Aplicacion Del Pid
24
Click here to load reader
-
Upload
leudy-encarnacion -
Category
Documents
-
view
607 -
download
2
Transcript of Aplicacion Del Pid

Universidad Tecnológica de Santiago
(UTESA)
Asignatura:
Controles De Sistemas Automáticos
Iel-900-001
Proyecto:
Aplicación del PID a una planta
Presentado a:
Prof. Ing. José Solís
Presentado por:
Handric Encarnación(2-07-0392)
18de Abril del 2011Santiago de los Caballeros,
República Dominicana.

Introducción:
A lo largo de nuestra carrera hemos visto materias interesantes en este caso nos
toco Control de Sistema Automático nos enseno mucho de la ingeniería moderna.
Como proyecto final de esta materia vamos crear una aplicación del PID que es un
mecanismo de control por retro-alimentación que calcula la desviación o error entre
un valor medido y el valor que se quiere obtener, para aplicar una acción correctora
que ajuste el proceso. El algoritmo de cálculo del controlPIDse da en tres
parámetros distintos: el proporcional, el integral, y el derivativo. El valor
Proporcional determina la reacción del error actual. El Integral genera una
corrección proporcional a la integral del error, esto nos asegura que aplicando un
esfuerzo de control suficiente, el error de seguimiento se reduce a cero. El
Derivativo determina la reacción del tiempo en el que el error se produce. La suma
de estas tres acciones es usada para ajustar al proceso vía un elemento de control
como la posición de una válvula de control o la energía suministrada a un
calentador, por ejemplo. Ajustando estas tres variables en el algoritmo de control del
PID, el controlador puede proveer un control diseñado para lo que requiera el
proceso a realizar.

Objetivo general
Implementar un PID para controlar una planta.
Objetivos específicos
Demostrar los conocimientos obtenidos en la materia.
Demostrar que el PID puede controlar la respuesta de la planta.
Aplicar simuladores de circuitos.
Aplicar criterio de Routh para verificar donde nuestro circuito se nos
hace estable.

Planteamiento del Problema
Diagrama de bloque
R(s) Y(s)
Referencia
Este es el diagrama de bloque de nuestro proyecto, como puede visualizarse que
consta de un PID, la Planta y la referencia para que el PID pueda funcionar
correctamente.
Planta del Sistema RC
Esta es la planta que vamos a controlar al energizarla se estabiliza a los 130ms. Este
tiempo se quiere reducir a un tiempo total que es 100ms. La siguiente grafica
muestra la señal de la planta al conectarlo al osciloscopio.
PlantaPID

Esta es la señal que se quiere mejorar. Enseguida el análisis para obtener dicha
mejora.
Función de transferencia de la planta
Análisis de malla y ley de voltaje de kirchoff
Ecuación # 1 del circuito
-ei+ vr1+vc1=o
ei(t)= vr1(t)+vc1(t)
ei(t)= R1I1(T) + 1 (I1(T)+ I2(t)d(t) C1(T)

Aplicamos la transformada de Laplace
e i(s )=R1 I 1 (S)+I 1 (S)−I 2(S )
C1(S)
e i(s )=R1 I 1 (S)+I 1 (S)
C1 (S)
−I 2 (S)
C1 (S )
e i(s )=I 1(S)(R1+1
C1(S )
)−I 2 (S)
C1 (S)
I 1(s)=e i (s)−I 2(S )
R1+C1 (S)
¿
Ecuación # 2 del circuito
c i+vr 2+vc 2=o
R2 I2 (T )+1
C1 (T )
∫ ( I ¿¿2−I ¿¿1)d (t)+ 1C2 (T)
∫ I2❑
d (t)¿¿ = 0
Aplicamos la transformada de Laplace
R2 I2 (S)+I2 (S)−I 1 (S)
C1(S )
+I 2(S )
C2(S )
=0
I 2(S )¿ ¿
I 2(S )(R2+1
C1(S )
+ 1C2(S)
)=I 1(S )
c1(s )
I 1(s)=I 2 (S)(R2+1
C1(S)
+ 1C2 (S)
)¿

Ecuación # 3 del circuito
eO (t )=− 1C2(T)
∫ ¿¿¿
Aplicamos la transformada de Laplace
eO (t )=−I 2(S )
C2(S )❑
Ecuación # 4 del circuito (Igualamos las Ecuaciones 1 y 2)
ei (s)−I 2 (S)
R1+C1(S )
¿=I 2(S)(R2+1
C1(S )
+ 1C2 (S)
)(C1 (S ))
ei (s)−I 2 (S)
I 2 (S)
¿=R1+C1 (S)(R2+1
C1(S )
+ 1C2 (S)
)(C1(S ))
e i(s )
I 2 (S)
−I 2 (S)
I 2 (S)
=R1+C1(S )(R2C1(S )+1+C1(S )
C2(S )
)
I 2(S )=1
R1C1C2 S2+(R¿¿1C1+R2C2+R1 C2)S+1¿
Para la función de transferencia Anterior los valores de Planta son los
Siguientes:
Ra= 2 k ohmios
Rb = 2 k ohmios
Ca= 1 micro faradio

