Análisis de Transitorios de Series de Tiempo Simbólico Para La Detección de Fallas en Aeronaves...
11
Análisis de transitorios de series de tiempo simbólico para la detección de fallas en aeronaves de turbina de gas Motores⋆ Soumalya Sarkar Kushal Mukherjee Soumik Sarkar †Asok Ray [email protected] [email protected] [email protected] [email protected] Departamento de Ingeniería Mecánica La Universidad del Estado de Pennsylvania University Park, PA 16802, EE.UU. Palabras clave: Análisis de series de tiempo transitoria; dinámica simbólica, detección de fallas, motores de turbina de gas de aviación Resumen-En este trabajo se presenta una simbólica basada en datos -método basado en la dinámica para la detección de fallas incipientes en motores de turbina de gas de los aviones comerciales. Detección fallas de incipientes en estos motores podrían ser significativamente se manifiesta mediante el aprovechamiento de datos transitorios (por ejemplo, durante el despegue). Desde esta perspectiva, la detección de fallos y algoritmos de clasificación se basan en la recientemente trabajo presentado en el filtrado dinámico simbólico. En particular, Análisis basado en modelos de Markov de los datos de estado estacionario es ampliado mediante el aprovechamiento de la transitoria disponibles datos. El procedimiento de detección de fallos y de clasificación tiene sido validado en el caso de prueba transitorio NASA C-MAPSS generador. I. INTRODUCCIÓN Varios investigadores han abordado el rendimiento monitoreo de motores de turbina de gas de aviación basado en datos en estado estacionario de cuasi-estacionarias durante condiciones de crucero. Sin embargo, los datos operativos transitorios (por ejemplo, de despegue, ascenso o aterrizaje) se pueden utilizar remunerados para la detección temprana de fallas incipientes. Normalmente los motores operar bajo
-
Upload
alexander-lopez-villanueva -
Category
Documents
-
view
11 -
download
0
Transcript of Análisis de Transitorios de Series de Tiempo Simbólico Para La Detección de Fallas en Aeronaves...

Análisis de transitorios de series de tiempo simbólico para la detección de fallas en aeronaves de turbina de gas Motores⋆ Soumalya Sarkar Kushal Mukherjee
Soumik Sarkar †Asok Ray
[email protected] [email protected] [email protected] [email protected] de Ingeniería Mecánica La Universidad del Estado de
Pennsylvania University Park, PA 16802, EE.UU. Palabras clave:Análisis de series de tiempo transitoria; dinámica simbólica, detección de
fallas, motores de turbina de gas de aviación
Resumen-En este trabajo se presenta una simbólica basada en datos -método basado en la dinámica para la detección de fallas incipientes en motores de turbina de gas de los aviones comerciales. Detección fallas de incipientes en estos motores podrían ser significativamente se manifiesta mediante el aprovechamiento de datos transitorios (por ejemplo, durante el despegue). Desde esta perspectiva, la detección de fallos y algoritmos de clasificación se basan en la recientemente trabajo presentado en el filtrado dinámico simbólico. En particular, Análisis basado en modelos de Markov de los datos de estado estacionario es ampliado mediante el aprovechamiento de la transitoria disponibles datos. El procedimiento de detección de fallos y de clasificación tiene sido validado en el caso de prueba transitorio NASA C-MAPSS generador.
