Compendio de aplicaciones de la Ingeniería Biomédica del ...
98
1 2 3 4 5 -0.5 0 0.5 1 Tiempo Amplitud 1 2 3 4 5 -0.5 0 0.5 1 Tiempo Amplitud Compendio de aplicaciones de la Ingeniería Biomédica del estado de Falcón, Venezuela Colectivo de autores
Transcript of Compendio de aplicaciones de la Ingeniería Biomédica del ...

1 2 3 4 5-0.5
0
0.5
1
Tiempo
Am
plitu
d
1 2 3 4 5-0.5
0
0.5
1
Tiempo
Am
plitu
d
Compendio de aplicaciones de la Ingeniería
Biomédica del estado de Falcón, Venezuela
Colectivo de autores

Edición: Merly López Delgado
Corrección: Liset Manso Salcerio
Emilio F. González Rodríguez, Miguel A. Mendoza Reyes, Feliberto Fernández
Castañeda, Idileisy Torres Rodríguez, Ruben Orozco Morales, Juan Lorenzo Ginori, Ileana
Moreno Campdesuñer, Eduardo González Moreira, Raymond Montes Rivero, Alexander Arguello
Biondo, Daniel Duno Bracho, Carlos Javier Murillo, Omaris de las Nieves Guigñan, Francisco J.
Higuera González, Sirit Murillo Felix Antonio, Alexander Falcón, Antonio Alvarez Serrano, Alberto
Taboada-Crispi
Editorial Feijóo, 2019
ISBN: 978-959-312-219-1
Aprobada por pares académicos
Editorial Samuel Feijóo, Universidad Central «Marta Abreu» de Las Villas, Carretera a Camajuaní, km 5 ½, Santa Clara, Villa Clara, Cuba. CP 54830
Compendio de aplicaciones de la Ingeniería Biomédica del Estado
de Falcón, Venezuela
• Dispositivo para medición y almacenamiento de señales EMG y de aceleración en
atletas basado en hardware libre.
• Diseño y construcción de una Prótesis mecánica para pacientes con amputación
transfemoral
• Algoritmo para la detección de la frecuencia cardiaca en fetos a partir del
electrocardiograma abdominal.
• Determinación de la frecuencia fundamental y la presión sonora mediante
fonetogramas realizados en lenguaje PYTHON
• Inteligencia Tecnológica en la Valoración de la Unidad Curricular Instrumentación
Médica con Entorno Virtual
• Análisis de Variabilidad del Ritmo Cardíaco con PYTHON
La importancia del deporte para la salud humana se suma a la lucha contra el
sedentarismo y al incremento del peso corporal, que en la actualidad tanto afectan a gran
cantidad de países. Cualquier desarrollo que logre mejorar su desempeño tiene un
impacto social apreciable. Se estudió el comportamiento de las señales bioeléctricas,
capturadas sobre músculos específicos en el momento en que el boxeador realiza un
movimiento de ataque y se pudo determinar la intensidad de la contracción muscular y la
aceleración instantánea con la que se efectuó el golpe. El análisis de estas señales
permite corregir y mejorar las distintas técnicas de golpear y maximizar de este modo el
rendimiento del atleta. El equipo cuenta con sensores superficiales, que están situados
sobre cuatro puntos del hombro para alimentar las entradas analógicas. Consta de
amplificadores, filtros pasa bajas y pasa altas. Se realizó el diseño, la simulación y se
utilizaron los programas FilterPro de Texas Instruments y Proteus. Se empleó un

dispositivo ARDUINO Uno R3, con entradas analógicas, convertidor A/D y entradas
digitales serie y un acelerómetro MPU 6050. Las pruebas preliminares mostraron
resultados satisfactorios.
El segundo trabajo aborda el diseño y construcción de una prótesis mecánica, que
da una respuesta alternativa a personas de bajos recursos con amputación de uno de sus
miembros inferiores para mejorar su nivel de movilidad y su calidad de vida. Se utilizaron
técnicas de modelación y análisis estructural y se emplearon materiales reciclados de fácil
adquisición. Además se realizó la validación del desempeño de la prótesis teniendo en
cuenta las condiciones del paciente y las ambientales de la localidad. Se ofreció una
valoración del impacto científico-técnico, económico, metodológico, social y ambiental del
proyecto. Las partes principales de un prótesis transfemoral son las siguientes: el encaje,
el vástago, mecanismo pie-tobillo y la rodilla. El material fundamental utilizado fue la
Aleación de Aluminio 6061-T6.
La actividad eléctrica del corazón es debida a la generación de los potenciales de
acción que producen las células del miocardio, principalmente para las diferencias en las
composiciones químicas iónicas entre el interior y el exterior de las células y en la
naturaleza semipermeable de la membrana celular, que permite la entrada de iones de
potasio, pero bloquea la entrada a los iones de sodio. El electrocardiograma es la prueba
que examina el comportamiento eléctrico del corazón. Se trabajó en una aplicación que
está relacionada con la elaboración de un algoritmo para la detección de la frecuencia
cardiaca en fetos a partir del electrocardiograma abdominal de la madre. La propuesta se
basa en la detección de QRS Materno a través de la técnica de Pan-Tompkins, para luego
suprimir estos complejos del registro abdominal. Se determinó la señal con el mayor nivel
de energía, para la frecuencia cardiaca fetal utilizando una ventana deslizante que cubre
nueve intervalos RR fetales. El algoritmo fue probado con señales tomadas en cuatro
madres, que están disponibles en un sitio Web. El Fonetograma es una herramienta que se ha usado para el diagnóstico y
tratamiento de patologías del discurso, basada en la representación gráfica de frecuencia
fundamental, diapasón, y la intensidad vocal. Se explora la aplicación del algoritmo
PYTHON para obtener la frecuencia fundamental usando el método de la correlación. La
actuación del sistema se evaluó comparando los resultados con los unos obtuvo con el
software de PRAAT; se usaron veinte cuatro signos del ¨a¨ legítimo vocal como los datos.
La inteligencia tecnológica es un proceso que incluye la identificación de las
necesidades de información de los usuarios, recolección de piezas de información,
análisis y obtención de conclusiones, que finalmente se transmiten a los usuarios para

responder a sus interrogantes y respaldar la toma de decisiones y en Venezuela se viene
desarrollando un proceso de transformación de la estructura tecnológica y científica
permitiendo alcanzar la soberanía y el desarrollo de fuerzas productivas, para lo cual se
requieren nuevas formas de producción, desarrollo y adaptación de tecnologías con una
visión científica y en un conjunto de aplicaciones educativas como el Entorno Virtual de
Aprendizaje (EVA) en la plataforma Moodle que se empleó con la Inteligencia
Tecnológica en la Valoración de la Unidad Curricular Instrumentación Médica.
Otro importante estudio es sobre la variabilidad del ritmo cardiaco porque permite
predecir enfermedades del sistema cardiovascular. Cuando se lleva a cabo en los
dominios del tiempo y de la frecuencia, por lo cual es de vital importancia implementar
correctamente los algoritmos necesarios para llevar a cabo esta tarea, que en este trabajo
se desarrollo mediante herramientas de software libre. Se describió su funcionamiento
partiendo de la carga del archivo txt, procesamiento de la señal y la impresión por pantalla
de los resultados en el dominio del tiempo, en el dominio de la frecuencia y en el dominio
no lineal

Dispositivo para medición y almacenamiento de señales EMG y de
aceleración en atletas basado en hardware libre
Montes-Rivero R. J, Falcón Alexander, González-Rodríguez E. F, Lorenzo-Ginori J. V
RESUMEN
Las señales mioeléctricas captadas sobre el brazo de un boxeador durante un movimiento
de ataque, permiten determinar la intensidad de la contracción y la aceleración del golpe.
En este trabajo se presenta el diseño de un equipo portátil para medir y almacenar esas
señales. El equipo cuenta con sensores superficiales, situados sobre la piel en cuatro
puntos del hombro para alimentar las entradas analógicas. Consta de amplificadores,
filtros pasa bajas y pasa altas para acotar la banda de paso entre 50 y 500 Hz y notch a
60 Hz. Para su diseño y simulación se utilizaron los programas FilterPro de Texas
Instruments y Proteus. Se empleó un dispositivo ARDUINO Uno R3, con entradas
analógicas, convertidor A/D y entradas digitales serie para las señales provenientes de un
acelerómetro MPU 6050. La frecuencia de muestreo fue de 2400 Hz y el almacenamiento
en una memoria SD. Las pruebas preliminares mostraron resultados satisfactorios.
INTRODUCCIÓN
Hoy día las innovaciones de las tecnologías cada vez más están incrementando la
calidad del deportista, aportándole valiosas herramientas con la finalidad de mejorar sus
entrenamientos.
Esta realidad no escapa del boxeo, donde los atletas deben estar en un continuo
entrenamiento ejecutando técnicas de defensa y ataque requeridas para su buen
desempeño.
Al estudiar el comportamiento de las señales bioeléctricas, capturadas sobre
músculos específicos en el momento en que el boxeador realiza un movimiento de
ataque, se pueden determinar la intensidad de la contracción muscular y la aceleración
instantánea con la que se efectúa el golpe. El estudio de estas señales permitirá luego

corregir y mejorar las técnicas de golpear y maximizar de este modo el rendimiento del
atleta.
En la figura [1] se observa una señal electromiográfica (EMG) típica del hombro de
un atleta, capturada mediante electrodos superficiales. Cuando el boxeador realiza
movimientos, se producen ráfagas aleatorias de voltaje, cuya intensidad y duración están
dadas por la naturaleza de la contracción. Durante los periodos de relajación o descanso,
la línea base no debe ser mayor que 3 a 5 uV [1]. Estas señales aleatorias en general
pueden llegar hasta los 5mV en los atletas y típicamente el rango de frecuencia está entre
50 y 500 Hz, mostrándose frecuencias entre 20 y 150 Hz[1_ENREF_4].
Fig. 1 Señal EMG capturada del hombro de un Fig. 2 Diagrama general
atleta mediante electrodos superficiales
En [2] se realizó un estudio del comportamiento de las extremidades superiores,
basándose en la respuesta de determinados músculos. En esta investigación se obtuvo
una metodología para el reconocimiento de patrones de movimiento, a partir de señales
EMG del conjunto fisiológico brazo–antebrazo, la cual partió del diseño y construcción de
un sistema de instrumentación para la captación de estas señales.
A través de otro estudio pudo estimarse la velocidad de los movimientos básicos de
la mano, usando redes neuronales artificiales, a partir del censado de la actividad EMG
del antebrazo [3]. Para la implementación del algoritmo propuesto fue necesario adaptar
un modelo funcional de laboratorio para la medición de la velocidad, empleando
procesamiento digital de imágenes, el cual presentó un bajo nivel de error en esta
medición.
En [4] se describe el diseño e implementación de un electromiógrafo, capaz de
capturar y procesar señales eléctricas de los músculos, tomadas en la superficie de la
piel. Este equipo consta de una etapa de acondicionamiento de la señal con amplificación
y filtrado, seguida por digitalización, procesamiento de la señal y transmisión de los datos
hacia un puerto USB.
La implementación mediante hardware libre, logra un impulso a la innovación
tecnológica, con bajo costo de los dispositivos, con respecto a otros de patente
propietaria. El objetivo del trabajo fue desarrollar un equipo para la medición de 4 señales
EMG de la superficie de la piel de los músculos del tríceps y el hombro de un boxeador,
combinarla con su aceleración y depositarlas en una memoria SD. Para su análisis y
procesamiento, se empleó una plataforma de código abierto, para que pueda ser una
opción viable [5],[6].
Se describe el diseño y la implementación del bloque de entrada y del procesador
del tipo ARDUINO UnoR3, el cual posee entradas analógicas que se emplearon para las
señales EMG. Adicionalmente se capturaron las señales de aceleración del puño del
atleta y las muestras capturadas se almacenan para su posterior procesamiento.
MATERIALES Y MÉTODOS
A. Diagrama general
En la figura 2 se muestra el diagrama general, que se dividió en 5 etapas funcionales para
su mejor comprensión. Para la captura de estas señales se emplearon electrodos
superficiales del tipo pediátrico usados en estudios de electrocardiografía. La primera
etapa consiste en un amplificador de instrumentación (AI) por cada uno de los 4 canales.
Esta etapa amplifica la señal diferencial captada por los electrodos, que están ubicados
sobre los músculos del atleta, al mismo tiempo que reducen los efectos del ruido común a
ambas entradas.
Las salidas de los AI se introducen en la etapa 2 de filtrado, donde cada canal pasa
a través de un filtro pasa-altas, que elimina el nivel de corriente directa de la etapa
anterior y luego a través de un filtro pasa-bajas, que la limita en banda. Se adicionó un
filtro notch a 60 Hz en cada canal y posteriormente la señal es convertida a su versión
digital mediante un convertidor análogo-digital, el cual está ubicado en la placa de
desarrollo programable de la etapa 4. Por otra parte, el chip dedicado de la etapa3,
registra la señal de aceleración, la cual es enviada mediante interface I2C al procesador.
Todas las muestras capturadas son almacenadas en tiempo real en una tarjeta de
memoria flash del tipo SD de la etapa 5.
B. Implementación
Alimentación y referencia: Los dispositivos ARDUINO permiten voltajes de alimentación
en el rango de 3.3V a 5V y en este diseño se decidió emplear el mayor voltaje, puesto que

favorece el comportamiento ante el ruido, lo cual es requerido al trabajar con señales
débiles como las electromiográficas.
Preamplificación: Debido a los bajos niveles de voltaje de las señales provenientes de los
electrodos y los altos niveles de ruido que pudieran generarse por fuentes externas, se
utilizaron AIs con una alta razón de rechazo al modo común. En este caso se emplearon
amplificadores del tipo AD620, capaces de funcionar con voltajes tan bajos como +/- 2,3
V, los cuales están dentro del rango de alimentación del ARDUINO (5 V). Su ganancia fue
configurada a 500mediante un resistor y esto permite lograr un elevado valor de ganancia,
pero al mismo tiempo que no se sature el canal debido al corrimiento de voltaje, según
demostraron las pruebas realizadas al circuito.
Filtrado pasa-altas: En las salidas de los cuatro A.I, se conectó esta etapa de filtrado, cuya
frecuencia de corte es de 50 Hz. Para el diseño de este filtro, se utilizó la herramienta
virtual FilterPro, desarrollada por la firma Texas Instruments [7] y los parámetros tomados
para su elaboración fueron los que aparecen en la Tabla 1. El circuito se observa en la
figura 3.
TABLA 1. Parámetros de diseño filtro pasa-altas
Fig. 3 Filtro pasa-altas
Filtrado pasa-bajas: El filtrado pasa-
bajas es la etapa posterior al pasa
altas y para su diseño se utilizó la herramienta virtual que se mencionó, teniendo en
consideración los parámetros de la Tabla 2, donde se destacó el empleo también de un
Nombre Pasa-
altas,,Chebyshev
0,5 dB
Orden 4
Etapas 2
Ganancia 1 V/V ( 0 dB)
Rizado permisible en la banda
de paso
1 dB
Frecuencia de corte 50 Hz
Atenuación mínima en la banda
de parada
-20 dB
Frecuencia de esquina, banda
de parada
35 Hz

filtro Chebyshev de cuarto orden a 500 Hz, como aparece en la figura 4, para garantizar
un corte más abrupto y donde también se emplearon 2 amplificadores operacionales.
TABLA 2. Parámetros de diseño filtro pasa-bajas
Fig. 4. Filtro pasa-bajas
Filtronotch: Este filtro se caracteriza
por rechazar una frecuencia determinada que esté interfiriendo a un circuito y se emplea
principalmente para normalizar picos de respuesta producidos por la variación de
impedancia. En un primer momento se valoró su implementación, aumentando la
frecuencia de corte del filtro pasa-altas, pero daba como consecuencia, la perdida de las
señales de baja frecuencia y tomando en consideración esta prueba, se introdujo el notch
como etapa final de filtrado. Los parámetros que se utilizaron para este diseño se
muestran en la Tabla 3.
Design Name Pasa-
bajas,Chebyshev
0,5 dB
Orden 4
Etapas 2
Ganancia 1 V/V ( 0 dB)
Rizado permisible en la banda
de paso
1 dB
Frecuencia de corte 500 Hz
Atenuación mínima en la banda
de parada
-20 dB
Frecuencia de esquina, banda
de parada
1k Hz
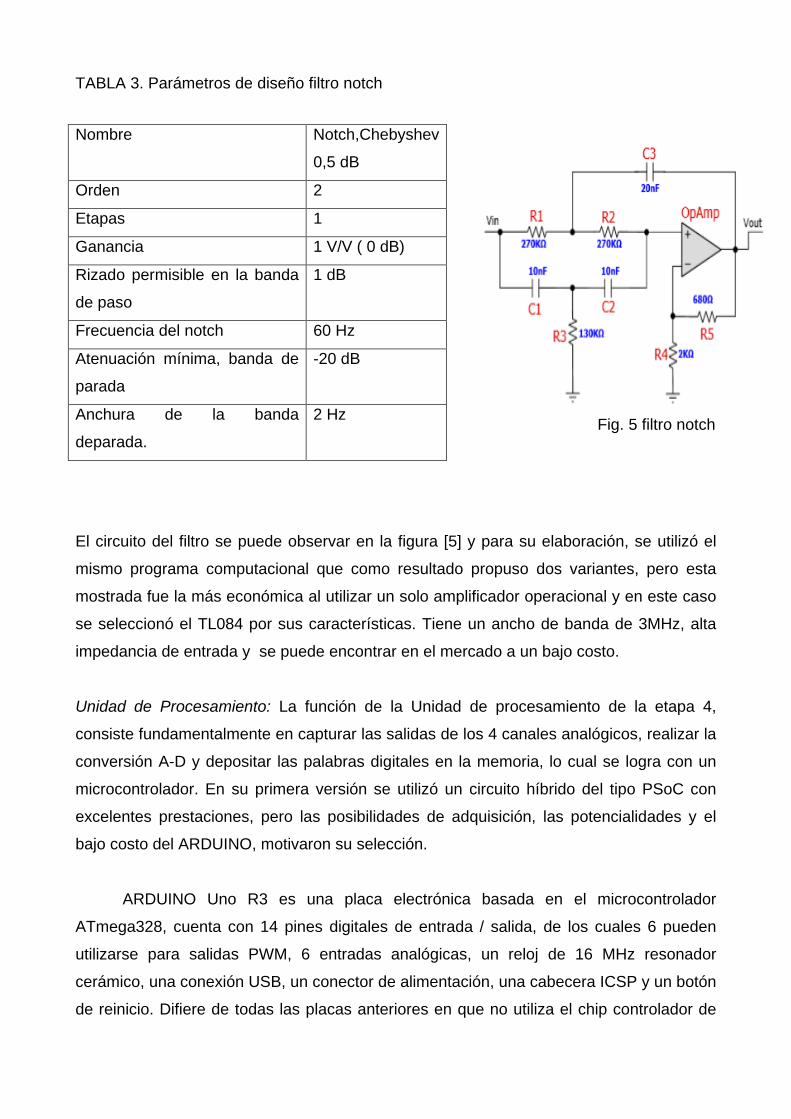
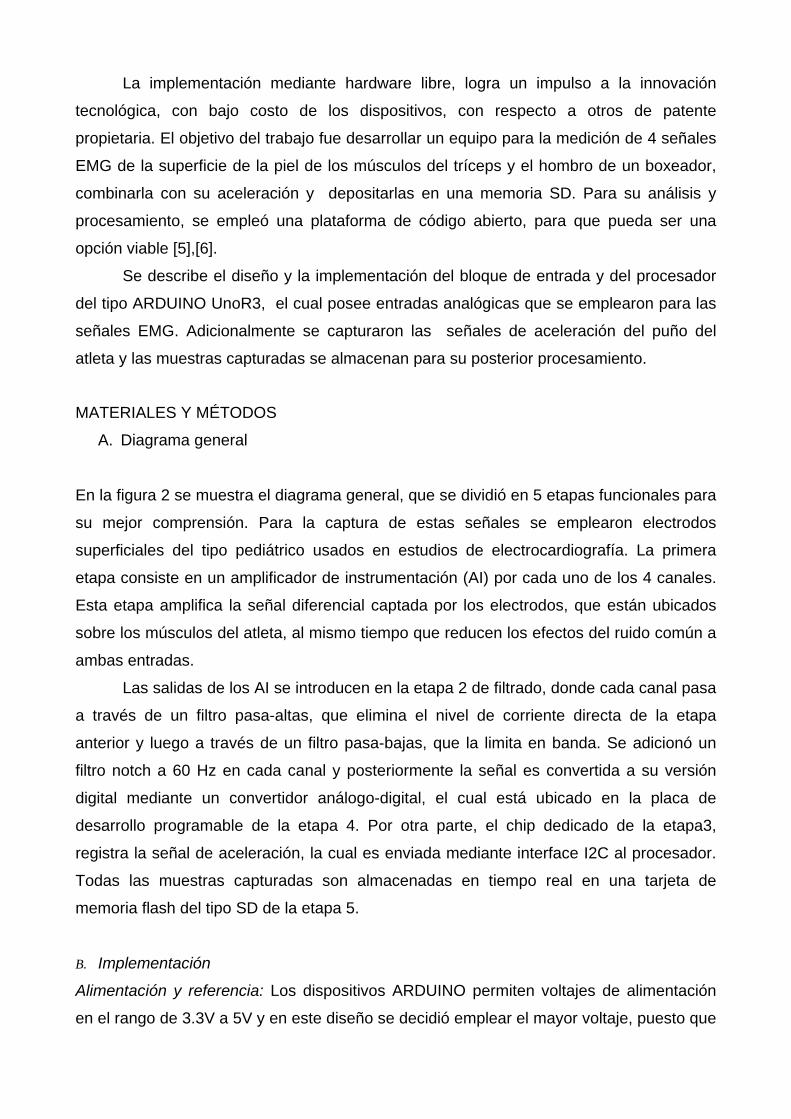
TABLA 3. Parámetros de diseño filtro notch
Fig. 5 filtro notch
El circuito del filtro se puede observar en la figura [5] y para su elaboración, se utilizó el
mismo programa computacional que como resultado propuso dos variantes, pero esta
mostrada fue la más económica al utilizar un solo amplificador operacional y en este caso
se seleccionó el TL084 por sus características. Tiene un ancho de banda de 3MHz, alta
impedancia de entrada y se puede encontrar en el mercado a un bajo costo.
Unidad de Procesamiento: La función de la Unidad de procesamiento de la etapa 4,
consiste fundamentalmente en capturar las salidas de los 4 canales analógicos, realizar la
conversión A-D y depositar las palabras digitales en la memoria, lo cual se logra con un
microcontrolador. En su primera versión se utilizó un circuito híbrido del tipo PSoC con
excelentes prestaciones, pero las posibilidades de adquisición, las potencialidades y el
bajo costo del ARDUINO, motivaron su selección.
ARDUINO Uno R3 es una placa electrónica basada en el microcontrolador
ATmega328, cuenta con 14 pines digitales de entrada / salida, de los cuales 6 pueden
utilizarse para salidas PWM, 6 entradas analógicas, un reloj de 16 MHz resonador
cerámico, una conexión USB, un conector de alimentación, una cabecera ICSP y un botón
de reinicio. Difiere de todas las placas anteriores en que no utiliza el chip controlador de
Nombre Notch,Chebyshev
0,5 dB
Orden 2
Etapas 1
Ganancia 1 V/V ( 0 dB)
Rizado permisible en la banda
de paso
1 dB
Frecuencia del notch 60 Hz
Atenuación mínima, banda de
parada
-20 dB
Anchura de la banda
deparada.
2 Hz

USB a serial FTDI, en lugar de ello cuenta con la Atmega16U2, programado como
convertidor USB a serie.
En cuanto al microcontroladores atmega328 es un circuito integrado de alto
rendimiento que esta basado un un microcontrolador RISC, combinando 32 KB ISP flash
una memoria con la capacidad de leer-mientras-escribe, 1 KB de memoria EEPROM, 2
KB de SRAM, 23 lineas de E/S de propósito general, 32 registros de proceso general, tres
temporizadores flexibles/contadores con modo de comparación, interrupciones internas y
externas, programador de modo USART, una interfase serial orientada a byte de 2 cables,
SPI puerto serial, 6-canales 10-bit Convertidor A/D (8-chanales en TQFP y QFN/MLF
packages), “watchdog timer” programable con oscilador interno, y cinco modos de ahorro
de energía seleccionables por software [7].
El dispositivo opera entre 1.8 y 5.5 voltios. Por medio de la ejecución de poderosas
instrucciones en un solo ciclo de reloj, el dispositivo alcanza una respuesta de 1 MIPS,
balanceando consumo de energía y velocidad de proceso, en la figura [7] se muestra
atmega328.
Teniendo en consideración otras tecnologías que están diseñadas para el
desarrollo de aplicaciones electrónicas tenemos: PSoC ó Programable System on Chip,
es la denominación comercial de una familia de microcontroladores programables
desarrollada por Cypress Semiconductor en 2002, entre sus características generales
tenemos: Unidad multiplicadora MAC, multiplicación por hardware de 8x8 con
almacenamiento de 32 bits, funciona con 5.0 volt o 3.3 volt o hasta con 1 volt, clock
interno o externo (frecuencia variable), voltaje de referencia variable para adaptarse a
distintos sensores [8].
Fig. 6 Arduino uno R3. Fig. 7 Circuito integrado atmega328

En cuanto a sus características de bloque esta varía de acuerdo a la familia de
microcontroladores seleccionada ya sea la familia CY28xx o CY29xx entre otras, la
cantidad de bloques que consume depende del tipo de dispositivo montado, en cada
bloque se puede montar 16 kbytes de memoria programable, 256 Mb de ram,
convertidores análogos digitales con una resolución de hasta 14 bits, convertidores
digitales-análogos con resolución de hasta 9 bits, amplificadores de ganancia variable,
amplificadores inversores, comparadores, filtros análogos, times de 8-16-32 bits,
moduladores de ancho de pulso (PWM) de 8-16-32 bits, interfaces de comunicación
UARTS, SPTI, I2C [8].
El Raspberry Pi es un ordenador de placa reducida o (placa única) (SBC) de bajo
costo, desarrollado en Reino Unido por la fundación Raspberry Pi, con el objetivo de
estimular la enseñanza de ciencias de la computación en las escuelas. El diseño incluye
un system-on-a-chip broadcom BCM2835, que contiene un procesador central (CPU)
ARM1176JZF-S a 700 MHZ (el firmware incluye unos modos “turbo” para que el usuario
pueda hacerle overclock de hasta 1 ghz sin perder la garantía), un procesador gráfico
(GPU) VideoCore IV, y 512 MB de memoria RAM (aunque originalmente al ser lanzado
eran 256 MB) [9].
Fig. 8 kit PoSC 1. Fig. 9 Raspberry Pi
Conversión análogo-digital: Para una frecuencia máxima de la señal de 500 Hz,
según el criterio de Nyquist se debe usar una frecuencia de muestreo teórica de al menos
1 kHz, aunque en la práctica se emplean frecuencias de muestreo mayores, en
dependencia de la caída del filtro y de la resolución de los convertidores. En este caso, se
decidió utilizar una frecuencia de muestreo efectiva de 2400 Hz por canal. Como en el

diseño se contemplaron 4 canales, el convertidor debe muestrear a 9600 Hz. Para llegar a
este valor, se tomo la atenuación de 36.6 db de la banda de transición a las altas
frecuencias del filtro pasa bajos, que fue a una frecuencia de 1119 Hz que, al aplicar el
teorema del muestreo, la frecuencia mínima a emplear alcanza el valor de aprox 2200 Hz
y se adoptó de 2400 Hz, para que resultara un múltiplo de la frecuencia del reloj del
dispositivo y fuera posible cargar el preescalador del ARDUINO con el valor apropiado.
Con la siguiente instrucción se realiza el barrido de las 4 entradas analógicas
dedicadas al muestreo y almacenamiento de las señales electromiográficas:
for (int analogPin = 0; analogPin < 4; analogPin++)
{ int sensor = analogRead(analogPin); dataString += String(sensor);
if (analogPin < 3) { dataString += ","; } }
Señal de aceleración: Para el registro de la señal de aceleración, se empleó el circuito
integrado MPU6050. Este envía los datos hacia el procesador mediante la interface I2C
de 16 bits por muestra y por cada uno de los ejes x,y,z de aceleración. Su manejo se
logra desde el propio ARDUINO mediante una librería que proporciona el fabricante [10].
Este sensor combina un giroscopio de 3 ejes y un acelerómetro de 3 ejes en un mismo
chip, siendo compatible con microcontroladores AVR, ARM y Microchip. Para un captura
precisa de movimiento rápido y lento, posee un rango de escala programable de
250/500/1000/2000 grados/segs para el giroscopio y de 2g/4g/8g/16g para el
acelerómetro
Fig. 9 Acelerómetro MPU6050
Mediante esta instrucción el arduino puede obtener los datos generados en el momento
que el sensor se desplaza:
Wire.beginTransmission (MPU);
Wire.write (0x3B);

