ALGORITMO PARA PROCESAMIENTO DE DATOS PARA DIAGNÓSTICO DE … Pratula.pdf · 2011-11-18 · La...
13
1 ALGORITMO PARA PROCESAMIENTO DE DATOS PARA DIAGNÓSTICO DE FALLAS EN MÁQUINAS ELÉCTRICAS. DR. HORACIO, R. DI PRÁTULA (1) , ING. ALBERTO C. RUSSIN (1) , MG. EDUARDO GUILLERMO (2) , ING. RODOLFO BOCERO (2). (1) Escuela de Oficiales de la Armada (ESOA). Facultad Regional Bahía Blanca (FRBB), Universidad Tecnológica Nacional (UTN); (2) Facultad Regional Bahía Blanca (FRBB), Universidad Tecnológica Nacional (UTN). Grupo GESE. Resumen En publicaciones anteriores se presentaron métodos de diagnóstico teórico-experimental de fallas rotóricas en Máquinas Eléctricas de Inducción (MEI), midiendo flujo magnético de dispersión y utilizando el análisis algebraico de la matriz de inductancia, el análisis espectral de la matriz de flujo y el procesamiento espectral de los datos de flujo externo adquiridos mediante pequeños sensores sobre la MEI. Debido a la disponibilidad de equipos de procesamiento digital, las ideas presentadas pueden ser mancomunadas en un algoritmo para el diagnóstico de fallas rotóricas y estatóricas de la MEI en línea (on line). Es así como, en este trabajo, se presenta un diseño de algoritmo novedoso que explicita la organización y metodología de trabajo de un sistema con monitoreo permanente para diagnosticar fallas rotóricas y estatóricas en una MEI. Palabras Clave: Algoritmo – diagnóstico - máquinas eléctricas - análisis algebraico - monitoreo permanente. Abstract In earlier publications we introduced theoretical - experimental diagnosis methods of rotor failures in Induction Electric Machines (IEM), measuring leakage flux and using the algebraic analysis of inductance matrix, the spectral analysis of the flux matrix and the spectral data processing of the external flux obtained by little sensors on the IEM. Due to the availability of digital processing equipment, the presented ideas can be associated in an algorithm for the diagnosis of rotor and stator failures of the IEM on line. That is how a novel algorithm design is introduced in this work, and it explains the organization and work methodology of a system with permanent monitoring to diagnose rotor and stator failures in an IEM. Keywords: algorithm - diagnostic – electric machine – algebraic analysis - permanent monitored. * * * Introducción El diseño del algoritmo propuesto exhibe el conjunto de instrucciones ordenadas para llegar al diagnóstico de fallas en la MEI.
Transcript of ALGORITMO PARA PROCESAMIENTO DE DATOS PARA DIAGNÓSTICO DE … Pratula.pdf · 2011-11-18 · La...

1
ALGORITMO PARA PROCESAMIENTO DE DATOS PARA
DIAGNÓSTICO DE FALLAS EN MÁQUINAS ELÉCTRICAS.
DR. HORACIO, R. DI PRÁTULA(1)
, ING. ALBERTO C. RUSSIN(1)
, MG.
EDUARDO GUILLERMO(2)
, ING. RODOLFO BOCERO(2).
(1)Escuela de Oficiales de la Armada (ESOA). Facultad Regional Bahía Blanca
(FRBB), Universidad Tecnológica Nacional (UTN); (2)
Facultad Regional Bahía
Blanca (FRBB), Universidad Tecnológica Nacional (UTN). Grupo GESE.
Resumen
En publicaciones anteriores se presentaron métodos de diagnóstico teórico-experimental de fallas
rotóricas en Máquinas Eléctricas de Inducción (MEI), midiendo flujo magnético de dispersión y
utilizando el análisis algebraico de la matriz de inductancia, el análisis espectral de la matriz de flujo y el
procesamiento espectral de los datos de flujo externo adquiridos mediante pequeños sensores sobre la
MEI. Debido a la disponibilidad de equipos de procesamiento digital, las ideas presentadas pueden ser
mancomunadas en un algoritmo para el diagnóstico de fallas rotóricas y estatóricas de la MEI en línea (on
line). Es así como, en este trabajo, se presenta un diseño de algoritmo novedoso que explicita la
organización y metodología de trabajo de un sistema con monitoreo permanente para diagnosticar fallas
rotóricas y estatóricas en una MEI.
