Centro Nacional de Investigación y Desarrollo …20Roman%2… · Diagnosticabilidad de Fallas en...
129
cnológico Centro Nacional de Investigación y Desarrollo Tecnológico Subdirección Académica Cuernavaca, Morelos, México. Junio de 2013. Subsecretaría de Educación Superior Dirección General de Educación Superior Tecnológica Coordinación Sectorial Académica Dirección de Estudios de Posgrado e Investigación Departamento de Ingeniería Electrónica TESIS DE MAESTRÍA EN CIENCIAS Diagnosticabilidad de Fallas en el Conjunto Convertidor Back to Back –Máquina de Inducción Doblemente Alimentada Usando Análisis Estructural presentada por Ing. Roman Pérez Saldaña como requisito para la obtención del grado de Maestro en Ciencias en Ingeniería Electrónica Director de tesis Dr. Jesús Darío Mina Antonio
-
Upload
trinhtuong -
Category
Documents
-
view
217 -
download
0
Transcript of Centro Nacional de Investigación y Desarrollo …20Roman%2… · Diagnosticabilidad de Fallas en...
cnológico
Centro Nacional de Investigación y Desarrollo Tecnológico
Subdirección Académica
Cuernavaca, Morelos, México. Junio de 2013.
Subsecretaría de Educación Superior Dirección General de Educación Superior Tecnológica
Coordinación Sectorial Académica Dirección de Estudios de Posgrado e Investigación
Departamento de Ingeniería Electrónica
TESIS DE MAESTRÍA EN CIENCIAS
Diagnosticabilidad de Fallas en el Conjunto Convertidor Back to Back
–Máquina de Inducción Doblemente Alimentada Usando Análisis Estructural
presentada por
Ing. Roman Pérez Saldaña
como requisito para la obtención del grado de Maestro en Ciencias en Ingeniería Electrónica
Director de tesis Dr. Jesús Darío Mina Antonio





Dedicatoria
A mi padre José por ser un ejemplo de vida, porque con su fortaleza y dedicación
logro hacer de sus hijos hombres y mujeres de bien que le estarán agradecidos toda
la vida, que sin duda alguna es el mejor padre que haya podido tener, te amo papá.
A mi madre Fidelia por enseñarme el verdadero valor del perdón, por ser una parte
fundamental para que yo esté cumpliendo este objetivo de mi vida y por darme la
vida.
A mis hermanos Cristina, Fausto, Arsenio, Mauricia, y sus respectivos esposos (as)
Margarito, Armandina, Maria del Refugio y Rómulo, por animarme y no dejarme caer
en los momentos más difíciles de mi vida y enseñarme que no importa las tormentas
que pasen, ellos siempre estarán conmigo y yo con ellos.
A mi hermano Miguel (†), porque durante el tiempo que estuvo con nosotros,
siempre me ilumino con su alegría, sin duda me estará viendo desde algún lugar del
cielo, te quiero mucho y nunca te olvidare.
A mis tíos Epifanio y Graciela por ser unas personas estupendas, siempre apoyando
a sus sobrinos, Dios los bendiga y les dé siempre en abundancia.
A mis primos Cesar, Miguel, Antonio y Diego, por ser una parte muy especial en mi
vida y siempre contagiarme de su buena vibra y alegría.

Agradecimientos
A Dios, por darme fortaleza y nunca dejarme solo, colocándome en el momento y
lugar exacto para lograr mis objetivos.
A toda mi familia, por ser muy unida y siempre apoyarme en todo momento y lugar.
A mi asesor Dr. Jesús Darío Mina, por su paciencia y consejos, los cuales fueron una
parte fundamental para la conclusión de este trabajo de tesis.
A mis revisores el Dr. Carlos Aguilar Castillo y el Dr. Jesús Aguayo Alquicira por sus
sugerencias y comentarios constructivos durante el desarrollo este trabajo y por ser
parte importante de mi formación académica en cenidet, gracias por compartir sus
conocimientos.
A los doctores, Jorge Hugo Calleja Gjumlich, Abraham Claudio Sánchez, Jaime
Eugenio Arau Roffiel, por compartir sus conocimientos y enriquecer mi formación
académica.
A mis compañeros de generación Antonio, Armando, Miriam, Susana, Julio, Juan,
Alberto, Olga, por hacer mi estancia más amena en cenidet y por dejarme ser parte
de tantos momentos gratos que nunca olvidaré. Eligio, gracias por tu amistad que
sin duda hemos pasado muy buenos ratos durante este tiempo, ojalá y Dios quiera
que esta amistad no termine. A ti Josefa por brindarme tu confianza y ser una gran
amiga, espero que esta camaradería no termine, eres una gran persona y que Dios
te bendiga por siempre.
A mis compañeros de otras generaciones y especialidades Maribel, Carmen, Alicia,
Rodolfo, Hilario, Ubaldo, Ricardo, y Jhonatan, por brindarme su amistad y dejarme
ser parte de su historia en cenidet.
Al Centro Nacional de Investigación y Desarrollo Tecnológico (cenidet), por
permitirme realizar mis estudios de maestría.
A CONACYT, por el apoyo económico brindado durante la realización de mis
estudios de maestría.

i
Contenido
Resumen ................................................................................................................... iii
Abstract ..................................................................................................................... v
Lista de figuras ........................................................................................................ vii
Lista de tablas .......................................................................................................... ix
Nomenclatura ........................................................................................................... x
1. Introducción ........................................................................................................ 1
1.1 Planteamiento del problema ..................................................................................................... 2 1.1.1 Diagnóstico de fallas ........................................................................................................ 2 1.1.2 Diagnosticabilidad ............................................................................................................ 3 1.1.3 Caso de estudio ................................................................................................................ 4 1.1.4 Hipótesis ........................................................................................................................... 7
1.2 Estado del arte ......................................................................................................................... 7 1.3 Propuesta de solución ............................................................................................................ 12 1.4 Objetivos ................................................................................................................................. 12 1.5 Aportaciones ........................................................................................................................... 13
2. Análisis estructural........................................................................................... 15
2.1 Modelo estructural .................................................................................................................. 15 2.2 Sistemas dinámicos................................................................................................................ 17
2.1.1 Restricciones diferenciales ............................................................................................. 18 2.1.2 Diferenciación estructural ............................................................................................... 19 2.1.3 Variables dinámicas consideradas como estáticas ........................................................ 19
2.3 Aparejamiento ........................................................................................................................ 20 2.3.1 Grafos orientados ........................................................................................................... 23 2.3.2 Cadenas alternadas y alcanzabilidad ............................................................................. 24 2.3.3 Interpretación causal ...................................................................................................... 25
2.4 Aparejamiento por algoritmo de propagación ........................................................................ 27 2.5 Descomposición canónica ...................................................................................................... 28 2.6 Observabilidad estructural ...................................................................................................... 31 2.7 Relaciones de redundancia analítica (ARR´s) ....................................................................... 33 2.8 Detectabilidad y aislabilidad ................................................................................................... 35
2.8.1 Matriz de Firma de Fallas y Matriz de Aislabilidad de Fallas ......................................... 36
3. Conjunto B2B - DFIM ........................................................................................ 39
3.1 Máquina de inducción doblemente alimentada (DFIM).......................................................... 40 3.1.1 Principio de funcionamiento de la DFIM ......................................................................... 40 3.1.2 Modelo de la DFIM ......................................................................................................... 41
3.2 Modelo del convertidor Back to Back (B2B) ........................................................................... 48 3.2.1 Ecuaciones del convertidor Back to Back ...................................................................... 49
ii
4. Análisis estructural del conjunto B2B - DFIM ................................................ 53
4.1 Modelo estructural ..................................................................................................................53 4.1.1 Matriz de incidencia .................................................................................................................. 56
4.1.2 Aparejamiento de la matriz de incidencia .............................................................................. 57
4.1.3 Descomposición canónica de la matriz aparejada .............................................................. 59
4.1.4 Relaciones de redundancia analítica ..................................................................................... 60
4.1.5 Fallas consideradas .................................................................................................................. 63
4.2 Determinación de la diagnosticabilidad ..................................................................................66 4.2.1 Determinación de la detectabilidad ........................................................................................ 66
4.2.2 Determinación de la aislabilidad ............................................................................................. 68
5. Comprobación de la diagnosticabilidad mediante simulación ..................... 71
5.1. Generación de residuos .........................................................................................................73 5.2. Promediado móvil con ponderación exponencial (EWMA) ....................................................75 5.3. Resultados de simulación .......................................................................................................77
5.3.1. Corto circuito en la fase A del estator.............................................................................78 5.3.2. Circuito abierto en la fase A del estator .........................................................................79 5.3.3. Corto circuito en la fase B del rotor ................................................................................81 5.3.4. Corto circuito en el filtro de salida de la fase A ..............................................................82 5.3.5. Corto circuito en el filtro de salida de la fase B ..............................................................83 5.3.6. Corto circuito en el filtro de salida de la fase C ..............................................................84 5.3.7. Falla en el sensor de corriente de la fase A del rotor .....................................................85 5.3.8. Falla en el sensor de corriente de la fase A del estator .................................................86 5.3.9. Falla en el sensor de corriente de la fase B del estator .................................................87 5.3.10. Falla en el sensor de corriente de la fase C del estator .................................................88 5.3.11. Falla en el sensor de corriente de la fase A del filtro de salida ......................................89 5.3.12. Falla en el sensor de corriente de la fase B del filtro de salida ......................................90 5.3.13. Falla en el sensor de corriente de la fase C del filtro de salida ......................................91 5.3.14. Falla en el sensor de desplazamiento angular ...............................................................92
6. Conclusiones y trabajos futuros ..................................................................... 95
6.1. Conclusiones ..........................................................................................................................95 6.2. Trabajos futuros ......................................................................................................................98
A. Anexo A ........................................................................................................... 103
iii
Resumen
En el ambiente industrial los sistemas que interactúan en él están expuestos a
condiciones adversas, tales como ruido, humedad, polvo, etc., que pueden ocasionar
una falla en dichos sistemas provocando pérdidas económicas por paro de
producción, accidentes de los trabajadores y gastos por reparación. Bajo este
contexto, es necesario contar con sistemas automáticos eficientes, capaces de
operar aun en condiciones de falla; para ello se han realizado diversos estudios que
pertenecen a un área que la comunidad científica ha llamado como diagnóstico de
fallas.
La tarea de diagnóstico de fallas, consiste básicamente en determinar la existencia
de una falla y aislarla (localizarla), esta tarea se conoce como FDI, por sus siglas en
inglés. Para lograr estos propósitos se han propuesto diversas técnicas, sin embargo,
no se piensa en analizar a priori la diagnosticabilidad de un sistema, es decir, cuál es
el alcance que un esquema de FDI tendrá para detectar y aislar fallas o si existe
solución al problema de detección y aislamiento de las fallas de interés. La
diagnosticabilidad, en similitud a la controlabilidad y observabilidad, es una
propiedad inherente a la estructura del sistema bajo estudio, por lo tanto, en dicho
análisis, de manera específica, se evalúa la existencia o no de información
redundante pues ello determina las posibilidades del FDI.
En este trabajo de tesis se aborda el análisis de la diagnosticabilidad en el conjunto
convertidor Back to Back (B2B)-máquina de inducción doblemente alimentada (DFIM,
por sus siglas en inglés) de un sistema de generación eoloeléctrico aislado. El
análisis de diagnosticabilidad se hace mediante la técnica de análisis estructural
(AE), la cual es una técnica eficaz que explota la estructura del sistema, es decir,
solo requiere de las relaciones existentes entre las restricciones (ecuaciones) y las
variables involucradas en éstas, no requiere del conocimiento de la forma explícita –
numérica, de las ecuaciones.
Con el AE se obtuvo el modelo estructural del sistema B2B-DFIM a partir del cual se
extrajo la información redundante del sistema, relaciones de redundancia analítica
(ARR´s, por sus siglas en inglés), las cuales sirvieron como base para determinar la
diagnosticabilidad del sistema. Por su parte, la comprobación de la diagnosticabilidad
se realiza mediante el uso de un simulador del sistema eoloeléctrico, creado en el
ambiente de MATLAB/SIMULINK, y la programación, también en dicha plataforma,
de las ARR´s como generadoras de residuos, las cuales en ausencia de falla deben
iv
presentar un valor cercano o igual a cero y diferente de cero en la presencia de una
falla. La emulación de las fallas se logra mediante la alteración de los valores
nominales de los parámetros del sistema de acuerdo a la información de la falla de
interés.
La sensibilidad de las ARR´s no siempre es clara, es por ello que se hace necesario
el uso de técnicas que ayuden a mejorar la sensibilidad; bajo este contexto, en este
trabajo se presenta la aplicación del promediado móvil ponderado exponencial
(EWMA, por sus siglas en inglés), el cual mejoró las respuestas mostradas por las
ARR´s.
En el trabajo de tesis se consideraron 26 fallas: 3 fallas en estator (corto
circuito/circuito abierto en bobinas), 3 fallas en rotor (corto circuito/circuito abierto en
bobinas), 3 fallas en filtro de salida (corto circuito/circuito abierto en bobinas), 3 fallas
en convertidor lado máquina (corto circuito/circuito abierto en interruptores), 3 fallas
en convertidor lado carga (corto circuito/circuito abierto en interruptores), 3 fallas en
sensores de corriente de estator, 3 fallas en sensores de corriente de rotor, 3 fallas
en sensores de corriente de filtro, 1 falla en sensor de desplazamiento mecánico y 1
falla en sensor de velocidad mecánica. Los resultados obtenidos fueron la
detectabilidad de todas las fallas y la aislabilidad de 15 conjuntos de fallas, los
conjuntos son: el conjunto de fallas eléctricas en el estator y rotor de la DFIM; los dos
conjuntos de fallas relacionadas con los interruptores de potencia de los
convertidores del B2B; el conjunto de fallas en los sensores de corriente de las fases
del rotor; y por último, 11 fallas que son aislables entre sí, fallas en los sensores de
corriente de las fases del estator, fallas eléctricas y en los sensores de las fases del
filtro de salida del B2B, así como las fallas de los sensores de velocidad y posición
mecánica.
Entre los logros de este trabajo de tesis está, la documentación detallada de la
metodología asociada a la herramienta de análisis estructural, de tal manera que sea
fácilmente asimilable para las personas interesadas en este tema.

v
Abstract In the industrial environment the systems are exposed to adverse conditions, such as
noise, moisture, dust and others, which can cause faults in such systems driving to
economic losses due to stop in production, accidents at work and repairing costs. In
this context, it is necessary to have efficient automatic systems capable of operating
even under fault conditions, to this effect, various studies pertaining to an area that
the scientific community has called fault diagnosis have been carried out.
The fault diagnosis task basically consists in determining the existence of a fault and
to isolate it, this task is known as Fault Detection and Isolation (FDI). To achieve
these purposes various techniques have been proposed, however, it is not intended
to analyze a priori the diagnosability of a system, that is to say, what is the extent of a
FDI scheme to detect and isolate faults or if there is a solution to the problem of
detection and isolation of faults of interest. Diagnosability, in similarity to the
controllability and observability, is an inherent property of the structure of the system
under study, therefore, in this analysis, specifically, it is evaluated the existence of
redundant information as this determines the possibilities for FDI.
This thesis deals with the analysis of the diagnosability in the set back to back
converter (B2B) - doubly fed induction machine (DFIM) for an isolated wind generator.
Diagnosability analysis is done by means of the structural analysis technique, which is
an effective technique which take advantage of the structure of the system, that is to
say, only requires the relationship between the constraints (equations) and the
variables involved in these, and does not require the knowledge of the numerical or
explicit form of equations.
With the structural analysis technique the structural model of the system B2B-DFIM
was obtained, from which the system redundant information (analytical redundancy
relations - ARR´s) is extracted, which served as the basis for system diagnosability.
The diagnosability verification is done by the use of a wind-electric system simulator,
created in the environment of MATLAB/SIMULINK and programming, also on that
platform, the ARR's as residual generators, which in the absence of faults must
generate a value close or equal to zero and non-zero in the presence of a fault. The
emulation of faults is achieved by changing the nominal values of the parameters of
the system according to the fault information of interest.
The sensitivity of ARR's is not always clear, that is why it is necessary to use
techniques to improve the ARR’s sensitivity; in this context, this thesis presents the

vi
application of the exponentially weighted moving average (EWMA), which improved
the responses of the ARR's.
In this thesis twenty-six fault were considered: three stator faults (short circuit / open
circuit in coils), three rotor faults (short circuit / open circuit in coils), three output filter
faults (short circuit / open circuit in coils), three machine side converter faults (short
circuit / open circuit breakers), three load side converter faults (short circuit / open
circuit breakers), three faults of stator current sensors, three faults of rotor current
sensors, three faults of filter current sensors, one fault in the mechanical
displacement sensor and one fault in the speed sensor. The obtained results were the
detectability of all faults and the isolability of 15 sets of faults, the sets are: the set of
electrical faults in the stator and rotor of DFIM, the two sets of faults related to power
switches of the B2B converters, the set of faults in the rotor current sensors per
phase, and finally, eleven faults which are isolable from each other, faults in the stator
current sensors per phase, electrical and current sensors faults per phase in the
output filter of the B2B, and faults in the speed and mechanical position sensors.
Among the achievements of this thesis is the detailed documentation of the
methodology associated with the structural analysis tool with the purpose of making it
easily comprehensible for people interested in this topic.

vii
Lista de figuras
Figura 1.1 Esquema de FDI ..................................................................................................................... 3
Figura 1.2 Evolución histórica de la capacidad eólica mundial, 2001-2011 ............................................ 4
Figura 1.3 Sistemas de generación eólica VS-WECS: a) Potencia parcial, b) Potencia total. ................ 5
Figura 2.1 Grafo bipartido ...................................................................................................................... 17
Figura 2.2 Grafo bipartido del sistema dinámico .................................................................................... 17
Figura 2.3 Grafo bipartido considerando la restricción diferencial. ........................................................ 18
Figura 2.4 Grafo bipartido aplicando diferenciación estructural. ............................................................ 19
Figura 2.5 Grafo considerando a las variables dinámicas como estáticas. ........................................... 20
Figura 2.6 Circuito RC ............................................................................................................................ 20
Figura 2.7 Grafos aparejados del circuito RC ........................................................................................ 22
Figura 2.8 Grafo orientado del circuito RC. ............................................................................................ 24
Figura 2.9 Cadenas alternadas .............................................................................................................. 25
Figura 2.10 Causalidad derivativa .......................................................................................................... 26
Figura 2.11 Causalidad integral ............................................................................................................. 26
Figura 2.12 Descomposición canónica de una MI* ................................................................................ 29
Figura 2.13 Aparejamiento del circuito RC en SaTool ........................................................................... 31
Figura 2.14 Observabilidad de un sistema ............................................................................................. 32
Figura 2.15 Subsistema dinámico .......................................................................................................... 32
Figura 2.16 ARR generada del sistema del circuito RC ........................................................................ 34
Figura 2.17 Comportamiento de una ARR ............................................................................................. 34
Figura 3.1 Esquema del sistema VS-WECS aislado basado en B2B-DFIM ......................................... 39
Figura 3.2 Esquema de un generador eléctrico ..................................................................................... 41
Figura 3.3 Estator y rotor de la DFIM idealizada .................................................................................... 42
Figura 3.4 Conjunto convertidor B2B-DFIM ........................................................................................... 42
Figura 3.5 Convertidor Back to Back ..................................................................................................... 49
Figura 3.6 Voltajes en el convertidor Back to Back................................................................................ 50
Figura 4.1 Procedimiento de la determinación de la diagnosticabilidad ................................................ 53
Figura 4.2 Grafo de la ARR1 .................................................................................................................. 62
Figura 5.1 Simulador del conjunto convertidor B2B-DFIM ..................................................................... 72
Figura 5.2 Programación de una falla .................................................................................................... 73
Figura 5.3 Programación de la ARR1 ..................................................................................................... 74

viii
Figura 5.4 Programa de la DFIM con ARR´s y fallas ............................................................................. 74
Figura 5.5 Señal generada por la ARR1 ................................................................................................. 75
Figura 5.6 Señal de la ARR1 con EWMA ............................................................................................... 76
Figura 5.7 Falla por corto circuito en la fase A del estator ..................................................................... 79
Figura 5.8 Falla por circuito abierto en la fase A del estator ................................................................. 80
Figura 5.9 Falla por corto circuito en la fase B del rotor ........................................................................ 81
Figura 5.10 Falla por corto circuito en la fase A del filtro de red ............................................................ 82
Figura 5.11 Falla por corto circuito en la fase B del filtro de red ............................................................ 83
Figura 5.12 Falla por Corto circuito en la fase C del filtro de salida....................................................... 84
Figura 5.13 Falla en el sensor de corriente de la fase A del rotor ......................................................... 85
Figura 5.14 Falla en el sensor de corriente de la fase A del estator ...................................................... 86
Figura 5.15 Falla en el sensor de corriente de la fase B del estator ...................................................... 87
Figura 5.16 Falla en el sensor de corriente de la fase C del estator ..................................................... 88
Figura 5.17 Falla en el sensor de corriente de la fase A del filtro de salida .......................................... 89
Figura 5.18 Falla en el sensor de corriente de la fase B del filtro de salida .......................................... 90
Figura 5.19 Falla en el sensor de corriente de la fase C del filtro de salida .......................................... 91
Figura 5.20 Falla en el sensor de desplazamiento angular ................................................................... 92
ix
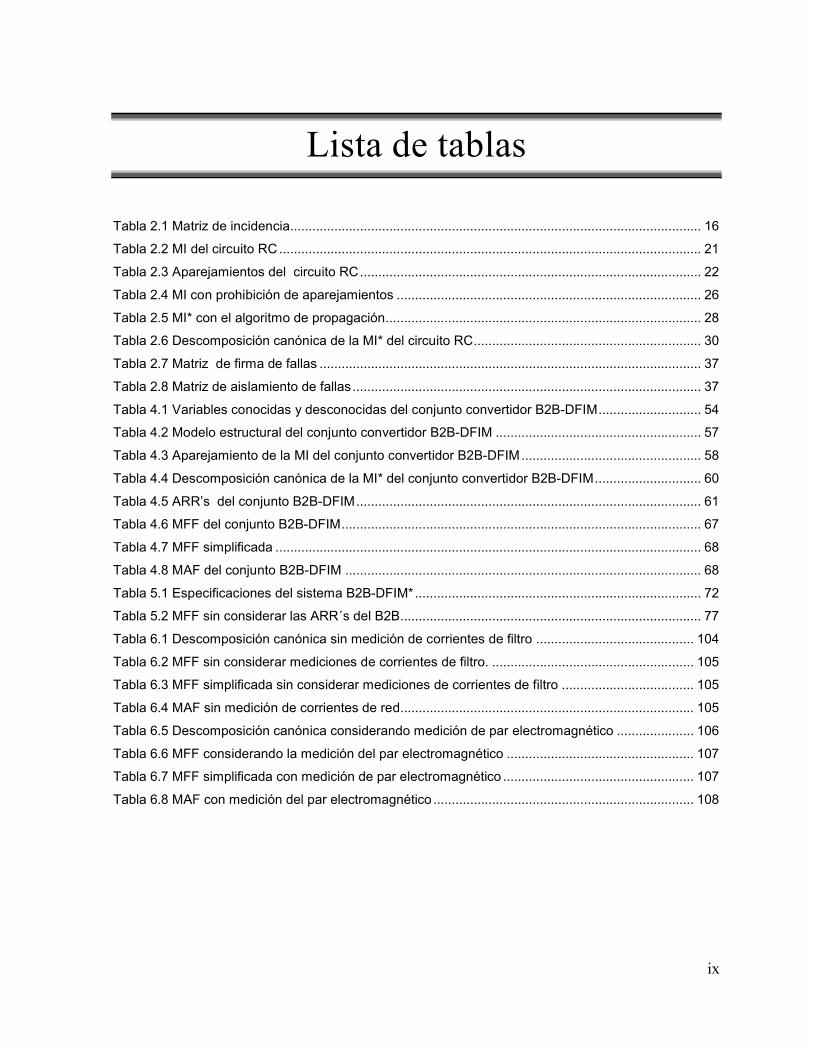
Lista de tablas
Tabla 2.1 Matriz de incidencia................................................................................................................ 16
Tabla 2.2 MI del circuito RC ................................................................................................................... 21
Tabla 2.3 Aparejamientos del circuito RC ............................................................................................. 22
Tabla 2.4 MI con prohibición de aparejamientos ................................................................................... 26
Tabla 2.5 MI* con el algoritmo de propagación ...................................................................................... 28
Tabla 2.6 Descomposición canónica de la MI* del circuito RC .............................................................. 30
Tabla 2.7 Matriz de firma de fallas ........................................................................................................ 37
Tabla 2.8 Matriz de aislamiento de fallas ............................................................................................... 37
Tabla 4.1 Variables conocidas y desconocidas del conjunto convertidor B2B-DFIM ............................ 54
Tabla 4.2 Modelo estructural del conjunto convertidor B2B-DFIM ........................................................ 57
Tabla 4.3 Aparejamiento de la MI del conjunto convertidor B2B-DFIM ................................................. 58
Tabla 4.4 Descomposición canónica de la MI* del conjunto convertidor B2B-DFIM ............................. 60
Tabla 4.5 ARR’s del conjunto B2B-DFIM .............................................................................................. 61
Tabla 4.6 MFF del conjunto B2B-DFIM .................................................................................................. 67
Tabla 4.7 MFF simplificada .................................................................................................................... 68
Tabla 4.8 MAF del conjunto B2B-DFIM ................................................................................................. 68
Tabla 5.1 Especificaciones del sistema B2B-DFIM* .............................................................................. 72
Tabla 5.2 MFF sin considerar las ARR´s del B2B .................................................................................. 77
Tabla 6.1 Descomposición canónica sin medición de corrientes de filtro ........................................... 104
Tabla 6.2 MFF sin considerar mediciones de corrientes de filtro. ....................................................... 105
Tabla 6.3 MFF simplificada sin considerar mediciones de corrientes de filtro .................................... 105
Tabla 6.4 MAF sin medición de corrientes de red................................................................................ 105
Tabla 6.5 Descomposición canónica considerando medición de par electromagnético ..................... 106
Tabla 6.6 MFF considerando la medición del par electromagnético ................................................... 107
Tabla 6.7 MFF simplificada con medición de par electromagnético .................................................... 107
Tabla 6.8 MAF con medición del par electromagnético ....................................................................... 108
x
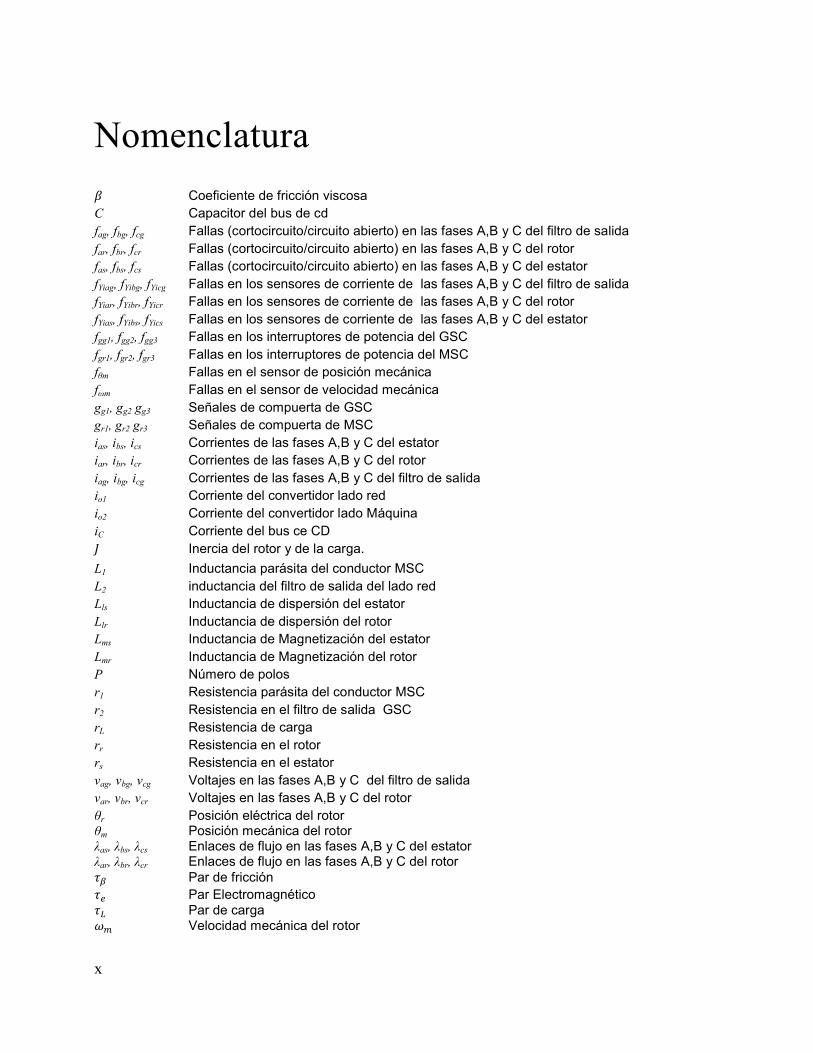
Nomenclatura
Coeficiente de fricción viscosa
C Capacitor del bus de cd
fag, fbg, fcg Fallas (cortocircuito/circuito abierto) en las fases A,B y C del filtro de salida
far, fbr, fcr Fallas (cortocircuito/circuito abierto) en las fases A,B y C del rotor
fas, fbs, fcs Fallas (cortocircuito/circuito abierto) en las fases A,B y C del estator
fYiag, fYibg, fYicg Fallas en los sensores de corriente de las fases A,B y C del filtro de salida
fYiar, fYibr, fYicr Fallas en los sensores de corriente de las fases A,B y C del rotor
fYias, fYibs, fYics Fallas en los sensores de corriente de las fases A,B y C del estator
fgg1, fgg2, fgg3 Fallas en los interruptores de potencia del GSC
fgr1, fgr2, fgr3 Fallas en los interruptores de potencia del MSC
fθm Fallas en el sensor de posición mecánica
fωm Fallas en el sensor de velocidad mecánica
gg1, gg2 gg3 Señales de compuerta de GSC
gr1, gr2 gr3 Señales de compuerta de MSC
ias, ibs, ics Corrientes de las fases A,B y C del estator
iar, ibr, icr Corrientes de las fases A,B y C del rotor
iag, ibg, icg Corrientes de las fases A,B y C del filtro de salida
io1 Corriente del convertidor lado red
io2 Corriente del convertidor lado Máquina
iC Corriente del bus ce CD
Inercia del rotor y de la carga.
L1 Inductancia parásita del conductor MSC
L2 inductancia del filtro de salida del lado red
Lls Inductancia de dispersión del estator
Llr Inductancia de dispersión del rotor
Lms Inductancia de Magnetización del estator
Lmr Inductancia de Magnetización del rotor
P Número de polos
r1 Resistencia parásita del conductor MSC
r2 Resistencia en el filtro de salida GSC
rL Resistencia de carga
rr Resistencia en el rotor
rs Resistencia en el estator
vag, vbg, vcg Voltajes en las fases A,B y C del filtro de salida
var, vbr, vcr Voltajes en las fases A,B y C del rotor
θr Posición eléctrica del rotor θm Posición mecánica del rotor λas, λbs, λcs Enlaces de flujo en las fases A,B y C del estator λar, λbr, λcr Enlaces de flujo en las fases A,B y C del rotor Par de fricción
Par Electromagnético Par de carga Velocidad mecánica del rotor
Capítulo 1
1. Introducción
La producción de energía eléctrica a partir de energías renovables es un área que se
ha desarrollado a gran velocidad, en particular la producción de energía eléctrica a
partir del viento ha incrementado su producción mundial a una tasa anual del 26%
[1], esto se debe al desarrollo de generadores eólicos cada vez más eficientes. Sin
embargo, este posicionamiento de la generación eoloeléctrica se puede ver
comprometido si el generador eólico sufre algún tipo de falla.
En este sentido, es importante mencionar que cualquier proceso industrial está
sujeto, por diversas causas, a fallas en cualquiera de sus componentes que lo
integran. Las consecuencias de estas fallas pueden ser: productos fuera de
especificación, paro del proceso, daños ambientales, pérdidas de vidas humanas,
etc. Estos hechos han motivado el interés por diseñar sistemas de monitoreo que
detecten y diagnostiquen oportunamente las fallas en un proceso con el fin de tomar
acciones correctivas, como la reconfiguración de la parte dañada del sistema.
En esta tesis se aborda como caso particular, un sistema de generación eólica
conformado por un convertidor Back to Back (B2B) y una máquina de inducción
doblemente alimentada (DFIM, por sus siglas en inglés) ya que es una de las
topologías de mayor preferencia para generación eoloeléctrica. Por otro lado, el
trabajo se enfoca en el análisis de la diagnosticabilidad de fallas del conjunto B2B-
DFIM.
En este capítulo se da una breve explicación de la tarea del diagnóstico de fallas, así
como qué es el análisis de la diagnosticabilidad. Por otro lado, se lleva también a
cabo una revisión de la literatura, en el contexto de diagnóstico de fallas
específicamente en relación al conjunto B2B-DFIM. Por último se da la propuesta de
solución, así como los objetivos y alcances de este trabajo.

Introducción
2 Departamento de Ingeniería Electrónica
1.1 Planteamiento del problema
Actualmente el ámbito industrial debe contar con procesos cada vez más eficientes
que aseguren el menor número de paros de planta posible, la seguridad de los
trabajadores y un menor impacto ambiental; esto ha llevado a la comunidad científica
a mejorar los procesos industriales para para lograr dichos objetivos. Un aspecto
muy importante para lograr una mayor eficiencia en los procesos, es asegurar que
estos sean capaces de funcionar de formar continua, reconfigurarse y avisar a los
trabajadores ante la presencia de una falla, para ello se han realizado diversos
estudios que pertenecen a un área que la comunidad científica ha llamado como
diagnóstico de fallas. En los siguientes párrafos se da una descripción de esta área.
1.1.1 Diagnóstico de fallas
Los procesos industriales están propensos a fallas que a menudo producen
reacciones indeseables como: paro de la planta, daño a la planta, al personal o al
medio ambiente, entendiéndose como falla a la desviación no permitida de al menos
una propiedad característica del sistema [2]. Ante esta situación, se han desarrollado
diversas técnicas de diagnóstico de fallas con el fin de evaluar sus efectos en el
sistema, con lo cual se puede decidir si es necesario un cambio del punto de
operación, la reconfiguración de una parte del sistema, el mantenimiento, etc.
La tarea de detección de fallas consiste en una decisión binaria que determina si el
sistema opera satisfactoriamente o no; por otra parte, la tarea de aislamiento de
fallas determina la localización de dichas fallas; la realización conjunta de detección y
aislamiento de fallas se conoce como FDI, por sus siglas en inglés.
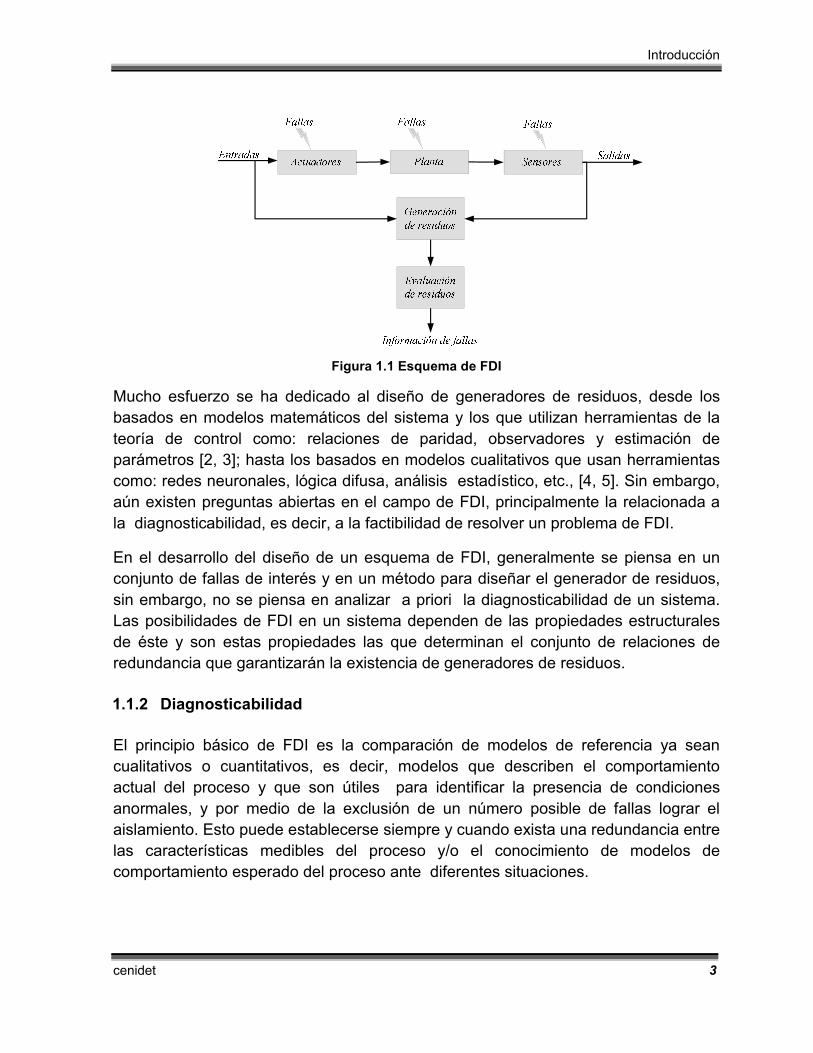
Un esquema de FDI consta básicamente de dos etapas: la generación de residuos y
su evaluación, ver Figura 1.1. En la primera etapa, mediante el procesamiento de las
variables medibles del sistema, se generan señales conocidas como residuos, las
cuales reflejan la consistencia entre el comportamiento actual del sistema y el
comportamiento estimado. Asumiendo que una inconsistencia es el resultado de
fallas en el sistema, entonces, los residuos proveen información que puede ser
usada para la detección y aislamiento en la etapa de evaluación.
Introducción
cenidet 3
Figura 1.1 Esquema de FDI
Mucho esfuerzo se ha dedicado al diseño de generadores de residuos, desde los
basados en modelos matemáticos del sistema y los que utilizan herramientas de la
teoría de control como: relaciones de paridad, observadores y estimación de
parámetros [2, 3]; hasta los basados en modelos cualitativos que usan herramientas
como: redes neuronales, lógica difusa, análisis estadístico, etc., [4, 5]. Sin embargo,
aún existen preguntas abiertas en el campo de FDI, principalmente la relacionada a
la diagnosticabilidad, es decir, a la factibilidad de resolver un problema de FDI.
En el desarrollo del diseño de un esquema de FDI, generalmente se piensa en un
conjunto de fallas de interés y en un método para diseñar el generador de residuos,
sin embargo, no se piensa en analizar a priori la diagnosticabilidad de un sistema.
Las posibilidades de FDI en un sistema dependen de las propiedades estructurales
de éste y son estas propiedades las que determinan el conjunto de relaciones de
redundancia que garantizarán la existencia de generadores de residuos.
1.1.2 Diagnosticabilidad
El principio básico de FDI es la comparación de modelos de referencia ya sean
cualitativos o cuantitativos, es decir, modelos que describen el comportamiento
actual del proceso y que son útiles para identificar la presencia de condiciones
anormales, y por medio de la exclusión de un número posible de fallas lograr el
aislamiento. Esto puede establecerse siempre y cuando exista una redundancia entre
las características medibles del proceso y/o el conocimiento de modelos de
comportamiento esperado del proceso ante diferentes situaciones.
Introducción
4 Departamento de Ingeniería Electrónica
La diagnosticabilidad, es usualmente conocida como la viabilidad de aislar fallas en
un sistema físico. La evaluación de la diagnosticabilidad nos brinda algunas
ventajas, por ejemplo, en un sistema en servicio, los resultados de la evaluación de
la diagnosticabilidad puede conducir al desarrollo de nuevos procedimientos de
diagnóstico o mejorar los programas de mantenimiento. En un sistema en la etapa de
diseño, el resultado de la evaluación nos ayuda a determinar los puntos estratégicos
a monitorear, y las fallas que pueden ser detectadas y aisladas.
1.1.3 Caso de estudio
La creciente demanda de energía eléctrica a nivel mundial ha sido causa de la
búsqueda de nuevas alternativas para su generación, entre las cuales han destacado
más las alternativas que usan fuentes renovables. En este contexto, la energía eólica
representa una opción con grandes perspectivas de desarrollo para la generación de
electricidad, debido a su limpieza, su abundancia, su bajo costo, entre otras. En los
últimos diez años, la capacidad mundial instalada en sistemas para la generación de
electricidad a partir de aerogeneradores, ha crecido con una tasa anual de 26%, al
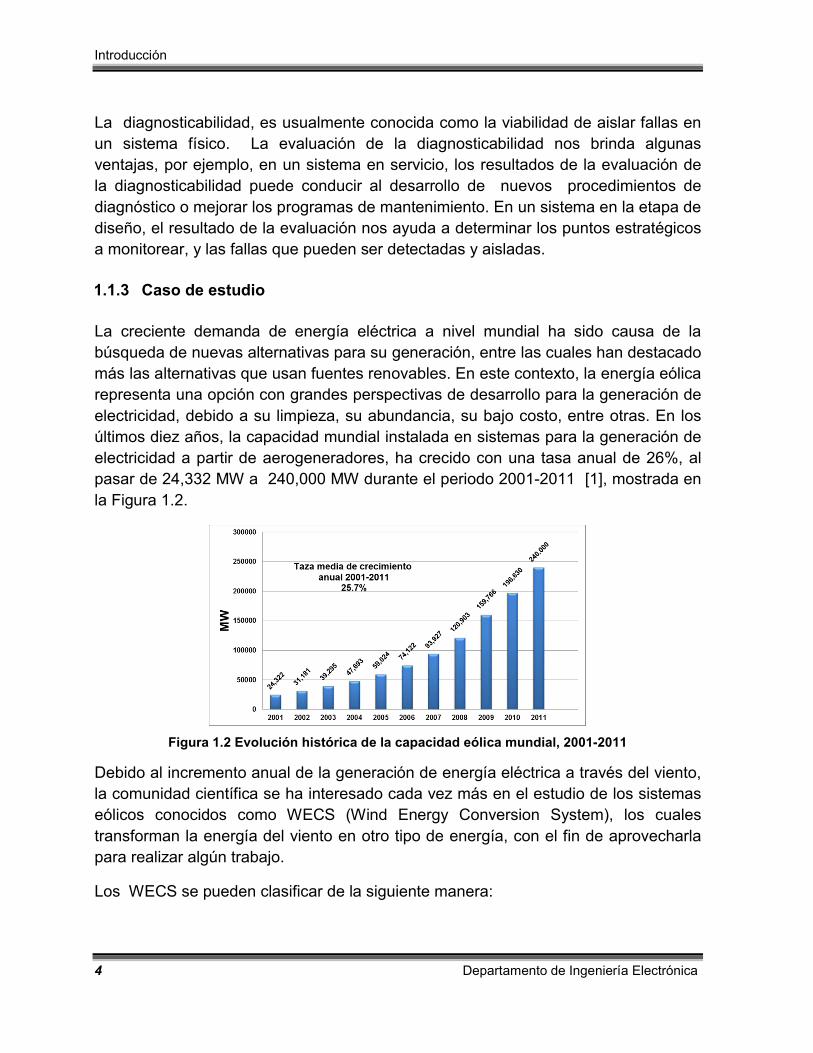
pasar de 24,332 MW a 240,000 MW durante el periodo 2001-2011 [1], mostrada en
la Figura 1.2.
Figura 1.2 Evolución histórica de la capacidad eólica mundial, 2001-2011
Debido al incremento anual de la generación de energía eléctrica a través del viento,
la comunidad científica se ha interesado cada vez más en el estudio de los sistemas
eólicos conocidos como WECS (Wind Energy Conversion System), los cuales
transforman la energía del viento en otro tipo de energía, con el fin de aprovecharla
para realizar algún trabajo.
Los WECS se pueden clasificar de la siguiente manera:

Introducción
cenidet 5
Sistemas de velocidad fija (Fixed Speed-WECS: FS-WECS), los cuales fueron los
primeros que se utilizaron para producir energía eléctrica alterna de frecuencia
constante. En su forma más básica, estos sistemas constan de una máquina de
inducción tipo jaula de ardilla, operando como generador, conectada en forma directa
a la red. Las ventajas de los sistemas de velocidad fija son su simplicidad y su bajo
costo. La desventaja es que se requiere un diseño mecánico resistente a las altas
ráfagas de viento, donde se observan variaciones apreciables en la potencia de
salida.
Sistemas de velocidad variable (Variable Speed-WECS: VS-WECS). Para su
implementación existe una amplia gama de alternativas, ya que pueden utilizarse
diferentes tipos de generadores en combinación con diversos convertidores
electrónicos de potencia. Los tipos de máquinas que pueden utilizarse son: máquina
de inducción de jaula de ardilla (SCIM, por sus siglas en inglés), máquina síncrona
de rotor devanado (WRSM, por sus siglas en inglés), máquina síncrona de imanes
permanentes (PWSM, por sus siglas en inglés), máquina de reluctancia variable
(VRM, por sus siglas en inglés) y las máquinas doblemente alimentadas (DFIG, por
sus siglas en inglés).
Los VS-WECS son clasificados de acuerdo a la ubicación y capacidad de manejo de
potencia del convertidor electrónico. Así pues, los VS-WECS pueden ser de potencia
parcial (Figura 1.3a) de potencia total (Figura 1.3b ).
Figura 1.3 Sistemas de generación eólica VS-WECS: a) Potencia parcial, b) Potencia total.

