Cap´ıtulo 2 Ecuaciones Diferenciales Ordinarias · 2014-09-22 · Cap´ıtulo 2 Ecuaciones...
46
Cap´ ıtulo 2 Ecuaciones Diferenciales Ordinarias Resumen del tema Introducimos notaci´on, algunos resultados y m´ ultiples ejemplos que servir´an durante el curso como ilustraci´on. 2.1. Notaci´onb´ asica El problema de Cauchy asociado a una ecuaci´on diferencial ordinaria (edo) plantea la b´ usqueda de una funci´on de una variable de la que se conoce c´omo cambia su derivada. Una edo define una familia de soluciones o curvas. Si queremosuna curvaen particular tenemos que dar un dato extra de informaci´on. Para fijar la curva soluci´on hay que dar tantos datos como derivadas aparezcan en la ecuaci´on. El Problema de Cauchy,o problema de valor inicial: se busca una funci´on y : I → R m ,y(t) ∈ C 1 (I ) tal que (PC ) y (t) = f (t, y(t)), t ∈ I, y(t 0 ) = y 0 , t 0 ∈ I De manera expl´ ıcita, en el caso de un sistema con m> 1, tenemos las ecuaciones y 1 (t) = f 1 (t, y 1 (t),y 2 (t), ..., y m (t)), y 2 (t) = f 2 (t, y 1 (t),y 2 (t), ..., y m (t)), . . . . . . . . . y m-1 (t) = f m-1 (t, y 1 (t),y 2 (t), ..., y m (t)), y m (t) = f m (t, y 1 (t),y 2 (t), ..., y m (t)) 23
Transcript of Cap´ıtulo 2 Ecuaciones Diferenciales Ordinarias · 2014-09-22 · Cap´ıtulo 2 Ecuaciones...

Capıtulo 2
Ecuaciones DiferencialesOrdinarias
Resumen del tema
Introducimos notacion, algunos resultados y multiples ejemplos que servirandurante el curso como ilustracion.
2.1. Notacion basica
El problema de Cauchy asociado a una ecuacion diferencial ordinaria(edo) plantea la busqueda de una funcion de una variable de la que se conoce comocambia su derivada.
Una edo define una familia de soluciones o curvas.
Si queremos una curva en particular tenemos que dar un dato extra de informacion.
Para fijar la curva solucion hay que dar tantos datos comoderivadas aparezcan en la ecuacion.
El Problema de Cauchy, o problema de valor inicial: se busca una funciony : I !" Rm, y(t) # C1(I) tal que
(PC)
!y!(t) = f(t, y(t)), t # I,y(t0) = y0, t0 # I
De manera explıcita, en el caso de un sistema con m > 1, tenemos las ecuaciones"#####$
#####%
y!1(t) = f1(t, y1(t), y2(t), ..., ym(t)),y!2(t) = f2(t, y1(t), y2(t), ..., ym(t)),...
......
y!m"1(t) = fm"1(t, y1(t), y2(t), ..., ym(t)),y!m(t) = fm(t, y1(t), y2(t), ..., ym(t))
23

24 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
y el dato inicial
y1(t0) = y0,1, y2(t0) = y0,2, ..., ym(t0) = y0,m
donde y0 = (y0,1, y0,2, ..., y0,m).
Cada fj depende de (t, y1, y2, ..., ym) por lo que el sistema esta acoplado.
Si fj depende solo de (t, yj) nos encontramos con un sistema desacoplado.Cada ecuacion es independiente de las demas.
El dato inicial viene dado por m constantes para obtener ası solucion unica ynormalmente pondremos t0 = 0 para fijar ideas, aunque t0 $= 0 en general.
Suponemos que f(t, y) : I % Rm !" Rm es una funcion continua en ambasvariables siendo I un intervalo real de alguna de las formas
I = [t0, t0 + T ], I = [t0, t0 + T ), I = [t0,+&).
A la funcion f se la denomina funcion pendiente puesto que es la funcionque rige el comportamiento de y!.
Por simplicidad, a la variable independiente la denotamos por t y la llamamostiempo puesto que la mayorıa de aplicaciones practicas son aquellas en lasque la edo describe un proceso temporal (tambien puede darse el caso en elque no represente una variable temporal sino espacial, en este caso se puededenotar mejor por x).
Dejamos fuera de nuestro estudio ecuaciones de la forma F (t, y(t), y!(t)) = 0en donde no siempre es posible despejar y!(t) en terminos del resto.
Cuando f(t, y) = f(y), es decir, f no depende de la variable temporal, en-tonces hablamos de una ecuacion autonoma: la variacion del estado y solodepende del propio estado y. El sistema se comporta de forma intemporal,permanente en tiempo.
Observacion 3 Se puede siempre convertir un problema no autonomo en unoautonomo a coste de aumentar en 1 la dimension del problema. Se usa la nuevavariable vectorial z = (z1, z2) = (t, y), entonces la derivada es z! = (1, f(t, y)).Luego para F (z) = (1, f(z)) el sistema queda como
z!(t) = F (z(t)) '(!
z!1(t) = t! = 1,z!2(t) = y!(t) = f(t, y).
Observacion 4 Cuando y(t) representa una cantidad,
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 24

2.1. Notacion basica 25
y!(t) < 0 implica perdida de materia
y!(t) > 0 implica ganancia de materia
Es por esto por lo que en muchas aplicaciones a la funcion f se la denomina tambientermino de reaccion puesto que es el termino que genera o destruye y. Podemostener entonces un termino de reaccion lineal como f(t, y) = y o un terminode reaccion no lineal como f(t, y) = 1 + y2. Es evidente que la forma generaldel termino de reaccion puede ser mas complicada y depender tambien de formaexplıcita del tiempo. Se usan los terminos fuente / sumidero cuando f > 0 /f < 0 respectivamente.
Campo de velocidades
Una ecuacion diferencial de primer orden nos indica en cada punto (t, y) lapendiente de la curva solucion que pasa por ese punto. El campo de velocidadesnos indica la pendiente de cada trayectoria posible. La importancia del campode pendientes reside en la informacion cualitativa que aporta sobre la familia desoluciones sin conocerlas explıcitamente.
Esta informacion nos permite considerar la solucion continua y(t) no como unacurva aislada sino como parte de una familia de curvas generadas variando el datoinicial y que de manera continua estan una contigua a la otra cubriendo una parteo todo el plano (t, y)
En cada punto (t!, y!) la pendiende de la curva que pasa por (t!, y!) es f(t!, y!).Luego si consideramos un segmento pequeno en sentido positivo para cada direcciont1 > t! e y1 > y! entonces
y1 ) y!t1 ) t!
* f(t!, y!) * tan(!)
donde ! es el angulo formado por la tangente.
Si f(t!, y!) > 0 tenemos un angulo entre 0 y "/2 para la recta tangente ala curva mientras que si f(t!, y!) < 0 tenemos entonces un angulo entre)"/2 y 0 para la recta tangente a la curva.
La ecuacion de la recta tangente r = r(t) viene dada por
r + y! + (t) t!)f(t!, y!)
y un vector en (t!, y!) con la misma direccion es
#u = (1, f(t!, y!)).
Si en cada punto (t!, y!) dibujamos un vector de componente OX dada por 1 y decomponente OY dada por f(t!, y!) generamos el campo de velocidades que repre-senta la edo.
25 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

26 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
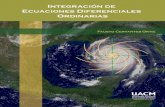
Figura 2.1: Campo de velocidades no autonomo f(t, y) = )y+t2+cos(t). Para cadavalor de y (paralelas horizontales) el campo de velocidades cambia dependiendo deltiempo (paralelas verticales).
Para construir un campo de velocidades se usa una parrilla de puntos en elplano y en cada punto (t!, y!) de la parrilla se dibuja el vector normalizado a 1, esdecir,
#v =1
|u|(1, f(t!, y!)), |u| =&
1 + f(t!, y!)2.
Esto es lo que se representa en el computador.
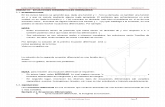
Ejemplo 8 En la Figura 2.1 se representa un sistema no autonomo, esto es, el cam-po de pendientes cambia con el tiempo y en la Figura 2.2 para un sistema autonomo,esto es (1, f(y)), donde ahora el campo de pendientes no cambia con el tiempo. Enla Figura 2.3 y en la 2.4 podemos ver las respectivas trayectorias asociadas, o curvassolucion, a estos campos de pendientes.
Observacion 5 Aparte de usar nuestra propia programacion existen algunos re-cursos web para visualizar un campo de pendientes y las soluciones asociadas. Porejemplo:
http://www.math.rutgers.edu/,sontag/JODE/A Java Applet for Studying Ordinary Di!erential Equations
http://www.aw-bc.com/ide/Interactive di!erential equations
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 26

