apuntes de transformadas de laplace.pdf
228
Apuntes de Ampliación de Matemáticas. Segundo curso de GITI Jose S. Cánovas Peña Silvestre Paredes Hernández 28 de abril de 2014
-
Upload
renzoromero -
Category
Documents
-
view
36 -
download
7
description
apuntes de transformadas de laplace una guía simplificada para que el estudiante pueda repasar aquel tema importante en ingeniería.
Transcript of apuntes de transformadas de laplace.pdf
-
Apuntes de Ampliacin de Matemticas.Segundo curso de GITI
Jose S. Cnovas Pea Silvestre Paredes Hernndez
28 de abril de 2014
-
ndice General
Advertencia.
No son los apuntes de la asignatura. Son una gua que no tiene porqu corresponderse al cienpor cien con lo explicado en clase.
Se ha utilizado el smbolo = para denotar un paso en alguna demostracin que, siendo cierto,no est bien justificado. Normalmente cuando se trata de permuta de lmites, como una integralcon un sumatorio. Para un estudio de las pruebas rigurosas al cien por cien nos remitimos a labibliografa al final de estas notas.
i
-
ndice General
ii
-
ndice general
1. Transformada de Laplace 11.1. Introduccin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. Funciones continuas a trozos. Funcin de Heaviside . . . . . . . . . . . . . . . . . . . 31.3. Definicin de Transformada de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.1. Definicin y primeros ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3.2. Dominio de definicin de la Transformada de Laplace . . . . . . . . . . . . . . 6
1.4. Propiedades de la Transformada de Laplace . . . . . . . . . . . . . . . . . . . . . . . 71.4.1. Linealidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.4.2. Transformada de la derivada . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.4.3. Transformada de la integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.4.4. Transformada de la convolucin . . . . . . . . . . . . . . . . . . . . . . . . . . 101.4.5. Primer Teorema de Traslacin . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.4.6. Segundo Teorema de Traslacin . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.5. Propiedades de la funcin Transformada de Laplace . . . . . . . . . . . . . . . . . . . 131.5.1. Derivabilidad de la Transformada de Laplace . . . . . . . . . . . . . . . . . . . 131.5.2. Teoremas del valor inicial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.5.3. Teorema del valor final . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.6. Transformada de Laplace inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.6.1. Inyectividad de la Transformada de Laplace . . . . . . . . . . . . . . . . . . . 151.6.2. Transformada de Laplace inversa . . . . . . . . . . . . . . . . . . . . . . . . . 161.6.3. Frmula de inversin compleja . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.7. Aplicaciones: una primera aproximacin . . . . . . . . . . . . . . . . . . . . . . . . . 191.8. Uso de la convolucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.9. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2. Estabilidad de ecuaciones diferenciales 252.1. Ecuaciones y sistemas lineales: generalidades . . . . . . . . . . . . . . . . . . . . . . . 25
2.1.1. Sistemas de ecuaciones diferenciales lineales . . . . . . . . . . . . . . . . . . . 272.1.2. Teora general para ecuaciones lineales de orden . . . . . . . . . . . . . . . . 32
2.2. Resolucin desistemas lineales de coeficientes constantes . . . . . . . . . . . . . . . . . 352.2.1. Resolucin del sistema homogneo . . . . . . . . . . . . . . . . . . . . . . . . . 352.2.2. Resolucin de sistemas. La exponencial de una matriz . . . . . . . . . . . . . . 372.2.3. El mtodo de variacin de constantes . . . . . . . . . . . . . . . . . . . . . . . 43
2.3. Resolviendo sistemas mediante la transformada de Laplace . . . . . . . . . . . . . . . 442.4. Problemas con funciones discontinuas . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
iii
-
ndice General
2.5. Sistemas autnomos, puntos crticos y nocin de estabilidad . . . . . . . . . . . . . . 472.6. Estabilidad de sistemas lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.6.1. Por qu un sistema estable es til en ingeniera? . . . . . . . . . . . . . . . . 522.7. Funciones de transferencia. Estabilidad y control de sistemas lineales . . . . . . . . . 53
2.7.1. Respuesta a una seal sinusuidal . . . . . . . . . . . . . . . . . . . . . . . . . 552.8. Estabilidad local de sistemas autnomos . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.8.1. Mtodo de linealizacin de Lyapunov. Teorema de HartmanGrobman . . . . 562.8.2. El mtodo directo de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.9. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3. Ecuaciones en derivadas parciales 633.1. Introduccin a las EDP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 633.2. Ecuaciones lineales de orden 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 643.3. Ecuacin del calor. Mtodo de separacin de variables. . . . . . . . . . . . . . . . . . 683.4. Series de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.4.1. Funciones pares e impares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 723.4.2. Aplicacin a ecuaciones diferenciales . . . . . . . . . . . . . . . . . . . . . . . 743.4.3. Aplicacin a la ecuacin del calor . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.5. Ecuacin de ondas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 763.6. Ecuacin de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 783.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4. Transformada de Fourier 854.1. Definicin y primeros ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 854.2. Propiedades bsicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
4.2.1. Linealidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 874.2.2. Transformada de la derivada . . . . . . . . . . . . . . . . . . . . . . . . . . . . 874.2.3. Cambios de escala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 884.2.4. Derivada de la transformada . . . . . . . . . . . . . . . . . . . . . . . . . . . . 884.2.5. Convolucin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
4.3. Transformada de Fourier inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 904.4. Relacin con la transformada de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.4.1. Aplicacin a los sistemas estables . . . . . . . . . . . . . . . . . . . . . . . . . 914.5. Aplicacin a las ecuaciones en derivadas parciales . . . . . . . . . . . . . . . . . . . . 914.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
5. Fundamentos de Optimizacin: Optimizacin no lineal 955.1. Conceptos bsicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 955.2. Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 995.3. Conjuntos Convexos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1045.4. Funciones convexas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1075.5. Optimizacin de funciones convexas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1125.6. Introduccin a la optimizacin no lineal . . . . . . . . . . . . . . . . . . . . . . . . . . 1155.7. Condiciones de Karush-Kuhn-Tucker . . . . . . . . . . . . . . . . . . . . . . . . . . . 1175.8. Condiciones necesarias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
iv
-
ndice General
5.9. Condiciones suficientes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1385.10. Interpretacin de los multiplicadores de KKT . . . . . . . . . . . . . . . . . . . . . . 1455.11. Dualidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1465.12. Temporal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1505.13. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
6. Optimizacin dinmica: mtodos variacionales 1656.1. Introduccin y ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
6.1.1. Problemas Geodsicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1666.1.2. Problemas temporales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1696.1.3. Problemas Isoperimtricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1736.1.4. Problemas de reas de superficies . . . . . . . . . . . . . . . . . . . . . . . . . 1756.1.5. Problemas con frontera libre . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1766.1.6. Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
6.2. Lemas de Lagrange y du Bois-Reymond . . . . . . . . . . . . . . . . . . . . . . . . . . 1796.3. Ecuaciones de Euler-Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
6.3.1. Optimizacin dinmica sin restricciones . . . . . . . . . . . . . . . . . . . . . . 1826.4. Condiciones Transversales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186
6.4.1. Casos especiales de la primera ecuacin . . . . . . . . . . . . . . . . . . . . . . 1906.4.2. La Segunda Ecuacin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
6.5. Condiciones de segundo orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1966.6. Condiciones suficientes con convexidad . . . . . . . . . . . . . . . . . . . . . . . . . . 1996.7. Optimizacin dinmica con restricciones . . . . . . . . . . . . . . . . . . . . . . . . . 201
6.7.1. Restricciones de igualdad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2016.7.2. Restricciones Integrales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
6.8. Formulacin Variacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2076.9. Extensin de los mtodos variacionales . . . . . . . . . . . . . . . . . . . . . . . . . . 208
6.9.1. Funciones Vectoriales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2086.9.2. Funcionales con derivadas de orden superior . . . . . . . . . . . . . . . . . . . 2116.9.3. Funcionales vectoriales con derivadas de orden superior . . . . . . . . . . . . . 2136.9.4. Funcionales derivadas parciales . . . . . . . . . . . . . . . . . . . . . . . . . . 213
6.10. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
v
-
Captulo 1
Transformada de Laplace
Sumario. Funciones continuas a trozos. Defincin de Transformada de Laplace.Propiedades Bsicas. Transformada de Fourier inversa: propiedades bsicas. Frmulade inversin compleja. Aplicaciones a la resolucin de ecuaciones diferenciales linealescon coeficientes constantes.
1.1. Introduccin
Vamos a desarrollar un tema sobre la Transformada de Laplace y su aplicacin a la resolucin deecuaciones y sistemas de ecuaciones diferenciales lineales con coeficientes constantes. Estas ecuacionessurgen de manera natural en el contexto de los circuitos elctricos.
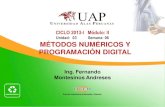
Consideremos por ejemplo el tpico circuito LRC de la figura
donde la inductancia , la resistencia y la capacidad de condensador se consideran constantes.Se tiene entonces que la carga () que circula por el circuito est dada por la ecuacin
00() +0() + () = ()y dado que la intensidad () es la derivada de la carga, sta puede calcularse por la ecuacin
0() +() +Z 0
() = ()
1
-
Transformada de Laplace
o equivalentemente con la ecuacin diferencial
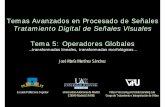
00() + 0() + () = 0()en el caso en que () sea una funcin derivable.De forma similar, si tenemos un circuito con varias ramas y ms elementos, como por ejemplo
podemos deducir a partir de las leyes de Kircho que las intensidades que circulan por los hiloselctricos del circuito vienen dadas por
0 = 1 2 3 0() = 011 + 11 + 0220 = 022 + 003+ 32
Si suponemos los elementos del circuito constantes, salvo a lo mejor el voltaje (), que supondremosuna funcin derivable, tenemos un sistema de ecuaciones diferenciales lineales con coeficientes con-stantes.
La Transformada de Laplace es una herramienta que permite transformar los problemas anterioresen problemas algebraicos y, una vez resuelto este problema algebraico ms fcil a priori de resolver,calcular a partir de la solucin del problema algebraico la solucin del problema de ecuaciones difer-enciales.
Esta es la forma en que los ingenieros abordan el estudio de estos problemas, como pone demanifiesto las referencias [12], [19] o [10]. Adems este mtodo es explicado en algunos libros deecuaciones diferenciales como [5], [6], [11] o [?].
Sin embargo, para entender en su justa dimensin la Transformada de Laplace hay que dominarcontenidos bsicos de variable compleja que nuestros alumnos ya han estudiado con anterioridad.
2
-
Transformada de Laplace
As, vamos a presentar la Transformada de Laplace en un primer lugar usando los conocimientos queel alumno tiene de funciones de variable compleja y una vez explicada sta, procederemos a indicaralgunas aplicaciones a las ecuaciones y sistemas citadas anteriormente. Nuestros alumnos tambindeben conocer y dominar contenidos relativos a integrales impropias que fueron explicados en laasignatura de primer curso fundamentos matemticos de la ingeniera.
A modo de introduccin histrica, diremos que la expresin
() =Z +
()
fu acuada en primer lugar por PierreSimon Laplace en 1782. Su utilizacin dentro de la tcnica sedebe en su forma rigurosa a Thomas Bromwich, el cual formaliz utilizando las funciones de variablecompleja y la Transformada de Laplace un clculo operacional inventado por Oliver Heaviside parala resolucin de circuitos elctricos.
