
Cin´etica de Cuerpos R´ıgidos: Ecuaciones de Newton …¡mica II... · a o el momento de inercia...
32
Cin´ etica de Cuerpos R´ ıgidos: Ecuaciones de Newton-Euler. Jos´ e Mar´ ıa Rico Mart´ ınez Departamento de Ingenier´ ıa Mec´ anica. Universidad de Guanajuato, F. I. M. E. E. Carretera Salamanca-Valle de Santiago Km. 3.8 + 1.5 CP 36730, Salamanca, Gto., M´ exico E-mail: [email protected] Alejandro Tadeo Ch´avez Departamento de Ingenier´ ıa Mecatr´ onica. Instituto Tecnol´ ogico Superior de Irapuato Carretera Irapuato-Silao Km. 12.5 CP 36614, Irapuato, Gto., M´ exico E-mail: [email protected] 1 Introducci´ on. En estas notas, se presentan los fundamentos de la cin´ etica de los cuerpos r´ ıgidos, en particular la deducci´ on de las ecuaciones de Newton-Euler para cuerpos r´ ıgidos. En un primer lugar, se derivan las ecuaciones de Newton-Euler para un cuerpo r´ ıgido sujeto a movimiento espacial, en una segunda etapa se determina la forma particular de las ecuaciones de Newton-Euler cuando el cuerpo r´ ıgidoest´a sujeto a movimiento plano general y la distribuci´ on de masas del cuerpo r´ ıgido satisface ciertas condiciones. En una etapa final, estas notas indican las limitaciones de las ecuaciones de Newton-Euler obtenidas aqu´ ı, as´ ı como los casos especiales de las ecuaciones de Newton-Euler cuando el cuerpo r´ ıgido est´ a sujeto a: 1.Traslaci´on. 2. Rotaci´ on alrededor de un eje fijo. 3. Movimiento de rodadura. Sin embargo, antes de iniciar el estudio de la derivaci´ on de las ecuaciones de Newton-Euler es necesario revisar algunas de las propiedades de los primeros momentos de masas, del centro de masas de un cuerpo r´ ıgido, conocido tambi´ en como baricentro o centro de gravedad y de los segundos momentos de masas, es decir del tensor de inercia. 1
Transcript of Cin´etica de Cuerpos R´ıgidos: Ecuaciones de Newton …¡mica II... · a o el momento de inercia...

Cinetica de Cuerpos Rıgidos: Ecuaciones de Newton-Euler.
Jose Marıa Rico MartınezDepartamento de Ingenierıa Mecanica.
Universidad de Guanajuato, F. I. M. E. E.Carretera Salamanca-Valle de Santiago Km. 3.8 + 1.5
CP 36730, Salamanca, Gto., MexicoE-mail: [email protected]
Alejandro Tadeo ChavezDepartamento de Ingenierıa Mecatronica.Instituto Tecnologico Superior de Irapuato
Carretera Irapuato-Silao Km. 12.5CP 36614, Irapuato, Gto., MexicoE-mail: [email protected]
1 Introduccion.
En estas notas, se presentan los fundamentos de la cinetica de los cuerpos rıgidos, en particular ladeduccion de las ecuaciones de Newton-Euler para cuerpos rıgidos. En un primer lugar, se derivan lasecuaciones de Newton-Euler para un cuerpo rıgido sujeto a movimiento espacial, en una segunda etapase determina la forma particular de las ecuaciones de Newton-Euler cuando el cuerpo rıgido esta sujeto amovimiento plano general y la distribucion de masas del cuerpo rıgido satisface ciertas condiciones. Enuna etapa final, estas notas indican las limitaciones de las ecuaciones de Newton-Euler obtenidas aquı,ası como los casos especiales de las ecuaciones de Newton-Euler cuando el cuerpo rıgido esta sujeto a:
1. Traslacion.
2. Rotacion alrededor de un eje fijo.
3. Movimiento de rodadura.
Sin embargo, antes de iniciar el estudio de la derivacion de las ecuaciones de Newton-Euler es necesariorevisar algunas de las propiedades de los primeros momentos de masas, del centro de masas de un cuerporıgido, conocido tambien como baricentro o centro de gravedad y de los segundos momentos de masas, esdecir del tensor de inercia.
1

2 Primeros Momentos de Masa, Centro de Masas.
Considere un cuerpo rıgido B y un punto arbitrario P . Entonces el primer momento de masas, �QP ,del cuerpo B respecto al punto P se define como
�QP =∫
B
�rM/P dm, (1)
donde la integral es con respecto a todas las partıculas del cuerpo rıgido B y el vector �rM/P es el vectorde posicion de una partıcula arbitraria del cuerpo, localizada en el punto M , y esta dado por, vea lafigura 1,
�rM/P = xi + yj + zk,
por lo tanto, vea la figura 2,
Figure 1: Primer Momento de Masas de un Cuerpo Rıgido B Respecto a un Punto P .
Figure 2: Componentes Cartesianas del Primer Momento de Masas de un Cuerpo Rıgido B Respecto aun Punto P .
2

�QP =∫
B
�rM/P dm =∫
B
(xi + yj + zk
)dm
=∫
B
xdm i +∫
B
y dm j +∫
B
z dmk = QPx i + QPy j + QPz k, (2)
donde
QPx =∫
B
xdm QPy =∫
B y dm QPz =∫
B
z dm, (3)
se denominan las componentes, x, y y z, del primer momento de masas del cuerpo B conrespecto al punto P .
Definicion: Centro de Masas. Considere un cuerpo rıgido B, un punto G del cuerpo rıgido B sedenomina el centro de masas, baricentro o centro de gravedad si y solo si el primer momento demasas, �QG, del cuerpo B respecto al punto G es igual a �0, es decir
�QG =∫
B
�rM/G dm = �0, (4)
o alternativamenteQGx =
∫B
xdm = QGy =∫
B
y dm = QGz =∫
B
z dm = 0. (5)
Ahora bien, considere otro punto Q, entonces los primeros momentos de masas respecto a los puntosG y Q estan relacionados por
�QG =∫
B
�rM/G dm =∫
B
(�rM/Q + �rQ/G
)dm =
∫B
�rM/Q dm + �rQ/G
∫B
dm = �QQ + M�rQ/G. (6)
sin embargo,�QG = �0.
Por lo tanto�QQ + M �rQ/G = �0 o �QQ = −M �rQ/G = M �rG/Q (7)
Asi pues, el centro de masas G es el punto donde la masa del cuerpo debe concentrarse para calcular,con respecto a un punto arbitrario, digamos M , los primeros momentos de masa.
3 Segundos Momentos de Masa, Tensor de Inercia.
Considere un cuerpo rıgido B y un punto arbitrario P . Entonces el vector de inercia, �IP,na , delcuerpo B respecto al punto P y en la direccion na se define como
�IP,na =∫
B
�rM/P × (na × �rM/P
)dm, (8)
donde la integral es con respecto a todas las partıculas del cuerpo rıgido B, el vector na es un vectorunitario y el vector �rM/P es el vector de posicion de una partıcula arbitraria del cuerpo, localizada en elpunto M , vea la figura 3.
3

