Apunts disseny engranatges
20
1 Disseny geomètric d’engranatges Model de molí fariner. Dibuix adaptat de l’Encyclopédie de Diderot i D’Alembert. (S. Strandh). L’estructura i la maqui- nària és de fusta refor- çada amb ferro. Els engranatges són de fusta i fabricats a mà. Corona dentada. Dentat disposat axialment. Engranatge amb dentat radial (convencional). Engranatge de llanterna. Dentat constituït per cilindres
-
Upload
konvict-isma -
Category
Documents
-
view
67 -
download
2
Transcript of Apunts disseny engranatges

1
Disseny geomètric d’engranatges
Model de molí fariner. Dibuix adaptat de l’Encyclopédie de Diderot i D’Alembert. (S. Strandh).
L’estructura i la maqui-nària és de fusta refor-çada amb ferro. Els engranatges són de fusta i fabricats a mà.
Corona dentada. Dentat disposat axialment.
Engranatge amb dentat radial (convencional).
Engranatge de llanterna. Dentat constituït per cilindres
2
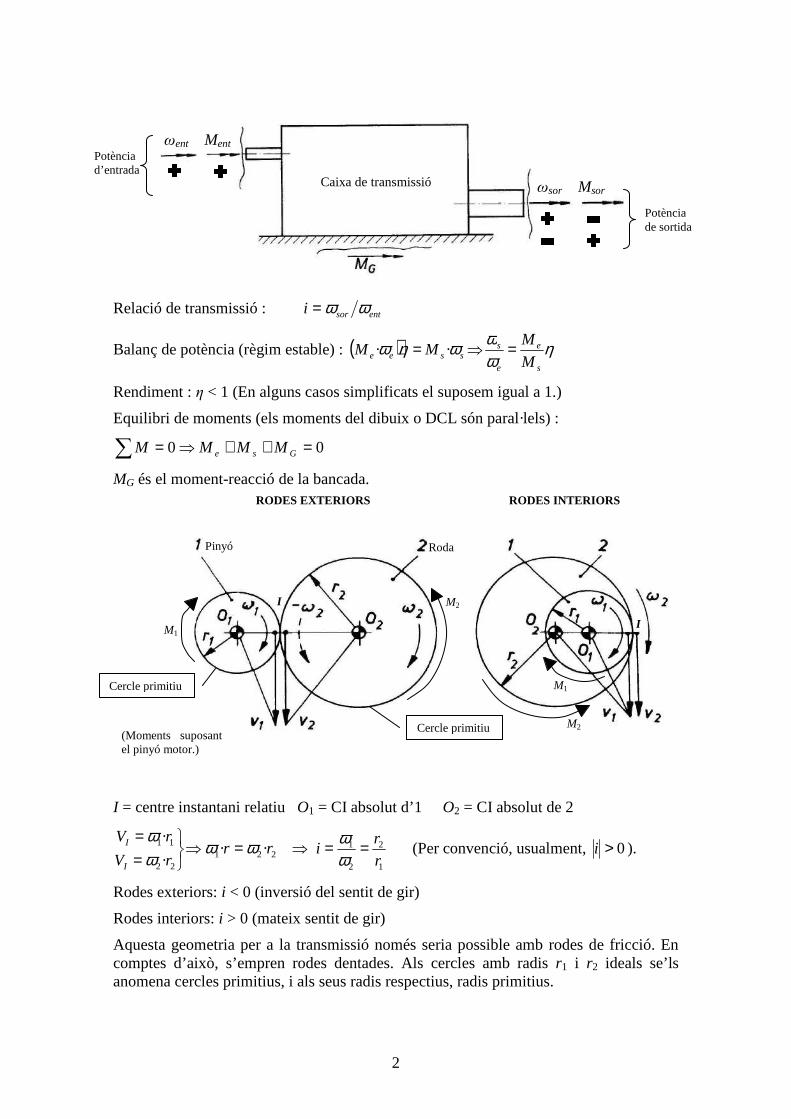
Relació de transmissió : entsori ωω=
Balanç de potència (règim estable) : ( ) ηωωωηω
s
e
e
sssee M
MMM =⇒= ··
Rendiment : η < 1 (En alguns casos simplificats el suposem igual a 1.)
Equilibri de moments (els moments del dibuix o DCL són paral·lels) :
∑ =++⇒= 00 Gse MMMM
MG és el moment-reacció de la bancada.
I = centre instantani relatiu O1 = CI absolut d’1 O2 = CI absolut de 2
1
2
2
1221
22
11 ···
·
r
rirr
rV
rV
I
I ==⇒=⇒
==
ωωωω
ωω
(Per convenció, usualment, 0>i ).
Rodes exteriors: i < 0 (inversió del sentit de gir)
Rodes interiors: i > 0 (mateix sentit de gir)
Aquesta geometria per a la transmissió només seria possible amb rodes de fricció. En comptes d’això, s’empren rodes dentades. Als cercles amb radis r1 i r2 ideals se’ls anomena cercles primitius, i als seus radis respectius, radis primitius.
Potència d’entrada
ωent Ment
ωsor Msor
Potència de sortida
Caixa de transmissió
RODES EXTERIORS RODES INTERIORS
(Moments suposant el pinyó motor.)
