
Cátedra Alfonso Xº “El Sabio” - dialnet.unirioja.es · de esas figuras planas. Ya en la...
22
Instituto Superior Fundación Suzuki Profesorado de Matemática para EGB3 y Polimodal. Cátedra Alfonso Xº “El Sabio” Acerca de la Exposición: ”Introducción a las Geometrías No Euclidianas” - 28 de junio de 2003 - “Dejamos de temer aquello que se ha aprendido a entender”. - Marie Curie - Página 1 de 22 Ing. Javier Accinelli
Transcript of Cátedra Alfonso Xº “El Sabio” - dialnet.unirioja.es · de esas figuras planas. Ya en la...
Instituto Superior Fundación Suzuki Profesorado de Matemática para EGB3 y Polimodal.
Cátedra Alfonso Xº “El Sabio” Acerca de la Exposición:
”Introducción a las Geometrías
No Euclidianas” - 28 de junio de 2003 -
“Dejamos de temer aquello que se ha aprendido a entender”.
- Marie Curie -
Página 1 de 22 Ing. Javier Accinelli
El siguiente trabajo es una síntesis del desarrollo de
la exposición “Introducción a las Geometrías No Euclidianas” a cargo del
Profesor Ingeniero Javier Accinelli quien se desempeña, como docente en el
profesorado de matemática, en el Instituto Superior Fundación Suzuki. La
misma se realizó en las instalaciones del mencionado Instituto el día 28 de
junio de 2003 con motivo de celebrarse la Cátedra Alfonso Xº “El Sabio”,
asistiendo al evento autoridades del Profesorado de Matemáticas, invitados
especiales, docentes y alumnos.
DESARROLLO
INTRODUCCIÓN:
Desde niño tomamos contacto con un universo de formas y
figuras: recortamos cuadrados y rectángulos de papel, construimos barriletes en
forma de rombo o hexágonos. Lentamente vamos descubriendo las propiedades
de esas figuras planas. Ya en la escuela formalizamos, y estructuramos, una serie
de conceptos: “los lados opuestos de un rectángulo son paralelos”, “dos rectas son
perpendiculares si se cortan formando ángulos de noventa grados”, etc.
Recurrimos permanentemente a herramientas de trazado que nos facilitan la tarea
de construir figuras geométricas. Segmentos, ángulos, triángulos, cuadrados y
circunferencias. Un sinfín de figuras aflora ante nuestros ojos. Memorizamos
axiomas, postulados y definiciones. Aparecen aquellos temidos “Teoremas” donde
rigurosamente se demuestra lo que subestimamos ya que, intuitivamente, sus
enunciados nos parecen obvios: surge el “rigor matemático“. Vamos estructurando
mentalmente nuestro espacio Euclidiano: viajamos por la ruta y observamos que
Página 2 de 22 Ing. Javier Accinelli
las bandas a ambos lados del camino son paralelas, sin embargo, se cruzan en un
punto sobre la línea del horizonte; elevamos el pulgar hacia el cielo, y mirando con
un ojo cerrado . . . ¡tapamos el Sol!, son nuestros primeros pasos hacia las
perspectivas.
En otras asignaturas aprendemos ¿quiénes fueron los griegos?,
¿cómo se construyeron las pirámides de Egipto?, ¿por qué se erigió la biblioteca
de Alejandría?, ¿La tierra es “redonda”?, ¿qué relaciones guardan las culturas del
pasado con la filosofía, la política, la religión y la ciencia moderna?.
Nombres como Euclides, Thales, Aristóteles, Pitágoras, Kepler,
Galileo y Newton nos pertenecen, pues a través de sus trabajos nos explican la
geometría y cómo funciona la dinámica celeste: ¿por qué la Luna no cae hacia la
Tierra?, ¿qué es la fuerza de gravedad?, etc.
Podemos aplicar la geometría, y la trigonometría, para resolver
problemas de la mecánica. Las leyes de Newton son una poderosa herramienta
para explicar aquellos acontecimientos que se presentan en lo que denominamos
la Mecánica Clásica. En física analizamos: la trayectoria parabólica del tiro
oblicuo, los planetas se desplazan en torno al Sol siguiendo órbitas elípticas, la luz
se propaga en forma rectilínea, etc. Evidentemente las cónicas cobran gran
importancia para nosotros como lo fue para Johannes Kepler al momento de
formular sus leyes. Todo tiene su explicación en un universo de apariencia,
físicamente newtoniana y geométricamente euclidiana, es decir, podemos
justificar cualquier problema de la mecánica celeste mediante la aplicación de
modelos considerados dentro de este marco referencial.
Sin embargo, cuando uno casi ha aceptado esta realidad
descubre, a través de la información que permanentemente adquiere de su
interacción con el contexto que lo rodea, que ese marco referencial considerado
Página 3 de 22 Ing. Javier Accinelli
por la mecánica clásica, y su espacio euclidiano, se acerca en gran medida a lo
que parece “ser” sin alcanzar lo que realmente “es”. Entonces nos preguntamos
¿existe otro (u otros) marco referencial en el cual la mecánica pueda ser estudiada
con un mayor grado de aproximación a la realidad?. Es decir los estándares, o
patrones, de la geometría euclidiana y la mecánica clásica explican con bastante
exactitud los fenómenos muy próximos a situaciones cotidianas, por ejemplo: la
marcha de un ciclista o la caída libre de un cuerpo, pero no son apropiadas para
explicar ciertas situaciones que se presentan en la física moderna, la química y la
astronomía, como expondré más adelante.
Quizás la audiencia en este momento se pregunte qué relación
guarda la mecánica con la geometría y la respuesta que mejor se aproxima no la
daré yo sino que, ya de alguna manera, la responde Albert Einstein (1879-1955)
en su teoría general de la relatividad donde expone: “que la gravedad quizás sea
una consecuencia de la deformación del espacio originada por la distribución de
masa y energía en él”. Es decir, el espacio está, indudablemente, vinculado a la
geometría, y por otra parte, un cuerpo está en movimiento cuando cambia de
posición en el tiempo respecto de un sistema de referencia por lo que obviamente:
mecánica y geometría poseen un vínculo íntimamente ligado.
Para poder obtener una mejor apreciación de la idea principal de
esta exposición se hace imprescindible saber: 1º) quién fue Euclides, 2º) cuál es la
estructura de su geometría, 3º) cuál es la importancia de ésta y 4º) cómo surgieron
las geometrías no euclidianas.
Página 4 de 22 Ing. Javier Accinelli
Euclides:
Según Proclo (1), Euclides vivió durante el reinado de Ptolomeo I (2)
puede ubicárselo temporalmente anterior a Eratóstenes (280-192 a.C. ) y posterior
a Platón (428-348 a.C.), por lo tanto se puede decir, que Euclides ha vivido
alrededor del año 300 a.C. Algunos historiadores consideran que la existencia de
Euclides puede haber sido hipotética atribuyendo su obra a una sociedad de
matemáticos griegos que intentaron agrupar los conocimientos hasta el momento
en esta disciplina.
