
62947452 Fisica Para Ingenierias de Ejecucion USACH
489
-
Upload
luis-martinez -
Category
Documents
-
view
385 -
download
38
Transcript of 62947452 Fisica Para Ingenierias de Ejecucion USACH


Esta es la SEGUNDA versión del libro de Física para Ingenierías de Ejecución que
durante el 2003 estuvo disponible en versión electrónica y en papel para nuestros
estudiantes. Como es de esperar, aun debe contener algunos errores, los que
veremos con mucho agrado nos los comuniquen a través de sus profesores o vía
correo electrónico.
La versión original, en colores, así como el capítulo 12 que no alcanzó a ser incluida
aquí, la puede encontrar en la página web que hemos creado para atender sus
necesidades académicas y administrativas. Este año no incluimos los ejercicios en
el texto buscando renovarlos y mejorar su presentación. Los encontrará en la
página web de acuerdo al avance el curso.
Les instamos a que nos visite continuamente para ver las noticias, los ejercicios,
las calificaciones, las pautas de corrección de las pruebas, el reglamento,
materiales adicionales y otras utilidades que esperamos sean de su interés. La
dirección es: http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
Les damos la más cordial bienvenida a su alma mater: La Universidad de Santiago
de Chile.
A trabajar………………………
Académicos que dictan cursos de Física del Plan Anual de Ingeniería de Ejecución
27/01/2004 [email protected] 1
1.1 Evolución de la Física Clásica
1.1.1 Introducción.
La preocupación por el universo comienza
probablemente en épocas prehistóricas,
con el hombre observando el cielo y
tratando de entender su evolución e
intentando catalogar, describir y
predecir eventos celestes.
Esta preocupación no era puramente
especulativa, puesto que en las primeras
etapas del desarrollo humano tal
conocimiento era la diferencia entre
sobrevivir o no.
Se hará a continuación una revisión
somera de la evolución de estas
observaciones y sus explicaciones. Las
ideas más actuales están bien
documentadas en la literatura y las más
antiguas contienen cierta base
especulativa aunque consensuada en la
comunidad científica.
Por último, si bien es cierto hoy día se
cuenta con un pequeño número de teorías
altamente sofisticadas acerca del
universo y su evolución, provenientes del
mundo científico, no es menos cierto que
existen aún otras aproximaciones de
carácter puramente religioso.
El mundo científico ciertamente opta por
las primeras, aunque no puede dejar de
desconocer que en algún punto de sus
teorías se encuentra con ciertos
principios dogmáticos de los que
probablemente nunca pueda prescindir.
1.1.2 Civilizaciones ancestrales: una
breve introducción histórica.
De acuerdo al conocimiento actual, la
tierra se formó entre 4.000 y 5.000
millones de años atrás; mientras que los
primeros restos de útiles usados por
hombres datan de aproximadamente 2,5
millones de años (encontrados en Etiopía)
en la denominada edad de piedra antigua
(Paleolítico) suponiéndose que la aparición
de formas de vida humana data de épocas
muy anteriores a los registros
arqueológicos disponibles (se han
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 2
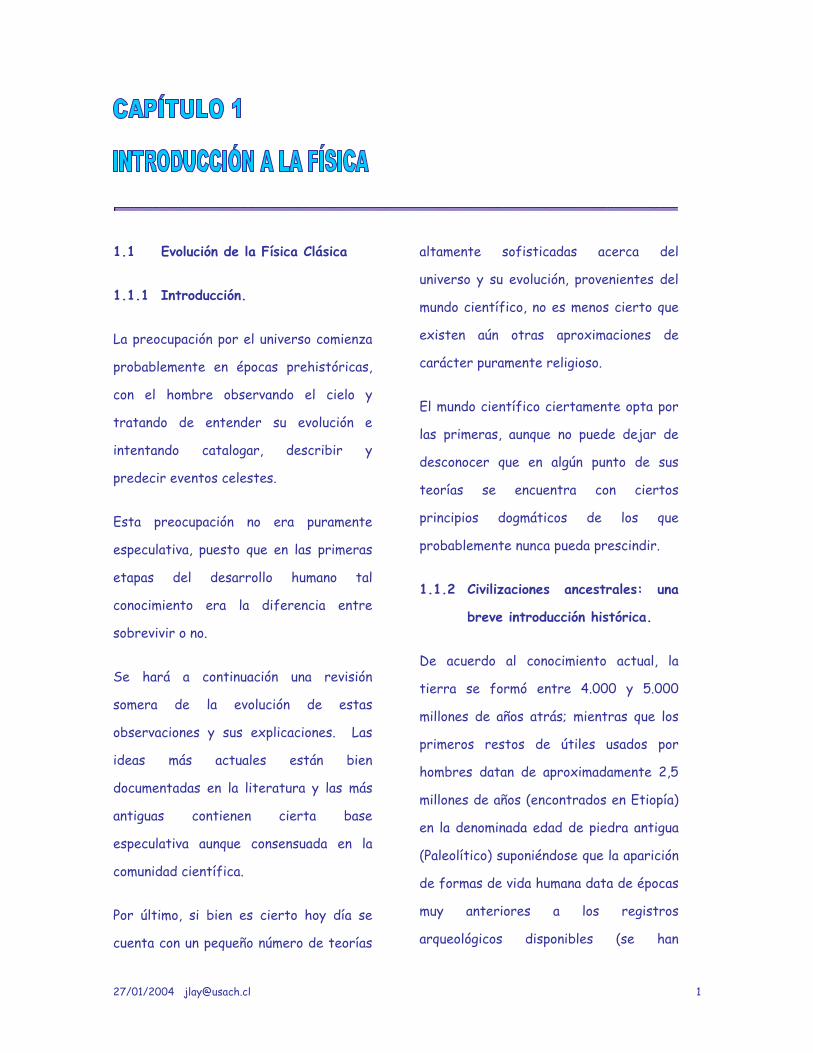
encontrado restos de homínidos de los
géneros australopithecus y homo sapiens
que datan de aproximadamente 5 millones
de años de antigüedad).
Fig 1.1 LUCY. Uno de los mejor conservados restos de australopithecus de entre 3,6 y 3 millones de años. Encontrado en Hadar, Etiopía.
Fundamentalmente recolectores y
cazadores (solo en la última etapa del
paleolítico), y organizados en grupos
nómades pequeños y dispersos, lograron
dominar el fuego para calentarse y
endurecer la madera empleada para
fabricar armas y herramientas (hace
aproximadamente 1,5 millones de años);
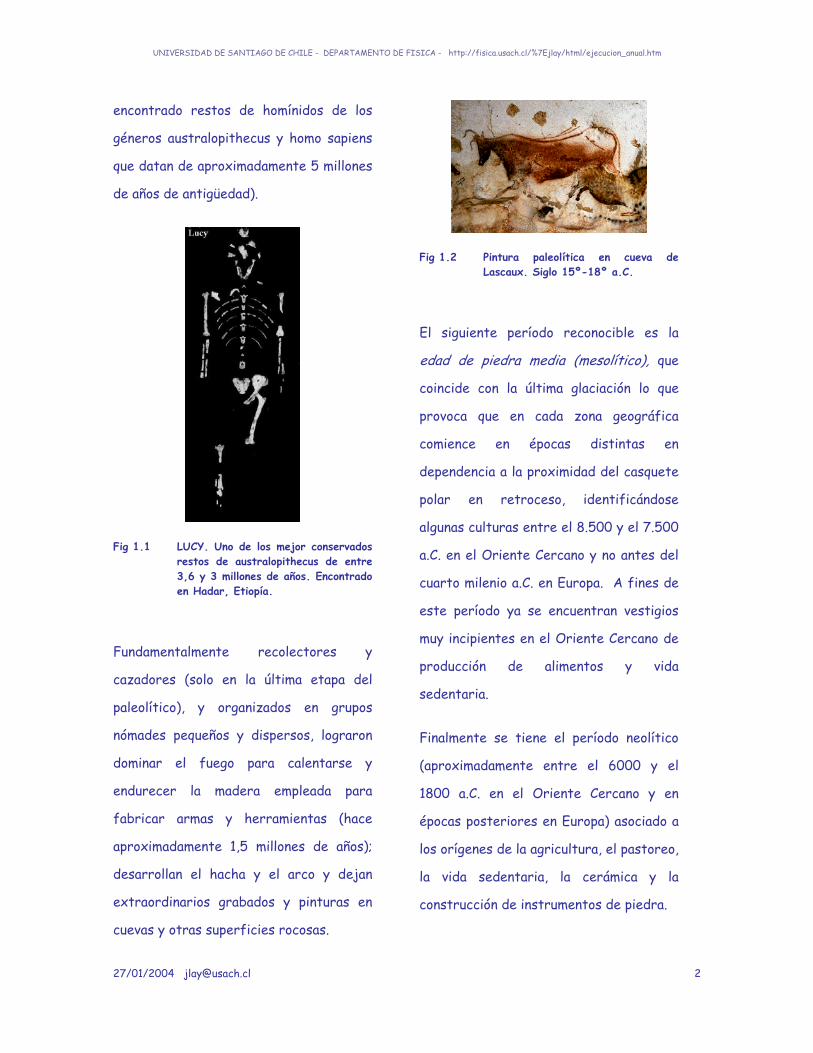
desarrollan el hacha y el arco y dejan
extraordinarios grabados y pinturas en
cuevas y otras superficies rocosas.
Fig 1.2 Pintura paleolítica en cueva de Lascaux. Siglo 15º-18º a.C.
El siguiente período reconocible es la
edad de piedra media (mesolítico), que
coincide con la última glaciación lo que
provoca que en cada zona geográfica
comience en épocas distintas en
dependencia a la proximidad del casquete
polar en retroceso, identificándose
algunas culturas entre el 8.500 y el 7.500
a.C. en el Oriente Cercano y no antes del
cuarto milenio a.C. en Europa. A fines de
este período ya se encuentran vestigios
muy incipientes en el Oriente Cercano de
producción de alimentos y vida
sedentaria.
Finalmente se tiene el período neolítico
(aproximadamente entre el 6000 y el
1800 a.C. en el Oriente Cercano y en
épocas posteriores en Europa) asociado a
los orígenes de la agricultura, el pastoreo,
la vida sedentaria, la cerámica y la
construcción de instrumentos de piedra.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 3
Estos hechos condujeron al rápido
crecimiento de la población, de la
creación de los primeros poblados (hecho
conocido como revolución neolítica), de
avances en la agricultura, la aparición del
uso de metales (empieza la edad del
bronce).
Es necesario recalcar que estos cambios
trascendentales ocurrieron en cada zona
geográfica en épocas distintas, aunque se
dieron en el Oriente Cercano mucho más
temprano.
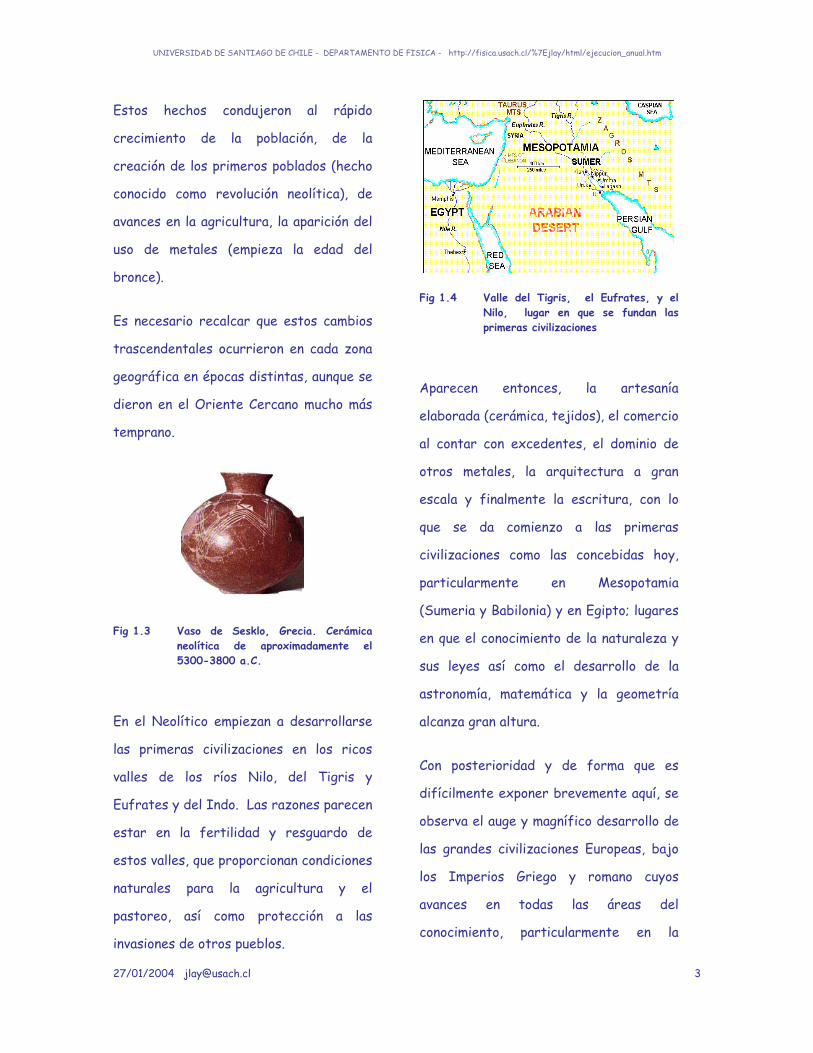
Fig 1.3 Vaso de Sesklo, Grecia. Cerámica neolítica de aproximadamente el 5300-3800 a.C.
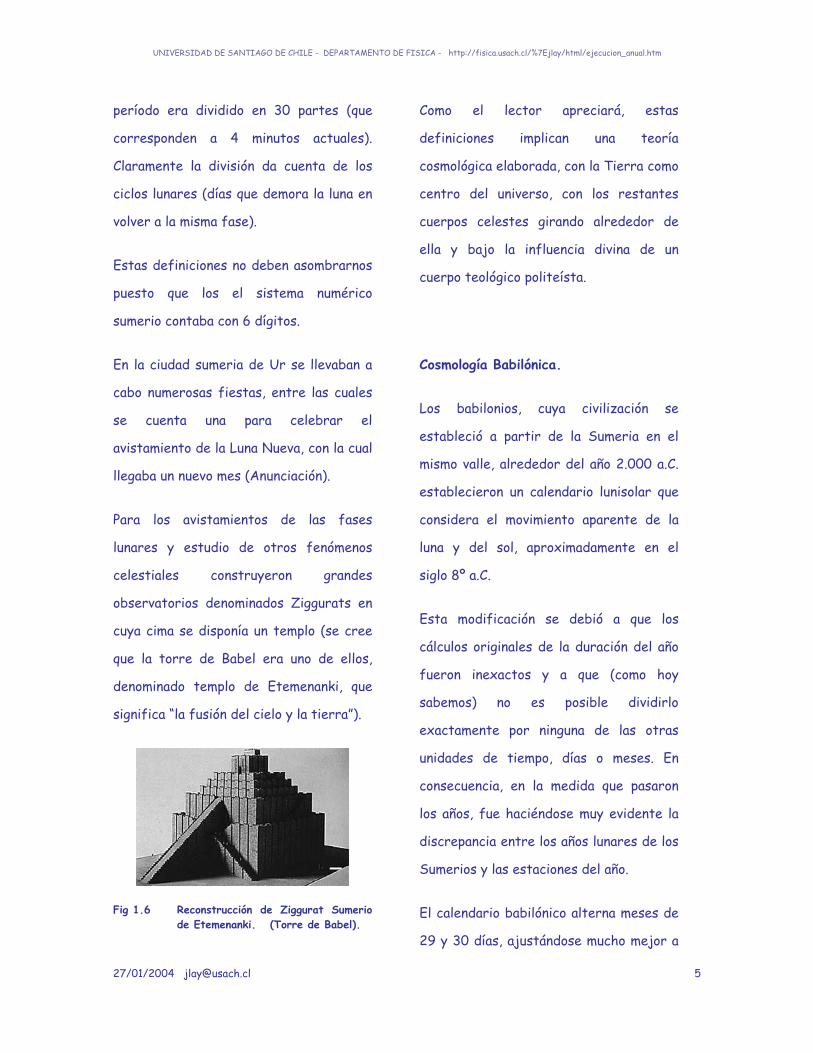
En el Neolítico empiezan a desarrollarse
las primeras civilizaciones en los ricos
valles de los ríos Nilo, del Tigris y
Eufrates y del Indo. Las razones parecen
estar en la fertilidad y resguardo de
estos valles, que proporcionan condiciones
naturales para la agricultura y el
pastoreo, así como protección a las
invasiones de otros pueblos.
Fig 1.4 Valle del Tigris, el Eufrates, y el Nilo, lugar en que se fundan las primeras civilizaciones
Aparecen entonces, la artesanía
elaborada (cerámica, tejidos), el comercio
al contar con excedentes, el dominio de
otros metales, la arquitectura a gran
escala y finalmente la escritura, con lo
que se da comienzo a las primeras
civilizaciones como las concebidas hoy,
particularmente en Mesopotamia
(Sumeria y Babilonia) y en Egipto; lugares
en que el conocimiento de la naturaleza y
sus leyes así como el desarrollo de la
astronomía, matemática y la geometría
alcanza gran altura.
Con posterioridad y de forma que es
difícilmente exponer brevemente aquí, se
observa el auge y magnífico desarrollo de
las grandes civilizaciones Europeas, bajo
los Imperios Griego y romano cuyos
avances en todas las áreas del
conocimiento, particularmente en la

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 4
ciencia que nos ocupa, son más conocidos
y serán dejadas a la inquietud de los
lectores.
Fig 1.5 Tableta de barro sumeria escrita en caracteres cuneiformes. Museo de Plimpton
También como inquietud se deja al lector
el estudio de las civilizaciones del valle
del Indo, aún no muy conocida que data de
aproximadamente del 2.500 a.C. y las del
Oriente Lejano dentro de las que destaca
la China.
1.1.3 Primeras teorías cosmológicas.
La aparición de la preocupación por la
cosmología en las primeras civilizaciones
sedentarias no es casual, sino debido a la
necesidad de contar con una forma de
predecir los ciclos anuales climáticos para
optimizar los períodos de siembra y
cosecha de vegetales así como las
pariciones de su ganado doméstico.
Probablemente también existía una
necesidad religiosa de explicar las
fuerzas de los elementos a objeto de
establecer acciones que paliaran las
acciones negativas que sobre los
asentamientos humanos y sus bienes
tenían.
A esto se debe sumar la necesidad de
determinar las subdivisiones del período
de luz y sombra diarios debido a las
actividades administrativas derivadas de
la organización social.
Todos los elementos anteriores concurren
a la medición del tiempo a partir de los
ciclos celestes periódicos naturales, que
se traduce en patrones usados aún hoy.
Es así como se desarrolla el calendario
(palabra derivada de la voz latina calare =
anunciación), el primero de los cuales
parece haberse creado en la civilización
Sumeria en Mesopotamia (hoy Irak)
alrededor del 3500 a.C.
Cosmología Sumeria.
Los sumerios contaban con un sistema
sofisticado que contemplaba años
divididos en meses de 30 días; cada día
estaba dividido en 12 períodos (que
corresponden a 2 horas actuales), y cada
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 5
período era dividido en 30 partes (que
corresponden a 4 minutos actuales).
Claramente la división da cuenta de los
ciclos lunares (días que demora la luna en
volver a la misma fase).
Estas definiciones no deben asombrarnos
puesto que los el sistema numérico
sumerio contaba con 6 dígitos.
En la ciudad sumeria de Ur se llevaban a
cabo numerosas fiestas, entre las cuales
se cuenta una para celebrar el
avistamiento de la Luna Nueva, con la cual
llegaba un nuevo mes (Anunciación).
Para los avistamientos de las fases
lunares y estudio de otros fenómenos
celestiales construyeron grandes
observatorios denominados Ziggurats en
cuya cima se disponía un templo (se cree
que la torre de Babel era uno de ellos,
denominado templo de Etemenanki, que
significa “la fusión del cielo y la tierra”).
Fig 1.6 Reconstrucción de Ziggurat Sumerio de Etemenanki. (Torre de Babel).
Como el lector apreciará, estas
definiciones implican una teoría
cosmológica elaborada, con la Tierra como
centro del universo, con los restantes
cuerpos celestes girando alrededor de
ella y bajo la influencia divina de un
cuerpo teológico politeísta.
Cosmología Babilónica.
Los babilonios, cuya civilización se
estableció a partir de la Sumeria en el
mismo valle, alrededor del año 2.000 a.C.
establecieron un calendario lunisolar que
considera el movimiento aparente de la
luna y del sol, aproximadamente en el
siglo 8º a.C.
Esta modificación se debió a que los
cálculos originales de la duración del año
fueron inexactos y a que (como hoy
sabemos) no es posible dividirlo
exactamente por ninguna de las otras
unidades de tiempo, días o meses. En
consecuencia, en la medida que pasaron
los años, fue haciéndose muy evidente la
discrepancia entre los años lunares de los
Sumerios y las estaciones del año.
El calendario babilónico alterna meses de
29 y 30 días, ajustándose mucho mejor a
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 6
la duración de las fases de la luna que el
calendario Sumerio de meses de 30 días
fijos. Esto se debe a que el tiempo real
que pasa entre una luna llena y otra es de
29,53 días.
La dificultad es que 12 ciclos lunares
consecutivos producen años de 354 días
por lo que los Babilonios agregaban meses
irregularmente para hacerlo coincidir con
las estaciones. La decisión de cuando
agregar un mes la tomaba el rey de
acuerdo con los adivinos.
Hacia el 747 a.C. reconocieron que 235
meses lunares correspondían
exactamente a 19 años lunares por lo que
se decidió intercalar a voluntad del
monarca, siete meses durante cada
período de 19 años.
Posteriormente los babilonios trabajaban
con ciclos de 19 años en los cuales los 12
primeros contaban con 12 meses y los
otros 7 con años de 13 meses. Este
sistema solo se puso en práctica a partir
del año 367 a.C. bajo la dominación persa.
Esta práctica de agregar meses
irregularmente a los años también fue
adoptada por otras civilizaciones vecinas
a Babilonia.
A Los Babilonios también se atribuye la
creación del sofisticado sistema del
zodíaco para describir la posición de los
planetas.
Como se puede apreciar, en la Babilonia ya
se tenía cierto conocimiento sofisticado,
que le permitía conocer con exactitud
eventos celestes como los eclipses, las
fases de la luna, los ciclos de las mareas,
catalogando las estrellas y otros avances
notables para la época.
Fig 1.7 Astrólogo Babilónico
Otros avances babilónicos no son motivo
de este curso, pero pueden citarse a
modo de conocimiento general, las
definiciones de patrones para medir el
tiempo que ya se han comentado, las
medidas de volumen (el ka), de peso (la
gran mina y el talento), de longitud (el
codo) entre otras.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 7
Sin embargo, no se avanza en lo principal,
puesto que no construyen un sistema de
conocimiento basado en teorías
estructuradas.
Cosmología Egipcia.
Existen antecedentes suficientes para
opinar que los egipcios contaban con
calendarios lunares tan antiguos como el
3.500 a 4.00 a.C. se han encontrado
Obeliscos (monumentos de piedra de 4
caras) construidos de tal manera que su
sombra permitía determinar claramente
el mediodía dividiendo el día en dos
partes. Se ha encontrado que incluso
algunas de sus secciones ubicadas
cercanas a su base permitían determinar
el día mas corto y el día mas largo del
año, coincidiendo con los solsticios.
Otro reloj de sol Egipcio que data de
aproximadamente el 1.500 a.C. permite
medir las horas a través de marcas
dispuestas en un dispositivo ubicado
cerca de su base. Este contaba con 10
marcas permitiendo dividir el período de
luz desde el amanecer hasta el mediodía
en 5 partes, mas una marca adicional que
medía un período de “penumbra”. El
aparato estaba dispuesto de tal manera
que se podía rotar en 180º de manera tal
que permitía medir las horas del
atardecer de la misma manera.
Este es el primer sistema que permite
dividir el día en horas cuya duración es
como las actuales.
Los egipcios también desarrollaron el
denominado “merkhet” aproximadamente
en el año 600 a.C., la herramienta
astronómica más antigua conocida, que
permite determinar una línea imaginaria
alineándolo con la estrella Polar. Esto
permitía la medición de las horas
nocturnas mediante el paso de otras
estrellas sobre el meridiano.
Fig 1.8 Reloj de sol egipcio. fuente: A walk through time.
Los Egipcios realizaron el extraordinario
descubrimiento de que la aparición de la
“primera agua regenerada”, es decir el
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 8
comienzo de la crecida del Nilo, coincidía
con el día en que la estrella Sothis (Sirio
hoy) se levantaba por encima del
horizonte al mismo tiempo que el sol y que
entre ese día y la siguiente crecida del
Nilo, existían exactamente 365 días.
Esto les permitió diseñar el primer
calendario solar conocido en la historia
(con 365 días), con años de 12 meses de
30 días más cinco días de fiesta al final
de cada año.
Respecto del año en que esto se realizó
existe una gran discrepancia puesto que
el Sol y Sirio solo presentan coincidencia
a lo largo de cuatro años consecutivos
cada 1.460 años. Esto significa que los
egipcios pudieron elaborar su calendario
solar entre el 2.785 y el 2.782 a.C. o
entre el 4.245 y el 4.242 a.C. Si la
segunda fecha es aceptada, entonces el
calendario Egipcio sería el primer
calendario conocido.
De cualquier modo, este fue el primer
calendario solar de 365 días y solo fue
modificado cerca del año 238 bajo el
reinado de Ptolomeo para agregar un día
complementario para plena coincidencia
entre el calendario oficial y la crecida del
Nilo con el pasar de los años (recuerde
que el año real estacional tiene 365,25
días).
Todas las civilizaciones desarrollan una
teoría cosmológica sin variaciones. La
tierra es el centro del Universo y la
creación y su evolución es explicada en
forma cada vez más sofisticada y precisa,
pero su base fundamental es el cuerpo
teológico politeísta.
Son los dioses quienes proveen, castigan y
premian y su comportamiento es reactivo
en base al comportamiento de los
hombres. Su respuesta puede modificarse
en base a actos de ofrenda y sacrificios y
apego a determinadas normas establecido
por los sacerdotes. En estos cae también
fundamentalmente, la tarea de observar,
medir y determinar el tiempo y el
calendario, así como la evolución de los
cuerpos celestes así como de anunciarlo a
la comunidad no ilustrada, entre los que
se incluían los miembros de la autoridad
administrativa y militar.
Se observa un gran desarrollo en la
Astronomía, aunque en la forma que hoy
día más bien conocemos como astrología,
lo que probablemente tiene una influencia
de las civilizaciones del medio oriente que
hemos analizado. Al respecto, aún hay

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 9
extraordinaria controversia entre los
autores, pero parece de sentido común
que en esa época ya hubiera cierta
comunicación comercial, cultural y militar
entre ellas.
Cosmología Griega.
Con el advenimiento de la civilización
Griega se da el salto cualitativo y
cuantitativo más importante conocido
hasta el momento en un período muy
breve de tiempo (aproximadamente entre
el siglo VIII y el siglo I a.C.), no solo en
las aproximaciones cosmológicas, sino en
todos los ámbitos del pensamiento
humano.
Hasta ese momento, las aproximaciones
cosmológicas así como el desarrollo de
otras áreas como la matemática, la
literatura, las artes, la política, etc. no
habían logrado constituirse en un cuerpo
sistemático del conocimiento ni sus
explicaciones establecidas como
principios.
El desarrollo del conocimiento en Grecia
probablemente se debe al gran período de
prosperidad que obtuvieron gracias a sus
campañas militares y a la organización del
imperio bajo bases administrativas
sólidas.
Esto permitió que un gran número de
pensadores pudieran dedicarse por
entero en condiciones de tranquilidad
social y económica notables y únicas hasta
ese momento.
En el tema que nos ocupa destaca
claramente Aristóteles (384 al 322 a.C.).
Aristóteles nació en Stágira en el norte
de Grecia su padre era el médico de
Amyntas II el rey de la cercana
Macedonia, padre de Filipo II y abuelo de
Alejandro el Grande. La temprana muerte
del padre hace que Aristóteles fuera
criado por un guardia del palacio, llamado
Proxenus.
A los 18 años entró en la escuela de
Platón en Atenas, donde en los siguientes
años se destacó como el más brillante
discípulo que hubiera estado allí.
Entre el 343 y el 336 a.C. Aristóteles fue
invitado por Filipo II para supervisar la
educación de su hijo Alejandro
(posteriormente llamado Alejandro el
Grande por sus extraordinarias campañas
militares y organización de uno de los más
grandes imperios de la historia).
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 10
Alrededor del 334 a.C. Aristóteles llega a
Atenas y funda una escuela denominada
Lyceum, cuyos discípulos se conocen como
peripatéticos, expresión que proviene de
una expresión griega que significa algo así
como “caminando alrededor”, debido a la
costumbre de Aristóteles de enseñar a
sus discípulos mientras caminaban.
En el ínter tanto Alejandro ha
emprendido una activa campaña militar
que le permitió anexarse Grecia,
Alejandría y gran parte del imperio Persa
hasta el valle del río Indo. Alejandro
había llegado a convertirse en rey
durante el año 336 luego del asesinato de
su padre Felipe II.
El ejército conquistador no solo anexa y
asuela estos territorios, sino que se nutre
de lo más granado del conocimiento
existente allí, produciéndose un gran
intercambio que trae como consecuencia
un notable avance en el desarrollo de las
nacientes ciencias. Alejandro recolecta
gran parte de los escritos encontrados y
funda una gran biblioteca en Alejandría,
uno de sus grandes aportes al
conocimiento.
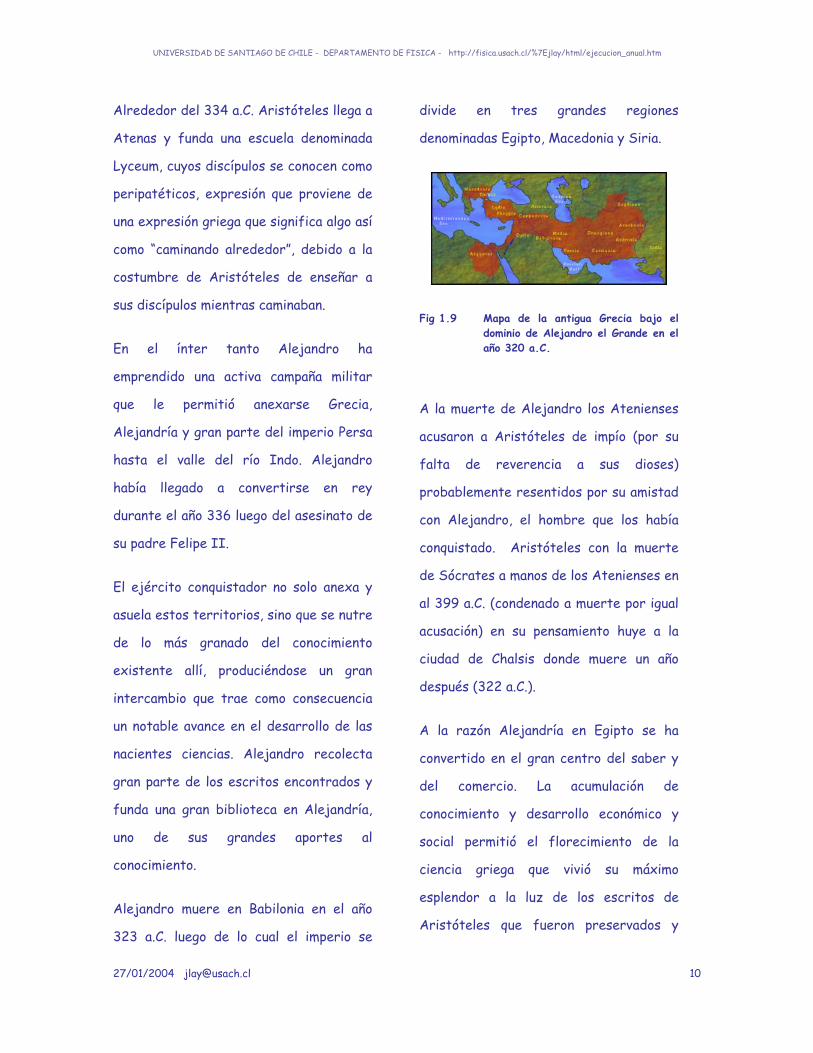
Alejandro muere en Babilonia en el año
323 a.C. luego de lo cual el imperio se
divide en tres grandes regiones
denominadas Egipto, Macedonia y Siria.
Fig 1.9 Mapa de la antigua Grecia bajo el dominio de Alejandro el Grande en el año 320 a.C.
A la muerte de Alejandro los Atenienses
acusaron a Aristóteles de impío (por su
falta de reverencia a sus dioses)
probablemente resentidos por su amistad
con Alejandro, el hombre que los había
conquistado. Aristóteles con la muerte
de Sócrates a manos de los Atenienses en
al 399 a.C. (condenado a muerte por igual
acusación) en su pensamiento huye a la
ciudad de Chalsis donde muere un año
después (322 a.C.).
A la razón Alejandría en Egipto se ha
convertido en el gran centro del saber y
del comercio. La acumulación de
conocimiento y desarrollo económico y
social permitió el florecimiento de la
ciencia griega que vivió su máximo
esplendor a la luz de los escritos de
Aristóteles que fueron preservados y

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 11
refinados. Euclides, Arquímedes, Hiparco
y muchos otros, construyen las bases de
la cultura que posteriormente se asienta
en occidente (Europa y las nuevas tierras
descubiertas por los grandes navegantes
muchos siglos después).
Los escritos de Aristóteles suelen
dividirse en tres grupos, denominados:
escritos populares, memoranda y
tratados.
Los primeros fueron escritos como
diálogos durante su permanencia en la
escuela de Platón y estaban destinados a
la difusión del conocimiento extramuros.
Ninguno de ellos fue preservado.
Los memoranda son una colección de
sucesos históricos y registros de
investigación destinados a la enseñanza
de los discípulos de Aristóteles, o como
fuentes de información. Algunos de ellos
fueron conservados, la mayoría se perdió.
Los tratados son escritos destinados a
convertirse en textos de estudio en el
Lyceum y son directamente resultado del
trabajo intelectual de alto nivel de
Aristóteles. Afortunadamente fueron
encontrados y preservados.
Aunque solo algunos de sus escritos han
sido rescatados, la mayoría de sus ideas
se conocen por los resúmenes y citas de
ellos en otros autores.
La obra de Aristóteles se ha preservado
mayormente gracias al trabajo de
Andrónico, quien la publicó luego de ser
encontrada en una cueva de Asia menor
200 años mas tarde.
Los principales tratados de Aristóteles
versan sobre: Lógica, Filosofía Natural,
Metafísica, Ética y Política y Literatura.
Este listado basta para entender la
importancia y magnificencia de la obra
intelectual de Aristóteles.
En lo que a nosotros interesa en este
curso, el tratado de Filosofía Natural,
considerado el primer libro de física,
incluye el primer esfuerzo metodológico
teórico en explicar los fenómenos
naturales y por tanto, se puede
considerar como la partida de las ciencias
naturales.
Para Aristóteles lo importante es el
cambio y el entendimiento del cambio. El
distingue a la materia de la forma, de tal
manera que una escultura de una persona
hecha de bronce contiene materia (el
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 12
bronce) y forma (la de una persona). La
materia puede cambiar adquiriendo nueva
forma, en consecuencia el cambio de la
materia es lo importante.
No es necesario explicar la espectacular
diferencia entre la forma de ver la
naturaleza desde una perspectiva teórica,
tratando de comprenderla y los esfuerzos
hechos por las culturas anteriores, que se
limitaban a observar y registrar, cosa que
hicieron con gran éxito, pero sin lograr
explicarlas.
Naturalmente el método que Aristóteles
usa para aproximarse a la naturaleza es la
Lógica, creada por el durante su período
Platónico. No es de extrañar entonces
que su estudio sobre el movimiento,
encontrado bajo el nombre de
“movimiento de los cuerpos celestes en el
cielo” estuviera basado en la especulación
lógica, en las observaciones propias o
heredadas y en los cambios ocurridos,
especialmente cuando algo parecía ser
creado o destruido.
Este tratado también incluye las primeras
aproximaciones serias a la psicología a
través del estudio de los sentimientos y
su relación con el cuerpo, y a la biología a
través de la publicación de una
extraordinaria cantidad de información
sobre la variedad, estructura y
comportamiento de animales y plantas.
Es necesario enfatizar que los estudios
de Aristóteles respecto de los
organismos vivientes están fuertemente
influidos por una visión teológica, es
decir, los estudia desde la perspectiva de
la los propósitos a los que sirven.
Aristóteles suponía que el Universo
estaba compuesto de cuatro elementos:
tierra, agua, aire y fuego; los chinos,
siglos VIII al V a.C. suponían la existencia
de cinco: agua, fuego, madera, metal y
aire; los hindúes, siglo V a.C. consideraban
cuatro: tierra, aire, agua y luz. Como se
observa, la imagen de la naturaleza
existente en esos años provenía de la
observación de ella, y en el caso de los
griegos, llegaron a concebir al universo
como “una especie de máquina gobernada
por leyes inmutables”.
Fig 1.10 "concepción griega del universo". Original de Pablo Ferrer

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 13
Tales leyes fueron deducidas por ellos a
través del razonamiento intelectual
(método deductivo), produciendo
bellas y complejas explicaciones de los
fenómenos naturales, aunque no llegaron a
concebir la necesidad de contrastarlas
con la realidad a través de la experiencia
en el mundo real.
Probablemente, esto se deba a que las
actividades manuales eran despreciadas
en ese instante entre los hombres libres
puesto que solo eran desempeñadas por
los esclavos, lo que motivó que el avance
científico no progresara aún más en
Grecia.
Sigamos una deducción Aristotélica para
entender bien esto: Según Aristóteles,
cada elemento tiene una tendencia
natural a alcanzar un “lugar natural” de
reposo. La tierra y el agua se mueven de
modo “natural” hacia el centro de la
Tierra, o sea, hacia abajo (“elementos
pesados”), y el aire y el fuego hacia la
periferia de la cuanto más se acerquen a
su “lugar natural”. Tierra, o sea, hacia
arriba (“elementos livianos”), siendo estos
movimientos tanto más rápidos
Adicionalmente, Aristóteles postulaba
que el movimiento de un objeto queda
determinado por la tendencia del
elemento más abundante; así, el
comportamiento del vapor que se eleva
desde una vasija en la que el líquido
hierve se explicaba como el movimiento
hacia arriba debido a la introducción del
elemento fuego como predominante. Una
consecuencia de este punto de vista era
que “el movimiento de un objeto hacia
abajo o hacia arriba es gobernado por el
balance de los elementos, de tal manera
que su velocidad es proporcional a la
cantidad del elemento predominante”.
Fig 1.11 "Los cuatro elementos". Original de Pablo Ferrer
Así, una piedra grande, que contiene
evidentemente más tierra que una
pequeña, debe descender mucho más
rápidamente que esta cuando se le
permita ejecutar un movimiento natural
de caída libre. Las observaciones

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 14
parecían probar esto, pero los
experimentos hechos muchos siglos
después demostraron que ambas caerían
con igual rapidez, si no fuera por la
resistencia del aire.
Aún así, se observa un notable avance en
el desarrollo del conocimiento de la
Naturaleza y de los principios que la
gobiernan, en estos trabajos.
En orden de no dejar una visión errónea
de los pensadores griegos, hemos de
destacar que su propuesta metodológica,
no muy eficiente en esta área del
conocimiento, resulta muy exitosa en el
campo de la geometría (incluso, hasta hoy
resulta invaluable la recopilación de los
teoremas matemáticos realizada por
Euclides alrededor del año 300 a.C. cuyos
axiomas y pruebas son básicas en el
entendimiento de la geometría plana).
Sus técnicas de abstracción y
generalización son vitales para el éxito
del desarrollo de la teoría matemática, e
incluso ocupadas en otros campos del
conocimiento con éxito relativo.
Para Aristóteles y los griegos la
estructura del Universo contenía a la
Tierra en su centro (esférica) que poseía
el excepcional atributo de atraer hacia su
centro a todas las cosas materiales, de
tal manera que ese punto al que se
dirigían era el centro del Universo.
Los siete planetas observados por los
antiguos astrónomos (Luna, Sol, Mercurio,
Venus, Marte, Júpiter y Saturno)
evidentemente cruzaban el cielo girando
en círculos concéntricos alrededor del
punto central ubicado en el centro de la
Tierra, moviéndose con velocidad
constante.
Fig 1.12 El cosmos según los griegos.
De esta manera, su visión cosmológica
incluía el movimiento de los cuerpos en las
cercanías de la tierra, teoría impecable
desde el estado del conocimiento de la
época que consideraba al círculo como la
forma perfecta y una bella estructura
teórica.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 15
Si bien es cierto todas las cosas se
corrompen (el hierro se oxida, las plantas
y los animales se mueren y se pudren,
cambiando hacia la imperfección, el
universo más allá de los planetas debía
estar compuesto de una sustancia
inmutable e incorruptible, la quinta
esencia, que Aristóteles denominó “éter”.
Durante el período griego hubo algunos
intentos de elaborar teorías
heliocéntricas, destacando la de
Aristarco de Samos, quien midió la
distancia entre el sol y la tierra y entre
la luna y la tierra, (una proeza de la
geometría y la imaginación), quien propuso
al Sol como centro, aunque por razones
puramente estéticas y se tropezó con el
inmenso prestigió de la obra de
Aristóteles por lo que no progresó
(aunque fue recogida muchos siglos más
tarde por los científicos del
renacimiento).
Finalmente el imperio sucumbe al
advenimiento del Imperio Romano en al
año 197 a.C. bajo el reinado de Felipe V,
convirtiéndose Grecia en una provincia,
del nuevo orden administrativo, en
territorios que en épocas actuales se
encuentra Egipto.
En Alejandría se sigue trabajando aunque
el nuevo Imperio no le da al desarrollo del
conocimiento la importancia que hasta ese
momento había tenido, lo que finamente
provoca un período de oscurecimiento
notable.
No obstante, en el año 146 a.C. el
astrónomo y Astrólogo Ptolomeo escribe
una obra sensacional, quizás si la última
gran obra de la civilización Greco-Egipcia,
denominado el Almagesto.
A la fecha, las extraordinariamente
elaboradas observaciones matemáticas
ponían en aprietos algunas de las bases
cosmológicas aristotélicas, las que no
explicaban el movimiento retrógrado y la
velocidad variable de algunos cuerpos
celestes.
El Almagesto, escrito en 13 tomos,
contiene la teoría cosmológica
Aristotélica, con un punto de vista
matemático mas elaborado, incluye el
concepto de epiciclos para explicar el
movimiento retrógrado de los planetas y
proporciona una extraordinaria cantidad
de datos, tablas y diagramas que
impresionan aun hoy día.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 16
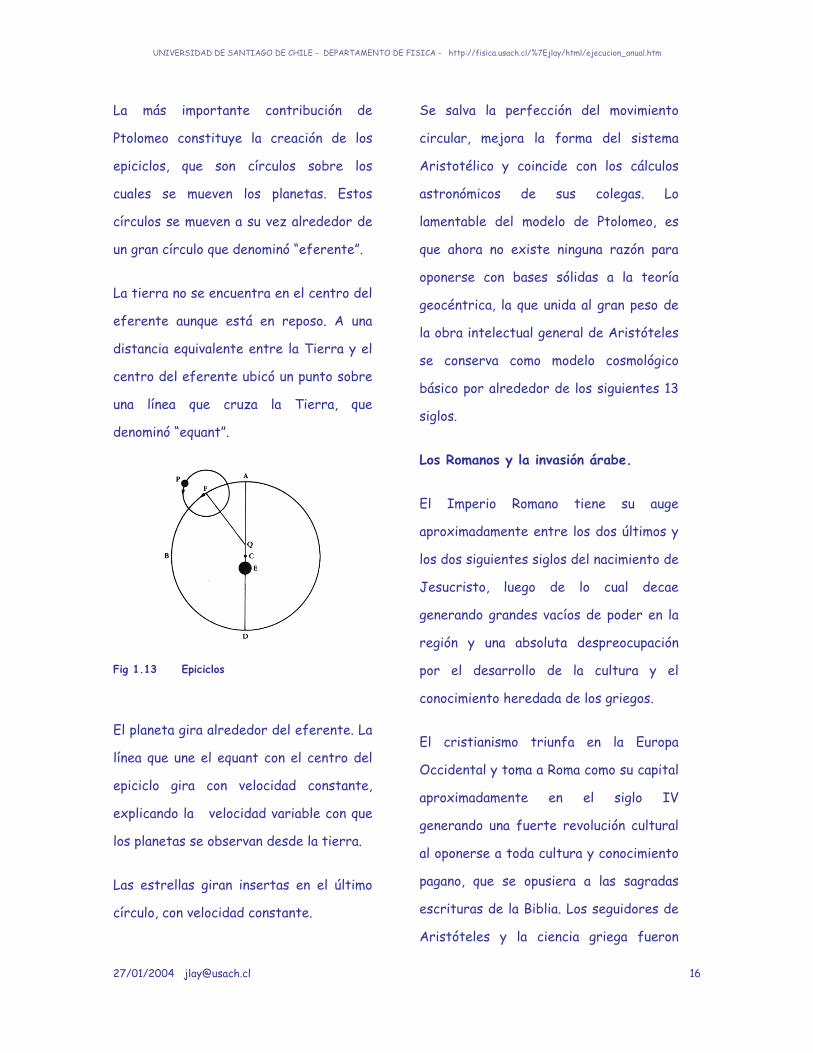
La más importante contribución de
Ptolomeo constituye la creación de los
epiciclos, que son círculos sobre los
cuales se mueven los planetas. Estos
círculos se mueven a su vez alrededor de
un gran círculo que denominó “eferente”.
La tierra no se encuentra en el centro del
eferente aunque está en reposo. A una
distancia equivalente entre la Tierra y el
centro del eferente ubicó un punto sobre
una línea que cruza la Tierra, que
denominó “equant”.
Fig 1.13 Epiciclos
El planeta gira alrededor del eferente. La
línea que une el equant con el centro del
epiciclo gira con velocidad constante,
explicando la velocidad variable con que
los planetas se observan desde la tierra.
Las estrellas giran insertas en el último
círculo, con velocidad constante.
Se salva la perfección del movimiento
circular, mejora la forma del sistema
Aristotélico y coincide con los cálculos
astronómicos de sus colegas. Lo
lamentable del modelo de Ptolomeo, es
que ahora no existe ninguna razón para
oponerse con bases sólidas a la teoría
geocéntrica, la que unida al gran peso de
la obra intelectual general de Aristóteles
se conserva como modelo cosmológico
básico por alrededor de los siguientes 13
siglos.
Los Romanos y la invasión árabe.
El Imperio Romano tiene su auge
aproximadamente entre los dos últimos y
los dos siguientes siglos del nacimiento de
Jesucristo, luego de lo cual decae
generando grandes vacíos de poder en la
región y una absoluta despreocupación
por el desarrollo de la cultura y el
conocimiento heredada de los griegos.
El cristianismo triunfa en la Europa
Occidental y toma a Roma como su capital
aproximadamente en el siglo IV
generando una fuerte revolución cultural
al oponerse a toda cultura y conocimiento
pagano, que se opusiera a las sagradas
escrituras de la Biblia. Los seguidores de
Aristóteles y la ciencia griega fueron
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 17
expulsados de Alejandría y su biblioteca
quemada.
La parte oriental del Imperio Romano aún
mantiene su control con capital en
Constantinopla en lo que antes era la
provincia griega denominada Bizancio. Por
esto a este período se le conoce como
Bizantino. El legado de Aristóteles se
preserva, pero no progresa.
Durante el siglo VII se instala en Europa
el Imperio Islámico, que llega a controlar
India, Persia, Siria, Egipto, el norte de
África y a España a través del estrecho
de Gibraltar, hasta el siglo XII.
Si bien los árabes terminan de quemar la
biblioteca de Alejandría, causando un
daño irreparable a la conservación de las
culturas griega egipcia y cristiana, no
deben ser considerados como un grupo de
salvajes que devastaron la civilización.
Por el contrario, como no había sucedido
desde los lejanos tiempos de Alejandro
Magno, los árabes trasladaron los
escritos encontrados durante su invasión
al centro de su imperio, situado en la
ciudad de Bagdad, donde los escritos
fueron traducidos del griego al árabe,
estudiados y enseñados. Su propio
conocimiento sobre astronomía, ciencias
naturales y matemáticas, incluyendo su
sistema numérico han engarzado de
manera magnífica, aunque por estar en
árabe y ser de dominio de los
conquistadores, no permearon el cuerpo
intelectual ni cultural de los conquistados.
No es sino hasta el siglo XII luego de la
derrota de los árabes a manos del
Cristianismo que las traducciones del
árabe al latín devuelven a Occidente los
escritos de los griegos.
Desafortunadamente, habrían de ser
sometidos a la censura de la Iglesia a fin
de que no se enseñara ni preservara
ningún vestigio de las culturas paganas de
los escolásticos, ni herejes de los
musulmanes, de tal manera que pasaron
largos años antes de ser transferidos a la
nueva generación de científicos de la
Europa occidental.
Quién produce el trabajo de conciliación
más notable en este empeño es el fraile
Tomás de Aquino (1225-1274), quien le
dedicó su vida entera.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 18
1.1.4 La Física y el renacimiento.
En la edad media, la imagen de la
naturaleza era en primer lugar, lo creado
por Dios, limitándose a una descripción
tan viva e intuitiva como fuera posible, y
a aceptar los postulados de los griegos.
La verdad filosófica de los escolásticos,
herederos de la filosofía aristotélica, fue
la base del pensamiento cristiano en
Europa, a partir de las enseñanzas de
Tomás de Aquino y sus seguidores. Se
estableció que el Universo y todo lo que
en ha sido creado están para satisfacer al
hombre y que el hombre ha sido creado
para satisfacer a Dios.
Según este esquema, el sol sirve para
darnos luz, las estrellas y los planetas
distribuyen su influencia maléfica o
maléfica a los objetos situados sobre la
Tierra, a los cuales están vinculados; las
plantas y los animales existen para dar
alimento y bienestar a los hombres, y
estos existen para agradar a Dios.
Naturalmente, bajo estos conceptos, a la
gente de esa época le habría parecido una
insensatez querer ahondar en el mundo
material prescindiendo de Dios.
Fig 1.14 “El hombre creado para satisfacer a dios”. Original de Pablo Ferrer
Esto es entendido plenamente a la luz de
que entre los siglos VII y XIII las
universidades en Europa bajo el amparo
de la Iglesia trabajan arduamente en el
restablecimiento del saber, traduciendo
los monjes los manuscritos (del griego y
del árabe) que llegaban a través de
mercaderes y caballeros que participaban
en las cruzadas en el oriente.
La traducción inalterada de los
manuscritos de Aristóteles fue
apadrinada por la Iglesia y propagada
como la verdad absoluta hasta
aproximadamente los años de 1550 d.C.
No obstante, ha de reconocérsele a la
Iglesia su contribución al
restablecimiento y propagación de la
instrucción y la ciencia, aunque no de su
avance.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 19
Este período que se pudiera denominar el
renacimiento de la Física, tiene sus raíces
en dos fuentes: por un lado, la aparición
de notables pensadores que realizan
propuestas distintas a las enseñadas por
los escolásticos y por otra parte, se
observa un cambio radical en las
concepciones de la naturaleza.
Fig 1.15 “La iglesia y la ciencia”. Original de Pablo Ferrer
Es necesario acotar que en la primera
parte del siglo XVI, aparecen
universidades dedicadas al estudio e
investigación fuera del ámbito de la
Iglesia, financiadas por los ricos
mercaderes cuya fortuna provenía del
aumento y desarrollo del comercio.
Antes, hemos de citar a Roger Bacon
(1214 a 1294 d.C.), que sostenía que las
creencias deben estar en la observación y
la experimentación, (lo que le significó
que pasara casi una tercera parte de su
vida en la prisión); a Leonardo da Vinci
(1452 a 1519 d. C.), de extraordinarios
conocimientos y autor de visionarios
escritos en casi todos los campos de las
artes y de las ciencias.
Fig 1.16 Roger Bacon
Ambos, adelantados a su época,
carecieron de gravitación, siendo
reconocidos solo en épocas recientes.
Fig 1.17 Grabado de Leonardo da Vinci: Estudio geométrico de las dimensiones del cuerpo humano.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 20
Dentro de los pensadores renacentistas,
destaca Nicolás Copérnico (1473 a 1543;
nacido en Torun, Polonia), quien recibió
una buena educación humanista en la
Universidad de Cracovia, y un grado en
Derecho Canónico en la Universidad de
Ferrara. Posteriormente se trasladó a
Italia, estudiando medicina en la
Universidad de Padua. En sus estudios,
se preparó en ciencias matemáticas,
consideradas relevantes pues los médicos
hacían uso de la Astrología.
Fig 1.18 Nicolas Copérnico
En 1513 escribió un breve informe de lo
que luego se denominó teoría Copernicana,
proponiendo al Sol como centro del
Universo en lugar de la Tierra.
Una versión completa de esta teoría fue
lentamente desarrollada por Copérnico y
publicada recién en 1543 en Nuremberg,
con el nombre: “Sobre las revoluciones de
los orbes celestes” (De revolutionibus
orbium coelestium).
Este libro, cuya primera copia fue
recibida por Copérnico en su lecho de
muerte, da cuenta del movimiento de la
Tierra y fue severamente criticada por la
gran mayoría de sus contemporáneos, y
por los astrónomos y filósofos naturales
de las siguientes generaciones, hasta
mediados del siglo XVII. La razón
principal de este rechazo está en la
contradicción de los postulados de la
física de Aristóteles y las enseñanzas de
la Iglesia.
Recordaremos que para los griegos el
universo tenía carácter geocéntrico (la
tierra era su centro), de acuerdo con los
postulados de Ptolomeo.
Desde épocas muy anteriores a los
griegos, se pensaba que la Tierra estaba
fija y rodeada de cuerpos luminosos
ubicados en una cubierta esférica, entre
los que se podían distinguir dos clases:
aquellos que se mueven en círculos
perfectos alrededor de la Tierra, y en
aquellos que se mueven según patrones
erráticos complejos alrededor de la
Tierra, que luego los griegos denominaron
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 21
Planetas (palabra que en griego significa
“errantes”).
Ptolomeo dos siglos antes de la era
cristiana realiza una formalización más
detallada de esta teoría, proponiendo que
los Planetas también se mueven en órbitas
circulares (epiciclos), conceptos que
prevalecieron por casi 1400 años.
Por otra parte, resultaba inaceptable
para la Iglesia el postulado de que la
Tierra se moviera alrededor del sol
arrastrando a la Luna en ese giro,
contradiciendo el texto bíblico, que en
su salmo 104 reza: “¡Dios mío, que grande
eres!, Tú asentaste la Tierra,
inconmovible para siempre jamás”.
Copérnico, desarrolló su teoría con la
observación y la razón. Con su modelo se
explicaban mucho mejor los movimientos
de los Planetas e incluso explicaba algunas
observaciones que la teoría geocéntrica
no podía, como por ejemplo el aparente
hecho de que los Planetas invierten el
sentido de su marcha, y las fases de
Venus.
La Sagrada Congregación del Índice de la
Inquisición finalmente censura De
revolutionibus, declarándolo contrario a
las enseñanzas de las Sagradas
Escrituras, escribiendo la expresión
“hipotéticos” ante los pasajes que
proponían a la tierra moviéndose.
No obstante, no lo prohíbe, pues dentro
del clero los Cardenales Bonifacio Caetani
y Maffeo Barberini (luego fue Papa, y
tomó el nombre de Urbano VIII)
opinaban que proponía importantes
reformas a la Astronomía de la que
dependía el calendario y la determinación
precisa de la Pascua.
Casi 50 años después en 1592, Tycho
Brae (1546 a 1601, nacido en Knudstrup,
Dinamarca), postula un modelo que no
contradice los postulados de la Iglesia y
conserva iguales explicaciones
matemáticas que las ofrecidas por
Copérnico: La tierra está fija en el
centro, el Sol gira alrededor de ella,
arrastrando a sus Planetas con él.
Fig 1.19 Tycho Brae
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 22
Si bien es cierto hoy se sabe que esta
teoría no es válida, tiene el valor central
que fueron hechas a partir de datos
experimentales realizados durante 20
años sobre los Planetas y las 777
estrellas visibles a simple vista con solo
un sextante y una brújula grandes.
Fig 1.20 “El sol es el centro”. Original de Pablo Ferrer
A la muerte de Brae, su asistente que
desde 1599 lo ayuda con sus cálculos
matemáticos, Johannes Kepler (1571 a
1630, nacido en Weil del Satdt, Alemania,
que en ese entonces formaba parte del
Sagrado Imperio Romano) de religión
Protestante, lo reemplaza en su cargo de
Matemático Imperial en la corte del
Sagrado Emperador Romano, Rudolph II.
Kepler estudiaba en la Universidad de
Tübingen, cuando por sus notables
habilidades matemáticas fue nombrado
asistente de Michel Mastlin, su profesor
de Astronomía.
Fig 1.21 Johannes Kepler
Ya en 1596 había publicado su libro
Mysterium Cosmographicum, que apoyaba
a Copérnico dándole una explicación
matemática a su estructura en función de
poliedros regulares.
Los datos heredados de Brae, le permiten
concluir que Copérnico está en lo cierto,
pero las órbitas deben ser elípticas
planas en lugar de circulares, que el Sol
se encuentra en un foco, que una línea que
une el Planeta y el Sol recorre áreas
iguales en iguales períodos de tiempo y
que el cuadrado del período orbital de
cualquier Planeta es proporcional al cubo
del semi eje mayor de la órbita elíptica
(formula las 3 famosas leyes que llevan su
nombre).
Desde un punto de vista puramente de
procedimiento sin embargo, solo se ha
cambiado a la Tierra por el Sol, y se han
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 23
descubierto las relaciones matemáticas
entre los cuerpos celestes involucrados
(para hacer justicia a Kepler, diremos que
la introducción de órbitas elípticas es una
extraordinaria contribución por cuanto
implica uno de los grandes cambios de la
visión respecto de la perfección de lo
circular).
Por otra parte, en Kepler aún subsiste la
idea medieval de que la ciencia es un
medio para la elevación del espíritu, una
vía para hallar reposo y consuelo en la
contemplación de perfección del Universo
creado.
En consecuencia, se sigue despreciando
lo empírico considerando a la experiencia
como un medio fortuito de descubrir los
hechos que pueden mucho mejor ser
descubiertos solo con la razón y los
principios (deducción). Así, leer la obra
de Dios (la Naturaleza), no constituye
más que el hecho de descubrir las
relaciones entre las cantidades y las
figuras geométricas.
Dice Kepler: “ La Geometría, eterna como
Dios y surgida del espíritu divino, ha
servido a Dios para formar el mundo, para
que este fuera el mejor y más hermoso, el
más semejante a su creador”; “ veamos en
efecto, que Dios ha intervenido en la
formación del Universo siguiendo un
orden y una regla, asemejándose a un
arquitecto humano y disponiéndolo todo
de tal modo que pudiera creerse que,
lejos de haber tomado el arte por modelo
a la Naturaleza, el propio Dios se ha
inspirado para su creación en los modos
de construir del futuro hombre” . (A
pesar de esto, su trabajo puede
considerarse como un notable adelanto al
considerar la observación como método
experimental, y el desarrollo matemático
que justifican esas observaciones son de
gran valor metodológico).
En este punto aparecen tres pensadores
notables, que revolucionan completamente
la forma de acceder a la verdad científica
y al concepto de la Naturaleza: Galileo
Galilei (1564 a 1642, nacido en Pisa,
Italia), Roger Bacon (1561 a 1626, Gran
Bretaña) y René Descartes (1596 a 1650,
Francia).
Fig 1.22 Galileo Galilei
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 24
Galileo estudió medicina en la Universidad
de Pisa, pero pronto derivó hacia las
matemáticas y a la mecánica. En 1952
empezó a enseñar matemáticas en la
Universidad de Padua.
Galileo es considerado el padre de la
física experimental; con él toma fuerza el
razonamiento inductivo como una
herramienta científica, al poner a prueba
experimentalmente a los postulados de la
física Aristotélica y principalmente, a los
postulados de la teoría heliocéntrica de
Copérnico.
Fig 1.23 Rene Descartes
Quizás si esto último es el hecho más
impactante recogido en la literatura. En
1609 Galileo construye un telescopio (lo
llamó perspicillium), probablemente
influido por los trabajos sobre óptica de
Kepler y los primitivos aparatos ya
construidos en Holanda en esos años y
con él empieza a observar el cielo,
quedando hondamente impresionado por
sus descubrimientos, que incluyeron la
presencia de montañas en la Luna), el
hecho de que la Vía Láctea era un
conglomerado de innumerables estrellas y
las Lunas de Júpiter.
Sus observaciones le permiten publicar el
libro Sidereus Nuncius (El Mensajero
Sideral) y obtener un empleo de
matemático en la corte de Fernando II
de Medici.
Pronto realiza el espectacular hallazgo de
las fases de Venus que confirmaba la
teoría Heliocéntrica, motivándole a
defender imprudentemente a Copérnico.
Conminado a demostrar que la teoría de
Copérnico no contradice a las Sagradas
Escrituras, Galileo redactó un escrito en
el que además de ilustrar su
descubrimiento opina que “la Biblia enseña
como ir al cielo, pero no como van los
cielos”.
Tales expresiones de Galileo, cuya
conocida creencia de que a la verdad no
se llega solo por el camino de los teólogos,
provocaron finalmente la censura de De
Revolutionibus y a la solicitud del
Cardenal Bellarmino hacia Galileo en
orden de no defender la teoría
Copernicana. Galileo accede, pero al

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 25
advenimiento del Papa Urbano se le
concede permiso para escribir un libro
que contrastara imparcialmente las
teorías heliocéntrica y geocéntrica.
Fig 1.24 "la Biblia enseña como ir al cielo, pero no como van los cielos". Original de Pablo Ferrer.
Finalmente publica su famoso “Diálogo
sobre los dos máximos sistemas del
mundo” (Dialogo sopra i due Massimi
Sistemi del Mondo, escrito en Italiano y
no en Latín que era lo usual en la época
para la ciencia) en Florencia, en 1632.
Sin embargo, en el diálogo el personaje de
nombre Salviati presenta la postura de
Galileo de tal manera que convence
siempre a otro personaje de nombre
Sagredo, hombre de mundo,
despierto y que hace preguntas
inteligentes y un tercer personaje de
nombre Simplicio (que evoca el de
simplón), presentando los argumentos de
Aristóteles y del Papa mismo.
El agravio a este y la descarada defensa
de la teoría Copernicana finalmente
producen que la Inquisición lo condene a
arresto domiciliario hasta su muerte en
1642.
Fig 1.25 Portada del “Diálogo sobre los dos máximos sistemas del mundo”
Pero lo verdaderamente notable es que en
este escrito se intenta mostrar que a
partir del libro de la Naturaleza se puede
establecer que una visión del mundo es
mucho más plausible que a través de las
Sagradas Escrituras y la simple
deducción. Este ha sido el método de la
ciencia desde entonces.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 26
Conviene detenerse aquí para revisar las
diferencias esenciales entre ambos
métodos (encontrados en la lógica
Aristotélica, a pesar de que Aristóteles y
sus seguidores, como hemos dicho,
prefiere el deductivo).
A través del método inductivo se
obtienen conclusiones generales a partir
de casos particulares; por ejemplo, se
puede concluir que debido a que las
gallinas ponen huevos, los avestruces
ponen huevos, etc. entonces las aves son
ovíparas.
Fig 1.26 "Leyendo el libro de la naturaleza". Original de Pablo Ferrer.
Sin embargo, no hemos probado la
conclusión, de manera tal que basta un
contra ejemplo para hacerla invalida; es
decir, el método inductivo no conduce a
una verdad indudable.
El método deductivo en cambio, alcanza
conclusiones verdaderas si son alcanzadas
a través de deducciones lógicas a partir
de premisas verdaderas. El problema con
este método, es que la conclusión resulta
falsa si las premisas son falsas.
Lo que propone Galileo en su Diálogo y en
su trabajo en general, es más refinada
que la inducción; era un inicio de lo que
ahora llamamos método hipotético-
inductivo: la contrastación de un modelo
hipotético que, a medida que va
superando con éxito cada prueba,
adquiere una verosimilitud más
convincente (hoy a eso le llamamos
“modelo”).
Por otra parte, es importante recalcar
que esta visión de Galileo (principio de la
alternancia entre la hipótesis y la
experiencia) cambia por completo la visión
de la Naturaleza. La mente humana
desarrolla presuposiciones para la
observación de la Naturaleza y debe
hacerlo en forma matemática y con todo
rigor lógico. Pero este rigor no implica
nada acerca de la efectiva realización en
la Naturaleza de aquellas conexiones
presupuestas. Para alcanzar el rango de
leyes naturales, las presuposiciones
deben ser transformadas en hipótesis,

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 27
aplicadas a la experiencia y por esta
verificadas. Las presuposiciones que en sí
son lógicas y matemáticas, pero no
corresponden a nada en la Naturaleza, no
quedan menoscabadas en su rigor, pero no
constituyen leyes naturales.
Pero Descartes fue más lejos. Descartes
nació en el seno de una noble familia
francesa, y a los 10 años de edad
comenzó sus estudios de la totalidad del
conocimiento occidental, incluyendo:
lógica, ética, metafísica, literatura,
historia, ciencia y matemáticas. Luego
de graduarse en leyes, terminó por opinar
que el conocimiento que le habían
mostrado era intelectualmente
inaceptable.
Descartes, entonces de 20 años, se
enrola en el ejército y se ve involucrado
en la Guerra de los Treinta Años, pero
aún así no descansa en su tarea en su
tarea de encontrar una solución para
alcanzar el conocimiento de manera más
satisfactoria que lo que le habían
enseñado.
Contando solo 23 años, en 1619,
Descartes publica su famoso “Discurso
sobre el Método”, en el cual, da cuenta de
cuatro reglas que han de seguirse para
alcanzar la verdad. Estas reglas son, en
sus palabras:
“Primero, no admitir jamás nada por
verdadero sin antes conocer que
evidentemente era tal: es decir, evitar
minuciosamente la precipitación y la
prevención, y no abarcar en mis juicios
nada más que lo que se presenta tan clara
y distintamente a mi espíritu que no
tuviera ocasión de ponerlo en duda.
Segundo, dividir cada una de las
dificultades en tantas partes como sea
posible y necesariamente para mejor
resolverlas.
Tercero, conducir por orden mis
pensamientos, comenzando por los
objetos más simples y más fáciles de
conocer para subir poco a poco, como por
grados, hasta el conocimiento de los más
compuestos, y aún suponiendo orden
entre aquellos que no se preceden unos a
otros.
Cuarto, hacer en todo enumeraciones tan
completas y revisiones tan generales que
tuviese la seguridad de no omitir nada.”
Descartes en sus escritos comenta que el
verdadero significado de su vida era
reformar el conocimiento y unificar las

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 28
ciencias: “he llegado a comprender los
fundamentos del maravilloso
descubrimiento de que todas las ciencias
están conectadas como una cadena”.
Esta es la primera manifestación escrita
de la idea de una teoría unificada, una
idea que ha llegado a convertirse en una
especie de “Santo Grial” para los físicos.
Si a los conceptos de Galileo y Descartes
le sumamos las ideas de Bacon respecto
de que el trabajo científico debe ser
guiado a través de cuatro pasos:
observación, medición, explicación y
verificación, se están completando las
ideas de lo que hoy conocemos como
Método Científico, que no es un conjunto
de procedimientos formales, sino más
bien una guía para explorar lo
desconocido, una actitud, una forma de
conducir a los sentidos humanos hacia la
verdad. El método puede ser usado en
cualquier disciplina y fuerza a los
científicos teóricos y a los científicos
experimentales a complementarse unos a
otros.
El mismo año que muere Galileo, nace
Isaac Newton (1643 a 1727) en la ciudad
de Woolsthorpe, Inglaterra. Newton
estudió en el Trinity College en
Cambridge.
Luego de obtener su grado, se encontraba
completamente dedicado a su vida
académica en la Universidad de
Cambridge, cuando a raíz de una epidemia
de peste fue cerrada por dos años (1666-
1668).
Newton se retira a una finca familiar en
Lincolnshire, donde realiza los más
grandes descubrimientos, los cuales
permiten que 20 años más tarde
desarrolle la Ley de Gravitación
Universal, un hito en la historia de la
física y de las ciencias.
Probablemente Newton sea la persona que
ha ejercido más influencia en nuestras
percepciones del mundo, no solo por su
obra en sí, sino que con su trabajo se
formaliza completamente una nueva
forma de entender la Naturaleza y los
fenómenos que en ella ocurren.
La influencia que estos hechos tienen en
la visión cosmológica del universo es
sencillamente revolucionaria y su
importancia es tal, que nos hemos
permitido extendernos en ellos para
entenderlos cabalmente.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 29
Con Newton el mundo no era
sencillamente la obra de Dios, que solo
puede ser comprendida en su conjunto.
Hasta entonces, los científicos se
limitaban a formular hipótesis cuidando
solo de la coherencia lógica, para
convertirlas luego en base de la
observación, pero con Newton se adquiere
certeza de que su formulación debe
hacerse en estrecha conexión con la
observación de la Naturaleza.
Según esto, el genio del científico se
muestra en la medida en que sus hipótesis
aprehenden sencillas relaciones entre
fenómenos naturales, las transformen en
conceptos matemáticos generales, y
presuponen siempre las ya adquiridas
explicaciones de los restantes
fenómenos.
Fig 1.27 Isaac Newton
Para Newton, los conocimientos se
derivan de los fenómenos y se generalizan
por inducción. En su obra máxima,
Principios Matemáticos de la Filosofía
Natural”, se lee en su Regla Cuarta: “En la
Física experimental, los teoremas
derivados por inducción de los fenómenos,
si no se dan presuposiciones contrarias,
deben ser tenidos por precisamente o
muy aproximadamente ciertos, hasta que
aparecen otros fenómenos gracias a los
cuales aquellos teoremas alcanzan mayor
precisión o son sometidos a excepciones.
Así debe hacerse, para que el argumento
de la inducción no sea abolido a fuerza de
hipótesis”.
Newton alcanza el conocimiento de la
impenetrabilidad, la movilidad y la fuerza
de percusión de los cuerpos, de las
famosas tres leyes del movimiento y de la
gravedad.
Al enunciar los postulados que definen
conceptos tales como los de masa, causa,
fuerza, inercia, espacio, tiempo y
movimiento, se constituye en el primer
sistematizador de la moderna ciencia.
Pero el momento culminante de la obra de
Newton se encuentra en su ley de
gravitación universal, (en la que tiene una
gran influencia Robert Hooke), que
permite someter a una sola ley

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 30
matemática a los fenómenos físicos más
importantes del universo observable. Con
ella demuestra que la física terrestre y la
física celeste son una misma cosa, lo que
representa un gran paso en el sentido
predicho por Descartes de la teoría
unificada.
Con la ley de gravitación universal, se
logra de un solo golpe: revelar el
significado físico de las tres leyes de
Kepler sobre el movimiento planetario,
resolver el intrincado problema del origen
de las mareas (equivocadamente
explicado por Galileo en su Diálogo), y dar
cuenta de la observación de Galileo
respecto de la independencia del peso en
el movimiento de caída libre de los
objetos.
Es interesante notar que muchos
científicos contemporáneos a Newton
habían realizado contribuciones
importantes a las ciencias a través de
métodos experimentales, entre los que se
pueden citar a Christian Huygens (1629 a
1695, Holandés), notable matemático y
físico, que propuso la teoría ondulatoria
de la luz en contraposición a los
postulados de Newton; Robert Boyle
(1627 a 1691, Inglés), y Edme Mariott
(1620 a 1684, Francés), que descubren la
ley de la presión de los gases; Blaise
Pascal (1623 a 1662, Francés), que
descubre la ley de la presión en los
fluidos; William Harvey (1578 a 1658) y la
circulación de la sangre; William Gilbert
(1540 a 1603), quien trata por primera
vez en su obra De Magnete los fenómenos
magnéticos; Evangelista Torricceli (1608
a 1643, Italiano), quien diseña el
Barómetro; Robert Hooke (1635 a 1703,
Inglés) con sus trabajos sobre
elasticidad; entre otros.
Fig 1.28 Robert Boyle
1.1.5 Física Clásica
Durante los siglos XVIII y XIX, los
físicos se forman una imagen mecanicista
y materialista del Universo (1700 a 1890).
En este período, el trabajo científico, fue
muy fértil, desarrollándose de tal modo
que la mecánica, el calor, la luz y la
electricidad se constituyeron en ramas

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 31
más o menos independientes, pero el
trabajo de Newton proporcionó el método
de integrarlas.
Fig 1.29 Pascal Huygens
El éxito de la física newtoniana fue tan
grande que al final de este período
parecía que se había alcanzado el
conocimiento pleno de los conocimientos
de la física, razón que permite designar a
esta física como física clásica.
Citaremos en la mecánica los trabajos de
Bernouilli (1700 a 1728) en hidrodinámica
y teoría de los gases; D’Alambert (1717 a
1783), Leonardo Euler (1707 a 1783,
Suizo), Lagrange (1736 a 1813) y Laplace
(1749 a 1827) en mecánica teórica (Euler
resolvió analíticamente los problemas
mecánicos; Lagrange estableció sus
célebres ecuaciones que contienen en
forma matemática toda la dinámica
clásica; con esto la mecánica alcanzó su
máximo desarrollo, quedando su
tratamiento en manos de los matemáticos
con el cálculo infinitesimal como
magnífico instrumento de trabajo); J.
Poncelet introduce el concepto de trabajo
mecánico; Poinsot, el concepto de par de
fuerzas en el estudio del movimiento
circunferencial; Rankine extiende los
conceptos de energía cinética y potencial
que habían sido enunciados por Leibniz;
entre otros.
En el campo del calor, al desarrollo de
termómetros y de escalas de
temperatura por parte de Galileo, se
suman los trabajos de Farenheit (1686 a
1736, Alemán) y otros autores; Black
(1728 a 1799) introduce los conceptos de
calor latente y calor específico; Watt
desarrolla la máquina de vapor; Joule
(1818 a 1889, Gran Bretaña), Rumford
(1753 a 1814, Estadounidense) y Rowland
(1848 a 1901) establecieron al calor como
una forma de energía; Carnot (1796 a
1832), Mayer (1814 a 1878), Helmholtz
(1821 a 1894), Kelvin (1824 a 1907,
Escocés), Clausius (1822 a 1888) y otros
establecieron las leyes fundamentales de
la termodinámica, en donde el concepto
básico de energía sirvió para unificar los
conceptos del calor con los de la
mecánica; finalmente mencionaremos a
Gibbs (1839 a 1903), cuyos trabajos en
termodinámica química y luego en
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 32
mecánica estadística están íntimamente
relacionados al calor.
Fig 1.30 Carnot Gibbs
Fig 1.31 kelvin Clausius
En el campo de la luz, finalmente
Michelson (1852 a 1931) determina el
valor de la velocidad de la luz; Young
(1773 a 1829) y Fresnel (1788 a 1827)
reviven los postulados ondulatorios de
Huygens; Malus (1775 a 1812) descubre el
fenómeno de la polarización de la luz por
reflexión, cuyo trabajo fue
complementado por Brewster (1781 a
1887).
El máximo aporte en este campo, lo hace
Maxwell (1831 a 1879), quien unifica los
campos de la luz y la electricidad, con su
teoría electromagnética.
Fig 1.32 Fresnel Maxwell
Fig 1.33 Volta Faraday
Durante el siglo XVIII la electricidad
recibió gran atención: Gray (1670
a1736), Du Fay (1698 a 1739), Franklin
(1706 a 1790), Cavendish (1731 a 1810) y
Coulomb (1736 a 1806) llevaron a cabo
significativos trabajos en
electroestática; Galvani (1737 a 1798) y
Volta (1745 a 1827) descubrieron la
corriente eléctrica. También realizaron
importantes aportes, Faraday (1791 a
1867), Oersted (1777 a 1851), Ohm (1789
a 1854), Henry (1797 a 1878), Ampere
(1775 a 1836), Wheastone (1802 a 1875),
Lenz (1804 a 1865), Kelvin (1824 a 1907),
Kirchhoff (1824 1887) y Hertz (1857 a
1894).
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 33
Fig 1.34 Franklin Ampere
Fig 1.35 Oersted Kirchhoff
En resumen, ya para 1890, se tenía la
impresión de que el estudio de la Física
como ciencia, había casi concluido y que
ya no se harían más descubrimientos
fundamentales. Sin embargo, el
descubrimiento del electrón, los rayos X
y la radioactividad, produce lo que hoy
denominamos Física Moderna, que es
materia de otro curso.
A pesar de esta nueva apertura al
conocimiento, la Física Clásica no deja de
tener validez, y sus aplicaciones a la
tecnología hoy aún son válidas y aquellas
provenientes de los nuevos conceptos, no
la ha reemplazado sino complementado;
de igual manera, la nueva física no puede
ser comprendida sin un conocimiento
profundo de la antigua, razones por la que
aún se estudia en nuestros tiempos.
1.1.6 Comentario.
Como hemos visto, hoy día el estudio de la
Naturaleza se realiza mediante el Método
Científico, que si bien se puede describir
a través de un cierto número de reglas,
es más bien una forma de enfrentar el
trabajo de desentrañar la verdad a
través de la hipótesis, la
experimentación, y los métodos inductivo
y deductivo.
La Física Clásica, se reduce al estudio de
las leyes de la mecánica clásica, la
termodinámica (calor, temperatura, y el
comportamiento de sistemas de
partículas) y electromagnetismo
(fenómenos eléctricos y magnéticos,
óptica y radiación); leyes que relacionan
los fenómenos en que intervienen las
propiedades generales de la materia.
La Física Moderna trata de las teorías
que dan cuenta de muchos de los
fenómenos que no pudo explicar la Física
Clásica, especialmente la mecánica
cuántica, y la teoría de la relatividad.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 34
De esta forma, parece adecuado definir a
la Física como “la ciencia de la materia y
la energía”, (con todas las dificultades de
hacer una definición, esta parece ser la
que hoy tiene más aceptación).
En el presente la física se ocupa
fundamentalmente de desentrañar los
misterios del cosmos y de los fenómenos
subatómicos. El gran quid de la ciencia
hoy día, es la Teoría del Campo Unificado
como predecía Descartes; la investigación
en el espacio exterior y en el mundo
subatómico, en el campo de la química, la
biología, y los procesos sociológicos, lenta
pero sostenidamente parecen indicar que
los fenómenos naturales están
encadenados inseparablemente, haciendo
necesario el cambio de los modelos
reduccionistas por holísticos.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 35
1.2 El Sistema Solar.
1.2.1 Datos generales.
El Sistema Solar pertenece a la Vía
Láctea, una galaxia en forma de espiral
que contiene unos 100 billones de
estrellas. El Sol se encuentra alejado del
centro de la galaxia, en el denominado
brazo de Orión.
El Sistema solar está compuesto por una
estrella central (el Sol), nueve planetas
mayores que se mueven alrededor de él
(Mercurio, Venus; Tierra, Marte, Júpiter,
Saturno, Urano, Neptuno y Plutón),
aproximadamente 64 satélites orbitando
los planetas, millones de asteroides,
billones de cometas, polvo y gas.
Fig 1.36 Vía Láctea. (copyright 1999. University of Michigan).
Con una edad aproximada de 5 billones de
años, está formado por un bello conjunto
de cuerpos celestes de diversas
conformaciones, dimensiones y colores.
Fig 1.37 Imagen artística de los planetas del Sistema Solar, excepto Plutón. (imagen cortesía NASA/JPL).
El siguiente cuadro muestra los datos
relevantes del Sistema Solar, que
permiten una idea de sus dimensiones, de
sus distancias y de sus movimientos de
rotación sobre sus ejes y de traslación
alrededor del Sol.
Estadísticas de cuerpos del Sistema Solar
Diámetro ecuador
(Km)
Distancia promedio
al sol (106 Km)
Período orbital (año)
Período de
rotación (día)
Sol 1.392.530 25,4 días Mercurio 4.878 58 88 días 58,6 días Venus 12.104 108 225 días 243 días Tierra 12.756 150 1 año 1 día Marte 6.794 228 1,9 años 24,6 hrs. Júpiter 142.800 778 11,9 años 9,8 hrs Saturno 120.000 1.427 29,5 años 10,2 hrs Urano 52.000 2.870 84 años 16-28 hrs Neptuno 48.400 4.497 164,8 años 18-20 hrs Plutón 2.385 5.899 247,7 años 6,3 días Fuente: Planetary Sciences. NSSDC.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 36
La distancia entre la Tierra y el Sol es
habitualmente indicada como 1 unidad
astronómica (1 UA = 149.598.000 Km) y la
distancia entre cuerpos celestes a veces
se indica en términos de este patrón.
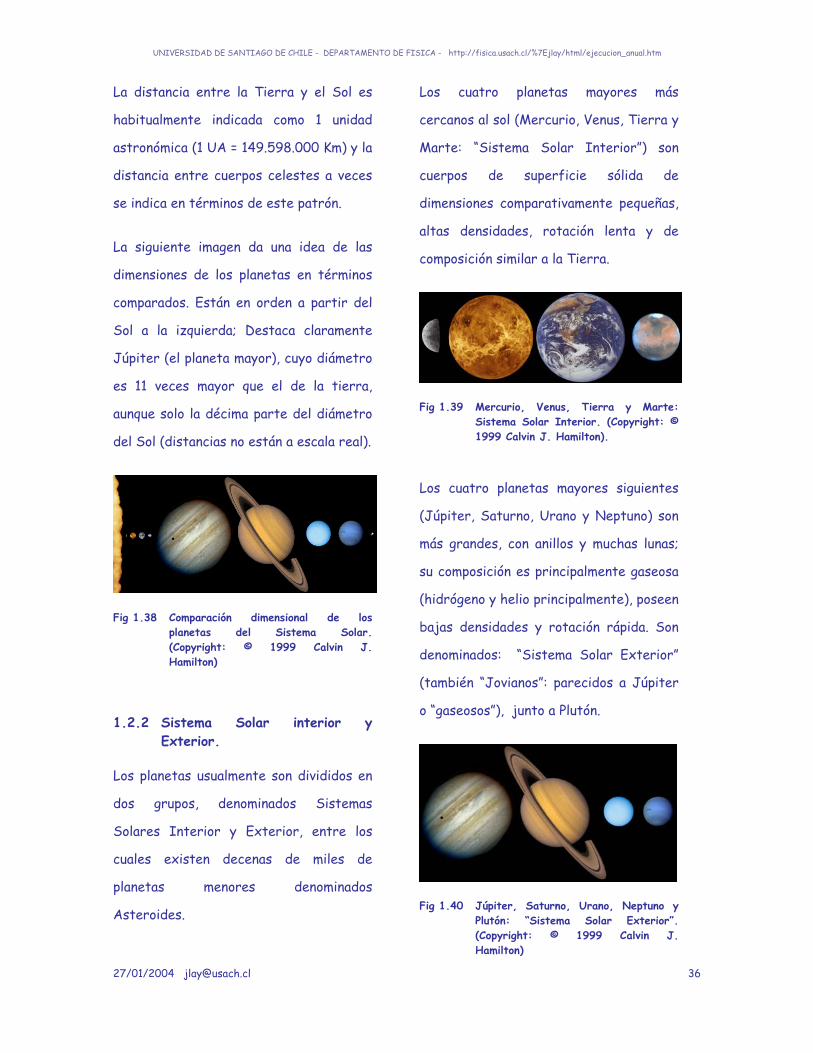
La siguiente imagen da una idea de las
dimensiones de los planetas en términos
comparados. Están en orden a partir del
Sol a la izquierda; Destaca claramente
Júpiter (el planeta mayor), cuyo diámetro
es 11 veces mayor que el de la tierra,
aunque solo la décima parte del diámetro
del Sol (distancias no están a escala real).
Fig 1.38 Comparación dimensional de los planetas del Sistema Solar. (Copyright: © 1999 Calvin J. Hamilton)
1.2.2 Sistema Solar interior y Exterior.
Los planetas usualmente son divididos en
dos grupos, denominados Sistemas
Solares Interior y Exterior, entre los
cuales existen decenas de miles de
planetas menores denominados
Asteroides.
Los cuatro planetas mayores más
cercanos al sol (Mercurio, Venus, Tierra y
Marte: “Sistema Solar Interior”) son
cuerpos de superficie sólida de
dimensiones comparativamente pequeñas,
altas densidades, rotación lenta y de
composición similar a la Tierra.
Fig 1.39 Mercurio, Venus, Tierra y Marte: Sistema Solar Interior. (Copyright: © 1999 Calvin J. Hamilton).
Los cuatro planetas mayores siguientes
(Júpiter, Saturno, Urano y Neptuno) son
más grandes, con anillos y muchas lunas;
su composición es principalmente gaseosa
(hidrógeno y helio principalmente), poseen
bajas densidades y rotación rápida. Son
denominados: “Sistema Solar Exterior”
(también “Jovianos”: parecidos a Júpiter
o “gaseosos”), junto a Plutón.
Fig 1.40 Júpiter, Saturno, Urano, Neptuno y Plutón: “Sistema Solar Exterior”. (Copyright: © 1999 Calvin J. Hamilton)
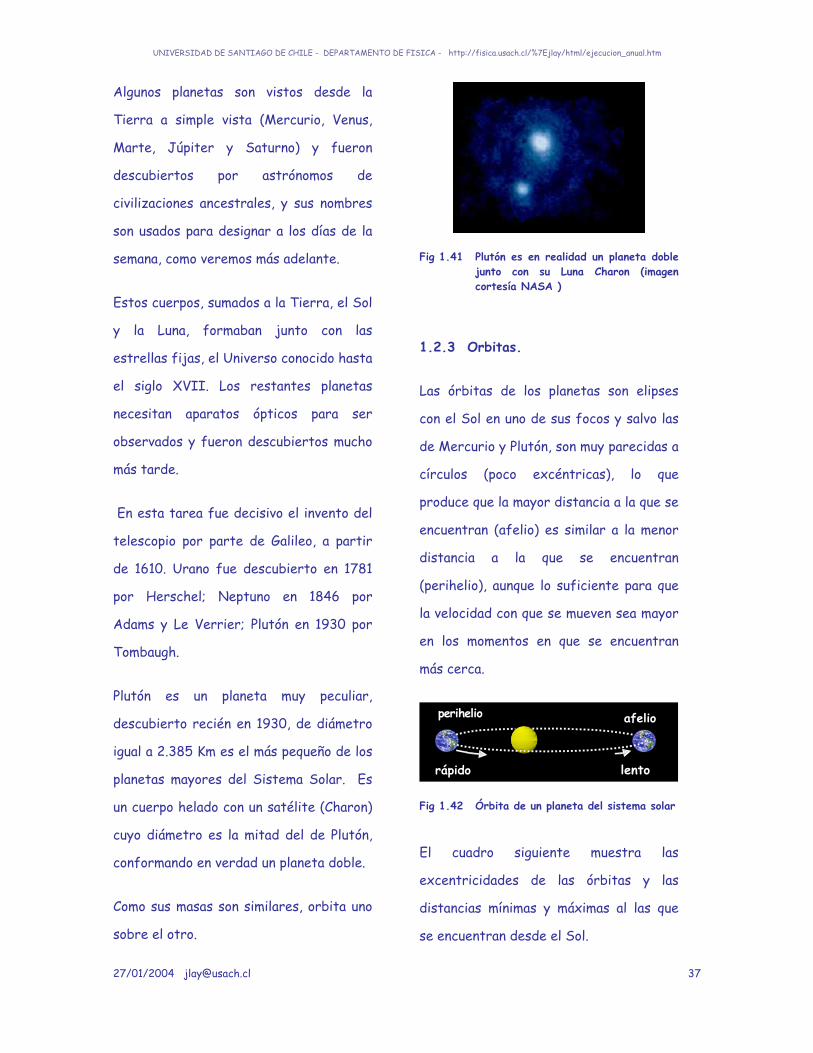
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 37
Algunos planetas son vistos desde la
Tierra a simple vista (Mercurio, Venus,
Marte, Júpiter y Saturno) y fueron
descubiertos por astrónomos de
civilizaciones ancestrales, y sus nombres
son usados para designar a los días de la
semana, como veremos más adelante.
Estos cuerpos, sumados a la Tierra, el Sol
y la Luna, formaban junto con las
estrellas fijas, el Universo conocido hasta
el siglo XVII. Los restantes planetas
necesitan aparatos ópticos para ser
observados y fueron descubiertos mucho
más tarde.
En esta tarea fue decisivo el invento del
telescopio por parte de Galileo, a partir
de 1610. Urano fue descubierto en 1781
por Herschel; Neptuno en 1846 por
Adams y Le Verrier; Plutón en 1930 por
Tombaugh.
Plutón es un planeta muy peculiar,
descubierto recién en 1930, de diámetro
igual a 2.385 Km es el más pequeño de los
planetas mayores del Sistema Solar. Es
un cuerpo helado con un satélite (Charon)
cuyo diámetro es la mitad del de Plutón,
conformando en verdad un planeta doble.
Como sus masas son similares, orbita uno
sobre el otro.
Fig 1.41 Plutón es en realidad un planeta doble junto con su Luna Charon (imagen cortesía NASA )
1.2.3 Orbitas.
Las órbitas de los planetas son elipses
con el Sol en uno de sus focos y salvo las
de Mercurio y Plutón, son muy parecidas a
círculos (poco excéntricas), lo que
produce que la mayor distancia a la que se
encuentran (afelio) es similar a la menor
distancia a la que se encuentran
(perihelio), aunque lo suficiente para que
la velocidad con que se mueven sea mayor
en los momentos en que se encuentran
más cerca.
afelioperihelio
lentorápido
Fig 1.42 Órbita de un planeta del sistema solar El cuadro siguiente muestra las
excentricidades de las órbitas y las
distancias mínimas y máximas al las que
se encuentran desde el Sol.
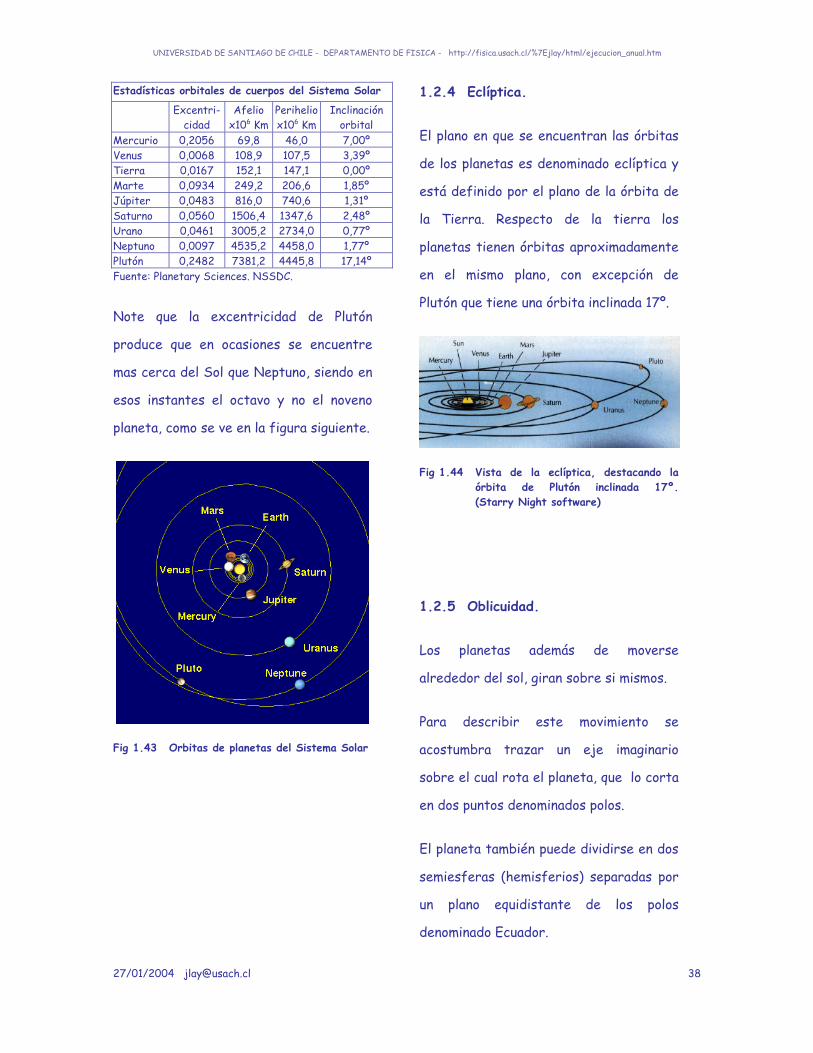
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 38
Estadísticas orbitales de cuerpos del Sistema Solar
Excentri- cidad
Afelio x106 Km
Perihelio x106 Km
Inclinación orbital
Mercurio 0,2056 69,8 46,0 7,00º Venus 0,0068 108,9 107,5 3,39º Tierra 0,0167 152,1 147,1 0,00º Marte 0,0934 249,2 206,6 1,85º Júpiter 0,0483 816,0 740,6 1,31º Saturno 0,0560 1506,4 1347,6 2,48º Urano 0,0461 3005,2 2734,0 0,77º Neptuno 0,0097 4535,2 4458,0 1,77º Plutón 0,2482 7381,2 4445,8 17,14º Fuente: Planetary Sciences. NSSDC.
Note que la excentricidad de Plutón
produce que en ocasiones se encuentre
mas cerca del Sol que Neptuno, siendo en
esos instantes el octavo y no el noveno
planeta, como se ve en la figura siguiente.
Fig 1.43 Orbitas de planetas del Sistema Solar
1.2.4 Eclíptica.
El plano en que se encuentran las órbitas
de los planetas es denominado eclíptica y
está definido por el plano de la órbita de
la Tierra. Respecto de la tierra los
planetas tienen órbitas aproximadamente
en el mismo plano, con excepción de
Plutón que tiene una órbita inclinada 17º.
Fig 1.44 Vista de la eclíptica, destacando la órbita de Plutón inclinada 17º. (Starry Night software)
1.2.5 Oblicuidad.
Los planetas además de moverse
alrededor del sol, giran sobre si mismos.
Para describir este movimiento se
acostumbra trazar un eje imaginario
sobre el cual rota el planeta, que lo corta
en dos puntos denominados polos.
El planeta también puede dividirse en dos
semiesferas (hemisferios) separadas por
un plano equidistante de los polos
denominado Ecuador.
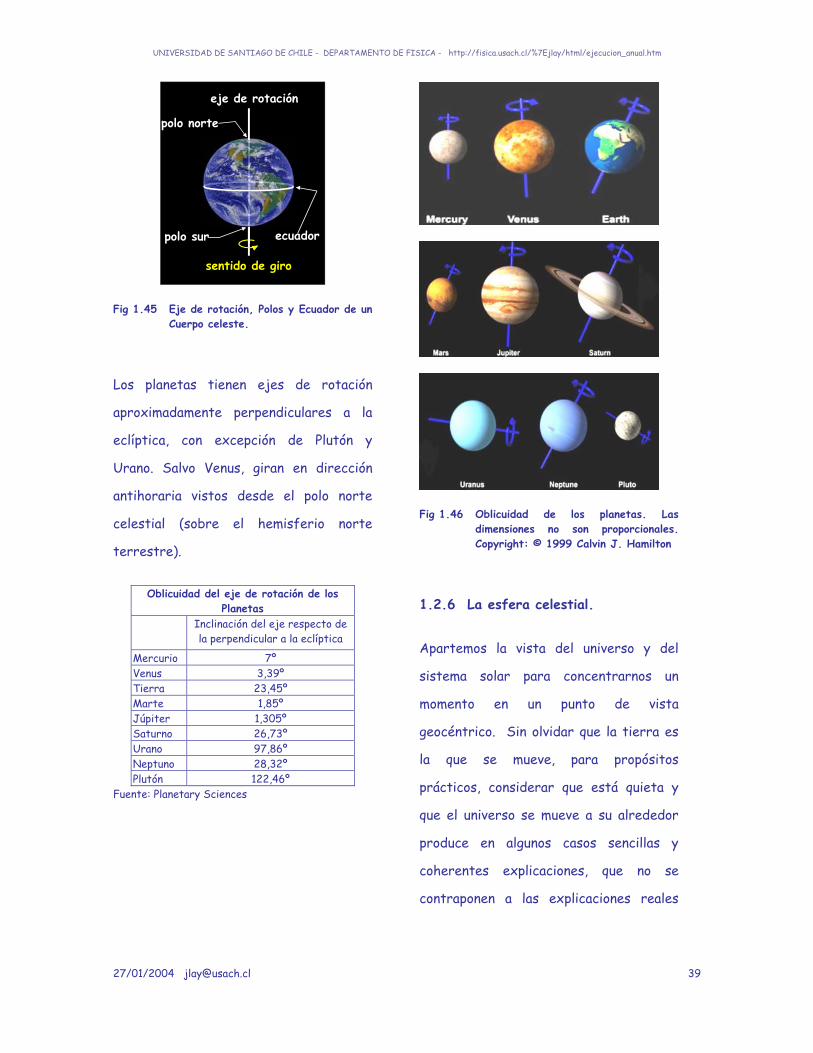
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 39
eje de rotación
polo norte
polo sur ecuador
sentido de giro
Fig 1.45 Eje de rotación, Polos y Ecuador de un Cuerpo celeste.
Los planetas tienen ejes de rotación
aproximadamente perpendiculares a la
eclíptica, con excepción de Plutón y
Urano. Salvo Venus, giran en dirección
antihoraria vistos desde el polo norte
celestial (sobre el hemisferio norte
terrestre).
Oblicuidad del eje de rotación de los Planetas
Inclinación del eje respecto de la perpendicular a la eclíptica
Mercurio 7º Venus 3,39º Tierra 23,45º Marte 1,85º Júpiter 1,305º Saturno 26,73º Urano 97,86º Neptuno 28,32º Plutón 122,46º
Fuente: Planetary Sciences
Fig 1.46 Oblicuidad de los planetas. Las dimensiones no son proporcionales. Copyright: © 1999 Calvin J. Hamilton
1.2.6 La esfera celestial.
Apartemos la vista del universo y del
sistema solar para concentrarnos un
momento en un punto de vista
geocéntrico. Sin olvidar que la tierra es
la que se mueve, para propósitos
prácticos, considerar que está quieta y
que el universo se mueve a su alrededor
produce en algunos casos sencillas y
coherentes explicaciones, que no se
contraponen a las explicaciones reales
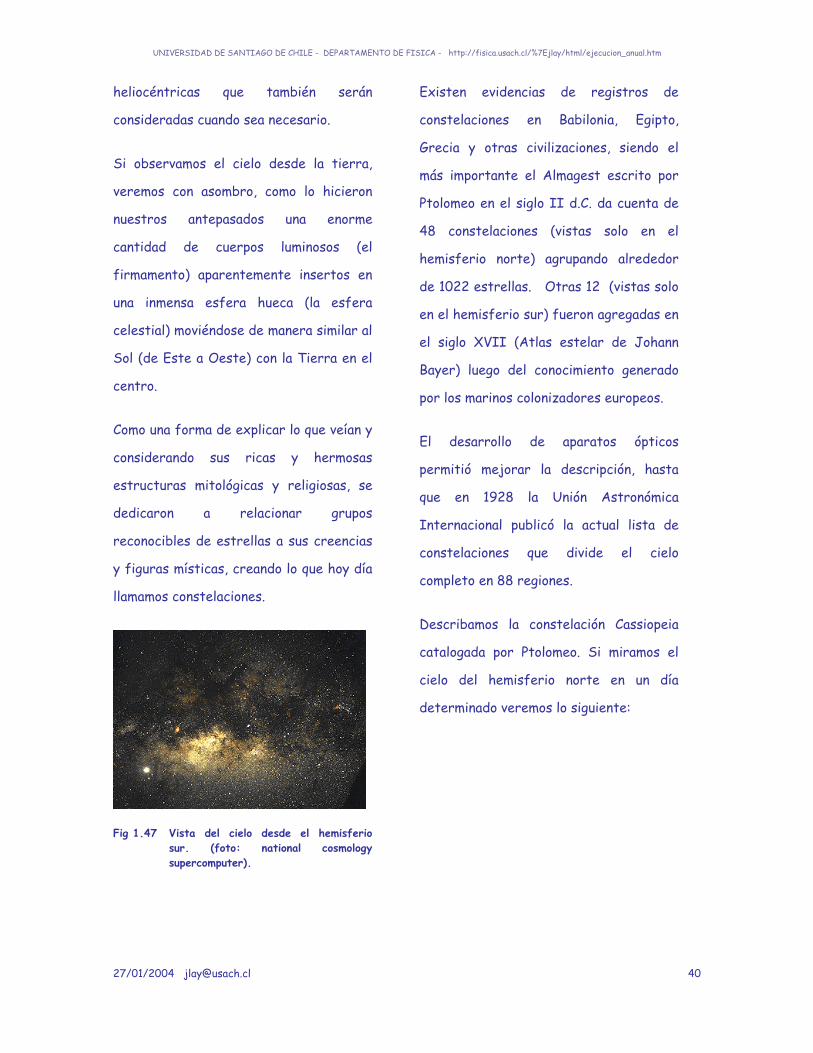
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 40
heliocéntricas que también serán
consideradas cuando sea necesario.
Si observamos el cielo desde la tierra,
veremos con asombro, como lo hicieron
nuestros antepasados una enorme
cantidad de cuerpos luminosos (el
firmamento) aparentemente insertos en
una inmensa esfera hueca (la esfera
celestial) moviéndose de manera similar al
Sol (de Este a Oeste) con la Tierra en el
centro.
Como una forma de explicar lo que veían y
considerando sus ricas y hermosas
estructuras mitológicas y religiosas, se
dedicaron a relacionar grupos
reconocibles de estrellas a sus creencias
y figuras místicas, creando lo que hoy día
llamamos constelaciones.
Fig 1.47 Vista del cielo desde el hemisferio sur. (foto: national cosmology supercomputer).
Existen evidencias de registros de
constelaciones en Babilonia, Egipto,
Grecia y otras civilizaciones, siendo el
más importante el Almagest escrito por
Ptolomeo en el siglo II d.C. da cuenta de
48 constelaciones (vistas solo en el
hemisferio norte) agrupando alrededor
de 1022 estrellas. Otras 12 (vistas solo
en el hemisferio sur) fueron agregadas en
el siglo XVII (Atlas estelar de Johann
Bayer) luego del conocimiento generado
por los marinos colonizadores europeos.
El desarrollo de aparatos ópticos
permitió mejorar la descripción, hasta
que en 1928 la Unión Astronómica
Internacional publicó la actual lista de
constelaciones que divide el cielo
completo en 88 regiones.
Describamos la constelación Cassiopeia
catalogada por Ptolomeo. Si miramos el
cielo del hemisferio norte en un día
determinado veremos lo siguiente:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 41
Fig 1.48 Vista del cielo del hemisferio norte. (foto: associazione urania Italia)
Claramente se observan estrellas de
brillos distintos. De manera arbitraria
podemos fijar la atención en una zona
particular de ella, por ejemplo:
Fig 1.49 Vista parcial del cielo del norte .(foto: Janet Slivoski).
Aún más arbitrariamente podemos unir
algunas de las estrellas según su brillo,
por ejemplo, de la manera siguiente:
Fig 1.50 Agrupación estelar arbitraria (foto: Janet Slivoski)
Y luego suponer que representan a la
diosa griega Cassiopeia, esposa de
Cepheus y madre de Andrómeda en la
mitología griega, cuya figura conteniendo
las estrellas que componen la constelación
se ve en el cuadro siguiente.
Fig 1.51 Cassiopeia y sus estrellas
Esta constelación es conocida como
Casiopedia o “la silla de Casiopedia”.
También es conocida como la “loca M” o la

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 42
“celeste W” debido a su forma y a que su
cambiante ubicación en el cielo le hace
ver como las letras homónimas.
La motivación para describir las
constelaciones y sus movimientos en el
cielo no responden solo a motivos
puramente místicos, sino prácticos:
Hesiod en el siglo VIII a.C. indica que las
cosechas deben empezar en el momento
en que “empiezan a elevarse las Pléiades,
hijas de Atlas”, reconociendo el ciclo
agrícola asociado a determinada época del
año y sus estaciones.
Las siguientes figuras muestran algunas
de las constelaciones vistas en cada
hemisferio de acuerdo a las estaciones.
Las constelaciones denominadas
circumpolares se observan todo el año en
el hemisferio correspondiente y no se
elevan ni ponen en el horizonte, como se
explicará más adelante.
Las denominadas estacionales, se
observan solo en determinadas épocas del
año, en dependencia de la latitud del
observador.
Fig 1.52 Constelaciones circumpolares vistas en el Hemisferio Sur (cuadro: Universidad de Michigan).
Fig 1.53 Constelaciones estacionales

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 43
Fig 1.54 Constelaciones circumpolares vistas en el Hemisferio norte. (cuadro: Universidad de Michigan)
Si uno observa cuidadosamente el cielo,
ve que estrellas y constelaciones
describen movimientos circunferenciales
con círculos concéntricos es decir, existe
un punto aparente en la esfera celeste
sobre el cual esta parece rotar (polo
celeste) y si estuviésemos en el
hemisferio norte (lugar en el que la
mayoría de las primeras civilizaciones
surgieron) veríamos una estrella brillante
(Polaris) que parece estar en ese lugar
(estrella polar o del norte).
Interesante es notar que el eje de la
tierra tiene un movimiento de precesión
cuyo ciclo es de aproximadamente 26.000
años, de modo tal que la ubicación del polo
celeste cambia en el tiempo.
Fig 1.55 Foto del cielo del hemisferio norte tomada con obturador abierto. Copyright: David Malin. Astronomy Picture of the day. NASA. 1998.
Debido a la lentitud del cambio, lo
suponemos fijo, aunque si proyectamos su
ubicación tan lejos como el siglo VIII a.C.
observamos que no existe una estrella
brillante como hoy que se ubique cerca
del polo norte celeste.
Adicionalmente, al viajar hacia el sur,
esta estrella se ubica más y más cercana
al polo norte terrestre, hasta que
finalmente no se observa. Pero entonces,
el firmamento parece girar de este a
oeste en torno a otro punto de la esfera
celestial (polo sur celeste), en donde
desgraciadamente no existe una estrella
brillante como en el otro hemisferio.
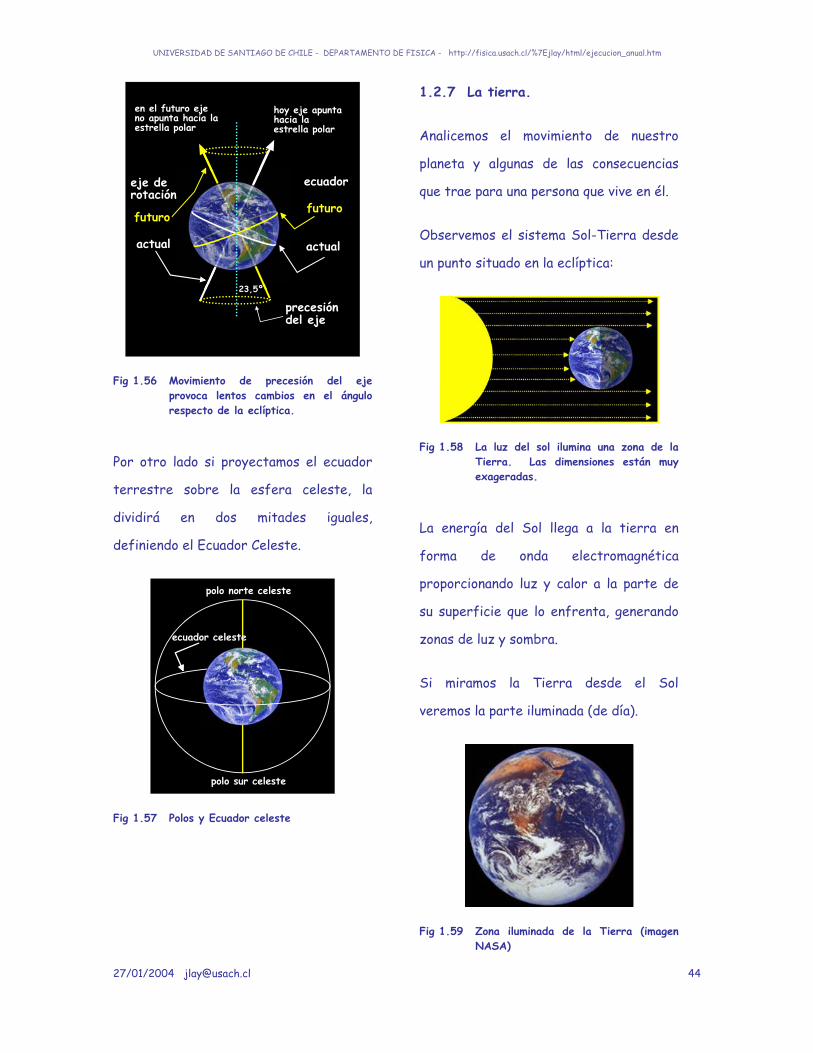
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 44
eje derotación
ecuador
actual
futurofuturo
actual
23,5º
precesión del eje
en el futuro ejeno apunta hacia laestrella polar
hoy eje apunta hacia laestrella polar
Fig 1.56 Movimiento de precesión del eje provoca lentos cambios en el ángulo respecto de la eclíptica.
Por otro lado si proyectamos el ecuador
terrestre sobre la esfera celeste, la
dividirá en dos mitades iguales,
definiendo el Ecuador Celeste.
polo norte celeste
polo sur celeste
ecuador celeste
Fig 1.57 Polos y Ecuador celeste
1.2.7 La tierra.
Analicemos el movimiento de nuestro
planeta y algunas de las consecuencias
que trae para una persona que vive en él.
Observemos el sistema Sol-Tierra desde
un punto situado en la eclíptica:
Fig 1.58 La luz del sol ilumina una zona de la Tierra. Las dimensiones están muy exageradas.
La energía del Sol llega a la tierra en
forma de onda electromagnética
proporcionando luz y calor a la parte de
su superficie que lo enfrenta, generando
zonas de luz y sombra.
Si miramos la Tierra desde el Sol
veremos la parte iluminada (de día).
Fig 1.59 Zona iluminada de la Tierra (imagen NASA)
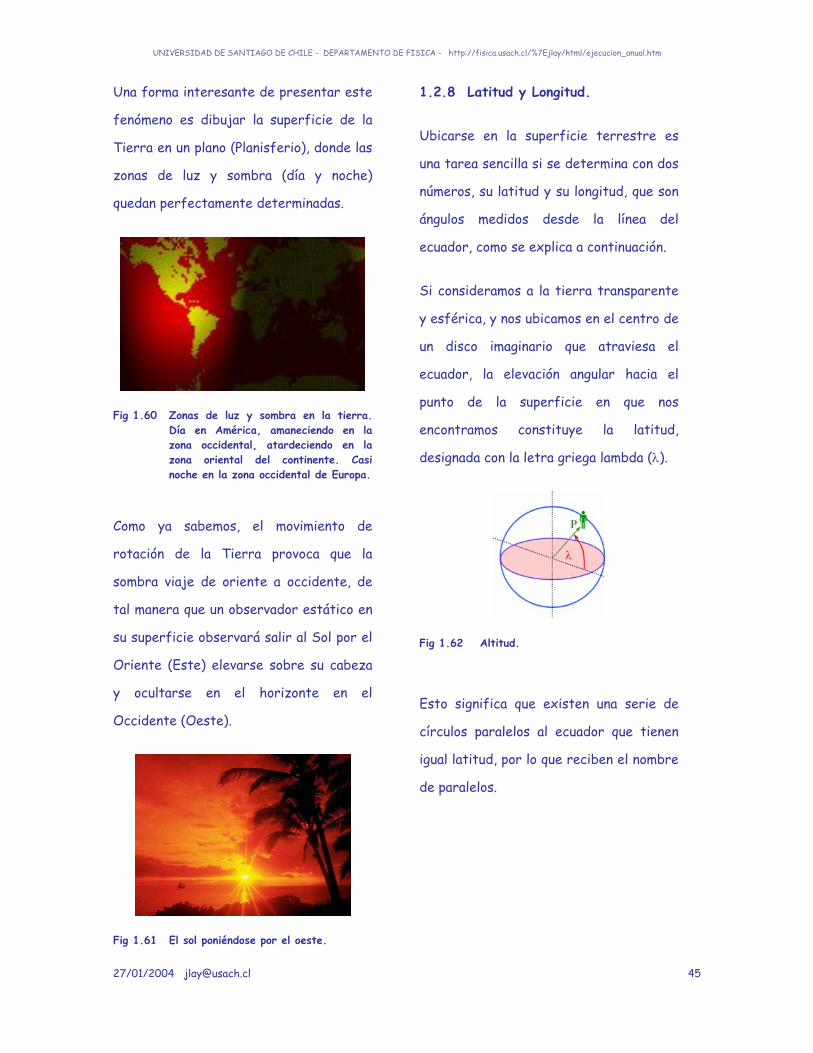
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 45
Una forma interesante de presentar este
fenómeno es dibujar la superficie de la
Tierra en un plano (Planisferio), donde las
zonas de luz y sombra (día y noche)
quedan perfectamente determinadas.
Fig 1.60 Zonas de luz y sombra en la tierra. Día en América, amaneciendo en la zona occidental, atardeciendo en la zona oriental del continente. Casi noche en la zona occidental de Europa.
Como ya sabemos, el movimiento de
rotación de la Tierra provoca que la
sombra viaje de oriente a occidente, de
tal manera que un observador estático en
su superficie observará salir al Sol por el
Oriente (Este) elevarse sobre su cabeza
y ocultarse en el horizonte en el
Occidente (Oeste).
Fig 1.61 El sol poniéndose por el oeste.
1.2.8 Latitud y Longitud.
Ubicarse en la superficie terrestre es
una tarea sencilla si se determina con dos
números, su latitud y su longitud, que son
ángulos medidos desde la línea del
ecuador, como se explica a continuación.
Si consideramos a la tierra transparente
y esférica, y nos ubicamos en el centro de
un disco imaginario que atraviesa el
ecuador, la elevación angular hacia el
punto de la superficie en que nos
encontramos constituye la latitud,
designada con la letra griega lambda (λ).
Fig 1.62 Altitud.
Esto significa que existen una serie de
círculos paralelos al ecuador que tienen
igual latitud, por lo que reciben el nombre
de paralelos.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 46
Fig 1.63 Paralelos
Estos círculos van disminuyendo su
diámetro hasta que se convierten en un
punto en el polo, donde la latitud es de
90º. Estos ángulos se miden hacia el polo
norte (+90º) de modo que hacia el polo
sur son negativos (-90º). Obviamente el
círculo del ecuador es latitud 0º.
Las líneas que marcan la longitud
(meridianos) son líneas equidistantes que
surcan la esfera imaginaria de polo a polo.
Fig 1.64 Meridianos
La longitud es el ángulo descrito entre
dos líneas que parten del centro del
círculo que pasa por el ecuador, que van
hacia un punto de la superficie que se ha
acordado como referencia (el meridiano
que pasa por Greenwich) y hacia el lugar
en que nos encontramos (P).
Se designa con la letra griega phi (φ).
Fig 1.65 Longitud
Los ángulos se miden entre 0 y 180º hacia
el este (E) y entre 0 y -180º hacia el
oeste (W).
Fig 1.66 Observatorio astronómico de la ciudad inglesa de Greenwich
Le Havre
Dover
Nantes
Londres
Francia
Irlanda
Loire
Loire
English Channel
OceanoAtlantico
0û
60N
5W
55N
50N
Meridiano deGreenwich
010W
Inglaterra
Fig 1.67 Meridiano de Greenwich
La ciudad de Santiago de Chile se
encuentra en las coordenadas:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 47
Latitud: 33° 27' S
Longitud: 70° 42' W
Santiago
70W80W 60W
33º27`S
70º42`W
60S
50S
40S
30S
20S
Fig 1.68 Santiago de Chile
Es posible entonces, ubicar cualquier
lugar de la superficie indicando sus
coordenadas latitud y longitud. Hoy en
día esto lo hace automáticamente un
instrumento muy preciso (GPS) conectado
a una red de satélites.
La siguiente figura muestra meridianos y
paralelos que cruzan América del Sur
PARAGUAY
URUGUAY
FALKLAND ISLANDS
SOUTH GEORGI A ISLAND
NAMIBIA
SOUTH AFRICA
ANGOLA
CONG O
Weddell Sea
Fig 1.69 Meridianos y paralelos cruzando América del Sur.
1.2.9 Zonas horarias.
Cuando el sol está exactamente sobre el
meridiano en que nos encontramos, será
mediodía para nosotros. Todos los
meridianos que están al este de nosotros
se encuentran en la tarde (post
meridiano: p.m.) y los que encuentran al
oeste nuestro, estarán en la mañana (ante
meridiano: a.m.).
Como esta referencia local no le dice
mucho a una persona que esté en otro
lugar, se adoptó la hora universal (UT:
universal time).
Como el círculo del ecuador tiene un
ángulo de 360º, entonces se puede
definir meridianos cada una hora,
describiendo ángulos de (360º/24) de 15º
a partir de Greenwich.
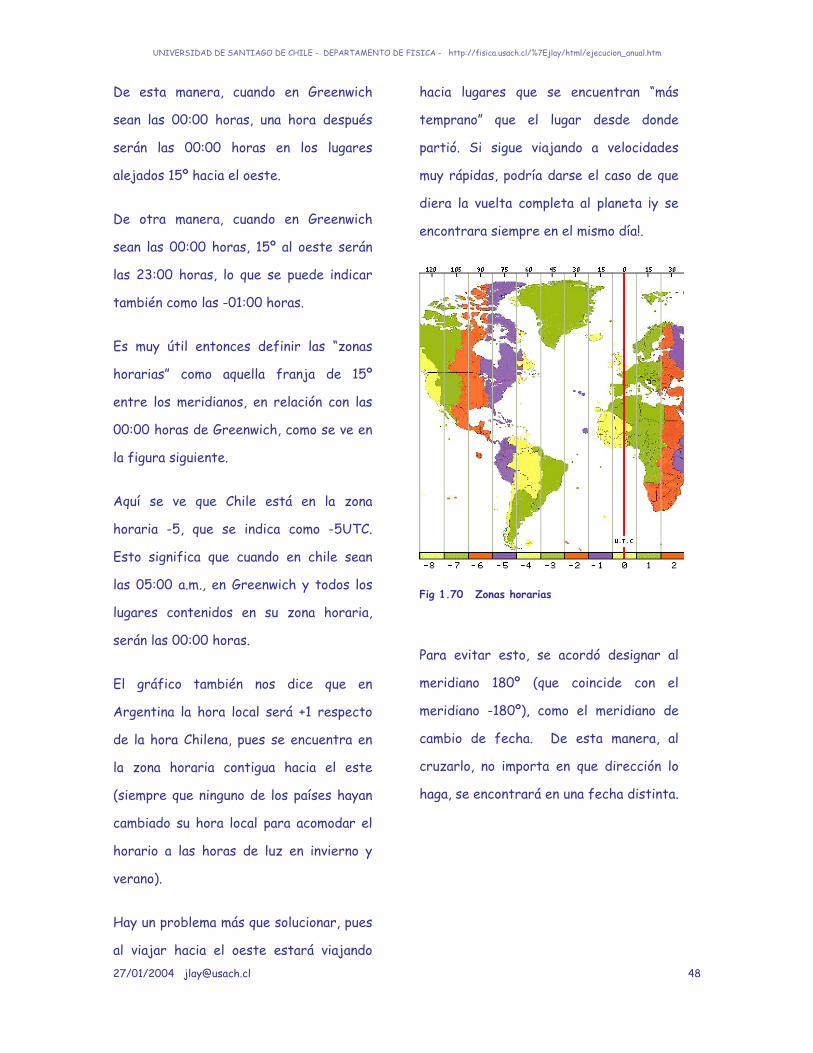
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 48
De esta manera, cuando en Greenwich
sean las 00:00 horas, una hora después
serán las 00:00 horas en los lugares
alejados 15º hacia el oeste.
De otra manera, cuando en Greenwich
sean las 00:00 horas, 15º al oeste serán
las 23:00 horas, lo que se puede indicar
también como las -01:00 horas.
Es muy útil entonces definir las “zonas
horarias” como aquella franja de 15º
entre los meridianos, en relación con las
00:00 horas de Greenwich, como se ve en
la figura siguiente.
Aquí se ve que Chile está en la zona
horaria -5, que se indica como -5UTC.
Esto significa que cuando en chile sean
las 05:00 a.m., en Greenwich y todos los
lugares contenidos en su zona horaria,
serán las 00:00 horas.
El gráfico también nos dice que en
Argentina la hora local será +1 respecto
de la hora Chilena, pues se encuentra en
la zona horaria contigua hacia el este
(siempre que ninguno de los países hayan
cambiado su hora local para acomodar el
horario a las horas de luz en invierno y
verano).
Hay un problema más que solucionar, pues
al viajar hacia el oeste estará viajando
hacia lugares que se encuentran “más
temprano” que el lugar desde donde
partió. Si sigue viajando a velocidades
muy rápidas, podría darse el caso de que
diera la vuelta completa al planeta ¡y se
encontrara siempre en el mismo día!.
Fig 1.70 Zonas horarias
Para evitar esto, se acordó designar al
meridiano 180º (que coincide con el
meridiano -180º), como el meridiano de
cambio de fecha. De esta manera, al
cruzarlo, no importa en que dirección lo
haga, se encontrará en una fecha distinta.
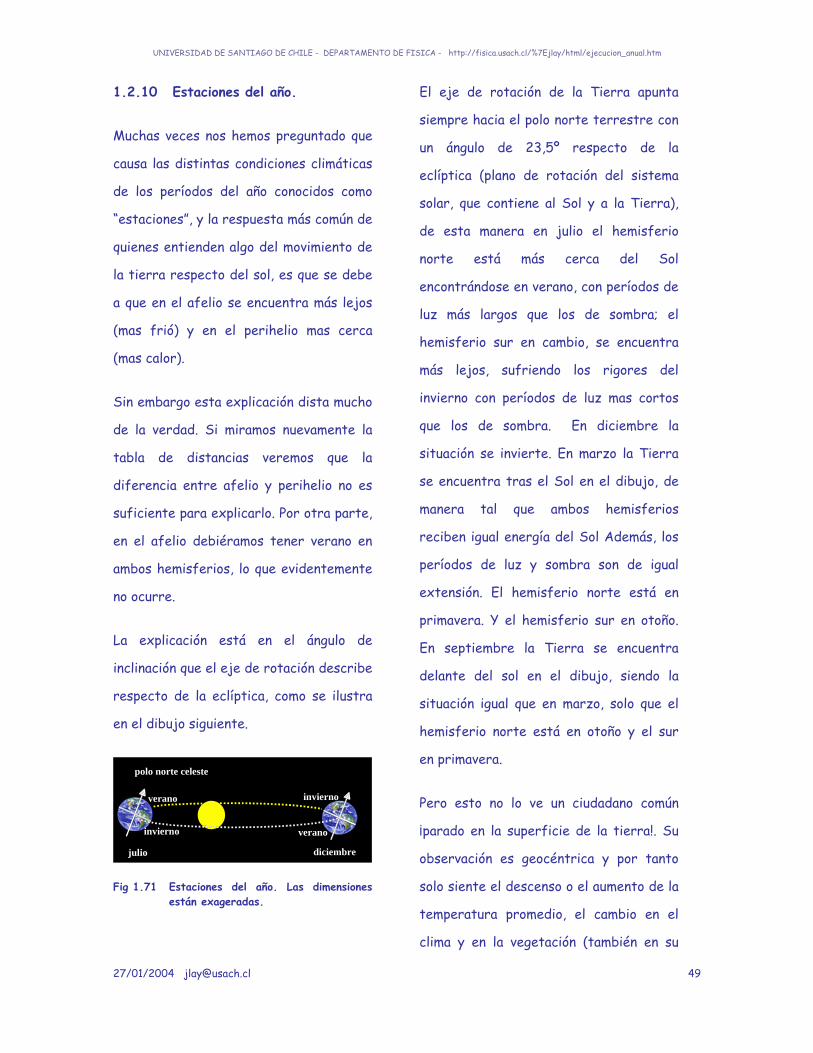
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 49
1.2.10 Estaciones del año.
Muchas veces nos hemos preguntado que
causa las distintas condiciones climáticas
de los períodos del año conocidos como
“estaciones”, y la respuesta más común de
quienes entienden algo del movimiento de
la tierra respecto del sol, es que se debe
a que en el afelio se encuentra más lejos
(mas frió) y en el perihelio mas cerca
(mas calor).
Sin embargo esta explicación dista mucho
de la verdad. Si miramos nuevamente la
tabla de distancias veremos que la
diferencia entre afelio y perihelio no es
suficiente para explicarlo. Por otra parte,
en el afelio debiéramos tener verano en
ambos hemisferios, lo que evidentemente
no ocurre.
La explicación está en el ángulo de
inclinación que el eje de rotación describe
respecto de la eclíptica, como se ilustra
en el dibujo siguiente.
invierno
invierno
verano
diciembrejulio
verano
polo norte celeste
Fig 1.71 Estaciones del año. Las dimensiones están exageradas.
El eje de rotación de la Tierra apunta
siempre hacia el polo norte terrestre con
un ángulo de 23,5º respecto de la
eclíptica (plano de rotación del sistema
solar, que contiene al Sol y a la Tierra),
de esta manera en julio el hemisferio
norte está más cerca del Sol
encontrándose en verano, con períodos de
luz más largos que los de sombra; el
hemisferio sur en cambio, se encuentra
más lejos, sufriendo los rigores del
invierno con períodos de luz mas cortos
que los de sombra. En diciembre la
situación se invierte. En marzo la Tierra
se encuentra tras el Sol en el dibujo, de
manera tal que ambos hemisferios
reciben igual energía del Sol Además, los
períodos de luz y sombra son de igual
extensión. El hemisferio norte está en
primavera. Y el hemisferio sur en otoño.
En septiembre la Tierra se encuentra
delante del sol en el dibujo, siendo la
situación igual que en marzo, solo que el
hemisferio norte está en otoño y el sur
en primavera.
Pero esto no lo ve un ciudadano común
¡parado en la superficie de la tierra!. Su
observación es geocéntrica y por tanto
solo siente el descenso o el aumento de la
temperatura promedio, el cambio en el
clima y en la vegetación (también en su
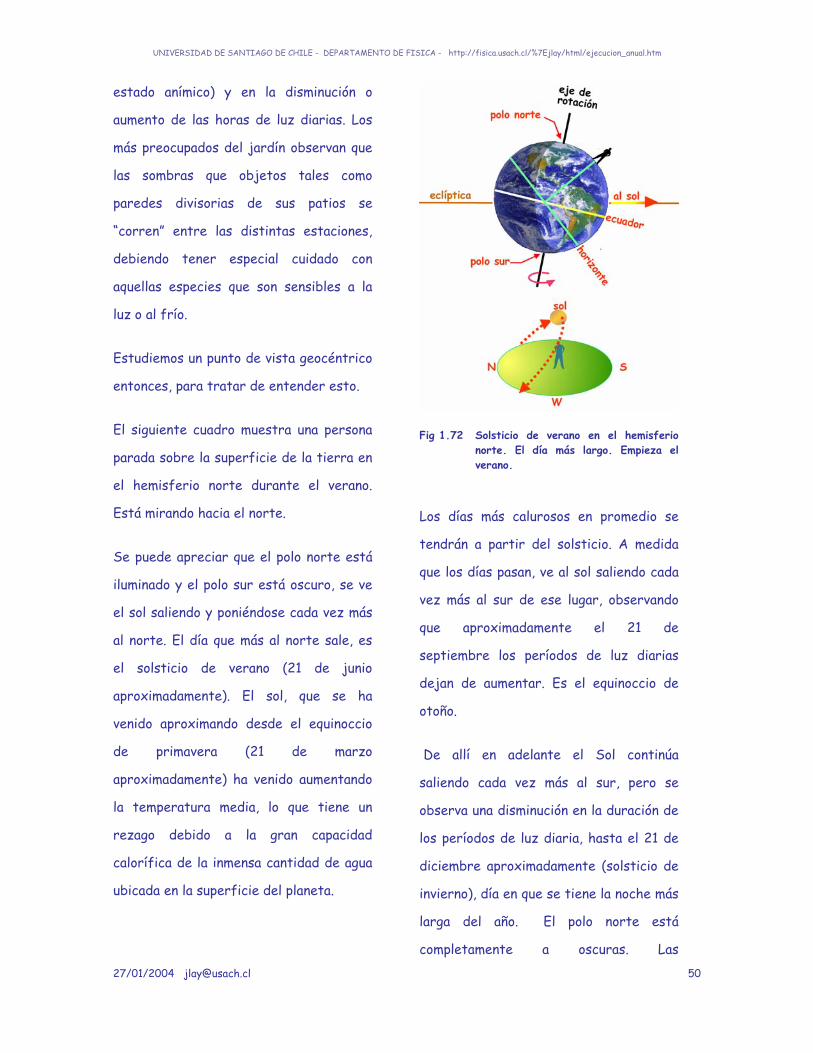
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 50
estado anímico) y en la disminución o
aumento de las horas de luz diarias. Los
más preocupados del jardín observan que
las sombras que objetos tales como
paredes divisorias de sus patios se
“corren” entre las distintas estaciones,
debiendo tener especial cuidado con
aquellas especies que son sensibles a la
luz o al frío.
Estudiemos un punto de vista geocéntrico
entonces, para tratar de entender esto.
El siguiente cuadro muestra una persona
parada sobre la superficie de la tierra en
el hemisferio norte durante el verano.
Está mirando hacia el norte.
Se puede apreciar que el polo norte está
iluminado y el polo sur está oscuro, se ve
el sol saliendo y poniéndose cada vez más
al norte. El día que más al norte sale, es
el solsticio de verano (21 de junio
aproximadamente). El sol, que se ha
venido aproximando desde el equinoccio
de primavera (21 de marzo
aproximadamente) ha venido aumentando
la temperatura media, lo que tiene un
rezago debido a la gran capacidad
calorífica de la inmensa cantidad de agua
ubicada en la superficie del planeta.
Fig 1.72 Solsticio de verano en el hemisferio norte. El día más largo. Empieza el verano.
Los días más calurosos en promedio se
tendrán a partir del solsticio. A medida
que los días pasan, ve al sol saliendo cada
vez más al sur de ese lugar, observando
que aproximadamente el 21 de
septiembre los períodos de luz diarias
dejan de aumentar. Es el equinoccio de
otoño.
De allí en adelante el Sol continúa
saliendo cada vez más al sur, pero se
observa una disminución en la duración de
los períodos de luz diaria, hasta el 21 de
diciembre aproximadamente (solsticio de
invierno), día en que se tiene la noche más
larga del año. El polo norte está
completamente a oscuras. Las
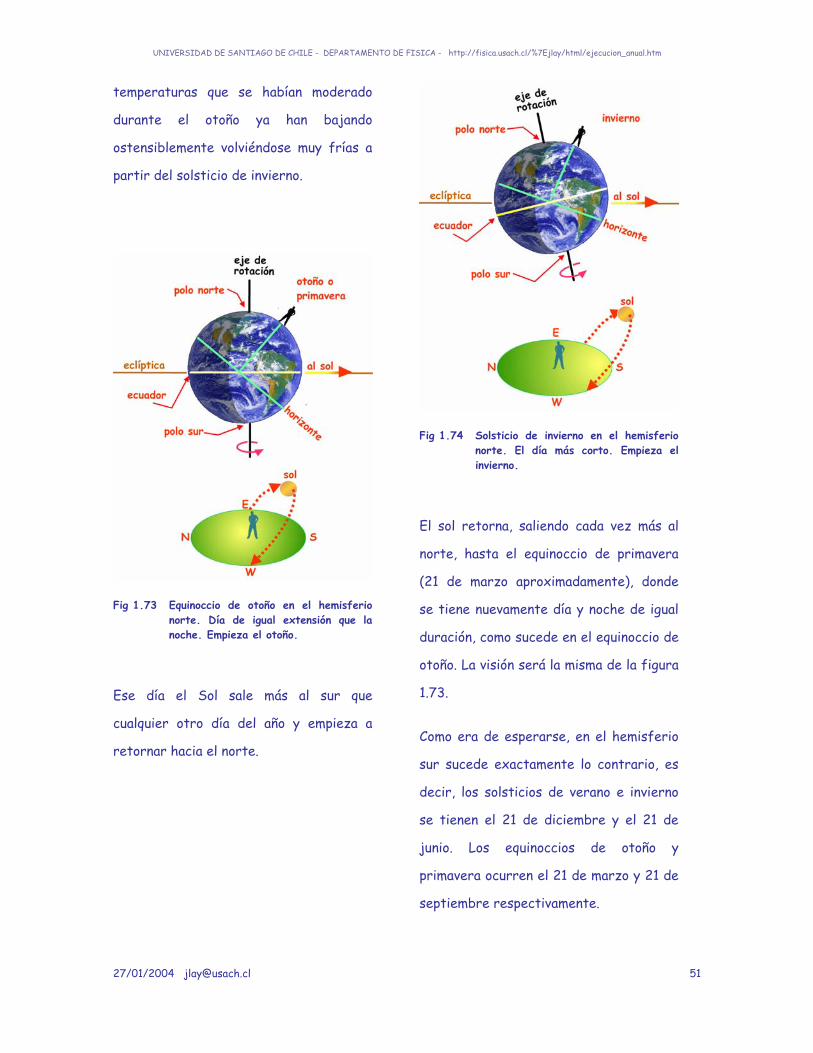
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 51
temperaturas que se habían moderado
durante el otoño ya han bajando
ostensiblemente volviéndose muy frías a
partir del solsticio de invierno.
Fig 1.73 Equinoccio de otoño en el hemisferio norte. Día de igual extensión que la noche. Empieza el otoño.
Ese día el Sol sale más al sur que
cualquier otro día del año y empieza a
retornar hacia el norte.
Fig 1.74 Solsticio de invierno en el hemisferio norte. El día más corto. Empieza el invierno.
El sol retorna, saliendo cada vez más al
norte, hasta el equinoccio de primavera
(21 de marzo aproximadamente), donde
se tiene nuevamente día y noche de igual
duración, como sucede en el equinoccio de
otoño. La visión será la misma de la figura
1.73.
Como era de esperarse, en el hemisferio
sur sucede exactamente lo contrario, es
decir, los solsticios de verano e invierno
se tienen el 21 de diciembre y el 21 de
junio. Los equinoccios de otoño y
primavera ocurren el 21 de marzo y 21 de
septiembre respectivamente.
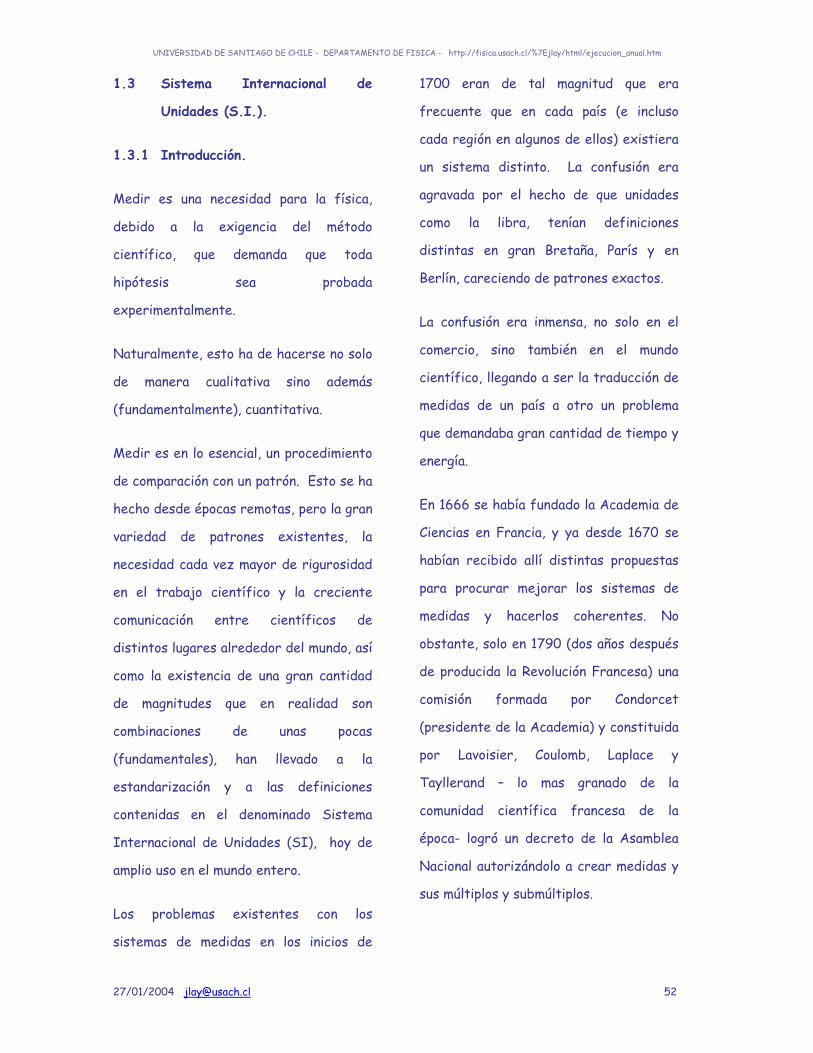
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 52
1.3 Sistema Internacional de
Unidades (S.I.).
1.3.1 Introducción.
Medir es una necesidad para la física,
debido a la exigencia del método
científico, que demanda que toda
hipótesis sea probada
experimentalmente.
Naturalmente, esto ha de hacerse no solo
de manera cualitativa sino además
(fundamentalmente), cuantitativa.
Medir es en lo esencial, un procedimiento
de comparación con un patrón. Esto se ha
hecho desde épocas remotas, pero la gran
variedad de patrones existentes, la
necesidad cada vez mayor de rigurosidad
en el trabajo científico y la creciente
comunicación entre científicos de
distintos lugares alrededor del mundo, así
como la existencia de una gran cantidad
de magnitudes que en realidad son
combinaciones de unas pocas
(fundamentales), han llevado a la
estandarización y a las definiciones
contenidas en el denominado Sistema
Internacional de Unidades (SI), hoy de
amplio uso en el mundo entero.
Los problemas existentes con los
sistemas de medidas en los inicios de
1700 eran de tal magnitud que era
frecuente que en cada país (e incluso
cada región en algunos de ellos) existiera
un sistema distinto. La confusión era
agravada por el hecho de que unidades
como la libra, tenían definiciones
distintas en gran Bretaña, París y en
Berlín, careciendo de patrones exactos.
La confusión era inmensa, no solo en el
comercio, sino también en el mundo
científico, llegando a ser la traducción de
medidas de un país a otro un problema
que demandaba gran cantidad de tiempo y
energía.
En 1666 se había fundado la Academia de
Ciencias en Francia, y ya desde 1670 se
habían recibido allí distintas propuestas
para procurar mejorar los sistemas de
medidas y hacerlos coherentes. No
obstante, solo en 1790 (dos años después
de producida la Revolución Francesa) una
comisión formada por Condorcet
(presidente de la Academia) y constituida
por Lavoisier, Coulomb, Laplace y
Tayllerand – lo mas granado de la
comunidad científica francesa de la
época- logró un decreto de la Asamblea
Nacional autorizándolo a crear medidas y
sus múltiplos y submúltiplos.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 53
El 27 de octubre de ese año, la comisión
decidió que las nuevas medidas incluyendo
las de monedas, serían decimales. La
evolución de la revolución Francesa
detuvo el avance del nuevo sistema al
volverse incruenta luego de reemplazarse
la Asamblea por la Convención, llegando a
caer en la guillotina Lavoisier.
Finalmente en 1795 se dictó una ley que
oficializó el sistema métrico, ordenando
al metro como patrón de longitud, el ara
como medida de superficie, al estro y al
litro como medidas de volumen, al gramo
para la masa y al franco para las monedas.
En 1778 finalizaron los cálculos oficiales
y se mandó a construir un metro oficial
de platino y un cilindro de platino de un
kilogramo de masa.
Estos fueron reemplazados por patrones
de mayor precisión de patino-iridio en
1889 y luego por patrones aún más
precisos, como veremos a continuación. Lo
importante es que se dio comienzo a una
nueva era, al dar inicio a los sistemas
métricos que luego darían vida al actual
Sistema Internacional de Unidades (SI).
En 1875 se firmó en París el “Tratado del
Metro” por parte de 18 países
constituyéndose la Conferencia General
de Pesos y Medidas (CGPM), imponiendo
el sistema métrico.
Diversas Conferencias se sucedieron en el
tiempo, hasta llegar a la 10ª CGPM en
1954 la que en su Resolución Nº 6, así
como la 14ª CGPM en su Resolución Nº 3
adoptaron como unidades básicas las
unidades de las siguientes siete
cantidades: longitud, masa, tiempo,
corriente eléctrica, temperatura
termodinámica, cantidad de sustancia e
intensidad luminosa.
La 11ª CGPM en 1960, oficializó SI,
sistema métrico moderno que
continuamente es revisado hasta hoy.
Interesante resulta destacar que el SI
ha sido extensamente adoptado por un
gran número de países a lo largo del
mundo (Chile adoptó el uso del metro en
1848).
El SI está dividido en dos clases de
unidades: básicas y derivadas.
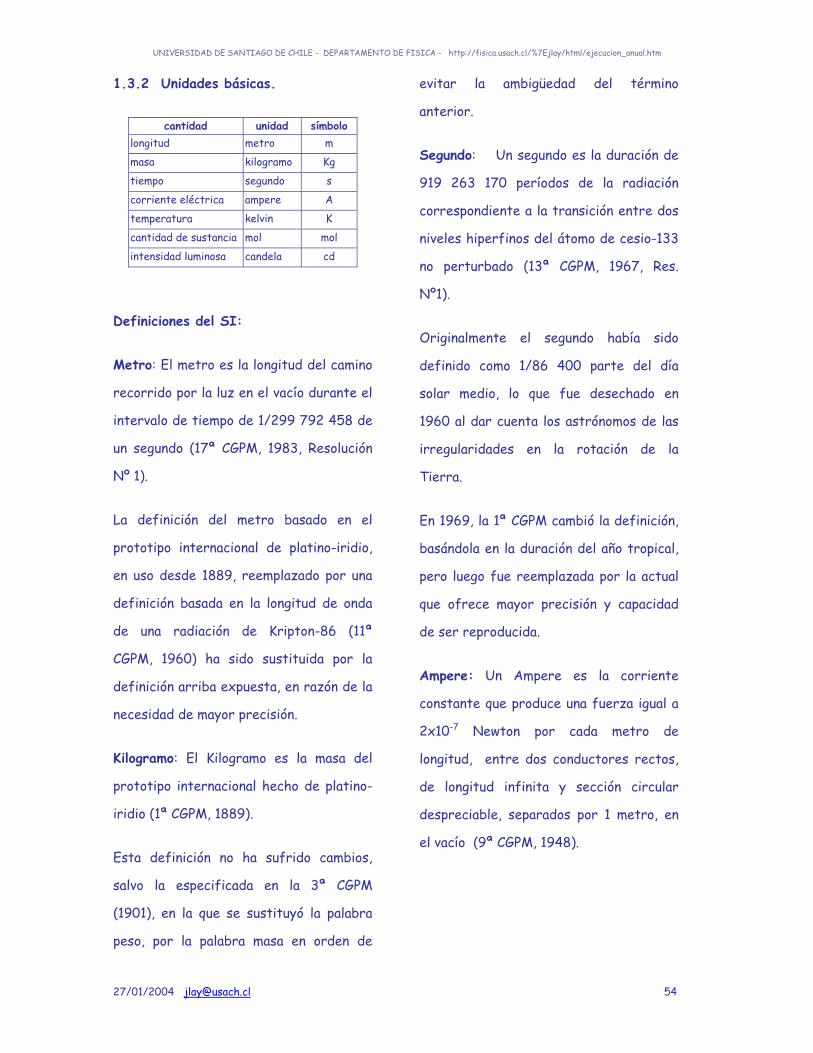
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 54
1.3.2 Unidades básicas.
cantidad unidad símbolo longitud metro m
masa kilogramo Kg
tiempo segundo s
corriente eléctrica ampere A
temperatura kelvin K
cantidad de sustancia mol mol
intensidad luminosa candela cd
Definiciones del SI:
Metro: El metro es la longitud del camino
recorrido por la luz en el vacío durante el
intervalo de tiempo de 1/299 792 458 de
un segundo (17ª CGPM, 1983, Resolución
Nº 1).
La definición del metro basado en el
prototipo internacional de platino-iridio,
en uso desde 1889, reemplazado por una
definición basada en la longitud de onda
de una radiación de Kripton-86 (11ª
CGPM, 1960) ha sido sustituida por la
definición arriba expuesta, en razón de la
necesidad de mayor precisión.
Kilogramo: El Kilogramo es la masa del
prototipo internacional hecho de platino-
iridio (1ª CGPM, 1889).
Esta definición no ha sufrido cambios,
salvo la especificada en la 3ª CGPM
(1901), en la que se sustituyó la palabra
peso, por la palabra masa en orden de
evitar la ambigüedad del término
anterior.
Segundo: Un segundo es la duración de
919 263 170 períodos de la radiación
correspondiente a la transición entre dos
niveles hiperfinos del átomo de cesio-133
no perturbado (13ª CGPM, 1967, Res.
Nº1).
Originalmente el segundo había sido
definido como 1/86 400 parte del día
solar medio, lo que fue desechado en
1960 al dar cuenta los astrónomos de las
irregularidades en la rotación de la
Tierra.
En 1969, la 1ª CGPM cambió la definición,
basándola en la duración del año tropical,
pero luego fue reemplazada por la actual
que ofrece mayor precisión y capacidad
de ser reproducida.
Ampere: Un Ampere es la corriente
constante que produce una fuerza igual a
2x10-7 Newton por cada metro de
longitud, entre dos conductores rectos,
de longitud infinita y sección circular
despreciable, separados por 1 metro, en
el vacío (9ª CGPM, 1948).
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 55
Kelvin: Un Kelvin es la 1/273,16 parte
de la temperatura termodinámica (T) del
punto triple del agua (13ª CGPM, 1967,
Resolución Nº 3).
La 13ª CGPM estableció el nombre Kelvin
(símbolo K) en lugar de la expresión“
grados Kelvin (símbolo ºK).
En dicha reunión se estableció además, el
uso de la temperatura Celsius (t) definida
por la expresión: t= T–T0; donde
T0=273,15K por definición. Para expresar
la temperatura Celsius debe usarse la
expresión “grados Celsius”. Una
diferencia o un intervalo de temperatura
puede expresarse en grados Celsius o en
Kelvin indistintamente.
Mol: Un mol es la cantidad de sustancia
de un sistema que contiene tantas
partículas elementales como átomos
existen en 0,012 Kilogramos de carbono
12. Cuando se usa el mol, deben
especificarse las partículas elementales,
y pueden ser: átomos, moléculas, iones,
electrones, otras partículas o grupos
específicos de tales partículas. (14ª
CGPM, 1971, Resolución 3).
Candela: Una candela es la intensidad
luminosa, en una dirección determinada,
de una fuente que emite radiación
monocromática de frecuencia 540 X 1012
Hz, y que tiene una intensidad radiante
en esa dirección de 1/683 Watt /
steradian (16ª CGPM, 1979, Res. 3).
1.3.3 Unidades derivadas
Las unidades derivadas, como su nombre
indica, resultan de la combinación
algebraica de las unidades básicas. Los
nombres y símbolos de algunas de estas
unidades pueden ser reemplazados por la
11ª CGPM en 1960 estableció una tercera
clase de unidades, denominadas unidades
suplementarias, conteniendo las unidades
SI para ángulos planos (radian) y ángulos
sólidos (steradian). Sin embargo, en la
20ª CGPM (1995) se eliminó esta
separación, considerándose a estas como
pertenecientes a la clase de unidades
derivadas.
El siguiente cuadro muestra las más
importantes unidades derivadas, sus
símbolos y las relaciones que las definen:
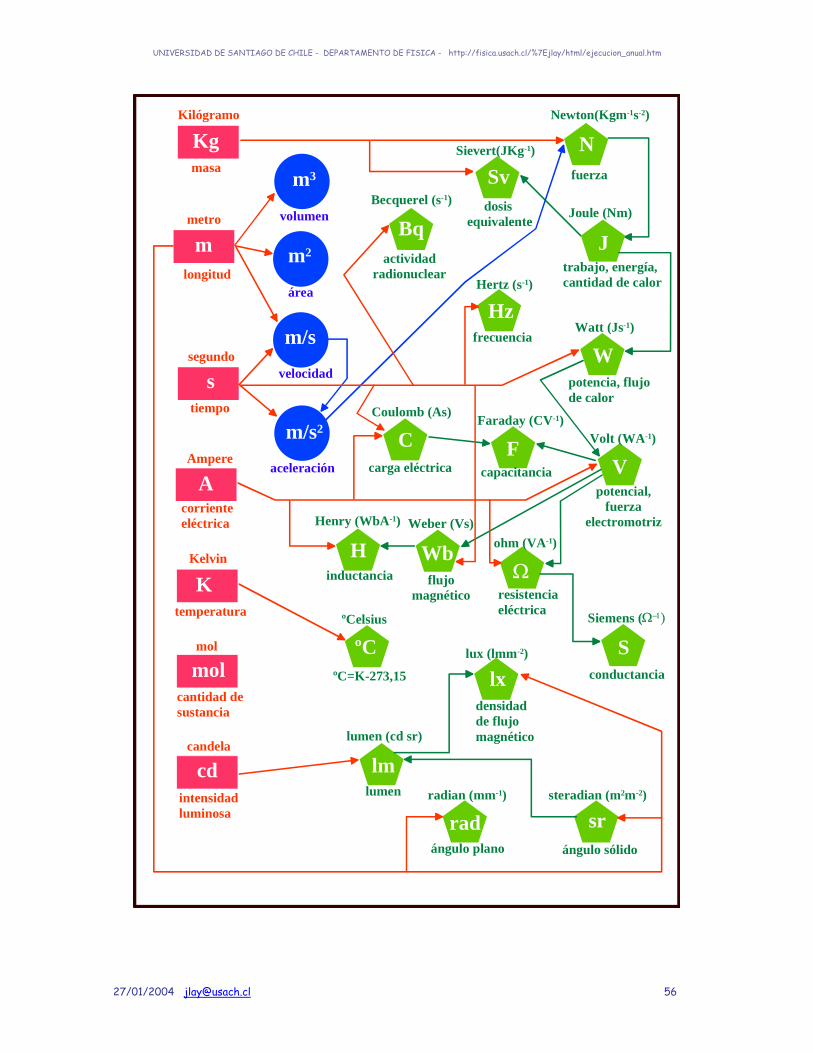
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 56
Kilógramo
masa
Kg
metro
longitud
m
segundo
tiempo
s
Ampere
corrienteeléctrica
A
Kelvin
temperatura
K
volumen
área
velocidad
m/s
m2
m3
m/s2
aceleración
SvN
J
Hz
Bq
frecuencia
fuerza
Newton(Kgm-1s-2)
Sievert(JKg-1)
trabajo, energía,cantidad de calorHertz (s-1)
Becquerel (s-1)
WWatt (Js-1)
potencia, flujode calor
ºC
Ω
VVolt (WA-1)
potencial, fuerza
electromotriz
FFaraday (CV-1)
capacitancia
CCoulomb (As)
carga eléctrica
mol
cantidad desustancia
mol
candela
intensidadluminosa
cd
WbWeber (Vs)
flujomagnético
HHenry (WbA-1)
inductancia
ºCelsius
ºC=K-273,15
lmlumen (cd sr)
lumen
radángulo plano
radian (mm-1)
lxdensidadde flujomagnético
lux (lmm-2)
resistenciaeléctrica
SSiemens (Ω−1)
conductancia
ohm (VA-1)
srángulo sólido
steradian (m2m-2)
dosis equivalente
Joule (Nm)
actividadradionuclear
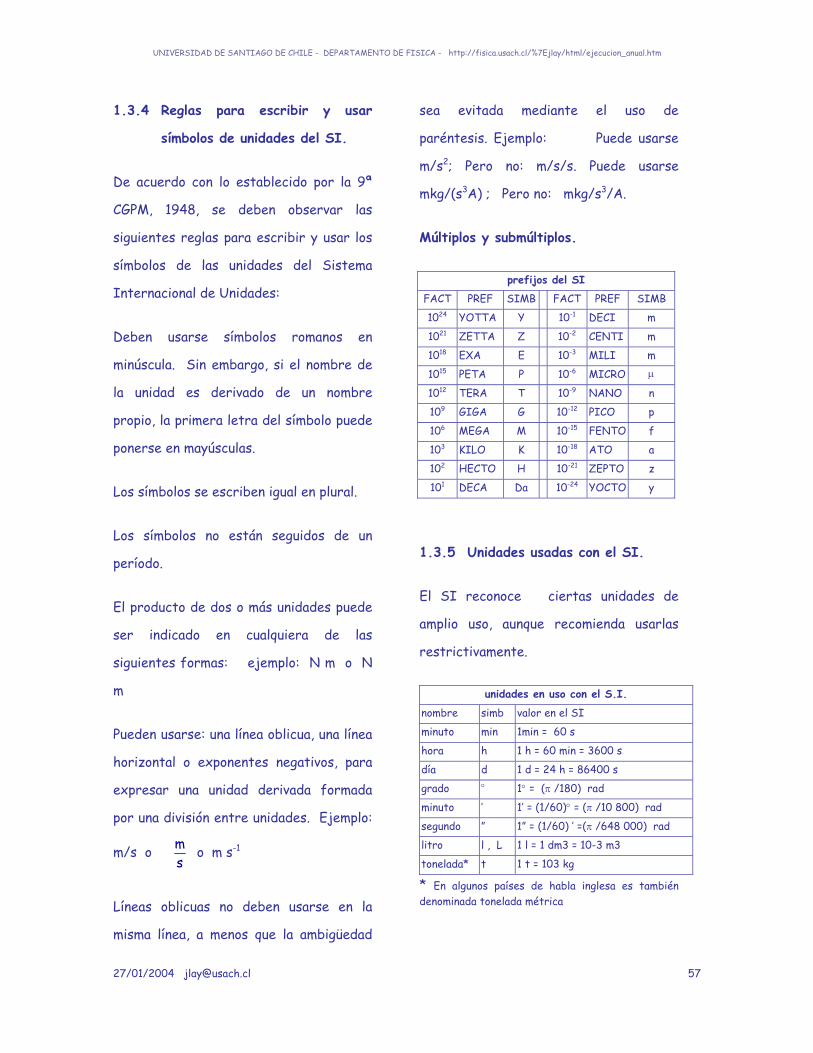
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 57
1.3.4 Reglas para escribir y usar
símbolos de unidades del SI.
De acuerdo con lo establecido por la 9ª
CGPM, 1948, se deben observar las
siguientes reglas para escribir y usar los
símbolos de las unidades del Sistema
Internacional de Unidades:
Deben usarse símbolos romanos en
minúscula. Sin embargo, si el nombre de
la unidad es derivado de un nombre
propio, la primera letra del símbolo puede
ponerse en mayúsculas.
Los símbolos se escriben igual en plural.
Los símbolos no están seguidos de un
período.
El producto de dos o más unidades puede
ser indicado en cualquiera de las
siguientes formas: ejemplo: N m o N
m
Pueden usarse: una línea oblicua, una línea
horizontal o exponentes negativos, para
expresar una unidad derivada formada
por una división entre unidades. Ejemplo:
m/s o ms
o m s-1
Líneas oblicuas no deben usarse en la
misma línea, a menos que la ambigüedad
sea evitada mediante el uso de
paréntesis. Ejemplo: Puede usarse
m/s2; Pero no: m/s/s. Puede usarse
mkg/(s3A) ; Pero no: mkg/s3/A.
Múltiplos y submúltiplos.
prefijos del SI
FACT PREF SIMB FACT PREF SIMB
1024 YOTTA Y 10-1 DECI m
1021 ZETTA Z 10-2 CENTI m
1018 EXA E 10-3 MILI m
1015 PETA P 10-6 MICRO µ
1012 TERA T 10-9 NANO n
109 GIGA G 10-12 PICO p
106 MEGA M 10-15 FENTO f
103 KILO K 10-18 ATO a
102 HECTO H 10-21 ZEPTO z
101 DECA Da 10-24 YOCTO y
1.3.5 Unidades usadas con el SI.
El SI reconoce ciertas unidades de
amplio uso, aunque recomienda usarlas
restrictivamente.
unidades en uso con el S.I.
nombre simb valor en el SI
minuto min 1min = 60 s
hora h 1 h = 60 min = 3600 s
día d 1 d = 24 h = 86400 s
grado ° 1° = (π /180) rad
minuto ’ 1’ = (1/60)° = (π /10 800) rad
segundo ” 1” = (1/60) ’ =(π /648 000) rad
litro l , L 1 l = 1 dm3 = 10-3 m3
tonelada* t 1 t = 103 kg
* En algunos países de habla inglesa es también denominada tonelada métrica
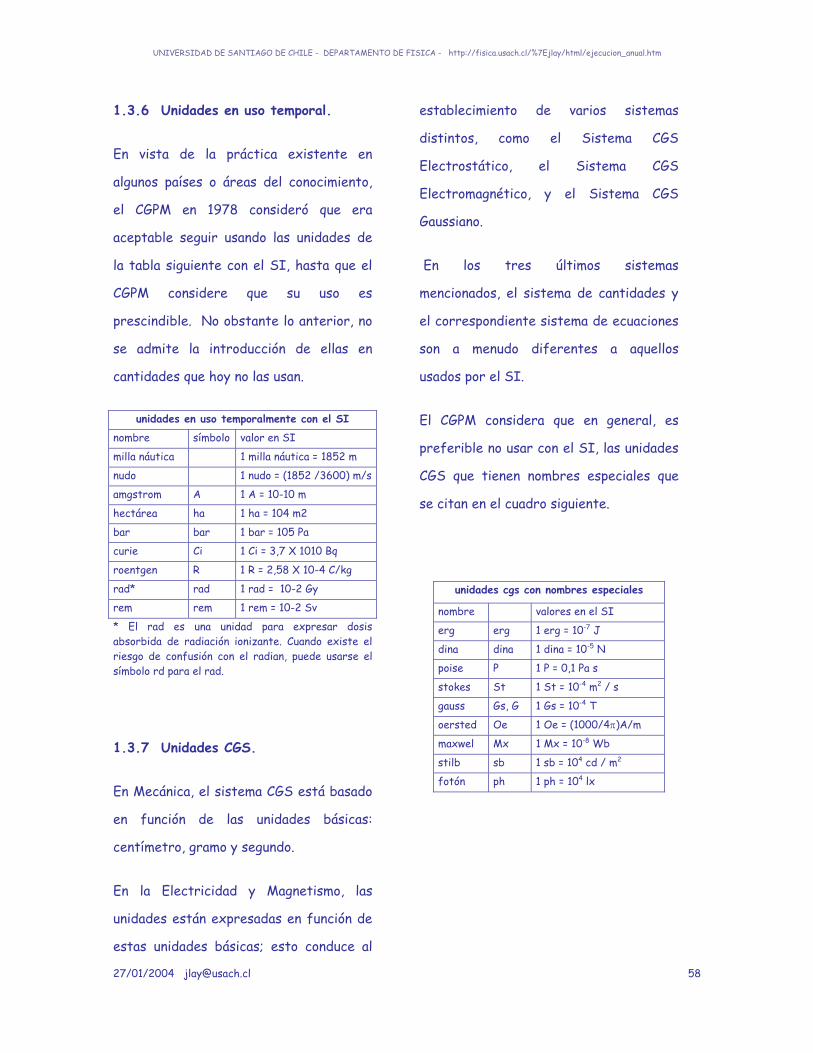
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 58
1.3.6 Unidades en uso temporal.
En vista de la práctica existente en
algunos países o áreas del conocimiento,
el CGPM en 1978 consideró que era
aceptable seguir usando las unidades de
la tabla siguiente con el SI, hasta que el
CGPM considere que su uso es
prescindible. No obstante lo anterior, no
se admite la introducción de ellas en
cantidades que hoy no las usan.
unidades en uso temporalmente con el SI
nombre símbolo valor en SI
milla náutica 1 milla náutica = 1852 m
nudo 1 nudo = (1852 /3600) m/s
amgstrom A 1 A = 10-10 m
hectárea ha 1 ha = 104 m2
bar bar 1 bar = 105 Pa
curie Ci 1 Ci = 3,7 X 1010 Bq
roentgen R 1 R = 2,58 X 10-4 C/kg
rad* rad 1 rad = 10-2 Gy
rem rem 1 rem = 10-2 Sv
* El rad es una unidad para expresar dosis absorbida de radiación ionizante. Cuando existe el riesgo de confusión con el radian, puede usarse el símbolo rd para el rad.
1.3.7 Unidades CGS.
En Mecánica, el sistema CGS está basado
en función de las unidades básicas:
centímetro, gramo y segundo.
En la Electricidad y Magnetismo, las
unidades están expresadas en función de
estas unidades básicas; esto conduce al
establecimiento de varios sistemas
distintos, como el Sistema CGS
Electrostático, el Sistema CGS
Electromagnético, y el Sistema CGS
Gaussiano.
En los tres últimos sistemas
mencionados, el sistema de cantidades y
el correspondiente sistema de ecuaciones
son a menudo diferentes a aquellos
usados por el SI.
El CGPM considera que en general, es
preferible no usar con el SI, las unidades
CGS que tienen nombres especiales que
se citan en el cuadro siguiente.
unidades cgs con nombres especiales
nombre valores en el SI
erg erg 1 erg = 10-7 J
dina dina 1 dina = 10-5 N
poise P 1 P = 0,1 Pa s
stokes St 1 St = 10-4 m2 / s
gauss Gs, G 1 Gs = 10-4 T
oersted Oe 1 Oe = (1000/4π)A/m
maxwel Mx 1 Mx = 10-8 Wb
stilb sb 1 sb = 104 cd / m2
fotón ph 1 ph = 104 lx

