Carro Robot
15
INDICE Resumen………………………………………………………………………………………….1 Problema………………………………………………………………………………………….2 Hipótesis………………………………………………………………………………………….3 Objetivos………………………………………………………………………………………….3 Justi ficac ión …………………………………………………………………………………….. 4 Marco Teór ico …………………………………………………………………………………. 4 Métod os y Mat eriales…………………………………………………………………………. 7 Resultados ………………………………………………………………………………. …….. 8 Conclusiones……………………………………………………………………………..…… 9 Referencias Bibliográficas ……………………………………………………………..…… 10 Anexos………………………………………………………………………………………… 11
-
Upload
ronald-estela-urbina -
Category
Documents
-
view
188 -
download
1
Transcript of Carro Robot

5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 1/15
INDICE
Resumen………………………………………………………………………………………….1
Problema………………………………………………………………………………………….2
Hipótesis………………………………………………………………………………………….3
Objetivos…………………………………………………………………………………………. 3
Justificación…………………………………………………………………………………….. 4
Marco Teórico …………………………………………………………………………………. 4
Métodos y Materiales…………………………………………………………………………. 7
Resultados ……………………………………………………………………………….…….. 8
Conclusiones……………………………………………………………………………..…… 9
Referencias Bibliográficas……………………………………………………………..…… 10
Anexos………………………………………………………………………………………… 11
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 2/15
RESUMEN
Dondequiera que escuchamos la palabra robot, siempre pensamos en “Terminator” ó
“Arturito” de la película “La Guerra de las Galaxias”. Sin embargo, les sorprenderá aprender
que los robots no solo se encuentran en todo lo que nos rodea, pero que no se ven ó
comportan en la forma que tu piensas. Para poder entender de que se tratan los robots nos
hicimos la siguiente pregunta :
¿Qué es un robot? , contestamos la pregunta con la siguiente definición “un robot es una
máquina que hace una actividad en particular repetidamente con un gran nivel de precisión.”
Esto significa que no solamente el robot hace un trabajo una y otra vez pero que lo hace
perfectamente cada vez. Lo que significa que los robots están por dondequiera, y que tal vez
no se ven como uno se los imagina. “Una video casetera, una puerta de garage automática,
la luz del semáforo, inclusive el control remoto de un aparato, son todos considerados
robots.”
En el presente trabajo presentamos un carro robot que se introducirá en un maqueta que
simula un posible e indeseado desastre, por lo tanto la misión del carro es esquivar todos
los obstáculos y enviar la información a un receptor en un PC para trazar las vías seguras de
acceso para el desalojo de accidentados.
1
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 3/15
DESCRIPCION DEL PROBLEMA
El desarrollo científico tecnológico en nuestra “nave tierra”, ha sido una constante desde que
apareció el hombre y comprendió que su rol es una permanente búsqueda.
Ha sido la creatividad y el estimulo de los países desarrollados lo que propulso la inventiva a
través del tiempo y del espacio; es por eso que nosotros como países subdesarrollados
tenemos un gran desafió que implica necesariamente dar “saltos científicos-tecnológicos”, de
lo contrario nos perderemos definitivamente en el “tren del tiempo”.
En cuanto al aprendizaje de las ciencias, este tiene como base la teoría y la práctica de
diversos principios, ¿pero que tan relacionados están con hechos reales?
Para un mejor aprendizaje de las ciencias es no caer en el aburrimiento de lo abstracto; por
esta razón planteamos lo siguiente:
PLANTEAMIENTO DEL PROBLEMA
¿ Podríamos introducirnos en escombros para trazar rutas seguras de desalojo de heridos
sin arriesgar mas vidas humanas ?
2
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 4/15
HIPOTESIS
Con relación a nuestro problema nos planteamos la siguiente hipótesis:
Construyendo un carro robot inteligente que valiéndose de sensores ópticos en la parte
delantera esquive todo obstáculo y envié cada avance o retroceso a un receptor instalado en
la PC y grafique un mapa en Visual Basic.
OBJETIVOS
Objetivo General.
Trazar rutas seguras que sirvan para acceso en caso de desastres naturales
Objetivos Específicos.
Aprender un poco mas de física, electrónica y computación. Aplicar la tecnología de manera ingeniosa en la solución de problemas.
