
22 de Septiembre de 2016 ANÁLISIS DE SENSIBILIDAD Lineal/Clases/PL 14 (22... · 2.Cambio en el...
45
Programación Lineal José Luis Quintero 1 22 de Septiembre de 2016 Postgrado de Investigación de Operaciones Facultad de Ingeniería Universidad Central de Venezuela ANÁLISIS DE SENSIBILIDAD
Transcript of 22 de Septiembre de 2016 ANÁLISIS DE SENSIBILIDAD Lineal/Clases/PL 14 (22... · 2.Cambio en el...

Programación Lineal José Luis Quintero 1
22 de Septiembre de 2016
Postgrado de Investigación de OperacionesFacultad de Ingeniería
Universidad Central de Venezuela
ANÁLISIS DE
SENSIBILIDAD

Programación Lineal José Luis Quintero 2
Puntos a tratar
1. Cambio en el vector de costos
2. Cambio en el vector de recursos
3. Mecánica Método Dual Simplex
4. Inclusión de una nueva variable
5. Inclusión de una nueva restricción
6. Modificación de un coeficiente
tecnológico

Programación Lineal José Luis Quintero
Se tiene una solución básica factible óptima,supóngase que el coeficiente de costo deuna variable xk en el problema originalcambia de ck a c’k.
El efecto de este cambio en el tablero final sereflejará en la fila de la función objetivo: secorre el riesgo de perder optimalidad o deque cambie el valor de la función objetivo.
Cambio en el vector de costos

Programación Lineal José Luis Quintero
� Caso 1: xk es no básica en el óptimo.
En este cB caso no es afectado, por lo tanto, el valor zde la función objetivo no cambia. Si el coeficiente decosto reducido de la variable no básica xk dado por:
pasa a ser positivo, entonces la solución actual dejade ser óptima, por lo que xk debe entrar a la base yel método sigue.
) c- (c - ) c- (z c -z k'kkk
'kk ====
Cambio en el vector de costos

Programación Lineal José Luis Quintero
� Sea el tablero inicial:
Z X1 X2 X3 X4 X5 LD
1 2 -1 1 0 0 0
0 1 1 1 1 0 6
0 -1 2 0 0 1 4
cuyo tablero óptimo es:
Z X1 X2 X3 X4 X5 LD
1 0 -3 -1 -2 0 -12
0 1 1 1 1 0 6
0 0 3 1 1 1 10
¿Qué ocurre si c2 cambia de 1 a -3?
Ejemplo ilustrativo 1

Programación Lineal José Luis Quintero
� Como x2 es no básica, el valor óptimo del objetivo nocambia, tan sólo se ajusta el valor de z2 – c’2 por :
es decir:
Luego el tablero óptimo cambia a uno no óptimo:
Z X1 X2 X3 X4 X5 LD
1 0 1 -1 -2 0 -12
0 1 1 1 1 0 6
0 0 3 1 1 1 10
por lo que el problema se continúa: x2 entra a la basesaliendo de ella x5.
) c-(c-) c-(z c-z 2'222
'22 ====
(((( )))) 0143133cz '22 >>>>====++++−−−−====−−−−−−−−−−−−−−−−====−−−−
Ejemplo ilustrativo 1

Programación Lineal José Luis Quintero
� Caso 2: xk es básica en el óptimo.
En este caso cB es afectado. Sea ,entoncessi cambia a . Para todo j se cumple:
es decir:
Si j=k se tiene que:
donde se cumple que zk – ck = 0 y que , luego:
y como era de esperarse, el coeficiente de costoreducido de xk sigue siendo nulo.
tBk x x ====
tBc 'B t
c
jB
'Bjj
1-B
jj1-'
B j'j
)y ,0,...,0c- c (0,...,0, )c -a B c (
c - a B c c-z
tt++++
========
ktk
'kkkk
'k y)c- (c )c- (z c- z ++++====
1ykt ====
0 c- c c- z c- c c- z kk'k
'kk
'kk
'k ========⇒⇒⇒⇒====
jtB
' Bjjj
'j y)c-(c )c- (z c- z
tt++++====
Cambio en el vector de costos