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 59
1.4 Definiciones básicas.
Antes de continuar es necesario que nos
pongamos de acuerdo sobre algunas
definiciones fundamentales. Lo que a
continuación se describirá, son los
significados y conceptos básicos que
requiere el estudio de la física en lo que a
mecánica clásica se refiere, cuidando de
que sean operacionales y lo más
asequibles que se pueda, sin sacrificar el
rigor. No se pretende aquí cubrir todas
las definiciones y es probable que algunas
de ellas contengan algunos conceptos aún
no discutidos, aunque de fácil
comprensión por ser muy intuitivos; estos
serán más adelante explicados inextenso.
Materia:
El concepto de materia, como veremos
frecuentemente en la física con otros
conceptos, no es definible ni posible de
describir; la noción de ella nos llega a
través de los sentidos (es sensorial). Se
dice que es todo aquello que afecta a
alguno de nuestros sentidos y goza de las
propiedades: extensión, impenetrabilidad,
inercia, gravedad, divisibilidad,
compresibilidad, elasticidad, dilatabilidad
(y otras tales como la dureza, la
ductilidad, la maleabilidad, la fragilidad,
la transparencia, la opacidad, etc.) y
puede presentarse en fase sólida, líquida
o gaseosa.
Cuerpo:
Toda porción limitada de materia; ligado
por tanto al concepto de materia dotada
de forma y tamaño (ejemplo: un libro, una
piedra, etc.). Los cuerpos pueden
agruparse en especies de acuerdo a la
materia de los que están hechos,
tomando cada especie el nombre de
sustancia (ejemplo: azufre, cobre, papel,
etc). Desde el punto de vista químico,
los cuerpos se pueden dividir en simples
(dotados de una sola clase de materia;
ejemplo; plata, cobre, etc.) y compuestos
(dotados de más de una clase de materia;
ejemplo: yeso, compuesto de azufre,
oxígeno y calcio).
Extensión:
Por extensión se entiende la propiedad de
los cuerpos de ocupar una determinada
porción del espacio, fija o variable, según
su fase, mensurable o no por métodos
geométricos, según su forma, y que
permanece constante en la fase sólida y
líquida, y variable en la gaseosa. En la
extensión se admiten tres dimensiones:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 60
longitud (o largo), latitud (o ancho) en una
dirección perpendicular a la anterior, y
grueso (altura o profundidad), en una
dirección perpendicular al plano de las
otras dos.
Impenetrabilidad:
Los cuerpos son impenetrables,
entendiéndose por esto que un lugar del
espacio no puede ser ocupado al mismo
tiempo por más de un cuerpo. En los
gases parece haber un contraejemplo,
pero en tal caso debemos recordar que
siendo muy grande la distancia entre dos
moléculas del mismo, pueden mezclarse,
pero donde existe una molécula, no puede
haber otra del otro gas.
Gravedad:
Toda la materia atrae a la restante
materia que lo rodea, siendo a la vez
atraído por las otras. La gravedad, que
es muy evidente entre la Tierra y los
pequeños cuerpos (comparados con ella)
que están en su cercanía, existe también
entre estos pequeños cuerpos, solo que no
es evidente a nuestros sentidos.
Inercia:
La propiedad de la materia de no poder
cambiar por si misma su velocidad.
Divisibilidad:
Toda materia es divisible, siendo
necesario en algunos casos mayor
esfuerzo que en otros, pero los cuerpos
finalmente pueden dividirse en cuerpos
de menor tamaño.
Compresibilidad:
Se puede reducir el volumen de todos los
cuerpos a través de la presión. Los gases
son muy compresibles, los líquidos son
muy poco compresibles y los sólidos
poseen compresibilidades de diferente
grado.
Elasticidad:
Resistencia de la materia a cambiar de
forma a los que se trata de someterla,
tendiendo a recuperar la forma primitiva
después de cesar la causa que producía la
deformación. Aquellos cuerpos que son
capaces de recuperar su forma primitiva
exacta, se denominan perfectamente
elásticos, y aquellos cuerpos que se
quedan deformados, incapaces de
recuperar ni un ápice su forma, se
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 61
denominan perfectamente inelásticos
(ambos cuerpos son ideales; en la
naturaleza solo existen cuerpos elásticos
e inelásticos, siendo posibles definirlos en
la medida en que su comportamiento se
asemeja a los ideales).
Dilatabilidad:
Al calentar un cuerpo, cambia su volumen,
aumentando en la gran mayoría de los
casos, con excepción de algunas
sustancias en algunos rangos de
temperatura (ejemplo: el agua entre 0 y
4ª Celsius se contrae).
Fuerza:
Todo lo que es capaz de cambiar la
velocidad de un cuerpo y/o deformarlo.
Fenómenos físicos y químicos:
Se entiende por fenómeno a cualquier
alteración o cambio de un cuerpo o
sistemas de cuerpos (un simple
movimiento, la combustión de la madera,
la ebullición del agua, etc). Todo
fenómeno obedece a un cierto número de
causas, que son antecedentes
indispensables para la aparición de aquel.
Los fenómenos pueden clasificarse
aproximadamente en grupos tales como
fenómenos físicos, fenómenos químicos,
fenómenos fisiológicos, etc., de los cuales
nos interesan particularmente los dos
primeros. Se puede caracterizar
aproximadamente a los fenómenos físicos
por no dar lugar a cuerpos nuevos, vale
decir, por no alterar la sustancia que
forma los cuerpos en que se manifiesta,
persistir solamente mientras dura la
causa que lo produce y ser
aproximadamente reversible en general
(si se calienta una varilla aumenta su
volumen, pero desaparecida la causa que
dio lugar al cambio, la varilla recupera su
forma inicial). Los fenómenos químicos en
cambio, se caracterizan por dar lugar a
cuerpos nuevos, persisten después de
cesar la causa que los producen y son
irreversibles en general (si quemamos la
varilla, aparecen cuerpos a resultado de
la combustión, cuyas propiedades son muy
distintas a las de la madera).
Constitución de la materia:
La materia no está formada por un todo
continuo, sino está constituida por
elementos separados unos de otros por
espacios desprovistos de materia. De no
admitirse esto, no podría comprenderse
la razón por la cual son compresibles
todos los cuerpos si a la vez son
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 62
impenetrables. Cuando se divide un
cuerpo por cualquier método, en general
se observa un límite para esa división,
pasado el cual aparecen cuerpos con
propiedades distintas a la del cuerpo que
se divide; este límite se denomina
molécula.
Una molécula es la menor porción de un
cuerpo que puede existir libre con todas
las propiedades generales del mismo.
Todos los cuerpos están formados por
moléculas agrupadas unas con otras con
una fuerza llamada cohesión, que se
ejerce entre cada molécula y las
circundantes, a través de espacios que las
separan, denominados espacios
intermoleculares, mayores en general, que
las mismas moléculas.
Las moléculas son invisibles y casi
siempre complejas, es decir, compuestas
de otros elementos más pequeños (para
entender el orden de magnitud, citaremos
que el diámetro de una molécula está en
el orden de 10-8cm. Si consideramos una
molécula de hidrógeno, cuyo diámetro es
de 2,4x10-8 veremos que 1cm3 en
condiciones normales de temperatura y
presión contiene 27x1018 moléculas). Las
moléculas de un cuerpo están dotadas de
movimiento alrededor de una cierta
posición de equilibrio (movimiento
Browniano).
Fraccionada la molécula, aparecen
cuerpos nuevos, denominados átomos, los
que no pueden a su vez dividirse por
medios químicos.
Un átomo es la menor porción de un
cuerpo que puede trasladarse íntegra en
las transformaciones químicas. Los
átomos están unidos mediante una fuerza
denominada afinidad, para constituir las
moléculas, existiendo entre ellas espacios
interatómicos mucho mayores que los
mismos átomos. Existen un poco más de
100 clases de átomos distintos.
Los átomos al reunirse para formar las
moléculas pueden hacerlo con otros de la
misma clase o de clases distintas, dando
lugar a la formación de moléculas simples
o compuestas respectivamente. Así, un
átomo de hidrógeno forma una molécula
simple al unirse a otro átomo de
hidrógeno, pero forma una molécula
compleja al unirse dos átomos de
hidrógeno y uno de oxígeno.
No corresponde aquí continuar con la
división de la materia, aunque se puede
citar el hecho de que el átomo a su vez
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 [email protected] 63
puede a su vez fraccionarse en núcleo y
electrones. El núcleo se ubica en la
región central del átomo y en la región
exterior se encuentra el conjunto de
electrones.
El núcleo está compuesto por los
nucleones, o sea los protones y los
neutrones. A su vez, cada nucleón resulta
de la unión de 3 quarks.
En resumen, actualmente se conocen 6
niveles estructurales en la constitución
de todos los cuerpos: cuerpo, molécula,
átomo, núcleo, nucleón, quarks. Algunos
científicos consideran que existe una
nueva etapa según la cual los quarks
estarían formados por los preones, un
nuevo tipo de partícula elemental. En
definitiva, esta cuestión esta hoy en la
frontera del conocimiento, estimándose
que las subdivisiones podrían continuar,
haciendo el viaje hacia el interior de la
materia cada vez más parecido a un viaje
sin final.
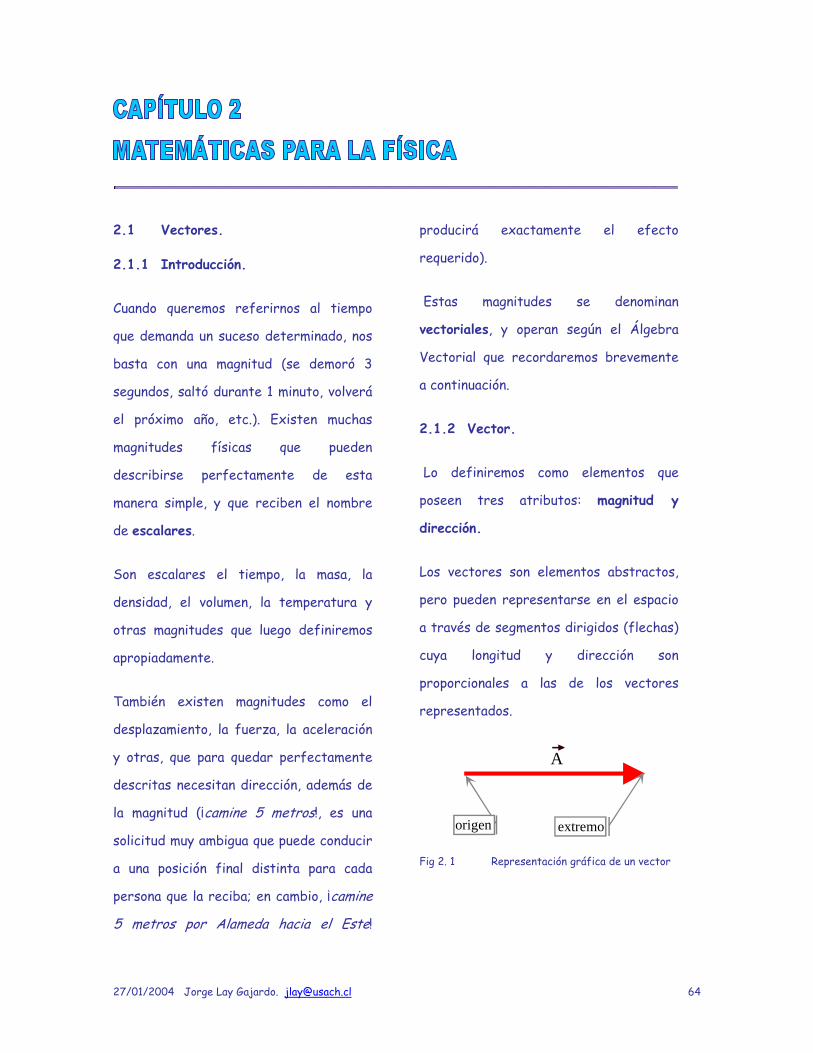
27/01/2004 Jorge Lay Gajardo. [email protected] 64
2.1 Vectores.
2.1.1 Introducción.
Cuando queremos referirnos al tiempo
que demanda un suceso determinado, nos
basta con una magnitud (se demoró 3
segundos, saltó durante 1 minuto, volverá
el próximo año, etc.). Existen muchas
magnitudes físicas que pueden
describirse perfectamente de esta
manera simple, y que reciben el nombre
de escalares.
Son escalares el tiempo, la masa, la
densidad, el volumen, la temperatura y
otras magnitudes que luego definiremos
apropiadamente.
También existen magnitudes como el
desplazamiento, la fuerza, la aceleración
y otras, que para quedar perfectamente
descritas necesitan dirección, además de
la magnitud (¡camine 5 metros!, es una
solicitud muy ambigua que puede conducir
a una posición final distinta para cada
persona que la reciba; en cambio, ¡camine
5 metros por Alameda hacia el Este!
producirá exactamente el efecto
requerido).
Estas magnitudes se denominan
vectoriales, y operan según el Álgebra
Vectorial que recordaremos brevemente
a continuación.
2.1.2 Vector.
Lo definiremos como elementos que
poseen tres atributos: magnitud y
dirección.
Los vectores son elementos abstractos,
pero pueden representarse en el espacio
a través de segmentos dirigidos (flechas)
cuya longitud y dirección son
proporcionales a las de los vectores
representados.
origen extremo
A
Fig 2. 1 Representación gráfica de un vector

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 65
2.1.3 Vectores equipolentes.
Dos vectores son equipolentes si son
iguales sus respectivas magnitudes
direcciones y sentidos. Esta definición,
que implica que un vector puede estar en
cualquier punto del espacio sin alterar sus
características, define a los vectores
libres.
A
D
CB
Fig 2. 2 Vectores equipolentes: A=B=C=Dr rrr
2.1.4 Vectores opuestos.
Dos vectores son opuestos cuando sus
magnitudes son iguales y sus direcciones
son opuestas.
A
B
Fig 2. 3 Vectores opuestos: A=- Brr
2.1.5 Ponderación de Vectores.
El producto entre un escalar m y un
vector Ar se conoce como ponderación del
vector.
A
B
A
Fig 2. 4 Ponderación de vectores: B=2Ar r
2.1.6 Suma gráfica de vectores.
Gráficamente la suma o RESULTANTE de
vectores se obtiene uniendo
sucesivamente los extremos y orígenes de
ellos, como se muestra en la figura. El
vector suma o resultante se obtiene
uniendo el primer origen con el último
extremo.
C
B
AR
Fig 2. 5 Resultante: A + B + C = Rrr rr
En el caso de dos vectores este
procedimiento produce un triángulo
formado por los vectores y la resultante.
Otra forma gráfica de sumar dos
vectores consiste en unir los orígenes y
trazar líneas auxiliares paralelas a los
vectores, que pasen por el extremo del
otro.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 66
La resultante es el vector que une los
orígenes comunes con la intersección de
las paralelas auxiliares (método del
paralelógramo).
A
B
R
Fig 2. 6 Resultante: Método del Paralelógramo
Note que el orden de la suma no afecta el
resultado, mostrando que es conmutativa:
A B B A+ = +r rr r
Si sumamos los vectores A, B y Crrr
de la
figura anterior a través del método del
paralelógramo, veremos claramente que:
( ) ( )A B C A B C+ + = + +r rr rr r
Mostrando que la suma es asociativa (se
recomienda comprobarlo gráficamente).
Por otra parte, es innecesaria la
definición de resta, pues claramente
A - Brr
es la suma de Ar
y el opuesto deBr
.
( )A - B A - B= +r rr r
-B
AR`
Fig 2. 7 Resta de vectores = suma del opuesto
Si consideramos el paralelógramo que
resulta de los vectores Ar
y Br
y las
paralelas auxiliares, observamos que la
suma y la resta de ambos vectores
constituyen gráficamente las diagonales
mayor y menor respectivamente.
A
B
A + B
A - B
Fig 2. 8 Suma y resta gráfica de vectores.
2.1.7 Vector unitario.
Se define como un vector cuya magnitud
es la unidad y cuya dirección y sentido
son las del vector sobre el que está
definido.
Si consideramos un vector Ar
cuya
magnitud es A, existe un vector unitario
A en la dirección deAr
, tal que:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 67
ˆA AA =r
Observe que entonces:
1 AA A A A
= =r
r
A
AAA =
Fig 2. 9 Vector Unitario en la dirección de Ar
2.1.8 Vector nulo.
Vector cuya magnitud es cero.
Gráficamente es representado por un
punto.
2.1.9 Componente de un vector.
La proyección ortogonal de un vector
sobre una recta es una cantidad que se
denomina componente (es un escalar).
Esta se determina como la magnitud del
segmento de la recta comprendido entre
dos rectas perpendiculares a ella, y que
pasan por el origen y el extremo del
vector respectivamente.
A
AL
L
Fig 2. 10 Componente de Ar
sobre la recta L
Vectores en el plano coordenado
cartesiano.
Un vector puede definirse en el plano
cartesiano, conformado por dos líneas
perpendiculares denominadas ejes.
Al eje horizontal se le denomina
ABSCISA y se identificará con una letra
mayúscula (usualmente X, aunque en física
será una letra que represente una
magnitud física), mientras que al eje
vertical se le denominará ORDENADA
(identificado por la letra Y, o una
magnitud física).
X
Y
X0 X1
Y1
Y0
Fig 2. 11 Vector en el plano coordenado cartesiano
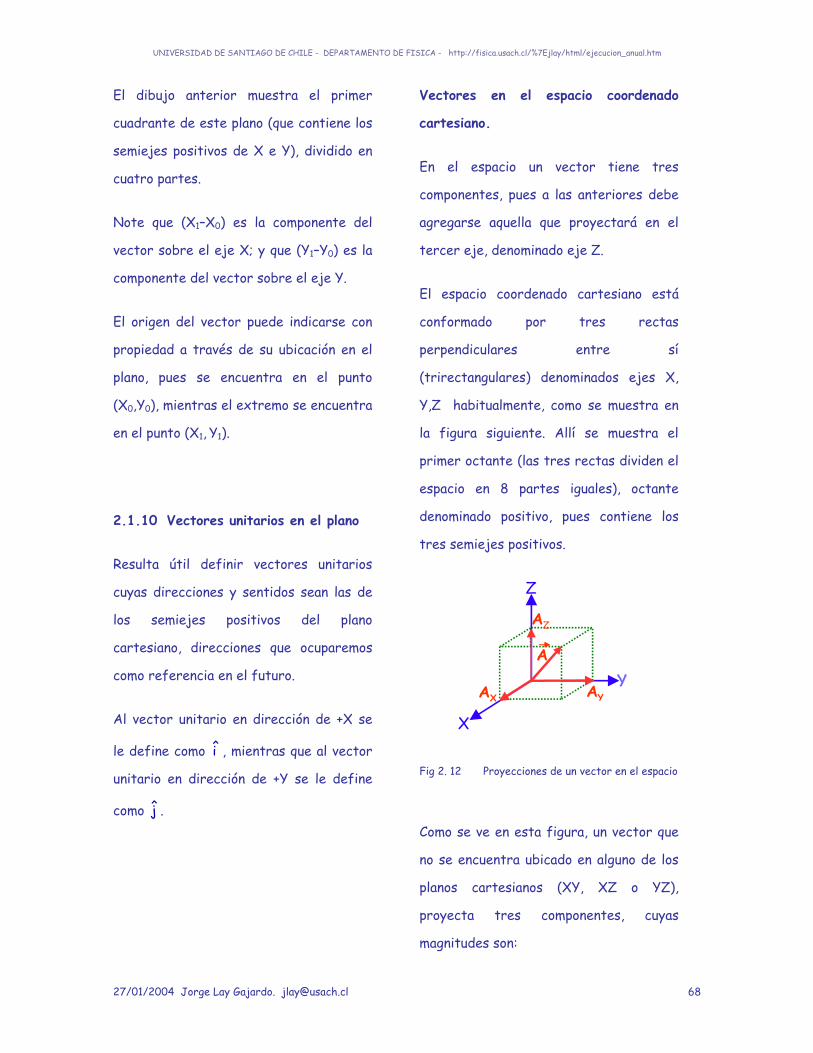
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 68
El dibujo anterior muestra el primer
cuadrante de este plano (que contiene los
semiejes positivos de X e Y), dividido en
cuatro partes.
Note que (X1–X0) es la componente del
vector sobre el eje X; y que (Y1–Y0) es la
componente del vector sobre el eje Y.
El origen del vector puede indicarse con
propiedad a través de su ubicación en el
plano, pues se encuentra en el punto
(X0,Y0), mientras el extremo se encuentra
en el punto (X1, Y1).
2.1.10 Vectores unitarios en el plano
Resulta útil definir vectores unitarios
cuyas direcciones y sentidos sean las de
los semiejes positivos del plano
cartesiano, direcciones que ocuparemos
como referencia en el futuro.
Al vector unitario en dirección de +X se
le define como i , mientras que al vector
unitario en dirección de +Y se le define
como j .
Vectores en el espacio coordenado
cartesiano.
En el espacio un vector tiene tres
componentes, pues a las anteriores debe
agregarse aquella que proyectará en el
tercer eje, denominado eje Z.
El espacio coordenado cartesiano está
conformado por tres rectas
perpendiculares entre sí
(trirectangulares) denominados ejes X,
Y,Z habitualmente, como se muestra en
la figura siguiente. Allí se muestra el
primer octante (las tres rectas dividen el
espacio en 8 partes iguales), octante
denominado positivo, pues contiene los
tres semiejes positivos.
AZ
AX AY
X
Z
A
Fig 2. 12 Proyecciones de un vector en el espacio
Como se ve en esta figura, un vector que
no se encuentra ubicado en alguno de los
planos cartesianos (XY, XZ o YZ),
proyecta tres componentes, cuyas
magnitudes son:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 69
AX=(X1–X0),
AY = (Y1 – Y0)
AZ = (Z1 – Z0)
Note que aquí el plano XY se encuentra en
el piso.
Finalmente, se puede definir un vector
unitario en dirección y sentido del
semieje positivo de Z, que se define
usualmente como k .
Este versor, junto a los versores ˆ ˆi, j del
plano XY forman un trío de versores
trirectangulares.
X
Z
Yi
k
j
Fig 2. 13 Versores trirectangulares
2.1.11 Componentes cartesianas de un
vector.
Ahora estamos en condiciones de
encontrar relaciones analíticas para
trabajar con los vectores, prescindiendo
de las representaciones gráficas, que si
bien es cierto prestan mucha ayuda
didáctica, nos confundirán cuando
trabajemos con magnitudes físicas, pues
se tiende a relacionar la longitud del
dibujo de un vector con su magnitud.
Consideremos un vector libre en el plano
XY, representado con su origen en el
origen del sistema cartesiano de
coordenadas para simplificar el análisis;
representemos gráficamente además, sus
componentes cartesianas y sus versores:
A
X
Y
AY
AX
j
i
Fig 2. 14 Vector en el plano; componentes y versores
En virtud de lo previamente definido, se
puede suponer la existencia de dos
vectores ficticios (que llamaremos

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 70
vectores componentes), tales que
sumados tengan al vector Ar
como
resultante.
El vector componente situado en la
abscisa tiene magnitud equivalente a AX
y dirección i , mientras el vector
componente situado en la ordenada tiene
magnitud equivalente a Ay y dirección j .
A
X
Y
AX
AY
Fig 2. 15 Vectores componentes
Aquí resulta claro que: X YA A +A=r r r
Y si recordamos nuestra definición de
versor tenemos que:
X
X
Ai=A
r
por lo que X x ˆA =A i
r
Y
Y
Aj=A
r
por lo que Y Y ˆA =A j
r
Entonces el vector Ar
puede escribirse
como:
X Yˆ ˆA = A i A j+
r
( X Y Zˆˆ ˆA=A i + A j+A k
r; en el espacio)
Esta nos será muy útil para encontrar una
forma más analítica de sumar vectores,
como se verá a continuación.
2.1.12 Suma de Vectores en función
de sus componentes.
Supongamos la los vectores A y Brr
en el
plano XY como en la figura siguiente.
Como son vectores libres, los hemos
dibujado de manera tal que el extremo de
Ar
coincida con el origen de Br
, con lo que
la suma de ambos se puede obtener
gráficamente uniendo el origen de Ar
con
el extremo deBr
, como ya sabemos. A
esta resultante le denominaremosRr
.
A
X
Y
AX
AY
BBY
BX
RRY
RX
Fig 2. 16 Suma de vectores y sus componentes

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 71
Entonces las componentes de Rr
son la
suma aritmética de las componentes de
los vectores A y Brr
.
X X XR A B= +
Y Y YR A B= +
Por lo que:
X X Y Yˆ ˆR (A +B )i +(A +B )j =
r
Si el vector estuviese en el espacio, por
extensión, se encuentra que:
X X Y Y Z Zˆˆ ˆR (A + B )i+ (A B )j (A B )k= + + +
r
Esta expresión es válida para la suma de
varios vectores, pues en ese caso a cada
dimensión se le agregarán los términos
correspondientes a las componentes de
los nuevos vectores.
Del mismo modo, la expresión permite
restar vectores, pues como hemos visto,
la resta corresponde a la suma del
opuesto.
Ejemplo 2.1
Sean los siguientes vectores:
ˆˆ ˆA 3i 4j 2k= + +r
; ˆˆ ˆB=i 3j-5k+r
Encontrar:
a) A B+r v
b) A B−r v
c) 2 Ar
Solución:
a) ( ) ( ) ( ) ˆˆ ˆA B= 3 1 i 4 3 j 2- 5 k+ + + + +rr
ˆˆ ˆA B= 4i 7j-3k+ +rr
Pues la resultante se obtiene sumando las
componentes respectivas.
b) ( ) ( ) ( ) ˆˆ ˆA (- B) 3 1 i 4 3 j 2 5 k+ = − + − + +rr
ˆˆ ˆA (-B) 2i j 7k+ = + +rr
Pues la resta no es más que la suma del
opuesto.
c) ˆˆ ˆ2A 6i 8j 4k= + +r
2.1.13 Notación polar.
En muchas ocasiones nos veremos
enfrentados a la necesidad de calcular o
referirnos a los vectores en función de su
magnitud y dirección directamente. Para
ello recurriremos a la notación polar, que
da cuenta de su magnitud a través de su
módulo y a su dirección a través de un

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 72
ángulo respecto de una recta de
referencia.
Consideremos un vector en el plano
coordenado cartesiano, como se ve en la
figura siguiente:
A
X
Y
AX
AY
θ
Fig 2. 17 Componentes cartesianas y polares
La dirección y sentido del vector pueden
indicarse a través de un ángulo, que
usualmente es el ángulo entre el vector y
el semieje positivo de la abscisa y su
magnitud, a través del módulo del vector;
analíticamente:
Ar
=(A,θ)
Las componentes cartesianas se pueden
encontrar fácilmente a través de las
polares mediante las expresiones:
AX = A cos θ
AY = A sen θ
Del mismo modo, conocidas las
componentes cartesianas, se pueden
calcular las polares a través de las
expresiones:
A2 = AX2 + AY
2
θ = arctg Y
X
AA
Ejemplo 2.2
Sea Ar
un vector de módulo 5 y dirección
37º respecto de +X situado en el plano
XY. Encontrar sus componentes
cartesianas.
Solución: Se tiene que A=5 y θx=37º.
Por tanto:
AX=5cos37º=5(0,8)=4
AY=5sen37º=5(0,6)=3
Si suponemos que el origen está en el
punto (0,0) del sistema de coordenadas,
entonces el extremo del vector estará en
el punto (4,3)
X
Y
4
3
37º
A = 5
Fig 2. 18 Representación gráfica del vector del ej. 2

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 73
Note que si el origen del vector estuviera
por ejemplo, en el punto (2,1), entonces el
extremo estaría en el punto (6,4) pues
sus componentes cartesianas son AX=4 y
AY=3.
Fig 2. 19 Componentes del vector del ej. 2
Ejemplo 2.3
Sea Br
un vector cuyas componentes
cartesianas son BX=10 y BY=5 situado en
el plano XY. Encontrar su magnitud y
dirección.
Solución: Se tiene que Bx=10 y BY=5.
Por tanto: B2=102+52; B = 11,2
5rctg 26,6º10
⎛ ⎞θ = ⎜ ⎟⎝ ⎠
2.1.14 En el espacio
En el espacio la dirección queda
determinada cuando se conocen los
ángulos respecto de los tres ejes. La
figura siguiente muestra los ángulos
directores:
Fig 2. 20 Un vector en el espacio.
Aquí se ve que los ángulos directores θX,
θY, θZ determinan la dirección. La
magnitud corresponde el módulo del
vector (A).
El vector se puede representar
analíticamente a través de su módulo A y
de sus ángulos directores θX; θY; θZ
Muy importantes son las siguientes
relaciones extraídas de la figura
anterior:
cos θX = XAA
cos θY = YAA
cos θZ = ZAA
Denominados cosenos directores,
permiten calcular las componentes
1
4
62
3
4
X
Y

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 74
cartesianas a partir de la magnitud y los
ángulos directores, pues de ellos se tiene:
AX = A cos θX
AY = A cos θY
AZ = A cos θZ
Dadas las componentes cartesianas se
pueden conocer la magnitud y los ángulos
directores a través de las siguientes
relaciones, provenientes también de los
cosenos directores:
θX = arccos XAA
θY = arccos YAA
θZ = arccos ZAA
El módulo se puede calcular a través de la
expresión:
A2=AX2+AY
2+AZ2
Ejemplo 2.4
Consideremos el vector ˆˆ ˆC=3i-6j+2kr
ubicado en el espacio coordenado
cartesiano. Encontrar su magnitud y
dirección.
Solución: Se tiene que CX=3, CY=-6 y
CZ=2 . Podemos calcular su magnitud:
C2=32+(-6)2+ 22= 49
Por lo tanto su magnitud es: C=7
Y sus direcciones:
θx=arcos 37
=64,6º
θy=arcos 6 7− =149 º
θz=arcos 27
=73,4º
2.1.15 Productos entre Vectores.
Existen dos formas de multiplicar
vectores, siendo una denominada
producto escalar (interno o de punto) y la
otro producto vectorial (exterior o de
cruz), puesto que ofrecen como resultado
un escalar y un vector respectivamente.
Producto Escalar.
Dados dos vectores Ar
yBr
, su producto
escalar se define como el producto de sus
módulos por el coseno del ángulo que
forman.
Ar•Br
=ABcosθ (π≥θ≥0)
La definición de producto escalar tiene
aplicaciones muy relevantes, pues permite
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 75
expresar magnitudes muy importantes
para la física en forma muy sencilla.
Las propiedades del producto escalar son:
1.- A B=B A• •r rr r
(Conmutatividad)
2.- ( )A B+C =A B+A C• • •r rr rr r r
(Distributividad
respecto de la suma).
3.- ( ) ( ) ( )m A B = mA B=A mB• • •r r rr r r
siendo m
un escalar.
Aplicaciones:
1.- 2A A=A•r r
El producto escalar entre un vector y si
mismo, constituye el cuadrado del vector,
y corresponde al cuadrado de su módulo.
Esto se debe a que si aplicamos la
definición, tenemos:
Ar•Ar
=AAcos0º=AA(1)=A2
2.- i • i =1 j • j =1 k • k =1
Por las razones expuestas en el punto 1.
3.- Si dos vectores son perpendiculares,
entonces según la definición se tiene:
Ar•Br
=ABcos90º=AB(0)= 0
Esta es condición de perpendicularidad.
4.- De acuerdo a lo anterior, entonces:
i • j =0 j • k =0 i • k =0
pues los vectores unitarios i , j , k forman
un sistema trirectangular.
5.- Ahora estamos en condiciones de
encontrar una expresión que permita
multiplicar escalarmente dos vectores
expresados en coordenadas cartesianas.
Sean los vectores:
x y zˆˆ ˆA=A i A j A k+ +
r; x y z
ˆˆ ˆB=B i B j B k+ +r
Si queremos multiplicarlos escalarmente,
tenemos, recordando la propiedad de
distributividad del producto escalar
respecto de la suma de vectores:
( ) ( )x y z x y zˆ ˆˆ ˆˆ ˆA B A i A j A k B i B j B k• = + + • + +
rr
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
x x x y x z
y x y y y z
z x z y z z
ˆˆ ˆ ˆ ˆˆA B A B i i A B i j A B i k
ˆˆˆ ˆ ˆ ˆA B j i A B j j A B j k
ˆ ˆ ˆ ˆˆ ˆA B k i A B k j A B k k
• = • + • + • +
+ • + • + • +
+ • + • + •
rr
Por tanto:
x x y y z zA B A B A B A B• = + +rr
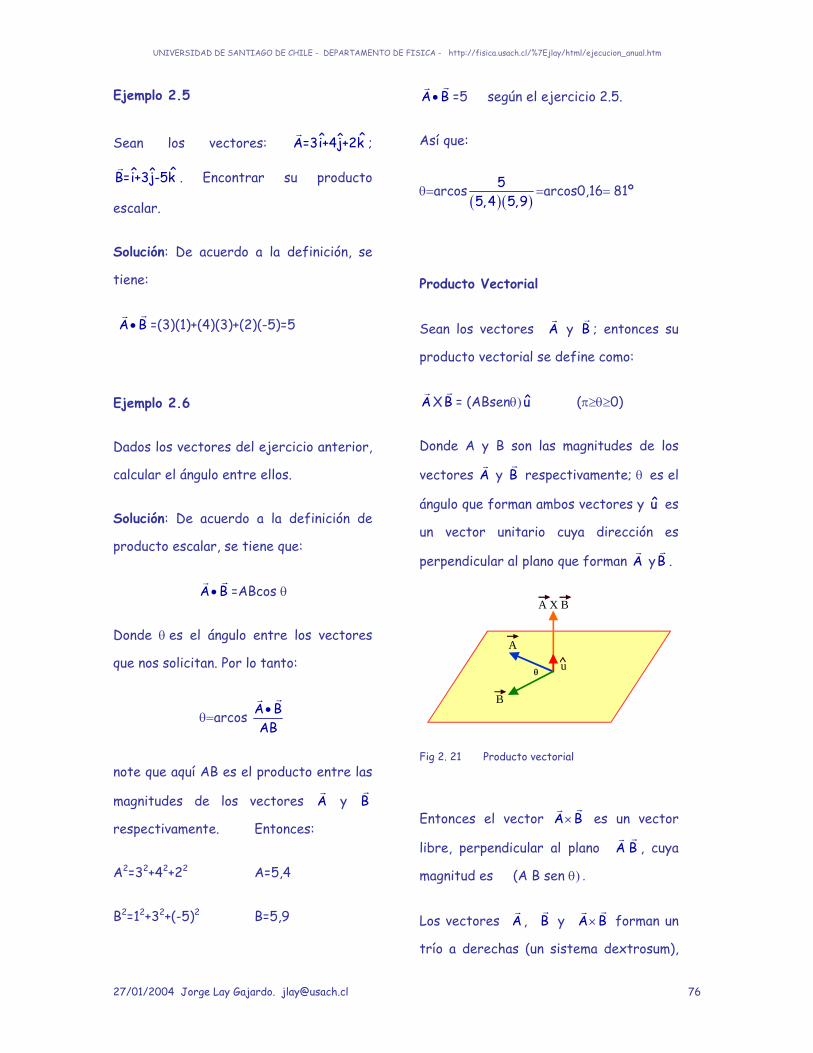
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 76
Ejemplo 2.5
Sean los vectores: ˆˆ ˆA=3i+4j+2kr
;
ˆˆ ˆB=i+3j-5kr
. Encontrar su producto
escalar.
Solución: De acuerdo a la definición, se
tiene:
A B•rr
=(3)(1)+(4)(3)+(2)(-5)=5
Ejemplo 2.6
Dados los vectores del ejercicio anterior,
calcular el ángulo entre ellos.
Solución: De acuerdo a la definición de
producto escalar, se tiene que:
A B•rr
=ABcos θ
Donde θ es el ángulo entre los vectores
que nos solicitan. Por lo tanto:
θ=arcos A BAB•rr
note que aquí AB es el producto entre las
magnitudes de los vectores Ar
y Br
respectivamente. Entonces:
A2=32+42+22 A=5,4
B2=12+32+(-5)2 B=5,9
A B•rr
=5 según el ejercicio 2.5.
Así que:
θ=arcos( )( )
55,4 5,9
=arcos0,16= 81º
Producto Vectorial
Sean los vectores Ar
y Br
; entonces su
producto vectorial se define como:
Ar
XBr
= (ABsenθ) u (π≥θ≥0)
Donde A y B son las magnitudes de los
vectores Ar y B
r respectivamente; θ es el
ángulo que forman ambos vectores y u es
un vector unitario cuya dirección es
perpendicular al plano que forman Ar yBr
.
θ
B
u
A
A X B
Fig 2. 21 Producto vectorial
Entonces el vector A B×rr
es un vector
libre, perpendicular al plano Ar
Br
, cuya
magnitud es (A B sen θ) .
Los vectores Ar
, Br y A B×
rr forman un
trío a derechas (un sistema dextrosum),

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 77
lo que quiere decir que la dirección A B×rr
es la que indica el dedo pulgar de la mano
derecha cuando esta se cierra desde el
vector Ar
hacia el vectorBr
, en el plano
Ar
Br
.
B
A
A X B
Fig 2. 22 Regla de la mano derecha.
Las propiedades del producto vectorial
son:
1.- A B×rr
= B A− ×r r
Anticonmutatividad
2.-Ar
x(Br
+ Cr
)=Ar
xBr
+Ar
x Cr
Distributividad respecto de la suma).
3.- m(Ar
xBr
)=(mAr
)xBr
=Ar
x(mBr
) siendo m
un escalar
Aplicaciones:
1.- Si los vectores Ar
y Br
son paralelos,
entonces, por definición:
A B×rr
=(ABsen0º) u = 0r
Esta es condición de paralelismo.
2.- i X i = 0r
; j X j = 0r
; k X k = 0r
Según la aplicación anterior.
3.- También se tiene aplicando la
definición que:
i X j =(1)(1)(sen90º) k = k
j X k =(1)(1)(sen90º) i = i
k X i =(1)(1)(sen90º) j = j
Y según la propiedad de
anticonmutatividad:
j X i =- k
k X j =- i
i X k =- j
El gráfico siguiente resume lo
encontrado, proporcionando además una
buena forma de recordarlo en el futuro.
Fig 2. 23 Producto vectorial entre versores.
Note que el producto vectorial entre 2
versores es el tercer versor, y es positivo
cuando el producto sigue la dirección de
i
k
j

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 78
las flechas en el gráfico, es decir, cuando
el sentido es contrario al movimiento de
las manecillas de un reloj (sentido
antihorario).
4.- Ahora estamos en condiciones de
encontrar una expresión que permita
encontrar el producto vectorial para
vectores que están expresados en función
de sus componentes rectangulares
(cartesianas) y sus respectivos versores.
Sean los vectores:
Ar
=AX i +AY j +AZ k y Br
=BX i +BY j +BZ k .
Si queremos multiplicarlos
vectorialmente, tenemos, recordando la
propiedad de distributividad del producto
vectorial respecto de la suma de
vectores:
Ar
XBr
=(AX i +AY j +AZ k )X(BX i +BY j +BZ k )
=AXBX( i X i )+AXBY( i X j )+AXBZ( i X k )+
+AYBX( j X i )+AYBY( j X j )+AYBZ( j X k )+
+AZBX( k X i )+AZBY( k X j )+AZBZ( k Xk )
reemplazando los productos vectoriales
entre paréntesis, se tiene:
Ar
XBr
=AXBY k +AXBZ(- j )+AYBX(- k )+
+AYBZ i +AZBX j +AZBY(- i )
Ar
XBr
=(AYBZ–AZBY) i +(AZBX–AXBZ) j +
+(AXBY-AYBX) k
Que equivale al desarrollo del
determinante siguiente:
X Y Z
X Y Z
ˆˆ ˆi j kA B A A A
B B B× =rr
5.- La magnitud del producto vectorial es
numéricamente igual que el área del
paralelógramo formado por los vectores
multiplicados y las paralelas que pasan por
sus extremos.
Para mostrar esto, consideraremos la
figura siguiente, que muestra dos
vectores unidos por el origen y las
paralelas a ellos.
θB
AAB sen θ
A sen θ
B
Fig 2. 24 Área del paralelogramo formado por 2 vectores.
El área de este paralelógramo se calcula
multiplicando la base (B) por la altura
(Asenθ):

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 79
Area=BAsenθ
Que es igual a la magnitud del producto
vectorial entre los vectores Ar
yBr
.
Note que el área del triángulo formado
por los vectores y alguna de sus
diagonales es justamente la mitad del
área calculada.
Ejemplo 2.7
Encontrar el producto vectorial entre los
vectores:
ˆˆ ˆA=3i+4j+2kr
; ˆˆ ˆB=i+3j-5kr
.
Solución: de acuerdo a la definición se
tiene:
ˆˆ ˆi j kA B 3 4 2
1 3 5× =
−
rr
( ) ( ) ( ) ˆˆ ˆAXB= -20-6 i 15 2 j 9 4 k− − − + −rr
ˆˆAXB=-26i 17j 5k+ +rr
Ejemplo 2.8
Encontrar un vector unitario
perpendicular al plano formado por los
vectores del ejemplo 7.
Solución: Según la definición de producto
vectorial se tiene que:
ˆAXB= AXB ur rr r
De donde:
A BuA B
×=
×
rr
rr = ˆˆ ˆ-26i 17j 5k
676 289 25+ +
+ +
ˆˆ ˆ-26i 17j 5 k ˆˆ ˆu 0,83i 0,54 j 0,16k31,5+ +
= = − + +
Que es el vector solicitado, cuya
magnitud es 1 y dirección es la del vector
A B×rr
.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 80
2.1.16 Ejercicios resueltos de
vectores.
Ejercicio 2.1.- Dos vectores Ar y B
r
de 3 y 5 unidades de magnitud
respectivamente, forman un ángulo de
37º. Determine analíticamente la
magnitud de la resultante y de la
diferencia entre ambos vectores.
Solución:
La resultante (R= A+Br rr
) así como la
diferencia o la suma del opuesto
(D= A-Br rr
) se puede ver en forma gráfica
en la figura siguiente:
A
37º
A
B
B
R= A + B
37º
A
B
D= A - B
37º
180º - 37º
Entonces aplicando el teorema del coseno
R2=A2+B2–2ABcos(180º-37º)
R2=9+25–2(3)(5)(- 0,8)
R=7,6
y la diferencia es:
D2=A2+B2–2ABcos(37º)
D2=9+25–2(3)(5)(0,8)
D=3,2
Ejercicio 2.2.- Hallar el vector
resultante entre los vectores Ar y B
r de 4
y 3 unidades de magnitud
respectivamente, que forman un ángulo de
60º entre ellos.
Solución:
En la siguiente figura se observan los
vectores y sus ángulos:
θ
B
A120º
R = A + B
La magnitud de la resultante se puede
calcular con el teorema del coseno:
R2=A2+B2–2ABcos120º
R2=14+9–2(4)(3)cos 120º
R=6,1

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 81
El ángulo entre la resultante y el vector
Ar
se puede calcular con el teorema del
seno:
sen sen120ºB R
θ=
sen 0,873 6,1
θ=
θ=arcsen0,43=25,5º
Ejercicio 2.3.- Un avión se mueve
hacia el norte con una rapidez de 30 Kmh
,
cuando es sometido a la acción del viento
que sopla con rapidez de 40 Kmh
en
dirección este. Encontrar el movimiento
resultante del avión.
Solución:
En este problema se trabaja con la
magnitud vectorial denominada
velocidad.
Para nosotros sin embargo, solo será un
vector en este momento, y por tanto, la
velocidad resultante no será más que la
suma de los vectores velocidad
correspondiente al movimiento del avión
propiamente tal, y la velocidad del viento.
En la siguiente figura se ilustra el
ejemplo:
V
VV
VA
θE
N
VA = velocidad del avión
VV = velocidad del viento
Entonces el vector velocidad del viento
será el vector: vKmˆV 40 ih
=r
mientras que
la velocidad del avión será: AKm ˆV 30 jh
=r
si consideramos que el plano geográfico
es el plano cartesiano XY.
De esta manera, la resultante debe ser:
( )Kmˆ ˆV= 40i+30jh
r
Cuya magnitud es
V2=(40 Kmh
)2+ (30 Kmh
) 2
V=50 Kmh
.
Que es la rapidez resultante con que se
moverá realmente el avión.
La dirección de la velocidad resultante
será:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 82
θ=arctg A
V
VV
=arctg 30 kph40 kph
=36,9º
Es decir, la velocidad resultante tiene una
dirección de 36,9º medidos desde el este
hacia el norte (E36,9ºN).
Ejercicio 2.4.- Otra magnitud
física vectorial interesante es el
denominado desplazamiento.
Por desplazamiento se entiende el vector
de posición que une los puntos inicial y
final de un movimiento, sin importar la
forma del camino recorrido entre ambos.
Supongamos que dos personas caminan
perdidas por un desierto plano y hostil de
manera tal que finalizado cada día anotan
en su diario de viaje lo siguiente:
• Día 1: caminamos 30 kilómetros en
línea recta hacia el norte; no
encontramos agua.
• Día 2: hoy solo hemos logrado caminar
20 kilómetros en línea recta, en
dirección norte 37º hacia el este
(N37ºE); nos encontramos
extenuados. No encontramos agua.
• Día 3: Por fin hemos encontrado agua.
El feliz hecho ocurrió hoy a las 16:00
horas, luego de caminar en línea recta
durante 20 kilómetros hacia el sur.
Nos encontramos a salvo.
El relato anterior puede traducirse en
términos de los desplazamientos diarios y
del desplazamiento final en forma
analítica:
53º
D1
D2
D3
R
N (Y)
E (X)
Entonces los desplazamientos diarios son:
1Dr
=30Km j
2Dr
=20Km cos53º i +20Km sen53º j
2Dr
=12Km i +16Km j
3Dr
=20Km(- j )
Por tanto, el desplazamiento resultante
es
1 2 3R D D D= + +r r rr
ˆ ˆR=12Kmi+26Kmjr
´
Cuya magnitud es:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 83
R2=(12Km)2+(26Km)2
R=28,6Km
y cuya dirección es:
θ=arctg 26 Km12 Km
=arctg2,17=65,3º
En otras palabras, si nuestros viajeros
hubiesen sabido la ubicación del pozo de
agua, habrían caminado solo 28,6Km en
línea recta, en dirección E65,3ºN.
Ejercicio 2.5.- Encontrar el valor de
a, de forma que Ar
y Br sean
perpendiculares.
ˆˆ ˆA=2i+aj+kr
; ˆˆ ˆB 4i -2j -2k=r
Solución:
La condición de perpendicularidad es que
el producto escalar entre ambos debe ser
cero:
Ar
•Br
=8–2a–2=0
De donde se obtiene a = 3
Ejercicio 2.6.- Hallar la proyección
del vector ˆˆ ˆA=i-2j+kr
sobre el vector
ˆˆ ˆB=4i-4j+7kr
Solución:
En la figura se observa la proyección
pedida
θ B
A
AB = A cos θ
De la definición de producto escalar se
tiene que:
A B=ABcos• θrr
Que se puede escribir como:
BA B=A B•rr
Ya que AB=Acosθ , como se observa en la
figura anterior.
En consecuencia:
BA BA
B•
=
rr
4 8 79
+ += =2,1

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 84
Ejercicio 2.7.- Dados los vectores
ˆˆA=2i-jr
; ˆˆB i k= +r
y ˆˆC=j+kr
, determinar:
a) Un vector unitario en la dirección del
vector A+B-3Crrr
.
b) Un vector perpendicular al plano
formado por los vectores Br
y Cr
.
c) Área del paralelógramo formado por
Ar
y Br
.
Solución:
a) A+B- 3 CuA+B-3C
=
rrr
rrrˆˆ ˆ3i-4j-2k
9+16+4=
ˆˆ ˆ3i-4j-2k5,39
=
u =0,56 i –0,74 j –0,37k
b) Pr
=Br
XCr
ˆˆ ˆi j kˆˆˆ1 0 1 -i-j+k
0 1 1= =
c) El Área es el módulo del producto
vectorial entre Ar y B
r, por tanto:
ˆˆ ˆi j kˆˆ ˆA B 2 -1 0 -i-2j+k
1 0 1× = =rr
AXB 2,4=rr
Ejercicio 2.8.- Dados los siguientes
vectores: ˆˆ ˆA=3i+2j+2kr
; ˆˆ ˆB i -3j 4k= +r
y
ˆˆ ˆC=2i+3j-kr
.
a) Determine analíticamente si Ar y B
r son
o no perpendiculares.
b) Calcular ( )A BXC•rrr
Solución:
a) Para ser perpendiculares deben cumplir
con la condición A B•rr
=0
A B•rr
=3–6+8=5
Luego no son perpendiculares.
b) La única interpretación posible de este
producto, denominado producto triple (y
que geométricamente representa el
volumen del paralelogramo cuyas aristas
son los vectores Ar
, Br y C
r) es la
operación ( )A BXC•rrr
) pues se tiene el
producto escalar entre los vectores Ar y
(BXCrr
).
En cambio la operación ( )A BXC•rrr
no
está definida pues es la multiplicación
vectorial entre un escalar (A B•rr
) y un
vector ( Cr
). Recordemos que el producto
vectorial está definido entre vectores.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 85
Por tanto:
ˆˆ ˆi j kˆˆ ˆBxC 1 -3 4 -9i+9j+9k
2 3 -1= =
rr
( ) ( )ˆ ˆˆ ˆˆ ˆA BXC= 3i+2j+2k 9i 9j 9k• • − + +rrr
A BXC=-27+18+18=9•rrr
Ejercicio 2.9.- Hallar los productos
siguientes:
a) ˆˆ2jX3k
b) ( )ˆˆ3iX -2k
c) ( ) ˆˆˆ2jXi -3k
Solución:
a) ˆ ˆˆ2jX3k=6i
b) ( ) ( )( )ˆ ˆ ˆˆ ˆ3iX -2k = 3 -2 iXk 6k=
c) ( ) ( )ˆ ˆ ˆ ˆˆˆ2jXi -3k=2 -k 3k 5k− = −
Ejercicio 2.10.- Demostrar que los
vectores: ˆˆ ˆA=2i+j-4kr
; ˆˆ ˆB i -3j 5k= +r
y
ˆˆ ˆC 3i -2j k= +r
forman un triángulo
rectángulo.
Solución:
En primer lugar hay que demostrar que
forman un triángulo, para lo que se
necesita que la resultante de dos de ellos
sea el tercero o que la resultante de los
tres sea el vector nulo, como se ve en la
figura siguiente.
C
A
BC
A
B
A + B = C A + B + C = 0
En segundo lugar, para que sea
rectángulo, el producto escalar entre dos
de ellos debe ser nulo.
En nuestro ejemplo, A+B=Crrr
por lo que son
un triángulo y A C•rr
=6–2–4= 0 por lo que
Ar ⊥ C
r.
Ejercicio 2.11.- Deducir el teorema
del seno.
Solución:
Suponer un triángulo formado por los
vectores de la figura.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 86
C
A
B
θAB
θCA
θBC
α
β γ
Entonces A B C 0+ + =rr rr
Multiplicando vectorialmente por Ar
:
AxA AXB AXC AX0+ + =rr rr r r r r
AXB AXC 0+ =rr rr r
( i )
Si la multiplicamos vectorialmente por Br
:
BXA+BXB+BXC=BX0rr r r r r rr
BXA+BXC=0rr r rr
( ii )
si la multiplicamos vectorialmente por Cr
:
CXA CXB CXC 0+ + =r r r rr rr
CXA CXB 0+ =r r r rr
( iii )
De (i): AXB=CXArrr r
De (ii): BXA=CXBrr rr
De (iii): CXA=BXCr rr
Pues el producto vectorial es
anticonmutativo.
De donde se tiene:
AXB CXA BXC= =r rr rr r
Es decir:
AB senθAB u =CA senθCA u =BC senθBC u
por igualdad de vectores, se tiene:
AB sen θAB = CA sen θCA = BC sen θBC
y debido a que sen (180-θ)=senθ:
AB senγ=CA senβ=BC senα
Dividiendo por ABC:
sen sen senC B A
γ β α= =
Conocido con el nombre de teorema del
seno.
Ejercicio 2.12.- Deducir el teorema
del coseno.
Solución:
Suponer que se tiene un triángulo
formado por los vectores de la figura.
C
A
B
β
Entonces: C=A-Br rr
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 87
Elevando al cuadrado la expresión:
( ) ( )C C= A-B A-B• •r r r rr r
( ) ( ) ( ) ( )C C= A A - A B - B A + B B• • • • •r r r r r rr r r r
( ) ( ) ( )C •C A•A -2 A•B B •B= +r r r r rr r r
C2=A2+B2–Bcosβ
Conocido como teorema del coseno.

27/01/2004 Jorge Lay Gajardo. [email protected] 88
3.1 Movimiento.
3.1.1 Introducción.
El estudio del movimiento de los cuerpos
permite conocer y determinar muchos
otros aspectos, entre ellos: si está
interactuando con otros o si se encuentra
aislado, el tipo de interacción a la que se
encuentra sujeto, etc.
En esta unidad, sin embargo, lo
analizaremos sin que tengamos que
preocuparnos de la causa. Es lo que se
denomina un estudio cinemático y para
ello será necesario definir determinadas
variables con las cuales analizaremos
semejanzas y diferencias de
determinados tipos de movimiento que
tomaremos como modelo.
El movimiento no es un fenómeno tan
simple como parece, basta detenernos a
pensar en la respuesta a la pregunta
¿Cuando nos asiste la seguridad de que un
cuerpo se mueve?; quizás podamos
responder cuando vemos que su posición
no cambia pero ¿respecto de que?; Sin ir
más lejos al observar una lámpara colgada
desde el techo en una habitación
podríamos decir que está en reposo pero
ella gira, traslada, nuta, precede y
ejecuta varios otros movimientos junto
con nuestro planeta Tierra, por lo tanto
un mínimo de cautela nos hará decir que
está en reposo solo respecto de la
habitación.
De esta forma nos damos cuenta que es
importante precisar respecto de qué
estamos analizando el movimiento en
estudio, es decir, el sistema de
referencia espacial a considerar, la
medida del tiempo también es importante
y se requiere de un sistema de referencia
temporal. Para el primero, se pueden
escoger uno o más cuerpos, no obstante,
para simplificar nuestro análisis
escogeremos el sistema cartesiano
ortogonal de coordenadas XYZ como un
sistema idealizado de referencia el cual
será considerado arbitrariamente fijo y
dado que un sistema con estas

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 89
características no existe, todos los
movimientos en estudio son relativos;
para el segundo, un instante arbitrario
denominado habitualmente como inicial
cumplirá como referencial temporal. Al
mismo tiempo, nuestro estudio se
referirá a la partícula o punto como un
ente idealizado pero que permitirá un
análisis más simplificado en los
movimientos, a pesar de que podamos
utilizar ejemplos referidos a cuerpos de
dimensiones mayores lo haremos
pensando en que se trata de partículas,
es decir, de objetos cuyas dimensiones
sean mucho menores que las distancias
que los separan de otros similares.
Fig 3. 1 Un objeto grande comparado con el
hombre puede ser considerado una partícula si se lo compara con el planeta.
La posición de un punto P o partícula
referida a un sistema de referencia XYZ
(S) está determinada por el vector de
posición:
ˆˆ ˆr x i y j z k= + +r
Z
X
Yx i
y j
r = x i + y j + z k
z k
Fig 3. 2 Vector de posición de una partícula P
respecto de un sistema de referencia S.
Si la partícula P está en reposo respecto
de S, entonces las componentes x,y,z
serán constantes en cambio si está en
movimiento respecto de S estas se
modificarán en el tiempo; en general
puede afirmarse que en este caso dichas
componentes son funciones del tiempo.
En este caso la partícula describirá una
curva en el espacio, y de acuerdo con la
forma que tenga la curva podemos
clasificar los movimientos en:
Rectilíneos: Aquellos cuyo camino es una
recta, pueden describirse mediante uno
de los vectores siguientes si se mueven
en uno de los ejes cartesianos:
ˆr(t) x(t) i =r (y; z=ctes.)
ˆr(t) y(t)j=r (x; z=ctes.)
ˆr(t) z(t) k=r (x; y=ctes.)
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 90
Z
X
Yr = y j
Fig 3. 3 Partícula moviéndose rectilíneamente en
la dirección del eje y.
Entre los que analizaremos en este curso
están los movimientos rectilíneos
uniformes, acelerados y armónicos
simples.
Planos: Son aquellos cuya trayectoria es
una curva plana. Si se mueven en uno de
los planos cartesianos, pueden
describirse mediante vectores del tipo:
ˆ ˆr(t) x(t)i y(t)j = +r (z cte.)
ˆˆr(t) x(t)i z(t)k = +r (y cte.)
ˆˆr(t) y(t)j z(t)k= +r (x cte.)
Z
X
Y
r = y j + z k
Fig 3. 4 Pelota moviéndose en plano YZ.
De éstos estudiaremos el movimiento
parabólico y el circunferencial.
Curvilíneos en el espacio: Aquellos cuya
trayectoria es una curva en el espacio, se
describen con las tres componentes:
ˆˆ ˆr(t) x(t)i y(t)j z(t)k= + +r
Ejemplo de este tipo es el movimiento
helicoidal cuya trayectoria se denomina
hélice. Estos movimientos no serán
tratados en este curso.
3.1.2 Descripción del cambio en la
posición.
Se puede describir el cambio en la
posición a través de las cantidades
denominadas trayectoria y
desplazamiento.
Trayectoria.
Se denomina así a longitud de la curva que
queda determinada por todos los puntos
por los que pasa el cuerpo en su
movimiento.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 91
Ejemplo 3.1. En la figura 3.5 se puede
observar una partícula que cambia de
posición entre los puntos A y B. Calcular
la trayectoria de los caminos:
a) AC b) CB c) ACB d) ADB e) AB
y (m)
A
BC
D
x (m)84
3
6
Fig 3. 5 Figura para el ejemplo 3.1.
Solución:
a) El camino AC es rectilíneo y tiene una
longitud de 3 m, por tanto la trayectoria
de la partícula es 3m.
b) El camino CB también es rectilíneo, en
consecuencia su trayectoria es de 4m.
c) El camino ACB no es rectilíneo, pues
está compuesto de las rectas AC cuya
longitud es 3m y CB cuya longitud es 4m.
En consecuencia la trayectoria del camino
ACB es de 7m.
d) El camino ADB no es rectilíneo y está
compuesto de las rectas AD cuya longitud
es 4m y DB cuya longitud es 3m. En
consecuencia la trayectoria del camino
ADB es de 7m.
e) El camino AB es rectilíneo y su longitud
es equivalente a la longitud de la
hipotenusa del triángulo ADB de catetos
4m y 3m. En consecuencia la trayectoria
del camino AB es de 5m.
Desplazamiento.
Se define el desplazamiento como el
vector cuya dirección es la que va desde
la posición fina hacia la posición final del
movimiento de la partícula.
Supongamos que en un instante t0 el
vector posición del móvil P sea 0rr y que en
otro instante posterior t su posición esté
determinada porrr , entonces se define el
vector desplazamiento en el lapso entre
t0 y t como:
0r r - r∆ =r r r
x
y
∆rr
r0
t0
t
Fig 3. 6 Vector desplazamiento.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 92
Es decir, dos partículas pueden moverse
entre dos puntos empleando caminos
distintos, pero con igual desplazamiento.
Z
X
Y
camino A
camino B
desplazamiento
Fig 3. 7 Caminos distintos, igual desplazamiento.
Ejemplo3.2. Calcular los desplazamientos
para los siguientes caminos de la figura
3.5.:
a) AC b) CB c) ACB d) ADB e) AB
Solución:
a) El camino rectilíneo AC produce un
desplazamiento equivalente al vector:
ACˆr - r 3jm=
r r .
La magnitud de este vector es de 3m.
b) El camino CB produce un
desplazamiento equivalente al vector:
B Aˆr - r 4im=
r r .
La magnitud de este vector es de 4m.
c) El camino no rectilíneo ACB produce
un desplazamiento igual a:
( )B A ˆ ˆr - r = 4i 3j m+
r r .
Su magnitud es: ( )2 2 24 3 m 5m+ = ,
distinta que la trayectoria calculada en el
ejemplo 3.1 para igual camino.
d) y e) Los caminos ADB y AB producen el
mismo desplazamiento que el camino ACB,
puesto que los puntos final e inicial son
los mismos.
Note que el desplazamiento tiene
magnitud igual que la trayectoria solo si
el camino es rectilíneo.
Velocidad media e instantánea.
Si una partícula ha experimentado un
desplazamiento r∆r durante un lapso ∆t,
se define el vector velocidad media mvr
en dicho lapso como:
mrvt
∆=
∆
rr
Puesto que 1t∆
>0 , el vector mvr tiene la
misma dirección y sentido que el vector
cambio de posición r∆r .
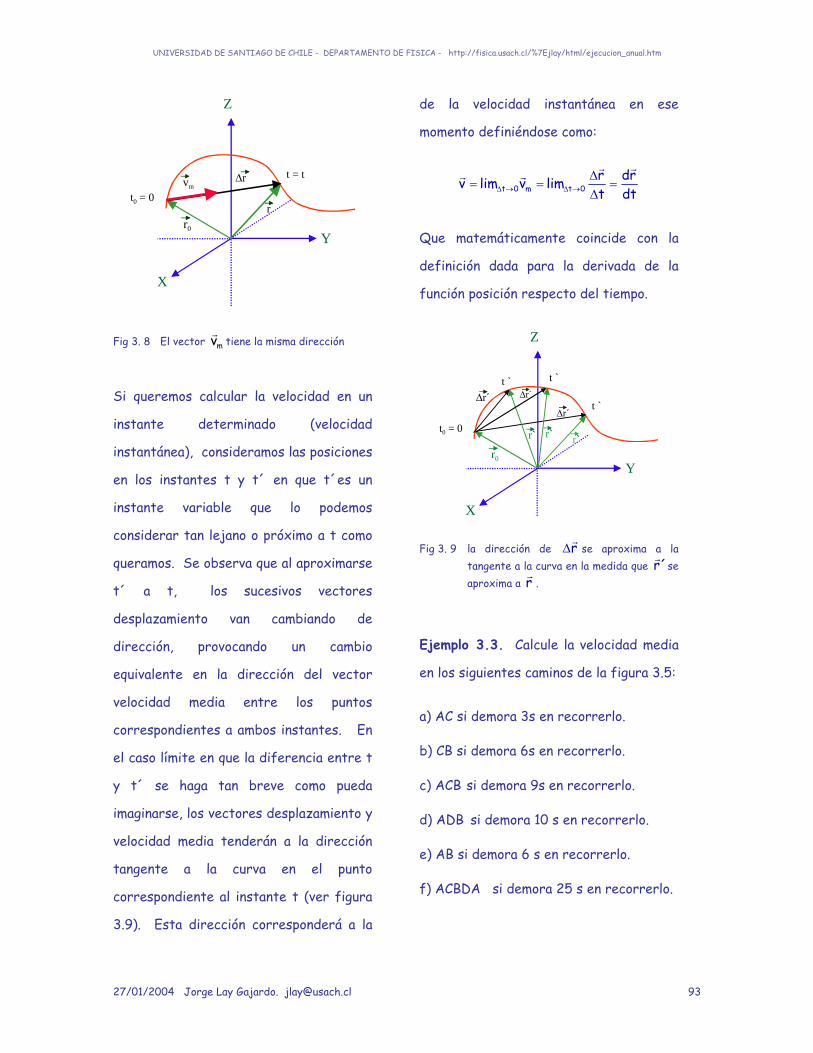
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 93
Z
X
Y
t0 = 0
t = t
r0
r
∆rvm
Fig 3. 8 El vector mvr tiene la misma dirección
Si queremos calcular la velocidad en un
instante determinado (velocidad
instantánea), consideramos las posiciones
en los instantes t y t´ en que t´es un
instante variable que lo podemos
considerar tan lejano o próximo a t como
queramos. Se observa que al aproximarse
t´ a t, los sucesivos vectores
desplazamiento van cambiando de
dirección, provocando un cambio
equivalente en la dirección del vector
velocidad media entre los puntos
correspondientes a ambos instantes. En
el caso límite en que la diferencia entre t
y t´ se haga tan breve como pueda
imaginarse, los vectores desplazamiento y
velocidad media tenderán a la dirección
tangente a la curva en el punto
correspondiente al instante t (ver figura
3.9). Esta dirección corresponderá a la
de la velocidad instantánea en ese
momento definiéndose como:
t 0 m t 0r drv lim v limt dt∆ → ∆ →
∆= = =
∆
r rr r
Que matemáticamente coincide con la
definición dada para la derivada de la
función posición respecto del tiempo.
Z
X
Y
t0 = 0
t `
r0
r`
t ` t `
r` r`
∆r´∆r´
∆r´
Fig 3. 9 la dirección de r∆r
se aproxima a la tangente a la curva en la medida que r´r se aproxima a rr .
Ejemplo 3.3. Calcule la velocidad media
en los siguientes caminos de la figura 3.5:
a) AC si demora 3s en recorrerlo.
b) CB si demora 6s en recorrerlo.
c) ACB si demora 9s en recorrerlo.
d) ADB si demora 10 s en recorrerlo.
e) AB si demora 6 s en recorrerlo.
f) ACBDA si demora 25 s en recorrerlo.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 94
Solución:
a) m AC
ˆ3jmr mˆv 1jt 3s s
∆= = =
∆
rr
cuya magnitud es 1 ms
b) m CB
ˆr 4im 2 mˆv it 6s 3 s
∆= = =
∆
rr
cuya magnitud es 2 m3 s
⎛ ⎞⎜ ⎟⎝ ⎠
c)
( )m ACB
m ACB
ˆ ˆ4i 3j mrvt 9s4 3 mˆ ˆv i j9 9 s
+∆= =
∆⎛ ⎞= +⎜ ⎟⎝ ⎠
rr
r
cuya magnitud es:
2 2
m ACB4 3 5 mv9 9 9 s
⎛ ⎞ ⎛ ⎞ ⎛ ⎞= + =⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎝ ⎠ ⎝ ⎠⎝ ⎠
d)
( )m ADB
m ADB
ˆ ˆ4i 3j mrvt 10s4 3 mˆ ˆv i j10 10 s
+∆= =
∆⎛ ⎞= +⎜ ⎟⎝ ⎠
rr
r
Cuya magnitud es:
2 2
m ADB4 3 5 mv10 10 10 s
⎛ ⎞ ⎛ ⎞ ⎛ ⎞= + =⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎝ ⎠ ⎝ ⎠⎝ ⎠
e)
( )m A B
m A B
ˆ ˆ4 i 3 j mrvt 6 s4 3 mˆ ˆv i j6 6 s
+∆= =
∆⎛ ⎞= +⎜ ⎟⎝ ⎠
rr
r
Cuya magnitud es:
2 2
m A B4 3 5 mv6 6 6 s
⎛ ⎞ ⎛ ⎞ ⎛ ⎞= + =⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎝ ⎠ ⎝ ⎠⎝ ⎠
f) El desplazamiento es el vector nulo.
Rapidez media e instantánea
Si durante el lapso transcurrido entre t0
y t, es decir ∆t, el móvil ha recorrido una
distancia s a lo largo de la curva, se
define su rapidez media en dicho lapso
como el escalar:
msvt
=∆
La rapidez instantánea, se define como el
límite de la rapidez media cuando el
intervalo de tiempo tiende a 0.
t 0s dsv limt dt∆ →= =
∆
Ejemplo 3.4. Calcule la rapidez media en
los siguientes caminos de la figura 3.5:
a) AC si demora 3s en recorrerlo..
b) CB si demora 6 s en recorrerlo..
c) ACB 9 s en recorrerlo.
d) ADB si demora 10 s en recorrerlo.
e) AB si demora 6 s en recorrerlo.
f) ACBDA si demora 25 s en recorrerlo.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 95
Solución:
a) mAC3m mv 13s s
= =
b) mCB4m 2 mv6s 3 s
⎛ ⎞= = ⎜ ⎟⎝ ⎠
c) mACB7 mv9 s
⎛ ⎞= ⎜ ⎟⎝ ⎠
d) mADB7 mv10 s
⎛ ⎞= ⎜ ⎟⎝ ⎠
e) mAB5 mv6 s
⎛ ⎞= ⎜ ⎟⎝ ⎠
f) mACBDA14m 14 mv15s 15 s
⎛ ⎞= = ⎜ ⎟⎝ ⎠
Como era de esperarse, la rapidez media
solo es igual a la magnitud de la velocidad
media cuando el camino es rectilíneo.
Aceleración media e instantánea
El concepto de aceleración tiene que ver
con la rapidez con la que se experimenta
un cambio de la velocidad de una
partícula. La definición del vector
aceleración media es:
mvat
∆=
∆
rr
El vector aceleración media mar tiene la
misma dirección y sentido que el vector
cambio de velocidad v∆r (al ser ∆t > 0)
como lo muestra la figura 3.10.
Z
X
Y
t0
t
v0
v∆v
Fig 3. 10 El vector aceleración tiene igual dirección que el vector v∆
r.
La aceleración se mide en unidad de
velocidad dividida en unidad de tiempo, en
el Sistema Internacional: 2ms
.
Es decir, un móvil tendrá la aceleración
de 1 2ms
si su rapidez cambia en 1 ms
en
cada segundo.
La aceleración instantánea es el límite de
la aceleración media en la medida que
∆t → 0.
m t 0va limt∆ →
∆=
∆
rr

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 96
3.2 Movimiento Rectilíneo.
El tipo de movimiento más simple posible
es el movimiento rectilíneo.
Estudiemos el movimiento de una
partícula que se mueve a lo largo del eje
x. Entonces su desplazamiento, velocidad
y aceleración serán:
ˆr x(t)i=r
ˆv v(t)i=r
ˆa a(t)i=r
Se tomó el eje x para ejemplificar a
estos movimientos, pero no se debe
perder de vista que el movimiento puede
ocurrir en otra dirección, incluso distinta
que la de un eje del sistema cartesiano.
Las funciones se pueden comportar de
distintas maneras en el tiempo. En este
curso, se estudiarán movimientos con
funciones x(t) donde x es directamente
proporcional al tiempo ∆t transcurrido
(movimiento uniforme rectilíneo, MRU) y
movimientos con funciones V(t) en los
cuales v es directamente proporcional al
tiempo ∆t transcurrido (movimientos
uniformes acelerados, MUA).
3.2.1 Movimiento Uniforme Rectilíneo
Son movimientos en los que la función de
la posición x respecto de la posición
inicial x0 es directamente proporcional al
tiempo ∆t transcurrido.
Si el movimiento ocurre en x, se tiene:
x(t) t∆ ∝ ∆
Donde la constante de proporcionalidad
corresponde a la rapidez, por lo que se
puede escribir:
0 0x- x v (t-t )=
o, lo que es lo mismo,
0 0x x v(t-t )= +
El vector posición del móvil quedará dado
por:
( )0 0x x v t-t= +r r r
Donde xr
y 0xr
son los vectores de
posición de la partícula en los instantes t
y t0 respectivamente y vr es el vector
velocidad que es constante en ese
intervalo de tiempo.
Esta función se conoce como función de
itinerario del movimiento rectilíneo
uniforme y establece la posición en cada
instante.
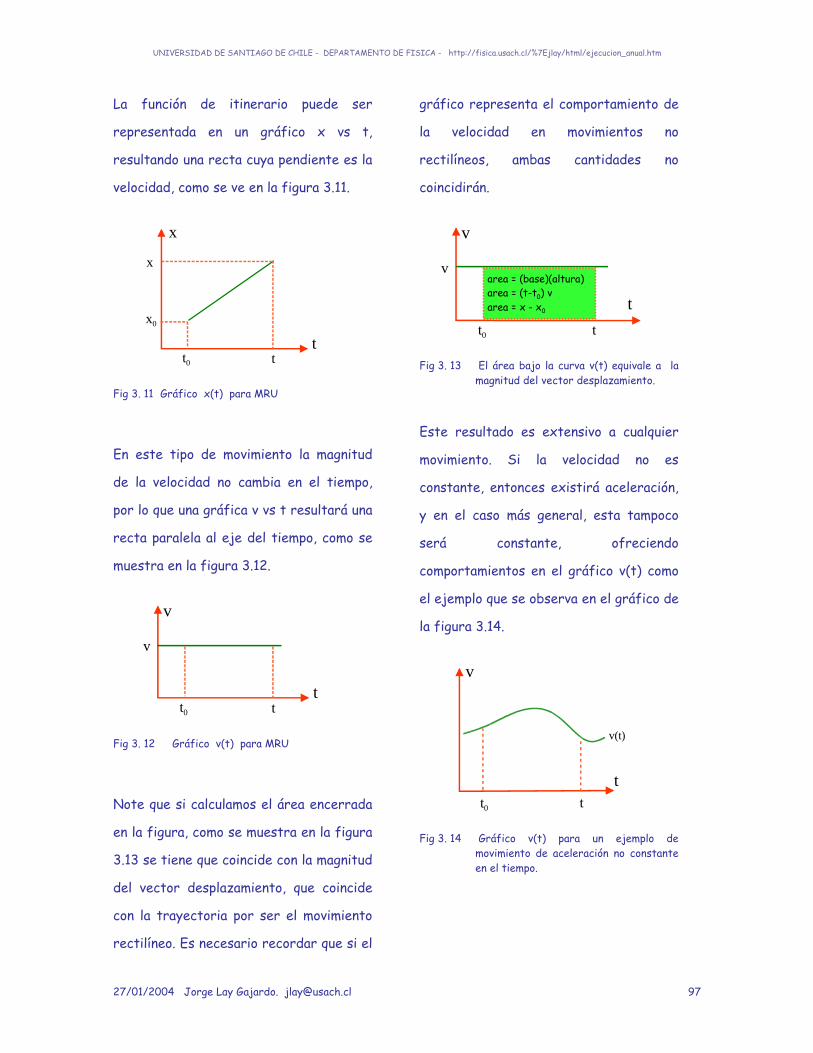
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 97
La función de itinerario puede ser
representada en un gráfico x vs t,
resultando una recta cuya pendiente es la
velocidad, como se ve en la figura 3.11.
x
tx0
t0 t
x
Fig 3. 11 Gráfico x(t) para MRU
En este tipo de movimiento la magnitud
de la velocidad no cambia en el tiempo,
por lo que una gráfica v vs t resultará una
recta paralela al eje del tiempo, como se
muestra en la figura 3.12.
v
tt0 t
v
Fig 3. 12 Gráfico v(t) para MRU
Note que si calculamos el área encerrada
en la figura, como se muestra en la figura
3.13 se tiene que coincide con la magnitud
del vector desplazamiento, que coincide
con la trayectoria por ser el movimiento
rectilíneo. Es necesario recordar que si el
gráfico representa el comportamiento de
la velocidad en movimientos no
rectilíneos, ambas cantidades no
coincidirán.
v
tt0 t
varea = (base)(altura)area = (t-t0) v area = x - x0
Fig 3. 13 El área bajo la curva v(t) equivale a la magnitud del vector desplazamiento.
Este resultado es extensivo a cualquier
movimiento. Si la velocidad no es
constante, entonces existirá aceleración,
y en el caso más general, esta tampoco
será constante, ofreciendo
comportamientos en el gráfico v(t) como
el ejemplo que se observa en el gráfico de
la figura 3.14.
v
tt0 t
v(t)
Fig 3. 14 Gráfico v(t) para un ejemplo de movimiento de aceleración no constante en el tiempo.
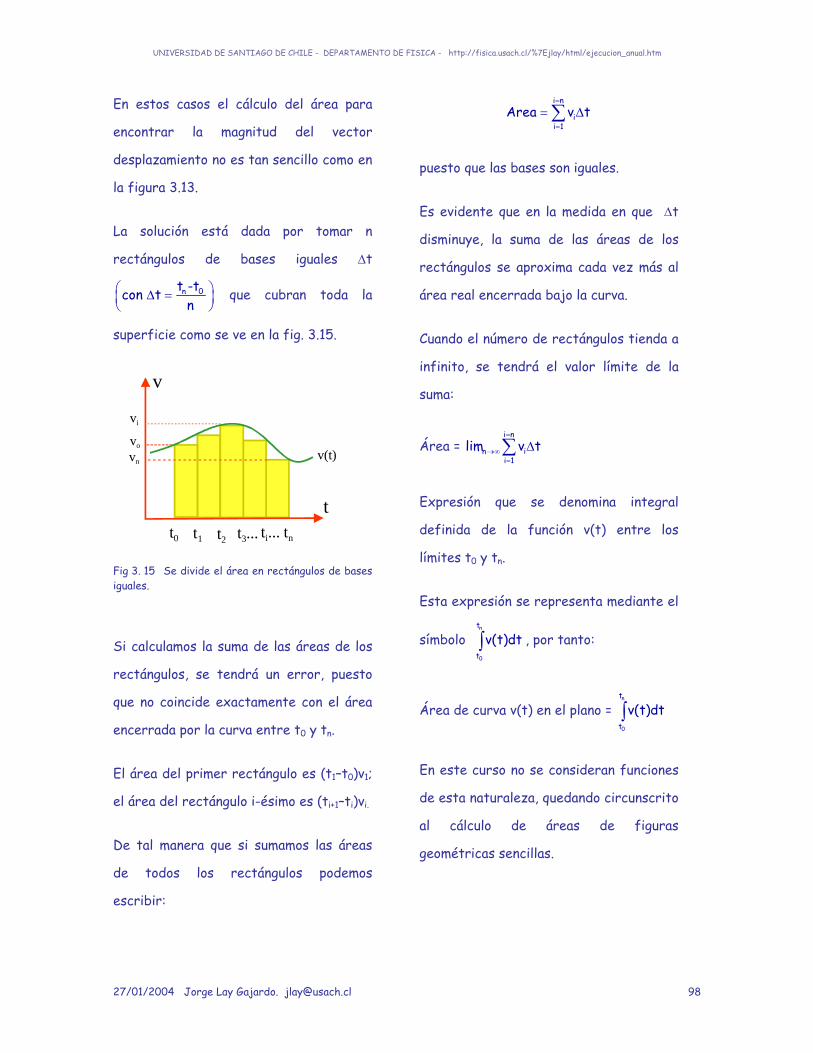
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 98
En estos casos el cálculo del área para
encontrar la magnitud del vector
desplazamiento no es tan sencillo como en
la figura 3.13.
La solución está dada por tomar n
rectángulos de bases iguales ∆t
n 0t -tcon tn
⎛ ⎞∆ =⎜ ⎟⎝ ⎠
que cubran toda la
superficie como se ve en la fig. 3.15.
v
tt0 t1 t2 t3... ti... tn
vo
vi
vn v(t)
Fig 3. 15 Se divide el área en rectángulos de bases iguales.
Si calculamos la suma de las áreas de los
rectángulos, se tendrá un error, puesto
que no coincide exactamente con el área
encerrada por la curva entre t0 y tn.
El área del primer rectángulo es (t1–t0)v1;
el área del rectángulo i-ésimo es (ti+1–ti)vi.
De tal manera que si sumamos las áreas
de todos los rectángulos podemos
escribir:
i n
ii 1
Area v t=
=
= ∆∑
puesto que las bases son iguales.
Es evidente que en la medida en que ∆t
disminuye, la suma de las áreas de los
rectángulos se aproxima cada vez más al
área real encerrada bajo la curva.
Cuando el número de rectángulos tienda a
infinito, se tendrá el valor límite de la
suma:
Área = i n
n ii 1
lim v t=
→∞=
∆∑
Expresión que se denomina integral
definida de la función v(t) entre los
límites t0 y tn.
Esta expresión se representa mediante el
símbolo n
0
t
t
v(t)dt∫ , por tanto:
Área de curva v(t) en el plano = n
0
t
t
v(t)dt∫
En este curso no se consideran funciones
de esta naturaleza, quedando circunscrito
al cálculo de áreas de figuras
geométricas sencillas.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 99
3.2.2 Movimiento Rectilíneo con
Aceleración Constante (MRUA).
En este movimiento la posición y tiempo
transcurrido no son directamente
proporcionales, en cambio sí lo son los
cambios producidos en la velocidad y los
lapsos de tiempo transcurridos para ello.
Por tanto:
( )v t t∆ ∝ ∆
Donde la constante de proporcionalidad
corresponde a la aceleración, por lo que
se puede escribir:
( )0 0v-v a t-t=
o, lo que es lo mismo,
( )0 0v v a t-t= +
el vector velocidad quedará determinado
por:
( )0 0v v a t-t= +r r r
donde vr y 0vr son los vectores velocidad
instantánea en los instantes t y t0
respectivamente y ar es el vector
aceleración que es constante durante el
mismo intervalo de tiempo.
Esta función puede representarse en un
sistema de coordenadas v vs t, resultando
una recta cuya pendiente es la magnitud
de la aceleración (a).
v
tv0
t0 t
v
Fig 3. 16 Gráfico v(t) para MRUA
Tal como se discutió, el área bajo la curva
de la figura 3.16 representa la magnitud
del vector desplazamiento, que coincidirá
con la trayectoria aquí también, puesto
que el movimiento analizado es rectilíneo.
Por tanto, si dividimos el área bajo la
curva en el intervalo comprendido entre
los instantes t0 y tn de manera
conveniente, se tiene (ver figura 3.17):
v
tv0
t0 t
v
A1
A2
Fig 3. 17 Área bajo la curva v(t) entre t0 y tn para MRUA.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 100
Área=A1+A2= ( ) ( )( )0 0 0 01v t-t t-t v-v2
+
y ya que:
v - v0 = a (t – t0)
Reemplazando en la ecuación anterior se
obtiene:
( ) ( )20 0 0 0
1x-x v t-t a t-t2
= +
Con x-x0=magnitud del vector
desplazamiento entre t0 y t.
De la ecuación anterior se tiene:
20 0
1x x v t at2
= + +
denominada Ecuación de Itinerario del
M.R.U.A.
Gráficamente esta función es una
parábola, en la que x0, v0 y a son
constantes, y la pendiente a la tangente
en cualquier punto de la curva representa
la rapidez instantánea.
x
t
t0 t1
x0
t2
x1
Fig 3. 18 Una forma de la función x(t) para MRUA
La figura 3.18 muestra una de las formas
posibles de una parábola. Note que la
posición x0 de la partícula es alcanzada
dos veces, cuando t=t0 y cuando t=t2.
Esto es una consecuencia de la función
cuadrática, que tiene 2 valores de t para
cada x.
La pendiente representa la velocidad
instantánea de la partícula, que es
negativa mostrando que se mueve hacia
los negativos y disminuyendo hasta
hacerse cero en t1. Entre t1 y t2 se vuelve
positiva mostrando que se mueve hacia los
positivos y aumentando su magnitud. En
todo momento existe aceleración
constante pues el cambio en la pendiente
siempre tiene igual valor en iguales
intervalos de tiempo.
Las funciones v(t) y x(t) descubiertas
permiten obtener una tercera ecuación
que relaciona la velocidad y la posición
v(x), la cual se logra eliminando el tiempo
entre ellas:
2 20 0v v 2a(x-x )= +

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 101
3.2.3 Movimiento con aceleración
constante igual a gr .
Un cuerpo moviéndose libremente en las
inmediaciones de la superficie terrestre
en condiciones de roce con el aire
despreciables y ausencia de otras
fuerzas no gravitacionales (esto es cierto
solo en el vacío, aunque existen
numerosos ejemplos reales que se pueden
estudiar con suficiente aproximación con
esta teoría), describe un movimiento
rectilíneo uniformemente acelerado como
los estudiados. Anteriormente.
Con independencia de su masa, y de la
dirección de su movimiento (cayendo o
subiendo verticalmente) su aceleración es
la denominada aceleración de gravedad,
cuya magnitud es de 9,8 2ms
o 32 2
piess
.
Este hecho lo descubrió y experimentó
Galileo Galilei durante el siglo XVI
demostrando así que las hipótesis de
Aristóteles respecto de este tipo de
movimiento no eran correctas.
En la figura 3.19 se representan los
movimientos de ascenso (izquierda) y
descenso (derecha) verticales de una
partícula libre lanzada hacia arriba.
y
v1
v4
v3
v2
suelo
g
y1
y2
y3
y4
y0
y
v7
v4
v5
v6g
y5
y6
y7
y8
y9 suelo
Fig 3. 19 Partícula libre moviéndose verticalmente con aceleración gr .
La velocidad está dirigida hacia arriba
mientras la partícula va subiendo,
disminuyendo su magnitud a una tasa de
9,8 ms
.
El vector aceleración en el intervalo
(y1,y2) está dado por 2 1v -v ˆa g -gjt
= = =∆
r rr r ,
es decir, hacia abajo y con magnitud
9,8 2ms
. En cualquier intervalo la
aceleración será igual.
Al llegar a la posición y4 la velocidad es
nula, invirtiendo su dirección en ese
momento. La aceleración provoca el
cambio de dirección del vector velocidad
y su magnitud sigue siendo g.
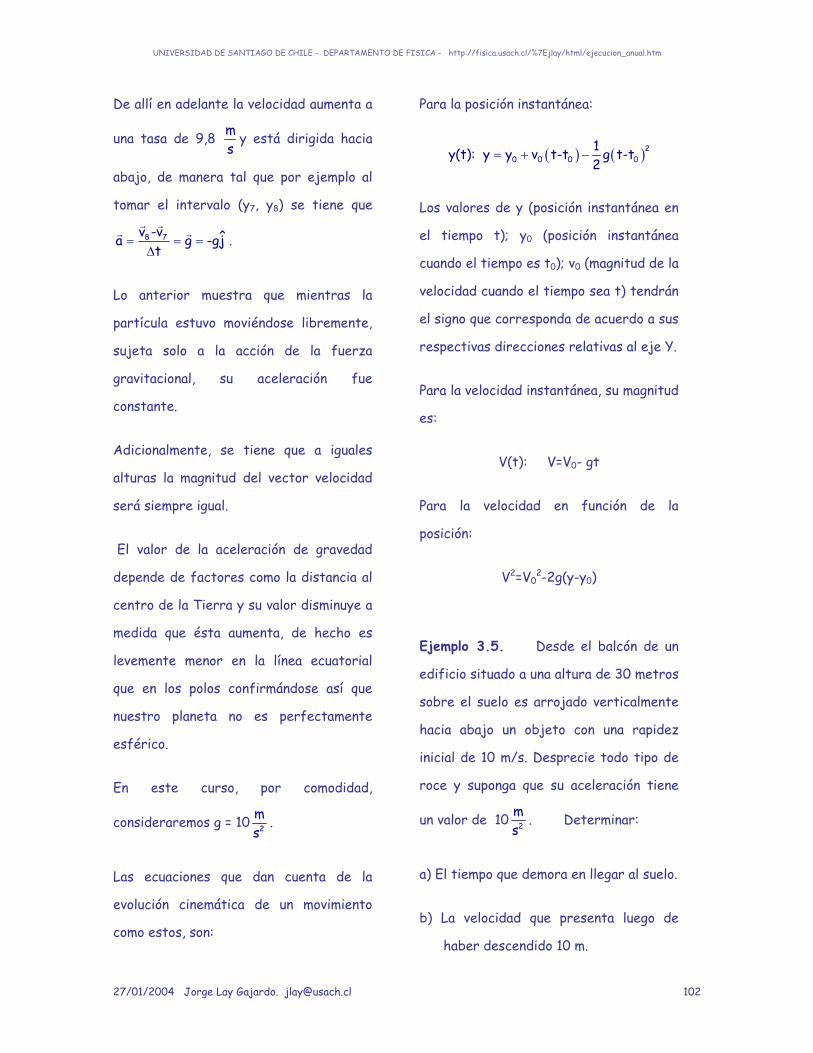
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 102
De allí en adelante la velocidad aumenta a
una tasa de 9,8 ms
y está dirigida hacia
abajo, de manera tal que por ejemplo al
tomar el intervalo (y7, y8) se tiene que
8 7v -v ˆa g -gjt
= = =∆
r rr r .
Lo anterior muestra que mientras la
partícula estuvo moviéndose libremente,
sujeta solo a la acción de la fuerza
gravitacional, su aceleración fue
constante.
Adicionalmente, se tiene que a iguales
alturas la magnitud del vector velocidad
será siempre igual.
El valor de la aceleración de gravedad
depende de factores como la distancia al
centro de la Tierra y su valor disminuye a
medida que ésta aumenta, de hecho es
levemente menor en la línea ecuatorial
que en los polos confirmándose así que
nuestro planeta no es perfectamente
esférico.
En este curso, por comodidad,
consideraremos g = 10 2ms
.
Las ecuaciones que dan cuenta de la
evolución cinemática de un movimiento
como estos, son:
Para la posición instantánea:
( ) ( )20 0 0 0
1y(t): y y v t-t g t-t2
= + −
Los valores de y (posición instantánea en
el tiempo t); y0 (posición instantánea
cuando el tiempo es t0); v0 (magnitud de la
velocidad cuando el tiempo sea t) tendrán
el signo que corresponda de acuerdo a sus
respectivas direcciones relativas al eje Y.
Para la velocidad instantánea, su magnitud
es:
V(t): V=V0- gt
Para la velocidad en función de la
posición:
V2=V02-2g(y-y0)
Ejemplo 3.5. Desde el balcón de un
edificio situado a una altura de 30 metros
sobre el suelo es arrojado verticalmente
hacia abajo un objeto con una rapidez
inicial de 10 m/s. Desprecie todo tipo de
roce y suponga que su aceleración tiene
un valor de 10 2ms
. Determinar:
a) El tiempo que demora en llegar al suelo.
b) La velocidad que presenta luego de
haber descendido 10 m.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 103
c) La velocidad al llegar al suelo.
d) La representación gráfica del
movimiento desde su lanzamiento
hasta que toca el suelo en sistemas Y
vs t ; V vs t.
Solución:
a) Considerando como referencia del
movimiento el eje Y con el origen en el
suelo, aplicamos la ec. de itinerario que
relaciona posición y tiempo, en que de
acuerdo al enunciado, la posición final
deberá ser 0 dado que llega al suelo; la
posición inicial +30m dado que desde allí
fue arrojado y V0 deberá tener el valor
-10 ms
dado que fue lanzado hacia abajo.
Luego sustituyendo:
0 = 30 - 10 t - 5 t2
Cuyas raíces son:
t1=+1,65s; t2=-3,65s
La respuesta correcta es t1.
Note que t2 corresponde al instante,
anterior al del lanzamiento (de allí su
signo) para el cual se cumple que y=0, es
decir, si se hubiese lanzado desde el
suelo y hubiera pasado por y=30m con una
rapidez hacia abajo de 10 ms
.
b) Se plantea aquí una relación entre la
velocidad y la posición, en que la posición
inicial es de 20m, que es la altura a la que
se encuentra por lo tanto es conveniente
aplicar la ecuación v(y).
V2= (-30)2-2(10)(20-30 )
V=±33,2 ms
En este caso la respuesta que debiéramos
considerar es V=-33,2 ms
pues el signo
negativo nos indica que está dirigida hacia
abajo.
c) Dado que para esta pregunta
conocemos el tiempo que tarda en llegar
al suelo y las posiciones, podemos aplicar
indistintamente las ecuaciones v(t) o bien
v(y). Apliquemos la primera:
V=-10-10(1,65)=-26,5 ms
Aplique Ud. la otra ecuación y verifique
este resultado.
Sabemos que en un gráfico y vs t la
representación del movimiento será la de
una parábola:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 104
y (m)
t (s)
0
30
1,65
m = - 10
m = - 26,5
Fig 3. 20 gráfico y(t)
Las pendientes de las tangentes a la
parábola en los instantes t=0s y t=1,65s
tienen los valores -10 ms
y -26,5 ms
respectivamente. En consecuencia, la
gráfica v vs t es:
v (m/s)
t (s)
-10
1,65
- 26,5
0
Fig 3. 21 gráfico v(t)
3.3 Movimiento parabólico.
Cuando en el campo gravitacional
terrestre un objeto es lanzado en
dirección vertical, hacia arriba o hacia
abajo, su movimiento será el descrito en
el punto anterior, sin embargo, si el
lanzamiento no es en dirección vertical
entonces la trayectoria descrita será una
curva y el movimiento presentará ciertas
particularidades que estudiaremos ahora;
ejemplos aproximados de este movimiento
son: el que sigue la jabalina, la bala o el
martillo arrojado por un atleta, el seguido
por una gota de agua que sale de la
manguera mientras estamos regando un
jardín, etc.
En primer lugar se trata de un
movimiento plano, luego lo podemos
referir a un sistema plano XY y por tanto
sus vectores posición, velocidad y
aceleración en cualquier instante pueden
expresarse como:
ˆ ˆr(t) x(t)i y(t)j= +r
x yˆ ˆv(t) v (t)i v (t)j= +
r
x yˆ ˆa(t) a (t)i a (t)j= +
r
Donde las funciones dependerán de las
características cinemáticas del
movimiento estudiado en cada eje.
En segundo lugar, cualquier partícula que
presente este movimiento estará afecta
al campo gravitacional de la Tierra por lo
tanto la aceleración experimentada será
ˆg -gj=r siempre que no se considere roce
alguno, que estemos próximos a la
superficie de la Tierra y se mueva
libremente.
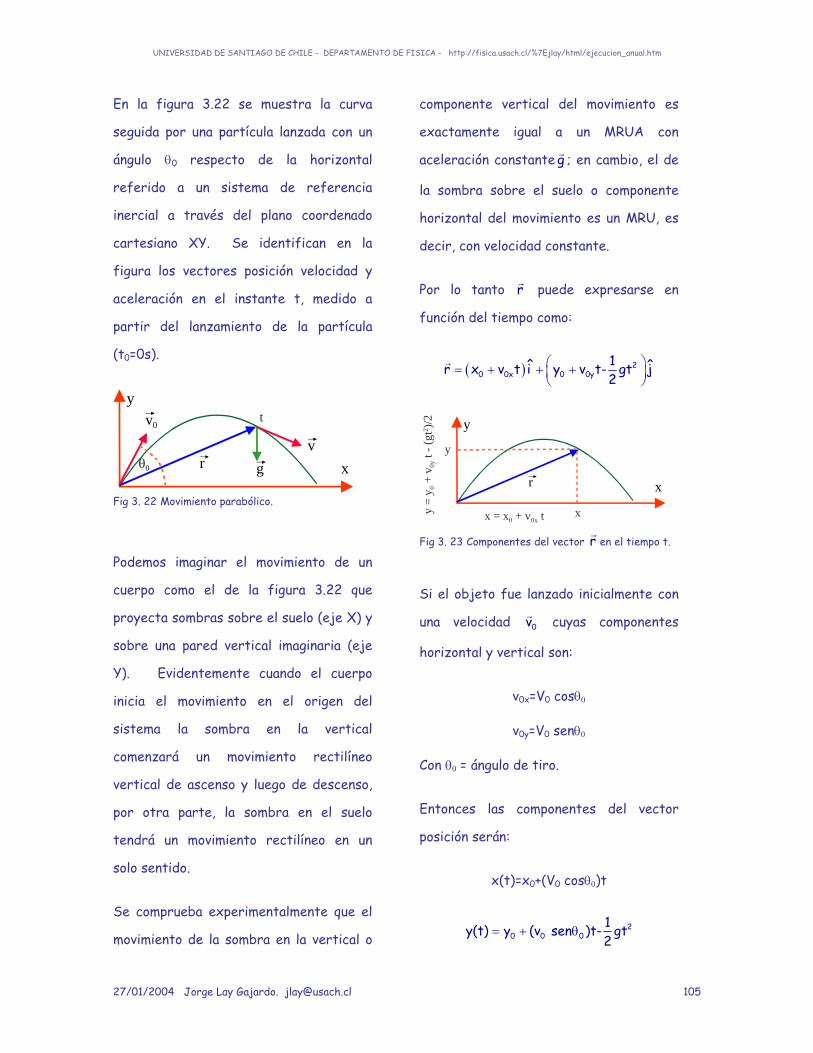
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 105
En la figura 3.22 se muestra la curva
seguida por una partícula lanzada con un
ángulo θ0 respecto de la horizontal
referido a un sistema de referencia
inercial a través del plano coordenado
cartesiano XY. Se identifican en la
figura los vectores posición velocidad y
aceleración en el instante t, medido a
partir del lanzamiento de la partícula
(t0=0s).
θ0 x
y
vr g
v0t
Fig 3. 22 Movimiento parabólico.
Podemos imaginar el movimiento de un
cuerpo como el de la figura 3.22 que
proyecta sombras sobre el suelo (eje X) y
sobre una pared vertical imaginaria (eje
Y). Evidentemente cuando el cuerpo
inicia el movimiento en el origen del
sistema la sombra en la vertical
comenzará un movimiento rectilíneo
vertical de ascenso y luego de descenso,
por otra parte, la sombra en el suelo
tendrá un movimiento rectilíneo en un
solo sentido.
Se comprueba experimentalmente que el
movimiento de la sombra en la vertical o
componente vertical del movimiento es
exactamente igual a un MRUA con
aceleración constante gr ; en cambio, el de
la sombra sobre el suelo o componente
horizontal del movimiento es un MRU, es
decir, con velocidad constante.
Por lo tanto rr puede expresarse en
función del tiempo como:
( ) 20 0x 0 0y
1ˆ ˆr x v t i y v t- gt j2
⎛ ⎞= + + +⎜ ⎟⎝ ⎠
r
x
y
r
x
y
x = x0 + v0x t
y =
y 0 +
v0y
t - (
gt2 )/
2
Fig 3. 23 Componentes del vector rr en el tiempo t.
Si el objeto fue lanzado inicialmente con
una velocidad 0vr cuyas componentes
horizontal y vertical son:
v0x=V0 cosθ0
v0y=V0 senθ0
Con θ0 = ángulo de tiro.
Entonces las componentes del vector
posición serán:
x(t)=x0+(V0 cosθ0)t
20 0 0
1y(t) y (v sen )t- gt2
= + θ

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 106
De la misma manera, el vector velocidad
instantánea representado por un vector
tangente a la curva en cualquier punto,
puede analizarse a partir de sus
componentes horizontal y vertical,
señaladas en la figura 3.18 como vx y vy
respectivamente y puesto que la
componente horizontal del movimiento es
uniforme (rapidez constante) entonces:
vx=V0 cosα constante,
en cambio la componente vertical, es:
vy=V0 senα-gt
x
v
vx = v0 cos θ0
v y =
v0 s
en θ
0 - g
t vx
vy
Fig 3. 24 Componentes del vector velocidad
instantánea en el tiempo t.
Por lo tanto el vector velocidad
instantánea quedará de la forma:
0 0 0 0ˆ ˆv(t) v cos i (v sen -gt)j= θ + θ
r
También podría aplicarse la ec. V(y) a
esta componente del movimiento, la cual
relaciona la componente vertical de la
velocidad con la posición en la vertical :
VY2= V0Y
2-2g(y-y0)
O bien:
VY2=(V0senθ0)2-2g(y-y0)
Si tomamos las ecuaciones de itinerario
x(t) e y(t) para este movimiento y
despejamos el tiempo se obtiene la
ecuación de la curva descrita por la
partícula:
De la ecuación: x(t)=x0+(V0cos θ0)t
Se tiene: 0
0 0
x-xtv cos
=θ
Y reemplazándolo en
20 0 0
1y(t) y (v sen )t- gt2
= + θ
Se tiene:
( ) ( )20
0 0 0 2 20 0
g x-xy(x) y tg x-x -
2v cos= + θ
θ
Que es la ecuación de una parábola, razón
por la que el movimiento recibe el nombre
de parabólico.
La aceleración en este movimiento, por lo
ya indicado, corresponde a la de gravedad
gr en todo momento, puesto que en la
horizontal es un MRU . ˆa -gj=r

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 107
x
y
gg
gg
g
g
g Fig 3. 25 La aceleración siempre es gr
El análisis efectuado en términos de
reconocer a este movimiento como
compuesto de otros dos con
características muy diferentes entre sí
pero que en conjunto lo describen
correctamente, hacen que sea éste un
claro ejemplo del principio de
independencia de los movimientos o de
superposición según como quiera verse.
Ejemplo 3.6. Un atleta lanzador de la
bala mide 1,8 m de estatura al lanzar el
implemento lo hace con una velocidad
inicial de magnitud 10 ms
que forma un
ángulo de 30º sobre la horizontal.
Determinar, despreciando el roce con el
aire:
a) El tiempo durante el cual la bala estuvo en el aire.
b) El alcance horizontal alcanzado.
c) La altura máxima lograda respecto al suelo.
d) La velocidad con la que impactó en el suelo y su módulo.
Solución.
a) Para determinar el tiempo durante el
cual estuvo en el aire a partir de la
información dada, podemos recurrir a la
componente vertical del movimiento y
aplicar específicamente la ecuación y(t)
que establece la posición vertical
instantánea para las condiciones:
y0=+1,8m (punto inicial de lanzamiento en la vertical).
y=0m (punto final o de llegada en la vertical).
v0y=V0 senα= 10(0,5)=5 ms
Reemplazando:
0=1,8+5t-5t2 ⇒ t=1,28 s
b) El alcance horizontal lo
determinaremos obviamente recurriendo
a la componente horizontal del
movimiento, aplicando la ec. X(t) para las
condiciones:
x0=0 (situando al atleta en el origen)
vx=V0 cosα=10(0,87)=8,7 ms
Reemplazando:
x=8,7(1,28)=11,1 m

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 108
c) La altura máxima la encontraremos
recurriendo nuevamente a la componente
vertical del movimiento. Esta vez existe
un dato implícito en la pregunta puesto
que al lograrse la altura máxima, la
componente de la velocidad es nula, es
decir vy=0 en el punto y=hmax (altura
máxima sobre el origen)
Aplicando entonces la ec. v(y):
0=(10)(0,5)2-(2)(10)(hmax-1,8)
Resolviendo: hmax=12,2m
d) La velocidad en cualquier instante a lo
largo de la trayectoria está determinada
por la ec. ( )v tr en la que se recuerda que
la componente horizontal de ella es
constante, en cambio la vertical cambia
en el tiempo, así:
vx=v0 cosα=(10)(0,87)=8,7 ms
vy=v0senα-gt=(10)(0,5)–(10)(1,28)=-7,8 ms
Luego: ( ) mˆ ˆv 8,7i-7,8 js
=r
Su módulo será:
( )22 mv 8,7 - 7,8 11,7s
= + =r
Parábola de seguridad.
Como se ha visto en el ejemplo anterior,
si la partícula tiene velocidad inicial de
magnitud constante (v0), entonces es
sencillo calcular la máxima altura (ymax) y
el alcance horizontal (xmax).
En general, la máxima altura se puede
calcular desde la función v(y), puesto que
en ese lugar la velocidad tiene
componente vertical cero.
Si suponemos y0=0:
2 2y 0y 0
20y max
20y
max
2 20 0
max
v v 2g(y y )
0 v 2gy
vy
2gv seny
2g
= − −
= −
=
θ=
Note que la altura máxima depende del
ángulo de lanzamiento.
Como la función seno tiene valores
comprendidos entre 0 y 1, entonces el
máximo valor de esta expresión es:
2* 0max
vy2g
=
Lo que ocurrirá cuando el ángulo sea de
90º (sen90º=1).

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 109
El alcance horizontal cuando recupere la
altura del lanzamiento se puede obtener
de la función x(t), para el tiempo que
demora en llegar a ese punto (tv). Este
tiempo se puede calcular en forma
sencilla, puesto que será el doble del
tiempo que demore en alcanzar la altura
máxima. Como hemos visto, esto ocurre
cuando la componente vertical de la
velocidad es nula.
y 0 0
0 0 s
0 0s
v (t) v sen -gt0 v sen -gt
v sentg
= θ
= θθ
=
Por tanto:
0 0v s
2v sent 2tg
θ= =
Entonces el alcance horizontal será:
( )
( )
0 0max 0x s o 0
2o
max 0 0
2o
max 0
2v senx v 2t v cosg
vx 2sen cosg
vx sen2g
⎛ ⎞θ= = θ ⎜ ⎟
⎝ ⎠
= θ θ
= θ
El mayor valor posible se obtiene cuando
sen2θ0=1, cuando 2θ0=90º, es decir, para
un ángulo de lanzamiento de θ0=45º.
2* omax
vxg
=
En resumen, hemos encontrado que para
un lanzamiento con velocidad inicial de
magnitud v0 se pueden obtener
movimientos parabólicos que no pueden
estar mas lejos que 2
ovg
en la dirección
horizontal y que 2
0v2g
en la dirección
vertical, como lo grafica la figura
siguiente.
y
x
45º
v02
2g ymax=
v02
2g sen2θ0
xmax=v0
2
gsen2θ0
v02
g
Fig 3. 26 Las parábolas posibles con v0 constante.
En general, se puede encontrar el ángulo
para alcanzar un punto del plano, es decir
la función θ0(x,y).
Para ello, tomaremos la función y(x):
( ) ( )20
0 0 0 2 20 0
g x-xy(x) y tg x-x -
2v cos= + θ
θ
Que puede expresarse en función de tgθ0,
debido a que 202
0
1 tg 1cos
= θ +θ

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 110
Por lo que, si además consideramos x0=0 e
Y0=0:
( )2
20 02
0
gxy tg x- tg 12v
= θ θ +
2 22
0 02 20 0
gx gxy tg x- tg2v 2v
= θ θ −
( )2 2
20 02 2
0 0
gx gxtg - x tg + + y 02v 2v
⎛ ⎞ ⎛ ⎞θ θ =⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
Que es una cuadrática para tgθ0, cuya
solución es:
2 22
2 20 0
0 2
20
gx gxx x 4 + y2v 2v
tggx2
2v
⎛ ⎞⎛ ⎞± − ⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠θ =⎛ ⎞⎜ ⎟⎝ ⎠
2 22 220 0
0 2 2 2 20 0
gx gxv x vtg x 4 +yx g x g 2v 2v
⎛ ⎞⎛ ⎞θ = ± − ⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠22 4 2
0 0 00 2 2
0
22 42 00 0
0 2
gxv v v1tg 2 +yxg x g g 2v
v yv v1tg x 2xg x g g
⎛ ⎞θ = ± − ⎜ ⎟
⎝ ⎠
θ = ± − −
Que permite calcular el ángulo que se
necesita para que la partícula alcance el
punto (x,y) deseado.
Note que la ecuación no tiene solución
real cuando la cantidad subradical es
negativa, es decir cuando:
242 00
2v yv x 2 0
g g− − <
Donde:
22
02
0
gxvy2g 2v
> −
Condición que contiene la región del plano
que resulta inalcanzable para una
partícula cuya velocidad inicial tenga una
magnitud v0.
Lo anterior permite decir que la frontera
de puntos (x,y) posibles está contenida en
la función:
220
20
gxvy2g 2v
= −
Que es una parábola envolvente de las
parábolas posibles (sin variar la magnitud
de la velocidad inicial). Por esta razón, se
le denomina parábola de seguridad.
y
x
v02
2g
y =
v02
2g
v02
g
parábola de seguridadregión inalcanzablegx2
2v02
Fig 3. 27 Parábola de seguridad y la región inalcanzable para una partícula lanzada con v0.
Note que si Y=0, entonces 2
ovxg
= , que es
el máximo alcance horizontal.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 111
Si x=0, entonces se encuentra que 2
0vy2g
= , la máxima altura.
Fig 3. 28 En las actividades deportivas que implican lanzar implementos lo más lejos posible, es intuitivo hacerlo en ángulos de 45º, aunque el movimiento no sea en el vacío. Esto se debe a que se puede considerar que la altura de lanzamiento y de caída están a la misma altura.
Es conveniente hacer notar que el análisis
ha considerado el caso de una partícula que
finalmente recupera la ordenada del
lanzamiento.
Si el lanzamiento se realiza desde una
altura distinta (Y0) del punto en que toca la
superficie (donde y=0), entonces la
parábola de seguridad toma la forma:
220
0 20
gxvy y2g 2v
= + −
Ejemplo 3.6. Desde una altura de
500m se lanza un proyectil con una
velocidad de 100 ms
.
a) Si el ángulo de lanzamiento respecto
de la horizontal es de 45º, determine el
alcance horizontal cuando llega al suelo.
b) Determine el máximo alcance
horizontal posible.
Solución:
y
x
x1,y1,t1,v1
x0,y0,t0,v0
θ0
x=0y=0
v0
De acuerdo a la información disponible:
v0x=V0 cos45º= 100(0,71)=71 ms
v0y=V0 sen45º= 100(0,71)=71 ms

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 112
a) Como en el ejemplo anterior, x1 se
calcula con el tiempo t1 que demora en
llegar al suelo. Este tiempo se puede
encontrar con la función y(t) para y1=0m,
y0=500m, t0=0s.
21 0 0y 1 1
21 1
21 1
2
1
1
1
1y y v t - gt210 500 71t - (10)t2
5t 71t 500 0
142 71 (4)(5)( 500)t10
t ´ 19,4st ´´ 5,16s
= +
= +
− − =
± − −=
=
= −
Descartamos t´´ y entonces se tiene:
X1=v0xt1´=(71)(19,4)= 1377,4m
b) El alcance máximo se puede encontrar
con la parábola de seguridad, con Y=0m.
2210
1 0 20
221
2
23 1
3
61
gxvy y2g 2v
(10)x1000 5002(10) 2(100)x0 10
2x10x 2x10 1414,21m
= + −
= + −
= −
= ± = ±
Cuya solución es la raíz positiva.
3.4 Movimiento Circunferencial
Este movimiento está caracterizado por
que la trayectoria es una circunferencia,
es decir es un movimiento plano como el
parabólico. Para referirlo a un sistema
cartesiano de coordenadas como los
anteriores, por comodidad haremos
coincidir el centro de la circunferencia
con el origen del sistema, como lo ilustra
la figura siguiente.
x
xx
y p
rθ
y
Fig 3. 29 Partícula moviéndose en una
circunferencia.
Imaginemos que la partícula P recorre la
circunferencia de radio R en el sentido
indicado, el tiempo que tarda en dar una
vuelta completa, se define como período
(T) y se mide en segundos. Su valor
recíproco representa el número de
vueltas que gira la partícula durante la
unidad de tiempo y se define como
frecuencia (f) midiéndose en Hertz (Hz)
o cicloss
(cps).
Por lo tanto: T = 1f

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 113
El vector posición rr que va desde el
origen del sistema hasta el punto donde
se ubica P en cualquier momento, va
modificando su dirección y sentido no así
su módulo R; el ángulo θ medido desde el
eje X y en el sentido contrario a como se
mueven las agujas de un reloj (sentido
antihorario) determina su dirección, por
lo que el vector rr puede expresarse
como:
ˆ ˆr Rcos i Rsen j= θ + θr
Es decir, podemos describir la posición
de la partícula a través del cambio en la
posición angular.
El comportamiento de la posición angular
en el tiempo puede indicarse mediante la
función θ = θ(t) medida en radianes.
Los cambios en la posición angular pueden
estudiarse mediante la rapidez angular
media definida como,
m t∆θ
ω =∆
, medida en rads
.
En un instante determinado, la rapidez
angular instantánea será:
ddt
θω =
Los cambios en la rapidez angular media
pueden estudiarse mediante la magnitud
de la aceleración angular media definida
como,
m t∆ω
α =∆
, medida en 2rads
En un instante determinado, la magnitud
de la aceleración angular instantánea
será:
ddt
ωα =
∆θ
∆sR
R
Fig 3. 30 Arco y ángulo descrito por una partícula
en un movimiento circunferencia.
Dar cuenta de la posición angular en
radianes es conveniente, puesto que nos
permite entre otras cosas, encontrar
relaciones simples entre las variables
cinemáticas lineales y angulares.
Si un punto P que se mueve a lo largo de
una circunferencia recorre un arco ∆s
durante un lapso ∆t describiendo un
ángulo del centro ∆θ como se observa en
la figura anterior, entonces se cumple
que:
∆s=R∆θ
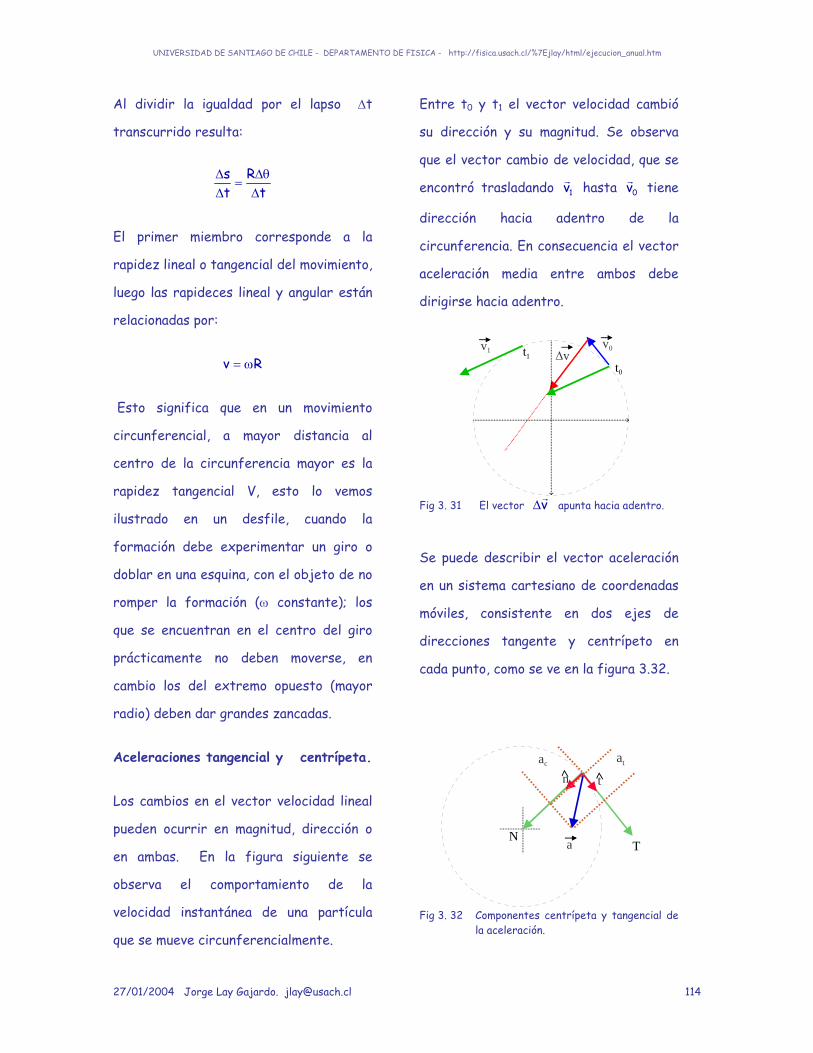
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 114
Al dividir la igualdad por el lapso ∆t
transcurrido resulta:
s Rt t
∆ ∆θ=
∆ ∆
El primer miembro corresponde a la
rapidez lineal o tangencial del movimiento,
luego las rapideces lineal y angular están
relacionadas por:
v R= ω
Esto significa que en un movimiento
circunferencial, a mayor distancia al
centro de la circunferencia mayor es la
rapidez tangencial V, esto lo vemos
ilustrado en un desfile, cuando la
formación debe experimentar un giro o
doblar en una esquina, con el objeto de no
romper la formación (ω constante); los
que se encuentran en el centro del giro
prácticamente no deben moverse, en
cambio los del extremo opuesto (mayor
radio) deben dar grandes zancadas.
Aceleraciones tangencial y centrípeta.
Los cambios en el vector velocidad lineal
pueden ocurrir en magnitud, dirección o
en ambas. En la figura siguiente se
observa el comportamiento de la
velocidad instantánea de una partícula
que se mueve circunferencialmente.
Entre t0 y t1 el vector velocidad cambió
su dirección y su magnitud. Se observa
que el vector cambio de velocidad, que se
encontró trasladando 1vr hasta 0vr tiene
dirección hacia adentro de la
circunferencia. En consecuencia el vector
aceleración media entre ambos debe
dirigirse hacia adentro.
t0
t1v0
∆vv1
Fig 3. 31 El vector v∆
r apunta hacia adentro.
Se puede describir el vector aceleración
en un sistema cartesiano de coordenadas
móviles, consistente en dos ejes de
direcciones tangente y centrípeto en
cada punto, como se ve en la figura 3.32.
NTa
atac
tn
Fig 3. 32 Componentes centrípeta y tangencial de
la aceleración.
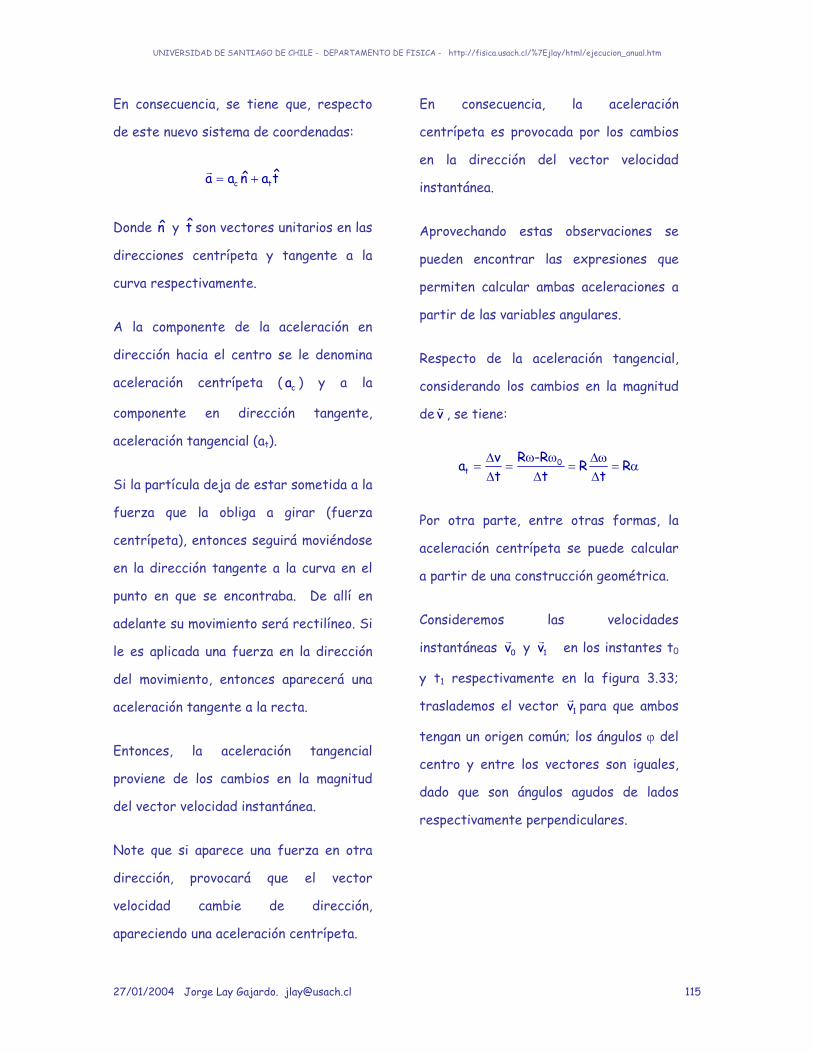
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 115
En consecuencia, se tiene que, respecto
de este nuevo sistema de coordenadas:
c tˆˆa a n a t= +
r
Donde n y t son vectores unitarios en las
direcciones centrípeta y tangente a la
curva respectivamente.
A la componente de la aceleración en
dirección hacia el centro se le denomina
aceleración centrípeta ( ca ) y a la
componente en dirección tangente,
aceleración tangencial (at).
Si la partícula deja de estar sometida a la
fuerza que la obliga a girar (fuerza
centrípeta), entonces seguirá moviéndose
en la dirección tangente a la curva en el
punto en que se encontraba. De allí en
adelante su movimiento será rectilíneo. Si
le es aplicada una fuerza en la dirección
del movimiento, entonces aparecerá una
aceleración tangente a la recta.
Entonces, la aceleración tangencial
proviene de los cambios en la magnitud
del vector velocidad instantánea.
Note que si aparece una fuerza en otra
dirección, provocará que el vector
velocidad cambie de dirección,
apareciendo una aceleración centrípeta.
En consecuencia, la aceleración
centrípeta es provocada por los cambios
en la dirección del vector velocidad
instantánea.
Aprovechando estas observaciones se
pueden encontrar las expresiones que
permiten calcular ambas aceleraciones a
partir de las variables angulares.
Respecto de la aceleración tangencial,
considerando los cambios en la magnitud
de vs , se tiene:
0t
R -Rva R Rt t t
ω ω∆ ∆ω= = = = α
∆ ∆ ∆
Por otra parte, entre otras formas, la
aceleración centrípeta se puede calcular
a partir de una construcción geométrica.
Consideremos las velocidades
instantáneas 0vr y 1vr en los instantes t0
y t1 respectivamente en la figura 3.33;
traslademos el vector 1vr para que ambos
tengan un origen común; los ángulos ϕ del
centro y entre los vectores son iguales,
dado que son ángulos agudos de lados
respectivamente perpendiculares.
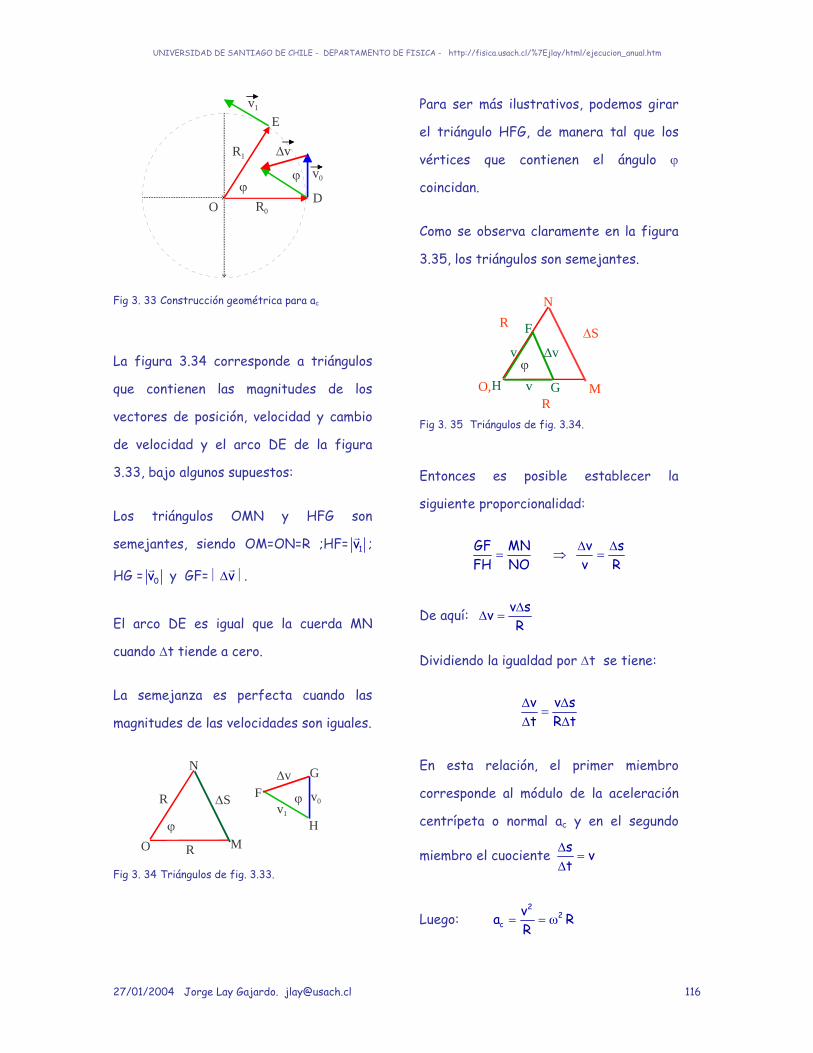
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 116
v1
E
O
v0
∆v
D
ϕϕ
R0
R1
Fig 3. 33 Construcción geométrica para ac
La figura 3.34 corresponde a triángulos
que contienen las magnitudes de los
vectores de posición, velocidad y cambio
de velocidad y el arco DE de la figura
3.33, bajo algunos supuestos:
Los triángulos OMN y HFG son
semejantes, siendo OM=ON=R ;HF= 1vr ;
HG = 0vr y GF= ⎢ v∆r
⎢.
El arco DE es igual que la cuerda MN
cuando ∆t tiende a cero.
La semejanza es perfecta cuando las
magnitudes de las velocidades son iguales.
ϕ
R
R ∆S
MO
N
v0
∆v
ϕv1
FG
H
Fig 3. 34 Triángulos de fig. 3.33.
Para ser más ilustrativos, podemos girar
el triángulo HFG, de manera tal que los
vértices que contienen el ángulo ϕ
coincidan.
Como se observa claramente en la figura
3.35, los triángulos son semejantes.
ϕ
R
R∆S
MO,
N
v
∆vv
F
GH
Fig 3. 35 Triángulos de fig. 3.34.
Entonces es posible establecer la
siguiente proporcionalidad:
GF MN v s FH NO v R
∆ ∆= ⇒ =
De aquí: v svR∆
∆ =
Dividiendo la igualdad por ∆t se tiene:
v v st R t
∆ ∆=
∆ ∆
En esta relación, el primer miembro
corresponde al módulo de la aceleración
centrípeta o normal ac y en el segundo
miembro el cuociente s vt
∆=
∆
Luego: 2
2 c
va RR
= = ω
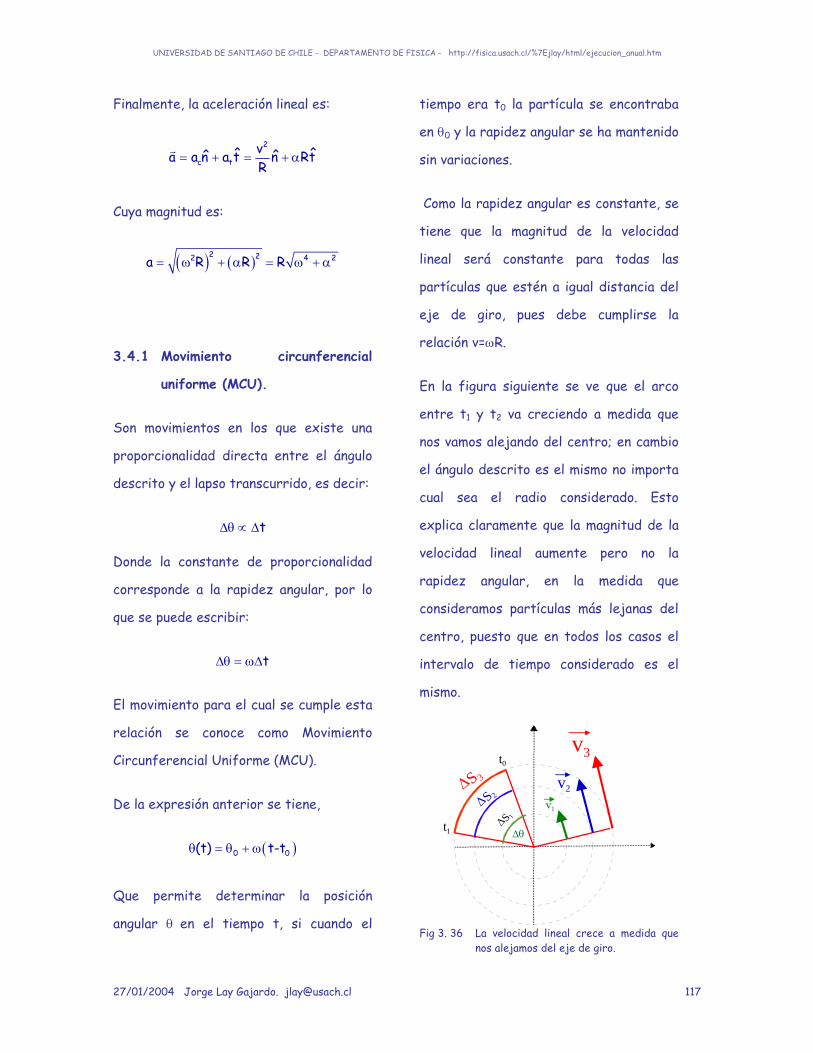
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 117
Finalmente, la aceleración lineal es:
2
c tvˆ ˆˆ ˆa a n a t n RtR
= + = + αr
Cuya magnitud es:
( ) ( )2 22 4 2a R R R= ω + α = ω + α
3.4.1 Movimiento circunferencial
uniforme (MCU).
Son movimientos en los que existe una
proporcionalidad directa entre el ángulo
descrito y el lapso transcurrido, es decir:
t∆θ ∝ ∆
Donde la constante de proporcionalidad
corresponde a la rapidez angular, por lo
que se puede escribir:
t∆θ = ω∆
El movimiento para el cual se cumple esta
relación se conoce como Movimiento
Circunferencial Uniforme (MCU).
De la expresión anterior se tiene,
( )0 0(t) t-tθ = θ + ω
Que permite determinar la posición
angular θ en el tiempo t, si cuando el
tiempo era t0 la partícula se encontraba
en θ0 y la rapidez angular se ha mantenido
sin variaciones.
Como la rapidez angular es constante, se
tiene que la magnitud de la velocidad
lineal será constante para todas las
partículas que estén a igual distancia del
eje de giro, pues debe cumplirse la
relación v=ωR.
En la figura siguiente se ve que el arco
entre t1 y t2 va creciendo a medida que
nos vamos alejando del centro; en cambio
el ángulo descrito es el mismo no importa
cual sea el radio considerado. Esto
explica claramente que la magnitud de la
velocidad lineal aumente pero no la
rapidez angular, en la medida que
consideramos partículas más lejanas del
centro, puesto que en todos los casos el
intervalo de tiempo considerado es el
mismo.
v3
v2
v1
∆θ
∆S 1
∆S 2
∆S 3
t0
t1
Fig 3. 36 La velocidad lineal crece a medida que
nos alejamos del eje de giro.
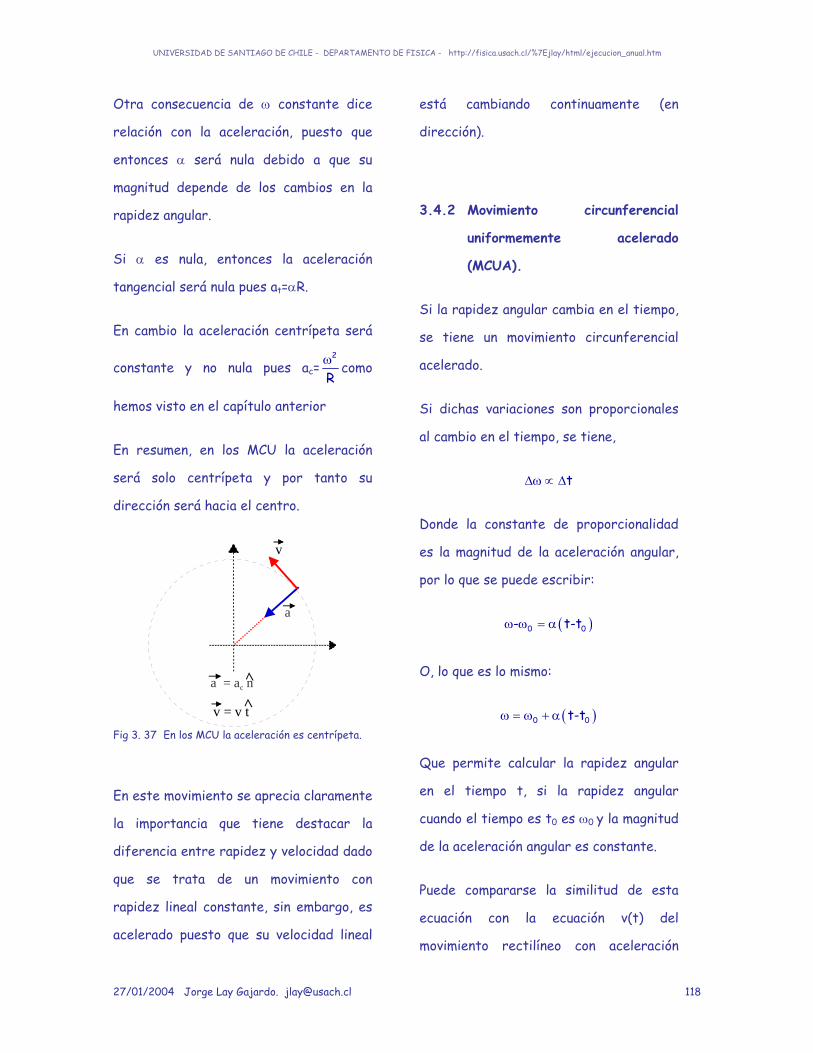
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 118
Otra consecuencia de ω constante dice
relación con la aceleración, puesto que
entonces α será nula debido a que su
magnitud depende de los cambios en la
rapidez angular.
Si α es nula, entonces la aceleración
tangencial será nula pues at=αR.
En cambio la aceleración centrípeta será
constante y no nula pues ac=2
Rω como
hemos visto en el capítulo anterior
En resumen, en los MCU la aceleración
será solo centrípeta y por tanto su
dirección será hacia el centro.
a
a = ac n
v
v = v t
Fig 3. 37 En los MCU la aceleración es centrípeta.
En este movimiento se aprecia claramente
la importancia que tiene destacar la
diferencia entre rapidez y velocidad dado
que se trata de un movimiento con
rapidez lineal constante, sin embargo, es
acelerado puesto que su velocidad lineal
está cambiando continuamente (en
dirección).
3.4.2 Movimiento circunferencial
uniformemente acelerado
(MCUA).
Si la rapidez angular cambia en el tiempo,
se tiene un movimiento circunferencial
acelerado.
Si dichas variaciones son proporcionales
al cambio en el tiempo, se tiene,
t∆ω ∝ ∆
Donde la constante de proporcionalidad
es la magnitud de la aceleración angular,
por lo que se puede escribir:
( )0 0- t-tω ω = α
O, lo que es lo mismo:
( )0 0t-tω = ω + α
Que permite calcular la rapidez angular
en el tiempo t, si la rapidez angular
cuando el tiempo es t0 es ω0 y la magnitud
de la aceleración angular es constante.
Puede compararse la similitud de esta
ecuación con la ecuación v(t) del
movimiento rectilíneo con aceleración

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 119
constante, por lo que podemos
legítimamente suponer entonces que las
restantes ecuaciones que describen este
movimiento guardan también igual
similitud con las del movimiento
rectilíneo,
Entonces la función θ(t) será:
20 0
1t t2
θ = θ + ω + α
Que es la ecuación de itinerario del
movimiento circunferencial con
aceleración angular de magnitud
constante. Finalmente la función análoga
a v(x) es para este movimiento:
( )2 20 02 -ω = ω + α θ θ
Que resulta de eliminar el tiempo en las
ecuaciones ω(t) y θ(t).
Solo restaría agregar que una partícula P
moviéndose de esta forma está
modificando su velocidad no solo en
dirección sino que también en su
magnitud, por tal razón no solo tendrá
aceleración centrípeta (variable puesto
que ω lo es) sino además aceleración
tangencial debido a la variación en la
magnitud del vector velocidad
instantánea, por lo tanto dicha
aceleración podemos expresarla de la
forma:
n tˆˆa a n a t= +
r
Cuya magnitud es:
4 2a R= ω + α
En la figura siguiente se pueden ver las
aceleraciones lineal, tangencial y normal
para este movimiento
at
ac
a
Fig 3. 38 Aceleración lineal y sus componentes
normal y tangencial para MCUA.
Ejemplo 3.7. El eje de un motor está
girando con una frecuencia de 1200r.p.m.
( revmin
), una polea de 5cm de radio está
fija a él y hace girar mediante una correa
a otra polea de 40cm de radio sin que se
produzca resbalamiento. El motor luego
de funcionar uniformemente durante 10
segundos se desconecta comenzando a
detenerse con aceleración angular de

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 120
magnitud constante hasta quedar en
reposo, demorando en este último
proceso 30 segundos. Determinar:
a) El número de vueltas que gira la última
polea durante los 10 segundos.
b) La aceleración centrípeta durante los
primeros 10 segundos de un punto en
el borde de la polea mayor.
c) La aceleración angular durante los
últimos 30 segundos.
Solución:
a) En primer lugar debemos encontrar la
rapidez angular con la que gira el eje del
motor cuya frecuencia es 1200r.p.m.
( )( ) 1 rad2 f 2 3,14 1200 4060s s
⎛ ⎞ω = π = = π⎜ ⎟⎝ ⎠
La rapidez lineal de los puntos situados en
el borde de la polea menor será:
( )rad cmv r 40 5cm 200s s
= ω = π = π
La rapidez lineal de la segunda polea debe
ser la misma, porque está unida a la
anterior, de tal manera que se puede
calcular la rapidez angular con que está
girando:
22
2 2
v v 200 rad5r r 40 s
πω = = = = π
Si gira con rapidez constante, entonces el
ángulo descrito en 10 s será:
2 2 2radt 5 10s 50 rad s
∆θ = ω ∆ = π = π
Como 2 2 2 n∆θ = π donde n2 es el número
de vueltas descritas,
22
50 radn 25 vueltas2 2 rad∆θ π
= = =π π
b) la polea mayor gira con rapidez angular
constante durante los 10 primeros
segundos, de tal manera que la
aceleración es solo centrípeta, cuya
magnitud es:
22
c2 2 2rad cma r 5 25cm 125s s
⎛ ⎞= ω = π = π⎜ ⎟⎝ ⎠
c) la rapidez angular final ω2f de las
partículas situadas en el borde de la polea
2 es cero al cabo de 30 segundos desde
que empezó a detenerse (∆t2*). Por
tanto:
*2 22f tω = ω + α∆
con ω2f=0, de donde:
22 2*
2
rad-5 - rads30s 6 st
π−ω π⎛ ⎞α = = = ⎜ ⎟∆ ⎝ ⎠

27/01/2004 Jorge Lay Gajardo. [email protected] 121
4.1 Introducción
Se entiende por dinámica al estudio de
las causas del movimiento.
Las leyes que describen el movimiento de
un sistema más grande que un átomo,
moviéndose con velocidades de magnitud
mucho menor que la de la luz, están
contenidas en las denominadas leyes de
Newton del movimiento.
Tales leyes, de una simpleza
extraordinaria, y de gran belleza,
permiten dar cuenta del movimiento de
pequeños y grandes cuerpos, de fluidos,
de resortes, cargas eléctricas tanto como
del movimiento de los cuerpos celestes.
Se citan como uno de los grandes logros
de la humanidad, puesto que no solo logró
unificar la explicación de movimientos
celestes y terrestres, sino que durante
mucho tiempo fueron considerados como
la explicación de los hechos
fundamentales del universo.
Con la publicación del magnífico libro
“Principios Matemáticos de Filosofía
Natural” conocido como Principia, Newton
proporciona las bases fundamentales de
la denominada Mecánica Clásica.
4.2 Leyes de Newton.
4.2.1 Primera ley de newton:
NOTA: En toda la discusión que sigue,
cuando se hable de cuerpos, se
entenderán como partículas, a objeto de
no considerar sus deformaciones (salvo
en el caso de los resortes) ni su
movimiento de rotación.
Basado en el trabajo de Galileo, Newton
sostiene que un sistema abandonado a si
mismo en un sistema aislado debe tener
velocidad constante.
Newton en cambio, sostiene que un
sistema aislado puede estar en reposo
(velocidad de magnitud constantemente
cero) o moviéndose con velocidad

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 122
constante (velocidad de magnitud y
dirección constante, MUR).
En consecuencia, no se podría diseñar
experimento alguno en el interior del
sistema que permitiera distinguir el
reposo del MUR (ver fig. 4.1 y 4.2.)
Esta afirmación contiene el concepto de
inercia expresado por Galileo: “inercia es
la tendencia natural de un objeto de
mantener su reposo o su movimiento
uniforme en línea recta”.
Por tanto, cualquier cuerpo que esté en
reposo o se esté moviendo con velocidad
constante, se dice que está en estado
inercial.
Fig 4.1 Una persona trabajando en un escritorio en reposo respecto de la calle
Fig 4.2 La misma persona no sentiría diferencia si estuviera encima de un camión que se mueve con velocidad constante (en una carretera rectilínea y plana)
Newton define el concepto de masa como
una forma de medir la inercia, lo que
representa una gran contribución puesto
que explica que un cuerpo que tiene mas
masa posee una mayor inercia y por
consiguiente una mayor capacidad de
oponerse a un cambio en su velocidad.
Fig 4.3 Un camión tiene más inercia que un automóvil
Newton introduce también el concepto de
fuerza, como todo aquello que es capaz de
sacar al cuerpo de este equilibrio.
La idea de que un cuerpo puede estar en
equilibrio no solo cuando está en reposo
sino también cuando se está moviendo con
velocidad constante fue largamente
resistida, puesto que el pensamiento de
Aristóteles establecía que “el estado
natural de los cuerpos era el reposo”.
Esta idea no es equivocada, sino en cuanto
restringe al reposo las posibilidades de
equilibrio.
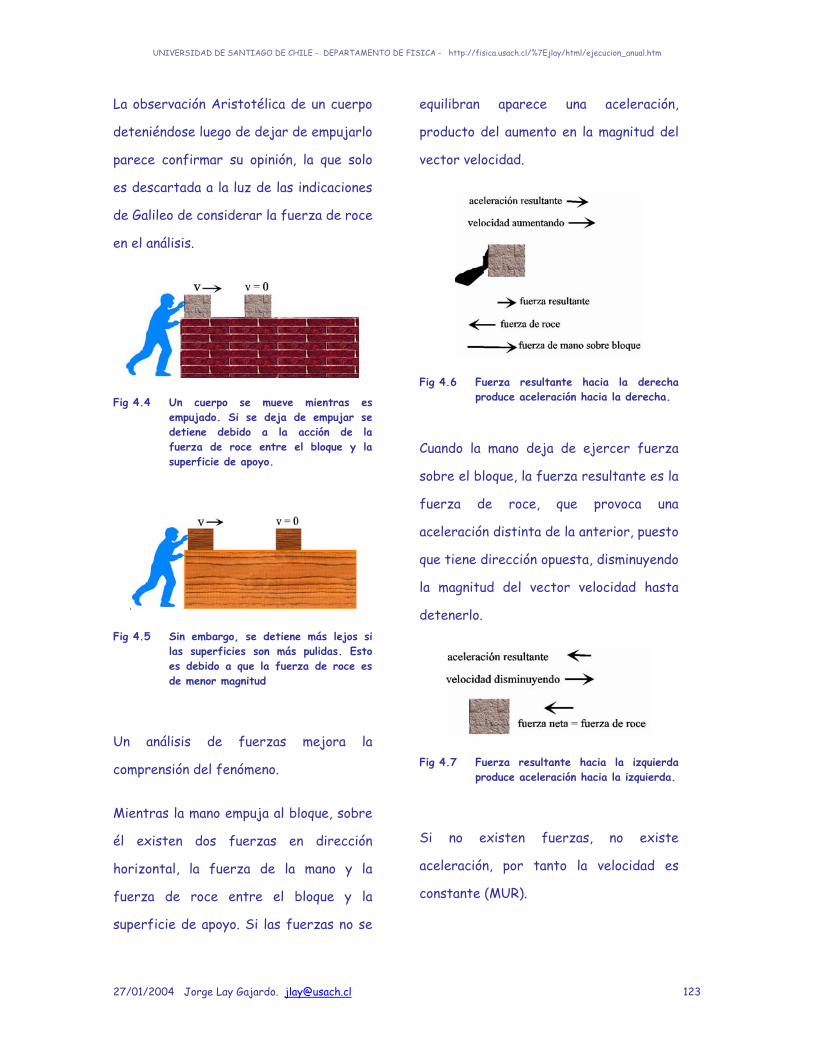
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 123
La observación Aristotélica de un cuerpo
deteniéndose luego de dejar de empujarlo
parece confirmar su opinión, la que solo
es descartada a la luz de las indicaciones
de Galileo de considerar la fuerza de roce
en el análisis.
Fig 4.4 Un cuerpo se mueve mientras es empujado. Si se deja de empujar se detiene debido a la acción de la fuerza de roce entre el bloque y la superficie de apoyo.
.
Fig 4.5 Sin embargo, se detiene más lejos si las superficies son más pulidas. Esto es debido a que la fuerza de roce es de menor magnitud
Un análisis de fuerzas mejora la
comprensión del fenómeno.
Mientras la mano empuja al bloque, sobre
él existen dos fuerzas en dirección
horizontal, la fuerza de la mano y la
fuerza de roce entre el bloque y la
superficie de apoyo. Si las fuerzas no se
equilibran aparece una aceleración,
producto del aumento en la magnitud del
vector velocidad.
Fig 4.6 Fuerza resultante hacia la derecha produce aceleración hacia la derecha.
Cuando la mano deja de ejercer fuerza
sobre el bloque, la fuerza resultante es la
fuerza de roce, que provoca una
aceleración distinta de la anterior, puesto
que tiene dirección opuesta, disminuyendo
la magnitud del vector velocidad hasta
detenerlo.
Fig 4.7 Fuerza resultante hacia la izquierda produce aceleración hacia la izquierda.
Si no existen fuerzas, no existe
aceleración, por tanto la velocidad es
constante (MUR).