Introducción
6 Departamento de Ingeniería Electrónica
Entre las topologías de convertidores de potencia empleados en los VS-WECS, se
encuentran: convertidor puente de diodos - inversor controlado, convertidor puente
de diodos-convertidor CD-CD-inversor controlado, convertidor matricial, convertidor
back to back [6].
En esta tesis, en particular, se considera el VS-WECS constituido por el conjunto
B2B-DFIM. Vale la pena mencionar que la DFIM está formada por una máquina de
inducción de rotor devanado, donde generalmente el estator se conecta a la red
eléctrica y el rotor se conecta a un convertidor B2B. El empleo de la DFIM permite el
control del voltaje y la frecuencia generada a partir de la adecuada manipulación de
las corrientes en el circuito rotórico de la máquina, además, permite que los
convertidores utilizados manejen una potencia alrededor del 30% de la potencia total
generada [7].
El convertidor B2B es de los más usados y estudiados en sistemas de conversión
eoloeléctrica [6]. El convertidor B2B es un convertidor bidireccional puesto que está
constituido por dos inversores/rectificadores puente completo conectados de espalda
a través de un enlace de CD capacitivo y es generalmente implementado con
dispositivos IGBT (Insulated Gate Bipolar Transistors). El inversor/rectificador
conectado al rotor del generador se denomina convertidor del lado de la máquina
(Machine Side Converter: MSC), mientras el que se conecta a la red eléctrica o a la
carga se llama convertidor del lado de la red (Grid Side Converter: GSC), algunas
veces referido como Front-End-Converter (FEC).
Entre las ventajas del convertidor back-to-back están: obtención de corrientes con
baja distorsión armónica en el estator, rotor y red; además, el condensador del bus
de CD permite el control separado de los dos convertidores.
Se han realizado diversas investigaciones abordando diversas problemáticas
relacionadas con los WECS como son: el control de tensión abordado en [8, 9], el
seguimiento del punto de máxima potencia (MPPT) abordado en [10, 11]. Sin
embargo una de vital importancia es la del FDI, ya que la detección de una falla
permite tomar las medidas necesarias para garantizar la seguridad de los
operadores, disminuir el número de intervenciones en mantenimiento correctivo, una
calendarización más eficiente del mantenimiento preventivo, y una mejora en la
calidad del servicio.

Introducción
cenidet 7
1.1.4 Hipótesis
El uso del análisis estructural para propósitos de la diagnosticabilidad permitirá
determinar la información redundante del conjunto convertidor B2B – DFIM, la cual
es útil para determinar propiedades como: la detectabilidad y aislabilidad de un
conjunto de fallas consideradas y establecer las mediciones de variables que
permitan obtener una mejor diagnosticabilidad.
1.2 Estado del arte
El análisis de la diagnosticabilidad es realizado por medio de métodos basados en
modelos que describen el comportamiento del sistema. Haciendo una revisión, en la
literatura se ha encontrado el desarrollo de diversas técnicas para realizar este
análisis, tal es el caso de la técnica mostrada en [12], la cual consiste en representar
las ecuaciones que describen el comportamiento del sistema en espacio de estado,
para dicha representación se debe tomar en cuenta la dinámica de las variables del
sistema, así como si son medibles o no. Para lograr una óptima ubicación de los
sensores y mayor aislamiento de fallas, se necesita de un algoritmo iterativo,
además el método se vuelve más complejo cuanto mayor sea el número de
componentes que integran al sistema.
Otra técnica es mostrada en [13], la cual propone el análisis de la diagnosticabilidad por medio de un grafo que representa las interconexiones en los elementos del sistema. Esta técnica consiste en la selección de puntos de prueba los cuales pueden ser variables medibles, a partir de estos puntos se pueden definir trayectorias, las cuales relacionan un grupo de elementos del sistema, por tanto, la relación entre sus ecuaciones y por medio de un algoritmo se define la diagnosticabilidad.
En [14] se describe los fundamentos del análisis estructural para la determinación de
las relaciones de redundancia analítica (ARR, por sus siglas en inglés). La
importancia de las ARR´s radica en el hecho de que por medio de ellas se logra
realizar el análisis de detectabilidad y aislabilidad de un grupo de fallas consideradas
en un sistema o proceso dado.
El análisis estructural ha sido empleado en sistemas como un turbogenerador [15],
una válvula de procesos industriales [16], y un sistema de dos tanques [17]. En
dichos trabajos se muestra que en esta técnica sólo es necesario conocer las
ecuaciones (restricciones) involucradas en el modelo de comportamiento de un
sistema y las relaciones existentes entre sus variables y parámetros, para determinar
las propiedades de detectabilidad y aislabilidad de fallas.
Introducción
8 Departamento de Ingeniería Electrónica
Sin embargo, la diagnosticabilidad es un interés reciente en la comunidad de FDI y
concretamente de este tema, nada se tiene reportado respecto al sistema de interés
(DFIM-Convertidor back-to-back). Pese a esto, en seguida se presenta una revisión
sobre lo que se ha hecho respecto a FDI en el sistema de interés con el objetivo de
conocer cuáles son las fallas más importantes y que se podrían considerar para el
desarrollo de esta tesis. A continuación se mencionan algunos trabajos que abordan
el problema del FDI en máquinas de inducción e inversores.
En [18] se hace una revisión de los trabajos de los últimos diez años en relación al
diagnóstico de fallas en la máquina de inducción. Aquí se resume que las fallas de
mayor interés son: fallas en el estator y en rotor, fallas mecánicas y fallas en los
dispositivos semiconductores de potencia de los convertidores. Entre las técnicas de
diagnóstico que se utilizan, predominan las basadas en análisis de señal entre las
cuales están: corriente de secuencia inversa, inyección de señal, análisis de la firma
de corriente, el método de monitoreo de Viena, análisis de la frecuencia de la
potencia instantánea de una o tres fases, las cuales son viables gracias a que la
máquina, en condiciones normales, tiene un modelo eléctrico altamente simétrico. De
acuerdo con esta revisión, otra de las aportaciones de este trabajo es el resumen de
los diferentes enfoques de modelado que se han considerado para fines de FDI en la
máquina de inducción, entre los cuales se citan: análisis de las fuerzas magneto
motrices, la función del devanado, malla dinámica de reluctancia y elemento finito.
En [19] se propone un método de diagnóstico basado en tiempo crítico y voltaje
crítico, e implementado con un FPGA. Este método se enfoca en el diagnóstico de
fallas de los dispositivos de potencia del convertidor back to back, principalmente
fallas por cortocircuito y circuito abierto.
En [20] se hace una revisión de las técnicas de diagnóstico en línea de la máquina
de inducción. Aquí se describen las siguientes técnicas: vector complejo de Park,
flujo axial, par y potencia, obtención del espectro de frecuencia, impedancia de
secuencia inversa, redes neuronales, y sistemas expertos. Las fallas que se
consideran son: fallas por cortocircuito en el estator, excentricidades en el eje del
rotor, fallos en rodamientos.
En [21] se propone un método de diagnóstico basado en el análisis de frecuencia de
las señales moduladas del rotor, las cuales son generadas dentro del control del
convertidor back to back del lado del rotor de la máquina de inducción, este método
propuesto diagnostica fallas tanto en el estator como rotor en cortocircuito y circuito
abierto.
Introducción
cenidet 9
En [22] se hace una comparación de los métodos de diagnóstico en los IGBT’s de
inversores, aquí se describen y comparan 31 métodos entre los cuales destacan los
basados en análisis de señales. Las fallas que se estudian son: cortocircuito, circuito
abierto y fallas de compuerta.
En [23] se propone dos métodos para la detección y aislamiento de fallas en los
interruptores de potencia, los métodos propuestos son: análisis de la trayectoria de
corriente y análisis de la frecuencia instantánea. Por medio del primer método se
logró detectar y aislar las fallas en los interruptores de potencia (cortocircuito y
circuito abierto), por su parte, el segundo método sólo logró la detección pero no el
aislamiento.
De esta revisión, se rescatan los diferentes enfoques de modelado y que serán de
utilidad para el desarrollo del modelo estructural del sistema convertidor Back to Back
– DFIM; así como el conjunto de fallas que se abordan en dichos trabajos y que se
enlistan a continuación:
Fallas en la máquina de inducción
Fallas mecánicas
o Fallas en baleros
o Fallas de excentricidad
Fallas eléctricas
o Falla de cortocircuito/circuito abierto en el estator
o Falla de cortocircuito/circuito abierto en el rotor
Fallas en el convertidor
o Falla de cortocircuito/circuito abierto en los dispositivos semiconductores
A continuación se hace una breve descripción de las causas más comunes de estas
fallas.
Fallas en baleros
La mayoría de las máquinas eléctricas usan baleros ya sea de forma circular o cilíndrica. Estos están constituidos por dos anillos, uno externo y otro interno, entre los anillos se encuentra un riel que contiene balines, los cuales rotan para generar un movimiento entre los anillos. Por lo general un anillo está en movimiento y el otro permanece estático.
De acuerdo con [24] entre el 40 y 50% de las fallas ocurridas en la máquina de inducción están relacionadas con los baleros que pueden ser afectados por las siguientes causas:

Introducción
10 Departamento de Ingeniería Electrónica
Contaminación y corrosión debidas al contacto con partículas duras, abrasivas, agua, ácidos, etc.
Lubricación inadecuada.
Instalación inadecuada, esto ocasiona un forzamiento incorrecto de los baleros en el eje o se forman grietas en la superficie de rodamiento.
Fallas de excentricidad
La excentricidad es ocasionada por la existencia de un entrehierro no uniforme entre
estator y rotor. Cuando la excentricidad sobrepasa los límites estándares puede
existir rozamiento entre el estator y rotor. Hay dos tipos de excentricidades, la
estática y la dinámica [25], las cuales son descritas a continuación.
Excentricidad estática, existe cuando el espacio entre el entrehierro no es
uniforme. La excentricidad estática es ocasionada por la posición incorrecta entre
el estator y el rotor. En la mayoría de los casos este tipo de problema es
generado por la desalineación de los alojamientos de los baleros, ya sea por una
colocación inadecuada o por que la carcasa de la máquina fue torcida al
momento de colocarla en su base.
Excentricidad dinámica, existe cuando el centro del rotor no es el centro de
rotación, este fenómeno puede ser causado por ejes gastados del rotor,
desgaste en los baleros, entre otras, esta situación ocasiona que la inductancia
mutua varié constantemente.
Fallas en el estator
De acuerdo a estudios realizados en [20, 22], las fallas relacionadas al estator abarcan entre 30 y 40% del total de fallas en la máquina de inducción. Generalmente estas fallas están relacionadas con el estado del material aislante de las bobinas. Un tipo de fallas es, corto circuito en devanados, lo cual es ocasionado por el derretimiento o desprendimiento del material aislante [18, 25]. Las causas de tal hecho son las siguientes:
Altas temperaturas en el núcleo del estator o sus devanados.
Esfuerzos magnéticos, debidos a fuerzas electromagnéticas, asimetrías magnéticas, ruido electromagnético o vibración.
Contaminación debida a la humedad, aceite o suciedad.
Descargas eléctricas.

Introducción
cenidet 11
Pérdidas en el sistema de enfriamiento.
Estas fallas comienzan como no detectadas entre espira y espira, las cuales luego se propagan hasta ocasionar una falla grave.
Otro tipo de fallas que puede presentarse en el estator es la de los devanados en circuito abierto, esto ocasiona aumento en las corrientes de secuencia positiva y negativa, y por tanto el calentamiento excesivo en los devanados del estator.
Fallas en el rotor.
Alrededor del 5 al 10% del total de fallas en la máquina de inducción están directamente relacionadas al rotor [20, 22]. En particular en el rotor de la DFIM, las fallas más comunes, son las de corto circuito en los devanados. Estas fallas ocasionan un desbalance magnético provocando vibraciones en el rotor, debido a la interacción magnética entre rotor y estator, el estator se ve afectado [26].
Este tipo de fallas puede deberse a las siguientes causas [27].
La fuerza centrífuga de inicio o de paro del generador o la expansión/ contracción del rotor por los cambios de temperatura debido a la variación de carga, lo cual ocasiona la deformación o desprendimiento del material aislante y por tanto se produce el corto.
La introducción de partículas u objetos extraños en el interior de la máquina produciendo daños al material aislante del rotor.
Por defectos de fabricación.
Fallas en el convertidor
En el convertidor las fallas que ocurren con mayor frecuencia tienen lugar en los dispositivos semiconductores de potencia. Las fallas se pueden clasificar en fallas por corto circuito o circuito abierto, estas fallas pueden ocurrir debido a problemas con la señal de compuerta o por envejecimiento del dispositivo. Hablando particularmente del convertidor B2B nos encontramos que la ocurrencia de una falla en sus dispositivos, puede generar vibraciones en el generador, una reducción en la potencia generada o la pérdida total del sistema [28].
Fallas en sensores
Un sensor es un dispositivo capaz de convertir magnitudes físicas en señales eléctricas. Por lo general, los sensores pueden presentar las siguientes condiciones de falla: una medición errónea de la variable física, la cual es debida a la variación de los parámetros de calibración del sensor; interrupciones momentáneas en la señal del sensor, estas son ocasionadas por falsos contactos en la conexión; una
Introducción
12 Departamento de Ingeniería Electrónica
interrupción permanente en la señal del sensor que puede ser ocasionada por la interrupción de la alimentación del sensor o daño total del mismo [25].
A partir de este resumen de las fallas en el sistema objeto de estudio y de acuerdo a su importancia en términos de las consecuencias de las mismas, en este trabajo se abordarán las siguientes: fallas de circuito abierto y cortocircuito en el estator y rotor; fallas en los interruptores de potencia por cortocircuito y circuito abierto; además de las fallas en sensores y, de acuerdo al sistema particular que se trata, fallas en el filtro de acoplamiento entre el convertidor y la carga.
1.3 Propuesta de solución
El diagnóstico de fallas en el conjunto convertidor B2B - DFIM aplicado a los VS-
WECS es crucial para asegurar una operación segura, un oportuno mantenimiento e
incrementar la confiabilidad de operación.
En particular, se propone utilizar el análisis estructural para determinar las
propiedades estructurales del conjunto convertidor B2B-DFIM para propósitos de
diagnóstico de fallas. Este análisis permitirá determinar características importantes
relacionadas con el FDI tales como la detectabilidad y aislabilidad del conjunto de
fallas de interés.
El análisis estructural es una herramienta basada en modelos estructurales que es
capaz de determinar las relaciones de redundancia útiles para el diagnóstico de un
sistema en particular. Esta técnica es descrita en el siguiente capítulo.
1.4 Objetivos
El objetivo general es el análisis de las propiedades estructurales del conjunto
convertidor back to back-DFIM para determinar su diagnosticabilidad.
Como objetivos particulares se tienen:
Estudiar la teoría del análisis estructural.
Desarrollar el modelo estructural a partir del modelo trifásico de la DFIM y el modelo del convertidor back to back.
Determinar la aislabilidad de fallas del sistema mediante el estudio de sus propiedades estructurales.
Evaluación mediante simulación de la aislabilidad del sistema.

Introducción
cenidet 13
1.5 Aportaciones
El desarrollo de esta tesis tendrá las siguientes aportaciones.
Modelo estructural del conjunto convertidor back to back-DFIM.
Propiedades estructurales del sistema ante distintas consideraciones de fallas.
Relaciones de redundancia.

Introducción
14 Departamento de Ingeniería Electrónica

Capítulo 2
2. Análisis estructural
El análisis estructural (AE) es una herramienta muy sencilla que se basa en modelos
matemáticos que describen el comportamiento de un sistema. En esta técnica sólo
se toma en cuenta las relaciones existentes entre las variables y las restricciones
(ecuaciones) sin importar su naturaleza (cualitativa o cuantitativa), es decir, sólo
basta con conocer qué variable está en qué restricción, de tal manera que permita
obtener un modelo en el cual se puedan realizar estudios concernientes a la
estructura del sistema sin trabajar con la complejidad de la naturaleza de las
variables y restricciones.
La posibilidad de la aplicación de técnicas de FDI radica en la existencia de
información redundante. Por tanto, la aplicación de AE es crucial, puesto que su
desarrollo determina la existencia de tal información, aunado a esto también permite
la obtención de restricciones que pueden ser útiles para el diseño de generadores de
residuos. Otra ventaja de la aplicación del AE es la posibilidad de determinar en un
conjunto de fallas consideradas su detectabilidad y aislabilidad, es decir, su
diagnosticabilidad.
Este capítulo está dedicado a la descripción del desarrollo del AE, para lograr la
determinación de la diagnosticabilidad.
2.1 Modelo estructural
Un modelo estructural es una abstracción del modelo que describe el
comportamiento del sistema [14], en otras palabras, es una representación de las
relaciones existentes entre las variables y las restricciones involucradas en dicho
modelo. Por tanto, el sistema puede dividirse en dos principales conjuntos, el primero
de ellos es el conjunto de las restricciones C y el segundo es el conjunto de las
variables Z, este último a su vez es dividido en dos subconjuntos: el subconjunto

Análisis estructural
16 Departamento de Ingeniería Electrónica
K, que representa las variables conocidas (medibles) y los parámetros propios del
sistema, y el subconjunto X, en el cual están contempladas las variables
desconocidas como pueden ser fallas, ruidos o estados internos.
Considere como ejemplo, un sistema con tres variables , , , con dos señales
de sensores y , una señal de actuador u.
: + − = 0: + − = 0: − = 0
Con lo descrito anteriormente el sistema es representado en conjuntos, como se
muestra a continuación.
= ,,
= ⋃ = ,,
= ,,
Existen dos enfoques de cómo representar el modelo estructural de un sistema. El
primero de ellos hace uso de una matriz llamada matriz de incidencia (MI). En esta
matriz los renglones representan las restricciones y las columnas representan las
variables. En la MI se coloca un “1” en la intersección de la variable con la restricción
a la cual está asociada. A continuación en la Tabla 2.1 se muestra la MI del ejemplo
anterior.
Tabla 2.1 Matriz de incidencia
La principal ventaja de este enfoque, es la fácil manipulación de los datos en forma
matricial por medio de procesos que se describirán más a adelante.
El otro enfoque hace uso del grafo bipartido, el cual está constituido por dos
vértices unidos por aristas, cada arista tiene en un extremo un elemento del conjunto
de las restricciones y en el otro extremo un elemento del conjunto de las variables.
En la Figura 2.1 se muestra el modelo estructural por medio de grafo bipartido del
ejemplo.
x 1 x 2 x 3 y 1 y 2 u
c 1 1 1 1
c 2 1 1 1
c 3 1 1
X K
C

Análisis estructural
cenidet 17
Figura 2.1 Grafo bipartido
Cada una de estas representaciones estructurales presenta sus propias ventajas y su aplicación depende del desarrollador del AE.
2.2 Sistemas dinámicos
Hasta ahora sólo se han considerado sistemas estáticos, pero en realidad la mayoría
de los sistemas son dinámicos, es decir, sus modelos están expresados en términos
de ecuaciones diferenciales. Por tanto, es necesario tomar en cuenta este aspecto
en el AE y buscar la forma de tratar a las derivadas que estén incluidas en el modelo
de un sistema.
La estructura de las variables dinámicas involucradas en un sistema pueden ser
representadas mediante: restricciones diferenciales, diferenciación estructural o bien
tratar a las variables dinámicas como estáticas [29]. A continuación se hace una
descripción de las representaciones estructurales, para ello, considere el siguiente
sistema dinámico:
: = + : = : =
Donde y son variables conocidas, y son variables desconocidas. Haciendo
uso del grafo bipartido, el modelo estructural queda como lo muestra la Figura 2.2.
1x 2x
Figura 2.2 Grafo bipartido del sistema dinámico
Como se puede observar c1 está relacionada con dos variables desconocidas y ,
y una variable conocida ; c2 está relacionada sólo con las variables desconocidas

Análisis estructural
18 Departamento de Ingeniería Electrónica
y ; c3 está relacionada con la variable conocida y con la variable desconocida .
En este conjunto de restricciones existe una relación que enlaza a las restricciones c2
y c3 a través de , pero no existe una relación que enlace a c1 con las dos
restricciones restantes. Sin embargo, la información estructural contenida en cada
una de las restricciones puede ser manipulada de tal forma que puedan estar
relacionadas ambas restricciones. A continuación se describen las representaciones
estructurales para variables dinámicas (derivadas).
2.1.1 Restricciones diferenciales
En esta representación estructural la variable y su derivada son consideradas
como diferentes variables conectadas por una restricción diferencial. El modelo se
extiende con ecuaciones diferenciales como = ⁄ para cada variable
diferenciada. A continuación se presenta el modelo del sistema considerando las
restricciones diferenciales.
: = + : = : =
: =
: =
Una vez agregada la restricción diferencial, el grafo bipartido queda como lo muestra
la Figura 2.3.
Figura 2.3 Grafo bipartido considerando la restricción diferencial.
Una vez considerando la restricción diferencial, se puede apreciar que existen
relaciones entre todas las variables del sistema, esto es una ventaja ya que facilita el
procesamiento de la información estructural del sistema, como se verá más a delante
en este capítulo.

Análisis estructural
cenidet 19
2.1.2 Diferenciación estructural
En esta opción la variable y su derivada son consideradas como diferentes
variables y son combinadas por medio de diferenciación estructural. La diferenciación
estructural consiste en relacionar a la variable y su derivada, por medio de la
derivación de las restricciones donde aparece la variable sin derivar. Por tanto, al
modelo se agregan las restricciones diferenciadas. A continuación se muestra el
modelo considerando la diferenciación estructural.
: = + : = : = : =
El agregar las restricciones diferenciadas, brinda una ventaja ya que las derivadas de
las variables desconocidas se pueden calcular a partir de las variables conocidas y
esto es de gran utilidad en el desarrollo del análisis estructural Figura 2.4 muestra el
grafo bipartido del sistema aplicando diferenciación estructural.
1x 2xy
3c
Figura 2.4 Grafo bipartido aplicando diferenciación estructural.
2.1.3 Variables dinámicas consideradas como estáticas
En esta última representación se consideran a y su derivada como
estructuralmente iguales, es decir tomarlas como una misma variable. Aplicando esta
consideración el modelo queda de la siguiente manera.
: = + : = : =
Al tomar en cuenta esta consideración ahora las variables desconocidas pueden ser
relacionadas con las variables conocidas sin importar si es una variable dinámica o
estática, como lo muestra la Figura 2.5.
Análisis estructural
20 Departamento de Ingeniería Electrónica
Figura 2.5 Grafo considerando a las variables dinámicas como estáticas.
En esta tesis se utiliza la representación de sistemas dinámicos por medio de
restricciones diferenciales, debido a que trata a las variables dinámicas por
separado, dando una mayor facilidad en la manipulación de la información estructural
del sistema.
2.3 Aparejamiento
Una vez obtenido el modelo estructural de un sistema, el AE hace uso de una
herramienta básica llamada aparejamiento, la cual consiste en la asignación de
cómo calcular cada una de las variables desconocidas mediante relaciones causales
entre ciertas restricciones y variables conocidas y/o variables calculadas, este cálculo
generalmente se describe por medio de concatenación de restricciones. Las
variables que no pueden ser aparejadas no pueden ser calculadas. Cuando una
variable puede ser aparejada de formas distintas, es decir, existe más de una
manera de calcularla, entonces se dice que el sistema contiene información
redundante que puede ser utilizada para propósitos del análisis de
diagnosticabilidad.
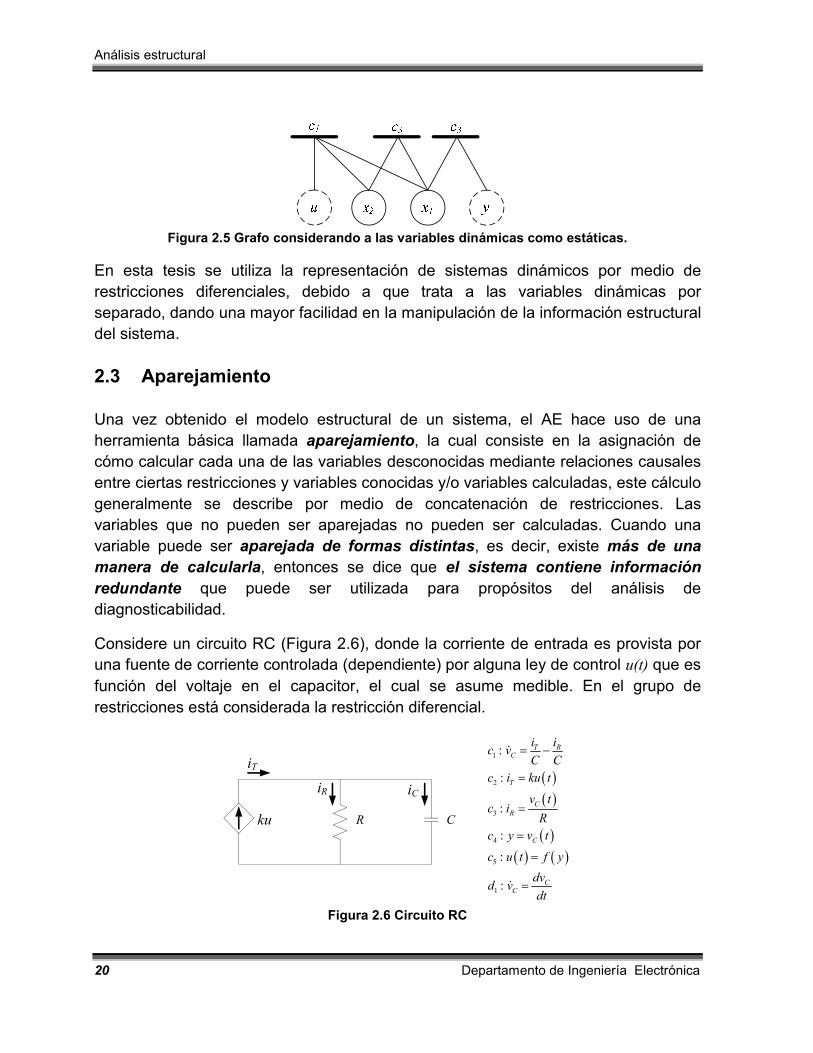
Considere un circuito RC (Figura 2.6), donde la corriente de entrada es provista por
una fuente de corriente controlada (dependiente) por alguna ley de control u(t) que es
función del voltaje en el capacitor, el cual se asume medible. En el grupo de
restricciones está considerada la restricción diferencial.
ku
iT
iR iC
R C
1
2
3
4
5
1
:
:
:
:
:
:
T RC
T
CR
C
CC
i ic v
C C
c i ku t
v tc i
R
c y v t
c u t f y
dvd v
dt
Figura 2.6 Circuito RC

Análisis estructural
cenidet 21
Otras variables contempladas en el circuito: y que es la señal del sensor; k, C, y R
son parámetros dados; iT e iR son la intensidad de corriente total y en la resistencia,
respectivamente. Como se observa c5 es la restricción de la ley de control, la cual
para este análisis no interesa de qué forma es, pero sí interesa el hecho de que es
función de y, una variable conocida (medible), por tanto, puede ser excluida del
modelo estructural. En la Tabla 2.2 se muestra el modelo estructural de este ejemplo.
Tabla 2.2 MI del circuito RC
Cabe mencionar que en el modelo estructural, todas las restricciones se consideran
con la misma jerarquía, de aquí que en la matriz de incidencia las relaciones entre
variables y restricciones sean todas descritas por 1’s.
Así, a fin de definir una secuencia de cálculo de variables, se lleva a cabo el
aparejamiento, con lo cual se rompe la simetría o la igualdad de jerarquía de las
restricciones. Cada representación de un modelo estructural (matriz de incidencia o
grafo bipartido) tiene sus propias técnicas o formas de representar el aparejamiento,
sin embargo, en ambos siempre se debe cumplir la propiedad de inyectividad, es
decir, que una restricción sólo puede ser aparejada con una variable desconocida y
viceversa. Con esto se define la secuencia de cálculo de la variable aparejada a
partir de las variables no aparejadas.
En el caso de la representación matricial, los aparejamientos y no aparejamientos en
la MI son representados con ⊗ y 1, respectivamente; una vez aparejada la MI, ésta
es nombrada como matriz de incidencia aparejada (MI*).
Considerando la propiedad de inyectividad, es posible que un modelo estructural
pueda ser aparejado de múltiples maneras, tal y como lo muestra la Tabla 2.3.
i T i R v C y u(t)
c 1 1 1 1
c 2 1 1
c 3 1 1
c 4 1 1
d 1 1 1
Cv

Análisis estructural
22 Departamento de Ingeniería Electrónica
Tabla 2.3 Aparejamientos del circuito RC
Como ilustración, considerando la fila uno en la Tabla 2.3a, el aparejamiento indica
que la variable (variable aparejada) será calculada vía la restricción c1 y las
variables iT e iR (variables no aparejadas).
Por otro lado, en la representación gráfica, el aparejamiento se distingue mediante
vértices (líneas) remarcados, indicando que la variable va a ser calculada por medio
de esa restricción. A continuación se muestran los aparejamientos del circuito RC
(Tabla 2.3) en su forma gráfica (grafos aparejados).
1c
2c
3c
4c
1dCv
1c
2c
3c
4c
1dCv
1c
2c
3c
4c
1dCv
Figura 2.7 Grafos aparejados del circuito RC
Es importante resaltar que en el aparejamiento la única directriz es conservar la
propiedad de inyectividad, de lo cual, como se vio, resultan múltiples formas de
aparejamiento. De estos múltiples aparejamientos se pueden dar distintas
situaciones con respecto a las restricciones y variables aparejadas como se describe
a continuación:
No todos los elementos del conjunto C y ni todos los elementos del conjunto X son
aparejados. A este tipo de aparejamiento se le llama incompleto, tanto en X como
en C (Tabla 2.3a o Figura 2.7a).
i T i R v C i T i R v C i T i R v C y u(t)
c 1 1 1 ⊗ 1 1 1 1 ⊗ 1
c 2 ⊗ ⊗ ⊗ 1
c 3 1 ⊗ ⊗ 1 1 ⊗
c 4 1 ⊗ 1 1
d 1 1 1 1 ⊗ 1 ⊗
c)a) b)
CvCvCv

Análisis estructural
cenidet 23
Todos los elementos del conjunto X son aparejados, pero no todos los elementos
del conjunto C. Este aparejamiento es completo con respecto a X (Tabla 2.3b,c o
Figura 2.7b,c).
Aunque no es el caso en este ejemplo, existe la posibilidad de obtener un
aparejamiento completo con respecto a C, para lo cual se requiere que haya más
variables que restricciones. También existe la posibilidad de obtener un
aparejamiento pleno, aparejamiento completo con respecto a C y X, para lo cual se
requiere que haya igual número de variables que restricciones. Es importante
señalar, que la existencia de aparejamientos completos es una posibilidad pero no
una garantía, pues depende de cómo se haga el aparejamiento y de las
propiedades estructurales del sistema.
Entre todas estas posibilidades de aparejamiento, para fines de evaluar la
diagnosticabilidad, interesan los aparejamientos completos con respecto a X, ya
que esto significaría restricciones “sobrantes” o redundantes; es decir, para obtener
información redundante se debe cumplir que el número de restricciones sea mayor al
número de variables: ||> ||1.
De lo anterior, como se mencionó, además de las propiedades estructurales del
sistema, el lograr un aparejamiento completo con respecto a X, depende de cómo se
haga el aparejamiento, en este sentido, es importante definir directrices o
lineamientos para obtener, si existe, dicho aparejamiento. En las secciones
siguientes se describen ciertos conceptos que serán de utilidad para el uso de un
algoritmo conocido como de propagación que busca el aparejamiento completo con
respecto a X.
2.3.1 Grafos orientados
Otra alternativa en la representación gráfica es el grafo orientado, cuya utilidad está
en el hecho de mostrar, de manera explícita, las trayectorias o secuencias del
cálculo de las variables x a partir de variables k; dichas trayectorias son útiles para la
programación de generadores de residuos, como se verá más adelante. Para la
construcción de los grafos orientados se toman en cuenta los siguientes criterios:
Restricción aparejada. En el aparejamiento entre la restricción y la
correspondiente variable, la dirección se define de la restricción a la variable, es
decir, la variable aparejada se considera como salida de la restricción aparejada;
en las aristas adyacentes a la restricción aparejada, se define una dirección de las 1 Las barras, |.|, indican la cardinalidad de un conjunto.

