Automatitzaci i control d’una planta potabilitzadora...
139
Automatització i control d’una planta potabilitzadora d’aigua TITULACIÓ: Enginyeria Automàtica i Electrònica Industrial AUTORS: Néstor Vallejo Sabanés. DIRECTORS: Lluís Massagués Vidal. DATA: Maig / 2007.
Transcript of Automatitzaci i control d’una planta potabilitzadora...
-
Automatització i control d’una planta potabilitzadora d’aigua
TITULACIÓ: Enginyeria Automàtica i Electrònica Industrial
AUTORS: Néstor Vallejo Sabanés.DIRECTORS: Lluís Massagués Vidal.
DATA: Maig / 2007.
-
Índex
1 Introducció........................................................................................................................7 1.1 Objecte del projecte ......................................................................................................................7 1.2 Antecedents ..................................................................................................................................7 1.3 Abast del projecte .........................................................................................................................7 1.4 Segon objectiu ..............................................................................................................................8
2 Dimensió del procés de potabilització...........................................................................10 2.1 Segons els paràmetres físics i químics de l’aigua a tractar .........................................................10 2.2 Segons les dimensions de la planta..............................................................................................10
3 El procés de depuració de l’aigua.................................................................................13 3.1 El procés físic i químic per a aigües del tipus A2........................................................................13 3.2 Les instal∙lacions de potabilització..............................................................................................14
4 Descripció de la planta potabilitzadora del municipi d’Alcampell............................17 4.1 Esquema sinòptic del procés de la planta potabilitzadora d’Alcampell.......................................17 4.2 Captació remota de l’aigua..........................................................................................................17 4.3 Estació de bombeig......................................................................................................................18 4.4 Ramal d’impulsió.........................................................................................................................19 4.5 Basses de regulació......................................................................................................................19 4.6 Bombeig a ETAP.........................................................................................................................20 4.7 Estació de tractament d’aigua potable ETAP...............................................................................20 4.8 Dipòsit d’aigua tractada...............................................................................................................22 4.9 Bombeig al municipi d’Alcampell...............................................................................................22 4.10 Pou de desguàs...........................................................................................................................23
5 Adaptacions necessàries en la planta per a implementar el control..........................25 5.1 Modificacions en la captació del canal........................................................................................25 5.2 Adaptacions en l’estació de bombeig...........................................................................................26 5.3 Modificacions en el ramal d’impulsió.........................................................................................26 5.4 Adaptacions en la zona de les basses de regulació......................................................................26 5.5 Modificacions en l’etapa de bombeig a ETAP............................................................................26 5.6 Modificacions en l’estació de tractament d’aigua potable ETAP................................................27 5.7 Adaptacions en el dipòsit d’aigua tractada..................................................................................29 5.8 Adaptacions en les instal∙lacions de bombeig al municipi d’Alcampell......................................29 5.9 Adaptacions en el pou de desguàs...............................................................................................30 5.10 Altres modificacions en la planta...............................................................................................30
6 Elements de control de la planta. Llistat E/S...............................................................32 6.1 Captació remota de l’aigua..........................................................................................................32 6.2 Estació de bombeig......................................................................................................................32
2
-
6.3 General estació captació i bombeig.............................................................................................34 6.4 Bassa de regulació.......................................................................................................................34 6.5 Bombeig a ETAP.........................................................................................................................34 6.6 ETAP...........................................................................................................................................35 6.7 Dipòsit d’aigua tractada i bombeig..............................................................................................36 6.8 Pou de desguàs.............................................................................................................................37 6.9 General ETAP i bombeig.............................................................................................................37
7 Característiques que ha de satisfer el sistema d’automatització...............................40 7.1 Permetre implementar control distribuït......................................................................................40 7.2 Control en temps real...................................................................................................................40 7.3 Treballar amb elements de camp analògics i discrets.................................................................41 7.4 Adaptació del control a processos seqüencials............................................................................41 7.5 Robustesa de l’equip de control...................................................................................................41 7.6 Seguretat i fiabilitat......................................................................................................................41 7.7 Resposta fiable en tots els estats del procés.................................................................................42 7.8 Facilitat de manteniment.............................................................................................................42 7.9 Flexibilitat per adaptació a canvis en el procés...........................................................................42
8 Alternatives de control...................................................................................................44 8.1 Segons l’arquitectura del sistema: control local o distribuït........................................................44
8.1.1 Arquitectura local, control centralitzat................................................................................44 8.1.2 Arquitectura distribuïda, control distribuït .........................................................................44
8.2 Segons els busos de comunicacions: propietaris o oberts............................................................44 8.2.1 Busos propietaris.................................................................................................................45 8.2.2 Busos oberts........................................................................................................................45
8.3 Segons els elements de control : PC’s o PLC’s..........................................................................46 8.3.1 Control amb PC...................................................................................................................46 8.3.2 Control amb PLC.................................................................................................................46
9 Sistema de control .........................................................................................................48 9.1 Solució adoptada .........................................................................................................................48
9.1.1 Arquitectura distribuïda ......................................................................................................48 9.1.2 Bus de comunicacions obert ...............................................................................................48 9.1.3 Control amb autòmats programables PLC's.......................................................................49
9.2 Sistema de control........................................................................................................................49 9.2.1 Xarxa de control i comunicacions.......................................................................................49 9.2.2 Dominis de colisió ............................................................................................................50 9.2.3 Enllaç per radio entre estació de bombeig i planta potabilitzadora.....................................52 9.2.4 Antena de comunicació entre estacions...............................................................................54 9.2.5 Autòmat programable..........................................................................................................55
9.2.5.1 Estructura de control ambModicon TSX Momentum.................................................55
3
-
9.2.5.2 Estació de captació .....................................................................................................56 9.2.5.3 Estació de potabilització ............................................................................................57 9.2.5.4 Mòdul processador M1E.............................................................................................58 9.2.5.5 Mòduls d’entrades binàries.........................................................................................58 9.2.5.6 Mòduls de sortides binàries.........................................................................................59 9.2.5.7 Mòduls d’entrades analògiques...................................................................................59 9.2.5.8 Mòduls d’entrades de comptatge.................................................................................59
10 Modes de funcionament del control............................................................................61 10.1 Funcionament en mode manual.................................................................................................61 10.2 Funcionament en mode automàtic.............................................................................................61 10.3 Funcionament en mode remot....................................................................................................62
11 Estudi del tràfic en la xarxa de control Ethernet. ....................................................65 11.1 Conceptes previs .......................................................................................................................65
11.1.1 Busos de camp clàssics i Ethernet.....................................................................................65 11.1.2 Protocols Modbus TCP, TCP/IP i UDP/IP.......................................................................67 11.1.3 Serveis de comunicació en el bus de camp........................................................................68 11.1.4 Seqüència bàsica d'operació de l'autòmat..........................................................................69
11.2 Anàlisi del rendiment de la xarxa de control.............................................................................70 11.2.1 Objectius de la simulació...................................................................................................70 11.2.2 El programa de simulació de xarxes NS (Network Simulator)..........................................70 11.2.3 Modelització de la xarxa de control amb protocol TCP....................................................73 11.2.4 Codi font del programa de simulació de la xarxa en NS per a TCP/IP..............................77 11.2.5 Simulació sobre TCP/IP....................................................................................................82 11.2.6 Conclusions sobre el funcionament de la xarxa de control amb protocol TCP................87 11.2.7 Modelització de la xarxa de control amb protocol UDP....................................................89 11.2.8 Codi font del programa de simulació de la xarxa en NS per a UDP/IP.............................91 11.2.9 Simulació sobre UDP/IP....................................................................................................95 11.2.10 Conclusions sobre el funcionament de la xarxa de control amb protocol UDP..............97
12 Programa de control. Descripció general.................................................................100 12.1 Grafcet de nivell 1...................................................................................................................100 12.2 Grafcet G60: Captació d’aigua...............................................................................................101 12.3 Grafcet G80: Bombeig a les basses.........................................................................................101 12.4 Grafcet G100: extracció de fangs en estació de bombeig.......................................................102 12.5 Grafcet G180: ETAP..............................................................................................................102 12.6 Grafcet G200: bombeig a la xarxa pública.............................................................................103 12.7 Grafcet G240: extracció de fangs en la planta de potabilització.............................................105
13 Modes de marxa i aturada, la guia GEMMA..........................................................107 13.1 Grup F: procediments de funcionament...................................................................................107 13.2 Grup A: procediments d’ aturada.............................................................................................107
4
-
13.3 Grup D: procediments de defecte............................................................................................108 13.4 Procediments de marxa i aturada implementats en el control de la planta de potabilització.. .109
13.4.1 Marxa normal de funcionament en producció.................................................................109 13.4.2 Marxa de verificació sense ordre.....................................................................................109 13.4.3 Producció malgrat els defectes. Alarmes.........................................................................110 13.4.4 Detecció d’anomalies. Alarmes.......................................................................................110 13.4.5 Aturada d’emergència.....................................................................................................111
14 Programa de control. Grafcets complets. ................................................................113 14.1 Estació de captació...................................................................................................................113
14.1.1 Captació del aigua i tamisat.............................................................................................113 14.1.2 Bombeig a basses de regulació........................................................................................117 14.1.3 Grafcet de seguretat.........................................................................................................121
14.2 Planta de potabilització............................................................................................................121 14.2.1 Bombeig a ETAP i potabilització....................................................................................121 14.2.2 Bombeig a la xarxa pública.............................................................................................127 14.2.3 Grafcet de seguretat.........................................................................................................131
Bibliografia.................................................................................................................132 Pressupost...................................................................................................................134
5
-
CAPÍTOL 1
Introducció
6
-
1 Introducció
1.1 Objecte del projecte
Dissenyar un sistema automàtic per a l’explotació de la planta potabilitzadora i d’abastament d’aigua del municipi d’Alcampell en la província d’Osca. El sistema projectat ha de permetre l’execució normal del procés de potabilització sense la necessitat de presència física en la planta, així com facilitar l’adaptació de sistemes de supervisió i control remots en temps real.
