4. LOCALIZACION HIPOCENTRAL´ -...
15
4. LOCALIZACI ´ ON HIPOCENTRAL El m´ etodo de localizaci´ on hipocentral a partir de tiempos de viaje asume una fuente puntual localizada en el punto de inicio de la fractura. Debido a que la velocidad con que se produce la ruptura o fallamiento corresponde, en promedio, a la mitad de la velocidad de propagaci´ on de la onda de cizalla -S-, y ´ esta a su vez es menor que la velocidad de propagaci´ on de la onda P -la primera onda en llegar a la estaci´ on-, el hipocentro puede ser determinado a partir del tiempo de arribo de la onda P sin tener en cuenta el tama ˜ no y la duraci ´ on del evento. Adem´ as, la informaci´ on contenida en los primeros segundos del sismograma a´ un no contiene mezcla de otros tipos de ondas, lo que hace muy f´ acil su identificaci ´ on (Fig. 4.4). Como se plante´ o en la secci´ on 2.1.4 (p´ ag. 10), el problema de localizaci´ on hipocentral se formula en un espacio de 4 dimensiones, planteando la ubicaci´ on espacial como un sistema de coordenadas cartesianas -X en direcci´ on este-oeste (longitud), Y en direcci´ on norte-sur (latitud) y Z en direcci´ on vertical (profundidad)- y la ubicaci´ on temporal T del tiempo de origen. Los datos para una localizaci´ on hipocentral son los tiempos de arribo de diferentes fases a N estaciones (τ 1 , ··· ,τ N ), los cuales se obtienen directamente de los registros del evento. Otros par´ ametros que son importantes para resolver el problema son las coordenadas de las estaciones s´ ısmicas (x i ,y i ,z i ) las cuales son conocidas - por lo tanto se tratan como constantes y no como par´ ametros-, y los par´ ametros que describen el modelo de velocidades, estimados a partir del conocimiento del medio -debido al impreciso conocimiento, este mode- lo no es exacto, por tanto el c´ alculo te´ orico de los tiempos de arribo de fases a las estaciones (t 1 , ··· t N ) tampoco lo es. Los par´ ametros desconocidos del problema son las coordenadas espacio-temporales del foco X , Y , Z y T . A partir de la teor´ ıa de propagaci´ on de ondas y de los valores absolutos de velocidad en la regi´ on de estudio, se plantea una relaci´ on te´ orica entre tiempos de arribo (datos) y las coordenadas espacio temporales del foco (par´ ametros) para calcular los tiempos de viaje de las diferentes ondas s´ ısmicas a cada una de las estaciones: por ejemplo, si la estructura de la tierra fuese homog´ enea, con velocidad de onda constante, el tiempo que tardar´ ıa dicha onda para recorrer la distancia comprendida desde el punto de radiaci´ on hasta la i-´ esima estaci´ on est´ a dado por: t i = d i v = (X - x i ) 2 +(Y - y i ) 2 +(Z - z i ) 2 c (4.1) donde c es un valor constante que promedia la velocidad de propagaci´ on de la onda conside- rada, d i es la distancia euclidiana entre dos puntos definida por el Teorema de Pit´ agoras y t i es el tiempo de viaje de dicha onda. Note como, a ´ un en el caso m´ as sencillo de una estructura homog´ enea, los tiempos de viaje t i no escalan linealmente con las coordenadas espaciales (X, Y y Z). Esto significa que, en el problema de la localizaci ´ on, la funci ´ on que relaciona las observaciones con el modelo es no lineal. 44
Transcript of 4. LOCALIZACION HIPOCENTRAL´ -...

4. LOCALIZACI ON HIPOCENTRAL
El metodo de localizacion hipocentral a partir de tiempos de viaje asume una fuente puntuallocalizada en el punto de inicio de la fractura. Debido a que la velocidad con que se producela ruptura o fallamiento corresponde, en promedio, a la mitad de la velocidad de propagacionde la onda de cizalla -S-, yesta a su vez es menor que la velocidad de propagacion de la ondaP -la primera onda en llegar a la estacion-, el hipocentro puede ser determinado a partir deltiempo de arribo de la onda P sin tener en cuenta el tamano y la duracion del evento. Ademas,la informacion contenida en los primeros segundos del sismograma aun no contiene mezclade otros tipos de ondas, lo que hace muy facil su identificacion (Fig. 4.4).
Como se planteo en la seccion 2.1.4 (pag. 10), el problema de localizacion hipocentral seformula en un espacio de 4 dimensiones, planteando la ubicacion espacial como un sistemade coordenadas cartesianas -X en direccion este-oeste (longitud),Y en direccion norte-sur(latitud) y Z en direccion vertical (profundidad)- y la ubicacion temporalT del tiempo deorigen. Los datos para una localizacion hipocentral son los tiempos de arribo de diferentesfases aN estaciones (τ1, · · · , τN ), los cuales se obtienen directamente de los registros delevento. Otros parametros que son importantes para resolver el problema son las coordenadasde las estaciones sısmicas (xi, yi, zi) las cuales son conocidas - por lo tanto se tratan comoconstantes y no como parametros-, y los parametros que describen el modelo de velocidades,estimados a partir del conocimiento del medio -debido al impreciso conocimiento, este mode-lo no es exacto, por tanto el calculo teorico de los tiempos de arribo de fases a las estaciones(t1, · · · tN ) tampoco lo es. Los parametros desconocidos del problema son las coordenadasespacio-temporales del focoX, Y , Z y T .