1.2. Funciones continuas a trozos. Funcin de Heaviside
Previamente a introducir la Transformada de Laplace, hemos de concretar qu tipo de funcionesvamos a considerar para nuestros problemas. Las funciones que van a ser de importancia dentro dela ingeniera son aquellas llamadas continuas a trozos, que a continuacin definimos.
Dados los nmeros reales , se dice que la funcin : [ ] C es continua a trozos si existeuna particin de [ ], = 0 1 = , de manera que es continua en ( +1), 0 ,y existen y son finitos los lmites laterales de en cada uno de los puntos , 0 .Una funcin : [0+) C se dice que es continua a trozos si para cada intervalo compacto
[ ] [0+) se verifica que : [ ] C es continua a trozos.Uno de los primeros ejemplos de funcin continua a trozos es
: [0+) Cdonde es un nmero real mayor o igual que cero. Esta funcin est definida por
() =0 si 1 si
y se conoce en ingeniera con el nombre de funcin de Heaviside.
Fsicamente, la funcin de Heaviside realiza la funcin de interruptor, de manera que si :[0+) C es una funcin continua se tiene que es la funcin
( )() =0 si () si 3
-
Transformada de Laplace
lo que representa que la funcin enciende a la funcin o seal en el instante de tiempo = .Adicionalmente, si consideramos 0 y la funcin : [0+) C, sta tiene la forma
( )() =0 si [ )1 si [ )
As, si tomamos ahora la funcin , la funcin tiene el efecto fsico de apagar lafuncin , ya que
( )() =0 si () si 0 si
Adems de estas interpretaciones fsicas, la funcin de Heaviside es til para describir funcionescontinuas a trozos que a su vez sean continuas por la derecha. Por ejemplo, la funcin
() =
si 0 1 1 si 1 3sin si 3
puede escribirse como
() = [0() 1()] + ( 1) [1() 3()] + sin 3()Esta forma de describir funciones continuas a trozos ser til en los siguientes apartados del temadebido a las propiedades de la Transformada de Laplace que posteriormente estudiaremos. Por otraparte hemos de comentar que al venir la Transformada de Laplace definida como una integral, lacondicin de ser la funcin continua por la derecha es irrelevante y todas las funciones pueden tomarsede esta forma.
1.3. Definicin de Transformada de Laplace
1.3.1. Definicin y primeros ejemplos
Sea : [0+) C una funcin localmente integrable, esto es, existe la integral de Riemann de en todo intervalo compacto [0 ] [0+). Se define la Transformada de Laplace de en Ccomo
L[ ]() =Z +0
() (1.1)siempre que tal integral impropia exista. Como el alumno debe conocer, la convergencia de la integralZ +
0
|()|
implica la convergencia de la integral (1.1). Denotaremos por D el dominio de L[ ], es decir, elsubconjunto del plano complejo donde la expresin (1.1) tiene sentido.
A continuacin vamos a ver ejemplos de Transformadas de Laplace de algunas funciones elemen-tales.
4
-
Transformada de Laplace
Funcin de Heaviside. Sea 0 y consideremos la funcin de Heaviside definida anteri-ormente. Entonces para todo C tal que Re 0 se verifica
L[]() =Z +0
() =Z +
= lm+
Z = lm+
=
En particular, cuando = 0 obtenemosL[0]() = 1
Funcin exponencial. Sea C y consideremos la funcin exponencial () = . Se verificaentonces para todo C tal que Re Re
L[ ]() =Z +0
=Z +0
()
= lm+
Z 0
() = lm+
1
()
=
1
En particular, si = 0 se verifica que () = 1, con lo que nuevamenteL[]() = 1 para todo C tal que Re 0.
Potencias. Sea un nmero natural y consideremos la funcin () = . Vamos ver que laTransformada de Laplace de viene dada por la expresin
L[]() = !+1 para todo C tal que Re 0.Para ver esto procedemos por induccin calculando en primer lugar la Transformada de 1.Integrando por partes obtenemos
L[1]() =Z +0
= lm+Z 0
= lm+
+
1 2
=1
2
A continuacin, por la hiptesis de induccin supongamos que L[]() = !+1 y calculemosla Transformada de +1. Consideremos
L[+1]() =Z +0
+1 = lm+Z 0
+1 (1.2)Tomando partes en la expresin anteriorZ
0
+1 = +1 +
+ 1
Z 0
(1.3)
5
-
Transformada de Laplace
Combinando (1.2) y (1.3) concluimos que
L[+1]() = + 1 L[]() =(+ 1)!+2
Funciones peridicas. Las funciones peridicas son bastante importantes en ingeniera debidoa que su periodicidad las hace controlables. Sea : [0+) C una funcin peridica conperiodo . EntoncesZ
0
() =1X=0
Z (+1)
() =1X=0
Z 0
()
realizando cambios de variable en las integrales y usando que la funcin es peridica de periodo . Tomando lmites cuando +, se verifica para todo C tal que Re 0 la relacin
L[ ]() = 11
Z 0
()
1.3.2. Dominio de definicin de la Transformada de Laplace
Los ejemplos que anteriormente hemos explicado ponen de manifiesto que la funcin Transfor-mada de Laplace de una funcin : [0+) C no tiene porque estar definida en todo el planocomplejo. Vamos a estudiar con precisin cmo es el dominio de definicin de estas funciones, peroconsideraremos una clase especial de funciones que tienen lo que llamaremos orden exponencial.
Una funcin : [0+) C se dice que tiene orden exponencial si existen constantes 0 y R de manera que para todo 0 se satisface la condicin
|()| (1.4)Denotaremos por E el conjunto de funciones continuas a trozos con orden exponencial, que sernlas funciones con las que trabajaremos a partir de ahora. El siguiente resultado ofrece una primeraaproximacin sobre el dominio de definicin de la Transformada de Laplace de funciones con ordenexponencial.
Proposicin 1 Sea : [0+) C una funcin continua a trozos cumpliendo la condicin (1.4).Entonces L[ ]() est definida para todo nmero complejo tal que Re Proof. Vamos a ver que la funcin () es absolutamente integrable para todo complejo talque Re . Para ello consideramosZ +
0
|()| =Z +0
Re |()|
Z +0
(Re )
= lm+Z 0
(Re )
= lm+
1
Re (Re ) Re
=
1
Re
6
-
Transformada de Laplace
con lo que la Transformada de Laplace existe en el subconjunto { C : Re }Este resultado prueba que { C : Re } D . Si definimos
= inf{ R : 0 con |()| para todo 0}y denotamos por
D = { C : Re }La Proposicin 1 nos asegura que D D .
1.4. Propiedades de la Transformada de Laplace
Una vez estudiada la definicin de Transformada de Laplace y caracterizadas algunas condicionespara que una funcin tenga Transformada de Laplace L[ ] definida en un dominio del planocomplejo D , pasamos a estudiar algunas propiedades bsicas de esta transformada integral. Laprimera propiedad que vamos a estudiar es la linealidad.
1.4.1. Linealidad
Esta propiedad ser muy til para resolver ecuaciones diferenciales lineales con coeficientes con-stantes, a la vez que permitir el clculo de la transformada de algunas funciones.
Teorema 2 Sean E y C. Entonces para todo D D se verifica queL[ + ]() = L[ ]() + L[]()
Proof. La demostracin se sigue inmediatamente de la linealidad de la integral. Consideremos
L[ + ]() =Z +0
(() + ())
= lm+
Z 0
(() + ())
= lm+Z 0
()+ lm+Z 0
()= L[ ]() + L[]()
lo que concluye la prueba.
A partir de la linealidad de la Transformada de Laplace podemos obtener nuevas Transformadasde funciones elementales, como muestran los siguientes ejemplos.
Funcin seno. Sea R y consideremos la funcin
() = sin() = 2
7
-
Transformada de Laplace
Entonces
L[ ]() = 12L[]() L[]()
=1
2
1
1
+ =
2 + 2
siempre que Re 0
Funcin coseno. Sea R y consideremos la funcin
() = cos() = +
2
De forma anloga a la anterior se obtiene que
L[ ]() = 2 + 2siempre que Re 0.
Funcin seno hiperblico. Sea R y consideremos la funcin
() = sinh() = 2
Entonces
L[ ]() = 12
L[]() L[]()=
1
2
1
1
+ =
2 2
si Re ||.
Funcin coseno hiperblico. Sea R y consideremos la funcin
() = cosh() = + 2
De forma anloga a la anterior se obtiene que
L[ ]() = 2 2
siempre que Re ||.
8
-
Transformada de Laplace
1.4.2. Transformada de la derivada
Se dice que la funcin E es derivable a trozos si es continua, existen las derivadas laterales de en cada punto de [0+) y en cada subintervalo [ ] [0+) existen a lo sumo una cantidadfinita de puntos donde no es derivable. Si es derivable a trozos, definimos 0 : [0+) C como 0() = 0+() para todo [0+). Es claro entonces que 0 es una funcin continua a trozos, quecoincidir en casi todos los puntos con la derivada ordinaria. Se tiene entonces el siguiente resultado.
Teorema 3 Bajo las condiciones anteriores se verifica para todo DL[ 0]() = L[ ]() (0) (1.5)
Proof. Sean D y 0 y consideremos0 1 2 1
los puntos de discontinuidad de 0 en el intervalo (0 ) y fijemos 0 = 0 y = . Entonces,dividiendo el intervalo de integracin y utilizando la frmula de integracin por partesZ
0
0() =X=1
Z 1
0()
=X=1[() 1(1)] +
X=1
Z 1
()
= () (0) + Z 0
()
Tomando lmites cuando +, y teniendo en cuenta que D y que por tanto existen R, 0, Re , tales que|()| (Re ) 0 si +
obtenemos inmediatamente (1.5).
Procediendo por induccin a partir de la frmula (1.5) se prueba una frmula general para laderivada sima de la funcin en el caso de que 1) sea derivable a trozos para N. Estafrmula viene dada para todo D por
L[)]() = L[ ]() 1(0) 2 0(0) 2)(0) 1)(0) (1.6)donde las derivadas sucesivas de en 0 se entienden como derivadas por la derecha.Las frmulas 1.5 y 1.6 sern claves para resolver ecuaciones y sistemas diferenciales lineales con
coeficientes constantes, como veremos en el apartado de aplicaciones de este tema.
9
-
Transformada de Laplace
1.4.3. Transformada de la integral
Sea E y definamos la funcin() =
Z 0
()que obviamente est bien definida y es continua para todo [0+). La relacin entre las Trans-formadas de Laplace de ambas funciones viene dada por el siguiente resultado.
Teorema 4 En las condiciones anteriores, para todo D { C : Re 0} se verifica
L[]() = L[ ]() (1.7)Proof. Sea 0 y consideremos
0 = 0 1 1 = de manera que no es continua en para 1 . Obviamente es derivable en ( +1) para1 . EntoncesZ
0
() =1X=0
Z +1
()
=1X=0
()
(+1)
+1
+1
1X=0
Z +1
()
= ()
+1
Z 0
()teniendo en cuenta la continuidad de y (0) = 0. Vamos a comprobar que
lm+ () = 0.Para ello y dado que E , existirn reales y 0 de manera que |()| para todo 0.Sea
|()| Z 0
() Z 0
Re
= Re
1
0 si +
Entonces tomando lmites en la expresin anterior obtenemos (??).
