
Tema-comportamiento de Los Materiales y Sus Posibilidades Estructurales
Upload
jimmy-vicente-yupanquiCategory
view
219download
2description

3
CAPÍTULO I
INTRODUCCIÓN
El objetivo de la presente tesis consiste en la creación de un paquete didáctico
interactivo que guíe y facilite al usuario la comprensión de algunos de los conceptos
manejados en el curso de Comportamiento de Materiales I del Departamento de
Ingeniería Civil y Ambiental de la Universidad de las Americas, Puebla.
El paquete didáctico parte de la premisa de que una animación logra ejemplificar de
manera más sencilla y efectiva lo expresado en libros con imágenes. En esta tesis la
ayuda visual es de gran importancia y va un paso más allá que en los libros, pues trata
de recrear en animaciones fluidas lo que en los medios impresos se explica a lo largo de
series de imágenes.
El software utilizado es el Macromedia Flash MX 2004. Flash es el programa de mayor
uso comercial empleado para la creación de páginas web interactivas, experiencias
digitales, animaciones, presentaciones, entre otros. Es una herramienta de trabajo que
cada vez se vuelve más popular, pues su fácil manejo permite realizar presentaciones y
trabajos de mucha calidad.
Ciertas animaciones se basaron en una selección de imágenes de diferentes libros,
siendo la principal influencia el libro Mechanics of Materials de Feerdinan P. Beer.
Algunas de las animaciones tuvieron su punto de partida en las imágenes presentadas en
este libro.

4
El Paquete didáctico cuenta con animaciones suaves y un ambiente amigable que
pretende mantener la atención del usuario a lo largo de los diferentes temas. El usuario
tiene la libertad de moverse dentro de los diversos temas, gracias a menús y submenús a
los que se tiene acceso durante toda la ejecución del paquete didáctico. También el
usuario impone su propio ritmo de estudio, puesto que las animaciones que se presentan
son controladas por una barra de menú en el extremo inferior de la pantalla.
El ambiente de trabajo del paquete tiene un diseño minimalista, con tipo de fuente
sencillo y en escala de grises. Todo esto para que el texto capte la atención del usuario
lo menos posible, y que el usuario se enfoque principalmente en las animaciones. El
ambiente minimalista proporciona la sensación de orden y limpieza facilitando al
usuario ordenar sus ideas. El concepto general del diseño fue basado en el sitio web
www.tokyoplastic.com.
El paquete didáctico se compone por un menú principal, menús de capítulos y escenas.
Cada escena trabaja con un concepto en especial a estudiar y puede llevar tantas
animaciones como sea necesario. De igual manera, en el desarrollo de un tema se
pueden llevar tantas escenas como sea requiera.
Para explicar los conceptos de la mecánica de materiales se utilizó la mezcla de teoría
escrita y animaciones. Todas las animaciones serán acompañadas de texto que explican
los acontecimientos y las deducciones que se pueden derivar de lo observado. También
otro factor que se introdujo para reforzar el aprendizaje fueron los ejemplos. Algunos
temas concluyen con un ejemplo que se resuelve paso a paso aplicando los conceptos
explicados en previas escenas.

5
En el paquete didáctico se dividen los temas de Comportamiento de Materiales I en 4
grupos, los cuales componen el menú principal. Cada uno de estos temas se subdivide,
quedando la formación del paquete didáctico de la siguiente manera:
Menú principal:
Esfuerzo: Cargas Axiales.
o Esfuerzo normal
o Esfuerzo cortante
Momento de Inercia en Áreas planas.
o Centroide
o Momento de Inercia
o Radio de giro
o Teorema de ejes paralelos
Fuerza cortante y momento flexionante en vigas.
o Introducción
o Convención de signos
o Secuela de cálculo
o Relación entre carga, cortante y momento
Esfuerzos debido a flexión y cortante.
o Esfuerzo debido a flexión
o Esfuerzo debido a cortante

6
El menú principal cuenta con un comando de ayuda que traslada al usuario a un
submenú donde se especifican las interfaces utilizadas en el paquete así como su
descripción y uso (Figura 1.1).
Figura 1.1 Menú de ayuda
7
CAPÍTULO II
ESFUERZO
2.1 ESFUERZOS
La estática de cuerpos dice que los cuerpos sometidos a cargas se mantienen en equilibrio
con la ayuda de fuerzas internas o reacciones. Las fuerzas internas son las que se estudiarán
en esta tesis, pues el estudio de estas fuerzas internas y su sección infinitesimal proporcionan
datos tales como la resistencia a la deformación del elemento en cuestión.
Las fuerzas internas se representan vectorialmente y son ellas las que mantienen el equilibrio
del cuerpo con las fuerzas aplicadas exteriormente. Estas fuerzas pueden generarse en
cualquier dirección; sin embargo, para fines prácticos se estudian como fuerzas
perpendiculares al plano.
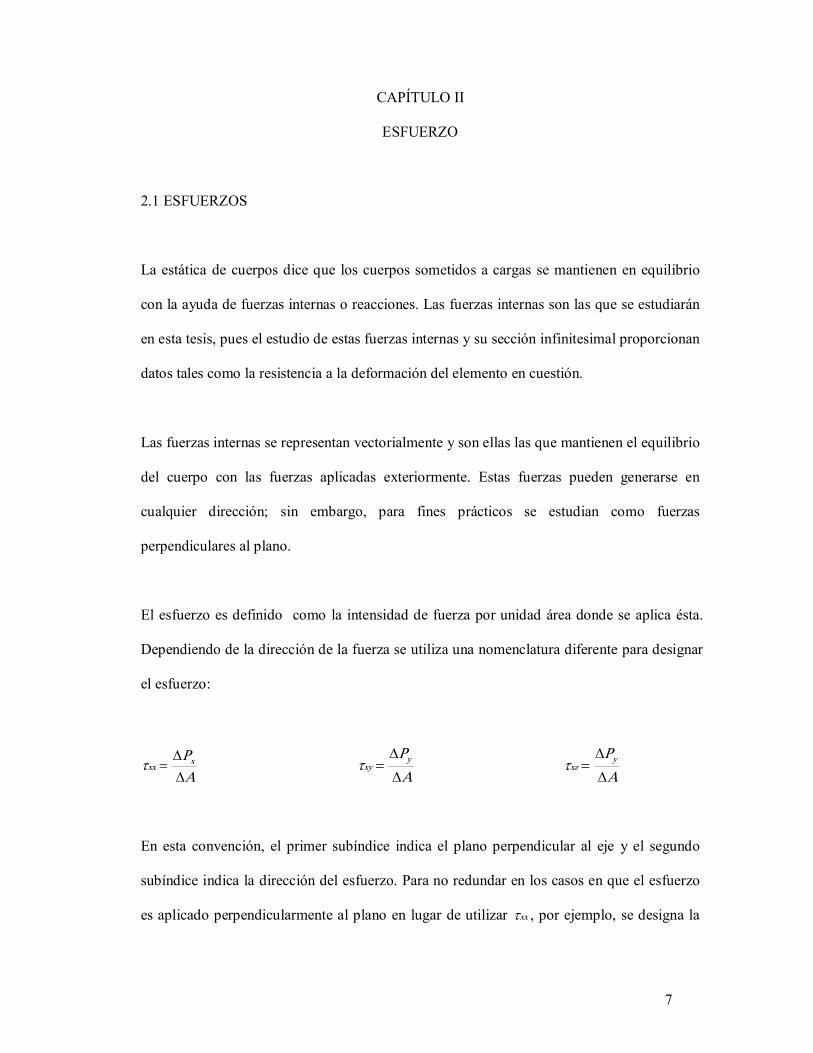
El esfuerzo es definido como la intensidad de fuerza por unidad área donde se aplica ésta.
Dependiendo de la dirección de la fuerza se utiliza una nomenclatura diferente para designar
el esfuerzo:
A P x
xx ∆ ∆
= τ A P y
xy ∆
∆ = τ
A P y
xz ∆
∆ = τ
En esta convención, el primer subíndice indica el plano perpendicular al eje y el segundo
subíndice indica la dirección del esfuerzo. Para no redundar en los casos en que el esfuerzo
es aplicado perpendicularmente al plano en lugar de utilizar xx τ , por ejemplo, se designa la

