
信号与系统讲义(eess.sjtu.edu.cn/Upload/Files/20170401153251424133.pdf · 2017-04-01 ·...
26
信号与系统讲义(2) 马殿光
Transcript of 信号与系统讲义(eess.sjtu.edu.cn/Upload/Files/20170401153251424133.pdf · 2017-04-01 ·...

信号与系统讲义(2)
马殿光
信号的分解
• 直流分量与交流分量
• 偶分量与奇分量
• 实分量与虚分量
• 正交函数分量
直流分量与交流分量
/2
/2
( ) ( ) ( )
where
1( ) lim ( )
d a
T
dTT
f t f t f t
f t f t dtT
偶分量与奇分量
( ) ( ) ( )
where
( ) ( )( )
2
( ) ( )( )
2
e o
e
o
f t f t f t
f t f tf t
f t f tf t
偶分量与奇分量
2
Find the even and odd components of the
signal ( ) cos
( ) cosh(2 )cos , ( ) sinh(2 )cos .
t
e o
x t e t
x t t t x t t t
Example
Answer :
实分量与虚分量
( ) ( ) ( )
where
( ) Re{ ( )}
( ) Im{ ( )}
r i
r
i
f t f t f t
f t f t
f t f t

正交函数分量
( ) ( ),
where
1( ) ( )
( ) ( ) ( )
n n
n
b
n na
n
b
n m na
f t a t a t b
a f t t dtK
t t dt K n m
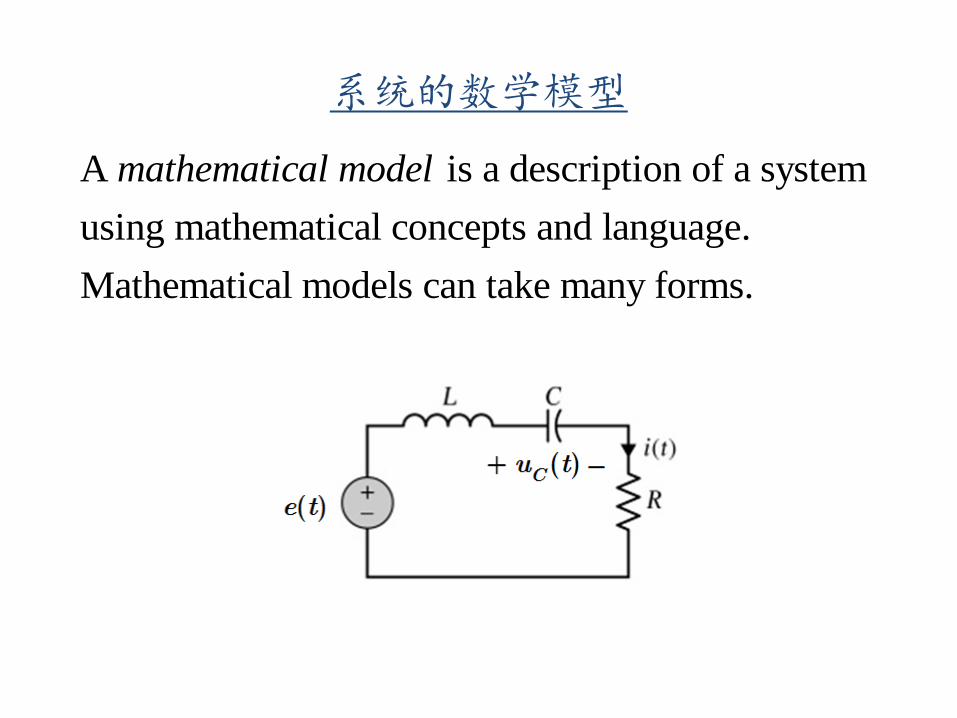
系统的数学模型
A is a description of a system
using mathematical concepts and language.
Mathematical models can take many forms.
mathematical model

系统的数学模型
2
2
For example, the series RLC circuit can be described
by a differential equation model
( ) ( ) 1 1 ( )( )
or a state equation model
1 1( ) ( ) ( ) ( )
1( ) ( )
C
C
d i t R di t de ti t
dt L dt LC L dt
d Ri t i t u t e t
dt L L L
du t i t
dt C

