INGRES, Réponse Au Rapport Sur l'École Impériale Des Beaux-Arts
Upload
nguyenkhanhCategory
view
221download
0
Universidad Nacional de Catamarca
Facultad de Ciencias Exactas y Naturales
Departamento de Cs. De la Computación – Informática y
Comunicaciones
CURSO DE INGRESO
Asignatura:
COMPUTACIÓN
Carreras:
Tecnicatura en Informática
Profesorado en Computación
Coordinadora: Lic. Alejandra Herrera
Correo de Comunicación: [email protected]

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 2
Listado de contenidos
Introducción a la informática Definición de informática. Definición de Computadora Estructura de una Computadora El Microprocesador. Instrucciones Registros Memoria Cache. Unidades Funcionales. Placa Madre
Características Factor de forma Componentes Integrados El chipset. El reloj y la pila CMOS El BIOS El socket de procesador.
Conectores de la RAM Ranuras de Expansión. Conectores de entrada y salida. El gabinete Fuente de alimentación. Factor de forma Tamaño Ventilación conexiones El rol de la memoria. Características técnicas. Tipos de memorias. Memorias de acceso aleatorio. Funcionamiento de la memoria. Memoria de solo lectura. Tipos de ROM Memorias Flash. BIOS POST Puertos de entrada y salida. Serial. Paralelo. USB. Conectores.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 3
Hardware Los periféricos. Teclado. Ratón. Impresoras (Tipos). El escáner. El modem. El disco rígido. El disco compacto. El DVD. Introducción a la Programación y resolución de problemas Resolución de problemas. Algoritmo. Pre y postcondiciones de un algoritmo. Diagrama de flujo. Estructuras de control. Secuencia de acciones. Selección. Repetición. Iteración. Conclusión. Introducción a las redes de datos ¿Qué es una red? ¿Por qué son importantes las redes? Tipos de redes. ¿Qué significa topología? Bus, estrella y anillo. Tipos de redes. LAN, MAN y WAN.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 4
Introducción a la Informática
Origen del término "informática"
La palabra "informática" es la unión de partes de las palabras "información" y "automática".
La palabra francesa "informatique" fue creada por Philippe Dreyfus, director de la Bull Corporation's National Centre for Electronic Computing en la década de 1950, quien creó el término en 1962 cuando describía su compañía como una "Société d'Informatique Apliquée" SIA (en castellano: "Compañía de Tecnología de la Información Aplicada"). Dado que Philippe Dreyfus nunca registró comercialmente el término (¿intencionalmente, quizás?), la Academia Francesa lo adoptó en 1967, con la definición de "ciencia del procesamiento lógico de la información por equipos automáticos considerada como soporte del conocimiento humano y de la comunicación en los campos técnicos, económicos y sociales".
Definición de computadora
Una computadora es un conjunto de circuitos electrónicos que permite administrar información en formato binario, es decir, en bits. La palabra "computadora" en francés, "ordinateur", fue inventada por la compañía IBM France. François Girard, quien en 1955 estaba a cargo del departamento de publicidad de IBM Francia, tuvo la idea de pedirle consejos a su antiguo profesor de arte en París para que le sugiriera una palabra que describiera de la mejor manera el dispositivo comúnmente denominado "calculateur" (traducción literal de la palabra en inglés "computer").
Por lo tanto, el 1 de abril de 1955, dicho profesor de arte, Jaques Perret, quien en aquella época enseñaba filología latina en La Sorbona, sugirió la palabra "ordinateur", especificando que era un adjetivo derivado de la palabra Littré, que significa "Dios pone orden en el mundo". Añadió que el concepto de "poner orden" podía adaptarse perfectamente al objeto en cuestión.
Estructura la computadora
Los componentes materiales la computadora se estructuran en torno a una placa principal, compuesta de algunos circuitos integrados y diversos componentes electrónicos, como capacitores, resistencias, etc. Todos estos componentes se encuentran fundidos en la placa y conectados entre sí mediante distintas conexiones para placas de circuitos y un gran número de conectores. Dicha placa se denomina placa madre.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 5
La placa madre se encuentra alojada en un gabinete(o carcasa) que contiene ranuras para los periféricos de memoria en la parte frontal, botones que permiten encender y apagar el computadora, y una cierta cantidad de luces indicadoras que le permiten al usuario verificar el estado operativo la computadora y la actividad de los discos duros. En la parte posterior, el gabinete cuenta con aberturas orientadas hacia las tarjetas de expansión y las interfaces de entrada/salida, que están conectadas a la placa madre.
Finalmente, el gabinete contiene una fuente de alimentación eléctrica (comúnmente denominada alimentación), la cual proporciona una corriente eléctrica estable y continua a todos los elementos que componen el computadora. La fuente de alimentación convierte la corriente alterna de la rejilla de potencia (220 ó 110 voltios) en un voltaje directo de 5 voltios para los componentes la computadora y de 12 voltios para algunos periféricos internos (unidades de disco, lectores de CD-ROM, etc.). Es la potencia de la alimentación eléctrica la determina la cantidad de periféricos que el computadora puede alimentar. En general, la fuente de alimentación es de 200 a 450 vatios.
La "unidad principal" incluye el gabinete y todos los elementos que ésta contiene. Los elementos externos de la unidad principal se denominan periféricos.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 6
Unidad Principal
El microprocesador o CPU
El procesador (CPU, por Central Processing Unit o Unidad Central de Procesamiento), permite el procesamiento de información numérica, es decir, información ingresada en formato binario, así como la ejecución de instrucciones almacenadas en la memoria.
El primer microprocesador (Intel 4004) se inventó en 1971. Era un dispositivo de cálculo de 4 bits, con una velocidad de 108 kHz. Desde entonces, la potencia de los microprocesadores ha aumentado de manera exponencial. ¿Qué son exactamente esas pequeñas piezas de silicona que hacen funcionar un computadora?

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 7
Funcionamiento
El procesador (denominado CPU, por Central Processing Unit) es un circuito electrónico que funciona a la velocidad de un reloj interno, gracias a un cristal de cuarzo que, sometido a una corriente eléctrica, envía pulsos, denominados "picos". La velocidad de reloj (también denominada ciclo), corresponde al número de pulsos por segundo, expresados en Hertz (Hz). De este modo, un computadora de 200 MHz posee un reloj que envía 200.000.000 pulsos por segundo. Por lo general, la frecuencia de reloj es un múltiplo de la frecuencia del sistema, es decir, un múltiplo de la frecuencia de la placa madre.
Instrucciones
Una instrucción es una operación elemental que el procesador puede cumplir.. Las instrucciones se almacenan en la memoria principal, esperando ser tratadas por el procesador. Las instrucciones poseen dos campos:
el código de operación, que representa la acción que el procesador debe ejecutar;
el código operando, que define los parámetros de la acción. El código operando depende a su vez de la operación. Puede tratarse tanto de información como de una dirección de memoria.
Registros
Cuando el procesador ejecuta instrucciones, la información almacena en forma temporal en pequeñas ubicaciones de memoria local de 8, 16, 32 o 64 bits,
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 8
denominadas registros. Dependiendo del tipo de procesador, el número total de registros puede variar de 10 a varios cientos.
Los registros más importantes son:
el registro acumulador (ACC), que almacena los resultados de las operaciones aritméticas y lógicas;
el registro de estado (PSW, Processor Estado: Word o Palabra de Estado del Procesador), que contiene los indicadores de estado del sistema (lleva dígitos, desbordamientos, etc.);
el registro de instrucción (RI), que contiene la instrucción que está siendo procesada actualmente;
el contador ordinal (OC o PC por Program Counter, Contador de Programa), que contiene la dirección de la siguiente instrucción a procesar;
el registro del búfer, que almacena información en forma temporal desde la memoria.
Memoria caché
La memoria caché (también memoria buffer) es una memoria rápida que permite reducir los tiempos de espera de las distintas informaciones almacenada en la RAM (Random Access Memory o Memoria de Acceso Aleatorio). En efecto, la memoria principal la computadora es más lenta que la del procesador. Existen, sin embargo, tipos de memoria que son mucho más rápidos, pero que tienen un costo más elevado. La solución consiste entonces, en incluir este tipo de memoria local próxima al procesador y en almacenar en forma temporal la información principal que se procesará en él. Los últimos modelos de computadoraes poseen muchos niveles distintos de memoria caché:
La Memoria caché nivel 1 (denominada L1 Cache, por Level 1 Cache) se encuentra integrada directamente al procesador. Se subdivide en dos partes:
o la primera parte es la caché de instrucción, que contiene instrucciones de la RAM que fueron decodificadas durante su paso por las canalizaciones.
o la segunda parte es la caché de información, que contiene información de la RAM, así como información utilizada recientemente durante el funcionamiento del procesador.
El tiempo de espera para acceder a las memorias caché nivel 1 es muy breve; es similar al de los registros internos del procesador.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 9
La memoria caché nivel 2 (denominada L2 Cache, por Level 2 Cache) se encuentra ubicada en el gabinete junto con el procesador (en el chip). La caché nivel 2 es un intermediario entre el procesador con su caché interna y la RAM. Se puede acceder más rápidamente que a la RAM, pero no tanto como a la caché nivel 1.
La memoria caché nivel 3 (denominada L3 Cache, por Level 3 Cache) se encuentra ubicada en la placa madre.
Todos estos niveles de caché reducen el tiempo de latencia de diversos tipos de memoria al procesar o transferir información. Mientras el procesador está en funcionamiento, el controlador de la caché nivel 1 puede interconectarse con el controlador de la caché nivel 2, con el fin de transferir información sin entorpecer el funcionamiento del procesador. También, la caché nivel 2 puede interconectarse con la RAM (caché nivel 3) para permitir la transferencia sin entorpecer el funcionamiento normal del procesador.
Unidades Funcionales
El procesador se compone de un grupo de unidades interrelacionadas (o unidades de control). Aunque la arquitectura del microprocesador varía considerablemente de un diseño a otro, los elementos principales del microprocesador son los siguientes:
Una unidad de control que vincula la información entrante para luego decodificarla y enviarla a la unidad de ejecución: La unidad de control se compone de los siguientes elementos:
o secuenciador (o unidad lógica y de supervisión), que sincroniza la ejecución de la instrucción con la velocidad de reloj. También envía señales de control:
o contador ordinal, que contiene la dirección de la instrucción que se está ejecutando actualmente;
o registro de instrucción, que contiene la instrucción siguiente. Una unidad de ejecución (o unidad de procesamiento), que cumple las tareas
que le asigna la unidad de instrucción. La unidad de ejecución se compone de los siguientes elementos:
o la unidad aritmética lógica (se escribe ALU); sirve para la ejecución de cálculos aritméticos básicos y funciones lógicas (Y, O, O EXCLUSIVO, etc.);
o la unidad de punto flotante (se escribe FPU), que ejecuta cálculos complejos parciales que la unidad aritmética lógica no puede realizar;
o el registro de estado; o el registro acumulador.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 10
Una unidad de administración del bus (o unidad de entrada-salida) que administra el flujo de información entrante y saliente, y que se encuentra interconectado con el sistema RAM;
El siguiente diagrama suministra una representación simplificada de los elementos que componen el procesador (la distribución física de los elementos es diferente a la disposición):
Introducción a las placas madre
El primer componente de una computadora es la placa madre (también denominada "placa base"). La placa madre es el concentrador que se utiliza para conectar todos los componentes esenciales la computadora.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 11