8
nomenclatura x σ , que representa el esfuerzo normal. La nomenclatura τ se utiliza para
esfuerzo cortante, ya que éste actúa tangencial o paralelamente al elemento de área.
Como los esfuerzos representan una intensidad de fuerza en un área, las unidades resultantes
son unidades de fuerza por unidad de área.
2.2 ESFUERZO NORMAL
El esfuerzo normal es la resultante de dividir la carga axial entre el área donde ésta se aplica.
A P
= σ
Para representar este concepto en el paquete se utilizó un ejemplo de una viga sometida a
una carga axial (Figura 2.1). Se definen las componentes P y A visualmente. Posteriormente
el área de la sección transversal de la viga se divide en pequeños cuadrados que representan
el área unitaria, y, de ahí, se aísla un pequeño cubo unitario (Figura 2.2) con la porción de la
fuerza que le corresponde, es decir, el esfuerzo normal (Figura 2.3).
Figura 2.1 Viga sometida a fuerza axial

9
Figura 2.2 Cubo unitario estudiado de la viga
Figura 2.3 Esfuerzo actuante sobre un cubo unitario
De esta manera la fórmula es expresada de manera gráfica.
Para profundizar en el tema y relacionarlo con otros conceptos se incluyó un ejercicio y se
resolvió paso a paso. Dicho ejercicio consta de un entramado sujeto a fuerzas externas y se
pide la determinación del esfuerzo normal en uno de sus miembros (Figura 2.4).

10
Figura 2.4 Entramado
Se presenta en pantalla el texto del problema acompañado de su figura y se da comienzo a la
solución.
El primer paso es la descomposición visual y analítica de la fuerza aplicada. Posteriormente,
se determinan las reacciones y, debido a que esta tesis se basa en el comportamiento de
materiales y el tema es el esfuerzo normal, no se profundiza en la obtención de éstas.
Visualmente se cambian los apoyos de la armadura por reacciones con su sentido y
magnitud correspondientes (Figura 2.5).
11
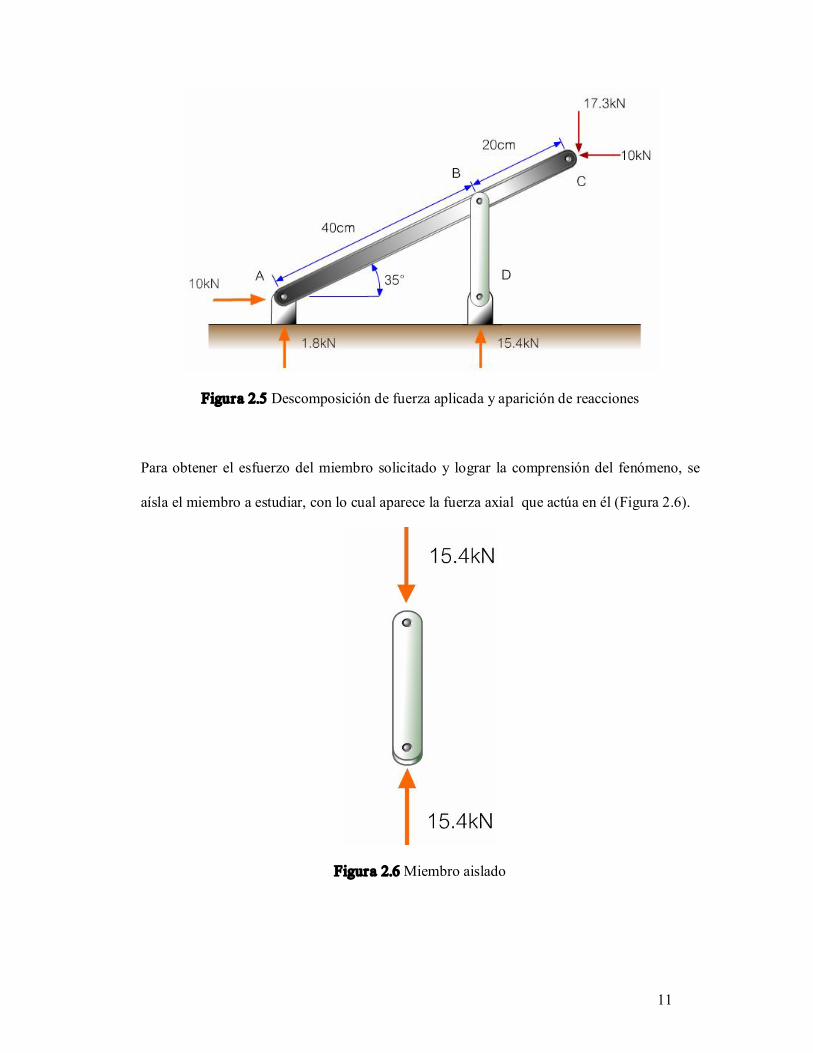
Figura 2.5 Descomposición de fuerza aplicada y aparición de reacciones
Para obtener el esfuerzo del miembro solicitado y lograr la comprensión del fenómeno, se
aísla el miembro a estudiar, con lo cual aparece la fuerza axial que actúa en él (Figura 2.6).
Figura 2.6 Miembro aislado

12
Se continúa realizando un corte donde se puede observar el área donde trabaja la fuerza. Para
terminar, se divide la fuerza entre el área de la sección y, con una animación, la fuerza se
convierte en pequeños esfuerzos (Figura 2.7).
Figura 2.7 Esfuerzo
2.3 ESFUERZO CORTANTE
El esfuerzo cortante es aquel que actúa tangente a la sección, denotado por la letra griega
A V
= τ
donde V es la letra comúnmente asignada para la fuerza cortante.
Gráficamente se utilizó un ejemplo simple y cotidiano donde sucede este fenómeno: un
tornillo que sujeta dos placas, donde éstas tienen empujes en sentidos opuestos. Estos
empujes son las fuerzas que ocasionan el cortante (Figura 2.8).

13
Figura 2.8 Tornillo sujeto a fuerzas cortantes
Se presentan diferentes vistas del tornillo y las placas para poder explicar cómo éstas
transmiten la fuerza al tornillo (Figura 2.9). Se aíslan las fuerzas y el tornillo, posteriormente
se realiza un corte a éste, y se observa el área donde la fuerza V atraviesa el tornillo (Figura
2.10)
Figura 2.9 Transmisión de fuerzas al tornillo

14
Figura 2.10 Fuerza cortante V y área A
Una vez presentadas gráficamente el área A y la fuerza cortante V, se aplica la fórmula y,
con una animación, Ves transformada en los pequeños esfuerzos cortantes τ (Figura 2.11).
Figura 2.11 Esfuerzo Cortante
Para continuar con la explicación se incluye un ejemplo de esfuerzo cortante.
En éste se presenta un empalme de dos elementos de madera que se unen con dos placas
mediante pegamento creando una junta, se les aplica fuerzas opuestas a los elementos de
madera (Figura 2.12). Aquí se presenta una condición de corte doble.