A partir de la teorıa de propagacion de ondas y de los valores absolutos de velocidad enla region de estudio, se plantea una relacion teorica entre tiempos de arribo (datos) y lascoordenadas espacio temporales del foco (parametros) para calcular los tiempos de viaje delas diferentes ondas sısmicas a cada una de las estaciones: por ejemplo, si la estructura de latierra fuese homogenea, con velocidad de onda constante, el tiempo que tardarıa dicha ondapara recorrer la distancia comprendida desde el punto de radiacion hasta la i-esima estacionesta dado por:
ti =di
v=
√(X − xi)2 + (Y − yi)2 + (Z − zi)2
c(4.1)
dondec es un valor constante que promedia la velocidad de propagacion de la onda conside-rada,di es la distancia euclidiana entre dos puntos definida por el Teorema de Pitagoras yties el tiempo de viaje de dicha onda. Note como, aun en el caso mas sencillo de una estructurahomogenea, los tiempos de viajeti no escalan linealmente con las coordenadas espaciales(X, Y y Z). Esto significa que, en el problema de la localizacion, la funcion que relaciona lasobservaciones con el modelo es no lineal.
44
4.1. Determinacion de parametros hipocentrales y tiempode origen
La localizacion espacio temporal de un sismo puede ser llevada a cabo de varias maneras:
Usando una sola estacion de tres componentes (seccion 4.1.1).
Usando un red de estaciones de 1o 3 componentes (secciones 4.1.2 y 4.1.3)
Usando un red de estaciones para localizar conjuntamente un cumulo de sismos (sec-cion 4.1.4)
Los siguientes son algunos de los metodos.
4.1.1. Mono estacion - polarizacion de la onda P
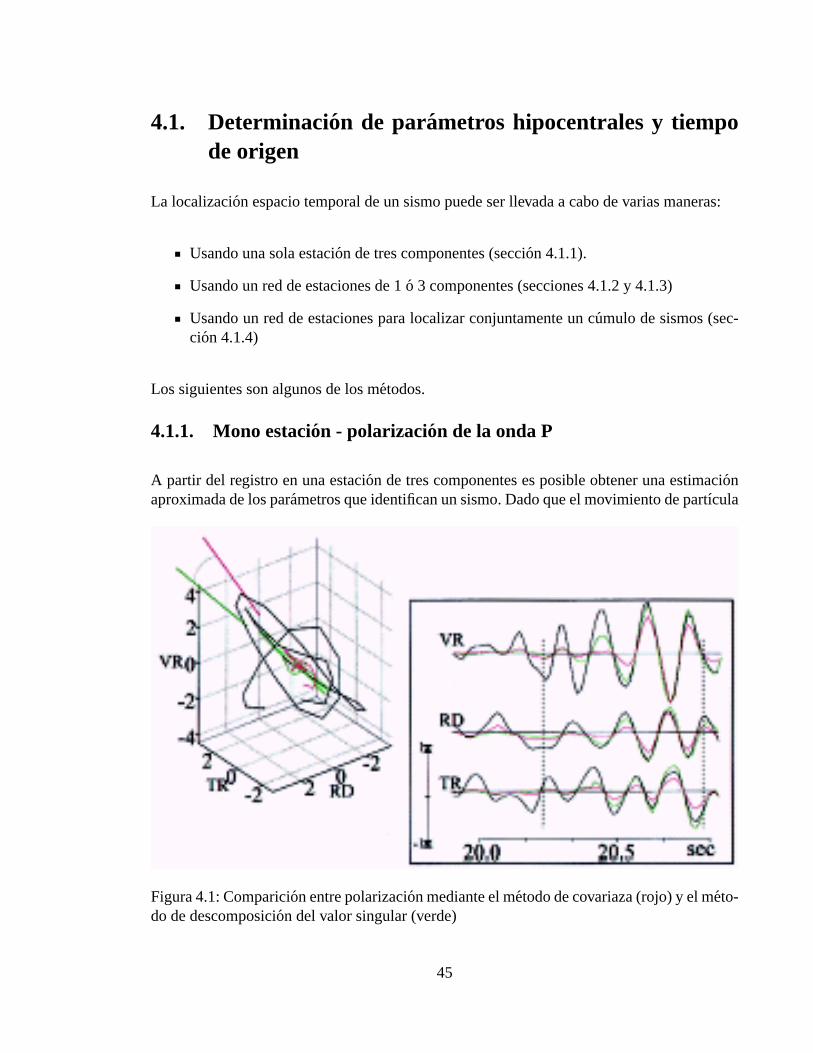
A partir del registro en una estacion de tres componentes es posible obtener una estimacionaproximada de los parametros que identifican un sismo. Dado que el movimiento de partıcula
Figura 4.1: Comparicion entre polarizacion mediante el metodo de covariaza (rojo) y el meto-do de descomposicion del valor singular (verde)
45

de la onda P es polarizado en una sola direccion, el cual es perpendicular a la direccion depropagacion, el vector de movimiento de esta onda es usado para inferir la direccion de lafuente. La relacion de amplitudes de las dos componentes horizontales (perfectamente pola-rizadas) es usada para encontrar la direccion del movimiento de partıcula o de propagacion.En la figura 4.1 se muestra el sismograma de un evento registrado en una estacion de trescomponentes, rotado radial y tangencialmente; el diagrama de la derecha se conoce comoodograma y muestra la direccion de polarizacion de la onda. Existen diversas tecnicas parallevar a cabo este metodo, tales como covarianza entre las tres senales, descomposicion delvalor singular ywavelets(Magotra et˜al., 1987; Franco and Musacchio, 2001). En este meto-
ts
�������
�
�������
���
������
���
� �
tp
t(s-p)
Figura 4.2: Sismograma de tres componentes
do, usando laley de omori, la distancia se obtiene a partir de las diferencias de tiempos dearribo de las ondas P y S (Fig. 4.2). Una vez conocida la distancia se determina el tiempo deviaje y por consiguiente el tiempo de origen.
