CONTROL DE PROCESOS VARIABLES DE ESTADO - 2011 -
21
CONTROL DE PROCESOS VARIABLES DE ESTADO - 2011 -
-
Upload
chita-meraz -
Category
Documents
-
view
12 -
download
5
Transcript of CONTROL DE PROCESOS VARIABLES DE ESTADO - 2011 -

CONTROL DE PROCESOS
VARIABLES DE ESTADO
- 2011 -

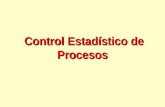
Balance para el tanque 2
2
12222 ;
R
hhq
dt
dhAqq iie
1
11
1111 ;
R
hq
dt
dhAqqq ssie
Balance para el tanque 1
qe2 qe1
A2 A1R2
R1
qs1qi
h2 h1
Recordando que
Se puede representar como:
2e22221212
2
1e12121111
1
qbhahadt
dhh'
qbhahadt
dhh'

2e
1e
2
1
2
1
2221
1211
2
1
q
q
0
0
h
h
aa
aa
h'
h'
b
b
Indicando a la integral por 1/s
qe1
qe2
b1 1/s 1h1
b2 1/s 1
h2
a11
a22
a21a12

t),u,...,u,u,x,...,x,(xfx'
............................................................
t),u,...,u,u,x,...,x,(xfx'
t),u,...,u,u,x,...,x,(xfx'
r21n21nn
r21n2122
r21n2111
t),u,...,u,x,....,(xgy
.............................................
t),u1,...,u,x,....,(xgy
r1n1mm
rn111

rnr11nnnn22n11nn
rr1111n12221111
ub...ubxa....xaxax'
...................................................................
ub....ubxna...xaxax'
rmr11mnmn2m21m1m
rr1111nn12121111
ud...udxc...xcxcy
..........................................................
ud...udxc...xcxcy

r
1
nr1n
r111
n
1
nn1n
n111
n
1
u
..
u
b..b
......
b..b
x
..
x
a..a
......
a...a
x'
..
x'
X’=AX+BU
r
1
mr1m
r1111
mn1m
n111
m
1
u
..
u
d..d
......
d..d
..
c..c
......
c..c
y
..
y
nx
x
Y=CX + DU

El uso de la representación en espacio de estado es que permite representar el modelo de sistemas tanto continuos como discretos, lineales o no lineales variables o invariantes en el tiempo, siempre en notación matricial.Pudiendo representar al sistema como:
DBAIsCsG 1)(
D
B dt CU Yx’ x
A
x’=Ax+Bu
y=Cx+Ducon salida
y función de transferencia

Veremos distintas formas de representación de sistemas Sea un sistema con función de transferencia:
012
23
3
2210
)()(
(asasasa
sbsbbsXsY
sF
Por fórmula de Mason:
...1)(
jii
kk
LLL
CPsF
Por lo tanto, si podemos llevarla a la misma forma nos será mas fácil poder representarla.
330
23132
322
313
3
1)(
saasaasaasabsabsab
sF o

330
23132
322
313
3
1)(
saasaasaasabsabsab
sF o
A partir de la misma podemos determinar los lazos, caminos directos y cofactores. Especificando primero que todos los lazos pasen por x’3
saaL 321
2312 saaL
3303 saaL
3301 sabP
2312 sabP
sabP 323
11 C
12 C 13 C
u x3’ x3 x2’ x2 x1’ x1 y11 1/s 1/s 1/s1-a2/a3
-a1/a3
-a0/a3
b2/a3
b1/a3
b0/a3

Escribiendo las ecuaciones de estado, obtenemos:x1’= x2
x2’= x3
x3’= -(a0/a3) x1 - (a1/a3) x2 - (a2/a3) x3 + u
Como en forma matricial sabemos que x’=Ax+Bu y=Cx+Du
323130
100
010
aaaaaa
A
1
0
0
B
323130 abababC 0D

Si ahora querenos que todos los lazos toquen x1:
saaL 321
2312 saaL
3303 saaL
3301 sabP
2312 sabP
sabP 323
11 C
12 C
13 C
u x3’ x3 x2’ x2 x1’ x1 y1/s 1/s 1/s1 1 1
b2/a3
b1/a3
b0/a3
-a2/a3
-a1/a3
-a0/a3

