
Cap´ıtulo 2 Algoritmo de generaci´on de columnas para … · El problema de ajustar una matriz...
26
Cap´ ıtulo 2 Algoritmo de generaci´ on de columnas para la estimaci´ on de matrices de viajes Origen-Destino en redes de tr´ afico congestionadas Resumen En este cap´ ıtulo se desarrolla un algoritmo de generaci´on de columnas (caminos) para el problema de estimaci´on de matrices de viaje Origen-Destino en redes de tr´afico con- gestionadas (DAP 1 ) 2 . Este algoritmo itera entre un problema de asignaci´on de tr´ afico en equilibrio, con el que obtiene un conjunto de caminos en equilibrio y el DAP res- tringido al conjunto de caminos previamente generados, cuya soluci´ on proporciona una nueva estimaci´on de la matriz de viajes O-D. El DAP restringido se formula mediante optimizaci´on de un solo nivel. Se demuestra, bajo una sola hip´ otesis relativa a la con- tinuidad de las funciones implicadas, la convergencia del algoritmo a un ´ optimo local del DAP. Para analizar la convergencia y rendimientos del algoritmo propuesto se han reali- zado varias pruebas num´ ericas sobre problemas de peque˜ na escala. Palabras claves: Estimaci´on de matrices origen-destino, programaci´ on matem´ atica con restricciones de equilibrio, m´ etodos de generaci´on de columnas, optimizaci´ on de gran escala, opti- mizaci´on no diferenciable. Demand adjustment problem Investigaci´on parcialmente financiada por fondos FEDER y el proyecto CICYT BFM2002-04548- C03-03 79
Transcript of Cap´ıtulo 2 Algoritmo de generaci´on de columnas para … · El problema de ajustar una matriz...

Capıtulo 2
Algoritmo de generacion decolumnas para la estimacion dematrices de viajes Origen-Destinoen redes de trafico congestionadas
Resumen
En este capıtulo se desarrolla un algoritmo de generacion de columnas (caminos) parael problema de estimacion de matrices de viaje Origen-Destino en redes de trafico con-gestionadas (DAP 1)2. Este algoritmo itera entre un problema de asignacion de traficoen equilibrio, con el que obtiene un conjunto de caminos en equilibrio y el DAP res-tringido al conjunto de caminos previamente generados, cuya solucion proporciona unanueva estimacion de la matriz de viajes O-D. El DAP restringido se formula medianteoptimizacion de un solo nivel. Se demuestra, bajo una sola hipotesis relativa a la con-tinuidad de las funciones implicadas, la convergencia del algoritmo a un optimo localdel DAP.
Para analizar la convergencia y rendimientos del algoritmo propuesto se han reali-zado varias pruebas numericas sobre problemas de pequena escala.
Palabras claves:
Estimacion de matrices origen-destino, programacion matematica con restriccionesde equilibrio, metodos de generacion de columnas, optimizacion de gran escala, opti-mizacion no diferenciable.
Demand adjustment problemInvestigacion parcialmente financiada por fondos FEDER y el proyecto CICYT BFM2002-04548-
C03-03
79

CAP 2: ESTIMACION DE MATRICES O-D
2.1 Introduccion
El problema de ajustar una matriz de viajes Origen-Destino (O-D), a partir de medicio-nes de aforos en una red de trafico y de una matriz O-D desactualizada, ha suscitado ungran interes entre los investigadores en los ultimos anos. Esto es debido fundamental-mente a que este tipo de informacion se puede obtener mas rapida y economicamenteque la obtenida tradicionalmente mediante la realizacion de encuestas.
El marco para la formulacion de este problema, en redes de trafico congestionadas,que abreviadamente denominaremos DAP, es la programacion matematica con restric-ciones de equilibrio (MPEC 3). Un MPEC consta de dos problemas relacionados: elproblema interior o tambien llamado problema del nivel inferior y el problema exterioro problema del nivel superior. En el DAP el problema interior esta definido por unproblema de asignacion de trafico en equilibrio parametrizado por la matriz de viajesO-D (variables del nivel superior) y el problema exterior esta definido por un problemade estimacion de la matriz de viajes O-D en el que interviene los flujos observados enla red.
Se puede realizar una taxonomıa de los modelos DAP empleados en la literatura enfuncion de tres caracterısticas fundamentales:
i) El modelo de asignacion de trafico en equilibrio empleado en el nivel inferior.Los ejemplos mas notables son la asignacion todo-o-nada para redes poco con-gestionadas, equilibrio determinista bajo el punto de vista del usuario (DUE),asignacion estocastica (SUE), etc.
ii) La informacion disponible para plantear el problema en el nivel superior. Estainformacion suele consistir en un subconjunto de mediciones de aforo en la redy, quizas, una matriz de viaje O-D desactualizada u obtenida por otro procedi-miento.
iii) El metodo estadıstico empleado. Los procedimientos mas habituales son el demaxima verosimilitud, mınimos cuadrados generalizados, derivaciones del princi-pio de maxima entropıa, etc.
Las elecciones ii) y iii) conducen a la especificacion de la funcion objetivo del DAP,mientras que i) define el problema interior. Una revision bibliografica de estos modelosse puede consultar en Chen and Florian (1996), Barcelo (1997), Abrahmsson (1998).
El DAP presenta tres dificultades esenciales. La primera deriva del hecho de poseermalas propiedades matematicas, como la no-convexidad y la no diferenciabilidad; lasegunda dificultad es las grandes dimensiones de los problemas reales y la terceraes que la aplicacion multievaluada que define los flujos en equilibrio no se conoceexplıcitamente, estando unicamente definida implıcitamente por el problema interior.
Mathematical programming with equilibrium constraints
80 D. Verastegui Rayo
2.1. INTRODUCCION
Estas dificultades ha conducido al desarrollo de algoritmos de una marcada naturalezaheurıstica.
A grosso modo dos son las estrategias que se han desarrollado para la resoluciondel DAP. La primera se basa en aplicar tecnicas de optimizacion comunmente usadasen optimizacion de un solo nivel, como son los algoritmos de direcciones de descenso.Los metodos descritos en Spiess (1990b), Drissi-Kaitouni and Lundgren (1992),Florianand Chen (1993), Codina and Barcelo (2000), Codina et al. (2001) y Codina andMontero (2003) constituyen ejemplos de esta lınea de investigacion en la que se obtienendiferentes aproximaciones al grandiente de la funcion objetivo.
La segunda estrategia se basa en aproximar la aplicacion multievaluada, que defineel problema interior, por una aproximacion lineal mediante los llamados factores deinfluencia. Los ejemplos mas notables son el algoritmo IEA4 propuesto en Yang et al.(1992), que esta basado en el uso de proporciones para obtener los factores de influen-cia, y el SAB5 dado en Yang (1995), en el que se calculan los factores de influenciamediante analisis de sensibilidad. En Codina et al. (2001) se plantea el calculo delas aproximaciones lineales de una forma diferente. En el citado trabajo se proponeobtener estas aproximaciones como la aplicacion multievaluada resultante de aproximarla funcion objetivo del problema interior original. El metodo propuesto, denominadoEAM, es el resultado de considerar una aproximacion de primer orden de la funcionobjetivo del nivel inferior.
Recientemente, Cascetta and Postorino (2001) formulan el DAP como la localizacionde un punto fijo, en una funcion definida implıcitamente, mediante la solucion de unproblema de programacion matematica. Esta formulacion permite el desarrollo dealgoritmos de tipo punto-fijo.
Los algoritmos de generacion de columnas son una poderosa herramienta para re-solver problemas de programacion matematica de gran escala. Estos metodos iteranentre la resolucion del llamado problema maestro restringido, que consiste en el proble-ma original restringido a una aproximacion interior de la region factible original, y elllamado problema de generacion de columnas, que mediante una relajacion del proble-ma original genera un nuevo vector (columna) para mejorar la anterior aproximacioninterior.
En este trabajo formulamos el DAP en el espacio de flujo en los caminos y pro-ponemos un algoritmo de generacion de columnas para evitar la enumeracion explıcitade todos los caminos de la red. Este algoritmo resuelve iterativamente un problema deasignacion para una matriz O-D dada, cuya solucion permite obtener nuevos caminos,y un problema de estimacion, en el que se resuelve el DAP original restringido al con-junto de rutas generadas. En el DAP restringido se reemplaza el problema inferiorrestringido por sus condiciones de optimalidad de primer orden, las llamadas condi-ciones de Karush-Kuhn-Tucker en el caso de modelos de optimizacion. Esta operacionconduce a un problema no lineal y no convexo de un solo nivel. Este algoritmo lo
Iterative estimation assignmentSensitivity analysis based
Tesis Doctoral 81