Palabras Clave: Algoritmo – diagnóstico - máquinas eléctricas - análisis algebraico - monitoreo
permanente.
Abstract
In earlier publications we introduced theoretical - experimental diagnosis methods of rotor failures in
Induction Electric Machines (IEM), measuring leakage flux and using the algebraic analysis of
inductance matrix, the spectral analysis of the flux matrix and the spectral data processing of the external
flux obtained by little sensors on the IEM. Due to the availability of digital processing equipment, the
presented ideas can be associated in an algorithm for the diagnosis of rotor and stator failures of the IEM
on line. That is how a novel algorithm design is introduced in this work, and it explains the organization
and work methodology of a system with permanent monitoring to diagnose rotor and stator failures in an
IEM.
Keywords: algorithm - diagnostic – electric machine – algebraic analysis - permanent monitored.
* * *
Introducción
El diseño del algoritmo propuesto exhibe el conjunto de instrucciones ordenadas
para llegar al diagnóstico de fallas en la MEI.

H.R. Di Prátula, A.C. Russin, E. Guillermo, R. Bocero
2
Dicho diseño se divide en tres niveles como muestra la Fig. 1. El NIVEL 1
corresponde al sistema de adquisición de datos y diagnóstico de fallas, cuyo diagrama
en bloques se representa en la Fig. 2 destacando los módulos componentes y su
interconexión. El NIVEL 2 corresponde al fraccionamiento en procesos de mayor
importancia del sistema de adquisición de datos, el cual se representa mediante el
diagrama secuencial de la Fig. 3.
Finalmente, el NIVEL 3, que se ilustra en la Fig. 4, corresponde a la descripción
de funciones (algoritmo) y se expresa en el texto y ecuaciones que acompañan a los
diagramas secuenciales.
El diagrama en bloques del algoritmo de diagnóstico de fallas en línea para la
MEI, que se exhibe en la Fig. 2, muestra la estructura del algoritmo y la organización
jerárquica sin incluir las relaciones temporales.
El diagrama secuencial del bloque correspondiente a la adquisición de datos se
ilustra en la Fig. 3, donde se pueden observar el tipo de datos necesarios y la
organización que se utiliza para almacenarlos. Los datos requeridos se utilizan en la
totalidad de las operaciones que se efectúan a lo largo del desarrollo del algoritmo de
diagnóstico de fallas y corresponden a las ecuaciones e ideas propuestas en diferentes
publicaciones .
Un análisis de la Fig. 3 muestra que hay tres zonas de cálculo y dos zonas
auxiliares. La primera zona indica el estado de inicio. La segunda zona corresponde a la
adquisición de datos y adecuación de los mismos en las matrices propuestas en la
sección Análisis y Resultados. La tercera zona corresponde a la base de datos donde se
van guardando los datos que surgen de los desarrollos que se realicen en el proceso de
cálculo. La cuarta zona corresponde a la adquisición de datos magnéticos y eléctricos,
su adecuación a través de una matriz y la toma de decisión de guardar los datos iniciales
en la base de datos y derivar los datos al almacén de datos en línea (zona auxiliar).
DI PRÁTULA, H., 2004, 2006, 2007, 2009, 79-89 a 4 .

Algoritmo para procesamiento de datos…
3
NIVEL 1
DIAGRAMA EN BLOCK – FIG. 2
NIVEL 2
DIAGRAMAS SECUENCIALES – FIG. 3
NIVEL 3: ALGORITMO
TEXTO Y ECUACIONES QUE ACOMPAÑAN LOS
DIAGRAMAS SECUENCIALES
Fig. 1: Organización del algoritmo de diagnóstico
de fallas en línea para la MEI.
