CIENCIAS BASICAS E INGENIERIA - 148.206.53.84148.206.53.84/tesiuami/UAM4040.pdf · por ejemplo el...
46
UNIVERSIDAD AUTONOMA METROPOLITANA UNIDAD IZTAPALAPA CIENCIAS BASICAS E INGENIERIA REPORTE DE PROYECTO TERMINAL I y II "FRECUENCIA MODULADA Y AMPLIFICADORES DE POTENCIA DE RF" ALUMNO: ORTA PEREZ HECTOR MANUEL MATRICULA. 92322637 ASESOR:PROF.FAUSTO CASCO SANCHEZ MEXICO, D.F. ABRIL DE 2000
Transcript of CIENCIAS BASICAS E INGENIERIA - 148.206.53.84148.206.53.84/tesiuami/UAM4040.pdf · por ejemplo el...

UNIVERSIDAD AUTONOMA METROPOLITANA
UNIDAD IZTAPALAPA
CIENCIAS BASICAS E INGENIERIA
REPORTE DE PROYECTO TERMINAL I y II
"FRECUENCIA MODULADA Y AMPLIFICADORES DE POTENCIA DE RF"
ALUMNO: ORTA PEREZ HECTOR MANUEL MATRICULA. 92322637
ASESOR: PROF. FAUSTO CASCO SANCHEZ
MEXICO, D.F. ABRIL DE 2000

CONTENIDO
l. Introducción
2. Sistemas
2.1 Definición de sistema 2.2 Propiedades de los sistemas 2.2.1 Linealidad 2.2.2 Invariabilidad en el tiempo 2.2.3 Causalidad
2.3 Fenómenos no lineales
3. Frecuencia Modulada
3.1 Antecedentes teóricos 3.2 Generación de señales de FM
4. Conceptos básicos de amplificadores
4.1 Definición de amplificador 4.2 Parámetros de un amplificador 4.2.1 Ganancia 4.2.2 Ancho de banda y producto Ganancia-Ancho de banda 4.2.3 lmpedancias de entrada y salida 4.3 Punto de trabajo y Clases de Operación 4.4 Ruido
5. Ampliticadores de Radio Frecuencia
5.1 Introducción 5.2 Algunos aspectos de diseño en estado sólido 5.3 Método de diseño en RF propuesto por Motorola 5.4 Alternativas para la medición de impedancias a señal grande 5.5 Algo sobre los tubos de vacío
6. Recomendaciones
7. Condusiones
8. Bibliografia
2

l. INTRODUCCION
El intervalo de frecuencias que va desde 1 O kHz aproximadamente hasta 300 GHz constituye el espectro de Radio Frecuencia o RF; estas frecuencias han sido muy útiles en el campo de las comunicaciones desde principios del siglo XX ya que desde esa época el ingeniero italiano Guillermo Marconi empezó a transmitir señales de radio a través del Océano Atlántico.
El uso de las radio frecuencias se ha venido incrementando considerablemente dando como resultado que hoy en día muchos sistemas de comunicación basen su funcionamiento en estas frecuencias, como es el caso de la T V , la Radio, los sistemas de Satélites, la tecnología de Microondas, etc.
Por otra parte, uno de los procesos más importantes en Electrónica es la amplificación de señales. Este proceso consiste simplemente en aumentar la magnitud de una señal eléctrica de tal forma que se pueda obtener una replica de mayor tamaño de la señal original. Prácticamente no hay un solo sistema electrónico que no tenga la necesidad en algún punto de su estructura interna de amplificar una señal.
Un amplificador de RF es un circuito capaz de amplificar señales en una banda de frecuencias relativamente estrecha la cual se ubica dentro del espectro de RF (10 kHz-300GHz). Los amplificadores de RF juegan un papel muy importante en la electrónica ya que se encuentran en muchos sistemas electrónicos de comunicaciones como transmisores y receptores para radio, televisión, telemetría, satélites, telefonía celular, etc.
Podemos afirmar que el diseño y la construcción de amplificadores de RF es un proceso más complicado que el que representa el desarrollo de otros tipos de amplificadores (como de audio, por ejemplo) ya que algunos factores adquieren importancia crítica como la longitud de los conductores, el aislamiento entre etapas y el tipo de aislantes por mencionar algunos, pero todo el trabajo adicional que representa construir estos circuitos se ve recompensado por las importantes aplicaciones que estos sistemas tienen.
Por otra parte la modulación en frecuencia (FM) es uno de los métodos para transmitir información más difundidos hoy en día ya que presenta atractivas ventajas técnicas con respecto a otros esquemas de modulación, por ejemplo el sistema de AM. Estas ventajas se centran principalmente en la manera en que un sistema de FM responde al ruido y en la riqueza espectral que es posible manejar.
De manera muy simple se puede decir que la modulación en frecuencia consiste en alterar la frecuencia de una señal senoidal de referencia (señal portadora) con relación a la amplitud de una señal de entrada, la cual representa información inteligente a transmitir. Mas adelante se explicará con mayor detalle en que consiste el sistema FM.
A diferencia de otros avances tecnológicos, la modulación en frecuencia surgió primero como producto de trabajos teóricos y luego fue puesta en práctica. En 1922 Carson realizó un estudio teórico en el que comparaba los sistemas AM y FM a partir del cual demostró algunas ventajas del segundo método.
3

Sus ideas fueron presentadas en la revista "Proceedings of IRE" (IRE son las siglas del Instituto de Ingenieros de Radio hoy IEEE) y algunos especialistas de esa época pensaron que no podrían ser llevadas a la práctica ya que con ese sistema se generaba un número infinito de bandas laterales, sin embargo esta situación fue superada exitosamente.
Posteriormente en 1936, el mayor Edwin H. Armstrong desarrolló un sistema de FM práctico para tratar de resolver algunos problemas de ruido que tenía la AM y su trabajo también fue publicado en la revista antes mencionada y al transcurrir los años se consideró a Armstrong como el padre de la FM.
Este trabajo pretende dar un panorama general de dos temas importantes como son la FM y el diseño de amplificadores de potencia de RF con el fin de si bien no ser una guía de diseño completa si servir como resumen de algunos conceptos teóricos y a veces prácticos de ambos temas.
4

2. SISTEMAS
2.1 Definición de sistema
Un sistema se puede considerar como un conjunto de elementos agrupados de tal modo que pueden interactuar armónicamente para llevar a cabo una tarea especifica.
La representación de un sistema puede hacerse mediante una regla u operación matemática que asigna una función g(t) de salida a una función f(t) de entrada, es decir:
g(t)= %{f(t)) ... (2.1)
Un sistema a su vez puede ser una porción de un sistema más grande en cuyo caso se le denominará subsistema y también podrá conectarse en serie o paralelo con otros sistemas.
2.2 Propiedades de los sistemas
2.2.1 Linealidad
Supongamos que queremos saber si el sistema que se representa matemáticamente por el operador %{ 1 es lineal. Para hacer esto primero se aplican al sistema de manera independiente dos señales de entrada denotadas por f,(t) y f4t). Estas señales provocan que el sistema genere las siguientes salidas:
Si ahora se considera como señal de entrada a la suma de las dos entradas individuales fl(t) y fz(t) entonces el sistema debe responder con una señal de salida igual a la suma de las respuestas obtenidas de manera individual para ser considerado como un sistema lineal, es decir:
%{aifl(t) + azfe(t))= algl(t) + azgz(t) ...( 2.3)
donde al y a2 son constantes.
Dicho de otra manera, el sistema debe cumplir con d principio de superposición para ser un sistema lineal. Si un sistema no satisface el principio anterior entonces es un sistema no lineal.
5

2.2.2 Invariabilidad en el tiempo.
Supóngase que se excita a un sistema con una señal de entrada f(t) y se observa que el sistema responde generando una señal de salida igual a:
g(t)= %i(f(t)) ... (2.4)
Ahora bien, si se repite el mismo experimento to unidades de tiempo después y se cumple lo siguiente entonces el sistema será invariable en tiempo.
g(t-to)=%i(f(t-b)) ... (2.5)
Para que un sistema tenga invariabilidad en tiempo debe responder a una misma señal de entrada siempre de la misma manera no importando el instante de tiempo en que se lleve a cabo el experimento. Cualquier sistema que cumpla con lo anterior se denomina invariable en tiempo.
2.2.3 Causalidad
Para que un sistema sea causal o físicamente realizable su salida en t= t o , es decir g(t0 ) debe depender de los valores de la señal de entrada f(t) para t l to. Un sistema causal no debe producir una señal de salida antes de ser excitado por una señal de entrada.
..
~ :o ..
,- I : ' , .
2.3 Fenómenos no lineales
Cuando un sistema no es lineal genera una serie de fenómenos importantes entre los cuales se encuentra la distorsión, que básicamente es un cambio indeseado que produce un sistema al tratar de reproducir alguna característica de una señal como la amplitud, la fase, el retardo, etc.
La distorsión puede tomar distintas formas y sus causas principales son la no linealidad de la respuesta en amplitud y la no uniformidad de la respuesta en fase. Algunos ejemplos son la distorsión armónica, la intermodulación y la modulación cruzada que a continuación se detallan.
a) Distorsión armónica total (Total Harmonic Distortion)
Sea un sistema no lineal que puede ser caracterizado (de manera aproximada) por la siguiente relación entradakalida:
6

donde y(t): salida del sistema x(t): entrada del sistema a1,2,3: constantes
En este caso resulta innecesario aplicar el principio de superposición para comprobar que el sistema es no lineal ya que la no linealidad es evidente por la presencia de los términos a2x2(t) y a3x3(t).
Aplicando una señal de entrada igual a x(t)= A cosot tenemos:
desarrollando ...
Y(t)= ~ I A COSot + (1/2)a2A2(1 +c0~20t) + (1/4)a3A3 COSO^ + C O S ~ O ~ ) ... (2.8)
y agrupando ...
y(t)= a2A2/2 + (a1A + 3a3A3/4) cosot + (a2A2/2)cos2ot + (a3A3/4)cos30t ... (2.9)
Como podemos notar, el sistema recibe una señal de frecuencia o y a su salida devuelve una señal de la misma frecuencia conocida como fundamental pero también genera señales armónicas, es decir señales cuyas frecuencias son múltiplos de la frecuencia de entrada.
La distorsión armónica total (THD: Total Harmonic Distortion) es un parámetro que indica el grado de distorsión introducido por las armónicas. Podemos considerar que la THD se determina de manera muy básica mediante la siguiente expresión:
Potencia cuadrática media de las armónicas THD- x 100% ... (2.10)
Potencia cuadrática media de la señal fundamental
b) Distorsión por intermodulaaón
Existen casos en los cuales la medición de la distorsión armónica total no permite obtener una información precisa de la distorsión que produce un sistema. Un ejemplo es el de un filtro pasabajas cuya función de transferencia se ilustra en la fig. 2.1
7

