
Acondicionadores de...
42
Acondicionadores de presión El acondicionador de presión es un dispositivo capaz de transformar la entrada neumática en una señal eléctrica. El fluido del que se pretende determinar la presión a la que se encuentra está separado de la galga extensiométrica, una referencia de presión y un puente de Wheatstone por un diafragma de acero inoxidable. Comparando la medida de la galga extensiométrica con la referencia de presión se obtiene la medida que se pretende para este caso. La familia de acondicionadores al que pertenece el que se está utilizando es del tipo de transductor de presión. Esto significa que la salida que dan estos acondicionadores es en voltaje. El rango de salida del transductor es de 0-5 V. El rango de presión de entrada es de 0-6 bares. Quedó demostrado mediante el análisis de ciclo que se hizo en el proyecto precedente que este tipo de transductor es suficiente. El funcionamiento de este acondicionador se basa en la correspondencia de voltajes a la salida con presiones a la entrada. El transductor da una señal de 0 V para una entrada de 0 bares y proporcionalmente una salida de 5 V para una entrada de 6 bares. La gráfica que rige el comportamiento es evidentemente una línea recta, tal y como se ve en la figura I.3.1: Figura I.3.1 0 1 2 3 4 5 6 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Presión (bares) Voltage de salida (Voltios) Comportamiento del transductor de presión
Transcript of Acondicionadores de...
Acondicionadores de presión
El acondicionador de presión es un dispositivo capaz de transformar la entrada neumática en una señal eléctrica. El fluido del que se pretende determinar la presión a la que se encuentra está separado de la galga extensiométrica, una referencia de presión y un puente de Wheatstone por un diafragma de acero inoxidable.
Comparando la medida de la galga extensiométrica con la referencia de presión se obtiene la medida que se pretende para este caso.
La familia de acondicionadores al que pertenece el que se está utilizando es del tipo de transductor de presión. Esto significa que la salida que dan estos acondicionadores es en voltaje. El rango de salida del transductor es de 0-5 V. El rango de presión de entrada es de 0-6 bares. Quedó demostrado mediante el análisis de ciclo que se hizo en el proyecto precedente que este tipo de transductor es suficiente.
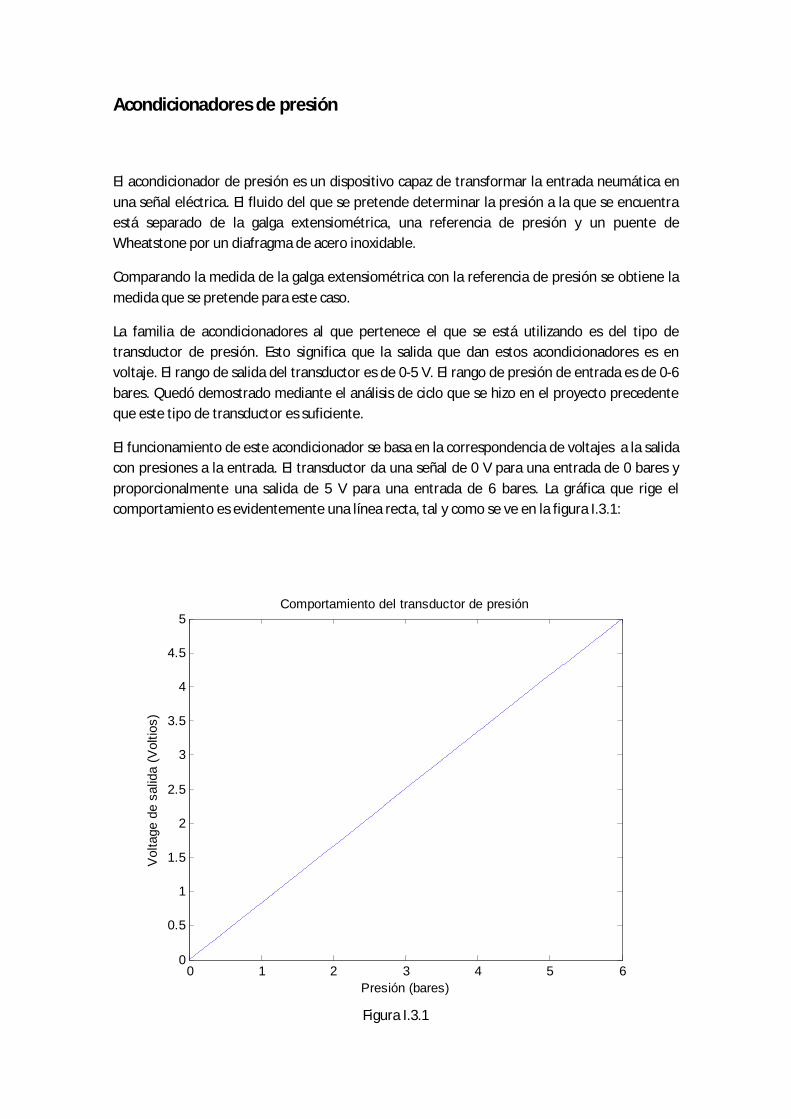
El funcionamiento de este acondicionador se basa en la correspondencia de voltajes a la salida con presiones a la entrada. El transductor da una señal de 0 V para una entrada de 0 bares y proporcionalmente una salida de 5 V para una entrada de 6 bares. La gráfica que rige el comportamiento es evidentemente una línea recta, tal y como se ve en la figura I.3.1:
Figura I.3.1
0 1 2 3 4 5 60
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Presión (bares)
Vol
tage
de
salid
a (V
oltio
s)
Comportamiento del transductor de presión

Que como vemos es una recta que pasa por cero. De este funcionamiento se sigue que la pendiente y el corte con el eje están determinados, no necesitando por tanto reglaje alguno. Es importante comentar que la precisión del acondicionador es del 0.25%.
Acondicionadores de temperatura
El tipo de acondicionador seleccionado es tal que teniendo un salida en voltaje de 0-10 V es capaz de asumir una entrada proveniente de termopares de tipo K. Se hace especialmente importante conocer el tipo de termopar usado ya que el modelado del termopar es imprescindible para poder realizar correctamente el reglaje de este dispositivo, como se verá más adelante.
Otros datos importantes del acondicionador de temperatura son su rango de funcionamiento y la precisión en los datos que proporciona. Para el rango se tiene un intervalo de 0-1000 ℃ y para la precisión se tiene el 0.5 %.
Antes de exponer como se ha realizado el reglaje del acondicionador es importante clarificar el funcionamiento del tipo de termopar que se ha elegido para poder extraer datos importantes a la hora de hacer el reglaje. De forma genérica, se puede decir acerca de los termopares que:
Un termopar es un dispositivo formado por la unión de dos metales distintos que produce un voltaje , que es función de la diferencia de temperatura entre uno de los extremos denominado punto caliente o unión caliente o de medida y el otro denominado "punto frío" o unión fría o de referencia.
El instrumento de medición debe además enfrentar el hecho de que el voltaje generado por un termopar es una función no lineal de la temperatura. Esta dependencia se puede aproximar por una función compuesta por un sumando exponencial y otro polinómico, que se mostrará más adelante. Los métodos analógicos de linealización son usados en medidores de termopares de bajo costo, como es nuestro caso. La aproximación del voltaje con la temperatura tiene la siguiente forma funcional:
훥푉 = 푐 훥푇 + 푎 푒( ( ) ) (20)
Teniendo los coeficientes de esta expresión para cada punto se pueden conocer las equivalencias de voltajes e incrementos de temperaturas correspondientes para el termopar en cuestión.
Dicho esto acerca de los termopares podemos decir que lo que se pretende en este apartado es adaptar el funcionamiento del acondicionador de temperatura al comportamiento físico del termopar que se ha elegido para el diseño de este banco de ensayos. El esquema eléctrico del acondicionador en cuestión es el siguiente:

Figura I.3.2
En el esquema eléctrico se puede ver por qué entradas se debe conectar el termopar al acondicionador de temperatura, así como ver cuáles son las entradas de alimentación (supply) y por dónde se debe medir la señal de salida en función de si se quiere salida en intensidad o en tensión. En nuestro caso se ha seleccionado una salida en voltaje haciendo la instalación en consecuencia.
El funcionamiento del acondicionador se puede modelar con una recta en el espacio temperatura de entrada a través del termopar, voltaje de salida del acondicionador. Para poder realizar el reglaje deben fijarse dos parámetros que posicionarán la curva del
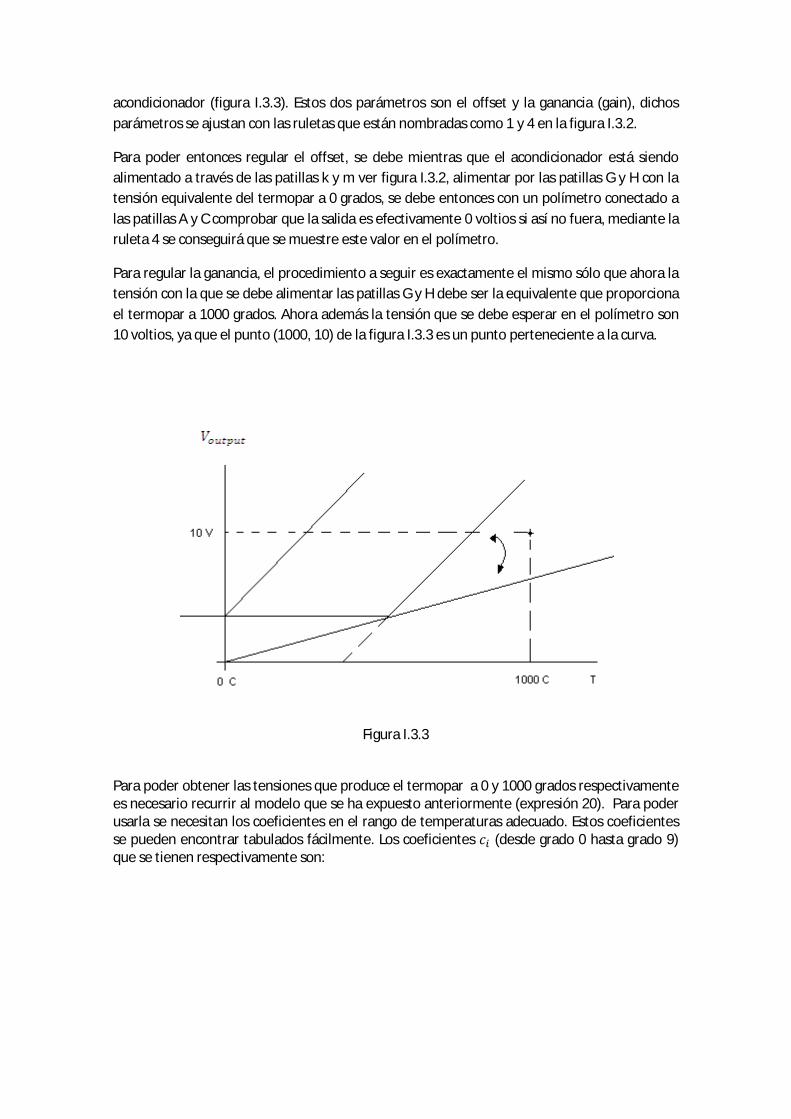
acondicionador (figura I.3.3). Estos dos parámetros son el offset y la ganancia (gain), dichos parámetros se ajustan con las ruletas que están nombradas como 1 y 4 en la figura I.3.2.
Para poder entonces regular el offset, se debe mientras que el acondicionador está siendo alimentado a través de las patillas k y m ver figura I.3.2, alimentar por las patillas G y H con la tensión equivalente del termopar a 0 grados, se debe entonces con un polímetro conectado a las patillas A y C comprobar que la salida es efectivamente 0 voltios si así no fuera, mediante la ruleta 4 se conseguirá que se muestre este valor en el polímetro.
Para regular la ganancia, el procedimiento a seguir es exactamente el mismo sólo que ahora la tensión con la que se debe alimentar las patillas G y H debe ser la equivalente que proporciona el termopar a 1000 grados. Ahora además la tensión que se debe esperar en el polímetro son 10 voltios, ya que el punto (1000, 10) de la figura I.3.3 es un punto perteneciente a la curva.
Figura I.3.3
Para poder obtener las tensiones que produce el termopar a 0 y 1000 grados respectivamente es necesario recurrir al modelo que se ha expuesto anteriormente (expresión 20). Para poder usarla se necesitan los coeficientes en el rango de temperaturas adecuado. Estos coeficientes se pueden encontrar tabulados fácilmente. Los coeficientes 푐 (desde grado 0 hasta grado 9) que se tienen respectivamente son:
푐 =-0.176004136860E-01 푐 = 0.389212049750E-01 푐 = 0.185587700320E-04 푐 =-0.994575928740E-07 푐 =0.318409457190E-09
푐 = -0.560728448890E-12 푐 = 0.560750590590E-15 푐 =-0.320207200030E-18 푐 = 0.971511471520E-22 푐 =-0.121047212750E-25
Mientras que los coeficientes de la parte exponencial son:
푎 = 0.118597600000E+00 푎 = -0.118343200000E-03 푎 = 0.126968600000E+03
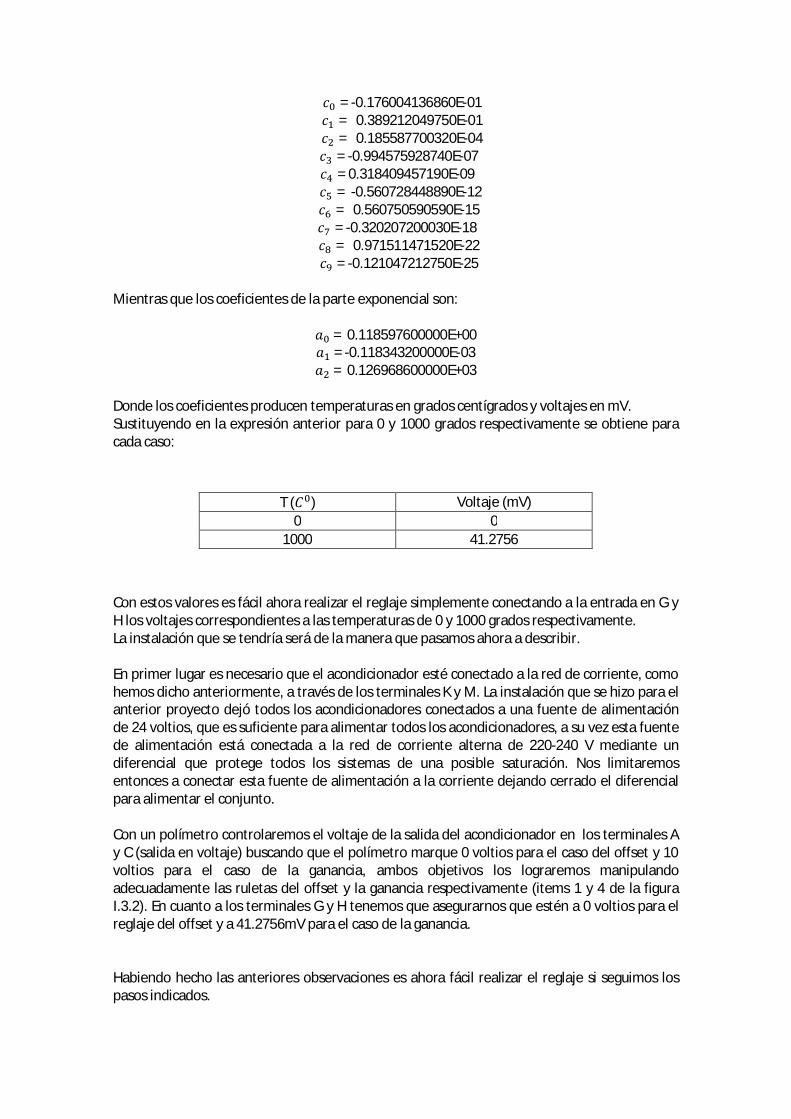
Donde los coeficientes producen temperaturas en grados centígrados y voltajes en mV. Sustituyendo en la expresión anterior para 0 y 1000 grados respectivamente se obtiene para cada caso: Con estos valores es fácil ahora realizar el reglaje simplemente conectando a la entrada en G y H los voltajes correspondientes a las temperaturas de 0 y 1000 grados respectivamente. La instalación que se tendría será de la manera que pasamos ahora a describir. En primer lugar es necesario que el acondicionador esté conectado a la red de corriente, como hemos dicho anteriormente, a través de los terminales K y M. La instalación que se hizo para el anterior proyecto dejó todos los acondicionadores conectados a una fuente de alimentación de 24 voltios, que es suficiente para alimentar todos los acondicionadores, a su vez esta fuente de alimentación está conectada a la red de corriente alterna de 220-240 V mediante un diferencial que protege todos los sistemas de una posible saturación. Nos limitaremos entonces a conectar esta fuente de alimentación a la corriente dejando cerrado el diferencial para alimentar el conjunto. Con un polímetro controlaremos el voltaje de la salida del acondicionador en los terminales A y C (salida en voltaje) buscando que el polímetro marque 0 voltios para el caso del offset y 10 voltios para el caso de la ganancia, ambos objetivos los lograremos manipulando adecuadamente las ruletas del offset y la ganancia respectivamente (items 1 y 4 de la figura I.3.2). En cuanto a los terminales G y H tenemos que asegurarnos que estén a 0 voltios para el reglaje del offset y a 41.2756mV para el caso de la ganancia. Habiendo hecho las anteriores observaciones es ahora fácil realizar el reglaje si seguimos los pasos indicados.
T (퐶 ) Voltaje (mV) 0 0
1000 41.2756
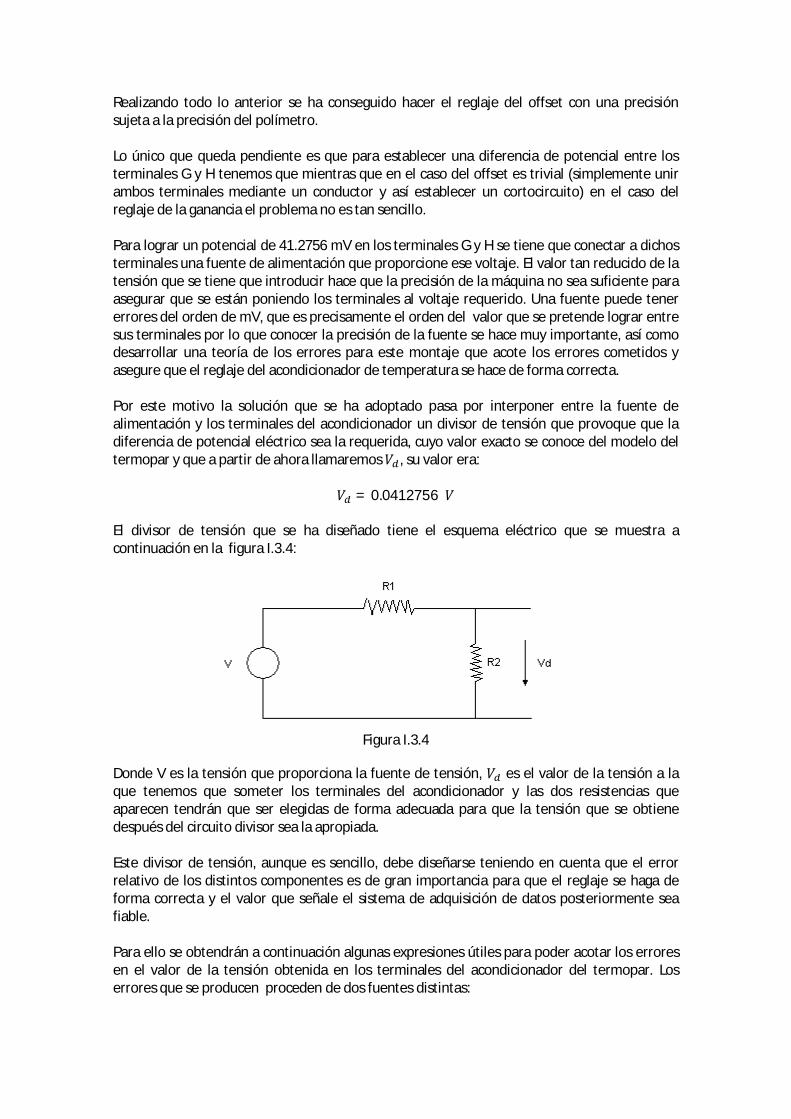
Realizando todo lo anterior se ha conseguido hacer el reglaje del offset con una precisión sujeta a la precisión del polímetro. Lo único que queda pendiente es que para establecer una diferencia de potencial entre los terminales G y H tenemos que mientras que en el caso del offset es trivial (simplemente unir ambos terminales mediante un conductor y así establecer un cortocircuito) en el caso del reglaje de la ganancia el problema no es tan sencillo. Para lograr un potencial de 41.2756 mV en los terminales G y H se tiene que conectar a dichos terminales una fuente de alimentación que proporcione ese voltaje. El valor tan reducido de la tensión que se tiene que introducir hace que la precisión de la máquina no sea suficiente para asegurar que se están poniendo los terminales al voltaje requerido. Una fuente puede tener errores del orden de mV, que es precisamente el orden del valor que se pretende lograr entre sus terminales por lo que conocer la precisión de la fuente se hace muy importante, así como desarrollar una teoría de los errores para este montaje que acote los errores cometidos y asegure que el reglaje del acondicionador de temperatura se hace de forma correcta. Por este motivo la solución que se ha adoptado pasa por interponer entre la fuente de alimentación y los terminales del acondicionador un divisor de tensión que provoque que la diferencia de potencial eléctrico sea la requerida, cuyo valor exacto se conoce del modelo del termopar y que a partir de ahora llamaremos 푉 , su valor era:
푉 = 0.0412756 푉 El divisor de tensión que se ha diseñado tiene el esquema eléctrico que se muestra a continuación en la figura I.3.4:
Figura I.3.4
Donde V es la tensión que proporciona la fuente de tensión, 푉 es el valor de la tensión a la que tenemos que someter los terminales del acondicionador y las dos resistencias que aparecen tendrán que ser elegidas de forma adecuada para que la tensión que se obtiene después del circuito divisor sea la apropiada. Este divisor de tensión, aunque es sencillo, debe diseñarse teniendo en cuenta que el error relativo de los distintos componentes es de gran importancia para que el reglaje se haga de forma correcta y el valor que señale el sistema de adquisición de datos posteriormente sea fiable. Para ello se obtendrán a continuación algunas expresiones útiles para poder acotar los errores en el valor de la tensión obtenida en los terminales del acondicionador del termopar. Los errores que se producen proceden de dos fuentes distintas:
-En primer lugar se tiene que los valores de las resistencias no serán los que proporcionen exactamente el valor de 푉 ya que ese valor es un número irracional, proveniente de la expresión 20 que modelaba el funcionamiento del acondicionador de temperatura. -En segundo lugar se tiene que los valores de las magnitudes físicas de los elementos del montaje no son exactos. Incorporan un error que debe ser tenido en cuenta. Considerando las ecuaciones que gobiernan el circuito de la figura I.3.4, se tiene que:
푉 = (푅 + 푅 )퐼 (21)
푉 = 푅 퐼 + 푉 (22) Donde I es el valor de la intensidad de corriente que corre por el circuito divisor de tensión. Despejando la intensidad de la expresión 21 y sustituyéndola en la 22 se obtiene después de simplificar y agrupar adecuadamente:
푉푉
=1
1 + 푅푅
(23)
Y después de definir 푓 = , se tiene que:
푉푉
=1
1 + 푓 (23)
Si ahora suponemos un valor de tensión que la fuente pudiera dar, algún valor que fuese del orden de la precisión de la máquina por ejemplo, V=10 V, se puede despejar un valor para el coeficiente f, que regirá cuanto tiene que ser el cociente de resistencias para que el cociente de voltajes sea el que realmente tiene que ser, este valor del cociente f es:
푓 = 241.2738 Como se comentó anteriormente es un hecho que las resistencias con las que finalmente se diseñe el divisor de tensión no serán capaces de cumplir el cociente anterior (ya que recordemos que el cociente satisface una tensión de entrada al acondicionador que es un valor irracional). Antes de seguir con nuestro análisis aclararemos a que nos referimos cuando decimos que el valor de una determinada magnitud tiene un error. Los errores que aquí se tratarán tienen un carácter relativo al valor nominal de una magnitud determinada x, es decir:
(푉푎푙표푟 푟푒푎푙) = (푉푎푙표푟 푛표푚푖푛푎푙) ± (푉푎푙표푟 푛표푚푖푛푎푙) 휀 (24) Donde 휀 es lo que llamamos error relativo de la magnitud x y se define matemáticamente como:
휀 =훥푉푎푙표푟
(푉푎푙표푟 푛표푚푖푛푎푙)=
|(푉푎푙표푟 푟푒푎푙) − (푉푎푙표푟 푛표푚푖푛푎푙) |(푉푎푙표푟 푛표푚푖푛푎푙)
(25)
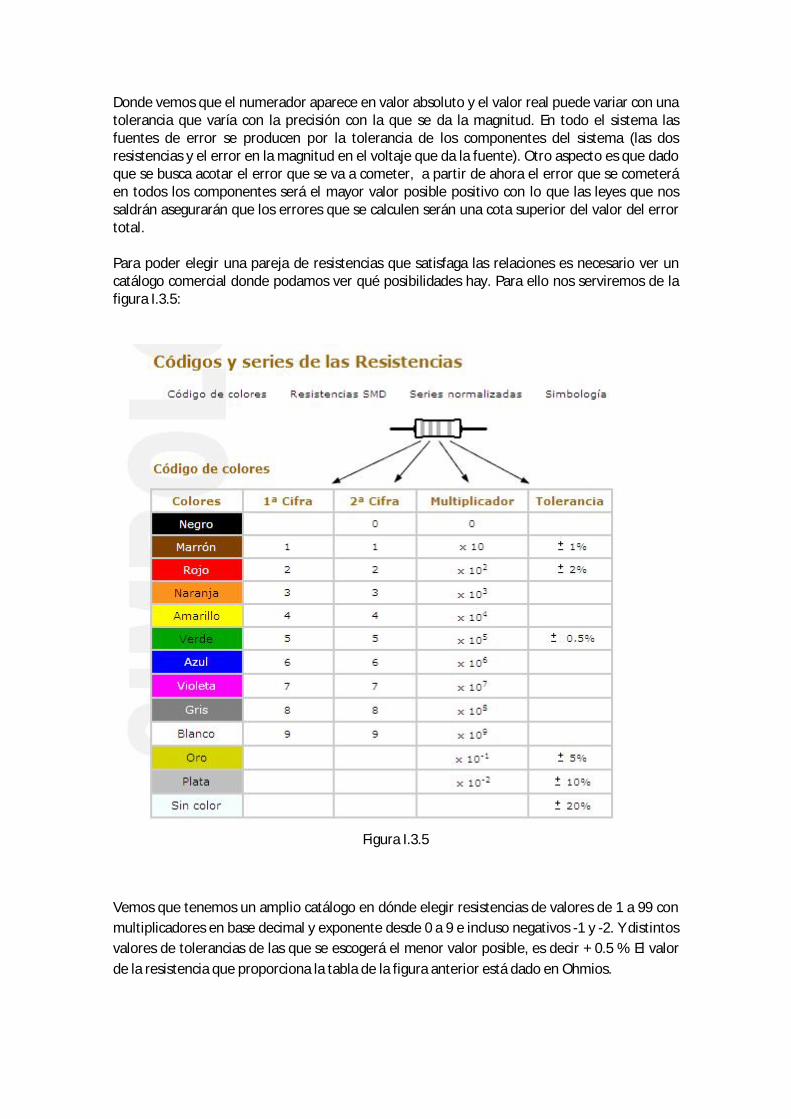
Donde vemos que el numerador aparece en valor absoluto y el valor real puede variar con una tolerancia que varía con la precisión con la que se da la magnitud. En todo el sistema las fuentes de error se producen por la tolerancia de los componentes del sistema (las dos resistencias y el error en la magnitud en el voltaje que da la fuente). Otro aspecto es que dado que se busca acotar el error que se va a cometer, a partir de ahora el error que se cometerá en todos los componentes será el mayor valor posible positivo con lo que las leyes que nos saldrán asegurarán que los errores que se calculen serán una cota superior del valor del error total. Para poder elegir una pareja de resistencias que satisfaga las relaciones es necesario ver un catálogo comercial donde podamos ver qué posibilidades hay. Para ello nos serviremos de la figura I.3.5:
Figura I.3.5
Vemos que tenemos un amplio catálogo en dónde elegir resistencias de valores de 1 a 99 con multiplicadores en base decimal y exponente desde 0 a 9 e incluso negativos -1 y -2. Y distintos valores de tolerancias de las que se escogerá el menor valor posible, es decir + 0.5 % El valor de la resistencia que proporciona la tabla de la figura anterior está dado en Ohmios.

