7 Torsion y Flexion
33
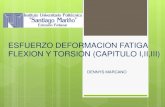
1 CAPITULO 7 TORSION, CORTE Y FLEXIÓN DE ELEMENTOS PRISMÁTICOS 7.1 Introducción Las estructuras reticulares usadas normalmente en la práctica (marcos planos o espaciales, reticulados planos o espaciales y emparrillados) están formadas por elementos rectos, generalmente prismáticos, unidos entre sí por sus extremos. Estos elementos trabajan de tres maneras diferentes o según una combinación de ellas: a) mediante fuerzas axiales que producen tracción o compresión en el elemento, b) mediante momentos de flexión y esfuerzos de corte en direcciones perpendiculares al eje del elemento y c) mediante momentos de torsión en la dirección del eje de éste. Este tipo de elementos se presenta también en máquinas en forma de bielas, ejes, etc. En este capítulo se estudiará el comportamiento de elementos sometidos a esfuerzos de torsión y flexión. Primero se analizará el problema de torsión pura de Saint Vennat en general, tanto para acciones simplemente conexas como para secciones multiconexas. Luego se verá aplicaciones a barras de pared delgada, tanto abiertas como cerradas, el concepto de centro de torsión y el efecto de torsión combinada con flexión. Más adelante se estudiará el caso de torsión con alabeo restringido, para terminar el capítulo con torsión en elementos de material de comportamiento plástico. 7.2 El problema de Saint Venant Saint Venant (1797-1886) estudió la torsión pura de cuerpos cilíndricos mediante el método “semi-inverso”, es decir, de adivinación parcial de la solución. Consideremos un cuerpo cilíndrico de material homogéneo e isótropo limitado por dos caras planas perpendiculares a las generatrices rectas, que está sometido a la acción de un sistema de fuerzas en equilibrio en sus caras planas, estáticamente equivalentes a un momento de torsión sobre el cuerpo. La superficie cilíndrica se encuentra libre de tensiones externas y sus puntos puede moverse libremente. Además de ello, las fuerzas de volumen son nulas en todos los puntos del cuerpo. La figura 7.1 muestra un cuerpo prismático sometido a torsión pura. Figura 7.1 Torsión de un elemento prismático. k1 k2 x2 x1 M θ x3 x2 n t k3 k2
-
Upload
david-santiago -
Category
Documents
-
view
276 -
download
6
description
Torsion
Transcript of 7 Torsion y Flexion

1
CAPITULO 7 TORSION, CORTE Y FLEXIÓN DE ELEMENTOS PRISMÁTICOS
7.1 Introducción Las estructuras reticulares usadas normalmente en la práctica (marcos planos o espaciales, reticulados planos o espaciales y emparrillados) están formadas por elementos rectos, generalmente prismáticos, unidos entre sí por sus extremos. Estos elementos trabajan de tres maneras diferentes o según una combinación de ellas: a) mediante fuerzas axiales que producen tracción o compresión en el elemento, b) mediante momentos de flexión y esfuerzos de corte en direcciones perpendiculares al eje del elemento y c) mediante momentos de torsión en la dirección del eje de éste. Este tipo de elementos se presenta también en máquinas en forma de bielas, ejes, etc. En este capítulo se estudiará el comportamiento de elementos sometidos a esfuerzos de torsión y flexión. Primero se analizará el problema de torsión pura de Saint Vennat en general, tanto para acciones simplemente conexas como para secciones multiconexas. Luego se verá aplicaciones a barras de pared delgada, tanto abiertas como cerradas, el concepto de centro de torsión y el efecto de torsión combinada con flexión. Más adelante se estudiará el caso de torsión con alabeo restringido, para terminar el capítulo con torsión en elementos de material de comportamiento plástico. 7.2 El problema de Saint Venant Saint Venant (1797-1886) estudió la torsión pura de cuerpos cilíndricos mediante el método “semi- inverso”, es decir, de adivinación parcial de la solución. Consideremos un cuerpo cilíndrico de material homogéneo e isótropo limitado por dos caras planas perpendiculares a las generatrices rectas, que está sometido a la acción de un sistema de fuerzas en equilibrio en sus caras planas, estáticamente equivalentes a un momento de torsión sobre el cuerpo. La superficie cilíndrica se encuentra libre de tensiones externas y sus puntos puede moverse libremente. Además de ello, las fuerzas de volumen son nulas en todos los puntos del cuerpo. La figura 7.1 muestra un cuerpo prismático sometido a torsión pura.
Figura 7.1 Torsión de un elemento prismático.
k1
k2
x2
x1
M
θx3
x2
ν
t
k3
k2

2
Las condiciones de borde pueden resumirse de la siguiente manera: En el manto cilíndrico, σνν = σνt =σν3 = 0 donde ν y t son los vectores unitarios normal y tangencial, respectivamente, a la curva que limita la sección. En las caras planas σ33 = 0. En cambio σ31 y σ32 ≠ 0 y tales que equivalen a un momento en la dirección x3 (momento de torsión). 7.2.1 El método semi - inverso El método semi - inverso usado por Saint Venant para el problema de torsión consiste en adivinar parcialmente la solución y luego completarla de manera que satisfaga todas las condiciones del problema. Se trata de un método de desplazamientos, pues sobre ellos se hace la suposición de partida. Supongamos que la solución del problema recién planteado está dada por
),( 2133
12
21
xxuuxuxu
==
−=θθ
(7.1)
es decir, los desplazamientos u1 y u2 son el resultado de una rotación de la sección como plano rígido en un ángulo θ y el desplazamiento u3, llamado función de alabeo, es sólo función de x1 y x2, independiente de la coordenada x3. A lo anterior se agrega la condición
3xχθ = (7.2) donde χ es una constante que representa el giro relativo de las secciones por unidad de longitud. Una vez supuesta la solución, hay que imponer las condiciones que debe cumplir la función de alabeo u3 (x1,x2) para que se satisfagan todas las relaciones de la teoría de elasticidad. Dadas las funciones de corrimientos (7.1), las deformaciones unitarias resultan
)xu(e
)xu(e
,
,
12332
21331
12332211
2121
0
χ
χ
εεεε
+=
−=
====
(7.3)
y en consecuencia, las tensiones correspondientes valen

