Control i-introducción-1
40
CONTROL I CÓDIGO : EE-615 SEMESTRE : 7 CRÉDITOS : 04 HORAS POR SEMANA : 05 (Teoría 03 – Práctica 02) TIPO DE EVALUACIÓN : G PRERREQUISITOS : EE421/MA185 CONDICION : Obligatorio PROFESOR : Rubén Darío Aquize Palacios
-
Upload
michael-vera-panez -
Category
Engineering
-
view
718 -
download
0
Transcript of Control i-introducción-1
CONTROL I
CÓDIGO : EE-615 SEMESTRE : 7 CRÉDITOS : 04 HORAS POR SEMANA : 05 (Teoría 03 – Práctica 02) TIPO DE EVALUACIÓN : G PRERREQUISITOS : EE421/MA185 CONDICION : Obligatorio PROFESOR : Rubén Darío Aquize Palacios
UNIDADES DE APRENDIZAJE
1. INTRODUCCIÓN A LOS SISTEMAS DE CONTROL.
2. MODELOS MATEMÁTICOS DE SISTEMAS DINÁMICOS.
3. ANÁLISIS TRANSITORIO DE SISTEMAS DE CONTROL.
4. CRITERIOS DE ESTABILIDAD.
5. ANÁLISIS DE SISTEMAS DE CONTROL EN EL ESPACIO DE ESTADO.
6. MÉTODOS GRÁFICOS DE ANÁLISIS DE SISTEMAS DE CONTROL.
7. MODELOS NO LINEALES, LINEALIZACIÓN Y TÉCNICAS ANÁLITICAS.
FÓRMULA DE EVALUACIÓN
• Sistema de Evaluación “G”. El Promedio Final PF se calcula tal como se muestra a continuación:
PF = (1 EP + 1 EF + 1 PP) / 3
EP: Examen Parcial
EF: Examen Final
PP: Prácticas Calificadas
BIBLIOGRAFIA
• OGATA, KATSUHIKO:
“Ingeniería de Control Moderna”, Quinta Edición, Pretince Hall Hispanoamericana – 2010. • RICHARD C. DORF AND ROBERT H. BISHOP
“Modern Control Systems” Pretince Hall – NEW JERSEY, 2011. • JEAN-JACQUES E. SLOTINE AND WEIPING LI :
“Applied Nonlinear Control” Pretince Hall - 1991
Capítulo 1
INTRODUCCION A LOS SISTEMAS DE CONTROL
1. La teoría de los sistemas de Control Automático estudia el comportamiento de un sistema frente a ordenes de mando o perturbaciones.