4.1.2. Metodo de los cırculos - S-P
Si se tienen registros de un sismo en varias estaciones, la localizacion puede ser determinadausando los tiempos de llegada de las ondas P y S (tp, ts respectivamente). Al graficar ladiferencia de tiempos (ts - tp) contratp, y ajustar una lınea recta a estos puntos, el punto en elcual la recta intercepta el eje detp corresponde al tiempo de origen (diagrama de Wadati). Apartir de la estimacion del tiempo de origen es posible estimar los tiempos de viaje de la ondaP a cada estacion; el tiempo de recorrido es multiplicado por un valor promedio de viaje dela onda y de esta manera se obtiene la distancia entre la estacion y el epicentro.
Sobre un mapa se dibujan circunferencias de radio igual a la distancia calculada para cadaestacion, el epicentro es ubicado en el punto donde se intersectan las circunferencias; aunquecomo difıcilmente las curvas coinciden en un punto, el epicentro es ubicado en el centro delarea (Fig. 4.3). Para sismos superficiales, el tamano de estaarea define la imprecision de la lo-calizacion, pero tambien esta relacionado con la profundidad focal (Lay and Wallace, 1995).Este metodo de localizacion grafico fue usado desde los primeros registros instrumentales y
46

durante muchos anos, hasta la implementacion de algoritmos computacionales para resolvereste problema.
Figura 4.3: Determinacion de los parametros hipocentrales mediante el metodo de los cırculos
4.1.3. Otros metodos de estimacion para el problema de localizacion
Para resolver el problema de la localizacion usando una red de estaciones se han desarrolladonumerosos algoritmos; cada modificacion depende de los supuestos con respecto a la natura-leza de la incertidumbre del modelo de velocidades, de la calidad de las observaciones y delas tecnicas de inversion. De manera general, se pueden clasificar ası,
1. Se asume el problema como la linealizacion de un problema no lineal, (secciones3.1.2.2 y 3.3).
usando metodos de optimizacion con evaluacion de derivadas parciales y procesositerativos: minimizando las diferencias entre los valores observados y los valoresobtenidos usando el modelo teorico, bien sea usando la suma de las diferencias alcuadrado (mınimos cuadrados o Norma L2) o mediante estimacion robusta, queminimiza la suma de los valores absolutos de esas diferencias (mınimos absolu-tos o Norma L1). Esto puede ser mediante descomposicion del valor singular, siel numero de observaciones es menor que el numero de parametros, o medianteotro metodo de descomposicion dependiendo de la forma de la matriz; o mediante
47

inversion de matrices como por ejemplo usando la inversa generalizada; o usan-do metodos que involucran el calculo del gradiente; o usando combinaciones dealgunos de ellos.
2. mediante determinacion probabilıstica, en la cual se plantean funciones de densidad deprobabilidad para los parametros desconocidos
estimadores puntuales de maxima verosimilitud
estimadores puntuales bayesianos
metodos de simulacion o estimacion bruta, tales como busqueda aleatoria pura,multicomienzo, recocido simulado, algoritmos geneticos y redes neuronales.
A pesar de existir innumerables metodologıas para localizacion de sismos, este problemacontinua siendo una componente importante de la investigacion sismologica debido a la ne-cesidad de mejorar las localizaciones para su uso posterior, como por ejemplo para tomografıasısmica.
4.1.3.1. Estimacion no lineal, mediante Mınimos Cuadrados
El metodo Gauss-Newton fue introducido al problema de localizacion hipocentral en 1912por Geiger (Lee and Stewart, 1981) para la implementacion de su algoritmo, el cual usa unaaproximacion lineal iterativa al problema no lineal mediante la aplicacion de mınimos cua-drados ponderados, cuyo objetivo es minimizar la suma de cuadrados de los residuales entrelos tiempos de arribo observados (τi) y los tiempos de arribo calculados (ti), para un grupode estaciones. Este metodo formula una relacion lineal entre los parametros y los datos de laformaGm = d, y asume una componente de error aleatorio que corresponde a desviacionesde los datos con respecto al modelo.