1.4.4. Transformada de la convolucin
Sean E y definamos () = () = 0 para todo 0. Se define la convolucin de y como la funcin
( )() =Z +0
( )() =Z 0
( )()Puede verse con el cambio de variable = que = . El principal inters de la convolucinrespecto a la Transformada de Laplace se concreta en el siguiente resultado.
10
-
Transformada de Laplace
Teorema 5 En las condiciones anteriores, para todo D D se verifica la frmulaL[ ]() = L[ ]()L[]()
Proof. En primer lugar, existen nmeros reales y 0, = 1 2, de manera que para todo 0se verifica
|()| 1 y |()| 2Entonces para todo 0
|( )()| =Z 0
( )()Z 0
|( )||()|
12Z 0
= 12con lo que se ve fcilmente que ( )() es absolutamente integrable para todo Re , conlo que L[ ]() existe para todo con Re . Por otra parte, como las funciones () y() tambin son absolutamente integrables para todo Re , por el Teorema de Fubini (ver[?, pag. 187]) se tiene que
L[ ]() =Z +0
Z
0
( )()
=
Z +0
Z 0
()( )()
=
Z +0
Z +
()( )()
=
Z +0
Z +
()( )()
=
Z +0
Z +0
()()
=
Z +0
L[ ]()() = L[ ]()L[]()con lo que termina la prueba.
La demostracin de este resultado no la haremos a los alumnos, debido a que pensamos que susconocimientos le impedirn comprenderla completamente. No obstante la frmula ser bastante tilen las aplicaciones.
1.4.5. Primer Teorema de Traslacin
Fijemos un nmero complejo y consideremos E . El primer teorema de desplazamiento hacereferencia a la transformada de la funcin () y afirma lo siguiente.Teorema 6 Bajo las condiciones anteriores
L[()]() = L[ ]( ) (1.8)para todo D +Re := { +Re : D}.
11
-
Transformada de Laplace
Proof. Sea Z +0
() = lm+Z 0
()() =Z +0
()()de donde se deduce inmediatamente (1.8).
A partir de este resultado podemos obtener las Transformadas de las funciones siguientes:
() = sin(), R, cuya Transformada de Laplace para todo nmero complejo tal queRe Re es
L[ ]() = ( )2 + 2
() = cos(), R, cuya Transformada de Laplace para todo nmero complejo tal queRe Re es
L[ ]() = ( )2 + 2
() = sinh(), R. Si Re ||+Re , entoncesL[ ]() =
( )2 2
() = cosh(), R. Si Re ||+Re , entoncesL[ ]() =
( )2 2
() = con N. EntoncesL[ ]() = !
( )+1siempre que Re Re .
1.4.6. Segundo Teorema de Traslacin
Sea ahora 0 un nmero real y supongamos que E est definida por () = 0 para todo 0. Recordemos que es la funcin de Heaviside. Entonces tenemos el siguiente resultado.Teorema 7 Bajo las anteriores condiciones se verifica para todo D
L[()( )]() = L[ ]() (1.9)Proof. Tomamos Z +
0
()( ) = lm+Z 0
()( )
= lm+
Z ( )
= lm
Z 0
(+)()
= Z +0
()
12
-
Transformada de Laplace
haciendo el cambio de variable = . De aqu se obtiene inmediatamente (1.9).Este resultado es til para obtener la Transformada de Laplace de funciones continuas a trozos.
Por ejemplo consideremos la funcin
() = si 0 10 si 1
Esta funcin puede describirse como
() = [0() 1()]Entonces
L[ ]() = L[0()]() L[1()]() = L[]() L[+ 1]()=
1
2 1
2 +1
=1
2 + 1
2
para todo C tal que Re 0.
1.5. Propiedades de la funcin Transformada de Laplace
En esta seccin estudiamos la propiedades de la funcin Transformada de Laplace considerndolacomo una funcin de variable compleja definida en un semiplano { C : Re }, R.Dividimos la seccin en tres subsecciones.
1.5.1. Derivabilidad de la Transformada de Laplace
Consideremos una funcin E y su Transformada de LaplaceL[ ] : { C : Re } C
Teorema 8 Bajo la notacin anterior, la funcin L[ ] es holomorfa para todo C tal que Re y adems se verifica
L[ ]() =
Z +0
()
En las condiciones del resultado anterior, obtenemos por induccin la frmula para la derivadasima de la Transformada de Laplace
L[ ]() = (1)
Z +0
()
Claramente la demostracin de este resultado no es apropiada para hacerla en clase, pues pre-supone muchos contenidos que no hemos explicado en la misma. Nos centraremos en que el alumnoentienda el resultado y sepa aplicarlo. Por ejemplo, calculando las Transformadas de las siguientesfunciones.
13
-
Transformada de Laplace
() = sin(), N y R. Se tiene siempre que Re 0 la relacin
L[ ]() = (1)
L[sin()]() = (1)
2 + 2
() = cos(), N y R. Se tiene anlogamente siempre que Re 0
L[ ]() = (1)
L[cos()]() = (1)
2 + 2
De forma similar se obtienen frmulas equivalentes para el coseno y seno hiperblicos.
1.5.2. Teoremas del valor inicial
Estos resultados hacen alusin a aspectos cualitativos de la Transformada de Laplace de funcionesde la clase E .Teorema 9 Sea E. Entonces
lmRe +L[ ]() = 0 (1.10)
Proof. Sea D . Existen nmeros reales 0 y de manera que |()| para todo 0.Entonces
|L[ ]()| lm+Z 0
|()| lm+Z 0
(Re )
= lm+((Re 1)
Re =
Re de donde claramente obtenemos (1.10) al hacer Re +.Continuamos esta seccin con otro resultado que estudia cuestiones cualitativas de la Transfor-
mada de Laplace.
Teorema 10 Asumamos que E es derivable a trozos y que 0 E. Entonceslm
Re + L[ ]() = (0) (1.11)Proof. Sea D . Por el Teorema 3 tenemos que
L[ ]() = (0) + L[ 0]() (1.12)Aplicando el Teorema 9 a (1.12) se tiene que lmRe +L[ 0]() = 0, de donde se deduce inmedi-atamente (1.11).
Los resultados anteriores muestran que no todas las funciones de variable compleja pueden serTransformadas de Laplace de funciones de E . Por ejemplo, la funcin 1 no puede serlo al tenerseque
lmRe +
=
14
-
Transformada de Laplace
1.5.3. Teorema del valor final
Al igual que los resultados de la seccin anterior el Teorema del valor final aporta informacincualitativa de la Transformada de Laplace en conexin directa con la funcin de la cual es transfor-mada.
Teorema 11 Sea E una funcin derivable a trozos tal que 0 E. Supongamos que 0 D yque existe y es finito lm+ (). Entonces
lm0 L[ ]() = lm+ ()
Proof. Por el Teorema 3,
L[ ]() (0) = L[ 0]() =Z +0
0()
Por el Teorema 8, L[ 0]() es derivable y por lo tanto continua. Entonces
lm0L[0]() = L[ 0](0) =
Z +0
0() = lm+ () (0)
lo cual concluye la demostracin.
1.6. Transformada de Laplace inversa
1.6.1. Inyectividad de la Transformada de Laplace
Al intervenir en la definicin de Transformada de Laplace la integracin, est claro que puedehaber infinitas funciones en E teniendo la misma Transformada, por lo que la sta no ser inyectiva.Sin embargo este problema puede paliarse en parte para as poder hablar de la Transformada inversade una funcin holomorfa definida en un semiplano complejo. Como veremos en las aplicaciones deltema, este punto ser de vital importancia.
Consideremos : [0+) C una funcin localmente integrable. Diremos que es nula o nulacasi por todas partes si para todo (0+) se verifica queZ
0
|()| = 0
Dos funciones : [0+) C localmente integrables se dirn iguales casi por todas partes si es nula. Se tiene entonces el siguiente resultado.
Proposicin 12 Sean E iguales casi por todas partes. Entonces L[ ]() = L[]() para todo D D.
15
-
Transformada de Laplace
Proof. Sea 0 y DD. Por el Teorema del Valor Medio del Clculo Integral existe (0 )tal que Z
0
|() ()| = Re Z 0
|() ()| = 0As
|L[ ]() L[]()| = lm+Z 0
()Z 0
()
lm+ Re
Z 0
|() ()| = 0
lo que termina la demostracin.
El siguiente resultado establece una especie de recproco para el resultado anterior.
Teorema 13 (Lerch) Sean E tales que L[ ]() = L[]() para todo D D. Entonces y son iguales salvo a lo mejor en los puntos de discontinuidad de ambas, con lo que ademsD = D.La demostracin de este resultado no la haremos en clase y no lo hemos incluido en la leccin ya
que no puede obtenerse de forma autocontenida con las tcnicas que tenemos a nuestra disposicin.
1.6.2. Transformada de Laplace inversa
Consideremos la funcinL : E L(E)
El Teorema 13 permite definir clases de equivalencia en E del siguiente modo. Dadas E sedir que ambas estn relacionadas, si y slo si son iguales salvo a lo sumo en los puntos dediscontinuidad de ambas. Podemos definir entonces la Transformada de Laplace inversa
L1 : L(E) E para L(E) como L1[ ] = [ ] donde [ ] denota la clase de E de manera que L[ ] = .En general con nuestros alumnos tenderemos a identificar clases con funciones que normalmentepodrn ser calculadas. As diremos que dada L(E) su Transformada inversa es una funcinL1[ ]() = () de forma que L[ ] = , aunque est perfectamente claro que tal no es nica.En este contexto, destacamos las siguiente propiedades de Transformada inversa que sern espe-
cialmente interesantes a la hora de las aplicaciones.
Linealidad. Dadas L(E) y C se verificaL1[ + ]() = L1[ ]() + L1[]()
Traslacin. Dada L(E) y 0 se cumple la relacinL1[ ()]() = ()L1[ ]( )
16
-
Transformada de Laplace
Convolucin. Dadas L(E) se cumpleL1[]() = (L1[ ] L1[])()
Estas propiedades son particularmente interesantes a la hora de obtener Transformadas inversasde Laplace una vez conocidas las Transformadas directas.
1.6.3. Frmula de inversin compleja
Aparte de las tcnicas estudiadas en el apartado anterior para hallar Transformadas inversas,estudiaremos la siguiente frmula de inversin compleja.
Teorema 14 Supongamos que () es holomorfa en C \ {1 2 }, y que existe R tal que es holomorfa en { C : Re }. Supongamos adems que existen constantes positivas , y tales que
| ()| || si || (1.13)Para 0 sea
() =X=1Res( () )
EntoncesL[ ]() = () si Re
Proof. Sea y consideremos el rectngulo de la figura, suficientemente grande para que lassingularidades de estn contenidas en su interior y adems todo cumpla la condicin || .Separamos en la suma de dos caminos cerrados 1 y 2 divididos por la recta Re = .