2. Un Sistema es un conjunto de elementos físicos o abstractos relacionados entre si, de forma que modificaciones o alteraciones en determinadas magnitudes de uno de ellos puede influir en los demás.
3. Las variables de un sistema son las magnitudes que definen el comportamiento del mismo. Su naturaleza define el carácter del sistema: Eléctrico, mecánico, hidráulico, térmico, biológico, económico, etc.
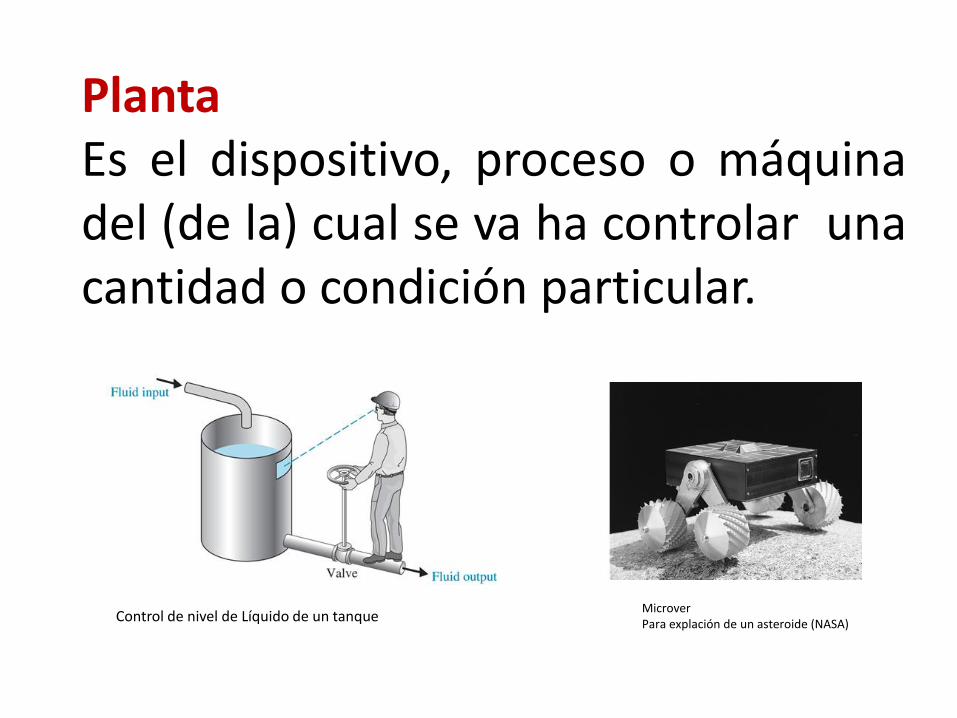
Planta Es el dispositivo, proceso o máquina del (de la) cual se va ha controlar una cantidad o condición particular.
Microver Para explación de un asteroide (NASA)
Control de nivel de Líquido de un tanque
Clasificación de las Variables de la Planta
1. Variables de Entrada: Denotan el efecto del medio ambiente sobre la planta (variables manipuladas y perturbaciones).
2. Variables de Salida: Denotan el efecto de la planta sobre el medio ambiente (variables manipuladas y perturbaciones).
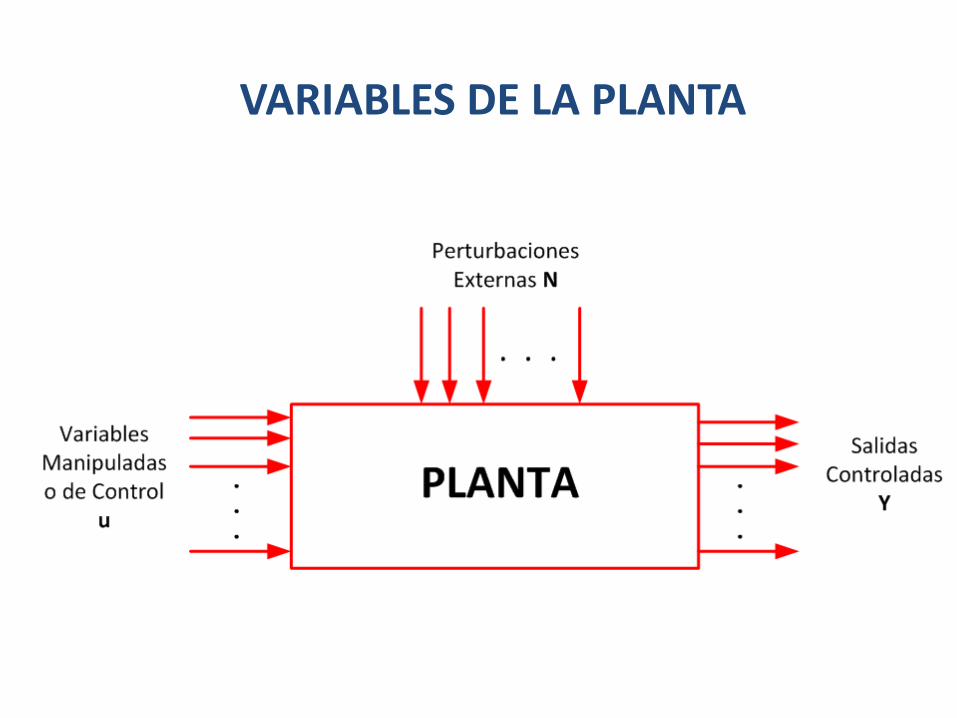
VARIABLES DE LA PLANTA
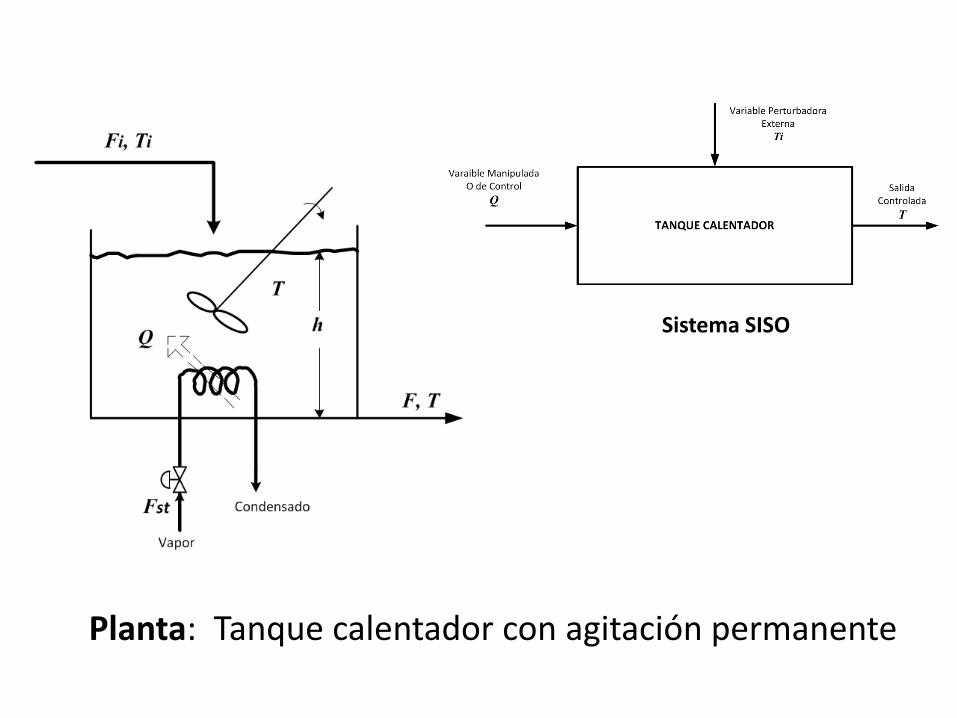
Planta: Tanque calentador con agitación permanente
Sistema SISO
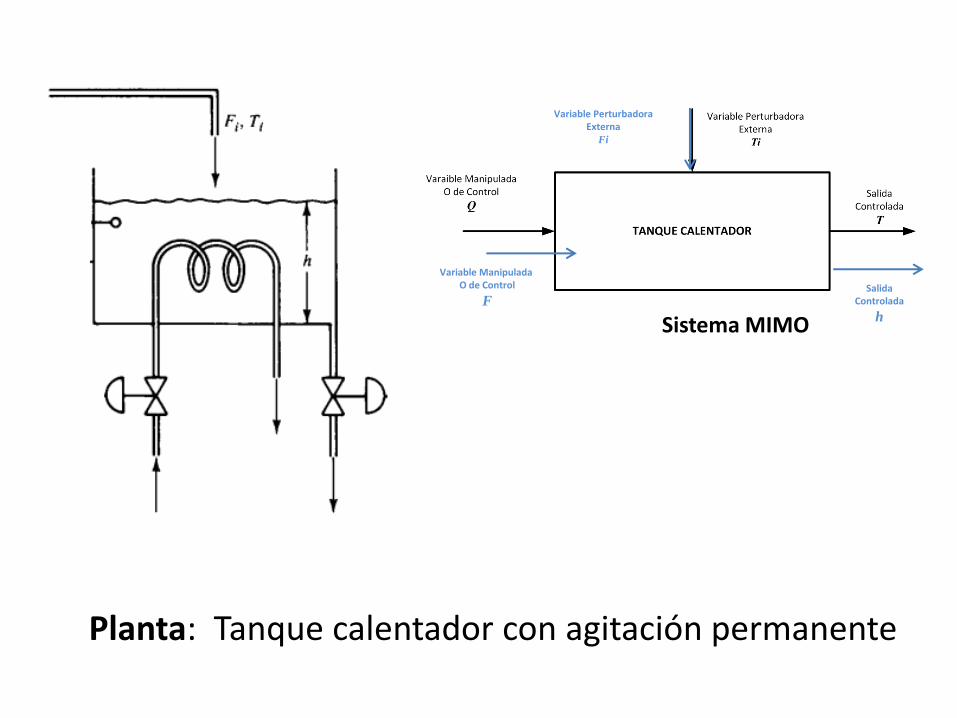
Planta: Tanque calentador con agitación permanente
Sistema MIMO
Variable Perturbadora Externa
Fi
Variable Manipulada O de Control
F Salida
Controlada
h
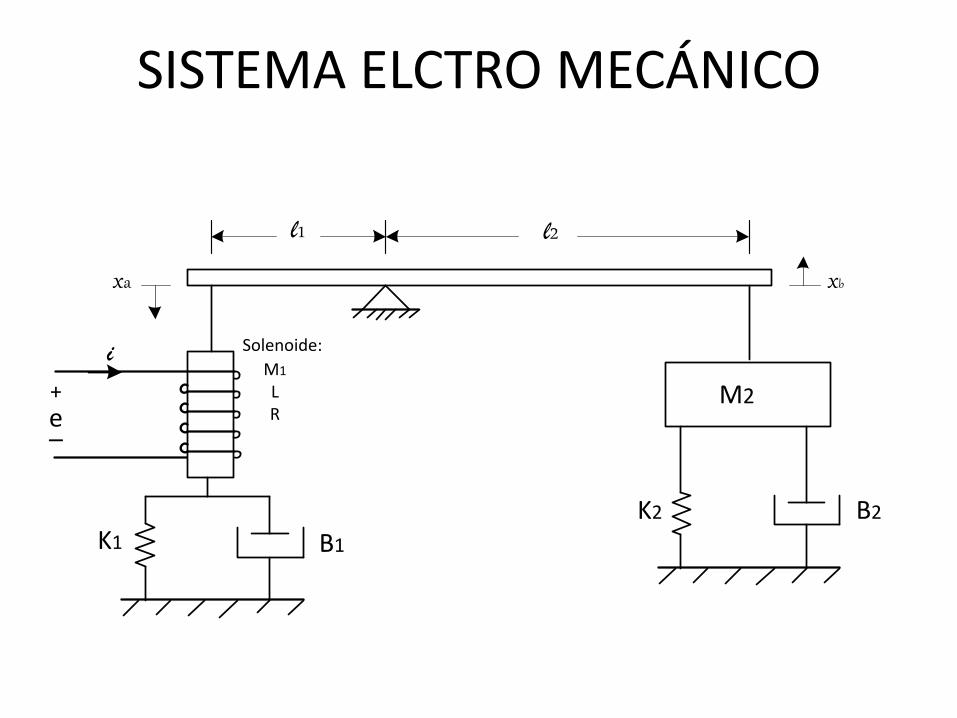
SISTEMA ELCTRO MECÁNICO
l1 l2
xa xb
+e_
M1
LR
Solenoide:i
K1 B1
K2 B2
M2
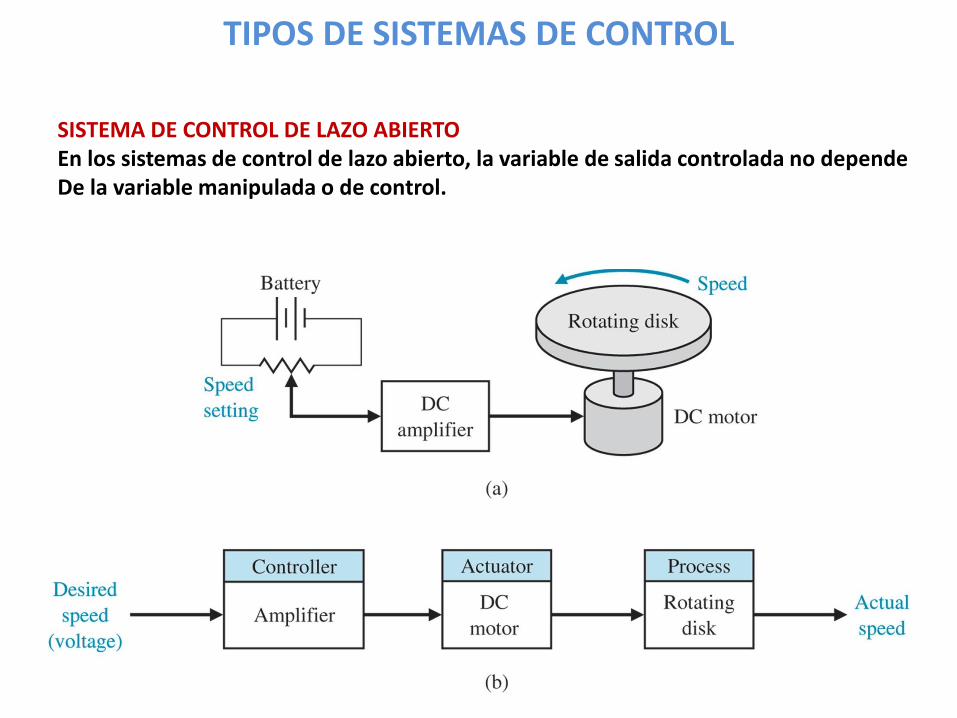
TIPOS DE SISTEMAS DE CONTROL
SISTEMA DE CONTROL DE LAZO ABIERTO En los sistemas de control de lazo abierto, la variable de salida controlada no depende De la variable manipulada o de control.
