Comportamiento del nivel de líquido en un sistema de dos ... · PDF fileBalance de masa...
20
f 0 (t) (f 1 = k 1 * h 1 yf 2 = k 2 * h 2 ) f 0 (t)
Transcript of Comportamiento del nivel de líquido en un sistema de dos ... · PDF fileBalance de masa...

Comportamiento del nivel de líquido en un
sistema de dos tanques en serie
Marcela Echavarria R., Gloria Lucía Orozco C., Alan Didier Pérez Á.
Abstract
Se desea conocer el comportamiento del nivel de un sistema de dostanques en serie donde el �ujo de salida del primer tanque entra al se-gundo tanque. Para ello se planteó un modelo matemático, el cual seresolvió por dos caminos en Matlab®, a saber: analíticamente utilizandoSimulink® y numéricamente empleando el comando ode23s el cual sebasa en un Runge Kutta. Luego de obtenidos los resultados se compara-ron ambos resultados para diferentes tipos de entradas (perturbaciones)y se observaron y analizaron ciertas diferencias en las soluciones.
1 Introducción
Un modelo matemático es simplemente una imitación de la realidad, con el cualse busca usualmente ganar perspicacia sobre el comportamiento de sistemas,probándolos, controlándolos u optimizándolos. En el proceso de construcciónde modelos, el principal objetivo es dar una equivalencia matemática de nuestroproblema de la vida real para luego resolver y �nalmente interpretar. En losproblemas de ingeniería, tratamos de capturar esto en forma de ecuaciones deciertas características, haciendo énfasis en ciertos aspectos y omitiendo aquellosque aunque hagan parte de la realidad, su contribución en ella sea mínima parasimpli�car nuestro modelo y su solución. [1]
Para nuestros modelos matemáticos, nos basamos en primera estancia delos principios fundamentales de conservación de masa, energía y/o movimientosegún el caso.
Nuestro problema se centra en la obtención del comportamiento de nivel dellíquido a través del tiempo, t de dos tanques conectados en serie donde el �ujode salida del primero entra al segundo tanque, dado el �ujo de entrada f0 (t).Se asume que el �ujo de salida de cada tanque es una función lineal de la alturade líquido en el tanque(f1 = k1 ∗ h1 y f2 = k2 ∗ h2) y que cada tanque tiene unárea de sección transversal constante. Se asume también que la densidad esconstante y el �ujo de entrada f0 (t).
1

2 Modelo matemático
El sistema de proceso se encuentra conformado por dos tanques en serie de áreasde sección transversal constantes, por donde �uye un líquido (una sustanciapura) que pasa del primer tanque al segundo tanque como se muestra en la�gura 1. El objetivo es modelar el sistema para predecir la variación de laaltura del segundo tanque de acuerdo a la alimentación del primer tanque f0 (t)Se asume que el �ujo de salida de cada tanque es una función lineal de la alturade líquido en el respectivo tanque (f1 = k1 ∗ h1 y f2 = k2 ∗ h2).
Figure 1: Esquema del proceso
2.1 Construcción del modelo matemático
Especi�caciones
� El �ujo de alimentación es función del tiempo (lineal, sinusoidal entreotros).
� El �ujo de salida del primer tanque es una función lineal de la altura deltanque 1.
� El �ujo de salida del segundo tanque es una función lineal de la altura deltanque2.
� Por los tanques transita un líquido puro.
� Tanques de àrea de sección transversal constante.
� Variable fundamental: Masa
� Variables de caracterizaciòn: Densidad (ρi), àrea (Aj), altura (hj)
2

2.1.1 Objetivo del modelamiento
� Predecir el comportamiento dinámico del nivel en el primer y segundotanque, de acuerdo al �ujo de entrada en el primer tanque.
2.1.2 De�nición de los volúmenes de control
Para el desarrollo del modelo matemático se trabajaran dos volúmenes de con-trol como se observan en la �gura 2 (líneas punteadas azul y roja). Como sepretende obtener la dinámica del nivel del tanque, entonces se debe saber cuáles la acumulación en el tanque y esta depende del �ujo de entrada y de salidaen el tanque. La dinámica del primer volumen de control (línea punteada azul)determinara el �ujo de entrada en el segundo tanque, por lo que se hizo nece-sario tomar este primer volumen de control. El segundo volumen de control(línea punteada roja) se plantea para realizar sobre el modelo matemático quedetermine la dinámica del tanque 2 y así predecir el nivel del tanque.
Figure 2: Esquema del volumenes de control del sistema
Volumen de control 1
� Sistema: Tanque 1.
� Límites: Paredes internas del tanque 1.
� Entrada: Flujo de alimentación Fo(t).
� Salida: Flujo de salida F1.
3