Se tiene un grupo de tiempos de arriboτi observados eni estaciones con coordenadasxi, yi
y zi (Fig. 4.4). Se calcula -usando el modelo de velocidades- el valor teorico de la trayectoriade ondati de un hipocentro hipotetico con posicionesXh, Yh, Zh y tiempo de origenTh
a cada una de las estaciones. El residual del tiempo de arribo en la i-esima estacion, ri, sedefine como la diferencia entre el tiempo de arribo observado, el tiempo de arribo teorico y eltiempo de origen, esto esri = τi−ti−T . La funcion a minimizar usando mınimos cuadradoses
f(χ) =n∑
i=1
(ri)2 =
n∑i=1
(τi − (ti − T ))2 (4.2)
Durante el proceso de localizacion, los valores de la variables iniciales (Xh, Yh, Zh, Th) vana tomar diferentes valores: uno cada que se haga un ajuste, y un ajuste se realiza en cadaiteracion. Esta tecnica se basa en la expansion en series de Taylor de la funcion no lineal,
48

Figura 4.4: Identificacion de tiempos de arribo de las ondas P y S en diferentes estaciones
considerando solo los terminos que incluyen derivadas parciales de primer y segundo orden(Gauss-Newton). El objetivo de la optimizacion es encontrar despues dek iteraciones losvalores paraχ = (X, Y, Z, T ) que proporcionen el mınimo valor paraf(χ) (Fig. 4.5). Larelacion linealGm = d en dondeG es la matriz Jacobiana, cuyos elementos son las derivadasparciales espaciales de los tiempos de recorrido del hipocentro hipotetico a cada una de lasestaciones, con respecto a las 4 variables del modelo, es
∂T1/∂x1 |χ ∂T1/∂y1 |χ ∂T1/∂z1 |χ 1∂T2/∂x2 |χ ∂T2/∂y2 |χ ∂T2/∂z2 |χ 1
......
......
∂Tn/∂xn |χ ∂Tn/∂yn |χ ∂Tn/∂zn |χ 1
δx
δy
δz
δt
=
τ1
τ2...τn
(4.3)
En este caso el metodo Gauss-Newton resuelve el sistema de ecuaciones lineales,
GT Gm = GT d (4.4)
49

en cada iteracion.
Las observaciones por estacion son ponderadas, de acuerdo a la incertidumbre en la lecturapi del sismogramai el cual se determina directamente del sismograma -lecturas mas preci-sas corresponden a pequenos valores depi-, y en cada iteracion, de acuerdo a la distanciaDi =
√(x− xi)2 + (y − yi)2 entre cada estacion y el hipocentro, estimada a partir de la
localizacion obtenida en esta iteracion. De esta manera, estaciones mas lejanas al evento yestaciones con lecturas deficientes tienen menor peso. La ponderacion wi para la i-esimaestacion es inversamente proporcional ap2
i
[1 +
(ri
100
)]2. El proceso iterativo es finalizado
cuando la suma de los cuadrados de los residuales (f(χ)) converge a algun valor predefinidoo cuando un numero maximo de iteraciones es alcanzado. En principio, el metodo fue apli-
Figura 4.5: Ejemplo de localizacion iterativa. Numero de iteraciones 6
cado para el primer arribo de la onda P, debido a que esta fase es la mas facil de identificaren los sismogramas y a que su estructura de velocidad de propagacion es mas conocida; mastarde, y con algunas modificaciones al planteamiento inicial, fue posible usar otras fases talescomo S, Pn, etc., como tambien tiempos absolutos usando la diferencia S-P. Sin embargo, esnecesario tener cuidado al usar otras fases, debido a que son mas difıciles de identificar enlos sismogramas y a que el calculo de tiempos de recorrido teoricos son menos precisos yaque su estructura de velocidad de propagacion se conoce, pero con mayor incertidumbre.
50

4.1.3.2. Localizacion probabilıstica
La localizacion probabilıstica se refiere a la formulacion y solucion del problema usando es-tadıstica bayesiana, la cual se usa para modificar el grado de conocimiento con respecto a losresultados de un fenomeno al tenerse nueva informacion. Informacion a priori se refiere a loque se cree o se asume con respecto a las variables de interes antes de tener informacion apartir de una muestra. La funcion de maxima verosimilitud representa el grado de concor-dancia entre los valores obtenidos con una muestra y la informacion a priori. Informaciona posteriori se refiere al grado de conocimiento modificado despues de obtener informacionmuestral (Mendenhall and Sincich, 1997; Canavos, 1988).
Como se plantea en 3.1.1.3, pagina 21, la relacion teorica entre datos (d) e incognitas oparametros del modelo (m) puede ser escrita comoF (d,m), dondem = χ = X, Y, Z, T sonlas coordenadas hipocentrales y el tiempo de origen,d son los tiempos de arribo observadoscon matriz de covarianzaCt, mientras que los tiempos calculados tienen matriz de covarianzaCT .
