Capitulo 4 introduccion a las maquinas de rotacion
72
________________________ ~C_A~~~O~_~ Introducción a las máquinas de rotación E l objetivo de este capítulo es introducir y analizar algunos de los principios subyacen tes al funcionamiento de las máquinas eléctricas. Como se estudiará, estos principios los comparten las máquinas de corriente alterna y de corriente directa. Las numerosas técnicas y aproximaciones que implican la reducción de una máquina física a simples modelos matemáticos, ilustran con suficiente claridad los principios básicos que se desarrollarán a con- tinuación. 4.1 CONCEPTOS ELEMENTALES La ecuación 1.27, e = dA/dt, se usa para determinar los voltajes inducidos por medio de campos magnéticos de variación temporal. La conversión de energía electromagnética toma lugar cuando se producen cambios en la dispersión de flujo A debida al movimiento mecánico. En las máquinas de rotación, los voltajes se generan en los devanados o en los grupos de bobinas al girar estos devanados de manera mecánica a través de un campo magnético, al girar mecánicamente un campo magnético por el devanado o al diseñar el circuito magnético de manera que la reluctancia varíe con la rotación del rotor. Con cualquiera de estos métodos, el acoplamiento que vincula una bobina específica se cambia de forma cíclica y se genera un voltaje variante en el tiempo. Al conjunto de dichas bobinas conectadas entre sí, comúnmente se le denomina devanado de armadura o inducido. En términos generales, el concepto devanado de armadura o inducido se emplea para referirse a ün devanado o conjunto de devanados en una máquina de rotación que lleva corrientes alternas. En las máquinas de corriente alterna, como son las máquinas de inducción o síncronas, el devanado de armadura o inducido se encuentra en la porción estacio- naria del motor conocido como el estator, en cuyo caso a estos devanados también se les denominará devanados estatóricos. La figura 4.1 muestra un devanado estatórico de un enor- me motor síncrono trifásico multipolar en construcción. Dentro de una máquina de corriente directa, el devanado de armadura o inducido se en- cuentra en el miembro que gira, denominado rotor. La figura 4.2 muestra un rotor de una máquina de corriente directa. Como se analizará, el devanado de armadura o inducido de una máquina de corriente directa consiste en varias bobinas conectadas entre sí para formar una curva cerrada. Mientras el rotor gira, se emplea un contacto mecánico de rotación para abaste- cer de corriente al devanado de armadura o inducido. 175
-
Upload
jose-saenz -
Category
Documents
-
view
3.207 -
download
8
Transcript of Capitulo 4 introduccion a las maquinas de rotacion

________________________ ~C_A~~~O~_~
Introducción a las máquinasde rotación
El objetivo de este capítulo es introducir y analizar algunos de los principios subyacentes al funcionamiento de las máquinas eléctricas. Como se estudiará, estos principioslos comparten las máquinas de corriente alterna y de corriente directa. Las numerosas
técnicas y aproximaciones que implican la reducción de una máquina física a simples modelosmatemáticos, ilustran con suficiente claridad los principios básicos que se desarrollarán a con-tinuación.
4.1 CONCEPTOS ELEMENTALESLa ecuación 1.27, e = dA/dt, se usa para determinar los voltajes inducidos por medio decampos magnéticos de variación temporal. La conversión de energía electromagnética tomalugar cuando se producen cambios en la dispersión de flujo A debida al movimiento mecánico.En las máquinas de rotación, los voltajes se generan en los devanados o en los grupos debobinas al girar estos devanados de manera mecánica a través de un campo magnético, al girarmecánicamente un campo magnético por el devanado o al diseñar el circuito magnético demanera que la reluctancia varíe con la rotación del rotor. Con cualquiera de estos métodos, elacoplamiento que vincula una bobina específica se cambia de forma cíclica y se genera unvoltaje variante en el tiempo.
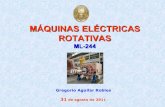
Al conjunto de dichas bobinas conectadas entre sí, comúnmente se le denomina devanadode armadura o inducido. En términos generales, el concepto devanado de armadura o inducidose emplea para referirse a ün devanado o conjunto de devanados en una máquina de rotaciónque lleva corrientes alternas. En las máquinas de corriente alterna, como son las máquinas deinducción o síncronas, el devanado de armadura o inducido se encuentra en la porción estacio-naria del motor conocido como el estator, en cuyo caso a estos devanados también se lesdenominará devanados estatóricos. La figura 4.1 muestra un devanado estatórico de un enor-me motor síncrono trifásico multipolar en construcción.
Dentro de una máquina de corriente directa, el devanado de armadura o inducido se en-cuentra en el miembro que gira, denominado rotor. La figura 4.2 muestra un rotor de unamáquina de corriente directa. Como se analizará, el devanado de armadura o inducido de unamáquina de corriente directa consiste en varias bobinas conectadas entre sí para formar unacurva cerrada. Mientras el rotor gira, se emplea un contacto mecánico de rotación para abaste-cer de corriente al devanado de armadura o inducido.
175

176
Figura 4.1Estator de un genera-dor hidroeléctricotrifásico de 190 MVA,12 kV 37 r/min. Losconductores presentanranuras huecas pordonde circula el aguade enfriamiento.(Brown BoveriCorporation.)
CAPíTULO 4 Introducción a las máquinas de rotación
Las máquinas síncronas y de corriente directa por lo general incluyen un devanado secun-dario (o un conjunto de devanados) que llevan corriente directa y se utilizan para producir elflujo principal de operación en la máquina. A un devanado como éste comúnmente se le deno-mina devanado de excitación. En una máquina de corriente directa, el devanado de excitacióncasi siempre se localiza en el estator, mientras que en una máquina síncrona dicho devanado seubica en el motor, en cuyo caso la corriente deberá abastecer al devanado de excitación a travésde un contacto de rotación mecánica. Como se ha estudiado, los imanes permanentes tambiénproducen un flujo magnético de corriente directa y se emplean en lugar de los devanados deexcitación en algunas máquinas.
En la mayoría de las máquinas de rotación, el estator y el rotar se fabrican de acero eléc-trico, y los devanados se instalan en ranuras elaboradas en dichas estructuras. Como se estudióen el capítulo 1, la utilización de estos materiales de alta permeabilidad maximiza el acopla-miento entre las bobinas e incrementa la densidad de energía magnética que se asocia con lainteracción electromecánica. Este hecha también permite al diseñador de máquinas dar formay distribuir los campos magnéticos de acuerdo con los requisitos de cada diseño de máquina enparticular. El flujo de variación temporal que está presente en las estructuras de los devanadosde estas máquinas tiende a inducir las corrientes, conocidas como corrientes de eddy, en elacero eléctrico. Las corrientes de eddy pueden ser una enorme fuente de pérdida en dichasmáquinas, además pueden reducir de manera significativa el funcionamiento de la maquinaria.Con el fin de minimizar los efectos de las corrientes de eddy, la estructura del devanado gene-ralmente se fabrica a partir de delgadas láminas de acero electrolítico aisladas entre sí. Lafigura 4.3 ilustra el núcleo del estator de un motor de corriente alterna construido como unapila de láminas individuales.
En algunas máquinas, como las máquinas de reluctancia variable y los motores de pasos,no existen devanados en el rotar. El funcionamiento de estas máquinas depende de que no sea

Figura 4.2Devanado de un motorde corriente directa(Genera/ E/eetrieCompany.)
Figura 4.3Núcleo del estatorparcialmente comple-tado para un motor decorriente alterna.(Westinghouse E/eetrieCorporation. )
4.1 Conceptos elementales 177
uniforme la reluctancia del entrehierro que se asocia con las variaciones en la posición delrotar, en conjunto con las corrientes de variación temporal que se aplican a sus devanadosestatóricos. En dichas máquinas, tanto el estator como las estructuras del rotor están sujetos alflujo magnético variante en el tiempo y, como consecuencia, ambos requieren de estas láminaspara reducir las pérdidas debidas a las corrientes de eddy.

178 CAPíTULO 4 Introducción a las máquinas de rotación
Las máquinas eléctricas de rotación tienen diversas presentaciones y se denominan me-diante diferentes nombres: de corriente directa, síncronas, de imán permanente, de inducción,de reluctancia variable, de histéresis, sin escobillas, etc. Aunque dichas máquinas en aparien-cia son disímiles, los principios básicos que controlan su funcionamiento son muy similares;con frecuencia es útil considerar esta maquinaria en términos del mismo cuadro físico. Porejemplo, el análisis de la máquina de corriente directa muestra que las distribuciones del flujomagnético se asocian tanto con el rotar como con el estator, y que éstos se fijan en el espacio,también muestra que la producción del par característico de las máquinas de corriente directacontrarresta la tendencia a alinearse en dichas distribuciones. Una máquina de inducción, apesar de diversas diferencias fundamentales, funciona sobre la base del mismo principio; así,es posible identificar las distribuciones de flujo que se asocian con el rotar y el estator. Aunquedentro del sincronismo estas distribuciones no son estáticas sino más bien rotacionales, comoen el caso del motor de corriente directa, dichas distribuciones se desplazan mediante unaseparación angular constante, y el par se produce por medio de una tendencia de dichos flujosa alinearse.
Es cierto que los modelos analíticos son indispensables para el análisis y el diseño de lasmáquinas eléctricas, por lo que dichos modelos se establecerán a lo largo de nuestro estudio.Sin embargo, también es importante reconocer que es esencial un entendimiento físico deldesempeño de estos dispositivos. Un objetivo de éste y los capítulos siguientes es guiar allector en su desarrollo de tal entendimiento.
Las máquinas tradicionales de corriente alterna se clasifican en una de dos categorías: síncronasy de inducción. Dentro de las máquinas síncronas, las corrientes de devanado del rotar seabastecen directamente de la estructura estacionaria a través del contacto de rotación. En lasmáquinas de inducción, las corrientes del rotar se inducen en los devanados del mismo por unacombinación de la variación temporal de las corrientes del estator y mediante el movimientodel rotar relativo al estator.
4.2 INTRODUCCiÓN A LAS MÁQUINAS DE CORRIENTEALTERNA Y DE CORRIENTE DIRECTA
4.2.1 Máquinas de corriente alterna
Máquinas síncronas Es posible dbtener un cuadro preeliminar del funcionamiento de lasmáquinas síncronas al analizar el voltaje inducido en el devanado que lleva el mismo nombredel generador síncrono simplificado de corriente alterna de polos salientes que se ilustra en lafigura 4.4. El devanado de excitación de esta máquina produce un par único de polos magnéti-cos (similar al que presenta la barra imantada), como consecuencia, a esta máquina se le deno-mina máquina de dos polos.
Con raras excepciones, el devanado de armadura o inducido en una máquina síncrona selocaliza en el estator y el devanado de excitación se ubica en el rotar, tal como se demuestra enla máquina esquematizada en la figura 4.4. El devanado de excitación se activa mediante unacorriente directa conducida hacia éste por medio de las escobillas de carbón estacionario quehacen contacto con los anillos deslizantes de rotación o con los anillos colectores de rotación.En general, los factores prácticos determinan la orientación de los dos devanados: presenta

Figura 4.4Vista esquemática deun generador síncronosencillo de fase únicacon dos polos.
Figura 4.5a) Distribución espa-cial de la densidad deflujo y b) forma deonda correspondienteal voltaje que produceel generador monofá-sico que se presentaen la figura 4.4.
4.2 Introducción a las máquinas de corriente alterna y de corriente directa 179
Eje magnético del devanadode armadura o inducido
Devanadode excitación
Patronesdel flujo
Devanado de armadurao inducido conN número de vueltas
ventajas colocar el devanado de excitación de baja potencia en el rotor mientras que el devana-do de armadura o inducido polifásico está en el estator.
El devanado de armadura o inducido, que en este caso consiste exclusivamente de unabobina única con N número de vueltas, se indica en la sección transversal por medio de los doscostados de la bobina a y -a colocada en ranuras opuestas diametralmente sobre la periferiainterna del estator en la figura 4.4. Los conductores que constituyen los costados de la bobinason paralelos a la flecha de la máquina y se conectan en serie mediante uniones (que no semuestran en la figura). El rotar gira a una velocidad constante por medio de una fuente depotencia mecánica que se conecta a esta flecha. Se asume que el devanado de excitación seencuentra en circuito abierto, por lo tanto, el flujo en esta máquina se produce sólo mediante eldevanado de excitación. Los patrones de flujo se muestran de forma esquemática por medio deuna línea punteada en la figura 4.4.
Un análisis muy idealizado de esta máquina supondría una distribución sinusoidal delflujo magnético del entrehierro. La distribución radial resultante de la densidad de flujo delentrehierro B se observa en la figura 4.5a como una función del ángulo espacial ea (dirnensionadocon respecto al eje magnético del devanado de armadura o inducido) alrededor de la periferiadel rotor. En la práctica, la densidad de flujo del entrehierro en las máquinas reales de polossalientes se produce de manera aproximada a una distribución sinusoidal al conformar de for-ma apropiada las caras del polo.
B e
a) b)

180
"\, .:
Figura 4.6Vista esquemática deun generador síncrono,tetrapolar monofásico.
CAPíTULO 4 Introducción a las máquinas de rotación
Mientras el rotor gira, las dispersiones de flujo del devanado de armadura o inducidocambian con el tiempo. Al suponer una distribución de flujo sinusoidal y una velocidad cons-tante del rotor, el voltaje de la bobina será sinusoidal con respecto al tiempo, como se muestraen la figura 4.5b. El voltaje de la bobina pasa a través de un ciclo completo para cada revolu-ción de la máquina bipolar, que se muestra en la figura 4.4. La frecuencia de este voltaje enciclos por segundo (Hz) es la misma que la velocidad del rotor en revoluciones por segundo: lafrecuencia eléctrica del voltaje generado se sincroniza con la velocidad mecánica, lo cual es larazón de la designación de máquina síncrona. De esta forma, una máquina síncrona bipolardeberá girar a 3 600 revoluciones por minuto para producir un voltaje de 60 Hz.
La mayoría de las máquinas síncronas presentan más de dos polos. Como un ejemploespecífico, la figura 4.6 muestra el esquema de un generador monofásico tetrapolar. Las bobi-nas de excitación se disponen de manera que los polos alternen su polaridad. Existen doslongitudes de onda completas, o ciclos en la distribución del flujo alrededor de la periferia,como se esquematiza en la figura 4.7. El devanado de armadura o inducido ahora se componede dos bobinas al, -al Y a2, -a2 que se unen en serie mediante conexiones finales. El espacio decada bobina es una longitud de onda del flujo. El voltaje que se genera se conduce a través dedos ciclos completos por revolución del rotor. Por lo tanto, la frecuencia en hertz será el doblede la velocidad en revoluciones por segundo.
Cuando una máquina presenta más de dos polos, es conveniente concentrarse únicamenteen un par de polos y reconocer que las condiciones mecánicas, magnéticas y eléctricas que seasocian con cada uno de los demás pares de polos son repeticiones del par polar bajo conside-ración. Por este motivo es conveniente expresar los ángulos en grados eléctricos o radianeseléctricos en vez de en unidades físicas. Un par de polos dentro de una máquina multipolar oun ciclo de la distribución del flujo es igual a 360 grados eléctricos o 2nradianes eléctricos. Yaque existen polos con dos longitudes de onda completas, o ciclos en una revolución completa,entonces,
(POlOS)
Bae = -2- Ba (4.1)
donde ()ae es el ángulo en unidades eléctricas y ()a representa al ángulo espacial. Esta mismarelación aplica a todas las dimensiones angulares en una máquina multipolar; sus valores enunidades eléctricas serán iguales a (polosl2) veces sus valores espaciales reales.
-al

Figura 4.7Distribución espacialde la densidad de flujodel entrehierro en ungenerador hipotéticosíncrono tetrapolar.
Figura 4.8Devanado de campode rotor cilíndricoelemental de dospolos.
4.2 Introducción a las máquinas de corriente alterna y de corriente directa 181
B
()a' radianesmecánicos
() ae' radianeseléctricos
El voltaje de la bobina de una máquina multipolar se conduce a través de un ciclo comple-to cada vez que un par de polos gira, o será igual a (polosl2) veces cada revolución. Comoconsecuencia, la frecuencia eléctrica fe del voltaje generado en una máquina síncrona es
fe = (po~os) :0 Hz (4.2)
donde n representa la velocidad mecánica en revoluciones por minuto, y por lo tanto n/60 es lavelocidad en revoluciones por segundo. La frecuencia eléctrica del voltaje generado en radianespor segundo es (¡)e = (polosl2) oi; donde (¡)m representa a la velocidad mecánica en radianes porsegundo.
Los rotores que se ilustran en la figura 4.4 y 4.6 presentan polos salientes o de proyección,con devanados concentrados. La figura 4.8 muestra en forma de diagrama un rotor cilíndricode polo no saliente. El devanado de excitación es un devanado distribuido bipolar; los costa-dos de la bobina se distribuyen en ranuras múltiples alrededor de la periferia del rotor y sedisponen para producir una distribución sinusoidal aproximada al flujo radial del entrehierro.
La relación entre la frecuencia eléctrica y la velocidad del rotor que se presenta en laecuación 4.2 sirve como fundamento para entender por qué algunos generadores síncronostienen estructuras de rotor con polos salientes, mientras que otros presentan rotores cilíndricos.La mayoría de los sistemas de potencia en el mundo operan a frecuencias de 50 o 60 Hz. Los

182
Figura 4.9Rotar enfriado poragua del generadorhidroeléctrico de 190MVA. cuyo estatar semuestra en la figura4.1. (Brown BoveriCorporation. )
CAPíTULO 4 Introducción a las máquinas de rotación
generadores hidroeléctricos se caracterizan por estructuras de polos salientes debido a que lasturbinas hidráulicas funcionan a relativamente bajas velocidades, y como consecuencia se ne-cesita una mayor cantidad de polos para producir la frecuencia que se desea; asimismo, laestructura de polos salientes se adapta mejor en términos mecánicos a estas condiciones. En lafigura 4.9 se presenta el rotar de un generador hidroeléctrico de gran tamaño. Sin embargo, aaltas velocidades las turbinas de vapor y de gas funcionan de manera más óptima y losaltemadores accionados por turbina o turboaltemadores por lo general son máquinas de rotarcilíndrico tetrapolar o bipolar. Los rotores se fabrican con un solo tipo de acero forjado o apartir de diversas forjas, como se muestra en las figuras 4.10 y 4.1l.
En todo el mundo la mayoría de los sistemas de potencia son trifásicos y, como conse-cuencia, con muy pocas excepciones, los generadores síncronos son máquinas trifásicas, Paraproducir un conjunto de tres voltajes con fase desplazada por 120 grados eléctricos en tiempo,deberán utilizarse un mínimo de tres bobinas con fase desplazada de 120 grados eléctricos enespacio. En la figura 4.12a se muestra una vista esquemática simplificada de una máquinabipolar trifásica con una bobina por fase. Las tres fases se designan por medio de las letras a, by c. En una máquina elemental tetrapolar, deberán utilizarse un mínimo de dos conjuntos debobinas, como se muestra en la figura 4.12b; en una máquina elemental multipolar, el númeromínimo de bobinas se obtiene mediante la mitad del número de polos.