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 124
aceleración resultante cerovelocidad constante
fuerza neta cero (equilibrio)
Fig 4.8 Si la fuerza resultante es nula, no hay aceleración.
La ley de inercia es valida para un
observador en reposo o moviéndose con
rapidez constante. Para una persona que
está sobre un vehículo que se mueve con
velocidad constante de magnitud 30 Kmh
,
un objeto dispuesto a su lado está en
reposo y por tanto la fuerza resultante
sobre él será nula.
Para un observador que está en reposo en
el exterior, vehículo, objeto y persona se
mueven con velocidad constante de
magnitud 30 Kmh
y por tanto para él
también la fuerza resultante sobre el
objeto será nula.
Se dice que un sistema de referencia en
reposo o moviéndose con velocidad
constante son marcos de referencia
inerciales.
Fig 4.9 Para la persona del camión, los libros están en reposo. Para la persona en la calle, viajan con velocidad constante. Para ambos, el objeto no está acelerado.
4.2.2 Segunda ley de Newton.
La primera ley ha establecido una forma
operacional de determinar si existe una
fuerza neta actuando sobre un cuerpo: si
la velocidad con que se mueve un cuerpo
no es constante, entonces sobre él debe
haber actuando una fuerza resultante o
neta.
Si queremos cuantificar la magnitud de la
fuerza neta se podrían realizar algunos
experimentos sencillos:
En primer lugar, dispongamos un cuerpo
de cierta masa y apliquemos sobre él una
fuerza neta determinada; entonces
aparece en él una aceleración.
Si aumentamos la fuerza neta aplicada,
observamos un aumento proporcional en la
aceleración.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 125
Fig 4.10 La fuerza resultante es directamente proporcional a la aceleración resultante.
Es decir, si la masa es constante, se
cumple que: na F∝
En segundo lugar, se puede averiguar que
pasaría si la misma fuerza neta se aplica a
cuerpos de masas distintas.
Fig 4.11 La aceleración resultante es inversamente proporcional a la masa.
Se observa que la aceleración es
inversamente proporcional a la masa
cuando la fuerza es constante, es decir:
1am
∝
Combinando ambas, podemos escribir:
nFam
∝
Desde donde,
nF =kma
Si escogemos unidades de masa y fuerza
adecuadas, la constante de
proporcionalidad vale 1.
Como ya hemos discutido en capítulos
anteriores, fuerza y aceleración son
cantidades vectoriales, por lo que la
expresión se debe escribir:
F ma∑ =r r
Puesto que la fuerza neta o resultante, no
es más que la suma vectorial de todas las
fuerzas aplicadas sobre el cuerpo.
Es necesario indicar que esta formulación
matemática no fue obra de Newton sino
de Leonhard Euler muchos años después
de la publicación de los Principia.
Si ambos vectores están en el espacio
coordenado cartesiano, se tiene:
( )x y z x y zF i F j Fk m a i a j a kΣ + Σ + Σ = + +) )) )) )
De donde, por igualdad de vectores,

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 126
x xF maΣ =
y yF maΣ =
z zF maΣ =
Sistema de ecuaciones algebraicas que
resulta inapreciable para resolver un
sinnúmero de aplicaciones.
Dimensionalmente se tiene que:
[ ] -2F MLT⎡ ⎤= ⎣ ⎦
En el Sistema Internacional de Unidades
la unidad de fuerza es
[ ] 2mF Kgs
⎡ ⎤= ⎢ ⎥⎣ ⎦
Denominado Newton [N].
En el sistema CGS, la unidad será:
[ ] 2cmF gs
⎡ ⎤= ⎢ ⎥⎣ ⎦
Denominada dina [dina].
En el Sistema Inglés, la unidad de fuerza
será:
[ ] 2
pieF slugs
⎡ ⎤= ⎢ ⎥⎣ ⎦
Denominada libra [lb].
Las equivalencias respectivas son fáciles
de encontrar y son:
1N=105dinas=0,225lb
1lb=4,45N
Ejemplo 4.1. Un barco es arrastrado
por tres remolcadores como se observa
en la figura 4.12 cada uno ejerce una
fuerza de magnitud 3000N.
y
- y
20º10º
20º x
y
- y
20º10º
Ra
Rc
Rb
Fig 4.12 Figura para ejemplo 4.1.
a) ¿Cuál es la magnitud de la fuerza
resultante?
b) ¿y la magnitud de la aceleración?
Solución.
a) Las fuerzas de los remolcadores se
pueden escribir como
a a aˆ ˆR R cos20ºi R sen20ºj= +
r
b b bˆ ˆR R cos-10ºi R sen-10ºj= +
r
b bˆ ˆR R cos-30ºi R sen-30ºj= +
r
Donde Ra=Rb=Rc=3000N

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 127
Por lo que:
a cbˆ ˆF R R R 8371,58Ni - 994,88NjΣ = + + =
r r r r
b) de la segunda ley, se tiene
ˆ ˆ8371,58Ni - 994,88NjFam 10000KgΣ
= =
sr
( ) 2mˆˆa 0,84 i - 0,10 js
=r
Cuya magnitud es:
( )2
2 22 2
m ma 0,84 0,10 0,85s s
⎛ ⎞= + =⎜ ⎟⎝ ⎠
4.2.3 Tercera Ley de Newton
Cuando un camión choca a un automóvil
observamos en este último un cambio en
su velocidad que nos hace indicar que le
fue suministrada una fuerza, de acuerdo
a la segunda ley. Sin embargo, al observar
al camión, vemos que este también
experimentó un cambio de velocidad en la
interacción y por tanto le fue aplicada
una fuerza (ver figs. 4.13 a 4.15).
Este sencillo fenómeno sirve para ilustrar
el tercer principio de Newton que indica
que un cuerpo sometido a una fuerza
reaccionará ejerciendo una fuerza de
igual magnitud pero de dirección opuesta
sobre el cuerpo que se la ejerció.
Fig 4.13 Un carro bomba con VCI constante mayor que la velocidad de un auto (VAI), que esta en su camino.
Fig 4.14 Al chocar, ambos se ejercen fuerzas.
Fig 4.15 Las fuerzas de acción y reacción se manifiestan cambiándole la velocidad a ambos.
En términos matemáticos:
12 21F -F=r r
La fuerza que el cuerpo 1 hace sobre el
cuerpo 2 tiene como reacción la fuerza
que el cuerpo 2 hace sobre el cuerpo 1.
Ambas fuerzas son de igual magnitud y
dirección opuesta y no se pueden anular
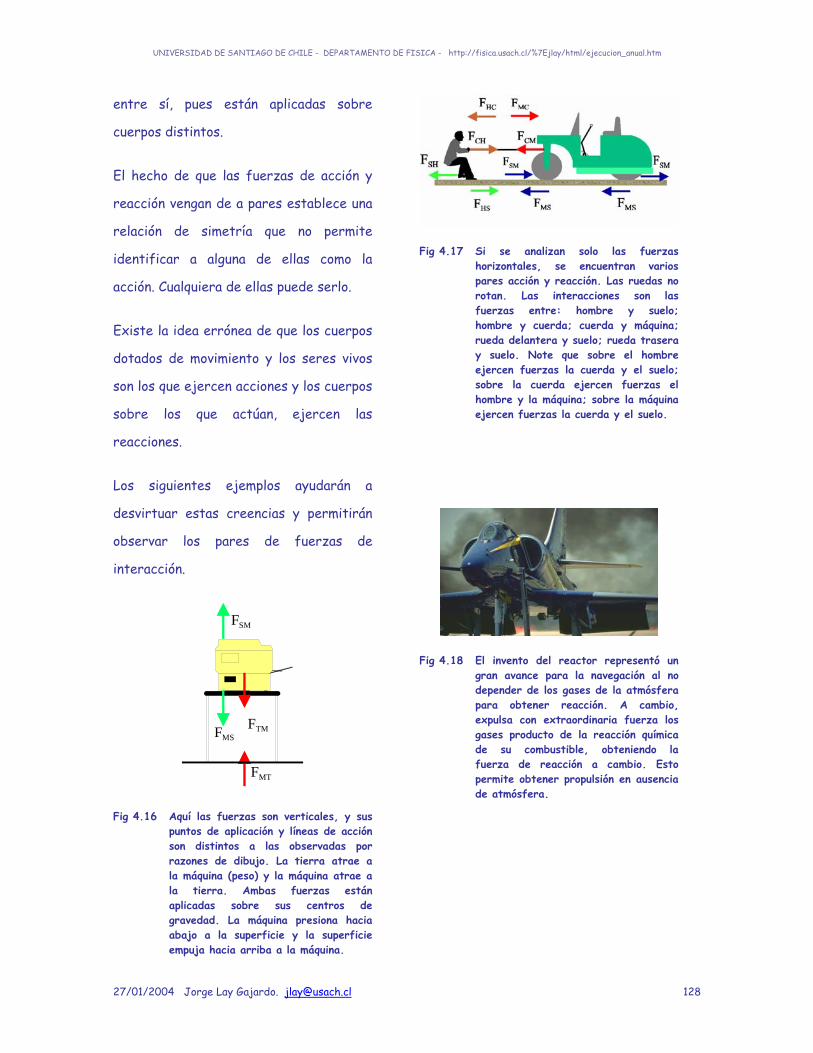
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 128
entre sí, pues están aplicadas sobre
cuerpos distintos.
El hecho de que las fuerzas de acción y
reacción vengan de a pares establece una
relación de simetría que no permite
identificar a alguna de ellas como la
acción. Cualquiera de ellas puede serlo.
Existe la idea errónea de que los cuerpos
dotados de movimiento y los seres vivos
son los que ejercen acciones y los cuerpos
sobre los que actúan, ejercen las
reacciones.
Los siguientes ejemplos ayudarán a
desvirtuar estas creencias y permitirán
observar los pares de fuerzas de
interacción.
FSM
FMSFTM
FMT
Fig 4.16 Aquí las fuerzas son verticales, y sus puntos de aplicación y líneas de acción son distintos a las observadas por razones de dibujo. La tierra atrae a la máquina (peso) y la máquina atrae a la tierra. Ambas fuerzas están aplicadas sobre sus centros de gravedad. La máquina presiona hacia abajo a la superficie y la superficie empuja hacia arriba a la máquina.
Fig 4.17 Si se analizan solo las fuerzas horizontales, se encuentran varios pares acción y reacción. Las ruedas no rotan. Las interacciones son las fuerzas entre: hombre y suelo; hombre y cuerda; cuerda y máquina; rueda delantera y suelo; rueda trasera y suelo. Note que sobre el hombre ejercen fuerzas la cuerda y el suelo; sobre la cuerda ejercen fuerzas el hombre y la máquina; sobre la máquina ejercen fuerzas la cuerda y el suelo.
Fig 4.18 El invento del reactor representó un gran avance para la navegación al no depender de los gases de la atmósfera para obtener reacción. A cambio, expulsa con extraordinaria fuerza los gases producto de la reacción química de su combustible, obteniendo la fuerza de reacción a cambio. Esto permite obtener propulsión en ausencia de atmósfera.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 129
Fig 4.19 La luna atrae a la tierra con igual fuerza que la tierra atrae a la luna. la aceleración de la luna es mayor pues su masa es menor. La fuerza sobre la luna le produce aceleración centrípeta que la obliga a girar sobre la tierra. La fuerza de la luna sobre la tierra produce las mareas y un ligero movimiento zigzageante.
Fig 4.20 El dibujo está muy exagerado, pretendiendo solo ejemplificar el efecto de la fuerza de la luna sobre la tierra en relación con su movimiento de traslación alrededor del sol.
Fig 4.21 Existe un gran número de aparatos que funcionan empujando fluidos como el aire o el agua, hacia atrás o hacia abajo o diversas otras combinaciones, para obtener movimiento gracias a la fuerza de reacción del fluido sobre la nave. Básicamente esto se hace con hélices, ruedas, toberas, etc.
Ejemplo 4.2. Una lámpara L cuelga de
una cuerda C. La lámpara pesa P. Ver
figura 4.22.
Fig 4.22 figura para ejemplo 4.2.
a) ¿Qué fuerzas actúan sobre la lámpara?
b) ¿Qué fuerza hace la lámpara sobre la
cuerda?
c) ¿Son un par acción-reacción el peso de
la lámpara y la fuerza de la lámpara
sobre la cuerda?
Solución.
Siempre es conveniente un diagrama de
cuerpo libre.
F cuerda sobre lámpara
F gravitacional sobre lámpara (peso)
Fig 4.23 Diagrama de fuerzas sobre lámpara.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 130
a) Sobre la lámpara existen dos fuerzas:
la fuerza de atracción gravitacional
dirigida hacia abajo y la fuerza de la
cuerda, dirigida hacia arriba.
De nuevo, un diagrama de cuerpo libre
ayuda a la comprensión del problema.
F lámpara sobre cuerda
F soporte sobre cuerda
Fig 4.24 Diagrama de fuerzas sobre cuerda.
b) Sobre la cuerda existen dos fuerzas,
la fuerza de la lámpara sobre ella,
dirigida hacia abajo y la fuerza del
soporte dirigida hacia arriba. Aquí se
considera a la cuerda con peso
despreciable, por lo que no participa en el
análisis.
c) No, pues el peso de la lámpara es la
fuerza con que la tierra atrae a la
lámpara y por tanto la reacción será la
fuerza con que la lámpara atrae a la
tierra hacia arriba.
4.3 Fuerzas
4.3.1 Fuerzas fundamentales
Son el resultado de las interacciones
elementales entre partículas. Explican
fenómenos que no pueden atribuirse a
otras fuerzas. A lo largo de la historia
se observa una tendencia hacia la
unificación de las fuerzas, esperándose
que finalmente se alcance el conocimiento
de una fuerza fundamental última,
determinando que la naturaleza posee una
estructura extraordinariamente simple.
El cuadro siguiente muestra el camino
seguido hacia la unificación.
GravedadCeleste
GravedadTerrestre
GravitaciónUniversal(Newton)
FuerzaEléctrica
FuerzaMagnética
FuerzaElectromagnética
(Maxwell)
FuerzaNuclear
débil
FuerzaElectrodébil
(Glashow, Salamy Weinberg)
FuerzaNuclearFuerte
Unificaciónposible
Unificaciónúltima
Fig 4.25 Fuerzas fundamentales y su evolución hacia la unificación última.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 131
Por consiguiente, hoy se sabe que en la
naturaleza existen tres fuerzas
fundamentales: de gravitación universal,
electro débil y nuclear o fuerte.
La fuerza de gravitación universal fue
descubierta por Newton quien logró
describir la fuerza que existe entre dos
cuerpos de cualquier masa (1687). Un
caso particular de gran importancia para
nosotros es la fuerza que existe entre la
Tierra y los cuerpos que están en su
cercanía, que estudiaremos más adelante.
La fuerza electro débil, propuesta a
mediados de la década de 1970 por
Glashow, Salam y Weinberg, quienes
unificaron las fuerzas nucleares débiles y
las fuerzas del electromagnetismo. Las
fuerzas nucleares débiles existen entre
partículas llamadas hadrones (entre las
que se incluyen mesones y bariones) y
entre partículas denominadas leptones
(entre las que se incluyen electrones,
positrones, muones y neutrinos),
responsables de la radioactividad beta y
de la inestabilidad en los núcleos y
partículas elementales. Las fuerzas
electromagnéticas a su vez son el
resultado de la unificación de las fuerzas
magnéticas y eléctricas, consideradas
independientes antes del trabajo de
Maxwell en el siglo XIX.
La fuerza nuclear fuerte es la
responsable de mantener unidos los
núcleos de los átomos.
Existe entre nucleones (protones y
neutrones) solo si están muy cercanos
(10-15m entre sí), decreciendo
rápidamente con la separación. A una
distancia mayor de 1,5x10-14m la fuerza
nuclear es mucho menor que la fuerza
eléctrica entre los nucleones y puede
despreciarse.
Si bien es cierto las fuerzas nucleares
son muchísimo más intensas que las
electro débiles y gravitacionales, su
acción a distancias muy cercanas
permiten a las restantes ser percibidas.
A escala astronómica sin embargo,
prevalecen las fuerzas gravitacionales,
debido a la disposición eléctricamente
neutra de los cuerpos celestes.
A escala macroscópica en nuestra vida
cotidiana, la mayor parte de las fuerzas
que observamos entre los cuerpos, son de
naturaleza gravitacional o de naturaleza
electro débil (electromagnéticas casi en
su totalidad).

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 132
Entre ellas se pueden citar las fuerzas de
contacto, y de rozamiento, así como las
fuerzas ejercidas por cuerdas y resortes,
que son manifestaciones muy complejas
de interacciones electromagnéticas.
A estas fuerzas se les denomina
secundarias.
En este curso, trabajaremos con fuerzas
de este último tipo por lo que nos
detendremos para analizar en detalle
fuerzas tales como roce, tensión, normal
y elástica.
A continuación analizaremos una fuerza
fundamental que ocuparemos en este
curso, como es el peso. Luego
analizaremos algunas fuerzas
secundarias.
Ley de Atracción Gravitacional. Peso.
Enunciada por Newton, establece que
entre dos cuerpos de masas m1 y m2 que
están separados una distancia r, existe
una fuerza de atracción gravitacional
cuya magnitud está determinada por la
expresión:
1 22
G m mF r
=
G es una constante universal cuyo valor
es 6,67x10-11 Nm2/Kg2, determinada con
gran exactitud por Cavendish en 1798.
Note que si queremos calcular la magnitud
de la fuerza con que el cuerpo de masa m1
atrae al cuerpo de masa m2 , obtenemos la
mismo valor que si calculamos la fuerza
con que m2 atrae a m1, lo que resulta
coherente con la tercera ley de Newton.
F12F21
r
m1 m2
Fig 4.26 Fuerzas de acción y reacción entre partículas
En la figura 4.27 se puede apreciar la
posición relativa de las partículas
respecto a un sistema de referencia.
r2
m1 m2
r1
r2-r1
x
y
Fig 4.27 Diagrama de posición de las partículas respecto de un sistema de referencia
Se tiene un sistema de referencia desde
el cual 1rr
y 2rr
son los vectores de
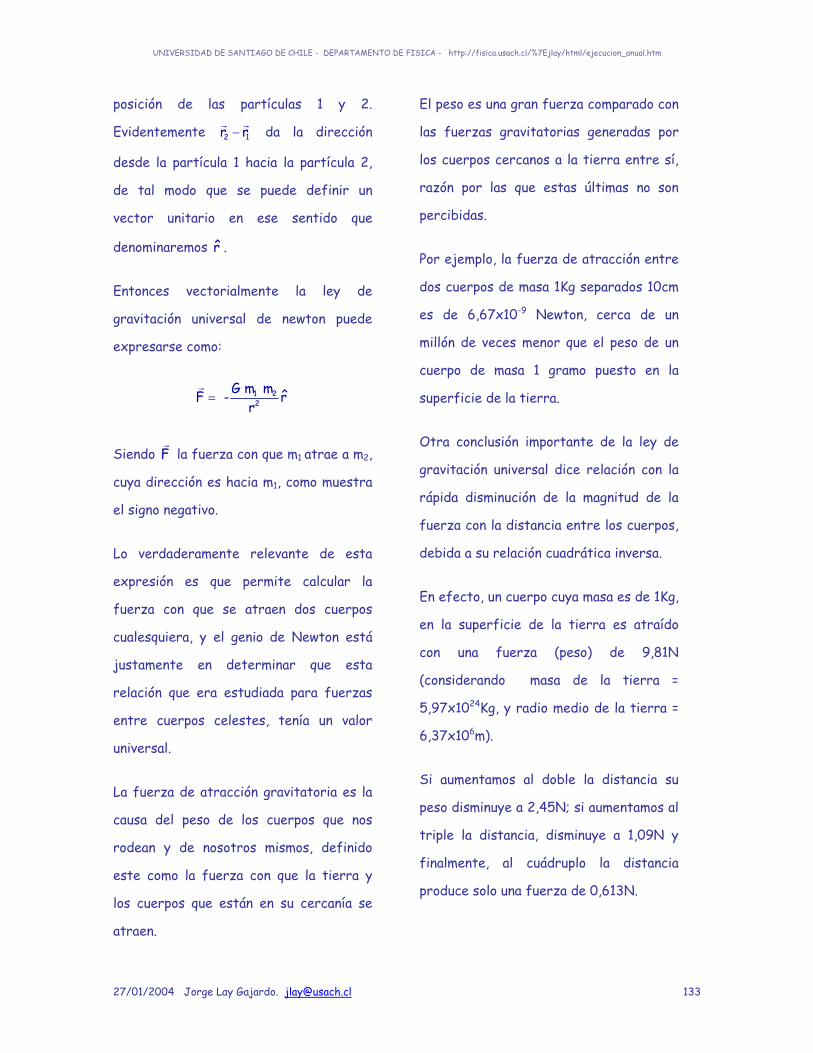
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 133
posición de las partículas 1 y 2.
Evidentemente 2 1r r−r r
da la dirección
desde la partícula 1 hacia la partícula 2,
de tal modo que se puede definir un
vector unitario en ese sentido que
denominaremos r .
Entonces vectorialmente la ley de
gravitación universal de newton puede
expresarse como:
1 22
G m m ˆF - rr
=r
Siendo Fr
la fuerza con que m1 atrae a m2,
cuya dirección es hacia m1, como muestra
el signo negativo.
Lo verdaderamente relevante de esta
expresión es que permite calcular la
fuerza con que se atraen dos cuerpos
cualesquiera, y el genio de Newton está
justamente en determinar que esta
relación que era estudiada para fuerzas
entre cuerpos celestes, tenía un valor
universal.
La fuerza de atracción gravitatoria es la
causa del peso de los cuerpos que nos
rodean y de nosotros mismos, definido
este como la fuerza con que la tierra y
los cuerpos que están en su cercanía se
atraen.
El peso es una gran fuerza comparado con
las fuerzas gravitatorias generadas por
los cuerpos cercanos a la tierra entre sí,
razón por las que estas últimas no son
percibidas.
Por ejemplo, la fuerza de atracción entre
dos cuerpos de masa 1Kg separados 10cm
es de 6,67x10-9 Newton, cerca de un
millón de veces menor que el peso de un
cuerpo de masa 1 gramo puesto en la
superficie de la tierra.
Otra conclusión importante de la ley de
gravitación universal dice relación con la
rápida disminución de la magnitud de la
fuerza con la distancia entre los cuerpos,
debida a su relación cuadrática inversa.
En efecto, un cuerpo cuya masa es de 1Kg,
en la superficie de la tierra es atraído
con una fuerza (peso) de 9,81N
(considerando masa de la tierra =
5,97x1024Kg, y radio medio de la tierra =
6,37x106m).
Si aumentamos al doble la distancia su
peso disminuye a 2,45N; si aumentamos al
triple la distancia, disminuye a 1,09N y
finalmente, al cuádruplo la distancia
produce solo una fuerza de 0,613N.
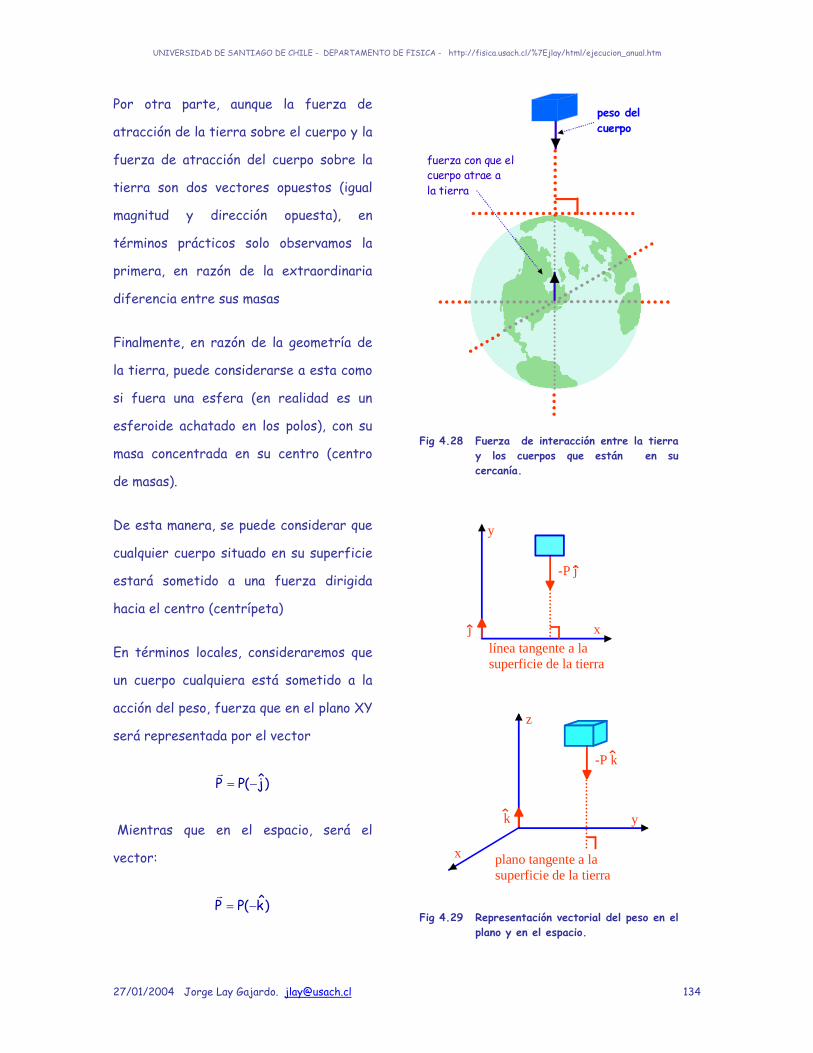
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 134
Por otra parte, aunque la fuerza de
atracción de la tierra sobre el cuerpo y la
fuerza de atracción del cuerpo sobre la
tierra son dos vectores opuestos (igual
magnitud y dirección opuesta), en
términos prácticos solo observamos la
primera, en razón de la extraordinaria
diferencia entre sus masas
Finalmente, en razón de la geometría de
la tierra, puede considerarse a esta como
si fuera una esfera (en realidad es un
esferoide achatado en los polos), con su
masa concentrada en su centro (centro
de masas).
De esta manera, se puede considerar que
cualquier cuerpo situado en su superficie
estará sometido a una fuerza dirigida
hacia el centro (centrípeta)
En términos locales, consideraremos que
un cuerpo cualquiera está sometido a la
acción del peso, fuerza que en el plano XY
será representada por el vector
ˆP P( j)= −r
Mientras que en el espacio, será el
vector:
ˆP P( k)= −r
peso delcuerpo
fuerza con que el cuerpo atrae a la tierra
Fig 4.28 Fuerza de interacción entre la tierra y los cuerpos que están en su cercanía.
j
-P j
y
xlínea tangente a lasuperficie de la tierra
k
-P k
y
x plano tangente a lasuperficie de la tierra
z
Fig 4.29 Representación vectorial del peso en el plano y en el espacio.
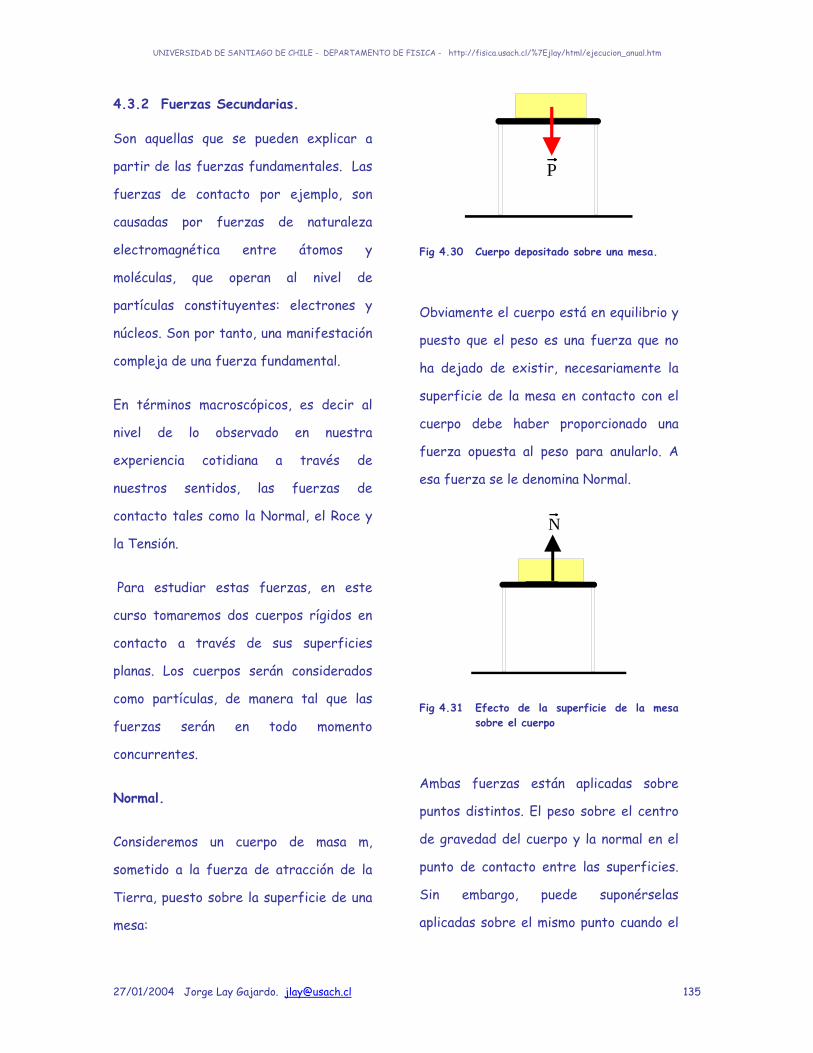
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 135
4.3.2 Fuerzas Secundarias.
Son aquellas que se pueden explicar a
partir de las fuerzas fundamentales. Las
fuerzas de contacto por ejemplo, son
causadas por fuerzas de naturaleza
electromagnética entre átomos y
moléculas, que operan al nivel de
partículas constituyentes: electrones y
núcleos. Son por tanto, una manifestación
compleja de una fuerza fundamental.
En términos macroscópicos, es decir al
nivel de lo observado en nuestra
experiencia cotidiana a través de
nuestros sentidos, las fuerzas de
contacto tales como la Normal, el Roce y
la Tensión.
Para estudiar estas fuerzas, en este
curso tomaremos dos cuerpos rígidos en
contacto a través de sus superficies
planas. Los cuerpos serán considerados
como partículas, de manera tal que las
fuerzas serán en todo momento
concurrentes.
Normal.
Consideremos un cuerpo de masa m,
sometido a la fuerza de atracción de la
Tierra, puesto sobre la superficie de una
mesa:
P
Fig 4.30 Cuerpo depositado sobre una mesa.
Obviamente el cuerpo está en equilibrio y
puesto que el peso es una fuerza que no
ha dejado de existir, necesariamente la
superficie de la mesa en contacto con el
cuerpo debe haber proporcionado una
fuerza opuesta al peso para anularlo. A
esa fuerza se le denomina Normal.
N
Fig 4.31 Efecto de la superficie de la mesa sobre el cuerpo
Ambas fuerzas están aplicadas sobre
puntos distintos. El peso sobre el centro
de gravedad del cuerpo y la normal en el
punto de contacto entre las superficies.
Sin embargo, puede suponérselas
aplicadas sobre el mismo punto cuando el

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 136
cuerpo pueda considerarse como una
partícula.
La Normal en general, es una fuerza
perpendicular a la superficie de contacto,
y su magnitud equivale a la fuerza
necesaria para equilibrar el sistema de
fuerzas en esa dirección.
En otras palabras, la normal tiene una
magnitud equivalente a la resultante de
las fuerzas perpendiculares a la
superficie.
Veamos esto en detalle, puesto que es
frecuente fuente de equivocaciones en
los alumnos iniciados en el tema:
Ejemplo 4.3 Calcular la fuerza normal a
la superficie en los ejemplos siguientes:
a) En la figura anterior si el peso es de
magnitud 20N.
Solución:
Si realizamos un diagrama de cuerpo libre
y suponemos que el cuerpo se comporta
como partícula se tiene:
N
P
Fig 4.32 Diagrama de cuerpo libre
Si el sistema está en equilibrio, entonces
debe cumplir con la condición F 0Σ =r r
, por
lo que se tiene, suponiendo que están en
el plano XY:
ˆ ˆNj Pj 0− =r
de donde N – P = 0
o sea N = P = 20N
b) Si además, se ejerce una fuerza hacia
arriba de magnitud 5N
Solución:
Entonces se tiene el siguiente diagrama
de cuerpo libre:
N
P
F
Fig 4.33 Diagrama de cuerpo libre

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 137
Entonces: ˆ ˆ ˆNj Pj Fj 0− + =r
de donde N – P + F = 0
o sea N = P – F = 20N – 5N
N = 15N
c) Si tenemos un cuerpo en equilibrio
sobre un plano inclinado sin roce como en
la figura siguiente (θ = 37º):
N
P
F
θ
N
P
F
θ
Psenθ
Pcosθx
y
Fig 4.34 Diagrama de cuerpo libre
Solución:
El diagrama de cuerpo libre muestra a las
tres fuerzas ubicadas en un plano
cartesiano que por conveniencia se ha
definido con uno de sus ejes (X) paralelo
al plano inclinado.
De esta manera, la normal tiene dirección
j+ , Fr
tiene dirección i− y Pr
forma un
ángulo θ (el ángulo de inclinación del
plano) respecto del eje –Y, debido a la
geometría del problema.
El vector Pr
se ha descompuesto en los
ejes mencionados, de manera que se
tiene: ˆ ˆP Psen i Pcos j= θ − θr
Y debido a que el cuerpo se encuentra en
equilibrio estático, debe cumplirse que
F 0Σ =r r
por lo que:
N P F 0+ + =r r r r
ˆ ˆˆ ˆNj Psen i Pcos j Fi 0⎡ ⎤+ θ − θ − =⎢ ⎥⎣ ⎦
r
desde donde, por igualdad de vectores,
se tienen las ecuaciones:
Psenθ - F = 0
N – Pcosθ = 0
por lo que:
F = Psen θ ⇒ F = 12N
N = Pcos θ ⇒ N = 16N
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 138
Fuerza de Roce.
El roce (o fricción) es una fuerza de
contacto que según los primeros
científicos provenía del entrelazamiento
mecánico de las irregularidades de las
superficies (asperezas).
En efecto hasta los materiales
aparentemente más lisos, se observan
irregulares al microscopio, mostrando
crestas y valles que se concatenan con los
de las superficies de otros cuerpos en
contacto impidiendo o dificultando en
mayor o menor medida el movimiento
relativo entre ellos.
El conocimiento actual del fenómeno sin
embargo, aun cuando no está totalmente
comprendido, lo muestra proviniendo de
tres fuentes principales: la mencionada
trabazón de las irregularidades, la
atracción entre los puntos de contacto
(que producen enlaces o uniones de
carácter electromagnético) debida a las
fuerzas entre las moléculas de los dos
cuerpos (fenómeno particularmente
importante para los metales) y el
desprendimiento de los materiales más
débiles por parte de los más fuertes
(efecto de “arado”).
Desde el punto de vista macroscópico,
quien más contribuyó al conocimiento de
esta fuerza fue Leonardo Da Vinci, el
que descubrió que el roce entre las
superficies de cuerpos en reposo o en
movimiento relativo era independiente del
área de contacto aparente entre ellos y
proporcional a la magnitud de la fuerza
Normal proporcionada por la superficie
de apoyo.
Este hecho sorprendente lo mostró al
encontrar igual valor de la fuerza de roce
entre una mesa y un cuerpo de madera
(con caras de áreas distintas), no
importando cual cara de este se pusiera
en contacto con la mesa.
También encontró que la fuerza necesaria
para mover un cuerpo en reposo relativo
sobre otro cuerpo (fuerza de roce
estática) es mayor que la fuerza de roce
entre dos cuerpos en contacto que
presentan movimiento relativo (cinética).
Esto es mejor entendido hoy, pues se
sabe que desde el punto de vista
microscópico la superficie real de
contacto es extraordinariamente inferior
a la superficie aparente de contacto.
Se explica así que la superficie real de
contacto sea prácticamente igual, no
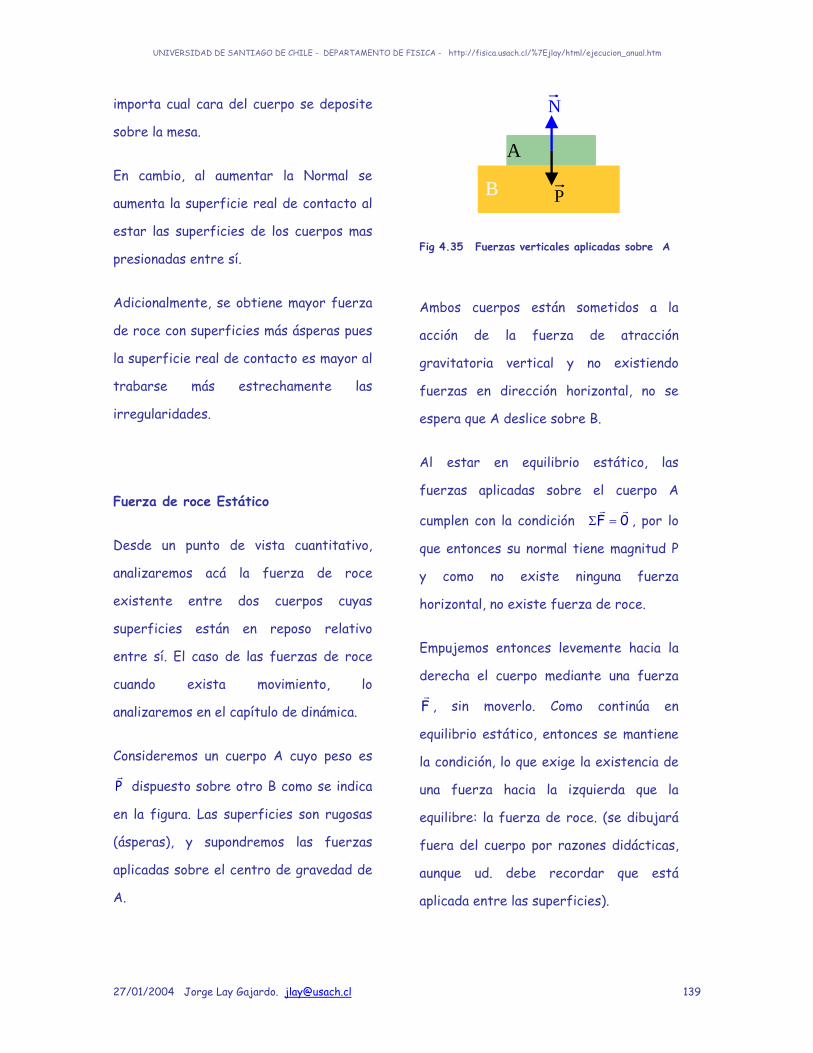
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 139
importa cual cara del cuerpo se deposite
sobre la mesa.
En cambio, al aumentar la Normal se
aumenta la superficie real de contacto al
estar las superficies de los cuerpos mas
presionadas entre sí.
Adicionalmente, se obtiene mayor fuerza
de roce con superficies más ásperas pues
la superficie real de contacto es mayor al
trabarse más estrechamente las
irregularidades.
Fuerza de roce Estático
Desde un punto de vista cuantitativo,
analizaremos acá la fuerza de roce
existente entre dos cuerpos cuyas
superficies están en reposo relativo
entre sí. El caso de las fuerzas de roce
cuando exista movimiento, lo
analizaremos en el capítulo de dinámica.
Consideremos un cuerpo A cuyo peso es
Pr
dispuesto sobre otro B como se indica
en la figura. Las superficies son rugosas
(ásperas), y supondremos las fuerzas
aplicadas sobre el centro de gravedad de
A.
A
P
N
B
Fig 4.35 Fuerzas verticales aplicadas sobre A
Ambos cuerpos están sometidos a la
acción de la fuerza de atracción
gravitatoria vertical y no existiendo
fuerzas en dirección horizontal, no se
espera que A deslice sobre B.
Al estar en equilibrio estático, las
fuerzas aplicadas sobre el cuerpo A
cumplen con la condición F 0Σ =r r
, por lo
que entonces su normal tiene magnitud P
y como no existe ninguna fuerza
horizontal, no existe fuerza de roce.
Empujemos entonces levemente hacia la
derecha el cuerpo mediante una fuerza
Fr
, sin moverlo. Como continúa en
equilibrio estático, entonces se mantiene
la condición, lo que exige la existencia de
una fuerza hacia la izquierda que la
equilibre: la fuerza de roce. (se dibujará
fuera del cuerpo por razones didácticas,
aunque ud. debe recordar que está
aplicada entre las superficies).
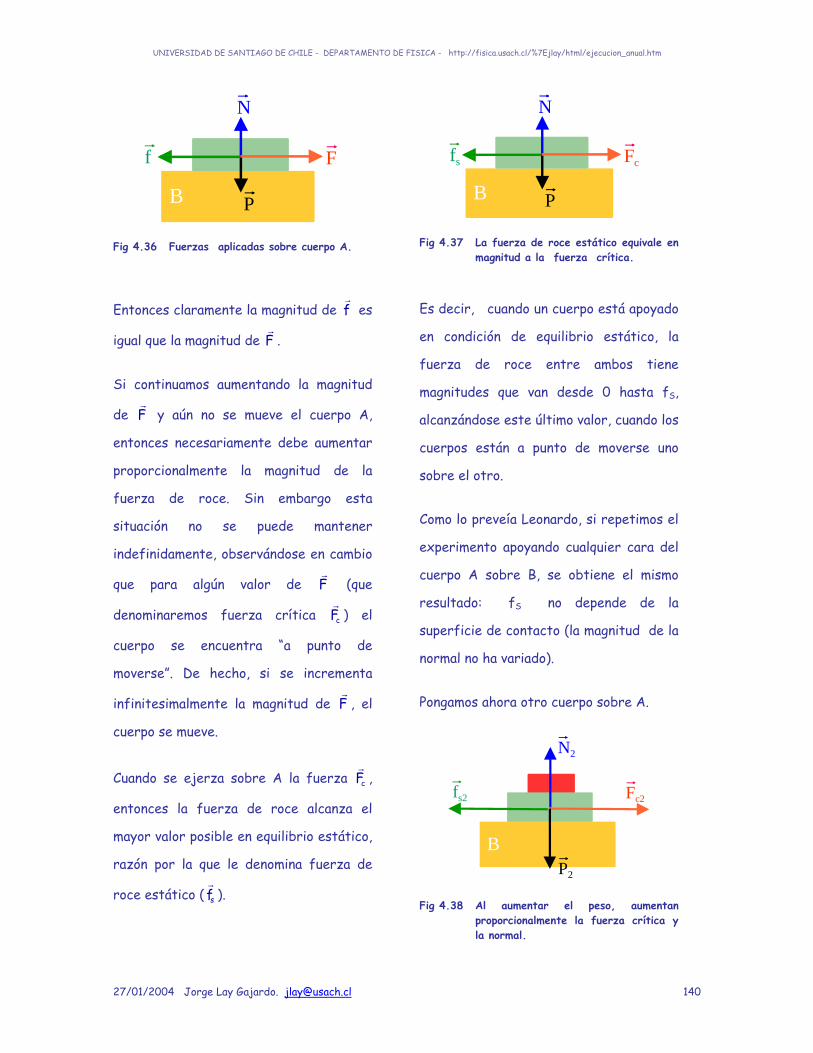
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 140
P
N
B
Ff
Fig 4.36 Fuerzas aplicadas sobre cuerpo A.
Entonces claramente la magnitud de fr
es
igual que la magnitud de Fr
.
Si continuamos aumentando la magnitud
de Fr
y aún no se mueve el cuerpo A,
entonces necesariamente debe aumentar
proporcionalmente la magnitud de la
fuerza de roce. Sin embargo esta
situación no se puede mantener
indefinidamente, observándose en cambio
que para algún valor de Fr
(que
denominaremos fuerza crítica cFr
) el
cuerpo se encuentra “a punto de
moverse”. De hecho, si se incrementa
infinitesimalmente la magnitud de Fr
, el
cuerpo se mueve.
Cuando se ejerza sobre A la fuerza cFr
,
entonces la fuerza de roce alcanza el
mayor valor posible en equilibrio estático,
razón por la que le denomina fuerza de
roce estático ( sfr
).
P
N
B
Fcfs
Fig 4.37 La fuerza de roce estático equivale en magnitud a la fuerza crítica.
Es decir, cuando un cuerpo está apoyado
en condición de equilibrio estático, la
fuerza de roce entre ambos tiene
magnitudes que van desde 0 hasta fS,
alcanzándose este último valor, cuando los
cuerpos están a punto de moverse uno
sobre el otro.
Como lo preveía Leonardo, si repetimos el
experimento apoyando cualquier cara del
cuerpo A sobre B, se obtiene el mismo
resultado: fS no depende de la
superficie de contacto (la magnitud de la
normal no ha variado).
Pongamos ahora otro cuerpo sobre A.
P2
N2
B
Fc2fs2
Fig 4.38 Al aumentar el peso, aumentan proporcionalmente la fuerza crítica y la normal.
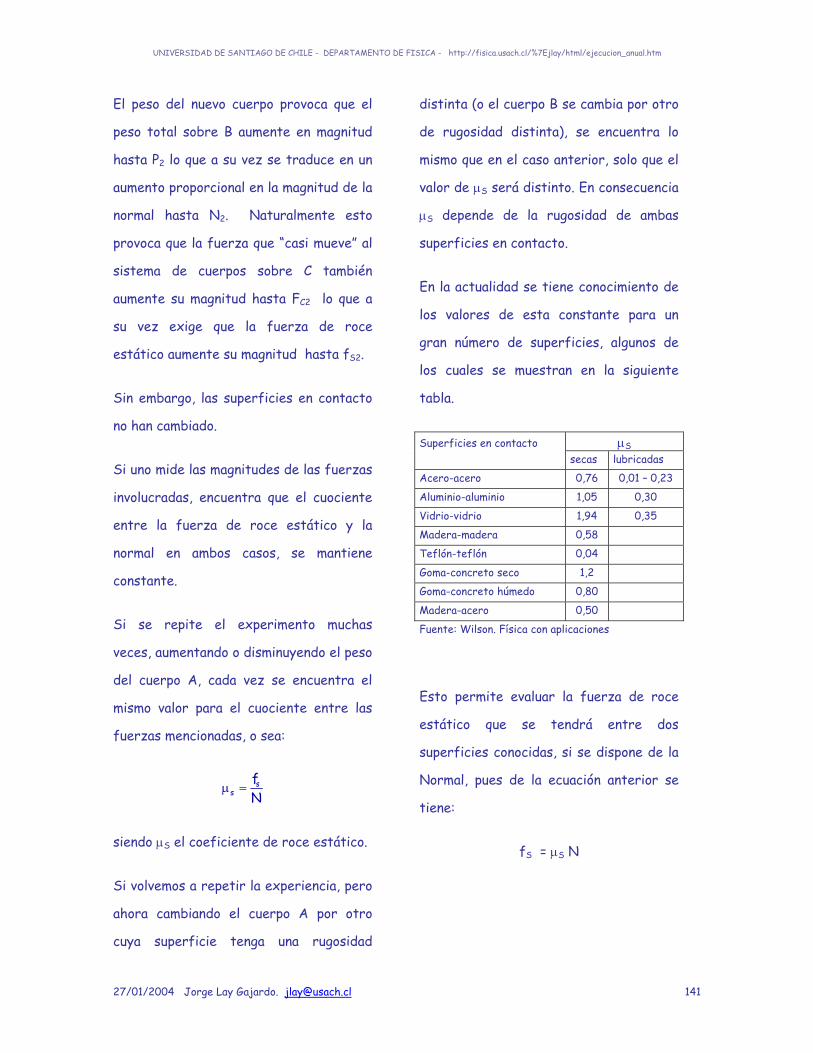
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 141
El peso del nuevo cuerpo provoca que el
peso total sobre B aumente en magnitud
hasta P2 lo que a su vez se traduce en un
aumento proporcional en la magnitud de la
normal hasta N2. Naturalmente esto
provoca que la fuerza que “casi mueve” al
sistema de cuerpos sobre C también
aumente su magnitud hasta FC2 lo que a
su vez exige que la fuerza de roce
estático aumente su magnitud hasta fS2.
Sin embargo, las superficies en contacto
no han cambiado.
Si uno mide las magnitudes de las fuerzas
involucradas, encuentra que el cuociente
entre la fuerza de roce estático y la
normal en ambos casos, se mantiene
constante.
Si se repite el experimento muchas
veces, aumentando o disminuyendo el peso
del cuerpo A, cada vez se encuentra el
mismo valor para el cuociente entre las
fuerzas mencionadas, o sea:
ss
fN
µ =
siendo µS el coeficiente de roce estático.
Si volvemos a repetir la experiencia, pero
ahora cambiando el cuerpo A por otro
cuya superficie tenga una rugosidad
distinta (o el cuerpo B se cambia por otro
de rugosidad distinta), se encuentra lo
mismo que en el caso anterior, solo que el
valor de µS será distinto. En consecuencia
µS depende de la rugosidad de ambas
superficies en contacto.
En la actualidad se tiene conocimiento de
los valores de esta constante para un
gran número de superficies, algunos de
los cuales se muestran en la siguiente
tabla.
µS Superficies en contacto secas lubricadas
Acero-acero 0,76 0,01 – 0,23
Aluminio-aluminio 1,05 0,30
Vidrio-vidrio 1,94 0,35
Madera-madera 0,58
Teflón-teflón 0,04
Goma-concreto seco 1,2
Goma-concreto húmedo 0,80
Madera-acero 0,50
Fuente: Wilson. Física con aplicaciones
Esto permite evaluar la fuerza de roce
estático que se tendrá entre dos
superficies conocidas, si se dispone de la
Normal, pues de la ecuación anterior se
tiene:
fS = µS N
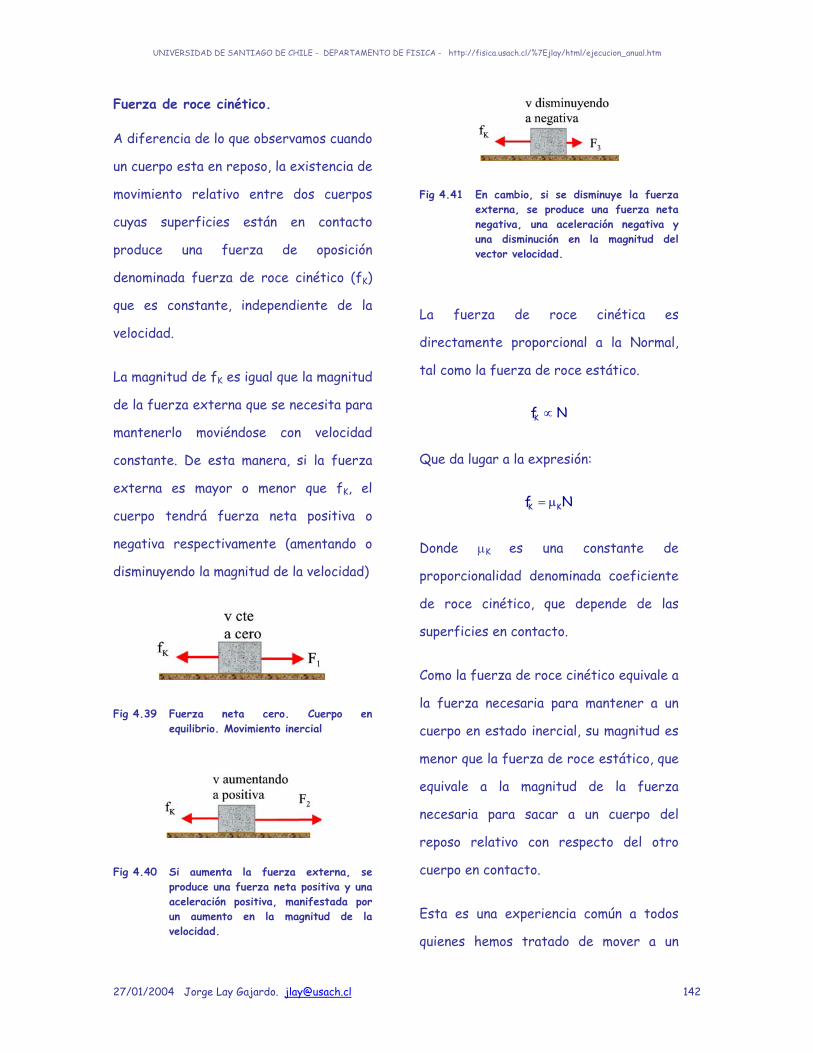
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 142
Fuerza de roce cinético.
A diferencia de lo que observamos cuando
un cuerpo esta en reposo, la existencia de
movimiento relativo entre dos cuerpos
cuyas superficies están en contacto
produce una fuerza de oposición
denominada fuerza de roce cinético (fK)
que es constante, independiente de la
velocidad.
La magnitud de fK es igual que la magnitud
de la fuerza externa que se necesita para
mantenerlo moviéndose con velocidad
constante. De esta manera, si la fuerza
externa es mayor o menor que fK, el
cuerpo tendrá fuerza neta positiva o
negativa respectivamente (amentando o
disminuyendo la magnitud de la velocidad)
Fig 4.39 Fuerza neta cero. Cuerpo en equilibrio. Movimiento inercial
Fig 4.40 Si aumenta la fuerza externa, se produce una fuerza neta positiva y una aceleración positiva, manifestada por un aumento en la magnitud de la velocidad.
Fig 4.41 En cambio, si se disminuye la fuerza externa, se produce una fuerza neta negativa, una aceleración negativa y una disminución en la magnitud del vector velocidad.
La fuerza de roce cinética es
directamente proporcional a la Normal,
tal como la fuerza de roce estático.
Kf N∝
Que da lugar a la expresión:
K Kf N= µ
Donde µK es una constante de
proporcionalidad denominada coeficiente
de roce cinético, que depende de las
superficies en contacto.
Como la fuerza de roce cinético equivale a
la fuerza necesaria para mantener a un
cuerpo en estado inercial, su magnitud es
menor que la fuerza de roce estático, que
equivale a la magnitud de la fuerza
necesaria para sacar a un cuerpo del
reposo relativo con respecto del otro
cuerpo en contacto.
Esta es una experiencia común a todos
quienes hemos tratado de mover a un
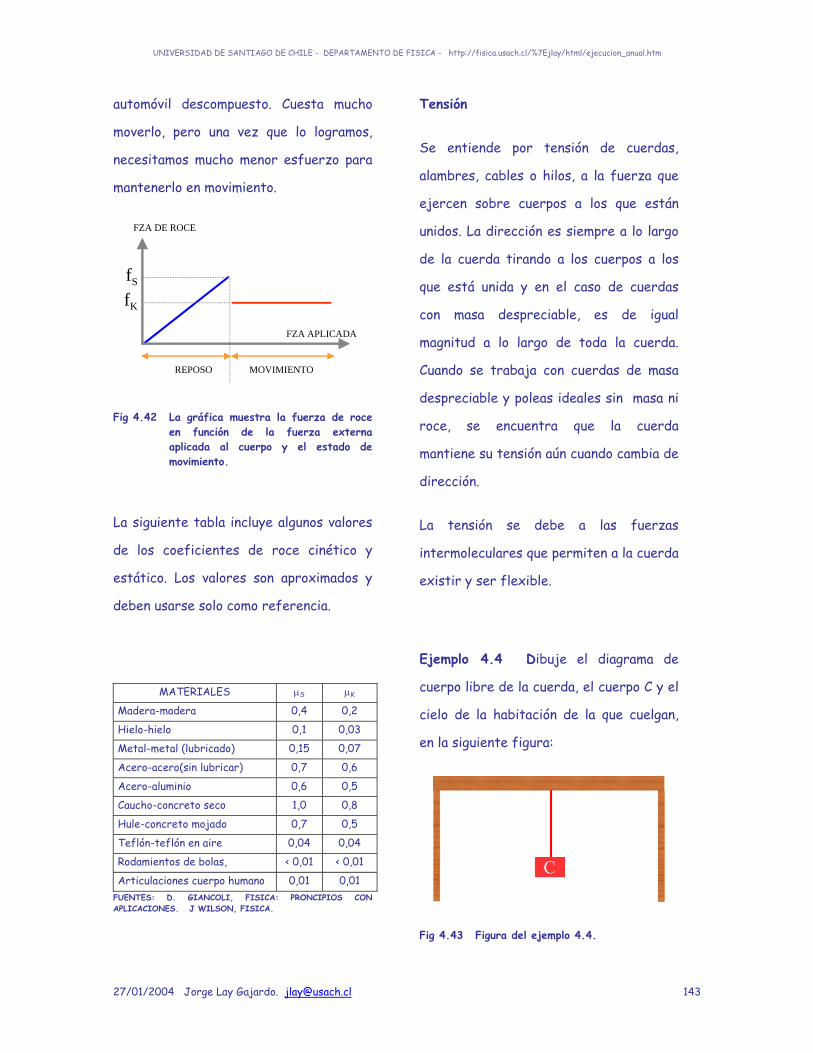
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 143
automóvil descompuesto. Cuesta mucho
moverlo, pero una vez que lo logramos,
necesitamos mucho menor esfuerzo para
mantenerlo en movimiento.
FZA APLICADA
FZA DE ROCE
REPOSO MOVIMIENTO
fS
fK
Fig 4.42 La gráfica muestra la fuerza de roce en función de la fuerza externa aplicada al cuerpo y el estado de movimiento.
La siguiente tabla incluye algunos valores
de los coeficientes de roce cinético y
estático. Los valores son aproximados y
deben usarse solo como referencia.
MATERIALES µS µK
Madera-madera 0,4 0,2
Hielo-hielo 0,1 0,03
Metal-metal (lubricado) 0,15 0,07
Acero-acero(sin lubricar) 0,7 0,6
Acero-aluminio 0,6 0,5
Caucho-concreto seco 1,0 0,8
Hule-concreto mojado 0,7 0,5
Teflón-teflón en aire 0,04 0,04
Rodamientos de bolas, < 0,01 < 0,01
Articulaciones cuerpo humano 0,01 0,01 FUENTES: D. GIANCOLI, FISICA: PRONCIPIOS CON APLICACIONES. J WILSON, FISICA.
Tensión
Se entiende por tensión de cuerdas,
alambres, cables o hilos, a la fuerza que
ejercen sobre cuerpos a los que están
unidos. La dirección es siempre a lo largo
de la cuerda tirando a los cuerpos a los
que está unida y en el caso de cuerdas
con masa despreciable, es de igual
magnitud a lo largo de toda la cuerda.
Cuando se trabaja con cuerdas de masa
despreciable y poleas ideales sin masa ni
roce, se encuentra que la cuerda
mantiene su tensión aún cuando cambia de
dirección.
La tensión se debe a las fuerzas
intermoleculares que permiten a la cuerda
existir y ser flexible.
Ejemplo 4.4 Dibuje el diagrama de
cuerpo libre de la cuerda, el cuerpo C y el
cielo de la habitación de la que cuelgan,
en la siguiente figura:
Fig 4.43 Figura del ejemplo 4.4.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 144
Solución:
En la figura se observan las fuerzas que
actúan sobre el cuerpo, sobre la cuerda y
sobre el cielo.
Fig 4.44 Diagrama de cuerpo libre para cuerda, cielo y cuerpo del ejemplo 4.4
Aquí se ha supuesto que la cuerda y el
cielo tienen masas despreciables.
Note que sobre el cuerpo existen dos
fuerzas que se anulan: el peso ( Pr
) y la
tensión de la cuerda ( cTr
).
Sobre la cuerda existen dos fuerzas
también: la reacción a la tensión de la
cuerda sobre el cuerpo ( *cTr
) y la reacción
de la tensión de la cuerda sobre el cielo
( *TTr
).
Sobre el cielo existen tres fuerzas: la
tensión de la cuerda ( TTr
) y las fuerzas de
las paredes ( 1Rr
y 2Rr
).
Debido a que están en equilibrio, la
resultante de las fuerzas sobre cada uno
de ellos debe ser igual al vector nulo.
4.3.3 Pesar y masar
Pesar
El Peso es una magnitud fácil de medir
(“pesar”) con un sencillo dispositivo
consistente en un resorte y una escala
graduada, denominada Dinamómetro
(Pesa).
Un resorte es un sistema que tiene la
propiedad de deformarse
apreciablemente bajo la acción de
fuerzas. Si la magnitud de las fuerzas
aplicadas es la apropiada, el resorte
retornará a su largo natural después de
ser liberado. Mientras esto suceda, se
tendrá que la fuerza aplicada y el
alargamiento serán directamente
proporcionales. La reacción a esta fuerza
sigue la denominada Ley de Hooke, que se
verá con detalle mas adelante.
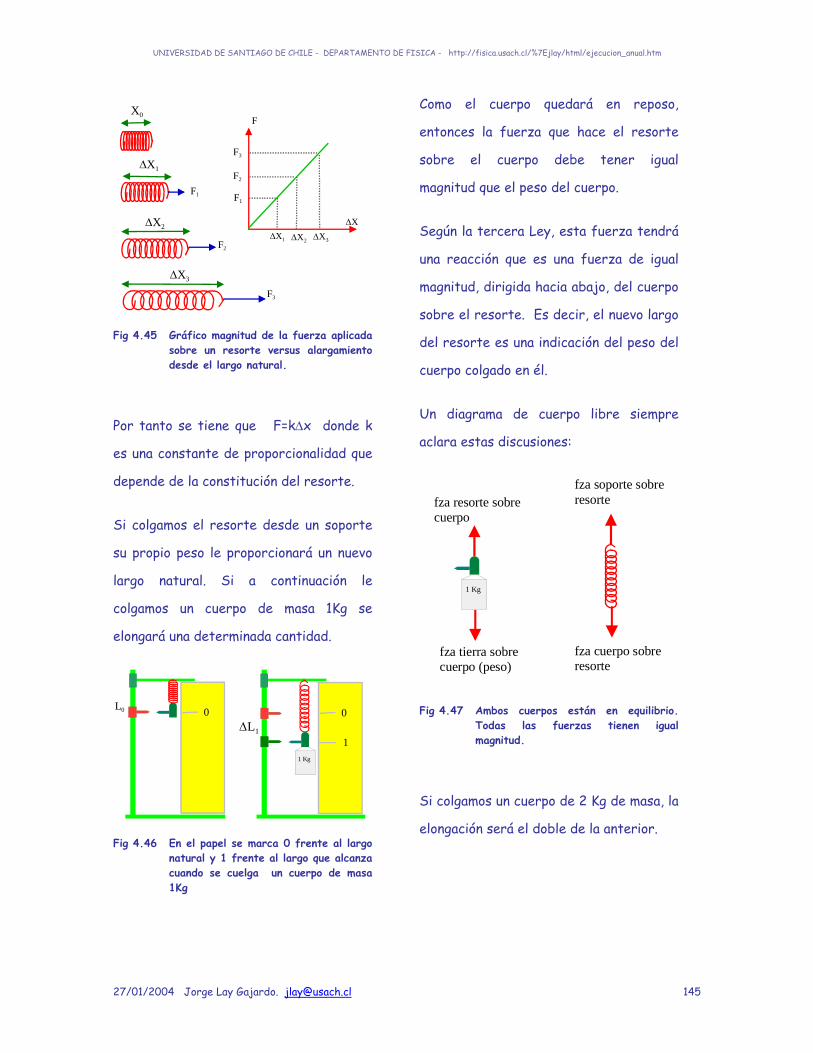
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 145
X0
∆X1
∆X2
∆X3
F1
F2
F3
F1
F2
F3
∆X1
∆X2
∆X3
∆X
F
Fig 4.45 Gráfico magnitud de la fuerza aplicada sobre un resorte versus alargamiento desde el largo natural.
Por tanto se tiene que F=k∆x donde k
es una constante de proporcionalidad que
depende de la constitución del resorte.
Si colgamos el resorte desde un soporte
su propio peso le proporcionará un nuevo
largo natural. Si a continuación le
colgamos un cuerpo de masa 1Kg se
elongará una determinada cantidad.
L0 0
∆L1
1 Kg
0
1
Fig 4.46 En el papel se marca 0 frente al largo natural y 1 frente al largo que alcanza cuando se cuelga un cuerpo de masa 1Kg
Como el cuerpo quedará en reposo,
entonces la fuerza que hace el resorte
sobre el cuerpo debe tener igual
magnitud que el peso del cuerpo.
Según la tercera Ley, esta fuerza tendrá
una reacción que es una fuerza de igual
magnitud, dirigida hacia abajo, del cuerpo
sobre el resorte. Es decir, el nuevo largo
del resorte es una indicación del peso del
cuerpo colgado en él.
Un diagrama de cuerpo libre siempre
aclara estas discusiones:
1 Kg
fza resorte sobre cuerpo
fza tierra sobre cuerpo (peso)
fza cuerpo sobre resorte
fza soporte sobre resorte
Fig 4.47 Ambos cuerpos están en equilibrio. Todas las fuerzas tienen igual magnitud.
Si colgamos un cuerpo de 2 Kg de masa, la
elongación será el doble de la anterior.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 146
∆L1
1 Kg
0
1
∆L2
2 Kg
0
1
2
Fig 4.48 La elongación es proporcional a la fuerza
Se tiene ahora una escala graduada que
permite comparar el peso de un cuerpo
cualquiera con el peso de una masa
patrón, simplemente observando la
elongación resultante y el número en la
escala.
0
1
2
peso (Kf)
Fig 4.49 La cámara pesa igual que un cuerpo patrón de masa 2 Kg, pues elonga el resorte hasta el número 2 de la escala graduada en Kf.
El instrumento permite medir pesos, por
lo que se denomina dinamómetro.
La escala está graduada en una unidad
nueva de fuerza, denominada Kilógramos-
fuerza o Kilógramos-peso [Kf] en el
denominado Sistema Técnico
Gravitacional (STG).
En nuestra vida diaria encontramos un
sinnúmero de estos aparatos, que no solo
utilizan la ley de hooke sino otras
variables físicas que dependen
linealmente del aumento de peso. Algunas
presentan escalas lineales, otras
circulares, otras digitales, etc.
Es común que se presente una confusión
con estas unidades. Cuando nos subimos a
una pesa en la farmacia, observamos una
lectura de 60Kg, erróneamente indicados,
puesto que debería decir Kf como
acabamos de ver. Lo mismo ocurre en la
mayoría de las tiendas que nos pesan los
artículos (verduras, frutas, clavos,
azúcar, etc) y nos dan indicaciones en
Kilogramos, cuando realmente está en
Kilogramos fuerza.
La confusión en términos cotidianos no es
tan grave si uno observa que la masa en
Kg es numéricamente igual que el peso en
Kf. Desde el punto de vista de la física
sin embargo, la diferencia es notable,
puesto que Kg es una unidad de masa en el
SI, en cambio Kf es una unidad de fuerza
en el STG.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 147
Es fácil advertir que este instrumento
tendrá validez solo en el lugar en el que
fue calibrado, puesto que una masa patrón
en la superficie de la Luna por ejemplo,
pesará solo la sexta parte de lo que pesa
en la Tierra. Deberá calibrarse
nuevamente allí.
Esto no es extraño, puesto que sabemos
que el peso es una fuerza de atracción
gravitacional, que depende de las masas
de ambos objetos.
Adicionalmente, también depende del
inverso del cuadrado de las distancias
entre ambos, por lo que en distintos
lugares de la Tierra también deberá
calibrarse nuevamente, puesto que cada
punto de la superficie de la tierra no está
a la misma distancia desde el centro de
gravedad de la Tierra.
Masar.
Un caso distinto es el procedimiento
destinado a medir masas (masar), para el
que se utiliza un aparato denominado
balanza analítica compuesto básicamente
de un soporte vertical con dos brazos
horizontales de igual largo con
dispositivos para colocar cuerpos.
FIZQ FDER
Fig 4.50 Balanza analítica. La fuerza con que la tierra atrae a ambos brazos es igual. Existe equilibrio de rotación y traslación. La barra se mantiene horizontal.
Cuando se pone un cuerpo en uno de los
platos, se observa que la barra se inclina,
debido a que al aumentar el peso, existe
desequilibrio de rotación produciéndose
un torque resultante. Note que no existe
desequilibrio de traslación, de modo tal
que la barra solo rota alrededor del eje
ubicado en el punto de unión con la barra
vertical.
FIZQ
FDER
Fig 4.51 El peso del lado izquierdo es mayor que el peso sobre el lado derecho. El torque resultante produce la inclinación.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 148
El equilibrio se puede restablecer
poniendo cuerpos con igual masa al lado
derecho. Si ponemos cuerpos de masas
conocidas, la suma de sus masas equivale
exactamente a la masa del cuerpo del
lado izquierdo.
Note que se necesita que las fuerzas a
ambos lados sean iguales,
independientemente de su magnitud. Es
decir, este instrumento permite medir
masas en cualquier lugar. El
procedimiento se denomina “masar”.
1 Kg
FIZQ FDER
Fig 4.52 El equilibrio se restablece cuando las fuerzas sobre el lado derecho e izquierdo son iguales. Esto ocurre cuando las masas son iguales. Aquí, la masa del balón es de 1 Kg.
Fig 4.53 balanza analítica
4.4 Aplicaciones de los principios de Newton a sistemas de cuerpos.
En los siguientes ejemplos, revisaremos
las formas de aplicar las leyes de Newton
en la resolución de problemas que
involucran interacción entre cuerpos
sometidos a la acción del campo
gravitacional e interacción entre ellos
mismos.
Ejemplo 4.5. Una fuerza de magnitud
50N es aplicada sobre un cuerpo (A) de
masa 30Kg, el que a su vez se encuentra
en contacto con un cuerpo (B) de masa
20Kg como se indica en la figura. Ambos
se encuentran sobre una superficie lisa
(sin roce).
a) ¿Cuál es la aceleración del sistema?
b) ¿Cuál es la magnitud de las fuerzas de
interacción entre los cuerpos?.
BAF
Fig 4.54 Figura para el ejemplo 4.5
Solución.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 149
a) Primero haremos un diagrama de
cuerpo libre para ambos bloques.
PB
FBAF
NA
NB
FAB
PA
A
B
Fig 4.55 Diagrama de cuerpo libre para los bloques del ejemplo 4.3
Las aceleraciones de los cuerpos A y B
son iguales en magnitud pues ambos
conforman el sistema y se mueven unidos.
A B S sˆa a a a i= = =
r r r
Como sabemos que la segunda ley tiene la
forma vectorial:
( )x y z x y zF i F j Fk m a i a j a kΣ + Σ + Σ = + +) )) )) )
Si la aplicamos al cuerpo A, se tendrá:
( )Ax Ay A Ax AyF i F j m a i a jΣ + Σ = +) )) )
De donde se tienen las ecuaciones
escalares:
xA A AxF m aΣ = (1)
yA A AyF m aΣ = (2)
si suponemos que los cuerpos A y B están
en el plano XY, entonces las ecuaciones
(1) y (2) serán,
BA A sF-F m a= (1)
A AN -P 0= (2)
pues ayS es cero.
Por las mismas razones, se tiene para B:
AB B SF m a= (3)
B BN -P 0= (4)
Disponemos por tanto, de un sistema de 4
ecuaciones. Si sumamos las ecuaciones
(1) y (3), tenemos:
F-FBA +FAB =mAaS+mBaS (5)
Pero FBA=FAB pues son las magnitudes de
las fuerzas de interacción entre los
cuerpos A y B, que constituyen un par de
Acción y Reacción.
Por tanto la ecuación resulta,
F=aS(mA+mB)
De donde
S 2A B
F 50N ma 1m m 30Kg 20Kg s
= = =+ +

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 150
b) La fuerza de interacción es posible de
obtener de la ecuación (1) o de la
ecuación (3). Tomemos la ecuación (3):
( )AB B S 2mF m a 20Kg 1 20Ns
⎛ ⎞= = =⎜ ⎟⎝ ⎠
Por lo que
ABˆF 20Ni=
r
Note que si toma la ecuación (1) tiene:
BA A sF-F m a=
De donde
( )BA A S 2mF F-m a 50N- 30Kg 1 20Ns
⎛ ⎞= = =⎜ ⎟⎝ ⎠
Pero FBA está definida como negativa, por
lo que BAˆF - 20 N i=
Como era de esperarse pues son un par de
acción y reacción.
Ejemplo 4.6. Calcular las tensiones de la
figura, si m1=10Kg; m2=20Kg,
m3=30Kg; F=6Kf y g=10 2ms
.
21
F3
Fig 4.56 Figura para el ejemplo 4.6.
Solución.
Nuevamente, la solución se facilita
enormemente si se considera un diagrama
de cuerpo libre para cada cuerpo, como se
observa en la figura.
1
2
3 FT23
T22T12
T11
N1
N2
P1
P2
P3
N3
Fig 4.57 Diagrama de cuerpo libre para ejemplo 4.6.
Sobre cada cuerpo existen 2 fuerzas
verticales, la fuerza de atracción
gravitacional, que es distinta pues cada
uno tiene masa distinta, y la fuerza con
que la superficie se opone al movimiento
hacia abajo, que es distinta para cada
uno.
Horizontalmente se tiene la acción de Fr
sobre el cuerpo 3 y la acción de las
cuerdas 1 y 2 sobre los cuerpos 1,2 y 3.
La cuerda 1 afecta a los cuerpos 1 y 2 con
una fuerza que hemos denominado
tensión.
La cuerda ejerce un esfuerzo hacia la
derecha sobre el cuerpo 1 ( 11Tr
) pero
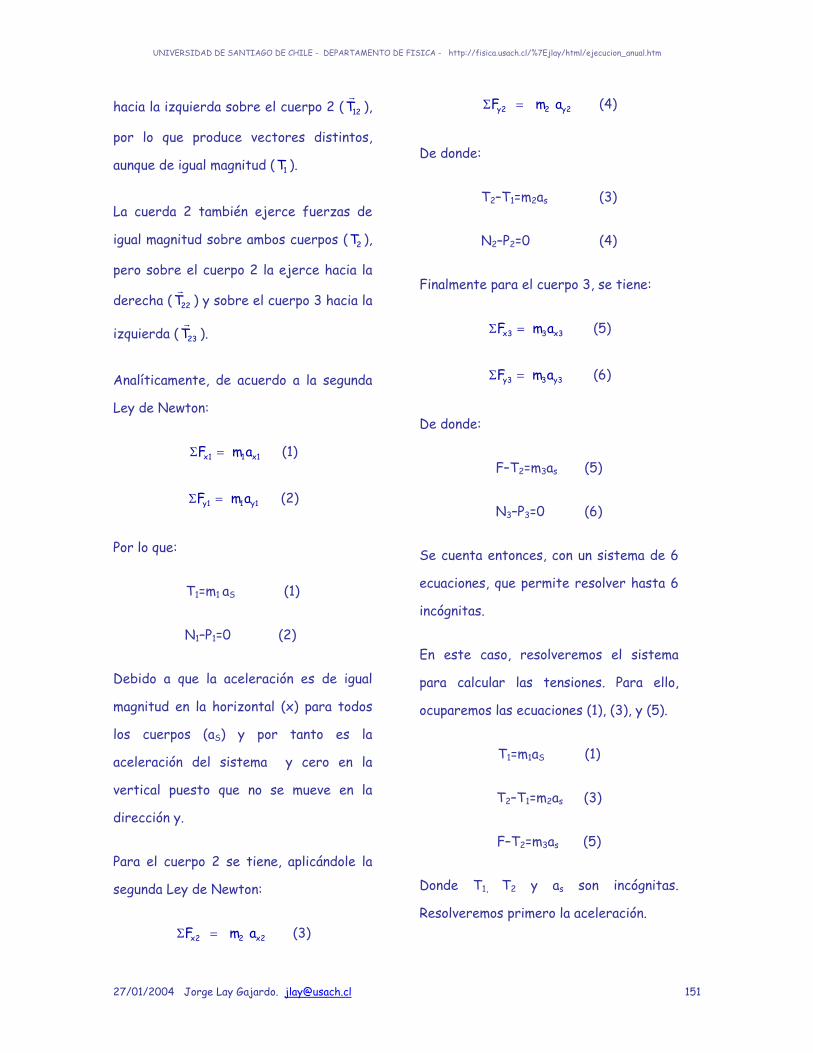
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 151
hacia la izquierda sobre el cuerpo 2 ( 12Tr
),
por lo que produce vectores distintos,
aunque de igual magnitud ( 1T ).
La cuerda 2 también ejerce fuerzas de
igual magnitud sobre ambos cuerpos ( 2T ),
pero sobre el cuerpo 2 la ejerce hacia la
derecha ( 22Tr
) y sobre el cuerpo 3 hacia la
izquierda ( 23Tr
).
Analíticamente, de acuerdo a la segunda
Ley de Newton:
x1 1 x1F m aΣ = (1)
y1 1 y1F m aΣ = (2)
Por lo que:
T1=m1 aS (1)
N1–P1=0 (2)
Debido a que la aceleración es de igual
magnitud en la horizontal (x) para todos
los cuerpos (aS) y por tanto es la
aceleración del sistema y cero en la
vertical puesto que no se mueve en la
dirección y.
Para el cuerpo 2 se tiene, aplicándole la
segunda Ley de Newton:
x2 2 x2F m aΣ = (3)
y2 2 y2F m aΣ = (4)
De donde:
T2–T1=m2as (3)
N2–P2=0 (4)
Finalmente para el cuerpo 3, se tiene:
x3 3 x3F m aΣ = (5)
y3 3 y3F m aΣ = (6)
De donde:
F–T2=m3as (5)
N3–P3=0 (6)
Se cuenta entonces, con un sistema de 6
ecuaciones, que permite resolver hasta 6
incógnitas.
En este caso, resolveremos el sistema
para calcular las tensiones. Para ello,
ocuparemos las ecuaciones (1), (3), y (5).
T1=m1aS (1)
T2–T1=m2as (3)
F–T2=m3as (5)
Donde T1, T2 y as son incógnitas.
Resolveremos primero la aceleración.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 152
Sumando las ecuaciones, se tiene:
F=(m1+m2+m3)as
De donde:
s 21 2 3
F 60N ma 1m m m 10Kg 20Kg 30Kg s
= = =+ + + +
Puesto que F=6Kf=6(10N)=60N
Ahora reemplazamos la aceleración en la
ecuación (1):
T1=m1as=(10Kg)(1 2sm )=10N
En la ecuación (3):
T2–T1=m2as
T2=m2as+T1=(20Kg)(1 2sm )+10N=30N
Es necesario destacar que:
11ˆT 10Ni=
r 12
ˆT 10N(-i)=r
22ˆT 30Ni=
r 23
ˆT 30N(-i)=r
Ejemplo 4.7. Determinar la tensión de
la cuerda en el sistema de la figura si
entre el plano y los cuerpos no existe
roce.
Considere: m1=30Kg, m2=20Kg, θ=30º.
θ
12
Fig 4.58 Figura para el ejemplo 4.7.
Solución:
Las figuras siguientes muestran los
diagramas de cuerpo libre para los
cuerpos 1 y 2 respectivamente.
El sistema de referencia para el cuerpo 1
se ha escogido de manera tal que el eje x
es paralelo a la superficie del plano y el
eje y es perpendicular a él.
θ θ
P1
N1x1Tc1
y1
P1 cos θ
P1 sen θ
x1y1
P1
Fig 4.59 Diagrama de cuerpo libre para cpo. 1

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 153
Las fuerza normal es perpendicular al
plano y por tanto tiene dirección 1j ; la
Tensión tiene dirección 2i ; el peso del
cuerpo 1 tiene componentes en ambos
ejes y se puede escribir como
1 1 1 1 1ˆ ˆP Pcos i Psen j= θ + θ
r puesto que el ángulo
se copia contra el semieje –y.
El ángulo se copia allí debido a que las
direcciones del plano de deslizamiento y
el eje y son perpendiculares, de igual
forma que la dirección del peso y el plano
de la base.
Si aplicamos segunda Ley de Newton al
cuerpo 1, se tiene:
x1 1 x1F m aΣ = (1)
y1 1 y1F m aΣ = (2)
De donde:
Tc1–P1senθ=m1ax1 (1)
N–P1cosθ=0 (2)
La aceleración del cuerpo 1 en la
perpendicular al plano es nula puesto que
no se mueve en esa dirección.
Las ecuaciones (1) y (2) se pueden
rescribir para expresarlas en función de
la masa del cuerpo 1:
Tc1–m1g senθ=m1ax1 (1)
N–m1gcosθ=0 (2)
Ya que P1=m1g
P2
y2
x2
Tc2
Fig 4.60 Diagrama de cuerpo libre para cpo. 2
Respecto al cuerpo 2 se tiene:
x2 2 x2F m aΣ = (3)
y2 2 y2F m aΣ = (4)
Pero como no existen fuerzas en el eje
horizontal y tampoco hay movimiento, solo
podemos escribir la ecuación (4):
Tc2–P2=m2(-ay2) (4)
Puesto que la dirección de la aceleración
del cuerpo 2 es la del semieje negativo de
las y en su sistema de referencia.
En función de la masa del cuerpo 2:
Tc2–m2g=m2(-ay2) (4)

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 154
Lo anterior nos ha proporcionado un
sistema de 3 ecuaciones, que cuenta con
un número de incógnitas mayor que 3.
Estas se pueden reducir, puesto que
sabemos que si la cuerda es inextensible
las magnitudes de las tensiones de la
cuerda sobre ambos cuerpos son iguales,
es decir:
Tc1=Tc2=T
y las aceleraciones de los cuerpos son de
igual magnitud: ax1=ax2=as.
Por tanto:
T–m1g senθ=m1as (1)
N–m1g cosθ=0 (2)
T–m2g=m2(-as) (4)
Haciendo (1)–(2), se tiene:
m2g–m1g senθ=(m1+m2)as
De donde:
2 1 s
1 2
g(m -m sen )a m m
θ=
+
( )( )2
s 2
m 10 20Kg 30 Kg 0,5 msa 130Kg 20Kg s
⎛ ⎞ ⎡ ⎤−⎜ ⎟ ⎣ ⎦⎝ ⎠= =+
Por lo tanto:
1 12m ˆa 1 is
=r ; ( )2 22
m ˆa 1 js
= −r
La ecuación (4) permite calcular
rápidamente la magnitud de la cuerda:
T=m2(g-as)= 2 2m m20Kg 10 -1 180Ns s
⎛ ⎞ =⎜ ⎟⎝ ⎠
Es decir,
c1 1T 180Ni=r
; c2 2T 180Nj=r
Ejemplo 4.8. Determine la magnitud de
la fuerza necesaria parra arrastrar el
cuerpo de la figura hacia la derecha con
velocidad constante, si m=20Kg; µk=0,2 y
θ=37º.
θ
F
Fig 4.61 Figura para el ejemplo 4.8.
Solución:
En la figura siguiente se encuentra un
diagrama de cuerpo libre.
θ
FN
P
fk
Fig 4.62 Diagrama de cuerpo libre para ejemplo 4.8.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 155
Si está en movimiento, entonces la fuerza
de roce es cinética, de manera que:
x xF maΣ = (1)
y yF maΣ = (2)
De donde:
Fcosθ–fk=0 (1)
Fsenθ+N–P=0 (2)
Puesto que la velocidad es constante en x,
y no hay movimiento en y.
La fuerza de roce cinético se puede
calcular como fk=µkN y el peso como
P=mg, por lo que:
Fcos37º–µkN=0 (1)
Fsen37º+N–mg=0 (2)
De (2);
N=mg–Fsen37º
Reemplazándola en (1):
Fcos37º-µk(mg–Fsen37º)=0
De donde:
( )k
k
mgF cos37º sen37º
µ=
+µ
( )( )
( )( )2
m0,2 20Kg 10sF 44,4N
0,8 0,2 0,6
⎛ ⎞⎜ ⎟⎝ ⎠= =
+
Ejemplo 4.9. Sobre el cuerpo A de la
figura actúa una fuerza de magnitud F e
inclinación 37º respecto de la horizontal.
Si la cuerda es inextensible y de masa
despreciable, mA=6Kg; mB= 8Kg; µs=0,1 y
µk=0,05:
a) ¿Cuál es la magnitud máxima que puede
tener Fr
para que el sistema siga en
reposo?
b) Determine la aceleración del sistema si
la magnitud de la fuerza fuera de
100N.
c) Para el caso de la pregunta b),
determine la magnitud de la tensión de
la cuerda.
θ
F
BA
Fig 4.63 Figura para el ejemplo 4.9.
Solución:
La figura muestra un diagrama de cuerpo
libre para cada cuerpo.
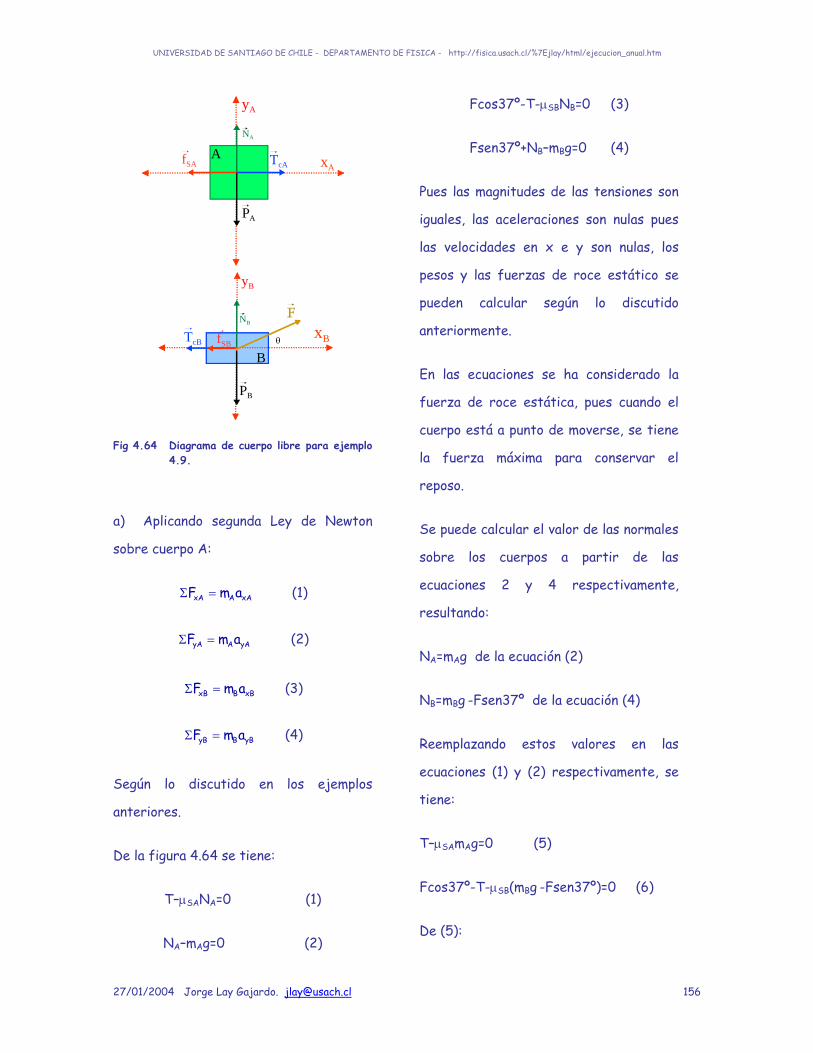
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 156
A
PA
fSA TcA
NA
yA
xA
θ
B
PB
fSB
yB
TcBxB
NB
Fig 4.64 Diagrama de cuerpo libre para ejemplo 4.9.
a) Aplicando segunda Ley de Newton
sobre cuerpo A:
xA A xAF m aΣ = (1)
yA A yAF m aΣ = (2)
xB B xBF m aΣ = (3)
yB B yBF m aΣ = (4)
Según lo discutido en los ejemplos
anteriores.
De la figura 4.64 se tiene:
T–µSANA=0 (1)
NA–mAg=0 (2)
Fcos37º-T-µSBNB=0 (3)
Fsen37º+NB–mBg=0 (4)
Pues las magnitudes de las tensiones son
iguales, las aceleraciones son nulas pues
las velocidades en x e y son nulas, los
pesos y las fuerzas de roce estático se
pueden calcular según lo discutido
anteriormente.
En las ecuaciones se ha considerado la
fuerza de roce estática, pues cuando el
cuerpo está a punto de moverse, se tiene
la fuerza máxima para conservar el
reposo.
Se puede calcular el valor de las normales
sobre los cuerpos a partir de las
ecuaciones 2 y 4 respectivamente,
resultando:
NA=mAg de la ecuación (2)
NB=mBg -Fsen37º de la ecuación (4)
Reemplazando estos valores en las
ecuaciones (1) y (2) respectivamente, se
tiene:
T–µSAmAg=0 (5)
Fcos37º-T-µSB(mBg -Fsen37º)=0 (6)
De (5):
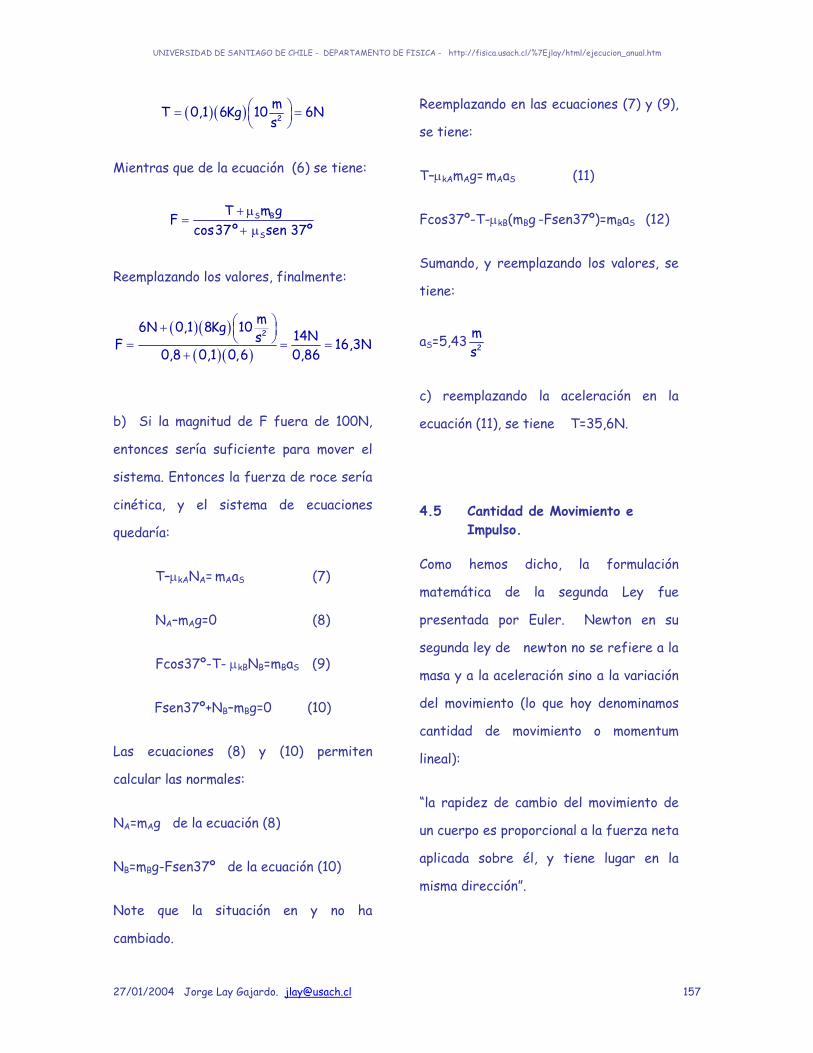
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 157
( )( ) 2mT 0,1 6Kg 10 6Ns
⎛ ⎞= =⎜ ⎟⎝ ⎠
Mientras que de la ecuación (6) se tiene:
S B
S
T m gFcos37º sen 37º
+ µ=
+ µ
Reemplazando los valores, finalmente:
( )( )
( )( )2
m6N 0,1 8Kg 10 14NsF 16,3N0,8 0,1 0,6 0,86
⎛ ⎞+ ⎜ ⎟⎝ ⎠= = =
+
b) Si la magnitud de F fuera de 100N,
entonces sería suficiente para mover el
sistema. Entonces la fuerza de roce sería
cinética, y el sistema de ecuaciones
quedaría:
T–µkANA= mAaS (7)
NA–mAg=0 (8)
Fcos37º-T- µkBNB=mBaS (9)
Fsen37º+NB–mBg=0 (10)
Las ecuaciones (8) y (10) permiten
calcular las normales:
NA=mAg de la ecuación (8)
NB=mBg-Fsen37º de la ecuación (10)
Note que la situación en y no ha
cambiado.
Reemplazando en las ecuaciones (7) y (9),
se tiene:
T–µkAmAg= mAaS (11)
Fcos37º-T-µkB(mBg -Fsen37º)=mBaS (12)
Sumando, y reemplazando los valores, se
tiene:
aS=5,43 2ms
c) reemplazando la aceleración en la
ecuación (11), se tiene T=35,6N.
4.5 Cantidad de Movimiento e Impulso.
Como hemos dicho, la formulación
matemática de la segunda Ley fue
presentada por Euler. Newton en su
segunda ley de newton no se refiere a la
masa y a la aceleración sino a la variación
del movimiento (lo que hoy denominamos
cantidad de movimiento o momentum
lineal):
“la rapidez de cambio del movimiento de
un cuerpo es proporcional a la fuerza neta
aplicada sobre él, y tiene lugar en la
misma dirección”.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 158
Definida la cantidad de movimiento como
el vector que resulta de multiplicar la
masa por la velocidad ( p mv=r r ), entonces
podemos escribir:
dpFdt
Σ =rr
En términos discretos:
pFt
∆Σ =
∆
rr
O en otras palabras: fuerza es todo
aquello que es capaz de cambiar la
cantidad de movimiento de un cuerpo.
Note que esta expresión puede
escribirse como:
d(mv) dvF m madt dt
Σ = = =r rr r
Es decir: F maΣ =r r
Expresión que es válida solo si la masa es
constante, de lo contrario sería
derivable y tenemos una expresión
distinta, como sucede con sistemas de
masa variable, de los cuales los cohetes
que van perdiendo masa al quemar el
combustible son los ejemplos más
emblemáticos.
Es importante reconocer el genio de
Newton en esta formulación mucho más
general que la consideración de masa
variable, puesto que se sintoniza
perfectamente con la teoría de la
relatividad, en donde la relación entre la
fuerza y la aceleración depende de la
velocidad. En efecto, en la medida en que
la velocidad se acerca a la de la luz, se
tiene que la masa va aumentando.
En este curso, consideraremos que la
masa es constante, pues los fenómenos
que estudiamos están muy lejos de las
dimensiones o velocidades relativistas.
La ecuación de la variación de momentum
lineal se puede escribir como:
F dt dpΣ =r r
En términos discretos:
F t pΣ ∆ = ∆r r
Donde FΣr
representa la fuerza neta
media aplicada sobre el cuerpo en el
intervalo de tiempo ∆t.
Esta ecuación explicita que el cambio en
la cantidad de movimiento depende del
tiempo en que estuvo aplicada la fuerza.
A la cantidad de la izquierda se le
denomina Impulso ( )Ir
y es un vector en
la misma dirección que la fuerza neta.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 159
I Fdt= Σr r
En términos discretos:
I F t= Σ ∆r r
Las unidades de la cantidad de
movimiento e impulso son las mismas como
es natural y son mKgs
⎡ ⎤⎢ ⎥⎣ ⎦
o [ ]Ns .
El impulso puede ser representado como
el área bajo la curva en un gráfico fuerza
versus tiempo.
t1t0
F
F
t
Fig 4.65 Aquí se representa la fuerza constante recibida por un cuerpo. Entre t0 y t1 el área bajo la curva es F(t1–t0), es decir, el impulso recibido durante ese lapso.
Se puede rescribir la segunda ley de
Newton en función de la cantidad de
movimiento y el impulso, quedando en
términos discretos como:
I p= ∆r r
La cantidad de movimiento es
particularmente importante por cuanto
nos permite estudiar fenómenos
complejos en los que participan varios
cuerpos, con gran sencillez.
En el caso de colisiones, las fuerzas de
interacción están presentes durante
intervalos de tiempo extremadamente
pequeños, a lo que se debe sumar la
dificultad de que no son constantes.
v v v
F1 F2 F3
Fig 4.66 Una pelota golpea una pared. La velocidad de la pelota disminuye en magnitud pues la fuerza de la pared tiene dirección opuesta al movimiento. La magnitud de la fuerza aumenta en la medida que la deformación de la pelota también lo hace.
vvv
F6 F5 F4
Fig 4.67 Finalmente la pelota se detiene, invierte el sentido de la dirección de la velocidad y se devuelve, aumentando la magnitud hasta separarse. La fuerza de la pared sobre la pelota está en igual dirección que el movimiento y su magnitud va disminuyendo.
Una gráfica de la fuerza versus el tiempo
es una curva como la siguiente:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 160
F
tF2 , F5
F3 , F4
F1 , F6
t1t0
Fig 4.68 Gráfica F(t) para interacción entre cuerpos
El impulso es el área bajo la curva, cuyo
cálculo no es trivial.
Sin embargo, si reemplazamos la fuerza
variable por una fuerza constante de
magnitud igual que la fuerza media
actuando en el mismo intervalo de tiempo,
tenemos un área igual.
F
tFmedia
t1t0
Fig 4.69 El área bajo la curva F(t) es el Impulso.
Que se puede calcular simplemente como
mediaI F t= ∆r r
Por tanto, si queremos evaluar el
complejo fenómeno de la colisión,
podemos usar la expresión:
mediaF t p∆ = ∆r r
Fig 4.70 Foto ultrarrápida del choque de una raqueta y una pelota de tenis.
4.6 Conservación de la cantidad de movimiento.
Observemos una interacción a la luz de la
tercera Ley y de la cantidad de
movimiento.
Para ello consideremos dos esferas que
chocan linealmente luego de lo cual salen
separadas, como se observa en la figura
siguiente.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 161
vA vBmA mB
mA mB
uA uBmA mB
Fig 4.71 Las bolitas de masas mA y mB viajan en la misma dirección, chocan y salen separadas con velocidades distintas. No hay roce con la superficie
En este ejemplo, si el roce entre las
bolitas y la superficie es despreciable, las
fuerzas que se hacen entre ellas son las
únicas que participan en la dirección del
movimiento.
La fuerza que A ejerce sobre B, le
produce un cambio en la cantidad de
movimiento a B, según lo previsto en la
segunda Ley:
( )AB B B BF t m u -v∆ =r r r
La fuerza que B ejerce sobre A está en la
dirección opuesta y le produce un cambio
en la cantidad de movimiento a A:
- ( )BA A A AF t m u -v∆ =r r r
Según la Tercera Ley ambas fuerzas son
iguales en magnitud; además estuvieron
actuando durante el mismo lapso de
tiempo, por tanto:
( ) ( )B B B A A Am u -v -m u -v=r r r r
Es decir la misma cantidad de movimiento
que pierde una bolita es ganada por la
otra, y por tanto si consideramos que
ambas bolitas constituyen un sistema, la
cantidad de movimiento del sistema ha
permanecido inalterable.
Este resultado, que puede extenderse a
sistemas de muchas partículas, incluso
gases u otros sistemas, es una forma del
denominado Principio de conservación de
la cantidad de movimiento (publicado por
primera vez por el matemático John
Wallis en 1668, antes de la publicación de
los Principia; se cree que Newton se basó
en este principio para la formulación de
su Tercera Ley).
El principio se enuncia así:
“si sobre un sistema no actúan fuerzas
externas, su cantidad de movimiento es
constante”.
Note que la expresión matemática
anterior se puede reordenar como:
A A B B A A B Bm v m v m u m u+ = +r r r r

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 162
Conocida en la mayoría de los textos como
la formulación matemática del principio
de conservación de la cantidad de
movimiento lineal, aunque es solo la
versión restringida a la colisión de dos
partículas.
En general, si el sistema tiene n
partículas:
i n i n
i i i ii 1 i 1
m v mu= =
= =
=∑ ∑r r
Esta es una expresión vectorial, por tanto
podemos tener el caso de que se conserve
en una dirección y en otra no, como en el
caso de la explosión de una granada que
está sujeta al peso en la dirección
vertical pero no tiene fuerza externa
actuando en la dirección horizontal y por
tanto conservará la cantidad de
movimiento solo en la última dirección.
Retornaremos a la discusión de las
colisiones, luego que discutamos el
principio de conservación de la energía
Ejemplo 4.10. Una pelota de golf cuya
masa es 50g recibe un golpe que le
proporciona una rapidez inicial de 30 ms
.
Determine:
a) La cantidad de movimiento adquirida.
b) El impulso que adquirió
c) Si el impulso duró 0,01, determine la
magnitud de la fuerza media que actuó
sobre la pelota.
Solución:
a) p m v∆ = ∆r r de modo que:
( ) gcmcmp 50g 3000 150000s s
⎛ ⎞∆ = =⎜ ⎟⎝ ⎠
b) Como I p= ∆r r
entonces:
I=150000 gcms
c) la fuerza no es constante, pero en la
expresión: I F t= ∆r
, F es la fuerza media
que actuó sobre la pelota, por tanto:
4
62
gcm15X10I sF 15X10 Dt 10 s−
⎛ ⎞⎜ ⎟⎝ ⎠= = =
∆
Ejemplo 4.11. Un bloque de masa 10Kg
desliza a partir del reposo por un plano
inclinado. Determinar su rapidez 3s
después de iniciado su movimiento, si
µk=0,25 y θ=25º.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 163
θ
Fig 4.72 Figura para el ejemplo 4.11.
Solución:
Como siempre, confeccionaremos un
diagrama de cuerpo libre.
P
θ θ
N xfk
y
mg cos θ
mg sen θ
xy
P
Fig 4.73 Diagrama de cuerpo libre para ej.4.11.
Aplicando segunda Ley de Newton:
x xF maΣ = (1)
y yF maΣ = (2)
Por lo que:
fk–mgsenθ=m(-a) (1)
N–mgcosθ=0 (2)
De (2): N=mgcosθ
En (1), ya que fk=µkN,
µkmgcosθ−mgsenθ=-ma
Ordenando:
mgsenθ−µkmgcosθ=ma
mg(senθ−µkcosθ)=ma
O, lo que es lo mismo:
xFΣ = mg(senθ−µkcosθ)
y como sabemos que I p= ∆r r
que se puede
escribir como: xF t m vΣ ∆ = ∆ , para la
dirección del movimiento,
mg(senθ−µkcosθ) t∆ =m(v3–v0)
de donde, como v0=0:
v3=g(senθ–µkcosθ)∆t
( )( )( )3 2mv 10 sen25º- 0,25 cos25º 3ss
=
3mv 5,88s
=
Ejemplo 4.12. Un cuerpo de masa 4Kg
y rapidez u=6 ms
se divide en dos
fragmentos que se separan en direcciones
que forman ángulos de 60º y 30º
respectivamente, con respecto de la

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 164
dirección original del movimiento. Si la
masa del primer fragmento es 1Kg. ¿Cuál
será la rapidez de cada fragmento?.
30º60º
m2 = 3 Kg
m1 = 1 KgM= 4 Kg
Fig 4.74 Figura para el ejemplo 4.12.
Solución:
En una explosión, la cantidad de
movimiento debe conservarse, pues es un
evento interno al sistema, por tanto:
Si SfP P=r r
1 1 2 2Mu m v m v = +r r r
( ) ( )x 1x 1y 2x 2yˆ ˆ ˆˆ ˆ4u i 1 v i v j 3 v i v j= + + +
con: xˆu u i=
r
1 1 1ˆ ˆv v cos60ºi v sen60ºj= +
r
2 2 2ˆ ˆv v cos30ºi-v sen30ºj=
r
En consecuencia:
( )x 1 1ˆ ˆ ˆ4u i v cos60ºi v sen 60ºj= + +
( )2 2ˆ ˆ3v cos30ºi-3v sen30ºj+
De donde, por igualdad de vectores se
tiene las ecuaciones:
x 1 24u v cos60º 3v cos30º= + (1)
1 20 v sen60º- 3v sen30º= (2)
Reemplazando los valores conocidos:
24=0,5v1+2,5v2
0=0,87v1–1,5v2
De donde:
V2=6,94 ms
; V1=11,94 ms
M x
y
u
v2
x
y-v
2 sen
30º
v2 cos 30º
30º
v1
x
y
v 1 s e
n 6 0
º
v1 cos 60º
Fig 4.75 Vectores velocidad antes y después de la explosión del ejemplo 4.12.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 165
4.7 Trabajo Mecánico.
Se define como Trabajo mecánico (W) a
la cantidad:
0
r
r
W F dr= •∫v r
Donde Fr
es la fuerza aplicada sobre el
cuerpo y drr es el desplazamiento.
Si existen varias fuerzas aplicadas sobre
el cuerpo, entonces el trabajo neto será
simplemente el trabajo realizado por la
fuerza neta
Esta definición constituye uno de los
pilares fundamentales de la física, como
veremos a continuación.
Consideremos un cuerpo que se mueve en
el eje x, por simplicidad. Si ninguna
fuerza actúa sobre el, entonces se
moverá con velocidad constante de
acuerdo a lo señalado por Newton.
Sin embargo, si la fuerza neta sobre el no
es nula, entonces tendrá una aceleración,
y las relaciones entre estas variables
fueron estudiadas en el capítulo de
dinámica con suficiente rigor.
El trabajo permite otro punto de vista, al
permitir estudiar la relación entre las
variables dinámicas y cinemáticas. Como
veremos, algunos de los ejemplos
posteriores nos permitirán estudiar
algunos de los complejos problemas de la
cinemática y de la dinámica, con gran
simplicidad y belleza.
La figura siguiente nos muestra a nuestro
cuerpo afectado por una fuerza cuya
dirección con respecto a la dirección del
movimiento es θ.
Recuerde que en este curso los cuerpos
son considerados como partículas, de
modo tal que no se deforman ni rotan.
x
F
F cos θ
mθ
Fig 4.76 Cuerpo sometido a una fuerza no paralela a la dirección del movimiento
Entonces, si consideramos que el cuerpo
sufre un desplazamiento infinitesimal
( )dx , el trabajo realizado por la fuerza
es:
0
x
x
W Fcos dx= θ∫
De acuerdo a la definición de producto
escalar entre vectores.
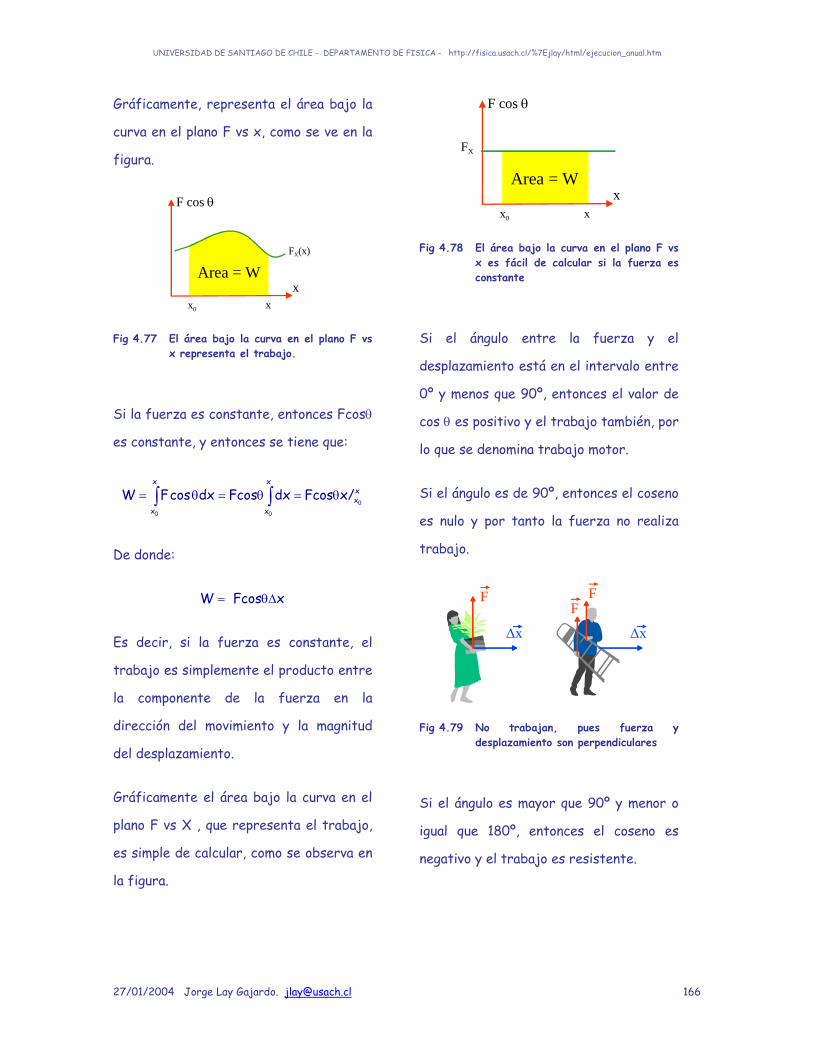
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 166
Gráficamente, representa el área bajo la
curva en el plano F vs x, como se ve en la
figura.
F cos θ
xx0 x
FX(x)
Area = W
Fig 4.77 El área bajo la curva en el plano F vs x representa el trabajo.
Si la fuerza es constante, entonces Fcosθ
es constante, y entonces se tiene que:
0
0 0
x xxx
x x
W Fcos dx Fcos dx Fcos x/= θ = θ = θ∫ ∫
De donde:
W Fcos x= θ∆
Es decir, si la fuerza es constante, el
trabajo es simplemente el producto entre
la componente de la fuerza en la
dirección del movimiento y la magnitud
del desplazamiento.
Gráficamente el área bajo la curva en el
plano F vs X , que representa el trabajo,
es simple de calcular, como se observa en
la figura.
F cos θ
xx0 x
Area = W
FX
Fig 4.78 El área bajo la curva en el plano F vs x es fácil de calcular si la fuerza es constante
Si el ángulo entre la fuerza y el
desplazamiento está en el intervalo entre
0º y menos que 90º, entonces el valor de
cos θ es positivo y el trabajo también, por
lo que se denomina trabajo motor.
Si el ángulo es de 90º, entonces el coseno
es nulo y por tanto la fuerza no realiza
trabajo.
F FF
∆x ∆x
Fig 4.79 No trabajan, pues fuerza y desplazamiento son perpendiculares
Si el ángulo es mayor que 90º y menor o
igual que 180º, entonces el coseno es
negativo y el trabajo es resistente.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 167
∆xF ∆x
FF
Fig 4.80 Si trabajan, pues fuerza y desplazamiento no son perpendiculares.
Si el ángulo es de 0º, se tiene el máximo
trabajo motor; mientras que se tendrá
máximo trabajo resistente si el ángulo es
de 180º.
.
F
F
∆x
Fig 4.81 Máximo trabajo motor
Respecto de las unidades:
En el Sistema Internacional de unidades
las unidades de Trabajo mecánico son:
[W]=[Nm]=[Joule]=[J]
También: [W]=[Dcm]=[Erg]
En el Sistema Técnico Gravitatorio:
[W]=[Kfm]=[Kilográmetros]=[Kgm]
Sus equivalencias son:
1J=107 Erg; 1Kgm=9,8J
Ejemplo 4.13. Un cuerpo pesa 40Kf y
es arrastrado 20m subiendo en un plano
inclinado 37º respecto de la horizontal,
por una fuerza que forma un ángulo de
14º respecto al plano inclinado y cuya
magnitud es de 200N. No existe roce.
Calcule:
a) El Trabajo realizado por la fuerza.
b) El Trabajo realizado por el peso
c) El Trabajo neto hecho sobre el cuerpo
en la dirección paralela al plano
inclinado.
d) El Trabajo neto hecho sobre el cuerpo
en la dirección perpendicular al plano
inclinado.
P
14ºN x
F
y
37º
P
14ºN
F
y
37º

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 168
mg cos 37º
mg sen 37º
xy
P
F sen 14º
F cos 14º
x
yF
14º
Fig 4.82 Figura para el ejemplo 4.13, incluyendo diagrama de cuerpo libre y descomposición de fuerzas.
Solución:
a) El trabajo realizado por Fr
es:
WF=Fcos14ºx=(200N)(0,97)(20m)
WF=3880J
b) El Trabajo realizado por el peso es:
WP=Pcos233ºx=(200N)(-0,6)(20m)
WP=4800J.
c) El trabajo neto realizado en la
dirección y es cero pues el
desplazamiento es cero en esa dirección.
d) El trabajo neto realizado en la
dirección x es el trabajo realizado por la
resultante de las fuerzas en esa
dirección:
WRx=FR x=(Fcos 14º-mgsen37º)x
WRx=-920J. es un trabajo resistente
Ejemplo 4.14. El registro de la
componente de la fuerza neta realizada
sobre un cuerpo en la dirección del
desplazamiento en un experimento,
permitió confeccionar el gráfico de la
figura. A partir de esta información,
determine el trabajo efectuado sobre el
cuerpo durante los primeros 30m.
Fx (N)
x(m)
30
00
50
20 30 40
Fig 4.83 Figura para el ejemplo 4.14.
Solución:
El trabajo es el área bajo la curva, por
tanto:
W=(30N)(20m)+(30N)(10m)+½(20N)(10m)
W=1000J
Ejemplo 4.15. Un cuerpo que se mueve
sobre una superficie horizontal sin roce
es sometido a una fuerza neta constante
de magnitud F paralela a ella. Calcule el
trabajo realizado sobre el cuerpo.
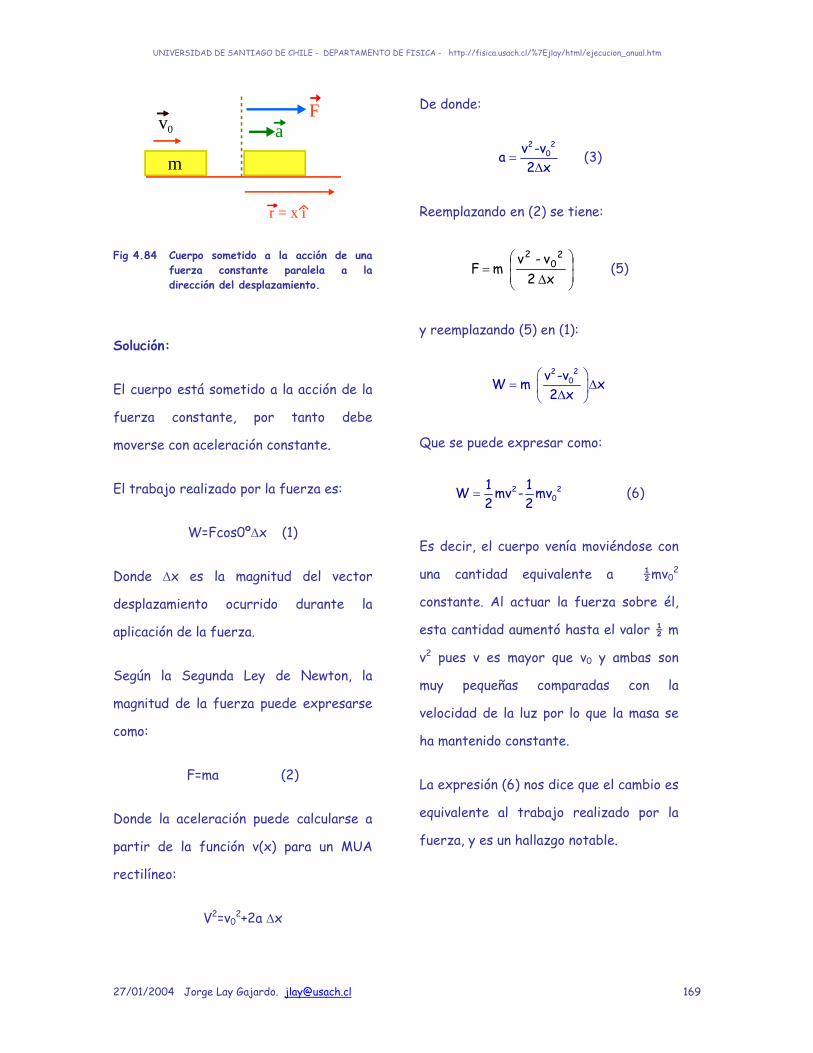
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 169
v0
m
aF
r = x i
Fig 4.84 Cuerpo sometido a la acción de una fuerza constante paralela a la dirección del desplazamiento.
Solución:
El cuerpo está sometido a la acción de la
fuerza constante, por tanto debe
moverse con aceleración constante.
El trabajo realizado por la fuerza es:
W=Fcos0º∆x (1)
Donde ∆x es la magnitud del vector
desplazamiento ocurrido durante la
aplicación de la fuerza.
Según la Segunda Ley de Newton, la
magnitud de la fuerza puede expresarse
como:
F=ma (2)
Donde la aceleración puede calcularse a
partir de la función v(x) para un MUA
rectilíneo:
V2=v02+2a ∆x
De donde:
2 20v -va
2 x=
∆ (3)
Reemplazando en (2) se tiene:
⎟⎟⎠
⎞⎜⎜⎝
⎛
∆=
x 2v - v
m F2
02
(5)
y reemplazando (5) en (1):
2 20v -vW m x
2 x⎛ ⎞
= ∆⎜ ⎟∆⎝ ⎠
Que se puede expresar como:
2 20
1 1W mv - mv2 2
= (6)
Es decir, el cuerpo venía moviéndose con
una cantidad equivalente a ½mv02
constante. Al actuar la fuerza sobre él,
esta cantidad aumentó hasta el valor ½ m
v2 pues v es mayor que v0 y ambas son
muy pequeñas comparadas con la
velocidad de la luz por lo que la masa se
ha mantenido constante.
La expresión (6) nos dice que el cambio es
equivalente al trabajo realizado por la
fuerza, y es un hallazgo notable.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 170
4.8 Energía Cinética (K).
El ejemplo 4.13 mostró que el trabajo
realizado por una fuerza se acumula en el
cuerpo en forma de la cantidad ½mv2.
Esta cantidad es denominada Energía
Cinética (K), y es una de las formas que
toma la Energía en la naturaleza.
En consecuencia, diremos que el cambio
en la energía cinética de un cuerpo es
igual al trabajo realizado sobre él por la
fuerza neta, expresión conocida con el
nombre de teorema del trabajo y la
energía.
WFN=∆K
A pesar de que este teorema fue
obtenido a partir de una fuerza
constante, es válido también para el caso
de que las fuerzas sean funciones del
tiempo o de la posición del cuerpo.
Ejemplo 4.16. Calcular el
desplazamiento total de un cuerpo hasta
detenerse, a partir del ingreso a un
sector rugoso en un plano horizontal.
Suponga que mk=0,1 y que la rapidez antes
de entrar a la zona rugosa es constante y
de magnitud 5 ms
.
m
v0
afk
∆r = ∆x i
v = 0
N
P
Fig 4.85 cuerpo moviéndose sobre un plano rugoso
Solución:
La fuerza neta aplicada sobre el cuerpo
es:
( )kˆF f -iΣ =
r
El trabajo realizado por la fuerza neta
es, por tanto:
( )FN k k kW f x cos180º N -1 x - mg x= ∆ = µ ∆ = µ ∆
ya que N = mg.
Aplicando teorema del trabajo y energía,
2 21 10k 2 2mg x mv - mv−µ ∆ =
Multiplicando por 1m
y ya que v=0, y x0=0
se tiene:
210k 2g x - v−µ ∆ =
De donde:
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 171
( )
2
20
k2
m5v s x 12,5mm2 g 2 0,1 10s
⎛ ⎞⎜ ⎟⎝ ⎠∆ = = =
µ ⎛ ⎞⎜ ⎟⎝ ⎠
Se ha resuelto una cantidad cinemática
con gran sencillez.
4.9 Energía.
Básicamente por energía se entiende una
magnitud que poseen los cuerpos,
mientras que el trabajo es una forma de
alterar su magnitud. La energía es un
escalar.
Realizar trabajo no es la única forma de
alterar la cantidad de energía que un
cuerpo posee, como veremos en otros
cursos de nuestra formación académica,
de igual forma que movimiento no es la
única forma de energía que el cuerpo
posee.
Una forma de definir energía es como “la
capacidad de realizar trabajo”.
Esto se entiende bien si se observa a un
cuerpo que se mueve con una velocidad
determinada e interacciona con otro que
se encuentra en su camino, como vimos en
el ejemplo de las colisiones. Entonces le
transferirá parte de su cantidad de
movimiento, disminuyendo su velocidad.
Bajo el nuevo concepto desarrollado aquí,
diremos que le realizó trabajo, a costa de
su energía cinética.
Al perder energía cinética el cuerpo
disminuyó la capacidad de realizar
posteriores trabajos sobre otros
cuerpos. El cuerpo colisionado aumentó su
energía cinética aumentando de esa
manera su capacidad de realizar trabajo.
Si la energía cinética ganada por el
cuerpo colisionado equivale a la energía
cinética del cuerpo que lo colisiona,
entonces el sistema compuesto por ambos
cuerpos se dice que es conservativo. Esto
es un sistema idealizado, puesto que en la
interacción participan otras formas de
energía, algunas de las cuales se
transfieren a otros sistemas.
Si el sistema pierde parte relevante de la
energía disponible, se dice que es
disipativo.
La energía es una forma de energía
denominada mecánica, como también lo es
la energía debida a la posición,
denominada energía potencial (U).
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 172
Otras formas de energía son: eléctrica,
térmica, electromagnética química,
nuclear, etc. Todas estas son formas
idénticas de representar una cantidad
que está contenida en los cuerpos y que
se puede cambiar de una forma en otra si
las condiciones son las apropiadas.
En una central hidroeléctrica, la energía
potencial del agua es transformada en
energía eléctrica; un cuerpo cae y se
golpea contra el piso deteniéndose: su
energía mecánica se disipa en forma de
calor y ruido; una “honda” transforma la
energía contenida en la deformación del
elástico en energía cinética; el cuerpo
humano transforma la energía química de
los alimentos en energía térmica y
muscular entre otras; las plantas
transforman la luz del sol en energía
química a través de la fotosíntesis; etc.
Note que no existe una idea clara de lo
que es la energía, sino que es descrita a
través de sus manifestaciones en los
cuerpos.
Incluso estas definiciones operacionales,
están basadas en nuestra capacidad de
medir los cambios experimentados en las
magnitudes básicas de los cuerpos (masa,
velocidad, temperatura y otras), pero no
indican “lo que es”.
4.10 Energía Potencial.
Como hemos indicado, un cuerpo tiene
capacidad de realizar trabajo sobre otro,
cuando posee energía cinética.
Además tiene capacidad de realizar
trabajo de acuerdo a su posición o a su
deformación. Un cuerpo dispuesto sobre
una mesa, un resorte comprimido y otros
ejemplos, son formas de trabajo
acumulado “potencialmente” disponible. Si
se deja caer el cuerpo desde la mesa o se
suelta el resorte, se manifestará la
energía potencial, realizando un trabajo,
como analizaremos a continuación.
4.10.1 Energía potencial gravitatoria.
Consideremos primero el caso del cuerpo
sobre la mesa.
Si se mueve hasta el borde, cae con
aceleración de gravedad. Este
movimiento se hace en dirección al centro
de gravedad de la tierra a menos que en
su camino se encuentre con otra
superficie u otra fuerza que se lo impida.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 173
En la figura 4.70 se observa un cuerpo de
masa m, dispuesto sobre una mesa a una
altura y0 desde el piso que se le permite
caer hasta otra superficie, cuya altura es
medida desde el piso. Al caer, el peso
( )ˆP mg - j=r
trabaja a lo largo del
desplazamiento ( ) ( )0 0ˆ ˆ ˆy yj-y j y-y j∆ = =
r ,
que tiene dirección j− puesto que y0>y;
por tanto:
P 0W mg (y-y ) cos0º =
De donde,
P 0W mgy- mgy =
y0
yP
∆y
Fig 4.86 Cuerpo cayendo bajo la acción del peso
El trabajo hecho por el peso le ha
provocado un cambio a la cantidad mgy
que poseía el cuerpo y por tanto esta es
la energía potencial gravitatoria.
En otras palabras, la energía potencial de
un cuerpo es:
U=mgy
Que es una cantidad relativa al sistema
de referencia utilizado. En rigor, y
debería ser la distancia entre los centros
de gravedad del cuerpo y de la Tierra.
Como esta distancia es difícil de conocer,
se acostumbra determinar una referencia
conocida y calcular la diferencia de
energía potencial que el cuerpo tendrá
entre dos puntos, que resulta igual que el
trabajo necesario para trasladarlo.
Ejemplo 4.17. Calcular el trabajo
necesario para levantar a un cuerpo h
metros desde la superficie de la tierra.
Solución:
Si consideramos a la superficie de la
tierra como origen del sistema de
referencia, entonces allí y0=0. Se
quiere levantar al cuerpo hasta que la
posición sea y = h
Se necesita una fuerza de magnitud a lo
menos igual a la magnitud del peso para
levantarlo. Por tanto:
W=mgy–mgy0=mgy=mgh

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 174
Note que si llevamos al cuerpo por un
camino no vertical, tal como un plano
inclinado o una escalera, el resultado
será el mismo.
y0= 0
y = h
F = m g jF = m g j
∆y = h j
Fig 4.87 El trabajo para levantar un cuerpo es independiente del camino.
Esto es debido a que la fuerza
gravitatoria es una fuerza conservativa.
Son fuerzas conservativas todas aquellas
cuyo trabajo no depende del camino. De
otra manera dicho, si el trabajo para un
camino cerrado es cero.
Las fuerzas conservativas no dependen
del tiempo, la velocidad ni de la
aceleración del cuerpo.
4.10.2 Energía potencial elástica.
Consideremos ahora el caso de un cuerpo
que se deforma, como un resorte.
Como ya hemos visto, la fuerza ejercida
por un resorte es variable, y depende de
la desviación de su posición de equilibrio,
siguiendo la Ley de Hooke: F=-kx
El signo se debe a que es una fuerza
restauradora, es decir, tiende a devolver
al resorte hacia la posición de equilibrio.
Consideremos un resorte que está sobre
una mesa y sujeto a una pared vertical,
como se observa en la figura siguiente.
Fm
-Fm1
−x1x
F = k ∆x
(0)
(1)
largo natural; x=0(0)
Fm = Fm (- i )
Fm1 = Fm1(- i )
∆x= x (- i )
(1)
Fig 4.88 Fuerza de una mano sobre un resorte.
Despreciemos el efecto del roce entre el
resorte y la mesa.
El resorte está en su posición de
equilibrio (0). Con la mano lo
comprimiremos ejerciéndole una fuerza

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 175
hacia la izquierda, hasta que alcance la
posición (1). En la misma figura se
muestra una gráfica de la fuerza ejercida
por la mano versus el desplazamiento
obtenido.
Se observa una fuerza negativa y un
desplazamiento negativo. La curva
obtenida es una recta de la forma
F=k(x-x0) con x0=0. La fuerza no es
constante, sino que ha aumentado
progresivamente hasta alcanzar el valor
Fm1 en el punto (1), cuando llegó a -x1.
El trabajo que hizo la mano es el área
bajo la curva en este gráfico, como ya
hemos visto antes, de manera que:
W=½(-Fm1)(-x1)
Pero: F1=kx1
Por lo que:
W=½(-kx1)(-x1)=½kx12
Fm
-Fm1
−x1x(0)
(1)
W
Fig 4.89 El trabajo es el área bajo la curva.
Es decir, el trabajo realizado por la
fuerza sobre el resorte le ha ido
aumentando progresivamente la cantidad
½kx2 en exactamente la misma cantidad
que trabajo le hacía. El resorte ha ido
acumulando el trabajo en deformación; en
cambio de posición relativa de sus
partículas. Es por tanto una forma de
energía potencial, denominada energía
potencial elástica.
Por tanto:
Ue=½kx2
Como el trabajo hecho por la mano ha
provocado un cambio en esa cantidad, se
tiene que en general,
Wexterno=½k∆x2
Donde ∆x es la compresión o elongación
del resorte y Wext es el trabajo realizado
sobre el resorte por cualquier agente
externo.
Ejemplo 4.18. Si se dispone de un
resorte cuya constante elástica es de
600 Nm
, cuanto debe comprimirse para
almacenar una energía potencial de 50J.
Solución:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 176
W=∆U=½k∆x2
( )2 50J2 Ux 0,41mNk 600m
∆∆ = = =
Si el resorte hubiera sido estirado en
lugar de comprimido, el resultado es el
mismo, como se puede apreciar en la
figura.
Fm
Fm2
x2
xF = k ∆x
(0)
(2)
largo natural; x=0(0)
(2)
∆x= x2 (+ i )
Fm = Fm (+ i )
Fm2 = Fm2(+ i )
W = (1/2)Fm2 x2
W = (1/2)(k x2)x2
W = (1/2)k x22
Fig 4.90 Mano elongando un resorte.
Observemos ahora el trabajo realizado
por el resorte. Para ello, atemos un
cuerpo a su extremo libre y empujemos
con la mano comprimiéndolo hasta -x1.
Una vez hecho esto, soltémoslo y
grafiquemos para estudiar el
comportamiento de la fuerza
restauradora.
(0)
(1)x1 = x1(- i )
FR1 = FR1 (+ i )
FR2 = FR2(+ i )(2)
(3)
(4)
x4 = x4( i )
FR3 = 0 x3 = 0
FR4 = FR4(- i )
x2 = x2(- i )
FR
FR1
−x1
xF = - k ∆x
(1)
-FR4
−x2
(3)
(2)
(4)
x4
FR2
Fig 4.91 Trabajo realizado por la fuerza restauradora de un resorte
En (1) se ha soltado el resorte. La fuerza
restauradora tiene dirección hacia la
derecha (es positiva) pero se encuentra a
la izquierda de la posición de equilibrio
por tanto su posición es negativa.
Entre (1) y (2) la fuerza restauradora
siempre es positiva pero su magnitud va
disminuyendo. Su posición sigue siendo
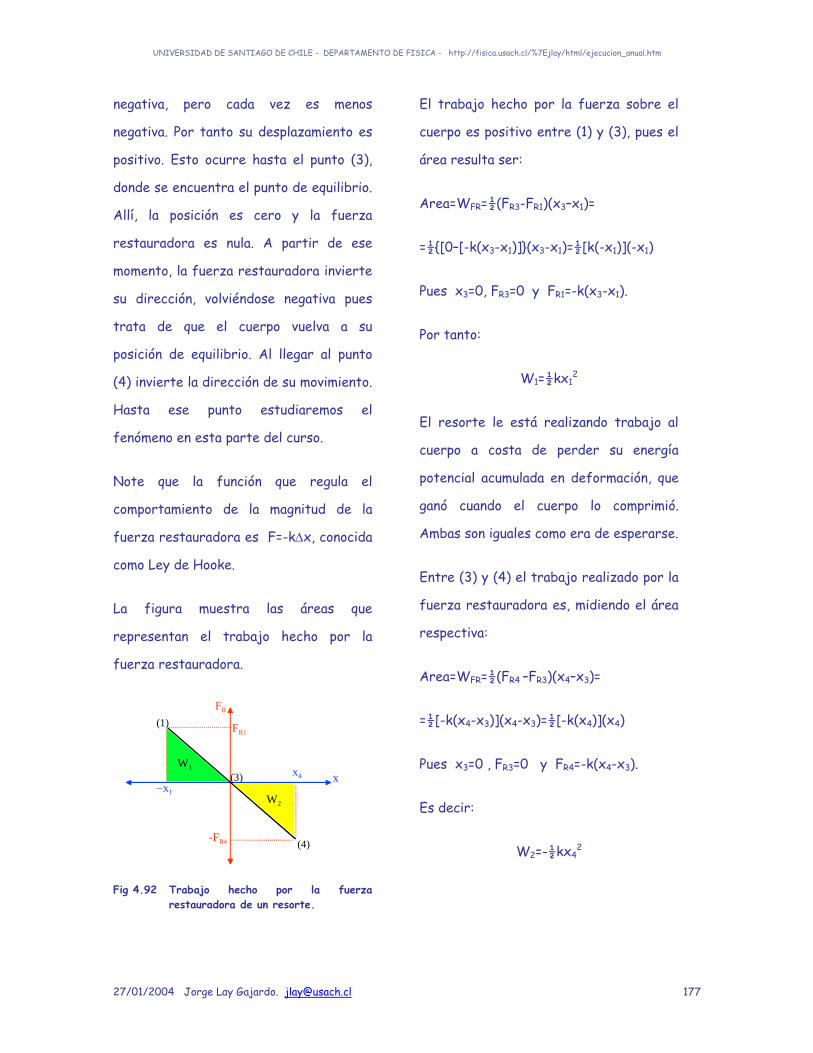
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 177
negativa, pero cada vez es menos
negativa. Por tanto su desplazamiento es
positivo. Esto ocurre hasta el punto (3),
donde se encuentra el punto de equilibrio.
Allí, la posición es cero y la fuerza
restauradora es nula. A partir de ese
momento, la fuerza restauradora invierte
su dirección, volviéndose negativa pues
trata de que el cuerpo vuelva a su
posición de equilibrio. Al llegar al punto
(4) invierte la dirección de su movimiento.
Hasta ese punto estudiaremos el
fenómeno en esta parte del curso.
Note que la función que regula el
comportamiento de la magnitud de la
fuerza restauradora es F=-k∆x, conocida
como Ley de Hooke.
La figura muestra las áreas que
representan el trabajo hecho por la
fuerza restauradora.
FR
FR1
−x1
x
(1)
-FR4
(3)
(4)
x4
W1
W2
Fig 4.92 Trabajo hecho por la fuerza restauradora de un resorte.
El trabajo hecho por la fuerza sobre el
cuerpo es positivo entre (1) y (3), pues el
área resulta ser:
Area=WFR=½(FR3-FR1)(x3–x1)=
=½[0–[-k(x3-x1)](x3-x1)=½[k(-x1)](-x1)
Pues x3=0, FR3=0 y FR1=-k(x3-x1).
Por tanto:
W1=½kx12
El resorte le está realizando trabajo al
cuerpo a costa de perder su energía
potencial acumulada en deformación, que
ganó cuando el cuerpo lo comprimió.
Ambas son iguales como era de esperarse.
Entre (3) y (4) el trabajo realizado por la
fuerza restauradora es, midiendo el área
respectiva:
Area=WFR=½(FR4 –FR3)(x4–x3)=
=½[-k(x4-x3)](x4-x3)=½[-k(x4)](x4)
Pues x3=0 , FR3=0 y FR4=-k(x4-x3).
Es decir:
W2=-½kx42

