Cinematica Del Vehiculo
92
Click here to load reader
-
Upload
jhony-jerez-lbc -
Category
Documents
-
view
212 -
download
0
Transcript of Cinematica Del Vehiculo

PROYECTO FIN DE MASTER
ESTUDIO CINEMÁTICO DEL COMPORTAMIENTO DE LA
SUSPENSIÓN DE UN PROTOTIPO DE FORMULA SAE STUDENT
ELÉCTRICO DEL EQUIPO UPM RACING.
Presentado en la
Universidad Politécnica de Madrid
Instituto de Investigación del Automóvil
Por
Ing. Giovanny Pablo Pillajo Quijia
Para la obtención del título de
MÁSTER EN INGENIERÍA DE AUTOMOCIÓN
Dirigido por
Ing. Miguel Ángel Álvarez Bórea
Madrid, Octubre 17 de 2012

ii
AGRADECIMIENTOS
Primero agradezco a Dios por seguir bendiciendo mi vida, salud, trabajo y estudios,
a mis padres Luz María Quijia y Segundo Majin por su apoyo incondicional, emocional,
consejos y valores transmitidos, que me han permitido seguir alcanzando mis objetivos; a
mis hermanos Cristian, Evelin, Yajaira y Julissa por sus ánimos y alientos brindados a la
distancia; a mi novia Arito por su amor, cariño y apoyo dedicado todo el transcurso del
Máster.
Agradezco a la Secretaría Nacional de Educación Superior, Ciencia, Tecnología y
Educación SENESCYT y el Gobierno del Ecuador presidido por el Ec. Rafael Correa
Delgado, por la oportunidad brindada para estudiar éste postgrado en España, promoviendo
la formación del talento humano y el desarrollo de la investigación, innovación y
transferencia tecnológica, así también al Centro Transferencia Tecnológica para la
Capacitación e Investigación en Control de Emisiones Vehiculares (CCICEV) de la
Escuela Politécnica Nacional por facilitar el auspicio para obtener la beca de estudios.
Se agradece a la Escuela Politécnica de Madrid principalmente al Instituto
Universitario de Investigación del Automóvil (INSIA) y a todos los profesores que
supieron transmitir sus conocimientos de manera adecuada en cada asignatura dictada; a
Miguel Ángel Álvarez por su colaboración y consejos en el proyecto fin de carrera; mil
gracias a todos los compañeros del Máster en Ingeniería de Automoción XXI y del Máster
en Ingeniería de Vehículos Híbridos y Eléctricos I, especialmente al grupo SAE UPM
Racing Team por todos los momentos y anécdotas compartidas durante el Máster, de
seguro os echaré de menos.

iii
PRESENTACIÓN
La Fórmula SAE Student, ha venido realizando año tras año, una competición de
vehículos incluyendo a los propulsados a motor eléctricos, esta clase de concursos entre
universidades de diferentes lugares del mundo, motivan a estudiantes a competir y mejorar
todas las habilidades adquiridas en la sala de clase, logrando así una mejora tecnológica e
intelectual.
El presente proyecto solicitada por el equipo de la UPM Racing Eléctrico, está enfocado a
un estudio cinemático del sistema de suspensión para el prototipo de formula SAE –
Eléctrico, y que el sistema cumpla con toda la seguridad pertinente, y con los requisitos
establecidos en la normativa para la competición en Inglaterra.
El primer capitulo habla sobre los objetivos que se pretenden alcanzar, la metodología y
estructura del proyecto a seguir.
El siguiente capítulo se detalla acerca de la competencia de la Formula SAE, las
participaciones de la Universidad Politécnica de Madrid y la normativa a cumplir,
específicamente concerniente al sistema de suspensión.
En el tercer capítulo se muestra el marco teórico de la suspensión y sus características, así
también los parámetros cinemáticos a tomar en cuenta para el análisis de la suspensión.
El análisis cinemático de la suspensión se detalla en el cuarto capítulo, donde se explica los
parámetros de partida, las bondades del programa LSA Lotus Suspension Analisys y la
respectiva aplicación de la simulación.
En el siguiente capítulo (5) se indica los lineamientos básicos a tomar en cuenta para
realizar un ensayo real del prototipo y recomendaciones de puesta a punto de un
monoplaza.
La planificación y actividades que se realizó dentro del proyecto y participación en el
equipo que representa a la UPM, se encuentra en el sexto capítulo, con lo cual se participó
en la competición de Silverston 2012.
En el último capítulo se describe las conclusiones del proyecto y futuras líneas de trabajo.

iv
ÍNDICE
AGRADECIMIENTOS ............................................................................................................................ ii
PRESENTACIÓN .................................................................................................................................. iii
1.1. ANTECEDENTES .................................................................................................................. 1
1.2. OBJETIVOS .......................................................................................................................... 2
1.2.1. OBJETIVOS GENERALES .............................................................................................. 2
1.2.2. OBJETIVOS ESPECÍFICOS ............................................................................................. 2
1.3. METODOLOGÍA Y ESTRUCTURA DEL DOCUMENTO ........................................................... 3
CAPITULO II ........................................................................................................................................ 4
FORMULA SAE Y UPM RACING ........................................................................................................... 4
2.1. HISTORIA DE LA COMPETICIÓN .......................................................................................... 4
2.2. UPM Racing FSAE ............................................................................................................... 4
2.3. ¿Qué es la Formula Student SAE Eléctrico? ....................................................................... 6
2.4. Ficha técnica UPM Racing FSAE Eléctrico 2011 .................................................................. 8
2.5. Pruebas estáticas y dinámicas............................................................................................ 8
2.5.1. Pruebas estáticas ....................................................................................................... 8
2.5.2. Pruebas dinámicas ................................................................................................... 10
2.6. Reglamento a tener en cuenta en el diseño de la suspensión ........................................ 11
CAPITULO III ..................................................................................................................................... 12
LA SUSPENSIÓN EN LA COMPETICIÓN ............................................................................................. 12
3.1. Fundamentos teóricos ..................................................................................................... 12
3.1.1. Elementos y características del sistema de suspensión ........................................... 13
3.2. Tipos de suspensiones en competición ............................................................................ 26
3.2.1. Push-rod ................................................................................................................... 27
3.2.2. Pull-rod ..................................................................................................................... 28
3.3. Geometría de la suspensión y parámetros cinemáticos .................................................. 29
3.3.1. Convergencia ............................................................................................................ 29
3.3.2. Caída “Camber” ........................................................................................................ 31
3.3.3. Ángulo de salida ....................................................................................................... 33
3.3.4. Ángulo de Avance “King-pin axis” ............................................................................ 35

v
3.3.5. Centro de Gravedad ................................................................................................. 37
3.3.6. Centro Instantáneo “Instant center” ........................................................................ 38
3.3.7. Centro de balanceo “roll center” ............................................................................. 39
3.3.8. Eje de balanceo “roll axis” ........................................................................................ 40
3.3.9. Rigidez de balanceo .................................................................................................. 40
3.3.10. Geometría Anti-levantamiento “anti-squat” y Anti-hundimiento “anti-dive” ..... 41
3.3.11. Bump steer y roll steer ............................................................................................. 43
3.3.12. Geometría de Ackermann ........................................................................................ 44
CAPITULO IV ..................................................................................................................................... 46
ANÁLISIS CINEMÁTICO DE SUSPENSIÓN FSAE ELECTRIC UPM ........................................................ 46
4.1. Diagnóstico de suspensión UPM 2011 E .......................................................................... 46
4.2. Datos de partida ............................................................................................................... 47
4.3. Cálculos de rigidez de muelles ......................................................................................... 49
4.3.1. Eje delantero ............................................................................................................ 49
4.3.2. Eje Posterior ............................................................................................................. 49
4.4. Introducción del Programa Lotus Suspension Analysis “LSA” ......................................... 50
4.4.1. Presentación ............................................................................................................. 50
4.4.2. ¿Qué es el Lotus Suspension Análisys? .................................................................... 51
4.4.3. Usos normales de Análisis Suspensión Lotus ........................................................... 52
4.4.4. Conceptos generales ................................................................................................ 52
4.4.5. Sistema de Coordenadas .......................................................................................... 53
4.4.6. Términos convencionales por defecto ..................................................................... 54
4.5. Diseño prototipo virtual ................................................................................................... 55
4.5.1. Creación del Modelo ................................................................................................ 55
4.5.2. Parametrización de los componentes de suspensión .............................................. 60
4.6. Simulación del prototipo .................................................................................................. 62
4.6.1. Modo Bump/rebound .............................................................................................. 62
4.6.2. Modo roll .................................................................................................................. 62
4.6.3. Modo Steer............................................................................................................... 63
4.6.4. Modo combinado ..................................................................................................... 64
4.7. Cinemática Animación suspensión................................................................................... 64
4.8. Análisis de resultados ....................................................................................................... 65
4.8.1. Modo Bump/rebound .............................................................................................. 65

vi
4.8.2. Modo roll .................................................................................................................. 66
4.8.3. Modo Steer............................................................................................................... 67
4.8.4. Resumen de datos obtenidos: ................................................................................. 68
CAPITULO V ...................................................................................................................................... 72
SETUP Y ENSAYO PRÁCTICO ............................................................................................................. 72
5.1. Introducción ..................................................................................................................... 72
5.2. Normas a seguir para efectuar en la práctica un set-up riguroso y fiable ....................... 72
5.3. En la pista ......................................................................................................................... 73
CAPITULO VI ..................................................................................................................................... 76
PLANIFICACIÓN Y ACTIVIDADES EN LA FORMULA SAE .................................................................... 76
UPM RACING 2012 ........................................................................................................................... 76
6.1. Planificación ..................................................................................................................... 76
6.2. Actividades en la suspensión ........................................................................................... 78
CAPITULO VII .................................................................................................................................... 81
CONCLUSIONES Y FUTURAS LINEAS DE TRABAJO ............................................................................ 83
7.1. Conclusiones .................................................................................................................... 83
7.2. Futuras líneas de trabajo .................................................................................................. 84
BIBLIOGRAFÍA ................................................................................................................................... 85
ANEXOS ............................................................................................................................................ 86

1
CAPITULO I
ANTECEDENTES, OBJETIVOS, METODOLOGÍA Y ESTRUCTURA
DEL PROYECTO
1.1. ANTECEDENTES
En vista de los avances tecnológicos y del nivel de competitividad que genera la
Formula SAE Student Eléctrico; y además la suspensión al ser un sistema de seguridad
activa, crítico en el comportamiento general del prototipo, se hace importante realizar un
estudio de la cinemática del sistema. La importancia del sistema de suspensión, se debe a
que posee la gran responsabilidad sobre la estabilidad del monoplaza durante su
conducción.
Se hace importante mencionar que el primer diseño constructivo de la suspensión del
prototipo UPM Eléctrico está basado en el diseño de suspensión del monoplaza de la
UPM08 de combustión que ha obtenido buenos resultados, sin embargo el prototipo UPM
Eléctrico al concursar en el año 2011 en Alemania han tenido inconvenientes, por lo que
para este año 2012 se hace necesario realizar el presente estudio cinemático de la
suspensión.
Este proyecto es de tipo técnico, cuyo alcance es analizar el diseño y la configuración de
sus componentes mediante el software LOTUS, luego validar los datos generados del
software con pruebas en pista y su posterior corrección y mejora. Este proyecto tiene como
finalidad implícita proporcionar información técnica sobre el comportamiento de la
suspensión (funcionamiento, restricciones, dimensiones, cotas, etc.) a futuros miembros de
la FSAE de la UPM para las futuras competiciones.