Figura 4.10Grupo turbina gene-rador 3 600 r/minbipolar. (WestinghouseElectric Corporation.)
Figura 4.11Secciones de un rotarmúltiple para unturbogeneradar de1 800 r/min. trifásico de1 333 MVA. Las forjasque se encuentranseparadas se ajustaránen la caja antes delmaquinado final y sefresarán ranuras paralos devanados. El pesototal del rotar es de435000 lb. (BrownBoveri Corporation.)
4.2 Introducción a las máquinas de corriente alterna y de corriente directa 183
Las dos bobinas de cada fase que se observan en la figura 4.12b se conectan en serie demanera que se añadan los voltajes, y las tres fases se conecten ya sea en Y o en delta. La figura4.12c muestra cómo las bobinas pueden interconectarse para formar una conexión en Y. Sinembargo, advierta que dado que los voltajes en las bobinas de cada fase son idénticos entre sí,es posible también una conexión en paralelo, por ejemplo, la bobina (a, -a) en paralelo con labobina (a', -o'), etcétera.
Cuando un generador síncrono abastece de energía eléctrica a una carga, la corriente deldevanado de armadura o inducido crea una onda de flujo magnético en el entrehierro que giraa una velocidad síncrona, como se muestra en la sección 4.5. Este flujo reacciona con el flujocreado mediante la corriente de excitación, y el par electromecánico es consecuencia de la

184
Figura 4.12Vistas esquemáticasde generadores trifási-cos: a) bipolar, b) tetra-polar y e) conexión eny de los devanados.
CAPíTULO 4 Introducción a las máquinas de rotación
a) b)
e)
tendencia a alinearse de estos dos campos magnéticos. En un generador, este par se opone a larotación; además, es necesario aplicar el par mecánico a partir del motor primario para mante-ner la rotación. Este par electromecánico es el mecanismo a través del cual el generador síncronotransforma la energía mecánica a energía eléctrica.
La contraparte del generador síncrono es el motor síncrono. En la figura 4.13 se esquematizaun diagrama en corte de un motor síncrono de 60 Hz, trifásico. En este motor, se abastece unacorriente alterna al devanado de armadura o inducido en el estator, y la corriente directa deexcitación se suministra al devanado de excitación en el rotor. El campo magnético que produ-cen las corrientes de inducido gira a una velocidad síncrona. Para lograr la producción de unpar electromecánico estable, los campos magnéticos del estator y el rotor deberán permanecerconstantes en amplitud y estáticos con respecto a ellos mismos. En un motor síncrono, lavelocidad de estado estacionario se determina mediante el número de polos y por medio de lafrecuencia de la corriente de inducido. Por lo tanto, un motor síncrono que funciona a partir deuna fuente de corriente alterna con frecuencia constante operará a una velocidad de estadoestacionario constante.
En un motor, el par electromecánico se encuentra en dirección de la rotación y equilibra elpar de torsión que se requiere para conducir la carga mecánica. El flujo que producen lascorrientes en el devanado de armadura o inducido de un motor síncrono gira por delante delflujo que produce el campo de excitación, así atrae dicho campo de excitación (y como conse-cuencia el rotor) y realiza el trabajo. Esta situación es contraria al caso que ocurre con elgenerador síncrono, donde el campo de excitación lleva a cabo el trabajo mientras que el flujo

Figura 4.13Vista en corte de unmotor síncrono de altavelocidad. El excitadorque se encuentra en elextremo izquierdo delrotor es un generadorde corriente alternacon rectificador semi-conductor de rotaciónensamblado. (GeneralElectric Company)
4.2 Introducción a las máquinas de corriente alterna y de corriente directa 185
atrae al devanado de armadura o inducido, que se encuentra desfasado detrás del mismo. Enambos casos, generadores y motores producen un par electromecánico y un voltaje de rota-ción. Estos fenómenos son indispensables cuando se lleva a cabo la conversión de energíaelectromecánica.
Máquinas de inducción Un segundo tipo de máquina de corriente alterna es la máquina deinducción. Como ocurre en el caso de las máquinas síncronas, el devanado del estator de unamáquina de inducción se excita con corrientes alternas. En contraste con una máquina síncrona,donde el devanado de campo en el rotor se excita con corriente directa, en la máquina de induc-ción las corrientes alternas fluyen en los devanados del rotor. En las máquinas de inducción, lascorrientes alternas se aplican directamente a los devanados del estator. Por lo tanto, las corrien-tes del rotor se producen por inducción, por ejemplo, la acción del transformador. La máqui-na de inducción se considera como un transformador generalizado en el que la energía eléctri-ca se transforma entre el rotor y el estator, los cuales están ligados a un cambio de frecuencia yun flujo de energía mecánica. Aunque el motor de inducción es el más común de todos los tiposde motores, se utiliza en contadas ocasiones como un generador, ya que sus características dedesempeño como generador son poco satisfactorias en la mayoría de sus aplicaciones. La má-quina de inducción también se utiliza como un transformador de frecuencias.
En el motor de inducción, los devanados del estator en esencia son los mismos que presen-ta la máquina síncrona. Sin embargo, los devanados del rotor se encuentran en corto circuito ycon frecuencia no presentan conexiones externas; las corrientes se inducen mediante la accióndel transformador a partir del devanado del estator. En la figura 4.14 se muestra una vista en

186
Figura 4.14Vista en corte de unmotor de inducción dejaula de ardilla.( Westinghouse ElectricCorporation.)
Figura 4.15Característica parvelocidad de un motorde inducción típico.
CAPíTULO 4 Introducción a las máquinas de rotación
corte de la caja del motor de inducción de jaula de ardilla. En este caso, los devanados del rotorson barras sólidas de aluminio que se funden dentro de las ranuras en el rotor y que estánlimitadas por medio de anillos fundidos de aluminio en cada extremo del rotor. Este tipo deconstrucción del rotor da como resultado motores de inducción que son económicos y muyconfiables, factores que contribuyen a su inmensa popularidad y amplia aplicación.
Como sucede en el caso del motor síncrono, el flujo del devanado de armadura o inducidoen el motor de inducción guía al rotor y produce un par electromecánico. De hecho, se observaque al igual que la máquina síncrona, los flujos del rotor y el estator rotan de forma síncronaentre ellos y que el par se relaciona con el desplazamiento relativo entre éstos. Sin embargo, adiferencia de una máquina síncrona, el rotor de una máquina de inducción no rota en sincroníapor ella misma; ya que es el deslizamiento del rotor con respecto al flujo del devanado dearmadura o inducido síncrono el que da auge a las corrientes del rotor inducidas y como con-secuencia el par. Los motores de inducción operan a velocidades menores en comparación conla velocidad mecánica síncrona. En la figura 4.15 se muestra la característica velocidad ymomento de torsión típico de un motor de inducción .
•
o 80 100Velocidad en porcentaje de velocidad síncrona

Figura 4.16Vista en corte de unmotor de corrientedirecta de potenciaintegral. (ASEA BrownBoveri.)
4.2 Introducción a las máquinas de corriente alterna y de corriente directa 187
4.2.2 Máquinas de corriente directa
Figura 4.17Máquina elemental decorriente directa conconmutador.
Como ya se ha analizado, el devanado de armadura o inducido de un generador de corrientedirecta se encuentra en el rotar con corriente que se conduce mediante escobillas de carbón. Eldevanado de excitación se localiza en el estator y se excita por medio de corriente directa. Enla figura 4.16 se ilustra una vista en corte de un motor de corriente directa.
En la figura 4.17 se presenta el esquema de un generador muy elemental de corrientedirecta bipolar. El devanado de armadura o inducido, que consiste en una bobina única con Nnúmero de vueltas, se indica por medio de los dos costados de la bobina a y -a colocados enpuntos diametralmente opuestos en el rotar con los conductores paralelos a la flecha. El rotor
N
Rotación
Bobina de inducido conN número de vueltas
I----f-'\___ Escobillas de carbón
H--=:¡"" Segmentosde cobre delconmutador
s

188
Figura 4.18a) Distribución espa-cial de la densidad delflujo del entrehierro enuna máquina elementalde corriente directa:b) forma de onda delvoltaje entre escobillas.
CAPíTULO 4 Introducción a las máquinas de rotación
normalmente gira a velocidad constante por medio de una fuente mecánica de potencia que seconecta a la flecha. En general, la distribución de flujo del entrehierro se aproxima a una ondarectangular, en vez de la onda sinusoidal que se presenta en las máquinas de corriente alterna yque se muestra en la figura 4.18a. La rotación en la bobina genera un voltaje de bobina que esuna función del tiempo y que presenta la misma conformación de onda que ocurre con ladistribución de la densidad de flujo espacial.
Aunque el objetivo final es la generación de un voltaje directo, el voltaje inducido en unabobina de inducido individual deberá rectificarse. El voltaje de salida en una máquina de co-rriente alterna se rectifica con el empleo de rectificadores semiconductores externos. Lo ante-rior sucede en contraste con la máquina de corriente directa convencional, en la cual la rectifi-cación se produce de forma mecánica por medio de un conmutador, que es un cilindro dematerial aislado en el que se monta, también de manera aislada, la flecha del rotor. Las escobi-llas de carbón estacionario se sostienen en contra de la superficie del conmutador que conectaal devanado con las terminales externas del armazón. El conmutador y las escobillas se obser-van claramente en la figura 4.16. La razón por la cual los devanados de inducido de las máqui-nas de corriente directa se colocan en el rotor, es la necesidad de conmutación.
Para el generador elemental de corriente directa, el conmutador adopta la forma que semuestra en la figura 4.17. Para el caso de la dirección de rotación que se esquematiza, elconmutador, en la totalidad del tiempo, conecta el costado de la bobina que se ubica debajo delpolo sur con la escobilla positiva y el costado de la bobina que se localiza debajo del polo nortecon la escobilla negativa. El conmutador suministra una rectificación total de onda, al transfor-mar la forma de onda del voltaje entre escobillas a una longitud de onda como la que se obser-va en la figura 4.18b y dispone un voltaje unidireccional al circuito externo. Es obvio que lamáquina de corriente directa de la figura 4.17 se encuentra simplificada hasta el extremo de
Distribución espacialde la densidad de flujo_--_
B
Ángulo", alrededor de laperiferia del entrehierro
oB
a)
Tiempo!
b)

4.3 Fuerza magnetomotriz de devanado distribuido 189
parecer poco real en un sentido práctico, no obstante, será indispensable examinar el desempe-ño de conmutadores más apegados a la realidad.
El efecto de la corriente directa en el devanado de excitación de una máquina de corrientedirecta es crear una distribución de flujo magnético que sea estacionario con respecto al estator.De manera similar, el efecto del conmutador funciona de tal modo que cuando la corrientedirecta fluye a través de las escobillas, el inducido crea una distribución de flujo magnéticoque también se fija en el espacio y cuyo eje, determinado por el diseño de la máquina y laposición de las escobillas, generalmente es perpendicular al eje del flujo de excitación.
Lo mismo ocurre con las máquinas de corriente altema que se analizaron anteriormente, lainteracción de estas dos distribuciones de flujos es lo que crea el par en la máquina de corrientedirecta. Si la máquina funciona como un generador, dicho par se opone a la rotación. Si lamáquina funciona como un motor, el par electromecánico actúa en la dirección de la rotación.Las observaciones similares a las que se realizaron en relación a las funciones que desempeña-ron el voltaje generado y el par electromecánico en los procesos de conversión de energía delas máquinas síncronas se aplican de igual forma a las máquinas de corriente directa.
4.3 FUERZA MAGNETOMOTRIZDE DEVANADO DISTRIBUIDO
La mayoría de las armaduras o inducidos presentan devanados distribuidos; por ejemplo, losdevanados que se distribuyen en un número particular de ranuras alrededor de la periferia delentrehierro, como se ilustra en las figuras 4.2 y 4.1. Las bobinas individuales se interconectande manera que produzcan un campo magnético que incluye el mismo número de polos que eldevanado de excitación.
El estudio de los campos magnéticos de los devanados distribuidos puede precisarse alexaminar el campo magnético que produce un devanado que contenga una bobina única con Nnúmero de vueltas y que abarca 180 grados eléctricos, como se muestra en la figura 4.19a.Unabobina que comprende 180 grados eléctricos se denomina bobina de paso completa. Los pun-tos y las cruces indican la corriente que fluye hacia el observador y en contra del observador,respectivamente. Para fmes de simplicidad, se ilustra un rotar cilíndrico concéntrico. En lafigura 4.19a se indica mediante una línea punteada la naturaleza general del campo magnéticoque produce la corriente en la bobina. Dado que la permeabilidad del inducido y del hierro deexcitación es mucho mayor que la del aire, resulta preciso para los fines presentes asumir quela reluctancia completa del circuito magnético se localiza en el entrehierro. A partir de la sime-tría de la estructura se hace evidente que la intensidad del campo magnético Hag en el entrehierroa un ángulo ea bajo un polo es la misma en magnitud que un ángulo ea + zrbajo el polo opuesto,pero los campos se encuentran en la dirección opuesta.
En la figura 4.19a, la frnm es Ni alrededor de cualquiera de las trayectorias cerradas que seindican mediante las líneas de flujo. La suposición de que todas las reluctancias de este circui-to magnético se localizan en el entrehierro conduce a la conclusión de que la integral lineal deH dentro del hierro es insignificante, y por lo tanto, es razonable ignorar el descenso de fmmque se asocia con las secciones del circuito magnético dentro del hierro. Debido a la simetría,se concluye que los campos del entrehierro Hag en lados opuestos del rotar son iguales enmagnitud pero opuestos en dirección. Por consiguiente, la frnm del entrehierro deberá distribuirsede manera similar; dado que cada línea de flujo atraviesa el entrehierro dos veces, el descensode fmm a través del entrehierro deberá igualar a la mitad del total o Nil2.

190
Figura 4.19a) Vista esquemáticadel flujo que produceun devanado de pasocompleto concentradoen una máquina conun entrehierro unifor-me. b) La fmm delentrehierro que produ-ce la corriente en estedevanado.
CAPíTULO 4 Introducción a las máquinas de rotación
Bobina con N númerode vueltas que llevauna corriente i Líneas de flujo
Eje magnético+f----h- de la bobina
del estator
a)
Fagl fundamental
Ni""2
\, -,-- ,,; ,,; ,1 1, 7r ,; 27r
O , ,;,- ,~;:=='=-=-='==:;;:~:::;==== Superficie del rotor
Superficie del estator
b)
La figura 4.19b representa, en forma desarrollada, las características del entrehierro y eldevanado, por ejemplo, el trazo plano. La distribución de la fmm del entrehierro se indicamediante la distribución escalonada de la amplitud de Nil2. Al suponer aberturas de ranuraangosta, la frnm salta de manera abrupta al cruzar Ni de un lado a otro de la bobina. La distri-bución de la fmm se analiza nuevamente en la sección 4.4, donde se evalúan los campos mag-néticos resultantes.
4.3.1 Máquinas de corriente alterna
Análisis posteriores muestran que la frnm del entrehierro que produce una sola bobina, comola bobina de paso completa que se muestra en la figura 4.19, consiste en un componente armó-nico espacial y una serie de componentes armónicos de un orden más elevado. En el diseño demáquinas de corriente alterna se llevan a 'cabo grandes esfuerzos con el fin de distribuir lasbobinas al ajustar los devanados, de manera que minimicen los componentes armónicos de unorden más elevado y produzcan una onda de la fmm del entrehierro que consista de manerapredominante de un componente sinusoidal fundamental espacial. Por lo tanto, es apropiadosuponer que este hecho se completó y concentrar la atención en el componente fundamental.
Al emplear las series de Fourier es posible resolver la onda rectangular que presenta lafrnm del entrehierro de los dos polos concentrados, y de la bobina de paso completo que seesquematiza en la figura 4.19b al incluir un componente fundamental y una serie de armónicasimpares. El componente fundamental Fagl es
4 (Ni)Fagl ="ii 2 cos ea (4.3)

Figura 4.20La fmm de un inducidotrifásico bipolar dis-tribuido con dos bobi-nas de paso completo.
4.3 Fuerza magnetomotriz de devanado distribuido 191
donde ea se mide a partir del eje magnético de la bobina del estator, como se muestra medianteel sinusoide punteado de la figura 4.19b. Éste es una onda espacial sinusoidal de amplitud
4 (Ni)(Fag1)pico = -; 2 (4.4)
con su pico alineado con el eje magnético de la bobina.Ahora considere un devanado distribuido, que se compone de bobinas dispuestas en dife-
rentes ranuras. Por ejemplo, la figura 4.20a ilustra la fase a de un devanado de armadura oinducido para una máquina de corriente alterna trifásica bipolar algo simplificada. Las fases by e ocupan las ranuras vacías. Los devanados de las tres fases son idénticos y se localizan consus ejes magnéticos distanciados por 120 grados. Se enfocará la atención a la fmrn del entrehierrode fase a únicamente, y después se analizarán los efectos de las tres fases completas hasta lasección 4.5. El devanado se dispone en dos capas, cada bobina de paso completa con N, núme-
a)
ÁI
__________~L---------J---------~~--------~~O
b)

192 CAPíTULO 4 Introducción a las máquinas de rotación
ro de vueltas presenta un costado en la parte superior de la ranura y el otro costado en la parteinferior de la ranura con distancia interpolar entre sí, En una máquina real, esta disposición dedos capas simplifica el problema geométrico de ubicar el extremo de las vueltas de las bobinasindividuales por delante de las mismas.
La figura 4.20b muestra la naturaleza plana de un polo de este devanado. Con las bobinasconectadas en serie y como consecuencia con la misma corriente, la onda de la fmm es unconjunto de escalones de altura 2Ncia (igual a los amperes vueltas de la ranura), donde iarepresenta la corriente del devanado. Su componente fundamental espacial se representa pormedio del sinusoide. Es posible observar que el devanado distribuido produce una aproxima-ción más cercana a una onda de la fmm sinusoidal en comparación con la bobina concentradaque se muestra en la figura 4.19.
Así, la amplitud del componente fundamental armónico espacial de la onda de la frnmde un devanado distribuido es menor que la suma de los componentes fundamentales de lasbobinas individuales, debido a ~ ejes magnéticos de las mismas no se alinean con laresultante. La expresión modificada de la ecuación 4.3 para un devanado distribuido multipolarque presenta una serie de vueltas Nph por fase es
Fagl = ~ (kwNph) ia cos (POlOSea)rr polos 2
en la cual el factor 4/rr resultado del análisis de series Fourier de la fmm rectangular desplazauna bobina de peso completo, como en la ecuación 4.3, y las vueltas de factor kw toman encuenta la distribución de las vueltas. Este factor es requerido porque la producción de la frnmpor la bobina individual de cualquier fase de grupo tiene ejes magnéticos diferentes. Cuando seconecta en serie para formar el devanado de fase, la suma del fasor es menor que la sumanumérica del mismo. (Véase apéndice B para más detalles.) Para la mayoría de los devanadostrifásicos, kw es común un descenso en el rango de 0.85 a 0.95.
El factor kwNph representa la serie de vueltas efectivas por fase para la fmm fundamental.El pico de la amplitud de esta onda fmm es
(4.5)
~ (kwNph) i¿(Fagl)pico =n polos (4.6)
~---------------------Se considera que el devanado de excitación bipolar de fase a que se presenta en la figura 4.20a con-siste de 8 N¿ vueltas, bobinas de paso completo que se conectan en serie, donde cada ranura contienedos bobinas. Existe un total de 24 ranuras en el inducido, y por lo tanto cada ranura se encuentra sepa-rada por 360°/24 = 15°.Asuma que el ángulo ea se mide a partir del eje magnético de la fase a, de maneraque las cuatro ranuras que contienen los costados de las bobinas se designen con la letra a y se ubiquena ea = 67.5°, 82.5°,97.5° Y 112.5°. El lado opuesto de cada bobina esta así en las ranuras en -112.5",-97.5°, -82.5° Y67.5°, respectivamente. Suponga que este inducido lleva una corriente ia'
a) Elabore una expresión para la frnm espacial fundamental que producen las dos bobinas cuyos costa-dos se localizan en las ranuras a ea = 112.5° Y-67.5°.
b) Elabore una expresión para la fmm fundamental producida por las bobinas cuyos costados se ubi-quen en las ranuras a ea = 67.5° Y-112.5°.
e) Elabore una expresión para la frnm espacial fundamental del devanado de armadura o inducidocompleto.
d) Determine el factor del devanado kw para este devanado distribuido.