15
Figura 2.12 Placas sometidas a fuerzas tangenciales en su superficie
En animación se presenta la manera en que la junta es creada y posteriormente se define la
geometría de todos los elementos incluidos en la junta. Como el objetivo del ejemplo es
determinar una longitud L que debe tener las placas de madera para que se cumpla la
condición de que τ no exceda cierta magnitud, la expresión de esfuerzo cortante τ queda
expresada en función de L.
Para comprender como el esfuerzo cortante τ trabaja en este ejemplo, se realizó una
animación donde las placas son separadas dejando ver los esfuerzos cortantes que tienen
internamente las placas de madera (Figura 2.13).
Figura 2.13 Esfuerzos internos

16
Una vez presentados todos los elementos de la ecuación, se procede a realizar el álgebra
paso a paso para que el usuario comprenda el procedimiento a seguir en la determinación del
valor de L.
17
CAPÍTULO III
MOMENTO DE INERCIA EN ÁREAS PLANAS
Este capítulo comprende diversas propiedades geométricas de secciones (para casos
prácticos, secciones de vigas) siendo la más importante el momento de inercia. Entre otras
propiedades estudiadas están los conceptos de centroide, radio de giro y el teorema de
Steiner o de los ejes paralelos.
3.1 CENTROIDE
Antes de poder empezar a definir el concepto de momento de inercia es necesario entender
completamente lo que es un centroide y cómo se obtiene. El centroide de un área se refiere al
punto que define el centro geométrico del área.
El enfoque dado al estudio del centroide es ejemplificar cómo se obtiene el centroide de una
sección compuesta por diferentes áreas geométricas. Puesto que el concepto básico no
necesita gran atención por su simplicidad, se empieza por resolver un ejemplo de una
sección compuesta.
Para fines prácticos, el paquete estudia una sección transversal que se obtiene de una viga
cargada mediante una animación (Figura 3.1 y 3.2). Esto para captar la atención del usuario
y vea alguna de las aplicaciones inmediatas del concepto.

18
Figura 3.1 Viga
Figura 3.2 Sección transversal de viga
Obtenida la sección, se divide en áreas sencillas, manejando diferentes colores para cada una
y así poder distinguirlas fácilmente. A continuación se presentan las dimensiones de cada
área, cada dato de un color diferente, lo cual será de ayuda posteriormente (Figura 3.3).

19
Figura 3.3 División de la sección
Se le da la opción al usuario de elegir qué respecto a que eje desea obtener el centroide. Una
vez que este selecciona una opción aparece el eje de referencia necesario. También se
presentan la distancia de los centroides de cada área individual hacia el eje (Figura 3.4).
Figura 3.4 Punto de decisión
Aparece la demostración de la fórmula de centroide de áreas compuestas:

20
i
i i
A A x x
Σ Σ
=
Los momentos estáticos del área total del eje x/y deberán ser igual a la sumatoria de
momentos estáticos de las áreas parciales respecto al mismo eje. Seguido de esto se visualiza
la expresión necesaria para obtener el centroide deseado.
Al aplicar la expresión del centroide en el paquete se observa cómo los datos son arrastrados
desde la figura de la sección transversal hasta la fórmula. Con ayuda de los colores el
usuario puede ubicar de dónde proviene cada dato y así comprenderá más rápido cómo debe
usarse la expresión (Figura 3.5).
Figura 3.5 Obtención la coordenada y del centroide
Terminada la obtención de un centroide, el usuario vuelve a encontrar la opción para decidir
si desea ver el ejemplo del centroide respecto al otro eje o seguir a otro tema.

21
3.2 MOMENTO DE INERCIA
La integral
∫ = A
x dA y I 2
representa el momento de inercia respecto al eje x. Popov dice:
“ La integral depende sólo de las propiedades geométricas del área transversal. En mecánica esta
cantidad lleva el nombre de momento de inercia (o momento de segundo orden) del área de la sección
respecto al eje centroidal, cuando y se mide desde tal eje. Es una constante definida para la forma del
área en particular y se designa por I ” (1982).
El paquete trata de la manera más práctica posible el concepto de momento de inercia,
puesto que es una propiedad geométrica y sin ninguna representación física
Para iniciar se toma la sección transversal de una viga y en ella se definen dA y y (Figura
3.6). Posteriormente, al momento de realizar la integral, el área de la viga se va
fraccionando, lo que representa los diferentes dA que forman parte de la integral (Figura
3.7), para cada uno de estos, dA implica una “y” nueva. Como ayuda visual al realizar la
integral, las expresiones de Ix e Iy se van “llenando” de tinta roja, expresando que hasta que
se tomen en cuenta todos los dA el Ix estará completo. Al mismo tiempo, la sección de la
viga se va tornando roja (Figura 3.8).

22
Figura 3.6Variables que participan en la integral ∫ = A
x dA y I 2
Figura 3.7 Se presentan todos los dAque se pueden encontrar en el área.
Figura 3.8 Al momento de integrar

23
Como es sabido, estas integrales ya han sido resueltas para las figuras con geometría básica:
rectángulo, círculo, triángulo. Estas expresiones quedan expresadas en función de variables
que representan las dimensiones del elemento. En la vida real la aplicación de estas fórmulas
resulta ser la manera más práctica de obtener los momentos de inercia.
Por lo tanto, estas fórmulas se le presentan al usuario en un pequeño menú sencillo donde
tendrá que escoger entre la figura que desee saber su fórmula (Figura 3.9), una vez
seleccionada, aparece la fórmula (Figura 3.10) y puede regresar al pequeño menú para elegir
otra figura o continuar a otro tema
Figura 3.9 Menú de momento de inercia de figuras básicas

24
Figura 3.10 Momento de inercia para un círculo
3.3 RADIO DE GIRO
El radio de giro de un área respecto al eje x se define como la cantidad rx que satisface la
relación:
Ix= r 2 x A
En el paquete se empieza la explicación con una viga sometida a cargas y la definición
anterior de radio de giro. Se prosigue realizando una ampliación a la sección transversal. Se
definen el Área y el Momento de Inercia (la integral ∫ = A
x dA y I 2 ) y en ese instante ya se
cuenta con los elementos participantes en la expresión de Radio de Giro (Figura 3.11).

25
Figura 3.11 Sección a la que se le encontrará el radio de giro
El propósito del paquete didáctico es representar visualmente lo que la expresión significa.
Según la ecuación, el radio de giro representa la distancia en que se concentra toda el área
para que se cumpla la expresión Ix= r 2 x A
Entonces se presenta una animación que parte de la sección transversal con su centroide y el
área es transportada hacia una nueva ubicación (Figura 3.12); en este momento es cuando el
área se transforma en un pequeño círculo, representando la concentración del área en un
punto. Enseguida se muestra la cota de rx que es la distancia necesaria para que se cumpla la
expresión Ix= r 2 x A (Figura 3.13).
Figura 3.12 El área cambiará de ubicación a una distancia r

26
Figura 3.13 El área es concentrada en un punto a una distancia r del eje
3.4 TEOREMA DE LOS EJES DE PARALELOS O DE STEINER
Como se sabe, si se conoce el momento de inercia de un área respecto al eje de inercia
centroidal, su momento de inercia puede determinarse respecto a un eje paralelo usando el
teorema de los ejes paralelos o de Steiner.
La primera escena se enfoca en la demostración del teorema de Steiner y cómo se utiliza el
concepto de los ejes paralelos. Para ello se presenta una sección con su área, su eje
centroidal, y al lado la fórmula de Ix (Figura 3.14).
Figura 3.14 Momento de inercia respecto al eje centroidal

27
A continuación se le explica al usuario que se obtendrá ese mismo momento de inercia pero
ahora desde otro eje paralelo al original (el centroidal) (Figura 3.15). Una vez presentado el
nuevo eje, aparecen las cotas desde éste hasta los puntos necesarios de la fórmula de Ix
(distancia desde el eje al centroide y desde el centroide del área hasta dA) (Figura 3.16).
Figura 3.15 Nuevo eje sobre el cual se obtendrá el momento de inercia
Figura 3.16 Elementos necesarios para el teorema de Steiner

28
Partiendo de la integral original de momento de inercia, se guía al usuario paso a paso en la
sustitución de los nuevos valores hasta llegar a la nueva expresión del “Teorema de ejes
paralelos”.
Ix´= Ix + Ad 2
Terminando la explicación de la determinación de la fórmula, el usuario puede continuar a
un ejemplo de áreas compuestas para que se comprenda la aplicación de la expresión.
La sección empleada en el ejemplo es la misma utilizada para el concepto de centroide, ya
que el usuario está familiarizado con esta sección y conoce su centroide (Figura 3.17). De
igual manera que en el ejemplo anterior, se le da al usuario la opción de elegir el Momento
de Inercia respecto al eje que él decida (Figura 3.18). Puesto que la sección es una viga T
simétrica respecto al eje y, los cálculos de Ix son mucho más extensos que los de Iy.
Figura 3.17 Sección transversal con la ubicación de sus centroide