2
1.2. OBJETIVOS
1.2.1. OBJETIVOS GENERALES
Realizar un estudio cinemático del comportamiento de la suspensión de un
prototipo de Formula SAE Student Eléctrico del equipo UPM Racing.
1.2.2. OBJETIVOS ESPECÍFICOS
Investigar los diferentes tipos de suspensiones adecuados a los prototipos y que
sean avalados para cumplir con las normas de las competiciones (Inglaterra).
Estudiar la teoría cinemática de la suspensión enfocada a las suspensiones de
prototipos de competición.
Diagnosticar el diseño actual del prototipo SAE Electric, de la UPM.
Analizar el comportamiento del sistema mediante simulación LOTUS y recopilar
información del modelo para su respectiva validación.
Realizar un ensayo en pista para la verificación del comportamiento y contrastar
con la simulación.
Optimizar la configuración (ángulos, cotas, etc.) de la suspensión para las
diferentes condiciones de la pista.
Debido a la falta de pruebas realizadas sobre un prototipo anterior, es muy complicado
“afinar” y dar con los parámetros “ideales” para un piloto, un vehículo y un circuito
determinados. Es por ello, que el objetivo intrínseco de este proyecto es tener un sistema
de suspensión que se comporte de una manera predecible, que haga del vehículo un
vehículo fácil de pilotar, y que proporcione una alta fiabilidad al conjunto.

3
1.3. METODOLOGÍA Y ESTRUCTURA DEL DOCUMENTO
Para el estudio del sistema de suspensión del Formula SAE Student Eléctrico se
realizará un diagnóstico de la configuración del año pasado (2011) y recopilación de datos,
luego con los datos y características de los elementos del modelo modificado se procederá
a simular mediante el software LOTUS, con los datos generados del programa se analizará
y se procederá a realizar actividades en la suspensión procurando obtener el mejor
desempeño; y su posterior validación en pista; al final se concluirá con el planteamiento
de futuras recomendaciones a realizar en la suspensión del prototipo con el fin de ir
desarrollando un mejor desempeño conforme a las condiciones de las competiciones.
El proyecto se desarrollará en tres fases, las cuales serán:
Fase I:
Estudio y diagnóstico de la geometría actual de la suspensión.
Tipología de los prototipos Formula SAE - Eléctrico
Fase II:
Análisis del mecanismo mediante simulación.
Condiciones de Evaluación e implementación en el prototipo.
Fase III:
Protocolos de Prueba
Validación en campo y optimización (ángulos y cotas) de suspensión.
Procesamiento de la Información.
Los recursos a utilizar:
Humano: Director del Proyecto - Estudiantes
Materiales: Textos especializados y fuentes bibliográficas (revistas, internet, libros
electrónicos), Ordenador, Software LOTUS Suspension Analysis V5.0, Prototipo FSAE
Eléctrico, Pista de prueba.

4
CAPITULO II
FORMULA SAE Y UPM RACING
2.1. HISTORIA DE LA COMPETICIÓN
En el año 1981 la SAE (Society of Automotive Engineers) creó la Formula SAE®, una
competición que tenía lugar todos los años en Texas (posteriormente en Michigan), USA,
con el fin de probar las capacidades de alrededor de 140 equipos de universidades de todo
el mundo.
En 1998 se celebró en el Reino Unido una demostración en la cual compitieron dos coches
americanos contra dos europeos. Fue tal el impacto que produjo este evento que IMechE
(Institution of Mechanical Engineers) en colaboración con SAE y el IET (Institution of
Engineering & Technology) creó la Formula Student, una competición internacional
universitaria basada en concebir, diseñar, fabricar y competir con vehículos tipo fórmula.
Desde entonces se ha realizado todos los años en Inglaterra la competición en la que
participan alrededor de 100 equipos por certamen.
Formula Student difiere de la SAE en cuanto a su diseño de organización. Sin embargo,
utiliza las mismas normas con pequeñas variaciones siendo el concepto de la competición
muy similar. Todo esto permite a los participantes ser protagonistas en diferentes
competiciones sin modificaciones en su forma de trabajar.
2.2. UPM Racing FSAE
A finales del 2003, por iniciativa del Instituto Universitario de Investigación del
Automóvil (INSIA) y de la Escuela Técnica Superior de Ingenieros Industriales de la
Universidad Politécnica de Madrid (UPM) y contando con el apoyo del Máster en
Ingeniería en Automoción del INSIA, se constituyó el equipo UPM RACING, primer
representante español en el evento. El cual, ha participado en todas las competiciones

5
organizadas por la SAE en Inglaterra desde entonces. El espíritu del proyecto es aprender
aplicando, aprender haciendo, aprender en equipo y aprender compitiendo1.
El equipo UPM de combustión se compone de más de 50 alumnos de la Escuela Técnica
Superior de Ingenieros Industriales de la UPM, del Máster de Ingeniería en Automoción
del INSIA, de la escuela de Ingeniería Técnica Aeronáutica y de EUIT
Telecomunicaciones.
El equipo UPM Racing eléctrico inicia su participación en el año 2011 para la competición
en Alemania; en el 2012 continúa su participación para competir en Inglaterra – Silverston,
ésta vez integrado por los estudiantes del Máster en Ingeniería de Automoción XXI y
Máster en Ingeniería de Vehículos Híbridos y Eléctricos I.
Figura 2.1. UPM Racing Team Eléctrico 2012
1 www.upmracing.es

6
Figura 2.2. Prototipo FSAE UPM Eléctrico 2012
El equipo se encuentra estructurado en 7 divisiones:
Aerodinámica-Chasis-Dinámica Vehicular-Frenos-Electrónica-Motor-Marketing
Cada división está liderada por un responsable que se encarga de coordinar y gestionar el
trabajo de todos sus miembros, tomar decisiones técnicas y actuar como portavoz en las
reuniones técnicas generales.
Participar en la FÓRMULA SAE supone un gran reto para los estudiantes que deben
organizarse como un equipo de profesionales donde, además de diseñar y fabricar un
monoplaza, deben administrar los recursos de que dispongan. Estos recursos deben
obtenerlos por sí mismos.
Igualmente, los propios alumnos pilotarán el fórmula y se encargarán de sus reparaciones.
En resumen, se trata de formar un grupo de estudiantes, organizados como una empresa,
que tiene un objetivo: medirse con las mejores universidades del mundo
2.3. ¿Qué es la Formula Student SAE Eléctrico?
Desde el año 2010, la Fórmula Student SAE estándar ha incluido a vehículos
eléctricos como equipos de clase 1A, en la actualidad por el tema del medio ambiente,
éstos vehículos tienen un gran impacto positivo, dentro de la competencia miden el paso de
corriente y tensión entre el almacenamiento de electricidad (batería) y el motor (es) de

7
accionamiento, es esencialmente la medición eléctrica, para determinar con precisión el
consumo eléctrico de los vehículos durante el evento de Endurance.
La competición de la Formula SAE Eléctrico es un desafío para equipos de estudiantes
universitarios, a la hora de diseñar, fabricar y competir con un pequeño monoplaza de
fórmula. Se intenta dar a los equipos la mayor flexibilidad posible y libertad para expresar
su creatividad pero, así todo, existe una serie de restricciones acerca del diseño del
vehículo.
El gran desafío para los equipos es desarrollar un vehículo que pueda competir con éxito
en todos los eventos descritos en la normativa.
Las competiciones dan a los equipos la oportunidad de demostrar tanto su creatividad
como sus capacidades en el ámbito de la ingeniería en comparación con otros
competidores de distintas universidades de todo el mundo.
Para lograr el propósito de la competición de la Formula SAE Eléctrico, los equipos
simulan estar trabajando a las órdenes de una compañía que está diseñando, fabricando y
probando un prototipo para el mercado del motor de competición. El vehículo debe mostrar
un alto rendimiento en términos de aceleración, frenos y manejo y ser suficientemente
resistente para completar con éxito todos los eventos descritos en la normativa. Otros
aspectos fundamentales a tener en cuenta en el diseño son: la estética, los costes, la
ergonomía, el mantenimiento, la manufacturabilidad y fiabilidad.
Supuestamente, una vez que el vehículo se ha completado y probado, la compañía de
diseño intentará vender el diseño a otra empresa que se encargará de la fabricación. El
desafío pues, para el equipo, es desarrollar un vehículo prototipo que cumpla con los
objetivos de diseño de la FSAE y que tenga una buena rentabilidad en el mercado. Cada
diseño será juzgado y evaluado en comparación con otros similares para decidir cuál es el
mejor de todos.

8
2.4. Ficha técnica UPM Racing FSAE Eléctrico 2011
Figura 2.3. FSAE UPM Eléctrico 20112
2.5. Pruebas estáticas y dinámicas
2.5.1. Pruebas estáticas
La máxima puntuación en las pruebas estáticas es:
Presentación 75 puntos
Diseño de Ingeniería 150 puntos
Costes y manufacturabilidad 100 puntos
__________________________________________________
TOTAL 325 puntos
2 www.formulastudent.com

9
Inspección Técnica
Cada vehículo tiene que pasar la inspección técnica y las pruebas para conseguir las
pegatinas de inspección antes de que se le permita participar en cualquier tipo de prueba
dinámica.
Los aspectos que se evalúan en la inspección técnica son:
El prototipo
Juegos de neumáticos (seco y mojado)
El equipamiento del conductor: el casco, el mono, los guantes, las zapatillas y otros
de elementos necesarios.
Los extintores
La barra para empujar el vehículo
El formulario de equivalencia estructural
El formulario de la inspección técnica
Todos los pilotos deben presentarse a la inspección del vehículo
Presentación
El objetivo de la presentación comercial es evaluar la habilidad del equipo para desarrollar,
ejecutar y entregar un proyecto que logre convencer a los ejecutivos de una empresa de
que su producto es rentable, fiable y sostenible en el futuro. Para esto, se deben plantear
cuestiones relacionadas con la comercialización y estandarización de los componentes.
Diseño de Ingeniería
El coche que mejor ilustre el uso de la ingeniería para lograr los objetivos de diseño y su
mejor entendimiento por parte de los miembros del equipo, se evalúa positivamente en la
prueba de diseño.
El equipo deberá entregar previamente un informe de diseño que no exceda de las 8
páginas. El documento debe contener una breve descripción del vehículo con detalles
acerca de las características técnicas del diseño y demás conceptos.
Costes y manufacturabilidad
Dentro de análisis de costes y manufacturabilidad señalan:

10
Enseñar a los participantes que los costes y el presupuesto son factores
significativos que deben considerarse en cualquier tipo de proyecto de ingeniería.
Hacer que los equipos tomen decisiones acerca de la elección entre costes y
rendimiento
Ganar experiencia creando y manteniendo un producto y todos sus subsistemas
Que los participantes aprendan y entiendan los principios de diseño de fabricación
y ensamblaje, teniendo en cuenta la manufacturabilidad y las restricciones que
impone tener bajos costes
2.5.2. Pruebas dinámicas
La máxima puntuación en las pruebas dinámicas es:
Aceleración 75 puntos
Skidpad 50 puntos
Autocross 150 puntos
Consumo económico / emisiones CO2 100 puntos
Endurance 300 puntos
__________________________________________________
TOTAL 675 puntos
Aceleración
Esta parte de la prueba dinámica evalúa la aceleración del coche en recta. La prueba se
lleva a cabo en una pista de 75 metros de largo. Además, se evalúa el rendimiento del
motor y la capacidad de la suspensión para ofrecer la máxima adherencia.
Prueba del Skidpad
En esta prueba se examina el trazado de las curvas cerradas. El monoplaza debe ser capaz
de formar círculos en el sentido de las agujas del reloj y viceversa. En esta prueba se ponen
de manifiesto el funcionamiento de la suspensión y la capacidad de soportar aceleraciones
laterales.