1.2 Antecedents
L’ any 2004 l’ Ajuntament del municipi d’ Alcampell (Osca) promou la redacció de projecte i la posterior construcció d’una planta d’abastament i de potabilització d’aigua des del canal d’Aragó i Catalunya per tal de satisfer les necessitats d’aigua potable de la població del municipi. En el moment de realitzar aquest projecte, les obres continuen en curs. Un cop finalitzin, la planta entrarà en funcionament de forma immediata. Encara que no permanentment però sí de forma periòdica, l’explotació normal de la planta en les condicions actuals necessitarà de presència humana per tal de supervisar el procés i realitzar les tasques de manteniment. En aquest sentit l’ Ajuntament d’ Alcampell es planteja dotar la planta d’un sistema de control automàtic que governi la totalitat del procés i eviti la presència de personal en les instal∙lacions.
1.3 Abast del projecte
El punt de partida serà l’estudi del projecte executiu de la planta de potabillització, facilitat pel mateix Ajuntament d’Alcampell, analitzant en detall el tipus i el dimensionat de les instal∙lacions projectades així com el procés de potabilització pròpiament. Es visitaran després les instal∙lacions per tal de comprovar l’adequació de les obres al projecte i determinar les adaptacions que han de realitzarse tant en la planta com en el procés per a permetre la implementació del sistema de control.
El sistema de control ha de cobrir i unificar tot el procés, dividit en dues plantes diferents i distants més de cinc quilòmetres. Des de l’estació de captació i bombeig de l’aigua en el canal d’Aragó i Catalunya fins a la planta de potabilització i bombeig a la xarxa pública del municipi. El sistema de control ha d’articularse al voltant d’una xarxa de comunicacions que ha de unir les dues estacions i facilitar l’intercanvi d’informació entre elements físicament distants en el procés.Alhora, ha de facilitar la implementació futura d’un sistema de supervisió que permeti realitzar el seguiment del procés des qualsevol ordinador amb accés a la xarxa internet, independentment de la seva localització.
7
-
Finalment tant el software com el hardware empleats han de enfocarse en el sentit de facilitar en tot moment la independència respecte de sistemes propietaris, per tal de disposar d’un sistema obert que no condicioni ampliacions o modificacions futures del procés pel fet de dependre d’un fabricant concret.
Per tal de satisfer aquest requisit la xarxa de comunicacions es basarà en mitjans físics i protocols estàndard, com son Ethernet i TCP/IP. La idea d’evitar en tot moment sistemes propietaris es farà extensiva fins i tot al software de control, així per al disseny del programa s’usarà el Grafcet com a un llenguatge gràfic de programació per a autòmats, universal i per tant independent de la tecnologia amb la que finalment s’implementi el control.
1.4 Segon objectiu
La redacció d’aquest treball persegueix un segon objectiu, segurament més important per a l’autor que la mera automatització d’un procés amb màquines programables seqüencials. Aprofitant les particularitats físiques del procés, s’ha articulat un sistema de control distribuït que supera els requeriments actuals necessaris per a l’automatització de la planta de potabilització, però serveix de base per a l’estudi del comportament d’una xarxa de comunicacions Ethernet, de les particularitats que han ralentit l’entrada de Ethernet i el protocol TCP/IP dins l’entorn del control industrial i de les diferències amb el busos de comunicacions tradicionals.
Mitjançant el programa simulador de xarxes de comunicacions Network Simulator es realitzarà un model de la xarxa de control de l’estació potabilitzadora. Sobre el model creat es realitzaran simulacions del tràfic que s’estima suportarà la xarxa en diferents condicions, tot estudiant l’afectació que aquest pot suposar en el rendiment del sistema. (Capítol 11).
També s’ha volgut anar més enllà en el moment de disseny del automatisme, preveient no només el comportament en funcionament normal, sinó també el comportament davant els diferents modes de marxa i aturades que el sistema pot presentar, dissenyant la resposta d’aquest en cada situació. En aquest sentit per a l’elaboració del programa s’han estudiat els procediments recollits en la guia GEMMA. Aquesta és una guia gràfica que permet presentar de forma comprensible els diferents modes de marxa d’una instal∙lació de producció, així com les formes i condicions per a passar d’un mode a l’altre. (Capítols 13 i 14).
8
-
CAPÍTOL 2
Dimensió del procés de potabilització
9
-
2 Dimensió del procés de potabilització
El grau de complexitat d’un procés de potabilització de l‘aigua ve determinat per les característiques físiques i químiques d’aquesta i per les dimensions de la planta d’acord amb la grandària de la població que ha d’abastir.
2.1 Segons els paràmetres físics i químics de l’aigua a tractar
El Reglamento de la Administración Pública del agua de la Planificación Hidrológica, R.D. 927/88 en el seu annex 1 classifica les aigües superficials susceptibles de ésser destinades al consum humà en tres grups segons el grau de tractament que requereixen per a la seva potabilització:
• Tipus A1. Tractament físic simple i desinfecció• Tipus A2. Tractament físic normal, tractament químic i desinfecció• Tipus A3. Tractament físic i químic intensius, afinament i desinfecció
La planta potabilitzadora d’Alcampell està dissenyada per a tractar aigües provinents d’un canal. Per aquest motiu cal considerar una uniformitat relativament sostinguda en el temps pel que fa a composició i terbolesa.
En aquests condicions el procés per a la potabilització correspondrà a aigües de tipus A2. Només en el cas de pertorbacions provocades per neteja del canal, pluges torrencials, o abocaments descontrolats l’aigua pot passar temporalment al tipus A3. En aquesta situació la planta no pot garantir el normal funcionament. Per evitar aquest problema un sensor de terbolesa en l’entrada avisarà quan es superen els llindars d’acceptació de la qualitat de l’aigua provocant l’aïllament temporal de la planta del presa del canal.Aquesta és una millora introduïda des d’aquest projecte d’automatització i serà descrita en més detall en un capítol posterior dedicat a les adaptacions i canvis a realitzar en la planta d’Alcampell per tal d’implementar el control automàtic.
2.2 Segons les dimensions de la planta
La planta potabilitzadora del municipi d’Alcampell està dissenyada per a donar un consum mensual punta de 18.000 m3, o 600 m3 diaris. En aquest sentit és una planta de grandària petitamitjana, però te algunes particularitats que condicionen les dimensions físiques de la planta i compliquen el procés: la necessitat de disposar d’una autonomia en el consum de 30 dies, la capacitat per a poder recuperar la reserva d’aigua en 48 hores i el fet de tenir un procés únic repartit en dues plantes distants 5,4 km, la estació de captació i la planta de potabilització.