I. INTRODUCCIÓNVarios investigadores han abordado el rendimiento monitoreo de motores de turbina de gas de aviación basado en datos en estado estacionario de cuasi-estacionarias durante condiciones de crucero. Sin embargo, los datos operativos transitorios (por ejemplo, de despegue, ascenso o aterrizaje) se pueden utilizar remunerados para la detección temprana de fallas incipientes. Normalmente los motores operar bajo mucho más altas condiciones de estrés y de la temperatura en virtud de las operaciones transitorias en comparación con los bajo condiciones de estado estacionario. Firmas de cierta los fallos de motor incipientes (por ejemplo, fallas de rodamientos, controlador miss-programación y las fallas del sistema de arranque) tienden a magnificar durante las condiciones transitorias, y las apropiadas el uso de los datos transitorios podría mejorar la probabilidad de detección de fallas [1]. En esta línea, basado en modelos varios y los métodos de diagnóstico de fallos basados en datos han sido propuesta, haciendo uso de los datos transitorios. Por ejemplo, Srendar y Ganguli [2] utilizaron un Myriad adaptativa filtrado para mejorar la calidad de las operaciones de transitorios para motores de turbina de gas. Sin embargo, los

diagnósticos basados en modelos pueden sufrir de inexactitud y pérdida de solidez debida a la baja fiabilidad de los modelos transitorios.Una técnica basada en datos recientemente desarrollada, llamada el filtrado dinámico simbólica (SDF) [3], ha sido demostrado que ofrecer un rendimiento superior en términos de principios detección de anomalías y robustez a la medición ruido en comparación con otras técnicas como la principalAnálisis de componentes (PCA), Redes Neuronales (NN) y técnicas bayesianas [4]. Sin embargo, estos se realizaron estudios sobre el estado de equilibrio de datos de vuelo de crucero que se correspondan con el supuesto de la cuasi-estacionariedad hecho en SDF. Debido a esta suposición, SDF puede no ser capaz de manejar adecuadamente los datos transitorios que son por lo general longitud de limitada.El objetivo de este trabajo es ampliar la capacidad del SDF para manejar (de corta longitud) datos transitorios, más allá de lo que se hace actualmente para los conjuntos de datos cuasi-estacionarias longitud de suficiente. Este trabajo utiliza Dirichlet y distribuciones multinomiales [5] para la construcción de la a priori y unos modelos a posteriori de las incertidumbres, respectivamente.Los algoritmos se formulan por cuantitativamente la incorporación los efectos de las cadenas de símbolos de longitud finita tanto en la formación y fases de pruebas de detección de fallos. El algoritmo resultante se valida utilizando el transitorio Test Generator-caso de la Comercial Modular Aero Sistema de Propulsión Simulación (C-MAPSS) banco de pruebas [6], desarrollado en la NASA.
II. ANÁLISIS SIMBÓLICO DEL TIEMPO DE LA SERIE DE DATOS
Una cadena de símbolos se obtiene a partir de la salida de gas la dinámica de motores de turbina de partición, también llamado cuantificación, de los datos de series de tiempo. A partir de entonces, una modelo probabilístico autómata de estados finitos (EPIP) es desarrollado a partir de la (finito - longitud ) secuencia de símbolos [ 3 ] .En esta sección se construye un clasificador bayesiano para la identificación de las matrices morph probabilidad de PFSA basado en los datos transitorios, tanto en la formación y las pruebas fases . El Dirichlet y distribuciones multinomiales [5] se han utilizado para construir el a priori y a posteriori modelos de incertidumbres , respectivamente. Esta formulación cuantitativamente incorpora los efectos de la longitud finita cadenas de símbolos en el entrenamiento y pruebas de las fases de clasificación de patrones. La serie de tiempo del sensor es codificada por la partición de datos en el rango de la señal, en el que el

