3. Funciones de varias variables - alojamientos.uva.es · de V se llaman curvas equipotenciales....
8
M´ etodos Matem´ aticos (Curso 2013 – 2014) Grado en ´ Optica y Optometr´ ıa 17 3. Funciones de varias variables Funci´ on real de varias variables reales Sea f una funci´ on cuyo dominio es un subconjunto D de R n y cuya imagen est´ a contenida en R. Se dice entonces que f es una funci´ on real de n variables reales. Ejemplo La funci´ on de tres variables reales f (x, y, z)=(x 2 + y 2 + z 2 ) (-3/2) lleva el conjunto D de los puntos (x, y, z) 6= 0 de R 3 en R. Gr´ afica de una funci´ on Sea f : D ∈ R 2 → R. Su gr´ afica consiste en el conjunto de puntos definido de la siguiente manera: Gr´ afica de f := { (x, y, z = f (x, y)) ∈ R 3 , (x, y) ∈ D}. As´ ı pues, la gr´afica de una funci´ on f (x, y) de dos variables es la superficie formada por todos los puntos (x, y, z ) del espacio tales que (x, y) est´ a en el dominio de la funci´ on y la tercera coordenada es z = f (x, y) (figura 14). Fig.14 Curvas de nivel Sean f una funci´ on de dos variables y c una constante. El conjunto de todos los puntos (x, y) del plano tales que f (x, y)= c se llama curva de nivel de f (con valor c). En la figura 15 se representan algunas curvas de nivel de z = x 2 + y 2 . En el Ap´ endice (p´ ag. 29), se dan m´ as ejemplos. Fig.15
Transcript of 3. Funciones de varias variables - alojamientos.uva.es · de V se llaman curvas equipotenciales....
Metodos Matematicos (Curso 2013 – 2014) Grado en Optica y Optometrıa 17
3. Funciones de varias variables
Funcion real de varias variables realesSea f una funcion cuyo dominio es un subconjunto D de Rn y cuya imagen esta
contenida en R. Se dice entonces que f es una funcion real de n variables reales.
Ejemplo