11
Consumo económico y Endurance
Para vehículos de tracción eléctrica o hybrida, la energía consumida en la prueba será
determinada con la medición de la energía eléctrica usada en DC (baterías) al inicio y final
del evento.
En el Endurance se ponen de manifiesto la fiabilidad del vehículo y su consumo. En la
prueba se pueden encontrar entre cinco y siete monoplazas a la vez. Con el fin de evitar
accidentes, el circuito dispone de zonas específicas para no interrumpir la marcha de otros
vehículos. La prueba se desarrolla a lo largo de 22 Km. y es obligatorio realizar un cambio
de piloto a mitad del recorrido.
Los tiempos del Endurance están basados en la suma de los tiempos de cada piloto más las
penalizaciones.
2.6. Reglamento a tener en cuenta en el diseño de la suspensión
Artículo B6.1.1. El coche debe estar equipado con un sistema de suspensión con
amortiguadores totalmente operativo, en el eje delantero y trasero, con un recorrido de la
rueda de al menos 50,8 milímetros: 25,4 milímetros en compresión y 25,4 milímetros en
extensión con el piloto sentado. Los jueces se reservan el derecho de descalificar a aquellos
coches que no presenten una propuesta seria de sistema de suspensión o que no presenten
un buen comportamiento direccional en el evento de Autocross.
Artículo B6.1.2. Todos los puntos de montaje de la suspensión deben ser visibles en la
inspección técnica, directamente o quitando alguna cubierta.
El reglamento específico del sistema de suspensión no es muy extenso como se puede ver,
habrá que prestar especial atención al recorrido de los neumáticos en compresión y
extensión de la suspensión.

12
CAPITULO III
LA SUSPENSIÓN EN LA COMPETICIÓN
3.1. Fundamentos teóricos
En la actualidad existe una amplia y variada información técnica sobre la suspensión de
vehículos y que se pueden encontrar en libros, revistas, internet, etc. Por lo que hablar de
forma genérica de la suspensión, su historia, tipos y evolución en vehículos convencionales
sería importante, pero al ser el proyecto enfocado a la competición, se hablará sobre la
teoría y concepto de la suspensión en la competición y sus particularidades, especialmente
con los elementos que cuenta el monoplaza UPM Racing 2012.
La suspensión de un monoplaza tiene la función de “absorber” las desigualdades del
circuito sobre el que se desplaza manteniendo aislado al chasis, además mantener de forma
óptima el contacto de las ruedas con la pista, proporcionando un adecuado nivel de confort
y seguridad de marcha3.
Sus funciones principales son las siguientes:
Absorber esfuerzos y vibraciones generados por las irregularidades de la pista,
y éstos no sean transmitidos al bastidor.
Control direccional del vehículo
Mantener el contacto del neumático con la carretera (adherencia).
Mantener la posición de los neumáticos y la geometría de la dirección.
Resistir el balanceo de la carrocería.
Figura 3.1. Elementos de la suspensión de un monoplaza
3 Fundamentos sobre comportamiento dinámico del coche deportivo H. Baylos

13
3.1.1. Elementos y características del sistema de suspensión
Figura 3.2. Representación de masa suspendida
y no suspendida de un vehículo4
Cuando se habla de suspensiones, existe un concepto muy importante que es el de
masa suspendida y masa no suspendida. La masa no suspendida son todas las partes que,
incluyendo la rueda, sirven para filtrar las irregularidades del terreno, mientras que la masa
suspendida es el resto de las partes del coche.
Figura 3.3. Sistema de suspensión (masa no suspendida) y sistema de
dirección de un monoplaza
4 http://aficionadosalamecanica.com/suspension1.htm

14
Las partes que generalmente se encuentran dentro de la parte no suspendida, y que
constituyen la suspensión son las siguientes:
Neumático.
Brazos de suspensión, soporte de neumático-chasis.
Muelle.
Amortiguador.
Barra estabilizadora.
3.1.1.1. Neumático
El neumático es el primer elemento de la suspensión. Tiene que ser capaz de absorber las
primeras irregularidades de la pista proporcionando, además, la adherencia transversal y
longitudinal necesarias para que el coche mantenga con seguridad la velocidad de paso por
curva que necesitamos. En realidad, es el único elemento que proporciona el rozamiento
con el suelo y, por lo tanto, toda la investigación que se ha llevado a cabo por los
fabricantes de coches para proyectar suspensiones, cada vez más eficaces, no serviría para
nada si el neumático no hubiera ido evolucionando a la par.
Figura 3.4. Partes de un neumático5
5 http://jeroitim.blogspot.com.es

15
En la figura 3.4 podemos ver las diferentes partes que constituyen un neumático en su
configuración moderna.
Hasta llegar a la actual, el neumático ha ido evolucionando de tal manera que a pesar de los
tremendos adelantos introducidos en el automóvil, seguramente sean éstos los que
proporcionalmente más han mejorado obteniendo los mayores avances. Gracias a esta
radical transformación, los ingenieros han podido conseguir de los coches actuales una
estabilidad impensable hace años atrás.
Fuerzas y pares que actúan sobre un neumático
Un neumático se encuentra sometido a las diferentes fuerzas y pares externas como se
indica a continuación, por lo que su diseño y fabricación es compleja para determinar su
funcionalidad óptima en conjunto con el diseño de la suspensión.
Figura 3.5. Fuerzas y momentos que actúan sobre un neumático.
En la actualidad se conoce dos tipos de neumáticos como son: diagonales y radiales (ver
figura 3.6.); pero por su rendimiento y prestaciones el neumático radial se ha impuesto
sobre el diagonal por lo que en competición es el que se utiliza más pero con características
especiales.

16
Como se puede observar los neumáticos convencionales o diagonales tienen esa
denominación por la forma del tejido de la carcaza, mientras que en el radial los tejidos son
paralelos.
Figura 3.6. Neumáticos convencionales (diagonales) y radiales
Neumático radial y diagonal en competición
Además es preciso indicar que la gran ventaja del neumático radial para competición es la
mayor independencia entre el flanco y la banda de rodadura, el primero tienen que ver con
la rigidez vertical y la relación con suspensión, mientras que el segundo tiene referencia
con el desgaste, duración y comportamiento rotacional.
Entre otras características importantes son:
Menor rozamiento interno y menor generación de calor.
Menor deformación de la banda ante solicitaciones
Por lo anterior: menor energía disipada.
Menor influencia de la fuerza centrífuga (más rigidez de la banda)
Menor ángulo de deriva para el mismo esfuerzo: más direccionalidad
En la figura 3.7. se muestra la diferencia de comportamiento en curva de un neumático de
carcasa radial sometido a una fuerza transversal, que es diferente al del diagonal; mientras
que en el último la mayor rigidez de los flancos y la menor de la banda de rodadura hacen
que no despegue ésta del suelo, el radial, en cambio, por tener los flancos más elásticos y
carcasa en la banda de rodadura más rígida, tiende a adoptar la posición que vemos en la

17
figura. Esta característica explica por qué el radial necesita un ángulo de caída mayor que
el convencional, debiendo contar con 1 ó 2º como valor de este ángulo en estático para que
sea capaz de proporcionarnos la máxima fuerza lateral de que es capaz.
Figura 3.7. Comportamiento del neumático frente a
solicitación transversal según su construcción
En la figura 3.8., se aprecia que si el ángulo de inclinación de la masa suspendida es del
mismo valor que el de caída en estático que tenía el neumático, éste se anula en el
momento que más lo necesita el neumático: en pleno apoyo.
Figura 3.8. Variación del ángulo de caída durante un apoyo6
6 http://jeroitim.blogspot.com.es

18
Factores de influencia:
Los principales factores que influyen en las prestaciones de los neumáticos una vez
montados en el coche son:
Presión de inflado
Ángulo de caída (estático y dinámico)
Anchura de la llanta
Temperatura de trabajo
3.1.1.2. Brazos de suspensión
Compuestos por las barras o brazos que definen la geometría de la suspensión. Son los
elementos que mantienen unidas las ruedas al chasis y restringen sus movimientos.
También transmiten las cargas al chasis, y de su geometría y posición depende
directamente el comportamiento del vehículo. Los brazos suelen tener forma de “A” y
suelen estar unidos al chasis y a la mangueta mediante rótulas que restringen sólo tres
grados de libertad, dejando libres las rotaciones. Los puntos de unión entre los brazos
(wishbones) y la mangueta deben ser los puntos de convergencia de los brazos, o vértice
del triángulo, de modo que los brazos trabajen sólo a tracción y a compresión, y nunca a
flexión. Hay un brazo superior y otro inferior por cada rueda.
Figura 3.9. Brazo de suspensión (wishbones)
Barra de empuje o push-rod
Es la barra encargada de transmitir el movimiento de la rueda a los muelles y
amortiguadores. A veces, las dimensiones del vehículo, y la falta de espacio hacen que la
posición de los muelles y amortiguadores esté restringida, y otras veces por aspectos

19
aerodinámicos. Este sistema permite colocar el conjunto muelle-amortiguador casi en
cualquier lugar, mediante la utilización del push rod y un balancín (rocker).
Figura 3.10. Barra de empuje (push-rod)
3.1.1.3. Amortiguadores
El amortiguador es el elemento elástico que “convierte” las fuerzas que transmite el
conjunto de la suspensión en deformación. Dadas las características de cualquier tipo de
muelle, la energía absorbida, con ciertas pérdidas es devuelta generándose oscilaciones de
larga duración en el tiempo y que se mitiga muy despacio. Con el amortiguador se
consiguen eliminar esas oscilaciones que siguen a la absorción de la fuerza generada sobre
el conjunto de la rueda.
Figura 3.11. Amortiguador de competición
marca Cane Creek

20
Existen diversos tipos de amortiguadores. Los más sencillos y rudimentarios son los de
rozamiento, pero las estrellas son los de sistema hidráulico, neumático o mixto
hidráulico/neumático.
Para poder cumplir su cometido de disipar la energía “almacenada” en el muelle, que ha
hecho que se modifique su forma, el sistema del amortiguador convierte esa energía en
calor y resistencia dinámica. De esta forma, el sistema, olvidándose ahora del de
rozamiento mecánico, hace pasar el fluido, normalmente aceite, por unos orificios con
forma y dimensiones concretas. La tecnología ha llegado a sistemas de múltiples cámaras y
canales para disipar de forma independiente y óptima fuerzas de amplitud y frecuencia
dispar.
El amortiguador utilizado en el monoplaza UPM Racing eléctrico es de tipo aceite y gas
con reservorio aislado, su funcionamiento se indica a continuación:
En la siguiente figura muestra al amortiguador en compresión y trabajando en alta presión,
por lo que las válvulas de high speed actúan (ver líneas rojas de flujo).
Las líneas azules indica el flujo de aceite en el caso de rebote de la rueda que corresponde
al estado de extensión del amortiguador.
Los amortiguadores de gas son sensibles a pequeños desplazamientos y a altas velocidades,
que es lo que hoy en día predomina en los vehículos de competición
Figura 3.12. Amortiguador en compresión y extensión (high speed)

21
En curvas lentas es necesario contar con un amortiguador que cuente con circuito a
velocidades bajas, como se muestra en la figura siguiente como es el funcionamiento en
estados de compresión y extensión bajo condiciones de baja velocidad.
Figura 3.13. Amortiguador en compresión y extensión (low speed)
3.1.1.4. Muelles
Para que esta oscilación no haga que se despeguen constantemente del suelo,
debemos aportar a la suspensión un elemento llamado muelle que atenúe su subida
acelerada, evitando el rebote una vez llegada al final del desplazamiento.
Los muelles almacenan la energía que se produce al chocar las ruedas del vehículo contra
los obstáculos del terreno, además relajan estas aceleraciones al comprimirse o extenderse,
ya sea por las irregularidades de la carretera como por la transferencia de cargas entre los
ejes por efecto de una variación en la trayectoria o la velocidad del vehículo
Figura 3.14. Muelles de competición