Fig. 2.1 Función de transferencia de un filtro pasabajas
En esta figura notamos la respuesta característica de un filtro pasabajas común y una serie de frecuencias que son generadas por el mismo filtro al ser excitado por un tono de prueba de frecuencia 0 1 . En este caso se escogió a 01
de tal forma que sus armónicas cayeran fuera de la banda de paso para enfatizar que el filtro 3 produce distorsión armónica pero la naturaleza misma del sistema oculta ese hecho atenuando las armónicas de 0 1 . Por 10 tanto es necesario otro tipo de análisis para medir la distorsión en situaciones semejantes a la del filtro pasabajas y la intermodulación es una alternativa.
El concepto de la distorsión por intermodulacion se apoya en el hecho de que un sistema no lineal al ser excitado por dos tonos de frecuencias distintas genera componentes de frecuencia que no son armónicos de ninguna de las señales de entrada.
Consideremos un sistema no lineal cuya relación de entradalsalida aproximada es la misma que la ecuación 2.6
y(t) = alx(t) + a2x2(t)+ap3(t)
donde y(t): salida del sistema x(t): entrada del sistema a1,2,3: constantes
Como deseamos determinar la distorsión por intermodulación del sistema aplicamos una señal de entrada compuesta de dos tonos:
x(t)= A cosolt + A C O S O ~ ~ ... (2.1 1)
La respuesta del sistema a esta excitación es:
8

desarrollando los binomios ...
y(t)= al(A cosalt + A C O S W ~ ~ ) + a2(A2 COS201 t + 2A2cosolt COSOZ~ + A2 COS 0 2 t ) + 013 ( A 3 ~ ~ ~ 3 0 1 t + 3A3
cos201t COSO^^ + 3A3 cosmlt cos2m2t + A3 C O S ~ W ~ ~ )
Para hacer más daros los resultados que nos brinda esta ultima expresión se ignorarán los componentes de y(t) que representan frecuencias de DC o frecuencias armónicas de 01 y 0 2 .
Haciendo la simplificación anterior y aplicando algunas identidades trigonométricas tenemos los siguientes productos:
Productos a las frecuencias fundamentales 01 y 0 2 :
y los siguientes productos de intermodulación (IM):
~~A‘COS(OI +02)t + O~~A~COS(WI -02) t
+ (3/4)a3 A3 C O S ( ~ O ~ + 02)t + (3/4)013 A3 C O S ( ~ O ~ - 02)t
+ (3/4)a3A3 COS(~CO~+COI)~ + (3/4)a3A3 C O S ( ~ W - W ) ~
Son de especial importancia los términos que resultan de elevar x(t) a la tercera potencia y que dan origen a los componentes en 2 0 1 - 0 2 y 202 - 01 ya que si se escoge que 01 y 0 2 sean frecuencias cercanas se producirá la siguiente situación:
Fig. 2.2 Productos de intermodulaaón de tercer orden
Efectivamente, al estar 01 cerca de 0 2 se consigue que los productos de intermodulación de tercer orden se ubiquen en su vecindad y que de esta forma pueda ser medida la distorsión de sistemas como la del filtro pasabajas que se puso de ejemplo en la sección anterior. Nótese la diferencia fundamental que hay entre la distorsión por intermodulación y la THD, mientras que en la primera la distorsión se ubica cerca de las señales de prueba, en la segunda la primera armónica se halla al doble de la frecuencia original.
9

La distorsión por intermodulación (IMD lntermodulation distortion) se define como la relación entre la amplitud de los productos de tercer orden con respecto a la amplitud de la componente fundamental.
3a3 A3/4 IMD= ~ ... (2.1 3)
a1A
por ejemplo, si para un sistema 3a3A3/4= 1mV y alA=lV entonces la IMD es:
IMD= 20 log (1 mV/lV) = -60 dBc
< I .-.$ d;..‘*I
La distorsión por intermodulación es un problema grave que puede afectar a un sistema, un ejemplo es el *:$ siguiente:
c Supóngase que se tiene un sistema no lineal que es excitado por una señal de información que ocupa una banda (“I 0
( - 1 3
limitada de frecuenaas. El problema surge cuando en la entrada aparece una interferencia consistente de dos : R t : 0
frecuencias cercanas entre sí que antes y después de pasar por el sistema no invaden la banda de la señal útil z, pero que al ser procesadas por el sistema dan lugar a productos de intermodulación de tercer orden que :,
distorsionan la información útil. ’.. I . ! -- r ’ (5 m z L’j
‘ T T t
Es de tal magnitud e importancia la distorsión por intermodulaaón de tercer orden que se ha establecido un parámetro llamado punto de intersección de tercer orden (third intercept point en inglés) para cuantificar sus efectos.
í> y .
r: :’, ;. y/
v;, , ,\ 1,; n
,! ‘3 r - - . . . I
Este parámetro denotado por lP3 se mide mediante una prueba con dos tonos cuya amplitud se mantiene lo suficientemente pequeña de modo tal que los productos de intermodulación de ordenes más altos se hagan despreciables y que la ganancia al se mantenga relativamente constante.
Es importante mencionar que existe una ventaja al usar este parámetro y no una simple medida de la distorsión por intermodulación. Cuando se calcula la IMD forzosamente se tiene que especificar la amplitud de las seiiales de prueba empleadas mientras que el punto de intersección de tercer orden es una cantidad que no depende de esta amplitud y que por si misma sirve para comparar la linealidad de diferentes circuitos.
La expresión que determina el nivel de la señal de entrada con el que se llega al IP3 es:
A I P ~ = [(4/3) [al / a 3 1 1 I/*... (2.14)
10

El parámetro IP3 solo caracteriza las no linealidades de tercer orden y establece un límite para la amplitud de la señal de entrada ya que cuando es alcanzado, otros productos de IM (intermodulación) de orden más alto comienzan a ser significativos. De hecho en muchos arcuitos prácticos este punto queda fuera del alcance de la señal de entrada.
La última expresión nos indica una manera de calcular el punto de intersección de tercer orden pero para poder hacerlo hay que tener las constantes a1,2,3, es decir hay que tener el polinomio que caracteriza al sistema.
Un método práctico para determinar IP3 consiste en medir el comportamiento del sistema para pequeñas amplitudes de la entrada como se ilustra a continuación:
Fig. 2.3 Determinación de IPS mediante extrapolación. (Figura obtenida de la referencia no. 4 de la bibliografía)
En esta gráfica se muestra el crecimiento de los componentes con frecuencia fundamental y los productos de intermodulación de tercer orden a medida que la amplitud de la señal de entrada aumenta. Una vez que se ha hecho la medición para niveles bajos de entrada se extrapolan esos datos para encontrar la intersección de ambas rectas (como lo indican las líneas punteadas).
El IP es un punto en un plano y como tal tiene dos componentes: la coordenada horizontal es el IP 3 de entrada o IIP3 (Input IP 3) y la vertical es el IP 3de salida o OIP 3 (Output IP 3).
c) Modulación azada.
Consideremos el mismo sistema no lineal de los párrafos anteriores para procesar la señal At cosmtt en presencia de una fuerte señal de interferencia A2coso2t. Entonces la señal de entrada queda establecida por:
La salida del sistema será entonces:
y(t)% ( ~ I A I + (3/4)a3Ai3+ (3/2)a3h b2) cosot t + .... (2.16)
11
Si consideramos que Al << AZ :
Hasta aquí podemos apreciar que la amplitud de la componente en 01 ya no es AI sino que esta afectada por la amplitud de la señal fuerte. Si la señal fuerte desde un inicio estaba modulada en amplitud, es decir:
&,,(t)= A2 ( 1 + m cos omt) cos 0 2 t ... (2.18)
donde m es el índice de modulación de AM ( m e l ) y om es la frecuencia de modulación.
Sustituyendo A2 por AZ( 1 + m cos Omt) en la ecuación 2.1 7
y(t)= [a1 + ( 3 / 2 ) a 3 ~ 1 ~ 2 ( ~ + m2 cos2 omt + 2m cosomt) ] cosol t + ...
y(t)= [at AI + (3/2)a3AlA~~( 1 + m2/2 + (m2/2) cos 20mt + 2m cosomt) ] C0SCi)t t + ... (2.19)
La señal deseada contiene modulación en amplitud en las frecuencias om y 2om, es decir, la modulación en amplitud que tiene la señal fuerte, ya sea que represente una información útil o ruido, modulará también a la señal débil, este fenómeno es llamado modulación cruzada y se da especialmente en sistemas que manejan varias señales independientes de manera simultánea.
12

3. FRECUENCIA MODULADA
3.1 Antecedentes teóricos.
A continuación se expone un desarrollo sobre la generación de señales de frecuencia modulada (FM) que servirá como respaldo para poder entender con mayor precisión todo lo relacionado con este esquema de modulación.
Consideremos la siguiente señal senoidal continua en tiempo:
$(t)= A cos [act + y(t)] ... (3.1)
donde:
y(t) : ángulo de fase (en radianes) A : amplitud de la señal (en volts) oc : frecuencia de la señal portadora (constante dada en rad/seg)
Por otro lado, una señal senoidal de amplitud constante se puede representar en forma fasorial como:
= A cos O(t) + jA sen O(t) ... (3.2)
Si recordamos la teoría de los fasores, la expresión 3.2 representa un vector de magnitud A girando en sentido contrario a las manecillas del reloj a una velocidad angular oi y el ángulo barrido por el fasor en cada instante es O(t) (figura 3.1).
t
Fig. 3.1 Relación entre el ángulo y la velocidad angular de un fasor
La relación que existe entre O(t) y wl es simple y establecida a partir de un concepto básico de anemática angular:
O(t)= oit + O0 ... (3.3)
con oi siendo una constante y O. es el ángulo en t =O.
13

Pero si 01 no fuera constante entonces 0(t) se determina mediante la siguiente expresión:
0(t)= f ~ ( t ) d-c + 00 ... (3.4)
derivando ambos lados de la ecuación ...
d O(t)
dt ai(t)=- ... (3.5)
Es decir, la frecuencia instantánea de una señal senoidal es igual al ritmo con que cambia su fase con respecto al tiempo.
Por otra parte se desea que mediante la variación de alguna característica de una señal senoidal de referencia, se pueda insertar información útil para ser procesada posteriormente.
Sea f(t) la señal de información que se quiere combinar con la señal senoidal de referencia (señal portadora). Para hacer esto tenemos dos alternativas, las cuales son:
a) @(t) varía en forma lineal con f(t) b) ai varía en forma lineal con f(t)
La primer alternativa da origen a la modulación en fase (PM), por lo tanto el interés se centra en la segunda opción: acarnbia linealmente con respecto a la señal de información f(t).
coi : frecuencia instantánea de la señal senoidal (rad/seg) ac: frecuencia de la señal senoidal cuando f(t)=O, es decir cuando no hay modulación kf : constante de modulación en frecuencia (rad/seg*volt)
Integrando la ecuación 3.6 podemos obtener la fase:
0(t)= m(z) dz + 00
= [oc + kf f ( ~ ) ] d ~ + 00
= h d r + kf j ( r ) d r + 00
14