Figure 3: Determinacion del Vector de Inercia de un Cuerpo Rıgido B Respecto a un Punto P .
El escalar de inercia IP,na,nbdenominada el escalar de inercia del cuerpo rıgido B relativa al
punto P en las direcciones na y nb se define como
IP,na,nb≡ �IP,na · nb. (9)
A partir de las definiciones indicadas en las ecuaciones (8) y (9), se tiene que
IP,na,nb= �IP,na · nb =
[∫B
�rM/P × (na × �rM/P
)dm
]· nb
=∫
B
[�rM/P × (
na × �rM/P
)] · nb dm =∫
B
[nb × �rM/P
] · (na × �rM/P
)dm
=∫
B
(�rM/P × nb
) · (�rM/P × na
)dm (10)
Ademas, de la ecuacion (10) se tiene que
IP,na,nb=
∫B
(�rM/P × nb
) · (�rM/P × na
)dm =
∫B
(�rM/P × na
) · (�rM/P × nb
)dm = IP,nb,na .(11)
La ecuacion (11) indica que el escalar de inercia es simetrico respecto al orden de los vectoresunitarios na y nb. Si na �= nb el escalar de inercia se denomina el producto de inercia del cuerpoB relativa al punto P en las direcciones na y nb, si na = nb el escalar de inercia se denomina elsegundo momento de masa o momento de inercia del cuerpo B relativa al punto P en ladireccion na o el momento de inercia del cuerpo B relativa al punto P respecto a la lınea La
definida por el punto P y la direccion dada por na. Estas definiciones no requieren que las direccionesdadas por na y nb sean perpendiculares. Sin embargo cuando las direcciones son perpendiculares, porejemplo, aquellas dadas por los vectores unitarios i, j, k es posible encontrar terminos que son masfamiliares a los interesados en la mecanica de los cuerpos rıgidos. Por ejemplo, si
�rM/P =
⎡⎣ x
yz
⎤⎦
4

Figure 4: Determinacion de las Componentes Cartesianas del Vector de Inercia de un Cuerpo Rıgido BRespecto a un Punto P .
entonces, vea la figura 4,
�IP,i =∫
B
�rM/P ×(i × �rM/P
)dm =
⎡⎣ Ii,i
Ii,j
Ii,k
⎤⎦ =
⎡⎣ Ixx
Ixy
Ixz
⎤⎦ =
⎡⎣
∫B
(y2 + z2) dm∫B(−x y) dm∫B
(−x z) dm
⎤⎦ , (12)
�IP,j =∫
B
�rM/P ×(j × �rM/P
)dm =
⎡⎣ Ij,i
Ij,j
Ij,k
⎤⎦ =
⎡⎣ Iyx
Iyy
Iyz
⎤⎦ =
⎡⎣
∫B
(−y x) dm∫B
(x2 + z2) dm∫B(−y z) dm
⎤⎦ (13)
y
�IP,k =∫
B
�rM/P ×(k × �rM/P
)dm =
⎡⎣ Ik,i
Ik,j
Ik,k
⎤⎦ =
⎡⎣ Izx
Izy
Izz
⎤⎦ =
⎡⎣
∫B(−z x) dm∫B
(−z y) dm∫B(x2 + y2) dm
⎤⎦ (14)
De los resultados dados en las ecuaciones (12,13,14) se obtiene que la matriz o tensor de inercia queesta dado por
IP =
⎡⎣ Ixx Ixy Ixz
Iyx Iyy Iyz
Izx Izy Izz
⎤⎦ (15)
Por el resultado indicado en la ecuacion (11), se sabe que la matriz es simetrica y todas las matricessimetricas tienen eigenvalores reales y los eigenvectores asociados son perpendiculares. Los eigenvalores seconvierten en los ejes principales de inercia y los eigenvectores se convierten en las direcciones principalesde inercia. Las direcciones principales de inercia, asociados al tensor de inercia de un cuerpo rıgido,B, respecto a un punto arbitrario, P , se caracterizan por que los productos de inercia asociados a estasdirecciones principales son todos 0. Es decir, si las direcciones principales asociados a un tensor de inerciaIP son n1, n2 y n3, entonces
I′P =
⎡⎣ In1 n1 In1 n2 In1 n3
In2 n1 In2 n2 In2 n3
In3 n1 In3 n2 In3 n3
⎤⎦ =
⎡⎣ In1 n1 0 0
0 In2 n2 00 0 In3 n3
⎤⎦ (16)
5

Los resultados dados de las ecuaciones (12,13,14) permiten calcular el vector de inercia, �IP,na conrespecto a una direccion arbitraria dada por na = nax i + nay j + nazk, de acuerdo a la siguiente ecuacion
�IP,na =∫
B
�rM/P ×[(
nax i + nay j + nazk)× �rM/P
]dm
= nax
∫B
�rM/P ×(i × �rM/P
)dm + nay
∫B
�rM/P ×(j × �rM/P
)dm + naz
∫B
�rM/P ×(k × �rM/P
)dm
= �IP,inax + �IP,jnay + �IP,knaz = IP
⎡⎣ nax
nay
naz
⎤⎦ = IP na =
⎡⎣ Ixx Ixy Ixz
Iyx Iyy Iyz
Izx Izy Izz
⎤⎦
⎡⎣ nax
nay
naz
⎤⎦ (17)
3.1 El Teorema de Ejes Paralelos o Teorema de Steiner.
En esta seccion se mostrara como el teorema de ejes paralelos, tambien conocido como teorema de Steiner,permite determinar los escalares de inercia asociados a dos diferentes puntos y respecto a direccionesparalelas. Considere dos puntos P y Q del cuerpo rıgido tal que por los dos puntos pasan direcciones na
y nb paralelas entre si, vea la figura 5, entonces
Figure 5: El Teorema de Ejes Paralelos o Teorema de Steiner.
IP,na,nb=
∫B
(�rM/P × nb
) · (�rM/P × na
)dm
=∫
B
[(�rQ/P + �rM/Q
) × nb
] · [(�rQ/P + �rM/Q
) × na
]dm
=∫
B
(�rQ/P × nb
) · (�rQ/P × na
)dm +
∫B
(�rQ/P × nb
) · (�rM/Q × na
)dm
+∫
B
(�rM/Q × nb
) · (�rQ/P × na
)dm +
∫B
(�rM/Q × nb
) · (�rM/Q × na
)dm.
(18)
6

Puesto que �rQ/P , na, nb son constantes respecto a la variable de integracion dm, las integrales de laecuacion (18) pueden reducirse, de manera que
IP,na,nb=
(�rQ/P × nb
) · (�rQ/P × na
) ∫B
dm +(�rQ/P × nb
) · (∫B
�rM/Q dm × na
)
+(∫
B
�rM/Q dm × nb
)· (�rQ/P × na
)+
∫B
(�rM/Q × nb
) · (�rM/Q × na
)dm.
=(�rQ/P × nb
) · (�rQ/P × na
)M +
(�rQ/P × nb
) · (�QQ × na
)+
(�QQ × nb
)· (�rQ/P × na
)+ IQ,na,nb
(19)
Esta ecuacion, (19) permite determinar los escalares de inercia asociados a dos puntos diferentes perocuyas direcciones son paralelas. En particular, si el punto P es el centro de masas del cuerpo G y na = nb,se tiene que
IG,na,na =| �rQ/G × na |2 M + 2(�rQ/G × na
) · ( �QQ × na
)+ IQ,na,na (20)
Sin embargo, el primer momento de masas �QQ esta dado por
�QQ = M �rG/Q = −M �rQ/G,
por lo tanto
IG,na,na = | �rQ/G × na |2 M + 2(�rQ/G × na
) · (−M �rQ/G × na
)+ IQ,na,na
= | �rQ/G × na |2 M − 2 | �rQ/G × na |2 M + IQ,na,na (21)
Por lo que, finalmenteIQ,na,na = IG,na,na + M | �rQ/G × na |2 (22)
4 Suposiciones Fundamentales y Derivacion de las Ecuacionesde Newton-Euler.
Considere un cuerpo rıgido B y un cierto numero de partıculas, P1, P2, P3, Pi y Pj , totalmente arbitrarias,que permiten ejemplificar el comportamiento de cualquier otra partıcula del cuerpo B. Sobre cada unade esas partıculas actuan las fuerzas internas que ejercen el resto de las partıculas del cuerpo. Estasfuerzas internas satisfacen dos propiedades:
1. La pareja de fuerzas internas que dos partıculas Pi y Pj se provocan entre si son iguales y de sentidoscontrarios.
�fij = −�fji. (23)
donde el primer subındice del vector �f indica la partıcula sobre la cual actua la fuerza y el segundosubındice del vector �f indica la partıcula que provoca la fuerza, vea la figura 6.
2. La direccion de las fuerzas internas que dos partıculas Pi y Pj , se provocan entre si, coincide conla lınea que une ambas partıculas. Es decir, las fuerzas �fij , �fji son colineales.
7

