CAPÍTULO1.1. CANTIDADES FÍSICAS. Cantidades fundamentales y cantidades derivadas. Es preciso...
26
CONCEPTOS FUNDAMENTALES. La mayoría de los estudios de Física en ingeniería suelen empezar con Mecánica Clásica, ya que contiene principios y conceptos que forman la base en la Física y en otras ciencias tales como la química, astronomía, biología y geología entre otras. En la vida diaria se observa una gran cantidad de aplicaciones de la Mecánica Clásica que ejemplifican la simplicidad de sus principios y lo práctico que puede ser su aplicación. La Mecánica Clásica es conocida también como Mecánica Newtoniana. Estudia el movimiento de los cuerpos sujetos a fuerzas y la evolución sus trayectorias en el tiempo. Se basa en los principios establecidos por Isaac Newton, y es aplicable a objetos o cuerpos que se mueven a velocidades mucho menores a la de la luz, y a escalas mucho mayores que la atómica. La mecánica parte de principios y postulados teóricos que llevan a la aplicación de modelos matemáticos para dar una interpretación de lo observado en el mundo cotidiano. De estos principios podríamos explicar el movimiento en sí, y además su posible evolución en el tiempo, tanto en fenómenos naturales como en sistemas tecnológicos. La Mecánica Clásica suele dividirse en tres ramas, Cinemática, Dinámica y Estática. Este documento se guía por el programa del curso que nos rige, empezando por Estática que estudia los cuerpos en equilibrio, después introduce la Cinemática que estudia el movimiento de los cuerpos sin considerar las causas que lo producen, y por último presenta la Dinámica que estudia las causas del movimiento. Leyes del movimiento de Newton. Estos principios son la base de la Mecánica Clásica y junto con la ley de Gravitación Universal ayudaron a explicar y predecir la mayoría de los movimientos, desde el lanzamiento de una piedra, hasta el movimiento de los planetas. Primera ley. Una partícula que se encuentra originalmente en reposo, o moviéndose en línea recta con rapidez constante, permanecerá en ese estado, siempre y cuando la fuerza resultante sobre ella sea cero. Este principio también es conocido como Ley de inercia (la tendencia de un cuerpo a mantenerse su estado). Segunda ley. Una partícula sobre la cual actúa una fuerza neta (fuerza resultante), experimentará una aceleración a que es directamente proporcional a la magnitud de la fuerza e inversamente proporcional a la masa del objeto ( a = F/m) y tiene la misma dirección que la fuerza resultante. Si se aplica a una partícula de masa m, esta ley puede expresarse matemáticamente como F= ma CAPÍTULO 1
Transcript of CAPÍTULO1.1. CANTIDADES FÍSICAS. Cantidades fundamentales y cantidades derivadas. Es preciso...
CONCEPTOS FUNDAMENTALES.
La mayoría de los estudios de Física en ingeniería suelen empezar con Mecánica Clásica, ya
que contiene principios y conceptos que forman la base en la Física y en otras ciencias tales
como la química, astronomía, biología y geología entre otras. En la vida diaria se observa
una gran cantidad de aplicaciones de la Mecánica Clásica que ejemplifican la simplicidad de
sus principios y lo práctico que puede ser su aplicación.
La Mecánica Clásica es conocida también como Mecánica Newtoniana. Estudia el
movimiento de los cuerpos sujetos a fuerzas y la evolución sus trayectorias en el tiempo. Se
basa en los principios establecidos por Isaac Newton, y es aplicable a objetos o cuerpos que
se mueven a velocidades mucho menores a la de la luz, y a escalas mucho mayores que la
atómica. La mecánica parte de principios y postulados teóricos que llevan a la aplicación de
modelos matemáticos para dar una interpretación de lo observado en el mundo cotidiano. De
estos principios podríamos explicar el movimiento en sí, y además su posible evolución en
el tiempo, tanto en fenómenos naturales como en sistemas tecnológicos.
La Mecánica Clásica suele dividirse en tres ramas, Cinemática, Dinámica y Estática. Este
documento se guía por el programa del curso que nos rige, empezando por Estática que
estudia los cuerpos en equilibrio, después introduce la Cinemática que estudia el movimiento
de los cuerpos sin considerar las causas que lo producen, y por último presenta la Dinámica
que estudia las causas del movimiento.
Leyes del movimiento de Newton.
Estos principios son la base de la Mecánica Clásica y junto con la ley de Gravitación
Universal ayudaron a explicar y predecir la mayoría de los movimientos, desde el
lanzamiento de una piedra, hasta el movimiento de los planetas.
Primera ley. Una partícula que se encuentra originalmente en reposo, o moviéndose en
línea recta con rapidez constante, permanecerá en ese estado, siempre y cuando la fuerza
resultante sobre ella sea cero. Este principio también es conocido como Ley de inercia (la
tendencia de un cuerpo a mantenerse su estado).
Segunda ley. Una partícula sobre la cual actúa una fuerza neta 𝐹 (fuerza resultante),
experimentará una aceleración a que es directamente proporcional a la magnitud de la fuerza
e inversamente proporcional a la masa del objeto (a = F/m) y tiene la misma dirección que
la fuerza resultante. Si 𝐹 se aplica a una partícula de masa m, esta ley puede expresarse
matemáticamente como
F= ma
CAPÍTULO 1

