Caracterización y modelado de sensores capacitivos para ... · Caracterización y modelado de...
119
©INAOE 2015 Derechos reservados El autor otorga al INAOE el permiso de reproducir y distribuir copias de esta tesis en su totalidad o en partes Caracterización y modelado de sensores capacitivos para aplicaciones médicas por M.C Daniela Díaz Alonso Tesis sometida como requisito parcial para obtener el grado de Doctor en ciencias en la especialidad de Electrónica En el Instituto Nacional de Astrofísica, Óptica y Electrónica Junio 2015 Tonantzintla, Puebla Supervisada por: Dr. Wilfrido Calleja Arriaga. Investigador Titular del INAOE
Transcript of Caracterización y modelado de sensores capacitivos para ... · Caracterización y modelado de...
©INAOE 2015
Derechos reservados
El autor otorga al INAOE el permiso de reproducir y
distribuir copias de esta tesis en su totalidad o en partes
Caracterización y modelado de sensores
capacitivos para aplicaciones médicas
por
M.C Daniela Díaz Alonso
Tesis sometida como requisito parcial para obtener el grado de
Doctor en ciencias en la especialidad de
Electrónica
En el
Instituto Nacional de Astrofísica,
Óptica y Electrónica
Junio 2015
Tonantzintla, Puebla
Supervisada por:
Dr. Wilfrido Calleja Arriaga.
Investigador Titular del INAOE
ii
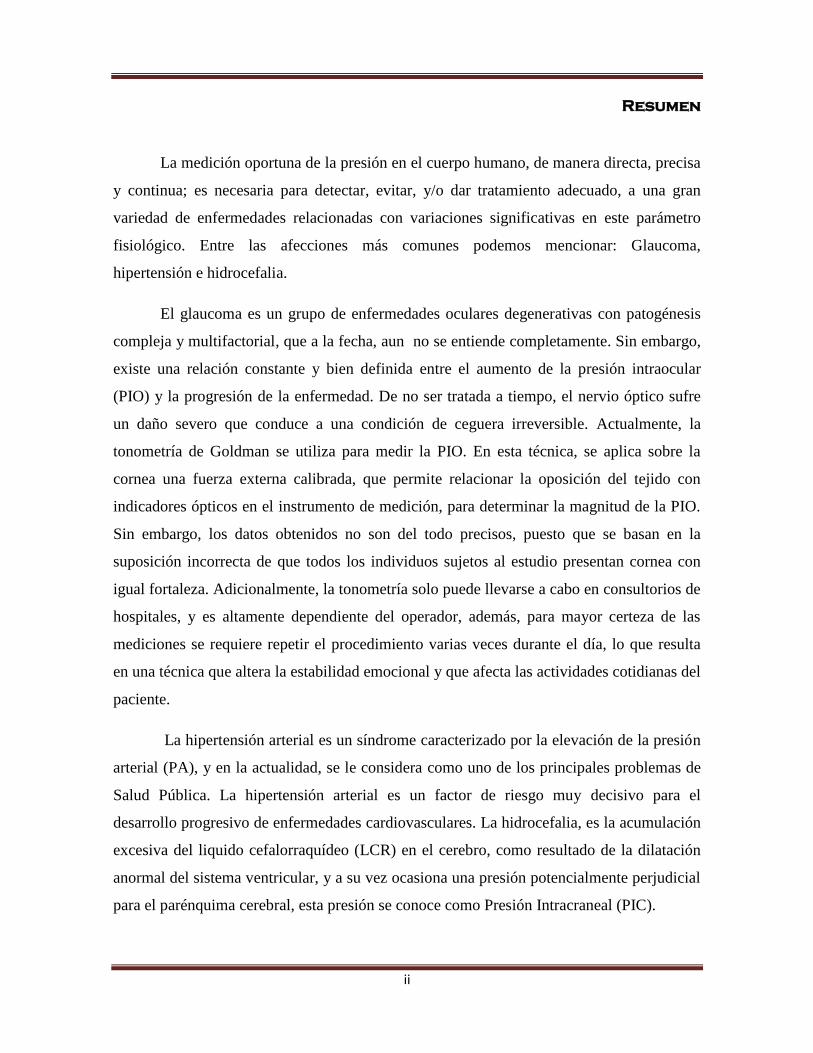
Resumen
La medición oportuna de la presión en el cuerpo humano, de manera directa, precisa
y continua; es necesaria para detectar, evitar, y/o dar tratamiento adecuado, a una gran
variedad de enfermedades relacionadas con variaciones significativas en este parámetro
fisiológico. Entre las afecciones más comunes podemos mencionar: Glaucoma,
hipertensión e hidrocefalia.
El glaucoma es un grupo de enfermedades oculares degenerativas con patogénesis
compleja y multifactorial, que a la fecha, aun no se entiende completamente. Sin embargo,
existe una relación constante y bien definida entre el aumento de la presión intraocular
(PIO) y la progresión de la enfermedad. De no ser tratada a tiempo, el nervio óptico sufre
un daño severo que conduce a una condición de ceguera irreversible. Actualmente, la
tonometría de Goldman se utiliza para medir la PIO. En esta técnica, se aplica sobre la
cornea una fuerza externa calibrada, que permite relacionar la oposición del tejido con
indicadores ópticos en el instrumento de medición, para determinar la magnitud de la PIO.
Sin embargo, los datos obtenidos no son del todo precisos, puesto que se basan en la
suposición incorrecta de que todos los individuos sujetos al estudio presentan cornea con
igual fortaleza. Adicionalmente, la tonometría solo puede llevarse a cabo en consultorios de
hospitales, y es altamente dependiente del operador, además, para mayor certeza de las
mediciones se requiere repetir el procedimiento varias veces durante el día, lo que resulta
en una técnica que altera la estabilidad emocional y que afecta las actividades cotidianas del
paciente.
La hipertensión arterial es un síndrome caracterizado por la elevación de la presión
arterial (PA), y en la actualidad, se le considera como uno de los principales problemas de
Salud Pública. La hipertensión arterial es un factor de riesgo muy decisivo para el
desarrollo progresivo de enfermedades cardiovasculares. La hidrocefalia, es la acumulación
excesiva del liquido cefalorraquídeo (LCR) en el cerebro, como resultado de la dilatación
anormal del sistema ventricular, y a su vez ocasiona una presión potencialmente perjudicial
para el parénquima cerebral, esta presión se conoce como Presión Intracraneal (PIC).
Resumen
iii
De la misma manera que en la presión intraocular, existen procedimientos y técnicas
conocidas para medir la presión arterial e intracraneal, pero de aquí muchos investigadores
y especialistas en el campo, coinciden en la necesidad de lograr un monitoreo continuo las
24 horas del día, que no solo permita la medición oportuna de la presión, sino que también
se obtengan datos en distintas condiciones de reposo y actividad, más allá del ámbito de un
hospital, para entender a profundidad la fisiología de la enfermedad.
El presente proyecto de tesis aborda el desarrollo de un sensor de presión capacitivo
en modo de contacto (TMCPS), fabricado mediante la tecnología de micromaquinado
superficial PolyMEMS INAOE®. El sensor se diseña considerando su implante en el
cuerpo humano y que opere en medios biológicos bajo un rango de presión de 1-80mmHg.
Este dispositivo integrado se modela como un capacitor de placas paralelas, el electrodo
dinámico superior (diafragma suspendido) y el electrodo inferior (fijo al substrato) están
aislados mediante una doble capa aislante/aire, para permitir el adecuado funcionamiento
dinámico en modo de contacto, sin posibilidad de cortocircuito. Toda la superficie externa
está diseñada para hacer contacto directo con el medio biológico, por lo que, el dispositivo
es recubierto con una película aislante biocompatible. Los sensores se fabrican con
diafragma de simetría circular, cuadrada y rectangular. El material estructural consiste de
películas de aluminio de 0.5µm de espesor y dimensiones espaciales que varían en un rango
de 200-400 micrómetros.
El proceso de diseño y fabricación de sensores capacitivos tipo TMCPS con
aluminio como material estructural, se desarrolló como alternativa a los sensores
capacitivos a base de polisilicio como material estructural. Esta variante permite gran
flexibilidad de diseño, fabricación y aplicaciones de los prototipos capacitivos
desarrollados con la Tecnología PolyMEMS INAOE. Además, esta tecnología es
perfectamente adecuada para desarrollar sensores de presión con etapas de manufactura a
bajas temperaturas. Este aspecto permite la integración de los sensores con un proceso
análogo de bobinas de aluminio integradas en substratos flexibles de poliimida para la
medición de presión en medios biológicos mediante un esquema de telemetría RF.

iv
Abstract
The timely measurement of pressure in the human body, directly, precisely, and
continuously, it is necessary to detect, prevent, and/or provide adequate treatment to a
variety of diseases related with significant variations in this physiological parameter.
Among the most common conditions we can mention: Glaucoma, hypertension, and
hydrocephalus.
Glaucoma is a group of degenerative eye diseases with complex and multifactorial
pathogenesis that, to date is still not fully understood. However, there is a constant and
well-defined relationship between the increase in intraocular pressure (IOP) and the disease
progression. If not treated early, the optic nerve suffers severe damage leading to a
condition of irreversible blindness. Currently, Goldman tonometry is used to measure IOP.
In this technique, a calibrated external force is applied to the cornea that relates the opposed
tissue with optical indicators on the measuring instrument to determine the magnitude of
IOP. However, the obtained data are not entirely accurate, since they are based on the
incorrect assumption that all individuals subject to the study present cornea with equal
strength. Further, the tonometry may only be performed in clinic hospitals and is highly
operator dependent; in addition; to greater certainty of measurement, it is required to repeat
the procedure several times during the day, resulting in a technique that alters the emotional
stability and affects the patient’s daily activities.
Hypertension is a syndrome characterized by elevated blood pressure (BP), and
today, it is considered as one of the major public health problems. Hypertension is a risk
factor very decisive in the progressive development of cardiovascular diseases.
Hydrocephalus is an excessive accumulation of cerebrospinal fluid (CSF) in the brain, as a
result of abnormal dilation of the ventricular system, and in turn causes a potentially
harmful pressure to the brain parenchyma; this pressure is called intracranial pressure
(ICP).
.
Abstract
v
In the same way as in the intraocular pressure, there are well established procedures
and techniques for the measuring blood and intracranial pressure, but many researchers and
experts in the field agree on the need for continuous monitoring 24 hours a day, not only
enabling timely measurement of pressure, but also providing data under different conditions
of rest and activity beyond the scope of a hospital, to understand in depth the physiology of
the disease.
This thesis project addresses the development of a touch mode capacitive pressure
sensor (TMCPS) manufactured with the surface micromachining technology called
PolyMEMS INAOE®. The sensor is designed by considering implantation into the human
body and for an operating pressure range in biological media between 1-80mmHg. This
integrated device is modeled as a parallel plate capacitor, the upper dynamic electrode
(suspended diaphragm) and the lower electrode (fixed to the substrate) are insulating by a
double insulator/air layer to allow proper dynamic operation in contact mode, without the
possibility of short circuit. The entire outer surface is designed to make direct contact with
the biological medium, so that, the device is coated with a biocompatible insulating film.
The sensors are fabricated with circular, square and rectangular diaphragm symmetry. The
structural material is a 0.5µm-thick aluminum film and it spatial dimension varies within a
range of 200-400 microns.
The process for designing and manufacturing TMCPS sensors with aluminum as a
structural material was developed as an alternative to capacitive pressure sensors based on
Polysilicon as structural material. This variant allows great flexibility in design,
manufacture and application of capacitive technology prototypes developed with
PolyMEMS INAOE®. Moreover, this technology is well suited to develop pressure sensors
with low thermal budget manufacturing steps. This aspect allows the full integration of
pressure sensors with a similar process of aluminum coils fabricated on flexible polyimide
substrates for measuring pressure in human body in a RF telemetry scheme.

Dedicatoria
vi
A mí querido esposo Manuel y a mí adorada hija Sofía, quienes día a día
me motivan para seguir adelante con su inmenso amor…
A mis padres Cuper y Daniel
A mis hermanos Arturo, Rogelio, Laura y Nel
Y especialmente a ustedes tres que siempre están en mi corazón:
Arturo†, Ciria† y Samantha†
vii
Agradecimientos
A Dios, por sostenerme y no dejarme caer en los momentos más difíciles…
A mi esposo y a mi hija, por alegrar mis días, por enseñarme el amor sincero, por
apoyarme incondicionalmente, y porque simplemente sin ustedes no sería lo que soy…
A mis padres Cuper y Daniel por su apoyo, cariño y amor que siempre me han dado.
A mis hermanos Arturo, Rogelio, Laura y Nel por su amor, compañía y apoyo…
A mi asesor Dr. Wilfrido Calleja Arriaga gracias por sus enseñanzas y sus consejos…
Al Dr. Mario Moreno Moreno por su disposición y apoyo durante este proyecto…
A mis sinodales, Dr. Luis Niño de Rivera y Oryazabal, Dr.Alejandro Díaz Mendez, Dr.
Carlos Zuñiga Islas, Dr. Luis Hernández Martínez y Dr. Ignacio Zaldivar Huerta por
evaluar mi trabajo de tesis.
También quiero expresar mi gratitud a Juan Manuel Álvarez Ledesma, Manuel Escobar,
Israel Medina, Oscar Aponte, Ignacio Juárez, Alfonso Cortes, Pablo Alarcón, Mauro
Landa, Adrian Itzmoyotl, Netzahualcoyotl Carlos, Leticia Tecuapetla, Armando
Hernández, Víctor Aca, Marino Conde, Adriana Tepaneca, Dr. Miguel Rocha, Dr.
Alejandro Díaz Sánchez. y demás técnicos de los laboratorios de Microelectrónica y LNN
del INAOE por todo su apoyo, sus consejos y disposición para culminar este proyecto de
tesis durante el desarrollo experimental.
Al Departamento de Física del CINVESTAV por las facilidades otorgadas para el uso del
SEM, en especial al Dr. Ángel Guillen
Agradecimientos
viii
Al Consejo Nacional de Ciencia y Tecnología (CONACyT) por la beca otorgada No.
224192
A mis tres grandes amigos, Israel Vivaldo, Oscar Addiel Seseña y Fernando Quiñones
porque pese a la distancia y el tiempo siempre han tenido un espacio para mí.
A mis compañeros y Amigos, Cesar Calleja Gómez, Luis Antonio Carillo, Hiram Enrique
Martínez, Manolo Pérez Ramos, Adrian Tec, Ramón Báez, Carolina Rosas, Oscar
Lozada, Johanny Escobar, Natiely Hernández, que hicieron de esta estadía en el INAOE,
una gran experiencia….
A la comunidad del INAOE en general y aquellos profesores que tuve el gusto de
conocer…
Y no menos importantes, A toda mi demás familia que siempre me ha apoyado…
ix
Índice
Resumen……………………………………………………………………………………..ii
Abstract……………………………………………………………………………..............iv
Dedicatoria………………………………………………………………………………….vi
Agradecimientos…………………………………………………………………………...vii
Índice……………………………………………………………………………….............ix
Lista de Acrónimos…………………………………………………………………….......xii
Lista de Símbolos………………………………………………………………………….xiii
Capitulo 1. Introducción……………….…………………………………………...1
1.1 Antecedentes………………………………………………………………………...1
1.2 Motivación y Justificación…………………………………………………………...2
1.3 Objetivos…………………………………………………………………….............3
1.4 Organización de la tesis……………………………………………………………..4
1.5 Referencias………….................................................................................................5
Capitulo 2. Sensores Biomédicos y sus aplicaciones………………………………6
2.1 Introducción…………………………………………………………………………6
2.2 Presión en el cuerpo humano………………………………………………………...6
2.2.1 Presión intraocular (PIO)……………………………………………………..7
2.2.2 Presión arterial o sanguínea (PA)……………………………………………10
2.2.3 Presión intracraneal (PIC)……………………………………………...........14
2.3 Sensores Biomédicos……………………………………………………………….15
2.3.1 Sensores físicos y sus aplicaciones en Biomedicina…………………...........15
2.4 Requerimientos para sensores de Presión in vivo..…………………………………16
2.4.1 Tamaño………………………………………………………………………17
2.4.2 Rango y Precisión……………………………………………………………17
2.4.3 Materiales y consideraciones de encapsulado……………………………….18
2.4.4 Telemetría y circuitería electrónica………………………………………….19
2.5 Estado del arte………………………………………………………………………20
2.6 Resumen…………………………………………………………………………….26
2.7 Referencias………………………………………………………………………….27
Índice
x
Capitulo 3. Diseño de un sensor capacitivo hermético para aplicaciones
biomédicas………………………………………………………...33
3.1 Aspectos generales de un sensor tipo TMCPS………………………………................33
3.2 Consideraciones de diseño de un sensor tipo TMCPS para aplicaciones en modo
invasivo………………………………..………………………………………………42
3.2.1 Suministro de Energía y restricciones de tamaño…………………...............42
3.2.2 Biocompatibilidad…………………………………………………………...44
3.3 Modelado del sensor TMCPS considerando un diafragma compuesto Aluminio-
Poliimida……………………………………………………………………………….44
3.4 Capacitancia del Sensor TMCPS……………………………………………................52
3.5 Resumen.………………………………………………………………………………56
3.6 Referencias…………………………………………………………………………….57
Capitulo 4. Proceso de Fabricación de un sensor de presión TMCPS………..59
4.1 Introducción………………………………..………………………………………….59
4.2 Descripción del proceso de fabricación del sensor TMCPS…………………………..59
4.3 Condiciones de depósito y grabado de la Poliimida PI-2610 de HD Microsystem…..62
4.3.1 Etapa de liberación mecánica……………………………………………….65
4.3.2 Etapa de Sellado con Poliimida……………………………………..............70
4.4 Resumen………………………………………………………………………………72
4.5 Referencias……………………………………………………………………………72
Capitulo 5. Caracterización eléctrica……………………………………………74
5.1 Introducción…………………………………………………………………………..74
5.2 Caracterización preliminar………………………………..…………………………...76
5.2.1 Mediciones de capacitancia a nivel oblea…………………………………76
5.2.2 Mediciones de capacitancia en encapsulado ……………………………...79
5.2.3 Sistema implementado para suministrar Presión…………………………..82
5.2.4 Circuito implementado para caracterizar la variación de capacitancia
con presión…………………….……………………………………….......84
5.3 Resumen…...…………………………………………………………………………..88
5.4 Referencias…………………………………………………………………………… 89
Capitulo 6. Conclusiones…………………………………………………………90
6.1 Conclusiones…………………………………………………………………………..90
6.2 Trabajo Futuro…………..………………………………..…………………………...91
Índice
xi
Apéndice A. Diseño y Proceso de fabricación de Bobinas de Aluminio
integradas en substratos flexibles de Poliimida………………………………………..92
Apéndice B. Aplicación del Teorema de ejes paralelos para determinar
la superficie neutral en diafragmas compuestos………………………………………101
Apéndice C. Patrón geométrico del chip CPS-DDA…………………………………104
xii
Lista de Acrónimos
APCVD Depósito Químico en fase Vapor a Presión Atmosférica
(Atmospheric Pressure Chemical Vapor Deposition)
APEC Asociación Para Evitar la Ceguera
ASIC Circuito Integrado de Aplicación Especifica (Application-
Specific Integrated Circuit)
CVD Depósito químico en fase vapor (Chemical vapor deposition)
CPP Presión de Perfusión Cerebral (Cerebral Perfusion Pressure)
GPAA Glaucoma Primario de Ángulo Abierto
GPAC Glaucoma Primario de Ángulo Cerrado
HI Hipertensión Intracraneal
IC Circuitos Integrados (Integrated Circuit)
IICP Presión Intracraneal Idiopática (Idiopathic Intracraneal
Pressure)
LCR Líquido Cefalorraquídeo
MEMS Sistemas Micro Electro Mecánicos (Micro Electro
Mechanical System)
MICS Servicios de Comunicación de Implantes Médicos (Medical
Implant Communication Service)
PA Presión Arterial
PS Presión Sanguínea
PIO Presión Intraocular
PIC Presión Intracraneal
RF MEMS Sistemas Micro Electro Mecánicos para aplicaciones de Radio
Frecuencia
SAR Razón de Absorción Específica (Specific Absorption Rate)
TMCPS Sensor de Presión Capacitivo en Modo de Contacto (Touch
Mode Capacitive Pressure Sensor)
xiii
Lista de Símbolos
a ½ de la longitud lateral de un diafragma cuadrado [m]
Atouch Área de contacto del diafragma con el electrodo inferior aislado [m]
C Capacitancia del diafragma [F]
CS Capacitancia del sensor [F]
Cpo Capacitancia del sensor a presión cero [F]
D Rigidez de Flexión [Pa·m3]
D1 Rigidez de flexión del material inferior en un diafragma [Pa·m3]
D2 Rigidez de flexión del material superior en un diafragma [Pa·m3]
Dcomp Rigidez de Flexión Compuesta [Pa·m3]
d Separación inicial entre los electrodos del diafragma [m]
deff Separación efectiva en un TMCPS considerando un material aislante
intermedio[m]
E Modulo de Young [Pa]
E1 Modulo de Young de Aluminio [Pa]
E2 Modulo de Young de Poliimida [Pa]
e1 Distancia desde la superficie neutral del diafragma compuesto hacia la parte
inferior del diafragma [m]
e2 Distancia desde la superficie neutral del diafragma compuesto hacia la parte
superior del diafragma [m]
εaire Constante dieléctrica del aire
εd Constante dieléctrica del material aislante
εo Permitividad dieléctrica del vacío [F/m]
G Ganancia en el Amplificador de instrumentación
h Espesor del diafragma [m]
h1 Espesor de la película de aluminio[m]
h2 Espesor de la película de Poliimida [m]
iC Corriente en el sensor capacitivo [A]
LS Inductancia de la bobina Integrada con el Sensor capacitivo [H]
p Presión externa
Lista de símbolos
xiv
Ptouch Presión de contacto [mmHg/Torr]
r Radio de un diafragma circular
Si Silicio
td Espesor del material dieléctrico [m]
Vm Señal de entrada variante en el tiempo [V]
V0 Voltaje de salida en amplificador [V]
ν Coeficiente de Poisson
ω Desplazamiento del diafragma [m]
ωmax Deflexión máxima del diafragma [m]
ω(p) Desplazamiento del diafragma en función de la presión aplicada[m]
Operador biharmónico
ΔC Variación de capacitancia [F]
τ Constante de tiempo en un capacitor [s]
1
Capítulo 1
Introducción
1.1 antecedentes
Los Sistemas Micro Electro Mecánicos (MEMS, por sus siglas en ingles), son la
integración de dispositivos mecánicos (sensores y actuadores) con tecnologia de circuitos
integrados en un mismo substrato, se caracterizan por tener dimensiones en escala de los
micrómetros. Inicialmente, la tecnologia MEMS fue basada en silicio con procesos de
fabricación que utilizan Micromaquinado de Volumen y Micromaquinado Superficial. Sin
embargo, otros materiales tales como, vidrios, cerámicos y polímeros han sido adaptados
para esta tecnologia. Algunas ventajas de los dispositivos MEMS son su tamaño reducido,
peso ligero, bajo consumo de energía y alta funcionalidad en comparación con los
dispositivos convencionales. Además, la tecnología MEMS ofrece la reducción de costos
en su proceso de manufactura, debido a sus técnicas de procesamiento por lotes, de manera
similar que en el desarrollo de circuitos integrados semiconductores (IC) [1.1]. En las
primeras etapas, los dispositivos MEMS demostraron ser una revolucionaria tecnología en
diversos campos del dominio de la física, tales como, Mecánica (sensores de presión,
acelerómetros, y giroscopios), Microfluídica (boquillas de inyección de tinta), Acústica
(micrófonos), RF MEMS (conmutadores y resonadores) y Óptica (microespejos) [1.2].
Gradualmente, la tecnología MEMS ha demostrado dar soluciones únicas y ofrece la
posibilidad de desarrollar dispositivos innovadores, no solo en la industria automotriz y
aeroespacial, por mencionar algunas; sino que actualmente, los dispositivos MEMS han
penetrado en el campo de la medicina, principalmente con el desarrollo de BioMEMS y
MEMS para aplicaciones biomédicas. En el proceso, los ingenieros biomédicos se han
comprometido activamente en el diseño, desarrollo, y la utilización de materiales,
dispositivos, sensores y técnicas para la investigación clínica, así como el diagnóstico y
tratamiento de pacientes [1.3]. En este aspecto, los polímeros son altamente atractivos para
aplicaciones biomédicas por que ofrecen biocompatibilidad, y bajo costo; además, pueden
integrarse muy fácilmente con dispositivos MEMS.
Capítulo 1 introducción
2
1.2 Motivación y Justificación
Muchas de las enfermedades pueden ser controladas con el uso de medicamentos si
son diagnosticadas antes de que el daño al órgano, tejido o mecanismo de control sea
irreversible. La solución ideal de tratamiento exige el monitoreo continuo de los parámetros
fisiológicos de interés [1.4], lo que implica una medición las 24 horas del día con el uso de
sensores biomédicos que puedan ser implantados en el cuerpo humano. Esto permitiría la
detección oportuna de cualquier enfermedad, el seguimiento y tratamiento adecuado, y por
último, sería posible evitar el deterioro definitivo de algún órgano del cuerpo humano.
Aunque investigadores y clínicos en el campo médico, reconocen la necesidad de un
esquema de medición permanente de la presión en pacientes con afecciones ligadas a este
parámetro, actualmente no existe un dispositivo confiable y eficaz, que presente un proceso
de fabricación sencillo y de bajo costo que permita que sea practico; y que al mismo tiempo
ofrezca una gran estabilidad y operación a largo plazo para la medición de la presión dentro
del cuerpo humano.
En este contexto, el presente proyecto doctoral, se enfoca a la realización de un
sensor mecánico, diseñado y orientado a medir la presión Intraocular en medios biológicos
mediante un esquema totalmente invasivo. Este dispositivo fue diseñado con un esquema
capacitivo que considera una cavidad hermética y dinámica, cuyas capacidades de
integración se basan en técnicas de micromaquinado superficial mediante la tecnología
PolyMEMS INAOE®. De manera preliminar ha sido reportado el uso de películas de
Polisilicio para definir al elemento sensor (diafragma suspendido). Los resultados
mostraron que los diafragmas fabricados con películas de 2µm de polisilicio son flexibles y
mecánicamente estables [1.5]. Actualmente, la tecnología PolyMEMS INAOE®
demuestra
ser lo suficientemente productiva para traspasar sus horizontes y desarrollar sensores de
presión incorporando películas de aluminio, como elemento estructural, y materiales como
poliimida, que en conjunto establecen un proceso de fabricación con etapas de manufactura
a bajas temperaturas <400°C. Todo esto, habilita la integración completa con un sistema de
telemetría para aplicaciones biomédicas [1.6].
Capítulo 1 introducción
3
1.3 Objetivos
El principal objetivo del presente proyecto de tesis es la fabricación y
caracterización eléctrica y mecánica de un sensor de presión absoluto
para operar en un rango de 1-80mmHg, y que tendrá como aplicación
principal la medición de presión en medios biológicos (Presión
intraocular, Presión sanguínea, Presión intracraneal)
A fin de alcanzar el objetivo se deben desarrollar los siguientes objetivos particulares:
a) Explorar la integración de películas de Aluminio, y materiales como resinas y
Poliimida con las principales etapas de manufactura de la tecnología de
micromaquinado superficial PolyMEMS INAOE®, para culminar con el desarrollo
de un proceso de fabricación de bajo costo y de menor complejidad.
b) Desarrollar una rutina de sellado hermético con Poliimida, que permita que el
dispositivo sensor pueda operar con una cavidad interna sellada que no se afecte por
el fluido biológico.
c) Considerando el diseño preliminar de estructuras capacitivas para medir presión;
modelar el efecto mecánico en el comportamiento de los diafragmas suspendidos,
cuando se incorpora un material adicional de cubierta y protección anticorrosión.
d) Implementación de un circuito electrónico a nivel discreto que permita evaluar las
variaciones de capacitancia en los dispositivos
e) Implementación de un sistema adecuado para suministrar presión de manera
controlada y precisa.
Capítulo 1 introducción
4
1.4 Organización de la tesis
La redacción de la tesis está organizada de la siguiente manera:
En el capítulo 2 se presentan una introducción general a los aspectos médicos más
importantes relacionados a la medición de la presión en el cuerpo humano. Además, se
detallan aspectos importantes de sensores biomédicos y sus principales aplicaciones. Por
último, se concluye el capitulo presentando el estado del arte de prototipos de sensores
biomédicos aplicados a la medición de la presión intraocular, la presión sanguínea y la
presión intracraneal.
En el capítulo 3 se detallan los aspectos y consideraciones de diseño más
importantes. Así mismo, se presenta el análisis por Elementos Finitos usando un software
con licencia CoventorWare para modelar el comportamiento mecánico de sensores de
presión que incluyen diafragmas compuestos por dos materiales distintos.
En el capítulo 4 se describe el trabajo experimental realizado en las distintas etapas
del proceso de fabricación.
En el capítulo 5 se detallan los aspectos generales de la metodología de medición
para realizar la caracterización eléctrica los dispositivos. Además, se presentan los
resultados obtenidos durante la caracterización preliminar.
Finalmente en el capítulo 6 se presentan las conclusiones derivadas de la tesis y se
propone el trabajo futuro.

Capítulo 1 introducción
5
1.5 referencias
[1.1] Madou, M. (1997). “Fundamentals of Mcrofabrication”, CRC Press.
[1.2] Bourne, M. (2007). “A Consumer’s Guide to MEMS & Nanotechnology”, Bourne
Research LLC, 1st edition.
[1.3] Harsanyi G. (2000). “Sensors in Biomedical Applications: Fundamentals, Technology
and Applications”, CRC Press.
[1.4] Leonardi, M., Leuenberger, P., Bertrand, A. Bertsch, and P. Renaud. (2004). “First
steps toward noninvasive intraocular pressure monitoring with a sensing contact lens,”
Investigative Ophthalmologhy & Visual Science, Vol. 45, No. 9, pp. 3113–3117.
[1.5] Díaz-Alonso, D. (2010) “Fabricación y Caracterización de estructuras para
monitorear presión, Tesis de Maestria, INAOE Electrónica.
[1.6] Rendón-Nava, A. E., Díaz-Méndez, J. A., Nino-de-Rivera, L., Calleja-Arriaga, W.,
Gil-Carrasco, F., & Díaz-Alonso, D. (2014). “Study of the Effect of Distance and
Misalignment between Magnetically Coupled Coils for Wireless Power Transfer in
Intraocular Pressure Measurement”. The Scientific World Journal, Vol. 2014, Article ID
692431, 11 pages.
6
Capítulo 2
Sensores Biomédicos y sus aplicaciones
2.1 Introducción
En el siglo XX, la innovación técnica y tecnológica ha progresado a un ritmo tan
acelerado que se ha impregnado en casi todos los aspectos de nuestras vidas. Este aspecto
es más evidente en el campo de la medicina. Con innovaciones tecnológicas casi continuas
que han conducido a la atención médica, profesionales de la ingeniería se han involucrado
íntimamente en muchas empresas médicas. Como resultado, la disciplina de la ingeniería
biomédica se ha convertido en un medio de integración para dos profesiones dinámicas: la
medicina y la ingeniería electrónica [2.1]. El campo de la ingeniería biomédica incluye
muchas nuevas áreas: biomecánica, biomateriales, modelado fisiológico, simulación y
control, entre otras. Una de las partes más importantes de la ingeniería biomédica es la de
sensores biomédicos, que permiten la detección de procesos biológicos y su conversión a
señales. Desde un punto de vista fisiológico, la presión en el cuerpo humano es un
parámetro crítico en muchos diagnósticos clínicos. En este contexto, han sido realizados
muchos esfuerzos para desarrollar sensores de presión MEMS que sean adecuados y
faciliten un monitoreo continuo de la presión en el cuerpo humano (intraocular, sanguínea,
e intracraneal) y que permiten evaluar y diagnosticar a tiempo cualquier enfermedad con la
finalidad de dar una mejor calidad de vida a los pacientes. En este capítulo se abordaran los
aspectos más relevantes de la medición de presión en el cuerpo humano (intraocular,
sanguínea e intracraneal); además, se detallan los antecedentes que conciernen el desarrollo
de sensores biomédicos.
2.2 Presión en el cuerpo humano
El cuerpo humano está compuesto por múltiples órganos los cuales cumplen funciones
especificas para el adecuado funcionamiento del organismo y la salud de la persona, los
médicos han clasificados de acuerdo a sus procesos y funciones diferentes tipos de
Capítulo 2 Sensores biomédicos
7
sistemas; aparato circulatorio, aparato digestivo, sistema inmunológico, aparato
respiratorio, entre otros. El cuerpo se ve afectado tanto por condiciones al interior del
organismo como por su entorno, entre este hecho se encuentra la presión. En este capítulo
se abordan las principales presiones que pueden ser medidas en el cuerpo humano y que a
menudo proporcionan indicadores médicos valiosos; entre las que destacan: la presión
arterial o sanguínea, la presión intraocular, y la presión intracraneal.
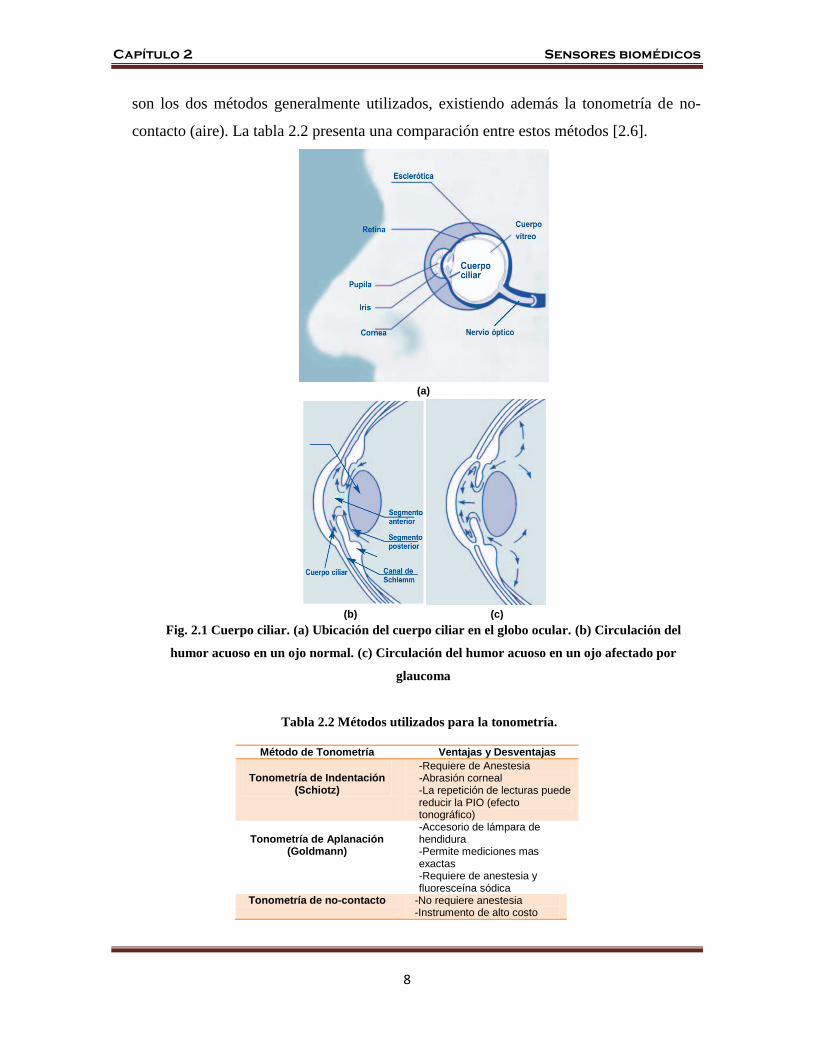
2.2.1 Presión intraocular
La Presión intraocular (PIO) se mantiene constante mediante el equilibrio que existe
entre la producción y eliminación de líquido en la parte anterior del ojo,
denominado humor acuoso. Si la circulación del humor acuoso es normal, éste entra al
ojo desde el cuerpo ciliar a través de las cámaras del ojo y sale por la red trabecular y el
canal de Schlemm, como se ilustra en la figura 2.1(b). En estos casos la PIO oscila entre
10-21 milímetros de mercurio (mmHg) [2.2]. Cuando se produce una alteración
modificando la circulación del humor acuoso y no se llega a producir la compensación
de salida por falla en el mecanismo de drenaje, figura 2.1(c), aumenta la presión dentro
de la cavidad ocular y nos encontramos ante un cuadro de hipertensión ocular que
clasificaremos como un tipo de glaucoma, de acuerdo con la tabla 2.1 [2.3].
Tabla 2.1 Clasificación de los tipos de Glaucoma
Presión característica Tipo de Glaucoma
10 mm Hg Congénito
>21 mm Hg Baja tensión o Normatensional
30-45 mm Hg Primario de Angulo Abierto (GPAA)
45-60 mm Hg Primario de Angulo Cerrado (GPAC)
Aunque los investigadores y clínicos en el campo reconocen la necesidad de un
seguimiento continuo en los pacientes con glaucoma, ningún método esta todavía
disponible [2.4]. El diagnostico del glaucoma se basa principalmente en la medición de
la PIO por tonometría, el aspecto de la papila, el estado de la capa de las fibras nerviosas
y la campimetría [2.5]. En un ambiente clínico, la tonometría de Schiotz (Indentación) y
la tonometría de aplanación, realizado frecuentemente con el tonómetro de Goldmann,
Capítulo 2 Sensores biomédicos
8
son los dos métodos generalmente utilizados, existiendo además la tonometría de no-
contacto (aire). La tabla 2.2 presenta una comparación entre estos métodos [2.6].
(a)
(b) (c)
Fig. 2.1 Cuerpo ciliar. (a) Ubicación del cuerpo ciliar en el globo ocular. (b) Circulación del
humor acuoso en un ojo normal. (c) Circulación del humor acuoso en un ojo afectado por
glaucoma
Tabla 2.2 Métodos utilizados para la tonometría.
Método de Tonometría Ventajas y Desventajas
Tonometría de Indentación
(Schiotz)
-Requiere de Anestesia -Abrasión corneal -La repetición de lecturas puede reducir la PIO (efecto tonográfico)
Tonometría de Aplanación
(Goldmann)
-Accesorio de lámpara de hendidura -Permite mediciones mas exactas -Requiere de anestesia y fluoresceína sódica
Tonometría de no-contacto -No requiere anestesia -Instrumento de alto costo
Capítulo 2 Sensores biomédicos
9
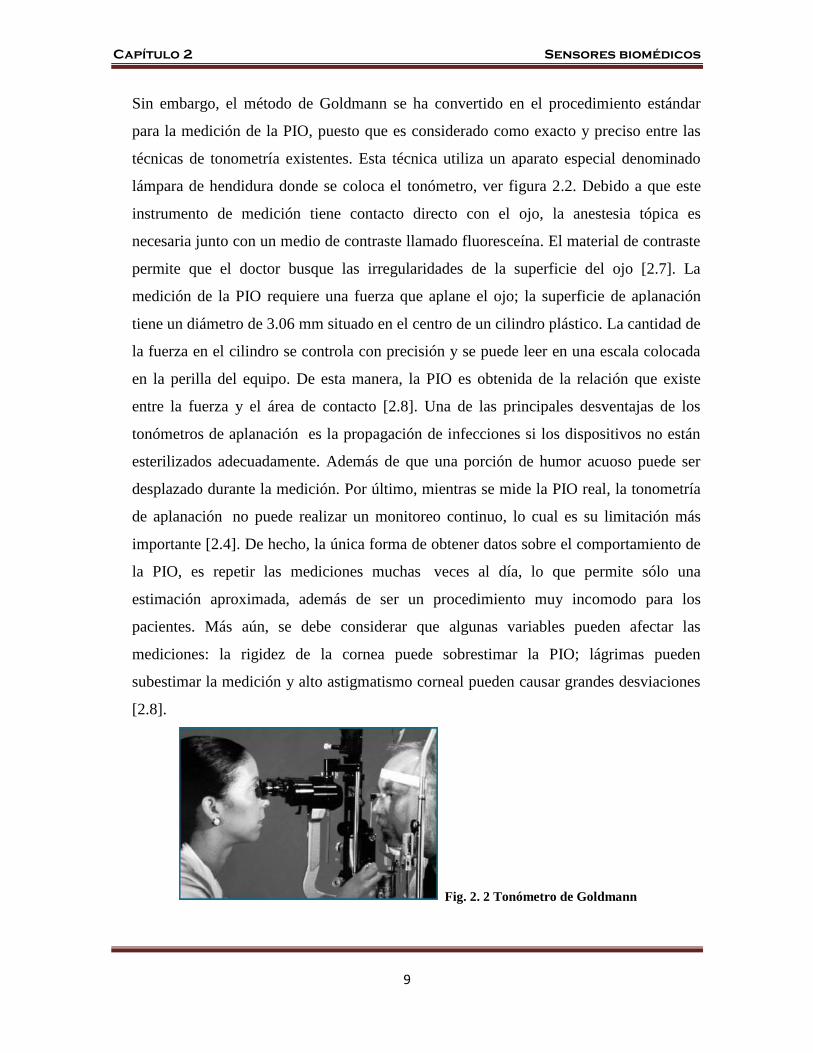
Sin embargo, el método de Goldmann se ha convertido en el procedimiento estándar
para la medición de la PIO, puesto que es considerado como exacto y preciso entre las
técnicas de tonometría existentes. Esta técnica utiliza un aparato especial denominado
lámpara de hendidura donde se coloca el tonómetro, ver figura 2.2. Debido a que este
instrumento de medición tiene contacto directo con el ojo, la anestesia tópica es
necesaria junto con un medio de contraste llamado fluoresceína. El material de contraste
permite que el doctor busque las irregularidades de la superficie del ojo [2.7]. La
medición de la PIO requiere una fuerza que aplane el ojo; la superficie de aplanación
tiene un diámetro de 3.06 mm situado en el centro de un cilindro plástico. La cantidad de
la fuerza en el cilindro se controla con precisión y se puede leer en una escala colocada
en la perilla del equipo. De esta manera, la PIO es obtenida de la relación que existe
entre la fuerza y el área de contacto [2.8]. Una de las principales desventajas de los
tonómetros de aplanación es la propagación de infecciones si los dispositivos no están
esterilizados adecuadamente. Además de que una porción de humor acuoso puede ser
desplazado durante la medición. Por último, mientras se mide la PIO real, la tonometría
de aplanación no puede realizar un monitoreo continuo, lo cual es su limitación más
importante [2.4]. De hecho, la única forma de obtener datos sobre el comportamiento de
la PIO, es repetir las mediciones muchas veces al día, lo que permite sólo una
estimación aproximada, además de ser un procedimiento muy incomodo para los
pacientes. Más aún, se debe considerar que algunas variables pueden afectar las
mediciones: la rigidez de la cornea puede sobrestimar la PIO; lágrimas pueden
subestimar la medición y alto astigmatismo corneal pueden causar grandes desviaciones
[2.8].