Figure 6: Suposiciones Acerca de las Fuerzas Internas de un Cuerpo Rıgido B.
3. Una partıcula Pi no ejerce fuerza sobre si misma, es decir
�fii = �0. (24)
Por otro lado, sobre algunas partıculas, digamos Pi del cuerpo rıgido B, actuan fuerzas externascuya resultante esta dada por �Fi.
5 Suma de las Fuerzas Internas y Externas que Actuan Sobrelas Partıculas del Cuerpo Rıgido B.
En esta seccion determinaremos la suma de las fuerzas internas y externas que actuan sobre las partıculasdel cuerpo rıgido B. Aplicando la segunda ley de Newton para cada una de las partıculas Pi, se tiene que
�Fi +∑
j
�fij = mi �aPi (25)
donde �aPi es la aceleracion de la partıcula Pi que puede expresarse en terminos de la aceleracion delcentro de masas G del cuerpo rıgido B como, vea la figura 7,
�aPi = �aG + �α × �rPi/G + �ω × (�ω × �rPi/G
). (26)
De manera que la ecuacion (25) puede expresarse, empleando los vectores velocidad, �ω, y aceleracion,�α, angular del cuerpo rıgido
�Fi +∑
j
�fij = mi
[�aG + �α × �rPi/G + �ω × (
�ω × �rPi/G
)]. (27)
Realizando la suma de ambos lados de la ecuacion (27) con respecto a todas las partıculas del cuerporıgido B se tiene que∑
B
(�Fi +
∑j
�fij
)=
∑B
{mi
[�aG + �α × �rPi/G + �ω × (
�ω × �rPi/G
)]}. (28)
8

Figure 7: Vectores Velocidad y Aceleracion Angular de un Cuerpo Rıgido B.
o separando los terminos,∑B
�Fi +∑B
(∑j
�fij
)= �aG
∑B
mi + �α ×∑B
(mi �rPi/G
)+ �ω ×
[�ω ×
∑B
(mi �rPi/G
) ]. (29)
Sin embargo, por las propiedades de las fuerzas internas entre las partıculas del cuerpo rıgido B, setiene que ∑
B
(∑j
�fij
)= �0. (30)
De manera semejante, por la definicion del centro de masas, G, se tiene que∑B
(mi �rPi/G
)= �0 (31)
Finalmente, la masa total, M , del cuerpo rıgido B esta dada por∑B
mi = M. (32)
Sustituyendo, ecuaciones (30,31,32) en la ecuacion (29) se tiene que∑B
�Fi = M�aG. (33)
Esta es la primera de las ecuaciones de Newton-Euler que explican la cinetica de un cuerpo rıgido.
6 Suma de los Momentos de las Fuerzas Internas y Externasque Actuan Sobre las Partıculas del Cuerpo Rıgido B con
Respecto al Centro de Masas del Cuerpo.
En esta seccion determinaremos la suma de los momentos de las fuerzas internas y externas que actuansobre las partıculas del cuerpo rıgido B con respecto al centro de masas G del mismo cuerpo rıgido.
9

El analisis comienza premutiplicando vectorialmente ambos lados de la ecuacion (25) por el vector deposicion de la partıcula Pi respecto al centro de masas G. De esa manera se obtiene
�rPi/G ×(
�Fi +∑
j
�fij
)= �rPi/G ×
(mi �aPi
). (34)
Sustituyendo la aceleracion de la partıcula Pi de acuerdo a la ecuacion (26) y sumando el efecto detodas las partıculas del cuerpo B, se tiene que∑
B
[�rPi/G ×
(�Fi +
∑j
�fij
)]=
∑B
(�rPi/G ×
{mi
[�aG + �α × �rPi/G + �ω × (
�ω × �rPi/G
) ]})(35)
Separando los terminos de la ecuacion (35) se tiene que∑B
(�rPi/G × �Fi
)+
∑B
(�rPi/G ×
∑j
�fij
)=
∑B
(�rPi/G × mi �aG
)
+∑B
[�rPi/G × (
mi �α × �rPi/G
)]
+∑B
{�rPi/G ×
[mi �ω × (
�ω × �rPi/G
) ]}(36)
Puesto que las fuerzas internas entre dos partıculas son iguales, de direccion opuesta y colineales, setiene que la suma de los momentos de las fuerzas internas esta constituido por pares de fuerzas de laforma
�rPi/G × �fij + �rPj/G × �fji = �rPi/G × �fij − �rPj/G × �fij
=(�rPi/G + �rG/Pj
) × �fij = �rPi/Pj× �fij = �0. (37)
Por lo tanto ∑B
(�rPi/G ×
∑j
�fij
)= �0. (38)
Ademas el primer termino del lado izquierdo de la ecuacion (36) es la suma del momento de las fuerzasexternas aplicadas al cuerpo B con respecto al centro de masas, es decir∑
B
(�rPi/G × �Fi
)=
∑B
�TG (39)
Sustituyendo las ecuaciones (38, 39) en la ecuacion (36) y rearreglando el lado derecho de la ecuacionresultante, se tiene que∑
B
�TG =∑B
(mi �rPi/G
) × �aG +∑B
(mi �rPi/G
) × (�α × �rPi/G
)+
∑B
{�rPi/G ×
[mi �ω × (
�ω × �rPi/G
) ]}(40)
Por un lado, de la ecuacion (31), el primer termino del lado derecho de la ecuacion (40) se tiene que∑B
(mi �rPi/G
)= �0.
10

El segundo termino del lado derecho de la ecuacion (40) puede reescribirse como∑B
(mi �rPi/G
) × (�α × �rPi/G
)= αx
∑B
�rPi/G × (mi i × �rPi/G
)+αy
∑B
�rPi/G × (mi j × �rPi/G
)+αz
∑B
�rPi/G × (mi k × �rPi/G
)= �IG,i αx + �IG,j αy + �IG,k αz
=[
�IG,i�IG,j
�IG,k
] ⎡⎣ αx
αy
αz
⎤⎦ = IG�α.
(41)
Finalmente, empleando la identidad del triple producto vectorial
�a ×(�b × �c
)= �b (�a · �c) − �c
(�a ·�b
), (42)
puede probarse que el tercer termino del lado derecho de la ecuacion (40) puede reescribirse como∑B
{�rPi/G ×
[mi �ω × (
�ω × �rPi/G
) ]}=
∑B
{mi �ω
[�rPi/G · (�ω × �rPi/G
) ]− (
�ω × �rPi/G
)�rPi/G · mi �ω
}
= −∑B
{mi �rPi/G · �ω (
�ω × �rPi/G
) }= −�ω × IG �ω. (43)
Sustituyendo ecuaciones (31, 41, 43) en la ecuacion (40), se obtiene que∑B
�TG = IG�α − �ω × IG �ω. (44)
La ecuacion (44) es la segunda de las ecuaciones de Newton-Euler necesarias para estudiar la cineticade un cuerpo rıgido con una distribucion de masas arbitraria y libre de moverse en el espacio sin restriccionalguna.
La siguiente seccion, 7, mostrara como esas ecuaciones pueden simplificarse cuando el cuerpo rıgidoesta sujeto a movimiento plano general y la distribucion de masas satisface ciertas condiciones relativa-mente faciles de satisfacer.
7 Simplificacion de las Ecuaciones de Newton-Euler Para elCaso de un Cuerpo Rıgido Sujeto a Movimiento Plano Gen-
eral y con una Distribucion de Masas Particular.
La seccion anterior, 6, permitio encontrar las ecuaciones de Newton-Euler para cuerpos rıgidos sujetosa movimiento espacial y con una distribucion de masas arbitraria, en esta seccion se mostrara que estasecuaciones pueden simplificarse de manera considerable.
Suponga ahora que el cuerpo rıgido cumple las siguientes suposiciones:
11