Volumen de control 2
� Sistema: Tanque 2.
� Límites: Paredes internas del tanque 2.
� Entrada: Flujo de alimentación F1.
� Salida: Flujo de salida F2.
2.1.3 Ecuaciones del modelo
Balance de masa (volumen de control 1):
m0 − m1 =d
dt(m1) (1)
Balance de masa (volumen de control 2):
m1 − m2 =d
dt(m2) (2)
Ecuaciones consecutivas
ρi =mi
Vi(3)
mi = ρi ∗ Fi (4)
V = Aj ∗ hj (5)
Variables
t: Tiempo [s]m:Flujo másico en el punto i [kg/s]ρi:Densidad del líquido en el punto i [kg/m3]V :Volumen [m3] : Altura del tanque j [m]Aj :Área de sección transversal del tanque j [m2]mi: Masa del líquido en el punto i [kg]Fi: Flujo volumétrico del líquido en el pinto i [m3/s]
Suposiciones:
� El proceso se realiza a propiedades físico-quimicas constantes.
ρi = cte
� Variación lineal con la altura de los �ujos de salida en cada tanque.
4

f1 = k1 ∗ h1 (6)
f2 = k2 ∗ h2 (7)
� El �ujo de entrada es una función del tiempo.
F0 = F0 (T )
� Sistema homogéneo.
Parámetros
Los parámetros son las constantes k1, k2, A1 y A2
Modelo a resolver
d masa acumulada
dt=
i∑i=1
masa de entrada −j∑
j=1
masa de salida (8)
Reemplazando las ecuaciones consecutivas(3) ,(5) y (6) en la ecuación (8), yaplicando las suposiciones mencionadas se obtiene que:
d ρA1h1 (t)
dt= f0(t)ρ− f1ρ (9)
d ρA1h1 (t)
dt= f0(t)ρ− k1h1ρ (10)
dh1 (t)
dt=f0(t)− k1h1
A1(11)
Reemplazando las ecuaciones consecutivas(3) ,(5) y (7) en la ecuación (8), yaplicando las suposiciones mencionadas se obtiene que:
d ρA2h2 (t)
dt= f1ρ− f2ρ (12)
d ρA2h2 (t)
dt= k1h1ρ− k2h2ρ (13)
dh2 (t)
dt=k1h1 − k2h2
A2(14)
Evaluando las ecuaciones diferenciales ordinarias (11) y (14 ) en estado es-table se obtiene:
dh1 (0)
dt=f0 (0)− k1h1 (0)
A1(15)
5

dh2 (0)
dt=k1h1 (0)− k2h2 (0)
A2(16)
Grados de Libertad
Variables independientes: tVariables dependientes: h1, h2Parámetros: k1, k2, A1 y A2
Número de ecuaciones: 2 Edo's.Numero de variables a resolver: 2 h1, h2
Análisis de unidades de las ecuaciones diferenciales ordinarias de primerorden (11) y (14)
⟨ms
⟩=
⟨m3
s
⟩− [k1] 〈m〉
m2
Para que las unidades sean consistentes, las unidades de la constante k1 yk2deben ser:
[k1] y [k2] =
⟨m2
s
⟩Para resolver el sistema de Edo's se implementara Simulink ®, utilizando
el ode45 en el cual se encuentra implementado un Runge-Kutta de 4to orden.
Luego, restando (11)-(15) y (14)-(16) se obtiene que:
A1
d(h1 (t)− h1 (0)
)dt
= (f0(t)− f0 (0))− k1(h1 (t)− h1 (0)
)(17)
A2
d(h2 (t)− h2 (0)
)dt
= k1(h1 (t)− h1 (0)
)− k2
(h2 (t)− h2 (0)
)(18)
De�niendo las variables de desviación:
H1 = h1 (t)− h1 (0) (19)
H2 = h2 (t)− h2 (0) (20)
F0 (t) = f0(t)− f0 (0) (21)
Reemplazando (19) y (21) en (17) , (19) y (20) en (18) se obtiene:
A1dH1 (t)
dt= F0 (t)− k1H1 (t) (22)
6
A2dH2 (t)
dt= k1H1 (t)− k2H2 (t) (23)
Reordenando las ecuaciones (22) y (23)
A1dH1 (t)
dt+ k1H1 (t) = F0 (t) (24)
A2dH2 (t)
dt+ k2H2 (t) = k1H1 (t) (25)
Dividiendo por el término que acompaña la variable dependiente, k1en laecuaciòn (24) y k2 en la ecuaciòn (25) se obtiene:
A1
k1
dH1 (t)
dt+H1 (t) =
1
k1F0 (t) (26)
A2
k2
dH2 (t)
dt+H2 (t) =
k1k2H1 (t) (27)
Agrupando y realizando el análisis dimensional
τ1 =A1
k1(28)
〈s〉 =
⟨m2
m2
s
⟩
K1 =1
k1(29)
⟨ s
m2
⟩=
⟨1m2
s
⟩
τ2 =A2
k2(30)
〈s〉 =
⟨m2
m2
s
⟩
K2 =k1k2
(31)
〈adimensional〉 =
⟨m2
sm2
s
⟩Reemplazando (28) y (29) en (26) y (30)y (31) en (27) se obtiene que:
τ1dH1 (t)
dt+H1 (t) = K1F0 (t) (32)
7