Pinyó Roda
M1
M1
M2
M2
Cercle primitiu
Cercle primitiu
I
I
3
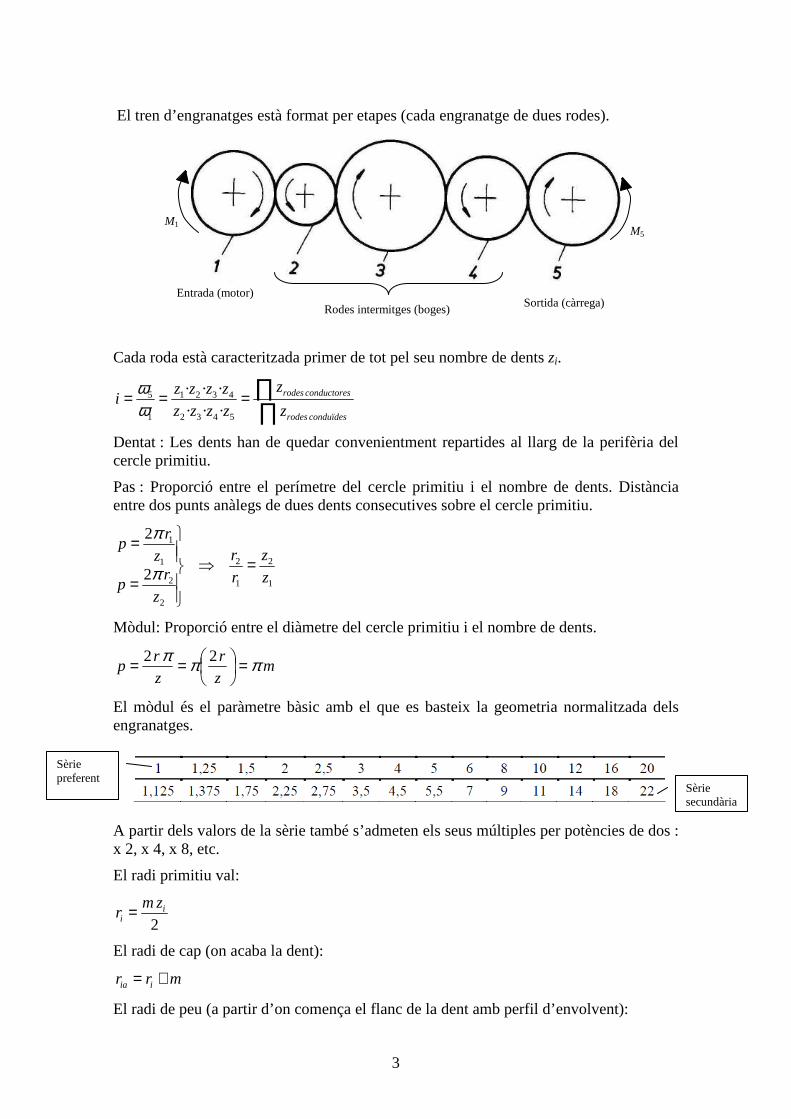
Cada roda està caracteritzada primer de tot pel seu nombre de dents zi.
∏∏===
conduïdesrodes
sconductorerodes
z
z
zzzz
zzzzi
5432
4321
1
5
······
ωω
Dentat : Les dents han de quedar convenientment repartides al llarg de la perifèria del cercle primitiu.
Pas : Proporció entre el perímetre del cercle primitiu i el nombre de dents. Distància entre dos punts anàlegs de dues dents consecutives sobre el cercle primitiu.
1
2
1
2
2
2
1
1
2
2
z
z
r
r
z
rp
z
rp
=⇒
=
=
π
π
Mòdul: Proporció entre el diàmetre del cercle primitiu i el nombre de dents.
mz
r
z
rp πππ =
== 22
El mòdul és el paràmetre bàsic amb el que es basteix la geometria normalitzada dels engranatges.
Existeix una sèrie normalitzada de valors per al mòdul (que es dóna en mm):
A partir dels valors de la sèrie també s’admeten els seus múltiples per potències de dos : x 2, x 4, x 8, etc.
El radi primitiu val:
2i
i
zmr =
El radi de cap (on acaba la dent):
mrr iia +=
El radi de peu (a partir d’on comença el flanc de la dent amb perfil d’envolvent):
Entrada (motor) Sortida (càrrega)
Rodes intermitges (boges)
M1 M5
El tren d’engranatges està format per etapes (cada engranatge de dues rodes).
Sèrie preferent
Sèrie secundària

4
mrr iip −=
El radi de fons (menor que el radi de peu per tal d’evitar que durant l’engranament el cap de les dents interfereixi amb el fons dels espais entredents):
( ) mrmcrr iiif 25,11 −=⋅+−=
Només engranen les rodes que tenen el mateix pas (o mòdul); però això no garanteix la qualitat suficient en la transmissió del moviment, només la relació de transmissió promig. Per tal que la relació de transmissió sigui constant sempre cal garantir que, des de que una parella de dents entra en contacte fins a que deixa d’estar-ho, el centre instantani relatiu entre les dues rodes estigui situat sempre en el mateix lloc.
Cal que es compleixi la llei de l’engranatge.
Els perfils es toquen en el punt instantani de contacte X.
Les velocitats v1x i v2x es poden descompondre, respectivament, en les components normal i tangencial als perfils.
Cal que les components normals siguin iguals xnxn vv 21 = per tal que no hi hagui
separació ni penetració.
⇒
==⇒=
==⇒=
222222
22
2
22
2
2
111111
11
1
11
1
1
TOTOR
vv
R
TO
v
v
TOTOR
vv
R
TO
v
v
nn
nn
ω
ω
iTO
TO ==⇒11
22
2
1
ωω
La normal en qualsevol punt de contacte dels dentats ha de passar sempre pel centre instantani relatiu C.
