Control interno y riesgos. Conceptos basicos. Charla cpce posadas
Upload
rafaellunahuertaCategory
view
217download
0description
INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 1
CONCEPTOS BÁSICOS DE CONTROL
1 DEFINICIONES. Proceso. Proceso es una operación o desarrollo natural, progresivamente continuo, caracterizado por una serie de cambios graduales que llevan de una a otra de un modo relativamente fijo y que tienden a un determinado resultado o final. O una operación artificial o voluntaria, progresivamente continua que consiste en una serie de acciones controladas o movimientos dirigidos sistemáticamente hacia determinado resultado o fin. Sistema. Un sistema es una combinación de componentes que actúan conjuntamente y cumplen un determinado objetivo. Un sistema no se limita a objetos físicos, puede referirse también a sistemas biológicos, económicos, etc... Función de Transferencia. Definimos la función de transferencia de un sistema como la relación de la señal de salida con respecto a la señal de entrada, en el dominio de Laplace, con toda condición inicial igualada a cero. Más específicamente, si para un sistema dado su señal de entrada es x(t) y su señal de salida es y(t), la función de transferencia del sistema
es )(
)()(
sX
sYsG = , donde [ ])()( tyLsY = , y [ ])()( txLsX = .
La función de transferencia resulta ser la expresión matemática que contiene la información básica sobre las características esenciales del sistema (nos referimos a los valores de los parámetros que intervienen en el sistema, así como su interconexión). Perturbación. Una perturbación es una señal que tiende a afectar adversamente el valor de la salida de un sistema. Si la perturbación se genera dentro del sistema, se le denomina interna, mientras una perturbación externa se genera fuera del sistema y constituye una entrada. Control retroalimentado. Control retroalimentado es una operación que, en presencia de perturbaciones, tiende a reducir la diferencia entre la salida y la entrada de referencia de un sistema y que lo hace sobre la base de esta diferencia. Sistema de control retroalimentado. Sistema de control retroalimentado es aquel que tiende a mantener una relación preestablecida entre la salida y la entrada de referencia, comparando ambas y utilizando la diferencia como parámetro de control. Servomecanismo v.s. Regulador. Un control de lazo cerrado se considera que es de tipo servomecanismo, cuando la variable controlada sigue al set point durante un recorrido preestablecido de este; se considera una forma de operar un lazo de control retroalimentado.
INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 2
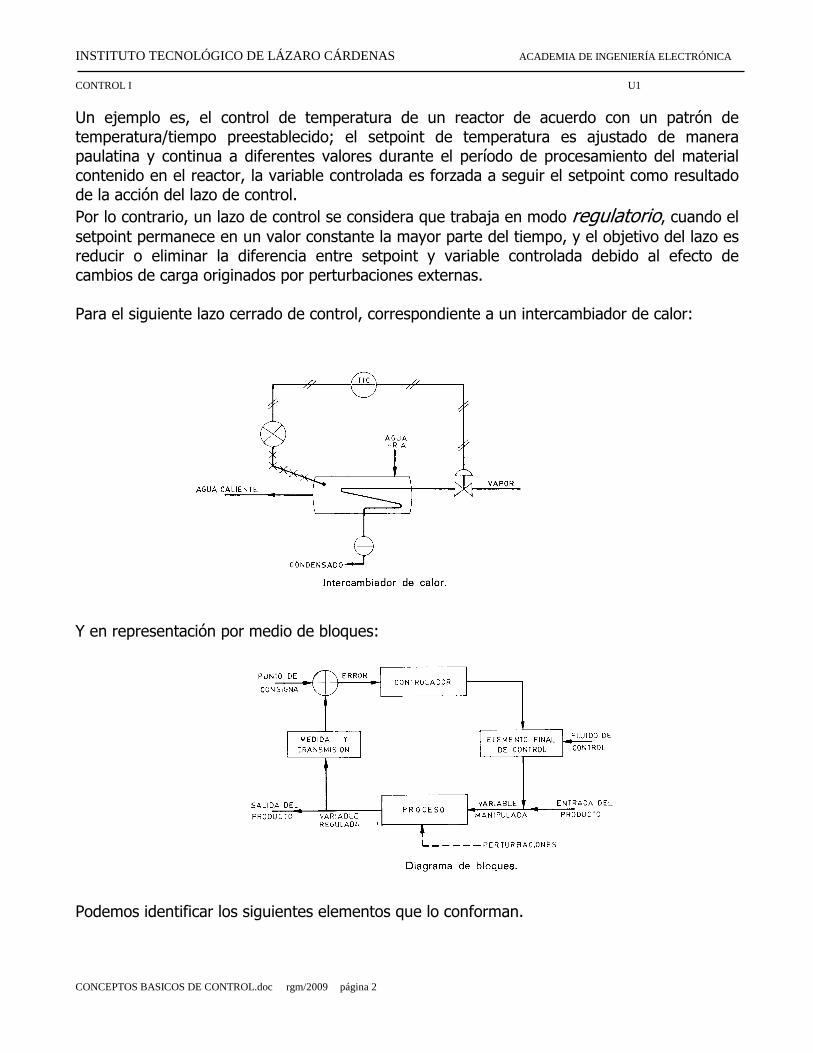
Un ejemplo es, el control de temperatura de un reactor de acuerdo con un patrón de temperatura/tiempo preestablecido; el setpoint de temperatura es ajustado de manera paulatina y continua a diferentes valores durante el período de procesamiento del material contenido en el reactor, la variable controlada es forzada a seguir el setpoint como resultado de la acción del lazo de control. Por lo contrario, un lazo de control se considera que trabaja en modo regulatorio, cuando el setpoint permanece en un valor constante la mayor parte del tiempo, y el objetivo del lazo es reducir o eliminar la diferencia entre setpoint y variable controlada debido al efecto de cambios de carga originados por perturbaciones externas. Para el siguiente lazo cerrado de control, correspondiente a un intercambiador de calor:
Y en representación por medio de bloques:
Podemos identificar los siguientes elementos que lo conforman.