2.1. Notacion basica 27
Figura 2.2: Campo de velocidades autonomo f(t, y) = cos(y). Para cada valor dey el campo de velocidades es siempre el mismo, luego no cambia dependiendo deltiempo.
Figura 2.3: Soluciones y campo de velocidades para f(t, y) = )y+ t2+ cos(t). Paracada valor de y el campo de velocidades cambia dependiendo del tiempo.
27 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

28 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
Figura 2.4: Soluciones y campo de velocidades para f(t, y) = cos(y). Para cada valorde y el campo de velocidades es siempre el mismo, luego no cambia dependiendodel tiempo.
http://math.rice.edu/,dfield/dfpp.htmlAplicaciones JAVA dfield y pplane
Orden de derivacion mayor que uno
Las ecuaciones del tipo
y(q) = $(t, y, y!, y!!, ..., y(q"1)) (q > 1)
se pueden reescribir como sistemas de primer orden usando variables auxiliares.Ponemos Yj = y(j"1) para j = 1, 2, 3, ..., q y obtenemos las ecuaciones
"#####$
#####%
Y !1 = y!,
Y !2 = y!!,
......
...Y !q"1 = y(q"1)
Y !q = $(t, Y1, Y2, ..., Yq"1)
La reduccion de un sistema de orden mayor que uno a un sistema de orden uno sesuele hacer siempre. En el caso del sistema de segundo orden existe la excepcion,voluntaria y tradicional, sobre todo cuando no aparece la primera derivada, endonde se han disenado metodos especiales. En todo caso la comparacion sobre quees mejor o peor no esta clara. Lo que sı que se tiene es una gran cantidad de software
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 28

2.2. Existencia y unicidad de solucion 29
disponible para sistemas de primer orden lo que conlleva un claro incentivo paraaplicar la reduccion.
Observacion 6 Metodo del factor integrante Nos va a ser muy util recordaresta tecnica. Si queremos encontrar la solucion de
y!(t) = % y(t) + g(t)
ponemosy!(t)) % y(t) = g(t)
y multiplicando por e"" t llegamos a
(e"" ty(t))! = e"" tg(t)
de donde integrando podemos llegar a la solucion facilmente.
2.2. Existencia y unicidad de solucion
Buscamos una funcion y : R !" R regular (de clase C1) solucion del problemade Cauchy
(PC)
!y!(t) = f(t, y(t)), t # [0, T ],y(0) = y0
donde f(t, y) : R% R !" R.
Definicion 9 Una funcion cumple la condicion de Lipschitz sobre la segunda va-riable de f(t, y) cuando
|f(t, x)) f(t, y)| - Lf |x) y|, .x, y # R, t # [0, T ].
Interpretacion geometrica:
Si se cumple la condicion de Lipschitz
|f(t, x)) f(t, y)| - Lf |x) y|, .x, y # R, t # [0, T ]
sobre la segunda variable de f(t, y) entonces la funcion es derivable conrespecto a y en casi todo punto y con derivada acotada mientras queen aquellos puntos donde no es derivable las derivadas laterales tienensaltos de discontinuidad finitos. Esto ocurre porque estamos diciendo
|f(t, x)) f(t, y)||x) y| - Lf .x, y # R, t # [0, T ].
Por lo tanto, si hay derivada esta acotada, y si no la hay los lımiteslaterales existen y estan acotados, aunque no coincidan.
29 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

30 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
Ejemplo 10 Una funcion en forma de dientes de sierra es Lipschitz pero no deri-vable en los picos o valles de la sierra.
Teorema 11 Si se cumple la condicion de Lipschitz
|f(t, x)) f(t, y)| - Lf |x) y|, .x, y # R, t # [0, T ]
podemos garantizar la unicidad de la solucion.
Dem: De hecho, si tenemos dos curvas solucion
y!(t) = f(t, y(t)), z!(t) = f(t, z(t))
es inmediato que para t > t0
y(t)) z(t) = y(t0)) z(t0) +
' t
t0
{f(s, y(s))) f(s, z(s))}ds
luego si t > t0 y usamos que f es Lipschitz tenemos
/y(t)) z(t)/ - /y(t0)) z(t0)/+ L
' t
t0
/y(s)) z(s)/ds.
Si definimos
g(t) = /y(t0)) z(t0)/+ L
' t
t0
/y(s)) z(s)/ds
comog!(t) = L/y(t)) z(t)/ - Lg(t)
hemos llegado a queg!(t) - Lg(t).
Multiplicando la desigualdad por el factor integrante
exp()L(t) t0))
obtenemosd
dt(g(t) exp()L(t) t0))) - 0
de dondeg(t) - g(t0) exp(L(t) t0)).
Es decir,/y(t)) z(t)/ - /y(t0)) z(t0)/eL(t"t0).
Por lo tanto, como g(t0) = /y(t0)) z(t0)/ obtenemos la unicidad de soluciones queempiezan en el mismo punto y(t0) = z(t0).
!Observemos que
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 30

2.2. Existencia y unicidad de solucion 31
Figura 2.5: Familia de soluciones tıpicas del problema modelo y!(t) = a y(t) cona > 0 y a < 0
El paso de la estimacion integral a la puntual se conoce como el Lema deGronwall.
No solo hemos comprobado la unicidad, ademas hemos dado una acotacionsobre la separacion de las soluciones desde puntos iniciales distintos.
La acotacion se abre exponencialmente conforme crece t debido a la exponen-cial.
La acotacion es precisa en unos casos pero muy pesimista en otros. Para a > 0
• es precisa si tenemos y!(t) = a y(t)
• pero no lo es en el caso y!(t) = )a y(t).
En ambas situaciones L = a pero el primer caso las soluciones se expandende forma exponencial mientras que en el segundo se contraen de formaexponencial, ver Figura 2.5.
Si f # C1 y usamos el TVM se puede ajustar mejor esta estimacion ya que
y(t)) z(t) = y(t0)) z(t0) +
' t
t0
{f(s, y(s))) f(s, z(s))}ds
= y(t0)) z(t0) + &#f(t!, '!)
' t
t0
{(y(s)) z(s)}ds
y entonces podemos tener en cuenta el signo de &#f (t(t, y) = )a y en el casoantes mencionado).
Las condiciones que se imponen sobre la funcion pendiente son
1. f(t, y) : R% R !" R es una funcion continua en ambas variables
31 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

32 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
2. Cumple la condicion de Lipschitz
|f(t, x)) f(t, y)| - Lf |x) y|, .x, y # R, t # [0, T ]
sobre la segunda variable de f(t, y)
3. Controlamos ademas el crecimiento de f con respecto a la segunda variable,esto es,
|f(t, y)| - Cf (1 + |y|), .y # R, t # [0, T ].
Teorema 12 Teorema de existencia, unicidad. Comportamiento
Bajo las condiciones 1 y 2 hay existencia y unicidad de solucion local en unsubintervalo de [0, T ]
Si controlamos ademas el crecimiento de f con respecto a la segunda variable,esto es, el punto 3, entonces tenemos garantizado la existencia y unicidad desolucion en todo [0, T ], ver por ejemplo el libro de Arnold [1].
Si ademas f # Cp entonces y # Cp+1.
2.2.1. Estudio cualitativo de las soluciones
Observacion 7 Punto de equilibrio Para el problema autonomo z!(t) = f(z(t))si para el valor constante z = z! se cumple f(z!) = 0 entonces z(t) + z! es unasolucion constante que se denomina un punto de equilibrio del sistema.
Ademas, como f(z!) = 0 usando el desarrollo de Taylor tenemos que
f(z) = f(z!) + (z ) z!)&zf(z!) + .... = (z ) z!)&zf(z!) + ....
aquı es evidente que &zf(z) = f !(z) pero en general f depende tambien de t yusaremos mejor la notacion de la derivada parcial. Finalmente, si suponemos parasimplificar que z! = 0 nos encontramos que para z cercano a z! = 0
f(z) * a z, (a = f !(0))
luego la dinamica cerca del punto de equilibrio se puede estudiar viendo elproblema modelo
z!(t) = a z(t).
Si a > 0 todas las soluciones se alejan del punto de equilibrio a gran velocidad,tenemos que el estado estacionario z(t) = 0 es inestable. Por otro lado, sia < 0 todas las soluciones convergen a gran velocidad hacia z(t) = 0 y se tiene queel estado estacionario es estable, ver Figura 2.6.
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 32

