Aterrizaje Autonomo Version Final
6
Implementación de un Sistema de Control para Recuperación Autónoma de un Vehiculo Aéreo no Tripulado (UAV) Mariano Lizárraga 1 , Vladimir Dobrokhodov 2 , Isaac Kaminer 2 . 1 Instituto de Investigación y Desarrollo Tecnológico de la Armada de México, El Salado, Veracruz, México, 95263 [email protected] 2 Naval Postgraduate School, Monterey, California, Estados Unidos de Norteamérica, 93943 [email protected] Resumen Se presenta la implementación de un controlador para la recuperación autónoma de un Vehiculo Aéreo no Tripulado (UAV). Se aborda el diseño e implementación del controlador para su desempeño en tiempo-real. El sistema completo fue desarrollado en Simulink e implementado en una computadora PC104 ejecutando un sistema operativo en tiempo-real. La simulación por computadora y Hardware en el Lazo (HIL) demuestran la efectividad del esquema aquí propuesto. Palabras clave: Vehículos Aéreos no Tripulados, UAV Táctico Silver Fox, Recuperación Autónoma, Navegación Autónoma, Real Time Workshop, xPC Target, Piloto Automático Piccolo . 1. Introducción A nivel táctico, los UAVs pequeños y de poco peso, que pueden ser fácilmente llevados al frente de batalla y lanzados en corto tiempo sin necesidad de una pista de aterrizaje, han demostrado ser extremadamente útiles en llevar a cabo misiones de vigilancia y seguimiento para las unidades de Infantería y Fuerzas Especiales. Este trabajo muestra la implementación de un controlador para la recuperación autónoma de estos UAVs tácticos, particularmente en un buque navegando. Actualmente, cuando un buque pretende recuperar ese tipo de UAVs, el piloto vuela el UAV cerca del buque, apaga la máquina y abre un paracaídas a fin de dejar caer el UAV al mar. Posteriormente, el buque se detiene y recupera el UAV de cualquier manera posible, dejando al buque expuesto a detección y fuego enemigo. El proyecto completo pretende hacer del UAV una verdadera unidad autónoma, con capacidad de recuperación por un buque navegando. Este sistema puede, potencialmente, ser integrado con transparencia a misiones tripuladas, control de tráfico aéreo y operaciones en cubierta. Este método ofrece una mayor seguridad militar, simplicidad y flexibilidad para operaciones en la mar, que cualquier otro método antes presentado. Esta capacidad, una vez integrada a las fuerzas, eliminaría la necesidad de que las fuerzas armadas entrenen pilotos de Radio Control para lanzar y recuperar UAVs. La implementación permitirá llevar a cabo operaciones de reconocimiento a una fracción de lo que actualmente cuestan ese tipo de operaciones tripuladas. Ofreciendo mayor autonomía, mas diversidad y facilidad de operación desde un mayor tipo de buques. La solución aquí propuesta contribuye con la recuperación autónoma de la aeronave y ofrece una alta compatibilidad con la aviónica instalada en muchos de los UAVs actualmente en uso por las fuerzas armadas, y con muchos de los proyectos de investigación en industria y academia. Muchos estudios se han publicado recientemente respecto a recuperación autónoma de UAVs. Saripalli, Montgomery y Sukhatme [1] presentaron un esquema de aterrizaje para un helicóptero autónomo; sin embargo, las suposiciones hechas acerca de la colinearidad de los puntos característicos y la existencia de una forma
-
Upload
candicesakhmet -
Category
Documents
-
view
213 -
download
0
description
Aeronautic
Transcript of Aterrizaje Autonomo Version Final
-
Implementacin de un Sistema de Control para Recuperacin Autnoma de un Vehiculo Areo no Tripulado (UAV)
Mariano Lizrraga1, Vladimir Dobrokhodov2, Isaac Kaminer2.