Tercera ley. Siempre que un cuerpo ejerce una fuerza sobre otro, el segundo ejercerá
sobre el primero una fuerza igual y en sentido opuesto.
Ley de Gravitación Universal de Newton. Este principio establece que existe una fuerza
de atracción entre cuerpos que poseen masa. Esa fuerza es directamente proporcional al
producto de las masas e inversamente proporcional al cuadrado de la distancia entre ellas. La
representación matemática de la interacción entre dos partículas es:
𝐹 = 𝐺𝑚1 ∙ 𝑚2
𝑟2
F = fuerza de gravitación entre dos partículas.
G = constante universal de gravitación.
m1, m2 = masa de las dos partículas.
r = distancia entre las dos partículas.
Peso. Es la fuerza de atracción gravitacional que ejerce la masa de la Tierra sobre un
cuerpo ubicado sobre la superficie o cercano a ella. Y suele representarse por 𝑤.
𝑤 = 𝑚𝑔
𝑤= peso.
𝑚= masa del cuerpo.
𝑔= aceleración debida a la gravedad.
Modelos o Idealizaciones. Se utilizan con la finalidad de simplificar la descripción y
aplicación de la teoría. Los principales modelos que se utilizarán en este curso son:
Partícula. Es un cuerpo que posee masa, pero cuyo tamaño puede ser considerado
despreciable para efectos de simplificación. Al estudiar el movimiento de los planetas en el
sistema solar, pueden ser representados en forma puntual, porque la dimensión de su tamaño,
comparado con la del sistema solar es minúscula.
Cuerpo Rígido. Se le considera que es indeformable cuando se le aplican fuerzas
externas, y se puede representar por un conjunto de puntos que no varía su posición relativa.
Un cuerpo como un puente o un avión sujeto a fuerzas externas, tiende a deformarse, pero en
este caso se le considera que no sufre la más mínima deformación.
Fuerza concentrada. Una fuerza concentrada representa la acción de una carga sobre un
cuerpo en un área tan pequeña que se considera un punto.
Fuerzas concurrentes. Son aquellas fuerzas cuya línea de acción cruzan o actúan en un
punto común.
Fuerzas coplanares. Fuerzas que actúan en el mismo plano.
Fuerzas colineales. Fuerzas que tienen la misma línea de acción.
1.1. CANTIDADES FÍSICAS.
Cantidades fundamentales y cantidades derivadas.
Es preciso definir las características físicas de un cuerpo, de manera cuantitativa; es por esto
que se utiliza un conjunto de cantidades fundamentales (básicas o elementales) y cantidades
derivadas (una combinación de las fundamentales).
Tradicionalmente las cantidades fundamentales son siete: longitud, masa, tiempo, corriente
eléctrica, temperatura, cantidad de sustancia e intensidad luminosa. De estas, se definen las
cantidades derivadas que se emplean para el resto de los conceptos.
Para establecer la relación entre las cantidades fundamentales y las derivadas, se requiere un
sistema de ecuaciones. Por ejemplo, para definir las unidades de fuerza en el Sistema
Internacional, se utiliza la segunda ley de Newton, 𝐹 = 𝑚 ∙ 𝑎 . Ésta se define como la fuerza
necesaria para acelerar una masa de 1 kg en 1 m/s2, es decir 𝐹 = 𝑘𝑔 ∙𝑚
𝑠2, la combinación de
unidades, genera una unidad derivada (𝑘𝑔∙𝑚
𝑠2 ) denominada Newton (N).
1.2. SISTEMAS DE UNIDADES.
De los diversos sistemas existentes, se empleará principalmente el Sistema Internacional de
Unidades, que es el de mayor aplicación a nivel global, y en menor medida el Sistema
Americano de Ingeniería o Sistema Inglés, ya que, debido al intercambio comercial y
tecnológico con EUA, existe una gran cantidad de productos e información con
especificaciones en este sistema en nuestro país.
Sistema internacional (SI). Es un acuerdo de estandarización de un sistema de unidades
único y práctico para las relaciones internacionales, la enseñanza y la investigación científica,
simplificando los intercambios a nivel global. El sistema fue establecido en la XI Conferencia
General de Pesas y Medidas en 1960, organizada y regida por el Comité Internacional de
Pesas y Medidas (CIPM). Su origen es el sistema métrico, y se estableció sobre la elección
de las siete cantidades básicas ya mencionadas. Las unidades correspondientes son: el metro,
el kilogramo, el segundo, el amperio, el kelvin, el mol y la candela.
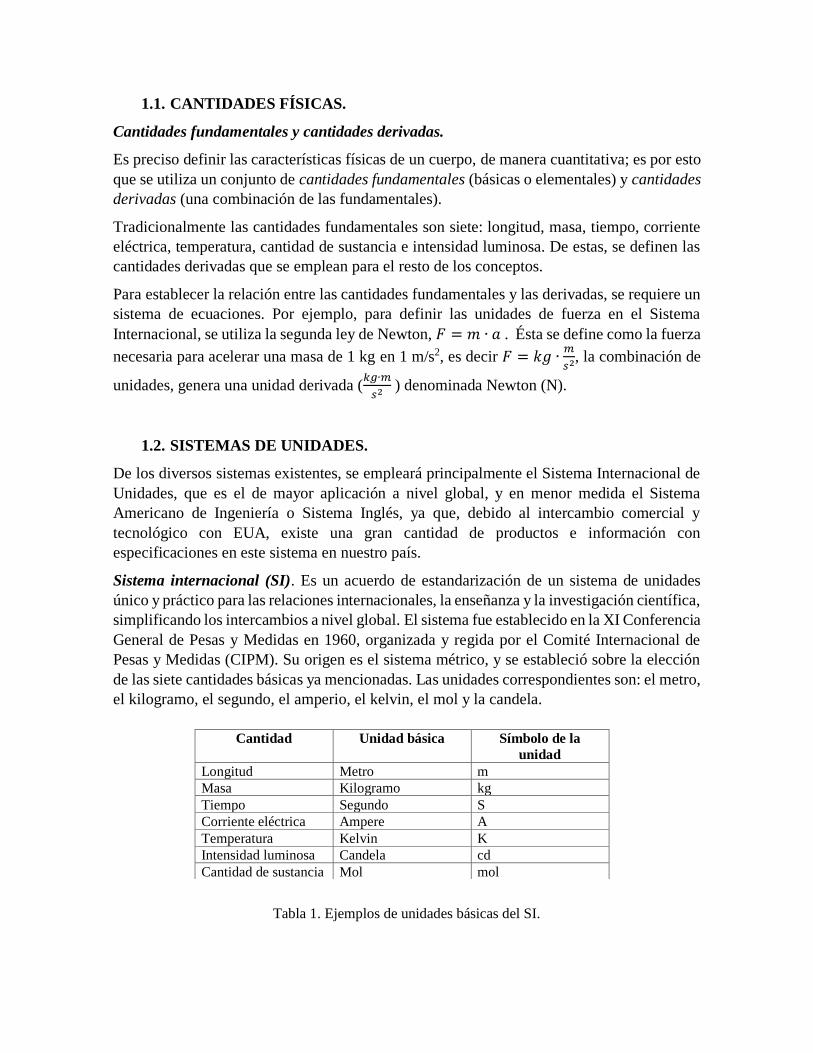
Cantidad Unidad básica Símbolo de la
unidad
Longitud Metro m
Masa Kilogramo kg
Tiempo Segundo S
Corriente eléctrica Ampere A
Temperatura Kelvin K
Intensidad luminosa Candela cd
Cantidad de sustancia Mol mol
Tabla 1. Ejemplos de unidades básicas del SI.
Metro. La definición del patrón del metro, ha sido una búsqueda progresiva, hacia una
precisión cada vez mayor. Se ha pasado por varias modificaciones. Establecida inicialmente
en 1795, como la diezmillonésima parte de la distancia del polo norte al ecuador terrestre,
fue sustituido en 1889, por un prototipo de una barra de platino-iridio, y este patrón fue
sustituido por otro aún más preciso en 1960. Este nuevo patrón fue definido como
1 650 763 .73 veces la longitud de onda de la radiación naranja emitida por el átomo de
kriptón 86 en el vacío. Finalmente en 1983 se establece que el metro patrón es la distancia
recorrida por la luz en el vacío durante un intervalo de tiempo de 1/299 792 458 de segundo.
Kilogramo. Inicialmente fue definido como un decímetro cúbico de agua destilada, a una
atmósfera de presión y a una temperatura de 3.98 grados C. Posteriormente en 1889, la
Conferencia General de Pesas y Medidas (CGPM), adoptó un prototipo de forma cilíndrica
con un diámetro y una altura de 39 mm, fabricado con una aleación de 90% de platino y 10%
de iridio, depositado en la Oficina Internacional de Pesas y Medidas (BIPM) en Sèvres,
Francia. El 16 de noviembre de 2018, fue aprobada una redefinición del kilogramo, que
entrará en vigor a partir del 20 de mayo de 2019, donde el prototipo de platino iridio, quedará
obsoleto, y ahora es definido en base a una constante universal de la naturaleza; la constante
de Planck. Cabe señalar que en la misma fecha fueron también actualizadas las definiciones
del amperio (corriente eléctrica), kelvin (temperatura) y el mol (cantidad de sustancia),
quedando así todas las unidades del Sistema Internacional basadas en constantes universales
de la naturaleza.
Segundo. La unidad fundamental del tiempo, inicialmente fue definida como la 1/86 400
parte del día solar medio (un día promedio entre los años 1750 y 1890). A partir del año de
1967, el segundo fue redefinido en función de un tipo particular de átomo de cesio.
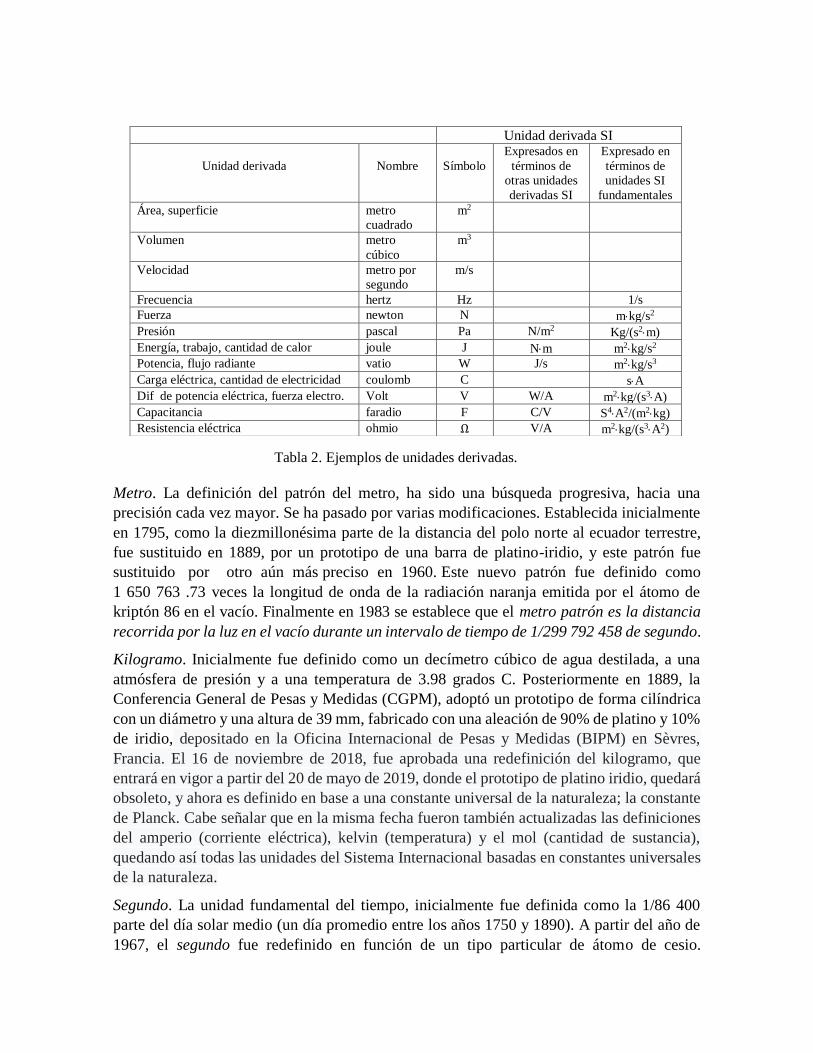
Unidad derivada SI
Unidad derivada
Nombre
Símbolo
Expresados en
términos de
otras unidades
derivadas SI
Expresado en
términos de
unidades SI
fundamentales
Área, superficie metro
cuadrado
m2
Volumen metro
cúbico
m3
Velocidad metro por
segundo
m/s
Frecuencia hertz Hz 1/s
Fuerza newton N mkg/s2
Presión pascal Pa N/m2 Kg/(s2m)
Energía, trabajo, cantidad de calor joule J Nm m2kg/s2
Potencia, flujo radiante vatio W J/s m2kg/s3
Carga eléctrica, cantidad de electricidad coulomb C sA
Dif de potencia eléctrica, fuerza electro. Volt V W/A m2kg/(s3A)
Capacitancia faradio F C/V S4A2/(m2kg)
Resistencia eléctrica ohmio Ω V/A m2kg/(s3A2)
Tabla 2. Ejemplos de unidades derivadas.