2.3. Ejemplos (I): Problemas de primer orden 33
Figura 2.6: Familia de soluciones tıpicas del problema modelo y!(t) = a y(t) cona > 0 y a < 0
Es posible extraer informacion sobre las soluciones sin necesidad de conocerlasexplıcitamente. Por ejemplo, si tenemos el modelo
y!(t) = f(y(t))
y sabemos sobre f que tiene un comportamiento como sigue
f(a) = 0, f(b) = 0,
f(y) > 0 a < y < b,
f(y) < 0 y # R \ (a, b),
por ejemplo f(y) = (y)a) (b)y). Gracias a que las curvas solucion no se pueden cor-tar podemos deducir facilmente que hay dos puntos de equilibrio y1(t) + a, y2(t) + bsiendo uno estable y otro inestable.
2.3. Ejemplos (I): Problemas de primer orden
Ejemplo 13 Problema modelo: La ecuacion no trivial mas simple es
y!(t) = a y(t), t > 0,
y(0) = y0.
con solucion y(t) = y0eat. Esta ecuacion se demonina problema modelo porser la aproximacion resultante cerca de un punto de equilibrio y ser poreso muy usada como primera aproximacion a ecuaciones mas generales.
Algunos ejemplos que provienen de ciencias experimentales:
33 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

34 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
Ejemplo 14 Modelo de poblaciones lineal
d
dtN(t) = %N(t), t > 0,
N(0) = N0 > 0.
Expresa un crecimiento generado por la poblacion existente en cada instante. Esteproblema se puede reescribir usando n(t) = N(t)/N0 como
d
dtn(t) = %n(t), t > 0,
n(0) = 1.
Ejemplo 15 Modelo de poblaciones no lineal Es interesante estudiar el com-portamiento de estos modelos de poblacion cuando el crecimiento no es proporcionala la poblacion sino a una potencia en torno a uno de la misma. Esto es,
n!(t) = n(t)1+$, t > 0,
n(0) = 1.
para algun ! # R. En el caso ! > 0 existe un tiempo t! < +& tal que n(t) " +&cuando t " t!, se dice que la solucion explota en tiempo finito. A este tiempot! se llama tiempo finito de explosion. Aquı es
f(t, n) = n1+$
y la condicion 3 no se cumple.
Ejemplo 16 Si ! # (0, 1)
n!(t) = n(t)$, t > 0,
n(0) = 0.
no hay solucion unica ya que para cada c > 0 tiene por soluciones
nc(t) =
!0, 0 < t - c,
(1) !)1/(1"$(t) c)1/(1"$), t > c.(2.1)
Ejemplo 17 Modelo de Verhulst o ecuacion logıstica El modelo de poblacio-nes lineal A!(t) = %A(t) tiene la contrariedad de predecir un crecimiento exponen-cial ilimitado. Una mejora la constituye el modelo de Verhulst que tiene en cuentala capacidad limitada del medio para sustentar la poblacion. Consideramos elproblema de valor inicial
"$
%
d
dtA(t) = (A(t)) )A(t)2, t > 0,
A(0) = A0 > 0,(2.2)
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 34

2.3. Ejemplos (I): Problemas de primer orden 35
donde (, ) > 0 son numeros positivos dados. El problema (2.4) surge, por ejemplo,en ecologıa cuando se hace el analisis del desarrollo de una sola especie que tieneacceso a recursos limitados.
Supongamos que A(t) es el tamano de una poblacion en el instante t. En elmodelo mas sencillo de crecimiento de una poblacion se supone un crecimientoproporcional al tamano de la poblacion,
d
dtA(t) = (A(t)
donde la constante ( > 0 es la tasa de crecimiento: la variacion neta depoblacion por unidad de tiempo dividida por la poblacion total en esemismo instante de tiempo. La solucion de esta ecuacion viene dada por
A(t) = A0e% t.
Esto da una poblacion que crece de forma exponencial e ilimitada. Sin embargo, elcrecimiento de la poblacion debe de estar limitado por los recursos del medio, locual, a su vez, implica que la rapidez de crecimiento debe de ser una funcion de lapoblacion, es decir, la tasa de crecimiento debe depender de y:
1
A(t)
d
dtA(t) = F (A(t)).
Cuando la poblacion es pequena, habra suficientes recursos, de modo que la rapidezde crecimiento sera independiente de los recursos y por tanto, podremos decir que,aproximadamente, la tasa de crecimiento sera constante, es decir, F (A) * (. Sinembargo, conforme la poblacion crece, los recursos van desapareciendo y se produceun efecto inhibidor sobre el crecimiento de la poblacion. Entonces, la tasa de cre-cimiento F (A) debe decrecer conforme A crece, de modo que, eventualmente, seaF (A) < 0. La funcion mas sencilla que satisface estas condiciones es
F (A) = () ) A (2.3)
donde ) > 0. Esto explica el modelo (2.4), que se conoce en ecologıa como ecuacionlogıstica.
Como hemos notado, si el termino no lineal )A2 no se toma en cuenta en laecuacion (2.4), entonces la poblacion crece ilimitadamente. La situacion es com-pletamente diferente si se conserva el termino no lineal. Ademas, si A = 0 o siA = (/) el segundo miembro de (2.4) se anula y tenemos dos soluciones constanteso estacionarias
A1(t) + 0, A2(t) + (/).Estas dos soluciones poseen una importancia particular y se denominan puntoscrıticos, o como A!(t) + 0, puntos de equilibrio.
35 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

36 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
σ = 10
ε = 8
A(t)=ε / σ = 0.8
A(t) = 0
t
A
Figura 2.7: A!(t) = ( y(t) ) )A(t)2, ( > 0, ) > 0. Varias soluciones tıpicas paradistintos valores de A0 ası como las soluciones constantes A1(t) + 0 y A2(t) + (/).
Siempre y cuando A $= 0 o A $= (/) podemos resolver la ecuacion diferencialdel problema (2.4) de forma explıcita usando tecnicas de separacion de variables yencontramos la expresion
A(t) =(A0
)A0 + (() )A0) e"% t
que sı que es valida para todo A0 > 0.Podemos observar de la Figura 2.7 que para cualquier A0 > 0, independien-
temente de lo pequeno que sea, al final se tiende siempre a la solucion constanteA1(t) + (/) cuando t " +&. A la razon (/) se le denomina nivel de saturacion;una poblacion que se inicia por debajo de este nivel no podra sobrepasarlo nunca ysi hay sobrepoblacion lleva a la eliminacion de individuos hasta alcanzar el nivel desaturacion.
Si examinamos la solucion A(t) + 0 resulta que si A0 = 0 es la entrada, datoinicial, de nuestro modelo, tendremos que A(t) + 0 es la solucion en todo tiempo,pero si cometemos un pequeno error y la entrada es A0 > 0, aunque pequena, resultaque la solucion A(t) se aleja asintoticamente en tiempo hacia (/). Se dice entonces,y de forma natural, que la solucion A(t) + 0 es una solucion inestable de (2.4),o que A = 0 es un punto crıtico (de equilibrio) inestable.
Si consideramos ahora el caso de la solucion A(t) + (/), si la entrada, datoinicial, es A0 = (/), entonces la salida, la solucion, sera siempre A(t) = (/).Si se comete un error en la entrada, la salida se aproximara asintoticamente a(/) cuando t " +&. Por lo tanto, decimos que la solucion A(t) + (/) es una
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 36