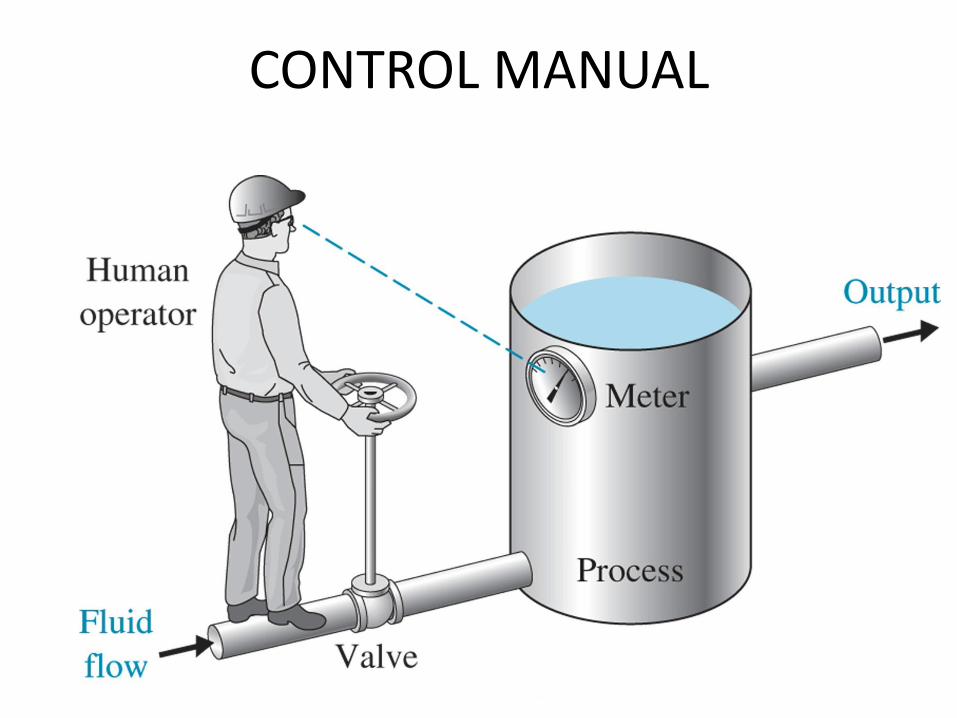
CONTROL MANUAL
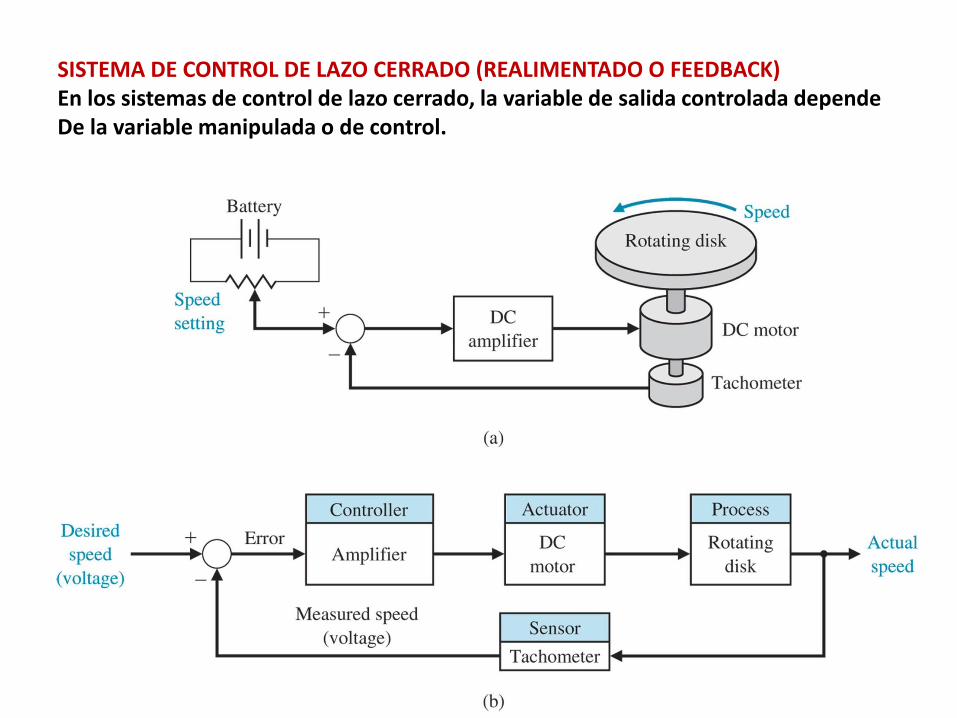
SISTEMA DE CONTROL DE LAZO CERRADO (REALIMENTADO O FEEDBACK) En los sistemas de control de lazo cerrado, la variable de salida controlada depende De la variable manipulada o de control.
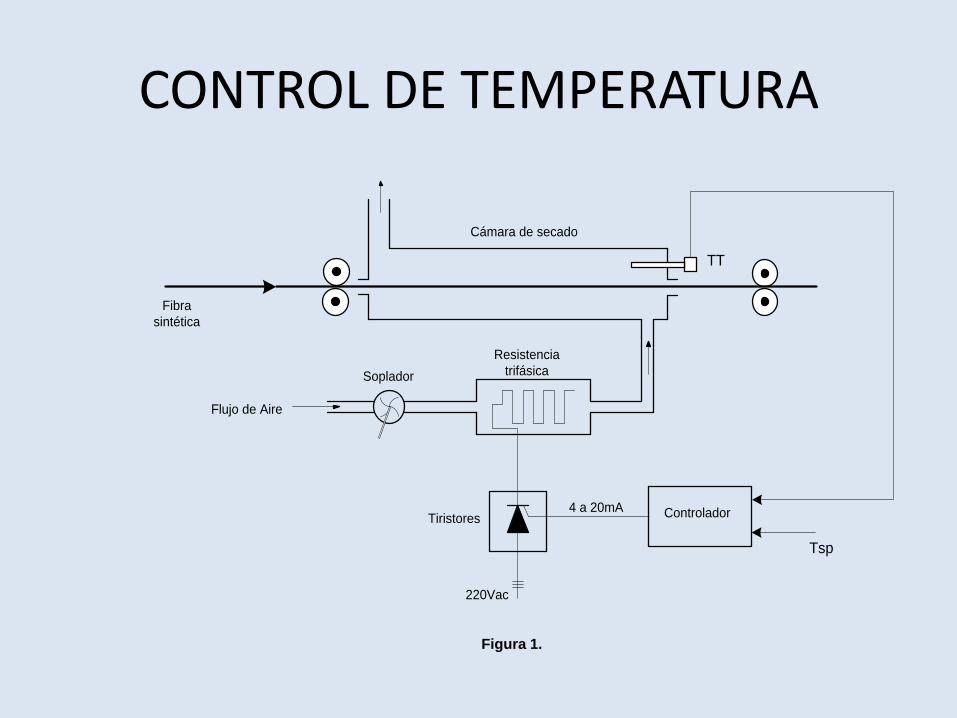
CONTROL DE TEMPERATURA
4 a 20mA
220Vac
Cámara de secado
TT
Tsp
Fibra
sintética
Soplador
Resistencia
trifásica
ControladorTiristores
Flujo de Aire
Figura 1.
