ApuntesIncompletos de MatemáticasIIcarlossuarezaleman.wikispaces.com/file/view/Matemáticas...
74
Departamento de Matemáticas Apuntes Incompletos de Matemáticas II Curso 2010/2011 Carlos Suárez Alemán
Transcript of ApuntesIncompletos de MatemáticasIIcarlossuarezaleman.wikispaces.com/file/view/Matemáticas...

Departamento de Matemáticas
Apuntes Incompletos
de
Matemáticas II
Curso 2010/2011
Carlos Suárez Alemán


Índice general
1. Matrices y Determinantes 1
1.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2. Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1. Introducción a las Matrices . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.2. Clasificación de matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.3. Suma de Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.4. Producto de una matriz por un escalar . . . . . . . . . . . . . . . . . . . 9
1.2.5. Producto de Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.2.6. Trasposición de matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.3. Determinantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.3.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.3.2. Menor complementario y Adjunto . . . . . . . . . . . . . . . . . . . . . . 21
1.3.3. Regla de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.3.4. Propiedades de los determinantes . . . . . . . . . . . . . . . . . . . . . . 27
1.4. Matriz Inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.4.1. Cálculo de la matriz inversa por Matriz Adjunta . . . . . . . . . . . . . . 30
1.5. Rango de una matriz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
1.5.1. Herramientas informáticas de interés para el calculo matricial . . . . . . 36
1.6. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2. Sistemas de ecuaciones lineales 55
2.1. Introducción a los sistemas de ecuaciones lineales . . . . . . . . . . . . . . . . . 55
2.2. Clasificación de sistemas de ecuaciones lineales . . . . . . . . . . . . . . . . . . . 56
2.3. Expresión matricial de los sistemas de ecuaciones lineales . . . . . . . . . . . . . 59
2.4. El método de eliminación de Gauss . . . . . . . . . . . . . . . . . . . . . . . . . 61
3


Capítulo 1
Matrices y Determinantes
Apeaos y usad vuestro compás de pies, de vuestros círculos y vues-tros ángulos y ciencia, que yo espero de haceros ver estrellas a mediodía con mi destreza[...]
Miguel de Cervantes: El Ingenioso hidalgo don Quijote de la Mancha, 1605.
1.1. Introducción
Una ecuación la podríamos definir como una igualdad entre dos expresiones algebraicas enlas que aparecen valores conocidos (datos) y desconocidos (incógnitas) relacionados medianteoperaciones matemáticas. Encontrar una solución de una ecuación es encontrar aquellos valoresque pudieran ser puestos en lugar de las incógnitas y mantuviesen cierta la igualdad. Veamosun ejemplo sencillo, el conocido problema 24 del Papiro de Rihnd que data de 1950 a.C.: Unmontón más un séptimo del montón son 19. En este enunciado, hay un valor desconocido queel el montón y que representaremos por la letra x. Por lo tanto, el enunciado se traduce en losiguiente: x más un séptimo de x son 19, lo que en lenguaje algebraico expresamos como
x+x
7= 10.
Resolver la ecuación, es encontrar el valor de x que puesto en su lugar hace cierta la igualdad,no es difícil encontrar que x = 16′625 ya que 16′625 + 16′625
7= 19.
El problema se complica cuando tenemos que encontrar las soluciones de varias ecuacionesque comparten unas mismas incógnitas, lo que conocemos como Sistemas de Ecuaciones. Estees un asunto que ha preocupado a los científicos de todos los tiempos. Se conocen problemasresueltos sobre la búsqueda del largo y ancho de unos terreno datados en la época Babilónica,4000 a.C. También encontramos que en el conocido libro Los Nueve capítulos del Arte Matemá-tico del 200 a.C. los chinos muestra una técnica para resolver un sistema de ecuaciones de tresecuaciones y tres incógnitas por el “método de eliminación”, que estudiaremos en este capítuloy que fue introducido posteriormente por Gauss unos 2000 años después.
1
2 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
Figura 1.1: Gabriel Cramer(1704-1752)
Sin embargo, el enfoque moderno sobre el estudio desistemas de ecuaciones lineales (conjunto de ecuaciones degrado uno) puede decirse que tiene su origen con Leibniz,quien en 1693 inventa la noción de determinante. Y en In-troducción sobre el Análisis de Curvas Algebraicas de 1750,Gabriel Cramer (1704-1752) publica la regla que lleva sunombre sobre la solución de un sistema de un cierto númeron ecuaciones lineales con el mismo número de incógnitas,aunque no aporta una demostración. Este es el primer estu-dio serio que indica un método general sobre cómo resolverun sistema de ecuaciones, con la única condición de quetenga el mismo número de ecuaciones que incógnitas. Estosurge de estudiar el problema geométrico de determinar unacurva algebraica que pase por
(12
)n2
+(32
)n puntos fijos.
Posteriormente, Leonhard Euler (1707-1783) indicó que un sistema de n ecuaciones y n
incógnitas no tiene necesariamente una solución única, y que para conseguir esa unicidad esnecesario añadir condiciones. Esto es, no basta que esté formado por el mismo número deecuaciones y de incógnitas para asegurar la unicidad de la solución. En el siglo XIX, el estudiode los sistemas de ecuaciones lineales fue asumido por el estudio de determinantes, y se descubrióque la existencia de soluciones estaba ligada a que el número de ecuaciones independientes fuerael mismo o diferente del número de incógnitas.
Por otro lado, con la aparición de la Regla de Cramer, parecía que el tema de la resoluciónde sistemas de ecuaciones lineales estaba finalizado. Sin embargo, los avances en astronomíay geodesia requirieron la resolución de sistemas de ecuaciones con un número considerablede ecuaciones e incógnitas. El método de Cramer requería un gran número de operaciones,tengamos en cuenta que este método necesita de unos 300 millones de multiplicaciones y sumaspara resolver un sistema de 10 ecuaciones con 10 incógnitas.
De este modo, cuando Carl F. Gauss (1777-1855) determinó la órbita de Ceres en 1807,tuvo que enfrentarse a sistemas de ecuaciones lineales de 12 ecuaciones con hasta 10 incógnitas.Al no ser un sistema de ecuaciones cuadrado (igual número de ecuaciones que incógnitas), nopodía aplicar la Regla de Cramer, además no sabía si quiera, si existía solución. Investigó yen 1810 cuando publicó Disquisitio de Elementis Ellipticis Palladis ex oppositionibus annorum1803, 1804, 1805, 1806, 1807, 1808 y 1809 incluyó un método de resolución de ecuaciones poreliminación de incógnitas muy similar al método chino del año 200 a.C. Este método se divulgócon el nombre de eliminación gaussiana. La ventaja de este método residía principalmente enla reducción del número de operaciones, esto es para resolver un sistema de 10 ecuaciones con10 incógnitas, por el método de la Regla de Cramer se necesitaban 300 millones de operaciones,mientras que con el método de Gauss sólo se necesitan unas 1000 operaciones.
En la actualidad, con la ayuda de herramientas informáticas, la resolución de ecuaciones esun tema baladí, algo muy sencillo y rápido, pero aún así, el método de eliminación Gaussiana

Matrices y Determinante 3
contribuye a la formación del alumno en el desarrollo de estrategias de resolución de problemasy de simplicidad de operaciones que veremos más adelante.
1.2. Matrices
1.2.1. Introducción a las Matrices
En matemáticas, una matriz es una tabla de números consistente en cantidades que puedensumarse y multiplicarse. Las matrices se utilizan principalmente para registrar los datos quedependen de varios parámetros, para describir sistemas de ecuaciones lineales o realizar unseguimiento de los coeficientes de una aplicación lineal.
De una forma simple, una matriz es una tabla cuadrada o rectangular de números (llamadoselementos) ordenados en filas y columnas, donde una fila es cada una de las líneas horizontalesde la matriz y una columna es cada una de las líneas verticales.
Ejemplo: Supongamos que una cierta cadena de tiendas de pantalones vaquero tiene en stock,en dos de sus tiendas, pantalones de las marcas Levi’s, Pepe Jeans, Dior y Dolcce&Gabbanade las tallas 38 a 48. Mejor forma de describir el número de pantalones de cada talla y marcaes mediante una tabla de la siguiente forma:
TIENDA A TIENDA BMarca Tallas Marca Tallas
38 40 42 44 46 48 38 40 42 44 46 48Levi’s 1 0 2 5 1 0 Levi’s 2 2 0 3 2 1Pepe Jeans 2 2 0 3 1 2 Pepe Jeans 4 1 1 0 1 3Dior 0 0 2 2 3 0 Dior 1 3 0 0 2 1D&G 1 1 6 4 2 3 D&G 1 0 0 2 1 2
¥
Para utilizar el lenguaje de matrices lo haremos del siguiente modo, utilizamos la mismaestructura básica de datos, es decir, en las filas indicaremos los datos de stock de cada marcay en cada columna los datos de stock de talla. De este modo cada una de las tables estaríarepresentada por las matrices denominadas A y B del siguiente modo:
A =
1 0 2 5 1 0
2 2 0 3 1 2
0 0 2 2 3 0
1 1 6 4 2 3
B =
2 2 0 3 2 1
4 1 1 0 1 3
1 3 0 0 2 1
1 0 0 2 1 2
Si quisiéramos calcular cuántos pantalones de cada marca y talla tiene la cadena de tiendas,habría que sumar los datos de cada una de las celdas de las tablas, esto es, para la marca Levi’stendríamos entre las dos tiendas los siguientes pantalones:

4 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
Tallas38 40 42 44 46 48
Levi’s 3 2 2 8 3 1
Trasladando esto a las matrices, tenemos que podemos sumar las dos matrices obteniendo elsiguiente resultado:
A+B =
1 0 2 5 1 0
2 2 0 3 1 2
0 0 2 2 3 0
1 1 6 4 2 3
+
2 2 0 3 2 1
4 1 1 0 1 3
1 3 0 0 2 1
1 0 0 2 1 2
=
3 2 2 8 3 1
6 3 1 3 2 5
1 3 2 2 5 1
2 1 6 6 3 5
Que nos daría los datos globales del stock de pantalones por tallas y marcas y que seinterpretaría del siguiente modo:
Tallas38 40 42 44 46 48
Levi’s 3 2 2 8 3 1Pepe Jeans 6 3 1 3 2 5Dior 1 3 2 2 5 1D&G 2 1 6 6 3 5
De forma general, tenemos entonces que a una matriz con m filas y n columnas se ledenomina “matriz m por n” (escrito m × n), y a m y n les llamamos dimensiones de lamatriz. Las dimensiones de una matriz siempre se dan con el número de filas primero y elnúmero de columnas después. Comúnmente se dice que una matriz m por n tiene un orden dem× n (“orden”tiene el significado de tamaño).
Una forma general, simbólica, de indicar una matriz A de orden m por n es de la forma
A =
a11 a12 a13 · · · a1n
a21 a22 a23 · · · a2n
a31 a32 a33 · · · a3n...
...... . . . ...
am1 am2 am3 · · · amn
donde el elemento a76 indica que es el número que ocupa la fila 7 columna 6 de la matriz. De
forma esquemática indicamos que la matriz es decir que A = (aij) donde
{i = 1 . . .m
j = 1 . . . n, lo
que significa que la matriz A está formada por elementos descritos como aij en los cuales elsubíndice i es un número comprendido entre 1 y m y el subíndice j, está comprendido entre 1y n.
De este modo, para describir la matriz suma de una matriz A y otra B, que sería de laforma

Matrices y Determinante 5
A+B =
a11 a12 a13 · · · a1n
a21 a22 a23 · · · a2n
a31 a32 a33 · · · a3n...
...... . . . ...
am1 am2 am3 · · · amn
+
b11 b12 b13 · · · b1n
b21 b22 b23 · · · b2n
b31 b32 b33 · · · b3n...
...... . . . ...
bm1 bm2 bm3 · · · bmn
=
=
a11 + b11 a12 + b12 a13 + b13 · · · a1n + b1n
a21 + b21 a22 + b22 a23 + b23 · · · a2n + b2n
a31 + b31 a32 + b32 a33 + b33 · · · a3n + b3n...
...... . . . ...
am1 + bm1 am2 + bm2 am3 + bm3 · · · amn + bmn
de forma esquemática, y mucho más corta, se queda en la siguiente expresión:
A+B = (aij) + (bij) = (aij + bij) donde
{i = 1 . . .m
j = 1 . . . n
²
±
¯
°
NOTA: Obsérvese que la suma de matrices sólo es posible entre matrices delas mismas dimensiones.
1.2.2. Clasificación de matrices
En un primer lugar, con los elementos de que disponemos en la actualidad podemos clasificarlas matrices en función de las dimensiones que tengan. De este modo una primera clasificacióndepende de que las dimensiones de la matriz sea la misma o no, esto es que tenga el mismonúmero de filas que de columnas o tenga diferente numero de filas que de columnas. Esto nosda dos tipos iniciales de matrices: Matrices Cuadradas o Rectangulares.
Las Matrices cuadradas son aquellas que tienen el mismo número de filas que de columnasy las Matrices Rectangulares o no cuadradas son las que tiene diferente número de filas que decolumnas.
Ejemplo:
Cuadrada: A =
1′2 3′4 23
−π
0′7 −√5 3 1
2
3 −2′3√28 3′8
π3
8 0√2
Rectangular: B =
(2 π
√6 4
5
−3 − sqrt32
1′2 3
)
¥
Unas denominaciones específicas de las matrices son las siguientes: Matriz Fila: aquella quesólo tiene una fila, por lo que su dimensión es 1×n. Ejemplo de Matriz fila de dimensión 1× 6:
C = (1, 2, π,√5, 7′8, 2′9)

6 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
Matriz Columna: aquella que sólo tiene una columna, por lo que su dimensión es m × 1.Ejemplo de Matriz Columna de dimensión 4× 1:
D =
2√3
8π6
Matriz Nula: aquella en la que todos los elementos son cero. Se denota por lo general conel símbolo 0, sin especificar las dimensiones, las cuales se sobreentenderán según el contexto enel que se aplique. Ejemplo de matriz Nula:
0 =
0 0 0
0 0 0
0 0 0
0 0 0
0 0 0
Un elemento esencial dentro de las matrices es lo que denominamos como diagonal prin-cipal de una matriz. Esta está formada por todos aquellos elementos que ocupan la misma filay la misma columna, es decir, aquellos de la forma aii.
Diagonal principal:
a11 a12 a13 a14 · · · a1n
a21 a22 a23 a24 · · · a2n
a31 a32 a33 a34 · · · a3n...
......
... . . . ...am1 am2 am3 am4 · · · amn
En el caso particular de que la matriz sea cuadrada, la diagonal principal iría desde laesquina superior izquierda de la matriz hasta la esquina inferior derecha de la matriz.
Diagonal principal:
a11 a12 a13 a14
a21 a22 a23 a24
a31 a32 a33 a34
a41 a42 a43 a44
Otra clasificación surge de considerar la posición que ocupen en una matriz los elementosiguales a cero. De este modo, si todos los elementos de una matriz, salvo la diagonal principalson cero, la matriz se denomina matriz diagonal, de este modo la matriz tendría la siguienteforma
Diagonal principal:
a11 0 0 0 · · ·0 a22 0 0 · · ·0 0 a33 0 · · ·0 0 0 a44 · · ·...
......
... . . .

Matrices y Determinante 7
Respecto a esta matriz hay que señalar que no es necesario que todos los elementos de ladiagonal principal sean distintos de cero. Una forma esquemática de indicar una matriz diagonales mediante la siguiente expresión simbólica:
¶
µ
³
´A = (aij) con
{i = 1 . . .m
j = 1 . . . nes diagonal si y sólo si aij = 0 cuando i 6= j
Un caso especial de matrices diagonales son las conocidas como matriz identidad deorden n. Estas matrices son matrices diagonales con todos los elementos de la diagonal igualesa 1, y se denotan como In.
Ejemplos de matrices identidad:
I2 =
(1 0
0 1
); I3 =
1 0 0
0 1 0
0 0 1
; I4 =
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
Otras matrices destacables son las matrices triangulares, de forma esquemática las definimosdel siguiente modo:
A = (aij) con
{i = 1 . . .m
j = 1 . . . nse denomina Triangular
{Superior si aij = 0 cuando i > j
Inferior si aij = 0 cuando i < j
Lo que se traduce en que las matrices triangulares son de la forma
Superior:
a11 a12 a13 a14 · · ·0 a22 a23 a24 · · ·0 0 a33 a34 · · ·0 0 0 a44 · · ·...
......
... . . .
Inferior:
a11 0 0 0 · · ·a21 a22 0 0 · · ·a31 a32 a33 0 · · ·a41 a42 a43 a44 · · ·...
......
... . . .
Como puede observarse, los elementos aij con i > j, son aquellos en que la fila tiene un índicemayor que la columna, por lo que ocupará una posición por debajo de la diagonal principal, sitodos estos elementos son cero, deducimos que los únicos que no tienen que ser cero son aquellosque ocupan posiciones en la diagonal principal o por encima, o lo que es lo mismo, el triánguloque forman los elementos por debajo de la diagonal principal son todos cero. Por esta razón sedenomina Triangular superior, tiene forma triangular en sus elementos distintos de cero y esteestá situado en la parte superior de la matriz. Ejemplos de matrices triangulares:
Superior:
2 3′5 14
π
0 0 a23 0
0 0 32
7
0 0 0 3
Inferior:
1 0 0 0
0 π 0 0
3′1 54
13
0
2 0 1′38 61,245

