Análisis de deformaciones en Obras Subterráneas
18
Deformación y desplazamiento
description
Análisis de las deformaciones producidas por la ejecución de túneles
Transcript of Análisis de deformaciones en Obras Subterráneas
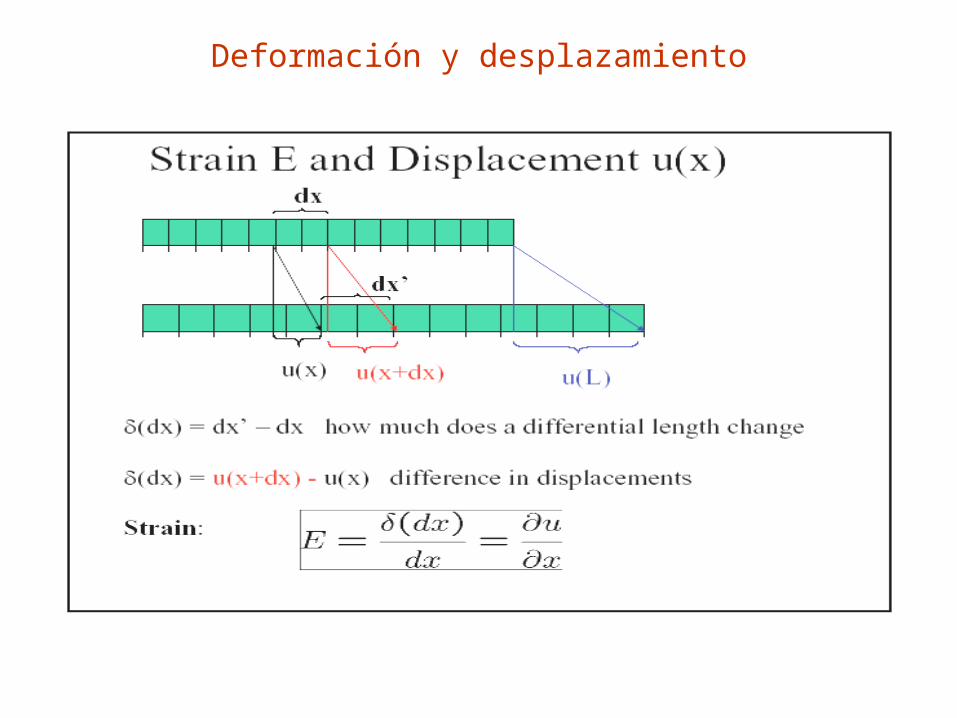
Deformación y desplazamiento
Deformaciones pequeñas
En este curso estudiaremos cuerpos deformablesLos estados de tensiones aplicadas producen
desplazamientos de material a lo largo del cuerpo tensionado, los que a su vez producen deformaciones.
Las deformaciones pueden ser reversibles, si al quitar la tensión ésta desaparece y en este caso se trata de
deformaciones elásticas. Éstas no son el interés primario del curso.