4.3 Fuerza magnetomotriz de devanado distribuido 193
• Solución
a) Al advertir que el eje magnético de este par de bobinas se encuentra a ea = (112.5° - 67.5°)/2 = 22.5°Y que el total de amperes vueltas en la ranura es igual a 2Ncia, la frnm producida por este par debobinas se determina a partir de una analogía con la ecuación 4.3
4 (2Ncia)(Fag' h2.5° = -; -2- cos (ea - 22S)b) Este par de bobinas producen la misma frnm espacial fundamental que el par que se describe en el
inciso a) con la excepción de que esta frnm se centra a ea = -22.5°. Por lo tanto,
e) Por analogía con los incisos a) y b), la frnm total espacial fundamental se describe de la siguienteforma
4 (2Nc)= -; 2 ia [cos (ea + 22S) + cos (ea + 7S)
+ cos(ea - 7S) + cos (ea - 22S)]
4 (7.66Nc)= -; --2- iD cos ea
d) Al reconocer que para el devanado Nph = 8 No la frnm total del inciso e) puede reelaborarse de lasiguiente manera
Al comparar esta expresión con la ecuación 4.5 se observa que para este devanado el factor dedevanado es kw = 0.958.
~~---------------------------------Calcule el factor de devanadó del inducido de fase a que se muestra en la figura 4.20 si el número devueltas en las cuatro bobinas dentro de las ranuras pares externas se reduce a seis, mientras que el númerode vueltas en las cuatro bobinas que se ubican en las ranuras internas permanece en ocho.
Solución
kw = 0.962
La ecuación 4.5 describe el componente espacial fundamental de la onda de frnm produci-da por la corriente en fase a de un devanado distribuido. Si la corriente de fase a es sinusoidalcon respecto al tiempo, por ejemplo, ia = 1m cos on, el resultado será una onda de la frnmestacionaria en el espacio y que varía de forma sinusoidal tanto con respecto a ()a como al

194
Figura 4.21La fmm del entrehierrode un devanado distri-buido en el rotor de ungenerador de poloslisos.
CAPíTULO 4 Introducción a las máquinas de rotación
tiempo. En la sección 4.5 se estudiará el efecto de las corrientes en las tres fases y se analizaráque la aplicación de las corrientes trifásicas produce una onda rotativa para la frnm.
De una forma análoga, los devanados del rotar con frecuencia se distribuyen en ranurascon el fin de reducir los efectos de las armónicas espaciales. La figura 4.21a muestra el rotar deun generador de polos lisos típico redondo bipolar. Aunque el devanado es simétrico con res-pecto al eje del rotar, el número de vueltas por ranura puede variar para controlar las diferentesarmónicas. En la figura 4.21b se observa que existe un menor número de vueltas en las ranurascercanas a la cara del polo. Además, el diseñador puede modificar el espaciado entre las ranu-
Caras del polo
a)
fmm
o,
Ejedel rotor
b)

4.3 Fuerza magnetomotriz de devanado distribuido 195
ras. Como sucede en el caso de los devanados de inducido distribuidos, la onda de la frnmfundamental del entrehierro del devanado de un rotor multipolar se determina a partir de laecuación 4.5 en términos del número total de vueltas en serie N; mientras que la corriente deldevanado Ir Yel factor del devanado k, son de la siguiente forma
Fagl = ~ ( krNr ) I.co» (POlOS (}r)n polos 2
donde er representa el ángulo espacial medido con respecto al eje magnético del rotor, como semuestra en la figura 4.21b. Su pico de amplitud es
(4.7)
4 (krNr)(ragl)pico = - -1- Irn po os (4.8)
4.3.2 Máquinas de corriente directa
Figura 4.22Sección cruzada deuna máquina de co-rriente directa bipolar.
Debido a las restricciones impuestas en la disposición del devanado por medio del conmuta-dor, la onda de la frnm del inducido de una máquina de corriente directa se aproxima a unaforma de onda dentada de manera más cercana que la onda senoidal que presentan las máqui-nas de corriente alterna. Por ejemplo, la figura 4.22 muestra, en forma de diagrama de cortetransversal, el inducido o la armadura de una máquina de corriente directa bipolar. (En lapráctica, todas excepto las máquinas de corriente directa de menor tamaño, contienen unamayor cantidad de bobinas y ranuras.) Las direcciones de la corriente se muestran mediantepuntos y cruces. Las conexiones de la bobina del devanado de armadura o inducido se dispo-nen de manera que el devanado de armadura o inducido produzca un campo magnético cuyoeje sea vertical y, por lo tanto, perpendicular al eje del devanado de excitación. Mientras que elinducido gira, las conexiones de la bobina que van al circuito externo cambian gracias al con-mutador, de manera que el campo magnético del inducido permanezca vertical. Así, el flujodel inducido siempre será perpendicular al campo que produce el devanado de excitación yeste hecho da como resultado un par unidireccional. La acción del conmutador se analiza conmás detalle en la sección 7.2.
Eje magnéticodel devanadode inducido__ --_
Eje magnético---:_T- del devanado
de excitación

196
Figura 4.23a) Esquema desarrolla-do de la máquina decorriente directa quese muestra en la figura4.22; b) onda de lafmm; e) oznda dentadaequivalente a la fmm,así como su compo-nente fundamental y laintercalación equiva-lente rectangular de lacorriente.
CAPíTULO 4 Introducción a las máquinas de rotación
La figura 4.23a muestra la naturaleza plana de este devanado. La onda de la fmm se ilustraen la figura 4.23b. Al suponer que las ranuras son estrechas, esta forma de onda consiste enuna serie de escalones. La altura de cada uno de éstos es igual al número de amperes vueltas2Ncic en una ranura, donde N¿ representa el número de vueltas de cada bobina e ic representa lacorriente de la bobina al suponer un devanado de dos capas y bobinas de paso completo. Elvalor pico de la onda de fmm se ubica a lo largo del eje magnético del inducido, a mitad de ladistancia de los polos de excitación. Este devanado es equivalente a una bobina de 12Ncicamperes vueltas distribuidas alrededor del inducido. Al asumir la simetría de cada polo, elvalor pico de la onda de frnm de cada polo de inducido es de 6Ncic amperes vueltas.
De manera aproximada, esta onda de fmm se representa mediante la onda dentada que setrazó en la figura 4.23b y posteriormente en la figura 4.23c. En el caso de un devanado más realcon un mayor número de ranuras de inducido por polo, la distribución triangular se convierte
a)
6Ncic --:---~--I I
4Ncic - -:- --I
2Ncic --
e)

Figura 4.24a) Sección transversalde una máquina decorriente directa tetra-polar; b) desarrollo dela forma de corriente yla onda de la fmm.
4.3 Fuerza magnetomotriz de devanado distribuido 197
en una aproximación más cercana. De esta manera, la onda de fmm se produciría mediante unadistribución rectangular de la densidad de corriente en la superficie del inducido, como seilustra en la figura 4.23c.
Para fines de este análisis preeliminar, es conveniente resolver las ondas de la fmm de losdevanados distribuidos por medio de los componentes de las series de Fourier. El componentefundamental de la onda dentada de la frnm que se muestra en la figura 4.23c se representamediante la onda senoidal. Su valor pico es de 8/,.2 = 0.81 veces la altura de la onda dentada.Esta onda fundamental de la frnm se produce por medio del componente fundamental armóni-co espacial de la distribución rectangular de la densidad de corriente que se observa en lafigura 4.23c. En la figura 4.23c se ilustra esta intercalación de corriente distribuida de manerasinusoidal.
Advierta que la distribución de la fmm del entrehierro depende únicamente de la disposi-ción del devanado y de la simetría de la estructura magnética de cada polo. Sin embargo, ladensidad de flujo del entrehierro depende no sólo de la frnm sino también de las condicionesde los límites magnéticos, en especial de la longitud del entrehierro, del efecto de las aberturaspara las ranuras y de la forma de la cara del polo. El diseñador considera estos efectos medianteun análisis a conciencia, pero estos detalles no conciernen a los fines de este estudio.
Las máquinas de corriente directa con frecuencia presentan una estructura magnética conmás de dos polos. Por ejemplo, la figura 4.24a ilustra de manera esquemática una máquina decorriente directa tetrapolar. El devanado de excitación produce una polaridad alternada norte-sur-norte-sur, y los conductores del inducido se distribuyen en cuatro cinturones de ranurasque llevan corrientes que se turnan en dirección del observador y en oposición al observador,como se indica mediante las áreas achuradas. En la figura 4.24b se esquematiza esta máquinaen forma de plano. También se indica la onda en forma de diente de sierra correspondiente a lafmm en el inducido. Al asumir que el devanado y los polos de excitación son simétricos, cadapar sucesivo de polos es similar a los demás pares. Por lo tanto, las condiciones magnéticas enel entrehierro se determinan al examinar cualquier par de polos adyacentes, esto es, a 360grados eléctricos.
El valor pico de la onda dentada de la frnm en el inducido puede formularse en términosdel número total de conductores en las ranuras del inducido como se indica a continuación
(ea ) .(.rag)pico = 2 1 lam· po os
A . vueltas/polo (4.9)
eConductores -la
po os---~--"\
a) b)

198 CAPíTULO 4 Introducción a las máquinas de rotación
8 ( Na ) .(Fagl)pico = 2 -1- latt pO OS
(4.11 )
donde
Ca = número total de conductores en el devanado de armadura o inducidom = número de trayectorias paralelas a través del devanado de armadura o inducidoi, = corriente de inducido, A
En este caso la ecuación toma en cuenta el hecho de que en algunas ocasiones el inducidodeberá devanarse con trayectorias múltiples de corriente en paralelo. Por tal razón, con fre-cuencia es más conveniente considerar al inducido en términos del número de conductores(cada conductor correspondiente a un patrón único que lleva corriente dentro de una ranura).Así, ijm representa la corriente en cada conductor. Esta ecuación se deriva directamente apartir de la integral de línea alrededor de la trayectoria cerrada punteada que se muestra en lafigura 4.24b que cruza el entrehierro en dos ocasiones y encierra los conductores Cjpolos, alllevar cada uno en la misma dirección una corriente ia/m. En una forma más reducida
(Na ) .();g)pico = -1- la
po OS(4.10)
donde N¿= Ca/(2m) representa el número de vueltas del inducido en serie. A partir de las seriesde Fourier para la onda dentada de la fmm que se observa en la figura 4.24b, el valor pico delespacio fundamental se obtiene mediante la siguiente ecuación .
4.4 CAMPOS MAGNÉTICOS EN LAS MÁQUINAS ROTANTESLos estudios preliminares se basarán tanto en máquinas de corriente alterna como en máquinasde corriente directa. Esta suposición otorgará resultados satisfactorios para la mayoría de losproblemas que implican máquinas de corriente alterna, debido a que sus devanados común-mente se distribuyen de manera que minimicen los efectos de las armónicas espaciales. Acausa de las restricciones colocadas en la disposición del devanado por medio del conmutador,las ondas de la fmm de las máquinas de corriente directa se aproximan de manera inherente auna forma de onda dentada. No obstante, Joa teoría que se fundamenta en un modelo sinusoidalpone de manifiesto las características básicas de la teoría de la máquina de corriente directa.Los resultados son susceptibles a modificarse cuando sea necesario tomar en cuenta cualquierdiscrepancia significativa.
Con frecuencia es más fácil iniciar el análisis al examinar una máquina bipolar, en dondelos ángulos y las velocidades eléctricas y mecánicas son iguales. Los resultados puedenextrapolarse de forma inmediata a una máquina multipolar, al recordar que los ángulos eléctri-cos y las velocidades angulares se relacionan con los ángulos mecánicos y con las velocidadesangulares mediante un factor polos/2 (véase, por ejemplo, la ecuación 4.1).
El comportamiento de la maquinaria eléctrica se determina por medio de los campos mag-néticos que crean las corrientes en los diversos devanados de la máquina. Esta sección analizacómo se relacionan estos campos magnéticos con dichas corrientes.

4.4 Campos magnéticos en las máquinas rotantes 199
4.4.1 Máquinas con entrehierros uniformes
Figura 4.25La fmm del entrehierroy el componente radialde HaQ para un indu-cido concentrado depaso completo.
La figura 4.25a ilustra una bobina de paso único con N número de vueltas en una estructura dealta permeabilidad magnética {J.1.-700), con un rotor cilíndrico concéntrico. En la figura 4.2Sb,la fmm del entrehierro Fag que se presenta en esta configuración se muestra graficada encontra del ángulo ea. Para una estructura de e tas condiciones, con un entrehierro uniforme delongitud g a un radio T, (mucho mayor que g), es preciso suponer que el campo magnético H enel entrehierro se dirige sólo de manera radial y presenta una magnitud constante a travé delentrehierro.
La distribución de la fmm en el entrehierro de la figura 4.25b es igual a la integral de líneade Hag a través del entrehierro. En este caso, donde existe una radial constante Hag, esta inte-gral es sencillamente igual al producto del campo magnético radial del entrehierro Hag veces la
Bobina con N númerode vueltas(Ja
_--!--'---'~Eje magnético de labobina del estator
a)
r:Fagl fundamental
,- 1-"'------ Ni ,-
",
2 "", "", "", .-
" O, "" _Ni ,
7C " 2n"
, "" 2, "-' '--
!~ !Zl ~ I
• b)
ig -<" Hagl fundamental ------ , , HagNi / -- / --2
--- '."/," ''\ 1/..',,"Í
_NiO ~, 1t
,,"1 2n... ".- ./ 2 Ni ,'-\,' ./
-' 2g -~ fmm
N2
Fagl fundamental
e)

4 ( kwNph ) . (POlOS)Hagl = - la COS --ea7T g . polos 2 (4.15)
200 CAPiTULO 4 Introducción a las máquinas de rotación
longitud del entrehierro g, y de esta forma, Hag puede determinarse de manera simple al dividirla frnm del entrehierro entre la longitud del entrehierro
r;Hag=-
g (4.12)
De esta forma, en la figura 4.25c, el campo radial Hag Yla frnm se observan como idénticas ensu forma, simplemente relacionadas mediante un factor de l/g.
El componente armónico espacial de Hag se determina directamente a partir del compo-nente fundamental Fag¡' que suministró la ecuación 4.3.
Fagl 4 (Ni)Hagl = g = -; 2g cos é,
Ésta es una forma de onda sinusoidal de amplitud
(4.13)
4 (Ni)(Hag1)pico = -; 2g
Para un devanado distribuido, como el que ilustra la figura 4.20, la intensidad del campomagnético del entrehierro se determina con facilidad una vez que se conoce la frnm delentrehierro. Así, el componente fundamental de Hag se determina al dividir dicho componentede la frnm del entrehierro (ecuación 4.5) entre la longitud del entrehierro g
(4.14)
Esta ecuación se formuló para una situación general con una máquina multipolar, y Nph es eltotal del número de vueltas en serie por fase.
Observe que la frnm del entrehierro fundamental espacial Fag 1 Yel campo magnético delentrehierro Hagl que producen el devanado distribuido con un factor de devanado kw Y Nph/polos vueltas en serie por polo es igual al que produce un devanado concentrado de pasocompleto de (kwNph)/polos vueltas por polo. En el análisis de las máquinas con devanadosdistribuidos, esta conclusión es útil ya que al considerar las cantidades espaciales fundamenta-les permite llegar a la solución de distribución a partir de la solución de la bobina única de pasocompleto sólo al reemplazar N por el número efectivo de vueltas, kfiph' del devanado distri-buido.
~~--------------------------------------Un generador síncrono de corriente alterna tetrapolar con un entrehierro suave presenta un devanadodistribuido en el rotor con 263 vueltas en serie, un factor de devanado de 0.935 y una longitud delentrehierro de 0.7 rnm. Al suponer que la caída de la frnm en el acero eléctrico es insignificante, determi-ne la corriente en el devanado del rotor que se requiere para producir un pico, con una densidad de flujomagnético espacial fundamental de 1.6 T en el entrehierro de la máquina .
• Solución
La densidad de flujo magnético espacial fundamental del entrehierro se determina al multiplicar elcampo magnético del entrehierro por la permeabilidad del espacio libre Po, que a su vez se calcula a par-

4.4 Campos magnéticos en las máquinas rotantes 201
tir del componente espacial fundamental de la frnm del entrehierro al dividirla por la longitud del entre-hierro g. Así, a partir de la ecuación 4.8
(B ). = J.LOF(agl) pico = 4J.Lo (krNr) Iragl pICO g ng polos
e Ir se calcula a partir de
Ir = (7f:;o~~:s)(Bagl)p;co
(
it X 0.0007 X 4 ) 1.64 X 47f X 10-7 X 0.935 X 263
= 11.4 A
-~----------------Una máquina síncrona bipolar presenta un entrehierro con una longitud de 2.2 cm y un devanado deexcitación con un total de 830 vueltas en serie. Cuando se excita mediante una corriente de excitación de47 A, el pico espacial fundamental de la densidad de flujo magnética en el entrehierro de la máquinaalcanza 1.35 T.
Con base en la medida de la densidad de flujo, calcule el factor de devanado k; en el devanado deexcitación.
Solución
k.> 0.952
4.4.2 Máquinas con entrehierros no uniformes
Figura 4.26Estructuras de máqui-nas típicas de polossalientes: a) máquinade corriente directa yb) máquina síncronade polos salientes.
La figura 4.26a ilustra la estructura de una máquina de corriente directa típica, y la figura4.26b muestra la estructura de una máquina síncrona de polos salientes típica. Ambas máqui-
J..--At--T Bobinade campo
a) b)

202
Figura 4.27Solución por medio delelemento finito para ladistribución del campomagnético en un gene-rador de corriente di-recta de polos salien-tes. Las bobinas deexcitación están acti-vadas, pero no haycorriente en las bobi-nas de inducido.(General ElectricCompany.)
CAPíTULO 4 Introducción a las máquinas de rotación
Estator
nas consisten en estructuras magnéticas con entrehierros no uniformes. En tales casos, la dis-tribución del campo magnético en el entrehierro es más compleja que la que presentan lasmáquinas con entrehierros uniformes.
Los análisis detallados sobre las distribuciones del campo magnético en dichas máquinasrequieren soluciones completas al problema de campo. Por ejemplo, la figura 4.27 muestra unadistribución del campo magnético en un generador de corriente directa de polos salientes (quese obtuvo mediante una solución del elemento finito). Sin embargo, la experiencia ha de-mostrado que a través de numerosas simplificaciones es posible desarrollar técnicas analíti-cas que produzcan resultados precisos. Estas técnicas se ilustran en capítulos posteriores, don-de se analizan los efectos de la saliencia sobre las máquinas de corriente directa y de corrientealterna.
4.5 ONDAS DE ROTACiÓN DE FUERZAMAGNETOMOTRIZ EN MÁQUINASDE CORRIENTE ALTERNA
Con el fin de entender la teoría y el funcionamiento de las máquinas de corriente alternapolifásicas, es necesario estudiar la naturaleza de la onda de la fmm producida por un devana-do polifásico. Se enfocará la atención en una máquina bipolar o en un par de devanadosmultipolares. Sin embargo, para alcanzar un entendimiento a fondo de las condicionespolifásicas, es útil empezar con el análisis de un devanado de fase única.

4.5 Ondas de rotación de fuerza magnetomotriz en máquinas de corriente alterna 203
4.5.1 Onda de fmm de un devanado de fase única
Figura 4.28Fuerza magnetomotrizde un entrehierrofundamental espacialde un devanado defase única: a) distri-bución de la fmm deun devanado de faseúnica en diferentestiempos; b) fmm totalFagl descompuesta endos ondas viajeras F-y F+, e) descomposi-ción del fasar de Fag1.
La figura 4.28a muestra la distribución de la frnm fundamental espacial de un devanado defase única, donde, a partir de la ecuación 4.5 se obtiene la siguiente expresión
4 (kwNph) . (POlOS)Fagl = - --- laCOS --ean polos 2
(4.16)
Cuando este tipo de devanado se excita por medio de una corriente de variación sinusoidal entiempo con una frecuencia eléctrica OJe
(4.17)
Fagl Eje magnético deldevanado de fase
a)
Eje magnético deldevanado de fase
Eje magnético deldevanado de fase
-¡¡;-+-1--+-1--\---\--+--'- eae
.-t---+-+---+---+ .•.eae <==~>
b)
we~F+Eje magnético del
Fag 1 - - - - - devanado de fasew.t F-
e)

204 CAPíTULO 4 Introducción a las máquinas de rotación
la distribución de la frnm se obtiene mediante la siguiente ecuación
Fagl = Fmáx [~cos (eae - úJet) + ~cos (eae + úJet)]
esta ecuación muestra que la frnm de un devanado de fase única puede resolverse en dos ondasde frnm de rotación cada una con una amplitud correspondiente a la mitad de la máxima am-plitud de Fagl con una F~gl viajando en la dirección +ea y la otra F;gl viajando en la dirección-ea' ambas con velocidades angulares eléctricas (Oe (igual a la velocidad angular mecánica de2(O/polos):
(4.20)
(polos )
Fagl = Fmáx cos -2-ea cos úJet
= Fmáx cos (eae) cos úJet(4.18)
La ecuación 4.18 se desarrolló para destacar el hecho de que el resultado es la distribuciónde la frnm de máxima amplitud.
Fmáx = ~ (kwNph) la
n polos
La distribución de la frnm permanece fija en el espacio con una amplitud que varía de formasinusoidal en tiempo con una frecuencia (Oe, tal como se muestra en la figura 4.28a. Adviertaque con el fin de simplificar la notación, la ecuación 4.1 se utilizó para expresar la distribuciónde la frnm de la ecuación 4.18 en términos del ángulo eléctrico eae.
La utilización de una identidad trigonométrica' común permite que la ecuación 4.18 seformule de la siguiente manera
(4.19)
(4.21)
(4.22)
Esta descomposición se muestra de manera gráfica en la figura 4.28b, y en la figura 4.28c seilustra la representación fasorial.
El hecho de que la frnm distribución del entrehierro en un devanado de fase única se excitepor medio de una fuente de corriente alternante puede resolverse mediante ondas viajeras derotación. Como se mostró en la sección 4.5.~, en la maquinaria de corriente alterna polifásicalos devanados se desplazan de manera similar en fase de tiempo, con el resultado de que lasondas de flujo negativas viajeras de los diferentes devanados suman cero mientras que lasondas de flujo positivas viajeras se refuerzan al suministrar una onda única de flujo positivaviajera.
En las máquinas de corriente alterna de fase única, la onda de flujo viajera positiva produ-ce un par útil, mientras que la onda de flujo viajera negativa produce tanto un par negativopulsante como pérdidas. Estas máquinas están diseñadas para minimizar los efectos de la ondade flujo negativa viajera, aunque a diferencia de las máquinas polifásicas, estos efectos nopueden eliminarse en su totalidad.
1 cos a cos {J = ~cos (a - {J) + ~cos (a + {J).

