Accionamiento de máquina dc operando en cuatro cuadrantes
41
UNIVERSIDAD DE CONCEPCIÓN FACULTAD DE INGENIERÍA DEPARTAMENTO DE INGENIERÍA ELÉCTRICA Control de Accionamientos eléctricos Tarea N°1: “Control de corriente, velocidad y posición de una máquina de DC” Alumno: Javier Valenzuela Cruzat
-
Upload
javier-ignacio-valenzuela-cruzat -
Category
Documents
-
view
15 -
download
1
description
Accionamiento de un motor dc alimentado a través de un chopper de cuatro cuadrantes, incluye control de posición, velocidad y corriente, indicando la síntesis de los controladores y las pruebas respectivas
Transcript of Accionamiento de máquina dc operando en cuatro cuadrantes
-
UNIVERSIDAD DE CONCEPCIN
FACULTAD DE INGENIERA
DEPARTAMENTO DE INGENIERA ELCTRICA
Control de Accionamientos elctricos Tarea
N1:
Control de corriente, velocidad y posicin
de una mquina de DC
Alumno: Javier Valenzuela Cruzat
-
1.1 ACCIONAMIENTO DC
Motor de corriente continua excitacin independiente, cuyos valores nominales son:
Potencia salida nominal Pout = 15 kW
Tensin armadura nominal Vrated = 400 V
Velocidad nominal r = 1000 RPM
Torque nominal Tr = 143 Nm
Corriente armadura nominal Iar = 42 A
Tensin campo nominal Vf = 400 V
Velocidad mxima m = 2000 RPM
Los parmetros de la mquina dc son los siguientes:
Resistencia armadura Ra = 1.02
Resistencia de campo Rf = 400
Constante de tiempo armadura ar = 10 ms
Constante de tiempo campo f = 150 ms
El chopper de cuatro cuadrantes es alimentado desde un suministro de 540 Vdc. La
frecuencia de conmutacin es de 2 kHz, donde el mximo ciclo de trabajo posible es de
0.98, utilizando modulacin PWM unipolar, con una triangular de amplitud mxima 10.
Convertidor dc/dc de cuatro cuadrantes, PWM unipolar:
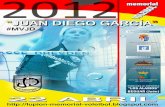
De manera simplificada se presenta un convertidor chopper de cuatro cuadrantes en la
figura 1. Este est constituido por cuatro interruptores ideales, y una fuente dc ideal, es
decir, no tiene lmites de potencia y su impedancia interna es cero.
-
Fig. 1.1: Convertidor chopper ideal
De la figura 1, se puede realizar las siguientes observaciones:
x No es posible tener +SwA(+SwB) y SwA(-SwB) cerrados o abiertos de manera simultnea.
x Tensin Van(Vbn) depender de los estados de los interruptores de la pierna A(B).
x Por LVK la tensin Vdc corresponde a la diferencia entre Van y Vbn.
Ahora trabajando con PWM unipolar, en donde se tiene dos seales de control que se
comparan con una triangular, tal como se presentan en la figura 2.
Fig. 1.2: Seal triangular, Vctrl y Vctrl, para determinar seales de conmutacin pierna A y B respectivamente
La seales SwA y SwB definen directamente forma de onda de la tensin Van y Vbn
respectivamente, solo es necesario multiplicar por el valor de la fuente dc. Por lo tanto el
valor medio de la tensin Van ser.
0dc enc apagan
s
V t tV
T
-
Donde Ts corresponde al periodo de la seal SwA. Por lo tanto se tiene que el valor medio
del a tensin Van, ser.
encan dc
s
tV V
T
Fig. 1.3: Simetra entre la interseccin de seale triangular, Vctrl y Vctrl
Aprovechando la simetra que existe entre la interseccin de las seales presentadas en la
figura 1.3, es posible expresar la tensin media Van en funcin de los valores de la
triangular y la seal de control, para esto solo se deben considerar las siguientes
ecuaciones.
11 1
22 2
o apag tr ctrl ctrl apag tri ctrl apagt t V V t V t V V t (igualdad de reas)
14 apag enct t t
Con lo que es posible definir el ciclo de trabajo de la pierna A como.
1
2
ctrl triA
tri
V VD
V
an dc AV V D
De igual forma se puede demostrar que para la pierna B el ciclo de trabajo ser.
1B AD D
Por lo tanto, se puede deducir adems que la tensin media dc de salida del convertidor
ser.
2 1o A dcV D V
ctrlo dc
tri
VV V
V
-
La ltima expresin nos permite determinar cul ser la tensin media de salida del
convertidor ideal, para una tensin continua, una triangular y una seal de control dada.
Esta expresin adems permitir realizar el control del convertidor, tras la manipulacin
de la seal de control Vctrl.
Ecuaciones mquina dc:
RaLa
Rf
Lf
J
Vf
Va
Ea
+
+
+
Fig. 1.4: Circuito equivalente motor dc conexin independiente
Del circuito presentado en la figura 1.4 se puede derivar las siguientes ecuaciones.
Ecuaciones elctricas
aa a a a a
diV R i L E
dt
a mE k
e aT k i
Ecuaciones mecnicas
me m L
dJ T b T
dt
Las ecuaciones anteriores se pueden representar con un diagrama de bloque presentado
en la figura 1.5.