CAP 2: ESTIMACION DE MATRICES O-D
hemos denominado CGA6.
El CGA ha sido desarrollado para DAPs en los que se emplea, como metodo deasignacion de trafico, un modelo determinista de equilibrio desde el punto de vista delusuario. No obstante, este algoritmo se puede adaptar a DAPs que empleen modelosestocasticos de asignacion.
Esta idea, la de reemplazar el problema interior por las condiciones de equilibrioque representa, ha sido empleada en los problemas de gestion de trafico y de disenode redes en Marcotte (1983), Meng et al. (2001). Un algoritmo similar al aquı de-sarrollado fue propuesto por Lim (2002) para el problema de diseno de redes (NDP7).Este autor demuestra la convergencia del mismo a un optimo local bajo la hipotesis decomplementariedad estricta de la sucesion de iteraciones generadas y bajo la hipotesisde continuidad en la funcion de coste en los caminos. En este trabajo, empleamos laseleccion de todos los caminos de mınimo coste en lugar de los caminos con flujo enla situacion de equilibrio, lo que nos permite demostrar la convergencia a un optimolocal del DAP sin necesidad de que esta sucesion de patrones de equilibrio cumplan lacondicion de holgura complementaria estricta.
El capıtulo se completa con una experiencia numerica sobre tres ejemplos de pequenasdimensiones, con el fin de estudiar la convergencia del CGA y testar la viabilidad deciertas estrategias heurısticas desarrolladas para su implementacion. Los resultadosobtenidos son prometedores, mostrando la convergencia a un mınimo local en muypocas iteraciones.
2.2 Revision del DAP
En esta seccion revisaremos brevemente el problema DAP, propondremos un algoritmobasado en la generacion de caminos y posteriormente estudiaremos su convergencia.
La notacion empleada a lo largo de este trabajo, por conveniencia, se resume en laTabla 3.1.
El problema de asignacion de trafico en redes congestionadas (TAP8), en su formamas general, admite una formulacion mediante el siguiente problema de desigualdadesvariacionales (Smith (1979), Dafermos (1980)):
Encontrar un v∗ ∈ Ω′ tal que
c(v∗)T (v − v∗) ≥ 0, ∀v ∈ Ω′[VIP(c,Ω′)]
donde el espacio factible de flujos en los arcos viene definido por Ω′ = v | v = ∆h,Λh =g, h ≥ 0. Una formulacion equivalente en el espacio de flujo en los caminos, es:
Column generation algorithmNetwork design problemTraffic assignment problem
82 D. Verastegui Rayo

2.2. REVISION DEL DAP
Encontrar un h∗ ∈ Ω tal que
C(h∗)T (h− h∗) ≥ 0, ∀h ∈ Ω[VIP(C,Ω)]
donde el espacio factible de flujos en los caminos, para una matriz de viajes O-D, g,esta definido por Ω(g) = h | Λh = g, h ≥ 0.
En este capıtulo asumiremos que el problema de asignacion de trafico VIP(C,Ω′)]corresponde a un modelo determinista desde el punto de vista del usuario (Primerprincipio de Wardrop).
El problema de estimacion o ajuste de una matriz O-D en una red de trafico con-gestionada (DAP) se formula mediante la programacion matematica con restriccionesde equilibrio (MPEC). Matematicamente, el DAP puede ser formulado en el espaciode flujo en los caminos por
Minimizar F (g, h) = η1F1(g) + η2F2(v)
sujeto a: C(h)T (h′ − h) ≥ 0, ∀h′ ∈ Ω(g)
h ∈ Ω(g)
v = ∆h
0 ≤ g ≤ b
[DAP]
donde las funciones F1 y F2 son dos metricas que miden respectivamente las discrepan-cias entre las observaciones disponibles de la matriz de demanda O-D y de los aforos enla red con sus respectivas predicciones. Los coeficiente η1, η2 ≥ 0 reflejan la confianzaque tenemos en la calidad de nuestras observaciones. Bajo las hipotesis de que lasfunciones F1 y F2 y c(v) sean continuas, Chen and Florian (1996) demostraron que elDAP admite una solucion.
Observese que si la funcion objetivo del nivel superior se multiplica por el numeropositivo 1
η1+η2la solucion del problema no varıa. Esto pone de manifiesto que el DAP es
una ponderacion de dos objetivos, por un lado intentar reproducir los flujos observadosy por otro intentar mantener la misma estructura que la matriz O-D desactualizada.
Nota 2.2.1 : Funcion objetivo F .
Las especificaciones de las funciones F1 y F2 permiten recoger las diferentes clasesde estimadores usados en la literatura. La estimacion por mınimos cuadrados genera-lizados (GLS9) [Cascetta (1984)], la tecnica de maxima entropıa [Willmunsen (1978)]o de maxima verosimilitud son las mas ampliamente empleadas en la literatura. Lasolucion del DAP mediante GLS es robusta con respecto a las distribuciones adoptadas[Cascetta and Nguyen (1988)].
En este trabajo no se asume ningun criterio especıfico, unicamente que las funcionesFi sean continuas en la region factible, con el objeto de poder asegurar la convergencia
Generalized least squares
Tesis Doctoral 83

CAP 2: ESTIMACION DE MATRICES O-D
del algoritmo propuesto. No obstante, se emplean dos metricas que son poco habitualesen los metodos de estimacion clasicos: El valor absoluto mınimo
F 1 (x, x) =∑
i
ωi|xi − xi|
y el MinMaxF∞ (x, x) = maximo
iωi |xi − xi|
para medir la discremancia entre un vector estimado x y el vector observado x. Losparametros ωi toman un conjunto de valores que se han determinado previamente.
Las metricas F 1 and F∞ transforman la funcion objetivo del DAP en una funcionobjetivo lineal mediante la introduccion de nuevas variables. En el caso del metodo delvalor absoluto mınimo, la transformacion puede ser expresada como:
minimizarZ =∑
i
ωiεi,
sujeto a:
xi − xi ≤ εi, i = 1, . . . , n
xi − xi ≤ εi, i = 1, . . . , n
εi ≥ 0, i = 1, . . . , n
En el caso de la estimacion MinMax, la transformacion sera:
minimizar Z = ε,
sujeto a:
ωi(xi − xi) ≤ ε, i = 1, . . . , n
ωi(xi − xi) ≤ ε, i = 1, . . . , n
ε ≥ 0
2.3 Algoritmo de generacion de columnas (CGA)
Tobin (1986) mostro que el problema de desigualdades variacionales que define el pro-blema de asignacion de trafico (TAP) es equivalente al sistema de ecuaciones y de-sigualdades siguientes
C(h) = ΛTU + π (2.1)
Λh = g (2.2)
πTh = 0 (2.3)
π, h ≥ 0 (2.4)
84 D. Verastegui Rayo

2.3. ALGORITMO DE GENERACION DE COLUMNAS (CGA)
donde U es el vector de costes en equilibrio de los pares O-D, esto es (. . . , Ui, . . . )para todo i ∈ I y π es el vector de multiplicadores asociados a las restricciones de nonegatividad en el flujo de los caminos. Estas condiciones reciben el nombre, para elcaso de costes separables, de condiciones de optimalidad de Karush-Khun-Tucker.
Esta representacion del problema de equilibrio permite transformar el DAP en unproblema de optimizacion de un solo nivel reemplazando el VIP(C,Ω) mediante lascondiciones (2.1) a (2.4).
Minimizar F = η1F1(g) + η2F2(v)
sujeto a: C(h) = ΛTU + π
Λh = g
v = ∆h
πTh = 0
π, h ≥ 0
0 ≤ g ≤ b
[DAP]
Este problema no se puede abordar mediante algoritmos que trabajen directamentesobre la formulacion explıcita, ya que el numero de variables (debido fundamental-mente al numero de caminos) es prohibitivo para problemas reales, incluso de medianotamano.
El algoritmo que presentamos en esta seccion es un metodo iterativo que construyeuna sucesion de aproximaciones del DAP. Cada uno de estos problemas aproximados,denominados DAP restringidos, esta definido por la restriccion del problema DAP sobreun subconjunto de caminos K ⊂ K y proporcionan una estimacion de la matriz deviajes O-D. Posteriormente se resuelve el problema de asignacion en equilibro para lamatriz O-D estimada, lo que genera nuevos caminos, ampliando el anterior subconjuntoK. El algoritmo termina cuando ningun nuevo camino es anadido a este subconjunto.Como el algoritmo propuesto para el resolver el DAP va generando nuevas columnas(caminos) en cada iteracion segun van siendo necesitadas, este es el origen del nombrealgoritmo de generacion de columnas (CGA).
Vamos a introducir la siguiente notacion que sera empleada en la descripcion del al-goritmo y en la demostracion de su convergencia. Se define la aplicacion multievaluadade flujos factibles restringidos a un conjunto de caminos K y para una matriz O-D gdada, por
Ω(K, g) :=
h /
∑k∈Ki
hk = gi ∀i ∈ I; hk ≥ 0, ∀k ∈ K y hk = 0, ∀k ∈ K − K
y la funcion multievaluada de soluciones del TAP restringido al conjunto de caminos
Tesis Doctoral 85