5
Si un engranatge es munta “a zero”, la distància entre centres és la suma dels radis primitius.
221
210
zzmrra
+=+=
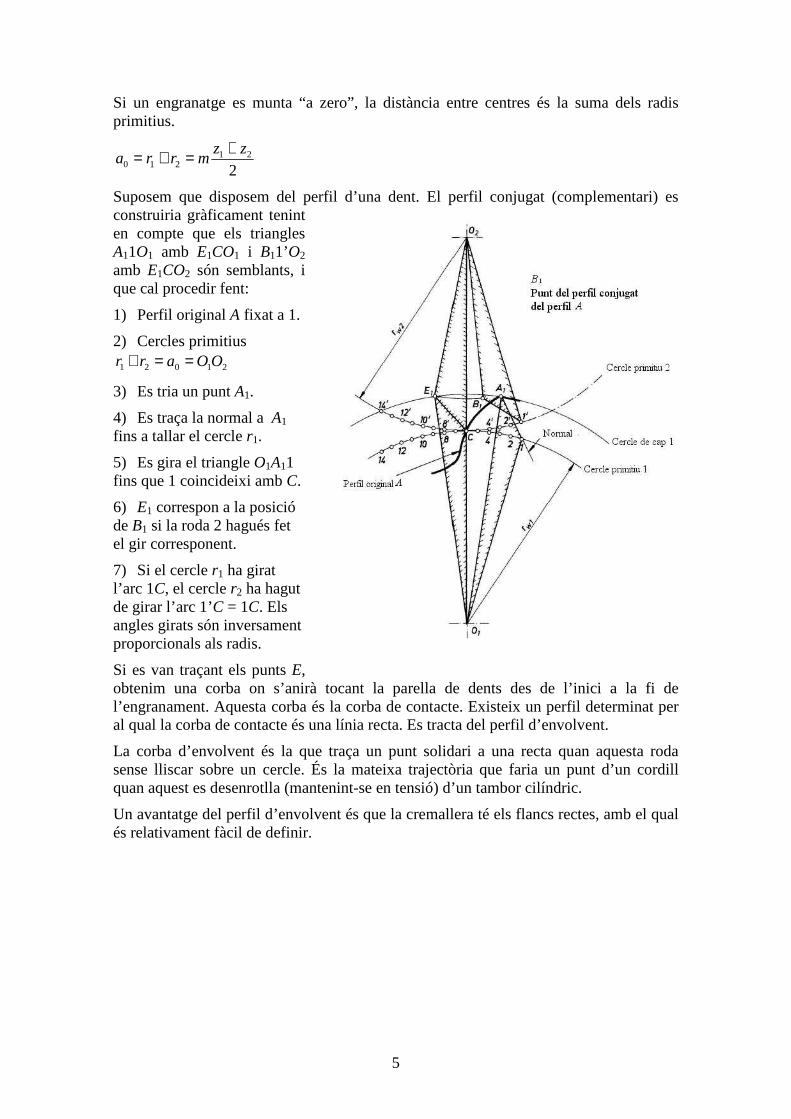
Suposem que disposem del perfil d’una dent. El perfil conjugat (complementari) es construiria gràficament tenint en compte que els triangles A11O1 amb E1CO1 i B11’O2 amb E1CO2 són semblants, i que cal procedir fent:
1) Perfil original A fixat a 1.
2) Cercles primitius
21021 OOarr ==+
3) Es tria un punt A1.
4) Es traça la normal a A1 fins a tallar el cercle r1.
5) Es gira el triangle O1A11 fins que 1 coincideixi amb C.
6) E1 correspon a la posició de B1 si la roda 2 hagués fet el gir corresponent.
7) Si el cercle r1 ha girat l’arc 1C, el cercle r2 ha hagut de girar l’arc 1’C = 1C. Els angles girats són inversament proporcionals als radis.
Si es van traçant els punts E, obtenim una corba on s’anirà tocant la parella de dents des de l’inici a la fi de l’engranament. Aquesta corba és la corba de contacte. Existeix un perfil determinat per al qual la corba de contacte és una línia recta. Es tracta del perfil d’envolvent.
La corba d’envolvent és la que traça un punt solidari a una recta quan aquesta roda sense lliscar sobre un cercle. És la mateixa trajectòria que faria un punt d’un cordill quan aquest es desenrotlla (mantenint-se en tensió) d’un tambor cilíndric.
Un avantatge del perfil d’envolvent és que la cremallera té els flancs rectes, amb el qual és relativament fàcil de definir.