Wire.endTransmission (false);
Wire.requestFrom (MPU, 14, true);
ACX = Wire.read () << 8 | Wire.read ();
ACY = Wire.read () << 8 | Wire.read ();
ACZ = Wire.read () << 8 | Wire.read ();
Almacenamiento: Para el almacenamiento de las muestras se empleó una de tarjeta de
memoria del tipo SD,es manejada desde el ARDUINO mediante la interface SPI. Para
evitar la pérdida de la señal, se debe tener el formato FAT-16 del sistema de archivos y
con una única partición en él. El tratamiento ulterior de esta información se realiza en una
computadora personal utilizando los programas de procesamiento de señales más
apropiados para estas aplicaciones.
Los datos obtenidos de la conversión análoga-digital y como los valores resultantes al
desplazar el acelerómetro son almacenados en un archivo, txt, esto se lleva a cabo
mediante el siguiente código;
File dataFile = SD.open("datalog.txt", FILE_WRITE);
if (dataFile) { dataFile.println(dataString); dataFile.close(); Serial.println(dataString); }
else { Serial.println("error opening datalog.txt"); }
RESULTADOS La gráfica de la figura [8] muestra el circuito en configuración de cascada, que fue
producto de la implementación del sistema de filtrado diseñado con la herramienta virtual
FilterPro de Texas instrument, con sus valores de diseño y formando un filtro pasa banda
de la unión de los anteriores con el notch para eliminar los 60 Hz.
Fig. 10 Sistema de filtros.
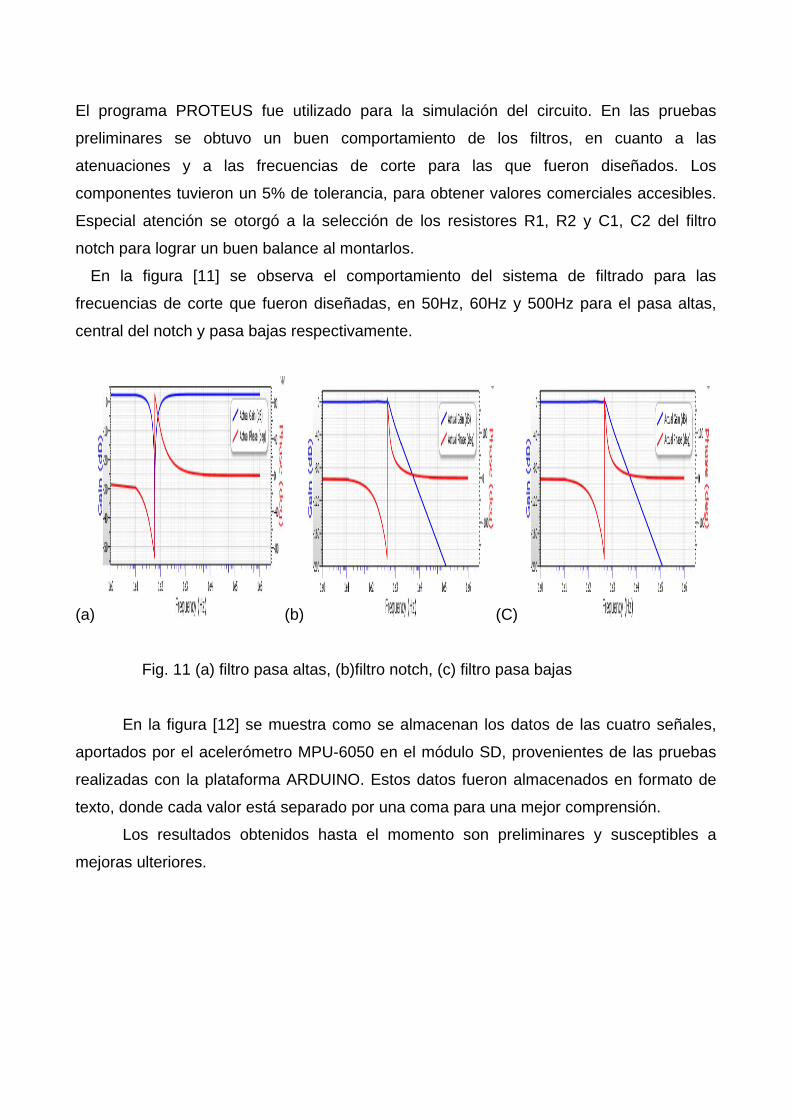
El programa PROTEUS fue utilizado para la simulación del circuito. En las pruebas
preliminares se obtuvo un buen comportamiento de los filtros, en cuanto a las
atenuaciones y a las frecuencias de corte para las que fueron diseñados. Los
componentes tuvieron un 5% de tolerancia, para obtener valores comerciales accesibles.
Especial atención se otorgó a la selección de los resistores R1, R2 y C1, C2 del filtro
notch para lograr un buen balance al montarlos.
En la figura [11] se observa el comportamiento del sistema de filtrado para las
frecuencias de corte que fueron diseñadas, en 50Hz, 60Hz y 500Hz para el pasa altas,
central del notch y pasa bajas respectivamente.
(a) (b) (C)
Fig. 11 (a) filtro pasa altas, (b)filtro notch, (c) filtro pasa bajas
En la figura [12] se muestra como se almacenan los datos de las cuatro señales,
aportados por el acelerómetro MPU-6050 en el módulo SD, provenientes de las pruebas
realizadas con la plataforma ARDUINO. Estos datos fueron almacenados en formato de
texto, donde cada valor está separado por una coma para una mejor comprensión.
Los resultados obtenidos hasta el momento son preliminares y susceptibles a
mejoras ulteriores.

Fig. 12. Monitor serial de arduino usado para las pruebas de transmisión: valores
registrados de aceleración.
CONCLUSIONES
1. Se desarrolló un equipo moderno y de bajo costo para el estudio de los golpes con
el miembro superior y factible de reproducir con componentes accesibles en el
mercado.
2. Los electrodos superficiales son económicos y apropiados para su uso en la piel del
boxeador como captadores de la señal EMG.
3. Se comprobó que los filtros de Chebyshev de cuarto orden utilizados, permitieron
atenuaciones razonables, con adecuados bordes de caída y una banda de paso
entre 50 y 500 Hz, apropiada para el filtrado de la señal EMG.
4. Los resultados del filtro notch atenuaron la frecuencia de 60 Hz, pero afectan en
alguna medida las frecuencias bajas del espectro de la señal original.
5. El procesador ARDUINO Uno R3 cuenta con los recursos imprescindibles para su
uso en esta aplicación, debido a sus prestaciones y a su bajo costo.
6. La selección de la frecuencia de muestreo consideró las características del reloj, del
procesador y la atenuación a las altas frecuencias de la señal EMG,
determinándose que el valor de 2400 Hz es adecuado en esta aplicación.

7. Realizando una comparación con las plataformas de desarrollo de programación
planteadas anteriormente, cada una tiene sus ventajas y desventajas técnicas con
respecto a la otra, pero lo que si hay que destacar son los siguientes aspectos:
8. Económico: realizando una búsqueda de precios de las diferentes plataformas de
desarrollo de programación se obtuvo que arduino uno R3 tiene un precio al de tal
de 2969bfs, raspberry PI tiene un precio al de tal de 7490bfs, en cuanto a PSoC
como es una tecnología netamente propietaria es muy costosa, por esta razón
ningún distribuidor del país la tiene disponible, los precios fueron sustraídos del
sitio de compras virtuales (http://articulo.mercadolibre.com.ve), ya que en otros
distribuidores de componentes electrónicos están agotados, entre estos
distribuidores tenemos www.tiendaelectronica.com.ve y www.electronica.com.ve .
9. Acoplamiento de sensores: el MPU6050 que se utiliza para la medición de la
aceleración del golpe, el fabricante del sensor es el mismo de la placa programable
arduino uno R3, como también el módulo donde se colocara la memoria SD.
10. Facilidad de adquisición de componentes: la tecnología arduino se ha convertido en
una industria de un sinfín de placas de desarrollo de programación y sensores de
distintas aplicaciones.
BIBLIOGRAFÍA
[1] Honrad M, The ABC of EMG. A Practical Introduction to Kinesiological
Electromyography, 2ra Ed, 2005.
[2] E. Aficas , J. Baquero, E. Suarez , “Reconocimiento de patrones de movimiento del
sistema fisiológico brazo-antebrazo a partir de señales”, M.Sc. tesis, Depto.
Elect. Ing., Univ. Pereira, Colombia, Pereira, 2004.
[3] .Sandoval C y col : “Estimación de velocidad del movimiento de mano usando redes
neuronales artificiales y medic. electromiográfica, Ing. Bioméd” vol. 4, Dic. 2010.
[4] W. Rojas, F Santa, “Implementación de un electromiográfico con interfaz USB,”
Tecnura, vol. 6, pp 117-130, Sept. 2012.
[5] Aragón O, y col: “Sistema de adquisición de señales de electromiografia superficial
con plataformas de código abierto,”vol. 36, pp. 348-35, Feb.2014
[6] Texas instrument: “ Filter Pro Active Filter Design Application (NRND),” Available in:
http://www.ti.com (2015, Mar. 10)
[7] Atmel (2015, Mar. 10). “Atmega328 data sheet” Available in: http://atmel.com.
[8] CYPRESS (2015, Mar. 03). “PSoC® 1”. Available in: http://www.cypress.com/
[9] Raspberry (2015, Mar. 03). “Raspberry Pi”, Available in: http://www.raspberrypi.org/

[10] InvenSense (2013, May. 12), “MPU-6000 and MPU-6050 Product Specification rev.
3.4,” Available in: www.invensense.com

Diseño y construcción de una Prótesis mecánica para pacientes con
amputación transfemoral
Arguello Biondo Alexander Manuel, Álvarez Serrano Antonio Vicente, Fernández
Castañeda Feliberto
RESUMEN
El trabajo aborda el diseño y construcción de una prótesis mecánica, denominada
BiondoPROT que da una respuesta alternativa a personas de bajos recursos con
amputación de uno de sus miembros inferiores para mejorar su nivel de movilidad y
calidad de vida. Parte de un problema real, relacionado con el aumento el número de
casos de accidentes de tránsito y otros traumas, que requieren amputación de algunas de
sus piernas y posterior rehabilitación en el área de fisiatría del Hospital General Alfredo
Van Grieken del Estado Falcón, en Venezuela. Para su desarrollo se utilizaron técnicas
de modelación y análisis estructural y se emplearon materiales reciclados de fácil
adquisición. Además se realizó la validación del desempeño de la prótesis teniendo en
cuenta las condiciones del paciente y ambientales de la localidad. Se ofrece una
valoración del impacto científico-técnico, económico, metodológico, social y ambiental del
proyecto.
Palabras claves: prótesis, amputación, rehabilitación, diseño, reingeniería.
INTRODUCCIÓN
El trauma de una amputación transfemoral afecta al paciente en una actividad básica y
primaria como es la locomoción y genera eventos complejos, tanto biológica como
psicológica, que conlleva a la colocación de una prótesis y su posterior rehabilitación.
Cada amputación de un miembro inferior es diferente y presenta particularidades y
requerimientos específicos. Por esa razón existen una gran variedad de tipos de prótesis
que difieren en su forma estructural, en el mecanismo de articulación de la rodilla,
funcionabilidad, durabilidad, seguridad y costo.
Las prótesis transfemorales abarcan, en la actualidad, una gran variedad de tipos
que van desde puramente mecánicos a mioeléctricos y robóticos. Son innumerables los
Centros de Investigación, Universidades y Corporaciones en el mundo que destinan

cuantiosos recursos a su desarrollo y perfeccionamiento. En el mercado internacional
existe un gran número de prótesis, variando el precio con referencia al modelo, que oscila
alrededor de los 12000 dólares. Estos precios resultan prohibitivos para la mayoría de la
población discapacitada que las necesita.
El principal problema radica en el acceso a esas tecnologías, realmente costosas
por los materiales empleados, los componentes electrónicos, las formas futuristas y los
elementos mecatrónicos que las integran. Además no están adecuados a las condiciones
climáticas y ambientales locales que atentan contra la durabilidad de los mismos.
Por otra parte, las prótesis más económicas son muy rígidas y evidentes durante la
marcha generando problemas en la autoestima de los pacientes.
Una solución a alternativa se concibió con el desarrollo de una prótesis mecánica
transfemoral monocéntrica o de eje simple, que funcione adecuadamente permitiendo
tener más grado de libertad que una prótesis rígida tradicional, facilitando la movilidad y
permitiendo reducir los costos de fabricación a partir de la reingeniería.
Para el diseño de la prótesis se emplearon programas computacionales basados
en el modelado, simulación y análisis estructurales.
DISEÑO CONCEPTUAL
Las partes principales de un prótesis transfemoral son las siguientes: el encaje, el
vástago, mecanismo pie-tobillo y la rodilla.
A. Biomecánica de la rodilla y el control de la estabilidad
El ciclo de marcha consta de dos fases principales y de varias sub fases: La de apoyo,
iniciada cuando el talón hace contacto con la superficie y que concluye con el despegue
de los dedos; la fase de oscilación, que comienza con el despegue de los dedos y termina
con el contacto del talón con el suelo, como se muestra en la figura 1.
Fig.1. Fases de la marcha humana [1].
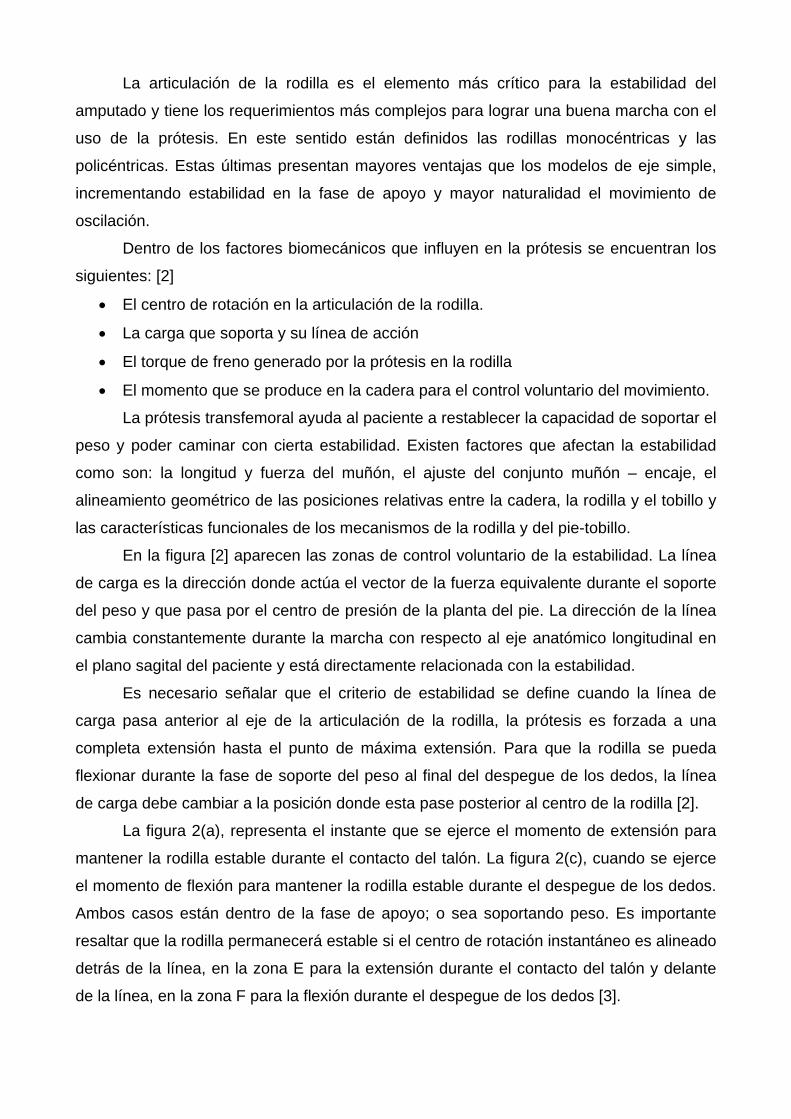
La articulación de la rodilla es el elemento más crítico para la estabilidad del
amputado y tiene los requerimientos más complejos para lograr una buena marcha con el
uso de la prótesis. En este sentido están definidos las rodillas monocéntricas y las
policéntricas. Estas últimas presentan mayores ventajas que los modelos de eje simple,
incrementando estabilidad en la fase de apoyo y mayor naturalidad el movimiento de
oscilación.
Dentro de los factores biomecánicos que influyen en la prótesis se encuentran los
siguientes: [2]
• El centro de rotación en la articulación de la rodilla.
• La carga que soporta y su línea de acción
• El torque de freno generado por la prótesis en la rodilla
• El momento que se produce en la cadera para el control voluntario del movimiento.
La prótesis transfemoral ayuda al paciente a restablecer la capacidad de soportar el
peso y poder caminar con cierta estabilidad. Existen factores que afectan la estabilidad
como son: la longitud y fuerza del muñón, el ajuste del conjunto muñón – encaje, el
alineamiento geométrico de las posiciones relativas entre la cadera, la rodilla y el tobillo y
las características funcionales de los mecanismos de la rodilla y del pie-tobillo.
En la figura [2] aparecen las zonas de control voluntario de la estabilidad. La línea
de carga es la dirección donde actúa el vector de la fuerza equivalente durante el soporte
del peso y que pasa por el centro de presión de la planta del pie. La dirección de la línea
cambia constantemente durante la marcha con respecto al eje anatómico longitudinal en
el plano sagital del paciente y está directamente relacionada con la estabilidad.
Es necesario señalar que el criterio de estabilidad se define cuando la línea de
carga pasa anterior al eje de la articulación de la rodilla, la prótesis es forzada a una
completa extensión hasta el punto de máxima extensión. Para que la rodilla se pueda
flexionar durante la fase de soporte del peso al final del despegue de los dedos, la línea
de carga debe cambiar a la posición donde esta pase posterior al centro de la rodilla [2].
La figura 2(a), representa el instante que se ejerce el momento de extensión para
mantener la rodilla estable durante el contacto del talón. La figura 2(c), cuando se ejerce
el momento de flexión para mantener la rodilla estable durante el despegue de los dedos.
Ambos casos están dentro de la fase de apoyo; o sea soportando peso. Es importante
resaltar que la rodilla permanecerá estable si el centro de rotación instantáneo es alineado
detrás de la línea, en la zona E para la extensión durante el contacto del talón y delante
de la línea, en la zona F para la flexión durante el despegue de los dedos [3].

En la figura 2(b), se muestra la superposición de áreas, donde se define la zona
“S”, es que conocida como zona de control voluntario. Los alineamientos dentro de la
región en forma de V varían en función de los requerimientos de la marcha del paciente
amputado.
Los alineamientos dentro de la región en forma de “V” variarán en función de los
requerimientos para un buen funcionamiento por parte del amputado.
Fig. 2. Diagrama de estabilidad [4] Fig. 3. Esquema general de carga
durante el contacto con el talón [2]
El análisis matemático realizado parte del modelo de prótesis transfemoral de eje
simple propuesto por Radcliffe [4], el cual centra su basamento en el efecto del momento
ejercido en la cadera. Este torque busca cambiar la línea de carga al instante del contacto
del talón y el despegue de los dedos, lo cual genera la zona de estabilidad donde el
centro instantáneo de rotación debe estar ubicado. En la figura 3 se representa el
esquema de carga durante el contacto con el talón, donde se muestra la línea de cargas y
las fuerzas que actúan, entre ellas el Momento ejercido por la cadera Mh, la fuerza de
reacción del suelo R y la carga soportada. La figura 3(a) muestra el diagrama de fuerzas
cuando se inicia el soporte del peso en el instante del contacto del talón, el cual es crítico
en la fase de apoyo. En ese caso no se ejerce un momento de extensión sobre la rodilla y
la carga se transmite directamente desde el punto de contacto hasta la cadera. En la
figura 3(b) se muestra el esquema cuando el amputado está ejerciendo el momento de
extensión sobre la cadera, que tiende a conducir el tobillo hacia atrás y se genera una
fuerza de reacción hacia delante. Esta componente inclina la dirección angular de la línea
de carga por delante del centro de rotación, logrando la estabilidad en la rodilla.

En la figura [4] se muestra la línea de carga en el instante de despegue de los
dedos y que está relacionada con la carga P que se transmite a través de la prótesis
hasta la articulación de la cadera y el Momento Mh ejercido, tanto en flexión como en
extensión. El momento de extensión desplaza la línea de carga hacia delante de la cadera
y el momento flector la desplaza la línea hacia la parte trasera.

Fig. 4. Esquema general de carga en el apoyo final [2]
B. Selección de la alternativa adecuada para el desarrollo de la prótesis transfemoral
En la literatura especializada [5]-[12] se reportan varias alternativas de prótesis,
entre ellas: mecánica, hidráulica o neumática y mioeléctrica. A las mismas se le realizó un
análisis cualitativo en cuanto a: funcionalidad, factibilidad en la fabricación, seguridad y
costo.
Los resultados arrojaron lo siguiente: las prótesis neumáticas o hidráulicas
presentan buen funcionamiento, con sistemas amortiguados que facilitan la locomoción.
Pero tienen un peso relativo mayor en comparación con las mecánicas, tienen mayor
complejidad de fabricación y un costo mayor.
Las mioeléctricas son de alta tecnología, muy funcionales y eficientes, logran
reproducir el movimiento natural humano, con un consumo mínimo de energía y esfuerzo.
Sin embargo tienen un alto peso relativo, son de difícil construcción, de costo muy
elevados, por los materiales y las tecnologías de fabricación.
Por otra parte, las prótesis mecánicas son más simple desde el punto de vista
constructivo y de menos costo que las anteriores, también son funcionales. No obstante
requiere mayor esfuerzo físico del paciente. Referente a la seguridad, desde el punto de
vista de durabilidad ante el cambio climatológico. Las mioeléctricas, neumáticas o
hidráulicas tienen más puntos críticos, ya que sus componentes electrónicos son
susceptibles a ambientes agresivos.
En la Tabla 1 se muestran un resumen comparativo de análisis cualitativo para los
diferentes tipos de prótesis antes mencionadas.
a b c
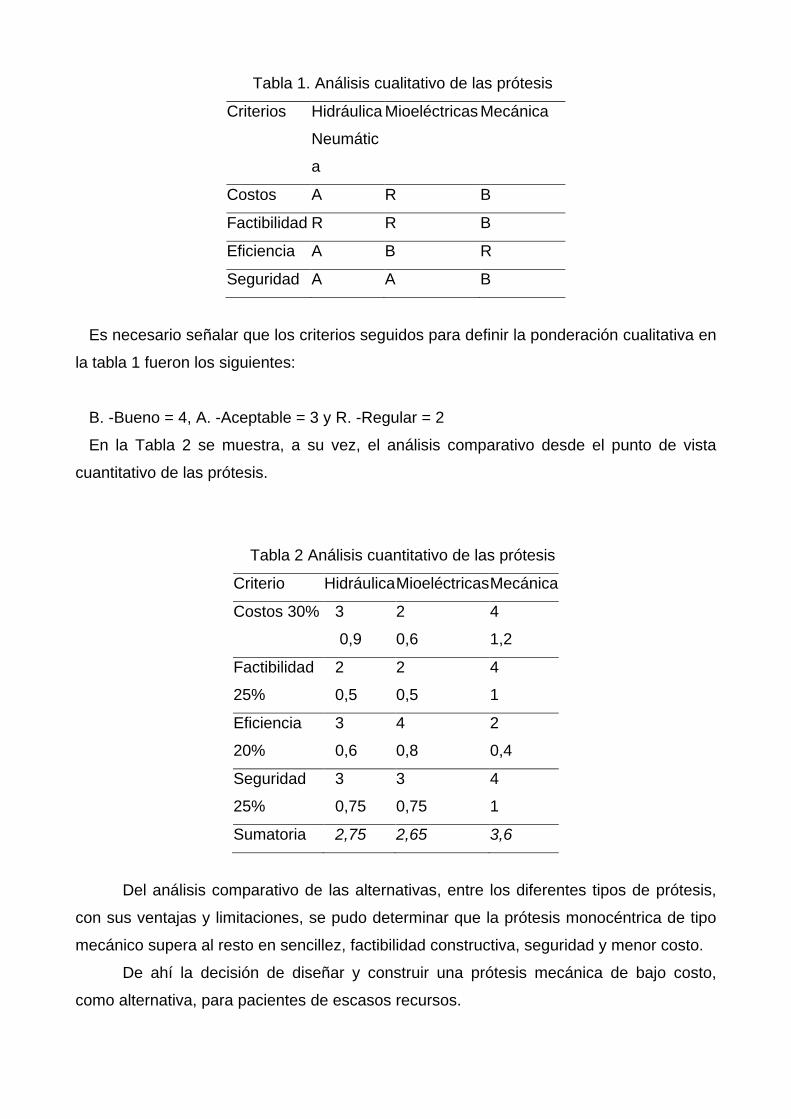
Tabla 1. Análisis cualitativo de las prótesis
Criterios Hidráulica
Neumátic
a
Mioeléctricas Mecánica
Costos A R B
Factibilidad R R B
Eficiencia A B R
Seguridad A A B
Es necesario señalar que los criterios seguidos para definir la ponderación cualitativa en
la tabla 1 fueron los siguientes:
B. -Bueno = 4, A. -Aceptable = 3 y R. -Regular = 2
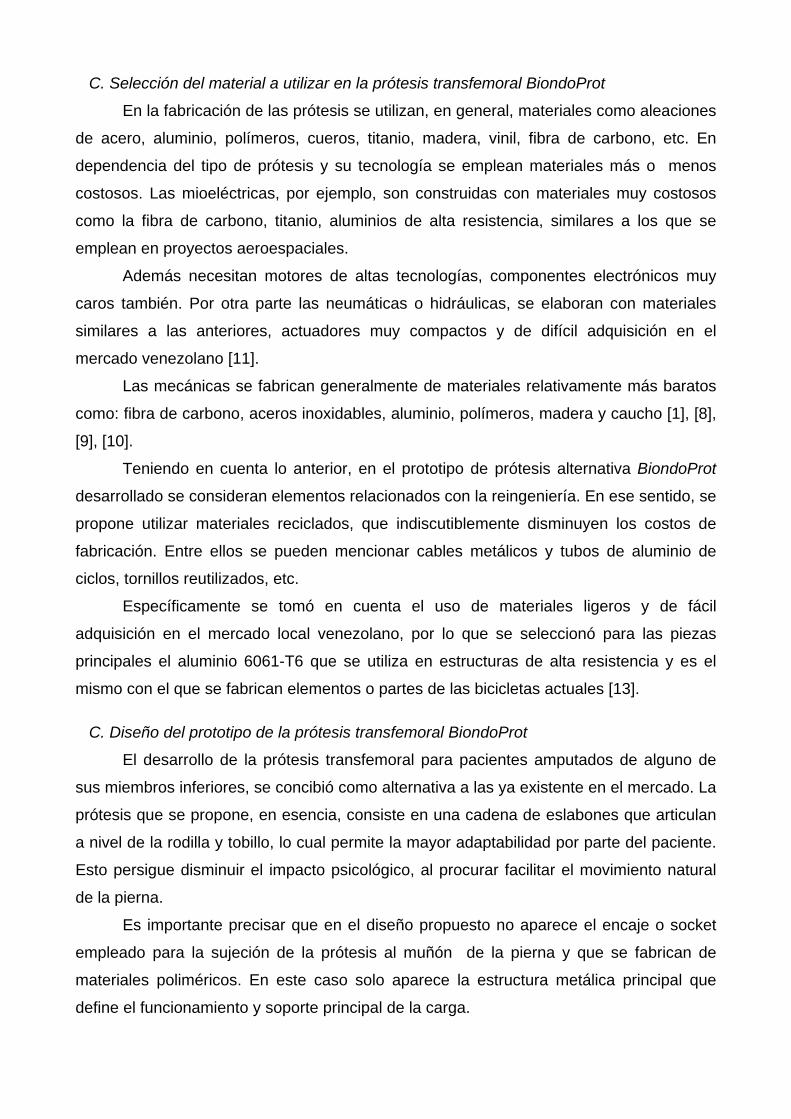
En la Tabla 2 se muestra, a su vez, el análisis comparativo desde el punto de vista
cuantitativo de las prótesis.
Tabla 2 Análisis cuantitativo de las prótesis
Criterio Hidráulica Mioeléctricas Mecánica
Costos 30% 3
0,9
2
0,6
4
1,2
Factibilidad
25%
2
0,5
2
0,5
4
1
Eficiencia
20%
3
0,6
4
0,8
2
0,4
Seguridad
25%
3
0,75
3
0,75
4
1
Sumatoria 2,75 2,65 3,6
Del análisis comparativo de las alternativas, entre los diferentes tipos de prótesis,
con sus ventajas y limitaciones, se pudo determinar que la prótesis monocéntrica de tipo
mecánico supera al resto en sencillez, factibilidad constructiva, seguridad y menor costo.
De ahí la decisión de diseñar y construir una prótesis mecánica de bajo costo,
como alternativa, para pacientes de escasos recursos.
C. Selección del material a utilizar en la prótesis transfemoral BiondoProt
En la fabricación de las prótesis se utilizan, en general, materiales como aleaciones
de acero, aluminio, polímeros, cueros, titanio, madera, vinil, fibra de carbono, etc. En
dependencia del tipo de prótesis y su tecnología se emplean materiales más o menos
costosos. Las mioeléctricas, por ejemplo, son construidas con materiales muy costosos
como la fibra de carbono, titanio, aluminios de alta resistencia, similares a los que se
emplean en proyectos aeroespaciales.
Además necesitan motores de altas tecnologías, componentes electrónicos muy
caros también. Por otra parte las neumáticas o hidráulicas, se elaboran con materiales
similares a las anteriores, actuadores muy compactos y de difícil adquisición en el
mercado venezolano [11].
Las mecánicas se fabrican generalmente de materiales relativamente más baratos
como: fibra de carbono, aceros inoxidables, aluminio, polímeros, madera y caucho [1], [8],
[9], [10].
Teniendo en cuenta lo anterior, en el prototipo de prótesis alternativa BiondoProt
desarrollado se consideran elementos relacionados con la reingeniería. En ese sentido, se
propone utilizar materiales reciclados, que indiscutiblemente disminuyen los costos de
fabricación. Entre ellos se pueden mencionar cables metálicos y tubos de aluminio de
ciclos, tornillos reutilizados, etc.
Específicamente se tomó en cuenta el uso de materiales ligeros y de fácil
adquisición en el mercado local venezolano, por lo que se seleccionó para las piezas
principales el aluminio 6061-T6 que se utiliza en estructuras de alta resistencia y es el
mismo con el que se fabrican elementos o partes de las bicicletas actuales [13].
C. Diseño del prototipo de la prótesis transfemoral BiondoProt
El desarrollo de la prótesis transfemoral para pacientes amputados de alguno de
sus miembros inferiores, se concibió como alternativa a las ya existente en el mercado. La
prótesis que se propone, en esencia, consiste en una cadena de eslabones que articulan
a nivel de la rodilla y tobillo, lo cual permite la mayor adaptabilidad por parte del paciente.
Esto persigue disminuir el impacto psicológico, al procurar facilitar el movimiento natural
de la pierna.
Es importante precisar que en el diseño propuesto no aparece el encaje o socket
empleado para la sujeción de la prótesis al muñón de la pierna y que se fabrican de
materiales poliméricos. En este caso solo aparece la estructura metálica principal que
define el funcionamiento y soporte principal de la carga.