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 12
Como su nombre lo indica, la placa madre funciona como una placa "materna", que toma la forma de un gran circuito impreso con conectores para tarjetas de expansión, módulos de memoria, el procesador, etc.
Características
Existen muchas maneras de describir una placa madre, en especial las siguientes:
el factor de forma; el chipset; el tipo de socket para procesador utilizado; los conectores de entrada y salida.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 13
Factor de forma de la placa madre
El término factor de forma normalmente se utiliza para hacer referencia a la geometría, las dimensiones, la disposición y los requisitos eléctricos de la placa madre. Para fabricar placas madres que se puedan utilizar en diferentes carcasas de marcas diversas, se han desarrollado algunos estándares.
Factor de forma Dimensiones Ranuras
ATX 305 x 244 mm AGP/6 PCI
microATX 305 x 244 mm AGP/3 PCI
FlexATX 229 x 191 mm AGP/2 PCI
Mini ATX 284 x 208 mm AGP/4 PCI
Mini ITX 170 x 244 mm 1 PCI
Nano ITX 120 x 244 mm 1 MiniPCI
BTX 325 x 267 mm 7
microBTX 264 x 267 mm 4
picoBTX 203 x 267 mm 1
Componentes integrados
La placa madre contiene un cierto número de componentes integrados, lo que significa a su vez que éstos se hallan integrados a su circuito impreso:
el chipset, un circuito que controla la mayoría de los recursos (incluso la interfaz de bus con el procesador, la memoria oculta y la memoria de acceso aleatorio, las tarjetas de expansión, etc.),
el reloj y la pila CMOS, el BIOS, el bus del sistema y el bus de expansión.
De esta manera, las placas madre recientes incluyen, por lo general, numerosos dispositivos multimedia y de red integrados que pueden ser desactivados si es necesario:
tarjeta de red integrada; tarjeta gráfica integrada; tarjeta de sonido integrada; controladores de discos duros actualizados.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 14
El chipset
El chipset es un circuito electrónico cuya función consiste en coordinar la transferencia de datos entre los distintos componentes la computadora (incluso el procesador y la memoria). Teniendo en cuenta que el chipset está integrado a la placa madre, resulta de suma importancia elegir una placa madre que incluya un chipset reciente para maximizar la capacidad de actualización la computadora.
Algunos chipsets pueden incluir un chip de gráficos o de audio, lo que significa que no es necesario instalar una tarjeta gráfica o de sonido. Sin embargo, en algunos casos se recomienda desactivarlas (cuando esto sea posible) en la configuración del BIOS e instalar tarjetas de expansión de alta calidad en las ranuras apropiadas.
El reloj y la pila CMOS
El reloj en tiempo real (o RTC) es un circuito cuya función es la de sincronizar las señales del sistema. Está constituido por un cristal que, cuando vibra, emite pulsos (denominados pulsos de temporizador) para mantener los elementos del sistema funcionando al mismo tiempo. La frecuencia del temporizador (expresada en MHz) no es más que el número de veces que el cristal vibra por segundo, es decir, el número de pulsos de temporizador por segundo. Cuanto más alta sea la frecuencia, mayor será la cantidad de información que el sistema pueda procesar.
Cuando la hora la computadora se reinicia de manera continua o si el reloj se atrasa, generalmente sólo debe cambiarse la pila.
El BIOS
El BIOS (Sistema básico de entrada y salida) es el programa que se utiliza como interfaz entre el sistema operativo y la placa madre. El BIOS puede almacenarse en la memoria ROM (de sólo lectura, que se puede escribir únicamente) y utiliza los datos almacenados en el CMOS para buscar la configuración del hardware del sistema.
Socket del procesador
El procesador (también denominado microprocesador) ejecuta programas a partir de un conjunto de instrucciones. El procesador se caracteriza por su frecuencia, es decir la velocidad con la cual ejecuta las distintas instrucciones. Esto significa que un procesador de 800 MHz puede realizar 800 millones de operaciones por segundo.
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 15
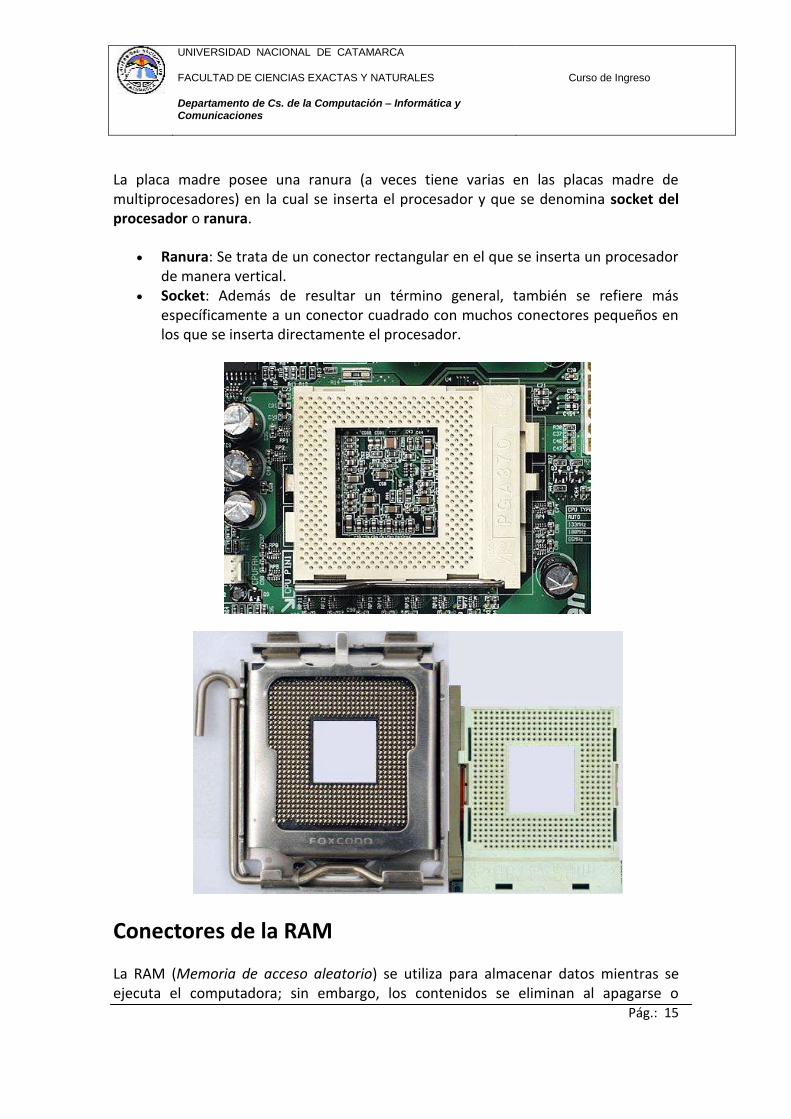
La placa madre posee una ranura (a veces tiene varias en las placas madre de multiprocesadores) en la cual se inserta el procesador y que se denomina socket del procesador o ranura.
Ranura: Se trata de un conector rectangular en el que se inserta un procesador de manera vertical.
Socket: Además de resultar un término general, también se refiere más específicamente a un conector cuadrado con muchos conectores pequeños en los que se inserta directamente el procesador.
Conectores de la RAM
La RAM (Memoria de acceso aleatorio) se utiliza para almacenar datos mientras se ejecuta el computadora; sin embargo, los contenidos se eliminan al apagarse o
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 16
reiniciarse el computadora, a diferencia de los dispositivos de almacenamiento masivo como los discos duros, que mantienen la información de manera segura, incluso cuando el computadora se encuentra apagado. Esta es la razón por la que la memoria RAM se conoce como "volátil".
Entonces, ¿por qué debería uno utilizar la RAM, cuando los discos duros cuestan menos y posen una capacidad de almacenamiento similar? La respuesta es que la RAM es extremadamente rápida a comparación de los dispositivos de almacenamiento masivo como los discos duros. Tiene un tiempo de respuesta de alrededor de unas docenas de nanosegundos (cerca de 70 por DRAM, 60 por EDO RAM y 10 por SDRAM; sólo 6 ns por DDR SDRAM) a diferencia de unos pocos milisegundos en los discos duros.
La memoria RAM se presenta en forma de módulos que se conectan en los conectores de la placa madre.
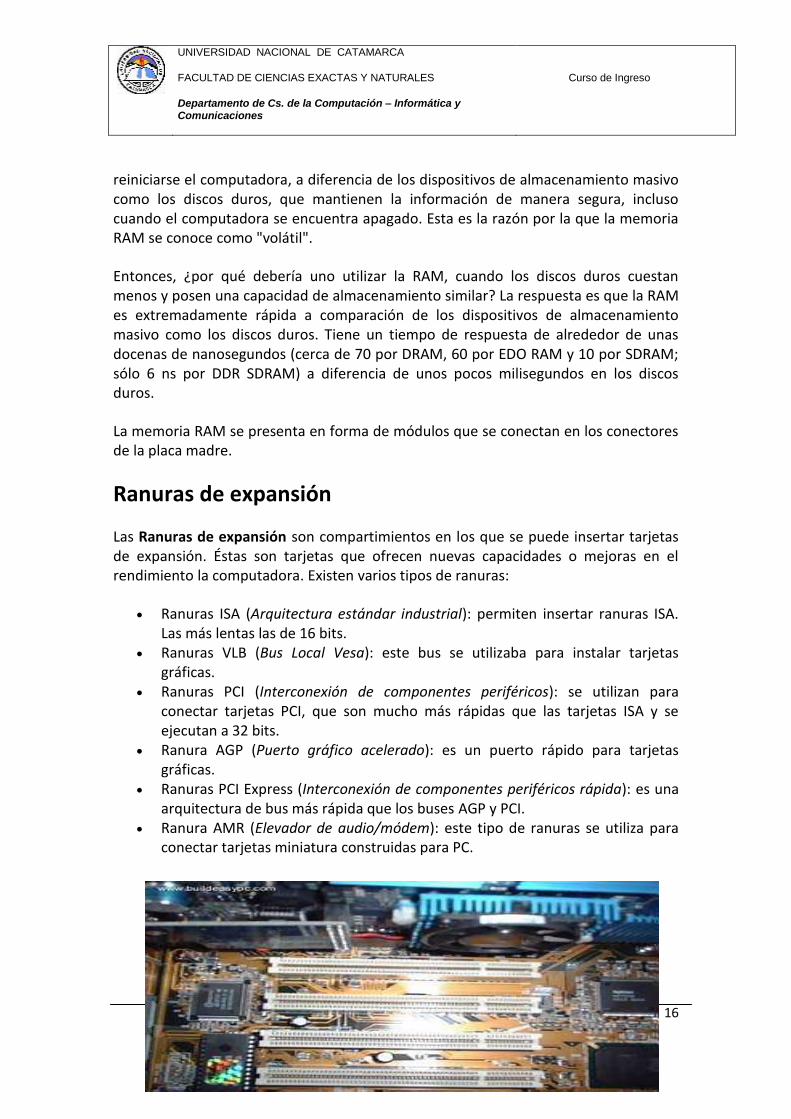
Ranuras de expansión
Las Ranuras de expansión son compartimientos en los que se puede insertar tarjetas de expansión. Éstas son tarjetas que ofrecen nuevas capacidades o mejoras en el rendimiento la computadora. Existen varios tipos de ranuras:
Ranuras ISA (Arquitectura estándar industrial): permiten insertar ranuras ISA. Las más lentas las de 16 bits.
Ranuras VLB (Bus Local Vesa): este bus se utilizaba para instalar tarjetas gráficas.
Ranuras PCI (Interconexión de componentes periféricos): se utilizan para conectar tarjetas PCI, que son mucho más rápidas que las tarjetas ISA y se ejecutan a 32 bits.
Ranura AGP (Puerto gráfico acelerado): es un puerto rápido para tarjetas gráficas.
Ranuras PCI Express (Interconexión de componentes periféricos rápida): es una arquitectura de bus más rápida que los buses AGP y PCI.
Ranura AMR (Elevador de audio/módem): este tipo de ranuras se utiliza para conectar tarjetas miniatura construidas para PC.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 17
Los conectores de entrada y salida.
La placa madre contiene un cierto número de conectores de entrada/salida reagrupados en el panel trasero.
La mayoría de las placas madre tienen los siguientes conectores:
Un puerto serial que permite conectar periféricos antiguos; Un puerto paralelo para conectar impresoras antiguas; Puertos USB (1.1 de baja velocidad o 2.0 de alta velocidad) que permiten
conectar periféricos más recientes; Conector RJ45 (denominado LAN o puerto Ethernet) que permiten conectar el
computadora a una red. Corresponde a una tarjeta de red integrada a la placa madre;
Conector VGA (denominado SUB-D15) que permiten conectar el monitor. Este conector interactúa con la tarjeta gráfica integrada;
Conectores de audio (línea de entrada, línea de salida y micrófono), que permiten conectar altavoces, o bien un sistema de sonido de alta fidelidad o un micrófono. Este conector interactúa con la tarjeta de sonido integrada.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 18
El gabinete
El gabinete (o caja, o carcasa) de un equipo es el esqueleto metálico que contiene los diferentes componentes internos. Los gabinetes tienen otros usos, tales como bloquear el ruido que produce el equipo y la protección contra la radiación electromagnética. Existen normas que garantizan dicha protección de manera tal que se cumpla con las regulaciones existentes.
El factor de forma es el aspecto más importante al momento de elegir una carcasa: sus dimensiones, el número de ranuras para unidades que posee, sus requisitos de alimentación, los conectores externos y por último, su diseño y color. Si bien todas las carcasas de los primeros equipos eran similares, las carcasas de hoy tienen diferentes formas y las hay incluso transparentes, lo que le permite a los usuarios "personalizar" sus equipos. Por ejemplo, pueden instalar luces de neón dentro de El gabinete (esto se denomina "modding").
Fuente de alimentación
La mayoría de las carcasas tienen una fuente de alimentación. La fuente de alimentación permite proveer corriente eléctrica a los distintos componentes del equipo. En los Estados Unidos, las fuentes de alimentación proveen 110 V a 60 Hz, mientras que en Europa la norma es 220 V a 50 Hz. Esta es la razón por la cual la mayoría de las fuentes de alimentación poseen un interruptor que permite seleccionar el tipo de voltaje.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 19
Es muy importante asegurarse de que el interruptor se encuentre en la posición correcta del
voltaje adecuado para que no haya riesgos de que se deterioren los componentes del CPU.
La fuente de alimentación debe tener suficiente corriente eléctrica para poder alimentar todos los dispositivos del equipo.
También se deberá prestar especial atención a la cantidad de sonidos que produce la fuente de alimentación.
Factor de forma
El factor de forma se refiere al formato de la ranura de la placa madre, los tipos de conectores utilizados y su disposición. Determina, a su vez, el tipo de placa madre que puede utilizarse en El gabinete.
Tamaño
El tamaño de del gabinete predetermina la cantidad de ranuras disponibles para unidades de discos, así como el número de ranuras disponibles para los discos duros internos. Por lo general, existen distintos tipos de carcasas:
Torre grande: Se trata de una carcasa grande (de 60 a 70 cm. de alto), posee de cuatro a seis ranuras de 5" 1/4 y de dos a tres ranuras laterales de 3" 1/2, como así también de dos a tres ranuras internas de 3" 1/2.
Torre mediana: Se trata de una carcasa de tamaño medio (de 40 a 50 cm. de alto), posee de tres a cuatro ranuras laterales de 5" 1/4 y dos ranuras internas de 3" 1/2.
Mini torre: Se trata de una carcasa pequeña (de 35 a 40 cm. de alto), por lo general tiene tres ranuras de 5" 1/4 y dos ranuras laterales de 3" 1/2. Asimismo, cuenta con dos ranuras internas de 3" 1/2.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 20
Barebone o mini PC: Es el tipo más pequeño de carcasa (de 10 cm. a 20 cm. de alto). La mayoría de los PC con barebone son equipos preinstalados en fábrica con una placa madre con factor de forma pequeño (SFF, Small Form Factor). Por lo general, poseen una o dos ranuras de 5" 1/4 y una ranura lateral de 3" 1/2, como así también una interna de 3" 1/2.
Ventilación
El gabinete contiene todos los componentes electrónicos internos de un equipo. A veces, los componentes electrónicos del equipo pueden llegar a alcanzar temperaturas muy altas. Por esta razón, se debe elegir una carcasa con buena ventilación, es decir que, además de las salidas de aire correspondientes posea tantos ventiladores como sea posible. Se recomienda elegir una carcasa que incluya al menos una toma de aire en la parte frontal, un filtro de aire desmontable y una salida de aire en la parte trasera.
Conexiones
Por razones evidentes que incluyen la facilidad de uso, existen cada vez más carcasas con paneles de conectores laterales. Para que funcionen, estos conectores deben estar conectados internamente a la placa madre.
El rol de la memoria
El término "memoria" se aplica a cualquier componente electrónico capaz de almacenar datos en forma temporal. Existen dos categorías principales de memorias:
La memoria interna que almacena datos en forma temporal mientras los programas se están ejecutando. La memoria interna utiliza microconductores, es decir circuitos electrónicos rápidos especializados. La memoria interna corresponde a lo que llamamos memoria de acceso aleatorio (RAM).
La memoria auxiliar (llamada también memoria física o memoria externa) que almacena información a largo plazo, incluso después de apagar el equipo. La memoria auxiliar corresponde a los dispositivos magnéticos de almacenamiento como por ejemplo el disco duro, dispositivos ópticos de almacenamiento como los CD-ROM y DVD-ROM, y a las memorias de sólo lectura.
Características técnicas
Las principales características de una memoria son las siguientes:

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 21
Capacidad, que representa el volumen global de información (en bits) que la memoria puede almacenar.
Tiempo de acceso, que corresponde al intervalo de tiempo entre la solicitud de lectura/escritura y la disponibilidad de los datos.
Tiempo de ciclo, que representa el intervalo de tiempo mínimo entre dos accesos sucesivos.
Rendimiento, que define el volumen de información intercambiado por unidad de tiempo, expresado en bits por segundo.
No volatilidad, que caracteriza la capacidad de una memoria para almacenar datos cuando no recibe más electricidad.
La memoria ideal posee una gran capacidad con tiempos de acceso y tiempos de ciclo muy restringidos, un rendimiento elevado y no es volátil.
Sin embargo, las memorias rápidas también son las más costosas. Ésta es la razón por la cual se utilizan en un equipo memorias que usan diferentes tecnologías, interconectadas entre sí y organizadas de manera jerárquica.
Las memorias más rápidas están ubicadas en pequeñas cantidades cerca del procesador. Las memorias auxiliares, que no son tan rápidas, se utilizan para almacenar información permanentemente.
Tipos de memorias
Memoria de acceso aleatorio
La memoria de acceso aleatorio, llamada generalmente RAM es la memoria principal del sistema, es decir, un espacio que permite almacenar datos temporalmente mientras un programa se está ejecutando.
A diferencia del almacenamiento de datos en una memoria auxiliar como un disco duro, RAM es volátil, lo que significa que solamente almacena datos mientras recibe