Fig. 2. 2 Tonómetro de Goldmann
Capítulo 2 Sensores biomédicos
10
2.2.2 Presión arterial o sanguínea
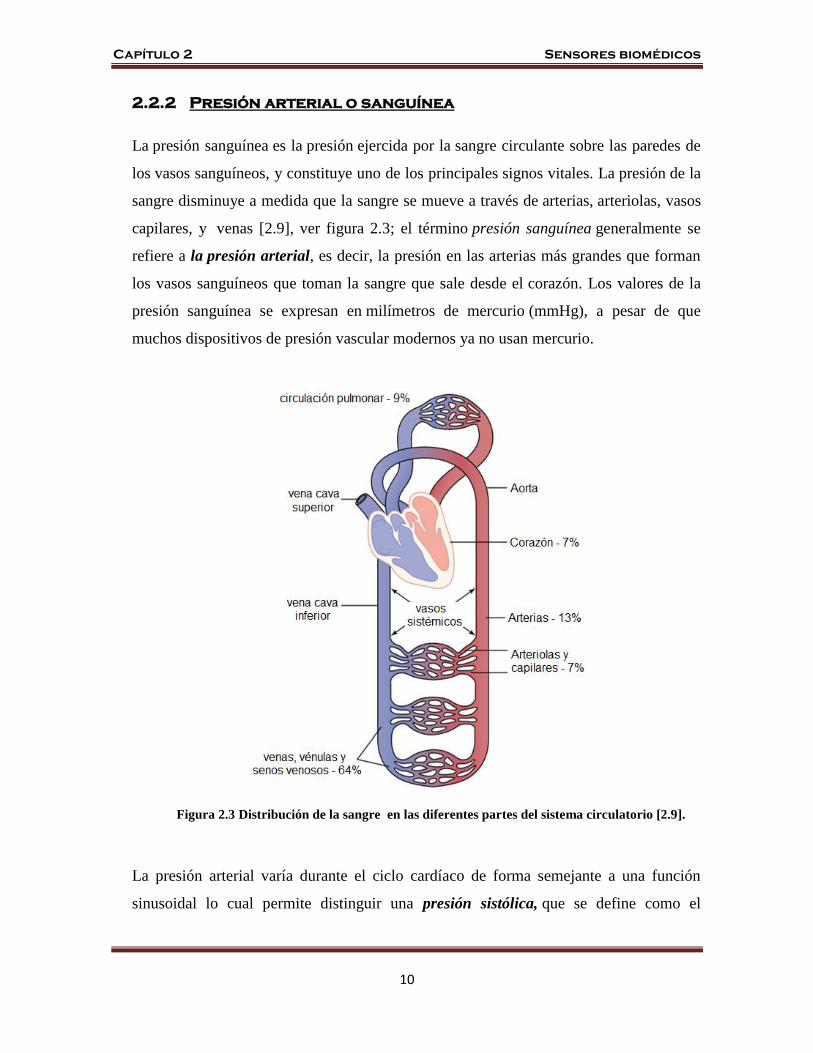
La presión sanguínea es la presión ejercida por la sangre circulante sobre las paredes de
los vasos sanguíneos, y constituye uno de los principales signos vitales. La presión de la
sangre disminuye a medida que la sangre se mueve a través de arterias, arteriolas, vasos
capilares, y venas [2.9], ver figura 2.3; el término presión sanguínea generalmente se
refiere a la presión arterial, es decir, la presión en las arterias más grandes que forman
los vasos sanguíneos que toman la sangre que sale desde el corazón. Los valores de la
presión sanguínea se expresan en milímetros de mercurio (mmHg), a pesar de que
muchos dispositivos de presión vascular modernos ya no usan mercurio.
Figura 2.3 Distribución de la sangre en las diferentes partes del sistema circulatorio [2.9].
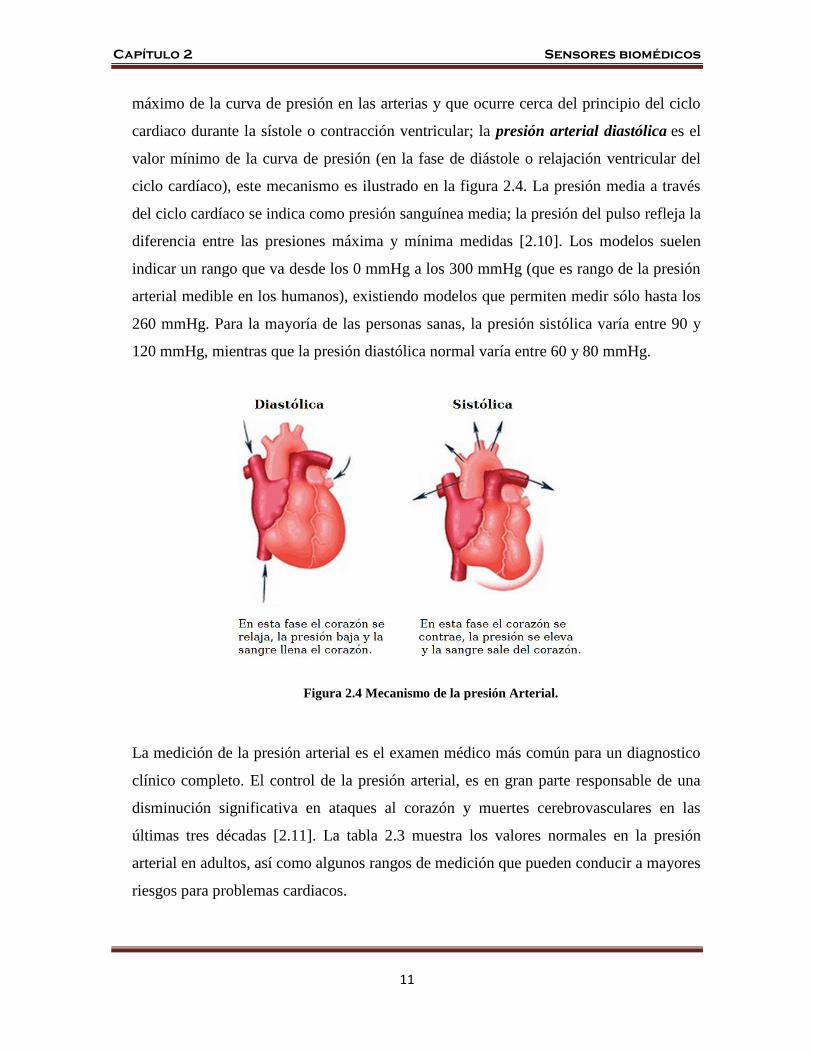
La presión arterial varía durante el ciclo cardíaco de forma semejante a una función
sinusoidal lo cual permite distinguir una presión sistólica, que se define como el
Capítulo 2 Sensores biomédicos
11
máximo de la curva de presión en las arterias y que ocurre cerca del principio del ciclo
cardiaco durante la sístole o contracción ventricular; la presión arterial diastólica es el
valor mínimo de la curva de presión (en la fase de diástole o relajación ventricular del
ciclo cardíaco), este mecanismo es ilustrado en la figura 2.4. La presión media a través
del ciclo cardíaco se indica como presión sanguínea media; la presión del pulso refleja la
diferencia entre las presiones máxima y mínima medidas [2.10]. Los modelos suelen
indicar un rango que va desde los 0 mmHg a los 300 mmHg (que es rango de la presión
arterial medible en los humanos), existiendo modelos que permiten medir sólo hasta los
260 mmHg. Para la mayoría de las personas sanas, la presión sistólica varía entre 90 y
120 mmHg, mientras que la presión diastólica normal varía entre 60 y 80 mmHg.
Figura 2.4 Mecanismo de la presión Arterial.
La medición de la presión arterial es el examen médico más común para un diagnostico
clínico completo. El control de la presión arterial, es en gran parte responsable de una
disminución significativa en ataques al corazón y muertes cerebrovasculares en las
últimas tres décadas [2.11]. La tabla 2.3 muestra los valores normales en la presión
arterial en adultos, así como algunos rangos de medición que pueden conducir a mayores
riesgos para problemas cardiacos.
Capítulo 2 Sensores biomédicos
12
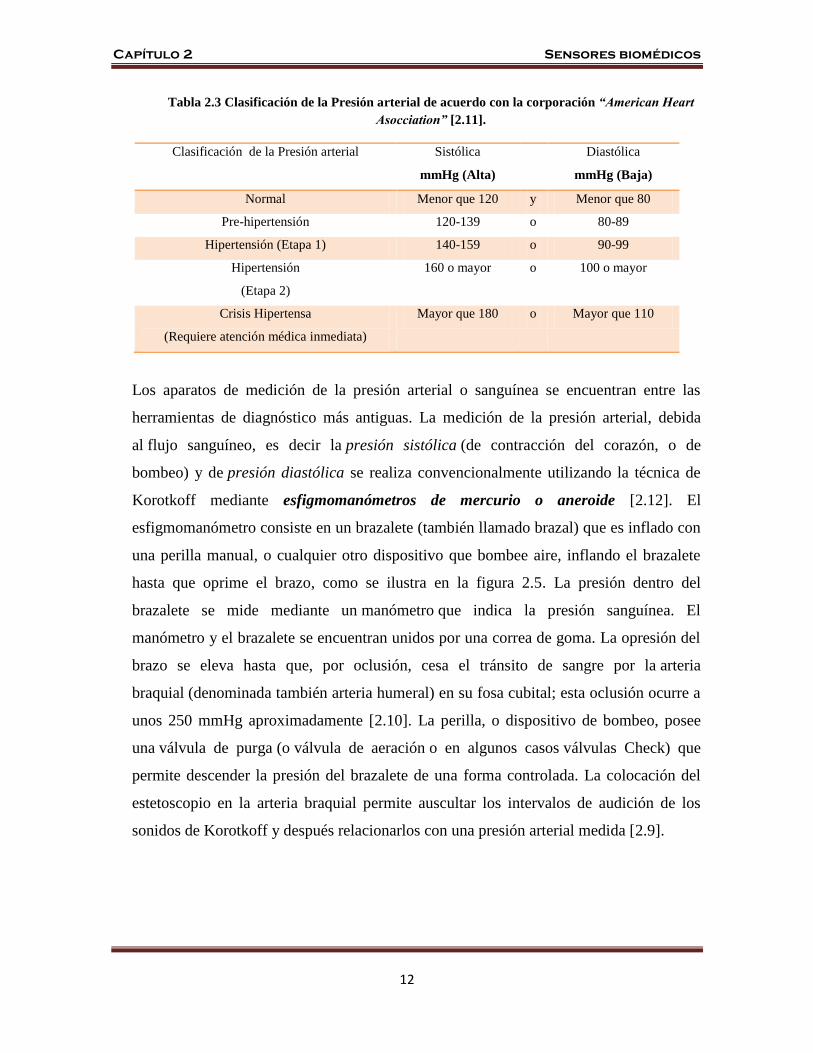
Tabla 2.3 Clasificación de la Presión arterial de acuerdo con la corporación “American Heart
Asocciation” [2.11].
Clasificación de la Presión arterial Sistólica
mmHg (Alta)
Diastólica
mmHg (Baja)
Normal Menor que 120 y Menor que 80
Pre-hipertensión 120-139 o 80-89
Hipertensión (Etapa 1) 140-159 o 90-99
Hipertensión
(Etapa 2)
160 o mayor o 100 o mayor
Crisis Hipertensa
(Requiere atención médica inmediata)
Mayor que 180 o Mayor que 110
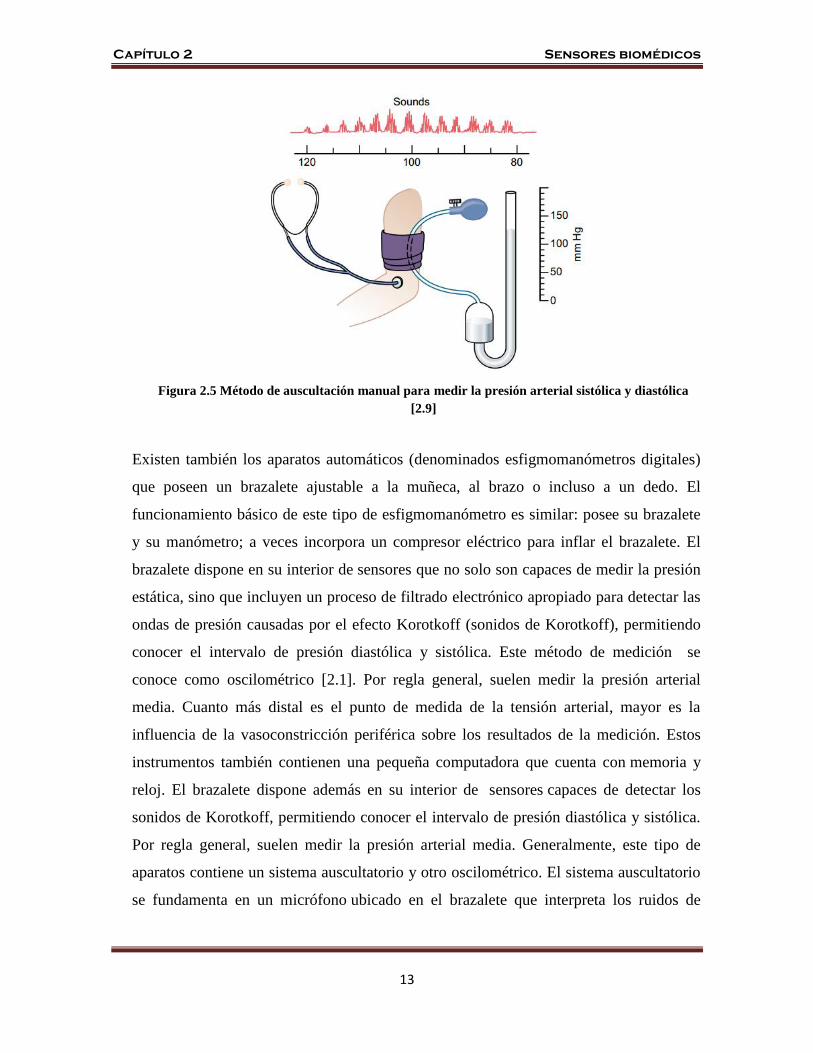
Los aparatos de medición de la presión arterial o sanguínea se encuentran entre las
herramientas de diagnóstico más antiguas. La medición de la presión arterial, debida
al flujo sanguíneo, es decir la presión sistólica (de contracción del corazón, o de
bombeo) y de presión diastólica se realiza convencionalmente utilizando la técnica de
Korotkoff mediante esfigmomanómetros de mercurio o aneroide [2.12]. El
esfigmomanómetro consiste en un brazalete (también llamado brazal) que es inflado con
una perilla manual, o cualquier otro dispositivo que bombee aire, inflando el brazalete
hasta que oprime el brazo, como se ilustra en la figura 2.5. La presión dentro del
brazalete se mide mediante un manómetro que indica la presión sanguínea. El
manómetro y el brazalete se encuentran unidos por una correa de goma. La opresión del
brazo se eleva hasta que, por oclusión, cesa el tránsito de sangre por la arteria
braquial (denominada también arteria humeral) en su fosa cubital; esta oclusión ocurre a
unos 250 mmHg aproximadamente [2.10]. La perilla, o dispositivo de bombeo, posee
una válvula de purga (o válvula de aeración o en algunos casos válvulas Check) que
permite descender la presión del brazalete de una forma controlada. La colocación del
estetoscopio en la arteria braquial permite auscultar los intervalos de audición de los
sonidos de Korotkoff y después relacionarlos con una presión arterial medida [2.9].
Capítulo 2 Sensores biomédicos
13
Figura 2.5 Método de auscultación manual para medir la presión arterial sistólica y diastólica
[2.9]
Existen también los aparatos automáticos (denominados esfigmomanómetros digitales)
que poseen un brazalete ajustable a la muñeca, al brazo o incluso a un dedo. El
funcionamiento básico de este tipo de esfigmomanómetro es similar: posee su brazalete
y su manómetro; a veces incorpora un compresor eléctrico para inflar el brazalete. El
brazalete dispone en su interior de sensores que no solo son capaces de medir la presión
estática, sino que incluyen un proceso de filtrado electrónico apropiado para detectar las
ondas de presión causadas por el efecto Korotkoff (sonidos de Korotkoff), permitiendo
conocer el intervalo de presión diastólica y sistólica. Este método de medición se
conoce como oscilométrico [2.1]. Por regla general, suelen medir la presión arterial
media. Cuanto más distal es el punto de medida de la tensión arterial, mayor es la
influencia de la vasoconstricción periférica sobre los resultados de la medición. Estos
instrumentos también contienen una pequeña computadora que cuenta con memoria y
reloj. El brazalete dispone además en su interior de sensores capaces de detectar los
sonidos de Korotkoff, permitiendo conocer el intervalo de presión diastólica y sistólica.
Por regla general, suelen medir la presión arterial media. Generalmente, este tipo de
aparatos contiene un sistema auscultatorio y otro oscilométrico. El sistema auscultatorio
se fundamenta en un micrófono ubicado en el brazalete que interpreta los ruidos de
Capítulo 2 Sensores biomédicos
14
Korotkoff, mientras que los dispositivos oscilométricos analizan la transmisión de
vibración de la pared arterial.
2.2.3 Presión intracraneal
La Presión intracraneal (PIC) es la presión dentro del cráneo y por lo tanto en el tejido
cerebral y el líquido cefalorraquídeo (LCR). El cuerpo tiene varios mecanismos por los
que se mantiene estable la PIC, con variaciones en la presión del LCR que varían
alrededor de 1 mmHg (adultos) mediante cambios en la producción y la absorción de
LCR. La presión del LCR es altamente influenciada por cambios bruscos en la presión
intratorácica durante la tos (presión intra-abdominal), y la comunicación con el sistema
vascular (sistemas venoso y arterial). La PIC se mide en milímetros de mercurio
(mmHg). Los cambios en la PIC se atribuyen a los cambios de volumen en uno o más de
los constituyentes contenidos en el cráneo. La hipertensión intracraneal, comúnmente
abreviado como HI o IICP es la elevación de la presión en el cráneo. Una PIC es normal
cuando se encuentra en un rango de 7-15 mmHg [2.13]. Para valores de la PIC entre 20-
25 mmHg o superiores, se requiere un tratamiento médico para reducir la PIC y no
desencadenar algún daño neurológico [2.14]. La medición de la presión intracraneal
(PIC) se considera una de las bases en la atención clínica neurointensiva moderna.
Básicamente, el parénquima cerebral es casi incompresible, encerrado en una porción de
hueso que no se expande; además es un sistema complejo con un equilibrio entre la
circulación de la sangre y el líquido cefalorraquídeo (LCR) [2.15]. Cuando se produce
una lesión cerebral traumática, hemorragia subaracnoidea, accidente cerebrovascular,
intracerebral, Hematomas o meningitis, afecta este equilibrio y la PIC aumenta. Por lo
tanto, mediante el seguimiento y la medición oportuna de la PIC, cualquier lesión
secundaria, que pudiera causar daño neurológico permanente o incluso la muerte, puede
ser detectada y tratada a tiempo [2.16]. Cuando la presión de perfusión cerebral (CPP),
obtenida sustrayendo la PIC de la presión arterial media, cae por debajo de 50 mmHg,
las consecuencias pueden ser la isquemia cerebral secundaria, hernia, y, en última
instancia, se produce la muerte cerebral.
Capítulo 2 Sensores biomédicos
15
2.3 Sensores biomédicos
Los sensores biomédicos toman señales que representan variables médicas y
generalmente las convierten en una señal eléctrica u óptica. Por lo tanto, el sensor
biomédico sirve como una interfaz entre un sistema biológico y un sistema electrónico
[2.1]. Los sensores biomédicos se utilizan en campos de aplicaciones médicas como
dispositivos para diagnóstico y monitoreo de enfermedades. Sin embargo, una de las tareas
de investigación más importante para sensores biomédicos, también comprende el
desarrollo de sistemas de control que puedan ser implantados en el cuerpo humano; y que
sean capaces de operar continuamente por largos periodos de tiempo, con el fin de simular
la función de un órgano interno u otro mecanismo de control. Muchas enfermedades
crónicas son el resultado de la operación fallida de alguno de los sistemas de control del
cuerpo humano.
2.3.1 Sensores físicos y sus aplicaciones en Biomedicina
En general, los sensores biomédicos se clasifican respecto a los siguientes aspectos: por
el parámetro físico que miden (presión, temperatura, flujo, pH, etc.), por su función
(terapéutico, diagnostico, monitoreo, asistencia etc.), por el principio de transducción
que emplean (resistivo, capacitivo, inductivo, etc.), por el sistema fisiológico al que son
enfocados (cardiovascular, pulmonar, nervioso, etc.), por las especialidades médicas
pediatría, oftalmología, cardiología, etc.), y por los niveles de riesgo que representan.
Los sensores biomédicos son conocidos como sensores físicos aplicados a la medicina, y
son usados en aplicaciones de monitoreo, como órganos artificiales, dispositivos de
control clínico y doméstico, además están incluidos en grandes aparatos de diagnostico
para la detección y tratamiento de enfermedades. Entre sus principales aplicaciones
destacan las mostradas en la tabla 2.4
Capítulo 2 Sensores biomédicos
16
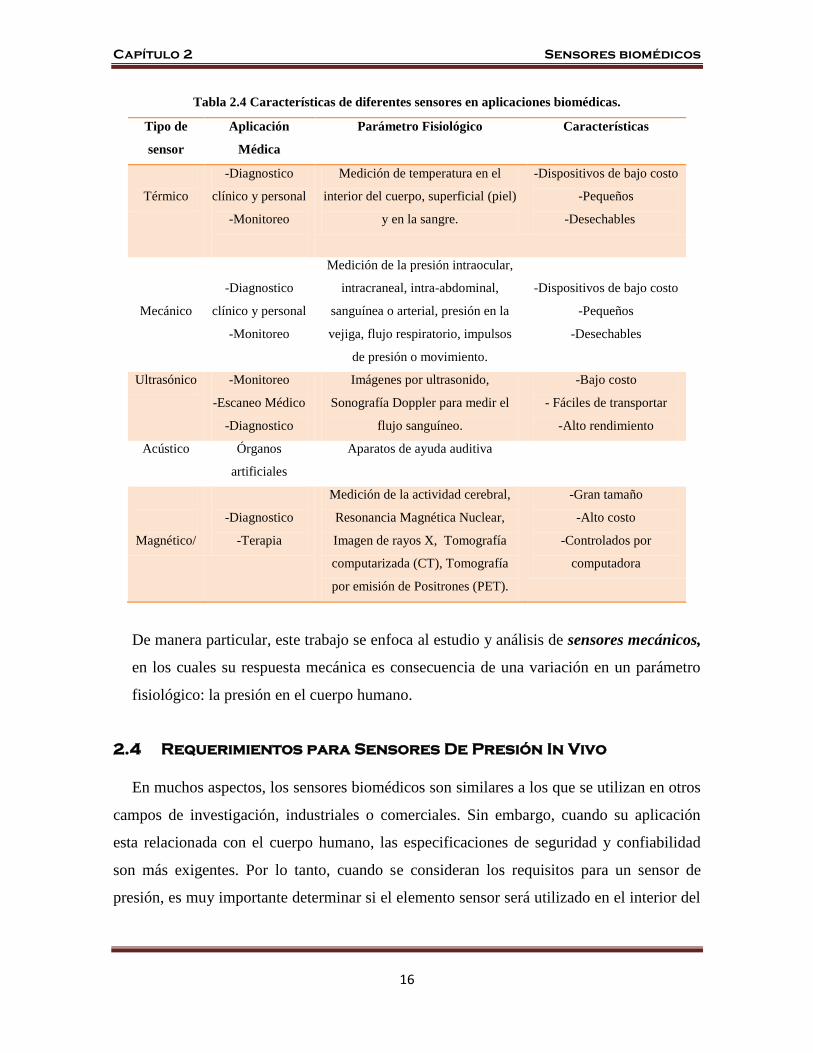
Tabla 2.4 Características de diferentes sensores en aplicaciones biomédicas.
Tipo de
sensor
Aplicación
Médica
Parámetro Fisiológico Características
Térmico
-Diagnostico
clínico y personal
-Monitoreo
Medición de temperatura en el
interior del cuerpo, superficial (piel)
y en la sangre.
-Dispositivos de bajo costo
-Pequeños
-Desechables
Mecánico
-Diagnostico
clínico y personal
-Monitoreo
Medición de la presión intraocular,
intracraneal, intra-abdominal,
sanguínea o arterial, presión en la
vejiga, flujo respiratorio, impulsos
de presión o movimiento.
-Dispositivos de bajo costo
-Pequeños
-Desechables
Ultrasónico -Monitoreo
-Escaneo Médico
-Diagnostico
Imágenes por ultrasonido,
Sonografía Doppler para medir el
flujo sanguíneo.
-Bajo costo
- Fáciles de transportar
-Alto rendimiento
Acústico Órganos
artificiales
Aparatos de ayuda auditiva
Magnético/
-Diagnostico
-Terapia
Medición de la actividad cerebral,
Resonancia Magnética Nuclear,
Imagen de rayos X, Tomografía
computarizada (CT), Tomografía
por emisión de Positrones (PET).
-Gran tamaño
-Alto costo
-Controlados por
computadora
De manera particular, este trabajo se enfoca al estudio y análisis de sensores mecánicos,
en los cuales su respuesta mecánica es consecuencia de una variación en un parámetro
fisiológico: la presión en el cuerpo humano.
2.4 Requerimientos para Sensores De Presión In Vivo
En muchos aspectos, los sensores biomédicos son similares a los que se utilizan en otros
campos de investigación, industriales o comerciales. Sin embargo, cuando su aplicación
esta relacionada con el cuerpo humano, las especificaciones de seguridad y confiabilidad
son más exigentes. Por lo tanto, cuando se consideran los requisitos para un sensor de
presión, es muy importante determinar si el elemento sensor será utilizado en el interior del
Capítulo 2 Sensores biomédicos
17
cuerpo humano (modo invasivo) para analizar in vivo o usado externamente para analizar
una muestra in vitro. Para sensores implantados, el diseño se guía por una serie de
requisitos especiales que sobrepasa a la selección inicial de un esquema de transducción de
presión [2.17]. Estos requisitos se detallan a continuación.
2.4.1 Tamaño
El tamaño del implante depende totalmente de la aplicación, y debe ser suficientemente
miniaturizado a fin de obtener la colocación apropiada del sensor en el cuerpo humano
(es decir, debe ser compatible con las técnicas de implantación y considerar las
restricciones anatómicas) y la integración con componentes de telemetría (que
aumentará aún más el impacto). Mediante el aprovechamiento de los avances en las
tecnologías de micromaquinado, se han desarrollado sensores basados en MEMS que
minimizan el impacto global y las dimensiones [2.17]. El tamaño total del sistema
completo se puede reducir mediante la combinación de sensores con circuitos integrados
de aplicación específica (ASIC) en lugar de componentes electrónicos discretos. Sin
embargo, las bobinas de acoplamiento inductivo (que son utilizadas para una adecuada
alimentación del sensor) y las baterías siguen siendo relativamente grandes e imponen
límites prácticos a una efectiva miniaturización.
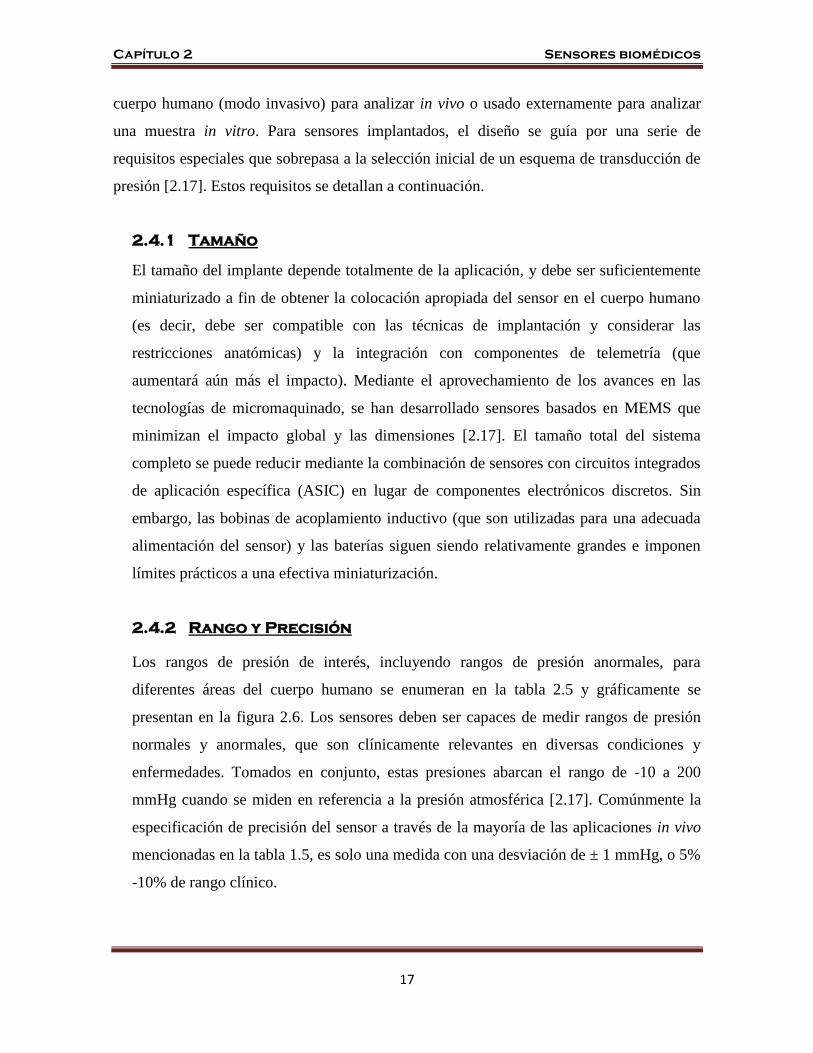
2.4.2 Rango y Precisión
Los rangos de presión de interés, incluyendo rangos de presión anormales, para
diferentes áreas del cuerpo humano se enumeran en la tabla 2.5 y gráficamente se
presentan en la figura 2.6. Los sensores deben ser capaces de medir rangos de presión
normales y anormales, que son clínicamente relevantes en diversas condiciones y
enfermedades. Tomados en conjunto, estas presiones abarcan el rango de -10 a 200
mmHg cuando se miden en referencia a la presión atmosférica [2.17]. Comúnmente la
especificación de precisión del sensor a través de la mayoría de las aplicaciones in vivo
mencionadas en la tabla 1.5, es solo una medida con una desviación de ± 1 mmHg, o 5%
-10% de rango clínico.
Capítulo 2 Sensores biomédicos
18
Figura 2.6 Rangos de presión relevantes para monitoreo y diagnostico de presión en aplicaciones
medicas.
Tabla 2.5 Parámetros relevantes en el desarrollo de sensores de presión para aplicaciones implantables
en el cuerpo humano.
Aplicación Rango de Presión
(mmHg) [Ref.]
Resolución
(mmHg) [Ref.]
Frecuencia
(Hz) [Ref.]
Consideraciones
de encapsulado
Presión Intracraneal
(PIC)
-10 a 50 [2.18] 1 [2.19] 0-30 [2.20] Integración por
shunt, catéter
Presión Intraocular
(PIO)
10-21, >21 valor
anormal [2.2], [2.21]
2 [2.22], [2.23] 0-30 [2.24] Needle delivery,
lentes de contacto
Presión Arterial o
Sanguínea
50-180 [2.25]
1 [2.25]
0-200 [2.25]
Catéter, stent
(cánula)
Presión de la Vejiga 10-70, ~150 durante
la evacuación [2.26]
1 [2.27]
3-5 [2.28],[2.29]
Catéter intrauretral
Presión Intra-
abdominal
0.2-16.2 [2.30]
------
0-15 [2.31]
------
2.4.3 Materiales y Consideraciones de encapsulado
Cuando se consideran los materiales y métodos de empaquetado para sensores de
presión implantables, se deben analizar tres aspectos importantes:
(1) La integración aceptable con el tejido humano (es decir, una baja citotoxicidad).
(2) El adecuado encapsulado hermético a fin de proteger los posibles circuitos activos.
Capítulo 2 Sensores biomédicos
19
(3) La estabilidad mecánica a largo plazo del dispositivo en el medio biológico.
Debido a la inevitable respuesta del cuerpo humano contra un sensor implantado ajeno a
su naturaleza, se deben elegir materiales apropiados para tratar de limitar la
contaminación biológica y poder obtener un rendimiento en el dispositivo sensor más
confiable y a largo plazo [2.32]. La esterilización también es un factor importante
cuando se seleccionan los materiales; los dispositivos deben ser capaces de resistir los
procesos de esterilización mediante calor o químicos (por ejemplo, óxido de etileno o
plasma) [2.33], [2.34]. Además, las consideraciones adicionales para el diseño de
dispositivos también pueden beneficiar la integración [2.35]. Para sensores que se
diseñan con circuitos activos, es necesario garantizar un adecuado encapsulado
hermético para impedir la intrusión del medio biológico, y así evitar una falla en la
operación del dispositivo. Para proporcionar una hermeticidad adicional mejorar la
biocompatibilidad al sistema, es posible realizar una encapsulado secundario con una
cubierta de Parileno [2.36-2.41]. Sin embargo, para sensores que basan su operación en
diafragmas o membranas, la elección del material debe considerar la estabilidad
mecánica a largo plazo [2.42], [2.43]; ya que una cubierta adicional sobre la estructura
del diafragma reduce la sensitividad del dispositivo [2.37-2.39], [2.44-2.46].
2.4.4 Telemetría y circuitería electrónica
El diseño de la circuitería electrónica, para implantes que utilizan métodos de telemetría,
requiere un tratamiento cuidadoso considerando una serie de ventajas y desventajas que
afectan el consumo de energía, el tamaño de la antena y la frecuencia de transmisión.
Las características de radiación electromagnética deben priorizar cuidadosamente la
seguridad y el rendimiento cuando se dirigen a los retos de potencia y transmisión de
datos en el entorno in vivo. Se han establecido normas que limitan el calentamiento del
tejido y la tasa de radiación específica de absorción (SAR), [2.47], [2.48]. Una banda de
frecuencias con licencia para comunicaciones, servicio de comunicaciones de implantes
médicos (MICS), fomenta el desarrollo de sistemas de telemetría dentro de un rango de
402-405 MHz, pero estudios más recientes sugieren que funciona a una frecuencia más
alta (2 + GHz) para un rendimiento mas óptimo [2.49]. Se debe considerar el
Capítulo 2 Sensores biomédicos
20
calentamiento dieléctrico durante los exámenes de resonancia magnética (especialmente
si el implante se encuentra en una zona crítica en el cuerpo), tal que se recomienda
realizar un análisis de resonancia magnética previo a la implantación del dispositivo
[2.38].
2.5 Estado del Arte
Los primeros dispositivos MEMS para ser utilizados en la industria biomédica eran
sensores de presión arterial reutilizables en 1980. Los sensores de presión MEMS tienen la
clase más grande de aplicaciones, incluyendo presión sanguínea (PS), presión intraocular
(PIO), la presión intracraneal (PIC), presión intrauterina, y la angioplastia [2.50]. Algunos
fabricantes de sensores de presión MEMS para aplicaciones biomédicas incluyen
CardioMEMS, Freescale Semiconductors, GE Sensing, Measurement Specialties, Omron,
Sensimed AG y Silicon Microstructures, entre otros.
Debido a que los procedimientos estándares de seguimiento clínico no identifican
los picos y variaciones en la Presión intraocular (PIO), se han realizado muchos intentos de
encontrar una solución práctica y portátil para el monitoreo continuo de la PIO. Con la
miniaturización de los sensores y actuadores, se han desarrollado nuevas técnicas de
medición, entre las que destacan principalmente, los lentes de contacto con circuitos
integrados y los sensores de presión intraocular. Los primeros lentes de contacto fueron
desarrollados por Gilman y Greene [2.51], como el primer método no invasivo de medición
de la PIO. Este sistema consistía de una suave lente de contacto, en la cual se integraban
sensores de deformación. Esta lente se colocaba sobre el ángulo meridional de la unión
corneoescleral para medir los cambios angulares debido a variaciones PIO. Su principal
inconveniente surgía por la necesidad de que la lente de contacto tenía que estar moldeada
como una copia exacta de la forma del ojo en cada paciente, conduciendo a un sistema de
sensado muy costoso. Por otro lado, los sensores de presión intraocular implantables,
presentan algunas ventajas de medición, ya que son independientes de la superficie ocular y
la rigidez de la cornea. En general, estos dispositivos basan su funcionamiento en sensores
capacitivos, porque consumen menor potencia, son inmunes a las variaciones de la
temperatura y presentan buena estabilidad a largo plazo [2.52]. Lo más atractivo y
Capítulo 2 Sensores biomédicos
21
novedoso de estos dispositivos, es que permiten desarrollar sensores implantables que
facilitan un monitoreo continuo las 24 horas. Además, las mediciones múltiples o continuas
de la PIO en pacientes con glaucoma, puede ayudar a mejorar el diagnostico, ofrecer un
mejor seguimiento y administrar el tratamiento adecuado para esta enfermedad, con la
finalidad de evitar una irreversible pérdida de la visión. Se conocen diversas técnicas para
fabricar estructuras de tipo capacitivo. Sin embargo, en el caso de sensores de presión
intraocular, no se conoce un procedimiento efectivo de fabricación. A continuación se
describen algunos prototipos de sensores de presión intraocular (sensor PIO) recientemente
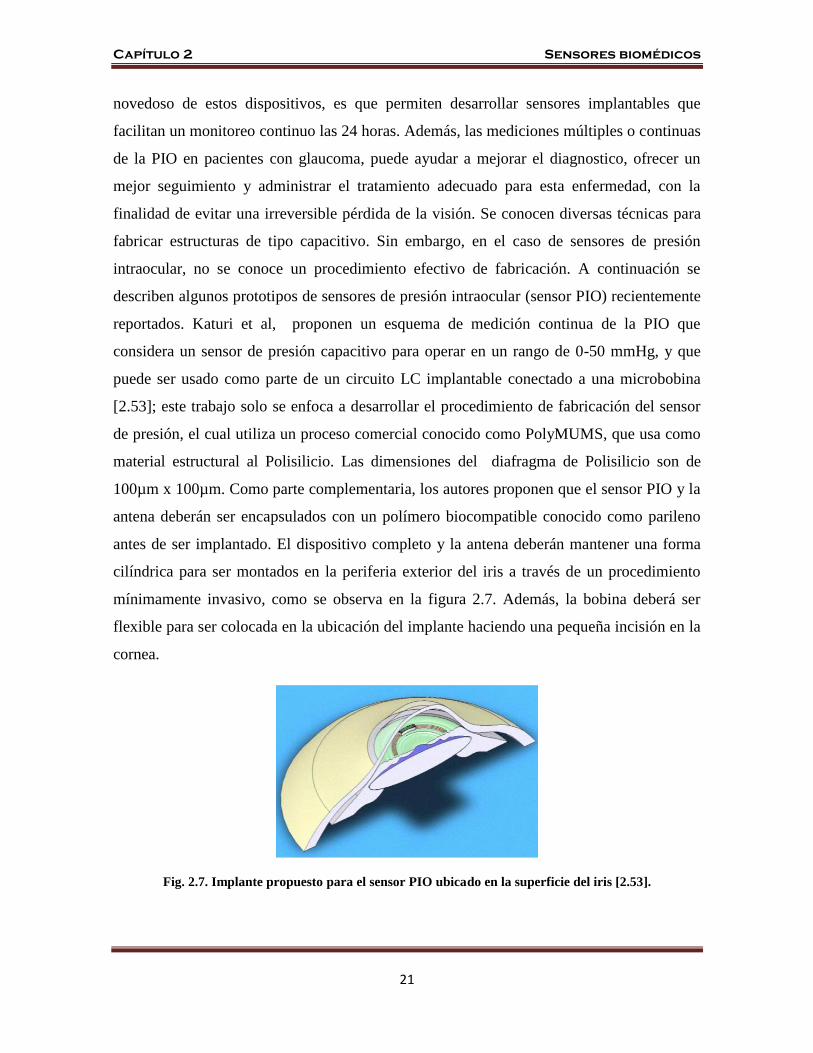
reportados. Katuri et al, proponen un esquema de medición continua de la PIO que
considera un sensor de presión capacitivo para operar en un rango de 0-50 mmHg, y que
puede ser usado como parte de un circuito LC implantable conectado a una microbobina
[2.53]; este trabajo solo se enfoca a desarrollar el procedimiento de fabricación del sensor
de presión, el cual utiliza un proceso comercial conocido como PolyMUMS, que usa como
material estructural al Polisilicio. Las dimensiones del diafragma de Polisilicio son de
100µm x 100µm. Como parte complementaria, los autores proponen que el sensor PIO y la
antena deberán ser encapsulados con un polímero biocompatible conocido como parileno
antes de ser implantado. El dispositivo completo y la antena deberán mantener una forma
cilíndrica para ser montados en la periferia exterior del iris a través de un procedimiento
mínimamente invasivo, como se observa en la figura 2.7. Además, la bobina deberá ser
flexible para ser colocada en la ubicación del implante haciendo una pequeña incisión en la
cornea.
Fig. 2.7. Implante propuesto para el sensor PIO ubicado en la superficie del iris [2.53].
Capítulo 2 Sensores biomédicos
22
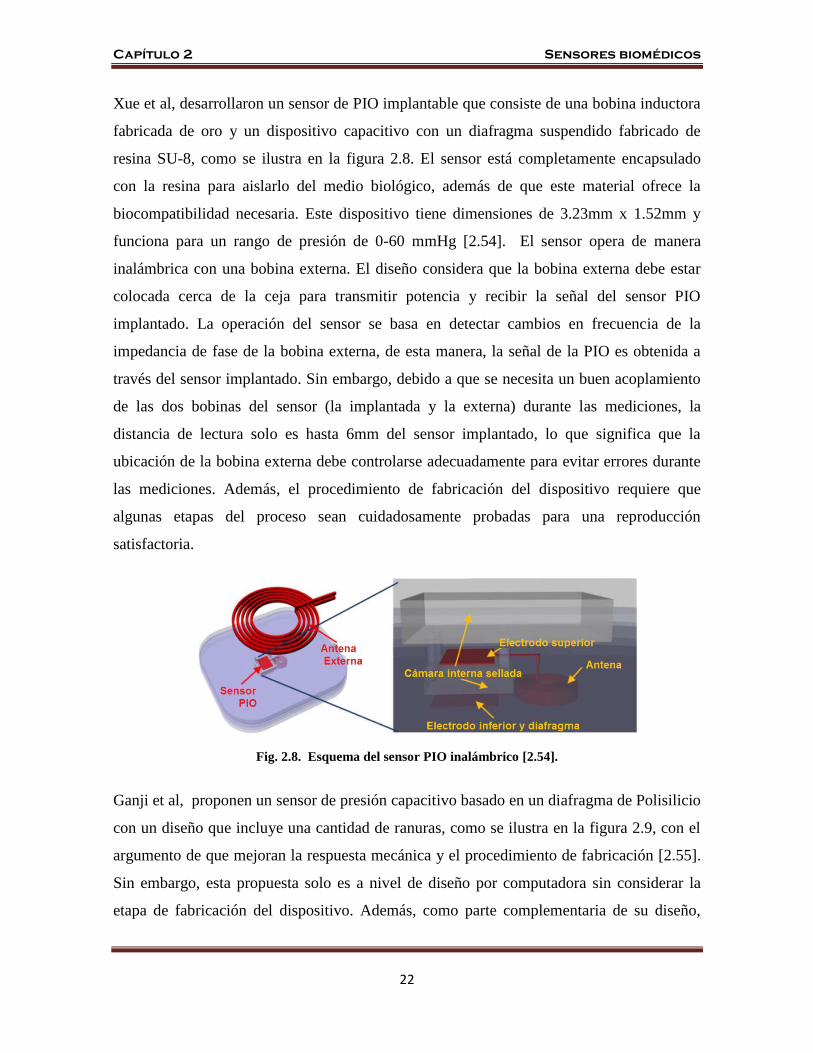
Xue et al, desarrollaron un sensor de PIO implantable que consiste de una bobina inductora
fabricada de oro y un dispositivo capacitivo con un diafragma suspendido fabricado de
resina SU-8, como se ilustra en la figura 2.8. El sensor está completamente encapsulado
con la resina para aislarlo del medio biológico, además de que este material ofrece la
biocompatibilidad necesaria. Este dispositivo tiene dimensiones de 3.23mm x 1.52mm y
funciona para un rango de presión de 0-60 mmHg [2.54]. El sensor opera de manera
inalámbrica con una bobina externa. El diseño considera que la bobina externa debe estar
colocada cerca de la ceja para transmitir potencia y recibir la señal del sensor PIO
implantado. La operación del sensor se basa en detectar cambios en frecuencia de la
impedancia de fase de la bobina externa, de esta manera, la señal de la PIO es obtenida a
través del sensor implantado. Sin embargo, debido a que se necesita un buen acoplamiento
de las dos bobinas del sensor (la implantada y la externa) durante las mediciones, la
distancia de lectura solo es hasta 6mm del sensor implantado, lo que significa que la
ubicación de la bobina externa debe controlarse adecuadamente para evitar errores durante
las mediciones. Además, el procedimiento de fabricación del dispositivo requiere que
algunas etapas del proceso sean cuidadosamente probadas para una reproducción
satisfactoria.
Fig. 2.8. Esquema del sensor PIO inalámbrico [2.54].