La funcion de tres variables reales f(x, y, z) = (x2 +y2 +z2)(−3/2) lleva el conjunto D de los puntos
(x, y, z) 6= 0 de R3 en R. �
Grafica de una funcionSea f : D ∈ R2 → R. Su grafica consiste en el conjunto de puntos definido de la
siguiente manera:
Grafica de f := { (x, y, z = f(x, y)) ∈ R3, (x, y) ∈ D}.
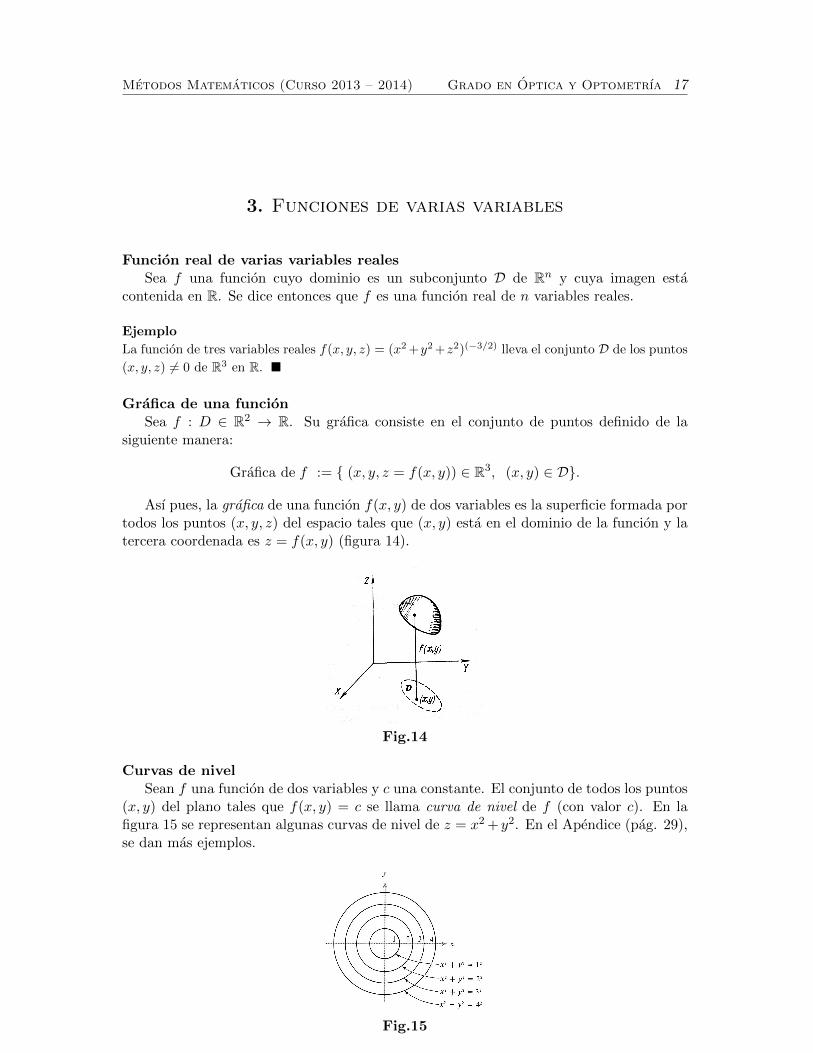
Ası pues, la grafica de una funcion f(x, y) de dos variables es la superficie formada portodos los puntos (x, y, z) del espacio tales que (x, y) esta en el dominio de la funcion y latercera coordenada es z = f(x, y) (figura 14).
Fig.14
Curvas de nivelSean f una funcion de dos variables y c una constante. El conjunto de todos los puntos
(x, y) del plano tales que f(x, y) = c se llama curva de nivel de f (con valor c). En lafigura 15 se representan algunas curvas de nivel de z = x2 + y2. En el Apendice (pag. 29),se dan mas ejemplos.
Fig.15
Metodos Matematicos (Curso 2013 – 2014) Grado en Optica y Optometrıa 18
Observacion
En el caso de funciones f(x, y, z) de tres variables se habla de superficies de nivel f(x, y, z) = c. �
Derivada parcialSea f : D ⊂ R2 → R una funcion real de dos variables. Entonces las derivadas parciales
∂f/∂x y ∂f/∂y de f respecto de la primera y segunda variable, son funciones reales dedos variables, las cuales, en el punto (x0, y0) estan definidas de la siguiente manera:
∂f
∂x(x0, y0) := lim
h→0
f(x0 + h, y0)− f(x0, y0)
h
∂f
∂y(x0, y0) := lim
h→0
f(x0, y0 + h)− f(x0, y0)
h
si estos lımites existen.
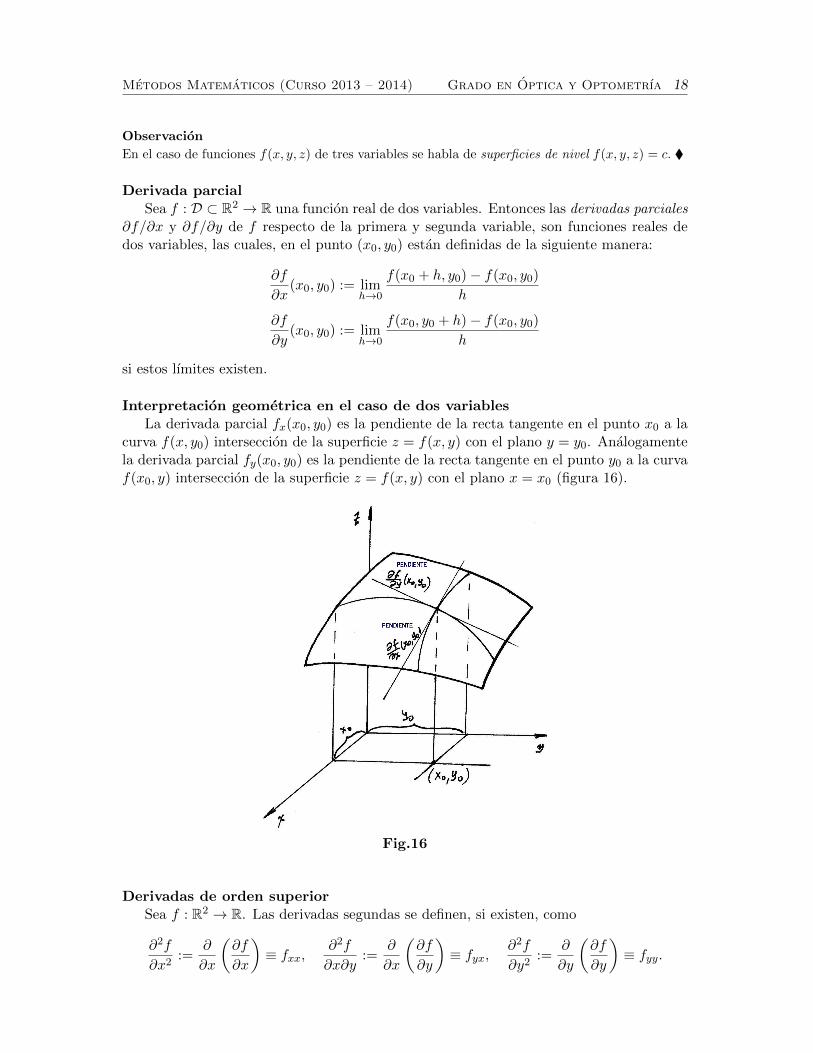
Interpretacion geometrica en el caso de dos variablesLa derivada parcial fx(x0, y0) es la pendiente de la recta tangente en el punto x0 a la
curva f(x, y0) interseccion de la superficie z = f(x, y) con el plano y = y0. Analogamentela derivada parcial fy(x0, y0) es la pendiente de la recta tangente en el punto y0 a la curvaf(x0, y) interseccion de la superficie z = f(x, y) con el plano x = x0 (figura 16).