1 Instituto de Investigacin y Desarrollo Tecnolgico de la Armada de Mxico, El Salado, Veracruz, Mxico, 95263
[email protected] 2 Naval Postgraduate School, Monterey, California, Estados Unidos de Norteamrica, 93943
Resumen
Se presenta la implementacin de un controlador para la recuperacin autnoma de un Vehiculo Areo no Tripulado (UAV). Se aborda el diseo e implementacin del controlador para su desempeo en tiempo-real. El sistema completo fue desarrollado en Simulink e implementado en una computadora PC104 ejecutando un sistema operativo en tiempo-real. La simulacin por computadora y Hardware en el Lazo (HIL) demuestran la efectividad del esquema aqu propuesto. Palabras clave: Vehculos Areos no Tripulados, UAV Tctico Silver Fox, Recuperacin Autnoma, Navegacin Autnoma, Real Time Workshop, xPC Target, Piloto Automtico Piccolo . 1. Introduccin A nivel tctico, los UAVs pequeos y de poco peso, que pueden ser fcilmente llevados al frente de batalla y lanzados en corto tiempo sin necesidad de una pista de aterrizaje, han demostrado ser extremadamente tiles en llevar a cabo misiones de vigilancia y seguimiento para las unidades de Infantera y Fuerzas Especiales. Este trabajo muestra la implementacin de un controlador para la recuperacin autnoma de estos UAVs tcticos, particularmente en un buque navegando. Actualmente, cuando un buque pretende recuperar ese tipo de UAVs, el piloto vuela el UAV cerca del buque, apaga la mquina y abre un paracadas a fin de dejar caer el UAV al mar. Posteriormente, el buque se detiene y recupera el UAV de cualquier manera posible, dejando al buque expuesto a deteccin y fuego enemigo. El proyecto completo pretende hacer del UAV una verdadera unidad autnoma, con capacidad de recuperacin por un buque navegando. Este sistema puede, potencialmente, ser integrado con transparencia a misiones tripuladas, control de trfico areo y operaciones en cubierta. Este mtodo
ofrece una mayor seguridad militar, simplicidad y flexibilidad para operaciones en la mar, que cualquier otro mtodo antes presentado. Esta capacidad, una vez integrada a las fuerzas, eliminara la necesidad de que las fuerzas armadas entrenen pilotos de Radio Control para lanzar y recuperar UAVs. La implementacin permitir llevar a cabo operaciones de reconocimiento a una fraccin de lo que actualmente cuestan ese tipo de operaciones tripuladas. Ofreciendo mayor autonoma, mas diversidad y facilidad de operacin desde un mayor tipo de buques. La solucin aqu propuesta contribuye con la recuperacin autnoma de la aeronave y ofrece una alta compatibilidad con la avinica instalada en muchos de los UAVs actualmente en uso por las fuerzas armadas, y con muchos de los proyectos de investigacin en industria y academia. Muchos estudios se han publicado recientemente respecto a recuperacin autnoma de UAVs. Saripalli, Montgomery y Sukhatme [1] presentaron un esquema de aterrizaje para un helicptero autnomo; sin embargo, las suposiciones hechas acerca de la colinearidad de los puntos caractersticos y la existencia de una forma
-
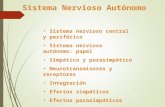
geomtrica bien definida del lugar de aterrizaje, lo hacen algo limitado para ser empleado en anaveajes. Sharp, Shakernia y Sastry [2] presentaron con xito un sistema de aterrizaje autnomo basado en reconocimiento de imgenes para un vehculo autnomo de ala mvil. Posteriormente ampliaron su mtodo usando estimacin de movimiento en mltiples vistas para aterrizarlo en una plataforma en movimiento simulando un buque navegando [3]. Kaminer y Yakimenko extendieron la idea de controladores de seguimiento de ruta presentados en [5] para llevar a cabo el aterrizaje coordinado de mltiples UAVs [4] (usando el esquema de control desarrollado en [6], en el cual este trabajo est basado). Este trabajo est organizado de la siguiente manera: la Seccin 2 presenta de manera general el esquema de control utilizado en el UAV. La Seccin 3 describe el mtodo propuesto para guiar el UAV de desde cualquier punto en el espacio hacia la red de recuperacin en el buque. La Seccin 4 describe el sistema de control diseado. Por ultimo, la Seccin 6 presenta las conclusiones y trabajo subsecuente. 2. Configuracin del UAV Como plataforma de vuelo se utiliz el UAV Silver Fox construido por Advanced Ceramics Research. El esquema de control utilizado por el UAV, mostrado en la Figura 1, consiste de cuatro componentes: la avinica ubicada en el UAV, la estacin terrena, el control manual del piloto, y la interfase del operador. Estos cuatro componentes proveen una manera confiable de volar la aeronave y permiten al usuario final programar rutas para sta. Para el lanzamiento y aterrizaje del UAV, se habilita un modo de piloto-en-el-lazo en el cual la estacin terrena slo retransmite la seal generada por el control manual del piloto. En este esquema se pueden identificar dos lazos de control. Un lazo rpido a bordo del UAV y otro lento en la estacin terrena. Este esquema utiliza un protocolo de dos capas propietario para comunicarse entre los componentes del sistema. La avinica utilizada por el UAV fue el sistema Piccolo, manufacturado por Cloud Cap Technologies , la cual contiene un piloto automtico diseado para seguir los comandos enviados por la estacin terrena; tres girscopos y tres acelermetros utilizados para determinar la actitud de la aeronave; un GPS Motorota G12 para determinar su posicin geogrfica; y, un conjunto de sensores de presin dinmica y esttica acoplados con un termmetro para determinar la velocidad y altura del UAV. El
enlace de datos se lleva a cabo a travs de un radio mdem de 900MHz/2.4 GHz.