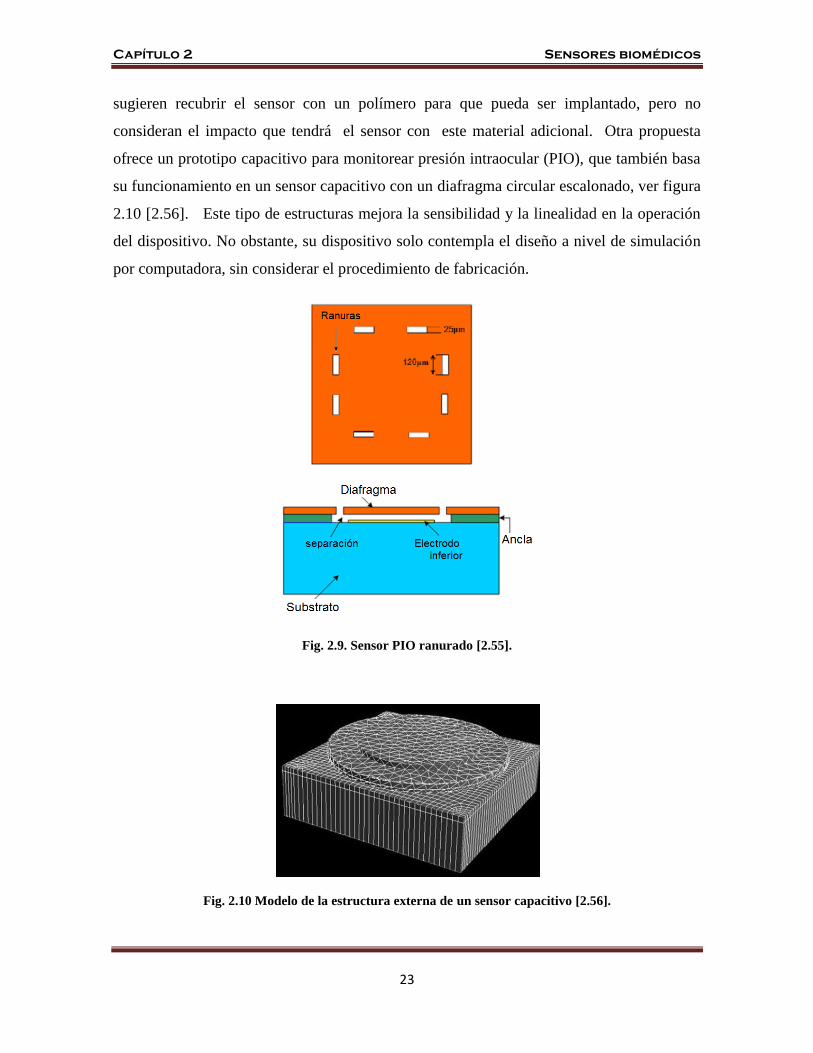
Ganji et al, proponen un sensor de presión capacitivo basado en un diafragma de Polisilicio
con un diseño que incluye una cantidad de ranuras, como se ilustra en la figura 2.9, con el
argumento de que mejoran la respuesta mecánica y el procedimiento de fabricación [2.55].
Sin embargo, esta propuesta solo es a nivel de diseño por computadora sin considerar la
etapa de fabricación del dispositivo. Además, como parte complementaria de su diseño,
Capítulo 2 Sensores biomédicos
23
sugieren recubrir el sensor con un polímero para que pueda ser implantado, pero no
consideran el impacto que tendrá el sensor con este material adicional. Otra propuesta
ofrece un prototipo capacitivo para monitorear presión intraocular (PIO), que también basa
su funcionamiento en un sensor capacitivo con un diafragma circular escalonado, ver figura
2.10 [2.56]. Este tipo de estructuras mejora la sensibilidad y la linealidad en la operación
del dispositivo. No obstante, su dispositivo solo contempla el diseño a nivel de simulación
por computadora, sin considerar el procedimiento de fabricación.
Fig. 2.9. Sensor PIO ranurado [2.55].
Fig. 2.10 Modelo de la estructura externa de un sensor capacitivo [2.56].
Capítulo 2 Sensores biomédicos
24
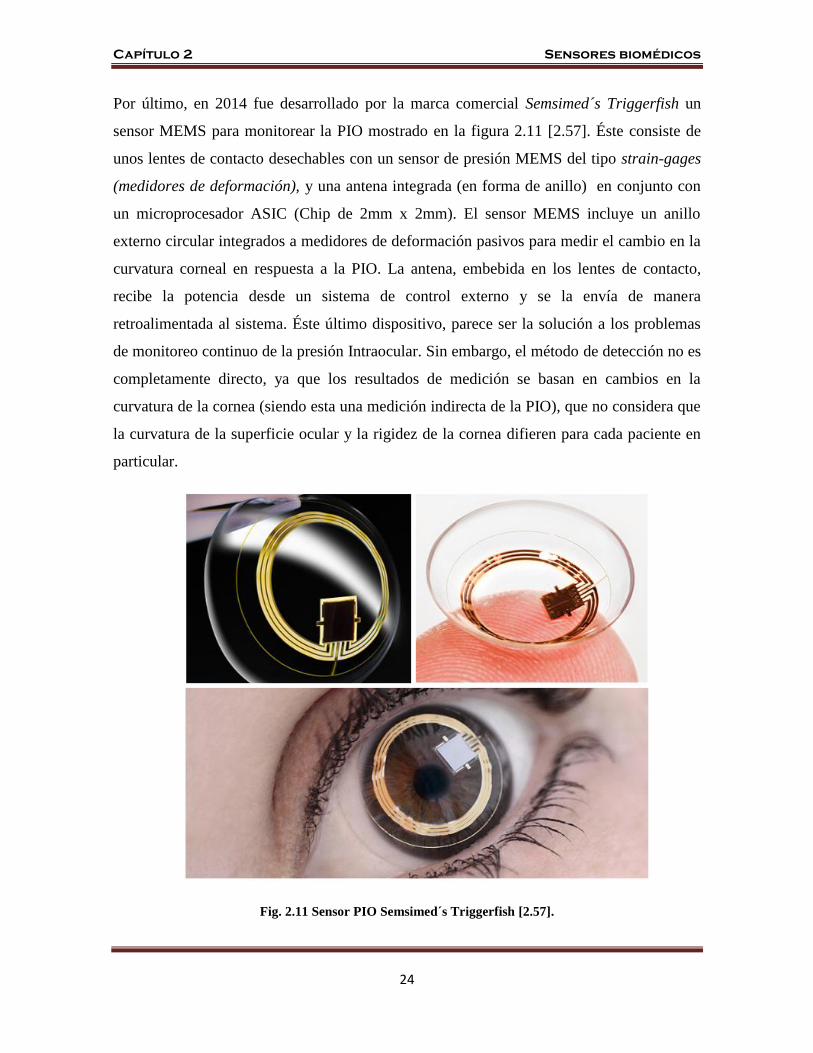
Por último, en 2014 fue desarrollado por la marca comercial Semsimed´s Triggerfish un
sensor MEMS para monitorear la PIO mostrado en la figura 2.11 [2.57]. Éste consiste de
unos lentes de contacto desechables con un sensor de presión MEMS del tipo strain-gages
(medidores de deformación), y una antena integrada (en forma de anillo) en conjunto con
un microprocesador ASIC (Chip de 2mm x 2mm). El sensor MEMS incluye un anillo
externo circular integrados a medidores de deformación pasivos para medir el cambio en la
curvatura corneal en respuesta a la PIO. La antena, embebida en los lentes de contacto,
recibe la potencia desde un sistema de control externo y se la envía de manera
retroalimentada al sistema. Éste último dispositivo, parece ser la solución a los problemas
de monitoreo continuo de la presión Intraocular. Sin embargo, el método de detección no es
completamente directo, ya que los resultados de medición se basan en cambios en la
curvatura de la cornea (siendo esta una medición indirecta de la PIO), que no considera que
la curvatura de la superficie ocular y la rigidez de la cornea difieren para cada paciente en
particular.
Fig. 2.11 Sensor PIO Semsimed´s Triggerfish [2.57].
Capítulo 2 Sensores biomédicos
25
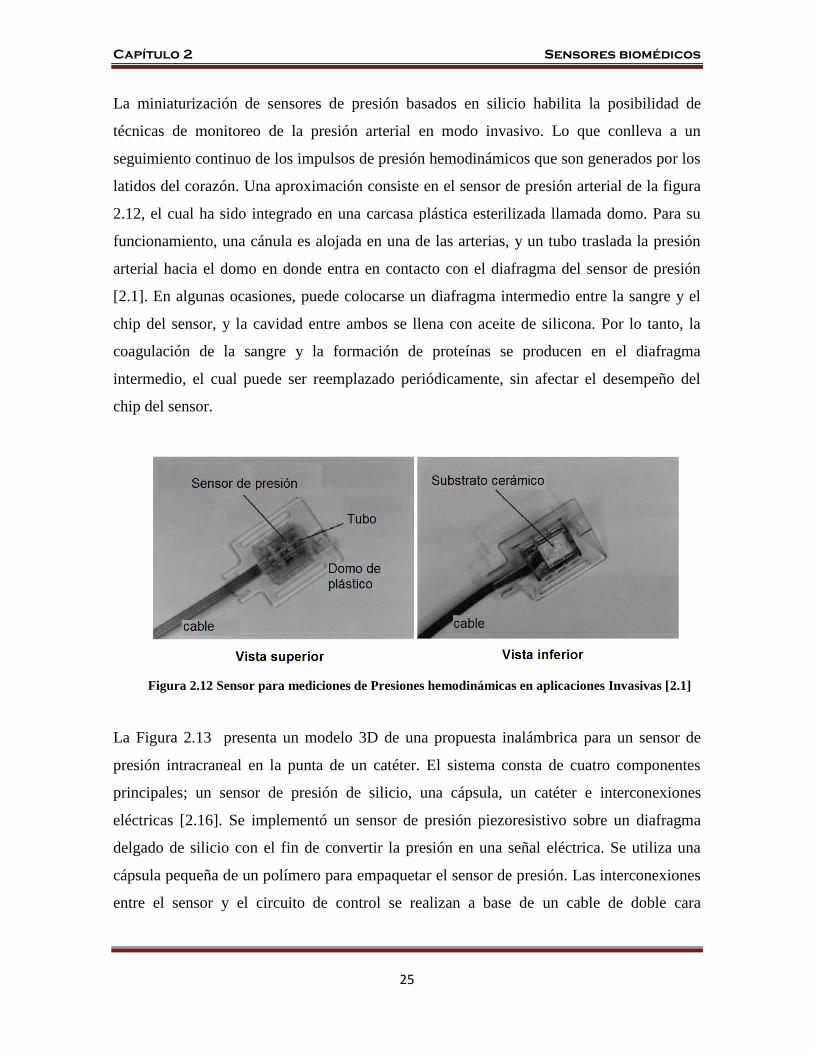
La miniaturización de sensores de presión basados en silicio habilita la posibilidad de
técnicas de monitoreo de la presión arterial en modo invasivo. Lo que conlleva a un
seguimiento continuo de los impulsos de presión hemodinámicos que son generados por los
latidos del corazón. Una aproximación consiste en el sensor de presión arterial de la figura
2.12, el cual ha sido integrado en una carcasa plástica esterilizada llamada domo. Para su
funcionamiento, una cánula es alojada en una de las arterias, y un tubo traslada la presión
arterial hacia el domo en donde entra en contacto con el diafragma del sensor de presión
[2.1]. En algunas ocasiones, puede colocarse un diafragma intermedio entre la sangre y el
chip del sensor, y la cavidad entre ambos se llena con aceite de silicona. Por lo tanto, la
coagulación de la sangre y la formación de proteínas se producen en el diafragma
intermedio, el cual puede ser reemplazado periódicamente, sin afectar el desempeño del
chip del sensor.
Figura 2.12 Sensor para mediciones de Presiones hemodinámicas en aplicaciones Invasivas [2.1]
La Figura 2.13 presenta un modelo 3D de una propuesta inalámbrica para un sensor de
presión intracraneal en la punta de un catéter. El sistema consta de cuatro componentes
principales; un sensor de presión de silicio, una cápsula, un catéter e interconexiones
eléctricas [2.16]. Se implementó un sensor de presión piezoresistivo sobre un diafragma
delgado de silicio con el fin de convertir la presión en una señal eléctrica. Se utiliza una
cápsula pequeña de un polímero para empaquetar el sensor de presión. Las interconexiones
entre el sensor y el circuito de control se realizan a base de un cable de doble cara
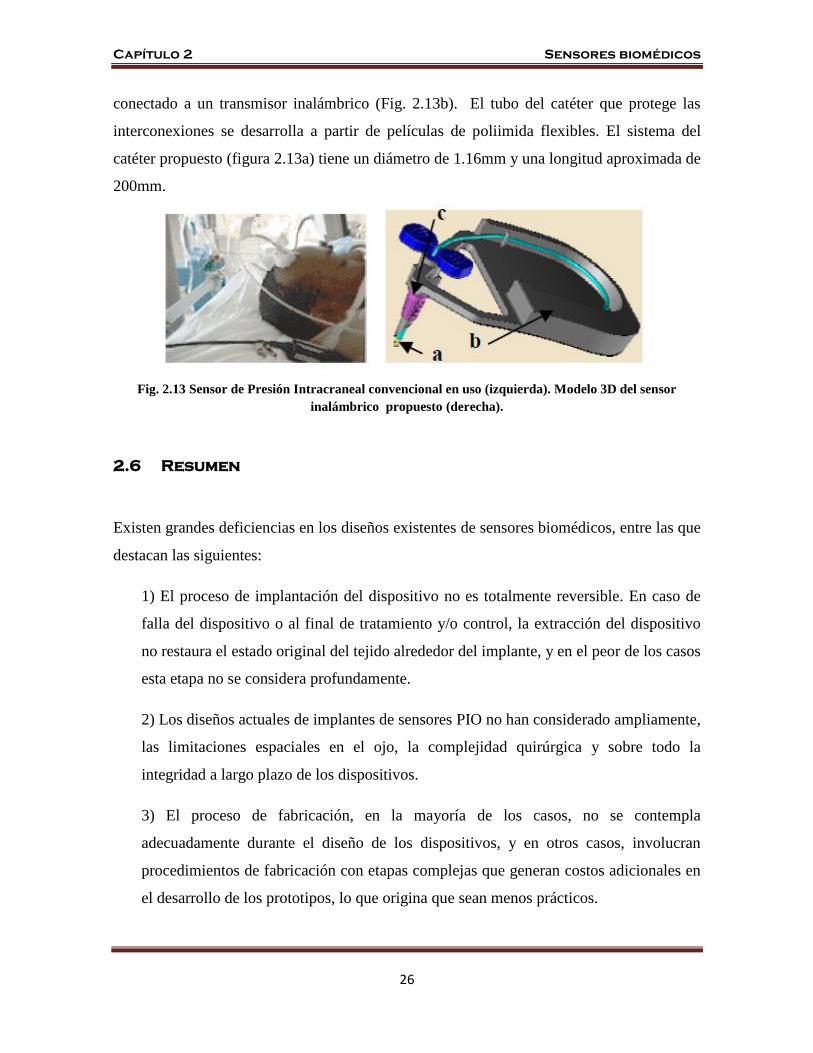
Capítulo 2 Sensores biomédicos
26
conectado a un transmisor inalámbrico (Fig. 2.13b). El tubo del catéter que protege las
interconexiones se desarrolla a partir de películas de poliimida flexibles. El sistema del
catéter propuesto (figura 2.13a) tiene un diámetro de 1.16mm y una longitud aproximada de
200mm.
Fig. 2.13 Sensor de Presión Intracraneal convencional en uso (izquierda). Modelo 3D del sensor
inalámbrico propuesto (derecha).
2.6 Resumen
Existen grandes deficiencias en los diseños existentes de sensores biomédicos, entre las que
destacan las siguientes:
1) El proceso de implantación del dispositivo no es totalmente reversible. En caso de
falla del dispositivo o al final de tratamiento y/o control, la extracción del dispositivo
no restaura el estado original del tejido alrededor del implante, y en el peor de los casos
esta etapa no se considera profundamente.
2) Los diseños actuales de implantes de sensores PIO no han considerado ampliamente,
las limitaciones espaciales en el ojo, la complejidad quirúrgica y sobre todo la
integridad a largo plazo de los dispositivos.
3) El proceso de fabricación, en la mayoría de los casos, no se contempla
adecuadamente durante el diseño de los dispositivos, y en otros casos, involucran
procedimientos de fabricación con etapas complejas que generan costos adicionales en
el desarrollo de los prototipos, lo que origina que sean menos prácticos.
Capítulo 2 Sensores biomédicos
27
4) En algunos casos se utilizan sensores de presión piezoresistivos, los cuales no
consideran la dependencia de los dispositivos con la temperatura, este parámetro debe
considerarse ampliamente para su operación adecuada en el cuerpo humano.
5) Cuando se diseña y fabrican la estructura del sensor, no se considera que cualquier
cubierta protectora adicional, tendrá un efecto significativo en la sensibilidad del
dispositivo.
6) Por último, se debe considerar que para un monitoreo eficiente y continuo de la PIO,
el sensor implantado debe alojarse donde una medición directa de la PIO pueda ser
obtenida. Recalcando que, los implantes ubicados en la cámara anterior del ojo tienen
una ventaja severamente marcada, en comparación con implantes ubicados en la
cavidad vítrea, ya que estos últimos tienen un alto riesgo de infección y
desprendimiento de retina [2.43].
En este contexto, en los siguientes capítulos de esta tesis, se detalla el diseño, fabricación y
caracterización de un sensor de presión capacitivo en modo de contacto que coadyuve a dar
solución a la mayoría de estos inconvenientes.
2.7 Referencias
[2.1] Harsanyi G. (2000). “Sensors in Biomedical Applications: Fundamentals,
Technology and Applications”, CRC Press.
[2.2] Pfizer Ophtalmics. “ Questions and answers about Glaucoma, The Sneak thief sigth”,
http://www.glaucoma.org.au/nesb/Spanish.PDF
[2.3] Ferreiro, L. Ruiz, N. “Anatomía y fisiología del aparato ocular: Glaucoma”,
http://www.sepeap.org/archivos/libros/OFTALMOLOGIA/Ar_1_8_44_APR_9.pdf
[2.4] Leonardi, M., Leuenberger, P., Bertrand, A. Bertsch, and P. Renaud. (2004). “First
steps toward noninvasive intraocular pressure monitoring with a sensing contact lens,”
Investigative Ophthalmologhy & Visual Science, Vol. 45, No. 9, pp. 3113–3117.
Capítulo 2 Sensores biomédicos
28
[2.5] González T. C. (2008) “Relación entre la presión intraocular y espesor central de la
cornea en ojos miopes normales y después de laser in situ Keratomileusis (LASIK)”. Tesis
Doctorado UNMSM.
[2.6] (2011) “Protocolo de Atención en el Examen Optométrico. Departamento de
optometría”. Colegio de Ópticos y Optómetras en Chile.
[2.7] Scamn, R. (2007) “How to measure intraocular pressure: applanation tonometry”
Community Eye Health Journal, Vol 20, No. 64.
[2.8] Piso, D., Veiga-Crespo, and P., Vecino, E. (2012) “Modern Monitoring Intraocular
Pressure Sensing Devices Based on Application Specific Integrated Circuits”, Journal of
Biomaterials and Nanobiotechnology, Vol. 3, pp. 301-309.
[2.9] Guyton, A.C. (1986) “Textbook of Medical Physiology”, 7th Ed., Elsevier-Saunders
[2.10] Beevers, G., Lip, G.Y. and O'Brien, E. (2001) “Blood pressure measurement Part
I—Sphygmomanometry: factors common to all techniques”. British Medical Journal,
Vol. 322, No.7292, pp. 981-985.
[2.11] Chobanian, A.V., Bakris, G.L., Black, H.R., Cushman, W.C., Green, L.A., Izzo, J.L.
Jones, D.W., Materson, B.J., Oparil, S., Wright, J.T., and Roccella, E.J. (2003)“Joint
National Committee on Prevention, Detection, Evaluation, and Treatment of High Blood
Pressure. National Heart, Lung, and Blood Institute; National High Blood Pressure
Education Program Coordinating Committee”. Seventh report of the Joint National
Committee on Prevention, Detection, Evaluation, and Treatment of High Blood Pressure.
Hypertension. Vol. 42, pp. 1206–1252.
[2.12] Webster, J. G., Neuman, M. R., Olson, W. H., Peura, R. A., Primiano, F. P.,
Siedband, M. P. and Wheeler, L. A., (1997) “Medical Instrumentation: Application and
Design”, 3rd ed., John Wiley & Sons, New York.
[2.13] Steiner, L.A. and Andrews, P.J. (2006). "Monitoring the injured brain: ICP and
CBF". British Journal of Anaesthesia, Vol. 97, No. 1, pp. 26–38.
[2.14] Ghajar, J. (2000). "Traumatic brain injury". The Lancet, Vol. 356, No.9233, pp.
923–9
[2.15] Czosnyka, M. and Pickard, J.D., (2004) “Monitoring and interpretation of
intracranial pressure”, Journal of Neurology, Neurosurgery, and Psychiatry, Vol. 75, No.
6. pp. 813-821.
[2.16] Yameogo, P., Heiba, U., Al Bahri, M. and Pons, P., (2009) “Self Calibrating
pressure sensor for biomedical applications”. IEEE Sensors 2009, pp. 691-694.
Capítulo 2 Sensores biomédicos
29
[2.17] Yu, L., Kim, B. J., and Meng, E. (2014). “Chronically Implanted Pressure Sensors:
Challenges and State of the Field”. Sensors, Vol. 14, No.11, pp. 20620-20644.
[2.18] Narayan, R.K., Kishore, P.R., Becker, D.P., Ward, J.D., Enas, G.G., Greenberg,
R.P., Da Silva, A.D., Lipper, M.H., Choi, S.C., and Mayhall, C.G. (1982) “Intracranial
pressure: To monitor or not to monitor? A review of our experience with severe head
injury”. Journal of.Neurosurgery, Vol. 56, No. 5, pp. 650–659.
[2.19] Morgalla, M.H., Mettenleiter, H., Bitzer, M., Fretschner, R. and Grote, E.H. (1999)
“ICP measurement control: Laboratory test of 7 types of intracranial pressure
transducers”. Journal of Medical Engineering & Technology, Vol. 23, No.4, pp. 144–
151.
[2.20] Bray, R., Sherwood, A., Halter, J., Robertson, C. and Grossman, R. (1986)
“Development of a clinical monitoring system by means of ICP waveform analysis”.
Intracranial Pressure VI, Springer: Berlin, Germany, 1986; pp. 260–264.
[2.21] Heijl, A., Leske, M.C., Bengtsson, B., Hyman, L., Bengtsson, B. and Hussein, M.
(2002) “Reduction of intraocular pressure and glaucoma progression: Results from the
Early Manifest Glaucoma Trial”. Archives of Ophthalmology, Vol. 120, No. 10, pp. 1268–
1279.
[2.22] Kotecha, A., White, E., Schlottmann, P.G. and Garway-Heath, D.F. (2010)
“Intraocular Pressure Measurement Precision with the Goldmann Applanation, Dynamic
Contour, and Ocular Response Analyzer Tonometers”. Ophthalmology, Vol.117, No. 4,
pp. 730–737.
[2.23] Chihara, E. (2008) “Assessment of true intraocular pressure: The gap between
theory and practical data”. Survey of Ophthalmology, Vol. 53, No.3, pp. 203–218.
[2.24] Cooper, R., Beale, D., Constable, I. and Grose, G. (1979) “Continual monitoring of
intraocular pressure: Effect of central venous pressure, respiration, and eye movements on
continual recordings of intraocular pressure in the rabbit, dog, and man”. British Journal
of Ophthalmology, Vol. 63, No. 12, pp. 799–804.
[2.25] Potkay, J.A. (2008) “Long term, implantable blood pressure monitoring systems”.
Biomedical Microdevices, Vol. 10, No. 3, pp. 379–392.
[2.26] Weaver, J.N. Alspaugh, J.C. and Behkam, B. (2010) “Toward a minimally invasive
bladder pressure monitoring system: Model bladder for in vitro testing. EMBS
International Conference on Biomedical Robotics and Biomechatronics (BioRob), Tokyo,
Japan, 26–29 September 2010; pp. 638–643.
[2.27] Schäfer, W., Abrams, P. ,Liao, L., Mattiasson, A., Pesce, F., Spangberg, A.,
Sterling, A.M., Zinner, N.R., and Kerrebroeck, P.V. (2002)“Good urodynamic practices:
Capítulo 2 Sensores biomédicos
30
Uroflowmetry, filling cystometry, and pressure-flow studies”. Neurourology and
Urodynamics. Vol. 21, No.3, pp. 261–274.
[2.28] Coosemans, J. and Puers, R. (2005) “An autonomous bladder pressure monitoring
system”. Sensors and Actuators A: Physical, Vol. 123, pp. 155–161.
[2.29] Fletter, P.C., Majerus, S., Cong, P., Damaser, M.S., Ko, W.H., Young, D.J. and
Garverick, S.L. (2009) “Wireless micromanometer system for chronic bladder pressure
monitoring. Proceedings of the 2009 Sixth International Conference on Networked Sensing
Systems (INSS), Pittsburgh, PA, USA, 17–19 June 2009; pp. 1–4.
[2.30] Iberti, T.J., Lieber, C.E. and Benjamin, E. (1989) “Determination of intra-abdominal
pressure using a transurethral bladder catheter: Clinical validation of the technique.
Anesthesiology, Vol. 70, No. 1, pp. 47–50
[2.31] Coleman, T.J., Thomsen, J.C., Maass, S.D., Hsu, Y., Nygaard, I.E. and Hitchcock,
R.W. (2012) “Development of a wireless intra-vaginal transducer for monitoring intra-
abdominal pressure in women”. Biomedical Microdevices, Vol. 14, No. 2, pp. 347–355
[2.32] Kotzar, G., Freas, M., Abel, P., Fleischman, A., Roy, S., Zorman, C., Moran, J.M.
and Melzak, J. (2002) “Evaluation of MEMS materials of construction for implantable
medical devices”. Biomaterials, Vol. 23, No. 13, pp. 2737–2750.
[2.33] Yokota, T., Kuribara, K., Tokuhara, T., Zschieschang, U., Klauk, H., Takimiya, K.,
Sadamitsu, Y., Hamada, M., Sekitani, T. and Someya, T. (2013) “Flexible Low-Voltage
Organic Transistors with High Thermal Stability at 250 °C”. Advanced Materials, Vol. 25,
No. 27, pp. 3639–3644.
[2.34]Kuribara, K., Wang, H., Uchiyama, N., Fukuda, K., Yokota, T., Zschieschang, U.,
Jaye, C., Fischer, D., Klauk, H. and Yamamoto, T. (2012) “Organic transistors with high
thermal stability for medical applications”. Nature Communications, Vol. 3, pp. 723,
doi:10.1038/ncomms1721.
[2.35] Matlaga, B.F., Yasenchak, L.P. and Salthouse, T.N. (1976) “Tissue response to
implanted polymers: The significance of sample shape”. Journal of Biomedical Materials
Research, Vol. 10, No. 3, pp. 391–397.
[2.36] Axisa, F., Jourand, P., Lippens, E., Rymarczyk-Machal, M. de Smet, N., Schacht, E.,
Vanfleteren, J., Puers, R. and Cornelissen, R. (2009) “Design and Fabrication of a Low
Cost Implantable Bladder Pressure Monitor”. Proceedings of the Annual International
Conference of the IEEE on Engineering in Medicine and Biology Society, EMBC 2009,
Minneapolis, MN, USA, 2–6 September 2009; pp. 4864–4867.
Capítulo 2 Sensores biomédicos
31
[2.37] Chen, P.J., Rodger, D.C., Saati, S., Humayun, M.S. and Tai, Y.C. (2008)
“Microfabricated implantable Parylene-based wireless passive intraocular pressure
sensors”. Journal of Microelectromechanical Systems, Vol. 17, No. 6, pp. 1342-1351.
[2.38] Aquilina, K., Thoresen, M., Chakkarapani, E., Pople, I.K., Coakham, H.B. and
Edwards, R.J. (2011) “Preliminary evaluation of a novel intraparenchymal capacitive
intracranial pressure monitor: Laboratory investigation”. Journal of Neurosurgery, Vol.
115, No. 3, pp. 561–569
[2.39] Fan, Z., Engel, J.M., Chen, J. and Liu, C. (2004) “Parylene surface-micromachined
membranes for sensor applications”. Journal of Microelectromechanical Systems, Vol. 13,
No. 3, pp. 484–490.
[2.40] Siwapornsathain, E., Lal, A. and Binard, J. (2002) “A telemetry and sensor platform
for ambulatory urodynamics. Proceedings of the Biology 2nd Annual International IEEE-
EMB Special Topic onference on Microtechnologies in Medicine, Madison, WI, USA, 2–4
May 2002; pp. 283–287.
[2.41] Takahata, K., DeHennis, A., Wise, K.D. and Gianchandani, Y.B. (2004) “A wireless
microsensor for monitoring flow and pressure in a blood vessel utilizing a dual-inductor
antenna stent and two pressure sensors”. Proceedings of the 17th IEEE International
Conference on Micro Electro Mechanical Systems, Maastricht, The Netherlands, 25–29
January 2004; pp. 216–219.
[2.42] Williams, D.F. (1976) “Corrosion of implant materials”. Annual Review of Material
Science, Vol. 6, No. 1, pp. 237–266.
[2.43] Voskerician, G., Shive, M.S., Shawgo, R.S., Recum, H.V., Anderson, J.M., Cima,
M.J. and Langer, R. (2003) “Biocompatibility and biofouling of MEMS drug delivery
devices”. Biomaterials, Vol. 24, No.11, pp. 1959–1967
[2.44] Ganji, B. A. and Majlis, B. Y. (2009). “Design and fabrication of a new MEMS
capacitive microphone using a perforated aluminum diaphragm”. Sensors and Actuators
A: Physical, Vol. 149, No. 1, pp. 29-37.
[2.45] Chen, P.J., Rodger, D.C., Agrawal, R., Saati, S., Meng, E., Varma, R., Humayun,
M.S. and Tai, Y.C. (2007) “Implantable micromechanical parylene-based pressure sensors
for unpowered intraocular pressure sensing”. Journal of Micromechanics and
Microengineering, Vol. 17, No.10, pp. 1931–1938.
[2.46] Jourand, P. and Puers, R. (2010) “The BladderPill: An in-body system logging
bladder pressure”. Sensors and Actuators A: Physical, Vol. 162, No. 2, pp. 160–166.
[2.47] IEEE Standards Coordinating Committee on Non-Ionizing Radiation Hazards.
(2002) IEEE Standard for Safety Levels with Respect to Human Exposure to Radio
Capítulo 2 Sensores biomédicos
32
Frequency Electromagnetic Fields, 3kHz to 300 GHz; Institute of Electrical and Electonics
Engineers, Incorporated: New York, NY, USA, 1992.
[2.48] Ahlbom, A. (1998) “Guideline, I. Guidelines for limiting exposure to time-varying
electric, magnetic, and electromagnetic fields (up to 300 GHz)”. Health Physics, Vol. 74,
No. 4, pp. 494–522.
[2.49] Poon, A.S.Y., O’Driscoll, S. and Meng, T.H. (2010) “Optimal frequency for wireless
power transmission into dispersive tissue. IEEE Transations Antennas and Propagation,
Vol. 58, No. 5, pp. 1739–1750.
[2.50] Bhansali, S. and Vasudev, A. (2012) “MEMS for Biomedical Applications”,
Woodhead Publishing, 1st edition.
[2.51] Greene, M.E., and Gilman, B.G. (1974) “Intraocular pressure measurement with
instrumented contact lenses” Investigation of Ophthalmology, Vol. 13, pp. 299–302.
[2.52] R. Puers, (1993) “Capacitive sensors: When and how to use them,” Sensors and
Actuators A: Physical, Vol. 37–38, pp. 93–105.
[2.53] Katuri K.C, Ramasubramanian M.K. and Asrani, S. (2010) “A surface
micromachined capacitive pressure sensor for intraocular pressure measurement”. IEEE
ASME international conference on mechatronics and embedded systems and applications,
pp. 149–154.
[2.54] Xue, N., Chang, S-P., and Lee, J-B., (2012) “A SU-8-Based Microfabricated
Implantable Inductively Coupled Passive RF Wireless Intraocular Pressure Sensor”,
Journal of Microelectromechanical Systems, Vol. 21, No. 6, p.p. 1338-1346.
[2.55] Ganji, B., and Shahiri-Tabarestani , M. (2013) “A novel high sensitive MEMS
intraocular capacitive pressure sensor”, Microsystem Technologies, Vol. 19, pp. 187–194.
[2.56] Yongtai, H., Jinhao, L., Lei, L., and Jinghong, H. (2013) “A novel capacitive
pressure sensor and interface circuitry”. Microsystem Technologies, Vol. 19, pp. 25–30.
[2.57] Sunaric-Megevand, G., Leuenberger, P. and Preußner, P.R. (2014) “Assessment of
the Triggerfish™ contact lens sensor for measurement of intraocular pressure
variations”, Acta Ophthalmologica Vol. 92, No. 5, pp. e414–e415.
33
Capítulo 3
Diseño de un Sensor Capacitivo Hermético
para aplicaciones biomédicas
Este capítulo presenta los conceptos básicos y criterios utilizados para el diseño de un
sensor capacitivo en modo contacto (TMCPS, Touch Mode Capacitive Pressure Sensor),
que se diseña con una cavidad hermética para medir presión en medios biológicos. La
estructura general del sensor contiene una cavidad herméticamente sellada, sobre la cual se
define el electrodo superior (diafragma), el cual se diseña para tener contacto directo con el
medio fisiológico. El electrodo inferior y el diafragma se encuentran separados por una
capa doble aislante, la cual consiste de una película de material dieléctrico y aire. El sensor
se protege con una película de Poliimida que presenta la biocompatibilidad que requiere la
aplicación. Además, también se detalla el análisis estructural y matemático para modelar el
comportamiento mecánico del sensor considerando esta capa adicional sobre el diafragma.
Como se muestra más adelante, la tecnologia de fabricación y la capa de protección
determinan la metodología de diseño y funcionamiento del sensor.
3.1 Aspectos generales de un sensor tipo TMCPS
La estructura general de un sensor de presión capacitivo en modo de contacto
(TMCPS) se ilustra en la figura 3.1 [3.1]. Este dispositivo contiene un electrodo superior
que consiste de un diafragma suspendido. El electrodo inferior y el diafragma se encuentran
separados por una capa doble aislante, la cual consiste de una película de material
dieléctrico y aire.
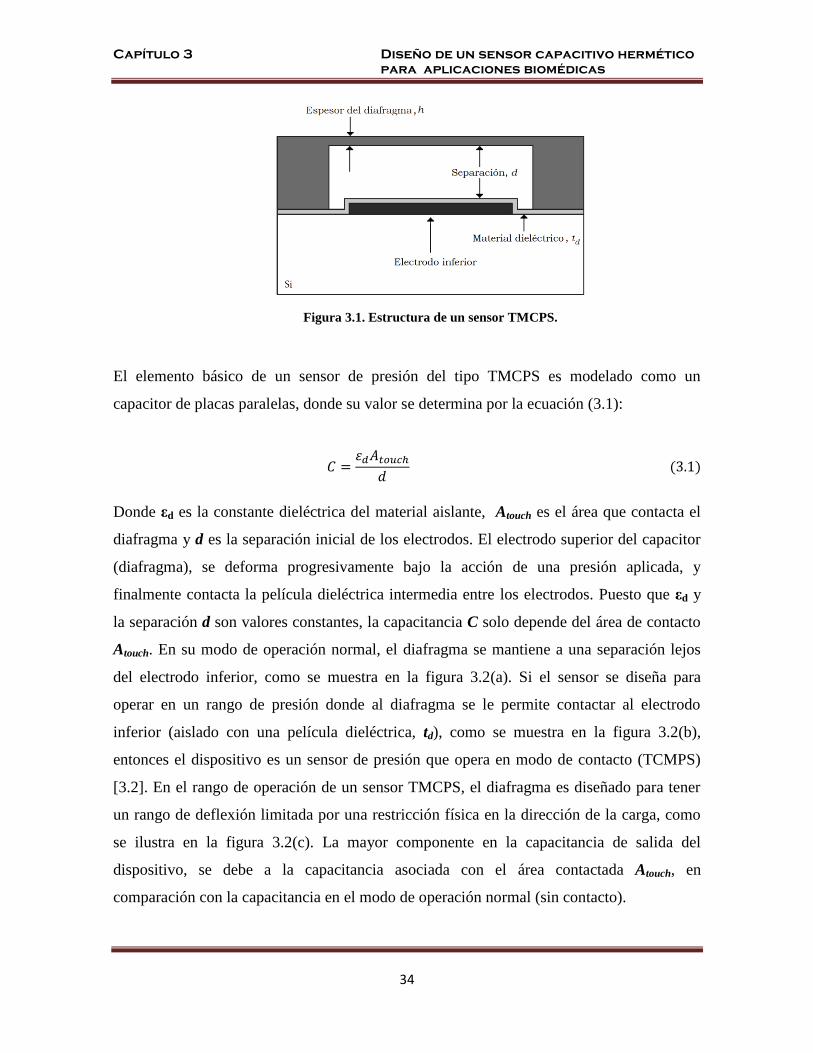
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
34
Figura 3.1. Estructura de un sensor TMCPS.
El elemento básico de un sensor de presión del tipo TMCPS es modelado como un
capacitor de placas paralelas, donde su valor se determina por la ecuación (3.1):
Donde εd es la constante dieléctrica del material aislante, Atouch es el área que contacta el
diafragma y d es la separación inicial de los electrodos. El electrodo superior del capacitor
(diafragma), se deforma progresivamente bajo la acción de una presión aplicada, y
finalmente contacta la película dieléctrica intermedia entre los electrodos. Puesto que εd y
la separación d son valores constantes, la capacitancia C solo depende del área de contacto
Atouch. En su modo de operación normal, el diafragma se mantiene a una separación lejos
del electrodo inferior, como se muestra en la figura 3.2(a). Si el sensor se diseña para
operar en un rango de presión donde al diafragma se le permite contactar al electrodo
inferior (aislado con una película dieléctrica, td), como se muestra en la figura 3.2(b),
entonces el dispositivo es un sensor de presión que opera en modo de contacto (TCMPS)
[3.2]. En el rango de operación de un sensor TMCPS, el diafragma es diseñado para tener
un rango de deflexión limitada por una restricción física en la dirección de la carga, como
se ilustra en la figura 3.2(c). La mayor componente en la capacitancia de salida del
dispositivo, se debe a la capacitancia asociada con el área contactada Atouch, en
comparación con la capacitancia en el modo de operación normal (sin contacto).
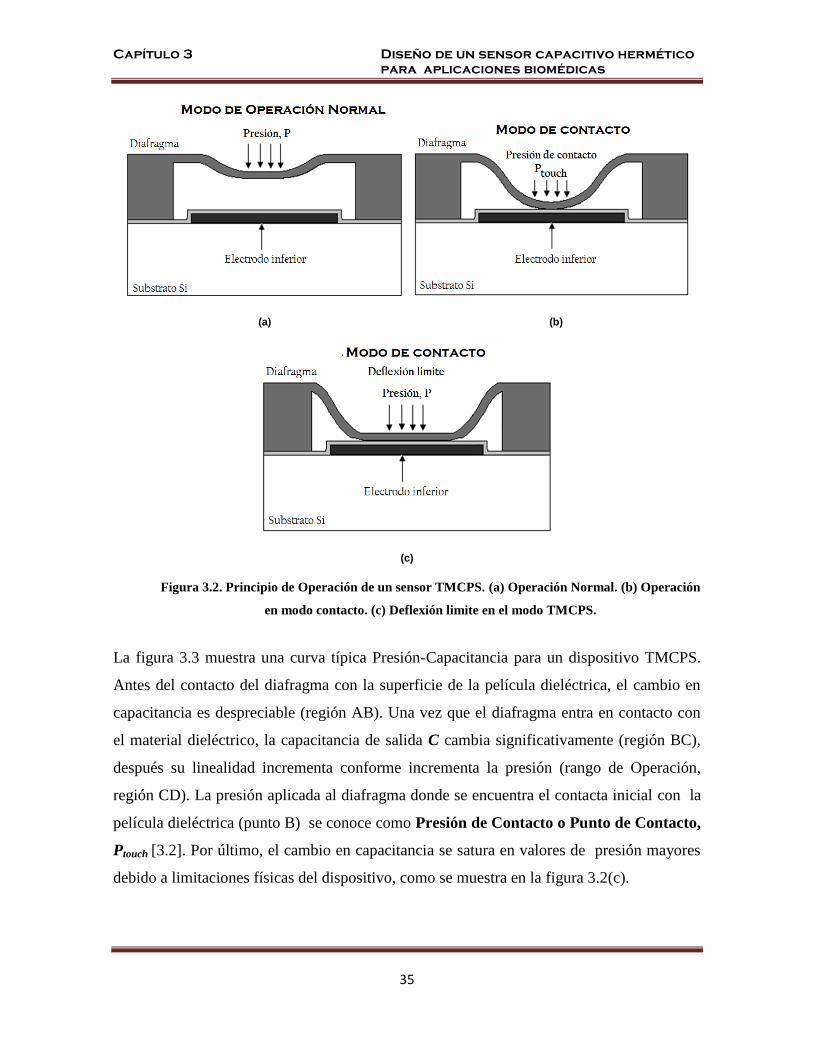
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
35
(a) (b)
(c)
Figura 3.2. Principio de Operación de un sensor TMCPS. (a) Operación Normal. (b) Operación
en modo contacto. (c) Deflexión limite en el modo TMCPS.
La figura 3.3 muestra una curva típica Presión-Capacitancia para un dispositivo TMCPS.
Antes del contacto del diafragma con la superficie de la película dieléctrica, el cambio en
capacitancia es despreciable (región AB). Una vez que el diafragma entra en contacto con
el material dieléctrico, la capacitancia de salida C cambia significativamente (región BC),
después su linealidad incrementa conforme incrementa la presión (rango de Operación,
región CD). La presión aplicada al diafragma donde se encuentra el contacta inicial con la
película dieléctrica (punto B) se conoce como Presión de Contacto o Punto de Contacto,
Ptouch [3.2]. Por último, el cambio en capacitancia se satura en valores de presión mayores
debido a limitaciones físicas del dispositivo, como se muestra en la figura 3.2(c).
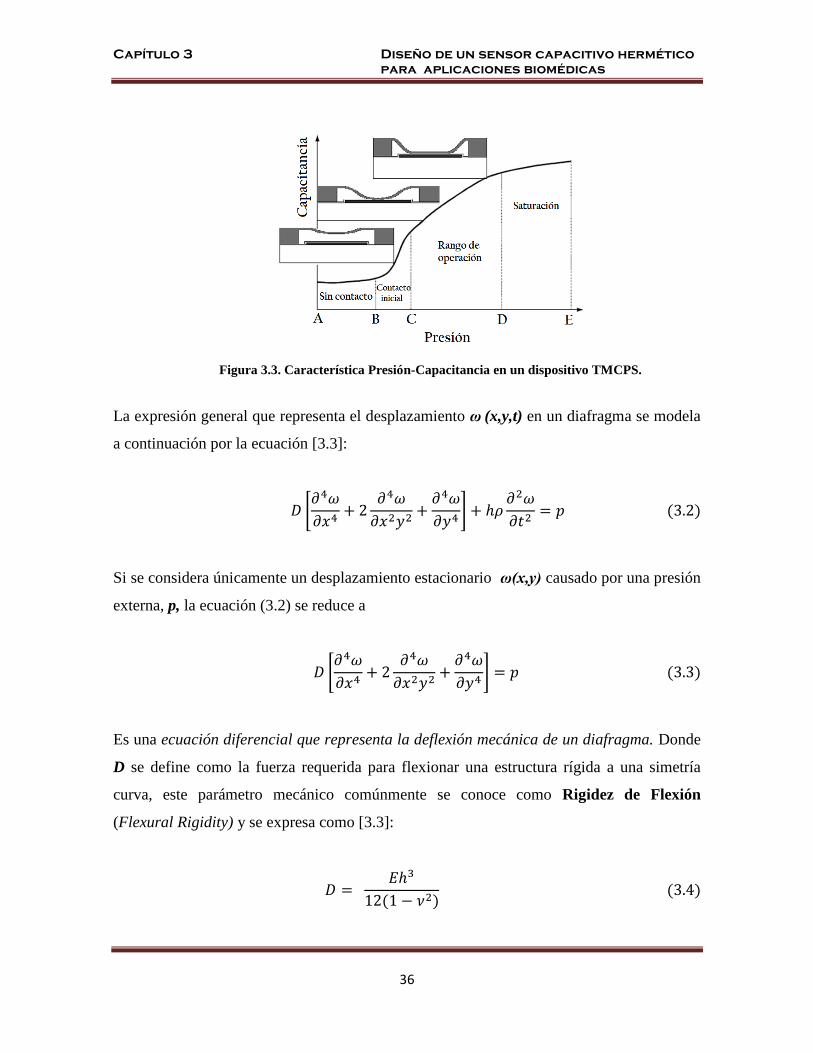
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
36
Figura 3.3. Característica Presión-Capacitancia en un dispositivo TMCPS.