la conversión a cadenas de símbolos se logra mediante la sustitución de cada una (con un valor real ) punto de datos de la serie temporal un símbolo correspondiente a la región ( es decir , el intervalo ) dentro del cual se encuentra el punto de datos . Este paso permite transformación de la información sensorial desde el dominio continuo para el dominio simbólico; en otras palabras, los datos del sensor en cada instante de muestreo es reemplazado por un símbolo.La secuencia simbólica se modela como una probabilístico autómata de estado finito ( PFSA ) que se construye como una tupla G, ( Q , ? , ? , ? ) , donde el alfabeto ? es un conjunto finito no vacío de símbolos y el conjunto de estados Q está obligado a ser no vacío y finito . Para simplificar la construcción del modelo PFSA , este documento sólo considera una clase de EPIP , conocidas como máquinas de D- Markov [ 3 ] , donde los estados son cadenas de los últimos símbolos D ;el número entero positivo D se denomina profundidad de la máquina y el número de estados | Q | ? | ? | D. dado el estado anterior y un símbolo observado , el estado transición función? : × Q ? ! Q produce el nuevo estado. Además , la función Morph ? : × Q ? ! [ 0 , 1 ] es un mapeo de salida que satisfaga la condición P :? ∈ ? ? ( q , ? ) = 1 para todo q 2 Q. La función de metamorfosis ? tiene una representación de la matriz ? , llamado (probabilidad )transformarse matriz de dimensión ( | Q | × | ? | ) . Cada suma fila de ? es igual a 1 y cada elemento de la matriz ? ij es estrictamente positivo debido a la restricción de longitud finita de series de tiempo a partir del cual se construyen modelos PFSA
A. La línea de clasificación de problemasQue no haya sistemas simbólicos de K (es decir, clases) de interés, denotado por C1, C2,. . . , CK, durante el mismo alfabeto?. Cada clase Ci es modelada por un ergódica (equivalentemente, irreductible) PFSA Gi = (Qi,?,? i,? i), donde i = 1, 2. . . , K. Durante la fase de entrenamiento, una cadena de símbolo Si se genera a partir de cada Ci clase. El estado transición función? y el conjunto de estados Q del DMarkov máquina se fija mediante la elección de una adecuada profundidad D. Por lo tanto , ? i ha convertido en las únicas incógnitas y podría haber sido seleccionados como los vectores de características con el fin de clasificación . La distribución de la matriz Morph ? i se calcula en la fase de formación de lo finito símbolo de la longitud de secuencias para cada clase.En la fase de prueba , dejar que otro símbolo de cuerda eS ser obtenido a partir de un conjunto de datos de series de tiempo del sensor. Entonces , la tarea es para determinar qué clase de esta cadena símbolo observado eS pertenece a . Mientras que el trabajo previo [ 3 ] ha dirigido en la identificación de un PFSA de una cadena símbolo dado , el objetivo de este trabajo es incrustar las incertidumbres debido a la longitud finita de la cadena en el símbolo algoritmo de identificación que influiría la final decisión de clasificación .

En la fase de entrenamiento , cada fila de ? I es tratado como un vector aleatorio . Deje que la fila de MTH ? I se denota como ? imy el enésimo elemento de la fila mth como ? i mn > 0Mn = 1 . El a priori de densidad de probabilidad? i función f m | ? Si de la fila - vector aleatorio i m , acondicionadoen una cadena de símbolo Si, sigue el Dirichlet distribución [ 5 ] como se describe a continuación.
III . INYECCIÓN DE FALLOS EN C- MAPSS TEST BEDEl banco de pruebas de simulación de la NASA C- MAPSS [ 6 ] tiene sido desarrollado para un twospool típica a escala comercial motor de turboventilador y su sistema de control . la motor en cuestión produce un empuje de aproximadamente 400.000 N y está diseñado para la operación en la altura ( A) desde el nivel del mar ( es decir , 0 m) hasta 12200 m, número de Mach (M ) de 0 a 0,90, y temperaturas de aproximadamente -50 ◦ C a 50 ◦ C. la del acelerador resolver ángulo ( TRA ) se puede ajustar a cualquier valor en el intervalo entre 0 ◦ en el nivel de potencia mínimo y 100 ◦ en el nivel máximo de potencia . La turbina de gas sistema de motor consta de cinco componentes principales que giran , a saber , el ventilador (F ) , el compresor de baja presión (LPC ) , compresor de alta presión (HPC ), alta presión de la turbina (HPT ) , y de la turbina de baja presión ( LPT). Dada la entradas de TRA , A y M , la forma interactiva controlada modelos de componentes calcular la dinámica no lineal de el funcionamiento del motor de turboventilador en tiempo real . Programado ganancia A sistema de control está incorporado en el sistema de motor , que consiste en reguladores de caudal y reguladores límite para los componentes del motor .En la configuración actual de la simulación C-MAPSS banco de pruebas, hay 13 de la salud a nivel de componentes los parámetros de entrada, es decir, los parámetros de eficiencia (), parámetros de flujo (?), y modificadores de la relación de presión que simular los efectos de fallos y / o degradación en los componentes del motor. Diez, de los 13 la salud parámetros [7], se seleccionan para modificar la eficiencia (?) y el flujo que se define como (?):•? , Relación entre la entalpía real y la entalpía ideales cambios.