3
)xu(G)xu(G
,
,
12332
21331
12332211 0
χσχσσσσσ
+=−=
==== (7.4)
Definiendo los vectores:
21
21
kkkxkxr
3231
21
σσ +=+=
3σ
(7.5)
Las relaciones (7.4) se pueden poner como:
( )rk3 ×+= χ3uG ∇3σ (7.6) Si la solución supuesta es la correcta, debe satisfacer las ecuaciones básicas de la teoría de elasticidad, es decir, las ecuaciones de equilibrio y las condiciones de borde 7.2.2 Ecuaciones de equilibrio: Las ecuaciones de equilibrio σij,j + fi =0 toman en este caso la forma
02,321,31 =+ σσ (7.7) Reemplazando las componentes de tensiones según (7.4) en las relaciones anteriores, se llega a
032 =∇ u (7.8)
La función de alabeo debe ser, por lo tanto, una función armónica para que se satisfagan las ecuaciones de equilibrio. 7.2.3 Condiciones de borde En la superficie cilíndrica, libre de tensiones, debe tenerse
3,2,1;2,1,0 === ikkikσν (7.9)
lo cual conduce a la relación 0322311 =+ σνσν (7.10) La condición (7.10), expresada en función de u3, da como resultado una relación para la función de alabeo en el borde de la sección.

4
En forma vectorial ésta puede ponerse como
03 =⋅σν (7.11) Es decir, la tens ión de corte por flexión es tangente a la curva de borde. Reemplazando σ3 por la expresión (7.6) se obtiene
033 =×⋅+⋅ rkν∇ν χu (7.12) Pero como
curvalaanormaldirecciónlaenudederivadauu n 3,33 ==∇⋅ν (7.13) y
( ) ss33 ,rr,rrrrrtrkrk −=⋅−=⋅−=⋅−=⋅×ν=×⋅ν 2
1s, (7.14
Con lo cual la condición de borde queda:
sn,n,
,rru
==
ψ
χ3 , donde ψ es la función de alabeo unitaria (7.15)
En resumen, eligiendo las funciones de desplazamiento según (7.1), se satisfacen todas las ecuaciones de la teoría de elasticidad en el interior del cuerpo y las condiciones de borde, siempre que la función de alabeo u3 cumpla con las relaciones (7.8) y (7.15). La determinación de u3 bajo las condiciones anteriores corresponde al llamado “problema de Neumann” en la teoría de potenciales. En la solución resulta una constante aditiva que corresponde a una traslación como cuerpo rígido en la dirección 3. 7.2.4 Relación entre M, χ y u3
Las condiciones de borde en las caras perpendiculares al manto cilíndrico (planos extremos) deben estar en equilibrio con las tensiones internas, vale decir, en dichas caras debe tenerse
( )( )
03
1232
2131
=+=−=
px,uGpx,uGp
χχ
(7.16)
Las tensiones sobre estas caras tienen por resultante un momento de torsión puro. En efecto, como no hay tensiones normales, tanto la resultante en la dirección 3 como los momentos de flexión en las direcciones 1 y 2 son nulos. Por la misma razón las fuerzas

5
resultantes de corte deben ser nulas. Ello se puede verificar realizando la integración de las tensiones de corte, en la forma siguiente
dAxu
GdApGVAA∫∫∫∫
−== 2
1,311 χ
χχ (7.17)
Que considerando la ecuación (7.8) se puede transformar a
dAxu
xxu
xGVA∫∫
++
−=
2,
12,3
1
1,
21,3
11 χχχ (7.18)
y recordando el teorema de Green (Stokes) para dos funciones P1 y P2 definidas en una superficie plana limitada por la curva C
( ) ( ) ∫∫∫∫ ⋅=+=−CCA
dxPdxPdAPP drP22112112 ,, (7.19)
se obtiene:
∫
−+
+−=
C
dxxu
xdxxu
xGV 221,3
1112,3
11 χχχ (7.20)
( )
∫
∫
∫
⋅−
⋅×−=
⋅−×
⋅=
+−+−=
C
3
C
C
dsu
dsxGx
uxG
dxxdxxdxu
dxu
xG
rdrdr
k
drrdrk
3
3
χ
χχ
χχχ
∇
∇
1
31
221121,3
12,3
1
Pero tdr
=ds
= vector tangente unitario
y ν=×=×− 33 ktdr
kds
= vector normal unitario
Además ν×= 3kdrds
Luego

6
dsu
xGVC∫
⋅×−
⋅= rk3 νν
χχ 3
11 ∇
dsu
xGVC∫
×⋅+
⋅= rk3νν
χχ 3
11 ∇ (7.21)
Según la relación (7.12), el paréntesis cuadrado dentro de la integral vale cero en el contorno, luego
01 =V (7.22) En la misma forma se puede demostrar que
02 =V (7.23) El momento de torsión está dado por
( ) dAu
GdAAA∫∫∫∫
××+
×=×= rkrrrM 3χ
χ 3∇3σ (7.24)
Considerando el teorema de Green ∫∫ ∫ +=−
A C
)dxFdxF(dA),F,F( 22112112
los términos de la integral se pueden transformar de la siguiente manera:
∫
∫
∫∫∫∫
⋅
−=
+−=
−
−=
×
C3
C3
A ,,3
A
drru
k
dxu
xdxu
xk
dAu
xu
xkdAu
r
χ
χχ
χχχ
3
23
213
1
1
32
2
31
3∇
(7.25)
A su vez se tiene
( ) p33A
IkdAkrdAr3kr ==×× ∫∫∫∫ 2 (7.26)
Ip = momento de inercia polar de la sección