29
Figura 3.18 Punto de decisión
Al elegir “momento de inercia en x” , se traza un nuevo eje x en el centroide de la sección
total, así como las distancias de éste hasta el centroide de las figuras individuales (Figura
3.19).
Figura 3.19 Distancias desde el eje centroidal x hasta el centroide de cada área
Aparece la fórmula del teorema de Steiner y se calculan los Ix de cada área individual con
ayuda de la expresión de bh 3 /12, ya que las secciones son rectangulares. Con una animación
se llevan los datos desde la figura hasta la fórmula, para que el usuario pueda entender de
dónde surge cada valor.
Para el Iy es más sencillo pues el eje centroidal de toda la figura coincide con todos los
centroides de las figuras individuales (Figura 3.20). Entonces se explica que se debe cancelar

30
el término de Ad 2 de la expresión, quedando la sumatoria de los momentos de inercia de las
secciones individuales (Figura 3.21).
Figura 3.20 Eje centroidal en y
Figura 3.21 Reducción de la fórmula de ejes paralelos para Iy para el ejemplo

31
CAPÍTULO IV
FUERZA CORTANTE Y MOMENTO FLEXIONANTE EN VIGAS
4.1 CONCEPTOS BÁSICOS
Este capítulo explica cómo las diversas fuerzas aplicadas a una viga llegan a producir fuerza
cortante y momento flexionante internos.
En la primera escena se muestra una viga; subsiguientemente se aplican fuerzas a ella
(Figura 4.1) y, debido a estas cargas, la viga sufre una deformación. Para explicarle al
usuario los que ocurre internamente en la viga es necesario realizar un corte en una sección
C (Figura 4.2).
C
Figura 4.1 Viga sometida a cargas
C
Figura 4.2 Flexión de la viga debido a cargas
Antes de pasar al corte se le indica al usuario que es necesario realizar el diagrama de cuerpo
libre y encontrar las reacciones.

32
Hecho esto, la viga se divide en dos partes para estudiar lo que ocurre en el corte (Figura
4.3). Se realiza un cambio de perspectiva para favorecer la visión de las acciones internas
(Figura 4.4 a) que equilibran al cuerpo con las fuerzas externas aplicadas y, entonces,
visualmente acciones las fuerzas V y M. Posteriormente se dibujan los esfuerzos que causa
la flexión en la viga (Figura 4.4 b) y cuya obtención se estudiará en el capítulo siguiente.
C
Figura 4.3 Corte en la viga
Figura 4.4 (a) Surgen las fuerzas que equilibran al elemento
Figura 4.4 (b) Esfuerzos producidos por momento flexionante

33
También se le proporciona información al usuario de la utilidad y necesidad de saber dónde
se ubican los momentos flexionantes y cortantes máximos. Esto último se explica en escenas
más adelante en la secuela de cálculo .
4.2 CONVENCIÓN DE SIGNOS
Para analizar vigas sometidas a cargas se ha adoptado una convención de signos para que los
cortantes y momentos estudiados tengan significado. En el paquete didáctico se dan los
ejemplos y circunstancias en los que un momento se considera positivo o negativo.
Se empieza con una escena donde se observan dos vigas sin carga alguna (Figura 4.5).
Figura 4.5 Vigas libre de cargas
Posteriormente a cada una se le aplican acciones externas diferentes, una fuerza vertical a la
primera viga y a la segunda momentos. Con esto se observa una deformación “cóncava” de
las vigas como se muestra en las figura 4.6.

34
Figura 4.6 Flexión positiva
Siguiendo, se cambia el sentido de las acciones externas y la deformación de las vigas se es
ahora “convexa” (Figura 4.7). Cada deformación va acompañada de su texto indicando si el
momento es positivo o negativo.
Figura 4.7 Flexión negativa
Al pasar a la siguiente escena se presenta la convención de signos usada para la fuerza
cortante. Aquí se presenta la animación de una viga libre de cargas y se le hace un corte por
la mitad.
Se le aplican cargas a la viga, de ambos lados del corte, y la viga se corta. Dependiendo del
sentido de las cargas aplicadas, la viga se corta de dos diferentes maneras. Al usuario se le
indica qué cargas logran el corte positivo y de igual forma cuáles el corte negativo (Figura
4.8).

35
Positivo
Negativo
Figura 4.8 Convención de signos para cortante
4.2 DIAGRAMA DE FUERZA CORTANTE Y MOMENTO FLEXIONANTE
Para la secuela de cálculo, el paquete reúne tres casos de vigas, de diferentes claros,
diferente ubicación de apoyos, y con diferentes tipos de cargas aplicadas a ellas (puntuales,
distribuidas, triangulares). Con esto se trata de abarcar los escenarios más comunes en que
una viga está sometida a fuerzas.
En cada ejemplo se guía al usuario con la metodología usual para determinar los diagramas
de fuerza cortante y momento flexionante.
36
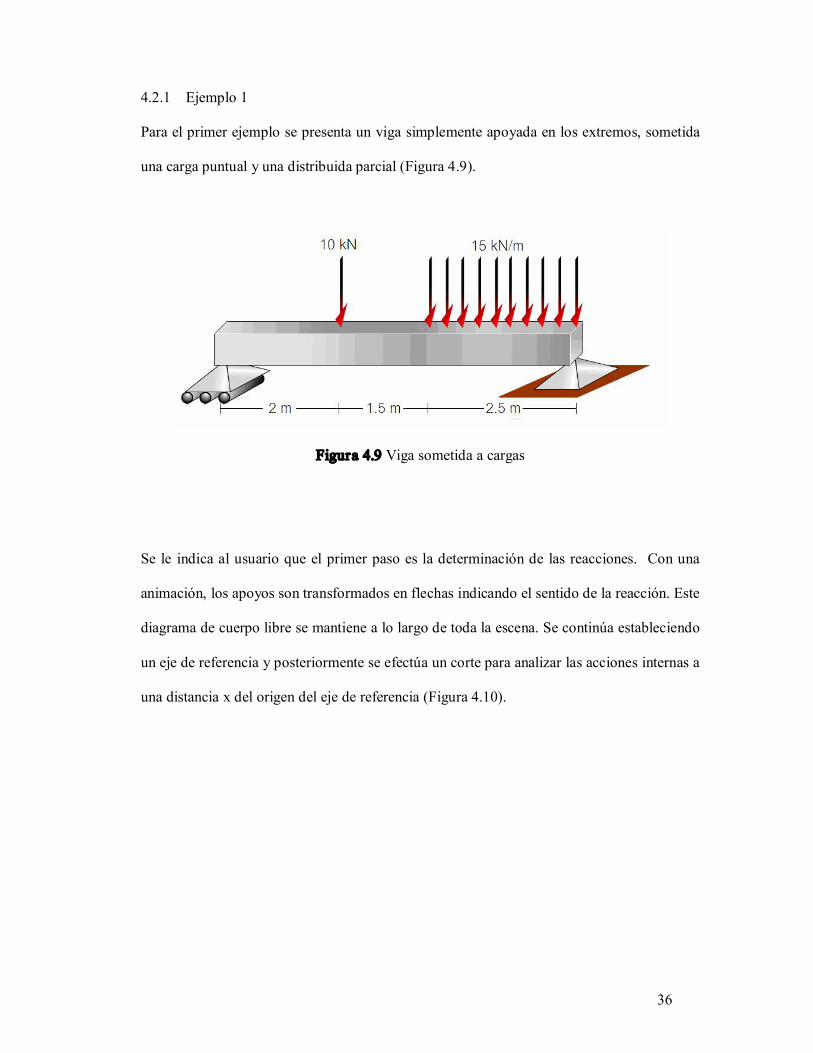
4.2.1 Ejemplo 1
Para el primer ejemplo se presenta un viga simplemente apoyada en los extremos, sometida
una carga puntual y una distribuida parcial (Figura 4.9).
Figura 4.9 Viga sometida a cargas
Se le indica al usuario que el primer paso es la determinación de las reacciones. Con una
animación, los apoyos son transformados en flechas indicando el sentido de la reacción. Este
diagrama de cuerpo libre se mantiene a lo largo de toda la escena. Se continúa estableciendo
un eje de referencia y posteriormente se efectúa un corte para analizar las acciones internas a
una distancia x del origen del eje de referencia (Figura 4.10).