Otras deformaciones son permanentes, produciendo un cambio permanente de forma, son deformaciones plásticas y éstas son el interés primario del curso.
En este capítulo veremos deformaciones pequeñas, las que forman un tensor (deij); más adelante pasaremos a
deformaciones grandes (eij), que interesan en este curso, mediante integración.
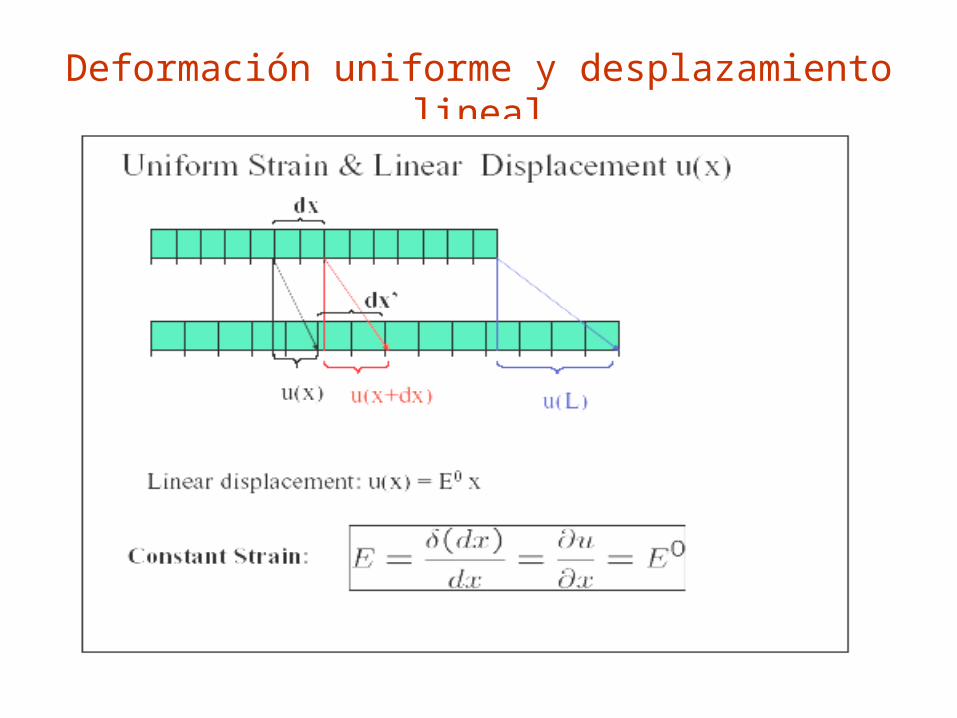
Deformación uniforme y desplazamiento lineal
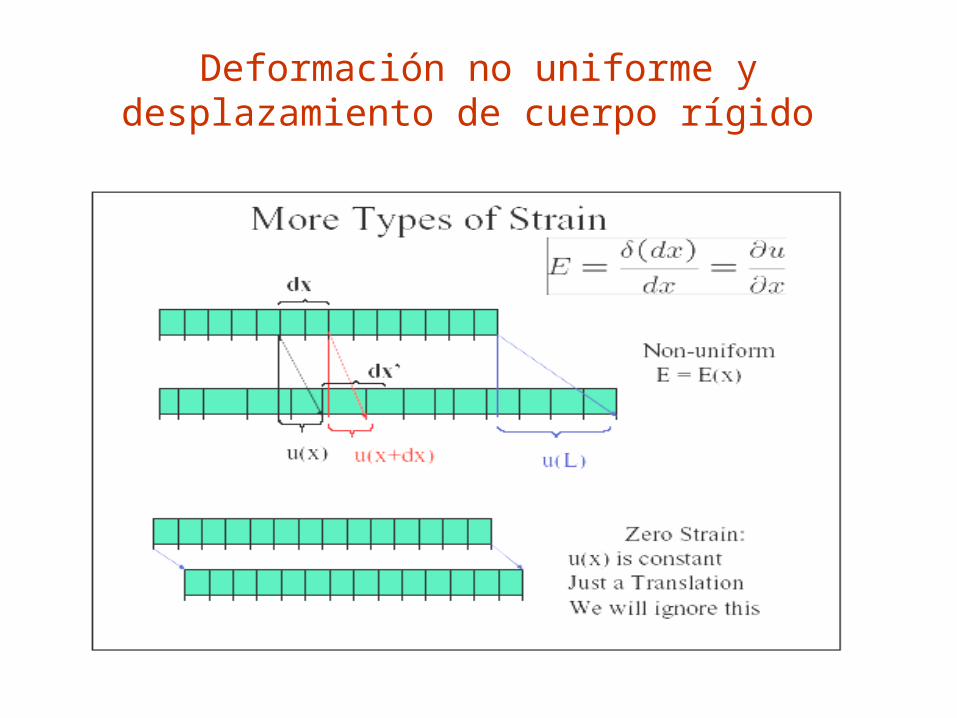
Deformación no uniforme y desplazamiento de cuerpo rígido
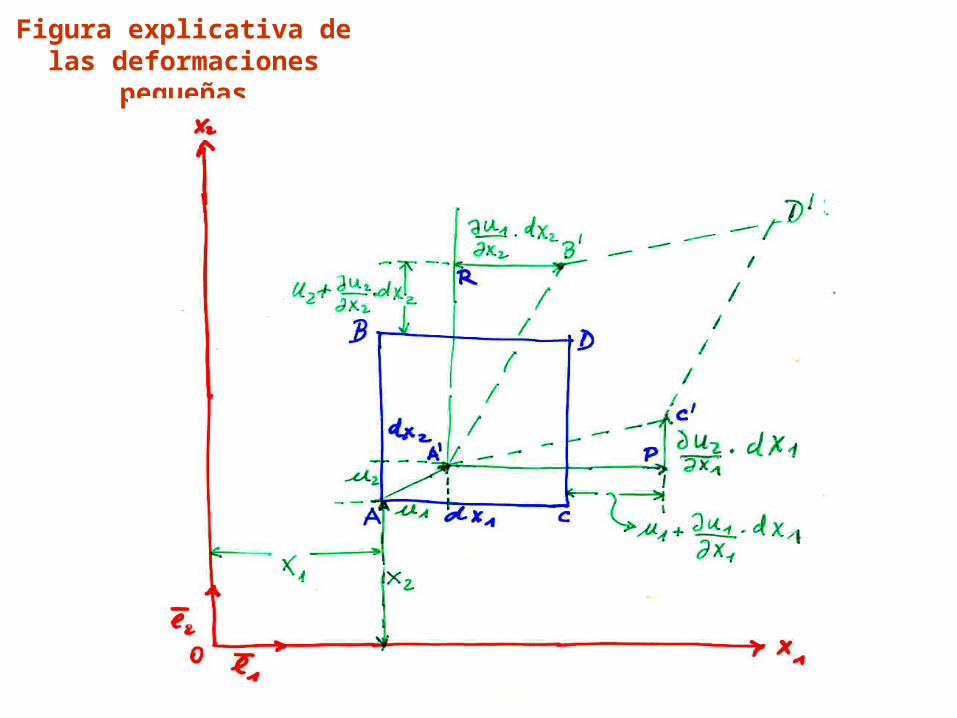
Figura explicativa de las deformaciones pequeñas
Explicación del concepto de deformación
