ANÁLISIS CINEMÁTICO DEL ROBOT FANUC ARC MATE 100iC
23
ANÁLISIS DEL ROBOT FANUC ARC MATE 100iC
-
Upload
juan-ladino -
Category
Documents
-
view
550 -
download
78
Transcript of ANÁLISIS CINEMÁTICO DEL ROBOT FANUC ARC MATE 100iC

ANÁLISIS DEL ROBOT FANUC ARC MATE 100iC
1. INTRODUCCIÓN
1.1 Generalidades del robot [1]
La serie Arc Mate 100iC es una familia de robots servo-actuados de construcción modular, de 6 ejes, que poseen alta precisión y velocidad. Son empleados principalmente en procesos de soldadura y corte. Están construidos para brindar un desempeño en la trayectorias preciso y consistente. Además del controlador hace uso de un software , ArcTool ® , ofrecieno en conjunto rendimiento confiable con alta productividad. Teien una programación especial que evita la interferencia del cable de la antorcha (de soldadura o corte) con piezas y herramientas.
Los beneficios de implementar este tipo de robot son los siguientes:
El brazo protege y minimiza el desgaste de la antorcha. La más alta velocidad de movimiento entre los de su clase. El mejor alcance entre los de su clase, con respecto a la carrera. Diseño compacto que simplifica su instalación y transporte. Amplias posibilidades de trabajo para piezas grandes o herramientas
complejas. Eje de la muñeca extremadamente rápido.
Las características más sobresalientes son:
Puede entrar en pequeñas aberturas por reducido tamaño de la muñeca. Ideal para aplicaciones invertidas. Diseñado con utilidades integrales que incluyen líneas de aire y gas y un
equipo de soldadura Lincoln con un alimentador de alambre que lo envía al interior del brazo del robot.
Además el sistema de alimentación y su colocación detrás de la articulación J4 hace que mejore la confiabilidad del cable y la capacidad de generar el arco en la soldadura.
Compatible con las principales marcas de equipos de soldadura. Permite varias posiciones de trabajo sin cambios en la unidad mecánica.
1.2 Aplicaciones
Procesos de soldadura y corte de alta velocidad y precisión con las técnologías TIG, MIG, MAG, WIG.
Procesos de soldadura laser.
1.3 Dimensiones del robot
El Arc Mate 100iC tiene:
Altura en posición de HOME : 1340.5 mm. Lado de la base cuadrada: 283 mm. Alcance: 1420 mm. Carrera: 1066 mm.
1.4 Espacio de trabajo
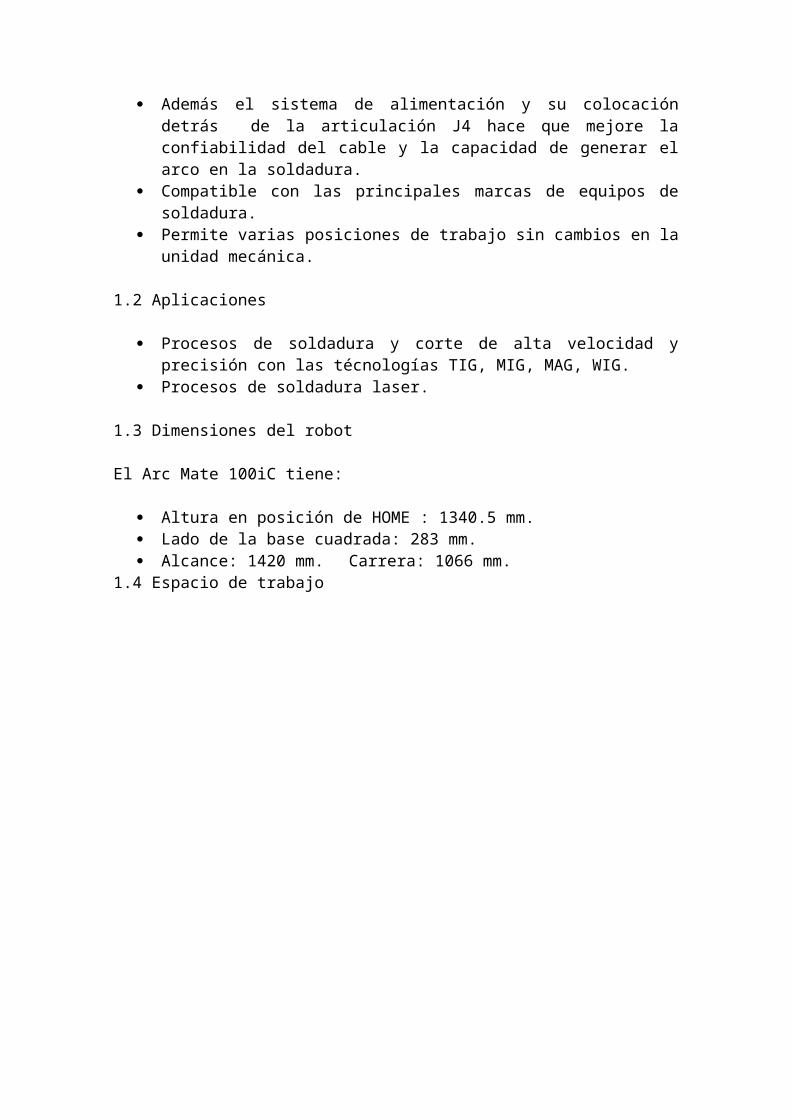
Muñeca
Base
Dimensiones en mm.