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 178
El trabajo es negativo (lógico pues la
fuerza va hacia la izquierda y el
desplazamiento hacia la derecha).
Ahora el resorte está acumulando energía
potencial.
Note que si x1=x4, entonces las áreas son
iguales, indicando que el trabajo neto
realizado por el resorte entre ambos
puntos es cero.
Este es un resultado muy importante,
pues muestra que si esperamos que el
resorte se devuelva desde x4 hasta x1 (si
no existen otras fuerzas que disipen
energía en el proceso), pasará lo mismo.
En efecto, entre (4) y (3) el trabajo será
positivo pues fuerza y desplazamiento
serán hacia la izquierda. Entre (3) y (1) el
trabajo será negativo pues la fuerza
estará hacia la izquierda y el
desplazamiento hacia la derecha. Sus
magnitudes deben ser equivalentes.
El ciclo completo tendrá entonces un
trabajo total neto cero, mostrando que la
fuerza de restauración es conservativa.
En general, se tiene que el trabajo
realizado por el resorte sobre otros
sistemas, viene dado por los cambios en la
energía potencial elástica (tal como pasó
con la gravitacional):
W=½kx02–½kx1
2
Donde x1 es la posición final y x0 es la
posición inicial en el tramo considerado.
Ejemplo 4.19 Calcular el trabajo
realizado por un resorte cuya constante
elástica es k=100 Nm
sobre un cuerpo de
masa 50kg, si el cuerpo se mueve desde
un punto situado 3cm a la izquierda del
punto de equilibrio (largo natural del
resorte) hasta un punto situado a 2cm a
la derecha de este último.
Solución:
W=½kx02–½kx1
2
W=½(100 Nm
)[(-3)2cm2]-½(100 Nm
)(22cm2)
Pero 1cm2=10-4 m2, por tanto:
W=½(100 Nm
)(9x10-4m2)-
-½(100 Nm
)(4x10-4m2)= 250x10–4J
Gráficamente:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 179
FR (N)
−3x(cm) 2
-F2
F1
W1 = 450 x 10-4 J
W2 = - 200 x 10-4 J
=-
Fig 4.93 Gráfico del ejemplo 4.19
4.11 Potencia Mecánica.
Hasta ahora hemos calculado el trabajo
que hace una fuerza y su acumulación en
los cuerpos, pero no hemos prestado
atención a la rapidez con que ello ocurre.
En situaciones industriales es vital la
obtención de trabajo mecánico: levantar
objetos, trasladarlos, deformarlos,
cortarlo, molerlos, hacerlos girar, y
muchas otras, son actividades que
demandan trabajo.
Las primeras actividades de manufactura
obtuvieron el trabajo a partir de la
energía muscular de los humanos y luego
de los animales. Posteriormente fueron
aprovechadas las fuerzas de la naturaleza
con la construcción de molinos de agua y
de viento. Hoy en día se cuenta con
dispositivos muy sofisticados que
transforman energía en trabajo. A estos
dispositivos que en este curso son
considerados cajas negras, les
denominaremos muy genéricamente
motores.
En una planta, tan importante como
especificar el trabajo que necesitamos de
un motor es la tasa de trabajo que es
capaz de entregarnos en el tiempo. No
solo deseamos trasladar botellas en una
planta de embotellado, sino que deseamos
que circulen a una determinada velocidad
para que sea eficiente el proceso de
llenado, tapado, etiquetado y embalado.
Una magnitud física que da cuenta de
esta necesidad es la denominada Potencia
mecánica (P), definida como cantidad de
trabajo por unidad de tiempo.
En términos discretos:
mWPt
∆=
∆
La potencia instantánea será:
mdWPdt
=
Cuyas unidades serán:
En el SI: [ ] [ ]JP Watts
⎡ ⎤= =⎢ ⎥⎣ ⎦
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 180
En honor del escocés James Watt, cuyo
trabajo en la eficiencia de las máquinas
de vapor y su industrialización en
sociedad con el industrial inglés Matthew
Boulton provocó una gran revolución en la
industria.
A raíz de la idea de Thomas Savery de
estandarización de la potencia en función
de la rapidez de realizar trabajo de un
caballo, fue el propio Watt quien
determinó que eran capaces de realizar
un trabajo de 360 libras fuerza pie por
cada segundo, aunque lo aumentó en 50%
por razones de estrategia comercial para
la venta de sus máquinas. Esta unidad que
fue denominada HP (Horse Power),
equivale entonces a 550 lbfuerza pies
o
a 746Watt.
Desgraciadamente la unidad HP está tan
enraizada en la cultura industrial que aún
pasará algún tiempo en dejar de usarse en
su argot.
En Francia se desarrolló una idea
equivalente, definiendo un caballo de
vapor (CV) como 746W.
A pesar de que estas unidades son
todavía usadas en países de habla inglesa
o francesa, y en aquellos que compran
maquinaria de ellos cuyas
especificaciones técnicas las usan, están
en retirada bajo la atenta mirada de la
Conferencia General de Pesas y Medidas,
quien los conmina a establecer sus
magnitudes dentro de lo definido en el
Sistema Internacional de Unidades.
Una unidad muy extendida para medir la
energía eléctrica consumida ha sido
diseñada a partir de la unidad del SI de
potencia: se denomina un Kwatt-hora a la
energía eléctrica consumida durante una
hora, por un sistema cuya potencia es de
1 Kwatt; equivale al trabajo realizado por
un motor cuya potencia sea de 1Kw, o la
energía consumida por una ampolleta en
10 horas si su potencia es de 100W.
La equivalencia con el Joule es:
1Kwh=(103W)(3600s)=3,6x106J.
En términos generales, se compra energía
a las compañías distribuidoras de
electricidad, quienes la miden en Kwhora.
Esto es muy práctico, puesto que
conocemos las potencias de nuestros
aparatos de calefacción e iluminación, así
como de los artefactos
electrodomésticos, de manera que es muy
sencillo calcular el valor de la factura
mensual por ese concepto.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 181
Se puede relacionar la potencia y la
velocidad de una manera muy sencilla y
conveniente, pues:
dW F dr drP F F vdt dt dt
•= = = • = •
r r rr r r
En términos discretos, si se mueve
rectilíneamente en x:
m xW Fcos x xP Fcos F vt t t
∆ θ∆ ∆= = = θ =
∆ ∆ ∆
Donde Pm es la potencia media, Fx es el
módulo de la fuerza si está hecha en la
misma dirección que la velocidad, de lo
contrario, será la componente de ella en
esa dirección y v es el módulo de la
velocidad.
Ejemplo 4.20. Determine la potencia
que necesita un automóvil de masa
1000Kg para subir una pendiente inclinada
en 30º con una rapidez constante de
36 Kmh
. Considere que la fuerza de
resistencia al movimiento producto del
roce de los neumáticos y el pavimento y
del viento con la carrocería es de 800 N.
Solución:
El diagrama de cuerpo libre de la figura
muestra las fuerzas que participan.
30º
y
x
P
30º
N
FR
FP
Fig 4.94 Diagrama de cuerpo libre para ejemplo 4.20.
Aquí PFr
es la reacción a la fuerza que las
ruedas hacen hacia atrás sobre el
pavimento. Este reacciona y ejerce una
fuerza sobre el automóvil hacia delante.
RFr
es la suma de todas las fuerzas que se
oponen al movimiento. Como veremos en
otro curso, estas son la fuerza con que el
aire afecta a la carrocería y depende
entre otras cosas, de su forma y de la
velocidad con que se mueve (Newton
descubrió que las fuerzas de roce viscoso
de un fluido son directamente
proporcionales al cuadrado de la
velocidad), y la fuerza de roce entre
pavimento y ruedas, que es una fuerza de
roce estático, pues al roto trasladarse la
velocidad de traslación del punto de
apoyo de las ruedas se compensa con su
velocidad de rotación (este efecto se
visualiza bien cuando observamos las
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 182
orugas de un tanque que están en
contacto con el piso).
El motor proporciona a las ruedas la
capacidad de ejercer fuerzas sobre el
pavimento, mediante un complejo juego de
trasmisiones mecánicas (en las que se
pierde parte importante de su potencia)
de tal manera que se puede calcular la
potencia desarrollada por PFr
para estimar
la que un auto necesita para subir la
cuesta.
En consecuencia:
x P RF F -F -mgsen30º 0Σ = = (1)
Porque la velocidad es constante (a=0)
x P RF F -F -mgsen30º 0Σ = = (2)
de (1)
FP=FR+mgsen30º
FP=800N +(1000Kg)(10 2ms
)(0,5)
FP = 850N
Por tanto la potencia será:
Pm=Fv=(850N)(40 Kmh
)
Pm= (850N)[36( m3,6s
)]=8500W
En HP, la potencia media será:
Pm=8500W=8500 HP746
⎡ ⎤⎢ ⎥⎣ ⎦
=11HP
Considerando que los automóviles
standard hoy desarrollan potencias de
alrededor de 80HP o más, esto no es una
dificultad para ellos.
4.12 Conservación de la energía.
Los principios de conservación son
probablemente las ideas teóricas más
importantes de la física. Si una magnitud
física permanece constante en un sistema
a pesar de los cambios que existan en su
interior, la convierte en una magnitud
fundamental. Por ello los físicos han
destinado parte importante de su vida a
buscarlas.
Hoy se estima como piedras angulares de
la física los principios de conservación de
la energía y de la cantidad de movimiento.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 183
4.12.1 Conservación de la energía mecánica.
A pesar de que el principio de
conservación de la energía escapa
largamente de las denominadas energías
mecánicas que hemos estado estudiando,
es posible restringirlo para ellas,
enunciándolo como:
“en un sistema aislado la energía mecánica
total en un sistema aislado permanece
constante”. Esto significa que las
energías pueden cambiar de formas
transformándose unas en otras, pero sin
alterar su suma total.
Esto es verdad absoluta si el sistema es
el universo.
En general, consideraremos a un sistema
conservativo si las fuerzas que actúan en
él, son conservativas (como el peso y la
fuerza restauradora de los resortes), es
decir, aquellas que no dependen del
camino, produciendo que el trabajo neto
en un camino cerrado es cero.
Adicionalmente, en ellas el trabajo
provoca solo un cambio en la energía
potencial como hemos visto en el caso de
las fuerzas conservativas peso y elástica.
En cambio un sistema es disipativo si
actúan en él fuerzas disipativas (como las
fuerzas de roce), es decir, fuerzas que
dependen del camino, produciendo que el
trabajo neto en un camino cerrado sea
distinto de cero. En el caso del roce,
parte de la energía del sistema se
perderá en calor migrando a otro sistema.
4.12.2 Sistemas conservativos.
La energía mecánica se define como la
suma de las energías cinética y potencial
de un cuerpo.
EM= K+U
Por tanto el principio de conservación de
la energía mecánica puede enunciarse
como:
EM= K+U=constante
O, lo que es lo mismo:
∆EM=0
Consideremos un cuerpo que es lanzado
verticalmente hacia arriba con velocidad
de magnitud v0. La única fuerza que actúa
sobre él es el peso por tanto está
moviéndose en un sistema conservativo.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 184
En ese momento tiene la máxima rapidez
del movimiento (K máxima) pero la mínima
altura, si consideramos ese punto como
referencia (U=0).
En la medida que sube su rapidez
disminuye, (disminuye K) pero su posición
respecto del centro de gravedad de la
tierra aumenta (aumenta U).
Cuando su velocidad es nula (K=0) alcanza
su máxima altura (U máximo), invierte su
movimiento y empieza a aumentar su
rapidez (K aumenta) pero disminuye su
altura (U disminuye).
En todo momento debe cumplirse que:
U+K=EM=cte.
En la figura se observa una gráfica de la
evolución de ambas formas de energía en
función de la altura.
K,U
t0 t1 t2 t3 t4
K
U
Fig 4.95 Comportamiento de U y K en un lanzamiento vertical hacia arriba
En t1 y t3 U=K, en cualquier otro tiempo
son distintas, pero siempre suman igual.
En t0 U es mínima (cero) y K máxima
sobre el nivel de referencia. A partir de
t4, K sigue aumentando, pues está
moviéndose bajo el nivel de referencia.
Note que después de t4, U se hace
negativa. Se dice entonces que está en
un pozo de energía potencial, lo que se
puede evitar simplemente escogiendo un
nivel de referencia más bajo.
En t2 K es mínima (cero) mostrando el
lugar de inversión de la dirección del
movimiento; allí U es máxima pues ya no
sigue subiendo.
Ejemplo 4.21. Se lanza una piedra de
masa 1Kg hacia arriba con una rapidez de
20 ms
. Calcular energía cinética y
potencial al lanzarse, 1 segundo después
de lanzada, cuando llega a la altura
máxima y cuando regresa al nivel del
lanzamiento.
Solución:
Al lanzarse tiene energía cinética
solamente si consideramos ese punto
como referencia.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 185
K0=½mv02=½(1Kg)(20 m
s)2=200J
Esa es la energía mecánica de la piedra,
que debe conservarse durante todo su
movimiento
EM=K0+U0=200J
1 segundo después su rapidez será:
v1=v0–gt=20 ms
-(10 ms
)(1s)=10 ms
Por tanto
K1=½mv12=½(1Kg)(10 m
s)2=50J
Su altura será:
X1=v0t–½gt2=(20 ms
)(1s)–½(10 2ms
)(1s)2
X1=15m
Por tanto:
U1=mgh=(1Kg)(10 2ms
)(15m)=150J
Entonces:
EM1=K1+U1=50J+150J=200J
Como era de esperarse, pues EM0= M1.
Cuando llega a su altura máxima entonces
v2=0 por tanto toda su energía es
potencial, de modo que allí
EM2=U2=200J.
Cuando regresa al nivel de lanzamiento U3
se hace cero y K3 debe ser la única
energía, por tanto:
EM3=K3=200J.
Lo que es razonable pues como vimos en
cinemática, la rapidez con que llega de
vuelta al nivel de lanzamiento vertical es
la misma.
No solo para los movimientos sujetos a la
fuerza gravitatoria siguen estos
comportamientos, por supuesto.
La figura siguiente muestra el
comportamiento de las energías potencial
elástica y energía cinética de un cuerpo
unido a un resorte en función de la
posición.
K,U
-x1 x2= 0 x3
K
U
x
Fig 4.96 Comportamiento de U y K en un cuerpo

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 186
El resorte es liberado en –x1, lugar donde
tiene U máximo y K mínimo (cero) y se
mueve hacia la derecha disminuyendo su
U y amentando K. Cuando llega a x2, U se
hace cero pues es la referencia (largo
natural) allí la velocidad es máxima así
que K es máxima. A partir de ese lugar,
la fuerza invierte su dirección
disminuyendo su velocidad (K disminuye)
pero empieza a aumentar su posición
hacia la derecha (U aumenta) hasta que
llega a x3. En ese lugar la velocidad se
hace cero nuevamente (K=0) y se invierte
la dirección del movimiento. Allí se tiene
nuevamente U máximo y empieza el
camino de retorno hacia –x1, lugar que
alcanzará si no existen fuerzas
disipativas.
Si solo existe la fuerza restauradora del
resorte, entonces el movimiento será
oscilatorio alrededor de x2.
La energía mecánica en todo momento
será igual. El sistema es conservativo.
Ejemplo 4.22. Una piedra es lanzada
verticalmente con una honda provista de
un resorte de constante elástica
k=500 Ns
. Si el elástico recorre 10cm
antes de soltar la piedra, calcular:
a) La rapidez con que suelta la piedra y
b) La altura máxima que alcanza.
Solución:
a) El elástico le hará a la piedra un
trabajo: We=½k∆x2. La piedra será
lanzada con una velocidad v0.
Si en el lugar que se suelta la piedra
escogemos nuestra referencia, entonces
allí la energía será solo cinética:
K0=½mv02.
Todo el trabajo elástico se transferirá a
la piedra en forma de energía cinética,
por tanto:
½ k∆x2 =½mv02
De donde:
( )22
0 2
N500 0,1mk x msv 10
m 0,5Kg s
⎛ ⎞⎜ ⎟∆ ⎝ ⎠= = =
b) En la máxima altura K=0, toda la
energía es potencial:
EM=U=mghmax

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 187
Y es igual que la cinética inicial, pues la
fuerza es conservativa:
mghmax=½mv02
2
2 20 0
max
2
m10mv v sh 5mm2gm 2g 2 10s
⎛ ⎞⎜ ⎟⎝ ⎠= = = =⎛ ⎞⎜ ⎟⎝ ⎠
Note que es independiente de la masa, y
la ecuación es igual que la encontrada en
cinemática.
4.12.3 Sistemas no conservativos.
Un caso más general que el anterior es
aquel en que participan fuerzas
conservativas y no conservativas
(disipativas).
A pesar de que la relación general puede
encontrarse deductivamente, pues la
diferencia entre las energías inicial y
final en un sistema deben ser igual que la
energía perdida a través del trabajo
hecho por las fuerzas disipativas u otras
formas de pérdida no mecánicas, es
conveniente encontrar esta relación a
través de un ejemplo.
Consideremos para ello a un cuerpo cuya
masa es m, que desliza subiendo por un
plano inclinado θº por medio de una
fuerza paralela al plano, como se muestra
en la figur, donde también se muestran
las fuerzas que participan.
Entre el plano y el cuerpo existe roce; el
coeficiente de roce cinético es µk.
θº
y
x
P
θº
N
FR
F
Fig 4.97 Cuerpo subiendo un plano sujeto a fuerzas conservativas y no conservativas.
Si el cuerpo pasa por el punto (0) con una
rapidez v0, que se encuentra a una altura
y1 respecto de un punto mas abajo que la
base del plano, entonces tendrá allí
energía cinética y potencial. Si la fuerza
Fr
es constante y paralela al plano, y con
una magnitud convenientemente grande,
entonces el movimiento será
uniformemente acelerado con aceleración
positiva.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 188
L
y1
y2
v1
v2
θ
y = 0
Fig 4.98 Consideraciones cinemáticas.
Cuando llegue a la altura y2 su rapidez
habrá aumentado hasta v2 y habrá
recorrido L metros.
Si aplicamos segunda ley de Newton al
cuerpo, se tiene:
x kF F-mgsen -f maΣ = θ = (1)
yF N-mgcos 0Σ = θ = (2)
de (1), se tiene:
kF-mgsen -f maθ =
Pero de la figura 4.82 resulta
( )2 1y -ysen
Lθ =
Además, como es un MUAR, se puede
calcular su aceleración con la función v(x):
2 22 1v v 2aL= +
De donde:
2 22 1 v - va 2 L
=
Reemplazando todo en (1)
( ) 2 22 1 2 1
ky -y v - vF-mg -f m
L 2L⎛ ⎞
= ⎜ ⎟⎝ ⎠
Si multiplicamos la expresión por L:
( )2 2
2 12 1 k
v -vFL-mg y y -fL m2
⎛ ⎞− = ⎜ ⎟
⎝ ⎠
Donde:
FL es el trabajo realizado por F,
mg(y2–y1) es el cambio en la energía
potencial,
fkL es el trabajo realizado por la fuerza
de roce y
2 22 1v -vm2
⎛ ⎞⎜ ⎟⎝ ⎠
es el cambio en la energía
cinética.
Entonces la expresión (3) se puede
escribir como:
WF -∆U–Wfk=∆K
O, lo que es lo mismo:
WF=∆K+∆U+Wfk
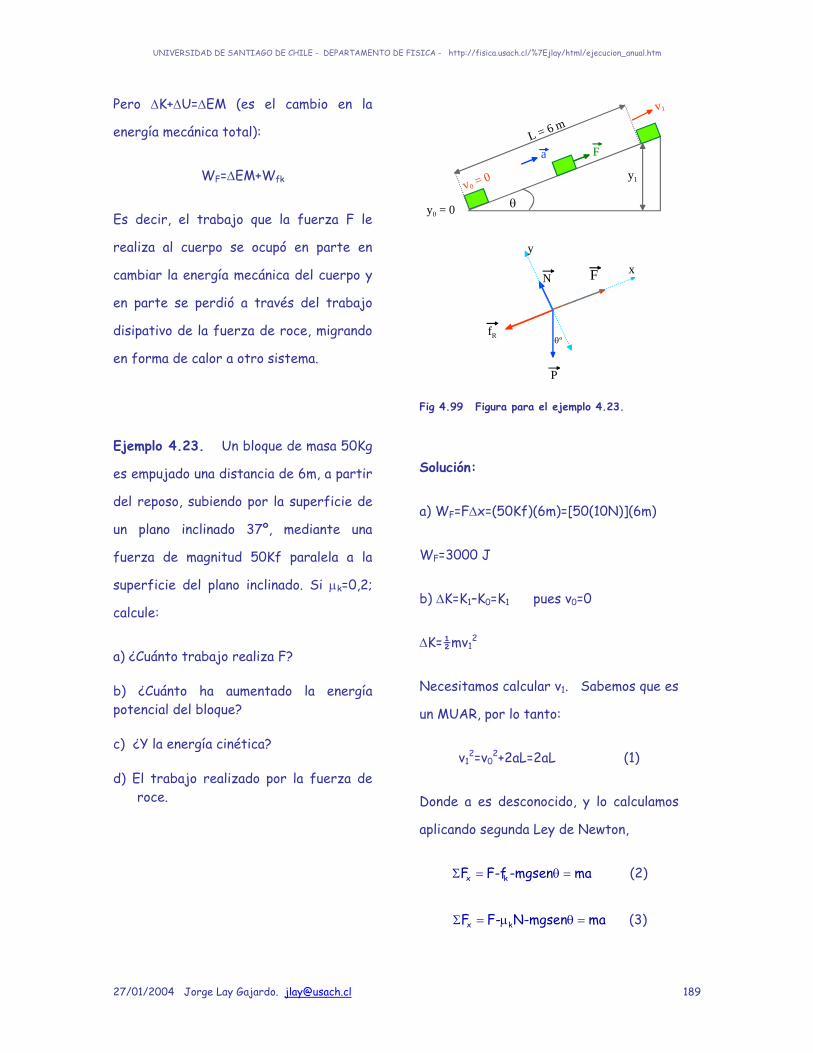
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 189
Pero ∆K+∆U=∆EM (es el cambio en la
energía mecánica total):
WF=∆EM+Wfk
Es decir, el trabajo que la fuerza F le
realiza al cuerpo se ocupó en parte en
cambiar la energía mecánica del cuerpo y
en parte se perdió a través del trabajo
disipativo de la fuerza de roce, migrando
en forma de calor a otro sistema.
Ejemplo 4.23. Un bloque de masa 50Kg
es empujado una distancia de 6m, a partir
del reposo, subiendo por la superficie de
un plano inclinado 37º, mediante una
fuerza de magnitud 50Kf paralela a la
superficie del plano inclinado. Si µk=0,2;
calcule:
a) ¿Cuánto trabajo realiza F?
b) ¿Cuánto ha aumentado la energía potencial del bloque?
c) ¿Y la energía cinética?
d) El trabajo realizado por la fuerza de roce.
L = 6 m
y0 = 0
y1v0 = 0
v1
θ
y
x
P
θº
N
fR
F
Fa
Fig 4.99 Figura para el ejemplo 4.23.
Solución:
a) WF=F∆x=(50Kf)(6m)=[50(10N)](6m)
WF=3000 J
b) ∆K=K1–K0=K1 pues v0=0
∆K=½mv12
Necesitamos calcular v1. Sabemos que es
un MUAR, por lo tanto:
v12=v0
2+2aL=2aL (1)
Donde a es desconocido, y lo calculamos
aplicando segunda Ley de Newton,
x kF F-f -mgsen maΣ = θ = (2)
x kF F- N-mgsen maΣ = µ θ = (3)
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 190
yF N-mgcos 0Σ = θ = (4)
de (4): N=mgcosθ
Reemplazando en (1),
F–mkmgcosθ-mgsenθ=ma
De donde:
( )
k
k
F - mgcos - mgsenam
Fa g cos senm
µ θ θ=
= − µ θ + θ
( )( )2500N ma - 10 0,2 0,8 0,650Kg s
⎛ ⎞= +⎡ ⎤⎜ ⎟ ⎣ ⎦⎝ ⎠
2ma 2,4s
=
en (1) v12=(2)(6m)(2,4 2
ms
)=28,82
2ms
Por tanto:
∆K=½(50Kg)(28,82
2ms
)=720J
c) Si consideramos la base del plano como
referencia, entonces:
∆U=U1-U0=U1=mgh1=mg(Lsenθ)
∆U= (50Kg)(10 2ms
)(6m)(0,6)=1800J
d) Sabemos que en caso de fuerzas
disipativas:
WF=(∆U+∆K)+Wfk
Por tanto:
Wfk=WF–(∆U+∆K)=3000J–(1800J+720J)
Wfk=480 J
Note que en la expresión
WF=(∆U+∆K)+Wfk el trabajo se ha
considerado negativo, por tanto el
resultado debe interpretarse como
negativo.
Lo mismo se obtendría si lo calculamos
como:
Wfk=fkLcos180º=µkNL(-1)
Wfk=-mkmgcosθL
Wfk=-(0,2)(50Kg)(10 2ms
)(0,8)(6m)
Wfk=-480J
4.13 Choques unidimensionales y los teoremas de la conservación.
El teorema de la conservación de la
cantidad de movimiento es otro de los
pilares fundamentales de la física.
De acuerdo a lo que sabemos, la segunda
ley de Newton puede escribirse como:
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 191
I p= ∆r r
Donde Ir
es el impulso que recibe un
cuerpo y p∆r
es el cambio en su cantidad
de movimiento.
Ahora que contamos con el concepto de
energía, podemos estudiar más
apropiadamente las colisiones.
La ecuación anterior implica que si no
existen fuerzas externas, no existe
cambio en la cantidad de movimiento del
sistema. En otras palabras, puede
cambiar la cantidad de movimiento de
cada uno de los cuerpos presentes, pero
su suma se mantiene inalterable en el
tiempo.
Ahora sabemos que si bien es cierto que
una colisión no implica un cambio en la
cantidad de movimiento del sistema
(siempre y cuando no exista intercambio
de materia entre el sistema y el
ambiente), bien puede ser que en el
proceso se obtenga una pérdida de
energía si existen fuerzas no
conservativas.
En consecuencia, podemos dividir a los
choques entre aquellos que son
perfectamente elásticos (conservan su
energía) y perfectamente inelásticos (no
conservan su energía). Ambos choques son
ideales y no se observan entre cuerpos
macroscópicos (choques perfectamente
elásticos se observan entre átomos y
partículas subatómicas), aunque existen
numerosos ejemplos que se pueden
considerar como tales, como hemos dicho.
Los choques reales pueden dividirse en
elásticos e inelásticos, en ninguno de los
cuales se conserva la energía.
Como una forma de diferenciarlos, se
harán observaciones teóricas y
experimentales.
Si los cuerpos resultan separados
después de la colisión, el choque se llama
elástico; si además el sistema conserva su
energía, se llama perfectamente elástico.
En ellos no existe deformación residual
en los cuerpos.
Si los cuerpos resultan unidos se llama
inelástico, si la deformación resultante es
igual que la máxima obtenida en el
proceso, se denomina perfectamente
elástica.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 192
4.13.1 Choques perfectamente elásticos
Para encontrar la forma matemática del
coeficiente de restitución, estudiaremos
un choque perfectamente elástico.
Sabemos que en ellos se deben conservar
ambos teoremas de la conservación y la
forma no debe alterarse, es decir la
razón entre la forma pre y postcolisión
debe ser igual a 1.
La siguiente figura presenta el caso más
sencillo de este choque, constituido por
dos esferas (que se comportan como
partículas) que están moviéndose en un
plano paralelo a la superficie de la tierra
de forma tal que ningún evento les
produce un cambio en su energía potencial
gravitatoria.
v1 v2m1 m2
m1 m2
u1 u2m1 m2
Fig 4.100 Esferas de masas m1 y m2 experimentando una colisión perfectamente elástica. No hay roce con la superficie.
Antes del choque, las esferas tienen
velocidades 1vr y 2vr respectivamente.
Después del choque, tienen velocidades
1ur y 2ur .
Debe conservarse la cantidad de
movimiento, por tanto:
1 1 2 2 1 1 2 2m v m v m u m u+ = +r r r r (1)
También debe conservarse su energía, de
modo que:
2 21 11 1 1 1 2 2 2 22 2m v m gh m v m gh+ + + =r r
2 21 11 1 1 1 2 2 2 22 2m u m gh´ m u m gh´= + + +r r
Donde todas las alturas son iguales, por
tanto:
2 2 2 21 1 1 11 1 2 2 1 1 2 22 2 2 2m v m v m u m u+ = +r r r r
Si multiplicamos por 2, tenemos:
2 2 2 21 1 2 2 1 1 2 2m v m v m u m u+ = +r r s r (2)
Las ecuaciones (1) y (2) pueden
reordenarse del modo siguiente:
1 1 1 1 2 2 2 2m v -m u m u -m v=r r r r
Todos los vectores tienen igual dirección,
por tanto, se puede escribir:
1 1 1 1 2 2 2 2m v -m u m u -m v=
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 193
De donde:
( ) ( )1 1 1 2 2 2m v -u m u -v= (3)
Mientras que (2) queda como:
2 2 2 21 1 1 1 2 2 2 2m v m u m u -m v− =
( ) ( )2 2 2 21 1 1 2 2 2m v u m u -v− =
( )( ) ( )( )1 1 1 1 1 2 2 2 2 2m v u v u m u -v u v− + = + (4)
Si dividimos (4) y (3), tenemos:
( )( )( )
( )( )( )
1 1 1 1 1 2 2 2 2 2
1 1 1 2 2 2
m v u v u m u v u vm v u m u v
− + − +=
− −
1 1 2 2v u u v+ = +
De donde:
(v1–v2)=- (u1– u2) (5)
El término de la izquierda es la velocidad
relativa de una esfera respecto de la
otra, antes del choque; el signo positivo
muestra que es una velocidad de
acercamiento. El término de la derecha es
la velocidad relativa entre las esferas
después del choque; el signo negativo
muestra que es una velocidad de
alejamiento.
La ecuación (5) indica que las velocidades
relativas en un choque perfectamente
elástico se mantienen constantes.
Ejemplo 4.24. Una partícula de masa
m1=5Kg moviéndose con rapidez v1=2 ms
choca con una partícula de masa m2=8Kg
inicialmente en reposo. Determinar la
rapidez de cada partícula después del
choque si es perfectamente elástico.
Solución:
Debe conservar la cantidad de
movimiento:
m1v1+m2v2=m1u1+m2u2 (1)
Puesto que es un choque unidimensional.
Debe conservar la energía mecánica. Si
suponemos que el evento completo ocurrió
en un plano equipotencial, se tiene:
½m1v12+½m2v2
2= ½m1u12+½m2u2
2
Multiplicando por 2,
m1v12+m2v2
2=m1u12+m2u2
2 (2)
Reemplazando los valores en la ecuación
(1), se tiene:
(5Kg)(2)+(8)(0)=(5)u1+(8)u2
10=5u1+8u2 (3)
Y en la ecuación (2):
(5Kg)(4)+(8)(0)=(5)u12+(8)u2
2
20=5u12+8u2
2 (4)
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 194
De donde:
u1´=2 ms
u2´=0 ms
u1´´=-0,46 ms
u2´´=1,39 ms
El primer juego de soluciones es
imposible, porque el cuerpo 2 no puede
quedar en reposo y menos que 1 pase a
través de 2.
El segundo juego de soluciones es el
correcto, e indica que el cuerpo 1 se
devuelve con rapidez de 0,46 ms
y el
cuerpo 2 se mueve hacia la derecha con
rapidez de 1,39 ms
.
4.13.2 Coeficiente de restitución.
Se define como coeficiente de
restitución (e) al módulo del cuociente
entre las velocidades relativas antes y
después del choque. Para choques en una
dimensión:
1 2
1 2
(u u )e(v v )− −
=−
(6)
Este coeficiente da cuenta del
porcentaje de deformación permanente
de los cuerpos a causa del evento.
En el caso de los choques perfectamente
elásticos este cuociente es 1, como se
observa en la ecuación (5).
Note que si los choques son
perfectamente inelásticos siguen juntos y
las velocidades después del choque son
iguales (u1=u2), por lo que e=0; es decir,
la deformación máxima que experimentan
en el evento, es la definitiva; se
recuperan 0%.
4.13.3 Choques perfectamente inelásticos (plásticos).
Son aquellos en los que los cuerpos siguen
juntos después de colisionar.
Aquí no se conserva la energía, pero se
conserva la cantidad de movimiento.
En la figura siguiente se tienen dos
esferas que se comportan como
partículas, que se mueven hacia la
derecha, chocan y siguen juntas. Se
mueven en un plano equipotencial sin roce.
Entonces se tiene que:
1 1 2 2 1 1 2 2m v m v m u m u+ = +r r r r
Pero 1 2u u u= =r r r
( )1 1 2 2 1 2m v m v m m u+ = +r r r

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 195
De donde:
1 1 2 2
1 2
m v m vum m
+=
+
r rr
v1 v2m1 m2
m1 m2
u1 = u2m1 m2
Fig 4.101 Dos esferas chocando inelásticamente.
Note que si consideramos el coeficiente
de restitución:
1 2
1 2
(u u )e(v v )− −
=−
=0 pues u1=u2.
En resumen, se tiene que los choques se
pueden clasificar de acuerdo a la tabla
siguiente.
Clasificación de choques. Choque ∆EM> ∆P>0 e siguen
Perfect. elástico si si 1 Separados Inelástico no si 0<e<1 juntos Perfect. inelástico no si 0 juntos
Ejemplo 4.25. En el ejemplo 4.24,
determine la rapidez después del choque
si es perfectamente inelástico.
Determine además, la variación de
energía cinética del sistema.
Solución:
Si el choque es perfectamente inelástico,
entonces:
1 1 2 2
1 2
m v m vu m m
+=
+
r rr
( )1 1
1 2
m 5 Kg 2m v msu 0,77m m 5Kg 8Kg s
⎛ ⎞⎜ ⎟⎝ ⎠= = =
+ +
Antes del choque, la energía cinética del
sistema es la energía cinética del cuerpo
1:
k1=½m1v12=½(5Kg)(2 m
s)2 =10J
Después del choque:
K1´=½(m1+m2)u2=½(5Kg+8Kg)(0,77 ms
)2
K1´=3,85J
Por tanto:
∆K=-6,15J
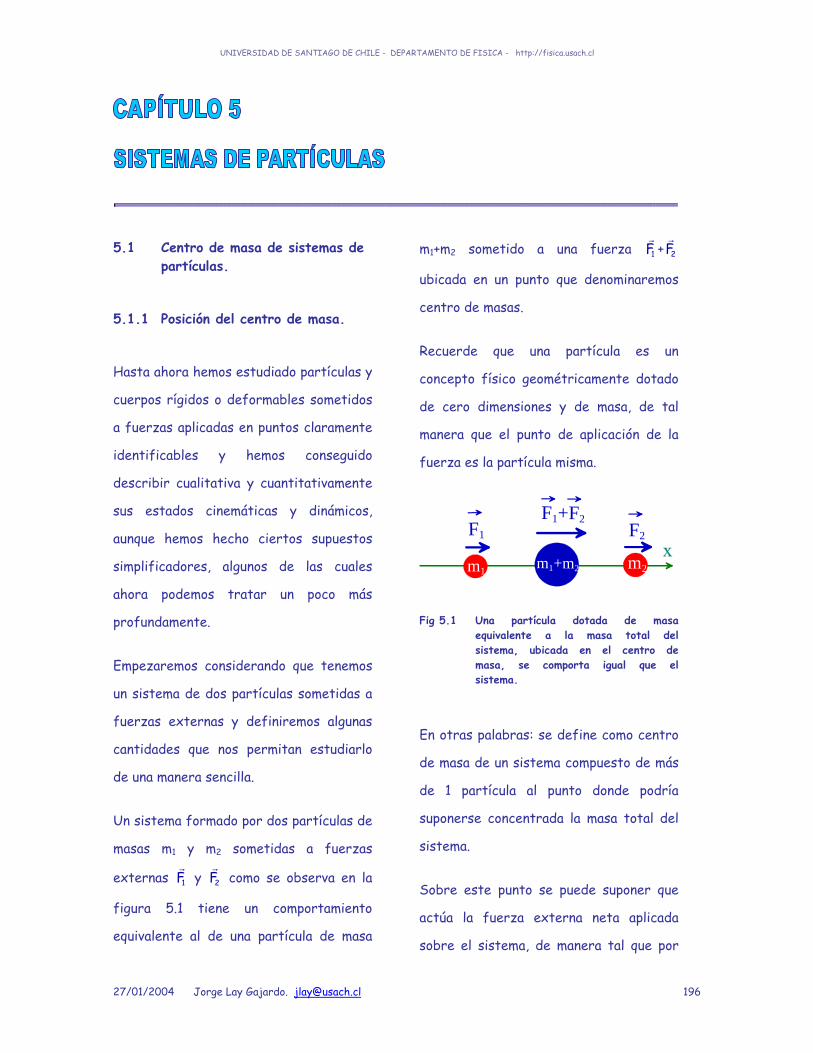
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl
27/01/2004 Jorge Lay Gajardo. [email protected] 196
5.1 Centro de masa de sistemas de partículas.
5.1.1 Posición del centro de masa.
Hasta ahora hemos estudiado partículas y
cuerpos rígidos o deformables sometidos
a fuerzas aplicadas en puntos claramente
identificables y hemos conseguido
describir cualitativa y cuantitativamente
sus estados cinemáticas y dinámicos,
aunque hemos hecho ciertos supuestos
simplificadores, algunos de las cuales
ahora podemos tratar un poco más
profundamente.
Empezaremos considerando que tenemos
un sistema de dos partículas sometidas a
fuerzas externas y definiremos algunas
cantidades que nos permitan estudiarlo
de una manera sencilla.
Un sistema formado por dos partículas de
masas m1 y m2 sometidas a fuerzas
externas 1Fr
y 2Fr
como se observa en la
figura 5.1 tiene un comportamiento
equivalente al de una partícula de masa
m1+m2 sometido a una fuerza 1Fr
+ 2Fr
ubicada en un punto que denominaremos
centro de masas.
Recuerde que una partícula es un
concepto físico geométricamente dotado
de cero dimensiones y de masa, de tal
manera que el punto de aplicación de la
fuerza es la partícula misma.
F2
m2m1+m2
F1
m1
F1+F2
Fig 5.1 Una partícula dotada de masa equivalente a la masa total del sistema, ubicada en el centro de masa, se comporta igual que el sistema.
En otras palabras: se define como centro
de masa de un sistema compuesto de más
de 1 partícula al punto donde podría
suponerse concentrada la masa total del
sistema.
Sobre este punto se puede suponer que
actúa la fuerza externa neta aplicada
sobre el sistema, de manera tal que por

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 197
complejo que sea el movimiento, puede
describirse a través del movimiento de su
centro de masa.
La ubicación del centro de masas en el
caso de que las partículas tengan igual
masa es simplemente el centro
geométrico de la línea que las une. Su
posición viene dada por el vector de
posición respecto de un sistema de
referencia arbitrariamente definido y su
comportamiento en el tiempo permite
describir el movimiento del sistema con
las mismas definiciones que hemos
adoptado para el caso de una partícula.
En el caso en estudio, podemos suponer
que las partículas se ubican en el eje x de
un sistema de coordenadas cartesianas,
de tal manera que si ubicamos el origen a
la izquierda de la partícula 1, los vectores
de posición serán 1rr y 2r
r
respectivamente, como se observa en la
figura 5.2, donde se han dibujado en
líneas separadas por razones didácticas.
También se identifica la posición del
centro de masa cmrr .
m2m1+m2m1
r1 r2
0
rcm
Fig 5.2 Posición de las partículas y del centro de masa del sistema, respecto de un sistema de referencia arbitrario.
Entonces se define la posición del centro
de masas como:
1 1 2 2cm
1 2
m r m rrm m
+=
+
r rr
Donde:
1 1 2 2cm
1 2
m x m xxm m
+=
+
si x1=2m, x2=8m, m1=m2=6Kg, entonces
( )( ) ( )( )cm
6Kg 2m 6Kg 8mx 5m
6Kg 6Kg+
= =+
Justo a la mitad de la distancia existente
entre las partículas, es decir 3m a la
derecha de la partícula 1, como intuíamos.
Note que si las masas no son iguales, la
posición del c.m. varía. Por ejemplo, si
m2=9Kg entonces xcm=5,6m; es decir
ahora se ubica 5,6m a la derecha de la
partícula 1. En la medida que una partícula

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 198
tiene más masa, el centro de masa del
sistema se va acercando hacia ella.
Le recomendamos que calcule el centro de
masa del sistema para distintos valores
de m2 creciendo a razón de 10Kg cada
vez.
Si el sistema estuviera compuesto de n
partículas cuyas masas fueran diferentes,
la ubicación del punto en donde se puede
suponer concentrada su masa será:
i n
i i1 1 2 2 i 1
cm i n1 2
ii 1
mrm r m r ......rm m ..... m
=
==
=
+ += =
+ +
∑
∑
rr r
r
si el sistema de partículas está en el
espacio coordenado cartesiano, entonces
sus componentes serán:
i n
i i1 1 2 2 i 1
cm i n1 2
ii 1
mxm x m x ......xm m ..... m
=
==
=
+ += =
+ +
∑
∑
i n
i i1 1 2 2 i 1
cm i n1 2
ii 1
mym y m y ......ym m ..... m
=
==
=
+ += =
+ +
∑
∑
i n
i i1 1 2 2 i 1
cm i n1 2
ii 1
mzm z m z ......zm m ..... m
=
==
=
+ += =
+ +
∑
∑
Ejemplo 5.1
Localice el centro de masa de las
partículas de la figura 5.3, cuyas masas
son: mA=20g; mB=30g; mC=30g y mD=40g.
x
z
y
12 cm8 cm
10 cm
Fig 5.3 Dibujo para ejemplo 5.1
Solución:
De acuerdo a la figura tenemos:
( )Aˆˆ ˆr 0i 12j 10k cm= + +
r
( )Bˆˆ ˆr 0i 12j 0k cm= + +
r
( )Cˆˆ ˆr 8i 12j 0k cm= + +
r
( )Dˆˆ ˆr 0i 0j 0k cm= + +
r
Por lo tanto:
( )( )cm
30g 8cmx 2cm
120g= =
( )( ) ( )( ) ( )( )cm
20g 12cm 30g 12cm 30g 12cmy
120g+ +
=
cmy 8cm=
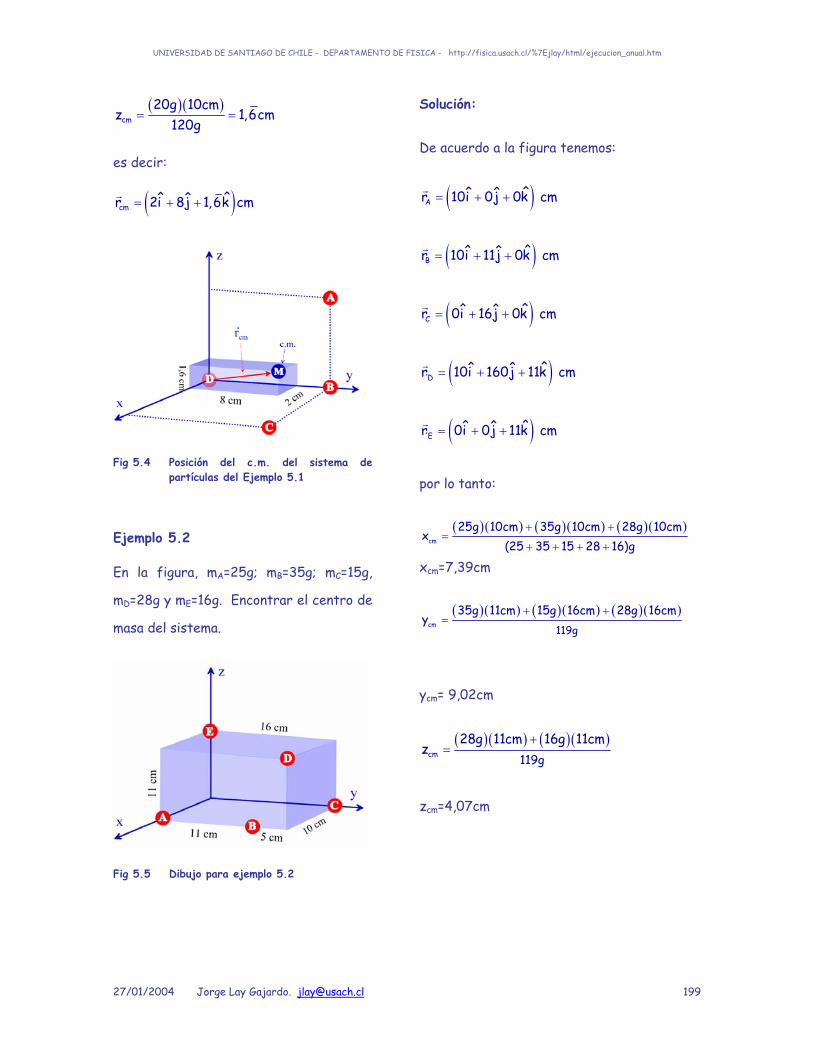
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 199
( )( )cm
20g 10cmz 1,6cm
120g= =
es decir:
( )cmˆˆ ˆr 2i 8j 1,6k cm= + +
r
Fig 5.4 Posición del c.m. del sistema de partículas del Ejemplo 5.1
Ejemplo 5.2
En la figura, mA=25g; mB=35g; mC=15g,
mD=28g y mE=16g. Encontrar el centro de
masa del sistema.
Fig 5.5 Dibujo para ejemplo 5.2
Solución:
De acuerdo a la figura tenemos:
( )Aˆˆ ˆr 10i 0j 0k cm= + +
r
( )Bˆˆ ˆr 10i 11j 0k cm= + +
r
( )Cˆˆ ˆr 0i 16j 0k cm= + +
r
( )Dˆˆ ˆr 10i 160j 11k cm= + +
r
( )Eˆˆ ˆr 0i 0j 11k cm= + +
r
por lo tanto:
( )( ) ( )( ) ( )( )cm
25g 10cm 35g 10cm 28g 10cmx
(25 35 15 28 16)g+ +
=+ + + +
xcm=7,39cm
( )( ) ( )( ) ( )( )cm 119g
35g 11cm 15g 16cm 28g 16cmy
+ +=
ycm= 9,02cm
( )( ) ( )( )cm 119g
28g 11cm 16g 11cmz
+=
zcm=4,07cm
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 200
5.1.2 Velocidad del Centro de masa
La velocidad con que se mueve el centro
de masa de un sistema de partículas es:
i n
i i1 1 2 2 i 1
cm i n1 2
ii 1
mvm v m v ......vm m ..... m
=
==
=
+ += =
+ +
∑
∑
rr r
r
donde:
ii i ii
dydr dx dz ˆˆ ˆv i j kdt dt dt dt
= = + +r
r
por tanto, sus componentes cartesianas
son:
i n
i xi1 x1 2 x2 i 1
xcm i n1 2
ii 1
mvm v m v ......vm m ..... m
=
==
=
+ += =
+ +
∑
∑
i n
i yi1 y1 2 y2 i 1
ycm i n1 2
ii 1
mvm v m v ......v
m m ..... m
=
==
=
+ += =
+ +
∑
∑
i n
i zi1 z1 2 z2 i 1
zcm i n1 2
ii 1
mvm v m v ......vm m ..... m
=
==
=
+ += =
+ +
∑
∑
5.1.3 Aceleración del Centro de masa
La aceleración del centro de masa de un
sistema de partículas es:
i n
i i1 1 2 2 i 1
cm i n1 2
ii 1
mam a m a ......am m ..... m
=
==
=
+ += =
+ +
∑
∑
rr r
r
donde:
22 2 2ii i i
i 2 2 2 2d yd r d x d z ˆˆ ˆa i j k
dt dt dt dt= = + +
rr
o,
yixi ziii
dvdv dvdv ˆˆ ˆa i j kdt dt dt dt
= = + +r
r
por tanto, sus componentes cartesianas
son:
i n
i xi1 x1 2 x2 i 1
xcm i n1 2
ii 1
mam a m a ......am m ..... m
=
==
=
+ += =
+ +
∑
∑
i n
i yi1 y1 2 y2 i 1
ycm i n1 2
ii 1
mam a m a ......a
m m ..... m
=
==
=
+ += =
+ +
∑
∑
i n
i zi1 z1 2 z2 i 1
zcm i n1 2
ii 1
mam a m a ......am m ..... m
=
==
=
+ += =
+ +
∑
∑

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 201
5.1.4 Centro de masa y movimiento de traslación.
Como se entiende intuitivamente, la
cinemática de un sistema de partículas es
sencilla una vez que se estudia a través
de una partícula que contiene la masa del
sistema, ubicada en el centro de masa del
sistema. El comportamiento en el tiempo
puede ser estudiado como lo hacíamos con
una partícula simple.
Por otro lado, lo verdaderamente
importante de la definición del centro de
masa de un sistema de partículas es que
relaciona su movimiento con la fuerza
externa al sistema.
Consideremos un sistema de partículas
cuyo movimiento es de traslación;
entonces por definición:
i n
i ii 1
cm i n
ii 1
mrr
m
=
==
=
=∑
∑
r
r
si consideramos que la masa del sistema
es:
i n
ii 1
m M=
=
=∑
entonces se puede escribir:
i n
cm i ii 1
M r mr=
=
= ∑r r
que se puede escribir como:
cm 1 1 2 2 n nM r m r m r ...... m r= + + +r r r r
si tomamos la primera derivada respecto
del tiempo, se tiene:
cm n21 2 n
1
dr drdrdrM m m ...... mdt dt dt dt
= + + +r rrr
es decir:
cm 1 1 2 2 n nMv m v m v ...... m v= + + +r r r r (*)
note que la expresión de la derecha
contiene la suma de la cantidad de
movimiento lineal de cada partícula del
sistema, es decir, la cantidad de
movimiento lineal del sistema de
partículas
SPr
, y en el lado izquierdo se tiene la
cantidad de movimiento lineal del centro
de masa cm cmP Mv=r r , por lo que entonces:
cm SP P=r r
es decir, el comportamiento de la
cantidad de movimiento lineal del centro
de masa de un sistema de partículas es
equivalente al comportamiento de la
cantidad de movimiento lineal del sistema.
Si tomamos la derivada de la ecuación (*)
tenemos:
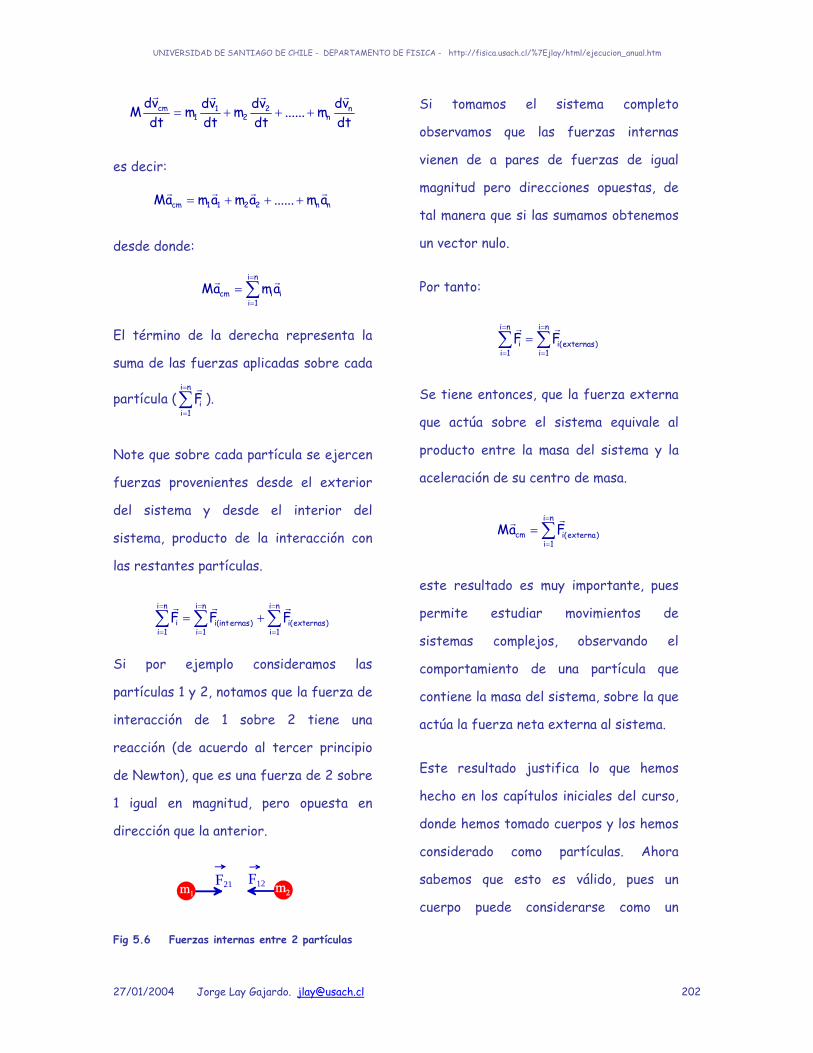
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 202
cm n1 21 2 n
dv dvdv dvM m m ...... mdt dt dt dt
= + + +r rr r
es decir:
cm 1 1 2 2 n nMa m a m a ...... m a= + + +r r r r
desde donde:
i n
cm i ii 1
Ma ma=
=
= ∑r r
El término de la derecha representa la
suma de las fuerzas aplicadas sobre cada
partícula (i n
ii 1
F=
=∑
r).
Note que sobre cada partícula se ejercen
fuerzas provenientes desde el exterior
del sistema y desde el interior del
sistema, producto de la interacción con
las restantes partículas.
i n i n i n
i i(internas) i(externas)i 1 i 1 i 1
F F F= = =
= = =
= +∑ ∑ ∑r r r
Si por ejemplo consideramos las
partículas 1 y 2, notamos que la fuerza de
interacción de 1 sobre 2 tiene una
reacción (de acuerdo al tercer principio
de Newton), que es una fuerza de 2 sobre
1 igual en magnitud, pero opuesta en
dirección que la anterior.
F12F21
Fig 5.6 Fuerzas internas entre 2 partículas
Si tomamos el sistema completo
observamos que las fuerzas internas
vienen de a pares de fuerzas de igual
magnitud pero direcciones opuestas, de
tal manera que si las sumamos obtenemos
un vector nulo.
Por tanto:
i n i n
i i(externas)i 1 i 1
F F= =
= =
=∑ ∑r r
Se tiene entonces, que la fuerza externa
que actúa sobre el sistema equivale al
producto entre la masa del sistema y la
aceleración de su centro de masa.
i n
cm i(externa)i 1
Ma F=
=
= ∑rr
este resultado es muy importante, pues
permite estudiar movimientos de
sistemas complejos, observando el
comportamiento de una partícula que
contiene la masa del sistema, sobre la que
actúa la fuerza neta externa al sistema.
Este resultado justifica lo que hemos
hecho en los capítulos iniciales del curso,
donde hemos tomado cuerpos y los hemos
considerado como partículas. Ahora
sabemos que esto es válido, pues un
cuerpo puede considerarse como un

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 203
sistema de partículas sometidas a los
principios de Newton.
Las siguientes figuras muestran cuerpos
moviéndose en el vacío bajo la acción de
fuerza neta externa nula (fig 5.7), y
fuerza neta externa igual al peso (fig 5.8
y 5.9).
En el primer caso la aceleración del
centro de masa es nula y en los dos casos
siguientes, la aceleración es la
aceleración de gravedad, como vimos al
estudiar el movimiento de traslación de
una partícula en capítulos anteriores.
Fig 5.7 Cuerpo con fuerza externa neta nula. El c.m. se mueve con MUR.
centro de masa
Fig 5.8 El centro de masa de un cuerpo moviéndose en un campo gravitacional se comporta como una partícula con masa igual que la del cuerpo, sobre la que actúa la fuerza externa igual al peso.
Fig 5.9 El mismo objeto de la figura 7.7 se rompe y sus pedazos siguen curvas distintas, pero el centro de masa del sistema no sufre variaciones pues la fuerza externa no ha variado.
Finalmente, observamos que la ecuación
i n
cm i(externa)i 1
Ma F=
=
= ∑rr
puede escribirse como:
i ncm
i(externa)i 1
dvM Fdt
=
=
= ∑r r
que es igual que:
i ncm
i(externa)i 1
d(Mv ) Fdt
=
=
= ∑r r
de donde:
i ncm
i(externa)i 1
dP Fdt
=
=
= ∑r
r
es decir, la fuerza neta externa aplicada
sobre el centro de masa equivale al
cambio en la cantidad de movimiento
lineal del centro de masa.
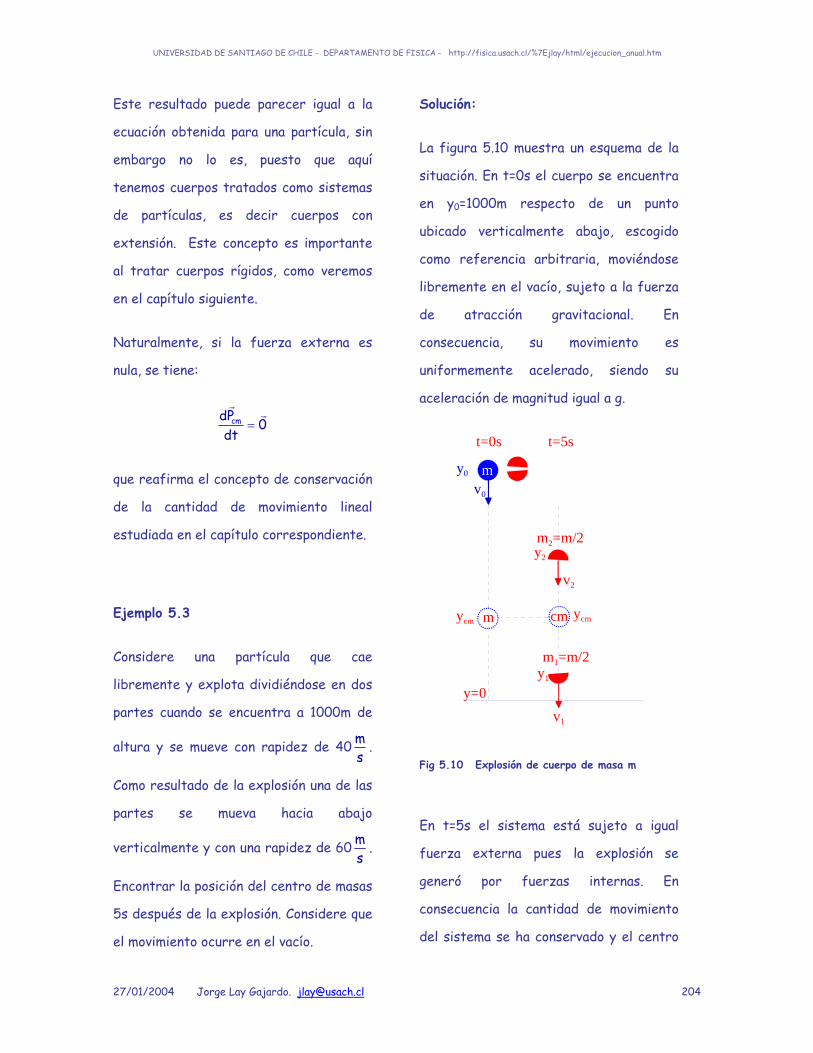
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 204
Este resultado puede parecer igual a la
ecuación obtenida para una partícula, sin
embargo no lo es, puesto que aquí
tenemos cuerpos tratados como sistemas
de partículas, es decir cuerpos con
extensión. Este concepto es importante
al tratar cuerpos rígidos, como veremos
en el capítulo siguiente.
Naturalmente, si la fuerza externa es
nula, se tiene:
cmdP 0dt
=
rr
que reafirma el concepto de conservación
de la cantidad de movimiento lineal
estudiada en el capítulo correspondiente.
Ejemplo 5.3
Considere una partícula que cae
libremente y explota dividiéndose en dos
partes cuando se encuentra a 1000m de
altura y se mueve con rapidez de 40 ms
.
Como resultado de la explosión una de las
partes se mueva hacia abajo
verticalmente y con una rapidez de 60 ms
.
Encontrar la posición del centro de masas
5s después de la explosión. Considere que
el movimiento ocurre en el vacío.
Solución:
La figura 5.10 muestra un esquema de la
situación. En t=0s el cuerpo se encuentra
en y0=1000m respecto de un punto
ubicado verticalmente abajo, escogido
como referencia arbitraria, moviéndose
libremente en el vacío, sujeto a la fuerza
de atracción gravitacional. En
consecuencia, su movimiento es
uniformemente acelerado, siendo su
aceleración de magnitud igual a g.
m1=m/2
m2=m/2
v2
v1
mv0
y0
y2
y1
t=0s
y=0
t=5s
m cmycm ycm
Fig 5.10 Explosión de cuerpo de masa m
En t=5s el sistema está sujeto a igual
fuerza externa pues la explosión se
generó por fuerzas internas. En
consecuencia la cantidad de movimiento
del sistema se ha conservado y el centro

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 205
de masas del sistema se ha comportado
como si no hubiera habido explosión.
Por tanto, de acuerdo a la nomenclatura
sugerida en la figura 5.10:
mv0=m1v1+m2v2
con m1=m/2 y m2=m/2, se obtiene:
0 1 2m mmv v v2 2
= +
de donde, considerando que v0=-40 ms
y
v1=-60 ms
se obtiene que v2=-20 ms
.
Observe que las rapideces v1 y v2 son las
iniciales de movimientos de partículas
sujetas a sus pesos, de manera tal que 5 s
después, sus posiciones respecto del
sistema de referencia escogido serán:
( ) ( )
21 0 1
21 2
1
1y y v t gt2
m 1 my 1000m 60 5s 10 5ss 2 s
y 575m
= + −
⎛ ⎞ ⎛ ⎞= + − −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
=
( ) ( )
21 0 2
22 2
2
1y y v t gt2
m 1 my 1000m 20 5s 10 5ss 2 s
y 775m
= + −
⎛ ⎞ ⎛ ⎞= + − −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
=
Entonces el centro de masa del sistema
en ese instante es:
( ) ( )1 1 2 2
cm1 2
cm
m m575m 775mm y m y 2 2ym m m
y 675m
++= =
+=
También podría haberse supuesto que el
centro de masa del cuerpo sin explosionar
se encontrará a los 5s simplemente en:
( ) ( )
2cm 0 0
2cm 2
cm
1y y v t gt2
m 1 my 1000m 40 5s 10 5ss 2 s
y 675m
= + −
⎛ ⎞ ⎛ ⎞= + − −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
=
5.2 Centro de gravedad.
Un concepto similar al de centro de masa
es el centro de gravedad (c.g.), definido
como el punto donde puede considerarse
que actúa la fuerza de atracción
gravitacional.
Matemáticamente:
i n
i i i1 1 1 2 2 2 i 1
cg i n1 1 2 2
i ii 1
mgrm g r m g r ......rm g m g ..... mg
=
==
=
+ += =
+ +
∑
∑
rr r
r
Note que en la práctica las dimensiones
de los cuerpos son despreciables
respecto de la distancia que existe entre
ellos y el centro de gravedad de la Tierra,
de manera tal que se puede suponer que
todas las partículas que lo componen

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 206
tienen igual aceleración de gravedad y
que además estos son vectores paralelos.
Con esto:
i n i n i n
i i i i i i ii 1 i 1 i 1
cg cmi n i n i n
i i i ii 1 i 1 i 1
mgr g mr mrr r
mg g m m
= = =
= = == = =
= = =
= = = =∑ ∑ ∑
∑ ∑ ∑
r r r
r r
En consecuencia: para sistemas de
partículas, o cuerpos que pueden
suponerse constituidos de partículas,
cuyas dimensiones sean despreciables
respecto de las dimensiones de la Tierra,
el centro de gravedad y el centro de masa
coinciden.
Una forma de determinar en forma
práctica el centro de gravedad de un
cuerpo irregular consiste en colgarlo con
una cuerda como se muestra en la figura
5.11.
centro de gravedad
Fig 5.11 Determinación práctica del c.g.
En dicha figura se ha colgado un cuerpo
plano y se ha dibujado una “línea de
plomada”, consistente en una línea que
sigue la dirección de la cuerda que
sostiene al cuerpo. Luego se ha colgado
de otro punto y la nueva línea de plomada
interfecta a la anterior en el centro de
gravedad. Si el cuerpo tuviera tres
dimensiones, el método también sirve.
Es importante recordar que aquí se
considera al cuerpo como la suma de
partículas, de tal manera que si se toma
una de ellas (de masa mi), como se
observa en la figura 5.12, experimenta
una fuerza gravitacional ( imgr ) que realiza
un torque respecto del c.g. igual a
( )( )i iˆmgx kτ = −
r si se considera al cuerpo
en el plano XY.
centro de gravedad
mig
xi
Fig 5.12 Fuerza gravitacional sobre una partícula i y su brazo de momento respecto del c.g.
Como las partículas que están a la
derecha de la línea de plomada hacen
torques positivos, pero las que están a la

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 207
izquierda hacen torques negativos, es
evidente que la suma de los torques
hechos por todas las partículas que
componen el cuerpo debe ser nulo.
En otras palabras, el centro de gravedad
es el punto del cuerpo respecto del cual
el torque neto producto de las fuerzas
gravitacionales sobre las partículas que lo
componen, es nulo. Si se corta la cuerda,
el cuerpo cae sin girar.
Igual cosa ocurre para el centro de masa,
solo que las fuerzas aplicadas sobre cada
partícula no son gravitacionales.
Una forma práctica de determinar el
centro de masa de un cuerpo es
depositarlo sobre una mesa y empujarlo
de manera tal que se traslade sin rotar.
La intersección de las líneas de acción de
las fuerzas que permiten dicha acción, es
el centro de masa del cuerpo.
Fig 5.13 Determinación práctica del c.m. de un cuerpo tridimensional, aplicando fuerzas sobre sus caras, sin producirle rotación. El único movimiento posible es traslación.
5.3 Centro de masa de cuerpos continuos.
Este capítulo excede el objetivo del
curso. Sin embargo, el método de
resolución de ejercicios, especialmente
los de cuerpos que pueden descomponerse
en cuerpos geométricamente sencillos
cuyos centros de masa se conocen es de
gran utilidad, por lo que le recomendamos
revisarlo con especial atención.
Cuando se requiera conocer la ubicación
del centro de masa de un cuerpo
geométricamente sencillo, este será un
dato dado.
Si el cuerpo es continuo, es decir no
puede representarse como la suma de
partículas (algunas veces erróneamente
denominadas masas puntuales), entonces
el centro de masa se debe calcular de
manera distinta.
Fig 5.14 Elemento de volumen de masa dmi perteneciente a un cuerpo continuo de forma irregular de masa total M.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 208
5.3.1 Cuerpos con tres dimensiones.
Consideremos un cuerpo continuo como el
de la figura 5.14.
Si suponemos al cuerpo formado por n
partículas de masa ∆mi ubicadas en una
posición i i i iˆˆ ˆr xi y j zk= + +
r respecto de un
sistema de referencia coordenado
cartesiano, entonces de acuerdo a la
definición de centro de masa se tiene
que:
i n
i ii 1
cm i n
ii 1
mrr
m
=
==
=
∆=
∆
∑
∑
r
r
cuyas componentes son:
i n
i ii 1
cm i n
ii 1
mxx
m
=
==
=
∆=
∆
∑
∑
i n
i ii 1
cm i n
ii 1
myy
m
=
==
=
∆=
∆
∑
∑
i n
i ii 1
cm i n
ii 1
mzz
m
=
==
=
∆=
∆
∑
∑
Tomemos el primer término:
No tenemos porque suponer que la
distribución de masa en la dimensión x es
constante de manera tal que resulta
conveniente definirla a través de una
cantidad denominada densidad lineal de
masa en función de la coordenada x:
( ) i
i
mxx
∆ρ =
∆
de donde:
( )i im x x∆ = ρ ∆
entonces la coordenada x del centro de
masa queda:
( )
( )
i n
i ii 1
cm i n
ii 1
x xxx
x x
=
==
=
ρ ∆=
ρ ∆
∑
∑
la suma del numerador corresponde a una
suma de Riemann para la función continua
x ρ(x) y la del denominador una suma de
Riemann para la función ρ(x), cuyos
límites cuando ∆xi tienda a infinito
conducen a la expresión:
( )
( )
f
i
f
i
x
xcm x
x
x x dxx
x dx
ρ
=
ρ
∫
∫
donde dm=ρ(x)dx.
por extensión, las restantes coordenadas
del centro de masa serán:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 209
( )
( )
f
i
f
i
y
ycm y
y
y y dyy
y dy
ρ
=
ρ
∫
∫
( )
( )
f
i
f
i
z
zcm z
z
z z dzz
z dz
ρ
=
ρ
∫
∫
en general, se tiene:
( )
( )V
cm
V
x, y,z rdVr
x, y,z dV
ρ=
ρ
∫
∫
r
r
donde dm=ρ(x,y,z)dV.
Es decir, se puede escribir también:
Vcm
V
rdmr
dm=
∫
∫
r
r (**)
Un caso particular se tiene cuando el
cuerpo tiene densidad constante
[ρ(x,y,z)=ρ; medida en 3Kgm
], pues
entonces: dm=ρdV.
Y reemplazándolo en (**):
V Vcm
V V
r dV rdVr
dV dV
ρ ρ= =
ρ ρ
∫ ∫
∫ ∫
r r
r
Vcm
V
rdVr
dV=
∫
∫
r
r
con V
dV V=∫
por tanto:
cmV
1r rdVV
= ∫r r
desde donde:
cmV
1x xdVV
= ∫
cmV
1y ydVV
= ∫
cmV
1z zdVV
= ∫
Este resultado es muy importante, pues
significa que cuando el cuerpo tiene
densidad constante, el centro de masa (y
el de gravedad si el campo gravitacional
es uniforme) dependen solo de la
configuración geométrica del cuerpo y no
de sus propiedades físicas.
En resumen, cuando la densidad es
constante, centro de masa y centro de
gravedad (si la aceleración de gravedad
es constante) coinciden con el centroide
de volumen.
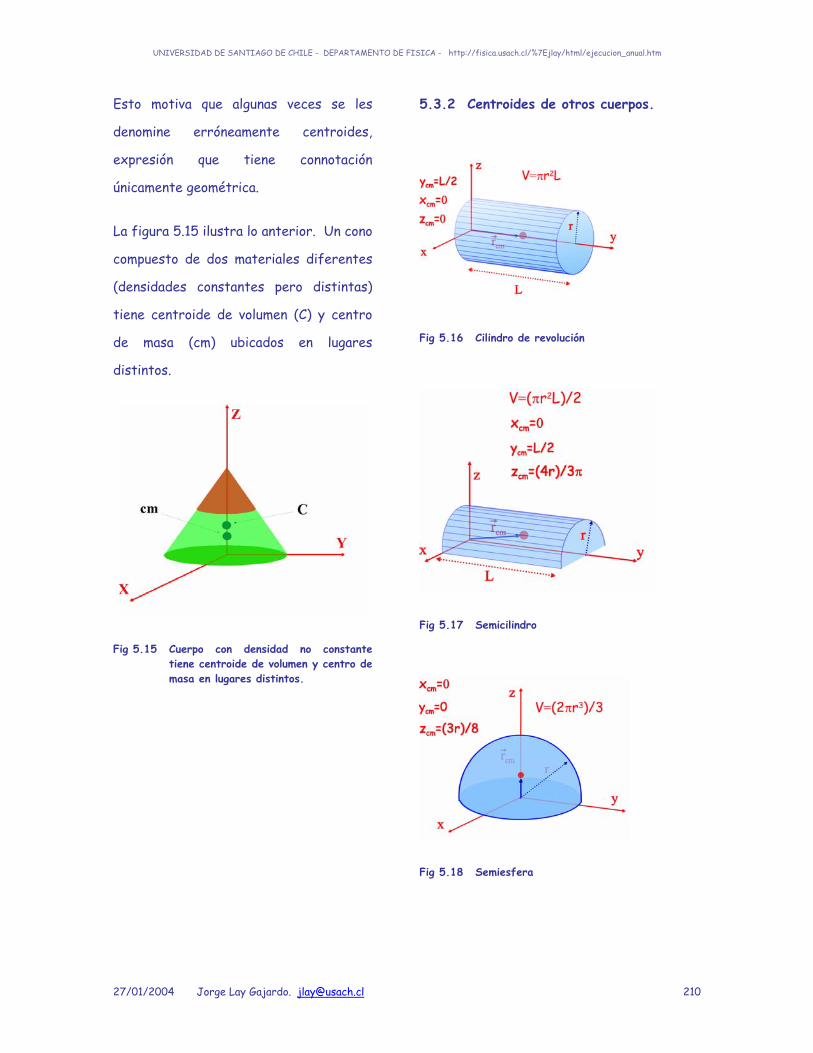
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 210
Esto motiva que algunas veces se les
denomine erróneamente centroides,
expresión que tiene connotación
únicamente geométrica.
La figura 5.15 ilustra lo anterior. Un cono
compuesto de dos materiales diferentes
(densidades constantes pero distintas)
tiene centroide de volumen (C) y centro
de masa (cm) ubicados en lugares
distintos.
Fig 5.15 Cuerpo con densidad no constante tiene centroide de volumen y centro de masa en lugares distintos.
5.3.2 Centroides de otros cuerpos.
Fig 5.16 Cilindro de revolución
Fig 5.17 Semicilindro
Fig 5.18 Semiesfera

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 211
Fig 5.19 Paraboloide
5.3.3 Cuerpos con dos dimensiones.
Existen numerosos ejemplos de cuerpos
que poseen una arista de dimensiones tan
pequeñas con respecto a las otras, que
puede considerarse como un cuerpo de
dos dimensiones. Las láminas delgadas son
el ejemplo más usado.
En este caso, resulta conveniente definir
una densidad superficial de masa σ
medida en Kg/m2, de manera tal que:
dmdA
σ =
de donde: dm=σdA
y para este caso, se tiene:
A Acm
A A
rdm r dAr
dm dA
σ= ≡
σ
∫ ∫
∫ ∫
r r
r
si la densidad superficial es constante:
A A Acm
A A A
r dA rdA rdAr
dA dA dA
σ σ= ≡ ≡
σ σ
∫ ∫ ∫
∫ ∫ ∫
r r r
r
que corresponde al centroide de área.
De aquí:
cmA
1x xdAA
= ∫
cmA
1y ydAA
= ∫
pues A
dA A=∫
Ejemplo 7.4
Encontrar el centro de masa de la placa
delgada triangular de la figura 5.20 si la
densidad (σ) es constante.
Fig 5.20 Placa delgada triangular

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 212
Solución:
Si suponemos que el espesor es
despreciable respecto de las otras
dimensiones, puede dibujarse como se ve
en la figura 5.21, donde se ha tomado una
superficie triangular de ancho a y alto h.
Fig 5.21 Placa delgada triangular. Elemento de masa vertical
Para calcular el centro de masa se ha
considerado un elemento vertical de área
rectangular de base dx y altura y (con y
una función de x); siendo su área por
tanto: dA= y(x)dx.
Por tanto, como hemos visto:
A A Acm
A A A
r dA rdA rdAr
dA dA dA
σ σ= ≡ ≡
σ σ
∫ ∫ ∫
∫ ∫ ∫
r r r
r
en consecuencia:
cmA A
1 1x xdA xy(x)dxA A
= =∫ ∫
en general, podemos suponer que y=mx,
donde m es la pendiente de la arista
inclinada del triángulo, cuyo valor es
hma
= y el intercepto n=0 ya que hemos
supuesto el origen del sistema de
coordenadas ubicado en el vértice
izquierdo del triángulo.
Por otra parte, el área del triángulo es: 1A ah2
=
Entonces:
a a2
cm0 0
a3 3
cm 2 20
h21 h ax x x dx x dx1 a ahah2
2 x 2 a 2x aa 3 a 3 3
⎛ ⎞= =⎜ ⎟⎛ ⎞ ⎝ ⎠⎜ ⎟⎝ ⎠
⎡ ⎤ ⎡ ⎤= = =⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦
∫ ∫
Para calcular la coordenada y del centro
de masa se tiene, tomando un elemento
horizontal de área dA=(a-x)dy, como se
observa en la figura 5.22
Fig 5.22 Placa delgada triangular. Elemento de masa horizontal

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 213
y y ayx hm ha
= = =
por tanto: dA=(a- ayh
)dy
ydA a 1 dyh
⎛ ⎞= −⎜ ⎟⎝ ⎠
h
cmA 0
h 2
cm0
h2 3 2 3
cm0
cm
y1 1y ydA a y(1 )dy1A hah2
y2y (y )dyh h
y y2 2 h hyh 2 3h h 2 3h
hy3
= = −⎛ ⎞⎜ ⎟⎝ ⎠
= −
⎡ ⎤ ⎡ ⎤= − = −⎢ ⎥ ⎢ ⎥
⎣ ⎦⎣ ⎦
⎛ ⎞= ⎜ ⎟⎝ ⎠
∫ ∫
∫
el centro de masa del triángulo está en el
punto:
cm2a hˆ ˆr i j3 3
= +r ´
como se puede ver en la figura 5.23.
Observe que el centro de masa se ubica
en la intersección de las medianas.
Fig 5.23 Centro de masa de una placa triangular.
5.3.4 Centroides de otras superficies.
A=(ah)/2
Fig 5.24 Centro de masa de un triángulo no rectángulo
A=(πr2)/2
Fig 5.25 Centro de masa de un semicírculo
A=(πr2)/4
Fig 5.26 Centro de masa de un cuadrante de círculo

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 214
A=(πab)/4
Fig 5.27 Centro de masa de un cuadrante de elipse
A=(2ah)/3
Fig 5.28 Centro de masa de un cuadrante de parábola
5.3.5 Cuerpos con una dimensión.
También existen cuerpos en los que una
de sus aristas es mucho mayor que las
restantes y podemos considerarlos como
cuerpos en una dimensión. Entre estos, se
cuentan alambres o varillas delgadas.
En este caso, resulta conveniente definir
una densidad lineal de masa λ medida en
Kg/m, de manera tal que:
dmdL
λ =
desde donde:
dm=λdL
en cuyo caso, se tiene:
L Lcm
L L
rdm r dLr
dm dL
λ= ≡
λ
∫ ∫
∫ ∫
r r
r
si la densidad lineal es constante:
L L Lcm
L L L
r dL rdL rdLr
dL dL dL
λ λ= ≡ ≡
λ λ
∫ ∫ ∫
∫ ∫ ∫
r r r
r
que corresponde al centroide de línea.
De aquí:
cmL
1x xdxL
= ∫
pues L
dx L=∫
Ejemplo 5.5
Determine el centro de masa de una
varilla recta y delgada, cuya densidad es
constante.
Solución:
Considere la varilla de la figura 7.29:
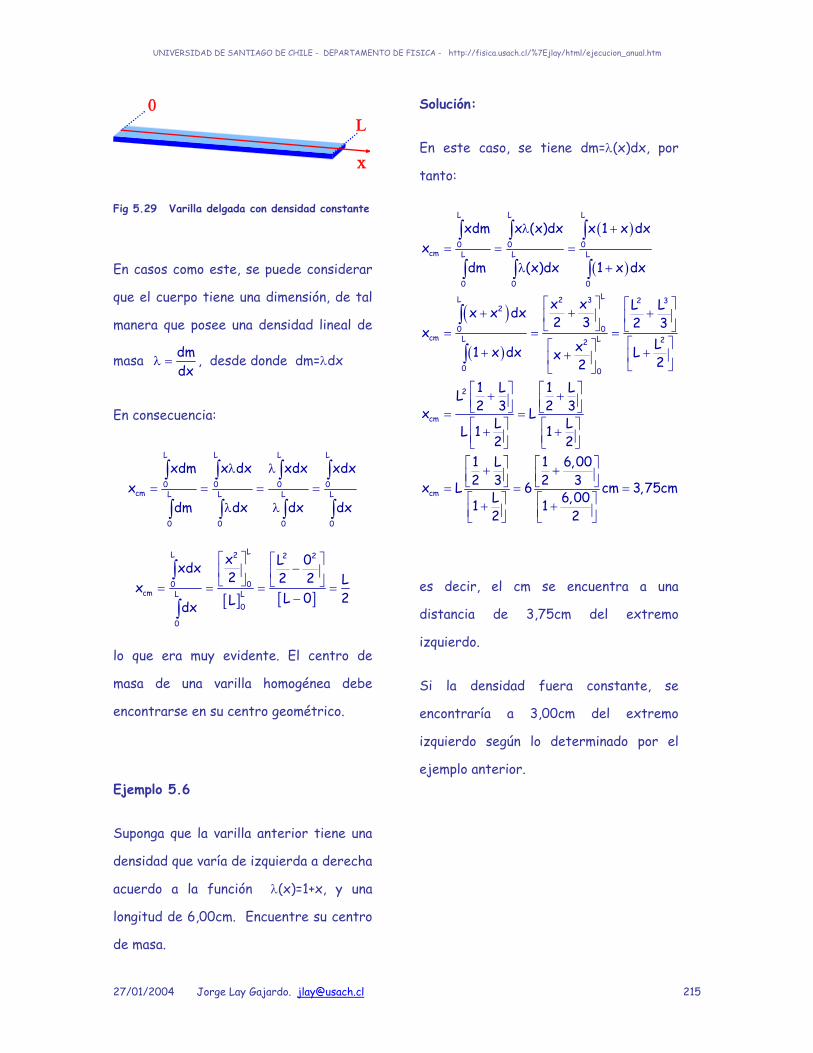
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 215
Fig 5.29 Varilla delgada con densidad constante
En casos como este, se puede considerar
que el cuerpo tiene una dimensión, de tal
manera que posee una densidad lineal de
masa dmdx
λ = , desde donde dm=λdx
En consecuencia:
L L L L
0 0 0 0cm L L L L
0 0 0 0
xdm x dx xdx xdxx
dm dx dx dx
λ λ= = = =
λ λ
∫ ∫ ∫ ∫
∫ ∫ ∫ ∫
[ ] [ ]
LL 2 2 2
0 0cm L L
0
0
x L 0xdx2 2 2 Lx
L 0 2Ldx
⎡ ⎤ ⎡ ⎤−⎢ ⎥ ⎢ ⎥
⎣ ⎦ ⎣ ⎦= = = =−
∫
∫
lo que era muy evidente. El centro de
masa de una varilla homogénea debe
encontrarse en su centro geométrico.
Ejemplo 5.6
Suponga que la varilla anterior tiene una
densidad que varía de izquierda a derecha
acuerdo a la función λ(x)=1+x, y una
longitud de 6,00cm. Encuentre su centro
de masa.
Solución:
En este caso, se tiene dm=λ(x)dx, por
tanto:
( )
( )
( )
( )
L L L
0 0 0cm L L L
0 0 0LL 2 3 2 3
2
0 0cm L L 22
0 0
2
cm
cm
xdm x (x)dx x 1 x dxx
dm (x)dx 1 x dx
x x L Lx x dx2 3 2 3
xLx1 x dx Lx 22
1 L 1 LL2 3 2 3x L
L LL 1 12 2
1 L2 3x L
L12
λ += = =
λ +
⎡ ⎤ ⎡ ⎤++ +⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦= = =
⎡ ⎤⎡ ⎤+ ++ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎣ ⎦
⎡ ⎤ ⎡ ⎤+ +⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦= =⎡ ⎤ ⎡ ⎤+ +⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
⎡ ⎤+⎢ ⎥⎣ ⎦=⎡ +
∫ ∫ ∫
∫ ∫ ∫
∫
∫
1 6,002 36 cm 3,75cm
6,0012
⎡ ⎤+⎢ ⎥⎣ ⎦= =⎤ ⎡ ⎤+⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
es decir, el cm se encuentra a una
distancia de 3,75cm del extremo
izquierdo.
Si la densidad fuera constante, se
encontraría a 3,00cm del extremo
izquierdo según lo determinado por el
ejemplo anterior.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 216
5.3.6 Cuerpos con ejes de simetría.
En muchos ejemplos tenemos cuerpos que
tienen ejes de simetría. En esos casos,
algunas sencillas reglas ayudan a
encontrar los centroides, que en los casos
de densidad constante, coincidirán con el
centro de masas como hemos explicado.
Para figuras planas más comunes:
Placa triangular: intersección de las
medianas.
Fig 5.30 Centro de masa de un triángulo
Polígonos regulares: centro geométrico.
Fig 5.31 Centro de masa de un pentágono
Fig 5.32 Centro de masa de un octaedro
Fig 5.33 Centro de masa de un cuadrado
Fig 5.34 Centro de masa de un rectángulo
En general, si la figura tiene un eje de
simetría de 180º, el centroide se
encuentra en el eje; si tiene dos ejes de
simetría de 180º, el centroide se
encuentra en la intersección de los ejes.
Fig 5.35 Centro de masa de una figura plana con un eje de simetría
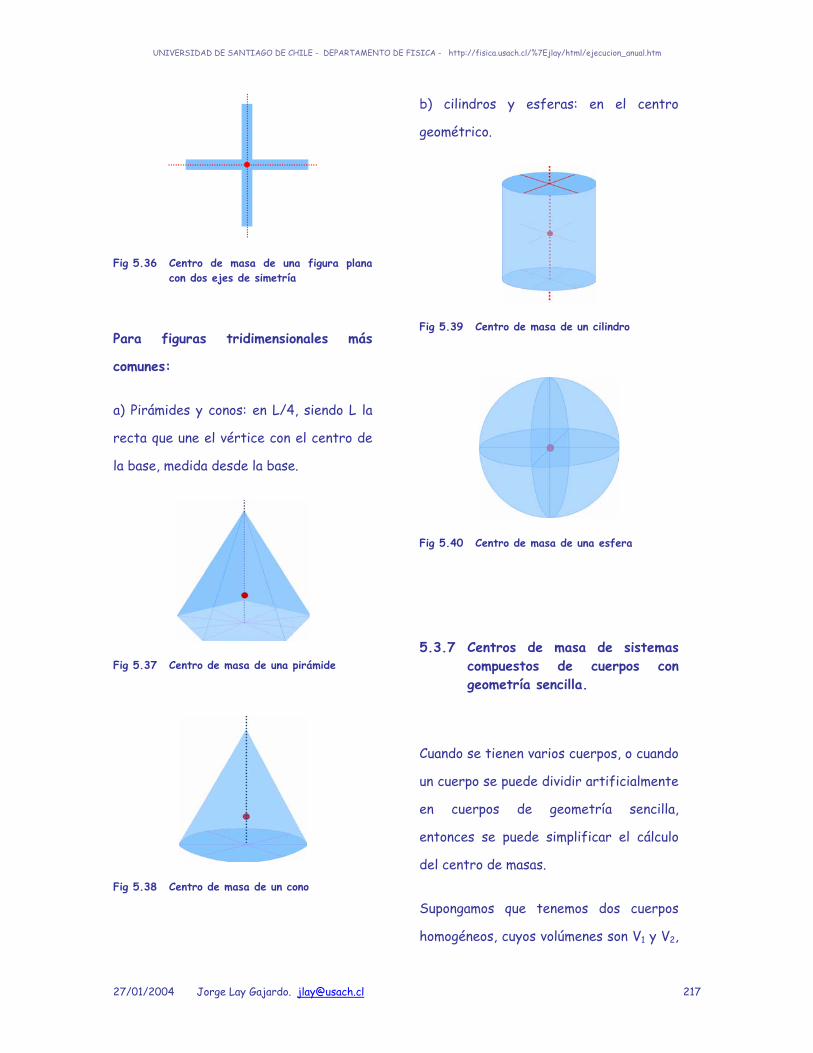
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 217
Fig 5.36 Centro de masa de una figura plana con dos ejes de simetría
Para figuras tridimensionales más
comunes:
a) Pirámides y conos: en L/4, siendo L la
recta que une el vértice con el centro de
la base, medida desde la base.
Fig 5.37 Centro de masa de una pirámide
Fig 5.38 Centro de masa de un cono
b) cilindros y esferas: en el centro
geométrico.
Fig 5.39 Centro de masa de un cilindro
Fig 5.40 Centro de masa de una esfera
5.3.7 Centros de masa de sistemas compuestos de cuerpos con geometría sencilla.
Cuando se tienen varios cuerpos, o cuando
un cuerpo se puede dividir artificialmente
en cuerpos de geometría sencilla,
entonces se puede simplificar el cálculo
del centro de masas.
Supongamos que tenemos dos cuerpos
homogéneos, cuyos volúmenes son V1 y V2,

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 218
y cuyos centros de masa respecto a un
sistema de referencia arbitrario sea 1rr y
2rr respectivamente, entonces por
definición el centro de masas viene dado
por:
Vcm
V
rdVr
dV=
∫
∫
r
r
donde:
1 2
1 2
1 2V VV
cm
V V V
rdV r dVrdVr
dV dV dV
+
= =+
∫ ∫∫
∫ ∫ ∫
r rr
r
Note que el término 1
1V
rdV∫r se puede
escribir como 1
1 11 V
1v rdVv ∫
r que es
equivalente a escribir11 cmv rr .
Lo mismo puede hacerse con el otro
término del numerador, por lo que
entonces se tiene que:
1 21 cm 2 cmcm
1 2
Vr V rr
V V+
=+
r rr
si se tienen n cuerpos, o el cuerpo se
puede subdividir en n cuerpos sencillos:
i
n
i cm1
cm n
i1
Vrr
V=
∑
∑
r
r
Si el cuerpo tiene una distribución
superficial de masa:
i
n
i cm1
cm n
i1
Arr
A=
∑
∑
r
r
Finalmente, si tiene distribución lineal de
masa:
i
n
i cm1
cm n
i1
Lrr
L=
∑
∑
r
r
Ejemplo 5.75
Consideremos el caso de una lámina
delgada, cuya representación gráfica en
un sistema de coordenadas cartesianas
conduce al trapecio de la figura 5.41.
y
x
a
c
b
Fig 5.41 Trapecio para el ejemplo 5.7
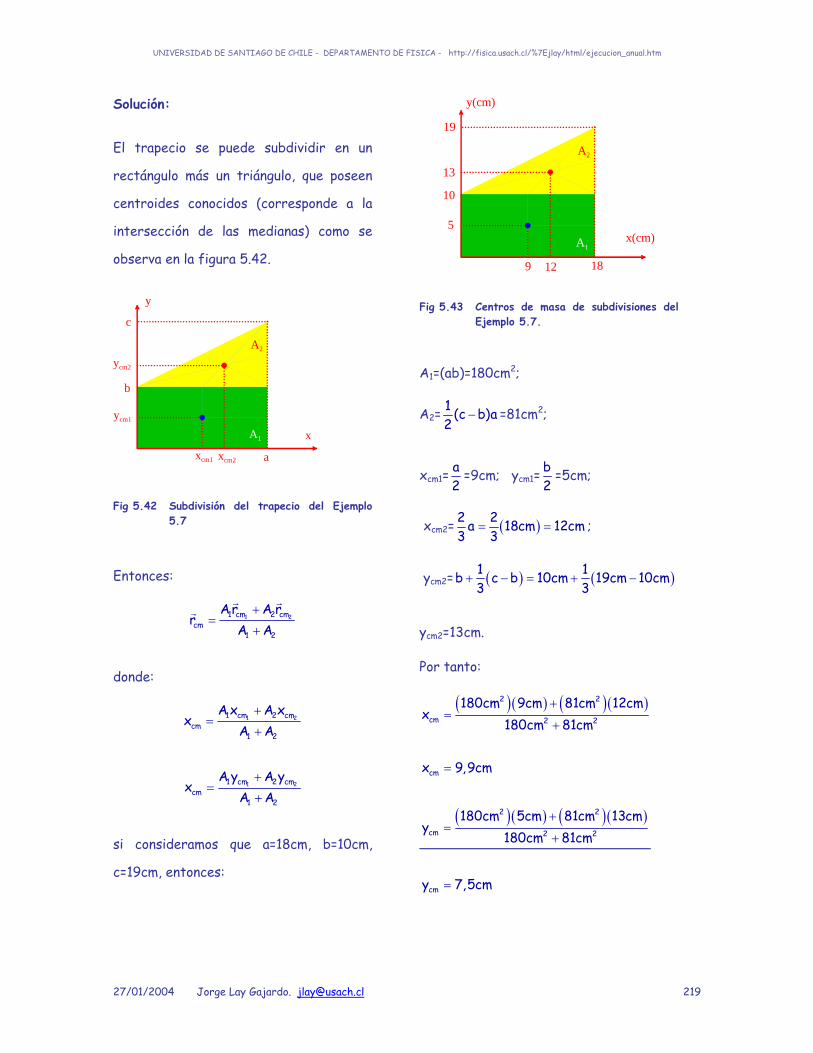
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 219
Solución:
El trapecio se puede subdividir en un
rectángulo más un triángulo, que poseen
centroides conocidos (corresponde a la
intersección de las medianas) como se
observa en la figura 5.42.
xcm1 xcm2
ycm2
ycm1
y
x
A2
A1
a
c
b
Fig 5.42 Subdivisión del trapecio del Ejemplo 5.7
Entonces:
1 21 cm 2 cmcm
1 2
Ar A rr
A A+
=+
r rr
donde:
1 21 cm 2 cmcm
1 2
A x A xx
A A+
=+
1 21 cm 2 cmcm
1 2
A y A yx
A A+
=+
si consideramos que a=18cm, b=10cm,
c=19cm, entonces:
9 12
13
5
y(cm)
x(cm)
A2
A1
18
19
10
Fig 5.43 Centros de masa de subdivisiones del Ejemplo 5.7.
A1=(ab)=180cm2;
A2=1 (c b)a2
− =81cm2;
xcm1=a2
=9cm; ycm1=b2
=5cm;
xcm2= ( )2 2a 18cm 12cm3 3
= = ;
ycm2= ( ) ( )1 1b c b 10cm 19cm 10cm3 3
+ − = + −
ycm2=13cm.
Por tanto:
( )( ) ( )( )2 2
cm 2 2
180cm 9cm 81cm 12cmx
180cm 81cm+
=+
cmx 9,9cm=
( )( ) ( )( )2 2
cm 2 2
180cm 5cm 81cm 13cmy
180cm 81cm+
=+
cmy 7,5cm=

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 220
El centro de masa calculado se puede
observar en la figura 5.44
9 12
13
5
y(cm)
x(cm)
A2
A1
18
19
10
9,9
7,5
cm
Fig 5.44 Centro de masa del trapecio
Ejemplo 5.8
Encuentre el centro de masa de la placa
delgada cuya representación gráfica y
dimensiones se ven en la figura 5.45.
y(mm)
x(mm)
50
50
25
25
100
Fig 5.45 Placa de ejemplo 5.8
La superficie se puede subdividir en un
círculo de área A1, un cuadrado de área
A2 y un cuadrante de círculo de área A3
como se observa en la figura 5.46. Se
indican allí los centros de masa de cada
subdivisión con un círculo pequeño.
y(mm)
x(mm)
50
50
25
25
A3
A1
100
Fig 5.46 Subdivisión de figura del Ejemplo 5.8
La novedad es que el área del círculo A1
es negativa pues debe restarse del área
del cuadrado cuya área es A2.
Por tanto:
A1=-πr2=-(3,14)(12,5mm)2
A1=- 490,63mm2
A2=(50mm)(50mm)
A2= 2500mm2
A3=( )( )22 3,14 50mmr
4 4π
=
A3= 1962,5mm2
Es decir:
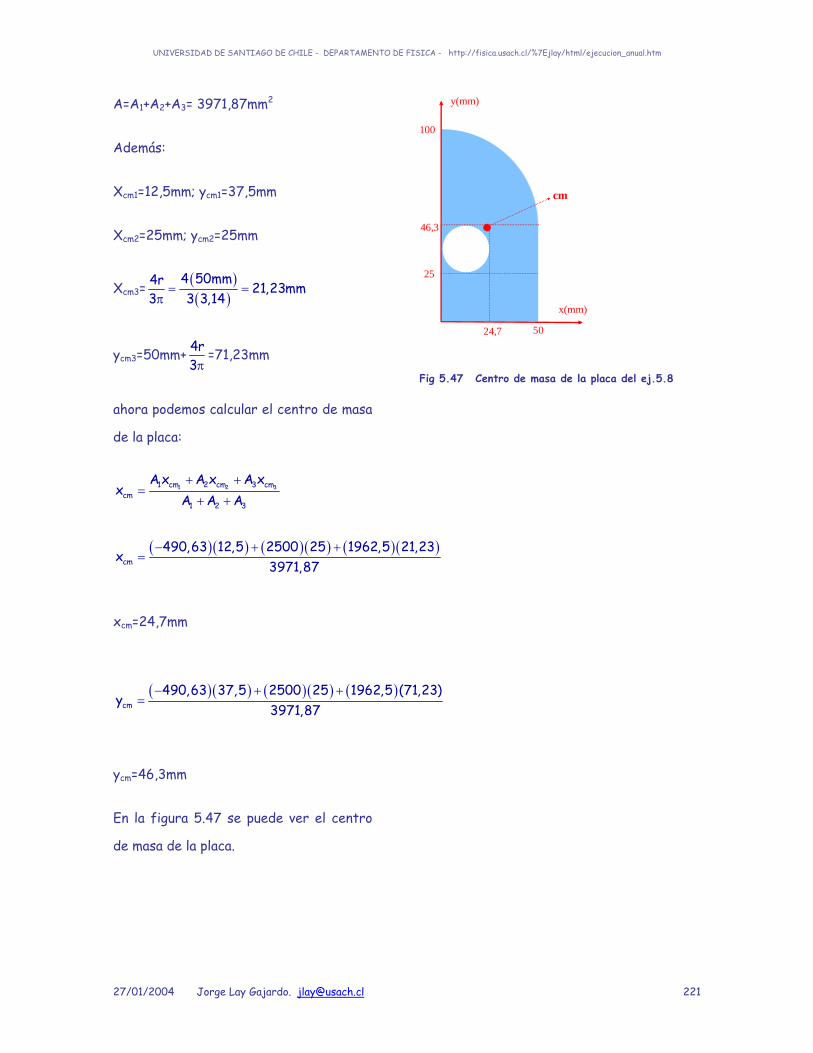
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 221
A=A1+A2+A3= 3971,87mm2
Además:
Xcm1=12,5mm; ycm1=37,5mm
Xcm2=25mm; ycm2=25mm
Xcm3=( )( )
4 50mm4r 21,23mm3 3 3,14
= =π
ycm3=50mm+ 4r3π
=71,23mm
ahora podemos calcular el centro de masa
de la placa:
1 2 31 cm 2 cm 3 cmcm
1 2 3
A x A x A xx
A A A+ +
=+ +
( )( ) ( )( ) ( )( )cm
490,63 12,5 2500 25 1962,5 21,23x
3971,87− + +
=
xcm=24,7mm
( )( ) ( )( ) ( )cm
490,63 37,5 2500 25 1962,5 (71,23)y
3971,87− + +
=
ycm=46,3mm
En la figura 5.47 se puede ver el centro
de masa de la placa.
y(mm)
x(mm)
50
46,3
24,7
25
100
cm
Fig 5.47 Centro de masa de la placa del ej.5.8
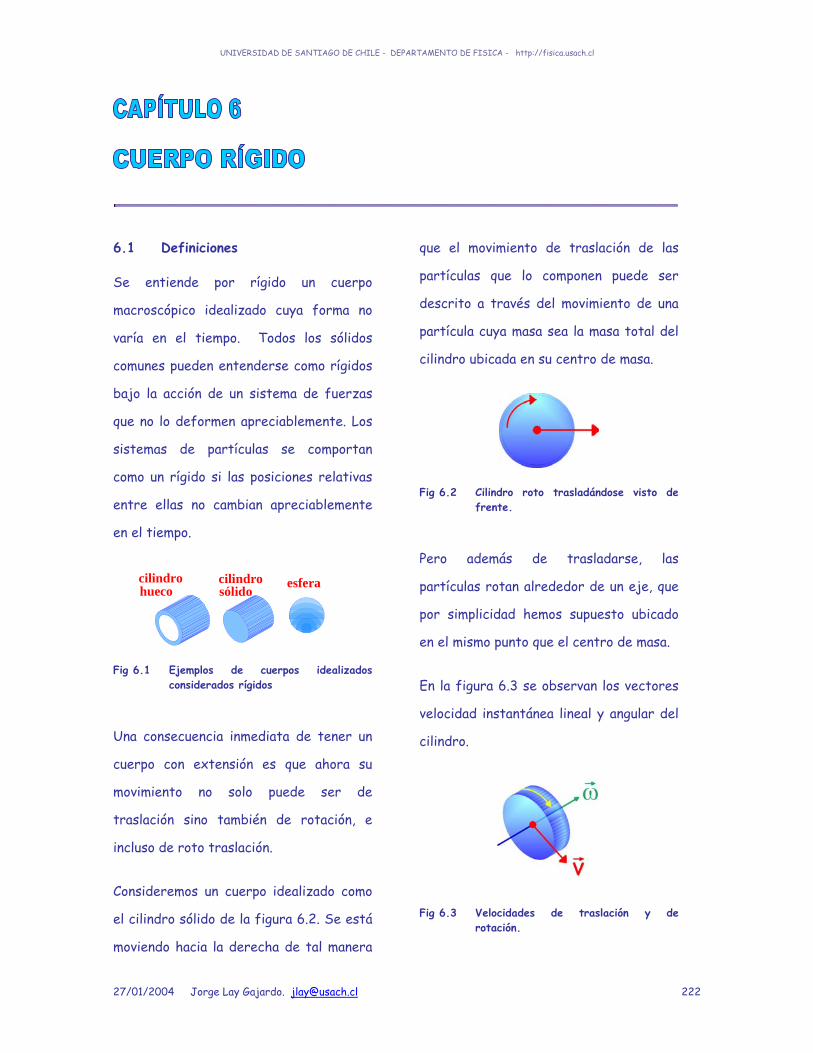
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl
27/01/2004 Jorge Lay Gajardo. [email protected] 222
6.1 Definiciones
Se entiende por rígido un cuerpo
macroscópico idealizado cuya forma no
varía en el tiempo. Todos los sólidos
comunes pueden entenderse como rígidos
bajo la acción de un sistema de fuerzas
que no lo deformen apreciablemente. Los
sistemas de partículas se comportan
como un rígido si las posiciones relativas
entre ellas no cambian apreciablemente
en el tiempo.
cilindrohueco sólido esferacilindro
Fig 6.1 Ejemplos de cuerpos idealizados considerados rígidos
Una consecuencia inmediata de tener un
cuerpo con extensión es que ahora su
movimiento no solo puede ser de
traslación sino también de rotación, e
incluso de roto traslación.
Consideremos un cuerpo idealizado como
el cilindro sólido de la figura 6.2. Se está
moviendo hacia la derecha de tal manera
que el movimiento de traslación de las
partículas que lo componen puede ser
descrito a través del movimiento de una
partícula cuya masa sea la masa total del
cilindro ubicada en su centro de masa.
Fig 6.2 Cilindro roto trasladándose visto de frente.
Pero además de trasladarse, las
partículas rotan alrededor de un eje, que
por simplicidad hemos supuesto ubicado
en el mismo punto que el centro de masa.
En la figura 6.3 se observan los vectores
velocidad instantánea lineal y angular del
cilindro.
Fig 6.3 Velocidades de traslación y de rotación.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 223
Las ecuaciones cinemáticas que describen
traslación y rotación han sido estudiadas
en capítulos anteriores para el caso de
partículas, y nos servirán aquí para
describir el movimiento del rígido. La
dinámica del rígido también está basada
en la teoría desarrollada para la partícula
aunque necesita algunas definiciones
adicionales que serán introducidas a su
debido tiempo.
6.2 Cinemática de rotación de un cuerpo rígido con eje fijo.
El caso más sencillo de analizar es el de
un rígido cuyas partículas rotan alrededor
de un eje que está fijo en un sistema de
referencia inercial (no se traslada). La
figura 8.4 muestra un cuerpo cualquiera
dotado de un eje fijo de rotación cuya
dirección es la del eje z de un sistema de
coordenadas cartesianas en el espacio.
Fig 6.4 Rígido con eje de rotación fijo.
Una partícula P cualquiera contenida en el
plano xy de la figura anterior (sombreado
para distinguirlo mejor) describirá una
circunferencia con centro en O. Note
que cualquier otra partícula
perteneciente al cuerpo describirá
circunferencias alrededor del eje z.
Desde arriba se vería como se observa en
la figura 6.5.
Fig 6.5 Vista desde arriba de una partícula rotando alrededor de eje z.
Entonces se tiene que P gira con una
velocidad angular media de magnitud:
mrad
t s∆θ ⎡ ⎤ω = ⎢ ⎥∆ ⎣ ⎦
y una velocidad angular instantánea de
magnitud:
d raddt sθ ⎡ ⎤ω = ⎢ ⎥⎣ ⎦
cuya dirección es la del eje perpendicular
al plano de giro en el sentido que da la
regla de la mano derecha.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 224
Fig 6.6 Vectores velocidad y aceleración angular.
Esta regla establece en términos
sencillos que la velocidad angular es
positiva cuando la rotación es en el
sentido opuesto del movimiento de los
punteros del reloj (antihorarias); y
negativa cuando la rotación es en igual
sentido que los punteros del reloj
(horaria).
x
y+z sale del plano
giro antihorario
y
z
+x sale del plano
giro antihorario
Fig 6.7 Una “llave de agua” de un baño común. La vista desde arriba muestra un giro antihorario que produce un avance positivo lo que se traduce en que la válvula suba (z positivo sale del plano del dibujo), permitiendo el paso del agua. En la vista lateral el eje x positivo sale del plano del dibujo y se observa mejor el avance de la válvula hacia arriba siguiendo la regla de la mano derecha.
Otra forma de recordarlo, es que la
dirección de la velocidad angular es igual
que la dirección de avance de un tornillo,
perno u otro dispositivo con rosca
dextrosum (tornillos y pernos comunes).
La aceleración angular media de la
partícula tiene una magnitud:
m 2rad
t s∆ω ⎡ ⎤α = ⎢ ⎥∆ ⎣ ⎦
Siendo su aceleración angular instantánea
un vector cuya magnitud es:
2d raddt sω ⎡ ⎤α = ⎢ ⎥⎣ ⎦
La dirección del vector aceleración
angular es la del eje de rotación, siendo
de igual sentido que la dirección de la
velocidad angular cuando la magnitud de
esta última aumenta en el tiempo.
Naturalmente, si la magnitud de la
velocidad angular disminuye en el tiempo,
entonces las direcciones de los vectores
velocidad y aceleración angulares son
opuestos.
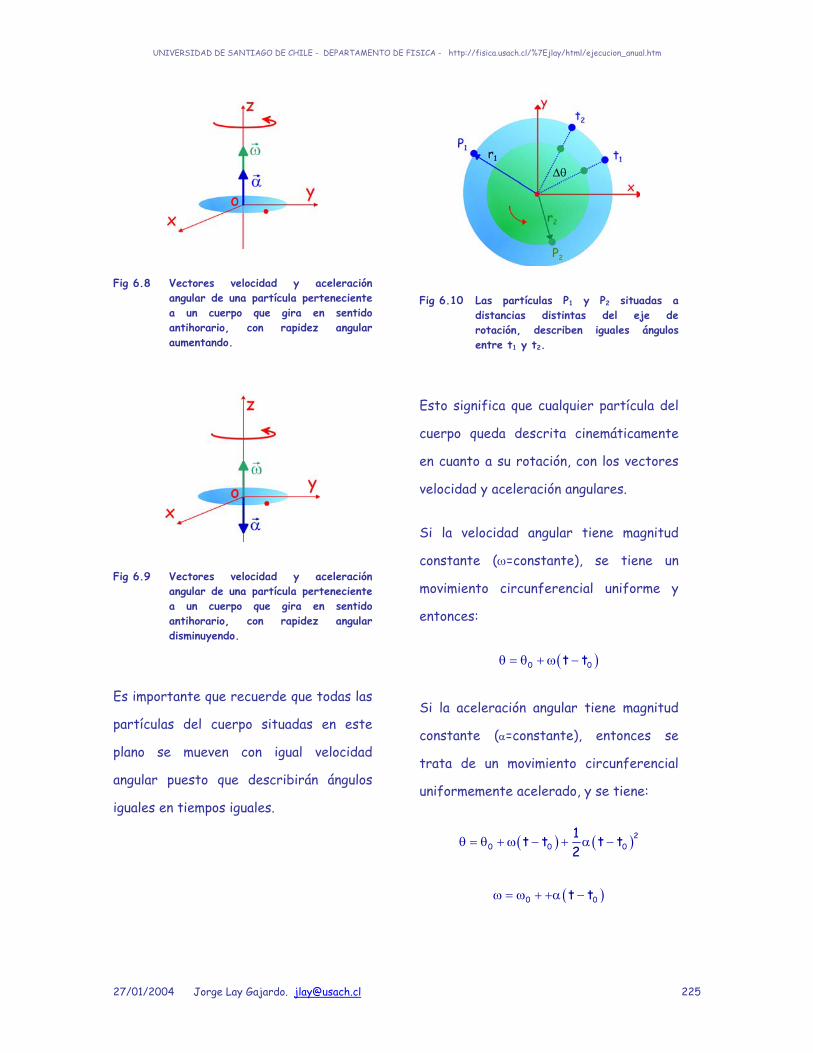
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 225
Fig 6.8 Vectores velocidad y aceleración angular de una partícula perteneciente a un cuerpo que gira en sentido antihorario, con rapidez angular aumentando.
Fig 6.9 Vectores velocidad y aceleración angular de una partícula perteneciente a un cuerpo que gira en sentido antihorario, con rapidez angular disminuyendo.
Es importante que recuerde que todas las
partículas del cuerpo situadas en este
plano se mueven con igual velocidad
angular puesto que describirán ángulos
iguales en tiempos iguales.
Fig 6.10 Las partículas P1 y P2 situadas a distancias distintas del eje de rotación, describen iguales ángulos entre t1 y t2.
Esto significa que cualquier partícula del
cuerpo queda descrita cinemáticamente
en cuanto a su rotación, con los vectores
velocidad y aceleración angulares.
Si la velocidad angular tiene magnitud
constante (ω=constante), se tiene un
movimiento circunferencial uniforme y
entonces:
( )0 0t tθ = θ + ω −
Si la aceleración angular tiene magnitud
constante (α=constante), entonces se
trata de un movimiento circunferencial
uniformemente acelerado, y se tiene:
( ) ( )20 0 01t t t t2
θ = θ + ω − + α −
( )0 0t tω = ω + +α −

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 226
Ejemplo 6.1
Una polea y dos bloques A y B están
unidos por cuerdas livianas e
inextensibles, como se muestra en la
figura 6.11. En t0=0s el bloque A asciende
con aceleración constante A 2m ˆa 0,3 js
=r
con una rapidez de v0A=0,5 ms
.
Fig 6.11 Figura para Ejemplo 6.1
Determinar, si los radios de las poleas son
RA=0,2m y RB=0,4m:
a) Velocidad angular y aceleración angular
de la polea en t=0s
b) Número de vueltas que describe la
polea entre t=0s y t=3s.
c) Aceleración del punto C de la polea.
d) Velocidad y aceleración del bloque B en
t=3s.
Solución:
a) La velocidad del bloque A es igual que
la velocidad del punto C pues la cuerda es
inextensible ( A Cv v=r r ). Igual cosa se tiene
para la aceleración tangencial ( A TCa a= )
Por otra parte, mientras el bloque A sube,
el bloque B baja y la polea gira en sentido
horario, luego la aceleración angular de la
polea tiene sentido negativo ( k− ).
En consecuencia, para t=0s se tiene que:
V0A=0,5 ms
Y como v0A=w0R2, entonces
0A0
2
0
m0,5v rads 1,25R 0,4m s
rad ˆ1,25 ks
ω = = =
ω = −r
En cuanto a la aceleración, se tiene que
A 2TC
2A
22
2
a a R de donde:m0,3a rads 0,75
R 0,4m srad ˆ0,75 ks
= = α
α = = =
α = −r
b) Como la aceleración del bloque a es
constante, la aceleración angular de la
polea también lo es, luego el movimiento
de cualquiera de sus partículas es
circunferencial uniformemente acelerado

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 227
pudiendo calcularse el ángulo descrito en
función del tiempo con la ecuación:
( ) ( )20 0 0 01t t t t2
θ = θ + ω − + α −
De donde, con t0=0s y θ0=0rad:
20
1t t2
θ = ω + α
Luego:
20
12 N t t2
π = ω + α
Por tanto:
( ) ( )
20
22
1t t2N
2rad 1 rad1.25 3s 0,75 3ss 2 sN
2 radN 1,13vueltas
ω + α=
π⎛ ⎞ ⎛ ⎞+⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠= =
π=
C) La aceleración en el punto C tiene
componentes tangencial y normal, por lo
que, en t=0s, respecto del sistema
cartesiano de referencia:
C
aT
aCx
y
T Cˆˆa a j a i= +
r
con AT 2ma a 0,3s
= = y
( )2
22C 2
rad ma R 1,25 0,4m 0,63s s
⎛ ⎞= ω = =⎜ ⎟⎝ ⎠
Luego:
( ) 2mˆ ˆa 0,63i 0,3js
= +r
d) Como la cuerda que une la polea y el
cuerpo B también es inextensible,
entonces aT=aB; y como aT=αR1:
aT= ( )2 2rad m0,75 0,2m 0,15s s
⎛ ⎞ =⎜ ⎟⎝ ⎠
Entonces:
B 2m ˆa 0,15 js
= −r
La velocidad a los 3 segundos es:
( )( )( )
( ) ( )
B 0 B
0 0 1
B 2
B
ˆv v a t j
rad mcon v R 1,25 0,2m 0,25s s
por tanto:m m ˆv 0,25 0,15 3s js s
m ˆv 0,7 js
= + −
⎛ ⎞= ω = =⎜ ⎟⎝ ⎠
⎡ ⎤⎛ ⎞= + −⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
= −
r
r
r

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 228
6.3 Dinámica de rotación de un cuerpo con eje fijo.
Cuando tenemos cuerpos rígidos, a
diferencia del caso de las partículas, las
fuerzas que actúan sobre él pueden tener
puntos de aplicación distintos. Ahora es
relevante definir un concepto denominado
línea de acción de la fuerza, que no es
más que la línea sobre la que se ubica la
dirección de la fuerza.
Fig 6.12 Fuerzas aplicadas sobre un rígido. Los puntos de aplicación y las líneas de acción de cada fuerza son distintas.
Consideremos el cuerpo rígido de la
figura 6.13 (cuadro superior) que posee
un eje fijo de rotación, cuya posición
respecto de un sistema de referencia
inercial no cambia en el tiempo.
Supongamos que el cuerpo no rota
respecto del eje.
Entonces, si aplicamos una fuerza cuya
línea de acción esté en un plano
perpendicular al eje, aparece una
aceleración angular en el rígido, como se
observa en la figura 6.13 (cuadro
inferior).
Fig 6.13 Una fuerza aplicada en un plano perpendicular al eje, produce aceleración angular en el cuerpo.
Pero, ¿será la Fuerza la “acción motriz”
que justifique la aceleración angular?.
Parece que si, puesto que al aumentar la
magnitud de la fuerza, también aumenta
la magnitud de la aceleración angular. Sin
embargo, la misma fuerza con línea de
acción paralela, pero más cercana al eje,
produce aceleración angular menor.
En consecuencia, es necesario realizar un
análisis más cuidadoso
Una vista del plano de la fuerza permite
observar mejor el punto de aplicación y su
línea de acción. Por conveniencia se ha
definido un vector de posición que va

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 229
desde el eje fijo hasta el punto de
aplicación de la fuerza.
Fig 6.14 El plano perpendicular al eje, contiene la fuerza y un vector de posición respecto del eje fijo de rotación. α es el ángulo entre ambos vectores.
Se puede estudiar con facilidad el efecto
de la fuerza si analizamos el
comportamiento de la partícula ubicada
en su punto de aplicación.
La partícula es obligada a describir un
movimiento circunferencial con centro en
el eje. La fuerza ejercida sobre ella
puede describirse por conveniencia, a
través de sus componentes tangencial y
radial en esa circunferencia, de radio r.
La componente tangencial de la fuerza
provoca una aceleración tangencial, cuya
relación con la magnitud de la aceleración
angular es conocida (aT=αr).
En consecuencia, aplicando 2º principio de
Newton, se tiene:
FT=maT=mαr
Y si multiplicamos la expresión por r,
tenemos:
FTr =mαr2
Expresión que nos permite identificar al
producto FTr como la causa (“acción
motriz”) de la aceleración angular y al
producto mr2 como el factor de
proporcionalidad.
Fig 6.15 Componentes tangencial y radial de la fuerza y componente tangencial de la aceleración de la partícula.
A la cantidad FTr se le denomina
Momento de la Fuerza o torque (respecto
del punto donde el eje de giro corta el
plano de rotación) designada con la letra τ
y a la cantidad mr2 como Momento de
Inercia de la partícula, designada con la
letra I.
En consecuencia, se tiene que:
τ=Iα
Es necesario recalcar nuevamente que en
esta expresión, a la izquierda se
encuentra la causa (el torque) y a la
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 230
derecha el efecto (la aceleración
angular). La cantidad I representa la
inercia rotacional de la partícula.
Otra consecuencia directa de esta
expresión es que la dirección del torque
es igual que la dirección de la aceleración
angular:
Iτ = αrr
Por otra parte, se ve en el dibujo de la
figura 6.15 que FT=Fsenα, de tal manera
que el torque se puede escribir como
τ=(Fsenαr), que resulta igual que la
magnitud del vector rxFrr .
Cada partícula que compone el cuerpo
tiene una masa mi y está ubicada a una
distancia ri del eje. Sobre cada una
existen fuerzas internas producto de las
interacciones entre partículas y fuerzas
externas.
La suma total de los efectos sobre cada
partícula conduce a:
( )2i i imrΣτ = Σ α
rr
Puesto que como ya hemos visto, todas las
partículas del cuerpo tienen igual
aceleración angular.
La expresión iΣτr representa la suma de
los torques (torque neto: τ) realizados
por las fuerzas internas y externas sobre
cada partícula.
( ) ( )i i i externasinternasΣτ = Στ + Στr r r
Pero de acuerdo a la tercera ley de
Newton la suma de los torques internos
es nula, por tanto al torque neto solo
concurren las fuerzas externas al cuerpo.
En la parte derecha de la ecuación se
tiene la cantidad ( )2i imrΣ , que representa
el Momento de Inercia del cuerpo (I).
En consecuencia, se tiene que el toque
neto sobre el cuerpo es directamente
proporcional a su aceleración angular,
siendo el factor de proporcionalidad el
momento de inercia del cuerpo:
Torque.
Como se encontró en la sección anterior,
un cuerpo rígido tendrá una aceleración
angular de magnitud no nula cuando sobre
él actúe una fuerza neta que genere un
torque no nulo.
El torque es una magnitud física muy
relevante, que estudiaremos con más
atención a través de algunos ejemplos.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 231
La definición de torque realizado por una
fuerza Fr
respecto de un punto según
observamos es:
[ ]rxF Nmτ =rrr
Fig 6.16 Direcciones de los vectores Torque y aceleración angulares.
En esta expresión se tiene fuerza neta,
torque neto y el vector de posición desde
el eje de giro hasta el punto de aplicación
de la fuerza neta.
Si miramos el plano de rotación desde
arriba, y ubicamos en él un sistema de
referencia con centro en el eje de giro se
tiene:
Fig 6.17 Vectores Fuerza y posición respecto del eje que pasa por el centro de masas de un cuerpo que rota.
Note que los vectores torque y
aceleración angulares tienen direcciones
hacia adentro de la página y se
representan con una x en el interior de
una circunferencia (la pluma de la flecha
con que se identifican gráficamente los
vectores) y por tanto, en la dirección k− .
Esto indica que cuando el cuerpo gira en
dirección horaria (en el sentido de los
punteros del reloj), el torque resultante
es negativo. Esto es una característica de
los sistemas dextrosum como los que
estamos estudiando (siguen la “regla de la
mano derecha”). Como el producto
vectorial es anticonmutativo, se tiene que
cuando el giro del cuerpo sea en dirección
antihoraria, entonces el torque resultante
es positivo.
Por otra parte, se tiene que la longitud de
la línea perpendicular a la línea de acción
de la fuerza que pasa por el eje de giro
es rsenθ, que es denominado brazo de
momento (d).
d r x
y
θθ
Fig 6.18 Definición de brazo de momento

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 232
Entonces, el torque se puede expresar en
función de d, puesto que por definición de
producto vectorial se tiene que:
ˆrxF rFsen uτ = = θrrr , donde u es un vector
unitario perpendicular al plano de los
vectores fuerza y posición (en este caso,
el versor k ) y θ es el ángulo formado por
ambos, por lo que:
ˆdFkτ =r
Naturalmente el sentido del versor está
dado por la regla de la mano derecha.
Esta expresión es particularmente útil,
puesto que permite fácilmente entender
que fuerzas cuya línea de acción pasen
por el eje de giro producirán torque nulo
(su brazo de momento es 0).
Fig 6.19 Vectores Fuerza 1Fr y 3F
r producen
torque puesto que d1 yd3 son mayores
que cero. En cambio 2Fr
no produce torque puesto que d2=0.
Esto explica con sencillez algunos
ejemplos prácticos de la vida diaria como
se ve en las figuras 6.20 a 6.23
bisagras
z
y
x
F
τ
vista desde arriba
pomo
bisagra
x
y
F
d
dirección de giro
τ
Fig 6.20 La puerta gira en el plano XY en sentido horario. F produce un torque
en dirección k− , cuya magnitud es dF. Por eso los pomos se ponen lo mas lejos posible de las bisagras.
Fig 6.21 Existe un número importante de pernos, tornillos, tuercas y otros, que tienen “hilos” que avanzan en sentido dextrosum. Para ello cuentan con distintos tipos de “cabezas”, que se hacen girar en un plano perpendicular al cuerpo del objeto con distintos tipos de instrumentos.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 233
d3
d2
d1
F4
F3F2F1
Fig 6.22 La llave hace girar a la cabeza de la tuerca. Todas las fuerzas tienen igual
magnitud. Las fuerzas 1 2 3F, F , y Fr r r
provocan giros antihorarios, es decir positivos, sacando la tuerca. La magnitud del torque aumenta en la
medida en que aumenta d. 4Fr
provoca un giro horario, es decir negativo apretando la tuerca pues la introduce
en el plano. Los torques de 1 4F, y Fr r
tienen igual magnitud. Herramientas de mango más largo requieren esfuerzos menores pero encarecen su costo al necesitar materiales mejores para conservar su rigidez.
Fig 6.23 Existe un número importante de utensilios cuya función es aprovechar el efecto de rotación de una fuerza sobre un eje fijo.
Ejemplo 6.2
Considere un cuerpo rígido que está
sometido a una fuerza neta igual a
( )ˆ ˆF 5i 6j N= +r
respecto de un sistema de
referencia cuyo plano XY está situado en
el plano de rotación (con centro en el eje
de giro), siendo el vector de posición del
punto de aplicación de la fuerza, el
vector ( )ˆ ˆr 3i 2j m= +r .
Solución:
Por definición rxFτ =rrr , por tanto:
Si ˆ ˆr xi yj= +r y x y
ˆ ˆF F i F j= +r
se tiene
( )[ ]
[ ]
x y
ˆ ˆˆ ˆˆ ˆi j k i j kˆx y 0 3 2 0 18 10 Nm k
F F 0 5 6 0
ˆ8 Nm k
τ = = = −
τ =
r
r
Es decir, el cuerpo gira en dirección
antihoraria, pues el torque resultó
positivo.
Fig 6.24 Figura para el ejemplo 6.2.
Note que los vectores torque y
aceleración angulares salen de la página y
se representan con un punto en el interior
de una circunferencia (la punta de la

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 234
flecha con que se identifican
gráficamente los vectores)
Ejemplo 6.3
Si la fuerza del ejemplo 6.2
fuera 1ˆF 5iN=
r, se tendría que:
( )[ ]
[ ]
1
1
F
F
ˆˆ ˆi j kˆ3 2 0 0 10 Nm k
5 0 0
ˆ10 Nm k
τ == = −
τ = −
r
r
Fig 6.25 Figura para el ejemplo 6.3.
El cuerpo gira en sentido horario, el
torque y la aceleración angular son
negativos (entran).
En cambio, si la fuerza es 2ˆF 6jN=
r,
entonces el torque que produce es:
( )[ ]
[ ]
2
2
F
F
ˆˆ ˆi j kˆ3 2 0 18 0 Nm k
0 6 0
ˆ18 Nm k
τ == = −
τ =
r
r
Fig 6.26 Figura para el ejemplo 6.3.
Note que al sumar los vectores 1Fr
y 2Fr
del ejemplo 6.3 se obtiene el vector Fr
del ejemplo 6.2. Además la suma de los
torques realizados por 1Fr
y 2Fr
corresponde al torque realizado porFr
,
como era de esperarse: 1 2F F Fτ = τ + τ
r r r .
Este hecho es importante para resolver
algunas situaciones presentadas en los
ejercicios de aplicación, donde las
fuerzas pueden descomponerse de
manera conveniente, como se observa en
los ejemplos siguientes.
Ejemplo 6.4
Calcule el torque que la fuerza Fr
ejerce
sobre la barra de la figura 6.27.
F
Fig 6.27 Figura para el ejemplo 6.4.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 235
Solución:
Se puede suponer que la barra es un
cuerpo unidimensional y fijar un sistema
de referencia tal que se sitúe sobre el
eje x, con origen en el eje fijo de
rotación ubicado en la bisagra.
F
r x(m)
y(m)
Fig 6.28 La barra se puede suponer como un cuerpo en una dimensión.
El vector de posición es ˆr xi=r , y la
fuerza está en el plano XY, de manera tal
que el torque respecto del eje fijo de
rotación es:
( )F y
x y
F y
ˆˆ ˆi j kˆx 0 0 xF 0 k
F F 0
ˆxF k
τ == = −
τ =
r
r
Note que
Fr θ
Fy
Fx
Fig 6.29 Componentes cartesianas de la fuerza.
Fy=Fsenθ por lo que
( )FˆxFsen kτ = θ
r
También podría haberse resuelto
suponiendo que la fuerza es la suma de los
vectores componentes, es decir
suponiendo que actúan las fuerzas
1 xˆ ˆF F i Fcos i= = θ
r y 2 y
ˆ ˆF F i Fsen i= = θr
F2=Fyj= Fsenθj
F1=Fxi=Fcosθi
d
Fig 6.30 Fuerza descompuesta como la suma de sus vectores componentes.
Claramente se observa que el brazo de
momento del vector fuerza componente
en X es nulo, por lo que no hace torque
respecto del eje. En cambio el vector
componente de la fuerza en Y si produce
torque pues su brazo de momento no es
nulo.
Como sabemos que ˆdFuτ =r , entonces:
yˆ ˆ ˆdF k dFsen k xFsen kτ = = θ = θ
r
Igual que con el método anterior. k es
positivo porque yFr
produce que el cuerpo
gire en sentido antihorario.
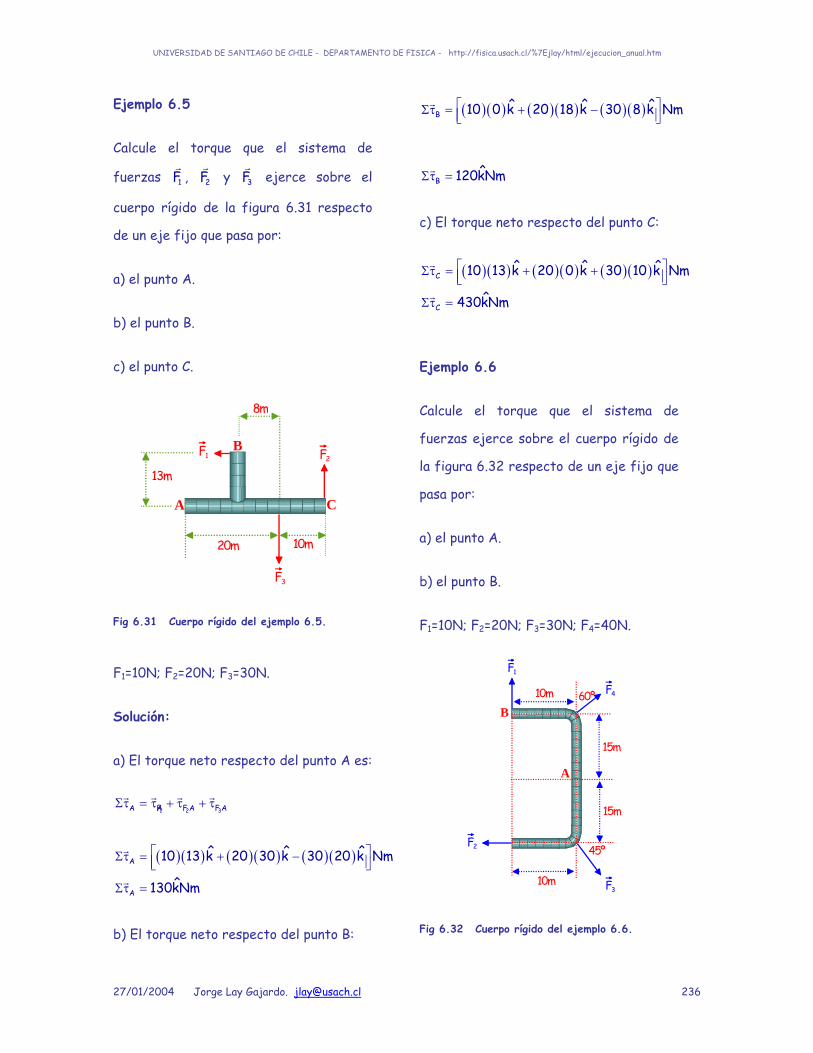
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 236
Ejemplo 6.5
Calcule el torque que el sistema de
fuerzas 1Fr
, 2Fr
y 3Fr
ejerce sobre el
cuerpo rígido de la figura 6.31 respecto
de un eje fijo que pasa por:
a) el punto A.
b) el punto B.
c) el punto C.
F1 F2
F3
A
13m
20m 10m
B
8m
C
Fig 6.31 Cuerpo rígido del ejemplo 6.5.
F1=10N; F2=20N; F3=30N.
Solución:
a) El torque neto respecto del punto A es:
1 2 3A FA F A F AΣτ = τ + τ + τr r r r
( )( ) ( )( ) ( )( )Aˆ ˆ ˆ10 13 k 20 30 k 30 20 k Nm⎡ ⎤Στ = + −⎢ ⎥⎣ ⎦
r
Aˆ130kNmΣτ =
r
b) El torque neto respecto del punto B:
( )( ) ( )( ) ( )( )Bˆ ˆ ˆ10 0 k 20 18 k 30 8 k Nm⎡ ⎤Στ = + −⎢ ⎥⎣ ⎦
r
Bˆ120kNmΣτ =
r
c) El torque neto respecto del punto C:
( )( ) ( )( ) ( )( )C
C
ˆ ˆ ˆ10 13 k 20 0 k 30 10 k Nm
ˆ430kNm
⎡ ⎤Στ = + +⎢ ⎥⎣ ⎦
Στ =
r
r
Ejemplo 6.6
Calcule el torque que el sistema de
fuerzas ejerce sobre el cuerpo rígido de
la figura 6.32 respecto de un eje fijo que
pasa por:
a) el punto A.
b) el punto B.
F1=10N; F2=20N; F3=30N; F4=40N.
F1
F2
A
15m
10m
B60º
45º
F3
F4
15m
10m
Fig 6.32 Cuerpo rígido del ejemplo 6.6.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 237
Solución:
a) El torque neto que el sistema de
fuerzas ejerce sobre el cuerpo respecto
del punto A es:
( )( ) ( )( )
( )( ) ( )( )
( )
A
A
ˆ ˆ10 10 kNm 20 15 kNmˆ ˆ30cos45º 15 kNm 40sen60º 15 kNm
ˆ-602,5 kNm
Στ = − − +
+ −
Στ =
r
r
b) El torque neto respecto del punto B:
( )( ) ( )( )
( ) ( ) ( ) ( )
( ) ( )
B
B
ˆ ˆ10 0 kNm 20 30 kNmˆ ˆ30cos45º 30 kNm 30sen45º 10 kNmˆ40cos60º 10 kNm
ˆ26kNm
Στ = − +
+ − +
+
Στ =
r
r
Ejemplo 6.7
Calcule el torque que el sistema de
fuerzas ejerce sobre el cuerpo rígido de
la figura 6.33 respecto de un eje fijo que
pasa por su centro. F1=100N (tangente a
la superficie del rígido); F2=200N.
La vista del plano de rotación proporciona
las coordenadas de los puntos de
aplicación de las fuerzas respecto de un
plano cartesiano con centro en el eje de
rotación.
x
y
F2
F1
x
y
F2
F1
30cm
50cm
20cm
Fig 6.33 Cuerpo rígido del ejemplo 6.7.
Solución:
Las fuerzas están en el plano XY, por
tanto el torque neto que el sistema de
fuerzas ejerce sobre el cuerpo respecto
del eje que pasa por su centro es:
( )( ) ( )( )
( )o
o
ˆ ˆ100 50 kNm 200 30 kNcmˆ11000 kNm
Στ = − −
Στ = − +
r
r
Note que el brazo de momento de 1Fr
es
igual que el radio de la circunferencia,
pues tiene dirección igual que la recta
tangente a ella.
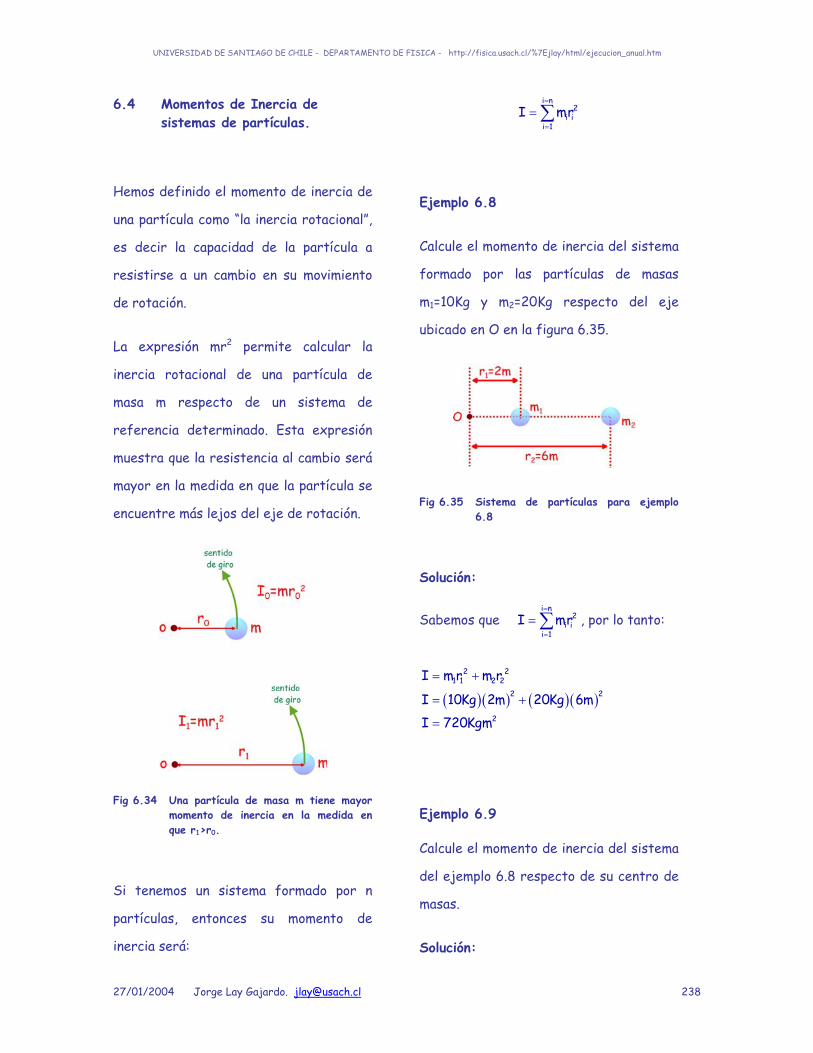
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 238
6.4 Momentos de Inercia de sistemas de partículas.
Hemos definido el momento de inercia de
una partícula como “la inercia rotacional”,
es decir la capacidad de la partícula a
resistirse a un cambio en su movimiento
de rotación.
La expresión mr2 permite calcular la
inercia rotacional de una partícula de
masa m respecto de un sistema de
referencia determinado. Esta expresión
muestra que la resistencia al cambio será
mayor en la medida en que la partícula se
encuentre más lejos del eje de rotación.
Fig 6.34 Una partícula de masa m tiene mayor momento de inercia en la medida en que r1>r0.
Si tenemos un sistema formado por n
partículas, entonces su momento de
inercia será:
i n2
i ii 1
I mr=
=
= ∑
Ejemplo 6.8
Calcule el momento de inercia del sistema
formado por las partículas de masas
m1=10Kg y m2=20Kg respecto del eje
ubicado en O en la figura 6.35.
Fig 6.35 Sistema de partículas para ejemplo 6.8
Solución:
Sabemos que i n
2i i
i 1I mr
=
=
= ∑ , por lo tanto:
( )( ) ( )( )
2 21 1 2 2
2 2
2
I m r m r
I 10Kg 2m 20Kg 6mI 720Kgm
= +
= +
=
Ejemplo 6.9
Calcule el momento de inercia del sistema
del ejemplo 6.8 respecto de su centro de
masas.
Solución:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 239
El centro de masas del sistema está
ubicado en el punto:
1 1 2 2cm
1 2
m r m rrm m
+=
+
( )( ) ( )( )cm
cm
10Kg 2m 20Kg 6mr 4,6m
10Kg 20Kgr 4,7m
+= =
+
≈
Por tanto, como se ve en la figura 6.36:
Fig 6.36 Posiciones de las partículas respecto del eje que pasa por su centro de masas.
En consecuencia:
( )( ) ( )( )
*2 *2cm 1 1 2 2
2 2cm
2cm
I m r m r
I 10Kg 2,7m 20Kg 1,3mI 106,7Kgm
= +
= +
=
Ejemplo 6.10
Existen numerosos ejemplos en la
literatura que se pueden resolver de esta
manera. Considere las dos esferas de
igual masa (m=1Kg) de la figura 6.37
unidas a través de una varilla rígida de
masa muy pequeña apoyada sobre una
base vertical en el punto en el que se
encuentra el centro de masas del
conjunto.
Fig 6.37 Cuerpo para el ejemplo 6.10.
Entonces se puede suponer que las
esferas se comportan como partículas
separadas por 1m, de manera tal que el
momento de inercia respecto del centro
de masas es:
( ) ( )
*2 *2cm 1 1 2 2
2 2
cm
2cm
I m r m r
1 1I 1Kg m 1Kg m2 2
I 0,5Kgm
= +
⎛ ⎞ ⎛ ⎞= +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
=
Ejemplo 6.11
Encuentre el momento de inercia de los
objetos de la figura 6.38 unidos por
barras muy delgadas, rígidas y de masa
despreciable formando un rectángulo de

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 240
dimensiones 0,5m y 1,0m
respectivamente. Suponga que se
comportan como partículas. Sus masas
son: m1=m2= 0,2Kg; m3=m4= 0,4Kg;
m1
0,5m
x
y
1,5mm2
m3m4
0,5m
Fig 6.38 Cuerpos puntuales (partículas) ubicados en una estructura de alambre rígido liviana, rectangular.
Encuentre el momento de inercia del
sistema de partículas respecto de ejes de
rotación ubicados en los ejes del sistema
de referencia.
Solución:
Respecto del eje x, se tiene:
( ) ( )
( ) ( )
2 2 2 2x 1 1 2 2 3 3 4 4
2 2
x
2 2
2x
I m r m r m r m r
1 1I 0,2Kg m 0,2Kg m4 4
1 10,4Kg m 0,4Kg m4 4
I 0,0075Kgm
= + + +
⎛ ⎞ ⎛ ⎞= + +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
⎛ ⎞ ⎛ ⎞+ + +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
=
Respecto del eje y, se tiene:
( ) ( )
( ) ( )
2 2 2 2y 1 1 2 2 3 3 4 4
2 2
y
2 2
2y
I m r m r m r m r
1 3I 0,2Kg m 0,2Kg m2 2
1 30,4Kg m 0,4Kg m2 2
I 1,5Kgm
= + + +
⎛ ⎞ ⎛ ⎞= + +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
⎛ ⎞ ⎛ ⎞+ + +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
=
Respecto del eje z, se tiene:
( ) ( )
( ) ( )
2 2 2 2z 1 1 2 2 3 3 4 4
2 2
z
2 2
2z
I m r m r m r m r
5 37I 0,2Kg m 0,2Kg m16 16
5 370,4Kg m 0,4Kg m16 16
I 1,25Kgm
= + + +
⎛ ⎞ ⎛ ⎞= + +⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
⎛ ⎞ ⎛ ⎞+ + +⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠=
6.5 Momentos de Inercia de cuerpos rígidos.
Si la distribución de masa es continua y
no se pueden hacer los supuestos
simplificadores de partícula o de sistema
de partículas, entonces el cálculo es más
complejo y requiere del cálculo integral.
La discusión que haremos a continuación
excede los objetivos de este curso. Sin
embargo, para aquellos que ya dominan
estas herramientas matemáticas, y para
los que vuelvan a revisar este capítulo al
preparar el examen final (fecha en que
dominarán el cálculo diferencial e
integral).