El diseño se realizó de manera automatizada con la aplicación de SolidWorks, un
software CAD (diseño asistido por computadora) para modelado mecánico en 3
dimensiones 3D, desarrollado en la actualidad por SolidWorks Corp [14].
En la figura [5] se muestra una imagen tridimensional de la estructura mecánica de
la prótesis. La forma de la prótesis es esencialmente tubular y permite su regulación en
longitud.
El mecanismo de articulación del tobillo y la rodilla se garantiza mediante un
sistema de poleas y cables que actúan como resorte y facilitan el movimiento de rotación
de ambas articulaciones simultáneamente durante la marcha.
Dentro de sus principales características funcionales se encuentran que puede ser
adaptada a las condiciones anatómicas de cada paciente en específico. Así como a las
características del ciclo de la marcha humana, durante las fases de apoyo y de balanceo,
que constan de varias etapas fundamentales, como son: el contacto del talón, despegue
de los dedos y posteriormente el contacto del talón nuevamente (ver figura 2). Además
con un peso adecuado que facilita la maniobrabilidad y el equilibrio del paciente durante la
marcha.
Este modelo de prótesis mecánica monocéntrica o de eje simple ofrece mayores
posibilidades que una prótesis rígida que afectan la autoestima del paciente.
Como se puede apreciar en la representación en explosión que se muestra en la
figura [6], la prótesis consta de un módulo de 15 piezas que al ensamblarse no exceden
las dimensiones normales del miembro amputado.
Las partes que conforman la prótesis son mostradas en la figura [6] y básicamente
algunos de los elementos principales son los siguientes: (1) articulación de rodilla (2) traba
de pivote, (3) pivote (6) adaptador, (7) guías de cables (8) puntal, (9) roldanas, (13) cables
que permiten la articulación rodilla - tobillo. El resto de los elementos enumerados actúan
como complementos al ensamble y funcionamiento de la prótesis.

Fig.5. Modelo en 3 Dimensiones Fig. 6. Partes que conforman la prótesis
prótesis BiondoProt.
En la etapa de diseño y concepción definitiva de la prótesis mecánica propuesta se
tuvo en cuenta complementar las soluciones prácticas, durante el proceso de desarrollo
del producto, con la modelación y simulación computacional.
Esto es debido a que un grupo de los elementos del conjunto se tomaron de
materiales reciclados, a partir de piezas de bicicletas fundamentalmente. A las cuales
hubo que hacerles modificaciones constructivas para lograr el propósito principal que era
la construcción de la prótesis mecánica. Mientras que otros elementos constituyeron
nuevos diseños de partes y piezas, pero siempre a partir de la adaptación de materiales
reciclados.
En este sentido fue muy importante la comparación sistemática del diseño y
construcción real de la prótesis con la modelación en 3D y simulación computacional. Lo
cual permitió tomar decisiones importantes del diseño, así como la comprobación de la
resistencia, tanto física (mediante pruebas experimentales), como computacional
utilizando el software.
Para cada elemento crítico del conjunto se le realizaron los análisis de resistencia a
partir del material seleccionado y del sistema de carga propuesto, de acuerdo a las
condiciones de trabajo asumidas. Entre ellas el peso a soportar sobre la prótesis, que se
corresponde con una masa de 70kg, lo cual es válido y muy superior al necesario por la
inmensa mayoría de los pacientes amputados ya que es una carga repartida entre ambos
miembros inferiores.

En el caso de pacientes muy obesos y de peso elevado, el uso de este tipo de
prótesis sería casi imposible, de hecho aunque no fueran discapacitados el andar natural
ya les resulta, de por sí, muy difícil de realizar.
El material fundamental utilizado es la Aleación de Aluminio 6061-T6 empleado
habitualmente en la construcción de los cuadros y otros componentes de bicicletas. En
esta aleación la proporción de aluminio oscila entre un 95,8 a 98,5 %, mientras que el
resto de elementos se encuentran dentro de los márgenes establecidos en la Tabla [3],
sin que existan otros elementos en proporciones superiores a 0,05 de forma individual ni
el 0,15 % en total:
Tabla 3. Composición química de la aleación 6061-T6
Elemento Mínimo
(%)
Máximo
(%)
Silicio 0,4 0,8
Hierro 0 0,7
Cobre 0,15 0,4
Manganeso 0 0,15
Magnesio 0,8 1,2
Cromo 0,04 0,35
Zinc 0 0,25
Titanio 0 0,15
Esta aleación tiene una densidad de 2,70 g/cm3 y la forma templada T6 presenta,
entre sus propiedades mecánicas, una resistencia máxima a la tracción de 290 MPa, un
límite tensión de fluencia de 270 MPa y una tensión de rotura de 310 MPa.
El valor típico de conductividad térmica a 80 ºC se encuentra alrededor de los 152
W/m K. Las características del material definen los límites de fatiga en 500 x106 ciclos de
carga de 100 MPa [13]. Otros materiales empleados en la confección de la prótesis son
los cables finos de acero de los utilizados en los frenos de las bicicletas.
D. Cargas generadas y análisis de fuerzas.
Durante el ciclo de marcha, las cargas generadas de la reacción del pie de apoyo
con la superficie del suelo varían. Los mayores valores de esfuerzos ocurren en la fase de
apoyo, porque en ese instante una sola pierna recibe todo el peso del cuerpo. Al contrario,
durante la etapa de balanceo los esfuerzos disminuyen abruptamente porque solo actúa
la fuerza de gravedad y la carga generada es debido al propio peso de la prótesis.

Por tanto, el análisis se realiza para la fase de apoyo en 3 puntos críticos; al
contacto del talón, el apoyo total del pie y en el impulso final.
En este análisis, la articulación de la rodilla constituye uno de los elementos más
crítico por las cargas que soporta y más propenso a sufrir roturas. Por tanto se le hicieron
los chequeos de resistencia, tanto por los métodos manuales tradicionales como con el
empleo de la computación por el método de los elementos finitos.
En este sentido se calcularon los esfuerzos utilizando las ecuaciones de equilibrio
estático, según el sistema de cargas representado en la figura [3] y [4].
A modo de ejemplificar el proceso de modelación y simulación realizado, en las
figuras 7 y [8] se muestran los dibujos tridimensionales de la articulación de la rodilla y la
traba de pivote respectivamente. Con el modelado obtenido de la prótesis, empleando el
SolidWorks [14], se procedió al análisis por el método de los elementos finitos MEF, para
determinar las deformaciones una vez es sometida a carga. Para ello se establecieron el
sistema de cargas, las propiedades del material y las restricciones de la pieza. Como se
mencionó anteriormente, la carga considerada para este análisis es de 686 N de fuerza,
toda vez que el individuo y que el peso está distribuido en cada una de las piernas.
Fig. 7. Articulación de la rodilla (pieza 1) Fig. 8. Traba de pivote (pieza 2)
En las figuras [9] y [10] se muestran los resultados de algunos de los elementos
más críticos a los que se les hicieron las comprobaciones de resistencia empleando el
método de los elementos finitos. Estos elementos se corresponden a las piezas definidas
como 1 y 2, que son la articulación de la rodilla y la traba de pivote respectivamente. En
todos los casos arrojaron resultados satisfactorios y se comprobó que no se alcanzan las
tensiones admisibles del material propuesto, por lo que soportará las cargas a las cuales
estará sometido.

Fig. 9. Análisis por elementos finitos Fig. 10. Análisis por elementos finitos
de la pieza 1 (FEA) de la pieza 2
Construcción de la prótesis transfemoral BiondoProt
A partir del diseño de los componentes se procedió a la construcción del prototipo
de prótesis a partir de los planos de fabricación obtenidos del modelado de las partes con
la ayuda del programa Solid Works. Para la fabricación de cada elemento se contó con los
talleres mecánicos del Instituto Universitario Alonso Gamero IUTAG, que dispone de
máquinas, herramientas convencionales que facilitan la elaboración de cada pieza. Entre
las máquinas y equipos utilizados se encuentran: una cortadora alternativa, un torno
paralelo, una fresadora, un equipo de oxicorte y de soldadura manual y una tronzadora.
Entre los materiales empleados para conformar la estructura de la prótesis se
emplearon: barras de acero de diferentes diámetros, perfiles de secciones angulares,
cilíndricas y cuadradas, pletinas, láminas y pernos de diferentes métricas. Además se
utilizaron herramientas de corte como brocas, cuchillas de torno HSS, fresas de disco y
pinzas.
CONCLUSIONES
1. En la actualidad existen una gran variedad de tipos de prótesis transfemorales,
que difieren en su estructura, en el mecanismo de articulación, su funcionalidad,
durabilidad, seguridad, su tecnología y su costo.
2. De lo reportado en la literatura consultada se corroboró que la articulación de la
rodilla presenta los requerimientos más complejos para lograr una marcha
aceptable con el uso de la prótesis, existiendo dos variantes de mecanismos
fundamentales: monocéntrico o policéntrico.
3. La prótesis mecánica y monocéntrica propuesta, denominada BiondoProt brinda
una alternativa para pacientes de bajo recursos que, a diferencia de una prótesis

rígida, le daría facilidades de movilidad, aumentando su autoestima y mejorando
indiscutiblemente la calidad de vida.
4. No obstante debe señalarse, como limitante de la prótesis de eje simple
diseñada, el problema de no facilitar acortamiento necesario de la longitud de la
extremidad. Lo que genera el movimiento excesivo de la cadera hacia arriba y
abajo, lo cual se evitaría con una articulación policéntrica pero a un costo mucho
mayor.
5. Como aspecto singular del trabajo se destaca la aplicación de la reingeniería y el
uso de materiales reciclados en la concepción del diseño y construcción del
prototipo de prótesis.
6. Con el empleo de las herramientas computacionales se logró modelar y simular
de manera rápida y sencilla las piezas que integran la estructura mecánica de la
prótesis y poder definir las formas y dimensiones definitivas. Así como realizar el
análisis estructural y comprobar la resistencia de la misma.
7. El desarrollo de este prototipo de estructura mecánica de la prótesis abre otras
perspectivas para futuros trabajos de diseño del encaje y el tobillo, así como de
los elementos superficiales que completarían desde el punto de vista estético a la
prótesis.
BIBLIOGRAFÍA
[1] Sheila A. Dugan, Rishna P. Bhat: “Biomechanics and Analysis of Running Gait”,
Journal of Physical Medicine and Rehabilitation Clinics of North America, Vol. 16, pp.
610, 2005.
[2] L. D. Castro Valladares: Diseño y Modelado Virtual del Mecanismo Policéntrico de una
Prótesis de Rodilla”. Tesis, Facultad de Ingeniería en Mecánica y Ciencias de la
Producción, Escuela Superior Politécnica del Litoral ESPOL, Guayaquil, Ecuador, 2012
[3] C.W. Radcliffe: “The Knud Jansen Lecture, Above-knee prosthetics”, University of
California Berkeley, Journal of Prosthetics and Orthotics International, Volume 37,
Number 1, pp 146-160, copyright 1977
[4] C.W. Radcliffe: “Four-bar linkage prosthetic knee mechanisms: kinematics, alignment
and prescription criteria”, Mechanical Engineering, University of California Berkeley,
ISPO, Prosthetic and Orthotics International, Volume 18, pp. 159-173, 1994
[5] C. A. Silva Castellanos: “Modelamiento de la marcha humana con prótesis de miembro
inferior mediante herramientas de simulación dinámica“, Tesis de maestría,

Departamento de Ingeniería Mecánica y Mecatrónica, Universidad Nacional de
Colombia, Bogotá, 20015
[6] J. Fernández Tamayo: “Diseño conceptual de un sistema protésico de rodilla para
amputado transfemoral”. Tesis. Universidad de Medellín. Colombia, 2007
[7] J. F. Ramírez Patiño: “Nivel de Confort y Distribución de Esfuerzos en la I, Tesis de
doctorado, Universidad Nacional de Colombia, Medellín, Colombia, 2011
[8] J. Sánchez, R. J. Hernández, J. E. Torres: “Diseño mecánico para una prótesis
transfemoral mediante el uso de herramientas computacionales y metodologías de
diseño”, Revista Ingeniería e Investigación Vol. 32 No. 3, Bogotá, Colombia, pp. 14-18,
Dic. 2012
[9] H. L. García Guerra: “Diseño de un socket autoajustable para prótesis de miembro
inferior”, Tesis de maestría , Facultad de Ingeniería, Universidad Nacional Autónoma
de México, UNAM, México, 2009
[10] U. R. Lanza Medina: “Diseño y construcción de una prótesis ortopédica modular para
amputado transtibial”, Tesis, Universidad Simón Bolívar, , Venezuela, 2006
http://www.dmpg.net/transfemoral-tipos-de-protesis-de-articulaciones-de-rodilla/
[11] Otto Bock: “Compendio de prótesis”. (2da ed.), SCHIELE &SCHON, 2009
[12] http://doc.ottobock.es/protesica/Miembro_Inferior_2007-2008.pdf
[13] http://asm.matweb.com/search/SpecificMaterial.asp?bassnum=MA6061T6
[14] http://www.solidworks.com/sw/3d-cad-design-software.htm
[15] Ed. Thompson: Ciencia e Ing. de Materiales. (4ta ed.) Edit. Mc. Graw Hill. México,
2003.
[16] J. Shigley: Diseño en Ing. Mecánica. (5ta ed.) Editorial Mc. Graw Hill. MEXICO,
1990.
Algoritmo para la detección de la frecuencia cardiaca en fetos a
partir del electrocardiograma abdominal
Murillo Carlos Javier, Orozco Morales Rubén
RESUMEN
La frecuencia cardiaca fetal es una variable que se utiliza para determinar el sufrimiento
fetal. Sin embargo, cuando se obtienen a partir del electrocardiograma abdominal están
presentes una serie interferencias en la señal, lo que requiere herramientas de software
para superar este inconveniente. El trabajo propone el diseño de un algoritmo en Matlab
que permite obtener la frecuencia cardiaca fetal utilizando sólo cuatro registros de
electrocardiograma abdominal de la madre. El algoritmo propuesto se basa en la
detección de QRS Materno a través de la técnica propuesta por Pan-Tompkins, para
luego suprimir estos complejos del registro abdominal. A continuación se propone
determinar la señal con el mayor nivel de energía, el cual será utilizado para determinar la
frecuencia cardiaca fetal utilizando una ventana deslizante que cubre nueve intervalos
RR fetales. El algoritmo fue probado con señales tomadas en cuatro madres, que están
disponibles en el sitio Web: http://physionet.org. Al determinar el error medio cuadrático
entre la frecuencia cardiaca fetal determinada con el algoritmo propuesto y la frecuencia
cardiaca fetal directa concluye que el algoritmo propuesto puede ser utilizado para
determinar la frecuencia cardiaca fetal indirectamente.
Palabras Claves: Abdominal electrocardiogram, Fetal heart rate.
INTRODUCCIÓN Los humanos por la condición de ser mamíferos nacen debido a la expulsión del feto a
través de la cavidad uterina. Durante el parto cuando el miometrio se contrae ocasiona
que los lagos vellosos en la placenta sean exprimidos lo que conlleva a que la sangre
materna en la proximidad de las vellosidades coriales desaparezca trayendo como
consecuencia que el flujo de oxigeno hacia el feto disminuya, Este estrés hipóxico es
normalmente tolerado debido a que el feto posee mecanismos compensatorios, sin
embargo algunos bebés no están preparados para asimilar esta condición fisiológica[1].
Es por estas razones que las técnicas de control y monitoreo forman parte fundamental
hoy día en el control pre natal de los centros de salud, debido a que la monitorización de
la frecuencia cardiaca fetal (FCF), permite determinar el sufrimiento fetal, el cual puede
levar a la aparición de lesiones permanentes e incluso la muerte [2]. Por otra parte, la
determinación de la FCF, que normalmente debe estar entre 110 a 170 latidos por minuto
[3], permite diagnosticar a tiempo patologías como la acidemia fetal intraparto [4], que
está relacionada directamente con la desaceleración del ritmo cardiaco. Es por esto que
toma importancia un diagnóstico temprano de cualquier anomalía en el sistema
cardiovascular y principalmente a nivel cardiaco y la medición de la frecuencia cardiaca
(FC) es el primer paso que se utiliza con este fin. Evidentemente realizarlo en un paciente
neonatal sería un procedimiento sencillo, pues se utilizarían las mismas técnicas que
aplican a un adulto. Pero cuando se trata de medir un feto las técnicas utilizadas cambian
totalmente debido a que no se tiene un absceso directo al mismo. La primera referencia
que se tiene del interés clínico por medir la frecuencia cardiaca fetal con el fin de
determinar la variabilidad del ritmo cardiaco fue en 1965 cuando Hon y Lee [5], notaron
que el sufrimiento fetal era precedido por cambios en los intervalos de la frecuencia
cardiaca, lo que conllevó que a partir de esa fecha se diera inicio a la realización de
investigaciones que buscaban determinar la FCF a través de registros
electrocardiográficos.
En la actualidad existen dos métodos para medir la FCF utilizando señales
electrocardiográficas. Uno de ellos es de forma invasiva y consiste en la colocación de un
electrodo sobre la cabeza del feto, con el objetivo de obtener directamente la señal
electrocardiográfica fetal (ECGF) [6], esto permite obtener la FCF con un bajo costo
computacional y con alta precisión, pero presenta como principal inconveniente que
representa un riesgo para la salud de la madre y del feto, debido a su condición invasiva y
solo puede ser aplicado al momento del parto. El segundo método es no invasivo y
consiste en utilizar una serie de electrodos colocados alrededor del vientre de la madre,
para obtener el registro electrocardiográfico abdominal (ECGA) [7], el cual está
compuesto por la señal electrocardiográfica de la madre y la del feto, para posteriormente,
con la utilización de técnicas en procesamiento digital, separar ambas señales y poder
determinar la FCF. Su ventaja radica en ser un procedimiento menos traumático para la
madre porque no es invasivo y puede aplicarse durante el último trimestre de embarazo.
La monitorización no invasiva de la actividad cardíaca fetal es de gran interés clínico para
evaluar la salud del feto; sin embargo, la posibilidad de obtener resultados fiables está

limitada por la gran cantidad de señales interferentes presentes, como son la actividad
cerebral, señales miográficas de la madre y del feto y también artefactos de movimiento.
Pero la principal señal interferente es el electrocardiograma materno (ECGM) [8] y
normalmente esta última señal es eliminada, realizando una toma del ECGM directamente
de la región torácica, para luego suprimir la señal al ECGA, generalmente por técnicas de
filtraje adaptativo[9]. Esto trae como inconveniente la utilización de tres electrodos
adicionales en la madre, que producen un mayor estrés e incomodidad al momento de
tomar el registro y lo hace poco práctico para monitorear por largos tiempo la FCF [10]. Es
por esta razón, que se plantea el diseño de un algoritmo que permita determinar la FCF a
partir únicamente del ECGA superficial.
En consecuencia, la situación problémica de la investigación es que los métodos
utilizados actualmente para la determinación de la FCF a partir de registros
electrocardiográficos, requieren de la utilización de un número grande de electrodos con
el fin de poder obtener dos señales por separado como son, el ECGM y el ECGA que
luego son procesadas a través de algoritmos matemáticos que permiten determinar la
FCF. Es evidente que estos tipos de métodos ocasionan incomodidad a la madre en el
momento de la medición.
Una de las tendencias para la obtención de registros electrocardiográficos es tratar
de utilizar el menor número de electrodos para hacer más sencilla la toma de la señal e
incomodar lo menos posible al paciente. Es por ello que esta investigación busca
desarrollar un algoritmo que solo utilice el ECGA, lo que permitiría reducir el número de
electrodos y de esta forma simplificar las conexiones eléctricas al paciente.
De aquí que el problema científico que se plantea sea; ¿Qué algoritmo permite
determinar la FCF a partir de registros electrocardiográficos utilizando un mínimo número
de electrodos?
Se considera que al utilizar solo el ECGA de la madre para determinar la FCF
podría resolver la situación planteada por lo que se utilizarán las señales de ECGA
disponibles en un banco en el sitio web http://physionet.org/challenge. Esta situación
permite plantear como objeto de la investigación los métodos utilizados para la
determinación de la FCF y como campo de acción la determinación de la FCF utilizando el
ECGA de la madre. El objetivo general de la investigación es desarrollar un algoritmo para
la detección de la frecuencia cardiaca en fetos a partir del electrocardiograma abdominal
de la madre.
Los objetivos específicos son:
• Describir las técnicas utilizadas para la detección de la frecuencia cardiaca fetal.
• Comparar las técnicas utilizadas para la detección de la frecuencia cardiaca fetal.
• Diseñar un algoritmo para la detección de la frecuencia cardiaca fetal a partir del
ECGA.
• Evaluar el algoritmo para la obtención de la frecuencia cardiaca fetal a partir del
ECGA.
SEÑALES
A. Características de las señales
B. Para la obtención de las señales se utilizó el sistema de monitorización KOMPOREL
(Distribuido por la compañía ITAM SYSTEM de Polonia), que permite la adquisición y
análisis de señales electrocardiográficas fetales, tomadas del vientre de la madre e
incluso en las labores de parto. La toma de los registros fue a través de seis electrodos de
Plata-Cloruro de plata (Ag-AgCl) marca 3M Red Dot 2271, de los cuales cuatro estaban
ubicados alrededor del ombligo, uno ubicado por encima de la sínfisis púbica como
electrodo de referencia y un electrodo ubicado en la pierna izquierda, como referencia en
modo común con señal activa a tierra. Para la toma de la señal electrocardiográfica
directa, se utilizó un electrodo en espiral para el monitoreo fetal. La señal fue muestreada
a 1KHz, con un ancho de banda de 1Hz hasta 150Hz y una resolución de 16 bits.
Utilizando como base las grabaciones que provienen de 5 mujeres, que se encontraban
entre las 38 y 41 semanas de embarazo y la misma se componen de 4 señales de ECGA,
tomadas en diferentes partes del abdomen de la madre y una señal de ECGF, tomada
directamente de la cabeza del feto de forma simultánea, que servirá para realizar las
anotaciones de la FCF. El conjunto de señales se encuentra en un banco de señales
disponibles en el portal electrónico http://physionet.org.[11] y fueron obtenidas por el
departamento de Obstetricia de la Universidad Médica de Silesia ubicada en Katowiece,
en Polonia, en la Figura [1], se muestra las señales correspondientes al paciente número
uno. Análisis de las señales
Primeramente se evaluaron las condiciones en que están las señales, para luego
decidir la metodología a seguir y observar cada uno de los cuatro canales, en cada una de
las madres; Lo primero que se observó fue la presencia de altos niveles de ruido,
movimientos en la línea base y señales muy débiles o con poca información. El

desplazamiento de la línea base es consecuencia en muchos casos de la respiración del
paciente, son generalmente de baja frecuencia (menores a 1 Hz) y se asemejan a una
sinusoide. Este patrón se observó en los cuatro canales de las pacientes N2 y N3, como
se puede apreciar en la Figura [2] donde también se muestra el desplazamiento en el
registro del canal uno en la paciente Nº2.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-200
0
200
Tiempo(S)
Ch1.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-100
0
100
Tiempo(S)
Ch2.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
Tiempo(S)
Ch3.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-100
0
100
Tiempo(S)
Ch4.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-500
0
500
Tiempo(S)
ECGF
D.
0 0.5 1 1.5 2 2.5 3 3.5 4-100
-50
0
50
100
150
Tiempo(S)
Am
plitu
d (
µV
).
ECGA
Fig. 1 Señales de la paciente Nº 1, en el canal 1 Fig.2 Desplazamiento en la línea base
Electrocardiograma fetal directo canal 2.
La metodología a aplicar para minimizar los efectos del desplazamiento de la línea
base es utilizar filtros en el algoritmo propuesto. Otro aspecto que se evaluó fueron los
niveles de ruido presentes en los registros, los cuales pueden tener diferentes fuentes de
origen, como el movimiento en los electrodos, ruido mioeléctrico y ruido de la red. De las
cinco pacientes, en una de ellas se observó un incremento del ruido en los cuatro canales,
como se puede apreciar en la Fig. 3.
45 50 55-200
-100
0
100
200
Tiempo(S)
Am
plitu
d (µ
V).
ECGA
1 2 3 4 5-200
0
200
Tiempo(S)
Am
plitu
d (µ
V).
canal 3
1 2 3 4 5-500
0
500
Tiempo(S)
Am
plitu
d (µ
V).
ECGF directo
Fig. 3 Ruido en la señal ECGA de Fig. 4 a) Señal muy débil del ECGF
paciente Nº 2 b) ECGF directo
con determinación de los QRSF

