Control a Los Sistemas Péndulo Invertido y Grua Viajera
21
Departamento de Mecatrónica Proyecto: Control a los sistemas péndulo invertido y grua viajera por realimentación de estados observados mediante un observador discreto de orden completo. Presentan: Marcos Infante Jacobo Eduardo Muriedas Le Royal Violeta Terrones Navarro Asignatura: Diseño de Sistemas Mecatrónicos I Asesores del proyecto: M. en C. Esteban Chávez Conde Loma Bonita, Oax. a 9 de Febrero del 2015. 1
-
Upload
marcos-infante-jacobo -
Category
Documents
-
view
17 -
download
3
description
Inverted pendulum control
Transcript of Control a Los Sistemas Péndulo Invertido y Grua Viajera
Departamento de Mecatrónica
Proyecto:
Control a los sistemas péndulo invertido y grua viajerapor realimentación de estados observados mediante un
observador discreto de orden completo.
Presentan:
Marcos Infante JacoboEduardo Muriedas Le RoyalVioleta Terrones Navarro
Asignatura:
Diseño de Sistemas Mecatrónicos I
Asesores del proyecto:
M. en C. Esteban Chávez Conde
Loma Bonita, Oax. a 9 de Febrero del 2015.
1

Control a los sistemas péndulo invertido y grua viajera por realimentación deestados observados mediante un observador discreto de orden completo.
M.Infante-Jacobo, E.Muriedas-L.Royal, V.Terrones-Navarro
Resumen
En este documento se presenta el procedimiento para la realización del control por realimentaciónde estados observados así como el diseño de un observador discreto para lograr controlar el sistemade Péndulo Invertido lineal, además se realizan algunas comparaciones del sistema controlado conobservador continuo y con observador discreto; todo esto a nivel simulación, utilizando el programade MATLAB Simulink.
2

Índice
1. Introducción 6
2. Objetivo 6
3. Desarrollo y análisis de resultados 73.1. Péndulo Invertido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1.1. Modelo matemático . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1.2. Parámetros físicos del sistema. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.1.3. Diseño del observador en tiempo continúo. . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.1.4. Diseño del observador en tiempo discreto. . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.2. Grua Viajera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2.1. Modelo matematico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2.2. Parámetros físicos del sistema. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2.3. Diseño del observador en tiempo continúo. . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2.4. Diseño del observador en tiempo discreto. . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4. Conclusiones generales 21
3

Índice de …guras
1. Pendulo invertido con barra de masa continua. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62. Grua Viajera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63. Diagrama a bloques del sistema con realimentación de estados observados en tiempo continuo. . 84. Diagrama a bloques del sistema de control por realimentacion de estados observados mediante
un observador discreto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115. Posición del carro de los sistemas linealizado y no lineal con observador en tiempo continuo y
discreto segun sea el caso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126. Posición angular del pendulo del sistema linelizado y no lineal con observador discreto. . . . . . . 127. Esfuerzo de control de los sistemas no lineales con observadores en tiempo continuo y discreto
respectivamente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138. Respuesta del sistema ante una entrada escalón de 0.2 m, cuando el pendulo tiene una posición
inicial de 0.1 rads. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139. Respuesta angular de los sistemas no lineales discreto y continuo cuando el pendulo tiene una
posición inicial de 01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1410. Esfuerzo de control del sistema no lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1411. Diagrama de bloques del sistema grua viajera no lineal con realimentación de estados observados. 1612. Diagrama a bloques del sistema con realimentacion por estados observados mediante un obser-
vador de orden completo discreto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1913. Respuesta de los sistemas no lineales ante la entrada escalón de 0.3 m . . . . . . . . . . . . . . . 1914. Posición angular en radianes de los sistemas ante entrada escalon de 0.3 m . . . . . . . . . . . . . 2015. Posición de los sistemas ante entrada escalon de 0.3 m y con una posición inicial angular de 0.2
rads. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2016. Posición angular de los sistemas ante una entrada escalon de 0.3 m y con una posición incial en
el pendulo de 0.2 rads. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4

Índice de cuadros
5
1. Introducción
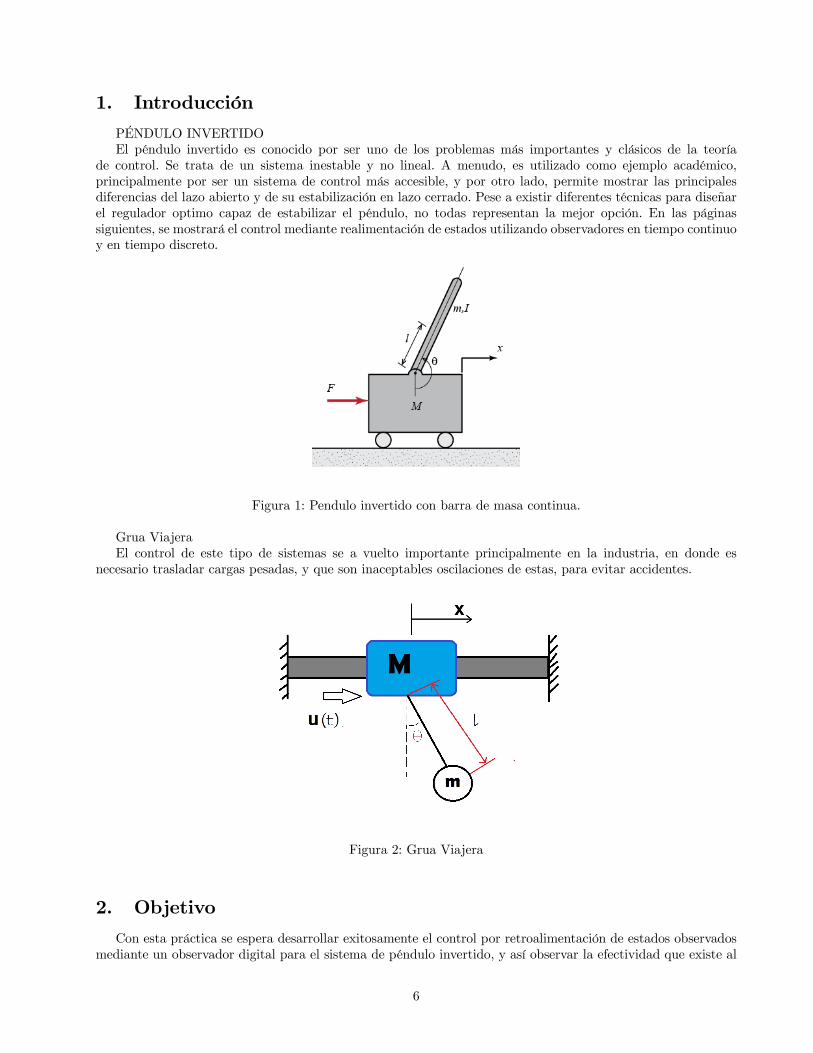
PÉNDULO INVERTIDOEl péndulo invertido es conocido por ser uno de los problemas más importantes y clásicos de la teoría
de control. Se trata de un sistema inestable y no lineal. A menudo, es utilizado como ejemplo académico,principalmente por ser un sistema de control más accesible, y por otro lado, permite mostrar las principalesdiferencias del lazo abierto y de su estabilización en lazo cerrado. Pese a existir diferentes técnicas para diseñarel regulador optimo capaz de estabilizar el péndulo, no todas representan la mejor opción. En las páginassiguientes, se mostrará el control mediante realimentación de estados utilizando observadores en tiempo continuoy en tiempo discreto.