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 241
Por mientras, se puede saltar la discusión
matemática y tomar solo la tabla de
momentos de inercia de cuerpos comunes
que se observa al final de este capítulo.
Consideremos una barra delgada de
densidad homogénea de masa M y
longitud L, como se muestra en la figura
6.39. Allí hemos dibujado un sistema de
coordenadas con centro en el punto donde
se ubica el centro de masas de la barra.
En la figura se ha agregado una vista del
cuerpo idealizándolo a una dimensión.
Esta idealización se hace considerando
que el espesor y el ancho de la barra son
despreciables comparados con su
longitud.
cm
dm
Fig 6.39 Varilla delgada de longitud L y masa M.
Si suponemos que la barra está
compuesta de elementos de volumen muy
pequeños de masa im∆ , con el i-ésimo
elemento ubicado a una distancia xi del
centro de masas, entonces el momento de
inercia de los i elementos será igual a: i n
2cm i i
i 1I x m
=
=
= ∆∑ , que es una suma de
Riemman, cuyo límite cuando im∆ tienda
a cero es el momento de inercia de la
barra:
i
i n2 2
cm i im 0 i 1I lim x m x dm
=
∆ → =
= ∆ =∑ ∫
El elemento de volumen seleccionado
tiene una masa dm y una longitud dx, los
que se pueden expresar a través de la
densidad lineal de masa λ:
dmdx
λ =
De donde:
dm dx= λ
Si la densidad es constante, entonces se
puede calcular considerando la masa total
M y la longitud total de la barra L, siendo:
ML
λ =
Entonces:
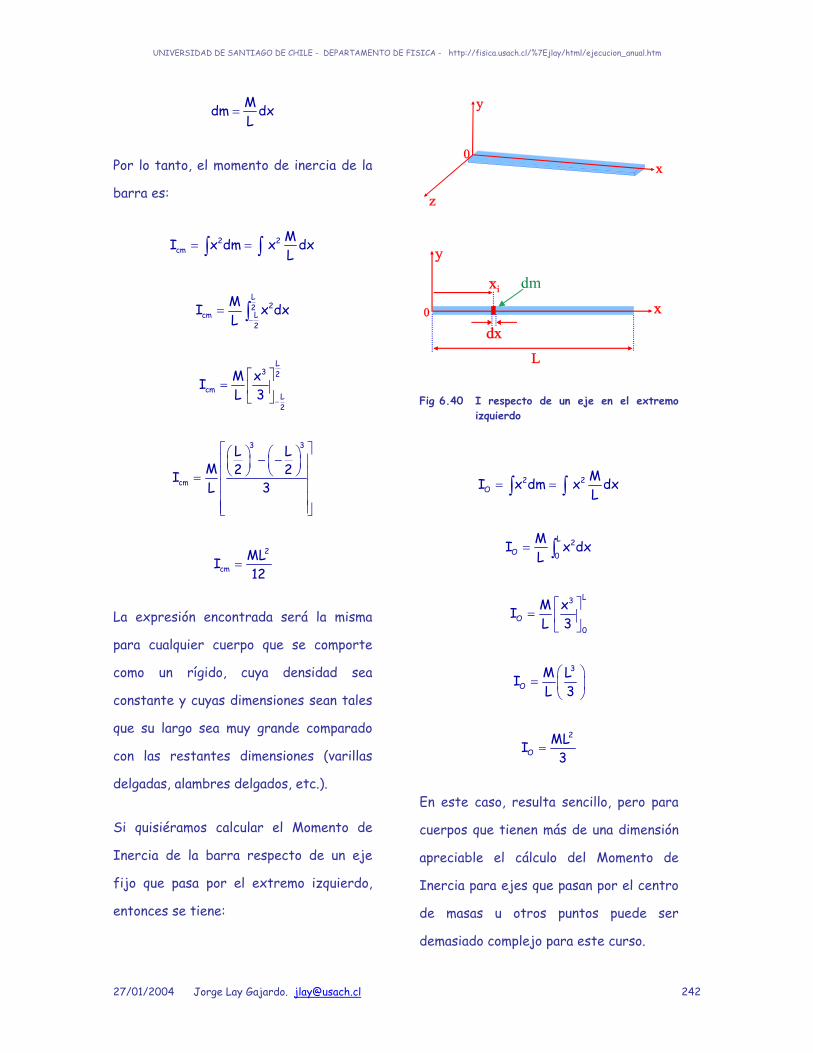
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 242
Mdm dxL
=
Por lo tanto, el momento de inercia de la
barra es:
2 2cm
MI x dm x dxL
= =∫ ∫
L22
Lcm2
MI x dxL −
= ∫
L3 2
cmL2
M xIL 3 −
⎡ ⎤= ⎢ ⎥
⎣ ⎦
3 3
cm
L LM 2 2IL 3
⎡ ⎤⎛ ⎞ ⎛ ⎞− −⎢ ⎥⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎢ ⎥=⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
2
cmMLI12
=
La expresión encontrada será la misma
para cualquier cuerpo que se comporte
como un rígido, cuya densidad sea
constante y cuyas dimensiones sean tales
que su largo sea muy grande comparado
con las restantes dimensiones (varillas
delgadas, alambres delgados, etc.).
Si quisiéramos calcular el Momento de
Inercia de la barra respecto de un eje
fijo que pasa por el extremo izquierdo,
entonces se tiene:
dm
Fig 6.40 I respecto de un eje en el extremo izquierdo
2 2O
MI x dm x dxL
= =∫ ∫
L 2O 0
MI x dxL
= ∫
L3
O0
M xIL 3⎡ ⎤
= ⎢ ⎥⎣ ⎦
3
OM LIL 3⎛ ⎞
= ⎜ ⎟⎝ ⎠
2
OMLI
3=
En este caso, resulta sencillo, pero para
cuerpos que tienen más de una dimensión
apreciable el cálculo del Momento de
Inercia para ejes que pasan por el centro
de masas u otros puntos puede ser
demasiado complejo para este curso.
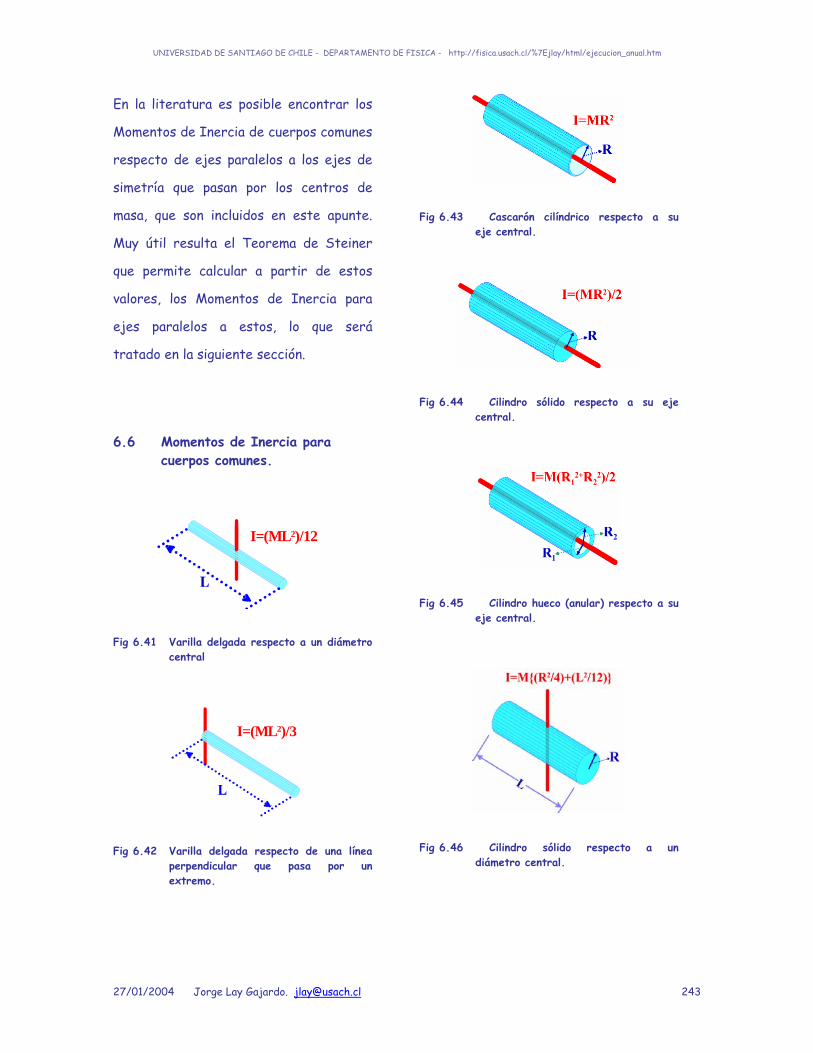
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 243
En la literatura es posible encontrar los
Momentos de Inercia de cuerpos comunes
respecto de ejes paralelos a los ejes de
simetría que pasan por los centros de
masa, que son incluidos en este apunte.
Muy útil resulta el Teorema de Steiner
que permite calcular a partir de estos
valores, los Momentos de Inercia para
ejes paralelos a estos, lo que será
tratado en la siguiente sección.
6.6 Momentos de Inercia para cuerpos comunes.
I=(ML2)/12
Fig 6.41 Varilla delgada respecto a un diámetro central
I=(ML2)/3
Fig 6.42 Varilla delgada respecto de una línea perpendicular que pasa por un extremo.
Fig 6.43 Cascarón cilíndrico respecto a su eje central.
Fig 6.44 Cilindro sólido respecto a su eje central.
Fig 6.45 Cilindro hueco (anular) respecto a su eje central.
Fig 6.46 Cilindro sólido respecto a un diámetro central.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 244
Fig 6.47 Lámina delgada respecto a eje central perpendicular a la cara mayor.
Fig 6.48 Lámina delgada respecto a un eje paralelo al borde mayor que pasa por el centro de masa.
Fig 6.49 Esfera maciza respecto al diámetro.
Fig 6.50 Cascarón esférico (hueco) respecto al diámetro.
R
I=MR2/2
Fig 6.51 Cascarón anular (anillo delgado) respecto a cualquier diámetro.
R
I=MR2
Fig 6.52 Cascarón anular (anillo delgado) respecto a su eje central.
6.7 Teorema de Steiner.
El teorema de Steiner o de los ejes
paralelos establece que el Momento de
Inercia (I) de un cuerpo respecto de
cualquier eje paralelo a un eje que pase
por el centro de masa es igual al Momento
de Inercia respecto del centro de masa
(Icm) más el producto entre la masa del
cuerpo multiplicada por el cuadrado de la
distancia (d) entre ambos ejes.
I=Icm+Md2

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 245
Ejemplo 6.12
Encuentre el Momento de Inercia de una
barra delgada respecto de un eje fijo que
pasa por el extremo izquierdo:
Solución:
Sabemos que el Momento de Inercia de
un eje paralelo al eje Y, que pasa por el
centro de masas es:
2
cmMLI12
=
La distancia que media entre este eje y
uno paralelo que pasa por el extremo
izquierdo es Ld2
= , por tanto según el
Teorema de Steiner:
2 2
O
2
O
ML LI M12 4
MLI3
= +
=
Igual que el resultado obtenido con la
integral.
Ejemplo 6.13
Encuentre el Momento de Inercia de una
lámina delgada respecto de un eje
perpendicular al plano y que pase por un
punto O situado en una esquina.
Solución:
Sabemos que el Momento de Inercia de
un eje paralelo al plano, que pasa por el
centro de masas de una lámina delgada
es:
2 2cm
MI (a b )12
= +
La distancia entre este eje y la esquina
es:
( )22
2 2 2a b 1d a b2 2 4
⎛ ⎞⎛ ⎞= + = +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
( )2 2 2 2O
2 2O
2 2O
M 1I (a b ) M a b12 4
1 1I M(a b )12 4
MI (a b )3
= + + +
⎛ ⎞= + +⎜ ⎟⎝ ⎠
= +
Ejemplo 6.14
Encuentre el Momento de Inercia de un
cilindro sólido respecto de un eje que
pase por la tangente de su superficie,
paralelo al eje de simetría.
Solución:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 246
De la tabla de Momentos de Inercia
tenemos que: 2MRI
2= y que el eje
escogido se encuentra ubicado a una
distancia R del anterior, por lo que
entonces, de acuerdo a Steiner:
22
R
2R
MRI MR2
3I MR2
= +
=
6.8 Momentos de Inercia de cuerpos compuestos.
En muchas ocasiones tenemos ejemplos
donde un cuerpo puede descomponerse en
cuerpos de geometría sencilla cuyos
Momentos de Inercia son conocidos.
En ese caso se debe tener en cuenta que
el Momento de Inercia del cuerpo
compuesto respecto a un eje cualquiera
es igual a la suma de los Momentos de
Inercia de los cuerpos que lo componen,
respecto del mismo eje.
Ejemplo 6.15
Encuentre el Momento de Inercia del
cuerpo de la figura, formado por dos
barras homogéneas de largo L y masa M,
respecto de un eje perpendicular al plano
de la figura y que pasa por la intersección
(O) de las barras.
desde arriba, se ve así:
L/3
L/3
Solución:
Para cada barra, el centro de masa está
ubicado en L2
y el Momento de Inercia
respecto de ese punto es2
cmLI M12
= .
L/3
L/6
L/2 cm
O
Entre este punto y O existe una
distancia L L Ld2 3 6
= − = , por tanto según
Steiner:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 247
22
oL LI M M12 6
⎛ ⎞= + ⎜ ⎟⎝ ⎠
2
oLI M9
=
Como las dos barras están en igual
situación geométrica, entonces el
Momento de Inercia del conjunto será:
2o
2I ML9
=
Ejemplo 6.16
Encuentre el Momento de Inercia del
rígido de la figura, compuesto de un anillo
homogéneo de masa M y tres barras
delgadas homogéneas de largo L y masa
m, respecto de un eje perpendicular al
plano.
Desde arriba, se ve así:
L
Para una barra: 2
cm barraLI m12
=
Respecto de O:
22 2
O barraL L mLI m m12 2 3
⎛ ⎞= + =⎜ ⎟⎝ ⎠
Para el anillo: 2cm anillo O anilloI I ML= =
Para el cuerpo:
( )
22
O cuerpo
2O cuerpo
mLI 3 ML3
I L m M
⎛ ⎞= +⎜ ⎟
⎝ ⎠= +

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 248
6.9 Aplicaciones de la dinámica de rotación.
Ahora podemos estudiar una serie de
casos que contienen rotación de cuerpos
rígidos con eje fijo. Lo haremos a través
de ejemplos.
Ejemplo 6.17
Calcule la aceleración angular de una
puerta respecto de un eje que pasa por
las bisagras (sin roce) si se le ejerce una
fuerza constante perpendicular como se
observa en la figura 6.53. Esto es una
idealización, puesto que la fuerza va a
dejar de ser perpendicular en la medida
en que la puerta se abra. Supondremos
aquí que la mano sigue ejerciendo la
fuerza perpendicular o que consideramos
solo un instante muy pequeño del evento.
Desde arriba, se ve así:
Fig 6.53 Figura para ejemplo 6.17
Solución:
Sabemos que Iτ = αrr y del dibujo se tiene
que el Momento de Inercia de la puerta
es el correspondiente al de un eje
paralelo a la dimensión mayor de una
lámina rectangular delgada que pase por
un extremo.
De la tabla se tiene que el Momento de
Inercia de una lámina delgada respecto a
un eje paralelo al borde mayor que pasa
por el centro de masa es:
En nuestro ejemplo a es el ancho de la
puerta ( a d= ), y las bisagras se
encuentran sobre un eje paralelo al que

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 249
pasa por el centro de masas a una
distancia dL2
= , de manera que el
Momento de Inercia respecto de las
bisagras según Steiner, será:
22 2
OMd d MdI M12 2 3
⎛ ⎞= + =⎜ ⎟⎝ ⎠
La magnitud del torque que la fuerza hace
respecto de O es dFτ = , y su dirección es
k− (gira en el sentido de los punteros del
reloj), según se puede apreciar
claramente en la figura 6.53. Claramente
esta dirección es la misma que la
dirección del vector aceleración angular.
En consecuencia, se tiene que:
( ) ( )2Mdˆ ˆdF k k
3− = α −
Cuya magnitud es, por igualdad de
vectores:
2MddF3
= α
Esta expresión nos permite calcular por
ejemplo, la aceleración angular, sin
recurrir a la cinemática angular.
Si la puerta tuviera 0,75m de ancho y una
masa de 20Kg, la magnitud de la
aceleración angular que una fuerza
perpendicular de magnitud 50N le
produciría sería de:
( )( )( ) 2
3 50N3F rad10Md 20Kg 0,75m s
α = = =
Para aquellos que aún tienen dificultades
con las unidades, se les recuerda que la
definición de radian (rad) es: ángulo (θ)
descrito cuando el radio (r) es igual al
arco (s), de manera tal que se tiene s=rθ.
Esto implica que el radian es adimensional
( mradm⎡ ⎤=⎡ ⎤⎣ ⎦ ⎢ ⎥⎣ ⎦
).
En el cálculo que acabamos de hacer, las
unidades se reducen de la siguiente
manera:
[ ]2
2 2
mKgN 1 m radsKgm Kgm s m s
⎡ ⎤⎡ ⎤ ⎢ ⎥ ⎡ ⎤⎡ ⎤α = = = =⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎢ ⎥
⎣ ⎦
Note que si la fuerza se aplica a una
distancia menor del eje entonces cambia
el torque y la aceleración angular.
Apliquemos la fuerza a una distancia r
menor que d respecto de las bisagras.
Entonces el torque es rFτ = y se tiene
que
( ) ( )2Mdˆ ˆrF k k
3− = α −
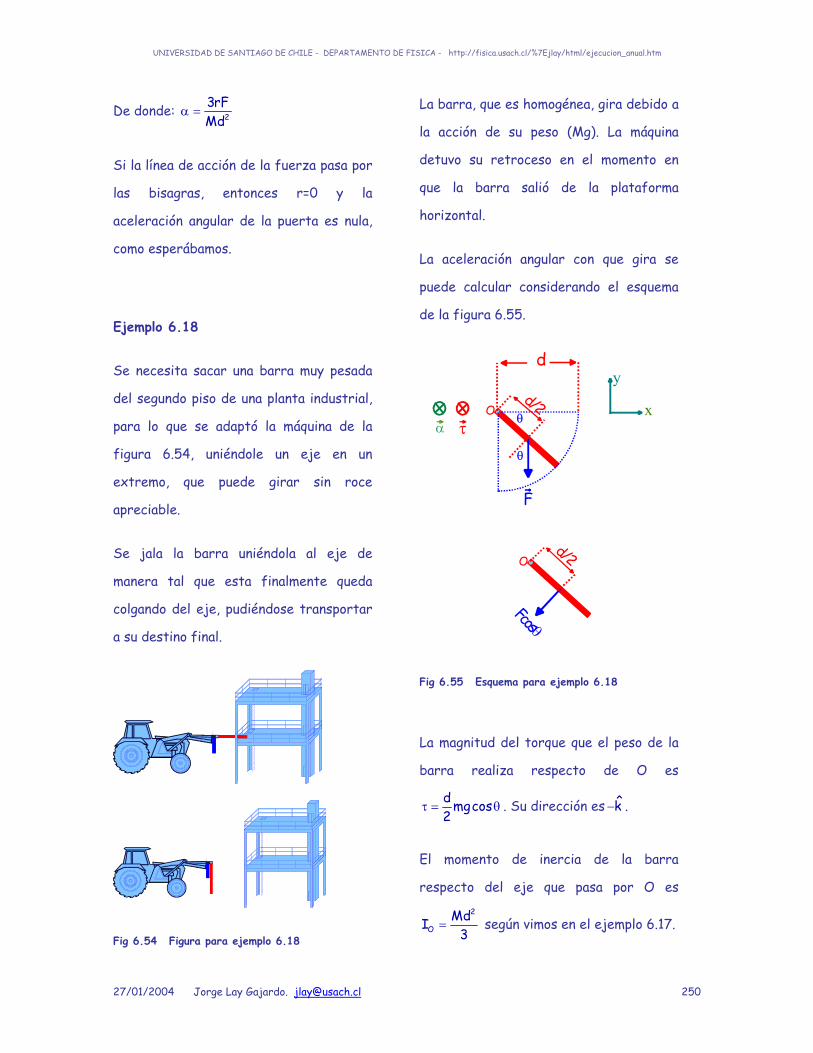
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 250
De donde: 23rFMd
α =
Si la línea de acción de la fuerza pasa por
las bisagras, entonces r=0 y la
aceleración angular de la puerta es nula,
como esperábamos.
Ejemplo 6.18
Se necesita sacar una barra muy pesada
del segundo piso de una planta industrial,
para lo que se adaptó la máquina de la
figura 6.54, uniéndole un eje en un
extremo, que puede girar sin roce
apreciable.
Se jala la barra uniéndola al eje de
manera tal que esta finalmente queda
colgando del eje, pudiéndose transportar
a su destino final.
Fig 6.54 Figura para ejemplo 6.18
La barra, que es homogénea, gira debido a
la acción de su peso (Mg). La máquina
detuvo su retroceso en el momento en
que la barra salió de la plataforma
horizontal.
La aceleración angular con que gira se
puede calcular considerando el esquema
de la figura 6.55.
F
ταO x
yd
θ
θ
d/2
Fcosθ
d/2O
Fig 6.55 Esquema para ejemplo 6.18
La magnitud del torque que el peso de la
barra realiza respecto de O es
d mgcos2
τ = θ . Su dirección es k− .
El momento de inercia de la barra
respecto del eje que pasa por O es 2
OMdI
3= según vimos en el ejemplo 6.17.
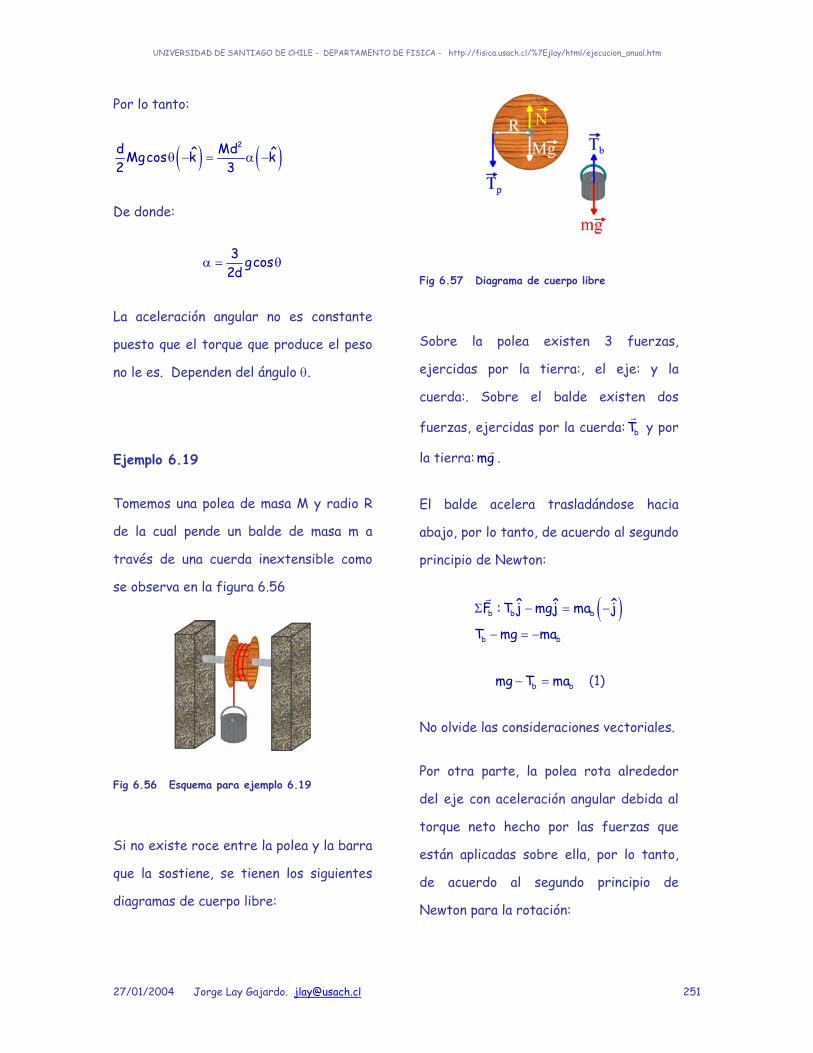
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 251
Por lo tanto:
( ) ( )2d Mdˆ ˆMgcos k k
2 3θ − = α −
De donde:
3 gcos2d
α = θ
La aceleración angular no es constante
puesto que el torque que produce el peso
no le es. Dependen del ángulo θ.
Ejemplo 6.19
Tomemos una polea de masa M y radio R
de la cual pende un balde de masa m a
través de una cuerda inextensible como
se observa en la figura 6.56
Fig 6.56 Esquema para ejemplo 6.19
Si no existe roce entre la polea y la barra
que la sostiene, se tienen los siguientes
diagramas de cuerpo libre:
Fig 6.57 Diagrama de cuerpo libre
Sobre la polea existen 3 fuerzas,
ejercidas por la tierra:, el eje: y la
cuerda:. Sobre el balde existen dos
fuerzas, ejercidas por la cuerda: bTr
y por
la tierra:mgr .
El balde acelera trasladándose hacia
abajo, por lo tanto, de acuerdo al segundo
principio de Newton:
( )b b b
b b
ˆ ˆ ˆF : T j mgj ma j
T mg ma
Σ − = −
− = −
r
b bmg T ma− = (1)
No olvide las consideraciones vectoriales.
Por otra parte, la polea rota alrededor
del eje con aceleración angular debida al
torque neto hecho por las fuerzas que
están aplicadas sobre ella, por lo tanto,
de acuerdo al segundo principio de
Newton para la rotación:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 252
IΣτ = αrr
Sobre la polea existen tres fuerzas, pero
solo la tensión produce torque respecto
del eje fijo de rotación, que pasa por el
centro de masas de la polea:
( )pˆ ˆ: RT k I kΣτ = α
r
De donde: pRT I= α
Y el momento de inercia para un disco
respecto de un eje perpendicular que
pasa por su centro de masas es:
21I MR2
=
Por tanto:
2p
1RT MR2
= α (2)
Debido a que la cuerda es inextensible,
entonces las magnitudes de las tensiones
que ejerce sobre balde y polea son iguales
(Tp=Tb=T). Las aceleraciones lineales
también son iguales por la misma razón
(ap=ab=a).
Entonces las ecuaciones (1) y (2) se
pueden escribir de nuevo:
mg T ma− = (1)
21RT MR2
= α (2)
Este sistema de ecuaciones permite
resolver numerosos ejercicios
encontrados en la literatura tradicional.
Como un ejemplo, si conocemos la masa
del balde, masa y radio de la polea,
podemos calcular la aceleración angular
del sistema y la tensión de la cuerda:
De (1):
T mg ma= −
pero a=αR:
T mg m R= − α
Reemplazando en (2):
21R(mg m R) MR2
− α = α
2mgR(M 2m)
α =+
Si la masa del balde es m=5Kg, la masa de
la polea es de M=1Kg y su radio es
R=0,2m:
( )2
2
m2(5Kg)(10 )s
0,2m (1Kg 10Kg)rad45,45s
α =+
α =
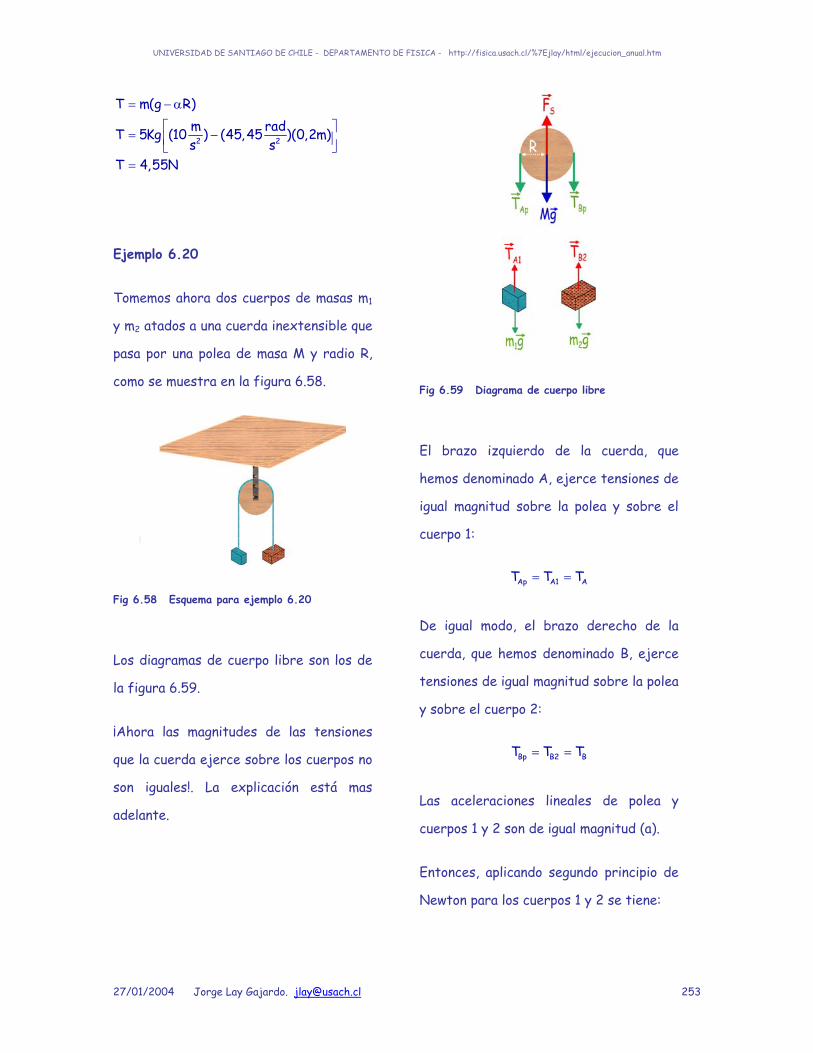
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 253
2 2
T m(g R)m radT 5Kg (10 ) (45,45 )(0,2m)s s
T 4,55N
= − α
⎡ ⎤= −⎢ ⎥⎣ ⎦=
Ejemplo 6.20
Tomemos ahora dos cuerpos de masas m1
y m2 atados a una cuerda inextensible que
pasa por una polea de masa M y radio R,
como se muestra en la figura 6.58.
Fig 6.58 Esquema para ejemplo 6.20
Los diagramas de cuerpo libre son los de
la figura 6.59.
¡Ahora las magnitudes de las tensiones
que la cuerda ejerce sobre los cuerpos no
son iguales!. La explicación está mas
adelante.
Fig 6.59 Diagrama de cuerpo libre
El brazo izquierdo de la cuerda, que
hemos denominado A, ejerce tensiones de
igual magnitud sobre la polea y sobre el
cuerpo 1:
Ap A1 AT T T= =
De igual modo, el brazo derecho de la
cuerda, que hemos denominado B, ejerce
tensiones de igual magnitud sobre la polea
y sobre el cuerpo 2:
Bp B2 BT T T= =
Las aceleraciones lineales de polea y
cuerpos 1 y 2 son de igual magnitud (a).
Entonces, aplicando segundo principio de
Newton para los cuerpos 1 y 2 se tiene:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 254
( )1 A 1 1
1 A 1
ˆ ˆ ˆF : T j m gj m a j
m g T m a (1)
Σ − = −
− =
r
si suponemos que el cuerpo 1 baja.
2 B 2 2
B 2 2
ˆ ˆ ˆF : T j m gj m ajT m g m a (2)Σ − =
− =
r
Puesto que el cuerpo 2 sube.
Ahora aplicamos el segundo principio de
Newton para la rotación en la polea:
El torque neto sobre la polea es causado
solo por las tensiones de la cuerda,
puesto que la fuerza del soporte y el peso
de la polea tienen líneas de acción que
pasan por el eje de rotación. Entonces:
( ) ( )O A B
A B
ˆ ˆ ˆ: RT k RT k I kRT RT I (3)Στ − = α
− = α
r
Note que si las tensiones aplicadas por la
cuerda a ambos lados de la polea fueran
iguales, entonces no tendría aceleración
angular.
El momento de inercia de una polea (es el
de un disco sólido) respecto de un eje
perpendicular a su superficie, que pasa
por su centro de masas es 21I MR2
= y la
magnitud de la aceleración lineal de las
partículas situadas en su borde es a=αR,
de modo que se podría escribir la
ecuación (2) como:
2A B
1 aRT RT MR (4)2 R
⎛ ⎞− = ⎜ ⎟⎝ ⎠
Naturalmente, las ecuaciones (1),(2) y (3)
o (4) permiten resolver 3 incógnitas.
Por ejemplo, si la masa de la polea es
M=2Kg, si su radio es R=0,1m, si las masas
de los cuerpos es m1=10Kg, m2=4Kg, si la
cuerda tiene masa despreciable y no
existe roce entre la cuerda y la polea ni
entre la polea y su eje, entonces podemos
calcular las magnitudes de las tensiones
de las cuerdas y la aceleración del
sistema.
de (1): A 1 1T m g m a = −
De (2): B 2 2T m a +m g =
Reemplazando en (4):
( ) ( )
( ) ( )
21 1 2 2
1 2 1 2
1 aR m g m a R m a +m g MR 2 R
1g m m Ma a m +m2
⎛ ⎞− − = ⎜ ⎟⎝ ⎠
− = +
( )
( )
( )
1 2
1 2
2
2
g m ma 1 M m +m
2m10 10Kg 4Kg msa 41 s2Kg 10Kg+4Kg
2
−=
+
⎛ ⎞ −⎜ ⎟⎝ ⎠= =
+

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 255
Si el roce entre la polea y su eje no se
puede despreciar, existirá un torque
producido por la fuerza de roce ( )fτr que
debemos incluir en la ecuación dinámica
de la polea.
En nuestro ejemplo, al rotar la polea en
dirección antihoraria, se tiene que el
torque producido por la fuerza de roce
tiene dirección horaria, por tanto la
ecuación (3) debe incluirlo:
( ) ( )O A B f
A B f
ˆ ˆ ˆ ˆ: RT k RT k k I kRT RT I (3*)Στ − − τ = α
− − τ = α
r
Ejemplo 6.21
Tomemos ahora dos cuerpos de masas m1
y m2 (considere que se comportan como
partículas) unidos por una cuerda
inextensible y de masa despreciable que
pasa por una polea de masa M y radio R
como se indica en la figura 6.60.
Supongamos que no existe roce entre
polea y su eje de rotación y que la cuerda
no desliza en la polea. Entre el cuerpo 1 y
la superficie horizontal en cambio, existe
roce apreciable.
Fig 6.60 Figura para ejemplo 6.21
Hemos supuesto que el cuerpo 1 se mueve
hacia la derecha.
Aplicando segundo principio de Newton
para los cuerpos considerados como
partículas 1 y 2 se tiene:
x1 A 1k
y1 1
F : T f m a (1)F : N m g 0 (2)
Σ − =
Σ − =
y2 B 2 2F : T m g m a (3)Σ − = −

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 256
y aplicando segundo principio de Newton
para la rotación de la polea se tiene:
( ) ( )O A B
B A
ˆ ˆ ˆ: RT k RT k I kRT RT I (4) Στ − = − α
− = α
r
Ahora tenemos un sistema de ecuaciones
que permite resolver varias preguntas.
Calculemos la aceleración lineal del
sistema por ejemplo:
De (2) obtenemos la normal sobre el
cuerpo 1: 1N m g=
Y la ocupamos para calcular kf que se
necesita en la ecuación (1) considerando
que k kf N= µ , por lo que:
A 1 1kT m g m a (5)− µ =
Ahora reemplacemos el momento de
inercia respecto del eje de rotación y
expresemos la magnitud de la aceleración
angular de la polea en función de la
aceleración lineal de las partículas que se
encuentran en su borde, en la ecuación
(4):
2B A
B A
1 aRT RT MR 2 R
1T T Ma (6)2
⎛ ⎞⎛ ⎞− = ⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
− =
Resumiendo, tenemos el siguiente sistema
de ecuaciones expresadas de manera
conveniente:
2 B 2m g T m a (3)− =
A 1 1kT m g m a (5)− µ =
B A1T T Ma (6)2
− =
Si las sumamos:
2 1 1 2k
2 1k
1 2
1m g m g a(m m M)2
g(m m )a 1(m m M)2
− µ = + +
− µ=
+ +
Reemplazando la aceleración en (3) se
puede calcular la tensión ejercida por la
cuerda sobre el cuerpo 2:
2 1kB 2 2
1 2
g(m m )T m g m 1(m m M)2
⎡ ⎤⎢ ⎥− µ
= − ⎢ ⎥⎢ ⎥+ +⎢ ⎥⎣ ⎦
y con un poco de álgebra:
1 1kB 2
1 2
2m M 2 mT m g(2m 2m M)⎡ ⎤+ + µ
= ⎢ ⎥+ +⎣ ⎦
La tensión de la cuerda sobre el cuerpo 1
se puede obtener de la ecuación (5):
A 1 1kT m g m a= µ +
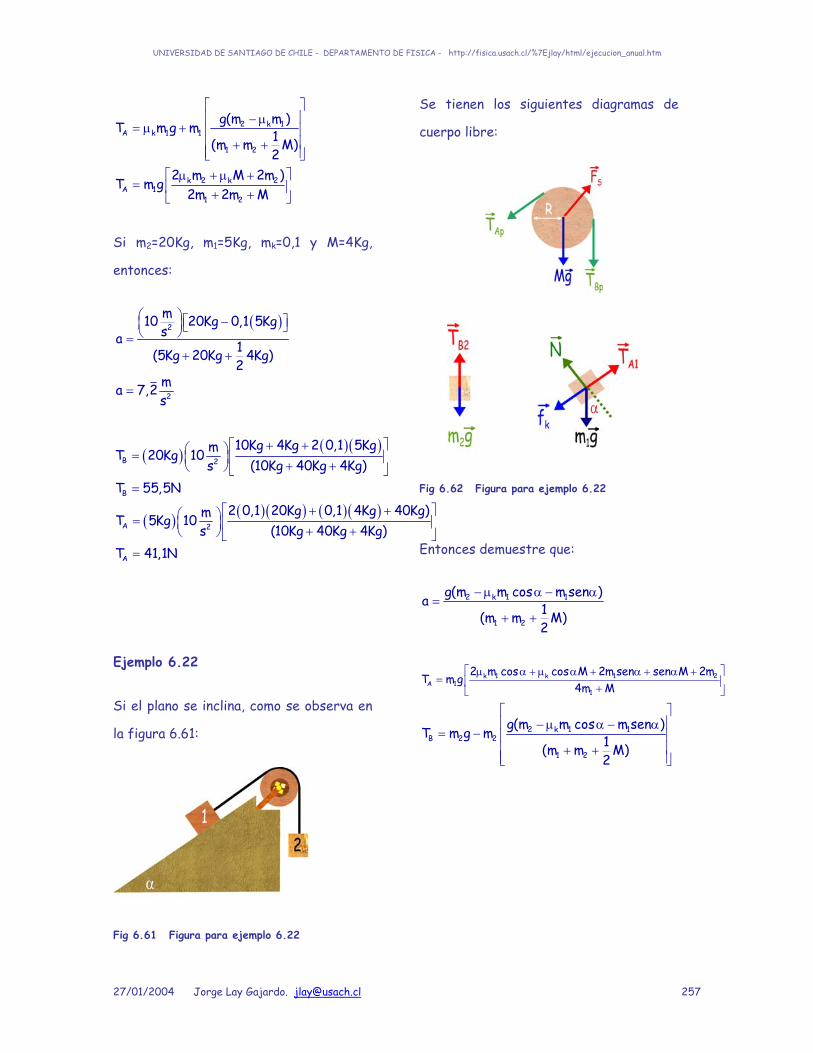
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 257
2 1kA 1 1k
1 2
2 2k kA 1
1 2
g(m m )T m g m 1(m m M)2
2 m M 2m )T m g2m 2m M
⎡ ⎤⎢ ⎥− µ
= µ + ⎢ ⎥⎢ ⎥+ +⎢ ⎥⎣ ⎦
⎡ ⎤µ + µ += ⎢ ⎥+ +⎣ ⎦
Si m2=20Kg, m1=5Kg, mk=0,1 y M=4Kg,
entonces:
( )2
2
m10 20Kg 0,1 5Kgsa 1(5Kg 20Kg 4Kg)
2ma 7,2s
⎛ ⎞ ⎡ ⎤−⎜ ⎟ ⎣ ⎦⎝ ⎠=+ +
=
( ) ( )( )B 2
B
10Kg 4Kg 2 0,1 5KgmT 20Kg 10s (10Kg 40Kg 4Kg)
T 55,5N
⎡ ⎤+ +⎛ ⎞= ⎢ ⎥⎜ ⎟ + +⎝ ⎠ ⎣ ⎦=
( ) ( )( ) ( )( )A 2
A
2 0,1 20Kg 0,1 4Kg 40Kg)mT 5Kg 10s (10Kg 40Kg 4Kg)
T 41,1N
⎡ ⎤+ +⎛ ⎞= ⎢ ⎥⎜ ⎟ + +⎝ ⎠ ⎣ ⎦=
Ejemplo 6.22
Si el plano se inclina, como se observa en
la figura 6.61:
Fig 6.61 Figura para ejemplo 6.22
Se tienen los siguientes diagramas de
cuerpo libre:
Fig 6.62 Figura para ejemplo 6.22
Entonces demuestre que:
2 1 1k
1 2
g(m m cos m sen )a 1(m m M)2
− µ α − α=
+ +
1 1 2k kA 1
1
2 m cos cos M 2m sen sen M 2mT m g4m M
⎡ ⎤µ α + µ α + α + α += ⎢ ⎥+⎣ ⎦
2 1 1kB 2 2
1 2
g(m m cos m sen )T m g m 1(m m M)2
⎡ ⎤⎢ ⎥− µ α − α
= − ⎢ ⎥⎢ ⎥+ +⎢ ⎥⎣ ⎦

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 258
6.10 Trabajo y energía de rotación.
Tal como en el movimiento de traslación
de una partícula, cuando tenemos rotando
un rígido con eje fijo las fuerzas
externas a él efectúan trabajo mecánico.
Consideremos el cuerpo rígido de la
figura 6.63, que puede rotar alrededor
del eje fijo Z del sistema de coordenadas
que usaremos como sistema de
referencia.
Fig 6.63 Cuerpo rígido con eje fijo.
Si ejercemos una fuerza en el plano xy
sobre una partícula cualquiera, realizará
un trabajo mecánico puesto que habrá un
desplazamiento angular.
Esto se observa mejor cuando se ve
desde arriba.
Fig 6.64 Vista desde arriba.
Sobre el cuerpo se ha aplicado una fuerza
constante en magnitud y dirección
respecto de la tangente a la curva. La
fuerza Fr
se puede suponer como la suma
de dos vectores cuyas direcciones son
radiales y tangenciales respectivamente.
La componente radial no trabaja pues no
existe desplazamiento en esa dirección.
La componente tangencial trabaja, pues
existe desplazamiento angular ∆θque se
puede relacionar con el desplazamiento
angular s.
El trabajo que la fuerza tangencial
realiza será: dW=FTds
Si se toma un desplazamiento
infinitesimal ds, se tiene que: ds=Rdθ
Por lo tanto: dW=FT Rdθ
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 259
y como la magnitud del torque que la
fuerza tangencial realiza sobre la
partícula es τ=FTR, se tiene que:
dW=τ dθ
Integrando a ambos lados, y considerando
que W0=0 para θ0, se tiene:
0 0
w
W
dW= dθ
θ
τ θ∫ ∫
0
w0W θ
θ= τθ
De donde finalmente:
W = τ∆θ
Que permite calcular el trabajo que una
fuerza constante realiza sobre el cuerpo,
puesto que es una partícula de un rígido.
6.11 Energía cinética rotacional.
Si consideramos ahora la velocidad lineal
de la partícula del cuerpo (cuya masa es
∆m), citada en el punto anterior respecto
de su centro de masas y calculamos su
energía cinética, tenemos que:
2i i i
1K mv2
= ∆
Su velocidad lineal puede expresarse en
función de su velocidad angular:
v=ωR
Por tanto:
2 2i i i i
1K m R2
= ∆ ω
La energía cinética de todas las
partículas del cuerpo será:
i n i n2 2
i i i ii 1 i 1
1K m R2
= =
= =
= ∆ ω∑ ∑
Donde la velocidad angular es igual para
todas las partículas, y tomando el límite
cuando ∆m tienda a 0, se tiene:
i n2 2
m 0 i ii 1
2 2
1K lim mR21K R dm2
=
∆ →=
= ω ∆
= ω
∑
∫
2cm
1K I2
= ω
Expresión que permite calcular la energía
cinética de rotación de un cuerpo
respecto del centro de masas.
Ejemplo 6.23
Esto permite resolver algunas situaciones
interesantes. Consideremos por ejemplo,
el caso de un cuerpo de masa m que baja a
partir del reposo por un plano inclinado,
unido a una polea cilíndrica de masa M y

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 260
radio R, a través de una cuerda
inextensible y de masa despreciable
enrollada varias veces en la polea.
Suponga que no existe roce entre la polea
y su eje ni entre el cuerpo y el plano.
Fig 6.65 Figura para el ejemplo 6.23
Al inicio, el cuerpo tiene solo energía
potencial gravitatoria (mgh). Cuando ha
bajado d metros por el plano llega al
punto arbitrariamente definimos U=0
(y=0), donde su energía se ha
transformado parte en Energía Cinética
de traslación del cuerpo 21 mv2⎛ ⎞⎜ ⎟⎝ ⎠
y parte
en Energía Cinética de rotación de la
polea 2cm
1 I2⎛ ⎞ω⎜ ⎟⎝ ⎠
, debido a que el sistema
es conservativo.
2 21 1mgh mv I2 2
= + ω
Conocido el momento de inercia de la
polea respecto del centro de
masas 2cm
1I MR2
⎛ ⎞=⎜ ⎟⎝ ⎠
, y que v=ωR:
22 2
21 1 1 vmgh mv MR2 2 2 R
⎛ ⎞⎛ ⎞= + ⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
De donde, con un poco de álgebra:
2 2mghv Mm2
=+
Es la velocidad con que el cuerpo llega al
plano horizontal.
La aceleración constante con la que baja
se puede calcular debido a que como v0=0,
entonces 2v 2ad= pues todas las fuerzas
son constantes, y que h=dsenθ quedando:
2mgdsen2ad Mm2
mgsena Mm2
θ=
+
θ=
+
Si existe roce entre el plano y el cuerpo
la situación es distinta.
Demuestre que entonces, la aceleración
con que el cuerpo baja el plano es:
kmg(sen cos )a Mm2
θ − µ θ=
+

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 261
6.12 Teorema del Trabajo y la Energía para rotación.
Interesante resulta ahora calcular el
trabajo neto efectuado sobre un rígido,
el que se puede obtener a partir de la
segunda ley de Newton para la rotación,
que se puede escribir como:
Iτ = α∑ rr
y como hemos visto, si el eje es fijo:
Iτ = α∑
Que se puede escribir como:
dIdtd dId dt
ωτ =
ω θτ =
θ
∑
∑
Donde ddtθ= ω por lo que:
dIdω
τ = ωθ∑
d I dτ θ = ω ω∑
Pero d dWτ θ =∑ :
dW I d= ω ω
Integrando a ambos lados:
0 0
W
W
dW I dω
ω
= ω ω∫ ∫
0
2
220
W I2
W I I2 2
ω
ω
ω=
ωω= −
En consecuencia, el trabajo realizado por
el torque neto que produce una
aceleración angular es igual a la variación
de la energía cinética de rotación.
6.13 Energía Cinética de Rototraslación
Ahora estamos en condiciones de
estudiar el caso de un cuerpo que posee
movimiento de traslación y rotación
simultáneamente.
Consideremos el cuerpo de la figura 6.66,
donde se tiene traslación del centro de
masas respecto de un sistema de
referencia inercial y movimiento de
rotación alrededor. Supondremos además,
que el eje de rotación pasa por el centro
de masas, perpendicular al plano de
rotación, y que el eje se desplaza solo
linealmente. Miremos una partícula:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 262
Fig 6.66 desde arriba:
Fig 6.67 Rígido roto trasladándose.
Entonces, la velocidad de la i-esima
partícula Pi ( ivr ) es la suma de las
velocidades respecto del sistema inercial
( cmvr ), que es la velocidad de traslación
del centro de masas del cuerpo que se
comporta como una partícula libre, y la
velocidad de la partícula respecto del
centro de masas del cuerpo ( oivr ), ubicado
en el punto O.
El eje de rotación es perpendicular al
plano de rotación (paralelo al eje z).
oi i cmv v v= +r r r
La energía cinética de la i-ésima partícula
es:
( )22 oi i i i i cm
1 1K mv m v v2 2
= = +r r r
Mientras que la energía cinética del
rígido (K) será la suma de las energías
cinéticas de sus n partículas.
( )i n i n 2o
i i i cmi 1 i 1
1K K m v v2
= =
= =
= = +∑ ∑ r r
Que corresponde a:
( ) ( )i n
o oi i cm i cm
i 1
1K m v v v v2
=
=
= + +∑ r r r r
( )i n
o o oi i i cm i cm cm
i 1
1K m v v 2v v v v2
=
=
= + +∑ r r r r r r
Expresándola por conveniencia como:
i n i n i no2 o 2
i i cm i i cm ii 1 i 1 i 1
1 1K mv v mv v m2 2
= = =
= = =
= + +∑ ∑ ∑r r r r
Donde i n
ii 1
M m=
=
= ∑ por lo que:
i n i no2 o 2
i i cm i i cmi 1 i 1
1 1K mv v mv Mv2 2
= =
= =
⎛ ⎞= + +⎜ ⎟⎝ ⎠
∑ ∑r r r r
Si recordamos que la definición de
velocidad del centro de masa de un
sistema de partículas es: i n
cm i ii 1
Mv mv=
=
= ∑r r ,
entonces vemos que el segundo término

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 263
es cero, puesto que i n
oi i
i 1mv
=
=∑ r representa el
producto entre la masa del cuerpo y la
velocidad del centro de masa respecto
del centro de masa.
El primer término es la energía cinética
de rotación como vimos en el punto 6.13 y
el tercer término es la energía cinética
de traslación del centro de masas, por lo
que se tiene:
2 2cm cm
1 1K I Mv2 2
= ω +
6.14 Eje instantáneo de rotación.
En todo este análisis no han intervenido
las fuerzas. Podemos suponer que si las
hubo, su resultante era nula, de manera
tal que el centro de masas del cuerpo se
mueve con velocidad constante
(movimiento uniforme rectilíneo). Además
el torque resultante respecto del centro
de masas de esas fuerzas era nulo, por lo
que la aceleración angular era nula, lo que
entonces significa que el cuerpo rotaba
con velocidad angular constante.
Estudiemos ahora el efecto que las
fuerzas.
Consideremos una esfera de radio R y
masa M sin movimiento de rotación inicial
que se lanza sobre una superficie rugosa.
Entonces sobre la esfera existe una
fuerza de roce cinético que produce que
la velocidad del centro de masas
disminuya, puesto que le proporciona una
aceleración cuya dirección es opuesta a la
velocidad del centro de masas. El peso de
la esfera y la reacción normal de la
superficie no participan en la dirección
del movimiento, ni hacen torque respecto
del centro de masas.
Como la fuerza de roce cinético es
constante, entonces la aceleración del
centro de masas es constante y el
movimiento del eje es rectilíneo.
Fig 6.68 Rígido roto trasladándose.
Pero la fuerza de roce cinético además
produce un torque sobre la esfera cuya
magnitud respecto del centro de masas
es fkR, y cuya dirección es k− . Entonces,
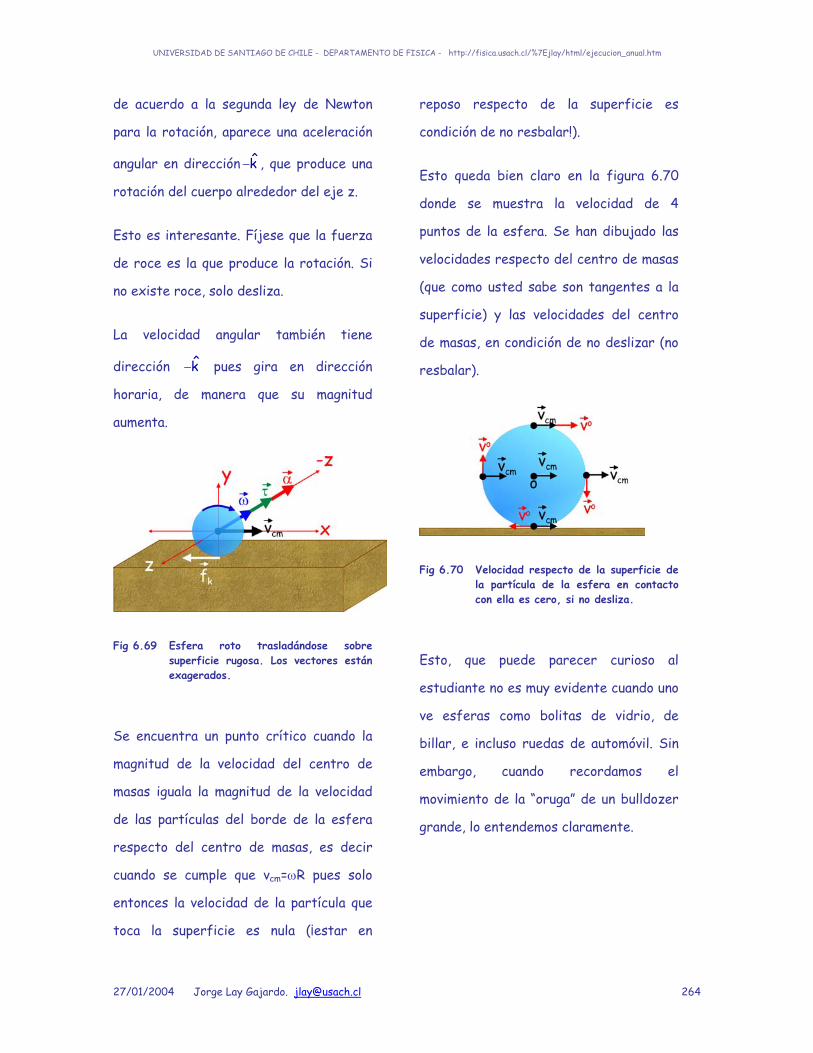
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 264
de acuerdo a la segunda ley de Newton
para la rotación, aparece una aceleración
angular en dirección k− , que produce una
rotación del cuerpo alrededor del eje z.
Esto es interesante. Fíjese que la fuerza
de roce es la que produce la rotación. Si
no existe roce, solo desliza.
La velocidad angular también tiene
dirección k− pues gira en dirección
horaria, de manera que su magnitud
aumenta.
Fig 6.69 Esfera roto trasladándose sobre superficie rugosa. Los vectores están exagerados.
Se encuentra un punto crítico cuando la
magnitud de la velocidad del centro de
masas iguala la magnitud de la velocidad
de las partículas del borde de la esfera
respecto del centro de masas, es decir
cuando se cumple que vcm=ωR pues solo
entonces la velocidad de la partícula que
toca la superficie es nula (¡estar en
reposo respecto de la superficie es
condición de no resbalar!).
Esto queda bien claro en la figura 6.70
donde se muestra la velocidad de 4
puntos de la esfera. Se han dibujado las
velocidades respecto del centro de masas
(que como usted sabe son tangentes a la
superficie) y las velocidades del centro
de masas, en condición de no deslizar (no
resbalar).
Fig 6.70 Velocidad respecto de la superficie de la partícula de la esfera en contacto con ella es cero, si no desliza.
Esto, que puede parecer curioso al
estudiante no es muy evidente cuando uno
ve esferas como bolitas de vidrio, de
billar, e incluso ruedas de automóvil. Sin
embargo, cuando recordamos el
movimiento de la “oruga” de un bulldozer
grande, lo entendemos claramente.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 265
vovcm
v=0
Fig 6.71 La cadena de un bulldozer en contacto con el piso está en reposo respecto del piso, aunque el bulldozer se traslada.
Se tiene entonces que en condiciones de
no deslizar (movimiento que a veces la
literatura denomina rodadura), la energía
cinética del cuerpo será:
2 2cm cm
1 1K I Mv2 2
= ω +
con vcm=ωR, por lo que:
( )22cm
2 2cm
1 1K I M R2 21K (I MR )2
= ω + ω
= ω +
Pero la expresión: 2cm(I MR )+ es el
momento de inercia del cuerpo respecto
de un eje paralelo al eje que pasa por el
centro de masas situado a una distancia R
de él de acuerdo al teorema de Steiner.
En particular, es el momento de inercia
del cuerpo respecto del punto P del
cuerpo en contacto con la superficie.
Entonces se tiene que cuando no hay
deslizamiento:
2P
1K I2
= ω
Al punto P, se le denomina eje instantáneo
de rotación, y simplifica mucho los
cálculos en varios ejemplos.
Ejemplo 6.24
Se tiene una esfera homogénea de masa
M=2Kg y radio R=10cm rodando sobre una
superficie rugosa horizontal con una
velocidad de 4 ms
. ¿Cuál es su energía
cinética?. ¿Se detiene?. ¿Porqué?.
Solución:
Fig 6.72 Velocidades lineal y angular de la esfera del ejemplo 6.24
La energía cinética del cuerpo es:
2 2cm cm
1 1K I Mv2 2
= ω +

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 266
Si la esfera no desliza, por lo que cumple
con la condición vcm=ωR, en consecuencia
se puede expresar como:
22 2
cm1 2 v 1K MR Mv2 5 R 2⎛ ⎞⎛ ⎞= +⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
( )
22 2
cm
2cm
2
1 v 1K MR Mv5 R 27K Mv107 mK 2Kg 410 s
K 22,4J
⎛ ⎞⎛ ⎞= +⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
=
⎛ ⎞= ⎜ ⎟⎝ ⎠
=
Pero el sistema es conservativo, puesto
que la fuerza de roce estática no disipa
energía. En consecuencia la esfera no se
detiene. De hecho, el trabajo hecho por
la fuerza neta en dirección opuesta del
movimiento del centro de masas necesaria
para detenerlo es de 22,4J.
Esta paradoja aparente se debe a que la
fuerza de roce actúa disminuyendo la
velocidad de traslación, pero aumentando
la velocidad de rotación. Sin embargo en
la vida real la esfera se detiene
finalmente!.
Esto no significa que lo anterior no es
válido, sino solo lo que sucedería en
condiciones ideales como hemos hecho en
el resto del curso.
Existen numerosos objetos reales que se
comportan aproximadamente como
esferas o discos ideales. Sin embargo,
sometidos a esfuerzos de determinado
rango, tienen cierto grado de
deformabilidad inevitable, e incluso, a
veces deseable.
Consideremos el caso de un material real.
El contacto del cuerpo y la superficie no
es un punto, sino un área apreciable, como
se observa en la figura 6.73.
Fig 6.73 Superficie de contacto de una esfera no ideal.
Como la esfera avanza hacia la derecha y
rota en dirección horaria, la fuerza que
ejerce sobre la superficie, y por tanto la
reacción normal de la superficie, debe ser
mayor en r (esta bajando) que en q (está
subiendo). Esto genera un sistema de
fuerzas distribuidas cuya resultante es
una fuerza normal de igual magnitud que
el peso del cuerpo, pero con línea de
acción ubicada d metros a la derecha del
centro de masas. Esta fuerza genera el

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 267
torque (d es muy pequeño, por tanto se
desprecia cuando existen otras fuerzas
aplicadas sobre la esfera) en dirección
antihoraria que justifica que el cuerpo se
detenga.
Fig 6.74 Esfera rígida: Normal y Peso son colineales. Si se deforma, no lo son, generando un torque que detiene al cuerpo. La normal es una fuerza distribuida.
Ejemplo 6.25
Analice una esfera de radio R y masa M
rodando hacia abajo por un plano rugoso
inclinado αº respecto de la horizontal.
Fig 6.75 Esfera rodando por un plano inclinado
Solución:
a) Por energía:
El centro de masas desciende h=dsenα
metros desde la posición inicial hasta la
posición final, donde se supone el origen
de la energía potencial gravitatoria. Se ha
trasladado d metros medidos en el plano
inclinado.
Fig 6.76 Cambio de posición del centro de masas al bajar por el plano inclinado.
En el punto inicial la energía mecánica del
centro de masas es E0=U0 si se suelta
desde el reposo. En el punto final la
energía mecánica es E=K puesto que allí
U=0. La fuerza de roce es estática si no
desliza, por tanto no se realiza trabajo
disipativo y la energía se conserva.
En consecuencia:
0E E=
2 2cm cm
1 1Mgh Mv I2 2
= + ω
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 268
con v=ωR
22
cm cm 21 1 vMgh Mv I2 2 R
= +
De donde, con un poco de álgebra:
2
cm2
2ghv I1mR
=+
b) A través de las ecuaciones de
movimiento:
Segunda ley de Newton para la traslación
del centro de masas:
cmx s cm
s cm
cmy
F : f Mgsen M( a )
Mgsen f Ma (1)F : N Mgcos 0 (2)
− α = −
α − =
− α =
∑
∑
Segunda ley de Newton para la rotación
alrededor del centro de masas:
cmz s cm: Rf I (3)τ = α∑
Pues solo fs produce torque.
Condición de rodadura:
cma R (4)= α
Reemplazando α de (4) en (3) y
despejando la fuerza de roce:
cms cm 2
af I (5)R
=
Reemplazando (5) en (1)
cmcm cm2
aMgsen I MaR
α − =
De donde la aceleración del centro de
masas resulta:
cmcm
2
gsena (6)I1MR
α=
+
Como todas las fuerzas son constantes,
entonces el movimiento es uniformemente
acelerado, por lo que cuando ha bajado d
metros en el plano inclinado a partir del
reposo, entonces la magnitud de la
velocidad será:
2cm cmv 2a d (7)=
Reemplazando (6) en (7):
2cm
cm2
gsenv 2 d I1MR
⎛ ⎞⎜ ⎟α
= ⎜ ⎟⎜ ⎟+⎜ ⎟⎝ ⎠
Pero h=dsenα, por lo que se tiene la
misma ecuación conseguida con energía.
2cm
cm2
2ghv I1MR
=+

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 269
Ejemplo 6.26
Un cilindro sólido, un cilindro hueco y una
esfera son soltados desde la misma altura
y al mismo tiempo rodando sin deslizar
por el plano inclinado de la figura 6.77.
¿Llegarán al mismo tiempo al plano
horizontal?
Fig 6.77 Cuerpos bajando por un plano inclinado.
Solución:
En el ejemplo anterior hemos calculado la
velocidad de un cuerpo que rueda por un
plano inclinado sin deslizar, obteniéndose
que es independiente de la masa, pero
dependiente del momento de inercia.
2cm
cm2
2ghv I1MR
=+
Y como sabemos:
2cm
2I MR5
= para una esfera
2cm
1I MR2
= para un cilindro sólido
2cmI MR= para un cilindro hueco
Entonces:
cmv 3,780 h = para una esfera
cmv 3,651 h = para un cilindro sólido
cmv 3,162 h = para un cilindro hueco.
Llega primero la esfera, luego el cilindro
sólido y finalmente el cilindro hueco.
Fig 6.78 Llega primero el cuerpo de menor momento de inercia.
Esto se debe a que un cuerpo con mayor
momento de inercia adquiere mayor
energía cinética de rotación, por tanto en
la medida en que la energía potencial se
va convirtiendo en energía cinética, una

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 270
fracción mayor será de rotación y una
menor de traslación.
Ejemplo 6.27
Considere un disco de radio R que rueda
sin deslizar a lo largo de un plano
horizontal. Sabiendo que la magnitud de
la aceleración del centro de masas es acm
y la aceleración angular de rotación
alrededor del centro de masas tiene
magnitud α, determine la magnitud de la
aceleración del punto más alto del disco.
Fig 6.79 Disco rodando sobre superficie con roce
Solución:
Sirve para repasar los conceptos.
Sabemos que la magnitud de la velocidad
de traslación del centro de masas es vcm y
que la velocidad angular en cualquier
punto del cuerpo es ω. En el punto A la
velocidad es la suma de las velocidades de
traslación y rotación, de manera tal que:
vA=vcm+ωR. Pero como no hay
deslizamiento, entonces vcm=ωR.
Fig 6.80 Velocidades en puntos A,B y O.
En consecuencia la velocidad en A es de
magnitud: vA=2vcm.
Si derivamos la expresión anterior,
tenemos que aA=2acm.
Ejemplo 6.28
Utilizando el resultado anterior, en el
sistema de la figura 8.82, calcule las
magnitudes de la aceleración del centro
de masas del disco, de la aceleración del
bloque (m=1,5Kg), de la tensión de la
cuerda en el punto A y de la fuerza de
roce. El disco tiene un radio de R=30cm y
masa M=8Kg y rueda sin deslizar. La polea
tiene una masa despreciable.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 271
A
Fig 6.81 Sistema de cuerpos del ejemplo 6.28
Solución:
a) Considerando traslación del centro de
masas más rotación en torno de un eje
que pasa por dicho centro:
La polea no tiene masa por lo que:
T1
T2T2
α
Fig 6.82 Tensiones sobre la polea
cmp 1 2 cmp
1 2
1 2
: RT RT I
RT RT 0T T T
τ − = − α
− =
= =
∑
El bloque baja trasladándose:
ab
mg
T2T2
Fig 6.83 Fuerzas sobre el bloque
my mF : T mg ma (1)− = −∑
El disco rueda sin deslizar:
T1
f
α
Fig 6.84 Fuerzas horizontales sobre el disco.
cm s cm: RT Rf I (2)τ − − = α∑
Mx s cmF : T f Ma (3)− =∑
cma R (4)= α
2cm
1I MR2
= (5)
(5) y (4) en (2):
2 cms
a1RT Rf MR2 R⎛ ⎞⎛ ⎞− − = − ⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠
s cm1T f Ma2
+ = (6)

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 272
(3)+(6)
cm cm12T Ma Ma2
= +
cm3T Ma4
= (7)
Reemplazando T en (3):
cm s cm3 Ma f Ma 4
− =
s cm1f Ma 4
= − (8)
Interesante. Significa que nos hemos
equivocado en la elección de la dirección
de la fuerza de roce.
Es decir, el diagrama de fuerzas
horizontales correcto es el siguiente:
T1
f
Fig 6.85 Dirección verdadera de la fuerza de roce
No era tan obvio, ¿verdad?.
Reemplazando (7) en (1):
cm b3 Ma mg ma 4
− = −
Pero la aceleración ab del bloque es igual
que la aceleración aA del punto donde la
cuerda está unido al disco, que como
vimos en el ejemplo anterior, es el doble
que la aceleración del centro de masas:
aA= 2acm.
( )cm cm3 Ma mg m 2a 4
− = −
( )cm cm
cm
3 Ma m 2a mg4
mga 3( M 2m)4
+ =
=+
Reemplazando valores:
( )
2
cm
cm 2
3 mKg 102 sa
3 38Kg 2 Kg4 2
5 ma3 s
⎛ ⎞⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠=
⎡ ⎤⎛ ⎞+ ⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦⎛ ⎞= ⎜ ⎟⎝ ⎠
La aceleración del bloque: am= 2acm
m cm 210 ma 2a3 s⎛ ⎞= = ⎜ ⎟⎝ ⎠
la tensión de la cuerda:
( )
( )
cm 2
2
3 3 5 mT Ma 8Kg4 4 3 s3 5 mT 8Kg4 3 s
T 10N
⎛ ⎞ ⎛ ⎞= = ⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠⎛ ⎞ ⎛ ⎞= ⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠
=
La fuerza de roce tiene dirección hacia la
derecha:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 273
( )s cm 2
s
1 1 5 mf Ma 8Kg 4 4 3 s10 f N 3
⎛ ⎞= = ⎜ ⎟⎝ ⎠
=
b) Resolvamos el problema de nuevo,
considerando ahora una rotación
alrededor del eje instantáneo:
El bloque traslada, de manera que su
ecuación es la misma:
my mF : T mg ma (1)− = −∑
La polea no participa como vimos.
El punto A del disco gira en torno del
punto B, lugar donde se ubica el eje
instantáneo de rotación. Luego:
T1
f
A
B
T1
A
B2R
Fig 6.86 El punto A parece rotar alrededor del eje instantáneo ubicado en B, sobre una circunferencia de radio 2R.
Entonces la 2da ley de Newton para la
rotación alrededor del eje
instantáneo:
B B: 2RT I (9)τ − = − α∑
El momento de inercia respecto de B, se
calcula con el teorema de Steiner de los
ejes paralelos:
2 2 2B cm
2B
1I I MR MR MR2
3I MR2
= + = +
=
La aceleración del punto A tiene igual
magnitud que la aceleración del bloque:
aA=ab=2Rα
Entonces la ecuación (9) queda:
2 ba32RT MR2 2R⎛ ⎞⎛ ⎞= ⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
b3T Ma8
=
Que permite calcular la aceleración del
bloque, reemplazándola en la ecuación (1)
mb3 Ma mg ma 8
− = −
( )
( )b
b 2
3 10mg 2a 3 3 3m M 88 2 8
10 ma3 s
= =+ +
⎛ ⎞= ⎜ ⎟⎝ ⎠
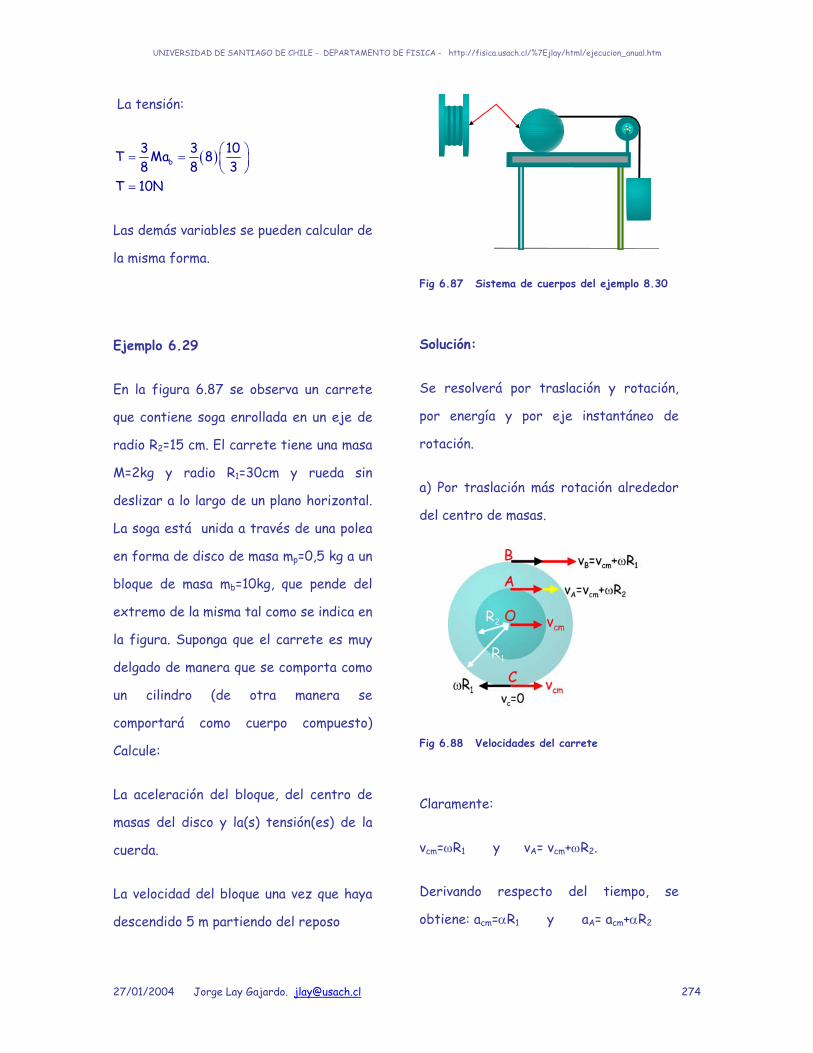
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 274
La tensión:
( )b3 3 10T Ma 88 8 3
T 10N
⎛ ⎞= = ⎜ ⎟⎝ ⎠
=
Las demás variables se pueden calcular de
la misma forma.
Ejemplo 6.29
En la figura 6.87 se observa un carrete
que contiene soga enrollada en un eje de
radio R2=15 cm. El carrete tiene una masa
M=2kg y radio R1=30cm y rueda sin
deslizar a lo largo de un plano horizontal.
La soga está unida a través de una polea
en forma de disco de masa mp=0,5 kg a un
bloque de masa mb=10kg, que pende del
extremo de la misma tal como se indica en
la figura. Suponga que el carrete es muy
delgado de manera que se comporta como
un cilindro (de otra manera se
comportará como cuerpo compuesto)
Calcule:
La aceleración del bloque, del centro de
masas del disco y la(s) tensión(es) de la
cuerda.
La velocidad del bloque una vez que haya
descendido 5 m partiendo del reposo
Fig 6.87 Sistema de cuerpos del ejemplo 8.30
Solución:
Se resolverá por traslación y rotación,
por energía y por eje instantáneo de
rotación.
a) Por traslación más rotación alrededor
del centro de masas.
Fig 6.88 Velocidades del carrete
Claramente:
vcm=ωR1 y vA= vcm+ωR2.
Derivando respecto del tiempo, se
obtiene: acm=αR1 y aA= acm+αR2

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 275
De donde:
cm 1 2A cm 2 cm
1 1
a R Ra a R aR R
⎛ ⎞+= + = ⎜ ⎟
⎝ ⎠
Reemplazando valores:
A cm
A cm
30cm 15cma a30cm
3a a (1)2
+⎛ ⎞= ⎜ ⎟⎝ ⎠
=
Para el bloque:
ab
mbg
T2T2
Fig 6.89 Fuerzas sobre el bloque
2by b b bF : T m g m a− = −∑
2b b bm g T m a− =
Reemplazando valores:
( ) ( )2 b2m10Kg 10 T 10Kg as
⎛ ⎞ − =⎜ ⎟⎝ ⎠
2 b100 T 10a (2)− =
Para la polea:
p p 1 p 2 p p: R T R T I τ − = − α∑
T2
T1Rp
Fig 6.90 Tensiones sobre la polea
Con 2cmp p p
1I M R2
= y p p pa R= α
Entonces:
p2p 1 p 2 p p
p
1 2 p p
a1R T R T M R2 R
1T T M a2
− = −
− = −
Reemplazando valores:
1 2 A A1 1 1T T Kg a Kg a2 2 4⎛ ⎞ ⎛ ⎞− = − = −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
2 1 p1T T a4
− = (3)
Para el carrete:
Fig 6.91 Fuerza sobre el carrete

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 276
cm 2 1 1 s cm: R T R f Iτ − − = − α∑
Con cm 1a R= α y 2cm 1
1I MR2
=
2 cm2 1 1 s 1
1
2 1 1 s cm 1
a1R T R f MR2 R1R T R f a MR2
⎛ ⎞⎛ ⎞− − = − ⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠⎛ ⎞+ = ⎜ ⎟⎝ ⎠
Reemplazando valores:
( ) ( ) ( )1 s cm115cm T 30cm f a 2Kg 30cm2
+ =
1s cm
T f a2+ = (4)
Por otro lado:
cx 1 s cmF : T f Ma− =∑
Reemplazando valores:
1 s cmT f 2a − = (5)
Sumando (4) y (5):
11 cm cm
1 cm
T T a +2a2T 2a (6)
+ =
=
También se obtiene fs=0 de (5).
Ahora disponemos de un juego de
ecuaciones que nos permiten calcular la
aceleración del centro de masas y las
tensiones:
A cm3a a (1)2
=
2 b100 T 10a (2)− =
2 1 p1T T a (3)4
− =
1 cmT 2a (6)=
Si sumamos (2), (3) y (6) y recordamos
que ap=aA=ab=a, entonces:
2
1 4100 10a a a4 3
ma 8,63s
= + +
=
por tanto:
cm 2
cm 2
2a 2 ma 8,633 3 s
ma 5,75s
⎛ ⎞= = ⎜ ⎟⎝ ⎠
=
Entonces:
De (6): 1 cmT 2a =2(8,63) 17,26N = =
de (2):
2 cmT 100 10a =100-10(8,60)=14N= −
Todas las fuerzas son constantes, por
tanto el movimiento del bloque es
uniforme acelerado, de manera tal que su
velocidad cuando ha descendido 5m a
partir del reposo es:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 277
25b
5b
5b
v 2ah
v 2(8,63)(5)mv 9,29s
=
=
=
b) También se puede calcular por energía:
Debido a que el sistema es conservativo,
la energía inicial es igual que la energía
cuando ha bajado 5m a partir del reposo.
E0c+E0p+E0b= E5c+E5p+E5b
En el estado inicial la energía del sistema
es solo potencial gravitatoria.
hoc hop hob
U=0
estado inicial
v0cm=0
v0b=0
ω0p=0ω0c=0
v0A=0
Fig 6.92 Estado inicial del sistema
Cuando el bloque ha bajado 5 metros
carrete y polea no han cambiado su
energía potencial gravitatoria, pero han
adquirido energía cinética. El bloque ha
cambiado su energía potencial
gravitatoria y adquirido energía cinética.
Fig 6.93 Estado final del sistema.
Entonces se puede escribir:
U0c+U0p+U0b= (U5c+K5c)+(U5p+K5p)+(U5b+K5b)
Reordenando:
(U0c-U5c)+(U0p-U5p)+(U0b-U5b)=K5c+K5p+K5b
Y como las energías potenciales de
carrete y polea no han cambiado:
U0b-U5b=K5c+K5p+K5b
Por tanto:
2 20 5 5cm cmc 5cb
2 2cmp 5p b 5b
1 1m g(h h ) Mv I2 2
1 1I m v2 2
⎛ ⎞− = + ω +⎜ ⎟⎝ ⎠
+ ω +
y sabemos que:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 278
2cmc 1
1I MR2
= ; 2cmp p p
1I m R2
= ;
v5p=ω5pRp; v5c=ω5cR1
Reemplazando:
22 2 5cm
0 5 5cm 1b 21
25p2 2
p p b 5b2p
v1 1 1m g(h h ) Mv MR2 2 2 R
v1 1 1m R m v2 2 R 2
⎛ ⎞⎛ ⎞⎛ ⎞− = + +⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠⎝ ⎠⎛ ⎞⎛ ⎞+ +⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
2 20 5 5cm 5cmb
2 2p 5p b 5b
1 1m g(h h ) Mv Mv2 4
1 1m v m v4 2
⎛ ⎞⎛ ⎞− = + +⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
⎛ ⎞+ +⎜ ⎟⎝ ⎠
Recuerde que en esta expresión v5p es la
magnitud de la velocidad tangencial de la
polea, que es de igual magnitud que la
velocidad del bloque (v5b), y que la
magnitud de la velocidad del punto A del
carrete v5A. En cambio v5cm es la velocidad
del centro de masas del carrete que está
relacionada con v5A a través de la
expresión v5A= v5cm+ωR2.
Como v5cm= ω5R1, entonces:
5cm5A 5cm 2
1
5A 15cm
1 2
vv v RR
v RvR R
= +
=+
Queda más sencilla si reemplazamos
valores:
5A5cm 5A 5b
v 0,3 2 2v v v0,3 0,15 3 3
= = ≡+
Entonces la expresión de la energía se
puede dejar en función de la magnitud de
la velocidad del bloque.
2 2
0 5b 5b 5b
2 2p 5b b 5b
1 2 1 2m g(h h ) M v M v2 3 4 3
1 1m v m v4 2
⎛ ⎞ ⎛ ⎞− = + +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
⎛ ⎞+ +⎜ ⎟⎝ ⎠
Reemplazando valores y recordando que
todas las unidades están en el SI:
( )( )( ) ( ) ( )
( )
2 25b 5b
2 25b 5b
2v 2v1 110 10 5 2 22 3 4 3
1 1 1v 10 v4 2 2
⎛ ⎞ ⎛ ⎞= + +⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
⎛ ⎞⎛ ⎞+ +⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
2 2 2 25b 5b 5b 5b
4 4 1500 v v v 5v9 18 8
= + + +
25b139v500
24⎛ ⎞
= ⎜ ⎟⎝ ⎠
25bv 86,33=
5bmv 9,29s
=
Hemos mostrado algunos pasos del cálculo
intermedio para enfatizar el hecho de
que cuando se trabaja con fracciones, los
resultados no arrastran errores de
aproximación.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 279
c) Por eje instantáneo de rotación:
Fig 6.94 A parece rotar alrededor del eje instantáneo que pasa por C, en circunferencia de radio R1+R2.
Entonces, para la rotación del carrete
delgado:
( )1 2 1C C: R R T Iτ − + = − α∑
La aceleración de A tiene una magnitud
de: aA=ab=ap=(R1+R2)α
El momento de inercia respecto de C es:
2 2 2cm 1 1 1C
21C
1I I MR MR MR2
3I MR2
= + = +
=
Entonces:
( ) 2 A1 2 1 1
1 2
a3R R T MR2 R R
⎛ ⎞⎛ ⎞+ = ⎜ ⎟⎜ ⎟ +⎝ ⎠⎝ ⎠
( )
21 A
1 21 2
3MR aT2 R R
=+
Reemplazando valores:
( )( )( )
2A
1 2
3 2 0,3 aT
2 0,3 0,15=
+
1 A4T a3
= (8)
El bloque cumple con (2):
2 b100 T 10a (2)− =
La polea cumple con la ecuación (3):
2 1 p1T T a4
− = (3)
Sumando (8)+(2)+(3) y recordando que
aA=ap=ab:
b b b
b 2
4 1100 a 10a a3 4
1200 ma 8,63139 s
= + +
= =
Lo demás sigue igual.
27/01/2004 Jorge Lay Gajardo. [email protected] 280
7.1 Equilibrio de un cuerpo rígido.
7.1.1 Introducción.
El equilibrio de un cuerpo rígido es
definido como la ausencia de aceleración
respecto de un sistema de referencia
inercial. Puede ser estático (velocidad
nula) o dinámico (velocidad constante).
Para que esto ocurra el cuerpo debe
experimentar fuerza externa neta nula.
Pero como ya sabemos, esto solo explica
la ausencia de traslación acelerada, pero
no explica la ausencia de aceleración
angular. El equilibrio también exige que no
exista aceleración angular respecto de
algún eje, para lo que se necesita que el
torque neto realizado por las fuerzas
externas sobre el cuerpo sea nulo.
En este capítulo analizaremos las
condiciones de equilibrio estático, es
decir, las condiciones para las que un
cuerpo rígido que está en reposo respecto
de un sistema de referencia inercial,
continúe en reposo.
Fig 7.1 Rocas en equilibrio respecto del piso.
7.1.2 Equilibrio estático.
Consideremos un cuerpo rígido plano en
reposo respecto de un sistema de
referencia, como el de la figura 7.2.
Fig 7.2 Sistema de Fuerzas sobre un cuerpo plano.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 281
Sobre el cuerpo existen varias fuerzas no
colineales, cuya suma contribuye a la
aceleración lineal del centro de masas y
por tanto un cuerpo que está en reposo
debe estar sometido a una fuerza
externa neta nula:
i n
ii 1
F 0=
=
=∑r r
Como la expresión anterior es vectorial,
puede expresarse también como:
i n i n i n
i Xi yii 1 i 1 i 1
ˆ ˆF F i F j 0= = =
= = =
= + =∑ ∑ ∑r r
de donde por igualdad de vectores, se
tiene:
i n
Xii 1
F 0=
=
=∑
i n
yii 1
F 0=
=
=∑
O sea, debe cumplirse que las
componentes rectangulares de las
fuerzas sumen cero.
La condición anterior implica que la
aceleración lineal es nula, pero no que la
aceleración angular sea nula. Para ello,
debe cumplirse que el torque resultante
de las fuerzas respecto de un eje
escogido como origen sea nulo, es decir:
i n
ii 1
0=
=
τ =∑rr
En este capítulo supondremos que todos
los cuerpos son rígidos, homogéneos y
simétricos y las fuerzas serán coplanares,
actuando en el plano XY de un sistema de
referencia cartesiano inercial, lo que
produce que el vector torque solo tenga
componente en la dirección k ; de manera
tal que tenemos la condición:
i n
zii 1
0=
=
τ =∑
Ejemplo 7.1
Sean las fuerzas coplanares
1ˆ ˆF 2i 3j= +
r, 2
ˆ ˆF 5i 4j= − +r
; y 3ˆ ˆF 5i 7j= −
r
medidas en Newton, aplicadas sobre un
cuerpo en reposo en un SRI. Determinar
si el cuerpo se encuentra en equilibrio
estático.
Solución:
Si el cuerpo está en reposo, se
encontrará en equilibrio estático si
cumple con la condicióni n
ii 1
F 0=
=
=∑r r
, por
tanto es necesario determinar la

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 282
resultante. Sumando los vectores, se
tiene:
( ) ( )1 2 3ˆ ˆF F F 2 5 5 Ni 3 4 7 Nj+ + = − + + + −
r r r
Es decir, i n
ii 1
ˆF 2Ni=
=
=∑r
por lo que no se
encuentra en equilibrio estático. Por
tanto, el cuerpo se mueve con su centro
de masas acelerado en la dirección i . No
se tiene información para decidir sobre el
estado de su rotación.
Ejemplo 7.2
Un cuerpo en reposo es sometido a la
acción de las fuerzas que se indican en la
figura Determine si rota y/o se traslada:
(F1= 10 N; F2 = 40 N y F3 = 30N).
Fig 7.3 Figura para ejemplo 7.2
Solución:
El torque que cada fuerza causa respecto
del eje fijo situado arbitrariamente en O
es:
( ) ( )( )( )1F 1 1ˆ ˆ ˆFd k 10N 11m k 110Nmkτ = − = − = −
r
( ) ( )( )( )2F 2 2ˆ ˆ ˆF d k 40N 5m k 200Nmkτ = = =
r
( ) ( )( )( )3F 3 3ˆ ˆ ˆF d k 30N 3m k 90Nmkτ = − = − = −
r
Sumando:
1Fˆ ˆ ˆ ˆ110Nmk 200Nmk 90Nmk 0kΣτ = − + − =
r
Por tanto el cuerpo no rota.
La fuerza neta actuando sobre el cuerpo
es:
1 2 3F F F F= + +∑r r r r
ˆ ˆ ˆF 10Nj 40Nj 30Nj 0= − + =∑r r
Por tanto tampoco se traslada. En
consecuencia, el cuerpo se encuentra en
equilibrio estático.
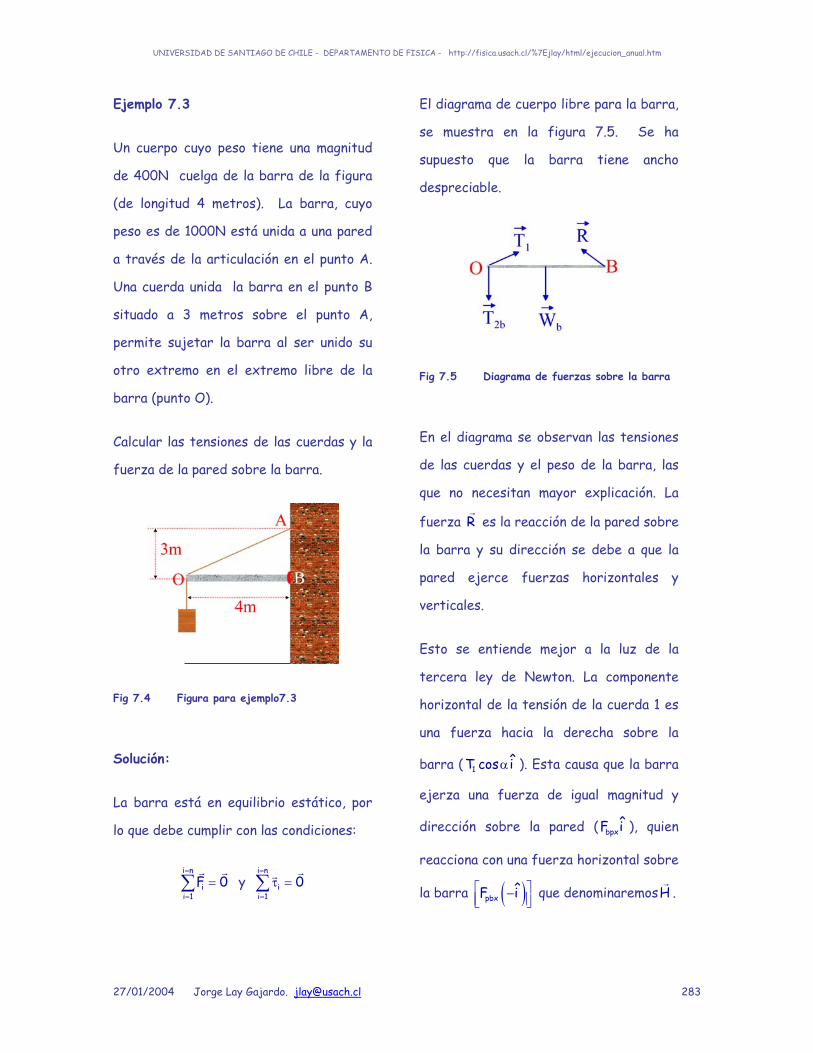
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 283
Ejemplo 7.3
Un cuerpo cuyo peso tiene una magnitud
de 400N cuelga de la barra de la figura
(de longitud 4 metros). La barra, cuyo
peso es de 1000N está unida a una pared
a través de la articulación en el punto A.
Una cuerda unida la barra en el punto B
situado a 3 metros sobre el punto A,
permite sujetar la barra al ser unido su
otro extremo en el extremo libre de la
barra (punto O).
Calcular las tensiones de las cuerdas y la
fuerza de la pared sobre la barra.
Fig 7.4 Figura para ejemplo7.3
Solución:
La barra está en equilibrio estático, por
lo que debe cumplir con las condiciones:
i n
ii 1
F 0=
=
=∑r r
y i n
ii 1
0=
=
τ =∑rr
El diagrama de cuerpo libre para la barra,
se muestra en la figura 7.5. Se ha
supuesto que la barra tiene ancho
despreciable.
Fig 7.5 Diagrama de fuerzas sobre la barra
En el diagrama se observan las tensiones
de las cuerdas y el peso de la barra, las
que no necesitan mayor explicación. La
fuerza Rr
es la reacción de la pared sobre
la barra y su dirección se debe a que la
pared ejerce fuerzas horizontales y
verticales.
Esto se entiende mejor a la luz de la
tercera ley de Newton. La componente
horizontal de la tensión de la cuerda 1 es
una fuerza hacia la derecha sobre la
barra ( 1ˆT cos iα ). Esta causa que la barra
ejerza una fuerza de igual magnitud y
dirección sobre la pared ( bpxˆF i ), quien
reacciona con una fuerza horizontal sobre
la barra ( )pbxˆF i⎡ ⎤−⎢ ⎥⎣ ⎦
que denominaremosHr
.
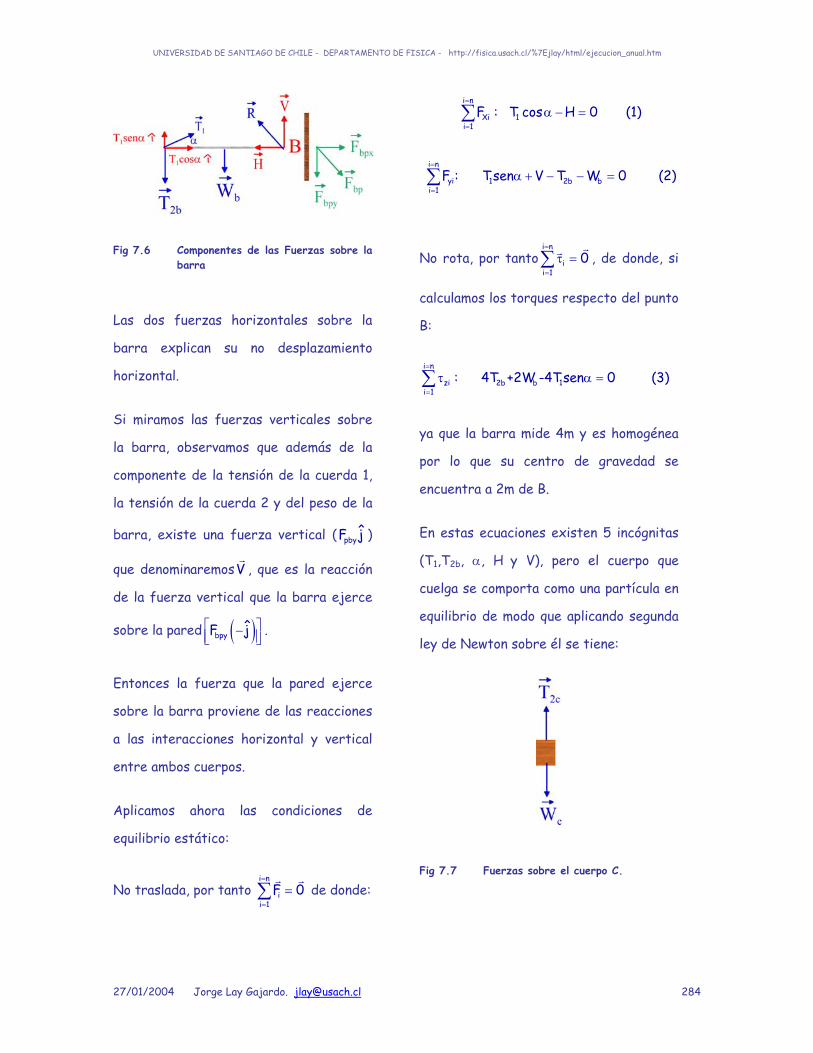
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 284
Fig 7.6 Componentes de las Fuerzas sobre la barra
Las dos fuerzas horizontales sobre la
barra explican su no desplazamiento
horizontal.
Si miramos las fuerzas verticales sobre
la barra, observamos que además de la
componente de la tensión de la cuerda 1,
la tensión de la cuerda 2 y del peso de la
barra, existe una fuerza vertical ( pbyˆF j )
que denominaremosVr
, que es la reacción
de la fuerza vertical que la barra ejerce
sobre la pared ( )bpyˆF j⎡ ⎤−⎢ ⎥⎣ ⎦
.
Entonces la fuerza que la pared ejerce
sobre la barra proviene de las reacciones
a las interacciones horizontal y vertical
entre ambos cuerpos.
Aplicamos ahora las condiciones de
equilibrio estático:
No traslada, por tanto i n
ii 1
F 0=
=
=∑r r
de donde:
i n
Xi 1i 1
F : T cos H 0 (1)=
=
α − =∑
i n
yi 1 2b bi 1
F : Tsen V T W 0 (2)=
=
α + − − =∑
No rota, por tantoi n
ii 1
0=
=
τ =∑rr , de donde, si
calculamos los torques respecto del punto
B:
i n
zi 12b bi 1
: 4T +2W -4Tsen 0 (3)=
=
τ α =∑
ya que la barra mide 4m y es homogénea
por lo que su centro de gravedad se
encuentra a 2m de B.
En estas ecuaciones existen 5 incógnitas
(T1,T2b, α, H y V), pero el cuerpo que
cuelga se comporta como una partícula en
equilibrio de modo que aplicando segunda
ley de Newton sobre él se tiene:
Fig 7.7 Fuerzas sobre el cuerpo C.
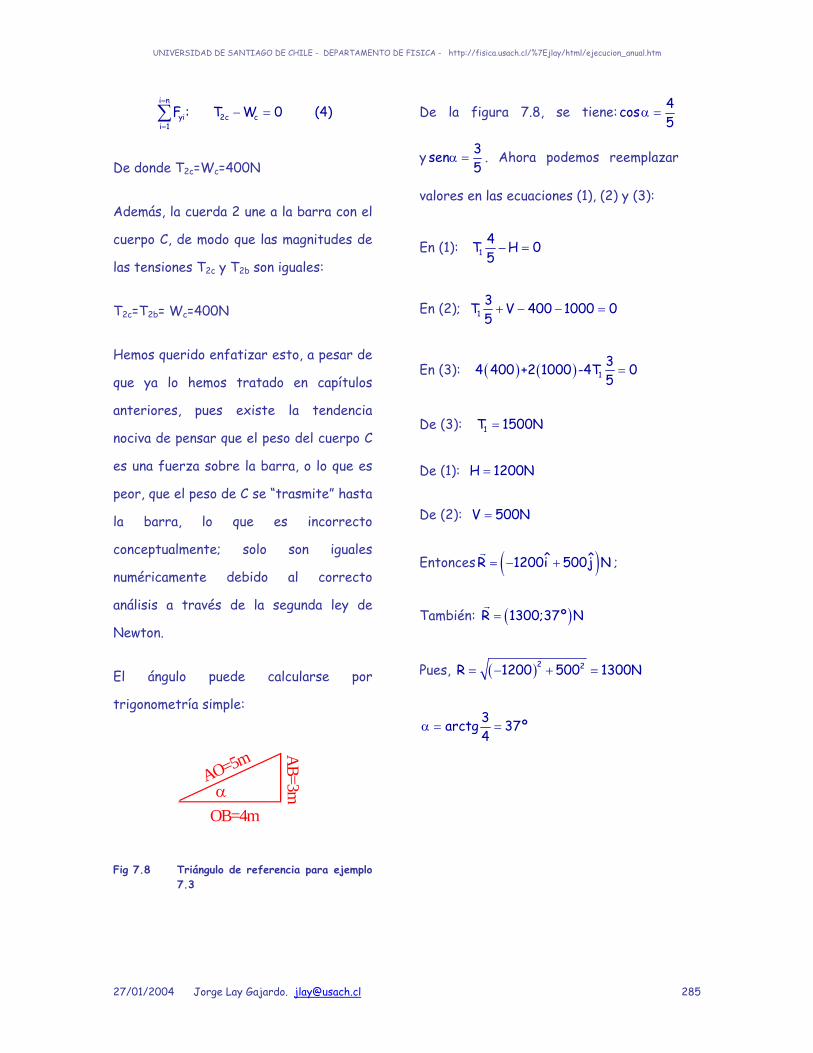
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 285
i n
yi 2c ci 1
F : T W 0 (4)=
=
− =∑
De donde T2c=Wc=400N
Además, la cuerda 2 une a la barra con el
cuerpo C, de modo que las magnitudes de
las tensiones T2c y T2b son iguales:
T2c=T2b= Wc=400N
Hemos querido enfatizar esto, a pesar de
que ya lo hemos tratado en capítulos
anteriores, pues existe la tendencia
nociva de pensar que el peso del cuerpo C
es una fuerza sobre la barra, o lo que es
peor, que el peso de C se “trasmite” hasta
la barra, lo que es incorrecto
conceptualmente; solo son iguales
numéricamente debido al correcto
análisis a través de la segunda ley de
Newton.
El ángulo puede calcularse por
trigonometría simple:
AO=5m
AB=3m
OB=4mα
Fig 7.8 Triángulo de referencia para ejemplo 7.3
De la figura 7.8, se tiene: 4cos5
α =
y 3sen5
α = . Ahora podemos reemplazar
valores en las ecuaciones (1), (2) y (3):
En (1): 14T H 05
− =
En (2); 13T V 400 1000 0 5
+ − − =
En (3): ( ) ( ) 13 4 400 +2 1000 -4T 05
=
De (3): 1 T 1500N=
De (1): H 1200N=
De (2): V 500N=
Entonces ( )ˆ ˆR 1200i 500j N= − +r
;
También: ( )R 1300;37º N=r
Pues, ( )2 2R 1200 500 1300N= − + =
3arctg 37º4
α = =

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 286
Ejemplo 7.4
Para sacar a un automóvil de una zanja, se
ata el extremo A de una cuerda AOB a un
árbol y el otro extremo B al automóvil. En
el punto medio O de la cuerda AB se
ejerce una fuerza de 1000N en dirección
perpendicular a AB. Calcular la tensión Tr
en la cuerda, si el ángulo AOB es de 170°.
F
O B
Fig 7.9 Figura para ejemplo 7.4
Solución: Primero debe confeccionarse el
diagrama de cuerpo libre.
En este caso, haremos el diagrama del
punto O, al cual concurre la fuerza Fr
y
las tensiones de las cuerdas:
F
170ºTA TB
5º 5º x
y
Fig 7.10 Diagrama de fuerzas sobre punto O.
Note que las cuerdas son de igual longitud
por lo que el triángulo AOB es isósceles,
así que los ángulos exteriores son de 5°.
Si expresamos las fuerzas en función de
sus componentes en el plano XY definido
en la figura, se tiene:
ˆF 1000Nj=r
A A Aˆ ˆT T cos5º i T sen5º j= − −
r
B B Bˆ ˆT T cos5º i T sen5º j= −
r
Debido al equilibrio estático, se cumple
con la condición F 0Σ =r r
, por lo que.
( )( )
A B
A B
ˆT cos5º T cos5º iˆ1000 T sen5º T sen5º j 0
− + +
+ − − =r
y por igualdad de vectores,
A BT cos5º T cos5º 0 (*)− + =
A B1000 T sen5º T sen5º 0 (**)− − =
En estas ecuaciones se tienen solo 2
incógnitas que son TA y TB, de tal manera
que permiten conocer las magnitudes de
las tensiones de las cuerdas:
TB cos 5° = TA cos 5° (*)
De donde TA = TB y reemplazando en
(**)
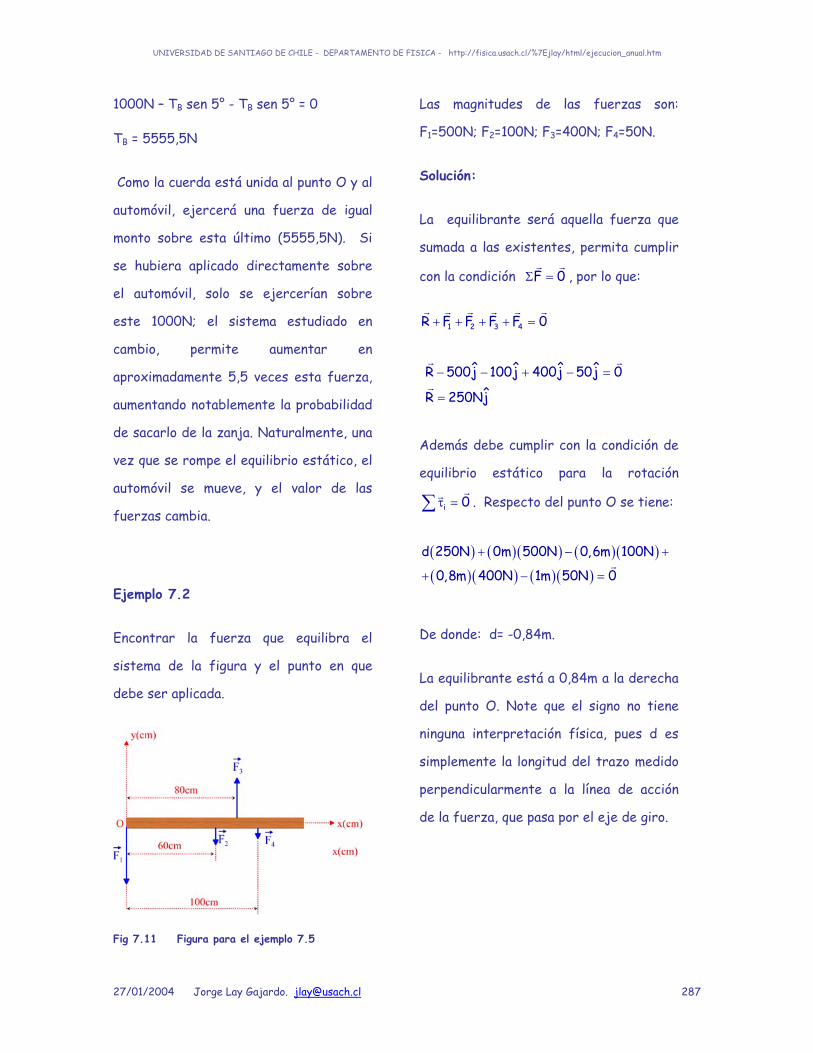
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 287
1000N – TB sen 5° - TB sen 5° = 0
TB = 5555,5N
Como la cuerda está unida al punto O y al
automóvil, ejercerá una fuerza de igual
monto sobre esta último (5555,5N). Si
se hubiera aplicado directamente sobre
el automóvil, solo se ejercerían sobre
este 1000N; el sistema estudiado en
cambio, permite aumentar en
aproximadamente 5,5 veces esta fuerza,
aumentando notablemente la probabilidad
de sacarlo de la zanja. Naturalmente, una
vez que se rompe el equilibrio estático, el
automóvil se mueve, y el valor de las
fuerzas cambia.
Ejemplo 7.2
Encontrar la fuerza que equilibra el
sistema de la figura y el punto en que
debe ser aplicada.
Fig 7.11 Figura para el ejemplo 7.5
Las magnitudes de las fuerzas son:
F1=500N; F2=100N; F3=400N; F4=50N.
Solución:
La equilibrante será aquella fuerza que
sumada a las existentes, permita cumplir
con la condición F 0Σ =r r
, por lo que:
1 2 3 4R F F F F 0+ + + + =r r r r r r
ˆ ˆ ˆ ˆR 500j 100j 400j 50j 0
ˆR 250Nj
− − + − =
=
r r
r
Además debe cumplir con la condición de
equilibrio estático para la rotación
i 0τ =∑rr . Respecto del punto O se tiene:
( ) ( )( ) ( )( )( )( ) ( )( )
d 250N 0m 500N 0,6m 100N
0,8m 400N 1m 50N 0
+ − +
+ − =r
De donde: d= -0,84m.
La equilibrante está a 0,84m a la derecha
del punto O. Note que el signo no tiene
ninguna interpretación física, pues d es
simplemente la longitud del trazo medido
perpendicularmente a la línea de acción
de la fuerza, que pasa por el eje de giro.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 288
Ejemplo 7.6
Averiguar en que punto de una barra de
peso despreciable se debe colgar un
cuerpo de manera que el peso soportado
por un muchacho en uno de sus extremos
sea la tercera parte del que soporta un
hombre en el otro.
Fig 7.12 Figura para el ejemplo 7.6
Solución:
En la figura se observan las fuerzas que
el hombre ( hFr
), el muchacho ( mFr
) y la
cuerda que une el cuerpo ( CFr
) con la barra
ejercen sobre la barra
Fm
Fh
xm
xh
Fc
A
Fig 7.13 Diagrama de fuerzas sobre la barra.
Si consideramos el eje de giro en el punto
donde colgamos el cuerpo, entonces las
distancias desde él hasta el muchacho y
hasta el hombre serán Xm y Xh
respectivamente.
Si F es la magnitud de la fuerza ejercida
por el muchacho, entonces se debe
cumplir que mˆF Fj=
r y que h
ˆF 3Fj=r
.
La barra está en equilibrio estático, por
lo que debe cumplir la condición AM 0∑ =r r
;
por lo que respecto del eje de giro, se
tiene:
Xm F – Xh (3 F) = 0
Xm = 3 Xh (*)
Pero se sabe que el largo de la barra (L)
es: L = Xm + Xh
De donde: Xh = L - Xm
Y reemplazándolo en (*):
Xm = 3 (L - Xm)
De donde
Xm = L ¾
Es decir, el cuerpo se debe ubicar a ¾ de
la longitud de la barra hacia la izquierda
del muchacho.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 289
Ejemplo 7.7
La tabla delgada AB de la figura 7.14 cuyo
peso tiene una magnitud W=400N se
apoya en una pared vertical. La
superficies de contacto del piso, tabla y
pared son perfectamente lisas. Si la
tabla forma un ángulo de 60° con el piso,
calcular la fuerza (Fr
) que hay que aplicar
en A, paralela al piso, y las reacciones en
A (Ar
) y en B (Br
), para que la tabla esté
en equilibrio estático.
Fig 7.14 Tabla para el ejemplo 7.7
Solución:
Un diagrama de cuerpo libre ayuda como
siempre a mejorar la comprensión del
problema.
Fig 7.15 Diagrama de cuerpo libre.
Se ven aquí las fuerzas que intervienen y
la simetría del problema. Las fuerzas Ar
y Br
son las reacciones a las fuerzas que
la escalera ejerce sobre el piso y la pared
respectivamente, y sus direcciones se
deben a la inexistencia de roce con las
superficies. La fuerza Fr
equilibra al
sistema de modo que debe cumplirse con
las condiciones de equilibrio estático para
la traslación y para la rotación:
Del equilibrio de traslación: F 0Σ =r r
.
Por tanto debe cumplir con:
i n
Xii 1
F : B F 0 (1)=
=
− =∑
i n
yii 1
F : A W 0 (2)=
=
− =∑
Del equilibrio de rotación: 0Στ =rr
Por tanto debe cumplir con:
z 0Στ =
Para determinar los torques conviene
considerar los vectores componentes
tangencial y perpendicular a la escalera,
los que se ven en la figura siguiente:
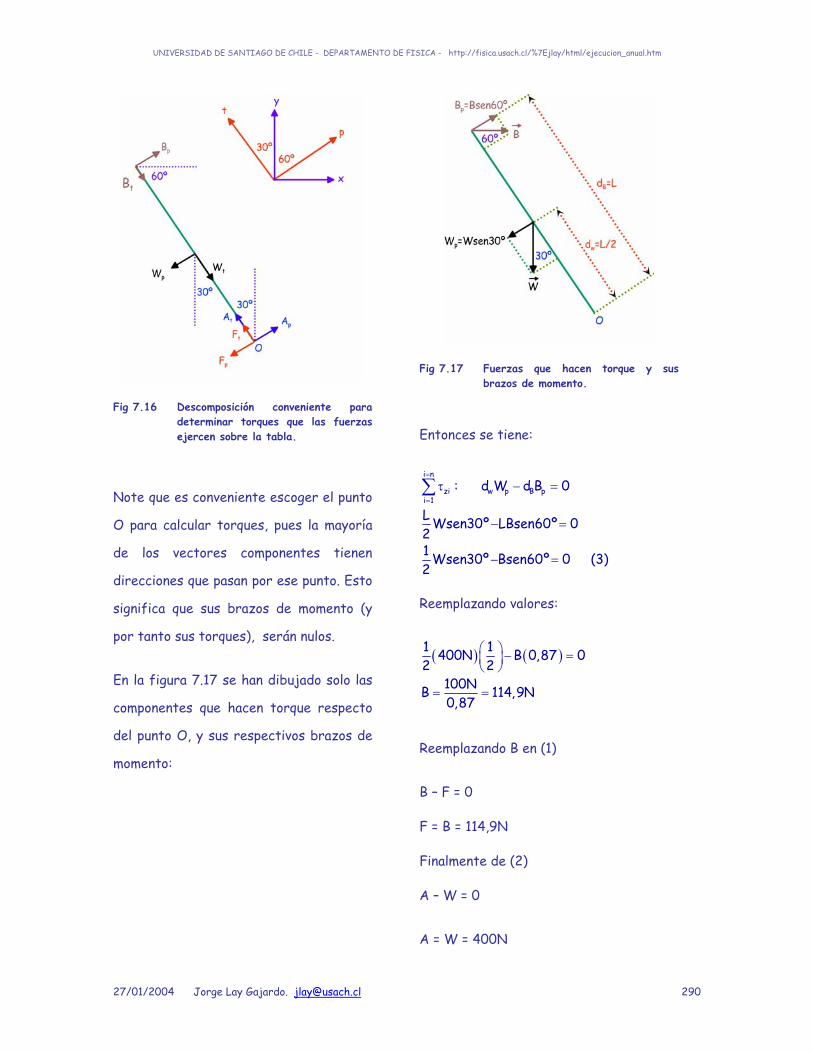
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 290
Fig 7.16 Descomposición conveniente para determinar torques que las fuerzas ejercen sobre la tabla.
Note que es conveniente escoger el punto
O para calcular torques, pues la mayoría
de los vectores componentes tienen
direcciones que pasan por ese punto. Esto
significa que sus brazos de momento (y
por tanto sus torques), serán nulos.
En la figura 7.17 se han dibujado solo las
componentes que hacen torque respecto
del punto O, y sus respectivos brazos de
momento:
Fig 7.17 Fuerzas que hacen torque y sus brazos de momento.
Entonces se tiene:
i n
zi w p B pi 1
: d W d B 0
L Wsen30º LBsen60º 021 Wsen30º Bsen60º 0 (3)2
=
=
τ − =
− =
− =
∑
Reemplazando valores:
( ) ( )1 1400N B 0,87 0 2 2
⎛ ⎞ − =⎜ ⎟⎝ ⎠
100NB 114,9N 0,87
= =
Reemplazando B en (1)
B – F = 0
F = B = 114,9N
Finalmente de (2)
A – W = 0
A = W = 400N
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl
27/01/2004 Jorge Lay Gajardo. [email protected] 291
8.1 Definiciones.
Se entiende por fluido a las sustancias
que tienen la capacidad de escurrir, de
fluir, que no posee la capacidad de
conservar su forma ante la presencia de
fuerzas cortantes (líquidos y gases).
Recuerde que según las circunstancias en
que se encuentren, las sustancias se
pueden encontrar en fase sólida, líquida o
gaseosa, y esto dependerá de las
condiciones físicas en que se encuentre
en el momento en que se hace la
observación.
Fig 8.1 Laguna de San Rafael. Agua en sus tres fases.
Existe una cuarta fase en la que se puede
encontrar a una sustancia, denominada
plasma; en esta fase, casi todos los
átomos están disociados faltándoles
algunos o todos los electrones. Un átomo
con un número de electrones mayor o
menor que los correspondientes a su
estado neutro, se dice que está ionizado o
que es un ion. La materia, en la fase de
plasma está formada entonces, por
electrones libres e iones. Una fase tal,
puede existir de manera estable,
solamente a temperaturas
extremadamente elevadas. Esta fase de
la materia es la que interviene en las
reacciones termonucleares y su
existencia es necesaria para controlar
dichas reacciones.
Esta es también la fase en que se
encuentra la materia en el interior de las
estrellas.
Fig 8.2 Las auroras boreales son otro ejemplo de plasma observado en la ionosfera.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 292
Fig 8.3 Aurora boreal. Foto de Alaska University
Existen hoy día un número elevado de
aplicaciones tecnológicas del plasma, en
sistemas de iluminación, en sistemas de
televisión y computación (display), etc,
que han puesto esta fase de la materia
más cerca de nuestras vidas que lo que
imaginamos.
Fig 8.4 “Plasmavision SlimScreen” modelo PDS4222 de Fujitsu.
Fig 8.5 Lámpara de arco de plasma de alta intensidad de OSRAM.
La explicación de las características de
cada fase está dada por la magnitud de
las fuerzas de interacción entre sus
moléculas, las que a su vez, dependen de
la separación entre ellas.
Si la separación es suficientemente
grande (comparada con las dimensiones
de la molécula), la fuerza es pequeña, las
moléculas no interaccionan salvo cuando
chocan entre sí, y se tiene a un gas, con
gran facilidad de compresión y de cambio
de forma. Ocupará el volumen del
recipiente que lo contiene.
Si la separación es muy pequeña (de
magnitud semejante a las dimensiones de
la propia molécula) las fuerzas entre
moléculas vecinas será muy grande y la
sustancia tomará formas determinadas,
en algunos casos tomando formas de
redes cristalinas, en otros casos formas
no definidas (amorfas); se tendrá un
sólido, capaz de resistir a la acción de
fuerzas cortantes (tangentes a la

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 293
superficie), de manera que conservará su
forma.
Fig 8.6 Estructura molecular del hielo. (WWW.nyu.edu)
En el caso de los líquidos, también se
tiene a las moléculas cercanas, pero no lo
suficiente para formar redes cristalinas
(en cierta forma la estructura de los
líquidos se asemeja a la de los sólidos
amorfos), por lo tanto no resisten
fuerzas de corte por lo que no pueden
conservar su forma ante fuerzas
tangenciales, aunque están lo
suficientemente cercanas para tener
resistencia a la compresibilidad. Se
asumirán aquí, líquidos ideales, los que no
se comprimen.
Fig 8.7 Estructura molecular del agua. (www.nyu.edu)
En realidad, los líquidos son muy poco
compresibles y perfectamente elásticos.
Un líquido se comprimirá como todos los
cuerpos, pero presentan esta propiedad
en tan ínfimo grado que ha sido preciso
realizar experiencias muy delicadas para
hacerla evidente. Los aparatos destinados
a comprobar esta propiedad y a
determinar su coeficiente de
compresibilidad son los piezómetros.
Fig 8.8 Piezómetro de Oersted.
Para entender esto cabe citar que el
coeficiente de compresibilidad del agua
es 0,000 05; el coeficiente del
mercurio es 0,000 009 3 (el menos
compresible de todos los líquidos), y el
del alcohol es 0,000 09. Es decir que si
por ejemplo, tenemos un litro de agua, al
aumentar su presión en un kilogramo
fuerza por cada centímetro cuadrado, su
volumen se reduce en 0,05 centímetros
cúbicos.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 294
Adicionalmente se ha encontrado además,
que los líquidos son perfectamente
elásticos, pues recuperan exactamente su
volumen original cuando cesan las fuerzas
que lo reducían.
Separaremos el estudio en dos partes:
primero miraremos a los fluidos en reposo
y luego en movimiento. Aplicaremos a
ellos las leyes de la mecánica estudiadas
en el curso anterior, aunque será
necesario realizar antes algunas
definiciones atendiendo al hecho de que
no podremos seguir con el concepto de
partícula: trabajaremos con los conceptos
de densidad y presión en lugar de los
conceptos de masa y fuerza.
8.1.1 Densidad:
Se entiende por densidad absoluta o
simplemente densidad de un fluido
homogéneo, al cuociente entre la masa y
el volumen de la sustancia, expresada por
tanto, en kilogramos por cada metro
cúbico o en otras unidades equivalentes.
mv
ρ = (1)
La densidad depende de la presión y de la
temperatura (especialmente la de los
gases). En condiciones normales (1
atmósfera de presión y 0 °C de
temperatura), la densidad del agua es 1
gr/cm3. Interesante resulta ver una
tabla con algunas densidades a
condiciones normales:
sólidos y otros ρ g/cm3 líquidos ρg/cm3
Aluminio
Hierro, Acero
Cobre
Plomo
Oro
Platino
Núcleo tierra
Núcleo del sol
Plata
Hielo
Granito
Madera ( pino)
2,7
7,8
8,9
11,3
19,3
21,4
9,5
1600
10,5
0,92
2,6
0,42
Mercurio
Agua de mar
Agua (100°C, 1 atm)
Agua (0°C, 50 atm)
Glicerina
Alcohol etílico
Aceite de oliva
Gasolina
Benceno
Sangre (25 ºC)
13,6
1,025
0,958
1,002
1,26
0,81
0,92
0,66
0,90
1,060
gases ρ g/cm3 (X10-3)
Hidrógeno
Oxígeno
Helio
Anhídrido carbónico
Aire
Aire (100°C, 1 atm)
0,0899
1,43
0,179
1.977
1,293
0,95

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 295
8.1.2 Peso específico:
Se entiende por peso específico absoluto,
o simplemente peso específico (Pe), al
peso de una unidad de volumen de la
sustancia, expresado por tanto, en
Newton por cada metro cúbico o en otras
unidades equivalentes.
WPe V= (2)
Note que entre densidad y peso
específico existe la relación :
eP g= ρ (3)
8.1.3 Densidad relativa y Peso
específico relativo:
Se entiende por densidad relativa al
cuociente entre la masa de la sustancia y
la masa de un volumen igual de agua.
substanciar
volumen igual de agua
mm
ρ = (4)
y por peso específico relativo, al
cuociente entre el peso de la sustancia y
el peso de un volumen igual de agua:
substanciaer
volumen igual de agua
WPW
= (5)
Note que ambas cantidades son
adimensionales y representan números
abstractos.
Además, como W=mg, resultan de igual
valor numérico, es decir:
r erPρ = (6)
Esto es importante, puesto que por
ejemplo, que el mercurio tenga una
densidad de 13,6 3
gcm
significa que su
densidad relativa será de:
3
3
g13,6cm 13,6g
cm
=
mismo valor de su peso específico
relativo. Esto significa que su masa es
13,6 veces mayor que la masa de un
volumen igual de agua. También que su
peso es 13,6 veces mayor que el peso de
un volumen igual de agua.
Sin embargo, su peso específico es de:
13,6 3
gcm
X980 2cms
=13330 3dinascm
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 296
8.1.4 Presión.
Se entiende por presión sobre una
superficie a la fuerza por unidad de área
que actúa perpendicularmente a la
superficie; de tal manera que se medirá
en Newton por cada metro cuadrado
(denominado Pascal o Pa), o en cualquier
otra unidad equivalente.
dFPdA
= (7)
Otras unidades usadas son: libra/pulgada2
(psi, proveniente del inglés: pound square
inches); atmósfera (presión atmosférica a
nivel del mar en condiciones normales,
atm); el bar; el torr; el Kgf/cm2; y el
milímetro de mercurio (mm Hg). Todas
ellas de uso en la actualidad.
Sus equivalencias son:
1 Pa = 1 N/m2
1 psi = 6,9 X 103 Pa
1 mm Hg = 132,89 Pa
1 atm = 1,01 X 105 Pa = 14,7 psi
1 bar = 105 Pa
1 Kf/cm2 = 14,2 psi= 0,976 X 105 Pa
1 torr = 133,32 Pa
Para casos en los que la fuerza es
uniformemente distribuida en toda la
superficie:
FPA
= (8)
Expliquemos este concepto con cuidado:
8.1.5 Presión en sólidos.
Consideremos un monitor de computador
puesto sobre un escritorio como se
observa en la figura.
Para el análisis, supondremos que el
monitor es un cuerpo homogéneo y
simétrico:
El monitor es atraído hacia abajo
producto del campo gravitacional (Peso)
que hasta ahora siempre hemos
representado como una fuerza aplicada
sobre el centro de gravedad del cuerpo
(punto que se ubica en el centro
geométrico del cuerpo si la distribución
de masa es homogénea y el cuerpo es
simétrico) y empujado hacia arriba por la
mesa (Normal), que es una fuerza
aplicada en el punto de contacto (M)
entre ambos cuerpos; este punto está en
la línea de acción de la fuerza peso. La
reacción a la normal es una fuerza sobre
la superficie de la mesa, que suponemos
uniformemente distribuida sobre la
superficie de contacto.
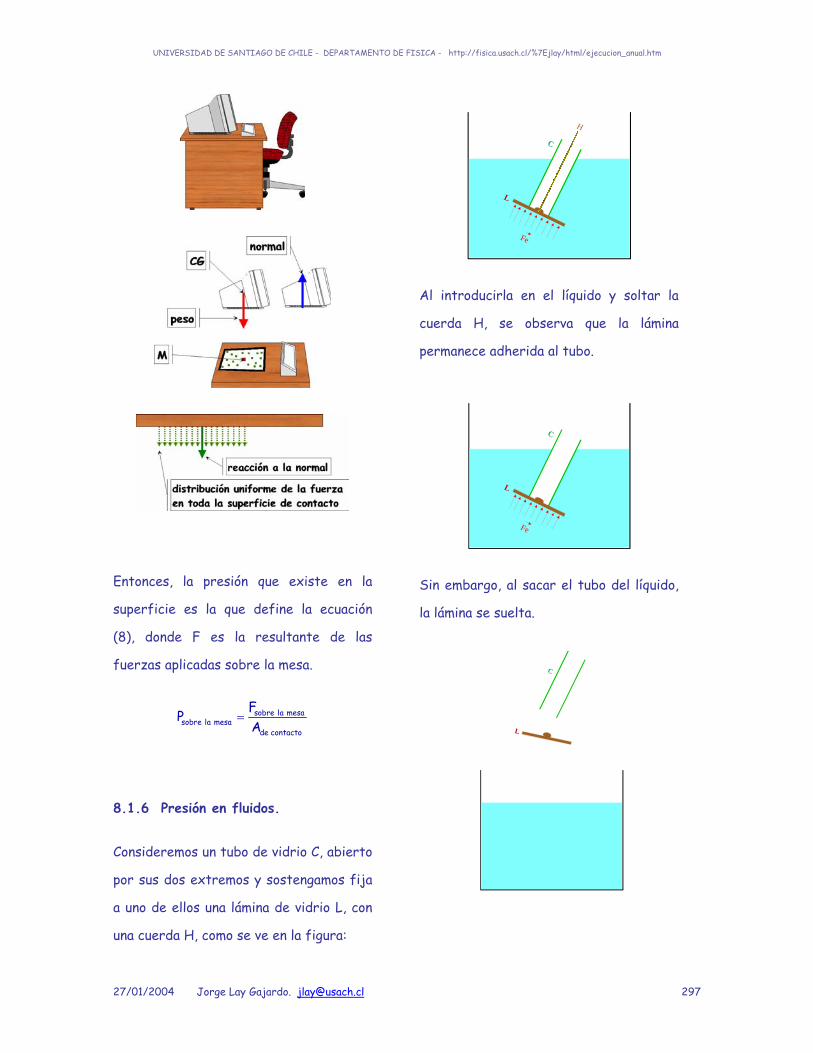
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 297
Entonces, la presión que existe en la
superficie es la que define la ecuación
(8), donde F es la resultante de las
fuerzas aplicadas sobre la mesa.
sobre la mesasobre la mesa
de contacto
FPA
=
8.1.6 Presión en fluidos.
Consideremos un tubo de vidrio C, abierto
por sus dos extremos y sostengamos fija
a uno de ellos una lámina de vidrio L, con
una cuerda H, como se ve en la figura:
Fe
L
C
H
Al introducirla en el líquido y soltar la
cuerda H, se observa que la lámina
permanece adherida al tubo.
Fe
L
C
Sin embargo, al sacar el tubo del líquido,
la lámina se suelta.
C
L
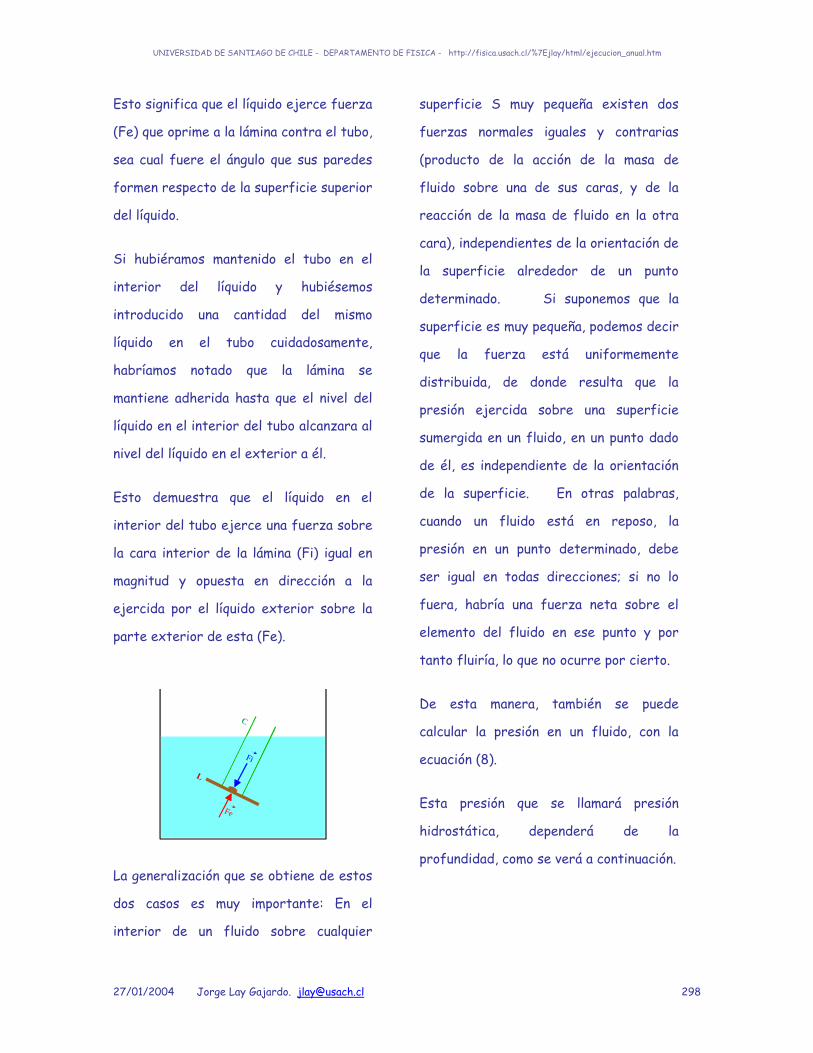
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 298
Esto significa que el líquido ejerce fuerza
(Fe) que oprime a la lámina contra el tubo,
sea cual fuere el ángulo que sus paredes
formen respecto de la superficie superior
del líquido.
Si hubiéramos mantenido el tubo en el
interior del líquido y hubiésemos
introducido una cantidad del mismo
líquido en el tubo cuidadosamente,
habríamos notado que la lámina se
mantiene adherida hasta que el nivel del
líquido en el interior del tubo alcanzara al
nivel del líquido en el exterior a él.
Esto demuestra que el líquido en el
interior del tubo ejerce una fuerza sobre
la cara interior de la lámina (Fi) igual en
magnitud y opuesta en dirección a la
ejercida por el líquido exterior sobre la
parte exterior de esta (Fe).
Fe
L
C
Fi
La generalización que se obtiene de estos
dos casos es muy importante: En el
interior de un fluido sobre cualquier
superficie S muy pequeña existen dos
fuerzas normales iguales y contrarias
(producto de la acción de la masa de
fluido sobre una de sus caras, y de la
reacción de la masa de fluido en la otra
cara), independientes de la orientación de
la superficie alrededor de un punto
determinado. Si suponemos que la
superficie es muy pequeña, podemos decir
que la fuerza está uniformemente
distribuida, de donde resulta que la
presión ejercida sobre una superficie
sumergida en un fluido, en un punto dado
de él, es independiente de la orientación
de la superficie. En otras palabras,
cuando un fluido está en reposo, la
presión en un punto determinado, debe
ser igual en todas direcciones; si no lo
fuera, habría una fuerza neta sobre el
elemento del fluido en ese punto y por
tanto fluiría, lo que no ocurre por cierto.
De esta manera, también se puede
calcular la presión en un fluido, con la
ecuación (8).
Esta presión que se llamará presión
hidrostática, dependerá de la
profundidad, como se verá a continuación.
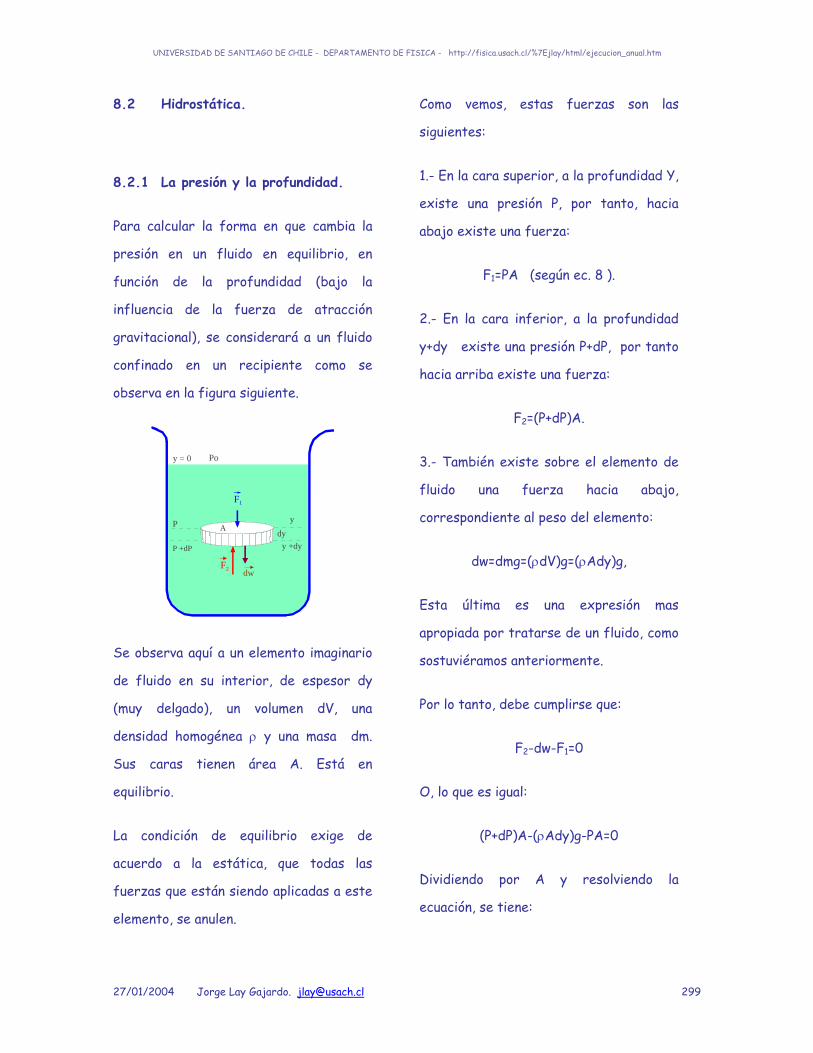
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 299
8.2 Hidrostática.
8.2.1 La presión y la profundidad.
Para calcular la forma en que cambia la
presión en un fluido en equilibrio, en
función de la profundidad (bajo la
influencia de la fuerza de atracción
gravitacional), se considerará a un fluido
confinado en un recipiente como se
observa en la figura siguiente.
Ay
dyP
y = 0 Po
y +dyP +dP
F1
dwF2
Se observa aquí a un elemento imaginario
de fluido en su interior, de espesor dy
(muy delgado), un volumen dV, una
densidad homogénea ρ y una masa dm.
Sus caras tienen área A. Está en
equilibrio.
La condición de equilibrio exige de
acuerdo a la estática, que todas las
fuerzas que están siendo aplicadas a este
elemento, se anulen.
Como vemos, estas fuerzas son las
siguientes:
1.- En la cara superior, a la profundidad Y,
existe una presión P, por tanto, hacia
abajo existe una fuerza:
F1=PA (según ec. 8 ).
2.- En la cara inferior, a la profundidad
y+dy existe una presión P+dP, por tanto
hacia arriba existe una fuerza:
F2=(P+dP)A.
3.- También existe sobre el elemento de
fluido una fuerza hacia abajo,
correspondiente al peso del elemento:
dw=dmg=(ρdV)g=(ρAdy)g,
Esta última es una expresión mas
apropiada por tratarse de un fluido, como
sostuviéramos anteriormente.
Por lo tanto, debe cumplirse que:
F2-dw-F1=0
O, lo que es igual:
(P+dP)A-(ρAdy)g-PA=0
Dividiendo por A y resolviendo la
ecuación, se tiene:
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 300
dP=ρgdy (9)
Que nos proporciona la relación que
existe entre una variación diferencial de
presión en relación con una variación
diferencial de profundidad. Si queremos
encontrar la relación entre una variación
finita de presión y una variación finita de
profundidad, debemos integrar la
ecuación (9) :
∫dP=∫ρgdy
Si tenemos un fluido incompresible ρ no
cambia con la profundidad por lo que
tenemos:
∫dP=ρg∫dy
Si integramos entre el punto donde y=0
(donde la presión es P0, que puede ser la
presión atmosférica o en general, la que
allí exista), y el punto donde y=y (donde la
presión es P), se tiene:
P-P0=ρg(y-0)
P-P0=ρgy (10)
Denominada presión manométrica.
De la ecuación anterior se tiene:
P=P0+ρgy (11)
Denominada presión absoluta.
Esta expresión muestra que la presión
varía linealmente con la profundidad en un
fluido incompresible (en los gases esta
expresión no es válida). Recuerde que y
representa la profundidad.
Esta expresión puede escribirse de forma
bien interesante reemplazando (3) en
(11):
P=P0+Pe y 12)
En el caso de fluidos compresibles, como
en los gases, esta expresión es más
compleja, por cuanto la densidad variará
con la profundidad, produciendo
integraciones distintas será necesario
conocer la forma de la función ρ (y).
8.2.2 Presión atmosférica.
La atmósfera está compuesta de una
mezcla de gases, que son atraídos por la
fuerza gravitacional de la tierra:
Nitrógeno (N2) : 78%
Oxígeno (O2) : 21%
Argón (Ar) : 0,99%
Dióxido de Carbono (CO2) : 0,03%
Cantidades muy pequeñas (trazas) de
Hidrógeno (H), Ozono (O3), Metano (CH4),

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 301
Monóxido de Carbono (CO), Helio (He),
Neón (Ne), Kriptón (Kr). Xenón (Xe) y
cantidades variables de vapor de agua.
Esta mezcla gaseosa está en movimiento
relativo en forma permanente y tiene
composición química y física distinta en
distintos puntos geográficos y a distintas
alturas. Es un sistema dinámico de
comportamiento y composición complejos.
Cerca de la superficie de la tierra, se le
agregan sólidos en suspensión (tierra,
arena, y otros), producto de la actividad
humana o de eventos naturales, y también
líquidos en suspensión (fundamentalmente
agua, producto de la evaporación).
Debido a la acción de la fuerza de
atracción gravitatoria, encontramos una
concentración mayor de moléculas más
pesadas en la medida que estamos más
cerca de la superficie de la tierra.
Fig 8.9 La composición química de la atmósfera es variable, debido a actividades humanas o naturales. Fotos tomadas de http://www.ecoworld.com/
En virtud de lo anterior, si quisiéramos
evaluar la presión debida a la atmósfera
(presión atmosférica), no podríamos
hacerlo con las ecuaciones anteriores,
puesto que es un fluido compresible y su
densidad no es homogénea. Por otra
parte, el nivel de referencia superior de
este “mar gaseoso” es complejo de
manejar, por lo que se acostumbra a
referirse al nivel inferior, que coincida
con la intersección con la superficie no
gaseosa del planeta.
Escoger un nivel de referencia inferior
no es una tarea sencilla, pues la tierra no
es una esfera (actualmente tiene una
forma mas bien parecida a una pera) y su
superficie es irregular y dinámica.
Por convención se ha definido como
referencia el “nivel del mar”, aunque
debido a la acción de las mareas, el
movimiento de rototraslación de la tierra,
los diferenciales de temperatura entre
distintas zonas de la superficie y a la
forma de la tierra, tal nivel es bastante
menos simple que el lugar en que se
encuentra la superficie del mar local en
un instante determinado.
La solución a este problema viene dado
por los geógrafos en 1929 quienes a
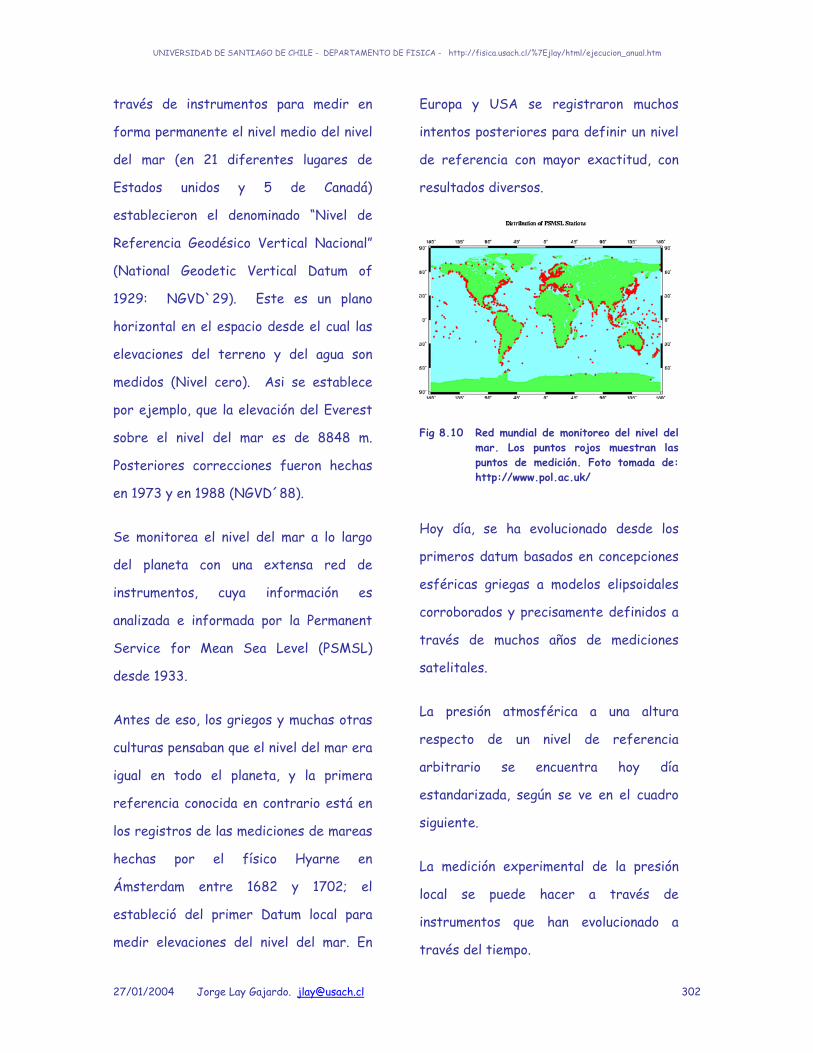
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 302
través de instrumentos para medir en
forma permanente el nivel medio del nivel
del mar (en 21 diferentes lugares de
Estados unidos y 5 de Canadá)
establecieron el denominado “Nivel de
Referencia Geodésico Vertical Nacional”
(National Geodetic Vertical Datum of
1929: NGVD`29). Este es un plano
horizontal en el espacio desde el cual las
elevaciones del terreno y del agua son
medidos (Nivel cero). Asi se establece
por ejemplo, que la elevación del Everest
sobre el nivel del mar es de 8848 m.
Posteriores correcciones fueron hechas
en 1973 y en 1988 (NGVD´88).
Se monitorea el nivel del mar a lo largo
del planeta con una extensa red de
instrumentos, cuya información es
analizada e informada por la Permanent
Service for Mean Sea Level (PSMSL)
desde 1933.
Antes de eso, los griegos y muchas otras
culturas pensaban que el nivel del mar era
igual en todo el planeta, y la primera
referencia conocida en contrario está en
los registros de las mediciones de mareas
hechas por el físico Hyarne en
Ámsterdam entre 1682 y 1702; el
estableció del primer Datum local para
medir elevaciones del nivel del mar. En
Europa y USA se registraron muchos
intentos posteriores para definir un nivel
de referencia con mayor exactitud, con
resultados diversos.
Fig 8.10 Red mundial de monitoreo del nivel del mar. Los puntos rojos muestran las puntos de medición. Foto tomada de: http://www.pol.ac.uk/
Hoy día, se ha evolucionado desde los
primeros datum basados en concepciones
esféricas griegas a modelos elipsoidales
corroborados y precisamente definidos a
través de muchos años de mediciones
satelitales.
La presión atmosférica a una altura
respecto de un nivel de referencia
arbitrario se encuentra hoy día
estandarizada, según se ve en el cuadro
siguiente.
La medición experimental de la presión
local se puede hacer a través de
instrumentos que han evolucionado a
través del tiempo.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 303
Presión Altura aproximada
Temperatura aproximada
Nivel del mar
1000 mb
850 mb
700 mb
500 mb
300 mb
200 mb
100 mb
0 m
100 m
1500 m
3000 m
5000 m
9000 m
12000 m
16000 m
15ºC
15 ºC
05 ºC
-05 ºC
-20 ºC
-45 ºC
-55 ºC
-56 ºC
Los principales instrumentos conocidos se
analizan brevemente a continuación.
8.2.3 Barómetros.
Los barómetros de mercurio son
probablemente los más conocidos y los
primeros utilizados en la medición de la
presión atmosférica, pero no son los
únicos:
Barómetro de Torricelli.
El barómetro de mercurio es un
instrumento utilizado para medir la
presión atmosférica inventado por el
Italiano Evangelista Torricelli (estudiante
de Galileo) en 1643.
Fig 8.11 Retrato de Torricelli tomado de: http://galileo.imss.firenze.it/museo/
Fig 8.12 http://galileo.imss.firenze.it/museo/
Para tener idea de su funcionamiento,
considérese el esquema del dispositivo de
la figura:
y0 = 0 P0 = 0
y1 = H
y1 P1

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 304
Un tubo lleno con mercurio es introducido
boca abajo en un recipiente que contiene
mercurio. Se observa que el nivel del
mercurio en el tubo desciende hasta un
punto, generando sobre ese nivel
prácticamente vacío (solo habrá un poco
de vapor de mercurio).
Tenemos entonces que en el punto donde
se ha escogido la referencia la presión es
cero y en la superficie del líquido del
recipiente (y1) la presión es la
atmosférica (P1).
Entonces, según la expresión (11) :
P1=P0+ρgy1
Con P0=0 e y1=H se tiene:
P1=ρgH
De donde:
1PHg
=ρ
Si estamos a nivel del mar:
5
33 2
1,01x10 PaHKg m14,6x10 9,8m s
=⎛ ⎞⎛ ⎞
⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
H=0,76m=760mm
En la figura siguiente se puede observar
un barómetro de mercurio comercial.
Fig 8.13 http://www.barometers.com/
Barómetro de agua:
Un barómetro de agua como el de la
figura siguiente permite detectar
variaciones en la presión atmosférica
local, a través de la elevación o la
disminución de la columna de agua en la
columna externa. Cuando se vierte el
agua en el interior, se tiene que sobre
ambas superficies la presión es igual; al

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 305
aumentar la presión atmosférica
exterior, se observa una disminución en la
altura del líquido del tubo externo.
Naturalmente, se observarán cambios en
la presión interior al elevarse la
temperatura ambiente
significativamente, de tal manera que
estos barómetros, muy usados en los
navíos desde épocas muy remotas para
predecir tormentas, solo permiten tener
ideas muy generales del comportamiento
de la presión atmosférica.
Se tienen registros del uso de aparatos
como estos desde la invasión árabe a
España en el año 711, fecha de fundación
del califato de Córdova. Algunos autores
sindican al Holandés Gheijsbrecht de
Donckere como su inventor en siglo XVI.
Sin embargo, no fue sino hasta la llegada
del escritor Johann Wolfgang von
Goethe’s a Ilmenau/Thuringia (Alemania)
en 1792 luego de uno de sus extensos
viajes, que su uso se generalizó en
Europa. La asociación de Goethe con la
industria de vidrio local, muy
desarrollada, permitió la construcción
masiva del aparato, que recibió el nombre
de barómetro de Gohete, olvidándose
luego el origen real del aparato.
Fig 8.14 http://www.secure.sciencecompany.com
Barómetro aneroide (sin líquido):
Fue desarrollado en términos prácticos
por el Francés Lucien Vidie en 1843,
aunque la idea data aproximadamente de
1700. Usa un resorte en lugar de un
líquido, es más fácil de construir y
transportar que el de Torriccelli. Aunque
más resistente, no es muy preciso.
Fig 8.15 Barómetro aneroide vendido en Sydney en 1870. Foto tomada de http://www.usyd.edu.au/
Básicamente consiste en una balanza de
resorte, que utiliza una cámara metálica
parcialmente al vacío, con paredes

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 306
flexibles y un mecanismo acoplado para
detectar variaciones en la elongación del
resorte.
Fig 8.16 Barómetro aneroide actual fabricado por Dalvey. Foto tomada de http://www.stanleylondon.com/
Las variaciones permiten calibrar la
respuesta del sistema en cualquier
sistema de unidades e indicadas en una
gran variedad de presentaciones, desde
rotaciones de una aguja sobre un círculo
calibrado, hasta registradores en papel
(barógrafos) o sistemas digitales de
presentación y/o procesamiento de datos.
Fig 8.17 Barómetro aneroide de la Russell Scientific Instruments Ltd. Foto tomada de http://www.russell-scientific.co.uk
Fig 8.18 Barógrafo aneroide foto tomada de: http://www.fa-gluck-clocks.co.uk/
Barómetros digitales.
Hoy día se encuentran disponibles una
gran variedad de instrumentos que
cuentan con sensores que permiten medir
distintos tipos de variables físicas
ambientales, tales como presión y
temperatura e incluso la altitud.
El barómetro de precisión digital como el
de la foto siguiente de la Paroscientific
permite medir presión barométrica,
altitud y temperatura, compensadas a las
condiciones locales, en diferentes escalas
de unidades con una pantalla plana VGA
electro luminescente que permite leer
números a una distancia de 9 m. posee
MODEM telefónico y conexión a PC o
Laptop. Dispone de memoria capaz de
almacenar data de 35 días (ampliable a
120 días) con adquisición de datos
configurable. Es portátil y resistente a
las condiciones atmosféricas extremas.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 307
Fig 8.19 http://www.paroscientific.com
Mide temperaturas entre -40 y55 ºC y
detecta cambios en la presión
atmosférica del orden de 0,06 pulgadas
de mercurio.
Fig 8.20 Termómetro - barómetro - altímetro digital modelo 43 de Wheather Instruments. Foto tomada de: http://www.sciencecompany.com
Mide alturas entre 0 y 8000 m con
resolución de 1 metro; presiones
atmosféricas entre 350 y 1040 mbar con
resolución de 0,1 mb; y temperaturas
entre -10 y 60 ºC con resolución de 1 ºC.
No dispone de otros sistemas de unidades
en pantalla. Es capaz de almacenar
valores máximos y mínimos.
Barómetros ecológicos.
Debido al extendido uso del mercurio en
termómetros y barómetros, al acabado
conocimiento de su poder como agente
nocivo para la salud humana y el medio
ambiente y a la presión de organizaciones
civiles en pos del desarrollo de aparatos
ecológicos, se han desarrollado
instrumentos tales como el “eco-celli”,
consistente en un tubo en U lleno de un
gas y un fluido rojo en base a silicona
para medir presión atmosférica y un tubo
lleno de un líquido azul (metilalcohol
coloreado) para medir temperaturas.
Entre ambos tubos existe una regla móvil
que permite corregir las lecturas de la
presión atmosférica de acuerdo a la
temperatura ambiente.
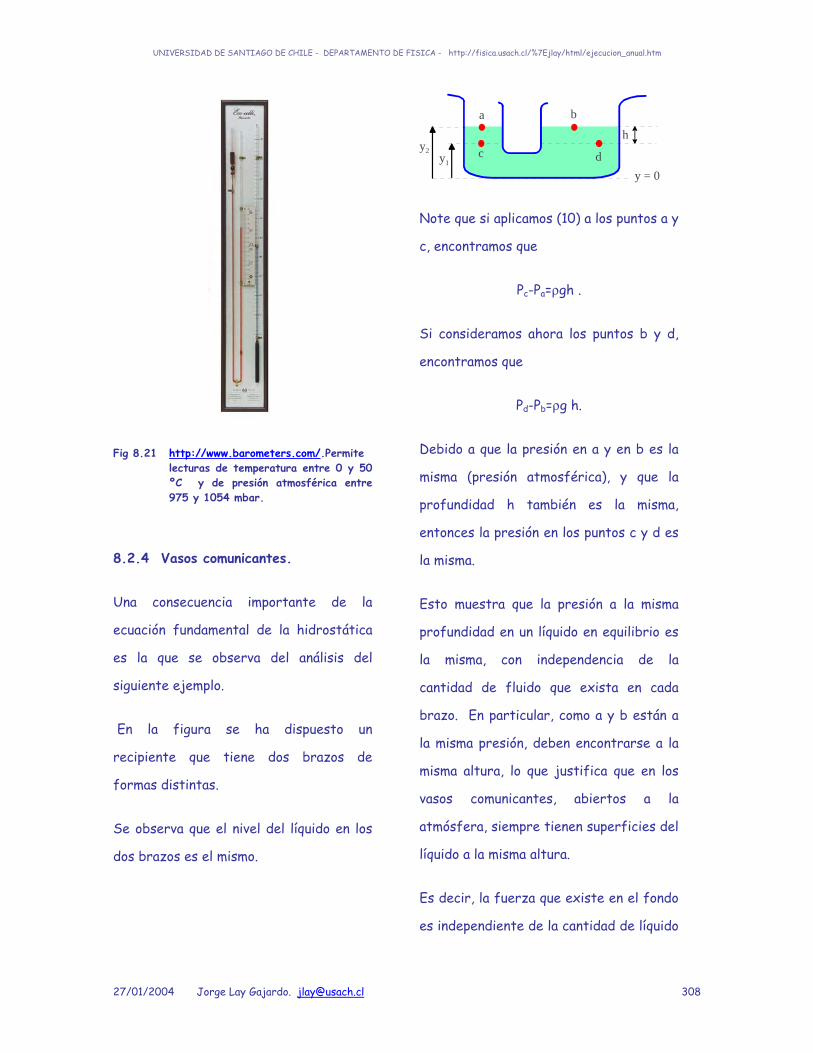
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 308
Fig 8.21 http://www.barometers.com/.Permite lecturas de temperatura entre 0 y 50 ºC y de presión atmosférica entre 975 y 1054 mbar.
8.2.4 Vasos comunicantes.
Una consecuencia importante de la
ecuación fundamental de la hidrostática
es la que se observa del análisis del
siguiente ejemplo.
En la figura se ha dispuesto un
recipiente que tiene dos brazos de
formas distintas.
Se observa que el nivel del líquido en los
dos brazos es el mismo.
y1
h
y = 0
y2
a b
c d
Note que si aplicamos (10) a los puntos a y
c, encontramos que
Pc-Pa=rgh .
Si consideramos ahora los puntos b y d,
encontramos que
Pd-Pb=rg h.
Debido a que la presión en a y en b es la
misma (presión atmosférica), y que la
profundidad h también es la misma,
entonces la presión en los puntos c y d es
la misma.
Esto muestra que la presión a la misma
profundidad en un líquido en equilibrio es
la misma, con independencia de la
cantidad de fluido que exista en cada
brazo. En particular, como a y b están a
la misma presión, deben encontrarse a la
misma altura, lo que justifica que en los
vasos comunicantes, abiertos a la
atmósfera, siempre tienen superficies del
líquido a la misma altura.
Es decir, la fuerza que existe en el fondo
es independiente de la cantidad de líquido