CAP 2: ESTIMACION DE MATRICES O-D
K y para una matriz O-D g dada, por
Ω∗(K, g) :=
h ∈ Ω(K, g) / Ck(h, g) = Ui + πk, ∀k ∈ Ki, ∀i ∈ I;
∑k∈K
πkhk = 0; πk ≥ 0, ∀k ∈ K
.
Cuando el conjunto K coincide con el conjunto original K, denota en Ω∗(g) =Ω∗(k, g) y Ω(g) = Ω(k, g)
Notar que si el conjunto de caminos Ki es no vacıo para todo i ∈ I entonces elconjunto de soluciones del TAP restringido es no vacıo, debido a la continuidad de laaplicacion C(h) sobre el conjunto convexo Ω(K, g).
El problema DAP restringido al conjunto de caminos K se formula:
Minimizar F = η1F1(g) + η2F2(∆h)
sujeto a: g ∈ [0, b]
h ∈ Ω∗(K, g) [RDAP(K)]
.
La ventaja del subproblema RDAP(K) respecto al problema DAP es que el numerode variables es significativamente menor y esto permite resolver (aproximadamente)directamente la formulacion explıcita.
La tabla 2.3 recoge el algoritmo CGA.
Nota 2.3.1 : Extension del CGA a DAP con un modelo de asignacion es-tocastico tipo logit
El CGA ha sido desarrollado para DAPs que emplean el equilibrio determinista,desde el punto de vista del usuario, como principio para efectuar la asignacion detrafico. El CGA se puede extender a DAPs con modelos de asignacion estocasticos talescomo el modelo estocastico basado en distribuciones tipo logit. La dificultad esencialviene generada por el hecho de que, en este contexto, el conjunto K(g) coincide conel espacio completo de caminos, haciendo coincidir el DAP-restringido con el DAPoriginal. Este problema se puede paliar usando algoritmos de resolucion del modeloestocastico basado en distribuciones tipo logit (Paso 1) que operasen en el espacio delos flujos en los caminos, como el dado en Damberg et al. (1996), en los que se obtienenuna aproximacion al conjunto K(g). La segunda modificacion que se debe introducir alCGA descrito en la Tabla 2.3 es en el DAP restringido (Paso 3) . Para poder describirel equilibrio estocastico, basado en distribuciones tipo logit, hay que reemplazar loscostes de los caminos Cp(h) por Cp(h) + 1
θlog(hp), donde θ es un parametro positivo
asociado con el componente aleatorio del coste.
Estas dos modificaciones conducirıan a un esquema operativo para este tipo de DAPspero en el que no se podrıa aplicar los resultados teoricos desarrollados en la seccion2.4 para establecer la convergencia del algoritmo.
86 D. Verastegui Rayo

2.4. ANALISIS DE LA CONVERGENCIA DEL CGA
2.4 Analisis de la convergencia del CGA
En esta seccion probamos que el CGA converge en un numero finito de iteraciones a unmınimo local del DAP. La demostracion de este resultado no requiere de las hipotesisque habitualmente se emplean para el analisis de la sensibilidad del TAP, como lacondicion de holgura complementaria estricta (esto es, si hk = 0 entonces πk > 0),ni hipotesis sobre diferenciabilidad (ver Tobin and Friesz (1988)). Estas suposicionessimplificarıan la demostracion de la convergencia del CGA, pero son demasiado res-trictivas para ser satisfechas en redes reales. Los argumentos empleados se basanexclusivamente en hipotesis de continuidad.
Observese que, como no se asume la hipotesis de complementariedad estricta, puedeque el algoritmo CGA, en alguna iteracion y para algun par, almacene caminos demınimo coste que no contengan flujo.
La idea fundamental, sobre la que se basa la convergencia del algoritmo CGA, esque si el problema TAP es perturbado respecto a la matriz g, esto es, si reemplazamosla matriz de demanda O-D g por g + ε, donde ε es una pequena perturbacion dela demanda, entonces la nueva situacion de equilibrio se puede describir empleandounicamente los caminos contenidos en K. Esto demuestra que existe un entorno de lademanda actual en los que el DAP y el DAP restringido son equivalentes. Por tanto,ambos problemas tienen el mismo conjunto de mınimos locales en dicho entorno. Elteorema de convergencia demuestra que se alcanza uno de estos mınimos locales.
Empezaremos demostrando que para cualquier matriz O-D g′ existe un entornoabierto en el que el DAP y el DAP restringido son equivalentes.
Teorema 2.4.1 Dado g′ ∈ [0, b]. Supongase que C(h) es continua en Ω =⋃
g Ω(g).Supongase que existe un entorno de g′, denotado por B, tal que para todo g ∈ B secumple las siguientes dos propiedades:
i) la aplicacion C(h) es constante en Ω∗(g),
ii) la aplicacion C(h) es constante en Ω∗(K(g′), g).
Entonces existe un entorno abierto B cumpliendo que
Ω∗(g) = Ω∗(K(g′), g), ∀g ∈ B
donde K(g′) es el conjunto de caminos de mınimo coste en el equilibrio para la matrizO-D g′.
Demostracion. Primero probaremos la inclusion
Ω∗(g) ⊂ Ω∗(K(g′), g)
Dado un h∗g′ ∈ Ω∗(g′). Por la suposicion i), existe unicamente un vector de costes
en equilibrio, que denotamos por U(g′).
Tesis Doctoral 87

CAP 2: ESTIMACION DE MATRICES O-D
El conjunto K(g′) consta de todos los caminos de mınimo coste para todos lospares i ∈ I, pudiendo incluso contener caminos sin flujo en la situacion de equilibrio.Entonces, existe un numero positivo ε cumpliendo
min Ck(h∗g′) − Ui(g
′) / p ∈ Ki −Ki(g′), i ∈ I > ε > 0,
donde U(g′) es el vector de costes en equilibrio para la matriz O-D g′. Por la suposicionii), Ck(h∗
g′) es independiente de la eleccion del vector de flujo en equilibrio h∗g′, y por
tanto, la anterior relacion se cumple para todo h∗g′ ∈ Ω∗(g′).
Esta relacion conduce a
Ui(g′) +
ε
2< Ck(h∗
g′) − ε
2; ∀k ∈ Ki −Ki(g
′), ∀i ∈ I, ∀h∗g′ ∈ Ω∗(g′). (2.5)
Dado ε2> 0, por la continuidad de C en el punto h∗
g′, existe un entorno abiertoV (h∗
g′) de h∗g′ y otro entorno abierto B(h∗
g′) de g′ cumpliendo:
‖C(h) − C(h∗g′)‖∞ <
ε
2; ∀(h, g) ∈ V (h∗
g′) × B(h∗g′),
donde ‖ · ‖∞ es la norma supremo.
La aplicacion punto-conjunto Ω∗(g) es semi-continua superiormente en g. Chen andFlorian (1996) demuestran que la aplicacion flujos en equilibrio en los arcos es semi-continua superiormente bajo la hipotesis de continuidad. Empleando un argumentosimilar se puede probar que Ω∗(g′) es un conjunto cerrado contenido en el conjuntoacotado Ω. Esto implica que el conjunto Ω∗(g′) es un conjunto compacto. Por otrolado, V (h∗
g′)h∗g′∈Ω∗(K(g′),g′) es un cubrimiento por abiertos de este conjunto compacto,
entonces existe un subcubrimiento finito. Denotamos por h∗1, . . . , h
∗s el conjunto
de puntos asociados al subcubrimiento finito. Denotamos por V = ∪iV (h∗i) y por
B =(∩iB(hi)) ∩ B
).
Esta relacion implica que todas las funciones coordenadas de C, satisfacen
‖Ck(h) − Ck(h∗g′)‖∞ <
ε
2; ∀(h, g) ∈ V ×B, ∀k ∈ K
y esta puede ser rescrita por
Ck(h∗g′) − ε
2< Ck(h) < Ck(h∗
g′) + ε2, ∀(h, g) ∈ V × B, ∀k ∈ K. (2.6)
Sea k ∈ Ki(g′) y k′ ∈ Ki − Ki(g
′), y empleando las ecuaciones (4.10) y (4.3), seobtiene que
Ck(h) < Ck(h∗g′) +
ε
2= Ui(g
′) +ε
2< Ck′(h∗
g′) − ε
2< Ck′(h), (2.7)
∀(h, g) ∈ V ×B.
88 D. Verastegui Rayo