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 3
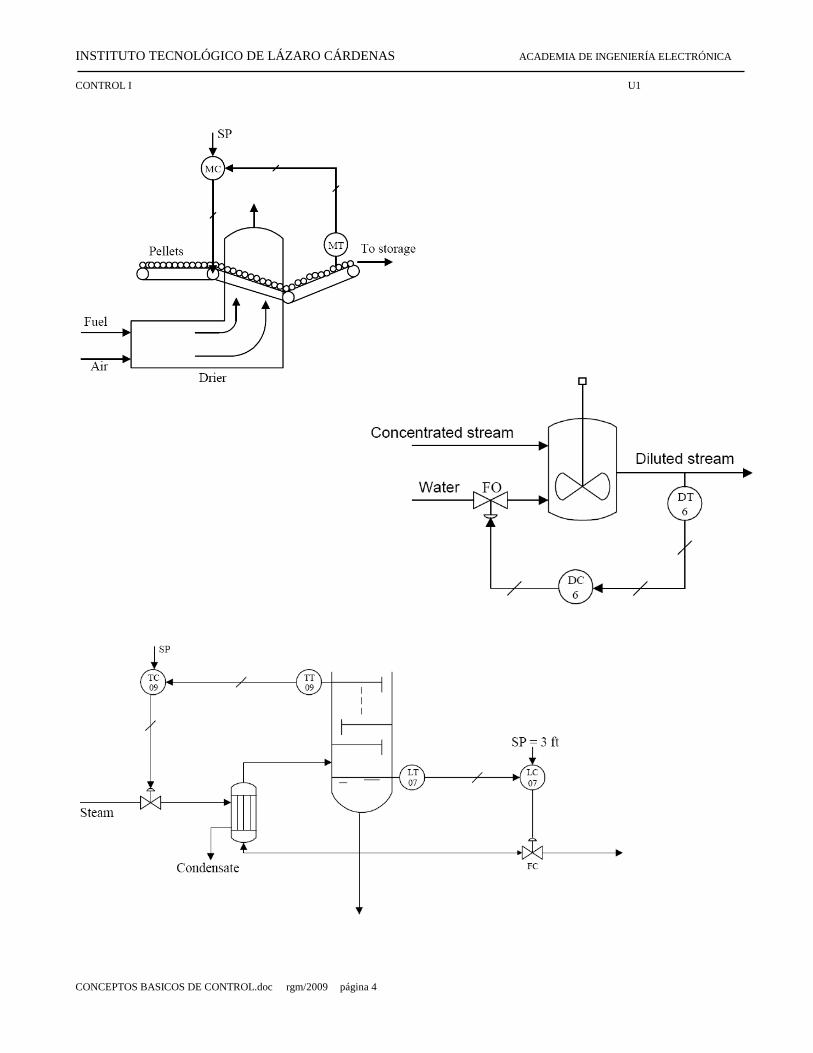
PROCESO. Cualquier operación o secuencia de operaciones que involucran un cambio de estado de energía, de composición, de dimensión u otra propiedad que pueda ser definida con respecto a un dato de comparación. Ejemplo: Evaporadores, Calderas, Tanque de sedimentación, Secadores, Reactores químicos, hornos, etc. VARIABLE CONTROLADA DE UN PROCESO. Es aquella condición o estado del material del proceso que está sujeta a cambiar, que es medida y controlada. La medida de esta variable sirve como base para la acción de control. Durante el proceso de medición y acondicionamiento de esta variable, se debe observar la necesidad de que finalmente tenga las mismas unidades que el Punto de Consigna o valor deseado (setpoint). La razón de esto es que ambas serán comparadas en un controlador y el resultado de esta comparación servirá de base para generar la acción de control. En el intercambiador de calor la VARIABLE CONTROLADA es la temperatura del agua caliente que sale del intercambiador. Sus unidades están dadas en % del rango de medición del elemento primario. Ejemplo: Flujo, velocidad, peso, densidad, humedad, voltaje, pH, etc. VARIABLE MANIPULADA. Es aquella cantidad o condición que es modificada (manipulada) por el controlador a través del elemento final de control, para eliminar el error. En el caso del intercambiador de calor, la variable manipulada es el flujo o caudal de vapor que entra al intercambiador. AGENTE DE CONTROL. Es aquella energía o material del proceso en el cual la variable manipulada es una condición o característica. Para el intercambiador de calor el vapor constituye la energía necesaria para mantener la variable controlada dentro de los parámetros de operación. ELEMENTO PRIMARIO DE MEDICIÓN. Es aquél que detecta el valor de la variable controlada. Utiliza o transforma la energía del medio controlado para producir un efecto que es una función de la variable controlada. En el intercambiador de calor el elemento primario de medición es un sistema de bulbo y capilar donde los cambios de temperatura de la variable controlada producen cambios en la presión del fluido que llena el bulbo. El efecto producido por el elemento primario de medición puede ser un cambio de presión, fuerza, posición, medida eléctrica, etc.
INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 4
INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 5
Ejemplo: VARIABLE DE PROCESO
ELEMENTO PRIMARIO
TEMPERATURA Termopar. Pirómetro de radiación. Termistor. Termómetro bimetálico. RTD (sensor de temperatura resistivo)
PRESIÓN Tubo Bourdon. Galgas extensométricas. Transductores capacitivos. Transductores magnéticos.
FLUJO Placa de orificio. Rotámetro. Tubo Venturi. Tubo Pitot. Turbina.
NIVEL Flotador. Medidores de presión diferencial. Tubo de burbujeo. Medidor capacitivo. Ultrasonido.
TRANSMISOR. Capta la variable de proceso proveniente del elemento primario de medición y la transmite a distancia en forma de una señal estándar ( 3 a 15 psi, 4 a 20 mA, 1 a 5 Vcd, 10 a 50 mA, etc.). El elemento primario de medición puede formar parte, o no, del transmisor. Ejemplo de esto es el transmisor de presión diferencial aplicado a la medición de nivel y de flujo, en el primer caso funciona como elemento primario y transmisor y en el segundo como transmisor. CONVERTIDOR. Sirven para convertir señales estándar de transmisión, ya sea neumática o eléctrica. Reciben una señal de entrada neumática (3 a 15 PSI) o eléctrica procedente de un instrumento y después de modificarla envían la resultante en forma de señal de salida estándar. Ejemplo: Convertidor P/I (presión a corriente), I/P (corriente a presión). En el intercambiador de calor, el controlador recibe y envía señales neumáticas en el lazo de control. Si tuviéramos que sustituir este controlador por otro con puertos de entrada y salida estándar para señal eléctrica de 4 a 20 mA, tendríamos que colocar un convertidor P/I entre el transmisor de temperatura y el controlador y un convertidor I/P entre el controlador y la válvula de control. En estas condiciones el lazo seguiría siendo funcional.
INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 6
CONTROLADOR. Compara la variable controlada con el valor deseado (setpoint) y ejerce una acción correctiva de acuerdo con la desviación o error. En el intercambiador de calor, el controlador compara la señal proveniente del transmisor neumático acoplado al sistema de bulbo y capilar y la compara con el valor deseado que es ajustado en el propio controlador; como resultado genera la señal de control que modifica la posición del elemento final de control, para regular el caudal de vapor que entra al intercambiador. ACCIÓN DEL CONTROLADOR. A partir de un valor constante en el setpoint: Acción Directa: Cuando al aumentar la variable controlada aumenta el valor de la señal de salida del controlador, y al disminuir la variable controlada disminuye el valor de la salida del controlador (incremento con incremento). Acción Inversa: Cuando al aumentar la variable controlada disminuye el valor de la señal de salida del controlador, y al disminuir la variable controlada aumenta el valor de la señal de salida del controlador (incremento con decremento). ELEMENTO FINAL DE CONTROL. Recibe la señal de salida del controlador y modifica el caudal del fluido o agente de control. En el intercambiador de calor, el elemento final de control está constituido por la válvula de control, la cual modula el caudal de vapor que entra al intercambiador de calor. Ejemplo: Actuador Neumático: Válvula con diafragma Válvula con pistón. Actuador Eléctrico: Válvula motorizada. Banco de Tiristores. Servomecanismo de posición. Motor síncrono. ACCIÓN DEL ELEMENTO FINAL DE CONTROL (Válvulas). Acción Directa: Cuando la válvula cierra con aire y abre a falla de este (FO). Acción Inversa: Cuando la válvula abre con aire y cierra a falla de este (FC). La acción de la válvula se elige según se desee la posición que deba adoptar en caso de falla del aire de instrumentos.

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 7
ACCIÓN DE UN SISTEMA DE CONTROL. De los elementos de un lazo cerrado de control, sólo en el controlador y en la válvula de control podemos elegir acción, por lo tanto, la acción del sistema de control dependerá de la combinación de acciones de estos elementos. Acción Directa: Cuando al aumentar la variable controlada la válvula debe cerrar. Acción Inversa: Cuando al aumentar la variable controlada la válvula de abrir.
COMBINACIÓN SISTEMA CONTROLADOR VÁLVULA
1 DIRECTA DIRECTA DIRECTA 2 DIRECTA INVERSA INVERSA 3 INVERSA DIRECTA INVERSA 4 INVERSA INVERSA DIRECTA
Ejemplo: Para el siguiente proceso, que corresponde a los medios de calentamiento de los productos de la parte baja de una columna de destilación, determine: a) Acción del Sistema de Control. b) Acción del Controlador. c) Acción del Elemento Final de Control.

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 8
1.1 ACCIÓN DE UN CONTROLADOR. La selección de la acción del controlador es crítica. Si la acción del controlador no se selecciona correctamente, este no será capaz de controlar la variable de proceso. Considere el INTERCAMBIADOR DE CALOR de la siguiente figura.
El proceso se encuentra en estado estable, y el set point se mantiene a un valor constante. Asuma que la señal procedente del transmisor de temperatura se incrementa, indicando que la temperatura de salida se ha incrementado por arriba se set point. Para retornar la temperatura al set point, el controlador debe cerrar progresivamente el vástago de la válvula de control. Debido a que la válvula cierra a falla del aire de instrumentos (FC fail to close), el controlador debe reducir su señal de salida (tal como lo indica la flecha anexa al controlador). Cuando un incremento de la variable de proceso requiere un decremento en la salida del controlador, el controlador deber ajustarse en modo ACCIÓN INVERSA (reverse action). Alternativamente, considere el LAZO DE CONTROL DE NIVEL que se muestra en la siguiente figura. El proceso se encuentra en estado estable y el set point se mantiene a un valor constante. Asuma que la señal procedente del transmisor de nivel se incrementa, indicando que el nivel se ha incrementado por arriba del set point. Para retornar el nivel al set point, el controlador debe abrir progresivamente la válvula de control. Debido a que la válvula es de acción inversa (FC), el controlador debe incrementar su señal de salida (tal como lo indica la flecha anexa al controlador).