- Clculo k y b
Utilizando la ecuacin elctrica en estado estacionario y considerando que mquina est
operando bajo condiciones nominales. Se obtiene la constante del flujo en el hierro,
despreciando los efectos de armadura.
, ,
,
a nom a a nom
nom
m nom
V R ik
-
3,4106nomk
A travs de un balance de potencia, se puede determinar la constante de friccin del
motor.
2
, , , ,out nom nom a nom m nom fr m nomP k i b
,
,
nom a nom nom
fr
m nom
k i Tb
0.0024frb
VaLaS JS
kRa b+
1
+
1
k
_+_
+
TL
Fig. 1.5: Diagrama de bloque motor dc conexin independiente
1.2 DISEAR LAZO DE CORRIENTE
i)
Suponiendo entonces que se trata de un convertidor con interruptores de potencia
ideales, es decir, no se consideran las prdidas de potencia por conmutacin, ni la cada
de tensin en los semiconductores, las tensiones mximas de salida que puede entregar el
convertidor, considerando un ciclo de trabajo mximo de 0,98 ( 9,6 ctrlV V ) son.
,maxout dcV V
,max 540 outV V
,min 540 outV V
,ctrl
out mean dc
tri
VV V
V
, ,max 518,4 out meanV V
, ,min 518,4 out meanV V
Utilizando el diagrama de bloque presentado en la figura 1.5 se puede derivar la
funcin de transferencia entre la corriente y tensin de armadura.
-
0 2Lfr
a a T
a a fr nom
Js bi V
R L s Js b k
Esta expresin no entrega informacin por s sola, pero del diagrama en bloques se
sabe que la corriente de armadura depender de la diferencia entre la tensin en bornes
del motor y la fem inducida. Por lo tanto.
1
a a a
a a
i V ER L s
donde,
acel
noma e L
frT
kE T T
b Js
En donde el ancho de banda de la funcin de transferencia entre la fem y el torque
acelerante Tacel ser.
frbBW
J
Mientras mayor sea el ancho de banda, la respuesta ser ms rpida. Por ende para
despreciar el efecto de realimentacin de fem, se debe tener una alta inercia del
accionamiento, es ms, se debe asegurar al menos.
6fra
a
bR
L J
En el accionamiento evaluado se tiene 100 msa
a
R
L y 0.0059 ms
frb
J , por lo tanto
se puede despreciar la realimentacin de fem.
ii)
El convertidor se modela a travs de una ganancia de voltaje y un retraso que
depender de la frecuencia de conmutacin del convertidor. Para el caso de un
convertidor chopper de cuatro cuadrantes se tiene.
1
convconv
conv
kG
T s
donde
ctrldc
triout dcconv
in ctrl tri
VV
VV Vk
V V V
-
12conv
c
Tf
Con los valores dcV , triV , ctrlV y cf se refieren a la tensin que alimenta al convertidor,
valor mximo de la portadora, valor mximo de seal de control y frecuencia de la
portador respectivamente. Por lo tanto 54convk y 0,25 msconvT . Al ser el ancho
de banda del convertidor mucho menor al ancho de banda de la funcin de
transferencia de armadura, se puede despreciar. Por lo tanto el convertidor ser
modelado por la expresin siguiente.
54convG
iii)
Para la sntesis del controlador de corriente se considera entonces el diagrama de bloque
presentado en la figura 1.6.
_+ convk1
a aR L srefI a
I
,ii
PI i
s Tk
s
Fig. 1.6: Diagrama de bloque sntesis controlador de corriente
La funcin de transferencia a considerar para sintetizar el controlador de corriente ser.
,
2
conv a
LD ia
a
k RG
Ls s
R
Con el objetivo de lograr una respuesta que tenga un sobrepaso cercano al 10% para
entrada escaln, rise time aproximado de 5 ms y una frecuencia natural en lazo cerrado
cercana a los 300 [rad/seg] se seleccionan los polos en lazo cerrado tal como se presenta
en la figura 1.7.
Los parmetros para sintetizar el controlador de velocidad son los siguientes.
, 0.0684PI ik
258.67 .iiT seg
, 305 / .o i rad seg
-
(a)
(b)
Fig. 1.7: a) LGR lazo de corriente; b) respuesta ante cambio escaln en la referencia de 100%
Para mantener velocidad constante durante los transientes de corriente, se implementa un
compensador de voltaje como el presentado en la figura 1.8, y adems solo para efecto de
simulacin 20 veces la inercia del motor. Luego se presentan las pruebas frente a cambio
escaln en la referencia de 100% para diferentes velocidades.