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 22
electricidad. Por lo tanto, cada vez que el equipo se apaga, todos los datos de la memoria se borran irremediablemente.
Memoria de sólo lectura
La memoria de sólo lectura, llamada ROM, es un tipo de memoria que permite guardar la información contenida en ella aun cuando la memoria no recibe electricidad. Básicamente, este tipo de memoria tiene únicamente acceso de sólo lectura. Sin embargo, es posible guardar información en algunos tipos de memoria ROM.
Memoria flash
La memoria flash es un punto intermedio entre las memorias de tipo RAM y ROM. La memoria flash posee la no volatilidad de las memorias ROM mientras que provee acceso a la lectura y escritura. En contrapartida, los tiempos de acceso de las memorias flash son más prolongados que los de RAM.
Memoria de acceso aleatorio (memoria RAM )
Tipos de memoria de acceso aleatorio
En términos generales, existen dos grandes categorías de memoria de acceso aleatorio:
Las memorias DRAM (Módulo de Acceso Aleatorio Dinámico), las cuales son menos costosas. Se utilizan principalmente para la memoria principal la computadora
Las memorias SRAM (Módulo de Acceso Aleatorio Estático), rápidas pero relativamente costosas. Las memorias SRAM se utilizan en particular en la memoria caché del procesador
Funcionamiento de la memoria de acceso aleatorio
La memoria de acceso aleatorio consta de cientos de miles de pequeños capacitadores que almacenan cargas. Al cargarse, el estado lógico del capacitador es igual a 1; en el caso contrario, es igual a 0, lo que implica que cada capacitador representa un bit de memoria.
Teniendo en cuenta que se descargan, los capacitadores deben cargarse constantemente (el término exacto es actualizar) a intervalos regulares, lo que se

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 23
denomina ciclo de actualización. Las memorias DRAM, por ejemplo, requieren ciclos de actualización de unos 15 nanosegundos (ns).
Formatos de módulos RAM
Existen diferentes tipos de memoria de acceso aleatorio. Estas se presentan en forma de módulos de memoria que pueden conectarse a la placa madre.
Las primeras memorias fueron chips denominados DIP (Paquete en Línea Doble). Hoy en día, las memorias por lo general se suministran en forma de módulos, es decir, tarjetas que se colocan en conectores designados para tal fin. En términos generales, existen tres tipos de módulos RAM:
módulos en formato SIMM (Módulo de Memoria en Línea Simple): se trata de placas de circuito impresas, con uno de sus lados equipado con chips de memoria. Existen dos tipos de módulos SIMM, según el número de conectores:
o Los módulos SIMM con 30 conectores (de 89x13mm) son memorias de 8 bits que se instalaban en los PC de primera generación (286, 386).
o Los módulos SIMM con 72 conectores (sus dimensiones son 108x25mm) son
memorias capaces de almacenar 32 bits de información en forma simultánea. Estas memorias se encuentran en los PC que van desde el 386DX hasta los primeros Pentiums. En el caso de estos últimos, el procesador funciona con un bus de información de 64 bits, razón por la cual, estos computadoraes necesitan estar equipados con dos módulos SIMM. Los módulos de 30 clavijas no pueden instalarse en posiciones de 72 conectores, ya que la muesca (ubicada en la parte central de los conectores) imposibilitaría la conexión.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 24
Los módulos en formato DIMM (Módulo de Memoria en Línea Doble), son memorias de 64 bits, lo cual explica por qué no necesitan emparejamiento. Los módulos DIMM poseen chips de memoria en ambos lados de la placa de circuito impresa, y poseen a la vez, 84 conectores de cada lado, lo cual suma un total de 168 clavijas. Además de ser de mayores dimensiones que los módulos SIMM (130x25mm), estos módulos poseen una segunda muesca que evita confusiones.
Cabe observar que los conectores DIMM han sido mejorados para facilitar su inserción, gracias
a las palancas ubicadas a ambos lados de cada conector.
También existen módulos más pequeños, conocidos como SO DIMM (DIMM de contorno pequeño), diseñados para computadoras portátiles. Los módulos SO DIMM sólo cuentan con 144 clavijas en el caso de las memorias de 64 bits, y con 77 clavijas en el caso de las memorias de 32 bits.
Los módulos en formato RIMM (Módulo de Memoria en Línea Rambus, también conocido como RD-RAM o DRD-RAM) son memorias de 64 bits desarrolladas por la empresa Rambus. Poseen 184 clavijas. Dichos módulos poseen dos muescas de posición, con el fin de evitar el riesgo de confusión con módulos previos.
Dada la alta velocidad de transferencia de que disponen, los módulos RIMM poseen una película térmica cuyo rol es el mejorar la transferencia de calor.
Al igual que con los módulos DIMM, también existen módulos más pequeños, conocidos como SO RIMM (RIMM de contorno pequeño), diseñados para computadoras portátiles. Los módulos SO RIMM poseen sólo 160 clavijas.
DRAM PM
La DRAM (RAM Dinámica) es el tipo de memoria más común en estos tiempos. Se trata de una memoria cuyos transistores se disponen en forma de matriz, en forma de filas y columnas. Un transistor, acoplado con un capacitador, proporciona información en forma de bits. Dado que un octeto contiene 8 bits, un módulo de memoria DRAM de 256 Mo contendrá por lo tanto 256 * 2^10 * 2^10 = 256 * 1024 * 1024 = 268.435.456

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 25
octetos = 268.435.456 * 8 = 2.147.483.648 bits = 2.147.483.648 transistores. De esta manera, un módulo de 256 Mo posee una capacidad de 268.435.456 octetos, o 268 Mo. Los tiempos de acceso de estas memorias son de 60 ns.
Además, el acceso a la memoria en general se relaciona con la información almacenada consecutivamente en la memoria. De esta manera, el modo de ráfaga permite el acceso a las tres partes de información que siguen a la primera parte, sin tiempo de latencia adicional. De este modo, el tiempo necesario para acceder a la primera parte de la información es igual al tiempo del ciclo más el tiempo de latencia, mientras que el tiempo necesario para acceder a las otras tres partes de la información sólo es igual al tiempo de ciclo; los cuatro tiempos de acceso se expresan, entonces, en la forma X-Y-Y-Y. Por ejemplo, 5-3-3-3 indica que la memoria necesita 5 ciclos del reloj para acceder a la primera parte de la información, y 3 para acceder a las subsiguientes.
DRAM FPM
Para acelerar el acceso a la DRAM, existe una técnica, conocida como paginación, que permite acceder a la información ubicada en una misma columna, modificando únicamente la dirección en la fila, y evitando de esta manera, la repetición del número de columna entre lecturas por fila. Este proceso se conoce como DRAM FPM (Memoria en Modo Paginado). El FPM alcanza tiempos de acceso de unos 70 u 80 nanosegundos, en el caso de frecuencias de funcionamiento de entre 25 y 33 Mhz.
DRAM EDO
La DRAM EDO (Salida de Información Mejorada, a veces denominada "híper- página") se introdujo en 1995. La técnica utilizada en este tipo de memoria implica direccionar la columna siguiente mientras paralelamente se está leyendo la información de una columna anterior. De esta manera, se crea un acceso superpuesto que permite ahorrar tiempo en cada ciclo. El tiempo de acceso de la memoria EDO es de 50 a 60 nanosegundos, en el caso de una frecuencia de funcionamiento de entre 33 y 66 Mhz.
De modo que la RAM EDO, cuando se utiliza en modo ráfaga, alcanza ciclos 5-2-2-2, lo cual representa una ganancia de 4 ciclos al acceder a 4 partes de información. Dado que la memoria EDO no funcionaba con frecuencias mayores a 66 Mhz, se suspendió su uso en favor de la SDRAM.
SDRAM
La SDRAM (DRAM Sincrónica), introducida en 1997, permite la lectura de la información sincronizada con el bus de la placa madre, a diferencia de lo que ocurre con las memorias EDO y FPM (conocidas como asincrónicas), las cuales poseen reloj

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 26
propio. La SDRAM elimina de esta manera, los tiempos de espera ocasionados por la sincronización con la placa madre. Gracias a esto se logra un ciclo de modo ráfaga de 5-1-1-1, con una ganancia de 3 ciclos en comparación con la RAM EDO. La SDRAM puede, entonces, funcionar con una frecuencia mayor a 150 MHz, logrando tiempos de acceso de unos 10 ns.
DR-SDRAM (Rambus DRAM)
La DR-SDRAM (DRAM Directa de Rambus), es un tipo de memoria que permite la transferencia de datos a un bus de 16 bits y a una frecuencia de 800 Mhs, lo que proporciona un ancho de banda de 1,6 GB/s. Al igual que la SDRAM, este tipo de memoria está sincronizada con el reloj del bus, a fin de mejorar el intercambio de información. Sin embargo, la memoria RAMBUS es un producto de tecnología patentada, lo que implica que cualquier empresa que desee producir módulos RAM que utilicen esta tecnología deberá abonar regalías, tanto a RAMBUS como a Intel.
DDR-SDRAM
La DDR-SDRAM (SDRAM de Tasa Doble de Transferencia de Datos) es una memoria basada en la tecnología SDRAM, que permite duplicar la tasa de transferencia alcanzada por ésta utilizando la misma frecuencia.
DDR2-SDRAM
Las memorias DDR2 (o DDR-II) alcanzan velocidades dos veces superiores a las memorias DDR con la misma frecuencia externa.
El acrónimo QDR (Tasa Cuádruple de Transferencia de Datos o con Quad-pump) designa el método de lectura y escritura utilizado. De hecho, la memoria DDR2 utiliza dos canales separados para los procesos de lectura y escritura, con lo cual es capaz de enviar o recibir el doble de información que la DDR.
La DDR2 también posee más conectores que la DDR clásica (la DDR2 tiene 240, en comparación con los 184 de la DDR).
Memoria de sólo lectura (ROM)
Existe un tipo de memoria que almacena información sin necesidad de corriente eléctrica; se trata de la ROM (Read Only Memory, o Memoria de Sólo Lectura), a veces denominada memoria no volátil, dado que no se borra cuando se apaga el sistema.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 27
Este tipo de memoria permite almacenar la información necesaria para iniciar el computadora. De hecho, no es posible almacenar esta información en el disco duro, dado que los parámetros del disco (vitales para la inicialización) forman parte de dicha información y resultan esenciales para el arranque. Existen diferentes memorias de tipo ROM que contienen dichos datos esenciales para iniciar el computadora, entre ellas:
El BIOS,es un programa que permite controlar las principales interfaces de entrada-salida, de ahí el nombre BIOS ROM que a veces se le da al chip de la memoria de sólo lectura de la placa madre que lo aloja.
El cargador de bootstrap: programa para cargar memoria (de acceso aleatorio) al sistema operativo y ejecutarla. Éste, generalmente busca el sistema operativo de la unidad de disquetes y luego el disco duro, lo que permite que el sistema operativo se ejecute desde el sistema de disquetes en el caso de que ocurra algún desperfecto en el sistema instalado en el disco duro.
La Configuración CMOS es la pantalla que se visualiza al iniciarse el computadora. Se utiliza para modificar los parámetros del sistema (a menudo erróneamente llamada BIOS).
La Auto-prueba de Encendido (POST) es un programa que se ejecuta automáticamente cuando arranca el sistema, permitiendo de esta manera probar dicho sistema (razón por la cual el sistema "cuenta" la RAM en el inicio).
Dado que las memorias ROM son mucho más lentas que las RAM (el tiempo de acceso en el
caso de la ROM es de unos 150 ns, mientras que para la SDRAM es de unos 10 ns), las
instrucciones suministradas en la ROM a veces se copian a la RAM en el inicio; proceso
denominado respaldo, aunque a menudo se le llama memoria de respaldo).
Tipos de ROM
Las memorias ROM han evolucionado gradualmente desde memorias fijas de sólo lectura hasta convertirse en memorias que pueden programarse y reprogramarse.
ROM
Las primeras memorias ROM se fabricaron utilizando un procedimiento que escribe directamente la información binaria en una placa de silicona mediante una máscara. Este procedimiento hoy en día es obsoleto.
PROM
Las memorias PROM (Programmable Read Only Memory, o Memoria Programable de Sólo Lectura), fueron desarrolladas a fines de la década del 70 por una compañía llamada Texas Instruments. Dichas memorias consisten en chips que comprimen miles

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 28
de fusibles (o diodos) capaces de "quemarse" mediante un dispositivo denominado "programador ROM", aplicando un alto voltaje (12V) a las cajas de memoria a marcar. Los fusibles quemados corresponden a 0 y los demás a 1.
EPROM
Las memorias EPROM (Erasable Programmable Read Only Memory, o Memoria Programable y Borrable de Sólo Lectura), son memorias PROM que se pueden eliminar. Estos chips disponen de un panel de vidrio que deja entrar los rayos ultra-violeta. Cuando el chip es sometido a rayos ultra-violeta de una determinada longitud de onda, se reconstituyen los fusibles, lo que implica que todos los bits de memoria vuelven a 1. Por esta razón, este tipo de PROM se denomina borrable.
EEPROM
Las memorias EEPROM (Electrically Erasable Programmable Read Only Memory, o Memoria Programable de Sólo Lectura Borrable Eléctricamente) también son memorias PROM borrables, pero a diferencia de éstas, se pueden borrar mediante una sencilla corriente eléctrica, es decir, incluso si se encuentran en posición en el computadora.
Existe una variante de estas memorias, conocida como memoria flash (también Flash ROM o Flash EPROM). A diferencia de las memorias EEPROM clásicas, que utilizan 2 o 3 transistores por cada bit a memorizar, la memoria EPROM Flash utiliza un solo transistor. Además, la memoria EEPROM puede escribirse y leerse palabra por palabra, mientras que la Flash únicamente puede borrarse por páginas (el tamaño de las páginas disminuye constantemente).
Por último, la memoria Flash es más densa, lo que implica que pueden producirse chips que contengan cientos de megabytes. De esta manera, las memorias EEPROM son preferibles a la hora de tener que memorizar información de configuración, mientras que la memoria Flash se utiliza para código programable (programas de IT).
Introducción a la memoria Flash
La memoria Flash es un tipo de memoria informática basada en semiconductores, no volátil y reescribible Esto significa que posee muchas de las características de la memoria RAM, excepto que sus datos no se eliminan al apagarse el computadora. La memoria Flash almacena porciones de datos en las celdas de memoria, pero esos datos permanecen almacenados aunque se produzca un corte de energía.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 29
Debido a su alta velocidad, durabilidad y bajo consumo de energía, la memoria flash resulta ideal para muchos usos, como por ejemplo en cámaras digitales, teléfonos móviles, impresoras, PDA, computadoraes laptop y dispositivos que puedan almacenar y reproducir sonido, como los reproductores de MP3. Además, este tipo de memoria no tiene partes móviles, lo que la hace más resistente a eventuales golpes.
Introducción al BIOS
BIOS (Sistema básico de entradas y salidas, del inglés "Basic Input/Output System") es un componente esencial que se usa para controlar el hardware. Es un pequeño programa, que se carga en la ROM (Read-Only Memory (Memoria de sólo lectura), tipo de memoria que no puede modificarse) y en la EEPROM (Electrically-Erasable Programmable Read-Only Memory (Memoria de sólo lectura que es programable y que puede borrarse eléctricamente)). De allí proviene el término flasher, que designa la acción de modificar el EEPROM.
El POST
Cuando se enciende o se restablece un sistema informático, el BIOS realiza un inventario del hardware conectado al computadora y efectúa un diagnóstico llamado Prueba automática en el encendido (POST, Power-On Self Test) para comprobar que el equipo funciona correctamente.
Efectuar una prueba del procesador (CPU) Verificar el BIOS Verificar la configuración del CMOS Inicializar el temporizador (reloj interno) Inicializar el controlador de DMA Verificar la memoria RAM y la memoria caché Instalar todas las funciones del BIOS Verificar todas las configuraciones (como por ejemplo teclado, unidades de
disco y discos rígidos)
Si en algún momento el POST encuentra un error, intentará continuar con el inicio la computadora. Sin embargo, si el error es serio, el BIOS detendrá la carga del sistema y:
de ser posible, mostrará un mensaje en la pantalla (porque el dispositivo puede no haber sido inicializado o puede presentar fallas);
emitirá una secuencia de sonidos que permite diagnosticar el origen del error; enviará un código (denominado código POST) al puerto serial la computadora,
que puede recuperarse a través de hardware especial de diagnósticos.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 30
Si no hay problemas, el BIOS emitirá un sonido corto para informar que no hay errores.
Introducción a los puertos de salida/entrada
Los puertos de salida/entrada son elementos materiales del equipo, que permiten que el sistema se comunique con los elementos exteriores. En otras palabras, permiten el intercambio de datos, de aquí el nombre interfaz de entrada/salida (también conocida como interfaz de E/S).
Puerto serial
Los puertos seriales (también llamados RS-232, por el nombre del estándar al que hacen referencia) fueron las primeras interfaces que permitieron que los equipos intercambien información con el "mundo exterior". El término serial se refiere a los datos enviados mediante un solo hilo: los bits se envían uno detrás del otro (consulte la sección sobre transmisión de datos para conocer los modos de transmisión).
Originalmente, los puertos seriales sólo podían enviar datos, no recibir, por lo que se desarrollaron puertos bidireccionales (que son los que se encuentran en los equipos actuales). Por lo tanto, los puertos seriales bidireccionales necesitan dos hilos para que la comunicación pueda efectuarse.
La comunicación serial se lleva a cabo asincrónicamente, es decir que no es necesaria una señal (o reloj) de sincronización: los datos pueden enviarse en intervalos aleatorios. A su vez, el periférico debe poder distinguir los caracteres (un carácter tiene 8 bits de longitud) entre la sucesión de bits que se está enviando. Ésta es la razón por la cual en este tipo de transmisión, cada carácter se encuentra precedido por un bit de ARRANQUE y seguido por un bit de PARADA. Estos bits de control, necesarios para la transmisión serial, desperdician un 20% del ancho de banda (cada 10 bits enviados, 8 se utilizan para cifrar el carácter y 2 para la recepción).
Los puertos seriales, por lo general, están integrados a la placa madre, motivo por el cual los conectores que se hallan detrás de del gabinete y se encuentran conectados a