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 9
Para tomar esta decisión, el controlador se debe ajustar en modo ACCIÓN DIRECTA (direct action). Para designar esta acción, frecuente se usa el término incremento-con-incremento (cuando la señal de entrada al controlador se incrementa, la señal de salida procedente del controlador se incrementa). En resumen, para determinar la acción de un controlador, el ingeniero debe conocer: 1.- Los requerimiento de control del proceso. 2.- La acción de la válvula de control (acción en modo de fallo), o de otro elemento final de control. Ambas cosas se deben tomar en cuenta. Cuál deberá ser la acción del controlador de nivel si la válvula fuera de acción directa (FO fail open)? Y cual debería ser si el nivel se controla manipulando el flujo de entrada en lugar del flujo de salida? En el primer caso cambia la acción de la válvula, mientras que en el segundo caso, cambian los requerimientos de control del proceso. La acción del controlador se ajusta por medio de un switch o bit de configuración en los controladores analógicos y digitales, respectivamente. La acción del controlador depende de la forma como se calcula el error. Un controlador con
acción proporcional, resuelve la siguiente ecuación: ( ) ( )teKmtm c+= .
INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 10
Donde.
( )tm = salida actual del controlador, %. =cK ganancia proporcional del controlador, %/%.
m = bias del controlador. Es la salida que presenta el controlador cuando la desviación o error es cero.
( )te = error o desviación entre el valor deseado (set point) y el valor actual de la variable controlada. En un controlador con ACCIÓN DIRECTA, el error se calcula de la siguiente manera.
( ) ( ) ( )trtcte −= Donde:
( )tc = valor actual de la variable controlada, %. ( )tr = valor actual del set point, %.
En un controlador con ACCIÓN INVERSA, el error se calcula de la siguiente manera.
( ) ( ) ( )tctrte −=

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 11
2 CONTROL DE LAZO ABIERTO. Los sistemas de control de lazo abierto son sistemas de control en los que la salida no tiene efecto sobre la acción de control. Es decir, en un sistema de control de lazo abierto la salida ni se mide ni se retroalimenta para comparación con la entrada.
Un ejemplo práctico es la máquina de lavar, el remojo, lavado y enjuague en la máquina se cumplen sobre una base de tiempo. La máquina no mide la señal de salida, es decir, la limpieza de la ropa. En un sistema de control de lazo abierto cualquiera, no se compara la salida con la entrada de referencia. Por lo tanto, para cada entrada de referencia corresponde una condición de operación fijada. Así, la exactitud del sistema depende de la calibración de los componentes (un sistema de control de lazo abierto debe ser cuidadosamente calibrado y debe mantener esta calibración para que sea útil). En presencia de perturbaciones un sistema de control de lazo abierto no cumple su función asignada. En la práctica, sólo se puede usar el control de lazo abierto si la relación entre la entrada y la salida es conocida y si no hay perturbaciones ni internas ni externas. Otro ejemplo de un sistema de control de lazo abierto es el control de tráfico que trabaja en función de una base de tiempos.
2.1 Efecto causado en un lazo de control abierto, p or cambio en los parámetros del proceso.
Supóngase que debido a variaciones en los parámetros, )(sG varía a G(s) + ∆G(s), donde )()( sGsG ∆>> . Entonces en el sistema de lazo abierto que se muestra en la figura
anterior, las salida está dada por:
( ) ( )sRsGsGsCsC )()()()( ∆+=∆+

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 12
Por tanto, la variación en la salida resulta dada por
)()()( sRsGsC ∆=∆ Esto quiere decir, que si la variación el los parámetros del proceso es significativa, en esa misma proporción lo será la variación en la salida del lazo de control abierto. A manera de ejemplo, suponga un proceso térmico con la siguiente figura, cuya función de transferencia está dada por:
( )( ) 1+
=s
K
sT
sT
i τ
Donde:
( )sTi = temperatura del líquido de entrada, °C. ( )sT = temperatura del líquido de salida, °C.
K = ganancia del proceso, CC
°° .
τ = constante de tiempo de primer orden del proceso, minutos. La ganancia de proceso indica cuánto cambia la variable de salida por unidad de cambio en la función de forzamiento o variable de entrada; la ganancia de proceso define la sensibilidad del proceso. La ganancia de proceso de puede definir como:
entrada de variablela de cambio
salida de variablela de cambio=∆∆=
I
OK .
La ganancia es un parámetro relacionado con la personalidad del proceso que se controla y, en consecuencia, depende de las propiedades físicas y los parámetros de operación del proceso. En el caso del proceso térmico la ganancia depende del flujo, de la densidad y capacidad calorífica del líquido que se procesa ( f , ρ , Cp ), del coeficiente global de transferencia de calor (U ) y del área de transferencia de calor ( A ); si cambia cualquiera de estos factores, la personalidad del proceso cambia y repercute sobre la ganancia.
INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 13
Si utilizamos un lazo abierto para controlar este proceso, el cambio en los parámetros repercute en forma proporcional en la exactitud del control, y como se mencionó anteriormente, esta desviación no puede ser corregida puesto que no hay retroalimentación del valor actual de la variable controlada. Resumen: Desde el punto de vista de estabilidad, el sistema de control de lazo abierto es más fácil de lograr, ya que la estabilidad no constituye un problema importante. Este sistema de control se puede aplicar con éxito en procesos en los que las entradas son conocidas previamente y en los que no hay perturbaciones.
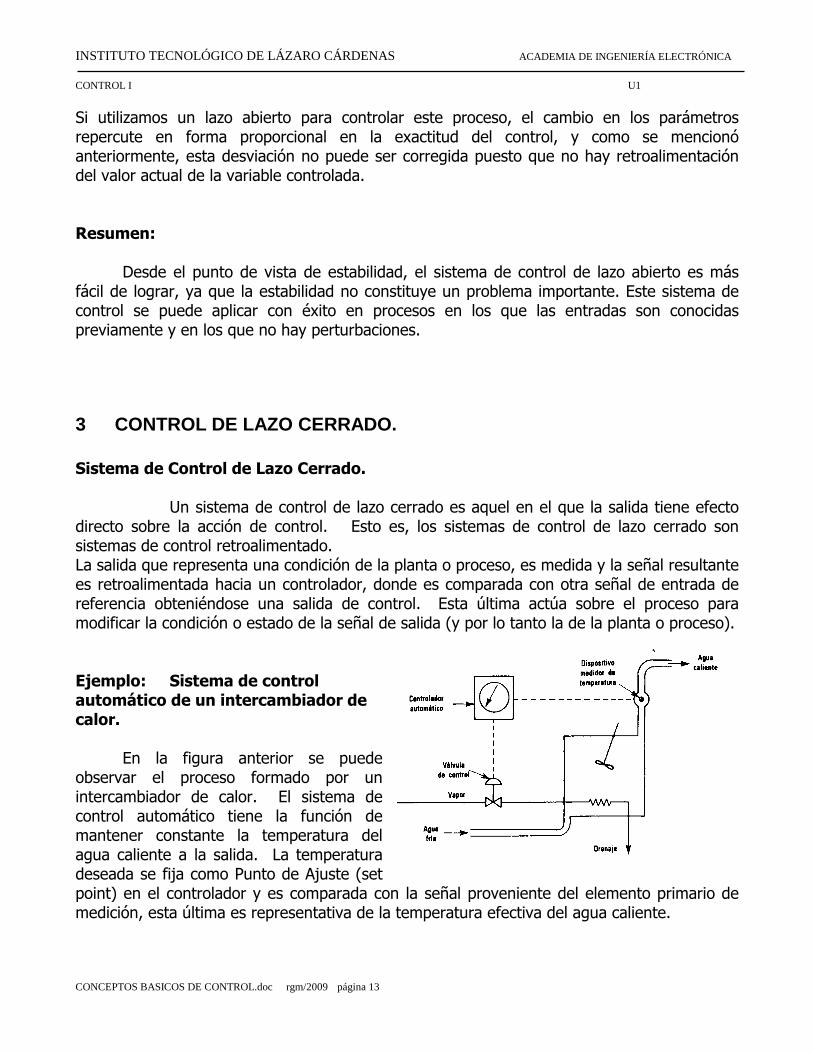
3 CONTROL DE LAZO CERRADO. Sistema de Control de Lazo Cerrado. Un sistema de control de lazo cerrado es aquel en el que la salida tiene efecto directo sobre la acción de control. Esto es, los sistemas de control de lazo cerrado son sistemas de control retroalimentado. La salida que representa una condición de la planta o proceso, es medida y la señal resultante es retroalimentada hacia un controlador, donde es comparada con otra señal de entrada de referencia obteniéndose una salida de control. Esta última actúa sobre el proceso para modificar la condición o estado de la señal de salida (y por lo tanto la de la planta o proceso). Ejemplo: Sistema de control automático de un intercambiador de calor. En la figura anterior se puede observar el proceso formado por un intercambiador de calor. El sistema de control automático tiene la función de mantener constante la temperatura del agua caliente a la salida. La temperatura deseada se fija como Punto de Ajuste (set point) en el controlador y es comparada con la señal proveniente del elemento primario de medición, esta última es representativa de la temperatura efectiva del agua caliente.