17
-
Transformada de Laplace
Como las singularidades de estn contenidas en el interior de 1, por definicin de tenemos queZ1 () = 2()
Entonces
2L[ ]() = lm+Z 0
Z
1 ()
= lm+
Z1
Z 0
() ()
aplicando el Teorema de Fubini. Por integracin directa
2L[ ]() = lm+Z1
() 1 () Para fijo en el semiplano Re , el trmino () converge uniformemente a 0 si + y elintegrando converge a ()( ) en 1. As
2L[ ]() = Z1
() =
Z2
()
Z ()
= 2 ()Z ()
Por otra parte, sea () = , [0 2] una circunferencia de radio y conteniendo a .Entonces Z
() =
Z ()
de donde Z ()
||()2 0 si +
As Z () = 0
y como era arbitrario, la frmula L[ ]() = () es vlida para todo Re .Remarquemos aqu que la condicin (1.13) del resultado anterior se cumple para funciones de la
forma () = ()() donde y son polinomios tales que deg 1 + deg , donde degdenota el grado de . As por ejemplo, la Transformada inversa de la funcin
() = 2 + 1puede calcularse como
L1[ ]() = ()= Res( () ) + Res( ())=
2 + 2 = cos
18
-
Transformada de Laplace
1.7. Aplicaciones: una primera aproximacin
La Transformada de Laplace es una herramienta til para resolver ecuaciones y sistemas deecuaciones diferenciales lineales con coeficientes constantes. Como comentamos en la introduccindel tema, estas ecuaciones aparecen de forma natural en la teora de circuitos elctricos. Para ilustrarel mtodo, consideremos el siguiente ejemplo: la ecuacin
00 + = cos (1.14)junto con las condiciones iniciales
(0) = 0; 0(0) = 1 (1.15)Bsicamente se trata de aplicar la Transformada de Laplace y sus propiedades a (1.14) de maneraque teniendo en cuenta (1.15), nuestro problema se convierte en el problema algebraico
2L[]() (0) 0(0) + L[]() = 2 + 1 de donde
L[]() = 2 + + 1(2 + 1)2
Una vez obtenida L[], hemos de usar la Transformada inversa para volver atrs y recuperar lasolucin del problema . En este caso, L[] satisface las condiciones del Teorema 14, por lo que
() = Res
2 + + 1(2 + 1)2
+Res
2 + + 1(2 + 1)2
= (1 + 2) sin
una vez realizados los clculos.
1.8. Uso de la convolucin
Otra forma de abordar el problema anterior, sin necesidad de tener que calcular la Transformadade Laplace de la funcin coseno es la siguiente. Consideremos los clculos realizados anteriormente,pero sin obtener L[ ]() donde () = cos . Nos quedar entonces la ecuacin algebraica
2L[]() 1 + L[]() = L[ ]()de donde
L[]() = 12 + 1 +1
2 + 1L[ ]()Entonces
() = L1[1(2 + 1)]() + L1[L[ ]()(2 + 1)]()= sin + (L1[L[ ]()] L1[1(2 + 1)])()= sin +
Z 0
sin( ) cos
= sin +1
4(cos(2 ) + 2 sin
0
= sin + 2sin = (1 + 2) sin
19
-
Transformada de Laplace
que era la solucin obtenida anteriormente.
As, el uso del producto de convolucin presenta una va alternativa para la resolucin de estosproblemas, aunque a veces el clculo de las integrales que aparecen en el producto de convolucinpueden ser bastante complicado.
1.9. Ejercicios
1. Calcular la transformada de Laplace de las siguientes funciones
(a) () = sin(3) (b) () = 5 (c) () = 5 cos 3 (d) () = (e) () = 3 (f) () = sinh (g) () = cos sin (h) () = cos sin(2)
2. Una funcin : [0+[ R se dice que es peridica con periodo 0 o -peridica si paracada 0 se tiene que () = (+ ). Comprobar que en caso de existir la transformada deLaplace de , se verifica la igualdad
L()() = 11
Z 0
()
3. Usar el resultado de la actividad anterior para calcular la transformada de Laplace de la funcinperdica de periodo 2 definida en [0 2] por
() = si [0 1]2 si [1 2]
4. Dada la funcin,
() =Z 0
sin 0calcular su transformada de Laplace. Calcular asimismo la transformada de Laplace de () =().
5. Dada la funcin (), definimos la funcin () = (), que puede verse como un cambio deescala en . Comprobar que
L[]() = L[()]() = 1L[]()Utilizar dicha frmula para calcular la transformada de la funcin sin() a partir de
L[sin ]() = 11 + 2
6. Calcular la transformada de Laplace de la funcin,
() =
si 0 11 si 1 20 si 2
20
-
Transformada de Laplace
7. Calcular la transformada de Laplace de las siguientes funciones.
(a) () = | sin | (b) () =0 si 0 1 si 1 (c) () =
2 1 si 0 22 si 2
8. Calcular la transformada de Laplace de la funcin escalonada
() = 0 10 1 2
extendida a todo [0+[ como 2-peridica.9. Existir la transformada inversa de Laplace de las siguientes funciones de variable compleja?
Razonar las respuestas.
(a) () = sin (b) () =
(c) () =
1 + 2 (d) () =
1 + cos (2)
10. Calcular la transformada inversa de Laplace de las funciones siguientes
(a) () = 2
1 + 3 (b) () =1
( 1)(2 2) (c) () = + 7
2 + 2 + 5
() () = 1( + 1)( + 2)(2 + 2 + 10)
11. Calcular la transformada inversa de Laplace de las siguientes funciones:
(a) () =
2 + 2 + 5 (b) () =( 1)3 + 2 (c) () =
+ 12(2 + 9) (d) () =
+ 14
12. Calcular las transformadas inversas de Laplace de las funciones:
(a) () =
1 + 2 ( 0) (b) () =
( 1)( + 2)2 (c) () = +
12 + 2
() () = 2
( 2)(3 1)13. Utilizar la transformada de Laplace para resolver los siguientes problemas de Cauchy asociados
a ecuaciones diferenciales lineales con coeficientes constantes:
000() + 500() + 170() + 13() = 1(0) = 0(0) = 1 00(0) = 0
0() + 3() = 2(0) = 2
00() + 0() 2() = 54()(0) = 1 0(0) = 0
00() + () = (0) = 1 0(0) = 2
21
-
Transformada de Laplace
14. Resolver los siguientes problemas de valores iniciales:
00() + 0() = () con () = 10 1
(0) = 0 0(0) = 2
00() + () = sin (0) = 0(0) = 1
)
15. En el caso de un circuito LCR en el que no se tiene ninguna resistencia, la ecuacin diferencialque describe la carga del condensador en funcin del tiempo es de la forma,
22 () +
() = ()
y se denomina oscilador armnico. Resolver la ecuacin anterior en los siguientes casos:
a) La fuerza electromotriz es constante y la carga e intensidad de corriente en el momentoinicial son ambas nulas.
b) La fuerza electromotriz es de la forma sin(+ ), con R, mientras que (0) = 1al conectar el circuito.
16. Usar la transformada de Laplace para resolver el siguiente sistema de ecuaciones diferencialeslineales:
2001() 002() 01() 02() + 91() 32() = 02001() 002() + 01() + 02() + 71() 52() = 0
)con las condiciones iniciales:
1(0) = 01(0) = 1 2(0) = 02(0) = 017. Encuentra la solucin del siguiente problema de Cauchy,
00() + () = sen( )(0) = 0 0(0) = 1
)con 1.
18. Encuentra la solucin del oscilador armnico dado por la ecuacin diferencial:
00() + () = sin ( ) ( R 0)que verifica las condiciones iniciales:
(0) = 12 0(0) = 0 (06-09-99)19. Resuelve el siguiente problema de Cauchy:
00() + () = cos ()(0) = 1 0(0) = 0
distinguiendo los casos en que 0 y 0 .22
-
Transformada de Laplace
20. Obtener la solucin del siguiente sistema de ecuaciones diferenciales,
301() + 02() 21() = 3 sin + 5 cos 201() + 02() + 2() = sin + cos
)
para las condiciones iniciales, 1(0) = 0, 2(0) = 1.
23
-
Transformada de Laplace
24
-
Captulo 2
Estabilidad de ecuaciones diferenciales
Sumario. Ecuaciones y sistemas de ecuaciones lineales. Funciones de transferencia.Nociones de estabilidad. Criterios de estabilidad. Estabilidad de sistemas autnomosno lineales.
2.1. Ecuaciones y sistemas lineales: generalidades
Para nosotros, un sistema de ecuaciones diferenciales es una expresin de la forma
1( 1 01 2 02 0) = 0;2( 1 01 2 02 0) = 0;...( 1 01 2 02 0) = 0;
donde 1 2 son funciones reales a determinar que dependen de y : R1+2 R,1 , son funciones reales de varias variables. Se suele suponer que hay igual nmero deecuaciones que de incgnitas de manera que todas las ecuaciones son independientes, es decir, ningunapuede deducirse de las dems. Estamos interesados en aquellos sistemas de ecuaciones diferencialesen los que podemos despejar la primera derivada de cada una de las funciones incgnita, es decir,sistemas de la forma
01 = 1( 1 2 );02 = 2( 1 2 );...0 = ( 1 2 );
donde : R1+ R, 1 , son funciones reales. Ejemplos de estos sistemas son 01 = 1 + 22;02 = + 1 + 2;
01 = 1 + 22 3;02 = + 1 + 23;03 = 123;25
-
Estabilidad de ecuaciones diferenciales
En general la resolucin de estos sistemas no es posible, salvo en casos excepcionales. Slo para elcaso de los sistemas de ecuaciones diferenciales lineales con coeficientes constantes, que veremos unpoco ms tarde existen algoritmos que permiten el clculo explcito de las soluciones. Sin embargo,es relativamente sencillo saber cundo un sistema tiene solucin, o ms precisamente cundo unproblema de condiciones iniciales asociado tiene solucn. Primero claro est, debemos definir quentendemos por un problema de condiciones iniciales para sistemas de ecuaciones diferenciales. Dichoproblema es un sistema de ecuaciones diferenciales
01 = 1( 1 2 );02 = 2( 1 2 );...0 = ( 1 2 );1(0) = 1 2(0) = 2 (0) =
junto con las condiciones (0) = , donde 0 1 2 son nmeros reales. Por ejemplo
01 = 1 + 22 3;02 = + 1 + 23;03 = 123;1(0) = 2 2(0) = 0 3(0) = 1es un problema de condiciones iniciales. Ntese que todas las condiciones iniciales implican el conocimien-to de la funcin en 0, es decir, lo siguiente
01 = 1 + 22 3;02 = + 1 + 23;03 = 123;1(0) = 2 2(1) = 0 3(0) = 1no sera un problema de condiciones iniciales, ya que conocemos 2 en 1 e 1 e 3 en 0.Para el caso de los problemas de condiciones iniciales para sistemas de ecuaciones diferenciales
tenemos el siguiente resultado anlogo al de ecuaciones diferenciales de orden uno.
Teorema 15 Sea el problema de condiciones iniciales
01 = 1( 1 2 );02 = 2( 1 2 );...0 = ( 1 2 );1(0) = 1 2(0) = 2 (0) =
donde (0 1 ) , : R1+ R, 1 , son funciones reales continuas en elabierto . Supongamos adems que las funciones existen y son continuas en . Entonces existeuna solucin del problema de condiciones iniciales anterior : R, 1 definido en unintervalo abierto de la recta real.
26
-
Estabilidad de ecuaciones diferenciales
Este resultado es fcil de aplicar. Por ejemplo el problema que consideramos anteriormente
01 = 1 + 22 3;02 = + 1 + 23;03 = 123;1(0) = 2 2(0) = 0 3(0) = 1es tal que 1( 1 2 3) = 1 + 22 3, 2( 1 2 3) = + 1 + 23 y 3( 1 2 3) = 123son funciones definidas en R4, continuas y las derivadas parciales de cada funcin respecto de 1 2e 3 son continuas. Entonces este problema de condiciones iniciales tiene solucin nica, aunque notengamos ni idea de cmo calcularla. Se ver en la asignatura de cuarto curso mtodos numricos cmoobtener soluciones aproximadas, y en esta misma asignatura estudiaremos cmo obtener informacinparcial sobre el sistema incluso sin conocer las soluciones.