Programación Lineal José Luis Quintero
Si j≠≠≠≠k, los costos reducidos en el tablero óptimo seajustan por:
En todo caso, el valor el valor óptimo del objetivocambia a:
es decir:
jtB
'Bjjj
'j y)c- (c )c- (z c- z
tt++++====
tB'B
1B
1'B
' b)cc(bBcbBcztt
−−−−++++======== −−−−−−−−
tB'B
' b)cc(zztt
−−−−++++====
Cambio en el vector de costos

Programación Lineal José Luis Quintero
� Sea el tablero inicial:
Z X1 X2 X3 X4 X5 LD
1 2 -1 1 0 0 0
0 1 1 1 1 0 6
0 -1 2 0 0 1 4
cuyo tablero óptimo es:
Z X1 X2 X3 X4 X5 LD
1 0 -3 -1 -2 0 -12
0 1 1 1 1 0 6
0 0 3 1 1 1 10¿Qué ocurre si c1 cambia de -2 a 0?
Ejemplo ilustrativo 2

Programación Lineal José Luis Quintero
� Como x1 es básica, se tiene que z’1 – c’1 = 0 y paralos demás j se tiene:
Si j=2:
Si j=3:
Si j=4:
Si j=5:
Este último valor no es necesario de calcular, puestoque todas las demás variables básicas permaneceninalteradas .
jtB
'Bjjj
'j y)c- (c )c- (z c- z
tt++++====
1231))2(0(3cz 2'2 −−−−====++++−−−−====−−−−−−−−++++−−−−====−−−−
1211))2(0(1cz 3'3 ====++++−−−−====−−−−−−−−++++−−−−====−−−−
0221))2(0(2cz 4'4 ====++++−−−−====−−−−−−−−++++−−−−====−−−−
0000))2(0(0cz 5'5 ====++++====−−−−−−−−++++====−−−−
)kj,j,0y( jt ≠≠≠≠ββββ∈∈∈∈∀∀∀∀====
Ejemplo ilustrativo 2

Programación Lineal José Luis Quintero
El valor óptimo del objetivo cambia a:
Luego el tablero queda modificado así:
Z X1 X2 ⇓⇓⇓⇓X3 X4 X5 LD
1 0 -1 1 0 0 0
0 1 1 1 1 0 6
0 0 3 1 1 1 10
el cual no es óptimo, x3 debe entrar en la base.
012126))2(0(12z ' ====++++−−−−====−−−−−−−−++++−−−−====
Ejemplo ilustrativo 2

Programación Lineal José Luis Quintero 12
Puntos a tratar
1. Cambio en el vector de costos
2. Cambio en el vector de recursos
3. Mecánica Método Dual Simplex
4. Inclusión de una nueva variable
5. Inclusión de una nueva restricción
6. Modificación de un coeficiente
tecnológico

Programación Lineal José Luis Quintero
Si el vector de recursos cambia de b a b’, entonces lasolución básica cambia de B-1b a B-1b’, donde:
Los costos reducidos no cambian, por lo que laoptimalidad se conserva, tan sólo pudo,eventualmente, perderse la factibilidad al hacersenegativo algún elemento del nuevo vector derecursos óptimo. Si ese es el caso, se aplica el MétodoSimplex Dual.
Una vez recuperada la factibilidad, el valor delobjetivo se recalcula aplicando:
jj
j
'j
1'11'1 y)bb(bB)bb(BbBbB −−−−++++====−−−−++++==== ∑∑∑∑ββββ∈∈∈∈
−−−−−−−−−−−−−−−−
'1B
' bBcz −−−−====
Cambio en el vector de recursos

Programación Lineal José Luis Quintero
� Sea el tablero inicial:
Z X1 X2 X3 X4 X5 LD
1 2 -1 1 0 0 0
0 1 1 1 1 0 6
0 -1 2 0 0 1 4
cuyo tablero óptimo es:
Z X1 X2 X3 X4 X5 LD
1 0 -3 -1 -2 0 -12
0 1 1 1 1 0 6
0 0 3 1 1 1 10
¿Qué ocurre si b cambia de a ?
4
6
====4
3b '
Ejemplo ilustrativo 3