Construir un carro robot para el trazado de rutas seguras.
3
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 5/15
JUSTIFICACION
Este proyecto fue hecho con el interés de que nos pueda ayudar cuando ocurra un
accidente, ya que en estos tiempos no estamos muy seguros porque ocurren muchos
desastres como los temblores, terremotos, huracanes dejando muchas destrucciones y muy
pocas posibilidades de poder auxiliar a las personas que están heridas , sepultados bajo
enormes escombros que nos impiden rescatarlos ya que a veces no alcanzamos en esos
pequeños lugares poniendo en riesgo la vida del que ayudaba, es por eso que se creo este
carro robot llamado CRETMA – 1 que traza mapas y nos ayuda a poder saber donde están
las zonas de acceso seguro.
MARCO TEÓRICO
En el presente trabajo hemos considerado las siguientes bases teóricas:
Ciencias Físicas:
Energía que interviene en nuestros carros robot.
Energía Cinética.
Energía que un objeto posee debido a su movimiento. La energía cinética
depende de la masa y la velocidad del objeto según la ecuación:
2
.2vm
E C =
Donde “m” es la masa del objeto y V2 es la velocidad del mismo elevada al
cuadrado.
La Electrónica es una disciplina que abarca un amplio abanico de actividades relacionadas
con la generación y transmisión de informaciones por medio de señales eléctricas.
4
5
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 6/15
A diferencia con la Electricidad -rama de la Física de la que arranca la Electrónica-, esta
moderna disciplina vuelca su interés en la información transportada por las señales eléctricas;
básicamente tensión y corriente eléctrica.
La puesta en práctica de las técnicas electrónicas toma cuerpo en los denominados sistemas
