Aplicación giroscópica para mejorar el control de presas (I) · presas de bóveda, especialmente...
14
A PLICACIÓN giroscópica para mejorar el control de presas (1) JOSÉ LUIS VALBUENA DURÁN Ingeniero Técnico en Topografía Especialista en instrumentación geodésica por el CSIC Instituto de Astronomía y Geodesia Profesor asociado de la E.U. de T.T. Topográfica de Madrid ANA GONZÁLEZ CABALLERO Ingeniera Técnica en Topografía TOPSER SA A MODO DE PROLOGO En otoño de 1994, en una reunión técnica con los responsables de Pro- ducción del Canal de Isabel II (CYII) me comentaron el interés que tenían por conocer la orientación exacta de los sistemas de lectura de péndulos en presas de bóveda, especialmente en la de El Atazar. Sus sistemas de control por péndu- los eran utilizados regularmente des- de la construcción de la presa, de for- ma plenamente satisfactoria, pero de- seaban realizar este trabajo, más a título experimental que de aplicación práctica. Fundamentalmente querían evaluar la precisión obtenida, libre de sistematismos, y poder hacer la com- paración con plena homogeneidad de estos datos con los procedentes de otras técnicas de control, así como es- tudiar futuras aplicaciones de las téc- nicas así desarrolladas en otros casos similares. Tras proponer una metodología viable se formalizó un contrato de in- vestigación, no remunerativo, em- pleando como vehículo administrati- vo a la empresa TOPSER S.A., que co- labora habitualmente con el CYII. Se me asignó la dirección del trabajo, que fue realizado. Tuve la fortuna de encontrar en la Escuela de Topografía a nuestra com- pañera Ana González Caballero, en- tonces aún alumna, pero veterana de campo por pertenecer a una ilustre fa- milia de colegas. Acababa de terminar los estudios y basó su proyecto fin de carrera en este trabajo, tan fuera de lo habitual. Tan to en la fase inicial como en la de observación de campo surgieron los múltiples obstáculos y dificultades propios de los trabajos experimenta- les, obligando a multiplicar esfuerzos y extremar la generosidad en la dedi- cación. Todo se fue superando, satisfa- ciendo en su mamen to las peticiones del CYII, y continuando con muchas horas de recopilación, de consultas y debates técnicos; de duro trabajo, en resumen. Aprendimos sobre girosco- pios y otras técnicas más de lo que es- perábamos y menos de lo que deseá- bamos. Nuestra compañera Ana obtuvo fi- nalmente el merecido título. En este artículo, parcialmente basa- do en el proyecto fin de carrera, des- cribimos el problema planteado, las metodologías utilizadas, unas conven- cionales y otras de desarrollo propio, y las actuaciones realizadas; todo ello con el debido análisis y razonamiento. Dado lo infrecuente de este trabajo y lo novedoso de algunas facetas, cree- mos de interés su divulgación porque la experiencia adquirida puede ser utilizada en otras aplicaciones dife- rentes (de hecho ya lo ha sido). 1. INTRODUCCION La presa de El Atazar, propiedad del CYII, está situada 80 km al norte de Madrid. Es de bóveda gruesa, de doble curvatura, con 134 m de altura sobre cimientos y 128 m sobre el nivel del cauce. Su espesor varía desde los 36 m de la base hasta los 6 m en la par- te superior. La coronación, con 484 m de longitud, tiene 10 m de anchura, ocupados por una carretera con ace- ras. Para el control geodésico de defor- maciones posee unas redes y poligo-
Transcript of Aplicación giroscópica para mejorar el control de presas (I) · presas de bóveda, especialmente...

APLICACIÓN giroscópica para mejorarel control de presas (1)
JOSÉ LUIS VALBUENADURÁNIngeniero Técnico enTopografíaEspecialista eninstrumentacióngeodésica por el CSICInstituto deAstronomía y GeodesiaProfesor asociado dela E.U. de T.T.Topográfica deMadrid
ANA GONZÁLEZ
CABALLEROIngeniera Técnica enTopografíaTOPSER SA
A MODO DE PROLOGO
En otoño de 1994, en una reunióntécnica con los responsables de Pro-ducción del Canal de Isabel II (CYII)me comentaron el interés que teníanpor conocer la orientación exacta delos sistemas de lectura de péndulos enpresas de bóveda, especialmente en lade El Atazar.
Sus sistemas de control por péndu-los eran utilizados regularmente des-de la construcción de la presa, de for-ma plenamente satisfactoria, pero de-seaban realizar este trabajo, más atítulo experimental que de aplicaciónpráctica. Fundamentalmente queríanevaluar la precisión obtenida, libre desistematismos, y poder hacer la com-paración con plena homogeneidad deestos datos con los procedentes deotras técnicas de control, así como es-tudiar futuras aplicaciones de las téc-nicas así desarrolladas en otros casossimilares.
Tras proponer una metodologíaviable se formalizó un contrato de in-vestigación, no remunerativo, em-pleando como vehículo administrati-vo a la empresa TOPSER S.A., que co-labora habitualmente con el CYII. Seme asignó la dirección del trabajo,que fue realizado.