22
Constante del muelle
En el caso del prototipo UPM Racing se utiliza un muelle helicoidal es un elemento
elástico capaz de darnos una fuerza que es proporcional a la longitud con que se deforma, o
lo que es lo mismo: ante una carga (fuerza) F que actúe sobre el muelle, éste se deforma
una longitud x (deflexión) ejerciendo una fuerza según la siguiente ley:
F = -K .x
Donde K es el factor de proporcionalidad que se utiliza para definir el muelle considerado,
y se denomina constante del muelle y el signo menos indica que la fuerza ejercida por el
muelle va en sentido contrario a la deformación que sufre.
En ocasiones se puede encontrar con una disposición de varios muelles asociados, en este
caso el conjunto se puede sustituir por un solo muelle cuya K se halle mediante la siguiente
equivalencia como muestran las siguientes figuras; para el sistema neumático – muelle de
una suspensión se formulará como sistema en serie.
Figura 3.15. Conjunto muelles en serie
(sistema suspensión: neumático – muelle)
Figura 3.16. Conjunto muelles en paralelo

23
Relación de desplazamiento
En los casos reales, el recorrido de la oscilación de la rueda, al moverse
verticalmente, no es igual al desplazamiento del muelle en su recorrido, por lo cual es
necesario saber la relación existente entre ellas: relación de desplazamiento (RD), y se
define como la relación entre el desplazamiento del centro de la rueda y el del muelle.
Es un parámetro eminentemente geométrico que depende de la configuración particular de
la suspensión.
Figura 3.17. Relación de desplazamiento
Al tomar en cuenta esto aparecen dos variables, la constante Kr que resulta en la rueda
(wheel rate), y la Km correspondiente al del muelle (spring rate), que deben ser diferentes:
Kr nos determinará la frecuencia de oscilación de la masa suspendida.
En función de la Kr que se considere necesaria, se elige la del muelle, puesto que según sea
la relación de desplazamiento RD que existe entre el recorrido de la rueda y del
amortiguador, se empleará un muelle más o menos rígido.
Para calcular la constante Km que se debe elegir en el muelle, para que el Kr en el centro
de la rueda sea la que se busca realmente, se aplica la siguiente fórmula:
Km = Kr · (RD)2

24
Ahora se añadirá la elasticidad de los neumáticos, en vehículos con muelles muy rígidos,
como por ejemplo aquellos sometidos a fuertes cargas aerodinámicas o los destinados a
circuitos ovales como el caso de competición en pistas, la mayor parte de la suspensión la
realizan los propios neumáticos, con lo que es éste un parámetro que no se deberá pasar
por alto en los cálculos. La constante elástica del neumático Kn (tire rate) a una presión de
inflado determinada es un dato que debe proporcionar el propio fabricante de neumáticos.
Figura 3.18. Esquema de las constantes elásticas de una suspensión.
Como se indicó anteriormente la suspensión y los neumáticos trabajan como dos muelles
en serie, con lo que sus constantes se relacionan con la rigidez total mediante la siguiente
expresión:
Frecuencia de la oscilación
Se denomina a la frecuencia (f) a las veces por segundo que se expande y vuelve a
comprimir un elemento elástico. Se mide en ciclos por segundo, es decir, en Hertzios (Hz).
Contemplando este movimiento con toda la masa suspendida del coche sin amortiguadores,
al someterlo a un aplastamiento se observa que ésta oscila con una determinada frecuencia.
Como se puede deducir, a mayor rigidez del muelle (Km) la oscilación será más rápida
(mayor frecuencia) y a menor constante, menor frecuencia (más tardará en subir y bajar la
masa del coche), puesto que la fuerza con la que éste responde a la compresión es menor
que en el caso de muelle más rígido.

25
Si un coche ejemplo (sin amortiguadores) tuviera la misma frecuencia de oscilación en el
tren delantero que en el trasero, el movimiento de subida y bajada con el lógico desfase
debido a su batalla sería insoportable, haciendo que los pasajeros despegaran
continuamente del asiento. Si la frecuencia de un tren fuera mucho más alta que la del otro,
el movimiento delante-atrás tampoco sería soportable.
La relación entre las frecuencias delantera y trasera debe guardar, por lo tanto, un
equilibrio teniendo como objetivo el confort de los pasajeros. En un turismo actual, con el
tren delantero más sobrecargado por la mecánica, la experiencia indica que la frecuencia
delantera debe ser entre un 20 y un 25% superior a la trasera.
En una utilización normal, si no queremos agitar demasiado a los pasajeros, la frecuencia
no debería sobrepasar los 1,2 Hz. En los deportivos rápidos, entre 1,3 y 7,5 Hz, mientras
que en competición la frecuencia puede llegar hasta los 6 Hz (caso de la F1).
La frecuencia de un sistema oscilatorio está relacionada con la constante elástica del
sistema K y con su masa M. En este caso, dicha constante será la de elasticidad de la
suspensión, Ks (ríde rate) y M será la masa total sobre cada tren (estudio de un cuarto del
vehículo), de manera que:
Por último, al trabajar con frecuencias de oscilación que tengan en cuenta los
amortiguadores, las fórmulas anteriores deberán incluir el coeficiente de amortiguación ξ
de la suspensión sustituyendo las frecuencias no amortiguadas f por las amortiguadas
obtenidas de:
Conociendo la deflexión que va a sufrir el muelle bajo la masa que gravita sobre su rueda y
la frecuencia amortiguada que se desea dar al tren considerado, se tendrá una base de
partida para elegir unos muelles de la rigidez apropiada y que haga más rápido el coche.

26
3.1.1.5. Barra estabilizadoras
Consiste en una barra de acero que, unida a la masa suspendida por su parte central,
va anclada por cada uno de sus extremos a una rueda, derecha e izquierda de uno de los
trenes. Su acción se lleva a cabo exclusivamente cuando existe una diferencia de recorrido
en una rueda respecto de la otra, o cuando hay un ángulo de inclinación lateral en la masa
suspendida (figura 3.19).
El principio de funcionamiento es muy simple; cuando se produce un movimiento de bump
o rebound en ambas ruedas de un mismo eje, la barra puede girar libremente sobre su eje, y
no crea ninguna fuerza de reacción en las ruedas, sin embargo, cuando el chasis gira, el
desplazamiento de cada extremo de la barra es diferente, y la barra se torsiona, originando
un momento contrario al giro del chasis que hace que el ángulo de balanceo disminuya. Se
utilizará para conseguir un equilibrio entre la rigidez del eje delantero con respecto al eje
trasero, para mejorar el comportamiento en curva
Figura 3.19. Efecto de la barra estabilizadora
3.2. Tipos de suspensiones en competición
En el mundo de las competiciones en pista y tomando como referencia la Formula 1,
existen dos tipos de suspensiones más utilizadas en la actualidad: el push-rod y pull-rod.
La diferencia básica entre las dos es que en una la barra trabaja a tracción y la otra a
compresión. Se puede decir que a nivel de suspensión no hay diferencia entre uno u otro,
dejando de lado los puntos de anclaje que evidentemente influirán mucho en la dinámica
del monoplaza. Como se puede observar en las figuras siguientes, la diferencia
constructiva no es más que la disposición de la barra en diagonal (color verde).

27
Figura 3.20. Suspensión independiente Pull-rod, Push-rod7
3.2.1. Push-rod
Consta principalmente de los 2 triángulos de suspensión, una barra diagonal que trabaja a
compresión y que empuja a su vez un balancín que acciona un conjunto muelle-
amortiguador. En este caso, al subir la rueda ante un impacto, giran los 2 triángulos (ver
figura 3.21, las barras “horizontales”). Con estas se mueve la barra diagonal, que empuja el
balancín de color verde que actúa a su vez sobre el amortiguador, haciendo que se
comprima. Esto implica que la barra diagonal funcione a compresión, lo que le da nombre
al sistema. En el esquema de la derecha se pueden ver en verde las fuerzas que transmiten
el impacto en la rueda hasta el amortiguador.
Figura 3.21. Suspensión Push-rod8
7 http://www.f1aldia.com/11219/suspensiones-push-rod-pull-rod
8 Juan Antonio Marchán "markchang" para tertuliasdeF1

28
3.2.2. Pull-rod
En este tipo, la barra diagonal trabaja a tracción y algunos elementos están colocados
diferente al push-rod. Como muestra la figura 3.22 la barra diagonal tira del balancín hasta
que forman una línea recta; al estar el amortiguador unido al balancín, se comprime;
además se puede ver el triángulo naranja, que representa como se mueve el conjunto barra
a tracción y balancín. Se pueden observar en morado el punto inicial y final del anclaje del
amortiguador
Figura 3.22. Suspensión Pull-rod9
Las diferencias esenciales que se pueden indicar son:
Una barra trabajando a tracción (pull) puede ser más delgada que otra trabajando a
compresión (push). Esto hace disminuir el peso de la masa no suspendida, aspecto
muy importante en competición.
Al ser la barra más delgada, presentará menos resistencia aerodinámica. Al mismo
tiempo queda más espacio libre en la parte trasera del coche para que el aire fluya
de mejor manera.
En la configuración 'Pull Rod', los amortiguadores y muelles pueden situarse más
abajo, reduciendo así la altura del centro de gravedad. Como se sabe, tener un
centro de gravedad bajo influye favorablemente en la dinámica del vehículo.
En 'Pull Rod', el sistema a tracción sufre esfuerzos más grandes en determinados
puntos y por este motivo es más delicado.
En cuanto a costo, el diseño y la fabricación del pull-rod es muy superior, por lo
que en la Formula SAE Student es más utilizado el de tipo push-rod
9 Juan Antonio Marchán "markchang" para tertuliasdeF1

29
3.3. Geometría de la suspensión y parámetros cinemáticos
3.3.1. Convergencia
Es el ángulo que forman las prolongaciones de los ejes longitudinales de los neumáticos,
tanto delanteros como traseros, con el eje longitudinal del coche. Se mide en milímetros,
en un plano paralelo al suelo que pasa por el centro de las ruedas del mismo eje, el valor de
la convergencia oscila entre: ±1 y +5 mm10
Convergencia Positiva “Toe in”
Cuando las ruedas están cerradas en su parte delantera.
Figura 3.23. Convergencia positiva
Convergencia Negativa “ Toe out”
Cuando las ruedas están cerradas en su parte trasera.
Figura 3.24. Convergencia negativa
10
Apuntes de Sistemas y componentes de chasis. Luis Martínez

30
Anomalías en el ángulo de convergencia
Un exceso de convergencia provoca un desgaste excesivo en la parte exterior de los
neumáticos del mismo eje. La falta de convergencia provoca un desgaste excesivo en la
parte interior de los neumáticos del mismo eje.
Figura 3.25. Anomalías en convergencia
Además el ángulo de convergencia, condicionan la posición del centro instantáneo de
rotación del vehículo y, por tanto, su comportamiento dinámico.
La extensión del cambio de convergencia dinámico depende de la elasticidad de la
suspensión y de sus brazos de guiado, así como, del brazo de palanca transversal de cada
rueda.
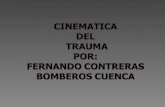
Figura 3.26. Variación de la convergencia vs oscilación de suspensión

31
3.3.2. Caída “Camber”
Es el ángulo de inclinación del neumático con respecto al plano perpendicular a la
superficie de la calzada. Un cierto ángulo negativo de camber, aumenta el agarre del
neumático en curvas, y un ángulo positivo, hace que haya cierta pérdida de adherencia.
Figura 3.27. Caida negativa (verde) y caída positiva (roja)
En la figura 3.28 indica cómo aumenta el coeficiente de fricción de un neumático para
ciertos ángulos de caída “camber”, se puede ver que el máximo se encuentra entre -1º y -2º
de caída para unos neumáticos concretos. Este comportamiento puede variar en función del
tipo de neumático, presión de inflado, temperatura, etc.
Figura 3.28. Camber vs tire cf
11
11
Extraída de “Tune to win” de Carroll Smith