electrónicos, los cuales manipulan las señales eléctricas para generar, canalizar y presentar
informaciones.
Los sistemas electrónicos están integrados por un conjunto de circuitos especializados en
ciertas funciones.
A su vez, los circuitos están constituidos por la asociación de elementos físicos cuyas
propiedades determinarán el tratamiento que recibirán las señales eléctricas manipuladas.
Estos elementos reciben el nombre de componentes.
La informática, es la ciencia de la información automatizada, todo aquello que tiene relación
con el procesamiento de datos, utilizando las computadoras y/o los equipos de procesos
automáticos de información.
Es la ciencia que se encarga de la automatización del manejo de la información.
SOFTWARE.
Es la parte lógica de un computador, es el soporte que controla el hardware.
El software de nuestro proyecto desarrollado en lenguaje Asembler que se cargará en la
memoria del microcontrolador que recibe información a través de sensores ópticos y/o
mecánicos.
SENSORES.
Un sensor es un elemento que capta una señal del mundo exterior. Puede ser digital o
analógico en función a los estados que está representado.
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 7/15
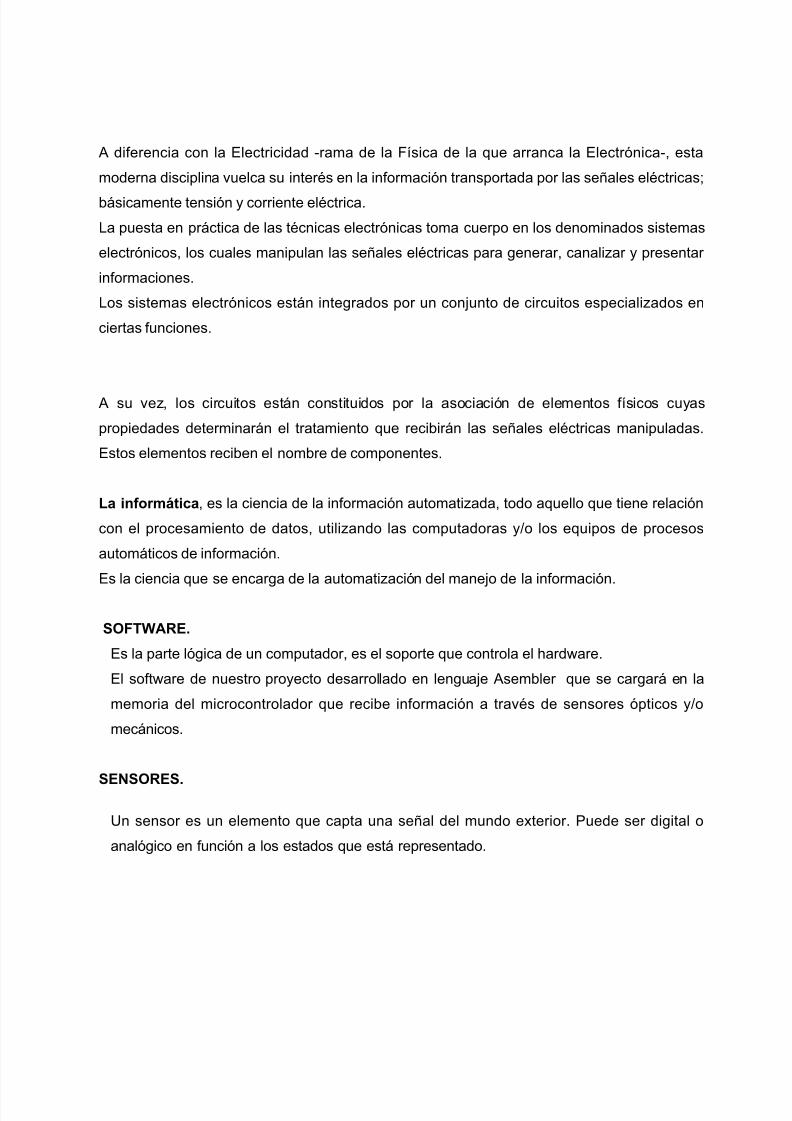
Sensor óptico de rayos infrarrojos:
basado en fototransistor (Emisor/Receptor integrados)El fototransistor conduce cuando capta la luz emitida por el ledUsado para distancias muy cortas
Configuración o esquema electrónico
Fotografía del sensor de manera comercial
Fuente de alimentación DC (corriente directa)
A
K
C
E
6
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 8/15
METODOS Y MATERIALES
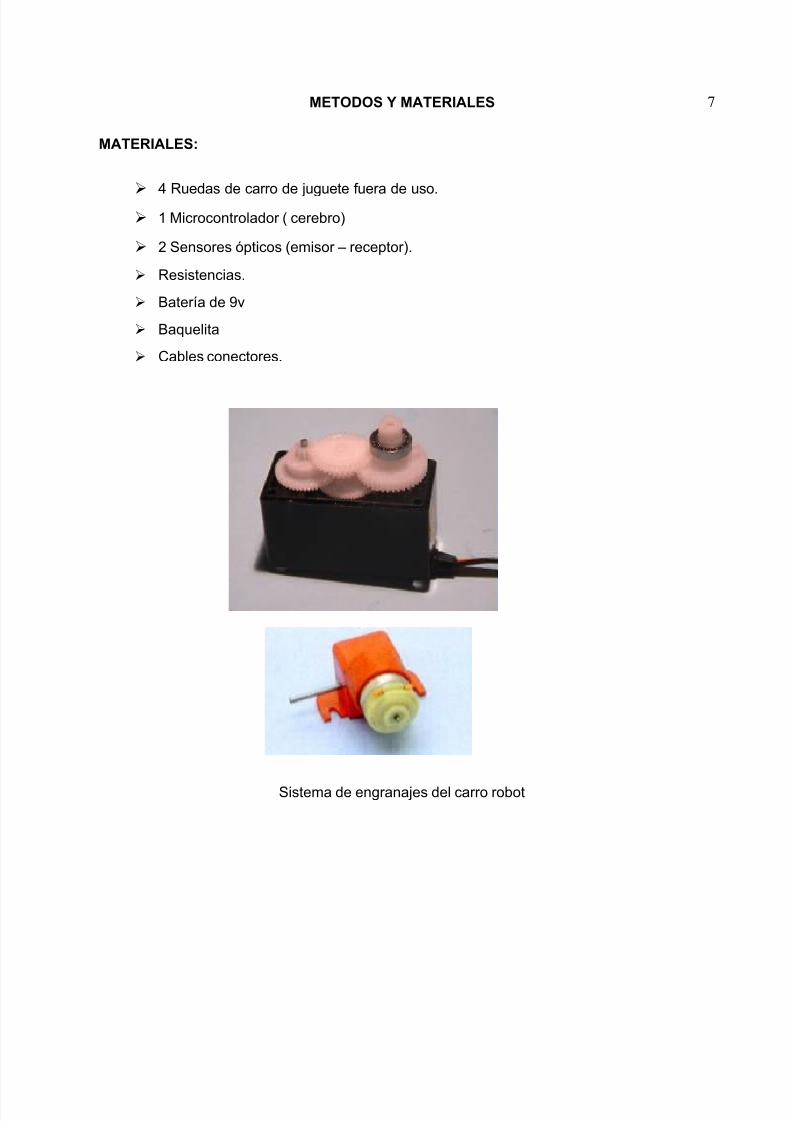
MATERIALES:
4 Ruedas de carro de juguete fuera de uso.
1 Microcontrolador ( cerebro)
2 Sensores ópticos (emisor – receptor).
Resistencias.
Batería de 9v
Baquelita
Cables conectores.
Sistema de engranajes del carro robot
7
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 9/15
RESULTADOS
Se ha generado mediante este prototipo aprendizajes muy significativos en cuanto a las
ciencias físicas, ya que se realizo una demostración de conceptos vistos en la universidad
que se pusieron en práctica como son la la energía cinética, peso, masa, velocidad,
electricidad, mecánica, rozamiento, etc.
Esta demostración se llevó a cabo con los alumnos de nuestra I.E, logrando una atención
permanente por parte de los compañeros ya que al manipular este prototipo se creaba un
ambiente de juego y de aprendizaje, lo cual trajo consigo una constante participación en
cuanto a preguntas y curiosidades de los presentes.Para nuestros compañeros se les facilitó el aprendizaje de importantes conceptos físicos
antes mencionados, ya que pudieron apreciar mediante este prototipo muchos conceptos
teóricos ya estudiados.
8
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 10/15
CONCLUSIONES
- Se ha demostrado que a través de un prototipo didáctico se obtienen aprendizajes muy
significativos en las ciencias físicas.
- Se diseñó y se ha construido un prototipo didáctico de un carro robot para generar
aprendizajes relacionados con las ciencias físicas.
- Se logró manipular, controlar el carro robot estableciendo simultáneamente un ambiente
de juego y de ciencia por parte de los expositores y presentes.
- Pudimos aprender conocimientos relacionados con la matemática, la física,
computación e informática y la electrónica puestos en práctica mediante nuestro carro
robot.
- Pudimos construir un carro robot que pueda enviar información para trazar mapas en
caso de desastre.
9
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 11/15
REFERENCIAS BIBLIOGRAFÍCAS
De la Cruz Romero Guillermo , “ Fisica “
Editorial CoveñasImpreso el año 2000Impreso en Perú
Joyanes Aguilar Luis , “Programación Basic de Microcomputadoras”.
Editorial McGraw – HillImpreso el año 1984Impreso en España
Sears Zemansky Young, “Física Universitaria”.