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 31
la placa madre mediante un cable, pueden utilizarse para conectar un elemento exterior. Generalmente, los conectores seriales tienen 9 ó 25 clavijas y tienen la siguiente forma (conectores DB9 y DB25 respectivamente):
Un PC posee normalmente entre uno y cuatro puertos seriales.
Puerto paralelo
La transmisión de datos paralela consiste en enviar datos en forma simultánea por varios canales (hilos). Los puertos paralelos en los PC pueden utilizarse para enviar 8 bits (un octeto) simultáneamente por 8 hilos.
Los primeros puertos paralelos bidireccionales permitían una velocidad de 2,4 Mb/s. Sin embargo, los puertos paralelos mejorados han logrado alcanzar velocidades mayores:
El EPP (puerto paralelo mejorado) alcanza velocidades de 8 a 16 Mbps El ECP (puerto de capacidad mejorada), desarrollado por Hewlett Packard y
Microsoft. Posee las mismas características del EPP con el agregado de un dispositivo Plug and Play que permite que el equipo reconozca los periféricos conectados.
Los puertos paralelos, al igual que los seriales, se encuentran integrados a la placa madre. Los conectores DB25 permiten la conexión con un elemento exterior (por ejemplo, una impresora).
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 32
Introducción al USB
El USB (Bus de serie universal), como su nombre lo sugiere, se basa en una arquitectura de tipo serial. Sin embargo, es una interfaz de entrada/salida mucho más rápida que los puertos seriales estándar. La arquitectura serial se utilizó para este tipo de puerto por dos razones principales:
La arquitectura serial le brinda al usuario una velocidad de reloj mucho más alta que la interfaz paralela debido a que este tipo de interfaz no admite frecuencias demasiado altas (en la arquitectura de alta velocidad, los bits que circulan por cada hilo llegan con retraso y esto produce errores);
Los cables seriales resultan mucho más económicos que los cables paralelos.
Estándares USB
A partir de 1995, el estándar USB se ha desarrollado para la conexión de una amplia gama de dispositivos.
El estándar USB 1.0 ofrece dos modos de comunicación:
12 Mb/s en modo de alta velocidad, 1,5 Mb/s de baja velocidad.
El estándar USB 1.1 brinda varias aclaraciones para los fabricantes de dispositivos USB, pero no cambia los rasgos de velocidad. Los dispositivos certificados por el estándar USB 1.1 llevan el siguiente logotipo:
El estándar USB 2.0 permite alcanzar velocidades de hasta 480 Mbit/s. Los dispositivos certificados por el estándar USB 2.0 llevan el siguiente logotipo:

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 33
Si no lleva ningún logotipo, la mejor manera de determinar si un dispositivo es de USB de alta o baja velocidad es consultar la documentación del producto, siempre y cuando los conectores sean los mismos.
La compatibilidad entre USB 1.0, 1.1 y 2.0 está garantizada. Sin embargo, el uso de un dispositivo USB 2.0 en un puerto USB de baja velocidad (es decir 1.0 ó 1.1) limitará la velocidad a un máximo de 12 Mbit/s. Además, es probable que el sistema operativo muestre un mensaje que indique que la velocidad será restringida.
Tipos de conectores
Existen dos tipos de conectores USB:
Los conectores conocidos como tipo A, cuya forma es rectangular y se utilizan, generalmente, para dispositivos que no requieren demasiado ancho de banda (como el teclado, el ratón, las cámaras Web, etc.);
Los conectores conocidos como tipo B poseen una forma cuadrada y se utilizan principalmente para dispositivos de alta velocidad (discos duros externos, etc.).
1. Fuente de alimentación de +5 V (VBUS) máximo 100 mA 2. Datos (D-) 3. Datos (D+) 4. Conexión a tierra (GND)
Funcionamiento del USB
Una característica de la arquitectura USB es que puede proporcionar fuente de alimentación a los dispositivos con los que se conecta, con un límite máximo de 15 V por dispositivo. Para poder hacerlo, utiliza un cable que consta de cuatro hilos (la conexión a tierra GND, la alimentación del BUS y dos hilos de datos llamados D- y D+).
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 34
El estándar USB permite que los dispositivos se encadenen mediante el uso de una topología en bus o de estrella. Por lo tanto, los dispositivos pueden conectarse entre ellos tanto en forma de cadena como en forma ramificada. La ramificación se realiza mediante el uso de cajas llamadas "concentradores" que constan de una sola entrada y varias salidas. Algunos son activos (es decir, suministran energía) y otros pasivos (la energía es suministrada por el computadora).
Podemos resumir que la Computadora está compuesta por: HARDWARE y SOFTWARE.
Hardware
El termino HARDWARE (del inglés hard: duro y ware: partes) se aplica a todos los
elementos físicos, tangibles de una computadora, todos los dispositivos, tarjetas y cables con
los que está fabricada. Todo sistema de computación tiene componentes de hardware
dedicados a estas funciones:
Periféricos de entrada
Periféricos de salida
Periféricos Mixtos (Entrada/Salida)
Unidad central de procesamiento.
Memoria y dispositivos de almacenamiento
Se denomina Periférico a cualquier dispositivo de Hardware conectada a la
computadora para realizar una tarea específica.
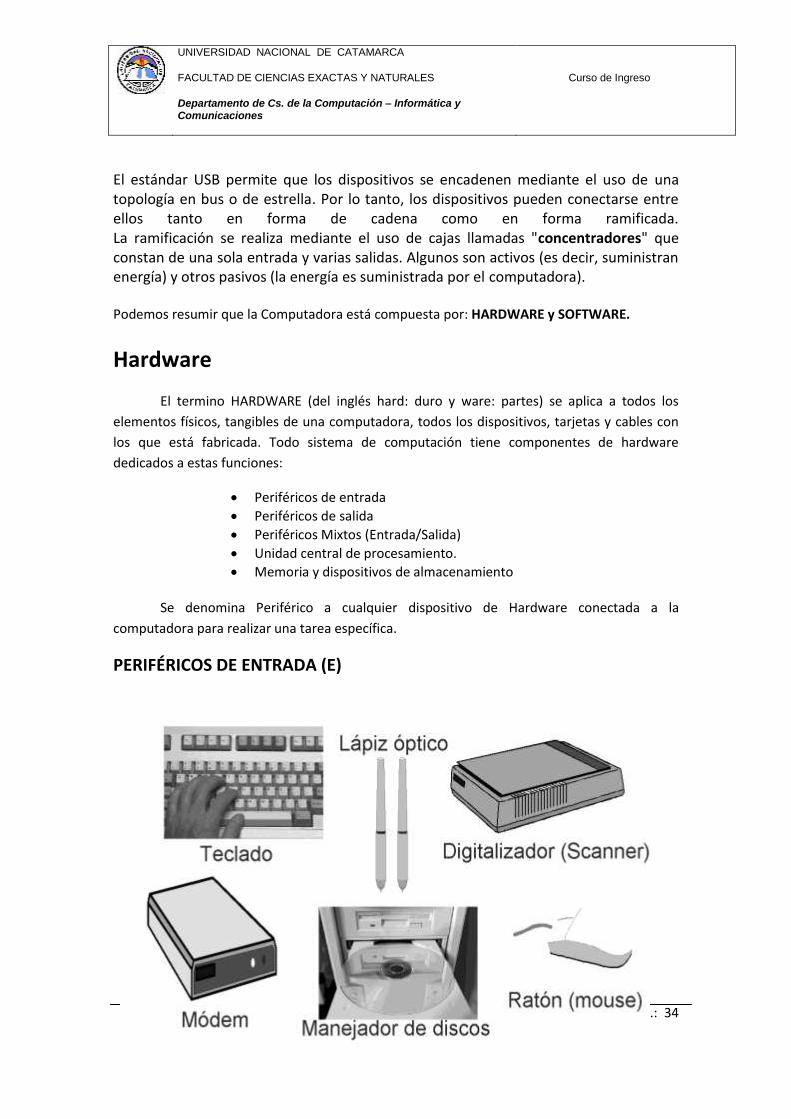
PERIFÉRICOS DE ENTRADA (E)