37
Figura 4.10 Primer corte a una distancia x del extremo izquierdo de la viga
Se obtiene el diagrama del cuerpo libre del lado izquierdo del corte y se analizará todas las
fuerzas que se encuentran en ese lado; por equilibrio se obtienen las ecuaciones para la
fuerza cortante V y el momento flexionante M (Figura 4.11).
Figura 4.11 Ecuaciones para V y M obtenidas para el primer corte
Una vez obtenidas las ecuaciones, la placa (que representa la localización del corte) se
mueve hacia la derecha hasta pasar la carga de los 10 kN. Aquí se le explica al usuario que el

38
diagrama de cuerpo libre del lado izquierdo de la viga ha cambiado debido a la presencia de
la nueva carga y, en consecuencia, habrá nuevas ecuaciones para V y M (Figura 4.12).
Figura 4.12 Ecuaciones para V y M obtenidas en el segundo corte
Realizado esto, la placa se mueve nuevamente ahora más allá de los 3.5 m. Aquí aparecen
nuevas cargas que modifican el diagrama de cuerpo libre anterior. Entonces nuevas
ecuaciones para V y M son obtenidas. Para explicar de manera visual cómo se consideran las
cargas distribuidas, mediante una animación ésta se transforma en una carga puntual y se
acota su distancia al corte (Figura 4.13).

39
Figura 4.13 Ecuaciones para V yM obtenidas en el tercer corte
Se le explica al usuario que no es estrictamente necesario estudiar la viga de izquierda a
derecha, y que, en el caso del último corte, resulta más conveniente analizar el diagrama de
cuerpo libre del lado derecho del corte. Se cambia el eje de referencia y se consiguen las
ecuaciones para V y M. Éstas se comparan con las obtenidas inicialmente para el mismo
corte, notando una disminución considerable de elementos en las expresiones (Figura 4.14).

40
Figura 4.14 Diagrama de cuerpo libre del lado derecho del tercer corte
De esta manera se le explica al usuario las consideraciones que debe de tomar en cuenta al
momento de definir el número de cortes necesarios para analizar una viga. A continuación se
muestran gráficamente los cortes que fueron necesarios para obtener las variaciones de
fuerza cortante y momento flexionante de esta viga en particular (Figura 4.15).
Figura 4.15 Cortes necesarios para en análisis de la viga
41
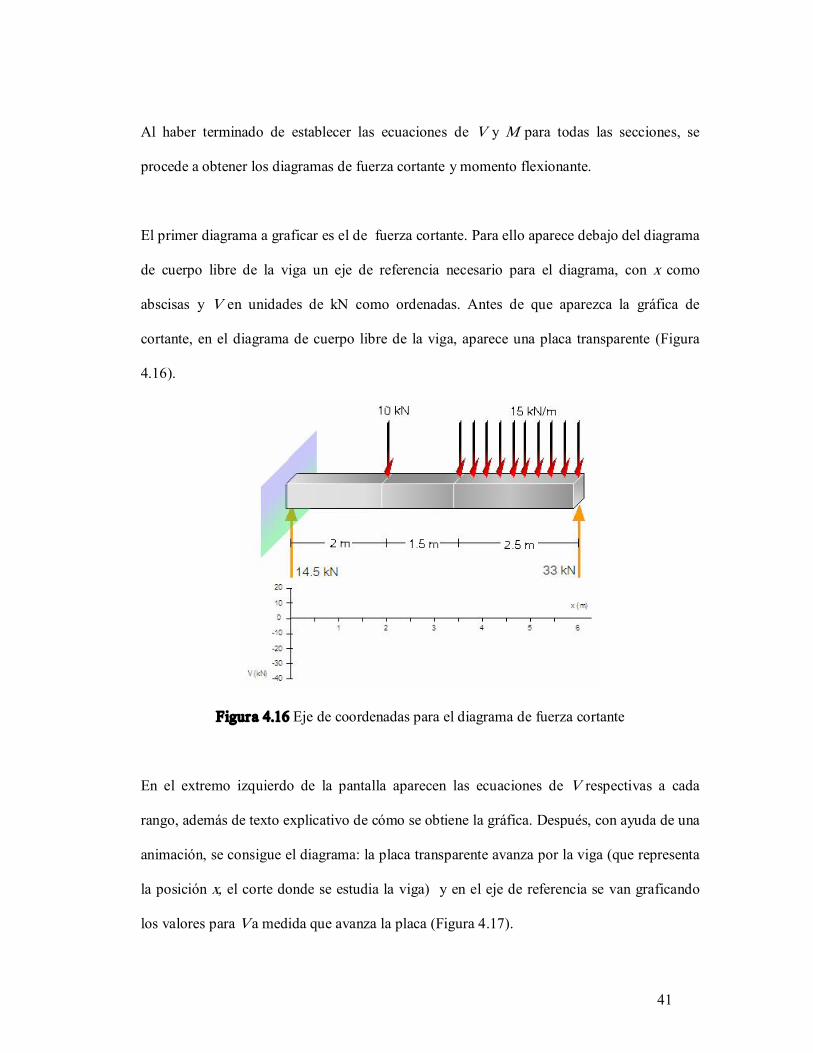
Al haber terminado de establecer las ecuaciones de V y M para todas las secciones, se
procede a obtener los diagramas de fuerza cortante y momento flexionante.
El primer diagrama a graficar es el de fuerza cortante. Para ello aparece debajo del diagrama
de cuerpo libre de la viga un eje de referencia necesario para el diagrama, con x como
abscisas y V en unidades de kN como ordenadas. Antes de que aparezca la gráfica de
cortante, en el diagrama de cuerpo libre de la viga, aparece una placa transparente (Figura
4.16).
Figura 4.16 Eje de coordenadas para el diagrama de fuerza cortante
En el extremo izquierdo de la pantalla aparecen las ecuaciones de V respectivas a cada
rango, además de texto explicativo de cómo se obtiene la gráfica. Después, con ayuda de una
animación, se consigue el diagrama: la placa transparente avanza por la viga (que representa
la posición x, el corte donde se estudia la viga) y en el eje de referencia se van graficando
los valores para V a medida que avanza la placa (Figura 4.17).
42
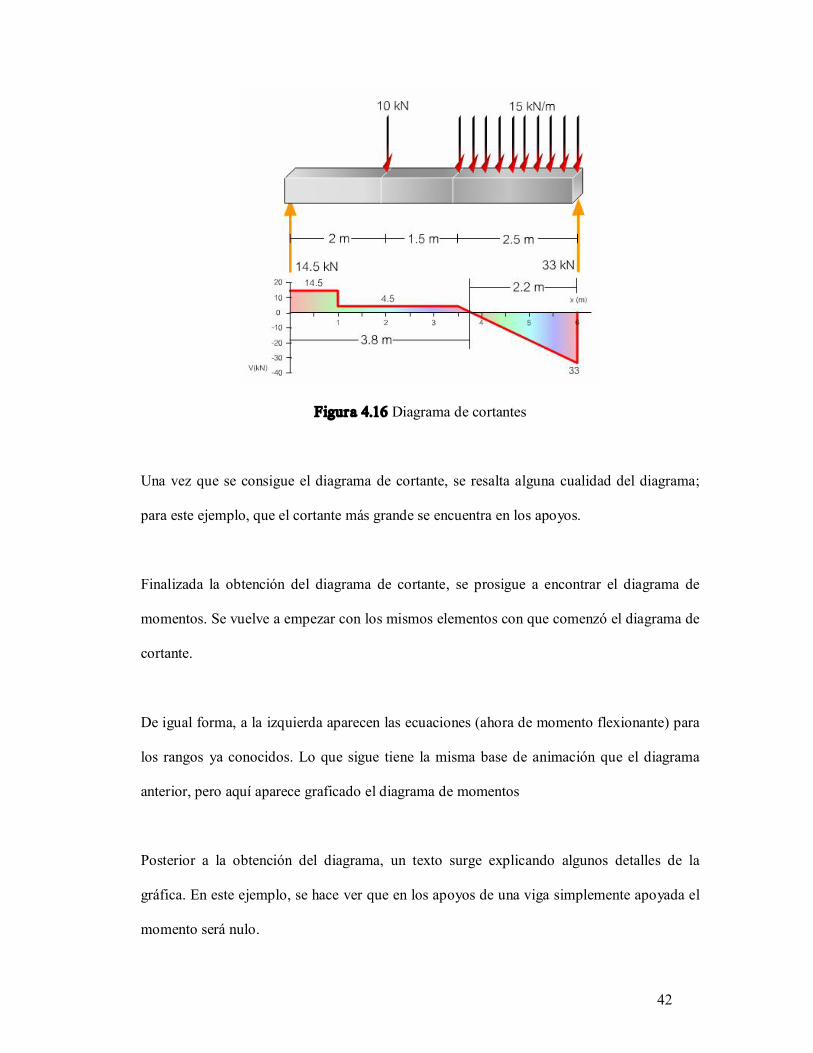
Figura 4.16 Diagrama de cortantes
Una vez que se consigue el diagrama de cortante, se resalta alguna cualidad del diagrama;
para este ejemplo, que el cortante más grande se encuentra en los apoyos.
Finalizada la obtención del diagrama de cortante, se prosigue a encontrar el diagrama de
momentos. Se vuelve a empezar con los mismos elementos con que comenzó el diagrama de
cortante.
De igual forma, a la izquierda aparecen las ecuaciones (ahora de momento flexionante) para
los rangos ya conocidos. Lo que sigue tiene la misma base de animación que el diagrama
anterior, pero aquí aparece graficado el diagrama de momentos
Posterior a la obtención del diagrama, un texto surge explicando algunos detalles de la
gráfica. En este ejemplo, se hace ver que en los apoyos de una viga simplemente apoyada el
momento será nulo.