Dado que el parámetro que nos interesa en este análisis es el cociente de resistencias se pueden fijar el valor de los multiplicadores (de forma que las resistencias que haya que adquirir sean lo más comercial posible), por ejemplo 10 para la resistencia 푅 y 10 para la resistencia 푅 , de forma que el orden de magnitud del cociente f sea de 10 , siendo así el adecuado.
A modo de hacernos una idea de cuál puede ser el orden de magnitud de este error podemos elegir al azar un par de resistencias cuyo cociente se acerque al valor de f y evaluar así el error porcentual que se comete en el valor de 푉 . En efecto eligiendo las resistencias:
푅 = 34 × 10 훺
푅 = 141 훺
Se obtienen los siguientes valores para la 푓 y 푉 :
푓 = 241.134751 푉 = 0.0412993 푉
Para obtener estos valores se ha sustituido el cociente de resistencias real que se tiene en la expresión 23 suponiendo que el valor de tensión que proporciona la fuente es 10 V y se ha despejado 푉 :
푉 = (1 + 푓 ) (26) El error en la tensión de entrada al acondicionador definido como sigue es:
휀 =푉 − 푉
푉 (27)
Donde recordemos que 푉 es el valor real de la tensión a la entrada del acondicionador y 푉 es el valor de la tensión que teóricamente se debería tener, teniéndose para este caso que:
휀 = 5.74457 × 10 Se tiene también que 휀 , corresponde a la expresión 25 de la siguiente manera:
휀 =훥푉푉
=|푉 − 푉 |
푉
Vemos que aunque las resistencias se han cogido casi al azar el error que se comete es de la diezmilésima parte del valor nominal de tensión que se quiere lograr, lo que en principio es un error más que aceptable. El valor anterior no es evidentemente el mínimo de todos los errores que se pueden cometer ya que en particular, habrá una pareja que minimice el error cometido por este efecto. En particular si fijamos los multiplicadores como se ha indicado anteriormente, se tiene que hay 99 valores de resistencias posibles de las cuales, habrá que elegir dos. Para encontrar ese mínimo del problema podemos definir los siguientes elementos que definirán nuestro problema:

-푏⃗ (vector columna que contiene los 99 valores de las resistencias) -푐⃗ (vector fila que contiene los inversos de los 99 valores de las resistencias)
-푍 = 푏⃗ ∙ 푐⃗ (matriz 99X99 que contiene 9081 valores posibles del cociente de resistencias) -퐸 (matriz 99X99 que contiene la diferencias (en valor absoluto) entre el valor ideal de f y cada uno de todos los valores reales posibles) El óptimo de nuestro problema se obtiene encontrando el elemento de la matriz E que tiene un valor absoluto menor, ya que así se habrá encontrado el valor de 푓 que más se parece a f. De esta manera e inspeccionando las expresiones 23 y 26, se puede afirmar que se cumple:
푉 → 푉 Si y sólo si:
푓 → 푓 Escribiendo una rutina de Matlab que genere las variables que se han comentado anteriormente y que realice las operaciones pertinentes se llega a que el valor de 푓 más cercano a f que se puede obtener y por tanto el error máximo más pequeño que se puede obtener es:
푓 = 241.37931
푉 = 0.041257 푉 Vemos que los valores son muy parecidos a los que realmente se desearían obtener, de hecho el máximo error cometido por esta fuente es:
휀 = 4.35113 × 10 Como vemos se ha conseguido bajar algo el error que se comete por el hecho de tener que comunicar una tensión de valor irracional. Los valores de resistencias que consiguieron minimizar el error fueron:
푅 = 7000 훺
푅 = 29 훺
En principio para que el análisis posterior sea válido es necesario que el cociente de las dos resistencias sea siempre el mismo pudiendo variar su valor relativo. Posteriormente a la luz de otras consideraciones se elegirán los valores definitivos de las resistencias.
Representando la matriz E de errores de f en el entorno del mínimo, se puede ver como la solución es única:
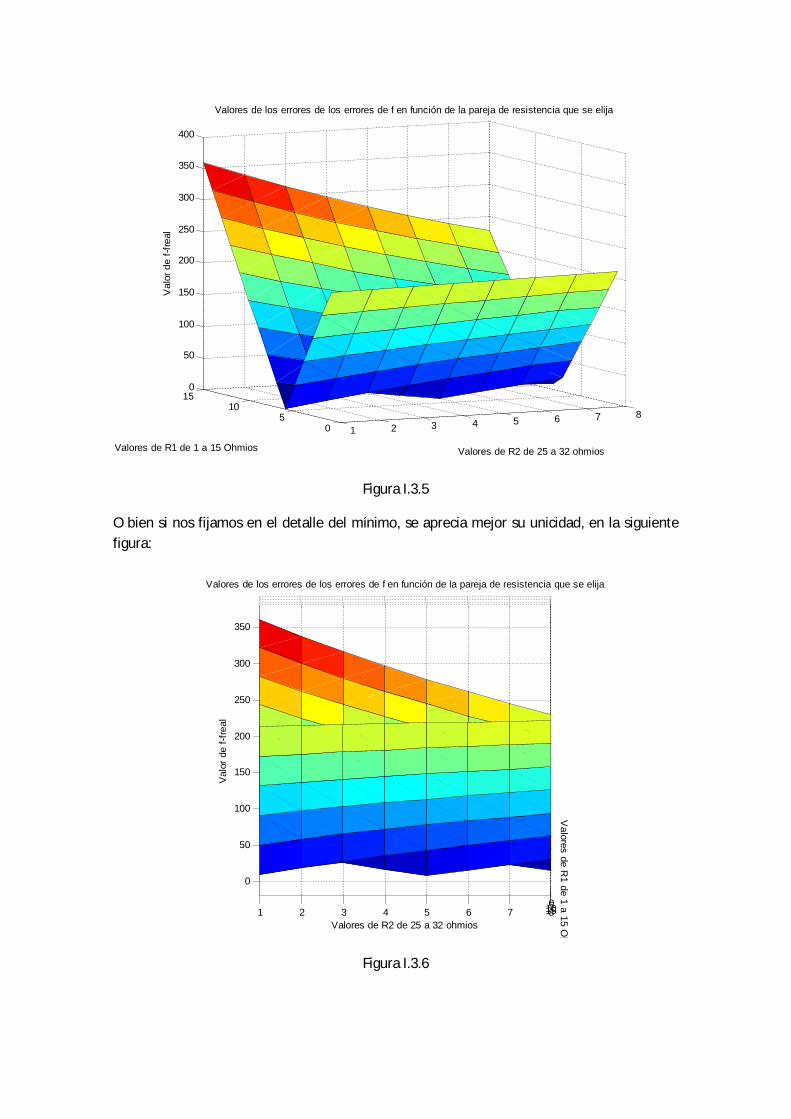
Figura I.3.5
O bien si nos fijamos en el detalle del mínimo, se aprecia mejor su unicidad, en la siguiente figura:
Figura I.3.6
1 2 3 4 5 6 7 80
510
150
50
100
150
200
250
300
350
400
Valores de R2 de 25 a 32 ohmios
Valores de los errores de los errores de f en función de la pareja de resistencia que se elija
Valores de R1 de 1 a 15 Ohmios
Val
or d
e f-f
real
1 2 3 4 5 6 7 8051015
0
50
100
150
200
250
300
350
Valores de R
1 de 1 a 15 Ohm
ios
Valores de R2 de 25 a 32 ohmios
Valores de los errores de los errores de f en función de la pareja de resistencia que se elija
Val
or d
e f-f
real

