Clase 04
21
CLASE 4: CÁLCULO DEL AMORTIGUAMIENTO CONOCIENDO LA RESPUESTA, EJEMPLOS E INTRODUCCIÓN A LA VIBRACIÓN FORZADA CON EXCITACIÓN ARMÓNICA Profesor: LUIS AUGUSTO LARA VALENCIA Medellín: Agosto – 2013 Universidad Nacional de Colombia sede Medellín Departamento de Ingeniería Civil Postgrado en Estructuras DINAMICA DE ESTRUCTURAS
description
DINAMICA UNALMED
Transcript of Clase 04

CLASE 4: CÁLCULO DEL AMORTIGUAMIENTO CONOCIENDO LA RESPUESTA, EJEMPLOS E
INTRODUCCIÓN A LA VIBRACIÓN FORZADA CON EXCITACIÓN ARMÓNICA
Profesor:LUIS AUGUSTO LARA VALENCIA
Medellín: Agosto – 2013
Universidad Nacional de Colombia sede Medellín Departamento de Ingeniería CivilPostgrado en EstructurasDINAMICA DE ESTRUCTURAS

CÁLCULO DEL AMORTIGUAMIENTO CONOCIENDO LA RESPUESTA
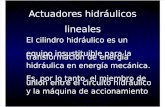
Contrariamente de lo que sucede en el movimiento no amortiguado, la amplitud de losdesplazamientos en sistemas sub amortiguados no es constante. A cada ciclo,la amplituddisminuye conforme la funciónρe-ξωt, llamada curva de decremento logarítmico, la cual estangencial a la curva de movimiento. Como es visto, la tasa de decremento dependerá delradio de amortiguamientoξ.
*Modificado de Clough y Penzien, 2003

CÁLCULO DEL AMORTIGUAMIENTO CONOCIENDO LA RESPUESTA
Supóngase dos picos de respuesta positiva sucesivosvn y vn+1 que ocurren en los instantesde tiempo n(2π/ωD) y n+1(2π/ωD), respectivamente. La relación entre esos valoressucesivos será:
Si se aplica el logaritmo natural a ambos lados de la ecuación anterior y sesustituye el valor
de la frecuencia circular subamortiguada , se obtiene:
Donde el coeficienteδ es denominado el decremento logarítmico del amortiguamiento,definido como el coeficiente entre dos amplitudes consecutivas. Para valoresdeamortiguamiento bajos (caso de las estructuras corrientes), el decremento logarítmico puedeser aproximado a:

CÁLCULO DEL AMORTIGUAMIENTO CONOCIENDO LA RESPUESTA
De esta manera: Representación en series de Taylor
Con dos términos de la expansión se obtiene suficiente precisión. Así, se tiene:
Es posible hacerse una idea de la precisión de la ecuación anterior observando el siguientegrafico:
Clough y Penzien, 2003
Si se desea obtener una precisión mayor en la determinación del amortiguamientodesistemas subamortiguados con coeficientes de amortiguamiento bajos, se deben considerarpicos de respuesta de ciclos bastante separados entre si. De esta forma:

CÁLCULO DEL AMORTIGUAMIENTO CONOCIENDO LA RESPUESTA
Dondem es el número de ciclos que acontecen entre los picos de respuesta elegidos. Así,el radio de amortiguamientoξ para sistemas con coeficientes de amortiguamiento bajopuede ser aproximado a:
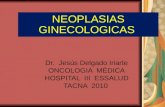
Cuando se tienen experimentalmente valores de respuesta, generalmente se estima el radiode amortiguamiento contabilizando el número de ciclos requeridos para que se de unareducción del 50% en la amplitud.
El siguiente grafico muestra la relación del número de ciclos necesarios para reducir elpico de respuesta (amplitud) en un 50% para distintos porcentajes de radio deamortiguamiento.

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
*Modificado de Clough y Penzien, 2003
Una estructura de concreto reforzado esta formada por una losa cuadrada de 6m de ancho,con una peso distribuido de 2,5ton/m2 y por cuatro columnas rectangulares de 20x30cm desección transversal. La altura de las columnas es de 3m y el modulo de elasticidad delconcreto es 200000 kg/cm2. Se desea obtener el periodo fundamental del sistema, laecuación de respuesta para desplazamientos y la amplitud máxima de la respuesta, teniendoen cuenta que se le induce a la estructura un desplazamiento y una velocidad inicial de0,5cm y -12 cm/s, respectivamente. Asúmase que el radio de amortiguamientodel sistemaes 5%.
Ejercicio

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
*Modificado de Clough y Penzien, 2003*Botero, 2011
Solución
El primer paso a seguir en la solución del problema es determinar los valoresde rigidez,amortiguamiento y masa del SDUGL. De esta manera, se obtienen los siguientescoeficientes:
3
12EIk
L====
Rigidez a flexión enelementos vigas (aplicandodesplazamiento unitario)
3
3
30*2012*200000*
12300
k ====