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 35
Son los que permiten al usuario que ingrese información desde el exterior. Entre ellos
podemos encontrar: teclado, ratón (mouse), escáner, micrófono, etc.
PERIFÉRICOS DE SALIDA (S)
Su función principal es de mostrar al usuario el resultado de las operaciones realizadas
por la computadora o PC. En este grupo podemos encontrar: monitor, impresora, parlantes,
etc.
PERIFÉRICOS DE ENTRADA/SALIDA (E/S)
Son los dispositivos que pueden aportar simultáneamente información exterior de la PC y al usuario. Aquí se encuentran: módem (Modulador/Demodulador), unidades de almacenamiento (Discos duros, disquetes o discos flexibles), almacenamiento ZIP, memorias de pequeño tamaño, memorias del tipo flash, etc.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 36
Los periféricos
Introducción al teclado
El teclado, como en las máquinas de escribir, permite la introducción de caracteres (como letras, números y símbolos). Es un dispositivo de entrada esencial para un equipo, ya que es lo que permite ingresar comandos.
El término "QWERTY" (por las primeras seis letras del teclado) se refiere al tipo de teclado que se utiliza en casi todos los equipos del mundo de habla inglesa. En otros países, los diseños de los teclados son diferentes.
El teclado Qwerty fue diseñado en 1868 en Milwaukee por Christopher Latham Sholes, quien colocó las teclas correspondientes a los pares de letras utilizados con más frecuencia (en la lengua inglesa) en extremos opuestos del teclado buscando, de esta manera, evitar que los martillos de las máquinas de escribir de la época se atoraran entre sí como era habitual. En 1873 la compañía Remington fue la primera en vender este teclado. Por lo tanto, el teclado Qwerty fue diseñado desde una perspectiva puramente técnica, lo que obstaculizó su funcionalidad y eficiencia. Se dice que la ubicación de las teclas a lo largo de la primera fila del teclado Qwerty fue impulsada por los comerciantes de máquinas de escribir de la época, que deseaban que todas las teclas necesarias para escribir la palabra"typewriter" (máquina de escribir) estuvieran ubicadas convenientemente a la hora de realizar una demostración del producto.
En 1936, August Dvorak (profesor de la Universidad de Washington) diseñó un teclado cuyas teclas estaban dispuestas exclusivamente teniendo en cuenta la eficiencia. En el teclado Dvorak, todas las vocales del alfabeto y las cinco consonantes más comunes se encontraran en la fila central para poder acceder a ellas con mayor facilidad y, a la vez, distribuir uniformemente, el trabajo entre la mano derecha y la mano izquierda. Además, las letras más frecuentes del alfabeto se ubicaron en el centro del teclado.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 37
Diferentes estudios han demostrado que la eficiencia mejorada del teclado Dvorak resultó insuficiente en la práctica y que el esfuerzo necesario para pasar del teclado Qwerty al Dvorak resultaba demasiado exigente como para que valiera la pena, lo que explica por qué todos los equipos de hoy en día aún tienen teclados Qwerty.
Conector de teclado
Los teclados generalmente suelen conectarse a la parte trasera del CPU, en la placa madre, con un conector PS/2:
Cómo funciona
Cada vez que se presiona una tecla, una señal específica se transmite al equipo. El teclado a su vez, utiliza una red de barras cruzadas para identificar cada tecla en función de su fila y columna
Al presionarse una tecla, se produce un contacto eléctrico entre la fila y la columna. Las señales eléctricas son transmitidas a un microcontrolador, que envía un código (BCD, ASCII o Unicode) al equipo describiendo el carácter que corresponde a dicha tecla.
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 38
Introducción al ratón
El ratón es un dispositivo señalador utilizado para desplazar un cursor en la pantalla y que permite seleccionar, mover y manipular objetos mediante el uso de botones. La acción consistente de pulsar un botón (sonido de clic) para llevar a cabo una acción se denomina "hacer clic".
El primer ratón fue inventado y desarrollado por Douglas Carle Engelbart del Instituto de Investigación Stanford (SRI): era de madera y contaba en ese entonces con dos discos perpendiculares conectados al equipo mediante un par de cables trenzados.
Conector del ratón
Generalmente, el ratón se conecta en la parte trasera de la unidad central de procesamiento, en la placa madre, con un conector verde PS/2:
Algunos ratones que presentan funciones avanzadas, a veces pueden contar con un conector USB.
Tipos de ratones
Existen varios tipos de ratones, clasificados según la tecnología de posicionamiento y según la transmisión de datos a la unidad central de procesamiento.
Por lo tanto, podemos distinguir diversas categorías principales de ratones:
Ratones mecánicos, en los que el funcionamiento está centrado en una bola (de plástico o goma) que se encuentra dentro de un marco (plástico) y transmite el movimiento a dos rodillos;
Ratones mecánicos-ópticos, en los que el funcionamiento es similar al de los ratones mecánicos pero el movimiento de la bola es detectado por sensores ópticos.
Ratones ópticos, que pueden determinar el movimiento mediante un análisis visual de la superficie sobre la que se deslizan.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 39
Impresoras
La impresora es un periférico que le permite realizar una impresión (en papel) de datos electrónicos.
Existen varias tecnologías de impresoras, siendo las más comunes:
la impresora margarita la impresora matriz de punto (también llamada impresora matriz de impacto). la impresora de inyección de tinta y la impresora Bubble Jet la impresora láser
Actualmente, las impresoras margarita y las de matriz ya casi no se utilizan.
Características
La impresora generalmente se caracteriza por los siguientes elementos:
Velocidad de impresión: expresada en páginas por minuto (ppm), la velocidad de impresión representa la capacidad de la impresora para imprimir un gran número de páginas por minuto. Para impresoras a color, generalmente se realiza la distinción entre la velocidad de impresión monocromática y a color.
Resolución: expresada en puntos por pulgada (abreviado dpi), resolución significa la nitidez del texto impreso. A veces, la resolución resulta diferente para una impresión monocromática, a color o de foto.
Tiempo de calentamiento: el tiempo de espera necesario antes de realizar la primera impresión. Efectivamente, una impresora no puede imprimir cuando está "fría". Debe alcanzar una cierta temperatura para que funcione en forma óptima.
Memoria integrada: la cantidad de memoria que le permite a la impresora almacenar trabajos de impresión. Cuanto más grande sea la memoria, más larga podrá ser la cola de la impresora.
Formato de papel: según su tamaño, las impresoras pueden aceptar documentos de diferentes tamaños, por lo general aquellos en formato A4 (21 x 29,7 cm), y con menos frecuencia, A3 (29,7 x 42 cm). Algunas impresoras permiten imprimir en diferentes tipos de medio, tales como CD o DVD.
Carga de papel: el método para cargar papel en la impresora y que se caracteriza por el modo en que se almacena el papel en blanco. La carga de papel suele variar según el lugar donde se ubique la impresora (se aconseja la carga posterior para impresoras que estarán contra una pared).* Los principales modos de carga de papel son:
o La bandeja de alimentación, que utiliza una fuente interna de alimentación de papel. Su capacidad es igual a la cantidad máxima de hojas de papel que la bandeja puede contener.
o El alimentador de papel es un método de alimentación manual que permite insertar hojas de papel en pequeñas cantidades (aproximadamente 100). El
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 40
alimentador de papel en la parte posterior de la impresora puede ser horizontal o vertical.
Cartuchos: los cartuchos raramente son estándar y dependen en gran medida de la marca y del modelo de la impresora. Algunos fabricantes prefieren los cartuchos de colores múltiples mientras que otros ofrecen cartuchos de tinta separados. Los cartuchos de tinta separados son más económicos porque a menudo se utiliza un color más que otro.
Resulta interesante examinar el costo de impresión por hoja. El tamaño de gota de tinta es especialmente importante. Cuanto más pequeña sea la gota de tinta, más bajo será el costo de impresión y mejor la calidad de la imagen. Algunas impresoras pueden producir gotas que son de 1 ó 2 picolitros.
Interfaz: cómo se conecta la impresora al equipo. Las principales interfaces son: o USB o Paralelo o Red: este tipo de interfaz permite que varios equipos compartan una misma
impresora. También existen impresoras WiFi disponibles a través de una red inalámbrica.
Impresora margarita
Las impresoras margarita se basan en el principio de las máquinas de escribir. Una matriz en forma de margarita contiene "pétalos" y cada uno de éstos posee un carácter en relieve. Para imprimir el texto, se ubica una cinta impregnado de tinta entre la margarita y la hoja de papel. Cuando la matriz golpea la cinta, ésta deposita tinta sobre el papel con la forma del carácter en el pétalo.
Estas impresoras se han vuelto obsoletas porque son extremadamente ruidosas y lentas.
Impresora matriz de punto
La impresora matriz de punto (llamada algunas veces impresora de matriz o impresora de impacto) permite la impresión de documentos sobre papel gracias al movimiento "hacia atrás y hacia adelante" de un carro que contiene un cabezal de impresión.
El cabezal se compone de pequeñas agujas metálicas, accionadas por electroimanes, que golpean una cinta de carbón llamada "cinta entintada", ubicada entre el cabezal y el papel.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 41
La cinta de carbón se desenrolla para que siempre haya tinta sobre ella. Al finalizar cada línea, un rodillo permite que la hoja avance.
Las impresoras de matriz de punto más recientes está equipadas con cabezales de 24 agujas, que permiten imprimir con una resolución de 216 dpi (puntos por pulgada).
Impresora a chorro de tinta y Bubble Jet
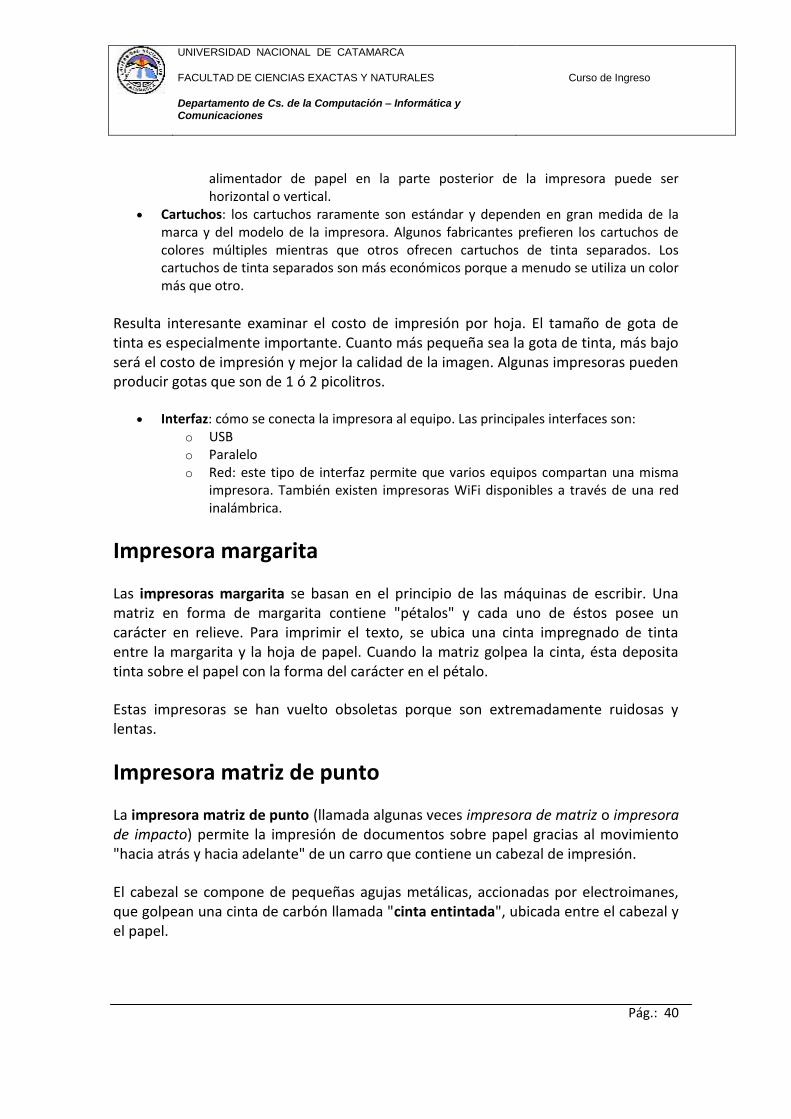
La tecnología de impresora a chorro de tinta fue inventada originalmente por Canon. Se basa en el principio de que un fluido caliente produce burbujas.
El investigador que descubrió esto había puesto accidentalmente en contacto una jeringa llena de tinta con un soldador eléctrico. Esto creó una burbuja en la jeringa que hizo que la tinta saliera despedida de la jeringa.
Actualmente, los cabezales de impresoras están hechos de varios inyectores (hasta 256), equivalentes a varias jeringas, calentadas a una temperatura de entre 300 y 400°C varias veces por segundo.
Cada inyector produce una pequeña burbuja que sale eyectada como una gota muy fina. El vacío causado por la disminución de la presión crea a su vez una nueva burbuja.
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 42
Generalmente, se efectúa una distinción entre las dos tecnologías diferentes:
Las impresoras a chorro de tinta utilizan inyectores que poseen su propio elemento de calentamiento incorporado. En este caso se utiliza tecnología térmica.
Las impresoras Bubble Jet utilizan inyectores que tienen tecnología piezoeléctrica. Cada inyector trabaja con un cristal piezoeléctrico que se deforma al ser estimulado por su frecuencia de resonancia y termina eyectando una burbuja de tinta.
Impresora láser
La impresora láser permite obtener impresiones de calidad a bajo costo y a una velocidad de impresión relativamente alta. Sin embargo, estas impresoras suelen utilizarse mayormente en ambientes profesionales y semiprofesionales ya que su costo resulta elevado.
Las impresoras láser utilizan una tecnología similar a la de las fotocopiadoras. Una impresora láser está compuesta principalmente por un tambor fotosensible con carga electrostática mediante la cual atrae la tinta para hacer una forma que se depositará luego en la hoja de papel.
Cómo funciona: un rodillo de carga principal carga positivamente las hojas. El láser carga positivamente ciertos puntos del tambor gracias a un espejo giratorio. Luego se deposita la tinta con carga negativa en forma de polvo (tóner) en las distintas partes del tambor que el láser cargó previamente.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 43
Al girar, el tambor deposita la tinta sobre el papel. Un alambre calentado (llamado corona de transferencia) permite finalmente la adhesión de la tinta en el papel.
Dado que la impresora láser no tiene cabezales mecánicos, resulta rápida y silenciosa.
Existen dos tipos diferentes de tecnología de impresora láser: "carrusel" (cuatro pasadas) o "tándem" (una pasada).
carrusel: con la tecnología de carrusel, la impresora efectúa cuatro pasadas sobre el papel para imprimir un documento (una por cada color primario y una para el negro, lo que en teoría hace que la impresión a color sea cuatro veces más lenta que en negro).
tándem: una impresora láser que utiliza tecnología "tándem" deposita cada color en una sola pasada. Los tóners se depositan simultáneamente. La salida es igual de rápida cuando se imprime a color como cuando se imprime en negro. Sin embargo, esta tecnología resulta más costosa ya que los mecanismos son más complejos. Por lo tanto, se suele utilizar en impresoras láser a color de mediana o alta calidad.
Impresora LED
Otra tecnología de impresión compite con las impresoras láser: la tecnología LED (diodo emisor de luz). Con esta tecnología, un cabezal de impresión con diodos electroluminiscentes polariza el tambor con un rayo de luz muy fino, permitiendo la obtención de puntos muy diminutos. Esta tecnología es particularmente útil para obtener una alta resolución (600, 1.200 ó 2.400 dpi).
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 44
Teniendo en cuenta que cada diodo representa un punto, la velocidad de impresión termina afectando mínimamente la resolución. Además, esta tecnología carece de piezas móviles, lo que permite el diseño de impresoras menos costosas, más sólidas y más fiables.
El escáner
Un escáner es un periférico de captura utilizado para escanear documentos; es decir, convertir un documento en papel en una imagen digital.
En general, se puede decir que existen tres tipos de escáner:
Los escáneres planos permiten escanear un documento colocándolo de cara al panel de vidrio. Éste es el tipo de escáner más común.
Los escáneres manuales son de tamaño similar. Éstos deben desplazarse en forma manual (o semi-manual) en el documento, por secciones sucesivas si se pretende escanearlo por completo.
Los escáneres con alimentador de documentos hacen pasar el documento a través de una ranura iluminada para escanearlo, de manera similar a las máquinas de fax. Este tipo de escáner se está incorporando cada vez más en máquinas como las impresoras multifunción.
También existen escáneres capaces de escanear elementos específicos, como diapositivas.
Características de un escáner
En general, un escáner se caracteriza por los siguientes elementos:
Resolución: expresada en puntos por pulgada (denominados dpi), la resolución define la calidad de escaneo. El orden de magnitud de la resolución se encuentra alrededor de los 1200 por 2400 dpi. La resolución horizontal depende mucho de la calidad y del número de capturadores, mientras que la resolución vertical está íntimamente ligada a la exactitud del motor principal de entrenamiento. Sin embargo, es importante distinguir la resolución óptica, la cual representa la resolución real del escáner, de la resolución interpolada. La interpolación es una técnica que implica la definición de píxeles intermedios de entre los píxeles reales mediante el cálculo del promedio de los colores de los píxeles circundantes. Gracias a dicha tecnología se logran obtener buenos resultados, aunque la resolución interpolada definida de esta manera no constituye en absoluto un criterio utilizable a la hora de comparar escáneres.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 45
El formato del documento: según el tamaño, los escáneres pueden procesar documentos de distintos tamaños: por lo general A4 (21 x 29,7 cm), o con menor frecuencia A3 (29,7 x 42 cm).
Velocidad de captura: expresada en páginas por minuto (ppm), la velocidad de captura representa la capacidad del escáner para procesar un gran número de páginas por minuto. Dicha velocidad depende del formato del documento y de la resolución elegida para el escaneo.
Interfaz: se trata del conector del escáner. Las principales interfaces son las siguientes:
o FireWire. Es la interfaz preferida, ya que su velocidad es particularmente conveniente para este tipo de periféricos
o USB 2.0. Suministrado en todos los computadoraes actuales. Se trata de una interfaz estándar recomendada cuando el computadora no posee conexión FireWire
o SCSI. Aunque a finales de los 90 constituyó la interfaz preferida, el estándar SCSI se dejó de utilizar debido a la aparición de FireWire y el USB 2.0
o Puerto paralelo. Este tipo de conector es lento por naturaleza, y se está utilizando cada vez menos; se debe tratar de evitar si el computadora dispone de alguno de los conectores mencionados anteriormente
Características físicas: es posible tener en cuenta otros elementos a la hora de seleccionar un escáner:
o Tamaño, en términos de las dimensiones físicas del escáner. o Peso. o Consumo de energía eléctrica, expresado en Watts (W). o Temperaturas de funcionamiento y almacenamiento. o Nivel de ruido. Un escáner puede producir bastante ruido, lo cual suele
ocasionar considerables perturbaciones. o Accesorios: Aunque generalmente se suministran los drivers y el manual
del usuario, se debe verificar que también se incluyan los cables de conexión; de lo contrario deberán adquirirse por separado.
Módem Artículo Tabla de contenidos
¿Para qué se utiliza un módem?
Un módem es un periférico utilizado para transferir información entre varios equipos a través de un medio de transmisión por cable (por ejemplo las líneas telefónicas). Los equipos funcionan digitalmente con un lenguaje binario (una serie de ceros y unos), pero los módem son analógicos. Las señales digitales pasan de un
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 46
valor a otro. No hay punto medio o a mitad de camino. Es un "todo o nada" (uno o cero). Por otra parte, las señales analógicas no evolucionan "paso a paso" sino en forma continua.
Por ejemplo, un piano funciona más o menos de manera digital ya que no existen "pasos" entre las notas. Por el contrario, un violín puede modular sus notas para pasar por todas las frecuencias posibles.
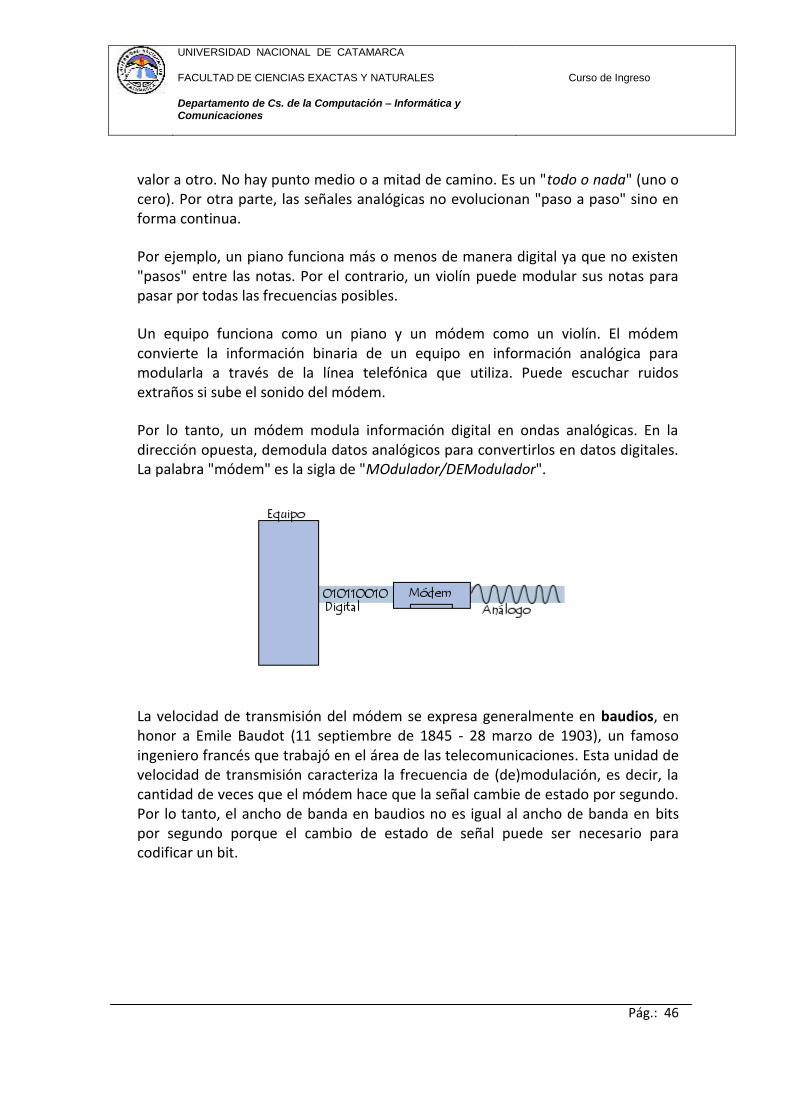
Un equipo funciona como un piano y un módem como un violín. El módem convierte la información binaria de un equipo en información analógica para modularla a través de la línea telefónica que utiliza. Puede escuchar ruidos extraños si sube el sonido del módem.
Por lo tanto, un módem modula información digital en ondas analógicas. En la dirección opuesta, demodula datos analógicos para convertirlos en datos digitales. La palabra "módem" es la sigla de "MOdulador/DEModulador".
La velocidad de transmisión del módem se expresa generalmente en baudios, en honor a Emile Baudot (11 septiembre de 1845 - 28 marzo de 1903), un famoso ingeniero francés que trabajó en el área de las telecomunicaciones. Esta unidad de velocidad de transmisión caracteriza la frecuencia de (de)modulación, es decir, la cantidad de veces que el módem hace que la señal cambie de estado por segundo. Por lo tanto, el ancho de banda en baudios no es igual al ancho de banda en bits por segundo porque el cambio de estado de señal puede ser necesario para codificar un bit.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 47
La comunicación entre el host (equipo) y los dispositivos se lleva a cabo según un protocolo (lenguaje de comunicación) basado en el principio de red en anillo. Esto significa que el ancho de banda se comparte temporalmente entre todos los dispositivos conectados. El host (equipo) emite una señal para comenzar la secuencia cada un milisegundo (ms), el intervalo de tiempo durante el cual le ofrecerá simultáneamente a cada dispositivo la oportunidad de "hablar". Cuando el host desea comunicarse con un dispositivo, transmite una red (un paquete de datos que contiene la dirección del dispositivo cifrada en 7 bits) que designa un dispositivo, de manera tal que es el host el que decide "hablar" con los dispositivos. Si el dispositivo reconoce su dirección en la red, envía un paquete de datos (entre 8 y 255 bytes) como respuesta. De lo contrario, le pasa el paquete a los otros dispositivos conectados. Los datos que se intercambian de esta manera están cifrados conforme a la codificación NRZI.
Debido a la longitud máxima de 5 metros del cable entre los dos dispositivos y a la cantidad máxima de 5 concentradores (a los que se les suministra energía), es posible crear una cadena de 25 metros de longitud.
Los puertos USB admiten dispositivos Plug and play de conexión en caliente. Por lo tanto, los dispositivos pueden conectarse sin apagar el equipo (conexión en caliente). Cuando un dispositivo está conectado al host, detecta cuando se está agregando un nuevo elemento gracias a un cambio de tensión entre los hilos D+ y D-. En ese momento, el equipo envía una señal de inicialización al dispositivo durante 10 ms para después suministrarle la corriente eléctrica mediante los hilos GND y VBUS (hasta 100 mA). A continuación, se le suministra corriente eléctrica al dispositivo y temporalmente se apodera de la dirección predeterminada (dirección 0). La siguiente etapa consiste en brindarle la dirección definitiva (éste es el procedimiento de lista). Para hacerlo, el equipo interroga a los dispositivos ya conectados para poder conocer sus direcciones y asigna una nueva, que lo identifica por retorno. Una vez que cuenta con todos los requisitos necesarios, el host puede cargar el driver adecuado.
El rol del disco rígido
El disco rígido es el componente utilizado para almacenar los datos de manera permanente, a diferencia de la memoria RAM, que se borra cada vez que se reinicia el computadora, motivo por el cual a veces se denomina dispositivo de almacenamiento masivo a los discos rígidos.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 48
El disco rígido se encuentra conectado a la placa madre por medio del controlador de disco rígido que actúa a su vez como una interfaz entre el procesador y el disco rígido. El controlador de disco rígido administra los discos racionados con él, interpreta comandos enviados por el procesador y los envía al disco en cuestión. Los discos rígidos generalmente están agrupados por interfaz de la siguiente manera:
IDE SCSI (Interfaz para sistemas de equipos pequeños) Serial ATA
Cuando apareció la norma USB se lanzaron al mercado carcasas que podían conectar un disco rígido mediante un puerto USB, lo que facilitó la instalación de discos rígidos y aumentó la capacidad de almacenamiento para hacer copias de seguridad. Estos discos se denominan discos rígidos externos, en oposición a los discos rígidos internos que se encuentran conectados directamente a la placa madre; de todas maneras, son el mismo tipo de discos, con la diferencia de que los discos duros externos se hallan conectados al computadora mediante una cubierta enchufada a un puerto USB.
Estructura
Un disco rígido no está compuesto por un solo disco, sino por varios discos rígidos que pueden ser de metal, vidrio o cerámica, apilados muy juntos entre sí y llamados platos.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 49
Los discos giran rápidamente alrededor de un eje (en realidad, a varios miles de revoluciones por minuto) en sentido contrario a las agujas de un reloj. El computadora funciona en modo binario, lo cual significa que los datos se almacenan en forma de ceros y unos (denominados bits). Los discos rígidos contienen millones de estos bits, almacenados muy próximos unos de otros en una delgada capa magnética de unos pocos micrones de espesor, recubierta a su vez por una película protectora.
Estos datos pueden leerse y escribirse por medio de cabezales de lectura ubicados a ambos lados de los platos. Estos cabezales son electroimanes que suben y bajan para leer la información o bien escribirla. Los cabezales de lectura se encuentran a sólo unos micrones de la superficie, separados por una capa de aire creada por la rotación de los discos, que genera una rotación de aproximadamente 250km/h (150 mph). Más aún, estos cabezales son móviles y pueden mover hacia los laterales para que las cabezas puedan barrer toda la superficie.
Sin embargo, los cabezales se encuentran unidos entre sí y solamente uno de ellos puede leer o escribir en un momento preciso. Se utiliza el término cilindro para hacer referencia a todos los datos almacenados verticalmente en cada uno de los discos.
El mecanismo completo de precisión se encuentra dentro de una caja totalmente hermética, debido a que la más mínima partícula puede degradar la superficie del disco. Es por esta razón que los discos rígidos están sellados y muestran la advertencia "Garantía nula si se extrae", ya que únicamente los fabricantes de discos rígidos pueden abrirlos (en "salas limpias" libres de partículas).
Cómo funciona
Se dice que los cabezales de lectura/escritura son "inductivos", lo que significa que pueden generar un campo magnético. Esto es de especial importancia en el momento de la escritura: Los cabezales, al crear campos positivos o negativos, tienden a polarizar la superficie del disco en un área muy diminuta, de modo tal que cuando

