CONTROL PARA UN ROBOT ARTICULADO CON TRES … · control para un robot articulado con tres grados...
114
CONTROL PARA UN ROBOT ARTICULADO CON TRES GRADOS DE LIBERTAD QUE SIMULE EL MOVIMIENTO DE PATA T.G. 0409 RICARDO LIZCANO GOMEZ JUAN CARLOS PUENTES GOMEZ CAMILO ANDRES VALENZUELA SABOGAL BOGOTA D.C. PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERIA CARRERA DE INGENIERI ELECTRÓNICA 2005
Transcript of CONTROL PARA UN ROBOT ARTICULADO CON TRES … · control para un robot articulado con tres grados...

CONTROL PARA UN ROBOT ARTICULADO CON TRES GRADOS DE LIBERTAD QUE SIMULE EL MOVIMIENTO DE PATA
T.G. 0409
RICARDO LIZCANO GOMEZ
JUAN CARLOS PUENTES GOMEZ
CAMILO ANDRES VALENZUELA SABOGAL
BOGOTA D.C.
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA
CARRERA DE INGENIERI ELECTRÓNICA
2005

CONTROL PARA UN ROBOT ARTICULADO CON TRES GRADOS DE LIBERTAD QUE SIMULE EL MOVIMIENTO DE PATA
RICARDO LIZCANO GOMEZ
JUAN CARLOS PUENTES GOMEZ
CAMILO ANDRES VALENZUELA SABOGAL
DIRECTOR: INGENIERO CAMILO ANDRÉS OTÁLORA
SÁNCHEZ Trabajo de Grado presentado como requisito para obtener el
título de Ingeniero Electrónico
BOGOTA D.C.
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA
CARRERA DE INGENIERI ELECTRÓNICA
2005

PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERIA
CARRERA DE INGENIERIA ELECTRÓNICA
RECTOR MAGNIFICO: R.P. GERARDO REMOLINA VARGAS S.J. DECANO ACADEMICO: Ing. ROBERTO ENRIQUE MONTOYA VILLA DECANO DEL MEDIO UNIVERSITARIO: R.P. ANTONIO JOSE SARMIENTO
NOVA S.J. DIRECTOR DE CARRERA: Ing. JUAN CARLOS GIRALDO CARVAJAL DIRECTOR DEL PROYECTO: Ing. CAMILO ANDRES OTALORA SÁNCHEZ

AGRADECIMIENTOS
Esta Trabajo de Grado es fruto de todas la enseñanzas impartidas por todos nuestros profesores a lo largo de la carrera, y de manera especial los grandes aportes del Ing. Camilo Otálora, sin cuya colaboración no hubiese sido posible llevar a feliz término este proyecto. Ricardo Lizcano: Gracias a mi Madre y mi Padre por su apoyo incondicional, a Carolina y Alberto por estar siempre presentes, a mi Abuela a mis tías Maria Eugenia y Claudia y a mi tío Gustavo quien ya no está, por ser lo que son para mi. A mis compañeros Juan Carlos y Camilo los mas importantes en la finalización de este trabajo, a Jorge Lince y Marcela Clavijo por sus valiosos aportes. Por último, pero no menos importantes a mis amigos Rodolfo Agudelo, Paula Sepúlveda, Germán Téllez el “Campion do Mundo” y a todos los de la Caja Negra, Gracias. Juan Carlos Puentes: A mi familia por todo el apoyo recibido. Su esfuerzo, paciencia, dedicación y sacrificio hicieron de este sueño, un logro alcanzado. A mis amigos, aquellos que me acompañaron en momentos buenos y malos, las historias vividas que tendré siempre presentes. Todo esto no hubiese sido posible sin las enseñanzas claras y certeras de Carlitos, los asados interminables de Mauro, los peligros con Luisga, la nobleza de Rodo, las quejas de Jaboncito, en fin a todos y cada uno de escarabajos F.C. A Juan Camilo y Rodri, con noches largas de amistad, de consejos y FIFA, a Tata por su compañía y cariño que me hicieron olvidar más de una vez de los problemas, a Pipo siempre vivo, mi amigo inseparable. Mis compañeros de tesis. En fin, estoy muy agradecido por conocer amigos de gran corazón que me acompañaron y con los que compartí todos estos años. Un abrazo para todos. Camilo Andrés Valenzuela: Quiero agradecer primero a Dios que nos iluminó y dio fortaleza en los momentos de dificultad. A mis compañeros de tesis que tuvieron siempre la paciencia suficiente y la entrega necesaria, especialmente a Juan Carlos Puentes, a quien Dios bendijo con una inteligencia excepcional y un corazón de oro. Agradezco a mi madre que siempre me brindó su comprensión y apoyo. A mi hermano Hugo que ha sido como un padre para mí. A mi hermana Maribel, con cuyo ánimo y aliento me dio fortaleza y esperanza. A mi sobrina Laura, mis profesores, especialmente al Ing. Carlos Cotrino y por último a los compañeros del 612: Ronald, Bikini, Lince, Sofía, Pacho, Alejo, Victor, Sebas, Navia, Carlos, Celis, Renan, Catalina y Yesid.

CONTENIDO
PAG
1. INTRODUCCIÓN ........................................................................................................... 14
2. MARCO TEORICO......................................................................................................... 15
2.1 ROBOTICA ............................................................................................................... 15 2.2. FECHAS RELEVANTES......................................................................................... 16 2.3. INTRODUCCIÓN AL CONTROL DE ROBOTS................................................... 17
2.3.1. CONTROL DE LA TRAYECTORIA ............................................................... 18 2.3.2. CONTROL DE FUERZA, ................................................................................. 18 2.3.3. CONTROL HÍBRIDO ....................................................................................... 19
2.4. GALGAS EXTENSIOMÉTRICAS.......................................................................... 19 2.4.1. DEFINICIÓN ..................................................................................................... 19 2.4.2. FUNDAMENTO TEÓRICO ............................................................................. 19 2.4.3. CONFIGURACIÓN DE UN CUARTO DE PUENTE ..................................... 21 2.4.4. CONFIGURACIÓN DE MEDIO PUENTE ...................................................... 21 2.4.5. CONFIGURACIÓN DE PUENTE COMPLETO ............................................. 22
2.5. CELDA DE CARGA ........................................................................................... 23 2.5.1. CELDA DE CARGA TIPO S ............................................................................ 23 2.5.2. CELDA DE CARGA BENDING BEAM ......................................................... 24 2.5.3. CELDA DE CARGA SHEAR BEAM .............................................................. 24 2.5.4. CELDA DE CARGA MINIATURA ................................................................. 25 2.5.5. CELDA DE CARGA PUENTE DE WHEATSTONE ...................................... 25
2.6. TRANSFORMACIONES LINEALES................................................................ 26 2.6.1. TRASLACIÓN .................................................................................................. 26 2.6.2. ESCALIZACIÓN............................................................................................... 27 2.6.3. ROTACIÓN ....................................................................................................... 28 2.6.4 CINEMÁTICA DIRECTA ................................................................................. 29 2.6.5. CINEMÁTICA INVERSA ................................................................................ 29 2.6.6. COORDENADAS HOMOGÉNEAS Y MATRIZ DE TRANSFORMACIÓN 30 2.6.7. INTERPRETACIÓN GEOMÉTRICA DE LAS MATRIZ DE TRANSFORMACIÓN HOMOGÉNEAS.................................................................... 30 2.6.8. TRANSFORMACIÓN HOMOGÉNEA COMPUESTA................................... 31
2.7. ACCIONES BÁSICAS DE CONTROL................................................................... 32 2.7.1. INTRODUCCIÓN ............................................................................................. 32 2.7.2. VARIABLE CONTROLADA Y VARIABLE MANIPULADA ...................... 32 2.7.3. PLANTA ............................................................................................................ 32 2.7.4. PERTURBACIONES. ....................................................................................... 32 2.7.5. SISTEMAS DE CONTROL EN LAZO ABIERTO .......................................... 33 2.7.6. CONTROL REALIMENTADO. ....................................................................... 33 2.7.7. SISTEMA DE CONTROL EN LAZO CERRADO. ......................................... 33
2.7.8. ACCIÓN DE CONTROL ON-OFF................................................................... 33 2.7.8.1. ACCIÓN DE CONTROL ON-OFF CON GAP O BANDA MUERTA .... 33
2.7.9. ACCION DE CONTROL PROPORCIONAL .................................................. 34 2.7.10. ACCIÓN DE CONTROL INTEGRAL ........................................................... 34 2.7.11. ACCIÓN DE CONTROL DERIVATIVA....................................................... 35 2.7.12. ACCIÓN DE CONTROL PROPORCIONAL INTEGRAL (PI) .................... 35 2.7.13. ACCIÓN DE CONTROL PROPORCIONAL DERIVATIVA (PD) .............. 36 2.7.14. ACCIÓN DE CONTROL PROPORCIONAL INTEGRAL DERIVATIVA .. 37
2.8. CONTROL DE FUERZA......................................................................................... 38 2.8.1. CONTROL POR FUERZA EXPLÍCITO .......................................................... 39 2.8.2. CONTROL POR IMPEDANCIA ACTIVA O IMPLÍCITO............................. 39 2.8.3. CONTROL PARALELO ................................................................................... 39
2.9. FILTROS DIGITALES............................................................................................. 40 2.9.1. INTRODUCCIÓN ............................................................................................. 40 2.9.2. DEFINICIÓN ..................................................................................................... 40 2.9.3. CARACTERÍSTICAS DE LOS FILTROS DIGITALES ................................. 41 2.9.4. FILTROS FIR (FINITE IMPULSE RESPONSE) ............................................. 42 2.9.5. FILTROS IIR (INFINITE IMPULSE RESPONSE).......................................... 42
3. ESPECIFICACIONES..................................................................................................... 44
3.1. DESCRIPCION GENERAL..................................................................................... 45 3.2. SENSOR ................................................................................................................... 47
3.2.1. TRANSCONDUCTOR.................................................................................... 47 3.2.2. ETAPA DE AMPLIFICACIÓN ........................................................................ 48 3.2.3. MICROCONTROLADOR 1 ............................................................................. 48
3.2.3.1. FILTRO PASA – BANDA ......................................................................... 48 3.2.3.2 RECTIFICACION DIGITAL ...................................................................... 50 3.2.3.3. FILTRO PASA – BAJOS ........................................................................... 51 3.2.3.4. SIMULACIÓN ETAPA DE FILTRAJE Y RECTIFICACIÓN ................. 52
3.2.4. RUTINA DE TRANSMISION .......................................................................... 54 3.3. CONTROL................................................................................................................ 55
3.3.1. MICROCONTROLADOR 2 ............................................................................. 55 3.3.1.1. ADQUISICIÓN DE DATOS...................................................................... 55 3.3.1.2. CONTROL DE POSICIÓN ........................................................................ 56 3.3.1.3. CONTROL DE FUERZA........................................................................... 57 3.3.1.4. TRANSFORMACIONES DE COORDENADAS ..................................... 57 3.3.1.5. ETAPA DE SALIDA.................................................................................. 57 3.3.1.6. ETAPA DE POTENCIA............................................................................. 58
3.4. PATA ROBOT.......................................................................................................... 58 3.4.1. MOTORES......................................................................................................... 58 3.4.2. POTENCIOMETROS........................................................................................ 58
4. DESARROLLO ............................................................................................................... 59
4.1. ALIMENTACION .................................................................................................... 59 4.1.1. ALIMENTACIÓN DEL SENSOR .................................................................... 59

4.1.2. ALIMENTACIÓN DE LA TARJETA DE CONTROL .................................... 59 4.2. SENSOR ................................................................................................................... 59
4.2.1. TRANSDUCTOR .............................................................................................. 59 4.2.2. PARTE ANALÓGICA DEL SENSOR ............................................................. 61 4.2.3. PARTE DIGITAL DEL SENSOR..................................................................... 63
4.3. TARJETA DE CONTROL ....................................................................................... 64 4.3.1. MICROCONTROLADOR ................................................................................ 64 4.3.2. ETAPA DE POTENCIA.................................................................................... 65 4.3.3. MODULO DE COMUNICACIÓN ................................................................... 65
4.4. DESCRIPCIÓN DETALLADA DE LA TARJETA DE CONTROL ...................... 66 4.5. TRANSFORMACIONES DE COORDENADAS ................................................... 67 4.6. SISTEMA DE SUPERVISION ................................................................................ 68
4.6.1. COMUNICACIÓN ............................................................................................ 68 4.6.1.1. TRAMAS .................................................................................................... 69
4.6.2. MENU DE CONTROL...................................................................................... 70 4.6.2.1. CONTROL DE POSICIÓN ........................................................................ 70 4.6.2.2. CONTROL DE TRAYECTORIA ............................................................. 71 4.6.2.3. CONTROL DE FUERZA........................................................................... 72 4.6.2.4. SINTONIZACIÓN..................................................................................... 72 4.6.2.5. VENTANA DE GRÁFICAS ...................................................................... 73 4.6.2.6. ESCALIZACION DE LAS GRAFICAS DE FUERZA ............................. 75
5. ANALISIS DE RESULTADOS ...................................................................................... 77
5.1. PRUEBAS DE LA CELDA DE CARGA ................................................................ 77 5.1.1. RESULTADOS OBTENIDOS .......................................................................... 77
5.1.1.1. PRUEBAS EN EJE Y ................................................................................. 77 5.1.1.2. PRUEBAS EN EJE X ................................................................................. 79 5.1.1.3. PRUEBAS EN EL EJE Z............................................................................ 81
5.2. PRUEBAS DE LOS FILTROS DIGITALES........................................................... 83 5.2.1. FILTRO PASA-BANDA ................................................................................... 83 5.2.2. FILTRO PASABAJOS ...................................................................................... 84
5.2.2.1. RESPUESTA DEL FILTRO PARA VALORES DE FUERZA PEQUEÑOS.................................................................................................................................. 86
5.3. TIEMPO DE RECUPERACIÓN DE LA CELDA DE CARGA ............................. 86 5.4. RESPUESTA DEL CONTROL DE POSICIÓN...................................................... 87
5.4.1. PRUEBAS CONTROL DE POSICIÓN MOTOR 1.......................................... 87 5.4.2. RESPUESTA A ENTRADA PASO MOTOR 2................................................ 89 5.4.3. RESPUESTA A ENTRADA PASO DEL MOTOR 3 ....................................... 91 5.4.4. RESPUESTA A DISTURBIOS ......................................................................... 91
5.5. PRUEBA DE LA TRANSFORMACIÓN DE COORDENADAS RELATIVAS A COORDENADAS GENERALES ................................................................................... 93 5.6. RESPUESTA DEL CONTROL DE FUERZA......................................................... 96
5.6.1. RESPUESTAS A ENTRADA PASO ................................................................ 96 5.6.2. RESPUESTAS PASO EN DONDE LOS EJES COORDENADOS RELATIVOS DIFIEREN DE LOS GENERALES. .................................................... 98

5.6.3. PRUEBA DE FUERZA CERO ....................................................................... 100
6. CONCLUSIONES ......................................................................................................... 103
7. BIBLIOGRAFIA .......................................................................................................... 105
ANEXOS ........................................................................................................................... 107
ANEXO 1. MONTAJE MECANICO Y UBICACIÓN DEL SENSOR ....................... 108 ANEXO 2. UBICACIÓN DE MOTORES .................................................................... 109 ANEXO 4. JUEGO DE PIÑONES................................................................................ 110 ANEXO 5. CIRCUITO SENSOR DE FUERZA........................................................... 112 ANEXO 6. TARJETA DE CONTROL ......................................................................... 113 ANEXO 7. ESQUEMATICO SENSOR DE FUERZA................................................. 114 ANEXO 8. ESQUEMATICO TARJETA DE CONTROL ........................................... 115

LISTA DE FIGURAS
PAG Figura 1. Galga Extensiométrica.......................................................................................... 19 Figura 2. Puente de Wheatstone........................................................................................... 20 Figura 3. Configuración de un cuarto de Puente.................................................................. 21 Figura 4. Configuración de medio puente............................................................................ 22 Figura 5. Elongación y compresión de galgas ..................................................................... 22 Figura 6. Configuración de puente completo....................................................................... 23 Figura 7. Celda de Carga tipo S ........................................................................................... 23 Figura 8. Celda de carga Bending Beam.............................................................................. 24 Figura 9. Celda de carga Shear Beam .................................................................................. 24 Figura 10. Celda de carga miniatura .................................................................................... 25 Figura 11. Celda de Carga tipo puente de Wheatstone ........................................................ 25 Figura 12. Traslación ........................................................................................................... 26 Figura 13. Escalización ........................................................................................................ 27 Figura 14. Rotación.............................................................................................................. 28 Figura 15. Metodología de la cinemática............................................................................. 29 Figura 16. Esquema de un Filtro Digital.............................................................................. 40 Figura 17. Filtros Digitales más representativos.................................................................. 41 Figura 18. Diagrama de Bloques del Sistema ...................................................................... 45 Figura 19. Montaje Mecánico. ............................................................................................. 46 Figura 20. Ubicación del sensor de Fuerza. ......................................................................... 47 Figura 21. Magnitud de la respuesta en frecuencia filtro Pasa-banda.................................. 49 Figura 22. Fase de la respuesta en frecuencia filtro Pasa-banda.......................................... 50 Figura 23. Respuesta paso del filtro pasa banda. ................................................................. 50 Figura 24. Respuesta en Magnitud del Filtro Pasa - bajos................................................... 51 Figura 25. Respuesta a entrada del Filtro Pasa - bajos........................................................ 52 Figura 26. Diagrama en Bloques Etapa de filtraje y rectificación ....................................... 52 Figura 27. Salida filtro pasa – banda.................................................................................... 53 Figura 28. Salida etapa de rectificación. .............................................................................. 53 Figura 29. Salida etapa de filtraje y rectificación. ............................................................... 54 Figura 30. Respuesta a disturbio .......................................................................................... 54 Figura 31. Diagrama en Bloques del Control Conmutado................................................... 55 Figura 32. Diagrama en Bloques del Control de Posición. .................................................. 56 Figura 33. Diagrama en Bloques del Control de Fuerza...................................................... 57 Figura 34. Disposición de las galgas en la celda de carga. .................................................. 60 Figura 35. Parte analógica del sensor de fuerza................................................................... 61 Figura 36. Parte Digital del Sensor de Fuerza...................................................................... 63 Figura 37. Esquemático tarjeta de control............................................................................ 64 Figura 38. Sistema coordenado Relativo y General............................................................. 67 Figura 39. Transformación de coordenadas. ........................................................................ 68 Figura 40. Esquema de Comunicación................................................................................. 69