Estableciéndose como la duración de 9 192 631 770 veces el periodo de vibración del átomo
de cesio-133.
Sistema Americano de Ingeniería o Sistema Inglés (SAI). Es el sistema de unidades no
métricas ampliamente utilizado en Estados Unidos de América y algunos países de habla
inglesa, que aún muestran una resistencia al cambio al Sistema Internacional. Las unidades
básicas o fundamentales son el pie, la libra y el segundo.
1.3. CONCEPTOS DE ESPACIO, TIEMPO Y MARCO DE REFERENCIA.
Uno de los objetivos de la Mecánica es la descripción del movimiento, por tanto, se requiere
un sistema de referencia que describa tanto las posiciones como las magnitudes físicas de los
cuerpos, ya sea en reposo o en movimiento. Un sistema de referencia es un marco de
observación, desde el cuál se describe el movimiento de las cosas.
Si nos preguntamos, ¿estamos en reposo o en movimiento?, tendríamos que plantearnos ¿con
respecto a qué?; si nos encontramos sentados en una banca, tal vez diríamos que estamos en
reposo, pero si tomamos en cuenta que la tierra está en rotación alrededor de su propio eje,
con una velocidad aproximada de 1 600 km/h, sería evidente que no estamos en reposo, y
más aún si tomamos en cuenta el movimiento de traslación de la tierra alrededor del sol a una
velocidad media de 107 000 km/h, y que el sistema solar se mueve alrededor de la vía láctea,
aproximadamente 792 000 km/h; además nuestra galaxia también está desplazándose, y el
universo se encuentra en plena expansión acelerada. Para describir movimientos como los
anteriores, los de nuestra vida cotidiana y aún aquellos a nivel atómico, es necesario utilizar
un sistema de referencia, así como tener presente los conceptos de espacio y tiempo.
En Mecánica Clásica se utilizan los sistemas de referencia inerciales (aquellos en los que se
cumplen las leyes de Newton), en donde la elección del punto de referencia es arbitrario. Y
este puede estar en reposo o en movimiento rectilíneo uniforme (los sistemas de referencia
no inerciales, son acelerados). El sistema de coordenadas más usado, son las coordenadas
cartesianas, designadas (x, y, z).
Al desarrollar las leyes del movimiento y sus ecuaciones, Newton consideraba el espacio
como una especie de escenario donde se desarrollaba el movimiento; este marco o escenario
lo consideraba rígido e invariable, es decir el espacio y tiempo no sufrían cambios, sin
Fig. 1.1 Sistema de coordenadas cartesiano.
importar donde se hicieran las mediciones, estas deberían ser constantes, inalterables e
independientes.
A principios del siglo XX, Einstein planteó una nueva forma de concebir el tiempo y el
espacio, donde dejaron de ser absolutos e independientes. Con sus teorías de la relatividad
especial y general, Einstein mostró que las magnitudes de longitud y tiempo eran relativas a
cada observador, según su estado de movimiento. Además, las teorías mostraron que el
espacio y el tiempo están interrelacionados, y están unificados en un solo concepto, el
espacio-tiempo. Los principios planeados en estas teorías, abarcan los fenómenos que trata
la mecánica newtoniana y aún más, es capaz de explicar y predecir fenómenos que involucran
velocidades cercanas a la de la luz y a campos gravitacionales tan intensos, que la mecánica
de Newton no logra tratar adecuadamente, pero para los fenómenos de nuestra experiencia
cotidiana, los principios de Newton, los describen con bastante exactitud, tales como el
movimiento de autos, aviones, cohetes o inclusive el movimiento de los satélites y los
planetas.
Por tanto, en la Mecánica Clásica tomaremos en cuenta los conceptos y principios de la
denominada Mecánica Newtoniana, donde se emplean marcos de referencia inerciales, y la
ubicación del sistema de referencia será aquel, que de manera más simple nos permita
describir el movimiento de los cuerpos, tomando generalmente la superficie de la tierra como
referencia y utilizando el sistema de coordenadas cartesianas.
1.4. VECTORES.
Cantidades escalares y vectoriales.
La información de algunas magnitudes físicas como temperatura, densidad, volumen, la
longitud de un cable, el peso de una persona, etc., solo expresan una cantidad y su unidad, en
ocasiones poseen un signo. Este tipo de magnitudes son denominadas cantidades escalares.
A diferencia de éstas, existen magnitudes que poseen más información, como es el caso de
las fuerzas, los desplazamientos, velocidades, campos eléctricos y magnéticos, el
movimiento dinámico de fluidos, etc., en donde no es suficiente definir la intensidad o
magnitud de estos valores, sino que requiere aclararse en qué dirección están actuando. Éstas
últimas cantidades son denominadas cantidades vectoriales, y no deben ser confundidas con
las escalares, tanto conceptualmente, como en su tratamiento analítico, por tanto, requieren
una distinción clara.
Los vectores se representan tanto en forma gráfica como escrita o analítica (esta última
denominada expresión vectorial). Para esta última existen varias formas para expresarlas. En
este documento lo haremos con itálicas con una flecha encima de ella (ej. ��, ��, 𝑐). Las
magnitudes o cantidades escalares serán representados solo en cursivas (sin utilizar negritas
ni la flecha) ej., A, también suele representarse |A|.
La representación gráfica de un vector es una flecha, en donde la longitud de la flecha es
proporcional a la magnitud del vector, y la dirección del vector es definida por la punta de la
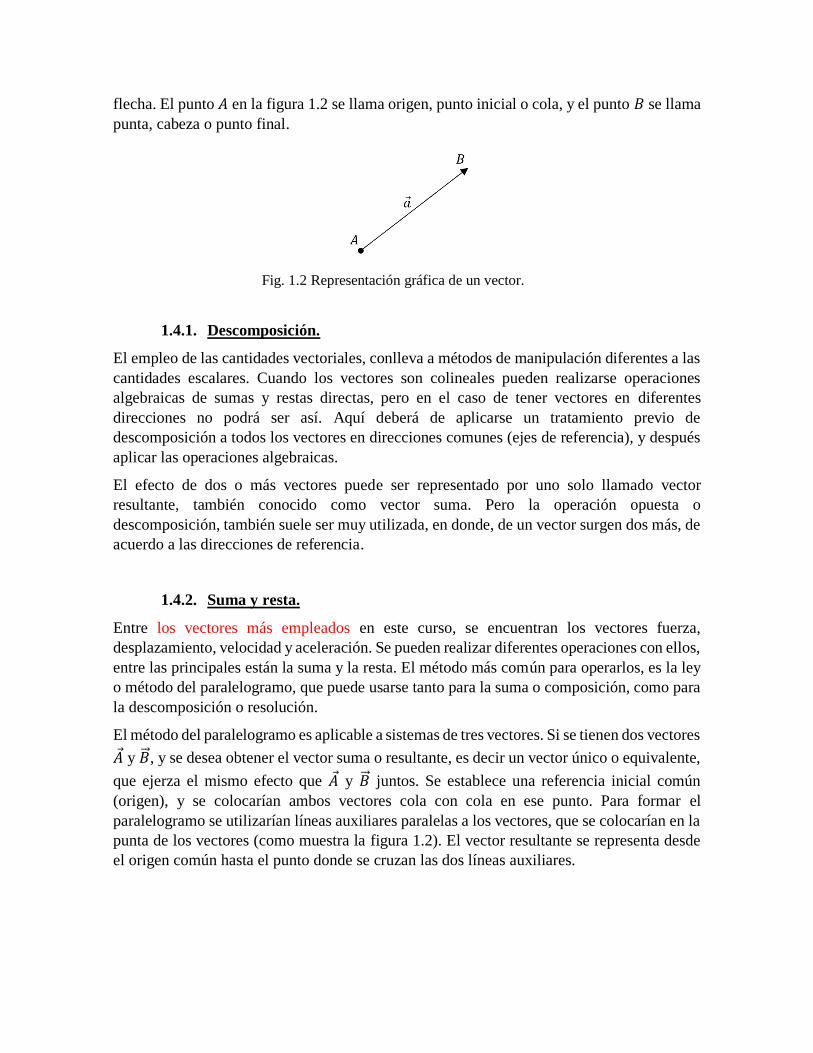
flecha. El punto 𝐴 en la figura 1.2 se llama origen, punto inicial o cola, y el punto 𝐵 se llama
punta, cabeza o punto final.
1.4.1. Descomposición.
El empleo de las cantidades vectoriales, conlleva a métodos de manipulación diferentes a las
cantidades escalares. Cuando los vectores son colineales pueden realizarse operaciones
algebraicas de sumas y restas directas, pero en el caso de tener vectores en diferentes
direcciones no podrá ser así. Aquí deberá de aplicarse un tratamiento previo de
descomposición a todos los vectores en direcciones comunes (ejes de referencia), y después
aplicar las operaciones algebraicas.
El efecto de dos o más vectores puede ser representado por uno solo llamado vector
resultante, también conocido como vector suma. Pero la operación opuesta o
descomposición, también suele ser muy utilizada, en donde, de un vector surgen dos más, de
acuerdo a las direcciones de referencia.
1.4.2. Suma y resta.
Entre los vectores más empleados en este curso, se encuentran los vectores fuerza,
desplazamiento, velocidad y aceleración. Se pueden realizar diferentes operaciones con ellos,
entre las principales están la suma y la resta. El método más común para operarlos, es la ley
o método del paralelogramo, que puede usarse tanto para la suma o composición, como para
la descomposición o resolución.
El método del paralelogramo es aplicable a sistemas de tres vectores. Si se tienen dos vectores
𝐴 y ��, y se desea obtener el vector suma o resultante, es decir un vector único o equivalente,
que ejerza el mismo efecto que 𝐴 y �� juntos. Se establece una referencia inicial común
(origen), y se colocarían ambos vectores cola con cola en ese punto. Para formar el
paralelogramo se utilizarían líneas auxiliares paralelas a los vectores, que se colocarían en la
punta de los vectores (como muestra la figura 1.2). El vector resultante se representa desde
el origen común hasta el punto donde se cruzan las dos líneas auxiliares.
Fig. 1.2 Representación gráfica de un vector.