Editorial Fondo Educativo InteramericanoImpreso el año 1986
Impreso en México
Tocci Ronald , “Sistemas Digitales”
Editorial Mac Graw Hill.Impreso el año 1998Impreso en México
10
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 12/15
ANEXOS
ALUMNA FIJANDO LAS RUEDAS
11
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 13/15
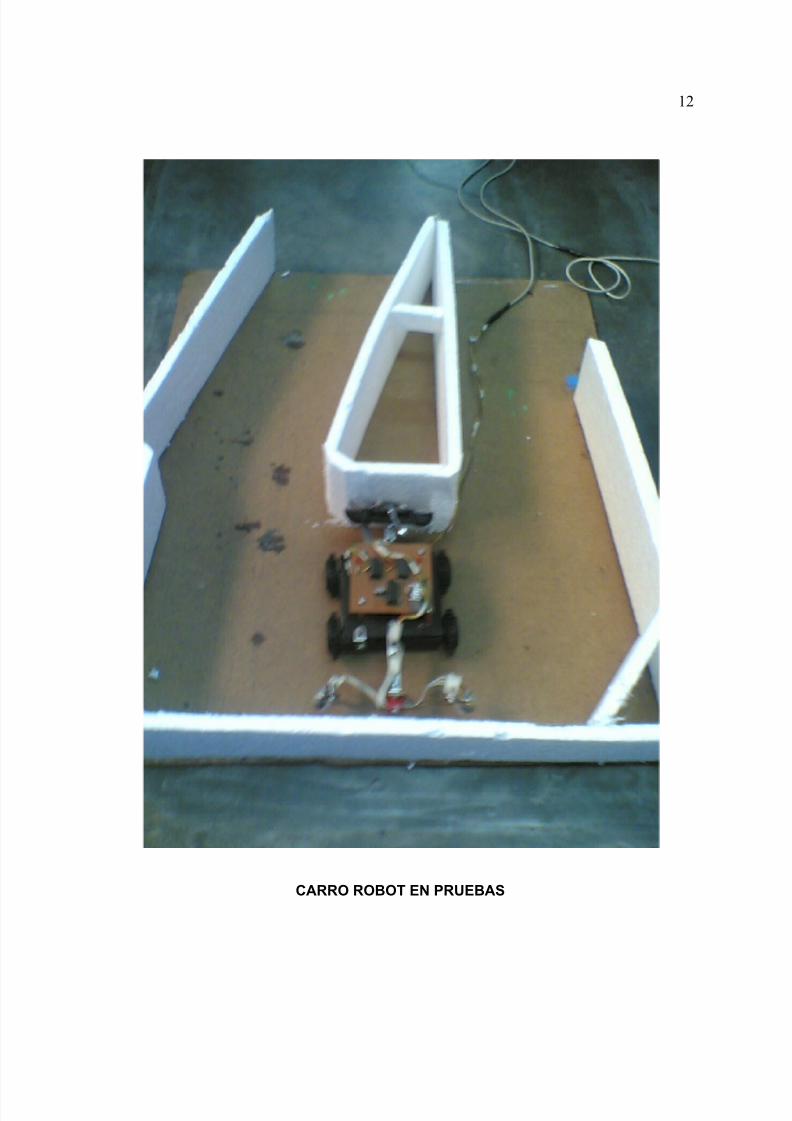