Programación Lineal José Luis Quintero
� Se tiene que:
luego:
Como no se perdió factibilidad, el valor óptimo delobjetivo cambia según:
con lo cual se tiene el tablero óptimo siguiente:
Z X1 X2 X3 X4 X5 LD
1 0 -3 -1 -2 0 -6
0 1 1 1 1 0 3
0 0 3 1 1 1 7
====−−−−
11
01B 1
====
======== −−−−
7
3
4
3
11
01bBx '1
B
(((( )))) 67
302bBcz '1
B* −−−−====
−−−−======== −−−−
Ejemplo ilustrativo 3

Programación Lineal José Luis Quintero 16
Puntos a tratar
1. Cambio en el vector de costos
2. Cambio en el vector de recursos
3. Mecánica Método Dual Simplex
4. Inclusión de una nueva variable
5. Inclusión de una nueva restricción
6. Modificación de un coeficiente
tecnológico

Programación Lineal José Luis Quintero
� Suponga que se tiene una solución óptima pero infactiblepara un problema de minimización. Ello significa que loscoeficientes de costo reducidos son no positivos, pero algúnelemento del vector de recursos es negativo. Ya se verácómo se puede llegar a esta situación. Sea el siguientetablero correspondiente a un problema de minimización:
Z X1 X2 X3 X4 X5 LD
1 -2 -3 -4 0 0 0
0 -1 -2 -1 1 0 -3
0 -2 1 -3 0 1 -4
� En él se observa que todos los coeficientes de costos son nopositivos, por lo que la solución actual es óptima. También seobserva que la solución actual es infactible, pues hayelementos negativos en el vector de recursos.
La mecánica del Método Dual Simplex

Programación Lineal José Luis Quintero
� Se plantea el problema siguiente: ¿es posible realizaruna secuencia de operaciones de pivoteo quepermitan recuperar factibilidad sin perderoptimalidad? ¿Es posible pivotear hasta obtener unasolución factible que también sea óptima? Larespuesta es afirmativa.
� La idea es hacer crecer los elementos del vector derecursos hasta recuperar la factibilidad sin perder laoptimalidad. Ello requiere que si se hace un pivoteo,el elemento del vector de recursos que sea negativocrezca hasta dejar de serlo, al mismo tiempo queningún coeficiente de costo se haga positivo.
La mecánica del Método Dual Simplex

Programación Lineal José Luis Quintero
� De acuerdo al significado que dimos a loscoeficientes tecnológicos, si alguno de ellos esnegativo entonces el crecimiento de la variableasociada genera cantidades adicionales de eserecurso en lugar de consumirlo, por lo tanto su valoraumenta.
La mecánica del Método Dual Simplex

Programación Lineal José Luis Quintero
� Este ultimo hecho indica que de hacer entrar unavariable xk (k=1,2,...,n) a la base, ello ayudará aeliminar la infactibilidad detectada en algún bi (aquelbi<0 para algún i=1,2,...,m), siempre y cuando secumpla que .
� Luego, para hacer no negativo el elemento –4 del LD,se debe pivotear en alguna de las posicionessombreadas:
Z X1 X2 X3 X4 X5 LD
1 -2 -3 -4 0 0 0
0 -1 -2 -1 1 0 -3
0 -2 1 -3 0 1 -4
lo cual llevaría a entrar a la base a x1 o a x3.
0 yki <<<<
La mecánica del Método Dual Simplex

Programación Lineal José Luis Quintero
� La selección de la variable que se debe hacer entrara la base depende del efecto del pivoteo sobre laoptimalidad. La relación entre el coeficiente de costoreducido zk -ck y el valor (para ) indica encuánto se puede desmejorar el valor actual delobjetivo por un crecimiento unitario de la variable xk
que beneficie la factibilidad.
� La idea es pivotear donde se desmejore lo menosposible el valor actual de la función objetivo. Por ello,para escoger la variable que va a entrar se hace unTRM entre los valores negativos de la fila del objetivoy los valores negativos de la fila pivote. El método escomo sigue:
kiy 0 yk
i <<<<
La mecánica del Método Dual Simplex

Programación Lineal José Luis Quintero
1. Elija la fila pivote que corresponda al elemento delvector de recursos más negativo.
2. Elija la columna pivote haciendo el TRM entre loscoeficientes de costo reducidos y los valores negativosde la matriz tecnológica en esa fila pivote. Si no sepuede hacer el TRM por no encontrar denominadoresnegativos, el problema no es factible.
La mecánica del Método Dual Simplex