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 309
que existe en ambos brazos, dependiendo
solo del área del fondo y de la altura del
líquido respecto de él.
Esto permite enunciar la Paradoja
Hidrostática, según la cual, la fuerza en
el fondo de un recipiente puede ser
mayor, igual o menor que el peso del
líquido.
En la siguiente figura se observan cuatro
vasos de formas distintas, pero con áreas
de la base iguales e iguales alturas del
mismo líquido.
Según la paradoja hidrostática, las
presiones en el fondo así como las
fuerzas totales sobre él, son iguales en
todos los vasos.
Sin embargo esta fuerza es menor que el
peso del líquido en a), igual que el peso en
b) y superior al peso en los casos c) y d).
a) b) c) d)
8.2.5 Manómetros.
Otra aplicación interesante es el
manómetro de tubo abierto, aparato que
es usado para medir presiones de gases (y
de líquidos si se tiene la precaución de no
mezclarlo con el fluido manométrico). En
la figura, se observa un manómetro de
tubo abierto:
P
y2
P0
y1
H
y=0
Consideraremos la referencia en el fondo
del tubo del manómetro.
Un manómetro de tubo abierto consiste
en un tubo en forma de U, uno de cuyos
brazos está abierto a la atmósfera y el
otro está conectado al sistema cuya
presión se quiere medir. El tubo
contiene generalmente mercurio, aunque
pueden usarse otros líquidos para medir
presiones pequeñas.
Como vimos en el ejemplo anterior, las
presiones en el fondo deben ser iguales.
En el tubo de la izquierda la presión en el
fondo será
P+rgY1
Mientras que en el de la derecha será de
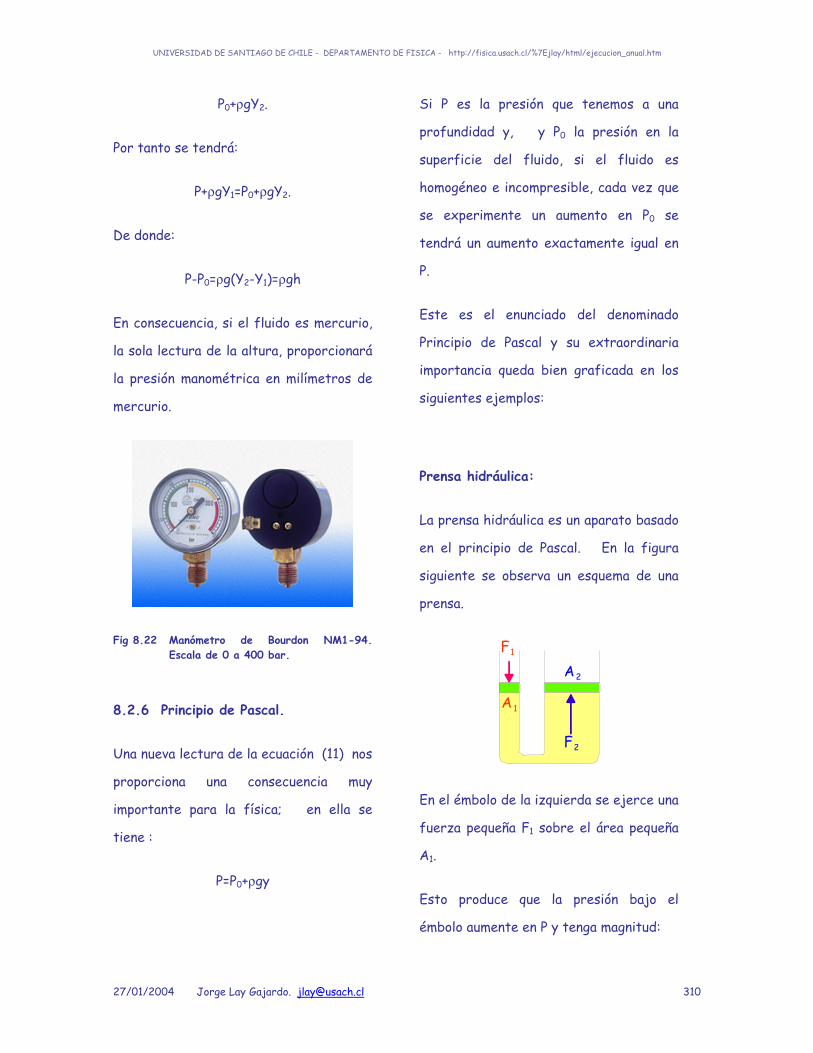
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 310
P0+rgY2.
Por tanto se tendrá:
P+rgY1=P0+rgY2.
De donde:
P-P0=rg(Y2-Y1)=rgh
En consecuencia, si el fluido es mercurio,
la sola lectura de la altura, proporcionará
la presión manométrica en milímetros de
mercurio.
Fig 8.22 Manómetro de Bourdon NM1-94. Escala de 0 a 400 bar.
8.2.6 Principio de Pascal.
Una nueva lectura de la ecuación (11) nos
proporciona una consecuencia muy
importante para la física; en ella se
tiene :
P=P0+rgy
Si P es la presión que tenemos a una
profundidad y, y P0 la presión en la
superficie del fluido, si el fluido es
homogéneo e incompresible, cada vez que
se experimente un aumento en P0 se
tendrá un aumento exactamente igual en
P.
Este es el enunciado del denominado
Principio de Pascal y su extraordinaria
importancia queda bien graficada en los
siguientes ejemplos:
Prensa hidráulica:
La prensa hidráulica es un aparato basado
en el principio de Pascal. En la figura
siguiente se observa un esquema de una
prensa.
A2
A1
F2
F1
En el émbolo de la izquierda se ejerce una
fuerza pequeña F1 sobre el área pequeña
A1.
Esto produce que la presión bajo el
émbolo aumente en P y tenga magnitud:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 311
1
1
FP A=
Bajo el émbolo de la derecha la presión
también aumentó en P según el Principio
de Pascal, siendo su magnitud:
2
2
FP A=
En consecuencia igualando las presiones
se puede escribir:
1 2
1 2
F FA A
=
De donde se tiene:
22 1
1
AF FA
=
Es decir si por ejemplo:
A2=2A1
Entonces:
F2=2F1.
Se ha duplicado la
fuerza!
Con este dispositivo se pueden ejercer
grandes fuerzas con esfuerzos pequeños.
Equilibrio de líquidos no miscibles en
vasos comunicantes:
Este es un caso interesante de analizar
por su aplicación a un sinnúmero de
ejercicios.
En la figura se observa un tubo en U con
mercurio y agua. Ambos extremos están
abiertos en la parte superior.
yA
yM
mercurio
agua
Según Pascal, a la misma altura debemos
tener igual presión en un fluido en
equilibrio, por tanto en la superficie de
separación existe igual presión.
Esta presión se debe a la columna de agua
en el brazo de la izquierda:
(Patm+rAgYA)
Y a la columna de mercurio en el de la
derecha;
(Patm+rMgYM )
De tal manera que:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 312
Patm+rAgYA=Patm+rMgYM
De donde:
MA
M A
ygg y
ρ=
ρ
Es decir :
MA
M A
yPePe y
=
Por tanto: en un vaso comunicante, las
alturas de la columna de dos líquidos no
miscibles en equilibrio son inversamente
proporcionales a sus pesos específicos.
8.2.7 Principio de Arquímedes.
Este, que es uno de los principios
fundamentales de la hidrostática, es
fácilmente recordado, pero exige de gran
atención para ser comprendido
cabalmente. Es imprescindible recordar
que Arquímedes vivió entre el 287 y el
212 A.C. para asombrarse por el rigor y la
belleza del razonamiento.
Pensemos en un cuerpo C de volumen
conocido V sumergido en un líquido
confinado en un recipiente, en estado de
equilibrio, como se ve en la figura.
Observe que antes de que C estuviera allí,
existía un volumen de fluido que ha sido
desplazado por él.
Este volumen estaba en equilibrio con el
resto del fluido, y estaba sujeto a la
acción de fuerzas perpendiculares a
todos los puntos de su superficie, como
ya hemos discutido anteriormente. La
resultante de esas fuerzas debe ser una
fuerza dirigida hacia arriba e igual al
peso del fluido que allí estaba, puesto que
deben anularse para justificar el
equilibrio.
Además esa resultante también está
aplicada a C puesto que es independiente
de lo que allí exista.
Básicamente, esto puede enunciarse como
sigue: La resultante de todas las acciones
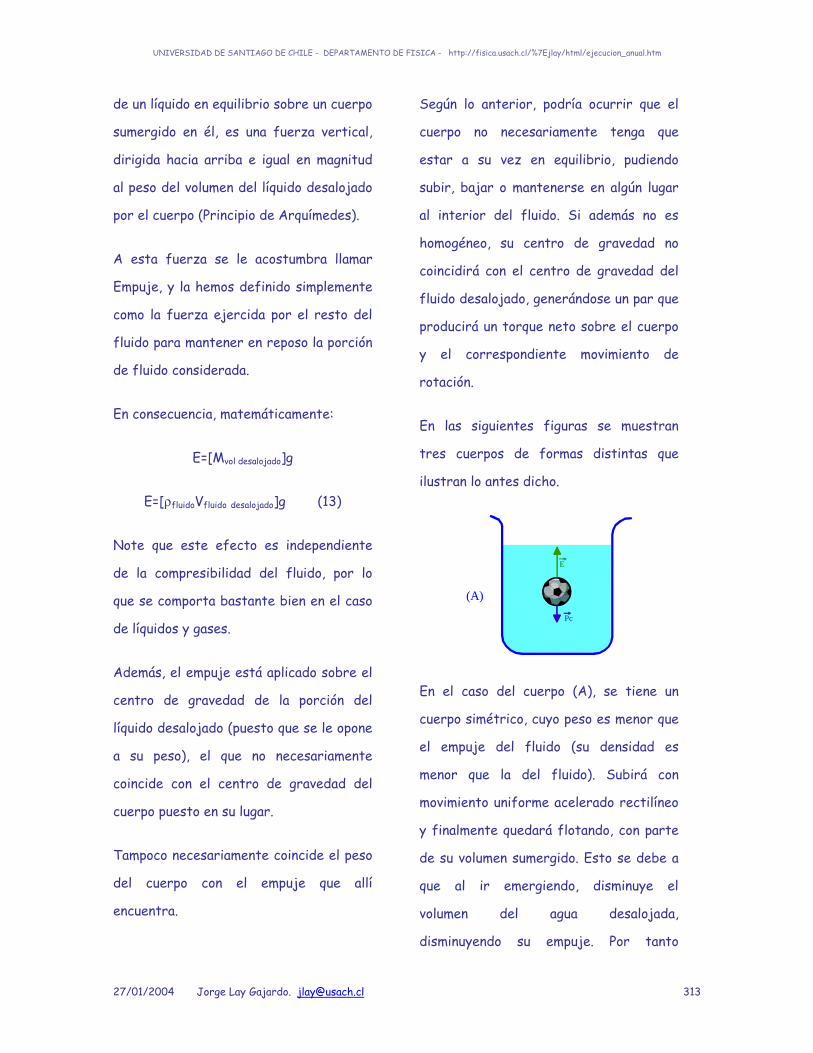
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 313
de un líquido en equilibrio sobre un cuerpo
sumergido en él, es una fuerza vertical,
dirigida hacia arriba e igual en magnitud
al peso del volumen del líquido desalojado
por el cuerpo (Principio de Arquímedes).
A esta fuerza se le acostumbra llamar
Empuje, y la hemos definido simplemente
como la fuerza ejercida por el resto del
fluido para mantener en reposo la porción
de fluido considerada.
En consecuencia, matemáticamente:
E=[Mvol desalojado]g
E=[rfluidoVfluido desalojado]g (13)
Note que este efecto es independiente
de la compresibilidad del fluido, por lo
que se comporta bastante bien en el caso
de líquidos y gases.
Además, el empuje está aplicado sobre el
centro de gravedad de la porción del
líquido desalojado (puesto que se le opone
a su peso), el que no necesariamente
coincide con el centro de gravedad del
cuerpo puesto en su lugar.
Tampoco necesariamente coincide el peso
del cuerpo con el empuje que allí
encuentra.
Según lo anterior, podría ocurrir que el
cuerpo no necesariamente tenga que
estar a su vez en equilibrio, pudiendo
subir, bajar o mantenerse en algún lugar
al interior del fluido. Si además no es
homogéneo, su centro de gravedad no
coincidirá con el centro de gravedad del
fluido desalojado, generándose un par que
producirá un torque neto sobre el cuerpo
y el correspondiente movimiento de
rotación.
En las siguientes figuras se muestran
tres cuerpos de formas distintas que
ilustran lo antes dicho.
(A)
E
Pc
En el caso del cuerpo (A), se tiene un
cuerpo simétrico, cuyo peso es menor que
el empuje del fluido (su densidad es
menor que la del fluido). Subirá con
movimiento uniforme acelerado rectilíneo
y finalmente quedará flotando, con parte
de su volumen sumergido. Esto se debe a
que al ir emergiendo, disminuye el
volumen del agua desalojada,
disminuyendo su empuje. Por tanto
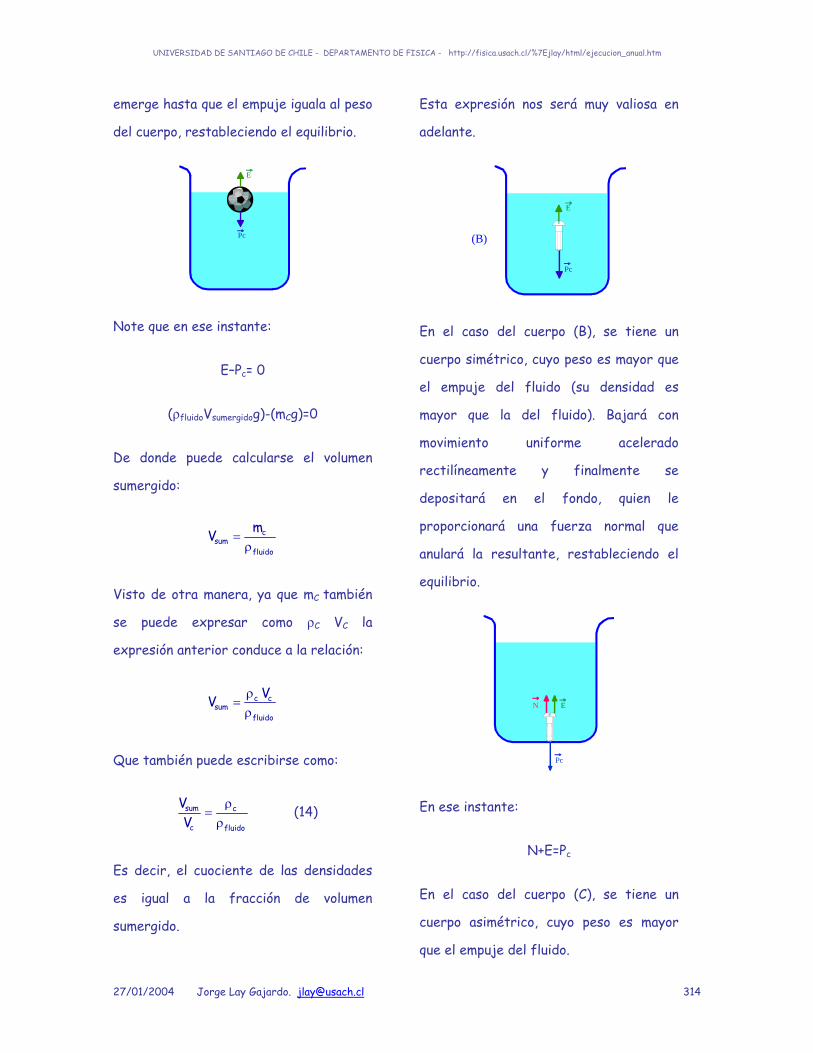
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 314
emerge hasta que el empuje iguala al peso
del cuerpo, restableciendo el equilibrio.
Pc
E
Note que en ese instante:
E–Pc= 0
(rfluidoVsumergidog)-(mCg)=0
De donde puede calcularse el volumen
sumergido:
csum
fluido
mV =ρ
Visto de otra manera, ya que mC también
se puede expresar como rC VC la
expresión anterior conduce a la relación:
c csum
fluido
VV ρ=
ρ
Que también puede escribirse como:
sum c
c fluido
VV
ρ=
ρ (14)
Es decir, el cuociente de las densidades
es igual a la fracción de volumen
sumergido.
Esta expresión nos será muy valiosa en
adelante.
(B)
Pc
E
En el caso del cuerpo (B), se tiene un
cuerpo simétrico, cuyo peso es mayor que
el empuje del fluido (su densidad es
mayor que la del fluido). Bajará con
movimiento uniforme acelerado
rectilíneamente y finalmente se
depositará en el fondo, quien le
proporcionará una fuerza normal que
anulará la resultante, restableciendo el
equilibrio.
Pc
EN
En ese instante:
N+E=Pc
En el caso del cuerpo (C), se tiene un
cuerpo asimétrico, cuyo peso es mayor
que el empuje del fluido.
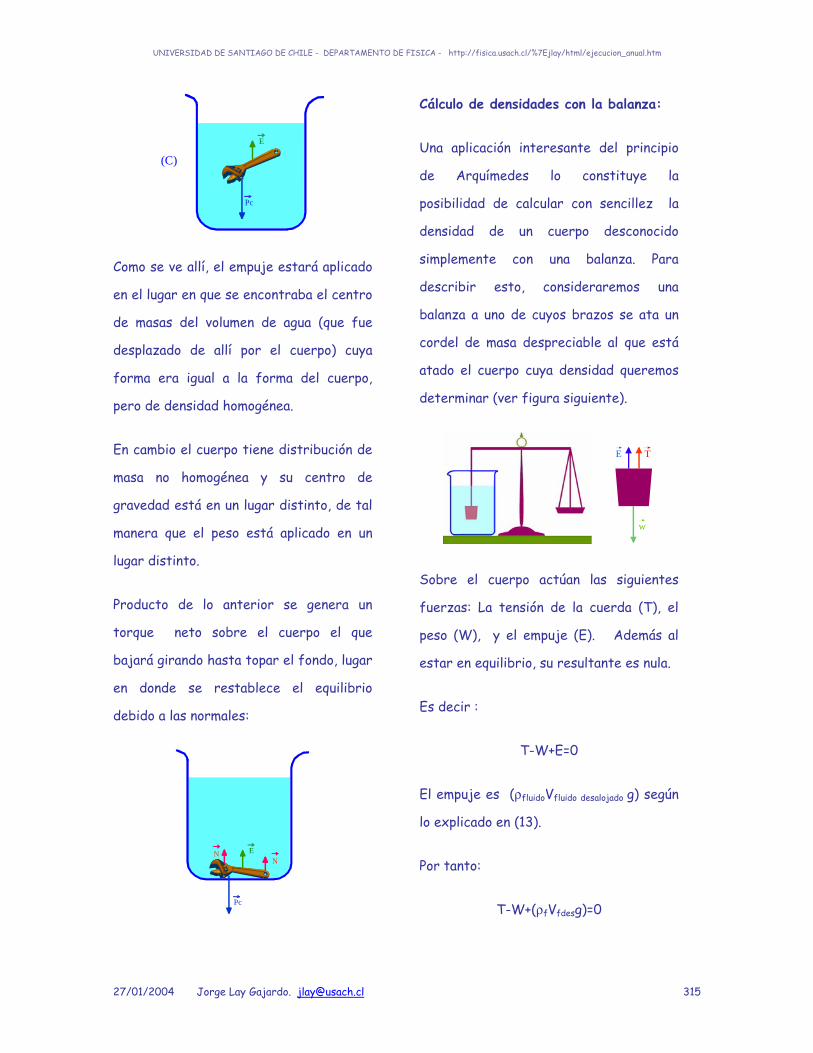
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 315
E
Pc
(C)
Como se ve allí, el empuje estará aplicado
en el lugar en que se encontraba el centro
de masas del volumen de agua (que fue
desplazado de allí por el cuerpo) cuya
forma era igual a la forma del cuerpo,
pero de densidad homogénea.
En cambio el cuerpo tiene distribución de
masa no homogénea y su centro de
gravedad está en un lugar distinto, de tal
manera que el peso está aplicado en un
lugar distinto.
Producto de lo anterior se genera un
torque neto sobre el cuerpo el que
bajará girando hasta topar el fondo, lugar
en donde se restablece el equilibrio
debido a las normales:
Pc
ENN
Cálculo de densidades con la balanza:
Una aplicación interesante del principio
de Arquímedes lo constituye la
posibilidad de calcular con sencillez la
densidad de un cuerpo desconocido
simplemente con una balanza. Para
describir esto, consideraremos una
balanza a uno de cuyos brazos se ata un
cordel de masa despreciable al que está
atado el cuerpo cuya densidad queremos
determinar (ver figura siguiente).
TE
w
Sobre el cuerpo actúan las siguientes
fuerzas: La tensión de la cuerda (T), el
peso (W), y el empuje (E). Además al
estar en equilibrio, su resultante es nula.
Es decir :
T-W+E=0
El empuje es (rfluidoVfluido desalojado g) según
lo explicado en (13).
Por tanto:
T-W+(rfVfdesg)=0

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 316
De donde :
rfVfdes g=(W-T)
Dividiendo ambos términos por el peso del
cuerpo, nos queda:
f fdes ρ V g W - TW W
=
Pero W puede escribirse como: rC VC g,
por lo que:
f fdes
c c
ρ V g W - T V g W
=ρ
Y como el volumen del fluido desalojado
es igual que el volumen del cuerpo,
f
c
ρ W - TW
=ρ
O, también :
c
f
ρ W W - T
=ρ
(15)
Esta expresión es muy relevante, por
cuanto la cantidad de la izquierda es la
densidad relativa (numéricamente igual
que el peso específico relativo), del
cuerpo directamente si el líquido es agua.
A la derecha tenemos el cuociente entre
el peso del cuerpo en el aire (medido con
la balanza) y la diferencia entre el peso
en el aire y la tensión de la cuerda
(también denominada pérdida de peso
aparente del cuerpo), que se obtiene
pesando con la balanza el cuerpo
sumergido en el líquido.
En la industria hoy se utilizan
densímetros electrónicos que calculan la
densidad a través de un software, pero
que esencialmente utilizan el principio de
Arquímedes, como la serie 200 de
Mirage, o el densímetro electrónico de
Densimat (usado en la industria
alimentaria) que se observan en las fotos
siguientes.
Fig 8.23 http://www.gibertini.com/
Fig 8.24 http://www.miragejp.com/densimeter.htm

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 317
Picnómetros:
Son frascos de vidrio mediante los cuales
es posible determinar densidades de
líquidos y sólidos pequeños no solubles en
agua. Usualmente son de 10 a 20 cm3
provistos de un tapón de vidrio hueco
prolongado en un capilar en el cual hay
una señal de enrase, como se ve en la foto
siguiente:
Fig 8.25 http://www.tecnotest.it/
En la figura siguiente se observa un
esquema de un picnómetro y las
indicaciones generales para su uso:
Procedimiento :
1.- Llenar el picnómetro con agua
destilada hasta la señal de enrase y
pesarlo (P1).
2.- Poner a su lado el cuerpo cuya
densidad desea medirse y volver a pesar
(P2).
Note que (P2 - P1) es el peso del cuerpo.
3.- Luego se pone el cuerpo en el interior
del picnómetro. Sube el nivel en el
capilar.
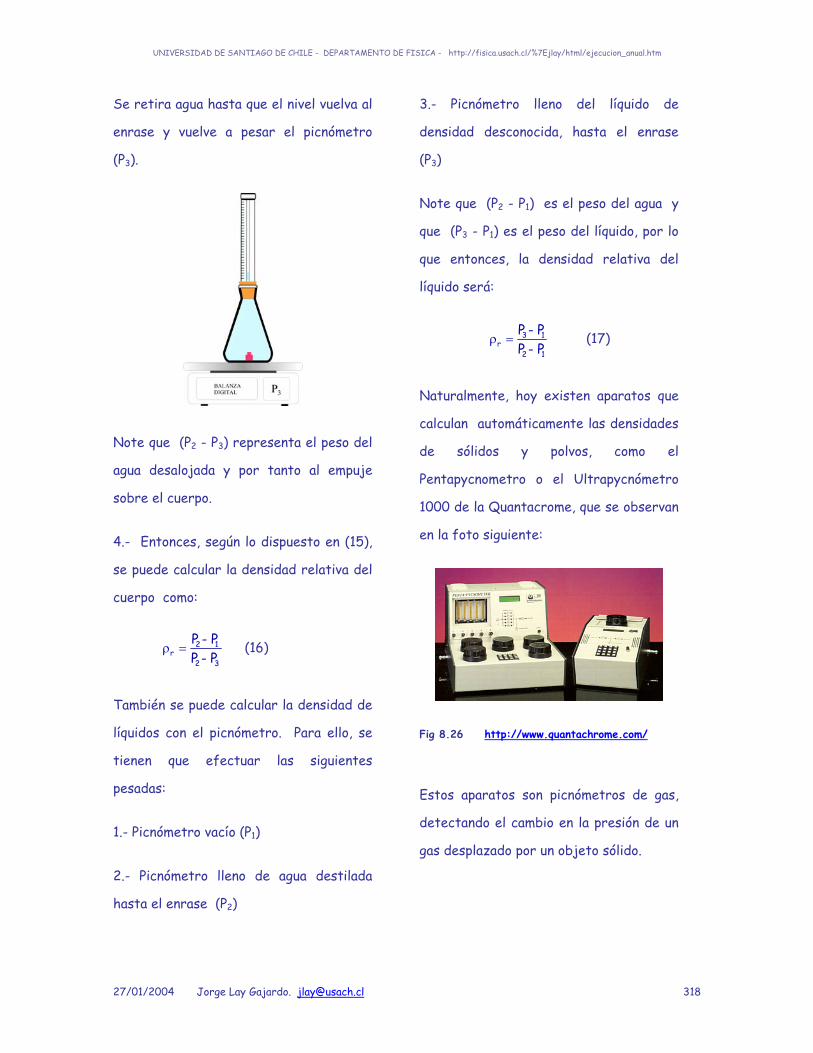
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 318
Se retira agua hasta que el nivel vuelva al
enrase y vuelve a pesar el picnómetro
(P3).
Note que (P2 - P3) representa el peso del
agua desalojada y por tanto al empuje
sobre el cuerpo.
4.- Entonces, según lo dispuesto en (15),
se puede calcular la densidad relativa del
cuerpo como:
2 1r
2 3
P - PP - P
ρ = (16)
También se puede calcular la densidad de
líquidos con el picnómetro. Para ello, se
tienen que efectuar las siguientes
pesadas:
1.- Picnómetro vacío (P1)
2.- Picnómetro lleno de agua destilada
hasta el enrase (P2)
3.- Picnómetro lleno del líquido de
densidad desconocida, hasta el enrase
(P3)
Note que (P2 - P1) es el peso del agua y
que (P3 - P1) es el peso del líquido, por lo
que entonces, la densidad relativa del
líquido será:
3 1r
2 1
P - PP - P
ρ = (17)
Naturalmente, hoy existen aparatos que
calculan automáticamente las densidades
de sólidos y polvos, como el
Pentapycnometro o el Ultrapycnómetro
1000 de la Quantacrome, que se observan
en la foto siguiente:
Fig 8.26 http://www.quantachrome.com/
Estos aparatos son picnómetros de gas,
detectando el cambio en la presión de un
gas desplazado por un objeto sólido.
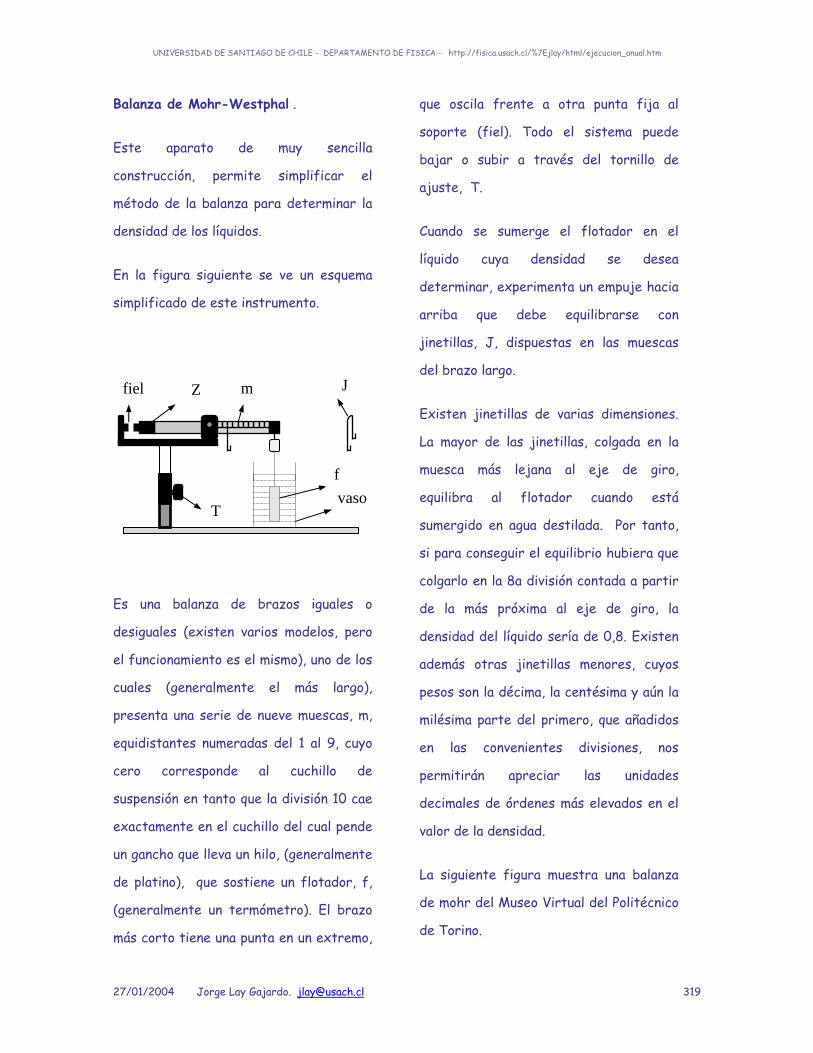
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 319
Balanza de Mohr-Westphal .
Este aparato de muy sencilla
construcción, permite simplificar el
método de la balanza para determinar la
densidad de los líquidos.
En la figura siguiente se ve un esquema
simplificado de este instrumento.
Es una balanza de brazos iguales o
desiguales (existen varios modelos, pero
el funcionamiento es el mismo), uno de los
cuales (generalmente el más largo),
presenta una serie de nueve muescas, m,
equidistantes numeradas del 1 al 9, cuyo
cero corresponde al cuchillo de
suspensión en tanto que la división 10 cae
exactamente en el cuchillo del cual pende
un gancho que lleva un hilo, (generalmente
de platino), que sostiene un flotador, f,
(generalmente un termómetro). El brazo
más corto tiene una punta en un extremo,
que oscila frente a otra punta fija al
soporte (fiel). Todo el sistema puede
bajar o subir a través del tornillo de
ajuste, T.
Cuando se sumerge el flotador en el
líquido cuya densidad se desea
determinar, experimenta un empuje hacia
arriba que debe equilibrarse con
jinetillas, J, dispuestas en las muescas
del brazo largo.
Existen jinetillas de varias dimensiones.
La mayor de las jinetillas, colgada en la
muesca más lejana al eje de giro,
equilibra al flotador cuando está
sumergido en agua destilada. Por tanto,
si para conseguir el equilibrio hubiera que
colgarlo en la 8a división contada a partir
de la más próxima al eje de giro, la
densidad del líquido sería de 0,8. Existen
además otras jinetillas menores, cuyos
pesos son la décima, la centésima y aún la
milésima parte del primero, que añadidos
en las convenientes divisiones, nos
permitirán apreciar las unidades
decimales de órdenes más elevados en el
valor de la densidad.
La siguiente figura muestra una balanza
de mohr del Museo Virtual del Politécnico
de Torino.
T
fvaso
Jm Z fiel

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 320
Fig 8.27 http://www.museovirtuale.polito.it
Aerómetros.
Comúnmente llamados densímetros o
hidrómetros, son flotadores que dan, a
veces mediante una manipulación y a
veces por lectura directa, las densidades
de sólidos o líquidos en el primer caso, la
densidad o una indicación convencional
sobre la concentración de ciertos líquidos
en el segundo. Suelen clasificarse en
tres tipos: aerómetros de peso variable y
volumen constante; de peso constante y
de volumen variable; y aerómetros en los
cuales ambos elementos son variables.
Fig 8.28 Hidrómetros de propósito general de la Stevenson-Reeves Co. http://.stewwwvenson-reeves.co.uk
En términos generales, básicamente
consisten en un flotador que en algunos
casos va provisto de un termómetro para
tomar nota al mismo tiempo de la
temperatura a que se está determinando
la densidad. Una larga varilla está dividida
de forma que indica directamente la
densidad del líquido que corresponde a la
división en que enrasa. Suelen fabricarse
separadamente para líquidos más o menos
densos que el agua. Los primeros tienen
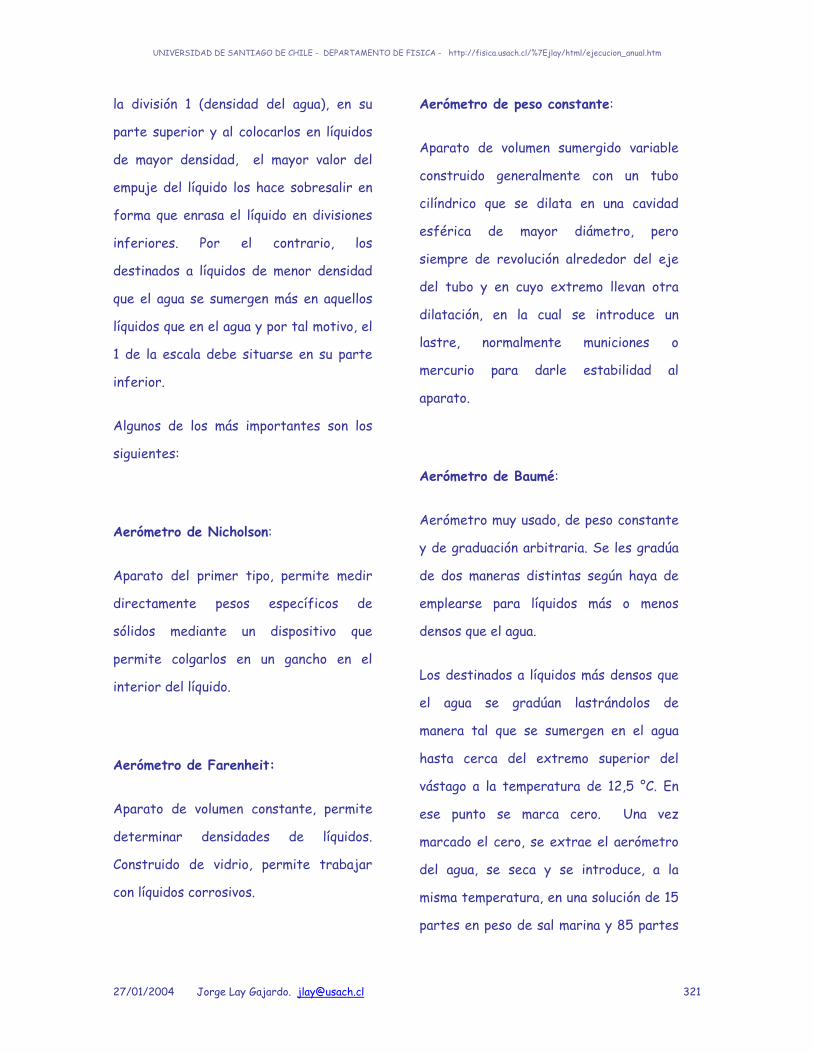
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 321
la división 1 (densidad del agua), en su
parte superior y al colocarlos en líquidos
de mayor densidad, el mayor valor del
empuje del líquido los hace sobresalir en
forma que enrasa el líquido en divisiones
inferiores. Por el contrario, los
destinados a líquidos de menor densidad
que el agua se sumergen más en aquellos
líquidos que en el agua y por tal motivo, el
1 de la escala debe situarse en su parte
inferior.
Algunos de los más importantes son los
siguientes:
Aerómetro de Nicholson:
Aparato del primer tipo, permite medir
directamente pesos específicos de
sólidos mediante un dispositivo que
permite colgarlos en un gancho en el
interior del líquido.
Aerómetro de Farenheit:
Aparato de volumen constante, permite
determinar densidades de líquidos.
Construido de vidrio, permite trabajar
con líquidos corrosivos.
Aerómetro de peso constante:
Aparato de volumen sumergido variable
construido generalmente con un tubo
cilíndrico que se dilata en una cavidad
esférica de mayor diámetro, pero
siempre de revolución alrededor del eje
del tubo y en cuyo extremo llevan otra
dilatación, en la cual se introduce un
lastre, normalmente municiones o
mercurio para darle estabilidad al
aparato.
Aerómetro de Baumé:
Aerómetro muy usado, de peso constante
y de graduación arbitraria. Se les gradúa
de dos maneras distintas según haya de
emplearse para líquidos más o menos
densos que el agua.
Los destinados a líquidos más densos que
el agua se gradúan lastrándolos de
manera tal que se sumergen en el agua
hasta cerca del extremo superior del
vástago a la temperatura de 12,5 °C. En
ese punto se marca cero. Una vez
marcado el cero, se extrae el aerómetro
del agua, se seca y se introduce, a la
misma temperatura, en una solución de 15
partes en peso de sal marina y 85 partes

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 322
de agua destilada. Cuando el aerómetro
queda quieto, se marca el grado 15 en el
punto de enrase. Se retira el aparato de
la solución, se seca, se divide el espacio
comprendido entre las marcas en 15
partes iguales y se prolongan las
divisiones hacia la parte baja del tubo,
hasta donde permita su longitud.
Cuando se conoce la naturaleza del
líquido, al introducir en él uno de estos
aparatos obtenemos una lectura que nos
permite saber el grado de concentración
de este líquido. Así pues, se sabe que en
el ácido sulfúrico comercial bueno, debe
marcar 66 grados; si indicación es
inferior se concluye que el ácido no es lo
suficientemente concentrado.
Cuando se trata de líquidos ligeros se
gradúan disponiendo el lastre de manera
que el aparato se sumerja hasta la parte
baja del vástago en una solución de 10
partes de sal marina por 90 de agua
destilada, a la temperatura de 12,5° C. En
el punto de enrase correspondiente se
marca el cero de la escala. Si se
introduce el aparato en agua destilada,
como este líquido empuja menos que el
anterior, el nuevo punto de enrase queda
más alto que el primero y se marca en él
la graduación 10. Se divide el espacio
comprendido entre estas dos marcas en
10 partes iguales y se prolongan las
divisiones hacia arriba. Las cosas se
disponen de manera tal que en el vástago
quepan 60 o más divisiones.
Cuando se sumerge el aparato en éter
ordinario se considera este líquido como
de buena concentración si marca en él 56
grados baumé.
Puede deducirse una fórmula que permita
conocer las densidades de los líquidos
conociendo los grados Baumé, es decir, la
graduación hasta la cual se sumerge en
ellos uno de estos aparatos. Las fórmulas
resultantes dependen de cierta constante
del aparato, cuyo valor depende de su
construcción y por esta razón se
encuentran fórmulas distintas en los
diferentes autores. En realidad, lo mejor
es determinar experimentalmente estas
fórmulas.
Existen dos fórmulas de amplia difusión:
Para líquidos más densos que el agua, si r
es la densidad del líquido y N la
graduación Baumé que le corresponde, se
tiene:
144,3144,3 N
ρ =−

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 323
Para líquidos menos densos que el agua:
146136 N
ρ =+
Fig 8.29 Hidrómetros para productos de aceites y petróleo. Foto tomada de http://www.stevenson-reeves.co.uk/
Alcoholímetro de gay-lussac:
Con él se puede determinar con rapidez el
porcentaje de alcohol puro contenido en
una mezcla de alcohol y agua. La
graduación se hace a la temperatura de
15 °C. Se lastra el aerómetro de manera
que puesto en agua destilada se sumerja
hasta la parte mas baja de la varilla y en
el enrase se marca cero. Se toman 5
volúmenes de alcohol puro y se completa
hasta 100 volúmenes agregando agua
destilada; se introduce el aerómetro en
esa solución y se marca 10 en el enrase.
Se sigue así, aumentando de 5 en 5 los
volúmenes de alcohol y completando hasta
100 volúmenes con agua y se marca 15,
20, 25,..., en los enrases sucesivos, hasta
llega a sumergir el aparato en alcohol
absoluto en cuyo enrase se marca la
graduación 100. Se divide en 5 partes
iguales cada uno de los espacios de la
escala así obtenidos.
En adelante, para obtener la riqueza de
una solución de alcohol en agua es preciso
disponerlo todo a 15 °C, introducir el
aerómetro en la solución y hacer la
lectura.
Si el resultado es 27 por ejemplo, quiere
decir que la solución está formada por 27
partes de alcohol puro y el resto hasta
100, de agua.
En caso de que la temperatura sea
distinta de 15 ºC, se debe hacer una
corrección de acuerdo a la ecuación:
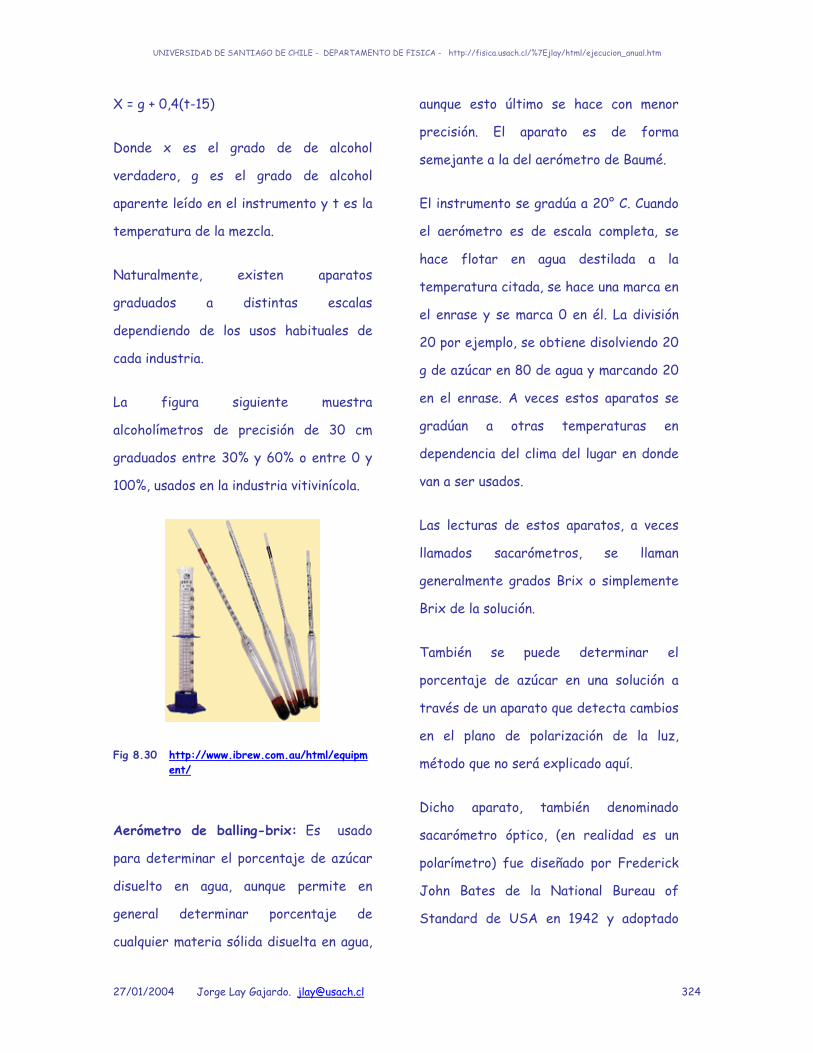
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 324
X = g + 0,4(t-15)
Donde x es el grado de de alcohol
verdadero, g es el grado de alcohol
aparente leído en el instrumento y t es la
temperatura de la mezcla.
Naturalmente, existen aparatos
graduados a distintas escalas
dependiendo de los usos habituales de
cada industria.
La figura siguiente muestra
alcoholímetros de precisión de 30 cm
graduados entre 30% y 60% o entre 0 y
100%, usados en la industria vitivinícola.
Fig 8.30 http://www.ibrew.com.au/html/equipment/
Aerómetro de balling-brix: Es usado
para determinar el porcentaje de azúcar
disuelto en agua, aunque permite en
general determinar porcentaje de
cualquier materia sólida disuelta en agua,
aunque esto último se hace con menor
precisión. El aparato es de forma
semejante a la del aerómetro de Baumé.
El instrumento se gradúa a 20° C. Cuando
el aerómetro es de escala completa, se
hace flotar en agua destilada a la
temperatura citada, se hace una marca en
el enrase y se marca 0 en él. La división
20 por ejemplo, se obtiene disolviendo 20
g de azúcar en 80 de agua y marcando 20
en el enrase. A veces estos aparatos se
gradúan a otras temperaturas en
dependencia del clima del lugar en donde
van a ser usados.
Las lecturas de estos aparatos, a veces
llamados sacarómetros, se llaman
generalmente grados Brix o simplemente
Brix de la solución.
También se puede determinar el
porcentaje de azúcar en una solución a
través de un aparato que detecta cambios
en el plano de polarización de la luz,
método que no será explicado aquí.
Dicho aparato, también denominado
sacarómetro óptico, (en realidad es un
polarímetro) fue diseñado por Frederick
John Bates de la National Bureau of
Standard de USA en 1942 y adoptado
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 325
como norma en la industria del azúcar y
sus derivados.
En la actualidad, un aparato muy vendido
en el mundo es el SUCROMAT VIS/NIR,
que se ve en la foto siguiente.
Fig 8.31 http://www.kernchen.de/
8.3 Problemas resueltos de Hidrostática.
Ejercicio 8.1.- Una estrella de
neutrones tiene un radio de 10 Km y
una masa de 2X1030 Kg. ¿Cuánto
pesaría un volumen de 1cm3 de esa
estrella, bajo la influencia de la atracción
gravitacional en la superficie de la tierra?
Solución:
El peso debe calcularse multiplicando la
masa por la aceleración de gravedad. En
consecuencia debemos calcular la masa
primero. Eso puede hacerse a través del
concepto de densidad, puesto que:
masa estrellaρ=volumen estrella
Es decir, cada cm3 de la estrella tendrá
una masa de 0,5x1012 Kg, por lo tanto en
la superficie de la tierra pesará:
W=(0,5x1012Kg)(9,8 2ms
)=0,5x1012N.
Ejercicio 8.2.- Júpiter tiene un
radio R=7,14X104Km y la aceleración
debida a la gravedad en su superficie es
gJ=22,9 2ms
. Use estos datos para
calcular la densidad promedio de Júpiter.
Solución: La densidad es
simplemente el cuociente entre la masa y
el volumen del planeta. Por tanto, hay que
calcular previamente ambas cantidades.
El volumen se puede calcular
geométricamente con la expresión:
(i) 34 r3
π
y la masa se puede calcular recordando
que el peso es una fuerza de atracción
gravitacional que se puede encontrar con
la expresión:
(ii) 2m MP G R
=

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 326
(donde G es una constante universal de
valor 6,67x10-112
2N mKg , m es la masa de
un objeto cualquiera en las cercanías del
cuerpo que genera el campo gravitacional,
en este caso el planeta Júpiter, M es la
masa del planeta y R es la distancia entre
el cuerpo y el planeta). Por otra parte, el
peso de un cuerpo cualquiera cercano al
planeta puede calcularse también con la
expresión proveniente de la segunda ley
de Newton :
P=mg (iii).
en consecuencia, igualando (ii) con (iii) :
2m M G m gR
=
de donde :
2g R M = G
ahora podemos calcular la densidad :
2
3
g R3 gM G 4V 4 G R R
3
ρ = = =ππ
( )( )( )( )( ) ( )11 7
3 22,9 =
4 6,67x10 7,14x10 3,14−ρ
3Kg = 1 148,5 m
ρ
Ejercicio 8.3.- ¿ Cuál es la presión
a 1m y a 10m de profundidad desde la
superficie del mar?. Suponga que
r=1,03x103Kg/m3 como densidad del agua
de mar y que la presión atmosférica en la
superficie del mar es de 1,01X105Pa.
Suponga además que a este nivel de
precisión la densidad no varía con la
profundidad.
Solución: En función de la
profundidad la presión es:
P=P0+rgh
Por tanto:
P=1,01x105Pa+(1,03x103 3Kgm )(9,8 2
ms
)( h)
Si h=1m: P=1,11x105Pa.
Si h=10m : P=2,02x105Pa
Ejercicio 8.4.- Las dimensiones de
una piscina rectangular son 25m de largo,
12m de ancho y 2m de profundidad.
Encontrar:
a) La presión manométrica en el fondo de
la piscina.
b) La fuerza total en el fondo debida al
agua que contiene.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 327
c)La fuerza total sobre una de las
paredes de 12m, por 2m.
d) La presión absoluta en el fondo de la
piscina en condiciones atmosféricas
normales, al nivel del mar.
Solución:
a) La presión manométrica se calcula con
la expresión (10) :
P-P0=rgh
P-P0=(13
gcm
)(980 2cms
)(200cm)
P-P0=196000 2D
cm=1,96 2
Ncm
b) Como la profundidad es constante, se
puede ocupar directamente la expresión
(8), pues la fuerza estará uniformemente
distribuida:
F=PA
donde P es la presión manométrica. Por
tanto :
F=(1,96 2N
cm) (1200cm)(2500cm)
F=5,88x106N
c) La fuerza total sobre una de las
paredes no puede calcularse de la misma
forma, puesto que la presión varía con la
profundidad, por lo que debe ocuparse la
expresión (7):
dF=PdA
Donde dF es la fuerza debida a la presión
manométrica P, existente en un elemento
de área dA de largo L y alto dh.
La presión manométrica varía con la
profundidad según r g h.
Por tanto :
dF=(rgh)(Ldh)
La fuerza requerida se encontrará
integrando esta expresión:
ÚdF= ÚrgLhdh
Que resulta :
2hF gL2
= ρ
Integrada y evaluada entre 0 y h.
Con los datos del problema :
F= (13
gcm
)(980 2cms
)(1200cm)(2200
2 cm2)
F=2,352x1010D=235200N

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 328
(d) La presión absoluta en el fondo de la
piscina es la suma de las presiones
manométrica y atmosférica, que a nivel
del mar vale 1,01x1052
Nm
=10,1 2N
cm ,
Por tanto :
P=1,96 2N
cm+10,1 2
Ncm
=12,06 2N
cm
Ejercicio 8.5.- En el tubo en U de la
figura, se ha llenado la rama de la
derecha con mercurio y la de la izquierda
con un líquido de densidad desconocida.
Los niveles definitivos son los indicados
en el esquema.
Hallar la densidad del líquido desconocido.
14 cm
2 cm
mercurio
líquido L
Solución:
En el nivel de la superficie de separación
la presión es la misma en los dos líquidos,
En dicho nivel la presión debida al
mercurio vale:
PM=P0+rMghM
y la del líquido desconocido vale:
PL=P0+rLghL
En ambas, P0 es la presión atmosférica
pues están abiertos.
Igualando ambas expresiones:
P0+rMghM=P0+rLghL
de donde :
M ML
L
h = h
ρρ
( )3
L
g13,6 2cmcm = 14 cm
⎛ ⎞⎜ ⎟⎝ ⎠ρ
rL=(1,94 3g
cm)
Ejercicio 8.6.- Un recipiente
cerrado que contiene líquido
(incompresible) está conectado al
exterior mediante dos pistones, uno
pequeño de área A1=1cm2 , y uno
grande de área A2=100cm2 como se ve
en la figura. Ambos pistones se

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 329
encuentran a la misma altura. Cuando se
aplica una fuerza F=100N hacia abajo
sobre el pistón pequeño. ¿Cuánta masa m
puede levantar el pistón grande?.
A2
A1
F2
F1
d1
d2
Solución:
Cuando actúa F1 sobre el pistón pequeño,
la presión P del líquido en ese punto es :
261
1 2 -4 21
F 100 N 10 NP = = = = 10 PaA 1 cm 10 m
Como el pistón grande está a la misma
altura, tendrá la misma presión P que el
otro pistón, por tanto la fuerza F2 que
actúa sobre él, es
F2=PA2
Y el peso que puede levantar es:
F2=mg
Por lo que se puede escribir:
PA2=mg
De donde:
( )( )6 2 22
2
10 Pa 10 mP Am = = mg 9,8 s
−
m = 1 020 Kg
Ejercicio 8.7.- Calcular el empuje
que ejerce (a) el agua y (b) el alcohol
sobre un cuerpo enteramente sumergido
en estos líquidos cuyo volumen es de
350cm3. El peso específico del alcohol es
de 0,8 3gf
cm.
Solución:
a) El empuje del agua es igual al peso de
los 350cm3 de este líquido que el cuerpo
desaloja y vale por lo tanto 350gf.
(b) En alcohol corresponde al peso de
350cm3 de este líquido. Conocido su peso
específico, que es el cuociente entre el
peso del líquido y su volumen:
Peso=PeV=(0,8 3gf
cm)(350cm3)=280 gf
Ejercicio 8.8.- ¿Cuál es el peso
específico de un cuerpo si flota en el agua
de modo que emerge el 35% de su
volumen?
Solución:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 330
Si emerge el 35% de su volumen, está
sumergido el 65% del cuerpo. Esto
significa que sobre él existe aplicado un
empuje equivalente al peso de un volumen
de agua equivalente a 0,65V (siendo V el
volumen del cuerpo). Este puede ser
expresado como en el ejercicio anterior,
como:
Pagua desalojada=Empuje=PeV=(1 3
gfcm
)(0,65V)
Por otra parte, si flota es porque está en
equilibrio, para lo que es necesario que el
peso del cuerpo sea igual al empuje. El
peso del cuerpo es:
Pcuerpo=PeV.
Debido a lo antes expuesto:
(0,65 V)gf=PeV
De donde:
Pe=0,65 3
gfcm
Ejercicio 8.9.- Una esfera
metálica pesa 1Kf en el aire y 880gf
sumergida en agua. Calcular su densidad
absoluta y relativa y su peso específico
absoluto y relativo.
Solución:
De acuerdo a lo encontrado en (15):
r1000 gfW = = = 8,3
E 1000 gf - 880 gfρ
La densidad relativa es numéricamente
igual que el peso específico relativo por lo
que este también vale 8,3.
La densidad absoluta será 8,3 3g
cm por
definición.
El peso específico absoluto se puede
encontrar con la expresión (3):
Pe=rg=(8,3 3g
cm)(980 2
cms
)
3DPe = 8 134
cm
Ejercicio 8.10.- Un objeto de masa
180 gramos y densidad desconocida (r1),
se pesa sumergido en agua obteniéndose
una medida de 150gf. Al pesarlo de
nuevo, sumergido en un líquido de
densidad desconocida (r2), se obtiene
144gf. Determinar la densidad del objeto
y del segundo líquido.
Solución:
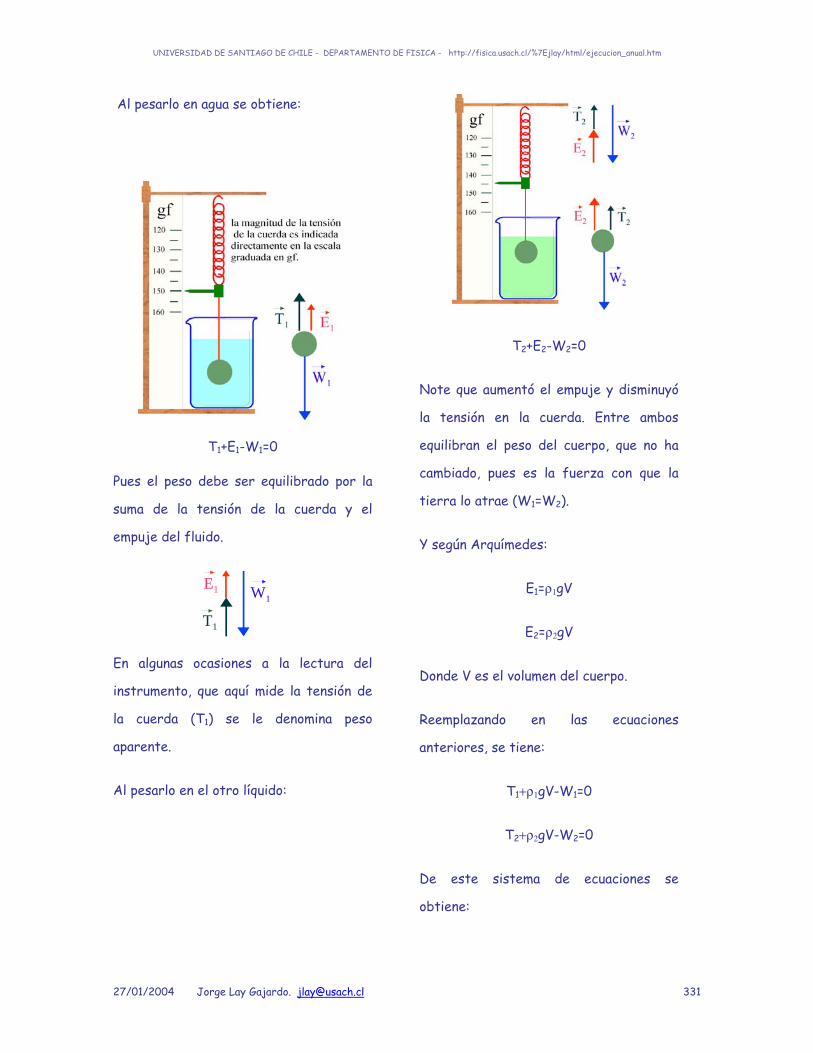
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 331
Al pesarlo en agua se obtiene:
T1+E1-W1=0
Pues el peso debe ser equilibrado por la
suma de la tensión de la cuerda y el
empuje del fluido.
E1 W1
T1
En algunas ocasiones a la lectura del
instrumento, que aquí mide la tensión de
la cuerda (T1) se le denomina peso
aparente.
Al pesarlo en el otro líquido:
T2+E2-W2=0
Note que aumentó el empuje y disminuyó
la tensión en la cuerda. Entre ambos
equilibran el peso del cuerpo, que no ha
cambiado, pues es la fuerza con que la
tierra lo atrae (W1=W2).
Y según Arquímedes:
E1=r1gV
E2=r2gV
Donde V es el volumen del cuerpo.
Reemplazando en las ecuaciones
anteriores, se tiene:
T1+r1gV-W1=0
T2+r2gV-W2=0
De este sistema de ecuaciones se
obtiene:
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 332
( )1 2 22
1 1
W - T =
W - Tρ
ρ
Donde:
W1=W2=W=mg=(180g)(980 2cms
)
W=176400D
T1=150gf=150(980D)=147000D
T2=144gf=144(980D)=141120D
Reemplazando:
[ ]3
2
g1 176400 D 141120 Dcm
176400 D - 147000 D
−ρ =
2 3g1,2
cmρ =
La densidad del cuerpo es fácil de
obtener, puesto que es igual a cmV
.
El volumen V se puede obtener del
sistema de ecuaciones:
1 1
1
W - TV g
=ρ
Reemplazando:
3 2
176400 D - 147000 DV g cm1 980cm s
=⎛ ⎞⎛ ⎞
⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
=30cm3
Con lo que:
rc= 3180 g
30 cm=6,00 3
gcm
Ejercicio 8.11.- Un recipiente
contiene una capa de agua (r2 1,00 3g
cm),
sobre la que flota una capa de aceite, de
densidad r1=0,80 3g
cm. Un objeto
cilíndrico de densidad desconocida r cuya
área en la base es A y cuya altura es h, se
deja caer al recipiente, quedando a flote
finalmente cortando la superficie de
separación entre el aceite y el agua,
sumergido en esta última hasta la
profundidad de 2h3
como se indica en la
figura. Determinar la densidad del
objeto.
El cuerpo está parcialmente sumergido en
aceite y parcialmente sumergido en agua.
Esta siendo sujeto de la acción de tres
fuerzas: El peso, el empuje del
volumen de aceite desplazado por el

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 333
cuerpo y el empuje del volumen de agua
desplazado por el cuerpo.
Está en equilibrio por lo que las fuerzas
se anulan, por lo que:
E1+E2-W= 0
con: E1=r1gV=r1gAh
E2=r2gV=r2gAh
Reemplazando los datos:
r1gAh+r2gAh-rgAh=0
Dividiendo por gAh se tiene:
r1+r2-r=0
Resolviendo para r y reemplazando:
r=0,800 3g
cm+1,00 3
gcm
=0,933 3g
cm
Ejercicio 8.12.- Una esfera de
plomo llena de aire, con radio R=0,1m, se
encuentra totalmente sumergida en un
tanque de agua como se ve en la figura.
¿ Cuál es el espesor e de la capa de plomo,
si la esfera ni flota ni se hunde?. La
densidad del plomo es r=11,3x103 3
Kgm .
Solución:
Si está en equilibrio, las fuerzas que
participan deben anularse. Estas son el
peso de la esfera y el empuje del líquido.
El Peso de la esfera es W=mg=rplomoVg
donde el volumen de la capa de plomo se
calculará usando una aproximación, que
consiste en calcular la superficie de una
esfera de radio R, es decir 4pR2, y
multiplicarla por el espesor e de la capa
de plomo.
Entonces el volumen que necesitamos es:
V=4pR2e
Por tanto, el peso es:
W=(4pR2e)(rplomog)
Y el empuje es:
E=raguaVg=raguag(4p3R
3)
Pues es el peso del volumen de agua
desplazada correspondiente a una esfera
de radio igual al radio exterior de la capa
de plomo.
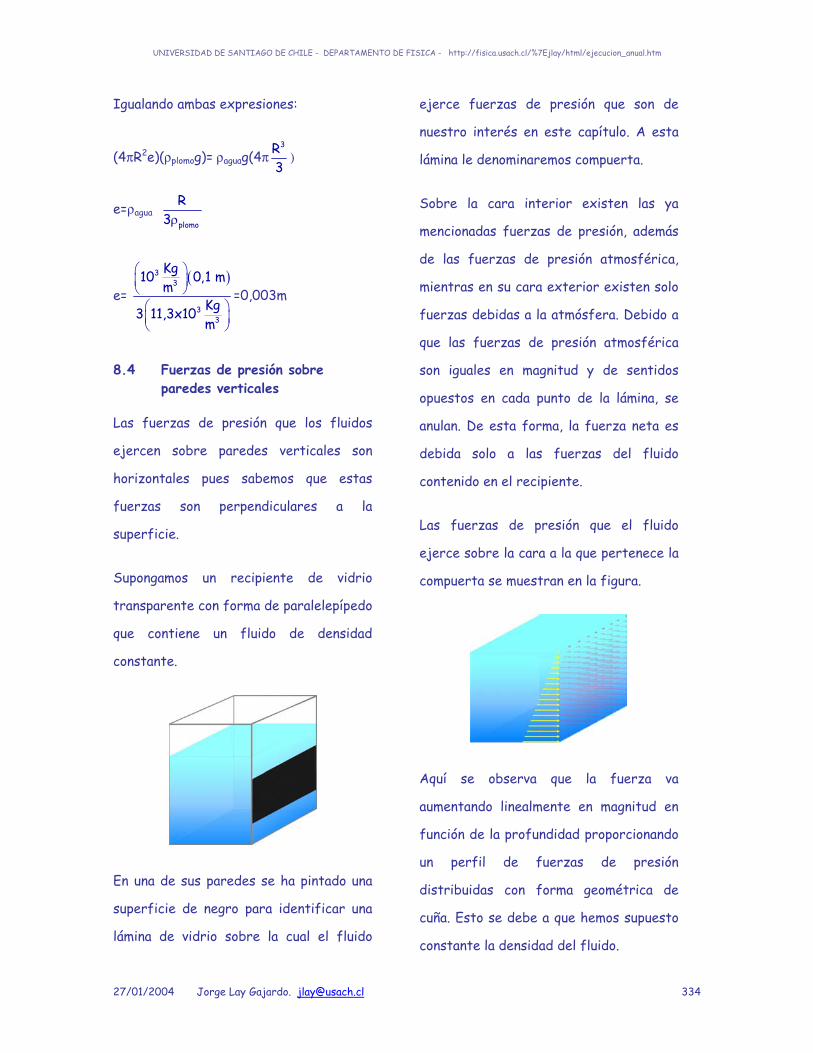
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 334
Igualando ambas expresiones:
(4pR2e)(rplomog)= raguag(4p3R
3)
e=ragua plomo
R3ρ
e= ( )3
3
33
Kg10 0,1 mm
Kg3 11,3x10m
⎛ ⎞⎜ ⎟⎝ ⎠
⎛ ⎞⎜ ⎟⎝ ⎠
=0,003m
8.4 Fuerzas de presión sobre paredes verticales
Las fuerzas de presión que los fluidos
ejercen sobre paredes verticales son
horizontales pues sabemos que estas
fuerzas son perpendiculares a la
superficie.
Supongamos un recipiente de vidrio
transparente con forma de paralelepípedo
que contiene un fluido de densidad
constante.
En una de sus paredes se ha pintado una
superficie de negro para identificar una
lámina de vidrio sobre la cual el fluido
ejerce fuerzas de presión que son de
nuestro interés en este capítulo. A esta
lámina le denominaremos compuerta.
Sobre la cara interior existen las ya
mencionadas fuerzas de presión, además
de las fuerzas de presión atmosférica,
mientras en su cara exterior existen solo
fuerzas debidas a la atmósfera. Debido a
que las fuerzas de presión atmosférica
son iguales en magnitud y de sentidos
opuestos en cada punto de la lámina, se
anulan. De esta forma, la fuerza neta es
debida solo a las fuerzas del fluido
contenido en el recipiente.
Las fuerzas de presión que el fluido
ejerce sobre la cara a la que pertenece la
compuerta se muestran en la figura.
Aquí se observa que la fuerza va
aumentando linealmente en magnitud en
función de la profundidad proporcionando
un perfil de fuerzas de presión
distribuidas con forma geométrica de
cuña. Esto se debe a que hemos supuesto
constante la densidad del fluido.
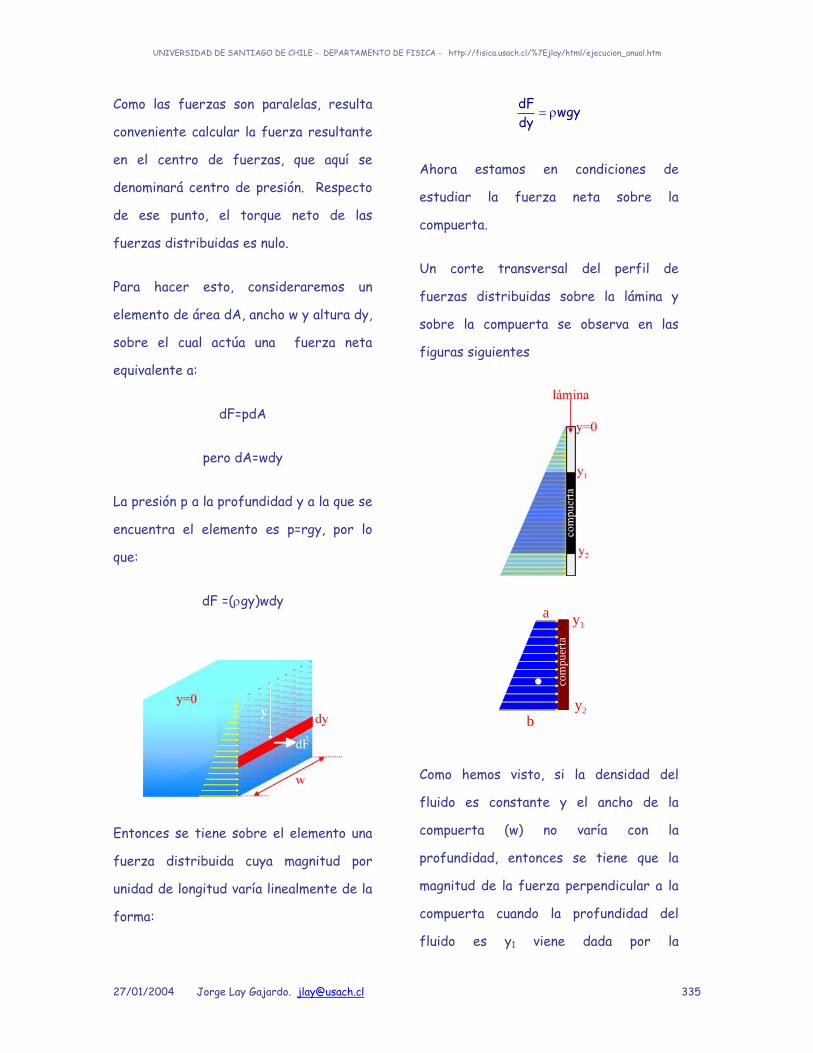
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 335
Como las fuerzas son paralelas, resulta
conveniente calcular la fuerza resultante
en el centro de fuerzas, que aquí se
denominará centro de presión. Respecto
de ese punto, el torque neto de las
fuerzas distribuidas es nulo.
Para hacer esto, consideraremos un
elemento de área dA, ancho w y altura dy,
sobre el cual actúa una fuerza neta
equivalente a:
dF=pdA
pero dA=wdy
La presión p a la profundidad y a la que se
encuentra el elemento es p=rgy, por lo
que:
dF =(ρgy)wdy
Entonces se tiene sobre el elemento una
fuerza distribuida cuya magnitud por
unidad de longitud varía linealmente de la
forma:
dF wgydy
= ρ
Ahora estamos en condiciones de
estudiar la fuerza neta sobre la
compuerta.
Un corte transversal del perfil de
fuerzas distribuidas sobre la lámina y
sobre la compuerta se observa en las
figuras siguientes
y1
y2b
a
com
puer
ta
Como hemos visto, si la densidad del
fluido es constante y el ancho de la
compuerta (w) no varía con la
profundidad, entonces se tiene que la
magnitud de la fuerza perpendicular a la
compuerta cuando la profundidad del
fluido es y1 viene dada por la

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 336
expresión 11
dF wgydy
⎛ ⎞= ρ⎜ ⎟
⎝ ⎠, que llamaremos
a, por comodidad. De igual manera, cuando
la profundidad sea y2 entonces la fuerza
por unidad de longitud sobre la
compuerta será:
22
dF wgydy
⎛ ⎞= ρ⎜ ⎟
⎝ ⎠, que llamaremos b.
La fuerza resultante será entonces, el
área de la distribución de fuerzas
contenida en el trapecio de la figura
anterior, la que puede calcularse
fácilmente subdividiéndola en un triángulo
(A) y un rectángulo (B) como se indica en
la figura siguiente, donde:
( )( )A 2 11A y y b a2
= − −
( )B 2 1A y y a= −
(y2-y1)
a
B
b-a
A
Por tanto:
( )( )2 11F A a b y y2
= = + −
Reemplazando a y b:
( )( )
( )
1 2 2 1
2 22 1
1F wgy wgy y y21F wg y y2
= ρ + ρ −
= ρ −
y el punto de aplicación de esa fuerza, el
centro de presión, está ubicado en
YP=y1+yPF
donde yPF es el centro de presión del
trapecio, que coincide con su centroide,
por lo que se puede calcular con:
PA A PB BPF
A B
y A y AyA A
+=
+
yPA e yPB son los centros de presión del
triángulo y el rectángulo
respectivamente, que coinciden con sus
respectivos centroides:
( )PA 2 12y y y3
= −
( )PB 2 11y y y2
= −
Por tanto,
( ) ( )( ) ( )( )
( )( ) ( )
2 1 2 1 2 1 2 1
PF
2 1 2 1
2 1 1y y y y b a y y y y a3 2 2y 1 y y b a y y a
2
− − − + − −=
− − + −
( )( ) ( )PF 2 1a 2b1y y y
3 a b+
= −+

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 337
Reemplazando a y b en esta expresión, se
tiene:
( )( ) ( )
( )( ) ( )
( )( )
1 2PF 2 1
1 2
1 2PF 2 1
1 2
2 21 2 1 2 1 2
PF1 2
wgy 2 wgy1y y y3 wgy wgy
y 2y1y y y3 y y
y y y 2y 2y y1y3 y y
ρ + ρ= −
ρ + ρ
+= −
+
− + −=
+
Entonces el punto de aplicación de la
fuerza respecto de la superficie del
fluido será:
( )( )
( )( )
2 21 2 1 2 1 2
P 11 2
2 21 1 2 2
P1 2
y y y 2y 2y y1y y3 y y
y y y y2y3 y y
− + −= +
+
+ +=
+
Note que si y1=0 e y2=h entonces:
P2y h3
=
Si sabe cálculo es más fácil, puesto que:
dF=pdA
Con p=ρgy pues la densidad es constante,
y dA= wdy, pues el ancho w de la
compuerta es constante, por tanto:
dF=(ρgy)wdy
De donde:
( )
y
y
y
y
dF gwydy
yF gw
gwF y y
2
1
2
1
2
2 22 1
2
2
= ρ
⎡ ⎤= ρ ⎢ ⎥
⎣ ⎦ρ
= −
∫ ∫
El centroide se calcula con:
( )P
ydF y gwydyy
dF dF
ρ= =∫ ∫
∫ ∫
( )
y
yP
gw y dyy
gw y y
2
1
2
2 22 1
12
ρ=
ρ −
∫
( )
2
1
y 2y
P2 2
2 1
gw y dyy 1 gw y y
2
ρ=
ρ −
∫
( )( )( )( )( )
( )( )( )
( )
2
1
y3
yP 2 2
2 1
3 32 1
P 2 22 1
2 22 1 2 1 2 1
P2 1 2 1
2 22 1 2 1
P2 1
y3
y 2y y
y y2y3 y y
y y y y y y2y3 y y y y
y y y y2y3 y y
⎡ ⎤⎢ ⎥⎣ ⎦
=−
−=
−
− + +=
− +
+ +=
+
Ejemplo:
Encontrar la fuerza resultante sobre la
pared de la represa de la figura si el
fluido es agua, y el ancho es 50m.
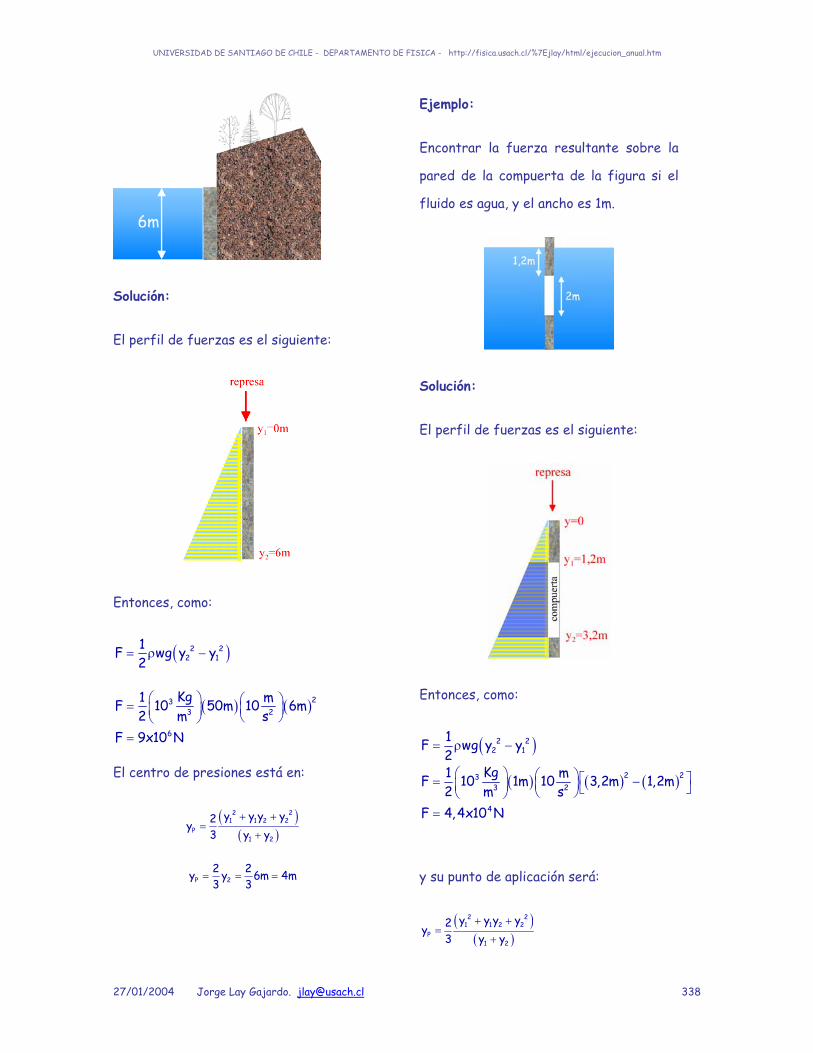
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 338
Solución:
El perfil de fuerzas es el siguiente:
Entonces, como:
( )2 22 1
1F wg y y2
= ρ −
( ) ( )233 2
6
Kg1 mF 10 50m 10 6m2 m s
F 9x10 N
⎛ ⎞ ⎛ ⎞= ⎜ ⎟⎜ ⎟ ⎝ ⎠⎝ ⎠=
El centro de presiones está en:
( )( )
2 21 1 2 2
P1 2
y y y y2y3 y y
+ +=
+
P 22 2y y 6m 4m3 3
= = =
Ejemplo:
Encontrar la fuerza resultante sobre la
pared de la compuerta de la figura si el
fluido es agua, y el ancho es 1m.
Solución:
El perfil de fuerzas es el siguiente:
Entonces, como:
( )2 22 1
1F wg y y2
= ρ −
( ) ( ) ( )2 233 2
4
Kg1 mF 10 1m 10 3,2m 1,2m2 m s
F 4,4x10 N
⎛ ⎞ ⎛ ⎞ ⎡ ⎤= −⎜ ⎟⎜ ⎟ ⎣ ⎦⎝ ⎠⎝ ⎠=
y su punto de aplicación será:
( )( )
2 21 1 2 2
P1 2
y y y y2y3 y y
+ +=
+

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 339
( ) ( )( ) ( )( )( )
2 2
P
P
1,2m 1,2m 3,2m 3,2m2y3 1,2m 3,2m
y 2,35m
+ +=
+
=
8.4.1 Fuerzas de presión sobre paredes rectangulares inclinadas.
Consideremos ahora un recipiente con una
pared inclinada un ángulo θ respecto de la
vertical, conteniendo un líquido de
densidad constante como se muestra en
la figura.
Calculemos le fuerza neta sobre una
compuerta ubicada en la pared inclinada y
su centro de presión.
La compuerta está ubicada entre s1 y s2
medidos a lo largo de la pared inclinada, a
partir de la superficie del líquido.
Observe el perfil de las fuerzas de
presión sobre la compuerta y a las alturas
y1 e y2 a las que se encuentran sus
extremos superior e inferior.
Este perfil de fuerzas de presión es
equivalente al perfil de fuerzas que se
tendría sobre una pared vertical como en
el ejemplo de la sección anterior entre
las profundidades y1=s1cosθ e y2=s2cosθ.
Esto se debe a que las fuerzas de presión
dependen solo de la profundidad, como
hemos explicado anteriormente.
Las fuerzas por unidad de longitud (la
compuerta tiene un ancho constante de
magnitud w), vienen dadas por:
a= ρwgy1= ρwgs1cosθ
b= ρwgy2= ρwgs2cosθ
(s2-s1)
a
B
b-a
A
Entonces se tiene que:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 340
( )( )AA s s b a2 112
= − −
( )BA s s a2 1= −
( )( ) ( )
( ) ( )
( ) ( )
A
A
A
A s s b a s s a
A s s b a a
A s s b a
2 1 2 1
2 1
2 1
12
1212
= − − + −
⎡ ⎤= − − +⎢ ⎥⎣ ⎦⎡ ⎤= − +⎢ ⎥⎣ ⎦
Entonces:
( ) ( )F s s wgs wgs2 1 2 11 cos cos2
⎡ ⎤= − ρ θ + ρ θ⎢ ⎥⎣ ⎦
( )( )F wg s s s s2 1 2 11 cos2
= ρ θ − +
( )F wg s s2 22 1
1 cos2
= ρ − θ
( )F wg s s2 22 1
1 cos2
= ρ − θ
y su punto de aplicación donde el torque
es nulo, respecto de la superficie del
fluido es:
( )( )P
y y y yy
y y
2 21 1 2 2
1 2
23
+ +=
+
por igual explicación que para paredes
verticales, lo que en función de la pared
inclinada queda como:
( )( )P
s s s sS
s s
2 21 1 2 2
1 2
23
+ +=
+
Note que si θ=0º entonces s1=y1, s2=y2,
sP=yP, obteniéndose igual resultado que en
el caso de paredes verticales.
De nuevo, si sabe cálculo, es más fácil:
Consideremos un elemento de área
dA=wds a lo largo de la compuerta,
entonces:
dF=pdA
dF=(ρgy)wds
con y=scosθ, por lo que:
dF=ρg(scosθ)wds
s
s
s
s
F gw sds
sF gw
2
1
2
1
2
cos
cos2
= ρ θ
⎡ ⎤= ρ θ ⎢ ⎥
⎣ ⎦
∫
( )F wg s s2 22 1
1 cos2
= ρ − θ

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 341
Ejemplo:
La represa de la figura tiene un ancho de
30m. Determine la fuerza neta sobre ella,
si el fluido es agua.
Solución:
El perfil de fuerzas es el siguiente:
Entonces:
( )F wg s s2 22 1
1 cos2
= ρ − θ
con S1=0m y ys 2
2 cos=
θ
( )yF wg
221
2 cos= ρ
θ
( ) ( )mKg mF mm s
23
3 2
101 10 30 102 0,87
⎛ ⎞ ⎛ ⎞= ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
( ) ( )mKg mF mm s
F x N
23
3 2
6
101 10 30 102 0,8717,24 10
⎛ ⎞ ⎛ ⎞= ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
=
Su punto de aplicación es:
( )( )P
s s s ss
s s
2 21 1 2 2
1 2
23
+ +=
+
P
yy
sy
22
22
2
2
cos2 23 3 cos
cos
⎛ ⎞⎜ ⎟θ ⎛ ⎞⎝ ⎠= = ⎜ ⎟θ⎛ ⎞ ⎝ ⎠⎜ ⎟θ⎝ ⎠
Pms m2 10 7,66
3 0,87⎛ ⎞
= =⎜ ⎟⎝ ⎠
Ejemplo: Hallar la fuerza neta sobre la
compuerta de la figura si el líquido es
agua (densidad Kgm
3310 ) y el centro de
presiones.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 342
Solución:
La fuerza neta viene dada por:
( )F wg s s2 22 1
1 cos2
= ρ − θ
( ) ( )Kg mF m m mm s
3 2 2 2 23 2
1 10 2 9,8 9 5 0,712
⎛ ⎞ ⎛ ⎞= −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
N3F=389,6x10
El centro de presiones viene dado por:
( )( )P
s s s ss
s s
2 21 1 2 2
1 2
23
+ +=
+
( )( )( )( )P
m m m ms
m m
2 2 2 25 5 9 923 5 9
+ +=
+
Ps m7,18=
Note que
( ) ( )P Py s m mcos 7,18 0,71 5,10= θ = =
Recuerde que la fuerza de presión
atmosférica no influye pues en cada
punto está actuando sobre las paredes
interna y externa de la compuerta,
anulándose.
Ejemplo:
El recipiente de la figura contiene agua.
El ancho de la compuerta rectangular es
de 4m.
Calcule la fuerza que el agua ejerce sobre
ella, el punto donde está aplicada y el
módulo del torque que ejerce sobre el
punto A.
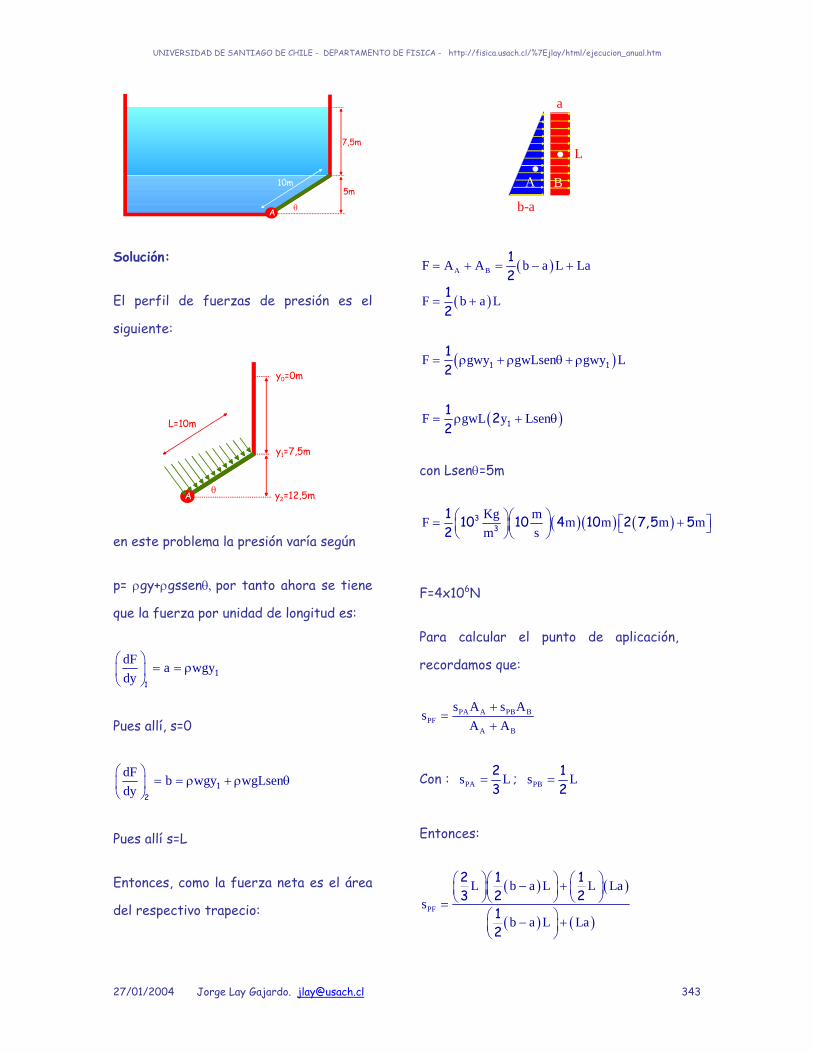
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 343
10m
7,5m
5m
A θ
Solución:
El perfil de fuerzas de presión es el
siguiente:
L=10m
A
y0=0m
y1=7,5m
y2=12,5mθ
en este problema la presión varía según
p= ρgy+ρgssenθ, por tanto ahora se tiene
que la fuerza por unidad de longitud es:
dF a wgydy 1
1
⎛ ⎞= = ρ⎜ ⎟
⎝ ⎠
Pues allí, s=0
dF b wgy wgLsendy 1
2
⎛ ⎞= = ρ + ρ θ⎜ ⎟
⎝ ⎠
Pues allí s=L
Entonces, como la fuerza neta es el área
del respectivo trapecio:
L
a
B
b-a
A
( )
( )
A BF A A b a L La
F b a L
12
12
= + = − +
= +
( )F gwy gwLsen gwy L1 112
= ρ + ρ θ + ρ
( )F gwL y Lsen11 22
= ρ + θ
con Lsenθ=5m
( )( ) ( )Kg mF m m m mm s
33
1 10 10 4 10 2 7,5 52
⎛ ⎞⎛ ⎞ ⎡ ⎤= +⎜ ⎟⎜ ⎟ ⎣ ⎦⎝ ⎠⎝ ⎠
F=4x106N
Para calcular el punto de aplicación,
recordamos que:
PA A PB BPF
A B
s A s AsA A
+=
+
Con : PAs L23
= ; PBs L12
=
Entonces:
( ) ( )
( ) ( )PF
L b a L L Las
b a L La
2 1 13 2 2
12
⎛ ⎞⎛ ⎞ ⎛ ⎞− +⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠⎝ ⎠ ⎝ ⎠=
⎛ ⎞− +⎜ ⎟⎝ ⎠
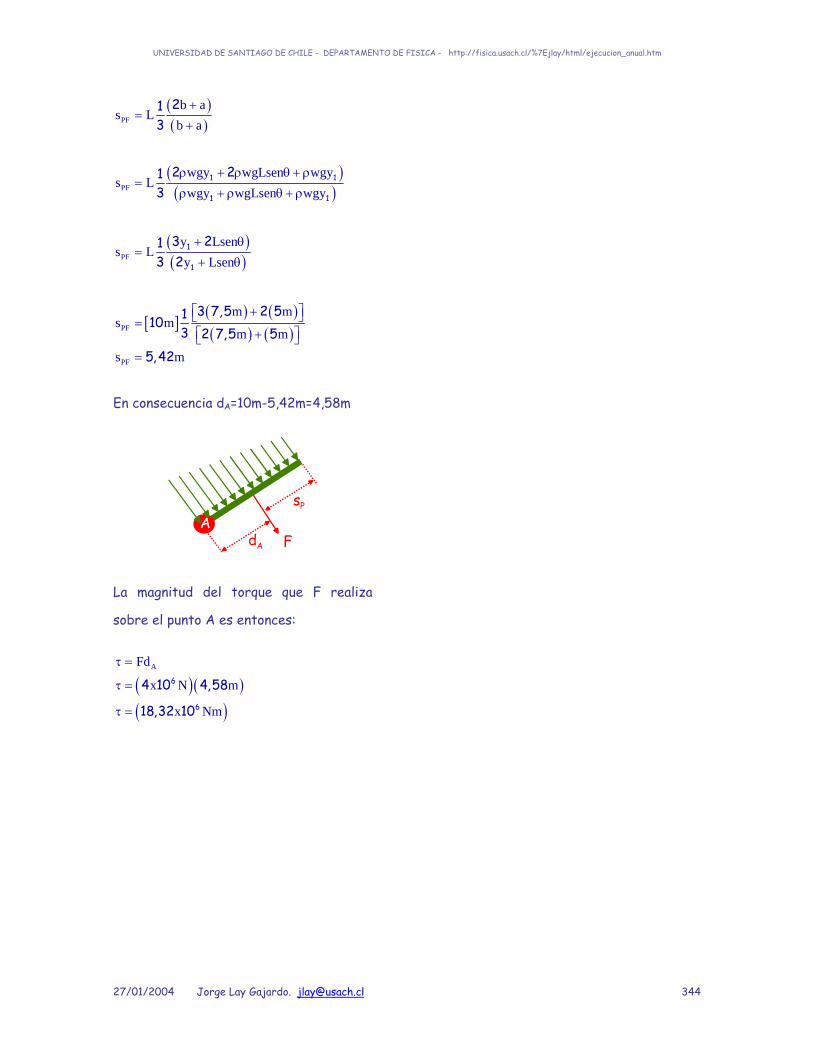
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo. [email protected] 344
( )( )PF
b as L
b a21
3+
=+
( )( )PF
wgy wgLsen wgys L
wgy wgLsen wgy1 1
1 1
2 213
ρ + ρ θ + ρ=
ρ + ρ θ + ρ
( )( )PF
y Lsens L
y Lsen1
1
3 213 2
+ θ=
+ θ
[ ]( ) ( )( ) ( )PF
PF
m ms m
m m
s m
3 7,5 2 51103 2 7,5 5
5,42
⎡ ⎤+⎣ ⎦=⎡ ⎤+⎣ ⎦
=
En consecuencia dA=10m-5,42m=4,58m
sP
FA
dA
La magnitud del torque que F realiza
sobre el punto A es entonces:
( )( )( )
AFd
x N m
x Nm
6
6
4 10 4,58
18,32 10
τ =
τ =
τ =
27/01/2004 Jorge Lay Gajardo [email protected] 345
9.1 Hidrodinámica
9.1.1 Definiciones previas:
Trabajaremos ahora con fluidos en
movimiento. Recordemos que estamos
considerando fluidos incompresibles, y
por tanto con densidad constante. Por
constituir esta la primera aproximación a
estos fenómenos, restringiremos además
el estudio al caso de un número de
fenómenos que quedan relativamente bien
explicados con solo un número limitado de
variables, tales como la presión, la
densidad y la temperatura. En el caso de
los gases, por ser compresibles, solo
trataremos aquellos fenómenos en los que
la compresibilidad no juega ningún papel.
Además, trabajaremos con flujos
estables o estacionarios (en ellos, la
velocidad y la presión no dependen del
tiempo), laminares (no turbulentos, con
líneas de flujo bien definidas y que no se
cruzan entre si), irrotacionales (no tienen
líneas de flujo que se cierran sobre si
mismas, como en los remolinos por
ejemplo), y no viscosos (la viscosidad es
en términos simples, la resistencia al
movimiento entre las capas del fluido). Al
final de este escrito, se trataran
brevemente algunos de los aspectos más
sencillos relacionados con la viscosidad y
la turbulencia.
Esta última restricción (no viscoso),
permitirá usar la expresión de la
conservación de la energía, puesto que no
habrá energía disipada por roce.
Nuevamente, observaremos aquí que el
estudio de los fluidos, esta vez en
movimiento, puede hacerse mediante la
aplicación sencilla de los principios que
estudiamos en la Mecánica.
Se estudiará a un elemento de fluido
(pequeña porción de fluido, cuyo
movimiento seguiremos), que describe una
línea bien definida que denominaremos
línea de flujo. En un régimen estable,
cada elemento que pasa por un punto
determinado, sigue la misma línea de flujo
(sinónimo de línea de corriente en
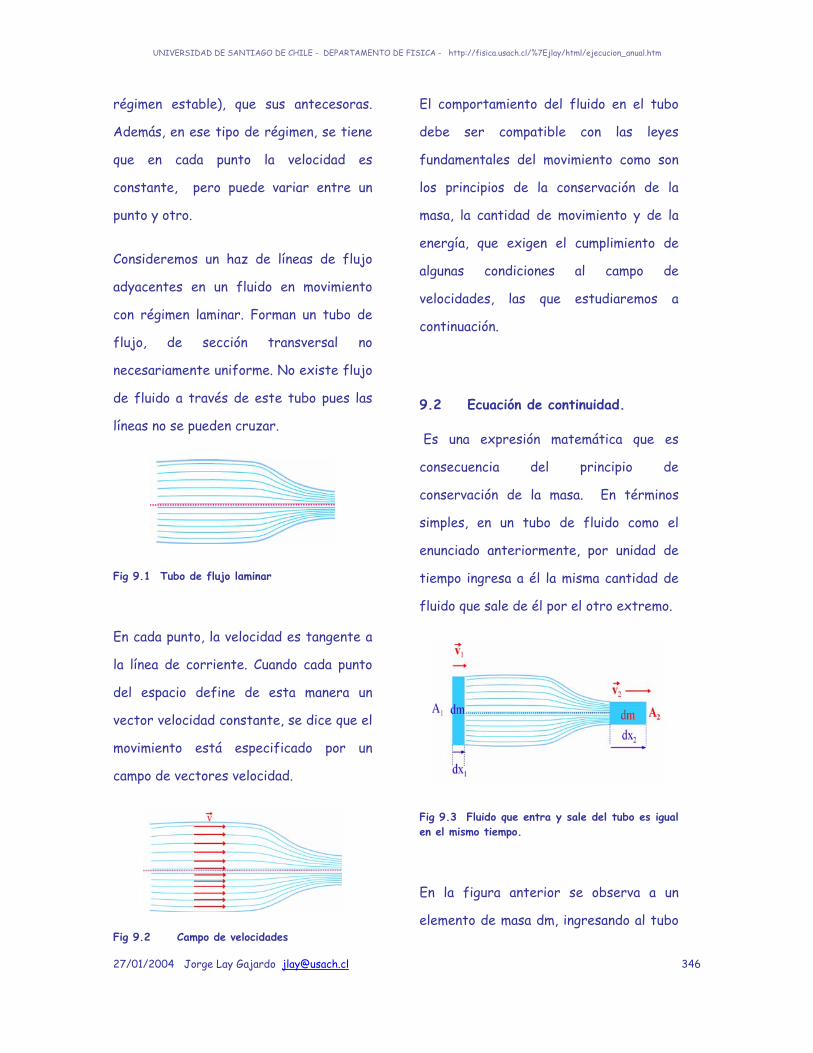
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 346
régimen estable), que sus antecesoras.
Además, en ese tipo de régimen, se tiene
que en cada punto la velocidad es
constante, pero puede variar entre un
punto y otro.
Consideremos un haz de líneas de flujo
adyacentes en un fluido en movimiento
con régimen laminar. Forman un tubo de
flujo, de sección transversal no
necesariamente uniforme. No existe flujo
de fluido a través de este tubo pues las
líneas no se pueden cruzar.
Fig 9.1 Tubo de flujo laminar
En cada punto, la velocidad es tangente a
la línea de corriente. Cuando cada punto
del espacio define de esta manera un
vector velocidad constante, se dice que el
movimiento está especificado por un
campo de vectores velocidad.
Fig 9.2 Campo de velocidades
El comportamiento del fluido en el tubo
debe ser compatible con las leyes
fundamentales del movimiento como son
los principios de la conservación de la
masa, la cantidad de movimiento y de la
energía, que exigen el cumplimiento de
algunas condiciones al campo de
velocidades, las que estudiaremos a
continuación.
9.2 Ecuación de continuidad.
Es una expresión matemática que es
consecuencia del principio de
conservación de la masa. En términos
simples, en un tubo de fluido como el
enunciado anteriormente, por unidad de
tiempo ingresa a él la misma cantidad de
fluido que sale de él por el otro extremo.
Fig 9.3 Fluido que entra y sale del tubo es igual en el mismo tiempo.
En la figura anterior se observa a un
elemento de masa dm, ingresando al tubo

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 347
de flujo de sección A1 con una velocidad
v1, recorriendo en dt segundos, una
distancia infinitesimal dx1 ; este elemento
de masa tiene un volumen dv y una
densidad ρ1. En igual tiempo, según el
principio de conservación de la masa,
debió salir por el otro extremo del tubo,
una masa igual de fluido dm. Sin
embargo, como la sección es distinta allí,
A2, se moverá con velocidad distinta v2,
recorriendo la distancia infinitesimal dx2 ;
este elemento tiene un volumen dv igual al
anterior, y densidad ρ2 igual a la anterior
por ser el fluido incompresible.
En otros términos, entra al tubo una
masa:
dm=ρ1dv=ρ1A1(dx1)=ρ1A1(v1dt)
Y sale en el mismo tiempo, una masa :
dm=ρ2 dv=ρ2A2(dx2)=ρ2 A2(v2 dt)
Igualándolos, se tiene
ρ1A1v1 dt=ρ2A2v2 dt,
Con ρ1=ρ2, por lo tanto :
A1v1=A2v2 (18)
Esta expresión denominada ecuación de
continuidad, muestra que a lo largo del
tubo de flujo, el producto entre la
sección y la velocidad es constante. En
otras palabras, en las partes en que se
estrecha la sección, la velocidad debe
aumentar para permitir el cumplimiento
del principio de la conservación de la
masa.
A la cantidad Av también se le denomina
flujo, gasto o caudal (Q).
Note que se puede escribir como:
Q= =dx dVAdt dt
Es decir el gasto es el volumen por unidad
de tiempo que pasa a través de un área
del tubo de flujo.
9.3 Ecuación de Bernouilli.
Esta ecuación es consecuencia del
teorema del trabajo y la energía. En
términos simples, el trabajo neto
realizado sobre el fluido en el tubo de
flujo es equivalente al cambio de su
energía cinética.
Usaremos el tubo de flujo de la figura
siguiente para calcular estas cantidades.
Sobre el fluido actúan dos fuerzas
debidas a las presiones P1 y P2 ; una

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 348
fuerza sobre el elemento inferior debida
a P1 que es de magnitud :
F1=P1A1
y una fuerza sobre el elemento superior
debida a P2 que es de magnitud :
F2=P2A2
Fig 9.4 La energía se conserva.
El trabajo realizado por F1 será entonces:
dW1=F1dx1cos0°=P1A1dx1=P1dv
Y el realizado por F2 será:
dW2= F2dx2cos180°
dW2=P2A2dx2 (-1)=-P2dv.
En consecuencia, el trabajo que las
fuerzas debidas a las presiones sobre el
fluido han realizado es:
dWF=(P1-P2)dv (19)
Las fuerzas gravitacionales también
realizan trabajo sobre el elemento. El
elemento de fluido de masa dm=ρdv (por
tanto de peso =ρdv g ), es elevado desde
la altura Y1 hasta la altura Y2 por lo
que el trabajo hecho por la fuerza
gravitacional es:
dWg=(ρdvg)(Y2-Y1)(cos180°)
dWg=-ρdvg(Y2-Y1)
Lo que puesto de otra forma :
dWg=-ρdvg(Y2-Y1) (20)
Este trabajo es equivalente al cambio en
la energía potencial del elemento de
fluido.
El cambio en la energía cinética del
elemento de fluido es la diferencia entre
la energía cinética del elemento en la
parte superior y la energía cinética del
elemento en la parte inferior, puesto que
el resto del fluido no cambia su velocidad.
Es decir:
dK=½dm(v22-v1
2)
dK=½ρdv(v22-v1
2) (21)
Finalmente, recordando el teorema del
trabajo y la energía se tiene:
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 349
dWF+dWg=dK
Reemplazando (19) , (20) y (21) :
(P1-P2)dv-ρdvg(Y2-Y1)=½ρdv(v22-v1
2)
Dividiendo por dv y reordenando esta
expresión, tenemos :
P1+ρgY1+½ρv12=P2+ρgY2+½ρv2
2 (22)
Conocida como la ecuación de Bernouilli.
Note que si la velocidad es cero (fluido en
equilibrio), tenemos la ec. Fundamental de
la hidrostática.
9.3.1 Efecto Venturi.
Supongamos que tenemos un flujo en el
cual no hay diferencias significativas de
energía potencial del fluido en
movimiento. Entonces en la ecuación de
Bernouilli se puede considerar Y1 = Y2 = 0,
con lo que queda:
P1+½ρv12=P2+½ρv2
2
De donde:
P1-P2=½ρ(v22-v1
2) (23)
En esta expresión, si V1 es mayor que v2,
entonces (v22-v1
2) también lo es. En
consecuencia (P1-P2) es negativo, lo que a
su vez, es posible solo si P2 es mayor que
P1.
En términos simples, donde la velocidad
sea mayor, la presión es menor. A este
fenómeno se le conoce con el nombre de
efecto Venturi.
Este efecto se aprecia con gran facilidad
al soplar entre dos hojas de papel
separadas unos cuantos centímetros. La
velocidad del aire entre las hojas será
mayor que en las caras externas y por
tanto la presión en las caras externas
será mayor, uniéndolas.
El mismo efecto se observa cuando se
sopla por la cara superior de una hoja
dispuesta horizontalmente, levantándola;
a su vez, este ejemplo explica los techos
arrancados de las casas con puertas y
ventanas bien cerradas en un día de
viento de gran intensidad.
Otro ejemplo interesante lo constituye
una pelota golpeada de manera que se
roto traslade como se observa en la
figura, que representa una mirada desde
arriba.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 350
lado 1
lado 2
vi
vS
vv
Fig 9.5 Pelota roto trasladándose.
La pelota se mueve hacia la derecha
girando en sentido contrario a las
manecillas del reloj. El movimiento de
rotación arrastra a una porción de aire en
las cercanías de la pelota, el que forma
una capa rotatoria que adquiere una
velocidad cuyas direcciones están
indicadas con vs y vi. El movimiento de
traslación en cambio, produce una
corriente de aire viajando hacia la
izquierda con una velocidad vV.
Se ve con claridad aquí, que la velocidad
será mayor en el lado 1 (vV+vs), que en el
lado 2 (vV–vi), y por tanto la presión será
mayor en el lado 2, produciendo una curva
en la trayectoria de la pelota, con radio
de curvatura hacia el lado 1.
Una aplicación interesante del efecto
Venturi, lo constituye el denominado Tubo
de Venturi, que permite medir la
velocidad con que se mueve un fluido en
un tubo.
9.3.2 Tubo de Venturi.
En la figura se observa un esquema de uno
de estos instrumentos, consistente en un
tubo en U que contiene un fluido, el que
se conecta a dos segmentos de secciones
distintas de un tubo por el que circula
otro fluido, cuya velocidad se desea
medir.
P1
v1
A1A2
v2
P2
h
y1
y2
Fig 9.6 Tubo de Venturi.
El fluido circula por el tubo horizontal,
que contiene un estrechamiento, de
manera tal que el área de la sección
cambia desde A1 hasta A2 (disminuyendo).
Esto provoca que la velocidad del fluido
que transporta, también cambie desde v1
hasta v2 (aumentando).
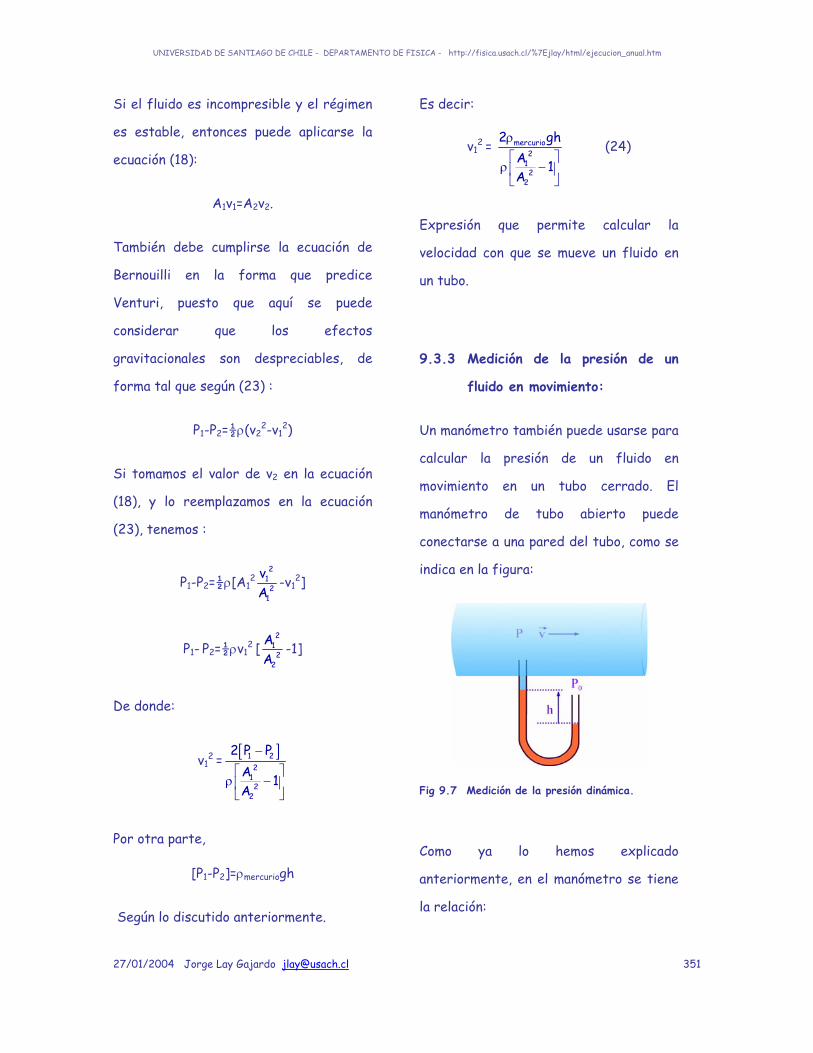
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 351
Si el fluido es incompresible y el régimen
es estable, entonces puede aplicarse la
ecuación (18):
A1v1=A2v2.
También debe cumplirse la ecuación de
Bernouilli en la forma que predice
Venturi, puesto que aquí se puede
considerar que los efectos
gravitacionales son despreciables, de
forma tal que según (23) :
P1-P2=½ρ(v22-v1
2)
Si tomamos el valor de v2 en la ecuación
(18), y lo reemplazamos en la ecuación
(23), tenemos :
P1-P2=½ρ[A12
212
1
vA
-v12]
P1- P2=½ρv12 [
212
2
AA
-1]
De donde:
v12 = [ ]−
⎡ ⎤ρ −⎢ ⎥
⎣ ⎦
1 22
12
2
2 P PA 1A
Por otra parte,
[P1-P2]=ρmercuriogh
Según lo discutido anteriormente.
Es decir:
v12 = ρ
⎡ ⎤ρ −⎢ ⎥
⎣ ⎦
mercurio2
12
2
2 ghA 1A
(24)
Expresión que permite calcular la
velocidad con que se mueve un fluido en
un tubo.
9.3.3 Medición de la presión de un
fluido en movimiento:
Un manómetro también puede usarse para
calcular la presión de un fluido en
movimiento en un tubo cerrado. El
manómetro de tubo abierto puede
conectarse a una pared del tubo, como se
indica en la figura:
Fig 9.7 Medición de la presión dinámica.
Como ya lo hemos explicado
anteriormente, en el manómetro se tiene
la relación:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 352
P0- P=ρmercuriogh
De donde:
P=P0-ρmercuriogh
Aquí, P es la presión en el fluido del tubo,
P0 es la presión atmosférica y ρ es la
densidad del fluido del manómetro, en
este caso mercurio.
9.3.4 Tubo de Prandtl (Pitot).
Básicamente es un manómetro que
permite medir velocidades de flujos de
fluidos. En la figura se puede observar un
esquema de él: Uno de los brazos está
inserto en el flujo de manera tal que a
través de una pequeña perforación
produce que la velocidad en ella sea
prácticamente nula. El otro brazo tiene
una perforación de manera tal que allí, la
velocidad es igual a la del flujo (v).
Fig 9.8 Tubo de Pitot.
Aplicando Bernouilli, se tiene :
P2-P1 = ½ρv2
Puesto que los efectos gravitacionales
son nulos.
La lectura del manómetro es h, que
permite calcular la presión manométrica:
P2-P1=ρmercuriogh
por tanto :
v2 = ρρ
mercurio2 gh (25)
A bordo de un avión permite calcular la
velocidad de este respecto del aire.
9.3.5 Velocidad de salida de un
estanque.
Consideremos el estanque de la figura, al
que se le ha abierto un orificio pequeño
en un costado:
h
P0
1
2
P0
Fig 9.9 Velocidad de salida a lo largo de una línea de flujo
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 353
El tanque está lleno de agua, y el orificio
está a la profundidad h. El orificio es
suficientemente grande para que no
existan fenómenos de capilaridad.
Aplicaremos la ecuación de Bernouilli a los
puntos 1 y 2 indicados en la figura: la
superficie del fluido y el orificio.
P1+½ρv12+ρgy1=P2+½ρv2
2+ρgy2
La velocidad con que sale el líquido en el
orificio respecto de la velocidad con que
baja el líquido en el estanque está
relacionada por la ecuación de continuidad
(18). En consecuencia, si el área del
recipiente es suficientemente grande
respecto del diámetro del orificio,
podemos suponer que la velocidad con que
baja el líquido en el recipiente es
suficientemente pequeña como para
considerarla nula. Por otro lado, en
ambos puntos la presión es la
atmosférica, puesto que son puntos
abiertos. Finalmente, si la referencia es
tomada a partir del orificio, entonces
y1=h e y2=0.
Entonces:
P0+½ρ(0)+ρgh=P0+½ρv22+ρg(0)
De donde:
v22=2gh (26)
Esta ecuación, conocida como ecuación de
Torricelli establece que el movimiento de
un elemento de un fluido en una línea de
flujo en régimen laminar se comporta de
igual manera que una partícula cayendo
libremente bajo la influencia de la fuerza
de atracción gravitacional. Este
resultado no debiera sorprendernos,
puesto que ambas ecuaciones son el
resultado de aplicar el principio de
conservación de la energía mecánica.
Una observación interesante es que una
vez conocida la velocidad con que sale el
chorro de fluido del recipiente, la
ecuación (18) permite calcular el gasto o
caudal teóricos (Q), simplemente
multiplicando dicha velocidad por el área
del orificio. Esta cantidad a veces es
denominada rapidez de salida.
Q=A v (27)
En aproximaciones prácticas algo
mejores, se considera que el caudal real
en realidad se calcula con la expresión:
QR=cAv (28)

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 354
Donde c es una constante denominada
coeficiente de descarga, que depende de
la altura del líquido en el recipiente, de la
forma del orificio, de su diámetro y de la
naturaleza del líquido.
Como valor promedio se toma 0,62 para
orificios circulares (en recipientes de
paredes delgadas), con diámetros de
aproximadamente 10mm.
9.3.6 Sifones.
Los sifones son aparatos que permiten
trasvasijar líquidos, es decir, pasarlos
desde un recipiente a otro, donde el nivel
es más bajo, sin mover los recipientes.
Básicamente es un tubo doblado que
penetra una de sus extremidades (A) en
el primer recipiente, quedando la otra
libre o sumergida en el segundo
recipiente (ver figura 9.10).
Fig 9.10 Sifón.
Para que el aparato funciones es preciso
cebarla, operación que consiste en
llenarla del líquido en cuestión. Al
introducir entonces una de las ramas (A),
en el vaso más alto, y abrir los dos
extremos, el líquido sale por B, siempre
que esta extremidad esté más baja que el
nivel del líquido en el recipiente superior.
Para dar una teoría sencilla supongamos el
sifón cebado y consideremos la sección
más alta S del líquido contenido en él. Sea
H la presión atmosférica expresada en
altura de la columna del líquido que llena
el sifón, h la distancia vertical de la
sección S a la superficie libre en el vaso
superior y h1 la distancia vertical de S al
orificio de salida B.
La presión en S de izquierda a derecha es
H-h, y como en B también actúa la presión
atmosférica que puede suponerse igual a
H, la presión en S de derecha a izquierda
es H - h1.
La presión resultante en S actúa de
derecha a izquierda, y vale:
H-h-[H-h1]=h1-h
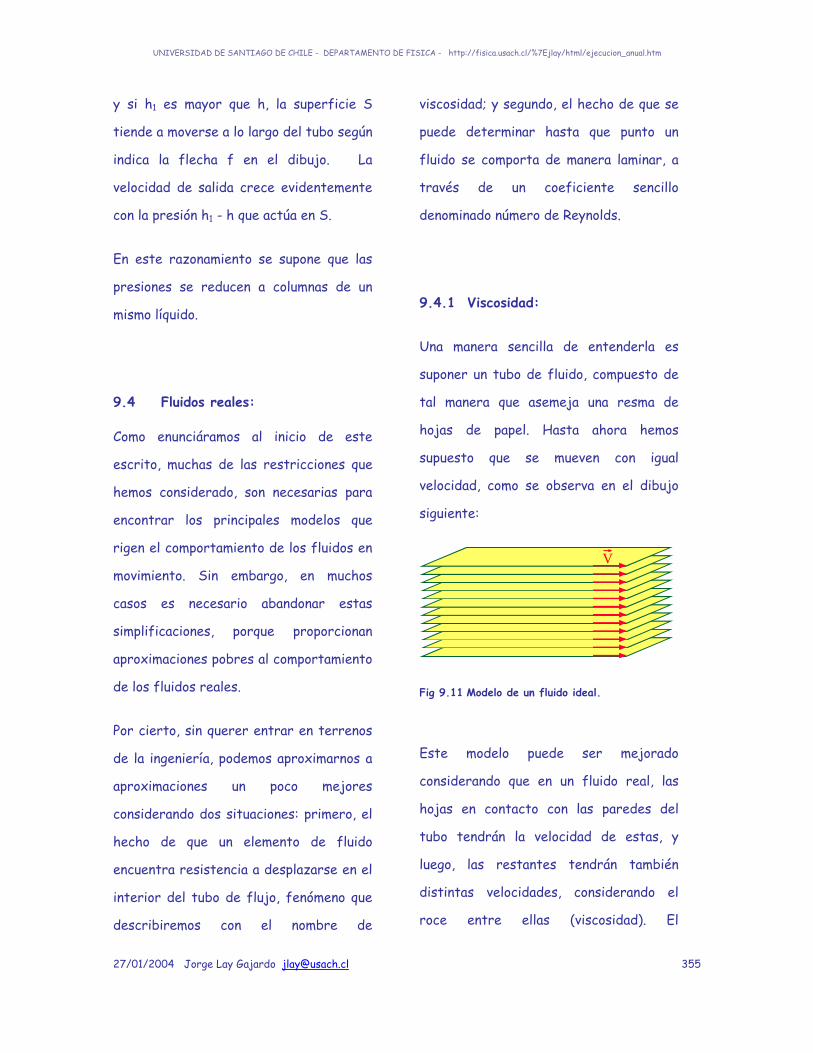
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 355
y si h1 es mayor que h, la superficie S
tiende a moverse a lo largo del tubo según
indica la flecha f en el dibujo. La
velocidad de salida crece evidentemente
con la presión h1 - h que actúa en S.
En este razonamiento se supone que las
presiones se reducen a columnas de un
mismo líquido.
9.4 Fluidos reales:
Como enunciáramos al inicio de este
escrito, muchas de las restricciones que
hemos considerado, son necesarias para
encontrar los principales modelos que
rigen el comportamiento de los fluidos en
movimiento. Sin embargo, en muchos
casos es necesario abandonar estas
simplificaciones, porque proporcionan
aproximaciones pobres al comportamiento
de los fluidos reales.
Por cierto, sin querer entrar en terrenos
de la ingeniería, podemos aproximarnos a
aproximaciones un poco mejores
considerando dos situaciones: primero, el
hecho de que un elemento de fluido
encuentra resistencia a desplazarse en el
interior del tubo de flujo, fenómeno que
describiremos con el nombre de
viscosidad; y segundo, el hecho de que se
puede determinar hasta que punto un
fluido se comporta de manera laminar, a
través de un coeficiente sencillo
denominado número de Reynolds.
9.4.1 Viscosidad:
Una manera sencilla de entenderla es
suponer un tubo de fluido, compuesto de
tal manera que asemeja una resma de
hojas de papel. Hasta ahora hemos
supuesto que se mueven con igual
velocidad, como se observa en el dibujo
siguiente:
V
Fig 9.11 Modelo de un fluido ideal.
Este modelo puede ser mejorado
considerando que en un fluido real, las
hojas en contacto con las paredes del
tubo tendrán la velocidad de estas, y
luego, las restantes tendrán también
distintas velocidades, considerando el
roce entre ellas (viscosidad). El
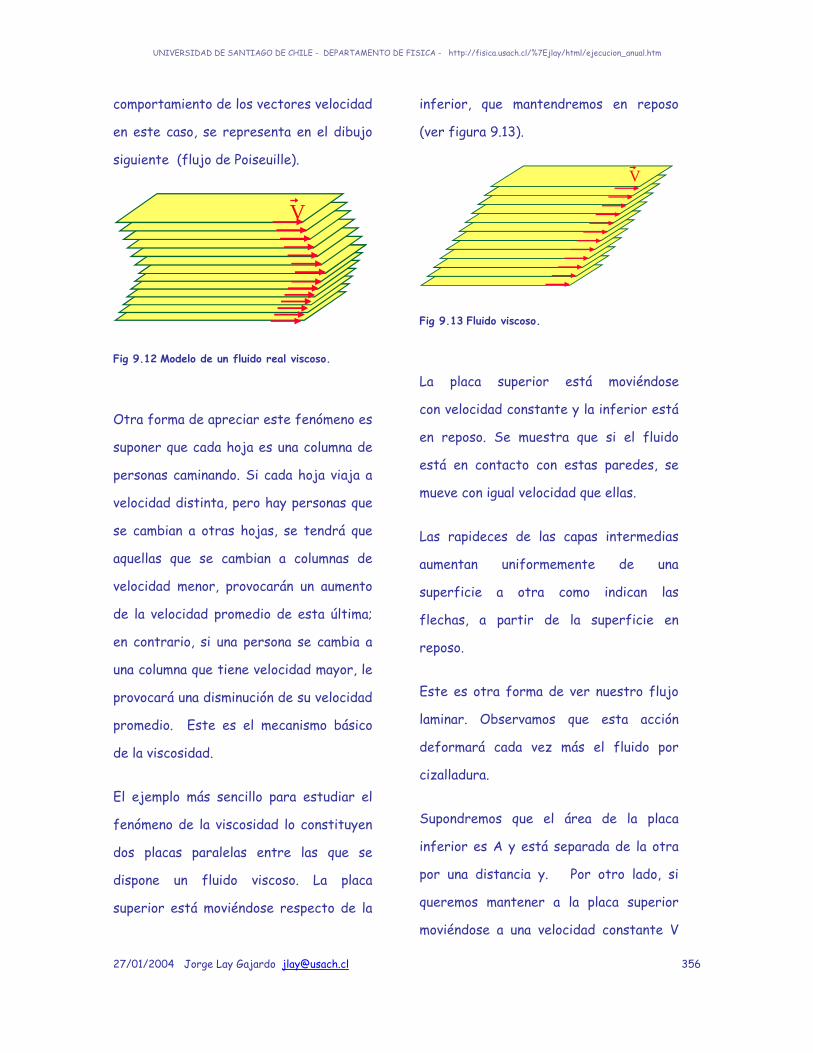
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 356
comportamiento de los vectores velocidad
en este caso, se representa en el dibujo
siguiente (flujo de Poiseuille).
V
Fig 9.12 Modelo de un fluido real viscoso.
Otra forma de apreciar este fenómeno es
suponer que cada hoja es una columna de
personas caminando. Si cada hoja viaja a
velocidad distinta, pero hay personas que
se cambian a otras hojas, se tendrá que
aquellas que se cambian a columnas de
velocidad menor, provocarán un aumento
de la velocidad promedio de esta última;
en contrario, si una persona se cambia a
una columna que tiene velocidad mayor, le
provocará una disminución de su velocidad
promedio. Este es el mecanismo básico
de la viscosidad.
El ejemplo más sencillo para estudiar el
fenómeno de la viscosidad lo constituyen
dos placas paralelas entre las que se
dispone un fluido viscoso. La placa
superior está moviéndose respecto de la
inferior, que mantendremos en reposo
(ver figura 9.13).
V
Fig 9.13 Fluido viscoso.
La placa superior está moviéndose
con velocidad constante y la inferior está
en reposo. Se muestra que si el fluido
está en contacto con estas paredes, se
mueve con igual velocidad que ellas.
Las rapideces de las capas intermedias
aumentan uniformemente de una
superficie a otra como indican las
flechas, a partir de la superficie en
reposo.
Este es otra forma de ver nuestro flujo
laminar. Observamos que esta acción
deformará cada vez más el fluido por
cizalladura.
Supondremos que el área de la placa
inferior es A y está separada de la otra
por una distancia y. Por otro lado, si
queremos mantener a la placa superior
moviéndose a una velocidad constante V
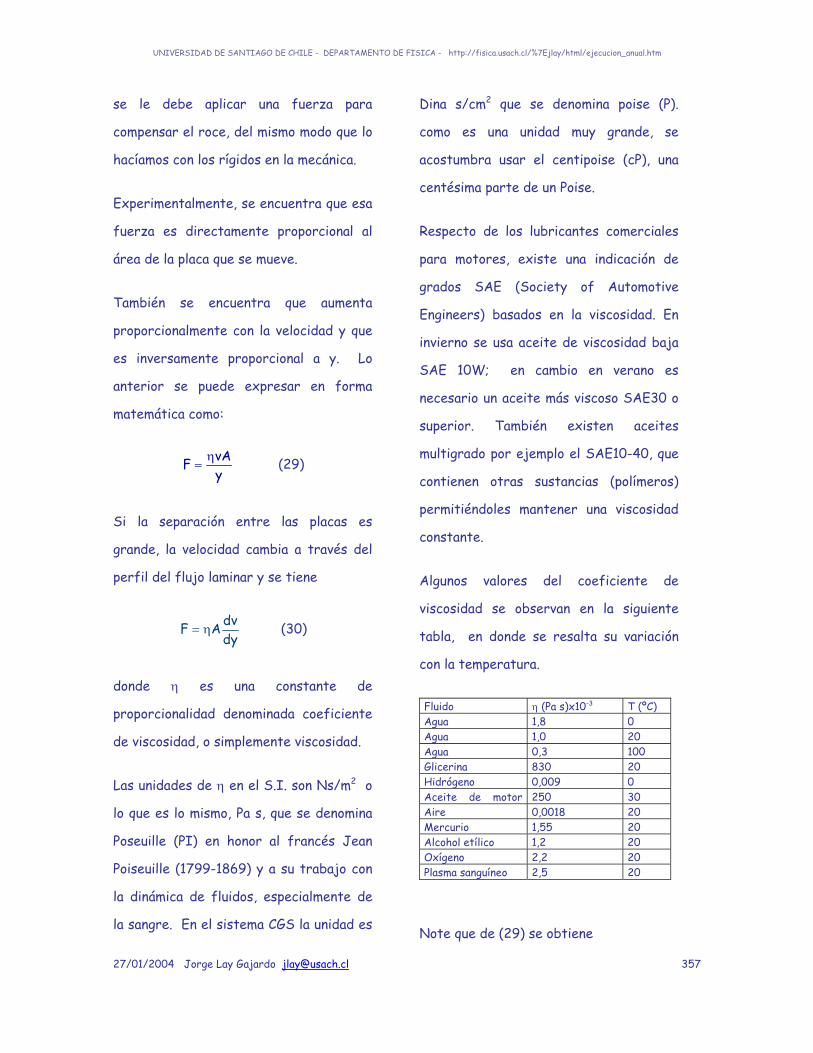
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 357
se le debe aplicar una fuerza para
compensar el roce, del mismo modo que lo
hacíamos con los rígidos en la mecánica.
Experimentalmente, se encuentra que esa
fuerza es directamente proporcional al
área de la placa que se mueve.
También se encuentra que aumenta
proporcionalmente con la velocidad y que
es inversamente proporcional a y. Lo
anterior se puede expresar en forma
matemática como:
η=
vAFy
(29)
Si la separación entre las placas es
grande, la velocidad cambia a través del
perfil del flujo laminar y se tiene
= ηdvF Ady
(30)
donde η es una constante de
proporcionalidad denominada coeficiente
de viscosidad, o simplemente viscosidad.
Las unidades de η en el S.I. son Ns/m2 o
lo que es lo mismo, Pa s, que se denomina
Poseuille (PI) en honor al francés Jean
Poiseuille (1799-1869) y a su trabajo con
la dinámica de fluidos, especialmente de
la sangre. En el sistema CGS la unidad es
Dina s/cm2 que se denomina poise (P).
como es una unidad muy grande, se
acostumbra usar el centipoise (cP), una
centésima parte de un Poise.
Respecto de los lubricantes comerciales
para motores, existe una indicación de
grados SAE (Society of Automotive
Engineers) basados en la viscosidad. En
invierno se usa aceite de viscosidad baja
SAE 10W; en cambio en verano es
necesario un aceite más viscoso SAE30 o
superior. También existen aceites
multigrado por ejemplo el SAE10-40, que
contienen otras sustancias (polímeros)
permitiéndoles mantener una viscosidad
constante.
Algunos valores del coeficiente de
viscosidad se observan en la siguiente
tabla, en donde se resalta su variación
con la temperatura.
Fluido η (Pa s)x10-3 T (ºC) Agua 1,8 0 Agua 1,0 20 Agua 0,3 100 Glicerina 830 20 Hidrógeno 0,009 0 Aceite de motor 250 30 Aire 0,0018 20 Mercurio 1,55 20 Alcohol etílico 1,2 20 Oxígeno 2,2 20 Plasma sanguíneo 2,5 20
Note que de (29) se obtiene

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 358
η =
FAvy
(31)
Por lo que la unidad de viscosidad en el
S.I. es:
−
⎡ ⎤⎢ ⎥ ⎡ ⎤=⎢ ⎥ ⎢ ⎥⎣ ⎦⎢ ⎥⎢ ⎥⎣ ⎦
2
1 2
NNsm
ms mm
Aunque la unidad más conocida es:
⎡ ⎤⎢ ⎥⎣ ⎦2dina scm
, denominada Poise.
De lo anterior:
1poise=1[dina s cm-2]=10-1 [Nsm-2].
La cantidad [F/A] es denominada
esfuerzo cortante, y la cantidad [v/y] es
denominada variación de la deformación.
En líquidos que fluyen fácilmente, como el
agua o el petróleo, el esfuerzo cortante
es relativamente pequeño para una
deformación dada, lo mismo que la
viscosidad. Para líquidos como la melaza
o glicerina, se necesita un esfuerzo
cortante mayor para la misma variación
de la deformación, y por tanto su
viscosidad será mayor.
Los fluidos que se comportan según la
ecuación (29), se denominan Newtonianos.
9.4.2 Número de Reynolds:
Existe una velocidad crítica, después de
la cual el fluido deja de comportarse en
forma laminar. Entonces se observa que
solo las líneas de flujo muy cercanas a las
paredes, que forman una capa denominada
capa límite, conservan las propiedades de
flujo laminar. Más allá de la capa límite el
movimiento es muy irregular, cesa el
sentido de líneas separadas nítidamente.
En el interior del fluido se originan
corrientes circulares aleatorias locales,
denominadas vórtices, que dan lugar a un
gran aumento de la resistencia al
movimiento. Un flujo así, se denomina
turbulento.
Existe un parámetro asociado a la
turbulencia, denominado Número de
Reynolds, que matemáticamente está
expresado por:
ρ=
ηRN vL (32)
Donde v es la velocidad del fluido, ρ es su
densidad, η es su viscosidad y L es una
longitud asociada al flujo como por

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 359
ejemplo, el diámetro del tubo, cuando el
flujo es un tubo. Es un número
adimensional y tiene el mismo valor
numérico para cualquier sistema
coherente de unidades.
Cuando el número de Reynolds es inferior
a 2000 el flujo es laminar; sobre los 3000
es turbulento; entre esas cantidades es
inestable y pasa de un régimen a otro con
facilidad.
Para tener una idea, considérese que, en
el caso del agua que pasa por un tubo de 1
cm de diámetro el número de Reynolds es
de 104v, de modo que el flujo se hace
turbulento cuando solo es de 0,3m/s.
Afortunadamente, un poco de turbulencia
no cambia mucho los valores predichos
por la ecuación de Bernouilli, de la misma
forma que un poco de viscosidad no
cambia la conservación de la energía para
períodos cortos de tiempo, de modo que
pueden seguirse aplicando las ecuaciones
aquí vistas, sin grandes errores de
aproximación.
Ejemplo 9.1
Considérese una manguera de sección
circular de diámetro interior de 2,0 cm,
por la que fluye agua a una tasa de 0,25
litros por cada segundo. ¿ Cuál es la
velocidad del agua en la manguera?. El
orificio de la boquilla de la manguera es
de 1,0 cm de diámetro interior.
¿Cuál es la velocidad de salida del agua?
Solución:
Disponemos del flujo de agua que circula
por la manguera que es de 0,25Lt/s, de
tal manera que según la ec (27):
G=Av
Por lo que :
( )
⎛ ⎞⎜ ⎟⎝ ⎠= = =
33
m 2 2
cm0,25x10sG cmv 79,6
A s3,14x1 cm
Ahora, la ecuación (18) permite calcular la
velocidad de salida del agua por la
boquilla, puesto que el flujo que pasa por
la manguera es el mismo que pasa por la
boquilla.
Es decir, se debe cumplir la relación:
Amvm = Abvb

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 360
De donde se tiene:
= =
= =
m mb
b b3
3
b 2 2
A V GvA A
cm0,25x10 cmsv 316,53,14x0,5 cm s
Este ejemplo es interesante, puesto que
muestra el mecanismo mediante el cual al
disminuir el diámetro de la boquilla, se
logra que el agua salga con una velocidad
que permite regar a distancias
convenientes. Note que ha disminuido el
diámetro a la mitad, sin embargo la
velocidad ha aumentado 4 veces, debido a
la relación cuadrática de las áreas.
Ejemplo 9.2
Por una tubería inclinada circula agua a
razón de 9 m3/min, como se muestra en la
figura: En a el diámetro es 30 cm y la
presión es de 1 Kf/cm2. ¿Cuál es la
presión en el punto b sabiendo que el
diámetro es de 15 cm y que el centro de
la tubería se halla 50cm más bajo que en
a?
Solución:
Entre los puntos a y b se puede usar la
ecuación de continuidad, de manera tal
que:
AAvA=AB vB=G
De donde se pueden calcular las
velocidades en a y en b :
= = = =
3
A 2 2A
9mG m cm60sv 2,14 214A 3,14x0,15 m s s
= = = =
3
B 2 2B
9mG m cm60sv 8,33 833A 3,14x0,075 m s s
También se puede ocupar la ecuación de
Bernouilli para relacionar ambos puntos,
de la que se puede calcular la presión en
b:
PA+ρghA+½ ρvA2=PB+ρghB+½ ρvB
2
PB=PA+ρg[hA-hB]+½ρ[v2-vB2]

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 361
( )
6B 2 3 2
2
3 2
B 2
gDinas cmP 10 1 980 50cmcm cm s
g1 cm1 45796 6938892 cm s
DinasP 724953,5cm
= + +
⎡ ⎤+ −⎢ ⎥
⎣ ⎦
=
Ejemplo 9.3
Un tubo que conduce un fluido
incompresible cuya densidad es
1,30X103Kg/m3 es horizontal en h0=0m.
Para evitar un obstáculo, el tubo se debe
doblar hacia arriba, hasta alcanzar una
altura de h1=1,00m. El tubo tiene área
transversal constante. Si la presión en la
sección inferior es P0=1,50atm. Calcule la
presión P1 en la parte superior.
Solución:
Según lo que predice la ecuación de
continuidad, al tener área transversal
constante, no debe cambiar la velocidad
del fluido en su interior, por tanto:
v0=v1=v
En consecuencia, aplicando la ecuación de
Bernouilli a puntos en la parte superior y
la parte inferior, se tiene:
P0+ρgh0+½ ρv2=P1+ρgh1+½ρv2
P0+ρgh0=P1+ρg 1
De donde:
P1 =P0+ ρg[h0-h1]
P1=1,5[1,01X105Pa]+[1,30X103Kg/m3]
[9,8m/s2][0m-1,0m]
P1=151500Pa-12740Pa=1,38atm
¡La presión bajó desde 1,5atm hasta
1,38atm!.
Esta conclusión parece contradecir lo
encontrado en el efecto Venturi, donde
las presiones eran inversamente
proporcionales a las velocidades. Sin
embargo, ha de recordarse que aquel era
cierto bajo la restricción de líneas de
flujo horizontales, en las que no hubiera
diferencias significativas en la energía
potencial del fluido en movimiento.
Ejemplo 9.4
Un fluido incompresible fluye de
izquierda a derecha por un tubo cilíndrico
como el que se muestra en la figura. La
densidad de la sustancia es de 105
utm/m3. Su velocidad en el extremo de
entrada es v0=1,5m/s, y la presión allí es
de P0=1,75Kgf/cm2, y el radio de la

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 362
sección es r0=20cm. El extremo de
salida está 4,5m abajo del extremo de
entrada y el radio de la sección allí, es
r1=7,5cm. Encontrar la presión P1 en ese
extremo.
Solución:
La presión se puede encontrar mediante
la ecuación de Bernouilli ; sin embargo,
previamente necesitaremos calcular la
velocidad v1 con la ecuación de
continuidad :
A0v0=A1 v1
De donde:
= = π =π
2 20 0 01 0 0 02 2
1 1 1
v v vv A r rA r r
( )−
−
⎛ ⎞⎜ ⎟⎝ ⎠= =
2 4
1 4
m20 x10 m 1,5 msv 10,7s7,5x10 m
Ahora, según Bernouilli :
P0+ρgh0+½ ρV02=P1+ρgh1+½ ρV1
2
P1=P0+ρg[h0-h1]+½ρ[V02-V1
2]
( )
= + +
⎡ ⎤+ −⎢ ⎥
⎣ ⎦
= =
41 2 3 2
22 2
3 2
B 22
Kf utm mP 1,75x10 105 9,8 4,5mm m s
1 utm m105 1,5 10,72 m s
Kf KfP 16237,9 1,62m cm
Note que si ponemos una válvula y
cortamos el flujo de agua, P1=2,21gf/m2 :
sube !
Ejemplo 9.5
Un tanque cilíndrico de 1,80m de
diámetro descansa sobre una plataforma
de una torre a 6m de altura, como se
muestra en la figura. Inicialmente, el
tanque está lleno de agua, hasta la
profundidad h0=3m.
De un orificio que está al lado del tanque
y en la parte baja del mismo, se quita un
tapón que cierra el área del orificio, de
6cm2.
¿Con qué velocidad fluye inicialmente el
agua del orificio?.
¿Cuánto tiempo necesita el tanque para
vaciarse por completo?.
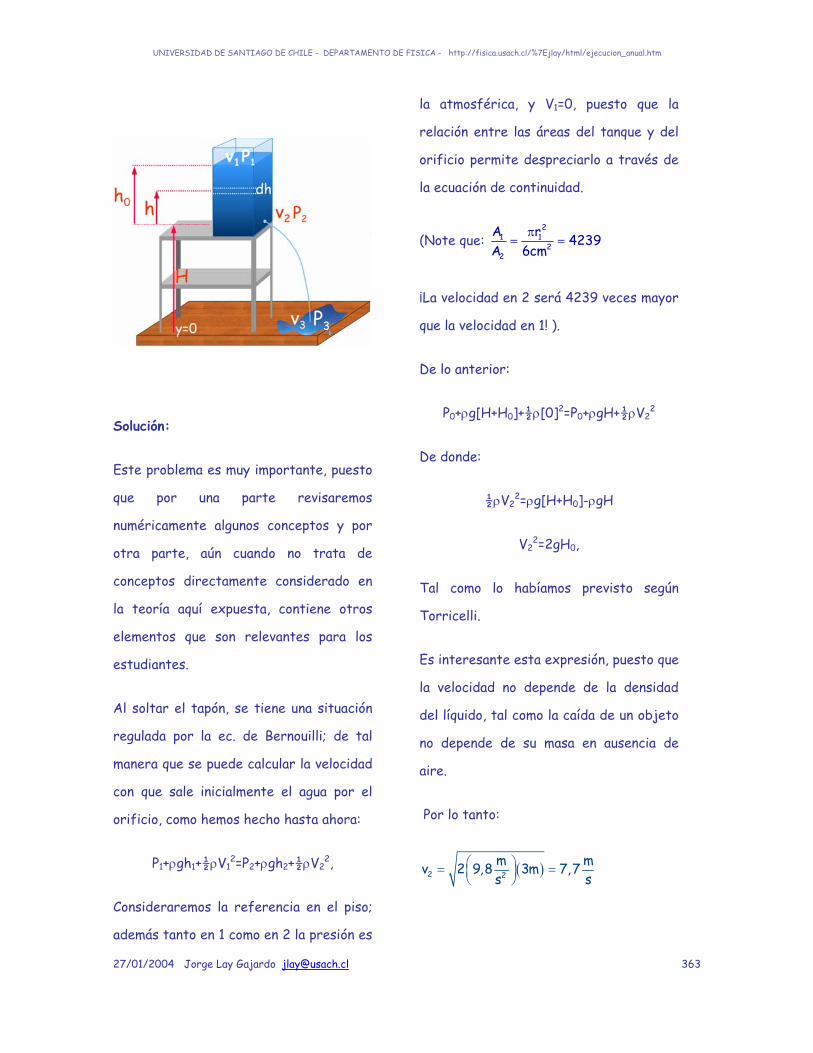
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 363
Solución:
Este problema es muy importante, puesto
que por una parte revisaremos
numéricamente algunos conceptos y por
otra parte, aún cuando no trata de
conceptos directamente considerado en
la teoría aquí expuesta, contiene otros
elementos que son relevantes para los
estudiantes.
Al soltar el tapón, se tiene una situación
regulada por la ec. de Bernouilli; de tal
manera que se puede calcular la velocidad
con que sale inicialmente el agua por el
orificio, como hemos hecho hasta ahora:
P1+ρgh1+½ρV12=P2+ρgh2+½ρV2
2,
Consideraremos la referencia en el piso;
además tanto en 1 como en 2 la presión es
la atmosférica, y V1=0, puesto que la
relación entre las áreas del tanque y del
orificio permite despreciarlo a través de
la ecuación de continuidad.
(Note que: π= =
21 1
22
A r 4239A 6cm
¡La velocidad en 2 será 4239 veces mayor
que la velocidad en 1! ).
De lo anterior:
P0+ρg[H+H0]+½ρ[0]2=P0+ρgH+½ρV22
De donde:
½ρV22=ρg[H+H0]-ρgH
V22=2gH0,
Tal como lo habíamos previsto según
Torricelli.
Es interesante esta expresión, puesto que
la velocidad no depende de la densidad
del líquido, tal como la caída de un objeto
no depende de su masa en ausencia de
aire.
Por lo tanto:
( )⎛ ⎞= =⎜ ⎟⎝ ⎠2 2
m mv 2 9,8 3m 7,7s s

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 364
Luego, aplicando nuevamente Bernouilli
para los puntos 2 y 3, podemos calcular la
velocidad con que llega el agua al suelo:
P2+ρgh2+½ρV22=P3+ρgh3+½ρV3
2
Con P2=P3=P0 :
P0+ρgH+½ρV22=P0+ρg[0]+½ρV3
2
De donde:
V32=V2
2+2gH
V32=58.8 m2/s2+2[9,8m/s2][6 m]
V3=13,3m/s
Hasta aquí, el problema es resuelto como
ha predicho la teoría expuesta. Sin
embargo, calcular el tiempo que demora el
tanque en vaciarse requiere de
consideraciones distintas, puesto que la
profundidad no será constante, como en
los casos anteriores. Esto producirá que
la velocidad con que baja el fluido en el
tanque, así como la velocidad con que sale
el líquido por el orificio, no sean
constantes en el tiempo.
Para resolver esto, consideraremos que la
altura h del líquido disminuye en dh
durante un intervalo de tiempo dt (ver
figura). Entonces, la velocidad con que
baja el fluido en el tanque V1, queda
determinada por la expresión:
= −1dhvdt
Negativa puesto que h disminuye en el
tiempo. Adicionalmente, se tiene que
V1A1=V2A2
Como ya sabemos, expresión que es cierta
para todo t, de donde:
= 21 2
1
Av vA
Al igualar ambas expresiones, se tiene:
− = 22
1
Adh vdt A
Además, según torricelli como hemos
visto:
=2v 2gh
Por lo que:
⎡ ⎤− = ⎣ ⎦2
1
Adh 2ghdt A
Que se puede expresar como :
⎡ ⎤− = ⎣ ⎦2
1
Adh 2g dtAh

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 365
Integrando la expresión para el intervalo
entre t=0, donde la profundidad es h0 y
el tiempo t=t, donde la profundidad es
h, se tiene :
− ⎡ ⎤− = ⎣ ⎦∫ ∫1
22
1
Ah dh 2g dtA
⎡ ⎤ ⎡ ⎤− − =⎢ ⎥ ⎣ ⎦⎣ ⎦
1 122 201
A2 h h 2g tA
Despejando t:
⎡ ⎤− −⎢ ⎥
⎣ ⎦=⎡ ⎤⎣ ⎦
1 12 21 0
2
2A h ht
2g A
Cuando el tanque se vacíe, h=0, por lo que:
⎡ ⎤− −⎢ ⎥⎣ ⎦=
121 0
2
2A ht
2gA
⎡ ⎤π −⎢ ⎥⎣ ⎦=
1221 0
2
2 r ht
2gA
Remplazando valores :
( )( ) ( )
( )=
⎛ ⎞⎜ ⎟⎝ ⎠
122
22
2 3,14 0,9m 3mt
m2 9,8 0,0006ms
t= 3263,3 segundos
Se recomienda revisar con especial
cuidado la lógica seguida en la solución de
este problema.
Ejemplo 9.6
Un tanque cilíndrico de 1,2m de diámetro
se llena hasta 0,3m de profundidad con
agua. El espacio encima del agua está
ocupado con aire, comprimido a la presión
de 2,026X105N/m2. De un orificio en el
fondo se quita un tapón que cierra un
área de 2,5cm3. Calcular la velocidad
inicial de la corriente que fluye a través
de este orificio. Encontrar la fuerza
vertical hacia arriba que experimenta el
tanque cuando se quita el tapón.
P2
P1
v2
v1
h
A1
A2
Solución:
Cuando el fluido sale del tanque, de
acuerdo al tercer principio de Newton,
reacciona con una fuerza hacia arriba
sobre el tanque de igual magnitud, pero
de dirección opuesta a la fuerza con que
es expulsado.
Por otro lado, el segundo principio de
Newton establece que el impuso que

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 366
recibe el fluido expulsado, debe ser
equivalente al cambio en su cantidad de
movimiento.
Justo al ser soltado la cantidad de
movimiento del líquido es cero, pero dt
segundos más tarde, habrá sido expulsado
un elemento de líquido de masa dm, que
tendrá una velocidad v2 en dirección hacia
abajo.
En consecuencia:
dp=v2dm=v2[ρdv]=v2ρ[A2dy]
dp=v2ρA2[v2dt]=v22ρA2dt
Esta cantidad de movimiento dirigida
hacia arriba será la comunicada al tanque,
la que debe ser igual al impulso de la
fuerza que actúa sobre él, de modo que :
Fdt=v22ρA2dt
De donde:
F=v22ρA2
La velocidad de salida puede calcularse
con la ecuación de Bernouilli:
P1+ρgh1+½ρv12=P2+ρgh2+½ρv2
2
Pero podemos suponer v1=0 por
continuidad y h2=0, usándola como
referencia :
De aquí:
( )−= +
ρ1 22
2 1
2 P Pv 2gh
Por lo que :
( )⎡ ⎤−= ρ +⎢ ⎥ρ⎣ ⎦
1 22 1
2 P PF A 2gh
Reemplazando:
( )( )( )
( )( )⎡ ⎤−⎢ ⎥= +⎢ ⎥⎣ ⎦
6 62 2,026x10 1,013x10F 1 2,5 2 980 30
1
F=5.212.000D=52,12Newton
Cuando la presión P1 es suficientemente
grande, este es básicamente el
mecanismo de propulsión de un cohete