Aunque a Euclides se le atribuyen varios tratados de geometría el
más importante quizás sea “Stoikheîa” o “Elementos”. Es a través de los
Elementos que Euclides consigue formalizar la geometría, darle carácter de
ciencia deductiva, puesto que hasta el momento podría sintetizarse a ésta como
un agrupamiento de reglas empíricas para la medición y/o trazado de figuras
geométricas planas. Es decir lo que antes era producto de la práctica y la
experimentación ahora lo es mediante una fuerte componente de racionalidad.
Es en esta obra, de trece volúmenes (donde se destacan más de
ciento ochenta definiciones, cinco postulados y cierta cantidad de nociones
comunes o axiomas) que Euclides establece las bases de su geometría: la
“geometría euclidiana”.
Muchos son los aspectos notables que Euclides detalla en los
Elementos pero solamente trataré uno que hace de generador a lo que
posteriormente se dio en llamar “geometrías no euclidianas”. El mismo está
centrado en el Vº postulado de Euclides o más conocido como el “postulado de las
(1) Matemático griego que vivió en Bizancio entre los años 400 y 490 a.C. (2) El primero de los Ptolomeos que se preocupó por convertir a Alejandría en un polo de la cultura del
mundo civilizado.
Página 5 de 22 Ing. Javier Accinelli
paralelas”, cuya enunciación apropiada, es la siguiente: “dada una recta y un
punto exterior a la misma solamente puede trazarse una paralela”.
Debemos considerar que dos rectas serán paralelas si ambas son
equidistantes, o sea, la distancia entre puntos de intersección pertenecientes a
cualquier recta perpendicular y las rectas paralelas se mantiene constante.
Geometrías No Euclidianas Elíptica e Hiperbólica
Estos nuevos modelos fueron desarrollados por grandes
matemáticos entre los siglos XVIII y XIX, como ser el ruso Nikolai I. Lobachevsky
(1793-1856) y el húngaro Johann Bolyai (1802-1860) entre otros. Ambos
matemáticos trabajaron desde perspectivas distintas pero coinciden en que el Vº
postulado debe ser “modificado”.
Bolyai analiza proposicionalmente en qué medida el Vº postulado
puede modificarse considerando propiedades geométricas que sean
independientes de éste.
Lobachevsky, en cambio, parte de la posibilidad de redefinir el Vº
postulado (en realidad lo niega) considerando que: por un punto exterior a una
recta pueden trazarse más de una paralela a la misma.
Para Euclides las rectas paralelas son aquellas “que si se
prolongan indefinidamente, en las dos direcciones posibles, no se encuentran”.
Por lo tanto si analizamos la figura 1 se observa que por el punto
“P” solo es posible trazar una recta paralela a “r” y ésta es la recta “s” cumpliendo
con el Vº postulado.
Página 6 de 22 Ing. Javier Accinelli
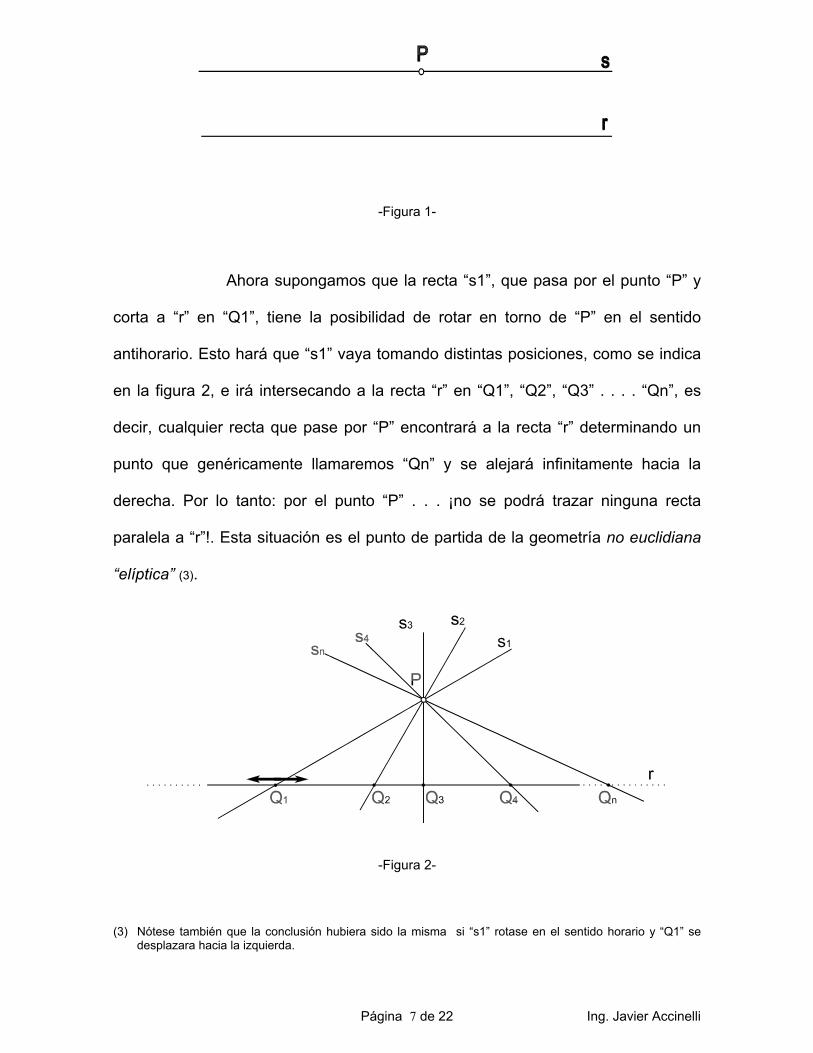
-Figura 1-
Ahora supongamos que la recta “s1”, que pasa por el punto “P” y
corta a “r” en “Q1”, tiene la posibilidad de rotar en torno de “P” en el sentido
antihorario. Esto hará que “s1” vaya tomando distintas posiciones, como se indica
en la figura 2, e irá intersecando a la recta “r” en “Q1”, “Q2”, “Q3” . . . . “Qn”, es
decir, cualquier recta que pase por “P” encontrará a la recta “r” determinando un
punto que genéricamente llamaremos “Qn” y se alejará infinitamente hacia la
derecha. Por lo tanto: por el punto “P” . . . ¡no se podrá trazar ninguna recta
paralela a “r”!. Esta situación es el punto de partida de la geometría no euclidiana
“elíptica” (3).
-Figura 2-
(3) Nótese también que la conclusión hubiera sido la misma si “s1” rotase en el sentido horario y “Q1” se desplazara hacia la izquierda.