7
Luego
3kdrrM
⋅
−= ∫
Cp
uIG
χχ 3 (7.27)
Con lo cual queda:
M = χ G J, ∫ ⋅
−=
Cp drr
uIJ
χ3 = Inercia torsional (7.29)
El producto G J se denomina “rigidez torsional”. Consideremos ahora la función u3/χ como variable independiente. Se tiene:
032 =
∇
χu
en el interior de la sección
sn
rru
,,
3 =
χ
en el contorno
Por lo tanto χ
3u depende solamente de la forma de la sección, pues el término J es una
propiedad geométrica de ésta. Algunos autores usan la notación:
JI P=β (7.30)
Con lo cual la expresión (7.29) se puede poner en la forma:
pGI
Mβχ = (7.31)

8
7.2.5 Ejemplo de aplicación: sección circular Consideremos el método anterior aplicado a una barra cilíndrica circular sometida a un momento de torsión M, como se aprecia en la figura 7.2.
Figura 7.2 Torsión en una sección circular. La solución está dada por una función u3 tal que dentro del círculo satisfaga la ecuación.
032 =∇ u
y en el contorno
0,,3 == sn rru χ La solución está dada por: 03 == cteu La constante se puede elegir igual a cero, ya que corresponde a una traslación de cuerpo rígido, sin influencia en los resultados. La propiedad J de la sección es, en este caso, igual al momento de inercia polar.
2
4aIJ P
π== (7.32)
La torsión χ de la barra vale, según la relación (7.29)
4
2aG
MJG
Mπ
χ == (7.33)
2a
x1
x2
M
M

9
La tensión de corte σ3 vale, según la fórmula (7.6)
raM
rG4
2π
χ ==3σ (7.34)
es decir, la tensión de corte varía linealmente desde cero al centro de la sección a 3
2aM
π
en el borde (ver figura 7.2). 7.3 La función de tensiones de Prandtl. 7.3.1 Ecuación de compatibilidad. Supóngase una función φ (x1,x2) tal que las tensiones se obtengan por derivación parcial, de la siguiente manera
( )( )231123
132231
,,
,,
uxGG
uxGG
+=−=
+−==
χχφσ
χχφσ (7.35)
O bien, en forma vertical φχ ∇σ3 ×−= 3kG (7.36) Las ecuaciones de equilibrio se satisfacen entonces idénticamente
( ) 0,,,, 1221232131 =−=+ φφχσσ G (7.37) y la condición de compatibilidad de desplazamiento
213123 ,,uu = (7.38), junto a las
relaciones (7.35), conduce a una ecuación para φ. En efecto, u3,1 y u3,2 se pueden obtener de las relaciones (7.4) y (7.35)
1123
2213
,,,,
xuxu
χχφχχφ
−−=+=
(7.39)
Derivando la primera con respecto a x2 y la segunda con respecto a x1 e igualando, se obtiene
022 =+∇ φ (7.40) 7.3.2 Condiciones de borde Las tensiones tangencial y normal en la superficie cilíndrica deben ser nulas. Esto conduce a la relación (7.11).

10
03 =⋅σν (7.41) O bien, usando la ecuación (7.36).
00
=⋅×=×⋅
φφ
∇ν∇ν
3
3
kk
(7.42)
Pero =−=× tk3ν vector tangente unitario a la curva de borde, entonces
bordeelenconstanteesdeciresbordeelsegúnlongitudscons
φφφ
,0,0
===⋅− ∇t
(7.43)
φ = Cte en (C) (7.44) El problema de torsión se ha reducido entonces a determinar la función φ que satisfaga las condiciones
sección
sección022
ladecontornoelenConstanteladedentro
==+∇
φφ
Se pueden presentar dos casos diferentes, como se aprecia en la figura 7.3. En el caso a) la sección es simplemente conexa y la función φ toma un valor constante en el contorno, valor que puede hacerse igual a 0. En el caso b) la sección es multiconexa y φ tiene valores constantes en cada contorno pero diferentes entre sí. (Función simplemente conexa es aquella en la cual un lazo cualquiera dibujado dentro de la sección puede ser reducido a un punto sin que la cuerda corte al borde. Esto es posible en a) pero no siempre en b). Otra forma de ver la multi conectividad es analizando de cuantas formas se puede cortar el cuerpo, de borde a borde, manteniendo su unidad).

11
022 =+∇ φ
022 =+∇ φ
φ = φ 0
φ = φ 2
φ = φ 1
φ = 0
(a) (b)
Figura 7.3 El problema de torsión mediante la función de Prandtl
7.3.3 Relación entre el momento M y la torsión χ Al igual que el método semi- inverso, las tensiones tangenciales en las caras normales al manto cilíndrico deben ser equivalentes a un momento de torsión según la dirección k3. Esta condición conduce a una relación entre el momento aplicado y el ángulo de torsión por unidad de longitud χ.
( )dAxxdAAA∫∫∫∫ −=×= 312321 σσ3krM 3s (7.45)
Usando ahora las expresiones (7.35) para las tensiones de corte en función de φ, se obtiene:
( )dAxxGMA∫∫ +−= 2,21,1 φφχ (7.46)
( ) ( )[ ]∫∫ −+−=A
dAxxG φφφχ 22,21,1 (7.47)
Aplicando el teorema de Green (7.19) se obtiene:
( )∫∫ ∫ −+=A C
dxxdxxGdAGM 21122 φχφχ (7.48)
Suponiendo que la sección es multiconexa con n contornos diferentes, la función φ es constante a lo largo de cada contorno. Sea φ = φi en el contorno i, entonces