8 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
1.2.3. Suma de Matrices
Si consideramos el ejemplo de las tiendas de pantalones expuesto en la sección 1.2.1, paracalcular el stock de pantalones que tiene la empresa entre ambas tiendas para sumar ambasmatrices sumábamos cada elemento de una matriz con el elemento de la otra matriz que ocupa lamisma posición (véase la página 4). De este modo, utilizando el lenguaje matemático, pasamosa definir la operación suma en un conjunto de matrices.
Denominamos como Mm×n, el conjunto formado por todas las matrices de orden m × n.Dadas dos matrices A = (aij) y B = (bij) de orden m × n, A,B ∈ Mm×n, se define la sumaA+B como aquella matriz de Mm×n que verifica que cada elemento de esta matriz es igual ala suma de los elementos de las matrices A y B que ocupan la misma posición, esto es
A+B = (aij + bij)
tal y como describimos en la página 4.
Como puede observarse, la operación de suma de matrices está íntimamente ligada a lasuma de números reales, tan solo hay que respetar el las posiciones de los elementos, por lo quees fácil de comprender que herede todas las propiedades de la suma de los números:
'
&
$
%
Propiedades de la suma de matrices:
1. Asociativa
Si A,B,C ∈ Mm×n entonces
A+ (B + C) = (A+B) + C
2. Existencia de Elemento neutro
En cada Mm×n existe una matriz nula, ∃0 ∈ Mm×n, tal quedada cualquier matriz A ∈ Mm×n, se verifica que
A+ 0 = 0 + A = A
3. Elemento opuesto
Para cualquier matriz A ∈ Mm×n existe una matriz opuesta,∃ − A ∈ Mm×n, de manera que
A+ (−A) = (−A) + A = 0
4. Conmutativa
Para cualquiera dos matrices A,B ∈ Mm×n, se verifica que
A+B = B + A
El uso de estas propiedades en las diversas operaciones con matrices, al ser idénticas a las

Matrices y Determinante 9
propiedades de la suma de números, nos permite trabajar con matrices del mismo modo quehacemos con números. De este modo, del mismo modo que para conocer cuál es el número quesumado con 10’3 da un total de 9’6, lo que hacemos es restar 9’6 menos 10’3, obteniendo -0’7,podemos aplicarlo para conocer la matriz que sumada con A nos da B, siendo
A =
(4′2 3′6 1
3 −1′2 6
)y B =
(1 −3 4′2
−2′3 2 4
).
Esto es buscamos la matriz X tal que A+X = B, y sabemos, por la aplicación de propie-dades, que X = B + (−A), de modo que
X = B + (−A) =
(1 −3 4′2
−2′3 2 4
)+
(−4′2 −3′6 −1
−3 1′2 −6
)
de donde
X =
(1− 4′2 −3− 3′6 4′2− 1
−2′3− 3 2 + 1′2 4− 6
)=
(−3′2 −6′6 3′2
−5′3 3′2 −2
)
1.2.4. Producto de una matriz por un escalar
En matemática, se denomina tensor a una cierta clase de entidad algebraica, ya tengan una ovarias componentes, de una manera que sea independiente de cualquier sistema de coordenadaselegido. Es un concepto que generaliza los conceptos propios de número, vector o matriz. Lostensores son de especial importancia en campos como física y electrónica.
De forma particular, si consideramos un tensor de rango cero, nos referimos exclusivamentea números y reciben el nombre de escalares. Es decir los escalares son aquellas cantidades quesirven para describir un fenómeno físico con magnitud, pero sin las características vectoriales dedirección o sentido. De este modo al ser operados con otros Tensores, no modifican de ningúnmodo ni la dirección, sentido o dimensión de estos últimos.
En términos teóricos, el producto por escalares es una operación entre dos conjuntos dis-tintos, uno con dimensión y otro exclusivamente numérico, cuyo resultado es un elemento delprimer conjunto. Es decir, el producto de una matriz por un escalar es una nueva matriz, elproducto de un vector por un escalar es un nuevo vector, etc.
Así se define el producto de un escalar λ (lo escribimos con letras griegas) por una matrizA de orden m× n, esto es A ∈ Mm×n, del siguiente modo:
Si A = (aij) ∈ Mm×n y λ ∈ R, entonces λA = (λaij)
Es decir, para multiplicar un número por una matriz se multiplica el número porcada uno de los elementos de la matriz.

10 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
Si A =
a11 a12 a13 · · · a1n
a21 a22 a23 · · · a2n
a31 a32 a33 · · · a3n...
...... . . . ...
am1 am2 am3 · · · amn
⇒ λA =
λa11 λa12 λa13 · · · λa1n
λa21 λa22 λa23 · · · λa2n
λa31 λa32 λa33 · · · λa3n...
...... . . . ...
λam1 λam2 λam3 · · · λamn
El producto por escalares así definido verifica las siguientes propiedades:'
&
$
%
Propiedades del producto por escalares:
1. λ · (A+B) = λ · A+ λ ·B
2. (λ+ µ) · A = λ · A+ µ · A
3. λ · (µ · A) = (λ · µ) · A
4. 1 · A = A · 1 = A
1.2.5. Producto de Matrices
Volvamos al ejemplo de las tiendas de pantalones descrito en la sección 1.2.1, teníamos queentre las dos tiendas el stock de pantalones existente era el siguiente:
Tallas38 40 42 44 46 48
Levi’s 3 2 2 8 3 1Pepe Jeans 6 3 1 3 2 5Dior 1 3 2 2 5 1D&G 2 1 6 6 3 5
Si supiéramos que para la cadena de tiendas, cada pantalón de la marca Levi’s tiene uncoste de 56e, cada uno de la marca Pepe jeans tiene un coste de 73e, los de la marca Diorle cuestan 122ey los de Doce&Gabbana cuestan 106e, y quisiéramos calcular el importe totaldel coste de la ropa en stock por tallas, podríamos hacerlo del siguiente modo: Multiplicamosel coste de cada marca por el stock de cada talla, después sumamos los resultados, esto es:
Tenemos los costes
e
Levi’s 56Pepe Jeans 73Dior 122D&G 106
multiplicamos y sumamos por columnas obteniendo:

Matrices y Determinante 11
Tallas38 40 42 44 46 48
Levi’s 56 · 3 56 · 2 56 · 2 56 · 8 56· 3 56 · 1Pepe Jeans 73 · 6 73 · 3 73 · 1 73 · 3 73 · 2 73 · 5Dior 122 · 1 122 · 3 122 · 2 122 · 2 122 · 5 122 · 1D&G 106 · 2 106 · 1 106 · 6 106 · 6 106 · 3 106 · 5Totales: 940 803 1065 1547 1242 1073
Expresando esto en el lenguaje de matrices tenemos lo siguiente:
(56 73 122 106
)·
3 2 2 8 3 1
6 3 1 3 2 5
1 3 2 2 5 1
2 1 6 6 3 5
=
=
56 · 3 56 · 2 56 · 2 56 · 8 56 · 3 56 · 1+ + + + + +
73 · 6 73 · 3 73 · 1 73 · 3 73 · 2 73 · 5+ + + + + +
122 · 1 122 · 3 122 · 2 122 · 2 122 · 5 122 · 1+ + + + + +
106 · 2 106 · 1 106 · 6 106 · 6 106 · 3 106 · 5= = = = = =
=
=(
940 803 1065 1547 1242 1073)
En este caso hemos realizado una multiplicación de una matriz fila, de orden 1× 4 por unamatriz de orden 4× 6. Para ello hemos seguido el siguiente esquema de multiplicaciones:
el elemento de la primera columna POR cada elemento de la primera fila.
el elemento de la segunda columna POR cada elemento de la segunda fila.
el elemento de la tercera columna POR cada elemento de la tercera fila.
el elemento de la cuarta columna POR cada elemento de la cuarta fila.
y finalmente sumamos todos los elementos de cada columna para obtener cada elemento dela fila.
Si nos fijamos en los órdenes de las matrices que hemos multiplicado tenemos
1× 4 · 4× 6 = 1× 6
es decir, que la primera fila tenga 4 columnas y la segunda matriz tenga 4 filas es necesariopara que cada elemento de la fila multiplique a su correspondiente elemento de la columna.

12 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
Veamos otro esquema, multiplicamos una matriz formada por símbolos de cartas francesas:tréboles(♣), rombos (♦), corazones(♥) y picas(♠) por otra de símbolos tipográficos:
(♣ ♦ ♥ ♠
)·
[ \
[′ \′
[′′ \′′
[′′′ \′′′
siendo el resultado final:(
♣ · [+♦ · [′ +♥ · [′′ +♠ · [′′′ ♣ · \+♦ · \′ +♥ · \′′ +♠ · \′′′)
Obsérvese que cada elemento del resultado final está formado por 4 sumandos y en cadasumando hay un elemento de la matriz fila por un elemento de una columna determinada. Estose realiza de forma ordenada, el primero por el primero, el segundo por el segundo, el terceropor el tercero, y así sucesivamente.
Si la primera matriz tuviera más de una fila, el resultado final tendría ese mismo número defilas y cada una de ellas compuesta por un producto realizado de la misma forma. En definitiva,la matriz producto se calcula del siguiente modo:
1. Cálculo de la primera fila:
a) Primer elemento: Es el resultado se sumar cada uno de los productos obtenidos almultiplicar ordenadamente cada elemento de la primera fila por cada elemento dela primera columna.
b) Segundo elemento: Es el resultado se sumar cada uno de los productos obtenidosal multiplicar ordenadamente cada elemento de la primera fila por cada elementode la segunda columna.
c) Tercer elemento: Es el resultado se sumar cada uno de los productos obtenidos almultiplicar ordenadamente cada elemento de la primera fila por cada elemento dela tercera columna.
d) &c
2. Cálculo de la segunda fila:
a) Primer elemento: Es el resultado se sumar cada uno de los productos obtenidos almultiplicar ordenadamente cada elemento de la segunda fila por cada elemento dela primera columna.
b) Segundo elemento: Es el resultado se sumar cada uno de los productos obtenidosal multiplicar ordenadamente cada elemento de la segunda fila por cada elementode la segunda columna.
c) Tercer elemento: Es el resultado se sumar cada uno de los productos obtenidos almultiplicar ordenadamente cada elemento de la segunda fila por cada elemento dela tercera columna.

Matrices y Determinante 13
d) &c
3. Cálculo de la tercera fila:
a) Primer elemento: Es el resultado se sumar cada uno de los productos obtenidos almultiplicar ordenadamente cada elemento de la tercera fila por cada elemento dela primera columna.
b) Segundo elemento: Es el resultado se sumar cada uno de los productos obtenidosal multiplicar ordenadamente cada elemento de la tercera fila por cada elemento dela segunda columna.
c) Tercer elemento: Es el resultado se sumar cada uno de los productos obtenidos almultiplicar ordenadamente cada elemento de la tercera fila por cada elemento dela tercera columna.
d) &c
4. Y sigue del mismo modo
De forma teórica se indica del siguiente modo:
'
&
$
%
Producto de matrices
La matriz producto es aquella que se obtiene como resultado de multi-plicar una matriz A = (aij) de orden m× n por otra B = (bjk) de ordenn× p es una matriz C = (cik) de orden m× p donde cada cik se obtienepor la expresión:
cik =n∑
j=1
aij · bjk
Para entender el significado de esa expresión matemática hay que recordar que el símbolo∑nj=1 indica la suma desde que j = 1 hasta que j = n sin modificar los demás subíndices, por
lo que∑n
j=1 aij · bjk es lo mismo que ai1 · b1k + ai2 · b2k + ai3 · b3k + ai4 · b4k + · · · + ain · bnk dedonde
cik = ai1 · b1k + ai2 · b2k + ai3 · b3k + ai4 · b4k + · · ·+ ain · bnk
para cada uno de los valores i desde 1 hasta m y cada j desde 1 hasta p. Por lo que la nuevamatriz tiene n filas y p columnas.
Ejemplo: Calculemos el producto de A y B, siendo
A =
(2 3 2
1 4 5
)y B =
3 8
5 2
6 3
Al ser el producto de una matriz 2× 3 por una 3× 2 el resultado final será una matriz 2× 2.

14 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
A ·B =
(2 3 2
1 4 5
)·
3 8
5 2
6 3
=
(2 · 3 + 3 · 5 + 2 · 6 2 · 8 + 3 · 2 + 2 · 31 · 3 + 4 · 5 + 5 · 6 1 · 8 + 4 · 2 + 5 · 3
)=
(33 28
53 31
)
¥
Hay que tener en cuenta que el producto así NO es una operación de composición internade forma general. Se recuerda que una operación se dice que es de composición interna cuandola operación sobre dos elementos de un mismo tipo tiene como resultado un elemento del mismotipo anterior. En nuestro caso, de forma general, dadas dos matrices una de orden m×n y otrade orden n× p, el producto es una matriz de orden m× p, la cual no es del mismo tipo que lasanteriores, salvo que m = n = p en cuyo caso estamos ante una matriz cuadrada. Por lo tanto,el producto de matrices sólo es una operación de composición interna dentro de unconjunto de matrices cuadradas.
Siendo así, sólo tiene sentido hablar de propiedades del producto de matrices en el caso dematrices cuadradas.
'
&
$
%
Propiedades del producto de MatricesCuadradas:
1. AsociativaA · (B · C) = (A ·B) · C
2. Existencia de Elemento neutro
En cada Mn existe una matriz neutra para el producto, ∃In ∈Mn, tal que dada cualquier matriz A ∈ Mn, se verifica que
A · In = In · A = A
3. Distributiva respecto de la suma
El producto de matrices cuadradas es distributivo respecto dela suma, esto es, dadas A,B,C ∈ Mn se tiene que
A · (B + C) = A ·B + A · C
Respecto a la propiedad conmutativa hay que indicar que de forma general el productode matrices cuadradas NO es conmutativo.
Ejemplo:(
1 2
3 4
)·(
0 0
1 1
)=
(1 · 0 + 2 · 1 1 · 0 + 2 · 13 · 0 + 4 · 1 3 · 0 + 4 · 1
)=
(2 2
4 4
)
(0 0
1 1
)·(
1 2
3 4
)=
(0 · 1 + 0 · 3 0 · 2 + 0 · 41 · 1 + 1 · 3 1 · 2 + 1 · 4
)=
(0 0
4 6
)

Matrices y Determinante 15
¥
Y como este ejemplo hay muchos casos.
En algunos casos particulares, puede darse el caso de que dos matrices sí verifiquen lapropiedad conmutativa, en esos caso se dice que esas dos matrices conmutan entre sí.
Ejercicios
1. Dadas las matrices A =
(1 2
−2 3
), B =
(0 3
1 2
)y C =
(−1 3
0 −2
), calcula
a) A+B − C
b) A−B + C
c) 2A− 3B
d) A− 2B + 3C
2. Calcula la matriz A que verifica la igualdad:
3 ·(
1 53
6
2 8′2 4
)=
(1 0 −4
−2 13
1′4
)+ A
3. Calcula las matrices X e Y que verifican el sistema de ecuaciones
2X + Y =
(5 12 7
4 2 7
)
3X + 2Y =
(11 25 0
20 10 35
)
4. Dadas A =
1 2 0
0 1 1
2 1 −1
y B =
0 1 2
−1 1 0
0 2 1
, calcula:
a) A2 −B2
b) (A−B)2
c) (A−B)(A+B)
d) Compara los resultados con las mismas reglas de productos notables en números. ¿Aqué se deben las conclusiones?
5. En una academia de idiomas se imparten clases de inglés y alemán en cuatro niveles cadauno y en dos tipos de grupos de cada nivel: grupos normales y grupos reducidos. La matriz

16 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
A representa el número de personas de cada nivel (filas) en cada idioma (columnas):
A =
130 160
120 80
210 130
100 60
La matriz B representa los tantos por uno de estudiantes siendo el mismo para ambosidiomas de grupos reducidos (primera fila) y grupos normales (segunda fila) de cada unode los niveles (columnas):
B =
(0′2 0′25 0′4 0′75
0′8 0′75 0′6 0′25
)
a) Obtener la matriz que proporciona el numero de estudiantes por tipos de grupos eidioma.
b) Sabiendo que la academia cobra 200eal mes por persona en grupos reducidos y125eal mes por persona en grupo normal, halla la cantidad que ingresa en cada unode los idiomas.
6. Dada la matriz M =
1 1 0
0 1 1
0 0 1
.
a) Calcula la matriz J tal que M = J + I3.
b) Calcula J2, J3 e induce J1994.
7. Calcula a, b, c y d para que 2
(a b
c d
)=
(a 7
−2 3d
)+
(5 a+ b
c+ d 4
)
8. Dada una matriz A de orden m × n con m y n distintos de 1. ¿Existe una matriz B talque A ·B sea una matriz fila?
9. Encuentra todas las matrices del orden que corresponda y que conmuten con la matriz
A =
(1 1
0 1
)
10. Calcula todos los productos posibles entre las siguientes matrices A =
1 2 3
1 1 1
0 1 −1
,
B =
1
2
1
y C =
(2 1 0
3 4 5
).
11. Indica razonadamente si alguna de estas expresiones son igualdades válidas para cuales-quiera matrices cuadradas A y B de orden n:

Matrices y Determinante 17
a) (A+B)2 = A2 + 2A ·B +B2
b) (A−B)2 = A2 − 2A ·B +B2
c) (A+B) · (A−B) = A2 −B2
12. Comprueba que es cierto que A2 − A− 2I3 = 0 siendo
A =
0 1 1
1 0 1
1 1 0
13. Encuentra la matriz A que verifica: A ·(
1 0
2 1
)=
(5 2
6 3
)
1.2.6. Trasposición de matrices
Volvamos a considerar el problema de las tiendas de pantalones, pero en esta ocasión, veamosla tabla desde otro punto de vista, consideramos la tabla en vez de ver las tallas respecto delas marcas (pág 4, veámoslo al revés, las marcas respecto de las tallas, con lo que tendríamos:
Tallas Levi’s PepeJeans
Dior D&G
38 3 6 1 240 2 3 3 142 2 1 2 644 8 3 2 646 3 2 5 348 1 5 1 5
En realidad, considerando sólo las matrices, lo que se ha hecho es intercambiar las filas porlas columnas, esto es lo que antes estaba escrito en filas de izquierda hacia la derecha, ahoraaparece escrito en columnas de arriba hacia abajo:
3 2 2 8 3 1
6 3 1 3 2 5
1 3 2 2 5 1
2 1 6 6 3 5
⇒
3 6 1 2
2 3 3 1
2 1 2 6
8 3 2 6
3 2 5 3
1 5 1 5
Esto es lo que se conoce como Trasposición de matrices. Escrito de forma matemáticadecimos que dada una matriz A de orden m × n, se tiene la matriz traspuesta, At de ordenn×m intercambiando las filas por columna de la matriz A:
Sea A ∈ Mm×n con A = (aij), entonces At ∈ Mn×m con A = (aji)