La expresión general que representa el desplazamiento ω (x,y,t) en un diafragma se modela
a continuación por la ecuación [3.3]:
Si se considera únicamente un desplazamiento estacionario ω(x,y) causado por una presión
externa, p, la ecuación (3.2) se reduce a
Es una ecuación diferencial que representa la deflexión mecánica de un diafragma. Donde
D se define como la fuerza requerida para flexionar una estructura rígida a una simetría
curva, este parámetro mecánico comúnmente se conoce como Rigidez de Flexión
(Flexural Rigidity) y se expresa como [3.3]:
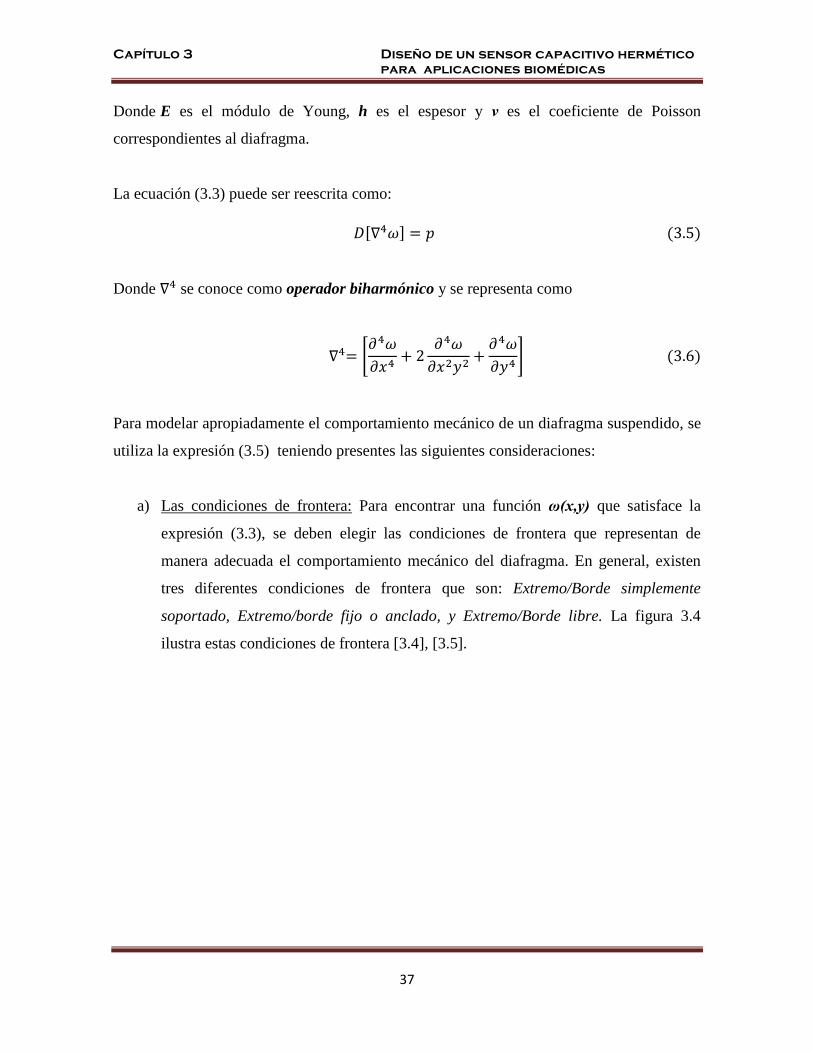
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
37
Donde E es el módulo de Young, h es el espesor y ν es el coeficiente de Poisson
correspondientes al diafragma.
La ecuación (3.3) puede ser reescrita como:
Donde se conoce como operador biharmónico y se representa como
Para modelar apropiadamente el comportamiento mecánico de un diafragma suspendido, se
utiliza la expresión (3.5) teniendo presentes las siguientes consideraciones:
a) Las condiciones de frontera: Para encontrar una función ω(x,y) que satisface la
expresión (3.3), se deben elegir las condiciones de frontera que representan de
manera adecuada el comportamiento mecánico del diafragma. En general, existen
tres diferentes condiciones de frontera que son: Extremo/Borde simplemente
soportado, Extremo/borde fijo o anclado, y Extremo/Borde libre. La figura 3.4
ilustra estas condiciones de frontera [3.4], [3.5].
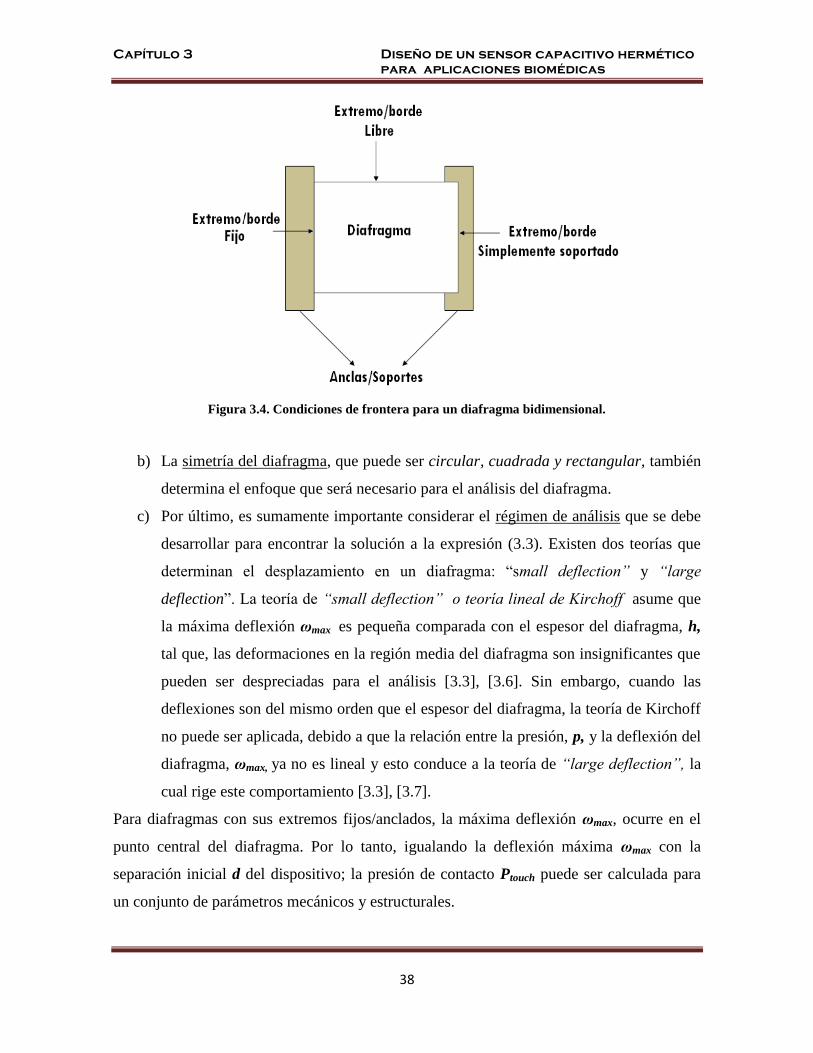
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
38
Figura 3.4. Condiciones de frontera para un diafragma bidimensional.
b) La simetría del diafragma, que puede ser circular, cuadrada y rectangular, también
determina el enfoque que será necesario para el análisis del diafragma.
c) Por último, es sumamente importante considerar el régimen de análisis que se debe
desarrollar para encontrar la solución a la expresión (3.3). Existen dos teorías que
determinan el desplazamiento en un diafragma: “small deflection” y “large
deflection”. La teoría de “small deflection” o teoría lineal de Kirchoff asume que
la máxima deflexión ωmax es pequeña comparada con el espesor del diafragma, h,
tal que, las deformaciones en la región media del diafragma son insignificantes que
pueden ser despreciadas para el análisis [3.3], [3.6]. Sin embargo, cuando las
deflexiones son del mismo orden que el espesor del diafragma, la teoría de Kirchoff
no puede ser aplicada, debido a que la relación entre la presión, p, y la deflexión del
diafragma, ωmax, ya no es lineal y esto conduce a la teoría de “large deflection”, la
cual rige este comportamiento [3.3], [3.7].
Para diafragmas con sus extremos fijos/anclados, la máxima deflexión ωmax, ocurre en el
punto central del diafragma. Por lo tanto, igualando la deflexión máxima ωmax con la
separación inicial d del dispositivo; la presión de contacto Ptouch puede ser calculada para
un conjunto de parámetros mecánicos y estructurales.
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
39
La deflexión central ωmax para diafragmas de simetría circular bajo el régimen de “small
defection” se expresa como [3.3]:
Donde r es el radio del diafragma.
Mientras que en el análisis de “large deflexión” la deflexión central ωmax se define por
El último factor de la izquierda en la ecuación (3.8), representa el estrechamiento en la
región media del diafragma, la cual desempeña un papel importante bajo este régimen de
análisis [3.3]. Para diafragmas de simetría cuadrada la ecuación que representa la deflexión
central es dada por [3.8]
Donde a representa un medio de la longitud lateral del diafragma.
Levy [3.9] ha reportado los resultados de su teoría “large deflection” para diafragmas de
simetría cuadrada con sus bordes/extremos anclados. La figura 3.5 muestra estos resultados
que simplifican el análisis.
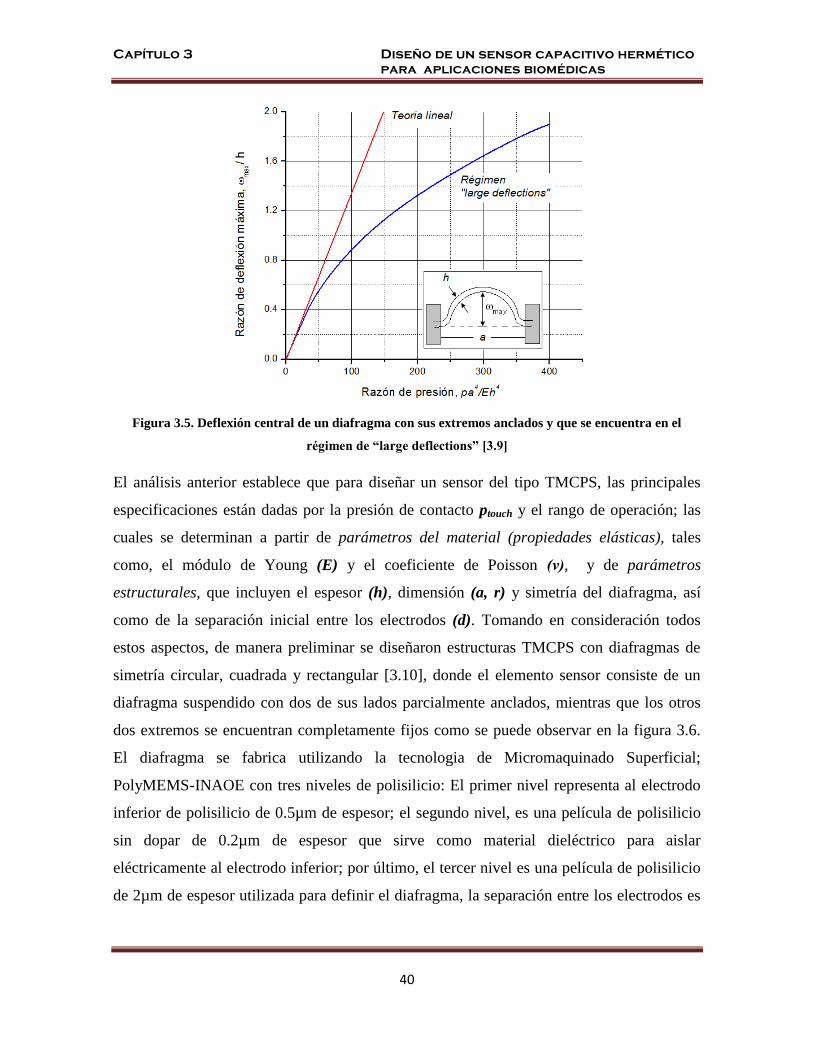
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
40
Figura 3.5. Deflexión central de un diafragma con sus extremos anclados y que se encuentra en el
régimen de “large deflections” [3.9]
El análisis anterior establece que para diseñar un sensor del tipo TMCPS, las principales
especificaciones están dadas por la presión de contacto ptouch y el rango de operación; las
cuales se determinan a partir de parámetros del material (propiedades elásticas), tales
como, el módulo de Young (E) y el coeficiente de Poisson (ν), y de parámetros
estructurales, que incluyen el espesor (h), dimensión (a, r) y simetría del diafragma, así
como de la separación inicial entre los electrodos (d). Tomando en consideración todos
estos aspectos, de manera preliminar se diseñaron estructuras TMCPS con diafragmas de
simetría circular, cuadrada y rectangular [3.10], donde el elemento sensor consiste de un
diafragma suspendido con dos de sus lados parcialmente anclados, mientras que los otros
dos extremos se encuentran completamente fijos como se puede observar en la figura 3.6.
El diafragma se fabrica utilizando la tecnologia de Micromaquinado Superficial;
PolyMEMS-INAOE con tres niveles de polisilicio: El primer nivel representa al electrodo
inferior de polisilicio de 0.5µm de espesor; el segundo nivel, es una película de polisilicio
sin dopar de 0.2µm de espesor que sirve como material dieléctrico para aislar
eléctricamente al electrodo inferior; por último, el tercer nivel es una película de polisilicio
de 2µm de espesor utilizada para definir el diafragma, la separación entre los electrodos es
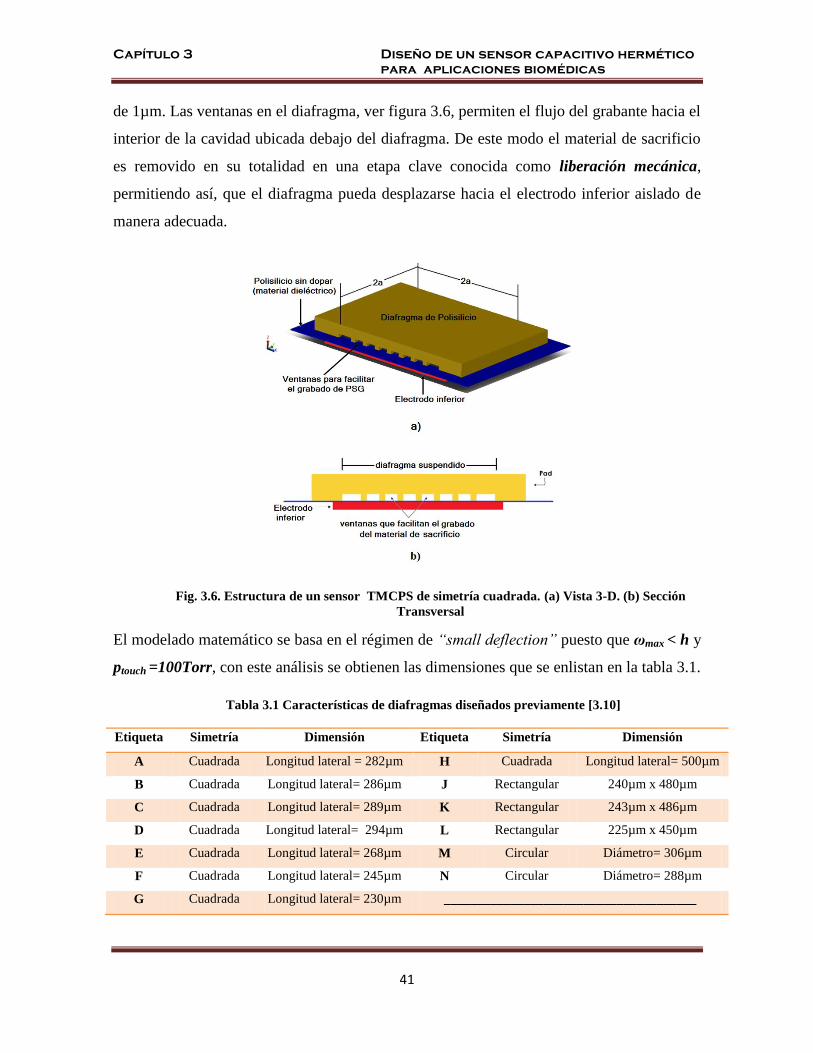
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
41
de 1µm. Las ventanas en el diafragma, ver figura 3.6, permiten el flujo del grabante hacia el
interior de la cavidad ubicada debajo del diafragma. De este modo el material de sacrificio
es removido en su totalidad en una etapa clave conocida como liberación mecánica,
permitiendo así, que el diafragma pueda desplazarse hacia el electrodo inferior aislado de
manera adecuada.
Fig. 3.6. Estructura de un sensor TMCPS de simetría cuadrada. (a) Vista 3-D. (b) Sección
Transversal
El modelado matemático se basa en el régimen de “small deflection” puesto que ωmax < h y
ptouch =100Torr, con este análisis se obtienen las dimensiones que se enlistan en la tabla 3.1.
Tabla 3.1 Características de diafragmas diseñados previamente [3.10]
Etiqueta Simetría Dimensión Etiqueta Simetría Dimensión
A Cuadrada Longitud lateral = 282µm H Cuadrada Longitud lateral= 500µm
B Cuadrada Longitud lateral= 286µm J Rectangular 240µm x 480µm
C Cuadrada Longitud lateral= 289µm K Rectangular 243µm x 486µm
D Cuadrada Longitud lateral= 294µm L Rectangular 225µm x 450µm
E Cuadrada Longitud lateral= 268µm M Circular Diámetro= 306µm
F Cuadrada Longitud lateral= 245µm N Circular Diámetro= 288µm
G Cuadrada Longitud lateral= 230µm ______________________________________
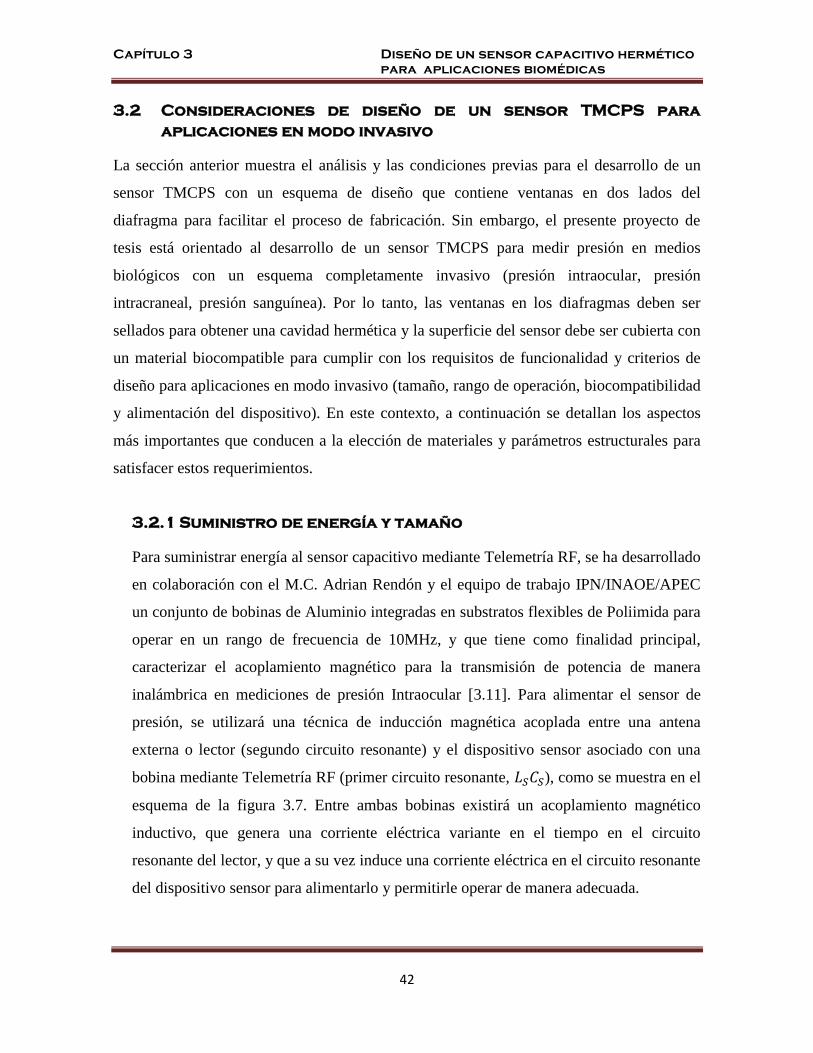
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
42
3.2 Consideraciones de diseño de un sensor TMCPS para
aplicaciones en modo invasivo
La sección anterior muestra el análisis y las condiciones previas para el desarrollo de un
sensor TMCPS con un esquema de diseño que contiene ventanas en dos lados del
diafragma para facilitar el proceso de fabricación. Sin embargo, el presente proyecto de
tesis está orientado al desarrollo de un sensor TMCPS para medir presión en medios
biológicos con un esquema completamente invasivo (presión intraocular, presión
intracraneal, presión sanguínea). Por lo tanto, las ventanas en los diafragmas deben ser
sellados para obtener una cavidad hermética y la superficie del sensor debe ser cubierta con
un material biocompatible para cumplir con los requisitos de funcionalidad y criterios de
diseño para aplicaciones en modo invasivo (tamaño, rango de operación, biocompatibilidad
y alimentación del dispositivo). En este contexto, a continuación se detallan los aspectos
más importantes que conducen a la elección de materiales y parámetros estructurales para
satisfacer estos requerimientos.
3.2.1 Suministro de energía y tamaño
Para suministrar energía al sensor capacitivo mediante Telemetría RF, se ha desarrollado
en colaboración con el M.C. Adrian Rendón y el equipo de trabajo IPN/INAOE/APEC
un conjunto de bobinas de Aluminio integradas en substratos flexibles de Poliimida para
operar en un rango de frecuencia de 10MHz, y que tiene como finalidad principal,
caracterizar el acoplamiento magnético para la transmisión de potencia de manera
inalámbrica en mediciones de presión Intraocular [3.11]. Para alimentar el sensor de
presión, se utilizará una técnica de inducción magnética acoplada entre una antena
externa o lector (segundo circuito resonante) y el dispositivo sensor asociado con una
bobina mediante Telemetría RF (primer circuito resonante, ), como se muestra en el
esquema de la figura 3.7. Entre ambas bobinas existirá un acoplamiento magnético
inductivo, que genera una corriente eléctrica variante en el tiempo en el circuito
resonante del lector, y que a su vez induce una corriente eléctrica en el circuito resonante
del dispositivo sensor para alimentarlo y permitirle operar de manera adecuada.
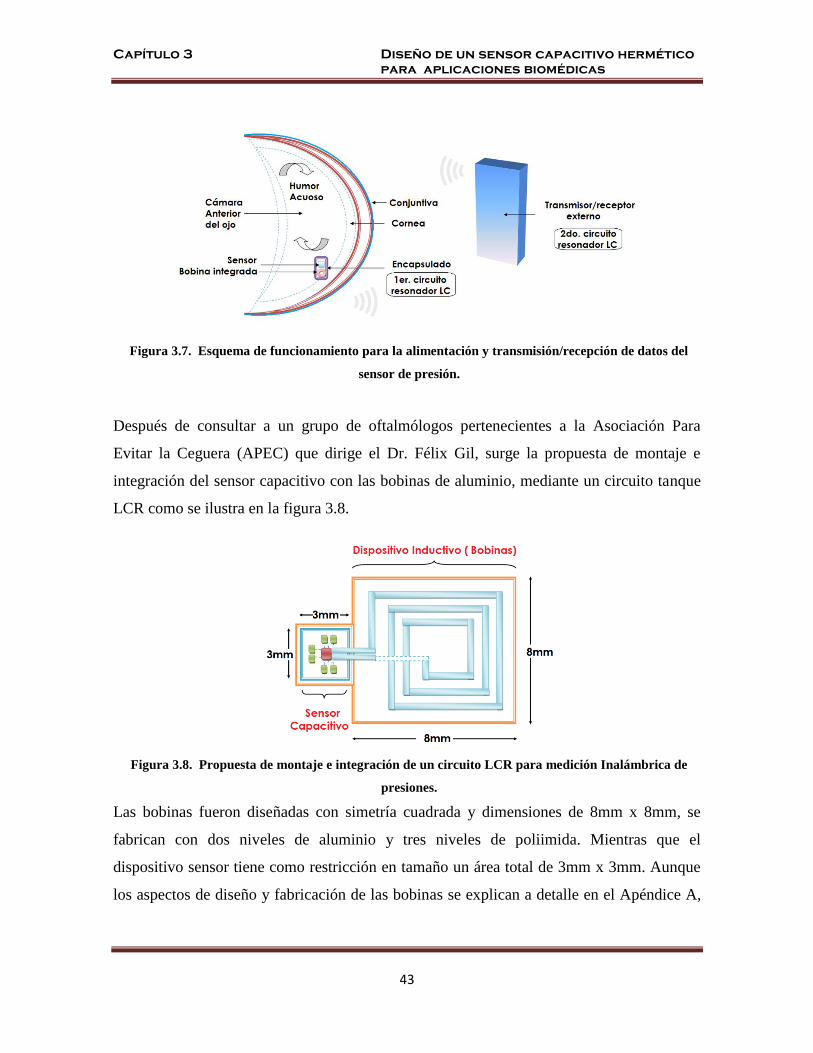
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
43
Figura 3.7. Esquema de funcionamiento para la alimentación y transmisión/recepción de datos del
sensor de presión.
Después de consultar a un grupo de oftalmólogos pertenecientes a la Asociación Para
Evitar la Ceguera (APEC) que dirige el Dr. Félix Gil, surge la propuesta de montaje e
integración del sensor capacitivo con las bobinas de aluminio, mediante un circuito tanque
LCR como se ilustra en la figura 3.8.
Figura 3.8. Propuesta de montaje e integración de un circuito LCR para medición Inalámbrica de
presiones.
Las bobinas fueron diseñadas con simetría cuadrada y dimensiones de 8mm x 8mm, se
fabrican con dos niveles de aluminio y tres niveles de poliimida. Mientras que el
dispositivo sensor tiene como restricción en tamaño un área total de 3mm x 3mm. Aunque
los aspectos de diseño y fabricación de las bobinas se explican a detalle en el Apéndice A,
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
44
es de suma importancia mencionar que, para facilitar la integración del dispositivo sensor
con el sistema de telemetría RF, el sensor de presión capacitivo se debe desarrollar a
base de aluminio, de este modo en un futuro será posible fabricar en un mismo substrato
flexible de poliimida, la bobina y el sensor capacitivo.
3.2.2 Biocompatibilidad
Como se mencionó anteriormente, las ventanas que se diseñan en los diafragmas, ver
figura 3.6, deben cerrarse para crear una cavidad interna herméticamente sellada (debajo
del diafragma) y que pueda operar como un sensor de presión absoluto. Considerando
que la superficie sensible (diafragma) debe estar expuesta a un ambiente líquido, es
necesario recubrir la superficie con un material biocompatible que no sea corrosible en
ese medio y para evitar cualquier contaminación y/o daño al tejido. Si se utiliza el
material biocompatible como cubierta de protección de la superficie y, el mismo
material es capaz de sellar las ventanas en los diafragmas, podemos reducir etapas de
diseño y fabricación. La elección de este material determinará el comportamiento final
de la estructura mecánica del sensor. Puesto que se ha trabajado con éxito el desarrollo
de un proceso de fabricación combinando películas de aluminio y poliimida [3.11], se
propone como material de protección una capa de poliimida de 1.5µm de espesor.
3.3 Modelado del sensor TMCPS considerando un diafragma
compuesto Aluminio/Poliimida
Debido a que el sensor TMCPS de aluminio tiene como objetivo futuro integrarse con las
bobinas de aluminio previamente reportadas [3.12], el esquema de diseño y fabricación del
sensor TMCPS debe ser análogo al de las bobinas para facilitar su integración (ver
Apéndice A, para más detalles del proceso de las bobinas de aluminio). Por lo tanto, se
propone utilizar dos niveles de aluminio, para definir el electrodo inferior y superior; y dos
niveles de poliimida, el primero servirá de material de sacrificio, mientras que el segundo
será la capa de protección de la superficie del sensor, y que al mismo tiempo sellará las
ventanas en los diafragmas. Estos dos materiales (aluminio/poliimida) determinan el
material dieléctrico a utilizarse: óxido de silicio depositado por la técnica APCVD. Esta
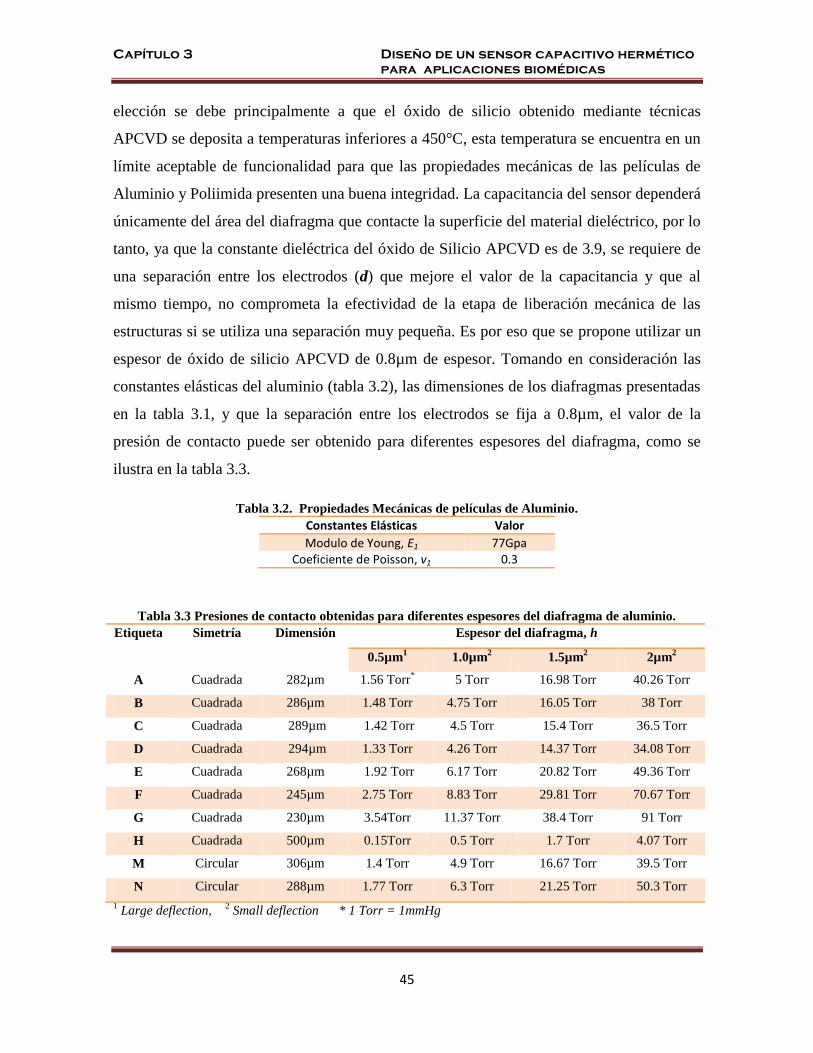
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
45
elección se debe principalmente a que el óxido de silicio obtenido mediante técnicas
APCVD se deposita a temperaturas inferiores a 450°C, esta temperatura se encuentra en un
límite aceptable de funcionalidad para que las propiedades mecánicas de las películas de
Aluminio y Poliimida presenten una buena integridad. La capacitancia del sensor dependerá
únicamente del área del diafragma que contacte la superficie del material dieléctrico, por lo
tanto, ya que la constante dieléctrica del óxido de Silicio APCVD es de 3.9, se requiere de
una separación entre los electrodos (d) que mejore el valor de la capacitancia y que al
mismo tiempo, no comprometa la efectividad de la etapa de liberación mecánica de las
estructuras si se utiliza una separación muy pequeña. Es por eso que se propone utilizar un
espesor de óxido de silicio APCVD de 0.8µm de espesor. Tomando en consideración las
constantes elásticas del aluminio (tabla 3.2), las dimensiones de los diafragmas presentadas
en la tabla 3.1, y que la separación entre los electrodos se fija a 0.8µm, el valor de la
presión de contacto puede ser obtenido para diferentes espesores del diafragma, como se
ilustra en la tabla 3.3.
Tabla 3.2. Propiedades Mecánicas de películas de Aluminio.
Constantes Elásticas Valor
Modulo de Young, E1 77Gpa Coeficiente de Poisson, v1 0.3
Tabla 3.3 Presiones de contacto obtenidas para diferentes espesores del diafragma de aluminio.
Etiqueta Simetría Dimensión
Espesor del diafragma, h
0.5µm1
1.0µm2
1.5µm2
2µm2
A Cuadrada 282µm 1.56 Torr*
5 Torr 16.98 Torr 40.26 Torr
B Cuadrada 286µm 1.48 Torr 4.75 Torr 16.05 Torr 38 Torr
C Cuadrada 289µm 1.42 Torr 4.5 Torr 15.4 Torr 36.5 Torr
D Cuadrada 294µm 1.33 Torr 4.26 Torr 14.37 Torr 34.08 Torr
E Cuadrada 268µm 1.92 Torr 6.17 Torr 20.82 Torr 49.36 Torr
F Cuadrada 245µm 2.75 Torr 8.83 Torr 29.81 Torr 70.67 Torr
G Cuadrada 230µm 3.54Torr 11.37 Torr 38.4 Torr 91 Torr
H Cuadrada 500µm 0.15Torr 0.5 Torr 1.7 Torr 4.07 Torr
M Circular 306µm 1.4 Torr 4.9 Torr 16.67 Torr 39.5 Torr
N Circular 288µm 1.77 Torr 6.3 Torr 21.25 Torr 50.3 Torr
1 Large deflection,
2 Small deflection * 1 Torr = 1mmHg
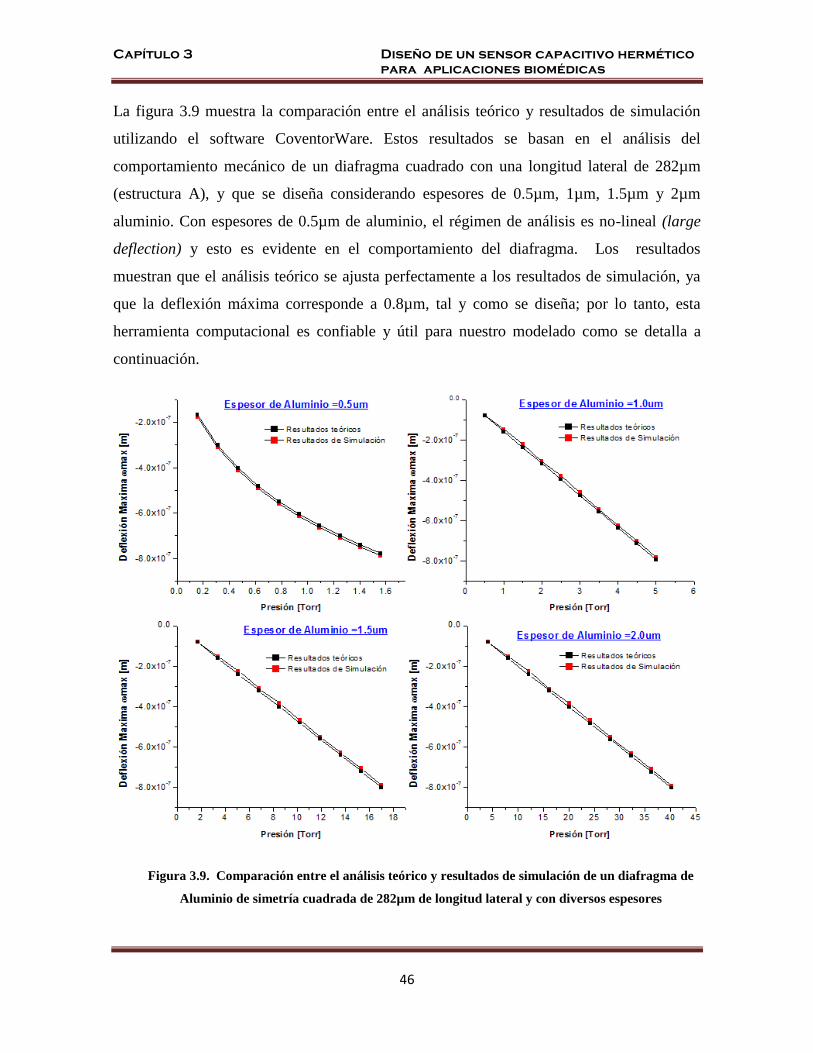
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
46
La figura 3.9 muestra la comparación entre el análisis teórico y resultados de simulación
utilizando el software CoventorWare. Estos resultados se basan en el análisis del
comportamiento mecánico de un diafragma cuadrado con una longitud lateral de 282µm
(estructura A), y que se diseña considerando espesores de 0.5µm, 1µm, 1.5µm y 2µm
aluminio. Con espesores de 0.5µm de aluminio, el régimen de análisis es no-lineal (large
deflection) y esto es evidente en el comportamiento del diafragma. Los resultados
muestran que el análisis teórico se ajusta perfectamente a los resultados de simulación, ya
que la deflexión máxima corresponde a 0.8µm, tal y como se diseña; por lo tanto, esta
herramienta computacional es confiable y útil para nuestro modelado como se detalla a
continuación.
Figura 3.9. Comparación entre el análisis teórico y resultados de simulación de un diafragma de
Aluminio de simetría cuadrada de 282µm de longitud lateral y con diversos espesores
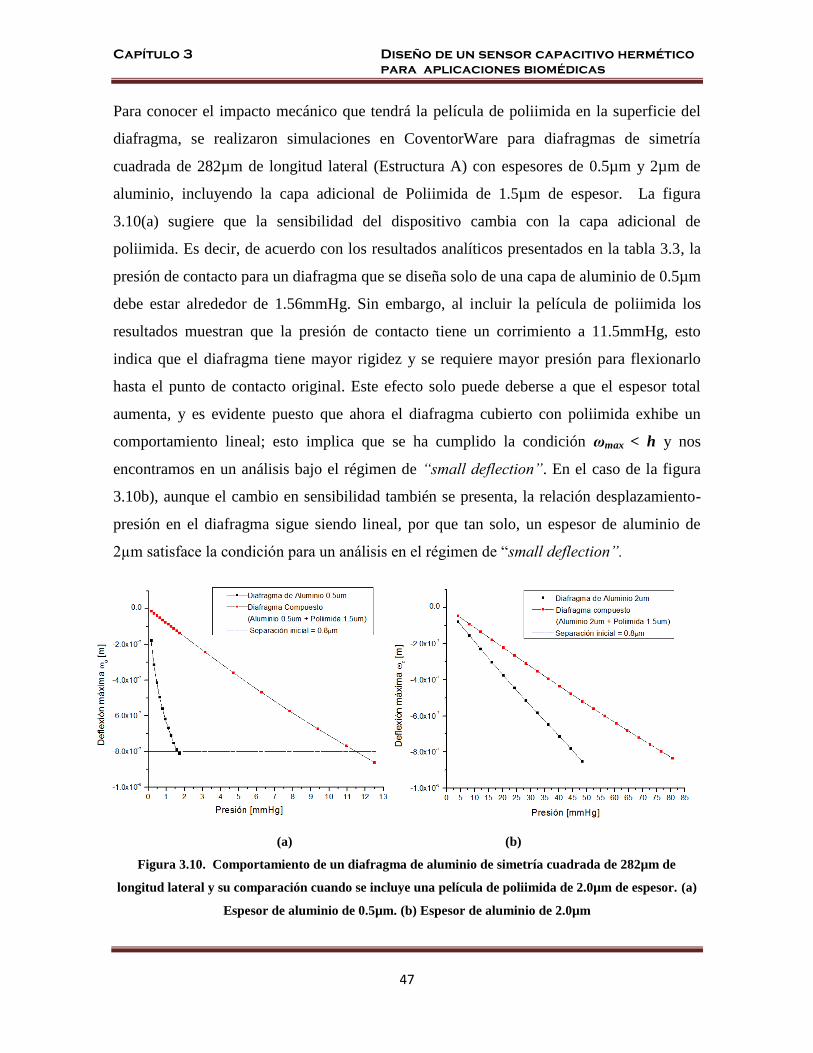
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
47
Para conocer el impacto mecánico que tendrá la película de poliimida en la superficie del
diafragma, se realizaron simulaciones en CoventorWare para diafragmas de simetría
cuadrada de 282µm de longitud lateral (Estructura A) con espesores de 0.5µm y 2µm de
aluminio, incluyendo la capa adicional de Poliimida de 1.5µm de espesor. La figura
3.10(a) sugiere que la sensibilidad del dispositivo cambia con la capa adicional de
poliimida. Es decir, de acuerdo con los resultados analíticos presentados en la tabla 3.3, la
presión de contacto para un diafragma que se diseña solo de una capa de aluminio de 0.5µm
debe estar alrededor de 1.56mmHg. Sin embargo, al incluir la película de poliimida los
resultados muestran que la presión de contacto tiene un corrimiento a 11.5mmHg, esto
indica que el diafragma tiene mayor rigidez y se requiere mayor presión para flexionarlo
hasta el punto de contacto original. Este efecto solo puede deberse a que el espesor total
aumenta, y es evidente puesto que ahora el diafragma cubierto con poliimida exhibe un
comportamiento lineal; esto implica que se ha cumplido la condición ωmax < h y nos
encontramos en un análisis bajo el régimen de “small deflection”. En el caso de la figura
3.10b), aunque el cambio en sensibilidad también se presenta, la relación desplazamiento-
presión en el diafragma sigue siendo lineal, por que tan solo, un espesor de aluminio de
2µm satisface la condición para un análisis en el régimen de “small deflection”.
(a) (b)
Figura 3.10. Comportamiento de un diafragma de aluminio de simetría cuadrada de 282µm de
longitud lateral y su comparación cuando se incluye una película de poliimida de 2.0µm de espesor. (a)
Espesor de aluminio de 0.5µm. (b) Espesor de aluminio de 2.0µm
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
48
Para cubrir el rango de presión que se desea medir para aplicaciones médicas se requiere
que la presión de contacto sea aproximadamente de 12mmHg, al analizar los datos en la
tabla 3.3, se observa que espesores de aluminio de 1.5µm y 2µm presentan presiones de
contacto superiores a las requeridas e incluso deberán aumentar al incluir la película
adicional de poliimida, de acuerdo con el análisis anterior.
Por lo tanto, para estimar el espesor que ajustaría la presión de contacto como se requiere
en las estructuras, es necesario modelar adecuadamente el comportamiento mecánico del
diafragma incluyendo la capa de Poliimida en un régimen de análisis “small deflection”.