Hemos visto entonces que asociado al hecho de que el valor de la tensión del termopar es un número irracional no podemos conseguir exactamente la que queremos, se comete un error que ha sido acotado.
Como dijimos se comete otro error asociado al hecho de que la precisión de los dispositivos que componen el sistema no es perfecta. Dicho error es lo que se pretende estimar ahora.
Para ello y en virtud de la expresión 24 se harán las siguientes definiciones:
푉 = (1 + 휀 )푉
푉 = (1 + 휀 )푉
푅 = (1 + 휀 )푅
푅 = (1 + 휀 )푅
Sustituyendo todo esto en 23 se tiene, si se reescribe la expresión, lo siguiente:
푉 = (1 + 휀 )푉(1 + 휀 )푅
(1 + 휀 )푅 + (1 + 휀 )푅
Que se puede reescribir como sigue:
(1 + 휀 )푉 =푉 푅
푅 + 푅(1 + 휀 )(1 + 휀 )
(1 + 휀 ) 푅푅 + 푅 + (1 + 휀 ) 푅
푅 + 푅
Y usando ahora la expresión 23 para los valores nominales se tiene, la siguiente igualdad:
(1 + 휀 ) =(1 + 휀 )(1 + 휀 )
(1 + 휀 ) 푅푅 + 푅 + (1 + 휀 ) 푅
푅 + 푅
Que es una expresión exacta para el error cometido por la existencia de tolerancias en los valores que proporcionan los elementos. A modo de obtener una expresión que nos dé una

idea del orden de magnitud del problema podemos, por ejemplo desarrollando en serie y despreciando por consistencia todos los errores de segundo y tercer orden, obtener:
(1 + 휀 ) ≅ (1 + 휀 + 휀 )(1 ±푅
푅 + 푅휀 ±
푅푅 + 푅
휀 )
De la última expresión se puede decir que se ha conservado la dualidad de signos en el segundo y tercer sumando del segundo factor del segundo miembro de la igualdad para recordar que el error realmente está definido con una tolerancia y que al hacer el desarrollo en serie se elegirá el signo negativo de la tolerancia para que con el signo menos propio del desarrollo en serie se tenga un signo positivo y así se esté considerando el máximo valor del error a la entrada de los terminales del acondicionador. En cualquier caso haciendo los productos y despreciando de nuevo los errores de segundo orden se tiene:
(1 + 휀 ) ≅ 1 + 휀 + 휀 +푅
푅 + 푅휀 +
푅푅 + 푅
휀
Teniendo en cuenta ahora que los valores de la resistencia comparados entre si llevan a la siguiente conclusión:
푅푅 + 푅
→ 1
푅푅 + 푅
→ 0
Se puede escribir para los errores la siguiente igualdad:
휀 ≅ 휀 + 휀 + 휀 (28)
Expresión que sugiere que el máximo error que se está cometiendo por el hecho de tener tolerancias en los distintos dispositivos es muy aproximadamente igual a la suma de todos ellos siendo su orden de magnitud por tanto el mismo.
Sólo falta ahora relacionar este error con el error provocado por la otra fuente que se analizó anteriormente. Para ello se considera lo siguiente:
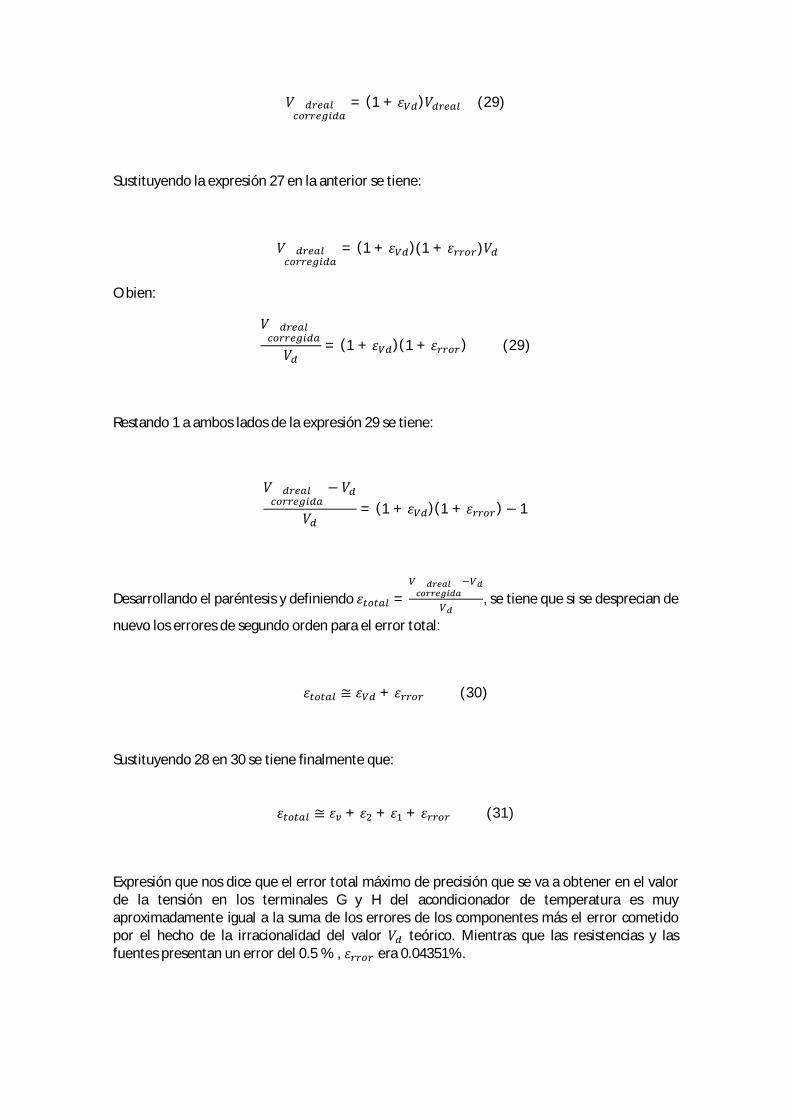
푉 = (1 + 휀 )푉 (29)
Sustituyendo la expresión 27 en la anterior se tiene:
푉 = (1 + 휀 )(1 + 휀 )푉
O bien:
푉
푉= (1 + 휀 )(1 + 휀 ) (29)
Restando 1 a ambos lados de la expresión 29 se tiene:
푉 − 푉
푉= (1 + 휀 )(1 + 휀 ) − 1
Desarrollando el paréntesis y definiendo 휀 = , se tiene que si se desprecian de
nuevo los errores de segundo orden para el error total:
휀 ≅ 휀 + 휀 (30)
Sustituyendo 28 en 30 se tiene finalmente que:
휀 ≅ 휀 + 휀 + 휀 + 휀 (31)
Expresión que nos dice que el error total máximo de precisión que se va a obtener en el valor de la tensión en los terminales G y H del acondicionador de temperatura es muy aproximadamente igual a la suma de los errores de los componentes más el error cometido por el hecho de la irracionalidad del valor 푉 teórico. Mientras que las resistencias y las fuentes presentan un error del 0.5 % , 휀 era 0.04351%.

Por lo tanto como conclusión después este análisis podemos decir que si bien las tolerancias en los valores hacen posible que no se haga correctamente el reglaje, los errores que se van a cometer son todos asumibles y del 0.5% como mucho. La luz que arroja este análisis nos hace ahora poder hacer el reglaje con el procedimiento descrito estando convencidos de que los errores no estropearán el proceso. Siendo así los valores que se obtengan del termopar y el acondicionador suficientemente fiables. Falta no obstante fijar el valor de las resistencias. Para poder fijar los valores es necesario que hagamos la siguiente consideración: - Un divisor de tensión se basa en la hipótesis de que está trabajando en vacio, es decir, toda la intensidad que viaja por el divisor cae a través de la resistencia 푅 . Para que esto sea así y todo lo anterior sea válido es necesario que la impedancia del acondicionador, Z, sea mucho más grande que el valor de la resistencia 푅 , por lo que debe ser cuanto más pequeño mejor y teniendo en cuenta que el cociente de resistencias debe ser constante obtener así el valor de 푅 . Dicha condición se puede formular como sigue:
푅 ≪ 푍 (32) Con el potenciómetro se estimó que la impedancia del conjunto del acondicionador era de unos 7 MΩ. Para que la condición 32 se verifique se ha optado por realizar el siguiente montaje con resistencias que se tienen en el laboratorio de ingeniería aeroespacial: -El papel de la resistencia llamada 푅 , se le asigna a una resistencia de valor 2700 Ω mientras que la resistencia 푅 se constituirá mediante la conexión en serie de dos resistencias de 3.4 Ω cada una (valor que es más que suficiente para hacer cumplir la condición 32). Evidentemente este cociente de resistencias poco tiene que ver con el que se llevó a cabo todo el proceso anterior. El análisis anterior sirvió para establecer que los errores que se cometen son la suma de los que se cometen por las tolerancias de los elementos del montaje más el error cometido por el hecho de la irracionalidad del valor del potencial que se tiene que conseguir, aunque este error era varios órdenes de magnitud menor que el provocado por la otra fuente. Se dispone de una fuente de alimentación para todo el conjunto que es capaz de producir hasta 18 voltios (con una intensidad de hasta 18 amperios) por lo que se puede ajustar el proceso con la tensión que proporciona la fuente. Con todo lo anterior se realizará el montaje del divisor con las tres resistencias que se han especificado anteriormente. Ahora de la expresión 23 teniendo la tensión 푉 y el cociente f se puede obtener el valor de la tensión V que hay que aplicar en la fuente para que todo este correcto:
푉 = 0.0412756 푉 푓 = 397.058
De 23 se obtiene entonces:
푉 = 16.43012 푉

Tenemos que tener en cuenta que la precisión de la fuente permite introducir el valor de la tensión con una exactitud de hasta dos decimales por lo que el valor de tensión que se le demandará a la fuente será de:
푉 = 16.43 푉
Lo que producirá un valor de la tensión de alimentación al acondicionador de:
푉 = 0.041275 푉 Lo que produce un error relativo en la medida de:
휀 = 7.2638 ∗ 10 Lo que supone un error más que aceptable y sustituyendo en la expresión del error total cometido en el reglaje suponiendo que los errores de las resistencias y la fuente sean del 1% y 0.5% aproximadamente se obtiene:
휀 ≅ 휀 + 휀 + 휀 + 휀 = 0.5% + 2% + 7.26 ∗ 10 % ≅ 2.5% Que constituye una cota superior para el error cometido con el montaje aceptable.

Acondicionador de la célula de carga
Básicamente el conjunto encargado de medir el empuje que proporciona el turborreactor es una célula de carga de flexión Tedea Huntleigh de 300 N fabricada de aluminio anodizado con límite de sobrecarga de 150 % sobre la carga nominal, límite de carga última de 300%, alta precisión, protección del entorno especial contra cambios de temperatura y humedad, y con clasificación IP66 además de su acondicionador correspondiente. El acondicionador que se ha elegido ha sido uno del fabricante Tedea-Huntleigh modelo 437 que resulta perfectamente compatible con la célula de flexión escogida y cuya salida es, en intensidad, de 0 a 20 amperios. Dicha salida en intensidad se transforma posteriormente mediante un divisor de intensidad adecuado en una salida en tensión hacia el registrador de datos.
Aunque, como se ha dicho, no se pretende aquí volver a hacer una descripción detallada de todos los elementos del sistema de adquisición de datos se mostrará a continuación el esquema eléctrico del acondicionador así como su cabezal de conexiones ya que se harán imprescindibles a la hora del reglaje del acondicionador.
Figura I.3.7
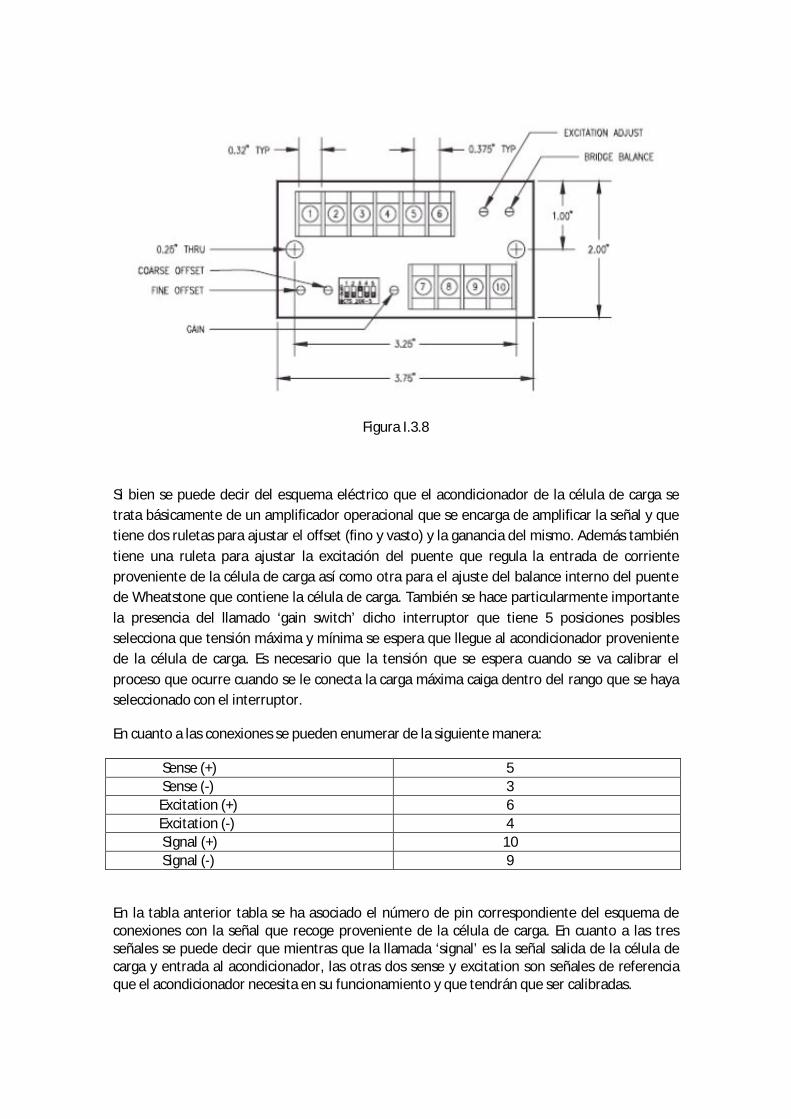
Figura I.3.8
Si bien se puede decir del esquema eléctrico que el acondicionador de la célula de carga se trata básicamente de un amplificador operacional que se encarga de amplificar la señal y que tiene dos ruletas para ajustar el offset (fino y vasto) y la ganancia del mismo. Además también tiene una ruleta para ajustar la excitación del puente que regula la entrada de corriente proveniente de la célula de carga así como otra para el ajuste del balance interno del puente de Wheatstone que contiene la célula de carga. También se hace particularmente importante la presencia del llamado ‘gain switch’ dicho interruptor que tiene 5 posiciones posibles selecciona que tensión máxima y mínima se espera que llegue al acondicionador proveniente de la célula de carga. Es necesario que la tensión que se espera cuando se va calibrar el proceso que ocurre cuando se le conecta la carga máxima caiga dentro del rango que se haya seleccionado con el interruptor.
En cuanto a las conexiones se pueden enumerar de la siguiente manera:
Sense (+) 5 Sense (-) 3 Excitation (+) 6 Excitation (-) 4 Signal (+) 10 Signal (-) 9
En la tabla anterior tabla se ha asociado el número de pin correspondiente del esquema de conexiones con la señal que recoge proveniente de la célula de carga. En cuanto a las tres señales se puede decir que mientras que la llamada ‘signal’ es la señal salida de la célula de carga y entrada al acondicionador, las otras dos sense y excitation son señales de referencia que el acondicionador necesita en su funcionamiento y que tendrán que ser calibradas.