Figura 1: Espacio de trabajo y datos técnicos.2. PARÁMETROS DENAVIT HARTENBERG
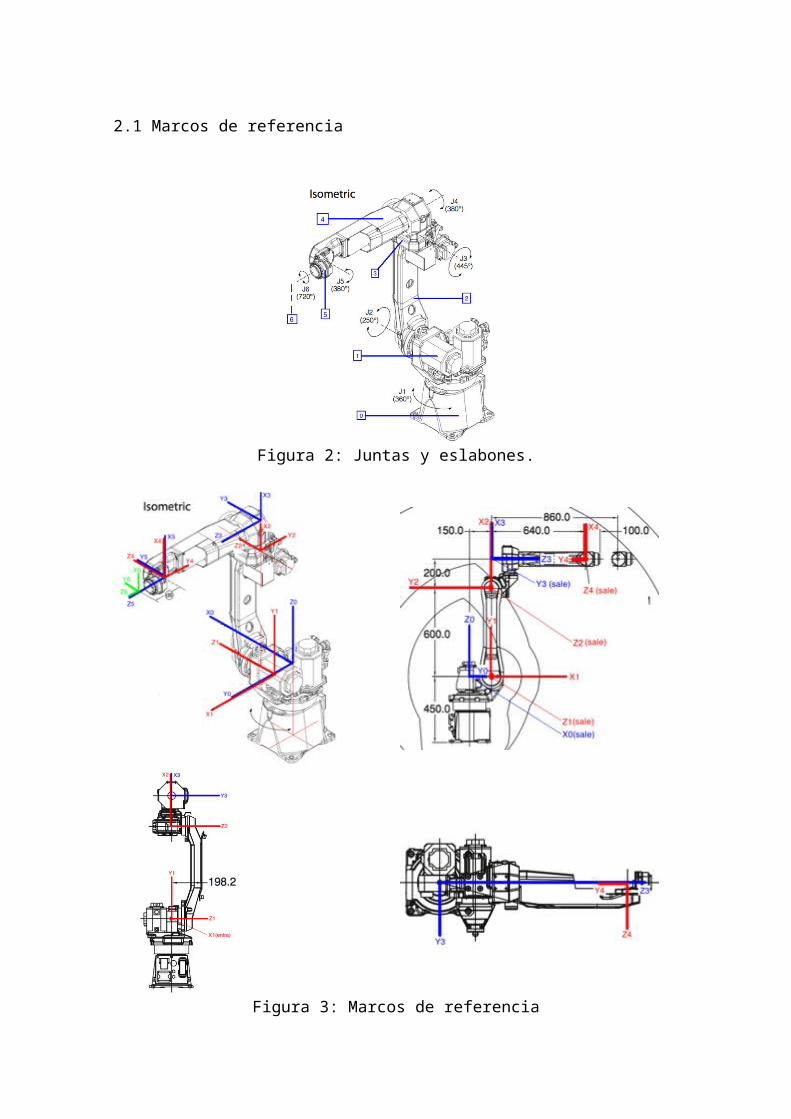
2.1 Marcos de referencia
Figura 2: Juntas y eslabones.
Figura 3: Marcos de referencia2.2 Tabla de parámetros DH
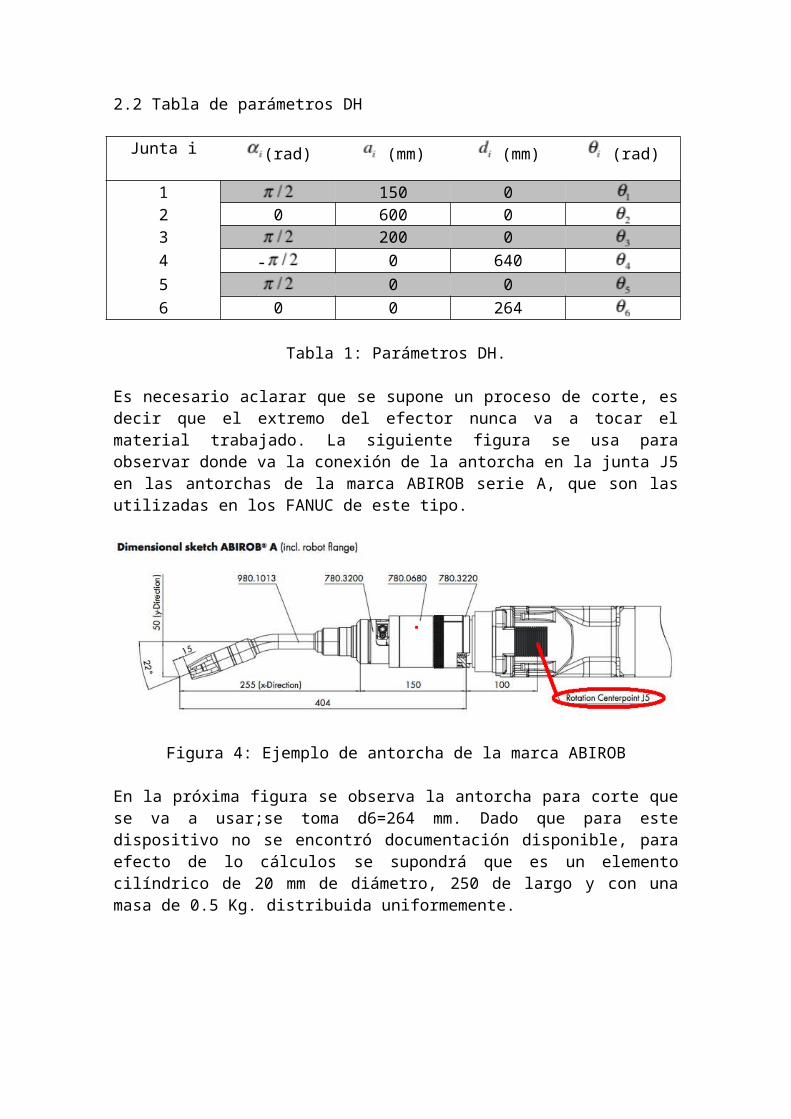
Junta i (rad) (mm) (mm) (rad)
1 150 02 0 600 03 200 04 - 0 6405 0 06 0 0 264
Tabla 1: Parámetros DH.