Figura 1: Pendulo invertido con barra de masa continua.
Grua ViajeraEl control de este tipo de sistemas se a vuelto importante principalmente en la industria, en donde es
necesario trasladar cargas pesadas, y que son inaceptables oscilaciones de estas, para evitar accidentes.
Figura 2: Grua Viajera
2. Objetivo
Con esta práctica se espera desarrollar exitosamente el control por retroalimentación de estados observadosmediante un observador digital para el sistema de péndulo invertido, y así observar la efectividad que existe al
6

utilizar diseños en tiempo discreto.
3. Desarrollo y análisis de resultados
3.1. Péndulo Invertido
3.1.1. Modelo matemático
El Modelo matemático del sistema se encuentra dado por las siguientes ecuaciones:
( +)Ä+ Ä cos ¡ _2 sin = () (1)
(2 + )Ä + Ä cos ¡ sin = 0 (2)
como se observa, son ecuaciones no lineales , por lo que se necesita linealizarlas para poder realizar lasoperaciones respectivas, dado que este documento no se enfoca en eso, las presentaremos de forma linealizadascomo sigue:
Ä = lg( +)
2 + ( +)()¡
2 + ( +)()
Ä =22
2 + ( +)()¡ +2
2 + ( +)()
podemos de…nir ahora el sistema en la forma de estados :
1 = ) _1 = 22 = _) _2 = Ä3 = ) _3 = 44 = _) _1 = Ä2664_1_2_3_4
3775 =
266640 1 0 0
(+)2+(+) 0 0 0
0 0 0 1¡()2
2+(+) 0 0 0
3777526641234
3775+26664
0¡
2+(+)
0+2
2+(+)
37775
3.1.2. Parámetros físicos del sistema.
El sistema que se procedió a simular tiene las siguientes características:Masa del Péndulo m=0.3 kgLongitud del Péndulo l=0.3 mMasa del Carro M=1 kgInercia I= 0.009 kg-m2
dando así como resultado el sistema con valores numéricos siguientes:
7
2664_1_2_3_4
3775 =
26640 1 0 0
296581 0 0 00 0 0 1
¡20533 0 0 0
377526641234
3775+2664
0¡232560
09302
3775 (3)
=£0 0 1 0
¤26641234
3775 (4)