ADQUISICIÓN DE DATOS
PREPROCESAMIENTO
DE
DATOS
CALCULOS
DETECCIÓN DE FALLAS
ALARMA
DECISIÓN
DOCUMENTO
ESCRITO
ESTADO DE
INICIO
Fig. 2: Diagrama en bloques del sistema de
adquisición de datos y diagnóstico de fallas.
ESTADO DE
INICIO
ADQUISICIÓN DE DATOS
MANUALES
BASE DE DATOS FIJOS DE
LA MEI Y DATOS DE LINEA
(“FIRMAS” DE LA MEI)
ADQUISICIÓN DE DATOS
MAGNÉTICOS Y ELÉCTRICOS
EN LÍNEA
ADQUISICIÓN DE
DATOS MANUALES
BASE DE DATOS
ADECUACIÓN DE
LOS DATOS
SISTEMA DE
SENSORES Y
CONVERSIÓN
ANALOGO/
DIGITAL
ADECUACIÓN DE
LOS DATOS
DATOS
INICIALESSI NOALMACEN DE
DATOS EN
LÍNEA
Fig. 3: Diagrama secuencial del bloque de adquisición de datos.

H.R. Di Prátula, A.C. Russin, E. Guillermo, R. Bocero
4
MATRIZ BOBINADO
ESTATÓRICA
MATRIZ BOBINADO
ROTÓRICAVECTOR ESTRUCTURAL DE
LOS BOBINADOS
ESTATÓRICOS Y ROTÓRICOS
BASE DE DATOS
MATRIZ DENSIDAD
DE CONDUCTORES
DEL ESTATOR
MATRIZ PREVIA A
LA MATRIZ
BOBINADO
ESTATÓRICA
MATRIZ BOBINADO
ESTATÓRICA
MATRIZ DENSIDAD
DE CONDUCTORES
DEL ROTOR
MATRIZ PREVIA A
LA MATRIZ
BOBINADO
ROTÓRICA
MATRIZ BOBINADO
ROTÓRICA
MATRIZ
ESTRUCTURAL DEL
BOBINADO
ESTATÓRICO
MATRIZ
ESTRUCTURAL DEL
BOBINADO
ROTÓRICO
ALMACEN DE DATOS
PREPROCESADOS
ALMACEN DE
DATOS EN
LÍNEA
Fig. 4: Ejemplo de un diagrama secuencial del bloque de
preprocesamiento de datos para fallas rotóricas en la MEI.
Análisis y Resultados
La adquisición de datos manuales de la MEI se efectúa a través de teclado y se
almacena en forma permanente. Estos datos son:
Datos de chapa
NV (tensión nominal), NI (corriente nominal), Nn (velocidad nominal en
rpm), NP (potencia nominal en el eje), Nf (frecuencia de trabajo),
Em (número de fases estator), Rm (número de fases rotor), p (número de
pares de polos).

Algoritmo para procesamiento de datos…
5
Otros datos del fabricante
rq (número de ranuras del estator y/o rotor), qZ (número de conductores
en cada ranura), bq número de ranuras por paso de bobina, (alto de
entrehierro), fq (número de ranuras por polo y fase), mD (diámetro
medio de entrehierro), l (longitud del rotor), pq (número de ranuras por
polo), 2S (barras del rotor), DCR (datos característicos del rodamiento:
diámetro, bolillas, etc.).
Datos de ensayos
Ensayo de vacío: 0I , 0P , )cos( 0 (corriente, potencia y factor de
potencia) Ensayo a rotor bloqueado: ccV , ccP , )cos( cc (corriente,
potencia y factor de potencia)
El período de repetición del ensayo es elegido por los especialistas en
mantenimiento predictivo.
La adquisición de datos magnéticos y eléctricos se efectúa mediante sensores no
invasivos, cuyas señales, después de la conversión analógico/digital, ingresan a la
computadora.