12
( )
∑ ∫ ∑
∫ ∫
= =
−=×−=
⋅×−=−
n
i C
n
iiii
C C
Ar
dxxdxx
1 1
2112
2 φφ
φφ
33
3
kdrk
kdrr
(7.49)
Donde Ai es el área encerrada por el contorno. Luego M = G χ J (7.50) con ( )∫∫ ++++=
AnnAAAdAJ φφφφ K221122 (7.51)
En la expresión para J las áreas Ai son positivas si el contorno es interior, es decir, cuando se trata de un hueco. Normalmente se elige φ = 0 en el contorno exterior, de manera que todos los términos sean positivos y la sumatoria se extiende sólo a los contornos de los huecos. Es corriente en la práctica que el momento de torsión M sea conocido y se desee determinar el ángulo de torsión unitaria χ y las tensiones internas. Para resolver este problema es preciso obtener primero la función φ para luego determinar la constante J de la sección mediante la fórmula (7.51). El valor de la torsión se obtiene a partir de la ecuación (7.50) y las componentes de la tensión de corte de las expresiones (7.35). 7.3.4 Distribución de las tensiones de corte La tensión de corte expresada en forma vectorial está dada por (7.36)
( )21,12,33ˆˆˆ kkGkG φφχφχ −=×= ∇σ
Considérese ahora un punto P sobre una curva interior C trazada dentro de la sección del cuerpo cilíndrico, como se muestra en la figura (7.4).
Figura 7.4 Distribución de tensiones de corte en la sección.
r P
νt
CO

13
En P se pueden definir los vectores unitarios t tangente a la curva C y ν normal a la curva. Si llamamos s la distancia en la dirección t y n la distancia en la dirección ν, entonces la expresión (7.36) se puede usar también para este caso, reemplazando k1 por ν , k2 por t, x1 por n y x2 por s. Resulta
( )tn3 ,, φφχ −= νσ sG (7.52) La expresión (7.52) para σ3 muestra que su componente según la tangente a la curva es proporcional a la derivada de φ respecto a la dirección normal a ella y que la componente según la normal es proporcional a la derivada de φ respecto a la dirección tangente. Un caso especial es aquél en que la curva corresponde a una línea φ = Cte. En ese caso la derivada respecto a la tangente vale cero y la tensión de corte tiene la dirección de la curva. Además el valor de la tensión de corte es proporcional a la derivada de φ respecto a la longitud en la dirección normal. Interpretación geométrica Considérese la superficie x3 = φ (x1, x2), representada en la figura 7.5.
Figura 7.5 Interpretación geométrica de la función de Prandtl En ella se puede observar que la derivada -φ,n en el punto P es igual a la tangente del ángulo α que forma la curva de máxima pendiente que pasa por P con la dirección ν . Esto significa que la magnitud de la tensión de corte de un punto cualquiera de la
νν
α
φ = 0
φ = Cte
x1
x2
φ(x1,x2)

14
sección es proporcional a la pendiente de la superficie φ = φ (x1,x2) en el punto correspondiente. Si se consideran ahora las proyecciones de líneas φ = Cte. Para incrementos iguales de la constante (curvas de nivel), la magnitud de la tensión de corte es inversamente proporcional a la distancia entre ellas; mientras más juntas se encuentren, mayor es el valor de la tensión de corte. El caso presentado en la figura 7.5 corresponde a una sección simplemente conexa. Para secciones multiconexas se producen zonas donde la función φ tiene un valor constante, las que corresponden a mesetas horizontales en la superficie φ = φ (x1,x2) (ver figura 7.6). La constante de torsión de la sección J se obtiene la expresión (7.51)
++++= ∫∫
Ann AAAdAJ φφφφ K22112
Si se considera el área AT = A1 + A2 +......+ An, es decir, el área total incluyendo los huecos, y se extiende la función φ a los huecos, asignándole en ellos el valor constante correspondiente, se puede poner
∫∫ ==TA
dAJ 22 φ (Volumen comprendido entre el plano φ = 0 y la superficie φ (x1,x2))
(7.53)
Figura 7.6 Función de Prandtl para sección multi conexa.
φ = 0x1
x2
φ(x1,x2)
φ = φ 1
φ = φ 2

15
7.3.5 Condición de univalencia de u3 en secciones multiconexas. Una sección con huecos en su interior es multiconexa pues se le pueden hacer cortes tales como a-a o b-b (figura 7.7) sin que la sección pierda su unicidad.
Figura 7.7 Condición de univalencia en una sección multiconexa. Es evidente que al tener dichos cortes, el cuerpo cilíndrico sometido a torsión se va a comportar en forma diferente a si no los tuviera, debido a la posibilidad o imposibilidad de desplazamiento relativo entre las caras de los cortes. Las condiciones de no existencia de desplazamientos relativo entre las caras de cada corte equivaldrán a sendas relaciones que permitirán determinar los valores constantes de la función φ en los huecos. En forma matemática la condición anterior se puede poner como
huecosº,,2,1;0,3 NidsuiC
s K==∫ (7.54)
Donde Ci son curvas alrededor de los huecos. Considerando un punto P de la curva Ci, la deformación unitaria de corte entre las direcciones 3 y s vale:
)u,u( ,sss 333 21
+=ε (7.55)
Como la sección gira en su plano como cuerpo rígido, us = θh, donde θ es el ángulo de giro de la sección y h es la distancia del centro de giro a la tangente a la curva Ci en P.
hhdxd
us χθ
==3
3, (7.56)
Reemplazando en la expresión (7.55) se obtiene
hu ss, χε −= 33 2 (7.57)
C1C2
Ph
Ob b
a a