2.3. Ejemplos (I): Problemas de primer orden 37
solucion asintoticamente estable de (2.4), o que A = (/) es un punto crıtico(de equilibrio) estable.
Podemos dar a esto una interpretacion biologica:
Si queremos realizar un experimento libre de bacterias, en un medio enel que el desarrollo de las bacterias viene dado por (2.4). Entonces, a no serque eliminemos completamente la poblacion de bacterias, no conseguiremosrealizar el experimento manteniendo la poblacion de bacterias por debajo deunos mınimos menores que el valor (/). El experimento no resultara seguro.
Si por otro lado estamos tratando de realizar un experimento mantenien-do un nivel de bacterias del orden de (/) podemos estar tranquilos deque, aunque de vez en cuando se eliminen bacterias por algun contaminante,la poblacion no desaparecera y tendera en tiempo a aproximar el valor (/).
Este comportamiento cualitativo es de gran interes aplicado y demuestradesde el punto de vista matematico que, en general, el valor asintotico de lasolucion no depende de forma continua de los datos iniciales.
Observacion 8 La informacion presentada se ha conseguido resolviendo la ecua-cion, pero para problemas mas complicados, para expresiones mas elaboradas de(2.3), es significativo que el comportamiento asintotico, es decir, en relacion conel comportamiento cuando t " +&, a menudo puede determinarse sin un conoci-miento previo de la solucion.
Por ejemplo, si tenemos el modelo
y!(t) = f(y(t))
y sabemos sobre f que tiene un comportamiento como sigue
f(a) = 0, f(b) = 0,
f(y) > 0 a < y < b,
f(y) < 0 y # R \ (a, b),
por ejemplo f(y) = (y) a) (b) y). Podemos deducir facilmente que hay dos puntosde equilibrio y1(t) + a, y2(t) + b y que el comportamiento de la solucion es similaral del modelo logıstico y tenemos un grafico similar a la Figura 2.6. En el ejemploprevio tenemos
!y!(t) = y(t)(() ) y(t)),y(0) = y0 > 0,
(2.4)
luego los puntos de equilibrio son y = 0 e y = (/) siendo el primero inestable y elsegundo estable.
37 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

38 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
Ejemplo 18 Modelo depredador-presa de Lotka-VolterraSupongamos que queremos aproximar el comportamiento de dos especies que
interactuan entre sı siendo depredador y presa en un entorno. Por ejemplo, la evo-lucion de una poblacion de insectos con respecto a la de pajaros. Normalmente, elcomportamiento puede ser el siguiente:
Si crece la poblacion de presas los depredadores aumentan porque tie-nen comida. Entonces empieza a decrecer la poblacion de presas y losdepredadores van desapareciendo porque no tienen comida, con lo queaumentan las presas... y ası volvemos a empezar el ciclo de la vida enel ecosistema.
Por lo tanto, nos encontramos con una evolucion oscilatoria e interconectada paracada especie. Uno de los mas simples puede ser el modelo de Lotka-Volterradado por, ver por ejemplo Golub-Ortega [11] entre muchos otros,
d
dtP (t) = aP (t)) b P (t)D(t)
d
dtD(t) = )cD(t) + dP (t)D(t)
donde D(t) es la poblacion de depredadores, P (t) es la poblacion de presas en elinstante de tiempo t y los valores a, b, c, d son parametros positivos del modelo.
En forma vectorial, poniendo X = (P,Q) y
f(P,Q) = aP ) b P D, q(P,Q) = )cD + dP D, F = (f, g)
se puede escribir comoX !(t) = F (X(t)).
La interaccion entre las dos especies se representa por el producto de ambascantidades P (t)D(t) y se puede observar como los insectos P (t) tendrıan un creci-miento exponencial si no hubiese depredadores mientras que los depredadores D(t)tendrıan un decrecimiento exponencial:
d
dtP (t) = aP (t)
d
dtD(t) = )cD(t)
La idea presente es que la capacidad reproductiva de las presas es mucho mas grandeque la de los depredadores, y estos ultimos tienen crecimiento si hay presas. Elefecto de la interaccion es negativo en las presas )b P (t)D(t) y positivo en losdepredadores +dP (t)D(t) que es de donde sale el modelo, ver Figura 2.8.
Una herramienta de gran utilidad a la hora de estudiar sistemas dinamicos es loque se conoce como plano de fases. El comportamiento de las curvas parametricas
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 38

2.3. Ejemplos (I): Problemas de primer orden 39
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2Plano de Fases
PresaDepredador
Figura 2.8: Solucion tıpica del modelo de Lotka-Volterra ası como algunas de lascurvas dentro de su plano de fases
(x(t), y(t)) nos da informacion relevante sobre puntos de equilibrio establese inestables ası como de orbitas periodicas y trayectorias no cerradas.Se puede observar facilmente que este modelo de Lotka-Volterra posee dos puntosestacionarios (P,Q) = (0, 0) que es inestable y (P,Q) = (c/d, a/b) que es muchomas interesante.
Las ecuaciones de Lotka-Volterra no se pueden resolver de forma exacta y tam-bien es ‘util la version linealizada de estos modelos
d
dtP (t) = aP (t)) bD(t)
d
dtD(t) = )cD(t) + dP (t)
que sı que se puede resolver de forma exacta recurriendo a los autovectores y auto-valores de la matriz de coeficientes A = [a,)b ;)c, d].
Observacion 9 La consideracion de un numero generico de m especies y1, ..., ymy las interacciones mutuas nos lleva con facilidad a un sistema de m ecuacionesdiferenciales no lineales.
"#####$
#####%
y!1(t) = f1(t, y1(t), y2(t), ..., ym(t)),y!2(t) = f2(t, y1(t), y2(t), ..., ym(t)),...
......
y!m"1(t) = fm"1(t, y1(t), y2(t), ..., ym(t)),y!m(t) = fm(t, y1(t), y2(t), ..., ym(t))
con dato inicial
y1(t0) = y0,1, y2(t0) = y0,2, ..., ym(t0) = y0,m
39 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

40 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
donde y0 = (y0,1, y0,2, ..., y0,m). Por ejemplo, si ponemos y1 = P e y2 = Q entoncesel modelo anterior se escribe como
!y!1(t) = a y1(t)) b y1(t)y2(t),y!2(t) = )c y2(t) + d y1(t)y2(t).
Ejemplo 19 Modelo de Lorenz o el efecto Mariposa Fue derivado por Lorenz(1963) en sus estudios sobre meteorologıa. Consiste en las tres ecuaciones
x!(t) = )c x(t) + c y(t),
y!(t) = a x(t)) y(t)) x(t)z(t),
z!(t) = b x(t)y(t)) b z(t),
en donde a, b y c son parametros y las tres magnitudes x(t), y(t), z(t) son cantidadestermodinamicas obtenidas simplificando un modelo meteorologico. A pesar de sersimples, no disponen de una solucion analıtica en general y es un ejemplo de unsistema caotico en R3.
El efecto mariposa se puede observar cuando se visualizan soluciones calculadasy se observa que se mantienen rotando durante un tiempo en un ala y de repentesaltan hacia la otra ala donde tambien siguen rotando, ver Figura 2.9.
El tiempo de salto de un ala a la otra es impredecible y soluciones distintaspara datos iniciales distintos generan comportamientos similares pero con tiemposde saltos distintos. Por lo tanto las curvas solucion son muy distintas pero generanla misma figura geometrica de las dos alas.
Esto ha contribuido a entender porque es dificil una prediccion meteorologica alargo tiempo. Ademas es el origen de la famosa frase pronunciada por Lorenz
el movimiento de las alas de una mariposa en Brasil pueden generar untornado en Texas dos semanas mas tarde.
2.4. Ejemplos (II): Problemas de orden mayorque uno
Los problemas vistos hasta ahora se consideran de primer orden pero muchasaplicaciones provienen de la Segunda Ley de Newton F = ma. Aquı F es lafuerza sobre un cuerpo de masa m que produce una aceleracion a. La aceleraciones la segunda derivada del vector de posicion del cuerpo.
Si denotamos por w la posicion y ponemos g = F/m nos encontramos con unaecuacion donde aparece la segunda derivada, ya que a(t) = w!!(t), de la forma
w!!(t) = g(t, w(t), w!(t)).
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 40

2.4. Ejemplos (II): Problemas de orden mayor que uno 41
0 5 10 15 20 25 30 35 40−20
0
20
40
60Modelo de Lorenz
−15 −10 −5 0 5 10 15−15
−10
−5
0
5
10
15Efecto mariposa: Plano de Fases x−y
−15 −10 −5 0 5 10 150
10
20
30
40
50Efecto mariposa: Plano de Fases x−z
xyz
Figura 2.9: Modelo de Lorenz (1963) y el efecto mariposa (a = 28, c = 10, b = 8/3).
41 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