= o, t + kf j ( z )d r + 00 ... (3.7)
siendo 00 una constante.
De la expresión anterior se puede notar que la fase 0(t) depende linealmente de la integral de la señal de información f(t). Para simplificar el siguiente análisis consideremos el caso en el que solo se quiere modular con un tono (una soia frecuencia) en el esquema FM.
f(t) = A, COSO^ t ... (3.8)
Anteriormente se había establecido que
y sustituyendo f(t) por su valor actual ...
definiendo Ace A, kt ...
A Ao se le conoce como la desviación de frecuencia pico, y representa la máxima diferencia en frecuencia que puede existir entre una portadora modulada y una sin modular. Para el sistema FM Am es de 75 kHz, por lo tanto si la frecuencia portadora es o, entonces el rango de frecuencia que puede tomar la señal modulada en FM es [oc - 2n*75kHz, o, + 2n*75kHz]. Como se puede ver de la definición anterior Am depende de la amplitud de la señal de entrada y de la constante de modulación en frecuencia kf.
Si se sustituye el resultado anterior en la expresión para @(t) y haciendo 00 =O llegamos a esta importante ecuación:
=act+ psena,,t ... (3.10)
donde p es el índice de modulación para FM y es igual a Am/&.
A diferencia del sistema AM, el índice de modulación p depende tanto de la amplitud como de la frecuencia de la señal moduladora. El pardmetro Bo indica que tanto se desvía la frecuencia de la señal portadora de su valor nominal mientras que om indica que tan seguido ocurre esta desviación en la frecuencia. Ambas cantidades repercuten fuertemente en el espectro de una señal modulada en frecuencia.
15

Retomando la expresión para una señal de FM Q(t) e incorporando las expresiones recientemente obtenidas tenemos lo siguente ...
La función elp senwmt es periódica en el. dominio del tiempo con frecuencia fundamental wm rad/s y puede ser representada por una serie exponencial de Fourier.
Los F, son números que determinan la amplitud de cada componente espectral y se calculan con la siguiente integral:
haciendo el siguiente cambio de variable: &= wmt= 27ttlT
Esta integral es una función de n y p representada por L(P) o función Bessel de primera clase, de orden n y argumento P. En este caso n es un entero y /3 es una variable continua positiva.
16

Sustituyendo en la expresión de @FM (t):
00
= A CJn(p) COS(O~ + n m ) t ... (3.16) n=-m
y desarrollando parcialmente para apreciar mejor el resultado ...
A E... + J-,(~)cos ( ~ - 2 m ) t + J-,(~)cos (a-&)t + JO(~)COS a t + J,(~)cos (Oc+Om)t + Jz(p)+ cos(oc+20,)t +...I
Un resultado muy importante se hace evidente a partir del anterior análisis: una señal FM con modulación senoidal tiene un número infinito de bandas laterales lo que da lugar a un ancho de banda teóricamente infinito, sin embargo las magnitudes de las componentes espectrales de orden superior se hacen despreciables y para todo propósito práctico la potencia de la señal a>FM(t) está contenida en un ancho de banda finito. Además es muy importante señalar que la magnitud de cada componente es una función del índice de modulación p.
3.2 Generación de señales FM
En el diseño de sistemas FM es importante satisfacer 3 aspectos:
1. La componente de frecuencia portadora en la señal de FM debe permanecer invariable cuando la señal moduladora es aplicada al sistema.
2. La desviación de frecuencia pico debe ser directamente proporcional a la amplitud de la señal moduladora y no a su frecuencia.
3. La amplitud de la señal FM debe permanecer siempre constante.
Existen básicamente dos métodos principales para generar FM: el método indirecto y directo. En el primero (método de Armstrong) se obtiene la señal portadora mediante un oscilador a cristal, luego se modula con la señal de entrada para producir la señal de FM. Posteriormente esa señal se pasa a través de varias etapas multiplicadoras de frecuencia hasta alcanzar la desviación de frecuencia pico y el índice de modulación requeridos. Este método tiene la ventaja de tener una portadora muy estable ya que utiliza osciladores a cristal.
17

El método directo se basa en obtener la señal de FM a partir de un VCO (oscilador controlado por voltaje) cuya frecuencia depende de la amplitud de la señal de entrada. Recibe el nombre de directo porque el mismo oscilador produce los cambios en frecuencia y no hay necesidad de generar primero la portadora y luego modularla en un subsistema diseñado para tal fin. La principal ventaja de este procedimiento es la ausencia de etapas multiplicadoras de frecuencia pero a veces es necesario incorporar un control de estabilidad de la frecuencia portadora.
Para implantar este método se puede usar un modulador basado en un tubo de reactancia, de capacitancia o de diodo. Esta última opción es la que produce menos ruido y distorsión además de que la desviación de frecuencia pico puede hacerse casi proporcional a la señal moduladora.
Dada la confiabilidad en el funcionamiento de los circuitos integrados (Cl) y la existencia de notas de aplicación sobre el uso de VCO se puede tomar como referencia este tipo de componentes para el diseño de moduladores de FM. Un ejemplo es el siguiente:
Un VCO integrado como el MC1648P es una excelente alternativa para producir modulación en frecuencia porque posee una buena estabilidad y requiere de pocos ajustes y componentes externos. Su diagrama de conexión aparece en la figura 3.2. Para una información más precisa de la estructura, características y variantes de conexión de este dispositivo se pueden consultar los manuales del fabricante (Motorola).
Fig. 3.2 Conexiones básicas del VCO MC1648P de Motorola (Figura tomada de la referencia no. 8 de la bibliografía)

4. CONCEPTOS BAslCOS DE AMPLIFICADORES.
La amplificación es uno de los procesamientos de señales más comunes y útiles que existen ya que se encuentra en casi cualquier equipo electrónico. El proceso de amplificación es necesario porque a menudo se tienen señales que contienen información útil pero cuya magnitud es muy débil como para ser procesadas adecuadamente, un ejemplo de esto es la débil señal que un radio-receptor capta en su antena y que no tiene la intensidad suficiente para excitar a una bocina y ser escuchada. Otro ejemplo es la transmisión de señales de radio que necesitan ser amplificadas fuertemente para poder ser emitidas de forma inalámbrica y que así puedan alcanzar lugares distantes.
A continuación se exponen algunos conceptos básicos sobre la amplificación de señales, hay que aclarar que estos conceptos son aplicables a cualquier tipo de amplificador (audio, video, RF, etc.).
4.1 Definición de amplificador
Es un circuito electrónico capaz de procesar una señal de entrada de tal forma que entrega en su salida una réplica ampliada o magnificada de la señal de entrada.
El símbolo adoptado para un amplificador se muestra en la figura 4.1 en la cual se puede apreciar que se trata de una red de dos puertos (entrada y salida) claramente diferenciados por la forma del símbolo que se asemeja a una flecha indicando la dirección de la señal procesada.
Fig. 4.1 Símbolo básico de un amplificador
La relación que existe entre las señales de entrada y salida para un amplificador es la siguiente:
Salida= G*Entrada ... (4.1)
Un amplificador que satisfaga la ecuación anterior recibirá el nombre de amplificador lineal ya que como puede verse la ecuación establece una relación lineal entre salida y entrada. Cuando la ecuación 4.1 contiene términos que son potencias de la señal de entrada entonces representa a un amplificador que no es lineal y que por Io tanto tendrá un cierto grado de distorsión.
19
4.2 Parárretros de un amplificador
Existen caractensticas comunes a todos los amplificadores no importando del tipo que sean, como son las siguientes:
a) Todos deben basar su funcionamiento en un dispositivo activo como BJT, FET, Tubo de Vacío, Circuitos Integrados, etc.
b) Todos deben tener al menos un voltaje de alimentación.
c) Su operación puede resumirse especificando ganancia, impedancias de salida y entrada y la respuesta en frecuencia.
Ahora veamos a detalle los pardmetros que determinan el comportamiento de cualquier amplificador como son la ganancia, ancho de banda, impedanaas de entrada y salida, clases de operación, etc.
4.2.1 Ganancia.
La ganancia de un amplificador se define como el cociente de la señal de salida entre la señal de entrada, retomando la ecuación 4.1 tenemos:
G= Salida/Entrada= G*Entrada/Entrada= G ... (4.2)
El valor de la ganancia indica que tan fuerte es el proceso de amplificación efectuado. A mayor ganancia mayor amplificación pero también crece el consumo de energía por parte del amplificador.
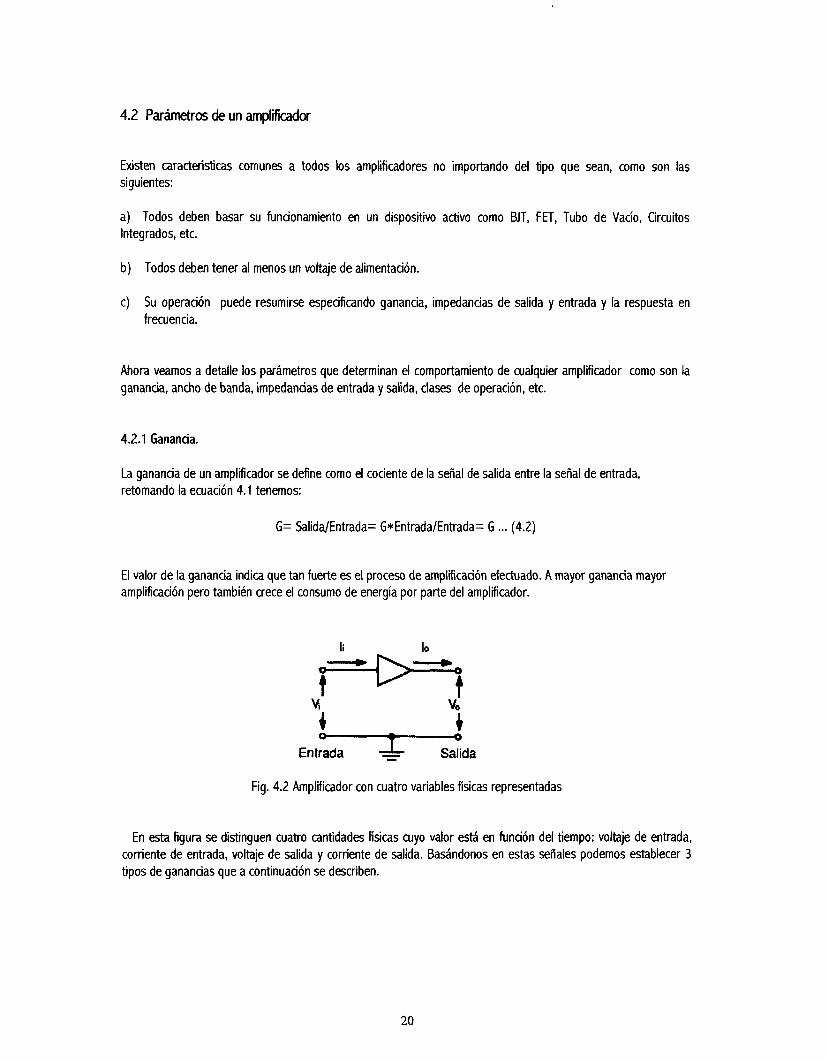
M- i
Entrada Salida - Fig. 4.2 Amplificador con cuatro variables físicas representadas
En esta figura se distinguen cuatro cantidades físicas cuyo valor está en función del tiempo: voltaje de entrada, corriente de entrada, voltaje de salida y corriente de salida. Basándonos en estas señales podemos establecer 3 tipos de ganancias que a continuación se describen.
20