16
Por lo tanto
( ) 02 33 =−= ∫∫ dshdsuii C
sC
s, χε (7.58)
Pero
iiiC
Ccurvalaporencerradaáreadshi
=ΩΩ=∫ 2 (7.59)
Luego, la condición de univalencia de u3 se puede expresar como
uecoshdeºN,,,ids iC
s
i
K213 ==∫ Ωχε (7.60)
Esta condición se puede transformar en una relación para la función de Prandtl
nns
s ,G
,GG
φχφχσ
ε21
223
3 −=−
== (7.61)
Reemplazando en la ecuación (7.60) resulta finalmente
iC
ndsi
Ω−=∫ 2,φ (7.62)
Como se vio anteriormente, la función φ tiene valores constantes, diferentes entre sí, en el contorno de los huecos. Habrá que determinar, por lo tanto, tantas constantes como huecos haya en la ecuación. Esto se consigue usando la relación (7.62) para cada uno de los huecos, y resolviendo luego el sistema de ecuaciones resultantes para las constantes. 7.3.6 Analogía de la membrana La determinación de la deformación transversal de una membrana sometida a tensión interna constante y a una presión normal uniforme, conduce exactamente al mismo problema matemático que la determinación de la función de Prandtl en la torsión pura de un cuerpo cilíndrico. Una descripción detallada de esta analogía puede verse en (Timoshenko). Esta analogía ha sido utilizada para dos fines: a) Para visua lizar la forma de la función de Prandtl por su analogía con un elemento físico cuya geometría es fácilmente identificable y b) la membrana análoga ha sido utilizada en el pasado para medir directamente, en laboratorio, la forma de la función de Prandtl, mé todo que quedó obsoleto por el desarrollo de soluciones numéricas mediante computadores digitales. Si se considera el equilibrio de fuerzas sobre un elemento infinitesimal (dx,dy) en dirección perpendicular a la membrana, para un sistema cartesiano (x,y), se obtiene la siguiente ecuación
02 =+∇TP
w (7.63)

17
donde: w = desplazamiento transversal de los puntos de la membrana p = presión normal a la membrana
T = tensión interna de la membrana expresada como fuerza por unidad de longitud
Llamando
φTP
w2
= (7.64)
se obtiene la misma ecuación que debe satisfacer la función de Prandtl en el problema de torsión. Además, la condición de borde para la membrana es w = 0 en el contorno, que es igual a la condición φ = 0 del problema de torsión. 7.3.7 Ejemplos de aplicación: 7.3.7.1 Torsión de un cilindro con ranura circular. La figura 7.8 muestra la sección de un eje circular de radio a al cual se le ha hecho una ranura, también circular, de radio b.
Figura 7.8 Eje con ranura circular
La ecuación de la línea de borde de la sección es
O
tθ
tr
r
x
y
b a
Pθ
Q
S
R
BAθο

18
ranuralaenbyxcilindroelenaxyx
222
22 2=+
=+ (7.65)
Para resolver el problema de torsión se necesita determinar una función φ (x1,x2) tal que ∇ 2 φ+2=0 en el interior y φ = 0 en el borde. La segunda condición se satisface automáticamente si se elige como función φ el producto de las ecuaciones del cilindro y la ranura, multiplicado por una constante. Además se comprueba que es posible satisfacer la ecuación de compatibilidad ∇2 φ+2=0 eligiendo adecuadamente el valor de la constante, siempre que la ecuación del cilindro se ponga en la forma
012
22=−
+ yxax
(7.66)
Resulta así la siguiente función que cumple con las condiciones del problema
( ) ( )
+
−−+−=22
22221
21
21
yxax
byxyx ,φ (7.67)
o bien, usando coordenadas polares
( ) ( )
−−−=r
abrr
θθφ
cos,
21
21 22 (7.68)
En forma adimensional, usando como variables
ar
ab
=
=
ρ
α (7.69)
La función (7.68) puede expresarse como
( )
−−−=
ρθ
αρφcos2
121 222a (7.70)
La función φ/a2 es siempre menor que 1/2 y sólo alcanza ese valor para α = 0 (eje circular sin ranura) y en el centro de la sección. En la figura 7.9 se ha representado φ/a2 para el caso α = 1/2

19
Figura 7.9 Planta y perspectiva de la función de Prandtl. Tensiones de corte Definiendo vectores unitarios radial y tangente, θtt r y respectivamente, la tensión de corte está dada por la ecuación (7.52).
−= θθ φφχ tt rrrG ,,
13σ (7.71)
Sustituyendo φ por (7.68) y dividiendo por aχG para obtener una relación adimensional, se obtiene
θθρα
ρθρα
χttr
+−+
−= cos1sen1 2
2
2
23
Gaσ (7.72)
La magnitud de la tensión de corte vale
2
1
4
4
2
2
2
223 22121
++
+−+=
ρα
θρα
θρα
ρρχσ
coscosGa
(7.73)
En el borde del eje la tensión se obtiene sustituyendo ρ por 2 cos θ en (7.73)
( )( )( )22
23
cos2cos2cos2
cos41
θθθ
θα
χσ
ababa
Ga−+
=−= (7.74)
Vale decir, refiriéndose a la figura 7.8
23
SOSQSR
Ga⋅
=χ
σ (7.75)
f
f