τ2dH2 (t)
dt+H2 (t) = K2H1 (t) (33)
Aplicando la transformada de Laplace en las ecuaciones (32) y (33) se obtieneque:
τ1sH1 (s) +H1 (s) = K1F0 (s) (34)
τ2sH2 (s) +H2 (s) = K2H1 (s) (35)
Factor común
H1 (s) (τ1s+ 1) = K1F0 (s) (36)
H2 (s) (τ2s+ 1) = K2H1 (s) (37)
Despejando de tal forma que se obtenga la función de transferencia quedescribe el comportamiento de el primer tanque se obtiene que:
H1 (s)
F0 (s)= G1 (s) =
K1
τ1s+ 1(38)
Asimismo despejando de tal forma que se obtenga la función de transferenciaque describe el comportamiento del segundo tanque se obtiene que:
H2 (s)
H1 (s)= G2 (s) =
K2
τ2s+ 1(39)
Las ecuaciones (38) y (39) son la F.T.1 y la F.T.2 respectivamente manejandoalgebraicamente estas se obtiene una tercera función de transferencia F.T.3 lacual determina la variación en el nivel del segundo tanque respecto a cualquiertipo de entrada es:
Despejando de (38) y (39) H1 (s)y H2 (s)respectivamente se obtiene:
H1 (s) =K1
τ1s+ 1F0 (s) (40)
H2 (s) =K2
τ2s+ 1H1 (s) (41)
Reemplazando (40) en (41)
H2 (s) =K2
τ2s+ 1
K1
τ1s+ 1F0 (s) (42)
H2 (s)
F0 (s)= G3 (s) =
K1K2
τ1τ2s2 + (τ1 + τ2) s + 1(43)
8

3 Diseño del tanque
Este diseño se realizò segùn las especi�caciones dadas en el ejemplo 2.3 [2] laaltura del lìquido con respecto al tiempo para el experimento del vaciado de untanque de diàmetro 10,75 plg (0,27305 m), altura del tanque =12 plg (0,3048m), diàmetro del ori�cio=0,609 plg (0,01547 m).
3.1 Dimensionamiento
Area de sección transversal del tanque en m2:
A = πr2 = π(0, 1365)2 = 0, 0586m2 (44)
Area seccional del ori�cio en m2:
A = πr2 = π(0, 007735)2 = 0, 000188m2 (45)
El sistema consta de dos tanques en serie, que tendran las mismas dimen-siones que se acabaron de especi�car.
3.2 Especi�cación de �ujos de entrada y salida
3.2.1 Flujo de alimentación al primer tanque
Los dos tanques tienen características de diseño iguales, asimismo tienen undiámetro del ori�cio=0,609 plg (0,01547 m),para una tuberia con estas carac-terísticas se tiene una velocidad promedio de V= 0,1404 m
s y un caudal =
2,1567*1010−4m3
s por lo tanto se asume un �ujo de entrada de:
fo = 0, 0001m3
s(46)
3.2.2 Flujo de salida del primer tanque (�ujo de entrada al segundotanque)
El �ujo de salida del primer tanque es una relación lineal de la altura del tanque,y para que haya una acumulación, el �ujo de salida debe ser menor al de entrada,al realizarse una regresión lineal de los datos de la TABLA 2.1 [2] se llega auna ecuación donde el caudal está en función de la altura. Se debe entoncesdeterminar cuánto es el valor de la constante k1 presente en dicha ecuación,para el �ujo de salida del primer tanque trabajándose con la altura máxima(0,3048 m, como si estuviera lleno completamente).
q = k1 · h1 (47)
−k1
A = 0,0145s
⟨m2
s
⟩
9