2.1.1. Sistemas de ecuaciones diferenciales lineales
Como hemos comentado anteriormente en general no va a ser posible resolver sistemas de ecua-ciones diferenciales salvo en ciertos casos particulares. Uno de ellos va a ser el de los sistemas deecuaciones diferenciales lineales de coeficientes constantes, cuya teora general pasamos a estudiar.Vamos a ver a continuacin cmo son las soluciones de un sistema de este tipo, pero antes necesitamosconocer un poco ms sobre stos. Un sistema de ecuaciones diferenciales lineales es una expresinde la forma
01 = 11()1 + 12()2 + + 1() + 1()02 = 21()1 + 22()2 + + 2() + 2()0 = 1()1 + 2()2 + + () + ()
donde para cada 1 , y son funciones reales definidas sobre un intervalo . Si denotamospor
A() = (())11 =
11() 12() 1()21() 22() 2()
1() 2() ()
y por
b() = (1() 2() ()) =
1()2()
()
e
y = (1 2 ) =
12
el sistema anterior puede escribirse de forma matricial como
y0 = A() y + b() (2.1)27
-
Estabilidad de ecuaciones diferenciales
donde por y0 se entender la derivada coordenada a coordenada, es decir,
y0 = (01 02 0) =
01020
Por ejemplo, los sistemas 01 = 1 + 2 + 1 202 = 1 2 +
01 = 1 + 22 + 3 + 1 202 = 1 22 + 03 = 1 + (1 )2 + 3son lineales. Un sistema se dir homogneo si b() = (0 0 0), es decir, el sistema
01 = 1 + 22 + 302 = 1 2203 = 1 + (1 )2 + 3es homogneo. Se dir no homogneo en caso contrario. Nosotros le prestaremos una gran atencina los sistemas lineales con coeficioentes constantes. Un sistema de ecuaciones diferenciales lineales sedir de coeficientes constantes si la matriz A() = A es constante. Ejemplos de tales sistemas, tantohomogneos como no homogneos son 01 = 21 + 2 + 1 202 = 1 2 +
01 = 21 2 + 302 = 1 2 + 7303 = 41 + 2 + 3Veremos en los sucesivos temas cmo resolver estos ltimos sistemas, dando un algoritmo que per-mitir el clculo de la solucin general del mismo.
Previamente, estudiaremos la teora general de los sistemas de ecuaciones lineales y para poste-riormente particularizarla al caso de las ecuaciones lineales de orden mayor o igual que dos (ver laltima seccin de este tema). Esta teora general de los sistemas de ecuaciones diferenciales lineales sesustenta en la nocin de espacio vectorial de dimensin finita estudiadas en la parte de lgebra linealimpartida durante el curso y utiliza el siguiente resultado sobre existencia y unicidad de solucionesde ecuaciones y sistemas que se deducen directamente del Teorema 15.
Teorema 16 Sea y0 = A() y + b() un sistema de ecuaciones diferenciales lineales donde A yb estn definidas en un intervalo 0 = [0 0 + ]. Si estas funciones son continuas en dichointervalo, entonces el problema de condiciones iniciales
y0 = A() y + b()y(0) = y0
tiene solucin nica definido en todo 0.28
-
Estabilidad de ecuaciones diferenciales
Recordemos por un instante dos nociones que ser importante tener claras para entender la teoraque a continuacin vamos a desarrollar. Por un lado hemos de tener presente que bajo la notacinque estamos utilizando, una solucin de un sistema lineal es una funcin y : ( ) R R, o dichode otro modo, un vector cuyas componentes son funciones reales. Por ejemplo, dado el sistema 01 = 202 = 1una solucin del mismo es y() = (sin cos), es decir, 1() = sin e 2() = cos.Por otra parte, recordemos una nocin de bsica del lgebra lineal. Si tenemos vectores cuyas
componentes son funciones y1y2 y, se dicen linealmente independientes si para toda combi-nacin lineal
1 y1 + 2 y2 + + y = 0donde R, 1 , y 0 es el vector que tiene a la funcin nula en cada componente, entoncesnecesariamente = 0, 1 .Vamos a empezar el estudio de los sistemas homogneos, empezando por el siguiente resultado.
Las demostraciones de los siguientes resultados estn basados en el Teorema 16.
Teorema 17 El conjunto de soluciones del sistema homogneo
y0 = A() y (2.2)tiene estructura de espacio vectorial de dimensin sobre R, esto es, cualquier solucin y del mismoes de la forma
y = 1 y1 + 2 y2 + + ydonde 1 2 R e y1y2 y son soluciones linealmente independientes del mismo.Proof. En primer lugar, veamos que cualquier combinacin lineal de soluciones del sistema (2.2)es una solucin del mismo. Para ello, sean y1y2 y soluciones de (2.2) y 1 2 R.Consideramos el vector de funciones z = 1 y1 + 2 y2 + + y y derivamos respecto de lavariable independiente (notar que z = z()), obtenindose, por ser y1y2 y soluciones de (2.2)que
z0 = 1 y01 + 2 y02 + + y0= 1 A() y1 + 2 A() y2 + + A() y= A() [1 y1 + 2 y2 + + y]= A() z
que prueba que z es solucin.
Sea ahora C = {u1u2 u} la base cannica de R, es decir, para cada {1 2 }, u esel vector de R que tiene 0 en todas las componentes salvo en la sima, donde tiene un 1. Sea 0
29
-
Estabilidad de ecuaciones diferenciales
un nmero real y supongamos que A() est definida en 0 (ver Teorema 16). Para cada 1 ,consideramos el problema de condiciones iniciales
y0 = A() y;y(0) = u
En virtud del Teorema 16, para cada {1 2 } existe una nica solucin de dicho problema,que denotaremos por y, definida en 0. Vamos a ver que B = {y1y2 y} forman una base delconjunto de soluciones del sistema 2.2.
Veamos primero que son linealmente independientes. Para ello sea
1 y1 + 2 y2 + + y = 0.Particularizamos en 0 y obtenemos que
1 y1(0) + 2 y2(0) + + y(0) = 0(0) = 0,y por ser cada y solucin del problema de condiciones iniciales, y(0) = u, 1 , de donde
1 u1 + 2 u2 + + u = 0Como los vectores u son los elementos de la base cannica de R, son linealmente independientes ypor tanto = 0, 1 , de donde y1y2 y son linealmente independientes.Acto seguido, vamos a ver que B es un sistema generador del conjunto de soluciones del sistema
(2.2). Para ello sea z una solucin arbitraria del sistema (2.2). Sea 0 el nmero real del apartadoanterior. Como C es una base de R, se verifica que existen 1 2 R tales que
z(0) = 1 u1 + 2 u2 + + uSea el vector de funciones
z1 = 1 y1 + 2 y2 + + yy consideremos el problema de condiciones iniciales
y0 = A() y;y(0) = z(0)
Claramente tanto z como z1 son soluciones de dicho problema. Como la solucin es nica en virtuddel Teorema 16, se tiene que
z = z1 = 1 y1 + 2 y2 + + ypor lo que B tambin es un sistema generador y la demostracin concluye.
Aunque el resultado anterior caracteriza las soluciones del sistema homogneo, el clculo ex-plcito de las soluciones dista mucho de estar al alcance. Un primer avance en el objetivo del cl-culo de las soluciones lo proporciona el determinante wronskiano, definido de la manera siguiente.
30
-
Estabilidad de ecuaciones diferenciales
Dadas y1y2 y : R R se define su determinante wronskiano como la funcin real [y1y2 y] : R R definida todo como
[y1y2 y]() := |y1();y2(); ;y()|El determinante wronskiano resulta ser til a la hora de determinar si soluciones del sistemahomogneo son o no linealmente independientes, como pone de manifiesto el siguiente resultado.
Proposicin 18 Sean y1y2 y : R R soluciones del sistema homogneo y0 = () y.Son equivalentes:
(a) y1y2 y son linealmente independientes.(b) [y1y2 y]() 6= 0 para todo .(c) Existe 0 tal que [y1y2 y](0) 6= 0.
Proof. Veamos en primer lugar que (a) implica (b). Procedemos por reduccin al absurdo suponiendoque (b) es falso, esto es, existe 0 tal que [y1y2 y](0) = 0. Entonces los vectores de Rson linealmente dependientes, es decir, existen 1 2 R, no todos nulos, tal que
1 y1(0) + 2 y2(0) + + y(0) = 0Consideremos el problema de condiciones iniciales
y0 = A() y;y(0) = 0
Obviamente el vector de funciones 0 (cuyas componentes son la funcin nula) es solucin de dichoproblema. Por otra parte, procediendo como en el final de la demostracin del Teorema 2.18, vemosque la funcin
z = 1 y1 + 2 y2 + + ytambin es solucin de dicho problema. Como la solucin debe ser nica por el Teorema 16, tenemosque
z = 0 = 1 y1 + 2 y2 + + yComo los escalares no eran todos nulos, tenemos que las funciones y1y2 y no pueden serlinealmente independientes, lo que nos lleva a una contradiccin.(b) implica (c) es trivial. La demostracin de (c) implica (a) es anloga a la demostracin del
Teorema 2.18, cuando se comprueba que las funciones son linealmente independientes.
Ahora bien, seguimos todava muy lejos de resolver un sistema homogneo. De hecho, los mtodosque permitirn dar soluciones explcitas a los sistemas planteados tendrn que esperar a los prximostemas. La teora general, en lo que a la estructura de las soluciones, queda cerrada al establecer lasiguiente caracterizacin de los sistemas no homogneos.
31
-
Estabilidad de ecuaciones diferenciales
Teorema 19 El conjunto de soluciones del sistema
y0 = A() y + b() (2.3)es de la forma
y = 1 y1 + 2 y2 + + y + ydonde 1 2 R, y1y2 y son soluciones linealmente independientes del problema homog-neo e y es una solucin particular del problema no homogneo.
Proof. Sea y una solucion particular del sistema (2.3) y sea y otra solucin. Consideremos el vectorde funciones z = y y y veamos que es solucin del sistema homogneo asociado a (2.3). Para ellocalculamos
z0 = y0 y0= A() y + b() [A() y+b()]= A() [y y]= A() z
Por el Teorema 2.2, existen soluciones del sistema homogneo asociado linealmente independientesy1y2 y tales que
z = 1 y1 + 2 y2 + + ydonde 1 2 R. Teniendo en cuenta la definicin de z concluimos que
y = 1 y1 + 2 y2 + + y + ycon lo que se concluye la demostracin.