Ganancia de voltqe
Consideremos el amplificador ilustrado en la figura 4.2. El amplificador recibe en su entrada la señal v,(t) y genera la señal de salida vo(t) en su puerto de salida.
La ganancia de voltaje del amplificador Av se define como:
Av= VJVI ... (4.3) 2 2 5 9 8 1 Ganancia de corriente.
Esta ganancia se define como:
Ai= iO/il ... (4.4)
donde il e io e son las corrientes de entrada y salida respectivamente.
Ganancia de potencia
Un amplificador es un circuito activo, es decir un circuito que es capaz de aumentar la potencia o la energía de una señal a diferencia de un elemento pasivo como un transformador, el cual también puede elevar el voltaje de una señal pero a expensas de una reducción en la corriente o viceversa.
Si un amplificador aumenta la potencia de la señal de entrada, entonces es necesario definir una ganancia de potencia.
$=Po(t)/Pl(t)=vo(t)*io(t)/vl(t) *il(t) ... (4.5)
A+,= A,*& ... (4.6)
Debido a varias razones, algunas de ellas de naturaleza histórica, las ganancias se expresan en forma logaritmica:
Ganancia de voltaje en dB= 20 log I A, I Ganancia de corriente en dB= 20 log I A, I Ganancia de potencia en dB= 1 O log I Ap 1
El valor absoluto que aparece en cada expresión debe ser respetado ya que la función logaritmo no esta definida para argumentos negativos. Un valor negativo de A, por ejemplo, representará no una atenuación sino un desfasamiento de 180' entre los voltajes de entrada y salida de un amplificador.
21

4.2.2 Ancho de Banda (B) y producto Gananaa-Ancho de Banda.
La cantidad de ganancia que proporciona un amplificador no es constante para todas las frecuencias. Los amplificadores se diseñan de tal manera que puedan responder solo dentro de un intervalo determinado de frecuencias lo que provoca que cualquier señal cuya frecuencia no pertenezca a esta banda no será amplificada.
Existe una gráfica muy importante que muestra lo explicado anteriormente llamada respuesta en frecuencia. Un ejemplo de esta gráfica se muestra en la figura 4.3
t
+- Ancho de banda +
I I I 1 *
f, f2 f/Hz
Fig. 4.3 Gráfica de la respuesta en frecuencia de un amplificador
Para encontrar el ancho de banda primero se tienen que encontrar las frecuencias que delimitan la región en la cual la ganancia es aceptable. Una forma de hacer esto es determinar la ganancia máxima del amplificador y considerar como significativas todas las gananaas que a lo mucho estén 3 dB por debajo de ese valor máximo. El ancho de banda (B) de un amplificador es la diferencia numérica entre fz y fl (llamadas frecuencias de corte) y dependiendo de la ubicaaón y tamaño de esta banda dentro del espectro total de frecuencias podemos tener amplificadores de audio, video, radiofrecuencia, etc.
El producto ganancia-ancho de banda es otra característica importante de un amplificador y como su nombre lo indica esta dado por:
donde:
Fa : figura de mériio A, : ganancia de referencia B : ancho de banda
Se llama figura de mérito a cualquier parámetro asociado con el desempeño de un sistema.
22

4.2.3 lmpedanaas de entrada y salida
Supóngase que se tiene un amplificador con sus puertos de entrada y salida y una fuente de señal conectados de como en la figura 4.2. La impedancia de entrada es la oposición que presenta el amplificador al paso de la señal de entrada Vi. Por ley de Ohm se puede calcular esta impedancia:
Z,= Vi/ 1, ... (4.8)
Es importante mencionar que la impedancia de entrada no solamente depende de la resistencia de entrada del elemento activo sino también de los componentes que estén presentes en la entrada del amplificador tales como inductores, capacitores, resistencias etc.
La impedancia de salida es la resistencia vista por la carga que recibe la señal amplificada. Para entender mejor el concepto podemos ver la salida de un amplificador como el siguiente circuito:
Fuente de sena1
L
Fig. 4.4 Etapa de salida de un amplificador conectado a una carga (Figura tomada de la referencia no. 3 de la bibliografía)
En esta figura apreaamos que Z, (o Zout) es la impedancia que la resistencia de carga ve hacia la fuente de voltaje y es precisamente esta impedancia la que impide que todo el voltaje de salida del amplificador llegue a la carga ya que forma un divisor de voltaje junto con RL. Es importante mencionar que para que exista la máxima transferencia de potencia del amplificador hacia la carga se debe satisfacer la siguiente relación:
Z,= RL ... (4.9)
4.3 Punto de trabajo y clases de operación.
La clase de operación de un amplificador determina en primer lugar el ángulo de conducción, es decir la porción angular de cada ciclo de la señal de entrada durante la cual fluye corriente por la salida del amplificador. Las clases de operación más comunes son A, B, AB y C, cada una presenta diferentes ángulos de conducción que van desde 360" para la clase A hasta ángulos menores a 180" para la dase C.
23

Existen también las clases de operación D, E, F, G y H que son usadas principalmente en aplicaciones de audio y RF en las cuales es necesario reducir las necesidades de voltaje de alimentación y tener un buen desempeño en disipación de calor. Es importante mencionar que la selección de la dase de operación es independiente del tipo de dispositivo activo empleado y de la configuración del circuito. La dase de operación también determina la distorsión y el rendimiento de un amplificador y cada dase presenta ventajas y desventajas y dependiendo de la aplicación será la clase de operación usada. Pero antes de explicar cada clase de operación es necesario conocer el concepto de punto de trabajo.
Punto de trabajo.
Como ya se había mencionado, todos los amplificadores necesitan un voltaje de DC para activar al dispositivo amplificador. Al estar polarizado un transistor (un BJT por ejemplo) obviamente fluyen corrientes en sus tres terminales (emisor, base y colector) y asimismo existen voltajes en esos mismos puntos. Todas estas señales son de DC, es decir son constantes y constituyen el punto de trabajo del amplificador. Cuando una señal de información es inyectada al amplificador provoca que todas las seiiales antes mencionadas varÍen su valor alrededor del valor que tenían en el punto de trabajo.
/ . .
P y
Existe una gráfica que indica el concepto de punto de trabajo además de que permite apreciar la relación entre IC y Vce (fig. 4.5)
' .
, \ I( '
IS' LW
Fig. 4.5 Relación entre IC y Vce y la recta de carga (Figura tomada de la referencia no. 3 de la bibliografía)
La recta dibujada en la figura se denomina recta de carga y sus dos extremos nos indican dos situaciones completamente distintas. Cuando Vce es máximo significa que no hay corriente circulando por el transistor o dicho de otra forma que el transistor está en corte. Por el contrario cuando Vce es cero se está en la región de saturación en la que IC es máxima.
El punto de operación (Q) puede ser escogido entre todos los puntos que componen la recta de carga. Es común especificar la pareja de valores Ic/Vce para determinar el punto de trabajo. La elección del punto de trabajo determinará a su vez la clase de Operación.
24

Clase de operación A
Esta clase de operación amplifica la totalidad del ciclo de la señal de entrada y proporciona corriente de salida aunque no se aplique ninguna señal en la entrada del amplificador.
La explicación de Io anterior se basa en el hecho de que el punto de trabajo se escoge en la mitad de la recta de carga tal como se muestra en la figura 4.6
Fig. 4.6 Recta de carga para la clase A (Figura tomada de la referencia no. 3 de la bibliografía)
En esta figura se nota que ambos semidclos de la señal de entrada alcanzan a ser amplificados en su totalidad sin ser recortados (lo que provocaría distorsión) y que aún cuando no hay señal de entrada existe una corriente ICQ en el colector.
Esta clase de operación proporciona máxima linealidad y ganancia y también baja distorsión pero baja potencia de salida y una pobre efiaencia del orden del 25 al 30%.
Clase de operación B
Un amplificador en clase B tiene un ángulo de conducción de 180 O por lo que sólo trabaja durante la mitad de un ciclo de la señal de entrada, esto obviamente introduce distorsión pero mejora notablemente la eficiencia ya que se alcanzan valores prácticos del 50 al 60%.
Este ángulo de conducción se puede obtener colocando el punto de operación en cualquiera de los extremos de la recta de carga (corte o saturación), de esta forma el amplificador sólo funcionará durante un semidclo de la señal de entrada. Los amplificadores en clase B son utilizados principalmente en aplicadones de potencia en bajas frecuencias.
Fig. 4.7 Recta de carga para la clase 6 (Figura tomada de la referencia no. 3 de la bibliografía)
25

Clase de operación AB
Para trabajar en esta clase de operación es necesario ubicar el punto de trabajo sobre la recta de carga de tal manera que no quede en el centro como en la clase A, ni en uno de los extremos como para la dase B, sino en un punto intermedio entre un extremo y el centro de la recta. De esta manera se obtienen ángulos de conducción mayores a 180° pero menores a 360'. Los amplificadores AB representan un punto intermedio entre la baja distorsión y eficiencia de la clase A y el alto rendimiento y distorsión de la clase B.
4 IC
Clase de operación C
V CE
Fig. 4.8 Recta de carga para la clase AB (Figura tomada de la referencia no. 3 de la bibliografía)
Para trabajar en esta clase de operación es necesario ubicar el punto de trabajo mas allá del punto de corte o de saturación de tal manera que solo se amplifique menos de la mitad de un ciclo de la señal de entrada
Fig. 4.9 Recta de carga para la clase C (Figura tomada de la referencia no. 3 de la bibliografía)
" if
i
Como puede verse, solo pequeñas porciones de la señal de entrada son amplificadas ocasionando que la señal de salida sea totalmente diferente a la de entrada. La clase C provoca una distorsión considerable y por lo tanto no es adecuada en aplicaciones a bajas frecuencias o para amplificar señales cuyos cambios en amplitud contengan información (como en AM). Esta distorsión no es importante en la amplificación de señales de FM ya que la información esta contenida en los cambios de frecuencia de la señal portadora y no en su amplitud.
26