Esto significa que la estructura completa del dispositivo sensor debe ser aproximada a una
estructura conocida como “diafragma compuesto”, puesto que se diseña a partir de dos
materiales distintos. Actualmente, no existe una expresión analítica valida que permita
modelar la deflexión de diafragmas compuestos de aluminio/poliimida. Sin embargo,
debido a que el comportamiento mecánico de diafragmas es gobernado principalmente por
su geometría (espesor, simetría y dimensión) y por las propiedades de los materiales
(Modulo de Young y coeficiente de Poisson), es posible considerar el efecto mecánico de
dos materiales distintos en un solo parámetro, la rigidez de flexión, D. Para el análisis de
un diafragma compuesto, como se ilustra en la figura 3.11, el material 1 (h1) es la película
de aluminio y el material 2 (h2) es la capa de poliimida. Bajo una deflexión, este diafragma
compuesto tiene una superficie neutral donde el esfuerzo mecánico (stress) y la
deformación (strain) son equivalentes a cero. Para un diafragma diseñado de solo un
material (h2=0), la posición de la superficie neutral se encuentra exactamente en la región
media del material (e1= e2=0.5h1); tal que la rigidez de flexión D, debe ser tomada con
respecto a esta superficie neutral. Cuando el diafragma consiste de dos materiales
diferentes, su rigidez de flexión tiene que ser calculada con respecto a la posición del eje
neutral. Los momentos de Inercia con respecto a este eje neutral se obtienen a partir del
Teorema de los ejes Paralelos [3.13]. Mientras la expresión (3.4) describe la rigidez de
flexión de un diafragma fabricado a partir de un solo material, si se desarrolla un diafragma
compuesto (como en el caso aluminio/poliimida) la expresión (3.10) describe su rigidez de
flexión, Dcomp [3.14]
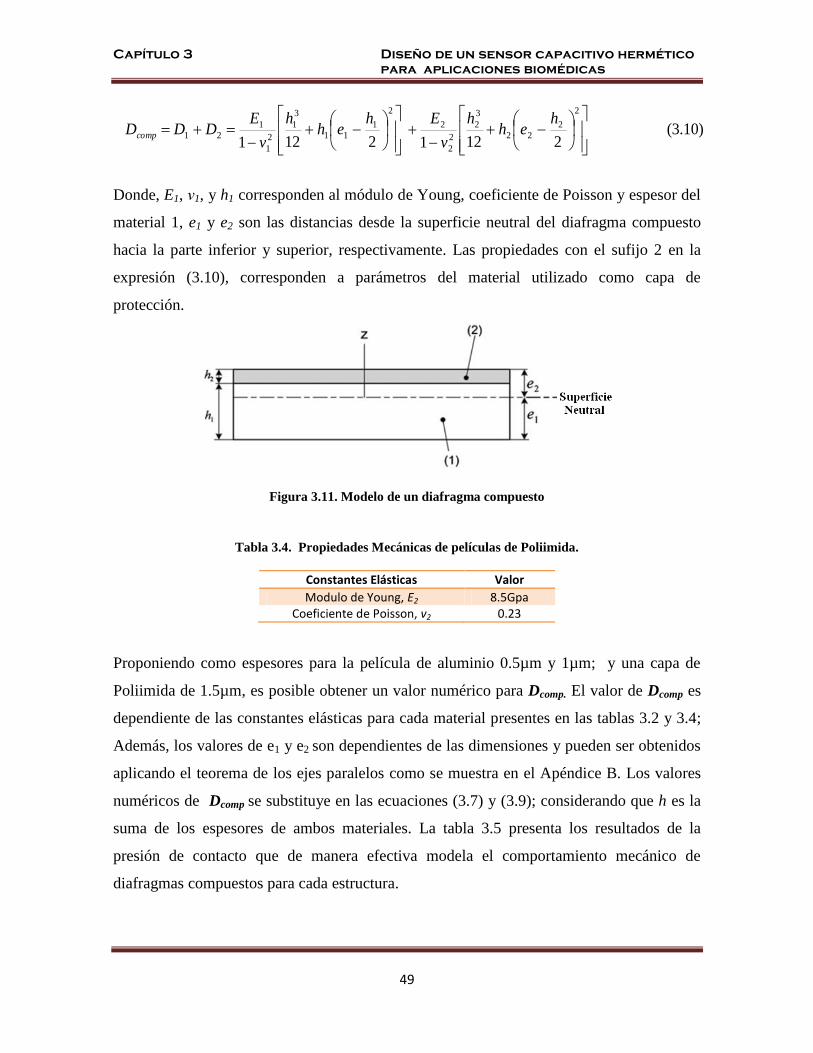
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
49
)10.3( 2121
2121
2
2
22
3
2
2
2
2
2
1
11
3
1
2
1
1
21
heh
h
v
Eheh
h
v
EDDDcomp
Donde, E1, ν1, y h1 corresponden al módulo de Young, coeficiente de Poisson y espesor del
material 1, e1 y e2 son las distancias desde la superficie neutral del diafragma compuesto
hacia la parte inferior y superior, respectivamente. Las propiedades con el sufijo 2 en la
expresión (3.10), corresponden a parámetros del material utilizado como capa de
protección.
Figura 3.11. Modelo de un diafragma compuesto
Tabla 3.4. Propiedades Mecánicas de películas de Poliimida.
Constantes Elásticas Valor
Modulo de Young, E2 8.5Gpa Coeficiente de Poisson, v2 0.23
Proponiendo como espesores para la película de aluminio 0.5µm y 1µm; y una capa de
Poliimida de 1.5µm, es posible obtener un valor numérico para Dcomp. El valor de Dcomp es
dependiente de las constantes elásticas para cada material presentes en las tablas 3.2 y 3.4;
Además, los valores de e1 y e2 son dependientes de las dimensiones y pueden ser obtenidos
aplicando el teorema de los ejes paralelos como se muestra en el Apéndice B. Los valores
numéricos de Dcomp se substituye en las ecuaciones (3.7) y (3.9); considerando que h es la
suma de los espesores de ambos materiales. La tabla 3.5 presenta los resultados de la
presión de contacto que de manera efectiva modela el comportamiento mecánico de
diafragmas compuestos para cada estructura.
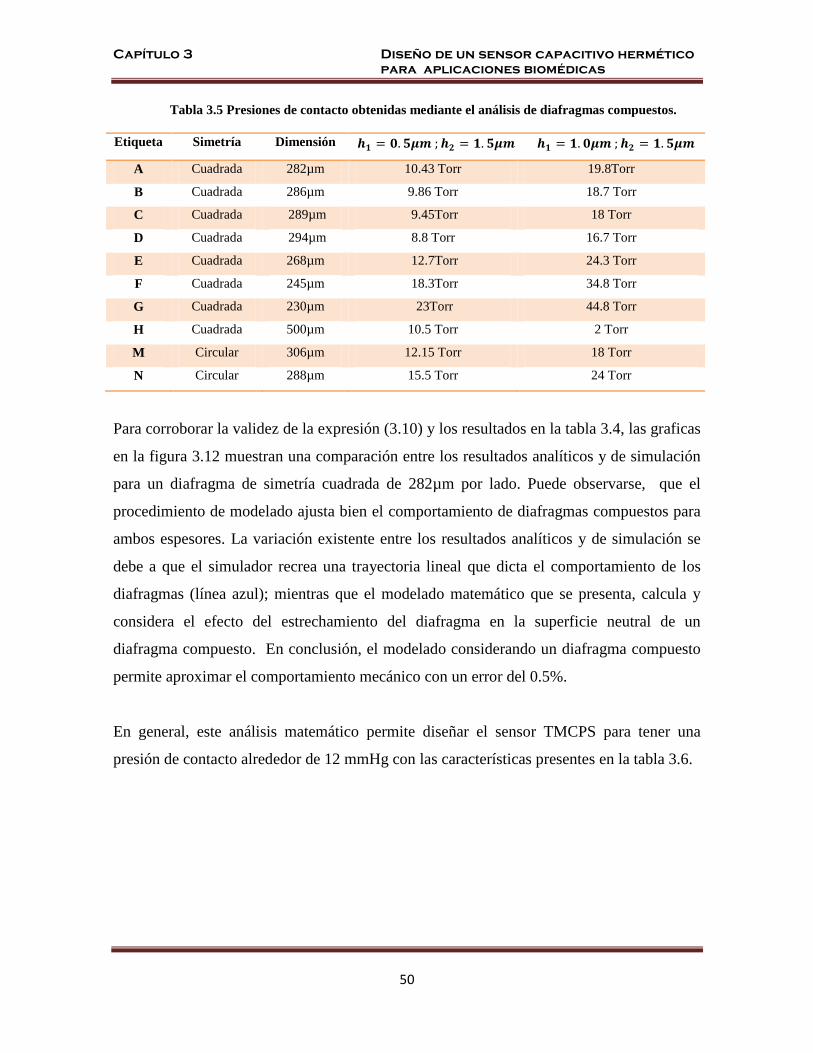
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
50
Tabla 3.5 Presiones de contacto obtenidas mediante el análisis de diafragmas compuestos.
Etiqueta Simetría Dimensión
A Cuadrada 282µm 10.43 Torr 19.8Torr
B Cuadrada 286µm 9.86 Torr 18.7 Torr
C Cuadrada 289µm 9.45Torr 18 Torr
D Cuadrada 294µm 8.8 Torr 16.7 Torr
E Cuadrada 268µm 12.7Torr 24.3 Torr
F Cuadrada 245µm 18.3Torr 34.8 Torr
G Cuadrada 230µm 23Torr 44.8 Torr
H Cuadrada 500µm 10.5 Torr 2 Torr
M Circular 306µm 12.15 Torr 18 Torr
N Circular 288µm 15.5 Torr 24 Torr
Para corroborar la validez de la expresión (3.10) y los resultados en la tabla 3.4, las graficas
en la figura 3.12 muestran una comparación entre los resultados analíticos y de simulación
para un diafragma de simetría cuadrada de 282µm por lado. Puede observarse, que el
procedimiento de modelado ajusta bien el comportamiento de diafragmas compuestos para
ambos espesores. La variación existente entre los resultados analíticos y de simulación se
debe a que el simulador recrea una trayectoria lineal que dicta el comportamiento de los
diafragmas (línea azul); mientras que el modelado matemático que se presenta, calcula y
considera el efecto del estrechamiento del diafragma en la superficie neutral de un
diafragma compuesto. En conclusión, el modelado considerando un diafragma compuesto
permite aproximar el comportamiento mecánico con un error del 0.5%.
En general, este análisis matemático permite diseñar el sensor TMCPS para tener una
presión de contacto alrededor de 12 mmHg con las características presentes en la tabla 3.6.
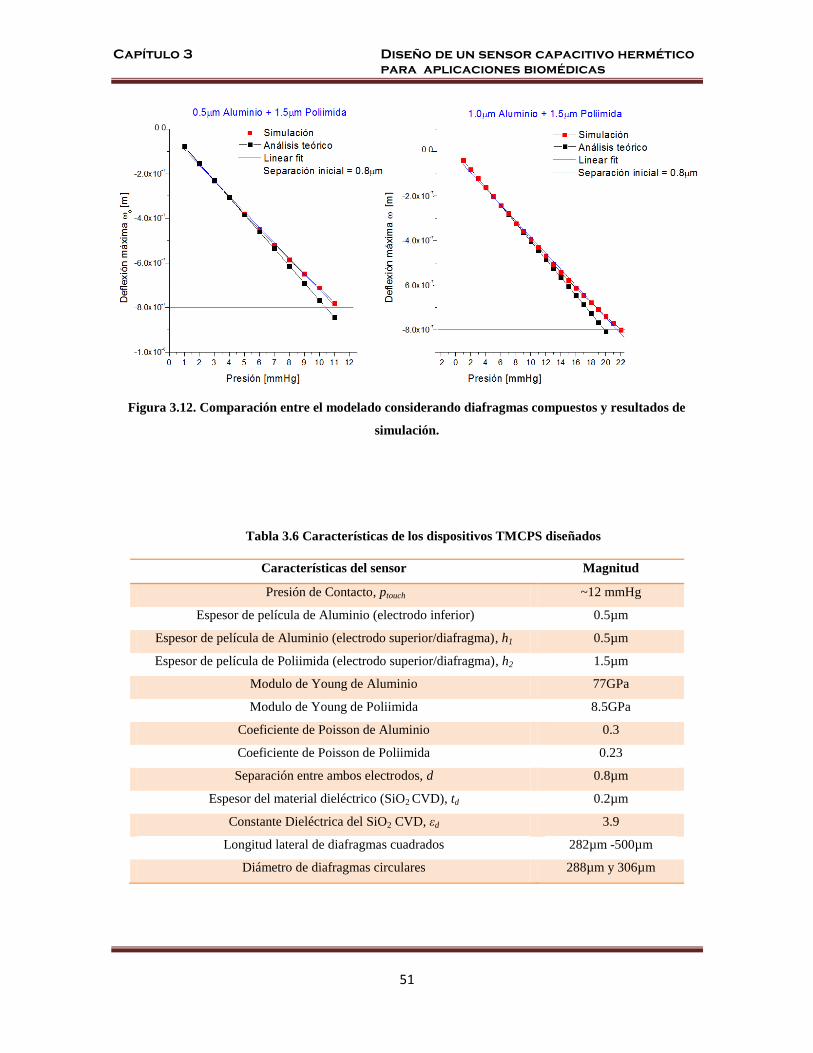
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
51
Figura 3.12. Comparación entre el modelado considerando diafragmas compuestos y resultados de
simulación.
Tabla 3.6 Características de los dispositivos TMCPS diseñados
Características del sensor Magnitud
Presión de Contacto, ptouch ~12 mmHg
Espesor de película de Aluminio (electrodo inferior) 0.5µm
Espesor de película de Aluminio (electrodo superior/diafragma), h1 0.5µm
Espesor de película de Poliimida (electrodo superior/diafragma), h2 1.5µm
Modulo de Young de Aluminio 77GPa
Modulo de Young de Poliimida 8.5GPa
Coeficiente de Poisson de Aluminio 0.3
Coeficiente de Poisson de Poliimida 0.23
Separación entre ambos electrodos, d 0.8µm
Espesor del material dieléctrico (SiO2 CVD), td 0.2µm
Constante Dieléctrica del SiO2 CVD, εd 3.9
Longitud lateral de diafragmas cuadrados 282µm -500µm
Diámetro de diafragmas circulares 288µm y 306µm
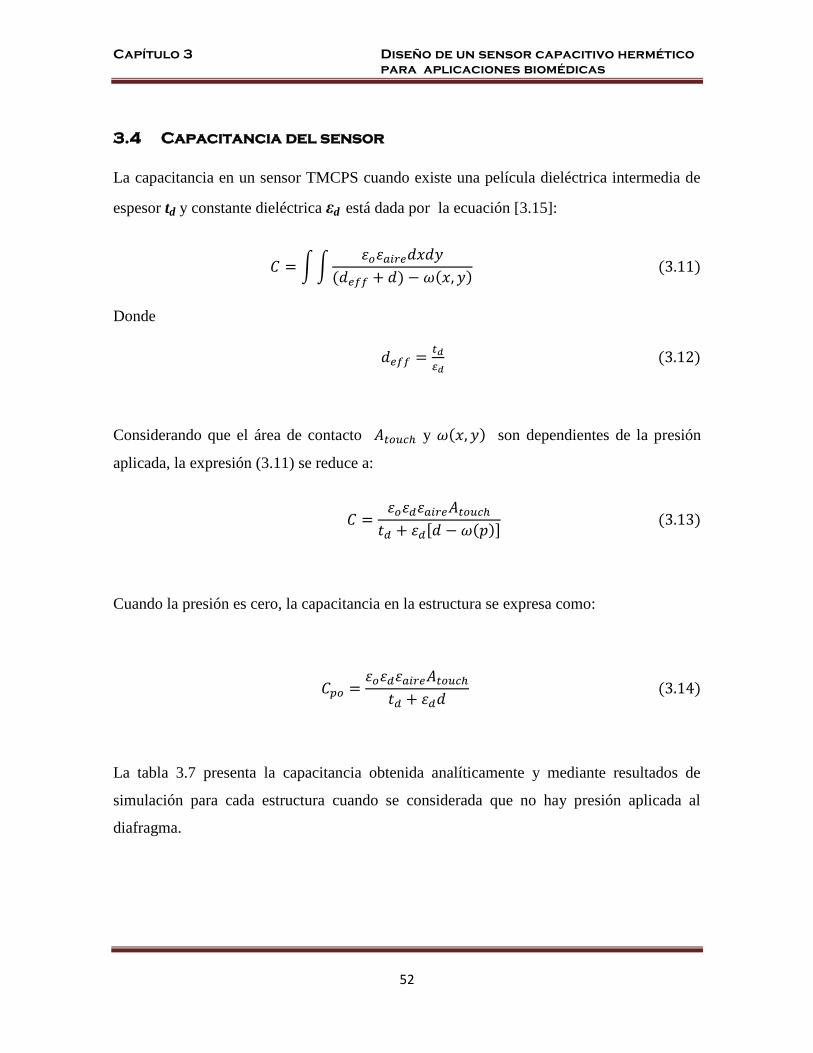
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
52
3.4 Capacitancia del sensor
La capacitancia en un sensor TMCPS cuando existe una película dieléctrica intermedia de
espesor td y constante dieléctrica εd está dada por la ecuación [3.15]:
Donde
Considerando que el área de contacto y son dependientes de la presión
aplicada, la expresión (3.11) se reduce a:
Cuando la presión es cero, la capacitancia en la estructura se expresa como:
La tabla 3.7 presenta la capacitancia obtenida analíticamente y mediante resultados de
simulación para cada estructura cuando se considerada que no hay presión aplicada al
diafragma.
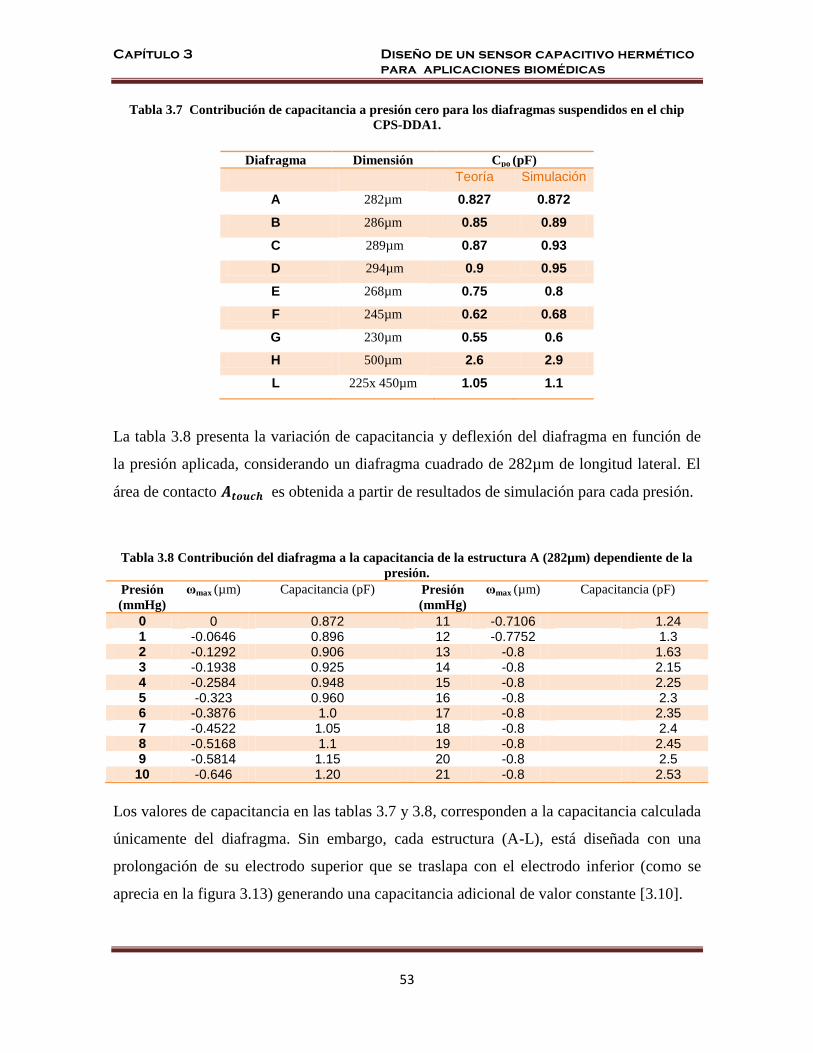
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
53
Tabla 3.7 Contribución de capacitancia a presión cero para los diafragmas suspendidos en el chip
CPS-DDA1.
Diafragma Dimensión Cpo (pF)
Teoría Simulación
A 282µm 0.827 0.872
B 286µm 0.85 0.89
C 289µm 0.87 0.93
D 294µm 0.9 0.95
E 268µm 0.75 0.8
F 245µm 0.62 0.68
G 230µm 0.55 0.6
H 500µm 2.6 2.9
L 225x 450µm 1.05 1.1
La tabla 3.8 presenta la variación de capacitancia y deflexión del diafragma en función de
la presión aplicada, considerando un diafragma cuadrado de 282µm de longitud lateral. El
área de contacto es obtenida a partir de resultados de simulación para cada presión.
Tabla 3.8 Contribución del diafragma a la capacitancia de la estructura A (282µm) dependiente de la
presión.
Presión
(mmHg)
ωmax (µm) Capacitancia (pF) Presión
(mmHg)
ωmax (µm) Capacitancia (pF)
0 0 0.872 11 -0.7106 1.24 1 -0.0646 0.896 12 -0.7752 1.3 2 -0.1292 0.906 13 -0.8 1.63 3 -0.1938 0.925 14 -0.8 2.15 4 -0.2584 0.948 15 -0.8 2.25 5 -0.323 0.960 16 -0.8 2.3 6 -0.3876 1.0 17 -0.8 2.35 7 -0.4522 1.05 18 -0.8 2.4 8 -0.5168 1.1 19 -0.8 2.45 9 -0.5814 1.15 20 -0.8 2.5
10 -0.646 1.20 21 -0.8 2.53
Los valores de capacitancia en las tablas 3.7 y 3.8, corresponden a la capacitancia calculada
únicamente del diafragma. Sin embargo, cada estructura (A-L), está diseñada con una
prolongación de su electrodo superior que se traslapa con el electrodo inferior (como se
aprecia en la figura 3.13) generando una capacitancia adicional de valor constante [3.10].
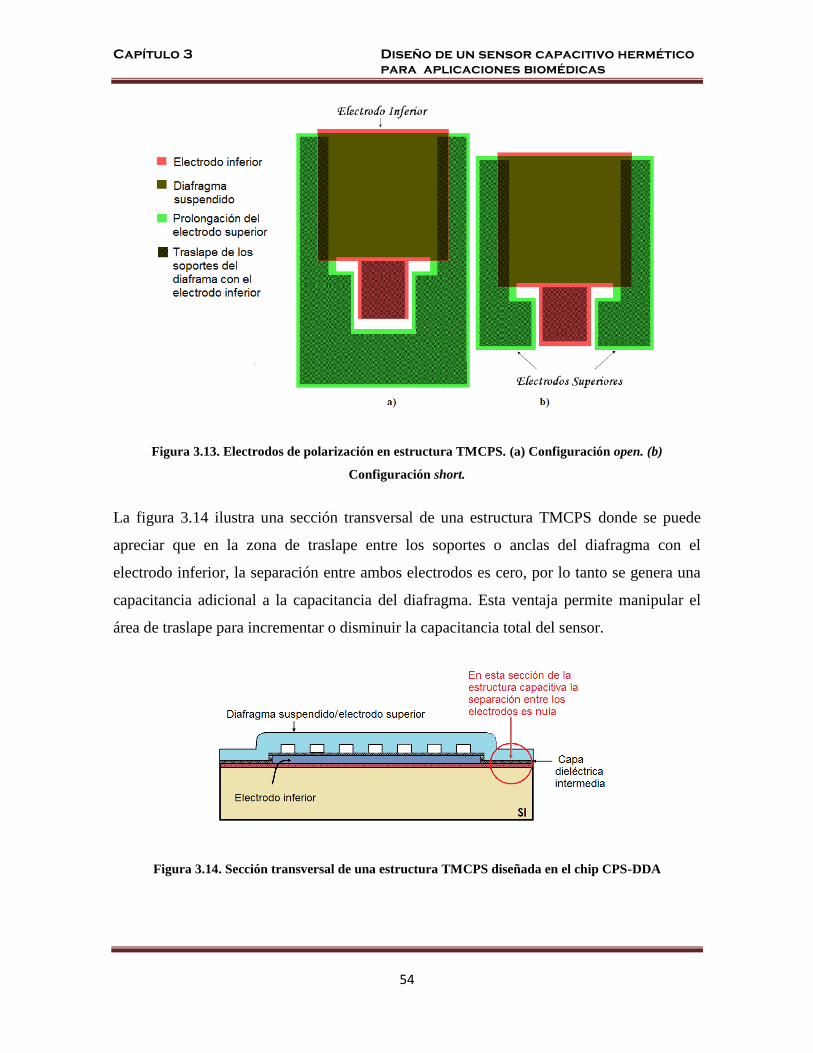
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
54
Figura 3.13. Electrodos de polarización en estructura TMCPS. (a) Configuración open. (b)
Configuración short.
La figura 3.14 ilustra una sección transversal de una estructura TMCPS donde se puede
apreciar que en la zona de traslape entre los soportes o anclas del diafragma con el
electrodo inferior, la separación entre ambos electrodos es cero, por lo tanto se genera una
capacitancia adicional a la capacitancia del diafragma. Esta ventaja permite manipular el
área de traslape para incrementar o disminuir la capacitancia total del sensor.
Figura 3.14. Sección transversal de una estructura TMCPS diseñada en el chip CPS-DDA
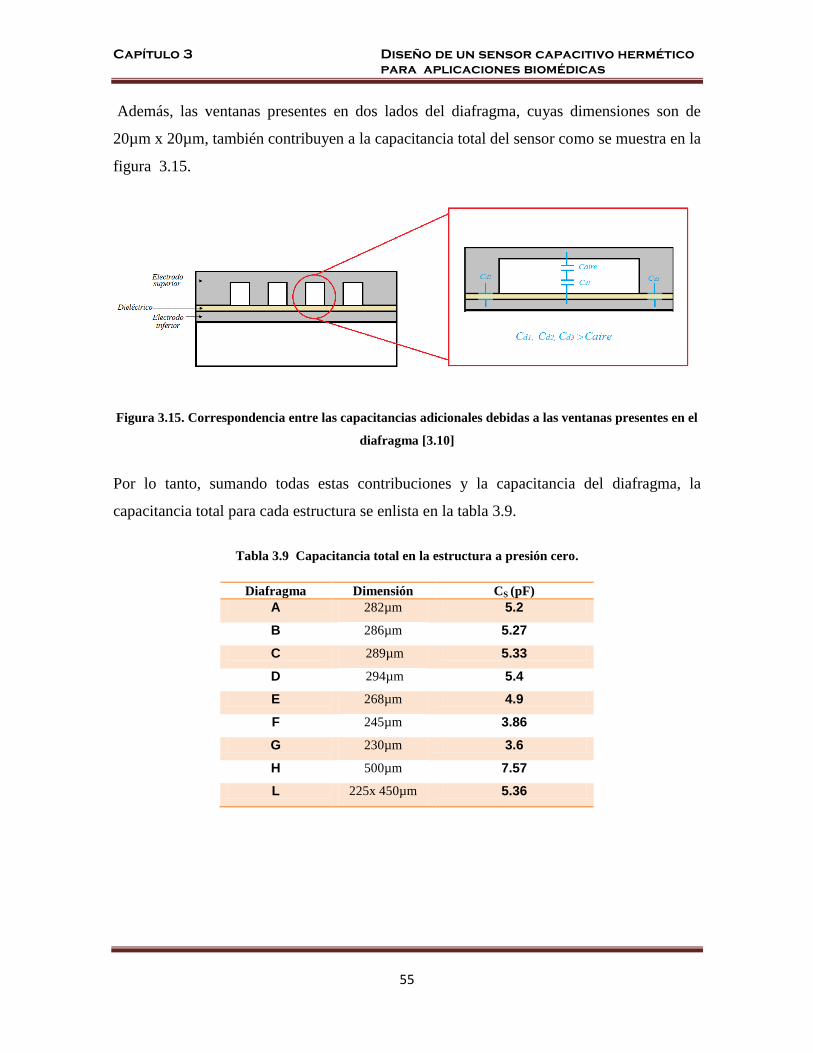
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
55
Además, las ventanas presentes en dos lados del diafragma, cuyas dimensiones son de
20µm x 20µm, también contribuyen a la capacitancia total del sensor como se muestra en la
figura 3.15.
Figura 3.15. Correspondencia entre las capacitancias adicionales debidas a las ventanas presentes en el
diafragma [3.10]
Por lo tanto, sumando todas estas contribuciones y la capacitancia del diafragma, la
capacitancia total para cada estructura se enlista en la tabla 3.9.
Tabla 3.9 Capacitancia total en la estructura a presión cero.
Diafragma Dimensión CS (pF)
A 282µm 5.2
B 286µm 5.27
C 289µm 5.33
D 294µm 5.4
E 268µm 4.9
F 245µm 3.86
G 230µm 3.6
H 500µm 7.57
L 225x 450µm 5.36
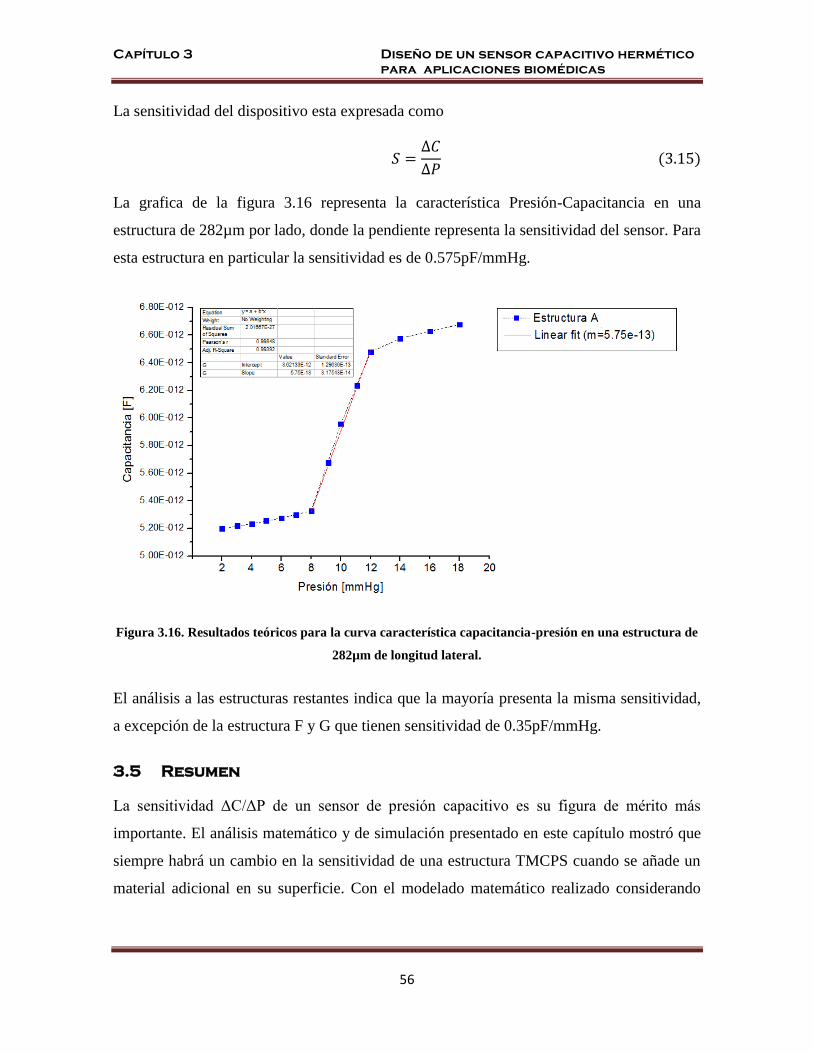
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
56
La sensitividad del dispositivo esta expresada como
La grafica de la figura 3.16 representa la característica Presión-Capacitancia en una
estructura de 282µm por lado, donde la pendiente representa la sensitividad del sensor. Para
esta estructura en particular la sensitividad es de 0.575pF/mmHg.
Figura 3.16. Resultados teóricos para la curva característica capacitancia-presión en una estructura de
282µm de longitud lateral.
El análisis a las estructuras restantes indica que la mayoría presenta la misma sensitividad,
a excepción de la estructura F y G que tienen sensitividad de 0.35pF/mmHg.
3.5 Resumen
La sensitividad ΔC/ΔP de un sensor de presión capacitivo es su figura de mérito más
importante. El análisis matemático y de simulación presentado en este capítulo mostró que
siempre habrá un cambio en la sensitividad de una estructura TMCPS cuando se añade un
material adicional en su superficie. Con el modelado matemático realizado considerando

Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
57
una aproximación a diafragmas compuestos, es posible predecir el comportamiento
mecánico de un diafragma fabricado de dos materiales distintos. De esta manera, se puede
prever cualquier variación en la sensitividad del dispositivo y compensarla con un
incremento en las dimensiones, o una disminución del espesor del diafragma, de una
manera directa, y sin la necesidad de llevar a cabo una rutina de simulaciones con
diferentes iteraciones. Actualmente, muchos dispositivos TMCPS han sido desarrollados
para mediciones en diferentes ambientes de presión, pero en su gran mayoría no exponen
las condiciones necesarias para cubrir la superficie externa del dispositivo con materiales
biocompatibles. Por lo tanto, éste análisis matemático y de modelado llega a ser una
herramienta útil y fácil de implementar en herramientas computacionales para facilitar la
etapa de diseño de estos dispositivos. Cuando se requiere que la capacitancia del sensor
tenga un valor especifico para acoplarse con un esquema de telemetría RF, el diseño del
sensor considera capacitancias adicionales que pueden manipularse fácilmente, variando el
área de traslape entre los soportes del diafragma y el electrodo inferior, lo cual presenta una
gran ventaja en comparación con algunos prototipos previamente desarrollados. Por último,
de manera particular se obtuvo que la sensitividad obtenida en los dispositivos es del orden
de 0.57pF/mmHg.
3.6 Referencias
[3.1] Ko, W.H. and Wang, Q. (1999) “Touch Mode Capacitive Pressure Sensor”, Sensors
and Actuators A: physical, Vol 75, No. 3, pp. 242-251.
[3.2] Yamamoto, S. (2002) “Touch Mode Capacitive Pressure Sensor for Passive
Tire Monitoring System”. Sensors Proceedings of IEEE.
[3.3] Timoshenko S.P. and Woinowsky-Krieger S. (1959) “Theory of Plates And Shells”.
Second Edition, Mcgraw-Hill Book Company.
[3.4] Reddy, J.N. (2004) “An Introduction to Nonlinear Finite Element Analysis”, Oxford
University Press.
[3.5] Jhonson D, (2000) “Advanced Structural Mechanics an Introduction to Continuum
Mechanics And Structural Mechanics”, Second Edition, Thomas Telford.
Capítulo 3 Diseño de un sensor capacitivo hermético
para aplicaciones biomédicas
58
[3.6] Reismann, H. (1998) “Elastic plates- Theory and applications”, John Wiley & Sons.
[3.7] Szilard, R. (1974) “Theory and Analysis of Plates”, Englewood Cliffs: Prentice-Hall
Inc., pp. 622.
[3.8] Sharma, A. and George, P.J. (2008) “A Simple Method for A Calculation Of The Pull-
In Voltage and Touch–Point Pressure for the Small Deflection of Square Diaphragm in
MEMS”. Sensors and Actuators A: Physical, Vol. 141, No. 2, pp. 376-382.
[3.9] Levy, S. (1942) “Square Plate with Clamped Edges under Normal Pressure
producing Large Deflections”, Naca-Report-740.
[3.10] Díaz Alonso, D. (2010) “Fabricación y Caracterización de estructuras capacitivas
para monitorear presión”, Noviembre 2010, INAOE, Tesis Maestria.
[3.11] Rendón-Nava, A. E., Díaz-Méndez, J. A., Nino-de-Rivera, L., Calleja-Arriaga, W.,
Gil-Carrasco, F., & Díaz-Alonso, D. (2014). “Study of the Effect of Distance and
Misalignment between Magnetically Coupled Coils for Wireless Power Transfer in
Intraocular Pressure Measurement”. The Scientific World Journal, Vol. 2014, Article ID
692431, 11 pages.
[3.12] Rendón Nava, A. (2015) “Diseño y construcción de un Microsistema de
comunicación Inalámbrica para la lectura de la presión intraocular”, Junio 2015, IPN
ESIME CULHUACAN. Tesis Doctorado.
[3.13] Gere, J.M. and Timoshenko, S.P., (1987). “Mechanics of Materials”, 3rd Ed.,
Chapman & Hall.
[3.14] Tiggelaar, R.M., Loeters, P.W.H., Van Male, P. (2004) “Thermal and mechanical
analysis of a microreactor for high temperature catalytic gas phase reactions”, Sensors
and Actuators A: Physical, Vol. 112, No. 2, pp. 267–277.
[3.15] Mittal, M. and Sharma (2012) “A. Virtual prototyping of a MEMS capacitive
pressure sensor for TPMS using Intellisuite®”, Physics and Technology of Sensors
(ISPTS).
59
Capítulo 4
Proceso de Fabricación de un sensor de
presión TMCPS
4.1 Introducción
El proceso de fabricación del chip CPS-DDA se desarrolla en base a la tecnología
PolyMEMS INAOE, mediante micromaquinado Superficial [4.1], [4.2]. Considerando las
posibilidades de integración entre los sensores de presión con un sistema de medición
telemétrico previamente desarrollado [4.3], [4.4] se llevó a cabo una secuencia de
fabricación para desarrollar los sensores de presión capacitivos a base de aluminio. Las
consideraciones para la fabricación de las estructuras capacitivas son las siguientes: Se
utilizan solo tres materiales, entre ellos, dos niveles de aluminio, el primer nivel (Metal 1)
se encuentra fijo al substrato y es utilizado como electrodo inferior; y el segundo (Metal 2),
es un nivel suspendido para la fabricación de los diafragmas; una capa de óxido de silicio
como material aislante de ambos electrodos de aluminio, y dos niveles de poliimida, la
primer capa se desarrolla como material de sacrificio (o soporte mecánico temporal),
mientras que el segundo nivel tiene la función de capa protectora biocompatible. El proceso
de liberación mecánica se realiza mediante técnicas de grabado en plasma de oxígeno
(RIE). En éste capítulo se abordan los detalles del proceso de fabricación. Así mismo, se
detallan aspectos relevantes en la etapa de sellado de los diafragmas.
4.2 Descripción del proceso de fabricación del sensor TMCPS
Los dispositivos sensores TMCPS se desarrollan en base a la tecnologia PolyMEMS-
INAOE®. Los pasos de fabricación principales son los siguientes:
a) Crecimiento de óxido de silicio para aislar el substrato de las estructuras
superficiales.
b) Evaporación del primer nivel de aluminio para definir el electrodo inferior.
c) Depósito de una capa dieléctrica sobre el electrodo inferior.
Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
60
d) Depósito y definición de patrones del primer nivel de poliimida usado como
material de sacrificio.
e) Evaporación del segundo nivel de aluminio utilizado para definir el electrodo
superior o diafragma.
f) Liberación mecánica del material de sacrificio.
g) Sellado de la cavidad interna mediante el depósito del segundo nivel de poliimida.
h) Definición de contactos eléctricos a través de la película de poliimida.
A continuación se presenta el proceso de fabricación completo descrito en la figura 4.1. Las
etapas más críticas en el procedimiento consisten en las etapas de liberación mecánica y
sellado hermético de la cavidad, las cuales serán abordadas con más detalle en las secciones
siguientes.
1. La fabricación comienza con el desengrasado y las limpiezas RCA estándar a obleas
de silicio de 2” con orientación (100), utilizadas como substrato rígido.
2. Posteriormente, se realiza en crecimiento de 2000Å de óxido de silicio (SiO2) a una
temperatura de 1000°C para efectos de aislar las estructuras que son desarrolladas
en la superficie del substrato, esto se ilustra en la figura 4.1(a).
3. Después, se realiza la evaporación del primer nivel de aluminio de 0.5µm de
espesor, mediante técnicas de litografía, utilizando la primera mascarilla del chip
CPS-DDA (Ver Apéndice C) y realizando el grabado húmedo del aluminio en
solución Al-Etch a 38°C, el electrodo inferior de la estructura TMCPS queda
definido como se muestra en la figura 4.1(b) utilizando la mascarilla No. 1 del chip
CPS-DDA.
4. El paso siguiente consiste en depositar 2000Å de óxido de Silicio a una temperatura
de 400°C en el sistema APCVD, usando Silano (SiH4) y oxígeno como gases
reactivos; el propósito de esta película es definir la capa dieléctrica sobre el
electrodo inferior, como se observa en la figura 4.1(c).
5. Se continúa el proceso con el depósito del primer nivel de poliimida con un espesor
de 0.8µm que se utiliza como material de sacrificio, ver figura 4.1(d). Este
polímero es depositado por centrifugado (spin-coating) de un precursor líquido PI-
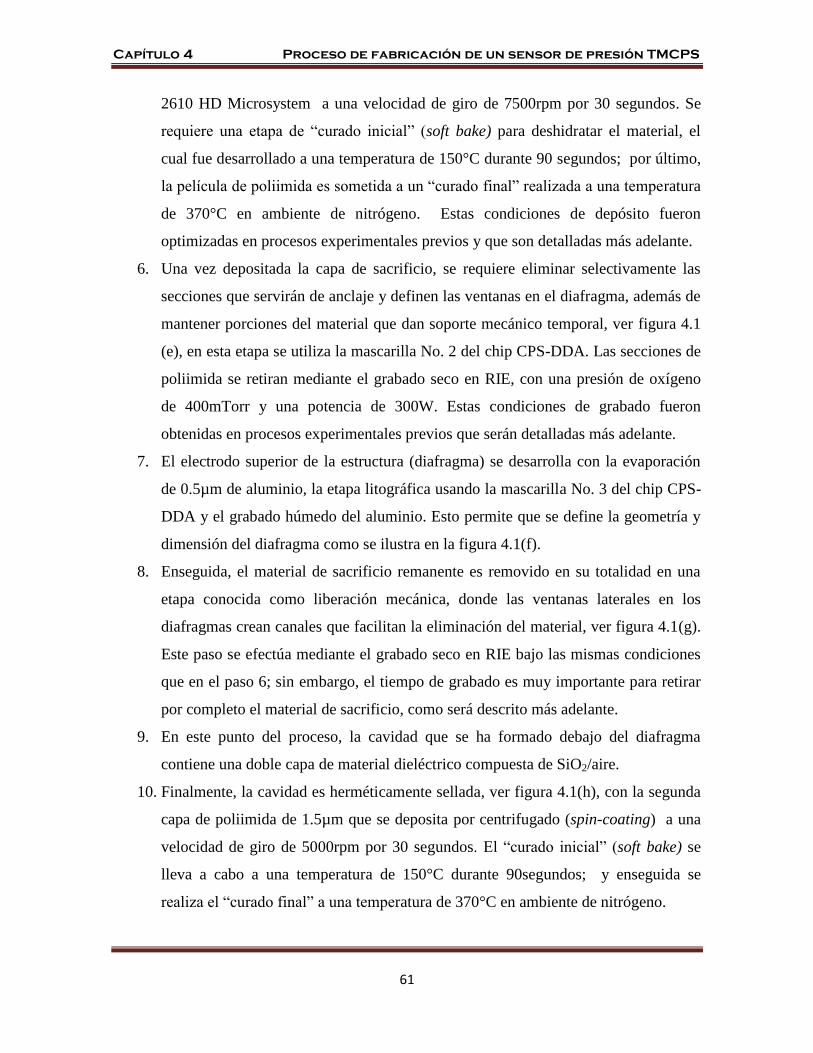
Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
61
2610 HD Microsystem a una velocidad de giro de 7500rpm por 30 segundos. Se
requiere una etapa de “curado inicial” (soft bake) para deshidratar el material, el
cual fue desarrollado a una temperatura de 150°C durante 90 segundos; por último,
la película de poliimida es sometida a un “curado final” realizada a una temperatura
de 370°C en ambiente de nitrógeno. Estas condiciones de depósito fueron
optimizadas en procesos experimentales previos y que son detalladas más adelante.
6. Una vez depositada la capa de sacrificio, se requiere eliminar selectivamente las
secciones que servirán de anclaje y definen las ventanas en el diafragma, además de
mantener porciones del material que dan soporte mecánico temporal, ver figura 4.1
(e), en esta etapa se utiliza la mascarilla No. 2 del chip CPS-DDA. Las secciones de
poliimida se retiran mediante el grabado seco en RIE, con una presión de oxígeno
de 400mTorr y una potencia de 300W. Estas condiciones de grabado fueron
obtenidas en procesos experimentales previos que serán detalladas más adelante.
7. El electrodo superior de la estructura (diafragma) se desarrolla con la evaporación
de 0.5µm de aluminio, la etapa litográfica usando la mascarilla No. 3 del chip CPS-
DDA y el grabado húmedo del aluminio. Esto permite que se define la geometría y
dimensión del diafragma como se ilustra en la figura 4.1(f).
8. Enseguida, el material de sacrificio remanente es removido en su totalidad en una
etapa conocida como liberación mecánica, donde las ventanas laterales en los
diafragmas crean canales que facilitan la eliminación del material, ver figura 4.1(g).