6
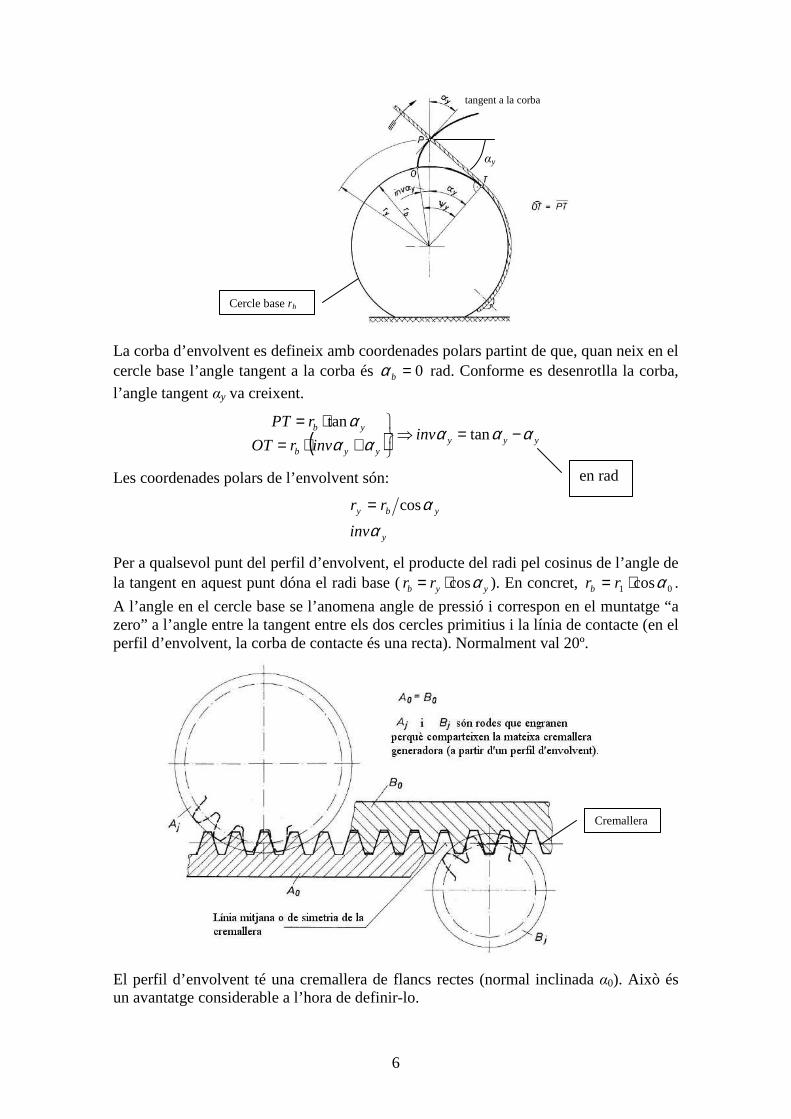
La corba d’envolvent es defineix amb coordenades polars partint de que, quan neix en el cercle base l’angle tangent a la corba és 0=bα rad. Conforme es desenrotlla la corba,
l’angle tangent αy va creixent.
( ) yyyyyb
ybinv
invrOT
rPTααα
ααα
−=⇒
+⋅=⋅=
tantan
Les coordenades polars de l’envolvent són:
y
yby
inv
rr
ααcos=
Per a qualsevol punt del perfil d’envolvent, el producte del radi pel cosinus de l’angle de la tangent en aquest punt dóna el radi base ( yyb rr αcos⋅= ). En concret, 01 cosα⋅= rrb .
A l’angle en el cercle base se l’anomena angle de pressió i correspon en el muntatge “a zero” a l’angle entre la tangent entre els dos cercles primitius i la línia de contacte (en el perfil d’envolvent, la corba de contacte és una recta). Normalment val 20º.
El perfil d’envolvent té una cremallera de flancs rectes (normal inclinada α0). Això és un avantatge considerable a l’hora de definir-lo.
Cremallera
Cercle base rb
αy
tangent a la corba
en rad

7
El gruix de la dent pot interessar de cares a comprovar si la dent acaba en punxa ( 01 ≤as ) o bé per estimar el gruix prop de l’arrel, que serà la secció a considerar quan
es calculi la dent a resistència. El gruix es calcula amb:
( )
−+= yyy invinv
r
srs αα 0
1
1 2
Sabem que
⋅=
yy r
r 01 cosarccos
αα .
Un altre avantatge del perfil d’envolvent és que les rodes es poden muntar amb una distància entre centres lleugerament superior a la distància “a zero” (a0) sense que es perdi la capacitat de funcionament (però al preu de tenir una línia de contacte més inclinada i de que aparegui joc).
En el dibuix es veu la comparació entre el muntatge “a zero” (a la dreta) i el muntatge “en V” a l’esquerra. En el muntatge “en V” les rodes es munten a una distància av una mica més gran que a0. La distància entre centres es reparteix proporcionalment al nombre de dents de cada roda en els radis de funcionament.
vvvv
vvv
azz
zra
zz
zr
rra
21
22
21
11
21
+=
+=
+=
Naturalment, la mateixa expressió val quan av = a0 i llavors r1v = r1 i r2v = r2.
La propietat de la corba envolvent que relaciona qualsevol radi amb el radi base permet determinar el nou angle de pressió en funcionament, que és major que α0.
vv
b
vvb
r
r
rr
rr
1
01
011
11 coscos
cos
cos αααα ⋅
=⇒
⋅=⋅=
o, també, v
v a
a 00 coscos
αα ⋅= .
α0
α0
αv
αv

8
En els cercles de funcionament el pas és major que el pas en el cercle primitiu. Per la proporcionalitat del pas amb el radi corresponent, es pot escriure
vv
pp
αα
cos
cos 0⋅= .
El joc tangencial (l’arc que podria girar una roda mentre es manté l’altra fixa) és la diferència entre el pas de funcionament i el gruix d’una dent de cada roda en els cercles de funcionament respectius ( vvv sspj 21 −−= ). Reagrupant termes el podem escriure
explícitament amb
( )( )0210
cos
cos αααα
invinvzzmj vv
−+= .