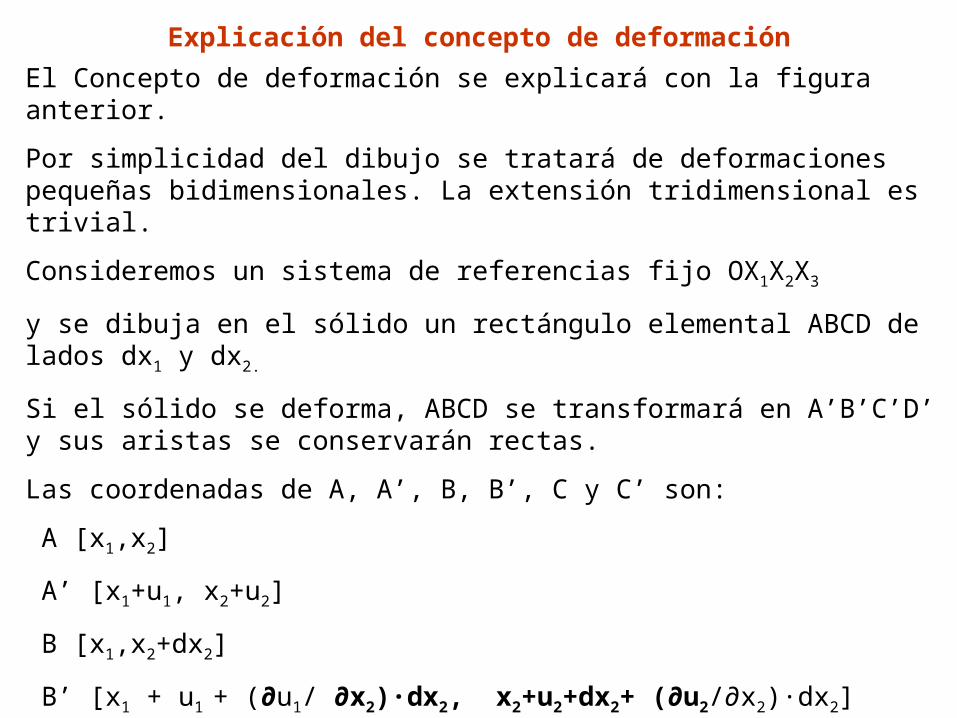
El Concepto de deformación se explicará con la figura anterior.
Por simplicidad del dibujo se tratará de deformaciones pequeñas bidimensionales. La extensión tridimensional es trivial.
Consideremos un sistema de referencias fijo OX1X2X3
y se dibuja en el sólido un rectángulo elemental ABCD de lados dx1 y dx2.
Si el sólido se deforma, ABCD se transformará en A’B’C’D’ y sus aristas se conservarán rectas.
Las coordenadas de A, A’, B, B’, C y C’ son:
A [x1,x2]
A’ [x1+u1, x2+u2]
B [x1,x2+dx2]
B’ [x1 + u1 + (∂u1/ ∂x2)·dx2, x2+u2+dx2+ (∂u2/∂x2)·dx2]
C [x1+dx1, x2]
C’ [x1+dx1+u1+(∂u1/∂x1)·dx1, x2+u2+(∂u2/∂x1)·dx1]
Explicación del concepto de deformación: deformaciones de extensión