Análisis estructural
24 Departamento de Ingeniería Electrónica
variables no aparejadas a la restricción, es decir, las variables no aparejadas se
consideran como entradas a la restricción aparejada.
Restricciones no aparejadas. Aquí, la orientación va desde las variables a la
restricción, es decir, todas las variables son consideradas como entradas.
Las variables conocidas siempre son consideras como entradas de una
restricción.
En las restricciones no aparejadas todas las variables son consideradas como
entradas y ninguna como salida, por tanto, estas restricciones pueden ser igualadas
a cero, es decir, pueden ser asociadas a un vértice de salida etiquetado como
“ZERO”. En la Figura 2.8 se muestra el grafo orientado de un aparejamiento del
circuito RC (Tabla 2.3a).
Cv
4c
1c
2c
3c
1d
Figura 2.8 Grafo orientado del circuito RC.
2.3.2 Cadenas alternadas y alcanzabilidad
Un grafo orientado está constituido por cadenas alternadas, ; cada una de éstas
son trayectorias de cálculo en la que se encuentran de manera secuencial o
alternada, respectivos vértices de variables y vértices de restricciones. Cada cadena
alternada tiene una longitud, ||, definida por el número de restricciones que se
encuentren a lo largo de ella. Si una trayectoria se encuentra a su paso con una
restricción no aparejada, entonces esta termina y la restricción es asociada con el
vértice ZERO.
Un término asociado a las cadenas alternadas es el de la alcanzabilidad o
calculabilidad, la cual tiene la siguiente definición:
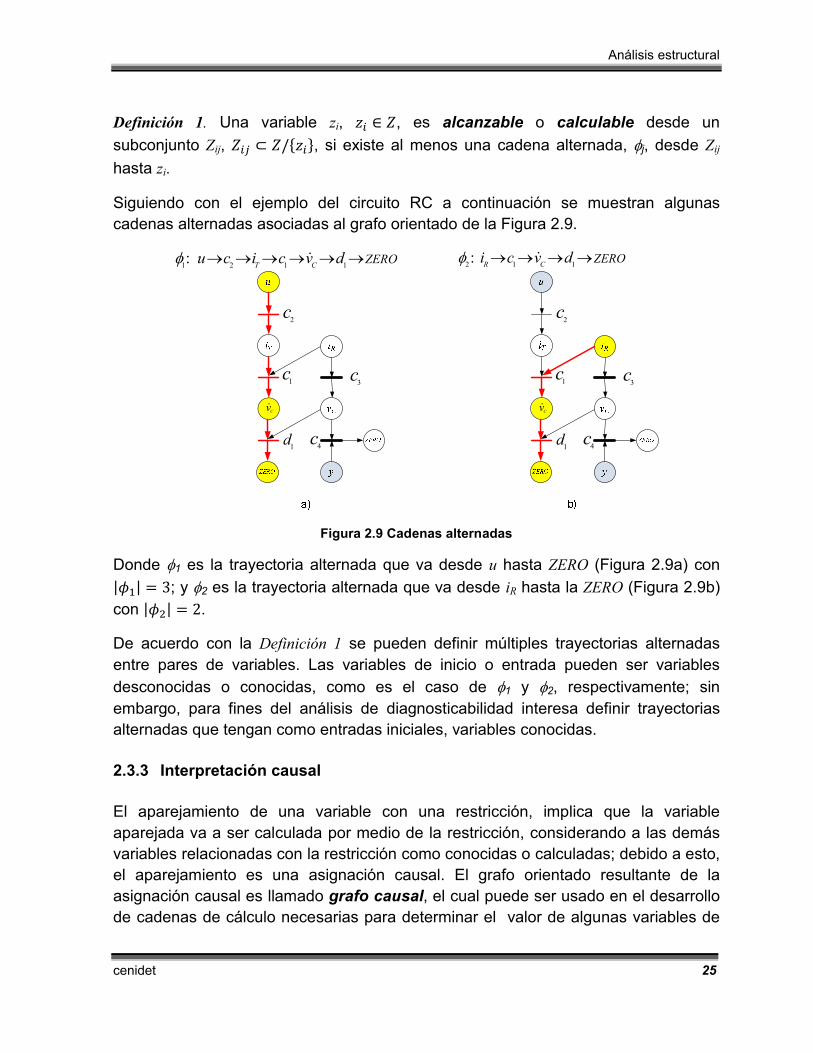
Análisis estructural
cenidet 25
Definición 1. Una variable zi, ∈ , es alcanzable o calculable desde un
subconjunto Zij, ⊂ /, si existe al menos una cadena alternada, j, desde Zij
hasta zi.
Siguiendo con el ejemplo del circuito RC a continuación se muestran algunas
cadenas alternadas asociadas al grafo orientado de la Figura 2.9.
Cv
4c
1c
2c
3c
1d
1 2 1 1:
T CZEROu c i c v d
Cv
4c
1c
2c
3c
1d
2 1 1:
R CZEROi c v d
Figura 2.9 Cadenas alternadas
Donde 1 es la trayectoria alternada que va desde u hasta ZERO (Figura 2.9a) con
||= 3; y 2 es la trayectoria alternada que va desde iR hasta la ZERO (Figura 2.9b)
con ||= 2.
De acuerdo con la Definición 1 se pueden definir múltiples trayectorias alternadas
entre pares de variables. Las variables de inicio o entrada pueden ser variables
desconocidas o conocidas, como es el caso de 1 y 2, respectivamente; sin
embargo, para fines del análisis de diagnosticabilidad interesa definir trayectorias
alternadas que tengan como entradas iniciales, variables conocidas.
2.3.3 Interpretación causal
El aparejamiento de una variable con una restricción, implica que la variable
aparejada va a ser calculada por medio de la restricción, considerando a las demás
variables relacionadas con la restricción como conocidas o calculadas; debido a esto,
el aparejamiento es una asignación causal. El grafo orientado resultante de la
asignación causal es llamado grafo causal, el cual puede ser usado en el desarrollo
de cadenas de cálculo necesarias para determinar el valor de algunas variables de

Análisis estructural
26 Departamento de Ingeniería Electrónica
interés. Sin embargo, hay que tener especial cuidado cuando tratamos restricciones
con variables dinámicas. Considere la siguiente restricción con variables dinámicas.
1c
11 2: t
ddtxc x
Figura 2.10 Causalidad derivativa
Note que x1 y x2 no pueden ser consideradas independientes una de la otra. Si la
trayectoria de x1 es conocida, por ende el cálculo de su derivada puede ser realizado,
lo cual permite que la restricción siempre sea aparejada con x2, a este aparejamiento
se le conoce como causalidad diferencial (Figura 2.10). Por otra parte, cuando la
trayectoria de x2 es conocida, la restricción es aparejada con x1 y su cálculo se
realizaría de la siguiente manera:
1c
1 1 1 20
: 0t
c x x x d
Figura 2.11 Causalidad integral
A este aparejamiento se le conoce como causalidad integral (Figura 2.11), en este
caso no se puede determinar a x1, al menos que se conozcan las condiciones
iniciales, lo cual no siempre es posible en diagnóstico de fallas, ello nos lleva a la
prohibición de la causalidad integral en restricciones con variables dinámicas. Bajo
este contexto, en la matriz de incidencia se usa el símbolo Δ para indicar la
prohibición del aparejamiento de algunas variables para evitar la situación antes
mencionada. En la Tabla 2.4 se muestra la matriz de incidencia con prohibición de
aparejamientos del circuito RC, esta prohibición significa que la variable vC no puede
ser aparejada.
Tabla 2.4 MI con prohibición de aparejamientos
i T i R v C y u(t)
c 1 1 1 1
c 2 1 1
c 3 1 1
c 4 1 1
d 1 Δ 1
Cv
Análisis estructural
cenidet 27
2.4 Aparejamiento por algoritmo de propagación
El obtener toda la información redundante posible de un sistema depende del
aparejamiento, es por ello que se debe encontrar un aparejamiento, en el cual ya no
sea posible aparejar más variables ni restricciones, es decir, que el sistema tenga un
aparejamiento completo con respecto a las variables desconocidas, X. Para
lograr este objetivo, en [14] se describe un proceso a seguir llamado “algoritmo de
propagación de restricciones (Ranking)”, el cual se basa en el índice de ranqueo R
para indicar el orden en el que se aparejan las variables desconocidas (secuencia de
cálculo) a partir de las variables conocidas y/o calculadas. A continuación se describe
el algoritmo de aparejamiento.
1. Colocar las variables conocidas al extremo derecho de la MI e iniciar R=i=0.
2. Marque todas las variables conocidas.
3. Encuentre todas las restricciones que tengan só lo una variable sin marcar. Asocie
estas restricciones con el rango i (R=i) y marque a la variable correspondiente con
el símbolo ⨂ , indicando con esto que la variable será calculada con esa
restricción.
4. Si existen restricciones sin marcar en las cuales todas las variables están
marcadas, éstas se asocian con el rango i, y se conectan con la pseudo-variable
ZERO.
5. Incremente i=i+1.
6. Si existen restricciones o variables sin marcar, continúe con el paso 3.
En el primer paso, todas las variables conocidas K son marcadas y todas las
variables desconocidas X permanecen sin marcar. Entonces, toda restricción que
tenga a lo mucho una variable sin marcar se le asigna el rango 0. La restricción es
aparejada con la variable que no está marcada (o cero si no existe ninguna) y se
marca la variable. Este paso se repite incrementando el rango, hasta que ya no
exista ninguna variable sin aparejar. El rango puede ser interpretado como el número
de pasos necesarios para calcular una variable desconocida a través de las
conocidas.
Aplicando el algoritmo de propagación en el circuito RC, en el cual u y y son
conocidas, y iT, iR, vC, son variables desconocidas, se obtienen los siguientes
resultados:
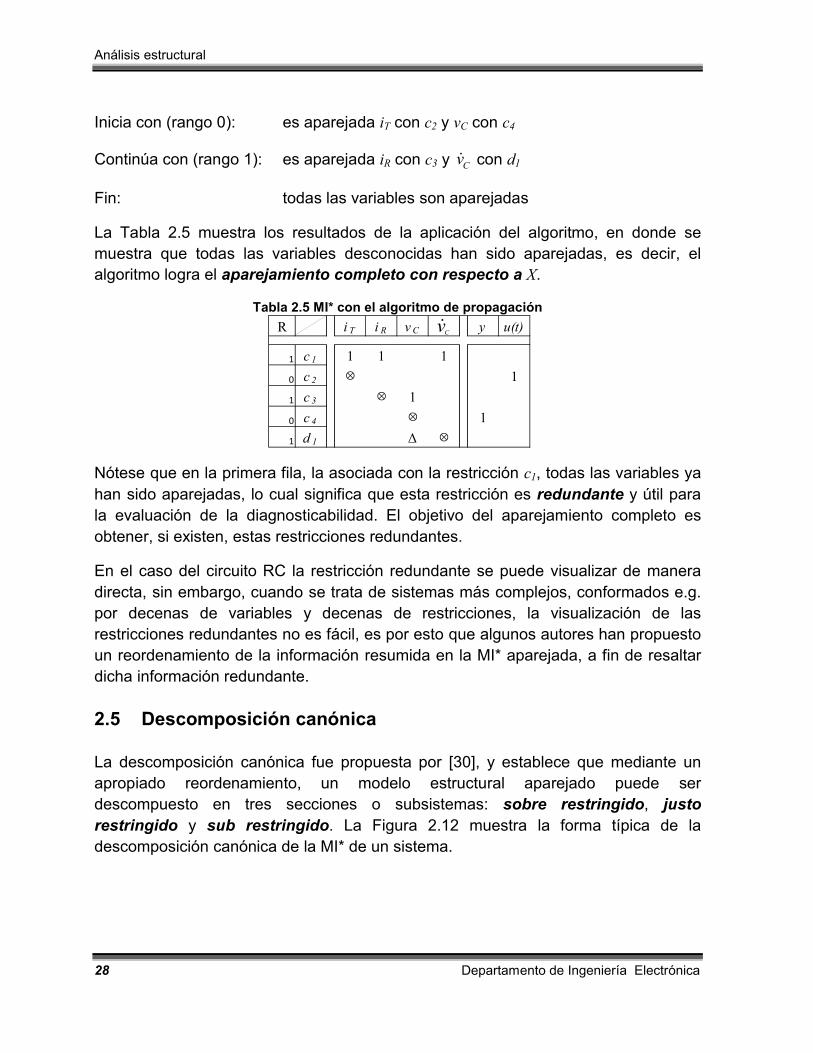
Análisis estructural
28 Departamento de Ingeniería Electrónica
Inicia con (rango 0): es aparejada iT con c2 y vC con c4
Continúa con (rango 1): es aparejada iR con c3 y Cv con d1
Fin: todas las variables son aparejadas
La Tabla 2.5 muestra los resultados de la aplicación del algoritmo, en donde se
muestra que todas las variables desconocidas han sido aparejadas, es decir, el
algoritmo logra el aparejamiento completo con respecto a X.
Tabla 2.5 MI* con el algoritmo de propagación
Nótese que en la primera fila, la asociada con la restricción c1, todas las variables ya
han sido aparejadas, lo cual significa que esta restricción es redundante y útil para
la evaluación de la diagnosticabilidad. El objetivo del aparejamiento completo es
obtener, si existen, estas restricciones redundantes.
En el caso del circuito RC la restricción redundante se puede visualizar de manera
directa, sin embargo, cuando se trata de sistemas más complejos, conformados e.g.
por decenas de variables y decenas de restricciones, la visualización de las
restricciones redundantes no es fácil, es por esto que algunos autores han propuesto
un reordenamiento de la información resumida en la MI* aparejada, a fin de resaltar
dicha información redundante.
2.5 Descomposición canónica
La descomposición canónica fue propuesta por [30], y establece que mediante un
apropiado reordenamiento, un modelo estructural aparejado puede ser
descompuesto en tres secciones o subsistemas: sobre restringido, justo
restringido y sub restringido. La Figura 2.12 muestra la forma típica de la
descomposición canónica de la MI* de un sistema.
R i T i R v C y u(t)
1 c 1 1 1 1
0 c 2 ⊗ 1
1 c 3 ⊗ 1
0 c 4 ⊗ 1
1 d 1 Δ ⊗
Cv

Análisis estructural
cenidet 29
Figura 2.12 Descomposición canónica de una MI*
En la descomposición canónica se distinguen la partición de = ,, y la
partición de = ,,. Las áreas en blanco son ceros, las áreas en gris
contienen unos y ceros, y la línea remarcada representa el aparejamiento. La gráfica
es el resultado de haber reorganizado las filas y las columnas de tal manera que el
aparejamiento de variables y restricciones aparezca en la diagonal.
Respecto a los subsistemas, éstos se caracterizan por las siguientes propiedades:
Sobre restringido. Si existe un aparejamiento completo de las variables Z, es
decir, resulta cuando existen más restricciones que variables ||> ||.
Justo restringido. Si existe un aparejamiento completo tanto en las variables Z
como en las restricciones C. Esta situación se da cuando existe el mismo número
de restricciones y variables ||= ||.
Sub restringido. Si existe un aparejamiento completo de las restricciones C, es
decir, que existen menos restricciones que variables ||> ||.
La posibilidad de FDI en un sistema está directamente ligada a la existencia de
información redundante en él. Por tanto, la existencia de un subsistema sobre
restringido es determinante, ya que sólo éste contiene las restricciones redundantes
que pueden ser empleadas para cumplir con tal propósito.
Una guía básica del ordenamiento que se debe llevar cabo en la MI* a fin de obtener
la descomposición canónica de forma manual es:
1. Primero. Tomar en cuenta, si es que existen, a las variables x que no fueron
aparejadas ni calculadas y reordenar las filas y columnas asociadas a estas
variables de tal forma que sean colocadas en la esquina superior izquierda de la
matriz.
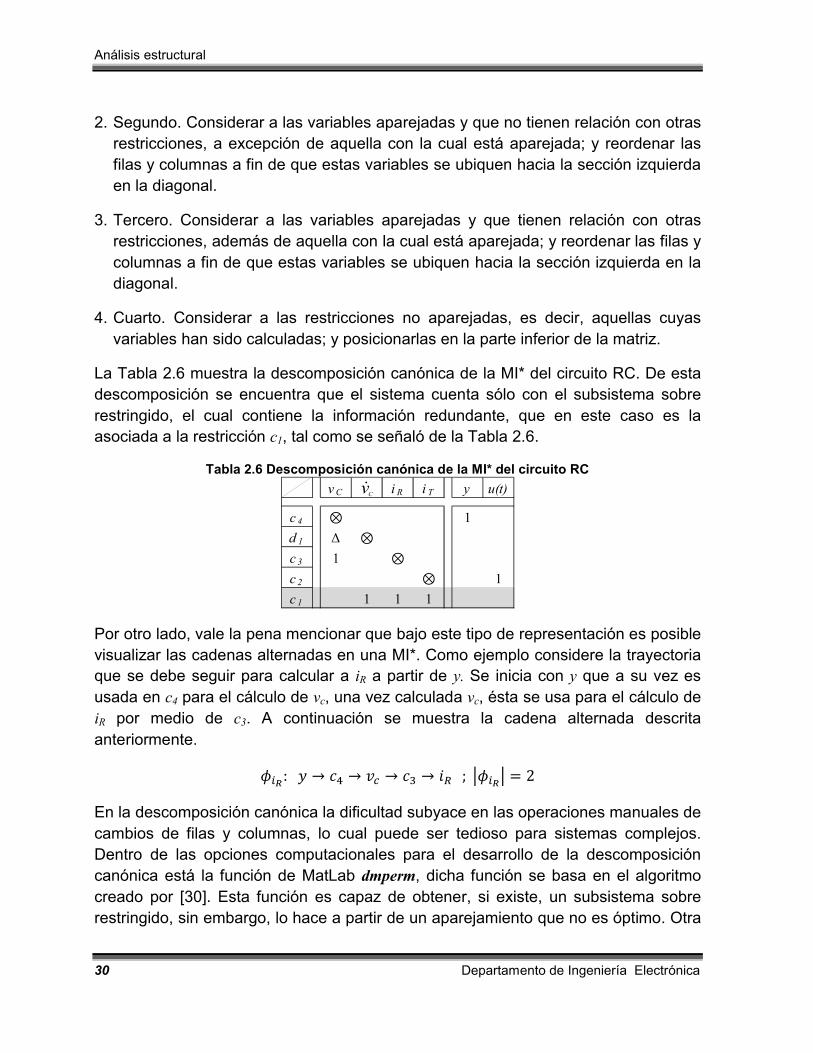
Análisis estructural
30 Departamento de Ingeniería Electrónica
2. Segundo. Considerar a las variables aparejadas y que no tienen relación con otras
restricciones, a excepción de aquella con la cual está aparejada; y reordenar las
filas y columnas a fin de que estas variables se ubiquen hacia la sección izquierda
en la diagonal.
3. Tercero. Considerar a las variables aparejadas y que tienen relación con otras
restricciones, además de aquella con la cual está aparejada; y reordenar las filas y
columnas a fin de que estas variables se ubiquen hacia la sección izquierda en la
diagonal.
4. Cuarto. Considerar a las restricciones no aparejadas, es decir, aquellas cuyas
variables han sido calculadas; y posicionarlas en la parte inferior de la matriz.
La Tabla 2.6 muestra la descomposición canónica de la MI* del circuito RC. De esta
descomposición se encuentra que el sistema cuenta sólo con el subsistema sobre
restringido, el cual contiene la información redundante, que en este caso es la
asociada a la restricción c1, tal como se señaló de la Tabla 2.6.
Tabla 2.6 Descomposición canónica de la MI* del circuito RC
Por otro lado, vale la pena mencionar que bajo este tipo de representación es posible
visualizar las cadenas alternadas en una MI*. Como ejemplo considere la trayectoria
que se debe seguir para calcular a iR a partir de y. Se inicia con y que a su vez es
usada en c4 para el cálculo de vc, una vez calculada vc, ésta se usa para el cálculo de
iR por medio de c3. A continuación se muestra la cadena alternada descrita
anteriormente.
: → → → → ; = 2
En la descomposición canónica la dificultad subyace en las operaciones manuales de
cambios de filas y columnas, lo cual puede ser tedioso para sistemas complejos.
Dentro de las opciones computacionales para el desarrollo de la descomposición
canónica está la función de MatLab dmperm, dicha función se basa en el algoritmo
creado por [30]. Esta función es capaz de obtener, si existe, un subsistema sobre
restringido, sin embargo, lo hace a partir de un aparejamiento que no es óptimo. Otra
v C i R i T y u(t)
c 4 ⊗ 1
d 1 Δ ⊗
c 3 1 ⊗
c 2 ⊗ 1
c 1 1 1 1
Cv
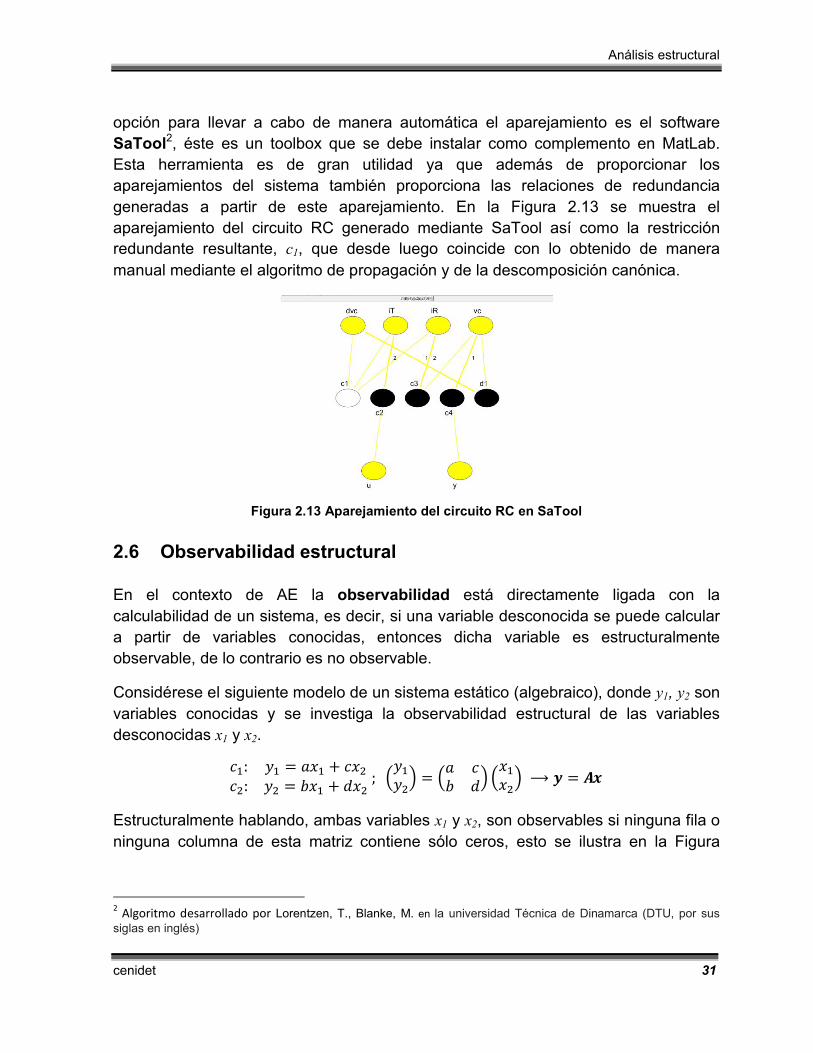
Análisis estructural
cenidet 31
opción para llevar a cabo de manera automática el aparejamiento es el software
SaTool2, éste es un toolbox que se debe instalar como complemento en MatLab.
Esta herramienta es de gran utilidad ya que además de proporcionar los
aparejamientos del sistema también proporciona las relaciones de redundancia
generadas a partir de este aparejamiento. En la Figura 2.13 se muestra el
aparejamiento del circuito RC generado mediante SaTool así como la restricción
redundante resultante, c1, que desde luego coincide con lo obtenido de manera
manual mediante el algoritmo de propagación y de la descomposición canónica.
Figura 2.13 Aparejamiento del circuito RC en SaTool
2.6 Observabilidad estructural
En el contexto de AE la observabilidad está directamente ligada con la
calculabilidad de un sistema, es decir, si una variable desconocida se puede calcular
a partir de variables conocidas, entonces dicha variable es estructuralmente
observable, de lo contrario es no observable.
Considérese el siguiente modelo de un sistema estático (algebraico), donde y1, y2 son
variables conocidas y se investiga la observabilidad estructural de las variables
desconocidas x1 y x2.
: = + : = +
; =
⟶ =
Estructuralmente hablando, ambas variables x1 y x2, son observables si ninguna fila o
ninguna columna de esta matriz contiene sólo ceros, esto se ilustra en la Figura
2 Algoritmo desarrollado por Lorentzen, T., Blanke, M. en la universidad Técnica de Dinamarca (DTU, por sus
siglas en inglés)
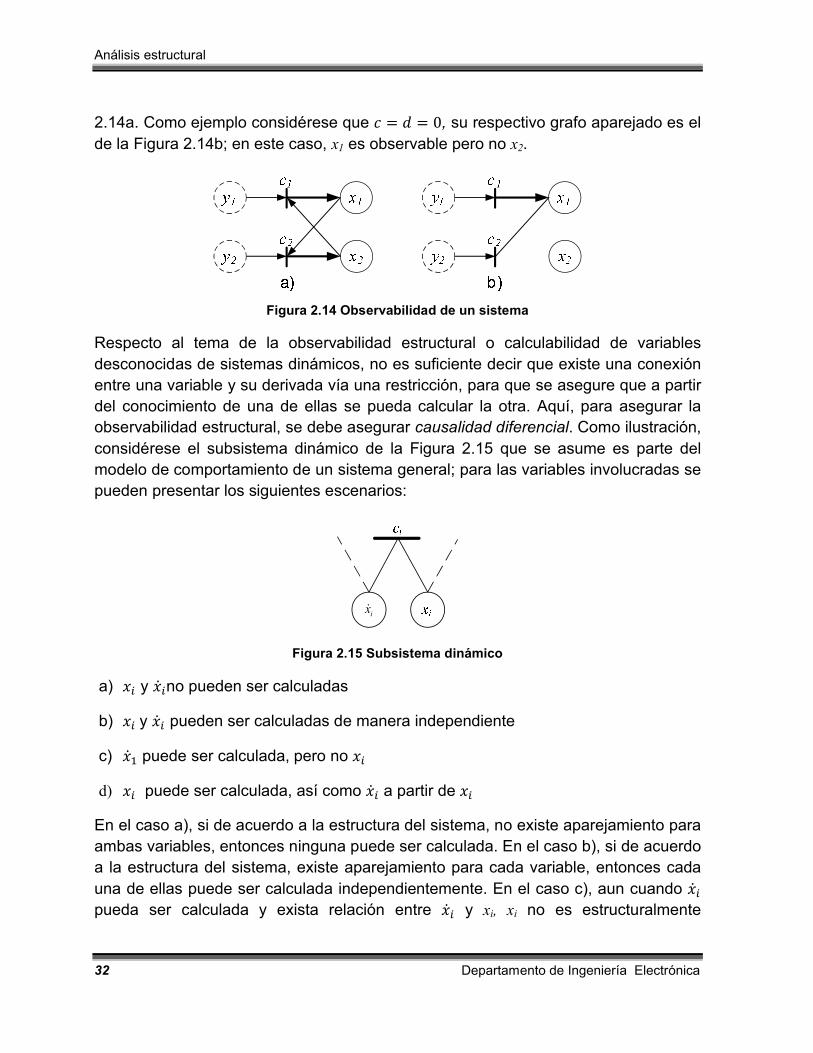
Análisis estructural
32 Departamento de Ingeniería Electrónica
2.14a. Como ejemplo considérese que = = 0, su respectivo grafo aparejado es el
de la Figura 2.14b; en este caso, x1 es observable pero no x2.
Figura 2.14 Observabilidad de un sistema
Respecto al tema de la observabilidad estructural o calculabilidad de variables
desconocidas de sistemas dinámicos, no es suficiente decir que existe una conexión
entre una variable y su derivada vía una restricción, para que se asegure que a partir
del conocimiento de una de ellas se pueda calcular la otra. Aquí, para asegurar la
observabilidad estructural, se debe asegurar causalidad diferencial. Como ilustración,
considérese el subsistema dinámico de la Figura 2.15 que se asume es parte del
modelo de comportamiento de un sistema general; para las variables involucradas se
pueden presentar los siguientes escenarios:
ix
Figura 2.15 Subsistema dinámico
a) y no pueden ser calculadas
b) y pueden ser calculadas de manera independiente
c) puede ser calculada, pero no
d) puede ser calculada, así como a partir de
En el caso a), si de acuerdo a la estructura del sistema, no existe aparejamiento para
ambas variables, entonces ninguna puede ser calculada. En el caso b), si de acuerdo
a la estructura del sistema, existe aparejamiento para cada variable, entonces cada
una de ellas puede ser calculada independientemente. En el caso c), aun cuando
pueda ser calculada y exista relación entre y xi, xi no es estructuralmente
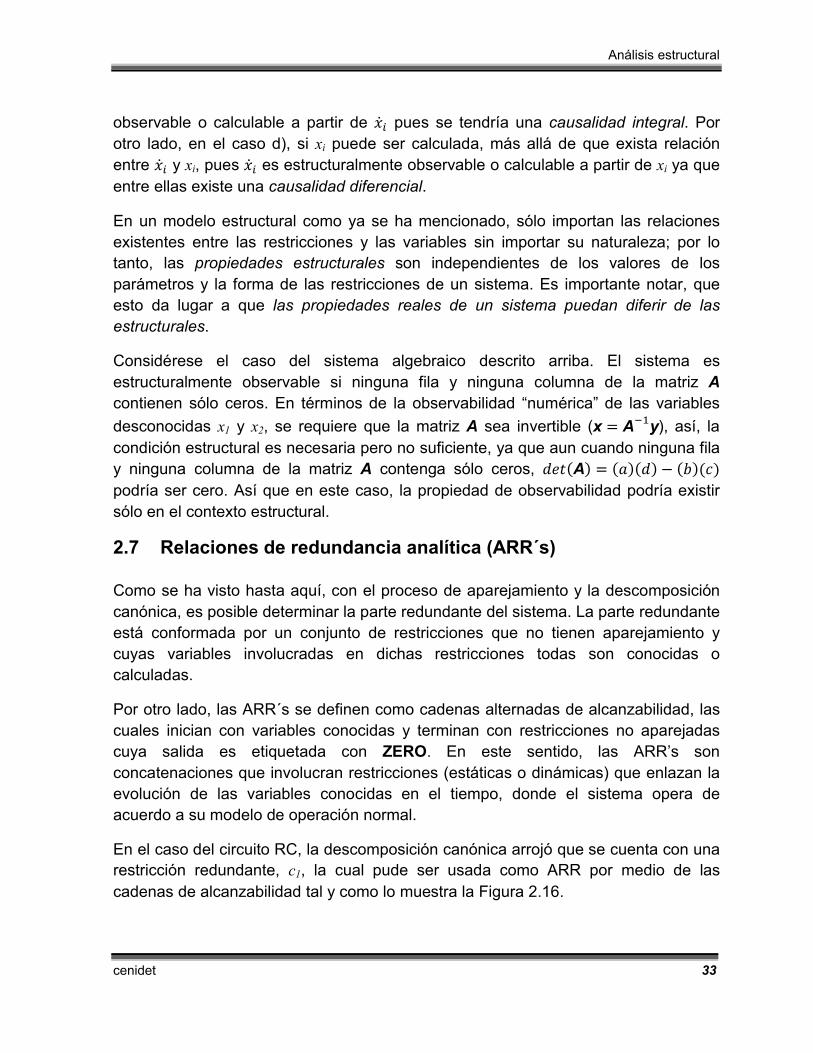
Análisis estructural
cenidet 33
observable o calculable a partir de pues se tendría una causalidad integral. Por
otro lado, en el caso d), si xi puede ser calculada, más allá de que exista relación
entre y xi, pues es estructuralmente observable o calculable a partir de xi ya que
entre ellas existe una causalidad diferencial.
En un modelo estructural como ya se ha mencionado, sólo importan las relaciones
existentes entre las restricciones y las variables sin importar su naturaleza; por lo
tanto, las propiedades estructurales son independientes de los valores de los
parámetros y la forma de las restricciones de un sistema. Es importante notar, que
esto da lugar a que las propiedades reales de un sistema puedan diferir de las
estructurales.
Considérese el caso del sistema algebraico descrito arriba. El sistema es
estructuralmente observable si ninguna fila y ninguna columna de la matriz A
contienen sólo ceros. En términos de la observabilidad “numérica” de las variables
desconocidas x1 y x2, se requiere que la matriz A sea invertible (x = Ay), así, la
condición estructural es necesaria pero no suficiente, ya que aun cuando ninguna fila
y ninguna columna de la matriz A contenga sólo ceros, (A)= ()()− ()()
podría ser cero. Así que en este caso, la propiedad de observabilidad podría existir
sólo en el contexto estructural.
2.7 Relaciones de redundancia analítica (ARR´s)
Como se ha visto hasta aquí, con el proceso de aparejamiento y la descomposición
canónica, es posible determinar la parte redundante del sistema. La parte redundante
está conformada por un conjunto de restricciones que no tienen aparejamiento y
cuyas variables involucradas en dichas restricciones todas son conocidas o
calculadas.
Por otro lado, las ARR´s se definen como cadenas alternadas de alcanzabilidad, las
cuales inician con variables conocidas y terminan con restricciones no aparejadas
cuya salida es etiquetada con ZERO. En este sentido, las ARR’s son
concatenaciones que involucran restricciones (estáticas o dinámicas) que enlazan la
evolución de las variables conocidas en el tiempo, donde el sistema opera de
acuerdo a su modelo de operación normal.
En el caso del circuito RC, la descomposición canónica arrojó que se cuenta con una
restricción redundante, c1, la cual pude ser usada como ARR por medio de las
cadenas de alcanzabilidad tal y como lo muestra la Figura 2.16.
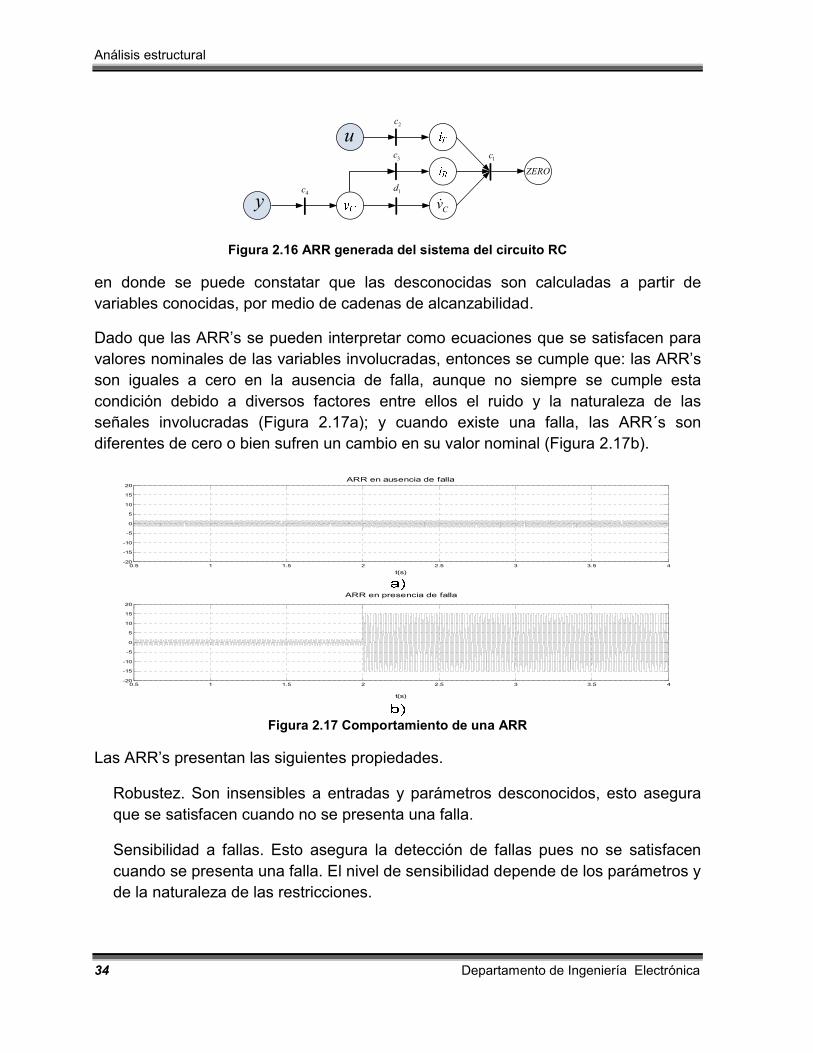
Análisis estructural
34 Departamento de Ingeniería Electrónica
Cv
1c
2c
3c
4c 1d
y
u
ZERO
Figura 2.16 ARR generada del sistema del circuito RC
en donde se puede constatar que las desconocidas son calculadas a partir de
variables conocidas, por medio de cadenas de alcanzabilidad.
Dado que las ARR’s se pueden interpretar como ecuaciones que se satisfacen para
valores nominales de las variables involucradas, entonces se cumple que: las ARR’s
son iguales a cero en la ausencia de falla, aunque no siempre se cumple esta
condición debido a diversos factores entre ellos el ruido y la naturaleza de las
señales involucradas (Figura 2.17a); y cuando existe una falla, las ARR´s son
diferentes de cero o bien sufren un cambio en su valor nominal (Figura 2.17b).
0.5 1 1.5 2 2.5 3 3.5 4-20
-15
-10
-5
0
5
10
15
20
ARR en presencia de falla
t(s)
0.5 1 1.5 2 2.5 3 3.5 4-20
-15
-10
-5
0
5
10
15
20ARR en ausencia de falla
t(s)
Figura 2.17 Comportamiento de una ARR
Las ARR’s presentan las siguientes propiedades.
Robustez. Son insensibles a entradas y parámetros desconocidos, esto asegura
que se satisfacen cuando no se presenta una falla.
Sensibilidad a fallas. Esto asegura la detección de fallas pues no se satisfacen
cuando se presenta una falla. El nivel de sensibilidad depende de los parámetros y
de la naturaleza de las restricciones.
Análisis estructural
cenidet 35
Estructurado. Asegura que ante la presencia de una falla dada sólo un conjunto de
ARR’s no se satisfacen; permitiendo así, distinguir (desde el conjunto de las
satisfechas y no satisfechas) la falla ocurrida.
2.8 Detectabilidad y aislabilidad
Para que las ARR’s sean útiles para propósitos de diagnosticabilidad, es necesario
considerar un conjunto de fallas y tener el conocimiento de cómo éstas afectan al
modelo que describe el comportamiento del sistema en cuestión. Así, la
detectabilidad a fallas está relacionada con la propiedad de sensibilidad de las
ARR’s; sin embargo, la sensibilidad que una ARR pueda tener a cierta falla depende,
entre otros, del conocimiento que se tenga de dicha falla. Respecto a una falla, se
pueden distinguir tres niveles de conocimiento [16]:
Nivel básico. En este nivel sólo se específica el componente que es afectado por
la falla y la restricción donde se encuentra, no se incluye información de cómo la
falla afecta al sistema.
Segundo nivel. Describe la forma en la que es afectada la ecuación sujeta a la
falla. Por ejemplo: cuáles son las ecuaciones del modelo que en caso de falla
pueden dejar de ser válidas. Para este propósito, nuevas variables (fi´s) deben ser
agregadas al modelo.
Tercer nivel. Incluye el modelo de la señal de falla. Por ejemplo: cuando se sabe
que la dinámica de la falla es lenta, o que la falla está rígidamente correlacionada
con algunas de las demás señales del modelo.
Por ejemplo, del circuito tratado en esta unidad se obtuvo sólo una ARR, la cual está
dada por la siguiente expresión.
: (),(),()
Como se puede ver esta ARR está constituida por todas las restricciones
consideradas en el AE c1, c2, c3, c4 y d1, así como por todas las variables y parámetros
relacionadas con estas restricciones, por lo tanto, será sensible a cualquier falla que
ocurra en el circuito, como por ejemplo, la falla en el capacitor (fC) que se verá
reflejada en c1; la falla en la resistencia que se ve reflejada en la restricción c3, o bien,
las fallas en las variables conocidas u que se verán reflejadas en las restricciones c2 y
Análisis estructural
36 Departamento de Ingeniería Electrónica
c4 respectivamente, así pues la sensibilidad de fallas esta ARR está representada
siguiente tabla.
De esta manera se concluye que en el circuito RC que todas las fallas pueden ser
detectas, sin embargo, no existe un aislamiento entre ellas dado que no es posible
cuando ocurre una u otra.
2.8.1 Matriz de Firma de Fallas y Matriz de Aislabilidad de Fallas
Definición 2. Sea ARR (k)=(),(),(),… , () un conjunto de
ARR´s y donde k es un vector de variables conocidas. Dos fallas diferentes , ∈ ,
donde es el conjunto de fallas de interés; se dice que son fallas aislables si se
satisface.
ARR(k(f1))≠ ARR(k(f2))
De acuerdo a la Definición 2, se deduce que para el aislamiento de fallas se requieren
de ARR´s con diferentes comportamientos ante fallas. Tomando en cuenta que una
ARRi es estructuralmente sensible a una falla fi, si esta falla produce la inconsistencia
de la ARRi, entonces es posible agrupar de manera matricial las inconsistencias de
las ARR’s para el conjunto F de fallas de interés. En dicha representación, las fallas
se ubican en las columnas y las ARR´s en las filas, en donde además, cada columna
de dicha matriz representa la firma de la falla correspondiente. Este concepto está
formalizado en las siguientes definiciones propuestas por [16].
Definición 3. La matriz de firma de fallas (MFF) de dimensión l× f, describe todas las
posibles firmas de fallas de un conjunto = ,,… ,. Cada línea corresponde a
una ARR y cada columna a una falla fj. Un 1 en la posición (i, j) indica que la falla j es
detectada por la ARRi. Cuando dos firmas son idénticas se dice que las fallas
correspondientes no son aislables (o no son distinguibles entre sí).
Esta matriz muestra las propiedades de detectabilidad estructural y aislabilidad de
fallas. Entonces una falla es detectable si existe al menos una entrada no-nula en su
firma. Mientras que dos fallas son estructuralmente aislables si sus firmas son
diferentes. Considere como ejemplo la MFF de la Tabla 2.7.
f C f R f u f y
ARR 1 1 1 1
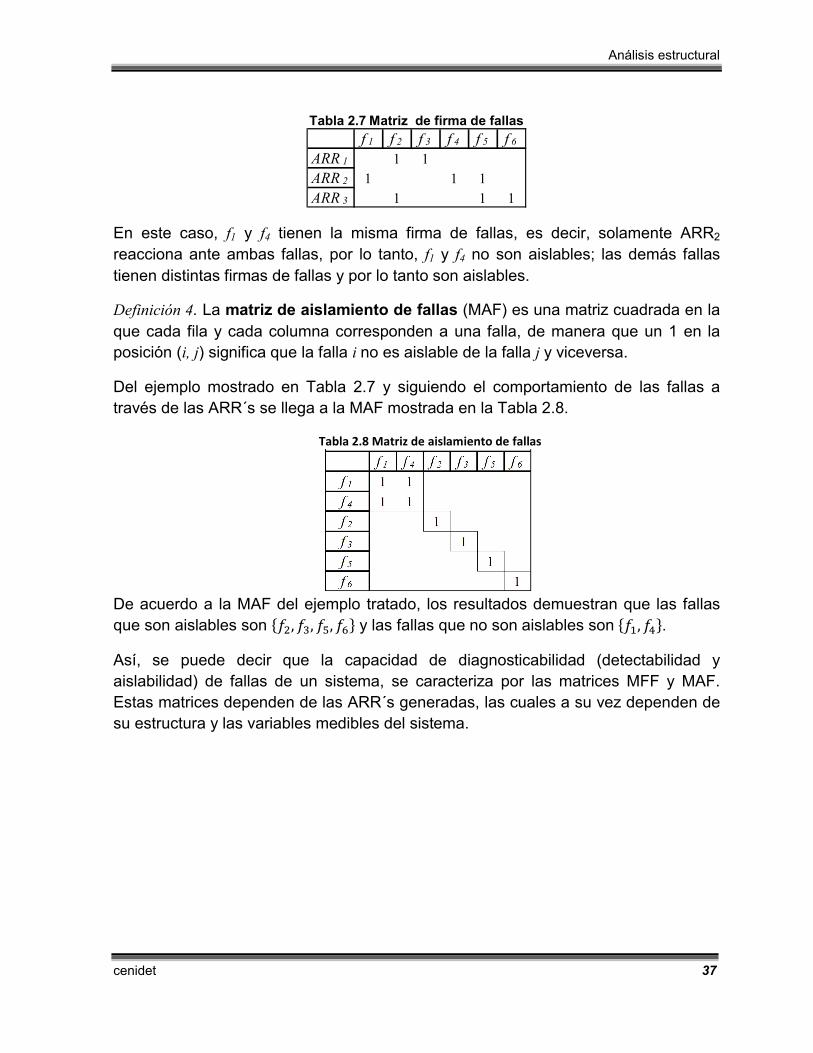
Análisis estructural
cenidet 37
Tabla 2.7 Matriz de firma de fallas
En este caso, f1 y f4 tienen la misma firma de fallas, es decir, solamente ARR2
reacciona ante ambas fallas, por lo tanto, f1 y f4 no son aislables; las demás fallas
tienen distintas firmas de fallas y por lo tanto son aislables.
Definición 4. La matriz de aislamiento de fallas (MAF) es una matriz cuadrada en la
que cada fila y cada columna corresponden a una falla, de manera que un 1 en la
posición (i, j) significa que la falla i no es aislable de la falla j y viceversa.
Del ejemplo mostrado en Tabla 2.7 y siguiendo el comportamiento de las fallas a
través de las ARR´s se llega a la MAF mostrada en la Tabla 2.8.
Tabla 2.8 Matriz de aislamiento de fallas
De acuerdo a la MAF del ejemplo tratado, los resultados demuestran que las fallas
que son aislables son ,,, y las fallas que no son aislables son ,.
Así, se puede decir que la capacidad de diagnosticabilidad (detectabilidad y
aislabilidad) de fallas de un sistema, se caracteriza por las matrices MFF y MAF.
Estas matrices dependen de las ARR´s generadas, las cuales a su vez dependen de
su estructura y las variables medibles del sistema.
f 1 f 2 f 3 f 4 f 5 f 6
ARR 1 1 1
ARR 2 1 1 1
ARR 3 1 1 1