Otro aspecto a considerar es la intensidad de la señal ya que por ser captadas a
nivel del abdomen de la paciente el ECGF en algunos canales puede encontrase muy
débil y posiblemente influenciado por la posición del feto dentro del vientre de la madre,
por lo tanto aquellos electrodos que se encuentren ubicados más distantes del corazón
del feto tomaran señales muy débiles y en algunos casos estarán carentes de información
relevante. Esto se puede apreciar en la Figura 4, donde se observa el canal 3 de la
paciente Nº 4 que al compararlo con el ECGF directo, se aprecia que están poco
distinguible los QRS fetales.
También al evaluar las señales, se detectó la presencia de ruido concentrado en
intervalos, como se puede observar en la Figura 5. En la parte superior se aprecia el canal
3 de la paciente Nº 5 y se ve como a partir del segundo 21, la señal está contaminada con
ruido que se solapa con los QRS de la madre y del feto. En la parte inferior se muestra el
ECGF directo que sirve para ubicar los QRS fetales.
20 21 22 23 24 25-200
0
200
Tiempo(S)
Am
plitu
d (µ
V).
canal 3
20 21 22 23 24 25-500
0
500
Tiempo(S)
Am
plitu
d (µ
V).
ECGF directo
Fig.5 a) Ruido concentrado en el canal 3. Fig. 6 Diagrama de flujo del algoritmo
b) Señal de ECGF directo
Por todas las interferencias anteriormente evaluadas en las señales, se hace necesario
considerar un algoritmo que tome en cuenta los cuatro canales de cada una de las
pacientes para lograr una alta tasa de efectividad al momento de determinar la FCF.
MÉTODO
Para determinar la FCF, se plantea seguir el diagrama de flujo que se muestra en la
Figura [6], primeramente se detectó la ubicación de los complejos QRS maternos en los
cuatro canales. Para tal fin se utilizó el método para detección de complejos QRS
propuesto por Jiapu Pan y Willis Tompkins, y seguidamente se eliminaron dichos

complejos de la señal ECGA original; El siguiente paso consistió en escoger el registro al
cual se le determinará la FCF, para lo cual se detectó la ubicación de los complejos QRS
fetales a cada uno de los canales y se determinó la energía de los picos para cada QRS
detectado. Luego se tomó la señal con mayor energía, que sería la señal donde hubo un
mayor número de detecciones de complejos QRS fetales y que correspondería al canal
más adecuado para detectar la FCF. A continuación se determinó la FCF buscando la
media de los intervalos RR en una ventana deslizante que se aplicó al canal
seleccionado.
A Supresión del ECG materno
Para eliminar el ECGM en los registros, se aplicó el método propuesto por Pan-
Tompkins[12], lo cual muestra la Figura [7]. Como se puede observar, la señal a procesar
se hace pasar por un filtro pasa banda construido a partir de un filtro paso bajo conectado
en cascada con un filtro paso alto.
Fig.7 Algoritmo Pan-Tompkins
La función principal del filtro pasa banda en reducir el ruido y cualquier interferencia
que estén fuera del rango de 5 a 15 Hz. Para el diseño del filtro pasa bajo que busca
eliminar las componentes de alta frecuencia, se utiliza un filtro digital IIR recursivo, de
segundo orden con coeficientes enteros, que permite una alta velocidad de
procesamiento[13]. La función para el filtro propuesto responde a la expresión 1.
H(z) = ((1 - z^(-6))^2) / (1 - z^(-1))^2 (1)
Y para el caso del filtro digital paso alto[13], la expresión de la función de trasferencia es
la 2.
H(z)=(-1+32z^(-16)+z^(-32))/(1+z^(-1)) (2)

Luego la señal pasa a través de un derivador, que suprime las componentes de
baja frecuencia como son ondas P y T y acentúa las componentes de alta frecuencia que
interesa detectar, como es el caso del complejo QRS materno. La función de transferencia
3 se utilizó para el derivador.
H(z) = (1/8T)(-z^(-2) - 2z^(-1) + 2z + z^(2)) (3)
Seguidamente se eleva al cuadrado la señal con el objetivo de convertirla a
valores totalmente positivos e intensificar aún más las altas frecuencias donde se
encuentra ubicado el complejo QRS. Después se integró la señal a través de una ventana
móvil que busca obtener la duración del complejo QRS detectado, de manera que
cualquier otra señal con un tiempo mayor a este no sea capturada por el integrador, lo
que implica que la duración de la ventana móvil, no debe superar el tiempo de un
complejo QRS materno. La función del integrador responde a la expresión 4.
y(n) = [x(n - (N-1)) + x(n - (N-2)) +...+ x(n)] / N (4)
Donde N es el número de muestras de la ventana equivalente al tiempo de un complejo
QRS materno.
En la Figura [8] se muestra la señal que se obtiene después de aplicar Pan-
Tompkins para detectar los puntos donde están ubicados los complejos QRS de la madre.
1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
Tiempo(S)
Ampl
itud
(µV)
.
1 1.5 2 2.5 3 3.5 4 4.5 5-200
0
200
400
Tiempo(S)
Ampl
itud
(µV)
.
1 2 3 4 5-0.5
0
0.5
1
Tiempo
Ampl
itud
1 2 3 4 5-0.5
0
0.5
1
Tiempo
Ampl
itud
Fig. 8 a) ACGA, b) señal sin ECGM Fig.9 a) Señal abdominal b) Detección del
ECGM
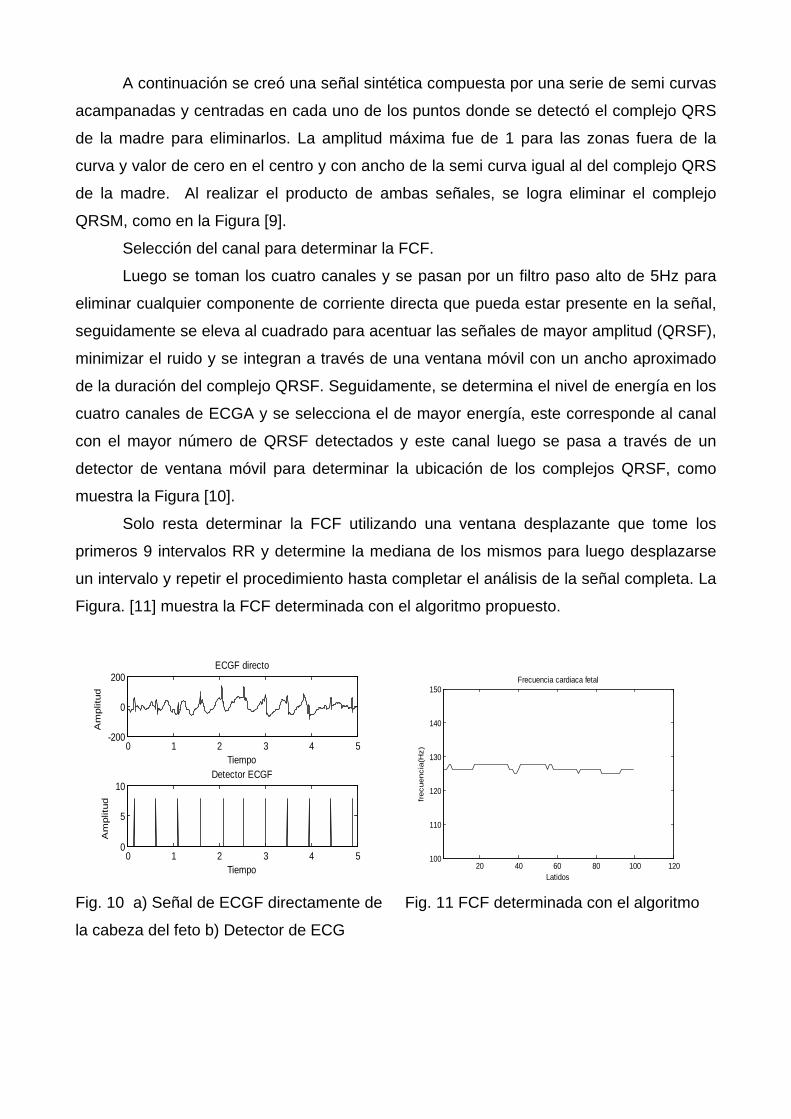
A continuación se creó una señal sintética compuesta por una serie de semi curvas
acampanadas y centradas en cada uno de los puntos donde se detectó el complejo QRS
de la madre para eliminarlos. La amplitud máxima fue de 1 para las zonas fuera de la
curva y valor de cero en el centro y con ancho de la semi curva igual al del complejo QRS
de la madre. Al realizar el producto de ambas señales, se logra eliminar el complejo
QRSM, como en la Figura [9].
Selección del canal para determinar la FCF.
Luego se toman los cuatro canales y se pasan por un filtro paso alto de 5Hz para
eliminar cualquier componente de corriente directa que pueda estar presente en la señal,
seguidamente se eleva al cuadrado para acentuar las señales de mayor amplitud (QRSF),
minimizar el ruido y se integran a través de una ventana móvil con un ancho aproximado
de la duración del complejo QRSF. Seguidamente, se determina el nivel de energía en los
cuatro canales de ECGA y se selecciona el de mayor energía, este corresponde al canal
con el mayor número de QRSF detectados y este canal luego se pasa a través de un
detector de ventana móvil para determinar la ubicación de los complejos QRSF, como
muestra la Figura [10].
Solo resta determinar la FCF utilizando una ventana desplazante que tome los
primeros 9 intervalos RR y determine la mediana de los mismos para luego desplazarse
un intervalo y repetir el procedimiento hasta completar el análisis de la señal completa. La
Figura. [11] muestra la FCF determinada con el algoritmo propuesto.
0 1 2 3 4 5-200
0
200
Tiempo
Am
plitu
d
ECGF directo
0 1 2 3 4 50
5
10
Tiempo
Am
plitu
d
Detector ECGF
20 40 60 80 100 120
100
110
120
130
140
150
frec
uenc
ia(H
z)
Latidos
Frecuencia cardiaca fetal
Fig. 10 a) Señal de ECGF directamente de Fig. 11 FCF determinada con el algoritmo
la cabeza del feto b) Detector de ECG

RESULTADOS Y DISCUSIÓN
Al evaluar el algoritmo propuesto mediante la determinación de FCF utilizando la señal del
ECGF directo, como se muestra en la Figura. [12], se observa que este permite dar un
estimado, que se aproxima a la FCF obtenida con el ECGF directa. Lo que permite
representar las variaciones de la frecuencia con una aproximación aceptable, si se toma
en cuenta que sólo se utilizaron los registros abdominales de la madre.
Además se observo que el algoritmo omite algunos latidos debido a que no son
detectados, lo que se traduce en falsos negativos como se puede ver en la Figura. [13].
Este inconveniente es superado por el algoritmo al realizar la estimación de la FCF
utilizando una ventana deslizante que toma 9 intervalos y determina la mediana, por lo
que mientras estos falsos se mantengan por debajo del 50% dentro de la ventana, no
implicarían un problema para el cálculo de la FCF.
20 40 60 80 100100
105
110
115
120
125
130
135
140
145
150
frecu
enci
a(Hz
)
Latidos
Frecuencia cardiaca fetal
0 20 40 60 80 100 120
0
50
100
150
200
Latidos
Falsos negativos
Fig. 12 Azul la FCF determinada con el Fig. 13 Falsos negativos generados en la
Algoritmo propuesto. Verde la FCF detección de los QRSF
Determinada con el ECGF directo.
También se observa que luego de comparar las señales obtenidas con las señales
reales de la FCF directa, utilizando el error medio cuadratico (EMC) como estimador en
las cuatro señales, como muestra la Tabla 1, se puede decir que el algoritmo propuesto
es una herramiente útil, que facilita la determinación de la FCF en madres embarazadas
que se encuentren en el último trimestre de gestación y donde es necesario realizar un
monitoreo continuo de la FCF. Una recomendación para futuras pruebas sería dividir las
señales en segmentos para determinar su nivel de energía lo que permitiría una
aproximación más exacta de la frecuencia cardiaca fetal, pues se descartarían los
segmentos con niveles muy bajos de energía. Finalmente se deduce que la principal
ventaja del algoritmo propuesto, es que sólo se requiere contar con los registros de ECGA
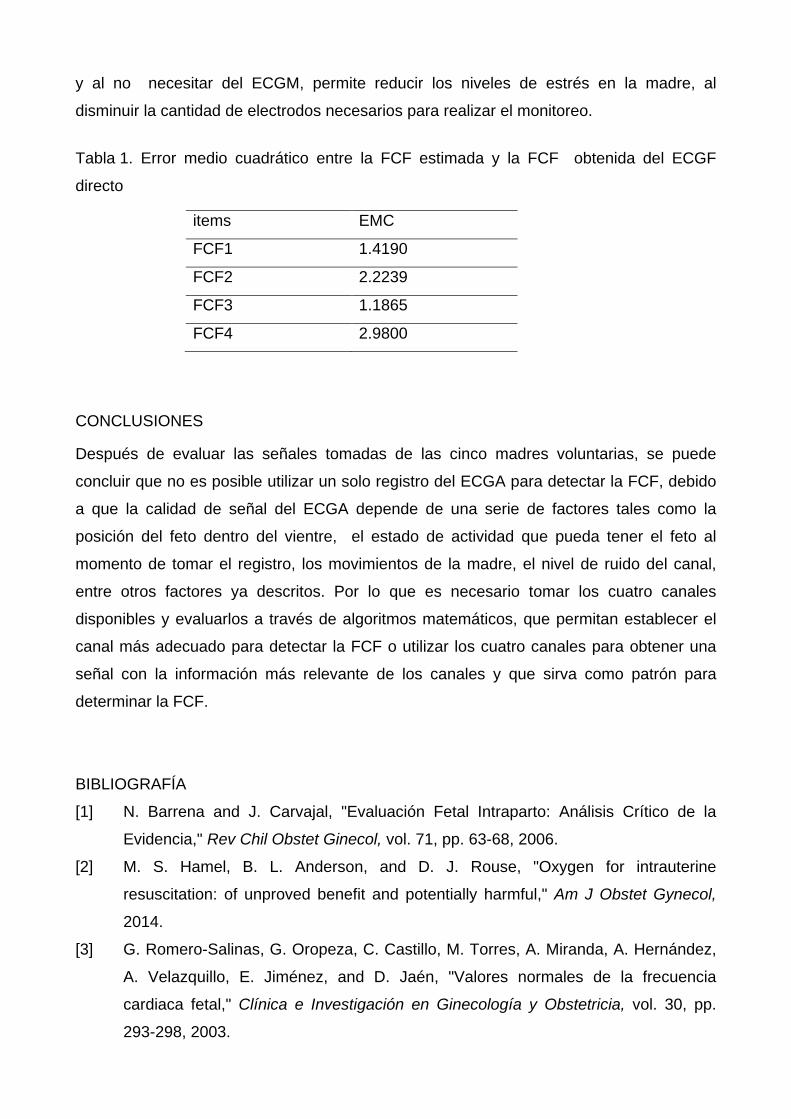
y al no necesitar del ECGM, permite reducir los niveles de estrés en la madre, al
disminuir la cantidad de electrodos necesarios para realizar el monitoreo.
Tabla 1. Error medio cuadrático entre la FCF estimada y la FCF obtenida del ECGF
directo
items EMC
FCF1 1.4190
FCF2 2.2239
FCF3 1.1865
FCF4 2.9800
CONCLUSIONES
Después de evaluar las señales tomadas de las cinco madres voluntarias, se puede
concluir que no es posible utilizar un solo registro del ECGA para detectar la FCF, debido
a que la calidad de señal del ECGA depende de una serie de factores tales como la
posición del feto dentro del vientre, el estado de actividad que pueda tener el feto al
momento de tomar el registro, los movimientos de la madre, el nivel de ruido del canal,
entre otros factores ya descritos. Por lo que es necesario tomar los cuatro canales
disponibles y evaluarlos a través de algoritmos matemáticos, que permitan establecer el
canal más adecuado para detectar la FCF o utilizar los cuatro canales para obtener una
señal con la información más relevante de los canales y que sirva como patrón para
determinar la FCF.
BIBLIOGRAFÍA
[1] N. Barrena and J. Carvajal, "Evaluación Fetal Intraparto: Análisis Crítico de la
Evidencia," Rev Chil Obstet Ginecol, vol. 71, pp. 63-68, 2006.
[2] M. S. Hamel, B. L. Anderson, and D. J. Rouse, "Oxygen for intrauterine
resuscitation: of unproved benefit and potentially harmful," Am J Obstet Gynecol,
2014.
[3] G. Romero-Salinas, G. Oropeza, C. Castillo, M. Torres, A. Miranda, A. Hernández,
A. Velazquillo, E. Jiménez, and D. Jaén, "Valores normales de la frecuencia
cardiaca fetal," Clínica e Investigación en Ginecología y Obstetricia, vol. 30, pp.
293-298, 2003.

[4] B. Strachan, D. Sahota, W. J. van Wijngaarden, D. K. James, and A. Z. Chang,
"The fetal electrocardiogram: relationship with acidemia at delivery," Am J Obstet
Gynecol, vol. 182, pp. 603-6, Mar 2000.
[5] E. H. Hon and S. Lee, "ELECTRONIC EVALUATION OF THE FETAL HEART
RATE. VIII. PATTERNS PRECEDING FETAL DEATH, FURTHER
OBSERVATIONS," Am J Obstet Gynecol, vol. 87, p. 814, 1963.
[6] R. E. Bailey, "Intrapartum fetal monitoring," American family physician, vol. 80, pp.
1388-96, 2009.
[7] E. M. Symonds, D. Sahota, and A. Chang, Fetal electrocardiography: World
Scientific, 2001.
[8] R. Sameni and G. D. Clifford, "A review of fetal ECG signal processing; issues and
promising directions," The open pacing, electrophysiology & therapy journal, vol. 3,
p. 4, 2010.
[9] J. B. González and J. P. Barrero, "Implementación de filtros adaptativos en DSP
aplicados al tratamiento de interferencia de 60 hz y desplazamiento de la línea de
base del ECG," 2011.
[10] M. Ungureanu, J. W. Bergmans, M. Mischi, S. Guid Oei, and R. Strungaru,
"Improved method for fetal heart rate monitoring," in Engineering in Medicine and
Biology Society, 2005. IEEE-EMBS 2005. 27th Annual International Conference of
the, 2006, pp. 5916-5919.
[11] A. L. Goldberger, L. A. Amaral, L. Glass, J. M. Hausdorff, P. C. Ivanov, R. G. Mark,
J. E. Mietus, G. B. Moody, C.-K. Peng, and H. E. Stanley, "Physiobank,
physiotoolkit, and physionet components of a new research resource for complex
physiologic signals," Circulation, vol. 101, pp. e215-e220, 2000.
[12] J. Pan and W. J. Tompkins, "A real-time QRS detection algorithm," Biomedical
Engineering, IEEE Transactions on, pp. 230-236, 1985.
[13] W. J. Tompkins, "Biomedical digital signal processing," Chapter, vol. 12, p. 13,
1993.
Determinación de la frecuencia fundamental y la presión sonora
mediante fonetogramas realizados en lenguaje PYTHON
Duno Bracho Daniel Abraham, Mendoza Reyes Migue
RESUMEN
El Fonetograma o el Voice Rango Perfil es una herramienta que se ha usado para el
diagnóstico y tratamiento de patologías del discurso basada en la representación gráfica
de frecuencia fundamental, diapasón, y la intensidad vocal. Este papel explora la
aplicación de un algoritmo para obtener la frecuencia fundamental usando el método de la
correlación. El algoritmo propuesto que usó la PITÓN como programar el idioma se
desarrolló. La actuación del sistema se evaluó comparando los resultados con los unos
obtuvo con el software de PRAAT; se usaron veinte cuatro signos del ¨a¨ legítimo vocal
como los datos. Los valores del errorvariance y porcentaje del error sugieren que el
algoritmo propuesto deba sujetarse a por y técnicas de proceso de poste en el diapasón
que estima la fase. La plataforma de la PITÓN demostrada ser una alternativa excelente
para aplicaciones en vías de desarrollo que satisfacen los requisitos del real-tiempo.
Palabras clave: Correlación, el Diapasón, la PITÓN, el Voice Rango Perfil.
INTRODUCCIÓN
El fonetograma o perfil de rango vocal es la representación gráfica del potencial fonatorio
de un individuo [17] Entre los parámetros que caracterizan el sonido el fonetograma mide
la frecuencia fundamental, y la intensidad así como la interrelación entre estas. En inglés,
el término acuñado es Voice Range Profile, o VRP [18].
El fonetograma es una herramienta útil para los logopedas, foniatras, profesores de
canto y en general para los profesionales de la voz, el mismo sirve para estimar las
funciones vocales de la persona [19], [20]. El VRP permite mostrar, de forma gráfica y en
tiempo real, en qué sentido y como debería la persona mejorar su voz con la
rehabilitación.
El fonetograma es una prueba que se puede utilizar tanto para voces normales
como patológicas[21]. La prueba convencional consiste en medir la intensidad de la voz

del paciente en niveles de menor a mayor volumen en al menos tres notas por octava
entre la más grave y la más aguda que puede producir el paciente. Los resultados se
presentan en una gráfica de dos dimensiones: intensidad(dB) en el eje de ordenadas y
frecuencia (Hz) en el eje de abscisas. Normalmente el propio programa permite producir
los sonidos que la persona explorada debe reproducir.
Mediante esta forma de representación de la voz, se puede observar gráficamente
en el monitor la localización exacta en un diagrama cartesiano de las frecuencias de la
voz en el momento de su emisión además de la indicación de los parámetros de
frecuencia, en Hz, e intensidad, en dB. El resultado gráfico obtenido, además de estar
influenciado por las características del paciente, depende también de las condiciones en
las que se registre la voz (ruido de fondo), las características del equipamiento utilizados y
de los algoritmos empleados para el cálculo de los parámetros, entre otros.
En la actualidad las aplicaciones disponibles para la obtención de fonetogramas
son por lo general restrictivas, existen limitaciones en la disponibilidad para las distintas
plataformas (Windows, Mac OS, Linux, Unix). Además de la dificultad para modificar los
sistemas disponibles, estos normalmente presentan restricciones para el uso y la
redistribución debido a la protección por licencias, lo cual hace que el usuario que
adquiere el software dependa totalmente de la empresa propietaria.
Por todo lo anterior, se mantiene vigente la necesidad de disponer de una
aplicación independiente y multiplataforma que permita su distribución y uso libres, con
características comparables con las aplicaciones comerciales.
SEÑALES
Las pruebas se basaron en el procesamiento de 24 señales correspondientes a fonemas
vocálicos segmenta-dos, distribuidas de la siguiente forma: 9 segmentos de prueba, para
evaluar los algoritmos seleccionados y 15 señales para evaluar el desempeño del sistema
propuesto. Todas las señales utilizadas pertenecen a la base de datos MIRLA (propiedad
de la Universidad Nacional de Colombia - Sede Manizales) [22], las que presentan valores
promedio de parámetros de referencia calculados utilizando el sistema PRAAT [23].
PRAAT es un programa diseñado especialmente para hacer investigación en fonética.
Desarrollado en la Universidad de Amsterdam por Paul Boersma y David Weenink en el
año 1992, permite hacer análisis acústico, síntesis articulatoria, procesamiento estadístico
de los datos, edición y manipulación de señales de audio.
Todas las señales están muestreadas a 10kHz y están compuestas por segmentos
de silencio y segmentos hablados, esto con la finalidad de evaluar el desempeño de

algoritmos para la detección de espacios sonoros y sordos.
DISEÑO E IMPLEMENTACIÓN DEL SISTEMA
Dentro de los requerimientos de recursos de hardware para procesos en tiempo real es
necesario seleccionar algoritmos que generen poco consumo computacional, por lo que
para la estimación de la frecuencia fundamental se seleccionaron algoritmos en el dominio
del tiempo.
El micrófono utilizado fue dinámico de supercardioide para vocalistas con señal de
salida de alta intensidad diseñado para uso en refuerzo de sonido profesional. Mantiene
un verdadero patrón supercardioide en toda su gama de frecuencias. Esto asegura un alto
valor de ganancia antes de realimentación, aislamiento máximo de otras fuentes sonoras
y una coloración mínima de los tonos fuera de su eje principal, con respuesta de
frecuencia 50 a 16.000 Hz. La impedancia nominal es de 150Ω (real: 290Ω) para conexión
a entradas de micrófono de baja impedancia (baja Z), con un nivel de salida (a 1.000 Hz)
voltaje en circuito abierto: -51,5 dBV/Pa (2,6 mV), siendo 1 Pa = 94 dB SPL.
Con respecto a la adquisición de la señal se operó con una Laptop con procesador
CORE i5 a 2,5GHz, bajo sistema operativo Windown 8.1 y desarrollado con PYTHON 2.7.
A. Estimación de la Frecuencia Fundamental.
En los métodos de análisis sobre intervalos cortos de tiempo, los segmentos de voz con
longitud T (denominada apertura), se procesan como si cada uno de ellos tuviese
propiedades estadísticas independientes [24]. Los métodos en el dominio del tiempo
pueden ser clasificados en tres grupos: algoritmos que parten de la forma de onda,
algoritmos basados en la función de auto-correlación y algoritmos de procesamiento
cepstral[24]
Estimación en el Dominio del Tiempo.
Los métodos más antiguos y populares para la detección de la frecuencia fundamental en
el dominio del tiempo, son los que se basan en la función de auto-correlación (FAC) [25].
El resultado de esta función indica el nivel de correlación que tiene una señal con ella
misma, es decir, qué tanta dependencia posee con sus valores pasados.
La FAC para señales discretas se define como:
Donde τ es un factor de retardo, x(n) la señal que se desea autocorrelacionar y N su

longitud en muestras. En [25], se propone hallar la FAC por medio de la transformada
discreta de Fourier (TDF), partiendo de una variación de la función cepstrum, lo cual trae
como beneficio la disminución del costo computacional. Una función derivada de la FAC
es la función de diferencia promedio de magnitud, Average Magnitude Difference Function
(AMDF). La AMDF produce valles donde la FAC produce picos, fig. [1] porque no se basa
en el producto de la señal con una versión retrasada de ella misma sino en la diferencia.
Con esto se logra que la AMDF sea computacionalmente menos costosa que la
FAC. Esta última presenta un pico máximo cuando τ = 0, correspondiente a la energía de
la señal, además este pico está en la posición central ya que la función es simétrica.
Debido a que una señal periódica se correlaciona fuertemente con ella misma, la posición
del segundo pico nos da una estimación del periodo fundamental.
Fig. 1. Señal de voz (superior), Autocorrelacion (centro), AMDF (inferior).
La función FAC es insensible al ruido aditivo, pero sensible al efecto de los
formantes [26]. Por tal razón antes de aplicar la autocorrelación se usa una técnica de
distorsión no lineal en el dominio del tiempo llamada center clipping (CC).
El objetivo de esta función es crear una nueva señal compuesta solo por los
valores absolutos de la señal original que superen un umbral predefinido, este valor de
umbral por lo general se toma como un porcentaje del máximo valor de amplitud de la
señal (generalmente del 30%)[26].
Para la investigación se consideraron dos tipos de center clipping de acuerdo a su
característica de cuantificación de entrada-salida, el primer tipo es un center clipping
comprimido(CLC) [27] cuya salida y(n) obedece a la relación con x(n) como entrada, de la
siguiente manera:

(2)
Donde es el umbral. Para el segundo método se utilizó la relación simple(CLP) [27]
definida de la siguiente forma:
(3)
Las figuras 2 y 3 ilustran los dos tipos de center clipping desarrollados.
Fig. 2. Señal de voz (superior) con center clipping CLC (inferior).