Página 7 de 22 Ing. Javier Accinelli
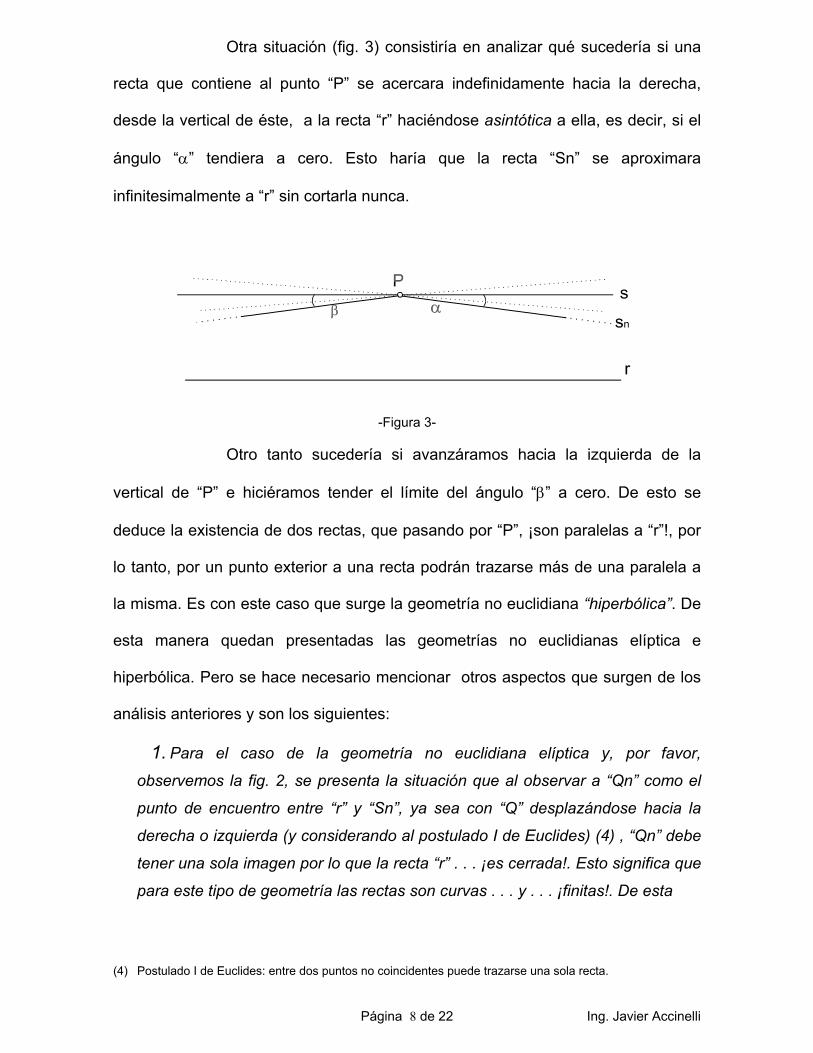
Otra situación (fig. 3) consistiría en analizar qué sucedería si una
recta que contiene al punto “P” se acercara indefinidamente hacia la derecha,
desde la vertical de éste, a la recta “r” haciéndose asintótica a ella, es decir, si el
ángulo “α” tendiera a cero. Esto haría que la recta “Sn” se aproximara
infinitesimalmente a “r” sin cortarla nunca.
-Figura 3-
Otro tanto sucedería si avanzáramos hacia la izquierda de la
vertical de “P” e hiciéramos tender el límite del ángulo “β” a cero. De esto se
deduce la existencia de dos rectas, que pasando por “P”, ¡son paralelas a “r”!, por
lo tanto, por un punto exterior a una recta podrán trazarse más de una paralela a
la misma. Es con este caso que surge la geometría no euclidiana “hiperbólica”. De
esta manera quedan presentadas las geometrías no euclidianas elíptica e
hiperbólica. Pero se hace necesario mencionar otros aspectos que surgen de los
análisis anteriores y son los siguientes:
1. Para el caso de la geometría no euclidiana elíptica y, por favor,
observemos la fig. 2, se presenta la situación que al observar a “Qn” como el
punto de encuentro entre “r” y “Sn”, ya sea con “Q” desplazándose hacia la
derecha o izquierda (y considerando al postulado I de Euclides) (4) , “Qn” debe
tener una sola imagen por lo que la recta “r” . . . ¡es cerrada!. Esto significa que
para este tipo de geometría las rectas son curvas . . . y . . . ¡finitas!. De esta
(4) Postulado I de Euclides: entre dos puntos no coincidentes puede trazarse una sola recta.
Página 8 de 22 Ing. Javier Accinelli
manera nos separamos notablemente de las “ilimitadas” rectas euclidianas.
2. En cambio, para la geometría no euclidiana hiperbólica, existe la
posibilidad de que los pares de rectas paralelas a “r” sean asintóticas, es decir,
una aproximación infinitesimal entre ambas, por lo tanto éstas deberán ser
abiertas.
Una mejor comprensión de estos conceptos podrá presentarse
cuando a continuación desarrolle otras geometrías alternativas, que si bien difieren
desde los distintos enfoques se arriban a conclusiones que no contradicen los
postulados de Euclides (excepto el Vº) ni los de las geometrías no euclidianas
elíptica e hiperbólica. Dentro de estas geometrías alternativas se encuentran las
geometrías proyectivas.
Geometrías Proyectivas: otros modelos de las geometrías no euclidianas.
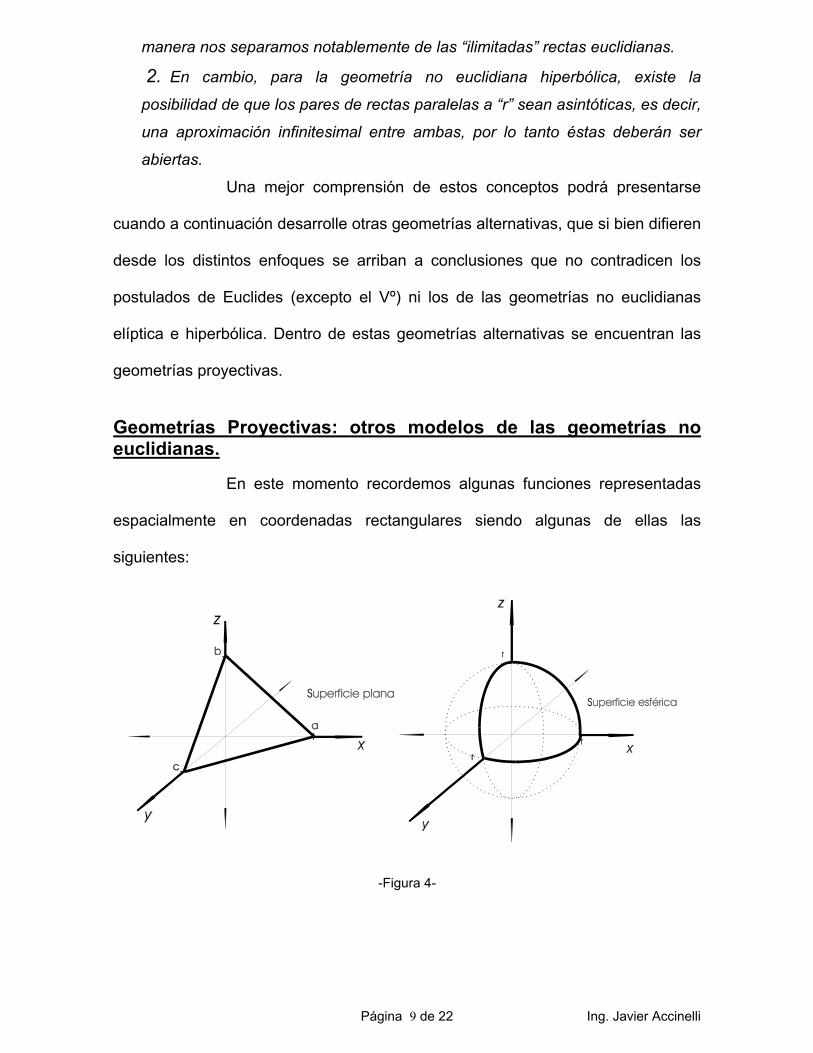
En este momento recordemos algunas funciones representadas
espacialmente en coordenadas rectangulares siendo algunas de ellas las
siguientes:
-Figura 4-
Página 9 de 22 Ing. Javier Accinelli

Las superficies presentadas en la figura 4 responden a un plano,
cuyas trazas se indican, y un octante de esfera con su centro coincidente con el
origen de coordenadas.