4.4 Ruido
El ruido se puede considerar como aquella señal de naturaleza aleatoria que afecta la correcta reproducción de una señal deseada en un sistema. El carácter de aleatorio distingue al ruido de fenómenos deterministas como la distorsión armónica y la intermodulaaón.
El ruido puede ser provocado por fuentes artificiales o naturales, ejemplos de las primeras son la captación electromagnética de otras señales o las vibraciones mecánicas que producen señales eléctricas no deseadas. Las fuentes artificiales de ruido tienen la característica de poder ser atenuadas o eliminadas en el mejor de los casos, pero la interferencia producida por fuentes naturales no es tan controlable y se debe recurrir a la estadística para describir mejor sus características y estar en mejores condiciones de combatirla.
Por otra parte existen vanos tipos de ruido, uno de ellos es el ruido térmico que se produce por el movimiento caótico de los electrones libres que son excitados térmicamente dentro de un conductor. La trayectoria de cada electrón es aleatoria debido a los choques que existen dentro del conductor y que en conjunto generan una corriente eléctrica con valor promedio cero. Este tipo de ruido esta presente en todos los circuitos y es generado, por ejemplo, en la resistencia que hay entre la base y el emisor en un BJT o en las resistencias discretas.
Además del ruido térmico los dispositivos activos pueden presentar otros tipos de ruido como el ruido de disparo (shot noise) que es un ruido blanco2 que surge cuando existe una transferencia de carga a través de una barrera de energía por ejemplo en una unión PN.
Dado que el ruido es una señal aleatoria, resulta impráctico y más aún imposible tratar de especificar su comportamiento en cualquier instante de tiempo de manera analítica. Resulta más conveniente analizar los promedios de este tipo de señales en lugar de las señales mismas. A continuación se presentan algunas expresiones importantes sobre ruido.
Sea n(t) una señal que representa una corriente o un voltaje de ruido (donde la letra “n” surge de la palabra inglesa naseque significa ruido) y se desea encontrar el promedio en tiempo de esta señal.
Para hacer esto es necesario sumar todos los valores que adquiere n(t) en un ¡?tervalo de tiempo determinado, luego dividir el resultado entre el ancho del intervalo y por último hacer que éste tienda a infinito.
TI2
Promedio de n(t)= lím (In) j n ( t ) dt ... (4.10) T4(4 -TI2
2Es un tipo de ruido cuyo espectro contiene todas las frecuencias además de que cada una de ellas contiene la misma cantidad potencia
27

El promedio de n(t) no revela como se comporta d ruido en cada instante pero proporciona el nivel de DC a partir del cual la señal cambia de valor de manera aleatoria lo cual es un dato significativo considerando la naturaleza de la señal analizada.
Una noción de la potencia de una señal de ruido se puede determinar aplicando esta señal (ya sea un voltaje o una corriente) a una resistencia R y a partir de la relación voltaje-corriente de dicho componente utilizar las ecuaciones P=V2/R o P=l2R para encontrar la potencia. El caso más simple es el de una resistencia cuyo valor se escoge de 1 ohm para simplificar los resultados de tal manera que la potencia de una señal de ruido n(t) es nz(t).
Como ya se había mencionado antes, es adecuado y más práctico considerar los valores promedios que las señales de ruido mismas. El valor cuadrático medio de n2(t) esta dado por:
TI2
La señal n(t) tiene una componente en DC que se calcula con la ecuación 4.10 y una de AC que representa las variaciones aleatorias del ruido. Esta última componente se deduce simplemente por:
o(t)= n(t) - promedio de n(t) ... (4.12)
Relación señal a ruido (S/N)
Esta relaaón nos indica que tan intenso es el ruido en comparación con la señal litil y se define como:
S/N= promedio de s2(t)/promedio de n2(t) ... (4.1 3)
Se acostumbra expresar esta ecuación en decibeles:
[S/NIde= 10 log [promedio de s2(t)/promedio de n2(t)]
donde:
s2(t): valor cuadrático de la señal n2(t): valor cuadrático del ruido
28

Factor de ruido (F)
También existe un parámetro conocido como factor ó figura de ruido que es una medida de la cantidad de ruido que un sistema adiciona a una señal de entrada. Este concepto utiliza la expresión de la relación S/N para hacer una comparación entre el ruido en la entrada y en la salida de un sistema. El factor de ruido se ha definido de varias formas pero la definición mas aceptada es la siguiente:
SJNi F = .,. (4.14)
S d N o
donde:
SdNi : relación señal a ruido en la entrada SJN, : relación señal a ruido en la salida
Por definición, a la potencia del ruido en la entrada del sistema (Ni ) se le ha asignado el valor de la potencia del ruido térmico que una resistencia conectada en la entrada de ese mismo sistema produciría a una temperatura de 290 OK.
Si la señal y el ruido de entrada son amplificados o atenuados en la misma medida y el sistema no adiciona ruido entonces el sistema es ideal y tiene un factor de ruido igual a 1 de manera que la relación S/N en la salida del sistema es igual a la de entrada. Cuando F>1 significa que el sistema genera ruido que se añade a la señal útil y por lo tanto empobrece la relación S/N de salida.
Factor de ruido en cascada (F)
A menudo es necesario conectar más de una etapa amplificadora en sene para conseguir determinados niveles de ganancia. El factor de ruido que presenta la asociación de dos amplificadores se puede conocer mediante el siguiente parámetro:
donde:
FT= factor de ruido en cascada FI= factor de ruido en la primera etapa F2= factor de ruido en la segunda etapa GA= ganancia de la primera etapa
Esta expresión puede ser generalizada para calcular el factor de ruido de m etapas o subsistemas conectados en cascada.
29

5. AMPLIFICADORES DE RADIOFRECUENCIA.
5.1 IntroducCicKI
La tarea fundamental de un amplificador de radiofrecuenaa consiste en amplificar señales cuyo espectro esta contenido en una banda relativamente estrecha de frecuencias ubicada en el intervalo que va desde unos 10 kHz hasta 300 GHz (espectro de RF).
Considerando el ancho de banda, los amplificadores de RF pueden ser de banda ancha o de banda estrecha. Los primeros son capaces de amplificar dentro de un ancho de banda de varios MHz y son aptos para aplicaciones de video, mientras que los de banda estrecha son adecuados para señales de audio.
En cuanto al nivel de las señales que manejan, los amplificadores de RF se pueden clasificar en dos categorías:
a) Amplificadores de RF a pequeña señal b) Amplificadores de RF a señal grande o de potencia
Los amplificadores a pequeña señal pueden trabajar con señales de entrada del orden de los microvolts o microamperes, además tienen circuitos de sintonía que los hacen selectivos. La distorsión producida por estos amplificadores no es considerable ya que generalmente trabajan en dase A.
Por el contrario, los amplificadores de potencia se diseñan para amplificar señales con amplitudes relativamente altas y producir potencias de salida que permitan excitar a una antena o a otras etapas amplificadoras. Estos amplificadores trabajan regularmente en dase C lo que provoca que generen distorsión pero también rendimientos muy buenos.
Los amplificadores a pequeña señal tienen aplicaciones en muchos sistemas electrónicos de la vida cotidiana, por ejemplo en los receptores de TV en los cuales se encargan de elevar el nivel de la señal modulada de entrada para que posteriormente otros subsistemas extraigan las señales de audio y video. Como este tipo de amplificadores maneja señales de bajo nivel generalmente encuentran uso en sistemas receptores o en etapas de preamplificación
5.2 Algunos aspectos de diseño en estado sólido
El diseño de amplificadores de RF de potencia representa un problema difícil especialmente cuando se requiere una operación lineal con bajos niveles de voltaje de polarización. Supongamos que tenemos el siguiente amplificador fuente común (fig. 5.1) que entrega en una potencia de 1 W en su salida que es una antena con 50 C2 de impedancia.
Haciendo un sencillo cálculo encontramos que para que exista esta potencia debe haber un voltaje de 20 Vpp en la antena y para que esto sea posible VOO debe ser más grande que 20 V.
30