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 14
La señal de error producida en el controlador es manejada por el controlador automático generando como resultado una señal de control que modifica finalmente la posición de la válvula reguladora. Esta válvula modula el caudal de vapor que entra al intercambiador de calor. Si no existe error la posición de la válvula no se modifica. Perturbaciones externas: Para el intercambiador de calor, una condición no prevista a raíz de la cual la salida del proceso sufre una alteración: 1. Aumento o disminución en el flujo de agua fría y/o variaciones en la temperatura de
entrada de esta. 2. Variaciones en el caudal de vapor no efectuados por el elemento final de control, si no por
una condición externa (cambio en la presión de suministro de vapor saturado). 3. Un cambio en las condiciones termodinámica (entalpía) del vapor saturado. Una ventaja del sistema de control de lazo cerrado es que el uso de la retroalimentación hace al sistema, en su respuesta, relativamente insensible a perturbaciones externas y a variaciones internas de parámetros del sistema. Por otro lado, en los sistemas de lazo cerrado la estabilidad siempre constituye un problema de importancia, por la tendencia a sobre corregir errores, que puede producir oscilaciones de amplitud constante o variable. Los sistemas de control de lazo cerrado solamente tienen ventajas si se presentan perturbaciones no previsibles y/o variaciones imprevisibles de componentes del sistema. El diagrama de bloques correspondiente, para el lazo cerrado de control de temperatura, se muestra a continuación:

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 15
3.1 Reducción del efecto de las variaciones de los parámetros por el uso de la retroalimentación.
El objetivo de utilizar retroalimentación en sistemas de control es reducir la sensibilidad del sistema a variaciones de los parámetros y perturbaciones indeseadas. Cuando hablábamos del control de lazo abierto se mencionó que los componentes de la función de transferencia )(sG se deberían seleccionar cuidadosamente para que respondan con exactitud. En el caso de tratarse de realizar un sistema de control de lazo cerrado, los componentes pueden ser menos precisos, ya que la sensibilidad a variaciones de los parámetros en )(sG es reducida por un factor )(1 sG+ . Para analizar esto debe observarse la siguiente figura: La función de transferencia de lazo cerrado, está dada por:
( ) ( )( )
( )( )sG
sG
sR
sCsG
+==
1
La función de transferencia correspondiente para una variación en )(sG debida a variaciones en los parámetros del sistema es:
)()()(1
)()()()( sR
sGsG
sGsGsCsC
∆++∆+=∆+
De donde se deduce que.
)()(1
)()( sR
sG
sGsC
+∆=∆ ya que: )()( sGsG ∆>>
Así, la modificación en la salida del sistema de lazo cerrado debido a variaciones en los parámetros en )(sG , es reducida por un factor de )(1 sG+ . En muchos casos prácticos el valor de )(1 sG+ es generalmente mucho mayor que uno.

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 16
3.2 Sistema de lazo cerrado sometido a una perturba ción. La siguiente figura muestra un lazo cerrado sometido a una perturbación. Cuando las dos entradas (la entrada de referencia y la perturbación) están presentes en un sistema lineal, cada entrada puede ser tratada independientemente de la otra; y se puede sumar las salidas correspondientes a cada una de las entradas independientemente para obtener la salida total. En el punto de suma se indica, ya sea por un signo más o un signo menos, la forma en que cada entrada es introducida al sistema. Al examinar el efecto de la perturbación )(sN , se puede suponer que el sistema está en reposo inicialmente, con error cero; se puede calcular la respuesta )(sCN a la perturbación solamente. Para 0)( =sR
C s
N s
G s
G s G s H sN ( )
( )
( )
( ) ( ) ( )=
+2
1 21
Por otro lado, considerando la respuesta a la entrada de referencia R(s), se puede suponer que la perturbación es cero. Entonces puede obtenerse la respuesta CR(s) a la entrada de referencia R(s).
Para ( ) 0=sN
C s
R s
G s G s
G s G s H sR ( )
( )
( ) ( )
( ) ( ) ( )=
+1 2
1 21

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 17
Se puede obtener la respuesta total a la aplicación simultánea de la entrada de referencia y de la perturbación sumando las dos respuestas individuales. La respuesta total está dada por:
[ ])()()()()()(1
)()()()( 1
21
2 sNsRsGsHsGsG
sGsCsCsC NR +
+=+=
Sea el caso en que G s G s H s1 2 1( ) ( ) ( ) >> . En esta situación la función de transferencia de
lazo cerrado )(/)( sNsCN se convierte en casi cero y se suprime el efecto de la perturbación.
0)()(
1)()(
1
≈=sHsGsN
sCN
Esta es una ventaja del sistema de lazo cerrado. Por otro lado, la función de transferencia de lazo cerrado )(/)( sRsCR tiende a:
)(1
)()(
sHsR
sCR =
cuando la ganancia de G s G s H s1 2( ) ( ) ( ) aumenta. Esto significa que si G s G s H s1 2 1( ) ( ) ( ) >> , la función de transferencia de lazo cerrado
)(/)( sRsCR se hace independiente de )(1 sG y de )(2 sG y se vuelve inversamente proporcional a )(sH , de modo que las variaciones de )(1 sG y )(2 sG no afectan a la función de transferencia de lazo cerrado )(/)( sRsCR . Esta es otra ventaja del sistema de lazo cerrado. Se puede ver que cualquier sistema de lazo cerrado con retroalimentación unidad 1)( =sH , tiende a igualar la entrada y la salida.

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 18
4 CONCEPTO DE LINEALIDAD. Un sistema es definido como lineal en términos de la excitación y respuesta de dicho sistema. En el caso de una red eléctrica, la excitación es la corriente de entrada )(ti y la respuesta es el voltaje de salida )(tv . Una propiedad de interés de los sistemas dinámicos es la referente a la linealidad, ya sea de los elementos que forman el sistema o del mismo sistema. No todos los sistemas dinámicos poseen esta propiedad, sin embargo, hay que enfatizar que los sistemas dinámicos lineales son los de mayor importancia en esta materia. Una propiedad de los sistemas lineales es que si su respuesta (o salida) es 1y cuando la entrada es 1x y cambia a 2y cuando la entrada es 2x , entonces la respuesta del sistema será
21 yyy += si la entrada se hace igual a 21 xxx += . Esta propiedad es conocida como PRINCIPIO DE SUPERPOSICIÓN y se expresa de la siguiente manera: Si en un sistema lineal actúan simultáneamente dos señales de entrada, 1x y 2x , la señal de salida puede calcularse sumando las dos señales de salida, 1y y 2y , que se tendrían debido a las entradas 1x y 2x si éstas actuaran separadamente. En realidad, para decidir si un sistema es o no lineal lo que interesa es la ecuación matemática que los describe (función de transferencia). Podemos entonces afirmar que para que un sistema sea lineal debe ser descrito por una ecuación lineal; es decir, por una ecuación en cuyos términos aparezcan las variables dependientes o sus derivadas elevadas a la primera potencia, que los coeficientes sean constantes o funciones de la variable independiente, además de que no se tengan productos, cocientes o funciones trascendentes de dichas variables. El logaritmo y la función exponencial son ejemplos de funciones trascendentes, otras funciones trascedentes son las funciones trigonométricas. Una función trascendente no puede ser representada en forma polinómicas. Algunos ejemplos de ecuaciones lineales son los siguientes:
xydt
dy
dt
yd9624
2
2
=+−
xtydt
dyt 2643 =+
)3cos(96242
2
tydt
dy
dt
yd =+−
xzdt
dz623 =−
INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 19
En estas ecuaciones t es la variable independiente (el tiempo) mientras que x , y y z son las variables dependientes (funciones del tiempo). Ejemplos de ecuaciones no-lineales son las siguientes:
xydt
dy653
2
=+
xydt
dyx 422 =−
)(3)log(4352
2
xsenydt
dy
dt
yd =−+
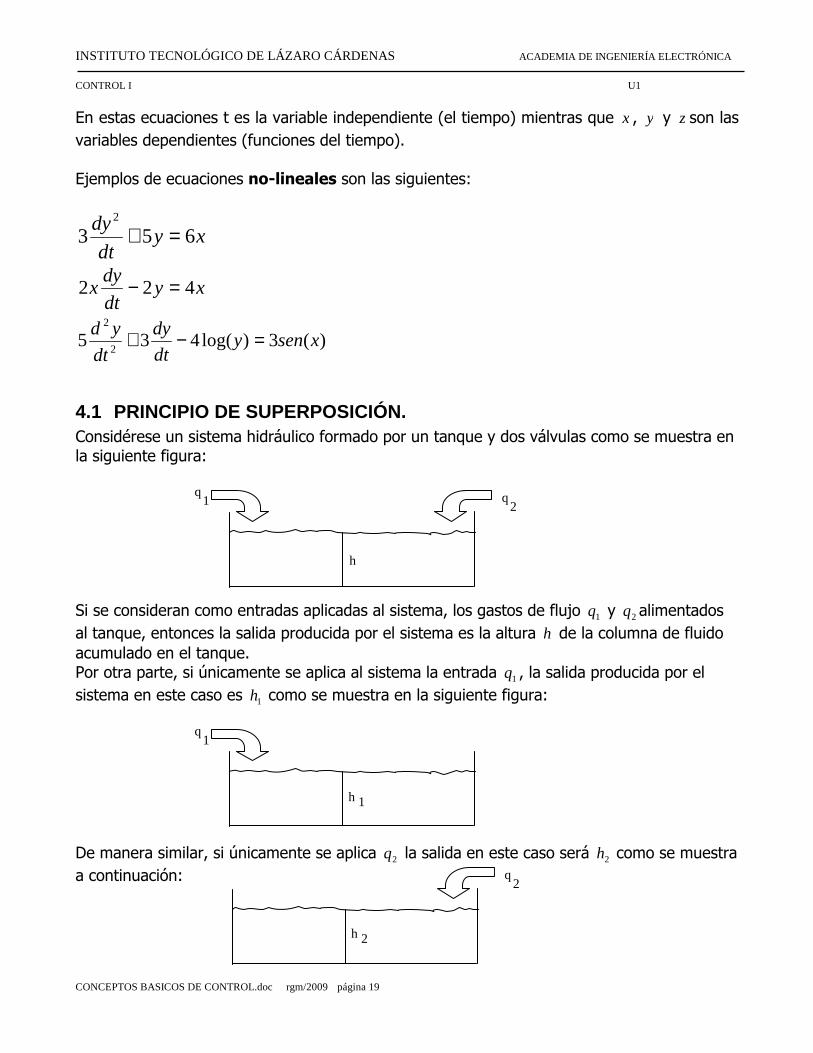
4.1 PRINCIPIO DE SUPERPOSICIÓN. Considérese un sistema hidráulico formado por un tanque y dos válvulas como se muestra en la siguiente figura: Si se consideran como entradas aplicadas al sistema, los gastos de flujo 1q y 2q alimentados al tanque, entonces la salida producida por el sistema es la altura h de la columna de fluido acumulado en el tanque. Por otra parte, si únicamente se aplica al sistema la entrada 1q , la salida producida por el sistema en este caso es 1h como se muestra en la siguiente figura: De manera similar, si únicamente se aplica 2q la salida en este caso será 2h como se muestra a continuación:
h
q 1 q
2
h 1
q 1
h 2
q 2