Si se asume una distribucion normal de los errores en el modelo de velocidades, la funcionde densidad de probabilidad teorica puede escribirse como,
F (d|χ) = θ(d|χ) = e−12[d−f(χ)]′C−1
T [d−f(χ)] (4.5)
asumiendo ahora que los datos poseen una estructura normal (informacion a priori de losdatos), conto el vector de valores medios, la funcion de densidad de probabilidad para losdatos es
ρ(d) = e−12(d−to)′C−1
t (d−to) (4.6)
y queρ(χ) es la informacion a priori sobre sobre los parametros del modelo, la funcion dedensidad de probabilidad para los parametros (coordenadas hipocentrales) estara entoncesdada por
σ(P ) = ρ(χ)
∫ρ(d)θ(d|χ)dd (4.7)
de la cual se obtiene la funcion de densidad de probabilidad a posteriori para las coordenadasespaciales,
σ(χ) = ρ(χ)e−12[to−f(χ)]′(CT +Ct)−1[to−f(χ)] (4.8)
σ(χ) puede ser evaluada con los tiempos de arribo observados y a partir de informacion apriori sobre la localizacion del evento en una red muy fina. Los valores de los parametros quemaximizan la funcion de maxima verosimilitud o que minimizan la suma de los residualesal cuadrado son losoptimos. Esta funcion que es basicamente combinacion de informacion(informacion experimental o datos, informacion a priori sobre los parametros e informacionteorica), proporciona la solucion general para el problema espacio temporal de localizacionhipocentral, en el caso de datos con distribucion normal. Esta solucion no contiene ninguna
51

aproximacion lineal, y proporciona estimadoresunicos y consistentes. Mosegaard and Ta-rantola (2000) propusieron este metodo como mejor solucion para resolver el problema delocalizacion de sismos.
4.1.4. Determinacion conjunta de hipocentros
Para una estacion sismologica determinada, el error en los tiempos de viaje teoricos se de-ben principalmente a inexactitudes en el modelo de velocidades asumido, las cuales puedenpresentarse cerca a la fuente, cerca a la estacion o a lo largo de la trayectoria de la onda.Por lo tanto, si un grupo de sismos ocurre con mas o menos la misma localizacion espacial(cumulo) es posible reducir conjuntamente los errores en el modelo idealizado, determinan-do una correccion por estacion que tenga en cuenta las inexactitudes del modelo a lo largodel recorrido entre la fuente y cada estacion. Es decir, para un grupo de sismos y una redde estaciones se estima cada hipocentro y finalmente se obtiene un factor de correccion paracada estacion (Douglas, 1967). Los esquemas de inversion para resolver el sistema de ecua-ciones en este caso generalmente usan descomposicion del valor singular. Las localizacionesrelativas usando el metodo de determinacion conjunta son mejores que las localizaciones in-dividuales determinadas usando mas completos y complejos modelos de velocidad (Lay andWallace, 1995).
4.2. Estimacion de tiempos de viaje
Una estructura de velocidad es un modelo regional generalizado de la Tierra, que representala estructura de la Tierra en capas, las cuales se asume que tienen diferentes velocidadessısmicas entre sı. Puede ser inferida mediante inversion de curvas de dispersion de tiempos deviaje, a partir de tiempos de arribo de varias ondas sısmicas (generalmente P y S) observadosen diferentes puntos como una funcion de la distancia usando un modelo de la Tierra porcapas.
En 1939 Jeffreys compilo los tiempos de viaje de cientos de arribos de ondas sısmicas y apartir de ellas desarrollo curvas de tiempos de viaje para la Tierra, desde la superficie hastael centro. Estas tablas se conocen comoJeffreys - Bullen Tablesy predicen los tiempos dearribo de ondas telesısmicas P a cualquier punto en la superficie de la Tierra con exactitud del0.2 %, limitado por la existencia de variaciones tridimensionales en las estructuras no tenidasen cuenta por los modelos asumidos para su elaboracion. Estas tablas se usan rutinariamentepara localizacion global de sismos (Lay and Wallace, 1995).
En 1981 Dziewonski y Anderson disenaron un modelo de velocidades (PREM, PreliminaryReference Earth Model, Fig 4.6) con el fin de ajustar un variado grupo de datos (oscilacio-nes libres, dispersion de ondas superficiales, tiempos de viaje de ondas de cuerpo y datos de
52

P
S
Man
tosu
per
ior
zon
ad
etr
an
sici
ón
(z.t
.)
Man
toin
feri
or
Nú
cleo
exte
rior
Núcleointerior
z.t.
z.t.
0
2
4
6
8
10
12
14
010001600260034803800480056005871615163476371
14
4
6
8
10
12
0
2
Vel
oci
da
d(k
m/s
)
Figura 4.6: Modelo PREM de velocidad para las ondas P y S en funcion de la profundidad
masa, momento e inercia). Este modelo de velocidades proporciona ademas densidad y ate-nuacion en funcion de la profundidad. Los modelos actuales de la Tierra tienen valores queson razonablemente cercanos a los valores contenidos en PREM (Shearer, 1999).
Estos son entre otros, modelos globales obtenidos a partir de observaciones en diferentespuntos de la Tierra y de aplicacion en localizacion global. Sin embargo, cada observatoriosismologico construye a partir de sus propias observaciones los modelos de velocidad quemejor representen la estructura de su region.