A més a més, la planta està pensada per poder ésser ampliada en un futur en previsió d’un augment de les necessitats d’aigua potable provocat per una major població en el municipi
10
-
en períodes estivals i fins i tot de forma estacionaria la resta de l’any, si prosperen iniciatives turístiques i industrials promogudes per l’ens municipal. El sistema de control dissenyat ha d’ésser prou flexible i tenir la capacitat d’adaptarse als canvis que tinguin lloc en la planta.
11
-
CAPÍTOL 3
El procés de depuració de l’aigua
12
-
3 El procés de depuració de l’aigua
3.1 El procés físic i químic per a aigües del tipus A2
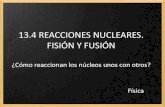
El tractament estàndard per a les aigües del tipus A2 compren les següents etapes seqüencials mostrades en la figura 3.1.
• Desbast / Tamisat: separa les matèries voluminoses arrossegades per l’aigua bruta. El tamisat és un primer filtratge destinat a remoure aquelles partícules sòlides en suspensió de dimensions superiors a 0,5mm.
• Desarenat : te per objecte aconseguir la separació mitjançant l’acció de la gravetat d’aquelles partícules de l’aigua bruta com la grava, arena i partícules minerals més o menys fines que no són filtrades per l’anterior etapa . Les partícules granulars sedimenten independentment unes de les altres.
• Precloració: un tractament de precloració, realitzat abans de la decantació, casi sempre es recomanable per a aconseguir una major qualitat de l’aigua. Aquesta precloració actua per oxidació dels diferents cossos continguts en l’aigua. Els avantatges d’aquest tractament són més apreciables en certs períodes de l’any especialment en aigües superficials quan la qualitat de l’aigua a tractar és inferior als valors normals. La principal diferència entre aquesta precloració i la desinfecció posterior està en el factor temps. En la desinfecció el temps és molt important, però no ho és tant en la precloració, on els efectes que es busquen s’obtenen ràpidament.
• Coagulació: les partícules en suspensió coloidal no es precipiten per gravetat per causa de les seves petites dimensions. Presenten càrrega electrostàtica de forma que la repulsió elèctrica impedeix l’agregació. La coagulació te per objecte la desestabilització de les suspensions coloidals presents en l’aigua mitjançant
13
Figura 3.1. Procés de potabilització
-
reactius químics que neutralitzen la càrrega elèctrica, permeten així l’agregació de les partícules descarregades segons el procés de floculació. El coagulant o reactiu químic que durant el procés de coagulació s’introdueix al aigua són generalment sals d’alumini o de ferro. El temps de coagulació és molt breu (inferior al segon) i l’ús òptim del coagulant exigeix que la neutralització dels coloides sigui total abans que una part del coagulant precipiti. Per aquest motiu el coagulant ha de difondre’s amb la major rapidesa possible. S’aconsegueix aquest propòsit mitjançant cambres de mescla ràpida mitjançant agitadors electromecànics.
• Floculació: l’agrupació de les partícules descarregades al ficarse en contacte les unes amb les altres constitueix la floculació. Aquesta dona lloc a la formació de flòculs capaços d’ésser retinguts en una fase posterior del tractament de l’aigua. S’introdueix en l’aigua un producte floculant que afavoreix l’augment del pes i cohesió dels flòculs formats. També una agitació mecànica però en aquest lenta (per tal de no trencar el flòcul) i homogènia del conjunt en una cambra de floculació ajudarà a la agrupació dels flòculs augmentantne la mida i la velocitat de sedimentació.
• Decantació / sedimentació: te per objecte aconseguir la separació mitjançant l’acció de la gravetat dels flòculs formats en l’etapa anterior.
• Filtrat: l’etapa de filtratge retindrà aquelles partícules de mida més petita que han superat l’etapa de decantació.
• Desinfecció: per tal d’aconseguir l’eliminació de certes matèries minerals dissoltes indesitjables (composts de ferro o de magnesi...), la supressió de sabors i olors i la destrucció de germens patògens es recorre a un procés químic d’oxidació. L’oxidació s’acostuma a fer mitjançant la injecció de clor. El clor posseeix un poder oxidant romanent molt elevat que afavoreix la destrucció de les matèries orgàniques.
3.2 Les instal∙lacions de potabilització.
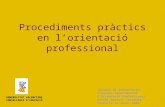
Freqüentment els rius o aqüífers des d’on es proveeix l’aigua no es troben situats prop de les poblacions de consum. Per altra banda, la planta de potabilització per raons logístiques i d’optimització de recursos s’acostuma a ubicar en zones pròximes a les poblacions que abasteixen. D’aquesta forma el procés de potabilització considerat en conjunt està físicament dividit en dues instal∙lacions, en edificacions independents separades normalment per distàncies de varis quilòmetres (figura 3.2).
14
-
L’edificació pròxima a l’aqüífer és l’estació de captació. Alberga les instal∙lacions destinades als processos de captació, tamisat, desarenat, així com la planta de bombeig on s'envia l'aigua a través del ramal d’impulsió fins als dipòsits d’entrada d’aigua de l’estació de potabilització ( ETAP).
L’edifici on es realitza el procés de potabilització pròpiament, s’anomena estació de tractament d’aigua potable E.T.A.P. L’aigua bruta arriba a l’estació de tractament sense partícules granulars que s’han separat en l’etapa de captació abans del bombeig. En l’estació l’aigua s’acumularà a l’entrada en dues o més basses de regulació amb l’objectiu de tenir l’autonomia suficient per garantir el consum durant el període en que per raons i particularitats de la font d’abastament d’aigua el subministrament queda interromput.Aquest és el cas que es dona en les captacions en canals durant els períodes en que cal realitzar les pertinents operacions de manteniment. El fet de disposar d’un mínim de dues basses permet les operacions de neteja en una i continuar tenint reserva d’aigua en la resta.Mitjançant un sistema de bombes s’abasteix la ETAP des de les basses de regulació. En la ETAP l’aigua circula per gravetat pels tancs de coagulació, floculació, decantació i filtrat en aquest ordre.
A la sortida, després de rebre el tractament químic de desinfecció l’aigua tractada s’emmagatzema novament en dos o més dipòsits estancs per tal de facilitarne el manteniment. La darrera etapa de la planta és l’estació de bombeig amb elements de cabal variable per tal de modular la quantitat d’aigua subministrada d’acord amb el perfil de la corba de demanda.
15
Figura 3.2. Captació i potabilització en edificacions separades
-
CAPÍTOL 4
La planta potabilitzadora del municipi d’Alcampell
16
-
4 Descripció de la planta potabilitzadora del municipi d’Alcampell
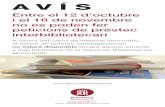
4.1 Esquema sinòptic del procés de la planta potabilitzadora d’Alcampell
Dues estacions separades 5,4 Km formen la planta potabilitzadora: l’estació de captació, prop del canal dAragó i Catalunya i la de potabilització, propera al nucli urbà d’Alcampell. La figura 4.1, és l’esquema hidràulic complet del procés.
4.2 Captació remota de l’aigua
La figura 4.3 esquematitza el procés que te lloc en l’estació de captació. La toma d’aigua per a l’abastiment de la planta està realitzada en el canal d’Aragó i Catalunya segons model de la Confederación Hidrográfica del Ebro. Aquesta toma consisteix en un boca de fàbrica de formigó en massa amb una comporta mural integrada de 400 x 400 mm per a poder realitzar el seccionament (figura
17
Figura 4.1. Esquema del procés de potabilització de la planta d’Alcampell
Figura 4.2. Obertura de captació en el canal
-
4.2). L’embocadura porta una reixa d’acer galvanitzat amb llum de pas de 4 cm. Aquest element constitueix el primer desbast de l’aigua captada.La toma d’aigua pròpiament està realitzada amb canonada de fundició dúctil de 200 mm. En la mateixa canonada estan ubicats una vàlvula comporta i un comptador totalitzador
DN200 amb emissió d’impulsos. Aquestes instal∙lacions són accessibles i controlades per la Confederación Hidrográfica.