CARRO ROBOT EN PRUEBAS
12
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 14/15
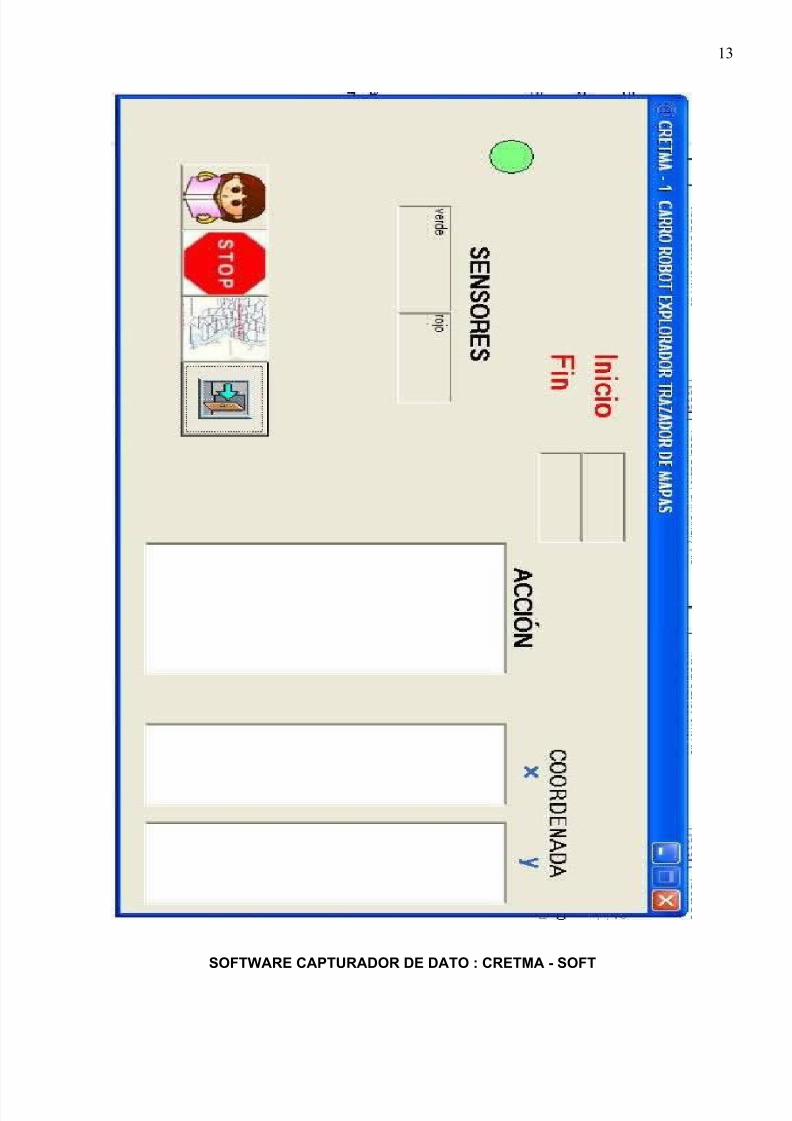
SOFTWARE CAPTURADOR DE DATO : CRETMA - SOFT
13
5/9/2018 Carro Robot - slidepdf.com
http://slidepdf.com/reader/full/carro-robot 15/15
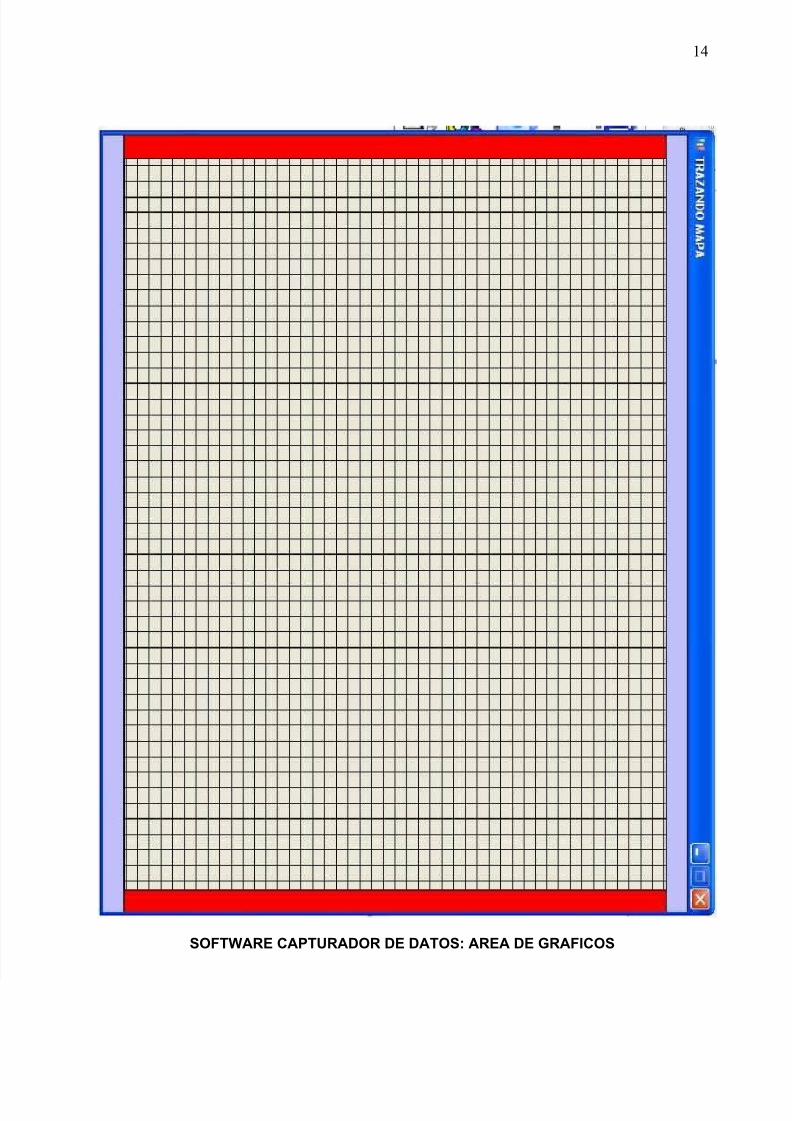
SOFTWARE CAPTURADOR DE DATOS: AREA DE GRAFICOS
14