−k1 = − 0,0145s ∗ 0, 0586m2 = −8, 4907 ∗ 10−4
⟨m2
s
⟩
k1 = 8, 4907 ∗ 10−4
⟨m2
s
⟩(48)
3.2.3 Flujo de salida del segundo tanque
Para determinar el �ujo de salida que es también una función lineal de la alturadel segundo tanque, y queriendo tener acumulación dentro de él, se �ja un �ujode salida que sea 25% más que el de entrada.
k2 = 1,25 · k1 = 10, 6134 ∗ 10−4
⟨m2
s
⟩(49)
3.2.4 Evalución de parámetros de la función de transferencia
Para la ecuación (38) G1 (s) Entada F0 (t) y salida h1
τ1 =A1
k1=
0, 056
8, 4907 ∗ 10−4= 69, 0167 〈s〉 (50)
K1 =1
k1=
1
8, 4907 ∗ 10−4= 1177, 76
⟨ s
m2
⟩(51)
Para la ecuación (39) G2 (s) Entada h1 y salida h2
τ2 =A2
k2=
0, 056
10, 6134 ∗ 10−4= 55, 2132 〈s〉 (52)
K2 =k1k2
=8, 4907 ∗ 10−4
10, 6134 ∗ 10−4= 0, 8 〈adimensional〉 (53)
Condiciones iniciales Se quiere observar el comportamiento del sistema re-
specto al nivel del tanque 2, para encontrar los valores de la altura en estadoestable se reemplazan los valores encontrados de k1 y k2 en las ecuaciones (48)y (49) respectivamente, y la ecuaciòn (46), en las ecuaciones (15) y (16), obte-niendose asi los siguientes valores de altura en estado estable:
h1(0) = 0, 1177m
h2(0) = 0, 094m
10
4 Resultados y análisis
4.1 Perturbación escalón unitario
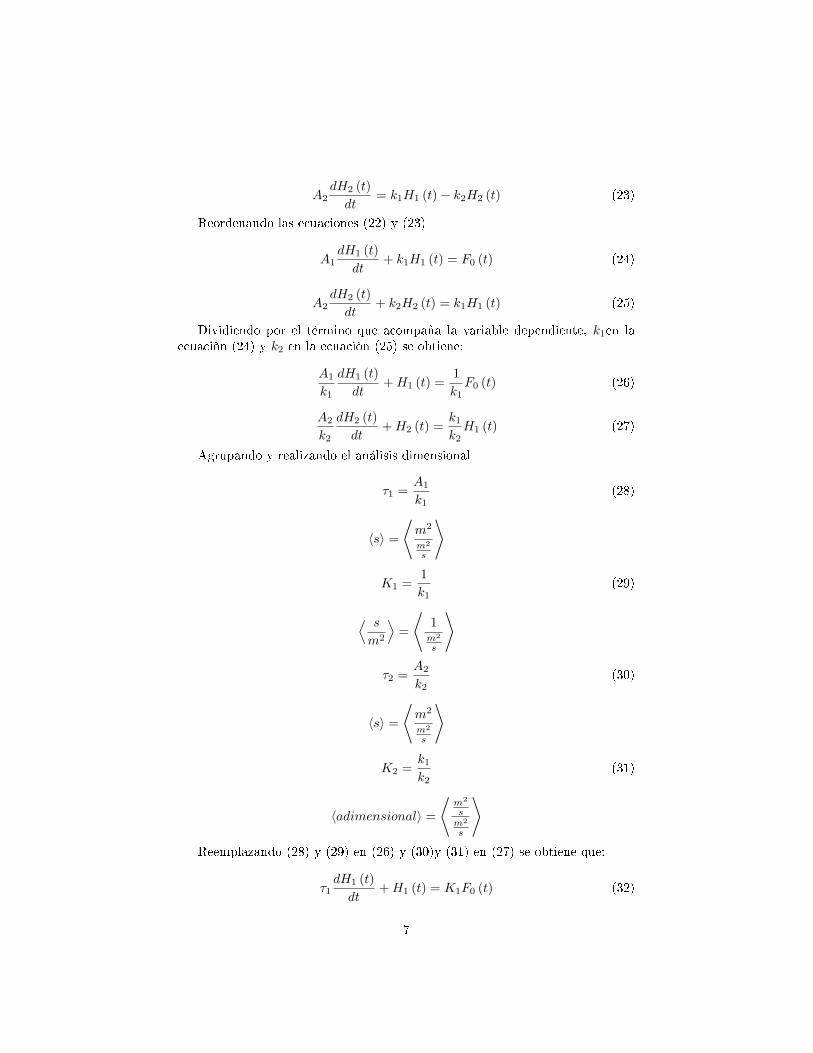
4.1.1 Solución analítica usando una función de transferencia paracomportamiento del nivel de cada tanque.
Las funciones de transferencia que describen el comportamiento del nivel delos tanques uno y dos son las ecuaciones (38) y (43) respectivamente. Usandosimulink con una entrada función escalón unitario se obtuvo el comportamientodescrito por la �gura 3. Esta demuestra que la perturbación escalón unitarioal iniciar en los valores de estado estable tanto el primer tanque como el se-gundo alcanzan valores óptimos de nivel al mantenerse �ujo constante hastaaproximadamente los 380 segundos, al variar este �ujo la altura alcanzada porel líquido es la adecuado para la altura total del tanque.
Cuando la altura de los tanques es baja el modelo no se aproxima bien dadoque se aleja de la linealidad de la ecuación predicha por la regresión nombradaanteriormente.
Figure 3: Comportamiento del nivel de los tanques usando la solución analíticatipo escalón unitario
11