18 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
Obsérvese que en At se han escrito los subíndices intercambiados j ↔ i. De otro modo,
Si A =
a11 a12 a13 · · · a1n
a21 a22 a23 · · · a2n
a31 a32 a33 · · · a3n...
...... . . . ...
am1 am2 am3 · · · amn
⇒ At =
a11 a21 a31 · · · am1
a12 a22 a32 · · · am2
a13 a23 a33 · · · am3
......
... . . . ...a1n a2n a3n · · · amn
Evidentemente, en el caso de que una matriz sea cuadrada, la matriz traspuesta tiene elmismo orden que la matriz original.
'
&
$
%
Propiedades la trasposición de matrices
1. Idempotencia(At)t = A
2. Respecto de la suma de matrices
(A+B)t = At +Bt
3. Respecto del producto por escalares
(λA)t = λAt
4. Respecto del producto de matrices
(A ·B)t = Bt · At
La trasposición de matrices permite distinguir dos nuevos tipos de matrices. Las matricesque al ser traspuestas quedan invariantes y las matrices que al ser traspuestas quedan cambiadasde signo (opuestas).
Las primeras de ellas, aquellas que al ser traspuestas quedan invariantes, esto es, aquellasmatrices tales que At = A, se denominan Matrices Simétricas. La razón del nombre es quepara que la matriz sea simétrica, al cambiar las filas por las columnas debe quedar igual, loque implica que los números ocupan una posición geométricamente simétrica respecto de ladiagonal principal.
A ∈ Mn es simétrica si y solo si aij = aji∀i, j ∈ {1, . . . , n}
Ejemplos de matrices simétricas:
A =
1 π 2 3
π −4 12
0
2 12
π6 −6
3 0 −6 198
B =
−6 3′2 −4′6
3′2 0 23
−4′6 23√6

Matrices y Determinante 19
El segundo caso, las matrices que al ser traspuestas cambian de signo, se denominan Ma-trices Antisimétricas. Ejemplo de matriz antisimétrica:
A =
0 π −2 3
−π 0 −12
0
2 12
0 −6
−3 0 6 0
⇒ At =
0 −π 2 −3
π 0 12
0
−2 −12
0 6
3 0 −6 0
Obsérvese que, en el ejemplo, la diagonal principal es completamente nula. Esto no es un casoaislado, es una condición necesaria para que pueda ocurrir que al sumar una matriz antisimétricacon su traspuesta, el resultado sea la matriz nula. Sin esta condición, como la diagonal principalpermanece invariante por la trasposición, al sumar una matriz y su traspuesta, si algún elementode la diagonal no fuera cero, la suma tendría en esa posición el doble del número, nunca seríacero. Ejemplo:
A+ At =
0 π −2
−π 3 −12
2 12
0
+
0 −π 2
π 3 12
−2 −12
0
=
=
0 + 0 π + (−π) −2 + 2
−π + π 3 + 3 −12+ 1
2
2 + (−2) 12+ (−1
2) 0 + 0
=
0 0 0
0 6 0
0 0 0
De este modo podemos decir que una matriz es antisimétrica si es cuadrada, tiene nulos todoslos elementos de la diagonal principal y además opuestos los elementos simétricos respectos dela misma.
A ∈ Mn es antisimétrica si y solo si
{aii = 0
aij = −aji∀i, j ∈ {1, . . . , n}
1.3. Determinantes
1.3.1. Introducción
Los determinantes fueron introducidos en Occidente a partir del siglo XVI, esto es, muchotiempo antes que las matrices que no aparecieron hasta finales del siglo XVIII. En su sentidooriginal, el determinante es un cálculo realizado con los coeficientes de un sistema de ecuacioneslineales cuyo objetivo es “determinar” la unicidad o no de la solución del sistema.
El primero que introdujo este cálculo en Europa, para el caso de sistemas de orden 2, fueGerlamo Cardano (1501-1576) quien en 1545 en su obra Ars Magna lo presenta como una reglapara la resolución de sistemas de dos ecuaciones con dos incógnitas. Esta primera fórmula llevael nombre de regula de modo.

20 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
Posteriormente, en el siglo XVII, el japonés Takakasu Seki Kowa (1642-1708) y GottfriedW. von Leibniz (1646-1716), con prácticamente los mismos ejemplos pero sin contacto entreellos, introdujeron los determinantes de matrices de orden 3 y 4. La aparición de determinantesde órdenes superiores tardó aún más de cien años en llegar.
Leibniz estudió distintos tipos de sistemas de ecuaciones lineales. Al no disponer de lanotación matricial, representaba los coeficientes de las incógnitas con una pareja de índices: asípues escribía ij para representar aij. En 1678 se interesó por un sistema de tres ecuaciones contres incógnitas y obtuvo, para dicho ejemplo, lo que se conoce como fórmula de desarrollo a lolargo de una columna. El mismo año, escribió un determinante de orden 4, correcto en todosalvo en el signo. Como Leibniz no publicó este trabajo, quedó olvidado hasta que los resultadosfueron redescubiertos de forma independiente cincuenta años más tarde.
Figura 1.2: Seki Kowa (1642-1708)
En el mismo periodo, Seki Kowa publicó en 1693 unmanuscrito titulado Método de resolver los problemas disi-mulados sobre los determinantes, donde se hallan fórmulasgenerales difíciles de interpretar. Se dan fórmulas correc-tas para determinantes de tamaño 3 y 4, pero, de nuevo,presenta errores en los signos para aquellos determinantesde orden superior. Este descubrimiento no pudo llegar ensu época a conocimiento de los científicos europeos debidoal cierre de fronteras de Japón respecto al mundo exteriorpor órdenes del shogun (Comandante Jefe de los Ejércitos)Tokugawa Iemitsu (1604-1651) en 1638.
A mediados del siglo XVIII se da un nuevo impulso ala teoría de los determinantes. En el trabajo publicado trassu muente, en 1748, Colin Maclaurin (1698-1746) ofrece laresolución correcta de un sistema de cuatro ecuaciones concuatro incógnitas. Y, como ya se dijo anteriormente, en 1750Cramer formula las reglas generales que permiten la reso-lución de un sistema de n ecuaciones con n incógnitas. En
este caso los métodos de cálculo de los determinantes son muy delicados debido a que se basanen la noción de signatura de una permutación, un concepto bastante lioso.
Los matemáticos de la época se familiarizaron con este nuevo objeto a través de los artículosde Étienne Bézout (1730-1783) en 1764 y de Alexandre-T. Vandermonde (1735-1796) en 1771.En 1772, Pierre-S. Laplace (1749-1827) establece las reglas de recurrencia que llevan su nombrepara el cálculo de determinantes y que estudiaremos en estos apuntes. Al año siguiente, Lagrangedescubrió la relación entre el cálculo de los determinantes y el cálculo de volúmenes.
Finalmente, durante el siglo XIX, con los trabajos de Gauss, Augustin L. Cauchy (1789-1857), Arthur Cayley (1821-1895), James J. Sylvester (1814-1897) y C.G. Jakob Jacobi (1804-1851) los determinantes y las matrices toman la notación y formulación que aún se conserva enla actualidad. Así como su extensión a otros campos de las matemáticas tomando un valor de

Matrices y Determinante 21
gran utilidad.
1.3.2. Menor complementario y Adjunto
El determinante de una matriz cuadrada, det(A) ó |A|, es un número asociado medianteuna serie de cálculos el cual está íntimamente ligado a una serie de propiedades de la matrizque iremos analizando poco a poco. Aunque hay diversas formas de establecer el cálculo de losdeterminantes, tal y como se indicó anteriormente, optamos por la forma definida por Laplace,en la que el determinante de una matriz de orden n se puede calcular a partir de determinantesde orden n− 1 obtenidos de la propia matriz. Así obtiene un proceso rescurrente de n pasos.
Antes de dar la definición tenemos que introducir el concepto de Menor complementariode un elemento de una matriz cuadrada. Sea A = (aij) ∈ Mn una matriz cuadrada, se llamamenor complementario de un elemento aij de la matriz A a la submatriz que resulta de suprimiren A la fila i y la columna j y se denomina Mij.
Veamos unos ejemplos, sean A ∈ M4 y B ∈ M3,
A =
1 π 2 3
−3 −4 12
0
2 35
π6 −6
4 9 7 198
B =
1 2 3
4 5 6
−7 8 −9
el menor complementario a43 = 7 de la matriz A sería M43 =
1 π 3
−3 −4 0
2 35
−6
y el menor
complementario del elemento b21 = 4 de la matriz B sería M21 =
(2 3
8 −9
)
Es evidente que cada elemento de una matriz tiene uno y sólo un menor complementario.
De este modo, si suponemos que sabemos calcular el determinante de una matriz cualquiera,podemos definir también el concepto de Adjunto de un elemento aij, denotado por Aij, el cualno sería nada más que la expresión Aij = (−1)i+j|Mij|, es decir, el Adjunto de un elemento aij
es el resultado de multiplicar (−1)i+j por el determinante de su menor complementario.
Un elemento que utilizaremos con posterioridad es la Matriz Adjunta, Adj(A) para cons-truir esta matriz el proceso es muy simple, dada una matriz A = (aij), la Matriz Adjunta de Aes aquella en la que se sustituye cada elemento aij de A por su Adjunto Aij, de este modo si
A =
a11 a12 a13 · · · a1n
a21 a22 a23 · · · a2n
a31 a32 a33 · · · a3n...
...... . . . ...
an1 an2 an3 · · · ann
entonces Adj(A) =
A11 A12 A13 · · · A1n
A21 A22 A23 · · · A2n
A31 A32 A33 · · · A3n
......
... . . . ...An1 An2 An3 · · · Ann

22 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
1.3.3. Regla de Laplace
Ahora ya estamos en condiciones de dar la regla del cálculo de determinantes de Laplace,la cual es la siguiente:
'
&
$
%
Regla de Laplace para DeterminantesSea A = (aij) ∈ Mn, consideremos una fila determinadak ∈ {1, . . . , n}, entonces
det(A) = |A| =n∑
j=1
akj · Akj
Es decir, para calcular el determinante de una matriz cuadrada, se considera una fila cual-quiera y se calcula la suma de los productos de cada elemento de la fila por su correspondienteadjunto. Si consideramos la segunda fila de la matriz tendríamos
det(A) = |A| = a21 · A21 + a22 · A22 + a23 · A23 + · · ·+ a2n · A2n+
Del mismo modo se puede calcular el determinante de una matriz mediante las columna, esdecir se determina una columna y se calcula la suma de los productos de cada elemento de lacolumna por su correspondiente adjunto, de donde obtendríamos
det(A) = |A| =n∑
j=1
ajk · Ajk
que en el caso particular de fijar la tercera columna quedaría como
det(A) = |A| = a13 · A13 + a23 · A23 + a33 · A33 + · · ·+ a3n · A3n+
Puede observase que como el para obtener el menor complementario hemos suprimido unafila y una columna, el menor complementario es de un orden menor que la matriz A, por loque queda evidente lo que afirmábamos anteriormente, que la regla de Laplace para calcularel determinante de una matriz de orden n utiliza determinantes de orden n − 1. Por lo tanto,conocidos todos los Adjuntos de una fila o columna de una matriz, podemos conocer el deter-minante de la matriz completa. Veamos como se utiliza esto para calcular el determinante deuna matriz cualquiera.
Comenzaremos por el determinante de una matriz cuadrada de orden más pequeño, de orden1, y finalizaremos por el de orden 3, aplicando sucesivamente la regla de Laplace, es evidenteque se podrá calcular el determinante de una matriz de un orden cualquiera.
1. Matriz de orden 1
Una matriz de orden 1 es una matriz formada por un único elemento. Sea A = (a) ∈ M1
entonces det(A) = |A| = a

Matrices y Determinante 23
2. Matriz de orden 2
Sea A =
(a11 a12
a21 a22
)∈ M2 consideremos los elementos de la primera fila a11 y a12,
sus menores complementarios son M11 = (a22) y M12 = (a21) por lo tanto los Adjuntosde estos elementos son A11 = (−1)1+1a22 = a22 y A12 = (−1)1+2a21 = −a21 entoncessiguiendo la Regla de Laplace
det(A) = |A| = a11 · a22 + a12 · (−a21) = a11 · a22 − a12 · a21.
Una regla práctica para recordar este cálculo del determinante de una matriz cuadradade orden 2 es: el producto de la diagonal principal menos el producto de la diagonalsecundaria.
3. Matriz de orden 3
Sea A =
a11 a12 a13
a21 a22 a23
a31 a32 a33
∈ M3, al igual que antes, consideremos los elementos de la
primera fila a11, a12 y a13. Sus menores complementarios son
M11 =
(a22 a23
a32 a33
)M12 =
(a21 a23
a31 a33
)y M13 =
(a21 a22
a31 a32
)
y los Adjuntos correspondientes son
A11 = (−1)1+1(a22a33 − a23a32) = a22a33 − a23a32
A12 = (−1)1+2(a21a33 − a23a31) = a23a31 − a21a33
A13 = (−1)1+3(a21a32 − a22a31) = a21a32 − a22a31
de donde tenemos, aplicando la regla de Laplace, que
det(A) = |A| = a11(a22a33 − a23a32) + a12(a23a31 − a21a33) + a13(a21a32 − a22a31)
aplicando la propiedad distributiva de los números y reordenando según signo, nos queda
det(A) = |A| = a11a22a33 + a12a23a31 + a13a21a32 − a11a23a32 − a12a21a33 − a13a22a31
En este último caso, si observamos un poco la forma de multiplicar observamos una reglapráctica para recordar este determinante, la conocida Regla de Sarrus,
Si consideramos figura formada por la matriz original añadiéndole las dos primeras co-lumnas
a11 a12 a13 a11 a12
a21 a22 a23 a21 a22
a31 a32 a33 a31 a32
Y en ella consideramos la diagonal principal de la matriz y dos paralelas que podríanformarse más, así como la diagonal secundaria de la matriz y dos paralelas más. Estaslíneas señalan seis productos de tres elementos cada uno.

24 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
a11 a12 a13 a11 a12
a21 a22 a23 a21 a22
a31 a32 a33 a31 a32
a11 a12 a13 a11 a12
a21 a22 a23 a21 a22
a31 a32 a33 a31 a32
Con signo positivo Con signo negativo
Considerando los primeros con signo positivo y los tres últimos con signo negativo, tene-mos la expresión del determinante de una matriz de orden 3.
|A| = a11a22a33 + a12a23a31 + a13a21a32 − a11a23a32 − a12a21a33 − a13a22a31
Otra forma de visualizar la Regla de Sarrus para el cálculo de un determinante de orden 3es mediante la multiplicación de los elementos unidos con líneas en la siguiente figura:
Con signo positivo Con signo negativo
@@@@@@
@@@¢¢¢¢¢©©©©©
¢¢¢¢¢@@@©©©©© ¡¡
¡¡¡¡A
AAAA¡¡
¡HH
HHH¡¡¡A
AAAAHHH
HH
Ejemplo de cálculo de determinantes :
Orden 2:
det
(2 −3
8 −9
)=
∣∣∣∣∣2 −3
8 −9
∣∣∣∣∣ = 2 · (−9)− 8 · (−3) = −18 + 24 = 6
Orden 3:
det
1 2 3
4 5 6
−7 8 −9
=
∣∣∣∣∣∣∣
1 2 3
4 5 6
−7 8 −9
∣∣∣∣∣∣∣=
= 1 · 5 · (−9) + 2 · 6 · (−7) + 4 · 8 · 3− 3 · 5 · (−7)− 4 · 2 · (−9)− 1 · 8 · 6 =
= −45− 84 + 96 + 105 + 72− 48 = 96
Orden 4:
det
1 2 3 −1
1 1 1 1
3 0 1 −1
2 1 2 0
=
∣∣∣∣∣∣∣∣∣∣
1 2 3 −1
1 1 1 1
3 0 1 −1
2 1 2 0
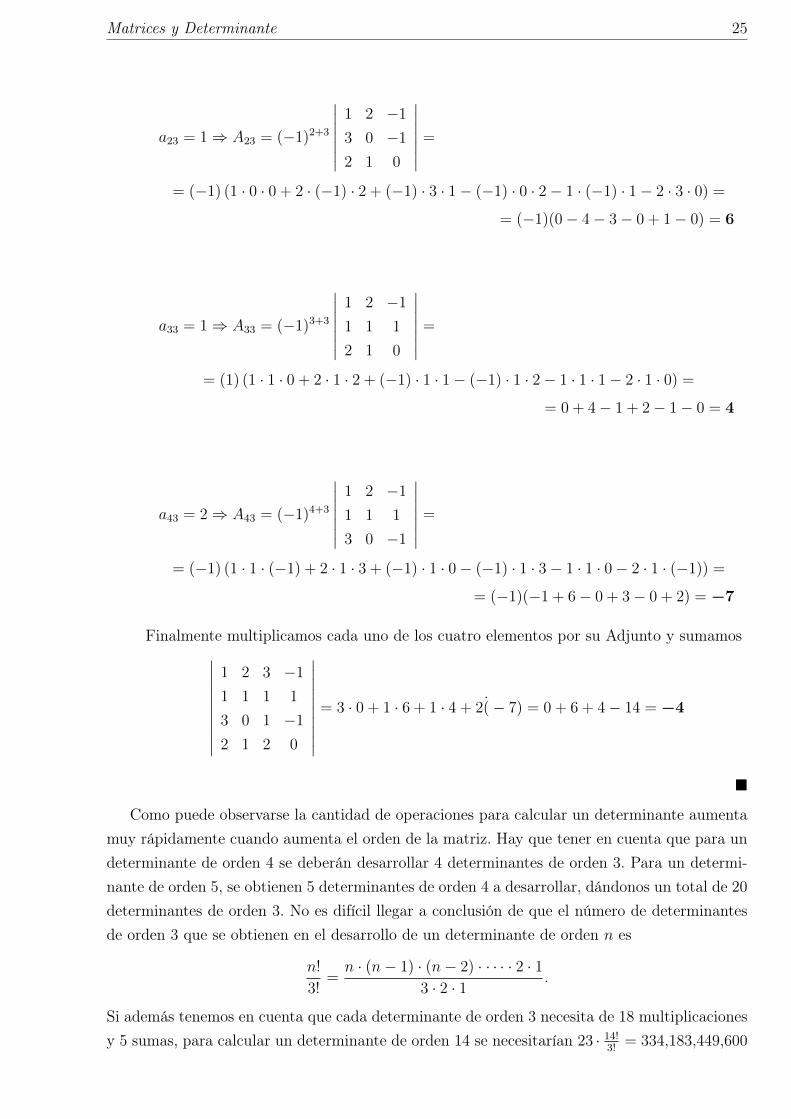
∣∣∣∣∣∣∣∣∣∣Elegimos una fila o columna, por ejemplo la tercera columna. Determinamos los Adjuntosde los cuatro elementos de la tercera columna:
a13 = 3 ⇒ A13 = (−1)1+3
∣∣∣∣∣∣∣
1 1 1
3 0 −1
2 1 0
∣∣∣∣∣∣∣=
= (1) (1 · 0 · 0 + 1 · (−1) · 2 + 1 · 3 · 1− 1 · 0 · 2− 1 · (−1) · 1− 1 · 3 · 0) == 0− 2 + 3− 0 + 1− 0 = 0
Matrices y Determinante 25
a23 = 1 ⇒ A23 = (−1)2+3
∣∣∣∣∣∣∣
1 2 −1
3 0 −1
2 1 0
∣∣∣∣∣∣∣=
= (−1) (1 · 0 · 0 + 2 · (−1) · 2 + (−1) · 3 · 1− (−1) · 0 · 2− 1 · (−1) · 1− 2 · 3 · 0) == (−1)(0− 4− 3− 0 + 1− 0) = 6
a33 = 1 ⇒ A33 = (−1)3+3
∣∣∣∣∣∣∣
1 2 −1
1 1 1
2 1 0
∣∣∣∣∣∣∣=
= (1) (1 · 1 · 0 + 2 · 1 · 2 + (−1) · 1 · 1− (−1) · 1 · 2− 1 · 1 · 1− 2 · 1 · 0) == 0 + 4− 1 + 2− 1− 0 = 4
a43 = 2 ⇒ A43 = (−1)4+3
∣∣∣∣∣∣∣
1 2 −1
1 1 1
3 0 −1
∣∣∣∣∣∣∣=
= (−1) (1 · 1 · (−1) + 2 · 1 · 3 + (−1) · 1 · 0− (−1) · 1 · 3− 1 · 1 · 0− 2 · 1 · (−1)) =
= (−1)(−1 + 6− 0 + 3− 0 + 2) = −7
Finalmente multiplicamos cada uno de los cuatro elementos por su Adjunto y sumamos∣∣∣∣∣∣∣∣∣∣
1 2 3 −1
1 1 1 1
3 0 1 −1
2 1 2 0
∣∣∣∣∣∣∣∣∣∣
= 3 · 0 + 1 · 6 + 1 · 4 + 2(− 7) = 0 + 6 + 4− 14 = −4
¥
Como puede observarse la cantidad de operaciones para calcular un determinante aumentamuy rápidamente cuando aumenta el orden de la matriz. Hay que tener en cuenta que para undeterminante de orden 4 se deberán desarrollar 4 determinantes de orden 3. Para un determi-nante de orden 5, se obtienen 5 determinantes de orden 4 a desarrollar, dándonos un total de 20determinantes de orden 3. No es difícil llegar a conclusión de que el número de determinantesde orden 3 que se obtienen en el desarrollo de un determinante de orden n es
n!
3!=
n · (n− 1) · (n− 2) · · · · · 2 · 13 · 2 · 1 .
Si además tenemos en cuenta que cada determinante de orden 3 necesita de 18 multiplicacionesy 5 sumas, para calcular un determinante de orden 14 se necesitarían 23 · 14!
3!= 334,183,449,600