43
También se le explica al usuario que el diagrama de momentos ayuda a entender la manera
en que la viga se flexiona. Para esto, el diagrama de cuerpo libre de la viga se flexiona con
una animación hasta el punto en que puede verse la relación entre la deflexión y el diagrama
de momentos (Figura 4.17).
Figura 4.17 Deflexión de la viga y Diagrama de momentos
4.2.2 Ejemplo 2
En el siguiente ejemplo se tiene una viga de diferente longitud, con una carga concentrada y
una distribuida, un apoyo simple en el extremo izquierdo y otro fijo a 2 metros del extremo
derecho (Figura 4.19).

44
Figura 4.19 Viga sometida a cargas
Para este ejercicio se empieza por obtener las reacciones, establecer el eje de referencia y,
posteriormente, a determinar el número de cortes necesarios (Figura 4.20).
Figura 4.20 Son necesarios 4 cortes para este ejemplo
La secuencia de cálculos sigue siendo la misma; sin embargo, hay un cambio en la secuencia
de animaciones. En este ejemplo, las animaciones no se enfocan en obtener los diagramas de
cuerpo libre, sino en trabajar con los intervalos para cada corte.
El conseguir las ecuaciones para cortante y momento se basa en el mismo procedimiento
analítico explicado en el ejemplo anterior y, de igual manera, se explica en éste.
Cuando se obtienen los diagramas de cortante (Figura 4.21) y de momento, se observa que
ellos son muy diferentes a los del otro ejemplo pues la posición de los apoyos influye mucho

45
en los diagramas. También se presenta una animación al final donde la viga se deforma
dejando ver así la relación con el diagrama de momentos (Figura 4.21).
Figura 4.21 Diagrama de cortantes
Figura 4.22 Deflexión de la viga y Diagrama de momentos

46
4.2.3 Ejemplo 3
En este ejemplo se presenta otro caso, donde la viga está sometida a una carga uniforme
trapezoidal y una puntual (Figura 4.23).
Figura (4.23) Viga sujeta a cargas
Puesto que la carga trapezoidal se encuentra en el extremo izquierdo y el análisis de la viga
se realiza de izquierda a derecha, en el primer corte es dónde se observan cambios.
La carga trapezoidal fue tratada de tal manera que se le dió al usuario la herramienta de
lidiar con un carga rectangular y una triangular, lo que sucede al descomponer el trapecio en
un rectángulo (una carga distribuida) y un triángulo (carga triangular) (Figura 4.24).
47
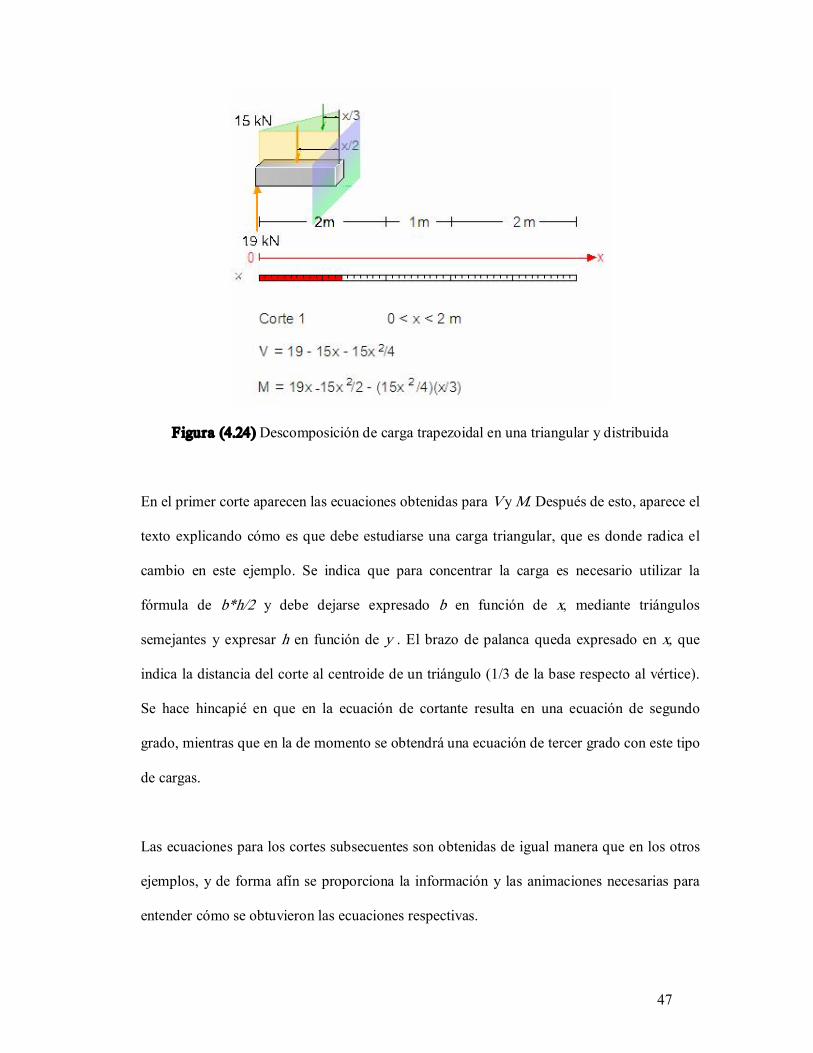
Figura (4.24) Descomposición de carga trapezoidal en una triangular y distribuida
En el primer corte aparecen las ecuaciones obtenidas para V y M. Después de esto, aparece el
texto explicando cómo es que debe estudiarse una carga triangular, que es donde radica el
cambio en este ejemplo. Se indica que para concentrar la carga es necesario utilizar la
fórmula de b*h/2 y debe dejarse expresado b en función de x, mediante triángulos
semejantes y expresar h en función de y . El brazo de palanca queda expresado en x, que
indica la distancia del corte al centroide de un triángulo (1/3 de la base respecto al vértice).
Se hace hincapié en que en la ecuación de cortante resulta en una ecuación de segundo
grado, mientras que en la de momento se obtendrá una ecuación de tercer grado con este tipo
de cargas.
Las ecuaciones para los cortes subsecuentes son obtenidas de igual manera que en los otros
ejemplos, y de forma afín se proporciona la información y las animaciones necesarias para
entender cómo se obtuvieron las ecuaciones respectivas.