4.3. Factores que influyen en errores de localizacion
La estimacion hipocentral mediante mınimos cuadrados (seccion 4.1.3.1, pag. 48), usadaactualmente en el OSSO para la determinacion rutinaria de hipocentros, plantea una relacionlineal de la formad = Gm + e dondee es el error, el cual puede ser visto como una combi-nacion de varios terminos. El metodo de mınimos cuadrados es apropiado cuando los erroresson independientes y aleatorios, pero su aplicacion puede dar desproporcionada ponderaciona datos con grandes errores y distorsionar la solucion. En efecto, errores grandes en los datostienden a ser distribuidos uniformemente entre las observaciones, de tal forma que los erro-res grandes se propaguen casi uniformemente en todas las estaciones, obteniendose pequenasdesviaciones de los datos con respecto a las estimaciones, por lo que, obtener bajos residualesen una estimacion no implica necesariamente una buena solucion.
53

La incertidumbre en las localizaciones obtenidas con este metodo se debe principalmentea errores en la medicion de los tiempos de arribo de las diferentes fases, a la incorrectaidentificacion de las mismas y a las diferencias entre el modelo de velocidades que se usapara estimar los tiempo de viaje y la estructura real. La mala localizacion de eventos inducidapor aquellas fuentes de error es afectada por el numero y distribucion espacial de estacionesque registran un evento, lograndose una mejor localizacion cuando se dispone de un suficientenumero de observaciones. En resumen, la exactitud, precision y consistencia en la estimacionde los parametros de localizacion dependen de los siguientes factores,
numero y distribucion espacial de las estaciones con respecto al sismo,
la cantidad y calidad de los tiempos de arribo observados,
la precision del modelo de velocidades usado para calcular los tiempos teoricos deviaje,
del metodo de estimacion y los supuestos involucrados en el mismo
4.3.1. Optimizacion de la red de observacion
Una red sismologica regional permanente esta constituida por estaciones remotas, dotadascon sismometros de alta sensibilidad y ubicadas a distancias inferiores a los 100 km de lasfuentes sısmicas de interes. Si ademas existe y se quiere monitorear actividad sısmica super-ficial, por ejemplo en los primeros 10 km de la corteza, el espaciamiento entre estacionesdebe reducirse al menos a 20 km (Aki and Richards, 1980). Las estaciones generalmentetransmiten los valores observados a una estacion central, en donde se recibe -generalmenteen tiempo real-, se acopia y se procesa la informacion.
Si el numero y la cobertura azimutal de las estaciones que registran un sismo son adecuados(por ejemplo, mınimo 4 estaciones con unangulo maximo entre el epicentro y dos estacionesconsecutivas menor a 90◦) y si al menos una de las estaciones esta localizada a una distanciaepicentral menor que la profundidad focal, entonces basta con observar la llegada de la ondaP para obtener una adecuada localizacion; en caso contrario, se requiere la identificacion defases secundarias para hacer una estimacion del hipocentro y del tiempo de origen del evento.
En general, las estaciones deben estar distribuidas de tal forma que rodeen el sismo; en casocontrario, cuando el sismo ocurre fuera de la red, los elementos de la columna∂Ti/∂x y loscorrespondientes elementos de la columna∂Ti/∂y pueden ser proporcionalmente cercanosunos a otros. Dado que el rango de una matriz (numero de filas linealmente independientes)debe ser mayor al numero de incognitas, si una matriz tiene una fila que es casi una combi-nacion lineal de otras, esta matriz presentara un rango defectivo con un valor singular muy
54
pequeno y el sistema tendra infinitas soluciones con errores que se aproximan al mınimo ab-soluto. Dado que los elementos de la matrizG dependen del modelo de velocidades y de ladistribucion espacial de las estaciones respecto al hipocentro, la distribucion relativa de lasestaciones con respecto a los sismos es muy importante para decidir si un sismo puede o noser localizado con una red determinada. En efecto, si la distribucion de estaciones es pobrerespecto a la ubicacion del sismo de interes, no basta con tener un numero mayor de datos quede incognitas para resolver el problema, pues en general la matrizG que resulta en este casoes una matriz mal condicionada. De igual manera, dado que las estaciones estan ubicadas enla superficie de la tierra, el parametro mas difıcil de determinar es la profundidad focal.
Uhrhammer (1980) propuso un metodo para determinar el numero mınimo de estacionesnecesarios para determinar hipocentros con cierta exactitud en una determinada region. Elmetodo consiste en construir matrices de correlaciones llamadas de ignorancia y de incerti-dumbre, a partir de los parametros hipocentrales. Estas matrices permiten determinar elareaen la cual la incertidumbre de los parametros hipocentrales es suficientemente pequena yproporciona ademas informacion sobre cuales observaciones son redundantes o suministranpoca o mayor informacion. Un analisis del metodo fue llevado a cabo con una red conforma-da por 4 estaciones, 3 de ellas son los vertices de un triangulo equilatero y la cuarta a unadistancia de 10 km de cada una de ellas, proporcionando tiempos de llegada de las ondasP y S para cada estacion y usando un modelo de velocidad constante. Este metodo permitecomparar varias geometrıas de red para determinar sus respectivas ventajas y desventajas.El metodo considera una configuracion optima cuando todas las observaciones minimizan laincertidumbre en los parametros hipocentrales.