Los datos manuales se ordenan en una matriz columna D cuyos elementos, según
(1), son tres matrices columna a saber: el primer elemento DE contiene los datos
eléctricos, el segundo DM los mecánicos y el tercero DF los de diseño.
DF
DM
DE
D con
l
Dm
S
q
Z
q
DFDCR
nDM
P
I
P
I
m
m
P
f
I
V
DE
B
q
r
N
cc
cc
cc
R
E
N
N
N
N
δ
,,
)cos(
)cos(
2
0
0
0
. (1)

H.R. Di Prátula, A.C. Russin, E. Guillermo, R. Bocero
6
Por su parte, según se indica en (2), los datos en línea (de los adquisidores de
datos) son acondicionados en una matriz columna DeL . El primer elemento de DeL es
la matriz FH con información temporal, el segundo ( DEeL) contiene los datos
eléctricos (V (voltaje), I (corriente), f (frecuencia), P (potencia activa), Q (potencia
reactiva), )cos( (factor de potencia), el tercero ( DMeL) con las velocidad rotórica nR
y el cuarto ( eLD ) los correspondientes a los sensores de flujo 1 , 2 y 3 en las
posiciones 1,2 y 3, ad (adelante), m (medio) y at (atrás). Las posiciones de los
sensores se definieron en las publicaciones referidas en [1]. Las matrices de flujo se
denominan de acuerdo a su posición: “matriz de datos del sensor en posición 1”, “matriz
de datos del sensor en posición 2”, “matriz de datos del sensor en posición 3”, “matriz
de datos del sensor en posición adelante”, “matriz de datos del sensor en posición
media” y “matriz de datos del sensor en posición atrás”.
eLD
DMeL
DEeL
FH
DeL con
at
eLDnDMeL
Q
P
f
I
V
DEeL
Hora
Año
Mes
Día
FH
m
adR
3
2
1
,,
)cos(
, , (2)
donde ))/(cos()cos( PQarctg , siendo inductivo si Q es negativo y capacitivo si
Q es positivo.
En la base de datos se almacenan los datos manuales y los datos iniciales
(“firmas”) de la MEI.Estos datos se utilizan en todas las etapas posteriores.
Los datos en línea se graban en un almacén de datos, que es una matriz de trabajo
donde se los conserva por fecha y por ubicación de sensor. Estos datos constituyen la
“historia” ordenada de la MEI.
El mantenimiento predictivo se basa en el análisis de los cambios en variables
conocidas y estudiadas del sistema.
La metodología del pre-procesamiento de datos se muestra en la Fig. 4; este
diagrama corresponde a la etapa de análisis teórico expuesto en la referencia [1]. La Fig.
5 muestra la secuencia a seguir para calcular los elementos componentes de las matrices
[2 FITZGERALD, A., 1992; CHEE-MUN-ONG,1998.
3 DI PRÁTULA, H., 2007.

Algoritmo para procesamiento de datos…
7
bobinados del estator y del rotor y las matrices estructurales de los bobinados del estator
y del rotor. Estas serán luego aplicadas para obtener las matrices de inductancia, flujo y
potencia reactiva para diagnosticar las fallas en la MEI.
La siguiente ecuación relaciona magnéticamente a través del coeficiente de
inducción mutua los bobinados “i” y “j” de las máquinas eléctricas de inducción, siendo
el origen del análisis teórico efectuado.
2
0
10 ),(),(),(
2)( dNNg
DlL ji
mij (3)
Donde “ ),(iN o ),(jN representa la distribución de fuerza magnetomotriz
a lo largo del entrehierro para una corriente unidad fluyendo en el bobinado”
considerando como la posición angular del rotor con respecto a una referencia
estatórica, es una posición angular particular a lo largo de la superficie interior del
estator de la máquina eléctrica, ),(1g es la longitud del entrehierro en función de la
posición angular del rotor y la posición angular particular, l es la longitud axial, o es
la permeabilidad del aire y 2/mD es el radio promedio del entrehierro 3 .