32
El ángulo de caída es importante ya que define la inclinación con que el neumático se
apoya en el suelo y por lo tanto la cantidad de goma de la banda de rodadura que va estar
en contacto con el suelo.
Variación del ángulo de caída
El ángulo de caída se modifica con el movimiento vertical de la suspensión. En la mayoría
de las suspensiones su tendencia es a disminuir cuando la suspensión se comprime.
Figura 3.29. Variación del ángulo de caída vs oscilación de suspensión
Efectos principales:
Durante la circulación en curva, el ángulo de caída sufre la misma variación que el
balanceo de la carrocería, tendiendo a hacerse más positivo en las ruedas exteriores
y disminuyendo en las interiores.
Las ruedas exteriores se comprimen debido a la transferencia de carga y se
compensan los dos efectos (compresión de la suspensión y balanceo de la
carrocería).
En las ruedas interiores también se produce una compensación entre la extensión de
la suspensión y el balanceo de la carrocería.
El efecto final que gobierna el eje es el conseguido en la rueda exterior ya que es la
que mayor carga vertical soporta y por lo tanto mayores esfuerzos genera

33
3.3.3. Ángulo de salida
También llamado de inclinación “king pin” en inglés, es el ángulo que forma el pivote o
eje de la dirección con la vertical, oscila entre (+4º 0’ y +14º 30’)
Figura 3.40. Ángulo de salida “King Pin”
Prolongando la línea del pivote hasta su intersección con el suelo se puede ver que, si este
punto está situado entre el centro geométrico de la elipse de contacto y el exterior del
coche, el ángulo será negativo, y si es hacia dentro, positivo.
Es obligado en los coches de serie con objeto de aproximar la huella de contacto al punto
donde se considera aplicada la fuerza normal de esa rueda, con lo que se evita así un
desgaste excesivo de rodamientos y manguetas. Igualmente, la distancia d entre esos dos
puntos será positiva si está situada de la mitad de la huella de contacto hacia dentro, y
negativa si es hacia fuera.
Figura 3.41. Ángulo de salida y sus efectos sobre la orientación de las ruedas

34
En los coches de competición, donde el preservar los rodamientos de un desgaste
prematuro no es primordial, el hecho de proporcionarle ángulo de salida a la dirección
viene condicionado por la importancia que tiene en el comportamiento dinámico del coche,
sobre todo en momentos de frenada o tracción.
Cuando el ángulo de salida es positivo, en el momento de la frenada el par de fuerzas
producido en cada neumático por la fuerza de rozamiento y el peso del vehículo, tiende a
desestabilizar el coche por tender a abrir la dirección.
Figura 3.42. El neumático en su giro baja por debajo de la cota cero
Además el ángulo de salida negativo al hacer que la rueda describa un plano que interseca
al de la cota cero, eleva la parte delantera del coche produciendo, cuando se suelta el
volante, la retornabilidad de la dirección a la posición de equilibrio como muestra la figura
3.41. El esfuerzo necesario para mover el volante está condicionado por este ángulo que,
en función del peso que gravita sobre el tren delantero, puede llegar a ser importante.
El que resta entre el de salida y el de caída es el ángulo incluído. Si la rueda tiene además
un ángulo de caída, habrá que sumarlo al de salida si es positivo (o restarlo si es negativo),
para saber el valor exacto de éste.

35
Figura 3.43. Ángulo incluido
3.3.4. Ángulo de Avance “King-pin axis”
El ángulo de avance es el formado por la línea de mangueta, mirada de perfil
(lateralmente), con la vertical. Se aprecia claramente en las motos o bicicletas, ya que es el
que forma hacia delante el pivote de dirección con la línea imaginaria vertical. Se mide en
grados, minutos. o incluso mm de distancia entre el punto de intersección con el suelo y el
punto medio de la huella de contacto del neumático con él. El valor del ángulo
recomendado oscila entre: -1º y 5º para tracción delantera y 7º y 12º para tracción trasera.
Figura 3.44. Ángulos de avance

36
El desequilibrio entre los ángulos de avance derecho e izquierdo provoca inestabilidad en
ruta y en la frenada. El ángulo de avance y el de salida son los ángulos que caracterizan el
par de reversibilidad de la dirección.
Acentuando lo anterior, el ángulo de avance proporciona en la geometría de la dirección un
aumento del de caída cuando la giramos, lo cual hace que el vehículo considerado se
comporte de muy diferente forma según el ángulo del que se haya partido en estático.
Dentro de los valores aconsejados por el fabricante de los neumáticos y del definido por el
del coche, en la medida que se administre adecuadamente los ángulos dados al tren
delantero, se conseguirá el comportamiento adecuado para que el coche sea más del gusto
del piloto, haciéndolo más rápido. En general, se procura que el valor del ángulo de avance
sea el mínimo necesario para que el rozamiento que se produce en línea recta no reste
excesiva velocidad.
Lanzamiento
La distancia longitudinal entre el punto de corte de la prolongación del eje de pivote con el
plano del suelo y el centro de la huella de contacto del neumático se conoce como
lanzamiento.
El diámetro del neumático y el ángulo de avance determinan el valor del lanzamiento. Para
el mismo avance al aumentar el diámetro del neumático se aumenta el lanzamiento.
Figura 3.44. Lanzamiento

37
El lanzamiento es la cota más importante de la dirección para generar el par de
reversibilidad y el efecto de auto-guiado del vehículo.
A mayor valor del lanzamiento el vehículo es más estable en línea recta y más perezos para
entrar en las curvas.
3.3.5. Centro de Gravedad
Se denomina Centro de Gravedad (CG) al punto donde se puede considerar concentrada
toda la masa del coche a efectos de cálculo. De su situación, tanto respecto al suelo (altura
del CG) como a lo largo del eje longitudinal del coche, va a depender en gran manera la
estabilidad y comportamiento en curva y en frenada o aceleración. Es intuitivo comprender
que, cuanto más bajo se halle situado, más rápida será la velocidad de paso por curva. La
figura siguiente indica con más claridad las fuerzas principales que actúan al tomar una
curva.
Figura 3.45. La altura del Centro de Gravedad influye
decisivamente sobre la tendencia al vuelco
Como se observa en la figura 3.45, cuanto mayor sea la vía del coche y más pequeña la
altura h del CG, más difícil será llegar a volcar: no importa este hecho en sí (que es
extremo) sino principalmente porque la transferencia de pesos de la rueda interior hacia la
exterior será inferior. De esta forma si la línea de acción de la resultante R interseca el
suelo fuera del área del neumático el coche tenderá a volcar, lo que es imposible si no se da
esta condición.

38
Efectivamente, bajar la altura al suelo en los coches, practicada en el momento de pensar
en una preparación para participar en carreras, está justificada siempre que se mantenga un
recorrido de suspensión suficiente para no llegar hacer tope, o genere algún problema en
las transmisiones u otro elemento de suspensión. Esto puede lograrse ya sea modificando la
posición de los anclajes o montando muelles de una rigidez superior, siempre que sean
compatibles con las condiciones estudiadas anteriormente.
3.3.6. Centro Instantáneo “Instant center”
El centro instantáneo de rotación CIR de los brazos de suspensión, desde una vista frontal
al vehículo, es el punto de intersección entre las rectas de prolongación del brazo superior
y el brazo inferior de la suspensión. Se puede afirmar que es el punto aproximado sobre el
que girarán los neumáticos y por lo tanto, de su posición dependerá el cambio de caída del
neumático al desplazarse verticalmente.
Figura 3.46. Centro instantáneo de rotación CIR
La distancia entre el instant center y el plano medio del neumático se denomina swing arm
lenght (SAL), a mayor SAL, menor será la variación del camber para un determinado
desplazamiento del neumático, y con un SAL menor, el camber change será mayor.

39
3.3.7. Centro de balanceo “roll center”
El roll center estático se encuentra uniendo el punto de contacto del neumático con
el instant center, la intersección de esta recta con el eje medio del coche nos da el roll
center, que es el centro de balanceo del chasis. La distancia entre el centro de gravedad del
coche y el roll center se llama roll moment arm, que definirá el roll del coche para una
determinada fuerza lateral.
Con un roll center muy cerca del centro de gravedad, se tendrá un ángulo de balanceo
menor, pero la variación de la geometría de la suspensión será mayor. Sin embargo, un roll
center bajo, hará que se tenga un ángulo de roll mayor, pero la geometría de la suspensión
cambiará menos.
Figura 3.47. Centro de balanceo CB12
Se sabe que el balanceo no es un movimiento deseado para el comportamiento dinámico,
por lo que conviene disminuirlo en lo posible; partiendo de que en los chasis diseñados
especialmente para competición los CB están situados a una altura razonable.
En realidad, el situarlo tan alejado del CG, por debajo del suelo, no es por otra razón que la
de poder manejar la transferencia de pesos a nuestra voluntad variando muelles y, sobre
todo, permite conseguir el equilibrio buscado con un reglaje adecuado de la barra
antibalanceo, más comúnmente llamada barra estabilizadora.
12
Extraida de “Design of a suspension for SAE car” Adam Theander

40
3.3.8. Eje de balanceo “roll axis”
Cada una de las secciones que constituyen un vehículo tendrá un Centro de Balanceo
distinto. El lugar geométrico unión de todos ellos constituye el llamado Eje de Balanceo,
también llamado NRA (Neutral Roll Axis) o eje respecto al cual no hay balanceo. Es decir,
si aplicamos una fuerza lateral de cualquier magnitud a la altura del Eje de Balanceo la
carrocería no se inclinará.
Debido a que la altura del centro de balanceo del eje posterior suele ser mayor que la del
eje delantero, el eje de balanceo que une ambos centros está inclinado hacia delante. Este
eje no pasa por el centro de gravedad, por lo que ésta es la causa de la existencia de
balanceo y, por tanto, de transferencia lateral de masa.
Figura 3.48. Eje de balanceo CB13
3.3.9. Rigidez de balanceo
Las rigideces de balanceo se expresan como la relación entre el momento de balanceo y el
ángulo que se inclina la carrocería. Relacionar estas magnitudes requeriría expresiones
matemáticas complejas, por lo que habitualmente se aproximan los cálculos considerando
la masa total en lugar de la masa suspendida (es decir, despreciando la no suspendida). Con
13
Comportamiento Dinamico del coche deportivo – H. Baylos

41
esta simplificación, el incremento de peso debido a la transferencia de un lado a otro para
el eje delantero, será deducido a la fórmula:
Para el tren trasero, la expresión es análoga sustituyendo todos los subíndices D por T y los
T por D, además de h1 por h7 (ver figura 3.48)
3.3.10. Geometría Anti-levantamiento “anti-squat” y Anti-hundimiento
“anti-dive”
Hay dos tipos de geometría de suspensión que se emplean para limitar el movimiento del
chasis, pero que no intervienen en la transferencia de masa: Anti-squat y Anti-dive
La geometría de las suspensiones sufre variaciones con la transferencia de pesos de delante
hacia atrás (o viceversa) que experimenta un coche en el momento de acelerar o frenar.
Por ejemplo, durante una frenada a gran velocidad el incremento de peso que sufre el tren
delantero puede llegar hasta el 50% de la masa suspendida, produciendo una inestabilidad
al descolocarse las suspensiones precisamente en un momento de gran relevancia. De igual
modo ocurre al acelerar. Para minimizar el aplastamiento que sufre la suspensión delantera
en el primer caso -o la trasera en aceleración- se emplea una disposición de sus elementos
que describimos a continuación.
Anti-levantamiento “Anti-Squat”
Uno de los cálculos imprescindibles que se debe hacer en una suspensión, es elegir
este porcentaje de anti-squat si se tiene la suerte de poder acceder a su diseño calculando
de forma adecuada, y en el que siempre se deberá fijar al estudiarla para comprender su
eficacia, e incluso modificar convenientemente si se trata de un monoplaza mediante el
cambio de posición del anclaje de los trapecios, ya que en un turismo se sale del alcance de
la mayoría de los preparadores debido a la dificultad que supone cambiar los anclajes de la
suspensión.