Es necesario aclarar que se supone un proceso de corte, es decir que el extremo del efector nunca va a tocar el material trabajado. La siguiente figura se usa para observar donde va la conexión de la antorcha en la junta J5 en las antorchas de la marca ABIROB serie A, que son las utilizadas en los FANUC de este tipo.
Figura 4: Ejemplo de antorcha de la marca ABIROB
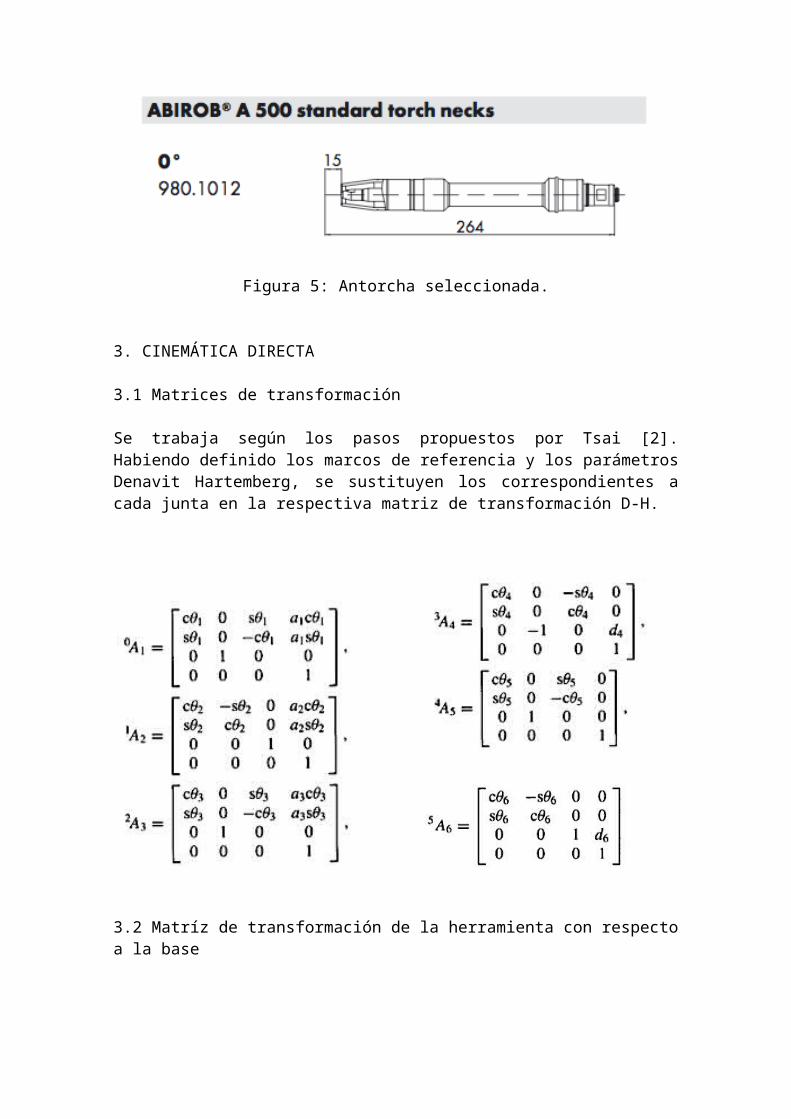
En la próxima figura se observa la antorcha para corte que se va a usar;se toma d6=264 mm. Dado que para este dispositivo no se encontró documentación disponible, para efecto de lo cálculos se supondrá que es un elemento cilíndrico de 20 mm de diámetro, 250 de largo y con una masa de 0.5 Kg. distribuida uniformemente.
Figura 5: Antorcha seleccionada.
3. CINEMÁTICA DIRECTA
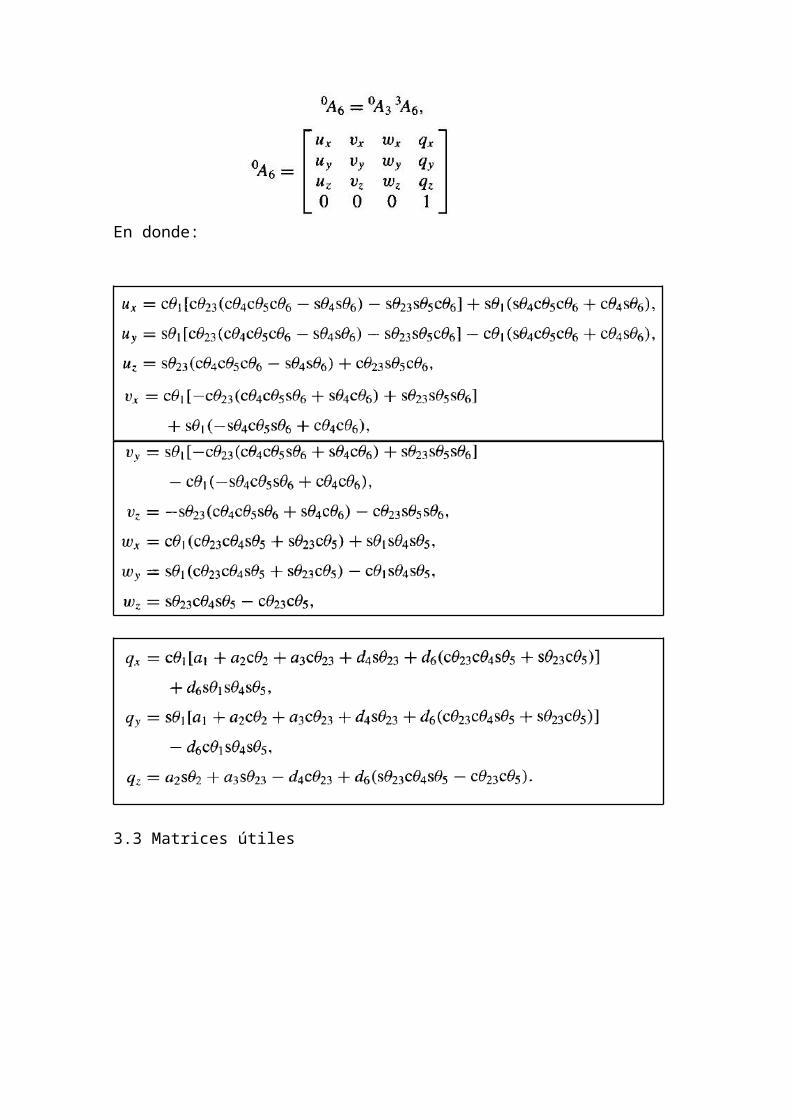
3.1 Matrices de transformación
Se trabaja según los pasos propuestos por Tsai [2]. Habiendo definido los marcos de referencia y los parámetros Denavit Hartemberg, se sustituyen los correspondientes a cada junta en la respectiva matriz de transformación D-H.