42 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
La trasformacion a una ecuacion de primer orden se hace usando el par de incognitas(w(t), v(t)) donde v(t) = w!(t) y escribiendo entonces el problema como
!w!(t) = v(t),v!(t) = g(t, w(t), v(t)).
Nos encontramos entonces con un sistema y!(t) = f(t, y(t)) donde
y = (y1, y2)T = (w, v)T f(t, y) = (y2, g(t, y1, y2))
T
Ejemplo 20 Calculo de trayectorias (I): satelitesLa situacion de un satelite viene determinada por su vector de posicion #r(t) #
R3, su velocidad #v(t) # R3 y su aceleracion #a(t) # R3, donde
#v(t) =d
dt#r(t) = #r!(t) # R3, #a(t) =
d
dt#v(t) =
d2
dt2#r(t) = #r!!(t) # R3.
La relacion que liga entre sı estas magnitudes viene dada por la segunda Ley deNewton y si la fuerza se toma dependiente de la posicion y de la velocidad llegamosa una ecuacion diferencial ordinaria de segundo orden
d2
dt2#r(t) = f(t,#r(t),#r!(t))
que suele venir complementada con la posicion inicial #r(0) = #r0 y la velocidad inicial#r!(0) = #v0.
Para simplificar, podemos suponer que r(t) es un escalar, entonces tenemos laecuacion "
$
%
r(0) = r0,r!(0) = v0r!!(t) = f(t, r(t), r!(t)), t > 0
La ecuacion se puede reescribir en terminos de un sistema de primer orden renom-brando la derivada r!(t). Por ejemplo, usamos r(t) y v(t) = r!(t) y queda como
!r!(t) = v(t), t > 0,v!(t) = f(t, r(t), v(t)), t > 0,
con (r(0), v(0)) = (r0, v0).
Ejemplo 21 Calculo de trayectorias (II): balısticaLos problemas de balıstica tienen una larga historia en la computacion cientıficay fueron la principal motivacion del desarrollo de los computadores durante lasdos grandes guerras mundiales, principalmente la segunda, por la necesidad deconfeccionar tablas de tiro precisas. Siguiendo el ejemplo descrito en el libro deGolub y Ortega [11] podemos considerar un caso simple del estudio de la trayectoriade un cohete que se lanza con un angulo de inclinacion respecto al suelo, ver Figura2.10. La trayectoria depende de muchos factores:
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 42

2.4. Ejemplos (II): Problemas de orden mayor que uno 43
Figura 2.10: Trayectoria tıpica de un objeto
caracterısticas del cohete y su propulsor
el arrastre producido por la densidad del aire
la fuerza de la gravedad
efectos del viento
etc...
Para poder realizar un modelo de este problema debemos simplificar la realidad. Sisuponemos que el cohete se mueve en un plano, es decir, no hay viento cruzado,y su posicion viene descrita por las coordenadas x(t) e y(t) nos encontramos conunas ecuaciones derivadas de la segunda ley de Newton F = ma dadas por
"##$
##%
x!!(t) =1
m(t)(T (t)) 0.5 * s v(t)2) cos(+(t))) m!(t)
m(t)x!(t),
y!!(t) =1
m(t)(T (t)) 0.5 * s v(t)2) sin(+(t))) m!(t)
m(t)y!(t)) g.
Aquı tenemos
v(t) = (x!(t)2 + y!(t)2)1/2 es el modulo de la velocidad del cohete
+(t) = tan"1(y!(t)/x!(t)) es el angulo del vector velocidad del cohete con lahorizontal, ver Figura 2.10.
m(t) la masa del cohete, que cambia conforme se consume el combustible
T (t) el empuje producido por el propulsor
0.5* s v(t)2 es la fuerza de arrastre sobre el cohete. Aquı * es la densidad delaire, y s es la seccion del cohete.
43 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

44 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
etc...
En el caso de un proyectil lanzado por un canon nos encontramos con unasimplificacion puesto que podemos suponer que la masa del proyectil es constante yque no hay empuje por el propulsor. Entonces las ecuaciones se simplifican como
"##$
##%
x!!(t) =) * s v(t)2
2mcos(+(t)),
y!!(t) =) c* s v(t)2
2msin(+(t))) g.
Siendo posible resolverse en algunas situaciones. Si se especifican los valores realis-tas de los parametros las ecuaciones se convierten en irresolubles analıticamente.
Este sistema se puede traducir a uno de primer orden mediante las ecuaciones
"######$
######%
x!(t) = v(t) cos(+(t)),y!(t) = v(t) sin(+(t)),
v!(t) =1
m(t)(T (t)) 0.5 * s v(t)2)) g sin(+(t))) m!(t)
m(t)v!(t),
+!(t) =) g
v(t)cos(+(t)).
Como se puede observar, hay una gran dificultad intrınseca en resolver este tipo deecuaciones.
2.5. Ejemplos (III): Problemas rıgidos e inesta-bles
Muchos sistemas presentan soluciones o partes de las soluciones (por ejemplo, sila solucion es una suma de funciones podemos estar hablando de un sumando) quetienen un comportamiento muy brusco con respecto al resto de la solucion.
Si la solucion, o alguna componente suya, desaparece o tiende a cero conmucha mas rapidez que el resto decimos que el problema es rıgido.
Si la solucion, o alguna componente suya, crece en magnitud con masrapidez que el resto y de una forma importante decimos que el problemaes inestable.
Esto es una descripcion, o definicion, poco matematica pero aquı no se puede pre-cisar mas por la subjetividad del fenomeno.
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 44

2.5. Ejemplos (III): Problemas rıgidos e inestables 45
2.5.1. Problemas rıgidos: Ejemplos en sistemas
Ejemplo 22 Consideremos el sistema lineal!
x!1(t) = )298 x1(t) + 99 x2(t),
x!2(t) = )594 x1(t) + 197 x2(t).
La solucion exacta es
#x(t) = c1e"t
(13
)+ c2 e
"100 t
(12
)
donde c1, c2 se fijan con los datos iniciales. Esto es, tenemos dos partes en la solu-cion, la correspondiente a e"t y la correspondiente a e"100 t
#x(t) = #w1e"t + #w2e
"100 t
para dos vectores #w1, #w2 fijos. La parte con la funcion coeficiente e"100 t decrecemucho mas rapido que la parte asociada a e"t.
Podemos describir esta situacion en sistemas lineales de forma general. Supon-gamos que tenemos el sistema
x!(t) = Ax(t) + $(t) # Rm
y A tiene espectro )(A) = {%1,%2, ...,%m} tal que Re(%j) < 0 para todo j =1, 2, ...,m. Entonces la solucion se puede escribir como
#x(t) =*
j
!je"jt#cj + #!(t)
donde #!(t) es una solucion particular del problema. Si Re(%j) < 0 se tiene
e"jt#cj " 0, t " +&
y por lo tanto#x(t) , #!(t), t " +&.
A cada uno de los terminos e"jt#cj se le suele denominar modo transitorio (lentoo rapido) y al termino #!(t) modo estacionario.
Si Re(%j) < 0 pero ademas |Re(%j)| >> 1 entonces el modo asociado decae muyrapido, es un modo transitorio rapido mientras que si |Re(%j)| , 1 el modoasociado decae mas lentamente y es un modo transitorio lento.
Si % es el autovalor con la parte real negativa mas pequena en valor absoluto y% es el autovalor con la parte real negativa mas grande en valor absoluto, entoncesel modo asociado a % es el mas rapido y el asociado a % el mas lento. El cociente
Re(%)
Re(%)
45 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