Programación Lineal José Luis Quintero
En el ejemplo que nos ocupa la fila pivote es lasombreada:
Z X1 X2 X3 X4 X5 LD
1 -2 -3 -4 0 0 0
0 -1 -2 -1 1 0 -3
0 -2 1 -3 0 1 -4
El TRM indica la columna pivote:
Z X1 X2 X3 X4 X5 LD
1 -2 -3 -4 0 0 0
0 -1 -2 -1 1 0 -3
0 -2 1 -3 0 1 -4
TRM ⇑⇑⇑⇑1 --- 1,333 --- ---
La mecánica del Método Dual Simplex

Programación Lineal José Luis Quintero
Al pivotear se llega a:
Z X1 X2 X3 X4 X5 LD
1 0 -4 -1 0 -1 4
0 0 -5/2 1/2 1 -1/2 -1
0 1 -1/2 3/2 0 -1/2 2
Ahora se procede con la siguiente fila pivote, la cual sombreamos:
Z X1 X2 X3 X4 X5 LD
1 0 -4 -1 0 -1 4
0 0 -5/2 1/2 1 -1/2 -1
0 1 -1/2 3/2 0 -1/2 2
La mecánica del Método Dual Simplex

Programación Lineal José Luis Quintero
El TRM indica la columna pivote:
Z X1 X2 X3 X4 X5 LD
1 0 -4 -1 0 -1 4
0 0 -5/2 1/2 1 -1/2 -1
0 1 -1/2 3/2 0 -1/2 2
TRM --- ⇑⇑⇑⇑1,60 --- --- 2
al pivotear se tiene:
Z X1 X2 X3 X4 X5 LD
1 0 0 -9/5 -8/5 -1/5 28/5
0 0 1 -1/5 -2/5 1/5 2/5
0 1 0 7/5 -1/5 -2/5 11/5
el cual sigue siendo un tablero óptimo, pero es ademásfactible.
La mecánica del Método Dual Simplex

Programación Lineal José Luis Quintero
� Gráficamente, la situación puede representarse enun caso bidimensional como sigue:
(0,0)
Óptimo infactible
Ganar factibilidadsin perder optimalidad
x1
x2
La mecánica del Método Dual Simplex

Programación Lineal José Luis Quintero 27
Puntos a tratar
1. Cambio en el vector de costos
2. Cambio en el vector de recursos
3. Mecánica Método Dual Simplex
4. Inclusión de una nueva variable
5. Inclusión de una nueva restricción
6. Modificación de un coeficiente
tecnológico

Programación Lineal José Luis Quintero
Si una nueva variable xn+1 cuyo coeficiente de costoes cn+1 y cuya columna tecnológica es an+1 estásiendo considerada, se determina si vale la penaincluirla. Ello se reduce a estudiar el signo dezn+1 - cn+1:
�Si zn+1 - cn+1 ≤≤≤≤ 0, entonces xn+1 es no básica en elóptimo y no vale la pena incluirla.
�Si zn+1 - cn+1 > 0, entonces xn+1 debe ingresar a labase, se actualiza el tablero y se continua elproblema.
Recordamos que:
y que:1n1n
1B1n1n caBccz ++++++++
−−−−++++++++ −−−−====−−−−
1n11n aBy ++++
−−−−++++ ====
Inclusión de una nueva variable

Programación Lineal José Luis Quintero
� Sea el tablero inicial:
Z X1 X2 X3 X4 X5 LD
1 2 -1 1 0 0 0
0 1 1 1 1 0 6
0 -1 2 0 0 1 4
cuyo tablero óptimo es:
Z X1 X2 X3 X4 X5 LD
1 0 -3 -1 -2 0 -12
0 1 1 1 1 0 6
0 0 3 1 1 1 10
¿Qué ocurre si se trata de incluir la variable x6 de costo c6 = 1
y de columna tecnológica ?
−−−−====
2
1a6
Ejemplo ilustrativo 4