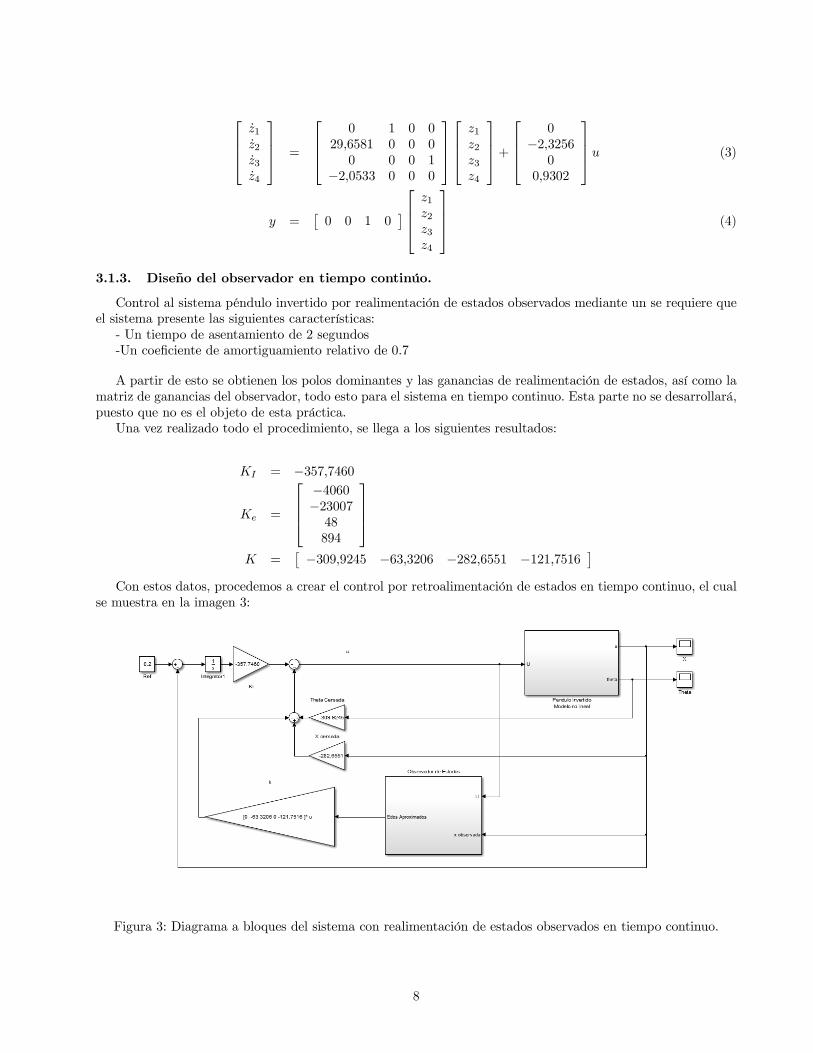
3.1.3. Diseño del observador en tiempo continúo.
Control al sistema péndulo invertido por realimentación de estados observados mediante un se requiere queel sistema presente las siguientes características:- Un tiempo de asentamiento de 2 segundos-Un coe…ciente de amortiguamiento relativo de 0.7
A partir de esto se obtienen los polos dominantes y las ganancias de realimentación de estados, así como lamatriz de ganancias del observador, todo esto para el sistema en tiempo continuo. Esta parte no se desarrollará,puesto que no es el objeto de esta práctica.Una vez realizado todo el procedimiento, se llega a los siguientes resultados:
= ¡3577460
=
2664¡4060¡2300748894
3775 =
£ ¡3099245 ¡633206 ¡2826551 ¡1217516 ¤Con estos datos, procedemos a crear el control por retroalimentación de estados en tiempo continuo, el cual
se muestra en la imagen 3:
Figura 3: Diagrama a bloques del sistema con realimentación de estados observados en tiempo continuo.
8

3.1.4. Diseño del observador en tiempo discreto.
Ahora pasaremos a desarrollar el procedimiento para encontrar las ganancias adecuadas para el sistemadiscreto, el cual es el objetivo de esta práctica.A partir del sistema 3 se obtienen las matrices A y B como se muestra a continuación:
=
26640 1 0 0
296581 0 0 00 0 0 1
¡20533 0 0 0
3775
=
26640
¡232560
09302
3775 =
£0 0 1 0
¤El polo deseado está dado por = 2 y = 07 , además elegimos un periodo de muestreo = 001 con lo
que ya es su…ciente para empezar a discretizar.primero se necesita discretizar la matriz de estados.La ecuación de estado en tiempo discreto deseada tendría la forma: ((+1) ) = ( )( )+( )( )donde las matrices ( ) y ( ) se obtienen de la siguiente manera:
( ) = = ¡1(( ¡)¡1)
( ) =
24 Z0
35
( ) =
2664cosh(54459) 01836 sinh(54459) 0 0
54459 sinh(54459) cosh(54459) 0 00069¡ 0069 cosh(54459) 0069¡ 00127 sinh(54459) 1 ¡0337 sinh(54459) 00692¡ 00692 cosh(54459) 0 1
3775
( ) =
266401836 sinh(54459 ) 00337(cosh(54459 )¡ 1) 0 0cosh(54459 )¡ 1 01836 sinh(54459 ) 0 0
0069 ¡ 001267 sinh(54459 ) 00346 2 ¡ 000233 [cosh(54459 )¡ 1] 2
2¡0377 cosh(54459 )¡ 1 00692[ ¡ 01836 sinh(54459 )] 0
37752664
0¡232560
09302
3775Sustituyendo el valor de T=0.01, se tiene:
( ) =
266410015 00100 0 002967 10015 0 0¡00001 0 1 001¡00205 ¡00001 0 1
3775
( ) =
2664¡00001¡002330004700093
3775Ahora se procede a diseñar las ganancias [K] para la retro de estados discretos.
9

Los polos deseados están dados por:
=4
jj = ¡
6 = =
q1¡ 2
1 = 09800 + 00200
2 = 09800¡ 00200así como en los sistemas en tiempo continuo, para asegurar la estabilidad y la dominancia de los polos
propuestos, se eligen otros dos polos 5 veces más cercanos a cero que la parte real de los dominantes. Es decir:
6 ) 34
34 = 08803§ 01083Por lo tanto el polinomio característico en lazo cerrado deseado es:
j ¡+j = ( ¡ 08803¡ 01083)( ¡ 08803 + 01083)( ¡ 09800¡ 00200)( ¡ 09800 + 00200)j ¡+j = 4 ¡ 3 720 63 + 5 198 22 ¡ 3 233 4 + 0755 82
1 = ¡37722 = 5198
3 = ¡323344 = 075582
se veri…ca la controlabilidad del sistema
£ 2 3
¤= 4
Como el rango efectivamente fue de 4, el sistema es de estado completamente controlable, y por lo tanto seprocede a determinar la matriz de ganancias K, para lo cual se ocupa la fórmula de Ackerman:
=£0 0 0 1
¤ £ 2 3
¤¡1()
donde () = 4 + 13 + 2
2 + 3+ 4
dando como resultado:
=£ ¡2007529 ¡323975 ¡913902 ¡52723 ¤
Como el sistema tiene una entrada de referencia procedemos a calcular para esto utilizamos
l¶³m!1 ()(1¡
¡1) = 1
donde () = ()()
() = ( ¡ )donde =
= ¡realizando todo esto, y para una entrada escalón escalado de 0.2 se obtiene que
= ¡9147
10
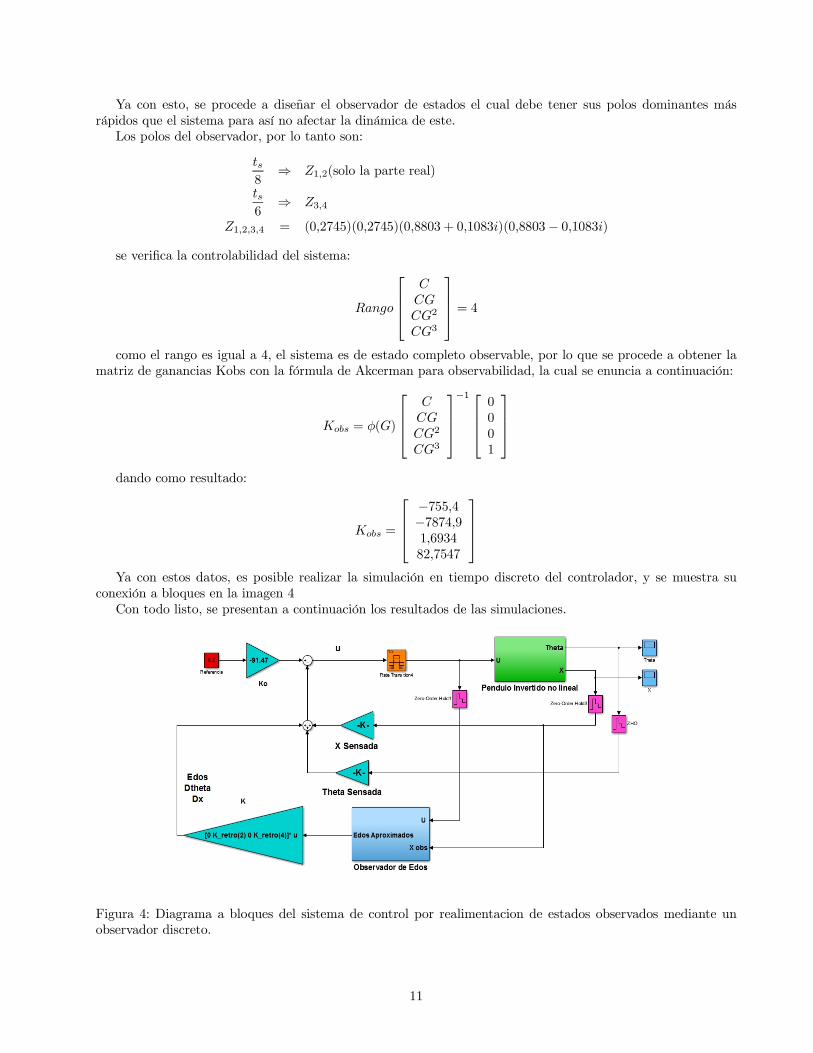
Ya con esto, se procede a diseñar el observador de estados el cual debe tener sus polos dominantes másrápidos que el sistema para así no afectar la dinámica de este.Los polos del observador, por lo tanto son:
8) 12(solo la parte real)
6) 34
1234 = (02745)(02745)(08803 + 01083)(08803¡ 01083)
se veri…ca la controlabilidad del sistema:
26642
3
3775 = 4como el rango es igual a 4, el sistema es de estado completo observable, por lo que se procede a obtener la
matriz de ganancias Kobs con la fórmula de Akcerman para observabilidad, la cual se enuncia a continuación:
= ()
26642
3
3775¡1 2664
0001
3775dando como resultado:
=
2664¡7554¡7874916934827547
3775Ya con estos datos, es posible realizar la simulación en tiempo discreto del controlador, y se muestra su
conexión a bloques en la imagen 4Con todo listo, se presentan a continuación los resultados de las simulaciones.
Figura 4: Diagrama a bloques del sistema de control por realimentacion de estados observados mediante unobservador discreto.
11

0 0.5 1 1.5 2 2.5 3 3.5 4-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Tiempo t(s)
Posic
ión de
l carr
o (m)
Respuesta de los sitemas ante una entrada escalón de 0.2
Posición del sistema no lineal con observado continuoPosicion del sistema no lineal con observador discretoPosición del sistema lineal discreto con observador discretoPosición del sistema lineal continuo con observador continuo
Figura 5: Posición del carro de los sistemas linealizado y no lineal con observador en tiempo continuo y discretosegun sea el caso.
0 0.5 1 1.5 2 2.5 3 3.5 4-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
Tiempo t(s)
Posic
ión a
ngula
r (ra
d)
Respuesta angular de los sistemas ante una entrada escalon de 0.2 en la posición.
Posición angular del sistema no lineal con observador continuoPosición angular del sistema no lineal con observador discretoPosición angular del sistema lineal discreto con observador discretoPosición angular del sistema lineal continuo con observador continuo
Figura 6: Posición angular del pendulo del sistema linelizado y no lineal con observador discreto.