Al trazar el paralelogramo se formarán dos triángulos, se selecciona uno de ellos y se traslada
la información conocida a él. Si el triángulo es oblicuángulo (ninguno de sus ángulos es recto)
se resuelve (se determina el resto de los datos que son incógnitas) aplicando las leyes de
trigonometría de Senos y Cosenos (Fig. 1.5). En el caso de ser triángulo rectángulo se
aplicarían las funciones trigonométricas básicas de seno, coseno y tangente.
Para la resta de vectores, se debe recordar que la resta, puede ser representada como la suma
del negativo de un vector, es decir 𝐴 − �� = 𝐴 + (−��). Gráficamente el vector �� sería de la
misma magnitud, pero de sentido contrario.
La ley del paralelogramo también se emplea para la descomposición de vectores. Pero difiere
del caso anterior, en que ahora de un vector surgen dos vectores (componentes) o más. Se
establece una referencia en el origen o cola del vector, pero ahora se trazan líneas paralelas a
los ejes en la punta del vector, de tal manera que se forma el paralelogramo. Los vectores
componentes se representan sobre las líneas de los ejes, iniciando en el origen (Fig. 1.4). Se
selecciona uno de los triángulos trasladando la información al mismo, en seguida se
identifican las incógnitas y se aplican las leyes de Senos y Cosenos (por ser triángulo
oblicuángulo).
Fig. 1.3 Suma de vectores con el paralelogramo
Fig. 1.4 Representación gráfica de la suma de vectores,
formando un triángulo oblicuángulo.
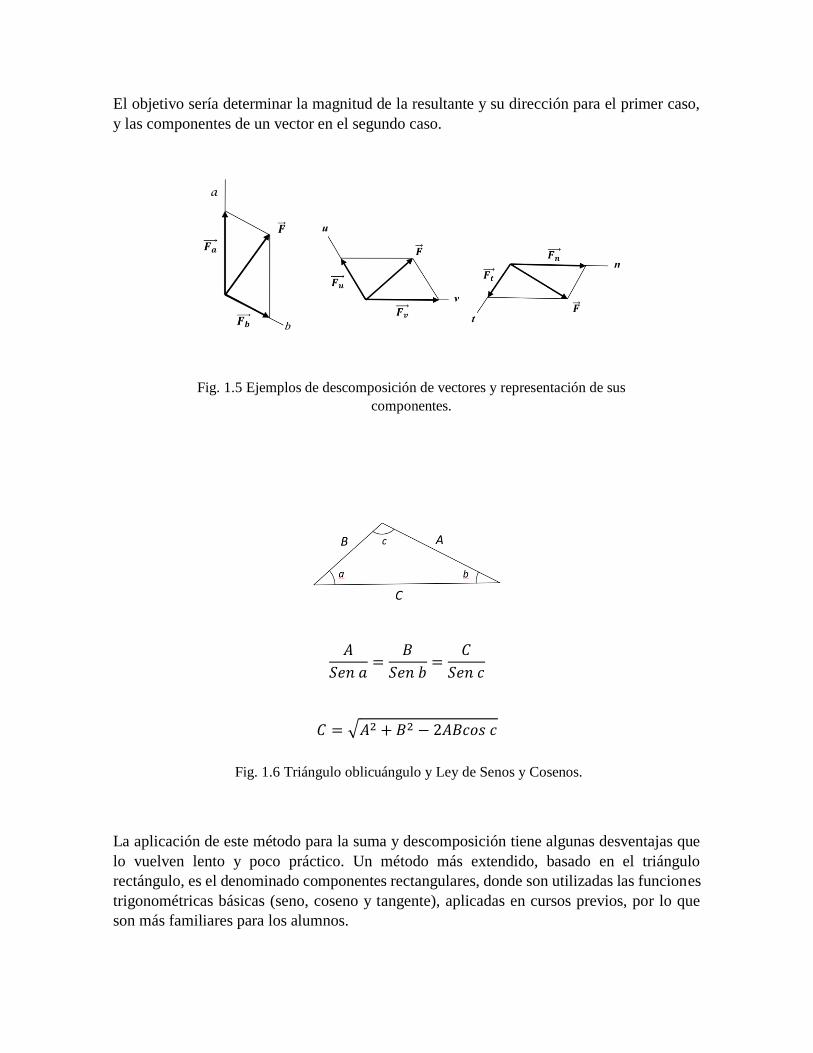
El objetivo sería determinar la magnitud de la resultante y su dirección para el primer caso,
y las componentes de un vector en el segundo caso.
𝐴
𝑆𝑒𝑛 𝑎=
𝐵
𝑆𝑒𝑛 𝑏=
𝐶
𝑆𝑒𝑛 𝑐
𝐶 = √𝐴2 + 𝐵2 − 2𝐴𝐵𝑐𝑜𝑠 𝑐
La aplicación de este método para la suma y descomposición tiene algunas desventajas que
lo vuelven lento y poco práctico. Un método más extendido, basado en el triángulo
rectángulo, es el denominado componentes rectangulares, donde son utilizadas las funciones
trigonométricas básicas (seno, coseno y tangente), aplicadas en cursos previos, por lo que
son más familiares para los alumnos.
Fig. 1.6 Triángulo oblicuángulo y Ley de Senos y Cosenos.
Fig. 1.5 Ejemplos de descomposición de vectores y representación de sus
componentes.

La aplicación del método de componentes rectangulares simplifica la operación con vectores,
porque es un método general que puede utilizar una gran cantidad de vectores a la vez (el
método anterior solo puede usar tres). Se parte de un sistema de coordenadas rectangulares
cartesianas, los ejes no necesariamente deben tener una orientación horizontal y vertical (pero
sí deben ser perpendiculares). Se puede representar cualquier vector en el plano xy, como la
suma de dos vectores, uno paralelo al eje x y otro paralelo al eje y. La dirección (el ángulo)
del vector puede expresarse desde el eje positivo de las x, pero con el uso de las funciones
trigonométricas básicas, pueden ser tomados como referencia los diferentes ejes, siempre y
cuando se tome en cuenta la dirección y el sentido del vector (tener presente el
convencionalismo de los signos en las direcciones de los ejes).
El vector puede ser expresado en dos formas: en función de sus vectores componentes
(expresión vectorial), y también en función de su magnitud (expresión escalar). El análisis
de los vectores en 2D pueden ser realizado en forma escalar y vectorial, siendo más práctico
desarrollarlo en forma escalar, pero en 3D el método a emplear es el vectorial.
Recordando las funciones trigonométricas básicas del triángulo rectángulo, y relacionándolas
con las componentes del vector nos quedan así.
Funciones trigonométricas básicas.
𝑆𝑒𝑛 𝜃 =𝑂𝑝𝑢𝑒𝑠𝑡𝑜
𝐻𝑖𝑝𝑜𝑡𝑒𝑛𝑢𝑠𝑎=
𝑎
ℎ
𝐶𝑜𝑠 𝜃 =𝐴𝑑𝑦𝑎𝑐𝑒𝑛𝑡𝑒
𝐻𝑖𝑝𝑜𝑡𝑒𝑛𝑢𝑠𝑎=
𝑏
ℎ
�� = 𝐹𝒙 + 𝐹𝒚
𝐹𝑥 = 𝐹𝑐𝑜𝑠
𝐹𝑦 = 𝐹𝑠𝑒𝑛
Fig. 1.7 a) Vector expresado en función de sus vectores componentes.
b) Magnitudes de las componentes en función del ángulo.
a) b)

Si el ángulo se extiende desde el eje de las “x”, las funciones son tal como se mostró. Pero si
el ángulo se extiende desde el eje de las “y” las funciones quedan invertidas (Fig. 1.8).
1.4.3. Vector unitario.
Un vector unitario es adimensional (no posee unidades) y su magnitud es uno. Su función es
definir la dirección. En lugar de definir la dirección como x, o y, (que podrían ser confundidas
como variables o como incógnitas en una expresión vectorial), se utilizarán vectores
unitarios. Aunque existen diferentes formas de representarlos, utilizaremos las expresiones 𝑖,
y 𝑗, por ser la más usual.
Funciones y componentes del vector ��.
𝑆𝑒𝑛 𝜃 =𝑂𝑝𝑢𝑒𝑠𝑡𝑜
𝐻𝑖𝑝𝑜𝑡𝑒𝑛𝑢𝑠𝑎=
𝐹𝑦
𝐹 𝐹𝑦 = 𝐹 𝑆𝑒𝑛 𝜃
𝐶𝑜𝑠 𝜃 =𝐴𝑑𝑦𝑎𝑐𝑒𝑛𝑡𝑒
𝐻𝑖𝑝𝑜𝑡𝑒𝑛𝑢𝑠𝑎=
𝐹𝑥
𝐹 𝐹𝑥 = 𝐹 𝐶𝑜𝑠 𝜃
Fig. 1.8 Comparativo de las funciones básicas del triángulo rectángulo y el
triángulo de fuerzas.
.
Fig 1.9 A la izquierda, vector resultante con su dirección 𝜃,
y a la derecha sus componentes.

En un sistema de coordenadas x-y, la dirección +x será definida por el vector unitario 𝑖,
mientras que la dirección +y es definida por 𝑗. Utilizando este convencionalismo, podemos
expresar tanto la magnitud como la dirección de los vectores y sus componentes. Un vector
fuerza sería expresado así,
�� = 𝐹𝑥 �� + 𝐹𝑦𝑗
𝐹𝑥 = 𝐹𝑥 ��
𝐹𝑦 = 𝐹𝑦𝑗
Estas ecuaciones son denominadas vectoriales, porque contienen tanto la magnitud como la
dirección en cada expresión:
𝐹𝑥 , 𝐹𝑦
= vectores componentes del vector ��
𝐹𝑥 y 𝐹𝑦 = magnitud
�� y 𝑗 = dirección
EJEMPLO 1.1
Exprese cada uno de los vectores mostrados en la figura, en sus componentes “x” y “y”,
también represéntelos en forma vectorial cartesiana.
Fig. 1.10 a) Vectores unitarios �� y 𝒋. b) Representación del vector con sus componentes

En F1 ambas componentes se dirigen en las direcciones
positivas.
𝐹1𝑥= 30 cos 45° = 21.21 𝑙𝑏
𝐹1𝑦= 30 sen 45° = 21.21 𝑙𝑏
En F2 la componente y se dirigen en dirección negativa.
𝐹2𝑥= 40 cos 15° = 38.64 𝑙𝑏
𝐹2𝑦= −40 sen 15° = − 10,35 𝑙𝑏
En F3 el ángulo se desarrolla desde el eje de las y, por lo tanto,
las componentes tienen las funciones invertidas; la
componente y tiene dirección negativa.
𝐹3𝑥= 25 sen 15° = 6.47 𝑙𝑏
𝐹3𝑦= −25 cos 15° = − 24.15 𝑙𝑏
La expresión vectorial cartesiana, es solo un reacomodo de
las componentes ya determinadas:
Resp: 𝑭𝟏 = {𝟐𝟏. 𝟐𝟏�� + 𝟐𝟏. 𝟐𝟏��} 𝒍𝒃
Resp: 𝑭𝟐 = {𝟑𝟖. 𝟔𝟒�� − 𝟏𝟎. 𝟑𝟓��} 𝒍𝒃
Resp: 𝑭𝟑 = {𝟔. 𝟒𝟕�� − 𝟐𝟒. 𝟏𝟓��} 𝒍𝒃
EJEMPLO 1.2 Exprese cada uno de los vectores en sus componentes “x” y “y”.
Posteriormente exprese cada fuerza en forma de vector cartesiano.
𝐹1𝑥= −20 sen 50° = − 15.32 𝑘𝑁
𝐹1𝑦= 20 cos 50° = 12.86 𝑘𝑁
𝐹2𝑥= 25 cos 30° = 21.65 𝑘𝑁
𝐹2𝑦= 25 sen 30° = 12.5 𝑘𝑁
𝐹3𝑥= −22 (
4
5) = −17.6 𝑘𝑁
𝐹3𝑦= −22 (
3
5) = −13.2 𝑘𝑁
Fig. 1.11 Diagrama de
fuerzas.
Fig. 1.12 Diagrama de fuerzas.