),(iN o ),(jN son las funciones bobinados de los bobinados “i” y “j”. La
definición se basa en la conformación espacial de la fuerza magnetomotriz para una
corriente unidad fluyendo por los bobinados.
Se define la densidad de conductores por ranura representada por pulsos con
magnitud dada por la cantidad de conductores por ranura. Las ecuaciones matemáticas
se expresarán en la página siguiente.
Un análisis de la Figura 5 muestra que hay tres zonas de cálculo y dos zonas
auxiliares. La primera zona (auxiliar) indica de dónde se obtienen los datos necesarios
para el cálculo. La segunda y tercera desarrollan aquellos cálculos teóricos asociados
con las matrices de los bobinados (ver Ecuaciones Matemáticas). La cuarta zona calcula
la matriz estructural del bobinado y la quinta zona (auxiliar) exhibe la base de datos
donde se extraen los datos en línea.
A continuación se detalla en particular los cálculos específicos que se desarrollan
en cada zona y sus vínculos con la teoría expuesta en la referencia [4].
3 XIAOGANG, L, 1995, 203-210.
[4] DI PRÁTULA, H., 2004, 2006, 2007, 2009, 79-89, 2011 [1a 5].

H.R. Di Prátula, A.C. Russin, E. Guillermo, R. Bocero
8
CALCULOS TEÓRICOS DE LA
MEI CON LOS VECTORES
ESTRUCTURALES DE LOS
BOBINADOS
CALCULOS TEÓRICOS DE LA
MEI CON LAS MATRICES
BOBINADOS
VERIFICACIÓN TEÓRICA.
CONTROL DE RESULTADOS
TEÓRICOS
CALCULOS
TEÓRICOS DE LA
MEI CON LOS
VECTORES
ESTRUCTURALES
DE LOS
BOBINADOS
CALCULOS
TEÓRICOS DE LA
MEI CON LAS
MATRICES
BOBINADOS
VERIFICACIÓN
TEÓRICA.
CONTROL DE
RESULTADOS
TEÓRICOS
ALMACEN DE
DATOS
TEÓRICOS
ALMACEN DE
DATOS EN
LÍNEA
ALMACEN DE
DATOS
PREPROCESADOS
ALMACEN DE DATOS DE
CALCULO CON EL VECTOR
ESTRUCTURAL DEL BOBINADO
ALMACEN DE DATOS DE
CALCULO CON LA MATRIZ
BOBINADO
ALMACEN DE
DATOS
PREPROCESADOS
BASE DE DATOS
ERRORSI NO
Fig. 5: Diagrama secuencial del bloque de cálculos teóricos.
Ecuaciones Matemáticas
Se define la matriz densidad numérica de conductores Z , para el caso de un
bobinado distribuido en “ n ” ranuras y “ m ” fases,
mnZ (4)
con elementos ijZ : cantidad de conductores en la i–ésima ranura de la j–ésima fase
(Tabla 1).
Se define la matriz PZ cuyos elementos son suma de funciones componentes
sucesivas, que corresponde cada una a un pulso espacial de valor constante igual a Z
(conductores por ranura), correspondiendo a un pulso solo en una franja (ranura) y nulo
fuera de él:
n
i
ijP ZZij
1
(5)
como paso previo para definir la matriz bobinado. Se requiere determinar el promedio
para las “ n ” ranuras del bobinado en estudio que se disponen en columnas en la matriz
bobinado, siendo 5 :
5 BOSSIO, G. et al, 2002, a-b 2003; HOUDUIN, G., et al, 2003, FAIZ, J and TABATABAEID I.,
2002; MESHGIN H. et al, 2003.

Algoritmo para procesamiento de datos…
9
nZ
n
i
Pij1
promedio
1(Z) (6)
cuyos valores –como ejemplo- se indican recuadrados en la Tabla 3, para 3,2,1j .
Tabla 1: Matriz densidad de conductores.
Ejemplo: bobinado estatórico de 20 conductores por ranura, 36 ranuras y 4 polos
en una Máquina Eléctrica de Inducción, tomando el 50% de las ranuras por ser el
bobinado periódico y repetitivo de módulo igual a un par de polos.