27/01/2004 Jorge Lay Gajardo [email protected] 367
10.1 Temperatura.
Las palabras temperatura y calor son de
amplio uso en la vida cotidiana, aunque no
siempre son bien usadas, e incluso en
ocasiones producen gran confusión en un
estudiante de cursos de introducción a la
física. Solemos decir que “hace mucho
calor” en un día de verano cuando lo que
queremos decir es que nuestra sensación
térmica es alta. Nos asombramos cuando
alguien “tiene frío”, cuando nosotros
tenemos una sensación térmica agradable.
En una mañana de invierno evitamos tocar
objetos de metal prefiriendo objetos de
madera o de plástico, sintiéndolos menos
fríos, aunque realmente están a la misma
temperatura.
Algunos de estos ejemplos involucran
usos coloquiales del lenguaje y que son
aceptados por cumplir con el rol de
comunicación entre las personas. En otros
casos, aluden a la sensación térmica, que
es personal y por tanto distinta entre un
individuo a otro.
En este capítulo, como hemos hecho en
otros temas previos, aprovecharemos
estas experiencias personales para
introducir el concepto de temperatura o
más bien, el concepto de igualdad de
temperatura, en términos operacionales.
10.2 Equilibrio Térmico.
Aprovecharemos el conocimiento vivencial
de haber visto alguna vez el pavimento de
las calles agrietado, o el mercurio de un
termómetro expandirse. En efecto, la
mayoría de los sólidos se dilata cuando su
temperatura aumenta, incluso en
condiciones ambientales y se puede hacer
un experimento sencillo para demostrarlo,
tome un objeto de metal tal como un
alambre o una varilla delgada y con
muchísimo cuidado expóngalo a una
fuente de calor y mida su longitud antes y
después. Observará un aumento de su
longitud.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 368
antes
exposición auna fuente de calor
L0
L0
∆L
L=L0+∆L
Fig 10.1 Un sólido expuesto a una fuente de calor se dilata.
Luego tome un tubo delgado que contiene
un recipiente en su parte inferior y vierta
en él un poco de mercurio. Mida el alto de
la columna de mercurio en su interior y
compárela con el alto que tiene luego de
ponerlo en contacto con alguna fuente de
calor (puede ser su propio cuerpo, una
ampolleta de tungsteno encendida o
simplemente la superficie de un objeto
expuesto a la luz del sol). Se observará un
aumento en el volumen del mercurio que
se detecta como un aumento en la altura
del tubo que lo contiene (cuidado, el
mercurio es extraordinariamente tóxico y
no se puede tocar con las manos por
motivo alguno).
antes
exposición a una fuente de calor
L0
∆LL=L0+∆L
Fig 10.2 Los líquidos también se dilatan ante la exposición de una fuente de calor
Finalmente tome un globo de cumpleaños,
ínflelo con cuidado y luego déjelo unos
cuantos minutos en el refrigerador (no el
en congelador), que debe considerarse
como un sistema que extra calor de los
cuerpos. Entonces observará que el globo
disminuye su volumen.
V0
antesexposición a una maquina que extrae calor V
Fig 10.3 El volumen de un gas disminuye cuando se le extrae calor.
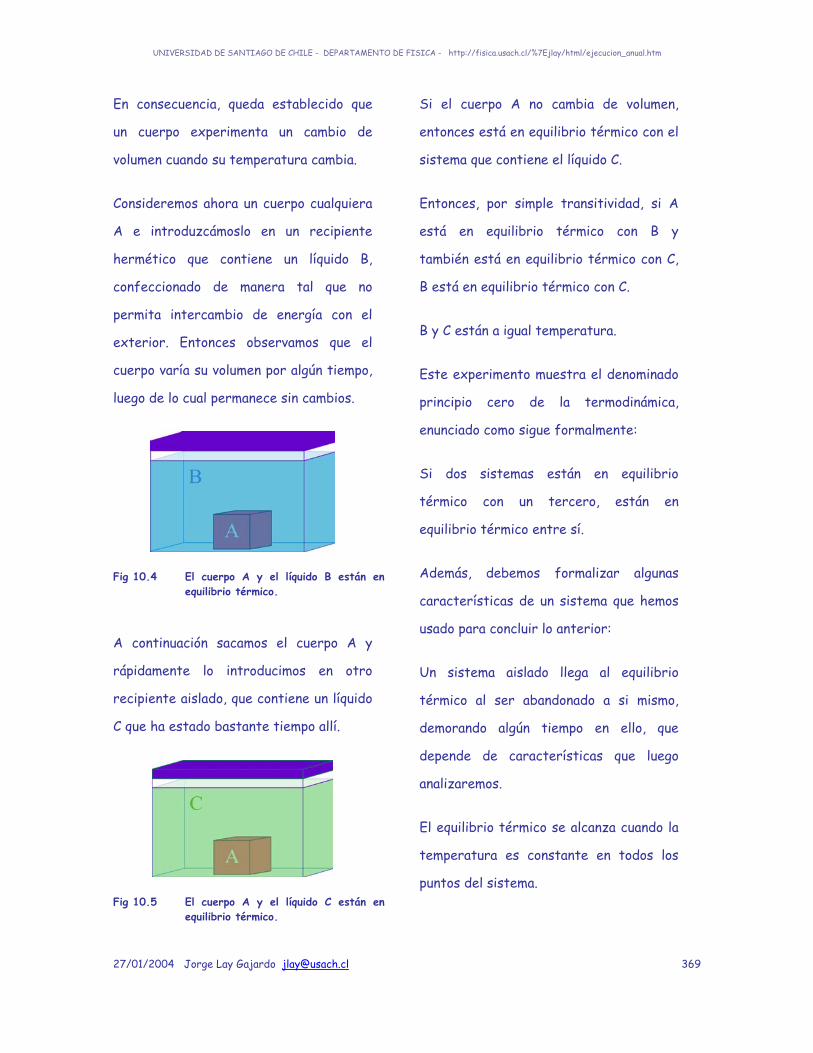
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 369
En consecuencia, queda establecido que
un cuerpo experimenta un cambio de
volumen cuando su temperatura cambia.
Consideremos ahora un cuerpo cualquiera
A e introduzcámoslo en un recipiente
hermético que contiene un líquido B,
confeccionado de manera tal que no
permita intercambio de energía con el
exterior. Entonces observamos que el
cuerpo varía su volumen por algún tiempo,
luego de lo cual permanece sin cambios.
Fig 10.4 El cuerpo A y el líquido B están en equilibrio térmico.
A continuación sacamos el cuerpo A y
rápidamente lo introducimos en otro
recipiente aislado, que contiene un líquido
C que ha estado bastante tiempo allí.
Fig 10.5 El cuerpo A y el líquido C están en equilibrio térmico.
Si el cuerpo A no cambia de volumen,
entonces está en equilibrio térmico con el
sistema que contiene el líquido C.
Entonces, por simple transitividad, si A
está en equilibrio térmico con B y
también está en equilibrio térmico con C,
B está en equilibrio térmico con C.
B y C están a igual temperatura.
Este experimento muestra el denominado
principio cero de la termodinámica,
enunciado como sigue formalmente:
Si dos sistemas están en equilibrio
térmico con un tercero, están en
equilibrio térmico entre sí.
Además, debemos formalizar algunas
características de un sistema que hemos
usado para concluir lo anterior:
Un sistema aislado llega al equilibrio
térmico al ser abandonado a si mismo,
demorando algún tiempo en ello, que
depende de características que luego
analizaremos.
El equilibrio térmico se alcanza cuando la
temperatura es constante en todos los
puntos del sistema.
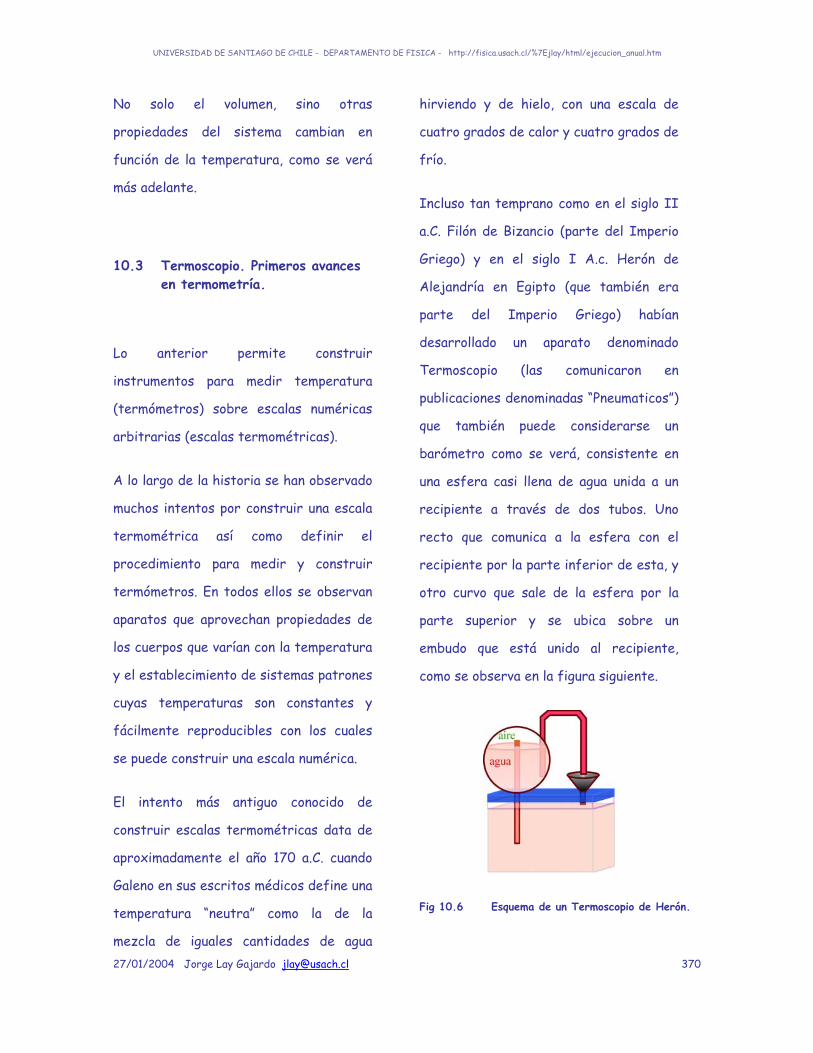
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 370
No solo el volumen, sino otras
propiedades del sistema cambian en
función de la temperatura, como se verá
más adelante.
10.3 Termoscopio. Primeros avances en termometría.
Lo anterior permite construir
instrumentos para medir temperatura
(termómetros) sobre escalas numéricas
arbitrarias (escalas termométricas).
A lo largo de la historia se han observado
muchos intentos por construir una escala
termométrica así como definir el
procedimiento para medir y construir
termómetros. En todos ellos se observan
aparatos que aprovechan propiedades de
los cuerpos que varían con la temperatura
y el establecimiento de sistemas patrones
cuyas temperaturas son constantes y
fácilmente reproducibles con los cuales
se puede construir una escala numérica.
El intento más antiguo conocido de
construir escalas termométricas data de
aproximadamente el año 170 a.C. cuando
Galeno en sus escritos médicos define una
temperatura “neutra” como la de la
mezcla de iguales cantidades de agua
hirviendo y de hielo, con una escala de
cuatro grados de calor y cuatro grados de
frío.
Incluso tan temprano como en el siglo II
a.C. Filón de Bizancio (parte del Imperio
Griego) y en el siglo I A.c. Herón de
Alejandría en Egipto (que también era
parte del Imperio Griego) habían
desarrollado un aparato denominado
Termoscopio (las comunicaron en
publicaciones denominadas “Pneumaticos”)
que también puede considerarse un
barómetro como se verá, consistente en
una esfera casi llena de agua unida a un
recipiente a través de dos tubos. Uno
recto que comunica a la esfera con el
recipiente por la parte inferior de esta, y
otro curvo que sale de la esfera por la
parte superior y se ubica sobre un
embudo que está unido al recipiente,
como se observa en la figura siguiente.
Fig 10.6 Esquema de un Termoscopio de Herón.
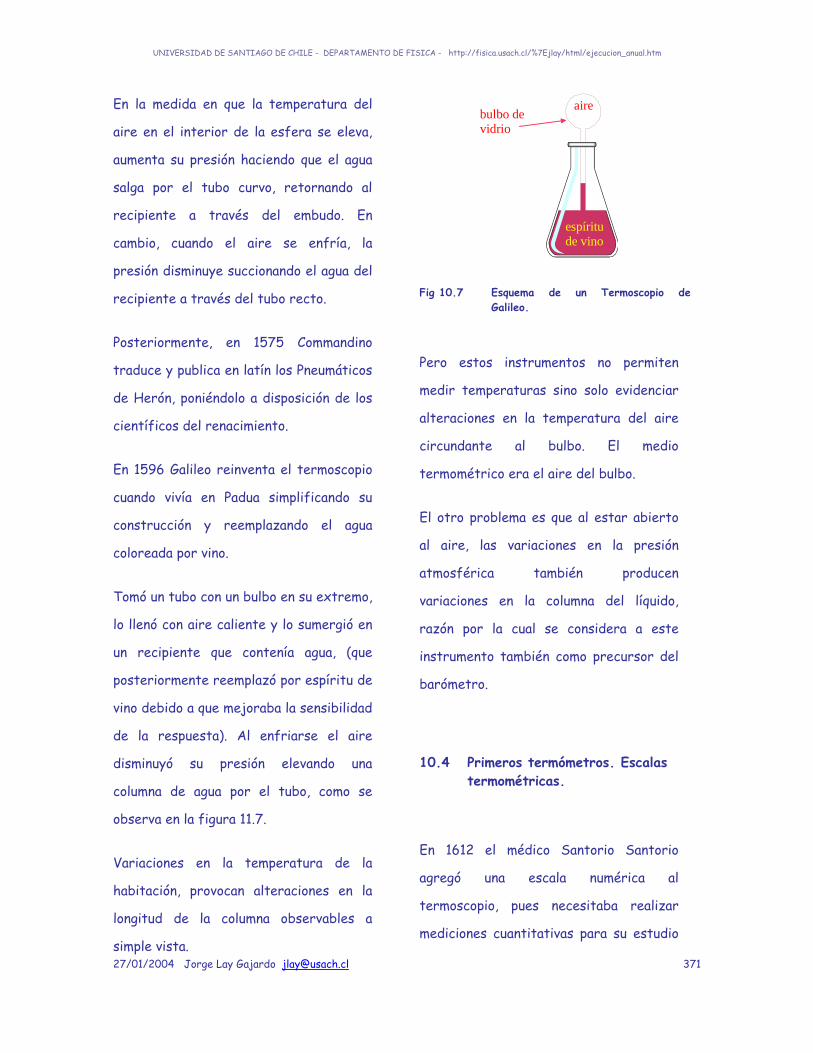
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 371
En la medida en que la temperatura del
aire en el interior de la esfera se eleva,
aumenta su presión haciendo que el agua
salga por el tubo curvo, retornando al
recipiente a través del embudo. En
cambio, cuando el aire se enfría, la
presión disminuye succionando el agua del
recipiente a través del tubo recto.
Posteriormente, en 1575 Commandino
traduce y publica en latín los Pneumáticos
de Herón, poniéndolo a disposición de los
científicos del renacimiento.
En 1596 Galileo reinventa el termoscopio
cuando vivía en Padua simplificando su
construcción y reemplazando el agua
coloreada por vino.
Tomó un tubo con un bulbo en su extremo,
lo llenó con aire caliente y lo sumergió en
un recipiente que contenía agua, (que
posteriormente reemplazó por espíritu de
vino debido a que mejoraba la sensibilidad
de la respuesta). Al enfriarse el aire
disminuyó su presión elevando una
columna de agua por el tubo, como se
observa en la figura 11.7.
Variaciones en la temperatura de la
habitación, provocan alteraciones en la
longitud de la columna observables a
simple vista.
aire
espíritu de vino
bulbo de vidrio
Fig 10.7 Esquema de un Termoscopio de Galileo.
Pero estos instrumentos no permiten
medir temperaturas sino solo evidenciar
alteraciones en la temperatura del aire
circundante al bulbo. El medio
termométrico era el aire del bulbo.
El otro problema es que al estar abierto
al aire, las variaciones en la presión
atmosférica también producen
variaciones en la columna del líquido,
razón por la cual se considera a este
instrumento también como precursor del
barómetro.
10.4 Primeros termómetros. Escalas termométricas.
En 1612 el médico Santorio Santorio
agregó una escala numérica al
termoscopio, pues necesitaba realizar
mediciones cuantitativas para su estudio
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 372
del metabolismo basal realizado en
Venecia.
Santorio definió como cero a la
temperatura de nieve derritiéndose y 110
a la temperatura de la llama de una vela.
Su escala contaba con graduación
uniforme, decimal.
En 1641 aparece el primer termómetro
(del griego Therme: calor y del latín
metrum: para medir) de tubo sellado con
alcohol diluido en lugar de aire como
medio termométrico, desarrollado en
Florencia gracias al impulso de Fernando
II de Medici, Gran Duque de Toscana,
introduciendo una escala de 50 grados.
El hecho de estar sellado impide las
alteraciones en la medición, producto de
las variaciones de la presión atmosférica,
de manera que se logra un avance
importante.
Fig 10.8 Fernando de Medici.
En la Academia de la Experimentación
(Accademia del Cimento) fundada por
Fernando II en 1657 se desarrollaron
gran cantidad de termómetros con
formas y escalas variadas. Se considera a
esta academia una de las mayores
precursoras en el desarrollo de la
termometría y su contribución a la ciencia
experimental es notable, convirtiéndose
en el centro de los más grandes
descubrimientos de la física del
renacimiento.
Una de las contribuciones del trabajo en
termometría de la Academia fue el
establecimiento de puntos fijos para
calibrar los termómetros, aunque no
lograron ponerse de acuerdo ni en su
elección ni en el tipo de escala
termométrica ni en el fluido
termométrico, experimentando con agua,
alcohol, aceites y mercurio entre otros.
Esto impedía comparar mediciones hechas
con instrumentos distintos.
A fines del siglo XVII existían al menos
35 tipos de escalas distintas y eran
típicos puntos fijos tales como la
temperatura del cuerpo de los animales,
del día más frío del invierno, de mezclas
de sustancias refrigerantes, etc.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 373
Fig 10.9 Termómetros y un higrómetro. Foto del Instituto y Museo de historia de la ciencia, Florencia, Italia. http://www.imss.fi.it/presale/iprsala9.html
Entre 1660 y 1700, Hooke y Huygens
entre otros, proponen que se use solo un
punto fijo en la construcción de escalas
termométricas, consistente en la
temperatura del agua fundiéndose
(Newton además sugiere usar como punto
fijo superior la temperatura del cuerpo
humano). En cambio otros, entre los que
se encuentra también Huygens y
Amontons (quien descubrió que el agua
hervía siempre a la misma temperatura y
desarrolló un termómetro de gas a
volumen constante), recomendaban usar
el punto de ebullición del agua, e incluso
otros como Renaldini (quien fue el
primero en proponerlo), optaban por usar
ambas temperaturas como puntos fijos.
10.5 Farhenheit y Celsius.
No es sino hasta 1714 que el físico
constructor de aparatos científicos
alemán Daniel G. Fahrenheit, recogiendo
las observaciones y resultados
experimentales mencionados y sumando
su habilidad y experiencia desarrolladas
en Ámsterdam, propone un termómetro
de mercurio (influenciado por el notable
desarrollo del barómetro de Torricceli),
debido a su estable tasa de expansión, a
su opacidad, a su pureza y a su respuesta
en un rango de temperaturas mejor que el
alcohol, que se había popularizado en esa
época (Fahrenheit se dedicaba a la
fabricación de instrumentos
meteorológicos).
La idea de establecer una escala estándar
ocupó a Fahrenheit por alrededor de 30
años y después de muchos intentos
finalmente publicó en “Philosophical
Transactions”, la revista de la Royal
Society of London (D. G. Fahrenheit, Phil.
Trans. London. 33,78. 1724) su célebre
escala termométrica que se conserva
hasta nuestros días, probablemente
influenciado por los trabajos de Hookw y
Newton.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 374
La propuesta de Fahrenheit incluye dos
puntos fijos consistentes en las
temperaturas de una mezcla refrigerante
compuesta de hielo, sal y sal de amoníaco
(o sal marina) que le permitió reproducir
la temperatura más baja registrada hasta
la época (en el invierno de 1709 en
Europa) y la temperatura de la sangre de
un ser humano sano (que en ese tiempo se
suponía constante), otorgándoles los
números 0 y 96 respectivamente, en una
escala no métrica, aunque futuras
correcciones otorgaron el número 98,6.
El extraño número 96 se debe a que
originalmente adoptó una escala de 24
grados equivalente al número de horas
que tiene un día solar propuesta por
Newton entre otros, los que subdividió en
4 partes por razones prácticas.
Fahrenheit midió las temperaturas de
congelación y ebullición del agua pura, que
correspondieron a los números 32 y 212
de su escala. Finalmente, construyó un
instrumento denominado hipsómetro, con
el que determinó que el punto de
ebullición del agua variaba con la presión
exterior.
Otro intento interesante es el realizado
por el francés Rene Antoine Ferchault de
Reaumur que en 1731 diseña un
termómetro de vidrio con alcohol y
propone una escala basada en un solo
punto fijo, la temperatura de congelación
del agua a la que asigna el número 1000 y
estableció que un grado era el aumento
del volumen de alcohol en una milésima
parte; por tanto, debido a que el
coeficiente de dilatación del alcohol es
0,0008, entonces el punto de ebullición
del agua correspondía a 1080 grados.
Posteriormente asigna 0º y 80º
respectivamente, a estos puntos.
Esta escala fue utilizada en algunos
países de Europa occidental por algunos
años, pero luego cayó en desuso.
Fig 10.10 Rene Antoine Ferchault de Reaumur
En 1742, Andrés Celsius publica su
célebre trabajo titulado: "Observations
on two persistent degrees on a
thermometer" en los anales de la Real
Academia Sueca de Ciencias, donde
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 375
establece una escala termométrica
basada en dos puntos fijos:
hielo o nieve derritiéndose y agua
hirviendo, asignándole los números 0 y
100 respectivamente, generando así por
primera vez una escala centesimal.
Fig 10.11 Portada del escrito publicado por Celsius en 1742.
A cada intervalo se le denominó grado
centígrado, aunque fue sustituido por
grado Celsius a partir de 1948.
Preocupado por el reporte de Fahrenheit
y otros, que sostenían que el punto de
ebullición variaba con la presión
atmosférica, dedicó considerable tiempo
a comprobar la estabilidad de los dos
puntos fijos.
Fig 10.12 Andrés Celsius
Durante dos años midió puntos de fusión
de la nieve en invierno y en localidades
distintas (Upsala de latitud 60ºN y
Tornea de latitud 66ºN), reportando
siempre el mismo resultado. En lo que al
punto de ebullición se refiere, reporta
igual resultado que Fahrenheit: depende
de la presión atmosférica.
Esto lo motiva a publicar un método para
estandarizar la calibración de
termómetros:
1.- Sumerja el bulbo del termómetro de
longitud AB en nieve derritiéndose y
marque en el tubo a la altura de la
columna de mercurio un punto C y luego
sumérjalo en agua hirviendo y marque en
el tubo un punto D a la altura que alcanza
la columna de mercurio.
2.- El punto D debe marcarse cuando la
presión atmosférica es de 755mm de
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 376
mercurio. Asegúrese que la distancia AC
es la mitad de la distancia CD.
3.- Divida la distancia CD en 100 partes
iguales, asignándole el número 0 al punto
de ebullición del agua y el número 100 al
punto de fusión de la nieve. Continúe
marcando con iguales intervalos hasta el
punto A, bajo el punto C. Entonces el
termómetro está calibrado y listo para
usarse.
Estos números fueron así escogidos para
evitar el uso de números negativos para
temperaturas menores que la de
congelación del agua, observadas en los
días de invierno.
Cinco años después de su muerte,
ocurrida en 1744 a la temprana edad de
42 años, el Sueco Carl von Linee presenta
la escala en la forma que hoy conocemos,
invirtiendo los números asignados a los
puntos fijos en un famoso trabajo
denominado "Hortus Cliffortianus". Sin
embargo, la Real Academia Sueca de
Ciencias en 1749 asigna a los científicos
suecos Strómer (sucesor de Celsius) y
Ekstróm (activo constructor de
termómetros) junto a Celsius, como los
autores de la escala definitiva. Aún hoy
existe una controversia al respecto.
A pesar de esto, la contribución de
Celsius de establecer dos puntos fijos
reproducibles, con un método de
calibración, el diseño del termómetro de
vidrio con mercurio como fluido
termométrico y la escala centígrada es lo
verdaderamente importante y el hecho de
revertir los números de la escala para la
comunidad científica tiene importancia
secundaria.
Alrededor de 1780 se reportaban
aproximadamente 30 tipos de escalas
distintas, pero la comunidad científica y
el uso generalizado, solo han concedido a
las escalas de Fahrenheit y Celsius su
permanencia hasta nuestros días.
La Escala Fahenheit fue adoptada por
Inglaterra y los países que fueron sus
colonias, aunque en la actualidad solo
tiene uso en Estados Unidos para uso
doméstico tales como los reportes de la
temperatura de la superficie de la tierra.
No obstante lo anterior, el Acta de
conversión al Sistema Métrico
promulgada en 1975 y el programa
federal “hacia una América métrica”
hacen actualmente serios esfuerzos para
cambiar los usos de la población a la
escala Celsius. (ver página:
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 377
(http://ts.nist.gov/ts/htdocs/200/202/
mpo_home.htm).
La comunidad científica en todo el mundo
ya usa las escalas Celsius y Kelvin
(explicada más adelante) contenidas en el
sistema métrico.
Los restantes países europeos y sus
antiguas colonias, así como muchos otros
países de los restantes continentes usan
las escalas Celsius y Kelvin.
El actual grado de globalización y la
fluidez de los intercambios comerciales,
tecnológicos y científicos, así como de las
comunicaciones es un poderoso aliciente
para la adopción de los estándares
contenidos en la Conferencia General de
pesas y medidas.
10.6 Temperatura absoluta.
Un paso adelante se obtiene a partir de
los extraordinarios descubrimientos
respecto de las leyes y propiedades de
los gases que ocurren en el siglo XVIII y
que conducen a la construcción del
termómetro de gas y a la formalización
de una escala de temperatura absoluta.
Probablemente este desarrollo parte con
el físico francés Guillaume Amontons en
1702, quien a través de su trabajo con un
termómetro de aire a volumen constante
ocupa la presión como variable de
medición, y define a la temperatura como
una cantidad medible y no solo observable
como era considerada hasta ese entonces.
También enunció la existencia de un cero
absoluto, aunque solo resultaba una
disquisición puramente intuitiva, pues sus
resultados experimentales no lo
acompañaban.
Aunque el físico-químico Irlandés Robert
Boyle (socio fundador de la Royal Society
of London) en 1660 había escrito su
célebre trabajo “New Experiments
Physio-Mechanicall, Touching the Spring
of the Air and its Effects” y en 1662 su
apéndice incluía la denominada Ley de
Boyle estableciendo que si no variaba la
temperatura el producto entre la presión
y el volumen de un gas era una constante
para bajas presiones (definió el gas ideal
como todo aquel que satisfacía la
expresión PV=constante), el pobre
desarrollo en la precisión de los
instrumentos de la época retrasó hasta la
segunda mitad del siglo XVIII el
descubrimiento.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 378
Fig 10.13 Robert Boyle
En 1679, el físico francés autodidacta
Edme Mariotte (miembro de la Academia
Francesa de Ciencias) publica un trabajo
denominado ”De la nature de l'air”,
describiendo la naturaleza isotérmica de
un volumen constante de aire confinado
en un recipiente. Su trabajo es
equivalente al desarrollado por Boyle,
razón por la cual a veces se le denomina
“Ley de Boyle-Mariotte” e incluso “Ley de
las isotermas” a la expresión PV=Cte.
Pero no fue sino hasta 1787, que el
también francés físico-químico Jacques
Charles, descubrió que el volumen de un
gas varía en forma directamente
proporcional a su temperatura medida en
grados Celsius, si la presión se mantiene
constante. Sin embargo, no logró
solucionar el problema de que existían
gases para los que la relación se cumplía
solo aproximadamente.
Fig 10.14 Jacques Charles
Este descubrimiento permitió comprobar
el trabajo de Amonton y sugerir que si la
temperatura disminuía en directa
proporción con el volumen, entonces
debería existir una temperatura para la
condición volumen cero.
Desafortunadamente Charles no publicó
su hallazgo.
En 1802 el químico francés Joseph Gay
Lusaac, formado en la Ècole Polyteccnique
(Institución creada por la Revolución
Francesa que gobernaba el país para
generar científicos y técnicos de alto
nivel, especialmente para fines militares),
quien a la sazón contaba con termómetros
de gas mucho más precisos que sus
antecesores, publica el artículo
“Expansión de los gases mediante el
calor” en “Annales de Chimie”, reportando
el mismo resultado que Charles, para

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 379
todos los gases, al descubrir que las
dificultades de Charles se debían a la
presencia de agua en el termómetro. El
hecho de citar a Charles, hace que hoy se
identifique esta ley como de “Charles y
Gay Lussac”.
Fig 10.15 Joseph Louis Gay Lussac
La correcta formulación de la ley permite
indicar que en la medida en que disminuye
el volumen hasta alcanzar el valor cero,
sin alterar la presión, la temperatura
debe tender a un valor mínimo.
Esta temperatura era calculada
extrapolando la curva V/T a partir de los
resultados experimentales para varios
gases. Estos resultados, notables
considerando las restricciones de
precisión experimentales de entonces,
constituye la base para la formulación de
la escala de temperaturas absolutas
enunciada por Williams Thompson (Lord
Kelvin) en 1848.
Fig 10.16 Williams Thompson (Lord Kelvin)
Thompson nació en Belfast, Irlanda, en
1824, asistiendo a la Universidad de
Glasgow, Escocia, desde los 10 años, y
luego a la Universidad de Cambridge, a
partir de 1841. Estudió Astronomía,
Química y Filosofía Natural (antiguo
nombre de la física), recibiendo fuerte
influencia de la aproximación a la ciencia
física de la escuela matemática francesa
durante un breve período de estadía en
París. En 1944, a la edad de 22 años
retornó a Glasgow para hacerse cargo de
la cátedra de Filosofía Natural.
En 1866 fue nombrado como Baron Kelvin
of Largs por la Reina Victoria en
retribución a su aporte en ciencia y a la
tecnología.
En 1848 publica en "Cambridge and Dublin
Mathematical Journal", una artículo
titulado: “Acerca de una escala
termométrica absoluta en base a la teoría
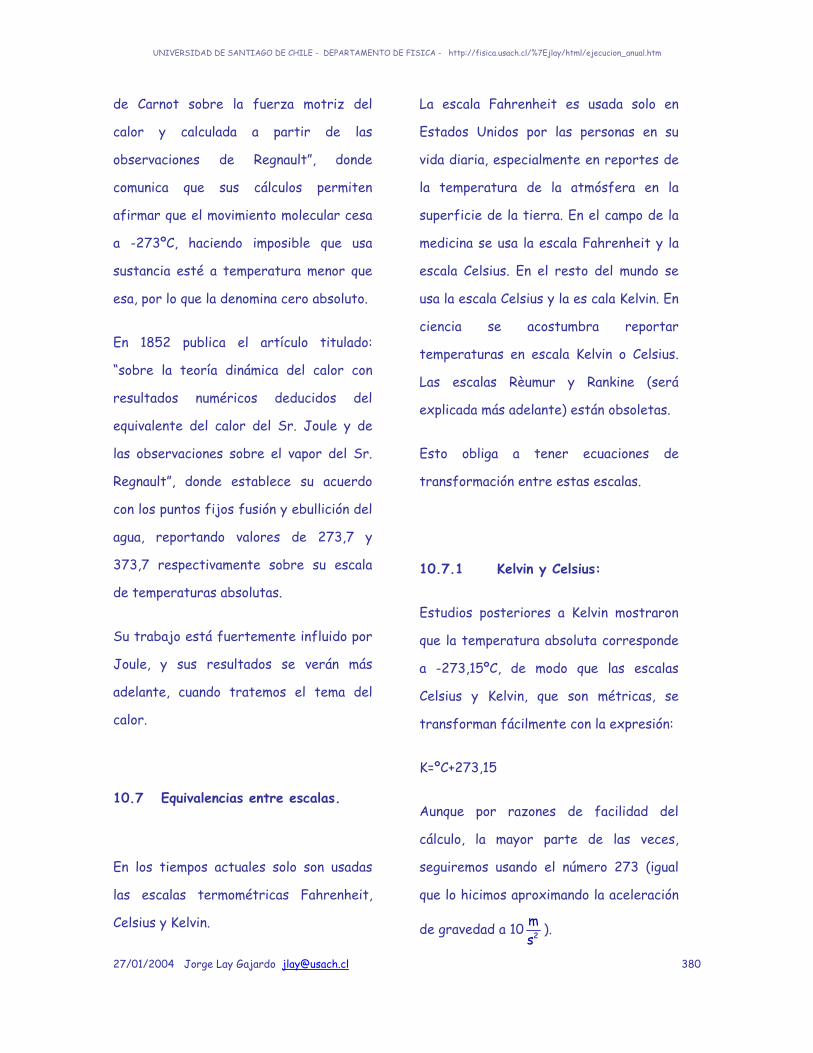
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 380
de Carnot sobre la fuerza motriz del
calor y calculada a partir de las
observaciones de Regnault”, donde
comunica que sus cálculos permiten
afirmar que el movimiento molecular cesa
a -273ºC, haciendo imposible que usa
sustancia esté a temperatura menor que
esa, por lo que la denomina cero absoluto.
En 1852 publica el artículo titulado:
“sobre la teoría dinámica del calor con
resultados numéricos deducidos del
equivalente del calor del Sr. Joule y de
las observaciones sobre el vapor del Sr.
Regnault”, donde establece su acuerdo
con los puntos fijos fusión y ebullición del
agua, reportando valores de 273,7 y
373,7 respectivamente sobre su escala
de temperaturas absolutas.
Su trabajo está fuertemente influido por
Joule, y sus resultados se verán más
adelante, cuando tratemos el tema del
calor.
10.7 Equivalencias entre escalas.
En los tiempos actuales solo son usadas
las escalas termométricas Fahrenheit,
Celsius y Kelvin.
La escala Fahrenheit es usada solo en
Estados Unidos por las personas en su
vida diaria, especialmente en reportes de
la temperatura de la atmósfera en la
superficie de la tierra. En el campo de la
medicina se usa la escala Fahrenheit y la
escala Celsius. En el resto del mundo se
usa la escala Celsius y la es cala Kelvin. En
ciencia se acostumbra reportar
temperaturas en escala Kelvin o Celsius.
Las escalas Rèumur y Rankine (será
explicada más adelante) están obsoletas.
Esto obliga a tener ecuaciones de
transformación entre estas escalas.
10.7.1 Kelvin y Celsius:
Estudios posteriores a Kelvin mostraron
que la temperatura absoluta corresponde
a -273,15ºC, de modo que las escalas
Celsius y Kelvin, que son métricas, se
transforman fácilmente con la expresión:
K=ºC+273,15
Aunque por razones de facilidad del
cálculo, la mayor parte de las veces,
seguiremos usando el número 273 (igual
que lo hicimos aproximando la aceleración
de gravedad a 10 2ms
).

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 381
De esta manera, 37ºC corresponden a
K=37+273,15=310,15
Es decir 310,15K, o simplemente 310K.
Note que en el caso de la escala Kelvin, no
se habla de grados, es decir una
temperatura de 37 grados Celsius
equivale a 310 Kelvin.
Los puntos fijos y otras temperaturas de
interés se observan en la figura siguiente.
-273
-100
0
100373
310
273
0
37 cuerpo humano sano
agua hirviendo a 1atm de presión
fusión del hielo a1atm de presión
ºCºK
-200
cero absolutoebullición del hidrógeno 17
Fig 10.17 Comparación entre las escalas Kelvin y Celsius.
10.7.2 Celsius y Fahrenheit:
A diferencia del caso anterior, una
diferencia de un grado en la escala
Celsius no equivale a una diferencia de un
grado en la escala Fahrenheit.
-40
-20
0
20
40
60
80
100200
160
120
80
40
0
-40
98,6
212
32
37 cuerpo humano sano
agua hirviendo a 1atm de presión
fusión del hielo a1atm de presión
ºCºF
Fig 10.18 Comparación entre las escalas Celsius y Farhenheit
Si tomamos los puntos fijos fusión del
hielo y ebullición del agua en ambas
escalas, se tiene que:
ºF 32 180 9ºC 100 5−
= =
Como se observa en la figura siguiente.
0
100
0
212
32
ºF-32=180 ºC=100
ºF ºC
Fig 10.19 Equivalencia entre las escalas Celsius y Fahrenheit.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 382
De donde:
9ºF ºC 325
⎛ ⎞= +⎜ ⎟⎝ ⎠
Entonces una temperatura de 5ºC
equivale a: 9ºF 5 32 415
⎛ ⎞= + =⎜ ⎟⎝ ⎠
, es decir
41ºF.
Si la temperatura está en Fahrenheit se
puede transformar en Celsius mediante la
ecuación:
( )5ºC ºF 329
= −
Si tenemos una temperatura de 32ºF,
entonces se obtiene: ( )5ºC 32 32 09
= − = ,
es decir 0ºC, como esperábamos.
10.7.3 Celsius y Rèaumur:
Como sabemos, la escala Rèaumur cuenta
con 80 grados, correspondiendo los
números 0 y 80 a los puntos fijos fusión
del hielo y ebullición del agua.
Por tanto, como se ve en la figura
siguiente, se tiene que:
ºRe 80 4ºC 100 5
⎛ ⎞= = ⎜ ⎟⎝ ⎠
De donde:
4ºRe ºC5
⎛ ⎞= ⎜ ⎟⎝ ⎠
Y es fácil demostrar que:
( )4ºRe ºF 329
= −
10.7.4 Celsius y Rankine:
La escala Rankine está en desuso, y fue
desarrollada por el físico e ingeniero
escocés William Macquorn Rankine en
1859. Es una escala de temperaturas
absolutas basada en la escala Fahrenheit,
considerando que el cero absoluto
corresponde a la temperatura -459,67ºF.
Los valores de los puntos fijos son los que
se observan en la figura.
0
100
200
300
400
600671,67212
32
agua hirviendo a 1atm de presión
fusión del hielo a1atm de presión
ºRºF
491,67
-459,67 cero absoluto
Fig 10.20 Equivalencia entre las escalas Fahrenheit y Rankine.
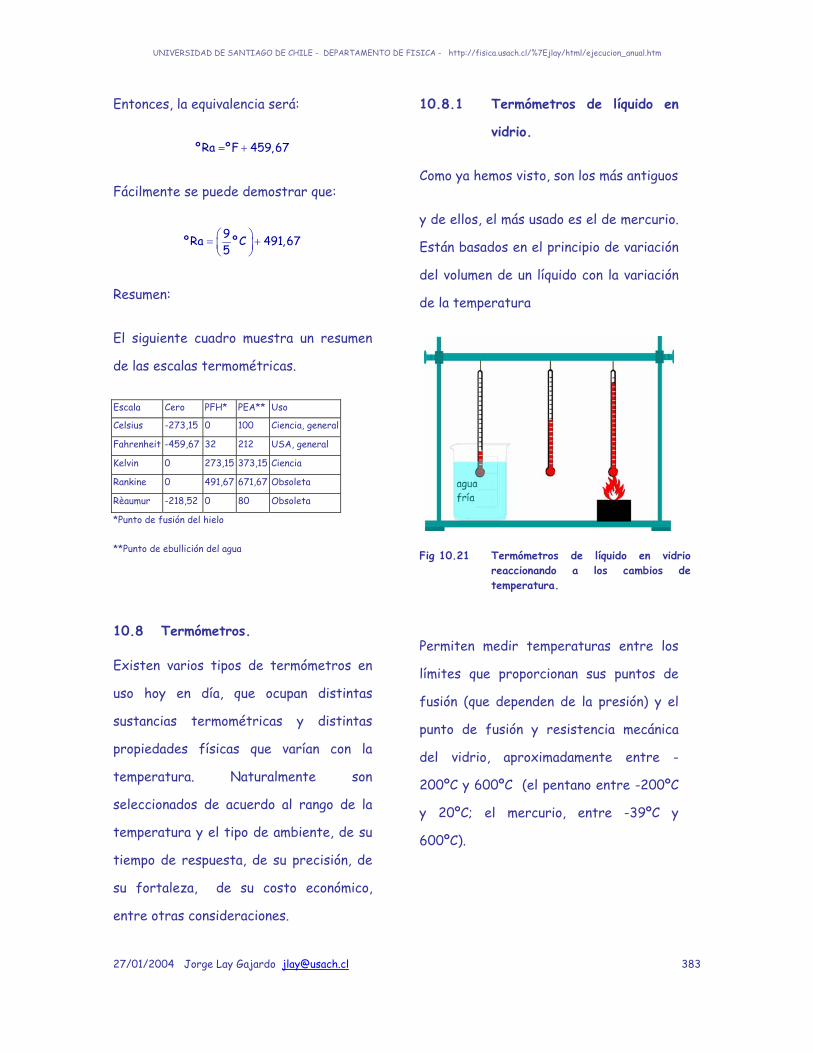
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 383
Entonces, la equivalencia será:
ºRa ºF 459,67= +
Fácilmente se puede demostrar que:
9ºRa ºC 491,675
⎛ ⎞= +⎜ ⎟⎝ ⎠
Resumen:
El siguiente cuadro muestra un resumen
de las escalas termométricas.
Escala Cero PFH* PEA** Uso
Celsius -273,15 0 100 Ciencia, general
Fahrenheit -459,67 32 212 USA, general
Kelvin 0 273,15 373,15 Ciencia
Rankine 0 491,67 671,67 Obsoleta
Rèaumur -218,52 0 80 Obsoleta
*Punto de fusión del hielo
**Punto de ebullición del agua
10.8 Termómetros.
Existen varios tipos de termómetros en
uso hoy en día, que ocupan distintas
sustancias termométricas y distintas
propiedades físicas que varían con la
temperatura. Naturalmente son
seleccionados de acuerdo al rango de la
temperatura y el tipo de ambiente, de su
tiempo de respuesta, de su precisión, de
su fortaleza, de su costo económico,
entre otras consideraciones.
10.8.1 Termómetros de líquido en
vidrio.
Como ya hemos visto, son los más antiguos
y de ellos, el más usado es el de mercurio.
Están basados en el principio de variación
del volumen de un líquido con la variación
de la temperatura
Fig 10.21 Termómetros de líquido en vidrio reaccionando a los cambios de temperatura.
Permiten medir temperaturas entre los
límites que proporcionan sus puntos de
fusión (que dependen de la presión) y el
punto de fusión y resistencia mecánica
del vidrio, aproximadamente entre -
200ºC y 600ºC (el pentano entre -200ºC
y 20ºC; el mercurio, entre -39ºC y
600ºC).

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 384
Fig 10.22 Termómetro de mercurio.
Fig 10.23 Termómetro de mercurio de 1896. http://www.antiquebottleconnection.com
Las figuras 10.22 y 10.23 muestran dos
ejemplos de termómetros, usados para
medir la temperatura del ambiente.
Cuentan con un reservorio, generalmente
un bulbo con mercurio, conectado a un
tubo de vidrio delgado protegido por una
cubierta de vidrio u otro material
transparente resistente a los golpes.
Cuentan con una escala numérica impresa
con escalas Celsius y/o Kelvin y/o
Fahrenheit, que permite rápidas y
sencillas lecturas. Permiten medir
temperaturas entre -39ºC y 375ºC,
debido a los puntos de fusión y ebullición
del mercurio a 1 atm de presión. Ofrecen
una precisión de 0,02ºC y una respuesta
relativamente lenta, de unos pocos
minutos.
10.8.2 Termómetros industriales de
líquido.
Existen termómetros industriales que
llenan el capilar con gas aumentando la
presión, alcanzando temperaturas de
hasta 600ºC, con presiones de 70 atm en
algunos casos.
Fig 10.24 Termómetro industrial de mercurio con escalas entre 40 y 400ºF. http://www.weissinstruments.com

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 385
Fig 10.25 Termómetro industrial de mercurio con escalas entre -60 y 950ºF.http://www.instrumentationgroup.com/
Fig 10.26 Termómetro de alcohol con escala entre -30 y 50ºC. http://www.toptestar.com/
Es imprescindible recordar que el
termómetro mide su propia temperatura
luego de alcanzar el equilibrio térmico con
el ambiente en el que está inmerso, de tal
manera que se requiere elegir con cuidado
el aparato, para que su propia carga
térmica no altere la temperatura del
ambiente que quiere medir. Por otra
parte, debe tenerse el cuidado de
esperar el tiempo suficiente para que el
termómetro alcance el equilibrio térmico,
lo que puede demorar algunos minutos. Si
el ambiente es estable, funciona bien,
pero si la temperatura varía muy
rápidamente, proporcionará lecturas
incorrectas.
10.8.3 Termómetros de máxima.
Existen termómetros de mercurio que
permiten medir temperaturas máximas,
entre los que se cuentan los termómetros
clínicos, usados para medir la
temperatura basal en personas o
animales. Fue inventado por el médico
inglés Sir Thomas Clifford Alibott en
1867.
Estos termómetros cuentan con una
estrangulación entre el bulbo y el tubo,
de manera tal que permite la elevación de
la columna de mercurio al elevarse la
temperatura, pero no le permite
devolverse al bajar la temperatura. Esto
obliga al permanecer en el tubo hasta el
nivel correspondiente a la máxima
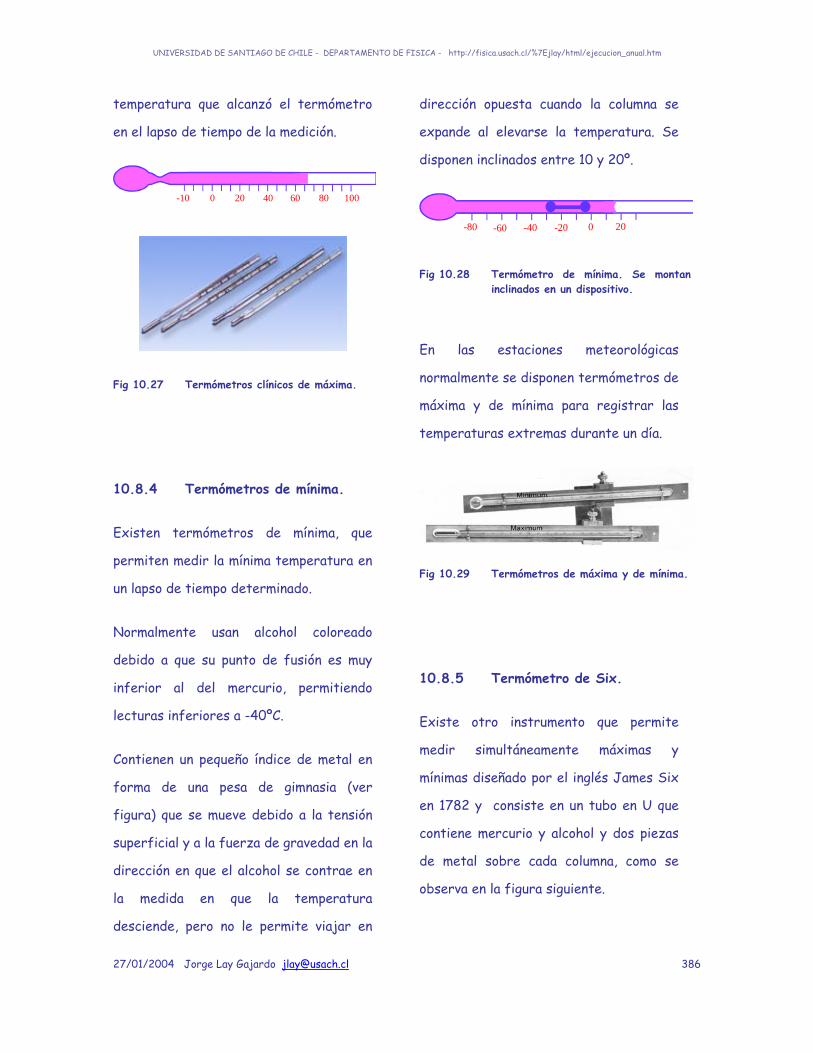
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 386
temperatura que alcanzó el termómetro
en el lapso de tiempo de la medición.
0 60-10 40 8020 100
Fig 10.27 Termómetros clínicos de máxima.
10.8.4 Termómetros de mínima.
Existen termómetros de mínima, que
permiten medir la mínima temperatura en
un lapso de tiempo determinado.
Normalmente usan alcohol coloreado
debido a que su punto de fusión es muy
inferior al del mercurio, permitiendo
lecturas inferiores a -40ºC.
Contienen un pequeño índice de metal en
forma de una pesa de gimnasia (ver
figura) que se mueve debido a la tensión
superficial y a la fuerza de gravedad en la
dirección en que el alcohol se contrae en
la medida en que la temperatura
desciende, pero no le permite viajar en
dirección opuesta cuando la columna se
expande al elevarse la temperatura. Se
disponen inclinados entre 10 y 20º.
-80 -20 0-40-60 20
Fig 10.28 Termómetro de mínima. Se montan inclinados en un dispositivo.
En las estaciones meteorológicas
normalmente se disponen termómetros de
máxima y de mínima para registrar las
temperaturas extremas durante un día.
Fig 10.29 Termómetros de máxima y de mínima.
10.8.5 Termómetro de Six.
Existe otro instrumento que permite
medir simultáneamente máximas y
mínimas diseñado por el inglés James Six
en 1782 y consiste en un tubo en U que
contiene mercurio y alcohol y dos piezas
de metal sobre cada columna, como se
observa en la figura siguiente.
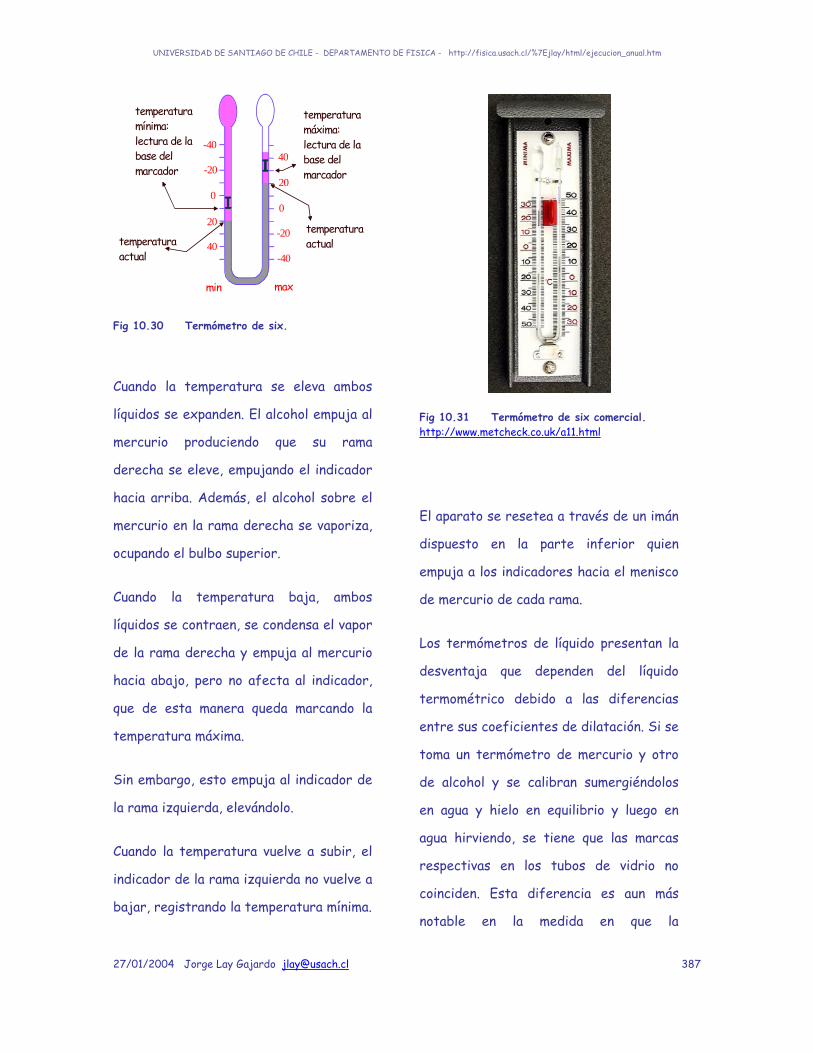
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 387
-20
0
-40
20
40
0
20
40
-20
-40
min max
temperaturamínima:lectura de la base del marcador
temperaturamáxima:lectura de la base del marcador
temperaturaactualtemperatura
actual
Fig 10.30 Termómetro de six.
Cuando la temperatura se eleva ambos
líquidos se expanden. El alcohol empuja al
mercurio produciendo que su rama
derecha se eleve, empujando el indicador
hacia arriba. Además, el alcohol sobre el
mercurio en la rama derecha se vaporiza,
ocupando el bulbo superior.
Cuando la temperatura baja, ambos
líquidos se contraen, se condensa el vapor
de la rama derecha y empuja al mercurio
hacia abajo, pero no afecta al indicador,
que de esta manera queda marcando la
temperatura máxima.
Sin embargo, esto empuja al indicador de
la rama izquierda, elevándolo.
Cuando la temperatura vuelve a subir, el
indicador de la rama izquierda no vuelve a
bajar, registrando la temperatura mínima.
Fig 10.31 Termómetro de six comercial. http://www.metcheck.co.uk/a11.html
El aparato se resetea a través de un imán
dispuesto en la parte inferior quien
empuja a los indicadores hacia el menisco
de mercurio de cada rama.
Los termómetros de líquido presentan la
desventaja que dependen del líquido
termométrico debido a las diferencias
entre sus coeficientes de dilatación. Si se
toma un termómetro de mercurio y otro
de alcohol y se calibran sumergiéndolos
en agua y hielo en equilibrio y luego en
agua hirviendo, se tiene que las marcas
respectivas en los tubos de vidrio no
coinciden. Esta diferencia es aun más
notable en la medida en que la

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 388
temperatura sea mucho mas baja que 0ºC
o mucho más alta que 100ºC.
En el dibujo siguiente, se observa que el
51 de la escala del termómetro superior
corresponde al 55 de la escala del
termómetro inferior, debido a que la
dilatación de ambos fue distinta (por
supuesto, el dibujo exagera mucho el
efecto).
55
800 60
51
0
20
20
40
40 60 80
100
100
Fig 10.32 Substancias termométricas distintas producen escalas distintas.
10.8.6 Termómetro de Galileo.
Finalmente, no podemos olvidar el
magnífico termómetro de Galileo,
confeccionado en función del cambio de la
densidad de un líquido en función de la
temperatura.
Fig 10.33 http://store3.yimg.com/
Fig 10.34 http://www-toys.science.unitn.it/ Termómetro de Galileo.
El termómetro está confeccionado con un
tubo de vidrio transparente que contiene
un líquido en el que flotan burbujas de
vidrio llenas con un líquido coloreado,
provistas de una etiqueta con indicación
de la temperatura a la que se hunde.
En la medida en que la temperatura del
agua cambia, también lo hace su densidad.
Como las burbujas se han construido de
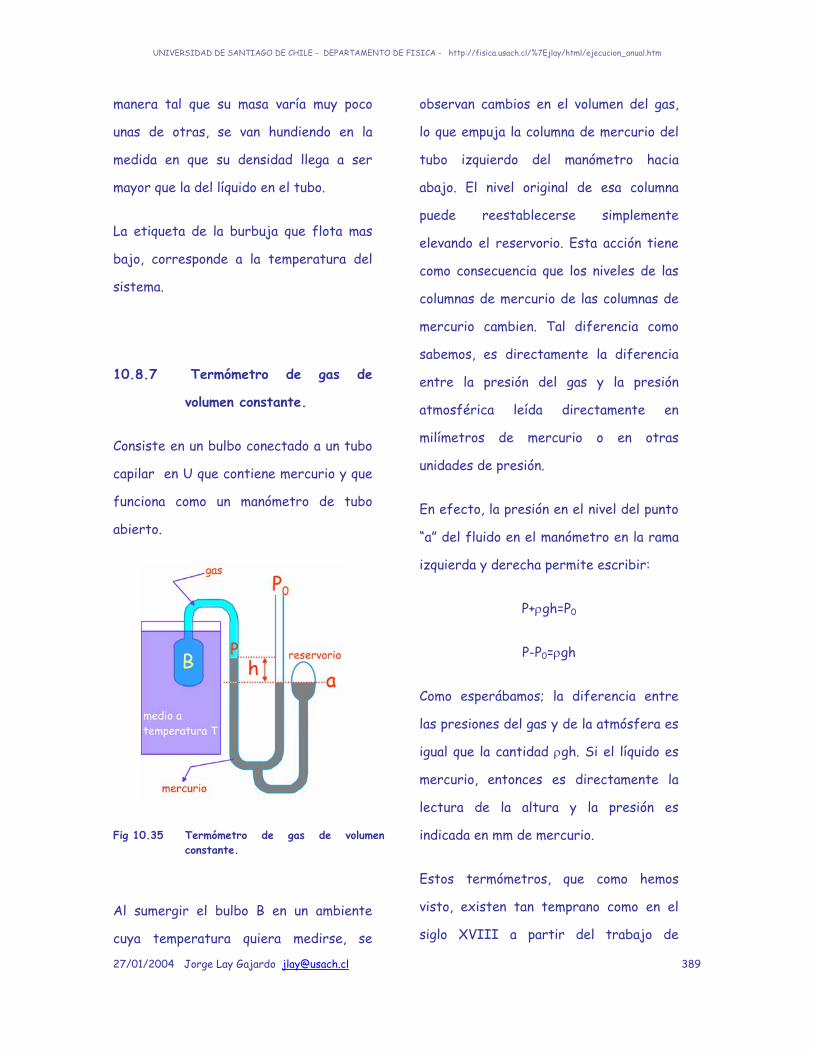
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 389
manera tal que su masa varía muy poco
unas de otras, se van hundiendo en la
medida en que su densidad llega a ser
mayor que la del líquido en el tubo.
La etiqueta de la burbuja que flota mas
bajo, corresponde a la temperatura del
sistema.
10.8.7 Termómetro de gas de
volumen constante.
Consiste en un bulbo conectado a un tubo
capilar en U que contiene mercurio y que
funciona como un manómetro de tubo
abierto.
Fig 10.35 Termómetro de gas de volumen constante.
Al sumergir el bulbo B en un ambiente
cuya temperatura quiera medirse, se
observan cambios en el volumen del gas,
lo que empuja la columna de mercurio del
tubo izquierdo del manómetro hacia
abajo. El nivel original de esa columna
puede reestablecerse simplemente
elevando el reservorio. Esta acción tiene
como consecuencia que los niveles de las
columnas de mercurio de las columnas de
mercurio cambien. Tal diferencia como
sabemos, es directamente la diferencia
entre la presión del gas y la presión
atmosférica leída directamente en
milímetros de mercurio o en otras
unidades de presión.
En efecto, la presión en el nivel del punto
“a” del fluido en el manómetro en la rama
izquierda y derecha permite escribir:
P+ρgh=P0
P-P0=ρgh
Como esperábamos; la diferencia entre
las presiones del gas y de la atmósfera es
igual que la cantidad ρgh. Si el líquido es
mercurio, entonces es directamente la
lectura de la altura y la presión es
indicada en mm de mercurio.
Estos termómetros, que como hemos
visto, existen tan temprano como en el
siglo XVIII a partir del trabajo de
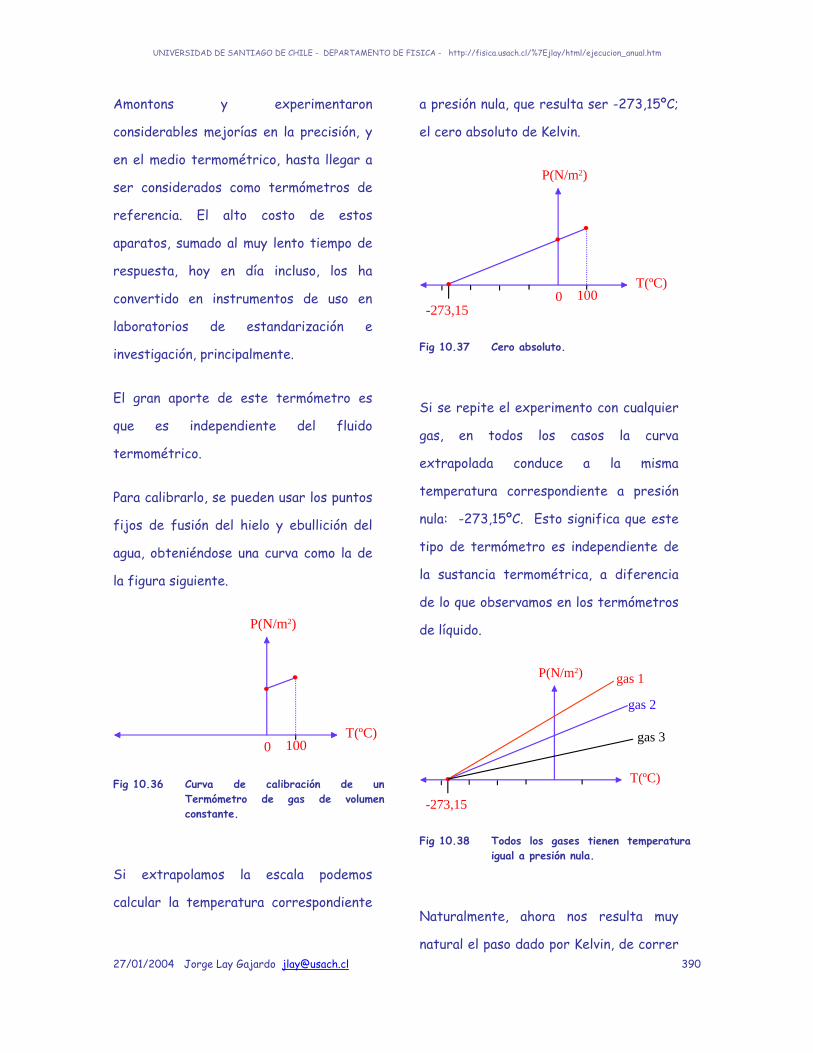
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 390
Amontons y experimentaron
considerables mejorías en la precisión, y
en el medio termométrico, hasta llegar a
ser considerados como termómetros de
referencia. El alto costo de estos
aparatos, sumado al muy lento tiempo de
respuesta, hoy en día incluso, los ha
convertido en instrumentos de uso en
laboratorios de estandarización e
investigación, principalmente.
El gran aporte de este termómetro es
que es independiente del fluido
termométrico.
Para calibrarlo, se pueden usar los puntos
fijos de fusión del hielo y ebullición del
agua, obteniéndose una curva como la de
la figura siguiente.
100
P(N/m2)
T(ºC)0
Fig 10.36 Curva de calibración de un Termómetro de gas de volumen constante.
Si extrapolamos la escala podemos
calcular la temperatura correspondiente
a presión nula, que resulta ser -273,15ºC;
el cero absoluto de Kelvin.
100
P(N/m2)
T(ºC)0
-273,15
Fig 10.37 Cero absoluto.
Si se repite el experimento con cualquier
gas, en todos los casos la curva
extrapolada conduce a la misma
temperatura correspondiente a presión
nula: -273,15ºC. Esto significa que este
tipo de termómetro es independiente de
la sustancia termométrica, a diferencia
de lo que observamos en los termómetros
de líquido.
P(N/m2)
T(ºC)
-273,15
gas 1
gas 2
gas 3
Fig 10.38 Todos los gases tienen temperatura igual a presión nula.
Naturalmente, ahora nos resulta muy
natural el paso dado por Kelvin, de correr
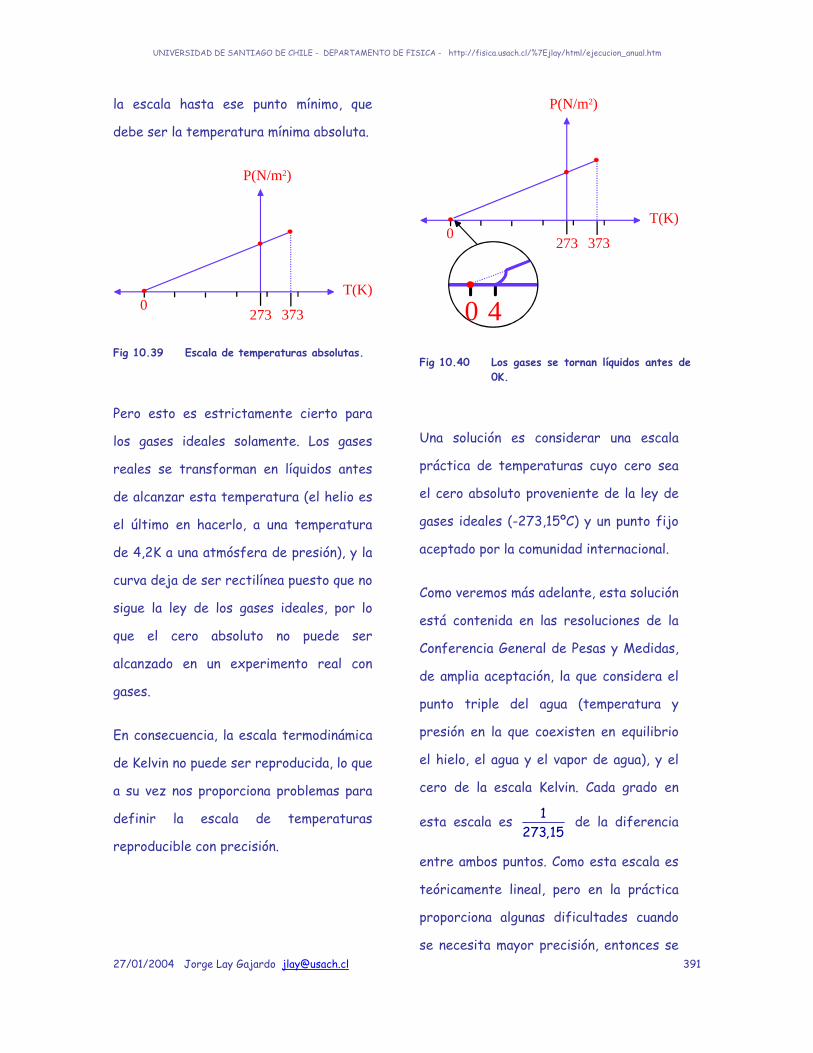
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 391
la escala hasta ese punto mínimo, que
debe ser la temperatura mínima absoluta.
373
P(N/m2)
T(K)0
273
Fig 10.39 Escala de temperaturas absolutas.
Pero esto es estrictamente cierto para
los gases ideales solamente. Los gases
reales se transforman en líquidos antes
de alcanzar esta temperatura (el helio es
el último en hacerlo, a una temperatura
de 4,2K a una atmósfera de presión), y la
curva deja de ser rectilínea puesto que no
sigue la ley de los gases ideales, por lo
que el cero absoluto no puede ser
alcanzado en un experimento real con
gases.
En consecuencia, la escala termodinámica
de Kelvin no puede ser reproducida, lo que
a su vez nos proporciona problemas para
definir la escala de temperaturas
reproducible con precisión.
373
P(N/m2)
T(K)0
273
0 4
Fig 10.40 Los gases se tornan líquidos antes de 0K.
Una solución es considerar una escala
práctica de temperaturas cuyo cero sea
el cero absoluto proveniente de la ley de
gases ideales (-273,15ºC) y un punto fijo
aceptado por la comunidad internacional.
Como veremos más adelante, esta solución
está contenida en las resoluciones de la
Conferencia General de Pesas y Medidas,
de amplia aceptación, la que considera el
punto triple del agua (temperatura y
presión en la que coexisten en equilibrio
el hielo, el agua y el vapor de agua), y el
cero de la escala Kelvin. Cada grado en
esta escala es 1273,15
de la diferencia
entre ambos puntos. Como esta escala es
teóricamente lineal, pero en la práctica
proporciona algunas dificultades cuando
se necesita mayor precisión, entonces se
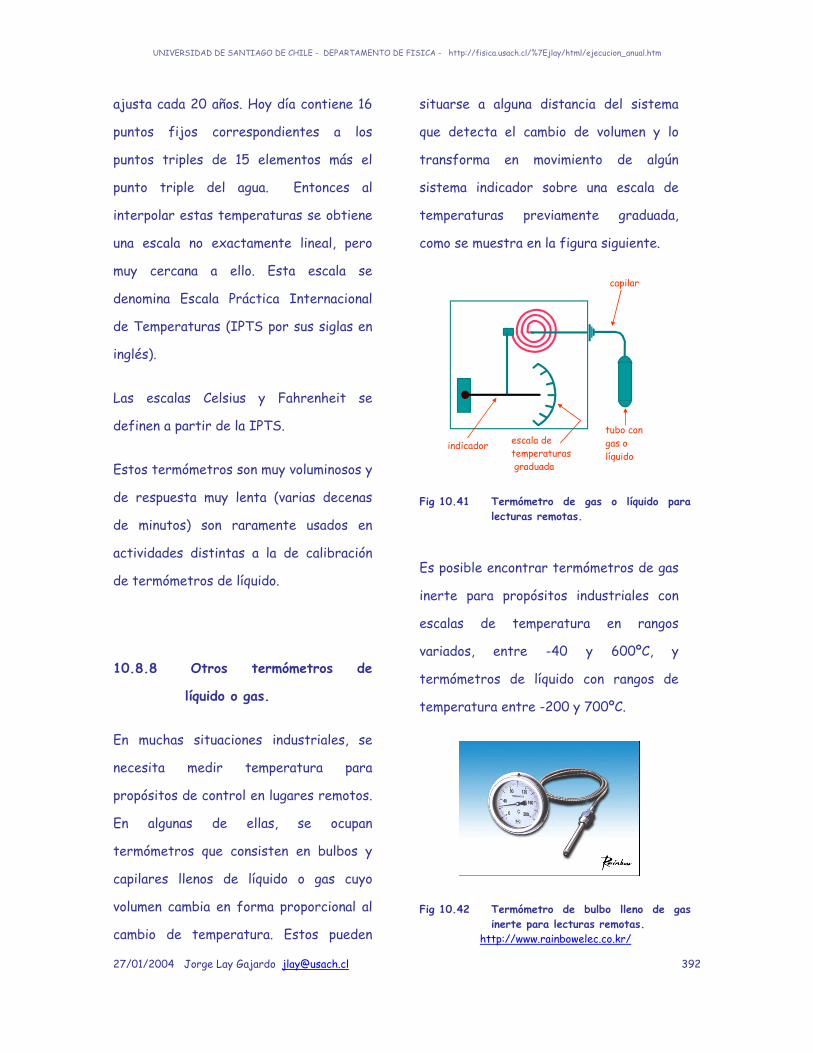
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 392
ajusta cada 20 años. Hoy día contiene 16
puntos fijos correspondientes a los
puntos triples de 15 elementos más el
punto triple del agua. Entonces al
interpolar estas temperaturas se obtiene
una escala no exactamente lineal, pero
muy cercana a ello. Esta escala se
denomina Escala Práctica Internacional
de Temperaturas (IPTS por sus siglas en
inglés).
Las escalas Celsius y Fahrenheit se
definen a partir de la IPTS.
Estos termómetros son muy voluminosos y
de respuesta muy lenta (varias decenas
de minutos) son raramente usados en
actividades distintas a la de calibración
de termómetros de líquido.
10.8.8 Otros termómetros de
líquido o gas.
En muchas situaciones industriales, se
necesita medir temperatura para
propósitos de control en lugares remotos.
En algunas de ellas, se ocupan
termómetros que consisten en bulbos y
capilares llenos de líquido o gas cuyo
volumen cambia en forma proporcional al
cambio de temperatura. Estos pueden
situarse a alguna distancia del sistema
que detecta el cambio de volumen y lo
transforma en movimiento de algún
sistema indicador sobre una escala de
temperaturas previamente graduada,
como se muestra en la figura siguiente.
escala detemperaturas graduada
indicador
capilar
tubo congas olíquido
Fig 10.41 Termómetro de gas o líquido para lecturas remotas.
Es posible encontrar termómetros de gas
inerte para propósitos industriales con
escalas de temperatura en rangos
variados, entre -40 y 600ºC, y
termómetros de líquido con rangos de
temperatura entre -200 y 700ºC.
Fig 10.42 Termómetro de bulbo lleno de gas inerte para lecturas remotas.
http://www.rainbowelec.co.kr/
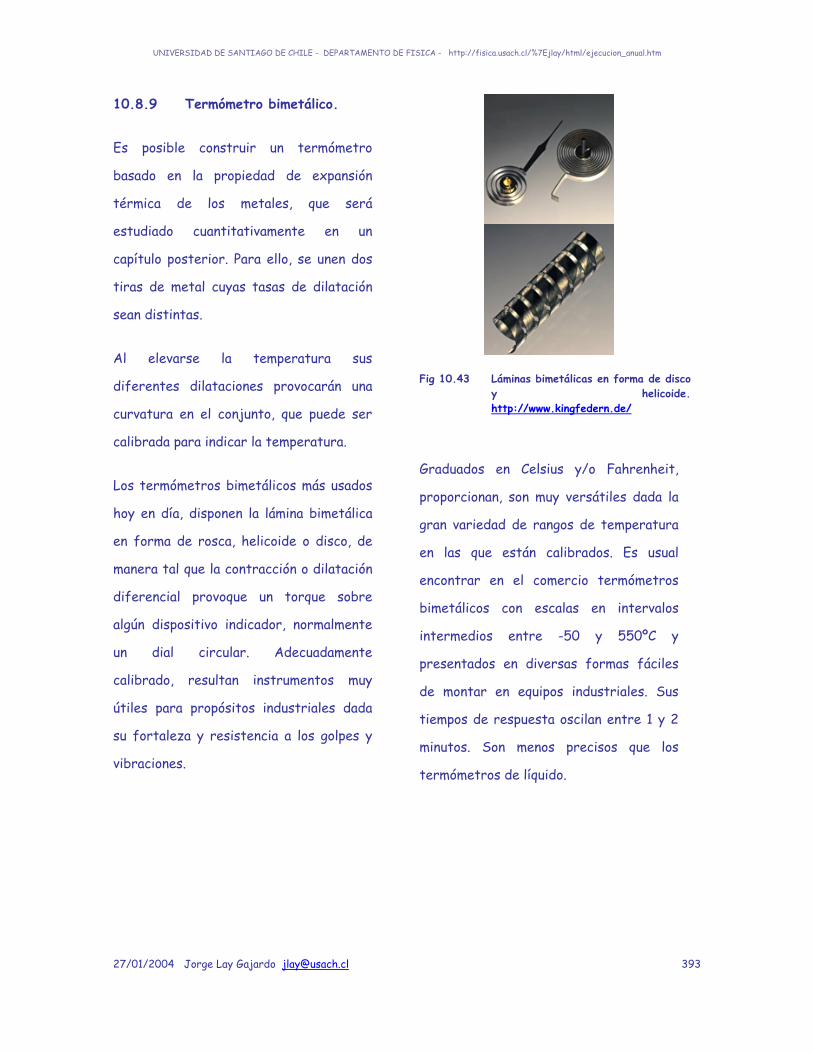
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 393
10.8.9 Termómetro bimetálico.
Es posible construir un termómetro
basado en la propiedad de expansión
térmica de los metales, que será
estudiado cuantitativamente en un
capítulo posterior. Para ello, se unen dos
tiras de metal cuyas tasas de dilatación
sean distintas.
Al elevarse la temperatura sus
diferentes dilataciones provocarán una
curvatura en el conjunto, que puede ser
calibrada para indicar la temperatura.
Los termómetros bimetálicos más usados
hoy en día, disponen la lámina bimetálica
en forma de rosca, helicoide o disco, de
manera tal que la contracción o dilatación
diferencial provoque un torque sobre
algún dispositivo indicador, normalmente
un dial circular. Adecuadamente
calibrado, resultan instrumentos muy
útiles para propósitos industriales dada
su fortaleza y resistencia a los golpes y
vibraciones.
Fig 10.43 Láminas bimetálicas en forma de disco y helicoide. http://www.kingfedern.de/
Graduados en Celsius y/o Fahrenheit,
proporcionan, son muy versátiles dada la
gran variedad de rangos de temperatura
en las que están calibrados. Es usual
encontrar en el comercio termómetros
bimetálicos con escalas en intervalos
intermedios entre -50 y 550ºC y
presentados en diversas formas fáciles
de montar en equipos industriales. Sus
tiempos de respuesta oscilan entre 1 y 2
minutos. Son menos precisos que los
termómetros de líquido.
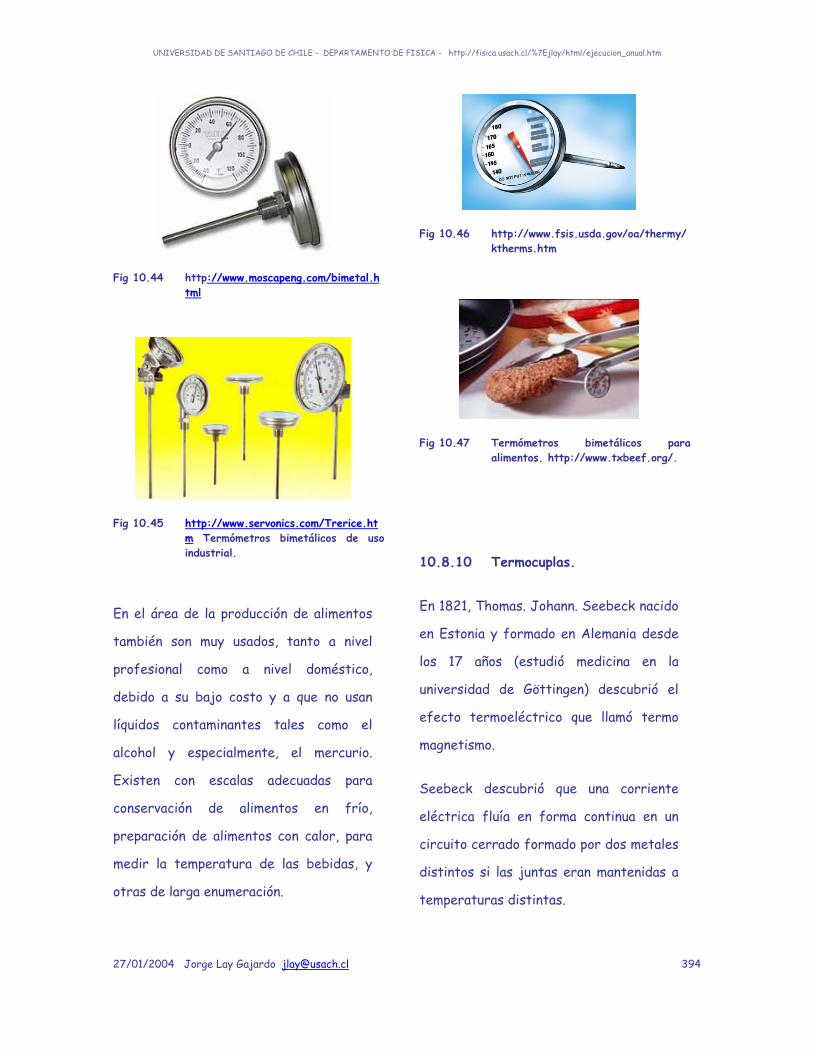
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 394
Fig 10.44 http://www.moscapeng.com/bimetal.html
Fig 10.45 http://www.servonics.com/Trerice.htm Termómetros bimetálicos de uso industrial.
En el área de la producción de alimentos
también son muy usados, tanto a nivel
profesional como a nivel doméstico,
debido a su bajo costo y a que no usan
líquidos contaminantes tales como el
alcohol y especialmente, el mercurio.
Existen con escalas adecuadas para
conservación de alimentos en frío,
preparación de alimentos con calor, para
medir la temperatura de las bebidas, y
otras de larga enumeración.
Fig 10.46 http://www.fsis.usda.gov/oa/thermy/ktherms.htm
Fig 10.47 Termómetros bimetálicos para alimentos. http://www.txbeef.org/.
10.8.10 Termocuplas.
En 1821, Thomas. Johann. Seebeck nacido
en Estonia y formado en Alemania desde
los 17 años (estudió medicina en la
universidad de Göttingen) descubrió el
efecto termoeléctrico que llamó termo
magnetismo.
Seebeck descubrió que una corriente
eléctrica fluía en forma continua en un
circuito cerrado formado por dos metales
distintos si las juntas eran mantenidas a
temperaturas distintas.
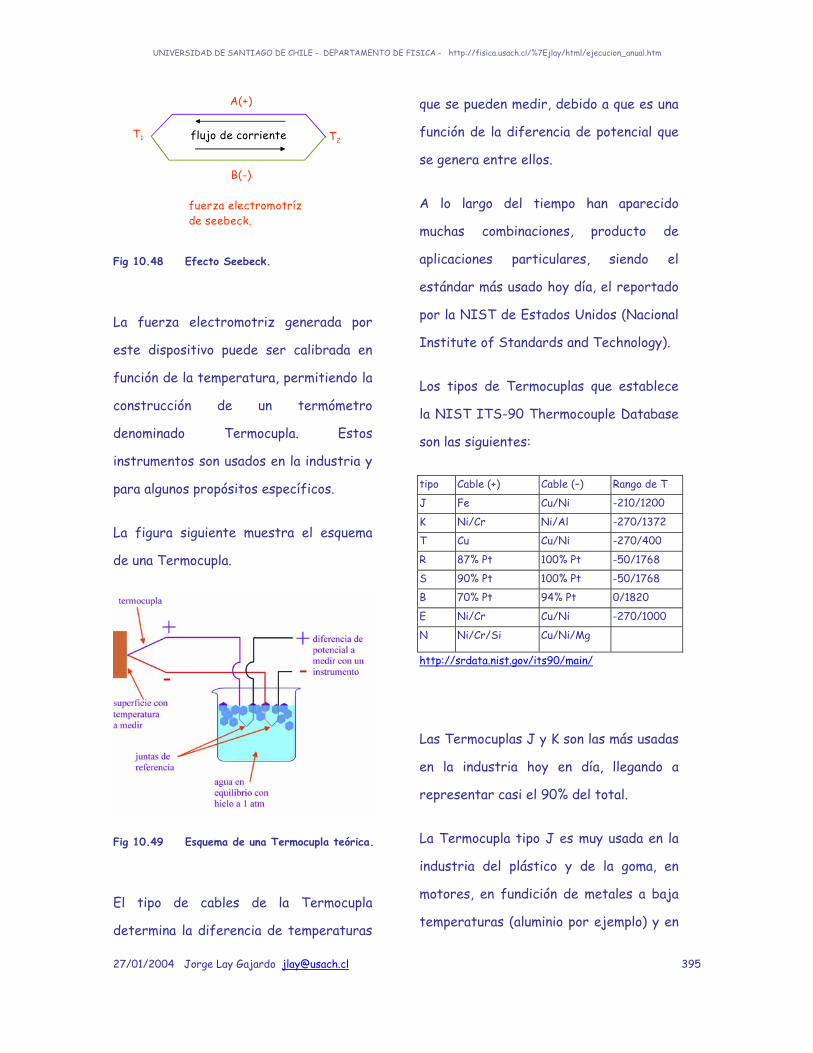
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 395
T1 T2
A(+)
B(-)
fuerza electromotríz de seebeck.
flujo de corriente
Fig 10.48 Efecto Seebeck.
La fuerza electromotriz generada por
este dispositivo puede ser calibrada en
función de la temperatura, permitiendo la
construcción de un termómetro
denominado Termocupla. Estos
instrumentos son usados en la industria y
para algunos propósitos específicos.
La figura siguiente muestra el esquema
de una Termocupla.
Fig 10.49 Esquema de una Termocupla teórica.
El tipo de cables de la Termocupla
determina la diferencia de temperaturas
que se pueden medir, debido a que es una
función de la diferencia de potencial que
se genera entre ellos.
A lo largo del tiempo han aparecido
muchas combinaciones, producto de
aplicaciones particulares, siendo el
estándar más usado hoy día, el reportado
por la NIST de Estados Unidos (Nacional
Institute of Standards and Technology).
Los tipos de Termocuplas que establece
la NIST ITS-90 Thermocouple Database
son las siguientes:
tipo Cable (+) Cable (–) Rango de T
J Fe Cu/Ni -210/1200
K Ni/Cr Ni/Al -270/1372
T Cu Cu/Ni -270/400
R 87% Pt 100% Pt -50/1768
S 90% Pt 100% Pt -50/1768
B 70% Pt 94% Pt 0/1820
E Ni/Cr Cu/Ni -270/1000
N Ni/Cr/Si Cu/Ni/Mg
http://srdata.nist.gov/its90/main/
Las Termocuplas J y K son las más usadas
en la industria hoy en día, llegando a
representar casi el 90% del total.
La Termocupla tipo J es muy usada en la
industria del plástico y de la goma, en
motores, en fundición de metales a baja
temperaturas (aluminio por ejemplo) y en

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 396
general, en procesos en los que el sensor
está sometida a vibraciones. Usualmente
el cable de Cu/Ni es de una aleación
denominada Constantan (Cu57Ni43 más la
adición de pequeños porcentajes de Mn y
de Fe) cuya composición depende de la
aplicación.
La Termocupla tipo K es muy usada en
hornos, en fundición de metales a altas
temperaturas (inferiores a 1300ºC, como
el cobre por ejemplo) no ferrosos, y en
lugares en que se necesitan sensores
delgados (pulpa de fruta por ejemplo)
Las Termocuplas Tipos R, S y B son
ocupadas casi exclusivamente en la
industria siderúrgica.
Las Termocuplas tipo T son ocupadas en
la industria de alimentos, aunque hoy en
día estas han empezado a ocupar
sistemas PT100, los que serán tratados
más adelante.
En el mercado se encuentra una gran
variedad de Termocuplas, las que
básicamente siguen el esquema que se
observa en la figura 11.38. Estos
instrumentos cuentan con un dispositivo
que proporciona una temperatura de
referencia controlada electrónicamente,
que debe ser calibrada periódicamente y
con un dispositivo que soluciona el
problema de la no linealidad de la
respuesta eléctrica al cambio en la
temperatura.
Fig 10.50 Esquema de una Termocupla usual.
La figura 11.39 muestra algunas
Termocuplas de los tipos más usados. No
se aprecian en la foto los sensores que
contienen la junta de medición
Fig 10.51 Termocuplas J, K y T. http://www.process-controls.com/cyronix/
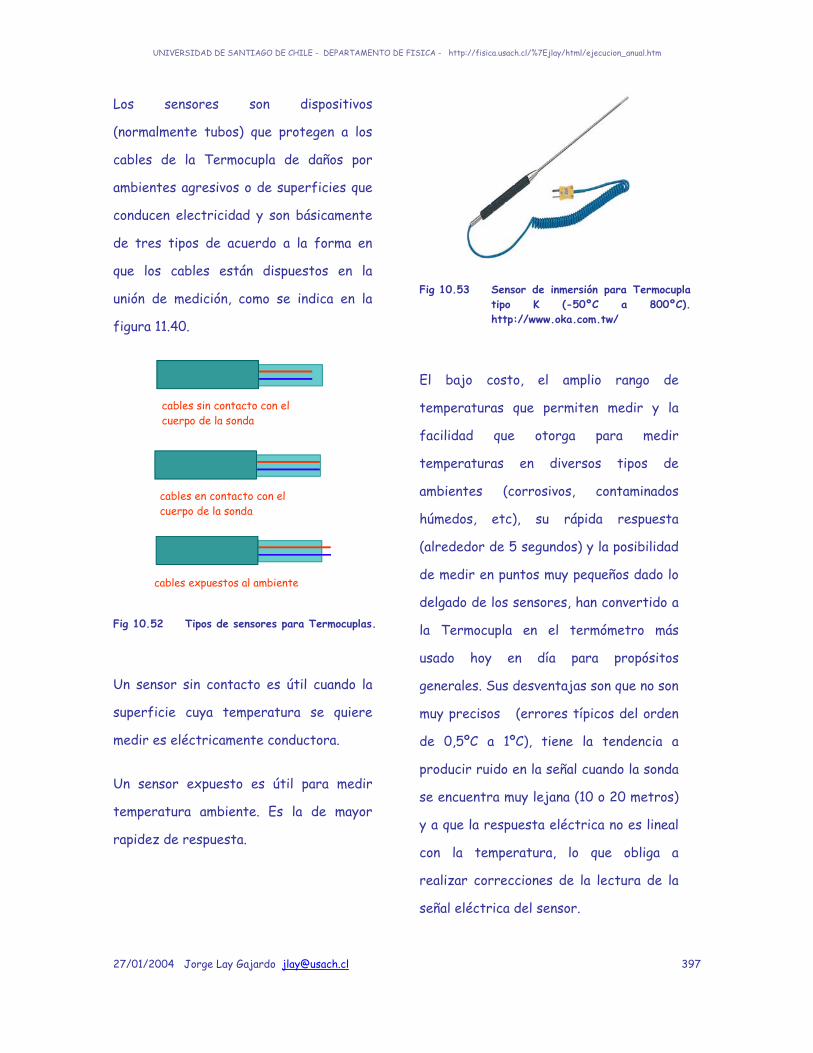
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 397
Los sensores son dispositivos
(normalmente tubos) que protegen a los
cables de la Termocupla de daños por
ambientes agresivos o de superficies que
conducen electricidad y son básicamente
de tres tipos de acuerdo a la forma en
que los cables están dispuestos en la
unión de medición, como se indica en la
figura 11.40.
cables sin contacto con elcuerpo de la sonda
cables en contacto con elcuerpo de la sonda
cables expuestos al ambiente
Fig 10.52 Tipos de sensores para Termocuplas.
Un sensor sin contacto es útil cuando la
superficie cuya temperatura se quiere
medir es eléctricamente conductora.
Un sensor expuesto es útil para medir
temperatura ambiente. Es la de mayor
rapidez de respuesta.
Fig 10.53 Sensor de inmersión para Termocupla tipo K (-50ºC a 800ºC). http://www.oka.com.tw/
El bajo costo, el amplio rango de
temperaturas que permiten medir y la
facilidad que otorga para medir
temperaturas en diversos tipos de
ambientes (corrosivos, contaminados
húmedos, etc), su rápida respuesta
(alrededor de 5 segundos) y la posibilidad
de medir en puntos muy pequeños dado lo
delgado de los sensores, han convertido a
la Termocupla en el termómetro más
usado hoy en día para propósitos
generales. Sus desventajas son que no son
muy precisos (errores típicos del orden
de 0,5ºC a 1ºC), tiene la tendencia a
producir ruido en la señal cuando la sonda
se encuentra muy lejana (10 o 20 metros)
y a que la respuesta eléctrica no es lineal
con la temperatura, lo que obliga a
realizar correcciones de la lectura de la
señal eléctrica del sensor.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 398
Fig 10.54 Termocupla, con rango entre-50 y 400ºC. http://www.hotektech.com/Tes915_922_935.htm
10.8.11 Termómetros de resistencia.
Conocidos como RTD (Resistance
Temperatura Detectors), fueron
desarrollados por Sir William Siemens en
1871, quien encontró que la resistencia
eléctrica de un conductor de Platino
cambia linealmente con la temperatura en
términos relativamente uniforme en un
amplio rango.
Siemens nació en Prusia con el nombre de
Karl Wilhelm Siemens en 1823 y emigró a
Inglaterra en 1844, anglicanizando su
nombre por Charles William. Su trabajo
fue notable en metalurgia y en
electricidad, siendo nombrado Caballero
en 1883 por su contribución a las ciencias
y a la ingeniería.
Fig 10.55 Sir William Siemens.
El Platino es un metal que no se oxida a
altas temperaturas y constituye un
elemento termométrico altamente
confiable entre -260 y 1235ºC.
La alta precisión que puede alcanzarse
con termómetros de platino, la mayor
entre los termómetros comercialmente
disponibles, hizo que fuera usado por el
Comité General de Pesos y Medidas para
la IPTS en 1968 para definir la
temperatura entre el punto triple del
hidrógeno (259,34ºC) y el punto de
congelamiento de la plata (961,78 ºC)
En la industria, los RTD son preferidos a
las Termocuplas debido a su precisión
(aún cuando son de respuesta más lenta),
para medir temperaturas entre -200ºC y
850ºC. No necesitan mecanismos de
corrección a la respuesta eléctrica y son

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 399
estables hasta el punto en que pueden
introducirse en un medio cuya
temperatura sea 300ºC mayor que la del
medio desde el que provenía y repetir el
cambio 40 o 50 veces, sufriendo errores
de lectura del orden de solo 0,02ºC.
La precisión de los RTD viene dada en
términos de % de error en la lectura de la
resistencia eléctrica en función de la
temperatura de trabajo, debido a que los
errores provienen fundamentalmente de
los cables conductores de la señal hacia el
instrumento de medición de la resistencia
y del autocalentamiento que estos sufren.
La IEC (International Electrotechnical
Comisión de Estados Unidos) reporta
para RTD clase B una resistencia
eléctrica nominal de 100 ohm ± 0,12%
para 0ºC.
Se encuentran disponibles en el comercio
RTD de platino (lejos el más usado),
cobre y Níquel (aunque se observan
últimamente otros materiales), debido a
la pureza con que se fabrican estos
metales en la industria, propiedad
fundamental para la respuesta con la
temperatura. Además con estos metales
pueden elaborarse cables muy delgados,
indispensable para la construcción de
termómetros con sensores para distintas
aplicaciones.
Son construidos, con medidores de
resistencia eléctrica y sensores con
cables de los metales citados
anteriormente, con formas distintas para
aplicaciones particulares.
Fig 10.56 Termómetro de resistencia con sensor de platino (-200ºC hasta 300ºC con precisión de 0,1ºC). http://www.topac.com/thermcontactPT.html
Fig 10.57 Sensores RTD para diferentes aplicaciones
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 400
10.8.12 El termómetro de
resistencia de Germanio
(GRT) permite medir temperaturas en
rangos tan bajos como entre 0,05K y
100K con iguales características de
estabilidad y precisión y posibilidad de
producir sensores de dimensiones muy
pequeñas, como las necesarias en
criogenia (estudio de materiales a
temperaturas muy bajas) que los de
Platino.
La NIST lo adoptó como Standard
Primario para temperaturas entre 2K y
20K en la norma ITS-90.
Resulta sorprendente como estos
sensores son calibrados año a año sin
experimentar cambios.
La fragilidad de algunos elementos usados
en los RTD, que los hacía desventajosos
frente a las Termocuplas en lugares
donde existen vibraciones o impactos han
motivado el desarrollo de elementos RTD
denominado “de película delgada” (Thin
film), que consiste en depositar una
película de Platino en un sustrato,
normalmente de material cerámico,
mediante técnicas eléctricas de alto
vacío. Esto ha permitido construir
sensores RTD mucho más versátiles,
mucho más baratos y de formas que antes
constituían la ventaja mayor de las
Termocuplas para algunas aplicaciones,
desplazándolas rápidamente.
10.8.13 Termistores.
Son básicamente termómetros
construidos con materiales
semiconductores (de bajo costo en el
mercado actual) cuya resistencia
eléctrica es mucho más sensitiva a los
cambios de la temperatura que la de los
RTD. La palabra termistor proviene de la
expresión ”thermally sensitive resistor
(thermistor)”.
Su desarrollo teórico fue publicada por
los oceanógrafos Steinhart y Hart en
"Deep Sea Research" vol. 15 p. 497
(1968).
Fig 10.58 Termistores. http://www.ussensor.com

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 401
Existen termistores con coeficiente
resistencia/temperatura positivos (PTC)
es decir aquellos cuya resistencia
eléctrica aumenta con el aumento de la
temperatura y Termistores con
coeficiente negativo (NTC) los que
disminuyen su resistencia con el aumento
de la temperatura.
Termistores NTC son construidos con
óxidos de metales de transición
(Manganeso, Cobalto, Cobre y Niquel)
permiten medir rangos de temperaturas
entre -200ºC y 1000ºC en rangos amplios.
Termistores PTC son construidos con
Titanato de Bario y son muy buenos
cuando se requiere de un drástico cambio
en la resistencia a una temperatura
específica (como la necesaria en
protecciones eléctricas o en alarmas
contra incendios).
Fig 10.59 Relay para protección de motor, con termistor. www.ad.siemens.de
Debido a que los Termistores tienen
respuestas muy poco lineales, son
construidos para medir rangos de
temperatura estrechos (aunque esto
puede ser solucionado cuando se les
integra en circuitos puente). Esto les hizo
en sus inicios poco competitivos en la
industria, sumado a la desventaja de la
rápida descalibración a altas
temperaturas debida a su estructura
semiconductora y a su fragilidad, lo que
no le permite trabajar en zonas de
vibraciones o impactos.
Sin embargo, la aparición de
microcontroladores compactos y baratos
en el mercado, y de instrumentación
electrónica muy versátil los ha
posicionado en aplicaciones en rápido
aumento. Hoy es posible encontrar
termistores NTC en sistemas de control
industrial que requieren mediciones de la
temperatura muy precisas, en
componentes de sistemas de display, en
tarjetas de computadores, entre otros.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 402
Fig 10.60 Tarjeta Iwill VD133 PRO con termistor. http://www.overclockers.com
Por otra parte, mejoras tecnológicas
obtenidas en los últimos tiempos en la
construcción de termistores NTC los han
ubicado en aplicaciones críticas de la
industria médica, de instrumentación
científica, militar y aeroespacial, con gran
éxito. Incluso se han desarrollado
termistores que permiten medir la
temperatura del interior del cuerpo
humano y de los alimentos en su
elaboración, debido a su precisión
(+/- 0,02ºC, mejor que los RTD y mucho
mejor que las Termocuplas), costos
accesibles, rápida respuesta y a la
ausencia de sustancias nocivas para la
salud humana en sus componentes.
Fig 10.61 Termistores libres de plomo usados en la compensación de la temperatura en circuitos de teléfonos celulares. www.mmc.co.jp
Fig 10.62 Termistor para carnes en forma de tenedor http://www.pueblo.gsa.gov/cic_text/food
10.8.14 Termómetros de circuito
integrado.
Los sensores más nuevos son aquellos
construidos con transistores de Silicio y
Germanio.
Si dos transistores trabajan a tasas
constantes, entonces la diferencia entre
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 403
los voltajes de base emitidos por ambos
será lineal. Este voltaje puede ser
convertido a corriente por un resistor de
película delgada, la que resulta
directamente proporcional a la
temperatura absoluta en Kelvin.
Las ventajas de este sensor es que la
respuesta en la corriente eléctrica es
absolutamente lineal con el cambio de la
temperatura; que puede ser usado con
sensores remotos de larga distancia
debido a que los cables de extensión no
afectan a la lectura de la corriente
eléctrica; son extraordinariamente
precisos, de bajo costo y fácilmente
integrables en circuitos de otros
aparatos.
La principal desventaja es que solo
permiten escalas termométricas en
rangos muy estrechos, con límite máximo
menor a 150ºC .
10.8.15 Termómetros de radiación.
Basados en la propiedad de que la materia
emite radiación electromagnética cuya
distribución espectral es determinada
por la temperatura, existen distintos
termómetros que son denominados
genéricamente termómetros de radiación
(pirómetros).
La teoría que sustenta esta afirmación
está fuera de los límites de este curso,
fue desarrollada por Stefan, Boltzman,
Planck y Einstein, entre otros.
En términos muy generales, si se dispone
un cuerpo en un recipiente cerrado y se
espera que se logre el equilibrio térmico,
al abrir un orificio existe una emisión de
una onda electromagnética, cuya energía
está distribuida en una banda específica
de longitudes de onda con distintas
intensidades (espectro
electromagnético). La forma de esta
curva de distribución de la energía en
función de la longitud de onda es
característica de cada temperatura.
La figura 10.63 muestra las curvas
teóricas correspondientes al espectro de
radiación electromagnética emitida por un
cuerpo negro ideal, usadas como base de
calibración de los termómetros de
radiación.
El cuerpo negro ideal es capaz de
absorber la totalidad de la energía que
recibe y es capaz de emitir la totalidad
de la energía que dispone, es decir su
emisividad es 1,0.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 404
ultravioleta infrarojo
longitud de onda en µm
ener
gía
radi
ada
para
c/l
ong.
de
onda visible
2000K
1750K
1500K
1250K
1 2 3 4 5
long. de onda máxima
curva de intensidadpara cadatemperatura
Fig 10.63 Espectro de radiación de un cuerpo negro.
Los cuerpos reales tienen emisividades
menores que 1,0. Emisividad de 0,6
significa que radia el 60% de la energía
emitida por un cuerpo negro. La
emisividad de la superficie del cuerpo
cuya temperatura quiere medirse debe
ser conocida para ajustar la respuesta
del termómetro de radiación.
El medio existente entre el detector de
radiación y el cuerpo cuya temperatura
quiere medirse proporciona otra
dificultad, puesto que su patrón propio de
radiación altera la medición. El
instrumento debe tener un mecanismo
que permita corregir este fenómeno.
El avance en la electrónica y en la
microelectrónica hoy permite construir
equipos y detectores en bandas
estrechas de gran precisión, bajo costo y
de muy rápida respuesta. La emisividad
real se mide actualmente con un láser y
un dispositivo electrónico especial.
Esto ha significado un gran aumento en el
número de aplicaciones para estos
equipos, que hasta no hace mucho tiempo
eran considerados aptos solo para medir
desde lugares remotos las altas
temperaturas de sistemas agresivos para
los restantes instrumentos (hornos de
fusión de metales por ejemplo) y cuyo
espectro ofrecía radiación en el rango de
la luz visible. Hoy se pueden medir con
ellos la temperatura de objetos en
movimiento, de dimensiones pequeñas e
incluso la temperatura del cuerpo humano
o de sistemas que emiten fuera del rango
visible.
Fig 10.64 Termómetro infrarrojo para medir temperatura en el oído. Rápida y precisa lectura, Libre de mercurio.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 405
En el mercado pueden encontrarse
equipos que oscilan entre aquellos que
detectan radiación en banda ancha,
bandas angostas, multicanales, en
longitudes de onda visible o infrarrojas,
con medidor de emisividad laser, con
calibradores de cuerpo negro o de
emitancia, algunos de los cuales son
descritos en las figuras siguientes.
Fig 10.65 Pirómetro óptico de banda angosta con detector de emisividad láser. Temperaturas entre 740ºC y 1538ºC. longitud de onda central:0,9 m. Precisión:+/- 3ºC. Aplicación: hornos de procesos industriales y de secado. http://www.quantumlogic.com
Fig 10.66 Pirómetro óptico. Banda: 0,4µm a 1,65 µm. Tiempo de respuesta: regulable entre 0,1s y 30s. Temperaturas entre 300ºC y 3000ºC. http://www.thermoest.com
Fig 10.67 Pirómetro infrarrojo para medir temperatura de combustión de madera en hornos. Temperaturas entre 25ºF y750ºF. Con dispositivo Láser. http://www.mugnaini.com
Fig 10.68 Pirómetro infrarrojo con control de emisividad manual. Temperaturas entre -30ºC y 100ºC. Precisión:+/- 5ºC. Tiempo de respuesta: menos de 1segundo. http://www.ossgeo.unimo.it
Fig 10.69 Termómetro infrarrojo de oído. 0,1s a 0,3s de tiempo de respuesta. Precisión:+/-0,1ºC. http://www.hyperphysics.phy-astr.gsu.edu

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 406
Fig 10.70 Lámpara Standard de carbono del laboratorio de calibración Leeds & Northrup's para temperaturas entre 2000°C - 3538°C
Fig 10.71 Fuente esférica de calibración de emitancia Isotech para pirómetros infrarrojos.
10.9 Ecuaciones de los gases ideales.
La escala de temperaturas absolutas de
Kelvin permite formular de manera muy
simple las relaciones entre las variables
que gobiernan el comportamiento de los
gases ideales, como se relatan
brevemente a continuación.
10.9.1 Ley de Boyle:
Si la temperatura es constante, entonces
se tiene que la cantidad PV de un sistema
compuesto por n moles de un gas ideal es
constante.
Como una consecuencia de lo anterior, se
tiene que: si el proceso para pasar desde
el estado E0 caracterizado por P0 y V0
hasta el estado E1 caracterizado por P1 y
V1 es isotérmico, entonces se tiene que:
P0V0=P1V1
Gráficamente, dado que PV=cte es la
ecuación de una hipérbola, se tiene:
P0
P1
V1V0
V
P
E0
E1
Isoterma T0
Fig 10.72 Isotermas. Curvas asintóticas a los ejes que representan estados de un gas ideal en un proceso a temperatura constante.
Aquí se observa claramente la relación
inversamente proporcional de la presión y
el volumen cuando el proceso es
isotérmico.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 407
10.9.2 1º Ley de Gay Lussac o ley
de Charles:
Si la presión es constante entonces se
encuentra que la variación del volumen
(∆V) de un gas compuesto de n moles
depende de la variación de la
temperatura (∆T) y del volumen inicial
(V0) de la siguiente forma:
∆V α ∆T
∆V α V0
Ambos hechos experimentales permiten
encontrar las relaciones:
∆V = k ∆T
∆V = k V0
de donde se obtiene:
∆V = k V0 ∆T
que se puede escribir como:
V - V0 = k V0 ∆T
V = V0 + k V0 ∆T
Con k= β, denominado coeficiente de
dilatación a presión constante del gas.
Entonces:
V=V0[1+β (Τ−Τ0)]
Donde V0 es el volumen a la temperatura
T0. Si T0 = 0, entonces β = β0 y la función
se convierte en:
V=V0[1+β0Τ]
Experimentalmente se encontró que para
presión constante muy baja (gas ideal) el
valor de β0 es igual para todos los gases:
01 10,003660
ºC 273⎡ ⎤β = ≈⎢ ⎥⎣ ⎦
Entonces se tiene:
0
0
TV V 1273
273 TV V273
⎡ ⎤= +⎢ ⎥⎣ ⎦+⎡ ⎤= ⎢ ⎥⎣ ⎦
0
V 273 TV 273
+⎡ ⎤= ⎢ ⎥⎣ ⎦
Pero 273+T es la temperatura absoluta
en Kelvin y 273 es T0, entonces:
0 0
V TV T
=
Note que en esta expresión T y T0 son
temperaturas absolutas.
Gráficamente:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 408
T0 T1
V1
V0
V(m3)
T(K)E0
E1
Isobara P0
0
Fig 10.73 Diagrama V/T para proceso isobárico.
Aquí se observa claramente que el
volumen que ocupa un gas ideal es
directamente proporcional a su
temperatura absoluta cuando el proceso
es isobárico (Presión constante).
Note que la extrapolación de la curva
permite calcular el valor que debería
tener el gas cuando el volumen sea cero,
es decir, el cero absoluto de Kelvin, pero
ni Charles ni Gay Lussac disponían de
instrumentos muy precisos y obtenían
valores muy distintos para cada gas.
10.9.3 2º Ley de Gay Lussac.
Si el volumen es constante entonces se
encuentra que la variación de la presión
(∆P) de un gas compuesto de n moles
depende de la variación de la
temperatura (∆T) y de la presión inicial
(P0) de la siguiente forma:
∆P α ∆T
∆P α P0
Ambos hechos experimentales permiten
encontrar las relaciones:
∆P = k` ∆T
∆P = k` P0
de donde se obtiene:
∆P = k` P0 ∆T
Que se puede escribir como:
P - P0 = k`P0 ∆T
P = P0 + k`P0 ∆T
Con k`= β`, denominado coeficiente de
dilatación a volumen constante del gas.
Entonces:
P=P0[1+β`(Τ−Τ0)]
Experimentalmente se encontró que
β = β` para todos los gases reales a
presiones bajas.
En esta expresión P0 es presión a la
temperatura T0. Si T0 = 0, entonces
β` = β0`1
273≈ y la función se convierte
en:
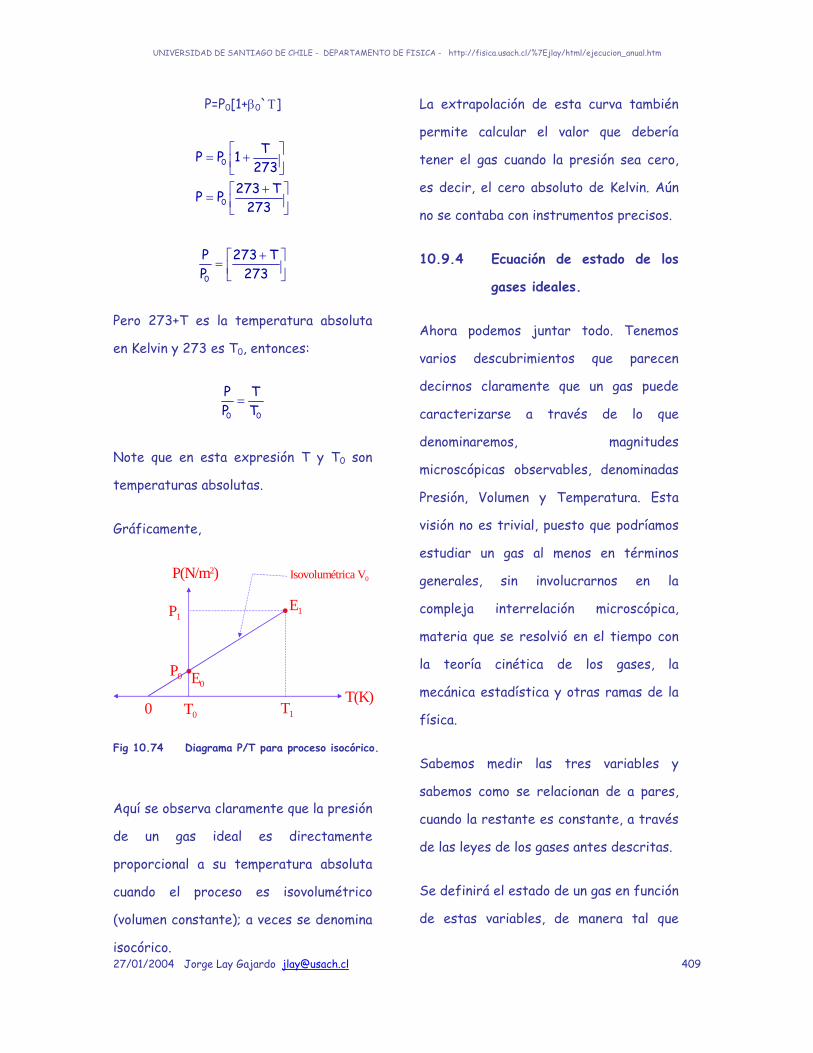
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 409
P=P0[1+β0`Τ]
0
0
TP P 1273
273 TP P273
⎡ ⎤= +⎢ ⎥⎣ ⎦+⎡ ⎤= ⎢ ⎥⎣ ⎦
0
P 273 TP 273
+⎡ ⎤= ⎢ ⎥⎣ ⎦
Pero 273+T es la temperatura absoluta
en Kelvin y 273 es T0, entonces:
0 0
P TP T
=
Note que en esta expresión T y T0 son
temperaturas absolutas.
Gráficamente,
T0 T1
P1
P0
P(N/m2)
T(K)E0
E1
Isovolumétrica V0
0
Fig 10.74 Diagrama P/T para proceso isocórico.
Aquí se observa claramente que la presión
de un gas ideal es directamente
proporcional a su temperatura absoluta
cuando el proceso es isovolumétrico
(volumen constante); a veces se denomina
isocórico.
La extrapolación de esta curva también
permite calcular el valor que debería
tener el gas cuando la presión sea cero,
es decir, el cero absoluto de Kelvin. Aún
no se contaba con instrumentos precisos.
10.9.4 Ecuación de estado de los
gases ideales.
Ahora podemos juntar todo. Tenemos
varios descubrimientos que parecen
decirnos claramente que un gas puede
caracterizarse a través de lo que
denominaremos, magnitudes
microscópicas observables, denominadas
Presión, Volumen y Temperatura. Esta
visión no es trivial, puesto que podríamos
estudiar un gas al menos en términos
generales, sin involucrarnos en la
compleja interrelación microscópica,
materia que se resolvió en el tiempo con
la teoría cinética de los gases, la
mecánica estadística y otras ramas de la
física.
Sabemos medir las tres variables y
sabemos como se relacionan de a pares,
cuando la restante es constante, a través
de las leyes de los gases antes descritas.
Se definirá el estado de un gas en función
de estas variables, de manera tal que

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 410
cuando se encuentre en el estado E0 , las
variables de ese estado serán (P0,V0,T0).
En adelante se llamará variable de estado
a todas aquellas que no dependan de la
forma en que llegó el gas a él.
Consideremos que disponemos de una
cantidad de gas cuya masa es m, que
contiene n moles, en el estado E1
(P0,V0,T0), confinado en un recipiente
cuyo volumen puede modificarse mediante
un mecanismo controlado. Suponga
además que P0=1atm y T0=0ºC
(denominadas condiciones normales de
temperatura y presión). Entonces
mediante un proceso a presión constante
se va hasta el estado E3(P0,V3,T) y luego
mediante un proceso a temperatura
constante, hasta el estado E2 (P,V,T),
según se observa en la gráfica de la
figura siguiente.
P0
P
V3V0
V
P
E2
E1
Isoterma T0
V
Isoterma T
E3
Fig 10.75 Diagrama P/V para cambio de estado compuesto de un proceso isobárico seguido de un proceso isotérmico.
El proceso E1E3 es isobárico por lo que
está gobernado por la ley Charles o de
Gay Lussac, con T0=0ºC, P0=1atm:
V3=V0(1+β0T) (1)
El proceso E3E2 es un proceso isotérmico
a la temperatura T, gobernado por la Ley
de Boyle:
P0V3=PV (2)
Reemplazando (1) en (2), se obtiene:
P0V0(1+β0T)=PV
Que se puede expresar como:
0 0 00
1PV P V ( T)= β +β
y como 01
273β =
0 0 0PV P V (273 T)= β +
Donde 273+T es la temperatura absoluta
en la escala Kelvin, de modo que:
0 0 0PV P V T= β
En esta expresión la cantidad P0V0β0 es
una constante, pues V0 es el volumen del
gas en el estado E1, bajo cuyas
condiciones y de acuerdo a la ley de
Avogadro es 22,4 litros por cada mol para
cualquier gas.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 411
Esta constante, que se le denomina
“constante universal de los gases ideales”
(R), se puede calcular fácilmente:
( )0 0 0litros 1P V 1atm 22,4mol 273K
atm ltR 0,082mol K
⎛ ⎞⎛ ⎞β = ⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
⎡ ⎤= ⎢ ⎥⎣ ⎦
En el sistema internacional de unidades,
se tiene:
3 33
0 0 0 2N 10 m 1P V 101,3x10 22,4xm mol 273K
JR 8,31mol K
−⎛ ⎞⎛ ⎞ ⎛ ⎞β = ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠⎡ ⎤= ⎢ ⎥⎣ ⎦
Como tenemos n moles, entonces podemos
escribir:
PV nRT
=
O, de la forma más conocida:
PV nRT=
Conocida como ecuación de estado de los
gases ideales.
Note que si se cuenta con un gas ideal
cuya masa no cambia (número de moles
constante), entonces las coordenadas
P,V,T, en un proceso cualquiera que
conduce al gas entre los estados E1 y E2
pueden relacionarse con la ecuación de
estado, pues entonces en el estado E1 se
tiene 1 1
1
PV nRT
= y en el estado E2 se tendrá
2 2
2
PV nRT
= , de manera tal que:
1 1 2 2
1 2
PV PVT T
=
Si el proceso se realiza a temperatura
constante, entonces se tiene T1=T2 y se
obtiene la ley de Boyle: 1 1 2 2PV PV= .
Si el proceso se realiza a presión
constante, entonces se tiene P1=P2 y se
obtiene la ley de Charles o 1º ley de Gay
Lussac: 1 2
1 2
V VT T
= .
Si el proceso se realiza a volumen
constante, entonces se tiene V1=V2 y se
obtiene la ley 2º ley de Gay Lussac:
1 2
1 2
P PT T
=
10.10 Escala Internacional de Temperaturas.
Como se ha establecido, la temperatura
puede definirse intuitivamente como una
medición de cuan caliente está algo. Para
que esto tenga algún valor, debe definirse
una escala de valores numéricos y una
interpolación a través de un instrumento
de medida.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 412
Las escalas de mayor uso son la Celsius y
la Kelvin, aunque la segunda es la única
escala que tiene una base real en la
naturaleza, pues no se pueden alcanzar
temperaturas menores que 0K. Debido a
su definición lineal, basta con solo un
punto fijo para establecer la escala.
Existen distintos instrumentos, que
ocupan distintas propiedades
termométricas para medir la temperatura
(propiedades que varían de alguna manera
comprensible con la temperatura:
volumen, presión, resistencia eléctrica,
resistividad, longitud de onda de la
radiación, etc).
Pero la tarea de construir termómetros
es muy compleja puesto que algunas de las
propiedades no varían linealmente con la
temperatura, o cambian de fase en rangos
estrechos o sufren otras
transformaciones que las inutilizan como
propiedades termométricas en algunos
rangos.
La búsqueda de instrumentos,
propiedades termométricas, así como
puntos fijos fácilmente reproducibles y
exactos proviene desde hace muchos
siglos.
La comunidad científica ha logrado
establecer una escala de temperaturas
absolutas estándar, puntos fijos y los
instrumentos aceptados para rangos
específicos de interpolación de la curva,
que sufren modificaciones debidas al
avance de la física y la tecnología, cada
cierto número de años.
El primer esfuerzo destacable de
establecer un estándar lo constituye la
proposición de una escala denominada
“Escala Práctica de Temperaturas”
durante la reunión de 1889 de la British
Association for de Advancement of
Science (BAAS). Allí se propuso adoptar
un termómetro de resistencia de platino
calibrado con los puntos fijos
correspondientes al punto de
congelamiento del agua y de ebullición del
agua y del azufre. Se propuso
denominarla “Escala de temperaturas de
la Asociación Británica” y se la relacionó
con la escala ideal de temperaturas
confeccionada a partir de un termómetro
de gas calibrado con el punto de ebullición
del azufre. No existe información
confiable de que este acuerdo haya sido
establecido en esta reunión.
Varios esfuerzos posteriores de los
laboratorios nacionales de Alemania
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 413
(Physikalish-Technische Reichanstalt,
Inglaterra (National Physical Laboratory)
y Estados unidos (National Institute of
Standards and Technology, NIST, en ese
entonces denominado National Bureau of
Standards, NBS) finalmente sugieren una
Escala Internacional que fue ampliamente
discutida por la comunidad internacional,
destacándose la participación de la
Oficina Internacional de Pesas y Medidas
(Bureau International des Poids et
Mesures, BIPM) y la Universidad de
Leiden.
Esta escala, acordada en 1925, fue
aceptada en 1927 por la Conferencia
General de Pesas y Medidas (CGPM) y
considera un termómetro de resistencia
de platino para temperaturas entre
-139ºC y 650ºC calibrado a 0ºC, a 100ºC y
a 444,5ºC (punto de ebullición del
azufre). Entre 650ºC y 1100ºC la escala
fue definida a través de una Termocupla
(Pt-10 % Rh/Pt) calibrada mediante los
puntos de congelación del antimonio
(630ºC), de la plata (960ºC) y del oro
(1063ºC). las curvas de interpolación de
los termómetros eran cuadráticas. Sobre
el punto de congelación del oro se
recomendó una curva que seguía la Ley de
Wien. En la práctica se usaba un
pirómetro óptico.
En 1948, durante la 9ª CGPM se realizó la
primera revisión de la Escala Práctica
Internacional de Temperaturas (IPTS-
48), cambiando el nombre, “grado
centígrado por “grado Celsius”, cambiando
el límite inferior del termómetro de
resistencia a -182,97ºC (punto de
ebullición del hidrógeno) y el superior a
630,5ºC (punto de congelación del
antimonio). El punto de congelación de la
plata fue modificado desde 960,5ºC a
960,8ºC y la Ley de Wien fue cambiada
por la Ley de Planck, aunque exige
radiación visible.
En 1954, la 10º CGPM adoptó la propuesta
realizada por Kelvin en 1854 definiendo la
unidad de temperatura termodinámica en
términos del intervalo entre el cero
absoluto y solo un punto fijo. Se adoptó el
punto triple del agua (temperatura a la
cual el agua coexiste en equilibrio en las
fases sólida, líquida y gaseosa) como
punto fijo, cuyo valor es 273,16K,
equivalentes a 0,01K.
En 1958 la Conferencia Internacional de
pesas y medidas, CIPM adoptó una escala
de presión de vapor de 4He versus
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 414
temperatura basada en datos
provenientes de un termómetro de gas
ajustada mediante termometría
magnética (y por cálculos teóricos
termodinámicos bajo los 2,2K) para el
rango de temperaturas entre 0,5K y
5,23K. Esta escala se conoce como Escala
de 4He de 1958 y a las temperaturas
medidas por ella se denominan T58 (en
1962 el CIPM realizó cambios en la escala
basados en la comparación entre las
escalas de presión de vapor del 3He con la
escala de presión de vapor de 4He de
1958 sobre 0,9K y con cálculos
termodinámicos bajo 0,9K. Mediciones
con esta nueva escala se denominan T62).
En 1968 se realizó la segunda revisión de
la escala internacional de temperaturas
(IPTS-68), en la que se eliminó la
distinción entre los métodos de definir
temperatura a través de procedimientos
termodinámicos y prácticos.
A partir de IPTS-68 la unidad fue
definida como 1273,16
de la temperatura
termodinámica del punto triple del agua.
También allí se cambió la denominación
“grados Kelvin (ºK)”, por la denominación
“Kelvin (K)”.
IPTS fue confeccionada en cuatro
etapas:
Entre 13,81K y 273,15K la escala fue
definida en términos de un conjunto de 6
puntos fijos de bajas temperatura y una
función de referencia.
Entre 0°C to 630,74°C la escala fue
definida en términos de la Antigua
ecuación cuadrática modificándola para
considerar los valores nuevos
encontrados para los puntos fijos a partir
del termómetro de gas.
Entre 630,74°C to 1064,43°C se definió
como instrumento la Termocupla Pt-10%
Rh/Pt calibrada a 630,74ºC y los puntos
de congelación de la plata y del oro,
usando una formula de interpolación
cuadrática.
Sobre 1064,43 °C la escala fue definida
en términos de la radiación emitida por un
cuerpo negro y descrita por la ecuación
de Planck. Se levanta la restricción de luz
visible, cambiándola por radiación.
En 1976 la CIPM se establece la
denominada Escala Provisional de
temperaturas, IPTS-76 para el rango
entre 0,5K y 30K en términos de 11
puntos fijos en ese rango, en conjunto
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 415
con las diferencias entre T76 y algunas
de las siguientes escalas: IPTS-68; las
escalas de presión de vapor de 4He-1958
y 3He-1962 ; NPL-75 y la versión NBS
de IPTS-68.
En contraste con IPTS-68, la IPTS-76
puede ser construida de la manera antes
descrita, con la ayuda de unas tablas
proporcionadas por la CIPM, o usando un
de gas o un termómetro magnético
(ambos interpolados
termodinámicamente) y calibrados con
uno o más puntos fijos especificados en
IPTS-76.
En 1990 se realizó la última modificación,
que será descrita en forma más extensa
por constituir el estándar actual.
La unidad de la cantidad física
fundamental denominada temperatura
termodinámica, símbolo T, es el Kelvin,
símbolo K, definida como la fracción de
1273,16 de la temperatura termodinámica
del punto triple del agua.
Debido a la anterior definición de
temperatura, es usual expresar una
temperatura en términos de su diferencia
con 273,15, el punto de fusión del hielo.
Una temperatura termodinámica
expresada de esa forma, se denomina
temperatura Celsius, símbolo t, definida
como:
t TºC K 273,15
=−
La unidad de temperatura Celsius es el
grado Celsius, símbolo ºC, el cual es por
definición, de igual magnitud que el Kelvin.
Una diferencia de temperatura puede ser
expresada en Kelvin o en grados Celsius.
IPTS-90 define temperaturas
denominadas T90 en Kelvin y t90 en grados
Celsius.
Las definiciones dadas en IPTS-90
consisten en una serie de rangos
interpolados. Esto produce que para
algunos rangos de temperatura existan
diferentes definiciones de T90, todas las
cuales tienen igual validez. Las
definiciones adoptadas allí producen
valores mucho más precisos a los teóricos
proporcionados por la escala
termodinámica, y son más fáciles de
reproducir. Se observan tres rangos
mayores y varios subrangos, brevemente
descritos a continuación:
Entre 0,65K y 5,0K, T90 se define en
términos de las relaciones entre la
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 416
temperatura y la presión de vapor del 3He
y 4He.
i 990
0 ii 1
pln BT PaA AK C
=
=
⎡ ⎤⎛ ⎞ −⎜ ⎟⎢ ⎥⎝ ⎠⎢ ⎥= +⎢ ⎥⎢ ⎥⎣ ⎦
∑
los valores de las constantes A0, Ai B y C
vienen dadas en una tabla para 3He en el
rango entre 0,65K y 3,2K; y para 4He en
el rango entre 1,25K y 2,1768K en el
rango entre 1,25K y 2,1768 (punto
lambda) y en el rango entre 2,1768 y
5,0K.
Entre 3,0 y el punto triple del Neón
(24,5561K), T90 se define mediante un
termómetro de gas de volumen constante
con 3He y 4He, calibrado por el punto
triple del neón (24,5561K), el punto triple
del hidrógeno (13,8033K) y una
temperatura entre 3,0K y 5,0K
determinada mediante un termómetro de
presión de vapor de 3He o 4He según un
procedimiento especificado por la IPTS-
90. Esto puede realizarse de dos maneras
distintas:
i) Desde 4,2K al punto triple del neón
con 4He como sustancia termométrica. En
este rango T90 se define a través de la
expresión:
T90 = a + bp + cp2
Donde p es la presión en el termómetro
de gas y a,b,c son constantes obtenidas
con un procedimiento parecido al usado en
el rango anterior.
Desde 3.0K hasta el punto triple del neón
con 3He o 4He como sustancia del
termómetro de gas. Cuando estos
termómetros sean usados, debe tomarse
en cuenta la no linealidad del gas bajo
4,2K, a través de coeficientes (B3 y B4).
En este rango T90 es definida por la
expresión:
2
90
x 90
a bp cpT N1 B (T )V
+ +=
+
Donde p es la presión en el termómetro
de gas, a,b,c son constantes obtenidas
con un procedimiento parecido al usado en
el rango anterior; NV
es la densidad del
gas, N es la cantidad de gas y V el
volumen del bulbo; x es 3 o 4 dependiendo
del isótopo del gas usado y los valores de
los coeficientes son determinados por las
expresiones siguientes:
para 3He:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 417
190
63 903 1 2 3
90 90
T16,69 336,98KB (T ) 10
m mol T T91,04 13,82K K
−
−− − −
⎡ ⎤⎛ ⎞− +⎢ ⎥⎜ ⎟
⎝ ⎠⎢ ⎥= ⎢ ⎥⎛ ⎞ ⎛ ⎞⎢ ⎥−⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦
Para 4He:
190
2 3690 90 904
3 1
4 590 90
T16,708 374,05K
B (T ) T T383,53 1799,2 10m mol K K
T T4033,2 3252,8K K
−
− −−
−
− −
⎡ ⎤⎛ ⎞− −⎢ ⎥⎜ ⎟
⎝ ⎠⎢ ⎥⎢ ⎥
⎛ ⎞ ⎛ ⎞⎢ ⎥= + −⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎢ ⎥⎢ ⎥⎛ ⎞ ⎛ ⎞
+⎢ ⎥⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎢ ⎥⎣ ⎦
La precisión obtenida para T90 con estas
expresiones depende del diseño del
termómetro utilizado y de la densidad del
gas.
Entre el punto triple del Hidrógeno
(13,8033K) y el punto de congelación de la
plata (961,78ºC) T90 es definido por
medio de termómetros de resistencia de
platino.
Las temperaturas se determinan en
términos de la razón [W(T90)] entre la
resistencia R [R(T90)] a la temperatura
T90 y la resistencia R [R(273,16)] a la
temperatura del punto triple del agua,
definida como:
9090
R(T )W(T )R(273,16)
=
un termómetro aceptable debe estar
construido en base de platino puro, y
debe satisfacer a lo menos una de las
siguientes relaciones:
W(29,7646ºC) 1,11807W( 38,8344ºC) 0,844235
≥
− ≥
Además, si se quiere usar a la
temperatura del punto de congelación del
platino, debe satisfacer la relación:
W(961,78ºC) 4,2844≥
Este rango está dividido en dos rangos
mayores (entre 13,8033K y 0ºC) y (entre
0ºC y 961,78ºC) y varios subrangos
sobrepuestos.
Entre 13,8033K y 0ºC las funciones de
referencia son:
( )90
i 12
90 0 ii 1
Tln 1,5273,16Kln W T A A i
1,5
=
=
⎡ ⎤⎛ ⎞+⎢ ⎥⎜ ⎟
⎝ ⎠⎢ ⎥⎡ ⎤ = +⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
∑
1i 15 6
90 900 i
i 1
T W(T ) 0,65B B i273,16K 0,35
=
=
⎡ ⎤−⎢ ⎥= + ⎢ ⎥
⎢ ⎥⎣ ⎦∑
Las constantes A0,Ai,B0 y Bi estan dadas
en una tabla.
Un termómetro puede calibrarse para el
uso en el rango entero, o para rangos más
estrechos con límite superior 0ºC y
rangos menores determinados por los
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 418
puntos fijos 24,5561 K; 54,3584 K y
83,8058 K.
Lo subrangos determinados son:
i) Entre el punto triple del hidrógeno
(13,8033K) y el punto triple del agua
(273,16K) el termómetro debe calibrarse
con el punto triple del hidrógeno, neón
(24,5561 K), oxígeno (54,3584), argón
(83,8058), mercurio (234,3156) y del
agua.
ii) Entre el punto triple del oxígeno y el
punto triple del agua, el termómetro debe
calibrarse con el punto triple del oxígeno,
argón, mercurio y del agua.
iii) Entre el punto triple del argón y el
punto triple del agua, el termómetro debe
calibrarse con el punto triple del argón,
mercurio y del agua.
Entre 0ºC y 961,78 las funciones de
referencia son:
( )
i90
i 9
90 0 ii 1
T 754,151,5KW T C C
481
=
=
⎡ ⎤−⎢ ⎥= + ⎢ ⎥
⎢ ⎥⎢ ⎥⎣ ⎦
∑
ii 990 90
0 ii 1
T W(T ) 2,64D DK 273,15 1,64
=
=
−⎡ ⎤= + ⎢ ⎥− ⎣ ⎦
∑
Las constantes C0,Ci,D0 y Di están dadas
en una tabla.
Un termómetro puede calibrarse para el
uso en el rango entero, o para rangos más
estrechos con límite inferior 0ºC y
rangos superiores determinados por los
puntos fijos 660,323°C; 419,527°C;
231,928°C; 156,5985°C o 29,7646°C.
Lo subrangos determinados son:
i) Entre el punto triple del agua y el punto
de congelación de la plata (961,78ºC) el
termómetro debe calibrarse con el punto
triple del agua (0,01ºC) y los puntos de
congelación del estaño (231,928ºC), zinc
(419,527ºC) y de la plata.
ii) Entre 0ºC y el punto de congelación del
aluminio (660,323ºC) el termómetro debe
calibrarse con el punto triple del agua, y
los puntos de congelación del estaño, zinc
y del aluminio.
iii) Entre 0ºC y el punto de congelación
del zinc el termómetro debe calibrarse
con el punto triple del agua, y los puntos
de congelación del estaño, y del zinc.
iv) Entre 0ºC y el punto de congelación
del estaño el termómetro debe calibrarse
con el punto triple del agua, y los puntos
de congelación del indio (156,5985), y del
estaño.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 419
v) Entre 0ºC y el punto de congelación del
indio el termómetro debe calibrarse con
el punto triple del agua, y el punto de
congelación del indio (156,5985).
vi) Entre 0ºC y el punto de congelación
del galio el termómetro debe calibrarse
con el punto triple del agua, y el punto de
fusión del galio (29,7646).
Sobre el punto de congelación de la plata,
T90 es definido en términos de un punto
fijo definido y la Ley de radiación de
Planck. Debe usarse un termómetro de
radiación.
La ecuación de referencia es:
( )( )
12 9090
190 2 90
exp c T (x) 1L (T )L T (x) exp c T 1
−
−
λ −⎡ ⎤⎣ ⎦λ=
λ ⎡ ⎤ λ −⎣ ⎦ ⎡ ⎤⎣ ⎦
Donde T90(x) a uno de los siguientes
puntos de congelación: T90(Ag)=1234,93K;
T90(Au)=1337,33K; o T90(Cu)=1357,77K.
LlT90 y Ll[T90(x)] son las concentraciones
espectrales de la radiación de un cuerpo
negro a la longitud de onda (en el vacío)
para T90 y para T90(x) respectivamente.
C2 = 0,014388 mK.
T90(x) puede ser el punto de la plata, del
oro o del cobre.
Bibliografía:
• Fundamentals of Thermometry.
Henry E Sostmann. Isotech
Journal of Thermometry.
• http://www.its-90.com/onref.html
• Thermodynamic and practical
temperature scales. Bureau
International des Poids et
Mesures.
• http://www.bipm.fr/enus/3_SI/
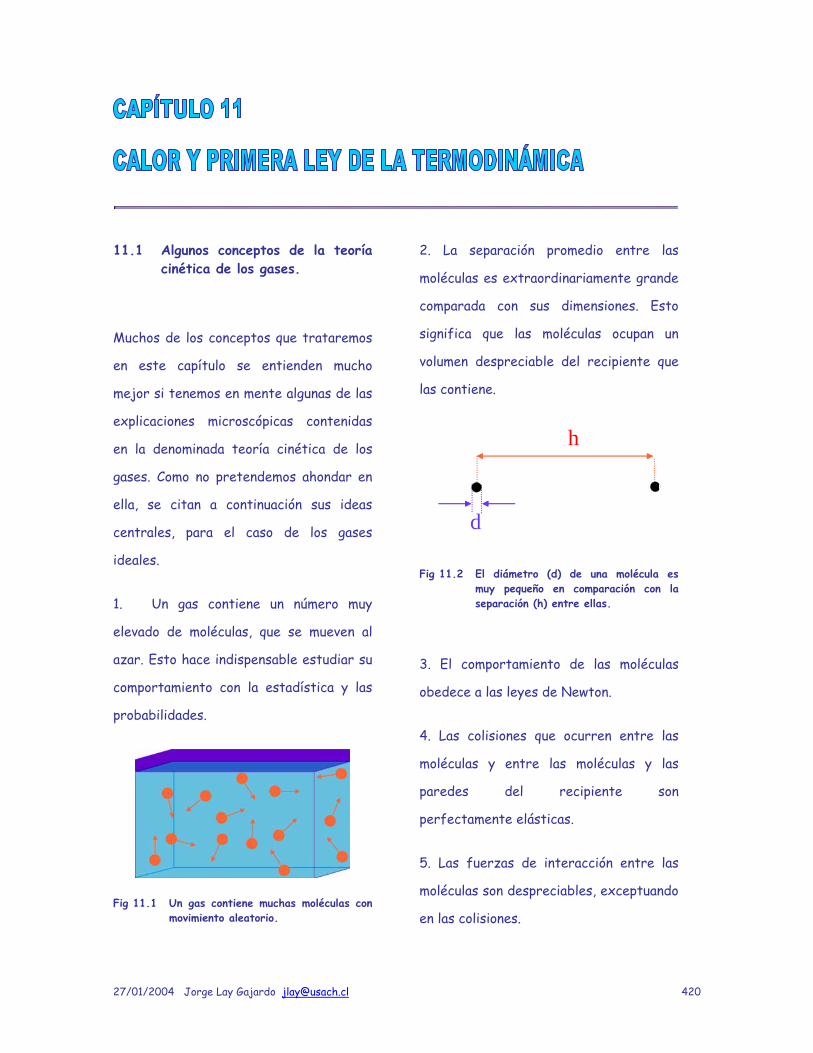
27/01/2004 Jorge Lay Gajardo [email protected] 420
11.1 Algunos conceptos de la teoría cinética de los gases.
Muchos de los conceptos que trataremos
en este capítulo se entienden mucho
mejor si tenemos en mente algunas de las
explicaciones microscópicas contenidas
en la denominada teoría cinética de los
gases. Como no pretendemos ahondar en
ella, se citan a continuación sus ideas
centrales, para el caso de los gases
ideales.
1. Un gas contiene un número muy
elevado de moléculas, que se mueven al
azar. Esto hace indispensable estudiar su
comportamiento con la estadística y las
probabilidades.
Fig 11.1 Un gas contiene muchas moléculas con movimiento aleatorio.
2. La separación promedio entre las
moléculas es extraordinariamente grande
comparada con sus dimensiones. Esto
significa que las moléculas ocupan un
volumen despreciable del recipiente que
las contiene.
d
h
Fig 11.2 El diámetro (d) de una molécula es muy pequeño en comparación con la separación (h) entre ellas.
3. El comportamiento de las moléculas
obedece a las leyes de Newton.
4. Las colisiones que ocurren entre las
moléculas y entre las moléculas y las
paredes del recipiente son
perfectamente elásticas.
5. Las fuerzas de interacción entre las
moléculas son despreciables, exceptuando
en las colisiones.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 421
11.1.1 Presión en la teoría cinética
molecular:
En esta teoría, la presión de un gas en un
recipiente es debida a la fuerza promedio
que las partículas efectúan al chocar
contra las paredes del recipiente por
unidad de área.
Fig 11.3 Vista de choques sobre un área pequeña de una pared lateral y una pared frontal.
Debido a que en un gas el número de
moléculas es del orden de 1023, la
cantidad de movimiento transferida a la
pared es constante y uniforme en todos
los puntos en situación de equilibrio
térmico. En otras palabras, la presión en
un gas es la misma en todos los puntos del
recipiente cuando existe equilibrio
térmico.
11.1.2 Temperatura y Energía.
Consideremos un gas ideal monoatómico
contenido en un recipiente con forma de
un paralelepípedo rectangular de arista L.
Estudiemos a una molécula chocando a la
pared vertical izquierda, asumiendo que
se comporta como una esfera.
v0=v0x(-i) v=vx i
Fig 11.4 Colisión elástica entre una molécula y la pared.
Debido a la conservación de la cantidad
de movimiento y considerando que la
pared no se mueve se tiene que:
0
0x x
mv mvv v
=− =
r r
Es decir, las velocidades de la molécula
antes y después del choque son de igual
magnitud.
En este evento la fuerza de la molécula
sobre la pared y la fuerza de la pared
sobre la molécula son un par acción y
reacción, por lo tanto tienen igual
magnitud.
Debido a que el impulso sobre la molécula
debe ser igual que el cambio en su
cantidad de movimiento, entonces se
tiene:
I p= ∆r r
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 422
m 0
m x 0x
F t p pF t p p
∆ = −
∆ = −
r r r
Pues solo existen componentes en x.
Entonces podemos calcular la fuerza
media que actúa sobre la molécula, ya que
hemos calculado las velocidades:
x x xm
mv m( v ) 2mvFt t
− −= =
∆ ∆
El tiempo que demora en ocurrir otra
colisión es el tiempo que demora la
molécula en ir y volver desde la pared
opuesta, recorriendo una distancia 2L. Si
suponemos que la velocidad tiene
magnitud constante (en la pared opuesta
la colisión también es elástica, y no choca
con otra molécula en el camino), entonces
se tiene:
x
x
2Lvt
2Ltv
=∆
∆ =
En consecuencia, la fuerza media que la
molécula ejerce sobre la pared es:
2x x
m
x
2mv mvF 2L Lv
= =
Cuya magnitud es igual que la fuerza que
la molécula ejerce sobre la pared según
explicamos anteriormente.
La fuerza total sobre la pared la podemos
calcular considerando que el gas tiene N
moléculas, viajando con velocidades
constantes pero distintas. La distribución
de velocidades es una distribución
gaussiana de acuerdo a lo que estableció
el físico escocés James Clerk Maxwell en
1860, cuyo valor máximo varía en forma
directamente proporcional a la
temperatura absoluta.
Entonces la fuerza neta puede escribirse
como:
i N2
m xii 1
mF vL
=
=
= ∑
Expresión que puede rescribirse por
conveniencia multiplicándola y
dividiéndola por el número de partículas:
i N2
xii 1
m
vmF NL N
=
==∑
La expresión
i N2
xii 1
v
N
=
=∑
es una cantidad
interesante. Si usted no sabe estadística
todavía le explicamos el significado a
continuación.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 423
Las moléculas viajan en todas direcciones.
Las componentes en el eje x de sus
velocidades tienen direcciones positivas y
negativas según viajen hacia la derecha o
hacia la izquierda respectivamente. Si
realizamos una distribución de sus
velocidades y encontramos que se
comportan de acuerdo a una curva
gaussiana, entonces la velocidad media
debe ser cero.
v(m/s)
frecuencia (nro de veces)
1 2 3 4 5 6 7 8 9 10 11-3
-2-101
23
valor medio
Fig 11.5 Comportamiento gaussiano de una curva de distribución de velocidades de las moléculas de un gas ideal.
La teoría dice que esta distribución
siempre se obtiene cuando el número de
casos tiende a infinito. El número de
moléculas en un gas no es infinito, pero es
un número tan grande, que podemos
considerarlo como tal.
Para aclarar aún más esto, supongamos
que tenemos solo 8 moléculas,
comportándose de manera gaussiana y
graficamos sus velocidades (ver gráfico
de la figura 11.6).
Claramente se observa que:
i
i
i N
xi 1
x
vv 0
N
=
== =∑
La velocidad media es nula como
preveíamos.
v(m/s)
molecula Nº
1 2 3 4 5 6 7 8 9-3
-2-101
23
v
Fig 11.6 Velocidades de 8 moléculas de un gas ideal.
Pero si tomamos el cuadrado de cada
velocidad, se tiene ahora que el valor
medio es:
i
i
i N2
2x2 i 1
x
vmv 3,75
N s
=
= ⎛ ⎞= = ⎜ ⎟⎝ ⎠
∑

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 424
v2(m/s)2
molecula Nº
1 2 3 4 5 6 7 8 9
12345678
109
v2
Fig 11.7 Cuadrado de las velocidades de las moléculas de la figura anterior.
Y su raíz cuadrada es la denominada raíz
cuadrática media (root mean square: rms)
de las velocidades:
i
i N2
xi 1
xrms
vmv 1,94
N s
=
= ⎛ ⎞= = ⎜ ⎟⎝ ⎠
∑
En consecuencia la fuerza media sobre la
pared contiene el cuadrado de la
componente x de la velocidad rms:
i N2
xi2i 1
m xrms
vm mF N N vL N L
=
== =∑
Si consideramos que las moléculas se
mueven en el espacio cartesiano XYZ,
entonces las velocidades deben tener
componentes en las tres dimensiones, por
extensión se tiene que:
rms xrms yrms zrmsˆˆ ˆv v i v j v k⎡ ⎤= + +⎢ ⎥⎣ ⎦
r
Cuyo cuadrado es:
2 2 2 2rms xrms yrms zrmsv v v v= + +
Pero no existe razón alguna para que la
velocidad rms sea distinta en una
dirección que en otra, por lo tanto se
puede expresar como:
2 2rms xrmsv 3v=
De donde:
22 rms
xrmsvv
3=
Entonces tenemos que la fuerza total
sobre la pared puede escribirse como:
2rms
mvmF N
L 3=
y como en estas condiciones, la presión en
la pared es simplemente FPA
= , entonces:
2rms
2rms
2
vmN NmvL 3PL 3V
= =
Esta expresión es sumamente
interesante, pues relaciona la presión y
volumen del gas con las características de
su movimiento.
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 425
11.1.3 Energía interna media.
La expresión encontrada se puede
rescribir de la siguiente manera:
2rms
NmP v3V
=
Multiplicando y dividiendo por 2 y
arreglando:
2rms
2N 1P mv3V 2
⎛ ⎞= ⎜ ⎟⎝ ⎠
( )m2 NP K3 V
=
Es decir, la presión del gas depende de
número de moléculas por unidad de
volumen (densidad de moléculas) y a la
energía cinética interna media (Km) de
ellas.
Lo verdaderamente importante de la
expresión es que relaciona una propiedad
macroscópica del gas (presión), con una
cantidad microscópica (Km).
Además, por analogía con la ley de los
gases ideales PV=nRT, se tiene que:
m2nRT NK3
=
de donde:
m3 nK RT2 N
=
Si consideramos que el número de
moléculas en un gas se puede representar
a través del número de Avogadro (NA)
como N=nNA, entonces:
mA A
3 n 3 RK RT T2 nN 2 N
⎛ ⎞= = ⎜ ⎟
⎝ ⎠
Donde A
R kN
= es una constante
denominada constante de Boltzmann, por
lo que finalmente se tiene:
m3K kT2
=
Donde 23 Jk 1,38x10K
−= .
Una extraordinaria expresión que
permite reconocer a la energía cinética
interna media como una función de la
temperatura absoluta del gas.
Desde otro punto de vista, escribiendo la
ecuación anterior como:
2rms
1 3mv kT2 2
=
Se puede calcular la velocidad rms:
rms3v kTm
=
Que manifiesta explícitamente que la
velocidad rms de las moléculas depende
de la temperatura. Es decir, a mayor

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 426
temperatura absoluta, mayor velocidad
rms de las moléculas del gas.
Ahora podemos explicar la razón de que
aumente la presión con la temperatura en
un proceso a volumen constante como el
estudiado en el termómetro de gas a
volumen constante: En la medida en que
aumenta la temperatura, aumenta la
velocidad rms, y por tanto, aumenta la
fuerza neta por unidad de área ejercida
sobre las paredes.
Finalmente, como la masa (m) de un gas es
función de la masa molar (M) y el número
de moles (n), a través de la expresión:
m=nM
Y recordando que la constante de
Boltzmann se puede escribir como:
A
R R Rnk NN Nn
= = =
Se tiene que:
rms3 3RTv kTm MN
= =
Que permite establecer que las moléculas
de menor masa molar se moverán más
rápido que las de masa molar mayor a
igual temperatura.
11.1.4 Teorema de la equipartición.
Uno de los postulados mas bellos de
Boltzmann, cuya demostración escapa de
los límites del curso, establece que para
el caso de un sistema compuesto de
moléculas en equilibrio térmico a una
temperatura absoluta T, entonces se
tiene que la energía cinética media se
distribuye igualmente entre los grados de
libertad, cuyo valor es 1 kT2
por cada
grado de libertad.
Esto es lo que observamos en el caso de
los gases ideales monoatómicos, que
tienen 3 grados de libertad (traslación
posible en tres ejes de coordenadas) que
produjo que su energía cinética interna
media tuviera el valor: m3K kT2
= .
Fig 11.8 Grados de libertad asociados a la traslación.
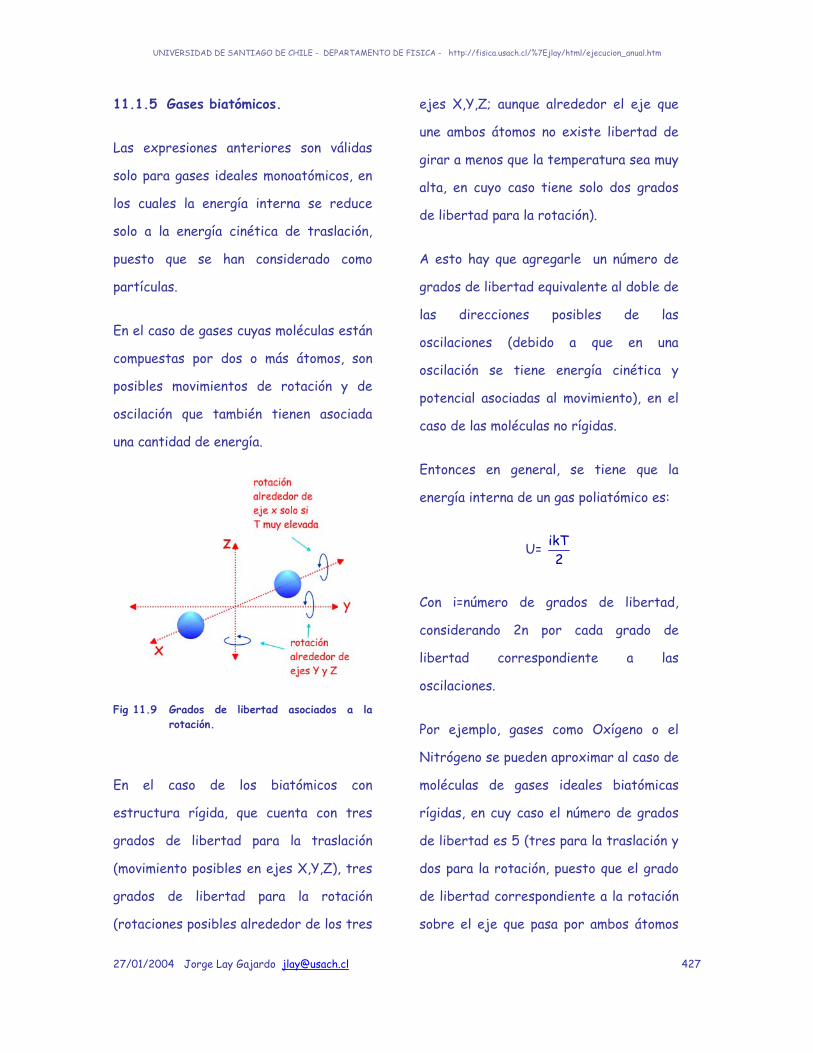
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 427
11.1.5 Gases biatómicos.
Las expresiones anteriores son válidas
solo para gases ideales monoatómicos, en
los cuales la energía interna se reduce
solo a la energía cinética de traslación,
puesto que se han considerado como
partículas.
En el caso de gases cuyas moléculas están
compuestas por dos o más átomos, son
posibles movimientos de rotación y de
oscilación que también tienen asociada
una cantidad de energía.
Fig 11.9 Grados de libertad asociados a la rotación.
En el caso de los biatómicos con
estructura rígida, que cuenta con tres
grados de libertad para la traslación
(movimiento posibles en ejes X,Y,Z), tres
grados de libertad para la rotación
(rotaciones posibles alrededor de los tres
ejes X,Y,Z; aunque alrededor el eje que
une ambos átomos no existe libertad de
girar a menos que la temperatura sea muy
alta, en cuyo caso tiene solo dos grados
de libertad para la rotación).
A esto hay que agregarle un número de
grados de libertad equivalente al doble de
las direcciones posibles de las
oscilaciones (debido a que en una
oscilación se tiene energía cinética y
potencial asociadas al movimiento), en el
caso de las moléculas no rígidas.
Entonces en general, se tiene que la
energía interna de un gas poliatómico es:
U= ikT2
Con i=número de grados de libertad,
considerando 2n por cada grado de
libertad correspondiente a las
oscilaciones.
Por ejemplo, gases como Oxígeno o el
Nitrógeno se pueden aproximar al caso de
moléculas de gases ideales biatómicas
rígidas, en cuy caso el número de grados
de libertad es 5 (tres para la traslación y
dos para la rotación, puesto que el grado
de libertad correspondiente a la rotación
sobre el eje que pasa por ambos átomos