Fig. 5.1 Amplificador fuente común (Figura tomada de la referencia no. 4 de la bibliografía)
Este voltaje puede no ser tan grande para aplicadones en equipos fijos pero es demasiado para el diseño de equipos portátiles que utilicen un amplificador con estas características. Una manera de reducir VOD es colocar en lugar de RL un inductor de valor muy elevado llamado choque ó RFC (Radio Frequency Choke) como se ve en la figura 5.2
T
Fig. 5.2 Sustitución de RL por RFC para disminuir VW, (Figura tomada de la referencia no. 4 de la bibliografía)
Con esta modificación es posible disminuir VDD a la mitad ya que ahora el voltaje en el punto X puede variar su valor desde casi cero hasta 2 VDD.
Podemos reducir aún más el nivel de Vx para sobrecargar menos al transistor pero para seguir teniendo 1 W en la antena es necesario conectar una red de acoplamiento de impedancias (Fig. 5.3) que reduzca la impedancia que ve el amplificador de manera que se compense la disminución que ha sufrido el voltaje de polarización.
I O . Fig. 5.3 Inserción de una red de acoplamiento de impedancias para disminuir la impedancia de carga
(Figura tornada de la referencia no. 4 de la bibliografía)
31
A pesar de las reducciones conseguidas en VDD existen dificultades que surgen de las corrientes tan grandes que tienen que soportar el dispositivo de salida y la red de acoplamiento. Esto repercute obviamente en el montaje de los circuitos.
Es necesario hacer notar que la etapa de salida de los amplificadores de potencia normalmente solo tiene un transistor ya que considerando la magnitud de las corrientes que se generan, un mayor número de transistores provocaría pérdidas más grandes de potencia.
Uno de los parámetros más significativos de un amplificador de potencia es la efiaencia. Usualmente la eficiencia se calcula diwdiendo la potencia que el amplificador entrega a la carga entre la potencia que la fuente de voltaje entrega al amplificador. Otros parámetros que especifican el desempeño de un amplificador de potencia son los siguientes:
a) Potencia de salida b) Distorsión por intermodulación c) Voltaje de polarización d) Ganancia e) Nivel de señales espurias y armónicas
Como ya se ha visto, uno de los efectos de la carencia de linealidad de un sistema (en este caso un amplificador) es la generación de señales cuya frecuencia es diferente a la frecuencia de entrada, Io que trae como consecuencia una señal de salida cuyo ancho de banda es mayor al de entrada. Cuando un amplificador tiene asignado un canal para su operación es muy importante no producir estas señales ó por lo menos atenuarlas lo suficiente para evitar invadir canales vecinos.
Este comportamiento puede ser medido siguiendo el concepto de intermodulaaón explicado al inicio de este trabajo. Se introducen dos tonos de la misma amplitud y con frecuencias ligeramente distintas y se analiza la salida del amplificador. Los productos de intermodulación de tercer orden afectarán a los canales adyacentes mientras que los de quinto orden harán lo mismo con los canales que siguen a los vecinos inmediatos. Sin embargo esta prueba es adecuada sobre todo en las fases iniciales de un diseño ya que no muestra el compoltamiento del amplificador cuando procesa una señal aleatoria modulada.
5.3 Método de diseiio en RF propuesto por Motorda
Dos de las técnicas de diseño en RF a pequeña señal son:
a) El uso de parámetros de dos puertos b) El uso de algún tipo de circuito equivalente para el transistor.
Al existir la necesidad de diseñar amplificadores de RF se hizo necesario contar con procedimientos confiables que sirvieran para tal fin, en primer lugar se trató de adaptar las dos técnicas antes mencionadas al diseño en RF de potencia pero los resultados fueron bastantes pobres.
A mediados de los años 60’s Motorola introdujo el diseño de amplificadores de potencia de RF en estado sólido el cual se basaba en las impedancias de entrada y salida de los transistores. A partir de entonces este método ha
32
ganado amplia aceptación por ser un procedimiento sistemático de diseño y no un proceso de prueba y error. Para entender mejor las ventajas de este procedimiento veamos las limitaciones que implica adaptar los métodos de diseño en pequeña señal a señal grande.
Limitaciones de los parámetros a pequeña señal.
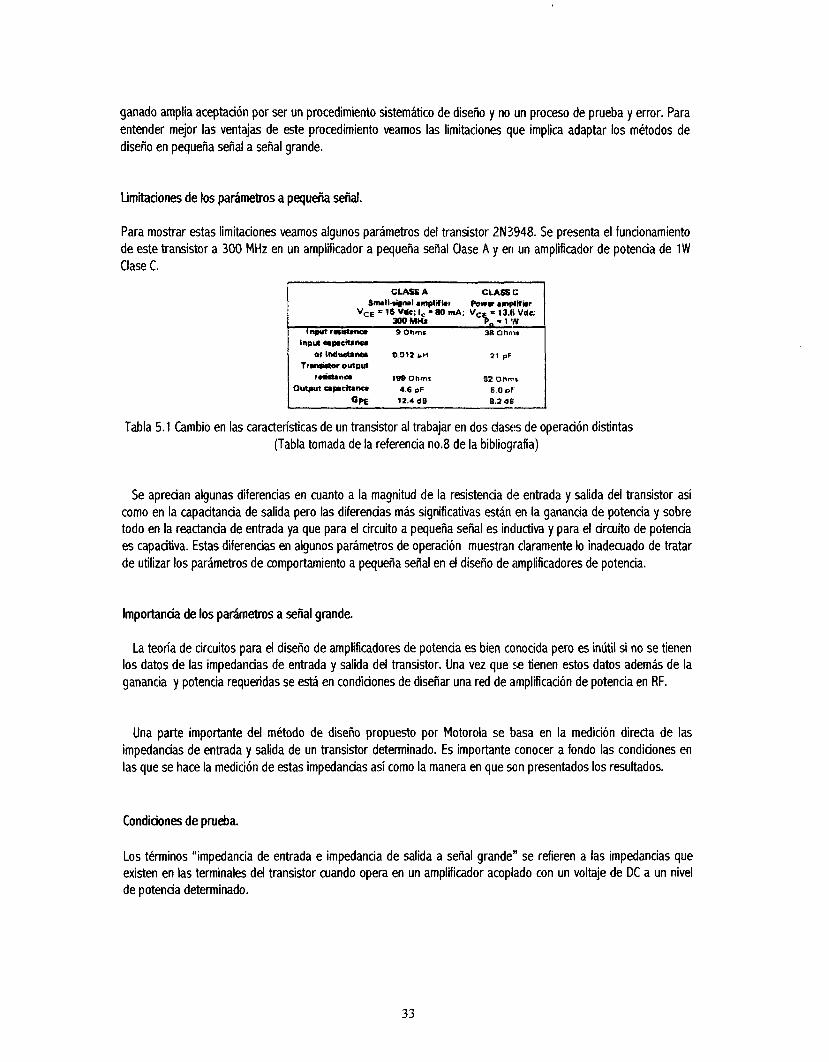
Para mostrar estas limitaciones veamos algunos parámetros del transistor 2N3948. Se presenta el funcionamiento de este transistor a 300 MHz en un amplificador a pequeña señal Clase A y en un amplificador de potencia de 1W Clase C.
Tabla 5.1 Cambio en las características de un transistor al trabajar en dos clases de operación distintas (Tabla tomada de la referencia no.8 de la bibliog,rafia)
Se aprecian algunas diferencias en cuanto a la magnitud de la resistencia de entrada y salida del transistor así como en ta capadtancia de salida pero las diferencias más significativas están en la ganancia de potencia y sobre todo en la reactancia de entrada ya que para el circuito a pequeña señal es inductiva y para el circuito de potencia es capacitiva. Estas diferencias en algunos parámetros de operación muestran claramente lo inadecuado de tratar de utilizar los parámetros de comportamiento a pequeña señal en el diseño de amplificadores de potencia.
Importancia de los parámetms a señal grande.
La teoría de circuitos para el diseño de amplificadores de potencia es bien conocida pero es inútil si no se tienen los datos de las impedancias de entrada y salida del transistor. Una vez que :e tienen estos datos además de la ganancia y potencia requeridas se está en condiciones de diseñar una red de amplificación de potencia en RF.
Una parte importante del método de diseño propuesto por Motorola se basa en la medición directa de las impedancias de entrada y salida de un transistor determinado. Es importante conocer a fondo las condiciones en las que se hace la medición de estas impedancias así como la manera en que san presentados los resultados.
Condiciones de prueba.
Los términos “impedancia de entrada e impedancia de salida a señal grande” se refieren a las impedancias que existen en las terminales del transistor cuando opera en un amplificador acoplado con un voltaje de DC a un nivel de potencia determinado.
33

El término acoplado o acoplamiento se refiere a la condición en la que las redes de entrada y salida del amplificador de prueba representan el conjugado de las impedancias del transistor de tal forma que la impedancia de entrada y salida del amplificador completo es de 50+jO ohms.
Las impedancias de entrada y salida no deben ser confundidas con los parámetros de dos puertos a pequeña señal ya que estos se miden a niveles de potencia bajos. La mayoría de los datos que aparecen en las fichas de datos de transistores de potencia de RF de Motorola son medidos en amplificadores clase C con emisor común, ya que esta condición abarca la mayoría de las aplicaciones de estos dispositivos.
Una excepción significativa a lo anterior son los transistores caracterizados para amplificadores lineales de potencia clase B. Dado que estos transistores se diseñan específicamente para una operación lineal sus impedancias a señal grande son medidas en un amplificador lineal de prueba con una señal compuesta de dos tonos en lugar de la señal convencional de un solo tono.
Formato de los datos.
Gran parte de la información de las fichas de datos se presenta por medio de un equivalente en paralelo de una resistencia y una capacitancia. Los datos también pueden ser presentados por un equivalente en serie. No hay diferencia si se usa una u otra forma mientras el diseñador ponga atención a la forma que esta empleando.
Otra forma de presentar los datos de impedancia utiliza el equivalente en sene dibujado en una carta de Smith (fig. 5.4). Esta forma es muy común en transistores de potencia de UHF debido al uso tan amplio que la carta de Smith tiene en el diseño de circuitos con microantas.
Fig. 5.4 Impedancia compleja en serie representada en una carta de Smith (Figura tomada de la referencia 8 de la bibliografia)
34
Diseño de amplificadores.
Después de haber seleccionado un transistor con los requerimientos de funcionalidad necesarios, el siguiente paso en el diseño de amplificadores de potencia es determinar las impedancias de entrada y salida a señal grande del transistor.
Cuando se usan dispositivos cuyos datos están disponibles esta etapa implica únicamente leer los valores de las impedancias en las fichas de datos. Si únicamente está la capacitancia de salida en las fichas entonces la resistencia de carga de colector puede ser calculada como se explica en la sección destinada a ese fin.
De nuevo es importante señalar que el diseñador debe ser cuidadoso al determinar si los datos de impedancia están en su forma equivalente en serie o paralelo y usarlos adecuadamente. Si los datos no están disponibles una sección posterior contiene la información necesaria para hacer las mediciones de impedancia. Una vez que se determinaron las impedancias a señal grande el diseñador selecciona una configuración de circuito adecuada y procede a su síntesis.
Resistencia de carga de colector.
Los datos de impedancia a señal grande en HF y VHF han sido publicados en su mayor parte por Motorola sin la información de la resistencia de carga de colector. La razón es que esta resistencia puede ser calculada fácilmente como a continuación se detalla.
Si algunas simplificaciones son hechas, el voltaje de colector teórico de un amplificador de potencia con una red de salida sintonizada es una onda senoidal que toma valores desde cero hasta 2 Vcc.
Hacer estas suposiciones también implica que:
l . VceSt es cero. 2. La red de salida tiene un valor adecuado de Q para producir un voltaje senoidal sin importar el ángulo de
3. La caída de voltaje en la fuente de DC que alimenta al colector es cero. 4. La impedancia de carga del colector en todas las armónicas de la frecuencia de operación es cero.
conducción del transistor.
Obviamente ninguna de las suposiciones anteriores es verdadera y las discrepancias más serias pueden surgir de los puntos 1 y 4. Sin embargo las condiciones son suficientemente buenas como para produar resultados satisfactorios.
Vamos a suponer por un momento que esta situación teórica eiste. Entonces el equivalente en paralelo de la resistencia de carga del colector RL’ viene a ser una función de la potencia de salida de RF y de Vcc únicamente. La expresión para RL’ es la siguiente:
R<=Vcc2/2P ... (5.1) donde P es la potencia de salida en RF.
35

Por consiguiente, la impedancia de carga de colector para un diseño de un amplificador sena el conjugado del equivalente paralelo de la capacitancia de salida y la resistencia de carga de colector calculada en la ecuación 5.1
A pesar de las suposiciones que son requeridas, la experiencia con componentes concentrados en un punto (lumped components) en HF y VHF, con amplificadores de potencia con voltajes de alimentación desde 7 a 30 Vdc y con niveles de potencia de salida desde unas decenas de watt hasta 300 watts ha demostrado que el uso de la ecuación 5.1 para calcular RL' produce buenos resultados.
Desde luego, si el valor de Vce, del transistor se conoce con precisión para la frecuencia de operación y el intervalo en el que varía la corriente de colector en un amplificador determinado la ecuación 5.1 se modifica de la siguiente forma:
RL'=(VCC- VC%~ )2/2P... (5.2)
El advenimiento de una gran cantidad de transistores de potencia de UHF y los problemas asociados de diseño trajo como consecuencia la revisión de los métodos de Motorola de presentar las impedancias a señal grande para dispositivos de UHF. Algunas razones de estos cambios son la popularidad de las redes de acoplamiento con microcintas y valores más altos de VceSat en UHF.
La principal diferencia en el formato de los datos est i en la impedancia de salida, la cual es presentada en su forma compleja completa en lugar de graficar únicamente el equivalente paralelo de la capaatancia de salida y usar la ecuación 5.1 ó 5.2 para calcular la resistencia de carga.
Mas aún, los dispositivos de UHF son medidos en un amplificador de prueba hecho a partir de microcintas con el fin de determinar las impedancias del transistor en un medio que sea lo mas parecido posible a la mayoría de las aplicaciones actuales más comunes del dispositivo. Y finalmente se usa una gráfica en una carta de Smith ya que representa una herramienta común para el diseñador de redes de microcintas.
Las futuras fichas de datos de Motorola podrían incluir también los datos de la resistencia de carga de colector a frecuencias por debajo del rango de UHF. La información es automáticamente generada por el circuito de prueba que se esté usando al medir Cin, Rin y Cout.
Medición de parámetros
Aunque sea posible encontrar las impedancias a señal grande en las fichas de datos puede ser de ayuda saber como fueron encontrados esos datos. El procedimiento de medición de parámetros consiste en colocar el transistor en un circuito de prueba que posea una buena capacidad de sintonía. El diseño del amplificador de prueba se basa en una estimación de las magnitudes de las impedancias que se quieren conocer. Parece ser que se está ante un problema sin salida ya que para determinar las impedancias es necesario diseñar un amplificador para lo cual se requiere saber dichas impedancias. Esta situaaón se resuelve utilizando la capaadad que tiene el amplificador sintonizarse en un intervalo amplio permitiendo con esto que gradualmente pueda ser ajustado hasta encontrar los datos deseados.
36