4.1.2 Solución numérica usando un integrador (ode23s) para el com-portamiento del nivel de los tanques.
Las ecuaciones que modelan matemáticamente el sistema, son las ecuaciones (38)y (43) que forman un sistema acoplado de ecuaciones diferenciales ordinariasresueltas por el ode23s y describen el nivel de cada tanque a lo largo del tiempo.En la Figura 4 se presenta el comportamiento del nivel de líquido de los tanquesusando el método numérico.
Figure 4: Comportamiento del nivel de líquido de los tanques usando un métodonumérico
12

4.1.3 Comparación entre la solución analítica y la solución numérica.
Figure 5: Comparación grá�ca para una perturbación de escalón unitario paraambos métodos
En la Figura 5 se observa cómo la solución numérica y analítica no coincidenen su comportamiento, esto es debido a el cambio que ocurre en el �ujo inicialantes de alcanzar el estado estable.
En la solución numérica se observa que para el valor inicial de la perturbaciónescalón unitario la pendiente de la curva altura dentro de los tanques es negativa,es decir que se vacían, lo que no debería ocurrir debido a que el diseño del tanquey sus �ujos, se hizo para que se mantenga una acumulación dentro de ellos, esdecir que la altura aumente mientras haya �ujo, sin embargo como este valorinicial está por debajo del valor obtenido para el estado estable el integradornumérico presenta problemas en cuanto a su pendiente, obteniéndose un errorde cálculo puesto que cambia de signo la pendiente para valores por debajo delestado estable.
Ya determinados los valores de τ para ambos tanques, los cuales nos indicanla rapidez para alcanzar la estabilidad del sistema esto se puede re�ejar entodos los casos donde el primer tanque siempre alcanza primero la estabilidad,aunque no es muy notoria la diferencia. Sin embargo se puede observar conmayor claridad la rapidez de los tanques en la pendiente que se presenta en elmomento de la perturbación, esta estabilidad se logra alrededor del 63 % parael escalón unitario
13