46 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
se denomina razon de rigidez de la matriz A. Las dificultades practicas surgencuando esta razon es muy grande puesto que se hace muy complicado seguir y calcu-lar de forma correcta todos los modos al mismo tiempo. Los que decaen mas rapidorequieren, en general, mas esfuerzo que los que decaen mas lento, aunque estos seanlos que realmente puedan importar.
Aparte de este ejemplo academico, existen muchas situaciones de gran importanciafısica, como por ejemplo las reacciones quımicas, donde diferentes compuestos setransforman de acuerdo a diferentes escalas temporales, con frecuencia con distintosordenes de magnitud, pensemos en explosiones o el encendido de una cerilla juntocon la difusion de compuestos quımicos restantes en el explosivo.
Estos problemas empezaron a plantearse en la decada de los 60 con el empujeen el modelado y calculo efectivo en fenomenos fısicos, quımicos como reaccionesquımicas, dinamica de guiado de misiles, circuitos electronicos, biomatematicas,etc....Este empuje fue grandemente potenciado por el desarrollo de los computado-res...o incluso se puede pensar que el desarrollo de las capacidades de computacionayudaron enormemente a este empuje.
Este tipo de problemas se denominan problemas rıgidos (sti", en ingles, raidesen frances) y son muy importantes por su presencia predominante en cualquiercampo de la ciencia.
Dos quımicos, Curtis y Hirschfeld de la Universidad de Wisconsin publicaronen 1952 un trabajo en donde ya estudiaban este fenomeno desde el punto de vistacomputacional.
...En torno a 1960 las cosas cambiaron y todo el mundo se dio cuentaque el mundo estaba lleno de problema rıgidos.(G. Dahlquist 1985)
Una idea clara encontramos en la siguiente descripcion
La esencia de la rigidez consiste en que la solucion buscada varıa des-pacio pero existen perturbaciones que decaen o cambian rapidamente.La presencia de estas perturbaciones complican el calculo efectivo de lasolucion buscada.
Las componentes de la solucion que cambian mas lentamente se suelen denominarmodos estacionarios o transitivos lentos en el sentido de que sus derivadas sonmucho mas pequenas que las derivadas de los modos transitivos rapidos, queson esas componentes de la solucion con decaimiento rapido. La dificultad practicareside en que nos encontramos forzados a describirlas o calcularlas todas al mismotiempo.
Ejemplo 23 Modelo de RobertsonLa cinetica quımica estudia la evolucion de la concentracion de sustancias quımicas
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 46

2.5. Ejemplos (III): Problemas rıgidos e inestables 47
sometidas a diversas reacciones. El modelo de Robertson (1966) ha llegado a ser muypopular en estudios numericos y describe la reaccion quımica entre tres compuestoscon distintias velocidades de reaccion
A0.04)" B (lenta)
B +B3·107)" C +B (muy rapida)
B + C104)" A+ C (rapida)
los numeros encima de las flechas indican la velocidad a la que se produce cadareaccion. Este modelo lleva a las ecuaciones para las concentraciones dadas por
x!(t) = )k1 x(t) + k2 y(t)z(t),
y!(t) = k1 x(t)) k2 y(t)z(t)) k3 y(t)2,
z!(t) = k3 y(t)2.
Aquı x(t), y(t), z(t) son las concentraciones, k1 = 0.04, k2 = 104, k3 = 3 · 107 sonlas velocidades de reaccion lenta, rapida y muy rapida y los valores iniciales sonx(0) = 1, y(0) = 0, z(0) = 0.
La funcion pendiente es
f(x, y, z) = ()k1 x+ k2 y z, k1 x) k2 y z ) k3 y2, k3 y
2)
luego el unico punto crıtico es (x(t), y(t), z(t)) + (1, 0, 0) ya que si z(t) es constanteentonces y(t), x(t) tambien lo son, esto es, el estado estacionario es (x!, y!, z!) = 0y de acuerdo al dato inicial debe ser (x(t), y(t), z(t)) + (1, 0, 0).t > 0.
Por otro lado, se conserva la materia en la reaccion quımica. Esto se ve por quela suma de las tres magnitudes se mantiene siempre constante igual a uno
x(t) + y(t) + z(t) = 1
y ademas, se ve tambien que x(+&) = z(+&) = 0 siendo por lo tanto y(+&) = 1,ver Figura 2.11. El estado estacionario se alcanza despues de un largo periodo detiempo, como del orden de 106. La concentracion y(t) alcanza rapidamente un estadocasi estacionario en un entorno de y!(t) = 0 el cual en en principio, usando quex(0) = 1 y z(0) = 0 se puede estimar mediante la aproximacion 0.04 * 3 107 y(t)2
que da y2(t) * 3.65 10"5, y entonces lentamente va a cero otra vez, ver Figura 2.12.Como se puede ver por la Figuras 2.11 y 2.12, las magnitudes son muy dis-
tintas entre las tres concentraciones y el comportamiento inicial de la componentey presenta un salto brusco desde cero, analogo a la creacion de una llama. Nosencontramos entonces con tres modos, uno lento, otro rapido y otro muy rapido.
Es difıcil ahora enmarcar todas las posibles situaciones practicas dentro de unamisma definicion, pero sı que se pueden hacer intentos que capturan la idea de loque pasa
47 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

48 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
0 10 20 30 40 50 60 70 80 90 100−0.5
0
0.5
1
1.5
xyz
0 10 20 30 40 50 60 70 80 90 100
0.70.80.9
1
x
0 10 20 30 40 50 60 70 80 90 1000
2
4x 10−5
y
0 10 20 30 40 50 60 70 80 90 1000
0.2
0.4
z
Figura 2.11: Modelo de Robertson (1963) para T = 100. Visualizacion de las tressoluciones juntas y por separado. Observar las diferencias en escala.
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 48

2.5. Ejemplos (III): Problemas rıgidos e inestables 49
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10.996
0.998
1
1.002
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
2
4x 10−5
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
2
4x 10−3
x
y
z
Figura 2.12: Modelo de Robertson (1963). Comportamientos iniciales de las con-centraciones.
49 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

50 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
El sistema homogeneo se dice rıgido si la razon de rigidez es muy grande.
Muy grande... ¿con respecto a que?
El sistema no homogeneo se dice rıgido si la razon de rigidez es muygrande cuando se compara con la razon de cambio del modo estacionario.
Se puede dar otras definiciones que, en el fondo, lo que hacen es caracterizar distintaspropiedades que pueden estar presentes o no.
Nos quedamos con esta idea:
Definicion 24 El sistema se dice rıgido en un intervalo de tiempo si en este in-tervalo las curvas solucion vecinas a la curva buscada se aproximan a esta a unavelocidad muy grande en comparacion a la velocidad con la que la curva buscadacambia en este intervalo.
2.5.2. Problemas rıgidos: Ejemplos escalares
Los problemas escalares tambien poseen soluciones con distintos modos.
Ejemplo 25 La ecuacion de Dahlquist-Bjorck es!
y!(t) = 100 (sin(t)) y(t)), 0 < t - 3,y(0) = 0
y se puede ver como un caso particular del problema!
y!(t) = a (sin(t)) y(t)), t > 0,y(0) = y0
cuya solucion es
y(t) = e"a ty0 +sin(t)) a"1cos(t) + a"1e"a t
1 + a"2.
Por lo tanto, para a >> 1 el modo transitorio exponencial e"a t decae muy rapido.En las Figuras 2.13, 2.14 y 2.15 se ve el efecto de incrementar el valor de a enel decaimiento de las distintas soluciones. Este modo debe ser capturado bien porcualquier proceso de calculo que se precie de funcionar. Aquı se tiene
f(t, y) = )a y + a sin(t) ( &yf(t, y) = )a.
Se tiene el mismo resultado cualitativo con el ejemplo mas simple!
y!(t) = a (1) y(t)), 0 < t,y(0) = y0
esto quiere decir que la dificultad fundamental la provoca el termino )a y en lafuncion pendiente, o lo que es lo mismo, tener &yf(t, y) << 0.
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 50

2.5. Ejemplos (III): Problemas rıgidos e inestables 51
Figura 2.13: Soluciones y campo de velocidades de la ecuacion de Dahlquist-Bjorckpara a = 5. Los valores iniciales en t0 = 0 son y0 = )0.5 : 0.1 : 2 (hemos usado lanotacion a:h:b).
51 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

52 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
Figura 2.14: Soluciones y campo de velocidades de la ecuacion de Dahlquist-Bjorckpara a = 10. Los valores iniciales en t0 = 0 son y0 = )0.5 : 0.1 : 2.
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 52

2.5. Ejemplos (III): Problemas rıgidos e inestables 53
Figura 2.15: Soluciones y campo de velocidades de la ecuacion de Dahlquist-Bjorckpara a = 100. Los valores iniciales en t0 = 0 son y0 = )0.5 : 0.1 : 2.
53 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

54 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
Figura 2.16: Soluciones y campo de velocidades de la ecuacion de Dahlquist-Bjorckpara a = 10 y distintos tiempos iniciales. Los valores iniciales en t0 = 0, t0 = 1 yt0 = 2 son y0 = )0.5 : 0.5 : 2.
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 54