Análisis estructural
38 Departamento de Ingeniería Electrónica
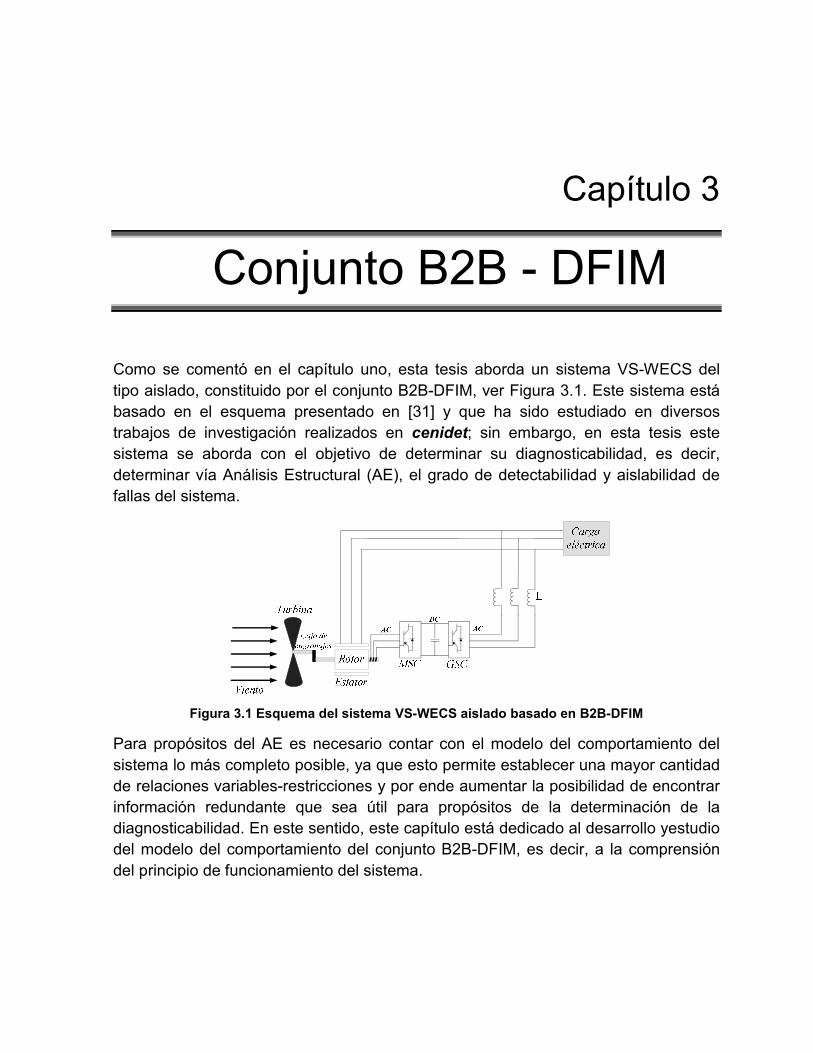
Capítulo 3
3. Conjunto B2B - DFIM
Como se comentó en el capítulo uno, esta tesis aborda un sistema VS-WECS del
tipo aislado, constituido por el conjunto B2B-DFIM, ver Figura 3.1. Este sistema está
basado en el esquema presentado en [31] y que ha sido estudiado en diversos
trabajos de investigación realizados en cenidet; sin embargo, en esta tesis este
sistema se aborda con el objetivo de determinar su diagnosticabilidad, es decir,
determinar vía Análisis Estructural (AE), el grado de detectabilidad y aislabilidad de
fallas del sistema.
Figura 3.1 Esquema del sistema VS-WECS aislado basado en B2B-DFIM
Para propósitos del AE es necesario contar con el modelo del comportamiento del
sistema lo más completo posible, ya que esto permite establecer una mayor cantidad
de relaciones variables-restricciones y por ende aumentar la posibilidad de encontrar
información redundante que sea útil para propósitos de la determinación de la
diagnosticabilidad. En este sentido, este capítulo está dedicado al desarrollo yestudio
del modelo del comportamiento del conjunto B2B-DFIM, es decir, a la comprensión
del principio de funcionamiento del sistema.
Conjunto B2B - DFIM
40 Departamento de Ingeniería Electrónica
3.1 Máquina de inducción doblemente alimentada (DFIM)
La DFIM es una máquina asíncrona trifásica con rotor bobinado, la cual en
aplicaciones de generación eólica interactúa con un convertidor electrónico acoplado
a los anillos del rotor. El empleo del convertidor permite el control del voltaje y la
frecuencia generada a partir de la adecuada manipulación de las corrientes en el
circuito rotórico de la máquina.
El rotor bobinado está conformado por un núcleo de acero laminado en el cual se
colocan uno o varios bobinados de alambre de cobre o algún material conductor. Las
tres fases del rotor están conectados en estrella (Y) y sus extremos están
conectados a unos anillos deslizantes montados sobre el eje, dichos anillos están
aislados eléctricamente del eje. En los anillos se colocan unos bloques
de carbón (escobillas) que mediante unos resortes hacen presión sobre ellos
estableciendo un contacto eléctrico. Las escobillas hacen posible que el rotor tenga
contacto con el exterior de la máquina.
3.1.1 Principio de funcionamiento de la DFIM
En los aerogeneradores, la DFIM tiene la función de convertir la energía mecánica
generada por el movimiento de las hélices en energía eléctrica (generador eléctrico).
Bajo este contexto un generador eléctrico consta de dos partes esenciales para su
funcionamiento los cuales son: el inductor, que es el que crea el campo magnético, y
el inducido, que es atravesado por las líneas de fuerza del campo magnético, dichos
elementos interactúan entre sí para generar una corriente eléctrica.
El principio de funcionamiento de los generadores eléctricos se basa en la acción
que se establece entre la corriente eléctrica y el campo magnético. Mediante un
electroimán se genera el campo magnético y se atraviesan sus líneas de campo por
un conductor en movimiento, la variación del flujo magnético que atraviesa ese
conductor induce una tensión en el mismo denominada fuerza electromotriz. Si se
cierra el circuito del conductor, la fuerza electromotriz inducida dará origen a una
corriente inducida, la cual al pasar por el conductor origina un nuevo campo
magnético que influencia al campo creado por el electroimán. La Figura 3.2 muestra
un esquema básico de un generador eléctrico.
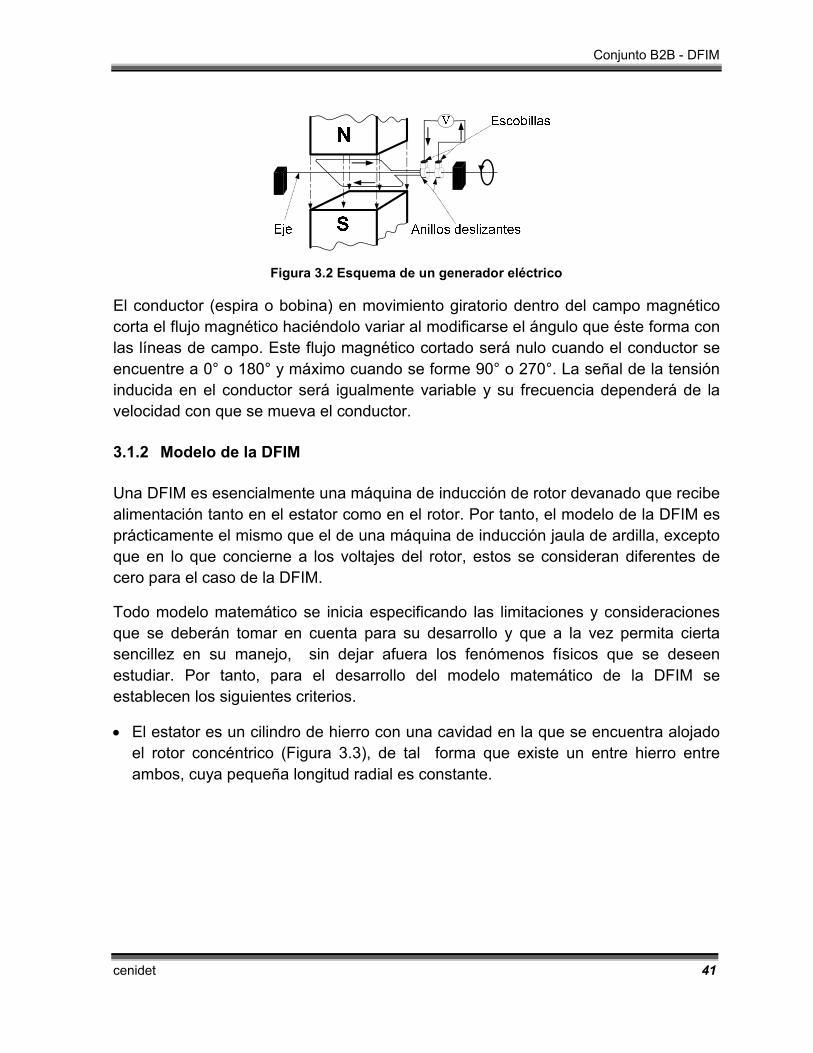
Conjunto B2B - DFIM
cenidet 41
Figura 3.2 Esquema de un generador eléctrico
El conductor (espira o bobina) en movimiento giratorio dentro del campo magnético
corta el flujo magnético haciéndolo variar al modificarse el ángulo que éste forma con
las líneas de campo. Este flujo magnético cortado será nulo cuando el conductor se
encuentre a 0° o 180° y máximo cuando se forme 90° o 270°. La señal de la tensión
inducida en el conductor será igualmente variable y su frecuencia dependerá de la
velocidad con que se mueva el conductor.
3.1.2 Modelo de la DFIM
Una DFIM es esencialmente una máquina de inducción de rotor devanado que recibe
alimentación tanto en el estator como en el rotor. Por tanto, el modelo de la DFIM es
prácticamente el mismo que el de una máquina de inducción jaula de ardilla, excepto
que en lo que concierne a los voltajes del rotor, estos se consideran diferentes de
cero para el caso de la DFIM.
Todo modelo matemático se inicia especificando las limitaciones y consideraciones
que se deberán tomar en cuenta para su desarrollo y que a la vez permita cierta
sencillez en su manejo, sin dejar afuera los fenómenos físicos que se deseen
estudiar. Por tanto, para el desarrollo del modelo matemático de la DFIM se
establecen los siguientes criterios.
El estator es un cilindro de hierro con una cavidad en la que se encuentra alojado
el rotor concéntrico (Figura 3.3), de tal forma que existe un entre hierro entre
ambos, cuya pequeña longitud radial es constante.
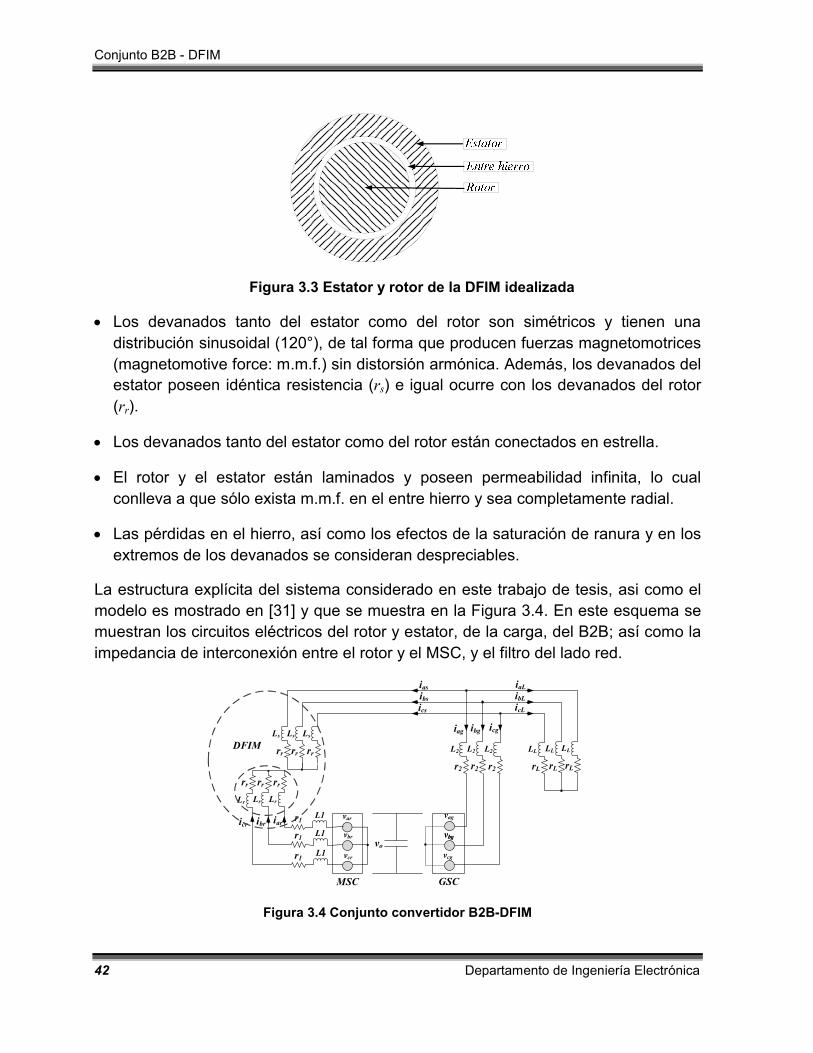
Conjunto B2B - DFIM
42 Departamento de Ingeniería Electrónica
Figura 3.3 Estator y rotor de la DFIM idealizada
Los devanados tanto del estator como del rotor son simétricos y tienen una
distribución sinusoidal (120°), de tal forma que producen fuerzas magnetomotrices
(magnetomotive force: m.m.f.) sin distorsión armónica. Además, los devanados del
estator poseen idéntica resistencia (rs) e igual ocurre con los devanados del rotor
(rr).
Los devanados tanto del estator como del rotor están conectados en estrella.
El rotor y el estator están laminados y poseen permeabilidad infinita, lo cual
conlleva a que sólo exista m.m.f. en el entre hierro y sea completamente radial.
Las pérdidas en el hierro, así como los efectos de la saturación de ranura y en los
extremos de los devanados se consideran despreciables.
La estructura explícita del sistema considerado en este trabajo de tesis, asi como el
modelo es mostrado en [31] y que se muestra en la Figura 3.4. En este esquema se
muestran los circuitos eléctricos del rotor y estator, de la carga, del B2B; así como la
impedancia de interconexión entre el rotor y el MSC, y el filtro del lado red.
var
vbr
vcr
MSC
vag
vbg
vcg
GSC
vo
rrrrrr
Lr Lr Lr
r1L1
r1L1
r1L1
iaribricr
rr rr rr
Ls Ls Lsicgibgiag
r2 r2 r2
L2 L2 L2
rLrLrL
LLLLLL
ics
ibs
ias
icL
ibL
iaL
DFIM
vbg
Figura 3.4 Conjunto convertidor B2B-DFIM

Conjunto B2B - DFIM
cenidet 43
El modelo de este sistema toma en cuenta las relaciones existentes entre los
devanados de DFIM descritas en [32]. Así pues, en este trabajo se denota
,
, como los vectores de voltajes, corrientes y enlaces de flujo del estator,
respectivamente. De igual manera para los voltajes, corrientes y enlaces de flujo del
rotor, se definen los vectores ,
, .
Para obtener las restricciones dinámicas de este sistema es necesario el uso de la
ley de voltajes de Kirchhoff en cada una de las mallas del circuito mostrado en la
Figura 3.4. Así, las ecuaciones de voltaje de estator y de rotor, en términos de las
variables de la DFIM son:
v = ri − ri +
λ − L
i (3.1)
v = ri − ri +
λ − L
i (3.2)
v = ri− ri +
λ− L
i (3.3)
v = (r + r)i+
λ − L
i (3.4)
v = (r + r)i +
λ − L
i (3.5)
v = (r + r)i+
λ− L
i (3.6)
donde: r1 y L1 representan la resistencia e inductancia propia del filtro que une al
rotor con el MSC; r2 y L2 representan la resistencia e inductancia del filtro que sirve
como acoplamiento entre el GSC y la red. En las ecuaciones (3.1)-(3.6), las letras a,
b y c representan las tres fases de la DFIM; y las letras s, r, g, representan los
parámetros y variables asociadas al estator, al rotor y al lado GSC, respectivamente.
La representación matricial de estas ecuaciones queda de la siguiente forma.
= −
+
−
(3.7)
= ( + )
+
−
(3.8)
Donde , ,
, ,, ,
, son vectores en ℜ ×, definidos por:
,
=
,,,
;, =
,,,
;, =
,,,
;
=

Conjunto B2B - DFIM
44 Departamento de Ingeniería Electrónica
En lo que concierne a Rs, Rr, R1, R2, L1, L2, son matrices diagonales en ℜ ×, las cuales
se muestran a continuación:
=
0 00 00 0
, = 0 00 00 0
, = 0 00 00 0
, = 0 00 00 0
=
0 00 00 0
, =
0 00 00 0
Los enlaces de flujo que relacionan los efectos magnéticos de un sistema están
dados por:
= ∙ (3.9)
En los devanados de una máquina de inducción existen tres tipos de inductancias,
las cuales por medio de su interacción describen a los enlaces de flujo; a
continuación se da una definición de dichas inductancias.
Inductancia propia. Es una medida del efecto que produce un devanado sobre sí
mismo y se define como “la razón del flujo enlazado por la bobina a la corriente que
circula por la misma, considerando que no está fluyendo corriente en los devanados
restantes”
Inductancia mutua. Es una medida del efecto que produce un devanado sobre otro.
Para su definición, considérense los devanados X e Y, que pueden ser del estator o
del rotor, o de ambos. La inductancia mutua es “la razón del flujo enlazado por el
devanado X a la corriente que circula por el devanado Y, considerando que no está
fluyendo corriente por ningún otro devanado (incluyendo a X)”.
Inductancia de dispersión. Es una medida del flujo magnético que no cruza a
través del devanado y se origina principalmente por el flujo magnético que se
dispersa en las vueltas de los extremos de los devanados.
Las inductancias que interactúan en la máquina de inducción son especificadas en
las siguientes relaciones. Donde: Lls y Llr son las inductancias de dispersión del
estator y rotor, respectivamente; Lms y Lmr son las inductancias de magnetización
estatórica y rotórica; Lsr es el valor máximo de la inductancia mutua entre el estator y
rotor.
Inductancias propias:
Estator = = = + (3.10)
Conjunto B2B - DFIM
cenidet 45
Rotor = = = + (3.11)
Inductancias mutuas entre fases:
Estator = = = = = = −
(3.12)
Rotor = = = = = = −
(3.13)
Inductancias mutuas entre estator-rotor:
= = = cos (3.14)
= = = cos +
(3.15)
= = = cos −
(3.16)
donde es la posición eléctrica, desplazamiento angular entre el flujo magnético del
estator y el rotor.
Una vez definidas las inductancias que conforman el acoplamiento magnético en los
devanados de la máquina de inducción, de acuerdo con (3.9), se llega a expresiones
en la cuales el enlace de flujo de cada devanado incluye los efectos magnéticos
existentes que se relacionan tanto con el mismo devanado como con los restantes. A
continuación se muestra las ecuaciones de los enlaces de flujo de cada devanado.
= + + + + + (3.17)
= + + + + + (3.18)
= + + + + + (3.19)
= + + + + + (3.20)
= + + + + + (3.21)
= + + + + + (3.22)
La expresión matricial de los enlaces de flujo del estator y el rotor, en términos de
inductancias y corrientes de los devanados, se muestra a continuación:
=
=
(3.23)
donde:

Conjunto B2B - DFIM
46 Departamento de Ingeniería Electrónica
=
, =
, =
Ls agrupa las inductancias propias y mutuas del estator; Lr agrupa las inductancias
propias y mutuas del rotor y = , representa las inductancias mutuas entre
estator y rotor.
Las ecuaciones que describen el acoplamiento magnético de la DFIM son de utilidad,
ya que como se puede observar, la alteración en los parámetros de alguna fase (e.g.
debido a alguna falla), afecta tanto al enlace de flujo de la misma fase como al de las
demás.
A continuación se llevan a cabo algunas manipulaciones en las ecuaciones del
modelo de la DFIM con el propósito de obtener expresiones más completas que nos
ayuden a visualizar de manera explícita la interacción de las variables para obtener el
modelo de comportamiento de la DFIM. En este sentido, sustituyendo (3.23) en (3.7)
y (3.8), se obtiene
= −
+
[
+ ]−
(3.24)
= ( + )
+
[
+
]−
(3.25)
En estas expresiones se debe tomar en cuenta que tanto Ls y Lr son inductancias de
valores constantes, mientras que Lsr es variable debido a que su valor depende de la
posición eléctrica del rotor, ecuaciones (3.14), (3.15) y (3.16); por lo tanto, la derivada
de los términos que incluyen a Lsr se hace mediante la regla de la cadena. Así, al
desarrollar las derivadas en (3.24) y (3.25), y expresando las inductancias mutuas y
propias en términos de las inductancias de dispersión y magnetización, se llega a las
siguientes expresiones que describen el comportamiento de la DFIM.
= − + (+ )−
(
+ )+ cos()
+ cos +
+ cos −
− sin() + sin +
+ sin −
−
(3.26)
= − + (+ )−
(
+ )+ cos −
+ cos() + cos +
− sin −
+ sin() + sin +
−
(3.27)
= − + (+ )−
(
+ )+ +
+ −
+
() −
+
+ −
+ ()−
(3.28)

Conjunto B2B - DFIM
cenidet 47
= ( + )+ (+ + )−
(
+ )+ cos()
+ cos −
+
cos +
− sin() + sin −
+ sin +
(3.29)
= ( + )+ (+ + )−
(
+ )+ +
+ () +
−
− +
+ () + −
(3.30)
= ( + )+ (+ + )−
(
+ )+ cos −
+ cos +
+
cos() −
sin −
+ sin +
+ sin() (3.31)
Por otro lado, para la obtención de las ecuaciones entre la tensión de salida del GSC
y la carga, se aplica LVK considerando el filtro de acoplamiento y la carga RL, de lo
cual resulta
= − −
− ( + )
− ( + )
(3.32)
donde RL y LL son matrices diagonales conformadas como se muestra a
continuación:
=
0 00 00 0
, =
0 00 00 0
Las ecuaciones involucradas en (3.32) están dadas por:
= − − ( + )
− − ( + ) (3.33)
= − − ( + )
− − ( + ) (3.34)
= − − ( + )
− − ( + ) (3.35)
Respecto al subsistema mecánico de la DFIM, se sabe que la interacción de los
campos magnéticos del estator y rotor origina un par electromagnético (), el cual
es aprovechado en la flecha para impulsar una carga mecánica acoplada al eje del
rotor (en modo motor); tal fenómeno es descrito por la ecuación del par inercial
mostrado a continuación
= − − (3.36)
Donde:

Conjunto B2B - DFIM
48 Departamento de Ingeniería Electrónica
, es el par de fricción que es opuesto al giro de la velocidad del rotor: = .
, es el par de carga aplicado en dirección a la velocidad del rotor. El valor de es
negativo en modo motor y positivo en modo generador.
, es la inercia del rotor y de la carga.
, es el coeficiente de fricción viscosa.
, es la velocidad mecánica del rotor.
Es importante recordar que la posición eléctrica está relacionada con la posición
mecánica (), a través de la siguiente ecuación:
=
(3.37)
donde P es el número de polos de la máquina, y donde además
= (3.38)
Así, el par electromagnético está dado por la siguiente ecuación:
=
[ ] ∙
∙[
] (3.39)
Despejando a ⁄ de la ecuación (3.36) y sustituyendo la ecuación (3.38), se
obtiene la siguiente expresión:
=
[ ] ∙
∙[
]−
−
(3.40)
El desarrollo de las ecuaciones (3.39) y (3.40) da como resultado las siguientes
expresiones matemáticas:
=
sin −
( + )+ −
( + )+ −
( + )
+√
cos [( − )+ ( + )+ ( + )]
(3.41)
=
sin −
( +
)+ −
( +
)+ −
( +
)
+√
cos [(
− )+ (
+ )+ (
+ )]
−
−
(3.42)
3.2 Modelo del convertidor Back to Back (B2B)
Los convertidores que integran al B2B tienen funciones diferentes dentro del sistema.
El MSC tiene la función de controlar a la DFIM, mientras que el GSC suele usarse
para regular el flujo de potencia entre el rotor y la carga, de tal manera que el B2B
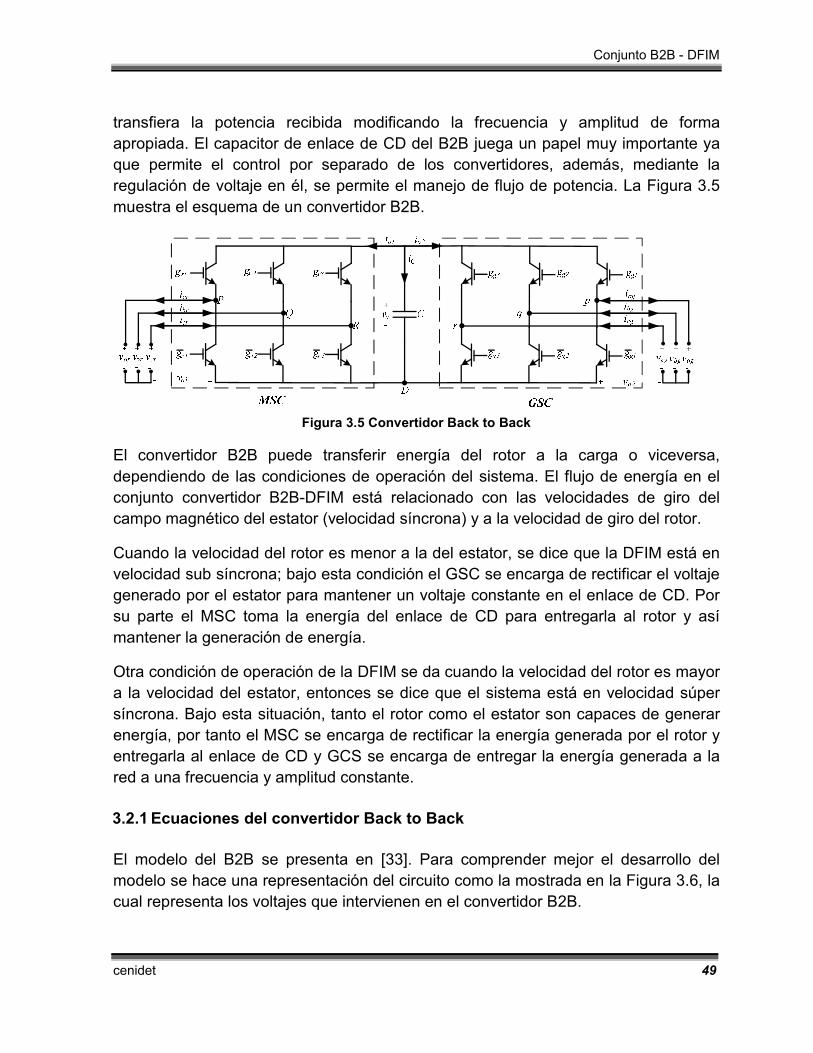
Conjunto B2B - DFIM
cenidet 49
transfiera la potencia recibida modificando la frecuencia y amplitud de forma
apropiada. El capacitor de enlace de CD del B2B juega un papel muy importante ya
que permite el control por separado de los convertidores, además, mediante la
regulación de voltaje en él, se permite el manejo de flujo de potencia. La Figura 3.5
muestra el esquema de un convertidor B2B.
Figura 3.5 Convertidor Back to Back
El convertidor B2B puede transferir energía del rotor a la carga o viceversa,
dependiendo de las condiciones de operación del sistema. El flujo de energía en el
conjunto convertidor B2B-DFIM está relacionado con las velocidades de giro del
campo magnético del estator (velocidad síncrona) y a la velocidad de giro del rotor.
Cuando la velocidad del rotor es menor a la del estator, se dice que la DFIM está en
velocidad sub síncrona; bajo esta condición el GSC se encarga de rectificar el voltaje
generado por el estator para mantener un voltaje constante en el enlace de CD. Por
su parte el MSC toma la energía del enlace de CD para entregarla al rotor y así
mantener la generación de energía.
Otra condición de operación de la DFIM se da cuando la velocidad del rotor es mayor
a la velocidad del estator, entonces se dice que el sistema está en velocidad súper
síncrona. Bajo esta situación, tanto el rotor como el estator son capaces de generar
energía, por tanto el MSC se encarga de rectificar la energía generada por el rotor y
entregarla al enlace de CD y GCS se encarga de entregar la energía generada a la
red a una frecuencia y amplitud constante.
3.2.1 Ecuaciones del convertidor Back to Back
El modelo del B2B se presenta en [33]. Para comprender mejor el desarrollo del
modelo se hace una representación del circuito como la mostrada en la Figura 3.6, la
cual representa los voltajes que intervienen en el convertidor B2B.
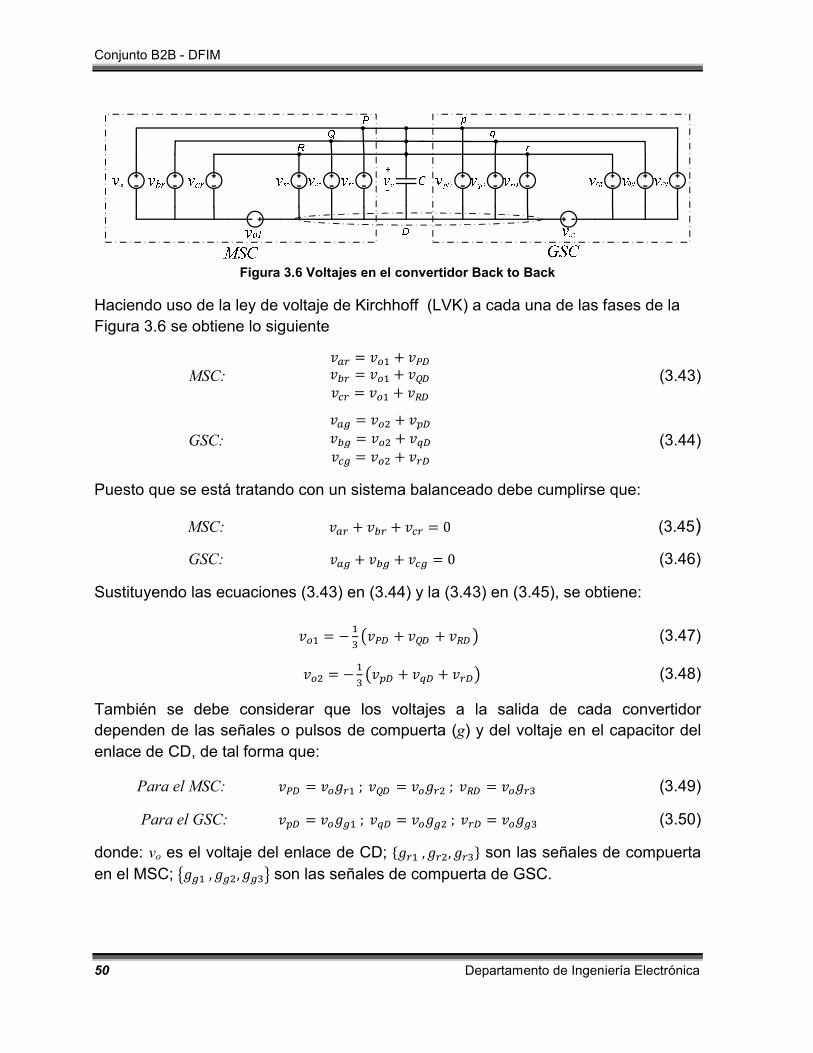
Conjunto B2B - DFIM
50 Departamento de Ingeniería Electrónica
Figura 3.6 Voltajes en el convertidor Back to Back
Haciendo uso de la ley de voltaje de Kirchhoff (LVK) a cada una de las fases de la
Figura 3.6 se obtiene lo siguiente
MSC:
= + = + = +
(3.43)
GSC:
= + = + = +
(3.44)
Puesto que se está tratando con un sistema balanceado debe cumplirse que:
MSC: + + = 0 (3.45)
GSC: + + = 0 (3.46)
Sustituyendo las ecuaciones (3.43) en (3.44) y la (3.43) en (3.45), se obtiene:
= −
+ + (3.47)
= −
+ + (3.48)
También se debe considerar que los voltajes a la salida de cada convertidor
dependen de las señales o pulsos de compuerta (g) y del voltaje en el capacitor del
enlace de CD, de tal forma que:
Para el MSC: = ; = ; = (3.49)
Para el GSC: = ; = ; = (3.50)
donde: vo es el voltaje del enlace de CD; ,, son las señales de compuerta
en el MSC; ,, son las señales de compuerta de GSC.