20
En el contorno de la ranura la tensión se obtiene sustituyendo ρ por α en la ecuación (7.72). Resulta
( )baaGa
−=−= θαθχσ
coscos 21
23 (7.76)
Por lo tanto
OBSQ
Ga23 =
χσ
(7.77)
Si b → 0, el eje se transforma en un cilindro circular lleno y las tensiones en el borde valen:
GrelaciónsegúnGarelaciónsegún
χθσχσ
cos2),76.7(),74.7( 3
==
(7.78)
El primer valor corresponde a un cilindro circular lleno, mientras el segundo proviene de una concentración de tensiones debida a una muesca circular infinitesimal. En el eje de simetría de la sección, θ = 0 y la tensión de corte vale
θρα
ρχ
t
−−= 2
2
1Ga3σ
(7.79)
Esta expresión se ha dibujado en la figura 7.10 como función de ρ, para distintos valores de α. Se puede observar que para α → 0, es decir, para una ranura muy pequeña, la distribución de tensiones se aproxima a la de un cilindro circular lleno, excepto en el punto donde está la ranura, en donde vale el doble.
0 0.5 1 1.5 21
0.5
0
0.5
1
1.5
22
1−
σ 31 k,
σ 32 k,
σ 33 k,
σ 34 k,
σ 35 k,
20 ρ k

21
Figura 7.10 Tensión de corte en el eje de simetría de la sección para una barra cilíndrica con ranura circular.
Inercia torsional J. La inercia torsional se obtiene integrando la función de Prandtl en el área de la sección.
( ) θθ
φθθ
drdrr
arbdAJ
a
bA
o
−−== ∫∫∫ ∫
cos2122
cos222
0
(7.80)
donde θ0 = arcos (b/(2 a)) Desarrollando las integrales y reduciendo el resultado a su forma adimensional, resulta
( ) ( ) 002
03424 4sen1212sen3/2sen382/21 θθαθαθαα +−++−−= oaJ (7.81)
La figura 7.11 muestra la constante torsional J en función de α
Figura 7.11 Inercia torsional para diferentes razones de forma α=b/a 7.3.7.2 Torsión de una barra de sección rectangular. Uno de los casos más comunes de la práctica es el de barras de sección rectangular o compuestas por secciones rectangulares unidas entre sí. La solución que se verá a continuación fue propuesta por Levy. Consiste en desarrollar la función incógnita en serie de senos en una dirección, reduciendo así el problema bidimensional en una serie de problemas unidimensionales de solución simple.
0 0.5 1 1.5 20
0.5
1
1.5
21.571
0
Jk
20 α k

22
La figura 7.12 muestra la geometría de la sección y la notación usada.
Figura 7.12 Sección rectangular La ecuación diferencial a resolver es:
22 −=∇ φ Su solución se puede obtener como suma de una solución particular de la ecuación completa más la solución homogénea, es decir
HP φφφ += (7.82)
donde:
)(02
2
2
armónicafunciónH
P
=∇−=∇
φφ
La solución particular se elige suponiendo que φ es independiente de x, que es aproximadamente correcto cuando a es mucho mayor que b. Entonces
2,2 −==∇ yyPP φφ (7.83)
Integrando e imponiendo las condiciones de borde φp = 0 para y = 0, b, resulta
)( byyp −−=φ (7.84) Como solución homogénea se elige:
a/2 a/2
b
x
y

23
( )b
ynxYn
nH
πφ sen
1∑
∞
=
= (7.85)
La función φH satisface idénticamente las condiciones de borde para y = 0,b. Por lo
tanto sólo habrá que considerar luego las condiciones de borde2
0a
xen ±==φ .
Sustituyendo φH en la ecuación homogénea, se obtiene:
( ) ( ) 02
22
1
=
−∑
∞
= byn
sen)xYb
nxY( n
"n
n
ππ (7.86)
Como cada término de esta serie debe valer cero, se tiene
( ) ( ) 02
22" =− xY
bn
xY nnπ
(7.87)
Ecuación cuya solución general es
bxn
Bb
xnAY nnn
ππcoshsenh += (7.88)
Por simetría An = 0, pues la función senh es antimétrica. Con ello la función de Prandtl completa vale
( ) ( ) ∑∞
=
+−−=1n
n byn
senb
xncoshBbyyy,x
ππφ (7.89)
Las constantes Bn quedan determinadas al imponer las condiciones de borde φ = 0 para x=± a/2.
( ) ∑∞
=
=−imparn
n byn
senban
coshBbyyππ
2 (7.90)
La ecuación (7.90) puede interpretarse como el desarrollo en serie de senos de la función y(y-b) en el intervalo (0,b). En esta forma resulta
( ) dyb
ynbyy
bban
Bb
nππ
sen2
2cosh
0
−= ∫ (7.91)
de donde se obtiene:

24
imparncon
ban
n
bBn =−= ,
2cosh
833
2
ππ
(7.92)
Luego, la expresión completa para la función φ es
( )
ban
coshn
byn
senb
xncoshb
byyimparn
2
8
33
2
π
ππ
πφ ∑
∞
=
−−−= (7.93)
Figura 7.13 Función de Prandtl para una sección rectangular. La constante torsional J se obtiene por integración de la función φ :
dydxdAJ
a
aA
b
== ∫∫∫ ∫
−
2
20
22 φφ
Resulta
)2tgh192
1(3 55
3
nban
abab
Jimparn
π
π ∑∞
=
−= (7.94)
Cuando b << a, J →3
3ab. En otros casos basta con unos pocos términos de la serie,
pues ésta converge rápidamente. La constante torsional J puede expresarse también como
3
3
1
abkJ = (7.95)
donde k1 es un factor que depende de la razón a/b, como sigue a/b = 1.0 1.2 1.5 2.0 2.5 3.0 5.0 10.0 k1 = 0.422 0.498 0.588 0.687 0.747 0.789 0.873 0.936
φφ