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 20
al sumar las salidas 1h y 2h , las cuales se obtuvieron en forma independiente, se tiene: 21 hhh += El principio de superposición se puede enunciar de la siguiente forma: La salida producida por un sistema que ha sido excitado o alimentado por varias entradas en forma simultánea es equivalente a la suma de las salidas producidas por el mismo sistema cuando las entradas se aplican en forma individual. Los sistemas cuyo comportamiento está regido bajo este principio son los sistemas lineales. Para verificar si el modelo matemático de un sistema es o no lineal, éste debe satisfacer las siguientes condiciones: HOMOGENEIDAD Sea )(xf una función real que se emplea para representar el sistema; la función es
homogénea si y solo si: )()( xkfkxf = ADITIVIDAD Considérese que la función )(xf y además las entradas 1x y 2x ; esta función es aditiva si y solo si:
)()(
)()(
2
1
2
1
xfxf
xfxf
xx
xx
=
=
=
=
Entonces: )()()( 2121 xfxfxxf +=+ Las dos propiedades anteriores se pueden conjuntar en una sola, es decir, si se desea verificar o investigar si el modelo matemático de un sistema es o no lineal, se debe satisfacer completamente la siguiente ecuación:
)()()( 2121 xbfxafbxaxf +=+ donde a y b , son constantes arbitrarias.

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 21
4.2 Ejemplo.
Considérese un sistema como el mostrado en la figura: La relación entrada-salida está dada por: 1+= uy (a-1 Para que el sistema descrito por medio de la ecuación (a-1 sea lineal, ésta debe satisfacer las condiciones de homogeneidad y aditividad, esto es: )()()( 2121 xbfxafbxaxf +=+ (a-2 Supóngase que al sistema se aplica una entrada: 1auu = (a-3 y la salida producida en este caso es: 111 += auy (a-4 al aplicar al sistema la otra entrada: 2buu = (a-5 la salida será: 122 += buy (a-6 si al sistema se aplica la entrada: 21 buauu += (a-7 la salida es: 121 ++= buauy (a-8 de las ecuaciones (a-4, (a-6 y (a-8, se tiene:
21 yyy +≠
por lo tanto el sistema no satisface la ecuación (a-2 y el sistema es no lineal.
ENTRADA u
SISTEMA SALIDA y
8
8
6
6
4
4
2
2
u
y

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 22
4.3 Ejemplos: Determinar en cada caso si la relació n entrada-salida es lineal.
4.3.1 Para el sistema representado por el modelo matemático: dt
duy =
si al sistema se aplican las entradas:
21
2
1
buauu
buu
auu
+===
las correspondientes salidas son:
dt
duay 1
1 =
dt
duby 2
2 =
dt
dub
dt
duay 21 +=
de las expresiones anteriores se obtiene: 21 yyy += por lo tanto el sistema es lineal. Para este sistema se sabe que operador derivativo )( dt
d
es lineal, y debido a que la relación entre la entrada y la salida del sistema es a través de este operador lineal, el sistema será lineal.
4.3.2 Para el sistema representado por el modelo matemático: 22
2
udt
udy +=
suponiendo las siguientes entradas:
21
2
1
buauu
buu
auu
+===
las correspondientes salidas son:

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 23
21
221
2
1 uadt
uday +=
22
22
22
2 ubdt
udby +=
22
221
21
22
22
21
2
2 ubuabuuadt
udb
dt
uday ++++=
de donde se tiene que: 21 yyy +≠ por lo tanto el sistema es no lineal.
4.3.3 Para el sistema representado por el modelo matemático: tudt
duy cos+=
suponiendo las entradas:
21
2
1
buauu
buu
auu
+===
se obtienen las salidas:
taudt
duay cos1
11 +=
tbudt
duby cos2
22 +=
tbutaudt
dub
dt
duay coscos 21
21 +++=
se obtiene: 21 yyy += por tanto el sistema es lineal.

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 24
5 Sistemas no-lineales. Estrictamente hablando, los sistemas lineales no existen en la práctica, ya que todos los sistemas físicos son no-lineales en alguna extensión. Los sistemas de control lineales son modelos ideales fabricados para facilitar el diseño y análisis de los mismos. Un sistema se considera lineal cuando las magnitudes de las señales de entrada se limitan a rangos en donde los componentes del sistema exhiben una característica lineal. Pero cuando las magnitudes de las señales se extienden más allá del rango de operación lineal, dependiendo de la severidad de la no-linealidad, el sistema debería ser considerado no-lineal. Por ejemplo, los amplificadores usados en los sistemas de control frecuentemente exhiben un efecto de saturación cuando la señal de entrada crece; el campo magnético de un motor usualmente tiene propiedades de saturación. Para análisis y diseño de los sistemas lineales existe una abundante cantidad de técnicas analíticas y gráficas. Los sistemas no-lineales, por lo contrario, son usualmente difíciles de tratar matemáticamente, y no hay métodos generales disponibles para resolver una amplia variedad de sistemas no-lineales. Lo más práctico es resolver un sistema en base a un modelo lineal, eliminando las no-linealidades y posteriormente hacer el rediseño del mismo por medio de simulación por computadora.
5.1 Linealización de sistemas no-lineales. Los sistemas mecánicos y eléctricos se puede asumir que son lineales sobre un rango razonablemente grande de las variables. Esto normalmente no es usual en los sistemas térmicos y de fluidos, los cuales presentan características no-lineales. Afortunadamente, podemos linealizar elementos no-lineales asumiendo condiciones de pequeña señal. Esta es la forma usual de obtener un modelo lineal equivalente para un circuito electrónico transistorizado. Debido a que la curva de una función es continua sobre el rango de interés, podemos utilizar la expansión de la serie de Taylor alrededor del punto de operación (punto de equilibrio).