Este paso se efectúa mediante el grabado seco en RIE bajo las mismas condiciones
que en el paso 6; sin embargo, el tiempo de grabado es muy importante para retirar
por completo el material de sacrificio, como será descrito más adelante.
9. En este punto del proceso, la cavidad que se ha formado debajo del diafragma
contiene una doble capa de material dieléctrico compuesta de SiO2/aire.
10. Finalmente, la cavidad es herméticamente sellada, ver figura 4.1(h), con la segunda
capa de poliimida de 1.5µm que se deposita por centrifugado (spin-coating) a una
velocidad de giro de 5000rpm por 30 segundos. El “curado inicial” (soft bake) se
lleva a cabo a una temperatura de 150°C durante 90segundos; y enseguida se
realiza el “curado final” a una temperatura de 370°C en ambiente de nitrógeno.
Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
62
Figura 4.1 Secuencia de fabricación de dispositivos TMCPS usando Aluminio como material
estructural.
4.3 Condiciones de depósito y grabado de la poliimida pi2610-
HD Microsystem
La Poliimida PI-2610 de HD Microsystem destaca por ser un material altamente flexible y
que resiste la exposición a diversos solventes durante procedimientos diversos de
manufactura; sin que se afecten sus propiedades mecánicas y eléctricas. El ácido poliámico
(PAA) es el precursor de la poliimida liquida. La transformación de estado liquido de la
poliimida a un material sólido, se obtiene a partir de la conversión del acido poliámico
mediante tratamientos térmicos a temperaturas que oscilan entre 300-380°C en un ambiente
controlado de nitrógeno. Este proceso se conoce como etapa de polimerización o “curado
final” [4.5], [4.6]. En el caso de la poliimida PI-2610 de HD-Microsystem, el precursor
PAA se encuentra disuelto en un solvente basado en N-metil-2-pirolidona (NPM); por lo
tanto, cuando la poliimida es empleada en aplicaciones “in vivo” se debe garantizar que la

Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
63
poliimida sólida exhiba la menor cantidad de solvente NMP en su estructura química, para
reducir cualquier daño y/o contaminación al tejido. Para comprobar que se cumpla este
requisito de biocompatibilidad, el material se sujeta a pruebas de absorción con análisis de
espectroscopia infrarroja (FTIR). Las longitudes de onda de interés que se asocian a los
componentes de la poliimida resultante se muestran en la tabla 4.1.
Tabla 4.1 Componentes de la Poliimida de acuerdo con longitudes de onda características.
Componente Numero de Onda (Cm-1)
Modo de Vibración
IMIDA I 1775-1780 Enlace simétrico C=O IMIDA II 1717-1738 Enlace Antisimetrico C=O IMIDA III 1359-1380 Enlace C-N IMIDA IV 725-740 Enlace C=0
SOLVENTE NMP 1680; 1408 CH2
Para el depósito de Poliimida, se utiliza la técnica “spin coating”, que consiste en colocar el
substrato en una centrifuga (spinner) y después se coloca sobre su superficie el precursor
liquido. El espesor de la película resultante depende de la velocidad de giro (rpm) de la
centrifuga y la viscosidad del material. En la mayoría de los casos se requiere un
tratamiento térmico previo a la polimerización final conocido como “soft bake”, el cual
contribuye a la evaporación del solvente NMP en el material. Es evidente que los
tratamientos térmicos repercuten directamente en la estructura química de la poliimida. Se
ha reportado en [4.7], una rampa de temperaturas para llevar a cabo la polimerización de la
Poliimida PI-2610 de HD Microsystem. El procedimiento se realiza a una temperatura
máxima de 350°C en ambiente de Nitrógeno, en una parilla diseñada para simular el
funcionamiento de un horno de convección, con un control manual de temperatura en
incrementos de 5°C/min para cumplir la rampa de polimerización térmica.
Como parte de la caracterización de la poliimida se realizaron depósitos de películas de
poliimida de 3µm de espesor, depositadas bajos las mismas condiciones que fueron
reportadas en [4.7] pero variando la temperatura de curado final entre 350-370°C, para una
rampa de polimerización como se muestra en la figura 4.2.
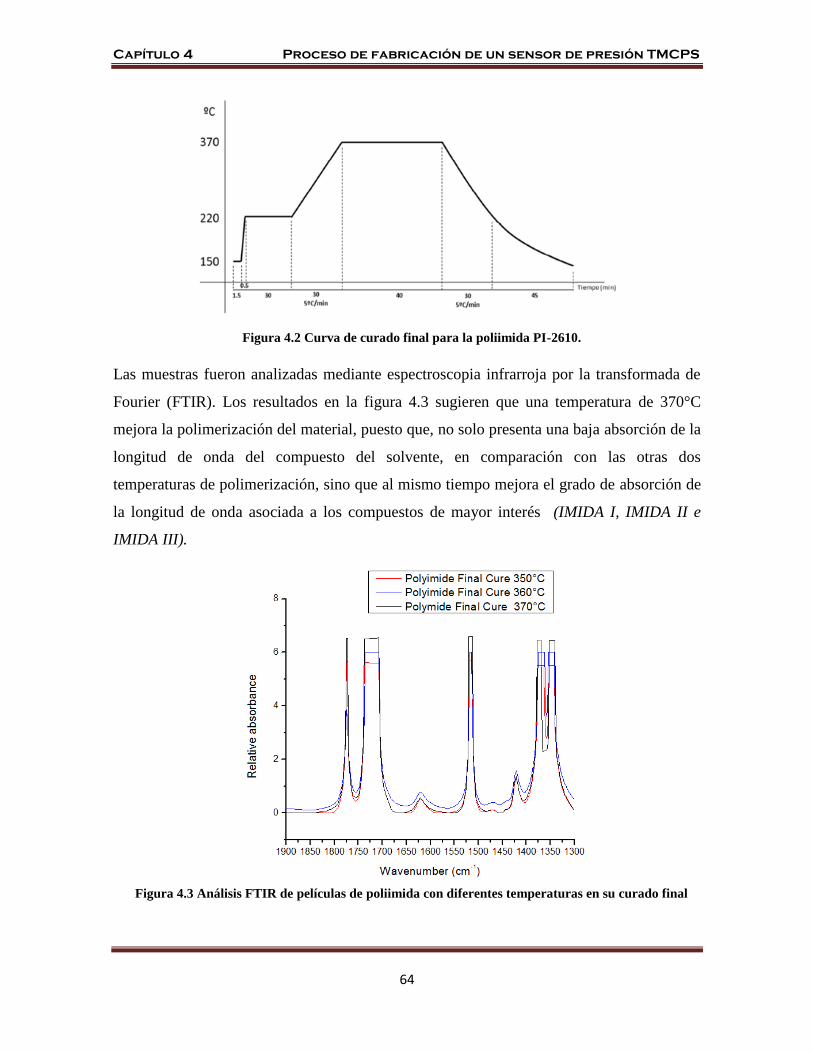
Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
64
Figura 4.2 Curva de curado final para la poliimida PI-2610.
Las muestras fueron analizadas mediante espectroscopia infrarroja por la transformada de
Fourier (FTIR). Los resultados en la figura 4.3 sugieren que una temperatura de 370°C
mejora la polimerización del material, puesto que, no solo presenta una baja absorción de la
longitud de onda del compuesto del solvente, en comparación con las otras dos
temperaturas de polimerización, sino que al mismo tiempo mejora el grado de absorción de
la longitud de onda asociada a los compuestos de mayor interés (IMIDA I, IMIDA II e
IMIDA III).
Figura 4.3 Análisis FTIR de películas de poliimida con diferentes temperaturas en su curado final
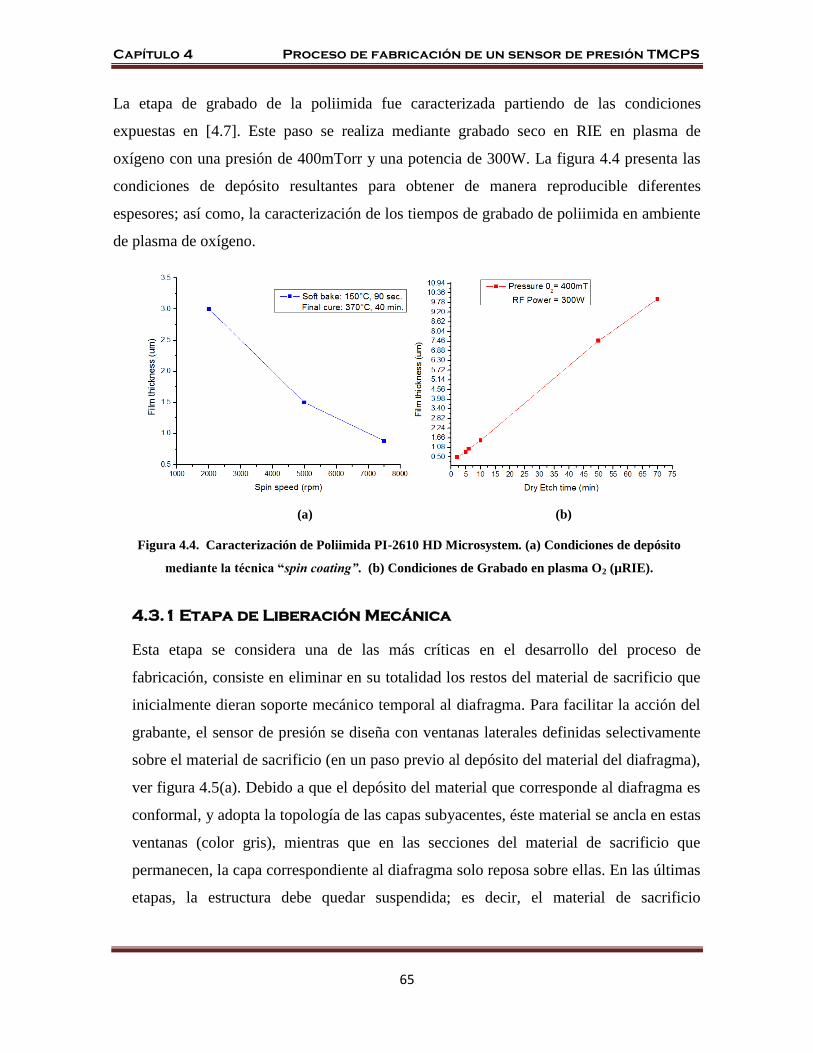
Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
65
La etapa de grabado de la poliimida fue caracterizada partiendo de las condiciones
expuestas en [4.7]. Este paso se realiza mediante grabado seco en RIE en plasma de
oxígeno con una presión de 400mTorr y una potencia de 300W. La figura 4.4 presenta las
condiciones de depósito resultantes para obtener de manera reproducible diferentes
espesores; así como, la caracterización de los tiempos de grabado de poliimida en ambiente
de plasma de oxígeno.
(a) (b)
Figura 4.4. Caracterización de Poliimida PI-2610 HD Microsystem. (a) Condiciones de depósito
mediante la técnica “spin coating”. (b) Condiciones de Grabado en plasma O2 (µRIE).
4.3.1 Etapa de Liberación Mecánica
Esta etapa se considera una de las más críticas en el desarrollo del proceso de
fabricación, consiste en eliminar en su totalidad los restos del material de sacrificio que
inicialmente dieran soporte mecánico temporal al diafragma. Para facilitar la acción del
grabante, el sensor de presión se diseña con ventanas laterales definidas selectivamente
sobre el material de sacrificio (en un paso previo al depósito del material del diafragma),
ver figura 4.5(a). Debido a que el depósito del material que corresponde al diafragma es
conformal, y adopta la topología de las capas subyacentes, éste material se ancla en estas
ventanas (color gris), mientras que en las secciones del material de sacrificio que
permanecen, la capa correspondiente al diafragma solo reposa sobre ellas. En las últimas
etapas, la estructura debe quedar suspendida; es decir, el material de sacrificio
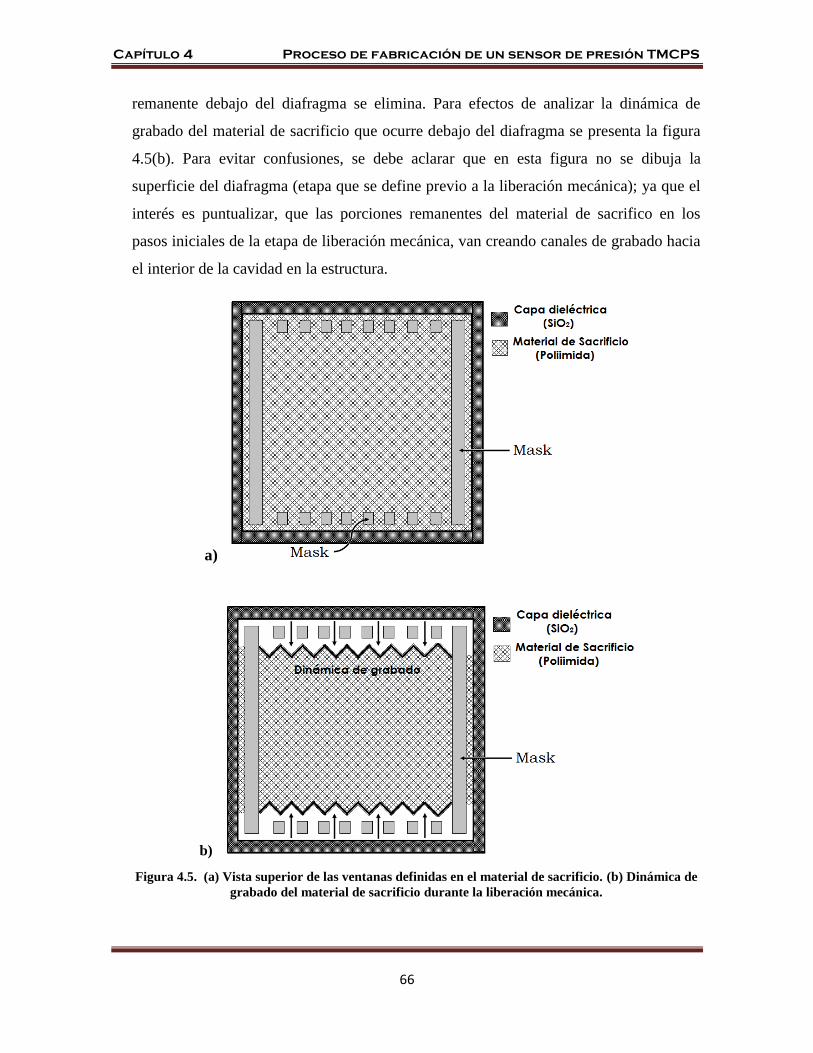
Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
66
remanente debajo del diafragma se elimina. Para efectos de analizar la dinámica de
grabado del material de sacrificio que ocurre debajo del diafragma se presenta la figura
4.5(b). Para evitar confusiones, se debe aclarar que en esta figura no se dibuja la
superficie del diafragma (etapa que se define previo a la liberación mecánica); ya que el
interés es puntualizar, que las porciones remanentes del material de sacrifico en los
pasos iniciales de la etapa de liberación mecánica, van creando canales de grabado hacia
el interior de la cavidad en la estructura.
a)
b)
Figura 4.5. (a) Vista superior de las ventanas definidas en el material de sacrificio. (b) Dinámica de
grabado del material de sacrificio durante la liberación mecánica.
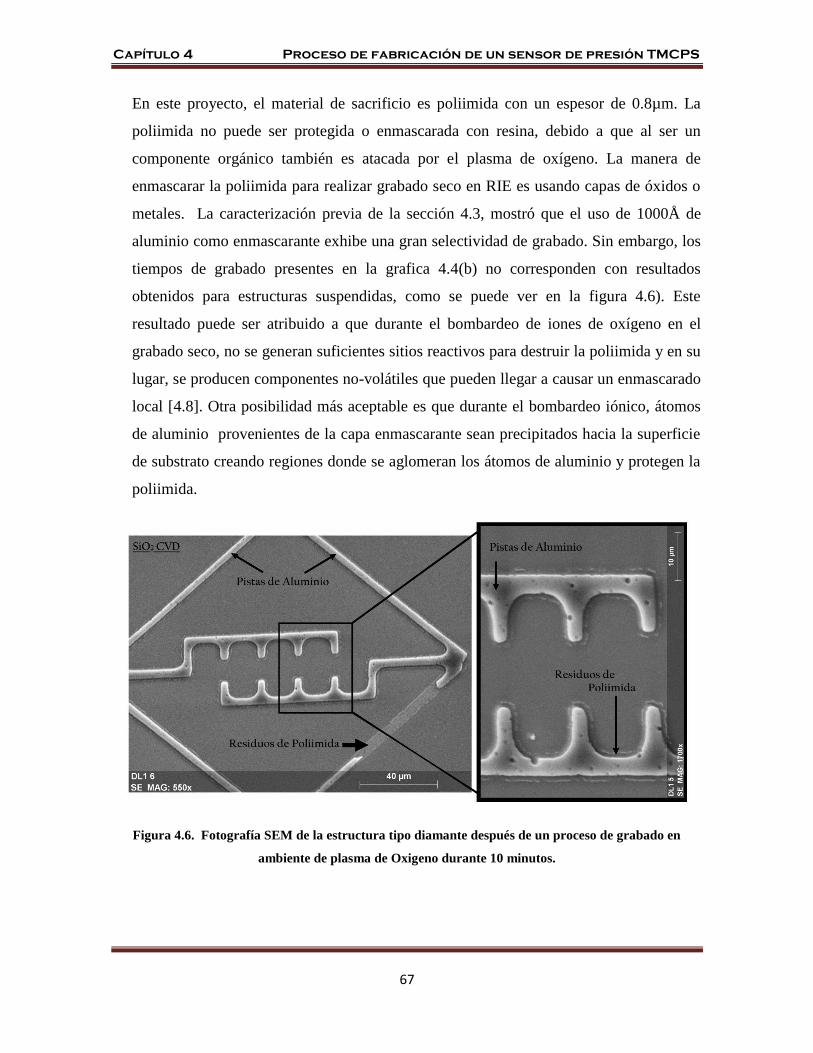
Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
67
En este proyecto, el material de sacrificio es poliimida con un espesor de 0.8µm. La
poliimida no puede ser protegida o enmascarada con resina, debido a que al ser un
componente orgánico también es atacada por el plasma de oxígeno. La manera de
enmascarar la poliimida para realizar grabado seco en RIE es usando capas de óxidos o
metales. La caracterización previa de la sección 4.3, mostró que el uso de 1000Å de
aluminio como enmascarante exhibe una gran selectividad de grabado. Sin embargo, los
tiempos de grabado presentes en la grafica 4.4(b) no corresponden con resultados
obtenidos para estructuras suspendidas, como se puede ver en la figura 4.6). Este
resultado puede ser atribuido a que durante el bombardeo de iones de oxígeno en el
grabado seco, no se generan suficientes sitios reactivos para destruir la poliimida y en su
lugar, se producen componentes no-volátiles que pueden llegar a causar un enmascarado
local [4.8]. Otra posibilidad más aceptable es que durante el bombardeo iónico, átomos
de aluminio provenientes de la capa enmascarante sean precipitados hacia la superficie
de substrato creando regiones donde se aglomeran los átomos de aluminio y protegen la
poliimida.
Figura 4.6. Fotografía SEM de la estructura tipo diamante después de un proceso de grabado en
ambiente de plasma de Oxigeno durante 10 minutos.
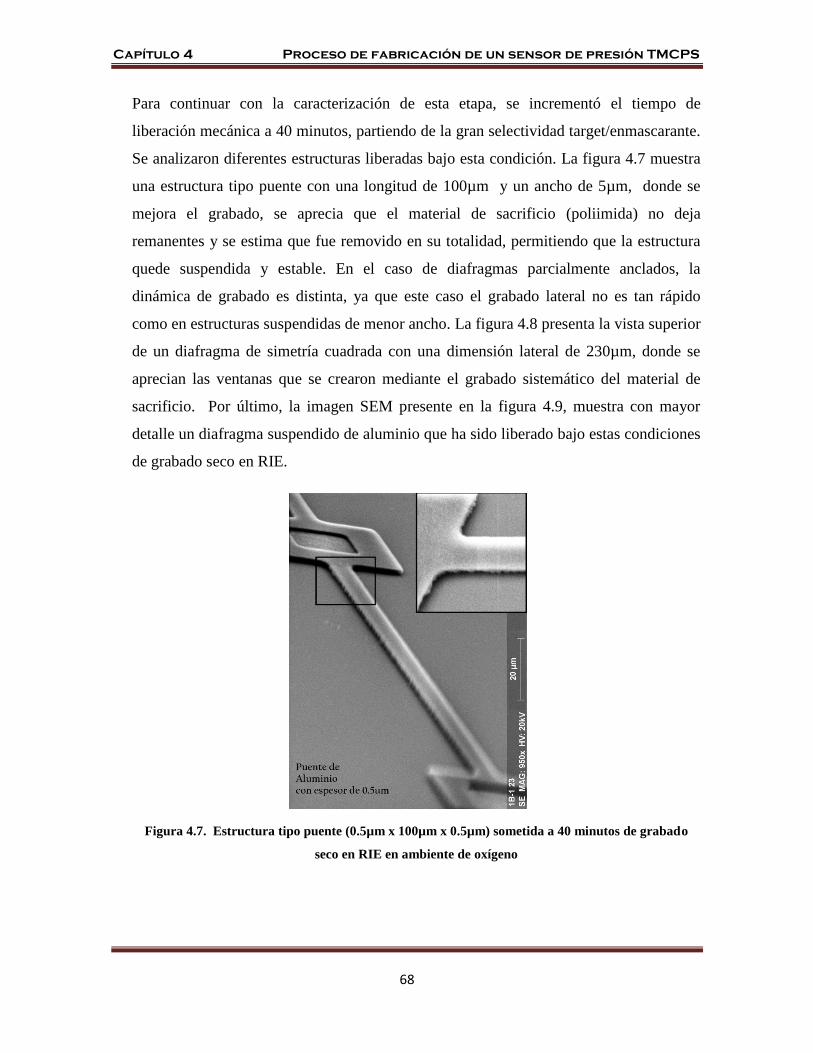
Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
68
Para continuar con la caracterización de esta etapa, se incrementó el tiempo de
liberación mecánica a 40 minutos, partiendo de la gran selectividad target/enmascarante.
Se analizaron diferentes estructuras liberadas bajo esta condición. La figura 4.7 muestra
una estructura tipo puente con una longitud de 100µm y un ancho de 5µm, donde se
mejora el grabado, se aprecia que el material de sacrificio (poliimida) no deja
remanentes y se estima que fue removido en su totalidad, permitiendo que la estructura
quede suspendida y estable. En el caso de diafragmas parcialmente anclados, la
dinámica de grabado es distinta, ya que este caso el grabado lateral no es tan rápido
como en estructuras suspendidas de menor ancho. La figura 4.8 presenta la vista superior
de un diafragma de simetría cuadrada con una dimensión lateral de 230µm, donde se
aprecian las ventanas que se crearon mediante el grabado sistemático del material de
sacrificio. Por último, la imagen SEM presente en la figura 4.9, muestra con mayor
detalle un diafragma suspendido de aluminio que ha sido liberado bajo estas condiciones
de grabado seco en RIE.
Figura 4.7. Estructura tipo puente (0.5µm x 100µm x 0.5µm) sometida a 40 minutos de grabado
seco en RIE en ambiente de oxígeno
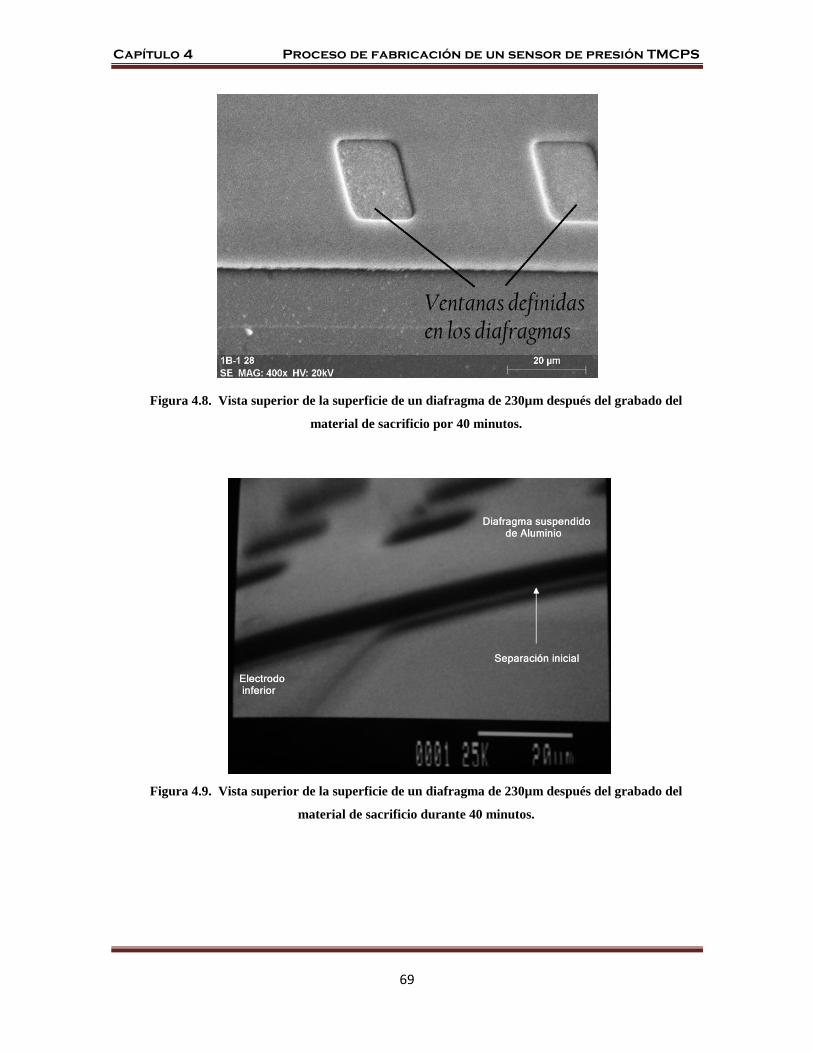
Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
69
Figura 4.8. Vista superior de la superficie de un diafragma de 230µm después del grabado del
material de sacrificio por 40 minutos.
Figura 4.9. Vista superior de la superficie de un diafragma de 230µm después del grabado del
material de sacrificio durante 40 minutos.

Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
70
4.3.2 Etapa de sellado con Poliimida
Otra etapa clave en el desarrollo de los sensores es el sellado hermético de la cavidad
que se origina debajo del diafragma después de la etapa de liberación mecánica. La
Poliimida se elige por su alta compatibilidad con el medio biológico, al cual deberá estar
expuesto el sensor. Mediante la caracterización previa en la sección 4.3, el depósito de la
capa final de poliimida se realiza en la centrifuga (spinner) con una velocidad de giro de
5000 rpm por 30 segundos para obtener una capa de poliimida de 1.5µm de espesor. El
“curado inicial” (soft bake) se lleva a cabo a una temperatura de 150°C durante
90segundos; y enseguida se realiza el “curado final” a una temperatura de 370°C en
ambiente de Nitrógeno. Esta etapa se lleva a cabo post-liberación; sin embargo, no se
reportaron eventos de colapso o inconvenientes en la etapa de litografía que se realiza
posteriormente a la poliimida para crear el contacto eléctrico hacia los electrodos. Las
figuras 4.10, 4.11 y 4.12 muestran imágenes SEM de una comparación entre antes y
después de la etapa de sellado en los dispositivos.
Figura 4.10 Fotografía SEM de una estructura de Aluminio de 282µm. (a) después del grabado del
material en RIE. (b) Después del sellado con una película de poliimida de1.5µm
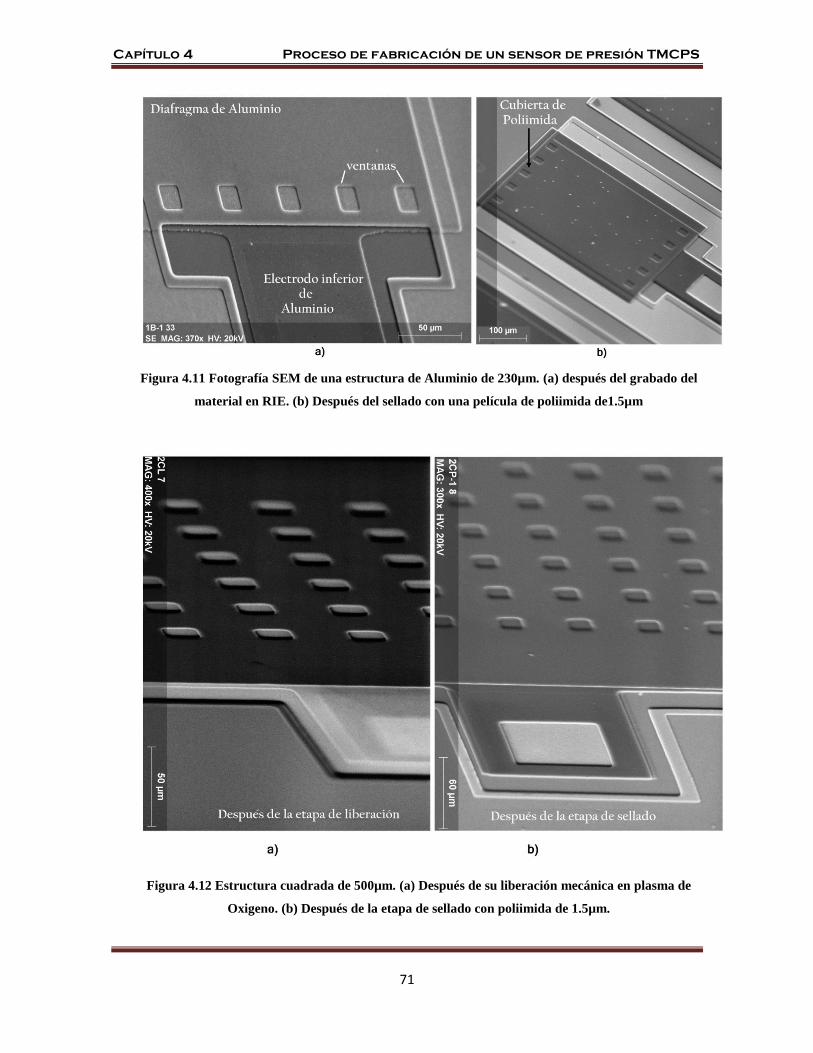
Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
71
Figura 4.11 Fotografía SEM de una estructura de Aluminio de 230µm. (a) después del grabado del
material en RIE. (b) Después del sellado con una película de poliimida de1.5µm
Figura 4.12 Estructura cuadrada de 500µm. (a) Después de su liberación mecánica en plasma de
Oxigeno. (b) Después de la etapa de sellado con poliimida de 1.5µm.

Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
72
4.4 Resumen
En el presente capítulo se presentaron los resultados de las pruebas de liberación mecánica,
y la etapa de sellado que se desarrolla post-liberación y que permite obtener una cavidad
hermética en la estructura interna del sensor. El proceso de fabricación del sensor de
presión TMCPS se basa en la tecnología PolyMEMS INAOE considerando solo tres
materiales: Aluminio, Poliimida y óxido de silicio CVD, este aspecto simplifica el
procedimiento de fabricación. Además, la tecnología es perfectamente adecuada para
desarrollar sensores de presión con etapas de manufactura a bajas temperaturas. El uso de
poliimida como material de sacrificio y cubierta de protección permite integrar en un
mismo substrato flexible de poliimida, el sensor de presión con un proceso de bobinas de
aluminio, para acoplar las mediciones de presión de manera inalámbrica, puesto que ambos
procesos se desarrollan siguiendo un esquema de fabricación análogo. Para verificar la
liberación mecánica de los diafragmas, las estructuras fueron sometidas a presiones
mecánicas de referencia, donde se aprecia que los diafragmas presentan deflexiones y son
completamente estables.
4.5 Referencias
[4.1] Díaz Alonso, D. (2010) “Fabricación y Caracterización de estructuras capacitivas
para monitorear presión”, Noviembre 2010, INAOE, Tesis Maestria.
[4.2] Díaz-Alonso, D., Quiñones-N, F.J., Zuñiga-Islas, C., Molina, J., Hidalga, J., Linares,
M., Rosales, P., Torres-Jacome, A., Reyes, C. and Calleja, W. (2011). “Fabrication of
PolySilicon Microstructures using the PolyMEMS INAOE Technology”, In World
Congress in Mechanism and Machine Science IFToMM 2011, Guanajuato, Mexico, pp.
IMD123-1-IMD123-5.
[4.3] Rendón-Nava, A. E., Díaz-Méndez, J. A., Nino-de-Rivera, L., Calleja-Arriaga, W.,
Gil-Carrasco, F., & Díaz-Alonso, D. (2014). “Study of the Effect of Distance and
Misalignment between Magnetically Coupled Coils for Wireless Power Transfer in
Intraocular Pressure Measurement”. The Scientific World Journal, Vol. 2014, Article ID
692431, 11 pages.
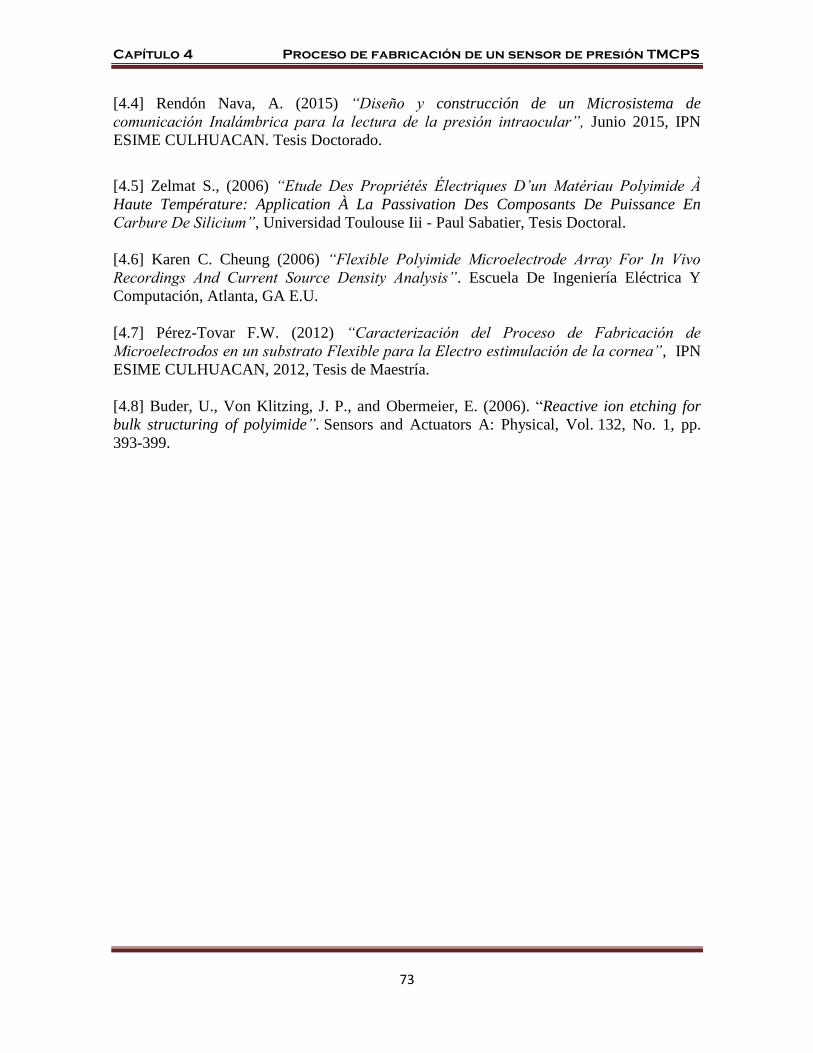
Capítulo 4 Proceso de fabricación de un sensor de presión TMCPS
73
[4.4] Rendón Nava, A. (2015) “Diseño y construcción de un Microsistema de
comunicación Inalámbrica para la lectura de la presión intraocular”, Junio 2015, IPN
ESIME CULHUACAN. Tesis Doctorado.
[4.5] Zelmat S., (2006) “Etude Des Propriétés Électriques D’un Matériau Polyimide À
Haute Température: Application À La Passivation Des Composants De Puissance En
Carbure De Silicium”, Universidad Toulouse Iii - Paul Sabatier, Tesis Doctoral.
[4.6] Karen C. Cheung (2006) “Flexible Polyimide Microelectrode Array For In Vivo
Recordings And Current Source Density Analysis”. Escuela De Ingeniería Eléctrica Y
Computación, Atlanta, GA E.U.
[4.7] Pérez-Tovar F.W. (2012) “Caracterización del Proceso de Fabricación de
Microelectrodos en un substrato Flexible para la Electro estimulación de la cornea”, IPN
ESIME CULHUACAN, 2012, Tesis de Maestría.
[4.8] Buder, U., Von Klitzing, J. P., and Obermeier, E. (2006). “Reactive ion etching for
bulk structuring of polyimide”. Sensors and Actuators A: Physical, Vol. 132, No. 1, pp.
393-399.
74
Capítulo 5
Caracterización eléctrica
5.1 Introducción
En este capítulo se presentan los métodos experimentales utilizados para la caracterización
eléctrica preliminar de los sensores de presión capacitivos TMCPS. La figura de mérito más
importante en estos dispositivos en su sensitividad expresada como ΔC/ΔP. La
caracterización eléctrica se divide en dos etapas presentes en la figura 5.1.
La caracterización preliminar o primera etapa, tiene como objetivo obtener las mediciones
de capacitancia de los dispositivos sin presión aplicada; mientras que la caracterización
final se centra en el procedimiento experimental desarrollado para obtener mediciones
eléctricas en los dispositivos dentro de un ambiente de presión controlado; esta etapa tiene
como objetivo principal obtener los resultados de la sensitividad ΔC/ΔP de los dispositivos
TMCPS.
Como parte fundamental de la etapa previa de caracterización se realizó un arreglo
experimental que consiste de amplificadores diferenciales integrados en una placa PCB,
con la finalidad de poder detectar las variaciones de capacitancia ΔC, las cuales se
encuentran en el orden de 1x10-15
F; dentro de esta etapa se implemento un sistema de
suministro de presión de manera controlada. Además, se realizaron mediciones de
capacitancia en los dispositivos a nivel oblea sin presión aplicada, y se obtuvieron datos
experimentales que conducen a cuantificar el porcentaje de funcionalidad para el proceso
de fabricación. A partir de estos resultados previos se realiza la selección de dados en la
oblea que son empaquetados en un DIP de 24 terminales para continuar con la
caracterización final siguiendo un esquema de medición como se ilustra en la figura 5.2.
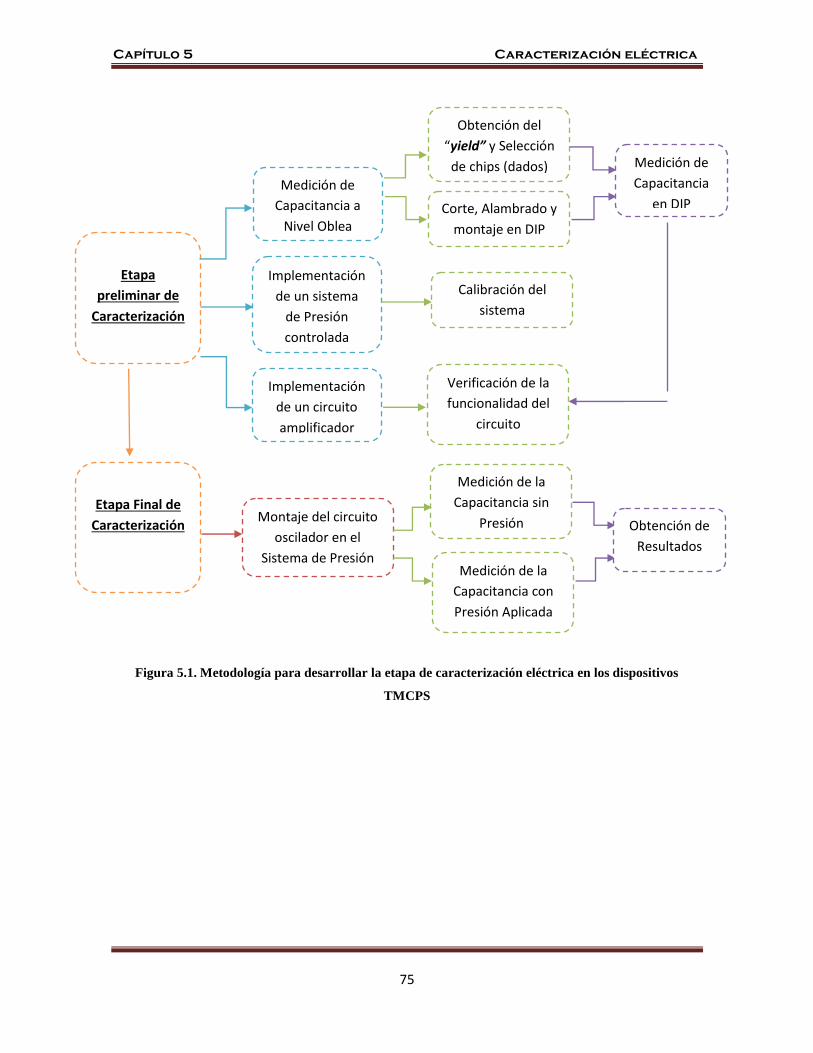
Capítulo 5 Caracterización eléctrica
75
Figura 5.1. Metodología para desarrollar la etapa de caracterización eléctrica en los dispositivos
TMCPS
Etapa
preliminar de
Caracterización
Medición de
Capacitancia a
Nivel Oblea
Obtención del
“yield” y Selección
de chips (dados)
Corte, Alambrado y
montaje en DIP
Medición de
Capacitancia
en DIP
Implementación
de un sistema
de Presión
controlada
Implementación
de un circuito
amplificador
Calibración del
sistema
Verificación de la
funcionalidad del
circuito
Etapa Final de
Caracterización Montaje del circuito
oscilador en el
Sistema de Presión
Medición de la
Capacitancia sin
Presión
Medición de la
Capacitancia con
Presión Aplicada
Obtención de
Resultados
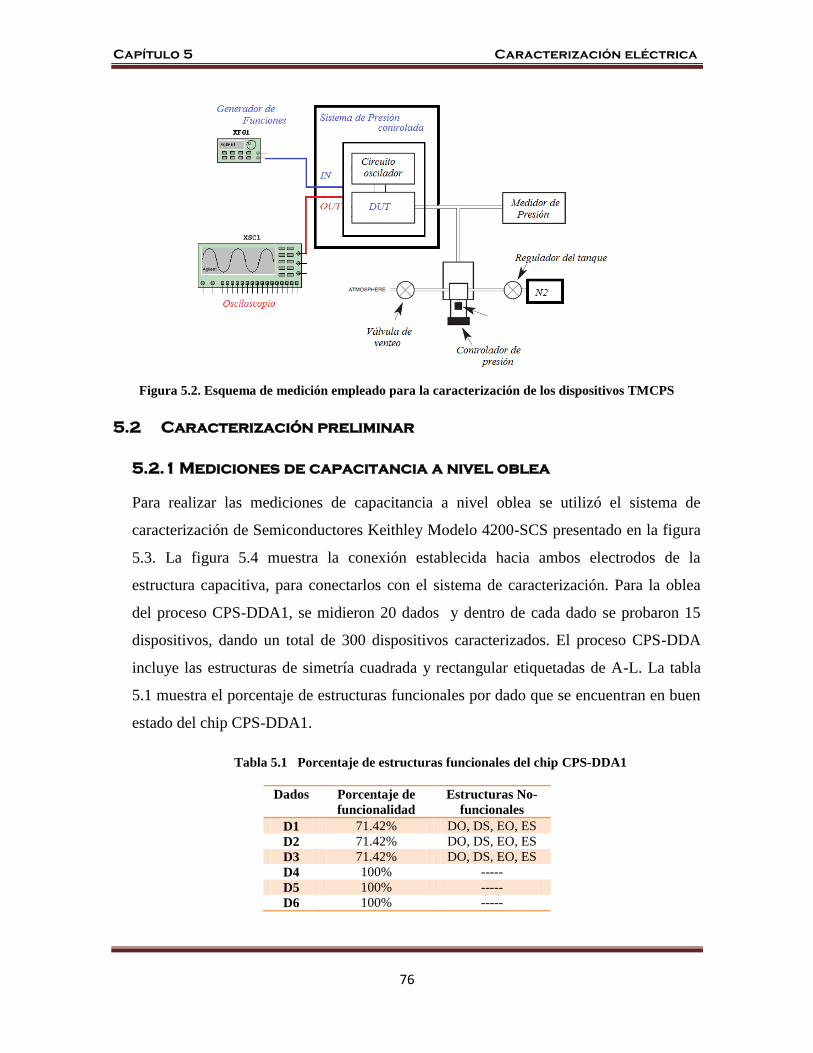
Capítulo 5 Caracterización eléctrica
76
Figura 5.2. Esquema de medición empleado para la caracterización de los dispositivos TMCPS
5.2 Caracterización preliminar
5.2.1 Mediciones de capacitancia a nivel oblea
Para realizar las mediciones de capacitancia a nivel oblea se utilizó el sistema de
caracterización de Semiconductores Keithley Modelo 4200-SCS presentado en la figura
5.3. La figura 5.4 muestra la conexión establecida hacia ambos electrodos de la
estructura capacitiva, para conectarlos con el sistema de caracterización. Para la oblea
del proceso CPS-DDA1, se midieron 20 dados y dentro de cada dado se probaron 15
dispositivos, dando un total de 300 dispositivos caracterizados. El proceso CPS-DDA
incluye las estructuras de simetría cuadrada y rectangular etiquetadas de A-L. La tabla
5.1 muestra el porcentaje de estructuras funcionales por dado que se encuentran en buen
estado del chip CPS-DDA1.