2.4. ANALISIS DE LA CONVERGENCIA DEL CGA
Ahora probaremos por reduccion al absurdo que existe un entorno B ⊂ B de g′
cumpliendoΩ∗(g) ⊂ Ω∗(K(g′), g), ∀g ∈ B
Supongamos que todo entorno de g′ contenido en B, posee un elemento g tal queh∗
g /∈ Ω∗(K(g′), g) para algun h∗g ∈ Ω∗(g). Entonces, podemos construir dos sucesiones
gj y hj cumpliendo: i) gj → g′ y ii) hj ∈ Ω∗(gj) − Ω∗(K(g′), gj).
Del hecho que hj ∈ Ω y que el conjunto de flujos factibles es compacto, existe unasubsucesion convergente hjj∈J . Denotamos su lımite por h.
La aplicacion multievaluada Ω∗(g) es semi-continua superiormente en g′ por el Teo-rema 1 de Chen and Florian (1996), y se cumple por tanto
Sihj ∈ Ω∗(gj), ∀j ∈ Jgjj∈J → g′ ⇒ h ∈ Ω∗(g′)hjj∈J → h
Debido a que (hj , gj)j∈J → (h, g′) ∈ V × B, donde V × B es un conjunto abierto,existe un numero entero j0 tal que (hj , gj) ∈ V × B para todo j > j0.
Empleando la relacion (4.11) para (hj , gj) con j > j0, obtenemos que el conjunto decaminos mınimos es un subconjunto de K(g′). Por otro lado, hj ∈ Ω∗(gj) (es un vectorde flujo de caminos en equilibrio) y eso implica que hj
k′ = 0 para todo k′ ∈ Ki −Ki(g′)
y para todo i ∈ I y se tiene que hj ∈ Ω∗(K(g′), gj) para todo j > j0, lo que es unacontradiccion.
Ahora probaremos la inclusion contraria. Sea h ∈ Ω∗(K(g′), g) donde g ∈ B∩B. Porla suposicion ii) C(h) es constante en Ω∗(K(g′), g) y Ω∗(g) ⊂ Ω∗(K(g′), g), entoncesexiste un vector flujo en los caminos en equilibrio h∗ ∈ Ω∗(g), cumpliendo
C(h) = C(h∗). (2.8)
Sea h ∈ Ω, probaremos que C(h, g)T (h− h) ≥ 0. De la optimalidad de h∗, se tiene
C(h∗)T (h− h∗) ≥ 0. (2.9)
De la optimalidad de h en Ω(K(g′)) y h∗ ∈ Ω(K(g′)), se tiene
C(h)T (h∗ − h) ≥ 0. (2.10)
Empleando (4.12), (4.13) y (4.14), se obtiene
C(h)T (h− h) = C(h)T [(h− h∗) + (h∗ − h)]
= C(h∗)T (h− h∗) + C(h)T (h∗ − h) ≥ 0.
Tesis Doctoral 89

CAP 2: ESTIMACION DE MATRICES O-D
Corolario 2.4.2 Condicion suficiente para la existencia de un mınimo localpara el DAP
Supongamos que se cumplen las hipotesis del teorema 2.4.1, y si (h∗g′ , g
′) es un
mınimo local para el RDAP(K) y K(g′) ⊂ K, entonces (h∗g′ , g
′) es un mınimo localpara el DAP.Demostracion. De la relacion Ω(K(g′)) ⊂ Ω(K) ⊂ Ω y del teorema 2.4.1, existe unentorno B de g′ tal que
Ω∗(K(g′), g) = Ω∗(K, g) = Ω∗(g), ∀g ∈ B.
Por hipotesis el par (h∗g′ , g
′) es un mınimo local de
Minimizar F (g, h) = η1F1(g) + η2F2(v)
sujeto a: g ∈ [0, b] ∩ B
h ∈ Ω∗(K, g).
lo que prueba el corolario.
El algoritmo CGA va ampliando en cada iteracion el conjunto de caminos retenidos.Debido a la finitud de estos en la red, el algoritmo debe terminar en un numero finitode iteraciones, incluso cuando se toma el valor del parametro ε = 0. El siguienteteorema establece una condicion para garantizar que la ultima matriz O-D estimadaes un mınimo local del DAP.
Teorema 2.4.3 (Convergencia del CGA) Sea g′ la ultima iteracion generadapor el algoritmo. Suponer que g′ satisface las condiciones del teorema 2.4.1, entoncesg′ es un mınimo local para el DAP.
Demostracion. El algoritmo CGA genera una sucesion de conjuntos de caminosK cumpliendo que K ⊂ K+1 (Mirar el paso 2 del algoritmo CGA). Por la finitud decaminos en la red de trafico, el CGA debe terminar en un numero finito de iteraciones.La ultima iteracion cumple el criterio de paro.
K(g′) ⊂ Ks−1para un cierto entero s.
Ademas, g′ es un mınimo local para el RDAP(Ks−1) por definicion del paso 3, y, em-pleando el corolario 4.3.5 para K = Ks−1, el teorema queda demostrado.
2.5 Experiencia numerica
En esta seccion se analiza numericamente la convergencia del algoritmo CGA y dealgunas estrategias heurısticas para su implementacion que llamaremos metodos CGAheurısticos. En esencia hay tres lıneas fundamentales para obtener metodos CGAheurısticos:
90 D. Verastegui Rayo

2.5. EXPERIENCIA NUMERICA
1 La primera simplificacion se basa en suponer que todos los caminos retenidosdeben de ser empleados por la nueva estimacion de la matriz O-D. Esto conducea que las restricciones h ≥ 0 no son activas y por tanto sus multiplicadores πasociados tomaran el valor de cero, lo que nos permite eliminar el conjunto derestricciones no lineales de complementariedad [2.4].
2 La segunda simplificacion consiste en no almacenar las columnas (caminos) ge-neradas en las iteraciones anteriores. Esta estrategia reduce el tamano de losdiferentes DAP restringidos pero no se cumplen las condiciones de convergenciadel CGA dadas en el teorema [2.4.3] .
3 La tercera considera aproximaciones lineales al coste en los caminos. Esta es-trategia no se aborda aquı y sera considerada mas adelante.
Un objetivo fundamental de esta experiencia se centra en analizar el efecto de lasdos primeras suposiciones sobre la convergencia del CGA resultante. Para ello hemosconsiderado todas las posibilidades de los dos primeros ıtem que se sintetizan en latabla 2.3. El CGA3 ha sido contemplado con el unico objeto de ser exhaustivos,aunque, a priori, podemos argumentar negativamente en contra de su efectividad yaque este algoritmo fuerza a emplear todos los caminos anteriormente generados, siendoalgunos de ellos unicamente viables para situaciones de gran congestion. Esto conducea estimaciones de matrices O-D que utilicen esos caminos con la consiguiente perdidade convergencia.
Se han realizado tres experimentos numericos sobre dos redes de pequeno tamano:Red de Nguyen-Dupuis (Nguyen and Dupuis (1984), en adelante ND) y Red de Friesz-Harker (Friesz and Harker (1985), en adelante FH). Sus topologıas se muestran en lasfiguras 2.1 y 2.2 respectivamente. La red ND tiene 13 nodos, 19 arcos y cuatro paresO-D: El par (1 → 2) con demanda g1, (1 → 3) con demanda g2, (4 → 2) con demandag3 y (4 → 3) con demanda g4. La red FH tiene 6 nodos, 16 arcos y dos pares O-D: Elpar (1 → 6) con demanda g1, (6 → 1) con demanda g2.
Hemos considerado cuatro modelos de DAP, caracterizados por el uso o no de unamatriz de referencia (target matrix) y por el uso de aforos en todos los arcos de la redo solo en un subconjunto de ellos. Todas las combinaciones se describen en la tabla 2.4
Los flujos observados para los experimentos 1 y 3 corresponden a la asignacion deuna matriz O-D (400, 800, 600, 200) desde el punto de vista del usuario (TAP-UE).En el experimento 1 se han usado los costes en los arcos descritos en Nguyen andDupuis (1984). Los costes en los arcos del experimento 3 se han construido medianteuna modificacion de las funciones de coste en los arcos del experimento 1. Ası, se haanadido una penalizacion en los arcos a14 y a18 cuando sus flujos respectivos superanlas 400 y 300 unidades. Estas penalizaciones son 8.914 para el arco a14 y 11.501 parael arco a18. Estos valores se corresponden con los multiplicadores de Lagrange para lasrestricciones de capacidad utilizadas en el TAP. Esta modificacion genera funciones decoste discontinuas. Esta eleccion significa que si usamos el TAP para estas funcionesde coste modificadas, los resultados obtenidos coinciden con el que genera los mismos
Tesis Doctoral 91
CAP 2: ESTIMACION DE MATRICES O-D
1 12
5 6 7 8
211109
13 3
a3
a4
a6
a5
a1
a2
a17
a7
a8
a14
a10
a15
a16
a19
a13
a12
a18
a9
a114
Figura 2.1: Topologıa de la red de Nguyen-Dupuis
a1
a2
a6
a7
a8
a3
a4
a9
a10
a11
a12
a13
a14
a15
a16
1
2
3
4
5
6
a5
Figura 2.2: Topologıa de la red de Friesz-Harker
flujos en equilibrio que el TAP con restricciones de capacidad y para las funciones decoste en los arcos usadas en el ejemplo 1.
Los flujos observados para el experimento 2 corresponden a la asignacion de unamatriz O-D (10, 20) desde el punto de vista del usuario utilizando los costes de arcodados en Friesz and Harker (1985).
92 D. Verastegui Rayo