Tabla 1. Tramas de Comunicación....................................................................................... 69 Figura 41. Interfaz Gráfica................................................................................................... 70 Figura 42. Ventana de Control de Posición. ........................................................................ 71 Figura 43. Ventanas de Control de Trayectoria. .................................................................. 72 Figura 44. Ventana del Control de Fuerza. .......................................................................... 72 Figura 45. Menú de Sintonización. ...................................................................................... 73 Figura 46. Posiciones y Fuerzas Relativas.......................................................................... 74 Figura 47. Ventana de Posiciones. ...................................................................................... 74 Figura 48. Ventana de Fuerzas Relativas............................................................................. 75 Figura 49. Ventana de Fuerzas Generales............................................................................ 75 Tabla 2. Equivalencia Unidades – grF. ................................................................................ 76 Tabla 3. Fuerza ejercida sobre el eje Y con un ángulo de - 90º. .......................................... 77 Tabla 4. Fuerza ejercida sobre el eje Y con un ángulo de 90º. ............................................ 78 Tabla 5. Regresión lineal de los datos de las tablas 1 y 2 .................................................... 78 Figura 50. Amplitud de la señal cuadrada en función de la fuerza ejercida en eje Y con un
grado de -90º ................................................................................................................ 78 Figura 51. Amplitud de la señal cuadrada en función de la fuerza ejercida en eje Y con un
grado de 90º.................................................................................................................. 79 Tabla 6. Fuerza ejercida sobre el eje X con un ángulo de - 90º ........................................... 79 Tabla 7. Fuerza ejercida sobre el eje X con un ángulo de - 90º. .......................................... 80 Tabla 8. Regresión lineal de los datos de las tablas 4 y 5. ................................................... 80 Figura 52. Amplitud de la señal cuadrada en función de la fuerza ejercida en el eje X con
un grado de -90º ........................................................................................................... 80 Figura 53. Amplitud de la señal cuadrada en función de la fuerza ejercida en eje X con un
grado de 90º.................................................................................................................. 81 Tabla 9. Fuerza ejercida sobre el eje Z con un ángulo de 90º............................................. 81 Tabla 10. Fuerza ejercida sobre el eje Z con un ángulo de - 90º ........................................ 82 Tabla 11. Regresión lineal de los datos de las tablas 7 y 8. ................................................. 82 Figura 54. Amplitud de la señal cuadrada en función de la fuerza ejercida en el eje Z con un
grado de 90º.................................................................................................................. 82 Figura 55. Amplitud de la señal cuadrada en función de la fuerza ejercida en el eje Z con un
grado de - 90º ............................................................................................................... 83 Figura 56. Respuesta del Filtro Rectificada sin ser sometido a fuerza alguna..................... 84 Figura 57. Respuesta del filtro pasa-bajos para una entrada paso de 1Kg en el eje X a -90º.
...................................................................................................................................... 85 Figura 58. Respuesta del filtro pasabajos para una entrada paso de 3Kg en el eje Y a -90º.85 Figura 59. Respuesta del filtro pasabajos para una entrada paso de 2Kg en el eje Z a 90º. 85 Figura 60. Respuesta del filtro pasabajos para una entrada paso de 100 g en el eje X a - 90º.
...................................................................................................................................... 86 Figura 61. Tiempo de recuperación de la cerda de carga..................................................... 87 Figura 62. Respuesta del motor 1 a entrada paso................................................................. 88 Figura 63. Respuesta del motor 1 a entrada paso................................................................. 88 Figura 64. Respuesta a entrada paso del motor 1................................................................. 89 Figura 65. Respuesta a entrada paso del motor 2................................................................. 89 Figura 66. Respuesta a entrada paso del motor 2................................................................ 90

Figura 67. Respuesta a entrada paso del motor 2................................................................. 90 Figura 68. Respuesta paso del motor 3 ................................................................................ 91 Figura 69. Respuesta a un Disturbio del motor 1................................................................. 92 Figura 70. Respuesta a un Disturbio del motor 2................................................................. 92 Figura 71. Fuerzas Relativas y Generales. ........................................................................... 93 Figura 72. Plano XY Rotado 90º......................................................................................... 94 Figura 73. Plano YZ Rotado 90º. ......................................................................................... 94 Figura 74. Sistema de Coordenadas Relativo disímil al Sistema General. .......................... 95 Figura 75. Fuerza Ejercida En El Eje X Relativo. ............................................................... 95 Figura 76. Fuerza Ejercida En El Eje Z Relativo................................................................. 96 Figura 77. Respuesta Paso Fuerza Eje X ............................................................................ 97 Figura 78. Respuesta Paso Fuerza Eje Y. ............................................................................ 97 Figura 79. Respuesta Paso Fuerza Eje Z............................................................................. 98 Figura 80. Fuerzas Generales............................................................................................... 99 Figura 81. Fuerzas Relativas. ............................................................................................. 100 Figura 82. Fuerzas Generales (Prueba de Fuerza Cero)..................................................... 101 Figura 83. Posiciones de Los Motores Durante La Prueba De Fuerza Cero...................... 102 Figura 84. Montaje Mecánico. ........................................................................................... 108 Figura 85. Ubicación del sensor de Fuerza. ....................................................................... 108 Figura 86. Vista superior.................................................................................................... 109 Figura 87. Ubicación de Motores....................................................................................... 109 Figura 88. Piñones Motor 1................................................................................................ 110 Figura 89. Piñones Motor 2................................................................................................ 110 Figura 90. Piñones Motor 3................................................................................................ 111 Figura 91. Circuito sensor de Fuerza. ................................................................................ 112 Figura 92. Tarjeta de Control. ............................................................................................ 113 Figura 93 Esquemático sensor de Fuerza........................................................................... 114 Figura 94. Esquemático Tarjeta de Control ....................................................................... 115
LISTA DE TABLAS
PAG
Tabla 1. Tramas de Comunicación....................................................................................... 69 Tabla 2. Equivalencia Unidades – grF. ................................................................................ 76 Tabla 3. Fuerza ejercida sobre el eje Y con un ángulo de - 90º. .......................................... 77 Tabla 4. Fuerza ejercida sobre el eje Y con un ángulo de 90º. ............................................ 78 Tabla 5. Regresión lineal de los datos de las tablas 1 y 2 .................................................... 78 Tabla 6. Fuerza ejercida sobre el eje X con un ángulo de - 90º ........................................... 79 Tabla 7. Fuerza ejercida sobre el eje X con un ángulo de - 90º. .......................................... 80 Tabla 8. Regresión lineal de los datos de las tablas 4 y 5. ................................................... 80 Tabla 9. Fuerza ejercida sobre el eje Z con un ángulo de 90º............................................. 81 Tabla 10. Fuerza ejercida sobre el eje Z con un ángulo de - 90º ........................................ 82 Tabla 11. Regresión lineal de los datos de las tablas 7 y 8. ................................................. 82

1. INTRODUCCIÓN
Este Trabajo de Grado se divide en dos partes principales: la primera radica en mejorar la respuesta del sensor de fuerza desarrollado en el Trabajo de Grado 0305 (TG0305), y a su vez, disminuir su sensibilidad al ruido. La segunda parte consiste en el desarrollo de una aplicación para el sensor de fuerza. Dicha aplicación utiliza un brazo robot articulado de tres grados de libertad para imitar el movimiento de una pata. Se desea controlar la posición de cada uno de los motores del brazo y la fuerza que se hace en el extremo del robot. El sensor de fuerza construido en el TG0305 era susceptible a mejoras ya que la medición de las fuerzas se hacía con señales DC, permitiendo que el ruido y el offset afectaran la medida. Para solucionar este inconveniente, se usaron señales AC en la medición de las fuerzas y una etapa de filtraje. Tanto en el desarrollo del sensor como en la aplicación se utilizaron microcontroladores por su versatilidad adecuada para esta clase de proyectos. El montaje mecánico consiste en el brazo que se encuentra sobre una plataforma rectangular en la cual también están ubicadas las baterías y la tarjeta de control. Es indispensable aclarar que el movimiento de la pata no es autónomo, el usuario envía desde el computador los comandos que controlan la pata a través de una interfaz gráfica hecha en LabVIEW y el microcontrolador los recibe serialmente (RS232). En la interfaz gráfica se supervisan las fuerzas y las posiciones.
2. MARCO TEORICO 2.1 ROBOTICA1
Por siglos el ser humano ha construido máquinas que imitan las partes del cuerpo humano. Los antiguos egipcios unieron brazos mecánicos a las estatuas de sus dioses. Estos brazos fueron operados por sacerdotes, quienes clamaban que el movimiento de estos era inspiración de sus dioses igualmente, los griegos construyeron estatuas que operaban con sistemas hidráulicas, los cuales se utilizaban para fascinar a los adoradores de los templos. Durante los siglos XVII y XVIII en Europa fueron construidos muñecos mecánicos muy ingeniosos que tenían algunas características de robots. Jacques de Vauncansos construyó varios títeres de tamaño humano a mediados del siglo XVIII. Esencialmente se trataban de robots mecánicos diseñados para un propósito específico: la diversión. En 1805, Henri Maillardert construyó una muñeca mecánica que era capaz de hacer dibujos, en la cual, una serie de levas eran el sistema principal de control para que esta pudiese escribir y dibujar. Hubo otras invenciones mecánicas durante la revolución industrial, muchas de las cuales estaban dirigidas al sector de la producción textil, entre ellas se puede citar la hiladora giratoria de Hargreaves (1770), la hiladora mecánica de Crompton (1779), el telar mecánico de Cartwright (1785), el telar de Jacquard (1801), entre otros2. El desarrollo en la tecnología, donde se incluyen las computadoras electrónicas, los actuadores de control retroalimentados, transmisión de potencia a través de engranajes, y la tecnología en sensores, han contribuido a facilitar la construcción de mecanismos autómatas para desempeñar tareas dentro de la industria. Son varios los factores que intervienen para que se desarrollaran los primeros robots en la década de los cincuenta; la investigación en inteligencia artificial desarrolló maneras de emular el procesamiento de información humana con computadoras electrónicas y proporciono una variedad de mecanismos para probar sus teorías. Una obra checoslovaca publicada en 1917 por Karel Kapek, denominada Rossum’s Universal Robots, dio lugar al término robot. La palabra checa ‘Robota’ significa servidumbre o trabajador forzado, en el momento en que se tradujo al inglés se convirtió en el término “robot”. Entre los escritores de ciencia ficción, Isaac Asimov contribuyó con varias narraciones relativas a robots, comenzó en 1939, a él se atribuye el acuñamiento del
1 NIKE B. Saeed, Introduction to Robotics Analysis, System, Applications. United State of America. 2001. 2 LUI, Jiming, Wu, Jianbing. Multi-Agent Robotics System. United State of America. 2001. CRC.

término Robótica. La imagen de robot que aparece en su obra es el de una máquina bien diseñada y con una seguridad garantizada que actúa de acuerdo con tres principios. Estos principios fueron denominados por Asimov las Tres Leyes de la Robótica, y son: • Un robot no puede actuar contra un ser humano o, mediante la inacción, que un ser
humano sufra daños. • Un robot debe obedecer las órdenes dadas por los seres humanos, salvo que estén en
conflictos con la primera ley. • Un robot debe proteger su propia existencia, a no ser que esté en conflicto con las
dos primeras leyes. La Robótica es una ciencia aplicada, que surgió como tal hacia 1960. Han transcurrido pocos años y el interés que ha despertado desborda cualquier previsión; el auge de la Robótica y la imperante necesidad de su implantación en numerosas instalaciones industriales, requiere el concurso de un buen número de especialistas en la materia. Los robots utilizados en la industrial hacia la década de los ochenta, se dedicaban al montaje y labores de inspección. En dicha época, la fabricación de automóviles llegaba al 58%3 de la industria mundial, siguiendo en importancia las empresas constructoras de maquinaria eléctrica y electrónica. La incorporación al mundo del trabajo del robot, introduce el nuevo vocablo de "sistema de fabricación flexible", cuya principal característica consiste en la facilidad de adaptación de este a diferentes tareas de producción. Las células flexibles de producción se ajustan a necesidades del mercado y están constituidas básicamente por grupos de robots, controlados por un ordenador. Las células flexibles disminuyen el tiempo del ciclo de trabajo en el taller de un producto y liberan a las personas de trabajos desagradables y monótonos, lo que dará lugar a la fábrica totalmente automatizada. 2.2. FECHAS RELEVANTES4
• El inicio del control de robots se puede considerar asociado a la idea de Denavit y
Hartenberg en 1955 de incluir sistemas de referencia solidarios a los distintos eslabones de una forma sistemática.
• El primer robot industrial se construyó en 1958 (J. F. Engelberger) y la primera patente
de robots la obtuvo George Devol en 1961. • Hasta 1965 los robots se controlaban en lazo abierto. 3 RENTERIA, Arantxa, Robótica Industrial - Fundamentos y Aplicaciones. McGraw-Hill Interamericana Febrero 2001. 4 NIKE B. Saeed, Introduction to Robotics Analysis, System, Applications. United State of America. 2001, 349p

• Hasta 1975 se hicieron avances en control mediante realimentación. El control más utilizado es el “Control independiente de las uniones” que se basa en suponer que las ecuaciones dinámicas están desacopladas y que las interacciones entre los eslabones no son más que perturbaciones o imperfecciones del modelo. Se exploró también el área de control mediante par calculado.
• Hasta 1993 los controles utilizados en los robots industriales se basan sobre todo en
conceptos clásicos o en los controles antes mencionados. En entornos académicos empiezan a aparecer los primeros robots que utilizan los conceptos de control robusto y control adaptativo.
• Salvo contadas excepciones, los robots comerciales no han cumplido las expectativas que
sobre ellos se tenían. De hecho, no es arriesgado decir que las capacidades de los robots en 1993 se parecían bastante a las que tenían en 1983. A finales del 1997 se podía decir que aún no se habían llegado a cumplir las expectativas fijadas en 1983 para 1988.
• En la actualidad, en ambientes de investigación, han evolucionado muchos conceptos de
diseño mecánico tales como sistemas capaces de manipular objetos (herramientas con formas de mano), sensores (especialmente visión), estructuras muy ligeras o estructuras flexibles, pero sin embargo aún no se puede decir que hayan llegado de forma masiva al robot comercial.
• Lo mismo ocurre con los conceptos de control, sobre todo en tareas que requieren una
interacción compleja con el ambiente. Se puede decir que las tendencias actuales en control de robots incluyen el control robusto, control adaptativo, control híbrido fuerza/posición, robots autónomos (exploración espacial o movimientos en ambientes peligrosos), más avances en sistemas de visión artificial, robots con forma humana y capaces de andar (de los que ya hay las primeras versiones) y control basado en niveles de comportamiento.
2.3. INTRODUCCIÓN AL CONTROL DE ROBOTS Como ya se ha comentado, tradicionalmente el control de los robots se basaba en el control independiente de las articulaciones. Esto supondría ver las interacciones entre las mismas como defectos del modelo o como meras perturbaciones. La idea es suponer que las ecuaciones dinámicas del robot están desacopladas y ver cada articulación como si se tratara de un sistema dinámico SISO5 independiente de las demás. Este esquema funcionaba debido al efecto de las reducciones en los engranajes. Los motores ven siempre lo mismo y se pueden despreciar las variaciones en la carga, el
5 Single Input, Single Output

rozamiento, y los efectos dinámicos debidos al movimiento del resto de articulaciones. Sin embargo, al mejorar las prestaciones de los robots (menos peso y más velocidad) y al utilizar motores de acoplamiento directo, que producen un gran par, eliminan el backlash6 y reducen los rozamientos, debido a esto ya no es válida la simplificación anterior ahora hay que tener en cuenta tanto las perturbaciones externas como los efectos no lineales y de acoplamiento entre las ecuaciones dinámicas. Algunos de los objetivos del control de robot son: • Control de trayectoria. • Control de fuerza. • Control híbrido. También es posible realizar el control en coordenadas generalizadas o en coordenadas del extremo del robot. 2.3.1. CONTROL DE LA TRAYECTORIA Dada una determinada trayectoria deseada q(t), la idea es diseñar un control tal que su salida, es decir, el mando de las acciones motoras, lleve asintóticamente la trayectoria real t(t) hacia la trayectoria deseada q(t). Los tipos de control de trayectoria más comunes son: • Control PD que tiene la estabilidad garantizada bajo ciertas condiciones. • Control de par calculado que, mediante una realimentación no lineal desacopla y
convierte en lineales las ecuaciones del movimiento del robot. • Control adaptativo que, partiendo del desconocimiento de los parámetros de masa y
geométricos del robot, es capaz de realizar una estimación de los mismos y garantizar el seguimiento tanto de la posición como de la velocidad de las uniones.
2.3.2. CONTROL DE FUERZA7,8
Una vez que el robot ha establecido contacto con el ambiente exterior es importante controlar la fuerza que el extremo del robot ejerce. En este sentido se puede analizar la
6 Reacción Violenta. 7 T. YOSHIKAWA, “Force control of robot manipulators,” in Proc. IEEE Int.Conf. Robotics and Automation, vol. 1, 2000, pp. 220–226. 8 M. RAIBERT and J. CRAIG, “Hybrid position/force control of manipulators,” J. Dynamic Syst., Measurement Contr., vol. 103, no. 2, pp. 126–133, Feb. 1981.

forma de modificar la rigidez del manipulador del robot así como distintos modelos de contacto con el ambiente exterior y los problemas de estabilidad asociados al control de fuerza. 2.3.3. CONTROL HÍBRIDO Hay veces que es necesario controlar a la vez la fuerza que el robot ejerce en unas direcciones determinadas y el movimiento del robot en otras. Si este es el caso hay que aplicar una mezcla de los métodos de control de trayectoria y de control de fuerza. El cual es denominado control Híbrido. 2.4. GALGAS EXTENSIOMÉTRICAS 2.4.1. DEFINICIÓN La galga extensiométrica es un dispositivo comúnmente usado en pruebas y mediciones mecánicas. La más usada es la galga extensiométrica de resistencia, la cual varía su resistencia linealmente dependiendo de la carga aplicada al dispositivo. Este dispositivo se construye sobre un metal de coeficiente de elasticidad conocido, adosándole además un alambre y una tira semiconductora. Al deformarse el soporte de la galga esta se estira o se comprime, variando así su resistencia; así este cambio será el reflejo de la deformación sufrida.
Figura 1. Galga Extensiométrica
2.4.2. FUNDAMENTO TEÓRICO El cambio de resistencia en un material sometido a una deformación es consecuencia de la combinación de dos factores:

1. La variación del área transversal a la conducción eléctrica. 2. El cambio intrínseco de la resistividad del material. Para conseguir la máxima modificación en el valor de la resistencia con la mínima deformación, la galga extensiométrica tiene la forma típica de parrilla. La razón de cambio en la resistencia debido a la deformación se denomina factor de la galga o parámetro k, este valor lo describe la siguiente ecuación:
ε0R
Rk =
Factor K de la Galga Donde, Ro es el valor de la resistencia eléctrica de la galga sin deformación alguna y ε es la deformación unitaria del dispositivo.
LL∆
=ε
Deformación Unitaria
La resistencia de una galga extensiométrica puede cambiar solamente una fracción de un por ciento para la gama completa de la fuerza para la cual la galga fue diseñada, dada las limitaciones impuestas por los límites elásticos del material del cual esta hecha. A mayor se la fuerza aplicada sobre la galga mayor será el cambio de la resistencia, pero fuerza de exagerado valor podrían deformar de manera permanentemente el elemento, arruinando la galga como dispositivo de la medida. Así, para utilizar la galga de tensión como instrumento práctico, se miden cambios extremadamente pequeños en resistencia con alta exactitud. Debido a la precisión impuesta por el material de la galga el circuito mas utilizado para hacer medidas es el puente de Wheatstone (Figura 2), en este circuito el valor de la tensión aplicada sobre la galga es proporcional al desequilibrio de voltaje entre sus terminales debido a la variación de la resistencia del elemento de medición.
Figura 2. Puente de Wheatstone

Para algunas aplicaciones específicas se utilizan mas de un elemento que varían su resistencia en el puente, a continuación se nombraran las configuraciones más conocidas de este circuito. 2.4.3. CONFIGURACIÓN DE UN CUARTO DE PUENTE En este montaje solo uno de los elementos del puente es una galga, las demás resistencias son fijas y del valor nominal de la galga sin fuerza aplicada, así el circuito será simétrico si en el momento que la fuerza sobre el sensor sea cero. Esta configuración se puede observar en la figura 3.
Figura 3. Configuración de un cuarto de Puente
Debido a que normalmente la galga no se encuentra cerca de las otras resistencias del puente se debe tener en cuenta el valor de resistencia de los cables que la unen al circuito para el cálculo del valor de las otras resistencias, con el fin de minimizar el efecto de elementos ajenos al circuito al momento de la medición. 2.4.4. CONFIGURACIÓN DE MEDIO PUENTE En esta configuración existen dos elementos del puente que varían como se puede observa en la figura 4, éste circuito es mas preciso que el anterior debido a que las galgas se encuentran en el mismo brazo y normalmente muy cercanas una de la otra, sufriendo así el mismo efecto de la resistencia de los cables que las conectan al circuito y de variaciones por temperatura.

Figura 4. Configuración de medio puente
Normalmente en esta configuración se busca que en el momento que una de las galgas se elonga la otra se comprime, produciendo así cambios contrarios de la resistencia en los elementos, como se puede ver en la figura 5.
Figura 5. Elongación y compresión de galgas
2.4.5. CONFIGURACIÓN DE PUENTE COMPLETO Esta configuración provee una condición de equilibrio perfecto debido a que todos los elementos del puente son galgas como se observa en la figura 6, y el desequilibrio de voltaje entre los terminales del circuito solo se presenta por la presencia de fuerza aplicada sobre alguno de los elementos.

Figura 6. Configuración de puente completo
Este circuito es el más adecuado para la aplicación que se realizo en este proyecto debido a que permite medir la variación de fuerza en los tres ejes cartesianos como se va a demostrar mas adelante. 2.5. CELDA DE CARGA Una célula de carga es un transductor que convierte una carga o fuerza que actúa en ella en una señal eléctrica análoga. Este elemento ha tomado muchas formas para acomodar la variedad de aplicaciones que existen tanto en el campo de la investigación y de usos industriales. La mayoría de diseños actualmente utilizan galgas de tensión como elemento de detección. Se pueden establecer múltiples clasificaciones para las celdas de carga, bien agrupándolas según el campo de aplicación, la tecnología empleada, el tamaño, la forma y precisión. Las más comunes son: 2.5.1. CELDA DE CARGA TIPO S Las celda de carga tipo S obtiene su nombre de su forma de S (Figura 7). Las medidas de tensión son vinculadas al área central conformada por un puente de Wheatstone. Los usos incluyen el nivel del tanque y tolvas.
Figura 7. Celda de Carga tipo S

2.5.2. CELDA DE CARGA BENDING BEAM Las galgas están ubicadas en las secciones planas superiores e inferiores de la celda de carga en los puntos de tensión máxima. Este tipo de célula de carga es usado para baja capacidad y trabaja con razonable linealidad. Su desventaja es que debe ser cargado correctamente para obtener resultados consistentes. Ver Figura 8.
Figura 8. Celda de carga Bending Beam
2.5.3. CELDA DE CARGA SHEAR BEAM Las galgas son ubicadas en una parte reducida de la sección cruzada del dispositivo para maximizar el efecto de la presión. Son usadas para capacidades de medias a grandes, esta celda de carga tiene buena linealidad y no es tan susceptible a cargas extrañas, en particular a cargas laterales. Ver Figura 9.
Figura 9. Celda de carga Shear Beam

2.5.4. CELDA DE CARGA MINIATURA Debido a su tamaño compacto, por lo general usan semiconductores como medidores de tensión. Están disponibles en muchas configuraciones diferentes para la medida de fuerza de compresión y tensión. Ofrecen un buen funcionamiento salidas altas y alta sobrecarga. Ver Figura 10.
Figura 10. Celda de carga miniatura
2.5.5. CELDA DE CARGA PUENTE DE WHEATSTONE Las galgas son conectadas para crear las cuatro pines de una configuración puente de Wheatstone. Cuando se aplica un voltaje de entrada, a la salida aparece un voltaje proporcional a la fuerza sobre la celda. Esta salida puede ser amplificada y procesada por la instrumentación convencional eléctrica. Ver Figura 11.
Figura 11. Celda de Carga tipo puente de Wheatstone

2.6. TRANSFORMACIONES LINEALES El fin de las transformaciones lineales es trasladar la dinámica del sistema desde el manipulador hasta cada una de las articulaciones con el fin de analizar y definir el aporte de cada uno de los motores que conforman los ejes del robot, para facilitar la implementación de una estrategia de control que permita el total dominio sobre la trayectoria y la fuerza que ejerce el manipulador. En el capítulo 4, se expondrá la razón por la cual es necesario usar este tipo de transformaciones. 2.6.1. TRASLACIÓN La transformación de traslación permite a un objeto ser ubicado en cualquier parte dentro de un entorno virtual simplemente especificando los valores de los tres desplazamientos que están asociados con los vértices del objeto en 3D.
Figura 12. Traslación
Debido a que la transformación de la traslación requiere un valor para ser sumado a un punto, la matriz que representa esta acción en 3D debe de ser una matriz de 4 x 4 para incorporar los términos de traslación. Cualquier punto P = (x, y, z) puede ser ubicado en P' = (x', y', z') con sumarle tx, ty y tz a x, y y z respectivamente:
x' = x + tx' y' = y + ty' z = z + tz
Lo cual puede ser representado por la siguiente operación de una matriz homogénea:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
11000100010001
1
'
'
'
zyx
tztytx
zyx
P' = T . P
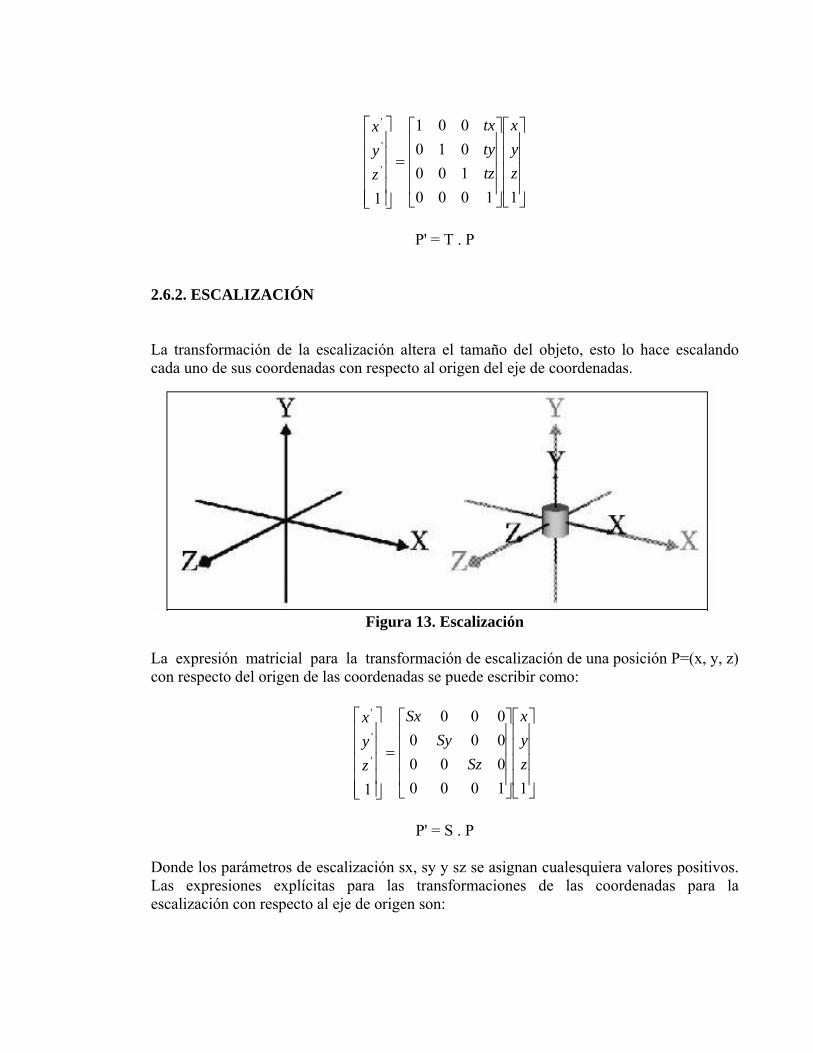
2.6.2. ESCALIZACIÓN La transformación de la escalización altera el tamaño del objeto, esto lo hace escalando cada uno de sus coordenadas con respecto al origen del eje de coordenadas.
Figura 13. Escalización
La expresión matricial para la transformación de escalización de una posición P=(x, y, z) con respecto del origen de las coordenadas se puede escribir como:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
11000000000000
1
'
'
'
zyx
SzSy
Sx
zyx
P' = S . P
Donde los parámetros de escalización sx, sy y sz se asignan cualesquiera valores positivos. Las expresiones explícitas para las transformaciones de las coordenadas para la escalización con respecto al eje de origen son:
x' = x . Sx' y' = y . Sy' z = z . Sz
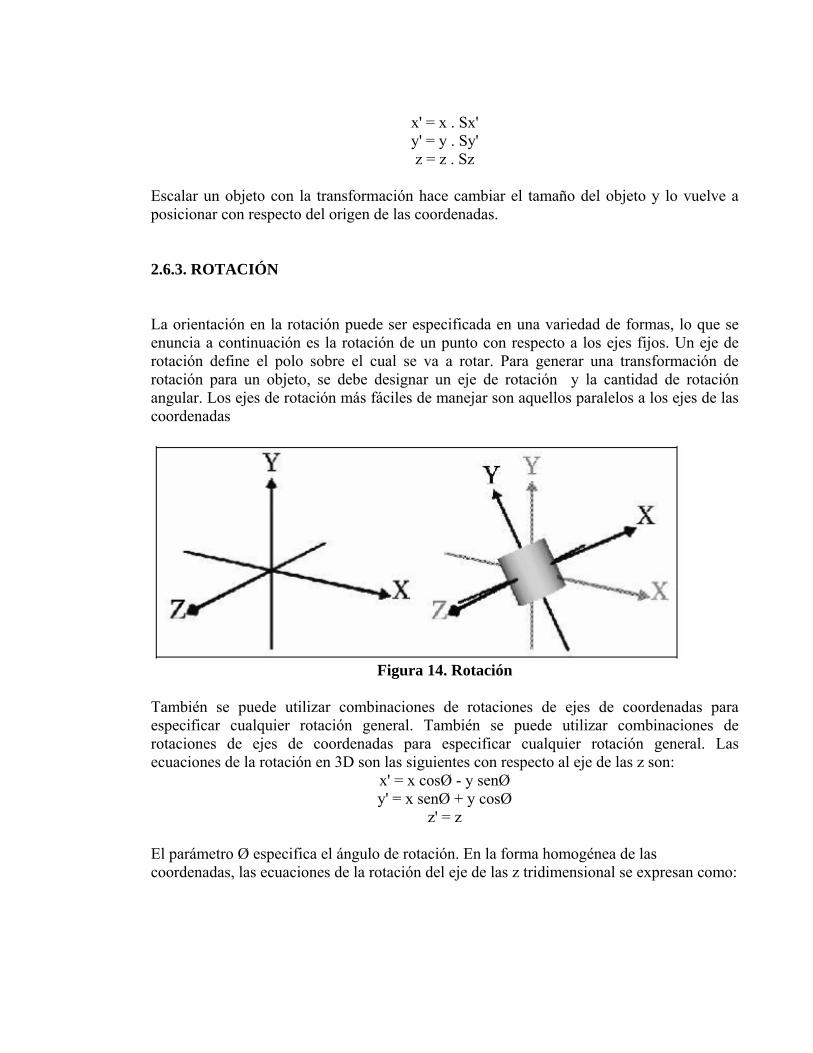
Escalar un objeto con la transformación hace cambiar el tamaño del objeto y lo vuelve a posicionar con respecto del origen de las coordenadas. 2.6.3. ROTACIÓN La orientación en la rotación puede ser especificada en una variedad de formas, lo que se enuncia a continuación es la rotación de un punto con respecto a los ejes fijos. Un eje de rotación define el polo sobre el cual se va a rotar. Para generar una transformación de rotación para un objeto, se debe designar un eje de rotación y la cantidad de rotación angular. Los ejes de rotación más fáciles de manejar son aquellos paralelos a los ejes de las coordenadas
Figura 14. Rotación
También se puede utilizar combinaciones de rotaciones de ejes de coordenadas para especificar cualquier rotación general. También se puede utilizar combinaciones de rotaciones de ejes de coordenadas para especificar cualquier rotación general. Las ecuaciones de la rotación en 3D son las siguientes con respecto al eje de las z son:
x' = x cosØ - y senØ y' = x senØ + y cosØ
z' = z El parámetro Ø especifica el ángulo de rotación. En la forma homogénea de las coordenadas, las ecuaciones de la rotación del eje de las z tridimensional se expresan como:

⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡ −
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
11000010000cos00cos
1
'
'
'
zyx
sensen
zyx
φφφφ
P' = Rz(Ø) . P
2.6.4 CINEMÁTICA DIRECTA9
El método usado en la cinemática directa, consiste en encontrar la matriz de transformación a través del mapeo o trazo que relacione el sistema de coordenadas del elemento final, con el sistema de coordenadas de referencia o espacio de configuración del manipulador. 2.6.5. CINEMÁTICA INVERSA La metodología usada en la cinemática inversa, consiste en que dado el espacio de configuración del manipulador tanto la posición como la orientación se debe encontrar su relación con la articulación a través de un mapeo inverso. El problema de la cinemática inversa es un poco más complicado debido a que pueden existir diversas soluciones para satisfacer un mismo espacio de configuración del manipulador. Además de ello, un robot puede que presente soluciones que no se encuentren en el rango de configuración de su manipulador y de la estructura de su brazo.
Figura 15. Metodología de la cinemática
9 LUI, Jiming, Wu, Jianbing. Multi-Agent Robotics System. United State of America. 2001. CRC,

2.6.6. COORDENADAS HOMOGÉNEAS Y MATRIZ DE TRANSFORMACIÓN10
En un espacio tridimensional, un vector de posición p = (px, py, pz)T se representa por un vector ampliado p = (wpx, wpy, wpz, w)T en la representación en coordenadas homogéneas. Las coordenadas físicas se relacionan con las homogéneas con:
px = wpx / w, py = wpy / w, pz = wpz / w La matriz de transformación homogénea es una matriz 4 x 4 que transforma un vector de posición expresado en coordenadas homogéneas desde un sistema de coordenado a otro. En general se representa:
Los elementos de la diagonal principal de una matriz de transformación homogénea producen escalado local y global. 2.6.7. INTERPRETACIÓN GEOMÉTRICA DE LAS MATRIZ DE TRANSFORMACIÓN HOMOGÉNEAS En general, una Matriz de Transformación Homogénea para un espacio tridimensional y en el contexto de la robótica, se representará:
10 NIKE B. Saeed, Introduction to Robotics Analysis, System, Applications. United State of America. 2001
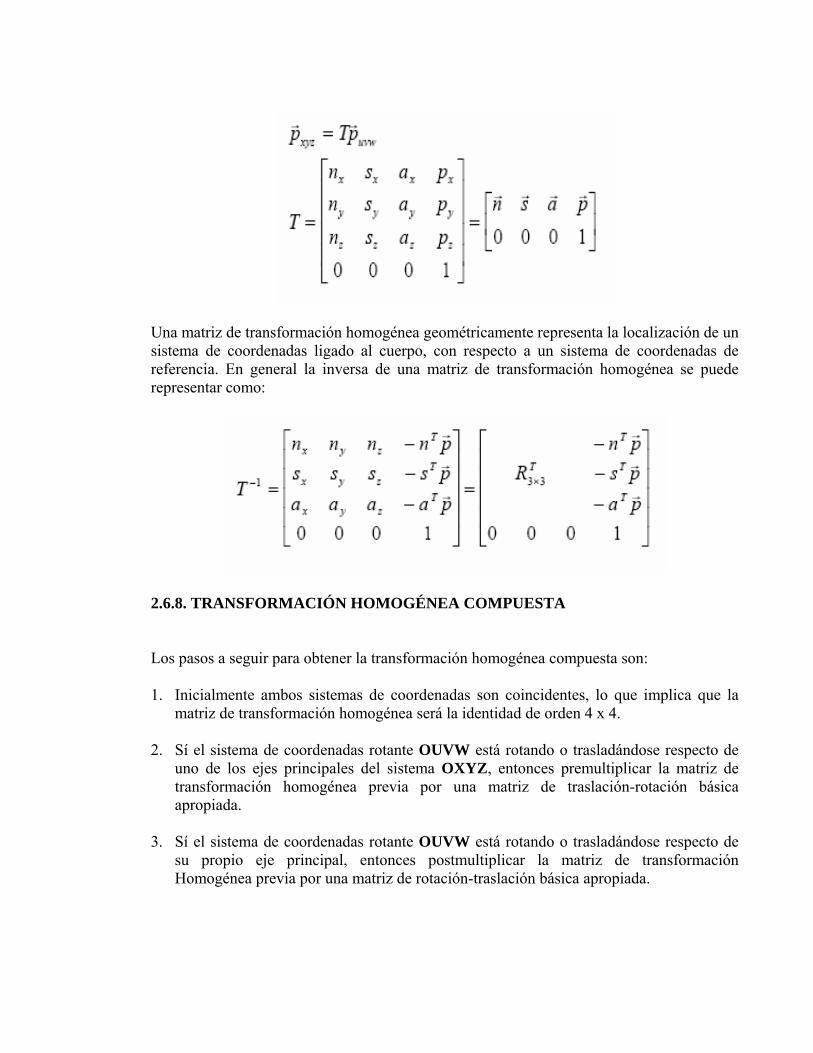
Una matriz de transformación homogénea geométricamente representa la localización de un sistema de coordenadas ligado al cuerpo, con respecto a un sistema de coordenadas de referencia. En general la inversa de una matriz de transformación homogénea se puede representar como:
2.6.8. TRANSFORMACIÓN HOMOGÉNEA COMPUESTA Los pasos a seguir para obtener la transformación homogénea compuesta son: 1. Inicialmente ambos sistemas de coordenadas son coincidentes, lo que implica que la
matriz de transformación homogénea será la identidad de orden 4 x 4. 2. Sí el sistema de coordenadas rotante OUVW está rotando o trasladándose respecto de
uno de los ejes principales del sistema OXYZ, entonces premultiplicar la matriz de transformación homogénea previa por una matriz de traslación-rotación básica apropiada.
3. Sí el sistema de coordenadas rotante OUVW está rotando o trasladándose respecto de
su propio eje principal, entonces postmultiplicar la matriz de transformación Homogénea previa por una matriz de rotación-traslación básica apropiada.