42
Figura 3.49. Geometría Anti-squat14
En la figura 3.49 se puede ver cómo se halla el Centro de Transferencia (CT) de delante
hacia atrás al acelerar, en una suspensión formada por trapecios superpuestos como es el
caso del monoplaza UPM Racing Eléctrico.
El CT es el centro teórico respecto del cual gira el tren trasero en su movimiento de delante
atrás en un momento de aceleración o de fuerte apoyo, normalmente a la salida de una
curva. La distancia entre el CG y el punto A nos define la magnitud de su efecto, y se
acostumbra a medir en porcentaje de la altura total de aquél. Por ejemplo si A se encuentra
al 20% de la altura del CG, éste será el porcentaje de efecto anti levantamiento.
Figura 3.50. Anti-squat de suspensión posterior
Anti-hundimiento “Anti-dive”
El anti-dive evita que la parte trasera del chasis se levante durante las frenadas, también se
mide en porcentaje de la altura del CT respecto al CG, no siendo usual un valor mayor del
30%.
14
Comportamiento Dinamico del coche deportivo – H. Baylos

43
Figura 3.51. Geometría Anti-dive15
3.3.11. Bump steer y roll steer
Reciben este nombre (siempre en inglés) las variaciones que sufre el paralelo por dos
causas distintas:
a. al oscilar la suspensión en todo su recorrido útil (bump steer).
b. al balancear (roll steer).
Esta variación impone un cambio de dirección en el coche; de ahí steer (dirección). Para
evitarlo, se debe trabajar con los elementos de dirección y suspensión, optimizar las
variaciones de paralelo.
El método representado en la figura 3.52 consiste en hacer oscilar la suspensión a lo largo
de todo su recorrido útil, y comprobar las variaciones de paralelo con los comparadores
centesimales que se pueden ver. Efectuando esta medición cada milímetro de
desplazamiento se conseguirá representar un gráfico que, si no es una línea recta, producirá
un comportamiento errático a la menor oscilación, intolerable en competición o en una
conducción rápida.
En cada tipo de suspensión habrá que actuar de una forma para conseguir la mínima
variación.
Cuando los semitrenes derecho e izquierdo se mueven relativamente entre ellos siguiendo
las oscilaciones del terreno, o en general ángulos diferentes de inclinación del lado interior
y exterior de la curva, las bieletas de la dirección, si se trata del tren delantero o las
pequeñas diferencias de longitud entre los elementos de suspensión de ambos lados si se
trata del trasero, determinan esas diferencias de paralelo que inducen variaciones de
15
Comportamiento Dinamico del coche deportivo – H. Baylos

44
trayectoria que producen unos movimientos parásitos que no favorecen en absoluto la
estabilidad.
Figura 3.52. Esquema para la medición del Bump-steer.
3.3.12. Geometría de Ackermann
Cuando un vehículo pasa una curva, su rueda delantera interna recorre menos camino que
la externa puesto que el radio de ambas trayectorias es diferente: tanto mayor es la
diferencia de giro que debe presentar una respecto de la otra cuanto más pronunciada sea la
curva en cuestión. Para que el Centro Instantáneo de Rotación (CIR) de ambos trenes
coincida, convirtiéndose en lo que se denomina punto de mínimo deslizamiento en el
estudio cinemático, es necesario que se cumpla la condición geométrica representada en la
figura 3.53.

45
Figura 3.53. Condición de Ackerman y CIR.
El Ackermann suele cuantificarse en forma de porcentaje con respecto a la batalla. Así,
cuando la intersección de las líneas formadas por las bieletas de dirección se produce sobre
el eje trasero, como se puede observar en la figura 3.54, se habla de Ackermann 100%. Si
las bieletas son paralelas entre sí: Ackermann neutro o al 0%. Y cuando la intersección se
produce por la parte delantera, se emplean porcentajes negativos.
Figura 3.54. Geometría tipo Ackermann.
En competición, dados los grandes apoyos en curva y la gran transferencia de pesos hacia
el exterior de la misma, la rueda exterior trabaja, casi siempre, con ángulos de deriva
acusados. En esta circunstancia, dependiendo del valor de dicho ángulo, puede ser
aconsejable reducir el Ackermann a 0 (Ackermann neutro) o incluso Ackermann negativo.

46
CAPITULO IV
ANÁLISIS CINEMÁTICO DE SUSPENSIÓN FSAE ELECTRIC UPM
4.1. Diagnóstico de suspensión UPM 2011 E
Luego de la presentación del equipo UPM Racing 2011 en Alemania, surgieron varias
oportunidades de mejora, entre ellas en el sistema de suspensión, dentro de los cuales se
detallan a continuación:
Calcular la riguidez de los muelles ya que al momento de arranque del coche, éste
tenía el contacto con el suelo.
Figura 4.1. UPM Racing Eléctrico 2011– CAR E20.
En la suspensión trasera, los puntos de articulación (rótulas) de los brazos de
suspensión están conectado al chasis en una zona donde hace que la barra trabaje a
flexión; por lo que se deberá estudiar en conjunto con el área de chasis y baterias
para llegar a un compromiso.
Con los parámetros anteriores solventados se procederá a la realización de la
simulación cinematica mediante el programa LOTUS LSA para analizar la
geometría y el comportamiento de la suspensión, y posteriormente realizar la
simulación dinámica con la ayuda del software MSC. ADAMS/CAR, éste último es
otro tema de estudio realizado como proyecto de fin de Máster de la UPM.

47
Figura 4.2. Suspensión trasera UPM Eléctrico 2011– CAR E20.
Figura 4.3. Modelado en programa CATIA UPM Eléctrico 2011.
4.2. Datos de partida
Muchos de los datos necesarios para realizar el análisis por simulación son datos
recopilados del proyecto anterior UPM 2011 Eléctrico, así también de los parámetros de
diseño de la suspensión del UPM 08 de combustión. Esto se debe a que es necesario
recuperar componentes del vehículo anterior para disminuir el presupuesto. Es por eso, que
muchas medidas y datos vendrán dados por las dimensiones de los componentes anteriores,
Además por las mejoras realizadas al chasis, el sistema de suspensión y demás sistemas, se
procedió a generar el monoplaza en el programa Catia V5 con el fin de estimar valores

48
teóricos como por ejemplo: Masa suspendida, masa no suspendidas, centro de gravedad,
etc.
A continuación, se muestra una lista de los datos de partida que se toman para el UPM
Racing 2012:
Longitud total (mm): 2940
Ancho total (mm): 1430
Altura total (mm): 1058
Track delantero (mm): 1230
Track trasero (mm): 1160
Batalla (mm): 1650
Masa total incluido 70 kg del piloto (kg): 350
Masa suspendida (kg): 265
Masa no suspendida (kg): 85
Altura del centro de gravedad (mm): 300
Masa en el eje delantero (%): 45
Masa en eje trasero (%): 55
Altura mínima del coche (mm): 45
Recorrido total de suspensión (mm): 50.8
Neumáticos: Hoosier 20.5 x 7.0 R13
Figura 4.4. Modelado de nuevo chasis UPM Eléctrico 2012 –
nuevos puntos de sujeción de suspensión trasera.

49
4.3. Cálculos de rigidez de muelles
4.3.1. Eje delantero
Tomando como referencia datos de diseño de UPM 2011:
Para una frecuencia de 2.32 Hz
Masa en eje delantero (0.45% del total) = 157.5 Kg
Rigidez de sistema en una rueda de eje delantero:
Con la rigidez del neumático: Kn = 120 N/mm
Se calcula la rigidez en la rueda:
Aplicando la formula de relación de desplazamiento RD:
La rigidez del muelle será:
En el mercado existen rigideces de valores exactos por lo que se seleccionará el de 225
lb/in que equivale a 40 N/mm
4.3.2. Eje Posterior
Para una frecuencia de 2.22 Hz
Masa en eje delantero (0.55% del total) = 192.5 Kg
Rigidez de sistema en una rueda de eje delantero:

50
Con la rigidez del neumático: Kn = 120 N/mm
Se calcula la rigidez en la rueda:
Aplicando la formula de relación de desplazamiento RD:
La rigidez del muelle será:
Se seleccionará muelle de rigidez de 350 lb/in o 60 N/mm
4.4. Introducción del Programa Lotus Suspension Analysis “LSA”
4.4.1. Presentación
LOTUS es una aplicación líder en el mercado para el modelado y diseño de suspensión de
los líderes mundiales en puesta a punto de vehículos y su análisis, el módulo del programa
Lotus Análisis SHARK es un simulador de suspensión geométrica y vienen con
herramientas de modelado cinemático, con una interfaz fácil de usar para aplicar cambios a
la geometría propuesta y de forma instantánea evaluar su impacto a través de los resultados
gráficos.
El módulo RAVEN utiliza un modelo de simulación integral no lineal para la dinámica
vehicular, derivada de las características cinemáticas de movimiento y compatible con las
ruedas de suspensión de un vehículo.

51
Figura 4.5. Simulador LOTUS Suspension Analisys
4.4.2. ¿Qué es el Lotus Suspension Análisys?
Figura 4.6. Pantalla LOTUS Suspension Analisys
Es una herramienta de análisis y diseño que se puede utilizar tanto para el diseño inicial de
los puntos fijos de la suspensión, y también para el diseño y la orientación de los brazos de
suspensión para la puesta a punto del comportamiento deseado.
Los modelos se crean y se modifican a través de un entorno 3D de visualización. Esto
permite que los puntos de articulación y los brazos ser "arrastrados" en la pantalla y que los

52
resultados gráficos / numérico sean actualizados en 'tiempo real'. El programa contiene uan
serie de plantillas bases para el modelado con lo que permite a los usuarios crear sus
propios modelos de suspensión.
4.4.3. Usos normales de Análisis Suspensión Lotus
LSA es utilizado tanto por los diseñadores y los analistas para la disposición de las
posiciones de los puntos de suspensión, a fin de conseguir que el comportamiento
cinemático deseado.
Cualquier resultados se puede mostrar gráficamente (por ejemplo ángulo de caída, el
ángulo del convergencia), en función del movimiento de rebote - vaiven, movimiento de
balanceo o el movimiento de la dirección. Estos resultados se actualizan en "tiempo real"
así como el movimiento de los puntos de suspensión.
4.4.4. Conceptos generales
LSA dispone de dos modos principales de visualización y análisis, en 2D y 3D, y es
posible importar un modelo 2D en 3D.
Las suspensiones pueden ser articuladas en los modos individual de bump / rebound, de
balanceo roll y de dirección steer o un modo de combinación que permite ejecutar a todos
los tres tipos de articulación. Los modos de dirección son relevantes solo para el modo 3D .
LSA utiliza plantillas para identificar determinados tipos de suspensión en 3D. Estas
plantillas definen el número de piezas, el número de puntos y la conectividad de las partes.
Un gran número de plantillas "estándar" se incluyen en la instalación, mientras que los
usuarios pueden crear su propio o modificar las existentes para los tipos de modelo de
suspensión cinemáticas no disponibles.
Los modelos 3D pueden ser construidos como ángulos, eje o modelos completos de
suspensión del vehículo.
LSA se puede utilizar sólo en modo cinemático, (es decir, cuerpos rígidos con juntas de
bola), o en el modo personalizado donde la deflexión debida a las articulaciones son
añadidas a los resultados cinemáticos sobre una base incremental, (nota que el módulo
personalizado necesitará licencia adicional al módulo cinemático). El modo personalizado
incluye el análisis modal y de capacidad de amortiguación forzada.