En F3 la dirección está expresada por un triángulo de semejanza. El ángulo puede ser
determinado con las funciones trigonométricas básicas, 𝜃 = 𝑡𝑎𝑛−1(43⁄ ), o usando la razón
de semejanza que puede ser planteada así:
𝐹3𝑥
4=
22
5 𝐹3𝑥
= −22 (4
5)
𝐹3𝑦
3=
22
5 𝐹3𝑦
= −22 (3
5)
Resp: 𝑭𝟏 = {−𝟏𝟓. 𝟑𝟐�� + 𝟏𝟐. 𝟖𝟔��} 𝒌𝑵
Resp: 𝑭𝟐 = {𝟐𝟏. 𝟔𝟓�� + 𝟏𝟐. 𝟓��} 𝒌𝑵
Resp: 𝑭𝟑 = {−𝟏𝟕. 𝟔�� − 𝟏𝟑. 𝟐��} 𝒌𝑵
Modelo general para la suma de vectores.
Se puede representar la suma de vectores en función de las componentes rectangulares. En
la suma de vectores coplanares (fig 1.8a) se descomponen los vectores en las componentes x
y y (fig. 1.8b). Luego se suman todas las componentes en x en forma algebraica por ser
colineales, y así obtener la fuerza resultante en las x. En seguida se realiza lo mismo en
dirección y.
Expresiones vectoriales de las fuerzas: ��1 = −𝐹1𝑥�� + 𝐹1𝑦𝑗
��2 = 𝐹2𝑥 �� + 𝐹2𝑦𝑗
��3 = 𝐹3𝑥 �� + 𝐹3𝑦𝑗
El vector resultante es la suma de los vectores,
��𝑅 = �� = ��1 + ��2 + ��3
= (−𝐹1𝑥�� + 𝐹1𝑦𝑗) + (𝐹2𝑥𝑖 + 𝐹2𝑦𝑗) + (𝐹3𝑥�� + 𝐹3𝑦𝑗)
= (−𝐹1𝑥 + 𝐹2𝑥 + 𝐹3𝑥)�� + (𝐹1𝑦 + 𝐹2𝑦 + 𝐹3𝑦)𝑗
𝐹𝑥 = 𝐹𝑅𝑥
𝐹𝑦 = 𝐹𝑅𝑦
��𝑅 = (𝐹𝑅𝑥)�� + (𝐹𝑅𝑦
)𝑗
Fig 1.13 Triángulos semejantes.

Los vectores
resultantes en dirección x y y se representan en un sistema de referencia de coordenadas
cartesianas, se traza el paralelogramo para representar la fuerza resultante y se define el
ángulo desde el eje de las x positivo como la dirección del vector (Fig. 1.9).
Para sumar los vectores componentes y obtener la magnitud de la fuerza resultante, se recurre
al teorema de Pitágoras (ya que son perpendiculares). Y el ángulo se puede determinar con
la tangente y las componentes.
Vector resultante: ��𝑅 = (𝐹𝑅𝑥)�� + (𝐹𝑅𝑦
)𝑗 (Expresión vectorial)
Magnitud de la fuerza resultante: 𝐹𝑅 = √ 𝐹𝑅𝑥
2 + 𝐹𝑅𝑦
2 (Expresión escalar)
Dirección de la fuerza resultante: 𝑡𝑎𝑛 =𝐹𝑅𝑦
𝐹𝑅𝑥
EJEMPLO 1.3 Determine la magnitud y dirección de la resultante de las tres fuerzas
mostradas en la imagen.
Fig. 1.14 a) Fuerzas concurrentes. b) Componentes de las fuerzas.
Fig 1.15 Vector resultante, sus componentes y su dirección.
a) b)
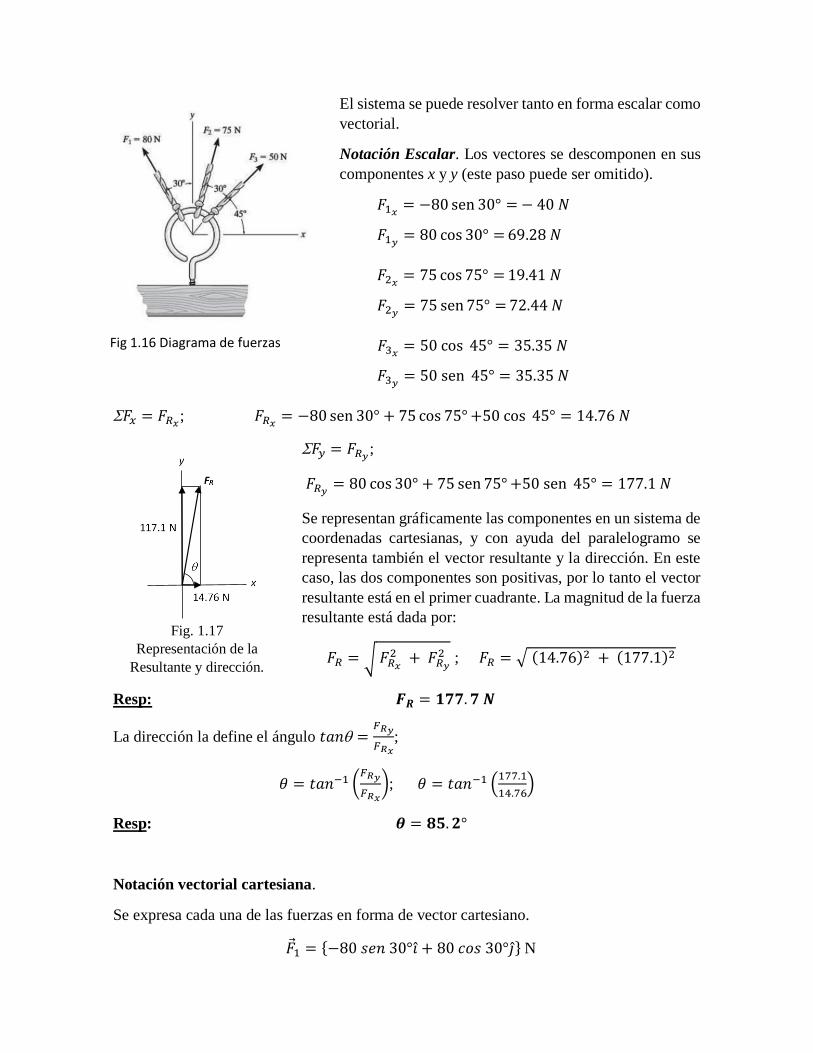
El sistema se puede resolver tanto en forma escalar como
vectorial.
Notación Escalar. Los vectores se descomponen en sus
componentes x y y (este paso puede ser omitido).
𝐹1𝑥= −80 sen 30° = − 40 𝑁
𝐹1𝑦= 80 cos 30° = 69.28 𝑁
𝐹2𝑥= 75 cos 75° = 19.41 𝑁
𝐹2𝑦= 75 sen 75° = 72.44 𝑁
𝐹3𝑥= 50 cos 45° = 35.35 𝑁
𝐹3𝑦= 50 sen 45° = 35.35 𝑁
𝐹𝑥 = 𝐹𝑅𝑥; 𝐹𝑅𝑥
= −80 sen 30° + 75 cos 75° +50 cos 45° = 14.76 𝑁
𝐹𝑦 = 𝐹𝑅𝑦;
𝐹𝑅𝑦= 80 cos 30° + 75 sen 75° +50 sen 45° = 177.1 𝑁
Se representan gráficamente las componentes en un sistema de
coordenadas cartesianas, y con ayuda del paralelogramo se
representa también el vector resultante y la dirección. En este
caso, las dos componentes son positivas, por lo tanto el vector
resultante está en el primer cuadrante. La magnitud de la fuerza
resultante está dada por:
𝐹𝑅 = √ 𝐹𝑅𝑥
2 + 𝐹𝑅𝑦
2 ; 𝐹𝑅 = √ (14.76)2 + (177.1)2
Resp: 𝑭𝑹 = 𝟏𝟕𝟕. 𝟕 𝑵
La dirección la define el ángulo 𝑡𝑎𝑛 =𝐹𝑅𝑦
𝐹𝑅𝑥
;
𝜃 = 𝑡𝑎𝑛−1 (𝐹𝑅𝑦
𝐹𝑅𝑥
); 𝜃 = 𝑡𝑎𝑛−1 (177.1
14.76)
Resp: 𝜽 = 𝟖𝟓. 𝟐°
Notación vectorial cartesiana.
Se expresa cada una de las fuerzas en forma de vector cartesiano.
��1 = {−80 𝑠𝑒𝑛 30°�� + 80 𝑐𝑜𝑠 30°𝑗} N
Fig 1.16 Diagrama de fuerzas
Fig. 1.17
Representación de la
Resultante y dirección.
��2 = {75 𝑐𝑜𝑠 75°�� + 75 𝑠𝑒𝑛 75°𝑗} N
��3 = {50 𝑐𝑜𝑠 45°�� + 50 𝑠𝑒𝑛 45°𝑗} N
Se suman;
��𝑅 = �� = ��1 + ��2 + ��3
��𝑅 = (−80 𝑠𝑒𝑛 30° + 75 cos 75 ° + 50 cos 45 °)𝑖
+ (80 𝑐𝑜𝑠 30° + 75 sen 75 ° + 50 sen 45 °)𝑗
��𝑅 = {14.76�� + 177.1𝑗} N
La magnitud y dirección se determinan de igual forma que en la expresión escalar.
𝐹𝑅 = √ 𝐹𝑅𝑥
2 + 𝐹𝑅𝑦
2 ; 𝐹𝑅 = √ (14.76)2 + (177.1)2
Resp: 𝑭𝑹 = 𝟏𝟕𝟕. 𝟕 𝑵
𝜃 = 𝑡𝑎𝑛−1 (𝐹𝑅𝑦
𝐹𝑅𝑥
); 𝜃 = 𝑡𝑎𝑛−1 (177.1
14.76)
Resp: 𝜽 = 𝟖𝟓. 𝟐°
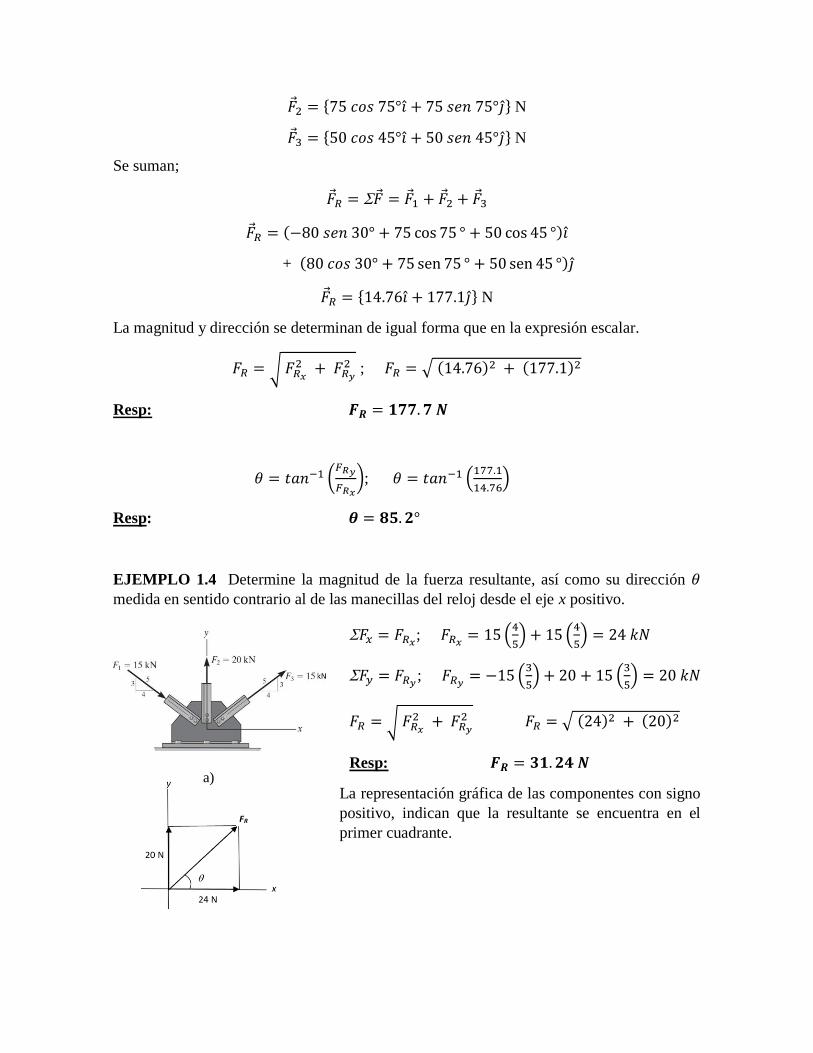
EJEMPLO 1.4 Determine la magnitud de la fuerza resultante, así como su dirección 𝜃
medida en sentido contrario al de las manecillas del reloj desde el eje x positivo.
𝐹𝑥 = 𝐹𝑅𝑥; 𝐹𝑅𝑥
= 15 (4
5) + 15 (
4
5) = 24 𝑘𝑁
𝐹𝑦 = 𝐹𝑅𝑦; 𝐹𝑅𝑦
= −15 (3
5) + 20 + 15 (
3
5) = 20 𝑘𝑁
𝐹𝑅 = √ 𝐹𝑅𝑥
2 + 𝐹𝑅𝑦
2 𝐹𝑅 = √ (24)2 + (20)2
Resp: 𝑭𝑹 = 𝟑𝟏. 𝟐𝟒 𝑵
La representación gráfica de las componentes con signo
positivo, indican que la resultante se encuentra en el
primer cuadrante.
a)