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 25
La serie de Taylor de la función ( )xfy = , se expresa como sigue:
( ) ( ) ( ).....
!2
20
2
2
00
00
+−+−+===
xx
dx
fdxx
dx
dfxfy
xxxx
La pendiente de la recta tangente en el punto de operación 0x , es una buena aproximación a la curva para un rango pequeño de desviación ( )0xx − , con respecto al punto de operación.
Entonces una razonable aproximación nos la dan los primeros dos términos de la serie de Taylor:
( ) ( ) ( )0000
0
xxmyxxdx
dfxfy
xx
−+=−+==
Donde m es la pendiente en el punto de operación. Finalmente, la ecuación anterior puede ser escrita como una ecuación lineal de la forma:
( )00 xxmyy −=− xmy ∆=∆

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 26
Como un ejemplo, tenemos el paso de fluido a través de una placa de orifico, el cual puede ser representado por la ecuación no-lineal:
( ) 21
21 PPKQ −= donde K = constante Obtenga una aproximación lineal para la ecuación del flujo a través de una placa de orificio. Hacemos 21 PPP −=∆ y evaluamos en el punto de operación 0P∆ y usando los primeros dos términos de la serie de Taylor para Q, tenemos:
( )00
0
PPP
QQQ
PP
∆−∆∆∂∂+=
∆=∆
Donde: 2
1
00 PKQ ∆= y 2
1
020
−
∆=∆
∆=∆∂∂= P
K
P
Qm
PP
Agrupando términos, tenemos:
( )00 PPmQQ ∆−∆=−
Definimos: 0QQQ −= y 0PPP ∆−∆=∆ , obtenemos finalmente,
PmQ ∆= Esta última ecuación, es una ecuación lineal evaluada alrededor del punto de operación 0P∆ . Tarea: leer el capitulo 2.10 No linealidades y 2.11 Linealización del libro: Sistemas de Control para Ingeniería, Norman S. Nise, CECSA.
1P 2P Q

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 27
6 Sistemas invariantes y sistemas variantes con el tiempo. Un sistema se denomina invariante con el tiempo cuando sus parámetros son estacionarios con respecto al tiempo durante la operación de dicho sistema. En la práctica, la mayoría de los sistemas contienen elementos que cambian o derivan con el paso del tiempo. Por ejemplo, la resistencia del bobinado eléctrico de un motor variará después de que el motor se energice y adquiera la temperatura de operación. Otro ejemplo es el control de trayectoria de un misil guiado, en donde la masa del misil se reduce conforme el combustible se agota. Aún cuando un sistema variante con el tiempo sin no-linealidades sigue siendo un sistema lineal, el análisis y diseño de esta clase de sistemas es usualmente más complejo que los sistemas lineales e invariantes con el tiempo.

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 28
7 Diagramas de bloques. En control de procesos, una herramienta valiosa es la representación gráfica de funciones de transferencia mediante diagramas de bloques. A continuación veremos una introducción a los diagramas de bloques y al álgebra de los diagramas de bloques. Todos los diagramas de bloques están formados por una combinación de cuatro elementos básicos: flechas, puntos de sumatoria, puntos de ramificación y bloques. La siguiente figura muestra esos elementos. Las flechas en general indican el flujo de información; ellas representan variables de proceso o señales de control. La punta de flecha indica la dirección del flujo de información. Los puntos de sumatoria representan la suma algebraica de las señales de entrada,
( ) ( ) ( )sCsRsE −= . Un punto de ramificación es la posición en una flecha en donde la información se ramifica de manera concurrente a otros punto de sumatoria o bloques. Los bloques representan la operación matemática, en forma de función de transferencia ( )sG , la cual evalúa la señal de entrada para producir la salida. Las flechas y bloques muestran en la figura anterior representan la expresión matemática siguiente:
( ) ( ) ( ) ( ) ( ) ( )[ ]sCsRsGsEsGsM cc −== Todos los diagramas de bloques pueden ser manejados, o manipulados, algebraicamente. La siguiente tabla muestra las reglas del álgebra de los diagramas de bloques. Estas reglas son para la simplificación de diagramas de bloques complicados.

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 29
INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 30
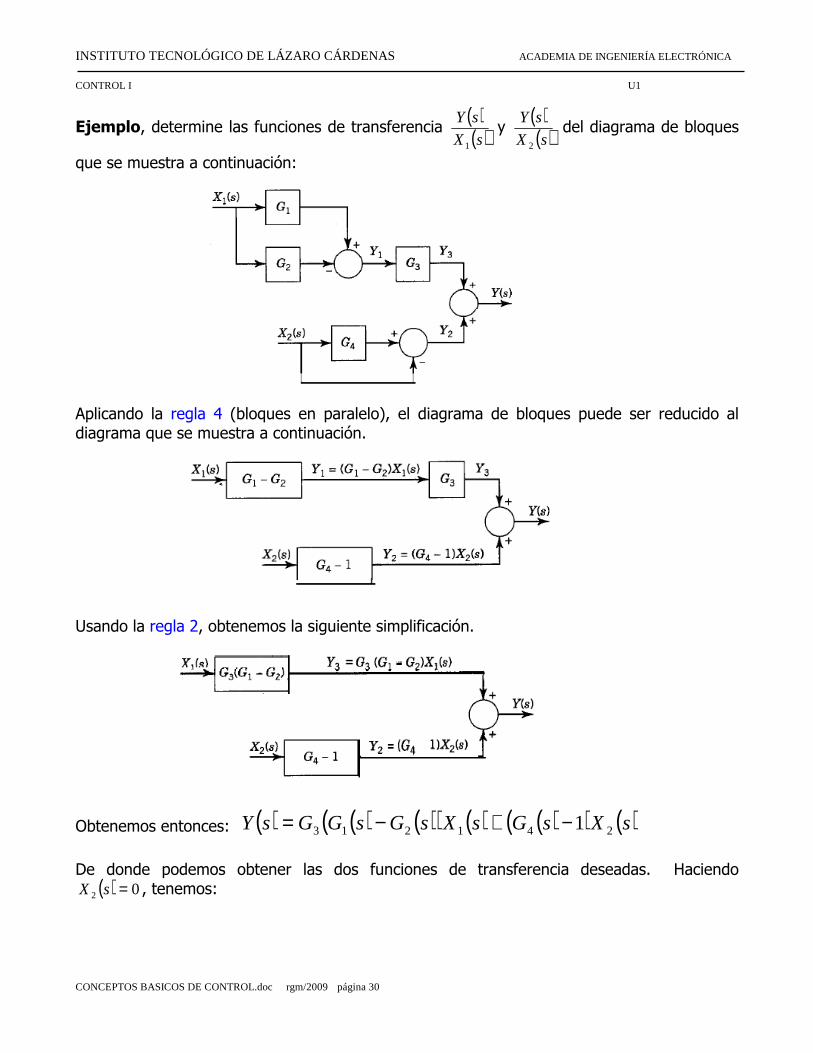
Ejemplo, determine las funciones de transferencia ( )( )sX
sY
1
y ( )( )sX
sY
2
del diagrama de bloques
que se muestra a continuación: Aplicando la regla 4 (bloques en paralelo), el diagrama de bloques puede ser reducido al diagrama que se muestra a continuación. Usando la regla 2, obtenemos la siguiente simplificación.
Obtenemos entonces: ( ) ( ) ( )( ) ( ) ( )( ) ( )sXsGsXsGsGGsY 241213 1−+−= De donde podemos obtener las dos funciones de transferencia deseadas. Haciendo
( ) 02 =sX , tenemos:
INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 31
( )( ) ( ) ( )( )sGsGGsX
sY213
1
−=
Haciendo ( ) 01 =sX , obtenemos:
( )( ) ( ) 14
2
−= sGsX
sY
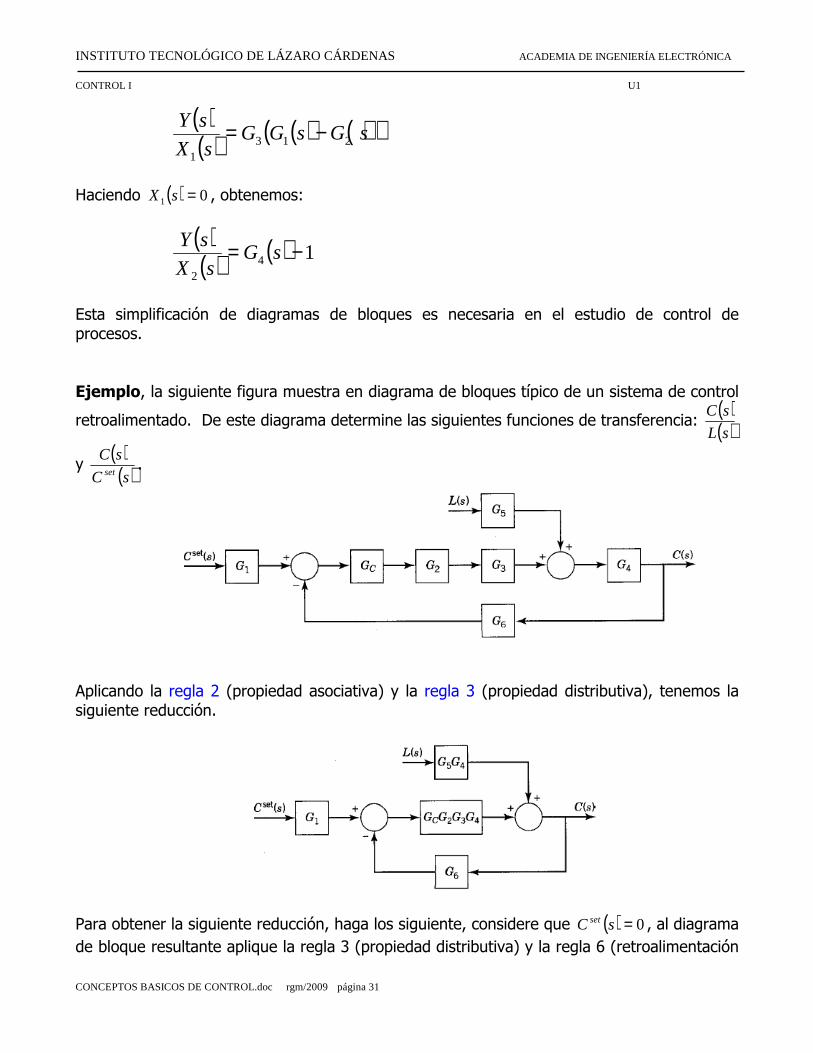
Esta simplificación de diagramas de bloques es necesaria en el estudio de control de procesos. Ejemplo, la siguiente figura muestra en diagrama de bloques típico de un sistema de control
retroalimentado. De este diagrama determine las siguientes funciones de transferencia: ( )( )sL
sC
y ( )( )sC
sCset
.
Aplicando la regla 2 (propiedad asociativa) y la regla 3 (propiedad distributiva), tenemos la siguiente reducción. Para obtener la siguiente reducción, haga los siguiente, considere que ( ) 0=sC set , al diagrama de bloque resultante aplique la regla 3 (propiedad distributiva) y la regla 6 (retroalimentación