53
Figura 4.7. Modelos 3D
4.4.5. Sistema de Coordenadas
El sistema de coordenadas de LSA es un sistema basado en la ley de la mano derecha con
origen que debe estar en la parte frontal del coche y coincidir con la línea central
longitudinal del vehículo.
Eje Y está paralelo a la vía del coche, y la dirección positiva es hacia la derecha cuando se
está sentado en el coche. Las suspensiones se pueden definir como lado derecho o el lado
izquierdo según se requiera.
Eje X está a lo largo de la batalla del vehículo y positiva hacia la parte trasera del coche.
El eje Z es la altura vertical y positiva hacia arriba.
Al introducir los datos de los puntos de suspensión se debe asegurarse de que todas las
coordenadas estén en referencia con el origen que se ha seleccionado y se tendrá en cuenta
que todos los puntos de suspensión generados por LSA serán relativos a dicho origen. Las
únicas restricciones son que el plano XZ debe pasar por el centro del coche y el origen

54
debe ser en parte delantera del coche. El origen del sistema de coordenadas no necesita ser
coincidente con el plano del suelo.
Figura 4.8. Sistema de coordenadas LSA
4.4.6. Términos convencionales por defecto
Camber.- Inclinación del plano de la rueda con la vertical, negativo cuando la
rueda se apoya en la parte superior.
King Pin Angle.- El ángulo en vista frontal entre el eje de dirección y la
vertical. Positivo cuando el eje de dirección inclina hacia el interior en la parte
superior.
Toe.- Ángulo entre el plano de la rueda y la dirección de avance, positivo si la
parte delantera de la rueda está "convergente" hacia el centro del coche.
Castor.- El ángulo en vista lateral entre el eje de dirección y la vertical.
Positivo cuando la parte superior del eje de dirección está inclinado hacia la
parte trasera.
Steering Lock.- Es el desplazamiento lineal en el eje Y de la cremallera de
dirección. Steering lock positivo puede producir convergencia negativa o
positiva dependiendo de si la cremallera de dirección está delante o detrás del
eje de la dirección.
Roll.- regla de la mano derecha aplicada al vehículo en el eje x positivo. Al
sentarse en el coche el balanceo roll a la izquierda es positiva.

55
4.5. Diseño prototipo virtual
Tomando en cuenta las medidas del chasis actual y de los elementos de la suspensión como
son: mangueta, llanta, características del neumático, de los muelles, de los brazos de
suspensión, batalle, vías, dirección, se procede a la modelización del prototipo.
4.5.1. Creación del Modelo
Para la generación del modelo se utiliza la plantilla “Double Wishbone, Push rod to
damper” tanto para la suspensión delantera como para la trasera, seleccionar suspensión
simétrica; además la plantilla para la dirección “Steering Rack”.
Seleccionado el modelo, se procede a editar las coordenadas de todos los puntos de la
suspensión tanto delantera, trasera y de la dirección; colocamos las coordenadas de los
neumáticos, amortiguadores, muelles, rocket, barras de suspensión, barra empujadora
push- rod, puntos de anclaje de la mangueta a la rueda.
Figura 4.9. Modelo suspensión prototipo UPM Eléctrico 2012

56
Parametrización de coordenadas de suspensión delantera y dirección
Figura 4.10. Ejm. Coordenadas de puntos suspensión delantera
Figura 4.11. Vista frontal suspensión delantera UPM Eléctrico 2012

57
Figura 4.12. Vista superior suspensión delantera UPM Eléctrico 2012
Figura 4.13. Vista lateral suspensión delantera UPM Eléctrico 2012

58
Parametrización de coordenadas de suspensión trasera
Figura 4.14. Ejm. Coordenadas puntos suspensión trasera
Figura 4.15. Vista frontal suspensión trasera UPM Eléctrico 2012

59
Figura 4.16. Vista superior suspensión trasera UPM Eléctrico 2012
Figura 4.17. Vista lateral suspensión trasera UPM Eléctrico 2012

60
4.5.2. Parametrización de los componentes de suspensión
El paso siguiente de la edición de las coordenadas de los puntos, es parametrizar el
comportamiento asociado con el modelo, para lo cual se inserta datos como: masa del
coche, distribución de masa, altura del centro de gravedad, recorrido de la rueda (conforme
a la normativa de la Formula SAE), ángulo de balanceo, distribución de frenado, etc. (ver
figura 4.18
Figura 4.18. Parametrización general del modelo

61
Propiedades muelle y amortiguador de suspensión delantera
Figura 4.19. Propiedades suspensión delantera
Propiedades muelle y amortiguador de suspensión trasera
Figura 4.20. Propiedades suspensión trasera
Propiedades específico de neumático
Figura 4.21. Propiedades del neumático

62
4.6. Simulación del prototipo
Para la simulación de la suspensión se cuenta con tres tipos de efecto de movimientos o
articulaciones; con los cuales se observa las variaciones de los parámetros cinemáticos
principales establecidos en estático como son: ángulo de caída, convergencia, anti-
hundimiento, anti-levantamiento, balanceo, ángulos de salida, ángulos de avance,
Ackermann. Para hallar un comportamiento óptimo bajo las solicitaciones, se procede bajo
el método de ensayo y error, con el fin de llegar a un compromiso donde la mayor parte de
los parámetros sean adecuados, y poder afinar el modelo con ensayo en pista real.
4.6.1. Modo Bump/rebound
Con este efecto se analiza la elevación o el rebote de la suspensión en dirección vertical, lo
que trata de simular es el paso del coche (en recta) por un bache o grada de 25.4 mm de
altura (normativa SAE). En la siguiente figura se muestra el recorrido del neumático y sus
elementos de suspensión acoplados en dirección del eje Z.
Figura 4.22. Suspensión trasera aplicado modo bump/rebound
4.6.2. Modo roll
Con esta solicitación se simula el paso del coche en curva, el cual hace que la suspensión
se incline por efecto de la aceleración centrífuga, la fuerza lateral se traduce en ángulo de

63
balanceo del coche. De la misma manera se puede visualizar y analizar la variación de
desplazamiento sufrido el modelo de suspensión en dirección del eje Y.
Figura 4.23. Suspensión delantera aplicado modo rol
4.6.3. Modo Steer
Con esta simulación se consigue girar la dirección en estático y observar si existe variación
de las cotas y ángulos de la suspensión, con el fin de corregir y tratar de conseguir el
comportamiento deseado, y si no es posible eliminar cambios que no afecten el
comportamiento fiable, al menos minimizarlo.
Figura 4.24. Suspensión aplicado modo steer

64
4.6.4. Modo combinado
Con esta condición se pretende simular los tres modos anteriores en un solo
comportamiento, es decir de cierta manera dinámica del coche en curva, con balanceo y
movimiento vertical, especialmente en la suspensión delantera ya que se encuentra también
el sistema de dirección.
Figura 4.25. Suspensión aplicado modo combinado
4.7. Cinemática Animación suspensión
El programa LSA cuenta con una herramienta de mucha utilidad que deforma muy
didáctica simula en forma de animación y en tiempo real, el movimiento realizado al
aplicar los modos cinemáticos.
Figura 4.26. Captura de animación del modelo de suspensión

65
4.8. Análisis de resultados
Para analizar los resultados obtenidos de la simulación cinemática del modelo de
suspensión elegida, se procederá a clasificar en las tres condiciones de movimiento; dentro
de cada una se explicará la variación de los parámetros principales, y sobre éstos las
recomendaciones que podrían surgir para la puesta a punto en la pista real y cómo se
podría regular y afinar.
4.8.1. Modo Bump/rebound
El figura 4.27 muestra que el ángulo de caída para la suspensión posterior está entre 1º y -
1.15º, mientras que la delantera está entre 1.3º y -1.5º (por diseño el ángulo máximo es de -
1.5°, por lo que siempre tendrá caída negativa ); con este comportamiento empírico se
puede decir es bueno de inicio para los ensayos en pista.
Figura 4.27. Ángulo de caída vs desplazamiento vertical
Figura 4.28. Convergencia vs desplazamiento vertical

66
En la anterior figura se puede analizar que la convergencia del eje trasero tiende a ser
negativo cuando la suspensión se comprime, se puede regular mediante el tirante que posee
paralelo a los brazos inferiores, además se deberá tomar en cuenta que es el eje de tracción
por lo que se deberá poner en convergencia positiva siempre.
4.8.2. Modo roll
En este modo, de forma geométrica es parecido a la aplicación de desplazamiento vertical,
por lo que el ángulo de caída y convergencia es similar. Por tanto se analizará los
parámetros de anti-dive y anti-squat
Figura 4.29. Anti-dive vs Roll angle
Figura 4.30. Anti-squat vs Roll angle

67
En las graficas anteriores muestran el 5 % de anti dive y con el 35% en promedio para el
anti squat, con esto se consigue que la suspensión tienda a resistir el movimiento tanto en
la frenada (anti-dive) y en aceleración luego de una curva e ingresar a una recta tenga un
buen comportamiento con este valor de anti squat.
4.8.3. Modo Steer
Al girar la dirección en estático, los ángulos de caída y convergencia varían como se
muestran en las dos figuras siguientes, se ha tratado de disminuir los valores pero se hace
complicado ya que los demás parámetros cambian negativamente el comportamiento, se
recomienda analizar en pista, regulando a caída más negativa y mayor convergencia (aplica
solo a suspensión delantera).
Figura 4.31. Ángulo de caída vs Steer travel
Figura 4.32. Convergencia vs Steer travel

68
4.8.4. Resumen de datos obtenidos:
SUSPENSION DELANTERA
Figura 4.33. Datos de suspensión izquierda delantera - bump
Figura 4.34. Datos de suspensión derecha delantera - bump

69
Figura 4.35. Datos de suspensión izquierda delantera - roll
Figura 4.36. Datos de suspensión derecha delantera - roll

70
SUSPENSION TRASERA
Figura 4.37. Datos de suspensión izquierda trasera - bump
Figura 4.38. Datos de suspensión derecha trasera - bump

71
Figura 4.39. Datos de suspensión izquierda trasera - roll
Figura 4.40. Datos de suspensión derecha trasera - roll

72
CAPITULO V
SETUP Y ENSAYO PRÁCTICO
5.1. Introducción
Setup o puesta a punto, se denomina así a la operación previa a rodar el vehículo en el
circuito o tramo de velocidad, según la especialidad que vayamos a desarrollar, en la que
se lleva a cabo el estudio de suspensiones, centros de balanceo (CB) y de gravedad (CG)
con sus correspondientes coordenadas, bump-steer y roll-steer, etc.
También se llama simplificadamente a la operación de poner el coche según los reglajes
necesarios para efectuar la primera prueba si se trata de un coche que no conocemos, o
aquellos que hayamos comprobado han ido mejor en un test o carrera anteriores, ya sea en
el mismo o en otro similar que hayamos utilizado con antelación.
Esta operación debemos efectuarla con rigor y precisión, conscientes de que el
conocimiento de la geometría de las suspensiones del coche o los reglajes perfectamente
realizados, dependiendo del caso, nos van a permitir tenerlo más "de la mano" en su puesta
a punto real, para hacer que el coche esté equilibrado y que el piloto vaya más deprisa.
5.2. Normas a seguir para efectuar en la práctica un set-up riguroso y fiable
El suelo debe estar absolutamente nivelado y plano.
La altura de rodaje debe ser medida con el coche vacío, ruedas nuevas o simuladas
del mismo diámetro.
Antes de medirla conviene hacer oscilar, bajando y subiendo ("bacheando")
suficientemente la suspensión.
La medición se efectuará con un compás de puntas hacia fuera, entre el suelo del
coche y la plataforma donde esté situado.
Después de cada intervención en la caída, paralelo, etc. conviene también bachearlo
antes de medir de nuevo, para que el chasis vuelva a su altura.
Los muelles deben montarse sin precarga, ya que ésta se pondrá al final de todas las
operaciones incluida la altura de rodaje, que como consecuencia de aplicar la