48
Pasando a la elaboración de los diagramas de cortante y momento, se colocan las ecuaciones,
ya sean de cortante o momento, en la izquierda y, con base en la misma animación usada en
ejemplos anteriores, se grafican los diagramas (Figura 4.25).
Figura 4.25 Diagrama de cortante
Al terminar con la obtención del diagrama de momentos, continúa la animación de la viga
flexionándose de acuerdo a éste (Figura 4.26).

49
Figura 4.26 Deflexión de la viga y Diagrama de momentos
4.3 RELACION ENTRE CARGA, CORTANTE Y MOMENTO.
En esta escena se presenta la demostración de la relación existente entre momento, cortante
y carga.
En una viga (Figura 4.27) se analiza un elemento diferencial de ancho Δx. Este elemento se
aísla del resto de la viga y se observa, que en un lado, existen las accionesas internas V y M,
y, del otro, estas acciones más un incremento Δ de M y V (Figura 4.28) debido a que la carga
aplicada se va incrementando cuando la viga se estudia de izquierda a derecha.

50
Figura 4.27 Viga sujeta a cargas
Figura 4.28 Elemento diferencial con sus correspondientes acciones internas y cargas
Contando con el diagrama de cuerpo libre del elemento diferencial se prosigue a establecer
las ecuaciones de equilibrio vertical y de momentos. Cada una de estas ecuaciones, después
de su manejo algebraico y de sustituciones explicadas en el paquete didáctico, conduce
respectivamente a la determinación de que:
) (x w dx dV − = ) (x V dx
dM − =

51
Lardner explica que:
“Si se piensa en el diagrama de carga como una curva de w (x) contra x, se ve que la pendiente de la
curva de la fuerza cortante V(x) en el punto x de un diagrama de cortante es igual al negativo del valor
de q(x) en ese punto del diagrama. Asimismo, con base en la segunda ecuación se concluye que la
pendiente de la curva del momento flexionante M(x) de un diagrama de momento flexionante en un
punto x es igual al negativo del valor V(x) en el diagrama de fuerza cortante en ese punto” (1996).

52
CAPÍTULO V
ESFUERZOS DEBIDO A FLEXIÓN Y CORTANTE
El objetivo de este capítulo es ilustrar el procedimiento seguido para obtener los esfuerzos
que son producidos por el momento flexionante y la fuerza cortante en vigas. Se dan las
herramientas para calcular la distribución de esfuerzos que actúan en una sección, donde la
resultante de estos esfuerzos es iguala a V y la sumatoria de momentos es igual al momento
flexionante M.
5.1 ESFUERZOS INDUCIDOS POR MOMENTO FLEXIONANTE
Para llegar a la ecuación deseada, en necesario conocer la geometría de deformación. Con
base a argumentos de deformación unitaria y simetría se obtiene la deformación unitaria de
la viga. Posteriormente con la relación entre esfuerzo y deformación unitaria, se obtienen
los esfuerzos con base en la deformación unitaria.
A continuación se hace uso de las condiciones generales de equilibrio, en las que
sustituyendo, se logra la ecuación para el esfuerzo normal máximo causado por el momento
flexionante .
I Mc
m = σ
Donde c es la distancia del eje neutro a la fibra más alejada de la sección.
Esta expresión va acompañada de una animación que muestra la ubicación de los esfuerzos
máximos en la sección transversal de una viga debidos a flexión positiva (Figura 5.1).

53
Figura 5.1 Esfuerzos máximos por flexión positiva obtenidos a una distancia c del eje neutro
También se obtiene la expresión para esfuerzo de cualquier fibra localizada a la distancia “y”
del eje neutro.
I My
x = σ
Junto con la expresión se muestra una animación ejemplificando los esfuerzos normales
obtenidos a una distancia “y” del eje neutro en una sección transversal de una viga (Figura
5.2).
Figura 5.2 Esfuerzos obtenidos a una distancia “y” del eje neutro

54
En el paquete didáctico se muestra, paso a paso, las sustituciones y, además, se profundiza
con imágenes en la obtención de las expresiones de deformación unitaria de una viga (Figura
5.3) y de la satisfacción de la condición general de equilibrio para momentos (Figura 5.4).
Figura 5.3 Deformación unitaria de una viga
Figura 5.4 Condición de equilibrio para un fragmento de una viga
Posterior a la obtención de las expresiones se continúa con la resolución de un ejemplo.
El objetivo es determinar el esfuerzo máximo para la viga del ejemplo 3 resuelto en el
capitulo anterior.

55
Se presenta la viga y el diagrama de momentos flexionantes que previamente fue obtenido.
Se localiza el momento flexionante máximo en la gráfica tanto en magnitud y localización
de la sección transversal donde se presenta dicho momento (Figura 5.5). Localizada la
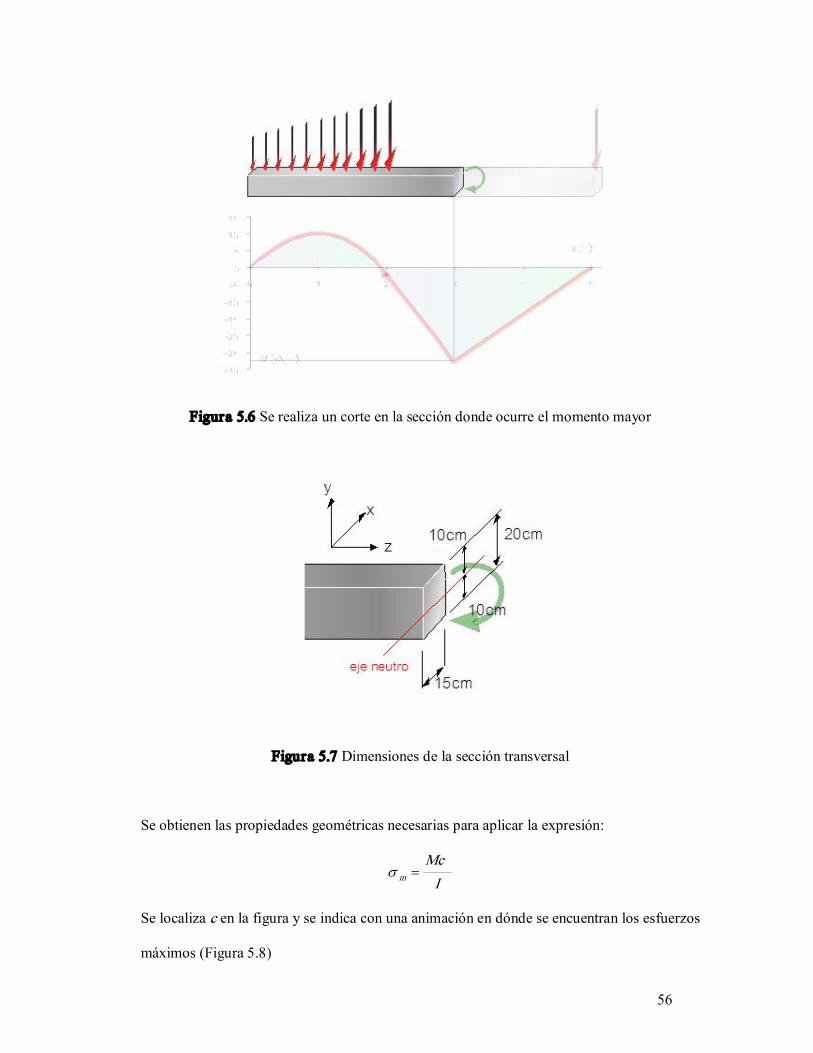
sección se realiza un corte en ella (Figura 5.6) y posteriormente se efectúa una ampliación a
la sección transversal donde se pueden observar las dimensiones de la viga. (Figura 5.7)
Figura 5.5 Magnitud y localización del momento flexionante más grande
56
Figura 5.6 Se realiza un corte en la sección donde ocurre el momento mayor
Figura 5.7 Dimensiones de la sección transversal
Se obtienen las propiedades geométricas necesarias para aplicar la expresión:
I Mc
m = σ
Se localiza c en la figura y se indica con una animación en dónde se encuentran los esfuerzos
máximos (Figura 5.8)