Conjunto B2B - DFIM
cenidet 51
Nótese que de acuerdo a la representación usada en la Figura 3.6, para el modelo
del B2B no es necesario incluir explícitamente las demás señales de compuerta
complementarias: ,
,
y
,
,
. Adicionalmente, también se
consideran interruptores ideales, es decir, se asume que los interruptores se apagan
y encienden instantáneamente sin considerar los tiempos muertos e inductancias y
corrientes parásitas propias de los dispositivos semiconductores de potencia. Así,
con estas consideraciones y sustituyendo (3.49) y (3.50) en las ecuaciones (3.47) y
(3.48) se tiene lo siguiente:
= −
( + + ) (3.51)
= −
+ + (3.52)
Sustituyendo vo1 y vo2 en los voltajes de cada una de las fases, ecuaciones (3.43) y
(3.44), se obtienen las siguientes expresiones:
MSC:
=
2 −1 −1−1 2 −1−1 −1 2
(3.53)
GSC:
=
2 −1 −1−1 2 −1−1 −1 2
(3.54)
Para realizar el análisis de las corrientes que fluyen a través del nodo superior del
enlace de CD, se aplica la ley de corriente de Kirchhoff (LCK), de lo cual se obtiene:
+ + = 0 (3.55)
donde:
iC, es la corriente en el enlace de CD.
io1, es la corriente que sale del enlace de CD hacia el MSC y está dada por
= + + (3.56)
io2, es la corriente que sale del enlace de CD hacia el GSC y está dada por
= + + (3.57)
iag, ibg e icg, son las corrientes de las fases del GSC.
Por otro lado, la corriente a través del capacitor está definida como
=
→
=
(3.58)
Conjunto B2B - DFIM
52 Departamento de Ingeniería Electrónica
Despejando iC de (3.55) y sustituyendo en (3.58) se obtiene
= −
( + ) (3.59)
Una vez desarrollado el análisis matemático del convertidor, el modelo matemático
del B2B queda descrito por las siguientes ecuaciones:
=
(2 − − ) (3.60)
=
(− + 2 − ) (3.61)
=
(− − + 2) (3.62)
=
2 − − (3.63)
=
− + 2 − (3.64)
=
− − + 2 (3.65)
=
+ + + + + (3.66)
Con esto se concluye el modelado del sistema B2B-DFIM en donde se resume que el
conjunto de restricciones que describen el comportamiento del sistema están
constituidas por:
6 restricciones para los circuitos del estator y rotor (DFIM), ecuaciones (3.26)-(3.31).
3 restricciones para el circuito del lado red (filtro de acoplamiento), ecuaciones
(3.33)-(3.35).
1 restricción para la posición eléctrica, ecuación (3.37).
1 restricción para la velocidad, ecuación (3.38).
1 restricción para el par electromagnético generado, ecuación (3.41).
1 restricción para la derivada de la velocidad, ecuación (3.42).
7 restricciones para el convertidor, ecuaciones (3.60)-(3.66).
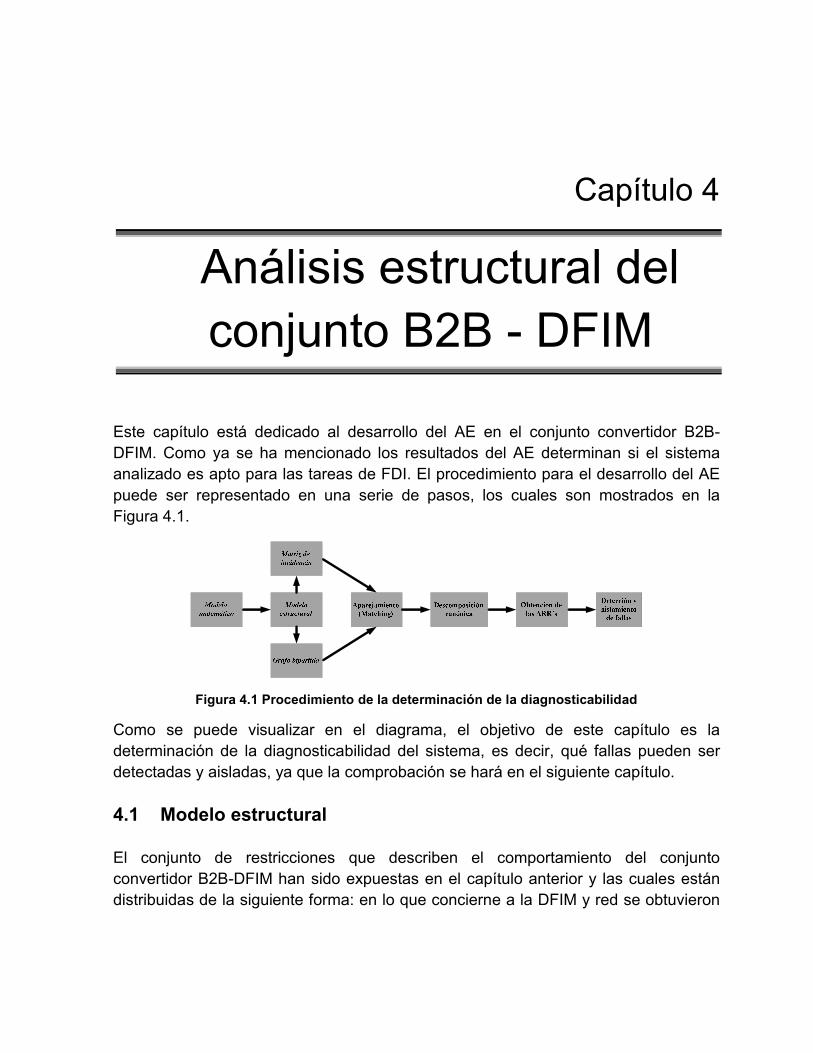
Capítulo 4
4. Análisis estructural del
conjunto B2B - DFIM
Este capítulo está dedicado al desarrollo del AE en el conjunto convertidor B2B-
DFIM. Como ya se ha mencionado los resultados del AE determinan si el sistema
analizado es apto para las tareas de FDI. El procedimiento para el desarrollo del AE
puede ser representado en una serie de pasos, los cuales son mostrados en la
Figura 4.1.
Figura 4.1 Procedimiento de la determinación de la diagnosticabilidad
Como se puede visualizar en el diagrama, el objetivo de este capítulo es la
determinación de la diagnosticabilidad del sistema, es decir, qué fallas pueden ser
detectadas y aisladas, ya que la comprobación se hará en el siguiente capítulo.
4.1 Modelo estructural
El conjunto de restricciones que describen el comportamiento del conjunto
convertidor B2B-DFIM han sido expuestas en el capítulo anterior y las cuales están
distribuidas de la siguiente forma: en lo que concierne a la DFIM y red se obtuvieron

Análisis estructural del conjunto B2B-DFIM
54 Departamento de Ingeniería Electrónica
restricciones para los circuitos del estator y rotor, 3 para circuitos del lado red, una
para la posición eléctrica, una para la velocidad mecánica, una para el par
electromagnético generado; así como 7 para el convertidor. Los subconjuntos
resultantes de variables conocidas K, parámetros , y variables desconocidas X son
mostradas en la Tabla 4.1.
Tabla 4.1 Variables conocidas y desconocidas del conjunto convertidor B2B-DFIM
X ,,,,,,,,,
, ,
, ,
,
,
, ,
,,,,
,, ,,
,,
K ,,,,,,,,,,,,,,,,,,,,,,
,,,,,,,,,,,,,,,
Entre el conjunto total de variables, las variables de corriente y de desplazamiento
mecánico son también variables de estado (desconocidas); así, a fin de distinguir
entre estas variables como variables de estado y como variables medibles o
conocidas, éstas se denotan con la letra “Y”. La necesidad de hacer esta distinción
es con el propósito de emular fallas en sensores, lo cual significaría una diferencia
entre el valor real de la variable de estado y el valor registrado por el sensor “Y”. Esta
distinción no es necesaria para las demás variables conocidas, la emulación de una
falla en los sensores asociados a estas variables se introduciría directamente.
Para fines de definir el modelo de comportamiento del sistema B2B-DFIM, no es
necesario conocer la forma explícita de las ecuaciones-restricciones que se
obtuvieron previamente, basta con saber de qué subconjunto de variables depende
cada restricción. En este sentido, a continuación se expresan cada una de las
restricciones previamente obtenidas, como expresiones genéricas homogéneas
(igualadas a cero).
,,,,,, ,
, ,
, ,
, ,,
= 0 c1
,,,,,, ,
, ,
, ,
, ,,
= 0 c2
,,,,,, ,
, ,
, ,
, ,,
= 0 c3
(,,,,, ,
, ,
, ,
,,)= 0 c4
(,,,,, ,
, ,
, ,
,,)= 0 c5
(,,,,, ,
, ,
, ,
,,)= 0 c6
,,, ,
= 0 c7

Análisis estructural del conjunto B2B-DFIM
cenidet 55
,,, ,
= 0 c8
,,, ,
= 0 c9
(,,,,,,,)= 0 c10
(,,,,,,,, ,)= 0 c11
(,)= 0 c12
( ,)= 0 c13
(,,,,)= 0 c14
(,,,,)= 0 c15
(,,,,)= 0 c16
,,,,= 0 c17
,,,,= 0 c18
,,,,= 0 c19
,,,,,,,,,,,,= 0 c20
Para representar a las variables dinámicas del sistema, en el análisis estructural se
opta por el uso de restricciones diferenciales. Por lo tanto, al conjunto de
restricciones del sistema se agregan 12 restricciones diferenciales adicionales,
asociadas a las variables de estado, en donde: 9 son para las derivadas de las
corrientes del estator, rotor y red; 1 para la velocidad angular; 1 para el voltaje de CD
del convertidor; y por último, 1 para la derivada de la velocidad mecánica.
=
⇒ (,
)= 0 d1 =
⇒ ,
= 0 d7
=
⇒ (,
)= 0 d2 =
⇒ ,
= 0 d8
=
⇒ (,
)= 0 d3 =
⇒ ,
= 0 d9
=
⇒ (,
)= 0 d4 =
⇒ ,
′= 0 d10
=
⇒ (,
)= 0 d5 =
⇒ (,
)= 0 d11

Análisis estructural del conjunto B2B-DFIM
56 Departamento de Ingeniería Electrónica
=
⇒ (,
)= 0 d6 =
⇒ (,
)= 0 d12
=
⇒ (,
)= 0 d13
Además de las restricciones diferenciales, también se consideró el agregar 11
restricciones más correspondientes a los sensores, esto como ya se mencionó, a fin
de emular fallas en sensores. Como se ha dicho también, si bien en AE no interesa la
forma explícita de la dinámica del mecanismo de sensado, no obstante, en este caso
se considera un sensado con ganancia unitaria, es decir, directamente proporcional
al valor de la variable de estado, tal como se muestra en las restricciones c21-c31.
= ⇒ (,)= 0 c21 = ⇒ (,)= 0
c26
= ⇒ (,)= 0 c22 = ⇒ ,= 0
c27
= ⇒ (,)= 0 c23 = ⇒ ,= 0
c28
= ⇒ (,)= 0
c24 = ⇒ ,= 0
c29
= ⇒ (,)= 0
c25 = ⇒ (,)= 0
c30
= ⇒ (,)= 0
c31
4.1.1 Matriz de incidencia
Como se mencionó en el capítulo 2, el modelo estructural de un sistema es una
representación que muestra las relaciones existentes entre las variables y las
restricciones, es decir, qué variable está en qué restricción. Para propósitos de este
trabajo la representación de estas relaciones se hace por medio de la matriz de
incidencia (MI), en la cual las filas representan las restricciones ci o di y las columnas
representan las variables xj. La relación (ci, xj) o (di, xj), es representada con un “1” en
la intersección (i, j) sí y sólo sí la variable j está en la restricción i, en caso contrario
sólo se deja la intersección en blanco.
Tomando en cuenta todas las restricciones que describen el comportamiento del
convertidor B2B-DFIM (c1-c31 y d1-d13), se obtiene una matriz de incidencia de 44x28,
la cual se muestra en la Tabla 4.2.
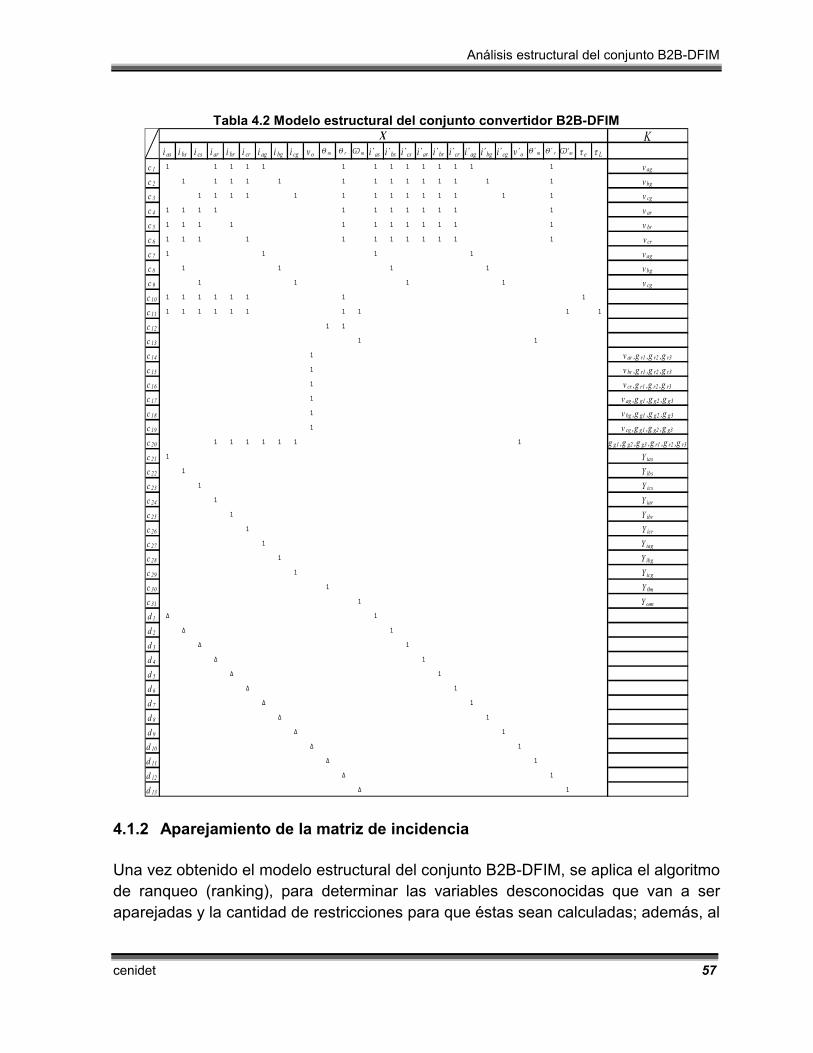
Análisis estructural del conjunto B2B-DFIM
cenidet 57
Tabla 4.2 Modelo estructural del conjunto convertidor B2B-DFIM
4.1.2 Aparejamiento de la matriz de incidencia
Una vez obtenido el modelo estructural del conjunto B2B-DFIM, se aplica el algoritmo
de ranqueo (ranking), para determinar las variables desconocidas que van a ser
aparejadas y la cantidad de restricciones para que éstas sean calculadas; además, al
Ki as i bs i cs i ar i br i cr i ag i bg i cg v o Ѳ m Ѳ r Ѡ m i´ as i´bs i´cs i´ ar i´ br i´cr i´ ag i´bg i´ cg v´o Ѳ´ m Ѳ´ r Ѡ' m τ e τ L
c 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 v ag
c 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 v bg
c 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 v cg
c 4 1 1 1 1 1 1 1 1 1 1 1 1 v ar
c 5 1 1 1 1 1 1 1 1 1 1 1 1 v br
c 6 1 1 1 1 1 1 1 1 1 1 1 1 v cr
c 7 1 1 1 1 v ag
c 8 1 1 1 1 v bg
c 9 1 1 1 1 v cg
c 10 1 1 1 1 1 1 1 1
c 11 1 1 1 1 1 1 1 1 1 1
c 12 1 1
c 13 1 1
c 14 1 v ar ,g r1 ,g r2 ,g r3
c 15 1 v br ,g r1 ,g r2 ,g r3
c 16 1 v cr ,g r1 ,g r2 ,g r3
c 17 1 v ag ,g g1 ,g g2 ,g g3
c 18 1 v bg ,g g1 ,g g2 ,g g3
c 19 1 v cg ,g g1 ,g g2 ,g g3
c 20 1 1 1 1 1 1 1 g g1 ,g g2 ,g g3 ,g r1 ,g r2 ,g r3
c 21 1 Y ias
c 22 1 Y ibs
c 23 1 Y ics
c 24 1 Y iar
c 25 1 Y ibr
c 26 1 Y icr
c 27 1 Y iag
c 28 1 Y ibg
c 29 1 Y icg
c 30 1 Y θm
c 31 1 Y ωm
d 1 Δ 1
d 2 Δ 1
d 3 Δ 1
d 4 Δ 1
d 5 Δ 1
d 6 Δ 1
d 7 Δ 1
d 8 Δ 1
d 9 Δ 1
d 10 Δ 1
d 11 Δ 1
d 12 Δ 1
d 13 Δ 1
X

Análisis estructural del conjunto B2B-DFIM
58 Departamento de Ingeniería Electrónica
aplicar este algoritmo se garantiza el aparejamiento más óptimo. Los resultados de la
aplicación del algoritmo sobre la MI del sistema convertidor B2B-DFIM son
mostrados en la Tabla 4.3.
Tabla 4.3 Aparejamiento de la MI del conjunto convertidor B2B-DFIM
Como se puede observar en la Tabla 4.3, existe un aparejamiento completo en el
conjunto de las variables X, mas no existe tal aparejamiento para el conjunto de las
Ki as i bs i cs i ar i br i cr i ag i bg i cg v o Ѳ m Ѳ r Ѡ m i´as i´ bs i´ cs i´ ar i´ br i´ cr i´ ag i´ bg i´ cg v´o Ѳ´ m Ѳ´ r Ѡ' m τ e τ L
3 c 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 v ag
3 c 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 v bg
3 c 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 v cg
3 c 4 1 1 1 1 1 1 1 1 1 1 1 1 v ar
3 c 5 1 1 1 1 1 1 1 1 1 1 1 1 v br
3 c 6 1 1 1 1 1 1 1 1 1 1 1 1 v cr
2 c 7 1 1 1 1 v ag
2 c 8 1 1 1 1 v bg
2 c 9 1 1 1 1 v cg
2 c 10 1 1 1 1 1 1 1 ⊗
2 c 11 1 1 1 1 1 1 1 1 1 ⊗
1 c 12 1 ⊗
1 c 13 1 1
0 c 14 ⊗ v ar ,g r1 ,g r2 ,g r3
0 c 15 1 v br ,g r1 ,g r2 ,g r3
0 c 16 1 v cr ,g r1 ,g r2 ,g r3
0 c 17 1 v ag ,g g1 ,g g2 ,g g3
0 c 18 1 v bg ,g g1 ,g g2 ,g g3
0 c 19 1 v cg ,g g1 ,g g2 ,g g3
2 c 20 1 1 1 1 1 1 1 g g1 ,g g2 ,g g3 ,g r1 ,g r2 ,g r3
0 c 21 ⊗ Y ias
0 c 22 ⊗ Y ibs
0 c 23 ⊗ Y ics
0 c 24 ⊗ Y iar
0 c 25 ⊗ Y ibr
0 c 26 ⊗ Y icr
0 c 27 ⊗ Y iag
0 c 28 ⊗ Y ibg
0 c 29 ⊗ Y icg
0 c 30 ⊗ Y θm
0 c 31 ⊗ Y ωm
1 d 1 Δ ⊗
1 d 2 Δ ⊗
1 d 3 Δ ⊗
1 d 4 Δ ⊗
1 d 5 Δ ⊗
1 d 6 Δ ⊗
1 d 7 Δ ⊗
1 d 8 Δ ⊗
1 d 9 Δ ⊗
1 d 10 Δ ⊗
1 d 11 Δ ⊗
2 d 12 Δ ⊗
1 d 13 Δ ⊗
RX
Análisis estructural del conjunto B2B-DFIM
cenidet 59
restricciones C. Esto significa que existen restricciones que no fueron aparejadas
pero en las cuales todas sus variables asociadas han sido aparejadas; con esto se
tiene la certeza de que existe redundancia en el sistema y por tanto abre la
posibilidad de la detección y aislamiento de fallas, es decir, la determinación de la
diagnosticabilidad.
4.1.3 Descomposición canónica de la matriz aparejada
Una vez obtenida la matriz de incidencia apareja, ahora se procede al
reordenamiento de las variables y restricciones, de tal manera que se obtenga la
descomposición canónica del sistema, la cual muestra los subsistemas sub, justo y
sobre restringido (si es que los hay). La descomposición canónica del sistema se
muestra en la Tabla 4.4.

Análisis estructural del conjunto B2B-DFIM
60 Departamento de Ingeniería Electrónica
Tabla 4.4 Descomposición canónica de la MI* del conjunto convertidor B2B-DFIM
El resultado de la descomposición canónica muestra que sólo existen dos
subsistemas en la MI*, los cuales son: el subsistema justo restringido G0∈ℝ 3x3 y el
subsistema sobre restringido G+∈ ℝ 41x25, el cual es usado para la determinación de la
diagnosticabilidad.
4.1.4 Relaciones de redundancia analítica
Del sistema sobre restringido se obtienen 16 ARR´s, que son las restricciones no
aparejadas y que se ubican en la parte sombreada de la MI* de la Tabla 4.4. Las
ARR´s son restricciones que se caracterizan por tener todas sus variables X
calculadas a partir de variables K, es decir, que todas sus variables hayan sido
K
τ L τ e Ѡ' m Ѡ m Ѳ´ m v´o v o Ѳ´ r Ѳ r Ѳ m i´ as i´ bs i´ cs i´ar i´ br i´ cr i´ ag i´ bg i´ cg i as i bs i cs i ar i br i cr i ag i bg i cg
c 11 ⊗ 1 1 1 1 1 1 1 1 1
c 10 ⊗ 1 1 1 1 1 1 1
d 13 ⊗ Δ
c 31 ⊗ Y ωm
d 11 ⊗ Δ
d 10 ⊗ Δ
c 14 ⊗ v ar ,g r1 ,g r2 ,g r3
d 12 ⊗ Δ
c 12 ⊗ 1
c 30 ⊗ Y θm
d 1 ⊗ Δ
d 2 ⊗ Δ
d 3 ⊗ Δ
d 4 ⊗ Δ
d 5 ⊗ Δ
d 6 ⊗ Δ
d 7 ⊗ Δ
d 8 ⊗ Δ
d 9 ⊗ Δ
c 21 ⊗ Y ias
c 22 ⊗ Y ibs
c 23 ⊗ Y ics
c 24 ⊗ Y iar
c 25 ⊗ Y ibr
c 26 ⊗ Y icr
c 27 ⊗ Y iag
c 28 ⊗ Y ibg
c 29 ⊗ Y icg
c 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 v ag
c 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 v bg
c 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 v cg
c 4 1 1 1 1 1 1 1 1 1 1 1 1 v ar
c 5 1 1 1 1 1 1 1 1 1 1 1 1 v br
c 6 1 1 1 1 1 1 1 1 1 1 1 1 v cr
c 7 1 1 1 1 v ag
c 8 1 1 1 1 v bg
c 9 1 1 1 1 v cg
c 13 1 1
c 15 1 v br ,g r1 ,g r2 ,g r3
c 16 1 v cr ,g r1 ,g r2 ,g r3
c 17 1 v ag ,g g1 ,g g2 ,g g3
c 18 1 v bg ,g g1 ,g g2 ,g g3
c 19 1 v cg ,g g1 ,g g2 ,g g3
c 20 1 1 1 1 1 1 1 g g1 ,g g2 ,g g3 ,g r1 ,g r2 ,g r3
0
X

Análisis estructural del conjunto B2B-DFIM
cenidet 61
aparejadas y cuya salida es cero. A continuación se muestran las ARR´s obtenidas
en el sistema.
Tabla 4.5 ARR’s del conjunto B2B-DFIM
ARR Restricciones
ARR1 ,(),(),(),(),,(),(),(),
(),(),(), , ()
ARR2 ,(),(),(),(),,(),(),(),
(),(),(), , ()
ARR3 ,(),(),(),(),,(),(),(),
(),(),(), , ()
ARR4
,(),(),(),(),(),(),(),
(),(),(), ()
ARR5 ,(),(),(),(),(),(),(),
(),(),(), ()
ARR6 ,(),(),(),(),(),(),(),
(),(),(), ()
ARR7 ,(),,(),
ARR8 ,(),,(),
ARR9 ,(),,(),
ARR10 (),()
ARR11 ,,,,,(,,,) ARR12 ,,,,(,,,)
ARR13 ,,,,(,,,)
ARR14 ,,,,(,,,)
ARR15 ,,,,(,,,)
ARR16 ,,,,,,(),(),(),
,,,(,,,)
En este tipo de representación, se muestra qué variables k y qué restricciones
intervienen para el cálculo de las variables x de las ARR´s. Por ejemplo, las variables
x de la ARR10 son calculadas a partir de los sensores de posición y velocidad
mecánica, cuyas restricciones son las c30 y c31 y finaliza el cálculo en la restricción
c12.
La importancia de las ARR’s se debe a que son útiles para analizar la
diagnosticabilidad, así como evaluar dicha diagnosticabilidad al usar las ARR’s como
formas elementales de generadores de residuo.
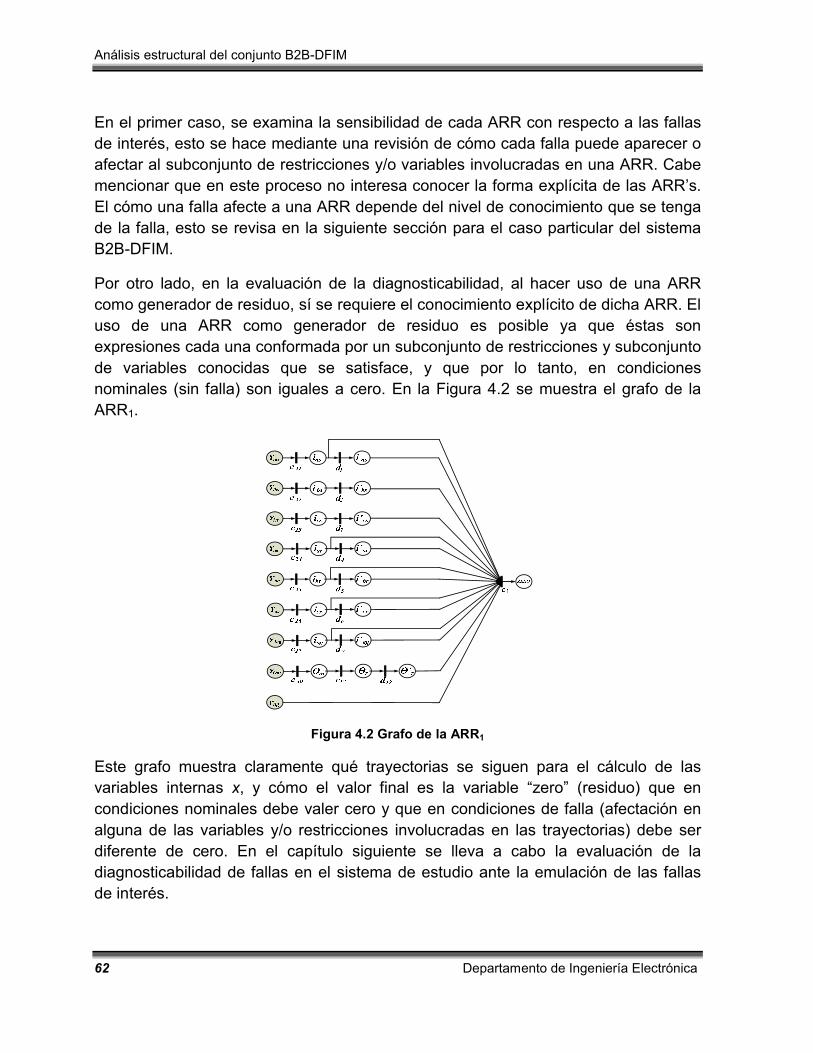
Análisis estructural del conjunto B2B-DFIM
62 Departamento de Ingeniería Electrónica
En el primer caso, se examina la sensibilidad de cada ARR con respecto a las fallas
de interés, esto se hace mediante una revisión de cómo cada falla puede aparecer o
afectar al subconjunto de restricciones y/o variables involucradas en una ARR. Cabe
mencionar que en este proceso no interesa conocer la forma explícita de las ARR’s.
El cómo una falla afecte a una ARR depende del nivel de conocimiento que se tenga
de la falla, esto se revisa en la siguiente sección para el caso particular del sistema
B2B-DFIM.
Por otro lado, en la evaluación de la diagnosticabilidad, al hacer uso de una ARR
como generador de residuo, sí se requiere el conocimiento explícito de dicha ARR. El
uso de una ARR como generador de residuo es posible ya que éstas son
expresiones cada una conformada por un subconjunto de restricciones y subconjunto
de variables conocidas que se satisface, y que por lo tanto, en condiciones
nominales (sin falla) son iguales a cero. En la Figura 4.2 se muestra el grafo de la
ARR1.
Figura 4.2 Grafo de la ARR1
Este grafo muestra claramente qué trayectorias se siguen para el cálculo de las
variables internas x, y cómo el valor final es la variable “zero” (residuo) que en
condiciones nominales debe valer cero y que en condiciones de falla (afectación en
alguna de las variables y/o restricciones involucradas en las trayectorias) debe ser
diferente de cero. En el capítulo siguiente se lleva a cabo la evaluación de la
diagnosticabilidad de fallas en el sistema de estudio ante la emulación de las fallas
de interés.

Análisis estructural del conjunto B2B-DFIM
cenidet 63
4.1.5 Fallas consideradas
Para la realización del análisis de la diagnosticabilidad es necesario tener el
conocimiento de cómo las fallas afectan al sistema analizado, es decir, saber cómo la
falla afecta a los parámetros y/o variables del sistema.
Fallas en estator y rotor
En la DFIM pueden ocurrir dos casos en cuestión de las fallas eléctricas, que son:
cortocircuito y circuito abierto en rotor o estator. El efecto de ellas se ve directamente
reflejado en los valores de los parámetros de las fases del estator o rotor. Para el
caso de una falla ocasionada por cortocircuito en los devanados de alguna fase, ya
sea del estator o del rotor, disminuye el número de devanados, es decir, reduce el
valor nominal de la resistencia e inductancia en esa fase, lo que conlleva a una
pérdida del balance entre las tres fases [34].
Si ocurriera una falla por corto circuito en cualquiera de los devanados del estator,
esta no afectaría a la matriz de inductancias mutuas y propias de las fases del rotor
(Lr), pero sí afectaría a la matriz de inductancias mutuas entre estator y rotor (Lrs),
así como a la matriz de inductancias propias y mutuas del estator (Ls). De forma
análoga pasaría si ocurriera una falla en el rotor.
Por otro lado, si ocurriera una falla por circuito abierto en los devanados de una fase
del estator o rotor, se traduce como la pérdida total o parcial de esa fase, o en
términos de los parámetros de la DFIM, se traduce como un aumento en la
resistencia e inductancia de dicha fase. Por tanto, se pueden hacer las mismas
suposiciones que se describieron en el párrafo anterior, respecto a las inductancias.
En este sentido, las fallas de corto circuito y circuito abierto se pueden expresar
como una variación ponderada de los parámetros (resistencias e inductancias) de los
devanados de cada fase; así, para la DFIM se tiene el siguiente conjunto de fallas.
, , , , , DFIM as bs cs ar br crF f f f f f f
Para corto circuito las fallas toman valores en el rango 0 ≤ , < 1, y para circuito
abierto , > 1. Tomando en cuenta lo anterior y considerando los parámetros de
la DFIM, las matrices de inductancias quedan de la siguiente manera:

Análisis estructural del conjunto B2B-DFIM
64 Departamento de Ingeniería Electrónica
=
⎣⎢⎢⎢⎡(+ ) −
−
−
− (+ ) −
−
−
− (+ )⎦
⎥⎥⎥⎤
(4.1)
=
⎣⎢⎢⎢⎡(+ ) −
−
−
(+ ) −
−
−
(+ )⎦
⎥⎥⎥⎤
(4.2)
=
⎣⎢⎢⎢⎡(cos) cos +
cos −
cos −
(cos) cos +
cos +
cos −
(cos) ⎦
⎥⎥⎥⎤
(4.3)
El efecto de las fallas en las matrices de resistencias, tanto del rotor como del
estator, se representa como sigue:
=
0 00 00 0
(4.4) =
0 00 00 0
(4.5)
Fallas en el filtro de acoplamiento convertidor-carga
Aquí las fallas también pueden ser de corto circuito y circuito abierto en la bobina.
Los efectos son iguales a los que se describieron para los devanados de estator y
rotor, estos fenómenos se reflejan en los parámetros del filtro de acoplamiento de la
siguiente manera
=
0 0
0 0
0 0
=
0 0
0 0
0 0
donde 0 ≤ , < 1 para corto circuito y , > 1 para circuito abierto.

Análisis estructural del conjunto B2B-DFIM
cenidet 65
Fallas en los interruptores de potencia
Las fallas que se consideran en los interruptores de potencia que conforman el
convertidor B2B son del tipo cortocircuito y circuito abierto. Un corto circuito en un
interruptor significaría que éste se quede en conducción a pesar de recibir una señal
de apertura en su compuerta; por otro lado, un circuito abierto en el interruptor
significaría que éste se quede en bloqueo a pesar de recibir una señal de cierre en
su compuerta. Estos fenómenos se emularán como sigue
Corto circuito: =
= = = 0 , = 1,2,3
Circuito abierto: = 1 − +
=
1 −
+
= = 1 , = 1,2,3
para las señales de compuerta del convertidor del lado máquina (MSC); y
análogamente, para las señales de compuerta del convertidor del lado red/carga
(GSC), se tiene
Corto circuito: =
= = = 0 , = 1,2,3
Circuito abierto: = 1 − +
=
1 − +
= = 1 , = 1,2,3
Fallas en sensores.
Entre otras señales que se asumen medibles están: las señales de corriente de
estator de cada fase, señales de corriente de rotor de cada fase, señales de corriente
de filtro de cada fase, señal del desplazamiento mecánico y señal de la velocidad
mecánica.
Por otro lado, es sabido que los sensores son sistemas de medición que constan,
entre otros elementos, de un mecanismo de transducción y acondicionamiento de
señal, es decir, un sensor es un sistema dinámico por sí mismo. Los sensores están
sujetos a situaciones adversas debidas a factores externos o del medio en el que se
encuentran instalados, a errores de calibración, etc. Estas condiciones pueden
provocar la falla de los mismos, las cuales se pueden manifestar como: offset’s,
cambios de ganancia, cambios de dinámica, no linealidades, etc. En este trabajo,
para los sensores considerados, únicamente se abordará el caso de fallas de tipo

Análisis estructural del conjunto B2B-DFIM
66 Departamento de Ingeniería Electrónica
multiplicativa con cambio de ganancia, también se asume que la ganancia es unitaria
entre la señal interna (variable de estado) y el valor generado por el sensor de
acuerdo a lo especificado en las restricciones c21-c31. Así, para cualquiera de las
señales medibles, , la emulación de falla de sensor se describe como sigue
=
donde 0 ≤ < 1 para reducción de ganancia y > 1 para aumento de ganancia.
4.2 Determinación de la diagnosticabilidad
Para la determinación de la diagnosticabilidad es necesario tomar en cuenta dos
aspectos importantes en el análisis: en primer lugar hay que considerar la
detectabilidad del sistema, que no es otra cosa más que determinar si al menos una
ARR es sensible a una falla considerada; y en segundo lugar la aislabilidad, que es la
determinación de la ubicación de las fallas consideradas.
4.2.1 Determinación de la detectabilidad
Como se mencionó, en el análisis de la detectabilidad se lleva a cabo un análisis de
la sensibilidad a falla de cada ARR, esto se hace mediante una revisión de cómo
cada falla puede aparecer o afectar al subconjunto de restricciones y/o variables
involucradas en una ARR. Este efecto de las fallas sobre las restricciones y/o
variables involucradas en una ARR es el que se describió en la sección anterior para
la emulación de fallas. Por ejemplo, si consideramos el caso de la ARR7 y que se
reescribe aquí
: ,(),,(),
ésta involucra a las variables medibles ,, así como a las restricciones
,,,,. Por lo tanto, ARR7 es sensible a fallas en estos sensores
,, por medio de las restricciones c21 y c27. Adicionalmente, tomando en
cuenta la presencia de c7 en ARR7
,,, ,
= 0
y que explícitamente está dada por (3.33)
= − − ( + )
− − ( + )
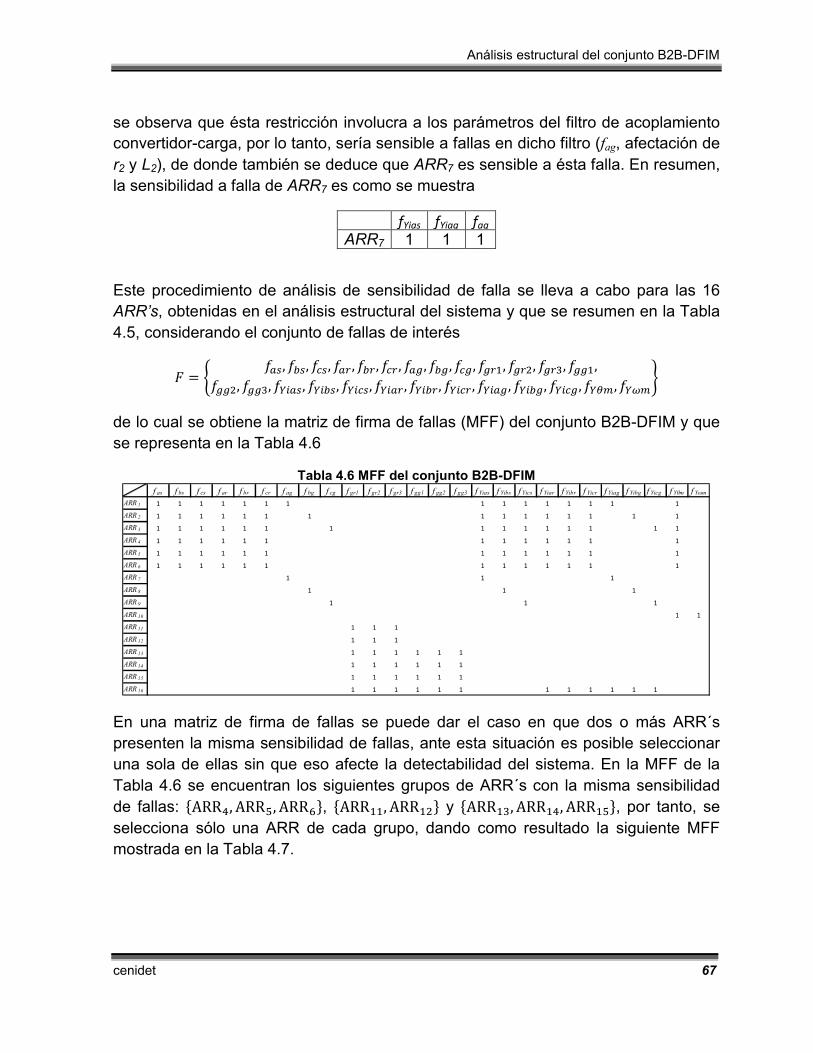
Análisis estructural del conjunto B2B-DFIM
cenidet 67
se observa que ésta restricción involucra a los parámetros del filtro de acoplamiento
convertidor-carga, por lo tanto, sería sensible a fallas en dicho filtro (fag, afectación de
r2 y L2), de donde también se deduce que ARR7 es sensible a ésta falla. En resumen,
la sensibilidad a falla de ARR7 es como se muestra
fYias fYiag fag
ARR7 1 1 1
Este procedimiento de análisis de sensibilidad de falla se lleva a cabo para las 16
ARR’s, obtenidas en el análisis estructural del sistema y que se resumen en la Tabla
4.5, considerando el conjunto de fallas de interés
= ,,,,,,,,,,,,,
,,,,,,,,,,,,
de lo cual se obtiene la matriz de firma de fallas (MFF) del conjunto B2B-DFIM y que
se representa en la Tabla 4.6
Tabla 4.6 MFF del conjunto B2B-DFIM
En una matriz de firma de fallas se puede dar el caso en que dos o más ARR´s
presenten la misma sensibilidad de fallas, ante esta situación es posible seleccionar
una sola de ellas sin que eso afecte la detectabilidad del sistema. En la MFF de la
Tabla 4.6 se encuentran los siguientes grupos de ARR´s con la misma sensibilidad
de fallas: ARR,ARR,ARR, ARR,ARR y ARR,ARR,ARR, por tanto, se
selecciona sólo una ARR de cada grupo, dando como resultado la siguiente MFF
mostrada en la Tabla 4.7.
f as f bs f cs f ar f br f cr f ag f bg f cg f gr1 f gr2 f gr3 f gg1 f gg2 f gg3 f Yias f Yibs f Yics f Yiar f Yibr f Yicr f Yiag f Yibg f Yicg f Yθm f Yωm
ARR 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 4 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 5 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 6 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 7 1 1 1
ARR 8 1 1 1
ARR 9 1 1 1
ARR 10 1 1
ARR 11 1 1 1
ARR 12 1 1 1
ARR 13 1 1 1 1 1 1
ARR 14 1 1 1 1 1 1
ARR 15 1 1 1 1 1 1
ARR 16 1 1 1 1 1 1 1 1 1 1 1 1
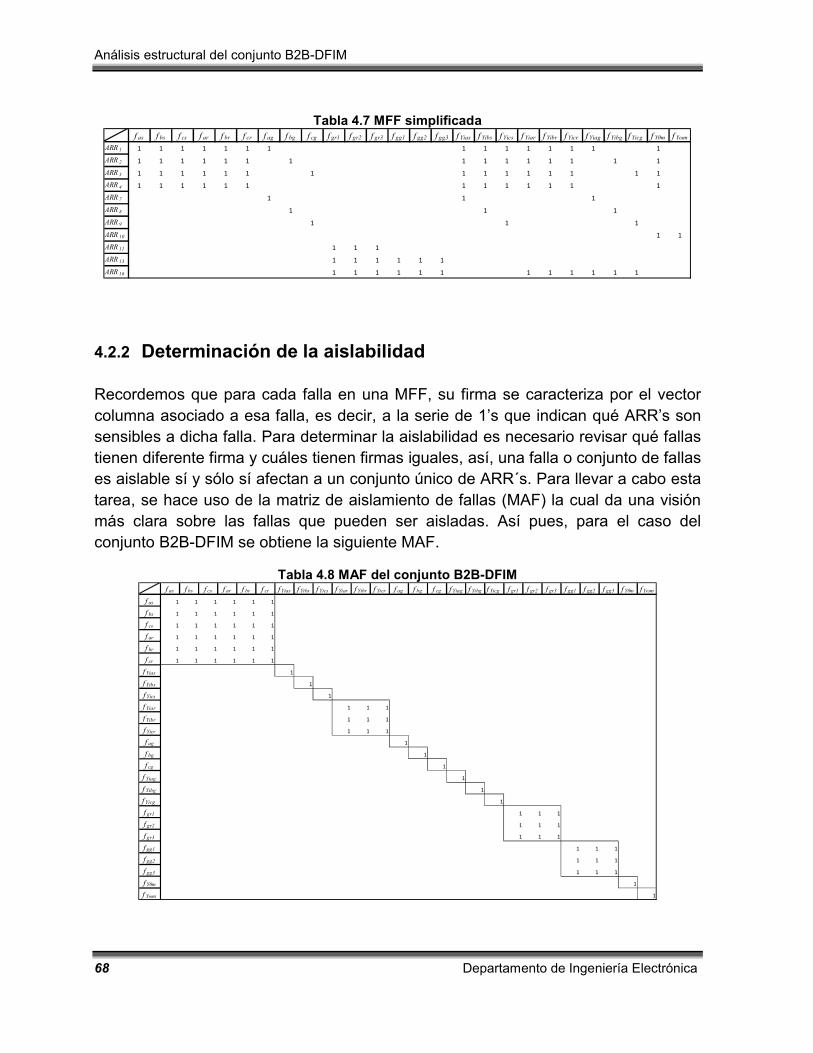
Análisis estructural del conjunto B2B-DFIM
68 Departamento de Ingeniería Electrónica
Tabla 4.7 MFF simplificada
4.2.2 Determinación de la aislabilidad
Recordemos que para cada falla en una MFF, su firma se caracteriza por el vector
columna asociado a esa falla, es decir, a la serie de 1’s que indican qué ARR’s son
sensibles a dicha falla. Para determinar la aislabilidad es necesario revisar qué fallas
tienen diferente firma y cuáles tienen firmas iguales, así, una falla o conjunto de fallas
es aislable sí y sólo sí afectan a un conjunto único de ARR´s. Para llevar a cabo esta
tarea, se hace uso de la matriz de aislamiento de fallas (MAF) la cual da una visión
más clara sobre las fallas que pueden ser aisladas. Así pues, para el caso del
conjunto B2B-DFIM se obtiene la siguiente MAF.
Tabla 4.8 MAF del conjunto B2B-DFIM
f as f bs f cs f ar f br f cr f ag f bg f cg f gr1 f gr2 f gr3 f gg1 f gg2 f gg3 f Yias f Yibs f Yics f Yiar f Yibr f Yicr f Yiag f Yibg f Yicg f Yθm f Yωm
ARR 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 4 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 7 1 1 1
ARR 8 1 1 1
ARR 9 1 1 1
ARR 10 1 1
ARR 11 1 1 1
ARR 13 1 1 1 1 1 1
ARR 16 1 1 1 1 1 1 1 1 1 1 1 1
f as f bs f cs f ar f br f cr f Yias f Yibs f Yics f Yiar f Yibr f Yicr f ag f bg f cg f Yiag f Yibg f Yicg f gr1 f gr2 f gr3 f gg1 f gg2 f gg3 f Yθm f Yωm
f as 1 1 1 1 1 1
f bs 1 1 1 1 1 1
f cs 1 1 1 1 1 1
f ar 1 1 1 1 1 1
f br 1 1 1 1 1 1
f cr 1 1 1 1 1 1
f Yias 1
f Yibs 1
f Yics 1
f Yiar 1 1 1
f Yibr 1 1 1
f Yicr 1 1 1
f ag 1
f bg 1
f cg 1
f Yiag 1
f Yibg 1
f Yicg 1
f gr1 1 1 1
f gr2 1 1 1
f gr3 1 1 1
f gg1 1 1 1
f gg2 1 1 1
f gg3 1 1 1
f Yθm 1
f Yωm 1