26 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
operaciones (multiplicaciones y sumas). Y de aquí la importancia de saber utilizar las herra-mientas actuales bien sean informáticas o calculadoras para que nos ahorren un buen númerode cálculos.
Una deducción lógica que nos puede servir para reducir el número de operaciones, es elegirpara aplicar la Regla de Laplace aquella fila o columna de la matriz que disponga de un mayornúmero de ceros entre sus elementos. De este modo, como sabemos que al multiplicar el elementonulo por su Adjunto, el resultado es cero, no necesitaremos calcular el Adjunto correspondiente.De este modo se simplifican muchos cálculos.
Ejemplo:
Consideremos el determinante de la matriz diagonal siguiente
|A| =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
2 1 −1 3 6 π
0 1 3√
(2) −2 0
0 0√2 0 −7 5
0 0 0 1 −2 1
0 0 0 0 2 1
0 0 0 0 0√2
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Desarrollando por la primera columna tenemos que
|A| = 2A11 + 0A21 + 0A31 + 0A41 + 0A51 + 0A61 = 2A11
Para calcular A11 tenemos que calcular
A11 = (−1)1+1
∣∣∣∣∣∣∣∣∣∣∣∣
1 3√
(2) −2 0
0√2 0 −7 5
0 0 1 −2 1
0 0 0 2 1
0 0 0 0√2
∣∣∣∣∣∣∣∣∣∣∣∣
Que desarrollando por también por la primera columna se queda reducido a la expresión A11 =
(−1)1+1 · 1A′11, por lo que tenemos que |A| = 2(−1)1+1 · 1 · A′
11 = 2 · 1 · A′11
Del mismo modo, para calcular A′11 tenemos que
A′11 = (−1)1+1
∣∣∣∣∣∣∣∣∣∣
√2 0 −7 5
0 1 −2 1
0 0 2 1
0 0 0√2
∣∣∣∣∣∣∣∣∣∣
=√2 · A′′
11
de donde |A| = 2 · 1 · √2 · A′′11 y siguiendo
A′′11 = (−1)1+1
∣∣∣∣∣∣∣
1 −2 1
0 2 1
0 0√2
∣∣∣∣∣∣∣= 1 · A′′′
11

Matrices y Determinante 27
por tanto, ahora, |A| = 2 · 1 · √2 · 1 · A′′′11 y finalmente
A′′′11 = (−1)1+1
∣∣∣∣∣2 1
0√2
∣∣∣∣∣ = 2 · Aiv11 = 2 ·
√2
quedando el determinante solo en
|A| = 2 · 1 ·√2 · 1 · 2 ·
√2 = 8
¥
Y del ejemplo, podemos deducir que en el caso de las matrices triangulares o diagonales, eldeterminante es igual al producto de los elementos de la diagonal principal.
1.3.4. Propiedades de los determinantes
1. Si en una matriz hay una fila o columna de ceros, el determinante de la matrizes cero.
Aplicando la Regla de Laplace a esa fila o columna se deduce que como todos los elementosde esa fila o columna son cero y la suma de productos de elementos por Adjuntos tambiénes cero.
2. El determinante de una matriz es igual al determinate de su traspuesta.
det(A) = det(At)
Ejemplo:
det(A) =
∣∣∣∣∣∣∣
2 3 5
−1 6 4
0 2 −1
∣∣∣∣∣∣∣= 2·6·(−1)+3·4·0+(−1)·2·5−5·6·0−3·(−1)·(−1)−2·4·2 =
= −12 + 0− 10− 0− 3− 16 = −41
det(At) =
∣∣∣∣∣∣∣
2 −1 0
3 6 2
5 4 −1
∣∣∣∣∣∣∣= 2·6·(−1)+(−1)·2·5+3·4·0−0·6·5−(−1)·3·(−1)−2·2·4 =
= −12− 10 + 0− 0− 3− 16 = −41
3. Si una fila o columna de una matriz se multiplica por un número, el determi-nante se multiplica por ese número.
Al aplicar la Regla de Laplace en esa fila o columna, todos los sumandos formados porel producto del elemento por su Adjunto, están multiplicados por el número, entonces

28 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
ese número es un factor común a la suma, aplicando la propiedad distributiva, se tienecomprobada la propiedad indicada.
Ejemplo: Puede calcularse que
∣∣∣∣∣∣∣
2 6 5
−1 12 4
0 4 −1
∣∣∣∣∣∣∣= −82 y teniendo en cuenta el ejemplo
anterior:∣∣∣∣∣∣∣
2 6 5
−1 12 4
0 4 −1
∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣
2 2 · 3 5
−1 2 · 6 4
0 2 · 2 −1
∣∣∣∣∣∣∣= 2 ·
∣∣∣∣∣∣∣
2 3 5
−1 6 4
0 2 −1
∣∣∣∣∣∣∣= 2 · (−41)
4. Si descomponemos una columna (o fila) de una matriz en suma de dos co-lumnas (o filas), las matrices compuestas por las mismas columnas (o filas)excepto la descompuesta que pasa cada sumando a una matriz, entonces lasuma de ambos determinantes es el igual al determinante de la matriz inicial.
Ejemplo:
∣∣∣∣∣∣∣
2 3 5
−1 6 4
0 2 −1
∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣
2 1 + 2 5
−1 2 + 4 4
0 3− 1 −1
∣∣∣∣∣∣∣=
=
∣∣∣∣∣∣∣
2 1 5
−1 2 4
0 3 −1
∣∣∣∣∣∣∣+
∣∣∣∣∣∣∣
2 2 5
−1 4 4
0 −1 −1
∣∣∣∣∣∣∣= −44 + 3 = −41
5. Si en un determinante se permutan dos filas (o columnas) el determinantecambia de signo.
Ejemplo:
∣∣∣∣∣∣∣
2 3 5
−1 6 4
0 2 −1
∣∣∣∣∣∣∣= −41
∣∣∣∣∣∣∣
2 3 5
0 2 −1
−1 6 4
∣∣∣∣∣∣∣= 2 · 2 · 4+ 3 · (−1) · (−1)+ 5 · 0 · 6− 5 · 2 · (−1)− 3 · 0 · 4− 2 · (−1) · 6 = 41
6. Si un determinante tiene dos filas (o columnas) iguales es cero.
7. Si en una matriz una fila (o columna) es el resultado de una combinación linealde otras filas (o columnas) su determinante es cero.
Ejemplo: En la siguiente matriz la tercera fila es el resultado de multiplicar la primerafila por 2 y restar la segunda.

Matrices y Determinante 29
∣∣∣∣∣∣∣
2 3 5
−1 6 4
5 0 6
∣∣∣∣∣∣∣= 0
8. Si a una fila (o columna) de una matriz se le suma una combinación lineal deotras líneas, el determinante no varía.
Ejemplo:
∣∣∣∣∣∣∣
2 3 5
−1 6 4
0 2 −1
∣∣∣∣∣∣∣= −41
Si a la tercer fila le sumo el doble de la primera y resto la segunda
∣∣∣∣∣∣∣
2 3 5
−1 6 4
5 2 5
∣∣∣∣∣∣∣= −41
9. El determinante del producto de dos matrices es igual al producto de losdeterminantes.
Ejemplo: Consideremos la dos matrices y su producto(
1 2
3 4
)·(
0 1
1 1
)=
(1 · 0 + 2 · 1 1 · 1 + 2 · 13 · 0 + 4 · 1 3 · 1 + 4 · 1
)=
(2 3
4 7
)
Los determinantes son∣∣∣∣∣1 2
3 4
∣∣∣∣∣ = 1 · 4− 2 · 3 = −2
∣∣∣∣∣0 1
1 1
∣∣∣∣∣ = 0 · 1− 1 · 1 = −1
∣∣∣∣∣2 3
4 7
∣∣∣∣∣ = 2 · 7− 3 · 4 = 2
y efectivamente ∣∣∣∣∣1 2
3 4
∣∣∣∣∣ ·∣∣∣∣∣0 1
1 1
∣∣∣∣∣ = (−2) · (−1) = 2 =
∣∣∣∣∣2 3
4 7
∣∣∣∣∣
1.4. Matriz Inversa
Por definición de inverso de un producto, si una matriz A ∈ Mn tiene inversa, debe existiruna matriz B ∈ Mn tal que A ·B = B ·A = In. En ese caso denotamos la inversa de A con elsímbolo A−1.
Ahora bien, ¿cuál es la condición que debe verificar una matriz cuadrada A para que tengainversa?

30 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
Si A tiene inversa A−1 entonces A · A−1 = In, entonces el determinante de ese productoserá 1, det (A · A−1) = det(In) = 1, por lo que aplicando las propiedades de los determinantesdet(A) · det(A−1) = 1, entonces ambos números, det(A) y det(A−1) tienen que ser distintos decero.
Por lo tanto, para que una matriz pueda tener inversa es necesario que su deter-minante sea distinto de cero.
det(A) 6= 0 ⇔ ∃A−1
1.4.1. Cálculo de la matriz inversa por Matriz Adjunta
Una vez que nos hayamos asegurado de que existe una la matriz inversa de una matrizA ∈ Mn, podemos proceder al cálculo del siguiente modo
A−1 =1
|A| · [Adj(A)]t =
1
|A| · Adj(At)
Es decir, la Matriz inversa de una Matriz A es igual a la matriz Traspuesta de la matriz Ad-junta multiplicada por el inverso del determinante, o también la matriz Adjunta de la traspuestamultiplicada por el inverso del determinante.
'
&
$
%
Propiedades la Inversa de una Matriz
1. Si existe es única
2. Idempotencia(A−1)−1 = A
3. Respecto del producto por escalares
(λA)−1 =1
λA−1
4. Respecto del producto de matrices
(A ·B)−1 = B−1 · A−1
5. |A−1| = 1|A|
Matrices y Determinante 31
Aplicaciones de la Matriz Inversa a la
CriptografíaLa palabra criptografía proviene del griego κρυπτω (kryptos), que significa oculto y γραϕω
(graphos), escribir, es decir, significa literalmente “escritura oculta”. La criptografía ha sidousada a través de los años para enviar mensajes confidenciales cuyo propósito era que sólo laspersonas autorizadas puedan entender el mensaje.
Si alguien que quiere mandar información confidencial aplica técnicas criptográficas parapoder “esconder” el mensaje, lo que usualmente se denomina como cifrar o encriptar, mandael mensaje por una línea de comunicación que se supone insegura y después solo el receptorautorizado pueda leer el mensaje “escondido”, lo que llamamos descifrar o descencriptar.
En realidad, es la criptología la ciencia que se dedica al estudio y análisis de sistemas queofrecen medios seguros de comunicación en los que un emisor oculta o cifra un mensaje antesde transmitirlo para que sólo un receptor autorizado pueda descifrarlo. Y es esta la que sedivide en dos partes diferenciadas: la propia criptografía que se dedica al diseño de sistemasde comunicación segura y el criptoanálisis que se dedica al estudio de técnicas para romper elsistema cifrado de las claves criptográficas.
La criptologia fue en un principio desarrollada con fines comunicacionales para diplomáticosy militares. Algunos de los ejemplos de su uso son la protección de archivos informáticos y laprotección de transacciones financieras informáticas.
El procedimiento utilizado para cifrar datos se realiza por medio de un “algoritmo”, al cual sele puede considerar como una función matemática. Por lo tanto, un algoritmo de cifrado es unafórmula para desordenar una información de manera que ésta se transforme en incomprensible,usando un código o clave (en ocasiones, más de una). Los mensajes que se tienen que proteger,denominados texto en claro o texto plano, se transforman mediante esta función, y a la salidadel proceso de puesta en clave se obtiene el texto cifrado o cifrograma. En muchos casos existeun algoritmo de descifrado encargado de reordenar la información y volverla inteligible, perono siempre es así. Cuando existen ambas funciones, una para cifrar y otra para descifrar, sedice que el sistema criptográfico es de dos vías o reversible (a partir de un mensaje en claro sepuede obtener uno cifrado y a partir de éste se puede obtener el mensaje original), mientras quecuando no existe una función para descifrar, se dice que el sistema es de una sola vía (a partirde un mensaje cifrado no es posible obtener el mensaje en claro que lo generó; la aplicación deesto es, por ejemplo, para el almacenamiento de contraseñas).
La transformación de datos provee una posible solución a dos de los problemas de la segu-ridad en el manejo de datos. El problema de la privacidad y el de la autentificación, evitandoque personas no autorizadas puedan extraer información del canal de comunicación o modificarestos mensajes.
La criptografía es una disciplina con multitud de aplicaciones, muchas de las cuales estánen uso hoy en día. Entre las más importantes destacamos las siguientes:

32 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
Seguridad de las comunicaciones. Es la principal aplicación de la criptografía a lasredes de computadores, ya que permiten establecer canales seguros sobre redes que no loson. Además, con la potencia de cálculo actual y empleando algoritmos de cifrado simétrico(que se intercambian usando algoritmos de clave pública), se consigue la privacidad sinperder velocidad en la transferencia.
Identificación y autentificación. Gracias al uso de firmas digitales y otras técnicascriptográficas es posible identificar a un individuo o validar el acceso a un recurso en unentorno de red con más garantías que con los sistemas de usuario y clave tradicionales.
Certificación. La certificación es un esquema mediante el cual agentes fiables (comouna entidad certificadora) validan la identidad de agentes desconocidos (como usuariosreales). El sistema de certificación es la extensión lógica del uso de la criptografía paraidentificar y autentificar cuando se usa a gran escala.
Comercio electrónico. Gracias al empleo de canales seguros y a los mecanismos deidentificación se posibilita el comercio electrónico, ya que tanto las empresas como losusuarios tienen garantías de que las operaciones no pueden ser espiadas, reduciéndose elriesgo de fraudes, timos y robos además de diferentes tipos de estafa.
Nosotros vamos a aplicar lo aprendido en el estudio de matrices para practicar un métodomuy simple, pero efectivo, para codificar y decodificar mensajes. Ten en cuenta que siempreque transmitimos un mensaje cifrado, la persona que lo recibe tiene que tener los mecanismosoportunos para descifrarlo. Este sistema ha sido importante en la historia de la criptografía,fue inventado por Lester S. Hill en 1929, y fue el primer sistema criptográfico polialfabético queera práctico para trabajar con mas de tres símbolos simultáneamente.
Para poner en práctica nuestro método vamos a necesitar una tabla en la que haremoscorresponder un número a cada letra del abecedario y al espacio, por ejemplo
A B C D E F G H I J K L M N27 26 25 24 23 22 21 20 19 18 17 16 15 14Ñ O P Q R S T U V W X Y Z13 12 11 10 9 8 7 6 5 4 3 2 1 0
Se elige un entero d que determina bloques de d elementos que van a ser tratados comovectores de d dimensiones y una matriz cuadrada de orden d que será la matriz de cifrado autilizar. Los elementos de esta matriz deben ser números enteros comprendidos entre 0 y 27,además la matriz debe ser inversible, por ejemplo, tomamos d = 5 y como matriz
Matriz =
1 0 1 3 1
1 4 5 1 9
0 1 1 0 1
2 2 3 0 9
1 6 0 0 8
Inversa =1
88
44 −132 352 88 0
10 −30 128 4 12
3 −9 100 10 −14
18 34 −104 −28 4
−13 39 −140 −14 2
Matrices y Determinante 33
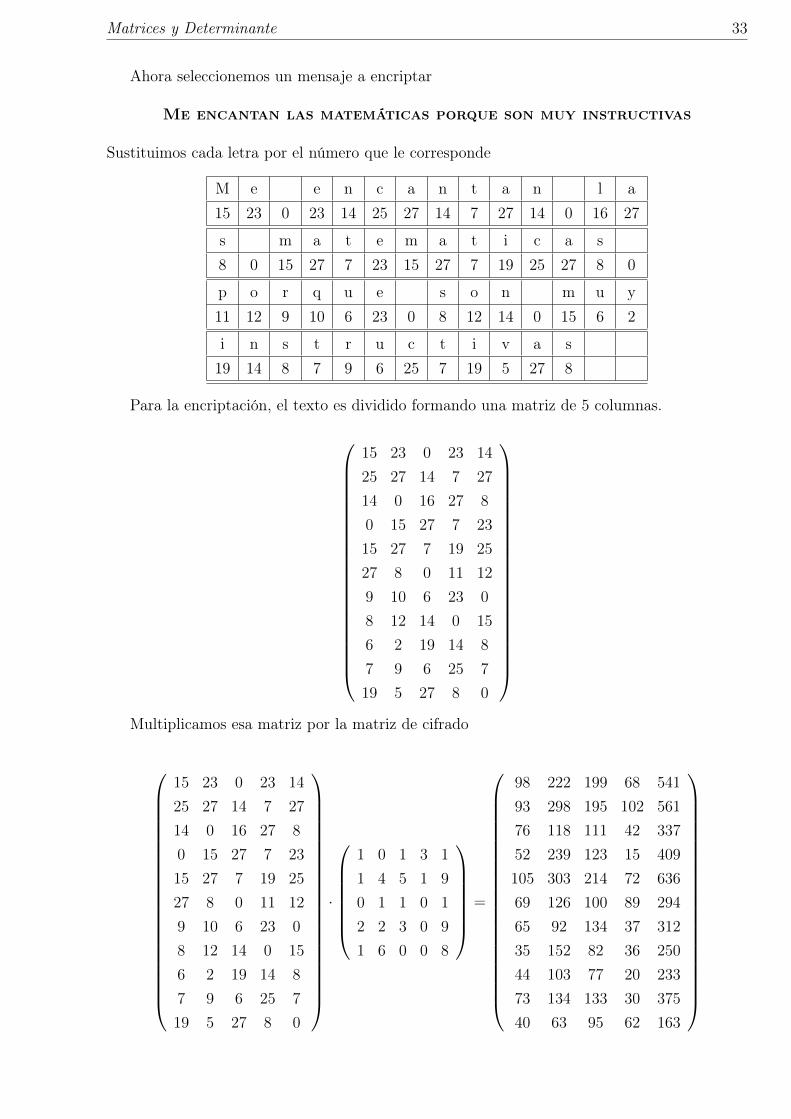
Ahora seleccionemos un mensaje a encriptar
Me encantan las matemáticas porque son muy instructivas
Sustituimos cada letra por el número que le corresponde
M e e n c a n t a n l a15 23 0 23 14 25 27 14 7 27 14 0 16 27
s m a t e m a t i c a s8 0 15 27 7 23 15 27 7 19 25 27 8 0
p o r q u e s o n m u y11 12 9 10 6 23 0 8 12 14 0 15 6 2
i n s t r u c t i v a s19 14 8 7 9 6 25 7 19 5 27 8
Para la encriptación, el texto es dividido formando una matriz de 5 columnas.
15 23 0 23 14
25 27 14 7 27
14 0 16 27 8
0 15 27 7 23
15 27 7 19 25
27 8 0 11 12
9 10 6 23 0
8 12 14 0 15
6 2 19 14 8
7 9 6 25 7
19 5 27 8 0
Multiplicamos esa matriz por la matriz de cifrado
15 23 0 23 14
25 27 14 7 27
14 0 16 27 8
0 15 27 7 23
15 27 7 19 25
27 8 0 11 12
9 10 6 23 0
8 12 14 0 15
6 2 19 14 8
7 9 6 25 7
19 5 27 8 0
·
1 0 1 3 1
1 4 5 1 9
0 1 1 0 1
2 2 3 0 9
1 6 0 0 8
=
98 222 199 68 541
93 298 195 102 561
76 118 111 42 337
52 239 123 15 409
105 303 214 72 636
69 126 100 89 294
65 92 134 37 312
35 152 82 36 250
44 103 77 20 233
73 134 133 30 375
40 63 95 62 163

34 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
La matriz con los datos obtenidos tras la multiplicaciónsería la que se enviaría, por ejemplo mediante un correoelectrónico tal y como muestra la figura. De este modo, elreceptor del mensaje, sólo tendrá que deshacer los pasosdados. Dividir el mensaje en una matriz de 5 columnas,multiplicar dicha matriz por la matriz inversa de la matrizde cifrado y buscar la correspondencia de letras respecto anúmeros.
Con este método se consigue dificultar el trabajo de des-cifrado para aquella persona que no conozca las claves.
Es un método sencillo y fácil de programar con ayuda deherramientas informáticas. También hay que destacar queel método descrito necesita pocos elementos para el cifradoy para que funcione tanto el emisor como el receptor delmensaje debe sólo deben conocer ambos: la tabla de corres-
pondencia entre letras y números y la Matriz de cifrado.
Evidentemente este no es un método muy seguro para los tiempos actuales. En la actualizadlas técnicas de cifrado utilizan conceptos matemáticos mucho más avanzados y basados enresultados matemáticos muy recientes, que llegan a permitir que, ni con la ayuda de los másmodernos ordenadores actuales, sea prácticamente imposible descifrar un código generado conlas técnicas admitidas por el sistema Advanced Encryption Standard (AES). Tan sólo unosinvestigadores afirmaron, en 2005, haber descifrado con éxito un código basado en bloques de128 bits, el admitido por AES. Pero hasta la fecha no se ha comprobado que sea cierto.
Por otro lado, la matemática ya tiene resueltos estos posibles inconvenientes para el caso deordenadores más potentes, tan sólo no se han llevado a la práctica por decisiones empresarialesde cambio de software.
1.5. Rango de una matriz
Dada una matriz cualquiera podemos considerar que dentro de ella hay otras submatricessin más que seleccionar aquellos elementos que forman parte de unas determinadas filas ycolumnas. Por ejemplo, consideremos la matriz siguiente:
A =
1 0 2 5 1 0
2 2 0 3 1 2
0 0 2 2 3 0
1 1 6 4 2 3
en ella seleccionaremos aquellos elementos que están en las filas 1 y 3 y en las columnas 2, 4 y

Matrices y Determinante 35
5. De esta forma podemos formar la matriz de orden 2× 3
A′ =
(0 5 1
0 2 3
)
Dentro de las múltiples submatrices que podemos formar tienen un especial interés aquellassubmatrices que son cuadradas. Y de estas consideramos su determinante. Así podemos definirel concepto de menor de orden k:
Â
Á
¿
À
Menor de orden k una matrizSea A = (aij) ∈ Mm×n y sea M ⊂ A una submatrizcuadrada de orden k, decimos que det(M) es un menorde orden k de la matriz.
Si consideramos la matriz
A =
1 0 2 5
2 2 0 3
1 1 6 4
tendremos que esta matriz tiene los siguientes menores:
De orden 1 tiene 12 menores, los doce valores de la matriz: 1, 0, 2, 5, 2, 2, 0, 3, 1, 1, 6 y4.
De orden 2 tiene 18 menores:∣∣∣∣∣1 0
2 2
∣∣∣∣∣ = 2;
∣∣∣∣∣1 2
2 0
∣∣∣∣∣ = −4;
∣∣∣∣∣1 5
2 3
∣∣∣∣∣ = −7;
∣∣∣∣∣0 2
2 0
∣∣∣∣∣ = −4;
∣∣∣∣∣0 5
2 3
∣∣∣∣∣ = −10;
∣∣∣∣∣2 5
0 3
∣∣∣∣∣ = 2;
∣∣∣∣∣1 0
1 1
∣∣∣∣∣ = 1;
∣∣∣∣∣1 2
1 6
∣∣∣∣∣ = 4;
∣∣∣∣∣1 5
1 4
∣∣∣∣∣ = −1;
∣∣∣∣∣0 2
1 6
∣∣∣∣∣ = −2;
∣∣∣∣∣0 5
1 4
∣∣∣∣∣ = −5;
∣∣∣∣∣2 5
6 4
∣∣∣∣∣ = −22;
∣∣∣∣∣2 2
1 1
∣∣∣∣∣ = 0;
∣∣∣∣∣2 0
1 6
∣∣∣∣∣ = 6;
∣∣∣∣∣2 3
1 4
∣∣∣∣∣ = 5;
∣∣∣∣∣2 0
1 6
∣∣∣∣∣ = 6;
∣∣∣∣∣2 3
1 4
∣∣∣∣∣ = 5;
∣∣∣∣∣0 3
6 4
∣∣∣∣∣ = −18.
De orden 3 tiene 4 menores:
∣∣∣∣∣∣∣
1 0 2
2 2 0
1 1 6
∣∣∣∣∣∣∣= 12;
∣∣∣∣∣∣∣
1 0 5
2 2 3
1 1 4
∣∣∣∣∣∣∣= 5;
∣∣∣∣∣∣∣
1 2 5
2 0 3
1 6 4
∣∣∣∣∣∣∣= 32;
∣∣∣∣∣∣∣
0 2 5
2 0 3
1 6 4
∣∣∣∣∣∣∣= 50.
No tiene menores de orden 4 o superior al no contener ninguna submatriz de orden mayorque 3.

36 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
Ahora podemos dar la definición de rango de una matriz :
Â
Á
¿
À
Rango de una matrizSea A = (aij) ∈ Mm×n se llama rango de la matrizA al mayor orden de todos los menores distintos de cerode la matriz.
En el caso del ejemplo anterior el rango de la matriz es 3 pues tiene menores de orden 3distintos de cero y este es el mayor orden posible
rang
1 0 2 5
2 2 0 3
1 1 6 4
= 3
En el caso de la matriz B =
1 0 2 1
2 2 2 0
3 2 4 1
puede comprobarse que el rango es 2, ya que
los cuatro menores de orden 3 son cero:
∣∣∣∣∣∣∣
1 0 2
2 2 2
3 2 4
∣∣∣∣∣∣∣= 0;
∣∣∣∣∣∣∣
1 0 1
2 2 0
3 2 1
∣∣∣∣∣∣∣= 0;
∣∣∣∣∣∣∣
1 2 1
2 2 0
3 4 1
∣∣∣∣∣∣∣= 0;
∣∣∣∣∣∣∣
0 2 1
2 2 0
2 4 1
∣∣∣∣∣∣∣= 0.
y además existe un menor de orden 2 distinto de cero,
∣∣∣∣∣1 0
2 2
∣∣∣∣∣ = 2 6= 0.
1.5.1. Herramientas informáticas de interés para el calculo matricial
WolframAlpha es un buscador de respuestas desarrollado por la compañía WolframResearch. Es un servicio en línea que responde a las preguntas directamente, mediante elprocesamiento de la respuesta extraída de una base de datos estructurados. Tiene grandesposibilidades y simplicidad de cálculo general (en inglés). http://www.wolframalpha.com/
Maxima potente programa completo de cálculo simbólicas. De gran extensión e interfaz ypotencialidad similar a Mathematica el programa matemático más extendido del mundo.Es gratuito: http://maxima.sourceforge.net/es/
Derive es un programa completo de cálculo simbólico. Uno de los más utilizados por suinterfaz de ventanas cómodas. Es de pago, por lo que se recomienda probar primero conla versión demo. http://www.derisoft.com.

Matrices y Determinante 37
1.6. Ejercicios
1. Sabiendo que A es
(1 2
2 1
)y que la inversa de A · B es
(2 4
5 3
)Calcular la inversa
de B
2. Dar un ejemplo de tres matrices de orden dos, A,B,C ∈ M2, no nulas y distintas entresí tales que A ·B = A · C. ¿Puedes afirmar algo sobre el determinante de A?
3. Calcula los determinantes
a)
∣∣∣∣∣∣∣∣∣∣
3 1 1 1
1 3 1 1
1 1 3 1
1 1 1 3
∣∣∣∣∣∣∣∣∣∣
, b)
∣∣∣∣∣∣∣∣∣∣∣∣
2 1 1 1 1
1 3 1 1 1
1 1 4 1 1
1 1 1 5 1
1 1 1 1 6
∣∣∣∣∣∣∣∣∣∣∣∣
, c)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
5 6 0 0 0 0
1 5 6 0 0 0
0 1 5 6 0 0
0 0 1 5 6 0
0 0 0 1 5 6
0 0 0 0 1 5
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣Sol: a) 48 , b) 394, c) 665
4. Calcular los determinantes de la matrices simplificando al máximo
A =
(senα cosα
cosα − senα
)B =
(x− 1 1
x3 x2 + x+ 1
)
C =
(tanα −1
1 tanα
)D =
(a+ b a− b
a− b a+ b
)
Sol: |A| = −1, |B| = −1, |C| = cos−2 α, |D| = 4ab
5. Encontrar una justificación para que el siguiente determinante sea nulo∣∣∣∣∣∣∣
1 1 1
a b c
b+ c a+ c a+ b
∣∣∣∣∣∣∣
6. Calcular, si es posible, la inversa de las siguientes matrices
a)
(2 3
5 7
)b)
1 2 3
4 5 6
7 8 9
c)
1 1 1 1
1 2 3 4
1 3 1 0
1 0 3 0
7. ¿Para qué valores de a la matriz
a 0 1
1 1 1
a 0 a− 1
es invertible?
8. ¿Para qué valores de a y b la matriz
a 0 1
1 b a
−1 1 1
es invertible?

38 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
9. Justificar que si A es una matriz cuadrada de orden n y λ un escalar no nulo, entonces|λA| = λn|A|.
10. ¿Es cierto que si A es una matriz cuadrada de orden n que verifica que A · At = In,entonces necesariamente |A| = 1?
11. ¿Es cierto que | − A| = −|A|?
12. Determinante de Vandermonde. A partir de comprobar que
a)
∣∣∣∣∣1 x1
1 x2
∣∣∣∣∣ = (x2 − x1),
b)
∣∣∣∣∣∣∣
1 x1 x21
1 x2 x22
1 x3 x23
∣∣∣∣∣∣∣= (x3 − x2)(x3 − x1)(x2 − x1)
c)
∣∣∣∣∣∣∣∣∣∣
1 x1 x21 x3
1
1 x2 x22 x3
2
1 x3 x23 x3
3
1 x4 x24 x3
4
∣∣∣∣∣∣∣∣∣∣
= (x4 − x3)(x4 − x2)(x4 − x1)(x3 − x2)(x3 − x1)(x2 − x1)
deducir que ∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
1 x1 x21 · · · xn−1
1
1 x2 x22 · · · xn−1
2
1 x3 x23 · · · xn−1
3
......
... . . . . . .
1 xn x2n · · · xn−1
n
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
=n∏
i>j
(xi − xj)
13. Sea A una matriz cuadrada de orden n, B una matriz cuadrada de orden m y C unamatriz de orden n ×m. Comprobar que la matriz cuadrada de orden n +m, compuesta
de la forma
(A C
0 B
)tiene por determinante |A| · |B|, esto es
∣∣∣∣∣A C
0 B
∣∣∣∣∣ = |A| · |B|
14. Resuelva, si se dan las condiciones necesarias, las ecuaciones matriciales
a)
4 7 8
7 5 9
8 9 6
·
x1 y1 z1
x2 y2 z2
x3 y3 z3
=
1 2 3
2 4 5
3 5 6
b)
1 0 0 0
0 0 4 7
0 2 3 0
0 0 6 8
·
x1 y1 z1 w1
x2 y2 z2 w2
x3 y3 z3 w3
x4 y4 z4 w4
=
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1

Matrices y Determinante 39
15. Demuestra, sin calcularlo, que el determinante
∣∣∣∣∣∣∣
1 0 5
3 3 0
4 6 5
∣∣∣∣∣∣∣es múltiplo de 15.
16. Demuestra, sin calcularlo, que el determinante
∣∣∣∣∣∣∣
1 2 1
1 9 8
5 0 6
∣∣∣∣∣∣∣es múltiplo de 11.
17. Resuelve la ecuación ∣∣∣∣∣∣∣∣∣∣
x 1 0 0
0 x 1 0
0 0 x 1
1 0 0 x
∣∣∣∣∣∣∣∣∣∣
= 0
18. Resuelve la ecuación ∣∣∣∣∣∣∣∣∣∣
−1 x x x
x −1 x x
x x −1 x
x x x −1
∣∣∣∣∣∣∣∣∣∣
= 0
19. Dada la matriz A =
1 1 1
0 m −1
1 −1 m
, averigua para qué valores del parámetro m existe
A−1. Calcula A−1 para m = 1.
20. El determinante
∣∣∣∣∣∣∣
2 a 5
4 a2 13
8 a3 35
∣∣∣∣∣∣∣vale 0 cuando a = 3. Compruébalo e indica las propiedades
aplicadas para justificarlo.
21. Dadas las matrices A =
(1 2 m
1 −1 −1
)y B =
1 3
m 0
0 2
, calcula los valores de m
para los que la matriz A ·B no tiene inversa.
22. Dadas las matrices A =
(1 2 m
1 −1 −1
)y B =
1 3
m 0
0 2
, calcula los valores de m
para los que la matriz B · A no tiene inversa.
23. Determinar dos matrices A y B tales que:
3A− 5B =
(1 −2
8 1
); − A+ 3B =
(2 4
3 0
)

40 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
24. Dadas las matrices:
A =
(1 2
3 −2
); B =
(0 3
1 2
); C =
(−1 −3
0 2
)
Calcular:A+B − C ; A−B + C ; A−B − C
2A− 3B ; 3B − 5A ; A− (B − 2C)
25. Hallar la matriz M que satisface la igualdad:
2
(1 0 1 −1
0 1 1 3
)=
(1 0 1 −2
0 1 0 5
)+M
26. Dadas las matrices:
A =
3 5 2
1 3 4
6 0 1
; B =
−1 0 2
3 1 5
6 1 4
; C =
4 6 7
3 5 0
0 0 2
Calcular A(B + C), ABτ , BτA, A(3B − 2C), A2
27. Dadas las matrices:
A =
(2 0
−4 15
); B =
(1 −1
−2 9
)
Resolver el sistema matricial:5X + 3Y = A
3X + 2Y = B
y calcular X2 + Y 2.
28. Dada la matriz A =
(a b
c d
)de coeficientes reales, hallar x e y para que se verifique:
A2 = xA+ yI
siendo I la matriz unidad de orden 2, es decir: I =
(1 0
0 1
)
29. Probar que para cualquier matriz cuadrada A, la matriz A · Aτ es simétrica.
30. ¿Por qué hay que premultiplicar a la matriz
(1 0
2 1
)para que resulte
(5 2
6 3
),
31. Dada la matriz A =
(1 2
3 λ
), determinar todas las matrices B de dimensión 2 × 2 tales
que A ·B =
(0 0
0 0
), obteniendo el valor de λ para que exista solución.