2.7. ACCIONES BÁSICAS DE CONTROL11
2.7.1. INTRODUCCIÓN En la actualidad los sistemas controlados están presentes en nuestras vidas sin que nos percatemos de ellos. El control automático es parte importante e integral de los procesos industriales y de manufactura. Con los avances en la teoría y en la práctica del control automático se obtiene un desempeño óptimo de los sistemas dinámicos, se aligera la carga de muchas operaciones manuales repetitivas y se obtiene una mejor productividad. 2.7.2. VARIABLE CONTROLADA Y VARIABLE MANIPULADA La variable controlada es la cantidad o condición que se mide y controla. Por lo común, la variable controlada es la salida del sistema mientras la variable manipulada es la cantidad o condición que el controlador modifica para afectar el valor de la variable controlada. Controlar significa medir el valor de la variable controlada del sistema y aplicar la variable manipulada al sistema para corregir o limitar una desviación del medio a partir de un valor deseado. 2.7.3. PLANTA La planta puede ser una parte de un equipo o un conjunto de partes de una máquina que funcionan en conjunto, es decir, cualquier objeto físico que se desea controlar. La planta tiene el propósito de ejecutar una operación particular. 2.7.4. PERTURBACIONES. A una señal que tiende a afectar negativamente el valor de la salida de un sistema se le conoce como perturbación. Si ésta se genera dentro del sistema se le conoce como perturbación interna, pero si se produce fuera de este, se le llama perturbación externa y es una entrada.
11 OGATA, Katsuhiko. Ingeniería de control moderna. Editorial Prentice may. Mayo 1997.

2.7.5. SISTEMAS DE CONTROL EN LAZO ABIERTO Un sistema de control en lazo abierto es aquel donde la salida no afecta la acción de control. En un sistema de control en lazo abierto no se mide la salida ni se realimenta para compararla con la entrada, es decir, a cada entrada le corresponde una condición operativa fija. La precisión del sistema depende de la calibración. 2.7.6. CONTROL REALIMENTADO. El control realimentado es una operación que reduce la diferencia entre la salida de un sistema y alguna entrada de referencia y lo continúa haciendo tomando como base a esta diferencia. 2.7.7. SISTEMA DE CONTROL EN LAZO CERRADO. Un sistema de control realimentado se denomina sistema de control en lazo cerrado. En este tipo de sistema se alimenta al controlador con la señal de error que es la diferencia entre la señal de entrada y la señal de realimentación, a fin de reducir el error. El control de lazo cerrado implica el uso de una acción de control realimentado para reducir el error del sistema. 2.7.8. ACCIÓN DE CONTROL ON-OFF Es la acción de control retroalimentada más sencilla y popular. Su principio de funcionamiento es simplemente el signo del error, generando así dos únicas posibilidades apagado o encendido. Como principal característica de esta acción de control es la presencia de una oscilación permanente en la variable controlada, la amplitud de esta oscilación depende de la rapidez con que cambie la medida una ve la acción de control cambie de signo. Por su parte el periodo de oscilación depende de cuanto tiempo le toma a la variable retornar al punto de referencia luego de hacer el cambio en el actuador. 2.7.8.1. ACCIÓN DE CONTROL ON-OFF CON GAP O BANDA MUERTA

Con el fin de reducir los efectos de la oscilación de la variable manipulada tales como fricción mecánica exagerada o el arco eléctrico de contactos, se acostumbra utilizar con esta acción de control una banda muerta o GAP, con este intervalo evita conmutaciones innecesarias minimizando el desgaste del actuador. 2.7.9. ACCION DE CONTROL PROPORCIONAL La salida de esta acción de control es una función lineal del error. Basándose así no solo en el signo del error sino también en la magnitud. La estrategia de control proporcional es en esencia un amplificador con ganancia ajustable. Este control sirve para reducir el tiempo de subida, incrementar el sobre pico y reducir el error de estado estable. Para una acción de control proporcional la relación entre la salida del controlador u(t) y la señal de error e(t) es:
donde Kp es la ganancia proporcional. Si se aplica la transformada de Laplace se obtiene:
Si se aplica la transformada Z se obtiene:
2.7.10. ACCIÓN DE CONTROL INTEGRAL Esta acción tiene como principio de funcionamiento la magnitud y duración del error. La ecuación que relaciona la salida del controlador u(t) y la señal de error e(t) en la acción integral es:

donde Ki representa la constante de integración. Si se duplica el valor de e(t), el valor de u(t) varía dos veces más rápido. Cuando el error es cero, el valor de u(t) permanece estacionario. La principal ventaja de esta acción es la capacidad que tiene de reducir el error a cero. Pero se caracteriza por la adición de un polo en el origen, el cual aumenta el orden del polinomio característico y con ello la posibilidad de inestabilidad. 2.7.11. ACCIÓN DE CONTROL DERIVATIVA Es este estrategia la salida del controlador es proporcional a la velocidad de cambio de la medida del error. Sin embargo como no existe ninguna relación con el valor del error en el momento que este deje de cambiar la contribución de esta acción es nula. En un controlador derivativo la relación entre la salida del controlador u(t) y la señal de error e(t) es:
Donde Kd es la constante derivativa. De la ecuación anterior se puede observar que debido a la implementación de esta acción de control se agrega un cero a la función de transferencia. Como consecuencia de esto se introduce un grado de previsión al sistema y se acelera la respuesta transitoria. Sin embargo, es obvio que una acción de control derivativa no predice una acción que nunca ha ocurrido. La principal desventaja de este controlador es la sensibilidad al ruido. Debido a que funciona con la velocidad de cambio del error, generando acción de control no deseadas para señales de magnitud pequeña pero de alta frecuencia como lo es el ruido. 2.7.12. ACCIÓN DE CONTROL PROPORCIONAL INTEGRAL (PI) En el control proporcional integral decrece el tiempo de subida, se incrementa el sobrepico y el tiempo de estabilización comparado con el control proporcional. Como se mencionó anteriormente la parte integral adiciona un polo en el origen el cual genera un sistema de segundo orden menos estable, por lo que la parte proporcional ayuda a la estabilización. La ecuación que describe la acción de control proporcional integral es:

Donde Kp es la ganancia proporcional y Ti se denomina tiempo integral. Con un control proporcional, es necesario que exista error para tener una acción de control distinta de cero; agregando la acción integral, un error pequeño positivo siempre nos dará una acción de control creciente, y si fuera negativo la señal de control será decreciente. Esto genera que el controlador haga tender el error permanente a cero. Si se desea implementar un controlador digital es necesario utilizar la transformada de Laplace y la transformada Z. Aplicando la transformada de Laplace,
Cuando se aplica la trasformada Z a través de la aproximación bilineal se obtiene:
Donde T es el tiempo de muestreo. 2.7.13. ACCIÓN DE CONTROL PROPORCIONAL DERIVATIVA (PD) El control proporcional derivativo se encarga de reducir el sobrepico y el tiempo de estabilización, incrementando la estabilidad del sistema mejorando la respuesta en algunos casos. La relación de un controlador proporcional-derivativo entre la salida u(t) y la señal de error e(t) está dada por:

en donde Kp es la ganancia proporcional y Td es una constante denominada tiempo derivativo. Al igual que en el caso anterior es necesario obtener las transformadas de Laplace y transformada Z del controlador para facilitar los cálculos. De la trasformada de Laplace obtenemos:
Aplicando la aproximación bilineal, se obtiene:
Donde T es el tiempo de muestreo. 2.7.14. ACCIÓN DE CONTROL PROPORCIONAL INTEGRAL DERIVATIVA Esta estrategia de control reúne todas las ventajes de las acciones básicas antes mencionadas, permitiendo reducir el error a cero y aumentar la velocidad de respuesta del sistema esto debido a la acción integral y derivativa respectivamente. La ecuación que describe la relación entre la salida y la entrada de esta acción de control es:
Para bajas frecuencia el controlador se comporta únicamente como un proporcional integral.

2.8. CONTROL DE FUERZA12
La combinación del control de fuerza y de posición es necesaria en varias aplicaciones en el campo de la robótica. Muchos años de investigación extensiva en esta área han resultado en diferentes estrategias de control, cada una de ellas implementada de diferentes formas. Como consecuencia existe un gran número controladores de fuerza propuestos. Cada uno de ellos tiene sus ventajas y desventajas. La utilización de un control regulador u otro, depende de la aplicación concreta. En una misma tarea se pueden utilizar varios reguladores en diferentes fases. Dada la amplia gama de posibilidades por una parte, y el peligro que conlleva experimentar con este tipo de tareas por otra, es conveniente probar los métodos de control en simulación antes de implementarlos en la realidad. Igualmente, se han simulado y analizado diferentes técnicas de control. En numerosas aplicaciones los brazos robot entran en contacto físico con el entorno. Esto provoca una fuerza de reacción sobre el manipulador final que se transmite a los actuadores. Por esta razón el comportamiento dinámico del brazo cambia. En este caso los métodos de control de posición y velocidad suelen ser insuficientes para un control adecuado en tareas tales como grabado, pulido o ensamblaje por nombrar algunas, las fuerzas y pares con las que el brazo actúa sobre el entorno deben estar dentro de un rango determinado. Si las fuerzas de interacción sobrepasan un valor máximo, podría ocurrir un daño irreversible tanto para el entorno como para el robot y la herramienta. En el caso contrario, si las fuerzas son insuficientes, la tarea no se efectuaría satisfactoriamente. Esto conlleva una serie de problemas específicos. La típica tarea de control de fuerza consiste en tres fases: • Movimiento libre: hasta el contacto entre el robot y la pieza. Requiere control de posición
o velocidad. • Impacto: es una fase transitoria, pero importante. Puede desestabilizar el robot. Además
de asegurar la estabilidad del sistema, es necesario evitar picos demasiado altos de fuerza para no ocasionar daños. Esta fase, además debe ser breve, y en lo posible sin perdida de contacto.
• Movimiento restringido: Fase de control de fuerza. Comienza una vez el robot está en contacto con el entorno y estabilizado.
Puede ser necesario utilizar estrategias de control diferentes en cada una de las tres fases. En este caso se deben establecer criterios para pasar de una fase a otra. Una alternativa es encontrar una estrategia que funcione bien para los tres casos, lo que es difícil dada la gran disparidad entre ellos. 12 NIKE B. Saeed, Introduction to Robotics Analysis, System, Applications. United State of America. 2001

Una complicación adicional reside en la alta susceptibilidad al ruido de los sensores de fuerza. Esto dificulta tanto el control de fuerza como el control del impacto. Los valores medidos no son totalmente confiables en el momento del impacto, por lo que la fuerza medida en ese instante tampoco lo es. Incluso puede ser arduo detectar si hay contacto o no. Dado que el robot entra en contacto con el mundo real, es imposible, en el caso general tener un modelo viable del sistema tanto mecánico como geométrico. Esto puede dificultar el diseño de algunos reguladores. Los controladores de robots industriales suelen ser cerrados, lo que imposibilita la implantación de nuevas técnicas de control. Como consecuencia, han surgido varias estrategias de control tales como implícito, explícito y paralelo, todas ellas implementadas con numerosas técnicas de control por ejemplo control PID, adaptativo, pasivo, difuso, no lineal, dinámica inversa, etc. 2.8.1. CONTROL POR FUERZA EXPLÍCITO Se controla directamente la fuerza, y no la posición. Es adecuado solamente para la tercera fase. Implica la necesidad de conmutación de un tipo de control a otro. Poco robusto ante incertidumbres en el modelado geométrico del entorno. Sin embargo, es la estrategia de control que obtiene mejores resultados. 2.8.2. CONTROL POR IMPEDANCIA ACTIVA O IMPLÍCITO En lugar de controlar directamente la fuerza de interacción con el entorno, el regulador debe asegurar que el brazo tenga el comportamiento dinámico (impedancia mecánica) requerido por la tarea. Es adecuado para las tres fases. Su principal inconveniente es que no alcanza ni la fuerza ni la posición de referencia. 2.8.3. CONTROL PARALELO Se pretende controlar a la vez la trayectoria y la fuerza de interacción. El error de posición se pasa por un regulador y el de fuerza por otro. La acción de control resultante es la composición de las dos salidas. El regulador de fuerza contiene integrador y el de posición no; por lo que el control de fuerza, prevalece sobre el control de posición. Cada una de ellas tiene sus ventajas y desventajas. En una misma planta puede ser necesario varias estrategias o técnicas de control según la situación. Para elegir la estrategia, es recomendable hacer antes las simulaciones necesarias.

2.9. FILTROS DIGITALES 2.9.1. INTRODUCCIÓN El procesamiento de señales estudia la representación, transformación y manipulación de señales y de la información que estas contienen. Este procesamiento se puede realizar aplicando tecnología analógica en tiempo continuo, o como se ha ido difundiendo cada vez más, aplicando procesamiento en tiempo discreto mediante programas y procesadores. Si las señales a tratar son analógicas, deberán ser convertidas en una secuencia de muestras, a fin de ser procesadas mediante algún algoritmo. Es común que se denomine a esta forma de procesamiento, indistintamente, como procesamiento digital de señales o procesamiento de señales en tiempo discreto. En general los filtros son sistemas que se diseñan principalmente para eliminar ciertas componentes no deseadas de una señal. Usualmente estas componentes no deseadas se describen en función de sus contenidos en frecuencia. Un filtro ideal permite el paso de ciertas frecuencias sin modificarlas y elimina completamente las otras frecuencias. El intervalo de frecuencias que se dejan pasar sin atenuación se denomina “banda pasante” del filtro y el intervalo de frecuencia que se elimina se denomina “banda atenuada”.
2.9.2. DEFINICIÓN Un filtro digital puede ser representado mediante el siguiente diagrama en bloques:
Figura 16. Esquema de un Filtro Digital
Donde x(nT) es la secuencia de entrada y y(nT) es la respuesta del filtro ante la excitación x(nT). El análisis de un filtro digital es el proceso de determinar la respuesta de un filtro ante una excitación dada. El diseño de un filtro digital es el proceso de sintetizar e implementar un filtro digital de tal manera que cumpla con las especificaciones prescritas. Dentro de los filtros más utilizados es posible mencionar los siguientes: Filtro Pasa-bajos.

Filtro Pasa-banda. Filtro Pasa-altos. Filtro Rechaza-banda.
En la Figura 17 se observa la magnitud en el espectro de frecuencia de los filtros digitales anteriormente mencionados.
Figura 17. Filtros Digitales más representativos
2.9.3. CARACTERÍSTICAS DE LOS FILTROS DIGITALES Los filtros digitales deben cumplir con las siguientes propiedades: Invarianza en el tiempo. Causalidad. Linealidad.
El método de diseño de filtro consiste en dado un conjunto de especificaciones, obtener una aproximación analítica en forma de una función de transferencia H(s) para sistemas en tiempo continuo y H(z) para sistemas en tiempo discreto. Los filtros digitales, así como los sistemas en tiempo discreto, pueden ser FIR13 o IIR14. Los métodos de diseño de filtros son especialmente especificados en el dominio analógico y mediante transformación encontrar su equivalente en tiempo discreto o diseñar este directamente en tiempo discreto. 13 Finite Impulse Response. 14 Infinite Impulse Response.

2.9.4. FILTROS FIR (FINITE IMPULSE RESPONSE) La función de transferencia de un filtro FIR (respuesta finita al impulso) está dada por:
Donde h(n) es la respuesta al impulso y H(z) es la función de transferencia en el plano z del filto. La respuesta al impulso tiene una duración de N. Para los filtros FIR se debe satisfacer la siguiente condición:
En la gran mayoría de las situaciones se requiere tener una fase lineal o un grupo de retrasos, esto se debe a la ecuación que se mencionó anteriormente. Los ceros de un filtro FIR con fase lineal deben tener cierta simetría. Es importante tener una fase lineal para aplicaciones donde se desee conservar la forma de onda original. Las principales características de un filtro FIR son: Son siempre estables. Pueden diseñarse para que tengan fase lineal, no distorsionando las características de
fase y el retardo de grupo. Requieren un mayor orden para valores de la atenuación y zonas de transición similares
lo que supone un mayor retardo en la obtención de la respuesta y mayor consumo de memoria.
2.9.5. FILTROS IIR (INFINITE IMPULSE RESPONSE) Los filtros IIR son filtros que presentan ceros y polos por lo que pueden ser inestables, a diferencia de los filtros FIR que siempre son estables. Además su respuesta a un impulso es infinita por lo que deben implementarse de forma recursiva. Existen dos filosofías de diseño de filtros IIR: Indirecta. Se basa en diseñar filtros analógicos que verifiquen las especificaciones y,
posteriormente, transformarlos al dominio digital preservando estas características.