•? , Relación entre la punta del rotor y las velocidades de flujo de fluido axiales.Para cada uno de de la rotación del motor de cinco componentes X, donde X representa F, LPC, HPC, LPT o HPT, hay son dos parámetros de salud, a saber, parámetro de eficiencia (X) y parámetro de flujo (? X). Si un componente del motor X está en la condición nominal, a continuación, ambos X y? X son establece en 1, y un fallo se puede inyectar en un componente X mediante la reducción de forma independiente los valores de los parámetros X y / o? X. Por

ejemplo, F = 0,98 significa un 2% pérdida relativa de la eficiencia del ventilador.En los estudios de casos que siguen en la Sección IV, (al azar) fault magnitudes Fm se distribuyen de manera uniforme entre 1,0 a 7,0. Relaciones de los parámetros de la Salud para el HPR Ventilador, LPC, y HPC se distribuyen uniformemente entre 1.0 y 2.0, mientras que HPR para HPT y LPT son uniformemente distribuido entre 0,5 a 1,0. Las perturbaciones en la eficiencia (X) y flujo (? X) los parámetros de salud producirse a partir de sus respectivos valores de base. La relativa pérdidas en los parámetros de salud se expresan como sigue: salud nominal está representado por 100% de X y X?; para defectuoso Ventilador, LPC y HPC, X es variado entre 95% y 99,5% y? X se varió entre 90% y 99,5%, para defectuoso HPT y LPT, X es variado entre94% y 99% y? X se varió entre 93,5% y 99,5%.
IV . RESULTADOS Y DISCUSIÓNEn esta sección se presentan los resultados de la simulación de simbólico análisis de series de tiempo transitoria y falla incipiente de detección en el banco de pruebas C- MAPSS . El objetivo aquí es demostrar cómo las fallas binarios (es decir , K = 2 en los algoritmos 1 y 2) son detectados e identificados en el una etapa temprana en las operaciones de tiempo crítico como motor gestión de la salud . Para establecer la relación entre tiempo de detección y precisión en la detección , numerosos experimentos de simulación se han realizado durante laOperación de " despegue " , donde el número de Mach es variada 0-0,24 en 60 segundos manteniendo la altitud a la cero (es decir , el nivel del mar ) y TRA a 80 % . operaciones defectuosas en tres componentes diferentes , Ventilador , LPC y HPT , son simulado junto con la condición ideal del motor . laSensor de temperatura de salida HPT ( T48 ) ( que capta lafirmas de fallos anteriores en la ruta del gas ) se elige a proporcionar la respuesta transitoria . La razón de ser elegir el sensor de T48 se atribuye a la siguiente hechos físicos : ( i ) T48 se coloca entre HPT y LPT , y (ii ) LPT está conectado mecánicamente al ventilador y LPC a través del eje exterior . La frecuencia de muestreo de laDatos del sensor T48 es 66,7 Hz . Para el propósito de la formación , la duración de cada ciclo de simulación es elegido para ser 60 segundos (es decir , una serie de tiempo de longitud ? 4000 ) y la conjunto de datos transitorios para cada clase de falla se construye concatenando 50 de estos bloques de datos de series de tiempo que se generaron de forma individual en el banco de pruebas de simulación en condiciones de funcionamiento transitorias similares . Se observaque estos bloques de datos son estadísticamente similar pero no son idénticos .El siguiente paso es dividir los conjuntos de datos para generar respectivas cadenas de símbolos . La gama de la serie temporal se divide en intervalos de 5 (

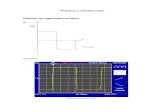
es decir , el tamaño del alfabeto | ? | = 5 ) , donde cada segmento de la partición corresponde a un símbolo diferente en el alfabeto ? .La fase de entrenamiento comienza después de las cadenas de símbolos se obtienen para cada una de las cuatro clases , es decir , uno nominal y tres condiciones defectuosas . En esta aplicación , basta con elegir la profundidad D = 1 [ 3 ] , lo que implica que la probabilidad de generación de un símbolo futuro depende sólo en el último símbolo, y por lo tanto el conjunto de los estados es isomorfo al alfabeto de símbolos ( es decir , Q ? ? ) . Para cada clase C1 y C2 , los parámetros MN Ni se obtienen contando el número de veces que el símbolo? n se emite desde qm estado. La fase de prueba se inicia con una nueva serie de tiempo de una