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
1778 /k kg cm==== Rigidez de cada columna
7,12 /sistk t cm====1
n
ii
k k====
====∑∑∑∑Rigidez del sistema
Masa del sistema20,00025*600*600
0,092 * /980
Wm t s cm
g= = == = == = == = =
Amortiguamiento del sistema
Conociendo el valor del radio de amortiguamientoξ, la rigidezk y la masam, es posibledeterminar el coeficiente de amortiguamiento del sistema, así:
cr
c
cξ ====
crc cξ==== 2 Dc mω ξ====

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
Se debe tener cuidado con el calculo de la frecuencia circular ya que el sistema essubamortiguado, la frecuencia circular que debe obtenerse es el valor de la frecuenciacircular subamortiguada (el valor de la frecuencia induciendo el efecto delamortiguamiento), de esta manera:
Se determina primero la frecuencia circular de vibración de la estructura (ω) y seaprovecha para determinar el periodo fundamental del sistema (T):
k
mω ====
7,128,8 /
0,092rad sω = == == == =
2T
πω
==== 0,71T s====
21Dω ω ξ= −= −= −= − 8,79 /D rad sω ====

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
De la expresión radio de amortiguamiento, se encuentra finalmente el valor del coeficientede amortiguamientoc, se tiene entonces:
2 Dc mω ξ==== 0,081 * /c t s cm====
Es posible ahora definir la ecuación de movimiento del sistema analizado, de estaforma:
(((( ))))1 2( ) costD Dv t e C t C sen tωξ ω ω−−−−= += += += + O
2 0m c kλ λ+ + =+ + =+ + =+ + = 20,092 0,081 7,12 0λ λ+ + =+ + =+ + =+ + = 2 0,88 77,44 0λ λ+ + =+ + =+ + =+ + =
Con solución igual a:
Utilizando la primera ecuación y las condiciones iniciales se tendrá:
Amplitud Angulo de fase

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
(((( ))))0,441 2( ) cos8,79 8,79tv t e C t C sen t−−−−= += += += +
0,44 0,44 0,44 0,441 1 2 2( ) 0,44 cos8,79 8,79 8,79 0,44 8,79 8,79 cos8,79t t t tv t e C t e C sen t e C sen t e C t− − − −− − − −− − − −− − − −= − − − += − − − += − − − += − − − +&
1 0,5C ====
2 1,34C = −= −= −= −
(((( ))))0,44( ) 0,5cos8,79 1,34 8,79tv t e t sen t−−−−= −= −= −= −
(((( ))))0,44( ) 12cos8,79 3,81 8,79tv t e t sen t−−−−= − −= − −= − −= − −&
(((( ))))0,44( ) 28,21cos8,79 107,16 8,79tv t e t sen t&&−−−−= − += − += − += − +

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
-1,50
-1,00
-0,50
0,00
0,50
1,00
1,50
0 1 2 3 4 5 6 7 8D
espl
azam
ient
o (c
m)
Tiempo (s)
-15,00
-10,00
-5,00
0,00
5,00
10,00
15,00
0 1 2 3 4 5 6 7 8
Vel
ocid
ad (
cm/s
)
Tiempo (s)
-100,00
-50,00
0,00
50,00
100,00
150,00
0 1 2 3 4 5 6 7 8
Ace
lera
ción
(cm
/s2)
Tiempo (s)

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
La amplitud máxima del sistema se determina de la siguiente forma:
(((( ))))0,44 12cos8,79 3,81 8,79 0te t sen t−−−− − − =− − =− − =− − = 0,21t s====
(((( ))))0,44( ) 0,5cos8,79 1,34 8,79tv t e t sen t−−−−= −= −= −= − 1,30A cm= −= −= −= −
Un sistema amortiguado de un grado de libertad es desplazado de su posición de reposo unadistancia v0 y después es liberado. Obténgase el grafico de la relacióndesplazamiento/desplazamiento inicial (v/v0) contra frecuencia natural de vibración portiempo (ωt) para radios de amortiguamiento iguales a (i)ξ=2, (ii) ξ=1 y (iii) ξ=0,1.
Ejercicio

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
*Modificado de Clough y Penzien, 2003
Solución
Se calculará entonces la variación de la respuesta del sistema para cuandoξ=2 (Sistemasobreamortiguado). De esta forma, se tendrá:
(((( ))))1 2ˆ ˆ( ) coshtv t e C t C senh tωξ ω ω−−−−= += += += +
2ˆ 1ω ω ξ= −= −= −= − ˆ 3ω ω====
(((( ))))21 2( ) cosh 3 3tv t e C t C senh tω ω ω−−−−= += += += + Se pasa ahora a determinar las constantes de
la función de respuesta.
(((( ))))
(((( ))))
cosh
h cos
dx senhx
dxd
sen x hxdx
====
====