Tabla 5.1 Porcentaje de estructuras funcionales del chip CPS-DDA1
Dados Porcentaje de
funcionalidad
Estructuras No-
funcionales
D1 71.42% DO, DS, EO, ES
D2 71.42% DO, DS, EO, ES
D3 71.42% DO, DS, EO, ES
D4 100% -----
D5 100% -----
D6 100% -----
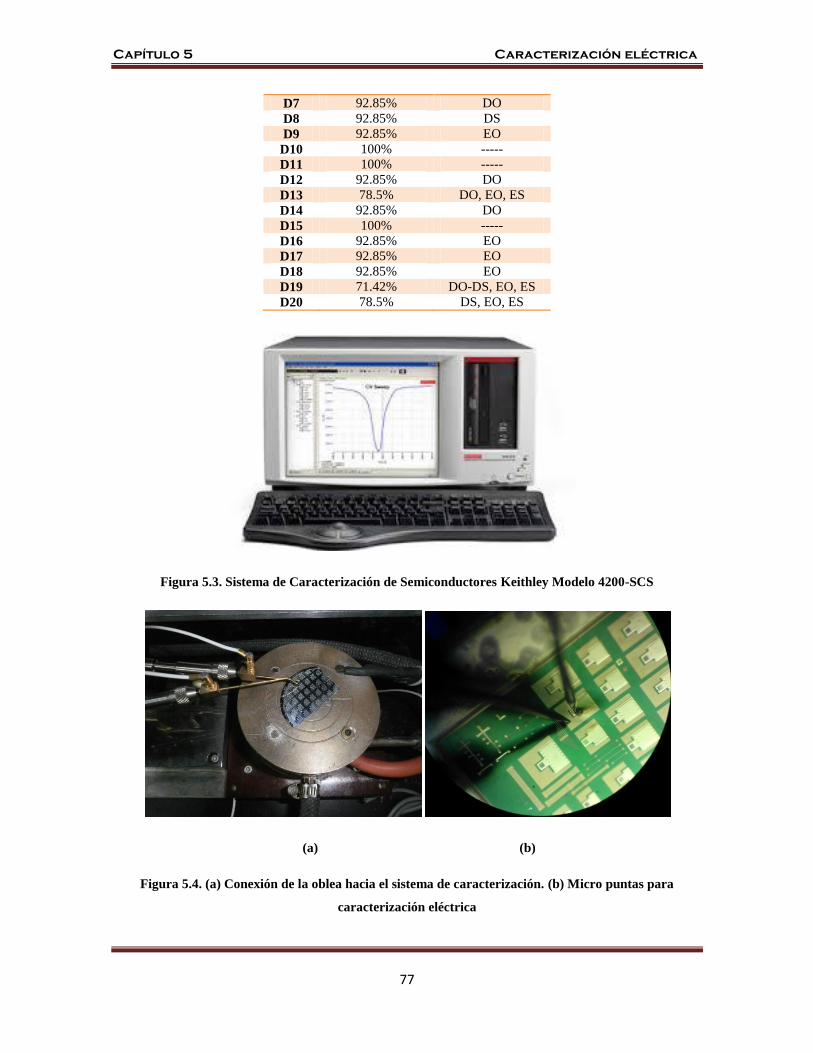
Capítulo 5 Caracterización eléctrica
77
D7 92.85% DO
D8 92.85% DS
D9 92.85% EO
D10 100% -----
D11 100% -----
D12 92.85% DO
D13 78.5% DO, EO, ES
D14 92.85% DO
D15 100% -----
D16 92.85% EO
D17 92.85% EO
D18 92.85% EO
D19 71.42% DO-DS, EO, ES
D20 78.5% DS, EO, ES
Figura 5.3. Sistema de Caracterización de Semiconductores Keithley Modelo 4200-SCS
(a) (b)
Figura 5.4. (a) Conexión de la oblea hacia el sistema de caracterización. (b) Micro puntas para
caracterización eléctrica
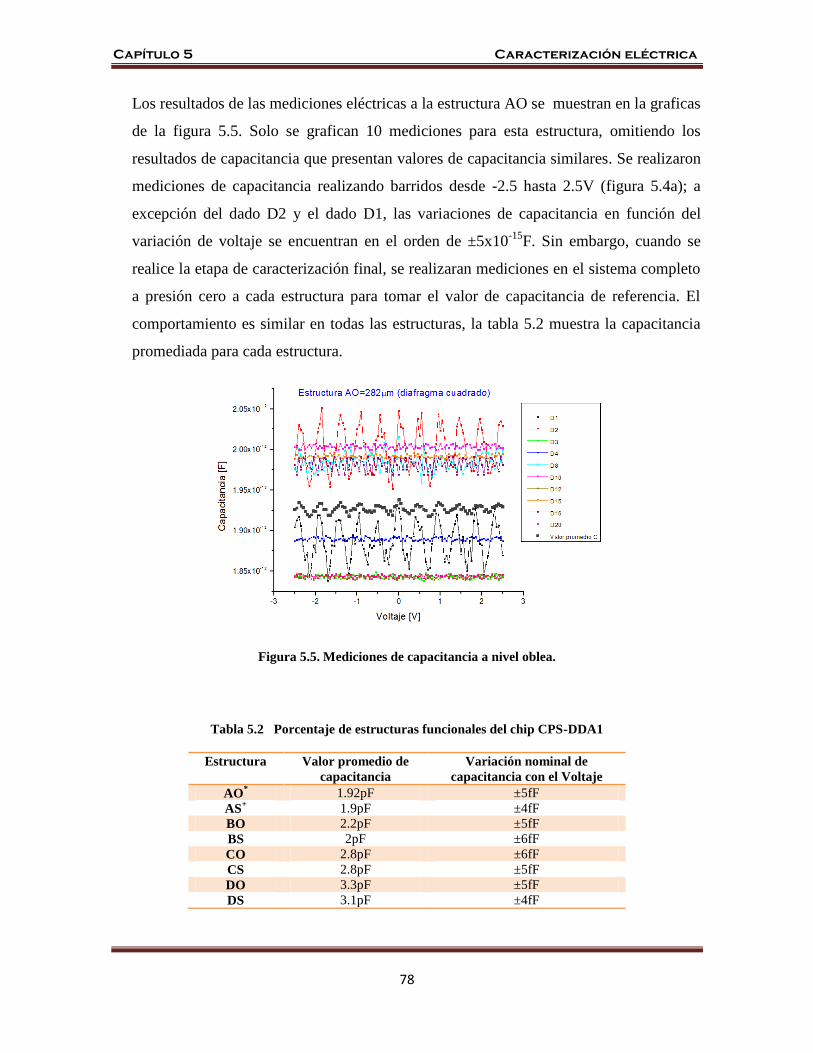
Capítulo 5 Caracterización eléctrica
78
Los resultados de las mediciones eléctricas a la estructura AO se muestran en la graficas
de la figura 5.5. Solo se grafican 10 mediciones para esta estructura, omitiendo los
resultados de capacitancia que presentan valores de capacitancia similares. Se realizaron
mediciones de capacitancia realizando barridos desde -2.5 hasta 2.5V (figura 5.4a); a
excepción del dado D2 y el dado D1, las variaciones de capacitancia en función del
variación de voltaje se encuentran en el orden de ±5x10-15
F. Sin embargo, cuando se
realice la etapa de caracterización final, se realizaran mediciones en el sistema completo
a presión cero a cada estructura para tomar el valor de capacitancia de referencia. El
comportamiento es similar en todas las estructuras, la tabla 5.2 muestra la capacitancia
promediada para cada estructura.
Figura 5.5. Mediciones de capacitancia a nivel oblea.
Tabla 5.2 Porcentaje de estructuras funcionales del chip CPS-DDA1
Estructura Valor promedio de
capacitancia
Variación nominal de
capacitancia con el Voltaje
AO* 1.92pF ±5fF
AS+ 1.9pF ±4fF
BO 2.2pF ±5fF
BS 2pF ±6fF
CO 2.8pF ±6fF
CS 2.8pF ±5fF
DO 3.3pF ±5fF
DS 3.1pF ±4fF
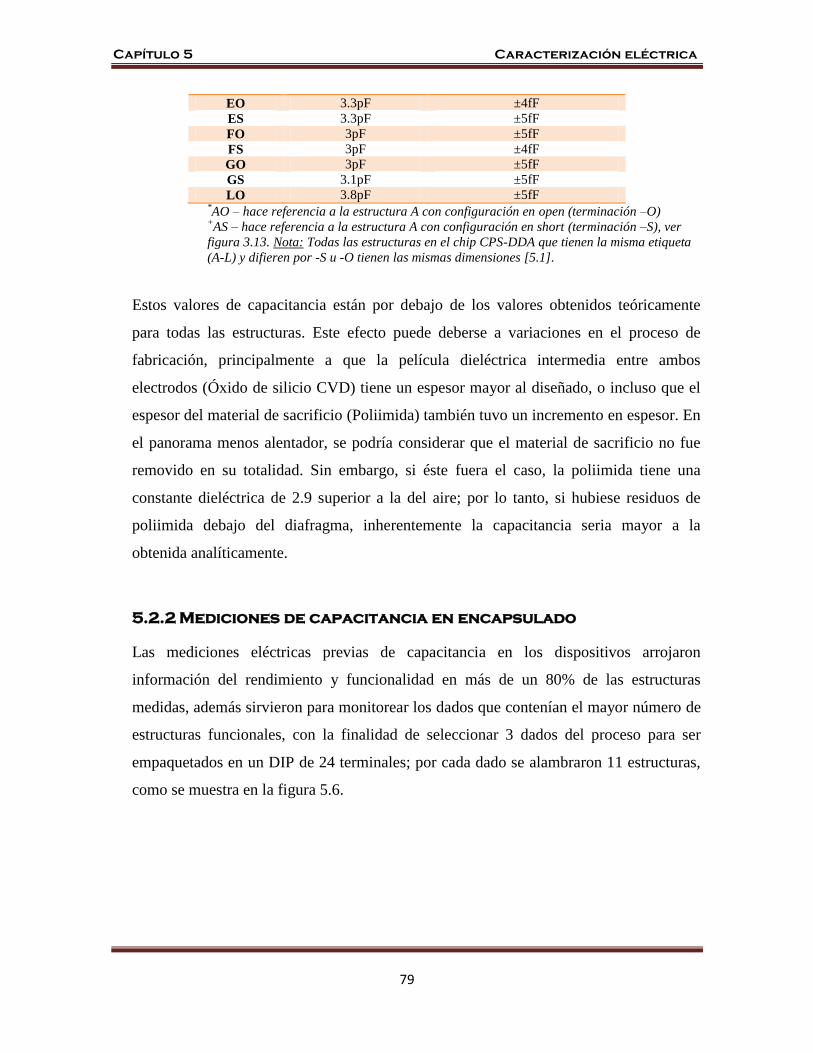
Capítulo 5 Caracterización eléctrica
79
EO 3.3pF ±4fF
ES 3.3pF ±5fF
FO 3pF ±5fF
FS 3pF ±4fF
GO 3pF ±5fF
GS 3.1pF ±5fF
LO 3.8pF ±5fF
*AO – hace referencia a la estructura A con configuración en open (terminación –O)
+AS – hace referencia a la estructura A con configuración en short (terminación –S), ver
figura 3.13. Nota: Todas las estructuras en el chip CPS-DDA que tienen la misma etiqueta
(A-L) y difieren por -S u -O tienen las mismas dimensiones [5.1].
Estos valores de capacitancia están por debajo de los valores obtenidos teóricamente
para todas las estructuras. Este efecto puede deberse a variaciones en el proceso de
fabricación, principalmente a que la película dieléctrica intermedia entre ambos
electrodos (Óxido de silicio CVD) tiene un espesor mayor al diseñado, o incluso que el
espesor del material de sacrificio (Poliimida) también tuvo un incremento en espesor. En
el panorama menos alentador, se podría considerar que el material de sacrificio no fue
removido en su totalidad. Sin embargo, si éste fuera el caso, la poliimida tiene una
constante dieléctrica de 2.9 superior a la del aire; por lo tanto, si hubiese residuos de
poliimida debajo del diafragma, inherentemente la capacitancia seria mayor a la
obtenida analíticamente.
5.2.2 Mediciones de capacitancia en encapsulado
Las mediciones eléctricas previas de capacitancia en los dispositivos arrojaron
información del rendimiento y funcionalidad en más de un 80% de las estructuras
medidas, además sirvieron para monitorear los dados que contenían el mayor número de
estructuras funcionales, con la finalidad de seleccionar 3 dados del proceso para ser
empaquetados en un DIP de 24 terminales; por cada dado se alambraron 11 estructuras,
como se muestra en la figura 5.6.
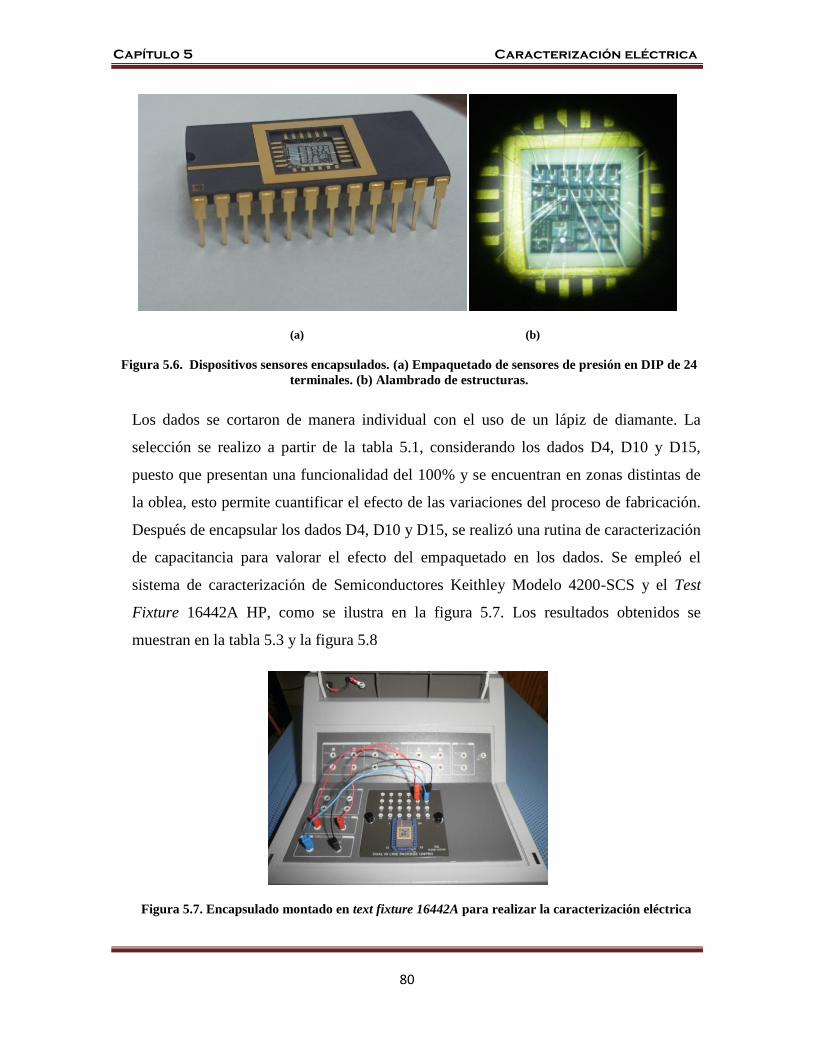
Capítulo 5 Caracterización eléctrica
80
(a) (b)
Figura 5.6. Dispositivos sensores encapsulados. (a) Empaquetado de sensores de presión en DIP de 24
terminales. (b) Alambrado de estructuras.
Los dados se cortaron de manera individual con el uso de un lápiz de diamante. La
selección se realizo a partir de la tabla 5.1, considerando los dados D4, D10 y D15,
puesto que presentan una funcionalidad del 100% y se encuentran en zonas distintas de
la oblea, esto permite cuantificar el efecto de las variaciones del proceso de fabricación.
Después de encapsular los dados D4, D10 y D15, se realizó una rutina de caracterización
de capacitancia para valorar el efecto del empaquetado en los dados. Se empleó el
sistema de caracterización de Semiconductores Keithley Modelo 4200-SCS y el Test
Fixture 16442A HP, como se ilustra en la figura 5.7. Los resultados obtenidos se
muestran en la tabla 5.3 y la figura 5.8
Figura 5.7. Encapsulado montado en text fixture 16442A para realizar la caracterización eléctrica
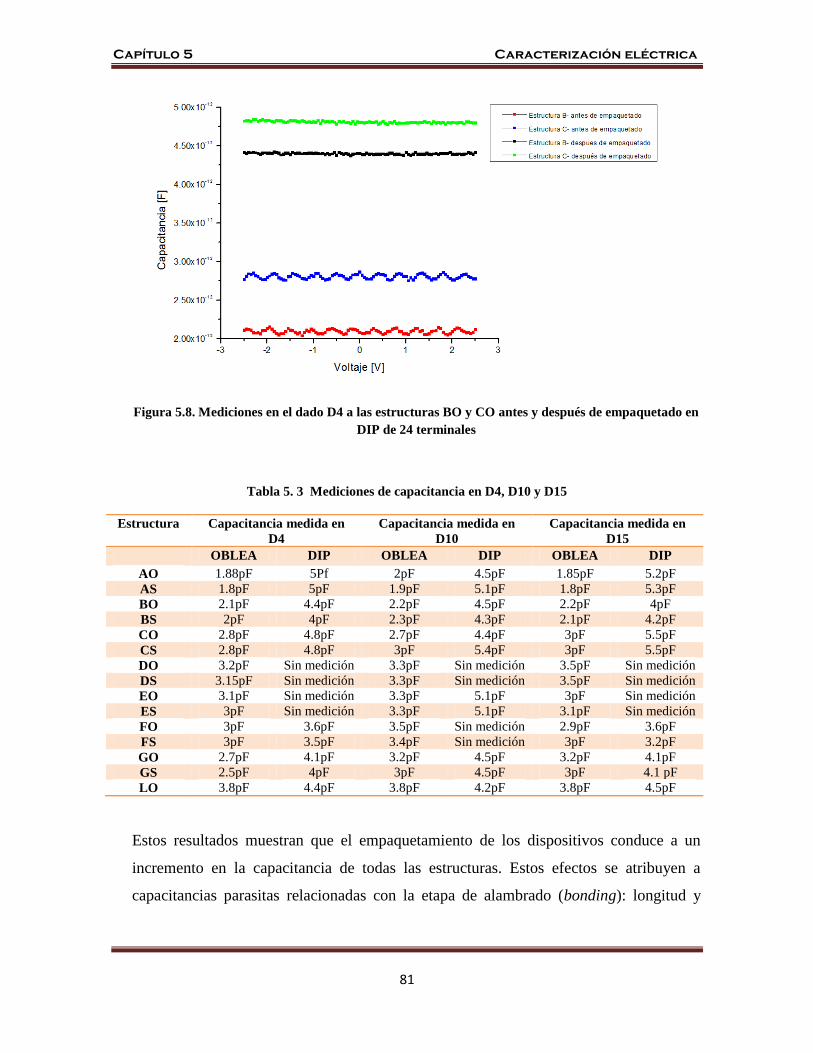
Capítulo 5 Caracterización eléctrica
81
Figura 5.8. Mediciones en el dado D4 a las estructuras BO y CO antes y después de empaquetado en
DIP de 24 terminales
Tabla 5. 3 Mediciones de capacitancia en D4, D10 y D15
Estructura Capacitancia medida en
D4 Capacitancia medida en
D10 Capacitancia medida en
D15
OBLEA DIP OBLEA DIP OBLEA DIP
AO 1.88pF 5Pf 2pF 4.5pF 1.85pF 5.2pF
AS 1.8pF 5pF 1.9pF 5.1pF 1.8pF 5.3pF
BO 2.1pF 4.4pF 2.2pF 4.5pF 2.2pF 4pF
BS 2pF 4pF 2.3pF 4.3pF 2.1pF 4.2pF
CO 2.8pF 4.8pF 2.7pF 4.4pF 3pF 5.5pF
CS 2.8pF 4.8pF 3pF 5.4pF 3pF 5.5pF
DO 3.2pF Sin medición 3.3pF Sin medición 3.5pF Sin medición
DS 3.15pF Sin medición 3.3pF Sin medición 3.5pF Sin medición
EO 3.1pF Sin medición 3.3pF 5.1pF 3pF Sin medición
ES 3pF Sin medición 3.3pF 5.1pF 3.1pF Sin medición
FO 3pF 3.6pF 3.5pF Sin medición 2.9pF 3.6pF
FS 3pF 3.5pF 3.4pF Sin medición 3pF 3.2pF
GO 2.7pF 4.1pF 3.2pF 4.5pF 3.2pF 4.1pF
GS 2.5pF 4pF 3pF 4.5pF 3pF 4.1 pF
LO 3.8pF 4.4pF 3.8pF 4.2pF 3.8pF 4.5pF
Estos resultados muestran que el empaquetamiento de los dispositivos conduce a un
incremento en la capacitancia de todas las estructuras. Estos efectos se atribuyen a
capacitancias parasitas relacionadas con la etapa de alambrado (bonding): longitud y
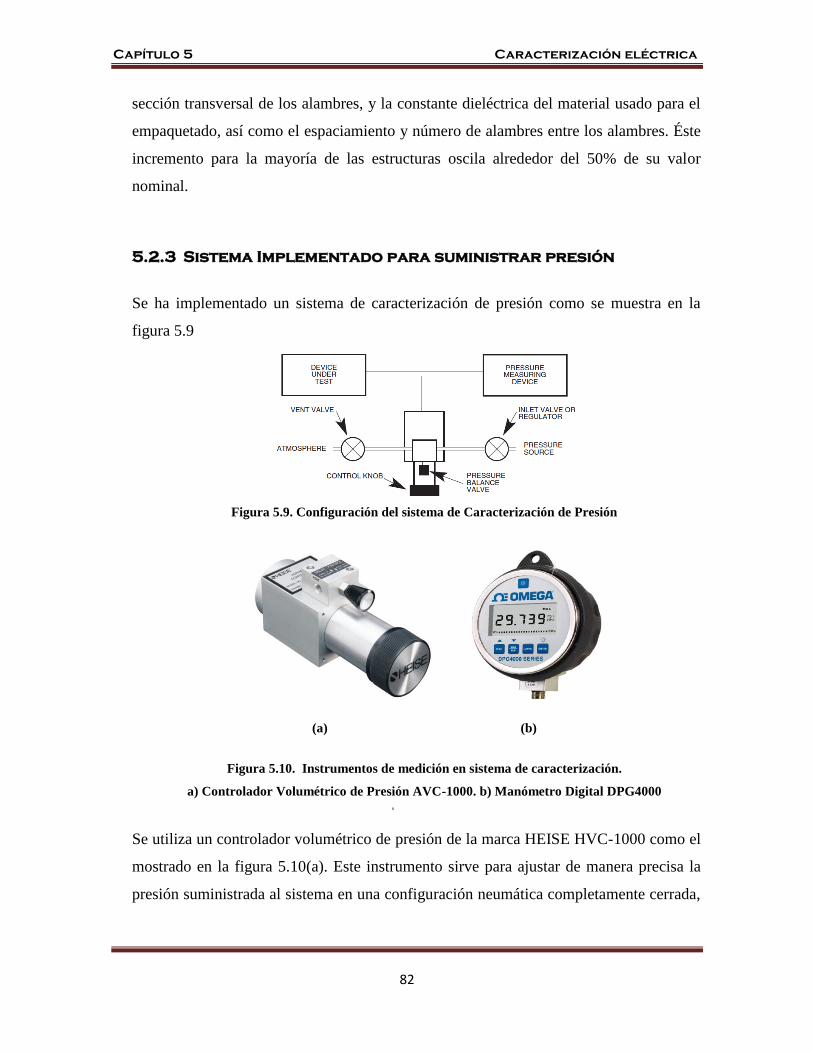
Capítulo 5 Caracterización eléctrica
82
sección transversal de los alambres, y la constante dieléctrica del material usado para el
empaquetado, así como el espaciamiento y número de alambres entre los alambres. Éste
incremento para la mayoría de las estructuras oscila alrededor del 50% de su valor
nominal.
5.2.3 Sistema Implementado para suministrar presión
Se ha implementado un sistema de caracterización de presión como se muestra en la
figura 5.9
Figura 5.9. Configuración del sistema de Caracterización de Presión
(a) (b)
Figura 5.10. Instrumentos de medición en sistema de caracterización.
a) Controlador Volumétrico de Presión AVC-1000. b) Manómetro Digital DPG4000 6
Se utiliza un controlador volumétrico de presión de la marca HEISE HVC-1000 como el
mostrado en la figura 5.10(a). Este instrumento sirve para ajustar de manera precisa la
presión suministrada al sistema en una configuración neumática completamente cerrada,
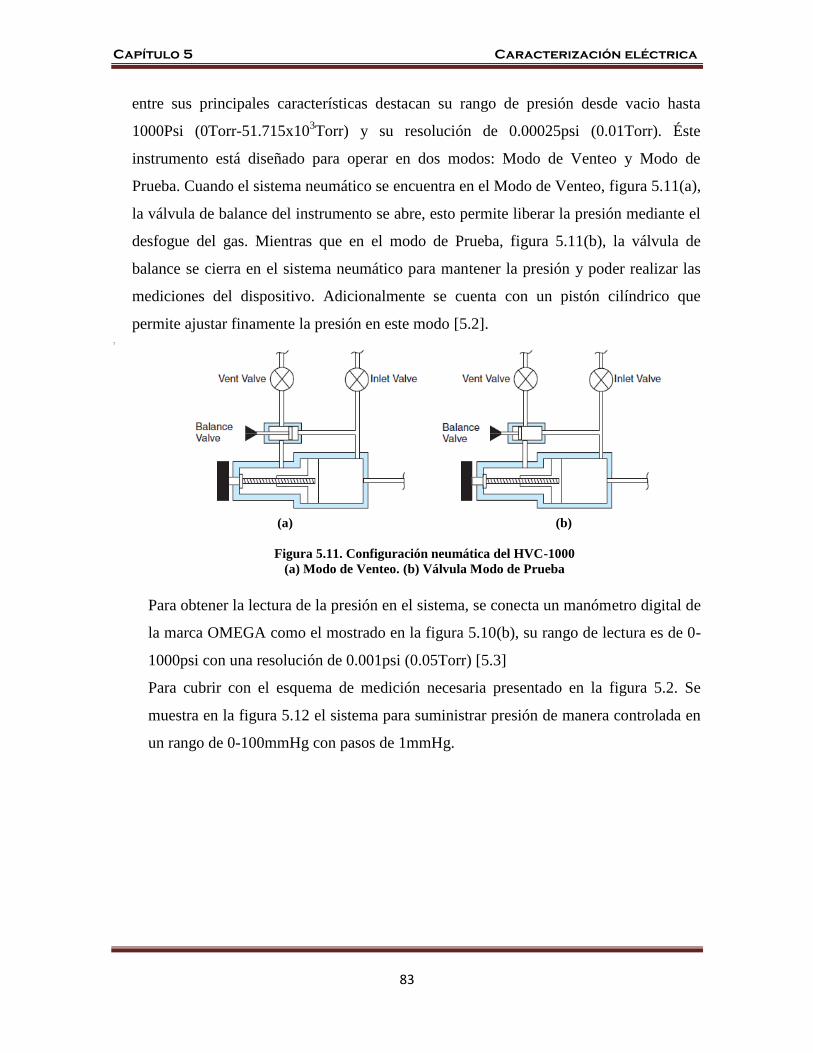
Capítulo 5 Caracterización eléctrica
83
entre sus principales características destacan su rango de presión desde vacio hasta
1000Psi (0Torr-51.715x103Torr) y su resolución de 0.00025psi (0.01Torr). Éste
instrumento está diseñado para operar en dos modos: Modo de Venteo y Modo de
Prueba. Cuando el sistema neumático se encuentra en el Modo de Venteo, figura 5.11(a),
la válvula de balance del instrumento se abre, esto permite liberar la presión mediante el
desfogue del gas. Mientras que en el modo de Prueba, figura 5.11(b), la válvula de
balance se cierra en el sistema neumático para mantener la presión y poder realizar las
mediciones del dispositivo. Adicionalmente se cuenta con un pistón cilíndrico que
permite ajustar finamente la presión en este modo [5.2]. 7
(a) (b)
Figura 5.11. Configuración neumática del HVC-1000
(a) Modo de Venteo. (b) Válvula Modo de Prueba
Para obtener la lectura de la presión en el sistema, se conecta un manómetro digital de
la marca OMEGA como el mostrado en la figura 5.10(b), su rango de lectura es de 0-
1000psi con una resolución de 0.001psi (0.05Torr) [5.3]
Para cubrir con el esquema de medición necesaria presentado en la figura 5.2. Se
muestra en la figura 5.12 el sistema para suministrar presión de manera controlada en
un rango de 0-100mmHg con pasos de 1mmHg.

Capítulo 5 Caracterización eléctrica
84
Figura 5.12. Sistema para suministrar Presión de manera controlada
5.2.4 circuito implementado para caracterizar la variación de
capacitancia con presión
Con la finalidad de caracterizar las variaciones de presión de los dispositivos se
implemento un amplificador diferencial a nivel discreto mostrado en la figura 5.13,
donde CS representa el sensor capacitivo, el cual tiene un valor nominal y una variación
de capacitancia ( C ) cuando se aplica presión sobre el diafragma, expresado en la
ecuación (5.1), Vm corresponde a una señal de entrada variante en el tiempo que se
necesita para que el capacitor se cargue y descargue generando siempre una corriente;
esta corriente circula por la resistencia R convirtiéndose en un voltaje de salida VO1.
CCC pS 0 (5.1)
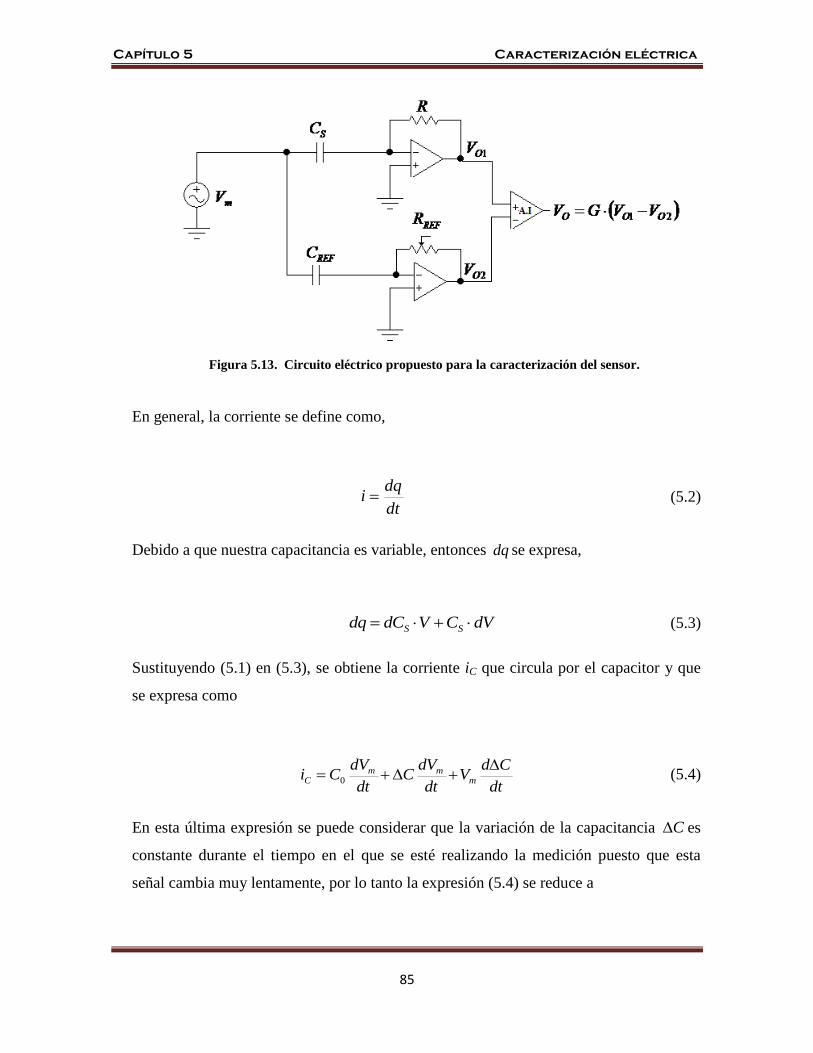
Capítulo 5 Caracterización eléctrica
85
Figura 5.13. Circuito eléctrico propuesto para la caracterización del sensor.
En general, la corriente se define como,
dt
dqi (5.2)
Debido a que nuestra capacitancia es variable, entonces dq se expresa,
dVCVdCdq SS (5.3)
Sustituyendo (5.1) en (5.3), se obtiene la corriente iC que circula por el capacitor y que
se expresa como
dt
CdV
dt
dVC
dt
dVCi m
mmC
0 (5.4)
En esta última expresión se puede considerar que la variación de la capacitancia C es
constante durante el tiempo en el que se esté realizando la medición puesto que esta
señal cambia muy lentamente, por lo tanto la expresión (5.4) se reduce a

Capítulo 5 Caracterización eléctrica
86
dt
dVC
dt
dVCi mm
C 0 (5.5)
Entonces para las dos ramas, el voltaje de salida VO1 y VO2 están definidos como,
dt
dVCRiRV
dt
dVCCRRiV
mREFREFCREFREF
mC
02
001
(5.6)
Ajustando los valores de la constante de tiempo de la segunda rama ( REFR y REFC ) con
los valores de R y SC sin presión aplicada al diafragma, tal que VO1 = VO2 y se utiliza un
amplificador de instrumentación, el voltaje de salida total VO será nulo (para facilitar la
situación REFR fue remplazado por un potenciómetro). Por lo tanto, una vez aplicada la
presión al diafragma será posible cuantificar las variaciones en la capacitancia nominal.
Bajo estas condiciones, VO se expresa,
tfACRGdt
dVCRGV m cos20 (5.7)
El amplificador de instrumentación en esta configuración se utiliza para restar ambas
salidas de voltaje, VO1 y VO2; además, cuando existan variaciones de capacitancia, se
debe utilizar una amplificación adecuada para evitar que la salida se sature. Se realizaron
simulaciones de la etapa de amplificación con el AD620 en Multisim. La ganancia en el
amplificador AD620 se modula con el valor de la Resistencia externa Rg, mediante la
expresión en la figura 5.14 [5.4]. Esta simulación tiene como objetivo verificar que las
conexiones, alimentación y funcionamiento del circuito amplificador sean efectivos. Los
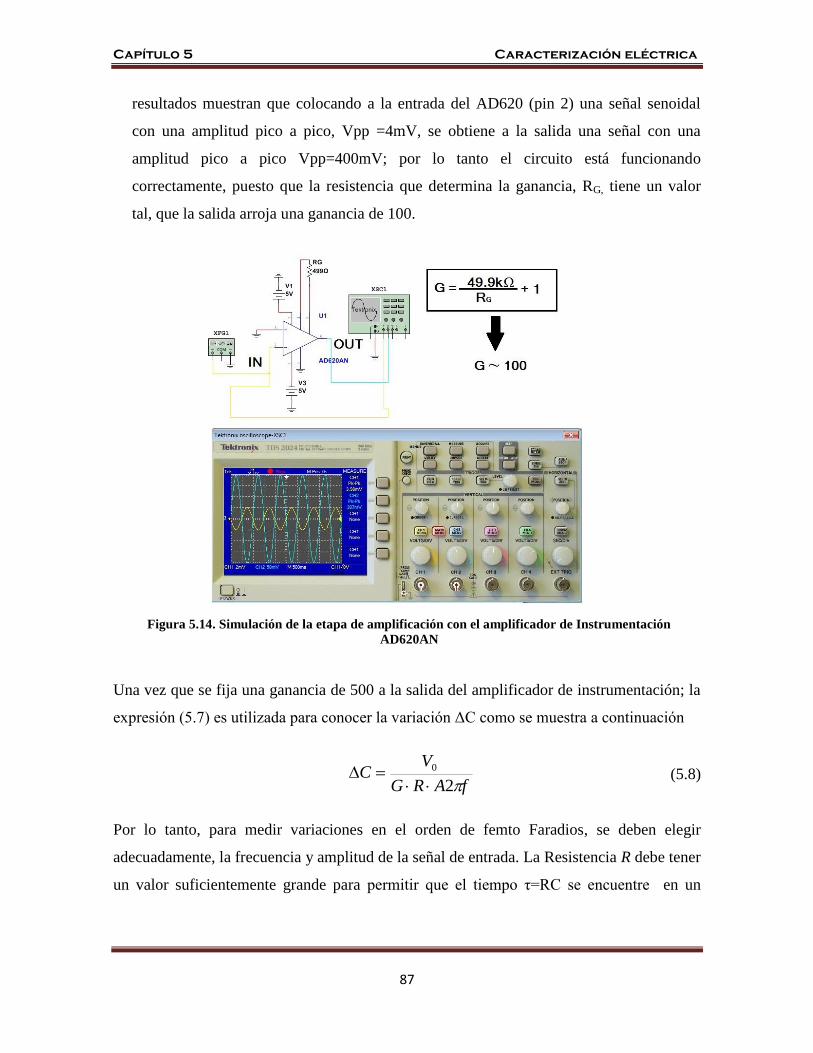
Capítulo 5 Caracterización eléctrica
87
resultados muestran que colocando a la entrada del AD620 (pin 2) una señal senoidal
con una amplitud pico a pico, Vpp =4mV, se obtiene a la salida una señal con una
amplitud pico a pico Vpp=400mV; por lo tanto el circuito está funcionando
correctamente, puesto que la resistencia que determina la ganancia, RG, tiene un valor
tal, que la salida arroja una ganancia de 100.
Figura 5.14. Simulación de la etapa de amplificación con el amplificador de Instrumentación
AD620AN
Una vez que se fija una ganancia de 500 a la salida del amplificador de instrumentación; la
expresión (5.7) es utilizada para conocer la variación ΔC como se muestra a continuación
fARG
VC
20
(5.8)
Por lo tanto, para medir variaciones en el orden de femto Faradios, se deben elegir
adecuadamente, la frecuencia y amplitud de la señal de entrada. La Resistencia R debe tener
un valor suficientemente grande para permitir que el tiempo τ=RC se encuentre en un
Capítulo 5 Caracterización eléctrica
88
rango en el que pueda ser obtenida la medición. El inconveniente principal, se debe a que
cuando se emplean amplificadores operacionales, se debe limitar el uso de resistencias con
valores muy grandes, ya que propician que se produzca ruido térmico debido a la agitación
térmica de los electrones en el conductor, tal como sucede en este caso. Por lo tanto, ya que
es necesario utilizar un filtro adicional a la entrada de los amplificadores operaciones para
cada rama de VO que garantice que el ruido térmico sea mínimo, se requiere un análisis
detallado para seleccionar el tipo de filtro que presente las características adecuadas, que
garantice que en la etapa de caracterización final no existan factores externos que
modifiquen el valor de ΔC excepto la presión.
5.3 Resumen
En este capítulo se presentaron los resultados de la caracterización preliminar para obtener
valores de capacitancia en los dispositivos sensores sin presión aplicada. Existen
variaciones en la magnitud de capacitancia diseñada en un porcentaje del 30%, lo que da
resultados de capacitancia total de ~3pF, este cambio en capacitancia está asociada con
variaciones en el proceso de fabricación, principalmente con modificaciones en el espesor
del material dieléctrico y material de sacrificio después de llevarse a cabo el proceso de
fabricación. Se puede mejorar la capacitancia total de la estructura, si se sustituye el
material aislante (óxido de silicio CVD) por otro material con mejor constante dieléctrica y
que permita un depósito de material más uniforme. El empaquetado de los dispositivos
origina un incremento en la capacitancia debido a efectos parásitos asociado con la etapa de
alambrado, longitud de los cables y material dieléctrico del encapsulado. Sin embargo, esta
etapa de empaquetado es necesaria solo para obtener la sensitividad del sensor. Si es
posible integrar el sensor con un sistema de telemetría, estos efectos parásitos no afectarían
el desempeño del sensor. El sistema implementado para suministrar presión permite aplicar
presiones en un rango de 0 a 1000psi (0-51715mmHg) con una resolución de 0.05mmHg.
Este sistema permitirá desarrollar más adelante la caracterización final de los sensores
TMCPS en un rango de presión de 0-100mmHg y también podrá ser empleado para otras
aplicaciones relacionadas con un ambiente controlado de presión. Se presentó la propuesta
Capítulo 5 Caracterización eléctrica
89
de un circuito amplificador para detectar variaciones de capacitancia en el orden de femto
farads, aunque todavía se tienen que mejorar las condiciones de filtrado en los
amplificadores operacionales, esta propuesta brinda ventajas para la caracterización final en
comparación con algunos esquemas previamente reportados. La primera es que este circuito
permite medir la capacitancia nominal y su variación sin la necesidad de implementar un
circuito adicional; y la segunda y más importante es que, aunque existen cambios en la
capacitancia nominal debido al empaquetado y por variaciones de proceso, el esquema de
medición del circuito propuesto no se ve afectado, debido a que este circuito está enfocado
a medir principalmente las variaciones en capacitancia, y la capacitancia nominal solo la
utiliza de referencia para acoplar la otra rama en el circuito.
5.4 Referencias
[5.1] Díaz Alonso, D. (2010) “Fabricación y Caracterización de estructuras capacitivas
para monitorear presión”, Noviembre 2010, INAOE, Tesis Maestria.
[5.2] Datasheet AVC-1000 Ashcroft User’s Guide
http://www.ashcroft.com/datasheet_pdf/upload/datasheet-test-avc-1000-3000.pdf
[5.3] Datasheet DPG4000 Omega, very high accuracy Digital pressure gauge.
http://www.omega.com/pressure/pdf/dpg4000.pdf
[5.4] Datasheet Analog Device AD620, Low Cost, Low power Instrumentation amplifier.
http://users.ece.utexas.edu/~valvano/Datasheets/AD620.pdf
90
Capítulo 6
Conclusiones y trabajo futuro
6.1 Conclusiones
1. Se presenta un sensor de presión del tipo TMCPS para ser usado en aplicaciones
biomédicas que considera implantarse en el cuerpo humano para medir presión en
medios biológicos. Esto es posible debido a la capa de protección de poliimida que
cubre la estructura completa del sensor y que presenta completa biocompatibilidad.
2. El esquema de fabricación del sensor se basa en la tecnología PolyMEMS INAOE
considerando solo tres materiales: Aluminio, Poliimida y óxido de silicio CVD, este
aspecto simplifica el procedimiento de fabricación. Además, se muestra que esta
tecnología es perfectamente adecuada para desarrollar sensores de presión con etapas
de manufactura a bajas temperaturas. Este aspecto permite la integración de los
sensores con un proceso análogo de bobinas de aluminio integradas en substratos
flexibles de poliimida
3. La sensitividad ΔC/ΔP de un sensor de presión capacitivo es su figura de mérito más
importante. Cuando se incorpora el efecto de la cubierta de protección en una
aproximación de diafragma compuesto, se desarrolla el modelado matemático que
ajusta bien el comportamiento mecánico cuando se considera en el diseño una
cavidad herméticamente sellada con una capa de protección de poliimida de 1.5um de
espesor.