Fig. 3. Señal de voz (superior) con center clipping CLP (inferior).
La función CC también ayuda a blanquear el espectro eliminando las influencias del
tracto vocal como el primer formante , pero el beneficio que más se aprovecha es que
hace más periódica la señal y se logran picos más sobresalientes en la señal
autocorrelacionada, haciendo de esta forma más fácil la detección del segundo pico [26].
Fig.[4].
Fig. 4. Comparación autocorrelación (superior) y la autocorrelación concenter
clipping(inferior)
Valores altos de umbral en center clipping definen mejor la periodicidad pero con el
riesgo de perder períodos enteros; por otra parte valores bajos de umbral producen pocos
efectos beneficiosos. Por tal razón se debe aplicar un método para la selección adecuada
del umbral, que depende de los parámetros propios de la señal. Dentro de los métodos
posibles se escogió determinar el máximo del valor absoluto del vector x(n), para luego
encontrar el nivel de recorte, CL, como un porcentaje p predefinido según:

En la función de correlación se puede comprobar que para τ = 0 R(0) tendrá valor
máximo y mientras que R(τ) disminuye en la medida que τ aumenta, es decir disminuye el
solapamiento entre la secuencia x(n) y x(n+τ)y en consecuencia R(τ) disminuye
linealmente conforme τ va aumentando, tal como se puede observar en la fig. [5], donde
para τ=N R(N)=0
Fig. 5. Disminución lineal de la correlación con el aumento de τ.
Definiendo R(τ)v=R(τ)+(j/N)R(0) el valor verdadero dela correlación para un valor
concreto de τ, la relación entre R(τ)vy el calculado R(τ) se obtiene de la expresión:
Donde:
Por lo que el valor calculado de la correlación puede ser fácilmente corregido
añadiéndole el término , ver fig. 6.

Fig. 6. Compensación de la disminución lineal con el aumento de τ
Otro método de estimación está basado en la función de transferencia del tracto
vocal x(n), según el modelo de producción de la voz, es la convolución de la secuencia de
excitación g(n) con la respuesta impulso del tracto vocal h(n)[31]:
Esto puede ser representado en el dominio de la frecuencia como:
Por la propiedad de la trasformada de Fourier, (7) en el dominio de la frecuencia
corresponde a una multiplicación de los espectros. Una de las características especiales
del cepstrum es que permite la separación de la envolvente espectral de la secuencia de
excitación, y para ello se vale de la propiedad de los logaritmos .
Este proceso de separación se llama liftering[26]o deconvolución homomórfica [32]. Las
correspondientes transformaciones al dominio de la frecuencia de la función de
transferencia del tracto vocal de la señal de excitación y de la respuesta impulso,
convierten (7) en (8), luego aplicando la propiedad de los logaritmos (8) se convierte en:
Al regresar otra vez al dominio del tiempo:
La primera función al lado derecho de la ecuación 10 indica la formación de un pico en
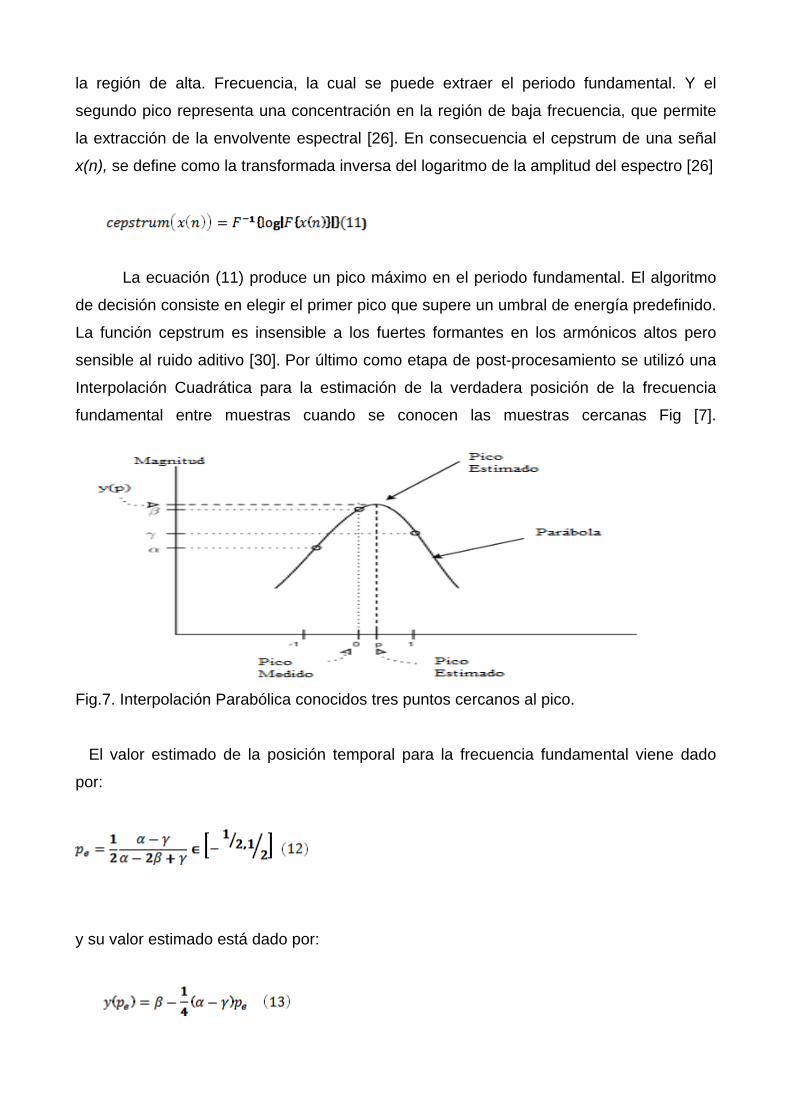
la región de alta. Frecuencia, la cual se puede extraer el periodo fundamental. Y el
segundo pico representa una concentración en la región de baja frecuencia, que permite
la extracción de la envolvente espectral [26]. En consecuencia el cepstrum de una señal
x(n), se define como la transformada inversa del logaritmo de la amplitud del espectro [26]
La ecuación (11) produce un pico máximo en el periodo fundamental. El algoritmo
de decisión consiste en elegir el primer pico que supere un umbral de energía predefinido.
La función cepstrum es insensible a los fuertes formantes en los armónicos altos pero
sensible al ruido aditivo [30]. Por último como etapa de post-procesamiento se utilizó una
Interpolación Cuadrática para la estimación de la verdadera posición de la frecuencia
fundamental entre muestras cuando se conocen las muestras cercanas Fig [7].
Fig.7. Interpolación Parabólica conocidos tres puntos cercanos al pico.
El valor estimado de la posición temporal para la frecuencia fundamental viene dado
por:
y su valor estimado está dado por:

B. Determinación de la presión sonora.
El sonido se mide generalmente con el uso de un micrófono y responde
(aproximadamente) proporcionalmente a la presión sonora. El oído humano no responde
por igual a todas las frecuencias siendo más sensible a los sonidos en el rango de
frecuencias de aproximadamente 1 kHz a 4 kHz que a los sonidos de frecuencia muy baja
o alta. La escala adaptada a la respuesta del oído humano de los niveles de presión
sonora se da en unidades de dBA, la cual es conocida como nivel de presión sonora
(soundpressurelevel, SPL). Los niveles de presión acústica en la escala dBA son fáciles
de medir y, por tanto, esta es ampliamente utilizada [31].
Con el fin de determinar el nivel de señal en dBA se debe integrar la energía total
de la señal a través de intervalos rápidos y cortos de tiempo. En general, la energía de
una señal se define como la suma de las magnitudes al cuadrado de la muestras de
dominio temporal [25]. En la ecuación (1) se observa que FAC para valores de τ = 0
representa la energía normalizada de la señal:
Siendo la energía media normalizada de cada trama de voz a ser evaluada. Para
obtener el valor de salida en dBA se debe contar con un valor de referencia. La presión
estándar de referencia es o . De forma
general no se conoce a qué presión corresponde el valor de voltaje leído del micrófono
por lo que se expresan los niveles de presión sonora de la siguiente forma [32]:
Teniendo en cuenta que es una constante fija de referencia, por lo que se
puede expresar el nivel de señal en dBA de la siguiente manera:
Después, la energía media de la señal instantánea se puede estimar, en el dominio

del tiempo, utilizando la autocorrelación para retardo cero. Dado un valor de calibración
constante C, se puede evaluar el nivel de señal en dBA utilizando (16). La constante C de
calibración se puede determinar a partir de experimentos de laboratorio, como se discute
en la próxima sección.
SIMULACIÓN Y PRUEBA
Una de las etapas más importantes en el sistema para la formación de
fonetogramas es la encargada del análisis de las muestras de voz, para obtener la
cuantificación y representación gráfica de los parámetros que serán interpretados por
profesionales. Una de las opciones más adecuadas para el procesado de muestras son
los lenguajes de alto nivel de cálculo numérico. Estos lenguajes no producen código
objeto, no son lenguajes compilados, sino que cada instrucción es analizada y ejecutada a
la vez.
Para la implementación del fonetograma primero se evaluó el desempeño
computacional de los algoritmos en el dominio del tiempo para el cálculo de la frecuencia
fundamental, utilizando como valores de referencia los calculados utilizando el PRAAT.
(Fig. 8)
Fig. 8. Contorno de la frecuencia fundamental (inferior) obtenido en PYTHON utilizando
autocorrelación con center clipping de una señal de voz de prueba (superior).
El algoritmo desarrollado para la obtención de fonetogramas en tiempo real
responde al diagrama en bloques representado en la Figura [9].

.
Fig. 9. Diagrama de bloques del algoritmo desarrollado en PYTHON.
Pese a ser un lenguaje interpretado PYTHON cuenta con una serie de bibliotecas
(Numpy, Matplotlib, Pyaudio) escritas en lenguaje C, lo cual optimiza los tiempos de
ejecución [27]. Utilizando la biblioteca Tkinter, nativa de PYTHON lo cual garantiza la
compatibilidad con cualquier arquitectura y sistema operativo, se generó la interfaz gráfica
de usuario, GUI que se muestra en la Figura [10].
Con el fin de verificar la implementación de la estimación de la presión sonora en el
fonetograma en tiempo real se usó un sonómetro comercial. Para calibrar el medidor de
nivel de sonido desarrollado en PYTHON, se colocó el sonómetro comercial junto a la
entrada del micrófono a una distancia de15cm del altavoz generador de la señal de
prueba. Un simple generador de señal, implementado en PYTHON, se utilizó para
producir los tonos puros de prueba. De forma tal que obteniendo con el sonómetro el valor
de referencia se puede calcular en valor de la constante C para calibrar utilizando (16).
El sonómetro utilizado fue el msm3 de la firma PCE, con un rango de 30 a 130 dB,
resolución de 0,1 dB, precisión de ±1,4 dB y rango de frecuencia de 31,5 Hz a 8 KHz,
ponderación temporal de FAST (125 ms), LOW (1 s) y escalas de ponderación A/C.
Siendo A la más cercana al rango del oído humano y la más usada por La Seguridad en el
Trabajo y Administración de Salud y El Departamento de Calidad Ambiental y Medidas
Reglamentarias. Es importante señalar que este procedimiento de calibración es
propenso a errores, especialmente cuando el sonómetro y el micrófono de entrada no
están cerca uno del otro. Por último, dado que se utilizó un micrófono direccional, el valor
de la constante de calibración C pudiera ser compensado por alguna pequeña cantidad.

Fig. 10. GUI para el fonetograma desarrollado con Tkinter de PYTHON.
En general, este producto debe ser suficiente para lograr precisiones de calibrado, dentro
de unos pocos Dba. La metodología para las pruebas consistió en la realización de los siguientes
pasos:
- Compilación de códigos sobre un entorno de programación empleando PYTHON.
- Aplicación de los programas en el procesamiento de fonemas vocálicos segmentados,
pertenecientes a la base de datos MIRLA, a manera de señales de prueba.
- Evaluación de desempeño, a partir de la comparación de los resultados con los alcanzados
con el sistema de referencia PRAAT, para las mediciones de valores de pitch promedio. Se
realiza además el análisis de precisión en la estimación del pitch, mediante estudios de
varianza en errores de cálculo, para los métodos empleados (tabla 1).
- Implementación de algoritmos entorno de adquisición de información en tiempo real.
- Evaluación de los resultados de estimación de la presión acústica en el sistema de
fonetograma en tiempo real en comparación con los medidos por el sonómetro comercial,
utilizando como señales de referencia las aportadas por la base de datos MIRLA.
- Para cada señal de prueba se evaluó el valor máximo de presión acústica, medido con el
sonómetro y el estimado con el fonetograma, para luego hacer análisis de precisión en la
estimación del nivel de presión sonora, mediante estudios de error porcentual y error
cuadrático medio (tabla 3).
RESULTADOS
En términos generales, se observó una buena respuesta por parte de las metodologías
analizadas, en cuanto al seguimiento de contornos del valor de referencia, sobre condiciones
controladas para ruido de fondo, tal y como se puede apreciar en la Figura. [11], en la que se
muestran los resultados comparativos del procesamiento de un segmento de voz equivalente al

fonema ‘a’, con valor de frecuencia de pitch promedio de 114 Hz y frecuencia de muestreo de 10
kHz.
Fig. 11. Contornos comparativos (inferior) de la voz de prueba (superior).
A partir de las mediciones realizadas, fue posible observar la aparición de algunos
fenómenos interesantes, como es el caso de: doblamiento y sobrepasos de inicio/final como en la
Figura [11]. Fueron evaluados resultados adicionales, respecto a valores promedio obtenidos
sobre otras señales de prueba, correspondientes a segmentos de voz.

TABLA I VARIANZA DEL ERROR PARA SEÑALES DE PRUEBA
Seña
AutoCorr CC CrossCorr AMDF
1 0.1303 0.1235 0.2496 0.3807
2 0.1366 0.1858 0.3095 0.3243
3 0.2217 0.2923 0.3670 0.5673
4 0.1292 0.1227 0.3474 0.3771
5 0.3499 0.3442 0.4878 0.4936
6 0.2199 0.1728 0.04918 0.04290
7 1.7193 1.9468 1.6928 3.3909
8 0.1984 0.6553 0.1469 0.1321
9 2.0391 2.1530 1.0707 0.0461
10 0.1195 0.7158 0.03567 0.8307
11 0.2331 0.2306 0.9812 1.1563
12 0.0218 0.0208 1.3874 3.7825
13 0.3772 0.2975 0.8871 1.4431
14 1.0573 2.012 0.025 0.7823
15 0.0923 0.0665 0.2525 0.3249
En la tabla 2 se muestran los resultados de la aplicación del método de autocorrelación con
center clipping, para 9 señales de prueba, por ser este método con el que mejor respuesta se
pudo observar; el modelo de referencia se fundamenta en resultados alcanzados con el PRAAT.
Se evidencia en la Fig. [11] que para el intervalo de tiempo comprendido entre 0.3 segundos
hasta los 0.4 segundos los métodos de estimación de la frecuencia fundamental propuestos
tienen un comportamiento similar, lo que indica que para segmentos de voz sostenidos los
métodos propuestos tienen el mismo rendimiento y que para voces no sostenidas los diferentes
métodos presentan diferentes rendimientos.
TABLA II ERROR PORCENTUAL ABSOLUTO EN LA FRECUENCIA DE PITCH PARA DIFERENTES SEÑALES
USANDO CENTER CLIPPING EN ENTORNO PYTHON
Referencia
Praat
(Hz)
Promedio
Medido
(Hz)
Error
porcentual
(%)
227 223 1.76
114 119 4.38

171 187 9.35
210 199 5.23
233 248 6.43
199 201 1.01
194 198 2.06
144 150 4.16
140 136 2.85
En la tabla 3 se muestran los resultados de la aplicación del error medio cuadrático y del
error porcentual para los niveles máximos de presión sonora medidos con el sonómetro comercial
y los obtenidos por el sistema propuesto a través del micrófono de prueba.
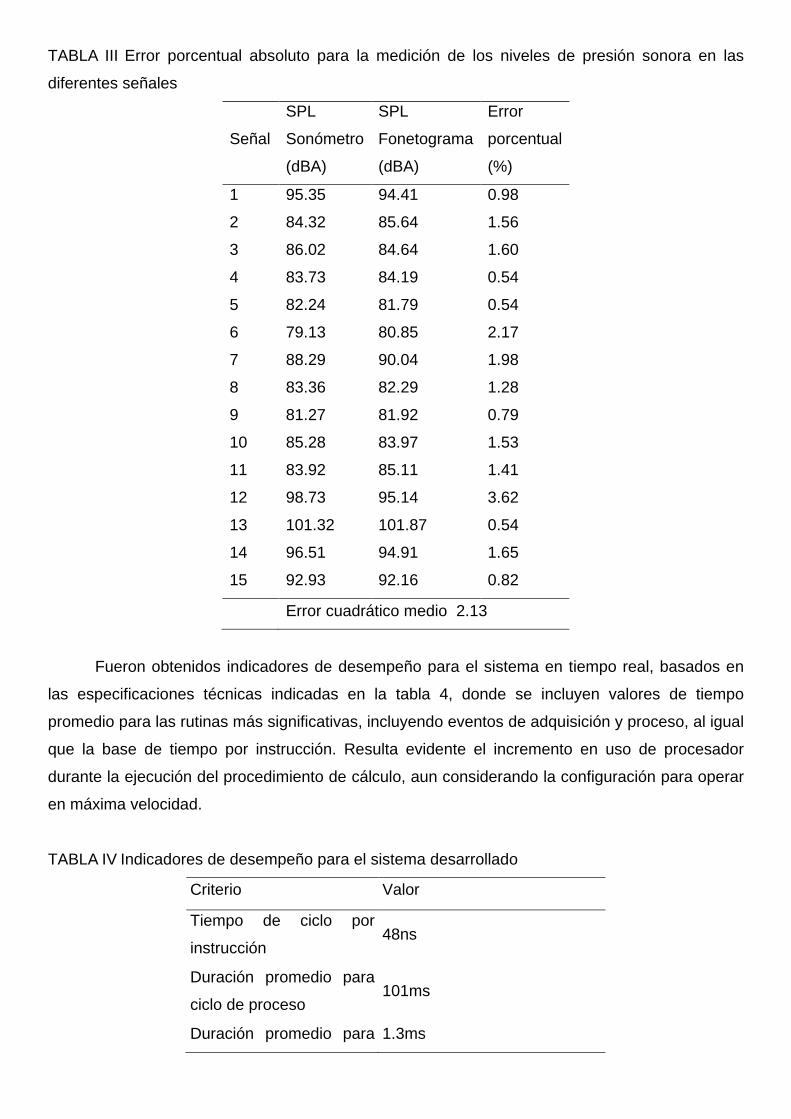
TABLA III Error porcentual absoluto para la medición de los niveles de presión sonora en las
diferentes señales
Señal
SPL
Sonómetro
(dBA)
SPL
Fonetograma
(dBA)
Error
porcentual
(%)
1 95.35 94.41 0.98
2 84.32 85.64 1.56
3 86.02 84.64 1.60
4 83.73 84.19 0.54
5 82.24 81.79 0.54
6 79.13 80.85 2.17
7 88.29 90.04 1.98
8 83.36 82.29 1.28
9 81.27 81.92 0.79
10 85.28 83.97 1.53
11 83.92 85.11 1.41
12 98.73 95.14 3.62
13 101.32 101.87 0.54
14 96.51 94.91 1.65
15 92.93 92.16 0.82
Error cuadrático medio 2.13
Fueron obtenidos indicadores de desempeño para el sistema en tiempo real, basados en
las especificaciones técnicas indicadas en la tabla 4, donde se incluyen valores de tiempo
promedio para las rutinas más significativas, incluyendo eventos de adquisición y proceso, al igual
que la base de tiempo por instrucción. Resulta evidente el incremento en uso de procesador
durante la ejecución del procedimiento de cálculo, aun considerando la configuración para operar
en máxima velocidad.
TABLA IV Indicadores de desempeño para el sistema desarrollado
Criterio Valor
Tiempo de ciclo por
instrucción 48ns
Duración promedio para
ciclo de proceso 101ms
Duración promedio para 1.3ms
rutina de adquisición
CONCLUSIONES
1. El método basado en la función de autocorrelación, generó un desempeño parecido al
método de autocorrelación con center clipping (a partir de los resultados contenidos en la
tabla 1). Se observaron efectos de doblamiento, y sobrepasos en inicio/final para
contornos debido a inconsistencias en la forma de la señal en algunos intervalos del
segmento. Se confirma por tanto el hecho de que algunos métodos para estimación del
pitch, requieren de minuciosos procedimientos de ajuste (pre y post procesos), que
garanticen condiciones óptimas de operación (característica principalmente evidenciada
en los casos de menor rendimiento). Los algoritmos implementados para la obtención del
fonetograma, generaron valores promedio de pitch, con reducido margen de error al ser
comparados con los resultados obtenidos con el sistema PRAAT.
2. Todos los métodos propuestos reflejan resultados aproximados en intervalos sostenidos
de voz.
3. La metodología definida para la determinación de los niveles sonoros genero valores
promedio de SPL con reducido margen de error al ser comparados con los resultados
obtenidos con el sonómetro comercial.
4. La constante de calibración C se debe determinar empíricamente. Un sonómetro
comercial se utilizó para calibrarla aplicación en PYTHON. En general, se debe volver a
calibrar el sistema cada vez que un nuevo micrófono se utiliza o los niveles de ganancia
se ajustan en la configuración del sistema o en el hardware.
5. Puede considerarse este proyecto, como un primer paso dentro de la realización de un
sistema más robusto, con un conjunto extendido de posibilidades, enfocadas hacia la
ejecución de tareas particulares del procesamiento de voz. Por último, PYTHON
demostró ser una plataforma con la capacidad de procesamiento y de desarrollo de
aplicaciones con tiempos de ejecución comparables con sistemas estándares utilizados
en la actualidad para el desarrollo de tareas científicas.
BIBLIOGRAFÍA:
1. R. Baken, Clinical measurement of speech and voice. Boston: College Hill Press,1987.
2. J. Calvet yG. Málica, Courbe Vocales et Mue de la voix,Congrés Bull, Soc. Fr. Foniatr, pp.
1:115-124,1952.
3. J. Perello, Evaluación de la voz, lenguaje y audición, Barcelona,Lebón, 1996.
4. F. Wuyts, M. De Bodt, G. Molenberghs, M. Remacle, L.Heylen, B. Millet y P. Van de
Heyning, The Dysphonia Severity Index An Objective Measure of Vocal Quality Based on a
Multiparameter Approach. Journal of Speech, Language, and Hearing Research, pp. 796-
809, 2000.
5. W. Seidner, Objective QualitätsbeurteilungStimmeMittelsDinamykmessungen,
Zeitschr,Klin,Medizin, pp. 40, 1985.
6. Castellanos, O. Castrillon, Comparación de algoritmos de estimacion del pitch en el
analisisacustico de la voz normal y patologica, VII Simposio de Tratamiento de Señales,
Imágenes y Visión Artificial, Bucaramanga, Colombia, 2002.
7. B, Paul y W. David. (2014, Jun 2). “Praat: Versión 5.3.51,” Disponible en:
http://www.praat.org
8. J. García, “Transformada Wavelet aplicada a la extracción de información en señales de
voz”, Universidad Politécnica de Cataluña, Barcelona, 1998.
9. J. Markel, The SIFT algorithm for fundamental frequency estimation. Audio and
Electroacoustics, IEEE Transactionson, pp. 367-377,1972.
10. M.Sadaoki, Advances in Speech Signal Processing,Electrical Engineering and Electronics,
New York, E.U. 1991.
11. L. Rabiner, On the Use of Autocorrelation Analysis for Pitch Detection,IEEETransactions
on acoustics, speech, and signal processing, Vol. assp-25, no. 1.1977.
12. W. Huang, Spoken Language Processing, Prentice Hall PTR, New Jersey, EU, 2001.
13. Z. Faundez, Tratamiento digital de voz e imagen, Alfaomega grupo editor, S.A. de C.V.,
México, D.F, 2001.
14. Gold, Speech And Audio Signal Processing, Processing and Perception of Speech and
Music, John Wiley and Sons, Inc., New York, EU, 2000.
15. ANSI, American National Standard, Criteria for Evaluating Room Noise, S12.2-1995.
16. P. Filippi, Acoustics: Basic physics, theory and methods,Academic Press, 1998.
17. Python 2.7. (2014, Jun 5). Disponible en: https://www.python.org