Cb = 1 micro faradio
G(S)= 1
RaRbCaCb S2+(RaCa+RaCb+RbCb) S+1
G(S)= 1
2∗103.2∗1031∗10−6 .2∗10−6 s2+(2∗103. 1∗10−6+2∗103. 1∗10−6+2∗103 .1∗10−6)S+1
G(S)= 1
4 S2+6∗10−3 S+1
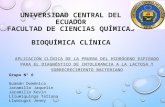
La función de transferencia nos proporciona una gráfica de segundo orden con una
señal aplicada ζ > 1. Al introducirla en el Matlab obtuvimos la Siguiente grafica.
>> step(c)
>> ra=2000;
>> rb=2000;
>> ca=1e-6;
>> cb=1e-6;
>> num=1;
>> den=[ra*rb*ca*cb,ra*ca+rb*cb+ra*cb,1];
>> c=tf(num,den)
Transfer function:
1
------------------------
4e-006 s^2 + 0.006 s + 1

Este análisis nos lleva a crear un PID que nos ofrezca junto a la planta un sistema
que se estabilice a los 100ms.
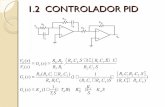
Diseño de controlador PID
Este es nuestro PID esquematicamente
Step Response
Time (sec)
Am
plit
ude
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
System: cTime (sec): 0.00605Amplitude: 0.631
System: cTime (sec): 0.0108Amplitude: 0.852
System: cTime (sec): 0.0171Amplitude: 0.955
System: cTime (sec): 0.0234Amplitude: 0.987
System: cTime (sec): 0.029Amplitude: 0.995

Este
es el PID de nuestro sistema.
Función de transferencia del PID
E(s) Ei(s)= -Z(2)
Z(1)
Donde:
Z(1) = R(1)
R(1) C(1) +1
Z(2) = R(2) C(2s) +1C2(s)
Por lo tanto:
E(s) Ei(s) = R(2) C(2s) +1 R(1)
C2(s) R(1) C1(s) +1
Considerando que:
E0/E(s) = - R(4) / R (3)

Tenemos que:
E0 ( s) ( R E0 ( s)+E( s) )Ei ( s) E( s)
=R4 R2
¿¿
R4 ( R1C1+R2 C2 )
[1+1 ( R1C1+R2C2 ) s+(R1 C1 R2
C2
R1
C1+R2 C2)]
Por lo que:
k p=R4 ( R1C1+R2C2 )
R3 R1 C2
T i=¿R 1C1+R2 C2¿
TD=¿
R1 C1 R 2C2
R1 C1+R2 C2
¿
En términos de la ganancia Proporcional, Integral, Derivativa tenemos:
k p=R4 ( R1C1+R2C2 )
R3 R1 C2
k i=R4
R3 R1 C2
k d=R4 R2 C1
R3
De esto tendremos que la ecuación de transferencia será:
C ( s )=k p+k i
s+kd s

De donde el valor de kp será:
K P=R4 ( R1 C1+R2 C2 )
R3 R1C2
=(90∗103 ) (10∗103 ) (100∗10−6 )+R2 (47∗10−6 )
(100∗103 ) (10∗103 ) (47∗10−6 )
K P=1.9+¿
Luego determinamos el valor de ki:
K i=R 4
R3 R1C2
= 3∗103
(100∗103 ) (10∗103 ) (47∗10−6 )=0.0638
Luego determinamos el valor de kd:
K D=R4 R2 C1
R3
=(3∗103 ) R2 (100∗10−6 )
(100∗103 )=3∗10−6 R2
Ahora procedemos a realizar la operación de lazo abierto para el sistema:
R(s) Y(s)
k p+k i
s+k d s
1
s2 ( R1 R2 c1c2 )+s ( R1 c2+R2c2+R1 c1 )+1

K P+K I
S+K D
S∗KD S2+K P S+K I
(C3 C2 R1 R2 ) S2+S (C1 R1+C2 R1+C2 R2 )+1
K P+K I
S+K D S
((C1C2 R1 R2 ) S2+S (C1 R1+C2 R1+C2 R2 )+1)
=K D S2+KP S+K I
((C1C2 R1 R2 ) S3+S2 (C1 R1+C2 R1+C2 R2 )+S)
Ahora procedemos a aplicar los cálculos a lazo cerrado lo cual es de la forma:
E ( s)= G1+GH
Entonces tendremos que:
K D S2+KP S+K I
( (C1C2 R1 R2 ) S3+S2 ( C1 R1+C2 R1+C2 R2 )+S )(C1C2 R1 R2 ) S3+S2 (C1 R1+C2 R1+C2 R2 )+S+K D S2+KP S+K I
( (C1C2 R1 R2 ) S3+S2 ( C1 R1+C2 R1+C2 R2 )+S )
(K ¿¿ D S2+KP S+K I )
(C1 C2 R1 R2 ) S3+S2 (C1 R1+C2 R1+C2 R2)+S+ KD S2+K P S+ K I
¿
Luego sustituimos letra por su valor en la ecuación de transferencia
(7.02∗10−7 RD S2+(0.14+2.12∗10−2 RD )S+3.17)47∗10
−6S
3+(1.47+3∗10−6
R2 )S2+ (1.9+1∗10−9
R2 )S+0.0638