4. Debido a que la estructura del sensor se diseña considerando capacitancias
adicionales, con valores de capacitancia establecidas por el área de traslape entre los
soportes del diafragma y el electrodo inferior, con tan solo manipular el área de
traslape es posible aumentar o disminuir la capacitancia total en la estructura del
sensor.
5. El diseño, modelado y fabricación permite desarrollar sensores de presión para
aplicaciones que requieren rangos de presión diferentes a los propuestos en este
Capítulo 6 Conclusiones
91
proyecto de tesis, esto se logra con tan solo modificar las dimensiones de los
diafragmas.
6. La etapa de liberación mecánica desarrollada, muestra que la película de poliimida
utilizada como material de sacrificio, puede ser removida de manera efectiva. Esto
fue comprobado analizando la estabilidad mecánica y desplazamiento de los
diafragmas. Sin embargo, el tiempo de grabado utilizando grabado seco en RIE con
plasma de oxígeno es muy largo, y podrían permanecer residuos en el interior de la
cavidad. Para mejorar las condiciones resultantes y disminuir el tiempo de grabado de
la poliimida, podría ser necesario incluir en el grabado pequeñas cantidades de gas
que contenga Flúor; que resulte en una mezcla de gases eficaz para remover
completamente cualquier residuo que pudiera permanecer debajo del diafragma.
7. La etapa de sellado con poliimida se efectúa post-liberación, los resultados
experimentales mostraron que no se presentan efectos de colapso durante esta etapa.
Este procedimiento permite obtener una cavidad herméticamente sellada para
desarrollar sensores de presión absoluta.
8. Las mediciones experimentales de capacitancia preliminar presentan variaciones
conforme a las tolerancias en el diseño, principalmente considerando variaciones en
el proceso de fabricación y el empaquetamiento de los dados. Sin embargo, la
variación es aceptable y permite continuar con la caracterización final.
9. El sistema de presión implementado tiene un amplio rango de presión 0-1000psi, lo
cual lo habilita para ser utilizado en otras áreas con aplicaciones diferentes donde se
requiere un ambiente de presión controlado
10. El proceso de diseño y fabricación de sensores capacitivos tipo TMCPS con aluminio
como material estructural, se desarrolló como alternativa a los sensores capacitivos a
base de polisilicio como material estructural. Esta variante permite gran flexibilidad
de diseño, fabricación y aplicaciones de los prototipos capacitivos desarrollados con
la Tecnología PolyMEMS INAOE.
Capítulo 6 Conclusiones
92
Los resultados obtenidos durante el desarrollo de este proyecto de tesis doctoral, han sido
presentados en conferencias internacionales y en una revista internacional que se enlistan a
continuación:
Diaz-Alonso, D., Quiñones-N, F.J., Zuñiga-Islas, C., Molina, J., Hidalga, J.,
Linares, M., Rosales, P., Torres-Jacome, A., Reyes, C. and Calleja, W. (2011).
“Fabrication of PolySilicon Microstructures using the PolyMEMS INAOE
Technology”, In World Congress in Mechanism and Machine Science IFToMM
2011, Guanajuato, Mexico, pp. IMD123-1-IMD123-5.
Quiñones, F., Diaz, D., Torres, A., Molina, J., Hidalga, J., Zuñiga, C., Rosales, P.,
Reyes, C., Hernandez, L., Linares, M., Moreno, M., Escobar, M., Carlos, N.,
Alarcon, P. and Calleja, W. (2011). “Estudio de esfuerzos mecánicos residuales
sobre monitores integrados e el chip PolyMEMS V-INAOE, In Procedding
IBERCHIP 2011, Bogota, Colombia, pp. 1-4.
Rendon-Nava, A.E., Diaz-Mendez, J.A., Nino de Rivera, L., Calleja-Arriaga, W.,
Gil-Carrasco, F. and Diaz-Alonso, D.(2014). “Study of the Effect of Distance and
Misalignment between Magnetically Coupled Coils for Wireless Power Transfer in
Intraocular Pressure Measurement”, The Scientific World Journal, Vol. 2014.
6.2 Trabajo futuro
Como trabajo futuro se propone:
Plantear una etapa de liberación mecánica que concluya en menores tiempos de
grabado, empleando el grabado seco en RIE con una combinación O2+CF4 para
películas de poliimida usadas como material de sacrificio.
Ensayar la inclusión de películas dieléctricas que presenten constantes dieléctricas
por encima de 3.9, que permitan incrementar el valor de la capacitancia.
Analizar los esquemas de filtrado reportados en la literatura y seleccionar el más
adecuado para poder determinar las variaciones de capacitancia.
Continuar con la caracterización final de los dispositivos TMCPS para obtener la
sensitividad ΔC/ΔP
Realizar la integración del sensor TMCPS con las bobinas de aluminio en un mismo
substrato flexible.
93
Apéndice A
Diseño y proceso de fabricación de
bobinas de aluminio integradas en
substratos flexibles de poliimida
Este apéndice presenta los conceptos más relevantes respecto al diseño y fabricación de
bobinas de aluminio integradas sobre substratos flexibles de poliimida, en el cual se
colaboró con el grupo de trabajo INAOE-ESIME IPN [A.1], [A.2] con el desarrollo de la
parte experimental que concierne el procedimiento de fabricación. A continuación se
detallan los aspectos más importantes:
En los últimos años, se han propuesto diversos implantes biomédicos inalámbricos.
La mayoría de ellos utilizan el acoplamiento magnético inductivo para alimentar un circuito
CMOS integrado en el implante. En conjunto, la ubicación del implante dentro del cuerpo
del paciente, y la posición del dispositivo lector (externo) desempeñan uno de los aspectos
más críticos, y de suma importancia para lograr la máxima potencia en la bobina del
implante. Ambas bobinas necesitan ser colocadas lo más cerca posible una de otra; además
tienen que ser paralelas entre si y sus centros necesitan ser colineales.
Para este proyecto en particular, la operación del sensor de presión se basa en la inducción
magnética acoplada entre una antena externa (dispositivo lector) y el dispositivo sensor
asociado con una bobina integrada mediante Telemetría RF (primer circuito resonante,
) [A.3]. La bobina asociada al sensor de presión capacitivo estará colocada cerca
del segundo circuito resonante ( ) ubicado en el dispositivo lector, como se ilustra en la
figura A.1. Entre ambas bobinas existirá un acoplamiento magnético inductivo, que genera
una corriente eléctrica variante en el tiempo en el circuito resonante del lector, y que a su
vez induce una corriente eléctrica en el circuito resonante del dispositivo sensor para
alimentarlo y permitirle operar, como se ilustra en la figura A.2
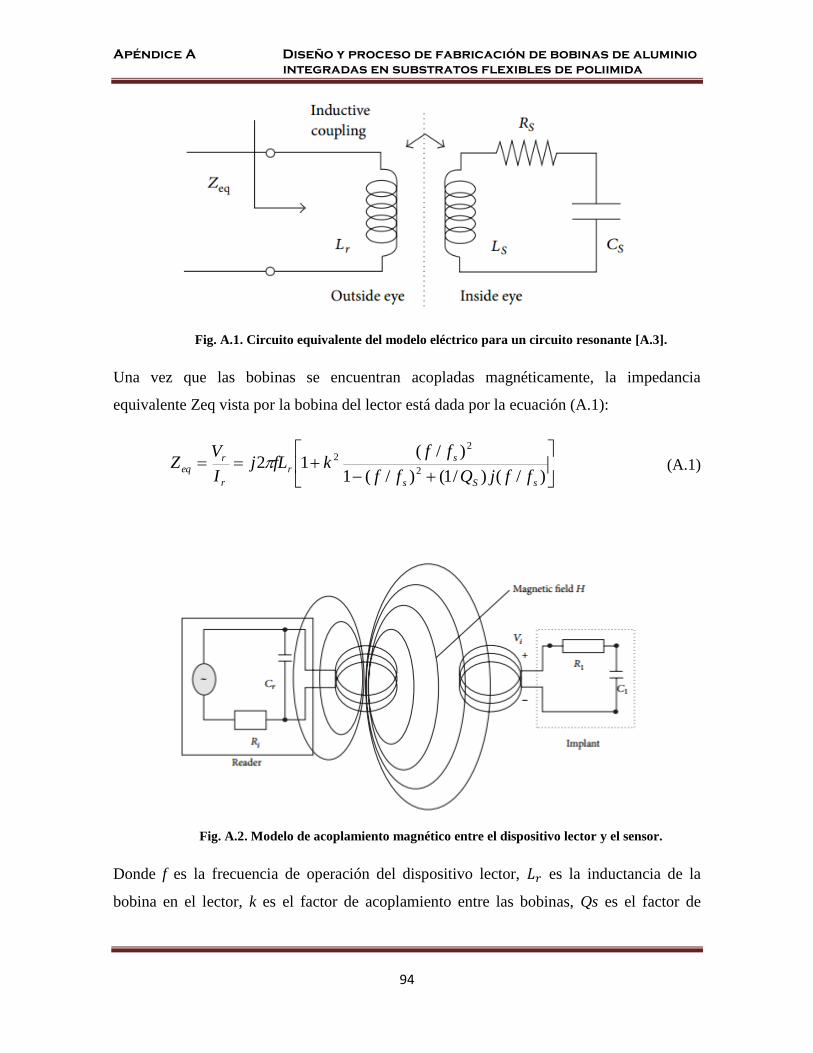
Apéndice A Diseño y proceso de fabricación de bobinas de aluminio
integradas en substratos flexibles de poliimida
94
Fig. A.1. Circuito equivalente del modelo eléctrico para un circuito resonante [A.3].
Una vez que las bobinas se encuentran acopladas magnéticamente, la impedancia
equivalente Zeq vista por la bobina del lector está dada por la ecuación (A.1):
)/()/1()/(1
)/(12
2
22
sSs
sr
r
req
ffjQff
ffkfLj
I
VZ (A.1)
Fig. A.2. Modelo de acoplamiento magnético entre el dispositivo lector y el sensor.
Donde f es la frecuencia de operación del dispositivo lector, es la inductancia de la
bobina en el lector, k es el factor de acoplamiento entre las bobinas, Qs es el factor de
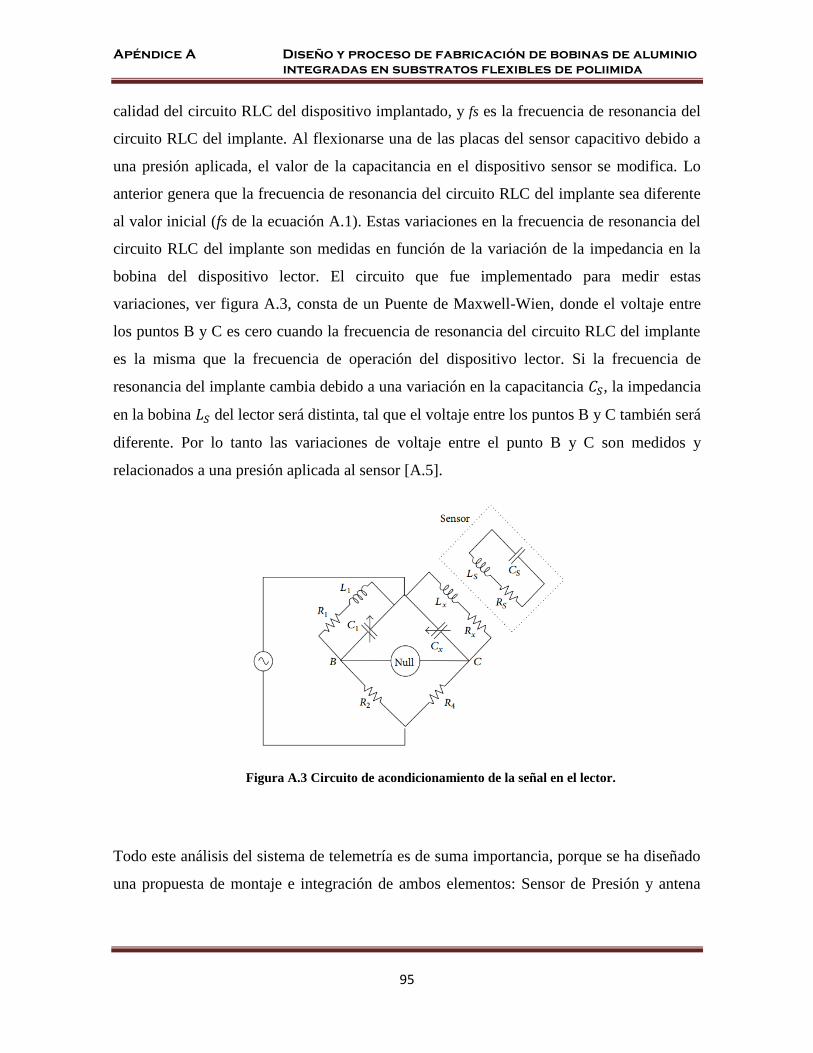
Apéndice A Diseño y proceso de fabricación de bobinas de aluminio
integradas en substratos flexibles de poliimida
95
calidad del circuito RLC del dispositivo implantado, y fs es la frecuencia de resonancia del
circuito RLC del implante. Al flexionarse una de las placas del sensor capacitivo debido a
una presión aplicada, el valor de la capacitancia en el dispositivo sensor se modifica. Lo
anterior genera que la frecuencia de resonancia del circuito RLC del implante sea diferente
al valor inicial (fs de la ecuación A.1). Estas variaciones en la frecuencia de resonancia del
circuito RLC del implante son medidas en función de la variación de la impedancia en la
bobina del dispositivo lector. El circuito que fue implementado para medir estas
variaciones, ver figura A.3, consta de un Puente de Maxwell-Wien, donde el voltaje entre
los puntos B y C es cero cuando la frecuencia de resonancia del circuito RLC del implante
es la misma que la frecuencia de operación del dispositivo lector. Si la frecuencia de
resonancia del implante cambia debido a una variación en la capacitancia , la impedancia
en la bobina del lector será distinta, tal que el voltaje entre los puntos B y C también será
diferente. Por lo tanto las variaciones de voltaje entre el punto B y C son medidos y
relacionados a una presión aplicada al sensor [A.5].
Figura A.3 Circuito de acondicionamiento de la señal en el lector.
Todo este análisis del sistema de telemetría es de suma importancia, porque se ha diseñado
una propuesta de montaje e integración de ambos elementos: Sensor de Presión y antena
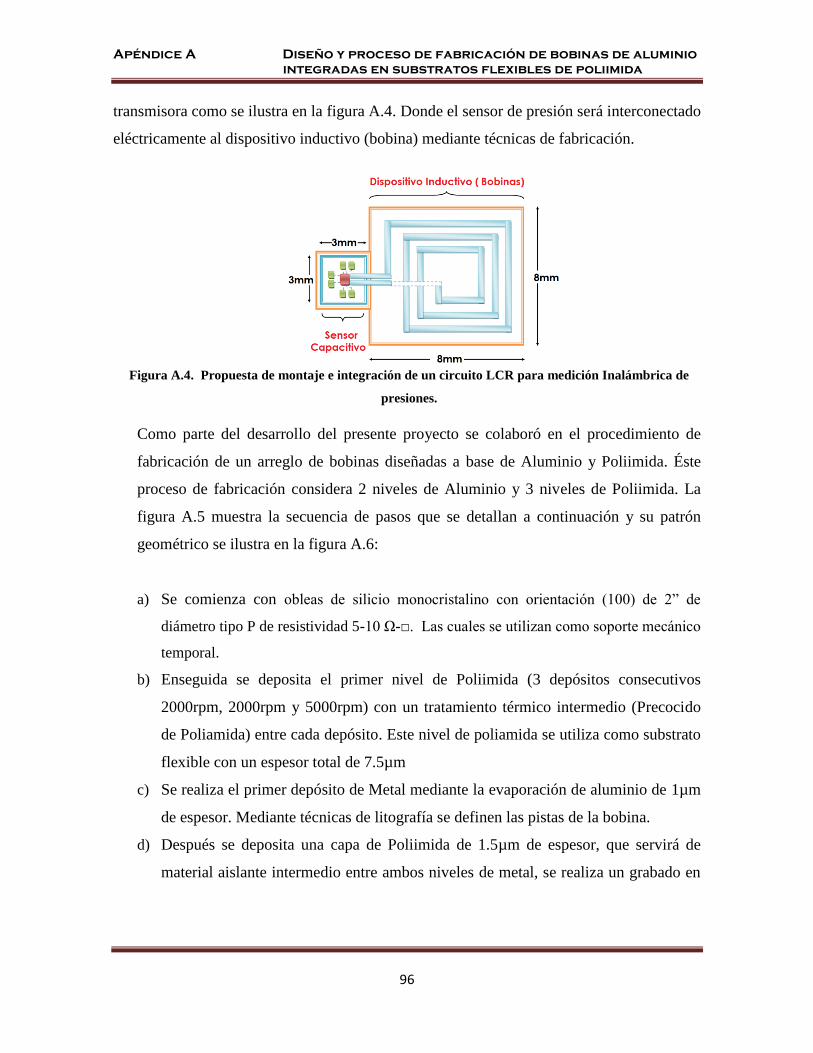
Apéndice A Diseño y proceso de fabricación de bobinas de aluminio
integradas en substratos flexibles de poliimida
96
transmisora como se ilustra en la figura A.4. Donde el sensor de presión será interconectado
eléctricamente al dispositivo inductivo (bobina) mediante técnicas de fabricación.
Figura A.4. Propuesta de montaje e integración de un circuito LCR para medición Inalámbrica de
presiones.
Como parte del desarrollo del presente proyecto se colaboró en el procedimiento de
fabricación de un arreglo de bobinas diseñadas a base de Aluminio y Poliimida. Éste
proceso de fabricación considera 2 niveles de Aluminio y 3 niveles de Poliimida. La
figura A.5 muestra la secuencia de pasos que se detallan a continuación y su patrón
geométrico se ilustra en la figura A.6:
a) Se comienza con obleas de silicio monocristalino con orientación (100) de 2” de
diámetro tipo P de resistividad 5-10 Ω-□. Las cuales se utilizan como soporte mecánico
temporal.
b) Enseguida se deposita el primer nivel de Poliimida (3 depósitos consecutivos
2000rpm, 2000rpm y 5000rpm) con un tratamiento térmico intermedio (Precocido
de Poliamida) entre cada depósito. Este nivel de poliamida se utiliza como substrato
flexible con un espesor total de 7.5µm
c) Se realiza el primer depósito de Metal mediante la evaporación de aluminio de 1µm
de espesor. Mediante técnicas de litografía se definen las pistas de la bobina.
d) Después se deposita una capa de Poliimida de 1.5µm de espesor, que servirá de
material aislante intermedio entre ambos niveles de metal, se realiza un grabado en
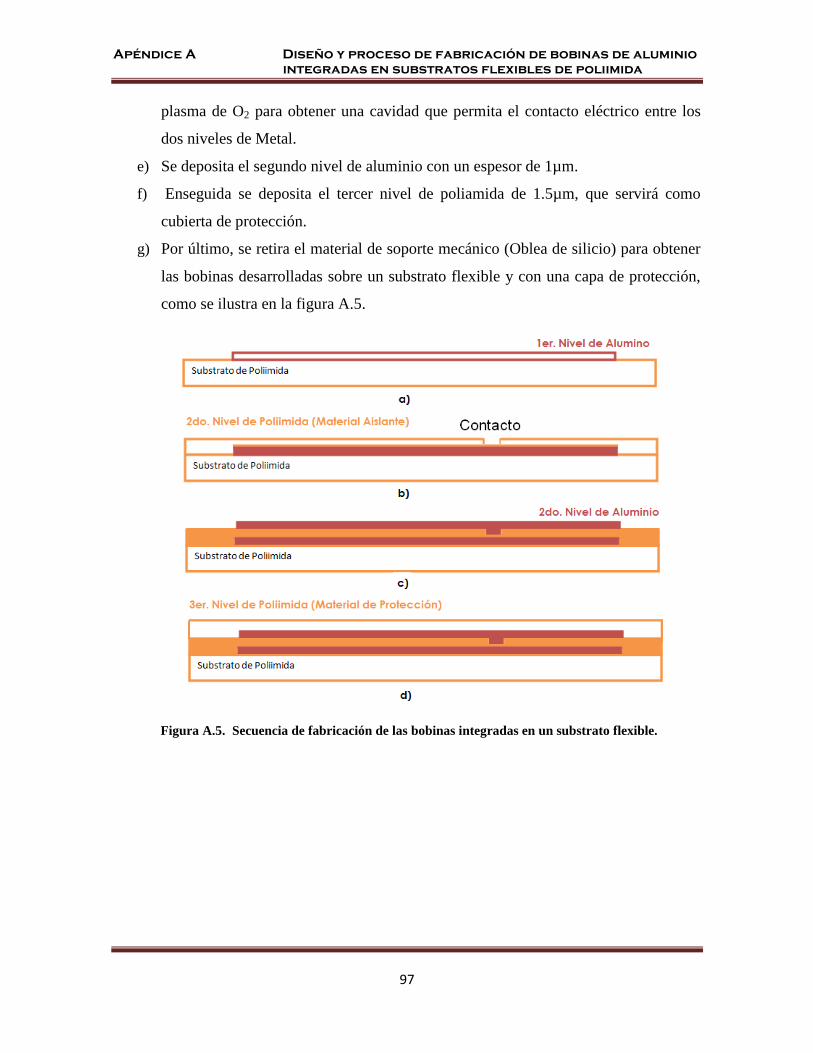
Apéndice A Diseño y proceso de fabricación de bobinas de aluminio
integradas en substratos flexibles de poliimida
97
plasma de O2 para obtener una cavidad que permita el contacto eléctrico entre los
dos niveles de Metal.
e) Se deposita el segundo nivel de aluminio con un espesor de 1µm.
f) Enseguida se deposita el tercer nivel de poliamida de 1.5µm, que servirá como
cubierta de protección.
g) Por último, se retira el material de soporte mecánico (Oblea de silicio) para obtener
las bobinas desarrolladas sobre un substrato flexible y con una capa de protección,
como se ilustra en la figura A.5.
Figura A.5. Secuencia de fabricación de las bobinas integradas en un substrato flexible.
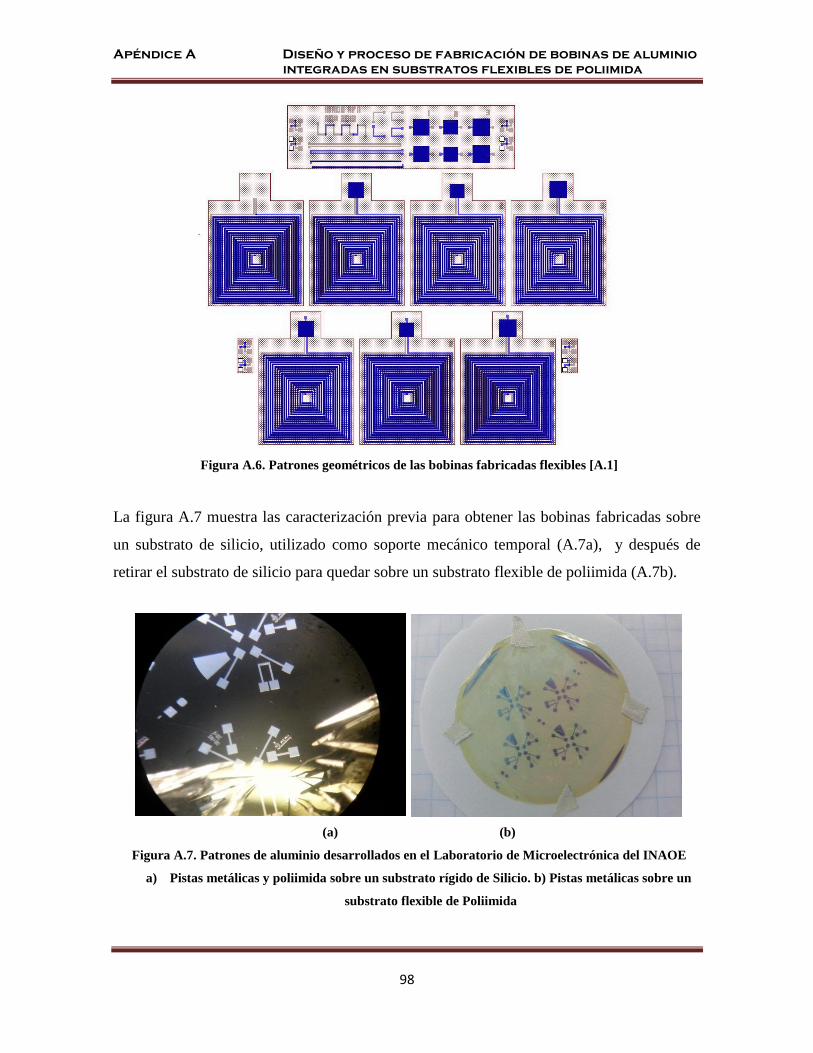
Apéndice A Diseño y proceso de fabricación de bobinas de aluminio
integradas en substratos flexibles de poliimida
98
Figura A.6. Patrones geométricos de las bobinas fabricadas flexibles [A.1]
La figura A.7 muestra las caracterización previa para obtener las bobinas fabricadas sobre
un substrato de silicio, utilizado como soporte mecánico temporal (A.7a), y después de
retirar el substrato de silicio para quedar sobre un substrato flexible de poliimida (A.7b).
(a) (b)
Figura A.7. Patrones de aluminio desarrollados en el Laboratorio de Microelectrónica del INAOE
a) Pistas metálicas y poliimida sobre un substrato rígido de Silicio. b) Pistas metálicas sobre un
substrato flexible de Poliimida
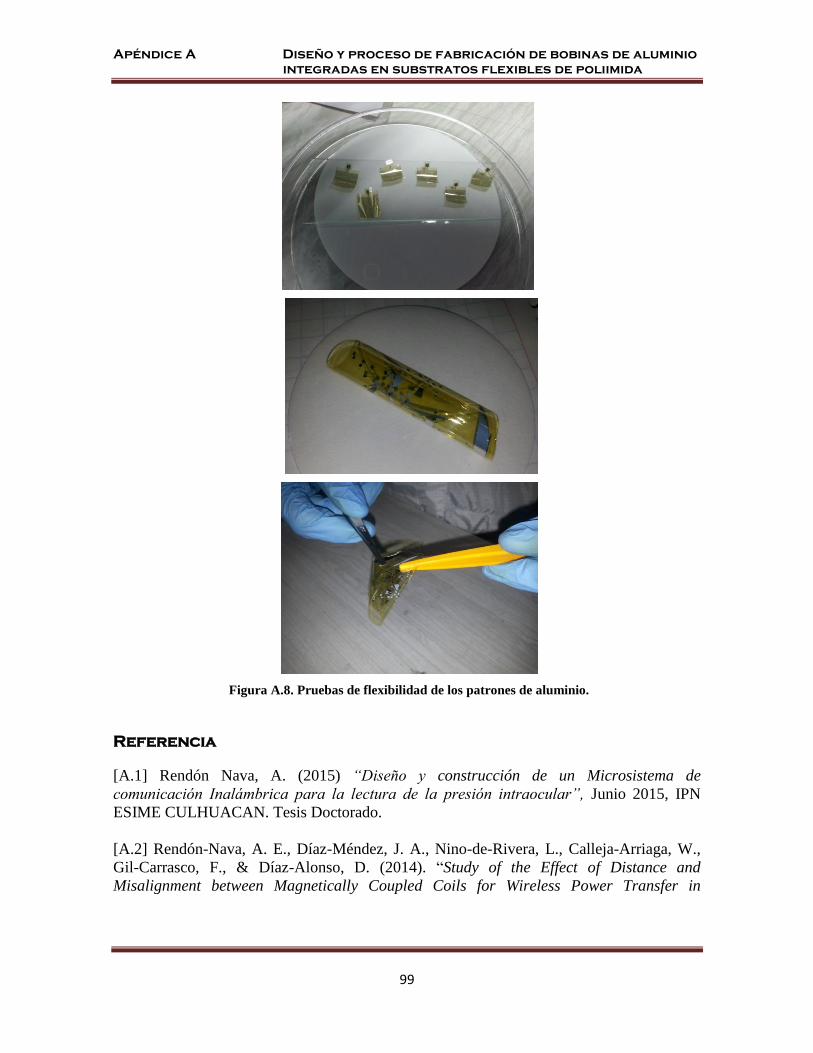
Apéndice A Diseño y proceso de fabricación de bobinas de aluminio
integradas en substratos flexibles de poliimida
99
Figura A.8. Pruebas de flexibilidad de los patrones de aluminio.
Referencia
[A.1] Rendón Nava, A. (2015) “Diseño y construcción de un Microsistema de
comunicación Inalámbrica para la lectura de la presión intraocular”, Junio 2015, IPN
ESIME CULHUACAN. Tesis Doctorado.
[A.2] Rendón-Nava, A. E., Díaz-Méndez, J. A., Nino-de-Rivera, L., Calleja-Arriaga, W.,
Gil-Carrasco, F., & Díaz-Alonso, D. (2014). “Study of the Effect of Distance and
Misalignment between Magnetically Coupled Coils for Wireless Power Transfer in

Apéndice A Diseño y proceso de fabricación de bobinas de aluminio
integradas en substratos flexibles de poliimida
100
Intraocular Pressure Measurement”. The Scientific World Journal, Vol. 2014, Article ID
692431, 11 pages.
[A.3] Fonseca, M. A., English, J. M., von Arx, M. and Allen, M. G. (2002) “Wireless
michomachined ceramic pressure sensor for high-temperature applications”. J. of
Microelectromechanical Systems 2002, Vol. 11, No.4, pp. 337-343.
[A.5] Pallas-Areny, R. and Webster, J. G. (2001) “In Signal Conditioning for Reactance
Variation Sensors”. Sensors and Signal Conditioning Second edition, John Wiley & Sons:
New York, USA, pp. 173-186.

101
Apéndice B
Aplicación del teorema de ejes paralelos
para determinar la superficie neutral en
diafragmas compuestos
El Teorema de los ejes paralelos establece que si se conoce el momento de Inercia I
respecto al eje centroidal de una figura, es posible calcular el momento de Inercia respecto
a cualquier eje paralelo al eje centroidal usando las siguientes expresiones:
Donde es el momento de inercia sobre el eje centroidal, por lo tanto lo primero que se
debe de hacer es obtener el eje centroidal en x y y, los cuales se expresan mediante las
ecuaciones (B.3) y (B.4):
A continuación se detallará el procedimiento cuando se desea obtener la superficie neutral
de un diafragma compuesto de dos materiales distintos.
Consideremos la figura B.1 que ilustra un diafragma compuesto de dos materiales distintos,
donde el espesor del materia
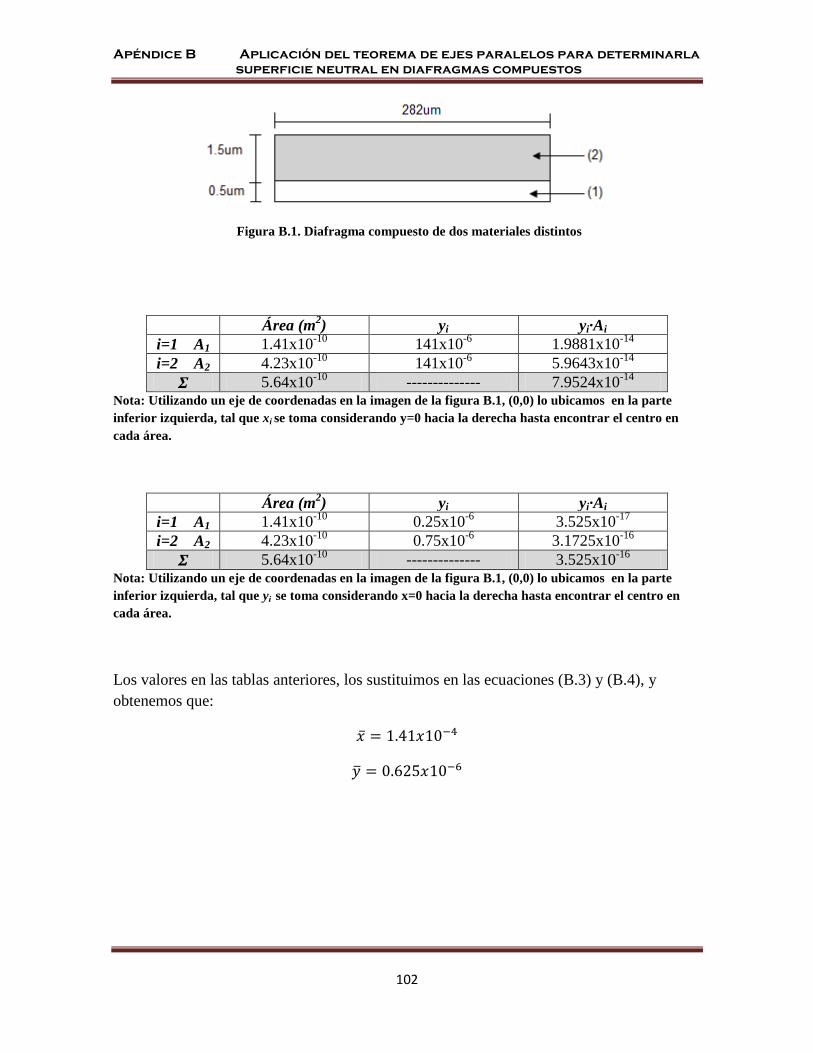
Apéndice B Aplicación del teorema de ejes paralelos para determinarla
superficie neutral en diafragmas compuestos
102
Figura B.1. Diafragma compuesto de dos materiales distintos
Área (m2) yi yi·Ai
i=1 A1 1.41x10-10
141x10-6
1.9881x10-14
i=2 A2 4.23x10-10
141x10-6
5.9643x10-14
Σ 5.64x10-10
-------------- 7.9524x10-14
Nota: Utilizando un eje de coordenadas en la imagen de la figura B.1, (0,0) lo ubicamos en la parte
inferior izquierda, tal que xi se toma considerando y=0 hacia la derecha hasta encontrar el centro en
cada área.
Área (m2) yi yi·Ai
i=1 A1 1.41x10-10
0.25x10-6
3.525x10-17
i=2 A2 4.23x10-10
0.75x10-6
3.1725x10-16
Σ 5.64x10-10
-------------- 3.525x10-16
Nota: Utilizando un eje de coordenadas en la imagen de la figura B.1, (0,0) lo ubicamos en la parte
inferior izquierda, tal que yi se toma considerando x=0 hacia la derecha hasta encontrar el centro en
cada área.
Los valores en las tablas anteriores, los sustituimos en las ecuaciones (B.3) y (B.4), y
obtenemos que:
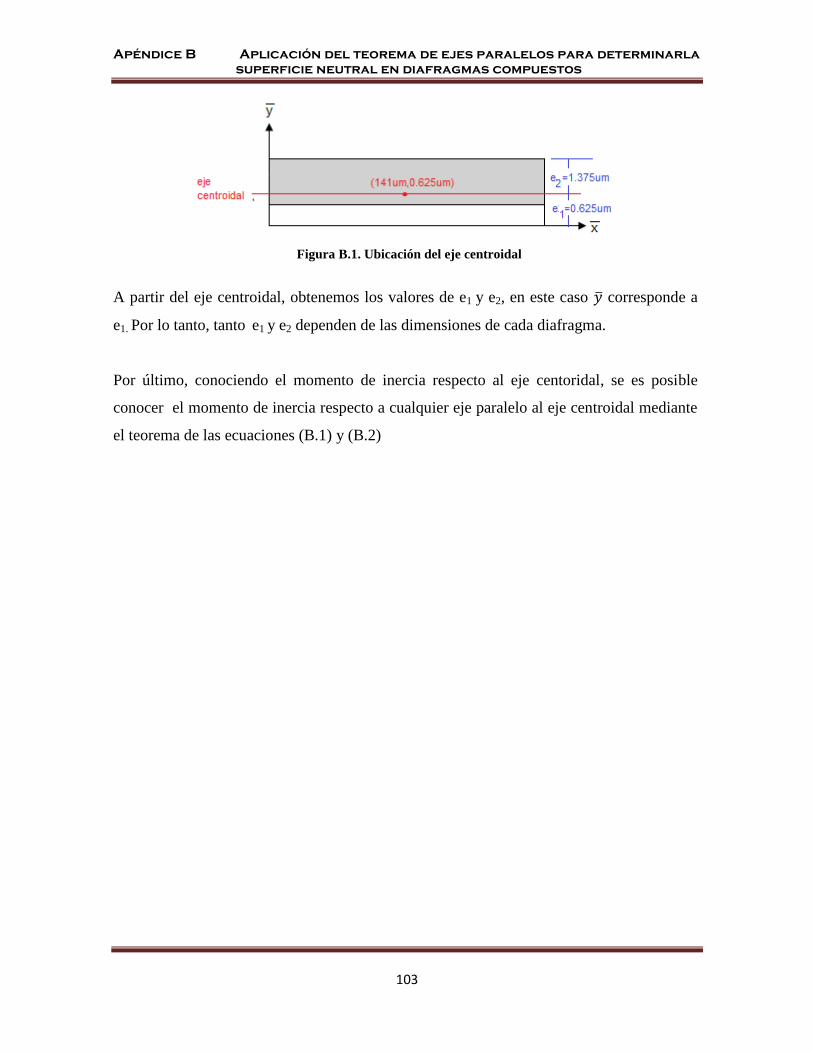
Apéndice B Aplicación del teorema de ejes paralelos para determinarla
superficie neutral en diafragmas compuestos
103
Figura B.1. Ubicación del eje centroidal
A partir del eje centroidal, obtenemos los valores de e1 y e2, en este caso corresponde a
e1. Por lo tanto, tanto e1 y e2 dependen de las dimensiones de cada diafragma.
Por último, conociendo el momento de inercia respecto al eje centoridal, se es posible
conocer el momento de inercia respecto a cualquier eje paralelo al eje centroidal mediante
el teorema de las ecuaciones (B.1) y (B.2)
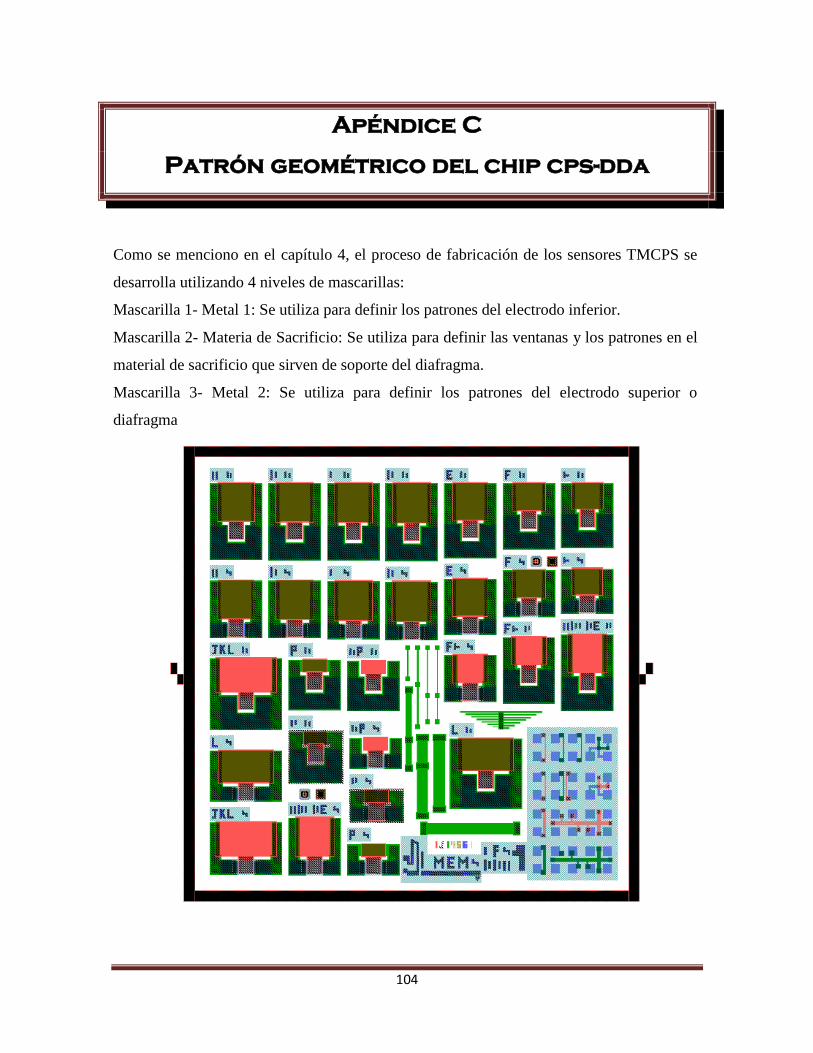
104
Apéndice C
Patrón geométrico del chip cps-dda
Como se menciono en el capítulo 4, el proceso de fabricación de los sensores TMCPS se
desarrolla utilizando 4 niveles de mascarillas:
Mascarilla 1- Metal 1: Se utiliza para definir los patrones del electrodo inferior.
Mascarilla 2- Materia de Sacrificio: Se utiliza para definir las ventanas y los patrones en el
material de sacrificio que sirven de soporte del diafragma.
Mascarilla 3- Metal 2: Se utiliza para definir los patrones del electrodo superior o
diafragma
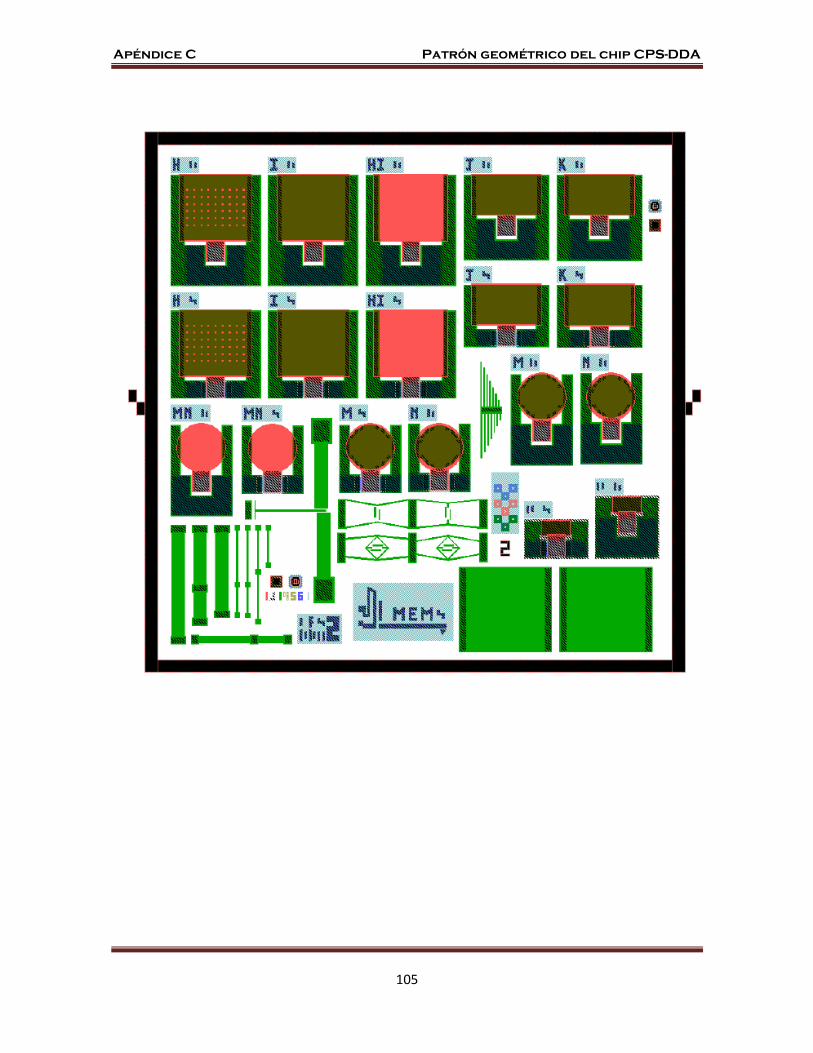
Apéndice C Patrón geométrico del chip CPS-DDA
105