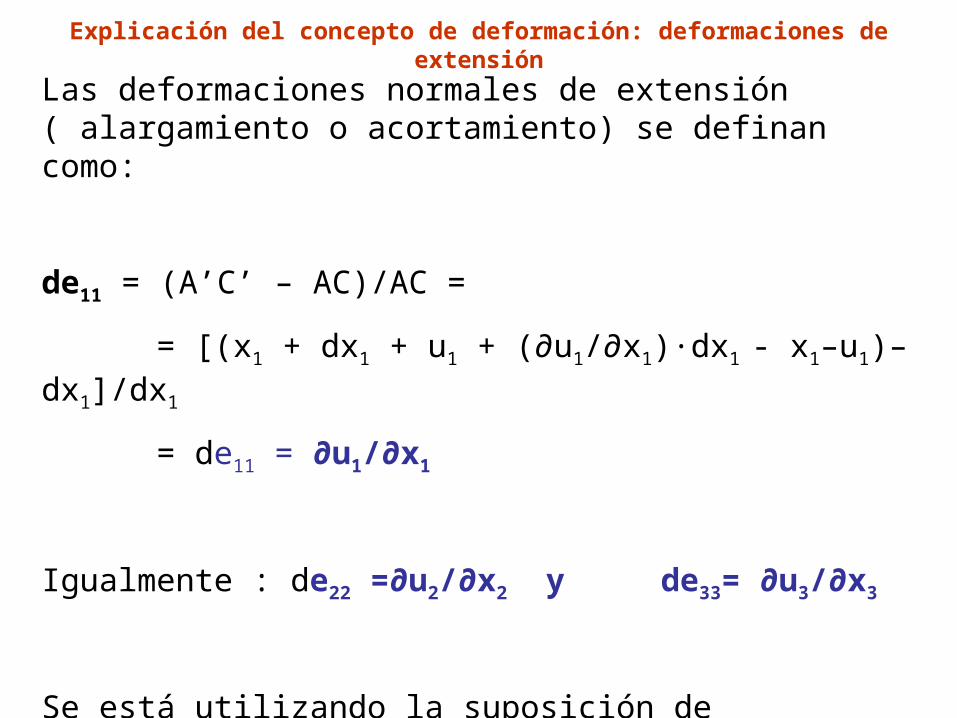
Las deformaciones normales de extensión ( alargamiento o acortamiento) se definan como:
de11 = (A’C’ – AC)/AC =
= [(x1 + dx1 + u1 + (∂u1/∂x1)·dx1 - x1–u1)– dx1]/dx1
= de11 = ∂u1/∂x1
Igualmente : de22 =∂u2/∂x2 y de33= ∂u3/∂x3
Se está utilizando la suposición de deformaciones pequeñas; por tanto A’C’≈ A’P y A’B’ ≈ A’R
Explicación del concepto de deformación: deformaciones de corte
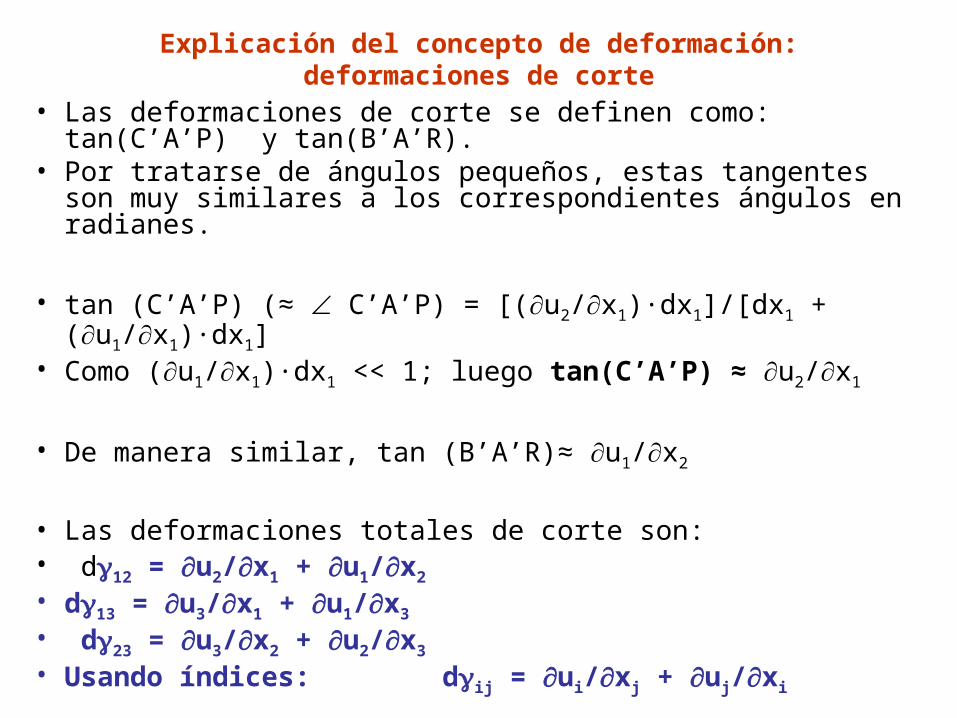
• Las deformaciones de corte se definen como: tan(C’A’P) y tan(B’A’R).
• Por tratarse de ángulos pequeños, estas tangentes son muy similares a los correspondientes ángulos en radianes.