Programación Lineal José Luis Quintero
� Tenemos que:
Como z6 - c6 = 1 > 0, vale la pena ingresar x6 a la base, por loque se requiere calcular y6:
El nuevo tablero queda entonces:
Z X1 X2 X3 X4 X5 ⇓⇓⇓⇓X6 LD
1 0 -3 -1 -2 0 1 -12
0 1 1 1 1 0 -1 6
0 0 3 1 1 1 2 10
el cual evidentemente no es óptimo, x6 tendrá que entrar a labase y se continúa con el método.
(((( )))) 11212
1
11
0102caBccz 66
1B66 ====−−−−====−−−−
−−−−
−−−−====−−−−====−−−− −−−−
−−−−====
−−−−
======== −−−−
1
1
2
1
11
01aBy 6
16
Ejemplo ilustrativo 4

Programación Lineal José Luis Quintero 31
Puntos a tratar
1. Cambio en el vector de costos
2. Cambio en el vector de recursos
3. Mecánica Método Dual Simplex
4. Inclusión de una nueva variable
5. Inclusión de una nueva restricción
6. Modificación de un coeficiente
tecnológico

Programación Lineal José Luis Quintero
Si se agrega una nueva restricción, ésta no afecta laoptimalidad pero si puede afectar la factibilidad: basta conque la nueva restricción haga que la solución óptima actualsea infactible. De ser ese el caso se puede aplicar el MétodoSimplex Dual para recuperar la factibilidad.
Se tiene una solución óptima de base B, por lo que lassoluciones básicas vienen dadas por la relación:
y se agrega la restricción
Esta última puede escribirse como:
donde y son, respectivamente, las componentesbásicas y no básicas del vector fila am+1 y xn+1 es una variablede holgura no negativa.
bBNxBx 1N
1-B
−−−−====++++
1m1m bxa ++++++++ ≤≤≤≤
1m1nN1m
NB1m
B bxxaxa ++++++++++++++++ ====++++++++
1mBa ++++ 1m
Na ++++
Inclusión de una nueva restricción

Programación Lineal José Luis Quintero
Luego, en la solución óptima se tiene:
entonces, las primeras m soluciones básicas vienendadas por:
y la solución básica m+1, que es xn+1, será factible si:
Es decir, si en el tablero óptimo, la holgura de la nuevarestricción introducida es no negativa, entonces lanueva restricción no excluye la solución óptimaanteriormente alcanzada. En ese caso la soluciónóptima actual sigue siendo factible, en caso contrario,debe recuperarse factibilidad con el Método SimplexDual.
bBabxx)NBaa( 11mB1m1nN
11mB
1mN
−−−−++++++++++++
−−−−++++++++ −−−−====++++−−−−
bBNxBx 1N
1B
−−−−−−−− ====++++
0bBab 11mB1m ≥≥≥≥−−−− −−−−++++
++++
Inclusión de una nueva restricción

Programación Lineal José Luis Quintero
� En el mismo problema del ejemplo anterior, ¿qué ocurre sise agrega al problema original la restricción -x1+2x3 ≥≥≥≥ 2 ?
El tablero óptimo del problema original es:
Z X1 X2 X3 X4 X5 LD
1 0 -3 -1 -2 0 -12
0 1 1 1 1 0 6
0 0 3 1 1 1 10
las variables básicas son x1 y x5 Al llevar la nuevarestricción a la forma ≤≤≤≤ se tiene: x1 - 2x3 ≤≤≤≤ - 2
luego:
(((( )))) 086210
6
11
01012bBab 13
B3 ≤≤≤≤−−−−====−−−−−−−−====
−−−−−−−−====−−−− −−−−
Ejemplo ilustrativo 5