Directa. Se propone el diseño de filtros digitales imponiendo una serie de condiciones a la respuesta en frecuencia para determinar los coeficientes.
Estos métodos se utilizan cuando se conoce la respuesta impulso de un sistema y se quiere determinar la función de transferencia que mejor se ajusta. Para lograr esto, se tiene en cuenta algún criterio de error para determinar los coeficientes del filtro. Las características principales de los filtros FIR son: Fase lineal: estos filtros se pueden diseñar para que su respuesta en fase sea lineal, por
tanto, su retardo de grupo es constante. La linealidad de fase se obtiene si existe simetría en los coeficientes del filtro: h(n) =
± h(N-n). Dado que el número de coeficientes del filtro puede ser par o impar, y que los coeficientes pueden ser simétricos o antisimétricos se originan cuatro tipos de filtro FIR de fase lineal:
o Tipo I. Número de coeficientes impar (N impar). Simetría par. o Tipo II. Número de coeficientes par (N par). Simetría par. o Tipo III. Número de coeficientes impar (N impar). Simetría impar. o Tipo IV. Número de coeficientes impar (N par). Simetría impar.
Aún cuando los polos estén situados dentro del círculo de radio unidad, pueden
presentar inestabilidades si se implementan en sistemas con aritmética de coma fija. Presentan mayor error de cuantización en función del número de bits empleado para
almacenar los coeficientes y las variables intermedias. Son más apropiados cuando se desea obtener regiones de transición estrechas.

3. ESPECIFICACIONES
Uno de los objetivos planteados en este trabajo de grado, fue realizar una mejora al sensor de fuerza realizado en el trabajo de grado T.G. 0305 “Sistema de sensor de fuerza para aplicaciones de control simples”. En dicho trabajo, se implementó un sensor de fuerza, el cual calculaba las fuerzas a partir de señales de voltaje DC, por lo cual las medidas eran fácilmente distorsionadas por ruido e influenciadas por voltajes de offsets inherentes a los componentes del circuito. El sensor de fuerza que se realizará, debe ser capaz de sensar fuerzas en un rango de cero a cinco kilogramos fuerza en cada uno de los ejes X, Y y Z referidos a el mismo, a su vez, esto se debe hacer de manera independiente y simultanea en los tres ejes. Con el fin de optimizar el funcionamiento del sensor realizado en el TG0305, se implementará un sistema en el cual la etapa de adquisición de datos del sensor se origine a partir de señales AC, tratando de corregir gran parte de los problemas antes mencionados. Para cumplir con este fin se implementará una etapa amplificación análoga que adecuara las señales del sensor a niveles de voltaje entre un rango de cero a cinco voltios, y posteriormente una etapa de filtrado digital para obtener un valor proporcional a la fuerza. Los filtros digitales estarán en un microcontrolador; se diseñaran de tal manera se obtenga el mayor rechazo posible a las señales no deseadas tales como offset y armónicos de la señal AC principal, de tal manera que se obtenga un valor constante y proporcional a una fuerza aplicada, con el menor tiempo de establecimiento posible. A su vez, el sensor deberá transmitir los valores proporcionales a la fuerza de manera serial. La tasa de transmisión del sensor, será la más alta posible; esta tasa estará limitada por la velocidad del microcontrolador PIC18F452 para realizar las operaciones requeridas en el procesamiento de las señales análogas de fuerza. Otro de los objetivos del trabajo de grado, es desarrollar un sistema mecánico que simule el movimiento de una pata. Con este fin, el Ing. Camilo Otálora, realizará un robot el cual tendrá tres motores DC, permitiendo movimientos en tres grados de libertad. El sensor realizado se ubicara en el punto de apoyo de la pata, esperando que el robot pueda ejercer fuerzas en un rango entre cero y cuatro kilosgramos fuerza, los cuales equivalen al 80% del rango del sensor. Se implementará un control de posición para cada uno de los motores del robot, el cual tendrá una respuesta rápida lo cual implica sobrepicos de amplitud considerable; para minimizar la amplitud de estos, se diseñará un control de trayectoria, en donde los cambios en el set – point de posición tipo paso, se transformaran en entradas tipo rampa, esperando obtener repuesta más suaves.

Intentando simular el movimiento de una pata, se programarán posiciones predefinidas tales como un paso adelante, un paso atrás, etc. Esto se realizará utilizando el control de trayectoria. Además, durante ese movimiento se registra la presencia de un obstáculo por medio del sensor de fuerza, el sistema deberá realizar una rutina de evasión. Con el fin de verificar el correcto funcionamiento y utilidad del sistema, se implementará un control de fuerza sobre el extremo de la pata del robot. El set – point de este control de fuerza, será un vector F(x,y,z) el cual lo dará el usuario y estará referido a la base del robot y no a los ejes X, Y, Z del sensor. Por esta razón será necesario implementar un conjunto de transformaciones trigonométricas que permitan relacionar las fuerzas realizadas en el extremo del robot con su equivalente en el sistema coordenado referido a la base del robot. El control de todo el sistema será realizado por el usuario, esto se hará a partir de una aplicación que se creará en el paquete LabView, en donde el usuario podrá controlar cada una de los aspectos mencionados anteriormente; así como supervisar la posición de el robot articulado y también, la fuerza que siente este en su extremo.
3.1. DESCRIPCION GENERAL
Fuerza
Sensor
Transconductor (Celda de
Carga)
Etapa de Amplificación
Etapa de Filtraje Digital
(Microcontrolador
Transmisión Serial SPI
Control Microcontrolador 2
Etapa de Salida (PWM)
Etapa de Potencia (Puentes H)
Pata Robot Motores
Potenciómetros (Posición)
Figura 18. Diagrama de Bloques del Sistema El Sistema desarrollado en este Trabajo de Grado, posee la capacidad de sensar las componentes de fuerza aplicada sobre el Transconductor o Celda de Carga en los tres ejes cartesianos (X, Y, Z) así como la posición de cada motor por medio de los potenciómetros acoplados a estos.

La señales provenientes de la celda de carga, son dos señales cuadradas de 10 Hz correspondientes a la fuerza en los ejes X y Y, que son comparadas de manera independiente con referencias generadas en puentes de Wheastone no descompensados; la fuerza en el eje Z se obtiene de manera indirecta a partir de los dos señales X y Y de la celda de carga. La diferencia con la referencia, es amplificada con el fin de poder sensar la magnitud de una fuerza aplicada sobre el transductor; luego de este proceso de adecuación, estas señales son digitalizadas con una frecuencia de muestro de 100Hz con ayuda del microcontrolador 1. Los datos obtenidos del sensor en cada eje, son filtrados a través de un pasa-banda, rectificados y nuevamente filtrados por un pasa-bajos, para obtener los valores de fuerza aplicados en los tres ejes. Por último estos valores son transmitidos utilizando el puerto serial del microcontrolador 1 (SPI15) hacia el microcontrolador 2. El sensor de fuerza se adecuó a un robot articulado con tres grados de libertad con el fin de simular el movimiento de una pata. Cabe notar que la celda de carga se encuentra en el extremo de la pata como se puede ver en las figuras 19 y 20, a su vez se implementó una etapa de control que permite analizar los datos transmitidos por el sensor de fuerza, digitalizar los niveles de voltaje de los potenciómetros acoplados a los motores del robot y efectuar las acciones pertinentes de control. Además de adquirir los datos del sensor de fuerza y de los potenciómetros, la etapa de control realiza transformaciones trigonométricas con el fin de obtener las componentes de fuerza referidas a un sistema de coordenadas globales. Las coordenadas del extremo del robot y los datos de fuerza, son empleados para realizar la estrategia de control de fuerza adecuado a cada situación.
Figura 19. Montaje Mecánico.
15 Serial Port Interface
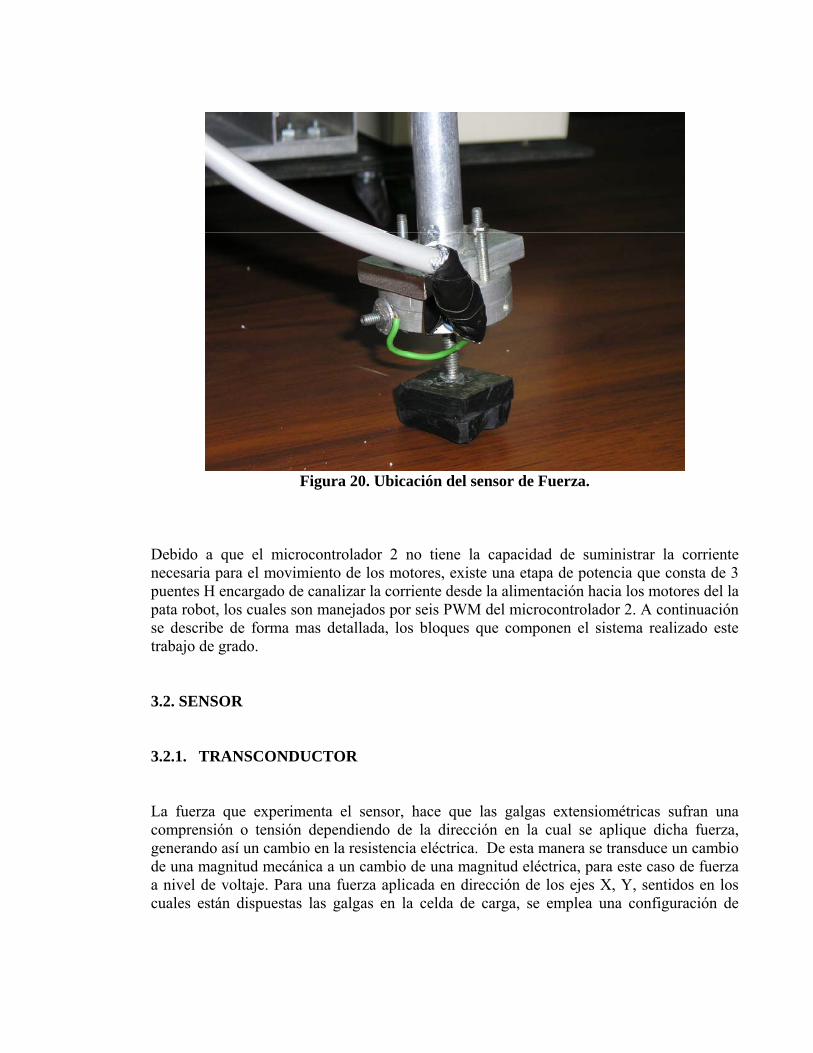
Figura 20. Ubicación del sensor de Fuerza.
Debido a que el microcontrolador 2 no tiene la capacidad de suministrar la corriente necesaria para el movimiento de los motores, existe una etapa de potencia que consta de 3 puentes H encargado de canalizar la corriente desde la alimentación hacia los motores del la pata robot, los cuales son manejados por seis PWM del microcontrolador 2. A continuación se describe de forma mas detallada, los bloques que componen el sistema realizado este trabajo de grado. 3.2. SENSOR 3.2.1. TRANSCONDUCTOR La fuerza que experimenta el sensor, hace que las galgas extensiométricas sufran una comprensión o tensión dependiendo de la dirección en la cual se aplique dicha fuerza, generando así un cambio en la resistencia eléctrica. De esta manera se transduce un cambio de una magnitud mecánica a un cambio de una magnitud eléctrica, para este caso de fuerza a nivel de voltaje. Para una fuerza aplicada en dirección de los ejes X, Y, sentidos en los cuales están dispuestas las galgas en la celda de carga, se emplea una configuración de

puente en mitad (ver sección 2.4.4.), mientras que para una fuerza aplicada en dirección del eje Z, se utiliza una sección de puente completo (ver sección 2.4.5.).
3.2.2. ETAPA DE AMPLIFICACIÓN Con el fin de adecuar la salida del puente de galgas a niveles de voltaje, donde sea viable un tratamiento y análisis dentro del microcontrolador 1, la diferencia de la señal proveniente de los puentes de Wheastone de galgas y la de los puentes de resistencia de referencia, los cuales nunca son desbalanceados; es amplificada utilizando amplificadores de instrumentación. Debido a que los niveles de voltaje que mencionábamos anteriormente no son aún adecuados, estas señales se amplifican nuevamente por medio de amplificadores operacionales. 3.2.3. MICROCONTROLADOR 1 Las señales provenientes de la etapa de amplificación, son digitalizadas usando un conversor análogo – digital de 10 bits que posee el microcontrolador a una frecuencia de 100 Hz. Estas señales digitales, son filtradas para obtener valores proporcionales a las fuerzas aplicadas sobre la celda de carga, y de esta manera tener datos que permitan a la parte de control digital incluida en el microcontrolador 2, tomar las acciones pertinentes en el control de fuerza. Estos datos mencionados anteriormente, son transmitidos serialmente hacia el microcontrolador 2 usando el protocolo de comunicaciones SPI.
3.2.3.1. FILTRO PASA – BANDA Con el fin de eliminar componentes de frecuencia indeseables de la señal digital proveniente de los puentes, tales como “offset” de la parte análoga del circuito, estática en el sensor de fuerza entre otros; y además para asegurar que la señal medida sea efectivamente la componente de 10Hz de la señal cuadrada generada por el microcontrolador 1, se implementó un filtro digital de las siguientes características: Tipo de filtro: IIR Butterworth. Pasa – Banda De segundo orden Frecuencia de muestreo 100 Hz Frecuencias de corte 9 y 11 Hz (Atenuación de 3 dB) Estructura de implementación: Forma Directa II.

Estas características fueron escogidas buscando una respuesta plana en la banda de paso y una gran atenuación en las otras frecuencias; además se trató de optimizar al máximo el tiempo de respuesta de los filtros, sin comprometer la respuesta en frecuencia. La función de transferencia del filtro es:
8816.0525.105919.00.05919z)( 2
2
+−−
=zz
zH
La respuesta en frecuencia del filtro es:
Figura 21. Magnitud de la respuesta en frecuencia filtro Pasa-banda.
Se observa en la figura 21, que la atenuación para que se obtiene en el filtro para una señal de 10 Hz, es mínima, para este caso es -0.077 dB, lo cual garantiza que la amplitud del armónico de 10 Hz de la señal cuadrada, no es afectada; mientras que el resto de armónicos de esta, son rechazados con un factor de más de 30 dB. Además, el “offset” es rechazado aproximadamente en -80 dB.

Figura 22. Fase de la respuesta en frecuencia filtro Pasa-banda.
Como se puede ver en la figura 22, la respuesta en fase del filtro, no distorsiona las componentes en frecuencia ubicadas en 10 Hz, señales en las cuales estamos interesados.
Figura 23. Respuesta paso del filtro pasa banda.
El tiempo de establecimiento del filtro pasa - banda es aproximadamente 0.4 segundos como se puede ver en la figura 23. 3.2.3.2 RECTIFICACION DIGITAL Debido a que la respuesta obtenida del filtro pasa-banda, es una señal senosoidal digital, con valores positivos y negativos; se implementó un proceso de rectificación digital para poder obtener un valor promedio diferente de cero.

3.2.3.3. FILTRO PASA – BAJOS Para poder obtener un promedio de la señal proveniente de la etapa de rectificación se diseño un filtro pasa – bajos con las siguientes características: Tipo de filtro: IIR Butterworth. Pasa – Bajos De segundo orden Frecuencia de muestreo 100 Hz Frecuencia de corte 2 Hz (Atenuación de 3 dB) Estructura de implementación: Forma Directa II.
Las características del filtro pasa – bajos fueron escogidas por las mismas razones que las expuestas en el filtro pasa - banda. La función de transferencia del filtro es:
8372.0823.1003622.0007243.00.00362z)( 2
2
+−++
=zz
zzH
La respuesta en frecuencia del filtro es:
Figura 24. Respuesta en Magnitud del Filtro Pasa - bajos.
En la figura 24 se resalta la atenuación de las señales de 20 Hz la cual es de –42 dB aproximadamente; valor en el cual es afectado la amplitud de la señal AC, proveniente de la etapa de rectificación; además, el filtro no interfiere en el paso de las señales DC (cero Hz), la cual corresponde al voltaje promedio de la señal.
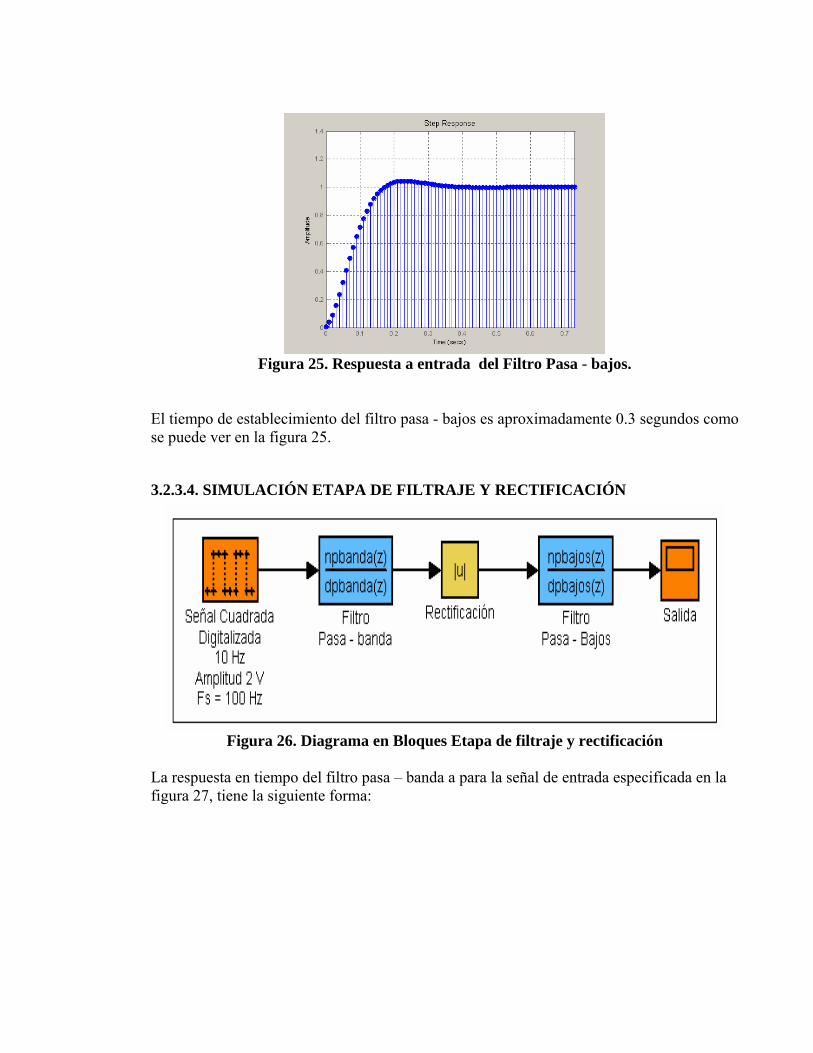
Figura 25. Respuesta a entrada del Filtro Pasa - bajos.
El tiempo de establecimiento del filtro pasa - bajos es aproximadamente 0.3 segundos como se puede ver en la figura 25.
3.2.3.4. SIMULACIÓN ETAPA DE FILTRAJE Y RECTIFICACIÓN
Figura 26. Diagrama en Bloques Etapa de filtraje y rectificación
La respuesta en tiempo del filtro pasa – banda a para la señal de entrada especificada en la figura 27, tiene la siguiente forma:

Figura 27. Salida filtro pasa – banda Una vez rectificada la señal anterior, obtenemos la siguiente respuesta:
Figura 28. Salida etapa de rectificación. Como se menciono anteriormente, por último la señal pasa a través del filtro pasa – bajos, donde obtenemos un promedio como se puede apreciar en la figura 29.