12
0 0.5 1 1.5 2 2.5 3-20
-15
-10
-5
0
5
10
Tiempo t[s]
Fuerza
de contr
ol (N)
Esfuerzo de control
Fuerza de control del sistema no lineal con observador continuoFuerza de control del sistema no lineal con observador discreto
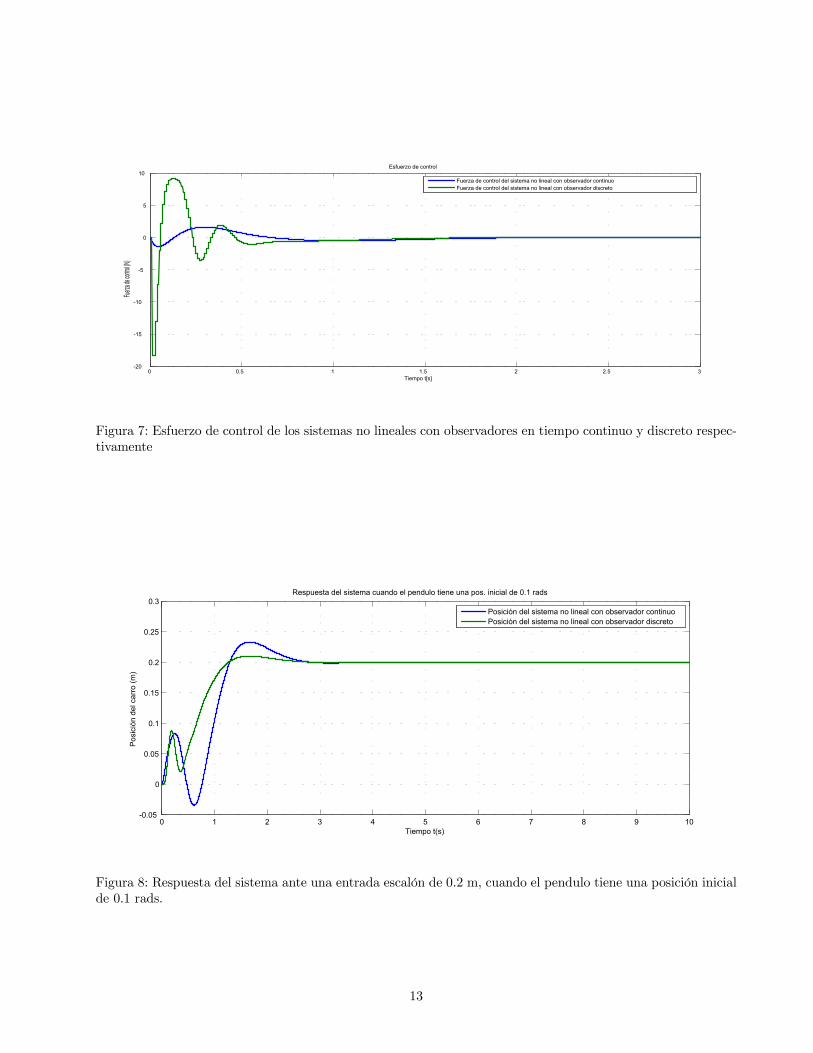
Figura 7: Esfuerzo de control de los sistemas no lineales con observadores en tiempo continuo y discreto respec-tivamente
0 1 2 3 4 5 6 7 8 9 10-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Tiempo t(s)
Posi
ción
del
car
ro (m
)
Respuesta del sistema cuando el pendulo tiene una pos. inicial de 0.1 rads
Posición del sistema no lineal con observador continuoPosición del sistema no lineal con observador discreto
Figura 8: Respuesta del sistema ante una entrada escalón de 0.2 m, cuando el pendulo tiene una posición inicialde 0.1 rads.
13
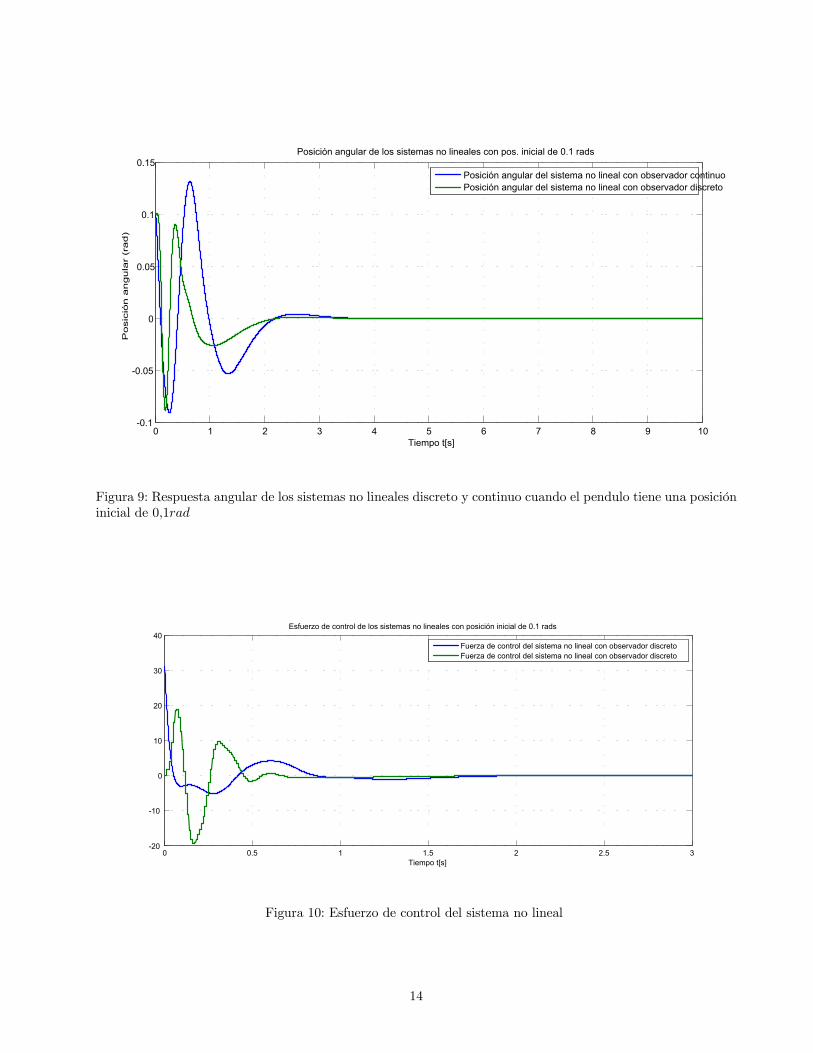
0 1 2 3 4 5 6 7 8 9 10-0.1
-0.05
0
0.05
0.1
0.15
Tiempo t[s]
Po
sic
ión
an
gu
lar
(ra
d)
Posición angular de los sistemas no lineales con pos. inicial de 0.1 rads
Posición angular del sistema no lineal con observador continuoPosición angular del sistema no lineal con observador discreto
Figura 9: Respuesta angular de los sistemas no lineales discreto y continuo cuando el pendulo tiene una posicióninicial de 01
0 0.5 1 1.5 2 2.5 3-20
-10
0
10
20
30
40
Tiempo t[s]
Esfuerzo de control de los sistemas no lineales con posición inicial de 0.1 rads
Fuerza de control del sistema no lineal con observador discretoFuerza de control del sistema no lineal con observador discreto
Figura 10: Esfuerzo de control del sistema no lineal
14

3.2. Grua Viajera
3.2.1. Modelo matematico
El Modelo matemático del sistema se encuentra dado por las siguientes ecuaciones:
( +)Ä¡ Ä cos + _2 sin = () (5)
(2 + )Ä ¡ Ä cos + sin = 0 (6)
al igual que en el péndulo invertido, se trata de un sistema no lineal, aunque la diferencia es, que este sistemaes asintoticamente estable. De cualquier forma, es necesario representarlo en su forma de estados, la cual semuestra a continuación:2664
_1_2_3_4
3775 =26664
0 1 0 0¡(+)2+(+) 0 0 0
0 0 0 1()2
2+(+) 0 0 0
3777526641234
3775+26664
0
2+(+)
0¡(+2)
2+(+)