Matrices y Determinante 41
32. Sea A una matriz cuadrada idempotente (A2 = A). Demostrar que si B = 2A − I, esB2 = I.
33. Dada la matriz:
M =
0 z −y
−z 0 x
y −x 0
en la que se verifica x2 + y2 + z2 = 1, calcular M2, P = M2 + I, PM y comprobar que Pes idempotente.
34. Obtener todas las matrices cuadradas de segundo orden A tales que A2 = I.
35. Calcular las potencias sucesivas de la matriz:
A =
1 1 1
1 1 1
1 1 1
36. Hallar el rango de las siguientes matrices:4 6 8 0
1 2 3 0
3 4 5 0
;
3 4 4 0
1 3 2 −2
2 1 2 2
;
1 2 3 t
2 4 6 8
3 6 9 12
según t
37. Discutir el rango de la matriz:
1 1 −1 2
a 1 1 1
1 −1 3 −3
4 2 0 a
según los valores de a.
38. Calcular el rango de la matriz:
A =
t 0 t 0
4 −6 8 −2
−2 3 −4 1
según los valores de t.
39. Una matriz cuadrada M es ortogonal si cumple M τ ·M = I donde I es la matriz identidady M τ es la traspuesta de M . Determinar si la siguiente matriz es ortogonal:
A =
1 1 0
1 −1 1
1 0 −1

42 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
40. Hallar el rango de la matriz:
5 5 5
a b c
b+ c a+ c a+ b
según los valores de a, b, c.
41. Resolver la ecuación matricial:(1 −1
3 2
)·(x
y
)=
(1 x
y −1
)·(3
2
)
42. Calcular el rango de la matriz:
2 1 5 −1 8
−1 2 3 4 5
3 −1 4 5 1
1 3 10 13 11
43. Sean:
A =
(1 1
1 1
); B =
1 1 1
0 1 1
0 0 1
Calcular An y Bn por inducción respecto a n.
44. ¿Es posible que para dos matrices A y B no cuadradas, puedan existir A ·B y B · A?.
45. Hallar todas las matrices simétricas de orden 2 tales que A2 = A.
46. Siendo A =
(1 1
0 1
), hallar todas las matrices B de segundo orden tales que A·B = B ·A
47. Hallar el rango de las matrices:
1 2 0 1
3 0 1 2
1 2 3 0
6 0 −1 5
;
1 6 11 16
2 7 12 17
3 8 13 18
4 9 14 19
5 10 15 20
1 −1 2 3
0 2 −1 4
3 1 4 1
−1 1 0 2
;
2 1 −1
2 3 1
4 −2 a
según los valores de a
48. Si A y B son dos matrices cuadradas del mismo orden, ¿es cierta en general la relación(A+B)2 = A2 + 2AB +B2?. Justificar la respuesta.

Matrices y Determinante 43
49. Sean A y B dos matrices cuadradas del mismo orden que tienen inversa. Razonar si elproducto A ·B también tiene inversa.
50. Consideramos la matriz
A =
0 3 4
1 −4 −5
−1 3 4
a) Siendo I la matriz identidad 3× 3 y O la matriz nula 3× 3, probar que A3 + I = O.
b) Calcular A10.
51. Calcular: ∣∣∣∣∣∣∣∣∣∣
0 1 1 1
−1 0 1 1
−1 −1 0 1
−1 −1 −1 0
∣∣∣∣∣∣∣∣∣∣
,
∣∣∣∣∣∣∣∣∣∣
1 2 3 6
2 3 5 10
3 7 2 12
4 5 6 15
∣∣∣∣∣∣∣∣∣∣
,
∣∣∣∣∣∣∣∣∣∣
1 2 3 4
5 6 7 8
9 10 11 12
13 14 15 16
∣∣∣∣∣∣∣∣∣∣
52. Calcular: ∣∣∣∣∣∣∣
a a a
−a a x
−a −a x
∣∣∣∣∣∣∣
53. Calcular: ∣∣∣∣∣∣∣∣∣∣
0 0 1 1
3 3 1 2
3 1 1 3
3 1 1 4
∣∣∣∣∣∣∣∣∣∣
,
∣∣∣∣∣∣∣∣∣∣
14 0 0 0
13 7 9 8
17 5 6 4
3 11 0 0
∣∣∣∣∣∣∣∣∣∣
,
∣∣∣∣∣∣∣∣∣∣
a b 0 0
0 a b 0
0 0 a b
b 0 0 a
∣∣∣∣∣∣∣∣∣∣
54. Calcular y simplificar al máximo:∣∣∣∣∣∣∣
a− b− c 2a 2a
2b b− c− a 2b
2c 2c c− a− b
∣∣∣∣∣∣∣,
∣∣∣∣∣∣∣
x− 1 x2 − 1 x3 − 1
2x− 4 x2 − 4 x3 − 8
3x− 9 x2 − 9 x3 − 27
∣∣∣∣∣∣∣
55. Calcular: ∣∣∣∣∣∣∣∣∣∣
a a a a
a b b b
a b c c
a b c d
∣∣∣∣∣∣∣∣∣∣
56. Los números 1573, 3263, 5369 y 2613 son divisibles por 13. Demostrar que también lo esel determinante: ∣∣∣∣∣∣∣∣∣∣
1 5 7 3
3 2 6 3
5 3 6 9
2 6 1 3
∣∣∣∣∣∣∣∣∣∣

44 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
57. Resolver las siguientes ecuaciones:∣∣∣∣∣∣∣
15 + 2x 11 x
11 + 3x 17 −2x
7 + x 14 −3x
∣∣∣∣∣∣∣= 0 ;
∣∣∣∣∣∣∣
−1 2 2
−x 3 −1
x2 −1 −3
∣∣∣∣∣∣∣= 0
∣∣∣∣∣∣∣
a− x x 1
a+ x −x2
−3
x x3
0
∣∣∣∣∣∣∣= 0 ;
∣∣∣∣∣∣∣
a+ x x x
x b+ x x
x x c+ x
∣∣∣∣∣∣∣= 0
58. Dada la ecuación: ∣∣∣∣∣∣∣
1 1 1
1 x 1
1 1 x2
∣∣∣∣∣∣∣= 0
se pide:
a) Teniendo en cuenta las propiedades de los determinantes, hallar una solución de laecuación dada sin desarrollar el determinante del primer miembro.
b) Hallar las restantes soluciones de dicha ecuación.
59. Demostrar las dos igualdades que siguen:∣∣∣∣∣∣∣∣∣∣
1 1 1 1
1 a+ 1 1 1
1 1 b+ 1 1
1 1 1 c+ 1
∣∣∣∣∣∣∣∣∣∣
= abc ;
∣∣∣∣∣∣∣∣∣∣
a+ 1 a a a
a a+ 1 a a
a a a+ 1 a
a a a a+ 1
∣∣∣∣∣∣∣∣∣∣
= 4a+ 1
60. Calcular por transformaciones elementales (sin emplear la regla de Sarrus) y justificandolos pasos, el determinante: ∣∣∣∣∣∣∣
1 b c+ a
1 a b+ c
1 c a+ b
∣∣∣∣∣∣∣
61. Dadas las matrices:
A =
1 3 1
−1 0 2
3 1 −2
; B =
0 1 3
−1 2 1
3 1 2
Comprobar que |A ·B| = |A| · |B|.
62. Sabiendo que ∣∣∣∣∣∣∣
a b c
d e f
g h i
∣∣∣∣∣∣∣= 2

Matrices y Determinante 45
calcular los siguientes determinantes y enunciar las propiedades que se utilicen:∣∣∣∣∣∣∣
3a 3b 15c
d e 5f
g h 5i
∣∣∣∣∣∣∣;
∣∣∣∣∣∣∣
a+ 2b c b
d+ 2e f e
g + 2h i h
∣∣∣∣∣∣∣
63. Hallar las matrices inversas de:
A =
(3 1
8 3
); B =
2 1 2
0 3 1
4 −2 1
; C =
1 1 2
2 0 −1
−6 −1 0
64. Verificar que todas las matrices A =
(a b
c d
)tales que a + d = −1 y |A| = 1, cumplen
A3 = I. ¿Hay alguna otra matriz que tenga esta propiedad?.
65. Dada la matriz A =
(2 3
2 1
), se llaman valores propios de dicha matriz a los valores de
λ, tales que el determinante de la matriz A − λI sea nulo. Hallar los valores propios deA. (I representa la matriz identidad o unidad).
66. Hallar la inversa de la matriz:
3 −2 −3
−4 1 −1
2 0 1
67. Resolver la ecuación A ·X = B, siendo:
A =
(2 3
1 2
); B =
(3 1
2 −5
)
68. Hallar una matriz X tal que:
0 1 2
−1 1 3
4 −1 −5
·X =
1 0 2 0
−1 3 1 0
−5 −1 4 0
69. Dada la matriz:
A =
1 1 0
0 1 1
1 0 1
Estudiar si tiene inversa y en caso afirmativo, calcularla.
70. Dada la matriz:
A =
(1 1
0 1
)
Demostrar que la inversa de An es
(1 −n
0 1
).

46 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
71. Hallar los valores de x para los cuales, la matriz:
A =
(|x| 1
|x− 2| 2
)
no tiene inversa.
72. Resolver la ecuación matricial A ·X ·B = C, siendo:
A =
(−1 0
0 1
); B =
(2 5
1 3
); C =
(1 0
0 1
)
73. Resolver la ecuación matricial M ·X +N = P , siendo:
M =
(−1 0
0 −1
); N =
(1 2
3 4
); P =
(4 3
2 1
)
74. Calcular la matriz X en la ecuación A3 ·X = B, siendo:
A =
(a b
c d
); a+ d = 1 ; |A| = 1 ; B =
(1 −2
0 3
)
75. Encontrar una matriz X que verifique A ·X +B = C, siendo:
A =
1 0 0
1 2 0
1 2 4
; B =
1 0 0
0 1 0
0 0 1
; C =
3 0 0
2 5 2
0 1 3
76. Resolver la ecuación matricial:5 2 0
0 0 1
3 1 0
·X =
0 1 1
1 0 0
1 1 0
77. Hallar los valores de λ para los que la matriz:
A =
1 1 λ
λ 2 −1
3 1 1
tiene inversa. Calcular su inversa cuando λ = 1.
78. Hallar el rango de la matriz A según los diferentes valores de t ∈ R, siendo:
A =
t t 0
2 t+ 1 t− 1
−2t− 1 0 t+ 3
¿Para qué valores de t existe A−1?.

Matrices y Determinante 47
79. Sea la matriz:
A =
x− 2 0 2
0 x− 2 0
0 0 x
a) Hallar los valores de x para los que A tiene inversa.
b) Hallar la matriz Y cuadrada de orden 3 que es solución de la ecuación matricialA · Y + B = I, siendo A la matriz anterior para x = 3, I es la matriz identidad deorden 3 y B es la matriz:
B =
1 0 −1
2 0 0
3 1 0
80. Dadas las matrices:
A =
0 −1 −2
−1 0 −2
1 1 3
; I =
1 0 0
0 1 0
0 0 1
Determinar si es posible un valor de λ para el cual la matriz (A−λI)2 sea la matriz nula.
81. Discutir, en función del valor de a el rango de la matriz:
A =
a 1 0
0 1 3
a 1 1
Para a = 2, >tiene A matriz inversa?. En caso afirmativo, calcularla.
82. Dadas las matrices
C =
(1 0 2
0 1 1
), D =
1 0
1 1
1 −1
determinar si C ·D tiene inversa, y en ese caso, hallarla.
83. La matriz cuadrada X de orden 3 verifica la relación:
X3 +X =
2 4 7
0 2 4
0 0 2
a) Determinar, si es posible, el rango de X.
b) ¿Verifica alguna de las matrices A y B siguientes la relación del enunciado?
A =
1 1 1
0 0 1
0 0 1
, B =
1 1 1
0 1 1
0 0 1

48 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
84. Se dice que una matriz cuadrada A de orden n es ortogonal si su inversa A−1 y sutraspuesta At coinciden. Dado un número real x, sea B la matriz
B =
cosx senx 0
− senx cosx 0
0 0 −1
a) ¿Es ortogonal la matriz B?.
b) ¿Es B2 ortogonal?.
85. Considerar las matrices:
A =
1 1 0
1 0 1
−1 1 1
, B =
1 1 1
0 1 1
0 0 0
a) Determinar si A y B son invertibles y, en su caso, calcula la matriz inversa.
b) Resolver la ecuación matricial BA− A2 = AB −X.
86. El determinante ∣∣∣∣∣∣∣
2 a 5
4 a2 13
8 a3 35
∣∣∣∣∣∣∣
vale cero para a = 3. Comprobar esta afirmación sin desarrollarlo e indicando las propie-dades de los determinantes que se apliquen. Determinar todos los valores de a para losque las tres columnas del determinante anterior representan vectores linealmente depen-dientes. Justificar la respuesta.
87. Sea C la matriz, que depende de un parámetro m, dada por
C =
2 −1 m
1 0 −1
−2 1 1
a) ¿Para qué valores del parámetro m no tiene inversa la matriz C?.
b) Calcular la matriz inversa de C para m = 2.
88. Consideremos las matrices
A =
(3 2
4 3
), X =
(x
y
), U =
(7
9
)
a) Hallar los valores de x e y tales que AX = U .
b) Calcular la matriz A−1 y determinar A−1U .

Matrices y Determinante 49
c) Encontrar los posibles valores de m para los que los vectores
A ·(1
m
)y
(1
m
)
son linealmente dependientes.
89. Resolver la ecuación matricial A2 ·X = 2B, siendo
A =
(1 −1
2 −3
)y B =
(1 −1 4
0 −3 1
),
90. De las matrices
A =
(1 2
3 4
), B =
(1 2 3
4 5 6
), C =
(1 1
3 3
), D =
1 2 3
0 1 2
0 0 1
determina cuáles tienen inversa y en los casos que exista, calcula el determinante de dichasinversas.
91. Se sabe que la matriz A =
a 0 −a
0 −1 0
b 0 b
verifica que det(A) = 1 y sus columnas son
vectores perpendiculares dos a dos.
a) Calcular los valores de a y b.
b) Comprobar que para dichos valores se verifica que A−1 = At, donde At denota lamatriz traspuesta de A.
92. Determinar la matriz X tal que AX − 3B = 0, siendo
A =
1 0 −1
2 3 −7
0 1 −2
y B =
1 2
−1 0
−2 1
93. Consideremos la matriz A =
1 0 −2
1 1 1
1 1 0
a) Calcular el determinante de las matrices 2A, A31 y (A31)−1.
b) Hallar la matriz A−1.
94. Consideremos la matriz A =
1 λ 1
λ 1 λ
0 λ 1
a) Determinar para qué valores del parámetro λ la matriz A no tiene inversa.

50 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
b) Calcular, si es posible, la matriz inversa de A para λ = −2.
95. Considerar la matriz
A =
1 2 1
λ 1 0
0 1 λ
a) Hallar los valores de λ para los que la matriz A no tiene inversa.
b) Tomando λ = 1, resolver el sistema escrito en forma matricial
A
x
y
z
=
0
0
0
96. Dada la matriz
A =
(1 2
3 4
)
calcular (AtA−1)2A.
97. Se considera la matriz
A =
1 0 −1
0 b 3
4 1 −b
a) Determinar para qué valores del parámetro b existe A−1.
b) Calcular A−1 para b = 2.
98. Sea
A =
senx − cosx 0
cosx senx 0
senx+ cos x senx− cosx 1
¿Para qué valores de x existe la matriz inversa de A?. Calcular dicha matriz inversa.
99. Determinar la matriz X que verifica la ecuación AX = X −B siendo
A =
0 0 1
0 0 0
−1 0 0
y B =
1 0 1
0 1 1
0 −1 −1
100. Sean C1, C2 y C3 las columnas primera, segunda y tercera, respectivamente, de una matrizcuadrada A de orden 3 cuyo determinante vale 5. Calcular, indicando las propiedadesutilizadas:
a) El determinante de A3.
b) El determinante de A−1.
c) El determinante de 2A.

Matrices y Determinante 51
d) El determinante de una matriz cuadrada cuyas columnas primera, segunda y tercerason, respectivamente, 3C1 − C3, 2C3 y C2.
101. Considerar las matrices
A =
1 0 0
1 m 0
1 1 1
, B =
0 1 1
1 0 0
0 0 0
y C =
1 0 0
0 1 0
1 0 1
a) ¿Para qué valores de m tiene solución la ecuación matricial A ·X + 2B = 3C?.
b) Resuelve la ecuación matricial dada para m = 1.
102. Considerar las matrices
A =
(1 0 1
0 1 2
), B =
1 0
0 1
0 0
y C =
1 0
0 2
1 0
a) Calcular A ·B, A ·C, At ·Bt, Ct ·At siendo At, Bt y Ct las matrices traspuestas deA, B y C respectivamente.
b) Razonar cuáles de las matrices A, B, C y A ·B tienen inversa y en los casos en quela respuesta sea afirmativa, hallarla.
103. Sean las matrices
A =
(2 1
3 −2
), B =
(0 1 0
3 −1 2
), C =
(1 2 0
−1 1 4
)
a) ¿Tiene A inversa?. En caso afirmativo, calcularla.
b) Determinar la matriz X que cumple que A ·X +C ·Bt = B ·Bt, siendo Bt la matriztranspuesta de B.
104. Sabiendo que:
|A| =
∣∣∣∣∣∣∣
a b c
d e f
g h i
∣∣∣∣∣∣∣= 2
calcular, indicando las propiedades que utilices, los siguientes determinantes:
a) | − 3A| y |A−1|.
b)
∣∣∣∣∣∣∣
c b a
f e d
2i 2h 2g
∣∣∣∣∣∣∣.
c)
∣∣∣∣∣∣∣
a b a− c
d e d− f
g h g − i
∣∣∣∣∣∣∣.