Interfase del Operador
Estacion Terrena
UAV Silver Fox
Protocolo Picolo en Serial
Protocolo Piccolo Inalambrico
Avionica Piccolo
Control Manual Figura 1: Esquema de Control.
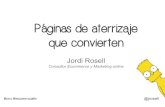
La interfase del operador es una computadora porttil ejecutando Windows 2000 y un sistema propietario utilizado por el usuario final para configurar y operar el sistema Piccolo. 3. Guiado del UAV a la Plataforma Guiar un aeronave desde cualquier punto en el espacio a un buque que se mueve en lnea recta puede ser descrito en dos segmentos. El primero, consiste en volar la aeronave desde cualquier condicin inicial de tal forma que se coloque detrs del punto de recuperacin en el extremo superior de una pendiente de descenso; adems, se requiere que los vectores velocidad de ambos se encuentren alineados en el plano horizontal. Una vez colocado en la parte superior de la pendiente de descenso, del segundo segmento consiste en mantener alineado los vectores velocidad del buque y de la aeronave en el plano horizontal, mientras el UAV inicia su descenso manteniendo su vector velocidad alineado con la pendiente de descenso en el plano vertical. Este mtodo es explicado a detalle en [6] y puede ser resumido de la siguiente manera: 3.1. Posicin y Orientacin de la Red Sea {L} un sistema coordenado de referencia Norte-Este-Arriba, y {G} un sistema coordenado de referencia de mano derecha con el eje x alineado con la pendiente de descenso y origen en el punto central de una red de recuperacin. Sea el vector
[ ] 0 0 1nz = un vector estabilizado que denota la orientacin vertical de la red; y 1p y 2p dos puntos
-
en los extremos de la red; entonces la direccin de la diagonal principal de la red puede ser calculada
como ( ) ( )12 1 2 1d p p p p= v v v v , y la posicin del punto medio de la red como ( )2 1 / 2.tp p p= v v v Con estos dos vectores coplanares, el vector normal a la
red puede ser calculado por ( ) ( )1 n nn z d z d= , el cual junto con cualquiera de las tres posiciones conocidas, describen inequvocamente el plano de la red en el espacio. 3.2. Calculo de la Pendiente Sea el ngulo formado entre la pendiente de descenso y el horizonte, y D la longitud de la pendiente de descenso. El punto superior de la pendiente, denotado como 0p en la Figura 2, esta dado por: 0 ,tp p DR n= +
v v (1) donde R es la matriz que rota n , grados sobre el eje G y ; y, tp
v es el punto central de la red de recuperacin. Los ngulos utilizados para construir R son: 0 = , = , ( )1 tan /n ny x = .