377753.2.2. Parámetros físicos del sistema.
El sistema que se procedió a simular tiene las siguientes características:Masa del Péndulo m=0.3 kgLongitud del Péndulo l=0.3 mMasa del Carro M=1 kgInercia I= 0dando así como resultado el sistema con valores numéricos siguientes:
2664_1_2_3_4
3775 =
26640 1 0 0
¡425100 0 0 00 0 0 1
04918 0 0 0
377526641234
3775+2664
0333330
¡04918
3775 (7)
=£0 0 1 0
¤ 26641234
3775 (8)
3.2.3. Diseño del observador en tiempo continúo.
Control al sistema péndulo invertido por realimentación de estados observados mediante un se requiere queel sistema presente las siguientes características:- Un tiempo de asentamiento de 2 segundos-Un coe…ciente de amortiguamiento relativo de 0.7
A partir de esto se obtienen los polos dominantes y las ganancias de realimentación de estados, así como lamatriz de ganancias del observador, todo esto para el sistema en tiempo continuo. Esta parte no se desarrollará,puesto que no es el objeto de esta práctica.Una vez realizado todo el procedimiento, se llega a los siguientes resultados:
= ¡6225603
=
2664397771789205615418
3775 =
£777792 ¡134975 ¡4804090 ¡1585832 ¤
15
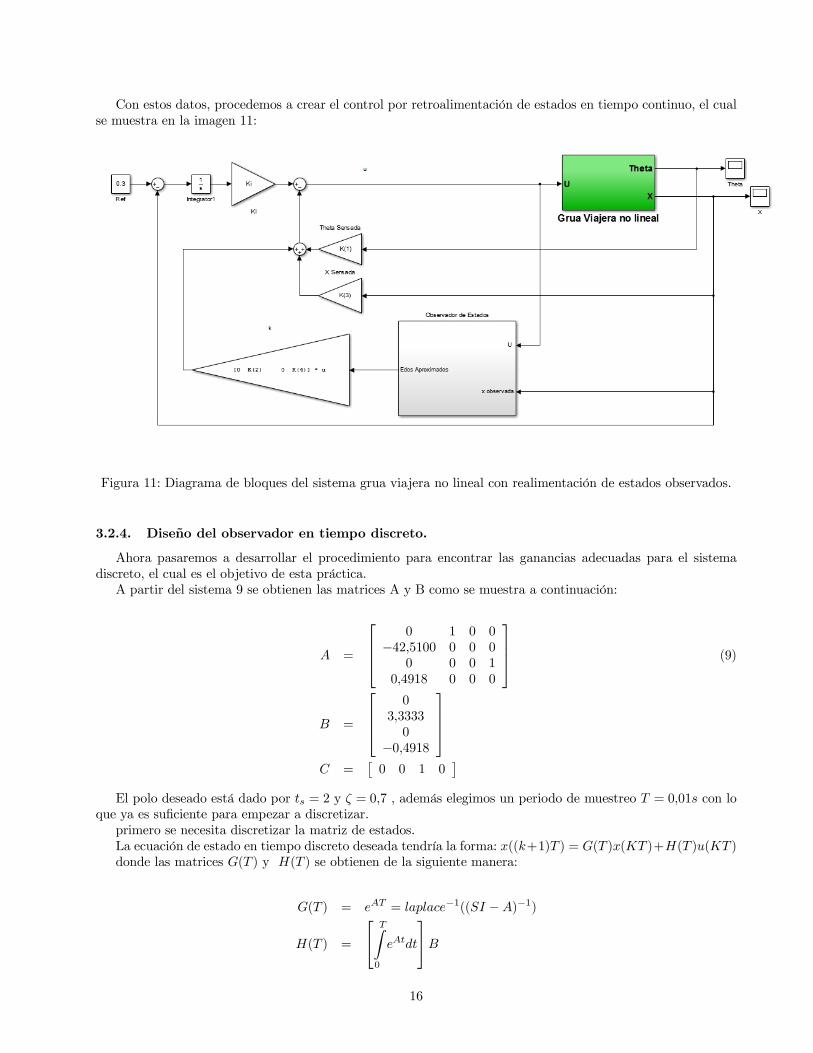
Con estos datos, procedemos a crear el control por retroalimentación de estados en tiempo continuo, el cualse muestra en la imagen 11:
Figura 11: Diagrama de bloques del sistema grua viajera no lineal con realimentación de estados observados.