Fig.16
Derivadas de orden superiorSea f : R2 → R. Las derivadas segundas se definen, si existen, como
∂2f
∂x2:=
∂
∂x
(∂f
∂x
)≡ fxx,
∂2f
∂x∂y:=
∂
∂x
(∂f
∂y
)≡ fyx,
∂2f
∂y2:=
∂
∂y
(∂f
∂y
)≡ fyy.

Metodos Matematicos (Curso 2013 – 2014) Grado en Optica y Optometrıa 19
Igualdad de las derivadas cruzadasSea f : R2 → R y supongamos f ∈ C2 (dos veces derivable con continuidad). Entonces
∂2f
∂x∂y=
∂2f
∂y∂x.
ObservacionAnalogamente si f ∈ C3
∂3f
∂x2∂y=
∂3f
∂y∂x2=
∂3f
∂x∂y∂x,
o bien si f es una funcion de tres variables, y con las mismas condiciones de derivabilidad,
∂3f
∂x∂y∂z=
∂3f
∂z∂y∂x=
∂3f
∂y∂z∂x. �
Funcion diferenciableSea f : D ⊂ R2 → R una funcion real de dos variables. Decimos que f es diferenciable
en (x0, y0) ∈ D si existen las derivadas parciales de f en (x0, y0) y si ocurre que
f(x, y) = f(x0, y0) +∂f
∂x
∣∣∣∣(x0,y0)
· (x− x0) +∂f
∂y
∣∣∣∣(x0,y0)
· (y − y0) +R1.
donde R1 es un termino que tiende a cero mas rapidamente que√
(x− x0)2 + (y − y0)2.
Observaciones
1. El plano tangente a la grafica de f que pasa por el punto (x0, y0, f(x0, y0)) es
z = f(x0, y0) + ∂f∂x
∣∣∣(x0,y0)· (x− x0) + ∂f
∂y
∣∣∣(x0,y0)· (y − y0)). Este plano es el que mejor se aproxima
a la grafica de f en la proximidad del punto (x0, y0, f(x0, y0)) (figura 17).
Fig.17
2. La sola existencia de las derivadas en un punto no garantiza la diferenciabilidad de la funcionen ese punto. En cambio la diferenciabilidad en un punto garantiza la existencia de derivadasparciales en ese punto. �
Diferencial de una funcionSi una funcion f es diferenciable en un punto (x0, y0) de su dominio se define la
diferencial de f en ese punto, para una variacion (dx, dy), como
df(x0, y0; dx, dy) :=
(∂f
∂x
)(x0,y0)
dx+
(∂f
∂y
)(x0,y0)
dy.