Rabinowitz and Steinberg (1990) aplicaron teorıa estadıstica del diseno de experimentos (es-timacion de parametros con maxima resolucion) para obtener laoptima configuracion de unared, es decir una que proporcione maxima precision para el monitoreo de un punto fuente. Elesquema de optimizacion propuesto se basa en el algoritmo DETMAX (Mitchell, 1974), elcual genera una red inicial seleccionandon sitios aleatoriamente de una lista de estacionescandidatas, la red es modificada secuencialmente adicionando sitios de la lista y removiendootros hasta lograr la maximizacion del determinante deGT G (criterio D). Este procedimientopuede ser aplicado a redes locales, regionales o globales y esutil para encontrar el sitioopti-mo si se quiere adicionar una nueva estacion a una red existente. Tambien mide la eficacia decada estacion por el incremento relativo en el determinante de la red debido a la inclusion decada una de ellas y proporciona informacion sobre el numero de estaciones necesarias parael monitoreo de una fuente.
Steinberg et˜al. (1995) retomaron el trabajo anterior y generalizaron su aplicacion para eloptimo monitoreo de diversos sistemas de fallas y fuentes multiples, justificado por el hechoque fuentes sısmicas no corresponden a simples puntos. El procedimiento es el mismo, perose lleva a cabo utilizando informacion de multiples fuentes. En su artıculo presentaron dosejemplos no teoricos para ilustrar el metodo y un tercero aplicado a un grupo de 17 estacionesde la red sismologica de Israel. Para diferentes redes -en numero- de estaciones sismologicas
55

encontraron diferencias significativas en las localizaciones, lo cual fue atribuido a anomalıasen la estructura local de velocidades. Encontraron que redes que sonoptimas con respectoa precision estadıstica pueden cubrir eficazmente fuentes potenciales y por lo tanto reducirerrores relacionados a desviaciones del modelo.
Gupta et˜al. (1973) plantearon que la precision de una red sısmica, en cuanto a localiza-cion de terremotos, puede estimarse calculando la distribucion relativa de los errores en ladeterminacion de cada uno de los parametros, usando un modelo simplificado de la Tierra.Aplicando el metodo de simulacion Monte Carlo con 200 muestras, los autores modelaronel proceso del registro de las ondas sısmicas, asumiendo errores normalmente distribuidos,velocidad de propagacion de la onda P constante e igual profundidad de los focos a traves delos calculos (25 km). Mediante el analisis de estos datos, determinaron la precision de la redsismologica de la India, teniendo en cuenta tambien la capacidad de deteccion, para localizareventos de magnitudes 5.0, 4.5 y 4.0. Garcıa (1986) siguiendo el trabajo anterior determino laprecision relativa de la red espanola en la localizacion de terremotos de la region. Utiliza losmismos criterios y parametros de Gupta et˜al. (1973) y realiza la simulacion para sismos conprofundidad de 10 km.
4.3.2. Evaluacion del modelo de velocidades
Dado que el proceso de localizacion requiere la evaluacion de tiempos de viaje de una ondasısmica a partir de un modelo de la estructura de la tierra, los sismos son localizados conmodelos de velocidad simplificados, es decir con solo informacion limitada de la estructurareal. Generalmente estos mode los asumen un conjunto de capas horizontales, ignorando elposible efecto de las variaciones laterales de velocidad. En la practica esto se debe al pococonocimiento que se tiene sobre la estructura de velocidades y a la dificultad de trazar rayossısmicos en medios heterogeneos. Como resultado se obtienen localizaciones sesgadas.
Billings et˜al. (1994b) plantean que tanto los errores de lectura como los errores del modelode velocidades influencian las estimaciones y que es difıcil separar sus efectos. Sin embargo,proponen dos metodos para el analisis de ellos usado simulacion Monte Carlo (el metodousado para el analisis de los errores de lectura se explica en la seccion 4.3.3). Para determinarel efecto de la heterogeneidad lateral de la Tierra, la cual no es tenida en cuenta en los mode-los de velocidad unidimensional, el evento fue relocalizado usando diferentes combinacionesde fases y geometrıas de red. Encontraron que ambos mecanismos tienen gran influencia enlas localizaciones, y que tanto el numero como el tipo de fase son importantes para la deter-minacion de la profundidad focal. Encontraron una gran discrepancia entre las localizacionesproducidas usando fases P y las producidas usando fases P y pP (35 km en profundidad y de12.5 km en epicentro), la cual resulta de imperfecciones en el modelo de velocidades debidasa la relativa insensibilidad de la onda P a cambios en profundidad, ya queestos son absorbi-dos por cambios en la longitud de la trayectoria del rayo, teniendo un pequeno efecto en eltiempo de viaje. Por tanto recomiendan el uso de fases adicionales tales como pP ya que son
56

fases sensitivas a cambios en profundidad.
En un trabajo anterior, der Hilst and Engdahl (1992) estudiaron un gran numero de eventosdel International Seismological Centre (ISC) y encontraron que las profundidades estimadasusando fases P y pP eran bastante diferentes a las obtenidas usando solo fases P. La diferenciaen profundidades, es decir, el sesgo fue particularmente evidente en zonas de subducciondonde los heterogeneidades laterales en velocidad son importantes.