• tan (C’A’P) (≈ C’A’P) = [(u2/x1)·dx1]/[dx1 + (u1/x1)·dx1]• Como (u1/x1)·dx1 << 1; luego tan(C’A’P) ≈ u2/x1
• De manera similar, tan (B’A’R)≈ u1/x2
• Las deformaciones totales de corte son: • d12 = u2/x1 + u1/x2
• d13 = u3/x1 + u1/x3 • d23 = u3/x2 + u2/x3
• Usando índices: dij = ui/xj + uj/xi
Expresión tensorial de la deformación de corte
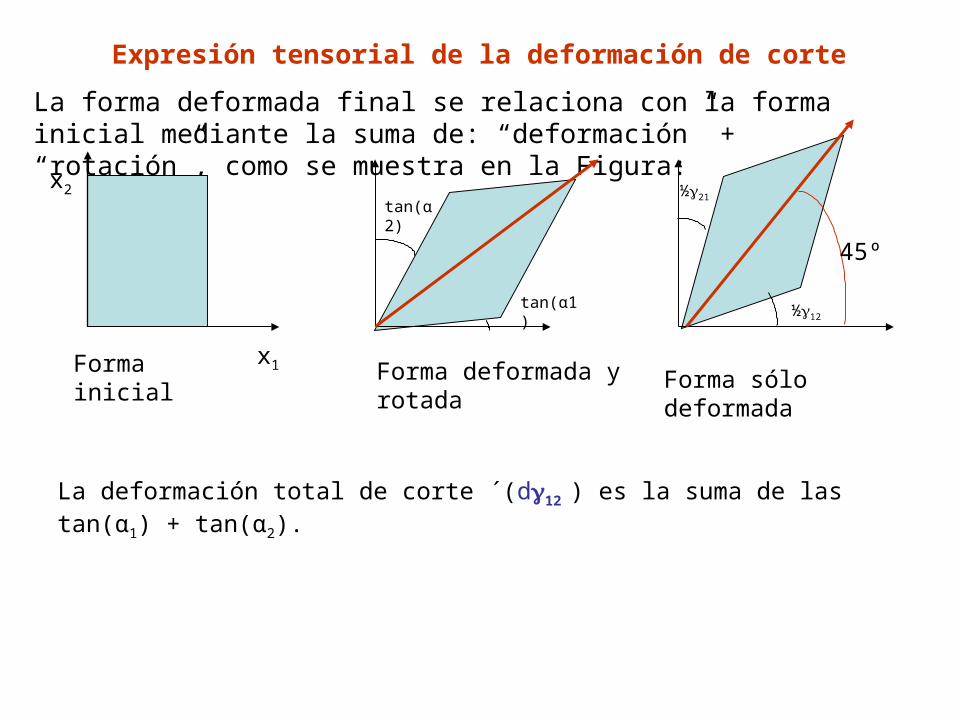
La forma deformada final se relaciona con la forma inicial mediante la suma de: “deformación” + “rotación”, como se muestra en la Figura:
La deformación total de corte ´(d12 ) es la suma de las tan(α1) + tan(α2).
tan(α2)
tan(α1)
Forma inicial Forma deformada y rotada
Forma sólo deformadax1
x2
45º
½21
½12
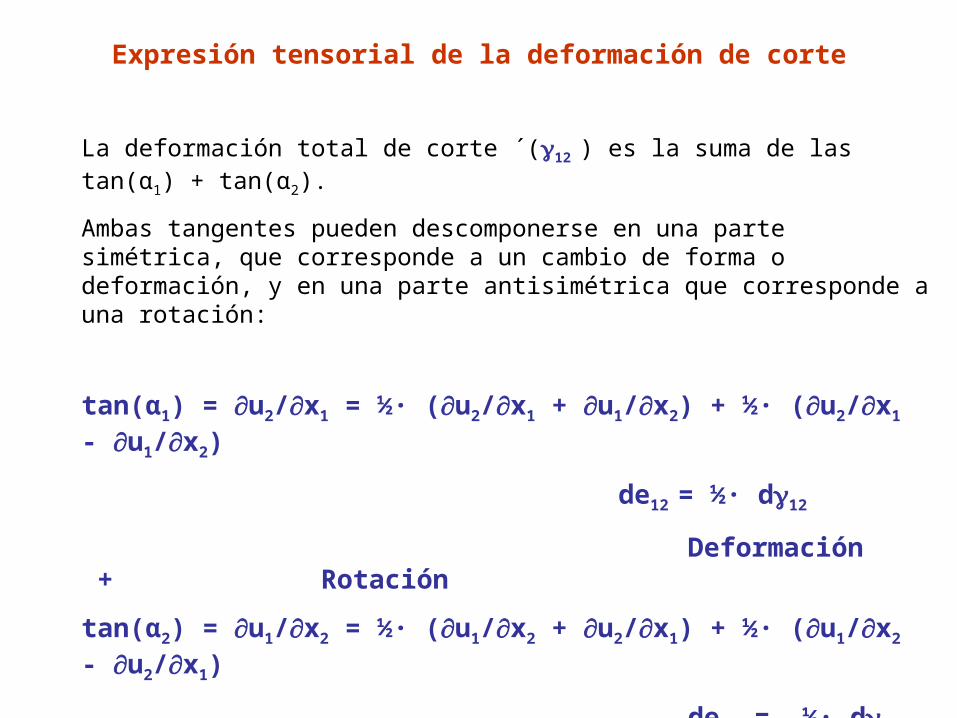
Expresión tensorial de la deformación de corte
La deformación total de corte ´(12 ) es la suma de las tan(α1) + tan(α2).