_+ convk1
a aR L srefI aI
,ii
PI i
s Tk
s
+
Ea
+
Fig. 1.8: a) LGR lazo de corriente; b) respuesta ante cambio escaln en la referencia de 100%
-
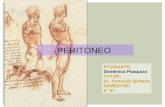
Fig. 1.9: Respuesta lazo de corriente con cambio 0 - 100%refi y 0 [p.u]m ,
0 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
Fig. 1.10: Respuesta lazo de corriente con cambio 0 - 100%refi y 0,3 [p.u]m ,
0 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.10
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-15
-10
-5
0
5
10
15
Tiempo [s]
PW
M
Generacin de pulsos
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-10
0
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
-
Fig. 1.11: Respuesta lazo de corriente con cambio 0 - 100%refi y 0,6 [p.u]m ,
0 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
Fig. 1.12: Respuesta lazo de corriente con cambio 0 - 100%refi y 0,3 [p.u]m ,
0 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-10
0
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.10
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-600
-400
-200
0
200
400
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
-
Fig. 1.13: Respuesta lazo de corriente con cambio 0 - 100%refi y 0,6 [p.u]m ,
0 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
Tabla 1: Resumen respuesta de corriente cambio escaln 100% y TL=0 [p.u]
m ,rise timet ,m mot
0 % 3,014 ms 0,0082 %
30 % 3,24 ms 0,0089 %
60 % 3,07 ms 0,0087 %
-30% 3,01 ms 0,0084 %
-60% 3,01 ms 0,0086 %
Durante el transiente, la tensin de armadura aumenta para luego decaer una vez que se
haya alcanzado esto estable. El peak de tensin depender de la velocidad del motor al
momento del cambio en la referencia y de que tan rpida se desea la respuesta de
corriente. Una vez superado el transiente, la tensin aplicada por el convertidor debe
asegurar una corriente de 42 [A]. Esto por esto que para velocidad inicial negativa, la
tensin aplicada por el convertido en rgimen ser negativa.
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.10
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-600
-400
-200
0
200
400
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
-
iv)
Fig. 1.14: Respuesta lazo de corriente con cambio 0 - 100%refi y 0 [p.u]m ,
0,25 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
Fig. 1.15: Respuesta lazo de corriente con cambio 0 - 100%refi y 0,3 [p.u]m ,
0,25 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.10
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-10
0
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
-
Fig. 1.16: Respuesta lazo de corriente con cambio 0 - 100%refi y 0,6 [p.u]m ,
0,25 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
Fig. 1.17: Respuesta lazo de corriente con cambio 0 - 100%refi y 0,3 [p.u]m ,
0,25 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-10
0
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.10
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-600
-400
-200
0
200
400
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
-
Fig. 1.18: Respuesta lazo de corriente con cambio 0 - 100%refi y 0,6 [p.u]m ,
0,25 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
Tabla 2: Resumen respuesta de corriente cambio escaln 100% y TL=0,25 [p.u]
m ,rise timet ,m mot
0 % 3,014 ms 0,0082 %
30 % 3,24 ms 0,0089 %
60 % 3,07 ms 0,0087 %
-30% 3,006 ms 0,0084 %
-60% 3,009 ms 0,0086 %
Para ambos casos ( 0 [p.u]LOADT y 0,25 [p.u]LOADT ) la parte transitoria de la corriente
es prcticamente igual, solo existe una leve diferencia en el rise time y en el delta de
velocidad provocados por el menor torque acelerante disponible, debido a la presencia de
un torque de carga.
v)
Durante las simulaciones realizadas no se observ un sobrevoltaje de armadura, pero para
efectos de seguridad, y para evitar que las portadoras alcances valores superiores a 9,6
como lo definido anteriormente se limita la tensin a 518.4 Volts.
Junto con esto se agrega un anti-integrator wind up para evitar que integrador siga
aumentando el error del controlador cuando el limitar de tensin este saturado. En la
figura 1.19 se presenta la implementacin del limitador y el anti-integrator wind up.
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.10
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-600
-400
-200
0
200
400
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.085 0.09 0.095 0.1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
-
Fig. 1.19: Control de corriente (Torque) con limitador de voltaje y anti-integrator wind up
vi)
Se aprecian la operacin en dos cuadrantes, que corresponden a velocidad positiva y
torque que vara de positivo a negativo, o bien velocidad negativa y torque que vara de
positivo a negativo. Es decir, se opera como motor y generador. Durante el cambio de
referencia de corriente de positiva a negativa, la tensin de armadura, pasa de positiva a
negativa para poder tener una rpida respuesta en la corriente de armadura de la mquina.
El valor de la tensin entregada por el convertidor durante estado estable, depender de
la velocidad inicial de la mquina.
Fig. 1.20: Respuesta lazo de corriente con cambio 100% - -100%refi y 0 [p.u]m , 0 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
0 0.05 0.1 0.15-60
-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.05 0.1 0.15-600
-400
-200
0
200
400
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.05 0.1 0.15-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0 0.05 0.1 0.15-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
-
Fig. 1.21: Respuesta lazo de corriente con cambio 100% - -100%refi y 0,3 [p.u]m , 0 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
Fig. 1.22: Respuesta lazo de corriente con cambio 100% - -100%refi y 0,6 [p.u]m ,
0 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
0 0.05 0.1 0.15-60
-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.05 0.1 0.15-600
-400
-200
0
200
400
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.05 0.1 0.15-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0 0.05 0.1 0.15-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.05 0.1 0.15-60
-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.05 0.1 0.15-600
-400
-200
0
200
400
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.05 0.1 0.15-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0 0.05 0.1 0.15-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.05 0.1 0.15-60
-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.05 0.1 0.15-600
-400
-200
0
200
400
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.05 0.1 0.15-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0 0.05 0.1 0.15-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
-
Fig. 1.23: Respuesta lazo de corriente con cambio 100% - -100%refi y 0,3 [p.u]m , 0 [p.u]LOADT , a) ai e refi ; b) ,a meanV c) aV ; d) aE ; e) m ; f) elecT
Fig. 1.24: Respuesta lazo de corriente con cambio 100% - -100%refi y 0,6 [p.u]m , 0 [p.u]LOADT , a) ai e refi ; b) ,m mot c) aV y ,a meanV ; d) Portadora y Moduladora
vii)
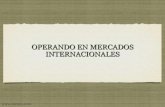
Fig. 1.25: FFT de seales lazo de corriente a) ai ; b) ctrlV c) ai
Por la naturaleza del convertidor solo se encuentra la presencia de armnicos de corriente
a 4 kHz, para esto se utiliza un filtro pasa bajo, de forma tal que el ancho de banda del
filtro se menor a 4 kHz, para efectos del trabajo se propone un filtro con ancho de banda
de 2 kHz.