Sintonizar el amplificador de prueba para que produzca la potencia de salida máxima es válido solamente si las impedancias de carga y de la fuente son de 50 + j0 ohms. Generalmente se dispone de una carga de ese valor en los laboratorios pero para el circuito de entrada existe un problema ya que los generadores de señal de RF no tienen una impedanaa preasa de 50 ohms.
Una buena solución es conectar un medidor de potencia direccional entre la entrada del amplificador y el generador de señal. Si la impedancia del generador no es de 50 ohms entonces habrá potenaa reflejada proveniente del amplificador que será detectada por el medidor de potencia y entonces será necesario ajustar el amplificador hasta que se obtenga una potencia reflejada igual a cero o a un valor mínimo.
En algunos casos el amplificador reflejará potencia generada por armónicos que impedirá que se obtenga una lectura de potencia reflejada mínima. Esto se puede solucionar colocando un filtro pasabanda centrado en la frecuencia de la señal de prueba que atenúe la potencia de las armónicas. Un amplificador de prueba típico para mediaones en HF y VHF se muestra en la fig. 5.5
Fig. 5.5 Amplificador de prueba típico para la medición de las impedancias a señal grande (Figura tomada de la referencia no. 8 de la bibliografia)
Una vez que el amplificador se sintoniza adecuadamente se procede a retirar el voltaje de polarización, la señal de entrada, la resistencia de carga y el transistor del amplificador de prueba para poder medir las impedancias a señal grande. La impedancia de entrada es el conjugado de la impedancia medida entre las terminales de base y emisor y la impedancia de salida es el conjugado de la impedancia entre colector y emisor (Fig. 5.6)
Fig. 5.6 Puntos en los cuales son medidas las impedancias a señal grande
37

5.4 Altematias para la medición de irnpedancias a señal grande.
Una de los pasos más importantes y decisivos en el diseño de amplificadores de potencia es la medición de las impedancias de entrada y salida de un dispositivo como un BIT, FET o tubo de vacío o de una etapa amplificadora completa, por lo que es deseable contar con procedimientos alternos que brinden posibilidades de elección al diseñador según sea el equipo y material con que se cuente en el laboratorio.
Existe un procedimiento sistemático que ayuda a encontrar la red de acoplamiento a señal grande para un amplificador mediante la implementación del siguiente circuito.
Fig. 5.7 Circuito para medir impedancias con el método de load-pull (Figura tomada de la referencia no. 4 de la bibliografía)
El procedimiento que se sigue es básicamente el siguiente: $ f."!
Se inyecta la señal del generador al amplificador bajo prueba cuya salida está conectada a un sintonizador que & 9 mediante una señal de control vana su impedancia (ZI) gradualmente y de manera automática. El sintonizador i l c, selecciona valores de impedancias que mantienen la lectura del medidor de potencia constante en un valor predeterminado. Es importante tener un segundo sintonizador que mantenga fija la impedancia 2, ya que tiende a 2: 12 cambiar cuando 21 se modifica. 5 - ;-. "
k; ..
m ('*
.' ' - ,., ,
Los resultados de esta prueba se pueden mostrar en una carta de Smith mediante contornos de potencia los cuales son curvas cerradas compuestas de todos los valores de impedancia que producen un valor determinado de potencia en la salida del amplificador. A través de reiteradas mediciones, cada una de las cuales produce un contorno de potencia más cerrado es posible encontrar un punto, un Único valor de impedancia de carga que produce la máxima potencia de salida.
Este método conocido en inglés como "load-pull'' ha sido muy utilizado en el diseño de amplificadores de potencia pero requiere el montaje de un circuito de medición controlado por computadora que además debe contar con sintonizadores precisos y estables.
Tiene el inconveniente de que los datos obtenidos para un dispositivo de cierto tamaño no pueden ser usados para un dispositivo con un tamaño distinto. Algo similar ocurre con ia frecuencia; los resultados obtenidos para una frecuencia de prueba no son válidos para otra frecuencia. Otra opción que en algunas ocasiones puede ei tar el montaje de un circuito como el de la figura 5.7 es la simulación de circuitos.
38

Existen programas de simulación como SPICE que permiten determinar las impedancias a señal grande de un dispositivo mediante una medición de parámetros S a pequeña señal y luego adaptar los resultados al caso de señal grande. Hay que señalar que este método requiere modelos precisos y confiables para hacer las simulaciones y una manera de tenerlos es diseñar circuitos con ellos y ver que tan cercanos son los resultados obtenidos en el laboratorio de los valores esperados. Algunos artículos que tratan este tema se encuentran en páginas WEB como www.rfdesign.com.
5.5 Algo sobre l o s tubos de vacío
El diseño basado en dispositivos de estado sólido presenta varias ventajas interesantes, por ejemplo los equipos se hacen más compactos y su vida útil se prolonga, además la fabricación de los componentes de estado sólido se simplifica cada vez más. Sin embargo cuando es necesario manejar grand& cantidades de corriente y voltaje los transistores son superados por los tubos de vaáo en varios aspectos, por ejemplo:
a) Los transistores de RF no pueden desarrollar por sí solos mas de 150W de potencia.
b) Los transistores de RF no tienen la estructura interna que les permita soportar cantidades considerables de calor sin dañarse.
c) Los transistores son mucho menos tolerantes a abusos en el suministro del voltaje de alimentación que los tubos de vacío.
d) Los dispositivos de estado sólido suelen ser muy sensibles a un daño ocasionado por electricidad estática.
Por todo lo anterior se consideró importante abordar el tema de los tubos de vacío mostrando los principales aspectos de su principio de operación.
Principios de operackjn de un tubo de vacío
El funcionamiento de los tubos de vacío se basa en la teoría termo-iónica que establece que una forma de lograr que los átomos dentro de un metal liberen electrones y formen una corriente eléctrica es calentando dicho metal.
En un tubo de vacío existe una parte llamada cátodo que al calentarse comienza a despedir electrones los cuales ingresan a una región del tubo que está al vacío (de ahí el nombre del dispositivo) y viajan en línea recta hasta alcanzar el otro extremo del tubo llamado placa.
1.
Los electrones son capaces de completar su recorrido gradas a que la placa tiene un potencial positivo (conocido como voltaje de placa) que los atrae debido a la diferencia de signos en las cargas.
39

El calentamiento del cátodo lo hace un elemento conocido como filamento que en condiciones normales de operación es atravesado por una corriente alta de AC para producir el calor suficiente para que la emisión de electrones sea posible. Los cátodos deben estar hechos con materiales que tengan la característica de emitir la mayor cantidad de electrones a la menor temperatura posible, ejemplos de estos materiales son el tungsteno y algunos metales recubiertos de óxido.
Es importante señalar que si se aumenta el voltaje de placa también aumentará el número de electrones que salen del cátodo rumbo a &a, dando como resultado un incremento en la comente del dispositivo. Pero existe un límite para este fenómeno ya que todo tubo tiene un punto de saturación que al ser rebasado provoca que cualquier incremento adicional en el voltaje de placa no produzca un correspondiente aumento en la corriente.
Cuando un tubo de vacío solo tiene dos terminales (cátodo y placa) es llamado diodo y al igual que un diodo semiconductor solo deja pasar corriente eléctrica en una dirección. A continuación se revisará algo sobre el dispositivo que le sigue en complejidad a un diodo.
Un triodo es un tubo que como su nombre lo indica tiene tres terminales. La terminal adicional se conoce como rejilla de control lo cual hace alusión a su forma debido a que fisicamente es una malla de alambre situada en medio del cátodo y la placa. La función de la rejilla es controlar el flujo de electrones por medio del voltaje que le sea aplicado. Por ejemplo si hay un voltaje positivo en la rejilla entonces habrá una corriente de electrones fluyendo de cátodo a placa porque este potencial favorece esta situación pero cuando la rejilla tiene un voltaje negativo la influencia del voltaje positivo de la placa sobre los electrones se ve opacada y la comente es inhibida. Dicho de otra forma, la rejilla es una terminal de control de corriente anátoga a la base de un BIT.
La construcción física de un tubo de vacío mediante dos conductores (cátodo y placa) separados por un dieléctrico (vacío) genera una capacitancia entre placa y cátodo, entre rejilla y cátodo y entre rejilla y placa. De estas tres capacitancias es la última la que puede causar mas problemas.
Para combatir los efectos de esta capaatancia se intercala una segunda rejilla (rejilla pantalla) en medio de la rejilla de control y la placa con lo cual se disminuye la capacitancia rejilla de control-placa. A este tipo de tubos se les conoce como tetrodos.
Es probable que cuando fluye corriente a través de un tetrodo algunos electrones en la placa sean desprendidos de sus átomos debido a la fuerza con la que llegan los electrones provenientes del dtodo. Cuando esto ocurre en un triodo no hay ningún problema porque la rejilla de control generalmente tiene voltajes negativos que envían de regreso esos electrones a la placa, pero en el caso de un tetrodo no ocurre así porque la rejilla de pantalla tiene un voltaje positivo que atrae a esos electrones y que ayuda a establecer una corriente inversa placa-rejilla de pantalla lo cual trae como consecuencia inmediata una disminución en la potencia del dispositivo. Se puede colocar una rejilla llamada supresora que tenga un potencial negativo y que esté ubicada entre la placa y la rejilla pantalla. Este nuevo dispositivo de cinco terminales es un pentodo.
40