Figura 29. Salida etapa de filtraje y rectificación. Por último, simulamos la aparición de una fuerza 1 segundo después de inicializar el sistema, obteniendo la siguiente respuesta.
Figura 30. Respuesta a disturbio 3.2.4. RUTINA DE TRANSMISION La última función del microcontrolador 1 es ajustar la respuesta de la etapa de filtraje a una trama de 8 bits, para ser transmitida al microcontrolador 2 a una frecuencia de 10Hz, utilizando el protocolo SPI. El inicio de la transmisión es dado por una señal de control generada por el microcontrolador 1 la cual es recibida por la etapa de control,
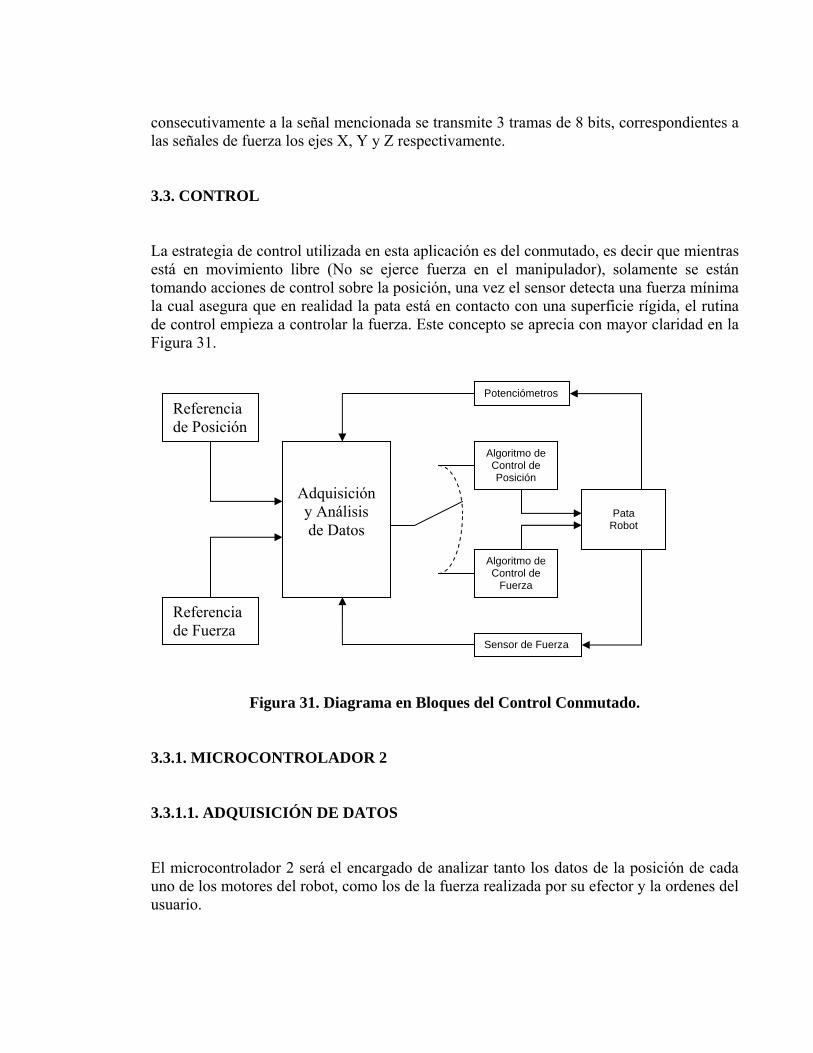
consecutivamente a la señal mencionada se transmite 3 tramas de 8 bits, correspondientes a las señales de fuerza los ejes X, Y y Z respectivamente. 3.3. CONTROL La estrategia de control utilizada en esta aplicación es del conmutado, es decir que mientras está en movimiento libre (No se ejerce fuerza en el manipulador), solamente se están tomando acciones de control sobre la posición, una vez el sensor detecta una fuerza mínima la cual asegura que en realidad la pata está en contacto con una superficie rígida, el rutina de control empieza a controlar la fuerza. Este concepto se aprecia con mayor claridad en la Figura 31.
Figura 31. Diagrama en Bloques del Control Conmutado.
3.3.1. MICROCONTROLADOR 2 3.3.1.1. ADQUISICIÓN DE DATOS El microcontrolador 2 será el encargado de analizar tanto los datos de la posición de cada uno de los motores del robot, como los de la fuerza realizada por su efector y la ordenes del usuario.
Referencia de Posición
Referencia de Fuerza
Adquisición y Análisis de Datos
Algoritmo de Control de Posición
Algoritmo de Control de
Fuerza
Potenciómetros
Pata
Robot
Sensor de Fuerza

Con el fin de un adecuado control de posición del robot se acoplaron potenciómetros lineales a los ejes de cada motor. Los voltajes de los potenciómetros son digitalizados por el microcontrolador 2 utilizando un conversor análogo digital de 10bits. Los datos de sensor de fuerza son adquiridos a través del puerto serial de este microcontrolador utilizando el protocolo serial SPI, como ya fue explicado anteriormente (Ver sección 3.2.4.). Por último el sistema recibe comandos enviados por el usuario a través de la USART, tales como órdenes de movimiento y de acción de fuerza. 3.3.1.2. CONTROL DE POSICIÓN El control de posición que se implementara será un control PID en configuración paralelo, el cual digitalizara las señales provenientes de los potenciómetros acoplados a los motores y los compara con la referencia dada por el usuario calculando un error. La frecuencia de muestreo del control sera de 500 Hz, siendo ésta apropiada para la aplicación, en la Figura 32 se encuentra el diagrama en bloques de la malla de control.
Figura 32. Diagrama en Bloques del Control de Posición. Se implementará un control tipo PID independiente para cada motor, el cual permite obtener resultados adecuados para la aplicación desarrollada en este trabajo de grado. Inicialmente se intentará sintonizar cada motor usando el método de Ziegler y Nichols, sin embargo debido a la complejidad de la dinámica del sistema, este método puede ser descartado y se procederá a una sintonización con otro método más conveniente. Los rangos del control de posición, serán de 190° aproximadamente para el motor 1, 60° para el motor dos y 140° para el motor 3.
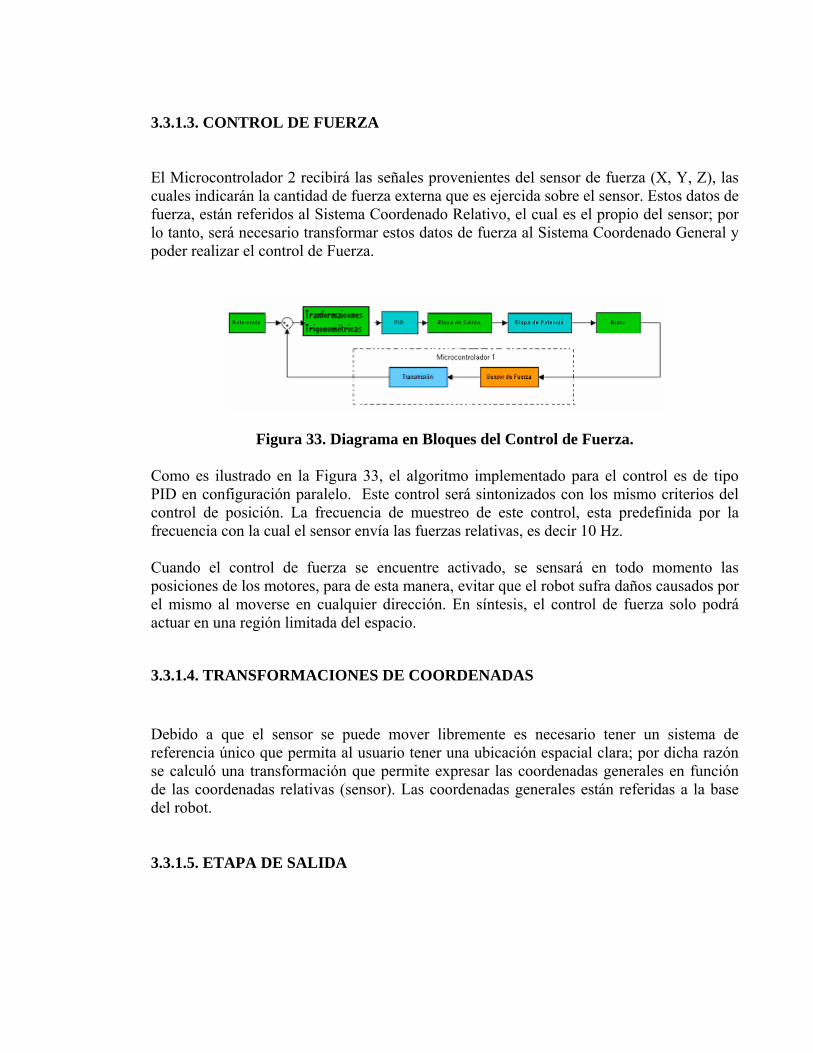
3.3.1.3. CONTROL DE FUERZA El Microcontrolador 2 recibirá las señales provenientes del sensor de fuerza (X, Y, Z), las cuales indicarán la cantidad de fuerza externa que es ejercida sobre el sensor. Estos datos de fuerza, están referidos al Sistema Coordenado Relativo, el cual es el propio del sensor; por lo tanto, será necesario transformar estos datos de fuerza al Sistema Coordenado General y poder realizar el control de Fuerza.
Figura 33. Diagrama en Bloques del Control de Fuerza. Como es ilustrado en la Figura 33, el algoritmo implementado para el control es de tipo PID en configuración paralelo. Este control será sintonizados con los mismo criterios del control de posición. La frecuencia de muestreo de este control, esta predefinida por la frecuencia con la cual el sensor envía las fuerzas relativas, es decir 10 Hz. Cuando el control de fuerza se encuentre activado, se sensará en todo momento las posiciones de los motores, para de esta manera, evitar que el robot sufra daños causados por el mismo al moverse en cualquier dirección. En síntesis, el control de fuerza solo podrá actuar en una región limitada del espacio.
3.3.1.4. TRANSFORMACIONES DE COORDENADAS Debido a que el sensor se puede mover libremente es necesario tener un sistema de referencia único que permita al usuario tener una ubicación espacial clara; por dicha razón se calculó una transformación que permite expresar las coordenadas generales en función de las coordenadas relativas (sensor). Las coordenadas generales están referidas a la base del robot. 3.3.1.5. ETAPA DE SALIDA

El microcontrolador 2 cuenta con 6 PWMs que trabajan de forma complementaria. Estas señales son la entrada de la etapa de potencia. La etapa de salida, cambia el ciclo útil de los PWMs, de acuerdo a lo ordenado por los controles de posición o de fuerza. 3.3.1.6. ETAPA DE POTENCIA Debido a que la corriente necesaria para hacer mover las articulaciones del robot está muy por encima de la que puede suministrar el microcontrolador 2, cada motor cuenta con un Puente H, el cual es controlado por las señales de los PWMs anteriormente mencionadas. 3.4. PATA ROBOT Consta de tres grados de libertad, los cuales permiten obtener movimientos similares a los de la extremidad de un insecto. La base de la pata, tiene una longitud de 26 cm por 30 cm; el segmento de mayor longitud mide 37 cm; mientras que el otro segmento tiene 30 cm. El peso del montaje es aproximadamente de 5 Kg. El sistema mecánico cuenta con un elaborado conjunto de piñones y reductores para los motores, lo cual permite aumentar el torque que los motores ejercen, haciendo más suave y fácil el movimiento. 3.4.1. MOTORES La pata robot cuenta con tres articulaciones, operadas por motores DC. La dirección de giro de los motores, es establecida por el sentido de la corriente promedio que los alimenta; mientras que la velocidad y el torque son determinados por el ciclo útil del voltaje que los alimenta. 3.4.2. POTENCIOMETROS Los potenciómetros están acoplados a los ejes de los motores, permitiendo obtener una medida diferente para cada ángulo de rotación del eje del motor. Los potenciómetros tienen variaciones lineales; poseen un valor aproximado de 10 kΩ y están polarizados con 5 V, los cuales los provee la tarjeta de control.

4. DESARROLLO En este capitulo se hace una síntesis de la manera en que se implementaron cada una de las partes de este trabajo de grado a partir de las especificaciones presentadas en el anterior capítulo. 4.1. ALIMENTACION El sistema se alimenta de dos baterías tipo SLA16 conectadas en serie, de un valor nominal de 12 V, 2 A-h modelo SB-122 fabricadas por la empresa Techman. Estas baterías son adecuadas para la aplicación permitiendo aproximadamente cinco horas de trabajo continuo si no se opera en condiciones extremas. Ver Anexo #1 y #2. 4.1.1. ALIMENTACIÓN DEL SENSOR El circuito del sensor de fuerza se alimenta con una señal de voltaje DC de 5V que proviene de la tarjeta de control. El sensor tiene un consumo de corriente aproximado a 200 mA. 4.1.2. ALIMENTACIÓN DE LA TARJETA DE CONTROL A partir del voltaje de 24 V de las baterías el circuito integrado LM2594 proporciona un voltaje de 5 V regulado que es utilizado para alimentar los circuitos que manejan la parte digital de ésta tarjeta. Cabe resaltar que el voltaje de las baterías es conectado directamente a la etapa de potencia que es la encargada de suministrar la corriente necesaria a los motores. 4.2. SENSOR 4.2.1. TRANSDUCTOR Las galgas extensiométricas utilizadas en la celda de carga presentan las siguientes características: 1. El material es de película de constantano. 16 SLA (Sealed Lead – Acid)

2. RgNOMINAL = 350Ω.3. Li = 3mm. 4. La tolerancia es del 0.5% del valor nominal. 5. Tempco = 23 ppm/°C (Variación con temperatura) 6. El voltaje máximo permitido entre sus terminales es de 8VRMS. 7. GF = 2. 8. Deformación unitaria. ε = 3%. Las galgas fueron dispuestas sobre la celda de tal manera que las fuerzas ejercidas sobre los ejes X y Y son medidas con la configuración de medio puente, es decir de manera paralela a los ejes, mientras que la fuerza en el eje Z es medida con la configuración de puente completo (utilizando las cuatro galgas de la celda de carga). Este arreglo se puede ver en la figura 34. Cuando se realiza una fuerza en los ejes X o Y, solo un par de galgas es deformado, una se comprime y otra se expande, esto resulta en el desbalanceo de un puente. Cuando se realiza una fuerza en Z, las cuatro galgas son deformadas de la misma manera, conservando el balance en los puentes correspondientes a los ejes X y Y, pero desbalanceando el puente de Z.
Figura 34. Disposición de las galgas en la celda de carga.