1. El cuerpo rıgido esta sujeto a movimiento plano general.
2. El cuerpo rıgido tiene una distribucion de masas tal que, considerando la matriz de inercia delcuerpo respecto a su centro de masas, la direccion perpendicular al plano de movimiento del cuerporıgido es un eje principal de inercia.1
Suponga, sin perdida de generalidad, que el plano de movimiento plano del cuerpo es el plano X −Y ,por lo tanto, las velocidades y aceleraciones angulares del cuerpo rıgido estan dados por
�ω = ωk, y �α = αk. (45)
La suposicion de la distribucion de masa implica que el tensor o matriz de inercia esta dada por
IG =
⎡⎣ IGxx IGxy 0
IGyx IGyy 00 0 IGzz
⎤⎦ , (46)
donde no es necesario conocer si los ejes en las direcciones X y Y son, o no, direcciones principales deinercia.
Sustituyendo el resultado de estas suposiciones en la ecuacion (44), se tiene que∑B
�TG = IG�α − �ω × IG �ω
=
⎡⎣ IGxx IGxy 0
IGyx IGyy 00 0 IGzz
⎤⎦
⎡⎣ 0
0α
⎤⎦ − ωk ×
⎡⎣ IGxx IGxy 0
IGyx IGyy 00 0 IGzz
⎤⎦
⎡⎣ 0
0ω
⎤⎦
= IGzz αk + ωk × IGzzωk = IGzz�α −�0 = IGzz�α (47)
La conclusion de esta seccion es que las ecuaciones de Newton-Euler que rigen la cinetica de cuerposrıgidos sujetos a movimiento plano general que satisfacen la segunda suposicion indicada en esta seccion,vea la figura 8, estan dadas por∑
B
�Fi = M�aG, y∑B
�TG = IGzz�α. (48)
8 El Principio de D’Alembert.
Las dos ecuaciones dadas por (48) pueden escribirse como, de acuerdo con D’Alembert,2 vea la figura 9.∑B
�Fi − M�aG = �0, y∑B
�TG − IGzz�α = �0. (49)
Este cambio, aparentemente cosmetico, tiene profundas implicaciones teoricas, las ecuaciones (49)indican que:
1En ocasiones, algunos libros indican que la distribucion de masas debe ser simetrica respecto al plano de movimientodel cuerpo rıgido que pasa por el centro de masas. Esta condicion es suficiente pero no necesaria.
2Jean Le Rond d’Alembert, 1717-1783, un matematico frances, fue el hijo ilegıtimo de una dama de sociedad y un oficialdel ejercito. Su madre lo abandono, recien nacido, en las puertas de la iglesia de St. Jean Le Rond, estudio teologıa, leyesy medicina pero su pasion fueron las matematicas, desde 1739 presento trabajos a la Academia de Ciencıas de Parıs y eranotorio por su terquedad. En 1743 publico su Traite de Dynamique que contiene el principio de D’Alembert.
12

Figure 8: Ecuaciones de la Cinetica de un Cuerpo Rıgido Sujeto a Movimiento Plano General.
Figure 9: Aplicacion del Principio de D’Alembert en las Ecuaciones de la Cinetica de un Cuerpo RıgidoSujeto a Movimiento Plano General.
1. La suma de las fuerzas externas, �Fi, aplicadas al cuerpo rıgido, B, junto con la fuerza de inercia,−M�aG, aplicada en el centro de masas, G, del cuerpo es igual a �0.
2. La suma del momento de las fuerzas externas, �Fi, aplicadas al cuerpo rıgido, B, junto con la fuerzade inercia, −M�aG, aplicada en el centro de masas, G, del cuerpo y el torque de inercia, −IGzz�α,con respecto a un punto arbitrario debe ser igual a �0.
A un nivel mas practico, aplicando el principio de D’Alembert, la suma de momentos de las fuerzasexternas y de las fuerzas de inercia, con respecto a un punto arbitrario del cuerpo rıgido debe ser cero.
13

9 Casos Especiales de las Ecuaciones de la Cinetica de CuerposRıgidos Sujetos a Movimiento Plano General.
En esta seccion, se analizaran los casos especiales de las ecuaciones de la cinetica de cuerpos rıgidos sujetosa movimiento plano general, bajo estos casos especiales, las ecuaciones de la cinetica tienen expresionesmas simples que permiten analizar el movimiento de estos cuerpos de modo mas sencillo.
9.1 Cuerpos Rıgidos Sujetos a Movimiento de Traslacion.
Si un cuerpo esta sujeto a movimiento de traslacion, el cuerpo no tiene rotacion, por lo tanto, �α = �0, veala figura 10, y las ecuaciones de Newton-Euler, para este caso, se reducen a
Figure 10: Ecuaciones de la Cinetica de un Cuerpo Rıgido Sujeto a Traslacion.
∑B
�Fi = M�aG, y∑B
�TG = �0. (50)
9.2 Cuerpos Rıgidos Sujetos a Movimiento de Rotacion Baricentrica.
Si un cuerpo esta sujeto a movimiento de rotacion baricentrica, el eje de rotacion del cuerpo, perpendicularal plano de movimiento, pasa por el centro de masas, G, y, por lo tanto, la velocidad y aceleracion delcentro de masas son iguales a �0 de aquı que, �aG = �0, vea la figura 11, y las ecuaciones de Newton-Euler,para este caso, se reducen a ∑
B
�Fi = �0, y∑B
�TG = IGzz�α. (51)
9.3 Cuerpos Rıgidos Sujetos a Movimiento de Rotacion No Baricentrica.
Si un cuerpo esta sujeto a movimiento de rotacion no baricentrica, suponga que el eje de rotacion delcuerpo, perpendicular al plano de movimiento, pasa por un punto O. En este caso, es necesario realizarun sencillo analisis para simplificar las ecuaciones de Newton-Euler. La aceleracion del centro de masas,
14

Figure 11: Ecuaciones de la Cinetica de un Cuerpo Rıgido Sujeto a Rotacion Baricentrica.
G, del cuerpo rıgido sujeto a movimiento de rotacion no baricentrica tiene tanto una componente normalcomo una componente tangencial, las cuales empleando el concepto de placa representativa, estan dadaspor
�aGn = −ω2 �rG/O y �aGt = �α × �rG/O, (52)
donde �rG/O es perpendicular al eje de rotacion.De esa forma, las fuerzas externas y las fuerzas de inercia aplicadas al cuerpo rıgido se muestran en la
figura 12. Aplicando el principio de D’Alembert para determinar la suma de los torques o momentos delas fuerzas externas aplicadas al cuerpo y de las fuerzas de inercia con respecto al punto O, la intersecciondel plano de movimiento del cuerpo con el eje de rotacion, esta dada por
Figure 12: Ecuaciones de la Cinetica de un Cuerpo Rıgido Sujeto a Rotacion No Baricentrica.
∑B
�TO + �rG/O × M(ω2 �rG/O
)+ �rG/O × M
(−�α × �rG/O
) − IGzz�α = �0. (53)
15

Puesto que�rG/O × �rG/O = �0
y aplicando las propiedades del triple producto vectorial
�rG/O × (−�α × �rG/O
)= − (
�rG/O · �rG/O
)�α +
(�rG/O · �α)
�rG/O = − | �rG/O |2 �α,
pues �rG/O · �α = 0. Sustituyendo estos resultados en la ecuacion (53), se tiene que∑B
�TO − M | �rG/O |2 �α − IGzz�α = �0. (54)
o ∑B
�TO = IGzz�α + M | �rG/O |2 �α =(IGzz + M | �rG/O |2) �α. (55)
Recordando que, a partir del teorema de ejes paralelos o teorema de Steiner, se sabe que
IOzz = IGzz + M | �rG/O |2 .
Por lo tanto, las ecuaciones de de Newton-Euler, para el caso de un cuerpo sujeto a rotacion nobaricentrica, se reducen a ∑
B
�Fi = M �aG, y∑B
�TO = IOzz�α. (56)
Figure 13: Centro de Percusion de un Cuerpo Rıgido Sujeto a Rotacion No Baricentrica.
10 Centro de Percusion de un Cuerpo Rıgido Sujeto a Rotacion
No Baricentrica.
Considere un cuerpo rıgido, de masa M , sujeto a movimiento de rotacion no baricentrica. Donde elcentro de masas de cuerpo rıgido es el punto G y la interseccion del plano de movimiento con el eje de
16