Tuve la fortuna de encontrar en laEscuela de Topografía a nuestra com-pañera Ana González Caballero, en-tonces aún alumna, pero veterana decampo por pertenecer a una ilustre fa-milia de colegas. Acababa de terminarlos estudios y basó su proyecto fin decarrera en este trabajo, tan fuera de lohabitual.
Tan to en la fase inicial como en lade observación de campo surgieron
los múltiples obstáculos y dificultadespropios de los trabajos experimenta-les, obligando a multiplicar esfuerzosy extremar la generosidad en la dedi-cación. Todo se fue superando, satisfa-ciendo en su mamen to las peticionesdel CYII, y continuando con muchashoras de recopilación, de consultas ydebates técnicos; de duro trabajo, enresumen. Aprendimos sobre girosco-pios y otras técnicas más de lo que es-perábamos y menos de lo que deseá-bamos.
Nuestra compañera Ana obtuvo fi-nalmente el merecido título.
En este artículo, parcialmente basa-do en el proyecto fin de carrera, des-cribimos el problema planteado, lasmetodologías utilizadas, unas conven-cionales y otras de desarrollo propio, ylas actuaciones realizadas; todo ellocon el debido análisis y razonamiento.Dado lo infrecuente de este trabajo ylo novedoso de algunas facetas, cree-mos de interés su divulgación porquela experiencia adquirida puede serutilizada en otras aplicaciones dife-rentes (de hecho ya lo ha sido).
1. INTRODUCCION
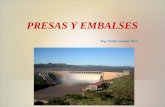
La presa de El Atazar, propiedaddel CYII, está situada 80 km al nortede Madrid. Es de bóveda gruesa, dedoble curvatura, con 134 m de alturasobre cimientos y 128 m sobre el niveldel cauce. Su espesor varía desde los36 m de la base hasta los 6 m en la par-te superior. La coronación, con 484 mde longitud, tiene 10 m de anchura,ocupados por una carretera con ace-ras.
Para el control geodésico de defor-maciones posee unas redes y poligo-

APlicación giroscópica para mejora del control de presas
nales, ya descritas en esta revista (Val-buena et al., 1992).
Además de esta infraestructura,también está instrumentada para sucontrol, entre otros elementos, con 6péndulos invertidos y 2 péndulos di-rectos (figura n" 1), cuyo sistema delectura, mediante coordinómetros,permite establecer el aparente vectordiferencial de desplazamiento hori-zontal del hilo metálico del pénduloen tre sucesivas observaciones.
Desde las galerías se accede a las ba-ses de lectura de los péndulos, situa-das en el interior de pequeños cuar-tos, pozos o pasillos ciegos, o inclusoun simple armario en un caso. Encada base, ante el hilo del péndulo,hay un instrumento, llamado coordi-nómetro, con el que se hacen las ob-servaciones para establecer la posi-ción relativa entre hilo e instrumento.
Lo que siempre se desplaza cuandola presa se deforma es el conjunto delcoordinómetro, que es solidario a laestructura. En el caso de los péndulosinvertidos podemos considerar estáti-co en el espacio el hilo de suspensiónpor su anclaje inferior en un puntomuy bajo de los cimientos, zona no su-jeta a deformaciones.
Este tipo de péndulos pueden aSI-milarse a un globo de los que empleanlos niños para jugar; siempre tienenvertical su hilo de sujeción (vientoaparte). De igual forma, un pénduloinvertido mantiene su hilo de suspen-sión vertical, no por estar relleno dehidrógeno y flotar en el aire que le ro-dea, sino porque el extremo superiordel hilo está sujeto a una especie deboya anular que flota en el interior deuna cuba llena de aceite; éste actúacomo amortiguador del movimiento.Funcionalmente es idéntico al globopuesto como ejemplo, ofreciendosiempre un hilo en la vertical del an-claje inferior.
Topografía YCartografía R
I~I; ¡, ,
--~-- -----~--1---! S.GelMlf1ll ¡I I¡ ¡!I--t-------- --I¡¡I
I--~--
¡¡¡¡¡
--~------- --
i
- -----------~--- -® Pozo d. p6ndulo
/:). HlIodolarocf.""'rior
La figura n" 2 muestra un pénduloinvertido con sus bases de lecturas yaccesos, con un detalle de cómo es lacuba y el flotador. La figura nQ 3 mues-tra una base superior en la que bajo lacuba está el coordinómetro.
Galer(a 'Claustro"Cuba y flotador
Flotador
TLbo
Hilo
Galeda
Base
Anclaje Inferior
Figura 1. El Atazar. Plantay situación de péndulosy algunos hitos
Figura 2. Sección de murode presa con pénduloinvertido
Anclale superior
Cuba con aceite

APlicación giroscópica para mejora del control de presas
Figura 3. Base superiorcon cuba y
coordinómetro
Los péndulos directos se usan a ve-ces (como en este caso) en la zonacentral del muro de presa, en la que lamayor curvatura vertical de la bóvedaprovocaría que el hilo de un péndulodesde la coronación hasta los cimien-tos saliera fuera de la estructura en lazona de mayor concavidad. Hay presasen las que se han instalado péndulosinvertidos en esta zona, pero prote-giendo su hilo del viento con un tuboexterior en la parte donde sale de laestructura.
Aunque la aplicación de los péndu-los directos es equivalente a la de losinvertidos, la interpretación de sus ob-servaciones es algo diferente al tenerque considerar el movimiento del an-claje superior.