2.5. EXPERIENCIA NUMERICA
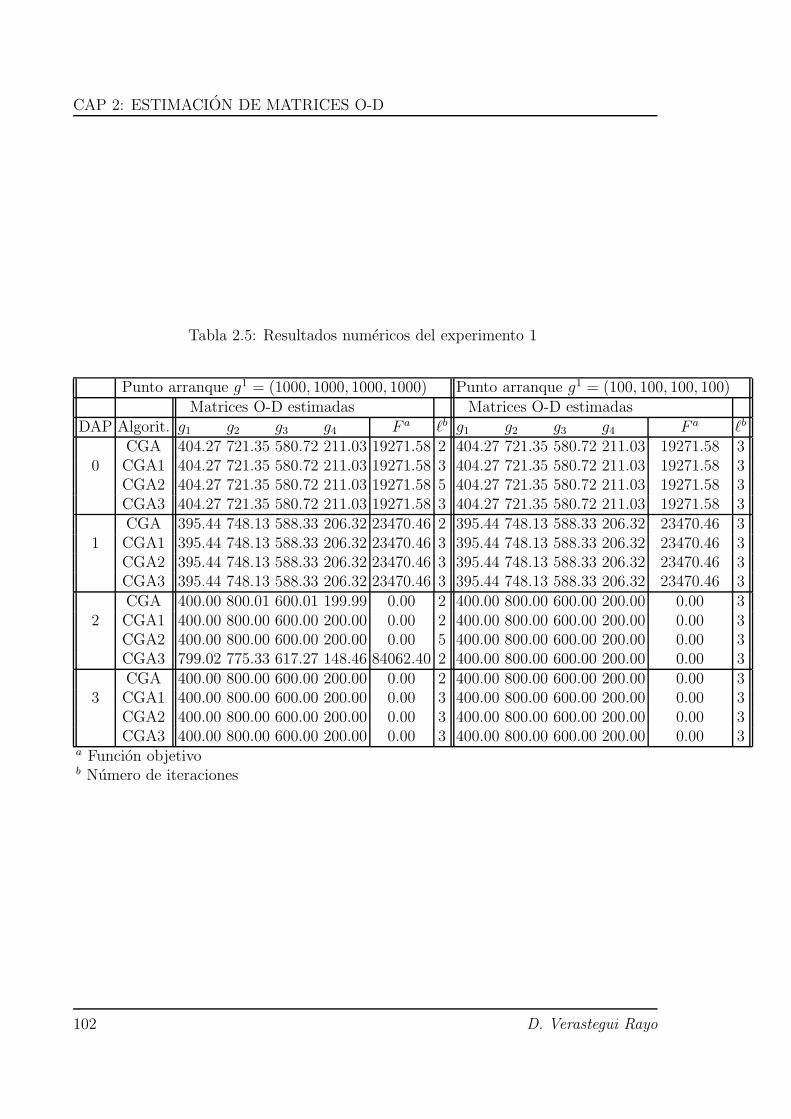
Los resultados obtenidos en los experimentos 1, 2 y 3 se muestran respectivamenteen las tablas 2.5, 2.6 y 2.7. Todas estas tablas tienen la misma estructura. Cada filamuestra los resultados obtenidos para cada combinacion de tipo de DAP (ver Tabla2.4) y algoritmo usado para resolverlo (ver Tabla 2.3). La primera columna define elDAP usado y la segunda el algoritmo empleado. Se han utilizado dos puntos iniciales,uno asociado a una situacion de gran congestion de las redes y otro a una de bajacongestion. Para cada punto inicial se ha reportado la ultima O-D matriz estimada, elvalor de la funcion objetivo y el numero de iteraciones empleadas. Esta informacion esrecogida en el resto de columnas.
Todos los algoritmos se han codificado usando el programa GAMS (General Alge-braic Modeling Systems). Una rapida introduccion a este programa se puede ver en ellibro de Castillo et al. (2002). Se ha elegido como criterio de paro el ratio de cambiorelativo entre sucesivas soluciones de la matriz O-D, g+1 y g, y el valor del parametrode tolerancia fue de ε = 1.0 × 10−4, es decir,
∑i∈I
∣∣∣g+1i − g
i
∣∣∣g
i
≤ ε = 1.0 × 10−4,
2.5.1 Experimento 1
En la tabla 2.5 se muestran los resultados obtenidos para la ultima iteracion de losalgoritmos, el valor de la funcion objetivo y el numero de iteraciones empleado. Laprimera conclusion es que los CGA, CGA1 y CGA2 alcanzan la solucion optima entodos los casos, y ademas el numero de iteraciones empleadas esta entre 2 y 3 para elCGA y CGA1, mientras entre 2 y 5 para el CGA2. Tambien se constata que el CGA3converge a un punto muerto en el DAP2 para la inicializacion asociada a una situacionde alta congestion.
Los problemas DAP2 y DAP3 tienen un optimo global en la matriz (400, 800, 600, 200)y el valor optimo es 0. Esta solucion es degenerada, esto es, la matriz O-D tiene caminosen equilibrio sin flujo y no satisface la condicion SC. Existen evidencias numericas dela no existencia de mınimos locales para los DAPs considerados en este experimento.
2.5.2 Experimento 2
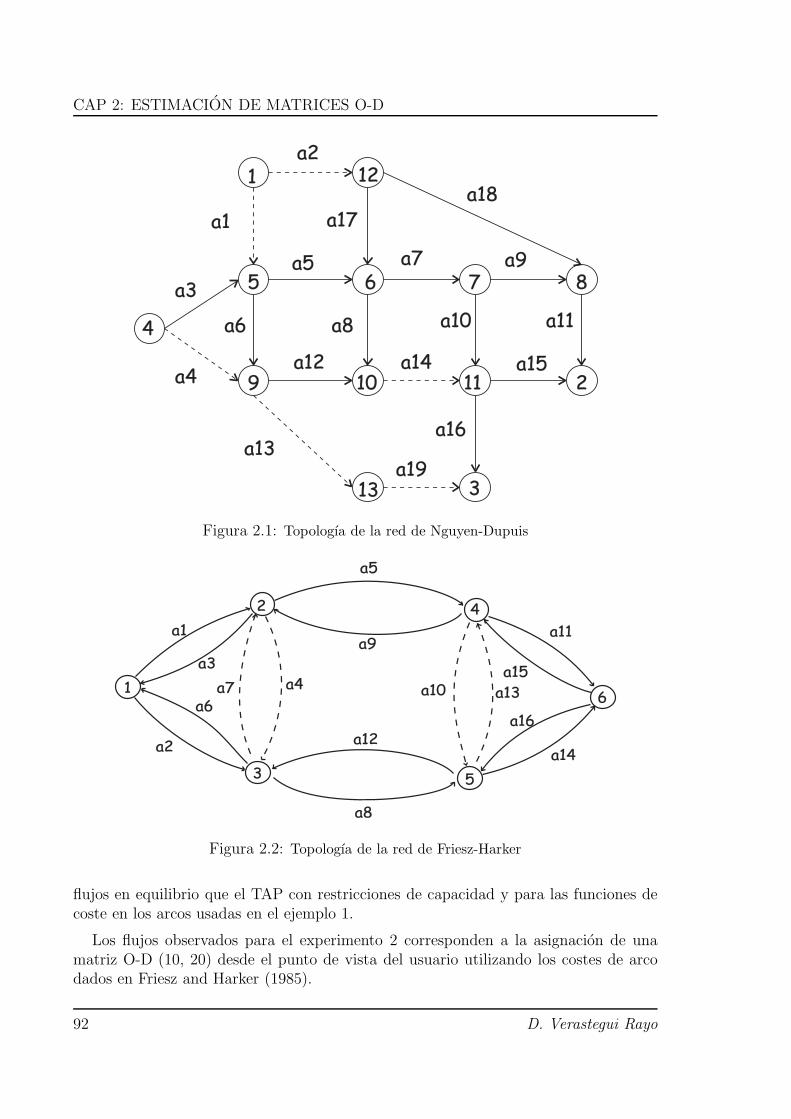
Los resultados obtenidos se muestran en la tabla 2.6. Para analizar las caracterısticasprincipales de este experimento hemos dibujado las curvas de nivel de los cuatro mode-los DAP que se muestran en la figura 2.3. Se observa que el DAP2 posee dos mınimoslocales, de los cuales, unicamente uno es global. Este problema es no convexo y nodiferenciable. El problema DAP3 posee un unico mınimo global y en un entorno suyoparece que se trata de un problema convexo y diferenciable. Los problemas DAP0 yDAP1 se obtienen sumando la funcion F1(g) a la funcion objetivo de los problemas
Tesis Doctoral 93
CAP 2: ESTIMACION DE MATRICES O-D
Figura 2.3: Curvas de nivel del experimento 2
DAP2 y DAP3. Este termino se puede interpretar de forma parecida al termino re-
94 D. Verastegui Rayo
2.5. EXPERIENCIA NUMERICA
0.00 0.40 0.80 1.20 1.60
6.80
7.20
7.60
8.00
8.40
Figura 2.4: Experimento 2: Mınimo local
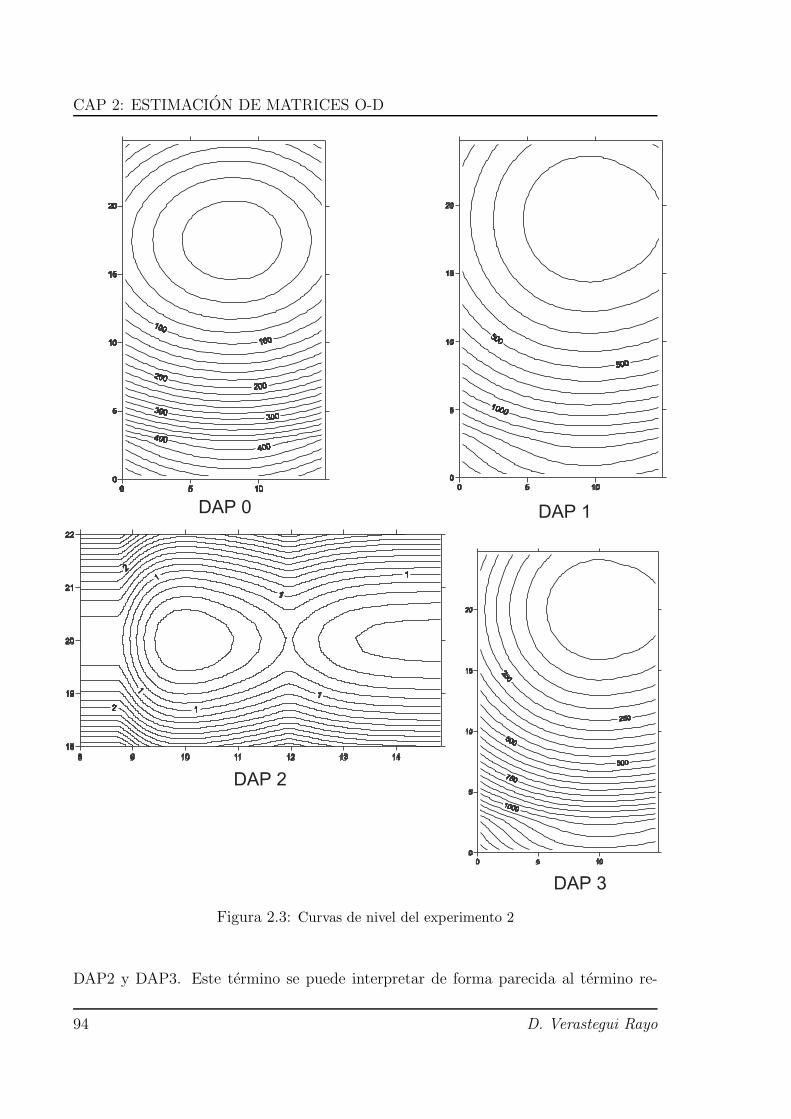
gularizador de los algoritmos de punto proximo. Esto harıa que el problema DAP0mejorase las propiedades de convexidad y diferenciabilidad del problema DAP2. Enla figura 2.3 parece que el problema DAP0 se vuelve convexo, diferenciable y con unsolo mınimo local. Pero esto no es ası. Hemos representado la funcion objetivo delDAP0 sobre el segmento que une los puntos (8, 17.47) con (8.92, 17.47) y se obtiene lagrafica de la figura 2.4, la cual muestra que estamos nuevamente ante un problema noconvexo, no diferenciable y que posee dos optimos locales.
En los resultados computacionales mostrados en la tabla 2.6 se observa que losCGA, CGA1 y CGA2 vuelven a converger a optimos locales, algunos de los cuales noson globales.
Respecto al numero necesario de iteraciones para alcanzar la convergencia se observaque el CGA utiliza 2 o 3 iteraciones. Esto es ası debido a que si partimos de una matrizaltamente congestionada se generan casi todos los caminos que describen la soluciondel DAP y por tanto el DAP restringido y el DAP casi coinciden, por tanto se resuelveen muy pocas iteraciones. Esto nos indicarıa que para redes de gran tamano, aunqueel coste computacional por iteracion es alto, serıan necesarias pocas iteraciones.
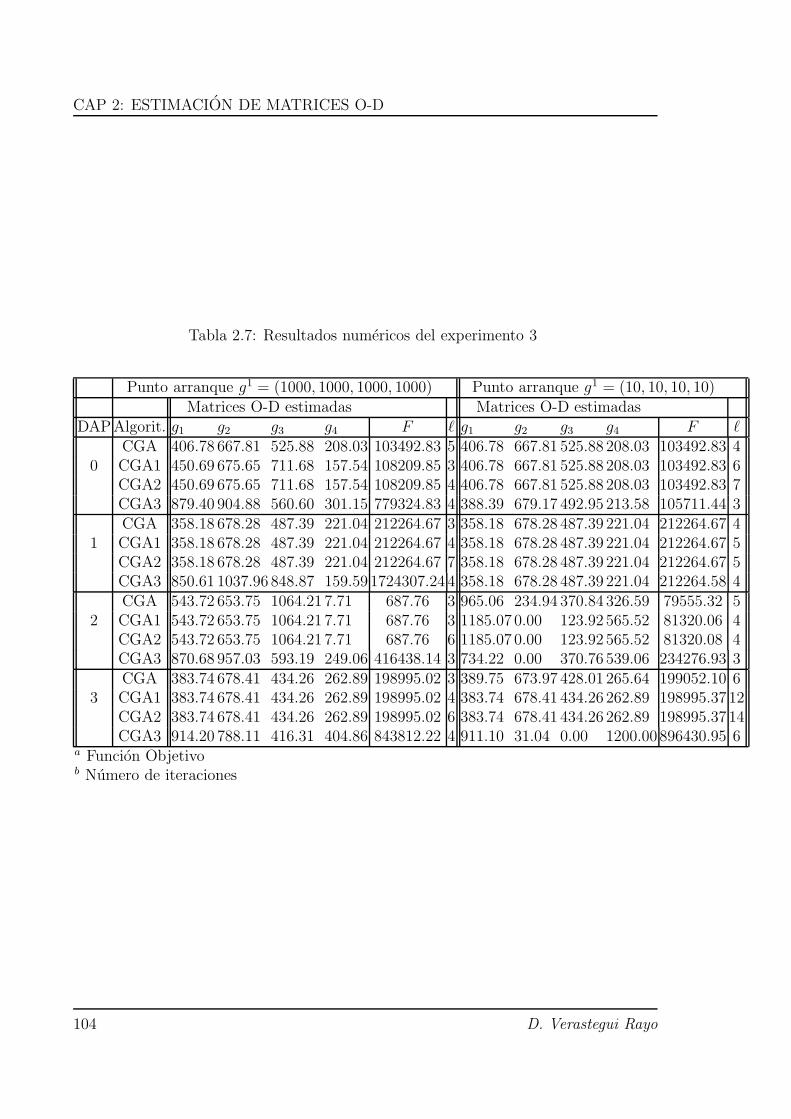
2.5.3 Experimento 3
La motivacion del tercer experimento es evaluar la robustez de los algoritmos propues-tos cuando la hipotesis de continuidad de la funcion de coste en los arcos no se cumple.Notese que esta hipotesis es necesaria para la convergencia del CGA y tambien lo espara garantizar la existencia de soluciones de VIP(C,Ω) (existencia de equilibrio). Elconcepto de equilibrio se ha extendido a funciones discontinuas, a traves del llamado
Tesis Doctoral 95