57
Figura 5.8 Esfuerzos máximos
5.2 ESFUERZOS INDUCIDOS POR CORTANTE
Para encontrar la ecuación de esfuerzo cortante promedio en una cara de un elemento que ha
sido cortado paralelo a su eje, se parte de estudiar un elemento diferencial vertical de una
viga sometida a cargas (Figura 5.9).
Figura 5.9 Viga sometida a cargas
58
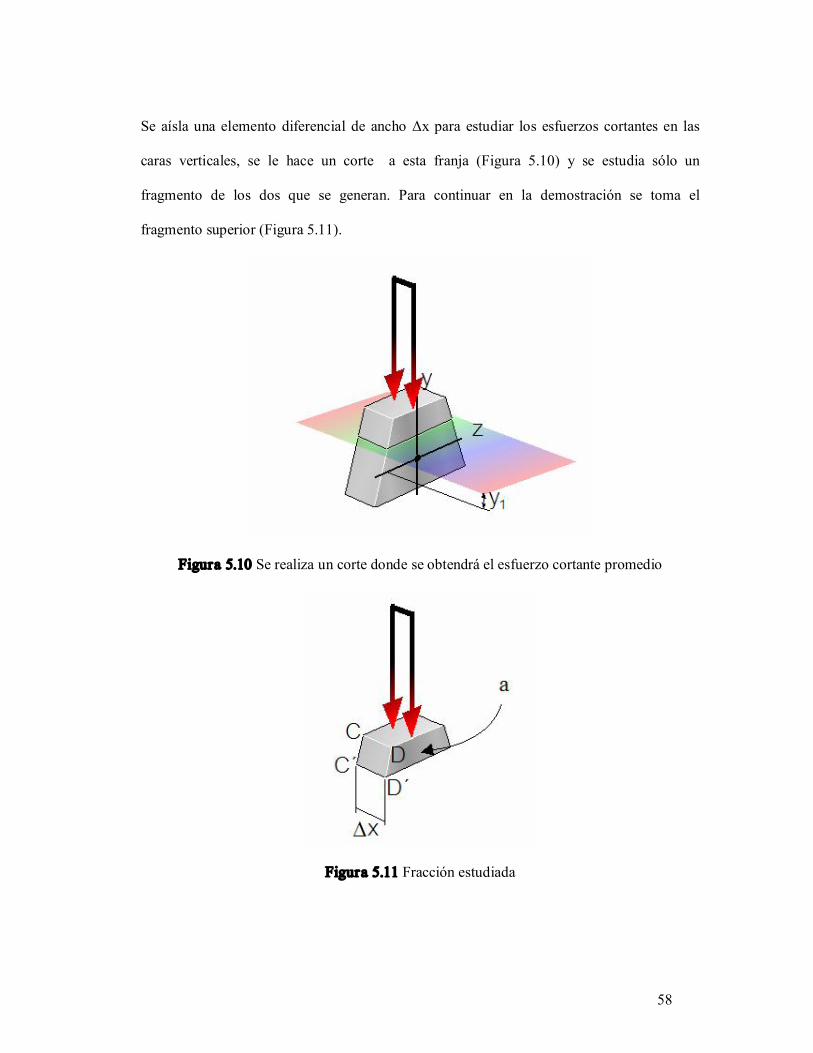
Se aísla una elemento diferencial de ancho Δx para estudiar los esfuerzos cortantes en las
caras verticales, se le hace un corte a esta franja (Figura 5.10) y se estudia sólo un
fragmento de los dos que se generan. Para continuar en la demostración se toma el
fragmento superior (Figura 5.11).
Figura 5.10 Se realiza un corte donde se obtendrá el esfuerzo cortante promedio
Figura 5.11 Fracción estudiada

59
Este elemento está sujeto a una fuerza cortante horizontal en la cara inferior, a fuerzas
cortantes verticales y esfuerzos normales en los costados (Figura 5.12).
Figura 5.12 Fuerzas actuantes en el fragmento estudiado
Se aplica la ecuación general de equilibrio en x, con todas las fuerzas y esfuerzos
mencionados que participan en ella. Sustituyendo por fórmulas vistas en el capítulo 3 (fuerza
cortante y momento flexionante en vigas) e introduciendo el concepto de Q, se llega a la
expresión que da el valor de fuerza cortante y a la expresión de fuerza por unidad de área q.
x I
VQ H ∆ = ∆
I VQ
q =
Para conseguir el esfuerzo cortante, se divide esta expresión entre el área ΔA (Figura 5.13).
Figura 5.13 Área y fuerza cortante

60
Eliminando términos, queda la expresión:
bI VQ
prom = τ
Se prosigue a la solución de un ejemplo que consiste encontrar el espaciamiento s de los
tornillos que unen a elementos de madera para formar una viga cuando ésta soporta una
carga vertical (Figura 5.14), sabiendo que los tornillos soportan cierta fuerza cortante.
Figura 5.14 Viga de madera
Se analiza la sección inferior del elemento de madera indicado en la figura 5.15. Ahí se
obtendrá la fuerza por unidad de área q.

61
Figura 5.15 Se obtendrá q en la parte inferior del elemento indicado
Se estudia la sección transversal para obtener las propiedades necesarias para aplicar la
formula de q.
I VQ
q =
Figura 5.16 Sección transversal de la viga

62
Una vez obtenido el primer momento de inercia Q y el segundo momento de inercia I , se
aplica la ecuación de q. Puesto que se proporcionó la resistencia de cada tornillo, la
separación s se obtiene de dividir dicha resistencia entre q
Figura 5.10 Separación s entre tornillos

63
CAPÍTULO VI
CONCLUSIONES Y RECOMENDACIONES
Se concluyó el trabajo creando el material didáctico e interactivo que se buscaba. El paquete
didáctico pretende ayudar a usuarios que tengan conocimiento previo a los temas tratados en
esta tesis, como estática, cálculo, física, etc.
Las animaciones encontradas en el paquete son la que han sido tratadas de recrearse en los
salones de clase y en los libros, es decir, las más representativas para cada tema. La
interactividad se logra al tener el usuario el control sobre la línea de tiempo en el paquete
didáctico, y en momentos donde se requiere que el usuario tome alguna decisión.
El ambiente de estudio en el paquete didáctico es fácil y son mínimas las divisiones y
subdivisiones de los temas, lo que, en caso contrario, llega a cansar a los usuarios y dificulta
la búsqueda de algún tema en particular.
El paquete didáctico tiene como fin ser un apoyo para algunos conceptos del curso, por lo
cual es conveniente contar con alguna persona conocedora de la materia para hacer cualquier
aclaración con dudas que lleguen a surgir estos temas u otros relacionados a ellos.
El medio seleccionado para el paquete didáctico fue acertado pues se necesitan pocos
requerimientos para poder ejecutarlo (Flash Player 7). En Internet se encuentran versiones
para descargar que permiten correr los archivos ejecutables del paquete didáctico

64
Al usuario se le proporciona la versión ejecutable del paquete didáctico, reservando la
versión programable para la UDLA, dejando abierta la oportunidad de actualizaciones en el
futuro.


