Metodos Matematicos (Curso 2013 – 2014) Grado en Optica y Optometrıa 20
Derivada de la funcion compuesta (Regla de la cadena)Sean las funciones x = x(t) e y = y(t) de una variable t, diferenciables en el punto t0,
y sean x0 = x(t0), y0 = y(t0). Si la funcion z = f(x, y) es diferenciable en el punto (x0, y0)entonces la funcion compuesta z = f(x(t), y(t)) tiene derivada en t0 y esta viene dada porla expresion
dz
dt=∂z
∂x
dx
dt+∂z
∂y
dy
dt
o mas detalladamente
df
dt(x(t0), y(t0)) =
∂f
∂x(x0, y0)
dx
dt(t0) +
∂f
∂y(x0, y0)
dy
dt(t0).
En el caso de funciones x = x(u, v) e y = y(u, v) tenemos expresiones “analogas”
∂z
∂u=∂z
∂x
∂x
∂u+∂z
∂y
∂y
∂u,
∂z
∂v=∂z
∂x
∂x
∂v+∂z
∂y
∂y
∂v.
Derivada de la funcion implıcitaAlgunas veces es preciso conocer y′(x) a partir de una expresion entre las dos variables
como, por ejemplo, y5+xy = 3. La funcion y(x) no puede obtenerse explıcitamente. Todolo que se tiene es una definicion de y como una solucion de y5 + xy = 3. El punto (2, 1),por ejemplo, satisface la ecuacion de la curva. Se trata de hallar dy/dx en x = 2.
Derivando en los dos miembros de la ecuacion, teniendo en cuenta la regla de la cadenatenemos
5y4dy
dx+ x
dy
dx+ y = 0
sustituyendo x = 2 e y = 1, y resolviendo para dy/dx:
5dy
dx+ 2
dy
dx+ 1 = 0,
dy
dx= −1
7.
Esta es la derivacion implıcita y, como se ha visto, proporciona dy/dx a partir de la reglade la cadena aunque y no sea conocida explıcitamente como una funcion de x.
Derivada direccionalSea f : D ⊂ R3 → R, y sea u ∈ R3 un vector unitario. Se define la derivada direccional
de f en un punto x0 = (x0, y0, z0) de su dominio de definicion en la direccion del vector ucomo el siguiente lımite (en caso de que este exista)
Duf :=d
dtf(x0 + tu)
∣∣∣∣t=0
Observaciones
1. En el dominio en el que f sea diferenciable existe la derivada direccional en todas las direc-ciones. La derivada direccional en x0, en la direccion u esta dada por
Duf =∂f
∂x(x0)u1 +
∂f
∂y(x0)u2 +
∂f
∂z(x0)u3
donde u = (u1, u2, u3) y ‖u‖ = 1.
2. En los casos en que u = i, j,k la derivada direccional coincide con las derivadas parciales∂f∂x ,
∂f∂y ,
∂f∂z respectivamente. �

Metodos Matematicos (Curso 2013 – 2014) Grado en Optica y Optometrıa 21
GradienteSea f : D ⊂ R3 → R diferenciable, y sea ∇ el operador diferencial vectorial dado por
∇ := ∂∂xi + ∂
∂yj + ∂∂zk. Se define el gradiente de f en x0 = (x0, y0, z0) como el vector de
R3 dado por la siguiente expresion:
∇f(x0) :=∂f
∂x(x0)i +
∂f
∂y(x0)j +
∂f
∂z(x0)j.
Observaciones
1. La relacion entre derivada direccional y gradiente en un punto x0 viene dada por
Duf(x0) = ∇f(x0) · u
2. El mayor valor de la derivada direccional en un punto tiene lugar cuando u es paralelo a∇f en ese punto, es decir, el gradiente nos da la direccion y el sentido de maxima variacioncreciente de f en un punto determinado.
3. El valor de esa variacion maxima viene dado por el modulo del gradiente en ese punto
Duf = ‖∇f‖ ‖u‖ cos 0 = ‖∇f‖.