Figura 4.29Devanado simplificadode un estator trifásicobipolar.
4.5 Ondas de rotación de fuerza magnetomotriz en máquinas de corriente alterna 205
fEje de la
fase e
4.5.2 Onda de la fmm en un devanado polifásico
En esta sección se estudiarán las distribuciones de la frnm en devanados trifásicos, como losque se encuentran en el estator de inducción trifásica y en las máquinas síncronas. Los análisisque se presentan pueden extenderse con facilidad para incluir un devanado polifásico concualquier número de fases. Una vez más se enfocará la atención en una máquina bipolar o enun par de polos de un devanado multipolar.
En una máquina trifásica los devanados de las fases individuales se desplazan uno de otroaproximadamente 120 grados eléctricos en el espacio que está alrededor de la circunferenciadel entrehierro, como se muestra en la figura 4.29 mediante las bobinas a, -a, b, -b Yc, -c. Seconsidera que las bobinas de paso completo que se presentan en esta figura representan deva-nados distribuidos que producen ondas de frnm sinusoidales centradas sobre los ejes magnéti-cos de las respectivas fases. Por consiguiente, las ondas frnm sinusoidales fundamentales espa-ciales de las tres fases se desplazan 120 grados eléctricos en el espacio. Cada fase se excitamediante una corriente altemante que varía en magnitud sinusoidal con el tiempo. Bajo condi-ciones trifásicas balanceadas, las corrientes instantáneas son
(4.23)
(4.24)
(4.25)
donde 1m representa el valor máximo de la corriente y el origen del tiempo se considera arbitra-riamente como el instante en que la corriente de fase a adquiere un valor positivo máximo. Seasume que la secuencia de fase es abc. En la figura 4.30 se muestran las corrientes instantá-neas. Los puntos y cruces en los costados de la bobina (figura 4.29) indican las direcciones dereferencia para las corrientes de fase positivas.
Se demostró que la fmm de fase a es
(4.26)

206 CAPíTULO 4 Introducción a las máquinas de rotación
Figura 4.30Corrientes de fase ins-tantánea bajo condi-ciones trifásicas ba-lanceadas.
o :rr 2:rr3 3
donde
(4.27)
(4.28)
y
_ 4 (kwNph)Fmáx - - -- 1m7r polos (4.29)
Advierta que para evitar la excesiva complejidad notacional, se eliminó el subíndice ag; eneste caso el subíndice al indica el componente fundamental espacial de la fmm del entrehierrode fase a.
De manera similar, para las fases b y e, cuyos casos se encuentran a ea = 1200 Y ea = -120°,respectivamente,
Fbl = F¡;¡ + F¡;j (4.30)
+ 1 (4.31)Fbl = 2. Fmáx cos (eae - wet)
•_ 1 o(4.32)Fbl = 2. Fmáx cos (eae + wet + 120 )
Y
Fel = F¿¡ + Fel (4.33)
+ 1 (4.34)'\ Fel = 2. Fmáx cos (eae - OJet)
_ 1 o(4.35)Fcl = 2. Fmáx cos (eae + OJet - 120 )

4.5 Ondas de rotación de fuerza magnetomotriz en máquinas de corriente alterna 207
La frnm total es la suma de las contribuciones obtenidas a partir de cada una de las tresfases
(4.36)
Esta operación matemática puede llevarse a cabo fácilmente en términos de las ondas viajeraspositivas y negativas. Las ondas viajeras negativas suman cero
F- «(}ae, t) = F;;¡ + FhI + Fel
1 °= "2 Fmáx [cos «(}ae+ úJet) + cos «(}ae+ úJet - 120 )
+ cos «(}ae+ úJet + 120°)]
=0 (4.37)
mientras que las ondas viajantes positivas se refuerzan
F+«(}ae, t) = r: + Ft¡ + F¿¡
3= "2 Fmáx cos «(}ae- úJet) (4.38)
Así, el resultado del desplazamiento de los tres devanados 120° en espacio fase y el des-plazamiento de las corrientes del devanado 120° en tiempo fase es una onda de la frnm viajerapositiva
3F«(}ae, t) = "2 Fmáx cos «(}ae- úJet)
3 ((POlOS) )= "2 Fmáx cos -2- (}a - úJet (4.39)
La onda de la fmm del entrehierro que se describe en la ecuación 4.39 es una funciónsinusoidal fundamental espacial del ángulo eléctrico espacial eae (y, como consecuencia,del ángulo espacial ea = (2/polosWae). Esta onda presenta una amplitud constante de (312)Fmáx- por ejemplo, 1.5 veées la amplitud de la onda de la fmm del entrehierro que sólo pro-ducen las fases individuales. Esta onda también presenta un valor pico positivo a un ángulo deea = (2/polos)av De esta forma, bajo condiciones trifásicas balanceadas, el devanado trifásicoproduce una onda de la frnm del entrehierro que gira a una velocidad angular síncrona ms
úJs = (_2 ) co;polos
(4.40)
donde
me = frecuencia angular de la excitación eléctrica aplicada [rad/seg](Os = velocidad angular espacial síncrona de la onda de la fmm del entrehierro [rad/seg]

208 CAPíTULO 4 Introducción a las máquinas de rotación
La velocidad síncrona n; en r/min correspondiente puede expresarse en términos de lafrecuencia eléctrica aplicada fe = m,/(2,.) en Hz, como se indica a continuación
n, = ( 120 ) fe rlminpolos
(4.41)
En general, se producirá un campo de rotación de amplitud constante por medio de undevanado de fase q excitado mediante corrientes balanceadas de fase q, con una frecuencia fecuando los respectivos ejes de las fases se coloquen a 2mq radianes eléctricos de distancia. Laamplitud de esta onda de flujo será ql2 veces la contribución máxima de cualquier fase unita-ria, y la velocidad angular síncrona permanecerá a úYs = (po~o.)úYe radianes por segundo.
En esta sección se ha observado que un devanado polifásico excitado mediante corrientespolifásicas balanceadas produce una onda de la fmm de rotación. La clave de la operación delas máquinas eléctricas de rotación es la producción de una onda de la fmm de rotación y sucorrespondiente flujo magnético de rotación. La interacción de esta onda de flujo magnéticocon la que se origina en el rotar es la responsable de que se produzca el par. Asimismo, el parconstante se origina cuando el flujo magnético producido por el rotar gira en sincronía con elque produce el estator.
4.5.3 Análisis gráficos de la fuerza magnetomotrizfmm polifásica
En el caso de corrientes trifásicas balanceadas como las que suministran las ecuaciones 4.23 a4.25, la producción de la frnm de rotación puede mostrarse también a través de medios gráfi-cos. Considere las circunstancias a un t = O (figura 4.30), el momento en que la corriente defase a se encuentra en su máximo valor 1m' Entonces, la frnm de la fase a se encuentra en sumáximo valor F máx- como lo demuestra el vector Fa = F máx que se trazó a lo largo del ejemagnético de la fase a en la máquina bipolar que se presenta de manera esquemática en lafigura 4.31a. En este momento, las corrientes ib e ie se dirigen en dirección negativa Im/2, comolo señalan los puntos y las cruces de la figura 4.31a al indicar las direcciones instantáneasreales. Las fuerzas magnetomotrices de las fases b y e se muestran por medio de los vectoresFb y Fe, ambos de magnitud F máx12, que se encuentra trazado en dirección negativa a lo largode los ejes magnéticos de las fases b y c, respectivamente. La resultante, que se obtiene alsumar las contribuciones individuales de las tres fases, es un vector de magnitud F = ~ Fmáxcentrado sobre el eje de la fase a. Esta resultante representa una onda espacial sinusoidal consu valor pico positivo centrado sobre el eje de la fase a y con una amplitud de ~ veces que lacontribución unitaria de la fase a.
Después met = m3 (figura 4.30), las corrientes en las fases a y b tendrán un valor máximosemipositivo, y la corriente en la fase e tendrá un valor máximo negativo. Los componentesindividuales de la frnm y sus resultantes se muestran en la figura 4.31b. La resultante presentala misma amplitud que t = O, pero ahora ha rotado en dirección contraria a las manecillas delreloj 60 grados eléctricos en el espacio. De manera similar, a met = 2m3 (cuando la corriente de
'1 la fase b presenta un valor positivo máximo y las corrientes de la fase e y de la fase a presentanun valor máximo seminegativo) la misma resultante de la distribución de la frnm se obtiene denuevo, pero ha rotado en dirección contraria a las manecillas del reloj 60 grados eléctricos másy ahora se alinea con el eje magnético de la fase b (véase figura 4.31c). Al paso del tiempo, la

Figura 4.31Laproducción de uncampo magnético derotación por medio detrescorrientes trifásicas.
4.5 Ondas de rotación de fuerza magnetomotriz en máquinas de corriente alterna 209
b\
3F="2Fmáx
'*----4~-I_--•.a3
F="2Fmáx
;1e
a) b)
-...b, 3
F = "2Fmáx
--»-a
e)
onda de la fmm resultante conserva su forma sinusoidal y su amplitud, pero rota de maneraprogresiva alrededor del entrehierro; el resultado neto se observa como una onda de la fmm deamplitud constante que rota a una velocidad angular uniforme.
En un ciclo la fmm resultante deberá regresar a la posición que ilustra la figura 4.31a. Laonda de la fmm, por consiguiente, realiza una revolución por ciclo eléctrico en una máquinabipolar. En una máquina multipolar la onda de la fmm se traslada un par polar por ciclo eléctri-co y como consecuencia una revolución en polos/2 ciclos eléctricos.
~~-----------------------------------------Considere un estator trifásico excitado con corrientes balanceadas de 60 Hz. Determine la velocidadangular síncrona en rad/seg y la velocidad en r/rnin para los estatores con dos, cuatro y seis polos .
• Solución
Para una frecuencia de fe = 60 Hz, la frecuencia angular eléctrica es igual a
(V. = Zn], = 120rr ~ 377 rad/seg

210 CAPíTULO 4 Introducción a las máquinas de rotación
Al utilizar las ecuaciones 4.40 y 4.41, la tabla que se presenta a continuación se estructura de la siguientemanera:
Polos n, (r/min) IDs (rad/seg)
246
360018001200
120n::::::37760n40n
~-------------------------------------Repita el ejemplo 4.3 para un estator trifásico que se excita por medio de corrientes balanceadas de50Hz.
Solución
4J1.o (kfNf)Bpico = Jrg polos If (4.42)
Polos n, (r/min) en. (rad/seg)
246
300015001000
lOOnSOn
lOOn/3
4.6 VOLTAdE GENERADO
En términos generales, la naturaleza del voltaje inducido se analizó previamente en la sección4.2. En esta sección se determinarán las expresiones cuantitativas del voltaje inducido.
4.6.1 Máquinasde corriente alterna
En la figura 4.32 se presenta el esquema de un corte transversal de una máquina elemental decorriente alterna. Las bobinas tanto en el rotar como en el estator se describen como bobinas depaso completo, con múltiples vueltas concentradas. Como se analizó anteriormente, una má-quina con devanados distribuidos se representa de forma simple al multiplicar el número devueltas en serie en el devanado por el factor de devanado. Al considerar la suposición de que elentrehierro es de menor tamaño, es posible asumir que el devanado de excitación produce flujode entrehierro fundamental espacial radial con un pico de densidad de flujo Bpico' A pesar deque la figura 4.32 muestra una máquina bipolar, el análisis que se presenta a continuación espara el caso general de una máquina multipolar. Como se determinó en el ejemplo 4.2, cuando
'1 el entrehierro es uniforme, Bpico puede ser encontrado a partir de

Figura 4.32Vista transversal deuna máquina elementalde corriente alternatrifásica.
4.6 Voltaje generado 211
Eje magnético Bobina con Nde la fase b número de vueltas
Eje magnético del+ devanado del rotor
e
Eje magnéticode la fase e
donde
g = longitud del entrehierroNf = número total de vueltas en serie en el devanado de campokf = factor de inducido en el devanado de campoIf = corriente de campo
Cuando los polos del rotor se alinean con el eje magnético de la fase del estator, el flujo dedispersión con un devanado de fase del estator es k.,."NphCf>p, donde Cf>p representa al flujo delentrehierro por polo [Wb). Para la densidad de flujo del entrehierro sinusoidal que se asumió
(polos )
B = Bpico cos -2-er (4.43)
Cf>p se determina como la integral de la densidad de flujo sobre el área polar
¡+n/polos (P0210Ser) r so,<1> p = 1 Bpico COS
• -n/polos
= (_2_) 2Bpico1rpolos
(4.44)
En este caso,
er = ángulo dimensionado a partir del eje magnético del rotorr = radio del entrehierro1 = longitud axial del hierro del estator/rotor
Como ocurre mientras que el rotor gira, el flujo de dispersión varía de manera cosinusoi-dal con el ángulo que hay entre los ejes magnéticos de la bobina del estator y del rotor. Al gi-

212 CAPíTULO 4 Introducción a las máquinas de rotación
rar el rotor a una velocidad angular constante IDm' el flujo de dispersión con la bobina de lafase a es
Aa = kwNphct>p COS ( (pO~OS) wmt)
= k.; Nph ct>p COSWme t (4.45)
donde el tiempo t se elige de manera arbitraria como cero cuando el pico de la onda de ladensidad de flujo coincide con el eje magnético de la fase a. En este caso,
Wme = (pO~OS) Wm (4.46)
representa la velocidad del rotor mecánico expresada en rad/seg eléctricos.Por medio de la ley de Faraday, el voltaje inducido en la fase a es el siguiente
dAa dct>pea = - = kwNph-- coswmet
dt dt-wmekwNphct>p sen wmet (4.47)
La polaridad de este voltaje inducido es tal que si la bobina del estator se encontrara encorto circuito, el voltaje inducido causaría que una corriente fluyera en dirección opuesta acualquier cambio en el flujo de dispersión de la bobina del estator. Aunque la ecuación 4.47 seobtuvo considerando la suposición de que sólo el devanado de campo produce un flujo deentrehierro, la ecuación aplica de igual manera a una situación donde <l>p represente el flujoneto del entrehierro por polo producido mediante las corrientes que se encuentren tanto en elrotor como en el estator.
El primer término en la sección derecha de la ecuación 4.47 es el voltaje transformador yse encuentra presente únicamente cuando la amplitud de la onda del flujo del entrehierro varíacon el tiempo. El segundo término es la velocidad de voltaje, la cual genera el movimientorelativo de la onda de flujo del entrehierro y de la bobina del estator. En condiciones normalesde operación del estado estacionario de la mayoría de las máquinas de rotación, la amplitud dela onda de flujo del entrehierro es constante; bajo estas condiciones, el primer término es ceroy el voltaje generado representa simplemente la velocidad de voltaje. El término fuerzaelectromotri: (fem en su forma abreviada) con frecuencia se utiliza para la velocidad de volta-je. De esta forma, para el flujo constante del entrehierro,
(4.48)
~~-------------------------La llamada ecuación de corte de flujo establece que el voltaje inducido v en un cable de longitud l (en elcuerpo o estructura del cable) que se mueve con respecto a un campo magnético constante con unadensidad de flujo de magnitud B se obtiene mediante la siguiente ecuación
v = lV1.B
donde v 1. representa el componente de la velocidad del cable que es perpendicular a la dirección de ladensidad de flujo magnético.

4.6 Voltaje generado 213
Considere la máquina elemental trifásica bipolar que se muestra en la figura 4.32. Suponga que ladensidad de flujo del entrehierro producida por el rotor es de la siguiente forma
Bag(Or) = Bpico sen o,y que el rotor gira a una velocidad angular constante me' (Advierta que mm = me dado que es una máquinabipolar.) Demuestre que cuando se asume que los costados de la bobina del devanado de armadura oinducido se localizan en el entrehierro y no en las ranuras, es posible calcular, a partir de la ecuación decorte de flujo, el voltaje inducido en una bobina de fase de inducido concentrada con N número de vueltasy de paso completo cuyo resultado es idéntico al que se obtuvo al utilizar la ecuación 4.48. Considere queel radio promedio del entrehierro es r y que la longitud del entrehierro es g (g « r) .
• Solución
El procedimiento se iniciará con la observación de que la ecuación de corte de flujo requiere que elconductor se mueva y que el campo magnético no presente variación temporal. Así, con el objetivo deaplicar esta ecuación para calcular el campo magnético del estator, es necesario precisar la referencia delcuerpo del rotor.
En la estructura del rotor el campo magnético es constante; por su parte, cuando los costados de labobina del estator se dirigen al centro del entrehierro r, parecen moverse con una velocidad mmer que esperpendicular al flujo del entrehierro y es dirigida en forma radial. Si se asume que el rotor y los ejesmagnéticos de las bobinas de fase se alinean al tiempo t = 0, la ubicación de los costados de las bobinascomo una función del tiempo se obtendrá por medio de 8r= -mmet. Como consecuencia, el voltaje indu-cido en un costado de una vuelta puede calcularse de la siguiente forma
el = lv 1.Bag(Or) = lúJmer Bpico sen (-úJmet)
Existen N número de vueltas por bobina y dos costados por vuelta. De esta forma, el voltaje total de labobina se obtiene mediante la siguiente expresión
e = 2Nel = -2NlúJmerBpicosenúJmet
A partir de la ecuación 4.48, el voltaje inducido en la bobina de paso completo del estator bipolar seobtiene mediante la siguiente ecuación
Al sustituir <l>p= 2Bpico1r de la ecuación 4.44 se obtiene la siguiente expresión
e = -úJmeN(2Bpicolr)senúJmet
que es idéntica al voltaje que se determinó al emplear la ecuación de corte de flujo.
En condiciones normales de operación del estado estable de las máquinas de corrientealterna, el interés se enfoca en los valores rms de los voltajes y de las corrientes en vez de ensus valores instantáneos. A partir de la ecuación 4.48 el valor máximo del voltaje inducido es
(4.49)
Su valor rms es
2rr ¡;:;e.; = ,J2fmekwNphct>p = ...;2 rrfmekwNphct>p
donde f me es la velocidad eléctrica del rotor medida en Hz, que también es igual a la frecuenciaeléctrica del voltaje generado. Observe que estas ecuaciones son idénticas en la forma a lasecuaciones fem correspondientes. El movimiento relativo de una bobina y una onda de densi-
(4.50)

214 CAPíTULO 4 Introducción a las máquinas de rotación
dad de flujo espacial con amplitud constante en una máquina de rotación produce voltaje delmismo modo como lo hace un flujo con variación temporal en conjunción con las bobinasestacionarias en un transformador. La rotación introduce el elemento de variación temporal ytransforma una distribución espacial de densidad de flujo en una variación temporal de voltaje.
El voltaje inducido en un devanado único es un voltaje monofásico. Para la producción deun conjunto de voltajes trifásicos balanceados, deberán emplearse tres devanados desplazados120 grados eléctricos en el espacio, como se mostró en el esquema elemental de la figura 4.12.La máquina de la figura 4.12 está conectada en Y, como consecuencia cada voltaje del devana-do es un voltaje de fase a neutro. Así, la ecuación 4.50 suministra el voltaje de línea a neutrorms producido en esta máquina cuando Nph es el total de vueltas en serie por fase. Para unamáquina conectada en triángulo, el voltaje del devanado de voltaje calculado a partir de laecuación 4.50 será el voltaje de línea a línea de la máquina.
~~-------------------------Un generador síncrono de rotor de polos lisos de 60 Hz conectado en Y presenta un devanado de excita-ción con Nf vueltas distribuidas y un factor de devanado k¡-El devanado de armadura o inducido presentaN¿ vueltas por fase y un factor de devanado ka. La longitud del entrehierro es g, y el radio principal delentrehierro es r. La longitud activa del devanado de armadura o inducido es l. Las dimensiones y los datosdel devanado son los siguientes
Nf = 68 vueltas en serieN¿ = 18 vueltas/fase en serie
r = 0.53 m1 = 3.8 m
kf= 0.945k¿ = 0.933g =4.5 cm
El rotar es impulsado por turbina de vapor a una velocidad de 3 600 r/min. Para una corriente deexcitación de If= 720 A cd, calcule a) el valor pico de frnm fundamental (Fagl)pico producido por el deva-nado de excitación, b) el valor pico fundamental de la densidad de flujo (Bag1)pico en el entrehierro, e) elflujo fundamental por polo <Pp, y ti) el valor rrns del voltaje de circuito abierto generado en el inducido .
• Solución
a) A partir de la ecuación 4.8
4 (k¡N¡) 4 (0.945 x 68)(Fag¡)pico = - -- I¡ = - 720tt polos it 2
•4
= - (32.1)720 = 2.94 x 104 A . turnos/polon
b) Al utilizar la ecuación 4.12, se obtiene lo siguiente
_ JLo(Fag¡)pico _ 4rr x 10-7 x 2.94 x 10" _ O 82(Bag¡)pico - - - . 1 T
g 4.5 X 10-2
Debido al efecto de las ranuras que se ubican en el devanado de inducido, la mayor cantidad delflujo del entrehierro se limita a los dientes del estator. La densidad de flujo en los dientes del polocentral es mayor que el valor calculado en el inciso b), probablemente un factor alrededor de 2. Enuna estructura detallada esta densidad de flujo deberá calcularse para determinar si los dientes seencuentran muy saturados.