Obtenida ya las ecuaciones aplicamos criterio de Routh para determinar la estabilidad del sistema.
47∗10−6 S3+(1.47+3∗10−6 R2 ) S2+((1.9+1∗10−9 R2)) S+0.0638
Aplicando el criterio de Routh obtenemos
S3 47∗10−6 1.9+1∗10−9 R20
S2 1.47+3∗10−6 R20.0638 0
S1 a1 a2❑
S0 0.0683
a1=
(1.47+3∗10−6 R2 )( 1.9+1∗10−9 R2
)– ( 47∗10−6∗0.0638 )
(1.47+3∗10−6 R2 )
a1=(5.9∗10−12 R2
2 )+(7.38∗10−6 R2)−(0.321∗10−6 )
(1.47+3∗10−6 R2)
a2=0
a3=(a1∗0.0683 )−(0.041+7.02∗10−7 R2 )∗0¿¿ ¿a1
=>a3=0.0683
Para Hallar a R2
1.47+3∗10−6 R2>0 despejado a R2 tenemos3∗10−6 R2>−1.47
R2>−0.41
3∗10−6 luego tendremos que R2>−136,666.67

(5.9∗10−12 R22)+(7.38∗10−6 R2)−(0.321∗10−6 )
(1.47+3∗10−6 R2 )>0
Despejando a R2 de la Ecuacion
R2 (7.38∗10−6+5.9∗10−12 R2 )3∗10−6 R2
>−1.47+0.321∗10−6
(7.38∗10−6+5.9∗10−12 R2)3∗10−6 R2
>−1.469
7.38∗10−6+5.9∗10−12 R2>−1.469∗3∗10−6 R2
7.38∗10−6+5.9∗10−12 R2>−4.407∗10−6de aquíencontramos que:
5.9∗10−12 R2>−4.407∗10−6−7.38∗10−6
R2>−12.39∗10−6
5.9∗10−12 R2
entonces R2>−2,099,491.55
Encontrado el aproximado de R2 mediante el criterio de Routh podemos decir que debido a que no hay resistencia según el valor de R2 podemos asumir que es estable en cualquier valor a partir de1.
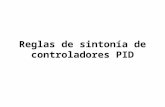
Debido a que nuestra planta se estabiliza a los 130ms segundos deseamos mejorar el sistema y que tenga un tiempo de respuesta mejor, fuimos variando a R2 y logramos lo que queriamos a los 10K ohm y esta fue la grafica que obtuvimos.

Como se puede apreciar en la grafica se pudo lograr el objetivo asignandole a R2 un valor de 10K ohm. Esta representa el circuito conectada aun osiloscopio, vamos a proceder a matlab para obtener dicha senal atraves de su ecuacion.
>> kd=3e-6;
>> ki=0.0638;
>> kd=3e-6*1000;
>> kp=1.9+1e-9*1000;
>> nu1=[kd kp ki];
>> de1=[ca*cb*ra*rb,ca*ra+cb*rb*ra*cb+kd,kp,ki];
>> c1=tf(nu1,de1)
Transfer function:
0.003 s^2 + 1.9 s + 0.0638
------------------------------------------

4e-006 s^3 + 0.005004 s^2 + 1.9 s + 0.0638
>> step(c1)
Como se puede apreciar en esta grafica la señal su tiempo de estabilización en aproximadamente 100ms. Ya con estas dos últimas simulaciones podemos demostrar que se alcanzaron los objetivos deseados. Obtuvimos la configuración de un PID que mejora el tiempo de estabilización de 130ms a 110ms.
0 0.002 0.004 0.006 0.008 0.01 0.0120
0.2
0.4
0.6
0.8
1
1.2
1.4
System: c1Time (sec): 0.0114Amplitude: 1
System: c1Time (sec): 0.00493Amplitude: 1.01
Step Response
Time (sec)
Am
plitu
de

Conclusión
A veces es necesario cambiar los parámetros de diseño, debido a que muchas veces no podemos cumplir con estos. Realmente todo se puede hacer pero en algunos casos debemos tomar en cuenta lo que nos ofrece el mercado.
El uso de programas de simulación de circuitos nos facilita el diseño, los cuales nos podrían salir un poco tedioso.
Se tuvo que variar algunas resistencias, debido a que solo algunas cumplían con las condiciones para que las resistencias del circuito del PID sean valores reales.
Se obtuvo el objetivo deseado con respecto al diseño del sistema.
Podríamos definir el diseño de este proyecto como un poco tedioso para aquella persona inexperta en el manejo de MATLAB, Simulink, Proteus, entre otros.
El PID es un dispositivo muy necesario en los sistemas de control automático ya que con este podemos controlar la salida de cualquier planta con tan solo configurarlo adecuadamente.
En nuestra configuración de PID variando la R2 se puede variar la salida de este ajustándolo al nivel deseado.

Bibliografía:
Ingeniería de Control Moderna Katsushimo Ogata
Sistema de control moderno. Benjamin Kuo
Internet