3.2 Matríz de transformación de la herramienta con respecto a la base
En donde:
3.3 Matrices útiles
3.4 Ejemplo de aplicación
Se puede ver un ejemplo de solución 1, hecho en Matlab [3], de la cinemática directa para este robot; se trabajó con los siguientes ángulos:
El resultado para la posición QF= (qx,qy,qz)T =(0,1054,800)T mm del efector final es la posición de HOME, según esquema del catálogo. Los resultados fueron:
donde la orientación está definida por la matríz de rotación de 3X3 que se forma quitando de A06F la última fila y la última columna. Se observa que, según los valores en la matríz, hay una rotación de –pi/2 alrededor del eje x seguida por otra de –pi/2 alrededor de z.
1 Archivo: am100iCdirecta.m
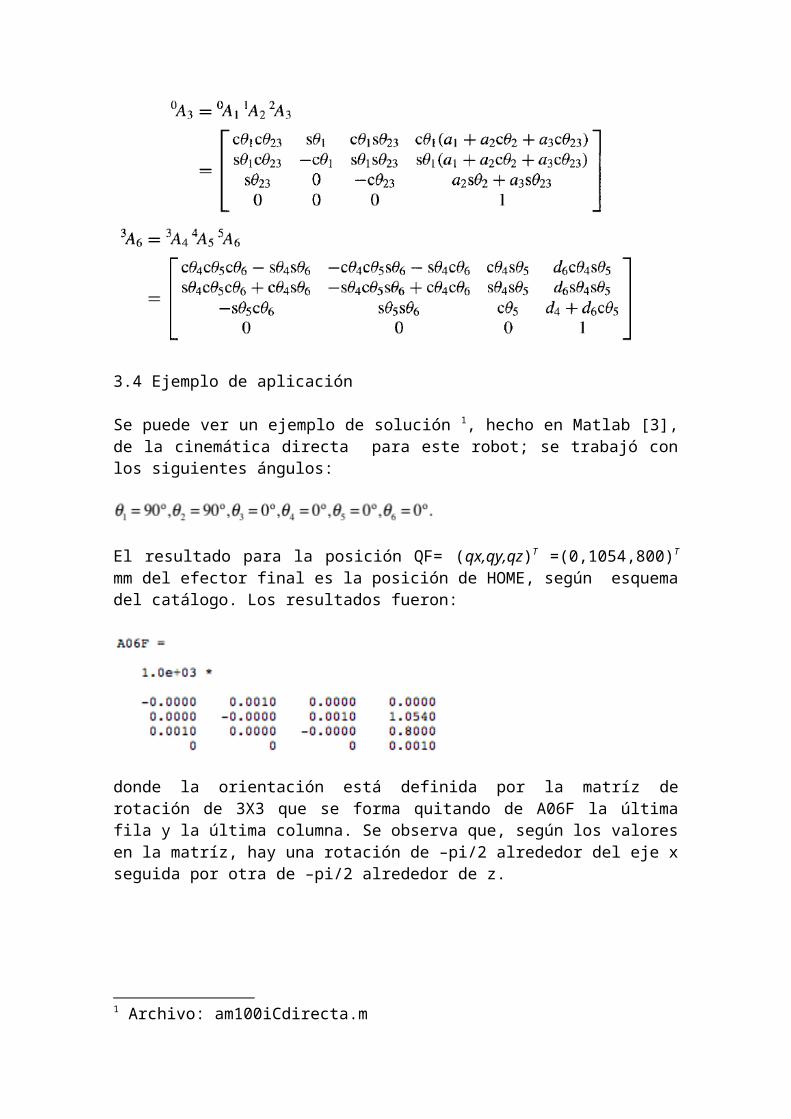
Figura 6: Posición de HOME (vista de planta).
Se comprueba que el vector QF y la orientación corresponden a la posición de HOME.