4.3 Estació de bombeig
Per a realitzar la impulsió fins a les bases i dipòsits de regulació hi ha construïdes les següents instal∙lacions. Dues bombes submergibles d’accionament elèctric de 5,5 kW amb un cabal de 54 m3/h a 10 mca (figura 4.4). Les bombes són de construcció per pas de sòlids de 50 mm. Estan situades en el nivell del canal i impulsen l’aigua fins el canal de tamisat. En aquest canal s’eliminen les partícules
de mida superior a 0,5 mm amb la finalitat de protegir les bombes principals. Per aquest afer s’usa un tamisador d'esglaons autonetejant amb pas de sòlids de 0,5 mm i un cabal nominal de 80m3/h.
D’aquest canal passa l’aigua per gravetat fins al dipòsit d’impulsió, amb una geometria expressament pensada per que sigui capaç de decantar les partícules arenoses menors de 0,5 mm. Una bomba submergible de tipus vortex de 0,75 kW amb un cabal de 10 m3/h a 15
mca, s’encarrega d’eliminar periòdicament els fangs acumulats en el fons del dipòsit.
18
1. Figura 4.4. Bombes d’impulsió al canal de tamisat
Figura 4.3. Captació remota de l’aigua
-
La impulsió a la planta de potabilització es realitza mitjançant dues bombes verticals multicel∙lulars d’accionament elèctric dimensionades per a elevar 43,5 m3/h a 180 mca. La seva potència és de 3,0 kW (figura 4.5). Les dues bombes en paral∙lel prenen l’aigua del dipòsit d’impulsió. Les instal∙lacions disposen de les vàlvules de retenció i seccionament adients. Aquestes instal∙lacions estan encabides en una edificació realitzada amb formigó armat.
4.4 Ramal d’impulsió
La conducció d’impulsió te una longitud de 5.395m des de l’estació de bombeig fins les bases de regulació, amb un desnivell de 170m. La conducció, soterrada està realitzada amb dos tipus de canonades. El tram inicial des de l’estació fins els 3320 m és de fundició dúctil DN 200 mm, el tram restant fins les bases de regulació està fet amb polietilé d’alta densitat de diàmetre 250 mm i 10 atm de pressió nominal amb una longitud de 2075 m.Disposa el ramal dels corresponents desguassos, vàlvules de retenció i vàlvules de seccionament.
4.5 Basses de regulació
Aquesta part del projecte es troba encara en execució. Les dades següents són extretes del projecte d’obra civil.L’aigua bruta procedent de la impulsió s’acumula en tres basses realitzades en el terreny, situades a l’entrada de la estació de potabilització (esquema en la figura 4.6). Les condicions de pressa d’aigües en el canal per abastiment urbà que estableix La Confederación Hidrográfica del Ebro són que les instal∙lacions han de tenir una autonomia de consum de 30 dies, període de temps aquest necessari per a la realització de les tasques de manteniment que requereix el canal.
19
Figura 4.5. Bombes d’impulsió a basses de regulació
Figura 4.6. Basses de regulació
-
La funció de les basses, per tant és la d’acumular un volum d’aigua equivalent al consum mensual. Per altra banda aquesta reserva ha de poderse omplir en un termini màxim de 48h. Amb un cabal de disseny de 600 m3 diaris la capacitat necessària és de 18.000 m3, que es materialitzarà en tres basses interconnectades de 9.000 m3 cada una. La canonada de connexió és de 200 mm amb fundició i disposa en tots els casos de vàlvula de comporta. Les basses estaran recobertes amb una làmina impermeabilitzant de polietilé d’alta densitat de 1,5 mm. Disposaran de desguàs de fons i sobreeixidor.La canonada d’impulsió de polietilé de 250 mm de diàmetre es redueix a 200 mm en l’entrada. Hi haurà una entrada en cada balsa amb una vàlvula de comporta de 200 mm i una vàlvula flotador pilotada també de 200 mm.
4.6 Bombeig a ETAP
Una edificació de formigó armat, encara en construcció (figura 4.7) albergarà les vàlvules de sortida de cada bassa i les vàlvules de desguàs de fons. Aquest edifici contindrà un dipòsit alimentat des de les basses i on mitjançant dues bombes submergibles de 0,75 kW amb un cabal de 12,5 m3/h a 8 mca s’abastirà d’aigua el procés de potabilització en la ETAP. La base del dipòsit es troba en un nivell piezomètric per sota del de les basses, de forma que mentre hi ha aigua en les basses està garantida l’entrada d’aigua en el dipòsit. Cada bomba alimentarà de forma independent una planta potabilitzadora modular.
4.7 Estació de tractament d’aigua potable ETAP
La ETAP, en un edifici de formigó armat, es proveeix d’aigua des de les bombes abans esmentades ubicades en l’edificació annexa. Donades les característiques de l’aigua de captació la solució adoptada segueix un tractament format per prefiltració, mesura del cabal, floculació, filtració i cloració en la canonada de sortida al dipòsit.El procés (figura 4.8) es realitza mitjançant dues plantes modulars compactes que porten inclòs tots els elements electromecànics necessaris per al funcionament (figura 4.9). Aquest mòdul disposa d’una unitat de filtració de 0,90m2 de superfície i ens permet tractar un cabal mim de 12,5 m3/h. Cada planta està preparada per a tractar un cabal diari de 300 m3. Les hores de tractament diàries dependran del consum real. Ja es veu, que totes les instal∙lacions estan doblades, tant a nivell de circuits i bombes com a nivell de plantes modulars pel tractament. De forma que el funcionament en paral∙lel de
20
Figura 4.7. Edifici annex a les basses, encara en construcció
-
les dues, proporciona les condicions nominals de cabal d’aigua potable de la planta, els 600 m3 diaris. Està fet així, per evitar que un defecte en un circuit deixi del tot inoperant la planta. Així en cas d’avaria o simplement de parada per manteniment la planta pot continuar treballant a la mitat de la seva capacitat.
Abans de l’entrada a les plantes modulars es realitza una prefiltració, amb el propòsit de garantir que en el filtre principal de sílex no hi arriben cossos estranys, com poden ésser fulles d’arbre, branques d’arbre, arena, etcètera... Aquesta es fa amb un filtre de xarxa metàl∙lica de neteja manual en la canonada d’entrada.
També en la canonada d’entrada a cada planta modular, es realitza l’adició de producte floculant, policlorur d’alumini líquid o PAX10 tal com se’l coneix en el mercat. El floculant es injectat en l’aigua en quantitat variable en funció del cabal d’entrada, des d’un equip dosificador controlat per microprocessador compost per una bomba de membrana de 5 l/h de cabal a 6 bar de pressió màxima, amb entrada de control analògica de 4/20 mA, vàlvula d’injecció i vàlvula de peu amb senyal de buit. La mesura del cabal, en la mateixa canonada d’entrada es fa mitjançant un mesurador magnèticinductiu Endress+Hauser tipus Promag 50W amb un rang de mesura que va des de 6 m3/h a 0,5 m/s fins 120 m3/h a 10 m/s.
21
Figura 4.9. Vista superior de la ETAP compacta
Figura 4.8. Procés en la ETAP
-
En l’interior de les unitats modulars de tractament, te lloc l’eliminació dels sòlids floculats mitjançant filtres de sílex. Les partícules queden retingudes en els els filtres, però aquest
tractament en continu, no pot permetre que s’hi acumulin indefinidament, per això en la zona del rentador del cada unitat es produeix una purga continuada mitjançant la injecció d’aire proporcionada per un compressor d’aire de 1,5 kW. Cada unitat de filtre disposa d’un quadre pneumàtic format per filtre d’aire, regulador de pressió i cabal i electrovàlvula de comandament.En la sortida de l’aigua després de travessar els filtres, es realitza la cloració en continu. Aquesta consisteix en l’adició d’hipoclorit sòdic des d’un tanc d'emmagatzematge
situat al costat. Un nou equip dosificador de característiques iguals al que controla l’adició de floculant, s’encarrega d’administrar la quantitat de clor necessària d’acord amb el valor de consigna fixat pel usuari. Per tancar el bucle de control del clor es disposa d’un equip analitzador de clor lliure en continu, controlat per microprocessador amb senyal d’alarma per contacte lliure de tensió i dues sortides analògiques 420 mA. Els productes químics pel tractament de l’aigua s’emmagatzemem per separat en tancs de polietilé blanc de 100 litres de capacitat. Cada tanc disposa d’una sonda de nivell de tipus boia amb interruptor per contrapes i tensió 250 V.