Se define como pseudoesfera a la superficie que se obtiene
rotando a una curva, denominada tractriz, en torno de un eje vertical y cuya
expresión matemática en el plano coordenado cartesiano “z-x” es:
z r x r log r r xx
= ± − −+ −
2 22 2
En realidad las pseudoesferas son superficies tridimensionales abiertas que
presentan radios de curvatura negativos y esto ha abierto debates debido a que
presentan ciertas singularidades cuando “x” se aproxima al valor de “r” (fig. 5).
-Figura 5-
Página 10 de 22 Ing. Javier Accinelli
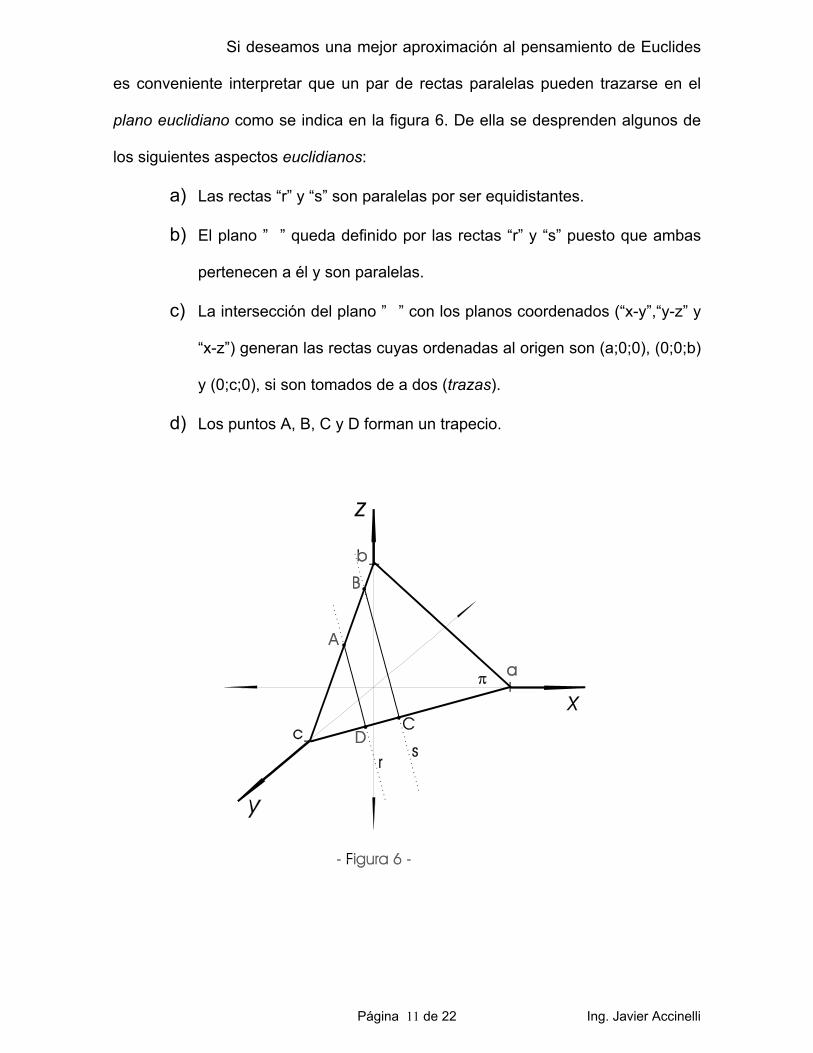
Si deseamos una mejor aproximación al pensamiento de Euclides
es conveniente interpretar que un par de rectas paralelas pueden trazarse en el
plano euclidiano como se indica en la figura 6. De ella se desprenden algunos de
los siguientes aspectos euclidianos:
a) Las rectas “r” y “s” son paralelas por ser equidistantes.
b) El plano ”�” queda definido por las rectas “r” y “s” puesto que ambas
pertenecen a él y son paralelas.
c) La intersección del plano ”�” con los planos coordenados (“x-y”,“y-z” y
“x-z”) generan las rectas cuyas ordenadas al origen son (a;0;0), (0;0;b)
y (0;c;0), si son tomados de a dos (trazas).
d) Los puntos A, B, C y D forman un trapecio.
Página 11 de 22 Ing. Javier Accinelli
Podríamos haber establecido muchas más relaciones a partir de
las consideraciones previas pero, como se verá más adelante, las enunciadas
serán suficientes para el objetivo de esta exposición.
Ya estamos en condiciones de apreciar que la geometría
euclidiana, tal cual ha sido construida, es una geometría plana o bidimensional.
Una vez definido el plano euclidiano podemos establecer todas las relaciones que,
su geometría y trigonometría, nos da las posibilidades de realizar. Sin embargo, es
válido definir a un plano como una esfera de radio infinito y esto hará posible
efectuar analogías entre la geometría euclidiana y otras a ser consideradas si
imaginamos que es factible proyectar una figura plana sobre superficies no-planas
o curvas como puede observarse en la figura 7.