Iversen and Lees (1996) plantean que para un grupo de sismos que ocurren muy cerca unosa otros y que son registrados por numerosas estaciones, es posible definir un estadıstico porestacion que identifique anomalıas del modelo de velocidades, determinando la contribuciono influencia de cada estacion al sesgo o error en la localizacion. Este estimador se basa en elmetodo estadıstico de remuestreo Jackknife y consiste en tomar un grupo de sismos con unsuficiente numero de observaciones; cada sismo es relocalizado eliminando una estacion a lavez, comparando la relocalizacion con la localizacion inicial se calcula el sesgo por estacion,este procedimiento se lleva a cabo para todo el grupo de sismos; finalmente se estudia la dis-tribucion del sesgo por estacion entre eventos, la cual se espera que este centrada alrededorde la media y que tenga varianza constante. El metodo fue aplicado a dos grupos de sismos:un grupo de 81 sismos de la region de Mount St Helens ocurridos entre 1987 y 1991 y otrogrupo de 113 sismos correspondientes a replicas del sismo de Joshua Tree de 1992. Con esteultimo grupo comparan ademas resultados obtenidos con un modelo unidimensional y unotridimensional. Encontraron que tanto el modelo unidimensional como el tridimensional usa-dos en la region de Mount St Helens no modelan adecuadamente la estructura de velocidadesregional. Para la secuencia de sismos de Joshua Tree encontraron satisfactorio el modelo develocidades tridimensional.
4.3.3. Errores en las observaciones
Los errores en los datos primarios, tales como tiempos de arribo o amplitudes, los cuales sonleıdos directamente del sismograma se comportan de una manera relativamente simple. Paratiempos de llegada de fases impulsivas obtenidas en registros analogos los errores son apro-ximadamente gaussianos (Buland, 1976), mientras que en lecturas de fases emergentes loserrores tienen una distribucion sesgada debido a la tendencia de leer llegadas debiles dema-siado tarde (Anderson, 1982). Si durante la interpretacion de los datos se dispone de muchasmediciones, los errores de lectura pueden ser tratados como normalmente distribuidos conmedia cero y varianza constante.
Billings et˜al. (1994b) proponen un analisis de error usando un tecnicas Monte Carlo ya queestas manejan bien la no linealidad del problema. El procedimiento fue disenado para ser usa-do con algoritmos de localizacion que usan estimadores de maxima verosimilitud. El metodousual consiste en perturbar los tiempos de arribo con numeros aleatorios tomados de una dis-tribucion normal con media cero y desviacion estandar de 0.25 segundos y de esta manera
57

el evento es relocalizado. Los autores realizaron dos modificaciones al procedimiento usual:por una lado la simulacion no se llevo a cabo generando fases aleatorias a partir del epicentrodeterminado inicialmente, con el fin de evitar la inclusion de errores debidos al modelo develocidades usado para generar las fases sinteticas sino que adicionaron errores aleatoriosa las lecturas previas; por otro lado, la distribucion de los errores usados para perturbar losdatos deberıa ser la misma usada en la estimacion inicial, pero dado que la combinacion deambos tipos de errores no sigue la misma distribucion que los errores de lectura, usaron unadistribucion de errores asociados con una norma L1.25 para la localizacion de los eventos.El procedimiento fue repetido 500 veces para obtener un cumulo de localizaciones, las cua-les fueron usadas para investigar la influencia de los errores de lectura en la determinacionhipocentral. Encontraron que el efecto de estos errores es menor que el causado por otrasfuentes de error tales como numero y tipo de fases o modelo de velocidades; ademas parauna mas rapida convergencia usaron como solucion inicial el hipocentro sin perturbaciones,dado que se espera que los errores de lectura no muevan el epicentro grandes distancias. Elprocedimiento fue llevado a cabo para un evento en los lımites entre Iran-Iraq, con 307 obser-vaciones. Las localizaciones perturbadas difieren entre sı por menos de 4.5 km en epicentro,6 km en profundidad y 0,75 segundos en tiempo de origen. Encontraron ademas una fuertecorrelacion entre la profundidad y el tiempo de origen.
Rodi and Toksoz (2001) retomando el trabajo de Billings et˜al. (1994b), repitieron el analisis,asumiendo dos distribuciones para los errores de lectura: distribucion normal y distribucionexponencial. El objetivo del trabajo era obtener una estimacion optima usando una funcionde maxima verosimilitud, a partir de la cual obtienen regiones de confianza en terminos depruebas de hipotesis aplicadas a las relaciones de verosimilitud. La funcion de verosimilitudes dada en terminos de un modelo probabilıstico para los diferentes tipos de error en los datossısmicos, lo cual permite implementar errores que no tengan distribucion normal y erroresespacialmente correlacionados en las tablas de tiempos de viaje, ademas no hace necesarioasumir restricciones de linealidad entre los tiempos de viaje y la localizacion; para esto usantecnicas de simulacion Monte Carlo y busqueda exhaustiva. Este metodo fue aplicado a unasecuencia de sismos del terremoto de Racha de 1991.
58