CAP 2: ESTIMACION DE MATRICES O-D
equilibrio discontınuo desde el punto de vista del usuario. Se puede garantizar la exis-tencia de este tipo de equilibrio, por tratarse de funciones de coste positivas, acotadas,semicontinuas superiormente y regulares (ver, por ejemplo, Teorema 3.18, Patriksson(1994)) para el Ejemplo 3. Este ejemplo consituye una evidencia numerica de que,quizas, se pudiera relajar la hipotesis de continuidad de las funciones de coste en losarcos (por ejemplo, trabajando con funciones de coste positivas, acotadas, semicon-tinuas superiormente y regulares) sin afectar a las propiedades de convergencia delCGA.
El esquema del algoritmo del CGA dado en la Tabla 2.3 sigue siendo valido en estecaso, pero aparece una dificultad en la resolucion del TAP en Paso 1. Para obtener lasituacion de equilibrio hemos tenido que introducir restricciones adicionales y variablesartificiales utilizadas en la programacion matematica clasica.
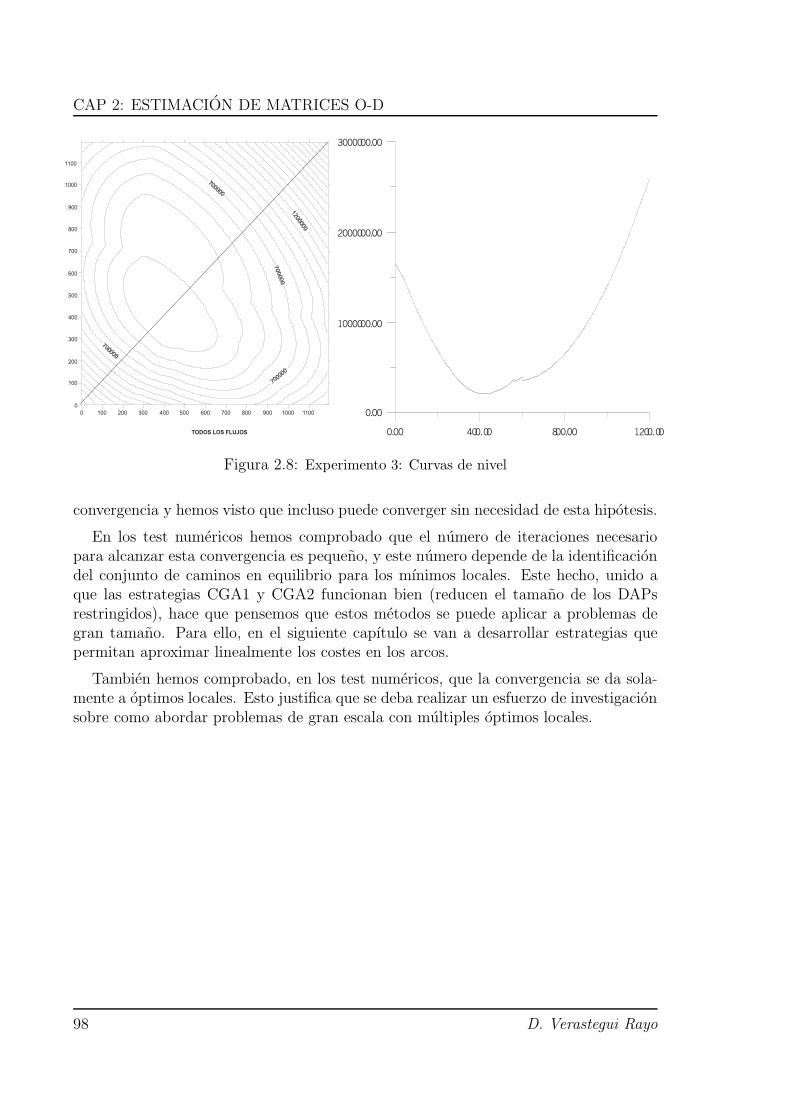
Para entender los DAP empleados en este ejemplo, hemos calculado las curvas denivel de la funcion objetivo para dos pares O-D fijos. Los valores fijados han sidog2 = 667.81 y g4 = 208.3. Las graficas obtenidas se muestran en la figura 2.5 ysiguientes. Se tratan de problemas de optimizacion discontinua junto a la existenciade mınimos locales.
La principal conclusion es que los algoritmos CGA, CGA1 y CGA2 siguen con-vergiendo a optimos locales y el numero de iteraciones sigue manteniendose pequeno.
0 100 200 300 400 500 600 700 800 900 1000 1100
0
100
200
300
400
500
600
700
800
900
1000
1100
TARGET + FLUJOS OBSERVADOS
0.00 400.00 800.00 1200.00
0.00
200000.00
400000.00
600000.00
800000.00
Figura 2.5: Experimento 3: Curvas de nivel
96 D. Verastegui Rayo