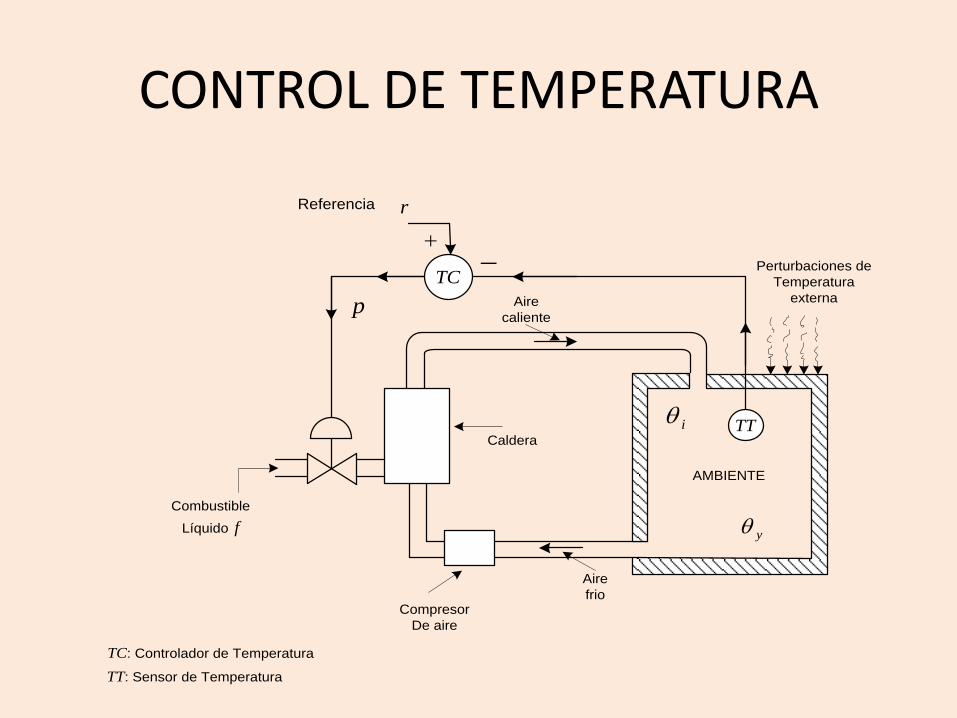
CONTROL DE TEMPERATURA
Referencia
TC
TT
p
Perturbaciones de
Temperatura
externa
i
y
AMBIENTE
Aire
caliente
Aire
frio
Compresor
De aire
Caldera
TC: Controlador de Temperatura
TT: Sensor de Temperatura
Combustible
Líquido f
r
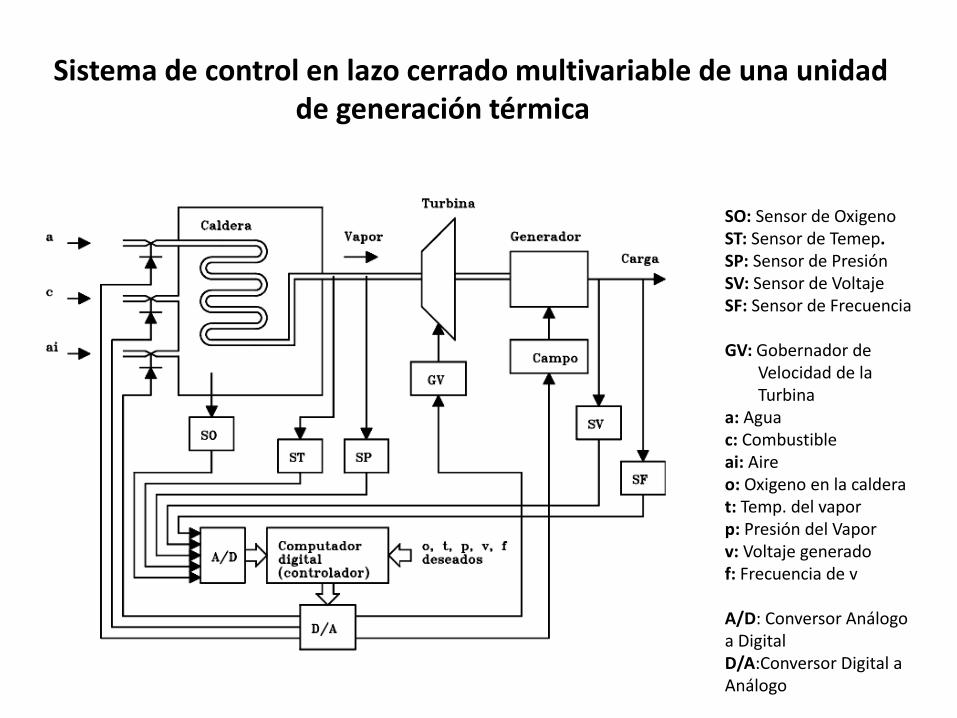
SO: Sensor de Oxigeno ST: Sensor de Temep. SP: Sensor de Presión SV: Sensor de Voltaje SF: Sensor de Frecuencia GV: Gobernador de Velocidad de la Turbina a: Agua c: Combustible ai: Aire o: Oxigeno en la caldera t: Temp. del vapor p: Presión del Vapor v: Voltaje generado f: Frecuencia de v A/D: Conversor Análogo a Digital D/A:Conversor Digital a Análogo
Sistema de control en lazo cerrado multivariable de una unidad de generación térmica
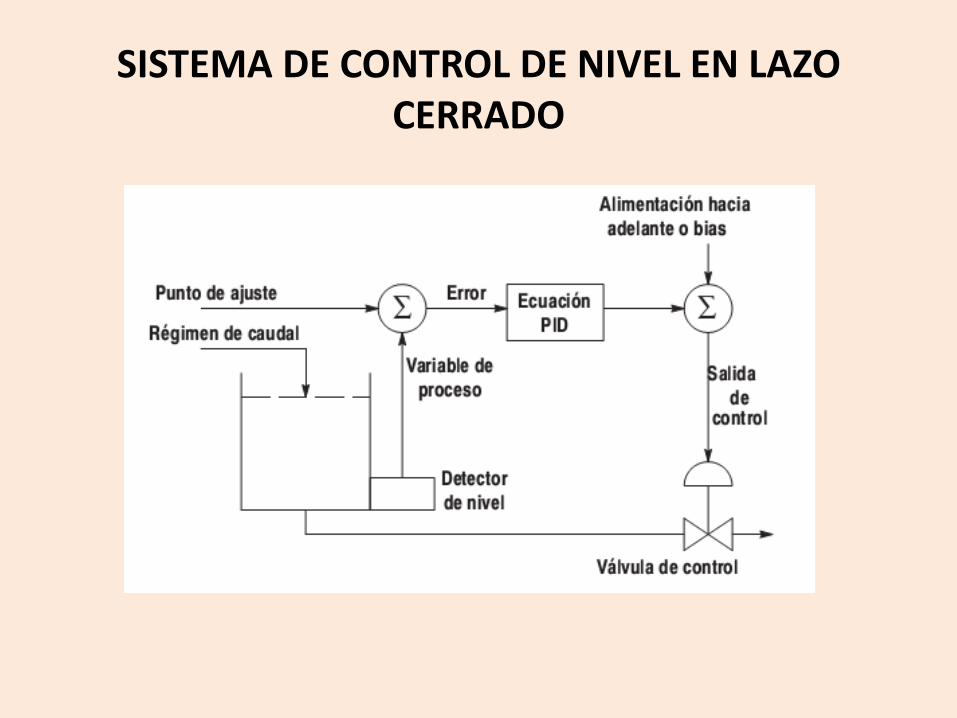
SISTEMA DE CONTROL DE NIVEL EN LAZO CERRADO
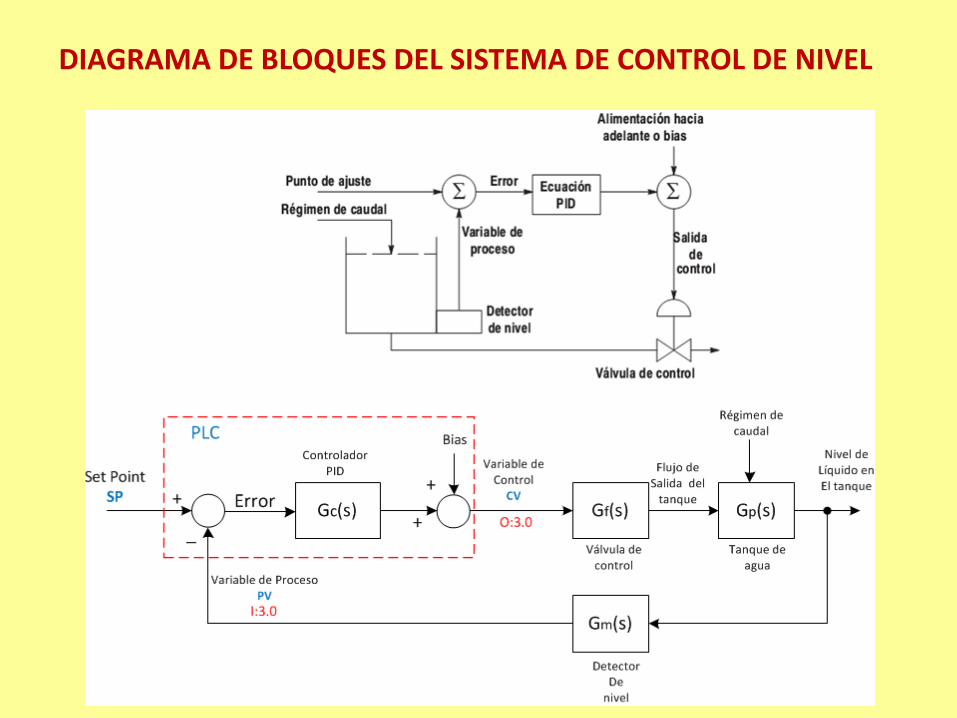
DIAGRAMA DE BLOQUES DEL SISTEMA DE CONTROL DE NIVEL
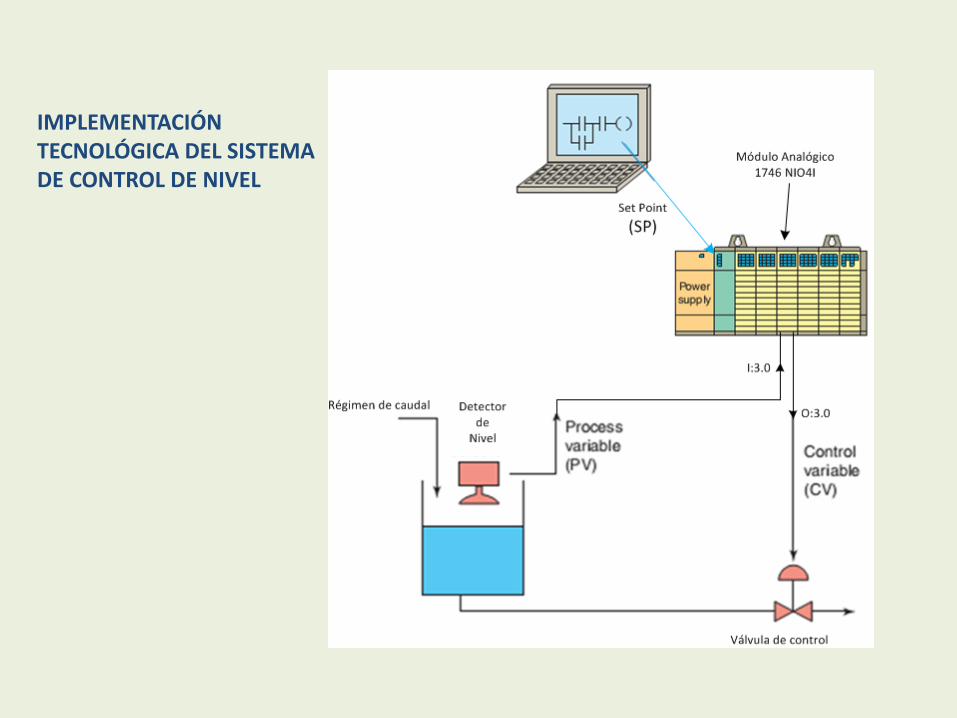
IMPLEMENTACIÓN TECNOLÓGICA DEL SISTEMA DE CONTROL DE NIVEL