Recordar que inv α0 = 0,014904383.
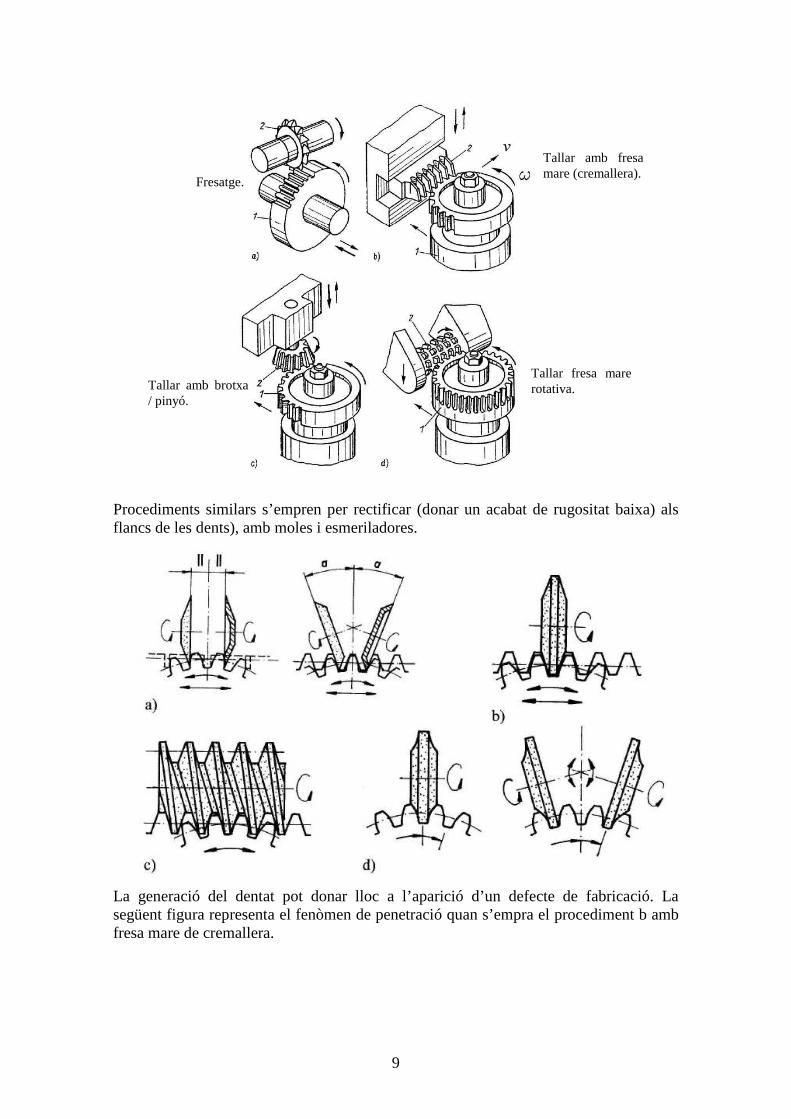
El dentat d’una roda d’engranatge segueix la normalització prevista perquè es mecanitza amb una eina que reprodueix (amb adaptacions) la cremallera teòrica.
En el cas b s’empra aquesta eina que s’anomena fresa mare i que imita la cremallera teòrica. El dentat es genera correctament si les velocitats d’avanç i de rotació del carro que porta la roda estan sincronitzades de tal manera que
1rv ⋅= ω .
Les altres tècniques de fabricació no utilitzen una fresa mare ja que no s’imita el procés d’engranament. Per contra, el que fan és utilitzar freses que tenen la forma de l’entredent (dins de cada mòdul i ha freses diferents depenent del nombre de dents de la roda que es vol fabricar). És el cas dels dibuixos a, c i d.
9
Procediments similars s’empren per rectificar (donar un acabat de rugositat baixa) als flancs de les dents), amb moles i esmeriladores.
La generació del dentat pot donar lloc a l’aparició d’un defecte de fabricació. La següent figura representa el fenòmen de penetració quan s’empra el procediment b amb fresa mare de cremallera.
Tallar amb brotxa / pinyó.
Fresatge.
Tallar amb fresa mare (cremallera).
Tallar fresa mare rotativa.