4.6 Voltaje generado 215
e) A partir de la ecuación 4.44
<l>p= 2(Bagl)picolr = 2(0.821)(3.8)(0.53) = 3.31 Wb
ti) A partir de la ecuación 4.50 con f me = 60 Hz
Erms.líneaneutr.ll = -Ji rrfm,kaNa<l>p = v'2 rr(60)(0.933)(18)(3.31)
= 14.8kV rms
El voltaje de línea a línea por lo tanto es
Erms.dellneaalínea =.,J3 (14.8 kV) = 25.7 kV rms
~~----------------------------------El rotar de la máquina que cita el ejemplo 4.5 va a devanarse nuevamente. El nuevo devanado de excita-ción tendrá un total de 76 vueltas en serie y un factor de devanado de 0.925. a) Calcule la corriente deexcitación que dará como resultado un valor pico de la densidad de flujo de entre hierro de 0.83 T. b)Calcule el voltaje de línea a línea rms correspondiente que se producirá si esta máquina modificada operacon este valor de corriente de excitación y 3 600 rpm .
• Solución
a) I¡= 696Ab) Enns, de línea a línea = 26.0 kV rms
4.6.2 Máquinas de corriente directa
En una máquina de corriente directa, a pesar de que el objetivo final es la generación de unvoltaje de corriente directa, se producen voltajes de corriente alterna en las bobinas del deva-nado de armadura o inducido cuando éstas giran a través de la distribución de flujo de corrientedirecta del devanado de excitación estacionaria, Por lo tanto, el voltaje alternante del devanadode armadura o inducido deberá rectificarse. De acuerdo con la sección 4.2.2, la rectificaciónmecánica la suministra el conmutador,
Considere única la bobina de inducido con N número de vueltas de la máquina elementalde corriente directa bipolar que se ilustra en la figura 4,17, El conmutador simple de dos seg-mentos suministra una rectificación de onda completa del voltaje de la bobina. Aunque ladistribución espacial del flujo del entrehierro en las máquinas de corriente directa en rarasocasiones es sinusoidal, es posible aproximar la magnitud del voltaje generado al asumir unadistribución sinusoidal. Como ya se ha estudiado, dicha distribución de flujo producirá unvoltaje de corriente alterna sinusoidal en la bobina de inducido, La rectificación del conmuta-dor producirá un voltaje de corriente directa a través de las escobillas, como se ilustra en lafigura 4.33, El valor promedio o corriente directa de este voltaje se determinan considerando elpromedio que se obtiene por medio de la ecuación 4.48,
(4.51)

216
Figura 4.33Voltaje entre las esco-billas en la máquinaelemental de corrientedirecta que se esque-matiza en la figura4.17.
CAPíTULO 4 Introducción a las máquinas de rotación
'hn.2n wto
En el caso de las máquinas de corriente directa, por lo general es más conveniente expre-sar el voltaje Ea en términos de la velocidad mecánica rom (rad/seg) o n(r/min). La sustituciónde la ecuación 4.46 en la ecuación 4.51 para una máquina multipolar produce
(POlOS) ( n )Ea = ---;- N~p(¡)m = polos N~p 30 (4.52)
El devanado de corriente directa con bobina única que se implica en este caso, obviamenteno es real en la práctica, pero después será esencial para examinar la acción de conmutadorescon más detalle. De hecho, la ecuación 4.52 también suministra resultados correctos para losdevanados de inducido distribuido de corriente alterna, si N se considera como el número totalde vueltas en serie entre las terminales de inducido. De manera común, el voltaje se expresa entérminos del número total de los conductores activos Ca y del número m de las trayectoriasparalelas a través del devanado de armadura o inducido. Debido a que se requieren dos costa-dos de la bobina para completar una vuelta y l/m de éstos se conectan en serie, el número devueltas en serie es Na = Cj(2m). Al sustituir este valor en la ecuación 4.52 se obtiene lo si-guiente
_ (POlOS) (Ca) _ (POlOS) (Ca)~- ~~- ~n2n m 60 m (4.53)
4.7 PARES EN MÁQUINAS DE POLOS NO SALIENTES
El comportamiento de cualquier dispositivo electromagnético como un componente de un sis-tema puede describirse en términos de las ecuaciones en sus terminales eléctricas y de sudesplazamiento, así como de su par-electromecánico. El objetivo de esta sección es deducir lasecuaciones para el voltaje y el par en una máquina elemental idealizada, los resultados podránampliarse posteriormente para incluir máquinas más complejas. Estas ecuaciones se obtienena partir de dos puntos de vista y mostrarán que básicamente se derivan de las mismas ideas.
En esencia, el primer punto de vista es el mismo que el que se plantea en la sección 3.6. Lamáquina será considerada como un elemento del circuito cuyas inductancias dependen de laposición angular del rotor. Las dispersiones de flujo Á y la coenergía del campo magnético seexpresarán en términos de las corrientes y las inductancias. El par se determina a partir de laderivada parcial de la energía o coenergía con respecto a la posición del rotor y los voltajesterminales a partir de las suma de las caídas de voltaje Ri y de la ley de Faraday dÁ/dt. Elresultado será un conjunto de ecuaciones diferenciales no lineales que describen el funciona-miento dinámico de la máquina.

4.7 Pares en máquinas de polos no salientes 217
El segundo punto de vista considera a la máquina como dos grupos de devanados queproducen flujo magnético en el entrehierro, un grupo en el estator y el otro en el rotor. Alrealizar suposiciones apropiadas concernientes a estos campos (similares a los que se utiliza-ron para deducir expresiones analíticas para las inductancias), se obtienen expresiones simplespara las dispersiones de flujo y la coenergía en el entrehierro en términos de las cantidades deexcitación. El par y el voltaje generado se determina a partir de estas expresiones. De estamanera, el par se expresa de manera explícita como la tendencia de dos campos magnéticospara alinearse, de la misma forma que los imanes permanentes tienden a alinearse, por lo tanto,el voltaje generado se expresa como el movimiento relativo entre un campo y un devanado.Estas ecuaciones conducen a un marco físico simple del comportamiento normal del estadoestacionario en las máquinas de rotación.
4.7.1 Punto de vista de circuito acoplado
Figura4.34Máquina bipolarelemental conentrehierro blando:a) distribución delinducido y b) represen-tación esquemática.
Considere el caso de la máquina elemental de entrehierro blando que se presenta en la figura4.34 con un devanado en el estator y otro en el rotor y con 0m como el ángulo mecánico entrelos ejes de los dos devanados. Estos devanados se distribuyen en un número de ranuras demanera que sus ondas de la fmm puedan aproximarse mediante sinusoides espaciales. En lafigura 4.34a los costados de la bobina s, -s y r, -r indican las posiciones de los centros decinturones de conductores que comprenden los devanados distribuidos. Una alternativa paraesquematizar estos devanados se muestra en la figura 4.34b, que también muestra direccionesde referencia para los voltajes y las corrientes. En este caso se asume que la corriente en ladirección de la flecha produce un campo magnético en el entrehierro con la misma dirección,de modo que una simple flecha define las direcciones de referencia para la corriente y el flujo.
El estator y el rotor son cilindros concéntricos, y las aberturas para las ranuras son insigni-ficantes. Como consecuencia, nuestro modelo elemental no incluye los efectos de los polossalientes que se estudian en capítulos posteriores. Se considera la suposición de que lasreluctancias del estator y el rotor también son insignificantes. Por último, aunque la figura 4.34muestra un máquina bipolar, se elaborarán las deducciones necesarias para el caso general deuna máquina multipolar, al reemplazar 0mpor el ángulo eléctrico del rotor
(POlOS)
f)me = -2- f)m (4.54)
s00
Eje magnético de r
a) b)

218 CAPíTULO 4 Introducción a las máquinas de rotación
Con base en estas suposiciones, se consideran como constantes las autoinductancias delestator y el rotor Lss Y Lm pero la inductancia mutua del estator al rotor depende del ánguloeléctrico ()meentre los ejes magnéticos de los devanados del estator y el rotor. La inductanciamutua se encuentra en su valor positivo máximo cuando ()me = O o 27r, es cero cuando ()me=±7r/2 y se encuentra en su valor negativo máximo cuando ()me= ±7r. Al asumir ondas sinusoidalesde la fmm y un entrehierro uniforme, la distribución espacial de la onda del flujo del entrehierroes sinusoidal, y la inductancia mutua será de la siguiente forma
Lsr(Bme) = Lsrcos (Bme) (4.55)donde el término e indica una inductancia que es una función del ángulo eléctrico ()me'La letramayúscula L indica un valor constante. Así, Lsr representa la magnitud de la inductancia mu-tua; es decir, representa este valor cuando los ejes magnéticos del estator y el rotor se alinean(()me = O). En términos de las inductancias, las dispersiones de flujo del rotor y del estator As yArson
As = Lssis + Lsr(Bme)ir = Lssis + Lsrcos (Bme)ir
Ar = Lsr(Bme)is + Lrrir = Lsrcos (Bme)is + Lrrir
(4.56)(4.57)
donde las inductancias se calculan como se indica en el apéndice B. En notación matricial
(4.58)
Los voltajes terminales Vs y u, son los siguientes
dAsVs = Rsis +-
dt
dArVr = Rrir+-
dt
(4.59)
(4.60)
donde R, YRrrepresentan la.s resistencias de los devanados del rotor y del estator, respectiva-mente.
Cuando el rotor se encuentra girando, ()medeberá considerarse como una variable.Al diferenciar las ecuaciones 4.56 y 4.57 Ysustituir los resultados en las ecuaciones 4.59
y 4.60, se obtiene lo siguiente
(4.61)
(4.62)
donde
dBme (P0210S) úJmdt = úJme = (4.63)
representa la velocidad instantánea en radianes eléctricos por segundo. En una máquina bipolar(como la que plantea la figura 4.34) ()meYwmeson iguales al ángulo de flecha o eje instantáneo()m Y a la velocidad del eje Wm, respectivamente. En una máquina multipolar se relacionan

4.7 Pares en máquinas de polos no salientes 219
mediante las ecuaciones 4.54 y 4.46. El segundo y tercer término de la porción derecha de lasecuaciones 4.61 y 4.62 L(dildt) representan los voltajes inducidos como los que se encontraronen los circuitos acoplados estacionarios, como es el caso de los devanados en los transforma-dores. El cuarto término de ambas ecuaciones se produce por el movimiento mecánico, ade-más es proporcional a la velocidad instantánea. Estos términos representan la velocidad devoltaje que corresponde al intercambio de potencia entre los sistemas eléctrico y mecánico.
El par electromecánico se determina a partir de la coenergía. De la ecuación 3.70, seobtiene lo siguiente
(4.64)
Observe que la coenergía de la ecuación 4.64 se expresó de manera específica en términos delángulo del eje (Jm debido a que la expresión del par de la ecuación 3.68 requiere que el par seobtenga a partir de la derivada de la coenergía en relación con el ángulo espacial (Jm Yno conrespecto al ángulo eléctrico (Jme' Así, a partir de la ecuación 3.68
(POlOS) ..= - -2- LsrlslrSen()me (4.65)
donde T representa el par electromecánico que actúa para acelerar el rotor (por ejemplo, un parpositivo actúa para incrementar el ángulo (Jm)' El signo negativo en la ecuación 4.65 indica queel par mecánico actúa para atraer los campos magnéticos del estator y del rotor con el fin dealinearlos.
Las ecuaciones 4.61, 4.62 Y4.65 son un conjunto de tres ecuaciones que relacionan lasvariables eléctricas vs' is, v" ir Ylas variables mecánicas Ty (Jm' Estas ecuaciones, en conjuntocon las restricciones impuestas en las variables eléctricas mediante las redes conectadas a lasterminales (fuentes o cargas e impedancias externas) y las restricciones impuestas al rotor(pares de torsión aplicados y pares de inercia, de fricción y elásticos), determinan el funciona-miento del dispositivo y sns características como un dispositivo de conversión entre los siste-mas eléctrico externo y el sistema mecánico. Estas ecuaciones son diferenciales no lineales yson difíciles de resolver excepto bajo circunstancias específicas. En esta sección no se hacereferencia particular a su solución; más bien, se aplican sólo como pasos en el desarrollo de lateoría de las máquinas de rotación.
~~----------------------------------------Considere la máquina elemental bipolar con dos devanados que se encuentra en la figura 4.34. La flechao eje de esta máquina se acopla a un dispositivo mecánico que pudiera estar hecho con el fin de absorbero producir un par de torsión mecánico en una amplia variedad de velocidades. Esta máquina puedeconectarse y operar de numerosas formas. Para este ejemplo, se considerará que el devanado del rotor se

220 CAPiTULO 4 Introducción a las máquinas de rotación
excita con una corriente directa Ir Yel devanado del estator se conecta a una fuente de ea que absorbe osuministran potencia eléctrica. Se considerará que la corriente del estator es la siguiente
t, = 1, cos w,t
donde t = O se elige de manera arbitraria como el momento en que la corriente del estator presenta unvalor pico.
a) Obtenga una expresión para el par magnético creado por la máquina, mientras que la velocidad varíapor medio del control del dispositivo mecánico conectado a su eje.
b) Determine la velocidad a la cual se producirá el par promedio si se considera que la frecuencia delestator es de 60 Hz.
e) De acuerdo con la suposición de las excitaciones de fuente y corriente, ¿qué voltajes se inducen enlos devanados del estator y del rotor a velocidad síncrona (rom = roe)?
• Solución
a) A partir de la ecuación 4.65 para una máquina bipolar:
T = -L"i,i,sen()m
Para las condiciones de este problema, con 8m = romt = O
T = -L"I,l,cosw,t sen (wmt + 8)
donde oi; representa la velocidad angular en el sentido de las manecillas del reloj que se aplica alrotor mediante un impulso mecánico y O representa la posición angular del rotor a t = O. Al utilizaruna identidad trigonométrica.! se obtiene lo siguiente
IT = - 2. L"l,I,{sen [(wm + w,)t + 8] + sen [(wm - w,)t + 8l!
El par consiste en dos términos sinusoidales con variación temporal de frecuencias rom + roe yrom - roe. Como se muestra en la sección 4.5, la corriente alterna aplicada al devanado del estatormonofásico bipolar en la máquina de la figura 4.34 crea dos ondas de flujo, una viaja en la direcciónpositiva de rom con velocidad angular roe y la segunda onda viaja en la dirección negativa 8m tambiéncon velocidad angular roe. La interacción del rotor con estas dos ondas de flujo es el factor queproduce dos componentes de la expresión para el par.
b) Excepto cuando rom = ±roe el par que se promedió en un periodo suficientemente largo equivale acero. Pero si to; = roe' el rotor se mueve en sincronía con la onda de flujo del estator que viaja endirección positiva, y el par se convierte en
IT = - - L"I,I,[sen (2wet + 8) + sen 8]
2 •
El primer término sinusoidal es un componente de doble frecuencia cuyo valor promedio es cero. Elsegundo término es el promedio del par
Un promedio de par diferente de cero se producirá también cuando rom = -roe que sólo significa larotación en dirección de las manecillas del reloj; ahora, el rotor se mueve en sincronía con la onda deflujo del estator que se mueve en dirección negativa. El signo negativo en la expresión para Tprom
significa que un valor positivo de Tprom actúa para reducir O.
2 sen a cos tl = 4 [sen (a + tl) + sen (a - tl)l.

4.7 Pares en máquinas de polos no salientes 221
Esta máquina es síncrona monofásica idealizada. Presenta un estator con frecuencia de 60 Hz,que produce un promedio de par diferente de cero para velocidades de ±mm = me = 2lr60 radlsegcorrespondiente a velocidades de ±3 600 r/min, este hecho se observa en la ecuación 4.41.
e) A partir de los términos segundo y cuarto de la ecuación 4.61 (con (Je = (Jm = mmt + 0), el voltajeinducido en el estator cuando mm = me es
A partir de los términos tercero y cuarto de la ecuación 4.62, el voltaje inducido en el rotor es
er = -woL,,!,[sen wet COS (wet + 8) + cos w,t sen (wet + 8)]
= -weL,,!, sen (2wet + 8)
El componente de rotación regresivo del flujo del estator induce un voltaje de doble frecuencia en elrotor, mientras que el componente de rotación progresiva, que gira en sincronía con el rotor, sepresenta como un flujo de corriente directa hacia el rotor, y, como consecuencia, no induce voltajeen el devanado del rotor.
Ahora considere una máquina con entrehierro uniforme con numerosos devanados en elestator y en el rotor. Los mismos principios generales que aplican al modelo elemental de lafigura 4.34 también se emplean en la máquina de multidevanado. Cada devanado presenta supropia autoinductancia y sus inductancias mutuas con otros devanados. Las autoinductancias ylas inductancias mutuas entre los pares de devanados que se encuentran sobre el mismo ladodel entrehierro son constantes si se considera la suposición de que el entrehierro es uniforme yla saturación magnética es insignificante. Sin embargo, las inductancias mutuas entre los paresde los devanados del estator y del rotor varían como el coseno del ángulo entre sus ejes magné-ticos. El par de torsión resulta de la tendencia a alinearse que presenta el campo magnético delos devanados del rotor con respecto a los devanados del estator. Este hecho se puede expresarmatemáticamente como la suma de sus términos, de manera similar a la ecuación 4.65.
~~-------------------------Considere una máquina síncrona trifásica tetrapolar con un entrehierro uniforme. Suponga que el deva-nado de auto inducido y las inductancias mutuas son constantes
De manera similar, suponga que la autoinductancia del devanado de excitación L¡ es constan-te, mientras que las inductancias mutuas entre el devanado de excitación y los tres devanados de inducidode fase varían con respecto al ángulo (Jm entre los ejes magnéticos del devanado de excitación y el de lafase a
Lbf = Lafcos (20m - 120°)
Lcf = Lafcos (20m + 120°)

ia = la cos (roet + 8)
222 CAPíTULO 4 Introducción a las máquinas de rotación
Demuestre que cuando el campo se excita con una corriente constante l¡y el inducido se excita pormedio de corrientes trifásicas balanceadas de la siguiente forma
ib = la cos (roet - 120° + 8)
ic = la cos (roet + 120° + 8)
el par será constante cuando el rotor gira a una velocidad síncrona de Ws como se obtiene por la ecua-ción 4.40 .
• Solución
El par se calcula a partir de la coenergía, como se describió en la sección 3.6. Esta máquina en particular esun sistema de cuatro devanados y la coenergía se conformará por cuatro términos que incluyen 1/2inductancia mutua multiplicada por el cuadrado de la corriente del devanado correspondiente, así como elproducto de los términos que consiste en las inductancias mutuas entre los pares de devanados multiplica-dos por las corrientes de los devanados correspondientes. Al observar que sólo los términos que incluyenlas inductancias mutuas entre el devanado de excitación y los tres devanados de inducido de fase contienenexpresiones que varían con respecto a em, es posible describir la coenergía de la siguiente forma
= (términos constantes) + Laflalf [cos 2em cos (roet + 8)
+ cos (20m - 120°) cos (roet - 120° + 8)
+ cos (20m + 120°) cos (roet + 120° + 8)]
= (términos constantes) + ~Laflalfcos (2em - roet - 8)
Ahora, el par de torsión se determina a partir de la derivada parcial de Wfld con respecto al ángulo em
aW~d IT= --aOm ....
la,lb·le.'!
= -3Laflalfsen (20•• - roet - 8)
A partir de esta ecuación, se observa que el par de torsión será constante cuando el rotor gire a unavelocidad síncrona ws, de manera que
, (ro2')tO", = rost =
en cuyo caso el par será igual a
T = 3Laf1aIf sen 8
Advierta que a diferencia del caso de la máquina de fase única que cita el ejemplo 4.6, el par esconstante para esta máquina trifásica que opera a velocidad síncrona bajo condiciones trifásicas balan-ceadas. Como se ha estudiado, lo anterior se debe al hecho de que la onda de la fmm del estator consisteen una onda de flujo rotacional única, al contrario de lo que ocurre en el caso de la fase única en donde lacorriente de fase del estator produce una onda de flujo rotacional progresiva y regresiva. Esta ondaregresiva no se encuentra en sincronía con el rotor y como consecuencia es responsable del componentedel par variante en el tiempo de doble frecuencia que se planteó en el ejemplo 4.6.