Programación Lineal José Luis Quintero
Como la solución pasa a ser infactible, se agrega lanueva restricción y se modifica el tablero anterior a:
Z X1 X2 X3 X4 X5 X6 LD
1 0 -3 -1 -2 0 0 -12
0 1 1 1 1 0 0 6
0 0 3 1 1 1 0 10
0 1 0 -2 0 0 1 -2
Ejemplo ilustrativo 5
Programación Lineal José Luis Quintero
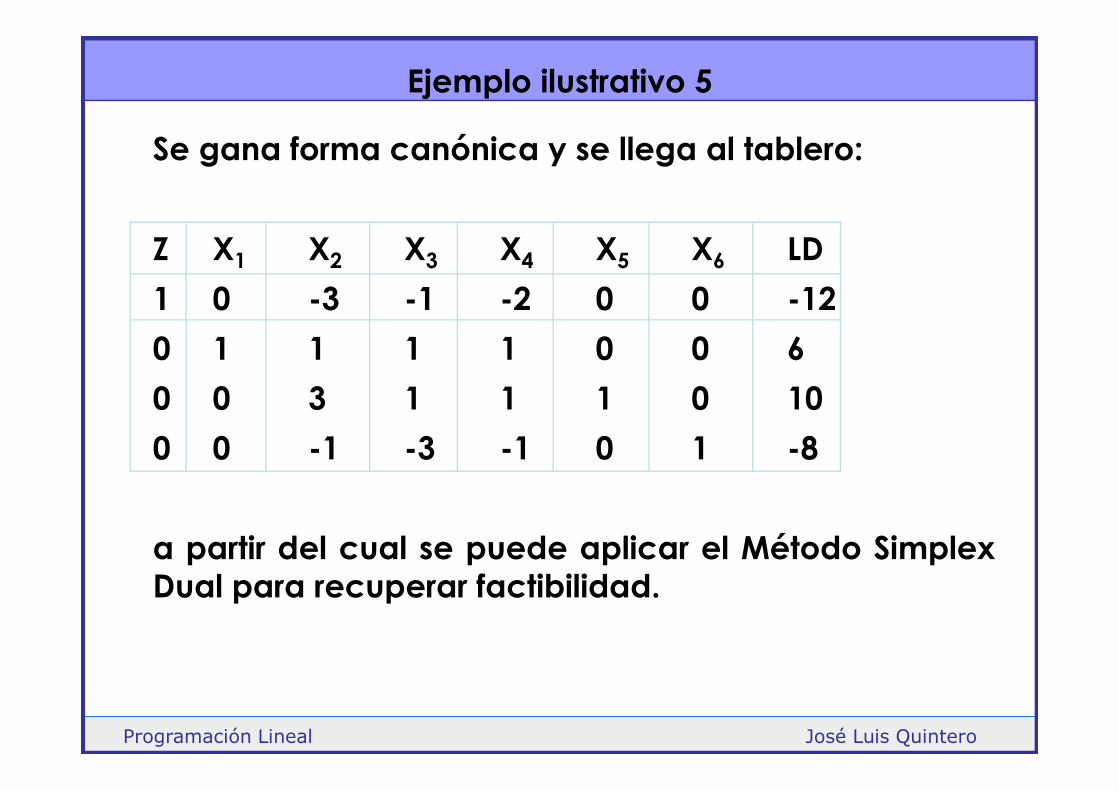
Se gana forma canónica y se llega al tablero:
Z X1 X2 X3 X4 X5 X6 LD
1 0 -3 -1 -2 0 0 -12
0 1 1 1 1 0 0 6
0 0 3 1 1 1 0 10
0 0 -1 -3 -1 0 1 -8
a partir del cual se puede aplicar el Método SimplexDual para recuperar factibilidad.
Ejemplo ilustrativo 5

Programación Lineal José Luis Quintero 37
Puntos a tratar
1. Cambio en el vector de costos
2. Cambio en el vector de recursos
3. Mecánica Método Dual Simplex
4. Inclusión de una nueva variable
5. Inclusión de una nueva restricción
6. Modificación de un coeficiente
tecnológico

Programación Lineal José Luis Quintero
Ello puede tener diversas consecuencias, puede ocasionar la
pérdida de la optimalidad, de la factibilidad o de la
independencia lineal de la base óptima. Veremos dos casos:
cuando la columna afectada es no básica y cuando es básica.
� Caso1: La columna afectada es no básica en el óptimo.
Si cambia la columna aj a a’j con j∈η∈η∈η∈η, la columna y’j en el
tablero óptimo es:
y el coeficiente de costo reducido correspondiente es:
Si z’j – cj ≤≤≤≤ 0, entonces la solución actual sigue siendo óptima,
en caso contrario, entonces se introduce xj a la base después
de actualizar la columna y’j.
'j
1j' aBy −−−−====
jj'
Bj'j
1Bj
'j cyccaBccz −−−−====−−−−====−−−− −−−−
Modificación de un coeficiente tecnológico