2.6. CONCLUSIONES
0 100 200 300 400 500 600 700 800 900 1000 1100
0
100
200
300
400
500
600
700
800
900
1000
1100
TARGET + TODOS LOS FLUJOS 0.00 400.00 800.00 1200.00
0.00
1000000.00
2000000.00
3000000.00
Figura 2.6: Experimento 3: Curvas de nivel
0 100 200 300 400 500 600 700 800 900 1000 1100
0
100
200
300
400
500
600
700
800
900
1000
1100
FLUJOS OBSERVADOS 0.00 400.00 800.00 1200.00
0.00
200000.00
400000.00
600000.00
800000.00
Figura 2.7: Experimento 3: Curvas de nivel
2.6 Conclusiones
En este trabajo hemos propuesto un algoritmo de generacion de columnas para el DAPque tiene garantizada su convergencia a optimos locales bajo unicamente hipotesis decontinuidad en las funciones de coste en los caminos y la norma usada en el problemade nivel superior. En los experimentos numericos hemos contrastado este tipo de
Tesis Doctoral 97
CAP 2: ESTIMACION DE MATRICES O-D
0 100 200 300 400 500 600 700 800 900 1000 1100
0
100
200
300
400
500
600
700
800
900
1000
1100
TODOS LOS FLUJOS 0.00 400.00 800.00 1200.00
0.00
1000000.00
2000000.00
3000000.00
Figura 2.8: Experimento 3: Curvas de nivel
convergencia y hemos visto que incluso puede converger sin necesidad de esta hipotesis.
En los test numericos hemos comprobado que el numero de iteraciones necesariopara alcanzar esta convergencia es pequeno, y este numero depende de la identificaciondel conjunto de caminos en equilibrio para los mınimos locales. Este hecho, unido aque las estrategias CGA1 y CGA2 funcionan bien (reducen el tamano de los DAPsrestringidos), hace que pensemos que estos metodos se puede aplicar a problemas degran tamano. Para ello, en el siguiente capıtulo se van a desarrollar estrategias quepermitan aproximar linealmente los costes en los arcos.
Tambien hemos comprobado, en los test numericos, que la convergencia se da sola-mente a optimos locales. Esto justifica que se deba realizar un esfuerzo de investigacionsobre como abordar problemas de gran escala con multiples optimos locales.
98 D. Verastegui Rayo

2.6. CONCLUSIONES
Tabla 2.1: Notacion empleada
N : conjunto de nodos de la red de trafico
A Conjunto de arcos de la red
I: Conjunto de pares O-D en la red
K: Conjunto de caminos en la red
Ki: Conjunto de caminos que unen en el par O-D i
i ∈ I: Un par O-D de la red
k ∈ K: Un camino de la red
a ∈ A: Un arco de la red
gi: Demanda de viajes para el par O-D i
g: Matriz de viajes O-D, esto es, el vector con todas las demandas de viajes(. . . , gi, . . . ).
b: Un lımite superior de g.
g: Matriz O-D de referencia (target O-D matrix), por ejemplo (. . . , gi, . . . ).
hk: Flujo en el camino k
h: Vector de flujo en los caminos (. . . , hk, . . . ).
va: Flujo en el arco a
v: Vector de flujo en los arcos (. . . , va, . . . ).
v: Vector de flujo en los arcos observados mediante aforos(. . . , va, . . . ).
∆ = [δak]: Matriz de incidencia arco-camino, en la que el elmento δak vale 1 si el caminok emplea el arco a y 0 en otro caso
Λ = [λik]: Matriz de incidencia par-camino, en la que el elmento λik vale 1 si el caminok une el par i y 0 en otro caso
ca(v): Coste de viaje en el arco a en funcion del flujo de todos los arcos de la red
c(v) = [ca(v)]: Vector de funciones de coste en los arcos
Ck(h): Coste de viaje en el camino k en funcion del flujo de todos los caminos de lared
C(h) = [Ck(h)]: Vector de funciones de coste en los caminos
Tesis Doctoral 99

CAP 2: ESTIMACION DE MATRICES O-D
Tabla 2.2: Algoritmo de generacion de columnas (CGA)
0. (Inicializacion). Determinar una matriz inicial de viajes O-D y denotarla por g1,inicializar el conjunto K0 = ∅ y tomar $ = 1. Fijar un parametro de toleranciaε > 0.
1. (Problema de asignacion de trafico). Resolver el TAP para la matriz de via-jes origen-destino g. Sea K(g) el conjunto de caminos de mınimo coste en elequilibrio para la matriz O-D g.
2. (Chequeo de la optimalidad). Si K(g) ⊂ K−1, entonces parar g es un mınimolocal del DAP. En caso contrario tomar K = K−1 ∪K(g).
3. (Problema DAP restringido). Encontrar un mınimo (local o global) del problemaRDAP(K) y denotarlo por g+1.
4. (Criterio de paro). Si g+1 satisface el criterio de convergencia
∑i∈I
∣∣∣g+1i − g
i
∣∣∣g
i
≤ ε,
parar, en caso contrario tomar $ = $ + 1 y regresar el paso 1.
Tabla 2.3: Definicion de los CGAs heurısticos
Nombre R. Complementariedad Eliminacion(πT h = 0) Caminos
CGA si noCGA1 si siCGA2 no siCGA3 no no
100 D. Verastegui Rayo