La observación de los péndulossólo permite cuantificar inclinacionesrelativas entre los puntos verticales enlos que se observe el hilo del péndulo.Por sí solos, los péndulos no podríandetectar un hipotético desplazamien-to conjunto en el que incluso el ancla-je inferior se moviera solidariamente.Las redes y poligonales geodésicas decontrol sí pueden hacerlo, como unade sus aplicaciones.
Es conveniente hacer algunas consi-deraciones elementales sobre el com-portamiento dinámico de la estructu-
ra de una presa de bóveda, limitándo-nos a comentar los desplazamientoshorizontales de la parte superior. Usa-remos los términos radial y tangencialreferidos al arco de curvatura de coro-nación. Lógicamente el radial es en ladirección del cauce y el tangencial ha-cia una y otra margen.
Según información de los Ingenie-ros de Caminos que tienen a su cargola presa de El Atazar, el máximo movi-miento horizontal radial en el centrode la coronación no supera los±20 mm. Estos casi 40 mm tienen doscomponentes: el térmico y el de carga.
Al aumentar la temperatura, la pre-sa se dilata y su radio de curvatura dis-minuye, desplazándose la coronaciónaguas arriba; y viceversa. Los estribosno tienen movimiento tangencial alno variar la carga sobre el terreno. En-tre condiciones extremas la magnitudtotal del movimiento en el centro decoronación por causas térmicas es apro-ximadamente de 20 mm (±10 mm).
Al embalsar agua y estar la presabajo carga, su coronación se desplazaradial mente aguas abajo; y viceversa.Los estribos aumentan la presión so-bre el terreno y tienden a tener movi-miento tangencia\. Entre condicionesextremas la magnitud total del movi-miento en el centro de coronaciónpor carga no llega a 20 mm«±10 mm). El movimiento tangencialde los estribos es residual, absorbien-do el hormigón por compresión la va-riación dimensional.
Estos conceptos son importantes. Escurioso que la deformación por causastérmicas sea algo mayor que la corres-pondiente a la carga. Bajo estas premi-sas, una presa grande de bóveda, delporte de la de El Atazar, en invierno ycargada tiene el centro de su corona-ción casi 40 mm más hacia agua abajoque en verano y descargada. En veranocon carga y en invierno sin carga, al
Topografíay 0.'(0".6. 11

APlicación giroscópica para mejora del control de presas
compensarse ambos fenómenos, la si-tuación tiende a ser parecida.
En control estricto, los valores corres-pondientes a un punto de una estructu-ra como la comentada incluyen, ademásde los parámetros dimensionales (coor-denadas), el momento de observación,el nivel de embalse y la temperatura delhormigón. Los dos últimos son obteni-bles conociendo el momento de la ob-servación, dado el seguimiento perma-nente que de estos parámetros se hacerutinariamente en la presa.
1.1. Coordinómetro
En cada base de medida, ante elhilo del péndulo, y montado en unplano horizontal sobre dos carriles so-porte laterales recibidos en el hormi-gón del muro, hay un coordinómetro.Este instrumento consta de una placabase que se desplaza lineal mente so-bre una barra guía de sección cuadra-da (figura nQ 4).
La placa base porta tres anteojoshorizon tales que funcionan sin lentes,como pínulas; el central es ortogonala la barra guía; los otros dos, uno acada lado, a 45°, convergentes hacia ellado del hilo. Apuntan hacia un conoque está en la parte delantera de laplaca base y que constituye el puntoprincipal del coordinómetro, al quese refieren todas las observaciones.
La placa base posee un nonius quepermite hacer lecturas, con resoluciónde 0,1 mm, sobre una escala milimétri-ca grabada en la barra guía. Aunquepor conveniencia mecánica los tres an-teojos están agrupados en una mismaplaca base, realmente se utilizan comosi fueran independientes uno de otro.
En la figura n Q 5, tomada desde laparte inferior, pueden verse los anteo-jos con las ranuras oculares, la escala yel nonius y el sistema micrométrico dedesplazamiento.
'I'opografía y Cartograf'í ~
1"'1
iBarra gura
Pozo Hilo
'1'''1
La observación se realiza sucesiva-mente por cada uno de los anteojos,superponiendo la imagen del cono so-bre la del hilo y haciendo una únicalectura longitudinal, en cada caso, so-bre la escala de la barra guía.
En función de la geometría de ob-servación, a partir de las lecturas reali-zadas podemos establecer la posiciónplanimétrica (x, y) del hilo en un sis-tema cartesiano bidimensional orto-gonal horizontal, cuyo eje de abscisasestá definido como paralelo a la barraguía, creciendo al mover a la derechael coordinómetro, en el que la dispo-sición es: observador - barra guía -
Figura 4. Coordinómetroen base
Figura 5. Vista inferior deun coordinó metro

Figura 6.Indeterminación angular
del vector deformación
APlicación giroscópica para mejora del control de presas
////.-""
//
/I
!I
II
IIIIIIIII\ I\ I\ I
\ I\ I
-. Hilo // ~' / f""'------~------/;~/·-\
\..••.•j,',,' : .; / "
,,_-..:..-,,:"
Ctrcuode error
(0= O,lrrm)
............... ,"'--, -, -,
\\\
\\\\\II
20·
hilo; el eje de ordenadas crece en elsentido observador - hilo.