0 0.05 0.1 0.15-60
-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.05 0.1 0.15-600
-400
-200
0
200
400
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.05 0.1 0.15-2000
-1000
0
1000
2000
Tiempo [s]
(b)
Ve
loc
ida
d [
RM
P]
Velocidad Motor
0 0.05 0.1 0.15-15
-10
-5
0
5
10
15
Tiempo [s]
(d)P
WM
Generacin de pulsos
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
20
40
60
80
100
FFT "Ia(t)"
Frecuencia (Hz)
(a)
|Ia(f
)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
0.2
0.4
0.6
0.8
1
1.2
1.4
FFT " Ia(t)"
Frecuencia (Hz)
(b)
| ,Ia(f
)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
0.5
1
1.5
2
FFT "Vctrl
(t)"
Frecuencia (Hz)
(c)
|Vc
trl(f)
|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
20
40
60
80
100
FFT "Ia(t)"
Frecuencia (Hz)
(a)
|Ia(f
)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
0.2
0.4
0.6
0.8
1
1.2
1.4
FFT " Ia(t)"
Frecuencia (Hz)
(b)
| ,Ia(f
)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
0.5
1
1.5
2
FFT "Vctrl
(t)"
Frecuencia (Hz)
(c)
|Vc
trl(f)
|
-
1.3 DISEAR LAZO DE VELOCIDAD
i)
Del diagrama de bloques presentado en la figura 3.1 se puede determinar la funcin de
transferencia completa ( ) / ( )a refi s i s .
_+ convk
1
a aR L srefI aI
,ii
PI i
s Tk
s
_
+
k
k1
Js b
Fig. 3.1: Diagrama de bloque lazo de corriente, sin considerar torque de carga
Del diagrama de bloque anterior se encuentra entonces.
0 2( )
LOAD
i conv ii
i a ref Ta a i conv ii
k k Js b s TG s i i
s R L s Js b k k k Js b s T
Adems del diagrama de bloques del motor se puede determinar.
( ) ( ) / ( )
L
p a
fr T
kG s s i s
Js b b
Donde LT
b corresponde al coeficiente del torque de carga, que para velocidad nominal
requiere de un 70% del torque nominal del motor, por lo tanto.
,
0.70.95588
L
nomT
mot nom
Tb
ii)
Para sintonizar el controlador de voltaje, se considera la funcin de transferencia
( ) / ( )a refi s i s determinada en el punto anterior como un retardo que corresponder al
tiempo que demora el lazo de corriente en alcanzar estado estable.
-
Fig. 3.2: Retardo lazo de corriente
_+ k1
Js b
1
1currents ,
iPI
s Tk
s
s zero
s pole
ref
Fig. 3.3: Diagrama de bloque para sintonizacin de lazo de velocidad
La funcin de transferencia a considerar para la sintonizacin del controlador de
velocidad es la presentada a continuacin.
, 1L
LD
current fr T
kG
s s Js b b
Donde 0.01701 .current seg
(a)
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
10
20
30
40
50
60
X: 0.01701
Y: 42.77
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
-
(b)
Fig. 3.4: Herramienta rltools Matlab para confeccionar LGR a) LGR; b) Respuesta a
entrada escal
En resumen los parmetros para sintonizacin del lazo de velocidad son los siguientes.
45.205pole
440.61zero
, 93.6PIk
24.896 .iT seg
, 34.1 / .o rad seg
Fig. 3.5: Respuesta lazo de velocidad para cambio escaln en la referencia de 25% a)
ai e refi ; b)
,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
500
1000
1500
2000
2500
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
-
Fig. 3.6: Respuesta lazo de velocidad para cambio escaln en la referencia de 50% a)
ai e refi ; b)
,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
Fig. 3.7: Respuesta lazo de velocidad para cambio escaln en la referencia de 75% a)
ai e refi ; b)
,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1000
2000
3000
4000
5000
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-2000
0
2000
4000
6000
8000
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
-
Fig. 3.8: Respuesta lazo de velocidad para cambio escaln en la referencia de 100% a)
ai e refi ; b)
,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
Para obtener una respuesta rpida en la velocidad se requiere de una gran corriente de
referencia tal como se presentan en las figuras 3.5 a), 3.6 a), 3.7 a), y 3.8 a), debido al
limitador de voltaje, y anti-integrador wind up implementado anteriormente la tensin de
armadura no alcanza valor prohibidos.
iii)
Ahora limitando la corriente en ,a nomi se obtiene las siguientes respuestas.