2.1.2. Teora general para ecuaciones lineales de orden Una ecuacin diferencial de orden 1 es una expresin de la forma
) = ( 0 1)) (2.4)donde : R+1 R. Esta ecuacin puede transformarse en un sistema de ecuaciones diferen-ciales de orden uno de la manera siguiente. Introducimos las variables dependientes 1 = , 2 = 0,3 = 00,..., = 1) y entonces la ecuacin (2.4) puede escribirse como el sistema
01 = 202 = 301 = 0 = ( 1 2 )
Por ejemplo, la ecuacin de orden tres
3) = + 0 0032
-
Estabilidad de ecuaciones diferenciales
puede escribirse como el sistema
01 = 202 = 303 = + 12 3De aqui se ve que para tener un problema de condiciones para la ecuacin, necesitamos condicionesiniciales 1(0) = (0) = 0, 2(0) = 0(0) = 00,...,(0) = 1)(0) = 10 , es decir, necesitamosconocer el valor de la funcin y de las sucesivas derivadas hasta la 1 en un punto 0. Entonces,en virtud del Teorema 15 vemos que si es continua y las derivadas , 1 , son continuas,el problema de condiciones iniciales tiene solucin nica. Por ejemplo, el problema de condicionesiniciales 3) = + 0 00
(0) = 0 0(0) = 1 00(0) = 2tiene solucin nica.
Nos ocuparemos expecialmente de ecuaciones diferenciales de orden que llamaremos lineales yque a continuacin describimos. Por una ecuacin diferencial lineal de orden entenderemos unaexpresin de la forma
()) + 1()1) + + 1()0 + 0() = () (2.5)donde para 0 , y son funciones reales de variable real definidas en un intervalo de la rectareal . Siempre que () sea diferente de cero, podemos escribir la ecuacin como
) + 1()1) + + 1()0 + 0() = () (2.6)donde () = ()(), 0 , y () = ()(). Por ejemplo, las ecuaciones
000 + 20 = 00 + 20 + =
6) 73) + 200 + (log ) = 0son ecuaciones lineales de rdenes tres, dos y seis, respectivamente. Como hemos visto anteriormente,una ecuacin de orden puede escribirse como el sistema
01 = 202 = 301 = 0 = () [1() + + 1()2 + 0()1]
que en forma matricial se escribe como
y0 = A() y + b()donde
A() =
0 1 0 0 00 0 1 0 00 0 0 1 0
0() 1() 2() 3() 1()
33
-
Estabilidad de ecuaciones diferenciales
y b() = (0 0 0 ()). Diremos entonces que la ecuacin (3.1) es homognea o no homogneasegn se sea b() nulo o no, es decir, si () = 0 para todo . Adems, la ecuacin se dir decoeficientes constantes cuando A() sea constante, es decir, cuando () = R para todo0 .Tanto los Teoremas 2.18 y 2.19 como la Proposicin 18 admiten la siguiente lectura en trminos de
ecuaciones lineales. A la vista de que cualquier ecuacin lineal puede escribirse como un sistema aa-diendo las derivadas como funciones, cualquier solucin del sistema y es de la forma ( 0 1),donde : R R es una funcin suficientemente derivable. En esta lnea, destacamos entoncesque el wronskiano puede escribirse como
[1 2 ]() = [y1y2 y]() := |y1();y2(); ;y()|
=
1() 2() ()01() 02() 0() 1)1 () 1)2 () 1) ()
donde 1 2 son las primeras componentes de y1y2 y. Podremos enunciar entonces lossiguientes resultados.
Teorema 20 El conjunto de soluciones de la ecuacin homognea
) + 1()1) + + 1()0 + 0() = 0tiene estructura de espacio vectorial de dimensin sobre R, esto es, cualquier solucin de lamisma es de la forma
= 1 1 + 2 2 + + donde 1 2 R e 1 2 son soluciones linealmente independientes del mismo.Proposicin 21 Sean 1 2 : R R soluciones de la ecuacin homognea
) + 1()1) + + 1()0 + 0() = 0Son equivalentes:
(a) 1 2 son linealmente independientes.(b) [1 2 ]() 6= 0 para todo .(c) Existe 0 tal que [1 2 ](0) 6= 0.Teorema 22 El conjunto de soluciones de la ecuacin
) + 1()1) + + 1()0 + 0() = ()es de la forma
= 1 1 + 2 2 + + + donde 1 2 R, 1 2 son soluciones linealmente independientes del problema homog-neo e es una solucin particular del problema no homogneo.
34
-
Estabilidad de ecuaciones diferenciales
2.2. Resolucin desistemas lineales de coeficientes constantes
Vamos a considerar sistemas de la forma
y0 = A y + b() (2.7)donde A = ()11 es una matriz cuadrada, b() = (1() 2() ()) donde para 1 , son funciones reales definidas sobre un intervalo de la recta real e y = (1 2 ). Los mtodosque vamos a estudiar son matriciales por lo que es necesario tener frescos conceptos sobre la teorade matrices y especialmente con la diagonalizacin de stas.
2.2.1. Resolucin del sistema homogneo
Vamos a introducir un mtodo matricial para la resolucin de sistemas de ecuaciones lineales concoeficientes constantes que est basado en el clculo de la exponencial de una matriz utilizando elTeorema de CayleyHamilton. Explicaremos en primer lugar en qu consiste el Teorema de CayleyHamilton y posteriormente introduciremos la exponencial de una matriz, que nos va a proporcionarla solucin de sistemas homogneos de la forma
y0 = A ydonde A = ()11 es una matriz cuadrada.
Teorema de CayleyHamilton
Supongamos que A = ()11 es una matriz cuadrada y () = +11+ +1+0,es un polinomio de coeficientes reales. Si intercambiamos porA construimos lo que denominaremosun polinomio matricial
(A) = A + 1A1 + + 1A+ 0INtese que el trmino independiente del polinomio aparece multiplicado por la matriz identidad I.Por ejemplo, si
A =
1 23 4
y () = 3 + 2 1, entonces
(A) = A3 + 2A I2=
1 23 4
3+ 2
1 23 4
1 00 1
=
38 5887 125
El Teorema de CayleyHamilton afirma lo siguiente.
Teorema 23 (CayleyHamilton). Sea A = () una matriz cuadrada y sea () = |A I|su polinomio caracterstico. Entonces (A) = 0.
35
-
Estabilidad de ecuaciones diferenciales
Demostracin. Como sabemos del tema inicial,
|A I| I = () I = (A I) (A I)donde (A I) es la matriz traspuesta de la adjunta de A I. Entonces (A I) =(()), donde () son polinomios reales en de grado a lo sumo 1. Podemos reordenar dichamatriz como
(A I) = B1 1 +B2 2 + +B1 +Bdonde B M(R). Entonces
() I = (B1 1 +B2 2 + +B1 +B) (A I)= B1 + (B1 AB2) 1 + + (B1 AB) +B A
de donde sustituyendo por la matriz A tenemos(A) = (A) I
= B1 A + (B1 AB2) A1 + + (B1 AB) A+B A = 0con lo que termina la demostracin.A modo de ejemplo, dada la matriz anterior, su polinomio caracterstico es
() = 2 5 2y si calculamos
(A) = A2 5A 2I2=
7 1015 22
5 1015 20
2 00 2
=
0 00 0
Este teorema ser clave para poder obtener una frmula que permita resolver sistemas de ecuacionesdiferenciales lineales con coeficientes constantes.El polinomio caracterstico de una matriz cuadrada A no tiene porqu ser el de menor grado que
satisfaga el teorema de CayleyHamilton. Un polinomio () se dice mnimo para la matriz cuadradaA si (A) = 0. En general se sabe que () divide al polinomio caracterstico de A, es decir, dichopolinomio ser de la forma
() = ( 1)1 ( )donde , 1 son los valores propios de A y = 1 + + , donde es el grado delpolinomio caracterstico ().Como sabemos, para que la matriz A sea diagonalizable tiene que cumplirse que si
() = (1)( 1)1 ( )entonces para cada valor propio debe cumplirse que su multiplicidad algebraica = dimKer(A I), donde Ker(A I) es el subespacio propio asociado al valor propio . Esta condicin esequivalente a que = 1, siendo el exponente del monomio en el polinomio mnimo.
36
-
Estabilidad de ecuaciones diferenciales
Veamos un par de ejemplos. Consideremos la matriz
A =
0 1 11 2 11 1 2
que tiene valores propios 1 (doble) y 2 (simple). Esta matriz ser diagonalizable si su polinomiomnimo es () = ( 1)( 2). Calculamos
(A) = (A I3) (A 2 I3) = 0,por lo que dicha matriz es diagonalizable.Sin embargo la matriz
A =
1 1 01 2 10 1 1
tiene los mismos valores propios con las mismas multiplicidades y sin embargo
(A) = (A I3) (A 2 I3) =1 0 10 0 01 0 1
por lo que no puede ser diagnalizable.Adems, si es valor propio de A, para comprobar la relacin = dimKer(A I), basta
comprobar que 1(A) = 0, siendo1() = ( ) ()
( )
2.2.2. Resolucin de sistemas. La exponencial de una matriz
En esta seccin vamos a obtener una frmula para resolver sistemas de ecuaciones de la forma
y0 = A y (2.8)dondeA es una matriz cuadrada de coeficientes reales. Para esto, debemos recordar un caso particularde ste cuando la matriz es de una fila y una columna, es decir, cuando tenemos la ecuacin linealhomognea de orden uno
0 = REn este caso, la solucin general de esta ecuacin es de la forma
() = RPor analoga con el caso unidimensional, para el caso general la solucin del sistema (2.8) va a serde la forma
y() = A Cdonde C es un vector columna constante y A es la exponencial de la matriz A definida por laserie
A :=X=0A
! Para hacer ms comprensible este captulo, vamos a dar algunas nociones sobre la exponencial deuna matriz.
37
-
Estabilidad de ecuaciones diferenciales
La exponencial de una matriz
Consideremos una matriz cuadrada A. Como hemos definido anteriormente, la exponencial dedicha matriz viene definida, en analoga con la exponencial de un nmero real, viene dada por laserie
A =X=0A 1!
donde supondremos que A0 = I. Esta serie siempre es convergente, es decir, para toda matrizcuadrada con coeficientes reales la serie anterior nos proporciona una matriz de coeficientes reales.
Hay casos en los que es bastante sencillo calcular la exponencial de una matriz. Por ejemplo,si D = diag(1 ) es una matriz diagonal, entonces para todo nmero natural se tiene queD = diag(1 ) y entonces
D =X=0D 1!
=X=0diag(1 ) 1!
= diag
X=0
1!
X=0
!!
= diag(1 )Por ejemplo, si
D =
1 0 00 2 00 0 2
entonces
D =
0 00 2 00 0 2
Adems, la exponencial de una matriz cumple la siguientes propiedades (que no justificaremos). SiA y B son matrices cuadradas que conmutan, esto es A B = B A, entonces
A+B = A B (2.9)Dado el vector columna C, la funcin y() = A C est definida para todo R, es derivable y
y0() = A C = A A C = A y()
es decir, es solucin del sistema de ecuaciones diferenciales lineales con coeficientes constantes (2.8).
Ahora bien, consideremos el sistema 0102=
1 11 1
12
38
-
Estabilidad de ecuaciones diferenciales
La solucin de este sistema es la matriz
1 11 1
12
pero cmo calculamos dicha matriz? A continuacin vamos a ver un mtodo basado en el Teorema deCayleyHamilton que permite hacer el clculo con cierta facilidad, aunque los clculos sean laboriosos.
Clculo prctico de la exponencial
Para fijar ideas supongamos que () es el polinomio caracterstico de la matriz A y que tiene races reales o complejas 1 2 con multiplicidades 1 2 . Buscamos entonces polinomios1() 2() () con grado a lo sumo 1 para cada 1 , de manera que se verifique laigualdad
1
() =1()
( 1)1 +2()
( 2)2 + +()
( ) de donde
1 = 1()1() + 2()2() + + ()() (2.10)con () = ()( ), 1 . Sustituyendo en (2.10) por A tendremos
I = 1(A)1(A) + 2(A)2(A) + + (A)(A) (2.11)Dado que para todo 1
I =X=0I
()! =
I
entonces
A = I(AI) = X=0(A I)
!