10
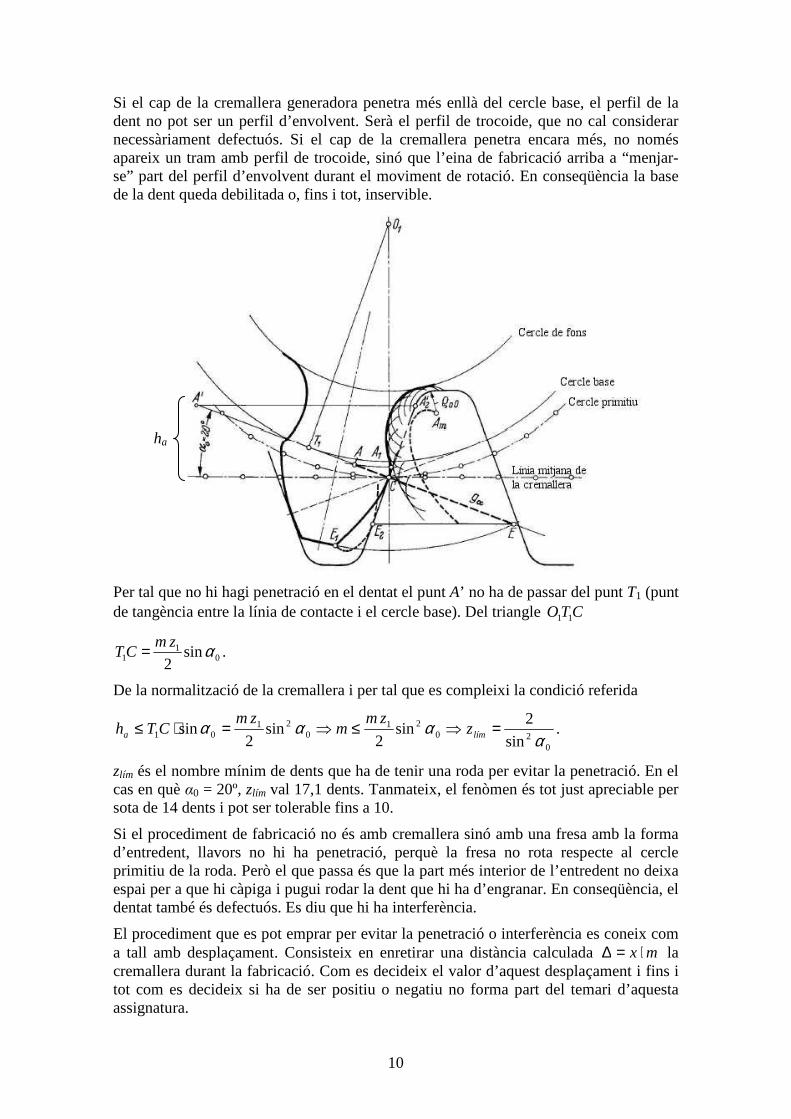
Si el cap de la cremallera generadora penetra més enllà del cercle base, el perfil de la dent no pot ser un perfil d’envolvent. Serà el perfil de trocoide, que no cal considerar necessàriament defectuós. Si el cap de la cremallera penetra encara més, no només apareix un tram amb perfil de trocoide, sinó que l’eina de fabricació arriba a “menjar-se” part del perfil d’envolvent durant el moviment de rotació. En conseqüència la base de la dent queda debilitada o, fins i tot, inservible.
Per tal que no hi hagi penetració en el dentat el punt A’ no ha de passar del punt T1 (punt de tangència entre la línia de contacte i el cercle base). Del triangle CTO 11
01
1 sin2
αzmCT = .
De la normalització de la cremallera i per tal que es compleixi la condició referida
020
210
2101 sin
2sin
2sin
2sin
αααα =⇒≤⇒=⋅≤ líma z
zmm
zmCTh .
zlím és el nombre mínim de dents que ha de tenir una roda per evitar la penetració. En el cas en què α0 = 20º, zlím val 17,1 dents. Tanmateix, el fenòmen és tot just apreciable per sota de 14 dents i pot ser tolerable fins a 10.
Si el procediment de fabricació no és amb cremallera sinó amb una fresa amb la forma d’entredent, llavors no hi ha penetració, perquè la fresa no rota respecte al cercle primitiu de la roda. Però el que passa és que la part més interior de l’entredent no deixa espai per a que hi càpiga i pugui rodar la dent que hi ha d’engranar. En conseqüència, el dentat també és defectuós. Es diu que hi ha interferència.
El procediment que es pot emprar per evitar la penetració o interferència es coneix com a tall amb desplaçament. Consisteix en enretirar una distància calculada mx ⋅=∆ la cremallera durant la fabricació. Com es decideix el valor d’aquest desplaçament i fins i tot com es decideix si ha de ser positiu o negatiu no forma part del temari d’aquesta assignatura.
ha

11
Pel que fa a com es transmeten les forces en un engranatge, l’exemple d’una sola etapa ens serveix per descriure les forces de contacte i les reaccions corresponents en els diagrames de cos lliure.
De la geometria: vtr FF αtan⋅=
Pel principi d’acció i reacció: tt FF 21 = i rr FF 21 = .
De les equacions de l’equilibri (en aquest cas concret per al pinyó i anàlogament per a la roda) :
vt
tyy
rxx
rFTM
FRF
FRF
111
11
11
0
0
0
⋅=⇒=
−=⇒=
=⇒=
∑∑∑
Fixeu-vos en que aquestes equacions no serien iguals es tractés d’una roda intermitja (sense cap parell exterior aplicat) i/o amb altres punts de contacte que, per exemple, no aliniessin les components tangencial tF1 i radial rF1 de la força de contacte amb els
eixos x i y.
Pinyó (motriu)
Roda (càrrega)
r1v r2v
F1r
F2r
R1x
R1y
R2y R2x

12
Una roda d’engranatge de dentat helicoïdal es diferencia d’una de dentat recte en que les dents estan disposades sobre el cilindre primitiu amb un angle d’inclinació β respecte a la recta generatriu del cilindre. A l’angle β se l’anomena angle d’hèlix perquè, efectivament, la dent forma una hèlix sobre el cilindre primitiu. El dentat recte és un cas particular del dentat helicoïdal en què β = 0º.
Una manera d’imaginar-se un dentat helicoïdal és com si estigués format per una successió infinitessimal de perfils rectes defasats cadascú una mica respecte del precedent.