4.7 Pares en máquinas de polos no salientes 223
----------------------------------Para el ejemplo 4.7 donde se cita una máquina tetrapolar, determine la velocidad síncrona en donde unpar constante se producirá si las corrientes del rotar son de la forma
ia = la cos (w.t + 8)
ib = la cos (w.t + 1200 + 8)
i, = la cos (w.t - 1200 + 8)
Solución
ws = -(w./2)
En el ejemplo 4.7 se determinó que bajo condiciones balanceadas, una máquina síncronatetrapolar producirá un par constante a una velocidad angular de rotación igual a la mitad de lafrecuencia de excitación eléctrica. Este resultado puede generalizarse para demostrar que bajocondiciones balanceadas de operación, una máquina síncrona multipolar producirá un par cons-tante a una velocidad de rotor en la que éste gire en sincronía con la onda de flujo rotacionalproducida por las corrientes del estator. Como consecuencia, a este hecho se le denominavelocidad sincrona de la máquina. A partir de las ecuaciones 4.40 y 4.41, la velocidad síncronaes igual a ws= (2/polos)we en radianes/segundo o ns = (120/polos) fe en r/min.
4.7.2 Punto de vista del campo magnético
Figura 4.35Máquina bipolar sim-plificada: a) modeloelemental y b) diagra-ma vectorial para lasondas de la fmm. Elpar de torsión se pro-duce por la tendenciade los campos mag-néticos del rotar y elestator a alinearse.Advierta que estasfiguras se esquema-tizan considerando ósr
con un valor positivo,por ejemplo, con laonda de la fmm delrotar Fr que guía a laFsdel estator.
En el planteamiento de la sección 4.7.1 las características de una máquina de rotación observa-da desdel punto de vista de sus terminales eléctricas y mecánicas se expresaron en términos delas inductancias de sus devanados. Esta perspectiva proporciona un entendimiento mínimoacerca de los fenómenos físicos que se llevan a cabo dentro de la máquina. En esta sección seexplorará una formulación alternativa relacionada a los campos magnéticos que interactúan.
Como se ha estudiado, las corrientes en los devanados de la máquina crean un flujo mag-nético en el entrehierro entre el estator y el rotor, mientras los patrones de flujo se completan através del hierro del estator y el rotor. Esta condición corresponde a la presencia de polosmagnéticos en el estator y en el rotor, que están centrados sobre sus respectivos ejes magnéti-cos, como se mostró en la figura 4.35a para una máquina tetrapolar con un entrehierro blando.
a) b)

224 CAPíTULO 4 Introducción a las máquinas de rotación
El par se produce mediante la tendencia de los dos campos magnéticos a alinearse con respectoa sus ejes magnéticos. Una ilustración física útil es la situación de dos barras magnéticas gira-torias que están articuladas en sus centros sobre el mismo eje; en este caso existirá un par,proporcional al desplazamiento angular de las barras magnéticas, que actuará para alinearlas.En la máquina que se presenta en la figura 4.35a, el par de torsión resultante es proporcional alproducto de las amplitudes de las ondas de la fmm del estator y del rotor y también es unafunción del ángulo Osrdimensionado a partir del eje de la onda de las frnm del estator conrespecto al del eje del rotor. De hecho, se demostrará que para una máquina con entrehierroblando, el par es proporcional al seno Osr'
En el caso de una máquina típica, la mayor parte del flujo producido por los devanados delestator y del rotor cruza el entrehierro y vincula ambos devanados; a este hecho se le denominaflujo mutuo, y es análogo directamente al flujo magnetizante o mutuo en un transformador. Sinembargo, parte del flujo que se produce por los devanados del estator y del rotor no cruza elentrehierro; este hecho es similar al flujo de dispersión en un transformador. Estos componen-tes del flujo se denominan flujo de dispersión del rotor y flujo de dispersión del estator. Loscomponentes de dicho flujo de dispersión incluyen el flujo de ranura, el flujo de la punta deldiente, el flujo de vuelta final y las armónicas espaciales en el campo del entrehierro.
No obstante, sólo el flujo mutuo es importante en lo que se refiere a la producción del parde torsión. Los flujos de dispersión afectan el desempeño de la máquina, pero únicamente enrelación a los voltajes que inducen en sus respectivos devanados. Su efecto en las característi-cas eléctricas dentro de las inductancias de dispersión, se considera similar a incluir las inductan-cias de dispersión en los modelos de transformadores que se estudiaron en el capítulo 2.
Al expresar el par de torsión en términos de las corrientes del devanado o sus fuerzasmagnetomotrices resultantes, las ecuaciones que se producen no incluyen los términos quecontienen las inductancias de dispersión. El análisis en esta sección será en relación al flujomutuo resultante. Se realizará una deducción para la coenergía magnética almacenada en elentrehierro en términos de las fuerzas magnetomotrices del estator y del rotor y también delángulo Osrentre sus ejes magnéticos. El par se determina a partir de la derivada parcial de lacoenergía con respecto al ángulo Osr'
Con fines de simplicidad analítica, se asumirá que la longitud radial g del entrehierro (laholgura radial entre el rotor y el estator) es menor en comparación con el radio del rotor y elestator. Para una máquina con entrehierro blando construida con acero eléctrico de alta per-meabilidad magnética, es posible demostrar que este hecho resulta en un flujo de entrehierroque se dirige fundamentalmente en forma radial; pero también que existe relativamente pocadiferencia entre la densidad de flujo que se encuentra en la superficie del rotor, en la superficiedel estator o en cualquier distancia intermedia radial en el entrehierro. El entrehierro de excita-ción se representa como un campo radial Hag o Bag cuya intensidad varía con respecto al ángu-lo que se encuentra en la periferia del entrehierro. La integral de línea de Hag a través delentrehierro simplemente es Hagg e iguala la Fsrfmm resultante del entrehierro producida porlos devanados del estator y del rotor; así
(4.66)
dondel término F indica la onda de la frnm como una función del ángulo alrededor de laperiferia del entrehierro.
Las ondas de la fmm del estator y del rotor son ondas sinusoidales espaciales con Osrquerepresenta el ángulo de fase entre los ejes magnéticos en grados eléctricos. También es posiblerepresentarlas mediante los factores espaciales F, y F r trazados a lo largo de los ejes magnéti-

4.7 Pares en máquinas de polos no salientes 225
cos de las ondas de la frnm del estator y del rotor, respectivamente, como se ilustra en la figura4.35b. La fmm resultante Fsr que actúa a través del entrehierro, y que también es una ondasinusoidal, representa la suma de los vectores. A partir de la fórmula trigonométrica para ladiagonal de un paralelogramo, su valor pico se determina a partir de
(4.67)
en donde los términos de F representan los valores pico de las ondas de la frnm. El camporadial resultante Hag es una onda espacial sinusoidal cuyo valor pico Hag, pico es, a partir de laecuación 4.66,
(4.68)
Ahora considere la coenergía del campo magnético acumulada en el entrehierro. A partirde la ecuación 3.49, la densidad de la coenergía al punto donde la intensidad del campo mag-nético es H será f.1o/2)H2 en unidades SI. Así, la densidad de la coenergía que se promediasobre el volumen del entrehierro será f.1o/2 veces el valor promedio de H2ag' El valor promediodel cuadrado de la onda sinusoidal representa la mitad del valor pico. Por lo tanto,
¡.,Lo ((Hag2)~icO) __ ¡.,L40 (Fgsr)2Promedio de la densidad de la coenergía = 2 (4.69)
La coenergía total se determina del siguiente modo
W~d = (promedio de la densidad de la coenergía)(volumen del entrehierro)
¡.,Lo (Fsr)2 ¡.,Lon Di 2=- - nDig=--F4 g 4g sr
(4.70)
donde l representa la longitud axial del entrehierro y D es su diámetro promedio.A partir de la ecuación 4.67, la coenergía acumulada en el entrehierro se expresa en térmi-
nos de los valores pico de las amplitudes de las ondas de la fmm del estator y del rotor y entérminos del ángulo de fase espacial que hay entre ellos; así
I ¡.,Lon Di (2 2 )Wftd = --- F; + F; + 2FsFrcos8sr4g (4.71)
Al reconocer que si se mantiene constante la frnm equivale a mantener constante la co-rriente, es posible obtener una expresión para el par electromecánico T, en términos de loscampos magnéticos que interactúan al considerar la derivada parcial de la coenergía de excita-ción con respecto al ángulo. Para una máquina bipolar
élW~d I (¡.,Lon Di)T = -- = - --- FsFrsen8sres; F"F, 2g(4.72)
La expresión general para el par de torsión para una máquina multipolar es
(4.73)

226 CAPíTULO 4 Introducción a las máquinas de rotación
En esta ecuación, osr representa el ángulo de fase espacial eléctrico entre las ondas de la frnmdel rotar y del estator, así como el par T que actúa en la dirección que corresponde a la acele-ración del rotar. Así, cuando osr es positivo, el par es negativo y la máquina opera como ungenerador. De manera similar, un valor negativo de osr corresponde a un par positivo y, comoconsecuencia, a la acción del rotar.
Esta importante ecuación establece que el par es proporcional a los valores pico de lasondas de la fmm del estator y del rotar F, YF" así como al seno del ángulo eléctrico de faseespacial osr que hay entre dichas ondas. El signo negativo significa que los campos tienden aalinearse a sí mismos. Pares iguales y opuestos se ejercen sobre el rotar y el estator. Asimismo,el par sobre el estator se transmite a través de la estructura de la máquina hasta su base.
En este momento es posible comparar los resultados obtenidos por medio de la ecuación4.73 con los de la ecuación 4.65. Al reconocer que F,es proporcional a is Yque F; es proporcio-nal a ir' se observa que son similares en forma. De hecho, deberían ser iguales, como se com-prueba al sustituirlas expresiones apropiadas para Fs, Fr(sección 4.3.1) YLsr (apéndice B). Ad-vierta que estos resultados se obtuvieron al asumir que la reluctancia del hierro es insignificante.Sin embargo, ambas técnicas son válidas para el caso de la permeabilidad finita del hierro.
Con referencia a la figura 4.35b, es posible apreciar que F; seno de osr representa el com-ponente de la onda F; en cuadratura con la onda F; Así, el par es proporcional al producto deun campo magnético y el componente del otro campo en cuadratura con éste, que es muysimilar al producto cruz del análisis vectorial. También advierta que en la figura 4.35b
F, sen osr = Fsr sen S, (4.74)
y
F r sen osr = Fsr sen Os (4.75)
donde, como se observó en la figura 4.35, or representa el ángulo dimensionado a partir del ejede la onda de la frnm resultante con respecto al eje de la onda resultante de la fmm del rotar. Demanera similar, Os representa el ángulo dimensionado a partir del eje de la onda de la fmm delestator con respecto al eje de la onda de la frnm resultante.
El par de torsión que actúa acelerando el motor, se expresa en términos de la onda de lafrnm resultante Fsr al sustituir ya sea la ecuación 4.74 o 4.75 en la ecuación 4.73 de esta forma
(POlOS) (¡';"OJTDI)T = - -2- ~ FsFsrsenos (4.76)
(POlOS) (¡';"OJTDI)T = - -2- ~ FrFsrsenor (4.77)
La comparación de las ecuaciones 4.73, 4.76 Y4.77 demuestra que el par se expresa en térmi-nos de los campos magnéticos que lo componen y que se deben a cada corriente que actúa demanera independiente, como sucede en la ecuación 4.73, o en términos del campo resultante ode cualquiera de los componentes, como ocurre en las ecuaciones 4.76 y 4.77, en caso de quese utilice el ángulo correspondiente entre los ejes de los campos. En el análisis de máquinas, lacapacidad de diferenciar cualquiera de estos términos representa una ventaja.
En las ecuaciones 4.73, 4.76 Y4.77, los campos se expresaron en términos de los valorespico de sus ondas de la frnm. Cuando la saturación magnética es insignificante, los campos

4.7 Pares en máquinas de polos no salientes 227
obviamente son capaces de expresarse en términos de los valores pico de las ondas de la den-sidad de flujo o en términos del flujo total por polo. Así, el valor pico Bag del campo que sedebe a la onda de la frnm distribuida de manera sinusoidal en el entrehierro uniforme de lamáquina es de f.1oFag. picdg, donde Fag. pico representa el valor pico de la onda de la frnm. Porejemplo, la frnm resultante Fsr produce una onda de densidad de flujo resultante, cuyo valorpico es Bsr = f.1oFs,Jg. Por lo tanto Fsr = gBs,Jf.1o Yla sustitución en la ecuación 4.77 proporcionala siguiente expresión
(POlOS) (re Di)T = - -2- -2- BsrFrsenor (4.78)
Una de las limitaciones inherentes al diseño de los dispositivos electromagnéticos es lasaturación de la densidad de flujo en los materiales magnéticos. Debido a la saturación en losdientes del inducido el valor pico Bsr de la onda resultante de la densidad de flujo en el entrehierrose limita aproximadamente de 1.5 a 2.0 T. El máximo valor permitido para la corriente deldevanado, y como consecuencia la onda de la frnm correspondiente, se limitan por el aumentode la temperatura en el devanado y otros requisitos del diseño. Debido a la densidad de flujoresultante y a la frnm que se muestra de manera explícita en la ecuación 4.78, esta ecuación seencuentra en una disposición conveniente en relación con los objetivos del diseño, por lo tanto,se aplica para calcular el máximo par que puede obtenerse de una máquina de dimensionesestablecidas.
~--------------------Un motor síncrono de 60 Hz tetrapolar de 1 800 r/min presenta una longitud en el entrehierro de 1.2 mm.El diámetro promedio del entrehierro es de 27 cm, y su longitud axial es de 32 cm. El devanado del rotores de 786 vueltas con un factor de devanado de 0.976. Asuma que las consideraciones térmicas limitan lacorriente del rotor a 18 A, después calcule el máximo par y la potencia de salida que es posible obtener apartir de esta máquina .
• Solución
Primero, se determinará la fmm máxima del rotor a partir de la ecuación 4.8
Al asumir que el valor pico del flujo del entrehierro resultante se limita a 1.5 T, es posible calcular elmáximo par a partir de la ecuación 4.78 al establecer O, igual a -rt/2 (se reconoce que los valores negati-vos de O" con la fmm del rotor desfasan la fmm resultante, que corresponde a un valor positivo, es decir,un par de torsión motor)
Tmáx = (po~os) (re ~l) Bs,(F,)máx
( ~) (re x 0.2~ x 0.32) 1.5 x 4400 = 1 790 N . m
Para una velocidad síncrona de 1 800 r/min, COm = n, (re/30) = l 800 (1t'/30) = 60 tt radlseg, y de estaforma, la potencia correspondiente se calcula como P máx = comT máx = 337 kW.

228 CAPíTULO 4 Introducción a las máquinas de rotación
~~---------------------------------Repita el ejemplo 4.8 para el caso de un motor síncrono de 60 Hz bipolar con una longitud de entrehierrode 1.3 mm, un diámetro promedio del entrehierro de 22 cm y con una longitud axial de 41 cm. El deva-nado del rotor presenta 900 vueltas y un factor de devanado de 0.965. La corriente máxima del rotor es de22 A.
Solución
Tmáx = 2 585 N . m y Pmáx = 975 kW
Las alternativas de la ecuación del par surgen cuando se reconoce que el flujo resultantepor polo es
<l>p = (valor promedio de B sobre un polo) (área polar) (4.79)
y que el valor promedio de una sinusoide de la mitad de la longitud de onda es 2/n veces suvalor pico. Así,
2<l>p = - Bpicon (
tt DI ) ( 2Dl )polos = polos Bpico (4.80)
donde Bpico representa el valor pico de la onda de la densidad de flujo correspondiente. Porejemplo, al utilizar el valor pico del flujo resultante Bsr Y al sustituir la ecuación 4.80 en laecuación 4.78 se obtiene la siguiente expresión
(4.81)
donde <l>sr representa el flujo resultante por polo producido mediante el efecto combinado delas fuerzas magnetomotrices del estator y del rotor.
Con el fin de hacer un recordatorio, en este momento ya se disponen de numerosasecuaciones en las que es posible expresar el par de una máquina con entrehierro uniforme entérminos de sus campos magnéticos. Todas son ecuaciones que establecen que el par es pro-porcional al producto de las magnitudes de los campos que interactúan y al seno del ánguloespacial eléctrico que se encuentra entre sus ejes magnéticos. El signo negativo indica que elpar electromecánico actúa en la dirección que favorece el decremento del ángulo que hay entrelos campos. En el estudio preeliminar de los tipos de máquinas, la ecuación 4.81 será la formapreferente.
Con respecto a las ecuaciones del par y al procedimiento que conduce a su obtención, esposible señalar otra observación. No existe restricción en la deducción de que la onda de lafrnm o la onda de la densidad de flujo permanezca estacionaria en el espacio. Estas ondaspueden ser estacionarias o viajeras, como se estudió en la sección 4.5. De acuerdo con lo que seha analizado, si los campos magnéticos del estator y del rotor son constantes en amplitud yviajan alrededor del entrehierro a la misma velocidad, se producirá un par de torsión por mediode la tendencia a alinearse de los campos del rotor y del estator de acuerdo con las ecuacionesdel par.

4.8 Máquinas lineales 229
4.8 MÁQUINAS LINEALESEn términos generales, cada tipo de máquina que se ha presentado en este texto puede fabricarseen una versión lineal, además de las versiones de máquinas rotantes que se citan regularmentey que se analizan de manera exhaustiva en los capítulos posteriores. De hecho, para fines deesclarecimiento, numerosos tipos de máquinas que se estudian en este libro se esquematizanen su forma desarrollada (plano cartesiano), como ocurre en el caso de la figura 4.l9b.
Quizá la aplicación más conocida de los motores lineales es en el área del transporte. Enestas aplicaciones, los motores de inducción lineal generalmente tienen un estator de corrientealterna del vehículo móvil y un rotor estacionario de conducción que constituye las bobinas.En estos sistemas, además de suministrar propulsión, las corrientes inducidas en la bobinatambién suministran levitación, al ofrecer de este modo un mecanismo para transporte de altavelocidad sin las dificultades que se asocian con la interacción de la rueda con el carril entransportes más convencionales.
Los motores lineales también encuentran aplicación en la industria de máquinas y herra-mientas y en robótica donde el movimiento lineal (que se requiere para posicionar y en laoperación de manipuladores) es un requisito común. Además, las máquinas lineales recíprocasse construyen para manejar compresores y alternadores recíprocos.
El análisis de las máquinas lineales es bastante similar al de las máquinas de rotación. Entérminos generales, las dimensiones y los desplazamientos lineales sustituyen a los angulares,y las fuerzas reemplazan a los pares. Salvo estas excepciones, tanto las expresiones para losparámetros de la máquina como la estructura de los resultados se obtienen de manera similar alas formas que se presentaron para las máquinas de rotación.
Considere el devanado lineal que se presenta en la figura 4.36. Este devanado consiste deN número de vueltas por ranura que llevan una corriente i, y es análogo directamente al deva-nado de rotación que se mostró en forma desarrollada en la figura 4.25. De hecho, la únicadiferencia es que la posición angular ea se sustituye por la posición lineal z.
El componente fundamental de la onda de la frnm que se muestra en la figura 4.36 puededeterminarse de manera directa a partir de la ecuación 4.13, simplemente al reconocer que estedevanado presenta una longitud de onda igual a f3 y que el componente fundamental de estaonda de la frnm varía como el coseno (2nzlf3). Así, al reemplazar el ángulo ea en la ecuación4.13 por 2nzlf3, es posible determinar el componente fundamental de la onda de la fmm de lasiguiente manera:
4 (Ni) (2JTZ)• Hagl = -; 2g cos T (4.82)
Si una máquina real presenta un devanado distribuido (similar al de su contraparte derotación que se muestra en la figura 4.20) que consiste en un total de Nph vueltas distribuidassobre p periodos en z (por ejemplo, sobre una longitud de pf3), el componente fundamental deHag puede determinarse por analogía con la ecuación 4.15
4 (kwNphi) (2JTZ)Ha 1 = - --- cos --g JT 2pg ~ (4.83)
donde kw representa el factor de devanado.En forma similar al planteamiento de la sección 4.5.2, un devanado lineal se elabora a
partir de tres devanados, como los que muestra la figura 4.31, con cada fase desplazada en su

230
Figura 4.36La fmm y el campo Hde un devanado linealde paso completo.
CAPíTULO 4 Introducción a las máquinas de rotación
FogFog! fundamental
...- ....--- Ni ...-;
" 2 ;;; " ;
; " /
/ O " /' Z2 ; _Ni /2; " ;
"" " ;
,'" 2 -- ~
I ~ ~ ~ tg
-P/
a)
is -V Rog! fundamental -._---- _ , RogNi / .•.- / -----
'/2 , J.""/;; '\2 ...? Ni O ~, !2 ;;/ z, "".•..
" 2 Ni ,--\" .•."...••. 2g .... -\ frnm
N2
-f3I
Fag! fundamental
b)
posición por una distancia de f3/3 y con cada fase excitada por corrientes trifásicas balanceadasde frecuencia angular roe
(4.84)
(4.85)
(4.86)
Al seguir el desarrollo de las ecuaciones 4.26 a 4.38, es posible observar que existirá unafrnm viajera positiva única que puede describirse de manera directa a partir de la ecuación 4.38simplemente al reemplazar ea por 2,.z /f3 como
+ 3 (2rr z ):F (z , t) = -Fmáx cos -- - wet2. f3
(4.87)
donde Fmáx se obtiene por medio de la ecuación
_ 4 (kwNph)Fmáx - - -- 1mtt 2p (4.88)
A partir de la ecuación 4.87 se observa que el resultado de un frnm que viaja en direcciónz con una velocidad angular de
wef3v = - = fef3
2rr(4.89)
donde fe representa la frecuencia de excitación en hertz.