De aqu, multiplicando por la izquierda ambos miembros por (A)
(A)A = X=0
(A)(A I)
!
= 1X=0
(A)(A I)
!
dado que por el Teorema de CayleyHamilton, para todo se tiene que (A)(A I) =(A)(A I) = 0. Multiplicando nuevamente por la izquierda por (A) obtendremos
(A)(A)A = 1X=0
(A)(A)(A I)
! (2.12)
39
-
Estabilidad de ecuaciones diferenciales
Sumando (2.12) desde 1 hasta y teniendo en cuenta (2.11) concluimos que la exponencial de lamatriz puede calcularse con la frmula
A =X=1
(A)(A)
1X=0(A I)
!! (2.13)
Consideremos por ejemplo el sistema 01 = 41 + 22;02 = 31 + 32La matriz asociada al sistema es
A =
4 23 3
y el polinomio caracterstico() = 2 7+ 6
que tiene por races 1 = 1 y 2 = 6. Calculamos ahora 1 y 2 a partir de1
() =1
1 +2
6 =(1 + 2) 61 2
()
de donde obtenemos el sistema 1 + 2 = 061 2 = 1
que tiene por solucin 1 = 15 y 2 = 15. Adems1() = ()( 1) = 6
y2() = ()( 6) = 1
Aplicamos ahora la frmula (2.13) y tenemos que
A = (15I2) I2(A 6I2) + 6(15I2) I2(A I2)=
1
536 + 2 26 236 3 26 + 3
La solucin del sistema ser 1()2()
=
1
536 + 2 26 236 3 26 + 3
12
=1
5 6(31 + 22) + (21 22)6(31 + 22) + (31 + 32)
esto es1() = 1
5
6(31 + 22) + (21 22)40
-
Estabilidad de ecuaciones diferenciales
e2() = 1
5
6(31 + 22) + (31 + 32) donde 1 y 2 son dos constantes reales. Si tuvisemos alguna condicin inicial, por ejemplo, 1(0) =1 2(0) = 0, entonces planteando el sistema
1(0) = 1 = 12(0) = 2 = 0
obtendramos que
1() = 15(36 + 2)
e2() = 1
5(36 3)
es la nica solucin de dicho problema de condiciones iniciales.
Consideremos ahora el sistema 01 = 31 + 2;02 = 1 + 2;cuyo polinomio caracterstico asociado a la matriz A es () = 2 4+4, que tiene por solucin laraz doble = 2. Entonces
1
() =1
( 2)2 =1()
de donde 1 = 1 y1 = ()( 2)2 = 1
Aplicando la frmula (2.13) tenemos que
A = 21(A)1(A)1X=0(A 2I2)
!= 2II
I +
1 11 1
= 2
1 + 1 +
con lo que la solucin del sistema 1()
2()=
(1 + )2 22 (1 + )2
12
donde 1 y 2 son dos constantes reales (la expresin definitiva de 1 e 2 se deja como ejercicio allector).
Si por ltimo tomamos el sistema 01 = 31 52;02 = 1 2;41
-
Estabilidad de ecuaciones diferenciales
podemos ver que el polinomio caracterstico asociado a la matriz A es () = 2 2+ 2 que tienepor races los nmeros complejos conjugados 1 = 1 + y 2 = 1 . De la expresin
1
() =1
( 1 ) +2
( 1 + ) =(1 + 2)+ 1(1 + ) + 2(1 )
() que da lugar al sistema 1 + 2 = 0
1(1 + ) + 2(1 ) = 1que nos da como solucin 1 = 12 y 2 = 12 . Teniendo en cuenta que
1() = 1 + y
2() = 1 se tiene aplicando la frmula (2.13)
A = (1+) 12 I2(A (1 )I2)
(1) 12 I2(A (1 + )I2)
= 122 + 51 2 +
1
22 51 2
= 2
2 + + 2
5 2
2 2
2 + + 2
= 2 sin+ cos 5 sin
sin 2 sin+ cos
dado que
cos = + 2
y
sin = 2
Entonces toda solucin del sistema viene dada por la expresin 1()2()
=
2 sin+ cos 5 sin
sin 2 sin+ cos 12
donde 1 y 2 son dos constantes reales.Los tres ejemplos anteriores resumen los casos que pueden darse para el caso de sistemas de dos
ecuaciones con dos incgnitas, es decir, que el polinomio caracterstico tenga dos soluciones realesdistintas, una real doble o dos complejas conjugadas. Cuando el nmero de ecuaciones es mayor,pueden aparecer otros casos, pero bsicamente la matriz exponencial contiene en sus coordenadasfunciones de la forma
cos() y sin()donde 0 y y son nmeros reales. En cualquier caso, resolveremos sistemas que a lo sumotienen cuatro ecuaciones con cuatro incgnitas, pues a partir de ese nmero de ecuaciones los clculossuelen ser muy largos y engorrosos en general.
42
-
Estabilidad de ecuaciones diferenciales
2.2.3. El mtodo de variacin de constantes
Volvamos ahora sobre el sistema no homogneo (2.7) y supongamos conocida la solucin generaldel sistema homogneo asociado. Para terminar de resolver el sistema no homogneo usaremos elmtodo de variacin de constantes. Para ello supongamos que la solucin es de la forma
y() = A C()donde C() es una funcin a determinar. Derivando respecto de obtendremos que
y0() = AA C() + A C0() = A y() + A C0()Sustituyendo en el sistema no homogneo tendremos
A y() + A C0() = A y() + b()o equivalentemente
A C0() = b()Dado que la matriz A es invertible (recordar la Proposicin 18) y teniendo en cuenta que
A A = 0 = Iconcluimos que A es la inversa de A y entonces
C() =Z
A b() (2.14)Una vez calculada C() obtenemos la solucin del sistema no homogneo.Por ejemplo, consideremos el sistema 01 = 41 + 22 + ;02 = 31 + 32
que tambin podemos escribir como 0102=
4 23 3
12+
0
Ya vimos que la exponencial de la matriz del sistema era
A = 1536 + 2 26 236 3 26 + 3
por lo que a partir de (2.14) obtenemos 1()
2()
=
Z1
5
36 + 2 26 236 3 26 + 3
0
=1
5
Z 35 + 235 3
=1
5
R(35 + 2)R(35 3)
=
1
5
355 + 2+ 1355 3+ 2
43
-
Estabilidad de ecuaciones diferenciales
con lo que la solucin
y() = 1536 + 2 26 236 3 26 + 3
15
355 + 2+ 1355 3+ 2
=
1
2536 + 2 26 236 3 26 + 3
12+1
25
10 33 15
Ntese que una solucin particular del sistema es
y() = 125
10 33 15
por lo que haciendo = 5, = 1 2, tenemos que
y() = A 12+ y()
tal y como el Teorema 2.19 afirmaba.
Si por ejemplo consideramos el problema de condiciones iniciales
01 = 41 + 22 + ;02 = 31 + 32;1(0) = 0 2(0) = 1;se verificar que 1(0)
2(0)=
01
=1
25
12+1
25
33
de donde
1 = 3y
2 = 22de donde sustituyendo en la solucin general concluimos que 1()
2()=1
25
136 + (10 13)136 + (12 15)
es la nica solucin de dicho problema de condiciones iniciales.
2.3. Resolviendo sistemas mediante la transformada de Laplace
Supongamos que tenemos un sistema de ecuaciones lineales de la forma
y0() = A y()+f() (2.15)44
-
Estabilidad de ecuaciones diferenciales
donde A es una matriz cuadrada de filas por columnas con coeficientes reales, f = (1 2 )donde son funciones dadas e y = (1 2 ) es la funcin vectorial incgnita. Supongamosadems las condiciones iniciales
y(0) = y0 (2.16)
donde y0 = (01 02 0) con 0 nmeros reales para 1 . SeaL[y]() = (L[1]()L[2]() L[]())
Entonces, tomando la Transformada de Laplace en (2.15) y teniendo en cuenta (2.16) obtenemos que
L[y]() y0 = A L[y]() + L[f ]()de donde, si I denota la matriz identidad,
(I A) L[y]() = y0 + L[f ]()y de aqu
L[y]() = (I A)1 (y0 + L[f ]()) (2.17)Una vez calculada de este modo L[y]() obtendremos y tomando la Transformada inversa.Por ejemplo consideremos el sistema 0102
=
2 33 2
12+
10
junto con las condiciones iniciales 1(0)
2(0)=
21
De (2.17) L[1]()L[2]()
=
2 33 2
12 + 11
=
1
2 4 + 13 2 3
3 2
2+11
=
222
(24+13)2+8+3(24+13)
!
Entonces la solucin del problema viene dada por 1()2()
=
L1[ 222(24+13) ]()L1[ 2+8+3(24+13) ]()
!
=1
13
282 cos(3) + 162 sin(3) 2282 sin(3) 162 cos(3) + 3
45
-
Estabilidad de ecuaciones diferenciales
2.4. Problemas con funciones discontinuas
Supongamos que el problema 00 + = ();(0) = 0 0(0) = 1;
viene dada ahora con la funcin discontinua
() = si 0 cos(2) si
Podemos escribir ahora(2 + 1)L[]() = 1 + L[ ]()
Por otra parte() = (0() ()) + () cos(2)
con lo queL[ ]() = L[0()]() + L[()]() + L[() cos(2)]()
Desarrollando cada sumando por separado, obtenemos
L[0()]() = 12
L[()]() = L[( )()]() + L[()]()=
2 +
L[() cos(2)]() = L[() cos(2( ))]()= 2 + 4
Combinando estas expresiones tenemos
(2 + 1)L[ ]() + 1 = 2 + 1
2 +
1
2 + +
2 + 4
Entonces
L[]() = 2 + 1
2(2 + 1) +
1
2(2 + 1) +
(2 + 1) +
(2 + 4)(2 + 1)
y as
() = L11
2() + L1
12(2 + 1)
() + L1
1(2 + 1)
()
+L1
(2 + 4)(2 + 1)()
= + 1( )() + 2( )() + 3( )()46
-
Estabilidad de ecuaciones diferenciales
donde las funciones 1, 2 y 3 se determinan de la siguiente manera.
1() = L1
1
2(2 + 1)() = L1
1
2() L1
1
2 + 1() = sin
2() = L1
1
(2 + 1)() = L1
1
() L1
2 + 1
() = 1 cos
3() = L1 (2 + 4)(2 + 1)
()
=1
3L1
2 + 1
() 1
3L1
2 + 4
() = 1
3cos 1
3cos(2)
Entonces
() = + ()[( ) sin( ) + cos( ) + 13cos( ) 1
3cos(2 2)]
= (1 ())+ ()[2+ sin + (3 1)3 cos cos(2)3]o equivalentemente
() = si 0 2+ sin (3 1)3 cos cos(2)3 si
2.5. Sistemas autnomos, puntos crticos y nocin de esta-bilidad
Consideremos un sistema de ecuaciones diferenciales
y0 = f(y)donde f : R+1 R es una funcin con regularidad suficiente para satisfacer la unicidad desoluciones para un problema de condiciones iniciales o de Cauchy. Si la variable independiente noaparece explcitamente en las ecuaciones del sistema, es decir, el sistema es de la forma
y0 = f(y)
donde f : R R, se dice que el sistema de ecuaciones es autnomo. Por ejemplo, el sistema 0 = + 0 =
es no autnomo mientras que 0 = 0 = (2.18)
o0 = 4(1 ) (2.19)
47
-
Estabilidad de ecuaciones diferenciales
son autnomos.Aunque estos sistemas pueden no ser fciles de resolver, es sencillo encontrar determinadas solu-
ciones particulares. Entre ellas destacan las soluciones constantes, cuyascondiciones iniciales vienendadas por las soluciones del sistema algebraico
f(y) = 0.