4.8 Dipòsit d’aigua tractada.
L’aigua clorada provinent de la ETAP s’emmagatzema en un dipòsit d’aigua construït amb formigó armat amb capacitat per a 800 m3 (figura 4.10). Aquest està dividit en dues cel∙les per facilitarne el manteniment. Disposa de dues sondes de nivell de tipus boia.
4.9 Bombeig al municipi d’Alcampell.
(Figura 4.11) la solera del dipòsit d’aigua tractada està situada en la cota 522,3 m. Això assegura una pressió mínima en el nucli d’Alcampell de 2 atm aproximadament. Per tal d’assolir una pressió de subministrament de 3 a 3,5 atm es disposa d’un grup de pressió format per tres electrobombes verticals multicel∙lulars de 25 m3/h i 10 mca amb una potència de 1,5 kW
22
Figura 4.10 Dipòsit d’aigua tractada
Figura 4.11. Bombeig a xarxa
-
cada una. L’accionament de les bombes es del tipus tot o res, i fa per pressostat amb l’ajut d’un calderí de membrana de 770 litres que evita una caiguda brusca de la pressió en la xarxa entre intervals de funcionament de les bombes. Un comptador totalitzador DN200 emissor d’impulsos aigües avall de les bombes, permet conèixer els metres cúbics d’aigua produïts i abocats a la xarxa a través d’ una canonada de polietilè, de 250 mm i 10 atm de pressió que porta l’aigua fins al nucli de la població.
4.10 Pou de desguàs.
S’anomena pou de desguàs a un dipòsit soterrat situat sota el nivell de la ETAP. Aquest recull les aigües provinents del rentat de filtres així com les aigües de buidat de les basses. En aquest dipòsit hi ha dues electrobombes submergibles de 0,75 kW de potència i 12,5 m3/h a 8 mca. Aquestes bombes impulsen l’aigua a l’exterior en un punt més alt fins una petita zona humida. La figura 4.12, és l’esquema sinòptic del procés
23
Figura 4.12. Extracció de fangs
-
CAPÍTOL 5
Adaptacions en la planta per a implementar el control
24
-
5 Adaptacions necessàries en la planta per a implementar el control.
L’automatització íntegra del procés de potabilització, comporta la necessitat de realitzar modificacions en les instal∙lacions per tal d’adaptar els nous elements de control. Aquestes modificacions de vegades necessàries, de vegades opcionals, cal veureles com millores en el control del procés i en el procés en sí mateix, augmentantne la fiabilitat i la seguretat. A continuació es detallen quins són i on es realitzen els canvis.
5.1 Modificacions en la captació del canal
En la toma d’aigua del canal, una comporta mural integrada permet realitzar el seccionament. Per tal de conèixer l’estat d’aquesta comporta, es col∙locaran en el mecanisme d’obertura dos detectors de posició, que indicaran l’estat de oberta o tancada. Donada la ubicació d’aquests detectors, en la intempèrie i pròxims a l’aigua, tindran un grau de protecció IP 67.
En la mateixa zona de la comporta, s’hi adaptarà un detector de nivell per ultrasons IP67, i sortida analògica 420mA (figura 5.2). La seva mesura serà comparada amb un valor umbral. Per sota d’aquest significarà que el nivell d’aigua del canal no arriba a un mínim que permeti garantir l’alimentació de les bombes.
Junt amb el detector de nivell, aigües amunt de la vàlvula de tall d’entrada d’aigua es col∙locarà un sensor de terbolesa novament amb IP67 i sortida analògica 420 mA, que ens informarà de la quantitat de fangs arrossegats per l’aigua. Quan el nivell de fangs és superior al valor màxim esperat, això és, superior al valor llindar fixat en els paràmetres d’inicialització del procés, pot interrompre’s l’entrada d’aigua fins que es torni als nivells normals. Aquesta circumstància pot donarse en cas de riades o pluges fortes. Una vàlvula de comporta de diàmetre nominal 200 mm, d'obertura manual, permet interrompre la entrada d’aigua a l’estació de captació. La vàlvula no està preparada per a poder ser motoritzada, i suposaria un temps i cost considerables adaptarhi expressament un motor elèctric amb la caixa desmultiplicadora. S’opta doncs per situar aigües avall una nova vàlvula. Donat que la seva funció és interrompre el subministrament d’aigua, però no pas el regularne el cabal, la vàlvula serà de tipus papallona motoritzada amb detectors finals de carrera que permetin conèixer la posició d’oberta i tancada (figura 5.2).
25
Figura 5.1. Sensor nivell
-
Totes les instal∙lacions en la captació són accessibles i controlades per la Confederación Hidrográfica, per aquest motiu tots aquest canvis es consensuaran amb aquesta entitat.
5.2 Adaptacions en l’estació de bombeig
S’aprofitaran els detectors de nivell instal∙lats en el dipòsit, un detector de nivell màxim de senyal tot o res, i un altre de nivell mínim per sota del qual no poden funcionar les bombes d’impulsió.
5.3 Modificacions en el ramal d’impulsió
En la conducció d’impulsió s’instal∙larà un interruptor de cabal que indicarà del correcte funcionament del bombeig fins a les bases de regulació. La no detecció de flux amb les bombes en funcionament indicarà d’un problema en la conducció ocasionat per fugues o obstruccions.
5.4 Adaptacions en la zona de les basses de regulació
L’entrada d’aigua amb canonada DN 200 a les bases i disposa en tots els casos de vàlvula de comporta. No es preveu la seva motorització donat que en el normal desenvolupament del procés aquestes vàlvules han de romandre sempre obertes. Només en el cas d’una aturada per manteniment pot tenir sentit el tancarles, però aquesta serà en tot cas una acció manual. Per les mateixes raons tampoc es motoritzaran les vàlvules de seccionament en les conduccions de comunicació entre basses, donat que durant el procés han de romandre sempre obertes. Es mantenen les vàlvules de flotador pilotades DN 200 en la conducció d’entrada en cada bassa, però traient un senyal tot o res de l’element flotador per al control. El propòsit és de donar ordre de parada de bombes en l’estació de bombeig quan els tres flotadors donin senyal, i evitar així sobrepressions innecessàries en la canonada d’impulsió.
5.5 Modificacions en l’etapa de bombeig a ETAP
La base del dipòsit des d’ on es bombeja l’agua per a la potabilització en la ETAP, es troba en un nivell piezomètric per sota del de les basses, garantint així un volum d’aigua en el dipòsit proporcional al nivell d’aigua en aquestes. Però com en les basses només es controla el nivell màxim (mitjançant les vàlvules de flotador), no podem determinar el nivell d’aigua en el dipòsit en el moment en que tot i tenir aigua en les basses, el nivell no arriba al màxim en cap d’ aquestes. Com el problema no és tan de conèixer amb exactitud el nivell d’aigua en el dipòsit, sinó de saber quan aquest arriba a un mínim que posaria en
26
Figura 5.2. Comporta motoritzada
-
perill les bombes, n’hi haurà prou amb col∙locar una sonda submergida en el fons del dipòsit per indicarne el nivell mínim.
5.6 Modificacions en l’estació de tractament d’aigua potable ETAP
La prefiltració que es realitza una abans de l’entrada de cada planta modular, amb el propòsit de garantir que en el filtre principal de sílex no hi arriben cossos estranys, ha de poder ésser controlada pel sistema. En aquest sentit es col∙locarà un sensor analògic de pressió diferencial amb sortida per corrent 420mA (figura 5.3). Les presses de mesura de pressió es mecanitzaran en la canonada d'entrada a la ETAP modular entre entrada i sortida del filtre. Quan la diferència de pressions llegides pels sensors arribi a un valor llindar fixat en el programa de control, significarà que el filtre
està obstruït i serà necessària la seva neteja. Aquest és un valor crític en el procés donat que una obstrucció important en el filtre, reduirà considerablement el cabal d'entrada fins al punt de deixar inoperant la planta modular que necessita d'uns cabals mínims per al seu correcte funcionament.