La dirección la define el ángulo con, 𝑡𝑎𝑛 =𝐹𝑅𝑦
𝐹𝑅𝑥
;
𝜃 = 𝑡𝑎𝑛−1 (𝐹𝑅𝑦
𝐹𝑅𝑥
); 𝜃 = 𝑡𝑎𝑛−1 (20
24)
Resp: 𝜽 = 𝟑𝟗. 𝟖°
EJEMPLO 1.5 Determine la magnitud de la fuerza resultante y su dirección, medida en
sentido contrario al de las manecillas del reloj desde el eje x positivo.
Como diagrama de cuerpo libre, puede ser utilizada la
misma figura que se proporciona. Se desarrollan las
ecuaciones de las sumatorias con las componentes de los
vectores en x y y.
𝐹𝑥 = 𝐹𝑅𝑥;
𝐹𝑅𝑥= 850 (
4
5) − 625 𝑠𝑒𝑛 30° − 750 𝑠𝑒𝑛 45° = −162.8𝑁
𝐹𝑦 = 𝐹𝑅𝑦;
𝐹𝑅𝑦= −850 (
3
5) − 625 𝑐𝑜𝑠 30° + 750 𝑐𝑜𝑠 45° = −520.9 𝑁
Ambas componentes son negativas, por tanto, el vector
resultante se ubica en el tercer cuadrante como muestra la
figura.
𝐹𝑅 = √ 𝐹𝑅𝑥
2 + 𝐹𝑅𝑦
2 ; 𝐹𝑅 = √ (−162.8)2 + (−520.9)2
Resp: 𝑭𝑹 = 𝟓𝟒𝟓. 𝟖 𝑵
La dirección es el ángulo desde el eje positivo de las x, por
lo que el ángulo 𝜃 será: 𝜃 = 180° + 𝜑 . Para determinar el
ángulo 𝜑 podemos usar la tangente
𝜑 = 𝑡𝑎𝑛−1 (𝐹𝑅𝑦
𝐹𝑅𝑥
); 𝜑 = 𝑡𝑎𝑛−1 (−520.9
−162.8) ; 𝜑 = 72.6°
𝜃 = 180° + 72.6° ;
Resp: 𝜽 = 𝟐𝟓𝟐. 𝟔°
b)
Fig 1.18 Representación: a)
Situación física b) Resultante
y dirección
Fig 1.19 a) Suma de
vectores, b) Vector
Resultante y su dirección
a)
b)

1.4.4. Productos.
Otra forma de realizar operaciones con vectores además de la suma y resta, son los productos
o multiplicaciones. Las dos formas más utilizadas son el producto escalar y el producto
vectorial.
Producto escalar.
También denominado producto punto, es la multiplicación entre dos vectores que generan
una cantidad escalar, y entre sus principales aplicaciones se usa para determinar el ángulo
formado entre dos vectores. Además, se puede usar para calcular la proyección de un vector
sobre otro vector, o sobre una línea.
Por definición, el producto escalar de dos vectores, es el producto de las magnitudes de 𝐴 y
�� por el coseno del ángulo que se forma entre ellos. Este producto se escribe 𝐴 ∙ �� y se lee
𝐴 punto ��.
Ec. 1.10 𝐴 ∙ �� = 𝐴𝐵 𝑐𝑜𝑠𝜃
Para desarrollar el producto, se expresan los vectores en función de los vectores unitarios
(expresión vectorial).
𝐴 ∙ �� = (𝐴𝑥 �� + 𝐴𝑦𝑗 + 𝐴𝑧��) ∙ (𝐵𝑥 �� + 𝐵𝑦𝑗 + 𝐵𝑧��)
= 𝐴𝑥𝐵𝑥(�� ∙ ��) + 𝐴𝑥𝐵𝑦(�� ∙ 𝑗) + 𝐴𝑥𝐵𝑧(�� ∙ ��)
+𝐴𝑦𝐵𝑥(𝑗 ∙ 𝑖) + 𝐴𝑦𝐵𝑦(𝑗 ∙ 𝑗) + 𝐴𝑦𝐵𝑧(𝑗 ∙ ��)
+𝐴𝑧𝐵𝑥(�� ∙ ��) + 𝐴𝑧𝐵𝑦(�� ∙ 𝑗) + 𝐴𝑧𝐵𝑧(�� ∙ ��)
Fig. 1.20 El producto escalar 𝐴 ∙ �� es igual a la magnitud de 𝐴 (𝐴) multiplicada por la
proyección de �� (𝐵 𝑐𝑜𝑠𝜃) sobre 𝐴.

Tomando en cuenta la ecuación del producto punto (Ec. 1.10) para definir los vectores
unitarios, quedará:
�� ∙ �� = (1) (1) 𝐶𝑜𝑠 0° = (1)(1)(1) = 1
�� ∙ 𝑗 = (1) (1) 𝐶𝑜𝑠 90° = (1)(1)(0) = 0
�� ∙ �� = (1) (1) 𝐶𝑜𝑠 90° = (1)(1)(0) = 0
�� ∙ �� = 1 �� ∙ 𝑗 = 0 �� ∙ �� = 0
𝑗 ∙ �� = 0 𝑗 ∙ 𝑗 = 1 𝑗 ∙ �� = 0
�� ∙ �� = 0 �� ∙ 𝑗 = 0 �� ∙ �� = 1
Por tanto, el producto punto será:
𝐴 ∙ �� = 𝐴𝑥𝐵𝑥 + 𝐴𝑦𝐵𝑦+𝐴𝑧𝐵𝑧
Así el producto punto multiplica las componentes x con las x, las y con las y, y las z con las
z. Posteriormente se suman algebraicamente, resultando una cantidad escalar.
Otra aplicación además del producto entre los vectores, es la determinación del ángulo que
se forma entre ellos
𝜃 = 𝑐𝑜𝑠−1 (𝐴 ∙ ��
𝐴𝐵)
Otra aplicación, es la proyección de un vector sobre un eje, como se muestra en la imagen
Fig 1.12
𝐴′ = 𝐴 𝑐𝑜𝑠 𝜃
Así este producto puede ser utilizado en aplicaciones de Trabajo:
Fig 1.21 Proyección del vector 𝐴
sobre el eje b-b’.