Análisis estructural del conjunto B2B-DFIM
cenidet 69
Del análisis de la aislabilidad se obtienen los siguientes conjuntos de fallas que son
aislables entre sí.
,,,,,. Las fallas que afectan a las fases del estator y del rotor no
son aislables, debido a que comparten la misma firma de fallas.
,
,
. De este análisis se puede deducir que es posible detectar la
ocurrencia de una falla en los sensores de corriente del rotor, sin embargo, no se
puede determinar la fase en la que está ubicado este sensor con falla.
1
,2
,3
,,,. Las fallas involucradas en estos conjuntos conciernen
al convertidor tanto en MSC como en GCS y éstas pueden ser por circuito abierto o
corto circuito en algún interruptor de potencia. Ante la ocurrencia de alguna de estas
fallas se puede determinar que la falla está ocurriendo en MCS o GCS, pero no se
puede determinar la fase o rama que ha sido afectada en el convertidor.
,
,
,
,
,
,,
,
,
,
. En este último conjunto se
muestra las fallas que de acuerdo con el MAF son aislables, es decir, se puede saber
el tipo de falla, y en el caso de las variables eléctricas, qué fase se está afectando.
Hasta aquí se concluye el análisis de la diagnosticabilidad, es decir, el análisis a
priori vía el AE para determinar qué fallas son detectables y cuáles conjuntos de
fallas son aislables. Como se mencionó en el Capítulo 1, la importancia de este
análisis es que nos permite conocer, también a priori, cuáles son los alcances que
pudiese lograrse con un esquema de detección y aislamiento de fallas (FDI),
independientemente de la estrategia o técnica que se use para implementar dicho
esquema de FDI y/o generadores de residuos. Es decir, el esfuerzo en el diseño de
un esquema de FDI será orientado y no bajo la incertidumbre de no saber si hay o no
solución para la detección y aislamiento de fallas.
Así pues, para nuestro caso de estudio, lo que sigue será la verificación mediante
algún esquema de FDI, de la diagnosticabilidad obtenida con el AE. En este sentido,
en el capítulo siguiente se lleva a cabo la implementación de las once ARR’s que se
agruparon en la Tabla 4.7 y se somete el sistema B2B-DFIM ante condiciones de
falla.
Vale la pena mencionar, que otra de las ventajas del AE es que es posible plantear
diferentes escenarios para dicho análisis, algunos de estos escenarios pueden ser la
inclusión y/o exclusión de alguna parte del sistema bajo estudio, la medición de
alguna otra variable, etc. Estos nuevos escenarios, se traducen en un cambio en la

Análisis estructural del conjunto B2B-DFIM
70 Departamento de Ingeniería Electrónica
estructura del sistema y/o en la posibilidad de mejorar las cadenas de
alcanzabilidad/calculabilidad del sistema vía más variables medidas. Así, con la
sistematización del procedimiento para el análisis de la diagnosticabilidad con el AE,
se pueden analizar los diferentes escenarios a fin de buscar una mejora en los
alcances de la diagnosticabilidad. En este contexto, en este capítulo se describió el
escenario que dio los mejores resultados, no obstante, para fines de ilustrar las
ventajas que pueden significar diversos escenarios, en el Anexo A se describen dos
escenarios adicionales.
Capítulo 5
5. Comprobación de la
diagnosticabilidad
mediante simulación
La comprobación de la diagnosticabilidad de fallas en el conjunto B2B-DFIM se
realiza por medio de las ARR’s obtenidas en el AE. Para hacer uso de las ARR’s
como generadoras de residuos elementales, éstas se construyen con las formas
explícitas de las restricciones involucradas en cada ARR y se igualan a cero, la idea
es que cada ARR es un sistema homogéneo que se satisface en condiciones
nominales y que no se satisface o resulta en un valor diferente de cero en
condiciones de falla. Vale la pena mencionar que debido a incertidumbres en el
modelado de un sistema, a la naturaleza de las señales y/o al ruido presente en
dichas señales, los residuos, en condiciones nominales, no son exactamente igual a
cero.
En este capítulo se lleva a cabo la simulación de cada una de las ARR’s como
generadoras de residuos, para lo cual se considera un simulador del sistema B2B-
DFIM para un sistema WECS aislado y controlado mediante control vectorial, dicho
sistema fue desarrollado por [31] en MATLAB/SIMULINK, y cuyas especificaciones
se presentan a continuación.

Comprobación de resultados mediante simulación
72 Departamento de Ingeniería Electrónica
Tabla 5.1 Especificaciones del sistema B2B-DFIM*
* En donde corresponda, estos valores son por fase.
En la Figura 5.1 se muestra el simulador sobre el cual se realizan las pruebas de las
ARR´s obtenidas.
GearBox
Vcd
Vcd_ref Qg_ref
60
220
700
vbr
Teg
var
Ic
Vcd
vcr
0.01
Vs*
fe*
wrm
Irabc
Vsabc
Isabc
Puls
es
MSC Controller
Vo
gamma123
Iabc
Vabc_n
io'
MSC
Is_abc
Ig_abc
VL_abc
IL_abc
Load
[gg123]
[Vr]
[Vcd]
[Ig]
[Tegb]
[Vs]
[Is]
[Vg]
[gr123]
[Ir]
-4
vs_3ph
is_3ph
Vcd_re
f
Vcd_m
eas
Q_re
f
ILabc
puls
es
GSC Controller
Vo
gamma123
Iabc
Vabc_n
io'
GSC
[Vcd]
[Ig]
[Ig]
[Ir]
[wm]
[wm]
[Is][Ir]
[Vs]
Vr
Vg
wm
Is_abc
Ir_abc
Ig_abc
Te
Or
DFIG
Io_1
Io_2
Vcd
Ic
DC Bus
Figura 5.1 Simulador del conjunto convertidor B2B-DFIM
Inductancia de magnetización del estator Lsm= 21.133 mH
Inductancia de magnetización del rotor Lrm= 21.133 mH
Inductancia de dispersión del estator Lls= 0.8 mH
Inductancia de dispersión del rotor Llr= 0.8 mH
Valor pico de las inductancias mutuas estator-rotor Lsr= 21.133 mH
Inductancia parásita del conductor del MCS L1=1 µH
Inductancia del filtro del GCS L2=12 mH
Inductancia de la carga LL=15 mH
Resistencia de la inductancia del estator Rs= 0.087 Ω
Resistencia de la inductancia del rotor Rr= 0.228 Ω
Resistencia parásita del conductor del MCS R1=0.1m Ω
Resistencia del filtro del GCS R2=1m Ω
Resistencia de carga RL=10 Ω
Número de polos P = 4
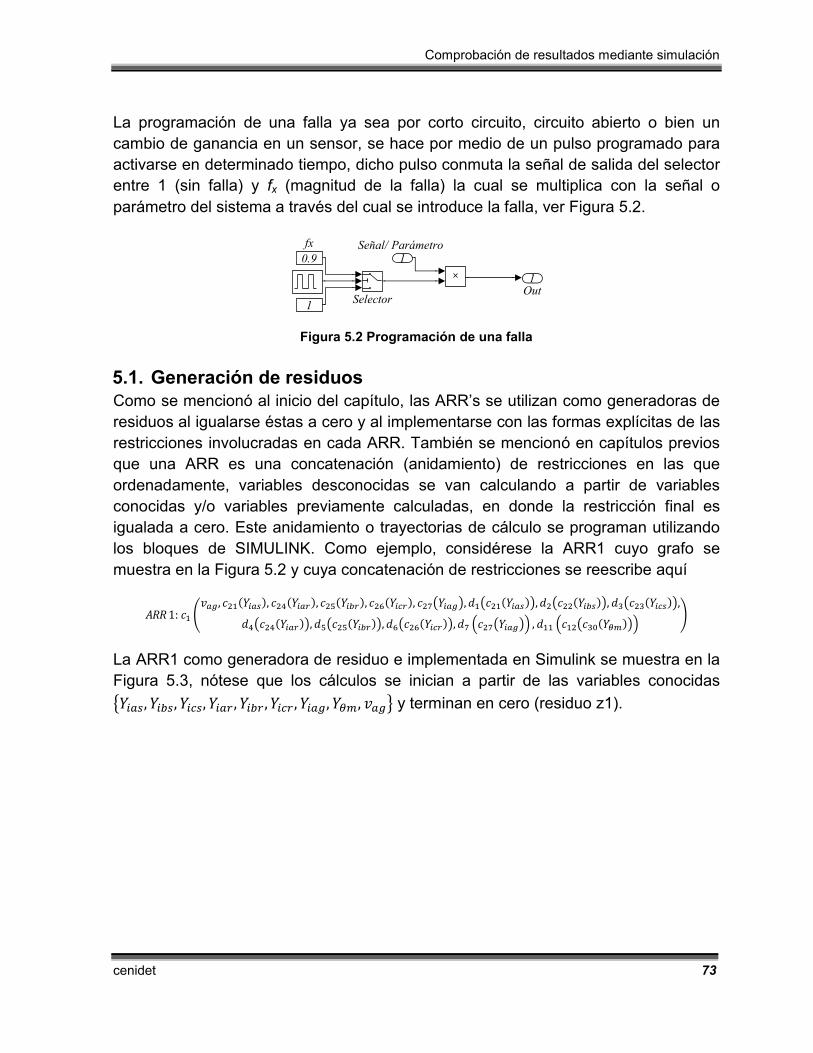
Comprobación de resultados mediante simulación
cenidet 73
La programación de una falla ya sea por corto circuito, circuito abierto o bien un
cambio de ganancia en un sensor, se hace por medio de un pulso programado para
activarse en determinado tiempo, dicho pulso conmuta la señal de salida del selector
entre 1 (sin falla) y fx (magnitud de la falla) la cual se multiplica con la señal o
parámetro del sistema a través del cual se introduce la falla, ver Figura 5.2.
Figura 5.2 Programación de una falla
5.1. Generación de residuos Como se mencionó al inicio del capítulo, las ARR’s se utilizan como generadoras de
residuos al igualarse éstas a cero y al implementarse con las formas explícitas de las
restricciones involucradas en cada ARR. También se mencionó en capítulos previos
que una ARR es una concatenación (anidamiento) de restricciones en las que
ordenadamente, variables desconocidas se van calculando a partir de variables
conocidas y/o variables previamente calculadas, en donde la restricción final es
igualada a cero. Este anidamiento o trayectorias de cálculo se programan utilizando
los bloques de SIMULINK. Como ejemplo, considérese la ARR1 cuyo grafo se
muestra en la Figura 5.2 y cuya concatenación de restricciones se reescribe aquí
1: ,(),(),(),(),,(),(),(),
(),(),(), , ()
La ARR1 como generadora de residuo e implementada en Simulink se muestra en la
Figura 5.3, nótese que los cálculos se inician a partir de las variables conocidas
,,,,,,,, y terminan en cero (residuo z1).
1Out
0.9
fx
1Selector
1Señal/ Parámetro
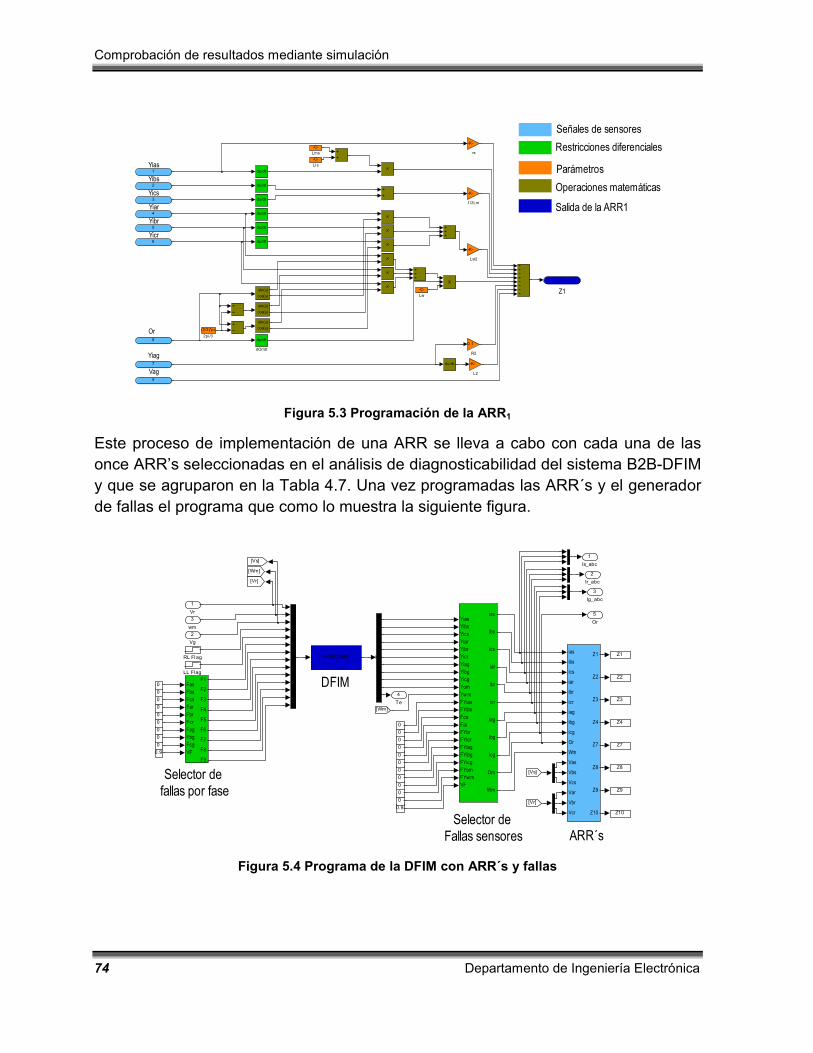
Comprobación de resultados mediante simulación
74 Departamento de Ingeniería Electrónica
zzzzzzz Señales de sensores
zzzzzzz Restricciones diferenciales
zzzzzzz ParámetrosYias
Yibs
Yics
Yiar
Yibr
Yicr
Or
Yiag
Vag
Z1
zzzzzzz Operaciones matemáticas
zzzzzzz Salida de la ARR1
1
-K-
rs
du/dt
du/dt
du/dt
du/dt
du/dt
du/dt
du/dt
du/dt
dOr/dt
sin(u)
cos(u)
sin(u)
cos(u)
sin(u)
cos(u)
0.1
R2
-K-
Lsr2
-C-
Lsr
-C-
Lms
-C-
Lls
-K-
L2
(2/3)*pi
2pi /3
-K-
1/2Lm
9
8
7
6
5
4
3
2
1
Figura 5.3 Programación de la ARR1
Este proceso de implementación de una ARR se lleva a cabo con cada una de las
once ARR’s seleccionadas en el análisis de diagnosticabilidad del sistema B2B-DFIM
y que se agruparon en la Tabla 4.7. Una vez programadas las ARR´s y el generador
de fallas el programa que como lo muestra la siguiente figura.
Selector de fallas por fase
Selector de Fallas sensores ARR´s
DFIM
5
Or
4
Te
3
Ig_abc
2
Ir_abc
1
Is_abc
Z4
Z3
Z10
Z9
Z8
Z7
Z2
Z1RL Flag
LL Flag
[Vs]
[Wm]
[Vr]
[Vs]
[Wm]
[Vr]
Yias
Yibs
Yics
Yiar
Yibr
Yicr
Yiag
Yibg
Yicg
Yom
Yw m
FYias
FYibs
Fcs
Far
FYbr
FYicr
FYiag
FYibg
FYicg
FYom
FYw m
VF
ias
ibs
ics
iar
ibr
icr
iag
ibg
icg
Om
Wm
Fas
Fbs
Fcs
Far
Fbr
Fcr
Fag
Fbg
Fcg
VF
F1
F2
F3
F4
F5
F6
F7
F8
F9
DemuxIsWECSMF
0.9
0
0
0
0
0
0
0
0
0
0.9
0
0
0
0
0
0
0
0
0
0
0
ias
ibs
ics
iar
ibr
icr
iag
ibg
icg
Or
Wm
Vas
Vbs
Vcs
Var
Vbr
Vcr
Z1
Z2
Z3
Z4
Z7
Z8
Z9
Z10
3
wm
2
Vg
1
Vr
Figura 5.4 Programa de la DFIM con ARR´s y fallas
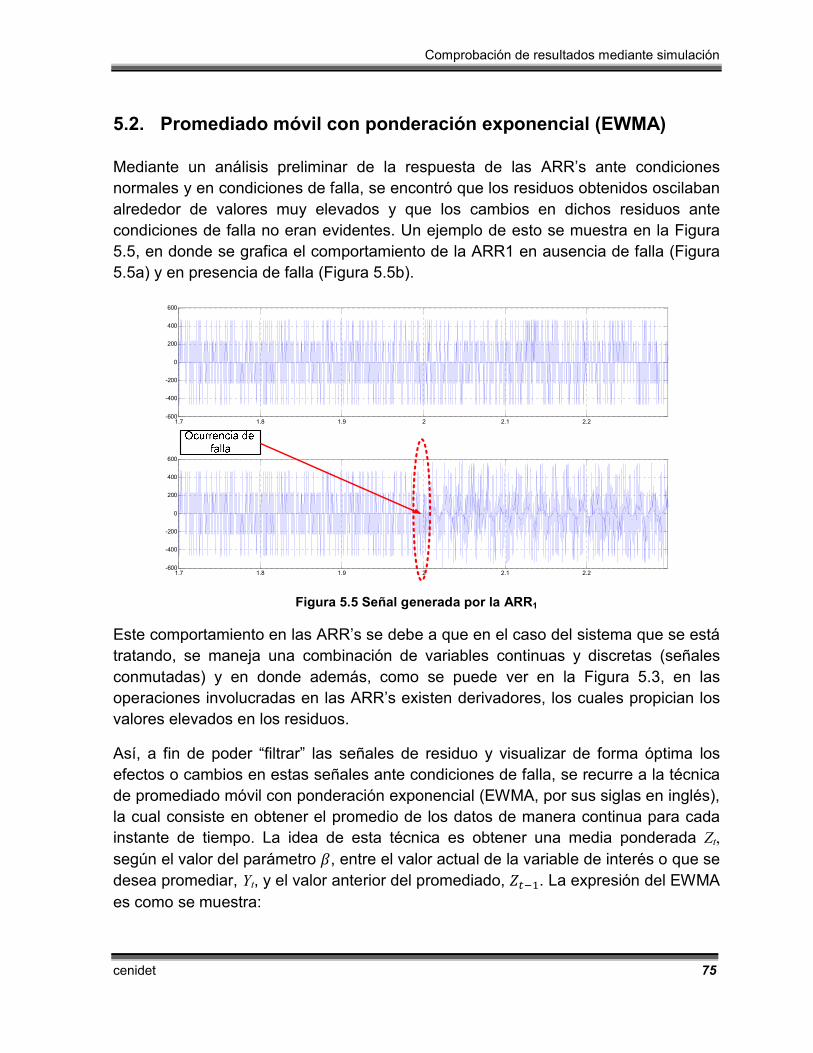
Comprobación de resultados mediante simulación
cenidet 75
5.2. Promediado móvil con ponderación exponencial (EWMA)
Mediante un análisis preliminar de la respuesta de las ARR’s ante condiciones
normales y en condiciones de falla, se encontró que los residuos obtenidos oscilaban
alrededor de valores muy elevados y que los cambios en dichos residuos ante
condiciones de falla no eran evidentes. Un ejemplo de esto se muestra en la Figura
5.5, en donde se grafica el comportamiento de la ARR1 en ausencia de falla (Figura
5.5a) y en presencia de falla (Figura 5.5b).
1.7 1.8 1.9 2 2.1 2.2-600
-400
-200
0
200
400
600
1.7 1.8 1.9 2 2.1 2.2-600
-400
-200
0
200
400
600
Figura 5.5 Señal generada por la ARR1
Este comportamiento en las ARR’s se debe a que en el caso del sistema que se está
tratando, se maneja una combinación de variables continuas y discretas (señales
conmutadas) y en donde además, como se puede ver en la Figura 5.3, en las
operaciones involucradas en las ARR’s existen derivadores, los cuales propician los
valores elevados en los residuos.
Así, a fin de poder “filtrar” las señales de residuo y visualizar de forma óptima los
efectos o cambios en estas señales ante condiciones de falla, se recurre a la técnica
de promediado móvil con ponderación exponencial (EWMA, por sus siglas en inglés),
la cual consiste en obtener el promedio de los datos de manera continua para cada
instante de tiempo. La idea de esta técnica es obtener una media ponderada Zt,
según el valor del parámetro , entre el valor actual de la variable de interés o que se
desea promediar, Yt, y el valor anterior del promediado, . La expresión del EWMA
es como se muestra:
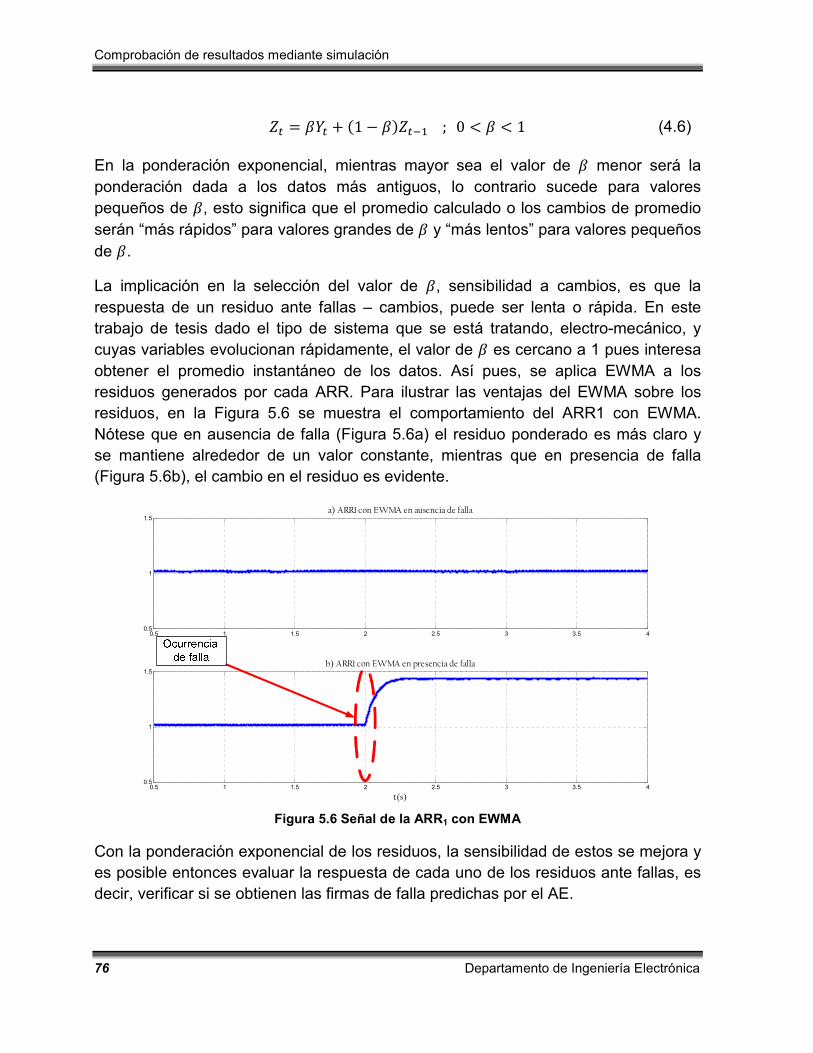
Comprobación de resultados mediante simulación
76 Departamento de Ingeniería Electrónica
= + (1 − );0 < < 1 (4.6)
En la ponderación exponencial, mientras mayor sea el valor de menor será la
ponderación dada a los datos más antiguos, lo contrario sucede para valores
pequeños de , esto significa que el promedio calculado o los cambios de promedio
serán “más rápidos” para valores grandes de y “más lentos” para valores pequeños
de .
La implicación en la selección del valor de , sensibilidad a cambios, es que la
respuesta de un residuo ante fallas – cambios, puede ser lenta o rápida. En este
trabajo de tesis dado el tipo de sistema que se está tratando, electro-mecánico, y
cuyas variables evolucionan rápidamente, el valor de es cercano a 1 pues interesa
obtener el promedio instantáneo de los datos. Así pues, se aplica EWMA a los
residuos generados por cada ARR. Para ilustrar las ventajas del EWMA sobre los
residuos, en la Figura 5.6 se muestra el comportamiento del ARR1 con EWMA.
Nótese que en ausencia de falla (Figura 5.6a) el residuo ponderado es más claro y
se mantiene alrededor de un valor constante, mientras que en presencia de falla
(Figura 5.6b), el cambio en el residuo es evidente.
0.5 1 1.5 2 2.5 3 3.5 40.5
1
1.5a) ARR1 con EWMA en ausencia de falla
0.5 1 1.5 2 2.5 3 3.5 40.5
1
1.5b) ARR1 con EWMA en presencia de falla
t(s)
Figura 5.6 Señal de la ARR1 con EWMA
Con la ponderación exponencial de los residuos, la sensibilidad de estos se mejora y
es posible entonces evaluar la respuesta de cada uno de los residuos ante fallas, es
decir, verificar si se obtienen las firmas de falla predichas por el AE.
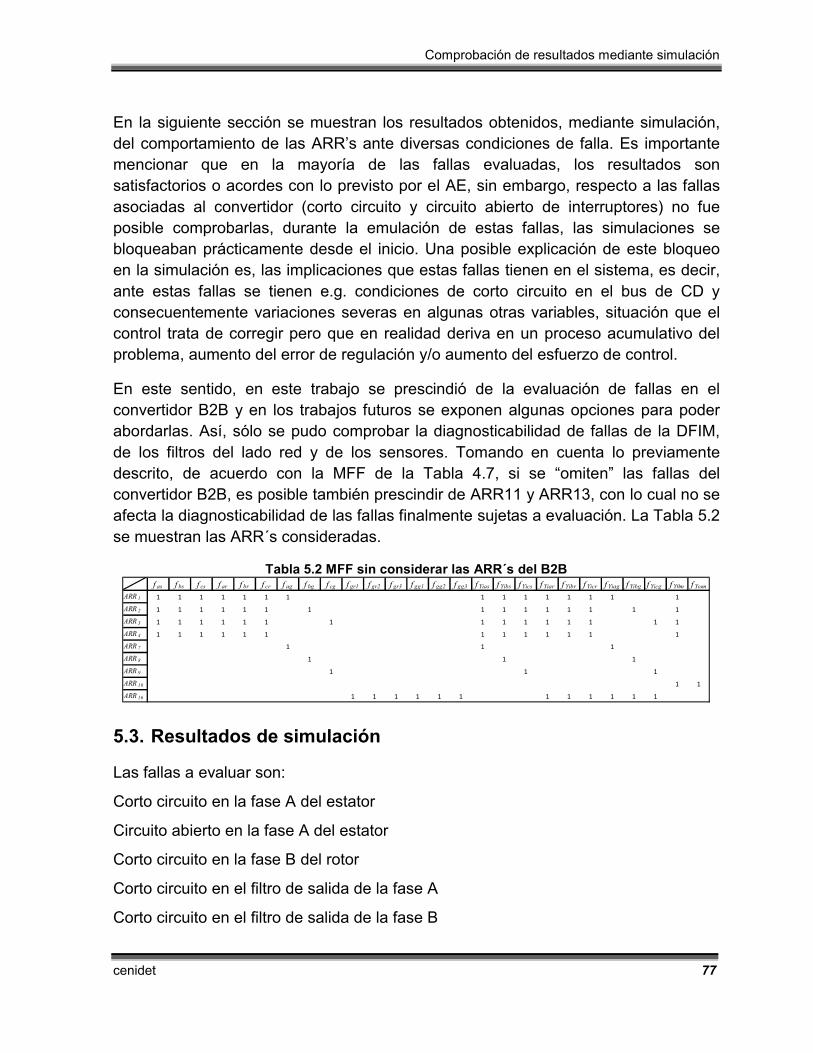
Comprobación de resultados mediante simulación
cenidet 77
En la siguiente sección se muestran los resultados obtenidos, mediante simulación,
del comportamiento de las ARR’s ante diversas condiciones de falla. Es importante
mencionar que en la mayoría de las fallas evaluadas, los resultados son
satisfactorios o acordes con lo previsto por el AE, sin embargo, respecto a las fallas
asociadas al convertidor (corto circuito y circuito abierto de interruptores) no fue
posible comprobarlas, durante la emulación de estas fallas, las simulaciones se
bloqueaban prácticamente desde el inicio. Una posible explicación de este bloqueo
en la simulación es, las implicaciones que estas fallas tienen en el sistema, es decir,
ante estas fallas se tienen e.g. condiciones de corto circuito en el bus de CD y
consecuentemente variaciones severas en algunas otras variables, situación que el
control trata de corregir pero que en realidad deriva en un proceso acumulativo del
problema, aumento del error de regulación y/o aumento del esfuerzo de control.
En este sentido, en este trabajo se prescindió de la evaluación de fallas en el
convertidor B2B y en los trabajos futuros se exponen algunas opciones para poder
abordarlas. Así, sólo se pudo comprobar la diagnosticabilidad de fallas de la DFIM,
de los filtros del lado red y de los sensores. Tomando en cuenta lo previamente
descrito, de acuerdo con la MFF de la Tabla 4.7, si se “omiten” las fallas del
convertidor B2B, es posible también prescindir de ARR11 y ARR13, con lo cual no se
afecta la diagnosticabilidad de las fallas finalmente sujetas a evaluación. La Tabla 5.2
se muestran las ARR´s consideradas.
Tabla 5.2 MFF sin considerar las ARR´s del B2B
5.3. Resultados de simulación
Las fallas a evaluar son:
Corto circuito en la fase A del estator
Circuito abierto en la fase A del estator
Corto circuito en la fase B del rotor
Corto circuito en el filtro de salida de la fase A
Corto circuito en el filtro de salida de la fase B
f as f bs f cs f ar f br f cr f ag f bg f cg f gr1 f gr2 f gr3 f gg1 f gg2 f gg3 f Yias f Yibs f Yics f Yiar f Yibr f Yicr f Yiag f Yibg f Yicg f Yθm f Yωm
ARR 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 4 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 7 1 1 1
ARR 8 1 1 1
ARR 9 1 1 1
ARR 10 1 1
ARR 16 1 1 1 1 1 1 1 1 1 1 1 1
Comprobación de resultados mediante simulación
78 Departamento de Ingeniería Electrónica
Corto circuito en el filtro de salida de la fase C
Falla en el sensor de corriente de la fase A del rotor
Falla en el sensor de corriente de la fase A del estator
Falla en el sensor de corriente de la fase B del estator
Falla en el sensor de corriente de la fase C del estator
Falla en el sensor de corriente de la fase A del filtro de salida
Falla en el sensor de corriente de la fase B del filtro de salida
Falla en el sensor de corriente de la fase C del filtro de salida
Falla en el sensor de desplazamiento angular
Las fallas se introducen en el instante de tiempo = 2.
5.3.1. Corto circuito en la fase A del estator
En esta simulación se considera una falla en la fase A del estator por corto circuito, la
cual ocasiona una disminución del 10% en las inductancias propias y mutuas
relacionadas con esta fase. El conjunto de ARR’s sensibles a esta falla son:
ARR,ARR,ARR,ARR tal y como lo muestra Tabla 5.2. A continuación se
muestran los comportamientos de las señales generadas por las ARR´s ante esta
falla.
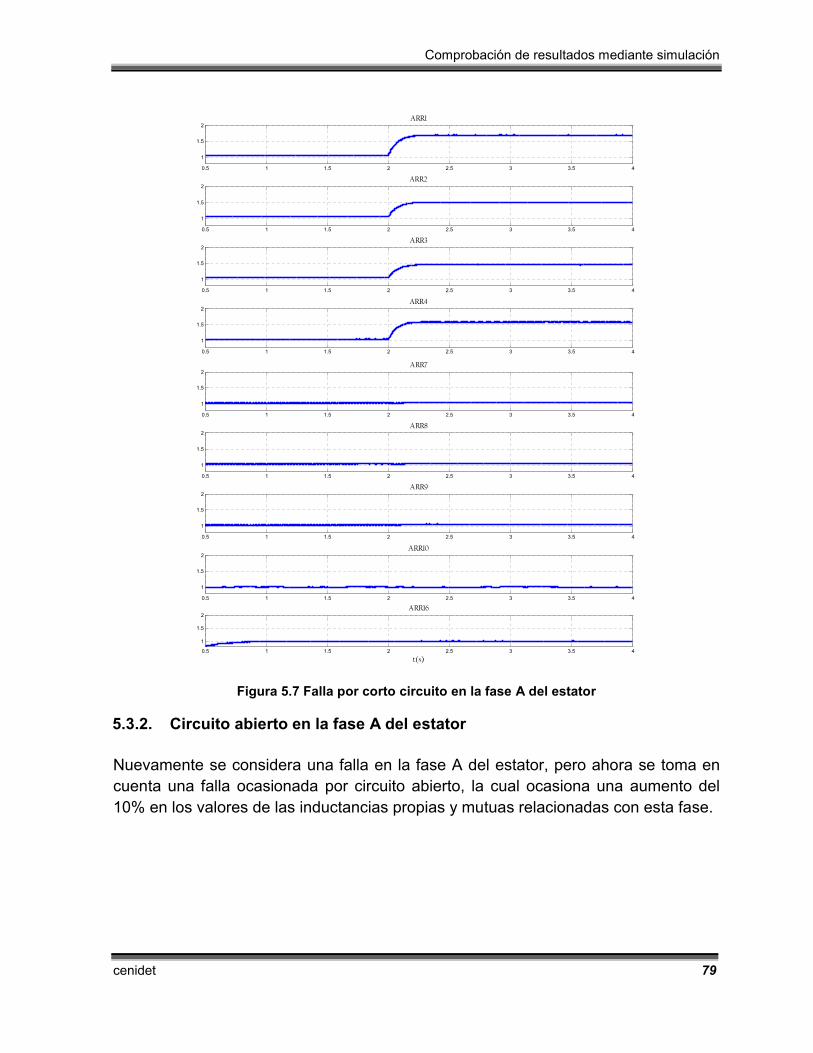
Comprobación de resultados mediante simulación
cenidet 79
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR1
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR2
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR3
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR4
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR7
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR8
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR9
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR10
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR16
t(s)
Figura 5.7 Falla por corto circuito en la fase A del estator
5.3.2. Circuito abierto en la fase A del estator
Nuevamente se considera una falla en la fase A del estator, pero ahora se toma en
cuenta una falla ocasionada por circuito abierto, la cual ocasiona una aumento del
10% en los valores de las inductancias propias y mutuas relacionadas con esta fase.