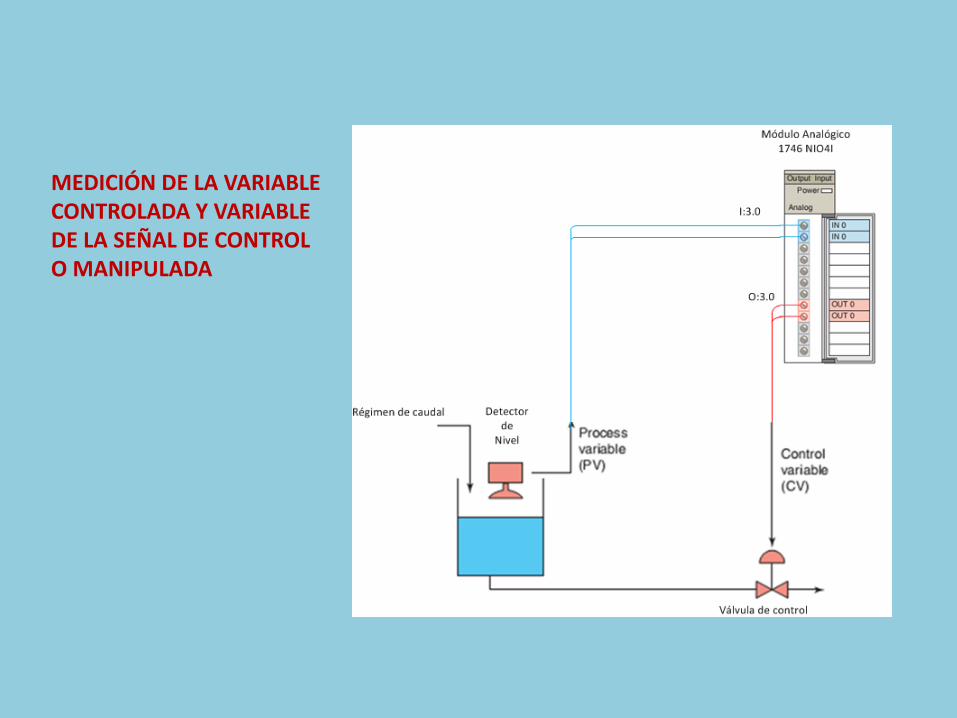
MEDICIÓN DE LA VARIABLE CONTROLADA Y VARIABLE DE LA SEÑAL DE CONTROL O MANIPULADA
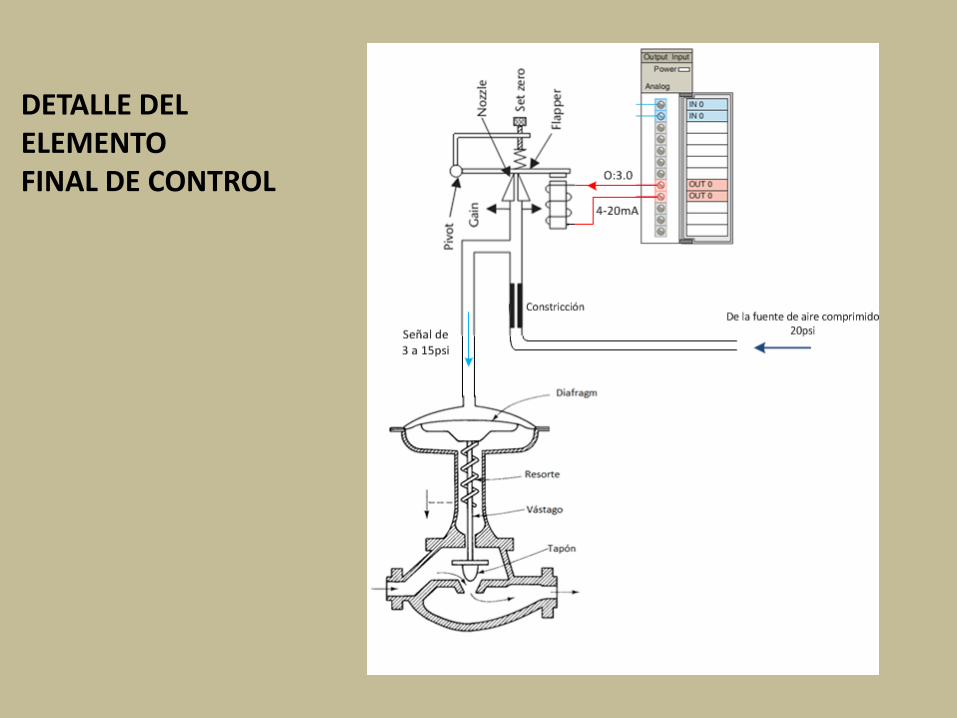
DETALLE DEL ELEMENTO FINAL DE CONTROL
Capítulo 2
MODELOS MATEMÁTICOS DE SISTEMAS DINÁMICOS
El modelo matemático de un sistema dinámico es la descripción matemática de dicho sistema.
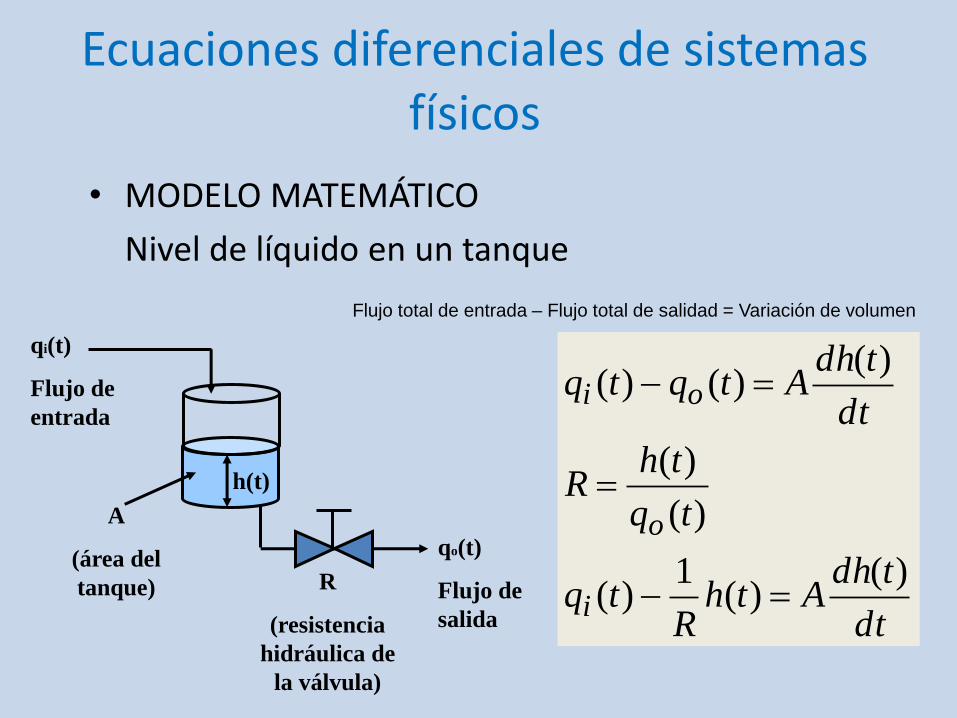
Ecuaciones diferenciales de sistemas físicos
• MODELO MATEMÁTICO
Nivel de líquido en un tanque
qo(t)
Flujo de
salida
R
(resistencia
hidráulica de
la válvula)
h(t)
qi(t)
Flujo de
entrada
dt
tdhAth
Rtq
tq
thR
dt
tdhAtqtq
i
o
oi
)()(
1)(
)(
)(
)()()(
Flujo total de entrada – Flujo total de salidad = Variación de volumen
A
(área del
tanque)
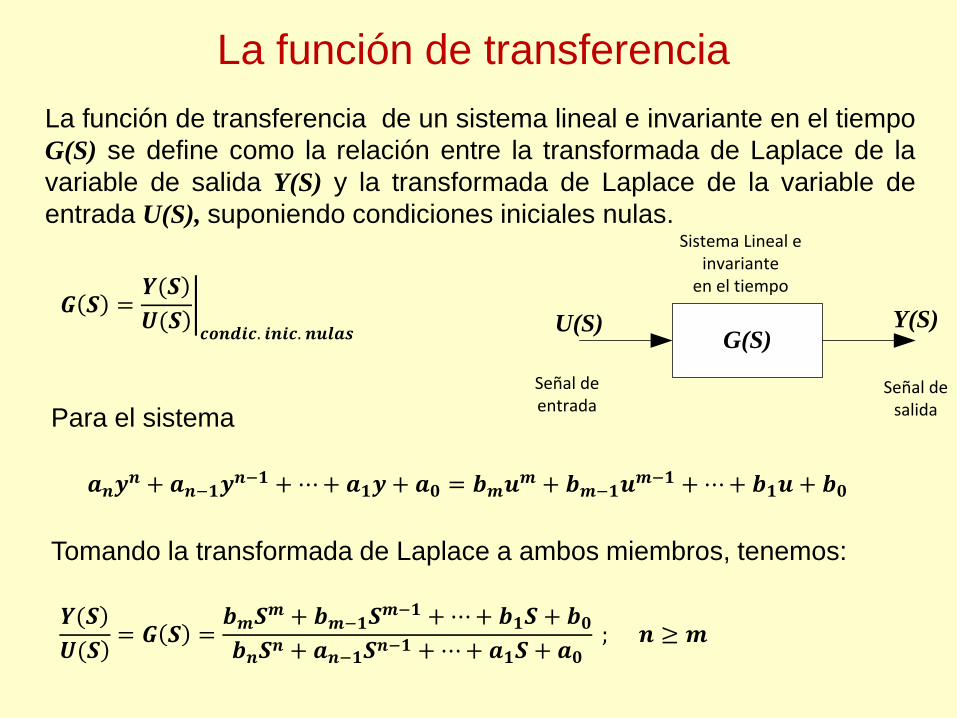
La función de transferencia de un sistema lineal e invariante en el tiempo
G(S) se define como la relación entre la transformada de Laplace de la
variable de salida Y(S) y la transformada de Laplace de la variable de
entrada U(S), suponiendo condiciones iniciales nulas.