p1
p2
Dp0
p t
ny x
zL
L
L
xz
GyG
G
Figura 2: Geometra de la Pendiente de Descenso
3.3. Primer Segmento: Captura de la Pendiente Dada la posicin conocida del UAV, UAVp
v , entonces la distancia de la parte superior de la pendiente, 0p , al UAV est dada por
0 UAVd p p= v v . Sea {F} un sistema coordenado de
referencia Serret-Frenet [7] definido por: Tv
como un vector unitario desde el centro de gravedad del UAV hacia la parte superior de la pendiente; N
v un
vector unitario que define el horizonte local del
UAV [ ]( ) [ ]10 0T T T TN y x y x= v y Bv como un vector unitario y ortogonal a estos dos. Si el UAV alinea su vector velocidad con T
v,
entonces est garantizado que el UAV
eventualmente alcanzar la parte superior de la pendiente. Entonces, se define el error en el vector velocidad en {F} como:
( ) ,T
c UAVF T
e c UAV UAVT
UAV
T v T vV N Tv v N v
B B v
= =
v v vv v v vv v
v v v (2)
donde cv es la velocidad ordenada al UAV y UAVv
v es el vector velocidad. A pesar que el resultado mostrado en (2) podra ser implementado, significa que se requerir control sobre el empuje del aeronave (el componente x de error en velocidad F
eVv
). Con el fin de evitar fluctuaciones en la velocidad el UAV, se decidi en la primer etapa de diseo, que el empuje se controlara por el piloto automtico, y no por el algoritmo de recuperacin, por lo cual ste componente fue arbitrariamente hecho igual a cero. 3.4. Segundo Segmento: Traqueo de la Pendiente Cuando el UAV llega a la parte superior de la pendiente, T
v es redefinido como T n=
v, de tal
manera que ahora apunta hacia el centro de la red, tp
v . Los vectores unitarios Nv y Bv
son calculados de la misma manera que en la seccin anterior. Si se parametriza la trayectoria de descenso deseada como se presento en [5], en trminos de su longitud de arco S, observando la geometra mostrada en la Figura 2, esta trayectoria deseada puede ser definida como: ( ) 0 ,cp S p TS= + vv v (3) donde S toma valores entre 0 y D; y 0 tp p TD=
vv v . Si definimos el error de posicin como la diferencia entre la posicin deseada y la posicin actual
( ) ( )e t UAVP S p T S D p= + v vv v , es claro que se requiere encontrar el valor de S que minimiza la funcin de error. Utilizando algebra elemental se puede demostrar que el valor buscado est dado por:
( ) ( )( )1 .2 T T TUAV t UAV tS T p p p p T D= + +v vv v v v (4)
donde, si se sustituye en (3) y se rota a {F}como en (2), el error de posicin se simplifica a:
( ) ( )( )
0.F e t UAV
t UAV
P S N p pB p p
=
v v v vv v v
(5)
-
Siguiendo el mismo procedimiento arriba mencionado, se puede demostrar que el error de velocidad esta dado por:
( ) ( )( )
0.F e t UAV
t UAV
V S N v vB v v
=
v v v vv v v
(6)
4. Diseo del Sistema de Control El sistema de control consiste de dos lazos (mostrados en la Figura 3): el piloto automtico en el lazo interno a bordo del UAV y un regulador en el lazo externo. Ambos fueron diseados con tcnicas de control clsico (controladores PD y Adelanto-Retraso) utilizando como planta el modelo dinmico del UAV Silver Fox linealizado alrededor de las condiciones de vuelo estable. El regulador fue desarrollado para llevar a cero las seales de error generadas por los segmentos de recuperacin autnoma descritos en la Seccin 3. Una vez que la simulacin por computadora mostr resultados satisfactorios, el diseo del piloto automtico se pas a la compaa Cloud Cap Technologies, para que fuera programado e incluido en el firmware de la avinica Piccolo. Para realizar las funciones de la Computadora de Recuperacin Autnoma y Control de Vuelo (ALFCC, por sus siglas en ingls), mostrada en la Figura 4, se utiliz una computadora PC104 construida por la compaa Integrated Systems Inc., con microprocesador Pentium I a 266 MHz. La computadora contiene un disco duro en chip con capacidad de 64 Mb, con sistema operativo IBM-PC-DOS versin 3.4 y el kernel de Mathworks XPC Target, el cual permite la implementacin de modelos desarrollados en Simulink [9] para ejecutarse en tiempo-real.
Figura 4: Computadora de Recuperacin
Autnoma y Control de Vuelo
Para establecer la interconexin entre la ALFCC, la estacin de tierra y los dispositivos perifricos, se desarrollaron los manejadores de dispositivo necesarios usando el lenguaje de programacin C. Los manejadores de dispositivo fueron implementados por medio de funciones-S en Simulink, y ajustados para producir los datos requeridos (en las unidades correctas) a 20 Hz de frecuencia de muestreo. Por cada manejador de dispositivo, se desarrollaron dos libreras, una para leer datos y la otra para escribir (o enviar) datos. Se utilizo el puerto serial 1 (COM1) de la ALFCC para recibir la informacin de la estacin terrena del Piccolo y para enviar los comandos de control. Los puertos seriales 2 y 3 (COM2 y COM3) se utilizaron para recibir informacin de dos unidades de GPS Trimble modelo agGPS114, las cuales envan las coordenadas de las esquinas de la red de recuperacin (puntos 1p
v y 2pv descritos en la
Seccin 3.1). El puerto serial 4 (COM4) se utilizo para recibir la informacin de un receptor de correccin diferencial Garmin GRB21 para proveer de correccin diferencial al GPS instalado a bordo del UAV. El puerto de red Ethernet se utilizo para descargar el modelo compilado de Simulink al disco duro en chip y para proporcionar un medio de registro de datos va UDP. Ver Figura 5.