4. El gradiente de f es ortogonal a las curvas y superficies de nivel de f (figura 18). �
Fig. 18
Ejercicios
1 Expresar como funcion de dos variables:
1. el volumen V (r, h) de un cono de radio r y altura h
2. la distancia d(x, y) desde el punto (2,4,3) a un punto en el plano x+ y + z = 1
3. el area total A(r, h) de un cilindro (incluyendo base y “tapa”) de radio r y altura h.
2 Expresar como funcion de tres variables
1. el lado c(a, b, θ) de un triangulo, en funcion de los otros dos lados a y b y el angulo queforman θ
2. la distancia d(a, b, c) del origen de coordenadas al plano ax + by + cz = 1, en terminos dea, b, c
3. la magnitud de la fuerza gravitatoria F (m1,m1, d) entre dos masas m1,m2, separadas unadistancia d.

Metodos Matematicos (Curso 2013 – 2014) Grado en Optica y Optometrıa 22
3 Si V (x, y) es el voltaje o potencial en un punto (x, y) del plano Oxy, entonces las curvas de nivelde V se llaman curvas equipotenciales. Sobre una de estas curvas el voltaje permanece constante.Siendo
V (x, y) =8√
16 + x2 + y2
trazar las curvas equipotenciales para las que V = 2.0, V = 1.5, V = 0.5.
4 Calcular las derivadas parciales primeras de las siguientes funciones
1. f(x, y) =sen(πx)
1 + y2
2. f(x, z) =x
1 + cos 2z
3. f(x, z) = xz2 − cos(xz3)
4. f(x, y, z) = xyz
5 Una funcion u = f(x, y) con derivadas parciales continuas satisfaciendo la ecuacion de Laplace
∂2u
∂x2+∂2u
∂y2= 0
se llama funcion armonica. Demostrar que la funcion u(x, y) = x3 − 3xy2 es armonica.
6 Demostrar que la funcion g(x, t) = 2 + e−t senx satisface la ecuacion del calor:
∂g
∂t=∂2g
∂x2
(En este caso g(x, t) representa la temperatura en una varilla de metal en la posicion x y en eltiempo t).
7 Hallar las derivadas parciales fx y fy de las siguientes funciones en los puntos que se indican
1. f(x, y) = ex−cos(xy) en (0, 1)
2. f(x, y) = cos(x+ exy) en (1, 0).
8 Calcular fx, fy, fxx, fyy, y fxy para las siguientes funciones
1. f(x, y) =2xy
(x2 + y2)2
2. f(x, y) = cos(x2y2)
3. f(x, y) =1
cos2 x+ e−y
9 La potencia electrica viene dada por
P =E2
Rdonde E es el voltaje y R la resistencia. Aproximar el maximo porcentaje de error al calcular lapotencia para un voltaje de 200 voltios y una resistencia de 4000 ohmios, si los posibles errores enlas medidas de E y R son 2 por 100 y 3 por 100, respectivamente.
10 En los casos siguientes hallar por derivacion implıcita la derivada de y:
i) x2 + y2 = 25
ii) tan(x+ y) = 1
iii) y = ex sen(y + x).

Metodos Matematicos (Curso 2013 – 2014) Grado en Optica y Optometrıa 23
11 En los siguientes casos hallar ∂w/∂s y ∂w/∂t utilizando la regla de la cadena apropiada yevaluar cada derivada parcial en los valores de s y t que se especifican:
1. w = y3 − 3x2y, x = es, y = et, s = 0, t = 1
2. w = x2 − y2, x = s cos t, y = s sen t, s = 3, t =π
4
3. w = sen(2x+ 3y), x = s+ t, y = s− t, s = 0, t =π
2.
12 Si el potencial electrico en un punto (x, y) del plano Oxy es V (x, y), entonces el vector intensidadde campo electrico en (x, y) es E = −∇V (x, y). Supongase que V (x, y) = e−2x cos 2y :
1. Hallar el vector intensidad de campo electrico en (π/4, 0)
2. Demostrar que en cualquier punto del plano el potencial electrico disminuye con mayorrapidez en la direccion de E.
13 En cierta montana, la elevacion z con respecto al nivel del mar viene dada por z(x, y) =2000− 2x2 − 4y2 metros. El eje x positivo apunta hacia el Este y el eje y positivo apunta hacia elNorte. Un alpinista esta en el punto (−20, 5, 1100).