Creemos que la detallada exposI-ción del funcionamiento del coordi-nómetro, descrita en el trabajo docen-te (González, 1995), no es procedenteincluirla en este artículo. A título pu-ramente conceptual haremos notarque los desplazamientos del hilo para-lelos a la barra guía corresponden conla variación de lectura del anteojocentral. Los desplazamientos perpen-diculares coinciden con el incremen-to de la diferencia de cualquiera delos laterales con el central por estarmon tados a 45 o, dependiendo el signode cual se use.
Además, la media de las lecturas ex-teriores debe coincidir con la central,posibilitando así un criterio de tole-rancia, lógicamente esperable al ha-ber redundancia por disponer de tresvalores para obtener dos incógnitas.Siendo L1 y L3 las lecturas correspon-dientes a los anteojos exteriores y L2la del central, el CYII emplea el si-guiente:
(L3 + Ll - 2 X L2) / 4 < 0,1 mm
El origen del sistema se mantieneconstante por su montaje mecánico.Aunque sería imprescindible su cono-
cimiento para la determinación abso-luta de la posición del hilo respecto alcoordinómetro, es irrelevante en laaplicación de control, ya que la finali-dad del instrumento es obtener la di-ferencia de posiciones horizontalesdel hilo entre una observación de re-ferencia y otra realizada en un mo-mento concreto, para lo que sólo seutilizan incrementos de lecturas.
El sistema definido por cada coordi-nómetro es local e idéntico en cadabase de lectura, aunque su orienta-ción es diferente en cada una de ellas.Lo denominaremos en adelante «sis-tema local». Hay tantos sistemas loca-les como bases de lectura.
Los vectores deformación son pe-queños, por lo que vamos a considerarcomo base de la exposición un valorde 30 mm, valor superior al máximoesperable, ya que si se considera comoreferencia una situación media, losdesplazamientos normales observa-bles serían menores de ±20 mm. En ladeterminación del módulo del vectorcon el coordinómetro se alcanza unaresolución no mejor que 0,1 mm,como ya sabemos, dado el criterio detolerancia expuesto.
Una variación en el argumento de20' generaría un error igual a la reso-lución mencionada (figura nº 6), sien-do menor el error en vectores máspequeños. Por tanto, para aprovecharadecuadamente la información obte-nida de los péndulos, es necesario ysuficiente establecer la orientación delas barras guía con precisión de ±1O'.Queremos resaltar que este plan tea-miento es intencionadamente severoporque el módulo considerado superaen un 50% al máximo esperable.
1.2. Determinación del vectordesplazamiento
Como ya hemos dicho, podemosconsiderar inmóvil en el espacio el
Topografía y Cartografía R

APlicación giroscópica para mejora del control de presas
hilo de un péndulo invertido, siendola estructura la que sufre los desplaza-mientos. Cualquier "movimiento" de-tectado del hilo es sólo aparente, ha-biendo ocurrido un desplazamientoidéntico de la estructura en sentidocontrario.
Como base para la exposición, su-pongamos que el coordinó metro estáinstalado en el interior del muro depresa con la barra guía paralela a latangente del eje longitudinal horizon-tal del muro y con el hilo situado aguaarriba de la barra.
Con este montaje, un incrementoL'lx positivo en las coordenadas delhilo nos mostrará un movimiento tan-gencial de la estructura hacia la mar-gen derecha, y un incremento L'ly posi-tivo en las coordenadas del hilo nosmostrará un movimiento radial de laestructura dirección agua abajo, comoes el caso representado en la figuran º 7, donde se incluye el vector des-plazamiento.
El desplazamiento siempre se refie-re a una cierta posición testigo origen,en la que se tomaron unas lecturas ini-ciales de referencia. En el momentodel control se hacen unas nuevas lec-turas con las que se determinan lasdos componentes L'lx y L'ly del vectordesplazamien to.
1.3. Alternativas de montaje
La disposición descrita (agua abajo- observador - barra - hilo - agua arri-ba) corresponde al montaje conside-rado como básico en la presa de ElAtazar. En la notación interna de con-trol del CYII, las dos componentes delvector desplazamiento en este sistemason denominadas T y R:
• T es la componente tangencial delmovimiento. Corresponde al L'lx.
• R es la componente radial del mo-vimiento. Corresponde al L'ly.
'Topografí y Cartografía p
Radial agua err oe
,,_,, __ oerecba +,,_,,_Pcsíctón ceoetecca eoecorKJen
~ ~1 11 11 <:=T= 11< Ax 1 /~,I I / I -.1 1 / ¡ -.1 1 / ¡ -.1 1 / ¡ "'"! .~~~---~--~------~~Ipector ¡ -. Ay R1 desplazamiento ¡ ",)ll' , "Ví-~---------~--------~
!
Situaciónactual
-
En este mon taje los signos de lascomponentes representan:
Si T > 0, un desplazamiento haciala margen derecha.Si T < 0, un desplazamiento haciala margen izquierda.Si R> 0, un desplazamiento haciaagua abajo.Si R < 0, un desplazamiento haciaagua arriba.