En els engranatges helicoïdals apareix l’amplada transversal de la roda b, tot i que de moment no l’emprarem en els càlculs. Cal recalcar, també, que el perfil de la dent segueix essent un perfil d’envolvent, només que el punt d’arrancada d’aquesta difereix entre G i G’ des de la cara anterior a la cara posterior. Podeu fixar-vos, també, en que l’angle d’hèlix en el cercle primitiu β és major que l’angle d’hèlix en el cercle base βb degut a que la dent ha d’haver fet el mateix avenç axial però el perímetre és major en el cercle primitiu
ββ tantan
rr
b
b = , i així per a qualsevol altre radi.

13
El perfil helicoïdal es genera a partir d’una cremallera teòrica que en comptes de traçar la dent en sentit longitudinal del cilindre primitiu, ho fa amb la inclinació β. Aquesta cremallera segueix exactament la mateixa normalització que s’ha explicat per als dentats rectes. Aproximadament, si mirem el dentat helicoïdal a contrallum de manera que quedin ocults el flancs, el que veiem és un perfil normal (transversal) a la dent que correspon amb aquest perfil normalitzat. Pel fet de ser perpendicular a la dent, s’anomena perfil normal. Tanmateix, el perfil normal no correspon a cap cilindre, sinó a una secció ideal que en cada lloc seria perpendicular a l’hèlix del dentat. Quan es mira la roda en la direcció del seu eix de rotació es veu un altre perfil de la dent: el perfil frontal o circumferencial. Aquest és el perfil real del dentat. Té les mateixes característiques radialment que el perfil normal però tangencialment és més ample (semblantment al que passa si tallem un cilindre transversalment –obtenim una secció circular- o de biaix – obtenim una secció el·líptica).
Per tal que dues rodes helicoïdals puguin engranar han de correspondre al mateix perfil normal i, a més, han de tenir els mateixos angles d’hèlix però de mà contrària. Un ha de ser de mà dreta i l’altre de mà esquerra.
És fàcil identificar la mà d’una roda: coincideix amb el sentit en què veiem que va l’hèlix des de la cara anterior a la posterior.
Perfil frontal o circumferencial
Perfil normal

14
En l’apartat de transmissió de forces es veurà que quan les rodes estan sobre un mateix eix (per tant no engranen entre sí) és convenient que siguin de la mateixa mà.
En el dentat helicoïdal cada dent individual té més àrea d’encastament amb el cilindre de peu. Per tant, el dentat és més resistent. A més, degut al desfasatge entre la cara anterior i posterior de la roda l’interval de temps en què dues dents engranen és major que si fossin rectes. Les dents es reparteixen millor la càrrega (hi ha força més que una parella de dents en contacte simultàniament) i el funcionament és més silenciós. Per aquestes raons els dentats helicoïdals són preferits en les transmissions industrials.
La relació entre el perfil normal i el circumferencial permet descriure la geometria de la roda helicoïdal a partir de l’angle d’hèlix i de les característiques de la cremallera.
La proporció entre el pas tangencial (circumferencial) i el pas normal ( mpn ⋅= π ) en el
cilindre primitiu és
βcosn
t
pp = .
Com que el perímetre del cercle primitiu és proporcional al pas
βπ
cos2
2 11
1
1 zmr
z
rp n
hh
t
⋅=⇒= .
Aquest és el radi del cercle primitiu de la roda helicoïdal. És major que el que tindria si el dentat fos recte. El mòdul normal hauria de correspondre als de les sèries recomanades per la normalització. És possible definir un mòdul circumferencial que seria

15
2cos1
1
zmr
mm c
hn
c =⇒=β
En canvi, les proporcions relacionades amb l’altura de la dent no queden afectades per β. Així
nihifh
nihiph
nihiah
mrr
mrr
mrr
25,1−=
−=+=
La mateixa relació que hi ha entre el pas circumferencial tc pp = i el pas normal np i
la conservació de l’altura de la dent fan que entre l’angle de pressió en el perfil normal ( º200 == αα n ) i l’angle de pressió en el perfil circumferencial sigui
=β
ααcos
tanarctan 0
c .
Els engranatges helicoïdals es poden muntar “a zero”
( )βcos2
21210
zzmrra n
hhh
+=+=
o “en V”, en el qual cas el joc es calcula a partir del perfil circumferencial amb
( )( )
⋅=
−+=
vh
chv
cvv
cc
a
a
invinvzzmj
αα
αααα
cosarccos
cos
cos
0
21
Cal dir que un altre avantatge del perfil helicoïdal és que el defecte de penetració en la generació del dentat és molt menys present. El nombre mínim de dents per sota del qual apareix depèn de l’angle d’hèlix
ββ 33 cos
1,17
cos== nlím
hlím
zz .
Es poden tenir pinyons helicoïdals d’una dent sense que es doni penetració. El preu a pagar és un angle d’hèlix gran, que presenta desavantatges considerables pel que fa a la transmissió de forces.
Igual que en el dentat recte, suposem que en el dentat helicoïdal la força de contacte és perpendicular al flanc de la dent. La força de contacte es descompon en tres components: tangencial Ft, axial Fa i radial Fr, referides a l’eix de la roda.

16
Suposant que a partir del DCL (∑ = 0M ) s’ha determinat el valor de la component
tangencial Ft, la component axial s’obté fent
βtan⋅= ta FF .
La component radial s’obté de
ctnt
r FF
F ααβ
tantancos
== .
Aquestes fórmules són vàlides si l’engranatge es munta ”a zero”. Si es munta amb joc caldria treballar amb els paràmetres de funcionament.