73
precarga cambiará aunque sea ligeramente, por lo que habrá que volverla a hacer de
nuevo con los push rods.
La longitud de los push rod delanteros, una vez puesta la altura de rodaje, se debe
igualar exactamente: pueden tener diferencias de pocos milímetros, pero muy
importantes a la hora de regular los pesos de cada rueda sobre las balanzas. Se debe
hacer desmontándolos del coche, sobre una barra regulable en longitud, en cuyos
extremos tenga dos ejes del mismo diámetro que el alojamiento de las rótulas para
poner acoplar cada push rod una vez des montado. Los traseros, servirán para
igualar pesos en la operación de pesaje sobre las balanzas (corner weight), de
manera que una vez terminada deben quedar a igual longitud.
El orden de actuación respecto a los ángulos del tren delantero y trasero, debe ser
empezando por el paralelo, luego caída - salida, y al final avance. En algunas
suspensiones modernas, la modificación del ángulo de caída no modifica en
absoluto los demás ángulos. Entre la medida de cada uno de ellos, es necesario
restituir cada vez la altura de rodaje elegida en el monoplaza.
El reparto de pesos sobre las balanzas debe hacerse sin la barra estabilizadora
trasera y sin precarga ninguna en las tuercas del stack delantero (si se trata de un
mono-amortiguador delantero).
5.3. En la pista
Con anterioridad a cada sesión de rodaje o carrera, es importante tener en cuenta los
siguientes aspectos:
Organización previa de todo lo necesario desde el punto de vista operativo
(material, neumáticos, gasolina, consumibles, herramienta, etc.)
Adecuar el set-up del coche, en la sede del equipo, a la pista o terreno en el que se
va a rodar.
Realizar el check-list (o chequeo) de todos los sistemas que son necesarios para el
correcto funcionamiento del coche (energía - motor, consumo, sistema eléctrico,
etc.)

74
Figura 5.1. Ejemplo de lista de chequeo
Una vez en la pista, y sobre todo en las sesiones de test, es muy importante llevar
un control exhaustivo de los cambios que se realizan, en qué orden, y cuáles son los
ficheros de adquisición de datos asociados a los mismos.
De igual modo, es importante contemplar, e identificar claramente en cada fichero
de datos, los siguientes aspectos:
o Configuración de cada sesión
o Piloto
o Datos de la pista (hora, temperaturas, estado, etc.)
o Neumáticos
o Configuración global (consumo, lastre, etc.)
La introducción de los sistemas de adquisición de datos en los vehículos de
competición ha permitido conocer mucho mejor lo que ocurre en el vehículo a lo
largo del recorrido realizado. No obstante, la información y, sobre todo la
“sensación” del piloto, es fundamental para conseguir que el conjunto coche-piloto
sea efectivo y rápido.
Es fundamental establecer un orden que se cumpla siempre, y ayudar al piloto a
estructurar la información. Un posible orden es repasar las sensaciones en:
o Frenada
o Aceleración
o Entrada de curva (frenada y giro)
o Zona media de la curva (acelerador constante)
o Salida de la curva (acelerador a fondo)

75
o Curvas enlazadas (si las hay)
o Resto de componentes (palancas, volante, pedales, etc.)
o Estabilidad o inestabilidad de comportamiento
Para cada información, se deberá tener una “teoría” del por qué, y verificarlo
posteriormente con los datos adquiridos.

76
CAPITULO VI
PLANIFICACIÓN Y ACTIVIDADES EN LA FORMULA SAE
UPM RACING 2012
6.1. Planificación
El cronograma establecido a inicios del proyecto se ha llevado a cabo paulatinamente,
conforme a los 5.4 créditos definidos para realizar el proyecto fin de Máster, las
actividades que se han efectuado son las siguientes:
ACTIVIDAD MES
1 2 3 4 5
1. Recopilación bibliográfica de información técnica
Teoría de vehículos, sistema de suspensión - General
Especializada – vehículos de competición
55 h
ora
s
2. Estudio de la reglamentación de la Formula SAE eléctrica,
Reglas Generales de la FSAE
Reglas específicas referentes al sistema de suspensión.
Análisis de las modificaciones a realizar en el prototipo UPM Racing - Electric, si aplica.
3. Investigación los diferentes tipos de suspensión que se utilizan en competición de un Formula SAE.
Recopilar Información
Sistematización y análisis de la información
35 h
ora
s
4. Evaluación del comportamiento cinemático de la Suspensión
Modelado de la suspensión en el software
Evaluación de los resultados y su respectivo análisis.
50 h
ora
s
5. Convalidación de resultados, ensayo en pista.
Ajuste y puesta a punto previo de la suspensión
Análisis de datos obtenidos
60 h
ora
s
6. Corrección, mejora y ajuste final de la configuración del sistema de
suspensión; puesta a punto para la competición.
7. Realización del Informe Final 80 horas
Además de realizar el estudio de análisis para adecuar los puntos de la suspensión
mediante Lotus LSA, se ha colaborado con la fabricación, ensamblaje y preparación del
sistema de suspensión, sistema de dirección, sistema de freno y varias tareas, a fin de que

77
el monoplaza pueda rodar y poder evaluar en pista el comportamiento de todos los
sistemas; con lo que en total se ha dedicado 280 horas.
En hora buena se logro superar todos los obstáculos y finalizar todas las actividades, y el
prototipo pudo rodar, para ello se contó con la pista de pruebas que dispone en INSIA.
Figura 6.1. Prueba en pista del monoplaza UPM Racing 2012
Figura 6.2. Prueba en pista Skidpad del monoplaza UPM Racing 2012

78
6.2. Actividades en la suspensión
a. Preparación de los puntos de suspensión en el chasis
Figura 6.3. Chasis monoplaza UPM Racing 2012
b. Fabricación de los brazos de suspensión trasera conforme a las medidas analizadas
en Lotus
Figura 6.4. brazos de suspensión trasera derecha UPM Racing 2012

79
c. Ensamble de los elementos suspensión delantera y trasera
Figura 6.5. Ensamble de suspensión delantera UPM Racing 2012
Figura 6.6. Ensamble de suspensión trasera UPM Racing 2012

80
d. Pesaje para equilibrar el reparto de masa, por eje y rueda.
Figura 6.7. Pesaje del monoplaza UPM Racing 2012
Figura 6.8. Vista posterior monoplaza UPM Racing 2012

81
6.3. Competencia en Inglaterra UK
a. Defensa de diseño y costos del proyecto
Figura 6.9. Defensa del proyecto antes Jueces UK
b. Revisión física – estática chasis, suspensión y parte electrónica / eléctrica.
Figura 6.10. Revisión física antes Jueces UK

82
c. Pruebas suspensión y electrónica / eléctrica.
Figura 6.11. Pruebas UK y aprobación (Suspensión –Safety, Electric)

83
CAPITULO VII
CONCLUSIONES Y FUTURAS LINEAS DE TRABAJO
7.1. Conclusiones
En este proyecto se utiliza un modelo simplificado de un cuarto de vehículo para
calcular la rigidez de los muelles en función de la masa en la rueda, relación de
desplazamiento del mecanismo rueda-muelle, de la frecuencia de oscilación y
rigidez del neumático.
Con la simulación de la suspensión se puede analizar los puntos mas adecuados
para colocar los puntos de acoplamiento de los brazos de suspensión y conocer la
variación de los parámetros cinemáticos aplicando las condiciones de movimiento.
En base a la simulación se ha verificado el buen funcionamiento de los elementos
de la suspensión en conjunto antes de fabricar el sistema.
Muchos de los parámetros considerados en la simulación son recopilados del
anterior monoplaza 2011, ya que los elementos se encuentran en buenas
condiciones.
El diseño, selección de materiales y proceso de construcción del monoplaza está
basado en el estudio del monoplaza UPM 08 de combustión, que ha tenido buenas
prestaciones y buen desempeño en pista.
El paso siguiente al análisis cinemático, es el estudio dinámico del sistema de
suspensión, con el cual se garantiza de mejor manera el comportamiento que
deseamos obtener.
De acuerdo a los objetivos planteados, se puede decir que se ha conseguido casi a
cabalidad, se ha llegado a rodar y poner a punto a la suspensión para la
competencia en Inglaterra.
En el ensayo de pista del INSIA se verificó el comportamiento del sistema de
suspensión, realizando ensayos de aceleración, frenada, curvas cerradas.
Al no contar un sistema de adquisición de datos se hace complicado afinar las cotas
y ángulos del sistema de suspensión, pero de forma cualitativa en base a
indicaciones del piloto, se podría decir que la configuración del sistema hace que el
monoplaza tenga buen comportamiento.

84
7.2. Futuras líneas de trabajo
A partir de las conclusiones y resultados extraídos de este Proyecto Fin de Máster se
pueden proponer una serie de futuras líneas de trabajo:
Primeramente de ser posible contar con un equipo de adquisición de datos, aunque
son equipos costos pero a mediano y largo plazo es rentable ya permite optimizar
tiempos y dinero en sesiones de test.
El modelo simulado en este proyecto era una simplificación de un sistema de
suspensión, para obtener resultados mas precisos se debería realizar la simulación
con modelos que se asemejen mas al modelo de vehículo completo, que consigan
simular mejor el sistema de suspensión de un vehículo real y sus masas e inercias.
Conjuntamente con un estudio de diseño de suspensiones se podría mejorar tmando
en cuenta materiales más livianos como son fibra de carbono, y que hoy en día se
ha iniciado la fabricación de trapecios con perfil aerodinámico.
Realizar pruebas de comportamiento efectuando cambios sobre la rigidez del
neumático o sobre los coeficientes de amortiguación del amortiguador.
Estudio del comportamiento de la suspensión durante procesos de aceleración o
frenada del vehículo.
Estudio de nuevas disposiciones de los elementos de suspensión, tanto de muelles y
amortiguadores como de los trapecios y mangueta, optimizándose así la geometría
de la suspensión.
Introducción de barras de torsión en lugar de muelles como elementos elásticos, por
sus mayores posibilidades de desarrollo y colocación dentro del vehículo.

85
BIBLIOGRAFÍA
TYRE AND VEHICLE DYNAMIC, H.B. Pacejka, University of Delft, 2001.
TEORÍA DE LOS VEHÍCULOS AUTOMÓVILES, F. Aparicio, C. Vera y V.
VEHICLE DYNAMICS LECTURES. Richard Hathaway
RACE CAR VEHICLE DYNAMICS, William y Douglas Milliken, SAE, 1ª Ed.,
1995.
ROAD VEHICLE SUSPENSIONS, Wolfgang Matschinsky, Wiley, 2000.
Manuales
Getting Started with Lotus Suspension Analysis V03
How to make your car handle-ebook pdf-racing chassis racecar engineering
F1 Technology. Peter Wright
Comportamiento dinámico del coche deportivo _ H. Baylos
Ferrari F1. Peter Wright
Revista Racecar Engineering
Internet
www.autosport.com
http://www.upmracing.es
www.formula1.com
www.motec.com
www.ten-tenths.com
www.italiaracing.net
http://scarbsf1.wordpress.com/ Técnica de F1
http://www.mulsannescorner.com/ Información técnica sobre prototipos
http://www.formulastudent.com

86
ANEXOS
Anexo I.- Normativa Formula Student FSAE 2012 (Digital)