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 32
negativa); a continuación, considere que ( ) 0=sL y aplique la regla 6. Finalmente sume los resultados obtenidos en los dos casos en una sola representación. Finalmente, aplicando la regla 2 (propiedad asociativa), obtenemos: De donde se obtienen las siguientes funciones de transferencia:
( )( ) 6432
4321
1 GGGGG
GGGGG
sC
sC
c
cset +
=
( )( ) 6432
45
1 GGGGG
GG
sL
sC
c+=
Las funciones de transferencia anteriores son funciones de transferencia de lazo cerrado.
Ejemplo. Determine la función de transferencia ( )( )sR
sC, para cada uno de los diagramas de
bloques que se muestran a continuación.

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 33
a)
b)
c)

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 34
8 Diagramas de flujo de señal. Las gráficas de flujo de señal son una alternativa a los diagramas de bloques. Las gráficas de flujo de señal están formadas por ramas (que representan sistemas) y nodos (que representan señales). Estos elementos se muestran en la siguiente figura: En el inciso a) se muestra una rama que representa el sistema descrito por la función de transferencia ( )sG , en el inciso b) se muestra un nodo el cual representa la señal dada por
( )sV , en el inciso c) se muestra la interconexión de sistema y señales.
8.1 Conversión de diagramas de bloques en gráficas de flujo de señal. Para convertir los diagramas de bloques en gráficas de flujo de señal, comience por dibujar los nodos de señal tomados del diagrama de bloques original. Si no están definidas estas señales, asigne un nombre representativo a la señales de entrada y salida de cada bloque. A continuación interconecte los nodos, mostrando la dirección del flujo de señales e identificando cada función de transferencia. Debe notarse que los signos negativos en los puntos de suma del diagrama de bloques están representados por las funciones de transferencia negativas de la gráfica de flujo de señales. Por último, si desea, simplifique la gráfica de flujo de señales al eliminar nodos que tienen solo un flujo de entrada y solo un flujo de salida.
INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 35
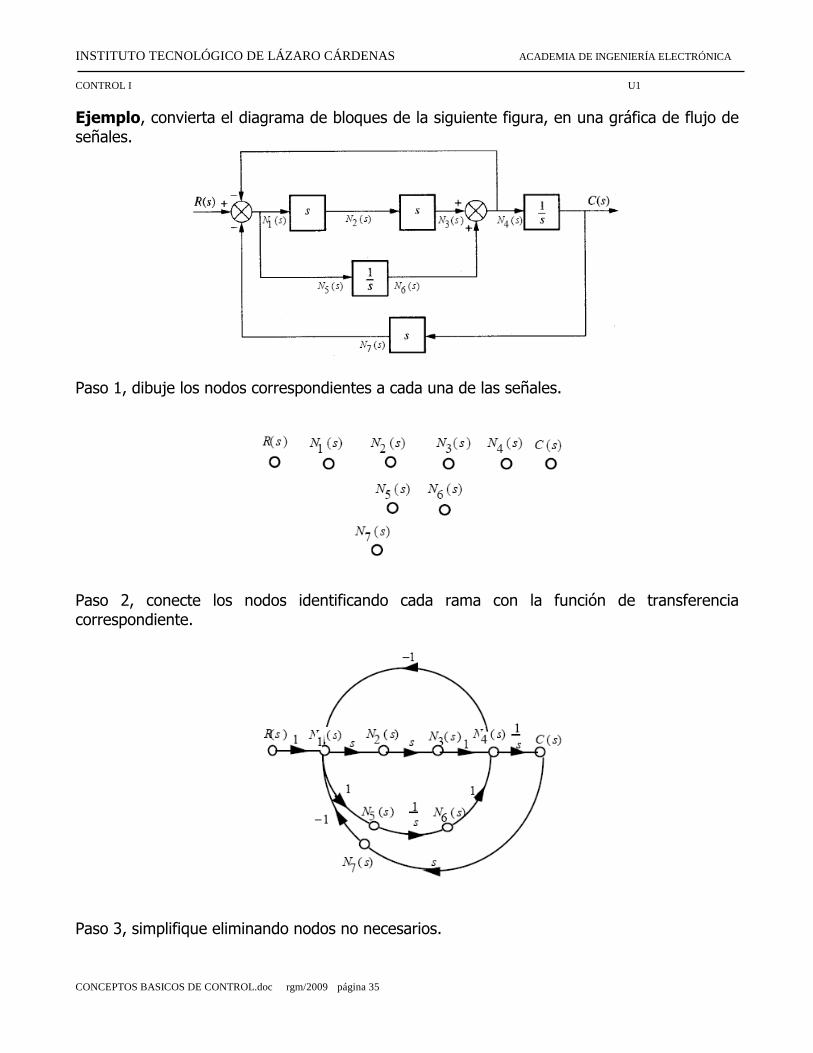
Ejemplo, convierta el diagrama de bloques de la siguiente figura, en una gráfica de flujo de señales. Paso 1, dibuje los nodos correspondientes a cada una de las señales. Paso 2, conecte los nodos identificando cada rama con la función de transferencia correspondiente. Paso 3, simplifique eliminando nodos no necesarios.
INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 36
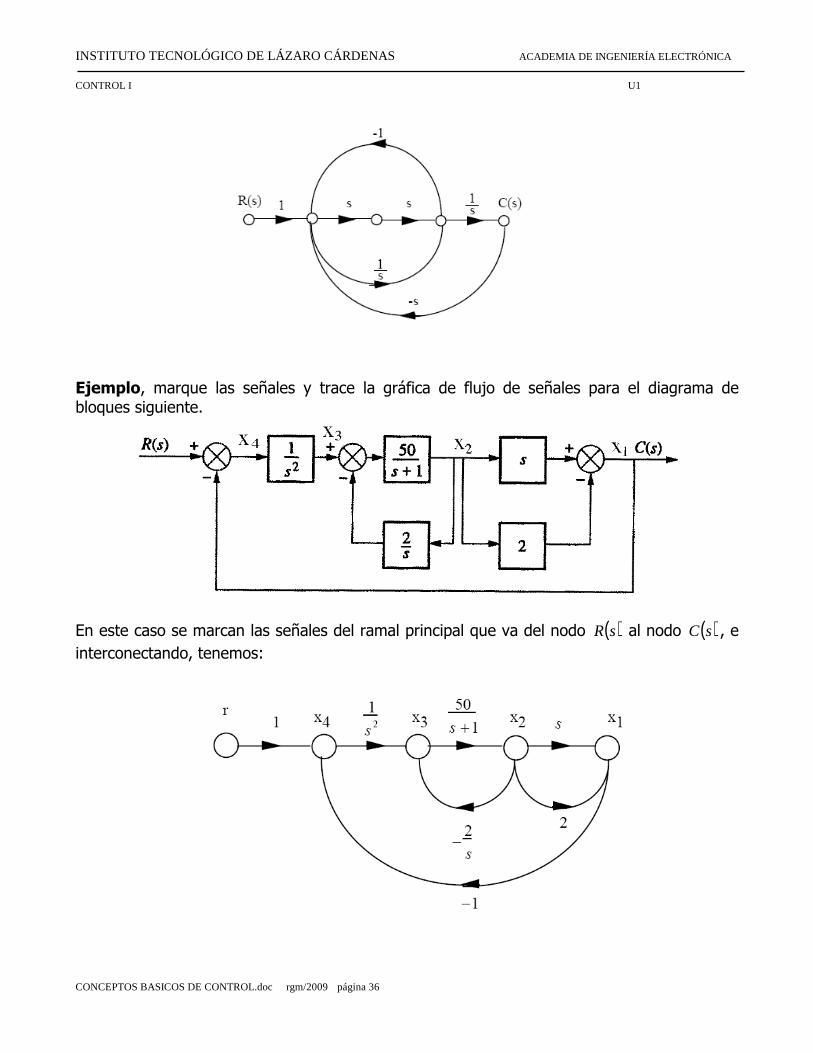
Ejemplo, marque las señales y trace la gráfica de flujo de señales para el diagrama de bloques siguiente.
En este caso se marcan las señales del ramal principal que va del nodo ( )sR al nodo ( )sC , e interconectando, tenemos:

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 37
8.2 Regla de Mason. Es una técnica para reducir gráficas de flujo de señales a funciones de transferencia individuales que relacionan la salida de un sistema con su entrada. La regla de Mason requiere de la aplicación de una fórmula para realizar la reducción de la gráfica de flujo de señales. La fórmula fue deducida por S.J. Mason cuando relacionó la gráfica de flujo de señales con las ecuaciones simultáneas que se pueden escribir a partir de la gráfica. En general puede ser complicado poner en práctica la fórmula sin cometer errores. Específicamente, la existencia de lo que más adelante llamaremos mallas que no se tocan aumenta la complejidad de la fórmula. Sin embargo muchos sistemas no tienen mallas que no se tocan. Para este tipo de sistemas, el estudiante encontrará que la regla de Mason es más fácil de usar que la reducción de diagramas de bloques. La regla de Mason tiene varios componentes que deben evaluarse. Primero, se debe estar seguro de que las definiciones de los componentes se entienden bien y a continuación se debe tener cuidado al evaluar los componentes, para lo cual se estudian algunas definiciones básicas aplicables a las gráficas de flujo de señales. Definiciones. Con el propósito de ejemplificar cada una de las definiciones, utilizaremos el diagrama de flujo de señales de la siguiente figura: Ganancia de malla. Es el producto de ganancias de rama encontrado al recorrer una trayectoria que empieza en un nodo y termina en el mismo nodo sin pasar por ningún otro nodo más de una vez, y siguiendo la dirección del flujo de señales. En la figura de ejemplo, tenemos cuatro mallas, cuyas ganancias son: 1. ( ) ( )sHsG 12 2. ( ) ( )sHsG 24 3. ( ) ( ) ( )sHsGsG 354 4. ( ) ( ) ( )sHsGsG 364

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 38
Ganancia de trayectoria directa. Es el producto de ganancias encontrado al recorrer una trayectoria del nodo de entrada al nodo de salida de la gráfica de flujo de señales, en la dirección del flujo de señales. En la figura de ejemplo, hay dos trayectorias directas: 1. ( ) ( ) ( ) ( ) ( ) ( )sGsGsGsGsGsG 754321 2. ( ) ( ) ( ) ( ) ( ) ( )sGsGsGsGsGsG 764321 Mallas que no se tocan. Son los lazos que no tienen nodos en común. En la figura de ejemplo, el lazo ( ) ( )sHsG 12 , no toca a los lazos ( ) ( )sHsG 24 , ( ) ( ) ( )sHsGsG 354 y
( ) ( ) ( )sHsGsG 364 . Ganancia de mallas que no se tocan. Es el producto de ganancias de mallas que no se tocan, tomadas dos a la vez, tres a la vez, cuatro a la vez, etc. En la figura de ejemplo, la ganancia de mallas que no se tocan, existe solo dos a la vez, por esta razón, tenemos: 1. ( ) ( )[ ] ( ) ( )[ ]sHsGsHsG 2412 2. ( ) ( )[ ] ( ) ( ) ( )[ ]sHsGsGsHsG 35412 3. ( ) ( )[ ] ( ) ( ) ( )[ ]sHsGsGsHsG 36412 Regla de Mason.
La función de transferencia,( )( )sR
sC, de un sistema representado por una gráfica de flujo de
señales, esta dado por:
∑ ∆∆
=K
KKTG1
Donde:
=G Función de transferencia Salida/Entrada. =KT Ganancia de la K-esima trayectoria directa.

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 39
=∆ Determinante del gráfico = 1 - ∑ ganancia de mallas simple + ∑ ganancia de mallas dobles no adjuntas - ∑ ganancia de mallas triples no adjuntas + ∑ ganancia de mallas cuádruples no adjuntas……
=∆ K Cofactor del determinante de la K-esima trayectoria directa, con los lazos que la tocan eliminados = ∆ - ∑ ganancias de mallas que tocan a la K-esima trayectoria.
Ejemplo. Utilice la regla de Mason para determinar la función de transferencia, ( ) ( )( )sR
sCsG = ,
para el diagrama de flujo de señal siguiente:
Ganancias de malla: 1. 37642 HGGGG 2. 37652 HGGGG 2. 37643 HGGGG 3. 37653 HGGGG 4. 27 HG 5. 16HG Ganancia de trayectorias directas:
764211 GGGGGT =
765212 GGGGGT =
764313 GGGGGT =
765314 GGGGGT = Mallas que no se tocan: 27HG y 16HG .

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 40
Ganancia de las mallas que no se tocan, dos a la vez: 1627 HGHG Determinante del gráfico:
[ ] 16271627376533764337652376421 HGHGHGHGHGGGGHGGGGHGGGGHGGGG ++++++−=∆
[ ] 1627162753435242763 )(1 HGHGHGHGGGGGGGGGGGH ++++++−=∆
1627162753435242763 )(1 HGHGHGHGGGGGGGGGGGH +−−+++−=∆ Cofactores de las trayectorias directas: 14321 =∆=∆=∆=∆ Función de transferencia equivalente:
( )∆
∆+∆+∆+∆=∆∆
= ∑ 443322111 TTTTTsG
KKK
( )1627162753435242763
76531764317652176421
)(1 HGHGHGHGGGGGGGGGGGH
GGGGGGGGGGGGGGGGGGGGsG
+−−+++−+++
=

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 41
Ejemplo. Utilice la regla de Mason para hallar la función de transferencia
equivalente, ( ) ( )( )sR
sCsG = , del diagrama de flujo de señal de la siguiente figura.
Ganancias de malla: 1. [ ][ ][ ] 21 sss −=−
2. [ ][ ] [ ] 21ss
sss −=−
3. [ ]s
sss
111 −=−
4. [ ]ss
11
1 −=−
Mallas que no se tocan: NO HAY
Ganancia de trayectorias directas: [ ][ ][ ] ss
ssT =
= 111 ; [ ]
22
1111
sssT =
=
Determinante del gráfico:
−−−−−=∆ss
ss11
1 22
Cofactores de las trayectorias directas: 121 =∆=∆ Función de transferencia equivalente:
( )sss
s
ss
ss
TTTsG
KKK 22
12
21
11
24
3
2
22211
+++=
++
+=
∆∆+∆=∆
∆= ∑

INSTITUTO TECNOLÓGICO DE LÁZARO CÁRDENAS ACADEMIA DE INGENIERÍA ELECTRÓNICA
CONTROL I U1
CONCEPTOS BASICOS DE CONTROL.doc rgm/2009 página 42
BIBLIOGRAFÍA Ingeniería de Control Automático (Instrumentación Industrial) José Nacif Carchi Instituto Politécnico Nacional Ingeniería de Control Moderna Katsuhiko Ogata Prentice may Instrumentación Industrial Antonio Creus Solé Marcombo Instrumentation for Process Measurement and Control Norman A. Anderson Chilton Company Introducción a la Ingeniería del Control Automático José E. Rodríguez Ávila McGraw Hill Automatic Control Systems Benjamín C. Kuo, Farid Golnaraghi Wiley International Principles and Practices of Automatic Process Control Carl A. Smith, Armando B. Corripio John Wiley Sistemas de control para ingeniería. Norman S. Nise. CECSA