4.2 Perturbación escalonada o tipo escalera.
4.2.1 Solución analítica usando una función de transferencia paracomportamiento del nivel de cada tanque.
En la �gura 6 se presentan dos grá�cas, la primera muestra la perturbación de laentrada ( Flujo de alimentación al primer tanque),una perturbación escalonadacon variaciones iguales para todos los instantes de tiempo. En la segunda grá�cade la �gura 6 se presenta el comportamiento del nivel de los tanques de acuerdoal modelo desarrollado para la solución analítica (aplicando la transformada deLaplace).
Figure 6: Comportamiento de nivel de líquido usando la solución analítica anteuna pertubación tipo escalonada
En la segunda grá�ca de la �gura 6 se puede observar el comportamientolineal del líquido en los dos tanques,ádemas de observar cómo in�uye el valorde tao para la rapidez al alcanzar la velocidad pues el tanque dos tiene uncomportamiento amortiguado frente a los cambios pudiendolo simular comouna linealidad.
Se observa en la �gura 6 que para cada valor de perturbación escalera laaltura tiende a estabilizarse a un valor y esto ocurre pasados un poco más de166 segundos después de cada perturbación.
14
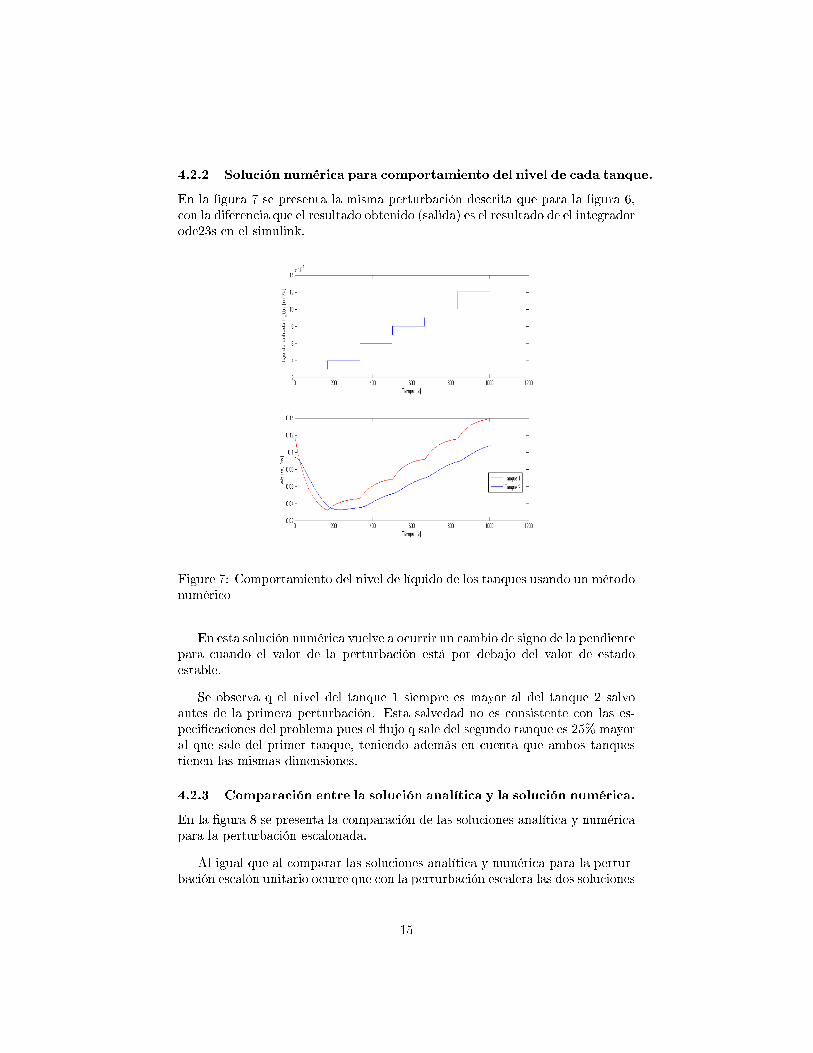
4.2.2 Solución numérica para comportamiento del nivel de cada tanque.
En la �gura 7 se presenta la misma perturbación descrita que para la �gura 6,con la diferencia que el resultado obtenido (salida) es el resultado de el integradorode23s en el simulink.
Figure 7: Comportamiento del nivel de líquido de los tanques usando un métodonumérico
En esta solución numérica vuelve a ocurrir un cambio de signo de la pendientepara cuando el valor de la perturbación está por debajo del valor de estadoestable.