La matriz bobinado se origina en una matriz densidad de conductores. Sin
embargo, como representa la discretización de la función bobinado en el recinto de la
ME, es posible deducirla de esta función (ver Fig. 6).
Luego, se define la matriz bobinado N(χ×m) dónde “ χ ” corresponden al número
de posiciones angulares espaciales fijas adoptadas según el objetivo de la investigación
(para este ejemplo igual al número de dientes) y “m” las fases (ver Tablas 2, 3 y 4),
siendo sus elementos:
])([Nij ZZijP (7)
1 2 3
1 11Z 12Z 13Z
2 21Z 22Z 23Z
1n 1)1(nZ 2)1(nZ 3)1(nZ
n 1nZ 2nZ 3nZ
fases ranuras

H.R. Di Prátula, A.C. Russin, E. Guillermo, R. Bocero
10
fase 1 fase 2 fase 3
1 20 0 0
2 20 0 0
3 10 0 -10
4 0 0 -20
5 0 0 -20
6 0 10 -10
7 0 20 0
8 0 20 0
9 -10 10 0
10 -20 0 0
11 -20 0 0
12 -10 0 10
13 0 0 20
14 0 0 20
15 0 -10 10
16 0 -20 0
17 0 -20 0
18 10 -10 0
ran
ura
s d
el e
sta
tor
fase 1-inicial fase 2-inicial fase 3-incial
1 20 0 0
2 40 0 0
3 50 0 -10
4 50 0 -30
5 50 0 -50
6 50 10 -60
7 50 30 -60
8 50 50 -60
9 40 60 -60
10 20 60 -60
11 0 60 -60
12 -10 60 -50
13 -10 60 -30
14 -10 60 -10
15 -10 50 0
16 -10 30 0
17 -10 10 0
18 0 0 0
20 30 -30Promedio
Po
sici
on
es a
ng
ula
res
fija
s en
el
entr
eh
ierr
o
Tabla 2: Matriz densidad de conductores del
ejemplo.
Tabla 3: Matriz previa a la matriz estructural del bobinado.
fase 1 fase 2 fase 3
1 0 -30 30
2 20 -30 30
3 30 -30 20
4 30 -30 0
5 30 -30 -20
6 30 -20 -30
7 30 0 -30
8 30 20 -30
9 20 30 -30
10 0 30 -30
11 -20 30 -30
12 -30 30 -20
13 -30 30 0
14 -30 30 20
15 -30 20 30
16 -30 0 30
17 -30 -20 30
18 -20 -30 30
po
scio
nes
an
gu
lare
s fi
jas
en e
l en
treh
ierr
o
Tabla 4: Matriz bobinado.
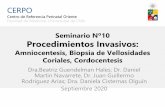
Fig. 6: Muestra la máquina eléctrica, su bobinado
estatórico, la función bobinado y las posiciones
angulares fijas, ranuras donde se inserta el bobinado
y dientes de la MEI [1].
Todas las estructuras eléctricas polifásicas de las ME pueden ser representadas por
una matriz bobinado de “ ” filas y “m” columnas. Una estructura eléctrica polifásica
(bobinados cuya característica esencial es la periodicidad, simetría y perfección en el
espacio de la ME), excitada por una corriente polifásica de características adecuadas
puede ser representada por una matriz de “ ” filas y una columna. En las condiciones

Algoritmo para procesamiento de datos…
11
especificadas por el párrafo anterior se define un vector que represente la estructura
polifásica de la MEI como síntesis de su fuerza magnetomotriz por unidad de corriente
del siguiente modo: es un vector cuya posición varía en función del tiempo con una
frecuencia “ ” (el vector estructural del estator gira a “ f2 ” y el del rotor “ Rf2 ”) y
sintetiza la estructura eléctrica polifásica excitada por una corriente de módulo unidad
polifásica (trifásica (estator de la MEI), polifásica (rotor de la MEI)).