Fig. 3.9: Respuesta lazo de velocidad para cambio escaln en la referencia de 25%, limitando la
corriente a ,a nomi ; a) ai e refi ; b) ,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-2000
0
2000
4000
6000
8000
10000
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-20
-10
0
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
-
Fig. 3.10: Respuesta lazo de velocidad para cambio escaln en la referencia de 50%, limitando la
corriente a ,a nomi ; a) ai e refi ; b) ,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
Fig. 3.11: Respuesta lazo de velocidad para cambio escaln en la referencia de 75%, limitando la
corriente a ,a nomi ; a) ai e refi ; b) ,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
0 0.2 0.4 0.6 0.8 1 1.2-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.2 0.4 0.6 0.8 1 1.2-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.2 0.4 0.6 0.8 1 1.2-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.2 0.4 0.6 0.8 1 1.20
0.2
0.4
0.6
0.8
1
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
0 0.2 0.4 0.6 0.8 1 1.2-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.2 0.4 0.6 0.8 1 1.2-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.2 0.4 0.6 0.8 1 1.2-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.2 0.4 0.6 0.8 1 1.20
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
-
Fig. 3.12: Respuesta lazo de velocidad para cambio escaln en la referencia de 100%, limitando la
corriente a ,a nomi ; a) ai e refi ; b) ,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
Con limitador de corriente ajustado en ,2 a nomi .
Fig. 3.13: Respuesta lazo de velocidad para cambio escaln en la referencia de 25%, limitando la
corriente a ,2 a nomi ; a) ai e refi ; b) ,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
0 0.5 1 1.5 2 2.5 3 3.5 4-20
-10
0
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.5 1 1.5 2 2.5 3 3.5 4-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.5 1 1.5 2 2.5 3 3.5 4-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.5 1 1.5 2 2.5 3 3.5 40
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-20
0
20
40
60
80
100
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
-
Fig. 3.14: Respuesta lazo de velocidad para cambio escaln en la referencia de 50%, limitando la
corriente a ,2 a nomi ; a) ai e refi ; b) ,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
Fig. 3.15: Respuesta lazo de velocidad para cambio escaln en la referencia de 75%, limitando la
corriente a ,2 a nomi ; a) ai e refi ; b) ,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-40
-20
0
20
40
60
80
100
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-50
0
50
100
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
-
Fig. 3.16: Respuesta lazo de velocidad para cambio escaln en la referencia de 100%, limitando la
corriente a ,2 a nomi ; a) ai e refi ; b) ,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
Tras limitar la corriente de armadura, se consigue un menor torque acelerante por lo tanto
la mquina acelera ms lento, lo que se traduce en una respuesta ms lenta del lazo de
velocidad.
Para la implementacin de anti-integrator wind up en el lazo de velocidad se utiliza el
esquema presentado en la figura 3.17
Fig. 3.17: Implementacin de anti-integrator wind up en lazo de velocidad
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-20
0
20
40
60
80
100
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
-
Fig. 3.18: Respuesta lazo de velocidad para cambio escaln en la referencia de 100%, limitando la
corriente a ,a nomi y con anti-integrator wind up; a) ai e refi ; b) ,m mot y ref c) aV y ,a meanV ; d)
Portadora y Moduladora
Fig. 3.19: Respuesta lazo de velocidad para cambio escaln en la referencia de 100%, limitando la
corriente a ,2 a nomi y con anti-integrator wind up; a) ai e refi ; b) ,m mot y ref c) aV y ,a meanV ;
d) Portadora y Moduladora
Gracias al anti-integrator wind up se consigue una respuesta ms rpida del lazo de
velocidad y la accin limitadora de corriente dura menos tiempo debido a que el error en
la parte integrativa del controlador no se est considerando cuando el limitador de
corriente est actuando.
Debido a las limitaciones de corriente que circula por lo carbones de los motores de
corriente continua, se prefiere dejar el lmite de corriente en 1 [p.u].
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
20
40
60
80
100
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
-
iv)
Para simular un tacogenerador, se implementa una seal sinusoidal de amplitud variable,
esta depender de la velocidad con la que rote el eje, tal como se muestra en la figura
3.20.
Fig. 3.20: Implementacin de ruido generado por tacogenerador utilizado en realimentacin
Fig. 3.21: Respuesta lazo de velocidad para operacin a 90% de velocidad nominal, limitando la
corriente a ,a nomi , con anti-integrator wind up y agregando ruido a realimentacin de velocidad; a)
ai e refi ; b) ,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
0 1 2 3 4 5 6-50
0
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 1 2 3 4 5 6-600
-400
-200
0
200
400
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 1 2 3 4 5 6-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor desde tacogenerador
0 1 2 3 4 5 6-50
0
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 1 2 3 4 5 6-600
-400
-200
0
200
400
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 1 2 3 4 5 6-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor desde tacogenerador
-
Fig. 3.22: Respuesta lazo de velocidad para operacin a 50% de velocidad nominal, limitando la
corriente a ,a nomi , con anti-integrator wind up y agregando ruido a realimentacin de velocidad; a)
ai e refi ; b) ,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
Fig. 3.23: Respuesta lazo de velocidad para operacin a 25% de velocidad nominal, limitando la
corriente a ,a nomi , con anti-integrator wind up y agregando ruido a realimentacin de velocidad; a)
ai e refi ; b) ,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
Fig. 3.24: Respuesta lazo de velocidad para operacin a 5% de velocidad nominal, limitando la
corriente a ,a nomi , con anti-integrator wind up y agregando ruido a realimentacin de velocidad; a)
ai e refi ; b) ,m mot y ref c) aV y ,a meanV ; d) Portadora y Moduladora
0 1 2 3 4 5 6-50
0
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 1 2 3 4 5 6-600
-400
-200
0
200
400
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 1 2 3 4 5 6-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor desde tacogenerador
0 1 2 3 4 5 6-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 1 2 3 4 5 6-600
-400
-200
0
200
400
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 1 2 3 4 5 6-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 1 2 3 4 5 60
0.01
0.02
0.03
0.04
0.05
0.06
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor desde tacogenerador
-
(a)
(b)
(c)
(d)
Fig. 3.25: seal error utilizada en el control de velocidad para distintas velocidades con respecto a la
nominal; a) 90% ; b) 50% c) 25%; d) 5%
El ruido en el tacogenerador de realimentacin trae dos problemas en el control, primero
mientras mayor sea el cambio en la referencia, habr mayor error en estado estable.