Para el sistema
Tomando la transformada de Laplace a ambos miembros, tenemos:
La función de transferencia
𝑮 𝑺 =𝒀(𝑺
𝑼(𝑺 𝒄𝒐𝒏𝒅𝒊𝒄. 𝒊𝒏𝒊𝒄. 𝒏𝒖𝒍𝒂𝒔
𝒂𝒏𝒚𝒏 + 𝒂𝒏−𝟏𝒚𝒏−𝟏 + ⋯+ 𝒂𝟏𝒚 + 𝒂𝟎 = 𝒃𝒎𝒖𝒎 + 𝒃𝒎−𝟏𝒖𝒎−𝟏 + ⋯+ 𝒃𝟏𝒖 + 𝒃𝟎
𝒀(𝑺
𝑼(𝑺 = 𝑮 𝑺 =
𝒃𝒎𝑺𝒎 + 𝒃𝒎−𝟏𝑺𝒎−𝟏 + ⋯+ 𝒃𝟏𝑺 + 𝒃𝟎
𝒃𝒏𝑺𝒏 + 𝒂𝒏−𝟏𝑺𝒏−𝟏 + ⋯ + 𝒂𝟏𝑺 + 𝒂𝟎 ; 𝒏 ≥ 𝒎
G(S)
Sistema Lineal e invariante
en el tiempo
U(S) Y(S)
Señal de entrada
Señal de salida
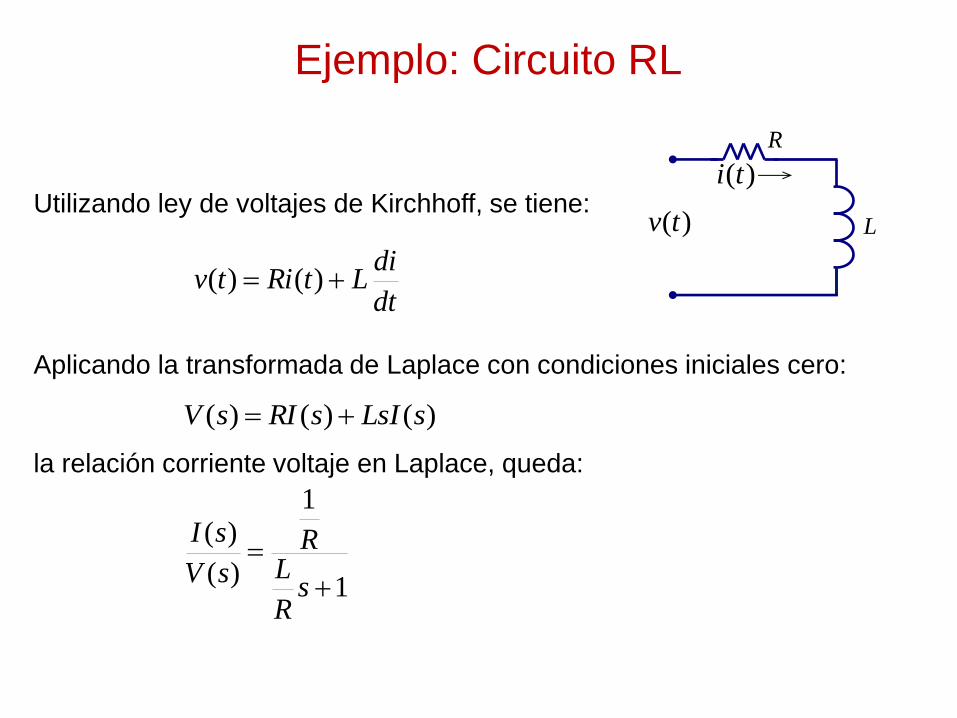
Ejemplo: Circuito RL Ejemplos de funciones de transferencia:
L
R
)(ti
)(tvUtilizando ley de voltajes de Kirchhoff, se tiene:
dt
diLtRitv )()(
Aplicando la transformada de Laplace con condiciones iniciales cero:
)()()( sLsIsRIsV
la relación corriente voltaje en Laplace, queda:
1
1
)(
)(
sR
LR
sV
sI
11
1
)(
)(
)1
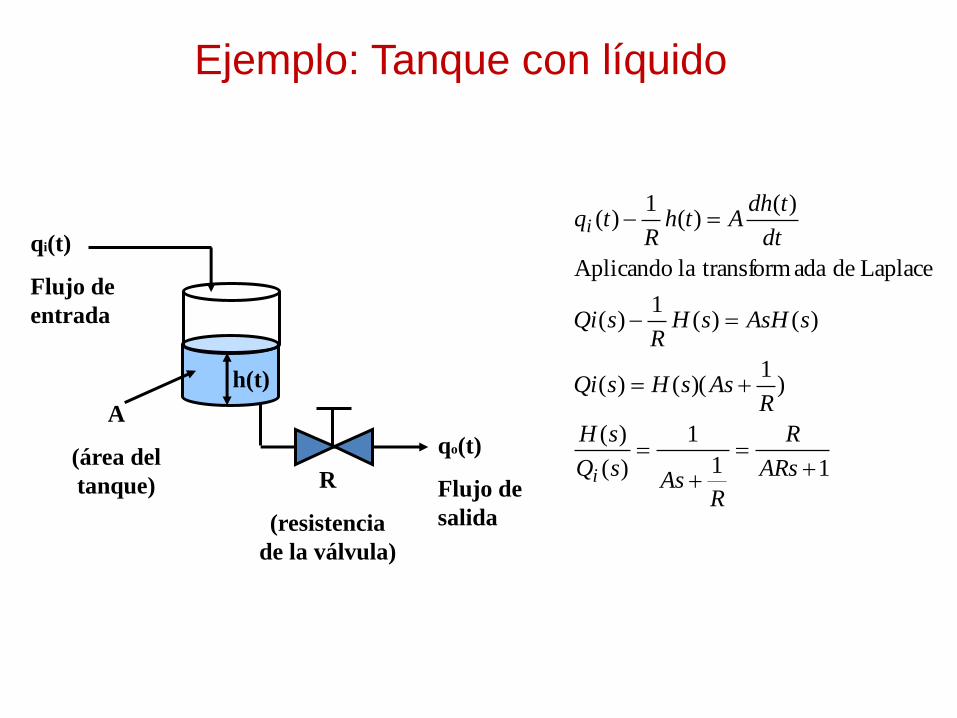