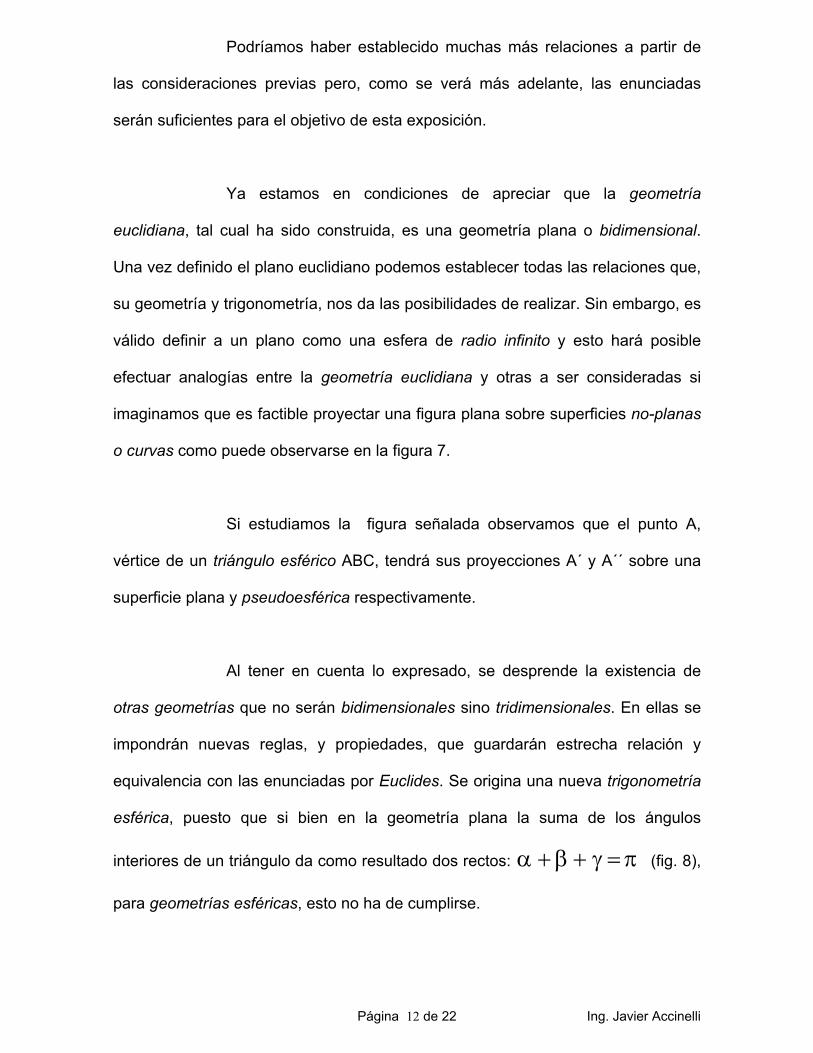
Si estudiamos la figura señalada observamos que el punto A,
vértice de un triángulo esférico ABC, tendrá sus proyecciones A´ y A´´ sobre una
superficie plana y pseudoesférica respectivamente.
Al tener en cuenta lo expresado, se desprende la existencia de
otras geometrías que no serán bidimensionales sino tridimensionales. En ellas se
impondrán nuevas reglas, y propiedades, que guardarán estrecha relación y
equivalencia con las enunciadas por Euclides. Se origina una nueva trigonometría
esférica, puesto que si bien en la geometría plana la suma de los ángulos
interiores de un triángulo da como resultado dos rectos: (fig. 8),
para geometrías esféricas, esto no ha de cumplirse.
α β γ π+ + =
Página 12 de 22 Ing. Javier Accinelli
-Figura 7-
-Figura 8-
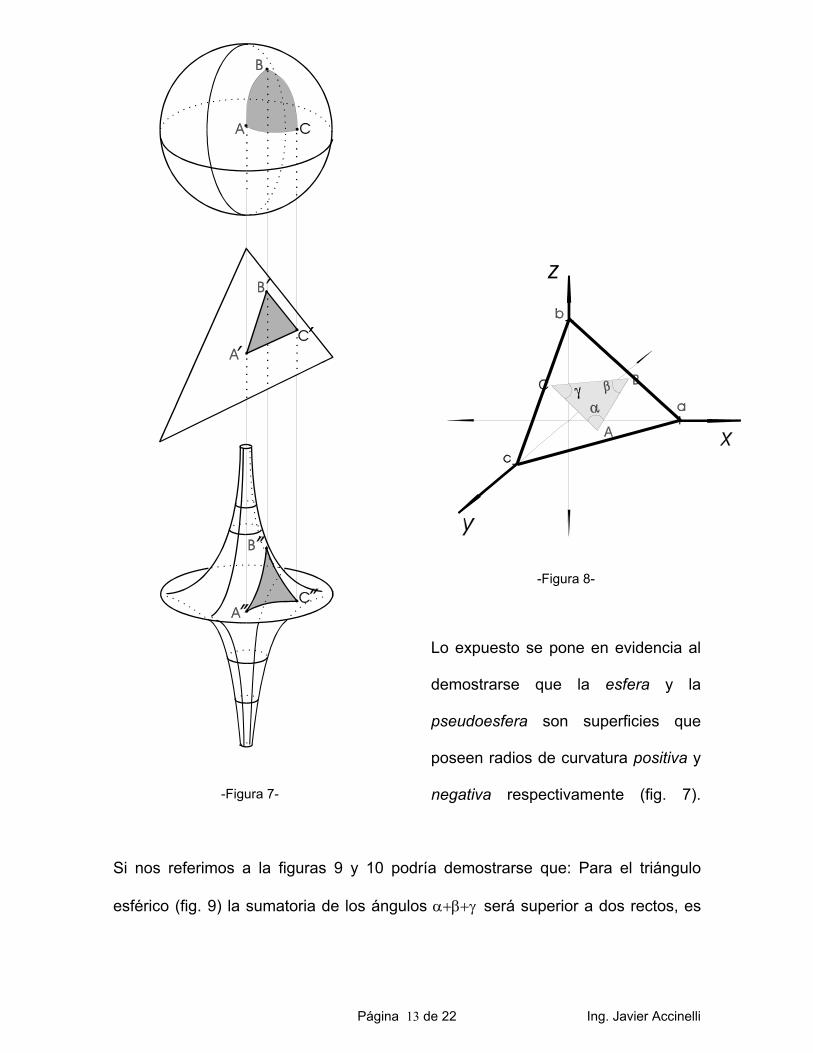
Lo expuesto se pone en evidencia al
demostrarse que la esfera y la
pseudoesfera son superficies que
poseen radios de curvatura positiva y
negativa respectivamente (fig. 7).