3.2.4. Diseño del observador en tiempo discreto.
Ahora pasaremos a desarrollar el procedimiento para encontrar las ganancias adecuadas para el sistemadiscreto, el cual es el objetivo de esta práctica.A partir del sistema 9 se obtienen las matrices A y B como se muestra a continuación:
=
26640 1 0 0
¡425100 0 0 00 0 0 1
04918 0 0 0
3775 (9)
=
26640
333330
¡04918
3775 =
£0 0 1 0
¤El polo deseado está dado por = 2 y = 07 , además elegimos un periodo de muestreo = 001 con lo
que ya es su…ciente para empezar a discretizar.primero se necesita discretizar la matriz de estados.La ecuación de estado en tiempo discreto deseada tendría la forma: ((+1) ) = ( )( )+( )( )donde las matrices ( ) y ( ) se obtienen de la siguiente manera:
( ) = = ¡1(( ¡)¡1)
( ) =
24 Z0
3516

Sustituyendo el valor de T=0.01, se tiene:
( ) =
266409979 00100 0 0¡04248 09979 0 00 0 1 001
00049 0 0 1
3775
( ) =
266400002003330
¡00049
3775Ahora se procede a diseñar las ganancias [K] para la retro de estados discretos.Los polos deseados están dados por:
=4
jj = ¡
6 = =
q1¡ 2
1 = 09800 + 00200
2 = 09800¡ 00200así como en los sistemas en tiempo continuo, para asegurar la estabilidad y la dominancia de los polos
propuestos, se eligen otros dos polos 5 veces más cercanos a cero que la parte real de los dominantes. Es decir:
6 ) 34
34 = 08803§ 01083Por lo tanto el polinomio característico en lazo cerrado deseado es:
j ¡+j = ( ¡ 08803¡ 01083)( ¡ 08803 + 01083)( ¡ 09800¡ 00200)( ¡ 09800 + 00200)j ¡+j = 4 ¡ 3 720 63 + 5 198 22 ¡ 3 233 4 + 0755 82
1 = ¡37722 = 5198
3 = ¡323344 = 075582
se veri…ca la controlabilidad del sistema
£ 2 3
¤= 4
Como el rango efectivamente fue de 4, el sistema es de estado completamente controlable, y por lo tanto seprocede a determinar la matriz de ganancias K, para lo cual se ocupa la fórmula de Ackerman:
=£0 0 0 1
¤ £ 2 3
¤¡1()
donde () = 4 + 13 + 2
2 + 3+ 4
dando como resultado:
=£769935 ¡14256 ¡1082786 ¡624659 ¤
17

Como el sistema tiene una entrada de referencia procedemos a calcular para esto utilizamos
l¶³m!1 ()(1¡ ¡1) = 1
donde () = ()()
() = ( ¡ )donde =
= ¡
realizando todo esto, y para una entrada escalón escalado de 0.3 se obtiene que
= ¡10841
Ya con esto, se procede a diseñar el observador de estados el cual debe tener sus polos dominantes másrápidos que el sistema para así no afectar la dinámica de este.Los polos del observador, por lo tanto son:
8) 12(solo la parte real)
6) 34
1234 = (02745)(02745)(08803 + 01083)(08803¡ 01083)
se veri…ca la controlabilidad del sistema:
26642
3
3775 = 4como el rango es igual a 4, el sistema es de estado completo observable, por lo que se procede a obtener la
matriz de ganancias Kobs con la fórmula de Akcerman para observabilidad, la cual se enuncia a continuación:
= ()
26642
3
3775¡1 2664
0001
3775dando como resultado:
=
2664¡1961¡1286913975582670
3775Ya con estos datos, es posible realizar la simulación en tiempo discreto del controlador, y se muestra su
conexión a bloques en la imagen 12Luego de todo esto, presentamos a continuación algunas simulaciones de este sistema.
18
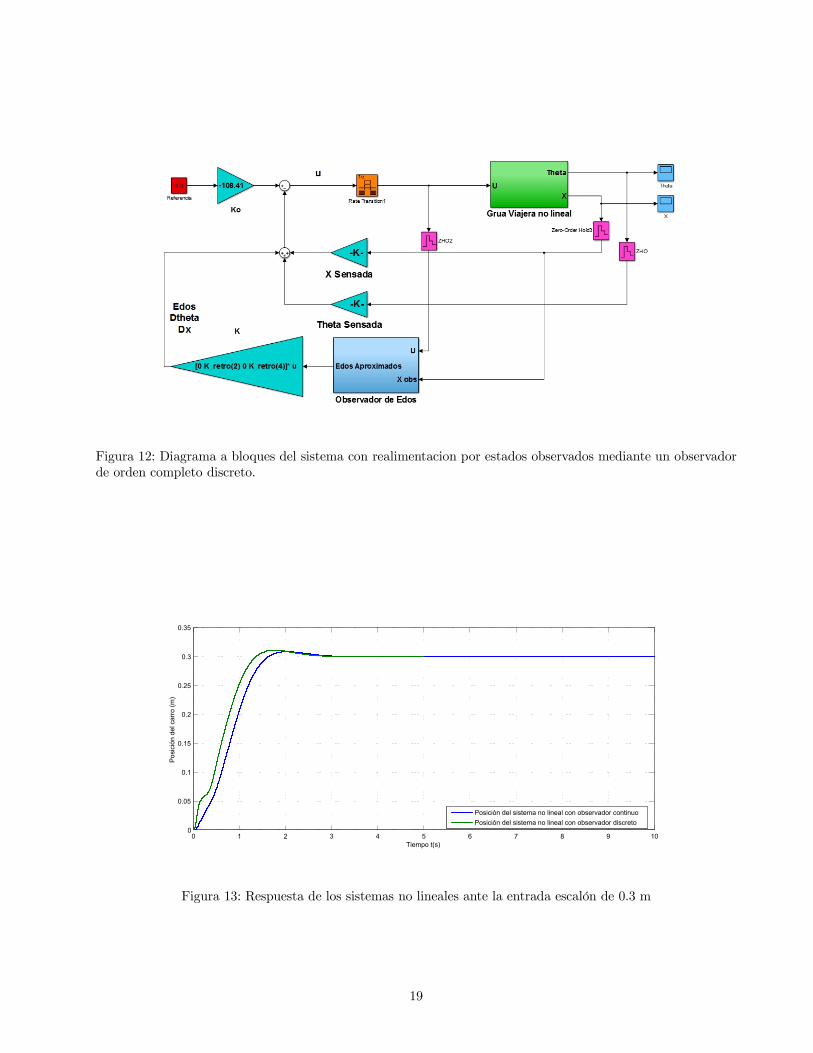
Figura 12: Diagrama a bloques del sistema con realimentacion por estados observados mediante un observadorde orden completo discreto.