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
Las condiciones iniciales son:• v(0)=v• v’(0)=0
• C1=v0
• C2=1,16v0
(((( ))))2
0
cosh 3 1,16 3tve t senh t
vω ω ω−−−−= += += += +
Ahora se calculará la variación de la respuesta del sistema para cuandoξ=1 (Sistemacríticamente amortiguado). De esta forma, se tendrá:
1 2( ) t tv t C e C teω ω− −− −− −− −= += += += +
Determinando las constantes de la funciónde respuesta
• C1=v0
• C2=ωv0
0
t tve te
vω ωω− −− −− −− −= += += += +

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
Por ultimo se calcula la variación de la respuesta del sistema para cuandoξ=0,1 (Sistemasubamortiguado). Así:
(((( ))))1 2( ) costD Dv t e C t C sen tωξ ω ω−−−−= += += += +
21Dω ω ξ= −= −= −= − Dω ω==== (((( ))))0,11 2( ) costv t e C t C sen tω ω ω−−−−= += += += +
Determinando las constantes de la funciónde respuesta
• C1=v0
• C2=0,1v0
(((( ))))0,1
0
cos 0,1tve t sen t
vω ω ω−−−−= += += += +
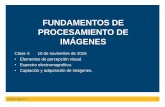
Graficando la relación desplazamiento/desplazamiento inicial (v/v0) contra frecuencianatural de vibración por tiempo (ωt) para los tres casos analizados se obtiene:

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
Grafico de la relación desplazamiento/desplazamiento inicial (v/v0) contra frecuencia natural de vibración por tiempo (ωt) para radios de amortiguamiento iguales a (i) ξ=2, (ii) ξ=1 y (iii) ξ=0,1.
-1,00
-0,80
-0,60
-0,40
-0,20
0,00
0,20
0,40
0,60
0,80
1,00
0 2 4 6 8 10 12 14 16
v/
v0
ωt
Sobreamortiguado
Criticamente amortiguado
subamortiguado
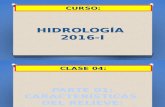
Un SDUGL posee una masa de 91000kg y es sometido a un desplazamiento inicial de30mm. Si el máximo desplazamiento (ocurrido a 0,5s) en el movimiento de retornoes20mm, determinar: a) La constante de rigidez del resortek, b) El radio de amortiguamientoξ, y c) la constante de amortiguamientoc.
Ejercicio
Respuesta no oscilatoria que decae exponencialmente

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
*Modificado de Clough y Penzien, 2003
Solución
Tomando la definición del decremento logarítmico, se obtiene:
2
30 2ln
20 1
πξξ
====−−−−
(((( ))))2 2 20,17 1 4ξ π ξ− =− =− =− =
6,5%ξ ==== Sistema subamortiguado

EJEMPLOS VIBRACIÓN LIBRE AMORTIGUADA
Sabiendo que el sistema está sometido a vibración libre subamortiguada, es posibledeterminar la frecuencia circular subamortiguada y por consiguiente la frecuencia devibración, recordando que se tiene el periodo de la estructura.
2D
D
Tπ
ω==== 2
0,5D
πω ====
2
2
0,5 1 0,065
πω ====−−−−
12,59 /rad sω ====
k
mω ====
Ya conociendo la frecuencia de vibración del SDUGL, se pueden inferir los coeficientes derigidezk y de amortiguamientoc.
214424237,1 / 1471860,93 /k kg s N m= == == == =

INTRODUCCIÓN A VIBRACIÓN FORZADA CON EXCITACIÓN ARM ÓNICA
cr
c
cξ ==== 2c mωξ==== 147600 / ( / )c Ns m kg s====
INTRODUCCIÓN A VIBRACIÓN FORZADA POR EXCITACIÓN ARM ÓNICA
Generalmente, la vibración en un sistema dinámico es causada por la presencia de unafuerza que varia a lo largo del tiempo. La respuesta que se presenta de aplicar tal fuerza esllamada respuesta de vibración forzada. Cuando no existe amortiguamiento, o este esausente, se dice que la vibración es forzada no amortiguada; ya si el amortiguamiento estomado en cuenta, el termino vibración forzada amortiguada es utilizado.
Si la señal de excitación que se le induce a la estructura es de tipo oscilatorio, compuestapor la repetición de un ciclo cada determinado tiempo, y además de eso, es posible modelarla señal como una función de tipo seno o coseno, o en su defecto una combinación de ellas,se dice que el sistema está sometido a vibración forzada por excitación armónica.

INTRODUCCIÓN A VIBRACIÓN FORZADA CON EXCITACIÓN ARM ÓNICA
Asúmase que un SDUGL está sometido a una carga armónica de tipo seno que presentaunaamplitudp0 y una frecuencia circular . La ecuación de movimiento estará dada por:ω
Si el sistema prescinde del amortiguamiento, la ecuación de movimiento será:
Ecuación que tiene solución complementaria igual a la ecuación de movimiento desistemassometidos a vibración libre no amortiguados.