de las clases , donde se genera la secuencia de símbolos utilizando el mismo alfabeto y la partición como en la fase de entrenamiento . Después de la ecuación . ( 11 ) , la parte posterior probabilidad de cada clase se calcula como una función de la longitud del conjunto de datos de prueba. La figura 1 muestra la probabilidad posterior de cada clase en función de la longitud de los datos de prueba observadas . Se ve que la secuencia observada se identificó correctamente a pertenecer a la clase de fallos LPC como la probabilidad posterior de la clase correspondiente se acerca a uno , mientrasse aproxima a cero para cada una de las clases restantes (es decir , los otros dos fallos de componentes y la condición nominal ) .Mediante la repetición de la misma técnica de clasificación en 50 nuevas pruebas de funcionamiento de culpa LPC, se observa que un dato longitud de 500 es suficiente para detectar el error con un confianza razonable . Para otros dos fallos de componentes , la probabilidad posterior para la clase de error correcto enfoques de la unidad dentro de la longitud de datos de 50 , como se veen la figura . 2 . La razón es que la culpa de firmas para ventilador y HPT en respuesta T48 son dominantes, aunque son incipientes. En una detección de fallos jerárquica y la estrategia de aislamiento , a un bajo nivel de resolución, el objetivo es identificar el componente defectuoso (por ejemplo , Ventilador , LPC o HPT) . una vez el fallo se encuentra , el siguiente paso es cuantificar el la gravedad de la falla localizada . El transitorio simbólica técnica de detección de fallo se puede ampliar para clasificar diferentes niveles de fallo en los componentes individuales de un motor de turbina de gas . Para la verificación, muestras de nominal los datos son inyectadas con una falla del ventilador de bajo nivel, donde la magnitud de fallo ( Fm) sigue un uniforme aleatorio distribución que va de 1 a 3. Las muestras restantes de los datos nominales se inyectan con un fallo en el ventilador de alto nivel de magnitud ( Fm ) dentro de la gama de 5 a 7. En este caso , se elige el tamaño del alfabeto ser | ? | = 6 a obtener una mejor separabilidad clase. La Figura 2 muestra que la probabilidad posterior de un alto satura de falla del ventilador para el valor de 1 dentro de una longitud de datos de 70 , que es equivalente a ? 1 seg . (Nota : Las

oscilaciones en posterior probabilidades en la figura . 2 son debido a la aleatoriedad de los parámetros estimados para las longitudes de datos más pequeños de 50 . Pero cuando el caso de prueba es un fallo de baja del ventilador ( ver La figura . 3 ) , la probabilidad posterior de un ventilador de alto nivel culpa sigue siendo dominante hasta los confines de longitud de datos? 400 . Esto daría lugar a una clasificación errónea como la probabilidad posterior de la clase verdadera alcanza 1 monotónicamente en alrededor de la longitud de datos de 1000 a , unos 15 segundos , como se ve en la figura . 3 . Este resultado está de acuerdo bien con la intuición de que el tiempo de detección se incrementa con más pequeños los niveles de fallo . Para examinar el desempeño de los transitorios simbólica detección de fallas , una familia de características de funcionamiento del receptor ( ROC ) se construye para diferentes longitudes de datos de prueba . Un escenario clasificación binaria se construye , que consiste en dos clases : el nominales la condición del motor que pertenece a la clase C1 , y una defectuosa condiciones fan perteneciente a la clase C2. La formación La longitud de datos es el mismo que el descrito en el anterior carreras de simulación . La regla de clasificación general en una símbolo cadena de ES es dada por donde el parámetro de umbral ? se varía para generar las curvas ROC . Para la clasificación binaria problema que nos ocupa , una curva ROC proporciona la compromiso entre la probabilidad de detección de PD = Pr { decidir C2 | C2 es true} y la probabilidad de falsa alarmas de PF = Pr { decidir C2 | C1 es true} . Para cada ROC curva , ? se varió entre 0,01 y 2 con los pasos de 0.01 . Se observa que las curvas ROC rendimiento mejorado rendimiento (es decir , el movimiento hacia la esquina superior izquierda ) progresivamente a medida que la longitud de datos de ensayo se aumentó deNtest = 20 a Ntest = 200 . Por lo tanto , basado en una familia de tales curvas ROC , una buena combinación de PD y Ntest se obtiene para un PF dado.