2.5. Ejemplos (III): Problemas rıgidos e inestables 55
Ejemplo 26 Un caso similar es la ecuacion de Prothero-Robinson!
y!(t) = L ($(t)) y(t)) + $!(t), 0 < t,y(0) = y0
con solucion exactay(t) = e"L t(y0 ) $(0)) + $(t)
y otra vez el modo rapido e"L t para L >> 1 debe ser capturado correctamente. Elmodo estacionario es $(t) y puede ser una funcion suave sin cambios bruscos, comopor ejemplo $(t) = sin(t). Tambien se tiene
f(t, y) = )Ly + L$(t) + $!(t) ( &yf(t, y) = )L.
Incluso en el caso en el que y0 = $(0) donde aparentemente el modo rapido noesta en la solucion, este sı que se encuentra en todas las soluciones vecinas y sedebe tambien capturar como si estuvise presente para conseguir que no aparezca.
Ejemplo 27 Ecuacion de Van der Pol El modelo de Van der Pol que apareceen la teorıa de circuitos electricos
"$
%
x!!(t)) µ · (1) x(t)2) · x!(t) + x(t) = 0, t > 0,
x(0) = 1,d
dtx(0) = 0.
Una vez mas, la ecuacion se puede reescribir en terminos de un sistema de primerorden usando las incognitas u(t) = x(t) y v(t) = x!(t). Queda como
u!(t) = v, t > 0,v!(t) = µ (1) u2) v ) u, t > 0,
con (u(0), v(0)) = (1, 0). Por ejemplo, en el caso µ = 6 observa la grafica de x(t)en la Figura 2.17.
Estos ejemplos nos motivan una definicion para ecuacion rıgida donde lo impor-tante es el comportamiento de las soluciones y que es similar a la anterior definicion:
Definicion 28 El sistema se dice rıgido si hay componentes de la solucion quedecaen mucho mas rapido que otras.
Incluso cuando no podemos comparar dos componentes de la solucion puesto quesolo tenemos una, tambien nos podemos encontrar con rigidez. Por ejemplo,
!y!(t) = )a y(t), 0 < t,y(0) = y0
tambien genera un comportamiento rıgido si a >> 1. ¿Con respecto a que compa-ramos aquı? Pues probablemente con respecto a la solucion de la ecuacion y! = 0que es la funcion constante y + 1.
55 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

56 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
0 5 10 15 20 25 30 35 40−3
−2
−1
0
1
2
3Desplazamiento x(t) del oscilador de Van der Pol
x(t)
0 5 10 15 20 25 30 35 40−10
−5
0
5
10Velocidad dx(t)/dt del oscilador de Van der Pol
dx(t)/dt
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5−10
−5
0
5
10Plano de Fases del oscilador de Van der Pol
Figura 2.17: Solucion ecuacion de Van der Pol para µ = 6, x(0) = 1 y x!(0) = 0.
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 56

2.5. Ejemplos (III): Problemas rıgidos e inestables 57
2.5.3. Influencia de la rigidez en datos iniciales
Podemos observar en los ejemplos previos que los cambios en los datos inicialesson rapidamente anulados si estan afectados por los modos rapidos:
Ejemplo 29 En los problemas!
y!(t) = )a y(t), 0 < t,y(0) = y0
dondey(t) = y0e
"a t
o la ecuacion de Dahlquist-Bjorck!
y!(t) = a (sin(t)) y(t)), t > 0,y(0) = y0
cuya solucion es
y(t) = e"a ty0 +sin(t)) a"1cos(t) + a"1e"a t
1 + a"2
o la ecuacion de Prothero-Robinson!
y!(t) = L ($(t)) y(t)) + $!(t), 0 < t,y(0) = y0
con solucion exactay(t) = e"L t(y0 ) $(0)) + $(t).
En todos estos casos se ve el valor inicial esta afectado por el modo rapido dedecaimiento e"L t para L >> 1, luego si y0 $= 0 o y0 $= $(0) la contribucion del valorinicial y0 desaparece rapidamente.
2.5.4. Problemas inestables
Como ya hemos dicho, podemos entender por problemas inestables aquellosdonde ligeras variaciones iniciales producen una gran diferencia en la solucion encorto periodo de tiempo. Tambien se pueden interpretar como problemas donde haymodos o componentes de la solucion que aumentan muy rapido.
Ejemplo 30 La ecuacion"$
%
d
dty(t) = 3 y ) 3 t, t > 0,
y(0) = !,
57 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

58 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
tiene por soluciony$(t) = (!) 1/3)e3t + t+ 1/3.
En el caso exacto de ! = 1/3 tenemos que
y1/3(t) = t+ 1/3
algo muy razonable. Pero si !) 1/3 = , $= 0 pequeno tendremos
y$(t) = , e3t + t+ 1/3
y el factor e3t amplifica de forma muy importante el valor de ,, ver Figura 2.18 yFigura 2.19. La situacion cambia totalmente si f(t, y) = )3y)3t, aquı el problemapasa de ser inestable a ser rıgido:
"$
%
d
dtz(t) = )3 z ) 3 t, t > 0,
z(0) = !,
tiene por solucionz$(t) = (!) 1/3)e"3t ) t+ 1/3
y otra vez, en el caso exacto de ! = 1/3 tenemos que
z1/3(t) = )t+ 1/3.
Si !) 1/3 = , $= 0 pequeno o grande tendremos
z$(t) = , e"3t + t+ 1/3
y ahora el factor e"3t reduce de forma muy rapida el valor de ,, ver Figura 2.20.En el primer caso la trayectoria
y1/3(t) = t+ 1/3
es inestable, repele todas las trayectorias vecinas, mientras que en el segundo caso
z1/3(t) = )t+ 1/3
es estable o atrae a todas las trayectorias. En estos dos casos tenemos
f(t, y) = ±3y ) 3t
y por lo tanto la constante de Lipschitz asociada es Lf = 3. Esta constante nodistingue entre una situacion estable y otra inestable que viene caracterizada por elsigno de &yf(t, y).
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 58

2.5. Ejemplos (III): Problemas rıgidos e inestables 59
Figura 2.18: Campo repulsivo desde la solucion y1/3(t) = t+ 1/3 .
59 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

60 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
Figura 2.19: Campo repulsivo y soluciones incluyendo la solucion z1/3(t) = t + 1/3con datos iniciales empezando en t = 0 y en t = 1. Se observa como se alejan dez1/3(t).
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 60

2.5. Ejemplos (III): Problemas rıgidos e inestables 61
Figura 2.20: Campo contrativo de velocidades y soluciones hacia z1/3(t) = )t+1/3.Usando datos iniciales empezando en t = 0 y en t = 1 se observa como se contraenhacia de z1/3(t).
61 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

62 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
Observacion 10 Se puede interpretar que cuando la estabilidad es muy fuertellegamos a la rigidez.
Ejemplo 31 La ecuacion (Golub-Ortega [11])
y!! ) 10y! ) 11y = 0, y(0) = 1, y!(0) = )1
posee solucion y(t) = e"t. Pero si usamos como dato inicial
y(0) = 1 + ,, y!(0) = )1
la solucion es
y&(t) = (1 +11
12,)e"t +
,
12e11 t
entonces para cualquier , > 0 independientemente de lo pequeno que sea tendre-mos un crecimiento muy fuerte de y&(t) para t > 0. Tenemos aquı dos modos muydispares en la solucion. Como consecuencia, pequenas perturbaciones generan gran-des cambios a tiempo finito y resulta que y(t) = e"t se puede considerar como unasolucion inestable.
Tambien podemos escribir este problema en terminos de un sistema de dos ecua-ciones lineales usando y1 = y e y2 = y! para obtener
!y!1 = y2,y!2 = 11y1 + 10y2
o bien en forma matriciald
dt#y(t) = A#y(t)
donde
A =
(0 111 10
)
y entonces nos encontramos con autovalores para A dados por )(A) = {)1, 11}luego la solucion es una combinacion lineal de {e"t, e11 t}. Tenemos entonces dosmodos uno dado por e"t que decae y uno que crece muy rapido dado por e11 t.
Ejemplo 32 El siguiente ejemplo de Golub-Ortega [11] tambien es interesante yaque muestra una inestabilidad mas fuerte
y! = t y (y ) 2), y(0) = y0.
Aquı y(t) + 0 e y(t) + 2 son puntos estacionarios y la solucion general es
y(t) =2 y0
y0 + (2) y0)et2 .
Si y0 < 2 entonces y(t) " 0 pero si y0 > 2 entonces hay explosion en tiempo finitode la solucion. Recordemos que el punto 3 sobre el crecimiento de f(t, y) = t y (y)2)en las condiciones de existencia y unicidad generales aquı no se cumple.
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 62