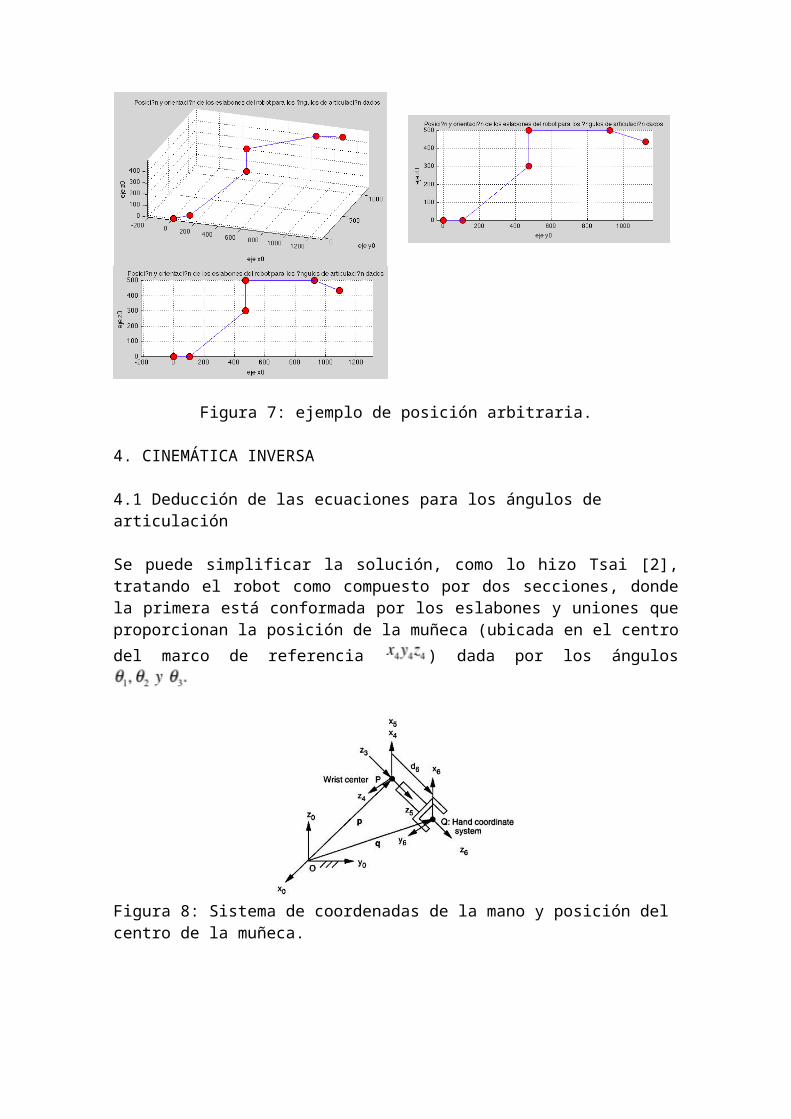
En este otro ejemplo de aprecia mejor la posición y orientación de cada eslabón visto desde el marco de base
La posición y orientación de cada eslabón se observa en las gráficas siguientes.
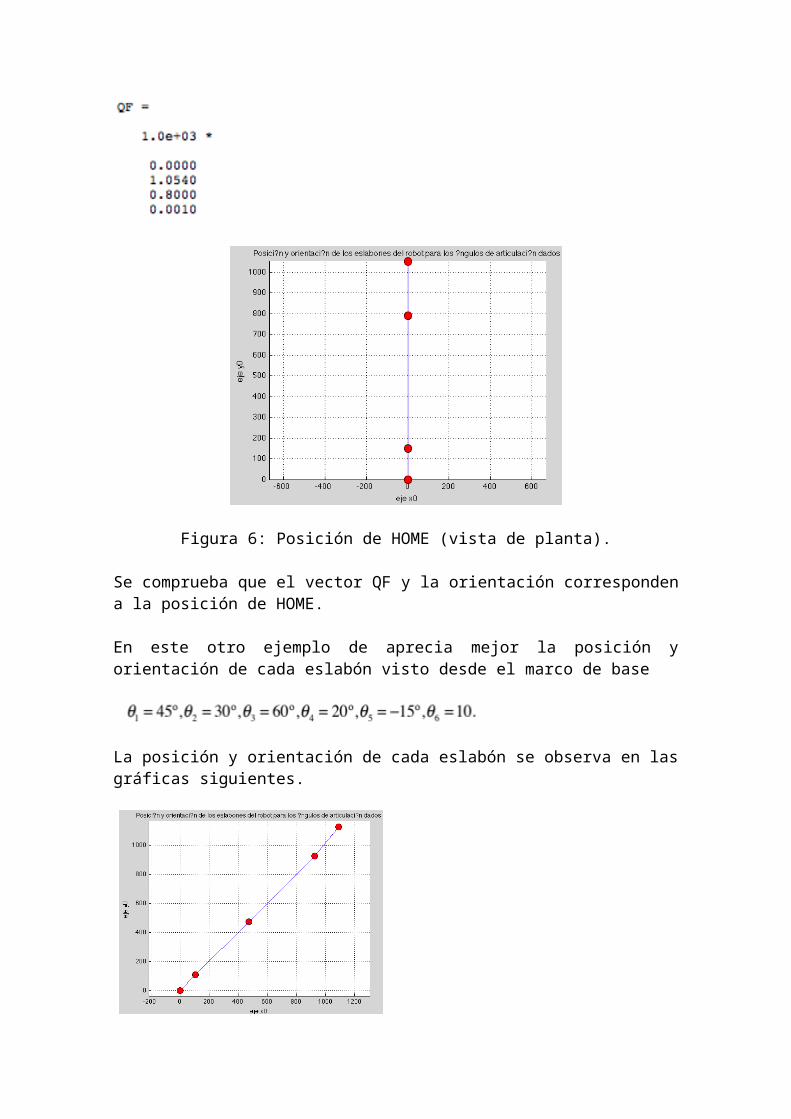
Figura 7: ejemplo de posición arbitraria.
4. CINEMÁTICA INVERSA
4.1 Deducción de las ecuaciones para los ángulos de articulación
Se puede simplificar la solución, como lo hizo Tsai [2], tratando el robot como compuesto por dos secciones, donde la primera está conformada por los eslabones y uniones que proporcionan la posición de la muñeca (ubicada en el centro del
marco de referencia ) dada por los ángulos
Figura 8: Sistema de coordenadas de la mano y posición del centro de la muñeca.
La segunda sección está dada por los eslabones y articulaciones que proporcionan
la orientación de la muñeca, dada por los ángulos
Se tiene entonces que:
La ecuación anterior contiene un sistema de ecuaciones de 3X3 no lineal. Al haber hecho esa manipulación, se dice que la posición y orientación del problema cinemático son desacopladas.