52 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
105. Consideremos la matriz:
A =
(a 1
0 −a
)
siendo a un número real.
a) Calcular el valor de a para que
A2 − A =
(12 −1
0 20
)
b) Calcular, en función de a, los determinantes de las matrices 2A, At, siendo At latraspuesta de A.
c) ¿Existe algún valor de a para el cual la matriz A es simétrica?. Razona la respuesta.
106. Resolver ABtX = −2C siendo Bt la traspuesta de la matriz B y
A =
(1 0 3
2 −1 0
), B =
(−1 3 0
0 2 −2
), C =
(1 4
0 −1
)
107. Consideremos la matriz:
A =
(1 −1
1 λ
)
a) Determinar la matriz B = A2 − 2A.
b) Determinar los valores de λ para los que la matriz B tiene inversa.
c) Calcular B−1 para λ = 1.
108. Sea I la matriz identidad de orden 2, y sea:
A =
(1 m
1 1
)
a) Encontrar los valores de m para los cuales se cumple que (A− I)2 = O, donde O esla matriz nula de orden 2.
b) Para m = 2, hallar la matriz X tal que AX − 2At = 0, donde At denota la matriztraspuesta de A.
109. Sean F1, F2 y F3 las filas primera, segunda y tercera, respectivamente, de una matriz B
de orden 3, cuyo determinante vale −2. Calcular, indicando las propiedades utilizadas:
a) El determinante de B−1.
b) El determinante de (Bt)4 (Bt es la matriz traspuesta de B).
c) El determinante de 2B.
d) El determinante de una matriz cuadrada C cuyas filas primera, segunda y tercerason, respectivamente, 5F1 − F3, 3F3, F2.

Matrices y Determinante 53
110. Sean las matrices
A =
1 −2 1
−2 −1 1
1 0 −1
, B =
(3 1 0
−1 2 1
), C =
−2 1
1 −2
0 3
Determinar la matriz X que verifica AX −Bt = 2C (Bt es la matriz traspuesta de B).
111. Sean las matrices:
A =
1 0 −1
0 m 3
4 1 −m
, B =
1 0
3 2
−1 1
, C =
(5 −3 4
−3 −2 2
)
a) Indicar los valores de m para los que A es invertible.
b) Resolver la ecuación matricial XA−Bt = C para m = 0 (Bt es la matriz traspuestade B).

54 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”

Capítulo 2
Sistemas de ecuaciones lineales
2.1. Introducción a los sistemas de ecuaciones lineales
Al principio del capítulo anterior indicábamos que un Sistema de Ecuaciones Lineales era unconjunto de ecuaciones de grado uno que comparten las mismas incógnitas. Resolver ese sistemapor tanto consiste en encontrar una serie de valores que al ser sustituidos por las incógnitas delsistema hace ciertas todas las igualdades.
lo primero que necesitamos para trabajar con cierta generalidad es una notación adecuada.De este modo, las incógnitas las escribiremos utilizando las últimas letras del alfabeto: x, y, z,. . . y los datos o coeficientes del sistema de ecuaciones los escribiremos utilizando las primerasletras del alfabeto: a, b, c, . . . . Ahora bien, como la teoría que vamos a estudiar es válidapara cualquier número de ecuaciones e incógnitas, utilizaremos preferentemente la siguienteforma de escribir: las incógnitas las escribiremos con la letra x y un subíndice numérico, estoes: x1, x2; x3, . . . ; y los datos o coeficientes los indicaremos con dos subíndices, el primero deellos indicará el número de ecuación y el segundo la incógnita a la que esta asociado, de estemodo a36 indicará que es el coeficiente de la 3a ecuación y 6a incógnita; los datos o coeficientesque no están asociados a ninguna incógnita, lo conocidos como términos independientes, losescribiremos con la letra b y un subíndice que indica la ecuación a la que pertence, así b1 es eltérmino independiente de la primera ecuación, b2 es el término independiente de la 2a ecuación,etc. De forma general escribimos un sistema de m ecuaciones y n incógnitas del siguiente modo
a11x1 +a12x2 + . . . +a1nxn = b1,
a21x1 +a22x2 + . . . +a2nxn = b2,...
......
......
am1x1 +am2x2 + . . . +amnxn = bm,
donde los subíndices i toman valores desde i = 1 hasta i = m (i = 1, . . . ,m), los j tomanvalores desde j = 1 hasta j = n, (j = 1, . . . , n), los números supuestamente conocidos aij sonlos datos que supondremos conocidos, los conocidos como coeficientes del sistema, al igualque los números bi que son los términos independientes.
55

56 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
El problema consiste entonces en hallar los números supuestamente desconocidos, las incóg-nitas, números xi, tales que se satisfagan las m ecuaciones simultáneamente. Nos referiremos aun sistema de este tamaño como a un sistema m× n, donde m hace referencia a la cantidadde ecuaciones, y n a la de incógnitas.
El problema de hallar los valores xi de las n incógnitas puede considerarse como el problemade hallar un lista de valores X = (x1, x2, . . . , xn) compuesta por n números. Aunque en unaprimera consideración no parece haber una gran ventaja en este enfoque, más allá de pensaren un sólo objeto en vez de en n, pero si tenemos en cuenta que estas listas de números puedenser vistas como vectores, matrices o tensores, es decir elementos de una estructura algebraica ogeométrica más compleja, que nos permite ver la gran utilidad y aplicabilidad que la resoluciónde ecuaciones puede llegar a tener.
De forma general decimos que una solución del sistema es una lista de n números(α1, α2, . . . , αn) tales que si se sustituyen x1 por α1, x2 por α2 y así sucesivamente hasta xn porαn se verifican simultáneamente las m ecuaciones, esto es:
a11α1 +a12α2 + . . . +a1nαn = b1,
a21α1 +a22α2 + . . . +a2nαn = b2,...
......
......
am1α1 +am2α2 + . . . +amnαn = bm,
Veamos un ejemplo. El sistema
{x1 + x2 = 1,
x1 − x2 = 1,tiene como solución (x1, x2) = (1, 0) ya
que
{1 + 0 = 1,
1− 0 = 1,.
Pero el sistema
{x1 + x2 = 1,
2x1 + 2x2 = 2,admite muchas soluciones, por ejemplo (1, 0), (2,−1)
y en general cualquier pareja cuya suma sea 1, ya que todas ellas satisfacen ambas ecuaciones.
Y sin embargo el sistema
{x1 + x2 = 1,
2x1 + 2x2 = 5,no admite ninguna solución puesto que es
imposible que la suma de dos números sea 1 y la de sus dobles sea 5.
De estos deducimos que un sistema lineal de ecuaciones puede tener una única solución, unnúmero infinito de soluciones o ninguna. Nuestra tarea al estudiarlos será encontrar y describirla solución de estos sistemas en el siguiente sentido. Dado un sistema de ecuaciones llamaremossolución del sistema al conjunto de todas aquellas listas que sean solución particular delmismo. Por lo tanto, resolver un sistema es determinar su el conjunto de soluciones.
2.2. Clasificación de sistemas de ecuaciones lineales
La clasificación de los sistemas de ecuaciones lineales se realiza teniendo en cuenta doscriterios principales: la distribución de incógnitas y la solución del sistema.

Matrices y Determinante 57
Respecto a la distribución de incógnitas consideramos un tipo especial de sistemas de ecua-ciones lineales: los sistemas escalonados.
'
&
$
%
Sistema de ecuaciones linealesescalonado
Un sistema de ecuaciones lineales se dice que es escalo-nado si cada ecuación tiene las mismas incógnitas ex-cepto un que la ecuación anterior.
De este modo el sistema de ecuaciones siguiente es escalonado:
3x +2y +5z −2t = 6
x −3z +3t = 5
−4x +5t = 8
3t = 99
ya que en la segunda ecuación están las incógnitas x, z y t que son las mismas que las de la 1a
ecuación excepto la y; en la 3a ecuación están las incógnitas x y t que son las mismas que enla 2a ecuación excepto la z; y en la 4a ecuación está la incógnita t son las mismas que las de 3a
excepto la x.
Lo mismo ocurre en el sistema
x −3y +4z −3t = 678
y −9z +12t = 15
2y +5t = 85
aunque este no tenga igual número de ecuaciones que de incógnitas. Sin embargo el sistemasiguiente no es escalonado:
3x +2y +5z −2t = 6
x −3z +3t = 5
−4y +5t = 8
3x = 99
ya que aunque el número de incógnitas disminuye en una unidad en cada nueva ecuación, la 1a
tiene 4 incógnitas, la 2a tiene 3, la 3a tiene 2 y la´4a tiene 1, las incógnitas de la 3a ecuaciónno están entre las incógnitas de la 2a puesto que la 3a tiene la y que la 2a no tenía, y lo mismoocurre entre las 3a y 4a ecuaciones.
Los sistemas de ecuaciones escalonados, cuando tienen el mismo números de ecuacionesque incógnitas, tienen la ventaja de que se pueden resolver de forma muy sencilla. Se despejala incógnita de la última ecuación, en ejemplo t = 99
3= 33, y se sustituye en la penúltima
ecuación, en el ejemplo −4x + 5 · 33 = 8, permitiendo despejar la única incógnita que queda,x = 8−165
−4= 157
4, así sucesivamente de forma escalonada hacia arriba se pueden obtener la
solución, es decir, el valor de todas las incógnitas, en el ejemplo (x, y, z, t) = (1574, −1607
12, 533
12, 33).

58 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
De forma teórica escribiremos los sistemas de ecuaciones escalonados de la forma siguiente:
a11x1 +a12x2 +a13x3 + . . . +a1nxn = b1,
a22x2 +a23x3 + . . . +a2nxn = b2,
a33x3 + . . . +a2nxn = b3,...
......
amnxn = bm,
Otra forma de clasificar los sistemas de ecuaciones es por sus soluciones, en primer lugarconsideremos el número de soluciones. Hemos visto sistemas que tiene un única solución, unnúmero infinito de soluciones o ninguna solución. Ahora bien, es posible que haya un sistema deecuaciones con sólo dos soluciones. La respuesta es NO. La razón es bien sencilla, si un sistema deecuaciones cualquiera tiene como soluciones la matriz A = (a1, a2, . . . , an) y B = (b1, b2, . . . , bn),no es difícil demostrar que entonces para cualquier número real λ, la matriz C = A+λ(A−B)
también es una solución del sistema. Por lo que si hay dos podemos obtener infinitas.
De este modo clasificamos los sistemas de ecuaciones del siguiente modo:
'
&
$
%
Clasificación de los Sistemas de ecuacioneslineales
Compatibles aquellos sistemas que tienen alguna solución. Sedividen en:
• Determinados : aquellos que tienen una única solución.
• Indeterminados : aquellos que tienen infinitas soluciones.
Incompatibles : aquellos que no tienen solución.
Finalmente, hay que señalar un tipo especial de sistemas de ecuaciones, aquel en el que lostérminos independientes son todos cero, un sistema del tipo:
a11x1 +a12x2 + . . . +a1nxn = 0,
a21x1 +a22x2 + . . . +a2nxn = 0,...
......
......
am1x1 +am2x2 + . . . +amnxn = 0,
Este tipo de sistemas tiene la característica especial de que admite siempre al menos unasolución, la que se conoce como solución trivial, aquella en la que todas las incógnitas son igualesa cero (xi = 0). Por lo tanto este tipo de sistema es siempre compatible. Si es determinado, suúnica solución es la trivial; si es indeterminado tendrá infinitas soluciones entre las que está lasolución trivial. Este tipo de sistemas recibe el nombre de sistema homogéneo.

Matrices y Determinante 59
2.3. Expresión matricial de los sistemas de ecuaciones li-
neales
Si observamos con atención un sistema de ecuaciones lineales cualquiera
5x −3y +2z −t = 9
x +2y −z +4t = 0
5x −4y +z −3t = −5
−x −y +z −t = 2
podemos ver que se puede escribir utilizando matrices del siguiente modo
5 −3 2 −1
1 2 −1 4
5 −4 1 −3
−1 −1 1 −1
·
x
y
z
t
=
9
0
−5
2
Esta modo de proceder se puede extender a cualquier tipo de sistema de ecuaciones lineales,de este modo el sistema genérico
a11x1 +a12x2 + . . . +a1nxn = 0,
a21x1 +a22x2 + . . . +a2nxn = 0,...
......
......
am1x1 +am2x2 + . . . +amnxn = 0,
se puede escribir de forma matricial
a11 a12 . . . a1n
a21 a22 . . . a2n...
......
am1 am2 . . . amn
·
x1
x2
...xm
=
b1
b2...bm
Una de las primeras ventajas que encontramos con este procedimiento reside en considerarque en una matriz como la del ejemplo, como se verifica que su determinante es distinto decero, se puede escribir el sistema del siguiente modo
x
y
z
t
=
5 −3 2 −1
1 2 −1 4
5 −4 1 −3
−1 −1 1 −1
−1
·
9
0
−5
2
y calculando la inversa se tiene que
5 −3 2 −1
1 2 −1 4
5 −4 1 −3
−1 −1 1 −1
−1
=1
25
7 −5 −4 −15
18 −20 −21 −35
19 −10 −18 −5
−6 15 7 20

60 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
de donde se tiene que
x
y
z
t
=1
25
7 −5 −4 −15
18 −20 −21 −35
19 −10 −18 −5
−6 15 7 20
·
9
0
−5
2
=
53251972525125−4925
La introducción de las matrices esta motivada por el deseo de almacenar en un único objeto,una matriz, toda la información relevante acerca de un sistema de ecuaciones lineales. Veamoscómo nos ayudan en esta tarea. Dado un sistema lineal de ecuaciones
a11x1 + a12x2 + . . .+ a1nxn = b1,
a21x1 + a22x2 + . . .+ a2nxn = b2,...
...am1x1 + am2x2 + . . .+ amnxn = bm,
llamaremos matriz del sistema a la matriz A que tiene dimensión m × n, donde m es elnúmero de ecuaciones y n el número de incógnitas del sistema, y que está formada por suscoeficientes.
Esto es:
A =
a11 a12 . . . a1n
a21 a22 . . . a2n...
... . . . ...am1 am2 . . . amn
.
Llamaremos, matriz ampliada del sistema a la matriz formada por la matriz del sistemay la columna de términos independientes, es decir una matriz de orden m× (n+ 1)
a11 a12 . . . a1n b1
a21 a22 . . . a2n b2...
... . . . ......
am1 am2 . . . amn bm
.
Usualmente escribiremos esta matriz en la forma
a11 a12 . . . a1n b1
a21 a22 . . . a2n b2...
... . . . ......
am1 am2 . . . amn bm
,
para recordar que estamos considerando la matriz ampliada de un sistema, cuya última columnatiene un significado diferente a las anteriores. También las representaremos en la forma breveA|B.
Naturalmente, toda la información que necesitamos sobre el sistema lineal está encerradaen la matriz ampliada A|B. Veremos más adelante que, en realidad, mucha de la informaciónrelevante acerca del sistema sólo depende de la matriz A formada por sus coeficientes.

Matrices y Determinante 61
Esta notación más compacta (matricial) para un sistema de ecuaciones nos libera de escribiruna y otra vez los nombres que hemos escogido para las incógnitas. Veamos un ejemplo:
Consideremos el sistema
x+ y + 2z = 9,
3x+ 6y − 5z = 0,
2x+ 4y − 3z = 1.
Entonces la matriz del sistema y la matriz ampliada son:
A =
1 1 2
3 6 −5
2 4 −3
, A|B =
1 1 2 9
3 6 −5 0
2 4 −3 1
.
2.4. El método de eliminación de Gauss
El objetivo de esta sección es presentar un método sistemático para la resolución de sistemaslineales de cualquier tamaño. La idea del método es muy simple: ir reduciendo en cada paso elproblema a un problema que tiene una ecuación menos y una incógnita menos hasta llegar aun sistema escalonado. Este método es conocido como método de eliminación Gaussianao de Gauss. El nombre alude a que en cada paso vamos eliminando una o más incógnitas, yson un reconocimiento a quien utilizó el método para resolver grandes sistemas de ecuacionescon muchas incógnitas. La idea de este método es transformar, por medio de la eliminacióninteligente de incógnitas, el problema original en un problema de sencilla solución. En nuestropróximo ejemplo mostramos uno de estos sistemas lineales de fácil solución, del tipo de los queintenta conseguir el método expuesto por Gauss.
Ejemplo: Busquemos tres números reales x, y y z que satisfagan
x+ y + 2z = 8,
2y + z = 8
z = 2.
Éste es un sistema 3×3 muy fácil de resolver. De la última ecuación se despeja z = 2. Con estevalor de z sustituimos en la segunda ecuación y tenemos
2y + 2 = 8 ⇒ 2y = 6 ⇒ y = 3.
Finalmente con los valores de y y z hallados “subimos” a la primera ecuación y sustituyendo setiene que
x+ 3 + 2× 2 = 8 ⇒ x = 1.
En consecuencia, el sistema es compatible y determinado, es decir, tiene una única solución,que es
x = 1, y = 3, z = 2.