rotacion no baricentrica esta dada por el punto O, sea r la magnitud de la distnacia mınima entre ejesperpendiculares al plano de movimiento que pasan por los puntos G y O, como se muestra en la figura13. Suponga que el cuerpo esta sujeto a una velocidad angular �ω y en ese instante se aplica una fuerza �Fen el punto P y se desea determinar la aceleracion angular del cuerpo rıgido y las reacciones en el centrode rotacion.
Figure 14: Diagrama de un Cuerpo Rıgido Sujeto a Rotacion No Baricentrica.
La figura 14 muestra un diagrama de cuerpo libre del cuerpo mostrado en la figura 13. Las ecuacionesde movimiento del cuerpo rıgido estan dados por∑
Fx = M aGx ROx + F = M α r∑
Fy = M aGy ROy − M g = M ω2 r
y finalmente, recordando que IO = IG + M r2, la ultima ecuacion esta dada por∑TO = IO α F (r + d) = IO α =
(IG + M r2
)α
Por lo tanto, la aceleracion angular esta dada por
α =F (r + d)IG + M r2
y las reacciones en el centro de rotacion O estan dadas por
ROy = M(g + ω2 r
),
y
ROx = −F + M α r = −F + M rF (r + d)IG + M r2
=−F
(IG + M r2
)+ M F r2 + M F r d
IG + M r2= F
M r d − IG
IG + M r2
Finalmente, la reaccion ROx desaparece, es decir igual a 0, cuando
M r d − IG = 0 d =IG
M r=
M k2
M r=
k2
r.
17

donde k es el radio de giro del cuerpo, definido como IG = M k2. La distancia d determina el centrode percusion del cuerpo rıgido, si se aplica una fuerza perpendicular a la lınea OP sobre el cuerpo, estafuerza no produce reaccion alguna en el centro de rotacion O.
11 Problemas Resueltos.
En esta seccion se presentan algunos ejemplos de problemas resueltos acerca de la cinetica de cuerposrıgidos sujetos a movimiento plano general, o a algunos de sus casos particulares.
1
1
1
2
3
4
Figure 15: Grafica de un barra sujeta por una cuerda y otra barra.
Problema 1. Una varilla delgada y uniforme AB de 4 Kg se mantiene fija mediante dos cuerdas yel eslabon CA cuyo peso puede ignorarse. Despues de cortar la cuerda BD, el ensamble gira en un planovertical bajo el efecto combinado de la gravedad y un par M de 6 N.m aplicado al eslabon CA en laforma en que se muestra. Determine, inmediatamente despues de que ha sido cortada la cuerda BD, a)la aceleracion de la varilla AB, b) la tension en la cuerda EB.3
Solucion: En esta primera parte mostraremos que, inmediatamente despues de que se corta la barraBD, la barra, 3, AB esta sujeta a movimiento de traslacion curvilınea. Si la cuerda EB, indicada comoeslabon 4, esta en tension, se comporta como un cuerpo rıgido de manera que la velocidad del punto Bde la barra esta dada por
�vB3 = �vB4 = �ω4 × �rB/E = ω4 k ×(LEB cos θi − LEB sen θj
)= LEB ω4 cos θ j + LEB ω4 sen θ i
donde θ = 60◦. Por otro lado, la velocidad del punto B puede calcularse como
�vB3 = �ω2 × �rA/C + �ω3 × �rB/A = ω2 k ×(LCA cos θi − LCA sen θj
)+ ω3 k × LAB i
= LCA ω2 cos θ j + LCA ω2 sen θ i + LAB ω3 j.
3Este es el Problema 16.13 del libro Mecanica Vectorial Para Ingenieros, Dinamica. Beer, F.P., Johnston, E.R. yClausen, W.E., Octava edicion, McGraw Hill: Mexico D.F.
18

Igualando las ecuaciones vectoriales, se obtienen las siguientes dos ecuaciones escalares:
LEB ω4 sen θ = LCA ω2 sen θ LEB ω4 cos θ = LCA ω2 cos θ + LAB ω3
De la primera ecuacion
ω4 = ω2LCA
LEB,
Sustituyendo este resultado en la segunda ecuacion, se tiene que
LEB ω2LCA
LEBcos θ = LCA ω2 cos θ + LAB ω3
Por lo queLAB ω3 = 0, Puesto que LAB �= 0, ω3 = 0.
Este resultado indica, que un instante despues de cortarse la cuerda BD, el movimiento de la barra ABes de traslacion. Mas aun, la aceleracion de la barra AB, tendra la direccion de la aceleracion tangencialde los puntos A o B. Los diagramas de cuerpo libre de las barras CA y AB se muestran en la figura 16.
Figure 16: Diagramas de Cuerpo Libre de los Cuerpos Rıgidos Involucrados.
Puesto que la masa de la barra CA es despreciable, las ecuaciones de la cinetica de esta barra seconvierten en las ecuaciones de la estatica, y estan dadas por∑
�F = �0∑
�MC = �0.
o−RAx + RCx = 0 − RAy + RCy = 0 M − RAx L sen θ − RAy L cos θ = 0.
donde L = 0.45 m. y θ = 60◦. De la tercera ecuacion, se tiene que
RAx
√3
2+ RAy
12
=M
L=
403
N. o√
3RAx + RAy =803
N.
19

Las ecuaciones de la cinetica de la barra AB estan dadas por∑�F = M �aG
∑�MG = �0.
o
RAx−TBD cos θ = −MAB aG sen θ RAy+TBD sen θ−MAB g = −MAB aG cos θ −RAyd
2+TBD senθ
d
2= 0,
donde d = 0.6 m. De la tercera ecuacion
RAy = TBD sen θ =√
32
TBD
Por lo tanto
√3RAx +
√3
2TBD =
803
N. RAx =803 N. −
√3
2 TBD√3
=80
3√
3N. − 1
2TBD.
Sustituyendo RAx y RAy en las dos primeras ecuaciones de la cinetica de la barra AB
803√
3N. − 1
2TBD − TBD cos θ = −MAB aG sen θ
√3
2TBD + TBD sen θ − MAB g = −MAB aG cos θ
Multiplicando la primera ecuacion por cos θ y la segunda ecuacion por −sen θ y sumando termino atermino, se tiene que
cos θ80
3√
3N. − 1
2TBD cos θ − TBD cos2 θ = −MAB aG sen θ cos θ
−sen θ
√3
2TBD − TBD sen2 θ + sen θMAB g = +MAB aG cos θ senθ
La ecuacion resulta es
403√
3N. − 1
4TBD − TBD − 3
4TBD +
√3
2(4Kgm.)
(9.81m/s2
)= 0
Por lo tantoTBD = 20.84 N.
La aceleracion de la barra AB esta dada por
803√
3N. − 1
2TBD − TBD cos θ = −MAB aG sen θ
aG =− 80
3√
3N. + 1
2 TBD + TBD cos θ
MAB sen θ=
− 803√
3N. + TBD
MAB sen θ= 1.571 m/s2.
Problema 2. El volante que se muestra en la figura 17 consiste en un disco de 30 pulgadas de diametrocon peso de 240 Lb. El coeficiente de friccion entre la banda y el volante es de 0.35. Si la velocidad
20

Figure 17: Grafica de un volante sujeto a friccion.
angular inicial del volante alcanza las 360 r.p.m. en el sentido de las manecillas del reloj, determine lamagnitud de la fuerza �P requerida para deternerlo en 25 revoluciones.4
Solucion: Este problema permite introducir un tema que forma parte de la estatica pero que quizaslos lectores no recuerdan, ese tema es friccion en bandas o cuerdas. Para tal fın considere la figura 18,que muestra un volante con una banda o cuerda que rodea al volante 180◦, la figura muestra ademasun analisis de fuerzas infinitesimales que permite determinar la relacion entre las fuerzas �T1 y �T2 queaparecen en los extremos de la banda, o correa.
Figure 18: Deduccion del Incremento de la Fuerza de Tension Debido a la Friccion.4Este es el Problema 16.23 del libro Mecanica Vectorial Para Ingenieros, Dinamica. Beer, F.P., Johnston, E.R. y
Clausen, W.E., Octava edicion, McGraw Hill: Mexico D.F.
21