Multiplicando ambos extremos de la ecuación anterior por la inversa de y reemplazando las matrices de transformación homogénea se obtiene:
(1)
Entonces existen dos soluciones para . La solución es de alcance frontal si
y de alcance trasero si .
La distancia entre el origen del marco de referencia 1 y el punto de muñeca P no
depende de ni de . Por lo tanto éstas variables se pueden eliminar por ahora del análisis. Se obtiene:
donde:
(2)
(3)
Se puede calcular:
(4)
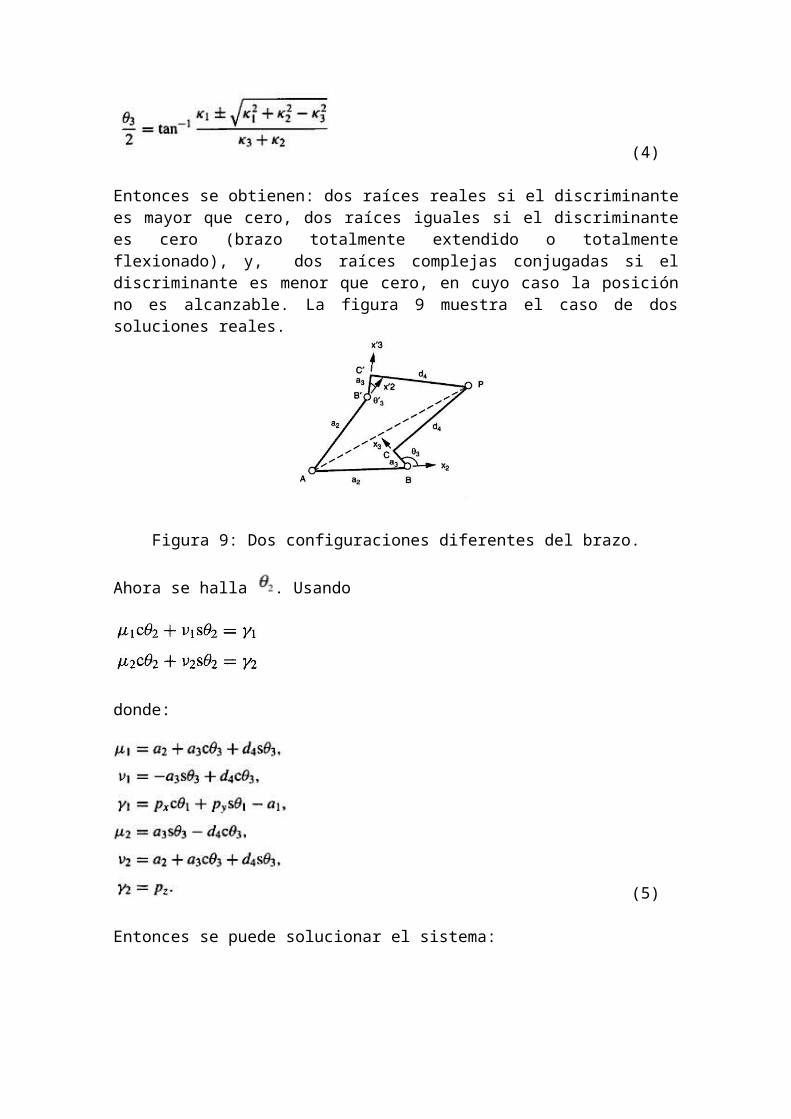
Entonces se obtienen: dos raíces reales si el discriminante es mayor que cero, dos raíces iguales si el discriminante es cero (brazo totalmente extendido o totalmente flexionado), y, dos raíces complejas conjugadas si el discriminante es menor que cero, en cuyo caso la posición no es alcanzable. La figura 9 muestra el caso de dos soluciones reales.
Figura 9: Dos configuraciones diferentes del brazo.
Ahora se halla . Usando
donde:

(5)
Entonces se puede solucionar el sistema:
Para encontrar que:
(6)
Se obtiene un único valor para . Dada la posición del centro de la muñeca, las posibles configuraciones del brazo son máximo 4, pero dadas las limitaciones mecánicas solo dos son físicamente posibles.
Ya conocidos los ángulos entonces es conocida. Para hallar los ángulos restantes se hace:
(7)
Dado que los elementos del extremo derecho de la ecuación son conocidos, por lo que igualando término a término con los del otro extremo se tiene:
(8)
donde:
(9)
Entonces, se obtiene un valor de para cada solución de los ángulos . Su
valor se da como dos soluciones reales si , o, dos soluciones :
( ) si ; en este caso el eje de la junta 6, z5, está alineado con el eje de la cuarta junta, z3, por lo que bajo esas condiciones hay una singularidad.
Cuando el movimiento no es físicamente alcanzable.
Si , se pueden calcular . Si se iguala el elemento de la fila 1, columna 3 con su correspondiente en la matríz de la derecha de la ecuación (7) se tiene :
(10)
Entonces se encuentra un único valor de para :
(11)
Igualmente, si:
Entonces:
(12)
Es de aclarar que cuando el conjunto de ecuaciones (10) a (12) se degenera, por lo que bajo ésta condición solo se puede hallar la suma o la resta de
.
4.2 Aplicación a la trayectoria dada
Lo primero que se hace es parametrizar la trayectoria, consistente de 8 tramos. Para los segmentos rectos se discretizó en 10 puntos y se usó la variable n como parámetro entre 1 y 10. Para los segmentos de cuarto de circunferencia se hizo lo mismo, teniendo en cuenta las coordenadas de cada punto usando funciones trigonométricas. Con estas coordenadas se dispuso una matríz de 3X80, que corresponden a las 80 ternas ordenadas de los puntos Q. Los puntos P se hallaron restando la longitud del efector final, d6=264 mm, en la coordenada x.