62 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
Podemos escribir esta solución como la lista de tres números reales (1, 3, 2). El conjunto desoluciones del sistema es{(1, 3, 2)}.
El procedimiento de despejar una incógnita en una ecuación y sustituirla en otra de arribase denomina sustitución hacia arriba, y es posible por la forma particular de este sistema.
Mostraremos ahora con un ejemplo como el método de eliminación gaussiana permite trans-formar el problema de calcular las soluciones de un sistema lineal en el problema de resolverun sistema lineal escalonado.
Ejemplo: Busquemos las soluciones del sistema
x+ y + 2z = 8,
x+ 2y + z = 0,
2x+ y + z = 4.
Veamos paso a paso la resolución del sistema
Paso 1. Comenzamos por conseguir eliminar la variable x de todas las ecuaciones menosuna, usando el siguiente procedimiento: para eliminar la x en la segunda ecuación le restamosla primera; como x aparece en la tercera ecuación con un factor 2 multiplicamos la primeraecuación por 2, y luego la restamos de la tercera. Obtenemos
x+ y + 2z = 8,
y − z = −8,
−y − 3z = −12.
El resultado del Paso 1 es que x no aparece en la segunda ni en la tercera ecuación. Simiramos esas dos ecuaciones aisladamente nuestro problema se reduce a un sistema 2 × 2,con incógnitas y y z. Una vez resuelto este problema, más pequeño que el original, podremoscalcular x usando la primera ecuación. De esta manera el algoritmo de eliminación va reduciendoel tamaño del problema.
Paso 2. Haremos desaparecer la variable y de la tercera ecuación. Simplemente sumamosla segunda ecuación a la tercera, y nuestro sistema se transforma en
x+ y + 2z = 8,
y − z = −8,
−4z = −20.
Nuestro sistema ya alcanzó la forma escalonada que lo vuelve de fácil resolución, por lo quedetenemos aquí nuestro algoritmo.
Paso 3. Resolvemos este último sistema. De la tercera ecuación concluimos z = 5. Sus-tituyendo hacia arriba y despejando de la segunda ecuación obtenemos y = −3. Finalmente,usamos los valores de hallados en la primera ecuación, para concluir que x = 1.
Último paso. Verificación. Parece que hemos resuelto el problema. Pero, ¿qué nosgarantiza que las soluciones halladas son las soluciones del problema original? Podemos verificar

Matrices y Determinante 63
que es así, sustituyendo los valores x = 1, y = −3 y z = 5 en el sistema
1× 1 + 1× (−3) + 2× 5 = 8,
1× 1 + 2× (−3) + 1× 5 = 0,
2× 1 + 1× (−3) + 1× 5 = 4.
Vemos que, efectivamente, nuestra presunta solución es realmente la solución del sistema.
De forma más general, cuando estemos trabajando con el sistema general:
a11x1 +a12x2 + . . . +a1nxn = b1,
a21x1 +a22x2 + . . . +a2nxn = b2,...
......
......
am1x1 +am2x2 + . . . +amnxn = bn,
restaríamos a la i-ésima ecuación, para i = 2, 3, . . . , el resultado de multiplicar la primeraecuación por el cociente ai1
a11, es decir, dividir el coeficiente ai1 que aparece multiplicando a x1
en la ecuación i por el coeficiente a11 que x1 tiene en la primera ecuación.
En el caso de que x1 no apareciera en la primera ecuación significa que a11 es cero y nopodemos hacer este cálculo. En este caso cambiaremos el orden de las ecuaciones, y pondríamosen primer lugar una ecuación en que la variable x1 aparezca.
Las transformaciones que hemos realizado en cada paso del ejemplo consisten en repetiruna y otra vez la misma operación: sumar a una de las ecuaciones un múltiplo de otra. Mos-traremos a continuación que esta operación no modifica el conjunto de soluciones del sistema:el nuevo sistema que obtenemos es equivalente al original, en el sentido de que ambos tienenexactamente el mismo conjunto solución. Naturalmente, luego de aplicar una serie de transfor-maciones que preservan la equivalencia de sistemas el sistema final es equivalente al sistemaoriginal: no hemos agregado ni perdido soluciones en todo el proceso.
'
&
$
%
ProposiciónSi en un sistema lineal de ecuaciones se sustituye una ecuación porel resultado de sumar a esa misma ecuación un múltiplo de otra,entonces el sistema resultante tiene el mismo conjunto solución queel sistema original.
Demostración. Supongamos que el sistema original sea
a11x1 +a12x2 + . . . +a1nxn = b1,
a21x1 +a22x2 + . . . +a2nxn = b2,...
......
......
ai1x1 +ai2x2 + . . . +ainxn = bi,...
......
......
aj1x1 +aj2x2 + . . . +ajnxn = bj,...
......
......
am1x1 +am2x2 + . . . +amnxn = bm,

64 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
y que sumamos a la ecuación j el resultado de multiplicar ambos miembros de la ecuación i
por un número β. Obtenemos un nuevo sistema
a11x1 +a12x2 + . . . +a1nxn = b1,
a21x1 +a22x2 + . . . +a2nxn = b2,...
......
......
ai1x1 +ai2x2 + . . . +ainxn = bi,...
......
......
aj1x1 +aj2x2 + . . . +ajnxn+
β(ai1x1 +ai2x2 + . . . +ainxn) = bj + βbi,...
......
......
am1x1 +am2x2 + . . . +amnxn = bm,
Para probar que ambos son equivalentes deberemos ver que cualquier solución del primersistema es solución del segundo sistema y viceversa. Veamos el primer caso, que cualquiersolución del primero es solución del segundo.
Sea (α1, α2, . . . , αn) una solución del primer sistema. Es evidente que (α1, α2, . . . , αn) satis-face todas las ecuaciones del segundo sistema salvo, tal vez, la j-ésima ecuación, pues son lasmismas que las del primero. Como (α1, α2, . . . , αn) debe verificar la i-ésima y j-ésima ecuacióndel primer sistema se tiene que
ai1α1 + ai2α2 + · · ·+ ainαn = bi
y queaj1α1 + aj2α2 + · · ·+ ajnαn = bj.
Multiplicando ambos miembros de la primera igualdad por β y sumando miembro a miembro,se deduce inmediatamente que
aj1α1 + · · ·+ ajnαn + β(ai1α1 + · · ·+ ainαn) = bj + βbi.
Por lo tanto, también la j-ésima ecuación del segundo sistema se satisface.
La verificación de que cualquier solución del segundo sistema es también solución del primersistema emplea esencialmente el mismo argumento. Igual que antes es claro que (α1, α2, . . . , αn)
debe verificar todas las ecuaciones del primer sistema salvo tal vez la j-ésima. Por la j-ésimaecuación en el segundo sistema sabemos que
aj1α1 + · · ·+ ajnαn + β(ai1α1 + · · ·+ ainαn) = bj + βbi,
en tanto que la i-ésima implica
ai1α1 + ai2α2 + · · ·+ ainαn = bi.
Multiplicamos esta ambos miembros de esta expresión por β, y restamos a la expresión anterior,para concluir
aj1α1 + aj2α2 + · · ·+ ajnαn = bj.

Matrices y Determinante 65
Esto muestra que (α1, α2, . . . , αn) es solución del primer sistema y la prueba esta concluída.
Esta proposición es el fundamento teórico del método de eliminación gaussiana y nos aseguraque en cada paso hemos respetado la equivalencia entre el sistema de partida y el de llegada.
En el proceso de eliminación hay veces en que es imprescindible intercambiar ecuaciones.Junto con la transformación de sumar a una ecuación un múltiplo de otra, esto es todo loque necesitaremos para el método de eliminación gaussiana. Además de estas operaciones re-curriremos a la de multiplicar una ecuación por algún número distinto de cero. Llamaremostransformaciones elementales a estas operaciones.
'
&
$
%
Transformaciones Elementales
1. Sumar a una ecuación un múltiplo de otra;
2. Intercambiar de lugar dos ecuaciones;
3. Multiplicar una ecuación por un número distinto de cero.
Nuestro interés por estas transformaciones proviene de que por medio del método de elimi-nación nos permiten transformar cualquier sistema lineal en un sistema escalonado equivalentede fácil resolución. Éste es el contenido de nuestra siguiente proposición y su corolario.
º
¹
·
¸
ProposiciónSi a un sistema de ecuaciones le aplicamos una operación elementalobtenemos un sistema equivalente al original.
#
"
Ã
!
CorolarioSi transformamos un sistema de ecuaciones aplicando una secuenciade transformaciones elementales obtenemos un sistema equivalenteal original.
Notemos que cuando una ecuación es sustituida por el resultado de sumarle un múltiplo deotra la información contenida en la ecuación eliminada no desaparece: está implícita en la nuevaecuación, porque la ecuación sustituida entró con un coeficiente no nulo en la formación de estanueva ecuación (en la mayoría de los casos este coeficiente será igual a 1). Esta nueva ecuación,junto con la que se usó en la combinación lineal, permiten recuperar la ecuación eliminada.
La notación matricial simplifica la escritura e implementación del algoritmo de eliminacióngaussiana. Antes de mostrar con un ejemplo la implementación del método de Gauss con lanotación matricial detengámonos en algunas observaciones. Cada fila de la matriz del sistemacorresponde a una de las ecuaciones del sistema. Las operaciones del método de Gauss se tradu-cirán entonces en operaciones sobre las filas de la matriz. En particular, las transformacioneselementales serán, en este contexto, las siguientes:
1. Sumar a una fila el resultado de multiplicar otra por un número cualquiera.

66 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
2. Intercambiar de lugar dos filas.
3. Multiplicar una fila por un número no nulo.
Cada incógnita del sistema queda en correspondencia con una de las columnas de la matrizA del sistema. Encontrar una entrada aij igual a 0 en la matriz A es equivalente a que laincógnita xj no aparezca en la i-ésima ecuación.
Con la introducción de las matrices ganamos, para empezar, con la economía en la notación.Pero no es todo. Veremos a lo largo de este curso que las matrices pueden ser consideradas desdevarios puntos de vista:
En muchas situaciones son una forma ordenada de escribir la información disponible;
Pueden ser consideradas como un arreglo de m× n números;
Como un conjunto ordenado de n columnas;
Como un arreglo de m filas;
También como un único objeto, que es además un elemento de una estructura algebraica.
Finalmente, pueden ser vistas como la definición de una transformación de Rn en Rm.
Vamos a reescribir los pasos del ejemplo
a11 a12 . . . a1n b1
a21 a22 . . . a2n b2...
... . . . ......
am1 am2 . . . amn bm
,
en notación matricial. Esto permite conseguir bastante economía en la notación. El sistemaoriginal queda expresado en la forma:
1 1 2 8
1 2 1 0
2 1 1 4
.
Cada ecuación está ahora representada por una fila de coeficientes en la matriz ampliada delsistema.
Pero antes de continuar, un poco de jerga matemática: Llamaremos pivote a la primeraentrada no nula de cada fila de una matriz. Con esta terminología podemos describir la elimi-nación de Gauss como un procedimiento que busca, a través de la aplicación reiterada de lastransformaciones elementales, dejar un único pivote por columna. En cada paso de la elimina-ción gaussiana, una vez escogido un pivote, lo empleamos para eliminar todos los otros pivotesde la misma columna.

Matrices y Determinante 67
Paso 1. Las operaciones que antes hacíamos con las ecuaciones deben hacerse ahora sobrefilas de coeficientes. Escogemos el pivote 1 en la primera fila, y restamos entonces esta primerafila de la segunda para hacer aparecer un cero en el primer lugar de la segunda fila (esto es equi-valente a hacer desaparecer la variable x en la ecuación correspondiente). Luego multiplicamosla primera fila por 2 y la restamos de la tercera. El resultado es
1 1 2 8
0 1 −1 −8
0 −1 −3 −12
.
Sólo un pivote, el 1 de la primera fila, aparece en la primera columna.
Paso 2. Sumamos la segunda fila a la tercera y llegamos a la matriz escalonada1 1 2 8
0 1 −1 −8
0 0 −4 −20
.
Observemos que con la representación matricial hemos aligerado bastante la notación.
La nueva matriz ampliada es una representación del sistema de ecuaciones
x+ y + 2z = 8,
y − z = −8,
−4z = −20,
cuya solución podemos calcular directamente. La tercera ecuación implica z = 5. Al sustituiren la segunda podemos despejar y = −3. Finalmente, la primera implica x − 3 + 2 × 5 = 8,por lo que x = 1. El procedimiento de escalonar y resolver el sistema escalonado sustituyendohacia arriba nos permite hallar el conjunto solución del sistema original.
Pondremos en práctica la técnica con un nuevo ejemplo. Resolver el sistema:
x1 + 2x2 + x3 + x5 + x6 = 1
−x1 − 2x2 + x3 + x4 − x6 = 0
x1 + 2x2 + x3 + 2x4 + 5x5 + 3x6 = 1
x1 + 2x2 + x3 + x5 + 3x6 = 3
x1 + 2x2 + x3 + 4x4 + 9x5 + 3x6 = −1
La matriz ampliada del sistema es:
1 2 1 0 1 1 1
−1 −2 1 1 0 −1 0
1 2 1 2 5 3 1
1 2 1 0 1 3 3
1 2 1 4 9 3 −1
.
El proceso comienza fijando la entrada no nula de la primera fila como pivote y utilizándola

68 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
para lograr ceros en el resto de la primera columna. El resultado es la matriz
1© 2 1 0 1 1 1
0 0 2 1 1 0 1
0 0 0 2 4 2 0
0 0 0 0 0 2 2
0 0 0 4 8 2 −2
←− F2 + F1
←− F3 − F1
←− F4 − F1
←− F5 − F1.
Hemos anotado al margen de la matriz las transformaciones que en este primer paso del procesode escalonado fueron hechas a la matriz ampliada del sistema. Creemos que la notación empleadaes suficientemente clarificadora.
En el ejemplo anterior, se utilizaba la entrada a22 en el segundo paso para conseguir cerosen la segunda columna. Aquí esto no es posible pues la segunda columna ya tiene todas susentradas, salvo la primera, nulas. En consecuencia, el siguiente paso deberá centrarse en latercera columna, donde aparece la entrada no nula a23. Por debajo de a23 sólo hay ceros, asíque continuamos nuestro algoritmo usando el pivote 2 de la posición a34. He aquí la matriz quese obtiene, junto con la indicación de las operaciones realizadas:
1© 2 1 0 1 1 1
0 0 2© 1 1 0 1
0 0 0 2© 4 2 0
0 0 0 0 0 2 2
0 0 0 0 0 −2 −2
←− F5 − 2F3
En el tercer paso operaremos sobre la sexta columna:
1© 2 1 0 1 1 1
0 0 2© 1 1 0 1
0 0 0 2© 4 2 0
0 0 0 0 0 2© 2
0 0 0 0 0 0 0
←− F5 + F4.
Ya tenemos la forma escalonada, con pivotes en las columnas primera, tercera, cuarta y sexta.El sistema lineal, equivalente al sistema original en el sentido de que tiene exactamente lasmismas soluciones, que corresponde a esta matriz es
x1 + 2x2 + x3 + x5 + x6 = 1,
2x3 + x4 + x5 = 1,
2x4 + 4x5 + 2x6 = 0,
2x6 = 2.
De la última ecuación resulta x6 = 1. Con esta información vamos a la tercera y concluimosx4 + 2x5 = −1. Esto no permite determinar x4 ni x5, pero podemos dejar expresada unaincógnita en términos de la otra. Expresemos x4 en términos de x5, como x4 = −1− 2x5.
Sustituyendo en la segunda ecuación obtenemos x3 =x5
2+ 1. Combinando toda esta infor-
mación con la primera ecuación resulta x1+2x2+3x5
2+1 = 0. Nuevamente escogemos despejar

Matrices y Determinante 69
la variable que corresponde al pivote para escribir x1 = −2x2 − 3x5
2− 1. Concluimos entonces
que todas las soluciones del sistema son de la forma
(−1− 2x2 − 3
x5
2, x2, 1 +
x5
2,−1− 2x5, x5, 1
),
donde x2 y x5 son dos parámetros reales que podemos fijar a nuestro antojo. Es decir si consi-deramos que x2 = 5 y x5 = 6, por ejemplo, entonces una solución sería
(−1− 2 · 5− 3 · 6
2, 5, 1 +
6
2,−1− 2 · 6, 6, 1
)= (−20, 5, 4,−13, 6, 1) .
Por lo que para cada par de valores que demos a x2 y a x5, obtenemos una solución nueva,por lo que la solución no es única, pero puede describirse completamente en términos de lasvariables x2 y x5.
¿Cualquier sistema puede ser escalonado? Hasta este momento hemos usado el métodode Gauss para resuolver unos cuantos sistemas de ecuaciones con él. Cabe preguntar si cualquiermatriz puede ser llevada a una forma escalonada. La respuesta es que sí. Y la demostraciónno pasa de ser un análisis cuidadoso del método. Todo esto está contenido en nuestra siguienteproposición.
º
¹
·
¸
ProposiciónToda matriz puede ser transformada en una matriz escalonada me-diante una cantidad finita de transformaciones elementales
Demostración. Razonaremos por inducción sobre el número de filas de la matriz A. Comoprimer paso, digamos que es obvio que una matriz que tiene una única fila se puede escalonarpor medio de una cantidad finita de operaciones elementales. En realidad no hay que hacerninguna: una matriz con una única fila ya está escalonada. No hay nada que hacer con ella.
Supongamos ahora que la proposición es cierta para matrices con m − 1 filas, y veremoscomo implica que se puede escalonar cualquier matriz con m filas. Sea A = (aij) una matrizm× n, con m ≥ 2. Indiquemos por
Ai = (ai1, ai2, . . . , ain)
su fila i-ésima.
Distingamos tres casos:
1. Si a11 6= 0 entonces realizamos el primer paso: sustituimos cada fila Ai, para i = 2, . . . ,m,por
A′i = Ai − ai1
a11A1.
La elección del multiplicador para A1 asegura que la primera entrada de cada una deestas filas A′
i es nula;

70 Dpto- Matemáticas - I.E.S. “J.M. Caballero Bonald”
2. Si a11 = 0, pero la primera columna tiene alguna entrada ai1 no nula, entonces escogemosuna fila Ai tal que ai1 6= 0, e intercambiamos la primera fila con Ai. La aplicación de estaoperación elemental de intercambiar dos filas nos coloca en la situación del caso anterior.Luego procedemos como en ese caso;
3. Si toda la primera columna es nula entonces no hacemos nada.
El resultado del paso anterior es una nueva matriz que tiene el siguiente aspecto
a11 a12 . . . a1n
0 a′22 . . . a′2n...
... . . . ...0 a′m2 . . . a′mn
.
Para escalonar esta matriz basta encontrar una forma escalonada de la submatriz
(a′ij) donde i = 2, . . . ,m y j = 2, . . . , n,
que tiene m − 1 filas. Por lo tanto esta forma escalonada puede obtenerse por medio de unnúmero finito de transformaciones elementales. Por lo que sólo hemos añadido un número finitode transformaciones elementales y en total sigue siendo finito, como queríamos demostrar.
La proposición que acabamos de demostrar tiene un útil corolario para la resolución desistemas de ecuaciones lineales.
²
±
¯
°
CorolarioTodo sistema lineal es equivalente a uno escalonado.