𝑊 = �� ∙ 𝑑 = 𝐹𝑑 𝐶𝑜𝑠𝜃
También en la determinación de Potencia:
𝑃 = �� ∙ �� = 𝐹𝑣 𝐶𝑜𝑠𝜃
Producto vectorial.
A diferencia del producto punto, cuyo resultado es un escalar, el producto cruz de dos
vectores es un vector, el cual posee las siguientes características:
1. La línea de acción del vector resultante es perpendicular al plano en que se encuentran
los dos vectores originales (Fig 1.13)
2. La magnitud del vector 𝐶 es el producto de las magnitudes de los vectores 𝐴 y �� por
el seno del ángulo formado entre ellos.
𝐶 = 𝐴𝐵 𝑆𝑒𝑛 𝜃
3. La dirección del vector 𝐶 será perpendicular, pero su sentido es especificado por la
regla de mano derecha, es decir, los dedos de la mano derecha apuntan a lo largo de
𝐴 y luego se enrollarán hacia el vector �� a través del ángulo 𝜃 y el pulgar señalará la
dirección del vector 𝐶 (Fig 1.14).
El producto de los vectores unitarios se desarrolla de acuerdo a la ecuación
𝐶 = 𝐴𝐵 𝑆𝑒𝑛 𝜃
Ejemplo: �� × �� = (1) (1) 𝑆𝑒𝑛 0° = (1)(1)(0) = 0
Fig 1.22 Vector resultante 𝐶 del producto cruz y regla de mano derecha.

�� × 𝑗 = (1) (1) 𝑆𝑒𝑛 90° = (1)(1)(1) = 1
�� × �� = (1) (1) 𝑆𝑒𝑛 90° = (1)(1)(1) = 1
�� × �� = 0 �� × 𝑗 = �� �� × �� = −𝑗
𝑗 × �� = −�� 𝑗 × 𝑗 = 0 𝑗 × �� = ��
�� × �� = 𝑗 �� × 𝑗 = −�� �� × �� = 0
La dirección del vector unitario resultante del producto
cruz de cada par de ellos, se determina con la regla de
mano derecha. La figura (Fig 1.15) ayuda a visualizar el
giro y determinar el signo. Ej: el producto �� × 𝑗 = ��, en
el circulo partiríamos de 𝑖 hacia 𝑗, y eso es sentido
antihorario (positivo), y en el caso de, 𝑗 × �� = −��, en el
circulo se parte de 𝑗 hacia ��, lo que será sentido horario
(negativo).
Por tanto, el producto cruz de dos vectores 𝐴 y �� será:
𝐴 × �� = (𝐴𝑥 �� + 𝐴𝑦𝑗 + 𝐴𝑧��) × (𝐵𝑥 �� + 𝐵𝑦𝑗 + 𝐵𝑧��)
= 𝐴𝑥𝐵𝑥(�� × 𝑖) + 𝐴𝑥𝐵𝑦(�� × 𝑗) + 𝐴𝑥𝐵𝑧(�� × ��)
+𝐴𝑦𝐵𝑥(𝑗 × ��) + 𝐴𝑦𝐵𝑦(𝑗 × 𝑗) + 𝐴𝑦𝐵𝑧(𝑗 × ��)
+𝐴𝑧𝐵𝑥(�� × ��) + 𝐴𝑧𝐵𝑦(�� × 𝑗) + 𝐴𝑧𝐵𝑧(�� × ��)
Las magnitudes de las componentes son escalares y se multiplican algebraicamente
(𝐴𝑥𝐵𝑥, 𝐴𝑥𝐵𝑦, 𝐴𝑥𝐵𝑧, 𝑒𝑡𝑐.), mientras que la operación de los productos cruz de los vectores
unitarios se realiza tal como se indicó.
La operación de los vectores será:
𝐴 × �� = (𝐴𝑦𝐵𝑧 − 𝐴𝑧𝐵𝑦)�� − (𝐴𝑥𝐵𝑧 − 𝐴𝑧𝐵𝑥)𝑗 + (𝐴𝑥𝐵𝑦 − 𝐴𝑦𝐵𝑥)��
El mismo producto cruz puede ser representado como un determinante (que es una forma
más sencilla de desarrollarlo) y llegar al mismo resultado.
𝐴 × �� = |
�� 𝑗 ��𝐴𝑥 𝐴𝑦 𝐴𝑧
𝐵𝑥 𝐵𝑦 𝐵𝑧
|
Fig 1.23 Multiplicación
vectores unitarios.
La primera fila representa las direcciones del vector unitario, la segunda las componentes del
vector 𝐴 y la tercera las componentes del vector ��.
Entre las aplicaciones del producto cruz se encuentra la determinación del momento de una
fuerza o momento de torsión.
1.5. EQUILIBRIO DE LA PARTÍCULA.
En la diversidad de situaciones de estudio de fuerzas, existe una condición muy frecuente de
gran interés en ingeniería, porque suele ser el principio en que se basan las estructuras, desde
las más simples como un bloque sostenido por cuerdas hasta los edificios más altos del
mundo y pasando por las estructuras naturales. Esa condición es el estudio del equilibrio,
planteada por la primera ley del movimiento de Newton.
Recordando la primera y segunda ley de Newton; la primera ley analiza las situaciones donde
la resultante de las fuerzas externas es nula, por tanto, su estado de movimiento no sufre
ningún cambio, como estaba inicialmente, así permanece, condición conocida como
“Equilibrio”(conocida también como ley de Inercia). En la segunda ley existe una fuerza
resultante, la cual provocará una aceleración, por lo tanto cambiará su estado de movimiento
(“Movimiento acelerado”).
Previamente hemos visto operaciones de suma de vectores que tienen un vector resultante y
se ha mostrado como determinar su magnitud y dirección. Todos estos casos pertenecen a la
segunda ley de Newton, es decir hay una fuerza resultante o neta, que se está aplicando al
sistema, por tanto, eso provocará una aceleración (a menos de que exista suficiente resistencia
en los apoyos y conexiones para contrarrestarla y se genere equilibrio). Otro conjunto de
fenómenos muy comunes, son aquellos que pertenecen a la primera ley de Newton, y son los
sistemas en equilibrio. El equilibrio se da en dos condiciones, en reposo y en movimiento a
velocidad constante en línea recta.
La condición de equilibrio para la partícula es establecida matemáticamente como
�� = 0
Donde Σ�� es el vector resultante de la suma de todas las fuerzas que actúan sobre la partícula.
En el caso de la partícula, esta condición es necesaria y suficiente para el equilibrio.
Al analizar un sistema en equilibrio, es necesario identificar todas las fuerzas presentes en el
sistema, tanto las conocidas como las desconocidas. En la determinación de resultantes, todos
los valores son conocidos (magnitud y dirección), pero en el análisis del equilibrio la
magnitud de algunas fuerzas o la dirección de alguna de ellas pueden ser desconocidas
(incógnitas). El estudio del equilibrio inicia con la partícula para pasar posteriormente al
cuerpo rígido.
Diagrama de fuerzas de la partícula (o de cuerpo libre).