Considere el equilibrio del elemento de la banda o correa mostrado en la figura 18. Las ecuaciones son
∑Fy = 0 T sen
Δ θ
2+ (T + Δ T ) sen
Δ θ
2− N = 0,
Despreciando, los terminos infinitesimales de orden superior, se tiene que5
N = 2 TsenΔ θ
2≈ T Δ θ.
y ∑Fx = 0 − T cos
Δ θ
2+ (T + Δ T ) cos
Δ θ
2− μ N = 0,
Nuevamente, despreciando los terminos de orden superior, y sustituyendo el valor de N ,6 se tiene
−T + (T + Δ T ) − μ T Δ θ = 0
oΔ T = μ TΔ θ
Δ T
Δ θ= μ T
dT
d θ= μ T.
Por lo tanto, resolviendo la ecuacion diferencial, se tiene que∫d T
T=
∫μθ Ln | T |= μ θ + C T = eμ θ+C T = C1 eμ θ
Si se propone la condicion inicial que para θ = 0, T = T0, se tiene que
T0 = C1 eμ 0 = C1 1 = C1
Por lo tantoT (θ) = T0 eμ θ.
De la cinematica del cuerpo rıgido, para que el volante pare en 25 rev = 50 π rad., desde una velocidadangular de ω0 = 360 r.p.m. = 12 π rad/s, es necesario que la aceleracion angular sea igual a
α =ω2
f − ω20
2Δ θ=
0 − (12 π rad/s)2
2 (50 π)= −36 π
25rad
s2.
Es importante notar que el signo negativo aquı indica que la aceleracion es en sentido opuesto a lavelocidad angular inicial, y por lo tanto, en sentido antihorario.
Por otro lado, puesto que la banda esta enrollada un cuarto de vuelta en el volante, la fuerza en elotro extremo de la banda esta dada por
Pf = P eμ π2
Finalmente, el momento de inercia del volante con respecto al eje de rotacion, que es un eje principal deinercia, esta dado por
IG =12M r2
5Para angulos pequenos sen α = α en radianes.6Para angulos pequenos cosα = 1
22

De modo que la ecuacion de movimiento del sistema esta dada por
∑MG = IGα − P r + P eμ π
2 r =12M r2 72 π
25rad
s2.
oP
(eμ π
2 − 1)
r =12M r2 36 π
25rad
s2.
o
P =M r 18 π
25rads2
eμ π2 − 1
=18 π
25(240 Lbm.) (1.25 pies) rad
s2
eμ π2 − 1
= 925.92 poundals = 28.755 Lbf.
Figure 19: Barra soportada por un apoyo y una cuerda.
Problema 3. Una barra uniforme de longitud L y masa m se sostiene como se indica en la figura19. Si el cable unido en B se rompe de manera repentina, determine a) la distancia b para la cual laaceleracion del extremo A es maxima, b) la aceleracion correspondiente del extremo A y la reaccion enC.7
Solution: Considere el diagrama de cuerpo libre de la barra mostrado en la figura 20, puesto que alromperse la cuerda en B, la velocidad angular de la barras es 0, solo esta presente la aceleracion normal.
Figure 20: Cuerpo libre de la barra.7Este es el Problema 16.80 del libro Mecanica Vectorial Para Ingenieros, Dinamica. Beer, F.P., Johnston, E.R. y
Clausen, W.E., Octava edicion, McGraw Hill: Mexico D.F.
23

Las ecuaciones de movimiento del cuerpo rıgido son
∑Fx = 0 Rcx = 0
∑Fy = M aGy RCy − m g = −m α
(l
2− b
)
y, finalmente,
∑TC = IC α −m g
(l
2− b
)= −
[112
m l2 + m
(l
2− b
)2]
α = −(
112
m l2 +14m l2 − m l b + m b2
)α.
Por lo tanto, la aceleracion angular de la barra esta dada por
α =g
(l2 − b
)13 l2 − l b + b2
Por lo tanto, la magnitud de la aceleracion del punto A esta dada por
| �aA |= α b =g
(l b2 − b2
)13 l2 − l b + b2
,
si se considera que b es una variable, el maximo valor de | �aA | esta dada para cuando
0 =d | �aA |
d b=
g(
l2 − 2 b
) (13 l2 − l b + b2
) − g(
l b2 − b2
)(−l + 2 b)(
13 l2 − l b + b2
)2
Por lo tanto (l
2− 2 b
)(13l2 − l b + b2
)−
(l b
2− b2
)(−l + 2 b) = 0.
Reduciendo la ecuacion se tiene quel2 − 4 l b + 3 b2 = 0.
Las dos raices de la ecuacion son8
b =4 l ± √
16 l2 − 4 (3) (l2)2 (3)
=4 l ± 2 l
6b1 = l b2 =
l
3.
Empleando b2 = l3 , se tiene que
α =g
(l2 − l
3
)13 l2 − l l
3 + l2
9
=3 g
2 l
De manera que, la magnitud de la aceleracion del punto A esta dado por
| �aA |= αl
3=
3 g
2 l
l
3=
g
2.
Finalmente la componente y de la reaccion en C esta dada por
RCy = m
[g − α
(l
2− b
)]= m
[g − 3 g
2 l
l
6
]=
34
m g.
24

1
2
3
4
Figure 21: Mecanismo plano de cuatro barras.
Problema 4. La barra AB de 2 kg. y la barra BC de 3 kg. estan conectadas como se muestra enla figura a un disco puesto a girar en un plano vertical a velocidad angular constante de 6 rad./s. en elsentido de las manecillas del reloj. Para la posicion indicada, determine las fuerzas ejercidas en A y Bsobre la barra AB.9
Solution: Para resolver este problema es necesario determinar los analisis de velocidad y aceleraciondel mecanismo plano de cuatro barras. Los vectores de posicion necesarios, estan dados por
�rA/O = 60 mm.j �rB/A = 120 mm.j �rB/C = 180 mm.j
Por otro lado, la velocidad y aceleracion angular del eslabon motriz, el disco 2, esta dada por
�ω2 = −6rad.
s.k �α2 = �0.
La ecuacion correspondiente al analisis de velocidad del mecanismo plano de cuatro barras es
�ω2 × �rA/O + �ω3 × �rB/A = �vB3 = �vB4 = �ω4 × �rB/C(−6
rad.
s.k
)×
(60 mm.j
)+ ω3k ×
(120 mm.i
)= ω4k ×
(180 mm.j
)Haciendo a un lado las unidades, se tiene que las ecuaciones escalares del analisis de velocidad son
360 = −180 ω4 120 ω3 = 0,
y su solucion esta dada por
�ω4 = −2rad.
s.k �ω3 = �0.
La ecuacion correspondiente al analisis de aceleracion del mecanismo plano de cuatro barras es
�α2 × �rA/O − ω22 �rA/O + �α3 × �rB/A − ω2
3 �rB/A = �aB3 = �aB4 = �α4 × �rB/C − ω24 �rB/C
−(−6
rad.
s.
)2 (60 mm.j
)+ α3k ×
(120 mm.i
)= α4k ×
(180 mm.j
)−
(−2
rad.
s.
)2 (180 mm.j
)8Cual es el argumento para no emplear b1?9Este es el Problema 16.130 del libro Mecanica Vectorial Para Ingenieros, Dinamica. Beer, F.P., Johnston, E.R. y
Clausen, W.E., Octava edicion, McGraw Hill: Mexico D.F.
25