25
El factor k1, se puede obtener también con bastante precisión tomando la sumatoria de la ecuación 7.94 igual a 1, con lo cual resulta
abk 63011 .−= (7.96)
La tensión máxima de corte se produce en los puntos x = 0 y = 0,b:
( )
−== ∑∞
===
ban
coshnbG,G
imparnyxymax
2
181
2203 ππ
χφχσ (7.97)
Cuando a/b → ∞, σ3max → G χ b En igual forma que para la constante torsional, la tensión máxima puede expresarse como
bGkmax χσ 23 = (7.98) donde k2 es función de a/b:
a/b = 1.0 1.2 1.5 2.0 2.5 3.0 5.0 10.0 k2 = 0.675 0.759 0.848 0.930 0.968 0.985 0.999 1.000
Considerando que GJM
=χ , la tensión máxima de corte en función del momento vale
21
23 3
baM
kk
max =σ 7.99)
7.4 Secciones de pared delgada 7.4.1 Secciones abiertas Como se vio anteriormente, cuando una sección rectangular es esbelta se pueden hacer las siguientes aproximaciones
3
3abJ = (7.100)
bGmax χσ =3 (7.101)
Esta aproximación es equivalente a suponer que la función de Prandtl es una superficie cilíndrica. En el caso de secciones abiertas formadas por varios elementos rectangulares

26
esbeltos, como aquellas de la figura 7.14, se puede suponer que en cada elemento φ es cilíndrico, despreciando el efecto de sus extremos.
Figura 7.16 Secciones típicas de perfiles abiertos de pared delgada. La constante torsional, que es igual a dos veces volumen bajo la superficie φ, resulta así igual a la suma de las constantes torsionales de los elementos rectangulares que forman el perfil.
( )∑=
=.º
1
3
31 ElemN
iiibaJ (7.102)
Además, la tensión de corte máxima en cada elemento vale
JMbi
maxi =3σ (7.103)
Esto es válido para secciones abiertas de pared delgada en general, no necesariamente constituidas por elementos rectangulares, sino éstos pueden ser también curvos de espesor constante. En este caso la magnitud “a” es la longitud de la línea central del elemento curvo y “b” es el espesor. Concentración de tensiones: En el encuentro de dos ramas rectas de una sección abierta de pared delgada se produce una concentración de tensiones, pues la membrana análoga de la función φ presenta una mayor pendiente. Este efecto se puede considerar multiplicando por un factor k la tensión que resulta de aplicar las fórmulas anteriores. De acuerdo con Trefftz1, la tensión de corte máxima por torsión está dada por
bkGmax χσ =3 , donde 3741ρb
,k =
siendo b el espesor de las ramas que se juntan en ángulo recto y ρ el diámetro de redondeo en la esquina interior. Valores típicos de k se pueden ver en la tabla siguiente:
1 Trefftz, E., “Mathematische Elastizitatstheorie”, Handb. der Phisik, Berlín, 1928. También en: García de Arangoá, Antonio, Elasticidad Teórica y Experimental, Editorial Dosset, 1945.

27
Factor de concentración de tensiones en la intersección de ramas perpendiculares
b/ρ k
0,2 1,02 0,4 1,28 0,6 1,47 0,8 1,62 1 1,74
1,2 1,85 1,4 1,95 1,5 1,99
7.4.2 Torsión de perfiles cerrados de pared delgada
7.4.2.1 Perfiles unicelulares Un perfil unicelular es de sección doblemente conexa, pues un corte longitudinal no lo separa en dos cuerpos (figura 7.17.a). Debe, entonces, satisfacerse la condición de univalencia del corrimiento en la dirección longitudinal, u3, de acuerdo con ecuación (7.67). Consideremos la función φ correspondiente a un tubo de pared delgada (figura 7.17.b). Supongamos que la curva a recorrer para la condición (7.67) es la línea media de la sección. Entonces debe tenerse
∫ Ω−=C
Cn ds 2,φ (7.104)
donde ΩC es el área encerrada por la curva media de la sección.
CORTE LONGITUDINAL
M
M
x1
x2
x3
φ1
h
φ = 0
φ = φ1
C
(a) (b)
Figura 7.17 Torsión en un tubo unicelular.
ρ b

28
Como la pared es muy angosta, la función φ variará en forma prácticamente lineal en la dirección normal al borde. Se puede hacer entonces la aproximación
h,n
1φφ
−= (7.105)
Luego, la condición (104) se transforma en
∫=
C
c
hdsΩ
φ2
1 (7.106)
La inercia torsional J está dada por
∫
ΩΩ=
C
cnC
hds
J2
,
42 φ (7.107)
La tensión de corte tiene una distribución uniforme a través de la pared
hG
G n,1
3
χφχφτσ =−== (7.108)
Se acostumbra definir el flujo de corte
∫===
C
c
hdsGGhq χΩχφτ 2
1 (7.109)
Analogía eléctrica. La relación (7.109) es análoga a la ecuación que define la intensidad de corriente en un circuito eléctrico, considerando las siguientes equivalencias (figura 7.18):
iq ⇔ VC ⇔Ω2
Rhds
G C
⇔∫χ1
potenciaiVqJGM C =⋅⇔Ω== 2χ (7.110)
Figura 7.18 Circuito eléctrico equivalente para tubo unicelular.
+
_
i RV
q