系统分类
• 连续时间系统与离散时间系统
• 无记忆系统与(有)记忆系统
• 可逆系统与不可逆系统
• 因果系统与非因果系统
• 稳定系统不稳定系统
• 时变系统与时不变系统
• 线性系统与非线性系统
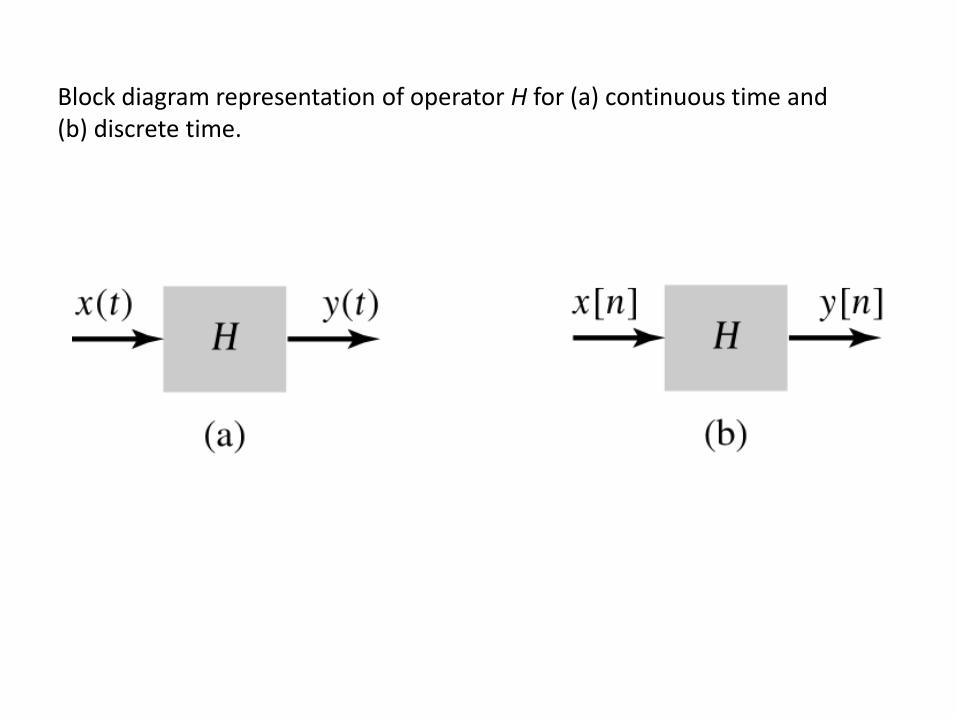
Block diagram representation of operator H for (a) continuous time and (b) discrete time.

A system is said
to possess memory if its output signal depends on
past or future values of the input signal. A system is
said to be if its output signal depmemoryless
Systems with or without Memory
ends
only on the present value of the input signal.

2
(a) ( ) ( )
1(b) ( ) ( )
1(c) ( ) ( ) ( 1) ( 2)
3
(d) ( ) ( )
t
v t i t R
i t v dL
y n x n x n x n
y t x t
Examples

A system is said
to be if the input of the system can be
recovered from the output.
( ) { ( )}
( ) { ( )} { { ( )}} { ( )}inv inv inv
inv
invertible
y t H x t
x t H y t H H x t H H x t
H H I
Invertibility and Inverse Systems

The notion of system invertibility. The second operator Hinv is the inverse of the first operator H. Hence, the input x(t) is passed through the cascade correction of H and H-1 completely unchanged.

2
0
(a) ( ) 2 ( )
(b) ( ) ( ) ( 1) ( )
(c) ( ) ( )
(d) ( ) ( )
n
k
y t x t
y n x k y n x n
y t x t
y t x t t
Examples
A system is said to be if the
present value of the output signal depends only on
the present or past values of the input signal. A
system is said to be if its output signal
causal
noncausal
Causality
depends on one or more future values of the input
signal.
(a) ( ) ( ) ( 1)
(b) ( ) ( 1)
1(c) ( ) ( )
2 1
(d) ( ) ( )
(e) ( ) ( ) cos( 1)
M
k M
y n x n x n
y t x t
y n x n kM
y n x n
y t x t t
Examples
A system is said to be
if and only if every
bounded input results in a bounded output.
( ) for all ( ) for all x y
bounded - input,
bounded - output (BIBO) stable
x t M t y t M t
Stability

( )
(a) ( ) ( )
(b) ( ) ( )
1(c) ( ) ( ) ( 1) ( 2)
3
(d) ( ) ( ), 1
(e) ( ) ( )
(f) ( )
n
k
n
x t
y t tx t
y n x k
y n x n x n x n
y n r x n r
dy t x t
dt
y t e
Examples

A system is said to be
if a time delay or time advance of the input
signal leads to an identical time shift in the output
signal. Otherwise, the system is said to be
time
invariant
ti
Time Invariance
1 1
2 2 2 1 0
2 1 0
.
( ) { ( )}
( ) { ( )} where ( ) ( ).
If ( ) ( ), then the system is time-invariant.
me
varying
y t H x t
y t H x t x t x t t
y t y t t

0
(a) ( ) sin ( )
(b) ( ) ( )
(c) ( ) (2 )
1(d) ( ) ( )
(e) ( ) ( )sin
t
y t x t
y n nx n
y t x t
y t x dL
y n x n n
Examples

1 1
A system is said to be in terms of
the system input and the system output if it satisfies
the following two properties of additivity and
homogeneity:
Additivity: If ( ) { ( )},
linear
y t H x t y
Linearity
2 2
1 2 1 2
( ) { ( )},
then { ( ) ( )} ( ) ( ).
Homogeneity: If ( ) { ( )}, then { ( )}
( ).
t H x t
H x t x t y t y t
y t H x t H ax t
ay t

The linearity property of a system. (a) The combined operation of amplitude
scaling and summation precedes the operator H for multiple inputs. (b) The operator H precedes amplitude scaling for each input; the resulting outputs are summed to produce the overall output y(t). If these two configurations produce the same output y(t), the operator H is linear.

2
( )
(a) ( ) ( )
(b) ( ) ( )
(c) ( ) 2 ( ) 3
(d) ( ) x n
y t tx t
y t x t
y t x t
y n e
Examples

THE END


















![[13]テトラヒドロフラン 13 テトラヒドロフラン 1.物質に関 …2002/02/13 · 13 テトラヒドロフラン 1 1.物質に関する基本的事項 (1)分子式・分子量・構造式](https://static.fdocuments.es/doc/165x107/61387c0f0ad5d2067649493e/13fffffffff-13-fffffffff-1icee.jpg)