Programación Lineal José Luis Quintero
� En el mismo problema anterior, ¿qué ocurre con elóptimo si la columna a2 cambia de a ?
El cambio a y’2 es:
con lo cual se tiene:
y la solución actual sigue siendo óptima.
2
1
5
2
====
======== −−−−
7
2
5
2
11
01aBy '
212'
(((( )))) 0517
202cyccz 2
2'B2
'2 <<<<−−−−====−−−−
−−−−====−−−−====−−−−
Ejemplo ilustrativo 6

Programación Lineal José Luis Quintero
�Caso 2: La columna afectada es básica en el óptimo.
Si cambia la columna aj a a’j con j ∈∈∈∈ ββββ∗∗∗∗, la columna y’j
en el tablero óptimo es:
De allí resultan dos subcasos, el primero:
Si la nueva columna básica junto al resto del conjuntode vectores básicos del tablero óptimo anterior no sonlinealmente independientes ya no forman una base.En ese caso se sustituye el antiguo yj por y’j y sepuede completar una base por la técnica de lasvariables artificiales agregando una variable artificialpara completar el vector unitario faltante en la base yse trata de eliminarla. Una vez recuperada la base sesigue con el problema normalmente.
'j
1j' aBy −−−−====
Modificación de un coeficiente tecnológico

Programación Lineal José Luis Quintero
� En el mismo problema anterior, ¿qué ocurre si la columna
a1 cambia de a ?
El cambio a y’1 es:
con lo cual se tiene el coeficiente de costo reducido:
Al incluir la nueva columna, el tablero cambia a:
Z X1 X2 X3 X4 X5 LD
1 2 -3 -1 -2 0 -12
0 0 1 1 1 0 6
0 -1 3 1 1 1 10
−−−− 1
1
−−−− 1
0
−−−−====
−−−−
======== −−−−
1
0
1
0
11
01'aB'y 1
11
(((( )))) (((( )))) 221
002c'ycc'z 1
1B11 ====−−−−−−−−
−−−−−−−−====−−−−====−−−−
Ejemplo ilustrativo 7

Programación Lineal José Luis Quintero
Ahora no se tiene una base, se incluye una variableartificial para proceder con Penalización y se tiene:
Z X1 X2 X3 X4 X5 X6 LD
1 2 -3 -1 -2 0 -M -12
0 0 1 1 1 0 1 6
0 -1 3 1 1 1 0 10
y se puede proceder a eliminarla pivoteando en laposición indicada y se sigue con el problema.
Ejemplo ilustrativo 7

Programación Lineal José Luis Quintero
�El segundo subcaso es:
Si la nueva columna básica junto al resto del conjuntode vectores básicos del tablero óptimo anterior sonlinealmente independientes forman una base,entonces se sustituye antiguo yj por y’j y se pivoteapara obtener un vector unitario. En el proceso depivoteo puede ser inocuo o puede ocasionar lapérdida de la factibilidad, de la optimalidad o deambas. Si se perdió sólo la factibilidad, el Simplex Dualpuede usarse para recuperarla, si se perdióoptimalidad se continúa con iteraciones.
Modificación de un coeficiente tecnológico

Programación Lineal José Luis Quintero
� En el mismo problema anterior, ¿qué ocurre si lacolumna a1 cambia de a ?
El cambio a y’1 es:
con lo cual se tiene:
−−−− 1
1
6
3
====
======== −−−−
9
3
6
3
11
01'aB'y 1
11
(((( )))) (((( )))) 429
302c'ycc'z 1
1B11 −−−−====−−−−−−−−
−−−−====−−−−====−−−−
Ejemplo ilustrativo 8

Programación Lineal José Luis Quintero
Al incluir la nueva columna, el tablero cambia a:
Z X1 X2 X3 X4 X5 LD
1 -4 -3 -1 -2 0 -12
0 3 1 1 1 0 6
0 9 3 1 1 1 10
en el cual se tiene una base, debe pivotearse en laposición indicada y seguir el proceso.
Ejemplo ilustrativo 8