4.2.2. PARTE ANALÓGICA DEL SENSOR
0
R7360
R4
22
R12360
R9360
0
+5U4
Fx
+5U3
U4
AD623
1
23
4
5
6
7
8 RG
-VIN+VIN
V-
REF
VO
V+
RG
0
R1110
13
2
R242k
0
C2 1u
R3360 0
R171k
R181k
0
R81k
L2
BEAD
Puente 2
0
+5U5
R14
22
R25 18kL5
BEAD
Fuerza X
+5U3
0
U5
AD623
1
23
4
5
6
7
8 RG
-VIN+VIN
V-
REF
VO
V+
RG
+5U2
U6
AD623
1
23
4
5
6
7
8 RG
-VIN+VIN
V-
REF
VO
V+
RG
R1510
13
2
Rg
350
+5U5
SREF
0
R20
18k
+5V
R191k
Rg
350
+5V
C4 1u
+
-
U3A
MCP604/SO3
21
411+
-
U2B
MCP604/SO 5
67
411
0
Rg
350R510
13
2
C5 1u
0
XREF
ZREF
+5U4C3 1u
+5V+5V
0
+5U2
0
+
-
U2A
MCP604/SO
3
21
411
+5V
L6
BEAD
C61u
0
YREF
Fuerza Y
+
-
U3B
MCP604/SO5
67
411
R21150k
0
L4
BEAD
+5U3
R10
22
+
-
U2C
MCP604/SO
10
98
411
R16360
0
R13360
+5U6
0
0
+5U2
Puente 1
0
+5U2
0
Fy
0
Fuerza X+
-
U3C
MCP604/SO10
98
411
L3
BEAD
0R23 18k
+5U3
R2330
0
Salida Cuadrada 5Hz
0
R222k
Fz
Rg
350
Fuerza Y
+5U6
R6360
Figura 35. Parte analógica del sensor de fuerza. El PUENTE 1 es alimentado por una señal cuadrada de 10Hz de amplitud 5V, generada por el microcontrolador 1, utilizando un contador interno de 16 bits, sincronizando el cambio de nivel. El PUENTE 2 se alimenta con el voltaje SREF, el cual es obtenido usando una retroalimentación negativa en el amplificador operacional U2A. La rama izquierda del PUENTE 1, establece un voltaje fijo que se refleja en el SREF, dicha señal es desacoplada utilizando el operacional U2B en configuración Buffer. Las características de U217 son: 1. Fuente de alimentación: 1.4V a 5.5V. 2. Bajo consumo de corriente 600nA típico. 3. Entradas y Salidas RAIL TO RAIL. 4. Producto Ganancia por Ancho de banda 14kHz 5. Slew Rate: 3V/ms. 6. Voltaje de offset a la entrada: 3mV. 7. Corriente de offset típica: 1pA.
17 Referencia MCP604

Las resistencias denominas en el plano como Rg corresponden a las galgas extensiométricas. R2 limita la corriente suministrada por el microcontrolador 1 a un valor adecuado. El PUENTE 1 contiene además las resistencias R3 a R7 donde R5 es un potenciómetro de valor nominal de 10Ω, el cual permite al usuario ajustar el cero de la fuerza en el eje Z. De la misma manera el PUENTE 2 cuenta con los potenciómetros R11 y R15, que cumplen las misma labor de R5, pero para los ejes X y Y respectivamente. Los valores de R4, R10 y R14 fueron seleccionados de tal forma que no tengan variaciones muy grandes en pocos giros de los potenciómetros, su valor nominal es de 22Ω. La diferencia de voltaje en los valores del PUENTE 1 y las referencias del PUENTE 2, son las entradas de los amplificadores de instrumentación U4, U5 y U6, las características de estos amplificadores son: 1. Fuente de Alimentación: ±2.5 o ±6 o 0-5V. 2. Voltaje de Offset a la entrada: 200uV. 3. Error de Ganancia Máximo: 0.35%. 4. CMRR18 = 84 dB mínimo 5. Corriente de offset a la entrada: 25nA máximo. 6. Manejo a la salida: VCC-0.5V. 7. Slew Rate: 0.3V/us. Las resistencias R17, R18 y R19 ajustan las ganancias de los amplificadores instrumentales en un valor de 100 aproximadamente. Las salidas de los amplificadores de instrumentación son amplificadas por medio de U3, que tiene la misma referencia de U2. La ganancia total de cada una de las señales que representan las fuerzas en los tres ejes es aproximadamente de 1700. Los condensadores de Tantalio C2, C3, C4, C5 y C6 junto con las ferritas L2, L3, L4, L5 y L6 forman un filtro pasa-bajos que desacopla la entrada de la batería a los diferentes integrados análogo. 18 Common Mode Rejection Rate

4.2.3. PARTE DIGITAL DEL SENSOR
Control Tx
Y1
10Mhz
+5U1
J5
1234
L7BEAD
C8
22p
Fx
+5U1
Clock SPI
C7
22p
RX USART
Control Tx
PGD
Tx SPI
+5V
JP2
HEADER 4
1234
Salida Cuadrada 5Hz
0
Fz
R110k
Rx SPI
Tx SPI
J2
ICD
123456
U7
PIC18LF452 TQFP
192021222324
89
101114151617
3536374243441
32
383940412345
252627
28 7
30 31 6 29
18
RA0/AN0RA1/AN1RA2/AN2/REF-RA3/AN3/VREF+RA4/T0CKIRA5/AN4/SS
RB0/INT0RB1/INT1RB2/INT2RB3/CCP2RB4RB5/PGMRB6/PGCRB7/PGD
RC1/T1OSI/CCP2RC2/CCP1
RC3/SCK/SCLRC4/SDI/SDA
RC5/SDORC6/TX/CKRC7/RX/DT
RC0/T1OSO/T1CK1
RD0/PSP0RD1/PSP1RD2/PSP2RD3/PSP3RD4/PSD4RD5/PSP5RD6/PSP6RD7/PSP7
RE0/RD/AN5RE1/WR/AN6RE2/CS/AN7
VD
D
VD
D1
OSC
1/C
LKIN
OSC
2/C
LKO
UT
GN
DG
NDMCRL/VPP
MCLR/VPP
Clock SPI
J6
Usart
12
PGC
MCLR/VPP
PGC
TX USART
TX USART
RX USART
PGD
FyRx SPI
Figura 36. Parte Digital del Sensor de Fuerza. El microcontrolador utilizado para el proceso de digitalización, tratamiento y transmisión de los datos provenientes de la parte analógica es el PIC18F452 de Microchip el cual posee las siguientes características: 1. Memoria de Programación Flash: 32kbytes. 2. Memoria de datos SRAM: 1536 bytes. 3. EEPROM: 256 bytes. 4. 2 PWMs. 5. Un módulo de ADC de 10bits. 6. Frecuencia de operación máxima de 40 MHz. 7. Un modulo USART direccionable. 8. 4 Timers de 8 y 16 bits. 9. Modulo transmisión serial con protocolos SPI e I2C.

Los datos provenientes de la parte analógica del sensor fueron digitalizados utilizando el modulo ADC del microcontrolador a una frecuencia de muestreo de 100Hz, con un tiempo de conversión de 6,4us. Estos datos son tratados como ya se explicó en la sección 3.1. y transmitidos por el puerto serial. 4.3. TARJETA DE CONTROL
VCCa
PGD
0
V/2
VCC
VCC
VCCa
+
-
U6C
MCP604
10
98
411
R19
1k
U5
MCP3208
12345678
16 15
9 14
10
13
11
12
CH0CH1CH2CH3CH4CH5CH6CH7
VD
D
Vre
f
DG
ND
AG
ND/CS
CLK
Din
Do
R80.1
L4
BEAD
R6 1k
C2210nF
0
PWM3
L2
BEAD
C7
100nF
0
QBPWM5
R10 10k
R12 10k
JP5
SPI
123456
VX1
C410uF
R14
10k
VX1
VCC
0
R130.1
AN0
+
-
U6A
MCP604
3
21
411
D1
1N5817M/CYL
VCCa
V/2
ENABLE
C17
100nF
JP1PWM
1 2 3 4 5 6 7 8
U1
L6203
2
4
8
3
1
9
5
7
11
106
VS
CBOOT1
CBOOT2
OUT1
OUT2
Vref
IN1
IN2
ENABLE
SE
NS
E
GN
D
C20
100nF
C18
100nF
U7
L6203
2
4
8
3
1
9
5
7
11
106
VS
CBOOT1
CBOOT2
OUT1
OUT2
Vref
IN1
IN2
ENABLE
SE
NS
E
GN
D
C25100uF
JP2
HEADER 10
123456789
10
C9
0.1uF
VCC
C2410uF
V/2
QA
TX
VCC
+
-
U6B
MCP604
5
67
411
JP3
ICD
123456
JP4
rs232
123
VCCa
ENABLE
R11
10k
C1410uF
VCC
C3
100nF
R18
1k
VCCa
C11
100nF
JP7
analog
123456789
101112
/MCLR
PGC
0
C160.1uF
VCCa
U2
dspic2010
1
234567
1112
1415
262524232221
13 20 288 19 279 10
1817
16/MCLR
RB0/EMUD3/AN0/Vr+/CN2RB1/EMUC3/AN1/Vr-/CN3RB2/AN2/SS1/CN4RB3/AN3/INDX/CN5RB4/AN4/QEA/IC7/CN6RB5/AN5/QEB/IC8/CN7
RC13/EMUD1/SOSCI/T2CK/U1ATX/CN1RC14/EMUC1/SOSCO/T1CK/U1ARX/CN0
RD1/EMUD2/OC2/IC2/INT2RD0/EMUC2/OC1/IC1/INT1
PWM1L/RE0PWM1H/RE1PWM2L/RE2PWM2H/RE3PWM3L/RE4PWM3H/RE5
VD
D1
VD
D2
AV
DD
VS
S1
VS
S2
AV
SS
OS
C1/
CLK
I
OS
C2/
CLK
O
RF2/PGC/EMUC/U1RX/SDI/SDI1/SDARF3/PGD/EMUD/U1TX/SDI/SDO1/SCL
RE8/FLTA/INT0/SCK1/OCFA
RX
C15
10uF
VCC
0
0
VCCa
PWM1
0
0
VCCa
+
-
U9
mcp603
3
26
7 14 5
JP6
SPI
123456
VX1
+
-
U6D
MCP604
12
1314
411
VCCa
JP8
Vbat
12
R21k
JP9
IM
1234
R7 1k
VCCa
V/2
INDX
C8
100nF
RX
ENABLE
0
R10.1
R9
10k
R15 10k
C2
100nF
PWM2
0
VCCa
R31k
VX1
U4
L6203
2
4
8
3
1
9
5
7
11
106
VS
CBOOT1
CBOOT2
OUT1
OUT2
Vref
IN1
IN2
ENABLE
SE
NS
E
GN
D
C2610nF
AN2PWM4
L1
10uH
C1210pF
VCCa
V/2
PWM6
C1310pF
/MCLR
C10
.47u
R41k
C1910nF
C5.47u
C2710nF
U8
LM2594
7
8
4
6
5Vin
Out
Feed
gndoff/on
R17 10k
VCC
R5
0
U3
SN65C3221
3 714
2 4 65
1113
98
1
10 12
1615
V+ V-
GN
D
C1+
C1-
C2-
C2+
DinDout
RoutRin
/EN
/Inv Fon
/FoffV
cc
L3
175uH
C1
100nF
Y1
10Mhz
VCC
R16
10k
C2368uF
0
ENABLE
TX
VCC1
VCC
C6.47u
C21100uF
AN1
Figura 37. Esquemático tarjeta de control 4.3.1. MICROCONTROLADOR En la etapa de control el microcontrolador encargado de realizar las decisiones respectivas de acuerdo a las entradas dadas por el sensor y las referencias es un integrado dsPIC30F2010 fabricado por la empresa MICROCHIP; sus principales características son:

1. Rango de alimentación: 2.5 - 5.5V 2. Posee un modulo UART 3. Protocolo de comunicación: SPI 4. Memoria SRAM 512 Bytes 5. Interfaz para manejo de encoders en cuadratura 6. Memoria programable FLASH 12 Kbytes 7. 6 PWMs 8. Protocolo de comunicación I²C 9. Memoria EEPROM 1024 Bytes 10. Velocidad de CPU 20,30 MHz 11. Módulo de ADC 10-bit 500 KSPS de 6 entradas 12. 3 Timers de 16-Bits Esta familia de microcontroladores esta diseñada para aplicaciones de procesamiento digital de señales, con una arquitectura que facilita el tratamiento de operaciones de punto flotante y funciones trigonométricas entre otras. Además, esta clase de microcontroladores se caracteriza por especializarse en el ámbito de control de motores, para lo cual cuenta con seis PWMs. 4.3.2. ETAPA DE POTENCIA La tarjeta de control posee tres integrados L6203 de Nacional Semiconductors, los cuales son manejadores para control de motores en configuración H, sus principales características son: 1. Corriente pico máxima: 5A 2. RDSon = 0.3Ω 3. Driver compatible con TTL 4. Frecuencia de conmutación típica 30 kHz y máxima de 100 kHz 5. Protección por temperatura. 6. Alta eficiencia. 7. Fuente de alimentación: 12 V – 48 V. 8. Voltaje de referencia: 13.5 V 9. Corriente de referencia 2mA 10. Potencia total de disipación 2.3 W 4.3.3. MODULO DE COMUNICACIÓN La tarjeta de control posee un circuito integrado SN65C3221 el cual cumple la función adecuar las señales provenientes del Microcontrolador 2 para su transmisión hacia el puerto serial del computador usando el protocolo RS-232. La comunicación es bidireccional.

4.4. DESCRIPCIÓN DETALLADA DE LA TARJETA DE CONTROL El integrado U8 es el encargado de regular el voltaje proporcionado por las baterías para la alimentación del circuito (conector JP8). El integrado U2 corresponde al Microcontrolador 2, sus entradas analógicas están ubicadas en el conector JP2, al igual que los puertos para interrupciones externas. Las entradas analógicas AN0, AN1 y AN2 corresponden a las señales de los potenciómetros de los motores uno, dos y tres respectivamente. En el conector JP6 se encuentran los terminales de comunicación serial SPI por lo tanto en este conector están las señales provenientes de la tarjeta del sensor. El conector JP3 se usa para la programación del Microcontrolador 2. El conector JP7 y los integrados U5 y U6 no están siendo utilizados en el momento pero están disponibles para futuras expansiones. La salida de los PWMs del Microcontrolador 2 están disponibles en el conector JP1 como puntos de monitoreo, a su vez están conectados a los operacionales U1, U4 y U7, los cuales son los puentes H que alimentan los motores de la planta a través del conector JP5. Por último está el conector JP9 que permiten sensar la corriente que entregan los puentes H. 4.5. CONTROL DE POSCION Debido a la complejidad y dinámica del sistema controlado, el método de sintonización de Ziegler – Nichols no fue adecuado para el control de posición, en especial el del motor 2. No obstante, la sintonización obtenida por este método para los controles de los motores 1 y 3, fue un buen punto de partida para una buena sintonización, es por esto que la sintonización de estos motores se optimizó utilizando el método de prueba y error. En el caso del motor 2 las constantes de la sintonización obtenidas por Ziegler Nichols no estaban acordes con las respuestas deseadas para el control de posición, por lo cual este método de sintonización se descartó. De este modo, fue necesario buscar otra manera de obtener las constantes del control PID, en nuestro caso optamos por el procedimiento de prueba y error. Cabe notar que los valores obtenidos para el motor 2 no funcionan adecuadamente para todos los casos, en especial cuando el motor 3 se encuentra totalmente extendido; por esta razón la sintonización de todos los motores es programable por el usuario a través del la interfaz gráfica.

4.6. CONTROL DE FUERZA La sintonización del control de fuerza fue realizada utilizando el criterio de Ziegler – Nichols y posteriormente se procedió a un ajuste fino para minimizar oscilaciones en la respuesta del control, obteniendo resultados satisfactorios a diferencia del control de posición al usar este método. La justificación para este resultado, es que la dinámica del sistema no cambia de manera considerable cuando se esta realizando control de fuerza debido a que el extremo del robot se encuentra apoyado sobre una superficie rígida; mientras que cuando se realiza control de posición la dinámica del sistema cambia constantemente de manera considerable. 4.7. TRANSFORMACIONES DE COORDENADAS Dentro de la programación del microcontrolador 2, se implementó un conjunto de transformaciones de coordenadas tal como se explica en la sección 3.3.1.4, en la figura 38, se puede apreciar las ejes X y Y relativos y generales, los ejes Z relativos y generales coinciden y son normales a esta página.
Figura 38. Sistema coordenado Relativo y General Las ecuaciones que relacionas las coordenadas relativas con las generales son:

3motor del Angulo 2motor del Angulo 1motor del Angulo
en Z Fuerza Cero"" Yen Fuerza Cero""
Xen Fuerza Cero"" relativa en Z Fuerzarelativa Yen Fuerzarelativa Xen Fuerza
:dondeEn
)cos()cos()()()()()cos()(
)()()cos()cos()()cos()()(
)cos()()()(
3
2
1
1321321
1132132
3232
→→→→→→→→→
⋅+⋅−+⋅+⋅−+⋅−=
⋅−−⋅+⋅−+⋅+⋅−=
+⋅−++⋅−=
θθθ
θθθθθθθ
θθθθθθθ
θθθθ
i
i
i
r
r
r
iririrgeneral
iririrgeneral
irirgeneral
fzfyfxfzfyfx
fzfzsensenfyfyfxfxFx
senfxfxfzfzsenfyfyFy
fyfysenfzfzFz
Figura 39. Transformación de coordenadas.
Estas ecuaciones, se derivan de una serie de composiciones de vectores a partir de las fuerzas relativas que envía el sensor. Los términos, fxi, fyi y fzi son los valores que se toman como ceros. Los ángulos de los motores son de gran importancia, debido a que de acuerdo a estos, los aportes de cada fuerza relativa implicaran un aumento o disminución en la magnitud de la fuerza general. 4.8. SISTEMA DE SUPERVISION Para mostrar el funcionamiento del Sensor de Fuerza y a su vez obtener y analizar de forma más precisa la posición de los motores del brazo, se desarrolló una interfaz gráfica en LabVIEW 6i. El programa cumple dos funciones fundamentales, la primera es recibir las fuerzas sensadas y las posiciones de los motores enviadas por el Microcontrolador 2. La segunda es transmitir los comandos necesarios para que el usuario controle el movimiento de la pata en el control de posición y también pueda ejecutar las rutinas de caminar. 4.9.1. COMUNICACIÓN La comunicación entre el Microcontrolador 2 y el computador se realiza a través del puerto serial y el Módulo de Transmisión UART. Utilizando un circuito integrado SN65C3221 para convertir las señales provenientes del computador en señales entre 0 V y 5 V, en la Figura 38, se muestra más detalladamente el esquema de comunicación.

Figura 40. Esquema de Comunicación.
4.9.1.1. TRAMAS Para sincronizar las tramas de datos se escogió como encabezado el byte 0x0119. en la Figura 39 se muestran las tramas para cada comando detalladamente.
Control de Posición
0x01 0xvelocidad|1 Posición
Motor1 Posición Motor2
Posición Motor3
Control de Trayectoria
Paso Adelante
0x01 0xvelocidad|2 Magnitud Altura xx
Paso Atrás 0x01 0xvelocidad|3 Magnitud Altura xx
Paso Izquierda
0x01 0xvelocidad|4 Magnitud Altura xx
Paso Derecha 0x01 0xvelocidad|5 Magnitud Altura xx
Tabla 1. Tramas de Comunicación.
19 Notación en hexadecimal 0x primer digito| segundo digito

4.9.2. MENU DE CONTROL En el menú de control se encuentran los diferentes comandos que pueden ser usados por el usuario. Se encuentran las rutinas predefinidas de Paso Adelante, Paso Atrás, Paso Izquierda, Paso Derecha. También se encuentra una ventana que permite hacer Control de Posición, otra para el Control de Fuerza y por último la ventana de Sintonización de los Controles. En la Figura 39 se muestra una imagen de la interfaz grafica, donde se puede apreciar tanto el menú de las gráficas, como el menú de control.
Figura 41. Interfaz Gráfica.
4.9.2.1. CONTROL DE POSICIÓN Dentro de la ventana de control de posición se encuentran las opciones de velocidad de desplazamiento y las posiciones de los motores representadas en decimales de 0 a 255. Al dar clic en el botón de OK se transmite la trama del comando de Control de Posición.

