsistema

Subsistemas (modo 2)Subsistemas (modo 2)
Edit | Create Subsystem o Ctrl‐G

Modelando una ecuación diferencial o Un sistema continuo
tdx )( Ctxdt
tdx+−= )(2)(

Modelando una ecuación diferencial o Un sistema continuo

Modelando una ecuación diferencial o un sistema continuo con la
Función de Transferencia del sistemaFunción de Transferencia del sistema

Respuesta de un sistema, Matlab
8)( 2=sHX(s) Y(s)
84)( 2 ++ ssx(t) y(t)

Respuesta de un Sistema, Simulinkexplícito o general

Respuesta de un Sistema, Simulinkexplícito o general

Respuestas de sistemas
•Modificar para un sistema inestable•Modificar para un sistema siempre oscilando o críticamente estable

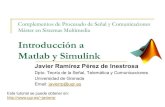
Controlador PIDProporcional‐Integral‐Derivativo
Proceso de tercer orden. Tres reactores en cascadaUtilizando la técnica de control Ziegler‐Nichols
pV Variables:H= altura del agua en el tanqueVol=volumen del agua en el tanque
H
V=voltaje aplicado a la bomba
Parámetros:A=área de la sección transversal del tanqueA=área de la sección transversal del tanquep=constante relacionada con la tasa del flujo de agua en la entradaq=constante relacionada con la tasa del flujo
Hq de agua de salida
HVdHAV ldModelo del sistema: HqpV
dtAVol
dt−==

Controlador PIDControlador PID
HqpVddHAVol
dd
−== qpdtdt

Controlador PIDControlador PID
Nivel de agua deseado = 10 Nivel de agua deseado = 49