Pasamos ahora a describir el procedimiento de montaje y el procedimiento de calibración que se ha seguido. Procedimiento del montaje de conexiones A.- Conectar la patilla positiva de la señal ‘signal’ proveniente de la célula de carga al pin número 10. B.- Conectar la patilla positiva de la señal ‘signal’ proveniente de la célula de carga al pin número 9. C.- Conectar la patilla positiva de la señal ‘excitation’ al pin 6 y la patilla positiva de la señal ‘sense’ al pin 5. Después se debe unir mediante un conductor (para cortocircuitar) estos dos pines, es decir, el 5 y 6. D.- Conectar la patilla negativa de la señal ‘excitation’ al pin 4 y la patilla negativa de la señal ‘sense’ al pin 3. Después se debe unir mediante un conductor (para cortocircuitar) estos dos pines, es decir, el 4 y 3. Nota: Los dos últimos pasos se han dado ya que la señal ‘sense’ no va a ser usado en nuestra aplicación. De no ser así no deberían haberse cortocircuitado las patillas como se ha descrito. E.-Determinar el voltaje (debe estar entre 10 y 36 V) que necesitará la célula de carga para funcionar y conectar las patillas positiva y negativa a los pines 1 y 2 de alimentación. En nuestro caso todo está dispuesto ya y el voltaje son los típicos 24 V de alimentación. F.-Verificar que todo el procedimiento está completo. G.-Encender la alimentación y comprobar el voltaje de alimentación de excitación del puente y comprobar que efectivamente son los 24 Voltios requeridos. Una vez terminado el procedimiento anterior pasamos ahora al procedimiento de reglaje pero antes hagamos algunas aclaraciones: -Los terminales de salida de la señal que proporciona el acondicionador son los pines 7 y 8. -Aunque en el procedimiento de calibración se refiere a buscar salidas determinadas en intensidad, nosotros buscaremos valores en tensión. Esto es debido a que se conectó un divisor de tensión a la salida que consiste en una resistencia de 120 Ω que transforma mediante la ley de Ohm la salida en intensidad, en una salida en voltaje multiplicando por esos 120 Ohmios. Procedimiento de calibración A.- Colocar el ‘Gain Switch’ en la posición 1 en ON. Todos los demás deben estar en OFF. B.- Cortocircuitar la señal entre los pines 9 y 10. Manipulando las ruletas de Offset (vasto y fino) se debe conseguir que se tenga a la salida (pines 7 y 8) una salida de 0 mA (0 mV). C.- Quitar el cortocircuito entre los terminales 9 y 10. Ajustar el ‘Bridge Balance’ mediante la ruleta correspondiente para que se tenga a la salida (pines 7 y 8) 0 mA (0 mV). D.- Seleccionar el ‘Gain Switch’ para el voltaje que se espere de la célula de carga. En nuestro caso interruptor 2 en ON. Todos los demás deben estar en OFF. E.- Ajustar el ‘Bridge Balance’ para tener la salida (pines 7 y 8) a 0 mA (0 mV). F.- Aplicar la carga de trabajo a la célula y ajustar la ganancia ‘Gain’ hasta que se tenga la salida en voltaje deseada. G.- Quitar la carga y usar las ruletas del Offset (vasto y fino) para conseguir que se tenga a la salida (pines 7 y 8) una salida de 0 mA (0 mV).

H.- Repetir los pasos desde el E al G hasta que todo quede como se espera. A la hora de llevar a cabo el reglaje aparece una limitación clara. La aplicación de la carga hace que cuando más próxima sea esta carga a la carga máxima que se puede obtener, menores sean los errores en el entorno de trabajo. Dado que aplicar 30 kg aproximadamente de forma estática a la célula de carga no es tarea sencilla, se opta por aplicar 15 Kg y construir posteriormente las leyes de equivalencia de forma coherente. Lo que se hizo fue colocar una brida en la pieza que evita el momento de cabeceo (y que se describirá posteriormente) y en esa brida conectar un dinamómetro que a su vez está conectado a un cable en el cuál se aplicarán los 15 kg de carga. Este cable se hace pasar por la superficie de una mesa que transforma la carga vertical en una fuerza aplicada sobre el dinamómetro de forma horizontal. Como se ha dicho en el paso D del proceso se ajustó al 2 el ‘gain switch’. El anterior hecho se debe a que los rangos de voltajes esperados de la célula de carga que entrarán al acondicionador son para cada interruptor: Interruptor Rango de voltaje de entrada de la célula de
carga 1 50 mV a 62.5 mV 2 25 mV a 50 mV 3 12.5 mV a 25 mV 4 6.25 mV a 12.5 mV 5 3.15 mV a 6.25 mV Ya que la carga que se va a aplicar para realizar el reglaje son 15 kg la intensidad de corriente que se espera que la célula de carga-acondicionador devuelva, teniendo en cuenta que cuando se apliquen 300 N serán 20 mA, han de ser los proporcionales para que se satisfaga la siguiente igualdad:
(15 ∗ 9.81)푁푥
=300 푁20 푚퐴
푥 = 9.81 푚퐴 (9.81 푚퐴 ∗ 120 훺 = 1177.2 푚푉)
Dado que la máxima salida en intensidad que puede producir el acondicionador es 20 mA, eso ha de corresponder al máximo voltaje que se puede esperar de la célula de carga, que según la tabla anterior es 62.5 mV. Suponiendo un comportamiento lineal del acondicionador si lo que se esperan introducir son 9.81 mA (debidos a los 15 kg), el voltaje que se espera proveniente de la célula de carga es:
62.5 푚푉푥
=20 푚퐴
9.81 푚퐴
푥 = 30.65 푚푉
Que como podemos apreciar en la tabla anterior equivale al interruptor de posición 2.
Cuando se realizó el reglaje debido a que la ruleta de la ganancia estaba algo deteriorada no se pudieron lograr los 1177.2 mV que se esperaban para los 15 kg. En vez de eso sólo se pudo llegar hasta 920 mV, que después de varias iteraciones del proceso de reglaje se volvió estable para los 15 kg de carga. Se hizo necesario, dado que el valor de la intensidad que devuelve la célula de carga cambió, verificar si realmente la posición 2 es la apropiada. Para ello volvemos a realizar la misma operación que antes para ver el valor de la tensión que entrará en el acondicionador:
62.5 푚푉푥
=20 푚퐴
(920 푚푉120 훺 )
푥 = 23.96 푚푉
Donde ahora vemos que el interruptor adecuado es el 3. Teniendo en cuenta esta nueva posición del interruptor se procede a llevar a cabo todo el proceso de reglaje descrito y finalmente el conjunto célula-acondicionador se comporte de la manera descrita en la tabla siguiente: Carga (kg) Tensión de salida del acondicionador (mV) 0 0 15 920 De la tabla anterior se sigue que la ley de transformación entre fuerza medida en la célula de carga y voltaje que proporciona el acondicionador es la siguiente:
퐶푎푟푔푎(푁) =15 ∗ 9.81
920∗ 푉표푙푡푎푗푒 (푚푉)
Dicha ley será fundamental para que el sistema de adquisición de datos sea capaz de monitorizar correctamente las medidas de empuje que proporcione el conjunto célula de carga-acondicionador. Es evidente que la obtención de dicha ley está sujeta a los errores en las medidas del polímetro (que se usó para comprobar los valores de tensión a la salida en cada uno de los pasos del proceso de calibración) y a los errores del dinamómetro que se usó para determinar que carga se le estaba aplicando a la célula de carga, si bien estos errores son todos asumibles y dentro del rango de admisibilidad que se tiene para los fines de este dispositivo.

Leyes de transformación
Para terminar este apartado y a modo de resumen se recogerán las tres leyes de funcionamiento que han resultado después de todos los procesos de reglaje de los distintos dispositivos. Recordemos que todos los acondicionadores llevan etapas de división de tensión para adecuar su salida al registrador de datos. Los sensores de presión y los acondicionadores de temperatura llevan una etapa de división que limita el voltaje a 2.5 V como máximo mientras que el acondicionador de la célula de carga lleva una etapa que hace que el voltaje sea 2.4 V como mucho. Con todo lo anterior las leyes de transformación son:
푃푟푒푠푖ó푛 (푏푎푟푒푠) = 0.0024 ∗ 푉(푚푉) (32)
푇푒푚푝푒푟푎푡푢푟푎 (º 퐶) = 0.4 ∗ 푉(푚푉) (33)
퐶푎푟푔푎(푁) =15 ∗ 9.81
920∗ 푉표푙푡푎푗푒 (푚푉) (34)
Estas leyes deberán introducirse, como se verá después en el software de adquisición de datos para poder especificar al programa como debe transformar las señales del registrador para mostrar las unidades adecuadas por pantalla.

4. Diseño, fabricación y montaje de una cogida rígida que evite el momento de cabeceo durante la operación
El turborreactor antes de la realización de este proyecto se encontraba fijado a la célula de carga mediante un sistema bastante simple. El turborreactor posee dos abrazaderas que lo envuelven. A su vez estas dos abrazaderas se cierran apretando el conjunto de sus dos extremos, extremos que se utilizan como punto de cogida para sostener el turborreactor en la posición correcta. A través de los extremos de la abrazadera el turborreactor lleva atornillado una pequeña pletina en forma de ‘L’ que tiene dos agujeros ovalados cuyo diámetro medio es de 6 mm. Esta pletina es la que va sujeta mediante dos uniones atornilladas a la célula de carga que mide el empuje. En la Figura I.4.1 se puede ver el conjunto descrito anteriormente.
Figura I.4.1

En este apartado se describirá como se hará que la unión del turborreactor a la célula de carga sea lo suficiente rígida para evitar el momento de cabeceo cuando el turborreactor empiece a proporcionar empuje.
La idea básica es utilizar un tramo de una barra prismática de acero hueca de 1.5 mm de espesor de medidas 5 x4.5x1.25 cm atornillada a la célula de carga para poder montar un sistema formado por una pieza en forma de ‘u’ que colocada adecuadamente evitará el momento de cabeceo. Para fijar la pieza en forma de ‘u’ a la barra prismática hueca se utilizará una pieza en ‘L’ similar a la que estaba puesta originalmente pero de doble espesor y cuyas dimensiones aproximadas se pueden ver en la siguiente figura:
Figura I.4.2
Como puede verse hay dos juegos de taladros. Los dos de la cara derecha se utilizarán para atornillar a la barra prismática mientras que los de la cara izquierda se utilizarán para atornillar la pletina en ‘u’.