Esto sería cierto sólo en el montajedescrito, y si consideráramos la barraguía como paralela a la tangente delmuro de presa, lo que es siempre in-definido porque los paramentos exte-rior e interior no son paralelos (salvoen el plano vertical medio de la presa,donde no hay péndulos), ya que el es-pesor del muro varía continua y pro-gresivamente, aumentando desde elcentro hacia los estribos.
Figura 7. Geometríagenet:al de control concoordinómetro
Por otra parte, unas componentesdadas pueden cambiar su signo si labarra está agua arriba respecto al hilo(conjunto invertido o rotado 1800
), oestar cambiados si la barra es perpen-dicular al muro de presa (conjunto ro-tado ±900
), dependiendo el signo, eneste caso, de la margen a la que la ba-rra esté más cercana. Todo ello, consi-derando genéricamente las compo-

APlicación giroscópica para mejora del control de presas
~~
---~------------- Genera I
Figura 8. Diferentesmontajes y sistemas de
referencia
nentes como tangencial y radial (figu-ra nº 8).
En esta presa hay montajes "norma-les", otros girados 180° y uno girado90°.
2. PROBLEMATlCA PLANTEADA
Para el mejor análisis del movimien-to de la estructura, es deseable cono-cer todos los vectores desplazamientoen un mismo sistema de referencia,siendo obvia la elección del sistemageneral de la presa, que en adelantedenominaremos «sistema general».Este sistema, también local, definidopor las coordenadas planas de la redexterior de control, es cartesiano tridi-mensional ortogonal, cuyo eje de abs-cisas es paralelo al eje de presa, consentido creciente dirección agua aba-jo; el de ordenadas crece desde lamargen derecha hacia la izquierda; elde Z hacia el cenit. El origen del siste-ma es aleatorio y todas las coordena-das de la estructura son positivas.
Cada base de lectura tiene bien es-tablecidas sus coordenadas en el siste-ma general, tanto las planimétricas,idénticas para todas las bases de unmismo péndulo (el hilo es vertical),como las altimétricas, por estar en ga-lerías de cota conocida. En cualquiercaso estas coordenadas no son críticas,porque el desplazamiento de dos pun-tos distanciados unos metros es tan si-milar que la diferencia entre el des-plazamiento de ambos será muy infe-rior a la precisión con la que se puedaobtener el vector deformación encualquiera de ellos mediante péndu-los y coordinómetros.
Para establecer en el sistema generalel argumento del vector deformaciónobtenido, hasta ahora siempre referidoal sistema local de cada base, era nece-sario conocer la orientación de cada ba-rra guía (y por tanto del sistema localque establece) en el sistema general.
Para ello tuvimos que solucionardos cuestiones.
La primera era la materialización,de forma observable, de la orienta-ción de la barra guía. La dificultad bá-sica estribaba en las cortas dimensio-nes de las barras guía y el reducido es-pacio (a veces casi inexistente) delque disponíamos, sobre todo en elsentido longitudinal de la barra.
La segunda era la transmisión de laorientación al exterior. En una estruc-tura de hormigón fuertemente arma-do la orientación magnética es invia-ble. Mediante breves itinerarios gonio-métricos sería posible orientar con laspoligonales de control de las galerías,pero en distancias tan cortas difícil-mente podría cumplirse la toleranciaestablecida. El problema se agudiza sia la base se accede por un pozo o nohay poligonal de control en la galería.
Esto lo resolvimos en este trabajoempleando respectivamente métodosde autocolimación y giroscópicos.

APlicación giroscópica para mejora del control de presas
El fundamento del método utilizadoes que un espejo aplicado a la barraguía presenta su superficie de refle-xión paralela a la barra. Si por autoco-limación se observa sobre el espejo conun giroteodolito, podemos establecerel acimut absoluto de la visual perpen-dicular a la barra, que corregido en±90° será el de la barra. Con sólo dis-poner de la orientación absoluta de lared externa el problema está resuelto.
2.1. Autocolimación
En la técnica de autocolimación, unteodolito observa sobre un espejo laimagen de su propio retículo. Para ellose sustituye el ocular del anteojo porun equipo de autocolimación, acceso-rio poco frecuente y de precio elevado,que integra un prisma cúbico partidor("beam spliter"), una fuente luminosay un ocular especial; también necesitaalimentación eléctrica externa.
Como este equipo no estaba disponi-ble para nuestro giroteodolito, desarro-llamos una técnica alternativa propia,que podría denominarse de «autocoli-mación externa», y que sustituye conplena eficacia a la autocolimación con-vencional sobre espejo simple. La únicamodificación instrumental necesariaconsiste en instalar un pequeño ele-mento adhesivo de puntería en el cen-tro del objetivo del anteojo del teodoli-to que debe hacer la autocolimación (fi-gura n" 9). Se visa la imagen reflejadadel propio elemento de puntería.
Por su colocación expedita, el ele-men to de puntería no puede estarexactamente en el eje del anteojo, porlo que el error de colimación en estascondiciones se compone del originalde colimación más una nueva compo-nente, que además es variable y estáen función de la distancia instrumen-to - espejo. Como cualquier error decolimación, éste también se compensaobservando en ambas posiciones delinstrumento (figura nº 10).
Topografía y Cartograña R
Señal de punter lacentrada
Eje de colimacióntoo-ico
Eje de colimaciónreal
SITUACON IDEAL
Dirección a:.. determinar ••, I ~:¡ li:¡ !!