29
Para determinar la tensión en el tubo, suponiendo que está sometido a un momento conocido, no es necesario calcular la constante φo, pues basta usar la relación (7.110) para determinar el flujo q y luego dividirlo por el espesor del tubo.
7.4.2.2 Perfiles multicelulares En tubos unicelulares el flujo de corte es constante a lo largo de la línea media de la sección y proporcional al valor constante de φ en el contorno del hueco (φ0). En tubos multicelulares, los flujos son constantes en cada rama pero difieren de una rama a otra. Considerando la forma de la superficie φ = φ0, se puede observar que en este caso los flujos en cada rama son proporcionales a la diferencia de los valores de φ en los huecos separados por la rama. Vale decir, refiriéndose a la figura 7.19.
( ) 21213
22
11
qqGq
Gq
Gq
−=−=
=
=
φφχ
χφ
χφ
(7.111)
Figura 7.19 Forma de la función de Prandtl en un tubo multicelular. Considerando nuevamente la similitud con un circuito eléctrico, la tercera de las relaciones (7.111) corresponde a la ley de los nudos de Kirchhoff , la cual establece que la suma algebraica de los flujos que llegan a un nudo debe ser cero. En cuanto a la ley de las mallas, según la cual las caídas de potencial en un recorrido cerrado cualquiera del
h2h3h1
q1 q3 q2
φ = φ1φ = φ2
φ = 0
A
BC D
EF

30
circuito deben sumar cero, tiene su equivalente en la ley de univalencia de u3, según la cual en un recorrido cerrado C debe tenerse:
∫ Ω= CGds χτ 2 (7.112)
es decir:
021
=Ω−∫∑ CnC
nn h
dsG
qχ
(7.113)
donde la sumatoria se extiende sobre las ramas del recorrido C. La ecuación eléctrica equivalente es:
0=−∑ VRi nn (7.114)
La resolución del problema de torsión de tubos multicelulares es, por lo tanto, equivalente a la de un circuito de corriente continua. El circuito equivalente a la sección de la figura 7.19 se encuentra esquematizado en la figura 7.20
Figura 7.20 Circuito eléctrico equivalente para tubo multicelular El flujo en la rama CF, considerando la ecuación de los nudos, vale q1 – q2. Es posible, ENTONCES, eliminar incógnitas asignando flujos a las mallas en vez de A las ramas (un flujo por cada hueco), de manera que el flujo en una rama sea igual a la suma algebraica de los flujos de las mallas separadas por la rama. En esta forma las ecuaciones de los nudos se satisfacen idénticamente. El problema se reduce entonces a resolver un sistema de ecuaciones algebraicas lineales de tantas incógnitas como huecos tenga la sección: un flujo incógnito y una ecuación por cada malla. En el caso particular del a figura 7.20 el sistema de ecuaciones es:
i2
R2
V2+
_
i1 R3V1
+_
R1A
B C D
EF

31
( )
( ) 22
122
2
2
3
21
1
1
211
211
Ω=−+
Ω=−+
∫∫
∫∫
FCCDEF
CFFABC
hds
Gqq
hds
Gq
hds
Gqq
hds
Gq
χχ
χχ (7.115)
El momento se obtiene calculando la potencia del circuito.
2211 22 qqM Ω+Ω= (7.116) Ejemplo de aplicación: Consideremos la sección que se muestra en la figura 7.21. Se pide determinar la tensión máxima de corte para un momento de torsión T = 12 (t.m), y el valor de la inercia torsional J.
Figura 7.21 Ejemplo de tubo multicelular Elijamos como incógnitas los flujos q1 y q2 (q3 = q1, por simetría) . Las ecuaciones de las mallas son
( ) ( ) ( )
( ) ( )( )∫ ∫
∫ ∫ ∫ ∫−×=+−
++−=−+
GFE EA
ABC CDA ADC CG
dsG
qds
Gqq
dsG
qds
Gqq
dsG
qqds
Gq
2212
2122
211
10204028.0
16.0
18.0
16.0
1102
6.01
6.01
πχχ
χχπ
χχ
(7.117) que desarrolladas toman la forma
χχ
GqqGqq558.189099.32
122
21
21
=+−=−
(7.118)
La solución del sistema de ecuaciones anterior es
Ø20
A
B
C
D
E
F
G
Hq 1 q3=q1q2
Placas e = 0,8
Tubos e = 0,6
Soldadura
Dimensiones en cm40

32
χχ
GqGq
5011025011
2
1
..
==
(7.119)
La inercia torsional está dada por 2 veces el volumen encerrado bajo la función φ
( )[ ]( )424431
501.101002040250.1110022
22
cm
GGG
qG
J iii
iii
=
××−×+×××=
Ω=Ω= ∑∑
χπχπχ
χφ
(7.120)
Considerando la relación (7.110), se obtiene
=== 330.49
243411200000
cmKg
JM
Gχ
Por lo tanto las tensiones valen Ramas ABC y GHE τ = 924.3 (Kg/cm2) Ramas CG y EA τ = 647.3 (Kg/cm2) Ramas CDA y EPG τ = 61.6 (Kg/cm2) 7.5 Torsión combinada con flexión y corte
Figura 7.22 Elemento prismático sometido a fuerza transversal. En este caso no se cumple la hipótesis de Saint Venant que las secciones giran como planos rígidos y sólo se deforman en dirección perpendicular al plano. Ahora hay cierta deformación en el plano, pero se acepta la hipótesis que hay un giro único de la sección, igual al giro medio, es decir:
∫∫ +==A
,, dA)uu(A
)(omedioPr 211221
31
ωθ (7.121)
C
x2
x1P1
x3
x1
dP1l

33
En cuanto a las tensiones, se supone
)xbxa)(xl(P
xdentesdindependie,,
213133
33231
212211 0
+−=
===
σ
σσ
σσσ
(7.122)
Por equilibrio entre 33σ y el momento de flexión, se obtiene
122211
12
122211
11
IIII
b
IIII
a
−=
−−=
donde 122211 Ie,I,I son los momentos de inercia y de inercia polar de la sección con respecto al
centro de gravedad de ésta. En caso que los ejes coordenados sean ejes principales, 012 =I y
resulta 2
1I
a −= , 0=b .