Inteligencia Tecnológica en la Valoración de la Unidad Curricular
Instrumentación Médica con Entorno Virtual
Guigñan Alvarado Omaris de las Nieves, Moreno Campdesúñer Ileana
INTRODUCCIÓN
La inteligencia tecnológica es un proceso que incluye la identificación de las necesidades de
información de los usuarios, recolección de piezas de información, análisis y obtención de
conclusiones, que finalmente se transmiten a los usuarios para responder a sus interrogantes y
respaldar la toma de decisiones [1]. Las nuevas situaciones de enseñanza-aprendizaje
soportadas por herramientas telemáticas traen consigo la posibilidad de participar de
experiencias educativas altamente interactivas, de mantener espacios de comunicación
continuos y acceder a numerosos recursos didácticos y fuentes de información, desde
escenarios distintos al aula presencial. Actualmente, no cabe duda respecto al potencial de los
nuevos medios de comunicación para, desde las organizaciones educativas, ofrecer espacios
de enseñanza flexibles basados en la participación activa del estudiante.
Actualmente existe una gran cantidad de fuentes de información disponibles en internet
que generan diariamente mucha información muy especializada y de alta calidad. Por otro lado,
es posible crear espacios compartidos de conocimiento especializado con el objetivo de
comprender mejor las oportunidades tecnológicas. Se trata de un espacio y una herramienta
para catalizar la colaboración y la innovación de las tecnologías en la unidad curricular
instrumentación médica.
Sin duda, afirma [2], las herramientas informáticas utilizadas en la formación de los
docentes trascienden de medios de aprendizaje a convertirse en agentes activos en el proceso
de enseñanza-aprendizaje, transformando el estilo pedagógico. Es evidente entonces, que la
estrategia virtual pueda causar impacto en todos los procesos sociales, políticos y económicos
de las últimas décadas, según lo declarado por [3].
Hasta el presente, [4] propone que el desarrollo vertiginoso de las Tecnologías de la
Información y la Comunicación (TIC) en el proceso de enseñanza aprendizaje no ha quedado
exento de este fenómeno de alcance mundial. Con el uso de las TIC en todos los sectores
educacionales, la educación se ha redimensionado a una modalidad virtual y a distancia,
logrando llevar el conocimiento a disímiles lugares y personas.
En este orden de ideas podemos nombrar que en Venezuela se viene desarrollando un
proceso de transformación de la estructura tecnológica y científica permitiendo alcanzar la
soberanía y el desarrollo de fuerzas productivas; para esto se requiere concebir nuevas formas
de producción, desarrollando y adaptando tecnologías con una visión científica; asimismo se
encuentran un conjunto de aplicaciones educativas, entre ellas está el Entorno Virtual de
Aprendizaje (EVA) en la plataforma Moodle.
Y al respecto las tecnologías involucradas en la salud, ha llegado el momento para
estimular la transición hacia prácticas de evaluación centradas en las necesidades de la
utilización de tecnologías apropiadas y el reconocimiento por parte de las universidades en
cuanto a la pertinencia del surgimiento de carreras que superen esta gran debilidad que ha
tenido el país.
La valoración de tecnologías en el área de salud, está llamada a poner cierta racionalidad
en un campo donde las novedades suelen deslumbrar en un primer momento, pero pueden
resultar muy costosas y sobre todo el mantenimiento que se ha de realizar para dichos equipos.
La utilización de una tecnología o las labores de mantenimiento y supervisión durante la
vida útil de un equipo, necesita de personal capacitado, y en este sentido se introducen en los
programas nacionales de formación de las universidades territoriales, unidades curriculares que
contribuyan una estrategia de análisis destinada a informar y facilitar las decisiones
relacionadas con la práctica médica.
De esta manera se presenta la unidad curricular Instrumentación Médica; dentro del
Programa Nacional de Formación instrumentación y Control (PNFIyC), la cual consta de
algunas prácticas en introducción a los sistemas de medición médicos, transductores y
amplificadores electrónicos, señales bioeléctricas electrocardiogramas (ecg), electromiogramas
(emg), electroencefalogramas (eeg), medidas en el sistema cardiovascular, medidas en el
sistema respiratorio, monitorización, biotelemetría, instrumentación de laboratorio clínico,
dispositivos o equipos terapéuticos, equipos electroquirúrgicos, introducción a la imaginología
médica, desfibriladores, prótesis ortopédicas, hemodializadores, equipos de anestesia, equipos
terapéuticos de neonatología y ventiladores mecánicos.
Esto conduce a evaluar a la unidad curricular en su calidad de proceso de enseñanza-
aprendizaje y de fortalecerla, desarrollando una valoración que conlleve un refuerzo del
conocimiento y con inteligencia tecnológica en la potenciación del proceso teórico–práctico,
además de integrar la tecnología como un sistema de aprendizaje.
Además de lo mencionado en el párrafo anterior, se requiere la evaluación o valoración
de las múltiples implicaciones de un desarrollo tecnológico, más allá de la mera determinación
de la factibilidad técnica y es el aporte que le representa para la unidad curricular.
Para abordar esta investigación se combina una metodología de investigación de cortes
cuantitativo y cualitativo. Además, se utilizaron diferentes métodos científicos—teóricos y
empíricos entre ellos: teóricos como análisis y síntesis de la información obtenida de la literatura
y la experiencia de los colectivos de trabajo; entre los empíricos se aplicaron encuestas y
entrevistas a los docentes para conocer el estado actual del proceso de enseñanza-aprendizaje
de la unidad curricular y las aplicaciones informáticas confeccionadas que se diseñan de forma
tal, que se pueden anexar a través de vínculos a la plataforma interactiva Moodle.
Este problema condujo al objetivo general: Valorar el proceso de enseñanza-aprendizaje
y la tecnología de la unidad curricular Instrumentación Médica del PNFIyC en entorno virtual de
aprendizaje.
Los Sistemas de inteligencia tecnológica ofrecen un aprendizaje al dar propuestas que se
adelantan a los cambios futuros del entorno basándose en la identificación de oportunidades y
amenazas para la innovación. Estos sistemas se llevan a cabo a través de un ciclo que consta
de: planeación, selección de fuentes de información, análisis de la información recopilada,
difusión de resultados y aplicación de resultados a las estrategias del proceso de toma de
decisiones. El sistema se enfoca al análisis e identificación de información relevante
concerniente a desarrollos y eventos tecnológicos externos que impacten en la competitividad
de una organización. Todo ello bajo un marco sistemático, ético y legal.
Asimismo, la Universidad Politécnica Territorial Alonso Gamero define por lineamientos
[5] que los Programas Nacionales de Formación (PNF) deben orientarse hacia el desarrollo e
incorporación de componentes tecnológicos nacionales a los procesos de producción de bienes
y de prestación de servicios desde una perspectiva de la innovación científico-tecnológica por
medio de la formación, creación intelectual y vinculación con la comunidad bajo un enfoque
socio-humanista-dialéctico, para contribuir con el desarrollo económico, político, social,
ambiental y cultural de las diferentes regiones ubicadas en su área de influencia, del país en
general, de Latinoamérica y del Caribe, articulando el conocimiento universal con los saberes
populares, a fin de transformarlo en un motor que dinamice la calidad de vida y el
fortalecimiento de los más altos principios y los valores de la democracia participativa y
protagónica en el conjunto de la sociedad.
En este sentido, el PNFIyC coopera en la construcción de la plataforma tecnológica y en
la sistematización de innovaciones para el desarrollo industrial de la nueva economía social del
país, orientada primordialmente a la satisfacción de las necesidades humanas; por otra parte,
favorece el desarrollo científico, impulsando el tejido productivo e innovador y la integración con
las comunidades para lograr una producción eficiente.
El uso de una herramienta tecnológica motiva a los usuarios permitiéndoles a su vez
desarrollar el pensamiento crítico, a expresar sentimientos y emociones, entre otros. Además se
desarrollan habilidades didácticas tales como la selección apropiada de componentes
específicos ubicados en cada uno de los equipos médicos y reconocer las etapas para cada
una de las señales biomédicas, realizar además prácticas que refuercen el ensamblaje
adecuado mediante los modelos representativos de cada diagrama de bloques, según la señal
biomédica en estudio.
El hecho de presentar la estrategia didáctica a través del entorno virtual permite estimular
el aprendizaje de los estudiantes, profundizar en los conocimientos de las disciplinas
relacionadas con la Instrumentación Médica para el ejercicio de su profesión, y a la vez reforzar
teorías a través de laboratorios y/o practicas virtuales con menor costo y así alcanzar
habilidades y aptitudes que inciden de forma más efectiva en estos profesionales del PNFIyC.
Dentro del PNFIyC se planean y desarrollan proyectos de investigación científica en el
campo de instrumentación y control de sistemas biomédicos, que busquen dar soluciones
tecnológicas a necesidades, problemáticas y realidades en el ámbito social, económico,
ambiental, académico y científico de la nación venezolana, aplicados al sector salud,
planificando, diseñando, simulando, construyendo y evaluando sistemas de instrumentación y
control mediante el uso de herramientas apropiadas, tales como software especializados.
Con el desarrollo de la línea de investigación “Sistemas de Instrumentación y Control
Biomédicos” se busca generar conocimiento nuevo y aplicable con compromiso social, para
facilitar la solución de problemas a nivel local, regional, nacional y de la sociedad, y favorecer el
desarrollo tecnológico y académico, con el propósito de contribuir directa e indirectamente a que
se alcance una mejor calidad de la atención médica y de la vida.
Los propósitos de esta línea de trabajo son desarrollar sensores e instrumentos para el
área médica, diseñar módulos didácticos para la enseñanza de la instrumentación médica,
introducir al estudiante en los conceptos básicos de normalización, calidad y seguridad
relacionados con equipos empleados en el ámbito hospitalario, detectar, diagnosticar fallas y
reparar equipos médicos así como desarrollar software para procesar señales e imágenes
biomédicas.
La unidad curricular permite la interacción de los saberes relacionados con la línea de
investigación de sistemas de instrumentación y control biomédicos, que busca desarrollar
conocimientos, habilidades, destrezas y herramientas básicas de diseño y funcionamiento de la
instrumentación utilizada en la medicina ya sean para diagnóstico y/o para el tratamiento de los
sistemas fisiológicos humanos y el funcionamiento de los instrumentos.
MATERIALES Y MÉTODOS
Al respecto, la metodología del proceso enseñanza–aprendizaje con entorno virtual, [6]
considera algunos de los elementos necesarios para entender un modelo de formación flexible.
Estos proporcionan conocimiento de alto valor agregado para el trabajo de inteligencia
tecnológica. Se reconoce además que la información de mayor confiabilidad, se encuentra en
las opiniones de los estudiantes y docentes que imparten la unidad curricular.
En consideración del autor propone considerar los siguientes componentes:
- Comunicación mediada por ordenador (Componente tecnológico)
- Medios didácticos (componente curricular)

- Flexibilidad (Elementos del aprendizaje abierto)
- Entorno organizativo (Componente institucional)
- Aprendizaje y tutoría (Componente didáctico)
Realizar el trabajo de inteligencia tecnológica comprende el procesamiento analítico de
la información que se ha recolectado y su conversión en inteligencia tecnológica para responder
a las necesidades. Para llevar a cabo el análisis es indispensable el empleo de las habilidades
de los analistas de inteligencia tecnológica, así como de herramientas (software, modelos y
metodologías) que permitan procesar los datos obtenidos con el objeto de dar sentido a la
información recolectada y alcanzar las conclusiones adecuadas.
A continuación se exponen las fases que deben ser aplicadas para el cumplimiento de la
metodología:
Preparatoria: Identificar la población a quien va dirigir la evaluación del proceso de
enseñanza-aprendizaje de la unidad curricular instrumentación médica, la cual contó con un
total de 143 docentes de los cuales, se seleccionaron intencionalmente los 43 docentes que
atienden el 3er y 4to trayectos del (PNFIyC), por ser en estos donde se imparte la unidad
curricular a intervenir. Posteriormente, se especifican cuales indicadores que según [7] deben
ser evaluados. En la siguiente tabla se establecen las dimensiones e indicadores dirigidos al
docente con respecto a la evaluación del proceso de enseñanza-aprendizaje en la unidad
curricular.
TABLA I
DIMENSIÓN E INDICADORES
Dimensión Indicador
Proceso
Enseñanza-
Aprendizaje
Teóricos
Metodológicos o
instrumentales
Didácticos
Se establecieron las interrogantes correspondientes a cada indicador, en la valoración
del basamento teórico el contenido de la unidad I permite comprender, identificar y evaluar los
conceptos básicos relacionados con los sistemas dedicados a medir variables fisiológicas. La
unidad II comprender, seleccionar y evaluar los principios básicos de transducción así como las
características básicas de los sensores biomédicos. La unidad III evaluar las características de
los sistemas utilizados para medir señales bioeléctricas. La unidad IV comprender las técnicas
de medidas empleadas para registrar variables relacionadas con el sistema cardiovascular. La
unidad V comprender las técnicas de medidas empleadas para registrar variables relacionadas
con el sistema respiratorio.
Como seguimiento de las actividades en la valoración instrumental, la metodología
aplicada en la unidad I permite el hacer del estudiante con respecto a los conceptos básicos
asociados a la instrumentación biomédica. La Unidad II a los principios de transducción de
varios sensores biomédicos, los sensores primarios para registrar determinadas variables
fisiológicas y selecciona los diferentes tipos de sensores según el aporte de energía y el modelo
eléctrico.
La Unidad III está orientada al estudio de las señales bioeléctricas, así como seleccionar
los sensores, mostrar las características básicas de una señal ECG, sus derivaciones
normalizadas e identificar los equipos que se utilizan para registrar otros tipos de señales
bioeléctricas. La Unidad IV aborda el origen de las diferentes variables hemodinámicas, los
diferentes métodos para medir la presión sanguínea, el flujo sanguíneo, comprender los
principales métodos para estimar el gasto cardiaco, el concepto de pletismografía y el de
fonomecanocardiografía.
La Unidad V se refiere a las diferentes técnicas que se utilizan para estimar el flujo y el
volumen respiratorio, las diferentes variables que se deben estimar para valorar la mecánica
respiratoria de un sujeto, la concentración de gases como indicador de la condición pulmonar de
un sujeto y las diferentes técnicas para medir la concentración de gases respiratorios.
Adicionalmente a este indicador se evaluó la metodología aplicada en la unidad curricular
por parte del docente en cuanto a realizar actividades prácticas para cada uno de los temas de
la unidad curricular.
Para la realización de la valoración del indicador didáctico, se evaluó la dinámica de la
unidad curricular: si permite al estudiante ser participe activo en el proceso enseñanza-
aprendizaje, si los estudiantes muestran interés y valoran los contenidos desarrollados dentro
de la unidad curricular, si se analizan de manera lógica, objetiva y crítica los contenidos
discutidos en la unidad curricular, si los estudiantes muestran interés por las actividades de
investigación asignadas en el desarrollo de la unidad curricular, si se logra la cooperación con
otros estudiantes en la solución de problemas y se mantienen relaciones asertivas durante el
proceso enseñanza-aprendizaje, si se forman equipos de trabajo para la discusión y análisis de
los problemas planteados y si muestran responsabilidad al entregar a tiempo las tareas
asignadas.
Ejecución: Los objetivos de esta fase son: Establecer el instrumento para la valoración
del proceso de enseñanza–aprendizaje de la unidad curricular Instrumentación Médica y
especificar las herramientas tecnológicas para desarrollar el entorno virtual de aprendizaje
(EVA).
Esta evaluación utiliza la medición, la cual garantiza datos válidos y confiables en los
cuales se fundamentaron los juicios que fueron determinados en esta investigación.

Con respecto a la aplicación del cuestionario, la evaluación fue un proceso integral que
permitió valorar los resultados obtenidos en términos de los objetivos propuestos, de acuerdo
con los recursos utilizados y las condiciones existentes.
Las técnicas para el diseño de entorno virtual para la estrategia del proceso de
enseñanza – aprendizaje poseen los detalles necesarios para poder instalar una plataforma de
manejo de aprendizaje basado en la web; en el mismo, se indicarán las especificaciones
técnicas necesarias para instalar un servidor y las plataformas para administrar el mismo como
un sistema de aprendizaje.
Las plataformas necesarias para poseer un sistema de aprendizaje virtual basado en la
web funcionan bajo la modalidad Cliente-Servidor, siempre existirá un computador denominado
servidor en el cual están instaladas las plataformas, dicho computador debe poseer ciertas
características técnicas, igualmente, existirán uno o más computadores denominados clientes,
que son aquellos desde los cuales se conectan los estudiantes del sistema para realizar
diversas actividades.
Esta estrategia está desarrollada en una plataforma llamada Moodle (Versión estable a la
fecha 2.6) que está en un lenguaje de programación llamado PHP, diseñado para la creación de
páginas web dinámicas; es un producto libre y sin coste [8].
Para que puedan ejecutarse las aplicaciones realizadas en PHP versión 5.5 es necesario
contar con un servidor web que no es otra cosa que un ordenador donde se ejecuta un
programa que elabora y devuelve páginas web a un cliente o navegador que se las solicita.
Este servidor web es denominado Apache versión 2.0, también de código abierto y
gratuito. Moodle se diseñó originalmente para trabajar con la base de datos libre y gratuita
MySQL versión 5.x
Como sistema operativo para un servidor se recomienda el uso de GNU/Linux por
lineamientos y además por los sustentos legales del Plan de la Patria 2013-2019 y la ley
Infogobierno, y por las ventajas de estabilidad, rendimiento, administración, seguridad y
ausencia de infecciones de software maliciosos.
Si se cuenta con la cantidad de 2 secciones dentro de la unidad curricular con un máximo
de 40 estudiantes por secciones, se puede definir de un total de 100 personas entre
estudiantes y docentes utilizando la plataforma, Moodle no necesita un gran procesador para
funcionar, sin embargo, mientras mejor sea el procesador, más rápido se entregarán respuestas
a los procesos solicitados, por lo tanto, tomando en cuenta que la cantidad de usuarios
interconectados simultáneamente puede llegar a ser bastante alta, se recomienda como mínimo
un servidor con procesador QuadCore y 8Gb de RAM para así permitir que un aproximado de
400 usuarios puedan estar conectados al mismo tiempo sin experimentar desconexión y un
disco duro de 80Gb.

RESULTADOS Y DISCUSIÓN
La fase de evaluación de los resultados se obtuvo con la obtención de la información mostrada
en la Fig. [1]. Esto permitió determinar la insatisfacciones con respecto a la metodología
aplicada en la unidad curricular, debido a la inexistencia de la realización de prácticas que
refuercen el contenido teórico, se resalta la unidad III con sus deficiencias de las practicas de
señales bioeléctricas, al seleccionar los sensores, mostrar las características básicas de una
señal ECG, sus derivaciones normalizadas e identificar los equipos que se utilizan para registrar
otros tipos de señales bioeléctricas.
Fig. 1. Evaluación del proceso enseñanza-aprendizaje de la Unidad Curricular
Segundo, con respecto a los procesos de enseñanza-aprendizaje en su contenido
teórico, se demostró la pertinencia de estos con la unidad curricular y que cumplen con los
propósitos planteados en cada una de ellos. Y por último la evaluación de las actividades
didácticas del proceso enseñanza – aprendizaje aplicados en la unidad curricular evidencia que
estas sí son efectivas. El resumen de esta evaluación se ilustra en la Fig. [1].
Para poder aprovechar las posibilidades educativas del EVA, son necesarias unas
habilidades básicas para la implantación, estas son: buena predisposición y capacidad para el
autoaprendizaje y conocimientos instrumentales sobre Instrumentación Médica, saber utilizar
las principales herramientas de internet como navegadores, correo electrónico, FTP, listas de
distribución y grupos de noticias, charlas, videoconferencias y programas de navegación off-
line. Además se necesita conocer las características básicas de los equipos e infraestructuras
informáticas necesarias, el funcionamiento de la red como las horas de menor tráfico y por lo
tanto mayor velocidad en la línea telefónica o en determinados servidores y la existencia de
"mirrors" que sirven la información más rápidamente.
Volviendo la mirada hacia la aplicación de la herramienta virtual en la educación en la
modalidad presencial sigue los parámetros de [9]. Para ello, se evaluó el Componente

tecnológico, esto se realizó en el laboratorio de computación 01 (LC01) del PNFIyC, el cual
posee 26 máquinas i5 procesador Intel, 1 terabyte de disco duro y 2 Gb de memoria RAM,
monitores 19” y bajo sistema operativo Canaima.
La lista del contenido a incluir en el curso a implementar en el EVA, del tema I
instrumentación biomédica, implicó desde el origen de la ingeniería aplicada en la medicina, la
estructura general de un sistema de medida biomédico, clasificación de la instrumentación
biomédica, estructura entrada-salida de un sistema de medida biomédico con interferencias y
perturbaciones internas y técnicas de compensación genéricas, así como características
generales de los sistemas de medida biomédicos como estáticas y dinámicas.
Con respecto al tema II presentaciones de definición y clasificación de los sensores
biomédicos: sensores primarios, resistivos, reactivos y electromagnéticos, sensores
generadores, ópticos y de radiación, se introdujeron videos con la utilización de hardware libre
en las prácticas tales como: Arduino sensor de radiación ultravioleta.
Del tema III sobre medidas de señales bioeléctricas, se desarrollaron los temas de
potenciales de acción: concepto y propagación, señales bioeléctricas, electrodos, interfaz
electrodo-electrolito, circuito equivalente electrodo-electrolito-piel y tipos de electrodos, señal
electrocardiográfica (ECG), características, derivaciones normalizadas, electrocardiógrafos y
tipos y otras señales bioeléctricas. Se reforzó con un material de diseño de un
electrocardiógrafo portátil y una actividad de señales ECG utilizando sensores biomédicos.
Correspondieron al tema IV las medidas en el sistema cardiovascular con variables
hemodinámicas, medida de la presión sanguínea, del flujo sanguíneo, caudalímetros
electromagnéticos, ultrasónicos, medida del gasto cardiaco. Incluyó un material de ultrasonido.
Y por último el tema V: medidas en el sistema respiratorio, espirometría,
pneumotacografía, pletismografía, mecánica respiratoria y medida de gases respiratorios.
Para el fortalecimiento de las prácticas se incluyó el link de descarga de Matlab, videos
de instalación y uso, y Biomédica con Arduino.
Como resultado, la inteligencia tecnológica se utilizó para minimizar las debilidades en la
unidad curricular Instrumentación Médica y para ello, se emplearon todas las herramientas que
residen en el proceso de enseñanza–aprendizaje de los estudiantes. Se fortalecieron las
destrezas en el aula del docente, e introdujeron las innovaciones dentro de la universidad.
Se cumplió con esta premisa, puesto que el proceso de valoración involucró fases
que requieren el talento y habilidades, a través de programas informáticos basados en el
procesamiento y recolección de la información. Estas herramientas, que no sustituyen el trabajo
de los analistas de inteligencia, sirven de aprendizaje para generar conocimientos de la
evaluación de la unidad curricular instrumentación médica en su calidad de enseñanza-
aprendizaje.

CONCLUSIONES
De los resultados obtenidos, se desprende que la unidad curricular en su basamento
teórico es pertinente, pero permite a través del EVA un cambio radical donde estos contenidos
se auto-modifican, se actualizan, bajo la dirección del docente y de la actuación de los alumnos.
Adicionalmente el contenido puede surgir de posteriores investigaciones de acuerdo con las
necesidades recurrentes en el área de salud de la comunidad que la rodea.
El EVA puede crecer y fortalecerse como estrategia didáctica virtual que conlleve un
refuerzo del conocimiento y así potenciar el proceso teórico–práctico, además integrar la
tecnológica como un sistema de aprendizaje y así se crean nuevos canales de comunicación
facilitando el desarrollo de nuevas experiencias formativas, expresivas y educativas. En tal
sentido podría ser modelo a seguir por futuras aulas virtuales y permite consolidar un proyecto
piloto.
Por lo tanto esta herramienta tecnológica motivó a los usuarios, permitiéndoles a su vez
desarrollar el pensamiento crítico y desarrollar habilidades didácticas tales como la selección
apropiada de componentes específicos ubicados en cada uno de los equipos médicos y
reconocer las etapas para cada una de las señales biomédicas, realizar prácticas adecuadas,
mediante los modelos representativos de cada diagrama de bloques según la señal biomédica.
Si bien es cierto que fortalecer los conocimientos técnicos en el área de Instrumentación
Médica conlleva potenciar los procesos de enseñanza-aprendizaje, abordando paradigmas que
utilizan herramientas tecnológicas, no solo va dirigido a un proceso sino también a un aporte
social que fortalece a la Institución, y así a un beneficio de la comunidad en el mejoramiento de
la vida en sociedad. Adicionalmente, es importante resaltar que la investigación cumplió con su
función de la búsqueda de las deficiencias y los recursos necesarios para lograr el desarrollo de
los mismos, lo que llevará a la transformación social esperada.
Conociendo la situación de la unidad curricular con sus debilidades, podemos colocarla
en yuxtaposición con respecto a la realidad venezolana de las instituciones y organismos
encargados de desarrollar y fortalecer la evaluación de tecnologías sanitarias. Y poner en
disyuntiva el contenido programático, y determinar si está en sintonía con la problemática de
salud del país.
Como resultado de este estudio, se evidencia que la formación de recursos humanos en
el área médica de mantenimiento y la evaluación de tecnologías, necesita preparar
profesionales capaces de evaluar las tecnologías de salud apropiadas para su contexto social y
orientar todos los esfuerzos en el sector tecnológico hacia los verdaderos problemas de salud
de la población. El aula virtual implementada en la plataforma Moodle, satisface las exigencias
que se derivan de las encuestas realizadas.
Por esta razón, las universidades politécnicas imponen nuevos retos, como institución
responsabilizada ante la sociedad con la formación de los profesionales que aporten al país
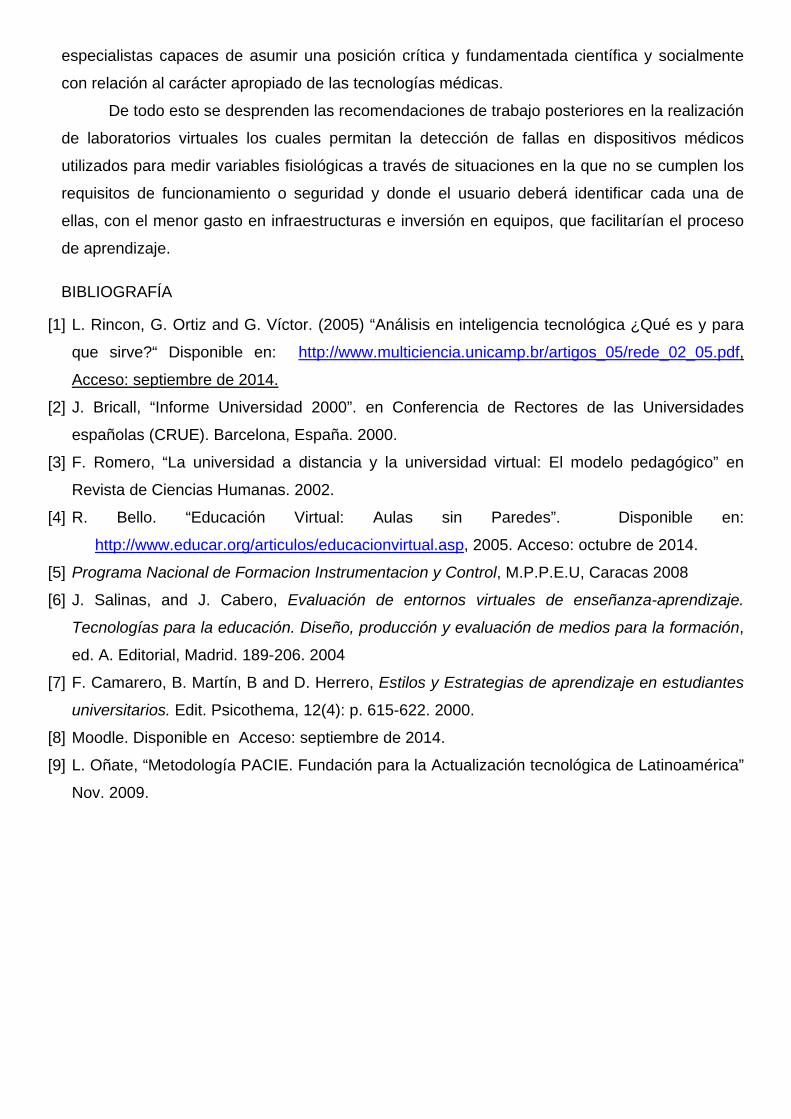
especialistas capaces de asumir una posición crítica y fundamentada científica y socialmente
con relación al carácter apropiado de las tecnologías médicas.
De todo esto se desprenden las recomendaciones de trabajo posteriores en la realización
de laboratorios virtuales los cuales permitan la detección de fallas en dispositivos médicos
utilizados para medir variables fisiológicas a través de situaciones en la que no se cumplen los
requisitos de funcionamiento o seguridad y donde el usuario deberá identificar cada una de
ellas, con el menor gasto en infraestructuras e inversión en equipos, que facilitarían el proceso
de aprendizaje.
BIBLIOGRAFÍA
[1] L. Rincon, G. Ortiz and G. Víctor. (2005) “Análisis en inteligencia tecnológica ¿Qué es y para
que sirve?“ Disponible en: http://www.multiciencia.unicamp.br/artigos_05/rede_02_05.pdf,
Acceso: septiembre de 2014.
[2] J. Bricall, “Informe Universidad 2000”. en Conferencia de Rectores de las Universidades
españolas (CRUE). Barcelona, España. 2000.
[3] F. Romero, “La universidad a distancia y la universidad virtual: El modelo pedagógico” en
Revista de Ciencias Humanas. 2002.
[4] R. Bello. “Educación Virtual: Aulas sin Paredes”. Disponible en:
http://www.educar.org/articulos/educacionvirtual.asp, 2005. Acceso: octubre de 2014.
[5] Programa Nacional de Formacion Instrumentacion y Control, M.P.P.E.U, Caracas 2008
[6] J. Salinas, and J. Cabero, Evaluación de entornos virtuales de enseñanza-aprendizaje.
Tecnologías para la educación. Diseño, producción y evaluación de medios para la formación,
ed. A. Editorial, Madrid. 189-206. 2004
[7] F. Camarero, B. Martín, B and D. Herrero, Estilos y Estrategias de aprendizaje en estudiantes
universitarios. Edit. Psicothema, 12(4): p. 615-622. 2000.
[8] Moodle. Disponible en Acceso: septiembre de 2014.
[9] L. Oñate, “Metodología PACIE. Fundación para la Actualización tecnológica de Latinoamérica”
Nov. 2009.