)(()(
)()(1
)(
Laplace de ada transformla Aplicando
)()(
1)(
ARs
R
RAs
sQ
sH
RAssHsQi
sAsHsHR
sQi
dt
tdhAth
Rtq
i
i
Ejemplo: Tanque con líquido
qo(t)
Flujo de
salida
R
(resistencia
de la válvula)
h(t)
qi(t)
Flujo de
entrada
A
(área del
tanque)
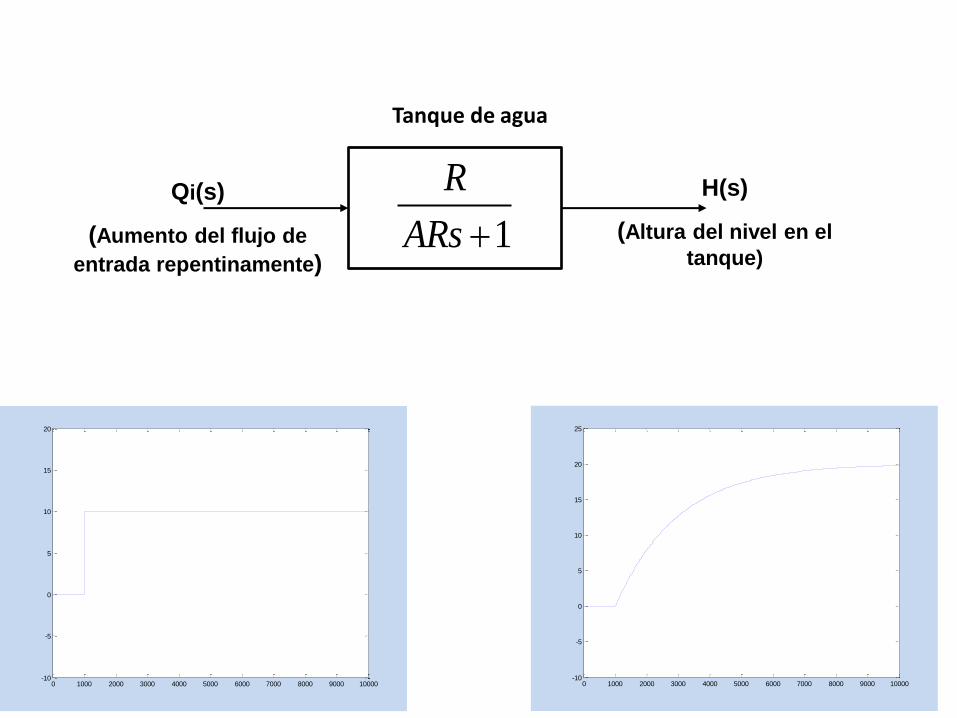
Qi(s)
(Aumento del flujo de
entrada repentinamente)
H(s)
(Altura del nivel en el
tanque) 1ARs
R
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000-10
-5
0
5
10
15
20
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000-10
-5
0
5
10
15
20
25
Tanque de agua
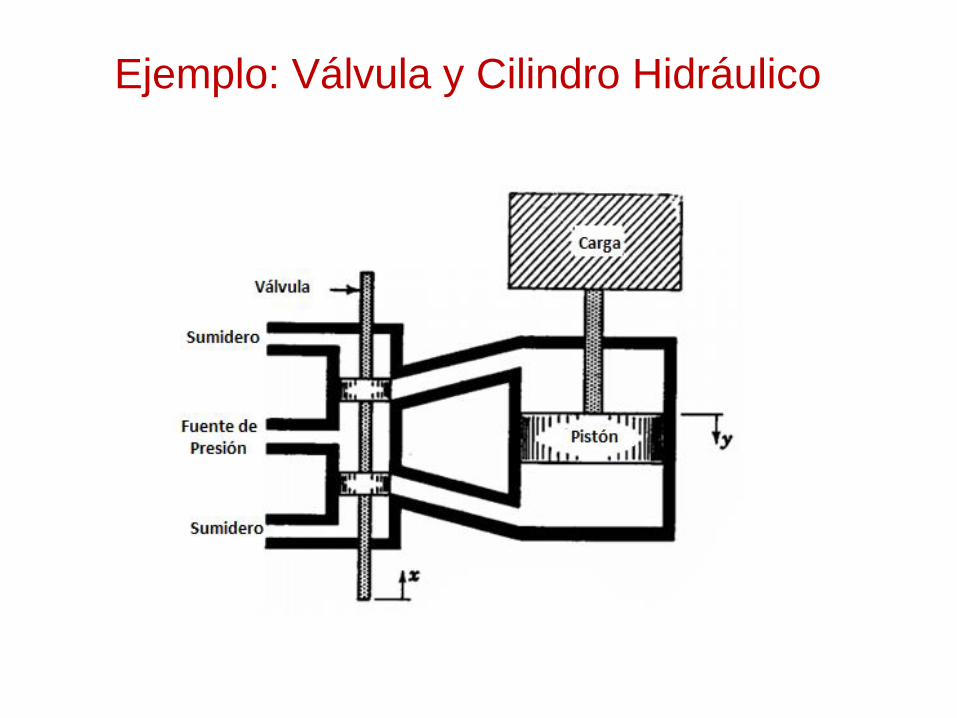
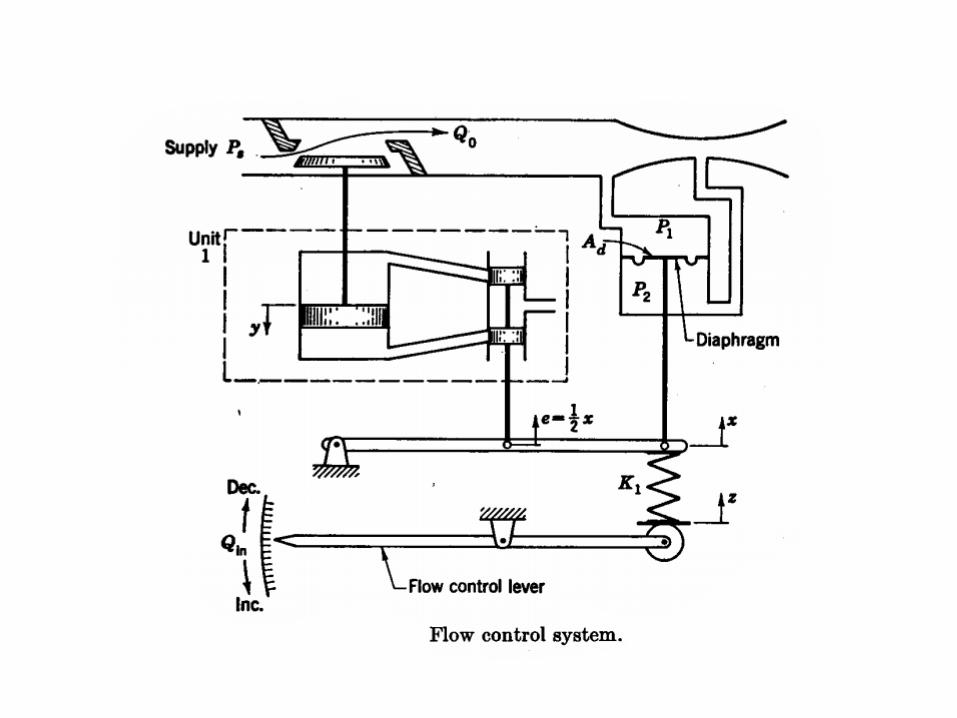
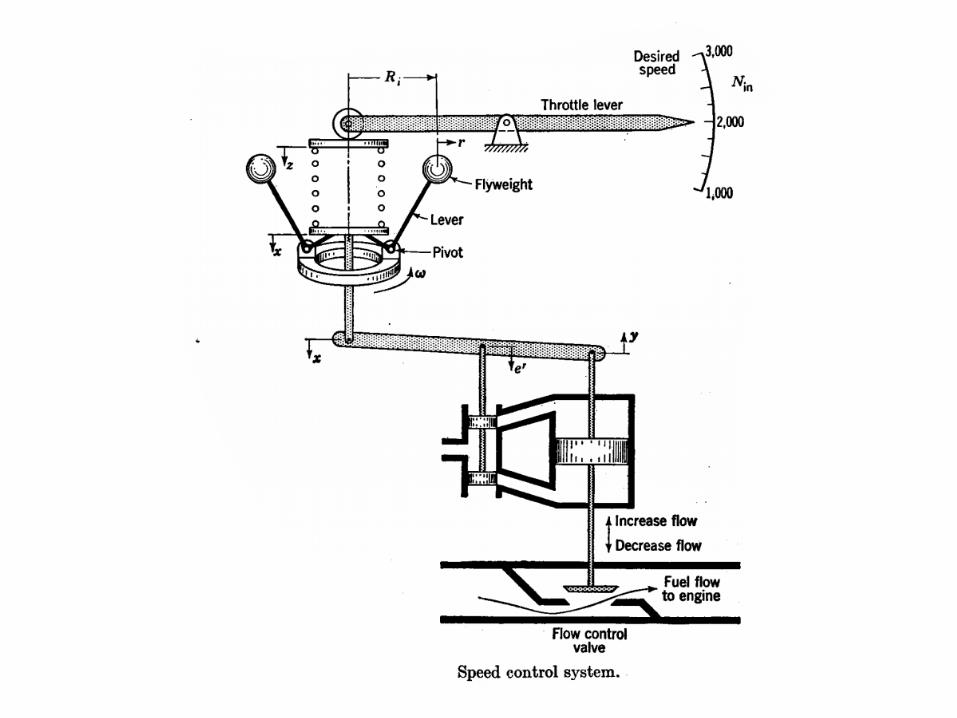
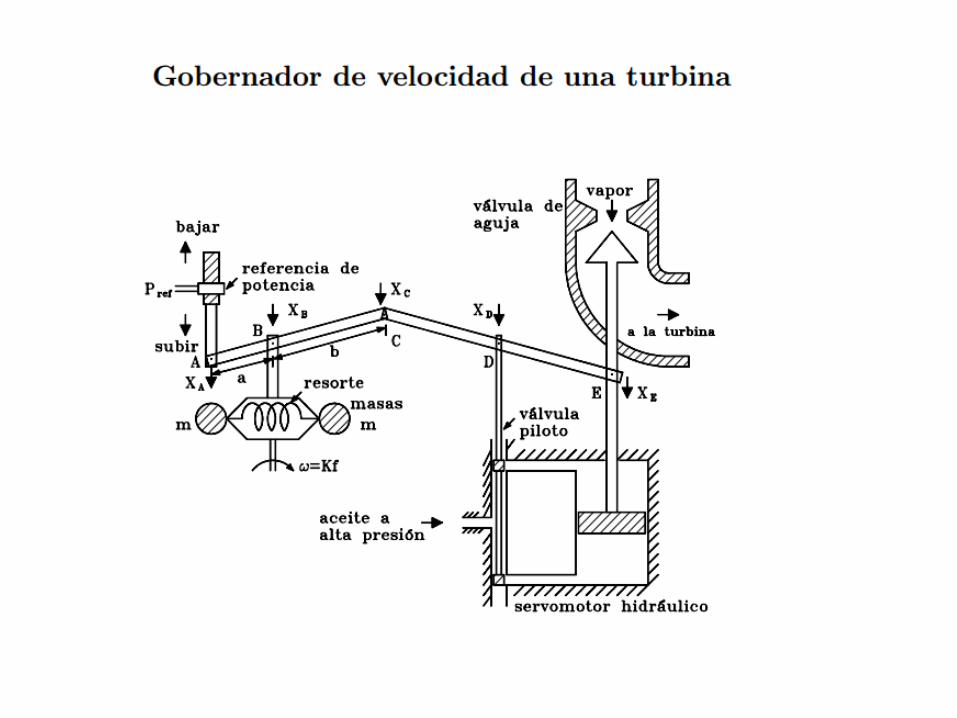
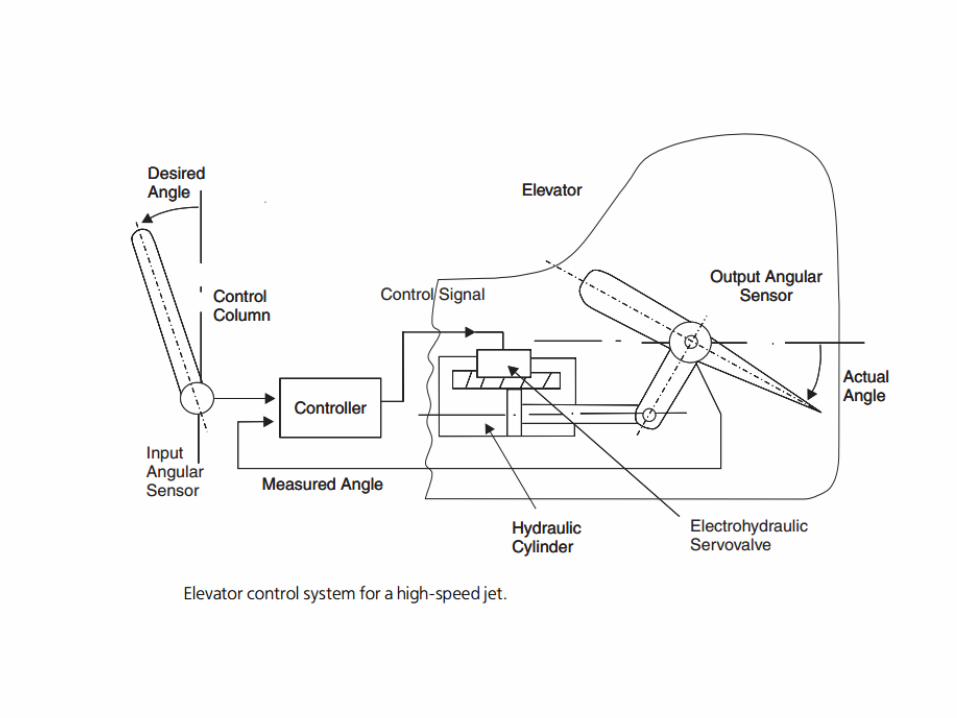