Se usó el dato de la rapidez (200 mm/s) para calcular el tiempo que tarda el efector final en recorrer cada tramo y se armó un vector fila con los 80 datos para el tiempo.
Una vez conocidos tiempo y posición del punto P de muñeca está completamente parametrizada la trayectoria y se puede usar para

encontrar cada uno de los ángulos de articulación aplicando las ecuaciones del numeral anterior.
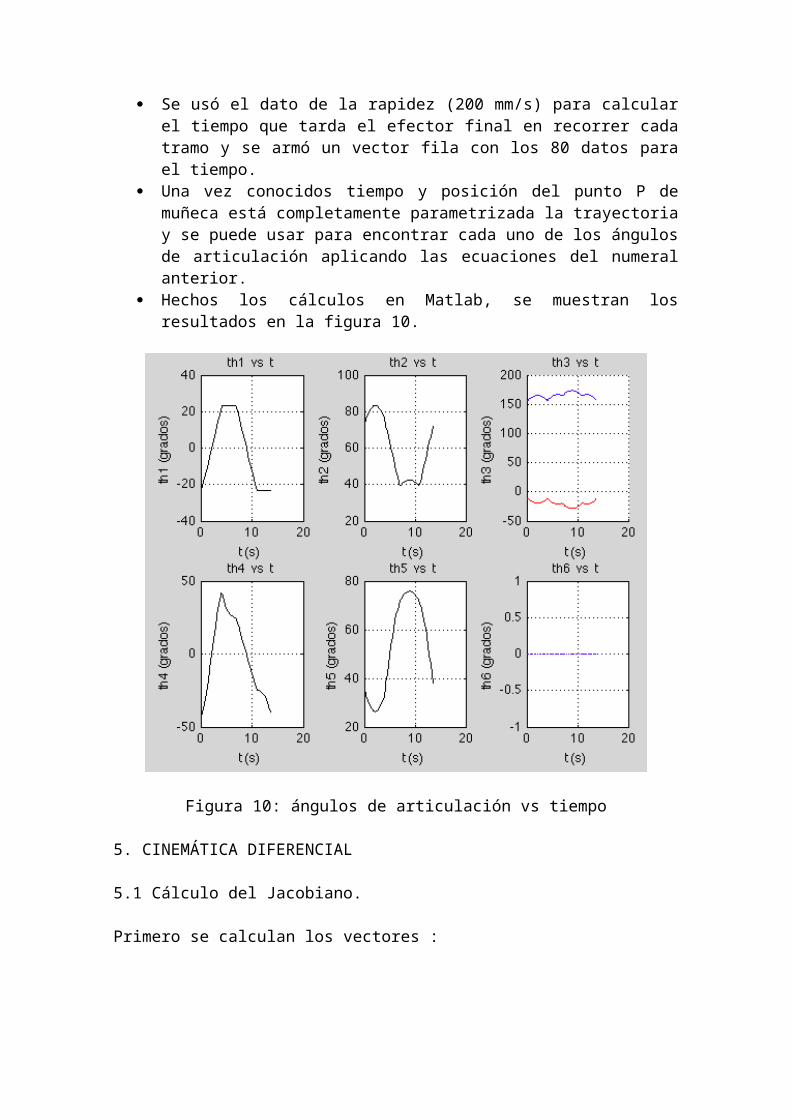
Hechos los cálculos en Matlab, se muestran los resultados en la figura 10.
Figura 10: ángulos de articulación vs tiempo
5. CINEMÁTICA DIFERENCIAL
5.1 Cálculo del Jacobiano.
Primero se calculan los vectores :
De acá en adelante se mostraran los cálculos usando las abreviaturas para las funciones seno y coseno, y , código en Matlab, de tal forma que la expresión del
arreglo en general se escribe como Mij. Según lo anterior:
r56=[0 0 264]’;r45=[0 0 0]’;r34=[0 0 640]’;r23=[200*c3 200*s3 0]’;r12=[600*c2 600*s2 0]’;r01=[150*c1 150*c2 0]’;
Ahora se calcula cada vector:
Dicho vector está representado en el marco de referencia de la base y va desde el
origen del marco de referencia (i-1) hasta el isp. del marco referencia n. En matlab se expresarán como pi6a (la a de la palabra asterisco). Para el Fanuc ArcMate 100iC se tiene n = 6. Acá se expresa como pin*. Las matrices de rotación de los marcos de referencia 1 hasta 5, con respecto al marco base, se detallan a continuación.
R01=[c1,0,s1;s1,0,-c1;0,1,0];R02=[c1*c2,-c1*s2,s1;s1*c2,-s1*s2,-c1,s2,c2,0];R03=[c1*c23,s1,c1*s23;s1*c23,-c1,s1*s23;s23,0,-c23];R04=[c1*c23*c4+s1*s4,-c1*s23,-c1*c23*s4+s1*c4; s1*c23*c4-c1*s4,-s1*s23,-s1*c23*s4-c1*c4; s23*c4,c23,-s23*s4];R05=[c5*(c1*c23*c4+s1*s4)-c1*s23*s5,-c1*c23*s4+s1*c4,s5*(c1*c23*c4+s1*s4)+c1*s23*c5; c5*(s1*c23*c4-c1*s4)-s1*s23*s5,-s1*c23*s4-c1*c4,s5*(s1*c23*c4-c1*s4)+s1*s23*c5; s23*c4*c5+c23*s5,-s23*s4,s23*c4*s5-c23*c5];
Entonces:
p56*=(R05)(5p56)’; (5p56)=(0 0 d6)
donde R05 es la matríz de rotación del marco 5 con respecto al marco base, y, el vector (5p56) es p56* pero visto desde el marco 5.