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 50
luego se leen, la inversión de polaridad procede a completar el circuito con el cabezal de lectura. Estos campos luego son transformados mediante un conversor analógico-digital (CAD) en 0 ó 1 para que el computadora los pueda comprender.
Los cabezales comienzan a escribir datos comenzando desde el borde del disco (pista 0) y avanzando hacia el centro. Los datos se organizan en círculos concéntricos denominados "pistas", creadas por un formateo de bajo nivel.
Estas pistas están separadas en zonas (entre dos radios) llamadas sectores, que contienen los datos (por lo menos 512 octetos por sector).
El término cilindro hace referencia a todos los datos que se encuentran en la misma pista de distintos platos (es decir, sobre y debajo de cada uno de ellos), ya que esto constituye un "cilindro" de datos.
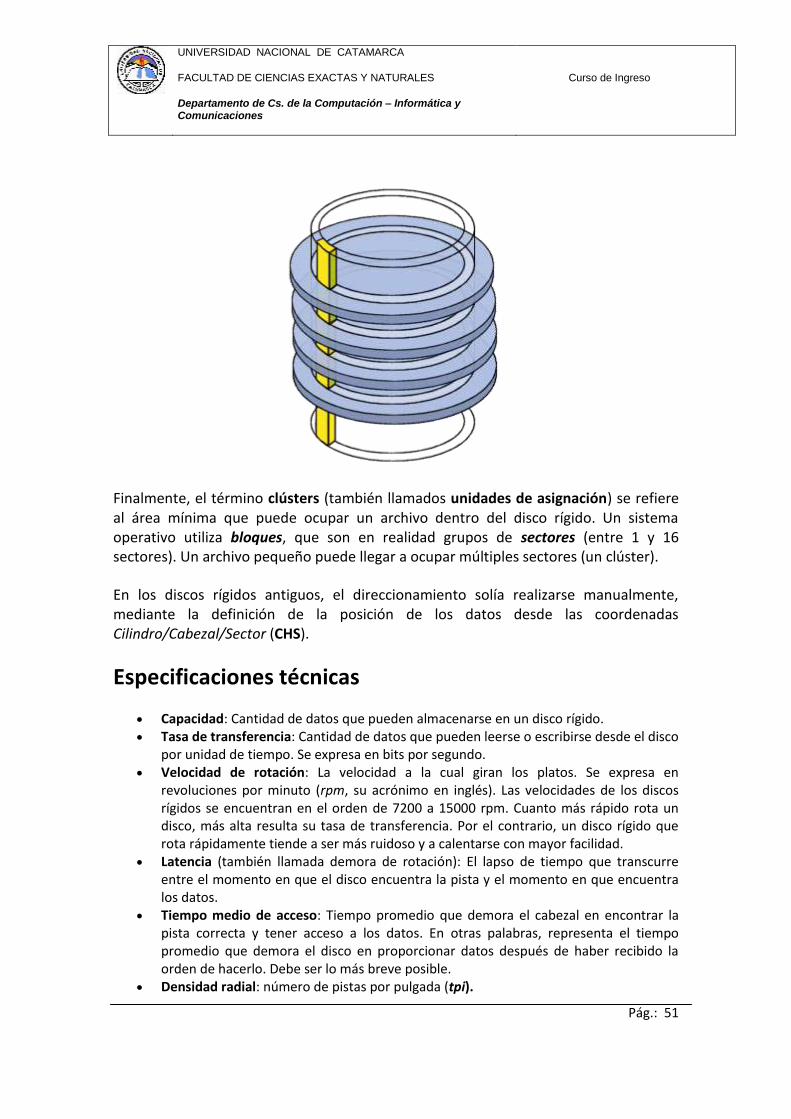
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 51
Finalmente, el término clústers (también llamados unidades de asignación) se refiere al área mínima que puede ocupar un archivo dentro del disco rígido. Un sistema operativo utiliza bloques, que son en realidad grupos de sectores (entre 1 y 16 sectores). Un archivo pequeño puede llegar a ocupar múltiples sectores (un clúster).
En los discos rígidos antiguos, el direccionamiento solía realizarse manualmente, mediante la definición de la posición de los datos desde las coordenadas Cilindro/Cabezal/Sector (CHS).
Especificaciones técnicas
Capacidad: Cantidad de datos que pueden almacenarse en un disco rígido. Tasa de transferencia: Cantidad de datos que pueden leerse o escribirse desde el disco
por unidad de tiempo. Se expresa en bits por segundo. Velocidad de rotación: La velocidad a la cual giran los platos. Se expresa en
revoluciones por minuto (rpm, su acrónimo en inglés). Las velocidades de los discos rígidos se encuentran en el orden de 7200 a 15000 rpm. Cuanto más rápido rota un disco, más alta resulta su tasa de transferencia. Por el contrario, un disco rígido que rota rápidamente tiende a ser más ruidoso y a calentarse con mayor facilidad.
Latencia (también llamada demora de rotación): El lapso de tiempo que transcurre entre el momento en que el disco encuentra la pista y el momento en que encuentra los datos.
Tiempo medio de acceso: Tiempo promedio que demora el cabezal en encontrar la pista correcta y tener acceso a los datos. En otras palabras, representa el tiempo promedio que demora el disco en proporcionar datos después de haber recibido la orden de hacerlo. Debe ser lo más breve posible.
Densidad radial: número de pistas por pulgada (tpi).