El punto de partida es la elaboración de un diagrama de fuerzas de la partícula, eligiendo un
punto donde las fuerzas que se desean analizar sean concurrentes. Se mostrará solo la
partícula con un sistema de coordenadas cartesianas, con los vectores fuerza, indicando su
magnitud y dirección, y cada uno de los elementos físicos tales como cuerdas, barras, vigas,
apoyos, etc., se eliminará, y se representará el efecto que ejerce sobre la partícula o cuerpo.
El análisis de una situación, puede requerir la separación del cuerpo en varias o muchas
partículas, que estarán interrelacionadas y en cada una de ellas se elaborará un diagrama de
fuerzas independiente.
Ecuaciones de Equilibrio.
En el análisis del equilibrio se debe tener presente la primera ley de Newton Σ𝐹 = 0 y este
principio debe hacerse extensivo al sistema bidimensional o tridimensional que se esté
analizando.
Σ𝐹𝑥 = 0
Σ𝐹𝑦 = 0
Las ecuaciones que surgen de este principio, son denominadas “Ecuaciones de Equilibrio”,
y representan al sistema físico que se está analizando. En términos generales lo que se está
realizando es un modelado de la situación física. Del desarrollo de estas ecuaciones surgen
la magnitud o dirección de las fuerzas definidas como incógnitas. El número de incógnitas
que se puede determinar, es el mismo número de ecuaciones con que se cuenta.
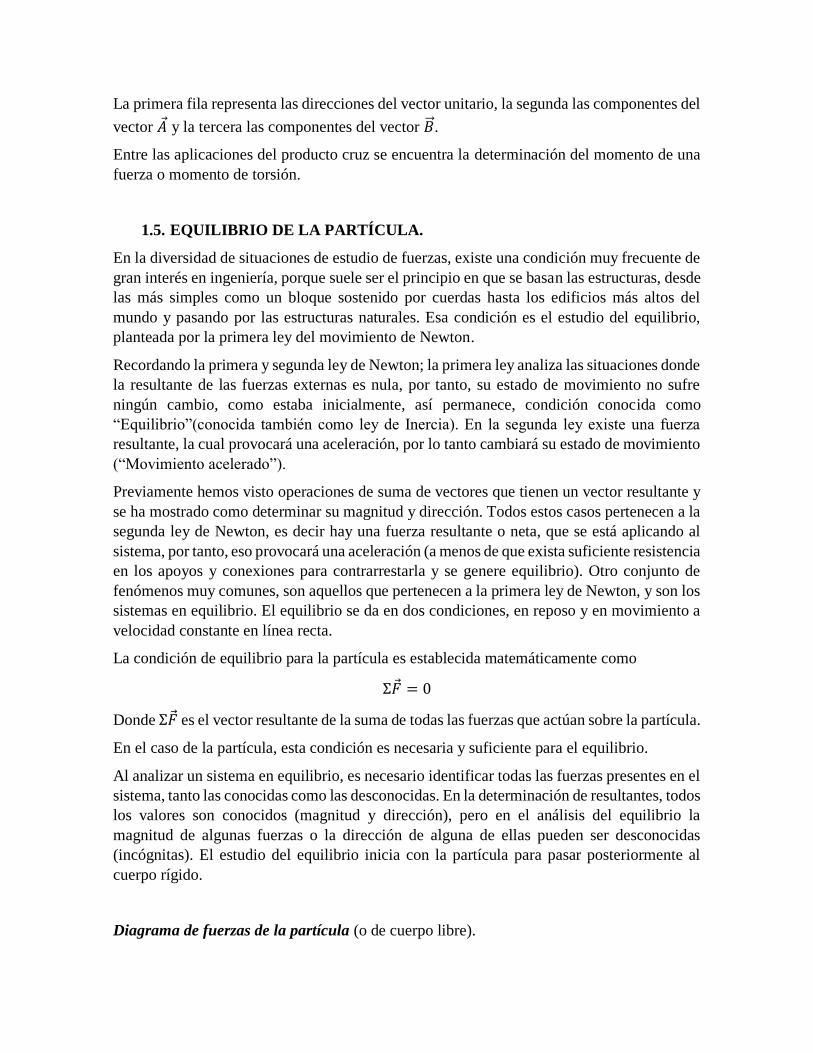
EJEMPLO 2.5
Dos cables están atados y cargados en C como se muestra. Determine la tensión en: (a) en el
cable AC y (b) en el cable BC.
En el punto C hay tres fuerzas concurrentes, dos de ellas son
nuestras incógnitas y la tercera tiene el mismo valor que el peso
del bloque. Por lo tanto, elegimos el punto C y lo representamos
como la partícula con las fuerzas concurrentes. Para poder
elaborar el diagrama de fuerzas, la masa de 200 kg la
expresamos en newtons, (multiplicándola por la gravedad),
usando la segunda ley de Newton, F = ma, es decir, 𝜔 = (200
kg) (9.81 m/s2) = 1962 N.
La fuerza del tercer cable es la misma que 𝜔, porque está en
equilibrio
Desarrollar diagrama de cuerpo libre o partícula. Todas las
fuerzas están actuando en tensión o tracción, por lo tanto se
representan saliendo de la partícula.
Elaborar ecuaciones de equilibrio. Usar las componentes x y y
de cada una de las fuerzas. Observe que W no tiene
componente en dirección x.
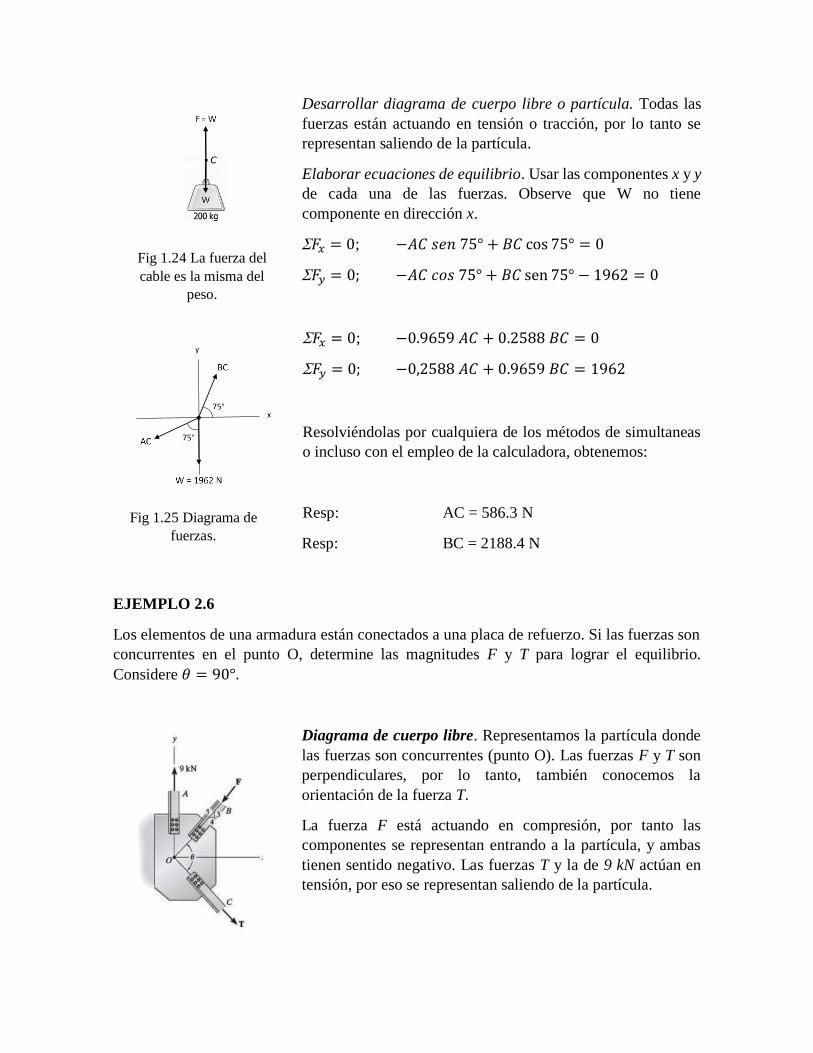
𝐹𝑥 = 0; −𝐴𝐶 𝑠𝑒𝑛 75° + 𝐵𝐶 cos 75° = 0
𝐹𝑦 = 0; −𝐴𝐶 𝑐𝑜𝑠 75° + 𝐵𝐶 sen 75° − 1962 = 0
𝐹𝑥 = 0; −0.9659 𝐴𝐶 + 0.2588 𝐵𝐶 = 0
𝐹𝑦 = 0; −0,2588 𝐴𝐶 + 0.9659 𝐵𝐶 = 1962
Resolviéndolas por cualquiera de los métodos de simultaneas
o incluso con el empleo de la calculadora, obtenemos:
Resp: AC = 586.3 N
Resp: BC = 2188.4 N
EJEMPLO 2.6
Los elementos de una armadura están conectados a una placa de refuerzo. Si las fuerzas son
concurrentes en el punto O, determine las magnitudes F y T para lograr el equilibrio.
Considere 𝜃 = 90°.
Diagrama de cuerpo libre. Representamos la partícula donde
las fuerzas son concurrentes (punto O). Las fuerzas F y T son
perpendiculares, por lo tanto, también conocemos la
orientación de la fuerza T.
La fuerza F está actuando en compresión, por tanto las
componentes se representan entrando a la partícula, y ambas
tienen sentido negativo. Las fuerzas T y la de 9 kN actúan en
tensión, por eso se representan saliendo de la partícula.
Fig 1.25 Diagrama de
fuerzas.
Fig 1.24 La fuerza del
cable es la misma del
peso.
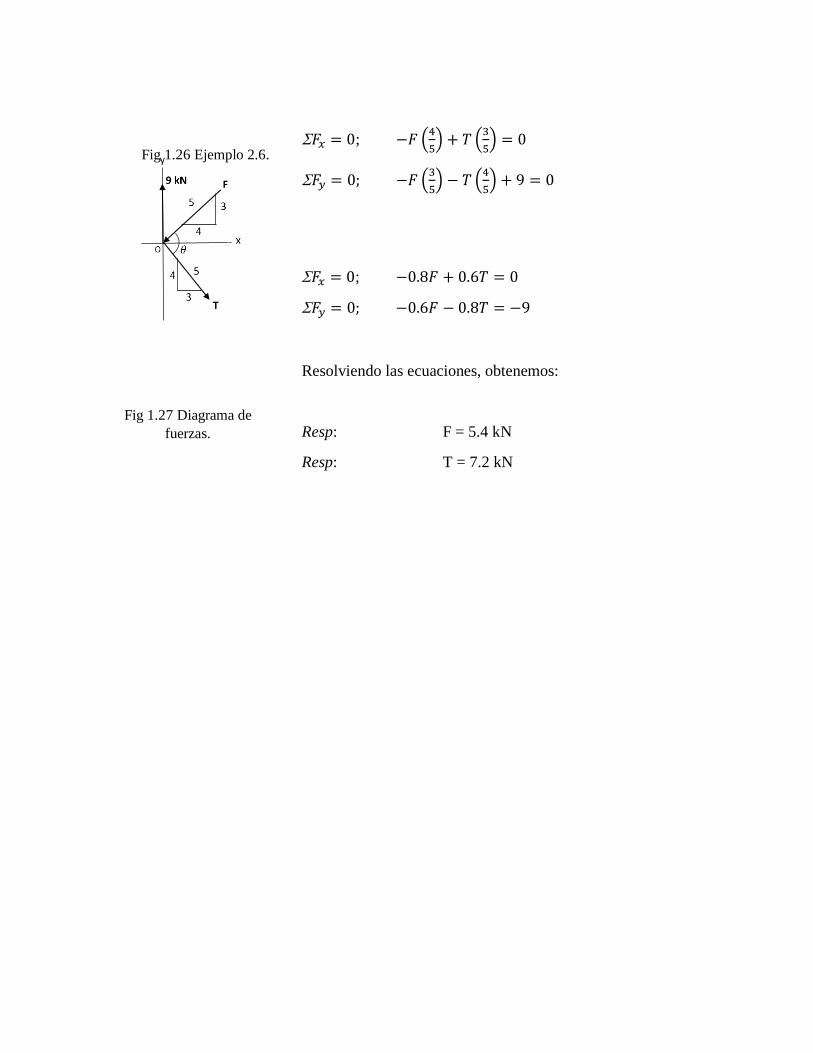
𝐹𝑥 = 0; −𝐹 (4
5) + 𝑇 (
3
5) = 0
𝐹𝑦 = 0; −𝐹 (3
5) − 𝑇 (
4
5) + 9 = 0
𝐹𝑥 = 0; −0.8𝐹 + 0.6𝑇 = 0
𝐹𝑦 = 0; −0.6𝐹 − 0.8𝑇 = −9
Resolviendo las ecuaciones, obtenemos:
Resp: F = 5.4 kN
Resp: T = 7.2 kN
Fig 1.26 Ejemplo 2.6.
Fig 1.27 Diagrama de
fuerzas.