ANÁLISIS DE VARIABILIDAD DEL RITMO CARDÍACO CON PYTHON
Higuera González Francisco, Taboada-Crispi Alberto, Torres Rodríguez Idileisy
INTRODUCCIÓN
La cardiología busca detectar enfermedades cardiovasculares a través de métodos no invasivos
que eviten el mínimo riesgo para el paciente y a su vez entreguen la mayor cantidad de
información para analizar la señal. El electrocardiograma es uno de los exámenes más
empleados hoy día puesto que cumple con estas características. Este registro muestra cada una
de las ondas Electrocardiográficas en una cuadrícula estándar que posteriormente será analizada
para detectar los parámetros de normalidad de la señal y descartar así cualquier cardiopatía. Sin
embargo los resultados de este examen perderán utilidad si se cometen errores en el manejo
adecuado de la cuadrícula generando mediciones erróneas, o si el proceso de interpretación se
hace demasiado lento.
El estudio de la variabilidad del ritmo cardiaco (HRV, siglas del inglés Heart Rate
Variability) permite predecir enfermedades del sistema cardiovascular. El análisis mediante
esta técnica de señales ECG de larga duración permite estudiar al paciente mientras realiza
sus actividades cotidianas. Generalmente el análisis de la HRV se lleva a cabo en los dominios
del tiempo y de la frecuencia, por lo cual es de vital importancia implementar correctamente
los algoritmos necesarios para llevar a cabo dicha tarea.
En los últimos años, la ingeniería se ha interesado por hacer de la interpretación de la
señal electrocardiográfica y el estudio la variabilidad del ritmo cardíaco un proceso que pudiera
ser matemáticamente analizado para obtener un resultado rápido y efectivo que apoye al personal
médico.
En la actualidad hay un sin número de programas de computación que facilitan el trabajo
en todos los ámbitos, particularmente en el área de ingeniería biomédica, se han multiplicado los
estudios tendentes a analizar el comportamiento de las señales biomédicas a través de distintos
software, particularmente el estudio de la variabilidad del ritmo cardíaco. Los resultados de dichos
análisis se consideran un factor sumamente importante para realizar un debido diagnóstico y
apoyar el diseño de los equipos electrocardiográficos.
Sin embargo, la gran variedad de programas de computación que permiten el análisis
respectivo de las señales electrocardiográficas están desarrollados basados en software
propietario, y es por ello que surge la necesidad de desarrollar un sistema que ofrezca todas
estas bondades en un ambiente dinámico basado en software libre, ya que permite la libertad de
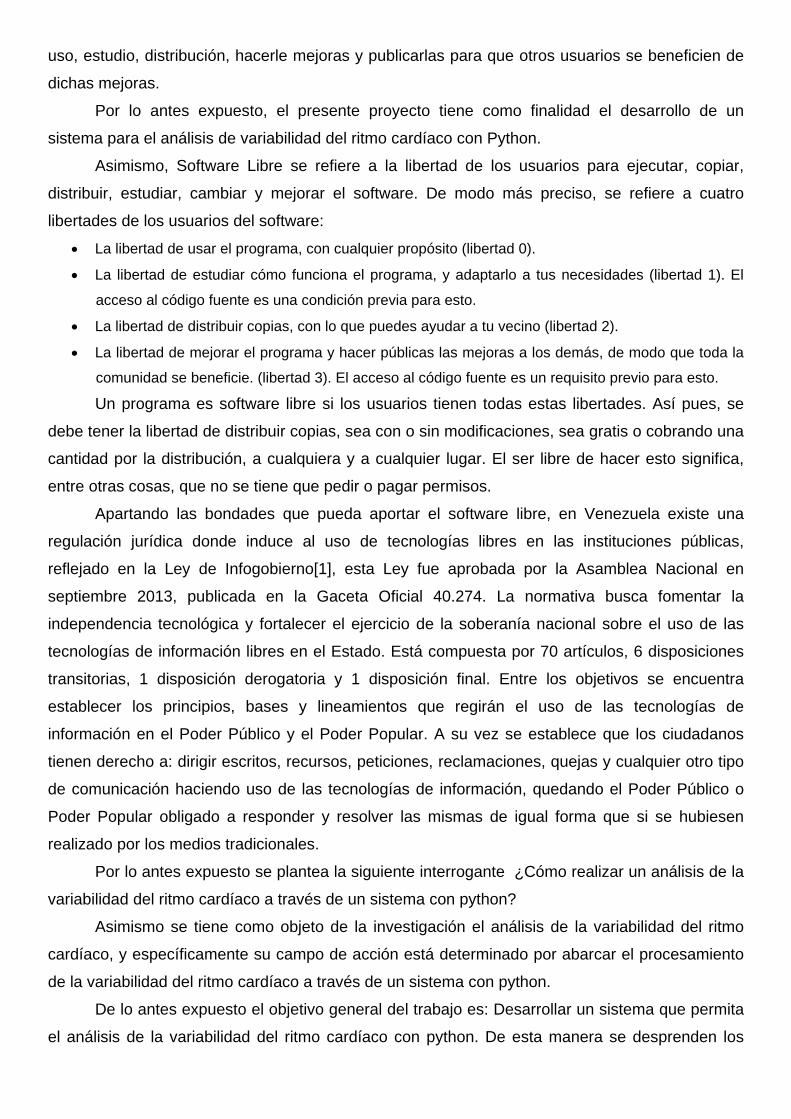
uso, estudio, distribución, hacerle mejoras y publicarlas para que otros usuarios se beneficien de
dichas mejoras.
Por lo antes expuesto, el presente proyecto tiene como finalidad el desarrollo de un
sistema para el análisis de variabilidad del ritmo cardíaco con Python.
Asimismo, Software Libre se refiere a la libertad de los usuarios para ejecutar, copiar,
distribuir, estudiar, cambiar y mejorar el software. De modo más preciso, se refiere a cuatro
libertades de los usuarios del software:
• La libertad de usar el programa, con cualquier propósito (libertad 0).
• La libertad de estudiar cómo funciona el programa, y adaptarlo a tus necesidades (libertad 1). El
acceso al código fuente es una condición previa para esto.
• La libertad de distribuir copias, con lo que puedes ayudar a tu vecino (libertad 2).
• La libertad de mejorar el programa y hacer públicas las mejoras a los demás, de modo que toda la
comunidad se beneficie. (libertad 3). El acceso al código fuente es un requisito previo para esto.
Un programa es software libre si los usuarios tienen todas estas libertades. Así pues, se
debe tener la libertad de distribuir copias, sea con o sin modificaciones, sea gratis o cobrando una
cantidad por la distribución, a cualquiera y a cualquier lugar. El ser libre de hacer esto significa,
entre otras cosas, que no se tiene que pedir o pagar permisos.
Apartando las bondades que pueda aportar el software libre, en Venezuela existe una
regulación jurídica donde induce al uso de tecnologías libres en las instituciones públicas,
reflejado en la Ley de Infogobierno[1], esta Ley fue aprobada por la Asamblea Nacional en
septiembre 2013, publicada en la Gaceta Oficial 40.274. La normativa busca fomentar la
independencia tecnológica y fortalecer el ejercicio de la soberanía nacional sobre el uso de las
tecnologías de información libres en el Estado. Está compuesta por 70 artículos, 6 disposiciones
transitorias, 1 disposición derogatoria y 1 disposición final. Entre los objetivos se encuentra
establecer los principios, bases y lineamientos que regirán el uso de las tecnologías de
información en el Poder Público y el Poder Popular. A su vez se establece que los ciudadanos
tienen derecho a: dirigir escritos, recursos, peticiones, reclamaciones, quejas y cualquier otro tipo
de comunicación haciendo uso de las tecnologías de información, quedando el Poder Público o
Poder Popular obligado a responder y resolver las mismas de igual forma que si se hubiesen
realizado por los medios tradicionales.
Por lo antes expuesto se plantea la siguiente interrogante ¿Cómo realizar un análisis de la
variabilidad del ritmo cardíaco a través de un sistema con python?
Asimismo se tiene como objeto de la investigación el análisis de la variabilidad del ritmo
cardíaco, y específicamente su campo de acción está determinado por abarcar el procesamiento
de la variabilidad del ritmo cardíaco a través de un sistema con python.
De lo antes expuesto el objetivo general del trabajo es: Desarrollar un sistema que permita
el análisis de la variabilidad del ritmo cardíaco con python. De esta manera se desprenden los
siguientes objetivos específicos:
1. Caracterizar las señales electrocardiográficas.
2. Diseñar un sistema para el análisis de la variabilidad del ritmo cardíaco basado
herramientas libres.
3. Evaluar el sistema a través de la comparación de los resultados obtenidos, con respecto a
otros sistemas similares aceptados por organizaciones internacionales de cardiología.
Durante el transcurso de la investigación, se dará respuesta a las siguientes interrogantes
científicas:
• ¿Cuáles son las concepciones teóricas sobre Electrofisiología Cardíaca?
• ¿Cuáles son las características de las señales electrocardiográficas?
• ¿Qué particularidades presentan los software para el análisis de la variabilidad del ritmo
cardíaco existentes en el mercado?
• ¿Cuáles son los requerimientos de software y hardware para el análisis y estudio de señales
electrocardiográficas?
• ¿Qué indicadores de la señal electrocardiográfica necesita el médico para el diagnóstico?
• ¿Cuáles son las fases del diseño del programa?
• ¿Qué resultados se obtendrán al evaluar el sistema para el análisis de de la variabilidad del
ritmo cardíaco con python con respecto a los software existentes en el mercado?
En cuanto a la novedad científica que aporta el presente trabajo, se refleja en la
particularidad que tiene el sistema análisis de la variabilidad del ritmo cardíaco con python, ya que
usualmente se utiliza software privativo.
Entre los aportes de la investigación, se puede señalar que en lo social permite el
desarrollo de alternativas distintas a lo que usualmente se encuentra en el mercado, ya que las
herramientas libres representan la punta de lanza de la independencia tecnológica para que cada
nación pueda desarrollar sistemas que le permitan garantizar la seguridad de la información en
materia industrial, financiera, salud etc. Así mismo, adaptarlos a sus propias necesidades y
circunstancias, en virtud de que, cada nación tiene sus propias características que la diferencian.
Asimismo, el programa beneficiará al paciente, al médico y la comunidad, ya que se podrán
realizar diagnósticos con mayor precisión en menor tiempo.
En lo que respecta al ámbito económico, permitirá adquirir un sistema que permite el
análisis de la variabilidad del ritmo cardíaco con python a muy bajo costo, con respecto a los
programas con licencia privativa, que deben cancelarse grandes cantidades de dinero por el pago
de licencia y derecho de autor.
En lo práctico se dispondrá de un sistema robusto para el análisis de la variabilidad del
ritmo cardíaco con python, permitirá la libertad de uso, estudio, corregirlo adaptándolo a cualquier
necesidad, mejorarlo y redistribuir las mejoras, características propias del software libre.
En lo que corresponde a los métodos utilizados, se tiene que a nivel teórico se hizo un

análisis sobre los distintos estudios realizados sobre el tema de manera empírica, así como las
teorías sobre el funcionamiento y anatomía del corazón que es el origen de la señal
electrocardiográfica en estudio. También, se realiza una modelación sobre los procedimientos del
sistema propuesto.
Igualmente la investigación se apoya con el nivel empírico, a través de la observación del
funcionamiento de sistemas desarrollados por otros investigadores con anterioridad, entrevistas
abiertas con expertos en el análisis y procesamiento de señales.
En cuanto al desarrollo del sistema análisis de la variabilidad del ritmo cardíaco con python,
se debe realizar un análisis de los costos, funciones, características y facilidades que ofrece el
entorno de desarrollo, las compatibilidades con las señales que arrojan los electrocardiógrafos. El objetivo de esta investigación consiste en desarrollar análisis de la variabilidad del ritmo cardíaco
con python, por su naturaleza y dentro del enfoque práctico, constituye un proyecto factible.
Según[2], el proyecto factible consiste en la investigación, elaboración y/o desarrollo de una
propuesta de un modelo operativo viable para solucionar problemas, requerimientos o necesidades de
organizaciones o grupos sociales, puede referirse a la formulación de políticas, programas, tecnologías,
métodos o procesos. El proyecto debe tener apoyo en una investigación de tipo documental, de campo o
un diseño que incluya ambas modalidades.
CARACTERIZACIÓN DE LAS SEÑALES ELECTROCARDIOGRÁFICAS
Anatomía del Corazón
El corazón es el órgano principal del sistema circulatorio, localizado en el tórax levemente a la
izquierda del esternón y conformado por músculos especializados que suministran la fuerza
motriz para impulsar la sangre a través del organismo. Como se observa en la figura [1] el
corazón se compone de dos cavidades superiores llamadas aurículas y dos inferiores
denominadas ventrículos, separadas por una pared muscular denominada tabique. El flujo
sanguíneo se controla por medio de cuatro válvulas: Tricúspide, Mitral, Pulmonar y Aórtica, las
cuales, se encargan de permitir el paso de la sangre entre las cavidades al interior y al exterior del
corazón[3].
Figura1 Anatomía interna del corazón [4]

Sistema de Conducción Auriculoventricular del Corazón
Un latido cardíaco es una acción de bombeo que toma aproximadamente un segundo. A
medida que se va acumulando sangre en las aurículas se produce una contracción en las
mismas, que impulsa la sangre a través de las válvulas tricúspide y mitral hacia las cavidades
inferiores que se encuentran en reposo (ventrículos derecho e izquierdo). Esta contracción se
origina a partir de un impulso eléctrico generado en el nodo Sinusal (SA) de la figura [2]
(denominado también el marcapasos natural del corazón).
Las señales eléctricas enviadas por el nódulo SA se propagan por una vía de conducción
eléctrica hasta el nodo auriculoventricular (AV), el cual, retrasa el impulso cardíaco hasta que los
ventrículos estén llenos de sangre; luego de cerrarse firmemente las válvulas tricúspide y mitral
para impedir el retorno de sangre, el impulso eléctrico pasa del nodo auriculoventricular al haz de
His y el sistema de Purkinje, los cuales estimulan la contracción de los ventrículos y abren las
válvulas pulmonar y aórtica. Al mismo tiempo que el ventrículo derecho impulsa sangre a los
pulmones para oxigenarla, fluye sangre rica en oxígeno del ventrículo izquierdo al corazón y a
otras partes del cuerpo.
Cuando la sangre pasa a las arterias pulmonar y aorta, los ventrículos se relajan y las
válvulas pulmonar y aórtica se cierran. Al reducirse la presión en los ventrículos se abren las
válvulas tricúspide y mitral y el ciclo comienza de nuevo.
Figura 2 Sistema de conducción eléctrica cardíaca [4]
Nociones de Electrofisiología Cardíaca
El corazón está conformado por los tipos de células de la figura 3:
- Células automáticas o de respuesta lenta (nodo SA)
- Células no automáticas o de respuesta rápida (masa muscular)
La diferencia fundamental entre estas células se basa en que las primeras poseen un
potencial de reposo inestable que de forma automática va despolarizándose y que al alcanzar un
potencial de umbral, generan un potencial de acción que va a transmitirse a las células vecinas.
Por el contrario, las células no automáticas poseen un potencial de reposo estable y necesitan de
un estímulo externo que lo sitúe en el potencial umbral para posteriormente, generar un potencial

de acción.
Figura 3. Potencial de acción, polarización y repolarización de la membrana celular [5]
Estos potenciales se presentan debido a que en las células se generan corrientes
eléctricas de muy baja intensidad como consecuencia de desplazamientos iónicos de Potasio
(K+), Sodio (Na+), Cloro (Cl-) y Calcio (Ca++) que continuamente se están produciendo en un
flujo continuo bidireccional a través de la membrana celular.
La membrana celular se encuentra en estado de reposo (polarización) si en el interior de la
célula predominan los iones K+ mientras que en el exterior prevalecen los iones Na+, generando
así una superioridad de cargas negativas en el interior (aprox. -90mV) y de positivas en el
exterior.
El impulso de excitación generado por la inestabilidad del potencial de reposo en células
automáticas (nodo SA) o a partir de un estímulo externo sobre células no automáticas, hace
disminuir el potencial de la membrana celular a un nivel de disparo de -70mV, la membrana deja
pasar iones de Sodio (Na+) y cambia la polaridad interna hasta llegar a un nivel de +30mV. En
este punto se genera la salida de iones Potasio (Ka+ ) y la entrada de iones cloro (Cl- ) haciendo
regresar el potencial a 0mV, lo cual permite la entrada de iones calcio (Ca-) y la salida posterior
de iones de potasio (Ka+) llevando a la célula a su repolarización (aprox. -90mV)[5].
Características de las Señales Electrocardiográficas
La electrocardiografía es el estudio de la actividad eléctrica del corazón que representa los
cambios en el potencial de acción ocurridos durante el ciclo cardíaco; estos cambios son
descritos como una serie de vectores que indican la dirección de la despolarización celular en
cada una de las cavidades cardiacas; por ello, el análisis de la secuencia de propagación del
impulso hace factible la deducción del comportamiento electrofisiológico de las estructuras del
corazón y de posibles anormalidades.
El registro de dicha actividad se ve representado en una gráfica que muestra una serie de
deflexiones en la medida en la que el impulso cardíaco se propaga y es obtenida a través de
aparatos llamados electrocardiógrafos, los cuales, son conectados al paciente mediante cables
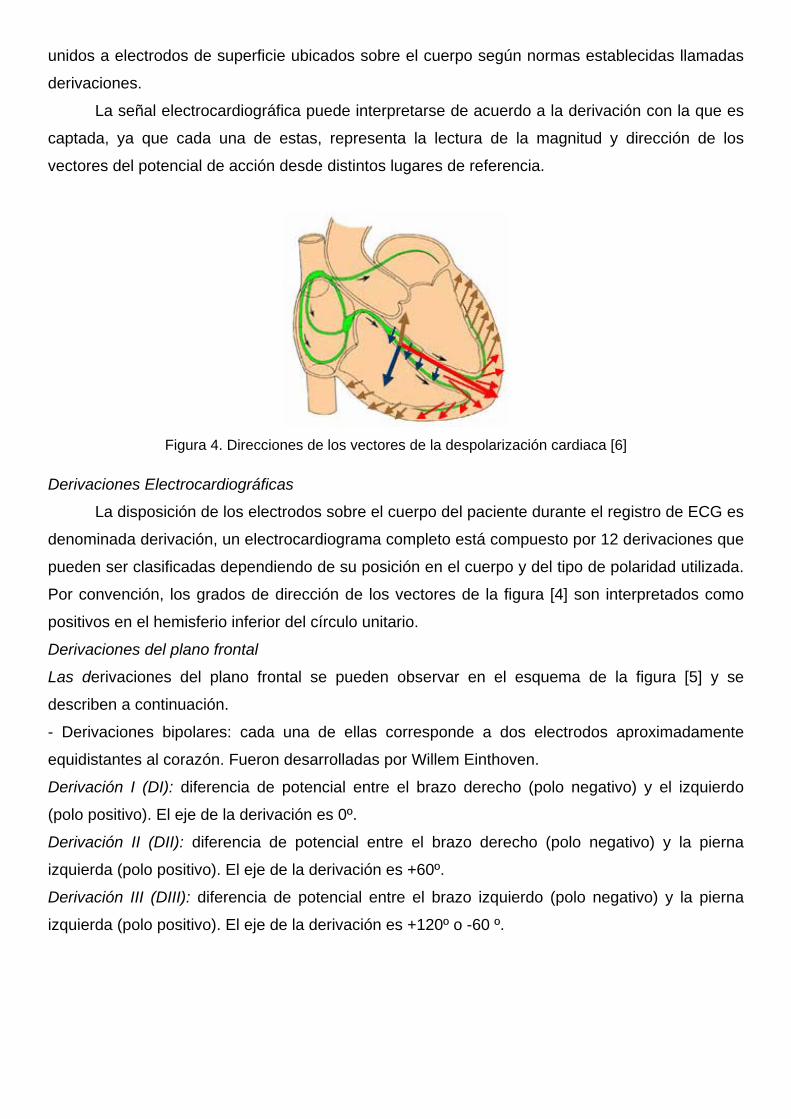
unidos a electrodos de superficie ubicados sobre el cuerpo según normas establecidas llamadas
derivaciones.
La señal electrocardiográfica puede interpretarse de acuerdo a la derivación con la que es
captada, ya que cada una de estas, representa la lectura de la magnitud y dirección de los
vectores del potencial de acción desde distintos lugares de referencia.
Figura 4. Direcciones de los vectores de la despolarización cardiaca [6]
Derivaciones Electrocardiográficas
La disposición de los electrodos sobre el cuerpo del paciente durante el registro de ECG es
denominada derivación, un electrocardiograma completo está compuesto por 12 derivaciones que
pueden ser clasificadas dependiendo de su posición en el cuerpo y del tipo de polaridad utilizada.
Por convención, los grados de dirección de los vectores de la figura [4] son interpretados como
positivos en el hemisferio inferior del círculo unitario.
Derivaciones del plano frontal
Las derivaciones del plano frontal se pueden observar en el esquema de la figura [5] y se
describen a continuación.
- Derivaciones bipolares: cada una de ellas corresponde a dos electrodos aproximadamente
equidistantes al corazón. Fueron desarrolladas por Willem Einthoven.
Derivación I (DI): diferencia de potencial entre el brazo derecho (polo negativo) y el izquierdo
(polo positivo). El eje de la derivación es 0º.
Derivación II (DII): diferencia de potencial entre el brazo derecho (polo negativo) y la pierna
izquierda (polo positivo). El eje de la derivación es +60º.
Derivación III (DIII): diferencia de potencial entre el brazo izquierdo (polo negativo) y la pierna
izquierda (polo positivo). El eje de la derivación es +120º o -60 º.

Figura 5. Derivaciones del plano frontal
- Derivaciones aumentadas: en este grupo, dos de las extremidades se conectan mediante
resistencias eléctricas al polo negativo del amplificador, mientras el polo positivo se conecta con
otra resistencia a la tercera extremidad. Fueron desarrolladas por Wilson y Goldberger.
aVR: polo positivo en el brazo derecho. El eje de la derivación es 210º (–150º).
aVL: polo positivo en el brazo izquierdo. El eje de la derivación es -30º.
aVF: polo positivo en la pierna izquierda. El eje de la derivación es +90º.
Derivaciones del plano horizontal
- Derivaciones precordiales: estas derivaciones son positivas y usan el centro del campo eléctrico
del corazón como punto negativo. El electrodo se coloca en la superficie anterior del tórax,
encima del corazón, como polo positivo, mientras el polo negativo, se conecta mediante
resistencias eléctricas provenientes de los electrodos en las extremidades. Estas derivaciones de
la figura 6 son:
V1: cuarto espacio intercostal. Borde derecho del esternón.
V2: cuarto espacio intercostal. Borde izquierdo del esternón.
V3: quinto espacio intercostal. Línea media clavicular.
V4: entre V3 y V5
V5: quinto espacio intercostal. Línea axilar anterior.
V6: quinto espacio intercostal. Línea media axilar.
V7, V8 y V9: son de utilidad ante el cuadro clínico del síndrome isquémico agudo. Estas
derivaciones se encuentran al mismo nivel de V4, pero sobre la línea axilar posterior, el omóplato
y el borde izquierdo de la columna vertebral respectivamente.
V3R-V9R: sobre el hemitórax derecho en la misma posición de las derivaciones izquierdas. V2R
es la misma V1.