;·;·:·:d:·:·:)<·:-········ :-/-:1-:-:'-'
\ : 1 ESPEJO : ; 1\:1; 1r.: :¡ ¡'.'
IPunterra
crrculo directoSituación de
partida
Figura 9. Teodolito conseñal de puntería paracolimación
Figura 10. Geometría dela autocolimación
senal de punterlaoescentraoa
SITUACON REAL
1111\
:.:.:.:.:-I.:S-:.: .
\ \.
i \¡ i:, '.
\Punterra
c trcuio Inverso

APlicación giroscópica para mejora del control de presas
Como en este trabajo se mezclan di-versas metodologías, el tratamientodel error de colimación, en los dife-rentes valores que puede asumir, exi-ge un especial tratamiento que anali-zaremos al final de OBSERVACIONen el apartado 4.3. Hasta ese momen-to, olvidémonos de que existe este va-riable error de colimación horizontalque hemos de compensar, suponien-do que todo es geométrica y óptica-mente perfecto.
2.2. Giroscopio
En Topografía, el giroscopio nor-malmente se utiliza en forma de teo-dolito giroscópico, o giroteodolito,consiste en un teodolito al que se aco-pla un componente giroscópico, nor-malmente sobrepuesto (figura nº 11).
El componente giroscópico constade una carcasa en cuyo interior, sus-pendido por un hilo de torsión (real-mente una finísima cinta metálica,como puede apreciarse en la figuranº 12), hay un motor eléctrico de altavelocidad, con el eje horizontal (per-pendicular al hilo), Ycuyo masivo ro-tor tiene un momento de inercia ele-vado (figura nº 13).
En el exterior de la carcasa del mo-tor está situado un espejo que, me-diante los adecuados elementos ópti-cos, hace incidir una marca luminosasobre una escala visible (figura n º 14),en la que se puede observar la orien-tación instantánea del eje del rotor(mediante el espejo fijado a la carcasadel motor) respecto al cuerpo del gi-roscopio. Para evitar la rotura del hilodurante el transporte, el conjunto mo-tor se acerca ligeramente al anclaje su-perior del hilo de torsión -que se des-tensa-, bloqueándose en esta posi-ción. Durante la observación se dejapender libremente con el instrumen-to perfectamente nivelado.
El rotor horizontal del motor cons-
Topo, ra fía y Cartcgrafí R
tituye un giroscopio con sólo un gra-do de libertad: giro sobre un eje verti-cal gracias a la suspensión. Esto obligaal eje del rotar a oscilar por precesión
Figura 11. GiroteodolitoSOKKISHA
Figura 12. Hilo desuspensión en torretasuperior descubierta

de rotación del rotor y de la velocidadde rotación de la Tierra. La teoría estáampliamente descrita en diversos tex-tos técnicos y resumida en el mencio-nado trabajo docente (González,1995) .
APlicación giroscópica para mejora del control de presas
Tornillos deajuste de
la cinta
~
Eje derotacióndel rotor
Cinta de suspensión
Escala deseguimientoEje de ~~~;::-I
precesión ~ W
Carcasasuspendidadel motor
Figura 13. Esquema degiroscopio Bancada de anclaje al teooouto
Figura 14. Escala deseguimiento en el
giroscopio.
en un plano horizontal, cosa que hacesimétricamente respecto a la meridia-na local por motivos inerciales.
El período de oscilación libre de-pende de la latitud de observación,del momento de inercia y velocidad
La velocidad de rotación de La Tie-rra se considera constante en cual-quier circunstancia, así como el mo-mento de inercia del rotor, para uninstrumento dado.
En los teodolitos giroscópicos me-cánicos actuales, la velocidad de rota-ción del rotor está estabilizada en unvalor que oscila en tre 12 000 Y20 000 rpm, según las marcas, al per-tenecer a un motor sincrónico, nor-malmente trifásico, alimentado poruna corriente alterna con tensionesdel orden de 115 V Yfrecuencias de almenos 400 Hz. Esta corriente alternaes generada y estabilizada en frecuen-cia (con un oscilador de cuarzo) porel «conversor. del equipo de alimenta-ción, en el que la corriente continuade baja tensión de los acumuladores esconvertida en la alterna mencionada.
El lugar de observación establece laúnica variable, la latitud.
El período de oscilación libre de ungiroscopio es mínimo en el Ecuador einfinito en los Polos, al ser inversa-mente proporcional a la raíz cuadradadel inverso del coseno de la latitud.Por ello, estos equipos no son operati-vos a más de 70° de latitud; en las me-dias, como las nuestras, el semiperío-do es del orden de 3 a 4 min para lamayoría de los giroscopios mecánicoscomercializados.
y hablamos de "giroscopios mecáni-cos" (o "inerciales") porque existenotros ingenios llamados "GIRO-LÁSER", cuya funcionalidad es idénti-ca, aunque con elevadas precisionesde sólo algún segundo sexagesimal.Su teoría de funcionamiento nada tie-ne que ver con la precesión (por lo

APlicación giroscópica para mejora del control de presas
que en vez de "giroscopios" deberíandenominarse "detectores absolutos degiro") sino con la mecánica relativista.No tienen partes móviles y no mantie-nen su posición en un espacio inercialcomo los giroscopios mecánicos, peromiden rotaciones angulares.