4.8 Máquinas lineales 231
~ -----------------------------------------------------------------------------Un motor de corriente alterna lineal trifásico presenta un devanado con una longitud de onda de f3 = 0.5m y un entrehierro de 1.0 cm en longitud. Presenta un total de 45 vueltas, con un factor de devanado de kw= 0.92, que se distribuye sobre la longitud total del devanado de 3f3 = 1.5 m. Suponga que los devanadosse excitan con corrientes trifásicas balanceadas con una amplitud pico de 700 A Y de frecuencia 25 Hz.Calcule a) la amplitud de la onda de fmm resultante, b) la densidad máxima de flujo del entrehierrocorrespondiente y e) la velocidad de la onda viajera de la frnm .
• Solución
a) A partir de las ecuaciones 4.87 y 4.88, la amplitud de la onda de la frnm resultante es
3 4 (kwNph)Fpico = 2 -; --;¡¡;- t:
3 4 (0.92 X 45)= - - 7002 ti 2x3
= 8.81 X 103 A/m
b) La densidad máxima de flujo del entrehierro se determina a partir del resultado que se obtiene en elinciso a) al dividirlo entre la longitud del entrehierro y multiplicado por J.Io
g
(4rr X 10-7)(8.81 x 103)
0.01= 1.11T
e) Por último, la velocidad de la onda viajera se determina a partir de la ecuación 4.89
v = f.f3 = 25 x 0.5 = 12.5 mis
------------------Un motor síncrono lineal trifásico presenta una longitud de onda de 0.93 m. Se observa que es una ondaviajera a velocidad de 83 km/h. Calcule la frecuencia de la excitación eléctrica que se requiere bajo estacondición de operación.
Solución
f = 24.8 Hz
En esta publicación no se estudia de manera completa a las máquinas lineales. En su lugar,se anima al lector a reconocer que los fundamentos de este tipo de máquinas así como suanálisis corresponden directamente a la máquinas de rotación. Una diferencia notable entreambos tipos de máquinas es que las máquinas lineales presentan efectos de punta, correspon-dientes a los campos magnéticos que se liberan del entrehierro en forma progresiva y regresi-

232 CAPíTULO 4 Introducción a las máquinas de rotación
va. Estos efectos se encuentran más allá del estudio de este libro, pero se tratan con detalle enla literatura que se ha publicado.'
4.9 SATURACiÓN MAGNÉTICA
Las características presentes en las máquinas eléctricas dependen en gran medida de la aplica-ción de los materiales magnéticos. Estos materiales se requieren para crear el circuito magné-tico y el fabricante los utiliza para obtener características específicas en las máquinas. Como seestudió en el capítulo 1, los materiales magnéticos son algo menos que ideales. Al incremen-tarse su flujo, se da lugar a la saturación, con la consecuencia de que su capacidad de per-meabilidad magnética comienza a decrecer, además de la carencia de efectividad al contribuircon la densidad de flujo total en la máquina.
Tanto el par electromecánico como el voltaje generado en todas las máquinas dependen delas reluctancias de las porciones de hierro de los circuitos magnéticos y de los entrehierros. Porconsiguiente, la saturación pudiera afectar de manera considerable las características que pre-sentan las máquinas.
Otro aspecto de la saturación, más agudo y difícil de evaluar sin las comparaciones expe-rimentales y teóricas, tiene que ver con su influencia en las premisas básicas a partir de las quese desarrolla el enfoque analítico de las máquinas. Específicamente, las ecuaciones para lafrnm del entrehierro por lo general se basan en la suposición de que la reluctancia es insignifi-cante en el hierro. Cuando estas ecuaciones se aplican a las máquinas reales con diferentesniveles de saturación en el hierro, es posible esperar errores significativos en los resultadosanalíticos. Para perfeccionar estas ecuaciones analíticas, la máquina real puede reemplazarsepor una equivalente al tomar en cuenta las siguientes consideraciones: una cuyo hierro presen-te una reluctancia insignificante pero cuya longitud de entrehierro se incremente lo suficientepara absorber la caída de potencial magnético en el hierro de la máquina real.
De manera similar, también se incorporan los efectos de la carencia de uniformidad en elentrehierro como ranuras y conductos de ventilación al incrementar la longitud efectiva delentrehierro. Por último, estas diferentes aproximaciones técnicas deberán verificarse y confir-marse por métodos experimentales. En los casos donde dichas técnicas simples se encuentreninadecuadas es posible utilizar análisis a detalle, como los que emplean el elemento finito uotras técnicas numéricas. Sin embargo, se debe reconocer que el uso de estas técnicas repre-senta un aumento importante en la complejidad del modelo.
Las características de saturación de ,las máquinas de rotación generalmente se presentanen forma de una característica de circuito abierto, también denominado curva de magnetizaciáno de saturación. En la figura 4.37 se ilustra un ejemplo. Esta característica representa la curvade magnetización para el tipo específico de hierro y la geometría particular de la máquina bajoconsideración. Para una máquina síncrona, la curva de saturación de circuito abierto se obtieneal operar la máquina a una velocidad constante y al medir el voltaje de inducido de circuitoabierto como una función de la corriente de campo. La línea recta tangente que va en la parteinferior de la curva representa la línea de entrehierro, que corresponde a los bajos niveles delflujo dentro de la máquina. Bajo estas condiciones la reluctancia del hierro de la máquina por
3 Véase, por ejemplo, S. Yamamura, Theory of Linear lnduction Motors, 2a. edición, Halsted Press, 1978. TambiénS. Nasar e 1. Boldea, Linear Electric Motors: Theory, Design and Practical Applications, Prentice Hall, 1987.

Figura 4.37Curva característicatípica de circuitoabierto y línea deentrehierro.
Figura 4.38Solución del elementofinito para la distribu-ción de flujo alrededorde un polo saliente.(General ElectricCompany.)
4.9 Saturación magnética 233
Excitación del campo en amperesvueltas o en amperes campo
lo genera] es insignificante, y la frnm que se requiere para excitar a la máquina es simplementela requerida para vencer la reluctancia del entrehierro. Si no fuera por los efectos de la satura-ción, la línea de entrehierro y la curva característica de circuito abierto coincidirían. A í, lapartida de la curva de la línea de entrehierro es una indicación del grado de aturación que seencuentra presente. En las máquinas comunes la razón con un voltaje nominal del total de lafmm que se requiere sólo por el entrehierro general se ubica entre 1.1 y 1.25.
Superficie blandade inducido equivalente
Flujo de dispersión
Devanado de excitación

234
Figura 4.39Onda de la densidadde flujo correspondien-te a la figura 4.38 consus componentesfundamentales yarmónicos terciarios.
CAPíTULO 4 Introducción a las máquinas de rotación
/1...../ ,
Distribución de ladensidad de flujo
Componentefundamental
Componentearmónico terciario/
/
-, 1....,../
-¡:.=- Línea central del polo
En una etapa de diseño la característica de circuito abierto se calcula a partir de las técni-cas de información del diseño como los análisis del elemento finito. En la figura 4.38 se mues-tra una solución típica delemento finito para la distribución de flujo alrededor del polo en unamáquina con polos salientes. En la figura 4.39 se observa la distribución del flujo del entrehierroque se determinó a partir de esta solución, además de los componentes armónicos terciarios yfundamentales.
Además de los efectos de saturación, la figura 4.39 señala de manera clara el efecto de unentrehierro no uniforme. Como se esperaba, la densidad de flujo sobre la cara polar, donde elentrehierro es diminuto, es mucho mayor que la que se encuentra a distancia del polo. Este tipode análisis detallado es de gran utilidad para el diseñador al obtener propiedades específicas dela máquina.
De acuerdo con lo que se ha estudiado, la curva de magnetización para una máquinasíncrona real se determina al operar la máquina como un generador sin carga al medir losvalores del voltaje terminal correspondiente a una serie de valores de la corriente de excita-ción. Para un motor de inducción, la máquina opera a una velocidad síncrona o se acerca a ella(en cuyo caso se inducirá muy poca corriente en los devanados del rotor), y los valores de lacorriente magnetizante se obtienen para una serie de valores impresos del voltaje del estator.Sin embargo, es necesario hacer énfasis en que la saturación en una máquina con carga com-pleta se lleva a cabo como consecuencia de la frnrn total que actúa sobre el circuito magnético.Dado que la distribución del flujo bajo carga generalmente difiere de las condiciones de nocarga, los detalles de las características de saturación en la máquina pueden variar con respectoa la curva de circuito abierto que se muestra en la figura 4.37.
4.10 FLUdOS DE DISPERSiÓNEn la sección 2.4 se mostró que en un transformador con dos devanados el flujo que crea cadadevanado se separa en dos componentes. Un componente consiste en el flujo que vinculaambos devanados, y el otro componente consiste en el flujo que vincula únicamente el devana-do que crea el flujo. El primer componente, denominado flujo mutuo, es responsable del aco-

Figura 4.40Tressistemas de bobi-na muestran compo-nentes de flujo mutuo yde dispersión produ-cidos por la corrienteen la bobina 1.
4.10 Flujos de dispersión 235
plamiento entre las dos bobinas. El segundo, denominado flujo de dispersión, contribuye sóloa la autoinductancia de cada bobina.
Advierta que el concepto de flujo de dispersión y flujo mutuo son significativos sólo en elcontexto de un sistema de multidevanado. Para sistemas de tres o más devanados, el lectordeberá proseguir con cuidado. Considere, por ejemplo, el sistema de tres devanados de lafigura 4.40. En esta figura se muestran los diferentes componentes del flujo creado por lacorriente en el devanado l. En este caso q>J23 representa claramente el flujo mutuo que vinculalos tres devanados, y q>1l representa el flujo de dispersión ya que vincula únicamente al devana-do 1. Sin embargo, q>J2 representa el flujo mutuo con respecto al devanado 2 a pesar de repre-sentar el flujo de dispersión con respecto al devanado 3, mientras que q>J3 representa el flujomutuo en lo que respecta al devanado 3 y el flujo de dispersión con respecto al devanado 2.
Las máquinas eléctricas a menudo contienen sistemas de devanados múltiples que requie-ren un estudio cuidadoso al considerar las contribuciones de flujo a los diferentes devanados.Aunque los detalles de tales análisis no se encuentran en la perspectiva de estudio de este libro,es útil analizar estos efectos de manera cualitativa y describir cómo afectan a las inductanciasde las máquinas básicas.
Flujos armónicos espaciales del entrehierro En este capítulo se ha observado que a pesarde que las bobinas únicas distribuidas crean un flujo en el entrehierro con una cantidadsignificante de contenido armónico espacial, es posible distribuir estos devanados de maneraque se destaque el componente fundamental espacial, mientras que los efectos armónicos sereducen ampliamente. Como consecuencia, es posible ignorar los efectos armónicos y consi-derar sólo los flujos fundamentales espaciales al calcular las ecuaciones B.26 y B.27 para lainductancia mutua y la autoinductancia.
A pesar de que con frecuencia los componentes armónicos espaciales presentan valorespequeños, sí existen. En las máquinas de corriente directa estos componentes son flujos útilesque producen pares y, como consecuencia, pueden considerarse como flujos mutuos entre losdevanados del rotor y el estator. Sin embargo, en las máquinas de corriente alterna generanvoltajes armónicos temporales u ondas de flujo de rotación asíncronas. Estos efectos general-mente no pueden considerarse de manera rigurosa en la mayoría de los análisis normalizados.No obstante, es consistente con las suposiciones básicas de este tipo de análisis al reconocerque estos flujos forman parte del flujo de dispersión de los devanados individuales que loproducen.
+
+0---=-1
+

236
Figura 4.41Flujo que produce unlado de una bobina enuna ranura.
Figura 4.42Vista de un extremo delestator de un turbo-generador de 26 kV908 MVA de 3 600 r/mincon devanadosenfriados por agua. Lasconexiones hidráulicaspara el flujo enfriadorabastecen a cadavuelta final del deva-nado. (General ElectricCompany.)
CAPfTULO 4 Introducción a las máquinas de rotación
Flujo de dispersión en ranura La figura 4.41 muestra el flujo que crea el costado de unabobina única dentro de una ranura. Observe que además del flujo que atraviesa el entrehierro,el cual contribuye al flujo del entrehierro, existen componentes de flujo que atraviesan la ranu-ra. Ya que este flujo vincula únicamente la bobina que lo produce, también forma un compo-nente de la inductancia de dispersión del devanado que la produce.
Flujos de final de vuelta La figura 4.42 muestra los devanados finales del estator en unamáquina de corriente alterna. La distribución del campo magnético creada por las vueltas fina-les es muy compleja. En términos generales, estos flujos no contribuyen al flujo útil mutuo delrotor y del estator, pero sí contribuyen a la inductancia mutua.

4.11
4.11 Resumen 237
A partir de este análisis se observa que la ecuación B.26 para la autoinductancia deberá, entérminos generales, modificarse con un término adicional L/, que representa la inductancia dedispersión del devanado. Como se analizó en el capítulo 1, esta inductancia de dispersióncorresponde a la inductancia de dispersión del devanado de un transformador. Aunque lainductancia de dispersión generalmente es difícil de calcular por medios analíticos y que sedebe determinar mediante técnicas de aproximación o empíricas, desempeña un papel impor-tante en el funcionamiento de la máquina.
RESUMEN
Este capítulo presenta una breve y básica descripción de los tres tipos elementales de máquinasde rotación: síncronas, de inducción y máquinas de corriente directa. Los voltajes se generanpor medio del movimiento relativo de un campo magnético con respecto a un devanado, y seproducen los pares mediante la interacción de los campos magnéticos de los devanados delrotor y del estator. Las características de los diferentes tipos de maquinaria se determinan através de los métodos de conexión y excitación de los devanados, pero los principios básicosson esencialmente los mismos.
Las herramientas analíticas básicas para el estudio de las máquinas de rotación sonecuaciones para los voltajes generados y para el par electromecánico. Al considerarlas en con-junto, estas herramientas expresan el acoplamiento entre los sistemas eléctrico y mecánico.Para desarrollar una teoría cuantitativa razonable, sin la confusión que surge con las especifi-caciones, se llevan a cabo numerosas aproximaciones simplificadas. En el estudio de las má-quinas de corriente alterna se considera la suposición de la variación sinusoidal temporal delos voltajes y las corrientes, así como las ondas espaciales sinusoidales de la densidad de flujodel entrehierro y de la fmm. Al examinar la fmm que producen los devanados de corrientealterna se observa que el componente fundamental espacial es el más importante. Por otraparte, en las máquinas de corriente directa la fmm del devanado de armadura o inducido seaproxima más a una onda dentada. Sin embargo, para fines del estudio preeliminar en estecapítulo, se asumen para ambos tipos de máquinas, de corriente alterna y de corriente directa,distribuciones de la fmm sinusoidales. Esta suposición se examinará de manera más detalladaen el caso de las máquinas de corriente directa en el capítulo 7. La ley de Faraday da comoresultado la ecuación 4.50 para el voltaje rms producido en una máquina de corriente alterna ola ecuación 4.53 para el voltaje promedio generado entre las escobillas en una máquina decorriente directa.
Al examinar la onda de l~ fmm de un devanado trifásico, se observan las corrientes queproduce un campo de rotación magnética del entrehierro con amplitud constante en velocidadsíncrona, como lo muestra la figura 4.31 y la ecuación 4.39. La importancia de este factor nodebe pasarse por alto, lo cual significa que es posible operar tales máquinas, ya sea comomotores o generadores, bajo condiciones con par constante (y, por consecuencia, potenciaeléctrica constante, como se analiza en el apéndice A), al eliminar la doble frecuencia, el parque se asocia de manera inherente con las máquinas de fase única. Por ejemplo, imagine ungenerador de 60 Hz monofásico multimegawatt sujeto a una pulsación de potencia instantáneade multimegawatts cerca de 120 Hz. El descubrimiento de los campos rotatorios condujo a lainvención del motor polifásico de inducción y simple, robusto y confiable de arranque automá-tico, que se analiza en el capítulo 6. (Un motor de inducción monofásico no arranca por sí solo;necesita un devanado de arranque auxiliar, como lo muestra el capítulo 9.)

238 CAPiTULO 4 Introducción a las máquinas de rotación
En las máquinas de fase única o en las máquinas polifásicas que operan bajo condicionesdes balanceadas, el componente de rotación retrógrada de la onda de la frnm de inducido pro-duce corrientes y pérdidas en la estructura del rotar. Así, la operación de las máquinas polifásicasbajo condiciones balanceadas no sólo elimina el segundo componente armónico del par que segenera, sino que también suprime una fuente importante de la pérdida en el rotar y el calenta-miento del mismo. La invención de las máquinas polifásicas que operan bajo condicionesbalanceadas es lo que ha hecho posible el diseño y la construcción de enormes generadoressíncronos con índices tan grandes como 1 000 MW.
Bajo la suposición de los campos magnéticos de distribución sinusoidal en el entrehierro,se dedujeron expresiones para el par de torsión magnético. Una sencilla ilustración física parala producción del par es la de dos imanes, uno en el estator y otro en el rotar, como se muestraen el esquema de la figura 4.35a. El par actúa en la dirección que favorece la alineación de losimanes. Para obtener un análisis cuantitativo, razonablemente cercano, sin detenerse en deta-lles, se asume un entrehierro blando y se ignora la reluctancia de las trayectorias magnéticas enlas secciones de hierro, conservando un recordatorio de que esta suposición pudiera no serválida en todas las situaciones y que quizá se requiera de un modelo con más especificaciones.
En la sección 4.7 se dedujeron ecuaciones para el par magnético a partir de dos puntos devista, ambos con base en los principios fundamentales presentados en el capítulo 3. El primerpunto de vista considera a la máquina como un conjunto de circuitos acoplados magnética-mente con inductancias que dependen de la posición angular del rotor, como se analizó en lasección 4.7.1. El segundo considera a la máquina desde el punto de vista de los campos mag-néticos en el entrehierro, como lo plantea la sección 4.7.2. Se ha demostrado que el par puedeexpresarse como el producto del campo del estator, del campo del rotar y del seno del ánguloque se encuentra entre sus ejes magnéticos, como lo presenta la ecuación 4.73 o como cual-quiera de las ecuaciones que se obtuvieron de la ecuación 4.73. Ambos puntos de vista soncomplementarios, y la capacidad de diferenciar y aplicar los términos de las dos perspectivases útil para alcanzar un entendimiento óptimo del funcionamiento de las máquinas.
Este capítulo se enfocó en los principios básicos que subyacen a la teoría de las máquinasde rotación. Por sí misma, es obvio que está incompleta. Muchas preguntas permanecen sinrespuesta. ¿Cómo se aplican estos principios a la determinación de las características de lasmáquinas de corriente directa, de inducción y síncronas? ¿Cuáles son algunos de los proble-mas prácticos que surgen a partir del uso de hierro, cobre y aislamiento en las máquinas reales?¿Cuáles son algunas de las consideraciones técnicas y económicas que afectan las aplicacionesde las máquinas de rotación? ¿Cuáles son los factores físicos que limitan las condiciones bajolas cuales una máquina opera de manera satisfactoria? En el apéndice D se analizan algunos deestos problemas. Al estudiar en conjunto el capítulo 4 con el apéndice D se obtiene una intro-ducción a tratamientos más específicos de las máquinas de rotación que se examinan en loscapítulos posteriores.
4.12 PROBLEMAS4.1 El rotar de un generador síncrono de 6 polos gira a una velocidad mecánica de 1200 r/min.
a) Exprese esta velocidad mecánica en radianes por segundo.b) ¿Cuál es la frecuencia del voltaje generado en hertz y en radianes por segundo?e) ¿Qué velocidad mecánica en revoluciones por minuto se requiere para generar un
voltaje a una frecuencia de 50 Hz?