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 52
Densidad lineal: número de bits por pulgada (bpi) en una pista dada. Densidad de área: índice entre la densidad lineal y la densidad radial (expresado en
bits por pulgada cuadrada). Memoria caché (o memoria de búfer): Cantidad de memoria que se encuentra en el
disco rígido. La memoria caché se utiliza para almacenar los datos del disco a los que se accede con más frecuencia, buscando de esta manera, mejorar el rendimiento general;
Interfaz: Se refiere a las conexiones utilizadas por el disco rígido. Las principales interfaces del disco rígido son:
o IDE/ATA (Entorno integrado de desarrollo / Agregado de tecnología de avanzada)
o Serial ATA o SCSI (Interfaz para sistemas de equipos pequeños) o Sin embargo, existen carcasas externas que se utilizan para conectar discos
rígidos con puertos USB o FireWire.
CD, CD de audio y CD-ROM
Sony y Philips inventaron el Disco Compacto en 1981 para que fuera un dispositivo de
almacenamiento de audio compacto de alta calidad y que permitiera, a su vez, el acceso
directo a las pistas de sonido digital. Se lanzó oficialmente en octubre de 1982. En 1984, las
especificaciones del disco compacto se extendieron (con la publicación del Libro Amarillo para
que se pudieran almacenar datos digitales.
Geometría del CD
Un CD (Disco Compacto) es un disco óptico de 12 cm de diámetro y 1,2 mm de espesor (éste puede variar entre 1,1 y 1,5) para almacenar información digital: hasta 650 MB de datos informáticos (lo que equivale aproximadamente a 300.000 páginas escritas) o 74 minutos de datos de audio. Posee un orificio circular de 15 mm de diámetro que permite centrarlo correctamente en el reproductor de CD.
La estructura de un CD
El CD está hecho de un sustrato plástico (policarbonato) y una capa metálica fina reflectante (oro de 24 kilates o una aleación de plata). La capa reflectante se halla recubierta por una terminación acrílica con protección contra rayos UV, creando de esta manera una superficie que favorece la protección de los datos. Por último, si se lo desea, puede agregarse una última capa que permite la impresión de datos del otro lado del CD.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 53
La capa reflectante contiene pequeños baches. De esta manera, cuando el láser atraviesa el sustrato de policarbonato, la luz se refleja en la superficie reflectante. Sin embargo, lo que permite que se codifique la información es el acercamiento del láser a un bache.
Esta información se almacena en 22188 pistas grabadas en distintas canaletas (aunque en realidad es una sola pista que se acerca en espiral hacia el centro).
Los CD adquiridos en los distintos comercios ya vienen impresos, es decir que los baches ya
han sido creados mediante una inyección de plástico dentro de un molde que contiene a su
vez el diseño deseado revertido. A continuación se aplica la capa metálica al sustrato de
policarbonato y se procede a cubrirlo con una capa protectora.
Por el contrario, los CD en blanco (CD-R) poseen una capa adicional (ubicada entre el sustrato y la capa metálica) con un tinte que puede ser marcado (o "quemado") por un láser de alta potencia (10 veces más potente que el que se usa para leerlos). La capa con el tinte es la encargada de absorber o reflejar el haz de luz emitido por el láser.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 54
Los tintes utilizados con más frecuencia son los siguientes:
Cianina de color azul, de parece verde cuando la capa metálica se hace con oro Talocianina de color verde claro, de apariencia dorada cuando la capa metálica se hace
con oro Azo de color azul oscuro
Teniendo en cuenta que la información no se almacena como hoyos sino como marcas coloreadas, se le agrega una canaleta previa en el disco en blanco afín de ayudar a la grabadora a seguir el camino trazado en espiral, de tal modo, que no resulta necesaria la presencia de mecanismos de alta precisión en las grabadoras de CD. Además, esta canaleta previa sigue una onda sinusoidal llamada oscilación, que posee una amplitud de +/-0,03 µm (30 nm) y una frecuencia de 22,05 kHz. La oscilación permite a su vez informar a la grabadora la velocidad a la que puede grabar. Esta información se denomina ATIP (Tiempo absoluto en canaleta previa).
Funcionamiento
El cabezal de lectura se compone de un láser (Amplificación de luz por emisión estimulada de radiación) que emite un haz de luz y una celda fotoeléctrica cuya función es la de capturar el haz reflejado. Los reproductores de CD utilizan un láser infrarrojo (que posee una longitud de onda de 780 nm), ya que es compacto y asequible. Una lente situada a proximidad del CD enfoca el haz del láser hacia los hoyos.
Un espejo semi-reflectante permite que la luz reflejada alcance la celda fotoeléctrica, como lo explica el siguiente diagrama:

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 55
Un brazo desplaza el espejo permitiendo que el cabezal de lectura pueda acceder a todo el CD-ROM.
Un CD tiene dos modos de funcionamiento básicos:
Lectura a velocidad constante lineal (o CLV). Se trata del modo de funcionamiento de las primeras unidades de CD-ROM, que se basaban en el funcionamiento de los reproductores de CD de audio e incluso de los platos giratorios antiguos. Cuando un disco gira, las canaletas se acercan al centro de manera más lenta que las canaletas del borde exterior, de modo tal que la velocidad de lectura (y por lo tanto la velocidad a la que gira el disco) se ajusta en base a la posición radial del cabezal de lectura. En este proceso, la densidad de la información es la misma en todo el disco, por lo que se produce un aumento en la capacidad. Los reproductores de CD de audio tienen una velocidad lineal entre 1,2 y 1,4 m/s.
La lectura a una velocidad angular constante (CAV) consiste en ajustar la densidad de la información de acuerdo a la ubicación de los datos afín de lograr que la velocidad de rotación sea la misma en cada punto del disco. Esto significa que la densidad de la información será más baja en el borde del disco y mayor cerca del centro. La velocidad de lectura de la unidad de CD-ROM correspondía originalmente a la velocidad de un reproductor de CD de audio, es decir una velocidad de 150 kB/s. Esta velocidad se adoptó como referencia y se denominó 1x. Las generaciones posteriores de unidades de CD-ROM se han caracterizado por tener múltiplos de este valor. La siguiente tabla muestra la velocidad de lectura por cada múltiplo de 1x:
Codificación de la información
La pista física tiene baches de de 0,168 µm de profundidad y 0,67 µm de ancho, con longitud variable. Los "anillos" en el espiral se hallan separados por una distancia de 1,6 µm. La denominación hoyos se utiliza para hacer referencia a las depresiones en la canaleta y las mesetas constituyen justamente los espacios existentes entre ellos.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 56
El láser que se utiliza para leer el CD posee una longitud de onda de 780 nm cuando se desplaza por aire. Como el índice de refracción del policarbonato es de 1,55, la longitud de onda del láser en el policarbonato equivale a 780/1,55 = 503 nm = 0,5 µm.
Teniendo en cuenta que la profundidad de la canaleta es un cuarto de la longitud de onda del haz del láser, la onda de luz reflejada por un hoyo se desplaza de vuelta la mitad de la longitud (125% de longitud para llegar al disco y lo mismo para volver) de la onda reflejada en la meseta.
DVD
El DVD (Disco versátil digital, o con menos frecuencia Disco de video digital) es una "alternativa" al disco compacto (CD) que posee seis veces más espacio de almacenamiento (para el tipo de DVD de menor capacidad: de capa simple y una cara). El formato DVD se diseñó para proporcionar un medio de almacenamiento universal, mientras que el CD, originalmente, se diseñó exclusivamente como un medio de audio.
El DVD está diseñado para poder localizar y acceder a los datos de una manera aleatoria (no secuencial). Posee una estructura compleja que proporciona mayor interactividad, pero requiere a la vez de microprocesadores más avanzados.
El formato DVD originalmente fue patrocinado (a partir del 15 de septiembre de 1995) por un consorcio de 10 compañías multimedia (Hitachi, JVC, Matsushita, Mitsubishi, Philips, Pioneer, Sony, Thomson, Time Warner y Toshiba). A partir de 1997, un nuevo consorcio llamado "DVD Forum" sucedió al anterior.
Un DVD puede confundirse fácilmente con un CD, ya que ambos son discos plásticos de 12 cm de diámetro y 1,2 mm de espesor y se leen por medio de un rayo láser. Sin embargo, los CD utilizan un rayo un láser infrarrojo que posee a su vez una longitud de onda de 780 nanómetros (nm), mientras que las grabadoras de DVD usan un rayo láser con una longitud de onda de 635 ó 650 nm. Además, los reproductores de CD generalmente usan una lente con un foco de 0.5, en cambio, los reproductores de DVD disponen de un foco de 0.6. Por este motivo, los DVD poseen ranuras cuya altura mínima es de 0,4µ con una separación de 0,74µ, a diferencia de la altura y separación de los CD, que son de 0,834µ y 1,6µ respectivamente.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 57
El interés principal de los DVD es la capacidad de almacenamiento que poseen, lo que los convierte en un excelente medio para video. Un DVD de 4,7 GB puede almacenar más de dos horas de video comprimido en MPEG-2 (Motion Picture Experts Group), un formato que permite comprimir imágenes conservando su alta calidad.
Estructura física
Los DVD existen tanto en versiones de "capa simple" como de "doble capa" (DL). Los discos de doble capa están compuestos de una capa transparente semireflectante de color dorado y una capa opaca reflectante de color plateado separadas ambas por una capa de enlace. Para poder leer estas dos capas, el disco dispone de una capa que puede cambiar de intensidad mediante la modificación de su frecuencia y foco:
con baja intensidad, el rayo se refleja sobre la capa dorada superior; con una intensidad mayor, el rayo atraviesa la primera capa y se refleja sobre la capa
plateada inferior.
Sin embargo, la capa inferior posee una densidad menor. Además, la información es almacenada "al revés" en un espiral invertido para poder limitar la latencia al momento de producirse el pasaje de una capa a la otra.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 58
Por otro lado, existen versiones de DVD tanto de una cara como de doble cara, como los discos de vinilo. En el segundo caso, la información se almacena en ambas caras del disco.
Los discos de DVD generalmente se dividen en cuatro grandes grupos, cada uno con una capacidad de almacenamiento diferente según sus características físicas:
DVD-R/RW
El formato DVD-R/DVD-RW se basa en lo que se conoce como técnica de "hoyo previo". Al igual que los CD-R, los DVD grabables y regrabables usan un "surco previo" (un surco espiral preestampado en el disco), que sigue una onda sinusoidal llamada oscilación. El surco previo permite definir la posición del cabezal de grabación en el disco (llamado rastreo) mientras que la frecuencia de oscilación permite que la grabadora ajuste su velocidad. Por el contrario, la información de direccionamiento (es decir, dónde se encuentran los datos) se define mediante hendiduras preestampadas en los hoyos del disco entre el surco del disco, denominadas "hoyos previos de meseta", (o LPP).
Los hoyos previos forman una segunda señal, que se utiliza para ubicar los datos. Cuando un rayo láser se encuentra con un hoyo previo, aparece un pico de amplitud en la oscilación, que permite que la grabadora sepa donde deben grabarse los datos. Las especificaciones del DVD-R establecen que un hoyo previo debe tener una duración de por lo menos un período (1T).

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 59
El formato DVD-R/DVD-RW propone funciones de administración de errores, que se basan principalmente en el software (llamadas gestión de errores permanente y gestión de errores en tiempo real).
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 60
Introducción a la resolución de problemas
La resolución de problemas, utilizando como herramienta una computadora,
requiere contar con la capacidad de expresión suficiente como para indicar a la máquina lo que debe llevarse a cabo.
Se comenzará resolviendo situaciones del mundo real tratando de utilizar determinados elementos que caracterizan a una secuencia de órdenes que una computadora puede comprender.
La resolución de problemas nunca es un proceso mecánico y general,
podemos decir que es un proceso creativo, porque todo problema tiene diferentes características y cada persona puede resolverlo de manera diferente. Sin embargo para llegar a la resolución de un problema se pueden tener en cuenta las siguientes fases.
La resolución de problemas puede dividirse en tres fases: Análisis del problema Diseño del algoritmo Programación (Resolución del algoritmo en la computadora).
El análisis y el diseño del algoritmo requieren la descripción del problema en subproblemas a base de refinamientos sucesivos. Para ello se pueden utilizar las siguientes herramientas:
Diagrama de flujo Pseudocódigo
Durante la tercera etapa se implementa este algoritmo en un código escrito en un
lenguaje de programación, reflejando las ideas obtenidas en las fases de análisis y diseño.
ALGORITMO Un algoritmo es un método para resolver un problema mediante una serie de pasos
precisos, definidos y finitos. Características del Algoritmo
preciso, tiene que indicar el orden de realización en cada paso. definido, es decir, si el algoritmo se prueba dos veces, en estas dos pruebas, se debe
obtener el mismo resultado. finito, es decir, que el algoritmo tiene que tener un número determinado de pasos.
Debe producir un resultado en un tiempo finito.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 61
Ejemplo: Algoritmo que describe la manera de levantarse para ir al trabajo:
Salir de la cama Quitarse el pijama Ducharse Vestirse Desayunar Arrancar el auto para ir al trabajo
Esta descripción del algoritmo a utilizar para la resolución de un simple problema,
cumple con los requisitos descritos. Un algoritmo es, en forma intuitiva, una receta, un conjunto de instrucciones o de
especificaciones sobre un proceso para hacer algo. Las instrucciones incluidas en esta receta deben ser No ambiguas es decir, que si se trabaja dentro de cierto marco o contexto, cada instrucción del algoritmo debe significar sólo una cosa. Ejemplo:
Problema: Indique la manera de salar una masa. Malo: Ponerle algo de sal a la masa (ambiguo) Bueno: Agregarle una cucharadita de sal a la masa.
PRE Y POSTCONDICIONES DE UN ALGORITMO Precondición es la información que se conoce como verdadera antes de comenzar el
algoritmo. Ejemplo: Problema: Indique la manera de salar una masa. Algoritmo: Agregarle una cucharadita de sal a la masa. Se supone que se dispone de todos los elementos para llevar a cabo esta tarea. Por lo tanto, como precondición puede afirmarse que se cuenta con la cucharita, la sal y la masa.
Postcondición es la información que se conoce como verdadera al concluir el algoritmo si se cumple adecuadamente el requerimiento pedido.
Ejemplo: Problema: Volcar un montículo de arena en una zanja. Algoritmo: Tome una pala. Mientras haya arena en el montículo cargue la pala con arena y vuélquela en la zanja. Dejar la pala.
La precondición es que se cuenta con la pala, la arena y está ubicado cerca de la zanja que debe llenar. La postcondición es que el montículo quedó vació al terminar el algoritmo.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 62
Ejercicios: Describir el algoritmo para los siguientes problemas y definir las postcondiciones y precondiciones.
a) armar una bicicleta. b) Hacer una torta. c) Que un robot suba 8 escalones.
Nota: Tener en cuenta que cada uno puede hacer un algoritmo distinto, y sin embargo cada uno puede ser correcto.
Los algoritmos se pueden expresar por fórmulas, diagramas de flujo, y pseudocódigos conocidos como herramientas de programación. Está última representación es la más utilizada por su sencillez y parecido a el lenguaje humano.
DIAGRAMA DE FLUJO
Los diagramas de flujo son descripciones gráficas de algoritmos; usan símbolos conectados con flechas para indicar la secuencia de instrucciones y están regidos por
ISO.
Los diagramas de flujo son usados para representar algoritmos pequeños, ya que abarcan mucho espacio y su construcción es laboriosa. Por su facilidad de lectura son usados como introducción a los algoritmos, descripción de un lenguaje y descripción de procesos a personas ajenas a la computación. Aspectos a tener en cuenta:
Existe siempre un camino que permite llegar a una solución (finalización del algoritmo).
Existe un único inicio del proceso. Existe un único punto de fin para el proceso de flujo (salvo del rombo que indica una
comparación con dos caminos posibles). Simbología:
Significado Símbolo
* INICIO
* FIN