2.6. CONCLUSIONES
Tabla 2.4: Definicion de los experimentos
Experimento DAP F
DAP0∑
i∈1,2,3,4 (gi − gi)2 +
∑a∈B (va − va)
2
1, 3 DAP1∑
i∈1,2,3,4 (gi − gi)2 +
∑a∈A (va − va)
2
DAP2∑
a∈B (va − va)2
DAP3∑
a∈A (va − va)2
donde g = (360, 640, 540, 160)v = (675.14, 524.86, 102.57, 697.43, 416.19, 361.53,
356.42, 184.63, 102.57, 253.85, 502.57, 497.43,561.53, 682.06, 497.43, 438.47, 124.85, 400.00,
561.53)B = a1, a2, a4, a13, a14, a19
DAP0∑
i∈1,2 (gi − gi)2 +
∑a∈C (va − va)
2
2 DAP1∑
i∈1,2 (gi − gi)2 +
∑a∈A (va − va)
2
DAP2∑
a∈C (va − va)2
DAP3∑
a∈A (va − va)2
donde g = (8, 16)v = (1.03433, 8.96567, 17.54423, 1.03433, 0.00000,2.45577, 0.53670, 10.00000, 17.00754, 0.00000,0.00000, 2.99246, 14.40415, 10.00000, 2.60339,
17.39661)C = a4, a7, a10, a13
Problema interiorExperimento Red Funciones coste en los arcos
1 Nguyen-Dupuis Descritas en Nguyen and Dupuis (1984)2 Friesz-Harker Descritas en Friesz and Harker (1985)3 Nguyen-Dupuis Descritas en Nguyen and Dupuis (1984)
exceptuando los arcos a14 y a18 que son
c14(v14) :=
c14(c14) if v14 ≤ 400c14(v14) + 8.914 if v14 > 400
c18(v18) :=
c18(v18) if v18 ≤ 300c18(v18) + 11.501 if v18 > 300
donde s14(v14) y s18(v18) se describen enNguyen and Dupuis (1984)
Tesis Doctoral 101
CAP 2: ESTIMACION DE MATRICES O-D
Tabla 2.5: Resultados numericos del experimento 1
Punto arranque g1 = (1000, 1000, 1000, 1000) Punto arranque g1 = (100, 100, 100, 100)Matrices O-D estimadas Matrices O-D estimadas
DAP Algorit. g1 g2 g3 g4 F a $b g1 g2 g3 g4 F a $b
CGA 404.27 721.35 580.72 211.03 19271.58 2 404.27 721.35 580.72 211.03 19271.58 30 CGA1 404.27 721.35 580.72 211.03 19271.58 3 404.27 721.35 580.72 211.03 19271.58 3
CGA2 404.27 721.35 580.72 211.03 19271.58 5 404.27 721.35 580.72 211.03 19271.58 3CGA3 404.27 721.35 580.72 211.03 19271.58 3 404.27 721.35 580.72 211.03 19271.58 3CGA 395.44 748.13 588.33 206.32 23470.46 2 395.44 748.13 588.33 206.32 23470.46 3
1 CGA1 395.44 748.13 588.33 206.32 23470.46 3 395.44 748.13 588.33 206.32 23470.46 3CGA2 395.44 748.13 588.33 206.32 23470.46 3 395.44 748.13 588.33 206.32 23470.46 3CGA3 395.44 748.13 588.33 206.32 23470.46 3 395.44 748.13 588.33 206.32 23470.46 3CGA 400.00 800.01 600.01 199.99 0.00 2 400.00 800.00 600.00 200.00 0.00 3
2 CGA1 400.00 800.00 600.00 200.00 0.00 2 400.00 800.00 600.00 200.00 0.00 3CGA2 400.00 800.00 600.00 200.00 0.00 5 400.00 800.00 600.00 200.00 0.00 3CGA3 799.02 775.33 617.27 148.46 84062.40 2 400.00 800.00 600.00 200.00 0.00 3CGA 400.00 800.00 600.00 200.00 0.00 2 400.00 800.00 600.00 200.00 0.00 3
3 CGA1 400.00 800.00 600.00 200.00 0.00 3 400.00 800.00 600.00 200.00 0.00 3CGA2 400.00 800.00 600.00 200.00 0.00 3 400.00 800.00 600.00 200.00 0.00 3CGA3 400.00 800.00 600.00 200.00 0.00 3 400.00 800.00 600.00 200.00 0.00 3
a Funcion objetivob Numero de iteraciones
102 D. Verastegui Rayo

2.6. CONCLUSIONES
Tabla 2.6: Resultados numericos del experimento 2
Punto de arranque g1 = (6, 9) Punto de arranque g1 = (18, 17)Matrices O-D Matrices O-D
estimadas estimadasDAP Algorit. g1 g2 F a $b g1 g2 F a $b
CGA 8.00 17.47 6.92 2 8.92 17.47 7.53 20 CGA1 8.00 17.47 6.92 2 8.92 17.47 7.53 2
CGA2 8.00 17.47 6.92 2 8.92 17.47 7.53 3CGA3 8.00 17.47 6.92 2 11.95 17.47 22.11 2CGA 9.53 18.99 14.97 3 9.53 18.99 14.97 3
1 CGA1 9.53 18.99 14.97 3 9.53 18.99 14.97 3CGA2 9.53 18.99 14.97 3 9.53 18.99 14.97 3CGA3 9.53 18.99 14.97 3 11.95 18.99 37.82 2CGA 6.00 20.00 1.07 2 14.95 20.00 0.10 2
2 CGA1 6.00 20.00 1.07 2 14.95 20.00 0.10 2CGA2 6.00 20.00 1.07 2 14.95 20.00 0.10 2CGA3 6.00 20.00 1.07 2 14.95 20.00 0.10 2CGA 10.00 20.00 0.00 3 10.00 20.00 0.00 2
3 CGA1 10.00 20.00 0.00 3 10.00 20.00 0.00 2CGA2 10.00 20.00 0.00 3 10.00 20.00 0.00 3CGA3 10.00 20.00 0.00 3 11.95 20.00 10.24 2
a Funcion objetivob Numero de iteraciones
Tesis Doctoral 103
CAP 2: ESTIMACION DE MATRICES O-D
Tabla 2.7: Resultados numericos del experimento 3
Punto arranque g1 = (1000, 1000, 1000, 1000) Punto arranque g1 = (10, 10, 10, 10)Matrices O-D estimadas Matrices O-D estimadas
DAP Algorit. g1 g2 g3 g4 F $ g1 g2 g3 g4 F $CGA 406.78 667.81 525.88 208.03 103492.83 5 406.78 667.81 525.88 208.03 103492.83 4
0 CGA1 450.69 675.65 711.68 157.54 108209.85 3 406.78 667.81 525.88 208.03 103492.83 6CGA2 450.69 675.65 711.68 157.54 108209.85 4 406.78 667.81 525.88 208.03 103492.83 7CGA3 879.40 904.88 560.60 301.15 779324.83 4 388.39 679.17 492.95 213.58 105711.44 3CGA 358.18 678.28 487.39 221.04 212264.67 3 358.18 678.28 487.39 221.04 212264.67 4
1 CGA1 358.18 678.28 487.39 221.04 212264.67 4 358.18 678.28 487.39 221.04 212264.67 5CGA2 358.18 678.28 487.39 221.04 212264.67 7 358.18 678.28 487.39 221.04 212264.67 5CGA3 850.61 1037.96 848.87 159.59 1724307.24 4 358.18 678.28 487.39 221.04 212264.58 4CGA 543.72 653.75 1064.21 7.71 687.76 3 965.06 234.94 370.84 326.59 79555.32 5
2 CGA1 543.72 653.75 1064.21 7.71 687.76 3 1185.07 0.00 123.92 565.52 81320.06 4CGA2 543.72 653.75 1064.21 7.71 687.76 6 1185.07 0.00 123.92 565.52 81320.08 4CGA3 870.68 957.03 593.19 249.06 416438.14 3 734.22 0.00 370.76 539.06 234276.93 3CGA 383.74 678.41 434.26 262.89 198995.02 3 389.75 673.97 428.01 265.64 199052.10 6
3 CGA1 383.74 678.41 434.26 262.89 198995.02 4 383.74 678.41 434.26 262.89 198995.37 12CGA2 383.74 678.41 434.26 262.89 198995.02 6 383.74 678.41 434.26 262.89 198995.37 14CGA3 914.20 788.11 416.31 404.86 843812.22 4 911.10 31.04 0.00 1200.00 896430.95 6
a Funcion Objetivob Numero de iteraciones
104 D. Verastegui Rayo

