Si nos referimos a la figuras 9 y 10 podría demostrarse que: Para el triángulo
esférico (fig. 9) la sumatoria de los ángulos α+β+γ será superior a dos rectos, es
Página 13 de 22 Ing. Javier Accinelli
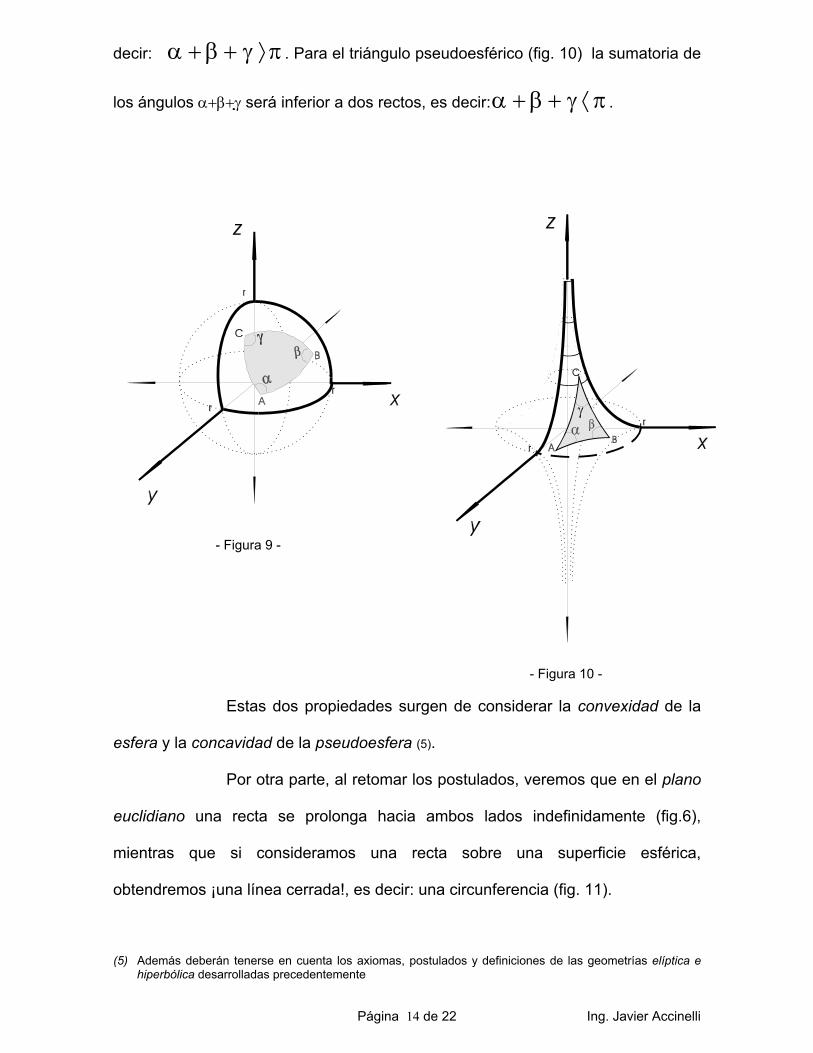
decir: α β . Para el triángulo pseudoesférico (fig. 10) la sumatoria de
los ángulos α+β+γ será inferior a dos rectos, es decir: .
γ π+ + ⟩
α β γ π+ + ⟨
- Figura 9 -
- Figura 10 -
Estas dos propiedades surgen de considerar la convexidad de la
esfera y la concavidad de la pseudoesfera (5).
Por otra parte, al retomar los postulados, veremos que en el plano
euclidiano una recta se prolonga hacia ambos lados indefinidamente (fig.6),
mientras que si consideramos una recta sobre una superficie esférica,
obtendremos ¡una línea cerrada!, es decir: una circunferencia (fig. 11).
(5) Además deberán tenerse en cuenta los axiomas, postulados y definiciones de las geometrías elíptica e hiperbólica desarrolladas precedentemente
Página 14 de 22 Ing. Javier Accinelli
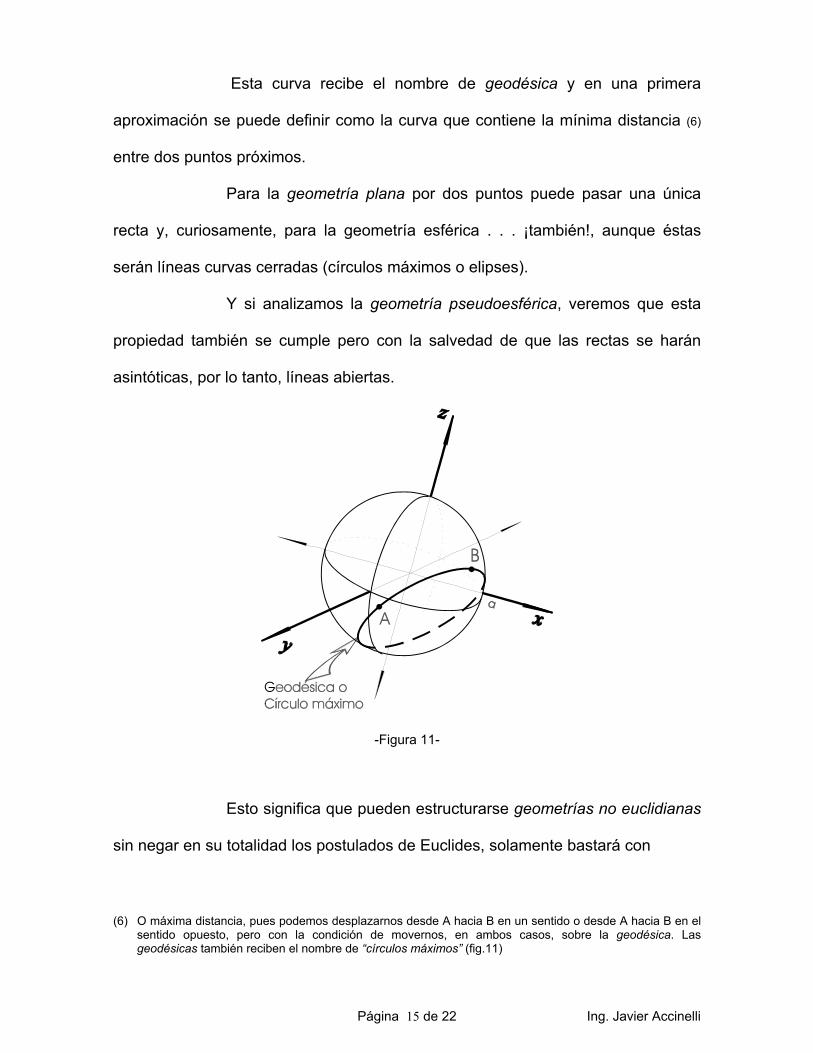
Esta curva recibe el nombre de geodésica y en una primera
aproximación se puede definir como la curva que contiene la mínima distancia (6)
entre dos puntos próximos.
Para la geometría plana por dos puntos puede pasar una única
recta y, curiosamente, para la geometría esférica . . . ¡también!, aunque éstas
serán líneas curvas cerradas (círculos máximos o elipses).
Y si analizamos la geometría pseudoesférica, veremos que esta
propiedad también se cumple pero con la salvedad de que las rectas se harán
asintóticas, por lo tanto, líneas abiertas.