4.12 Problemas 239
4.2 El voltaje generado en una fase de un generador síncrono trifásico sin carga es de laforma v (t) = Vo cos úJ t. Formule una ecuación para el voltaje en las dos fases restantes.
4.3 Se utiliza un motor trifásico para controlar o impulsar una bomba. Se observa (medianteel uso de un estroboscopio) que la velocidad del motor disminuye de 898 r/min, cuandola bomba esta en vacío, hasta llegar a un nivel de 830 r/min, cuando la bomba es cargada.
a) ¿Es un motor síncrono o de inducción?b) Calcule la frecuencia del voltaje de inducido que se aplica en hertz.e) ¿Cuántos polos presenta el motor?
4.4 El objetivo de este problema es ilustrar la manera en que los devanados de inducido deciertas máquinas, por ejemplo, máquinas de corriente directa, pueden representarse demanera aproximada por láminas de corriente uniforme, el grado de correspondencia cre-ce a medida que se distribuye el devanado en mayor número de ranuras alrededor de laperiferia del inducido. Para fines de este problema, considere un inducido con ochoranuras distribuidas de manera uniforme alrededor de 360 grados eléctricos (correspon-diente a un intervalo de distancia de un par polar). La longitud del entrehierro es unifor-me, las aberturas de las ranuras son muy pequeñas y la reluctancia del hierro es insigni-ficante.
La disposición en conjunto es de 360 grados eléctricos de inducido con sus ranurasesquematizadas en la forma que las presenta la figura 4.23a, donde se observa de 1 a 8ranuras de izquierda a derecha. El devanado consiste en 8 bobinas de vuelta única, cadauna lleva corriente directa de 10 A. Los costados de la bobina se colocan en cualquierade las ranuras 1 a 4 y llevan una corriente dirigida dentro del papel; las ranuras, coloca-das en cualquiera de las bobinas 5 a 8, llevan corriente dirigida hacia fuera del papel.
a) Considere que las ocho ranuras se localizan con un costado de la ranura 1 y los otrosen la ranura 5. Las ranuras restantes permanecen vacías. Esquematice la onda fmmrectangular producida por las ranuras.
b) A continuación considere que las cuatro bobinas presentan un costado en la ranura 1y el otro costado en la ranura 5, mientras que las cuatro bobinas restantes presentanun costado en la ranura 3 y el otro en la ranura 7. Esquematice las ondas componen-tes de la fmm rectangular producidas por cada grupo de bobinas, y superponga loscomponentes para suministrar la onda resultante de la fmm.
e) Ahora, considere que las dos bobinas se localizan en las ranuras 1 y 5, dos en lasranuras 2 y 6, dos en las ranuras 3 y 7 Ydos en las ranuras 4 y 8. De nuevo superpon-ga las ondas rectangulares componentes para producir la onda resultante. Adviertaque el ejercicio puede sistematizarse y simplificarse al reconocer que la onda de lafmrn es simétrica con respecto a su eje y cada ranura requiere de un paso que esdirectamente proporcional al número de conductores amperes en dicha ranura.
ti) Considere ahora que el inducido consiste en 16 ranuras por 360 grados eléctricos,con un costado de la bobina por ranura. Esquematice la onda de la fmrn resultante.
4.5 Una máquina de corriente alterna conectada en Y trifásica inicialmente opera bajo con-diciones trifásicas balanceadas. Debido a que no existe una conexión neutra en el deva-nado, se requiere que las corrientes en los dos devanados restantes permanezcan igualesy en oposición. Bajo esta condición, calcule las magnitudes relativas resultantes de lasondas de la fmm viajera negativa y positiva.

240
."l •• ,
Figura 4.43Problema 4.8: a) bobi-na de paso completo yb) bobina de pasofraccionado.
CAPíTULO4 Introducción a las máquinas de rotación
4.6 ¿Cuál es el efecto sobre la frnm de rotación y las ondas de flujo de un devanado trifásicoque se produce por corrientes trifásicas balanceadas si dos de las conexiones de fase seintercambian?
4.7 En una máquina balanceada de dos fases, los dos devanados se disponen 90 grados eléc-tricos en el espacio, y las corrientes en los dos devanados se encuentran desfasados 90grados eléctricos en tiempo. Para una máquina con tales características, elabore el proce-so que dará como resultado una ecuación para la onda de la frnm de rotación correspon-diente a la ecuación 4.39 (que se obtiene de una máquina trifásica).
4.8 En este problema se investigan las ventajas de disminuir el paso de las bobinas de estatoren una máquina de corriente alterna. La figura 4.43a muestra una bobina única de pasocompleto en una máquina bipolar. La figura 4.43b muestra una bobina de paso fraccio-nado que presenta una separación de sus costados en {3radianes, en vez de n radianes(180°), como es el caso de la bobina de paso completo.
Para un entrehierro con distribución de flujo radial de la forma
s,= L e, coe nen impar
donde n = 1 corresponde a la armónica espacial fundamental, n = 3 a la tercer armóni-ca espacial, etc.; asimismo, la dispersión de flujo de cada bobina es la integral de B,sobre una superficie con intervalo de una bobina. De esta forma, para la armónica es-pacial de número n, la razón de la máxima dispersión de flujo de la bobina de pasofraccional es
r: r:-f3/2 B; cos ne de -f3/2 cos ne de71:/2 = 71:/2 = [sen (n.B/2)I
1-71:/2 s, cos ne de 1-71:/2 cos ne de
Es común, por ejemplo, fraccionar el paso de las bobinas de una máquina de co-rriente alterna alrededor de 30 grados eléctricos ({3= 5n16 = 150°). Para n = 1, 3, 5calcule la reducción fraccionaria de encadenamientos de la dispersión de flujo debida ala disminución del paso.
Bobina con N númerode vseltas
Estator Estator
a) b)

Figura 4.44Generador elementalesquematizado para elproblema 4.13.
4.12 Problemas 241
4.9 Una máquina síncrona de 60 Hz de 6 polos presenta un devanado de rotar con un totalde 138 vueltas en serie y un factor de devanado k, = 0.935. La longitud del rotar es de1.97 m, el radio del rotar es de 58 cm y la longitud del entrehierro = 3.15 cm.
a) ¿Cuál es la velocidad de operación nominal en r/min?b) Calcule la corriente de devanado del rotar que se requiere para alcanzar un valor
pico de la densidad fundamental de flujo del entrehierro de 1.23 T.e) Calcule el correspondiente flujo por polo.
4.10 Asuma que un devanado de fase de la máquina síncrona que se cita en el problema 4.9consiste en una bobina de paso completo, con 11 vueltas en la bobina por par polar y conlas bobinas conectadas en serie para formar el devanado de fase. Si la máquina opera auna velocidad nominal y bajo las condiciones de operación del problema 4.9, calcule elvoltaje rms generado por fase.
4.11 La máquina síncrona del problema 4.9 presenta un devanado trifásico con 45 vueltas enserie por fase y un factor de devanado de kw = 0.928. Para la condición de flujo y veloci-dad nominal del problema 4.9, calcule el voltaje rms generado por fase.
4.12 La máquina síncrona trifásica del problema 4.9 se trasladará a una aplicación que requie-re que su frecuencia de operación se reduzca de 60 a 50 Hz. Esta aplicación requiere que,de acuerdo con las condiciones de operación que se consideran en el problema 4.9, elvoltaje rms generado sea igual a 13.0 kV de línea a línea. Como consecuencia, el induci-do de la máquina deberá volverse a devanar con un número diferente de vueltas. Alasumir que el factor de devanado es de kw = 0.928, calcule el número de vueltas en serieque se requieren por fase.
4.13 La figura 4.44 muestra un rotar bipolar que gira dentro de un estator blando que llevauna bobina de 110 vueltas. El rotar produce una distribución espacial sinusoidal del flujoen la superficie del estator; el valor pico de la onda de la densidad de flujo es de 0.85 Tcuando la corriente en el rotar es de 15 A. El circuito magnético es lineal. El diámetrointerno del estator es de 11 cm y su longitud axial es de 0.17 m. El rotar se maneja a unavelocidad de 50 r/seg.
a) El rotar se excita por una corriente de 15 A. Al considerar un tiempo de cero comoel instante en que el eje del rotar es vertical, determine la ecuación para el voltajeinstantáneo generado en la bobina del estator de circuito abierto.
Costados de labobina del estator

242 CAPiTULO 4 Introducción a las máquinas de rotación
b) El rotor ahora se excita por una corriente de alternante sinusoidal de 50 Hz cuyovalor pico es de 15 A. Como consecuencia, la corriente del rotor regresa cada mediarevolución; se estima que el tiempo se encuentra en su valor máximo justo cuando eleje del rotor es vertical (por ejemplo, justo cuando se alinea con la bobina del estator).Al considerar un tiempo igual a cero, como el instante en que el eje del rotor esvertical, determine la ecuación para el voltaje instantáneo generado en la bobina decircuito abierto del estator. En algunas ocasiones, este esquema se sugiere como ungenerador de corriente directa sin un conmutador; el hecho es que si la mitad de losvoltajes alternados que se generan en el inciso a) se regresan mediante la inversiónde polaridad de un devanado de excitación (rotor), entonces un voltaje directo pulsantese producirá en el estator. Analice las posibilidades de que este esquema funcione.
4.14 Un devanado bipolar trifásico se excita mediante corrientes balanceadas trifásicas de60 Hz, como se describe en las ecuaciones 4.23 a 4.25. Aunque la distribución del deva-nado se ha diseñado con el fin de minimizar las armónicas, se conservan las armónicasespaciales tercera y quinta. Así, la fmm de fase a se formula de la siguiente manera
Para las fases b se formulan ecuaciones similares (reemplazar ()a por ()a - 120°) Y e(reemplazar ()aPor ()a+ 120°). Calcule la fmm total trifásica. ¿Cuál es la velocidad angu-lar y la dirección de la rotación de cada componente de la fmm?
4.15 Los datos de placa de un generador de corriente directa indican que produce un voltajede salida de 24 V de corriente directa cuando se opera a una velocidad de 1 200 r/min. ¿Aqué factor deberá cambiarse el número de vueltas del inducido de manera que para elmismo flujo de campo por polo el generador produzca un voltaje de salida de 18 V decorriente directa a una velocidad de 1 400 r/min?
4.16 El inducido de un generador de corriente directa bipolar tiene un devanado de 320 vuel-tas en serie. Cuando opera a una velocidad de 1 800 rlmin, el voltaje de circuito abiertoque se genera es de 240 V. Calcule <Dp, el flujo del entrehierro por polo.
4.17 El diseño de un motor de inducción de 60 Hz, y de 230 V trifásico de 6 polos se basa enel núcleo del estator con una longitud de 21 cm y un diámetro interno de 9.52 cm. Ladistribución del devanado del estator que se seleccionó presenta un factor de devanadode kw = 0.925. El inducido se conecta en Y, y por lo tanto el voltaje por fase proporcionales de 230/ v'3 v.a) El diseñador debe elegir el número de vueltas del inducido, de manera que la densi-
dad de flujo en la máquina sea lo suficientemente grande para llevar a cabo unautilización correcta del material magnético sin ser mayor y tener como consecuen-cia una saturación excesiva. Para lograr este objetivo, la máquina se diseñará conuna densidad de flujo máxima fundamental en el entrehierro de 1.25 T. Calcule elnúmero de vueltas en serie que se requieren por fase.
b) Para una longitud del entrehierro de 0.3 mm, calcule la autoinductancia de la fase deinducido con base en el resultado del inciso a) y aplique las fórmulas del apéndiceB. Ignore la reluctancia del hierro en el rotor y del estator, así como la inductanciade dispersión en el inducido.
4.18 Un generador experimental trifásico de 60 Hz bipolar presenta un radio de rotor de 5.71cm, una longitud de rotor de 18.0 cm, y una longitud de entrehierro de 0.25 mm. El

4.12 Problemas 243
devanado de excitación del rotor consiste en 264 vueltas con un factor de devanado dek; = 0.95. El devanado de armadura o inducido se conecta en Y, está compuesto de 45vueltas por fase con un factor de devanado de kw= 0.93.
a) Calcule el flujo por polo y la máxima densidad de flujo fundamental en el entrehierroque resultará en un circuito abierto, de 60 Hz y un voltaje en el inducido de 120 Vrms/fase (de línea a neutro).
b) Calcule la corriente directa de excitación que se requiere para lograr las condicionesde operación que se citan en el inciso a).
e) Calcule el valor pico de la inductancia mutua del devanado de excitación al devana-do de fase del inducido.
4.19 Elabore un programa en MATLAB que calcule las vueltas en serie del devanado dearmadura o inducido y del devanado de excitación para un motor síncrono conectado enY trifásico de acuerdo con la siguiente información
Radio del rotor, R (metros)Longitud del entrehierro, g (metros)Frecuencia eléctrica, feFactor del devanado de armadura o inducido, k¡Voltaje rms terminal de línea a línea de circuito abierto nominal Vnominal
Corriente de campo a un voltaje terminal de circuito abierto nominal I¡Longitud del rotar, 1 (metros)Número de polos, polosValor pico de la densidad de flujo fundamental del entrehierro, Bpico
Factor del devanado de armadura o inducido, kw
4.20 Un generador síncrono de 60 Hz de 4 polos presenta una longitud del rotor de 5.2 cm, undiámetro de 1.24 m y una longitud de entrehierro de 5.9 cm. El devanado del rotorconsiste en una conexión en serie de 63 vueltas por polo con un factor de devanadode k; = 0.91. El valor pico de la densidad de flujo fundamental del entrehierro se limita a1.1 T Y la corriente del devanado del rotor a 2 700 A. Calcule el par de torsión máximo(N . m) y la potencia de salida (ME) que abastecen a esta máquina.
4.21 Las consideraciones térmicas que limitan la corriente de campo del generador síncronoexperimental del problema 4.18 ascienden a un valor máximo de 2.4 A. Si el valor picode la densidad de flujo fundamental del entrehierro se limita a un máximo de 1.3 T,calcule el par máximo eN . m) y la potencia (kW) que puede producir este generador.
4.22 La figura 4.45 muestra un corte transversal de una máquina que presenta un devanado enel rotor f y dos devanados idénticos en el estator a y b cuyos ejes se encuentran encuadratura. La autoinductancia de cada devanado del estator es de Laa Y del devanado delrotor es de Lff' El entrehierro es uniforme. La inductancia mutua entre un devanado delestator depende de la posición angular del rotor y se puede considerar de la siguienteforma
donde M representa el valor máximo de la inductancia mutua. La resistencia de cadadevanado de estator es de Ra.

244
Figura 4.45Rotor cilíndrico de unamáquina elementalbitáslca síncronaesquematizada para elproblema 4.22.
CAPíTULO 4 Introducción a las máquinas de rotación
-aEstator
a) Deduzca una ecuación general para el par de torsión T en términos del ángulo ea,para los parámetros de la inductancia y las corrientes instantáneas ia, h e i¡- ¿Aplicaesta ecuación cuando el rotor se encuentra en reposo? ¿Y cuando el rotor se encuen-tra girando?
b) Suponga que el rotar es estacionario y que las corrientes directas constante /a = /0,h = /0 e /f = 2/0 abastecen a los devanados en las direcciones indicadas por lospuntos y cruces en la figura 4.45. Si se le permite el movimiento al rotor, ¿girarácontinuamente o tenderá al reposo? Si la respuesta es la segunda opción, ¿a quévalor de ea sucederá?
e) El devanado del rotor ahora se excita mediante una corriente constante /f mientrasque los devanados del estator llevan corrientes balanceadas bifásicas
El rotor gira a una velocidad síncrona de manera que su posición angular ins-tantánea se obtiene mediante la ecuación ea = cat - 8, donde 8 representa el ángulode fase que describe la posición del rotor cuando t = O. La máquina es síncronabifásica básica. Obtenga una ecuación para el par bajo estas condiciones.
d) Bajo las condiciones que cita el inciso e), obtenga una ecuación para los voltajesterminales instantáneos de la§ fases a y b del estator.
4.23 Considere la máquina síncrona bifásica del problema 4.22. Obtenga una ecuación para elpar que actúa en el rotor si éste gira a una velocidad angular constante, de modo que ea =ox + 8, y las corrientes de fase pierdan el balance de manera que
ia = vIz/a cos cot ib = vIz(/a + /') sen cot
¿Cuáles son los pares con promedio de tiempo e instantáneo bajo esta condición?4.24 La figura 4.46 muestra un corte transversal de una máquina síncrona de polos salientes
que presenta dos devanados de estator idénticos, a y b, sobre un núcleo de acero lamina-do. El rotor de polos salientes se fabrica de acero y lleva un devanado de campo f conec-tado a los anillos deslizantes.

Figura 4.46Corte transversal deuna máquina síncronade polos salientesesquematizada para elproblema 4.24.
4.12 Problemas 245
-bEstator
Debido a la no uniformidad del entrehierro, la inductancia mutua y autoinductanciason funciones de la posición angular ea del rotor. Su variación con respecto a ea puedeaproximarse de la siguiente manera
Loa = Lo + L2 cos 280 Lbb = Lo - L2 cos 280 Mab = L2 sen 280
donde Lo Y Lz son constantes positivas. La inductancia mutua entre los devanados delrotor y del estator son funciones de ea
Ma¡ = M cos80 Mb¡ = M sen80
donde M es también una constante positiva. La autoinductancia del devanado de excita-ción, Lff, es constante, independiente de ea.
Considere las condiciones de operación en donde el devanado de excitación se acti-va mediante una corriente directa de l¡ y los devanados del estator se conectan a unafuente de voltaje bifásica balanceada con una frecuencia de aJ. Al girar el rotor a unavelocidad síncrona, su posición angular se obtiene mediante ea = on.
Bajo estas condiciones de operación, las corrientes del estator serán de la siguienteforma
ia = ..fila cos (wt + 8) ib = ..fila sen (wt + 8)
a) Obtenga una ecuación para el par electromagnético que actúa sobre el rotor.b) ¿Es posible que fa máquina opere como un motor y/o generador?e) ¿Continuará la máquina activa si la corriente de excitación l¡se reduce a cero?
Apoye su respuesta con una ecuación para el par y con una explicación de por qué dichaoperación es o no posible.
4.25 Un motor de corriente alterna lineal trifásico presenta un devanado de armadura o indu-cido con una longitud de onda de 25 cm. Se aplica al inducido un conjunto de corrientestrifásicas balanceadas a una frecuencia de 100 Hz.
a) Calcule la velocidad lineal de la onda de la fmm del inducido.b) En el caso de un rotor síncrono, calcule la velocidad lineal del rotor.e) En el caso de un motor de inducción que opera a un deslizamiento de 0.045, calcule
la velocidad lineal del rotor.

246 CAPíTULO 4 Introducción a las máquinas de rotación
4.26 El inducido del motor lineal que se muestra en el problema 4.25 presenta una longitudactiva total de 7 longitudes de onda, con un total de 280 vueltas por fase con un factor dedevanado de kw = 0.91. Para una longitud del entrehierro de 0.93 cm, calcule la magnitudrms de las corrientes trifásicas balanceadas que deberán suministrarse al inducido con elfin de alcanzar un valor pico de la densidad de flujo fundamental espacial de 1.45 T.
4.27 Un motor síncrono de imán permanente lineal bifásico presenta un entrehierro de longi-tud de 1.0 rnm, una longitud de onda de 12 cm y un polo con espesor de 4 cm. El rotarpresenta 5 longitudes de onda en su longitud. Los imanes permanentes sobre el rotor sedisponen de manera que producen una distribución de flujo magnético en el entrehierroque es uniforme sobre el ancho del polo, pero varía de forma sinusoidal en el espacio enla dirección que viaja el rotar. El valor pico de la densidad de flujo del entrehierro es de0.97 T.
a) Calcule el flujo neto por polo.b) Cada fase de inducido consiste de 10 vueltas por polo, con todos los polos conecta-
dos en serie. Al asumir que el devanado de armadura o inducido se extiende nume-rosas longitudes de onda más allá del rotar, calcule el valor pico de las dispersionesde flujo del devanado de armadura o inducido.
e) Si el rotar se mueve a una velocidad de 6.3 rn/seg, calcule el voltaje rms que seproduce en el devanado de inducido.