Si y0 y verifica quef(y0) = 0,
entonces la solucin constante de la forma
y() = y0es la nica solucin del problema de condiciones inciales
y0 = f(y)y(0) = y0
para todo 0 R. As, resolviendo el sistema = 0 = 0
vemos que (0 0) es el nico punto crtico del sistema (2.18), mientras que al resolver la ecuacin4(1 ) = 0
comprobamos que 0 y 1 son los puntos crticos de la ecuacin (2.19). Como veremos posteriormente,estos puntos sern de gran importancia en el anlisis de la estabilidad de un sistema. Veamos que seentiende por estabilidad.
Definicin 1 Sea el sistema autnomoy0 = f(y) (2.20)
donde y = (1 2 ) y f : R R es una funcin con funciones coordenadas 1 2 .Una solucin y() de (2.20) definida para todo 0 se dice estable si para todo 0 existe 0tal que si z() es otra solucin que cumple la condicin ||y(0)z(0)|| entonces z() est definidapara todo 0 y se verifica que ||z() y()|| para todo 0. Si adems se verifica que
lm ||z() y()|| = 0
la solucin y() se dir asintticamente estable. La solucin y() se dir inestable si no es estable.Por ejemplo, consideremos la ecuacin
0 = cuyas soluciones son de la forma
() = 00
48
-
Estabilidad de ecuaciones diferenciales
para condiciones iniciales (0) = 0. Claramente, para dos soluciones 1() e 2() se verifica quelm+ |2() 1()| = +
por lo que dicha ecuacin es iniestable en todas sus soluciones. Lo contrario ocurre con la ecuacin
0 = que es asintticamente estable. Finalmente, dado que las soluciones del sistema 0 =
0 = son circunferencias concentricas con centro (0 0), se tiene que las soluciones del sistemas son estableaunque no asintticamente estables.
2.6. Estabilidad de sistemas lineales
Consideremos ahora un sistema lineal y0 = A y donde la matriz A tiene filas y columnas.Aunque en este caso no disponemos de la representacin de los diagramas de fases del mismo, s quees posible determinar la estabilidad del mismo, con un resultado anlogo al anterior. Para establecerel mismo, dada la matriz A, denotaremos por 1 los valores propios de A con multiplicidades1 . Asmismo, denotaremos por 1 las dimensiones sobre C de los subespacios propiosKer(A 1I) Ker(A I).Teorema 24 Sea el sistema lineal plano y0 = A y, A (R) no nula. Entonces(a) El sistema es estable si Re 0, 1 , y adems si verifica que Re = 0, entonces
= .(b) El sistema es asintticamente estable si Re 0 para todo = 1 .(c) El sistema es inestable si o bien existe tal que Re = 0 y , o bien existe tal que
Re 0.Ejemplo 1 Consideremos el sistema
0 = 3+ 2 + 20 = 2+ + 20 = 2+ 2 +
Es fcil ver que 1 y 1 son los valores propios de la matriz asociada al sistema, por lo que en virtuddel Teorema 24 (c), ste es inestable.
Ejemplo 2 Sea ahora el sistema
0 = 2+ 0 = 2 0 = + 2
Podemos ver ahora que los valores propios de la matriz asociada son 1, 2 y 3, por lo que por elTeorema 24 (b), el sistema es asintticamente estable.
49
-
Estabilidad de ecuaciones diferenciales
Ejemplo 3 Sea el sistema
0 = 4+ + 30 = 20 = 2
Puede comprobarse que 2 y 4 son los valores propios de la matriz del sistema. Cmo las dimen-siones de los subespacios propios de los valores propios son 1 y coincide con la multiplicidad destos, por el Teorema 24 (a) y (b) el sistema ser estable, aunque no ser asintticamente estable.
La aplicacin del Teorema 24 tiene a priori un punto flaco puesto de manifiesto por el siguienteejemplo. Consideremos el sistema
0 = 2+ 20 = 3 90 = 4+ +
Este sistema coincide con el del apartado (d) del ejercicio anterior en todos los coeficientes de la matrizasociada excepto el primero. El polinomio caracterstico es () = 31021263, pero resolverla ecuacin () = 0 no resulta sencillo, y quizs ni siquiera factible para los conocimientos de losque se disponen. Ahora bien, para aplicar el Teorema 24 en la mayora de los casos slo necesitamosconocer los signos de las partes reales de los valores propios de la matriz asociada. Para este objetivopodemos usar el siguiente criterio de Routh-Hurwitz que, aunque no siempre es aplicable, suponeuna gran ayuda para determinar al menos si el sistema es asintticamente estable.
Proposicin 25 Sea () = (1)( + 11 + + 1 + ) el polinomio caracterstico dela matriz A (R). Las races de () tienen parte real negativa si y slo son estrictamentepositivos los menores principales de la matriz
HA =
1 3 5 01 2 4 00 1 3 00 1 2 0 0 0 0
Ejemplo 4 Consideremos el sistema
0 = 3+ + 0 = 4 + 0 = 2 3
El polinomio caracterstico de la matriz asociada es () = 41 34 102 3 y la matriz HA10 41 01 34 00 10 41
cuyos menores principales son 10, 299 y 12259. Est claro entonces que todos los valores propios dela matriz A tienen parte real negativa, por lo que el sistema ser asintticamente estable.
50
-
Estabilidad de ecuaciones diferenciales
Adems puede ser de utilidad el siguiente resultado que denominaremos Teorema de crculo deGershgorin.
Teorema 26 Sea A = () M(R) con valores propios 1 . Entonces todos los valorespropios estn en el conjunto del plano de la forma
{+ C :p( 11)2 + 2 1} {+ C :p( )2 + 2 }donde =P=1 || ||, = 1 2 .Demostracin. Si es valor propio deA con vector propio v = (1 ) C y = max{|| :
= 1 }. Definimosu=1
v = (1 )que tambin es vector propio de tal que max{|| : = 1 } = || = 1. Entonces
X=1
0 = 0
con lo queX=1 6=0
0 = ( 00)0
As
| 00 | =
X=1 6=0
0
X
=1 6=0
|0||| X=1 6=0
|0| = 0
con lo que el resultado queda probado.Vemos cmo se aplica este resultado en el siguiente ejemplo.
Ejemplo 5 Consideremos el sistema
0 = 4+ + 0 = 2 + 0 = 4 5
El conjunto a que hace referencia el resultado anterior es
{( ) :p(+ 4)2 + 2 2} {( ) :p(+ 2)2 + 2 1}{( ) :p(+ 5)2 + 2 4}51
-
Estabilidad de ecuaciones diferenciales
que grficamente representamos por
por lo que todos los valores propios tienen parte real negativa y el sistema es por tanto asitticamenteestable.
Ejercicio 1 Determinar si es posible la estabilidad asinttica de los siguientes sistemas
(a)
0 = 12
0 = 12 1
2
0 = 12 1
2
(b)
0 = 3 + 0 = 5 0 = 2 2 4
(c)
0 = 512 1
4 + 1
4
0 = 512 13
12 5
12
0 = 23 2
3 5
6
2.6.1. Por qu un sistema estable es til en ingeniera?
Supongamos que tenemos un sistema de ecuaciones diferenciales lineales no autnomo
y0 = A y + f()donde A (R) y supongamos que el sistema autnomo asociado
y0 = A y
es asintticamente estable. Entonces toda solucin del sistema autnomo
y() = A C C R
verifica quelmy() = 0
Ahora bien, toda solucin del sistema no autnomo es de la forma
y() = y() + y() (2.21)52
-
Estabilidad de ecuaciones diferenciales
donde y() es una solucin particular del sistema no homogneo. Si tomamos lmites cuando tiendea infinito, tenemos que
y() ' y()es decir, para tiempos grandes (aqu lo de grande depende de cada sistema) la solucin del sistema noautnomo es bsicamente la solucin particular del mismo y la parte de la solucin correspondiente alsistema homogneo se va reduciendo con el tiempo. En ingeniera a la funcin f() se le llama entradadel sistema e y() es la salida del mismo. Si el sistema es estable, al variar la entrada, vara la salidasin que la parte homognea intervenga en el proceso. Esto es lo que ocurre en la mayora de lossistemas lineales utilizados en las ciencias experimentales, como en circuitos elctricos o vibracionesmecnicas.
2.7. Funciones de transferencia. Estabilidad y control de sis-temas lineales
Supongamos un sistema dado por la ecuacin
) + 11) + + 10 + 0 = ) + 11) + + 1 0 + 0 (2.22)donde , R para 0 y R para 0 . es una seal entrada del sistemae es la respuesta que produce en sistema a la excitacin que representa. Aplicando formalmentela transformada de Laplace a (2.22) con todas las condiciones iniciales nulas obtenemos
()L[]() = ()L[ ]()donde es un polinomio de grado y es un polinomio de grado . La funcin de transferenciadel sistema, se define como
() = L[]()L[ ]() =()()
La estabilidad del sistema puede estudiarse a partir de los polos de la funcin de transferencia,entendiendo por estabilidad de un sistema lo siguiente. El sistema ser asintticamente estable sien ausencia de excitacin ( = 0) y para cualquier condicin inicial que consideremos se verificaque |()| 0 si +. Ser estable si existen 0 y 0 0 tales que |()| si 0.Finalmente es sistema es inestable si lm+ |()| = +. Se tiene entonces el siguiente resultado.Teorema 27 Sea () =Q=1 ( ), P=1 = . Entonces el sistema (2.22) es(a) Asintticamente estable si Re 0 para todo = 1 2 .(b) Estable si Re 0 y Re = 0 implica que la multiplicidad de es 1.(c) Inestable si no se cumplen algunas de las condiciones (a) o (b) anteriores.
Proof. Sean , 1 las races de () con multiplicidades . Para 1 , consideremoslos polinomios
() = ( )1Y6=( ) 1
53
-
Estabilidad de ecuaciones diferenciales
Es fcil comprobar que B = { () : 1 ; 1 } es una base del conjunto depolinomios con coeficientes en el cuerpo de los nmeros complejos de grado a lo sumo 1.Consideremos el problema de condiciones iniciales
) + 11) + + 10 + 0 = 0 (2.23)(0) = 1 0(0) = 2 1)(0) = (2.24)
donde 1 2 son nmeros reales arbitrarios.Supongamos en primer lugar que Re 0 para todo = 1 2 . Entonces, sean cuales fueran
las condiciones (2.24) se tiene que la solucin del problema es de la forma
() =X
=1
X=1
L1[1( ) ]()
=X
=1
X=1
1
( 1)!
donde los coeficientes , 1 , 1 vienen determinados a partir de las condicionesiniciales del problema. Como Re 0, es claro que lm+ |()| = 0.Supongamos ahora que existe {1 2 } de manera que Re 0. Como B es una base,
existen condiciones iniciales de manera que para las mismas la solucin () contiene un trmino dela fo