V. RESUMEN , CONCLUSIONES Y TRABAJOS FUTUROS
Este trabajo aborda la detección de fallas incipientes en motores de turbina de gas de análisis de transitorios pertinentesseries de tiempo. Probabilístico autómatas de estados finitos (EPIP ) Se han construido modelos de comportamiento del motor para la identificación de fallos en el contexto de la dinámica simbólica filtrado ( SDF ) [ 3 ] . La detección de fallos propuestoy el método de clasificación ha sido validada en el NASA C- MAPSS banco de pruebas de simulación [ 6 ] para varios condiciones de funcionamiento , y se informó de la dependencia de la precisión de detección en la longitud de datos . El importante conclusiones del documento son los siguientes.

1 ) Ampliación de la capacidad del SDF para manejar ( shortlength ) datos transitorios , más allá de lo que se ha hecho para conjuntos de datos cuasiestacionarios de suficiente longitud .2 ) Uso de la distribución Dirichlet y multinomial distribución [ 5 ] para a priori ya posteriori modelos , respectivamente , para representar las incertidumbres que resulta de la longitud finita de cadenas de símbolos tanto en la formación y fases de pruebas . El siguiente paso es la validación de los algoritmos subyacentes con los datos reales de funcionamiento del motor , seguido por a bordo de la prueba. Algunos de los temas de investigación futurae enumeran a continuación .• Comparación con otro basado en modelos y basadas en datos métodos de detección de fallas y clasificación.• Ampliación de la detección de fallos y clasificación método para dar cabida a diferentes tipos de sensores la degradación .• Pruebas y validación de la detección de fallos y método de clasificación en una variedad de instalaciones de prueba .
REFERENCIAS[ 1 ] G. Merrington , O. Kwon , G. Goodwin, y B. Carlsson " , Falladetección y diagnóstico en las turbinas de gas , " J. Eng . Turbinas de GasPoder, vol . 113 , pp 276-282 , 1991 .[ 2 ] VP Surender y R. Ganguli , "Adaptive filtro miríada demejora de la condición de la turbina de gas de monitoreo utilizando transitoriadatos ", J. Eng . Turbinas de gas de alimentación , vol . 127 , pp 329-339 , 2005 .[ 3 ] A. Ray, " análisis dinámico simbólica de los sistemas complejos dedetección de anomalías , " Procesamiento de Señales, vol . 84 , no. 7 , pp 1115 -1130, 2004 .[ 4 ] C. Rao , A. Ray , S. Sarkar, y M. Yasar , "Examen y comparativaevaluación de filtrado dinámico simbólico para la detección depatrones de anomalías , "Signal , Procesamiento de Imágenes y Vídeo, vol . 3 ,No . 2 , pp 101-114 , 2009 .[ 5 ] S. Wilks, Estadística Matemática . John Wiley , Nueva York , NY ,EE.UU. , 1963 .[ 6 ] DK Frederick , JA DeCastro , y JS Litt " , guía del usuariopara la simulación modular comercial sistema aero - propulsión(C- MAPSS ) ", octubre de 2007. NASA/TM2007-215026 .[ 7 ] T. Kobayashi y D. Simon , "Hybrid GeneticAlgorithm red neuronaltécnica para el diagnóstico de rendimiento de motores de avión , "

Diario de Propulsión y Energía , vol . 21 , no. 4 , pp 751 - 758, 2005,