Segundo, el ruido ser transmitido hacia la referencia de corriente, lo que trae como
consecuencia una referencia difcil de seguir, lo que provoca una corriente con gran
contenido armnico y por ende un torque pulsatorio, que si la inercia del accionamiento
es baja, generar una velocidad pulstoria.
Adems mientras mayor sea la velocidad de operacin, mayor frecuencia y amplitud
tendr el ripple generado por el tacogenerador. Lo que tiene su ventaja a velocidades altas,
ya que se podr filtrar el ruido fcilmente. En cambio a velocidades bajas, ser ms difcil
su eliminacin.
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
20
40
60
80
100
120
140
FFT "Nmot
(t)"
Frecuencia (Hz)
(a)
|Nm
ot(
f)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
10
20
30
40
50
FFT "Ia(t)"
Frecuencia (Hz)
(a)
|Ia(f
)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
20
40
60
80
100
120
140
FFT "Nfeedback
(t)"
Frecuencia (Hz)
(a)
|Nfe
ed
ba
ck(f
)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
20
40
60
80
100
FFT "Nmot
(t)"
Frecuencia (Hz)
(a)
|Nm
ot(
f)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
5
10
15
20
25
30
FFT "Ia(t)"
Frecuencia (Hz)
(a)
|Ia(f
)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
20
40
60
80
100
FFT "Nfeedback
(t)"
Frecuencia (Hz)
(a)
|Nfe
ed
ba
ck(f
)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
10
20
30
40
50
FFT "Nmot
(t)"
Frecuencia (Hz)
(a)
|Nm
ot(
f)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
5
10
15
20
FFT "Ia(t)"
Frecuencia (Hz)
(a)
|Ia(f
)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
10
20
30
40
50
FFT "Nfeedback
(t)"
Frecuencia (Hz)
(a)
|Nfe
ed
ba
ck(f
)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
2
4
6
8
10
FFT "Nmot
(t)"
Frecuencia (Hz)
(a)
|Nm
ot(
f)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
1
2
3
4
FFT "Ia(t)"
Frecuencia (Hz)
(a)
|Ia(f
)|
0 500 1000 1500 2000 2500 3000 3500 4000 4500 50000
2
4
6
8
10
12
FFT "Nfeedback
(t)"
Frecuencia (Hz)
(a)
|Nfe
ed
ba
ck(f
)|
0 1 2 3 4 5 6-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 1 2 3 4 5 6-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 1 2 3 4 5 6-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor desde tacogenerador
-
Fig. 3.26: Respuesta lazo de velocidad para operacin a 90% de velocidad nominal, limitando la
corriente a ,a nomi , con anti-integrator wind up, agregando ruido a realimentacin de velocidad y
agregando filtro pasa bajo a 20 Hz para realimentacin de velocidad; a) ai e refi ; b) ,m mot y ref c)
aV y ,a meanV ; d) Portadora y Moduladora
Fig. 3.27: Respuesta lazo de velocidad para operacin a 90% de velocidad nominal, limitando la
corriente a ,a nomi , con anti-integrator wind up, agregando ruido a realimentacin de velocidad y
agregando filtro pasa bajo a 10 Hz para realimentacin de velocidad; a) ai e refi ; b) ,m mot y ref c)
aV y ,a meanV ; d) Portadora y Moduladora
Fig. 3.27: Respuesta lazo de velocidad para operacin a 90% de velocidad nominal, limitando la
corriente a ,a nomi , con anti-integrator wind up, agregando ruido a realimentacin de velocidad y
agregando filtro pasa bajo a 5 Hz para realimentacin de velocidad; a) ai e refi ; b) ,m mot y ref c)
aV y ,a meanV ; d) Portadora y Moduladora
0 1 2 3 4 5 6-20
-10
0
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 1 2 3 4 5 6-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 1 2 3 4 5 6-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor desde tacogenerador
0 1 2 3 4 5 60
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 1 2 3 4 5 6-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 1 2 3 4 5 6-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor desde tacogenerador
-
Fig. 3.27: Respuesta lazo de velocidad para operacin a 90% de velocidad nominal, limitando la
corriente a ,a nomi , con anti-integrator wind up, agregando ruido a realimentacin de velocidad y
agregando filtro pasa bajo a 2.5 Hz para realimentacin de velocidad; a) ai e refi ; b) ,m mot y ref
c) aV y ,a meanV ; d) Portadora y Moduladora
Fig. 3.27: Respuesta lazo de velocidad para operacin a 90% de velocidad nominal, limitando la
corriente a ,a nomi , con anti-integrator wind up, agregando ruido a realimentacin de velocidad y
agregando filtro pasa bajo a 1.5 Hz para realimentacin de velocidad; a) ai e refi ; b) ,m mot y ref
c) aV y ,a meanV ; d) Portadora y Moduladora
Se realizan pruebas con filtros sintonizados a diferentes frecuencias, donde la mayor
frecuencia ser de 20 Hz, debido a que la menor frecuencia de ripple que se puede tener
es de 20 Hz. Se aprecia que el ruido en la velocidad es eliminado, pero este se sigue
propagando hacia la referencia de corriente, lo que genera corrientes con armnicos.