Se observa q el nivel del tanque 1 siempre es mayor al del tanque 2 salvoantes de la primera perturbación. Esta salvedad no es consistente con las es-peci�caciones del problema pues el �ujo q sale del segundo tanque es 25% mayoral que sale del primer tanque, teniendo además en cuenta que ambos tanquestienen las mismas dimensiones.
4.2.3 Comparación entre la solución analítica y la solución numérica.
En la �gura 8 se presenta la comparación de las soluciones analítica y numéricapara la perturbación escalonada.
Al igual que al comparar las soluciones analítica y numérica para la pertur-bación escalón unitario ocurre que con la perturbación escalera las dos soluciones
15
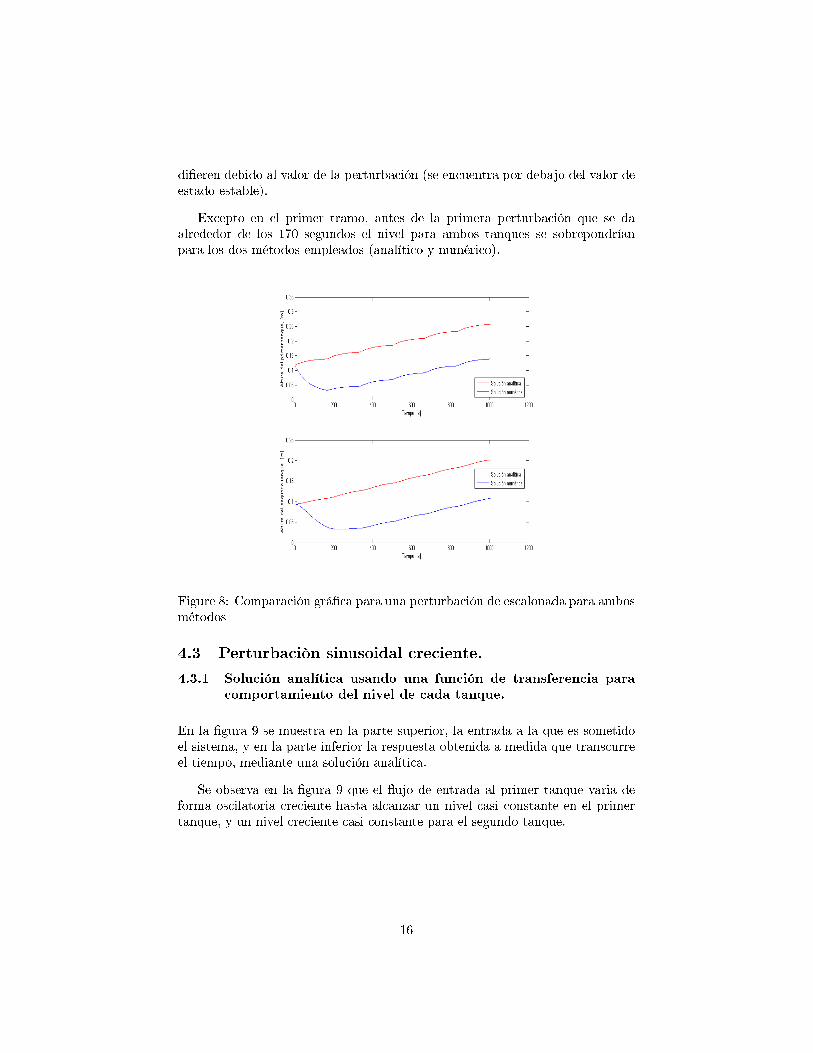
di�eren debido al valor de la perturbación (se encuentra por debajo del valor deestado estable).
Excepto en el primer tramo, antes de la primera perturbación que se daalrededor de los 170 segundos el nivel para ambos tanques se sobrepondríanpara los dos métodos empleados (analítico y numérico).
Figure 8: Comparación grá�ca para una perturbación de escalonada para ambosmétodos
4.3 Perturbaciòn sinusoidal creciente.
4.3.1 Solución analítica usando una función de transferencia paracomportamiento del nivel de cada tanque.
En la �gura 9 se muestra en la parte superior, la entrada a la que es sometidoel sistema, y en la parte inferior la respuesta obtenida a medida que transcurreel tiempo, mediante una solución analítica.
Se observa en la �gura 9 que el �ujo de entrada al primer tanque varia deforma oscilatoria creciente hasta alcanzar un nivel casi constante en el primertanque, y un nivel creciente casi constante para el segundo tanque.
16