En ellos se hace una comparaciónde dos haces láser que recorren enambos sentidos un circuito cerrado,siendo cada uno diferentemente afec-tados por el giro terrestre. Al girar elconjunto, adecuadamente orientado,existe una variación de longitudes re-corridas a velocidad forzosamenteconstante, como establece la teoría dela relatividad. La variación de fase en-tre ambas señales coherentes, detecta-ble interferométricamente, es el ob-servable a partir del cual se puede es-tablecer el parámetro de rotación.
Se emplean en navegación aero-náutica inercial ("relativista" deberíallamarse en lo que atañe a sus compo-nentes rotacionales) y en aplicacionestopográfico-geodésicas extremada-mente precisas. Su descripción y análi-sis de funcionamiento, ciertamentefascinante, no tiene cabida aquí; yaúnhay otros sistemas alternativos equiva-lentes, algunos en desarrollo.
3. INSTRUMENTACION
Utilizamos el siguiente instrumental:
• Giroteodolito.• Espejo de reflexión exterior.• Equipo auxiliar.
Antes de comenzar las observacionesverificamos los instrumentos, y corregi-mos, en su caso, todas las fuentes deerror que pudieran afectar a los datosque en este trabajo habíamos de obtener.
3.1. Giroteodolito
El giroteodolito que empleamos,constaba de un teodolito SOKKISHA
TM6 Yun giroscopio SOKKISHA GPl(figura nº 4), propiedad de la Escuelade Ingeniería Técnica Topográfica deMadrid.
3.1.1. Teodolito SOKKlSHA TM6
Es un teodolito optomecánico degraduación centesimal. Las lecturasacimutales se realizan, mediante unmicrómetro óptico, en partes diame-tralmente opuestas del limbo. Quizádebería considerarse este instrumen-to como un taquímetro preciso, por-que es repetidor y tiene una precisióninferior a la de los teodolitos habitua-les (Wild T2, KERN DKM-2, ZEISSTHEO 010, etc), aunque el fabricantelo cataloga como "teodolito ". En cual-quier caso es plenamente adecuadoporque su precisión angular es supe-rior a la necesaria para aplicacionesgiroscópicas.
De sus características generales, lasque son importantes para esta aplica-ción son:
Sensibilidad del nivelprincipal
Aumentos del anteojo:Apreciación del círculo
horizontal:Mínima distancia de
enfoque del anteojo: 1,3 m
Haciendo el cálculo de la precisiónangular, obtenemos un valor de 16cc(±8cc= ±5"2) , por lo que podemos con-siderar que la apreciación de 20cc enlas lecturas angulares acimutales deeste instrumento es adecuada y apro-vechable, pudiendo interpolar a esti-ma lecturas cada 10cc, como hicimos.
30"/2 mm30x
20cc
3.1.2. Giroscopio SOKKlSHA GP1
El giroscopio utilizado fue el SOK-KlSHA GP1, constituido por una uni-dad giroscópica, la fuente de alimen-tación y accesorios. La unidad giroscó-pica se acopla al teodolito en su parte

APlicación giroscópica para mejora del control de presas
superior sobre una bancada especial,a tal efecto dispuesta.
La unidad giroscópica consta deuna carcasa en cuyo interior está el gi-roscopio en si. Según el fabricante,sus características son:
Determinación del Norte(desviación estándar):
Velocidad de rotaciónEstabilización tras arranqueIntervalo entre divisionesPrecisión de remontaje en
bancada
±20"12000 rpm1 min10'
±5"
Coherentemente con la indicadaprecisión nominal en desviación es-tándar, el fabricante indica que a efec-tos prácticos de uso (intervalo de con-fianza del 99%) debe esperarse del gi-roteodolito una precisión final de ±1'en la determinación del Norte.
La fuente de alimentación consisteen una caja, llamada "Inversor", en laque están los elementos de alimenta-ción (dos acumuladores en serie de12 Vy 6 Ah) Yel equipo electrónico deoscilación, transformación y estabili-zación de corriente alterna de mediatensión para el motor del giroscopio,así como la alimentación de baja ten-sión continua de servicio.
3.1.3. Verificaciones
La verificación del teodolito fueconvencional, circunscrita en este casoa los niveles y al error de colimaciónhorizontal, ya que el de colimaciónvertical y el de la plomada óptica eranirrelevantes en este trabajo. No olvida-mos el trípode, que fue debidamenteajustado.
Por la poca difusión de los girosco-pios puede ser interesante divulgarmás detalladamente su proceso de ve-rificación. Consta de dos comproba-ciones, la de longitud del hilo de sus-pensión y la de centrado de oscilaciónlibre del péndulo giroscópico (que
pueden mostrar la necesidad de unajuste) y de una determinación, la dela constante K de desorientación me-cánica.
COMPROBACION DE LALONGITUD DEL HILO DE
SUSPENSION
El punto más delicado de un giros-copio es su hilo de torsión. Si el ins-trumento se mueve accidentalmentesin el previo y preceptivo bloqueo delmotor (especialmente si está en mar-cha, en cuyo caso la precesión provocaenérgicos y violentos movimientos in-ternos), es posible su estiramiento eincluso su rotura. La comprobacióny/ o reposición no es complicada y lapuede realizar el mismo operador si-guiendo las instrucciones del manualy con un útil especial ("suspensiónjig"o calibre de suspensión) que suminis-tra el fabricante en la caja del instru-mento, así como hilos de suspensiónde repuesto.