6. RECOMENDACIONES
El diseño en RF es una rama de la electrónica que exige un cuidado y atención considerables debido a que en altas frecuencias surgen algunos fenómenos que adquieren gran importancia y que a frecuencias bajas son despreciados.
2 2 5 9 0 1 Por ejemplo es obligatorio que en los amplificadores de RF se utilice un punto de tierra Único para evitar
interferencias entre etapas distintas. También la longitud de los conductores es crítica ya que si un amplificador tiene conductores largos en lugar de amplificar puede producir oscilaciones auto-sostenidas o producir un efecto mutuo capacitivo o inductivo con otras etapas. Considerando la longitud, un conductor demasiado largo en RF se comporta como una línea de transmisión.
Cuando se tienen circuitos sintonizados cuyos campos puedan inducir tensiones en otros circuitos es necesario colocar blindajes que proporcionen un aislamiento entre etapas vecinas. El material más apto para hacer blindajes es la plata por ser el mejor conductor, pero debido a su costo es muy empleado el aluminio. Otra alternativa es considerar que a altas frecuencias la corriente solo fluye en forma de película dentro de un conductor y por lo tanto es posible usar blindajes hechos de cobre pero recubiertos de plata.
Prácticamente todos los receptores de comunicaciones usan apantallamientos para las bobinas de RF y FI (frecuencia intermedia) para evitar sintonías erráticas y oscilaciones indeseables. También la señal de AC que llega a la fuente de voltaje puede provocar un zumbido en la señal modulada si no se aisla de manera correcta.
Otra consideración importante es la disipación de calor de los dispositivos amplificadores ya sean BIT’S, FET’s o tubos de vacío. Una disipación de calor deficiente puede provocar la destrucción de los dispositivos especialmente los de estado sólido por Io que es recomendable utilizar los disipadores adecuados y un flujo de aire suficiente que impida la concentración excesiva de calor en los puntos sensibles de los sernicondudores. En algunos manuales de los fabricantes se publican notas de aplicación sobre la disipación térmica necesaria para un adecuado desempeño de los productos.
AI iniciar un diseño se debe plantear la disposición de los componentes tomando en cuenta la longitud de los conductores y el blindaje entre etapas de modo que desde las primeras pruebas y montajes se utilicen placas de circuito impreso de fibra de vidrio y dependiendo de los resultados obtenidos se hagan las modificaciones necesarias. El montaje en protoboard y la técnica de wire-wrap no sirven en RF porque dan lugar a una gran cantidad de capaatancias parásitas.
También se debe tomar en cuenta la frecuencia y la potencia de las señales que se manejan en RF. En algunas etapas donde fluyen corrientes considerables se deben emplear pistas anchas en lugar de pistas gruesas debido al efecto pelicular de la corriente en altas frecuencias.
Otro aspecto muy importante para la realización exitosa de cualquier diseño electrónico es la adquisición de componentes. La falta de componentes adecuados puede afectar el desempeño de un diseño o en el peor de los casos puede paralizar o cancelar la implementación del mismo.
41
Es muy importante que la etapa de diseño no se haga de manera aislada para que se puedan hacer las modificaciones necesarias en caso de que no sea imposible conseguir algunos componentes. Por lo tanto es necesario verificar que los valores de los componentes que vayan surgiendo del diseño estén disponibles comercialmente.
Los elementos necesarios en un diseño de RF deben tener características especiales que les permitan funcionar confiablemente en determinadas condiciones de potencia y frecuencia. Se debe ser cuidadoso de seleccionar el componente correcto tomando en cuenta las condiciones en las que va a funcionar pero además se tiene que considerar et material y la estructura Csica del componente. Por ejemplo supóngase que se va a probar el funcionamiento de un amplificador y es necesario poner una carga resistiva de 50 en la salida. Si se elige colocar una resistencia de alambre, la prueba no producirá resultados satisfactorios ya que la resistencia se comportará como una inductancia en RF.'En este c a k sería adecuado usar una carga fantasma o una resistencia * Y - .. ". de carbón.
En nuestro país existe una carencia de componentes especializados de RF y la mayoria de las veces es necesario e' comprar los componentes en EU con la dificultad que esto implica ya que es necesario establecer contacto con las 8: casas distribuidoras en idioma inglés, además se debe considerar que el costo de los componentes se especifica c7 c en dólares y que se debe pagar un impuesto aduana1 y una tarifa de mensajería internacional para contar con los c: I
componentes en un tiempo razonable. ". S 11'1 2 I z -3 c.. r : T L
....
A pesar de lo exqlicado en el párrafo anterior, las posibilidades de llevar a buen término un proyecto de diseño rn ;: \3 (I
en RF son mayores que antes de la aparición de Internet debido a que este medio permite acceder a la publicidad G. ;, de muchas empresas especializadas en RF. De todos modos es recomendable buscar los componentes en ri ;;
compañías nacionales o en empresas extranjeras con sucursales en México y en caso de no encontrarlos recurrir a " -1.
Internet. m; o .*.
-4 ;.
. S ' . i.
Por último se puede decir que el equipo de prueba y medición es algo fundamental en el diseño de radiofrecuencia. Una breve lista del material requerido se presenta a continuación:
1 .- Analizador de espectro 2.- Generador de RF 3.- Generador de audio 4.- Medidor de potencia y VSWR (relación de ondas estacionarias) 5.- Cargas fantasma de 50 R 6.- Cables y conectores de buena calidad.
42

7. CONCLUSIONES
El diseño de un transmisor de FM que sea capaz de tener potencias de salida de varios watts representa una serie de desafíos para una persona que inicia en esta área de la Ingeniería Electrónica. Entre los retos más importantes están los siguientes:
1. Conseguir bibliografia adecuada y actualizada sobre estos temas.
2. Comprender todos los conceptos fundamentales que soportan la teoría de la FM y la amplificación de potencia en RF para estar en condiciones de desarrollar adecuadamente el diseño.
3. Contar con un suministro suficiente de componentes y herramientas así como de un conjunto de equipo de prueba y medición que permita evaluar el desempeño del diseño.
Toda persona que incursione en estos temas debe contar con los recursos anteriormente descritos y con una disponibilidad de tiempo para la experimentación y el estudio. Ambos aspectos: experimentación y estudio deben complementarse si se desea obtener buenos resultados ya que si se exagera en la experimentación y se descuida la comprensión de conceptos es probable que se gaste demasiado tiempo en resolver una falla por no tener una comprensión clara del funcionamiento de un circuito. En el otro extremo, si se dedica mucho tiempo a la teoría hay que recordar que los circuitos de RF son una cosa en los libros y otra en la vida real.
De manera general se puede dear que el diseño de un sistema de FM se hace en dos partes claramente diferenciadas. La primera parte se encarga de acondicionar la señal que va a ser transmitida para pasarla después a la etapa en donde se modula en frecuencia la señal portadora. Esta parte del diseño trabaja con niveles muy bajos de potencia por lo que no ofrece muchos problemas, aunque si es necesario tener cuidado en los blindajes de algunos componentes como los que generan la portadora. Este tipo de etapas puede ser construida con componentes discretos o incorporar algún tipo de circuito integrado que reduzca el tamaño y las dificultades del montaje.
En la siguiente parte del diseño se presentan situaciones más difíciles de resolver como el acoplamiento de impedancias, la interferencia electromagnética, la elección del dispositivo amplificador y la disipación de calor entre otras dando como resultado una mayor inversión de tiempo y recursos materiales en esta parte del diseño.
De la experiencia tenida con este tipo de circuitos se puede afirmar que la etapa de modulación puede ser implementada a base de un circuito integrado. Para la etapa de potencia es recomendable, si no se tiene suficiente experiencia, diseñar un amplificador de potencia que no rebase los 2W para no tener que incorporar varios pasos de amplificación lo que repercutiría en la complejidad del diseño. Este amplificador podría hacerse con transistores de costo no muy elevado y una alternativa interesante es emplear un tubo de vacío por las ventajas descritas en el capítulo 5 además de la existencia de estos dispositivos en el mercado naaonal.
Posteriormente se podría intentar desarrollar más potencia usando transistores de potencia como el 2N5590 ( 1 OW) o bien con tubos más grandes pero ya teniendo un cierto nivel de experiencia en aspectos como el acoplamiento de impedancias, la disipación de calor, los materiales empleados en RF, etc.
43

1. STREMLER, F.G. [1993]. Introducción a los sistemas de comunicación, 3a. Ed., Addison-Wesley Iberoamericana, Delaware E.U.A.
Contiene conceptos importantes del tema de ruido, así como un desarrollo de las series de Fourier (exponenaal y trigonométrica) que permite una mejor comprensión de la distorsión armónica total (THD) en el capitulo 2.
2. SEDRA, AS. y SMITH, K.C. [1990]. Microelectronic Circuits, 3a. Ed., Saunders College Publishing, Florida E.U.A. En el capitulo 1 se abordan temas básicos de electrónica de manera muy dara sin perder por esto precisión. Es
recomendable leer este capitulo sobre todo en las secciones que tratan sobre señales y amplificadores. Por otra parte el capitulo 9 hace una buena revisión de las clases de operación mediante el uso de gráficas y circuitos prácticos.
3. EDITORIAL CEKIT [1990]. Curso de Radio AM, FM, Banda Ciudadana y Radioafición, Bogotá, Colombia. Trata de manera muy amena y clara aspectos como ganancia, impedancias, respuesta en frecuencia y otros en
su lección 18. Es buena practica abordar un tema primero en una publicación como esta para después pasar a un texto más riguroso.
4.
5.
6.
J.
8.
RAZAVI, B. [1998]. RF Microelectronics, Prentice Hall, Nueva Jersey E.U.A Es una obra muy completa y rigurosa que se enfoca principalmente al diseño de RF basado circuitos
integrados y MOSFET's y en técnicas de modulación digital.
SHRADER, R. [1968]. Comunicación Electrónica, 2a Ed., McGraw-Hill. Contiene un buen contenido sobre el diseño de amplificadores de RF basados en tubos de vacío. Solo es
recomendable para el diseño con este tipo de dispositivos amplificadores.
THE ARRL'S HANDBOOK [1995]. Proporciona un conocimiento claro y aplicado de muchas áreas de la electrónica en un estilo directo y fácilmente entendible. Aunque deben hacerse las distinciones necesarias para encontrar el material deseado ya que es una obra destinada a radioafiaonados es recomendable para cualquier persona afin a la Ingeniería Electrónica.
BRUSS, H. Montajes de Radiofreamaa. Es una guía de diseño en RF pero sobre todo relacionado con la construcción de transmisores para control a distancia de modelos.
MOTOROLA [1989]. RF Device Data Vol. I y 11. Contiene informacih sobre los componentes de RF fabricados por Motorola además de una buena colección de notas de aplicación que ilustran muchos de los aspectos prácticos del diseño en RF. Es necesario tomar en cuenta la fecha de edición de este tipo de publicaciones para evitar hacer diseños basados en dispositivos discontinuados. De todas maneras es muy recomendable tener
44

acceso a este tipo de materiales.
9. CLARKE, K. & HESS. Communication Circuits
10. HAYKIN, S. [1983]. Communication Systems, 2a Ed., John Wiley & Sons, Nueva York E.U.A.
1 1. PANTER, P.F. [1965]. Modulation, Noise and Spectral Analysis, McGraw-Hill, Nueva York E.U.A.
12. SCHWARTZ, M. [1980]. Information Transmission, Modulation and Noise, 3a Ed., McGraw-Hill, E.U.A.
13. CARLSON, A.B. [1986]. Communication Systems, 3a Ed., McGraw-Hill, Nueva York E.U.A.
45