-Figura 11-
Esto significa que pueden estructurarse geometrías no euclidianas
sin negar en su totalidad los postulados de Euclides, solamente bastará con
(6) O máxima distancia, pues podemos desplazarnos desde A hacia B en un sentido o desde A hacia B en el
sentido opuesto, pero con la condición de movernos, en ambos casos, sobre la geodésica. Las geodésicas también reciben el nombre de “círculos máximos” (fig.11)
Página 15 de 22 Ing. Javier Accinelli
sustituir alguno/s de ellos por otro/s, o bien, negarlo/s. Además obsérvese que
tanto para la geometrías proyectivas esférica y pseudoesférica las rectas serán
líneas curvas abiertas o cerradas como se postulan en las geometrías elíptica e
hiperbólica y es por esto que las primeras pueden considerarse una interpretación
proyectiva de las últimas en su total coincidencia.
El Espacio-tiempo:
Supongamos ahora que la figura 11 representa a la Tierra y
quisiéramos trasladarnos desde la ciudad ”A” hasta la ciudad “B” a través de su
superficie. Además, si consideramos nuestra altura despreciable frente a la
distancia existente entre ambas ciudades, y también con respecto al radio
terrestre, podríamos ser considerados individuos bidimensionales . . . ¡casi
sombras!. Por lo tanto, si pudiéramos ver la trayectoria desde una posición alejada
en el espacio, está claro que nos moveríamos siguiendo una geodésica
(recordemos el ejemplo al comienzo de la exposición acerca de las bandas
paralelas en el camino). Pero esa no es la única trayectoria posible puesto que,
desde nuestra nueva perspectiva, vemos la alternativa de atravesar el planeta en
forma rectilínea desde “A” hasta “B”. Claro que para hacer esta observación se
hizo necesario ubicarnos, en una posición “de privilegio”, en un lugar distante fuera
de la Tierra lo que implica salir de esa situación plana y contemplar, el objeto de
estudio, tridimensionalmente. Es decir que si nos consideramos individuos planos,
desplazándonos sobre una superficie espacial curvada, no tendríamos la
sospecha de la existencia de una trayectoria más corta entre dos puntos
separados, entre sí una, cierta distancia. Ahora propongo un interrogante:
evidentemente somos seres tridimensionales. . . pero ¿podríamos ubicarnos en
algún lugar del universo y contemplar que existen trayectorias no-rectilíneas, entre
Página 16 de 22 Ing. Javier Accinelli
dos puntos, de mínima distancia?. (Reflexión) . . . La respuesta, si bien todavía no
tenemos la certeza absoluta para todos los casos, es: ¡si!. Pero, al igual que en el
ejemplo anterior, necesitaríamos de una dimensión extra para la observación del
acontecimiento experimentado . . . ¡Una cuarta dimensión!, lo que indudablemente
modificaría nuestro concepto de espacios tridimensionales, euclidiano y no
euclidianos, vistos hasta el momento. Este espacio de cuatro dimensiones lo
propone Einstein en su “teoría de la relatividad general” en el año 1915. Es con la
obra de este notable, y controvertido, pensador que se produce una revolución
filosófico-científica a nivel mundial.
Él propone un espacio dinámico(7) de cuatro dimensiones,
bautizándolo “espacio-tiempo” y es donde se alteran ciertas leyes de la física, por
ejemplo: la gravedad, ya enunciada anteriormente como cierta distorsión del
espacio. Además considera, en discrepancia con Newton, que las fuerzas de
origen gravitatorio son atractivas, pero también lo son repulsivas a grandes
distancias, a niveles interestelares. Es lógico suponer que si dos cuerpos se
atraen gravitacionalmente, en un universo curvo, simultáneamente se estén
repeliendo desde una perspectiva opuesta.
Quizás estos comentarios puedan parecer alejarme de mi objetivo
de presentar solamente aspectos geométricos del espacio pero quisiera, a modo
de cierre, presentar dos situaciones netamente astronómicas que me permitirían
justificar el por qué de éstos, y son las siguientes:
(7) Newton suponía que espacio y el tiempo eran invariables y absolutos.
Página 17 de 22 Ing. Javier Accinelli
1º) La problemática de la precesión del perihelio(8) del
primer planeta del Sistema Solar: Mercurio.
2º) El Big Bang.
Con respecto a la primera situación resulta que en la astronomía,
a través de la leyes de Kepler y la mecánica clásica, se trata de justificar la
dinámica que rige el movimiento de los astros que componen el Sistema Solar.
Pero cuando la Ciencia y la Tecnología avanzaron lo suficiente se consiguieron
realizar mediciones de altísima precisión y se descubrió que el planeta Mercurio
presenta una anomalía y ésta es que, si bien su órbita es elíptica, el semieje
mayor de su elipse sufre una rotación en torno al Sol de aproximadamente 1º cada
diez mil años. La mecánica clásica, con la geometría euclidiana, no podrían
explicar el fenómeno, sin embargo, ésto lo había predicho Einstein
matemáticamente con sus postulados del continuo espacio-tiempo en 1915.
La conclusión arribada es que la gran masa del astro rey produce
una distorsión del espacio-tiempo muy notable (fig. 12) en las inmediaciones de la
órbita de Mercurio(9) (fig. 13), y no solamente afecta de esta manera a éste, sino
que también influye sobre el resto de los planetas (y sus satélites, cometas,
asteroides, etc) del sistema solar, pero debido a las lejanías, su efecto se hace
casi imperceptible.
(8) Perihelio: distancia más próxima al sol. (9) Las figuras 12 y 13 están graficadas totalmente fuera de escala y son únicamente ilustrativas.
Página 18 de 22 Ing. Javier Accinelli
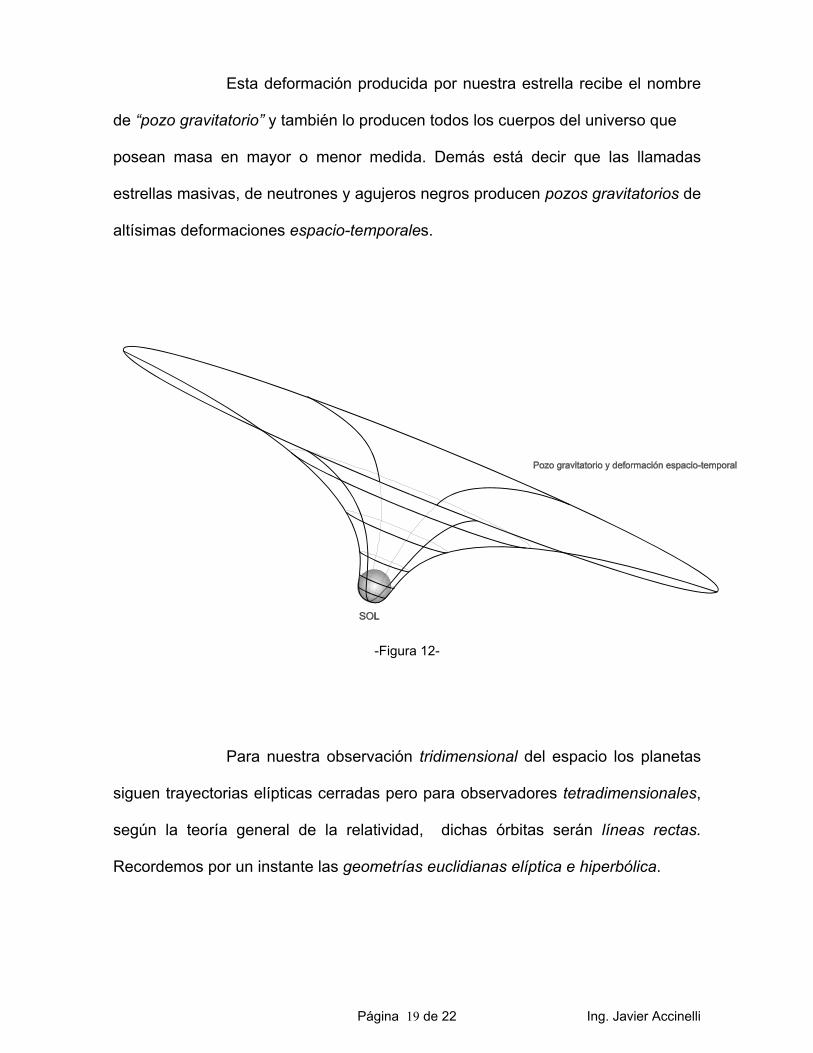
Esta deformación producida por nuestra estrella recibe el nombre
de “pozo gravitatorio” y también lo producen todos los cuerpos del universo que
posean masa en mayor o menor medida. Demás está decir que las llamadas
estrellas masivas, de neutrones y agujeros negros producen pozos gravitatorios de
altísimas deformaciones espacio-temporales.