0 1 2 3 4 5 60
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 1 2 3 4 5 6-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 1 2 3 4 5 6-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor desde tacogenerador
0 1 2 3 4 5 60
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 1 2 3 4 5 6-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 1 2 3 4 5 6-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor desde tacogenerador
-
1.4 DISEAR LAZO DE POSICIN
i)
Para poder determinar la posicin el rotor del motor, es necesario integrar la velocidad
del eje, por lo tanto para el control de posicin, el sistema es de tipo 1, es decir, se asegura
cero error en estado estacionario para entrada escaln en la referencia, por lo tanto solo
se utiliza un integrador proporcional.
Para sintonizar el lazo de posicin, se considera el lazo interno de velocidad como un
retardo.
Fig. 4.1: Retraso provocado por lazo interno de velocidad
Luego el diagrama de bloque a considerar se presenta en la figura 4.2.
Fig. 4.2: Diagrama de bloque para sintonizacin de lazo de posicin
Donde 0.7speed .
Para determiner la ganancia del controlador se utiliza la siguiente funcin de transferencia
en lazo directo.
, 2
1LD
speed
Gs s
Con lo que se obtiene el LGR presentado a continuacin.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-100
0
100
200
300
400
500
600
Tiempo [s]
(c)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-15
-10
-5
0
5
10
15
Tiempo [s]
(d)
PW
M
Generacin de pulsos
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
Tiempo [s]
(e)
Nm
ot [r
pm
]
Velocidad Motor
_+1
1speed s 1
sref k
-
Fig. 4.3: LGR para sintonizar lazo de posicin con entrada escaln
Los valores caractersticos del lazo de posicin para entrada escaln son.
32,6k
, 6,82 / .o rad seg
Fig. 4.4: Respuesta del lazo de posicin frente a cambio escaln de 0 a 30 a)
ai e refi ; b) aV y
,a meanV ; c) ,m mot y ref d) ref y
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-20
-10
0
10
20
30
40
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-600
-400
-200
0
200
400
600
Tiempo [s]
(b)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.05
0
0.05
0.1
0.15
0.2
Tiempo [s]
(c)
Nm
ot [r
pm
]
Velocidad Motor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-60
-40
-20
0
20
40
60
Tiempo [s]
(d)
m
ot [r
pm
]
Posicion de rotor
-
Fig. 4.5: Respuesta del lazo de posicin frente a cambio escaln de 0 a 60 a)
ai e refi ; b) aV y
,a meanV ; c) ,m mot y ref d) ref y
Fig. 4.6: Respuesta del lazo de posicin frente a cambio escaln de 0 a 90 a)
ai e refi ; b) aV y
,a meanV ; c) ,m mot y ref d) ref y
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-600
-400
-200
0
200
400
600
Tiempo [s]
(b)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.1
0
0.1
0.2
0.3
0.4
Tiempo [s]
(c)
Nm
ot [r
pm
]
Velocidad Motor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
20
40
60
80
Tiempo [s]
(d)
m
ot [r
pm
]
Posicion de rotor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-600
-400
-200
0
200
400
600
Tiempo [s]
(b)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Tiempo [s]
(c)
Nm
ot [r
pm
]
Velocidad Motor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
20
40
60
80
100
120
Tiempo [s]
(d)
m
ot [r
pm
]
Posicion de rotor
-
Fig. 4.7: Respuesta del lazo de posicin frente a cambio escaln de 0 a 180 a)
ai e refi ; b) aV y
,a meanV ; c) ,m mot y ref d) ref y
Fig. 4.8: Respuesta del lazo de posicin frente a cambio escaln de 0 a 360 a)
ai e refi ; b) aV y
,a meanV ; c) ,m mot y ref d) ref y
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-50
0
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-600
-400
-200
0
200
400
600
Tiempo [s]
(b)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Tiempo [s]
(c)
Nm
ot [r
pm
]
Velocidad Motor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
50
100
150
200
Tiempo [s]
(d)
m
ot [r
pm
]
Posicion de rotor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-60
-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-600
-400
-200
0
200
400
600
Tiempo [s]
(b)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.5
0
0.5
1
1.5
2
Tiempo [s]
(c)
Nm
ot [r
pm
]
Velocidad Motor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
100
200
300
400
Tiempo [s]
(d)
m
ot [r
pm
]
Posicion de rotor
-
Fig. 4.9: Respuesta del lazo de posicin frente a cambio escaln de 0 a 540 a)
ai e refi ; b) aV y
,a meanV ; c) ,m mot y ref d) ref y
Mientras mayor sea el cambio en la referencia, mayor ser el sobrepaso de posicin que
se tendr, esto se genera debido a los grandes cambios en la referencia de velocidad, por
lo tanto, el motor no es capaz de seguir esta referencia, lo que provoca sobrepasos en la
posicin.
ii)
Como sistema es de tipo 1, y para asegurar cero error en estado estacionario se requiere
tener un sistema tipo 2, en necesario ahora utilizar un controlador proporcional
integrativo. Se tiene entonces el siguiente diagrama de bloque presentado en figura 4.10
junto con sus sintonizacin a travs de comando rltool de Matlab presentado en la figura
4.11.