Ejemplo: Válvula y Cilindro Hidráulico
Para una caída de presión constante a través de la válvula, la tasa de flujo hacia el pistón es proporcional a la posición 𝑥. Así
𝑞 = 𝐶1𝑥 (1)
Donde: 𝑞 :es la tasa de flujo a través de la válvula hacia el cilindro hidráulico. 𝐶1: Coeficiente de fricción viscosa.
La tasa de flujo 𝑞 que ingresa a la cámara del pistón es igual a tasa de cambio en volumen de la cámara, y está dada por
𝑞 = 𝐴1𝑑𝑦
𝑑𝑡 (2)
Donde: 𝐴1 es el área del pistón
Igualando (1) y (2)
𝐴1𝑑𝑦
𝑑𝑡= 𝐶1𝑥 (3)
Hallando la transformada de Laplace a (3)
𝐴1𝑠𝑌 𝑠 = 𝐶1𝑋(𝑠 De donde
𝑌 𝑠 =𝐶1
𝐴1𝑠𝑋(𝑠
𝑌(𝑠
𝑋(𝑠 =
𝐶1
𝐴1𝑠
La función de transferencia que relaciona 𝑌 𝑠 con 𝑋(𝑠 es
𝐶1
𝐴1𝑠
𝐶1
𝐴1𝑠
𝑋(𝑠 𝑌(𝑠
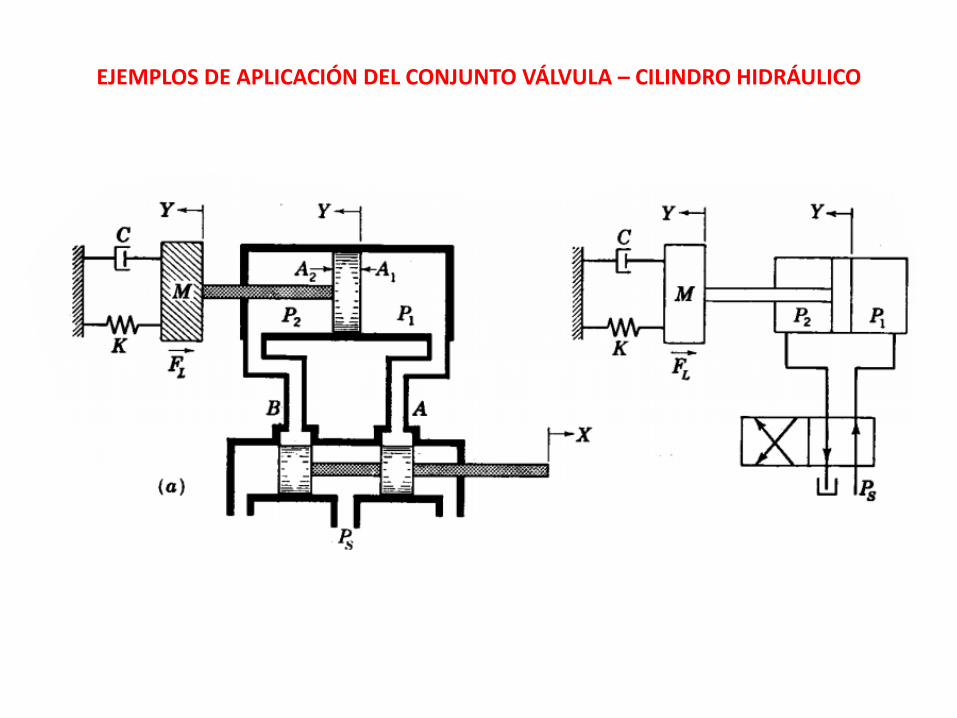
EJEMPLOS DE APLICACIÓN DEL CONJUNTO VÁLVULA – CILINDRO HIDRÁULICO