Desde el punto de vista algebraico el vector estructural del bobinado al ser
función del tiempo ( tn) se transforma en una matriz de “ ” filas y “ nt ” columnas.
n
(m-1)2πmj
χ x ωtjωtmU n m U
m = 1
f (χ x ωt ) = (N Re(e )) * Re (e ) = (f Î R ) (8)
Siendo aplicado al bobinado estatórico ( UEf ) y/o rotórico ( URf ):
Los datos se almacenan en una matriz de preprocesamiento de datos. Esta matriz
columna tendrá los siguientes elementos componentes (ver Fig.4):
E
R
UE
UR
N
NPD
f
f
(9)
Un análisis del diagrama exhibido en la Fig.5, muestra que hay tres zonas de
cálculo y dos zonas auxiliares. La primera zona indica de dónde se extraen los datos
necesarios para el cálculo. La segunda zona investiga la aplicación del vector estructural
del bobinado. En la tercera zona se efectúan los cálculo de la totalidad de las variables y
parámetros de la ME utilizando la matriz bobinado y las ecuaciones propuestas. Los
datos obtenidos en las zonas explicitadas anteriormente son almacenados en las
respectivas bases de datos. La cuarta zona propone un control teórico de resultados
utilizando los valores obtenidos en los procesos anteriores y la quinta zona propone el
almacenamiento de datos teóricos.
Como este diagrama secuencial es extenso se divide en sub-diagramas para su
mejor comprensión. Cada sub-diagrama presenta una secuencia de cálculo y
almacenamiento de datos, como también la posibilidad de imprimir o mostrar en
pantalla aquellos que se requieran rápidamente.

H.R. Di Prátula, A.C. Russin, E. Guillermo, R. Bocero
12
Conclusiones
Los diagramas presentados, su explicación y los desarrollos teóricos asociados
permitirán que un programador realice sin inconvenientes un programa de adquisición
de datos, análisis teórico y de fallas de una MEI en línea utilizando sensores magnéticos
y medición de las variables eléctricas, permitiendo que en una etapa futura dicho
software sea usado en un instrumento que adquiera y procese los datos dando el
diagnóstico.
El diseño del algoritmo exhibe una diferencia marcada en los aspectos teóricos y
experimentales actuales, porque permite efectuar la detección y alarma temprana
(método propuesto de determinación diagnóstica por autovalores y autovectores de falla
estatórica de la MEI) basado en el análisis algebraico. Al mismo tiempo, efectúa doble
cálculo teórico de las variables a comparar (matriz bobinado y vector estructural del
bobinado) y almacena datos de fabricación y de ensayo que no son conocidos
habitualmente por los expertos en mantenimiento predictivo (bobinados, medidas
internas de la MEI, ensayos de vacío y rotor bloqueado, tipo de dientes, la permeancia
original de entrehierro, tipo de rodamiento, etc.).
Referencias bibliográficas
- BOSSIO, G. et al, A 2D –Model of the Induction Motor: An Extensión of the
Modified Winding Function Approach,” The 28th Annual Conference of the IEEE
Industrial Electronics Society (IECON'02), Vol. 1, pp. 62–67, Sevilla, Spain,
November., 5-8, 2002.
- BOSSIO, G. et al, Effects of rotor bar and end-ring faults over the signals of a
position estimation strategy for induction motors, Electric Machines and Drives
Conference, IEMDC'03. IEEE International Vol. 1, pp. 151-155,1-4 June, a 2003.
- BOSSIO, G. et al, Un modelo para motores de inducción con entrehierro no
uniforme, X Reunión de Trabajo en Procesamiento de la Información y Control (X
RPIC), pp. 92-97, San Nicolás, Buenos. Aires, 8-10 de Octubre, b 2003.