UAV Silver Fox Algoritmo de Recuperacion Autonoma
Controllador del Lazo Internor Controlador de Lazo Externo
25
Vc
p hat
v hat
p track
v track
i_gammaf
p err
v err
T Frenet
v hat_out
Segmentos deCaptura y Traqueo
pt1
v t1
i_gamma1
Movimientodel
Buque
des
das
drs
dts
dec
dac
drc
dtc
Modelo de Actuadores
de
da
dr
dt
Pos_e
Vel_l
pqr
VT
Modelo Silver Foxde 6GDL
VTC
rc
qc
pqr
VT
dec
dac
drc
dtc
Lazo Interno(Piloto Automatico)
p err
v err
T Frenet
v hat
OL q Gain
OL r Gain
rc
qc
Lazo Externo(Regulador)
-0.3
Ganancia r
1
Ganancia q
Figura 3: Lazos de Control del Sistema Propuesto
-
Hub
Con
figur
acio
n de
Lim
ites
GUI y Registro de Datos
Puerto Ethernet
Con
figur
acio
n de
G
anan
cias
Con
figur
acio
n de
Est
ados
Util
idad
de
Reg
istro
de
Dat
os
Dis
play
Gra
fico
Interfase del Operador
Antena
MA
TLAB
Puerto Ethernet
Sim
ulin
k y
Rea
l Tim
e W
orks
hop
Host PC
EnlaceInalambrico
Antena del UAV
Sensores UAV
UAV
Piloto Automatico
NPS
Piloto Automatico
Piccolo
Superficies de Control
Estacion Terrena
Control Manual
Avionica
Lector/Decodificador
Protocolo Piccolo
Posicion y Orientacion de la Red
Computadora de Vuelo
Manejador GPS
COM 2
Puerto Ethernet
Manejador UDP
Filtro de Posicion y Velocidad
Calculo de los
Segmentos 1 o 2
Lazo Externo de Control y Realinea
Ruta
Envoltorio de
Protocolo Piccolo
Receptor de GBR 21
Envolotrio del
Protocolo Piccolo
Recivir Estados, Limites y
Ganancias
Envoltorio del
Protocolo Piccolo para
estados, Limites y
Ganancias
COM 1
Lectura
XPC Target
Download
Escritura
GPS
1G
PS 2
GBR
21
RS232Manejador
GPSCOM 3
Figura 5: Esquema Completo de implementacin del Sistema de Control.
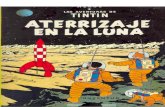
5. Resultados Se efectuaron exhaustivas simulaciones por computadora y de HIL para verificar la viabilidad de la solucin aqu presentada. Los resultados obtenidos se presentan en las siguientes subsecciones. 5.1 simulacin por Computadora Para verificar el xito del algoritmo propuesto, se desarrollaron en Simulink, un modelo de simulacin por computadora no lineal que contena el comportamiento dinmico del UAV representado por el modelo de 6GDL del Silver Fox, un modelo simple de un barco navegando con rumbo constante y la implementacin del algoritmo de recuperacin autnoma. La Figura 6 muestra los resultados tpicos de una simulacin. En sta se puede observar el recorrido del UAV desde un punto en el espacio hasta alcanzar el buque. 5.2. simulacin de Hardware en el Lazo (HIL) Se llevaron a cabo simulaciones de HIL para verificar la correcta implementacin de los controladores de dispositivo desarrollados en C e implementados como funciones-S, el impacto de los retrasos y perdidas en el canal de comunicaciones y el desempeo del algoritmo de recuperacin autnoma ejecutado en tiempo-real en la ALFCC. La configuracin de los equipos fue similar a la mostrada en la Figura 1, pero en lugar del vuelo real del UAV se utilizo una computadora personal ejecutando un programa desarrollado por la compaa Cloud Cap Technologies para simular la dinmica del vuelo y los sensores del UAV, y se transfirieron los datos a la avinica Piccolo a travs de un bus CAN.