Comprobación de resultados mediante simulación
80 Departamento de Ingeniería Electrónica
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6
ARR1
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR2
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR3
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR4
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6
ARR7
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR8
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR9
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6
ARR10
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR16
t(s)
Figura 5.8 Falla por circuito abierto en la fase A del estator
El comportamiento de las ARR´s es mostrado en la Figura 5.8 y como se puede
observar concuerda con lo esperado en la MFF (Tabla 5.2), la cual muestra que el
conjunto ARR,ARR,ARR,ARR es sensible ante esta falla. Vale la pena resaltar,
que las ARR´s no distinguen la naturaleza de la falla, es decir, si esta fue ocasionada
por un cortocircuito o un circuito abierto, pues como se pudo comprobar reaccionan
las mismas ARR’s en cualquiera de los dos casos. Es por ello que de aquí en
adelante sólo se mostrarán los resultados de las simulaciones de las fallas por corto
circuito.
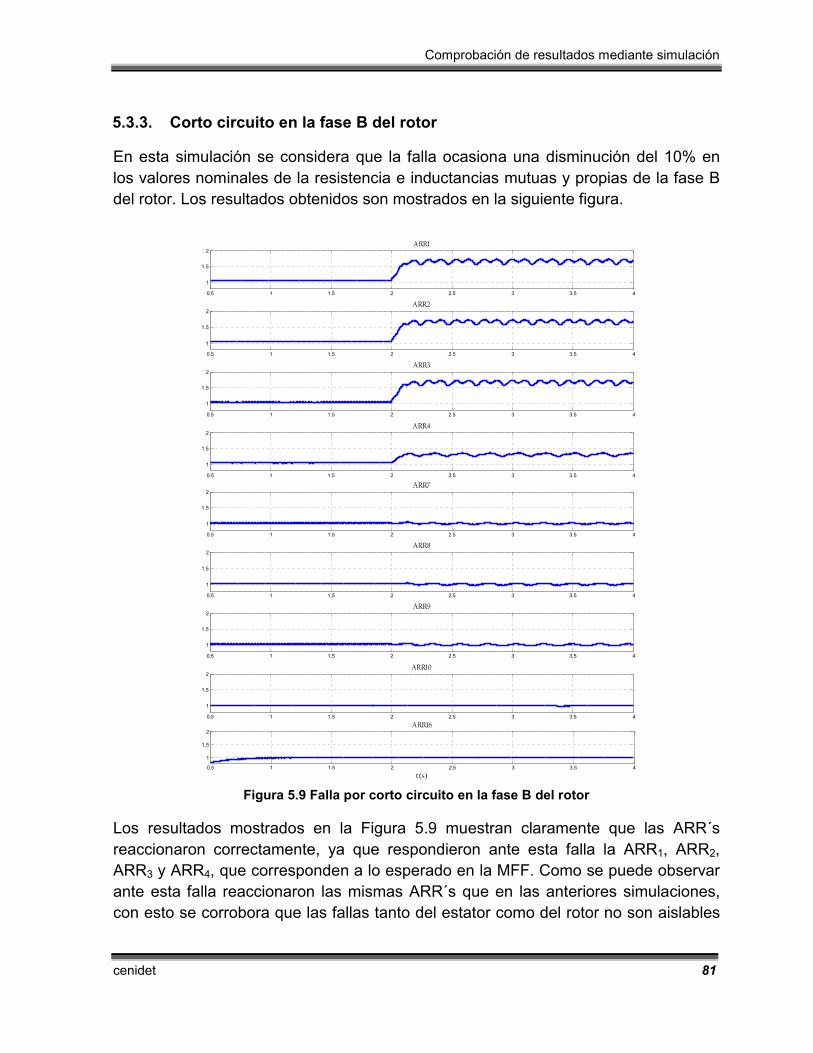
Comprobación de resultados mediante simulación
cenidet 81
5.3.3. Corto circuito en la fase B del rotor
En esta simulación se considera que la falla ocasiona una disminución del 10% en
los valores nominales de la resistencia e inductancias mutuas y propias de la fase B
del rotor. Los resultados obtenidos son mostrados en la siguiente figura.
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR1
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR2
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR3
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR4
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR7
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR8
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR9
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR10
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR16
t(s)
Figura 5.9 Falla por corto circuito en la fase B del rotor
Los resultados mostrados en la Figura 5.9 muestran claramente que las ARR´s
reaccionaron correctamente, ya que respondieron ante esta falla la ARR1, ARR2,
ARR3 y ARR4, que corresponden a lo esperado en la MFF. Como se puede observar
ante esta falla reaccionaron las mismas ARR´s que en las anteriores simulaciones,
con esto se corrobora que las fallas tanto del estator como del rotor no son aislables
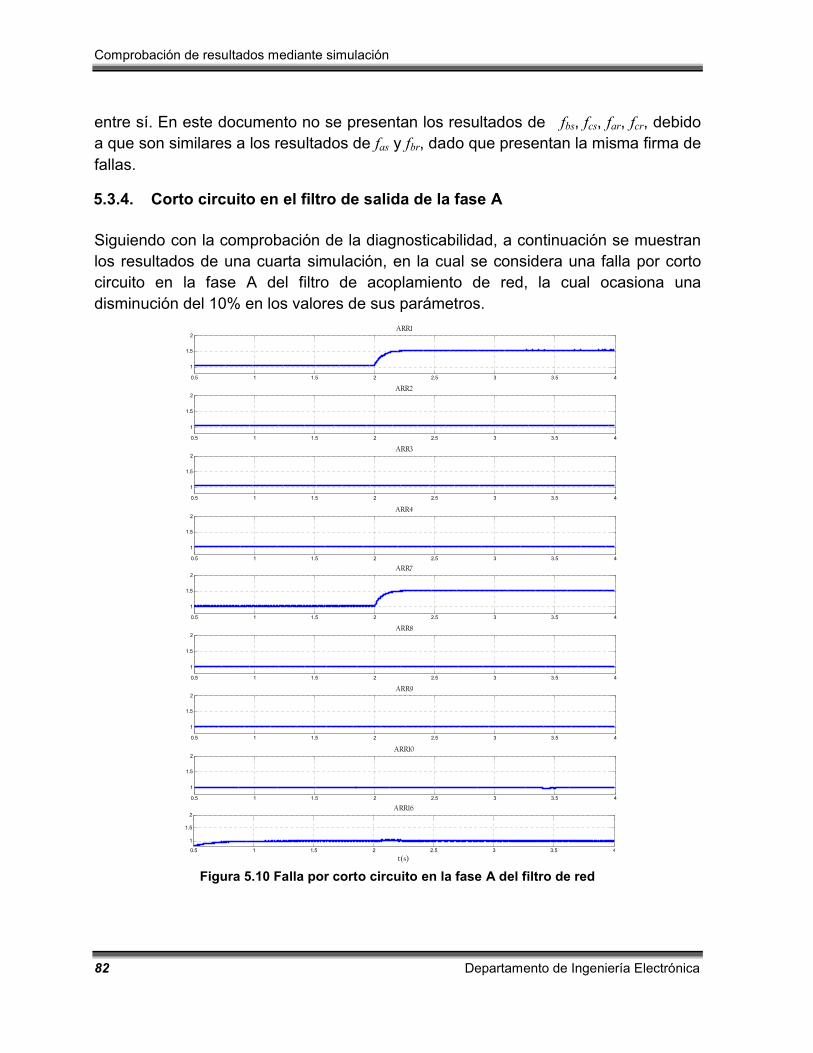
Comprobación de resultados mediante simulación
82 Departamento de Ingeniería Electrónica
entre sí. En este documento no se presentan los resultados de fbs, fcs, far, fcr, debido
a que son similares a los resultados de fas y fbr, dado que presentan la misma firma de
fallas.
5.3.4. Corto circuito en el filtro de salida de la fase A
Siguiendo con la comprobación de la diagnosticabilidad, a continuación se muestran
los resultados de una cuarta simulación, en la cual se considera una falla por corto
circuito en la fase A del filtro de acoplamiento de red, la cual ocasiona una
disminución del 10% en los valores de sus parámetros.
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR1
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR2
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR3
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR4
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR7
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR8
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR9
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR10
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR16
t(s)
Figura 5.10 Falla por corto circuito en la fase A del filtro de red
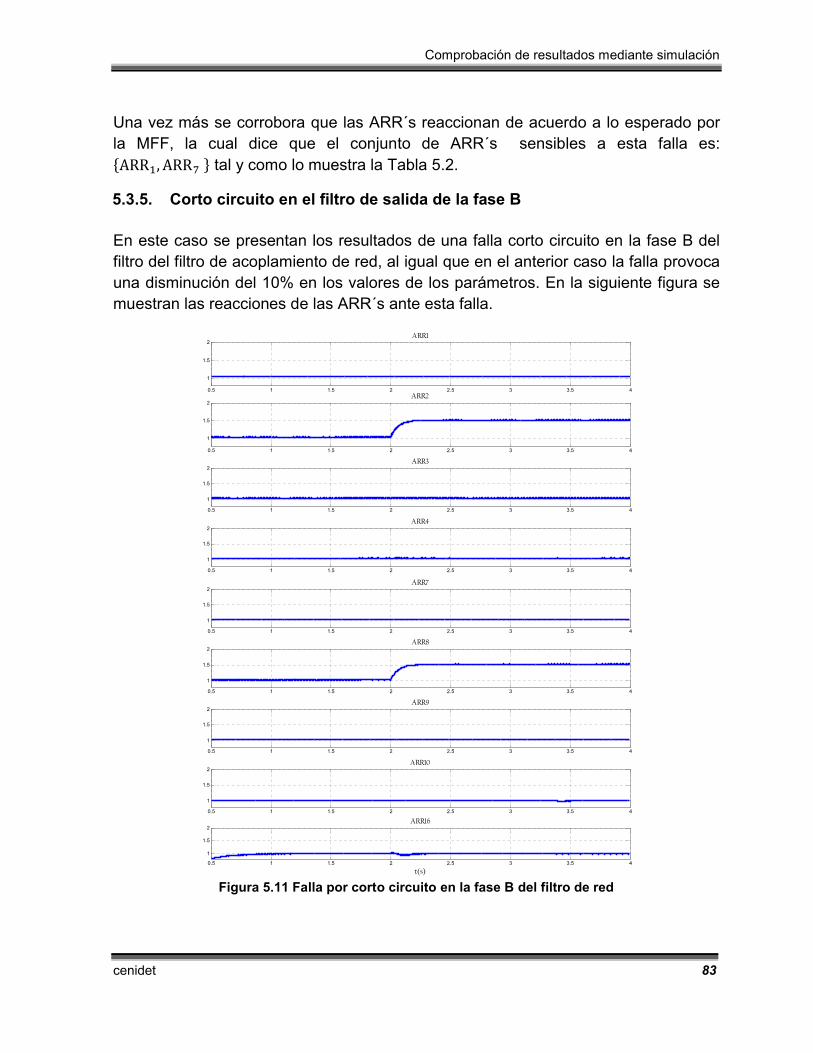
Comprobación de resultados mediante simulación
cenidet 83
Una vez más se corrobora que las ARR´s reaccionan de acuerdo a lo esperado por
la MFF, la cual dice que el conjunto de ARR´s sensibles a esta falla es:
ARR,ARR tal y como lo muestra la Tabla 5.2.
5.3.5. Corto circuito en el filtro de salida de la fase B
En este caso se presentan los resultados de una falla corto circuito en la fase B del
filtro del filtro de acoplamiento de red, al igual que en el anterior caso la falla provoca
una disminución del 10% en los valores de los parámetros. En la siguiente figura se
muestran las reacciones de las ARR´s ante esta falla.
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR1
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR2
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR3
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR4
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR7
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR8
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR9
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR10
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR16
t(s) Figura 5.11 Falla por corto circuito en la fase B del filtro de red

Comprobación de resultados mediante simulación
84 Departamento de Ingeniería Electrónica
Lo mostrado en la Figura 5.11, muestra que sólo reaccionaron las ARR2 y ARR8, esto
concuerda con lo esperado de acuerdo a la Tabla 5.2 y la cual muestra que esta falla
tiene una firma única, lo cual la hace aislable.
5.3.6. Corto circuito en el filtro de salida de la fase C
Esta vez se considera la ocurrencia de una falla en el filtro de salida de la fase C del
GSC, la cual es ocasionada por un corto circuito que provoca la disminución del valor
nominal de sus parámetros de un 10%. La siguiente figura muestra la respuesta de
las ARR´s ante esta falla.
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR1
0.5 1 1.5 2 2.5 3 3.5 40
1
2
ARR2
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR3
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR4
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR7
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR8
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR9
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR10
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR16
t(s)
Figura 5.12 Falla por Corto circuito en la fase C del filtro de salida
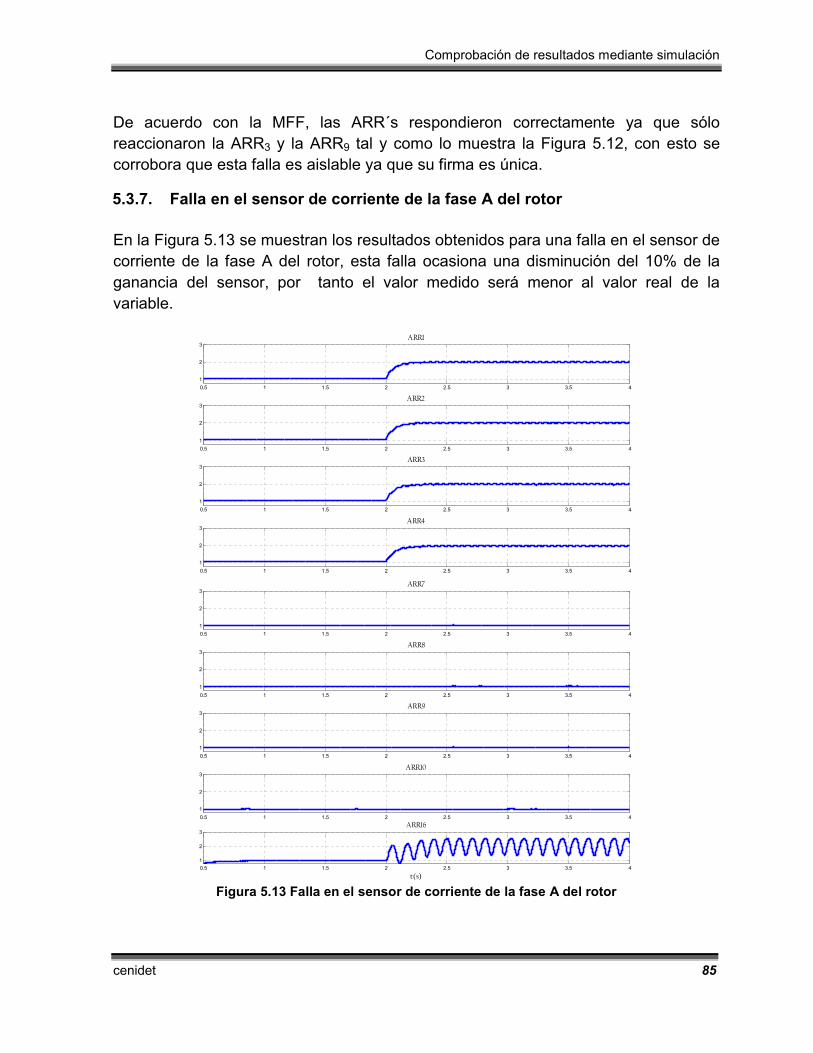
Comprobación de resultados mediante simulación
cenidet 85
De acuerdo con la MFF, las ARR´s respondieron correctamente ya que sólo
reaccionaron la ARR3 y la ARR9 tal y como lo muestra la Figura 5.12, con esto se
corrobora que esta falla es aislable ya que su firma es única.
5.3.7. Falla en el sensor de corriente de la fase A del rotor
En la Figura 5.13 se muestran los resultados obtenidos para una falla en el sensor de
corriente de la fase A del rotor, esta falla ocasiona una disminución del 10% de la
ganancia del sensor, por tanto el valor medido será menor al valor real de la
variable.
0.5 1 1.5 2 2.5 3 3.5 4
1
2
3
ARR1
0.5 1 1.5 2 2.5 3 3.5 4
1
2
3
ARR2
0.5 1 1.5 2 2.5 3 3.5 4
1
2
3
ARR3
0.5 1 1.5 2 2.5 3 3.5 4
1
2
3
ARR4
0.5 1 1.5 2 2.5 3 3.5 4
1
2
3
ARR7
0.5 1 1.5 2 2.5 3 3.5 4
1
2
3
ARR8
0.5 1 1.5 2 2.5 3 3.5 4
1
2
3
ARR9
0.5 1 1.5 2 2.5 3 3.5 4
1
2
3
ARR10
0.5 1 1.5 2 2.5 3 3.5 4
1
2
3
ARR16
t(s) Figura 5.13 Falla en el sensor de corriente de la fase A del rotor
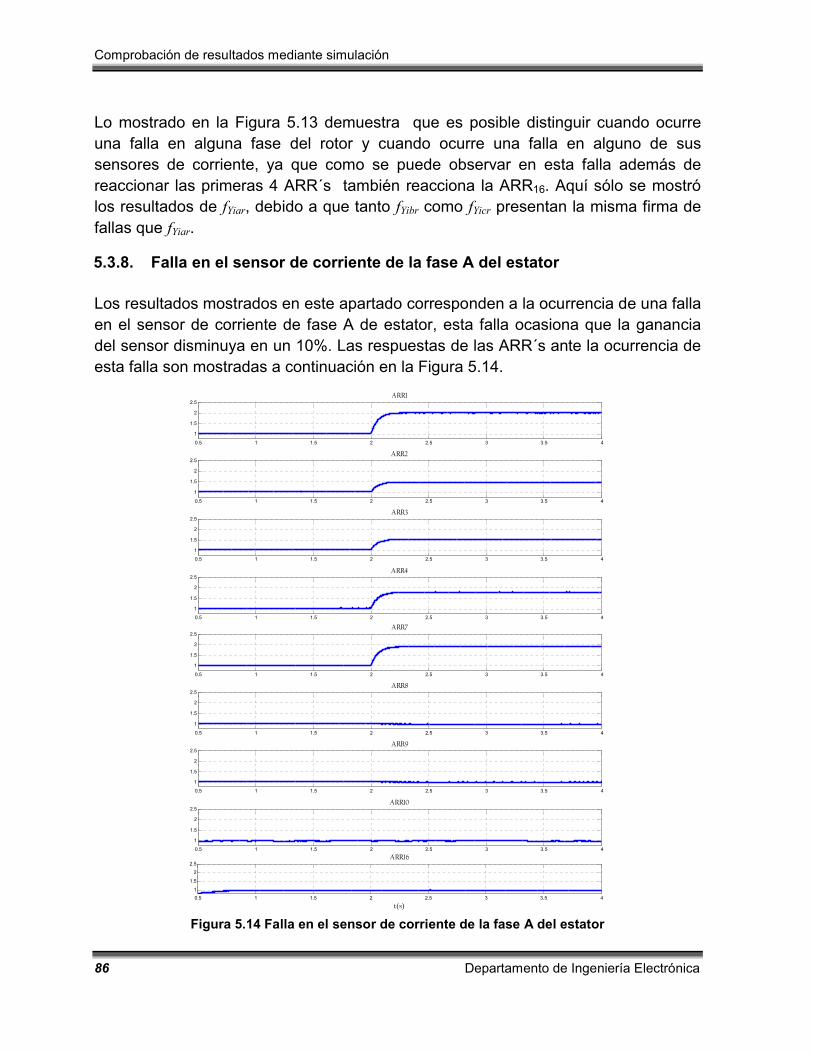
Comprobación de resultados mediante simulación
86 Departamento de Ingeniería Electrónica
Lo mostrado en la Figura 5.13 demuestra que es posible distinguir cuando ocurre
una falla en alguna fase del rotor y cuando ocurre una falla en alguno de sus
sensores de corriente, ya que como se puede observar en esta falla además de
reaccionar las primeras 4 ARR´s también reacciona la ARR16. Aquí sólo se mostró
los resultados de fYiar, debido a que tanto fYibr como fYicr presentan la misma firma de
fallas que fYiar.
5.3.8. Falla en el sensor de corriente de la fase A del estator
Los resultados mostrados en este apartado corresponden a la ocurrencia de una falla
en el sensor de corriente de fase A de estator, esta falla ocasiona que la ganancia
del sensor disminuya en un 10%. Las respuestas de las ARR´s ante la ocurrencia de
esta falla son mostradas a continuación en la Figura 5.14.
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
2.5
ARR1
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
2.5ARR2
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
2.5ARR3
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
2.5ARR4
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
2.5
ARR7
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
2.5ARR8
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
2.5ARR9
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
2.5ARR10
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
2.5ARR16
t(s) Figura 5.14 Falla en el sensor de corriente de la fase A del estator
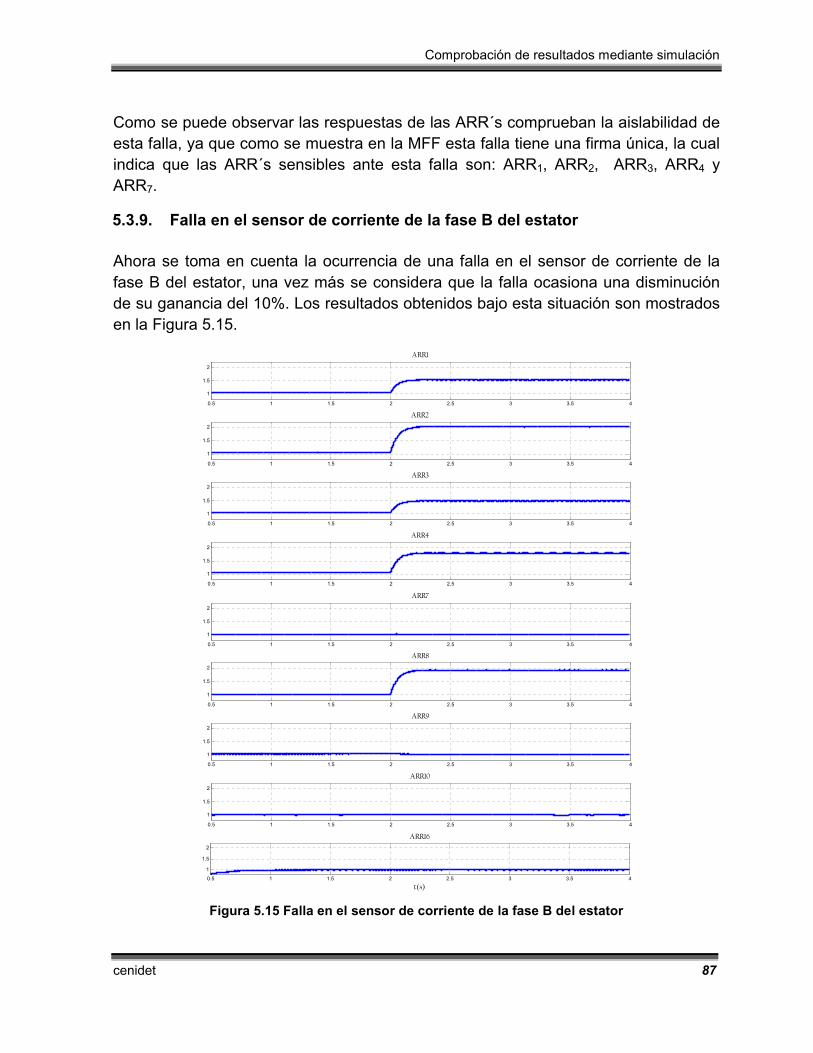
Comprobación de resultados mediante simulación
cenidet 87
Como se puede observar las respuestas de las ARR´s comprueban la aislabilidad de
esta falla, ya que como se muestra en la MFF esta falla tiene una firma única, la cual
indica que las ARR´s sensibles ante esta falla son: ARR1, ARR2, ARR3, ARR4 y
ARR7.
5.3.9. Falla en el sensor de corriente de la fase B del estator
Ahora se toma en cuenta la ocurrencia de una falla en el sensor de corriente de la
fase B del estator, una vez más se considera que la falla ocasiona una disminución
de su ganancia del 10%. Los resultados obtenidos bajo esta situación son mostrados
en la Figura 5.15.
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR1
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR2
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR3
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR4
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR7
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR8
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR9
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR10
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR16
t(s)
Figura 5.15 Falla en el sensor de corriente de la fase B del estator
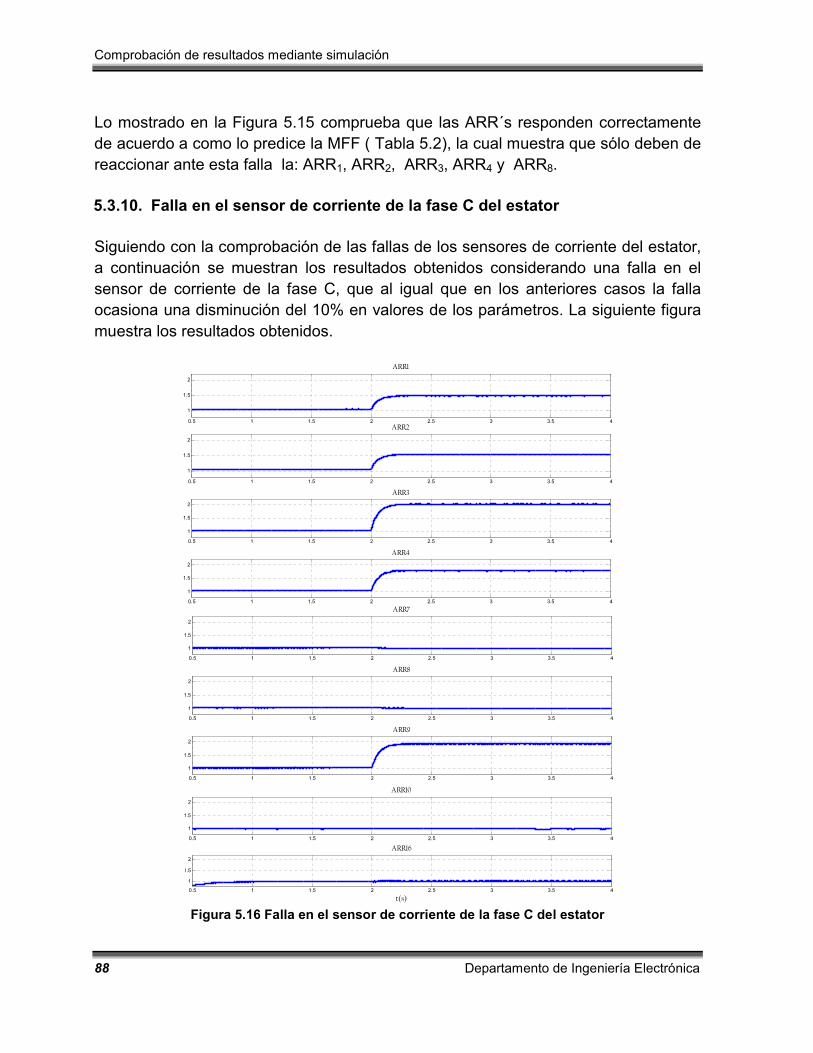
Comprobación de resultados mediante simulación
88 Departamento de Ingeniería Electrónica
Lo mostrado en la Figura 5.15 comprueba que las ARR´s responden correctamente
de acuerdo a como lo predice la MFF ( Tabla 5.2), la cual muestra que sólo deben de
reaccionar ante esta falla la: ARR1, ARR2, ARR3, ARR4 y ARR8.
5.3.10. Falla en el sensor de corriente de la fase C del estator
Siguiendo con la comprobación de las fallas de los sensores de corriente del estator,
a continuación se muestran los resultados obtenidos considerando una falla en el
sensor de corriente de la fase C, que al igual que en los anteriores casos la falla
ocasiona una disminución del 10% en valores de los parámetros. La siguiente figura
muestra los resultados obtenidos.
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR1
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR2
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR3
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR4
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR7
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR8
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR9
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR10
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR16
t(s) Figura 5.16 Falla en el sensor de corriente de la fase C del estator
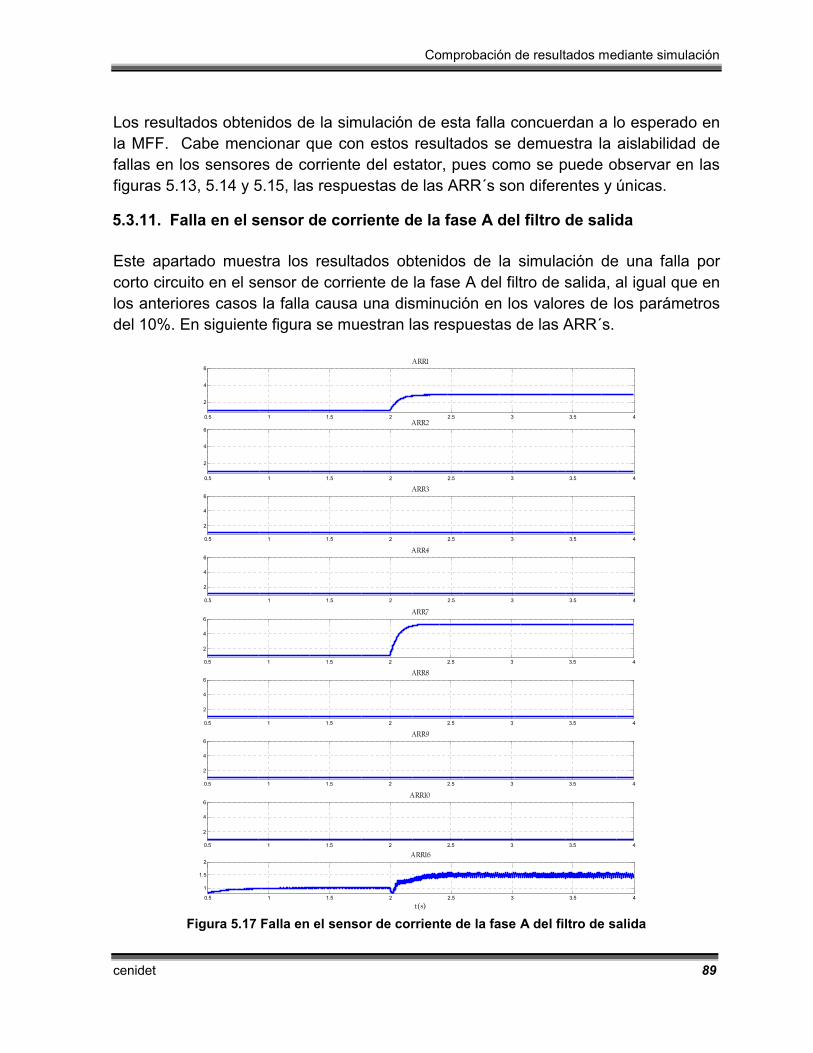
Comprobación de resultados mediante simulación
cenidet 89
Los resultados obtenidos de la simulación de esta falla concuerdan a lo esperado en
la MFF. Cabe mencionar que con estos resultados se demuestra la aislabilidad de
fallas en los sensores de corriente del estator, pues como se puede observar en las
figuras 5.13, 5.14 y 5.15, las respuestas de las ARR´s son diferentes y únicas.
5.3.11. Falla en el sensor de corriente de la fase A del filtro de salida
Este apartado muestra los resultados obtenidos de la simulación de una falla por
corto circuito en el sensor de corriente de la fase A del filtro de salida, al igual que en
los anteriores casos la falla causa una disminución en los valores de los parámetros
del 10%. En siguiente figura se muestran las respuestas de las ARR´s.
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR1
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6
ARR2
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6
ARR3
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6
ARR4
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6
ARR7
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6
ARR8
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6
ARR9
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6
ARR10
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2
ARR16
t(s)
Figura 5.17 Falla en el sensor de corriente de la fase A del filtro de salida

Comprobación de resultados mediante simulación
90 Departamento de Ingeniería Electrónica
Como se puede observar respondieron las ARR´s conforme se esperaban de
acuerdo a la MFF, la cual muestra que ante esta falla solo deben reaccionar ARR1,
ARR2 y ARR16, además esta presenta una firma única, la cual la hace aislable.
5.3.12. Falla en el sensor de corriente de la fase B del filtro de salida
En los resultados arrojados por el AE muestran que las fallas de los sensores de
corriente del filtro de salida del GCS son aislables, es por ello que en este apartado
se presentan para su comprobación los resultados obtenidos ante la presencia de
una falla en el sensor de corriente de la fase B del filtro, dichos resultados son
mostrados en la Figura 5.18.
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR1
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR2
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR3
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR4
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR7
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR8
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR9
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR10
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR16
t(s) Figura 5.18 Falla en el sensor de corriente de la fase B del filtro de salida
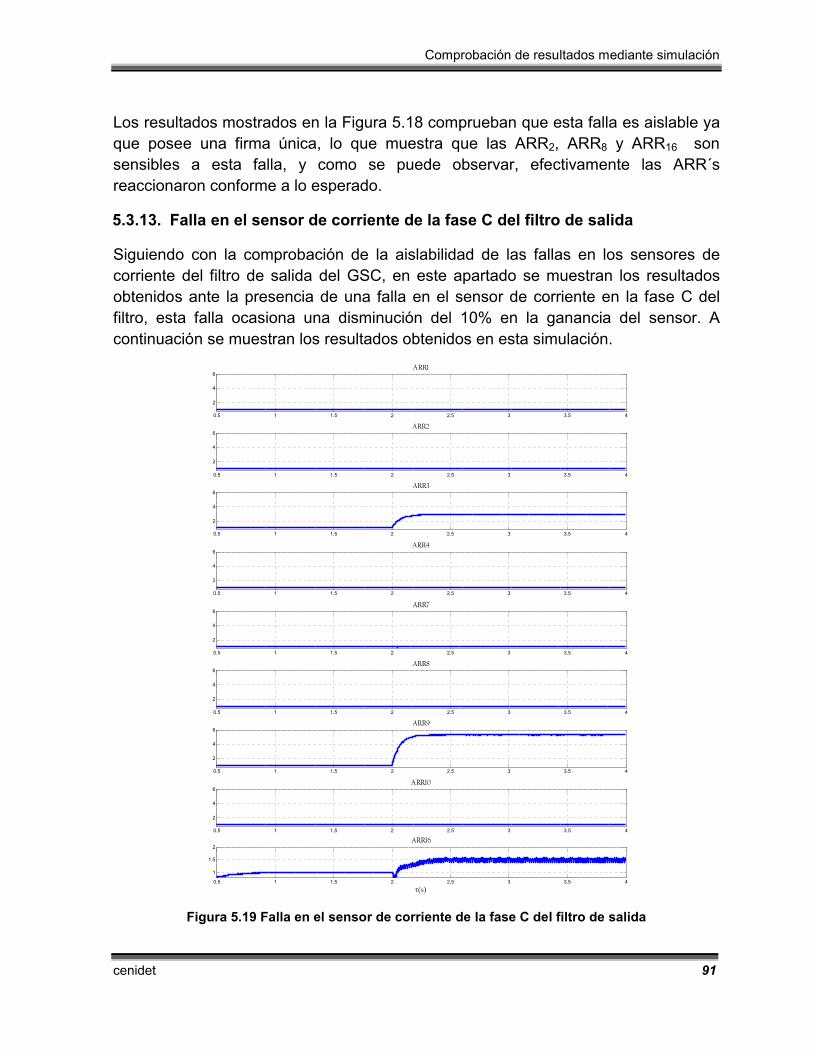
Comprobación de resultados mediante simulación
cenidet 91
Los resultados mostrados en la Figura 5.18 comprueban que esta falla es aislable ya
que posee una firma única, lo que muestra que las ARR2, ARR8 y ARR16 son
sensibles a esta falla, y como se puede observar, efectivamente las ARR´s
reaccionaron conforme a lo esperado.
5.3.13. Falla en el sensor de corriente de la fase C del filtro de salida
Siguiendo con la comprobación de la aislabilidad de las fallas en los sensores de
corriente del filtro de salida del GSC, en este apartado se muestran los resultados
obtenidos ante la presencia de una falla en el sensor de corriente en la fase C del
filtro, esta falla ocasiona una disminución del 10% en la ganancia del sensor. A
continuación se muestran los resultados obtenidos en esta simulación.
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR1
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR2
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR3
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR4
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR7
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR8
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR9
0.5 1 1.5 2 2.5 3 3.5 4
2
4
6ARR10
0.5 1 1.5 2 2.5 3 3.5 4
1
1.5
2ARR16
t(s)
Figura 5.19 Falla en el sensor de corriente de la fase C del filtro de salida
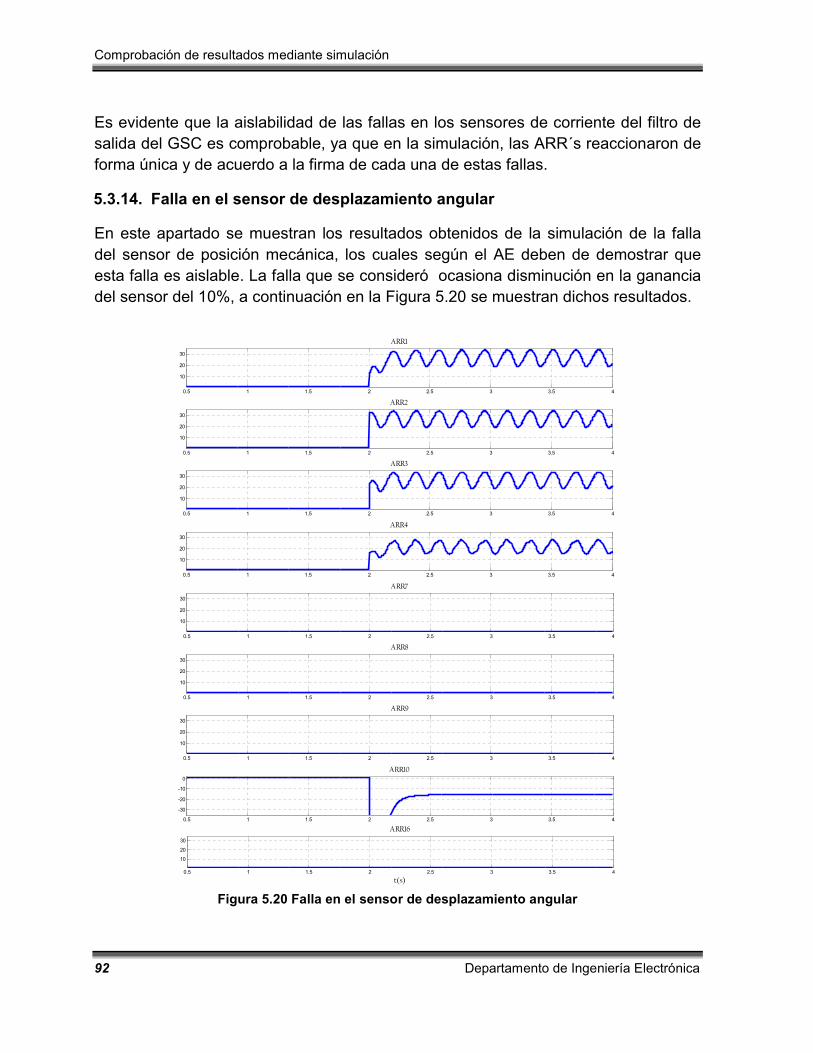
Comprobación de resultados mediante simulación
92 Departamento de Ingeniería Electrónica
Es evidente que la aislabilidad de las fallas en los sensores de corriente del filtro de
salida del GSC es comprobable, ya que en la simulación, las ARR´s reaccionaron de
forma única y de acuerdo a la firma de cada una de estas fallas.
5.3.14. Falla en el sensor de desplazamiento angular
En este apartado se muestran los resultados obtenidos de la simulación de la falla
del sensor de posición mecánica, los cuales según el AE deben de demostrar que
esta falla es aislable. La falla que se consideró ocasiona disminución en la ganancia
del sensor del 10%, a continuación en la Figura 5.20 se muestran dichos resultados.
0.5 1 1.5 2 2.5 3 3.5 4
10
20
30
ARR1
0.5 1 1.5 2 2.5 3 3.5 4
10
20
30
ARR2
0.5 1 1.5 2 2.5 3 3.5 4
10
20
30
ARR3
0.5 1 1.5 2 2.5 3 3.5 4
10
20
30
ARR4
0.5 1 1.5 2 2.5 3 3.5 4
10
20
30
ARR7
0.5 1 1.5 2 2.5 3 3.5 4
10
20
30
ARR8
0.5 1 1.5 2 2.5 3 3.5 4
10
20
30
ARR9
0.5 1 1.5 2 2.5 3 3.5 4
-30
-20
-10
0
ARR10
0.5 1 1.5 2 2.5 3 3.5 4
10
20
30
ARR16
t(s) Figura 5.20 Falla en el sensor de desplazamiento angular

Comprobación de resultados mediante simulación
cenidet 93
Las respuestas de las ARR´s concuerdan con la firma de esta falla, por tanto se
comprobó que esta falla es aislable. Cabe mencionar que las señales de las ARR´s,
no siempre tendrán un cambio positivo cuando ocurre una falla, si no también se
puede dar el caso contrario tal y como lo muestra la señal generada por la ARR10.
Los resultados presentados en este capítulo muestran que no siempre se puede
visualizar con facilidad la sensibilidad de una ARR, esto se debe principalmente a la
naturaleza de las señales que intervienen en esta, es por ello que en este trabajo de
tesis se hizo necesario implementar el promediado EWMA para mejorar estas
condiciones. Los resultados obtenidos demuestran la diagnosticabilidad predicha por
el AE, se corroboró la detectabilidad de las fallas que sí se predijeron detectables, así
como la aislabilidad de los conjuntos de fallas aislables.
Con el análisis de la diagnosticabilidad y su evaluación vía las ARR’s encontramos
que existen situaciones de falla, de acuerdo a su naturaleza, que no son
distinguibles, como fue el caso de fallas de corto circuito y circuito abierto en el
estator. Sin embargo, el valor del análisis de diagnosticabilidad yace en el hecho de
que a priori es posible saber si un sistema es apto para aplicársele técnicas de FDI y
saber los alcances que dicho sistema de diagnóstico tendrá en términos de la
detectabilidad y aislabilidad de fallas. Es importante también resaltar que aquí los
generadores de residuos implementados son “simples”, y aunque tuvieron un buen
desempeño para evaluar la diagnosticabilidad, no obstante, es posible mejorarlos
aplicando técnicas avanzadas de control.