- CHEE-MUN-ONG, Dynamic Simulation of Electric Machinery using
Matlab/Simulink, Prentice
- [1] DI PRÁTULA, H.R., Diagnóstico predictivo de fallas rotóricas en máquinas
eléctricas de inducción. En Revista Digital del Instituto Universitario Naval,
SECRETARÍA DE INVESTIGACIÓN. Año I, Nº 1, p. 79-89, 2009. En
http://www.ara.mil.ar/revista_investigacion.asp
- [2] DI PRÁTULA, H.R., Métodos de diagnóstico no invasivo de fallas en máquinas
eléctricas: análisis teórico-experimental comparativo. XXI Congreso Panamericano
de Ingeniería Mecánica, Eléctrica, Industrial y Ramas Afines, COPIMERA, Lima
Perú, 10-12 de octubre, 2007.

Algoritmo para procesamiento de datos…
13
- [3] DI PRÁTULA, H.R., Nuevo Enfoque Teórico y Experimental para el
Diagnóstico de Fallas en la Máquina Eléctrica (ME) de Inducción, IX Congreso
Nacional de Ingeniería Mecánica y Eléctrica, UTN, Facultad Regional Pacheco,
Buenos Aires, 14-15 de octubre, 2004.
- [4] DI PRÁTULA, H.R., Métodos de diagnóstico no invasivo de fallas en máquinas
eléctricas: análisis teórico-experimental comparativo, CONIME, Buenos Aires, 24
y 25 de agosto, 2006.
- [5] DI PRÁTULA, H.R., Turbinas Eólicas: Optimización en el Pre-Diagnóstico de
Fallas en el Generador. En Revista Internacional “Información Tecnológica”, Lugar
s/d, 2011.
- XIAOGANG, L., et al, Multiple Coupled Circuit Modeling of Induction Machines,
IEEE Transactions on Industry Aplications., Vol. 31, Nº 2, pp. 203-210,
March/April, 1995.
- FAIZ, J and TABATABAEID I., Extension Winding Function Theory for
Nonuniform Air Gap in Electric Machinery, IEEE Transactions on Magnetics, Vol.
38, No. 6, pp. 3654-3657, November 2002.
- FITZGERALD, A., E., et al, Máquinas Eléctricas, Mc Graw-Hill , 5ta Edición,
1992.
- Hall PTR , 1998.
- HOUDUIN, G., et al, A Winding Function Theory Based Global Method for the
Simulation of Faulty Induction Machines, Proc. IEEE International Electric
Machines and Drives conferences (IEMDC' 03), pp. 297-303, MADISON, June 1st-
4th, b 2003.
- MESHGIN H. et al, A Comprehensive Method for the Calculation of Inductance
Coefficients of Cage Induction Machines, IEEE Transactions on Energy
Conversion, Vol. 18, Nº.2, pp.187-193, June, 2003.
***
Horacio Raúl di Prátula. Ingeniero Electricista, egresado de la Universidad Tecnológica
Nacional (UTN), Facultad Regional de Bahía Blanca (FRBB). Doctor en Ingeniería, egresado
de la Universidad Nacional del Sur (UNS). Se desempeña como docente de grado y de
postgrado. Es Profesor Titular en la UTN – FRBB y profesor Titular en la Escuela de Oficiales
de la Armada (ESOA). Ejerce la docencia de postgrado en la UTN - FRBB y en otras
universidades. Es Director del GESE (Grupo de estudio sobre energía), dependiente de CyT de
la UTN - FRBB desde 2004. Es investigador categoría III (categoría otorgada por el Ministerio
de Educación); actualmente participa en varios proyectos como director, co-director e
investigador. Es autor de más de cincuenta publicaciones en Congresos Nacionales e
Internacionales. Asimismo, es Representante Técnico de la Cooperativa Eléctrica y de Servicios
Mayor Buratovich Ltda. Ha realizado proyectos, ejecución y dirección de 600 kms de línea
rural y 250 SE eléctricas, una Central de arranque rápido, sistema de distribución de gas en 40
manzanas y un parque eólico. Es Consejero Departamental en el Dpto. de Ingeniería Eléctrica
UTN –FRBB; Consejero Suplente en el Consejo Académico UTN – FRBB e integrante de la
Comisión de Postgrado en la UTN.