Els tancs de policlorur d’alumini líquid ( producte floculant ) i d’hipoclorit sòdic disposen actualment d’interruptors de nivell que permeten conèixer l'estat
de la reserva de producte. De cara a l'automatització del procés, és important conèixer dos valors en el nivell de producte. Un valor que serà merament indicatiu, avisarà quan s'està en situació de reserva. No repercutirà en el procés fins que un segon valor de nivell indiqui la manca de producte, moment en que cal aturar el procés. S'aprofitarà doncs, els detectors instal∙lats com a sondes de nivell mínim i s'afegirà un detector que avisarà de la necessitat de realitzar la recarrega. Aquest serà un detector capacitiu situat en l’exterior del tanc per evitar que siguin danyats pel mateix producte emmagatzemat.
La planta compacta potabilitzadora realitza la filtració automàticament: mitjançant el mesurador magnèticinductiu Endress+Hauser (figura 5.4), llegeix el cabal d’aigua entrant i dosifica el floculant segons aquest. L’aigua floculada travessa els filtres de sílex de la ETAP modular on queden retingudes les partícules aglomerades en flòculs. Donat que el procediment de floculació i filtració es realitza en continu, no pot permetre’s que les partícules retingudes s’hi acumulin indefinidament, per això en la zona del
27
Figura 5.3. Sensor pressió diferencial
Figura 5.4. Cabalímetre
-
rentador del cada unitat es produeix una purga continuada mitjançant la injecció d’aire proporcionada per un compressor.La cloració la realitza en continu també la planta compacta. El procés te lloc en la sortida, després de travessar els filtres. Aquesta consisteix en l’adició d’hipoclorit sòdic amb una bomba dosificadora des d’un tanc d'emmagatzematge. La planta afegeix la quantitat de clor necessària d’acord amb el valor de consigna fixat per l’usuari. Realitza una regulació en bucle tancat seguint un algoritme PID de paràmetres fixats pel fabricant. El valor de clor en la sortida es pren mitjançant un equip analitzador de clor en continu (figura 5.5)
Amb l’automatització íntegra del procés de captació i potabilització es plantegen dues alternatives en el moment d’integrar la planta compacta.La primera és anul∙lar l’automatisme que incorpora la pròpia planta compacta, i realitzar l’adició de floculant, la neteja dels filtres i l’adició de clor directament des de el control general de la planta. La segona consisteix en mantenir actiu el propi automatisme de la planta integrantlo en el control general i des d’aquest controlarne el correcte funcionament, aprofitant la lectura de les variables de control des dels mateixos sensors empleats per la planta. S’opta per la segona opció per diverses raons:
1. no menysprear de nou en nou un automatisme que ja està instal∙lat, que ve provat d’origen i no perdre així la garantia del fabricant al intervenir la planta. 2. El fet que el mantenir l’automatisme de la planta compacta, no significa perdre plena capacitat de control sobre el procés que aquesta realitza. Es pot supervisar des del control general el seu correcte funcionament, llegint en temps real l’estat de les diferents variables que intervenen, podent aturar el procés quan es detecti anomalies.3. Per la pròpia naturalesa del control implementat, obert, modular i flexible, la primera opció sempre està disponible. Si en un moment posterior es decideix assumir la regulació que realitza la planta compacta, només cal afegir els corresponents mòduls de control: un nou mòdul d’entrades i sortides i un mòdul de regulació PID, connectats al bus Ethernet i afegir en el programa general les rutines de control d’aquests nous elements.
La demanda d’aigua potable pot ésser molt variable en funció de l’època de l’any i del hora del dia. En aquest sentit és d’esperar que hi hagi llargs intervals de temps en que la reserva del dipòsit no baixi el suficient com per a justificar el continuar amb la producció d’aigua potabilitzada.
28
Figura 5.5. Analitzador de clor
-
En aquests moments la ETAP en conjunt pot deixar de treballar, no cal bombar aigua ni mantenir els compressors i les pròpies plantes modulars actives. Però en el moment d’iniciar de nou la producció cal esperar a disposar de pressió d’aire i a que la planta estigui llesta per a produir de nou. Per aquest motiu s’instal∙laran sensors de pressió en la xarxa pneumàtica, per detectar quan la pressió en la xarxa està per sota de la de treball del equips i es cablejarà fins al control un senyal de “ready” des de cada planta.
5.7 Adaptacions en el dipòsit d’aigua tractada.
Ja s’ha esmentat al descriure en el capítol anterior la planta de potabilització, que els dipòsits on s’emmagatzema l’agua tractada (figura 5.6) disposen de sensors de nivell del tipus de boia. Aquests només permeten conèixer el moment en que el nivell assoleix un punt determinat, però no permeten disposar d’una lectura en temps real del nivell i per tant de les reserves d’aigua potable de l’estació. Donat que es considera aquesta un dada rellevant, es substituiran els actuals sensors de boia per sensors analògics d’ultrasons amb sortida per corrent de 420mA. Es col∙locarà un sensor en cada cel∙la del dipòsit, permetent conèixer l’estat de les reserves d’aigua en cada moment.
5.8 Adaptacions en les instal∙lacions de bombeig al municipi d’Alcampell.
Les tres electrobombes verticals multicel∙lulars usades per assolir una pressió de subministrament de 3 a 3,5 atm, es governen actualment amb un senyal de tipus tot res provinent d’un pressostat situat en un calderí de membrana de 1000 litres de capacitat. la pressió de servei oscil∙la entre un valor màxim i un mínim determinats per la desconnexió i connexió del pressòstat. Les tres bombes s’activen i es detenen alhora (figura 5.7)
Tenint en compte que per altura de la planta respecte el nucli de població s’aconsegueixen ja gairebé 2 atm de pressió, les bombes només han de subministrar entre 1 i 1,5 atm. La regulació obtinguda amb el sistema actual és poc eficient.
Es proposa, eliminar el calderí pneumàtic i muntar un variador de velocitat que actuarà sobre una única bomba. Un sensor de pressió que es col∙locarà en la conducció d’impulsió cap a la xarxa d’aigua potable donarà lectura en tot moment de la pressió de
29
Figura 5.6. Dipòsit aigua tractada
Figura 5.7. Bombes de xarxa
-
subministrament. El valor de la pressió descendirà al augmentar el cabal sol∙licitat en la xarxa. En funció d’aquest valor de pressió s’actuarà sobre el variador i sobre l’encesa i parada de la resta de bombes, de forma que en un moment donat per mantenir la pressió de treball segons sigui la demanda d’aigua, només estaran en marxa la bomba accionada pel variador o la bomba accionada pel variador més una o dues de la resta de bombes disponibles.
5.9 Adaptacions en el pou de desguàs.
En el pou de desguàs que recull les aigües provinents del rentat de filtres i de buidat de les basses s’instal∙larà un detector de nivell. Aquest es situarà en el fons del dipòsit per sobre de la boca de les dues electrobombes submergides. S’anul∙larà la sonda de nivell per flotador que porta instal∙lada cada bomba.
5.10 Altres modificacions en la planta.
Per tal que d’informar al control de l’estat dels elements de protecció i maniobra de circuits i motors, s’afegiran contactes auxiliars, que aniran cablejats fins als mòduls d’entrades i sortides:
• en els contactors que accionen els motors i bombes del procés.• en els relés tèrmics de protecció de motors i bombes.• en els elements disjuntors de motors i bombes.• en els elements de protecció de circuits de maniobra i potencia.
En cada estació, captació i ETAP s’ubicarà un petit quadre de maniobra i senyalització que ha de permetre:
• commutar el procés a mode manual per a realitzar les tasques de manteniment en la planta. En mode manual es permet l’accionament de cada dispositiu de forma individual.
• commutar el procés a mode automàtic.• detenir de forma normal el procés finalitzant les tasques en curs.• detenir el control automàtic en cas d’emergència mitjançant un polsador, aturant el
procés i deixant sense alimentació els actuadors.
30
-
CAPÍTOL 6
Elements de control de la planta. Llistat E/S
31
-
6 Elements de control de la planta. Llistat E/S
D’acord amb la divisió per etapes del procés feta fins ara, definim en aquest apartat els elements de control del procés sensors i actuadors, i el tipus de senyal en cada cas, binària (B) o analògica (A).