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 63
* INGRESO/ LECTURA
* PROCESO/ OPERACIÓN/
ASIGNACION
* SALIDA POR PANTALLA
* SALIDA POR IMPRESORA
ESTRUCTURAS DE CONTROL
Las estructuras de control de un lenguaje de programación se refieren al orden en que las instrucciones de un algoritmo se ejecutarán. El orden de ejecución de las
sentencias o instrucciones determina el flujo de control.
Estas estructuras de control son por consiguiente fundamentales en los lenguajes de programación y en los diseños de algoritmos especialmente los pseudocódigos. Las estructuras de control básicas son:
secuencia de acciones selección repetición Iteración
SECUENCIA DE ACCIONES
Una secuencia de acciones está formada por una serie de instrucciones que se ejecutan una a continuación de otra.
Acción 1
Acción 2

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 64
Ejemplo: Un niño debe subir 5 escalones para subir a su cuarto. … Subir escalón 1 Subir escalón 2 Subir escalón 3 Subir escalón 4 Subir escalón 5 …
SELECCIÓN
La escritura de soluciones a través de una secuencia de órdenes requiere conocer a priori las diferentes alternativas que se presentarán en la resolución del problema. Lamentablemente, es imposible contar con esta información antes de comenzar la ejecución de la secuencia de acciones. Por ejemplo, que ocurriría si al querer sacar la lámpara quemada, el portalámpara se rompe. Esto implica que el resto de las acciones no podrán llevarse a cabo por lo que el algoritmo deberá ser interrumpido. Si se desea que esto no ocurra, el algoritmo deberá contemplar esta situación. Nótese que el estado del portalámpara es desconocido al iniciar el proceso y sólo es detectado al intentar sacar la lámpara quemada. Por lo que el solo uso de la secuencia es insuficiente para expresar esta solución.
OPERACIÓN SIMBOLO
* BIFURCACION O PREGUNTA
(DECISION)
Acción por el SI, y acción por el NO.
NO SI
Acción solo por el SI.
NO SI
Acción 3
Condición
Acción 1 Acción 2
Condición
Acción

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 65
Acción invalida. Nunca debe solo haber
una acción el NO. Para que esto no
suceda se debe invertir la condición.
NO SI
Por lo tanto, el algoritmo debe considerar las dos alternativas, es decir, qué hacer en cada uno de los casos. La selección se notará de la siguiente forma:
si (condición) acción o acciones a realizar si la condición es verdadera
sino acción acciones a realizar si la condición es falsa
La condición es una expresión que al ser evaluada puede tomar solamente uno de dos valores posibles: verdadero o falso.
Ejemplo: Su amigo le ha pedido que le compre $1 de caramelos en el kiosco. De ser posible, prefiere que sean de menta pero si no hay, le da igual que sean de cualquier otro tipo. Escriba un algoritmo que represente esta situación.
Ir al kiosco si (hay caramelos de menta) Llevar caramelos de menta
Sino Llevar de cualquier otro tipo
Pagar 1 peso
REPETICIÓN
Un componente esencial de los algoritmos es la repetición. La computadora, a diferencia de los humanos, posee una alta velocidad de procesamiento. A través de ella, es posible ejecutar, de manera repetitiva, algunos pasos elementales de un algoritmo. Esto puede considerarse una extensión natural de la secuencia.
La repetición es la estructura de control que permite al algoritmo ejecutar un conjunto de instrucciones un número de veces fijo y conocido de antemano.
La notación a utilizar es la siguiente:
Condición
Acción

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 66
repetir N Acción o acciones a realizar N veces.
Ejemplo: En el ejemplo del niño que debe subir 5 escalones, es muy simple por que la cantidad es un número pequeño. Pero imagine que el niño debe subir 100 escalones. Esto podría resolverse de la siguiente manera.
repetir 100 Subir escalón
Ejemplo: Escriba un algoritmo que permita poner 4 litros de agua en un balde utilizando un vaso de 50 cc.
Se observa que hay dos pasos básicos: llenar el vaso con agua y vaciarlo en el balde. Para completar los cuatro litros es necesario repetir estas dos operaciones ochenta veces. Suponga que se dispone de un vaso, un balde y una canilla para cargar el vaso con agua.
Tomar el vaso y el balde repetir 80 Llenar el vaso de agua. Vaciar el vaso en el balde. Dejar el vaso y el balde. Nótese que, la instrucción “Dejar el vaso y el balde” no pertenece a la
repetición. Esto queda indicado por la sangría o indentación utilizada para cada instrucción. Por lo tanto, se repetirán 80 veces las instrucciones de “Llenar el vaso de agua” y “Vaciar el vaso en el balde”.
ITERACIÓN
Existen situaciones en las que se desconoce el número de veces que debe repetirse un conjunto de acciones. Por ejemplo, si se quiere llenar una zanja con arena utilizando una pala, será difícil indicar exactamente cuántas paladas de arena serán necesarias para realizar esta tarea. Sin embargo, se trata claramente de un proceso iterativo que consiste en cargar la pala y vaciarla en la zanja.
Por lo tanto, dentro de una iteración, además de una serie de pasos elementales que se repiten; es necesario contar con un mecanismo que lo detenga.
La iteración es una estructura de control que permite al algoritmo ejecutar en
forma repetitiva un conjunto de acciones utilizando una condición para indicar su finalización.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 67
El esquema iterativo es de la forma: mientras (condición) Acción o acciones a realizar en caso de que la condición sea verdadera.
Las acciones contenidas en la iteración serán ejecutadas mientras la condición
sea verdadera. Es importante notar que, la primera vez, antes de ejecutar alguna de las acciones de la iteración, lo primero que se realiza es la evaluación de la condición. Sólo luego de comprobar que es verdadera se procede a ejecutar el conjunto de acciones pertenecientes al mientras.
Verdadero Falso
Si inicialmente la condición resultara falsa, el contenido del mientras no se ejecutará ni siquiera una sola vez.
Es importante que las acciones realizadas en el interior de la iteración modifiquen el valor de verdad de la condición a fin de garantizar que la iteración terminará en algún momento.
Ejemplo : Escriba un algoritmo que permita volcar un montículo de arena en una zanja utilizando una pala.
Tomar la pala. Ubicarse frente a la zanja. mientras (no esté vacío el montículo de arena) cargar la pala con arena volcar la arena en la zanja Dejar la pala. La iteración indica que, mientras no se vacíe el montículo, se seguirá incorporando
arena en la zanja. Cuando el montículo esté vacío, la condición será falsa y la iteración terminará. Es importante destacar, que si el montículo inicialmente estaba vacío,
Condición
Acciones a repetir

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 68
ninguna palada de arena será tomada del montículo ni incorporada a la zanja. Es decir, la condición se verifica ANTES de comenzar la iteración.
CONCLUSIÓN
El uso de algoritmos permite expresar, de una forma clara, la manera en que un problema debe ser resuelto. Los elementos que lo componen son característicos de la resolución de problemas con computadora.
La ejercitación es la única herramienta para poder comprender y descubrir la verdadera potencialidad de las estructuras de control. Resulta fundamental alcanzar un total entendimiento del funcionamiento de estas estructuras para poder lograr expresar soluciones más complejas que los ejemplos aquí planteados.
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 69
Introducción a las redes de computadoras
¿Qué es una red?
El término genérico "red" hace referencia a un conjunto de entidades (objetos, personas, etc.) conectadas entre sí. Por lo tanto, una red permite que circulen elementos materiales o inmateriales entre estas entidades, según reglas bien definidas.
red: Conjunto de equipos y dispositivos periféricos conectados entre sí. Se debe tener en cuenta que la red más pequeña posible está conformada por dos equipos conectados.
redes: implementación de herramientas y tareas para conectar equipos de manera que puedan compartir recursos en la red.
Según el tipo de entidad involucrada, el término utilizado variará:
red de transporte: conjunto de infraestructuras y vehículos usados para transportar personas y bienes entre diferentes áreas geográficas.
red telefónica: infraestructura usada para transportar señales de voz desde una estación telefónica a otra.
red neural: conjunto de neuronas conectadas entre sí. red criminal: conjunto de estafadores complotados (donde hay un estafador,
por lo general hay otro). red informática: conjunto de equipos conectados entre sí mediante líneas
físicas que intercambian información bajo la forma de datos digitales (valores binarios, es decir valores codificados como una señal que puede representar 0 ó 1).
Obviamente, los artículos que está leyendo en este momento tratan de las redes informáticas.
No existe un sólo tipo de red, ya que históricamente han existido diferentes tipos de equipos que se han comunicado en varios lenguajes diferentes. La necesidad de contar con múltiples tipos de redes también surge de la heterogeneidad de los medios físicos de transmisión que las une, ya sea que los datos se transfieran de la misma manera (por pulsos eléctricos, haces de luz u ondas electromagnéticas) o que utilicen el mismo tipo de medio físico (como un cable coaxial, pares trenzados o líneas de fibra óptica).
Cada capítulo describe las características de los medios físicos de transmisión así como la manera en que los datos se desplazan por la red.
UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 70
Por qué las redes son importantes
Un equipo es una máquina que se usa para manipular datos. Los seres humanos, como seres comunicativos, comprendieron rápidamente porqué sería útil conectar equipos entre sí para intercambiar información.
Una red informática puede tener diversos propósitos:
Intercambio de recursos (archivos, aplicaciones o hardware, una conexión a Internet, etc.)
Comunicación entre personas (correo electrónico, debates en vivo, etc.) Comunicación entre procesos (por ejemplo, entre equipos industriales) Garantía de acceso único y universal a la información (bases de datos en red) Videojuegos de varios jugadores
Las redes también se usan para estandarizar aplicaciones. El término groupware se usa generalmente para referirse a las herramientas que permiten que varias personas trabajen en una red. Por ejemplo, las agendas grupales y el correo electrónico se pueden usar para comunicar de manera más rápida y eficaz. A continuación se presenta una breve descripción de las ventajas de dichos sistemas:
Costos más bajos gracias al uso compartido de datos y de periféricos Estandarización de aplicaciones Acceso a los datos a tiempo Comunicación y organización más eficaces
Actualmente, gracias a Internet, presenciamos una unificación de las redes. Por lo tanto, las ventajas de instalar una red son múltiples, ya sea para un comercio o para uso particular.
Tipos de redes
Generalmente se dice que existen dos tipos de redes:
Redes de igual a igual Redes organizadas alrededor de servidores (Cliente/Servidor)
¿Qué significa "topología"?
Una red informática está compuesta por equipos que están conectados entre sí mediante líneas de comunicación (cables de red, etc.) y elementos de hardware

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 71
(adaptadores de red y otros equipos que garantizan que los datos viajen correctamente). La configuración física, es decir la configuración espacial de la red, se denomina topología física. Los diferentes tipos de topología son:
Topología de bus Topología de estrella Topología en anillo Topología de árbol Topología de malla
La topología lógica, a diferencia de la topología física, es la manera en que los datos viajan por las líneas de comunicación. Las topologías lógicas más comunes son Ethernet, Red en anillo y FDDI.
Topología de bus
La topología de bus es la manera más simple en la que se puede organizar una red. En la topología de bus, todos los equipos están conectados a la misma línea de transmisión mediante un cable, generalmente coaxial. La palabra "bus" hace referencia a la línea física que une todos los equipos de la red.
La ventaja de esta topología es su facilidad de implementación y funcionamiento. Sin embargo, esta topología es altamente vulnerable, ya que si una de las conexiones es defectuosa, esto afecta a toda la red.
Topología de estrella
En la topología de estrella, los equipos de la red están conectados a un hardware denominado concentrador. Es una caja que contiene un cierto número de sockets a los cuales se pueden conectar los cables de los equipos. Su función es garantizar la comunicación entre esos sockets.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 72
A diferencia de las redes construidas con la topología de bus, las redes que usan la topología de estrella son mucho menos vulnerables, ya que se puede eliminar una de las conexiones fácilmente desconectándola del concentrador sin paralizar el resto de la red. El punto crítico en esta red es el concentrador, ya que la ausencia del mismo imposibilita la comunicación entre los equipos de la red.
Topología en anillo
En una red con topología en anillo, los equipos se comunican por turnos y se crea un bucle de equipos en el cual cada uno "tiene su turno para hablar" después del otro.
En realidad, las redes con topología en anillo no están conectadas en bucles. Están conectadas a un distribuidor (denominado MAU, Unidad de acceso multiestación) que administra la comunicación entre los equipos conectados a él, lo que le da tiempo a cada uno para "hablar".
Las dos topologías lógicas principales que usan esta topología física son la red en anillo y la FDDI (interfaz de datos distribuidos por fibra).
Diferentes tipos de redes
Se distinguen diferentes tipos de redes (privadas) según su tamaño (en cuanto a la cantidad de equipos), su velocidad de transferencia de datos y su alcance. Las redes privadas pertenecen a una misma organización. Generalmente se dice que existen tres categorías de redes:
LAN (Red de área local)

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 73
MAN (Red de área metropolitana) WAN (Red de área extensa)
Existen otros dos tipos de redes: TAN (Red de área diminuta), igual que la LAN pero más pequeña (de 2 a 3 equipos), y CAN (Red de campus), igual que la MAN (con ancho de banda limitado entre cada una de las LAN de la red).
LAN
LAN significa Red de área local. Es un conjunto de equipos que pertenecen a la misma organización y están conectados dentro de un área geográfica pequeña mediante una red, generalmente con la misma tecnología (la más utilizada es Ethernet).
Una red de área local es una red en su versión más simple. La velocidad de transferencia de datos en una red de área local puede alcanzar hasta 10 Mbps (por ejemplo, en una red Ethernet) y 1 Gbps (por ejemplo, en FDDI o Gigabit Ethernet). Una red de área local puede contener 100, o incluso 1000, usuarios.
Al extender la definición de una LAN con los servicios que proporciona, se pueden definir dos modos operativos diferentes:
En una red "de igual a igual", la comunicación se lleva a cabo de un equipo a otro sin un equipo central y cada equipo tiene la misma función.
En un entorno "cliente/servidor", un equipo central brinda servicios de red para los usuarios.
MAN
Una MAN (Red de área metropolitana) conecta diversas LAN cercanas geográficamente (en un área de alrededor de cincuenta kilómetros) entre sí a alta velocidad. Por lo tanto, una MAN permite que dos nodos remotos se comuniquen como si fueran parte de la misma red de área local. Una MAN está compuesta por conmutadores o routers conectados entre sí mediante conexiones de alta velocidad (generalmente cables de fibra óptica).
WAN
Una WAN (Red de área extensa) conecta múltiples LAN entre sí a través de grandes distancias geográficas. La velocidad disponible en una WAN varía según el costo de las conexiones (que aumenta con la distancia) y puede ser baja.

UNIVERSIDAD NACIONAL DE CATAMARCA
FACULTAD DE CIENCIAS EXACTAS Y NATURALES
Departamento de Cs. de la Computación – Informática y Comunicaciones
Curso de Ingreso
Pág.: 74
Las WAN funcionan con routers, que pueden "elegir" la ruta más apropiada para que los datos lleguen a un nodo de la red.
La WAN más conocida es Internet.