0 1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Tiempo t(s)
Posi
ción
del
car
ro (m
)
Posición del sistema no lineal con observador continuoPosición del sistema no lineal con observador discreto
Figura 13: Respuesta de los sistemas no lineales ante la entrada escalón de 0.3 m
19
0 1 2 3 4 5 6 7 8 9 10-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
Tiempo t(s)
Posi
ción
ang
ular
(rad
)
Ángulo del pendulo no lineal con observador continuoÁngulo del pendulo no lineal con observador discreto
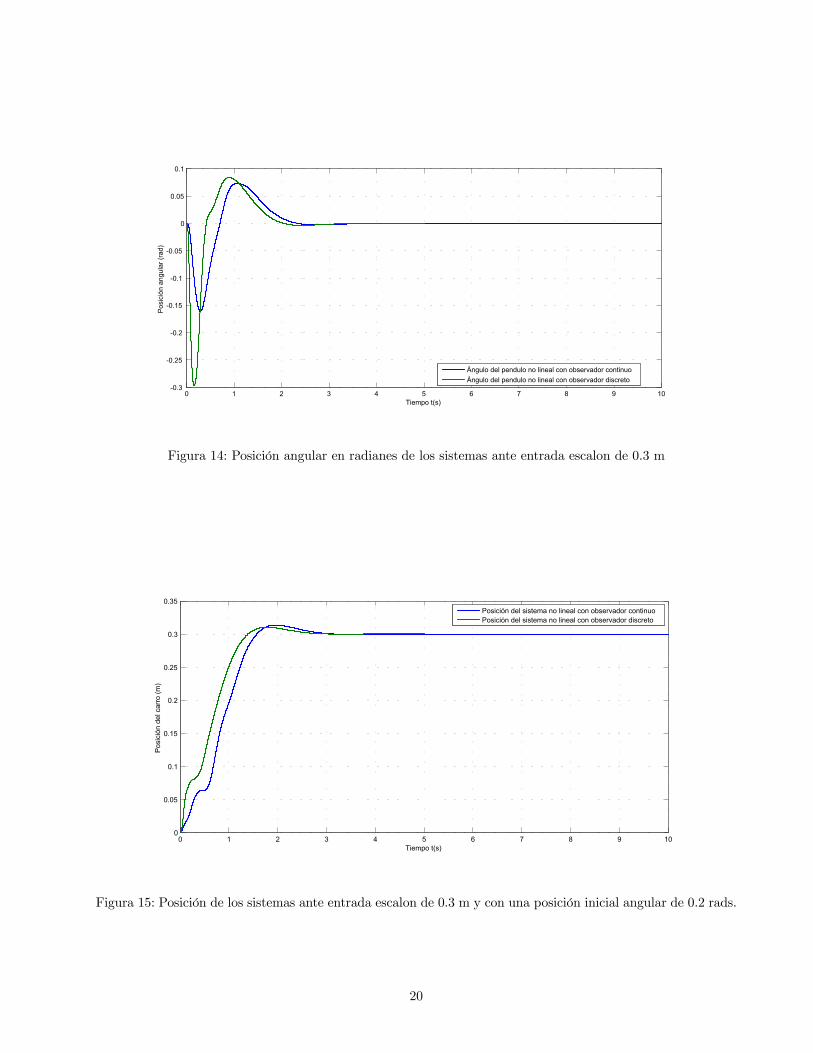
Figura 14: Posición angular en radianes de los sistemas ante entrada escalon de 0.3 m
0 1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Tiempo t(s)
Posi
ción
del
car
ro (m
)
Posición del sistema no lineal con observador continuoPosición del sistema no lineal con observador discreto
Figura 15: Posición de los sistemas ante entrada escalon de 0.3 m y con una posición inicial angular de 0.2 rads.
20

0 1 2 3 4 5 6 7 8 9 10-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Tiempo t(s)
Posi
ción
ang
ular
(rad
)
Posición angular de la grua no lineal con observador continuoPosición angular de la grua no lineal con observador discreto
Figura 16: Posición angular de los sistemas ante una entrada escalon de 0.3 m y con una posición incial en elpendulo de 0.2 rads.
4. Conclusiones generales
En conclusión se puede decir que el control por realimentación de estados en tiempo discreto es muy efectivo,al lograr hacer converger al sistema de forma satisfactoria, y como se había planeado, además se puede ver queno hay mucha diferencia entre el controlador digital y el continuo. Algo que si se hizo notorio al momento deintroducir una posición inicial en el péndulo, fue que esta se vio reducida en 6± menos respecto al controladoren sistema continuo, pues ahora solo soporta 9± como condición antes de que el eslabón caiga.En esta practica se pudo comprobar que los sistemas controlados de forma digital presentan ciertas ventajas
y desventajas ante los sistemas continuos, pues por un lado tenemos la facilidad de conexion y cambio rapidode valores, pero por otro tenemos la perdida de datos al discretizar el sistema, ademas de que si esto no se llevaa cabo con cuidado, es decir, que se desprecen cantidades que pudiesen no parecer signi…cativas, muchas veces,el sistema se comporta de forma distinta.
En esta práctica se diseño un control por realimentación de estados, en el cual se hizo un subsistema paraque las variables estado del sistema fueran estimadas.Debido a que solo se conocían la entradas y la posicionangular y lineal del sistema a controlar fue necesario construir un observador de estados de orden completo, yasi aproximar los otros dos parametro faltantes.
Referencias
[1] Ogata Katsuhiko / Sistemas de control en tiempo discreto / 2 edición
[2] Ogata, K. Ingeniería de Control Moderna, 5ta Edición, 2010.
[3] Gene F. Franklin, J. David Powell, Michael L. Workman/ Digital Control of Dynamic Systems, Third Edition
21