2.6. Ejemplos (IV): Problemas oscilatorios 63
Figura 2.21: Soluciones y campo de velocidades del modelo y’(t)=t y(t) (y(t)-2)
2.6. Ejemplos (IV): Problemas oscilatorios
Aunque la mayorıa de sistemas fısicos exhiben algun nivel de disipacion, es-to es, perdida de masa, informacion etc...hay otros en donde este efecto no es elimportante, o simplemente no es ası.
Estamos hablando por ejemplo delmovimiento de planetas, satelites, etc....Las dificultades principales en este tipo de problemas son dos:
se debe de calcular en un intervalo de tiempo muy grande, y ...
se debe conseguir mantener las trayectorias cerradas
Los metodos que se adaptan bien a estas dificultades se llaman simplecticos.
Ejemplo 33 Movimiento armonico simple!
+!!(t) + +(t) = 0, t > 0,+(0) = 1, +!(0) = 0.
En terminos de un sistema de primer orden con las incognitas u(t) = +(t) y v(t) =+!(t) queda como
d
dt
(u(t)v(t)
)=
(0 1)1 0
)(u(t)v(t)
).
y nos encontramos con autovalores complejos puros conjugados para la matriz A delsistema dados por )(A) = {i,)i} y la solucion general es una combinacion linealreal de las funciones complejas {ei t, e"i t}.
63 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

64 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
Ejemplo 34 Calculo de trayectorias (III): Sistema planetarioEl problema de N cuerpos es importante en campos tan dispares como as-
tronomıa y biologıa molecular (movimientos de moleculas). Las ecuaciones son
y!!i = G*
j #=i
mjyj ) yi
/yj ) yi/3
donde yi(t) # R3 describe la trayectoria del cuerpo i-esimo, mi es su masa y G laconstante gravitacional. Introduciendo la velocidad vi(t) = y!i(t) como nueva variablese obtiene un sistema de primer orden de dimension 6N siendo N el numero decuerpos. En verdad, el numero de ecuaciones es 18N al ser cada una de ellas detres componentes.
La figura 2.22 muestra la diferencia de resultados cuando se usa un metodoclasico para no eficiente para resolver el problema metodo no simplecticos ycuando se usa uno bien adaptado a este tipo de problemas metodos simplecticos(simplectico significa preservar area).
Una simplificacion de las ecuaciones nos da"$
%
r(0) = r0,r!(0) = v0r!!(t) = )r(t)/|r(t)|3, t > 0
si se escribe en terminos de las incognitas r = (y1, y2) y r! = (y3, y4) (aquı y3 e y4son las velocidades), nos encontramos con el sistema
"##$
##%
y!1 = y3,y!2 = y4,y!3 = )y1/(y21 + y22)
3/2,y!4 = )y2/(y21 + y22)
3/2.
2.7. Uso de variable compleja
Siendo t real y usando la derivada siempre con respecto a la variable real t sepueden considerar %, y(t) # C y trabajar en el cuerpo de los numeros complejoscomo se hace en el de los reales. Se tiene la ventaja de poder usar la exponencialcompleja que simplifica operaciones algebraicas.
En este caso, la ecuacion y!(t) = % y(t), y(0) = y0 posee solucion
y(t) = y0e" t # C, .t > 0
y equivale a un sistema de dos ecuaciones, una para la parte real y otra para laparte imaginaria. Simplemente se escribe y = u + iv y % = a + i b y se obtienenambas ecuaciones.
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 64

2.7. Uso de variable compleja 65
Figura 2.22: Trayectorias calculadas con un metodo clasico y con un metodosimplectico. Las trayectorias cerradas no se calculan bien con el metodo clasicode Euler.
65 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

66 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
Ejemplo 35 El problema del movimiento harmonico simple se reescribe muy facil-mente en terminos de la variable compleja z(t) = u(t) + iv(t) como
z!(t) = i z(t), z(0) = 1
con solucion z(t) = eit. En general, el modelo
z!(t) = i- z(t), z(0) = z0
con solucion z(t) = z0 ei' t representa un oscilador con frecuencia (numero devueltas por unidad de tiempo) -. Se puede ahora observar facilmente que, usandoel valor absoluto de un numero complejo c = a + i b, lo que equivale a la norma l2
del vector (a, b), que|z(t)| = |z0|
luego el movimiento es circular con radio dado por el dato incial.
Ejemplo 36 En el caso donde % # R la ecuacion simplemente representa el mismoproblema escalar pero repetido en su parte real y en su parte compleja.
Por consiguiente, el problema modelo y!(t) = % y(t) en C representa cualquier siste-ma lineal 2% 2 sobre el cuerpo de los reales R con autovalores distintos, despues deun proceso de diagonalizacion, de una forma compacta y facil ası como el problematest real. Esquematicamente
1. Si Re(%) > 0 tenemos un problema inestable; con oscilaciones si Im(%) $= 0 osin oscilaciones cuando Im(%) = 0.
2. Si Re(%) < 0 tenemos un problema estable; con oscilaciones si Im(%) $= 0 osin oscilaciones cuando Im(%) = 0.
3. Si Re(%) = 0 tenemos un problema oscilatorio puro. Ademas,
d
dt(u(t)2 + v(t)2) = 0
luego la solucion se encuentra en la familia de curvas u(t)2+v(t)2 = constanteen el plano (u, v).
2.8. Algunos problemas modelo
Cuando estudiemos procesos de aproximacion numerica usaremos modelos sim-ples para observar su comportamiento y trasladar conclusiones a situaciones mascomplicadas. A pesar de ser triviales, cualquier esquema numerico debe ha-cerlo bien en estos casos tan simples:
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 66

2.9. Conclusion sobre los ejemplos y objetivos 67
1. y!(t) = 1, y(0) = 0. La solucion exacta es y(t) = t.
2. y!(t) = 0, y(0) = 0. La solucion exacta es y(t) = 0.
3. y!(t) = % y(t), y(0) = 1, % # R. Usualmente % < 0 tal que y(t) " 0, t " +&y modela decaimiento o disipacion. Si % > 0 se modela expansion.
4. y!(t) = i y(t), y(0) = 1, (i2 = )1). Modela fenomenos oscilatorios.
2.9. Conclusion sobre los ejemplos y objetivos
La mayorıa de las ecuaciones diferenciales ordinarias no se pueden resolver porlas tecnicas basicas analıticas que dan una solucion explıcita.
Incluso cuando podemos, a veces resultan demasiado complicadas para ser deutilidad. Por lo tanto, debemos de deducir informacion sobre el comportamientocualitativo y cuantitativo de las soluciones desde la propia ecuacion.
Se debe ademas recurrir a procesos computacionales que generen aproximacionesa la solucion exacta. Para ello calculamos valores puntuales de las curvas eintentaremos que sean proximos a los valores exactos de la curva solucion.
En general, y como ya hemos visto, nos encontramos con situaciones y compor-tamientos muy variados en lo que se refiere a la solucion continua.
Buscamos aproximar una curva concreta que esta dentro de una fa-milia de curvas y nos podemos encontrar con
Soluciones expansivas... esto es nos lo hace difıcil porque nos movemos deuna a otra debido a errores de computo y la expansion del sistema nos hacealejarnos mucho de la curva solucion que buscamos
Soluciones contractivas... esto nos lo puede hacer facil porque, aunquecambiemos de curva debido a los errores de computo, la propia familia desoluciones nos acerca a la curva buscada
Soluciones oscilatorias Se debe capturar este tipo de movimiento. Esto llevaa lo que se conoce como metodos simplecticos y es de gran importancia enel seguimiento de orbitas de planetas o satelites.
Soluciones con comportamientos expansivos, contractivos u oscila-torios bruscos y repentinos... pueden necesitar una adaptacion del calculode forma dinamica, esto nos complica el trabajo bastante
Soluciones vectoriales con modos de velocidades muy distintas... sedeben calcular de manera simultanea y hay que evitar perder informacion delos modos rapidos.
67 Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia

68 Capıtulo 2 Ecuaciones Diferenciales Ordinarias
Soluciones vectoriales con comportamientos expansivos, contracti-vos bruscos y repentinos, globales o por componentes...
Combinaciones de todo lo anterior
Eliseo Chacon Vera, Dpto. Matematicas, Universidad de Murcia 68