Escribiendo las ecuaciones de estado, obtenemos:x1’= - (a2/a3) x1 + x2 + 0 x3 + (b2/a3) ux2’= - (a1/a3) x1 + 0 x2 + x3 + (b1/a3) ux3’= - (a0/a3) x1 + 0 x2 + x3 + (b0/a3) u
Como en forma matricial sabemos que x’=Ax+Bu y=Cx+Du
00
10
01
30
31
32
aa
aa
aa
A
001C
30
31
32
ab
ab
ab
B
0D

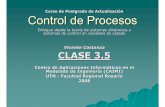
En la siguiente configuración, todos los lazos se tocan en x1 , pero los caminos se unen a la salida:
Debemos encontrar los valores de los para que se verifique la misma funciónde transferencia.
2 1
u 1 x3́ 1 /s x3 1 x2́ 1/s x2 1 x 1́ 1/s x1 0Y
- a0 / a3 - a1 / a3 - a2 / a3

Si buscamos los caminos, lazos y cofactores, obtenemos:
saaL 321
2312 saaL
3303 saaL
212 sP
sP 23
11 C
saaC 322 1
231323 1 saasaaC
301 sP
Como vemos en este caso los cofactores NO son unitarios, lo que lleva a aumentar la complejidad de la resolución.
Y(s) b0 + b1 s + b2 s 2
F(s) = = = U(s) a3 s
3 + a2 s
2 + a1 s + a0
0/ s3 + 1 /s
2 ( 1 + a2 / a3 s)+ 2 s ( 1 + a2/a3s + a1 / a3 s2 )
= 1 + a2 /a3 s + a1 /a3 s
2 + a0 /a3 s3
0 a3+ 1 ( a3s + a2 )+ 2 ( a3 s2 + a2 s + a1 )
= a3 s
3 + a2 s
2 + a1 s + a0

Distribuyendo y comparando los términos de igual orden, obtenemos:
bo = 0a3 + 1a2 +2a1
b1 = 1a3 + 2a2
b2 = 2a3
3 ecuaciones con 3 incógnitas, podemos resolverlo , obteniendo:
2 = b2/a3
1 = b1/a3 - (b2/a3)a2
0 = b0 - [b1/a3 - (b2/a3)a2] - b2

En términos de variables de estado obtenemos:
x1’= - (a2/a3) x1 + x2 + 0 x3 + 0 ux2’= - (a1/a3) x1 + 0 x2 + x3 + 0 ux3’= - (a0/a3) x1 + 0 x2 + x3 + 1 u
u
x
x
x
aa
aa
aa
x
x
x
*
1
0
0
3
2
1
*
00
10
01
'3
'2
'1
30
31
32
ux
x
x
y 0
3
2
1
*210

El siguiente ejemplo descompone a la función de transferencia en fracciones parciales:(Sistema desacoplado)
)()()()()(
(3
3
2
2
1
1
012
23
3
2210
pspspsasasasasbsbb
sXsY
sF
x1´ 1/s x1
p1
1 1
1 x2´ 1/s x2 2
u y p2
1 3
x3´ 1/s x3
p3

En término de variables de estado, obtenemos:
x1’ = p1x1 + ux2’ = p2x2 + ux3’ = p3x3 + u
u
x
x
x
p
p
p
x
x
x
*
1
1
1
3
2
1
*
00
00
00
'3
'2
'1
3
2
1
La salida viene dada por y=Cx+Du :
ux
x
x
y 0
3
2
1
*321

Caso donde la función de transferencia tiene un par de polos complejos conjugados:
Podemos considerar al bloque como:
)()2(
1(
3
322
21
3012
23
3
2210
pswnwnsss
aasasasasbsbb
sF
)/()2(1)2( 22
221
2221
swnswnss
wnwnsss
)/(1)( 3
3
3
3
sps
ps

Por lo tanto el diagrama en flujo queda de la forma:
1/sx2’ x2 x1’ x11/s11/a3
-2wn
2
1
yu
-wn2
1/s
p3
x3’ x3
3
1/a3

En término de variables de estado, obtenemos:
x1’ = x2
x2’ = -wn2x1 - 2wnx2 + (1/a3)ux3’ = p3x3 + (1/a3)u
u
a
a
x
x
x
p
wnwn
x
x
x
*
/1
/1
0
3
2
1
*
00
02
010
'3
'2
'1
3
3
3
2
La salida viene dada por y=Cx+Du :
ux
x
x
y 0
3
2
1
*321