Haciendo a un lado las unidades, se tiene que las ecuaciones escalares del analisis de aceleracion son
0 = −180 α4 −2160 + 120 α3 = −720,
y su solucion esta dada por
�α4 = −0rad.
s2.k �α3 = 12
rad.
s2.k.
El siguiente paso consiste en determinar las aceleraciones de los centros de masas de los eslabones,supuestos homogeneos e uniformes 3 y 4. Estas aceleraciones estan dadas por
�aG3 = �aA + �aG3/A = �α2 × �rA/O − ω22 �rA/O + �α3 × �rG3/A − ω2
3 �rG3/A
= −(−6
rad.
s.
)2 (60 mm.j
)+
(12
rad.
s2.k
)×
(60 mm.i
)= −1440
mm
s2j = −1.44
m
s2j.
y
�aG4 = �α4 × �rG4/C − ω24 �rG4/C = −
(−2
rad.
s
)2 (90 mm j
)= −360
mm
s2j = −0.36
m
s2j.
Ahora si, prepararemos el analisis dinamico del mecanismo plano de cuatro barras, el momento deinercia de la barra 3 respecto a su centro de masas, esta dado por
I3/G3 =112
m3 l23 =112
(2 Kgm.) (0.12 m)2 = 0.0024Kgm− m2.
La figura 22 muestra los diagramas de cuerpo libre de los eslabones del mecanismo plano de cuatrobarras.
Figure 22: Mecanismo plano de cuatro barras.
26

Las ecuaciones de movimiento de los cuerpos 3 y 4, estan dadas por∑Fx = 0
∑Fy = m3 aG3y
∑TG3 = I3/G3α3
RAx − RBx = 0 RAy − RBy − m3 g = m3 aG3y −RAyL
2− RBy
L
2= I3/G3α3.
y ∑Fx = 0
∑Fy = m4 aG4y
∑TG4 = I4/G4α4
RBx + RCx = 0 RBy + RCy − m4 g = m4 aG4y −RBxd
2+ RCx
d
2= 0.
A partir de la primera, cuarta y sexta ecuacion de estos dos conjuntos de ecuaciones, se tiene que
RAx = RBx = RCx = 0.
La segunda y tercera ecuacion de estos dos conjuntos pueden escribirse como
RAy − RBy = m3 (g + aG3y)
RAy + RBy = − 2L
I3/G3 α3.
Sumando las ecuaciones termino a termino, se tiene que
RAy =12
[m3 (g + aG3y) − 2
LI3/G3 α3.
]
=12
[2 Kgm. (9.81 − 1.44)
m
s2− 2
0.12 m0.0024 Kgm · m2 12
rad
s2
]= 8.13 N.
De manera semejante, si se resta de la segunda ecuacion, la primera ecuacion, se tiene que
RBy =12
[−m3 (g + aG3y) − 2
LI3/G3 α3.
]
=12
[−2 Kgm. (9.81 − 1.44)
m
s2− 2
0.12 m0.0024 Kgm · m2 12
rad
s2
]= −8.61 N.
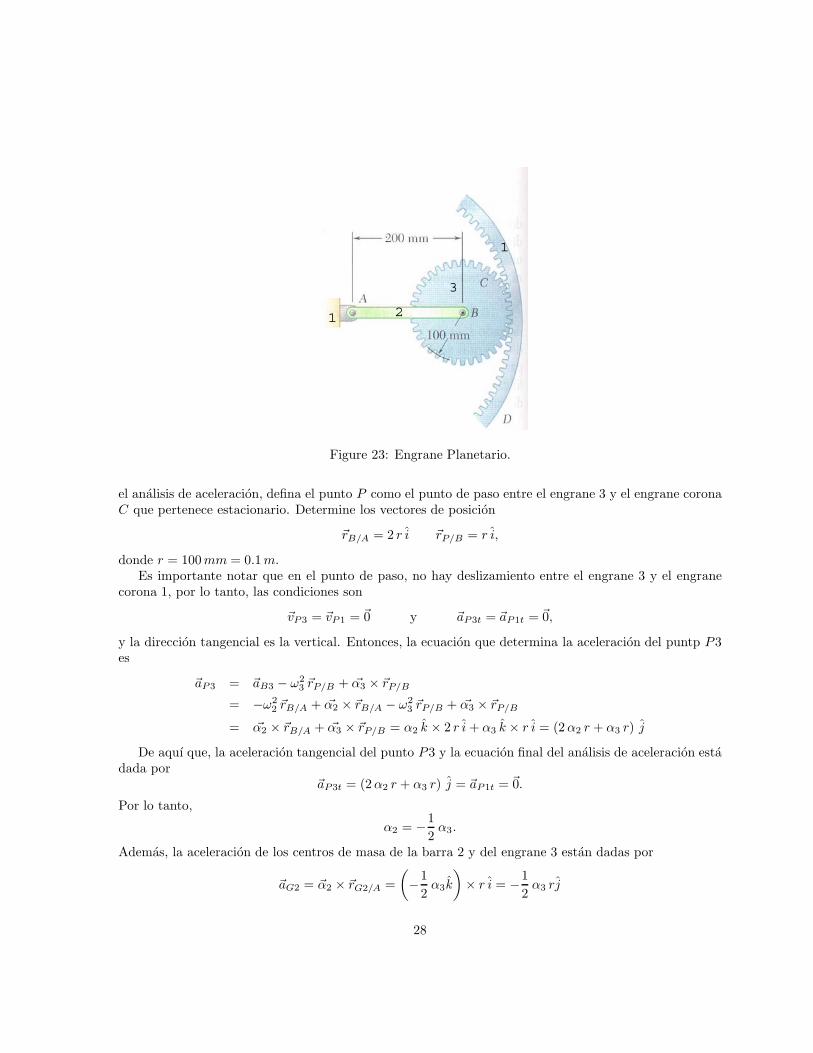
Problema 5. El engrane 3 tiene una masa de 5 kg. y radio de giro centroidal k = 75 mm. La barra2 tiene una masa de 3 kg. y el engrane C es estacionario. Si el sistema se suelta desde el reposo en laposicion que se muestra, determine a) la aceleracion angular del engrane 3, b) la aceleracion del puntoB.10
Solution: Para resolver este problema es necesario determinar los analisis de velocidad y aceleraciondel engrane planetario. El analisis de velocidad es trivial, pues si el sistema parte del reposo, las veloci-dades angulares de todos los cuerpos y las velocidades de todos los puntos del cuerpo son 0. Para realizar
10Este es el Problema 16.104 del libro Mecanica Vectorial Para Ingenieros, Dinamica. Beer, F.P., Johnston, E.R. yClausen, W.E., Octava edicion, McGraw Hill: Mexico D.F.
27
1 2
3
1
Figure 23: Engrane Planetario.
el analisis de aceleracion, defina el punto P como el punto de paso entre el engrane 3 y el engrane coronaC que pertenece estacionario. Determine los vectores de posicion
�rB/A = 2 r i �rP/B = r i,
donde r = 100 mm = 0.1 m.Es importante notar que en el punto de paso, no hay deslizamiento entre el engrane 3 y el engrane
corona 1, por lo tanto, las condiciones son
�vP3 = �vP1 = �0 y �aP3t = �aP1t = �0,
y la direccion tangencial es la vertical. Entonces, la ecuacion que determina la aceleracion del puntp P3es
�aP3 = �aB3 − ω23 �rP/B + �α3 × �rP/B
= −ω22 �rB/A + �α2 × �rB/A − ω2
3 �rP/B + �α3 × �rP/B
= �α2 × �rB/A + �α3 × �rP/B = α2 k × 2 r i + α3 k × r i = (2 α2 r + α3 r) j
De aquı que, la aceleracion tangencial del punto P3 y la ecuacion final del analisis de aceleracion estadada por
�aP3t = (2 α2 r + α3 r) j = �aP1t = �0.
Por lo tanto,
α2 = −12
α3.
Ademas, la aceleracion de los centros de masa de la barra 2 y del engrane 3 estan dadas por
�aG2 = �α2 × �rG2/A =(−1
2α3k
)× r i = −1
2α3 rj
28