6.1 Captació remota de l’aigua
Entrades
1 Final carrera comporta mural oberta B
2 Final carrera vàlvula papallona oberta B
3 Final carrera vàlvula papallona tancada B
4 Relé tèrmic motor vàlvula B
5 Contactor motor vàlvula B
6 Magnetotèrmic línia motor vàlvula B
7 Diferencial línia motor vàlvula B
8 Comptador totalitzador / cabalímetre B
9 Sensor de nivell A
10 Sensor de terbolesa A
Sortides
12 Bobina contactor motor vàlvula comporta B
13 Senyal reset de comptador B
6.2 Estació de bombeig
Entrades
1 Relé tèrmic bomba 1 impulsió tamisat B
2 Contactor bomba 1 impulsió tamisat B
3 Magnetotèrmic línia bomba 1 impulsió tamisat B
4 Relé tèrmic bomba 2 impulsió tamisat B
5 Contactor bomba 2 impulsió tamisat B
6 Magnetotèrmic línia bomba 2 impulsió tamisat B
32
-
7 Diferencial línia bombes 1 i 2 impulsió tamisat B
8 Relé tèrmic motor tamisador B
9 Contactor motor tamisador B
10 Magnetotèrmic línia tamisador B
11 Diferencial línia motor tamisador B
12 Relé tèrmic bomba impulsió 1 a bassa regulació B
13 Contactor bomba impulsió 1 a bassa regulació B
14 Magnetotèrmic línia bomba 1 impulsió bassa regulació B
15 Relé tèrmic bomba impulsió 2 a bassa regulació B
16 Contactor bomba impulsió 2 a bassa regulació B
17 Magnetotèrmic línia bomba 2 impulsió bassa regulació B
18 Diferencial línia bombes 1 i 2 a bassa regulació B
19 Detector de flux impulsió a bassa B
20 Relé tèrmic bomba submergible d’extracció de fangs B
21 Contactor bomba submergible d’extracció de fangs B
22 Magnetotèrmic línia bomba extracció fangs B
23 Diferencial línia bomba extracció fangs B
24 Sonda nivell màxim dipòsit B
25 Sonda nivell mínim dipòsit B
Sortides
1 bobina contactor motor bomba tamisat 1 B
2 bobina contactor motor bomba tamisat 2 B
3 bobina contactor motor accionament tamisador B
4 bobina contactor motor bomba impulsió 1 a bassa B
5 bobina contactor motor bomba impulsió 2 a bassa B
6 bobina contactor motor bomba d’extracció de fangs B
33
-
6.3 General estació captació i bombeig
Entrades
1 Selector mode manual B
2 Selector mode automàtic B
3 Polsador aturada emergència B
Sortides
1 Pilot funcionament en automàtic B
2 Pilot funcionament manual B
3 Pilot aturada emergència B
4 Pilot alarma disfunció B
6.4 Bassa de regulació
Entrades
1 nivell màxim bassa 1 B
2 nivell màxim bassa 2 B
3 nivell màxim bassa 3 B
6.5 Bombeig a ETAP
Entrades
1 Relé tèrmic bomba 1 impulsió B
2 Contactor bomba 1 impulsió B
3 Magnetotèrmic línia bomba 1 impulsió B
4 Relé tèrmic bomba 2 impulsió B
5 Contactor bomba 2 impulsió B
6 Magnetotèrmic línia bomba 2 impulsió B
7 diferencial línia bombes 1 i 2 impulsió B
8 Sensor nivell mínim del pou impulsió B
34
-
Sortides
1 bobina contactor motor bomba 1 impulsió B
2 bobina contactor motor bomba 2 impulsió B
6.6 ETAP
Entrades
1 Cabalímetre inductiu ETAP modular 1 A
2 Cabalímetre inductiu ETAP modular 2 A
3 Detector inductiu de nivell de floculant ETAP 1 B
4 Detector inductiu de nivell d'hipoclorit ETAP 1 B
5 Sensor de nivell mínim en tanc de floculant ETAP 1 B
6 Sensor de nivell mínim en tanc d'hipoclorit ETAP 1 B
7 Detector inductiu de nivell de floculant ETAP 2 B
8 Detector inductiu de nivell d'hipoclorit ETAP 2 B
9 Sensor de nivell mínim en tanc de floculant ETAP 2 B
10 Sensor de nivell mínim en tanc d'hipoclorit ETAP 2 B
11 Relé tèrmic motor compressor planta 1 B
12 contactor motor compressor planta 1 B
13 magnetotèrmic línia motor compressor planta 1 B
14 Relé tèrmic motor compressor planta 2 B
15 contactor motor compressor planta 2 B
16 magnetotèrmic línia motor compressor planta 2 B
17 diferencial línia compressors B
18 sensor de pressió de xarxa 1 d’aire comprimit B
19 sensor de pressió de xarxa 2 d’aire comprimit B
20 Relé tèrmic entrada ETAP modular 1 B
21 contactor alimentació ETAP modular 1 B
22 magnetotèrmic línia ETAP 1 B
23 Relé tèrmic entrada ETAP modular 2 B
35
-
24 contactor alimentació ETAP modular 2 B
25 magnetotèrmic línia ETAP 2 B
26 diferencial línia alimentació ETAPS B
27 senyal de ETAP 1 preparada per a producció B
28 senyal de ETAP 2 preparada per a producció B
29 sensor diferencial de pressió prefiltre 1 A
30 sensor diferencial de pressió prefiltre 2 A
31 analitzador de clor ETAP modular 1 A
32 analitzador de clor ETAP modular 2 A
Sortides
1 bobina contactor compressor planta 1 B
2 bobina contactor compressor planta 2 B
3 bobina contactor alimentació ETAP modular 1 B
4 bobina contactor alimentació ETAP modular 2 B
6.7 Dipòsit d’aigua tractada i bombeig
Entrades
1 Sensor de nivell cel∙la 1 dipòsit A
2 Sensor de nivell cel∙la 2 dipòsit A
3 Contactor motor bomba pressió 1 B
4 Magnetotèrmic línia bomba pressió 1 B
5 Relé tèrmic motor bomba pressió 2 B
6 Contactor motor bomba pressió 2 B
7 Magnetotèrmic línia bomba pressió 2 B
8 Relé tèrmic motor bomba pressió 3 B
9 Contactor motor bomba pressió 3 B
10 Magnetotèrmic línia bomba pressió 3 B
11 Diferencial línia bombes 1,2 i 3 pressió B
12 Sensor de pressió A
36
-
Sortides
1 bobina contactor motor bomba pressió 1 B
2 bobina contactor motor bomba pressió 2 B
3 bobina contactor motor bomba pressió 3 B
4 variador de freqüència bomba pressió 1 A
6.8 Pou de desguàs
Entrades
1 Sensor de nivell B
2 Relé tèrmic motor bomba 1 de fangs B
3 Contactor motor bomba 1 de fangs B
4 Magnetotèrmic línia bomba 1 fangs B
5 Relé tèrmic motor bomba 2 de fangs B
6 Contactor motor bomba 2 de fangs B
7 Magnetotèrmic línia bomba 2 fangs B
8 diferencial línia bombes 1 i 2 fangs B
Sortides
9 bobina contactor motor bomba 1 de fangs B
10 bobina contactor motor bomba 2 de fangs B
6.9 General ETAP i bombeig
Entrades
1 Selector mode manual B
2 Selector mode automàtic B
3 Polsador aturada emergència B
Sortides
1 Pilot funcionament en automàtic B
37
-
Entrades
2 Pilot funcionament manual B
3 Pilot aturada emergència B
4 Pilot alarma disfunció B
En síntesi, i per cada planta el nombre d’entrades i sortides per al control és el següent:
• en l’estació de captació resulten un total de 38 entrades, 35 binàries, 2 analògiques i 1 numèrica, i 13 sortides, totes binàries.
• En l’estació de potabilització hi ha 68 entrades, 58 binàries, 9 analògiques i 1 numèrica, i 15 sortides, 14 binàries i 1 analògica.