Comprobación de resultados mediante simulación
94 Departamento de Ingeniería Electrónica
Capítulo 6
6. Conclusiones y trabajos
futuros
6.1. Conclusiones
Durante el desarrollo de este trabajo de tesis se pudo constatar que el AE es una
herramienta muy sencilla para determinar la existencia de información redundante en
un sistema así como para la construcción de las ARR´s, las cuales son de utilidad
para determinar la diagnosticabilidad de un sistema.
El AE es una técnica que sólo emplea las relaciones existentes entre las
restricciones y las variables del modelo de comportamiento de un sistema dado, sin
la necesidad de involucrarse con la forma explícita de las restricciones pues solo
basta con saber qué variable se encuentra en qué restricción para determinar que
existe una relación entre ellas. La relación entre variables y restricciones se describe
en lo que se conoce como modelo estructural y puede ser representado mediante
grafos o mediante una matriz de incidencia (MI). El modelo estructural basado en
grafos permite una apreciación más clara de la interacción entre variables y
restricciones, sin embargo, cuando se trata de sistemas complejos, el modelo basado
en la MI es más fácil de manejar.
El propósito del AE es obtener, si existe, información redundante con la cual se
pueda analizar la diagnosticabilidad e implementar generadores de residuos en un
esquema de detección y aislamiento de fallas. El AE, dentro del proceso de análisis
de la existencia de información redundante, realiza un proceso conocido como
aparejamiento, esto es, definir rutas de cálculo de las variables desconocidas a partir
de las variables conocidas (medibles). Para un sistema dado es posible definir

Conclusiones y trabajos futuros
96 Departamento de Ingeniería Electrónica
múltiples opciones de aparejamiento, sin embargo, solo uno es óptimo –
aparejamiento completo con respecto a las variables desconocidas; este
aparejamiento óptimo se obtiene mediante el algoritmo de ranqueo con lo cual se
obtiene la matriz de incidencia aparejada (MI*). Finalmente, para explicitar la
información redundante, es posible hacer una descomposición canónica de MI*, en
donde la parte sobre-restringida resume dicha información redundante, es decir, las
ARR’s como subsistemas conformados por subconjuntos de restricciones y variables.
Para determinar la diagnosticabilidad de un sistema es necesario complementar las
ARR´s obtenidas por el AE, con el conocimiento de las fallas de interés. El nivel de
conocimiento de las fallas, es decir, saber cómo se comportan, dónde y cómo actúan
sobre el sistema, es determinante en el análisis de la diagnosticabilidad, pues en
dicho análisis se hace una revisión de la sensibilidad a falla de cada ARR. Así, si una
falla afecta al menos a una de las ARR’s entonces ésta será detectable; por otro
lado, una falla será aislable si afecta a un conjunto único de ARR´s; y si dos o más
fallas afectan a un mismo conjunto de ARR´s, entonces se dice que no son aislables.
Estos criterios son los que determinan la diagnosticabilidad.
El análisis de la diagnosticabilidad en este trabajo de tesis es realizado en el conjunto
B2B-DFIM que está integrado en un sistema de generación eólica aislado. El modelo
matemático de este sistema está constituido por un conjunto de 44 restricciones,
entre las cuales 13 son del tipo diferencial, 28 variables desconocidas y 23 variables
medibles. Dado el tamaño del sistema el modelo estructural se planteó en la forma
de MI. Del estudio de la diagnosticabilidad del sistema B2B-DFIM, se obtuvieron los
siguientes resultados:
Las 26 fallas de interés son detectables
Se obtuvieron 15 conjuntos de fallas aislables y agrupados como sigue
1. ,,,,,. Fallas eléctricas en las bobinas de las fases del estator
y del rotor.
2. ,,. Fallas de los sensores de corriente de las fases del rotor.
3. ,,. Fallas en los interruptores de potencia del convertidor MSC.
4. ,,. Fallas en los interruptores de potencia del convertidor MSC.
5. . Falla en la fase A del filtro de salida del GSC.
6. . Falla en la fase B del filtro de salida del GSC.
7. . Falla en la fase C del filtro de salida del GSC.
8. . Falla en sensor de corriente de fase A del estator.
9. . Falla en sensor de corriente de fase B del estator.
10. . Falla en sensor de corriente de fase C del estator.
Conclusiones y trabajos futuros
cenidet 97
11. . Falla en sensor de corriente de fase A del filtro de salida del GSC.
12. . Falla en sensor de corriente de fase B del filtro de salida del GSC.
13. . Falla en sensor de corriente de fase C del filtro de salida del GSC.
14. . Falla en sensor de posición mecánica.
15. . Falla en sensor de velocidad mecánica.
Cabe mencionar que en los primeros cuatro conjuntos de fallas, no es posible la
aislabilidad entre las fallas de cada conjunto, es decir, ante la ocurrencia de una falla
no se puede determinar en qué elemento (interruptor, fase o sensor) se presenta la
falla; sin embargo, existe aislabilidad entre estos conjuntos de fallas, con lo cual se
puede determinar en qué área del sistema está ocurriendo la falla. Por otro lado, los
últimos 11 subconjuntos están conformados por una sola falla, es decir, existe
aislabilidad total entre estas once fallas.
Bajo este procedimiento del estudio de la diagnosticabilidad, una parte fundamental
es la comprobación de sus resultados. La evaluación de la diagnosticabilidad se hizo
haciendo uso de las ARR’s como generadoras de residuos; para estos propósitos sí
se requiere del conocimiento explícito de las restricciones (ecuaciones) involucradas
en las ARR’s. En la generación de residuos, las ARR’s son vistas como subsistemas
de ecuaciones que dependen solo de variables medibles, que se igualan a cero y
que por lo tanto, se deben satisfacer en condiciones de ausencia de falla, y generar
un valor distinto de cero ante las fallas a las cuales son sensibles. Las ARR’s se
implementaron en MATLAB/SIMULINK.
Particularmente en el sistema B2B-DFIM, se manejan variables continuas y discretas
debido al proceso de conmutación del convertidor, lo cual dado que en las ARR’s se
utilizan derivadores, provoca que los residuos generados resulten en valores muy
elevados. Así, a fin de mejorar la respuesta de los residuos, se propuso el filtrado de
estas señales mediante promediado móvil con ponderación exponencial (EWMA, por
sus siglas en inglés).
Para fines de corroborar la diagnosticabilidad, se llevaron a cabo simulaciones
emulando fallas en el sistema. Se seleccionaron solo algunas de las fallas, entre el
total de las fallas consideradas en el estudio, y se demostró que las firmas de fallas
correspondían con las obtenidas mediante el AE.
Es importante mencionar que en lo que concierne a las fallas en los interruptores de
potencia del B2B, la comprobación de la diagnosticabilidad no fue posible debido a
que específicamente ante la emulación de estas fallas, las simulaciones se

Conclusiones y trabajos futuros
98 Departamento de Ingeniería Electrónica
bloqueaban. Este fenómeno se atribuyó al control del sistema ya que éste trata de
corregir los fenómenos derivados de las fallas en los interruptores, e.g. corto circuito
del bus de CD y elevación de las corrientes en el sistema. Una posible opción para
estar en condiciones de simular las fallas en interruptores es incluir en el análisis de
diagnosticabilidad, y por ende en las ARR’s, las restricciones asociadas al control; sin
embargo, esto queda fuera del alcance de esta tesis y como se señala adelante se
propone como actividad futura.
Como se vio, el procedimiento para determinar la diagnosticabilidad de un sistema
mediante AE es relativamente fácil, lo cual permite la flexibilidad de evaluar la
diagnosticabilidad con AE de un sistema ante diversos escenarios como puede ser,
el incluir la medición de una o más variables para evaluar la posible mejora de la
diagnosticabilidad o prescindir de algunas mediciones de variables para evaluar la
suficiencia de sensores con los cuales se logre cierta diagnosticabilidad. Sin
embargo, se debe tener cierto cuidado cuando se prescinde de algunas variables
medibles del sistema, ya que en algunos casos puede ser necesario contar con el
conocimiento de los valores de dichas variables aun en condiciones de falla. Esto es
importante pues si bien dichas variables omitidas pueden ser vistas como variables
desconocidas y eventualmente calculables con las ARR’s, este cálculo sólo es válido
en ausencia de falla; por lo tanto, sería necesario recurrir a técnicas de control
avanzadas como son los observadores y que se basan en los modelos matemáticos
del sistema.
6.2. Trabajos futuros Para complementar lo desarrollado en este trabajo de tesis se sugiere los siguientes
trabajos.
Realizar el análisis de la diagnosticabilidad prescindiendo de algunas variables
medibles del sistema, empleando algún modelo matemático o técnica de control
que describa el comportamiento de éstas ante una falla.
Mejorar el generador de residuos implementado en esta tesis, empleando alguna
técnica o método de control.
Implementar físicamente los generadores de residuos a fin de evaluar la
diagnosticabilidad estimada por el AE mediante pruebas experimentales.
Realizar el análisis de la diagnosticabilidad considerando las restricciones que
involucran al control del convertidor B2B.
Referencias
[1] WWEA, "Reporte Anual de la Energía Eólica en el Mundo 2010 " presented at the WWEC 2011, El Cairo, Egipto 2011.
[2] J. R. Patton , et al., Issues of Fault Diagnosis for Dynamic Systems, 1 ed. London Springer Verlag, 2000.
[3] R. Isermann, Fault Diagnosis systems an introduction from fault detection to fault tolerance. Berlin Germany Springer Verlag, 2006.
[4] V. Venkatasubramanian, et al., "A Review of Process Fault Detection and Diagnosis Part II: Process History Based methods," Computers and Chemical Engineering, vol. 27(3), pp. 313-326, 2003.
[5] V. Venkatasubramanian, et al., "A Review of Process Fault Detection and Diagnosis Part III: Process History Based methods," Computers and Chemical Engineering, vol. 27(3), pp. 327-346, 2003.
[6] J. A. Baroudi, et al., "A review of power converter topologies for wind generators," in Electric Machines and Drives, 2005 IEEE International Conference on, 2005, pp. 458-465.
[7] C. Zhe, et al., "A Review of the State of the Art of Power Electronics for Wind Turbines," Power Electronics, IEEE Transactions on, vol. 24, pp. 1859-1875, 2009.
[8] A. Luna, et al., "Control strategies for DFIG wind turbines under grid fault conditions," in Industrial Electronics, 2009. IECON '09. 35th Annual Conference of IEEE, 2009, pp. 3886-3891.
[9] M. Lixin, et al., "Research and simulation of double-fed wind power generation rotor side control technology," in Electrical and Control Engineering (ICECE), 2011 International Conference on, 2011, pp. 2472-2475.
[10] H. Geng and G. Yang, "A Novel Control Strategy of MPPT Taking Dynamics of Wind Turbine into Account," in Power Electronics Specialists Conference, 2006. PESC '06. 37th IEEE, 2006, pp. 1-6.
[11] M. Cirrincione and M. Pucci, "Sensors-less neural MPPT control of wind generators with induction machines," in Industrial Electronics, 2009. IECON '09. 35th Annual Conference of IEEE, 2009, pp. 818-824.
[12] F. Nejjari, et al., "Diagnosability Analysis using Quasi-Static Models," in IEEE Industrial Electronics, IECON 2006 - 32nd Annual Conference on, 2006, pp. 519-524.
[13] H. Wei-Hsing and W. Chin-Long, "Test points selection process and diagnosability analysis of analog integrated circuits," in Computer Design: VLSI in Computers and Processors, 1998. ICCD '98. Proceedings. International Conference on, 1998, pp. 582-587.
[14] M. Blanke, et al., Diagnosis and Fault Tolerant Control, 2 ed. vol. 1. Berlin: Springer Verlag, 2006.
[15] A. Flores, A., et al., "Diagnóstico de Fallas en el Turbogenerador a Vapor de una Central de Ciclo Combinado," presented at the AMCA, Ciudad de México 2006.
[16] D. Düstegör, et al., "Structural analysis of fault isolability in the DAMADICS benchmark," Control Engineering Practice, vol. 14, pp. 597-608, 2006.
Referencias
100 Departamento de Ingeniería Electrónica
[17] F. Nejjari, et al., "Fault diagnosability utilizing quasi-static and structural modelling," Mathematical and Computer Modelling, vol. 45, pp. 606-616, 2007.
[18] A. Bellini, et al., "Advances in Diagnostic Techniques for Induction Machines," Industrial Electronics, IEEE Transactions on, vol. 55, pp. 4109-4126, 2008.
[19] S. Karimi, et al., "FPGA-Based Real-Time Power Converter Failure Diagnosis for Wind Energy Conversion Systems," Industrial Electronics, IEEE Transactions on, vol. 55, pp. 4299-4308, 2008.
[20] C. J. Verucchi and G. G. Acosta, "Fault Detection and Diagnosis Techniques in Induction Electrical Machines," Latin America Transactions, IEEE (Revista IEEE America Latina), vol. 5, pp. 41-49, 2007.
[21] A. Stefani, et al., "Doubly Fed Induction Machines Diagnosis Based on Signature Analysis of Rotor Modulating Signals," Industry Applications, IEEE Transactions on, vol. 44, pp. 1711-1721, 2008.
[22] L. Bin, et al., "A review of recent advances in wind turbine condition monitoring and fault diagnosis," in Power Electronics and Machines in Wind Applications, 2009. PEMWA 2009. IEEE, 2009, pp. 1-7.
[23] R. Peuget, et al., "Fault detection and isolation on a PWM inverter by knowledge-based model," Industry Applications, IEEE Transactions on, vol. 34, pp. 1318-1326, 1998.
[24] S. Nandi and H. A. Toliyat, "Fault diagnosis of electrical machines-a review," in Electric Machines and Drives, 1999. International Conference IEMD '99, 1999, pp. 219-221.
[25] D. U. Campos-Delgado, et al., "Fault-tolerant control in variable speed drives: a survey," Electric Power Applications, IET, vol. 2, pp. 121-134, 2008.
[26] S. Wan, et al., "Analysis of generator vibration characteristic on rotor winding interturn short circuit fault," in Electrical Machines and Systems, 2003. ICEMS 2003. Sixth International Conference on, 2003, pp. 882-885 vol.2.
[27] Y. Li, et al., "Inter turn short-circuit fault research on generator rotor windings," in Electrical Machines and Systems, 2001. ICEMS 2001. Proceedings of the Fifth International Conference on, 2001, pp. 357-360 vol.1.
[28] Q. Duan, et al., "A fault detection and tolerant scheme for back-to-back converters in DFIG-based wind power generation systems," in Advanced Computer Theory and Engineering (ICACTE), 2010 3rd International Conference on, 2010, pp. V3-95-V3-99.
[29] M. Krysander, et al., "An Efficient Algorithm for Finding Minimal Overconstrained Subsystems for Model-Based Diagnosis," Systems, Man and Cybernetics, Part A: Systems and Humans, IEEE Transactions on, vol. 38, pp. 197-206, 2008.
[30] A. L. DULMAGE and N. S. MENDELSOHN, "Coverings of Bipartite Graphs," Canadian Journal of mathematics, vol. 10, pp. 517-534, 1958.
[31] R. Galindo del Valle, et al., "Two families of sliding mode controllers for a doubly-fed induction generator in an isolated generation system," Latin America Transactions, IEEE (Revista IEEE America Latina), vol. 5, pp. 115-121, 2007.
[32] C. P, Krause., Analysis of Electric Machinery. Singapore: Mc Graw Hill, 1987.
Referencias
cenidet 101
[33] V. F. Pires and J. F. A. Silva, "Teaching nonlinear modeling, simulation, and control of electronic power converters using MATLAB/SIMULINK," Education, IEEE Transactions on, vol. 45, pp. 253-261, 2002.
[34] C. Xianrong, et al., "A model of asynchronous machines for stator fault detection and isolation," Industrial Electronics, IEEE Transactions on, vol. 50, pp. 578-584, 2003.

Referencias
102 Departamento de Ingeniería Electrónica
A. Anexo A
Como se mencionó en el capítulo 4, el análisis estructural hace posible considerar
diversos escenarios en el mismo sistema estudiado. Bajo este contexto en este
apartado se muestran los resultados obtenidos del estudio de la diagnosticabilidad
del conjunto B2B-DFIM ante dos escenarios, adicionales al considerado en el
capítulo 4, los cuales son descritos a continuación.
Escenario 1
El primer escenario considera que las corrientes del filtro de acoplamiento son
desconocidas y no medibles, lo cual se traduce a una disminución en el número de
restricciones con respecto al escenario presentado en el capítulo 4, pasando de 44 a
41 restricciones y se conserva el mismo número de variables desconocidas. Las
restricciones que se omitieron son las relacionadas con los sensores de corriente del
filtro de red. La MI obtenida bajo estas consideraciones tiene una dimensión de
41x28, a la cual se aplicó el algoritmo de ranqueo para determinar su aparejamiento
y así también se utilizó la descomposición canónica en la MI* dando como resultado
lo mostrado en la Tabla A.1.

Anexo A
104 Departamento de Ingeniería Electrónica
Tabla 6.1 Descomposición canónica sin medición de corrientes de filtro
Como se puede observar, bajo este escenario el sistema cuenta con los subsistemas
sub restringido (recuadro superior izquierdo), justo restringido (recuadro intermedio) y
sobre restringido (recuadros inferiores), lo cual representa una desventaja ya que se
cuenta con una mayor cantidad de información que no es de utilidad para la
determinación de la diagnosticabilidad. Para corroborar lo anterior se obtuvo la MFF
simplificada con las 9 ARR´s obtenidas (recuadro gris), tal y como lo muestra la
Tabla 6.2.
Ki ag i bg i cg i´ag i´bg i´cg τ L τ e Ѡ' m i´as i´bs i´cs i as i bs i cs i´ar i´br i´cr i ar i br i cr Ѳ´m Ѳ´r Ѳ r Ѳ m Ѡ m v´o v o
c 20 1 1 1 1 1 1 1 g g1 ,g g2 ,g g3 ,g r1, g r2 ,g r3
d 7 1 Δ
d 8 1 Δ
d 9 1 Δ
c 7 1 1 1 1 v ag
c 8 1 1 1 1 v bg
c 9 1 1 1 1 v cg
c 1 1 1 1 1 1 1 1 1 1 1 v ag
c 2 1 1 1 1 1 1 1 1 1 1 v bg
c 3 1 1 1 1 1 1 1 1 1 1 v cg
c 10 ⊗ 1 1 1 1 1 1 1 1
c 11 ⊗ 1 1 1 1 1 1 1
d 13 ⊗ Δ
d 1 ⊗ Δ
d 2 ⊗ Δ
d 3 ⊗ Δ
c 21 ⊗ Y ias
c 22 ⊗ Y ibs
c 23 ⊗ Y ics
d 4 ⊗ Δ
d 5 ⊗ Δ
d 6 ⊗ Δ
c 24 ⊗ Y iar
c 25 ⊗ Y ibr
c 26 ⊗ Y icr
d 11 ⊗ Δ
d 12 ⊗ Δ
c 13 ⊗ 1
c 27 ⊗ Y θm
c 28 ⊗ Y ωm
d 10 ⊗ Δ
c 14 ⊗ v ar ,g r1 ,g r2 ,g r3
c15 1 v br ,g r1 ,g r2 ,g r3
c16 1 v cr ,g r1, g r2 ,g r3
c17 1 v ag ,g g1 ,g g2, g g3
c18 1 v bg ,g g1 ,g g2 ,g g3
c19 1 v cg, g g1 ,g g2 ,g g3
c 4 1 1 1 1 1 1 1 1 v ar
c 5 1 1 1 1 1 1 1 1 v br
c 6 1 1 1 1 1 1 1 1 v cr
c 12 1 1
X
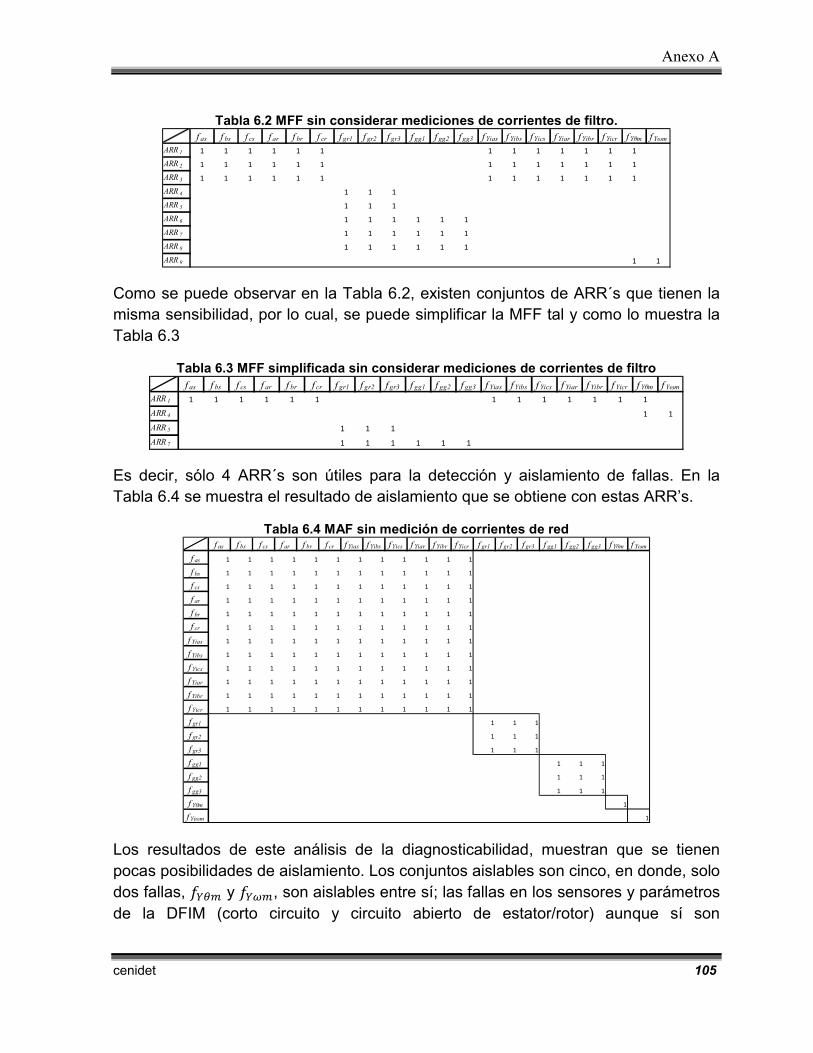
Anexo A
cenidet 105
Tabla 6.2 MFF sin considerar mediciones de corrientes de filtro.
Como se puede observar en la Tabla 6.2, existen conjuntos de ARR´s que tienen la
misma sensibilidad, por lo cual, se puede simplificar la MFF tal y como lo muestra la
Tabla 6.3
Tabla 6.3 MFF simplificada sin considerar mediciones de corrientes de filtro
Es decir, sólo 4 ARR´s son útiles para la detección y aislamiento de fallas. En la
Tabla 6.4 se muestra el resultado de aislamiento que se obtiene con estas ARR’s.
Tabla 6.4 MAF sin medición de corrientes de red
Los resultados de este análisis de la diagnosticabilidad, muestran que se tienen
pocas posibilidades de aislamiento. Los conjuntos aislables son cinco, en donde, solo
dos fallas, y , son aislables entre sí; las fallas en los sensores y parámetros
de la DFIM (corto circuito y circuito abierto de estator/rotor) aunque sí son
f as f bs f cs f ar f br f cr f gr1 f gr2 f gr3 f gg1 f gg2 f gg3 f Yias f Yibs f Yics f Yiar f Yibr f Yicr f Yθm f Yωm
ARR 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 2 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 3 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 4 1 1 1
ARR 5 1 1 1
ARR 6 1 1 1 1 1 1
ARR 7 1 1 1 1 1 1
ARR 8 1 1 1 1 1 1
ARR 9 1 1
f as f bs f cs f ar f br f cr f gr1 f gr2 f gr3 f gg1 f gg2 f gg3 f Yias f Yibs f Yics f Yiar f Yibr f Yicr f Yθm f Yωm
ARR 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 4 1 1
ARR 5 1 1 1
ARR 7 1 1 1 1 1 1
f as f bs f cs f ar f br f cr f Yias f Yibs f Yics f Yiar f Yibr f Yicr f gr1 f gr2 f gr3 f gg1 f gg2 f gg3 f Yθm f Yωm
f as 1 1 1 1 1 1 1 1 1 1 1 1
f bs 1 1 1 1 1 1 1 1 1 1 1 1
f cs 1 1 1 1 1 1 1 1 1 1 1 1
f ar 1 1 1 1 1 1 1 1 1 1 1 1
f br 1 1 1 1 1 1 1 1 1 1 1 1
f cr 1 1 1 1 1 1 1 1 1 1 1 1
f Yias 1 1 1 1 1 1 1 1 1 1 1 1
f Yibs 1 1 1 1 1 1 1 1 1 1 1 1
f Yics 1 1 1 1 1 1 1 1 1 1 1 1
f Yiar 1 1 1 1 1 1 1 1 1 1 1 1
f Yibr 1 1 1 1 1 1 1 1 1 1 1 1
f Yicr 1 1 1 1 1 1 1 1 1 1 1 1
f gr1 1 1 1
f gr2 1 1 1
f gr3 1 1 1
f gg1 1 1 1
f gg2 1 1 1
f gg3 1 1 1
f Yθm 1
f Yiωm 1
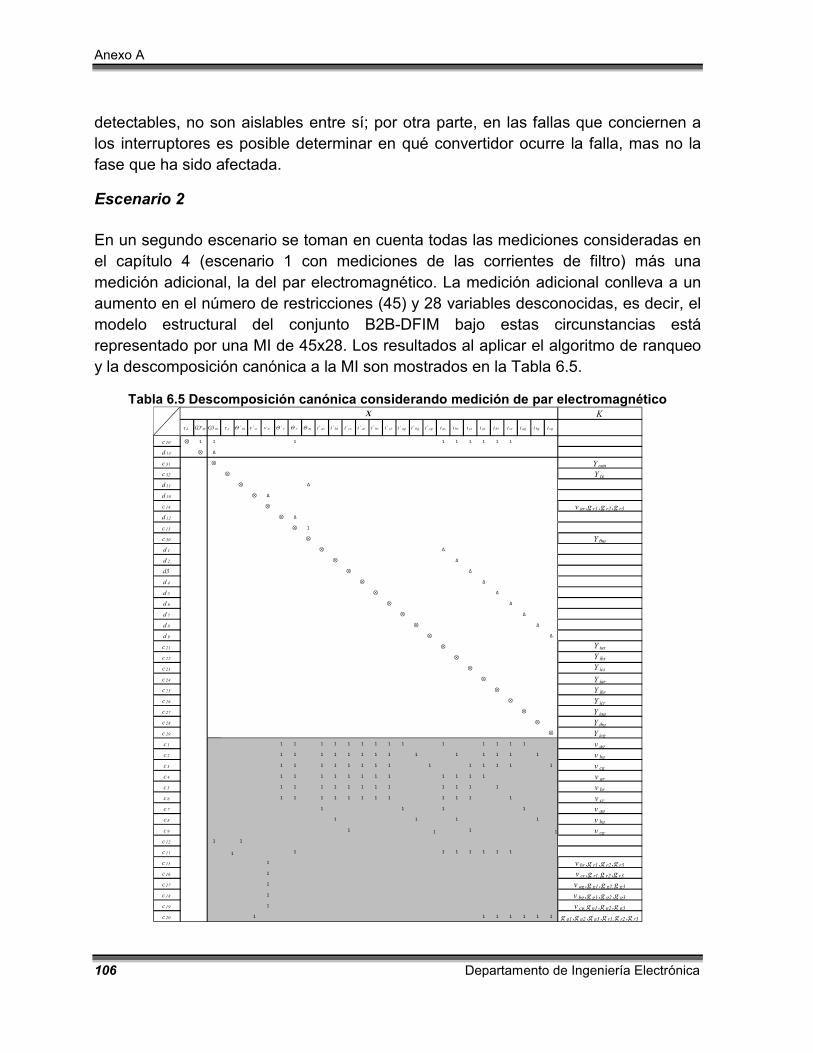
Anexo A
106 Departamento de Ingeniería Electrónica
detectables, no son aislables entre sí; por otra parte, en las fallas que conciernen a
los interruptores es posible determinar en qué convertidor ocurre la falla, mas no la
fase que ha sido afectada.
Escenario 2
En un segundo escenario se toman en cuenta todas las mediciones consideradas en
el capítulo 4 (escenario 1 con mediciones de las corrientes de filtro) más una
medición adicional, la del par electromagnético. La medición adicional conlleva a un
aumento en el número de restricciones (45) y 28 variables desconocidas, es decir, el
modelo estructural del conjunto B2B-DFIM bajo estas circunstancias está
representado por una MI de 45x28. Los resultados al aplicar el algoritmo de ranqueo
y la descomposición canónica a la MI son mostrados en la Tabla 6.5.
Tabla 6.5 Descomposición canónica considerando medición de par electromagnético
K
τ L Ѡ' m Ѡ m τ e Ѳ´ m v´ o v o Ѳ´ r Ѳ r Ѳ m i´ as i´ bs i´ cs i´ ar i´ br i´ cr i´ ag i´ bg i´ cg i as i bs i cs i ar i br i cr i ag i bg i cg
c 10 ⊗ 1 1 1 1 1 1 1 1 1
d 13 ⊗ Δ
c 31 ⊗ Y ωm
c 32 ⊗ Y τe
d 11 ⊗ Δ
d 10 ⊗ Δ
c 14 ⊗ v ar ,g r1 ,g r2 ,g r3
d 12 ⊗ Δ
c 13 ⊗ 1
c 30 ⊗ Y θm
d 1 ⊗ Δ
d 2 ⊗ Δ
d3 ⊗ Δ
d 4 ⊗ Δ
d 5 ⊗ Δ
d 6 ⊗ Δ
d 7 ⊗ Δ
d 8 ⊗ Δ
d 9 ⊗ Δ
c 21 ⊗ Y ias
c 22 ⊗ Y ibs
c 23 ⊗ Y ics
c 24 ⊗ Y iar
c 25 ⊗ Y ibr
c 26 ⊗ Y icr
c 27 ⊗ Y iag
c 28 ⊗ Y ibg
c 29 ⊗ Y icg
c 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 v ag
c 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 v bg
c 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 v cg
c 4 1 1 1 1 1 1 1 1 1 1 1 1 v ar
c 5 1 1 1 1 1 1 1 1 1 1 1 1 v br
c 6 1 1 1 1 1 1 1 1 1 1 1 1 v cr
c 7 1 1 1 1 v ag
c 8 1 1 1 1 v bg
c 9 1 1 1 1 v cg
c 12 1 1
c 11 1 1 1 1 1 1 1 1
c 15 1 v br ,g r1 ,g r2 ,g r3
c 16 1 v cr ,g r1, g r2 ,g r3
c 17 1 v ag ,g g1 ,g g2, g g3
c 18 1 v bg ,g g1 ,g g2 ,g g3
c 19 1 v cg, g g1 ,g g2 ,g g3
c 20 1 1 1 1 1 1 1 g g1 ,g g2 ,g g3 ,g r1, g r2 ,g r3
X

Anexo A
cenidet 107
Los resultados obtenidos al agregar la medición del par, muestran que se obtiene un
total de 17 ARR´s con lo que se presume que se pueda mejorar la diagnosticabilidad
en el conjunto B2B-DFIM, recuérdese que en el escenario del capítulo 4 (sin
medición de par) se obtuvieron 16 ARR’s. Para la construcción de la MFF se toman
en cuenta los criterios de fallas descritos en el capítulo 4, dicha matriz es mostrada
en la siguiente tabla.
Tabla 6.6 MFF considerando la medición del par electromagnético
Como se puede observar en la Tabla 6.6, existen conjuntos de ARR´s que tienen la
misma sensibilidad, por lo cual, se puede simplificar la MFF tal y como lo muestra la
Tabla 6.7.
Tabla 6.7 MFF simplificada con medición de par electromagnético
Un total de 27 fallas pueden ser detectadas bajo este escenario. Para obtener la
aislabilidad del sistema se construye la MAF partiendo del análisis de firma de fallas
y cuyos resultados son mostrados en la Tabla 6.8.
f as f bs f cs f ar f br f cr f ag f bg f cg f gr1 f gr2 f gr3 f gg1 f gg2 f gg3 f Yias f Yibs f Yics f Yiar f Yibr f Yicr f Yiag f Yibg f Yicg Y τe f Yθm f Yωm
ARR 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 4 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 5 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 6 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 7 1 1 1
ARR 8 1 1 1
ARR 9 1 1 1
ARR 10 1 1
ARR 11 1 1 1 1 1 1 1 1
ARR 12 1 1 1
ARR 13 1 1 1
ARR 14 1 1 1 1 1 1
ARR 15 1 1 1 1 1 1
ARR 16 1 1 1 1 1 1
ARR 17 1 1 1 1 1 1 1 1 1 1 1 1
f as f bs f cs f ar f br f cr f ag f bg f cg f gr1 f gr2 f gr3 f gg1 f gg2 f gg3 f Yias f Yibs f Yics f Yiar f Yibr f Yicr f Yiag f Yibg f Yicg Y τe f Yθm f Yωm
ARR 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 3 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 4 1 1 1 1 1 1 1 1 1 1 1 1 1
ARR 7 1 1 1
ARR 8 1 1 1
ARR 9 1 1 1
ARR 10 1 1
ARR 11 1 1 1 1 1 1 1 1
ARR 11 1 1 1
ARR 13 1 1 1 1 1 1
ARR 17 1 1 1 1 1 1 1 1 1 1 1 1
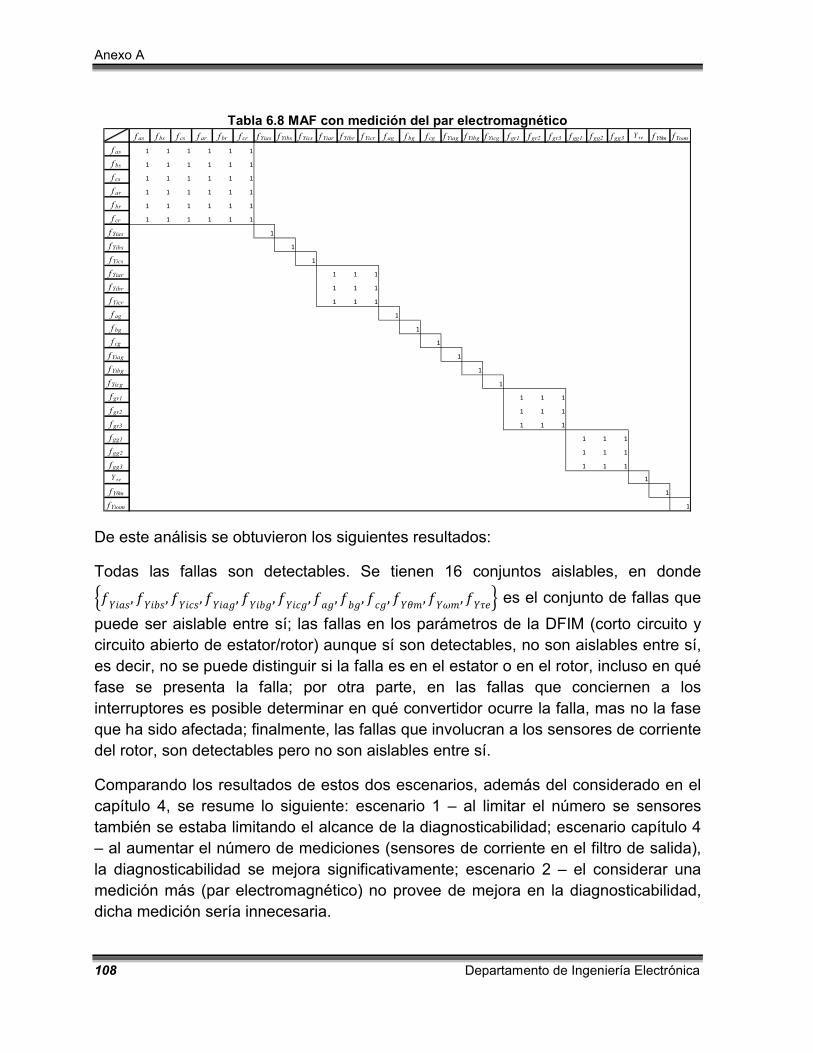
Anexo A
108 Departamento de Ingeniería Electrónica
Tabla 6.8 MAF con medición del par electromagnético
De este análisis se obtuvieron los siguientes resultados:
Todas las fallas son detectables. Se tienen 16 conjuntos aislables, en donde
,
,
,
,
,
,,
,
,
,
,
es el conjunto de fallas que
puede ser aislable entre sí; las fallas en los parámetros de la DFIM (corto circuito y
circuito abierto de estator/rotor) aunque sí son detectables, no son aislables entre sí,
es decir, no se puede distinguir si la falla es en el estator o en el rotor, incluso en qué
fase se presenta la falla; por otra parte, en las fallas que conciernen a los
interruptores es posible determinar en qué convertidor ocurre la falla, mas no la fase
que ha sido afectada; finalmente, las fallas que involucran a los sensores de corriente
del rotor, son detectables pero no son aislables entre sí.
Comparando los resultados de estos dos escenarios, además del considerado en el
capítulo 4, se resume lo siguiente: escenario 1 – al limitar el número se sensores
también se estaba limitando el alcance de la diagnosticabilidad; escenario capítulo 4
– al aumentar el número de mediciones (sensores de corriente en el filtro de salida),
la diagnosticabilidad se mejora significativamente; escenario 2 – el considerar una
medición más (par electromagnético) no provee de mejora en la diagnosticabilidad,
dicha medición sería innecesaria.
f as f bs f cs f ar f br f cr f Yias f Yibs f Yics f Yiar f Yibr f Yicr f ag f bg f cg f Yiag f Yibg f Yicg f gr1 f gr2 f gr3 f gg1 f gg2 f gg3 Y τe f Yθm f Yωm
f as 1 1 1 1 1 1
f bs 1 1 1 1 1 1
f cs 1 1 1 1 1 1
f ar 1 1 1 1 1 1
f br 1 1 1 1 1 1
f cr 1 1 1 1 1 1
f Yias 1
f Yibs 1
f Yics 1
f Yiar 1 1 1
f Yibr 1 1 1
f Yicr 1 1 1
f ag 1
f bg 1
f cg 1
f Yiag 1
f Yibg 1
f Yicg 1
f gr1 1 1 1
f gr2 1 1 1
f gr3 1 1 1
f gg1 1 1 1
f gg2 1 1 1
f gg3 1 1 1
Y τe 1
f Yθm 1
f Yiωm 1
Anexo A
cenidet 109
La flexibilidad del AE nos brinda la posibilidad de considerar u omitir mediciones de
tal forma que seleccionemos las mediciones que brinden los resultados más óptimos
de acuerdo al modelo de comportamiento del sistema.