
Control del vuelo en micro-UAVs (MAV) de geometría no ...
16
Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil 24 - 25 enero 2017 Control del vuelo en micro-UAVs (MAV) de geometría no convencional M.A. Barcala-Montejano, A.A. Rodríguez-Sevillano, J. Crespo-Moreno, R. Bardera-Mora, A. J. Silva-González, S. del Río Rot, D. Shportenko, A. Romero García
Transcript of Control del vuelo en micro-UAVs (MAV) de geometría no ...

Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vueloen micro-UAVs (MAV) de
geometría no convencionalM.A. Barcala-Montejano, A.A. Rodríguez-Sevillano, J. Crespo-Moreno, R. Bardera-Mora, A. J. Silva-González, S. del Río Rot, D. Shportenko, A. Romero García

Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Índice
2. Fundamentos teóricos
1. Introducción
2.1. Alas basadas en “Morphing”
2.2. Alas basadas en “wing-grids”
4. Desarrollo del control de MAV basados en “wing-grids"
3. Desarrollo plataforma para control de “Morphing”
5. Conclusiones
Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vuelo en micro-UAV (MAV) de geometría no convencional
• La experiencia de los autores se ha centrado, desde haceaños, en el diseño de RPAS de ala fija no tripuladas dedimensiones reducidas (micro-UAV)
• Las líneas de Investigación buscan:– Sencillez, actuaciones adecuadas (VTOL o STOL, E, R).– Conceptos diferenciales.– Condiciones en cubiertas de vuelo de buques y barcos para
operaciones seguras– Mejora de actuaciones de aeronaves en operación.– Análisis de misiones innovadoras de RPAS.
Presentación

Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vuelo en micro-UAV (MAV) de geometría no convencional
Condiciones:• Hay una demanda creciente de adaptar una misma
aeronaves a cada operación.• Los Diseños innovadores no son viables en la aviación
convencional debido a su alto coste de desarrollo.• Nuestros proyectos desarrollan RPAS que cumplan los
requisitos y especificaciones prefijados, “en cadamomento de la operación” con geometría noconvencional.
1. Introducción
Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vuelo en micro-UAV (MAV) de geometría no convencional
• Esta presentación se centra en el desarrollo y puesta a punto dedos sistemas viables de control versátil y de bajo coste
• Uno es el concepto de geometrías alares adaptativas (morphing),el objetivo ha sido diseñar una ley de control que permitieramodificar parámetros geométricos del ala de un MAV.
• Otro es el concepto de aletas en punta de ala (wing-grids) elobjetivo ha sido ha sido diseñar una ley de control que permitieradesplegar dichas aletas según la necesidades
• En ambos casos se mejoran características del tipo R&E y,además, se han aprovechado estos sistemas para el control enbalance por modificaciones asimétricas de estos sistemas.
1. Introducción

Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vuelo en micro-UAV (MAV) de geometría no convencional
• Con el objetivo de conocer el comportamiento del ala ante laaplicación del voltaje se conectó el amplificador del MFC situadoen el ala del MAV a una fuente de alimentación a través de la cualse fue suministrando distintos valores del voltaje dicho actuador
2.1. Fundamentos teóricos; Alas basadas en “Morphing”
• la característica geométrica que se haconsiderado para el desarrollo de la ley decontrol ha sido la curvatura máxima delperfil y se ha procedió determinar su valorpara distintos voltajes aplicados .
Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vuelo en micro-UAV (MAV) de geometría no convencional
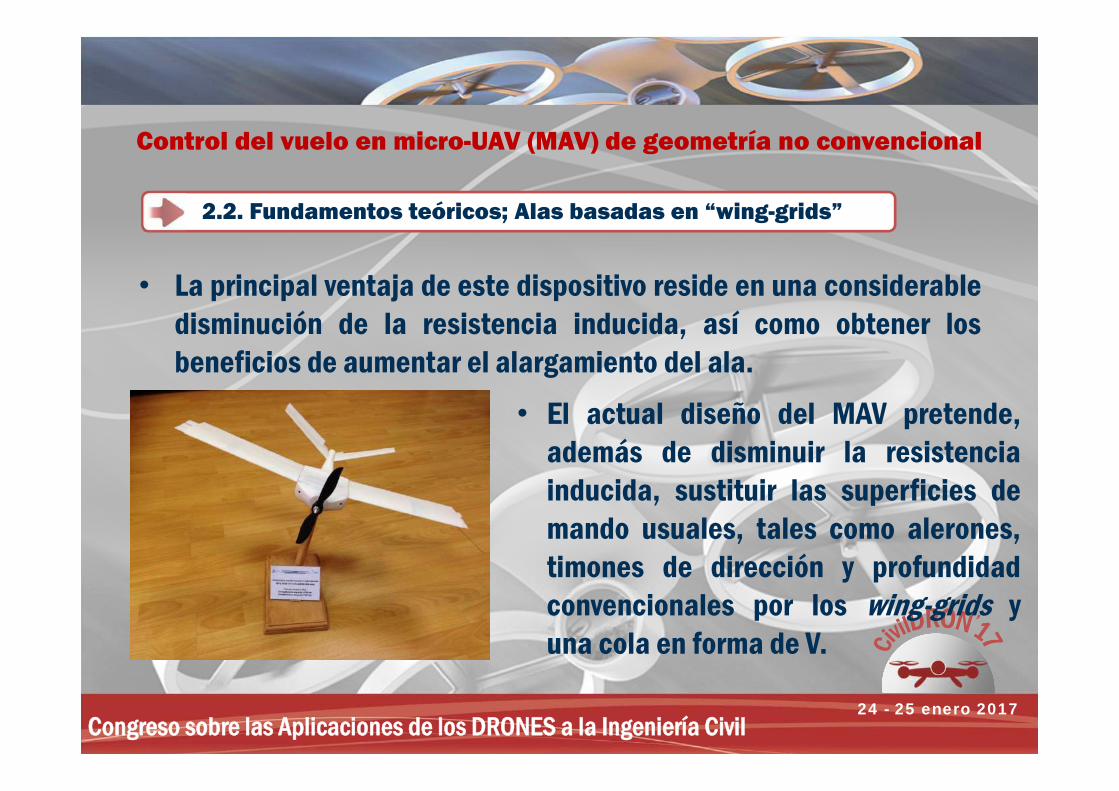
• La principal ventaja de este dispositivo reside en una considerabledisminución de la resistencia inducida, así como obtener losbeneficios de aumentar el alargamiento del ala.
2.2. Fundamentos teóricos; Alas basadas en “wing-grids”
• El actual diseño del MAV pretende,además de disminuir la resistenciainducida, sustituir las superficies demando usuales, tales como alerones,timones de dirección y profundidadconvencionales por los wing-grids yuna cola en forma de V.

Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vuelo en micro-UAV (MAV) de geometría no convencional
Set_up del ensayo:• Se han aplicado distintos valores siguiendo un intervalo
de 0,2 V, en un rango que va desde los 0 a los 5 V, siendo estos dos voltajes el mínimo y el máximo admisible por el amplificador del MFC.
• Para cada voltaje suministrado, se capturó una imagen de la deformación del perfil. A partir de éstas se han determinado las curvaturas máximas (f y f/c) para cada voltaje aplicado.
3. Desarrollo plataforma para control de “Morfphng”

Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vuelo en micro-UAV (MAV) de geometría no convencional
3. Desarrollo plataforma para control de “Morphing”
Ensayo
Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vuelo en micro-UAV (MAV) de geometría no convencional
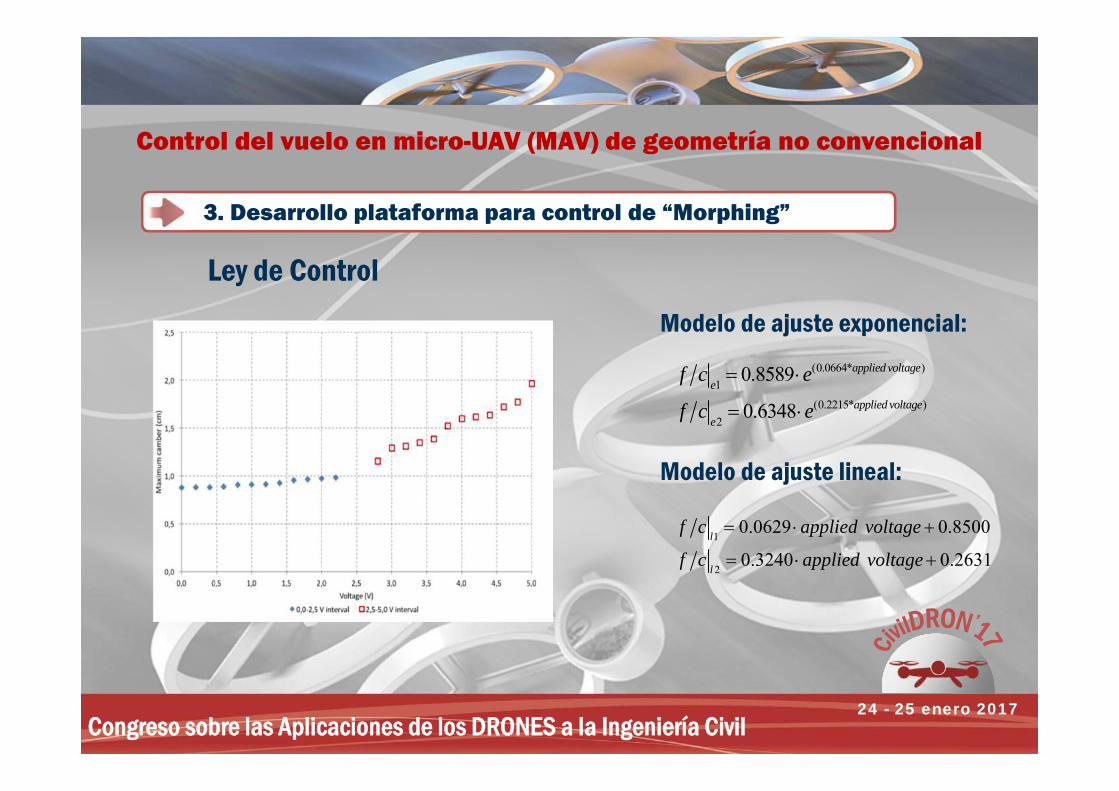
Modelo de ajuste exponencial:(0.0664* )
1
(0.2215* )2
0.8589
0.6348
applied voltagee
applied voltagee
f c e
f c e
Modelo de ajuste lineal:
1
2
0.0629 0.8500
0.3240 0.2631l
l
f c applied voltage
f c applied voltage
3. Desarrollo plataforma para control de “Morphing”
Ley de Control

Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vuelo en micro-UAV (MAV) de geometría no convencional
• Los criterios de selección del software,se tuvieron en cuenta distintoscriterios:
Debía ser un software que dispusiese de su propiohardwareTenía que presentar un lenguaje de programaciónsencillo.
• El control esta basado en un hardwareArduino
3. Desarrollo plataforma para control de “Morphing”
Esquema

Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vuelo en micro-UAV (MAV) de geometría no convencional
• El objetivo del software decontrol es coordinar elmovimiento de los wing-gridsa través de un joystick como
4. Desarrollo plataforma para control de “wing-grids”
controlador principal del movimiento de balance y unpulsador, que será el encargado de cambiar laconfiguración de vuelo.

Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vuelo en micro-UAV (MAV) de geometría no convencional
• Como resumen de las capacidades del demostrador se tiene el siguiente esquema:
Condición de ascenso y descenso. Wing-grids retraídosCondición de crucero. Wing-grids extendidos
4. Desarrollo plataforma para control de “wing-grids”

Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vuelo en micro-UAV (MAV) de geometría no convencional
• El software de control (programapropio de Arduino).
El pulsador cambia el estadocompleto del sistema, wing-gridsextendidos/replegadosEl jostick modifica la longitud deforma asimétrica de los wing-grid
4. Desarrollo plataforma para control de “wing-grids”

Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
Control del vuelo en micro-UAV (MAV) de geometría no convencional
5. Conclusiones

Congreso sobre las Aplicaciones de los DRONES a la Ingeniería Civil24 - 25 enero 2017
¡GRACIAS PORSU ATENCIÓN!




![neutralización de UAVs · seguimiento de UAVs en entornos abiertos como el Drone-Sentinel [UAV 1.1.1] que podemos observar en la Figura 3, de la empresa Advanced Radar Technology](https://static.fdocuments.es/doc/165x107/5e7025485bd6b374ea72b0a6/neutralizacin-de-seguimiento-de-uavs-en-entornos-abiertos-como-el-drone-sentinel.jpg)