y
�aG3 = �α2 × �rG3/A =(−1
2α3k
)× 2 r i = −α3 rj
Despues de este paso, es necesario determinar los diagramas de cuerpo rıgido de la barra 2 y el engrane3, vea la figura 24.
Figure 24: Diagrama de Cuerpo Libre del Engrane Planetario.
Las ecuaciones de la cinetica del engrane planetario se simplifican notando que la barra 2 esta sujeta aun movimiento de rotacion alrededor de un eje fijo no baricentrico, que pasa por el punto A y el engrane3 esta sujeto a un movimiento de rotacion alrededor de un eje fijo —instantaneamente— no baricentrico,que pasa por el punto P , de manera que los momentos de inercia de la barra respecto al punto A estadado, empleando el teorema de Steiner, por
I2A = IG2 + m2 r2 =112
m2 (2r)2 + m2 r2 =13
m2 r2 + m2 r2 =43m2 r2.
De manera semejante, el momento de inercia del engrane 3 respecto al punto P esta dado por
I3p = IG3 + m3 r2 = m3 k2 + m3 r2 = m3 k2 + m3 r2 = m3
(k2 + r2
).
Las ecuaciones de la cinetica de la barra son∑Fx = 0 RAx − RBx = 0
∑Fy = m2 aG2y RAy − RBy − m2 g = −1
2m2 α3 r
y ∑MA = I2A α2 − m2 g r − RBy 2 r =
43m2 r2
(−1
2α3
)= −2
3m2 r2 α3.
Las ecuaciones de la cinetica del engrane son∑Fx = 0 RBx − RPx = 0
∑Fy = m3 aG3y RBy − RPy − m3 g = −m3 α3 r
y ∑MP = I3P α3 m3 g r − RBy r = m3
(k2 + r2
)α3.
29
Multiplicando por −1 la tercera ecuacion de la cinetica de la barra y multiplicando por 2 la terceraecuacion de la cinetica del engrane,
m2 g r + RBy 2 r =23m2 r2 α3 (57)
2 m3 g r − 2 RBy r = 2 m3
(k2 + r2
)α3 (58)
y sumando las ecuaciones, se tiene que
(m2 + 2 m3) g r =[(
23
m2 + 2 m3
)r2 + 2 m3 k2
]α3
o
α3 =(m2 + 2 m3) g r(
23 m2 + 2 m3
)r2 + 2 m3 k2
=[3 + 2 (5)] (9.81) (0.1)[
233 + 2 (5)
](0.1)2 + 2 (5) (0.075)2
= 72.3574rad
s2.
Por lo tanto, la aceleracion angular de la barra 2, esta dada por
α2 = −12
α3 = −36.178rad
s2.
Finalmente, la aceleracion del punto B, esta dada por
�aB = −ω22 �rB/A + �α2 × �rB/A = −7.235
m
s2j.
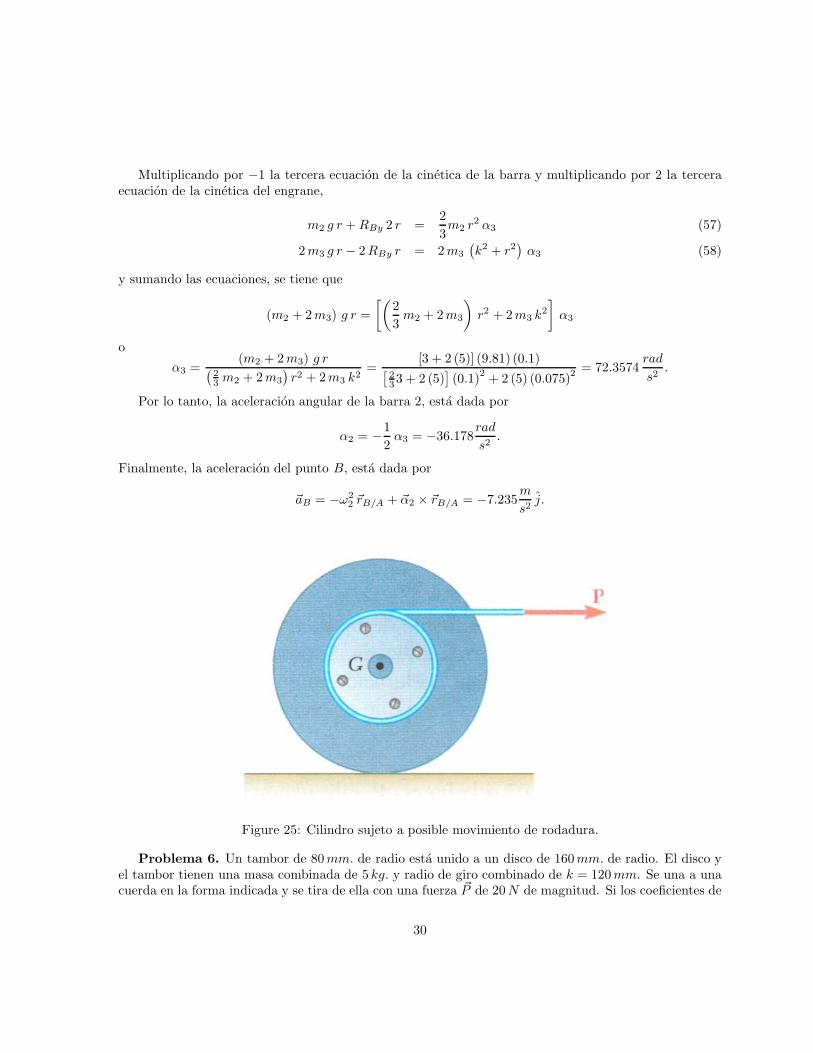
Figure 25: Cilindro sujeto a posible movimiento de rodadura.
Problema 6. Un tambor de 80 mm. de radio esta unido a un disco de 160 mm. de radio. El disco yel tambor tienen una masa combinada de 5 kg. y radio de giro combinado de k = 120 mm. Se una a unacuerda en la forma indicada y se tira de ella con una fuerza �P de 20 N de magnitud. Si los coeficientes de
30

friccion estatica y cinetica son, respectivamente, μs = 0.25 y μk = 0.2, determine a) si el disco se deslizao no b) la aceleracion angular del disco y la aceleracion del punto G.11
Solution: Para resolver el problema supondremos, inicialmente, que el disco compuesto rueda sindeslizar, por lo tanto, el punto Q tiene velocidad igual a �0 y el disco esta, instantaneamente, sujeto arotacion alrededor de un eje fijo no baricentrico. Ademas, note que la direccion de la aceleracion angulary la aceleracion del centro de masas del disco compuesto estan coordinadas.
Figure 26: Diagrama de cuerpo libre de un cilindro sujeto a posible movimiento de rodadura.
Considere el diagrama de cuerpo libre del disco, vea la figura 26. El momento de inercia del discocompuesto respecto a un eje perpendicular al plano del papel que pasa por el punto Q, esta dada por
IQ = IG + m r21 = m k2 + m r2
1 = m(k2 + r2
1
)Las ecuaciones de movimiento del sistema son∑
Fx = m aGx P + Ff = m (−αr1)∑
Fy = 0 − m g + N = 0
y ∑MQ = IQ α − P (r1 + r2) = m
(k2 + r2
1
)α
Por lo tanto, bajo la suposicion de ausencia de deslizamiento, se tiene que
α = −P (r1 + r2)m (k2 + r2
1)= − 20 · 0.24
5 (0.122 + 0.162)= −24
rad
s2
A partir de este resultado, la fuerza de friccion necesaria para evitar que exista deslizamiento es
Ff = −P − m α r1 = −20 − 5 (−24) (0.18) = 7.6 N.
11Este es el Problema 16.98 del libro Mecanica Vectorial Para Ingenieros, Dinamica. Beer, F.P., Johnston, E.R. yClausen, W.E., Octava edicion, McGraw Hill: Mexico D.F.
31

Finalmente compararemos la fuerza de friccion necesaria con la disponible
Ff = 7.6 N ≤ μs N = μs m g = 0.25 5 9.81 = 12.2625N.
Por lo tanto, el disco rueda sin deslizar y la aceleracion del punto G esta dado por
aGx = −α r1 = − (−24) (0.18) = 3.84m
s2.
32


