Figura 6 Derivaciones precordiales
Electrocardiograma
El electrocardiograma es la gráfica resultante de la actividad eléctrica cardiaca en cada una
de sus derivaciones, la cual es adquirida a través del electrocardiógrafo. Las deflexiones
obtenidas son interpretadas de acuerdo a su amplitud y duración tomando como referencia la
cuadrícula del papel de la figura 7 en el cual se imprime el electrocardiograma; este papel esta
milimetrado de manera que el tiempo se mida sobre el eje de abscisas y la amplitud sobre el de
ordenadas; cada cinco milímetros (5 cuadros pequeños), aparece una línea más gruesa
conformando cuadros de 5mm de lado. La velocidad del papel es de 25 mm/seg y por tanto cada
milímetro en el eje de abscisas supone 0,04 seg y cada 5 mm representan 0,2 seg. Cada
milivoltio (mV) registrado se traduce en un desplazamiento de la aguja de 10 mm en el eje de
ordenadas.
Figura 7 Cuadrícula del papel electrocardiográfico
Ondas, Intervalos y Segmentos del Electrocardiograma
Las ondas del electrocardiograma aparecen durante la despolarización (contracción o
sístole) y repolarización (relajación o diástole) miocárdica. Un periodo del ECG perteneciente a
una persona normal (sin ninguna patología cardiaca), consiste de una onda P, el complejo QRS,

la onda T y la onda U de la figura 8. Las partes del electrocardiograma entre deflexiones se
denominan segmentos, y las distancias entre las ondas se llaman intervalos. La señal
electrocardiográfica se divide en las siguientes ondas, intervalos y segmentos:
Onda P: Es la deflexión producida por la despolarización auricular. Es una onda redondeada con
una amplitud normal no mayor de 0.25 mV y una duración entre 60 y 100 ms. El eje de una onda
P en el plano frontal bajo condiciones normales está entre 30 y 60º, por lo cual es positiva en las
derivaciones DI, DII y aVF, y es negativa en aVR. En aVL y DIII, la onda P puede ser positiva en
ambas o positiva en una e isobifásica en la otra. En las derivaciones precordiales derechas esta
onda es bifásica aun cuando puede ser positiva solamente.
Figura.8 Señal electrocardiográfica [7]
Intervalo PR (PQ): Se denomina así al intervalo desde el inicio de la onda P al comienzo del
complejo QRS cualquiera que sea su primera deflexión, suele ser isoeléctrico. En los adultos su
valor normal va entre 120 y 200 ms. Es reflejo del tiempo de conducción auriculoventricular (AV)
que incluye el retardo fisiológico a través del nodo AV. Su duración disminuye con el aumento de
la frecuencia cardiaca.
Complejo QRS: Corresponde a la activación ventricular. En adultos su intervalo normal es de 60 y
100 ms. La rotulación de las deflexiones que corresponde a los complejos QRS es arbitraria
quedando establecida así:
- Onda Q: deflexión negativa no precedida por deflexión positiva.
- Onda R: primera deflexión positiva del complejo.
- Onda S: primera deflexión negativa después de una primera deflexión positiva.
- Onda R’: deflexión positiva después de la onda S.
- Onda S’: deflexión negativa después de la onda R’.
- Onda QS (Complejo QS): cuando el complejo posee una deflexión negativa monofásica.
En las derivaciones del plano frontal la polaridad de los complejos varía de acuerdo a la posición
anatómica del corazón; y en las derivaciones precordiales hay un progresivo crecimiento de la
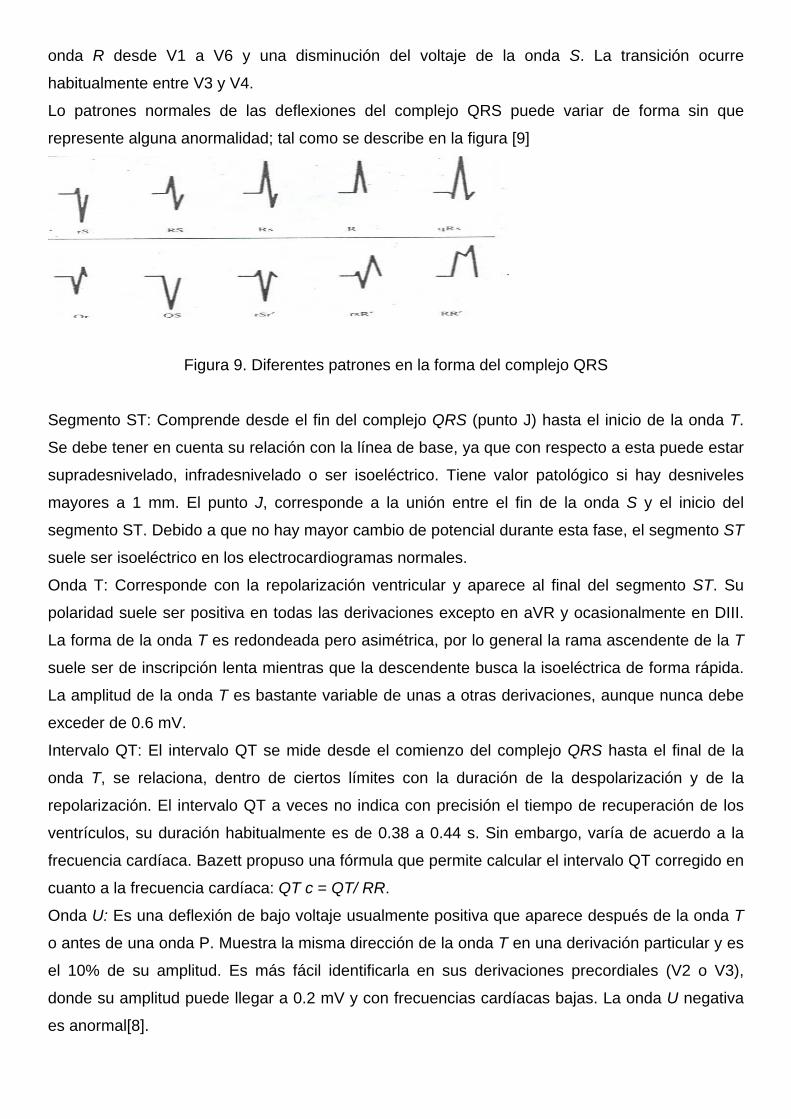
onda R desde V1 a V6 y una disminución del voltaje de la onda S. La transición ocurre
habitualmente entre V3 y V4.
Lo patrones normales de las deflexiones del complejo QRS puede variar de forma sin que
represente alguna anormalidad; tal como se describe en la figura [9]
Figura 9. Diferentes patrones en la forma del complejo QRS
Segmento ST: Comprende desde el fin del complejo QRS (punto J) hasta el inicio de la onda T.
Se debe tener en cuenta su relación con la línea de base, ya que con respecto a esta puede estar
supradesnivelado, infradesnivelado o ser isoeléctrico. Tiene valor patológico si hay desniveles
mayores a 1 mm. El punto J, corresponde a la unión entre el fin de la onda S y el inicio del
segmento ST. Debido a que no hay mayor cambio de potencial durante esta fase, el segmento ST
suele ser isoeléctrico en los electrocardiogramas normales.
Onda T: Corresponde con la repolarización ventricular y aparece al final del segmento ST. Su
polaridad suele ser positiva en todas las derivaciones excepto en aVR y ocasionalmente en DIII.
La forma de la onda T es redondeada pero asimétrica, por lo general la rama ascendente de la T
suele ser de inscripción lenta mientras que la descendente busca la isoeléctrica de forma rápida.
La amplitud de la onda T es bastante variable de unas a otras derivaciones, aunque nunca debe
exceder de 0.6 mV.
Intervalo QT: El intervalo QT se mide desde el comienzo del complejo QRS hasta el final de la
onda T, se relaciona, dentro de ciertos límites con la duración de la despolarización y de la
repolarización. El intervalo QT a veces no indica con precisión el tiempo de recuperación de los
ventrículos, su duración habitualmente es de 0.38 a 0.44 s. Sin embargo, varía de acuerdo a la
frecuencia cardíaca. Bazett propuso una fórmula que permite calcular el intervalo QT corregido en
cuanto a la frecuencia cardíaca: QT c = QT/ RR.
Onda U: Es una deflexión de bajo voltaje usualmente positiva que aparece después de la onda T
o antes de una onda P. Muestra la misma dirección de la onda T en una derivación particular y es
el 10% de su amplitud. Es más fácil identificarla en sus derivaciones precordiales (V2 o V3),
donde su amplitud puede llegar a 0.2 mV y con frecuencias cardíacas bajas. La onda U negativa
es anormal[8].

Frecuencia Cardíaca
El tiempo que existe entre dos ondas R sucesivas sirve para calcular la frecuencia
cardíaca, parámetro que define la rapidez con la que se expande el impulso eléctrico del corazón.
La frecuencia es considerada normal si está entre 60 y 100 latidos por minuto.
Recordando que un segundo equivale a 5 cuadros de 5mm (cuadros grandes), luego en un
minuto habrá 300 cuadros grandes y 1500 cuadros de 1mm (cuadros pequeños).
Existen varios métodos para medir este parámetro como son [8]:
- Método estándar: consiste en dividir 300 entre el número de cuadros de 5mm que hay
entre dos ondas R.
- Método de los 1500: consiste en dividir 1500 entre el número de cuadros de 1mm que
existen entre dos ondas R.
- Método del muestreo: se divide 60000 (un minuto tiene 60000 milisegundos) entre la
longitud en milisegundos que hay entre dos ondas R consecutivas.
Eje Eléctrico del Corazón
El eje eléctrico podría definirse como el vector resultante del conjunto de la actividad
eléctrica de cada ciclo cardíaco.
Representa la resultante eléctrica determinada por la despolarización de ambos ventrículos
se muestra en la figura [10] y es de gran utilidad clínica, ya que nos orienta en el diagnóstico
electrocardiográfico. Su localización entre -30° y +110° se considera normal.
El cálculo del eje eléctrico puede realizarse a partir de las derivaciones DI, DII y DIII
midiendo desde la línea isoeléctrica el número de cuadros pequeños de la grilla
electrocardiográfica que representan la amplitud de la onda R y restándole el número de cuadros
que representa la onda que tenga mayor amplitud entre la onda Q y S, en cada derivación. Una
vez se tiene esa magnitud se trazan los vectores teniendo en cuenta el eje de cada derivación y
se calcula el vector resultante el cual representara el eje eléctrico del corazón [3].
Figura 10 Representación vectorial del eje eléctrico
Interpretación de un ECG
Para una adecuada interpretación de la señal electrocardiográfica deben revisarse los siguientes
aspectos en el orden que se muestra a continuación:

- Ritmo: se revisa que siga un patrón P, QRS, T.
- Frecuencia cardíaca: debe ser medida por los métodos expuestos.
- Eje eléctrico: el ángulo debe estar entre 0 y +110 grados.
- Onda P: debe considerarse su amplitud, voltaje y morfología.
- Intervalo PR: se mide su duración preferiblemente en DII.
- Complejo QRS: se mide en la derivación que presente el intervalo mayor, se tiene en cuenta su
duración y morfología.
- Segmento ST: se establece el punto J, debe ser isoeléctrico.
- Onda T: se debe considerar su morfología.
- Onda U: se busca su presencia en derivaciones precordiales.
- Intervalo QT: se calcula su duración.
Variabilidad del ritmo cardíaco
La frecuencia cardíaca (FC) es el número de contracciones que ejerce el corazón por
unidad de tiempo y normalmente se expresa en latidos por minuto (lpm). La FC en una persona
sana varía como consecuencia de factores circunstanciales tales como cambios en la
temperatura ambiente que le rodea, cambios de la situación física del individuo (reposo, actividad
física, sueño, vigilia, etc.), estado nervioso, entre otros. La variación de la FC a lo largo del tiempo
se conoce como variabilidad del ritmo cardíaco.
La HRV se calcula a partir de las posiciones de los complejos QRS en los registros ECG.
Los picos de la onda R en los electrocardiogramas pueden ser considerados como indicadores de
la frecuencia de despolarización del nodo sinoatrial. Para detectar estos máximos, es necesario
aplicar un algoritmo de detección de complejos QRS y así conocer su tiempo de ocurrencia. La
frecuencia de muestreo del ECG determina la resolución en la localización de los picos y por tanto
la precisión de los análisis subsiguientes. Es por eso que se recomienda utilizar frecuencias de
muestreo superiores a 300 Hz[9].
A partir de las posiciones de los complejos QRS detectados se genera la señal R. Ésta no
es más que un vector lógico donde se muestran las posiciones de los complejos QRS como
impulsos unitarios, mientras que en el resto del tiempo es igual a cero. A partir de R se pueden
generar diferentes señales que sirven para representar la HRV [12], [54]. A partir de la señal R se
obtiene la serie RR, compuesta por las diferencias de tiempo entre latidos (Figura 1.7). Las
mediciones de la HRV, utilizan tanto la señal R como la serie RR para su análisis en el dominio
del tiempo y en el de la frecuencia.
MATERIALES Y MÉTODOS
Componentes Hardware:
Equipo de Computación personal: laptop Gateway, con disco duro de 640 GB, 4 GB de memoria

RAM, procesador XX. El cual se utiliza para el desarrollo de la aplicación.
Herramientas Software:
Sistema Operativo Linux Mint: En la actualidad es uno de los sistemas operativos más aceptado
por la comunidad de Software Libre a nivel mundial.
Lenguaje de Programación Python: permiten desarrollar aplicaciones poderosas, y
particularmente para este trabajo que exige cálculos matemáticos que procesa gran cantidad de
datos, asimismo se puede diseñar aplicaciones de ventana amigables a los usuarios, a través de
las librerías Wxpython. Igualmente se utilizaron las librerías numpy y matplotlib, para cálculos
matriciales y generación gráficas respectivamente.
Herramientas libres para el procesamiento de señales ecg: facilita el desarrollo de aplicaciones
para el análisis de variabilidad de ritmo cardíaco, proporcionando filtros prestablecidos, que
facilitan el preprocesamiento de la señal.
Indicadores y Procedimientos aplicados a la Señal Electrocardiográfica
Eliminación de Ruido:
Los latidos extraídos de la señal ECG deben ser pre-procesados antes de su
caracterización y posterior clasificación, para remover las componentes que no son producidas
por la actividad cardiaca. El ruido presente en las señales electrocardiográficas puede provenir de
diversas fuentes: las de baja frecuencia: línea base, respiración profunda, artefactos de
movimiento, desconexión de electrodos y las de frecuencia alta: interferencia de red y ruido
electroquirúrgico. Inicialmente, se realiza un proceso de filtrado digital con haciendo pasar la
señal por un filtro.
Detección del complejo QRS
Para seleccionar un algoritmo para la detección del complejo QRS, los principales criterios
que deben ser tenidos en cuenta son su complejidad y efectividad, con el fin de ser ejecutados en
tiempo real. El criterio de desempeño es la base para la aprobación o el rechazo de los algoritmos
de detección del QRS que son altamente susceptibles al ruido. Todos los algoritmos deben ser
robustos a niveles altos de ruido si se pretende incorporarlos a sistemas clínicos para diagnosticar
diversas patologías cardiacas. Por lo cual, para la detección de QRS se utilizó a partir de la teoría
propuesta por Pan y Thompkins (1985)[10], el cual consiste en pasar la señal a través de un filtro
pasabanda, luego se procede a la diferenciación de la señal resultante y posteriormente elevarla
al cuadrado e integrar la señal con un filtro especial y enventanado.

Procedimientos para el Análisis de la Variabilidad del Ritmo Cardíaco
Detección de la Serie RR
La HRV se calcula a partir de las posiciones de los complejos QRS en los registros ECG.
Los picos de la onda R en los electrocardiogramas pueden ser considerados como indicadores de
la frecuencia de despolarización del nodo sinoatrial. Para detectar estos máximos, es
necesario aplicar un algoritmo de detección de complejos QRS y así conoce su tiempo de
ocurrencia. La frecuencia de muestreo del ECG determina la resolución en la localización de los
picos y por tanto la precisión de los análisis subsiguientes. Es por eso que se recomienda utilizar
frecuencias de muestreo superiores a 300 Hz.
A partir de las posiciones de los complejos QRS detectados se genera la señal R. Ésta no
es más que un vector lógico donde se muestran las posiciones de los complejos QRS
como impulsos unitarios, mientras que en el resto del tiempo es igual a cero. A partir de R se
pueden generar diferentes señales que sirven para representar la HRV. A partir de la señal R se
obtiene la serie RR, compuesta por las diferencias de tiempo entre latidos. Las mediciones de la
HRV, utilizan tanto la señal R como la serie RR para su análisis en el dominio del tiempo
y en el de la frecuencia.
Detección de latidos ectópicos
Los latidos ectópicos son aquellos que están muy alejados de lo normal, por lo que el programa
realiza un promedio de todos los valores de la serie RR, haciendo un umbral con un valor máximo
y mínimo aceptable, y si algún latido no se encuentra dentro del umbral se elimina de la serie.
Análisis de la Variabilidad del Ritmo Cardíaco:
Análisis en el Dominio del Tiempo
En el presente estudio se aplica los métodos estadísticos para realizar el análisis en el dominio
del tiempo, obteniéndose parámetros sencillos como lo son la desviación estándar entre los
intervalos, la variación total, las diferencias entre intervalos, entre otros parámetros.
Análisis en el Dominio de la Frecuencia:
Para este análisis se realiza un filtrado de la señal con un filtro paso bajo, luego se calcula las
potencias absolutas en las bandas de ultra baja frecuencia (ULF), muy baja frecuencia (VLF), baja
frecuencia (LF) y alta frecuencia (HF).
Análisis No Lineal:
En el análisis no lineal se utilizó el Diagrama de Poincaré, que es una representación gráfica y de
fácil interpretación, que facilita la identificación de la correlación entre intervalos RR sucesivos, a
través de la distribución de los puntos ajustando dichos puntos a una figura geométrica que en
nuestro caso es una elipse.
RESULTADOS
El producto de la investigación consiste en una aplicación que integra técnicas para el
procesamiento y análisis de señales electrocardiográficas, el sistema tiene por nombre libreHRV,
dada la combinación de herramientas libres para la para el análisis de la variabilidad del ritmo
cardíaco cuyas siglas en ingles son HRV, el cual presenta una interfaz gráfica permitiendo una
interacción amigable con el usuario final.
Carga, Procesamiento y Visualización de los Datos
El sistema proporciona el menú principal de la figura [11], donde se encuentra los menú Archivo,
Edición, Ver y Ayuda. En el menú Archivo se encuentra la opción abrir, al hacer clic sobre el
permitirá elegir un archivo en formato txt donde se encuentra la señal electrocardiográfica, al
seleccionar el archivo el sistema carga la señal y realiza el procesamiento.
Figura 11. Menú Principal
Fuente: Autor, 2016
Resultados del Análisis de la Variabilidad del Ritmo Cardíaco
Primeramente se muestra la pantalla de la figura [12], donde se distribuye un contenedor páginas
(notebook), donde se encuentra los resultados del procesamiento, en la primera página se
muestra la gráfica de la señal bruta y la gráfica de la serie RR.

Figura 12. Gráficas de los Datos Origen
Fuente: Autor, 2016
En la página Dominio del Tiempo de la figura [13], se encuentra los resultados del análisis
estadístico, mostrando los parámetros respectivos (desviación estándar, promedios, entre otros),
así como una gráfica de tipo histograma que visualiza dichos resultados.
Figura 13. Resultados del Análisis en el Dominio del Tiempo
Fuente: Autor, 2016
Seguidamente en la tercera página de la figura [14], , se tienen los resultados del análisis en el
dominio de la frecuencia, mostrando los parámetros de las potencias absolutas en las bandas de
ultra baja frecuencia (ULF), muy baja frecuencia (VLF), baja frecuencia (LF) y alta frecuencia
(HF).

Figura 14. Resultados del Análisis en el Dominio de la Frecuencia
Fuente: Autor, 2016
Finalmente, en la página Dominio No lineal de la figura [15], se presenta la gráfica de Poincaré
con la distribución de los puntos que conforman la serie RR, permitiendo un análisis visual
efectivo.
Figura15. Resultados del Análisis No Lineal
Fuente: Autor, 2016
DISCUSIÓN
Para evaluar el funcionamiento del sistema, se realizaron pruebas comparativas de los resultados
que genera el mismo con respecto a los sistemas existentes en el mercado, donde se observó
que dichos resultados compaginan con sistemas estudiados como el Kubios y el gHRV, muy
aceptados en la comunidad internacional de cardiólogos.
Igualmente, se evaluaron los aspectos cualitativos del sistema, en cuanto a la facilidad en
el manejo de la aplicación y la captura de los datos, lo cual es dinámico y amigable a los usuarios.
Entre otras cosas, la evaluación económica se observa que es factible el desarrollo de este tipo
de aplicación, ya que no se cancelan montos costosos por pago de licencia privativa.

CONCLUSIONES
Se puede inferir que el análisis de la variabilidad del ritmo cardíaco es un método que
permite detectar una gran cantidad de patologías cardiovasculares, es por ello que poseer una
herramienta que apoye dicho análisis es esencial e importante, logrando agilizar el trabajo con
resultados exactos de manera eficiente y eficaz. La variabilidad del ritmo cardíaco no proporciona
un diagnóstico exacto, proporciona el riesgo de salud no específico en porcentaje (antes del
desarrollo del proceso de la enfermedad), ya que la variabilidad del ritmo cardíaco mide los
niveles cualitativos/numéricos de estrés y de entrenamiento, que son factores de riesgo
importantes. Los niveles de riesgo de salud crecientes crónicamente (por un período mayor a
varios meses), pueden activar el progreso hacia enfermedades graves.
Existen una serie de programas tanto privativos como libres que permite apoyar el
diagnóstico a través del análisis de la variabilidad del ritmo cardíaco, sin embargo, en el ámbito de
los programas privativos tienen la limitación de no tener la libertad de adaptarse a las
necesidades que cada empresa, organismo o usuario, por no suministrar los archivos fuentes que
lo conforma. A su vez, los programas con tecnologías libre en su mayoría realizan el análisis a
partir de un archivo con la serie RR, y en algunos casos no son cien por ciento libres porque
utilizan algunas librerías de matlab para realizar los cálculos. Es por ello la herramienta libreHRV
permite realizar el análisis a partir de un archivo de texto (.txt) con la señal electrocardiográfica
original, haciendo el filtrado correspondiente en el preprocesamiento, desarrollando los cálculos
de la variabilidad del ritmo cardíaco en los dominios del tiempo, frecuencia y no lineal.
Igualmente, se logró verificar que existen muchos algoritmos para la detección de QRS,
pero que ninguno abarca la gran gama de morfologías de los mismos.
Asimismo, está comprobado que un sistema desarrollado con python como lo es el caso de
libreHRV, procesa la señal electrocardiográfica de manera rápida, con resultados aceptables
acompañado de una interfaz gráfica amigable y de fácil uso. En el desarrollo del sistema se
utilizaron herramientas libres que permiten la libertad de uso, estudio, distribución y mejorarlo
para adaptarlo a cualquier necesidad.
BIBLIOGRAFÍA
[1] Ley de Infogobierno, 2013.
[2] U. P. E. Libertador, Manual de Trabajos de Grado de Especialización y Maestría y Tesis
Doctorales, 3ra. Edición ed., 2007.
[3] B. y. R. VESGA, Oscar, "El corazón y sus variables hemodinámicas, electrocardiografía,
presión arterial, sistema nerviosoautónomo. (Modulo 4)," Revista Salud UIS, Universidad
Industrial De Santander, Colombia, 2002.
[4] (Junio 13 de 2006). Anatomía Interno del Corazón. Available: www.3dscience.com

[5] V. B. y. C. Ángel, "Evidencias en electrocardiografía 1: Electrofisiología cardiaca," Revista
Salud UIS, Universidad Industrial de Santander, Colombia, 1999.
[6] (Diciembre 6 de 2005). Direcciones de los vectores de la despolarización cardiaca. Available:
http://uuhsc.utah.edu/healthinfo/spanish/cardiac/electric.htm
[7] F. d. I. U. d. B. A. Argentina. (Junio 13 de 2006). Available:
www.fi.uba.ar/materias/6643/u3_cardiologia.pdf
[8] H. MATIZ, GUTIÉRREZ, Oscar y TORRES, Adriana, Electrocardiografía Básica, 1ra. Edición
ed. vol. Volumen I, 1999.
[9] T. F. o. t. E. S. o. C. t. N. A. S. o. P. Electrophysiology, "Heart Rate Variability. Standards of
Measurement, Physiological Interpretation, and Clinical Use," European Heart Journal, vol. vol.
17, pp. pp. 354-381, 1996.
[10] J. y. T. Pan, W., "A Real-Time QRS Detection Algorithm," IEEE Transactions On
Biomedical Engineering, vol. BME-32, 1985.
AUTORES
Arguello Biondo, Alexander M. Ingeniero Mecánico. Profesor del Instituto Universitario de
Tecnología Alonso Gamero IUTAG. Departamento de Mecánica, Santa Ana de Coro, Venezuela.
email: [email protected]
Falcón, Alexander. Profesor Asistente del Departamento de Computación de la Fac. Matemàtica
Física y de Computación de la Universidad Central Marta Abreu de Las Villas.
Fernández Castañeda, Feliberto. Ingeniero Mecánico. Doctor en Ciencias Técnicas. Profesor de
la facultad de Ingeniería Mecánica de la Universidad Central Marta Abreu de Las Villas. Cuba.
Actualmente Vicedecano Docente de la Facultad de Ingeniería Mecánica
email: [email protected]
Murillo, Carlos Javier. Nació en Venezuela en 1977. Técnico Superior Universitario en el Instituto
Universitario de Tecnología Región los Andes en 2001 Venezuela, Ingeniero en
Telecomunicaciones en la Universidad Nacional Experimental de la Fuerza Armada Nacional en
2012 Venezuela. Desde 2001 pertenece al Programa de Electromédicina – Ingeniería Biomédica
de la Universidad Nacional Experimental Francisco de Miranda como encargado del Laboratorio
de Bioinstrumentación. También es docente desde el 2012 en la Universidad Politécnica Alonso
Gamero y en la Universidad Nacional Experimental de la Fuerza Armada. Miembro de la
Sociedad Venezolana de Electromédicina (SOVEM). Correo: [email protected]
Orozco Morales Rubén. Ing. Equipos Electrónicos. Doctor en Ciencias Técnicas. Profesor de la
Facultad de Mat, Física y Computación de la Universidad Central de Las Villas, Cuba.
Sirit Murillo Felix Antonio. Ingeniero en electrónica, Docente a tiempo completo del programa
Ingeniería Biomédica de la Universidad Nacional Experimental. Francisco de Miranda (UNEFM),
Coro, Venezuela [email protected]
Duno Bracho, Daniel Abraham. Nació en Venezuela en 1985. Ingeniero en Telecomunicaciones
en la Universidad Nacional Experimental de la Fuerza Armada Nacional (2008) y Especialista en
Gerencia de las Telecomunicaciones (2014). Desde 2009 pertenece al Programa de Ingeniería en
Telecomunicaciones de la Universidad Nacional Experimental de la Fuerza Armada Nacional
como coordinador de la misma. Correo: [email protected]
Mendoza Reyes, Miguel. Ing. Telecomunicaciones y electrónica, Prof. Titular Fac. Matemática
Física y computación de la Universidad Central Marta Abreu de Las Villas. Doctor en Ciencias
Técnicas de la UCLV.
Higuera González, Francisco Javier. Ingeniero de Sistemas, Graduado en la Universidad Nacional
Experimental de la Fuerza Armada Nacional (UNEFA), en el año 2012, actualmente laborando en
la Oficina de Sistemas y Tecnologías de la Información en la Secretaría de Salud del Estado
Falcón, en Santa Ana de Coro, Estado Falcón, Venezuela. [email protected]

Moreno Campdesuñer, Ileana: Profesor Titular del Departamento de Energía de la Fac de
ingieneria Eléctrica. DrC.
Torres Rodríguez, Idileisy: Profesora Asistente del Departamento de Computación de la Fac.
Matemàtica Fìsica y de Computación de la Universidad Central Marta Abreu de Las Villas
Lorenzo Ginori, Juan: Profesor Titular, Investigador titular del Centro de Estudios Informáticos,
MSc y DrC.
Taboada-Crispi, Alberto. Profesor Titular, Investigador titular del Centro de Estudios Informáticos,
MSc y DrC.
González Moreira, Eduardo. Profesor Auxiliar, Investigador auxiliar del Centro de Estudios
Informáticos, MSc.
Álvarez Serrano, Antonio. Ingeniero Biomédico. Ingeniero de Mantenimiento del servicio de
radiología del hospital (HUAVG)
Orozco Morales, Rubén. Ing Equipos Electrónicos. Doctor en Ciencias Técnicas. Profesor de la
Facultad de Ing. Eléctrica de la Universidad Central de Las Villas, Cuba.
Sirit Murillo, Felix Antonio: Ingeniero en electrónica, Docente a tiempo completo del programa
Ingeniería Biomédica de la Universidad Nacional Experimental. Francisco de Miranda (UNEFM),
Coro, Venezuela [email protected]
Montes Rivero, Raymond José. Ingeniero Electrónico en Computación. Profesor del Instituto
Universitario de Tecnología "Alfonso Gamero" IUTAG.
Guigñan Omaris de las Nieves: Ingeniera en Computación. Profesor del Instituto Universitario de
Tecnología "Alfonso Gamero" IUTAG.
González Rodríguez, Emilio F. Ing. Telecomunicaciones y electrónica, Prof. Titular Fac. Ing.
Eléctrica, Universidad Central Marta Abreu de Las Villas. MSc. ISPJAE-CUSO. DrC. Email:
[email protected]. Calle Caridad 1 e/ Cuba y Villuendas. Santa Clara, Cuba.
Autor de correspondencia González Rodríguez Emilio F: [email protected]








![INSTRUMENTACIÓN BIOMÉDICA (11803 - ing.ens.uabc.mxing.ens.uabc.mx/.../bioingenieria/instrumentacion_biomedica[11803].pdf · instrumentacion biomedica instrumentaciÓn biomÉdica](https://static.fdocuments.es/doc/165x107/5e1d3c1dcb4e5d331a3e297b/instrumentacin-biomdica-11803-ingensuabcmxingensuabcmxbioingenieriainstrumentacionbiomedica11803pdf.jpg)