Ambas tangentes pueden descomponerse en una parte simétrica, que corresponde a un cambio de forma o deformación, y en una parte antisimétrica que corresponde a una rotación:
tan(α1) = u2/x1 = ½· (u2/x1 + u1/x2) + ½· (u2/x1 - u1/x2)
de12 = ½· d12
Deformación + Rotación
tan(α2) = u1/x2 = ½· (u1/x2 + u2/x1) + ½· (u1/x2 - u2/x1)
de21 = ½· d21
Se debe destacar que: de12= ½·d12 ; de21= ½·d21; luego: de12= de21
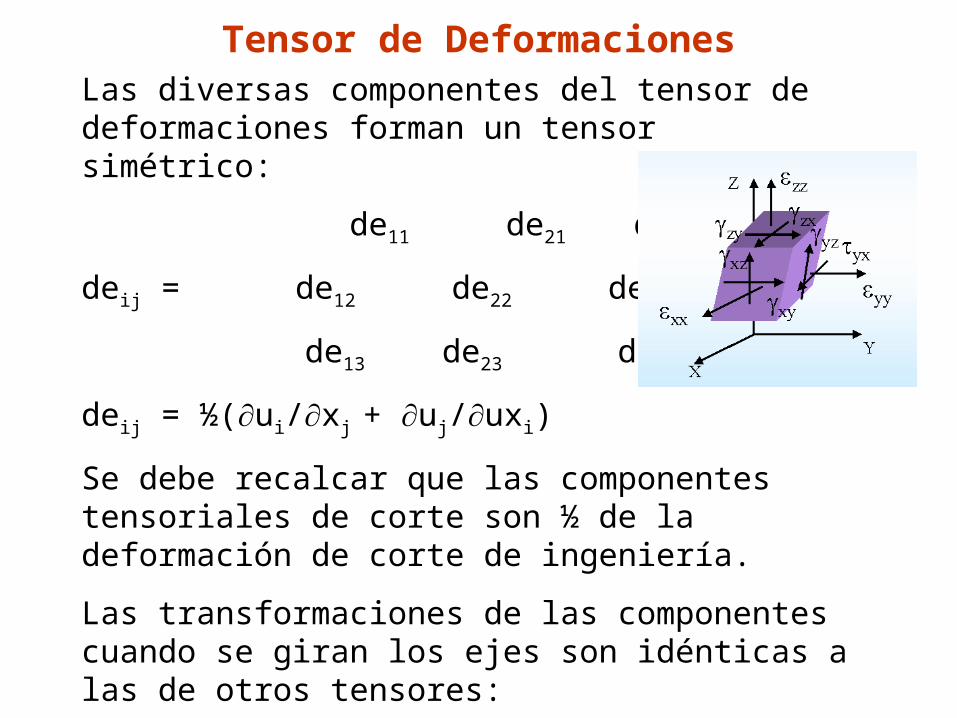
Tensor de DeformacionesLas diversas componentes del tensor de deformaciones forman un tensor simétrico:
de11 de21 de31
deij = de12 de22 de32
de13 de23 de33
deij = ½(ui/xj + uj/uxi)
Se debe recalcar que las componentes tensoriales de corte son ½ de la deformación de corte de ingeniería.
Las transformaciones de las componentes cuando se giran los ejes son idénticas a las de otros tensores:
deij = aim·ajn·demn
Nuevas Antiguas
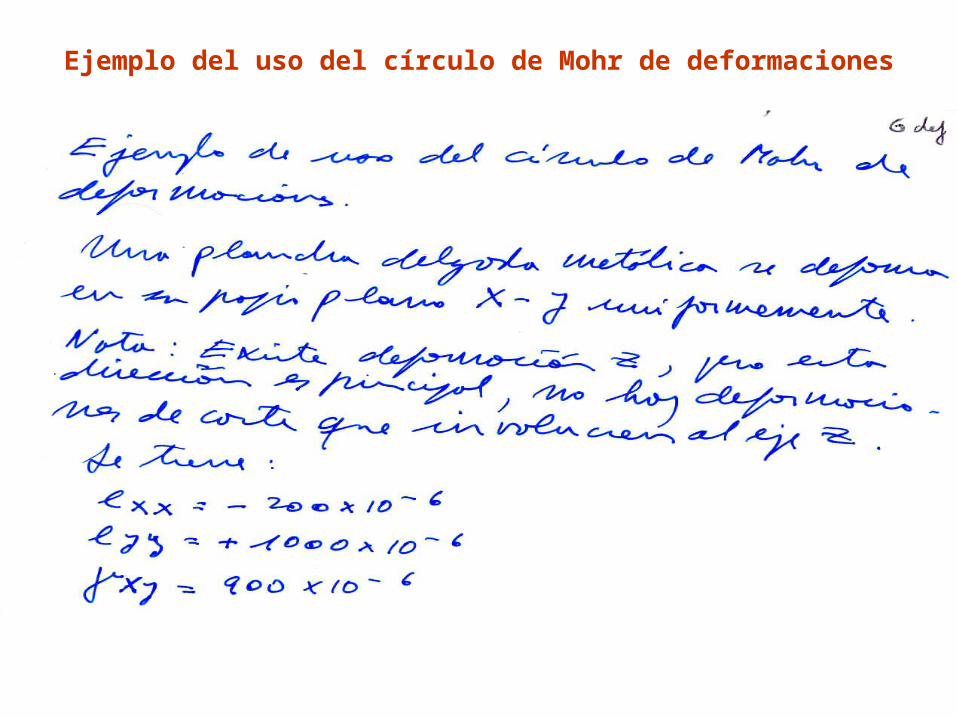
Ejemplo del uso del círculo de Mohr de deformaciones