38
-
CAPÍTOL 7
Característiques que he de satisfer el sistema d’automatització
39
-
7 Característiques que ha de satisfer el sistema d’automatització
D’acord amb el tipus de procés i les particularitats de la planta, el sistema d’automatització ha de complir amb les següents especificacions:
• permetre la implementació d’un sistema de control distribuït• control del procés en temps real• treballar amb elements de camp tant analògics com discrets• facilitat per a la implementació de processos seqüencials• robustesa de l’equip de control • seguretat i fiabilitat• resposta fiable del sistema en tots els estats possibles del procés • facilitat de manteniment• flexibilitat per a l’adaptació a canvis en el procés
Tot seguit es detalla cada punt.
7.1 Permetre implementar control distribuït
La planta potabilitzadora està físicament dividida en dues estacions que estan separades per una distànca de varis quilòmetres: l’estació de captació i bombeig i l’estació depuradora pròpiament o ETAP. Una primera subdivisió del procés de potabilització ve donada precisament per aquesta deslocalització entre els edificis que alberguen cada instal∙lació. Els processos que tenen lloc en l’estació de captació i en la ETAP presenten un cert grau d’independència gràcies a la bassa de regulació que actua com a dipòsit de reserva, permetent el normal funcionament de la ETAP encara que el procés en la estació de captació estigui aturat.
De la mateixa forma, el procés en l’estació de captació pot romandre actiu quan en la ETAP està aturat. Tot i així aquesta independència és només temporal, segons sigui el nivell d’aigua en les bases i el cabal d’entrada a la ETAP. A més a més ha d’haver un intercanvi d’informació entre tots dos processos. Un senyal originat en l’edifici de la ETAP com pot ésser el nivell d’aigua de les basses de regulació condicionarà l’estat d’atur o marxa del procés en la planta de captació. També els senyals d’alarma originats en un edifici poden influir en el procés que te lloc en l’altra instal∙lació.
7.2 Control en temps real
Encara que no es preveu cap punt en el procés on el temps de resposta necessari per a la regulació sigui crític per causa de la relativa lentitud de canvi inherent a les variables d’aquest tipus de processos, el sistema de control ha d’explorar les entrades dels sensors i modificar la resposta, d’acord amb el programa de control, de forma cíclica i amb un període de temps per al cicle el més petit possible, normalment de l’ordre de milisegons.
40
-
7.3 Treballar amb elements de camp analògics i discrets
Un gran nombre de sensors i actuadors de procés seran discrets, amb resposta del tipus tot o res, però també és necessari que el control treballi amb captadors numèrics com poden ésser els cabalímetres i amb senyals analògiques. En alguns casos cal tancar llaços de control entre sensors i actuadors analògics per a la regulació d’una variable analògica, com la pressió de servei.
7.4 Adaptació del control a processos seqüencials.
El procés de potabilització de l’aigua respon perfectament al que s’entén per un procés seqüencial amb la particularitat de que moltes etapes d’aquest romanen actives alhora. És en la posta en marxa on es posa de manifest la característica seqüencial. El procés presenta clarament una orientació en l’espai que obliga normalment a l’activació d’una etapa darrera l’altra de forma ordenada i en el sentit del flux de l’aigua. Aquest caràcter seqüencial queda perfectament descrit amb el mètode gràfic GRAFCET que s’usarà més endavant per a descriure les etapes del procés i les condicions de transició d’una a l’altra. En aquest sentit és important que el sistema de control permeti la programació en aquest llenguatge o si més no, faciliti la implementació d’estructures que emulin l’autòmat creat en GRAFCET .
7.5 Robustesa de l’equip de control
L’entorn de treball on s’ubiquen els equips de control és un entorn industrial. Les condicions del procés corresponen a les d’un ambient humit amb atmosfera potencialment corrosiva per causa del productes químics emprats per a la potabilització i amb presència de sorolls electromagnètics per causa dels motors elèctrics. Està clar que contra aquestes condicions l’equip de control ha d’estar blindat. La seva electrònica ha de quedar aïllada de l’entorn en un grau que asseguri la protecció suficient de les condicions ambientals del procés. Aquest punt és especialment crítics en el cas dels elements de camp del control.
7.6 Seguretat i fiabilitat
L’absència o minimització de la presència humana en el procés com persegueix l’automatització i un entorn de treball relativament hostil necessita d’uns equips de control fiables, preparats per a reaccionar davant els diferents events i condicions que poden donarse. La dedicació al procés de l’equip de control de planta ha d´ésser exclusiva, sense compartició de cap altres tasques que no siguin les de reconeixement intern del correcte funcionament de l’equip control.
41
-
7.7 Resposta fiable en tots els estats del procés
Cal preveure que poden aparèixer contingències previstes i imprevistes en el procés que provoquin la sortida del mode automàtic i l’aturada del procés. El sistema de control ha de tenir “tabulades” les possible situacions diferents al funcionament normal i respondre de forma fiable en cada cas. Aquestes situacions seran les parades previstes o d’emergència i les postes en marxa. En aquest projecte es farà ús de la guia GEMMA per tal d’estudiar i programar les accions que el control realitzarà.
7.8 Facilitat de manteniment
El sistema de control ha de permetre un manteniment àgil, simple i amb el menor temps possible, tant pel que fa als elements de planta o cèl∙lula com als elements de camp Normalment les intervencions per manteniment en el control seran de tipus correctiu, necessitant la substitució d’algun dels elements de l’equip. En aquest sentit te avantatges un control amb elements modulars, evitant sistemes compactes que obligarien a canviar completament l’equip en cas de fallida d’alguna de les seves unitats o a llargues aturades en el procés si es pretén la reparació o substitució de la part afectada. En un sistema modular la substitució del mòdul avariat pot ésser molt ràpida, i en molts casos sense necessitat de que el procés se’n ressenti.
7.9 Flexibilitat per adaptació a canvis en el procés
Les ampliacions o variacions que poden produirse en l’equipament de la planta no poden quedar condemnades per un sistema de control que no presenti facilitats per adaptar ampliacions en el nombre d’entrades i sortides per a incorporar nous elements de camp. De la mateixa forma la reprogramació ha de poder realitzarse sense complicacions. Novament es fa palesa la necessitat d’un sistema modular, descentralitzat que minimitzi les necessitats de cablejat.
42
-
CAPÍTOL 8
Alternatives de control
43
-
8 Alternatives de control
8.1 Segons l’arquitectura del sistema: control local o distribuït
8.1.1 Arquitectura local, control centralitzat
El control del sistema s’estructura al voltant d’un sistema processador central actuant com a únic gestor. Aquest rep totes les entrades del procés, executa els càlculs apropiats d’acord amb l’algoritme de control i produeix les sortides que s’adrecen als actuadors o dispositius finals de control.
8.1.2 Arquitectura distribuïda, control distribuït
En un de control distribuït els elements del sistema posseeixen la intel∙ligència necessària per a prendre decisions de forma autònoma sense que existeixi un nivell jeràrquic superior. És necessari un intercanvi continu d’informació rellevant entre elements de control per a mantenir la coordinació de tot el sistema.
Un control distribuït s’articula en diferents nivells de control : en el nivell més baix, el nivell de camp o nivell 1, estan aquells elements en contacte amb el procés, sensors i actuadors. En en un nivell superior (nivell de control o nivell 2) estan els elements de control i regulació. Per sobre d’aquest, és el nivell 3 on estan els controladors de grup, ordinadors dedicats a la coordinació entre elements del nivell inferior i a la supervisió i control de tota una àrea. Finalment en el nivell més alt, és el nivell 4, de producció on es planifica la producció dels nivells inferiors .
El desenvolupament del control distribuït està íntimament lligat amb el desenvolupament de les comunicacions industrials. La comunicació entre elements de cada nivell es realitza mitjançant busos i protocols de comunicació especialitzats. Busos de cèl∙lula i camp en els nivells inferiors i Ethernet en el nivell superior. Un sistema de control distribuït no te que constar sempre de l’estructura de quatre nivells abans esmentada. La seva complexitat dependrà del nombre de processos i la complexitat d’aquests.
8.2 Segons els busos de comunicacions: propietaris o oberts
És inherent als sistemes de control distribuït l’ús de busos de camp com a canals de comunicacions entre els diferents elements del control, des de sensors o actuadors fins als ordinadors o autòmats programables.