Figure 9: Comportamiento de nivel de líquido usando la solución analítica anteuna pertubación tipo sinusoidal
4.3.2 Solución numérica para comportamiento del nivel de cada tanque.
En la �gura 10 se encuentra a las mismas condiciones de la �gura 9 pero desar-rollada con una solución numérica.
En las �guras 10 y 11 se observa claramente que el primer tanque es bastantesensible a las condiciones de entrada del �ujo de alimentación, presentandose car-acterísticas similares en el comportamiento del nivel del primer tanque a las del�ujo de alimentación del mismo, sin embargo el nivel del segundo tanque es pocosensible a esta entrada, lo cual indicaría que la ganancia del primer tanque debeser signi�cativamente alta comparada con la del segundo tanque,veri�cándoseesto en las ecuaciones (51) y (53).
17

Figure 10: Comportamiento del nivel de líquido de los tanques usando unmétodo numérico
4.3.3 Comparación entre la solución analítica y la solución numérica.
En la �gura 11 se presenta la comparación de la solución numérica y analíticapara el sistema sometido a una perturbación oscilatoria creciente.
En la �gura 11 se puede observar el gran distanciamiento entre la soluciónnumérica y analítica, y esto se pueda deber a la complejidad de la función deltiempo (sinusoidal creciente) a la que se sometió el sistema.
La solución numérica se aleja de la realidad en todos los casos de perturbacióndebido a que desde el momento inicial la solución tiene una pendiente opuesta ala que debería tener al compararse con la solución analítica, cuando sucede estoes porque el valor del �ujo de alimentación al primer tanque Fo, se perturbaestando por debajo del valor de estado estable, sin embargo cuando este valorde la perturbación está por encima del valor de estado estable la pendiente es lamisma que la de la solución analítica y eso se debe a problemas en el cambio delpendiente del integrador (método numérico usado), en este caso un runge-kutta(ode23s de Matlab®).
18
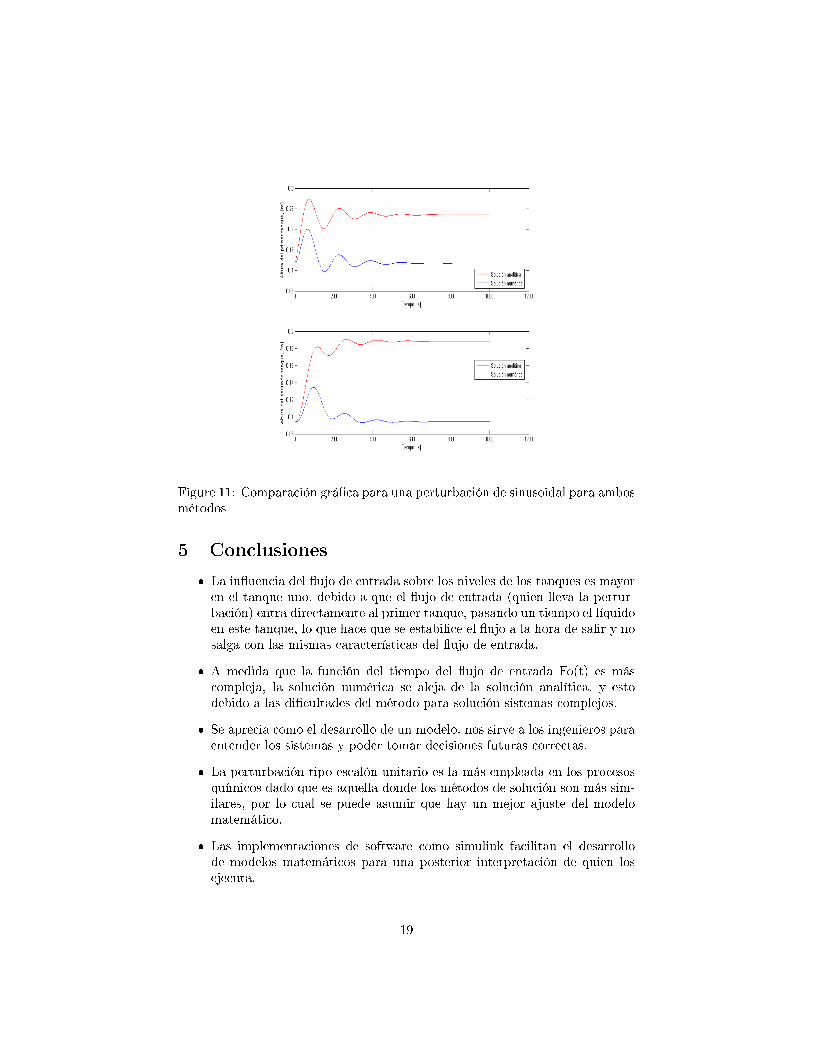
Figure 11: Comparación grá�ca para una perturbación de sinusoidal para ambosmétodos
5 Conclusiones
� La in�uencia del �ujo de entrada sobre los niveles de los tanques es mayoren el tanque uno, debido a que el �ujo de entrada (quien lleva la pertur-bación) entra directamente al primer tanque, pasando un tiempo el líquidoen este tanque, lo que hace que se estabilice el �ujo a la hora de salir y nosalga con las mismas características del �ujo de entrada.
� A medida que la función del tiempo del �ujo de entrada Fo(t) es máscompleja, la solución numérica se aleja de la solución analítica, y estodebido a las di�cultades del método para solución sistemas complejos.
� Se aprecia como el desarrollo de un modelo, nos sirve a los ingenieros paraentender los sistemas y poder tomar decisiones futuras correctas.
� La perturbación tipo escalón unitario es la más empleada en los procesosquímicos dado que es aquella donde los métodos de solución son más sim-ilares, por lo cual se puede asumir que hay un mejor ajuste del modelomatemático.
� Las implementaciones de software como simulink facilitan el desarrollode modelos matemáticos para una posterior interpretación de quien losejecuta.
19

� La primera función de transferencia (que describe el comportamiento delnivel del primer tanque) tiene un valor de τ mayor que el de la segunda fun-ción de transferencia (que describe el nivel del segundo tanque), entoncescomo τ1 > τ2 la respuesta del nivel del primer tanque se demora más queel del primer tanque tal y como se observó en las tres diferentes pertur-baciones mostradas. Sin embargo τ1 y τ2 son valores similares (69,0167 y55,2132 respectivamente) haciendo que no sea tan demarada la respuestadel segundo tanque respecto al primero.
� El valor de K (ganancia) permite saber que tan sensible es el sistema yen nuestro sistema K1>�> K2 indicando que la primera función de trans-ferencia es mucho más sensible a las perturbaciones de entrada que lasegunda función de transferencia, y esto se observa claramente en las tresperturbaciones realizadas pero es más notorio en la tercera perturbación(oscilatoria creciente) puesto que el nivel del liquido en el primer tanquepresenta oscilaciones como lo presenta el �ujo de entrada (muy sensible),característica que no presenta el nivel del liquido en el segundo tanque(poco sensible).
6 Referencias
[1] Universidad nacional de Colombia, Facultad de Ingeniería y Arquitectura,Departamento de Ingeniería Química, Control automático de procesos, Traduc-ciones capitulo 1.
[2] Rusell, T.W.F. y Denn, M.M., �Introducción al análisis en ingenieríaquímica�Limusa, México, D.F., 1976.
20





![@AH ?KKeKK @A eeeJ =O ?KHKFe>E=ecK€¦ · &')AH ?KKeKK @A eeeJ =O ?KHKFe>E=ecK D+ D+e>EP+e?EKJAO+ Mnc_g igh^h ^_l_g\kck d ][m_[k ng[ fc* gl _g eh[ E(%[mch_( $%( ^h e[_ knk[e_l( J](https://static.fdocuments.es/doc/165x107/5e22ea7195bff46778165dc4/ah-kkekk-a-eeej-o-khkfee-ah-kkekk-a-eeej-o-khkfeeeck-d.jpg)