Por lo tanto:
p56a*=[d6*(s5*(c1*c23*c4+s1*s4)+c1*s23*c5)d6*(s5*(s1*c23*c4-c1*s4)+s1*s23*c5)d6*(s23*c4*s5-c23*c5)];
Usando la formula recursiva se puede encontrar:
p46a=p56a;p46a=p56a;p36a=R03*r34+p46a’;p26a=R02*r23+p36a’;p16a=R01*r12+p26a;
Conocidos estos vectores ya se puede calcular el Jacobiano aplicando la ecuación:
5.2 Análisis de un caso de singularidad
Como se mencionó en la sección 4.2, al calcular la cinemática inversa, cuando
el conjunto de ecuaciones (10) a (12) se degenera, por lo que bajo ésta
condición solo se puede hallar la suma o la resta de . Cuando se habla de que se “degenera” se refiere a que hay división entre cero para las expresiones que
intervienen en los cálculos de individualmente, por lo que no se podrían
calcular.
6. DINÁMICA
Se calculan las velocidades y aceleraciones, lineales y angulares, de cada eslabón partiendo desde la base hasta llegar al efector final. Es de aclarar que para la base estas cantidades son todas cero.
Se calculan las velocidades lineales de acuerdo con la trayectoria propuesta. La rapidez siempre será de 200 mm/s y la componente en x siempre es cero.
Se calculan las velocidades angulares de articulación usando la expresión:
Θ=J−1 X

Se aplica el método de Newton-Euler comenzando por la iteración hacia delante. Primero se calculan las velocidades y aceleraciones lineales y angulares absolutas de cada eslabón en su correspondiente marco de referencia. Es de aclarar que todos los datos necesarios para hacer estos cálculos ya se encuentran disponibles o se obtienen por la geometría del manipulador.
El software DELMIA V5 proporciona los datos de masa, centro de masa y tensor de inercia para cada eslabón, los cuáles se muestran en las siguientes tablas.
Base:
Eslabón 1:
Eslabón 2:
Eslabón 3:
Eslabón 4:
Eslabón 5:
Eslabón 6:
El eslabón 6 es la antorcha de soldadura escogida. Como se mencionó antes no se hallaron datos acerca de masa, centro de masa y tensor de inercia. Se propone trabajar con datos aproximados. Para la masa, se tiene en cuenta que las boquillas en el mercado tienen una masa aproximada de 0.5 Kg. Se supondrá que dicha masa está uniformemente distribuida a lo largo de un cilindro de 249 mm de largo por 20 mm de diámetro. Entonces el centro de gravedad del eslabón 6 estará ubicado en su centro geométrico. Así mismo se puede calcular la matríz de inercia del cilindro con respecto a un sistema de referencia cuyos ejes son paralelos al marco base.
Se calcula la ubicación del centro de inercia de cada eslabón con respecto a la base por resta de vectores, y luego con respecto a su marco de referencia.
Una vez conocido esto de calculan las aceleraciones lineales del centro de inercia de cada eslabón en su marco de referencia. Así mismo se calcula el vector aceleración de la gravedad en el marco de referencia de cada eslabón.
Se inicia con la iteración hacia atrás, encontrando la propagación de fuerza y momento par cada eslabón.
Por último se calculan los torques necesarios en cada articulación para que el efector final del robot recorra la trayectoria establecida.
7. CONCLUSIONES Y COMENTARIOS
La cinemática directa se puede calcular de una manera relativamente sencilla para el FANUC Arc Mate 100iC y las matrices de rotación del marco de referencia de un eslabón con respecto al siguiente cumplen con las condiciones necesarias para ser usadas en la metodología de Denavit Hartenberg.
El ejemplo de aplicación ilustra la utilidad del enfoque por parámetros DH. El cálculo de la cinemática inversa para el manipulador requiere de hacer
manipulaciones matemáticas que a veces involucran suposiciones en cuanto a dominio de los ángulos de articulación. Además se deja en evidencia que para una misma posición del efector final la solución para los ángulos de articulación no es única, e incluso puede no existir debido a restricciones en cuanto al espacio de trabajo, o uso de expresiones que involucren división entre cero o raíz cuadrada de cantidades negativas.
Con base en comentario anterior se puede establecer claramente un caso de singularidad, para el cuál los ángulos de las articulaciones 4 y 6 no se podrían calcular individualmente.
Las gráficas de ángulo de articulación vs tiempo obtenidas para cada eslabón comienzan y terminan en el mismo punto; es decir que si el robot recorre varias veces la misma trayectoria la gráfica se va a repetir, siendo el comportamiento en un período lo que se muestra en las gráficas obtenidas, dado que va a ser un movimiento peródico.
La gráfica para la articulación 3 vs tiempo no muestra un patrón definido, para haciendo uso de los datos de este ángulo en otros cálculos se obtiene un patrón como se observa por ejemplo para las articulaciones 2, 4 y 5. La 6 no está involucrada porque se suposo que el efector final mantiene un ángulo de articulación 6 fijo en cero.
El cálculo del jacobiano es factible usando herramientas de software como Matlab. Sin embargo para calcular la inversa del jacobiano de manera simbólica se requiere de un equipo con un desempeño muy por encima del promedio, haciendo alusión a la eficiencia en el proceso.
REFERENCIAS
[1] http://www.fanucrobotics.com/cmsmedia/datasheets/ARC%20Mate%20100iC%20Series_7.pdf
[2] TSAI, Lung-Wen.:“Robot Analysis: the mechanics of serial and parallel manipulators”. New York. Editorial John Wiley & Sons, Inc. 1999. Pág. 54 a 85.
[3] HANSELMAN, Duane. LITTLEFIELD, Bruce. “Mastering Matlab 5. A Comprehensive Tutorial and Reference”. Prendice Hall. New Jersey. 1998.


