(a)
(b)
Figura 6: Resultados de la Simulacin por Computadora de una Recuperacin Tpica a
bordo. (a) Vista 3D. (b) Vista Superior y Lateral.
La ALFCC estaba conectada a la estacin de tierra a travs de un cable serial utilizando protocolo RS32 para controlar la recuperacin del UAV. La configuracin en laboratorio de los equipos se muestra en la Figura 7. En las simulaciones de HIL se obtuvieron resultados similares a los mostrados en la Figura 6. La Figura 8 muestra como la velocidad angular en cabeceo ordenada al UAV, cr , exitosamente dirige a cero los errores de posicin y velocidad en el canal lateral.
-
Antena
Estacion Terrena
Avionica Piccolo
Concentrador
Control Manual
Interfase del Operador
Computadora de Vuelo
SimuladorGUI y Registro de
Datos
Host PC
Adaptador USB/CAN
Figura 7: configuracin en Laboratorio para
simulacin de HIL.
Figura 8: Errores de Posicin y Velocidad en la
Simulacin de HIL. Velocidad Angular de Cabeceo Ordenada.
6. Conclusiones y Trabajo Subsecuente Este trabajo presenta el diseo, desarrollo e implementacin de un sistema de recuperacin autnoma para un UAV. El algoritmo fue desarrollado en Simulink. Todos los controladores de dispositivo de bajo nivel fueron desarrollados en ANSI C e integrados a los modelos de Simulink, con el fin de proveer el enlace necesario entre el hardware y el software. Los resultados de simulacin por computadora y de HIL aqu presentados, muestran que el algoritmo propuesto tiene potencial de ser exitoso en las pruebas de vuelo reales. La idea fundamental bajo la cual fue desarrollado este sistema esta basada principalmente en el trabajo presentado en [5], reduciendo as un problema de tres dimensiones a un problema de dos dimensiones, haciendo ms sencillo el diseo del sistema de control.
Un elemento que aadira confiabilidad al sistema completo sera un predictor que permita a la aeronave dar la vuelta y reiniciar el acercamiento en caso de que identifique que no incidir sobre la red de recuperacin. Otro elemento que dara valor agregado al sistema sera un observador o un filtro Kalman para tener una mejor estimacin de la posicin actual y futura del buque, lo cual se estima mejorara el desempeo del algoritmo. Referencias [1]. Srikanth Saripalli, James F. Montgomery and
Gaurav S. Sukhatme. Vision-based Autonomous Landing of an Unmanned Aerial Vehicle. En Proceedings Of IEEE International Conference on Robotics and Automation, pp 2799-2804, Mayo 2002., Washington D.C., USA.
[2]. Cory S. Sharp, Omid Shakernia, S. Shankar Sastry. A Vision System for Landing an Unmanned Aerial Vehicle. En Proceedings of IEEE ICRA, pp1720-1727, Mayo 2001.
[3]. Omid Shakernia, Rene Vidaly, Courtney S. Sharp, Yi Ma, Shankar Sastry. Multiple View Motion Estimation and Control for Landing an Unmanned Aerial Vehicle. En Proceedings of IEEE International Conference on Robotics and Automation, Mayo 2002., Washington D.C., USA.
[4]. I. Kaminer, O. Yakimenko, V. Dobrokhodov, M. Lizarraga, A. Pascoal. Cooperative Control of Small UAVs for Naval Applications. En Proceedings of the 43rd IEEE Conference on Decision and Control, Diciembre 2004, Bahamas.
[5]. I. Kaminer, A. Pascoal, E. Hallberg, and C. Silvestre. Trajectory Tracking for Autonomous Vehicles: An Integrated Approach to Guidance and Control. Journal of Guidance, Control and Dynamics, Vol. 21, No. 1, pp. 29-38, Enero Febrero 1998.
[6]. M. Lizarraga. Autonomous Landing System for a UAV. Electrical Engineers Degree Thesis. Naval Postgraduate School, Marzo 2004. Disponible en: http://library.nps.navy.mil/uhtbin/hyperion/ 04Mar%5FLizarraga.pdf
[7]. James Stewart, Calculus Early Transcedentals, Fourth Edition, Brooks/Cole, Pacific Grove, CA, 1999.
[8]. Cloud Cap technology Inc. Technical Documentation on a low cost avionics system for small UAVs, Disponible en: http://www.cloudcaptech.com/piccolo.htm .
[9]. Mathworks, The, XPC Target Users Guide. Nantick, MA, 2003.