En cuanto a la pieza prismática hueca puede verse en la siguiente figura:
Figura I.4.3
En ella, como puede verse, se han practicado dos juegos de orificios, dos en la cara delantera y dos en la trasera. Mientras que los orificios en la cara delantera están centrados en la cara, los orificios en la cara trasera están descentrados adecuadamente para que al atornillar la célula de carga (que queda en el interior) a la pieza prismática, ésta quede acomodada en la parte izquierda trasera de la sección como puede verse en la siguiente figura:
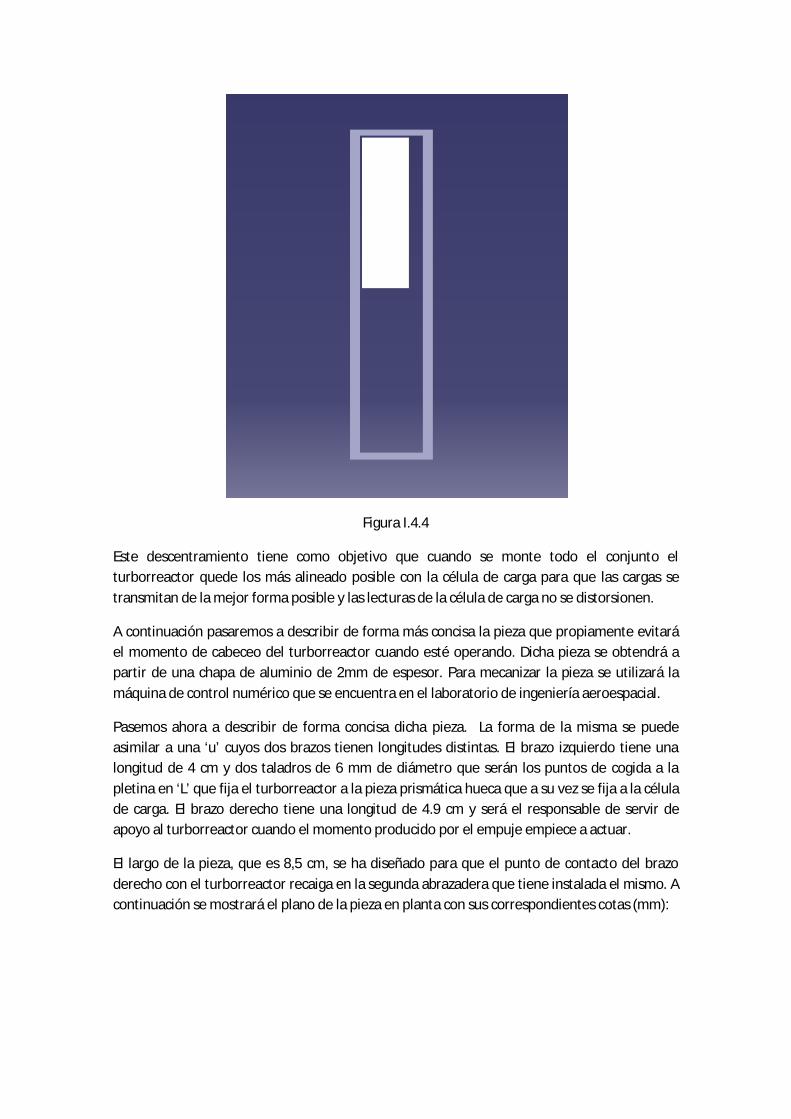
Figura I.4.4
Este descentramiento tiene como objetivo que cuando se monte todo el conjunto el turborreactor quede los más alineado posible con la célula de carga para que las cargas se transmitan de la mejor forma posible y las lecturas de la célula de carga no se distorsionen.
A continuación pasaremos a describir de forma más concisa la pieza que propiamente evitará el momento de cabeceo del turborreactor cuando esté operando. Dicha pieza se obtendrá a partir de una chapa de aluminio de 2mm de espesor. Para mecanizar la pieza se utilizará la máquina de control numérico que se encuentra en el laboratorio de ingeniería aeroespacial.
Pasemos ahora a describir de forma concisa dicha pieza. La forma de la misma se puede asimilar a una ‘u’ cuyos dos brazos tienen longitudes distintas. El brazo izquierdo tiene una longitud de 4 cm y dos taladros de 6 mm de diámetro que serán los puntos de cogida a la pletina en ‘L’ que fija el turborreactor a la pieza prismática hueca que a su vez se fija a la célula de carga. El brazo derecho tiene una longitud de 4.9 cm y será el responsable de servir de apoyo al turborreactor cuando el momento producido por el empuje empiece a actuar.
El largo de la pieza, que es 8,5 cm, se ha diseñado para que el punto de contacto del brazo derecho con el turborreactor recaiga en la segunda abrazadera que tiene instalada el mismo. A continuación se mostrará el plano de la pieza en planta con sus correspondientes cotas (mm):
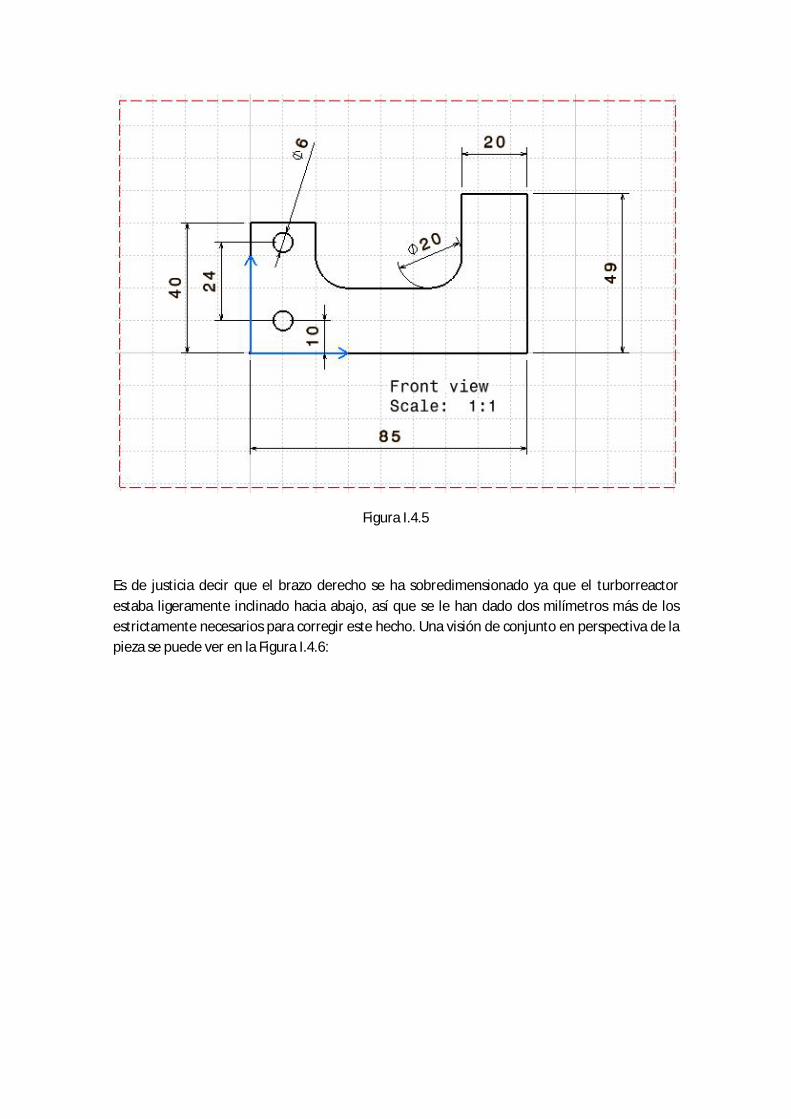
Figura I.4.5
Es de justicia decir que el brazo derecho se ha sobredimensionado ya que el turborreactor estaba ligeramente inclinado hacia abajo, así que se le han dado dos milímetros más de los estrictamente necesarios para corregir este hecho. Una visión de conjunto en perspectiva de la pieza se puede ver en la Figura I.4.6:
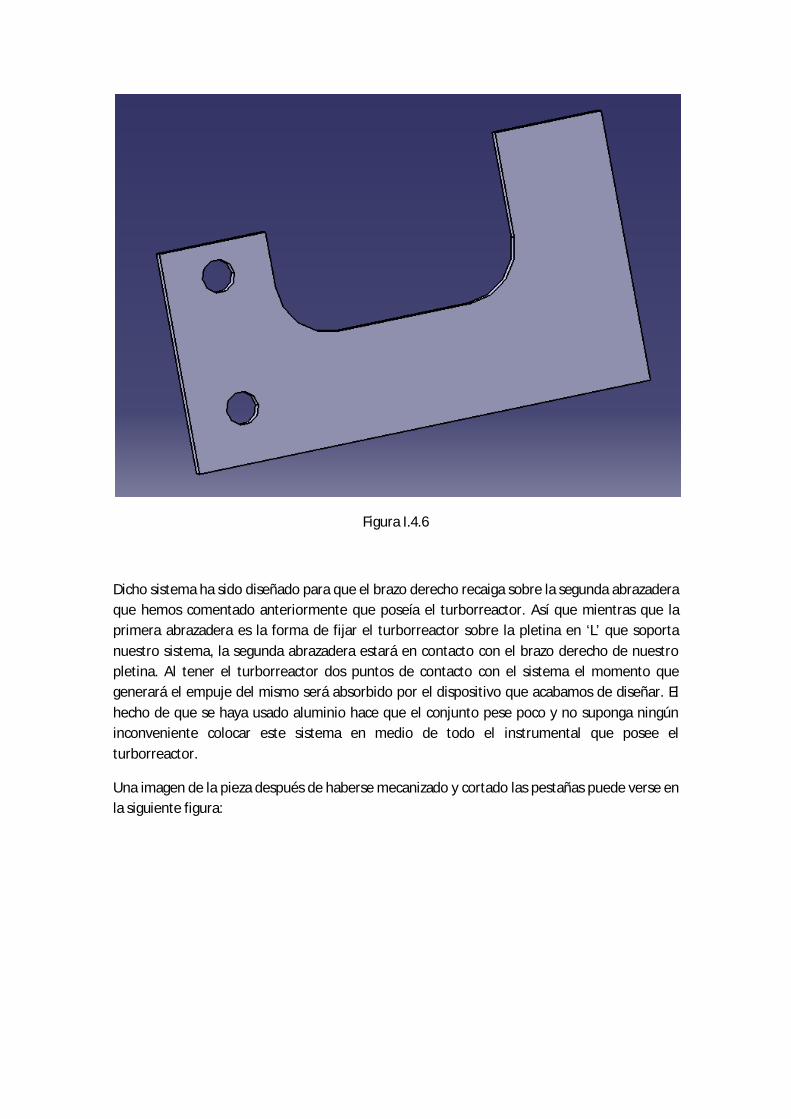
Figura I.4.6
Dicho sistema ha sido diseñado para que el brazo derecho recaiga sobre la segunda abrazadera que hemos comentado anteriormente que poseía el turborreactor. Así que mientras que la primera abrazadera es la forma de fijar el turborreactor sobre la pletina en ‘L’ que soporta nuestro sistema, la segunda abrazadera estará en contacto con el brazo derecho de nuestro pletina. Al tener el turborreactor dos puntos de contacto con el sistema el momento que generará el empuje del mismo será absorbido por el dispositivo que acabamos de diseñar. El hecho de que se haya usado aluminio hace que el conjunto pese poco y no suponga ningún inconveniente colocar este sistema en medio de todo el instrumental que posee el turborreactor.
Una imagen de la pieza después de haberse mecanizado y cortado las pestañas puede verse en la siguiente figura:

Figura I.4.7
En cuanto a la forma de fijar las uniones del dispositivo podemos decir que se utilizarán tornillos y tuercas normalizados apropiados para los taladros de seis milímetros que se han practicado en la pieza.
Una perspectiva de todo el conjunto montado se puede ver en la siguiente figura:
Figura I.4.8
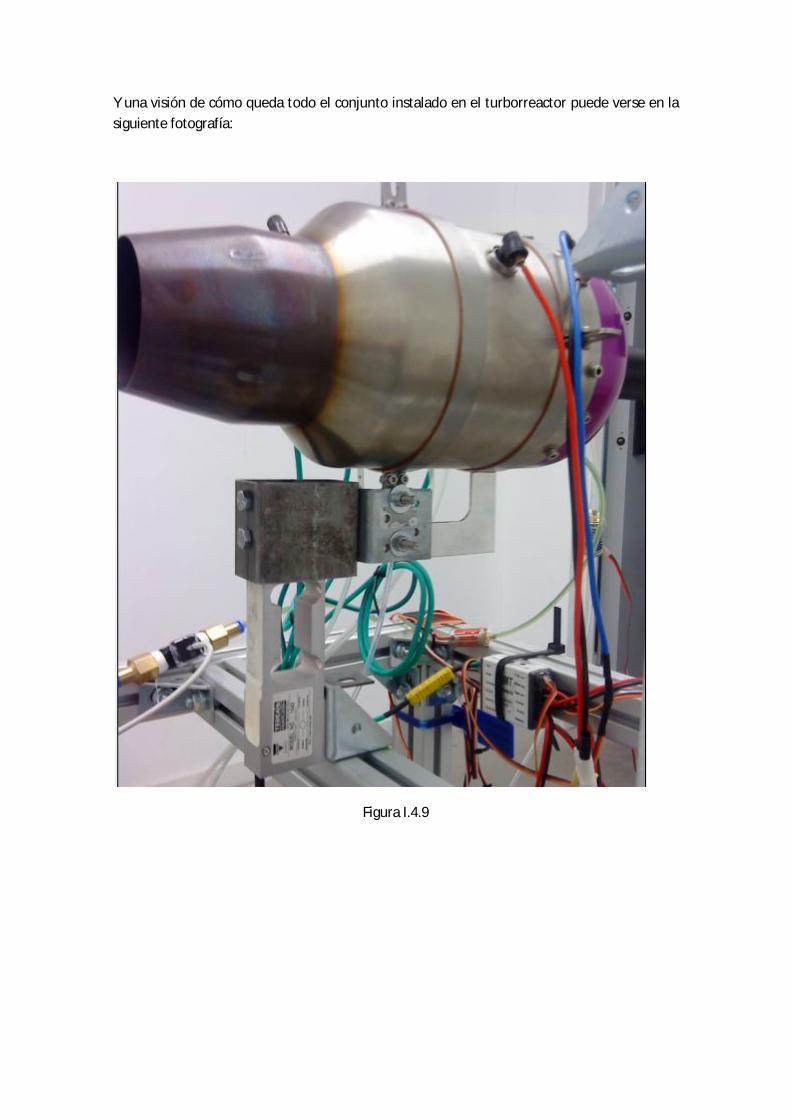
Y una visión de cómo queda todo el conjunto instalado en el turborreactor puede verse en la siguiente fotografía:
Figura I.4.9

5. Puesta a punto del sistema de adquisición de datos del turborreactor
Consideraciones generales
El siguiente paso que se ha dado ha sido el reconocimiento de todo el sistema de adquisición de datos físico, así como reconocer y analizar el software de adquisición de datos. No queriendo volver a repetir todo el trabajo de descripción exhaustiva que se hizo para el proyecto precedente se hará una breve descripción para recordar cómo estaba establecido dicho sistema de adquisición de datos. En especial es interesante recordar los siguientes aspectos:
-Como es bien sabido, hay diversos sensores de temperatura y presión que recogen los siguientes valores de presión y temperatura 푃 푃 푃 푃 푇 푇 y 푇 correspondientes al ciclo del turborreactor. Aparte también se recoge los valores de empuje y flujo de combustible.
-La señal proveniente de los sensores pasa a diversos acondicionadores que amplifican la señal y que la adaptan al funcionamiento del registrador de datos.
-En el caso de los transductores de presión la señal va directamente a un divisor de tensión que pasa la señal hasta los 2,5 voltios que es capaz de soportar el registrador.
-En el caso de los termopares, la señal pasa antes por unos acondicionadores de temperatura (a los que ya se les ha realizado el reglaje que necesitaban) para acomodar la señal a una más perceptible. Antes de llegar al registrador de datos la señal pasa por un divisor de tensión que reduce el valor de la tensión hasta los 2,5 voltios que es capaz de soportar el registrador.
-En cuanto a la célula de carga se puede decir que la señal que proporciona se deriva a un acondicionador que la adapta y la transforma en una señal en intensidad. Dicha señal en intensidad que proporciona se transforma en un divisor de intensidad en 2,4 voltios que ya si es capaz de soportar el registrador de datos.
-Finalmente todas las señales provenientes de los ocho acondicionadores (4 de presión, 3 de temperatura y el de la célula de carga) se conectaron de forma diferencial a la placa de terminales que a su vez se conecta al registrador de datos. Esto quería decir que la señal proveniente de cada acondicionador se recoge como la diferencia de potencial medida entre el cable positivo y negativo de cada acondicionador, lo que según se indica produce unos valores en las medidas mucho más precisas.
-Se incluirá a continuación una tabla que recoge en qué clavija correspondiente a qué canal se ha conectado cada cable de cada acondicionador (figura I.5.1). Todo esto se hace necesario

para tener claro posteriormente qué canal corresponde a cada señal para incluirlo en el programa que nos permitirá monitorizar las señales en el ordenador.
Figura I.5.1
Aparte de todo esto se ha enchufado un alargador USB a la salida del registrador de datos para poder alargar la señal a la habitación contigua al turborreactor y poder enchufar el conector USB al ordenador. Recordemos que aparte de todo el sistema de adquisición de datos adicional teníamos la caja de control analógica y la EDT a través de las cuales se podía arrancar el turborreactor y operarlo. Si bien la señal del estado del turborreactor, de cara a su monitorización, podía conectarse a la EDT o bien al ordenador. Aunque se ha estudiado la posibilidad de derivar la señal para hacer posible el uso de los dos dispositivos de forma simultánea se ha preferido optar por la opción estándar y conectar la señal directamente al ordenador para no estropear la garantía del dispositivo deteriorando las envolturas de los cables.

El cable que transmite la señal se ha conectado a una ficha que transforma la salida en un puerto serie de 9 pines macho. Esta salida se ha conectado a una alargadera que lleva la señal desde la celda de ensayos hasta el ordenador instalado en la habitación contigua.
De esta manera la señal sólo se deriva al ordenador y es el ordenador, utilizando el software que a continuación pasamos a describir, el que visualizará todo el proceso de arrancado y apagado así como la operación del motor.
V2 ECU Toolsuite V1.6.1 de AMT Netherlands
El software que se utilizará no es otro que la V2 ECU Toolsuite V1.6.1 de AMT Netherlands (Advanced Micro Turbines). Es una interfaz gráfica que facilita desde la operación del turborreactor hasta el grabado de datos e historiales. Las alarmas y combinaciones de pitidos que antes proporcionaba la EDT ahora están implementadas de forma visual en el software.
En última instancia se remite a la ayuda que dicho software incluye, donde todas y cada una de las opciones que presenta el programa son explicadas con suficiente detalle y dónde se explican posibles motivos de fallos potenciales que pudieran sucederle a la turbina.
Haremos un recorrido por todas las ventanas del programa y explicaremos todas las opciones así como se explicarán posibles y errores y fallos de montaje.
Antes de empezar a hacer nada es necesario que se den una serie de pasos iniciales. Lo primero que tenemos que hacer es seleccionar la opción Settings dentro de la opción Comport. Aquí debemos seleccionar el puerto a través del cual se enviará la información al ordenador. En nuestro caso COM1. Aparte también se puede cambiar la velocidad de comunicación aunque se recomienda dejar la que viene por defecto.
En Configuration dentro de Options se puede cambiar el tiempo de espera entre dos órdenes consecutivas. Si se disminuye los procesos correrán más deprisa pero bajarlo demasiado puede provocar fallos en el programa por lo que se recomiendo dejar el que viene por defecto.
Sin olvidar grabar los cambios que hagamos podemos salir de estas opciones reiniciando el programa para que los cambios tengan efecto. Si los cambios han surtido efecto deben de aparecer en la barra de tareas en la parte baja izquierda de la ventana.
A continuación pasaremos a comentar diversos aspectos de la ventana de Settings. Se pueden llevar a cabo diversas órdenes cuando la ECU está en Command Mode.
-Basic Factory Settings: Podrán todas las opciones tal y como venían de fábrica.
-Handshake: Esta opción sirve para activar el Command Mode aunque no estará disponible cuando esté la ECU esté en Running Mode.
-Download All Settings: Muestra la configuración actual de la ECU.

-Program Changed Settings : Antes de poder pasar al modo Programming es necesario haber realizado y rellenado correctamente los dos modos anteriores. Si no fuera así es necesario hacerlo. Cuando seleccionamos esta opción los cambios y ajustes que hayamos hecho serán señalados. Después de terminar con el modo Programming se realizará una verificación automática.
Una vista de la ventana que aparece cuando estamos en la opción Settings se muestra en la Figura I.5.2:
Figura I.5.2
La siguiente ventana que podemos seleccionar es la ventana ‘Log’ donde todos los historiales de todas las variables de interés para el control del turborreactor aparecen. Estas variables son la EGT, RPM, Throttle, el voltaje de la bomba de combustible y el voltaje de la batería. Todos las evoluciones de dichas variables pueden ser grabadas y almacenadas para posteriores comparaciones ya que de estas comparaciones se pueden sacar conclusiones acerca de porque ocurre un determinado error u otro.
Diversos problemas pueden ser habituales, tales como:
Batería en mal estado: Muchas son los dispositivos que tiene la batería que alimentar, la bujía, el iniciado del motor, la bomba de combustible las válvulas de solenoide y todos los componentes eléctricos. Cuando el motor ya se ha arrancado, sólo la válvula de combustible y

la bomba están consumiendo batería. Si la batería no se ha usado en mucho tiempo puede ocurrir que su autonomía sea pequeña o puede contener celdas defectuosas. Gracias a que el voltaje de la batería aparece en la ventana del programa, las características de descarga pueden ser comparadas con otros arranques. Cargar y descargar la batería puede hacer que mejore su actuación. Si esto no funciona se puede considerar reemplazar la batería. El espesor del cable también puede tener algo que ver, así que es conveniente que el cable tenga un espesor de 1.5 푚푚 como mínimo. Cables más delgados aumentan la resistencia y por tanto el voltaje.
-Bomba en mal estado/filtro de combustible sucio/restricción en la línea de suministro de combustible/restricción en la válvula de combustible: La ECU es capaz de compensar los problemas en el sistema de combustible mientras que el voltaje de la bomba permanezca dentro de los límites permitidos. Si súbitamente, sin haber cambiado el empuje y a RPM constantes, el voltaje de la bomba sube, o al terminar la operación es significativamente alto comparado con otras operaciones anteriores, se debe encontrar la causa y arreglarla.
-Alguna etapa del compresor dañada/desencajada/ sensor de RPM dañado: Normalmente el número de fallos grabados en una operación debe estar cercano a 0 (ver configuración TAB, información de la última operación). Si se muestra otro valor cualquiera, tiene que haber alguna irregularidad en la detección de RPM. Si el valor empeora después de diversas operaciones, se debe determinar la causa. Si el sensor se ha movido debe recolocarse mientras que si el sensor parece dañado debe cambiarse. El cambio del sensor de RPM puede ser realizado por el usuario mientras que si el fallo es la rotura o deterioro de alguna hoja del compresor el cambio y el equilibrado posterior debe hacerse en AMT.
El registro de datos se obtiene de la ECU, o de un archivo de registro. Para obtener el archivo, tiene que haberse configurado previamente a través del modo handshake comentado anteriormente. El estado que se muestra debe ser ahora Mode Command Idle. Para adquirir el registro de datos debe seleccionarse Download del menú Command.
Se pueden registrar las operaciones del turborreactor. Si un registro válido está disponible se muestra automáticamente. Todos los registros disponibles se enumeran en la ventana the Select RunID Combo Box.
Las configuraciones con las que se hicieron los registros también se guardan. La configuración se puede comparar pulsando el correspondiente botón derecho de the RunID Combo Box.
Una imagen de esta ventana se muestra en la siguiente figura:
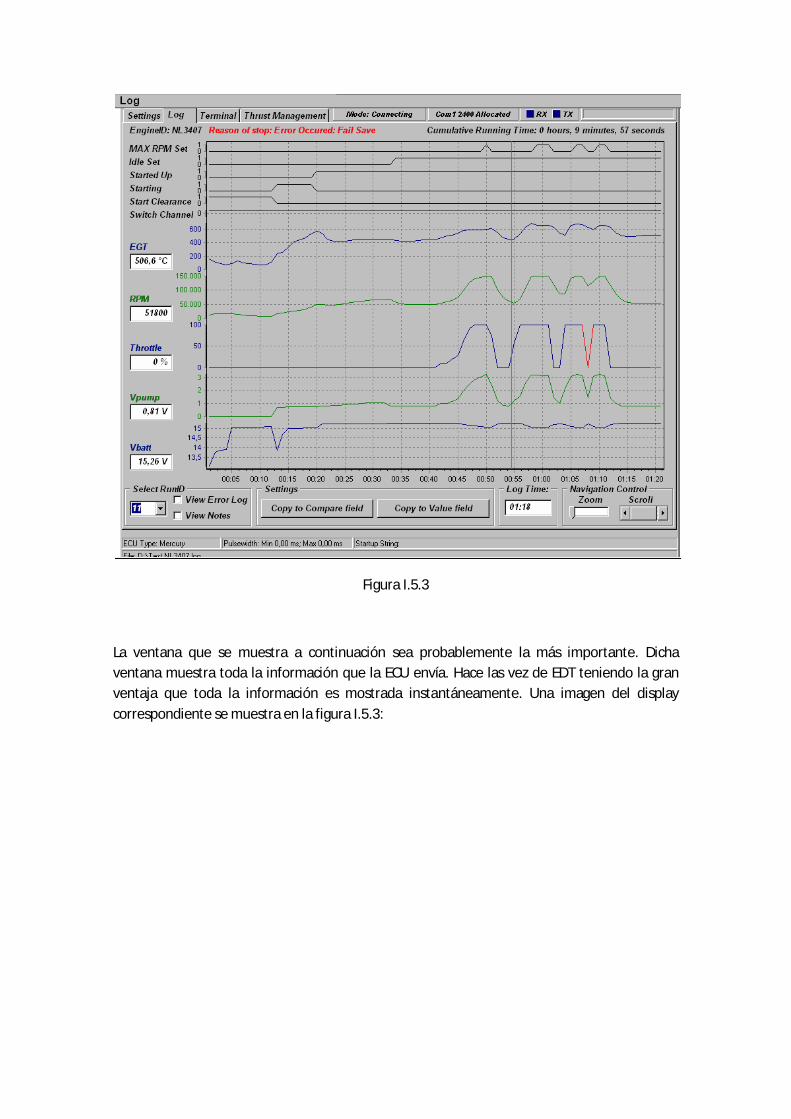
Figura I.5.3
La ventana que se muestra a continuación sea probablemente la más importante. Dicha ventana muestra toda la información que la ECU envía. Hace las vez de EDT teniendo la gran ventaja que toda la información es mostrada instantáneamente. Una imagen del display correspondiente se muestra en la figura I.5.3:

Figura I.5.4
Por otro lado también se tiene una ventana que permite visualizar el efecto que la temperatura ambiente y la presión de aire ambiente tiene en la actuación del motor. Seleccionando el tipo de turbina e introduciendo la temperatura y la presión ambiente el programa es capaz de estimar el empuje que el turborreactor debería dar. Utilizando este dato para comparar el empuje que se está obteniendo se puede hacer una comparación de cómo está funcionando el turborreactor. Además se hace útil cuando se quiere operar el turborreactor en un ambiente con el que no se está familiarizado, así se sabrá de antemano como habrá de comportarse el turborreactor pudiendo anticiparse a distintas actuaciones en entornos distintos. En la figura I.5.5 se muestra el aspecto que presenta esta ventana:
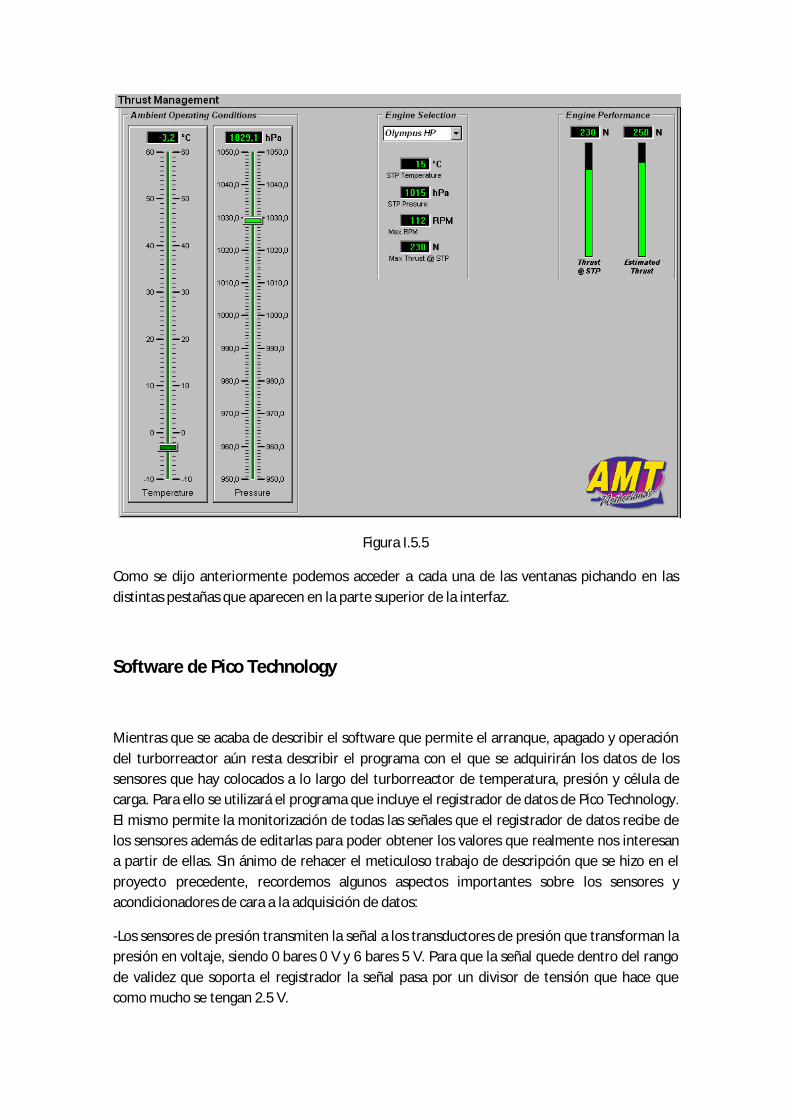
Figura I.5.5
Como se dijo anteriormente podemos acceder a cada una de las ventanas pichando en las distintas pestañas que aparecen en la parte superior de la interfaz.
Software de Pico Technology
Mientras que se acaba de describir el software que permite el arranque, apagado y operación del turborreactor aún resta describir el programa con el que se adquirirán los datos de los sensores que hay colocados a lo largo del turborreactor de temperatura, presión y célula de carga. Para ello se utilizará el programa que incluye el registrador de datos de Pico Technology. El mismo permite la monitorización de todas las señales que el registrador de datos recibe de los sensores además de editarlas para poder obtener los valores que realmente nos interesan a partir de ellas. Sin ánimo de rehacer el meticuloso trabajo de descripción que se hizo en el proyecto precedente, recordemos algunos aspectos importantes sobre los sensores y acondicionadores de cara a la adquisición de datos:
-Los sensores de presión transmiten la señal a los transductores de presión que transforman la presión en voltaje, siendo 0 bares 0 V y 6 bares 5 V. Para que la señal quede dentro del rango de validez que soporta el registrador la señal pasa por un divisor de tensión que hace que como mucho se tengan 2.5 V.
-En cuanto a los termopares la señal se deriva a unos acondicionadores que amplifican la señal siendo la equivalencia de 0 V a 0 °C y 10 V a 1000°C. De nuevo para que la señal pueda ser admisible en el registrador se debe pasar por una etapa de división que reduzca la tensión a 2.5 V.
-En cuanto a la célula de carga ocurre que la señal se deriva a un acondicionador que transforma la señal en una señal en intensidad pudiendo variar de 0 a 20 mV. Esta señal se deriva nuevamente a un divisor, en este caso, de intensidad que hace que la señal puede alcanzar como mucho 2.4 V.
Teniendo en cuenta los aspectos que se acaban de enumerar y la información importante que se expone en la tabla de la figura I.5.1 pasamos ahora a la descripción del software.
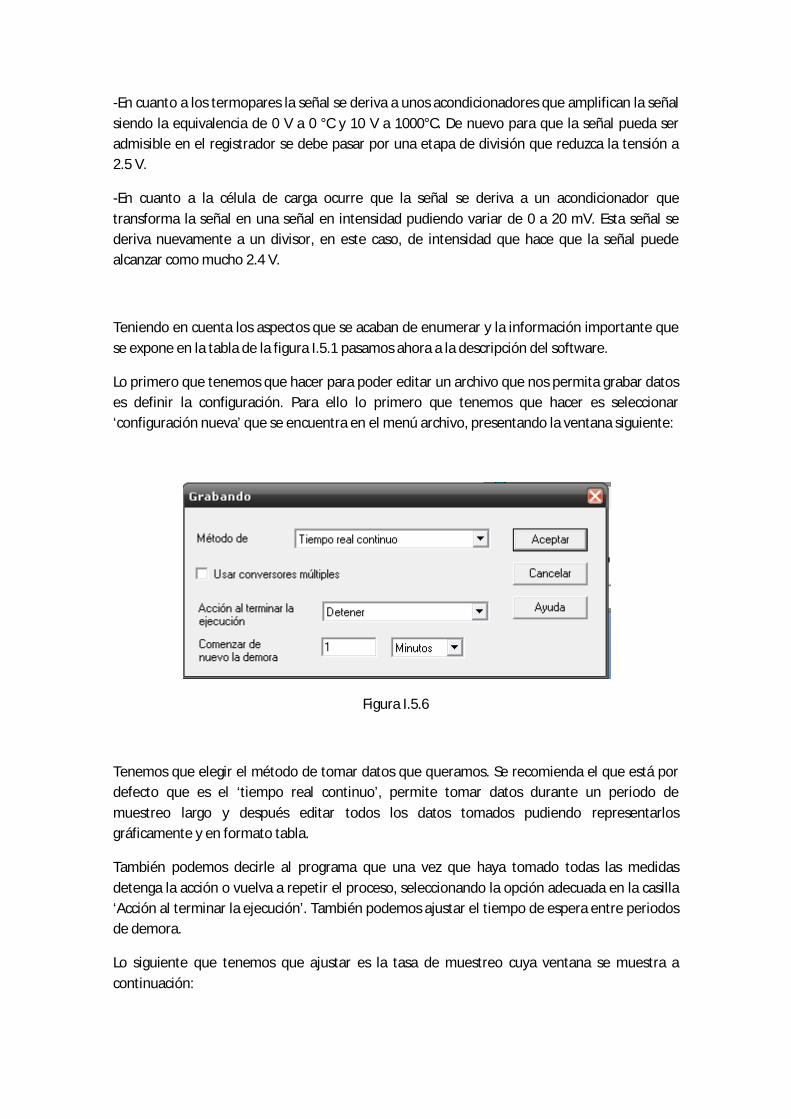
Lo primero que tenemos que hacer para poder editar un archivo que nos permita grabar datos es definir la configuración. Para ello lo primero que tenemos que hacer es seleccionar ‘configuración nueva’ que se encuentra en el menú archivo, presentando la ventana siguiente:
Figura I.5.6
Tenemos que elegir el método de tomar datos que queramos. Se recomienda el que está por defecto que es el ‘tiempo real continuo’, permite tomar datos durante un periodo de muestreo largo y después editar todos los datos tomados pudiendo representarlos gráficamente y en formato tabla.
También podemos decirle al programa que una vez que haya tomado todas las medidas detenga la acción o vuelva a repetir el proceso, seleccionando la opción adecuada en la casilla ‘Acción al terminar la ejecución’. También podemos ajustar el tiempo de espera entre periodos de demora.
Lo siguiente que tenemos que ajustar es la tasa de muestreo cuya ventana se muestra a continuación:

Figura I.5.7
En esta ventana se puede seleccionar la duración del intervalo de muestreo así como el número de muestras a tomar. También se puede ajustar el número de muestras con las que queremos que se quede el programa durante la adquisición de datos.
Lo siguiente que tenemos que hacer es seleccionar el tipo de registrador de datos que tenemos, en nuestro caso es el ADC-20/ADC-24. Cuando lo seleccionemos de la lista si todo el montaje está bien hecho debe aparecer como que la entrada USB lo detecta. La ventana donde podemos configurar lo que se acaba de explicar presenta el siguiente aspecto:
Figura I.5.8
Lo siguiente que tenemos que hacer es visualizar todos los canales que están llevando información del registrador de datos al ordenador (dicha ventana aparece al aceptar la ventana anterior ‘detalles del conversor’). Cuando los seleccionemos de la lista deben aparecer al lado de un piloto, que si todo ha ido bien debe presentar un color verde. El aspecto que presenta la ventana es el siguiente:



