_+s zero
s pole
1
1speed s 1
sref i
s Tk
s
Fig. 4.10: Diagrama de bloque para sintonizacin de lazo de posicin
Donde la funcin de transferencia a considerar ser.
, 3 2
1LD
speed
Gs s
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-60
-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-600
-400
-200
0
200
400
600
Tiempo [s]
(b)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.5
0
0.5
1
1.5
2
2.5
3
Tiempo [s]
(c)
Nm
ot [r
pm
]
Velocidad Motor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
100
200
300
400
500
600
Tiempo [s]
(d)
m
ot [r
pm
]
Posicion de rotor
-
Con la ayuda del commando rltool se definen el pole de la red de adelanto y los ceros del
integrador y la red de adelanto. Con lo que se consigue un LGR como el presentado en la
figura 4.11.
Fue necesario agregar una red de adelanto para poder tener mejor respuesta en transiente
debido a que la ubicacin de los polos de la funcin de transferencia de lazo directo no
permita tener una frecuencia natural en lazo de cerrado prxima a 6 [rad/s].
Los valores caractersticos del lazo de posicin para entrada rampa son.
283k
, 6,85 / .o rad seg
Fig. 4.11: Sntesis control de posicin para entrada rampa
-60 -50 -40 -30 -20 -10 0 10-150
-100
-50
0
50
100
150
System: untitled1
Gain: 283
Pole: -4.36 + 5.29i
Damping: 0.636
Overshoot (%): 7.52
Frequency (rad/sec): 6.85
Root Locus
Real Axis
Ima
gin
ary
Ax
is
0 1 2 3 4 5 6-50
0
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 1 2 3 4 5 6-600
-400
-200
0
200
400
600
Tiempo [s]
(b)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 1 2 3 4 5 6-0.005
0
0.005
0.01
0.015
0.02
0.025
Tiempo [s]
(c)
Nm
ot [r
pm
]
Velocidad Motor
0 1 2 3 4 5 6
0
20
40
60
80
100
120
Tiempo [s]
(d)
m
ot [r
pm
]
Posicion de rotor
-
Fig. 4.12: Respuesta del lazo de posicin frente a cambio rampa de 0 a 90 en 1s. a) ai e refi ; b) aV
y ,a meanV ; c) ,m mot y ref d) ref y
Fig. 4.13: Respuesta del lazo de posicin frente a cambio rampa de 0 a 180 en 2s. a)
ai e refi ; b) aV
y ,a meanV ; c) ,m mot y ref d) ref y
Fig. 4.14: Respuesta del lazo de posicin frente a cambio rampa de 0 a 360 en 4s. a)
ai e refi ; b) aV
y ,a meanV ; c) ,m mot y ref d) ref y
0 1 2 3 4 5 6-50
0
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 1 2 3 4 5 6-600
-400
-200
0
200
400
600
Tiempo [s]
(b)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 1 2 3 4 5 6-0.005
0
0.005
0.01
0.015
0.02
0.025
Tiempo [s]
(c)
Nm
ot [r
pm
]
Velocidad Motor
0 1 2 3 4 5 6
0
50
100
150
200
Tiempo [s]
(d)
mo
t [r
pm
]
Posicion de rotor
0 1 2 3 4 5 6 7 8-50
0
50
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 1 2 3 4 5 6 7 8-600
-400
-200
0
200
400
600
Tiempo [s]
(b)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 1 2 3 4 5 6 7 8-0.005
0
0.005
0.01
0.015
0.02
0.025
Tiempo [s]
(c)
Nm
ot [r
pm
]
Velocidad Motor
0 1 2 3 4 5 6 7 8
0
100
200
300
400
Tiempo [s]
(d)
m
ot [r
pm
]
Posicion de rotor
-
Fig. 4.15: Respuesta del lazo de posicin frente a cambio escaln de 0 a 540 en 8s. a)
ai e refi ; b)
aV y ,a meanV ; c) ,m mot y ref d) ref y
0 2 4 6 8 10 12-40
-20
0
20
40
60
Tiempo [s]
(a)
I arm
atu
re [
Am
p.]
Corriente Armadura
0 2 4 6 8 10 12-600
-400
-200
0
200
400
600
Tiempo [s]
(b)
Va
rma
ture
[V
olt
s]
Tensin Armadura
0 2 4 6 8 10 12-5
0
5
10
15
20x 10
-3
Tiempo [s]
(c)
Nm
ot [r
pm
]
Velocidad Motor
0 2 4 6 8 10 120
100
200
300
400
500
600
Tiempo [s]
(d)
m
ot [r
pm
]
Posicion de rotor