Ejemplo del uso del círculo de Mohr de deformaciones
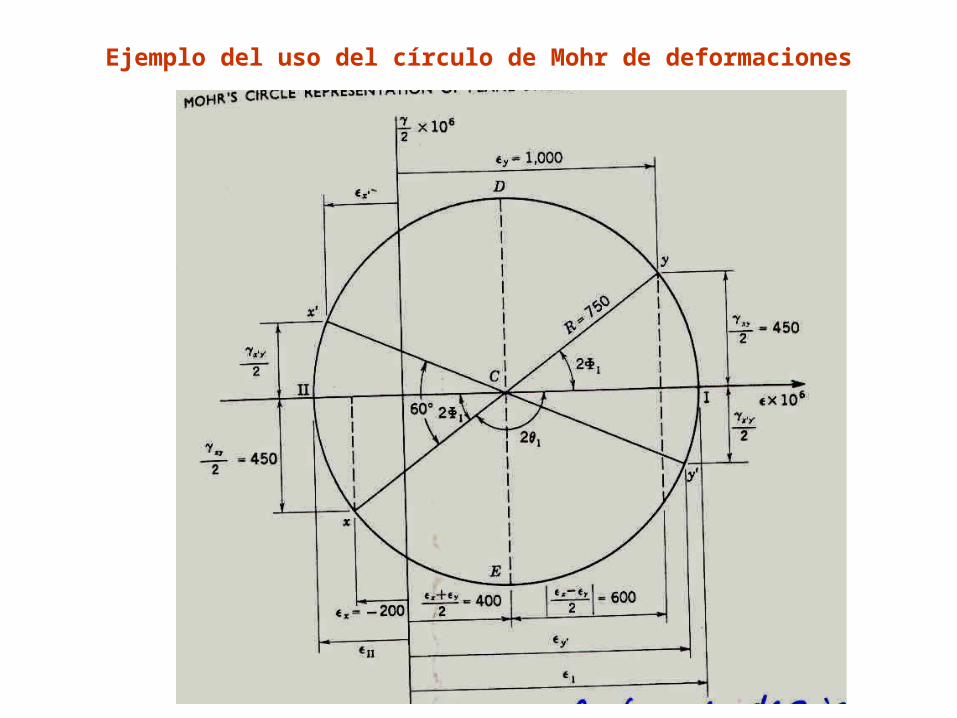
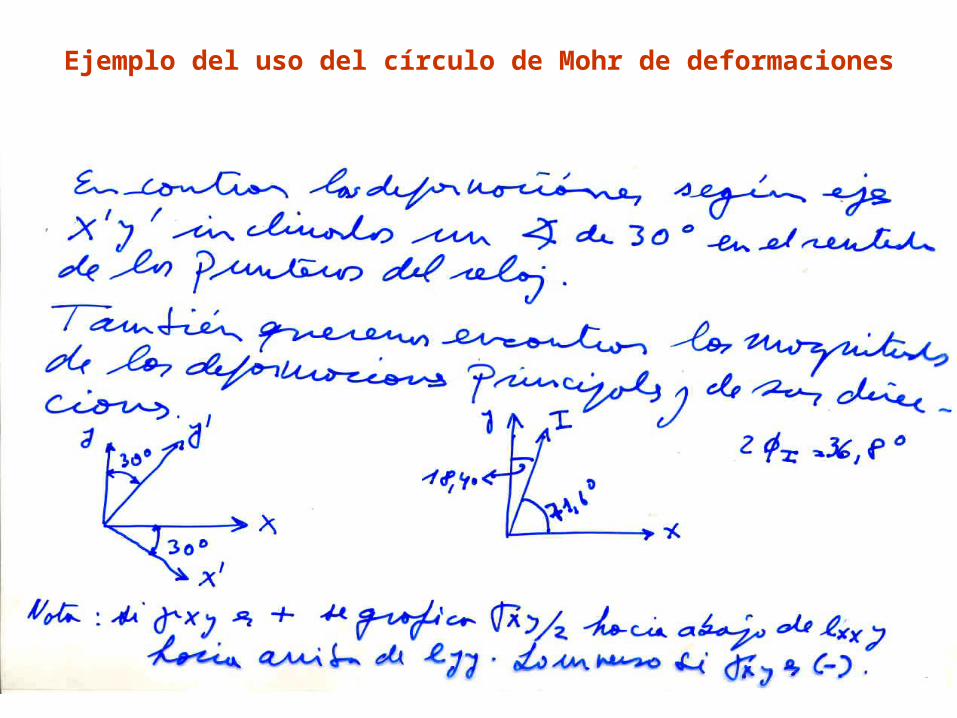
Ejemplo del uso del círculo de Mohr de deformaciones
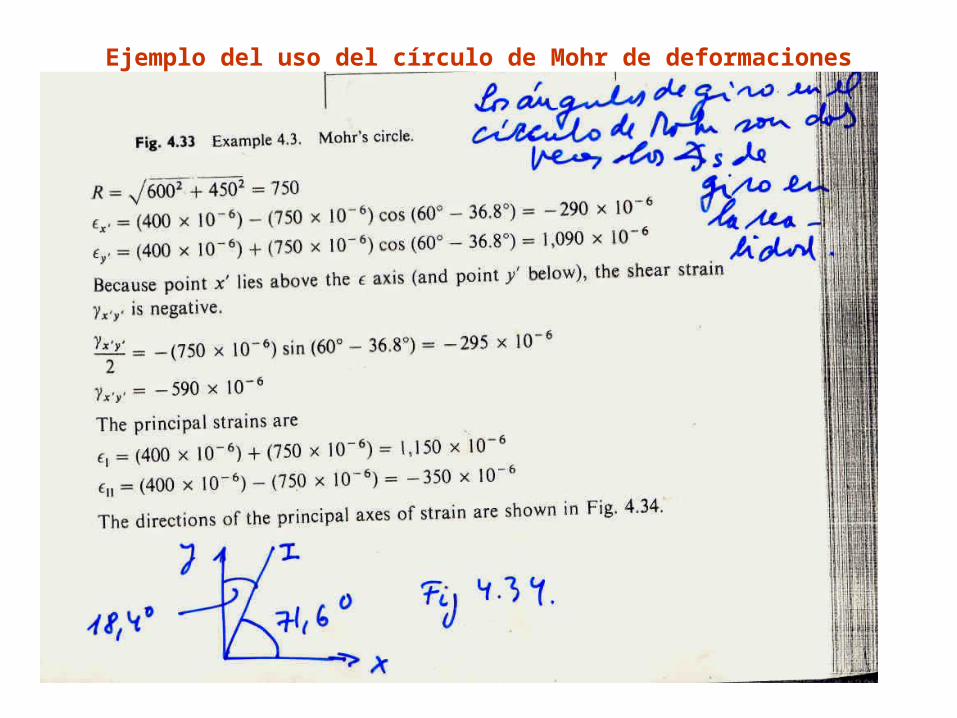
Ejemplo del uso del círculo de Mohr de deformaciones
Velocidades de deformaciones
En muchos cálculos de mecánica de la plasticidad se utilizarán frecuentemente las velocidades de deformación, éstas forman un tensor. Si se divide deij por dt se obtiene el tensor velocidades de deformaciones:
deij/dt = ½·[d(ui/xj)/dt + d(uj/xi)/dt]
Las diagonales del tensor (i=j) son velocidades de deformación de tracción o de compresión;
las otras componentes i≠j corresponden a d(ij/2)/dt, velocidad de deformaciones angulares;
Igualmente se puede derivar respecto de t el tensor rotación:dwij/dt = ½·[d(uj/xi)/dt - d(ui/xj)/dt]
Las componentes de estos tensores se transforman siguiendo las reglas comunes a los tensores cuando se giran los ejes coordenados.
Deformaciones grandes
• Las deformaciones grandes o totales (eij) no son tensores, y pueden ser obtenidas del tensor de deformaciones pequeñas por integración:
• B t=t
• eij = ∫deij = ∫ (deij/dt)·dt
• A t=0
• Deformación volumétrica y condición de incompresibilidad
• Si se considera un elemento de volumen formado por un paralelepípedo de lados a, b, c y volumen V= a·b·c.
• Diferenciando: dV = (b·c)da + (a·c)db + (a·b)dc
• Dividiendo por V = a·b·c
• dV/V = da/a + db/b + dc/c = de11 + de22 + de33 = deii = 0
• Esta es la condición de incompresibilidad o de conservación de volumen.
• Cuando se produce deformación elástica, se produce un pequeño cambio de volumen; pero la deformación plástica (permanente) ocurre por desplazamiento de dislocaciones y por tanto ocurre a volumen constante. Como las deformaciones plásticas usualmente son mucho mayores que las elásticas, éstas pueden despreciarse y en plasticidad se usa la condición de conservación de volumen.