COMPROBACION DEL CENTRADODE OSCILACION LIBRE
Debe comprobarse siempre antesdel inicio de cualquier trabajo y repe-tirse en caso de reposición o retensa-do del hilo. No evoluciona espontá-neamente.
Para realizarla se estaciona el ins-trumento, desbloqueando el girosco-pio sin haber activado el giro eléctricodel motor. En estas condiciones, lamasa del motor actúa como un pén-dulo giratorio, oscilando de un lado aotro de la escala la marca luminosaque materializa su posición. Aunqueel dato no es importante, añadamosque el período de esta oscilación amotor parado está en función de lalongitud y constante torsional del hilode suspensión, y del momento deinercia alrededor del eje vertical de la

APlicación giroscópica para mejora del control de presas
masa suspendida, consistente en estascondiciones en el conjunto completodel motor.
La oscilación de la marca, tenue-mente amortiguada con el paso deltiempo, debe tener como punto finalde reposo el cero central de la escalade observación, o lo que es equivalen-te y más rápido de comprobar: oscilarsimétricamente a ambos lados delcero central (despreciando la lentísi-ma amortiguación).
Si en las condiciones de verificacióndescritas la marca no oscila simétrica-mente a ambos lados del cero central,hemos de proceder a su correcto cen-trado, actuando sobre los tornillos an-tagonistas de ajuste del anclaje supe-rior del hilo de torsión (figura n º 15),que lo giran a uno u otro lado hasta al-canzar la posición buscada, en la quela oscilación es simétrica.
DETERMINACION DE LACONSTANTE K
La determinación de K, o constantemecánica de orientación, es impres-cindible para usar el giroteodolito enorientaciones absolutas. Podemos de-finirla como el ángulo formado por elplano vertical de colimación del teo-dolito y el Norte giroscópico o centrode la amplitud de oscilación horizon-tal del eje del rotar, cuando su giroeléctrico es activado.
Su explicación mecánica es elemen-tal: el giroscopio se monta sobre unabancada fijada sobre el teodolito-so-porte. Recordemos que el montaje delgiroscopio sobre esta bancada tieneuna repetibilidad de ±5", garantizadapor un sistema de autocentrado radialen tre bancada y unidad giroscópica.
El problema estriba en que el ator-nillado inicial de esta bancada sobrela alidada del teodolito soporte, aun-que permanece constante en tanto no
Topog ra fía y Cartografía F
sea desmontada, es variable de unmontaje a otro por la holgura entrelos tornillos y los orificios de la pieza,estableciendo un valor concreto de K.Incluso hay que prevenir un ocasionalaflojado (y consecuente variación deK) durante el tiempo en el que se rea-licen los trabajos.
Figura 15. Corrección enel anclaje superiordel hilo
Dado este tipo de montaje mecáni-co, en la observación se establececomo lectura del Norte giroscópico unvalor normalmen te diferen te del co-rrespondiente al geográfico. El giros-copio sí establece el Norte correcto,pero es el teodolita el que normalmen-te está desviado bajo él (figura n º 16).
Figura 17. Giroteodolitoen el pilar astronómicoSur de la Escuela deTopografía
Para determinar la constante debeaccederse a un punto de estaciona-

.¡~.:. ' :
Eje de '.colimación ~ '!'
\ I'K'~~, !\ I
/,-c--n
~\¡
~', /"e ',:<, \ I
'- , ,Origen de ''-, \ !
lecturas
K . Constante fnstrumenta!Le: Lectura correcta a Norte
Le: Lectura obtenida a Norte
k~=='r=r= Rotar
Figura 16. Interpretación geométrica de la constante K
miento desde el que exista al menosuna dirección cuyo acimut geográficosea conocido (O que para verificacio-nes haya ya sido establecido con elpropio giroscopio a título testimo-nial). La comparación del acimut geo-gráfico con el giroscópico ofrecerá elvalor de K.
La determinación de K, siendo nor-malmente imprescindible cuando sedesean obtener acimutes absolutos,no hacía falta en una aplicación comoésta. Como sólo se buscaban diferen-
APlicación giroscópica para mejora del control de presas
cias de acimutes, elcorregir de K a am-bos, que debían res-tarse entre sí, era in-necesario. Por estemotivo, al no aplicar-se en este trabajo lacorrección K, cuan-do mencionemos lostérminos «acimut» y«Norte», se debe so-brentender que es-tán afectados de esteerror sistemático yautocompensado alhacer el estudio com-parativo.
Pero, aunque no lanecesitáramos, hici-mos dos determina-ciones de K, una an-tes del comienzo delas observaciones enla presa y otra al fina-
lizar, para constatar que su valor nohabía sufrido alteración por un posi-ble desajuste mecánico durante lostrabajos.
Las observaciones se realizaron enel pilar astronómico Sur de nuestraEscuela de Topografía (figura n" 17).El acimut a la referencia empleada entodos los trabajos de Astronomía estáperfecta y repetidamente establecidodesde este pilar.
(Continuará)
Topografía y Cartografía R