17
A continuació, tenim uns exemples de diagrames de cos lliure d’un eix intermig (on no hi ha aplicats ni parell motor ni càrrega). L’eix portaria una roda r2 i un pinyó r3. Fixeu-vos en que la roda va muntada sobre l’eix mentre que el pinyó està mecanitzat en el mateix eix.
Aquí veiem el DCL del pinyó r1 que arrossega la roda r2. Els croquis de l’esquerra ens el mostren connectat a l’eix 2-3 amb dues possibilitats de muntatge: que els rodaments estiguin disposats en els extrems dels eixos (les rodes estan muntades en el tram entre els rodaments) o que les rodes 1 i 2 estiguin muntades en voladiu respecte dels rodaments. L’enginyer optarà entre una o altra opció atenent a l’espai disponible, les sol·licitacions que apareguin en cada cas, les càrregues sobre els rodaments o altres condicionants de disseny.
Observeu en el croquis de la dreta com la força axial sobre el dentat del pinyó carregarà sobre els rodaments. Per estàtica és impossible distingir si provocarà una reacció axial en el rodament G o en el rodament H. Això dependrà de com es resolgui tecnològicament la selecció i muntatge dels rodaments. En aquest exemple concret han suposat que la reacció axial l’assumeix tota el rodament H.

18
En aquest segon esquema s’analitzen les forces de contacte i les reaccions en l’eix 2-3. Observeu com les forces tangencials estan disposades de tal manera que fan moment sobre l’eix en sentits oposats, de manera que es poden equilibrar els moments. Per causa d’elles entre la roda 2 i el pinyó 3 la secció de l’eix suportarà una sol·licitació que serà un moment torsor. A més, provocaran moments flectors en la direcció x.
Tenim també les components radials. Aquestes provocaran moments flectors en la direcció y.
Finalment, tenim també les forces axials. Fixeu-vos en que també provocaran moments flectors en la direcció y. També cal fixar-se en que (com ja s’havia comentat abans) els angles d’hèlix de 2 i de 3 són de la mateixa mà (en aquest cas esquerra). La conseqüència d’això és que les forces axials tenen sentits oposats, amb el qual la seva resultant és menor que si anessin en el mateix sentit. Això és desitjable perquè els rodaments suporten una càrrega axial menor.
En aquest tercer cas els contactes en els engranatges segueixen estant sobre el mateix pla, però en el mateix costat. Els diagrames de moments de l’eix canviaran. Observeu com els angles d’hèlix (que no tenen per què ser iguals) sempre són de la mateixa mà.

19
Finalment, el quart cas és un exemple en què els contactes no estan en el mateix pla.
20
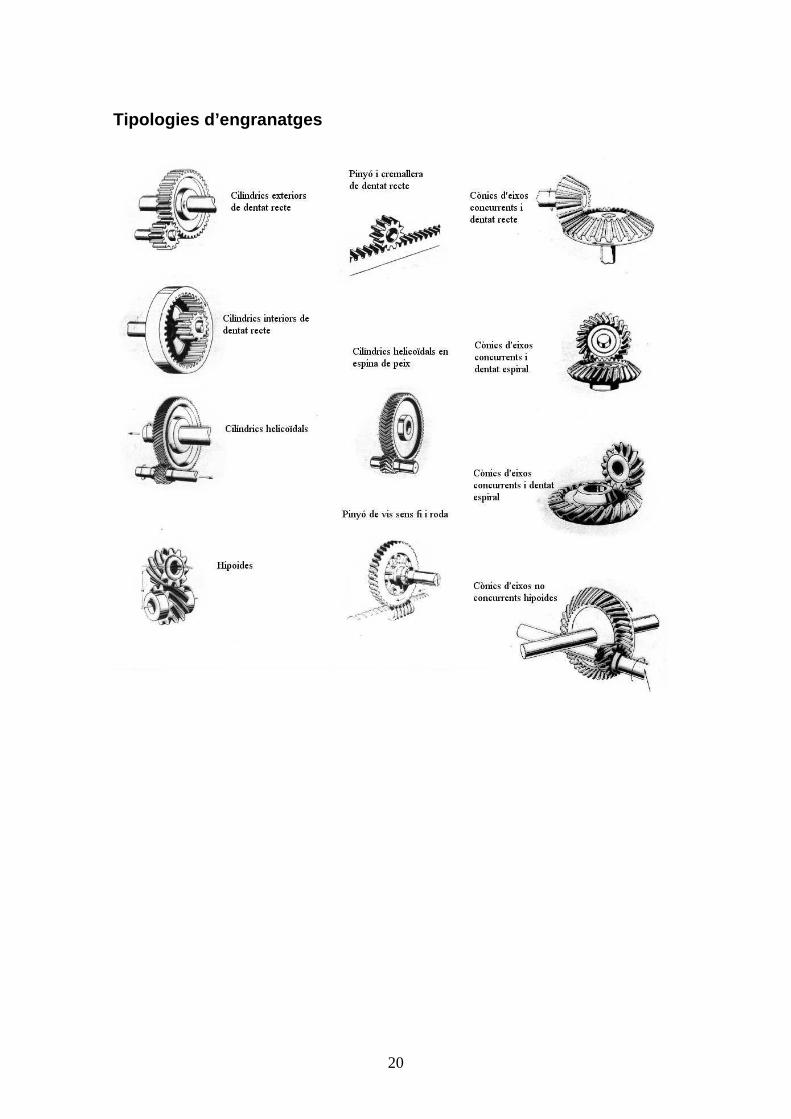
Tipologies d’engranatges