-Figura 12-
Para nuestra observación tridimensional del espacio los planetas
siguen trayectorias elípticas cerradas pero para observadores tetradimensionales,
según la teoría general de la relatividad, dichas órbitas serán líneas rectas.
Recordemos por un instante las geometrías euclidianas elíptica e hiperbólica.
Página 19 de 22 Ing. Javier Accinelli
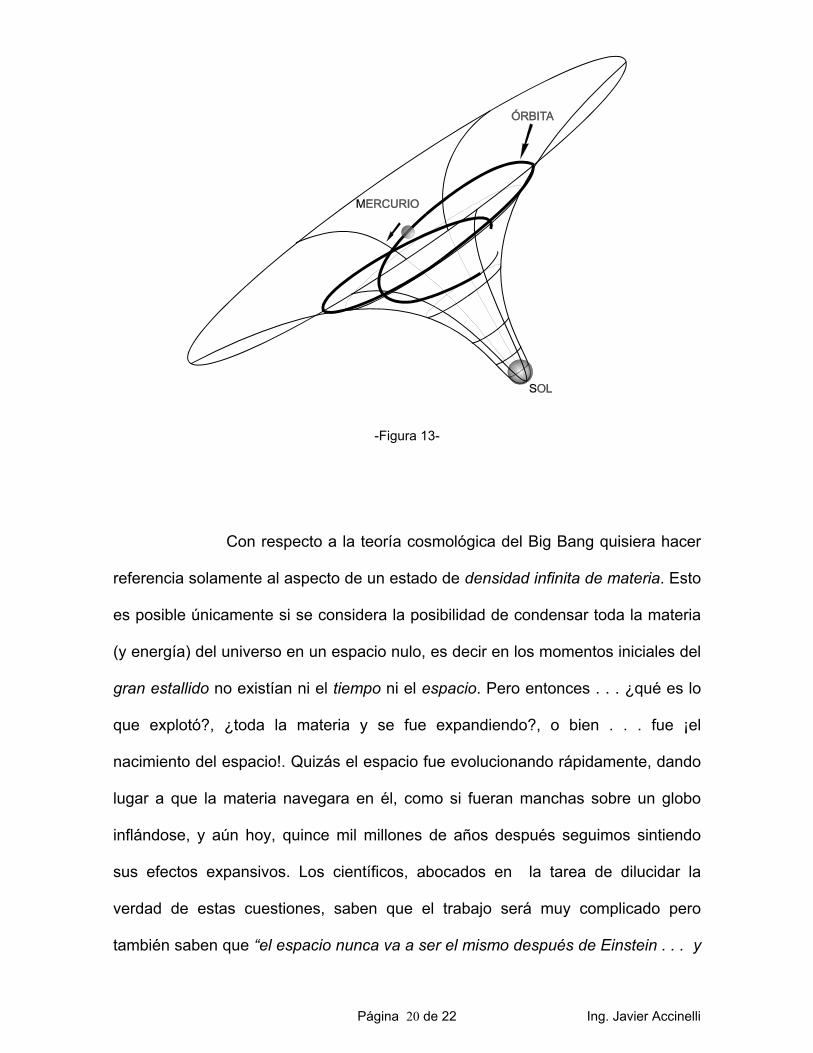
-Figura 13-
Con respecto a la teoría cosmológica del Big Bang quisiera hacer
referencia solamente al aspecto de un estado de densidad infinita de materia. Esto
es posible únicamente si se considera la posibilidad de condensar toda la materia
(y energía) del universo en un espacio nulo, es decir en los momentos iniciales del
gran estallido no existían ni el tiempo ni el espacio. Pero entonces . . . ¿qué es lo
que explotó?, ¿toda la materia y se fue expandiendo?, o bien . . . fue ¡el
nacimiento del espacio!. Quizás el espacio fue evolucionando rápidamente, dando
lugar a que la materia navegara en él, como si fueran manchas sobre un globo
inflándose, y aún hoy, quince mil millones de años después seguimos sintiendo
sus efectos expansivos. Los científicos, abocados en la tarea de dilucidar la
verdad de estas cuestiones, saben que el trabajo será muy complicado pero
también saben que “el espacio nunca va a ser el mismo después de Einstein . . . y
Página 20 de 22 Ing. Javier Accinelli
la mecánica tampoco. Las leyes de Newton dejaron de ser leyes. El universo,
regido monárquicamente por un espacio euclidiano y una mecánica
newtoniana, ha sufrido una revolución irreversible, y quizás, el espacio no se
comporte como lo intento describir en esta exposición. Nuevas geometrías
surgirán del agregado de otras dimensiones al espacio-tiempo y el Hombre se
acercará un poco más a la verdad: a Dios”.
Muchas gracias y hasta el próximo encuentro.
Página 21 de 22 Ing. Javier Accinelli
BIBLIOGRAFÍA CONSULTADA:
1. EINSTEIN, Albert; “La relatividad”, Ed. Grijalbo.
2. HAWKING, Stephen W; “Historia del Tiempo”; Ed. Planeta-Agositni.
3. REY PASTOR, Julio, PI CALLEJA, Pedro y TREJO, César:
“Análisis Matemático”; Ed. Kapelusz.
4. SAGAN, Carl; “Cosmos”; Ed. Planeta.
5. SANTALÓ, Luis A.; “Geometrías no euclidianas”, EUDEBA.
Página 22 de 22 Ing. Javier Accinelli


