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 428
no está excitado), por lo que su energía
interna media será:
U= 5kT2
11.1.6 Energía interna para gases no
ideales.
En el caso de los gases ideales o cualquier
cuerpo en fase no gaseosa la energía
interna es función de la temperatura y
del volumen ocupado por la sustancia.
Esto se debe a que en estos casos, la
energía interna se compone de la energía
cinética interna (Ki) asociada a las
moléculas y a la energía potencial interna
(Vi) asociada a la separación media entre
ellas.
En ese caso, aumentos en la energía
cinética de las moléculas se manifestarán
como aumentos en la temperatura del
cuerpo y aumentos en la energía potencial
interna se manifestarán como aumentos
en el volumen del cuerpo.
Por ejemplo, si se agrega energía a un
trozo de hielo cuya temperatura es -50ºC
a presión de 1 atmósfera, se observa que
parte de ella se usa en aumentar su
energía cinética interna (aumenta su
temperatura) y parte se usa en aumentar
su energía potencial interna (aumenta su
volumen).
En cambio, si se tiene hielo a 0ºC y se
agrega energía, entonces toda la energía
se usa para vencer las fuerzas
intermoleculares aumentando la energía
potencial interna, provocando un cambio
de fase desde hielo hasta agua y por
tanto mientras eso ocurra, la
temperatura no cambiará (proceso
isotérmico).
11.2 Dilatación térmica.
Sabemos que una sustancia puede
presentarse básicamente en 4 fases,
siendo las fases sólida, líquida y gaseosa
estudiadas aquí.
Bajo los postulados de la teoría cinética
hemos estudiado los conceptos centrales
del comportamiento de los gases y hemos
encontrado que los gases tienen moléculas
que viajan libremente con velocidad media
que es función de la temperatura. Eso es
posible porque el diámetro de una
molécula es muy grande respecto de la
separación media entre ellas. Eso explica
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 429
que un gas no pueda conservar su
volumen, ocupando el volumen del envase
que lo contiene.
En la medida en que la energía interna
disminuye, también lo hace la
temperatura y las moléculas están cada
vez más cercanas y la libertad de las
moléculas disminuye puesto que la acción
de las fuerzas intermoleculares empieza
a tener importancia en la interacción. Eso
hace que ahora se comporte diferente
pues es capaz de conservar su volumen,
aunque conserva la capacidad de cambiar
de forma (aún es un fluido).
Si disminuimos aún más la energía interna,
la velocidad media de las moléculas
seguirá disminuyendo (y su temperatura
por tanto), hasta que la fuerza
intermolecular es suficientemente
importante como confinarla en un lugar
específico, en torno al cual solo puede
oscilar y/o rotar. Se ha pasado a la fase
sólida y es capaz de conservar su volumen
y su forma.
Las sustancias al solidificarse pueden
formar estructuras regulares de
patrones definidos (cristales), existiendo
muchas formas distintas, que las
caracterizan (se denominan cristalinas) o
pueden no formarlas (sólidos amorfos;
brea, vidrio, carbón, resinas).
Los sólidos cristalinos elevan su
temperatura hasta un punto en que
cambian de fase convirtiéndose en
líquidos (poseen punto de fusión definido,
a presión constante). En cambio los
sólidos amorfos se comportan como
líquidos de gran viscosidad, de manera
que a bajas temperaturas conservan su
forma y en la medida en que su
temperatura aumenta, disminuyen su
viscosidad hasta alcanzar la capacidad de
fluir, sin que exista una temperatura
definida en que empiezan a hacerlo (no
tienen punto de fusión).
Existe la idea errada que los sólidos
amorfos fluyen a temperatura ambiente,
lo que parece confirmado en la leyenda de
que los vidrios de ciertas catedrales
antiguas son más gruesos en la base,
aunque estudios más serios lo explican
por defectos en su construcción. A
temperatura y presión ambiente un vidrio
no fluye (aproximadamente a los 270ºC un
vidrio alcanza la propiedad de fluir
apreciablemente, aunque pasará un largo
tiempo antes de que la deformación sea
apreciable a simple vista).
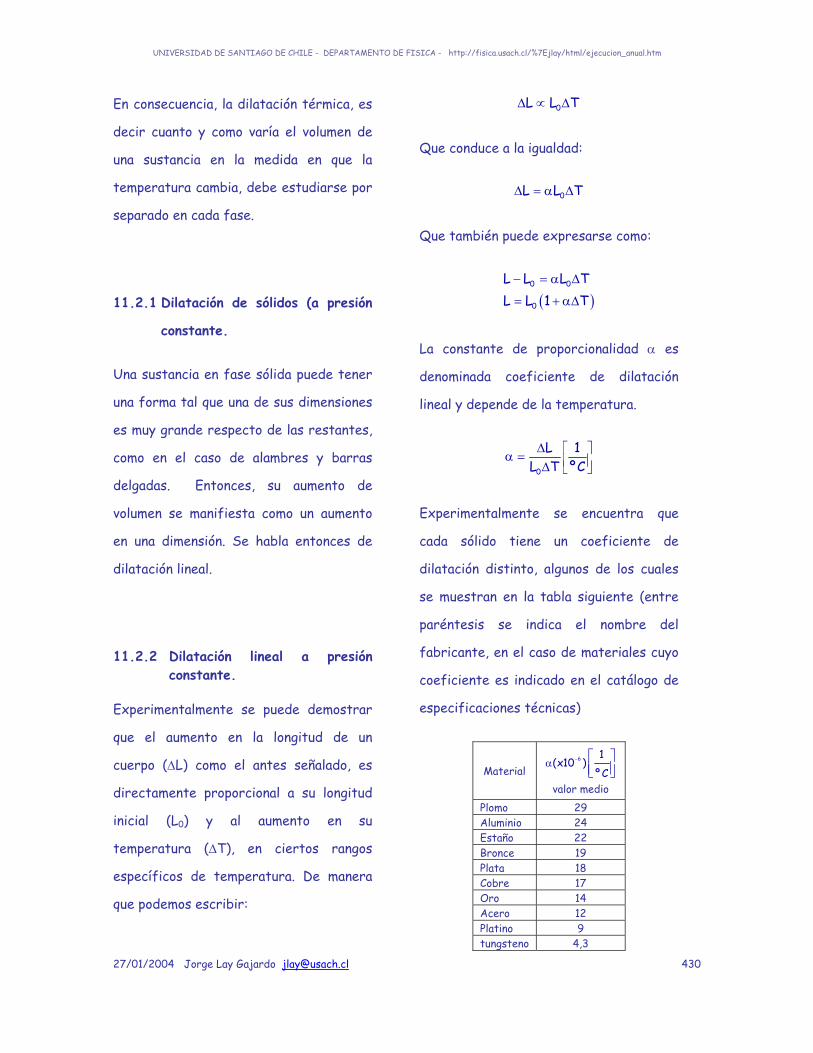
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 430
En consecuencia, la dilatación térmica, es
decir cuanto y como varía el volumen de
una sustancia en la medida en que la
temperatura cambia, debe estudiarse por
separado en cada fase.
11.2.1 Dilatación de sólidos (a presión
constante.
Una sustancia en fase sólida puede tener
una forma tal que una de sus dimensiones
es muy grande respecto de las restantes,
como en el caso de alambres y barras
delgadas. Entonces, su aumento de
volumen se manifiesta como un aumento
en una dimensión. Se habla entonces de
dilatación lineal.
11.2.2 Dilatación lineal a presión constante.
Experimentalmente se puede demostrar
que el aumento en la longitud de un
cuerpo (∆L) como el antes señalado, es
directamente proporcional a su longitud
inicial (L0) y al aumento en su
temperatura (∆T), en ciertos rangos
específicos de temperatura. De manera
que podemos escribir:
0L L T∆ ∝ ∆
Que conduce a la igualdad:
0L L T∆ = α ∆
Que también puede expresarse como:
( )0 0
0
L L L TL L 1 T
− = α ∆
= + α∆
La constante de proporcionalidad α es
denominada coeficiente de dilatación
lineal y depende de la temperatura.
0
L 1L T ºC
∆ ⎡ ⎤α = ⎢ ⎥∆ ⎣ ⎦
Experimentalmente se encuentra que
cada sólido tiene un coeficiente de
dilatación distinto, algunos de los cuales
se muestran en la tabla siguiente (entre
paréntesis se indica el nombre del
fabricante, en el caso de materiales cuyo
coeficiente es indicado en el catálogo de
especificaciones técnicas)
Material 6 1
(x10 )º C
−α ⎡ ⎤⎢ ⎥⎣ ⎦
valor medio
Plomo 29 Aluminio 24 Estaño 22 Bronce 19 Plata 18 Cobre 17 Oro 14 Acero 12 Platino 9 tungsteno 4,3
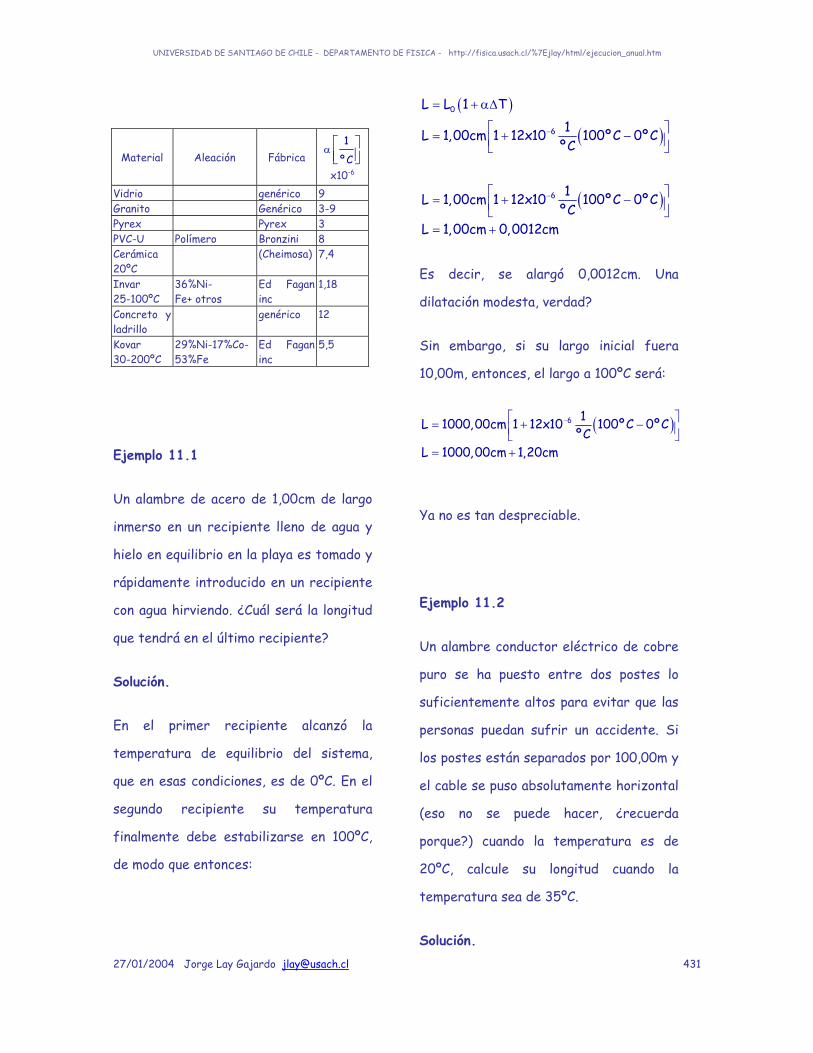
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 431
Material Aleación Fábrica 1
º Cα ⎡ ⎤
⎢ ⎥⎣ ⎦
x10-6
Vidrio genérico 9 Granito Genérico 3-9 Pyrex Pyrex 3 PVC-U Polímero Bronzini 8 Cerámica 20ºC
(Cheimosa) 7,4
Invar 25-100ºC
36%Ni- Fe+ otros
Ed Fagan inc
1,18
Concreto y ladrillo
genérico 12
Kovar 30-200ºC
29%Ni-17%Co-53%Fe
Ed Fagan inc
5,5
Ejemplo 11.1
Un alambre de acero de 1,00cm de largo
inmerso en un recipiente lleno de agua y
hielo en equilibrio en la playa es tomado y
rápidamente introducido en un recipiente
con agua hirviendo. ¿Cuál será la longitud
que tendrá en el último recipiente?
Solución.
En el primer recipiente alcanzó la
temperatura de equilibrio del sistema,
que en esas condiciones, es de 0ºC. En el
segundo recipiente su temperatura
finalmente debe estabilizarse en 100ºC,
de modo que entonces:
( )
( )0
6
L L 1 T1L 1,00cm 1 12x10 100ºC 0ºC
ºC−
= + α∆
⎡ ⎤= + −⎢ ⎥⎣ ⎦
( )6 1L 1,00cm 1 12x10 100ºC 0ºCºC
L 1,00cm 0,0012cm
−⎡ ⎤= + −⎢ ⎥⎣ ⎦= +
Es decir, se alargó 0,0012cm. Una
dilatación modesta, verdad?
Sin embargo, si su largo inicial fuera
10,00m, entonces, el largo a 100ºC será:
( )6 1L 1000,00cm 1 12x10 100ºC 0ºCºC
L 1000,00cm 1,20cm
−⎡ ⎤= + −⎢ ⎥⎣ ⎦= +
Ya no es tan despreciable.
Ejemplo 11.2
Un alambre conductor eléctrico de cobre
puro se ha puesto entre dos postes lo
suficientemente altos para evitar que las
personas puedan sufrir un accidente. Si
los postes están separados por 100,00m y
el cable se puso absolutamente horizontal
(eso no se puede hacer, ¿recuerda
porque?) cuando la temperatura es de
20ºC, calcule su longitud cuando la
temperatura sea de 35ºC.
Solución.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 432
La solución es fácil de nuevo. Con estos
ejemplos queremos que ud. tenga una idea
de los órdenes de magnitud de la
dilatación térmica.
( )6 1L 100,00m 1 17x10 35ºC 20ºCºC
L 100,00m 0,0255m
−⎡ ⎤= + −⎢ ⎥⎣ ⎦= +
Aproximadamente 3cm. En un día de
intenso calor, esto provocará que el cable
se combe. Aunque es de pequeña
magnitud, este efecto debe considerarse
en los tendidos eléctricos.
Fig 11.10 El tendido eléctrico se comba debido al peso del cable y a la dilatación térmica.
En muchas situaciones industriales se
tienen tuberías por las que circulan
fluidos a altas temperaturas, los efectos
pueden ser suficientemente importantes
como para unir las secciones mediante las
denominadas “juntas de expansión”, las
que son de distintos tipos, dependiendo
de lo agresivo del fluido, de los
gradientes de temperatura del proceso y
de otras consideraciones técnicas.
Las figuras siguientes muestran algunos
ejemplos.
Fig 11.11 Junta de fuelle metálica para expansión de tuberías de una fábrica de acero. http://www.maineindustrialplasticsandrubber.com/
Fig 11.12 Juntas de expansión metálicas para tuberías. http://www.tubiflex.com/UK/expansion.htm

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 433
Fig 11.13 Junta de expansión axial para tuberías.http://www.metraflex.com/pipingproducts
Fig 11.14 Juntas de expansión de goma para tuberías.http://www.kws-industrietechnik.de
Ejemplo 11.3
¿A qué temperatura se tocan dos barras,
una de aluminio de 2m de longitud y otra
de cobre de 1m de longitud si sus
extremos están separados por 1,0x10-3m
cuando su temperatura es de 22ºC?.
Considere que no existe expansión en
otro sentido que no sea hacia la otra
barra.
Solución.
Fig 11.15 Figura para ejemplo 11.3. las dimensiones están exageradas.
La separación a la temperatura T es cero.
La dilatación experimentada por las
barras de cobre y de aluminio es,
respectivamente:
Cu0Cu CuL L T∆ = α ∆ ; Al 0Al AlL L T∆ = α ∆
La suma de las dilataciones debe ser igual
que la separación a la temperatura T0 y
ambas barras experimentan el mismo
gradiente de temperatura ∆T, por lo que:
3Cu AlL L 1x10 m−∆ + ∆ =
Considerando que:
6Al
124x10ºC
−α = y 6Cu
117x10ºC
−α =
Entonces:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 434
Cu
Cu
30Cu Al 0Al
3
0Cu Al 0Al
L T L T 1x10 m
1x10 mTL L
−
−
α ∆ + α ∆ =
∆ =α + α
( ) ( )
3
6 6
1x10 m(T 22ºC)1 117x10 1m 24x10 2m
ºC ºC
−
− −
− =⎛ ⎞ ⎛ ⎞+⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
T 22ºC 15,4ºCT 37,4ºC
= +
=
Fig 11.16 Cuando T=37,4ºC las barras se tocan.
11.2.3 Dilatación superficial a presión
constante.
Existen casos en los que dos dimensiones
de un cuerpo son apreciables. En ese caso
puede suponerse que el cuerpo tiene
dilatación superficial.
Fig 11.17 Junta de separación para prevenir daños por dilatación del concreto. http://www.homestore.com
Fig 11.18 Junta de expansión metálica para puentes.
Considere una placa delgada con
coeficiente de dilatación lineal α, arista
L0 y área A0 cuando la temperatura es T0.
Al aumentar la temperatura hasta T se
deben dilatar todas sus dimensiones de
manera lineal, por lo que se tendrá una
nueva placa de arista L y área A.
La figura siguiente muestra la placa, a
ambas temperaturas, superpuestas de
manera imaginaria.
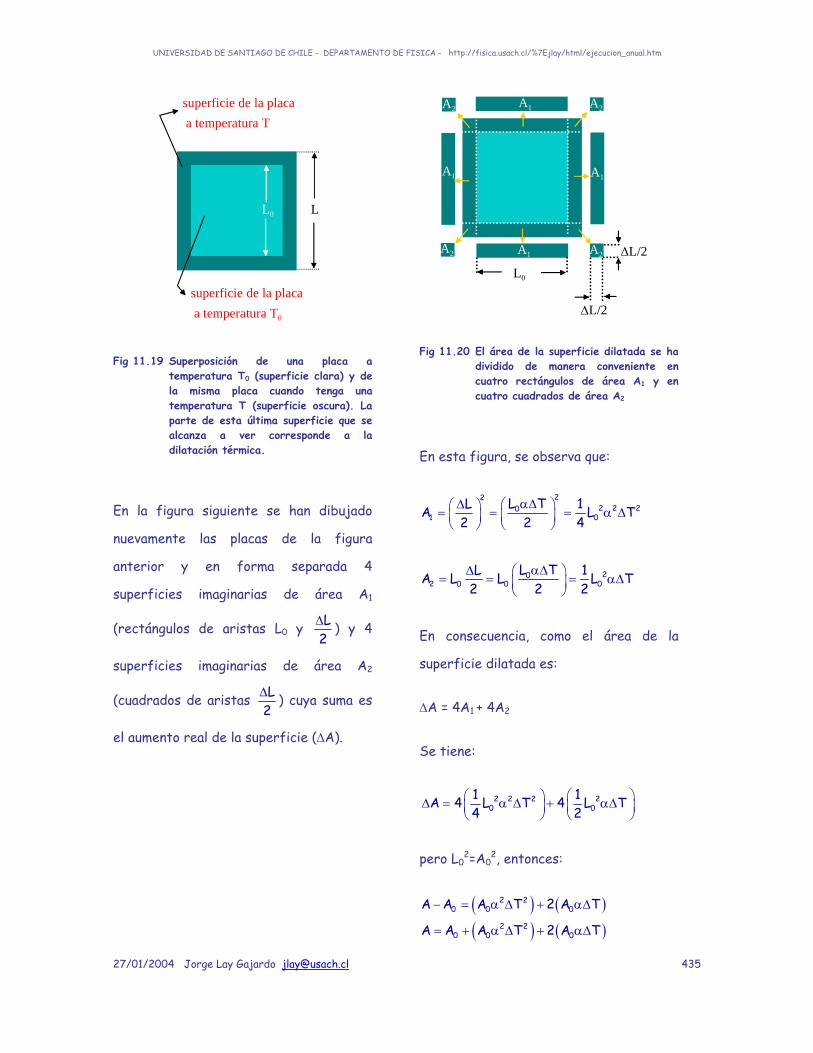
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 435
superficie de la placa a temperatura T0
superficie de la placa a temperatura T
LL0
Fig 11.19 Superposición de una placa a temperatura T0 (superficie clara) y de la misma placa cuando tenga una temperatura T (superficie oscura). La parte de esta última superficie que se alcanza a ver corresponde a la dilatación térmica.
En la figura siguiente se han dibujado
nuevamente las placas de la figura
anterior y en forma separada 4
superficies imaginarias de área A1
(rectángulos de aristas L0 y L2
∆ ) y 4
superficies imaginarias de área A2
(cuadrados de aristas L2
∆ ) cuya suma es
el aumento real de la superficie (∆A).
A2A2
A2 A2
A1A1
A1
A1
L0
∆L/2
∆L/2
Fig 11.20 El área de la superficie dilatada se ha dividido de manera conveniente en cuatro rectángulos de área A1 y en cuatro cuadrados de área A2
En esta figura, se observa que:
222 2 20
1 0L TL 1A L T
2 2 4α∆∆ ⎛ ⎞⎛ ⎞= = = α ∆⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
202 0 0 0
L TL 1A L L L T2 2 2
α∆∆ ⎛ ⎞= = = α∆⎜ ⎟⎝ ⎠
En consecuencia, como el área de la
superficie dilatada es:
∆A = 4A1 + 4A2
Se tiene:
2 2 2 20 0
1 1A 4 L T 4 L T4 2
⎛ ⎞ ⎛ ⎞∆ = α ∆ + α∆⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
pero L02=A0
2, entonces:
( ) ( )( ) ( )
2 20 0 0
2 20 0 0
A A A T 2 A T
A A A T 2 A T
− = α ∆ + α∆
= + α ∆ + α∆

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 436
Pero, si consideramos que para los sólidos
α es del orden de 10-6, entonces el
término A0α2∆T2 (el área de la superficie
cuadrada A2) es del orden de 10-12, por lo
que se puede despreciar. Entonces se
tiene que una aproximación al cálculo del
área es:
( )0 0A A 2 A T= + α∆
o, también:
0A A (1 2 T)= + α∆
Ejemplo 11.4
Consideremos un remache que se
introduce ajustadamente en un orificio de
diámetro igual a 20,00mm cuando su
temperatura es de -80ºC. ¿Cuál es su
diámetro cuando está a temperatura de
20ºC?.
Solución.
El área de la superficie se dilata según
( )0A A 1 2 T= + α∆
Reemplazando las áreas de las superficies
inicial y final en función de sus radios
queda:
( )2 20R R 1 2 Tπ = π + α∆
( )0R R 1 2 T= + α∆
Donde R0 es el radio cuando la
temperatura es -80ºC y R el radio cuando
la temperatura es 20ºC. α para el acero
es 12x10-6 1ºC
. Entonces:
( )6 1R 10,00mm 1 2 12x10 20ºC ( 80ºC)ºC
−⎡ ⎤⎛ ⎞= + − −⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
R 10,01mmd 2R 20,02mm
=
= =
También podría haberse calculado
considerando que se tiene un alambre de
longitud igual al diámetro del remache.
El diámetro se expande linealmente:
( )0d d 1 T= + α∆
( )( )( )6d 20,00mm 1 12x10 100ºC
d 20,02mm
−= +
=
Lo que muestra que la aproximación en el
cálculo de la dilatación superficial era
razonable.
Por otra parte, cualquier superficie puede
considerarse como la suma de infinitas
líneas. Esto significa que si tenemos un
cuerpo con superficie circular por
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 437
ejemplo, entonces podemos considerarla
como la suma de infinitos cuerpos lineales
circunferenciales, en cuyo caso, al
elevarse la temperatura deben alargarse
proporcionalmente a su longitud inicial y
al aumento de la temperatura.
La consecuencia de esto es que si el
cuerpo tiene un orificio, entonces al
elevarse la temperatura, el orificio
aumentará de diámetro.
Ejemplo 11.5
Un aro confeccionado con un alambre
delgado de estaño tiene un diámetro de
50cm. Se eleva su temperatura desde
20ºC hasta 50ºC al introducirlo en un
horno de pintura de temperatura
constante. Determinar su diámetro en el
horno.
Solución.
El alambre tiene una longitud L0 cuando la
temperatura es T0=20ºC, equivalente a
0L d= π , donde d0 es el diámetro.
Si extendemos el alambre que forma el
aro, se tiene un cuerpo que se comporta
linealmente, de manera tal que su longitud
en el horno será:
( )0L L 1 T= + α∆
Si nuevamente formamos el aro, tenemos
que el nuevo diámetro será:
( )0d d 1 Tπ = π + α∆
( )0d d 1 T= + α∆
6 1d 50cm 1 22x10 (50ºC 20ºC)ºC
d 50,03cm
−⎡ ⎤⎛ ⎞= + −⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
=
Lo verdaderamente importante es que
muestra que el aro se dilató como si fuera
un disco macizo confeccionado con
estaño. Nuevamente nos refuerza la idea
de que un material que experimenta un
cambio en su temperatura se dilata de
manera que lo predice la dilatación lineal
en todas sus dimensiones.
Ejemplo 11.6
Considere un anillo plano de diámetro
exterior d=40cm y diámetro interior
d=20cm cuando la temperatura es
T0=20ºC. Calcular el área del anillo,
confeccionado con cobre
( 6 117x10ºC
−α = ), cuando la temperatura
aumente hasta el valor T=100ºC.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 438
Solución:
r0
R0
R0-r0
T0
Fig 11.21 Anillo a la temperatura T0.
Puede suponerse que se tienen dos discos
macizos de radios R0 y r0 del mismo
material, cuyo coeficiente de dilatación
lineal es α. Entonces el área del anillo (A0)
cuando la temperatura es T0 corresponde
a la diferencia entre sus áreas (A0R-A0r).
0 0R 0rA A A= −
2 20 0 0A R r= π − π
2 2 2 20
2 20
20
A 20 cm 10 cmA 400 cm 100 cmA 300 cm
= π − π
= π − π
= π
Cuando la temperatura sea T, el área del
anillo (A) será la diferencia entre las
nuevas áreas de los discos, de radios R y
r: R rA A A= −
r
R
R-r
T
Fig 11.22 Anillo a la temperatura T.
Estas áreas se pueden encontrar con la
expresión de dilatación superficial de
cada disco.
( ) ( )( ) ( )
( )( )( )
0R 0r
2 20 0
2 20 0
0
A A 1 2 T A 1 2 TA R 1 2 T r 1 2 T
A R r 1 2 T
A A 1 2 T
= + α∆ − + α∆
= π + α∆ − π + α∆
= π − + α∆
= + α∆
Notable. El área del anillo se comporta
como si tuviéramos un disco sólido.
( )2 6
2
1A 300 cm 1 2 17x10 80ºCºC
A 300,8 cm
−⎛ ⎞⎛ ⎞= π +⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
= π
También pudo obtenerse a partir de la
dilatación del radio como hemos visto en
ejemplos anteriores.
El radio del disco mayor crece según:
( )0R R 1 T= + α∆
El disco menor en cambio crece según:

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 439
( )0r r 1 T= + α∆
El cambio neto es:
( ) ( )0 0R r R 1 T r 1 T− = + α∆ − + α∆
( )( )0 0R r R r 1 T− = − + α∆
Pero (R-r) es el ancho del anillo (w) a la
temperatura T y (R0-r0) es el ancho del
anillo (w) cuando la temperatura es T0.
Por tanto:
( )0w w 1 T= + α∆
Obviamente encontramos lo mismo, pero
de manera más sencilla: el ancho del anillo
se dilata linealmente.
Reemplazando valores:
( ) 6 1w 20cm 10cm 1 17x10 80ºCºC
−⎛ ⎞⎛ ⎞= − +⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
w 10,01cm=
El ancho ha aumentado en 0,01cm.
Calculemos el área final:
El radio externo aumenta según:
( )0R R 1 T= + α∆
Reemplazando valores:
6 1R 20cm 1 17x10 80ºCºC
R 20,027cm
−⎛ ⎞⎛ ⎞= +⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
=
Y el radio interno,
( )0r r 1 T= + α∆
Reemplazando valores:
6 1r 10cm 1 17x10 80ºCºC
R 10,014cm
−⎛ ⎞⎛ ⎞= +⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
=
El área del disco entonces será:
2 2R r
2 2 2 2
2
A A A (R r )A (20,027 cm 10,014 cm )A 300,8 cm
= − = π −
= π −
= π
Igual que con el otro método.
11.2.4 Dilatación volumétrica a P constante.
Si ninguna de las dimensiones de un
cuerpo es despreciable, el cuerpo tiene
dilatación volumétrica.
Una forma interesante de entender la
dilatación volumétrica es la siguiente.
Considere un cubo hecho de un material
con coeficiente de dilatación lineal α,
arista L0 y volumen V0 cuando la
temperatura es T0.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 440
Al aumentar la temperatura hasta T se
deben dilatar todas sus dimensiones de
manera lineal, por lo que se tendrá un
nuevo cubo de arista L y volumen V.
La figura siguiente muestra el cubo, a
ambas temperaturas, superpuestos de
manera imaginaria.
Fig 11.23 Superposición de un cubo a temperatura T0 (volumen oscuro) y del mismo cubo cuando tenga una temperatura T (volumen claro). La diferencia entre los volúmenes corresponde a la dilatación térmica.
En la figura siguiente se han dibujado
nuevamente el cubo de la figura anterior
y en forma separada 12 cuerpos
imaginarios de volumen V1
(paralelepípedos rectos de aristas L0, L
2∆
y L2
∆ ), 8 cuerpos imaginarios de volumen
V2 (cubos de arista L2
∆ ) y 6 cuerpos
imaginarios de volumen V3
(paralelepípedos rectos de aristas L0, L0
y L2
∆ ). La suma de todos estos cuerpos es
el aumento real del volumen (∆V).
L0
L0
L0
∆L/2∆L/2
V3 V2
V1
Fig 11.24 El volumen dilatado se ha dividido de manera conveniente en 12 paralelepípedos de volumen V1, en 8 cubos de volumen V2 y en 6 paralelepípedos rectos de volumen V3.
Los volúmenes de los cuerpos son los
siguientes, recordando que 0L L T∆ = α∆ :
( )
( )
2
1 0 0
20
1 0
3 2 20
1
L L LV L L2 2 4
L TV L
4L TV
4
∆ ∆ ∆⎛ ⎞⎛ ⎞= =⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
α∆=
α ∆=
( )
3
2
30
2
L L L LV2 2 2 8
L TV
8
∆ ∆ ∆ ∆⎛ ⎞⎛ ⎞⎛ ⎞= =⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠⎝ ⎠
α∆=
3 3 30
2L TV
8α ∆
=
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 441
( )( ) 23 0 0 0
L LV L L L2 2
∆ ∆⎛ ⎞= =⎜ ⎟⎝ ⎠
( )( )
( )
( )
23 0 0 0
023 0
30
3
L LV L L L2 2
L TV L
2L T
V2
∆ ∆⎛ ⎞= =⎜ ⎟⎝ ⎠
α∆=
α∆=
En consecuencia, como el volumen total
dilatado es:
1 2 3V 12V 8V 6V∆ = + +
Se tiene:
3 2 2 3 3 3 30 0 0L T L T L TV 12 8 6
4 8 2α ∆ α ∆ α∆
∆ = + +
3 2 2 3 3 3 30 0 0V 3L T L T 3L T∆ = α ∆ + α ∆ + α∆
Donde L03 es el volumen V0, cuando la
temperatura es T0, de modo que:
2 2 3 30 0 0V 3V T V T 3V T∆ = α ∆ + α ∆ + α∆
El mismo razonamiento del caso
superficial conduce a desechar los
términos cuadráticos y cúbicos por tener
órdenes de magnitud despreciables, de
modo que una aproximación razonable del
volumen dilatado es:
0V V 3 T∆ = α∆
O, lo que es lo mismo:
( )0 0
0
V V V 3 TV V 1 3 T
− = α∆
= + α∆
A la cantidad 3α se le denomina β
(coeficiente de dilatación volumétrica).
Tal como hemos demostrado en el caso de
la dilatación superficial, una esfera hueca
esférica se dilatará en todas sus
dimensiones, de manera tal que el volumen
de la esfera interna crecerá con la
temperatura como si fuera una esfera
maciza de igual material que el cuerpo.
11.2.5 Dilatación de líquidos.
Los líquidos se comportan igual que los
sólidos respecto de la dilatación a presión
constante, aunque debido a su incapacidad
de mantener su forma se puede
considerar solo su cambio volumétrico.
Entonces, la expresión que permite
conocer el cambio en su volumen es:
0V V T∆ = β∆
Donde β es su coeficiente de dilatación
volumétrica.
La siguiente tabla muestra algunos
valores para líquidos comunes a presión
atmosférica.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 442
Material 6 1
(x10 )º C
−α ⎡ ⎤⎢ ⎥⎣ ⎦
valor medio
Agua 210 Gasolina 950 Glicerina 500 Alcohol etílico 110 Mercurio 180 Benceno 120 Petróleo 890
Como se puede observar, los líquidos
tienen coeficientes de dilatación mayores
que los sólidos.
Esto provoca que un líquido contenido en
un recipiente se dilate más que este.
Ejemplo 11.7
Un tanque de acero está lleno con
gasolina en un almacén subterráneo que
se mantiene a 10ºC. Calcule el porcentaje
de gasolina que se derrama cuando el
tanque se traslada a un recinto donde la
temperatura es de 40ºC.
Solución.
La gasolina se dilata según:
gas 0gas gasV V T∆ = β ∆
Por tanto:
( )6gas 0gas
6gas 0gas
1V V 950x10 30ºCºC
V 28500x10 V
−
−
⎛ ⎞∆ = ⎜ ⎟⎝ ⎠
∆ =
El tanque en cambio, se dilata según:
T 0T TV V 3 T∆ = α ∆
Por tanto:
( )6T 0T
6T 0T
1V V 3 12x10 30ºCºC
V 1080x10 V
−
−
⎛ ⎞∆ = ⎜ ⎟⎝ ⎠
∆ =
Como el volumen inicial de ambos es el
mismo, entonces se puede calcular el
porcentaje de volumen de gasolina
derramado (%VD).
( ) ( )
gas TD
0gas
6 60 0
D0
V V%V x100
V
28500x10 V 1080x10 V%V x100
V
− −
∆ − ∆=
−=
( ) ( )6 60 0
D0
D
28500x10 V 1080x10 V%V x100
V%V 2,7%
− −−=
=
Se derramó el 2,7% del volumen inicial de
la gasolina contenida en el tanque.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 443
11.2.6 Dilatación anómala.
Es bien conocido el caso de la botella de
bebida gaseosa que reventó en el
congelador del refrigerador en la casa. A
cualquiera que haya seguido con cuidado
el análisis anterior tendría que llamarle la
atención, puesto que se esperaba que el
líquido contenido en el recipiente debiera
haberse contraído mucho más que el
vidrio del recipiente. Sin embargo, pasó al
revés.
La explicación de este fenómeno está en
los cristales que se forman en el agua al
congelarse generando espacio entre ellos
lleno de gas. Al enfriarse, el volumen
aumenta. Al contrario, al fundirse, los
cristales se destruyen liberando el gas y
disminuyendo su volumen.
El fenómeno, conocido como dilatación
anómala, en el agua ocurre a presión de 1
atmósfera, entre 0ºC y 4ºC, pero también
ocurre en forma importante en otros
sólidos en el punto de fusión. En el agua
es más notado porque el punto de fusión
ocurre a temperatura que es fácil de
encontrar en la vida diaria.
1,00000
1,00010
1,00020
1,00030
1,00040
1,00050
Volumen de un litro de agua x103m3
TºC
0 4
0,999950
1,000000
densidad en g/cm3
TºC
0 4
0,999900
0,999850
0,999800
0,999700
Fig 11.25 El volumen disminuye entre 0ºC y 4ºC. La densidad es máxima a 4ºC.
Las curvas de la figura anterior ilustran
bien el fenómeno. Entre 0ºC y 4ºC los
cristales desaparecen paulatinamente
disminuyendo el volumen del líquido. A los
4ºC ya casi no quedan, observándose de
ahí en adelante un comportamiento
clásico.
Debido a que la densidad es inversamente
proporcional al volumen, entonces a los
4ºC se tiene la densidad máxima posible
(1 3g
cm).
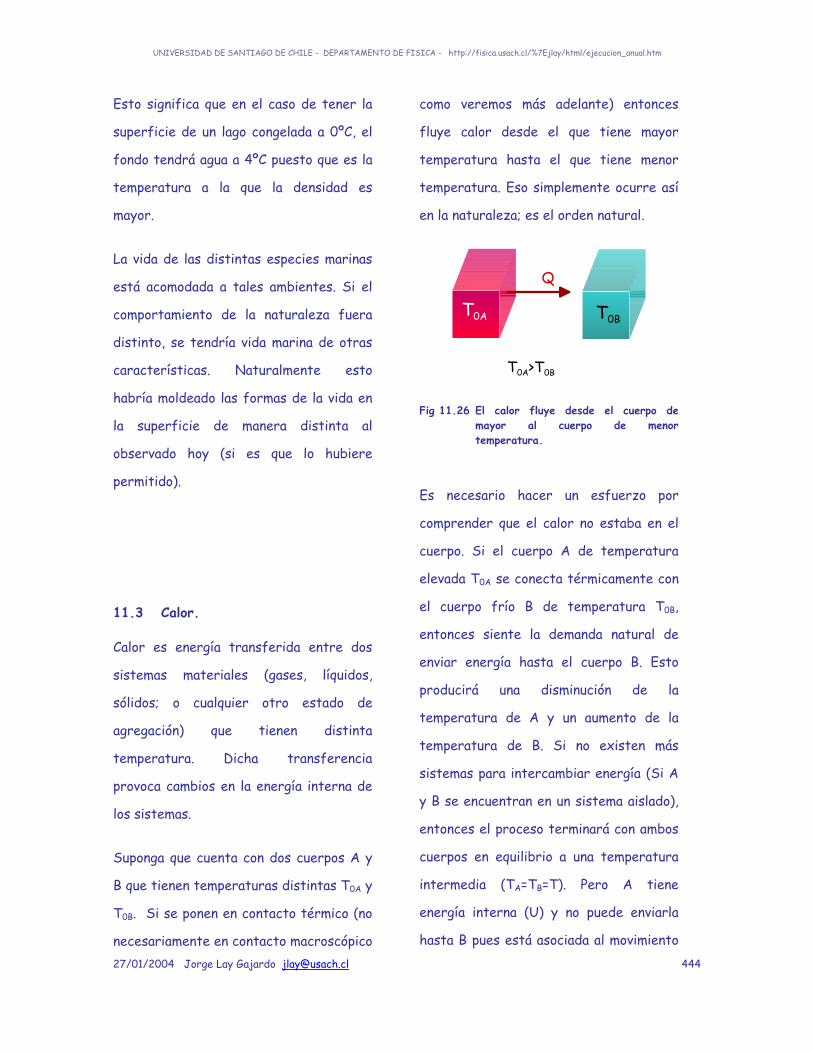
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 444
Esto significa que en el caso de tener la
superficie de un lago congelada a 0ºC, el
fondo tendrá agua a 4ºC puesto que es la
temperatura a la que la densidad es
mayor.
La vida de las distintas especies marinas
está acomodada a tales ambientes. Si el
comportamiento de la naturaleza fuera
distinto, se tendría vida marina de otras
características. Naturalmente esto
habría moldeado las formas de la vida en
la superficie de manera distinta al
observado hoy (si es que lo hubiere
permitido).
11.3 Calor.
Calor es energía transferida entre dos
sistemas materiales (gases, líquidos,
sólidos; o cualquier otro estado de
agregación) que tienen distinta
temperatura. Dicha transferencia
provoca cambios en la energía interna de
los sistemas.
Suponga que cuenta con dos cuerpos A y
B que tienen temperaturas distintas T0A y
T0B. Si se ponen en contacto térmico (no
necesariamente en contacto macroscópico
como veremos más adelante) entonces
fluye calor desde el que tiene mayor
temperatura hasta el que tiene menor
temperatura. Eso simplemente ocurre así
en la naturaleza; es el orden natural.
T0A
Q
T0A>T0B
T0B
Fig 11.26 El calor fluye desde el cuerpo de mayor al cuerpo de menor temperatura.
Es necesario hacer un esfuerzo por
comprender que el calor no estaba en el
cuerpo. Si el cuerpo A de temperatura
elevada T0A se conecta térmicamente con
el cuerpo frío B de temperatura T0B,
entonces siente la demanda natural de
enviar energía hasta el cuerpo B. Esto
producirá una disminución de la
temperatura de A y un aumento de la
temperatura de B. Si no existen más
sistemas para intercambiar energía (Si A
y B se encuentran en un sistema aislado),
entonces el proceso terminará con ambos
cuerpos en equilibrio a una temperatura
intermedia (TA=TB=T). Pero A tiene
energía interna (U) y no puede enviarla
hasta B pues está asociada al movimiento
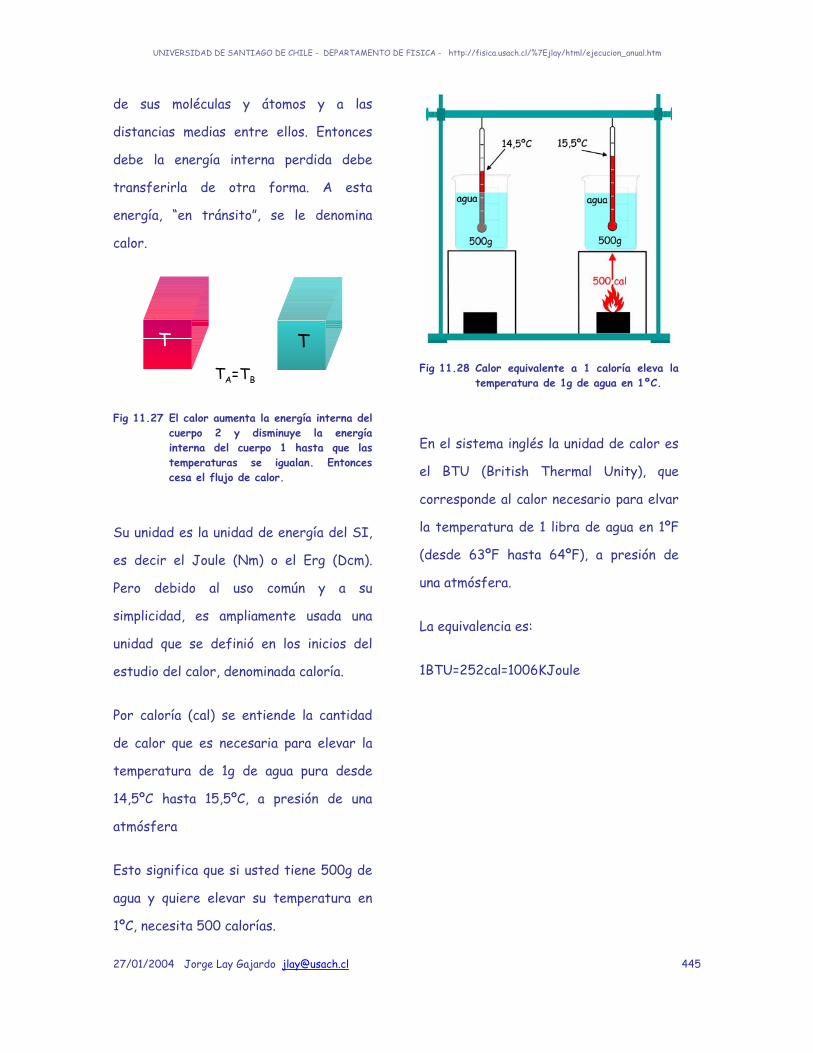
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 445
de sus moléculas y átomos y a las
distancias medias entre ellos. Entonces
debe la energía interna perdida debe
transferirla de otra forma. A esta
energía, “en tránsito”, se le denomina
calor.
T
TA=TB
T
Fig 11.27 El calor aumenta la energía interna del cuerpo 2 y disminuye la energía interna del cuerpo 1 hasta que las temperaturas se igualan. Entonces cesa el flujo de calor.
Su unidad es la unidad de energía del SI,
es decir el Joule (Nm) o el Erg (Dcm).
Pero debido al uso común y a su
simplicidad, es ampliamente usada una
unidad que se definió en los inicios del
estudio del calor, denominada caloría.
Por caloría (cal) se entiende la cantidad
de calor que es necesaria para elevar la
temperatura de 1g de agua pura desde
14,5ºC hasta 15,5ºC, a presión de una
atmósfera
Esto significa que si usted tiene 500g de
agua y quiere elevar su temperatura en
1ºC, necesita 500 calorías.
Fig 11.28 Calor equivalente a 1 caloría eleva la temperatura de 1g de agua en 1ºC.
En el sistema inglés la unidad de calor es
el BTU (British Thermal Unity), que
corresponde al calor necesario para elvar
la temperatura de 1 libra de agua en 1ºF
(desde 63ºF hasta 64ºF), a presión de
una atmósfera.
La equivalencia es:
1BTU=252cal=1006KJoule

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 446
11.3.1 Equivalente mecánico del calor
Quien postuló que el calor era una forma
de energía fue Benjamín Thompson en
1799, nacido en Woburn, Massachssets al
concluir que era inútil describir cualquier
efecto del calor a partir de su peso. Esto
estaba en contradicción con la teoría
postulada por Lavoisier en 1787 que
consideraba al calor como un fluido
(calórico) con masa que se generaba a
partir de la combustión de las sustancias
y se trasmitía por conducción entre los
cuerpos.
El problema principal de la teoría del
calórico es que no cumple con ningún
principio del calor y las mediciones
cuidadosas de la masa de sustancias frías
y calientes no permitían determinarlo en
forma experimental. Se concluía que sus
órdenes de magnitud estaban fuera del
alcance de los instrumentos poco precisos
de la época.
La aceptación del calor como una forma
de energía fue principalmente debido a
que podía ser incorporado en el principio
de conservación de la energía mecánica,
ampliando el cuerpo teórico de manera
muy eficiente.
Quien dio el paso fundamental en el
camino de demostrar al calor como una
forma de energía fue el Inglés James
Prescott Joule, quien mostró
experimentalmente (entre 1843 y 1878)
que una cantidad determinada de energía
mecánica se transforma siempre en la
misma cantidad de calor.
Fig 11.29 James Prescott Joule
Para hacer esto, Joule diseñó un aparato
consistente en un vaso con agua en el que
se sumergía una rueda de paletas unida a
un sistema mecánico por medio de una
cuerda que a su vez estaba unida a un
cuerpo suspendido a cierta altura, que
pasa por una polea. Al bajar el cuerpo,
hace un trabajo mecánico sobre el agua a
través de la rotación de la rueda de
paletas. El agua eleva la temperatura, lo
que muestra que el trabajo está
incorporándose al agua. Eso no sería

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 447
posible sin la aparición de una cantidad de
calor.
Fig 11.30 Agitador de agua usado por Joule para medir la relación entre calor y trabajo mecánico. Foto de: http://www.sciencemuseum.org.uk/
Cuidadosas mediciones lo llevaron a
concluir que cada vez que se hacían 4,186
Joule de trabajo (naturalmente la unidad
SI de energía se llamó posteriormente
Joule en honor a su nombre), la
temperatura del agua se elevaba en 1ºC
por cada gramo.
Fig 11.31 La energía potencial gravitatoria perdida por el cuerpo se transforma en trabajo hecho por la rueda de paletas al agua. Esto produce un aumento en la temperatura del agua, lo que muestra un aumento en su energía interna.
Como sabemos que el calor necesario para
elevar la temperatura de 1 gramo de agua
en 1ºC es de 1 caloría, entonces se tiene
que 1cal = 4,186Joule (o 1J=0,24cal).
Suele representarse este resultado a
partir de lo que se denomina equivalente
mecánico del calor, J.
W calJ 4,186Q Joule
= =
Posteriores experimentos realizados por
Joule y muchos otros, que incluían el uso
de energía eléctrica demostraron que
existían muchas otras formas de energía,
avanzándose notablemente en el camino
del establecimiento del principio de
conservación de la energía que tan
relevante papel juega en los modelos de la
física en la búsqueda de conocer el
comportamiento de la naturaleza.
11.3.2 Energía en la naturaleza.
La energía en la naturaleza cambia de
forma pero su cantidad total permanece
invariante. Existen sistemas que pierden
energía pero otros que ganan en
cantidades equivalentes a la perdida por
el primero, a través de innumerables
tipos de transformaciones.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 448
Cuando una planta recibe la luz del sol
(energía electromagnética radiada) la usa
para construir moléculas complejas
orgánicas. El sol perdió energía, la planta
ganó energía (aumentó su energía
química).
Fig 11.32 Los vegetales a través de la fotosíntesis acumulan la energía electromagnética radiada por el sol
Las plantas acumulan energía química que
es transferida a los animales, los que la
transforman en sus estómagos en otro
tipo de moléculas que ocupan
inmediatamente o almacenan para futuras
necesidades orgánicas.
Los animales de las cadenas superiores
comen plantas y/u otros animales. El
hombre es omnívoro. Sus alimentos
contienen energía potencial almacenada
en sus estructuras moleculares en tres
formas básicas: Carbohidratos y
proteínas (cada gramo de ellas contiene
4000cal), y lípidos (grasa, cada gramo de
ellas contiene 9000cal).
Fig 11.33 Los alimentos contienen formas de energía potencial transformables en energías útiles para los procesos orgánicos, en el estómago.
Los vegetales al morir continúan
almacenando su energía en otras formas.
Grandes volúmenes de vegetales
sepultados por eventos terrestres han
sufrido descomposiciones anaeróbicas
(sin la presencia de oxígeno) a grandes
presiones, produciendo carbón, gas y
petróleo, que concentran la energía en
cantidades enormes.
Fig 11.34 El carbón es producido por masa vegetal sometida a grandes presiones y contiene cantidades grandes de energía potencial acumulada.
Estas energías se liberan al combustionar
estos productos (elevando sus
temperaturas hasta que se rompen los

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 449
enlaces) devolviendo la energía a formas
tecnológicamente aprovechables (por
ejemplo, en centrales térmicas que
producen vapor de agua que mueven
turbinas las que a su vez producen
energía eléctrica que es fácilmente
enviada a través de una red física a
hogares o industrias de manufactura; o en
motores de combustión interna
incorporados en los vehículos motorizados
o en procesos industriales).
Fig 11.35 Planta de producción de energía eléctrica a través de la combustión de carbón.
El organismo humano también quema los
alimentos en el estómago, a través de
procesos denominados metabólicos (es un
reactor). En él, las enzimas extraen
glucosa y otros azúcares de los
carbohidratos, glicerol y otros ácidos
grasos de las grasas y los aminoácidos de
las proteínas. Estas moléculas son
transportadas a través del sistema
sanguíneo a las células donde son usadas o
almacenadas. Esto motiva que el valor
energético nutricional de los alimentos
venga expresado en función de las
calorías que desprenderían si los
quemaran (Usualmente medido en
Kilocalorías, que se denota por Cal:
1Cal=103cal).
Existen muchas otras formas de energía
así como sus transformaciones en formas
útiles que no son tratadas aquí por
razones de espacio. Existe abundante
información sobre ellas tanto en la
bibliografía tradicional como en Internet.
Investigue acerca de la energía
almacenada en el viento, en el agua, en los
núcleos de los átomos, en el interior de la
tierra, etc.
11.3.3 Calor específico.
Cada sustancia eleva su temperatura de
manera diferente al serle entregada una
cantidad de calor determinada.
Estudios experimentales revelan que la
cantidad de calor necesaria (dQ) para
elevar la temperatura de una sustancia
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 450
depende su masa (m), y del cambio de
temperatura requerido (dT).
dQ mdT∝
La constante de proporcionalidad
necesaria para transformar la proporción
en una igualdad es distinta para cada
sustancia, y es denominada calor
específico (c).
dQ mcdT=
De aquí el calor específico puede
definirse como el calor necesario para
elevar la temperatura de un gramo de la
sustancia en 1ºC.
dQ calcmdT gºC
⎡ ⎤= ⎢ ⎥
⎣ ⎦
Pero como veremos más adelante, la
cantidad de calor necesaria para cambiar
la temperatura depende de la forma en
que se haga el proceso. Si el proceso se
realiza a volumen constante (se tiene cV)
o a presión constante (se tiene cP), el
calor necesario es distinto (el calor
depende del camino). Ambos calores
específicos varían de manera
despreciable en el caso de los líquidos y
los sólidos. En los gases la diferencia es
significativa y a su debido tiempo se
estudiará.
En consecuencia, para líquidos y sólidos
simplemente se puede definir el calor
específico como (en términos discretos):
Q calcm T gºC
⎡ ⎤∆= ⎢ ⎥∆ ⎣ ⎦
Cuyo valor depende del rango de
temperaturas, aunque puede considerarse
constante si la variación no es muy
grande.
En algunas aplicaciones es conveniente
definir el calor específico molar, que
consiste en el calor necesario para
cambiar la temperatura de un mol de la
sustancia en 1ºC.
El calor empleado en la transformación
puede entonces calcularse de manera
sencilla a través de la expresión discreta:
Q mc T= ∆
El calor específico caracteriza a las
sustancias. La siguiente tabla muestra
algunos valores para presión equivalente a
1 atmósfera y a 20ºC, a menos que se
indique otro valor.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 451
Sustancia
Calor específico
cal
gº C
⎡ ⎤⎢ ⎥⎣ ⎦
Calor específico
J
Kgº C
⎡ ⎤⎢ ⎥⎣ ⎦
Calor específico
molarcal
molºC⎡ ⎤⎢ ⎥⎣ ⎦
Cobre 0,093 390 5,85 Plomo 0,031 130 6,32 Mercurio 0,033 140 6,7 Plata 0,056 230 Agua (15ºC) 1,00 4186 18,0 Hielo (-5ºC 0,50 2100 Vapor de agua (110ºC)
0,48 2010
Aluminio 0.22 900 5,82 Silicio 0,17 4,78 Alcohol etílico 0,58 2400
Muy útil resulta estudiar un sistema
aislado en que varios cuerpo intercambian
calor, puesto que en esas condiciones la
suma del calor intercambiado debe ser
nula por conservación de la energía.
En efecto en esas condiciones los cuerpos
que tengan mayor temperatura perderán
energía interna a través de la emisión de
calor hacia los cuerpos que tienen menor
temperatura, mientras que estos
incrementarán su energía interna debido
al calor recibido de los primeros. La
transferencia continuará hasta que
finalmente todos los cuerpos alcancen la
temperatura de equilibrio.
Ejemplo 11.8
En un sistema aislado cuya temperatura
es de 50ºC existen 100g de agua en
equilibrio térmico. Si se introduce un
pedazo de cobre de 20g a 80ºC,
determine la temperatura de equilibrio de
la mezcla.
Solución:
Como sabemos, en un sistema aislado la
suma de los calores es nula:
i n
ii 1
Q 0=
=
=∑
De manera tal que se tiene:
( ) ( )A A Cu CuA Cum c T m c T 0∆ + ∆ =
Reemplazando valores:
( ) ( )
( ) ( )
e A
e
cal100g 1 T 50ºCgºC
cal20g 0,093 T 80ºC 0gºC
⎛ ⎞− +⎜ ⎟
⎝ ⎠⎛ ⎞
+ − =⎜ ⎟⎝ ⎠
eT 50,55ºC=

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 452
Ejemplo 11.9
En un vaso de Dewar en equilibrio térmico
a 20ºC se introducen 300 g de agua a
50ºC con la precaución de hacerlo
rápidamente a fin de no perder calor
desde el vaso hacia el ambiente. Calcular
el equivalente en agua del vaso de Dewar,
si la temperatura final de equilibrio es de
40ºC.
Solución:
Un vaso de Dewar es un sistema aislado,
que impide el intercambio de calor por
conducción con una pared doble de vidrio
en medio de la cual se hace vacío (en
realidad una presión muy baja), por
convección al estar herméticamente
cerrado y por radiación plateando las
paredes de los vidrios (espejos).
El vaso de Dewar, fue diseñado por Sir
James Dewar en 1892 y comercializado a
partir de 1904 por una empresa alemana
cuyo nombre era Thermos GMBH, razón
por la que el aparato es conocido
popularmente como termo.
Fig 11.36 Aviso publicitado vasos de Dewar de marca Thermos para propósitos domésticos en 1914.
Los termos comerciales disponibles hoy
día son fabricados por gran número de
empresas, y los materiales usados son
muy diversos. Cada uno de ellos posee una
capacidad de intercambiar calor con las
sustancias depositadas en su interior que
le son características.
Para laboratorios de investigación existen
aparatos considerablemente más
precisos, pero que conservan el mismo
principio.
En la mezcla citada en el problema
participan 2 elementos intercambiando
calor: el agua y el vaso de Dewar.
Entonces se puede plantear:
( ) ( )A A vd vdA vdm c T m c T 0∆ + ∆ =

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 453
En la ecuación, la cantidad vd vdm c es una
constante del aparato, denominada
“equivalente en agua del vaso de Dewar”
el que para estos propósitos es
denominado “calorímetro”. Entonces:
( )( )A A A
vd vdvd
m c Tm c
T− ∆
=∆
( ) ( )
( )vd vd
cal300g 1 40ºC 50ºCgºC
m c40ºC 20ºC
⎛ ⎞− −⎜ ⎟
⎝ ⎠=−
( ) ( )
( )vd vd
cal300g 1 40ºC 50ºCgºC
m c40ºC 20ºC
⎛ ⎞− −⎜ ⎟
⎝ ⎠=−
11.4 Cambios de fase.
El intercambio de calor cuando en el
proceso existe un cambio de fase es
distinto.
Consideremos una sustancia en fase
sólida, cuya temperatura aumenta debido
a que se le agrega calor. En el proceso, el
calor suministrado se está invirtiendo en
aumentar su energía interna, lo que
microscópicamente se traduce en
aumentos en su temperatura y en su
volumen. Sin embargo, cuando llega hasta
el punto de fusión, la temperatura deja
de subir, pues el calor se ocupa en el
proceso de vencer las fuerzas
intermoleculares, es decir en aumentar su
energía potencial interna.
De esta manera, durante el proceso de
fusión, que ocurre a temperatura
constante (punto de fusión; depende de la
presión), el calor que demanda la
sustancia es denominado “calor latente de
fusión”, Lf. Esta cantidad es
característica de cada sustancia.
En la gráfica siguiente se observa el
comportamiento de 1g de hielo cuya
temperatura cambia entre -20ºC y 0ºC,
punto en el que empieza a fundirse si la
presión es 1 atmósfera.
T (ªC)
Q(cal)
0 20.-20
-10
0
40 60 80 100
calor latente de fusión del hielo.Lf=19,7 cal/g
Fig 11.37 Comportamiento del hielo con el calor en el punto de fusión a 1 atm de presión.
Entre -20ºC y 0ºC el calor que demanda
el proceso es

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 454
1 H HQ m c T= ∆
( ) ( )( )1calQ 1g 0,5 0ºC 20ºCgºC
⎛ ⎞= − −⎜ ⎟
⎝ ⎠
1Q 10cal=
En cambio, para fundir el gramo de hielo,
se necesitaron 79,7 cal.
Es decir, para el hielo a 1 atmósfera de
presión, el calor latente de fusión es de
79,7 calg
. Entonces se puede escribir:
fQ mL=
Que para este ejemplo:
( )2 fcalQ mL 1g 79,7 79,7calg
⎛ ⎞= = =⎜ ⎟
⎝ ⎠
Para otras sustancias, la siguiente tabla
muestra los puntos de fusión y sus
respectivos calores latentes de fusión a
presión 1 atmósfera.
Sustancia Pto fusión
(ºC)
Calor de fusión
(cal/g)
Oxígeno -218,8 3,3 Nitrógeno -210,0 6,1 Alcohol etílico -114 25 Amoníaco -77,8 8,0 agua 0 79,7 Plomo 327 5,9 Plata 961 21 Hierro 1808 69,1
Traspasado el punto de fusión, el sólido
se encuentra en la fase líquida.
Los sólidos amorfos no tienen punto de
fusión, reblandeciéndose paulatinamente
en la medida en que la temperatura
aumenta, hasta que la viscosidad
disminuye hasta al punto en que empiezan
a fluir.
Si seguimos agregándole calor al agua
proveniente del hielo nuevamente se eleva
su temperatura hasta que llega al punto
de ebullición, temperatura a la cual el
agua empieza a gasificarse en el interior
del líquido, generando burbujas que son
desalojadas del interior por tener menor
densidad.
Fig 11.38 La ebullición del agua pura a 1 atm de presión, ocurre a 100ºC.
La cantidad de calor que se necesita para
ello es:
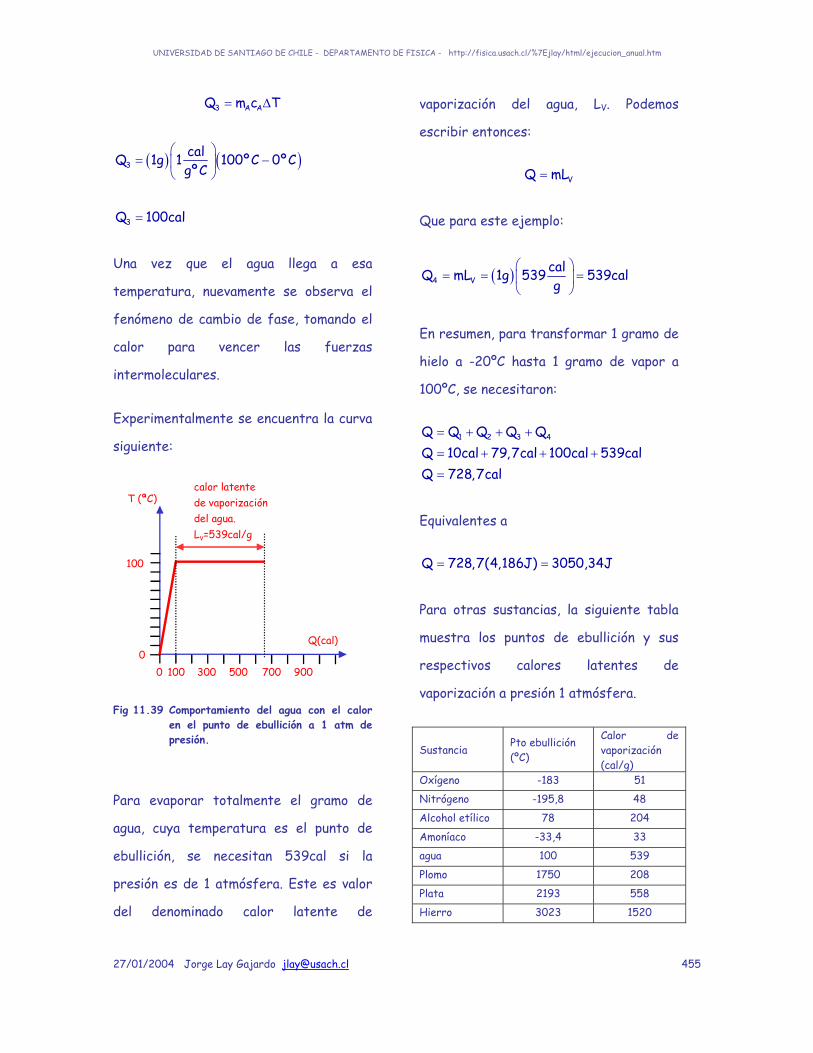
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 455
3 A AQ m c T= ∆
( ) ( )3calQ 1g 1 100ºC 0ºCgºC
⎛ ⎞= −⎜ ⎟
⎝ ⎠
3Q 100cal=
Una vez que el agua llega a esa
temperatura, nuevamente se observa el
fenómeno de cambio de fase, tomando el
calor para vencer las fuerzas
intermoleculares.
Experimentalmente se encuentra la curva
siguiente:
T (ªC)
Q(cal)
0 1000
100
300
calor latente de vaporización del agua.LV=539cal/g
500 900700
Fig 11.39 Comportamiento del agua con el calor en el punto de ebullición a 1 atm de presión.
Para evaporar totalmente el gramo de
agua, cuya temperatura es el punto de
ebullición, se necesitan 539cal si la
presión es de 1 atmósfera. Este es valor
del denominado calor latente de
vaporización del agua, LV. Podemos
escribir entonces:
VQ mL=
Que para este ejemplo:
( )V4calQ mL 1g 539 539calg
⎛ ⎞= = =⎜ ⎟
⎝ ⎠
En resumen, para transformar 1 gramo de
hielo a -20ºC hasta 1 gramo de vapor a
100ºC, se necesitaron:
1 2 3 4Q Q Q Q QQ 10cal 79,7cal 100cal 539calQ 728,7cal
= + + +
= + + +
=
Equivalentes a
Q 728,7(4,186J) 3050,34J= =
Para otras sustancias, la siguiente tabla
muestra los puntos de ebullición y sus
respectivos calores latentes de
vaporización a presión 1 atmósfera.
Sustancia Pto ebullición (ºC)
Calor de vaporización (cal/g)
Oxígeno -183 51
Nitrógeno -195,8 48
Alcohol etílico 78 204
Amoníaco -33,4 33
agua 100 539
Plomo 1750 208
Plata 2193 558
Hierro 3023 1520

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 456
Ejemplo 11.10
En un sistema aislado cuya temperatura
es de 20ºC existen 100g de agua, en los
que se introducen 50g de hielo a 0ºC.
Calcular la temperatura final de la
mezcla.
Solución.
En los casos de intercambio de calor
entre sustancias de distintas fases en los
que las temperaturas son suficientemente
elevadas para provocar un cambio de
fases, primero se debe determinar si la
energía disponible es suficiente para
cambiar la fase de la totalidad del sólido.
En nuestro ejemplo, el agua desprenderá
una cantidad de calor para cambiar su
temperatura hasta 0ºC equivalente a:
A AQ m c T= ∆
( ) ( )calQ 100g 1 0ºC 20ºCgºC
⎛ ⎞= −⎜ ⎟
⎝ ⎠
Q 200cal= −
El hielo necesita para fundirse una
cantidad de calor equivalente a:
fQ mL=
( ) calQ 50g 79,7 3985calg
⎛ ⎞= =⎜ ⎟
⎝ ⎠
De esto se desprende que la energía no es
suficiente para fundir todo el hielo.
En consecuencia, solo se fundirá una
cantidad de hielo equivalente a
f
Q 200calm 2,51gcalL 79,7g
= = =
Y la temperatura final de equilibrio de la
mezcla será de 0ºC, con hielo y agua
coexistiendo.
Ejemplo 11.11
Calcular el calor que 100g de vapor de
agua a 150ºC necesitan ceder para
transformarse en 150g de hielo a -30ºC a
presión de 1 atmósfera.
Solución:
Se necesita enfriar el vapor de agua
hasta el punto de condensación (Q1),
condensarlo (Q2), enfriar el agua
proveniente del vapor hasta el punto de
congelamiento (Q3), congelarlo (Q4), y
finalmente enfriar el hielo hasta -30ºC
(Q5).

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 457
1 V VQ m c T= ∆
( ) ( )1calQ 100g 0,48 100ºC 150ºCg
⎛ ⎞= −⎜ ⎟
⎝ ⎠
1Q 2400cal= −
( )
2 V f
2
2
Q m L
calQ 100g 539g
Q 53900cal
= −
⎛ ⎞= − ⎜ ⎟
⎝ ⎠= −
( ) ( )3 A A
3
3
Q m c T
calQ 100g 1 0ºC 100ºCg
Q 10000cal
= ∆
⎛ ⎞= −⎜ ⎟
⎝ ⎠= −
( )
A4 f
4
4
Q m L
calQ 100g 79,7g
Q 7970cal
= −
⎛ ⎞= − ⎜ ⎟
⎝ ⎠= −
( ) ( )5 H H
5
5
Q m c T
calQ 100g 0,5 30ºC 0ºCg
Q 1500cal
= ∆
⎛ ⎞= − −⎜ ⎟
⎝ ⎠= −
Es decir, se necesitan ceder 75770cal.
Ejemplo 11.12
En un sistema aislado existen 500g de
agua a 70ºC en equilibrio y se introducen
10g de vapor de agua a 130ºC. Calcular la
temperatura de equilibrio de la mezcla.
Solución.
El vapor de agua necesita entregar calor
para llegar al punto de condensación (Q1)
y para condensarse totalmente (Q2):
1 V VQ m c T= ∆
( ) ( )1calQ 10g 0,48 100ºC 130ºCgºC
⎛ ⎞= −⎜ ⎟
⎝ ⎠
1Q 144cal= −
2 V fQ m L= −
( )2calQ 10g 539g
⎛ ⎞= − ⎜ ⎟
⎝ ⎠
2Q 5390cal= −
Entonces, el vapor entrega 5534cal para
transformarse en agua caliente a 100ºC.
El agua necesita Q3 para llegar hasta
100ºC.
3 A AQ m c T= ∆
( ) ( )3calQ 500g 1 100ºC 70ºCgºC
⎛ ⎞= −⎜ ⎟
⎝ ⎠
3Q 15000cal=
Es decir, para llegar al punto de
condensación el agua necesita más calor
que la suma del calor cedido por el vapor

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 458
para llegar al punto de condensación y
para condensarse.
Entonces la mezcla finalmente alcanzará
el equilibrio con todos los participantes
en fase líquida a una temperatura (Te)
entre 70ºC y 100ºC.
Por tanto:
Q1+Q2+Q3+Q4=0
Donde Q4 es el calor que el vapor
condensado necesita para pasar desde
100ºC hasta la temperatura de equilibrio.
Entonces:
( ) ( )
( ) ( )
e
e
cal144cal 5390cal 500g 1 T 70ºCgºC
cal10g 1 T 100ºC 0gºC
⎛ ⎞− − + − +⎜ ⎟
⎝ ⎠⎛ ⎞
− =⎜ ⎟⎝ ⎠
eT 81,44ºC=
11.4.1 Punto triple.
Los puntos de fusión y de ebullición varían
con la presión de la atmósfera y con las
impurezas.
Las impurezas elevan el punto de fusión y
disminuyen el punto de fusión. Observe la
gráfica de la figura siguiente, donde se
muestra la elevación del punto de
ebullición en función de la cantidad de sal
agregada al agua pura, a presión de 1
atmósfera.
108
punto de ebullición de solución de agua con sal
T(ªC)
cantidad de sal en la solución en gramos
109
107106105104103102101100
0 10 15 20 25 30 355
Fig 11.40 Comportamiento del punto de ebullición a 1 atm de presión del agua con sal. “An investigation of how salt affects the boiling point of water”. www.soton.ac.uk/~plf/ScI-Journal/ vol3no2/v3n2a2.html
Obviamente no solo la sal eleva el punto
de ebullición del agua, sino cualquier otro
elemento diluido en ella, tal como el
azúcar, las sales minerales, etc.
Las impurezas producen una disminución
en el punto de fusión. En Punta Arenas o
en otras ciudades chilenas muy australes
que experimentan temperaturas muy
bajas en invierno, la congelación del agua
en el suelo causa numerosos accidentes
de tránsito. La municipalidad entonces
arroja sal en la calle. La sal se incorpora
al agua del piso y esto produce una
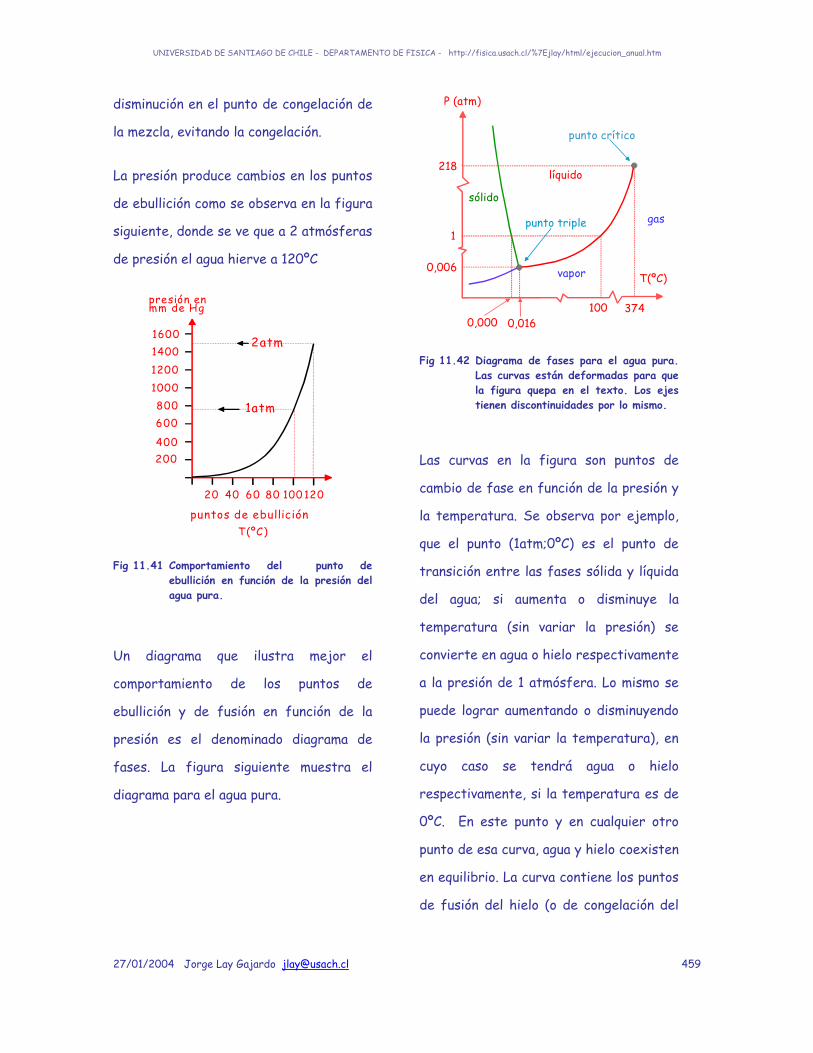
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 459
disminución en el punto de congelación de
la mezcla, evitando la congelación.
La presión produce cambios en los puntos
de ebullición como se observa en la figura
siguiente, donde se ve que a 2 atmósferas
de presión el agua hierve a 120ºC
T(ºC)puntos de ebullición
1atm
2atm
presión enmm de Hg
200400
600800
1000120014001600
20 40 60 80 100 120
Fig 11.41 Comportamiento del punto de ebullición en función de la presión del agua pura.
Un diagrama que ilustra mejor el
comportamiento de los puntos de
ebullición y de fusión en función de la
presión es el denominado diagrama de
fases. La figura siguiente muestra el
diagrama para el agua pura.
0,006
1
sólido
líquido
gas
vapor
punto crítico
punto triple
0,000 0,016
T(ºC)
P (atm)
218
374100
Fig 11.42 Diagrama de fases para el agua pura. Las curvas están deformadas para que la figura quepa en el texto. Los ejes tienen discontinuidades por lo mismo.
Las curvas en la figura son puntos de
cambio de fase en función de la presión y
la temperatura. Se observa por ejemplo,
que el punto (1atm;0ºC) es el punto de
transición entre las fases sólida y líquida
del agua; si aumenta o disminuye la
temperatura (sin variar la presión) se
convierte en agua o hielo respectivamente
a la presión de 1 atmósfera. Lo mismo se
puede lograr aumentando o disminuyendo
la presión (sin variar la temperatura), en
cuyo caso se tendrá agua o hielo
respectivamente, si la temperatura es de
0ºC. En este punto y en cualquier otro
punto de esa curva, agua y hielo coexisten
en equilibrio. La curva contiene los puntos
de fusión del hielo (o de congelación del
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 460
agua) a distintas presiones y
temperaturas.
El punto (1atm;100ºC) es el punto de
transición entre agua y vapor de agua, de
manera tal que aumentando la
temperatura (sin variar la presión) o
disminuyendo la presión (sin variar la
temperatura) producirá vapor de agua.
Los puntos de esta curva contienen los
puntos de ebullición del agua (o de
condensación del vapor de agua).
La distinción entre vapor de agua y gas es
determinada por el denominado punto
crítico (218atm;374ºC). Sobre esa
temperatura no existe presión alguna que
permita al gas transformarse en líquido.
En estos estados la sustancia tiene
algunas propiedades de los líquidos y
algunas propiedades de los gases.
Note que si las presiones son inferiores a
0,006 atmósferas, entonces al elevar la
temperatura el hielo (a partir de las
temperaturas de la curva) se transforma
en vapor sin pasar por la fase líquida (se
sublima). Lo mismo ocurre en dirección
opuesta, pues el vapor de agua se congela
directamente al disminuir la temperatura.
El mismo efecto se obtiene disminuyendo
o aumentando la presión a partir de las
temperaturas de la curva .La curva
respectiva contiene los puntos de
sublimación a diferentes presiones y
temperaturas.
Existe un solo punto en que es posible
tener las tres fases coexistiendo en
equilibrio, denominado punto triple
(0,006atm; 0,016ºC). Esta extraordinaria
circunstancia ha causado que este punto
fácilmente reproducible en cualquier
lugar se haya convertido en punto fijo
para la escala internacional de
temperaturas en 1990.
Cada sustancia tiene diagramas de fases
distintos. Los puntos triples de algunas de
ellas también han sido incorporados como
puntos fijos en la escala de temperaturas.
11.5 Transferencia de calor.
Los mecanismos de transferencia de calor
son tres. Conducción, convección y
radiación.
El Calor se transmite entre dos cuerpos o
sistemas si existe una diferencia de
temperaturas.
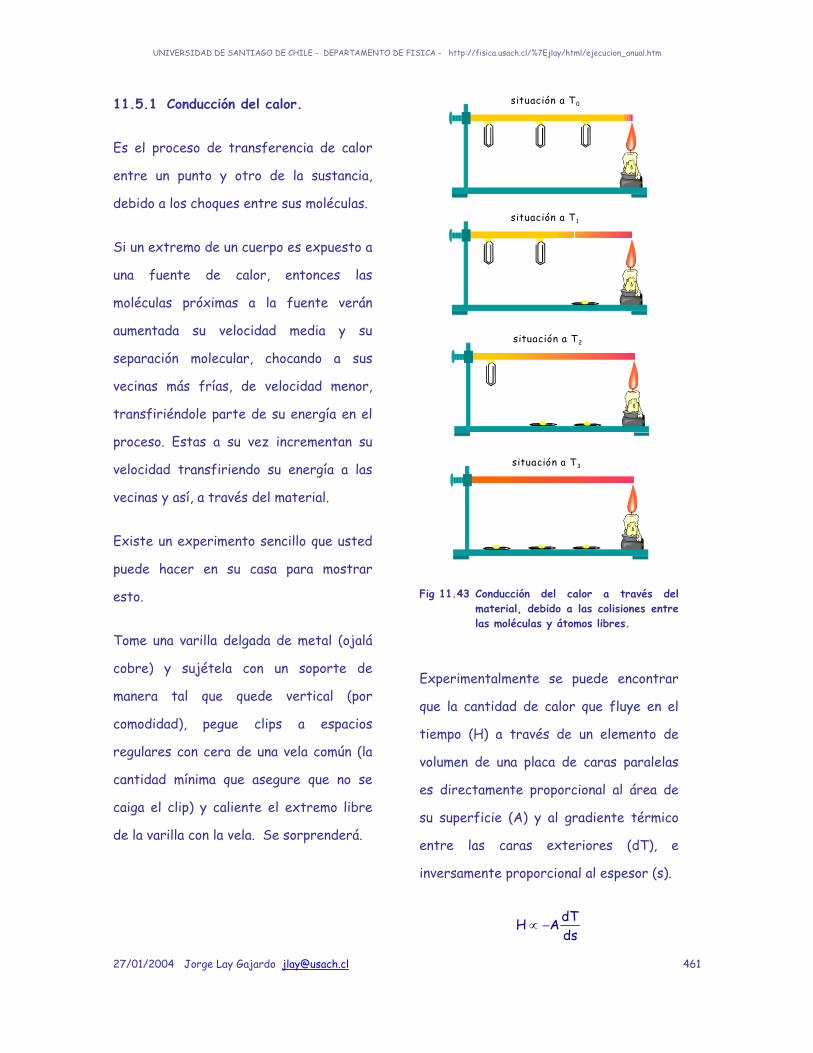
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 461
11.5.1 Conducción del calor.
Es el proceso de transferencia de calor
entre un punto y otro de la sustancia,
debido a los choques entre sus moléculas.
Si un extremo de un cuerpo es expuesto a
una fuente de calor, entonces las
moléculas próximas a la fuente verán
aumentada su velocidad media y su
separación molecular, chocando a sus
vecinas más frías, de velocidad menor,
transfiriéndole parte de su energía en el
proceso. Estas a su vez incrementan su
velocidad transfiriendo su energía a las
vecinas y así, a través del material.
Existe un experimento sencillo que usted
puede hacer en su casa para mostrar
esto.
Tome una varilla delgada de metal (ojalá
cobre) y sujétela con un soporte de
manera tal que quede vertical (por
comodidad), pegue clips a espacios
regulares con cera de una vela común (la
cantidad mínima que asegure que no se
caiga el clip) y caliente el extremo libre
de la varilla con la vela. Se sorprenderá.
situación a T0
situación a T1
situación a T3
situación a T2
Fig 11.43 Conducción del calor a través del material, debido a las colisiones entre las moléculas y átomos libres.
Experimentalmente se puede encontrar
que la cantidad de calor que fluye en el
tiempo (H) a través de un elemento de
volumen de una placa de caras paralelas
es directamente proporcional al área de
su superficie (A) y al gradiente térmico
entre las caras exteriores (dT), e
inversamente proporcional al espesor (s).
dTH Ads
∝ −
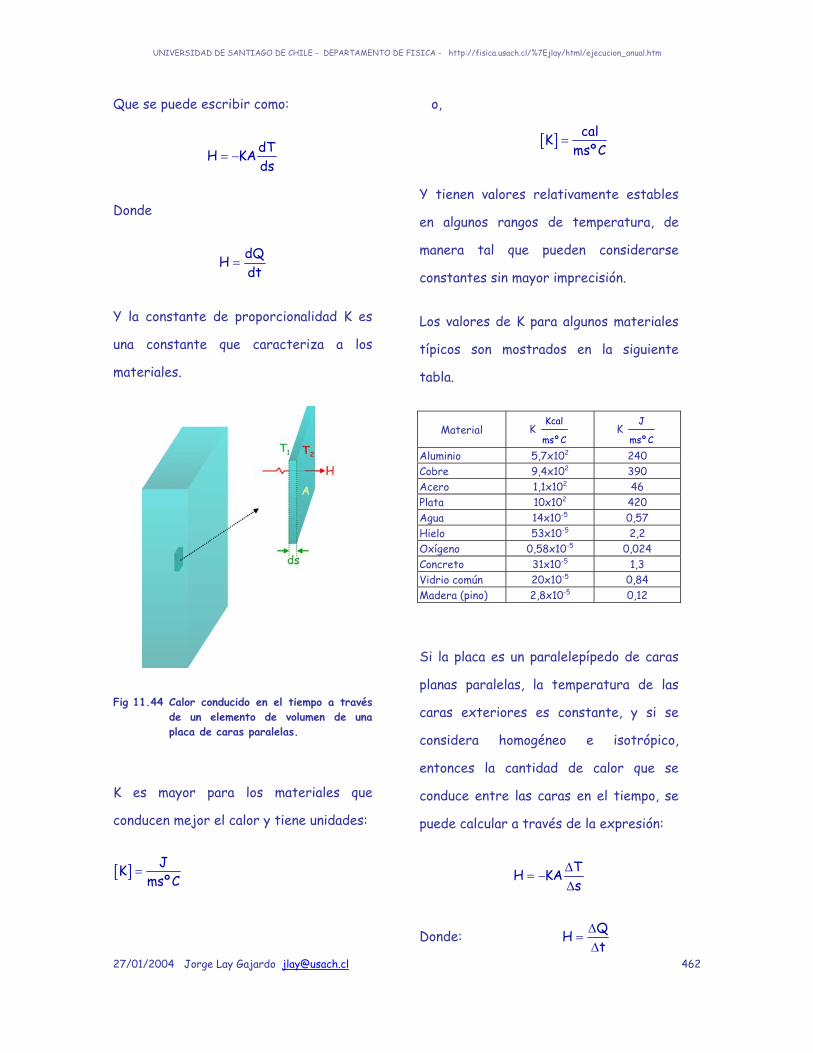
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 462
Que se puede escribir como:
dTH KAds
= −
Donde
dQHdt
=
Y la constante de proporcionalidad K es
una constante que caracteriza a los
materiales.
Fig 11.44 Calor conducido en el tiempo a través de un elemento de volumen de una placa de caras paralelas.
K es mayor para los materiales que
conducen mejor el calor y tiene unidades:
[ ] JKmsºC
=
o,
[ ] calKmsºC
=
Y tienen valores relativamente estables
en algunos rangos de temperatura, de
manera tal que pueden considerarse
constantes sin mayor imprecisión.
Los valores de K para algunos materiales
típicos son mostrados en la siguiente
tabla.
Material K Kcal
msº C K
J
msº C
Aluminio 5,7x102 240 Cobre 9,4x102 390 Acero 1,1x102 46 Plata 10x102 420 Agua 14x10-5 0,57 Hielo 53x10-5 2,2 Oxígeno 0,58x10-5 0,024 Concreto 31x10-5 1,3 Vidrio común 20x10-5 0,84 Madera (pino) 2,8x10-5 0,12
Si la placa es un paralelepípedo de caras
planas paralelas, la temperatura de las
caras exteriores es constante, y si se
considera homogéneo e isotrópico,
entonces la cantidad de calor que se
conduce entre las caras en el tiempo, se
puede calcular a través de la expresión:
TH KAs
∆= −
∆
Donde: QHt
∆=
∆
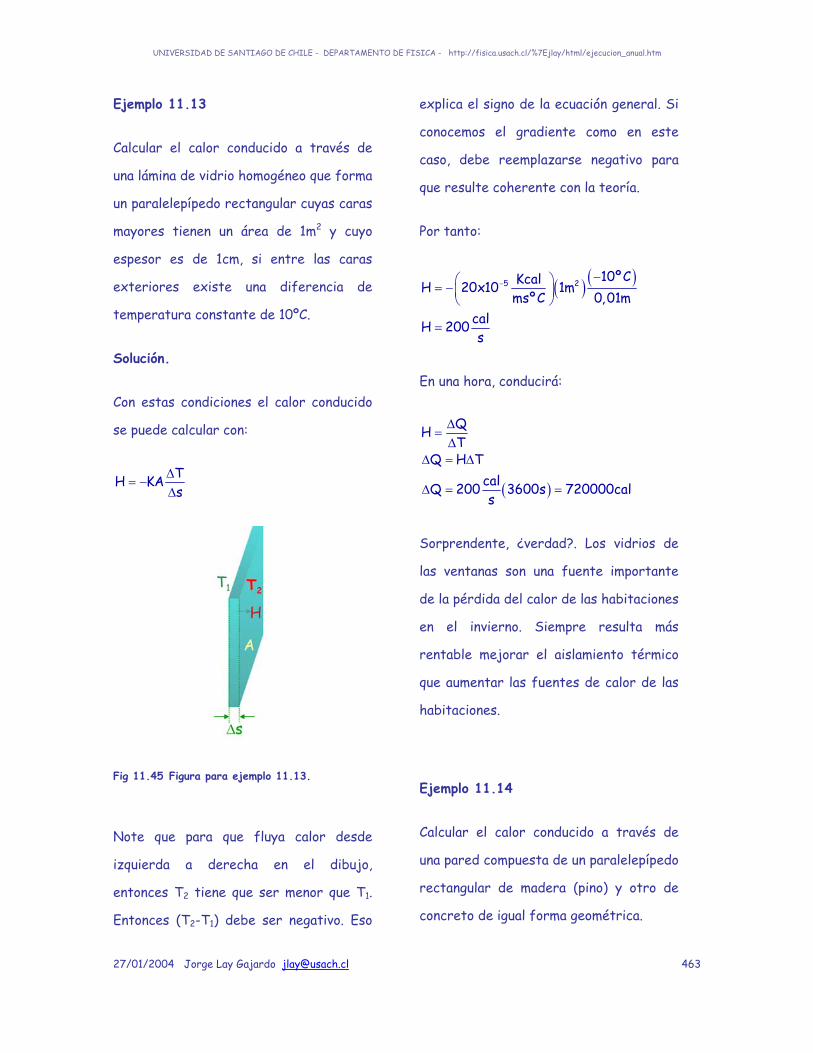
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 463
Ejemplo 11.13
Calcular el calor conducido a través de
una lámina de vidrio homogéneo que forma
un paralelepípedo rectangular cuyas caras
mayores tienen un área de 1m2 y cuyo
espesor es de 1cm, si entre las caras
exteriores existe una diferencia de
temperatura constante de 10ºC.
Solución.
Con estas condiciones el calor conducido
se puede calcular con:
TH KAs
∆= −
∆
Fig 11.45 Figura para ejemplo 11.13.
Note que para que fluya calor desde
izquierda a derecha en el dibujo,
entonces T2 tiene que ser menor que T1.
Entonces (T2-T1) debe ser negativo. Eso
explica el signo de la ecuación general. Si
conocemos el gradiente como en este
caso, debe reemplazarse negativo para
que resulte coherente con la teoría.
Por tanto:
( ) ( )5 2 10ºCKcalH 20x10 1mmsºC 0,01m
calH 200s
−−⎛ ⎞= −⎜ ⎟
⎝ ⎠
=
En una hora, conducirá:
( )
QHT
Q H TcalQ 200 3600s 720000cals
∆=
∆∆ = ∆
∆ = =
Sorprendente, ¿verdad?. Los vidrios de
las ventanas son una fuente importante
de la pérdida del calor de las habitaciones
en el invierno. Siempre resulta más
rentable mejorar el aislamiento térmico
que aumentar las fuentes de calor de las
habitaciones.
Ejemplo 11.14
Calcular el calor conducido a través de
una pared compuesta de un paralelepípedo
rectangular de madera (pino) y otro de
concreto de igual forma geométrica.
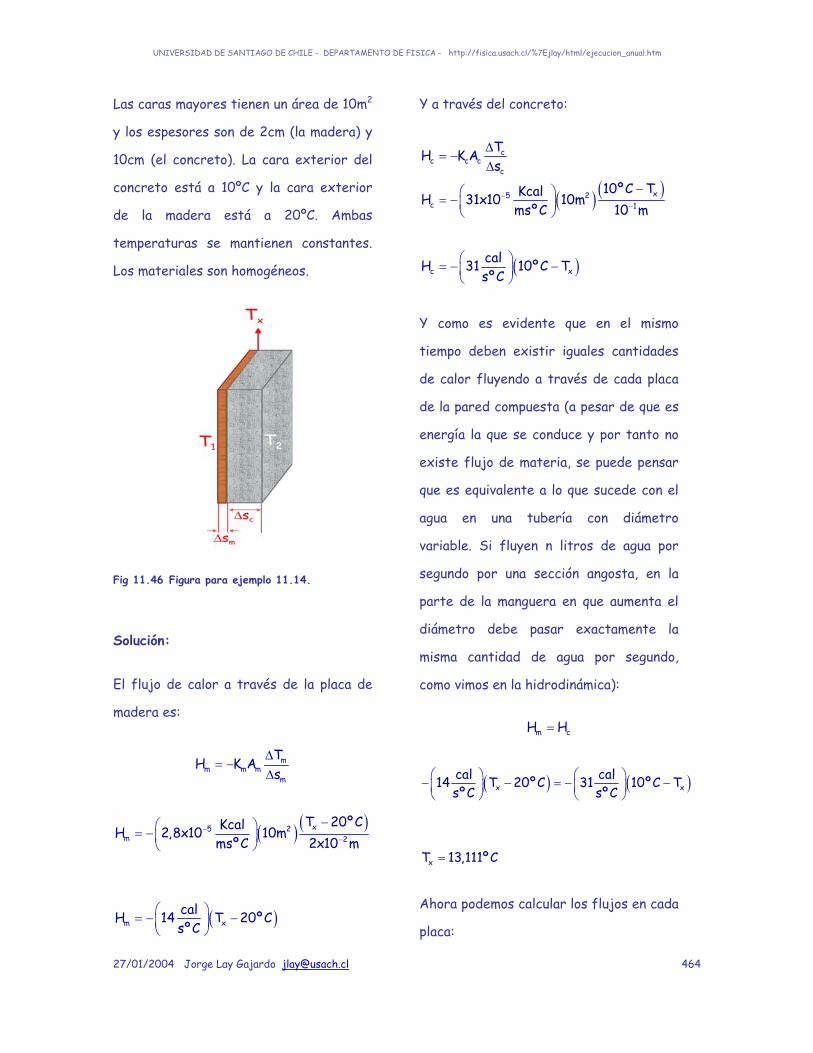
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 464
Las caras mayores tienen un área de 10m2
y los espesores son de 2cm (la madera) y
10cm (el concreto). La cara exterior del
concreto está a 10ºC y la cara exterior
de la madera está a 20ºC. Ambas
temperaturas se mantienen constantes.
Los materiales son homogéneos.
Fig 11.46 Figura para ejemplo 11.14.
Solución:
El flujo de calor a través de la placa de
madera es:
mm m m
m
TH K As
∆= −
∆
( ) ( )x5 2m 2
T 20ºCKcalH 2,8x10 10mmsºC 2x10 m
−−
−⎛ ⎞= −⎜ ⎟⎝ ⎠
( )m xcalH 14 T 20ºCsºC
⎛ ⎞= − −⎜ ⎟
⎝ ⎠
Y a través del concreto:
( ) ( )
cc c c
c
x5 2c 1
TH K As
10ºC TKcalH 31x10 10mmsºC 10 m
−−
∆= −
∆
−⎛ ⎞= −⎜ ⎟⎝ ⎠
( )c xcalH 31 10ºC TsºC
⎛ ⎞= − −⎜ ⎟⎝ ⎠
Y como es evidente que en el mismo
tiempo deben existir iguales cantidades
de calor fluyendo a través de cada placa
de la pared compuesta (a pesar de que es
energía la que se conduce y por tanto no
existe flujo de materia, se puede pensar
que es equivalente a lo que sucede con el
agua en una tubería con diámetro
variable. Si fluyen n litros de agua por
segundo por una sección angosta, en la
parte de la manguera en que aumenta el
diámetro debe pasar exactamente la
misma cantidad de agua por segundo,
como vimos en la hidrodinámica):
m cH H=
( ) ( )x xcal cal14 T 20ºC 31 10ºC TsºC sºC
⎛ ⎞ ⎛ ⎞− − = − −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
xT 13,111ºC=
Ahora podemos calcular los flujos en cada
placa:
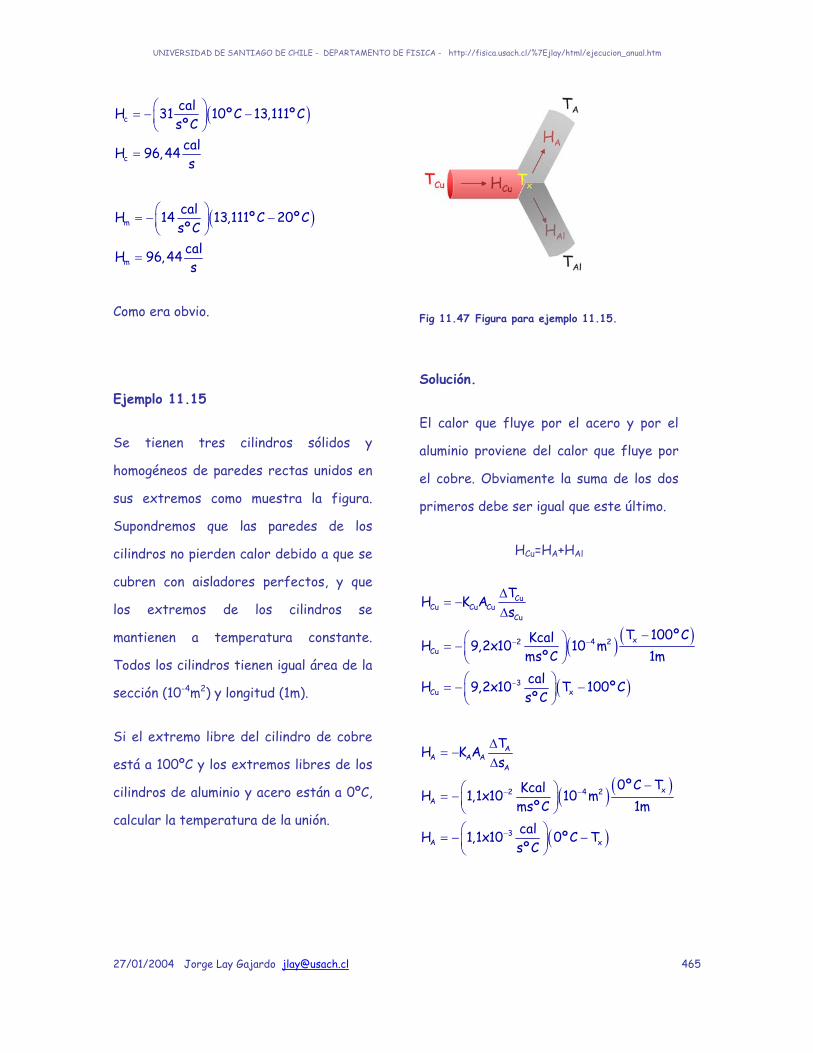
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 465
( )c
c
calH 31 10ºC 13,111ºCsºCcalH 96,44s
⎛ ⎞= − −⎜ ⎟⎝ ⎠
=
( )m
m
calH 14 13,111ºC 20ºCsºCcalH 96,44s
⎛ ⎞= − −⎜ ⎟⎝ ⎠
=
Como era obvio.
Ejemplo 11.15
Se tienen tres cilindros sólidos y
homogéneos de paredes rectas unidos en
sus extremos como muestra la figura.
Supondremos que las paredes de los
cilindros no pierden calor debido a que se
cubren con aisladores perfectos, y que
los extremos de los cilindros se
mantienen a temperatura constante.
Todos los cilindros tienen igual área de la
sección (10-4m2) y longitud (1m).
Si el extremo libre del cilindro de cobre
está a 100ºC y los extremos libres de los
cilindros de aluminio y acero están a 0ºC,
calcular la temperatura de la unión.
Fig 11.47 Figura para ejemplo 11.15.
Solución.
El calor que fluye por el acero y por el
aluminio proviene del calor que fluye por
el cobre. Obviamente la suma de los dos
primeros debe ser igual que este último.
HCu=HA+HAl
( ) ( )
CuCu Cu Cu
Cu
x2 4 2Cu
TH K As
T 100ºCKcalH 9,2x10 10 mmsºC 1m
− −
∆= −
∆
−⎛ ⎞= −⎜ ⎟⎝ ⎠
( )3xCu
calH 9,2x10 T 100ºCsºC
−⎛ ⎞= − −⎜ ⎟⎝ ⎠
( ) ( )
AA A A
A
x2 4 2A
TH K As
0ºC TKcalH 1,1x10 10 mmsºC 1m
− −
∆= −
∆
−⎛ ⎞= −⎜ ⎟⎝ ⎠
( )3A x
calH 1,1x10 0ºC TsºC
−⎛ ⎞= − −⎜ ⎟
⎝ ⎠

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 466
( ) ( )
AlAl Al Al
Al
x2 4 2Al
TH K As
0ºC TKcalH 5,7x10 10 mmsºC 1m
− −
∆= −
∆
−⎛ ⎞= −⎜ ⎟⎝ ⎠
( )3xAl
calH 5,7x10 0ºC TsºC
−⎛ ⎞= − −⎜ ⎟⎝ ⎠
En consecuencia:
( )( )
( )( ) ( )( )
3
x
3 3
x x
cal9,2x10 T 100º C
sº Ccal cal
5,7x10 0º C T 1,1x10 0º C Tsº C sº C
−
− −
− − =
− − − −
xT 57,5ºC=
11.5.2 Convección.
Es el mecanismo mediante el cual el calor
es conducido por las moléculas mismas de
un lugar a otro. Es un fenómeno muy
efectivo en gases y menos efectivo en
líquidos, debido a la libertad de las
moléculas de moverse libremente.
El principio básico es el principio de
Arquímedes. Veamos el caso de un vaso
con agua expuesto a una fuente de calor
en su superficie interior, como se observa
en la figura siguiente.
Fig 11.48 Convección en el agua de un recipiente expuesto a una fuente de calor.
La cubierta recibe el calor de manera
localizada, transfiriéndolo por conducción
al recipiente y mediante igual mecanismo,
a las moléculas de agua cercanas. Las
moléculas aumentan su energía interna y
se mueven más rápido (aumentan su
temperatura) y aumentan la amplitud de
sus oscilaciones alrededor de su posición
de equilibrio. De esta manera ahora
existen menos moléculas por unidad de
volumen, disminuyendo la densidad local.
Esto produce un desequilibrio en la
fuerza neta sobre las moléculas (el
empuje es mayor que el peso), elevándose.
El vacío generado por este
desplazamiento es ocupado por moléculas
más frías vecinas, generándose una
corriente de convección.
El hecho de que vivamos inmersos en un
medio gaseoso como la atmósfera y en
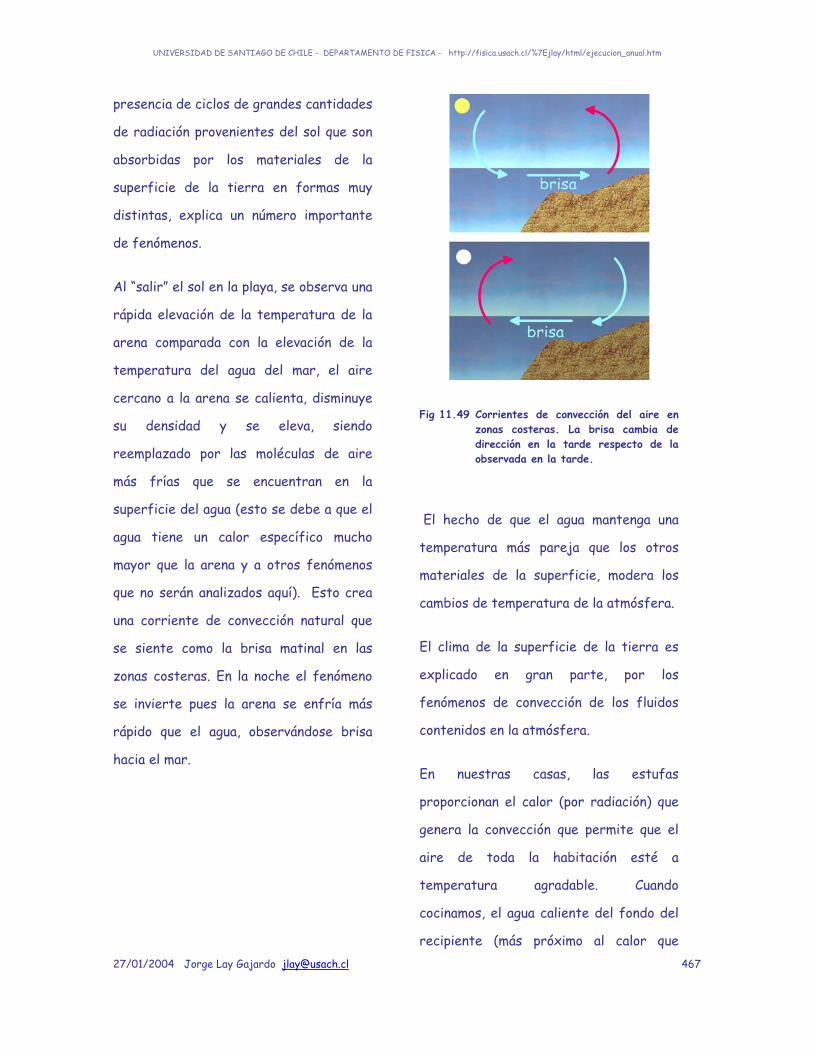
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 467
presencia de ciclos de grandes cantidades
de radiación provenientes del sol que son
absorbidas por los materiales de la
superficie de la tierra en formas muy
distintas, explica un número importante
de fenómenos.
Al “salir” el sol en la playa, se observa una
rápida elevación de la temperatura de la
arena comparada con la elevación de la
temperatura del agua del mar, el aire
cercano a la arena se calienta, disminuye
su densidad y se eleva, siendo
reemplazado por las moléculas de aire
más frías que se encuentran en la
superficie del agua (esto se debe a que el
agua tiene un calor específico mucho
mayor que la arena y a otros fenómenos
que no serán analizados aquí). Esto crea
una corriente de convección natural que
se siente como la brisa matinal en las
zonas costeras. En la noche el fenómeno
se invierte pues la arena se enfría más
rápido que el agua, observándose brisa
hacia el mar.
Fig 11.49 Corrientes de convección del aire en zonas costeras. La brisa cambia de dirección en la tarde respecto de la observada en la tarde.
El hecho de que el agua mantenga una
temperatura más pareja que los otros
materiales de la superficie, modera los
cambios de temperatura de la atmósfera.
El clima de la superficie de la tierra es
explicado en gran parte, por los
fenómenos de convección de los fluidos
contenidos en la atmósfera.
En nuestras casas, las estufas
proporcionan el calor (por radiación) que
genera la convección que permite que el
aire de toda la habitación esté a
temperatura agradable. Cuando
cocinamos, el agua caliente del fondo del
recipiente (más próximo al calor que
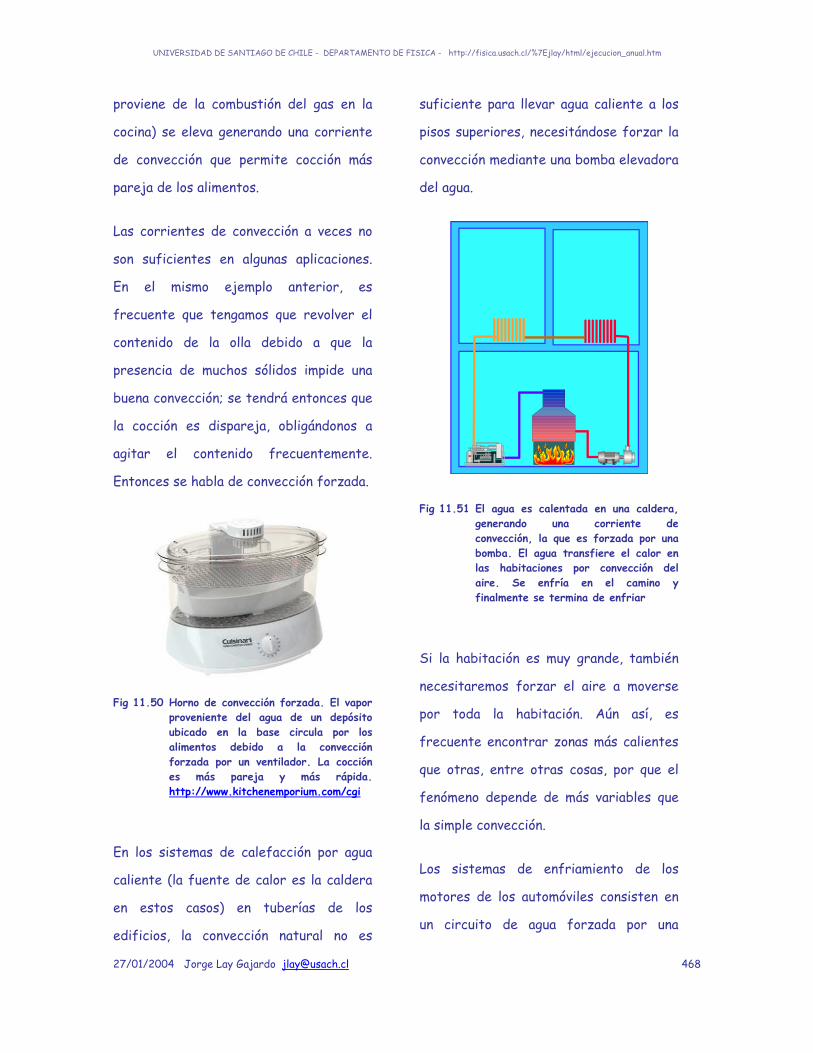
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 468
proviene de la combustión del gas en la
cocina) se eleva generando una corriente
de convección que permite cocción más
pareja de los alimentos.
Las corrientes de convección a veces no
son suficientes en algunas aplicaciones.
En el mismo ejemplo anterior, es
frecuente que tengamos que revolver el
contenido de la olla debido a que la
presencia de muchos sólidos impide una
buena convección; se tendrá entonces que
la cocción es dispareja, obligándonos a
agitar el contenido frecuentemente.
Entonces se habla de convección forzada.
Fig 11.50 Horno de convección forzada. El vapor proveniente del agua de un depósito ubicado en la base circula por los alimentos debido a la convección forzada por un ventilador. La cocción es más pareja y más rápida. http://www.kitchenemporium.com/cgi
En los sistemas de calefacción por agua
caliente (la fuente de calor es la caldera
en estos casos) en tuberías de los
edificios, la convección natural no es
suficiente para llevar agua caliente a los
pisos superiores, necesitándose forzar la
convección mediante una bomba elevadora
del agua.
Fig 11.51 El agua es calentada en una caldera, generando una corriente de convección, la que es forzada por una bomba. El agua transfiere el calor en las habitaciones por convección del aire. Se enfría en el camino y finalmente se termina de enfriar
Si la habitación es muy grande, también
necesitaremos forzar el aire a moverse
por toda la habitación. Aún así, es
frecuente encontrar zonas más calientes
que otras, entre otras cosas, por que el
fenómeno depende de más variables que
la simple convección.
Los sistemas de enfriamiento de los
motores de los automóviles consisten en
un circuito de agua forzada por una

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 469
bomba, que la obliga a moverse. Al pasar
por el motor el agua se calienta y al pasar
por el mal denominado “radiador” se
disipa fundamentalmente por convección
forzada del aire, movido por las aspas de
un ventilador dispuesto para tal efecto.
A pesar de que el efecto de convección es
pobre en los sólidos, en la tierra es el
único medio en que el núcleo puede
desprenderse del calor, debido a que la
conducción en el material del que están
compuestos el manto y la corteza es muy
mala y es opaco a la radiación emitida por
el núcleo.
La convección se debe a que a altas
temperaturas los sólidos se comportan
como fluidos viscosos.
Este efecto que está simplificado en el
dibujo, explica en parte el movimiento de
los continentes.
continentesseparándose
continentesjuntándose
Fig 11.52 Corrientes de convección en el manto de la tierra explican en parte el movimiento de los continentes.
11.6 Trabajo y energía en un sistema termodinámico.
Termodinámica es el estudio del
comportamiento y evolución de un
sistema. Por sistema se entiende una
porción del espacio que puede estar en
reposo o en movimiento, puede ser real o
virtual, a la cual se le asignan parámetros
o variables para describir el estado en un
instante determinado y su evolución en el
tiempo. Algunas de estas variables y sus
relaciones fueron tratadas en capítulos
anteriores a modo de introducción en el
tema.
En este capítulo se formalizará la
discusión respecto de la energía, el calor
y el trabajo y su conservación en
sistemas denominados termodinámicos.
Se atribuye al físico francés Sadi Carnot
el establecimiento de los orígenes de la
denominada termodinámica clásica
alrededor de 1824, habiendo contribuido
en forma notable a su cuerpo conceptual
de manera teórica y/o experimental una
gran cantidad de científicos entre los que
se puede citar a Kelvin, Gibgs y
Helmholtz, cuyos trabajos fueron o serán
citados en el texto cuando la discusión lo
amerite.
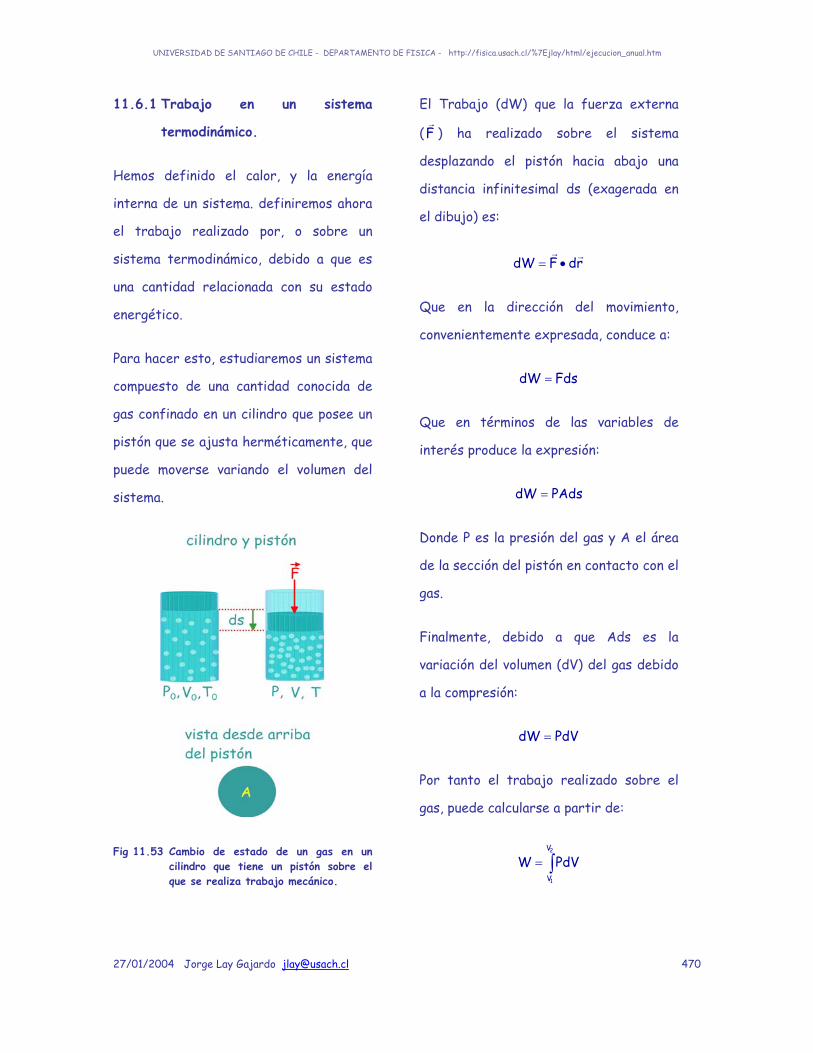
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 470
11.6.1 Trabajo en un sistema
termodinámico.
Hemos definido el calor, y la energía
interna de un sistema. definiremos ahora
el trabajo realizado por, o sobre un
sistema termodinámico, debido a que es
una cantidad relacionada con su estado
energético.
Para hacer esto, estudiaremos un sistema
compuesto de una cantidad conocida de
gas confinado en un cilindro que posee un
pistón que se ajusta herméticamente, que
puede moverse variando el volumen del
sistema.
Fig 11.53 Cambio de estado de un gas en un cilindro que tiene un pistón sobre el que se realiza trabajo mecánico.
El Trabajo (dW) que la fuerza externa
(Fr
) ha realizado sobre el sistema
desplazando el pistón hacia abajo una
distancia infinitesimal ds (exagerada en
el dibujo) es:
dW F dr= •r r
Que en la dirección del movimiento,
convenientemente expresada, conduce a:
dW Fds=
Que en términos de las variables de
interés produce la expresión:
dW PAds=
Donde P es la presión del gas y A el área
de la sección del pistón en contacto con el
gas.
Finalmente, debido a que Ads es la
variación del volumen (dV) del gas debido
a la compresión:
dW PdV=
Por tanto el trabajo realizado sobre el
gas, puede calcularse a partir de:
2
1
V
V
W PdV= ∫

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 471
Durante la compresión el gas ha sufrido
un cambio de estado, de manera que la
presión es una función del volumen y de la
temperatura. Esta función es la ecuación
de estado, que para el caso de los gases
ideales, es conocida por nosotros:
nRTPV
=
Note que si el proceso es a temperatura
constante, entonces se tiene que:
2 2
1 1
V V
V V
nRT dVW dV nRTV V
= =∫ ∫
2
1
V
VW nRTlnv=
( )2 1W nRT lnv lnV= −
2
1
vW nRT lnV
⎛ ⎞= ⎜ ⎟
⎝ ⎠
Que es una cantidad positiva si 2
1
vlnV
es
positivo. Ello ocurre cuando V2 es mayor
que V1, es decir cuando el sistema hace
trabajo al ambiente. Si el ambiente hace
trabajo sobre el sistema, entonces se
tiene una compresión del gas, V1>V2 y el
2
1
vlnV
es negativo.
Si el proceso es a presión constante,
entonces se tiene;
2 2
1 1
V V
V V
W PdV P dV= =∫ ∫
2
1
VVW PV=
( )2 1W P V V= −
Si el proceso es a volumen constante,
entonces dV=0 y no se realiza trabajo.
Lo anterior puede verse gráficamente en
un plano PV como en las figuras
siguientes.
Fig 11.54 Proceso de expansión isotérmico. El trabajo es positivo y corresponde al área bajo la curva. El sistema hace trabajo al ambiente. La curva contiene todos los puntos para los que PV=Constante (es una isoterma).
Fig 11.55 Proceso de compresión isobárico. El trabajo es negativo y corresponde al área bajo la curva. El ambiente hace trabajo al sistema. La curva contiene todos los puntos para los que P=Constante (es una isobara).

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 472
V
P
A
CPC
PA
Fig 11.56 Proceso de compresión isocórico. El trabajo es nulo. La curva contiene todos los puntos para los que V=Constante (es una isocora).
Estudiemos un ciclo cerrado. En las
figuras que siguen se observa el trabajo
realizado para cambiar el estado de un
gas desde a hasta b (Wab) y luego el
trabajo realizado en el camino de regreso
(Wba), que como hemos visto,
corresponde al área bajo la curva en un
plano PV. En la última figura se observa
el trabajo neto realizado en el ciclo, que
corresponde al área encerrada en el ciclo
y que resulta destinto de cero.
Fig 11.57 Proceso ab: dilatación (trabajo positivo). Proceso ba: compresión (trabajo negativo). Ciclo aba: dilatación mas compresión (trabajo distinto de cero).
Esto implica que no se puede repetir el
ciclo sin agregarle una cantidad de
energía al menos equivalente al trabajo
neto que acaba de realizar el sistema. De
lo contrario se tendría un proceso desde
el que se podría sacar continuamente
trabajo equivalente al área encerrada en
cada ciclo, sin reponer la energía perdida.
Un sistema que hiciera tal cosa violaría el
principio de conservación de la energía y

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 473
se denomina móvil perpetuo de primera
especie.
Un número importante de personas que
buscaba construir máquinas de esta
especie vieron desvanecerse sus
esfuerzos al comprender que las leyes
fundamentales de la física se los
impedían.
Esto es uno de los fundamentos
esenciales contenidos en la primera ley de
la termodinámica.
11.7 Primera ley de la termodinámica.
Estrictamente es una generalización del
principio de conservación de la energía
encontrado en la mecánica.
Si recordamos lo que hemos descubierto
hasta ahora, tenemos 2 mecanismos
básicos para cambiar la energía interna
de un sistema: transferencia de calor o
realización de trabajo.
Como hemos visto, el trabajo y el calor
necesario en un proceso dependen de la
forma en que el proceso ha ocurrido
(dependen del camino) en cambio la
variación en la energía interna es
independiente del camino debido a que es
una variable de estado.
Consideremos un proceso isobárico como
el siguiente: un gas confinado en un
cilindro recibe calor por la base (única
pared que permite intercambio de calor.
Las restantes son adiabáticas). Entonces
el volumen y la temperatura deben
aumentan en iguales proporciones para
que el proceso sea isobárico 1 2
1 2
V VT T
⎡ ⎤=⎢ ⎥
⎣ ⎦.
Fig 11.58 Proceso isobárico entre los estados E1 y E2. Aumenta el volumen y la temperatura. El trabajo realizado es el área pintada.
Al aumentar la temperatura, aumenta la
energía interna (recuerde que U es
función de la temperatura).
Al aumentar el volumen, el gas realiza
trabajo al ambiente (área bajo la curva),
de manera tal que el cambio en la energía
interna se debe a la cantidad de calor
entregado al sistema menos la cantidad
de trabajo realizado al ambiente.
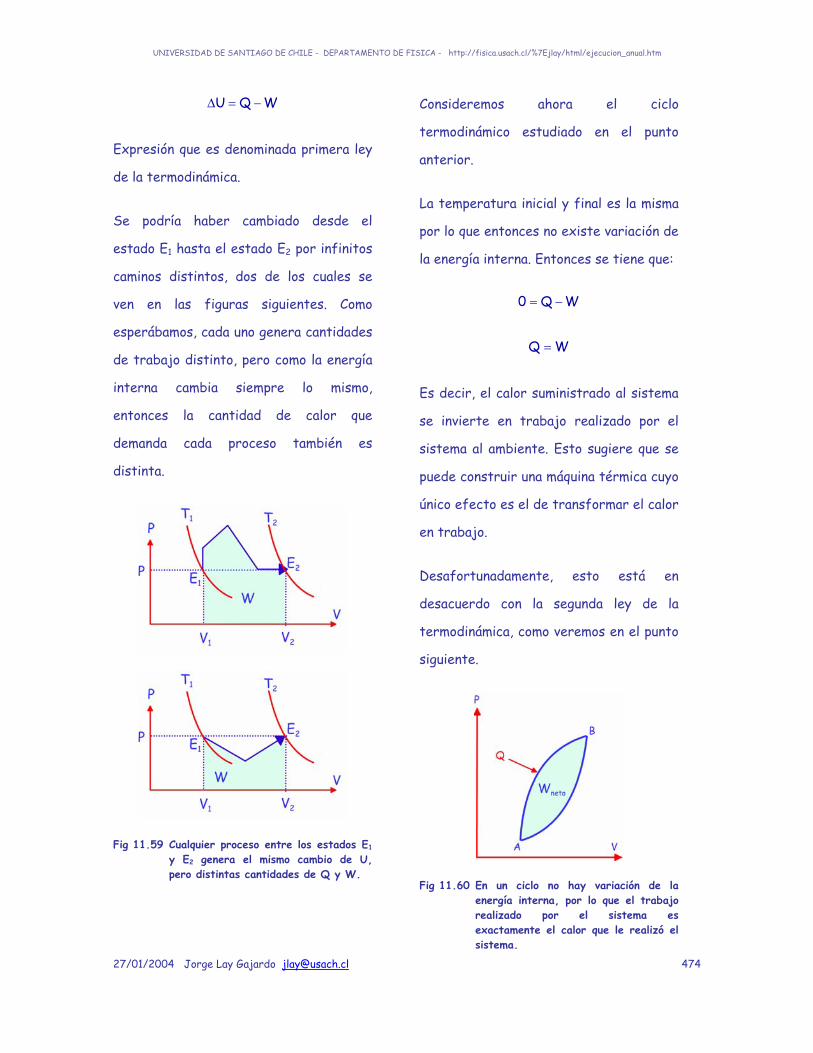
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 474
U Q W∆ = −
Expresión que es denominada primera ley
de la termodinámica.
Se podría haber cambiado desde el
estado E1 hasta el estado E2 por infinitos
caminos distintos, dos de los cuales se
ven en las figuras siguientes. Como
esperábamos, cada uno genera cantidades
de trabajo distinto, pero como la energía
interna cambia siempre lo mismo,
entonces la cantidad de calor que
demanda cada proceso también es
distinta.
Fig 11.59 Cualquier proceso entre los estados E1 y E2 genera el mismo cambio de U, pero distintas cantidades de Q y W.
Consideremos ahora el ciclo
termodinámico estudiado en el punto
anterior.
La temperatura inicial y final es la misma
por lo que entonces no existe variación de
la energía interna. Entonces se tiene que:
0 Q W= −
Q W=
Es decir, el calor suministrado al sistema
se invierte en trabajo realizado por el
sistema al ambiente. Esto sugiere que se
puede construir una máquina térmica cuyo
único efecto es el de transformar el calor
en trabajo.
Desafortunadamente, esto está en
desacuerdo con la segunda ley de la
termodinámica, como veremos en el punto
siguiente.
Fig 11.60 En un ciclo no hay variación de la energía interna, por lo que el trabajo realizado por el sistema es exactamente el calor que le realizó el sistema.

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 475
Si el sistema es aislado, entonces no es
posible intercambiar ni trabajo ni calor
con el ambiente. En ese caso se tiene que
U 0∆ =
Si el proceso no permite el intercambio
de calor, entonces es adiabático, en cuyo
caso Q=0, entonces se tiene que:
U W∆ = −
Ejemplo 11.16
¿Desde qué altura debe caer una masa de
cobre para que su temperatura se eleve
en 3°C al chocar contra el suelo, si el
cuerpo absorbe el 40% del calor
producido?
Solución:
La energía que posee el cuerpo es:
E=mgh (1)
Al chocar con el suelo esa energía se
transforma íntegramente en calor, pero
solo el 40% es absorbido por el cuerpo,
es decir: (0,4)mgh.
Por otro lado, el calor absorbido se puede
calcular con la expresión
Q=mc∆T (2)
Con c=0,094 calgºC
Igualando (1) con (2), se tiene:
0,4mgh=mc∆T
De donde:
( )
2
cal0,094 3ºCgºCc Th m0,4g 0,4 10
s
∆= =
⎛ ⎞⎜ ⎟⎝ ⎠
Para que las unidades estén en el MKS
deben transformarse las calorías a
Joules, y los gramos a kilogramos:
[1cal=4,2J=4,2Nm ]
( )( ) ( )3
2
2
4,2Nm0,094 3ºC
10 Kg ºCh m0,4 10
sNmh=296,1 296,1mmKg
s
−
=⎛ ⎞⎜ ⎟⎝ ⎠
=
Ejemplo 11.17
Una bala de plomo que se mueve a una
rapidez de 0,4 Kms
choca contra un muro
de hormigón. En el supuesto de que la
cuarta parte de la energía cinética se
convierta en calor de la propia bala,

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 476
calcular el aumento de la temperatura que
se produce en el choque. El calor
específico del plomo es de 0,03 calgºC
.
Solución:
La energía cinética que trae la bala es:
21K mv2
=
La cantidad de energía transformada en
calor es:
21K mv (1)8
=
También puede calcularse el calor
transferido como:
Q=mc∆T (2)
Igualando (1) con (2):
21 mv =mc T (1)8
∆
De donde:
2
2
vT= 8c
Km0,4sT=cal8 0,03gºC
∆
⎛ ⎞⎜ ⎟⎝ ⎠∆⎛ ⎞⎜ ⎟⎝ ⎠
Lo expresaremos en unidades cgs:
Sabemos que: 1Km=103m=105cm
y que: 1cal=4,2Joule=4,2x107Erg
Por tanto:
( )
( )
25
7
2
2
2
10 cm0,4
sT=
4,2x10 Erg8 0,03
gºC
gºCcmT=158,73 cms g cms
⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠∆
⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠
⎡ ⎤⎛ ⎞⎢ ⎥⎜ ⎟⎛ ⎞
∆ ⎢ ⎥⎜ ⎟⎜ ⎟⎝ ⎠⎢ ⎥⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
T=158,73ºC∆
Ejemplo 11.18
En un cilindro de 5cm de diámetro, en
cuyo interior se desplaza un émbolo una
distancia de 25cm, se admite aire
comprimido a una presión de 3,5 2Kfcm
.
Calcular el trabajo realizado por el gas en
ese proceso.
Solución:
Se trata de un proceso isobárico por lo
que:
W=P(V-V0)

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 477
El volumen del proceso es posible
calcularlo geométricamente:
V-V0=πr2s
Por lo tanto:
( )( ) ( )22
KfW= 3,5 3,14 0,25cm 25cmcm
⎛ ⎞⎜ ⎟⎝ ⎠
Transformando las unidades al CGS:
1Kf=10N=10(105D)=106D
( ) ( )( ) ( )6
22
10 D3,5 3,14 0,25cm 25cm
cm
⎛ ⎞⎜ ⎟⎜ ⎟⎝ ⎠
9W=1,72x10 Erg
Ejemplo 11.19
Suponga que 0,12 moles de un gas ideal
(n) están en contacto con un recipiente
térmico que mantiene fija la temperatura
en T0=9,8°C, y que el gas tiene un volumen
inicial (V0) de 1,3litros y efectúa
14Joules de trabajo (W). ¿Cuáles son la
presión y el volumen finales?.
Solución:
Como es un proceso a temperatura
constante se tiene que:
0 00
VW P V lnV
= (1)
Como es un gas ideal se tiene que:
P0V0=nRT0 (2)
Introduciendo (2) en (1):
00
VW nRT lnV
=
Por tanto:
00
VW nRT lnV
=
( ) ( )0
J V14J 0,12mol 8,134 283K lnmolK V
⎛ ⎞= ⎜ ⎟⎝ ⎠
0
Vln 0,05V
=
Aplicando antilogaritmo natural:
0,05
0
V eV
=
0
V 1,05V
=
V=1,05V0
Conocido el volumen inicial, se tiene:
V=1,05 (1,3 litros) = 1,37 litros
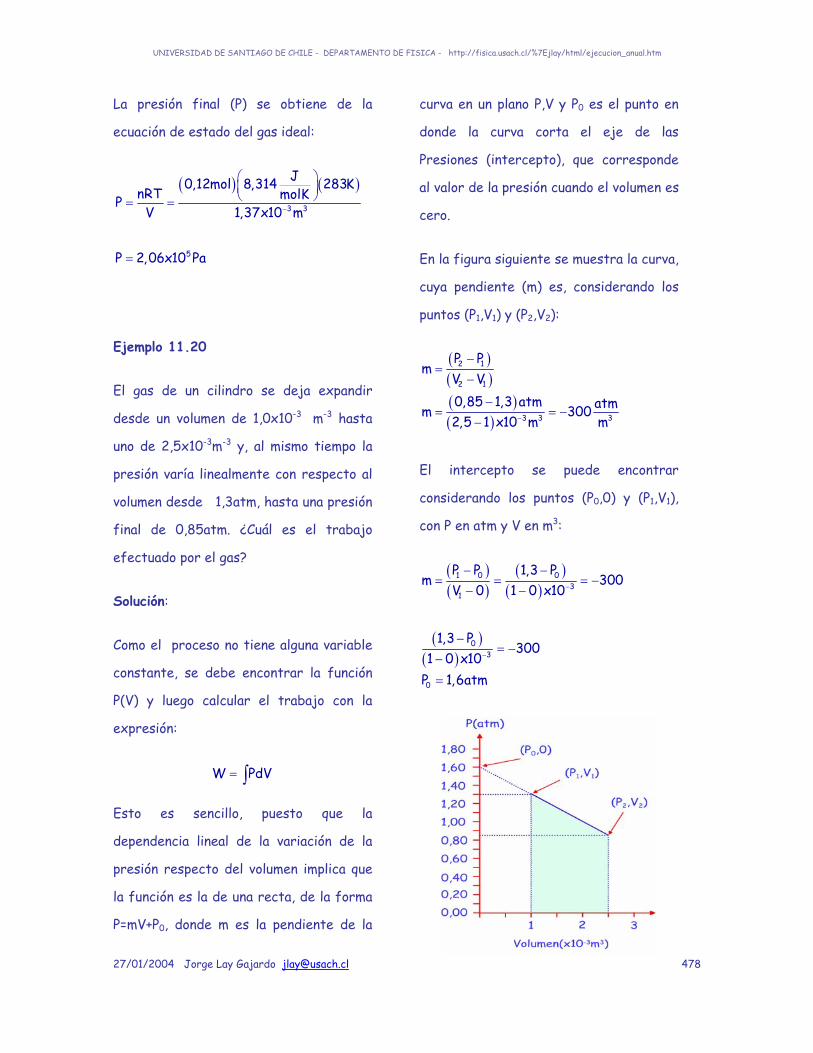
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 478
La presión final (P) se obtiene de la
ecuación de estado del gas ideal:
( ) ( )3 3
J0,12mol 8,314 283KnRT molKP
V 1,37x10 m−
⎛ ⎞⎜ ⎟⎝ ⎠= =
5P 2,06x10 Pa=
Ejemplo 11.20
El gas de un cilindro se deja expandir
desde un volumen de 1,0x10-3 m-3 hasta
uno de 2,5x10-3m-3 y, al mismo tiempo la
presión varía linealmente con respecto al
volumen desde 1,3atm, hasta una presión
final de 0,85atm. ¿Cuál es el trabajo
efectuado por el gas?
Solución:
Como el proceso no tiene alguna variable
constante, se debe encontrar la función
P(V) y luego calcular el trabajo con la
expresión:
W PdV= ∫
Esto es sencillo, puesto que la
dependencia lineal de la variación de la
presión respecto del volumen implica que
la función es la de una recta, de la forma
P=mV+P0, donde m es la pendiente de la
curva en un plano P,V y P0 es el punto en
donde la curva corta el eje de las
Presiones (intercepto), que corresponde
al valor de la presión cuando el volumen es
cero.
En la figura siguiente se muestra la curva,
cuya pendiente (m) es, considerando los
puntos (P1,V1) y (P2,V2):
( )( )( )( )
2 1
2 1
3 3 3
P Pm
V V0,85 1,3 atm atmm 3002,5 1 x10 m m−
−=
−
−= = −
−
El intercepto se puede encontrar
considerando los puntos (P0,0) y (P1,V1),
con P en atm y V en m3:
( )( )
( )( )
1 0 03
1
P P 1,3 Pm 300
V 0 1 0 x10−
− −= = = −
− −
( )( )
03
0
1,3 P300
1 0 x10P 1,6atm
−
−= −
−
=

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 479
El intercepto se puede encontrar
considerando los puntos (P0,0) y (P1,V1),
con P en atm y V en m3:
( )( )
( )( )
1 0
1
03
0
P Pm
V 01,3 P
3001 0 x10
P 1,6atm
−
−=
−
−= −
−
=
De manera que la ecuación es:
P=-300V+1,6
Ahora podemos calcular el trabajo:
( )0
V
V
W 1,6 300V dV= −∫
0
0
V2VV
V
VW 1,6V 3002
= −
[con V0=1,0x10-3 m3 y V=2,5x10-3 m3]
W=1,6(2,5-1,0)x10-3-150(6,25-1,0)x10-6
W=1,61x10-3atm m3
Lo que en MKS significa:
W=1,61x10-3(1,013x105Nm-2)m3=
W=163,3Joules
También podría haber sido resuelto
calculando el área bajo la curva. ¡Hágalo!.
Ejemplo 11.21
Un gramo de agua (1cm3) se transforma
en 1671 cm3 de vapor cuando hierve a una
presión de 1atm. El calor latente de
vaporización a esta presión es de 539 calgº
.
Calcular el trabajo realizado y el cambio
en la energía interna del sistema.
Solución.
Por ser un proceso que ocurre a presión
constante:
W=P(Vf-Vi)=1atm(1671-1)cm3
Lo que en el CGS, significa:
W=(1,013x106Dcm-2)(1671-1)cm3
W=1,69x109 Ergs
Por otra parte, el calor demandado por el
proceso es:
Q=mLV =(1g)(539 calgº
)=539 cal.
En consecuencia, el cambio de energía
interna es, a partir del primer principio:
∆U=Q-W
∆U =539cal-1,69x109Ergs
∆U=539cal-1,69x109(0,24x10-7cal)
∆U=539cal-40,4cal=498,6cal

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected] 480
Ejemplo 11.22
Un cuerpo absorbe 60cal mientras su
volumen aumenta de 300cm3 a 800cm3 a
una presión de 4,0x106 bar. ¿Cuál es la
variación de su energía interna?
Solución:
Según el primer principio:
∆U=Q-W
∆U=Q-P(Vf-Vi)
∆U=60cal-4,0x106bar(800cm3-300cm3)
∆U=60cal-2000x106Erg
∆U=60(4,2J)-2000X106(10-7J)
∆U=252J-200J=52J
Valores de R en distintos sistemas de
unidades:
R=8,314(Nm-2)m3mol-1K-1=8,314Jmol-1K-1
R=8,314x
107 (Dinas cm-2 ) cm3 mol-1 K-1 = 8,314 X 107 erg mol -1 K-1
R = 1,99 cal mol -1 K-1
R = 0,082071 atm lt mol -1 K-1
R= 82 atm cm3 mol-1 K-1
La Presión en distintos sistemas de unidades
1Pascal=1Nm-2=1,451x10-4lbplg-2=0,209lb pie-2
1lbplg-2=6891Pa
1lbpie-2=47,85Pa
1atm=1,013x105Pa=14,7lbplg-2=2117lbpie-2
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected]
Capítulo 1: Introducción a la Física...................................1 1.1 Evolución de la Física Clásica………………………………………………………………………. 1
1.1.1 Introducción. ………………………………………………………………………………… 1 1.1.2 Civilizaciones ancestrales: una breve introducción histórica 1 1.1.3 Primeras teorías cosmológicas. ………………………………………………….4
Civilización Sumeria. ……………………………………………………………… 4 Civilización Babilónica………………………………………………………………5 Civilización Egipcia. …………………………………………………………………7 Civilización Griega………………………………………………….……………… .9
Imperio Romano y la invasión Árabe...…………………………………16 1.1.4 La Física y el renacimiento………………………………………………..……..18
1.1.5 Física Clásica…………………………………………………………………………….…30 1.1.6 Comentario……………………………………………………………………………….….33 1.2 El Sistema Solar. …………………………………………………..…………………………………..35
1.2.1 Datos generales………………………………………………………………………….35 1.2.2 Sistema Solar interior y Exterior………………………………...………36 1.2.3 Orbitas…………………………………………………………………………....….………37 1.2.4 Eclíptica..........................................................................................38 1.2.5 Oblicuidad......................................................................................38 1.2.6 La esfera celestial........................................................................39 1.2.7 La tierra..........................................................................................44 1.2.8 Latitud y longitud.........................................................................45 1.2.9 Zonas horarias..............................................................................47 1.2.10 Estaciones del año......................................................................49
1.3 Sistema Internacional de Unidades (S.I.)................................................53 1.3.1 Introducción...................................................................................53 1.3.2 Unidades básicas...........................................................................55 1.3.3 Unidades derivadas.......................................................................56 1.3.4 Reglas para escribir y usar símbolos de unidades del SI....58 1.3.5 Unidades usadas con el SI..........................................................58 1.3.6 Unidades en uso temporal...........................................................59 1.3.7 Unidades CGS.................................................................................59.
1.4 Definiciones básicas.......................................................................................60
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected]
Capítulo 2: Matemáticas para la Física..............................64 2.1 Vectores...........................................................................................................64
2.1.1 Introducción..................................................................................64 2.1.2 Vector..............................................................................................64 2.1.3 Vectores equipolentes.................................................................65 2.1.4 Vectores opuestos........................................................................65 2.1.5 Ponderación de Vectores.............................................................65 2.1.6 Suma gráfica de vectores...........................................................65 2.1.7 Vector unitario..............................................................................66 2.1.8 Vector nulo.....................................................................................67 2.1.9 Componente de un vector............................................................67 2.1.10 Vectores unitarios en el plano..................................................68 2.1.11 Componentes cartesianas de un vector..................................69 2.1.12 Suma de Vectores en función de sus componentes............70 2.1.13 Notación polar..............................................................................71 2.1.14 En el espacio.................................................................................73 2.1.15 Productos entre Vectores........................................................74
Producto Escalar......................................................................74 Producto Vectorial...................................................................76
2.1.15 Ejercicios resueltos de vectores............................................80
Capítulo 3: Cinemática de la partícula..............................88 3.1 Movimiento.....................................................................................................88
3.1.1 Introducción.................................................................................88 3.1.2 Descripción del cambio en la posición....................................90 Trayectoria..............................................................................90
Desplazamiento.......................................................................91 Velocidad media e instantánea............................................92 Rapidez media e instantánea...............................................94 Aceleración media e instantánea........................................95
3.2 Movimiento Rectilíneo................................................................................96 3.2.1 Mov. Uniforme Rectilíneo (MRU)............................................96 3.2.2 Mov. Rectilíneo con Aceleración Constante (MRUA)........99
3.2.3 Movimiento con aceleración constante igual a gr ...............101 3.3 Movimiento parabólico..............................................................................104 Parábola de seguridad..............................................................108 3.4 Movimiento Circunferencial.....................................................................112 Aceleraciones tangencial y centrípeta..................................114
3.4.1 Mov. circunferencial uniforme (MCU)..................................117 3.4.2 Mov. Circunf. uniformemente acelerado (MUA)...............118

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected]
Capítulo 4: Dinámica de la partícula.............................121 4.1 Introducción..............................................................................................121 4.2 Leyes de Newton......................................................................................121
4.2.1 Primera ley de Newton..........................................................121 4.2.2 Segunda ley de Newton........................................................124 4.2.3 Tercera Ley de Newton........................................................127
4.3 Fuerzas .....................................................................................................130 4.3.1 Fuerzas fundamentales..........................................................130 Ley de atracción gravitacional.Peso....................................132 4.3.2 Fuerzas secundarias..............................................................135 Normal......................................................................................135 Fuerza de roce.......................................................................138 Fuerza de roce estático.......................................................139 Fuerza de roce cinético........................................................142 Tensión.......................................................................................143 4.3.3 Pesar y masar..........................................................................144 Pesar..........................................................................................144 Masar.........................................................................................147 4.4 Aplicaciones de los principios de Newton a sistemas de cuerpos.....148 4.5 Cantidad de Movimiento e Impulso......................................................157 4.6 Conservación de la cantidad de movimiento......................................160 4.7 Trabajo Mecánico....................................................................................165 4.8 Energía Cinética (K).................................................................................170 4.9 Energía.......................................................................................................171 4.10 Energía Potencial...................................................................................172
4.10.1 Energía potencial gravitatoria..........................................172 4.10.2 Energía potencial elástica.................................................174
4.11 Potencia Mecánica..................................................................................179 4.12 Conservación de la energía..................................................................182
4.12.1 Conservación de la energía mecánica.............................. 183 4.12.2 Sistemas conservativos......................................................183 4.12.3 Sistemas no conservativos.................................................187
4.13 Choques unidimensionales y los teoremas de la conservación.....190 4.13.1 Choques perfectamente elásticos.....................................192 4.13.2 Coeficiente de restitución.................................................194 4.13.3 Choques perfectamente inelásticos (plásticos)............194

UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected]
Capítulo 5: Sistemas de partículas...............................196 5.1 Centro de masa de sistemas de partículas........................................196
5.1.1 Posición del centro de masas...............................................196 5.1.2 Velocidad del Centro de masa.............................................200 5.1.3 Aceleración del Centro de masa.........................................200 5.1.4 Centro de masa y movimiento de traslación....................201
5.2 Centro de gravedad................................................................................205 5.3 Centro de masa de cuerpos continuos................................................207
5.3.1 Cuerpos con tres dimensiones.............................................208 5.3.2 Centroides de otros cuerpos..............................................210 5.3.3 Cuerpos con dos dimensiones..............................................211 5.3.4 Centroides de otras superficies........................................213 5.3.5 Cuerpos con una dimensión..................................................214 5.3.6 Cuerpos con ejes de simetría.............................................216 5.3.7 Centros de masa de sistemas compuestos
de cuerpos con geometría sencilla....................................217
Capítulo 6: Cuerpo Rígido........................................222 6.1 Definiciones..............................................................................................222 6.2 Cinemática de rotación de un cuerpo rígido con eje fijo..............223 6.3 Dinámica de rotación de un cuerpo con eje fijo.............................228 Torque.......................................................................................................230 6.4 Momentos de Inercia de sistemas de partículas............................238 6.5 Momentos de Inercia de cuerpos rígidos.........................................240 6.6 Momentos de Inercia para cuerpos comunes..................................243 6.7 Teorema de Steiner..............................................................................244 6.8 Momentos de Inercia de cuerpos compuestos................................246 6.9 Aplicaciones de la dinámica de rotación...........................................248 6.10 Trabajo y energía de rotación..........................................................258 6.11 Energía cinética rotacional.................................................................259 6.12 Teorema del Trabajo y la Energía para rotación..........................261 6.13 Energía Cinética de Rototraslación..................................................261 6.14 Eje instantáneo de rotación...............................................................263
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected]
Capítulo 7: Estática Plana.......................................280 7.1 Equilibrio de un cuerpo rígido.............................................................280
7.1.1 Introducción..........................................................................280 7.1.2 Equilibrio estático...............................................................280
Capítulo 8: Hidrostática.........................................291 8.1 Definiciones............................................................................................291
8.1.1 Densidad.................................................................................294 8.1.2 Peso específico.....................................................................295 8.1.3 Densidad relativa y Peso específico relativo................295 8.1.4 Presión....................................................................................296 8.1.5 Presión en sólidos................................................................296 8.1.6 Presión en fluidos................................................................297
8.2 Hidrostática..........................................................................................299 8.2.1 La presión y la profundidad..............................................299 8.2.2 Presión atmosférica...........................................................300 8.2.3 Barómetros..........................................................................303
Barómetro de Torricelli................................................303 Barómetro de agua.........................................................304 Barómetro aneroide.......................................................305 Barómetros digitales.....................................................306 Barómetros ecológicos..................................................307
8.2.4 Vasos comunicantes...........................................................308 8.2.5 Manómetros.........................................................................309 8.2.6 Principio de Pascal..............................................................310
Prensa hidráulica.............................................................310 Equilibrio de líquidos no miscibles...............................311
8.2.7 Principio de Arquímedes....................................................312 Cálculo de densidades con la balanza..........................315 Picnómetros.......................................................................317 Balanza de Mohr-Westphal...........................................319 Aerómetros.......................................................................320 Aerómetro de Nicholson................................................321 Aerómetro de Fahrenheit..............................................321 Aerómetro de peso constante.......................................321 Aerómetro de Baumé.......................................................321 Alcoholímetro de gay-lussac..........................................323 Aerómetro de balling-brix.............................................324
8.3 Problemas resueltos de Hidrostática...............................................325 8.4 Fuerzas de presión sobre paredes verticales................................334
8.4.1 Fuerzas de presión sobre paredes inclinadas................339
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected]
Capítulo 9: Hidrodinámica.......................................345 9.1 Hidrodinámica.........................................................................................345
9.1.1 Definiciones previas.............................................................345 9.2 Ecuación de continuidad......................................................................346. 9.3 Ecuación de Bernouilli..........................................................................347
9.3.1 Efecto Venturi......................................................................349 9.3.2 Tubo de Venturi...................................................................350 9.3.3 Medición de la presión de un fluido en movimiento.....351 9.3.4 Tubo de Pitot...................................................................... 352 9.3.5 Velocidad de salida de un estanque................................352 9.3.6 Sifones..................................................................................354
9.4 Fluidos reales........................................................................................355 9.4.1 Viscosidad.............................................................................355 9.4.2 Número de Reynolds..........................................................358
Capítulo 10: Temperatura y equilibrio térmico................367 10.1 Temperatura..........................................................................................367 10.2 Equilibrio térmico................................................................................367 10.3 Termoscopio. Primeros avances en termometría.........................370 10.4 Primeros termómetros. Escalas termométricas..........................371 10.5 Farhenheit y Celsius...........................................................................373 10.6 Temperatura absoluta........................................................................377 10.7 Equivalencia entre escalas................................................................380 10.7.1 Kelvin y Celsius........................................................................380 10.7.2 Celsius y Fahrenheit...............................................................381 10.7.3 Celsius y Rèaumur....................................................................382 10.7.4 Celsius y Ranking......................................................................382 10.8 Termómetros........................................................................................383 10.8.1 Termómetros de líquido en vidrio........................................383 10.8.2 Termómetros industriales de líquido..................................384 10.8.3 Termómetros de máxima.......................................................385 10.8.4 Termómetros de mínima........................................................386 10.8.5 Termómetros de six...............................................................386 10.8.6 Termómetro de Galileo....................................................... ..388 10.8.7 Termómetro de gas de volumen constante.......................389 10.8.8 Otros termómetros de líquido o gas..................................392 10.8.9 Termómetro bimetálico.........................................................393 10.8.10 Termocuplas...........................................................................394 10.8.11 Termómetros de resistencia...............................................398 10.8.12 El termómetro de resistencia de germanio.....................400 10.8.13 Termistores.............................................................................400 10.8.14 Termómetros de circuito integrado...................................402
UNIVERSIDAD DE SANTIAGO DE CHILE - DEPARTAMENTO DE FISICA - http://fisica.usach.cl/%7Ejlay/html/ejecucion_anual.htm
27/01/2004 Jorge Lay Gajardo [email protected]
10.8.15 Termómetros de radiación..................................................403 10.9 Ecuaciones de los gases ideales.......................................................406 10.9.1 Ley de Boyle..............................................................................406 10.9.2 Ley de Charles o 1ª Ley de Gay Lussac..............................406 10.9.3 2ª Ley de Gay Lussac..............................................................408 10.9.4 Ecuación de estado de los gases ideales............................409 10.10 Escala Internacional de Temperaturas...........................................411 Capítulo 11: Calor y primera ley de la termodinámica.........420 11.1 Algunos conceptos de la teoría cinética de los gases..................420 11.1.1 Presión en la teoría cinética molecular................................421 11.1.2 Temperatura y energía............................................................421 11.1.3 Energía interna media..............................................................425 11.1.4 Teorema de la equipartición...................................................426 11.1.5 Gases biatómicos.......................................................................427 11.1.6 Energía interna para gases no ideales..................................428 11.2 Dilatación térmica................................................................................428 11.2.1 Dilatación de sólidos a presión constante...........................430 11.2.2 Dilatación lineal a presión constante...................................430 11.2.3 Dilatación superficial a presión constante.........................434 11.2.4 Dilatación volumétrica a presión constante.......................439 11.2.5 Dilatación de líquidos...............................................................441 11.2.6 Dilatación anómala....................................................................443 11.3 Calor........................................................................................................444 11.3.1 Equivalente mecánico del calor..............................................446 11.3.2 Energía en la naturaleza.........................................................447 11.3.3 Calor específico........................................................................449 11.4 Cambios de fase...................................................................................453 11.4.1 Punto triple................................................................................458 11.5 Transferencia de calor.......................................................................460 11.5.1 Conducción del calor.................................................................461 11.5.2 Convección..................................................................................466 11.6 Trabajo y energía en un sistema termodinámico..........................469 11.6.1 Trabajo en un sistema termodinámico.................................470 11.7 Primera ley de la termodinámica......................................................473








![Física i [usach]](https://static.fdocuments.es/doc/165x107/55801454d8b42a190e8b4b60/fisica-i-usach.jpg)