1. Si el alpinista usa una brujula para avanzar hacia el Este, ¿ascendera? o ¿descendera? ¿conque rapidez? Y si avanza hacia el Oeste ¿que ocurrirıa?
2. Si el alpinista usa una brujula para avanzar hacia el Noroeste, ¿ascendera? o ¿descendera?,¿con que rapidez?
3. ¿En que direccion de la brujula debe avanzar el alpinista para permanecer siempre en elmismo nivel?
14 Hallar la derivada direccional de las siguientes funciones en el punto P y en la direccion vindicadas:
1. f(x, y) = 3x− 4xy + 5y, P = (1, 2), v =1
2(i +
√3j)
2. f(x, y) = e−(x2+y2), P = (0, 0), v = i + j
3. f(x, y) = arcsenxy, P (1, 0), v = i + 5j.
Metodos Matematicos (Curso 2013 – 2014) Grado en Optica y Optometrıa 24
APENDICE
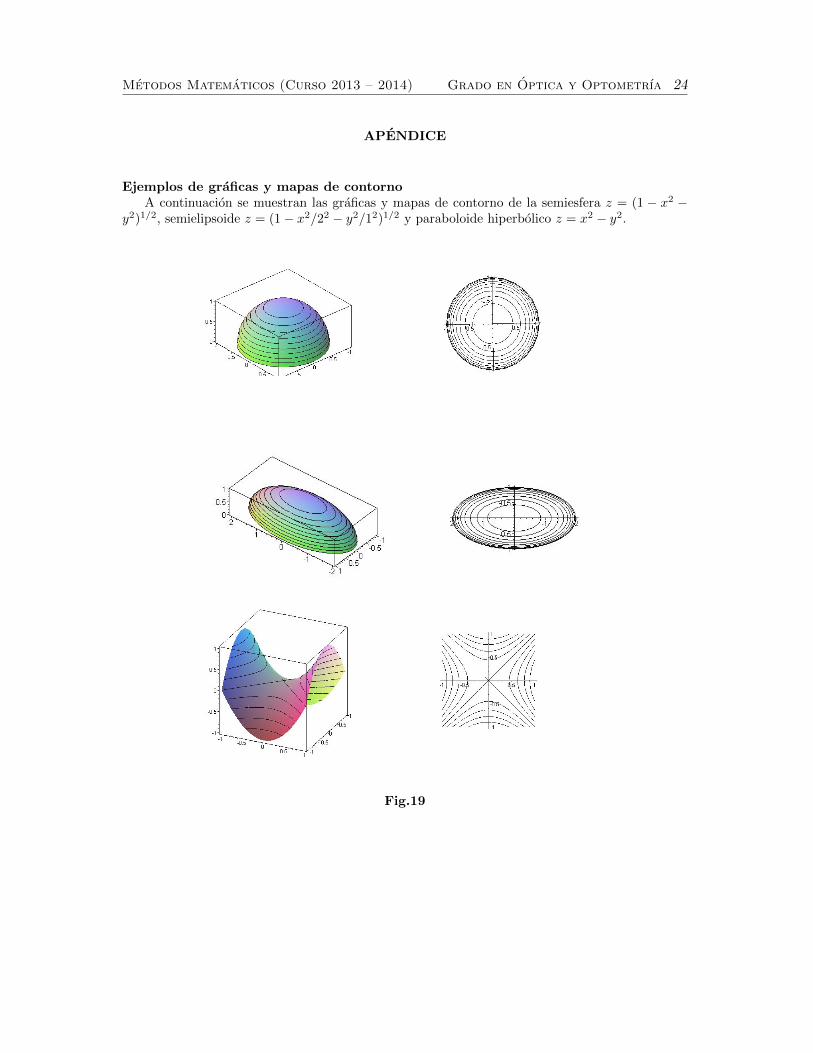
Ejemplos de graficas y mapas de contornoA continuacion se muestran las graficas y mapas de contorno de la semiesfera z = (1 − x2 −
y2)1/2, semielipsoide z = (1− x2/22 − y2/12)1/2 y paraboloide hiperbolico z = x2 − y2.
Fig.19