Figura 42. Ventana de Control de Posición.
4.9.2.2. CONTROL DE TRAYECTORIA El Control de Trayectoria permite hacer pasos hacia delante, atrás, derecha e izquierda. El botón de decimales permite escoger entre ocho diferentes opciones, al igual que la Magnitud y la Altura. La Figura 41 muestra las diferentes ventanas del Control de Trayectoria.

Figura 43. Ventanas de Control de Trayectoria.
4.9.2.3. CONTROL DE FUERZA En el control de fuerza se encuentran tres botones que permiten escoger la intensidad de la fuerza que ejercerá el brazo en coordenadas globales20. En la Figura 42 se encuentra la ventana del Control de Fuerza.
Figura 44. Ventana del Control de Fuerza.
4.9.2.4. SINTONIZACIÓN La ventana de Sintonización permite hacer la sintonización de los tres motores que posee el brazo. Estas constantes son decimales entre 0 a 255. En la Figura 43 se muestra el Menú de Sintonización.
20 Existen dos sistemas de coordenadas las globales y las relativas. Las relativas son las que están referidas al sensor.

Figura 45. Menú de Sintonización.
4.9.2.5. VENTANA DE GRÁFICAS En la ventana de gráficas se encuentran las posiciones de los motores y las fuerzas. En la ventana de Posiciones y Fuerzas se muestran las seis gráficas de posición y fuerza (ver Figura 44). Para poder observar dichas gráficas más detalladamente se poseen las ventanas de Fuerzas y de Posiciones (Figuras 45 y 46).

Figura 46. Posiciones y Fuerzas Relativas.
Figura 47. Ventana de Posiciones.

Figura 48. Ventana de Fuerzas Relativas.
Figura 49. Ventana de Fuerzas Generales.
4.6.2.6. ESCALIZACION DE LAS GRAFICAS DE FUERZA En las gráficas de la interfaz, las unidades de los ejes correspondientes a fuerzas, tienen un equivalente en gramos fuerza. En la siguiente tabla podemos ver la equivalencia de las unidades de las gráficas.

Eje Unidades Eje Relativo Equivalencia en grF X 1 28.5 Y 1 28.6 Z 1 28.9
Tabla 2. Equivalencia Unidades – grF.

5. ANALISIS DE RESULTADOS
5.1. PRUEBAS DE LA CELDA DE CARGA Con el fin de realizar estas pruebas se solicitó al laboratorio del Departamento de Física de la Universidad, un juego de pesas, para observar el comportamiento de la celda de carga con diferentes valores de fuerza. Con el objetivo de facilitar el montaje necesario para la obtención de medidas solo se realizaron pruebas con ángulos de 90 y –90 grados en los ejes X, Y y Z. 5.1.1. RESULTADOS OBTENIDOS 5.1.1.1. PRUEBAS EN EJE Y Los datos21 de las siguientes tablas fueron obtenidos midiendo la amplitud de la señal cuadrada a la salida de la parte analógica del sensor, realizando fuerza sobre el eje Y.
Fuerza(Kg) Voltaje pico(V) 0 2,5
100 2,46 200 2,44 500 2,34 1000 2,2 2000 1,9 3000 1,6 4000 1,3 5000 0,9
Tabla 3. Fuerza ejercida sobre el eje Y con un ángulo de - 90º.
Fuerza (Kg) Voltaje Pico(V) 0 2,5
100 2,54 200 2,56
21 Estos datos son un promedio de una serie de medidas realizadas con la celda de carga en las cuales se trataron de garantizar condiciones de medida similares.
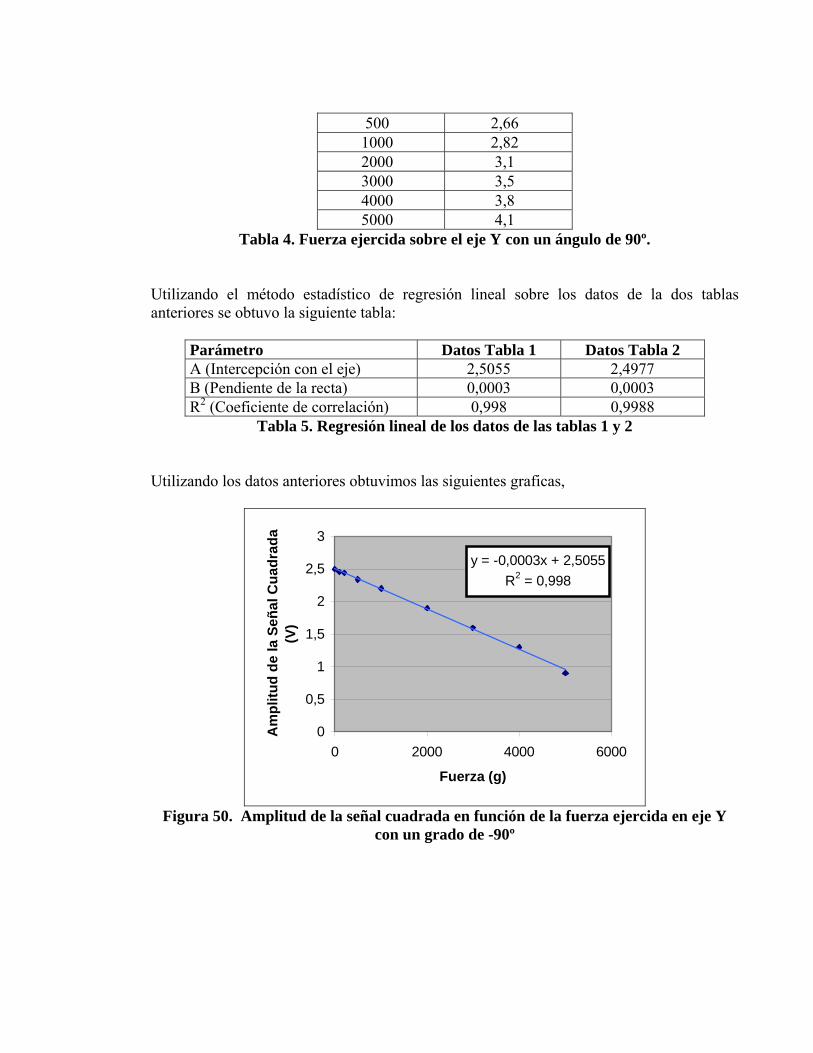
500 2,66 1000 2,82 2000 3,1 3000 3,5 4000 3,8 5000 4,1
Tabla 4. Fuerza ejercida sobre el eje Y con un ángulo de 90º. Utilizando el método estadístico de regresión lineal sobre los datos de la dos tablas anteriores se obtuvo la siguiente tabla:
Parámetro Datos Tabla 1 Datos Tabla 2 A (Intercepción con el eje) 2,5055 2,4977 B (Pendiente de la recta) 0,0003 0,0003 R2 (Coeficiente de correlación) 0,998 0,9988
Tabla 5. Regresión lineal de los datos de las tablas 1 y 2 Utilizando los datos anteriores obtuvimos las siguientes graficas,
y = -0,0003x + 2,5055R2 = 0,998
0
0,5
1
1,5
2
2,5
3
0 2000 4000 6000
Fuerza (g)
Am
plitu
d de
la S
eñal
Cua
drad
a(V
)
Figura 50. Amplitud de la señal cuadrada en función de la fuerza ejercida en eje Y
con un grado de -90º
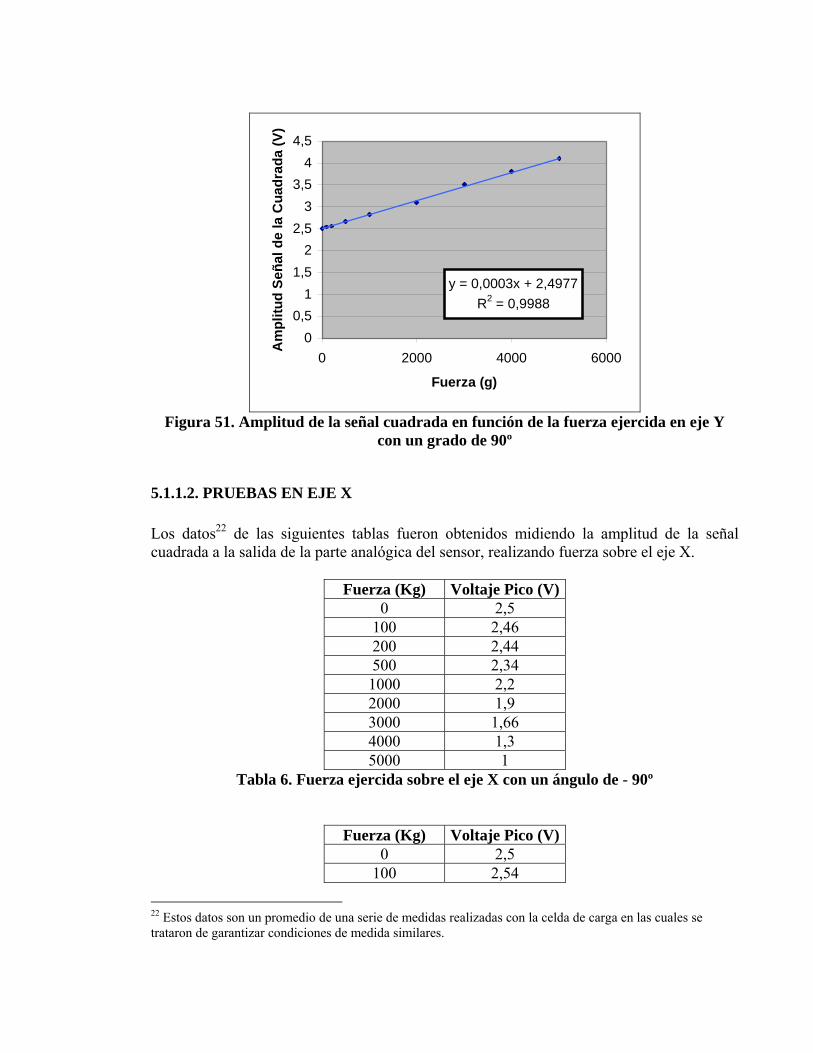
y = 0,0003x + 2,4977R2 = 0,9988
00,5
11,5
22,5
33,5
44,5
0 2000 4000 6000
Fuerza (g)
Am
plitu
d Se
ñal d
e la
Cua
drad
a (V
)
Figura 51. Amplitud de la señal cuadrada en función de la fuerza ejercida en eje Y
con un grado de 90º
5.1.1.2. PRUEBAS EN EJE X Los datos22 de las siguientes tablas fueron obtenidos midiendo la amplitud de la señal cuadrada a la salida de la parte analógica del sensor, realizando fuerza sobre el eje X.
Fuerza (Kg) Voltaje Pico (V)0 2,5
100 2,46 200 2,44 500 2,34 1000 2,2 2000 1,9 3000 1,66 4000 1,3 5000 1
Tabla 6. Fuerza ejercida sobre el eje X con un ángulo de - 90º
Fuerza (Kg) Voltaje Pico (V)0 2,5
100 2,54
22 Estos datos son un promedio de una serie de medidas realizadas con la celda de carga en las cuales se trataron de garantizar condiciones de medida similares.

200 2,58 500 2,66 1000 2,8 2000 3,1 3000 3,4 4000 3,75 5000 4
Tabla 7. Fuerza ejercida sobre el eje X con un ángulo de - 90º. Utilizando el método estadístico de regresión lineal sobre los datos de la dos tablas anteriores se obtuvo lo siguiente:
Parámetro Datos Tabla No.4 Datos Tabla 5 A (Intercepción con el eje) 2,4978 2,5067 B (Pendiente de la recta) 0,0003 0,0003 R2 (Coeficiente de correlación) 0,9987 0,9992
Tabla 8. Regresión lineal de los datos de las tablas 4 y 5. Utilizando los datos anteriores obtuvimos las siguientes graficas,
y = -0,0003x + 2,4978R2 = 0,9987
0
0,5
1
1,5
2
2,5
3
0 2000 4000 6000
Fuerza (g)
Am
plitu
d de
la s
eñal
cua
drad
a (V
)
Figura 52. Amplitud de la señal cuadrada en función de la fuerza ejercida en el eje X con un grado de -90º

y = 0,0003x + 2,5067R2 = 0,9992
00,5
11,5
22,5
33,5
44,5
0 2000 4000 6000
Fuerza (g)
Am
plitu
d de
la S
eñal
Cua
drad
a (V
)
Figura 53. Amplitud de la señal cuadrada en función de la fuerza ejercida en eje X
con un grado de 90º 5.1.1.3. PRUEBAS EN EL EJE Z Los datos23 de las siguientes tablas fueron obtenidas midiendo la amplitud de la señal cuadrada a la salida de la parte analógica del sensor, realizando fuerza sobre el eje Z.
Fuerza (g) Voltaje Pico (V)0 2,5
400 2,65 500 2,7 1000 2,85 2000 3,025 3000 3,35 4000 3,5 5000 3,8
Tabla 9. Fuerza ejercida sobre el eje Z con un ángulo de 90º
Fuerza (g) Voltaje Pico (V)0 2,5
400 2,35
3 Estos datos son un promedio de una serie de medidas realizadas con la celda de carga en las cuales se trataron de garantizar condiciones de medida similares.

500 2,2 1000 2,05 2000 1,95 3000 1,75 4000 1,4 5000 1,1
Tabla 10. Fuerza ejercida sobre el eje Z con un ángulo de - 90º Utilizando el método estadístico de regresión lineal sobre los datos de la dos tablas anteriores se obtuvo lo siguiente:
Parámetro Datos Tabla 7 Datos Tabla 8 A (Intercepción con el eje) 2,5531 2,5067 B (Pendiente de la recta) 0,0002 0,0003 R2 (Coeficiente de correlación) 0,9924 0,9992
Tabla 11. Regresión lineal de los datos de las tablas 7 y 8. Utilizando los datos anteriores obtuvimos las siguientes graficas,
y = 0,0002x + 2,5531R2 = 0,9924
00,5
11,5
22,5
33,5
4
0 2000 4000 6000Fuerza (g)
Am
plitu
d de
la S
eñal
Cua
drad
a (V
)
Figura 54. Amplitud de la señal cuadrada en función de la fuerza ejercida en el eje Z
con un grado de 90º

y = -0,0002x + 2,4487R2 = 0,9907
00,5
11,5
22,5
3
0 2000 4000 6000Fuerza (g)
Am
plitu
d de
la S
eñal
Cua
drad
a (V
)
Figura 55. Amplitud de la señal cuadrada en función de la fuerza ejercida en el eje Z
con un grado de - 90º Tal como se puede observar en las gráficas de las pruebas de la celda de carga, la linealidad de las mismas es bastante buena, hecho que es corroborado por el coeficiente de correlación de cada uno de las gráficas (muy cercano a 1); por lo tanto podemos concluir que el sensor también responderá de manera proporcional a diferentes fuerzas ejercidas en cualquiera de los tres ejes X, Y o Z, o a una combinación de estos. La resultados obtenidos en las pruebas para el eje Z; no son completamente similares a los obtenidos para los ejes X y Y, ya que la configuración de puente completo24, no permite una obtención de datos tan precisos en este eje debido a que no se puede adquirir una medida directa como se puede realizar en los ejes X y Y. 5.2. PRUEBAS DE LOS FILTROS DIGITALES Estos filtros fueron implementados con rutinas de programación en el microcontrolador 1. 5.2.1. FILTRO PASA-BANDA El filtro pasa-banda, como se explicó anteriormente25, fue diseñado con una frecuencia de corte de 10 Hz y una frecuencia de muestreo de 100 Hz. Para probar el desempeño del filtro, se aplicaron diferentes valores de fuerza (entre 100 g y 5000 g) a cada uno de los
24 Ver sección 2.4.5. 25 Ver sección 3.2.3.1

ejes, la respuesta del filtro fue transmitida por medio de la USART a una tasa de transmisión de 19200 bps, al computador obteniendo las siguientes gráfica:
Salida Pasa Banda (Estado Estable)
050
100150200250300
0 0,5 1 1,5 2 2,5
Tiempo (s)
Salid
a Fi
ltro
Figura 56. Respuesta del Filtro Rectificada sin ser sometido a fuerza alguna.
Se observa que la salida del filtro resultante se aproxima a una señal senosoidal de 20 Hz tal como se esperaba en el desarrollo teórico26. 5.2.2. FILTRO PASABAJOS La frecuencia de corte de los filtros pasabajos es de 2 Hz y su frecuencia de muestreo es de 100 Hz al igual que los filtros pasa-banda. La entrada de cada filtro pasa-bajos es la salida de los filtros pasa-banda rectificada correspondientes a cada uno de los ejes. El desempeño de este filtro fue probado de forma idéntica al filtro pasa-banda, obteniendo los siguientes resultados:
26 Ver sección 3.2.3.2

Entrada Paso 1Kg
135140145150155160
0 1 2 3 4 5
Tiempo (s)Sa
lida
Filtr
os
Figura 57. Respuesta del filtro pasa-bajos para una entrada paso de 1Kg en el eje X a
-90º.
Entrada Paso 3 Kg
130
150
170
190
210
0 1 2 3
Tiempo
Salid
a Fi
ltro
4
Figura 58. Respuesta del filtro pasabajos para una entrada paso de 3Kg en el eje Y a -
90º.
Entrada Paso 2 Kg
130
150
170
190
0 1 2 3 4 5
Tiempo
Salid
a Fi
ltros
Figura 59. Respuesta del filtro pasabajos para una entrada paso de 2Kg en el eje Z a 90º.

En las tres figuras anteriores se observa que el transiente que el filtro pasa-bajos es de aproximadamente de 1.5 segundo. Además se observa que la respuesta del filtro no presenta picos considerables, lo cual facilitó el control de fuerza evitando acciones de control agresivas. Gracias a la implementación del filtro pasa-bajos se obtiene el promedio de la salida del filtro pasa-banda rectificada, lo cual asegura que los valores transmitidos por el dispositivos presenten una variación más pequeña, logrando acciones de control iguales para fuerzas equivalentes.
5.2.2.1. RESPUESTA DEL FILTRO PARA VALORES DE FUERZA PEQUEÑOS
Respuesta Paso a entrada paso 100 gr
126128130132134136
0 0,11 0,22 0,32 0,43 0,54 0,65 0,75 0,86
Tiempo (s)
Salid
a de
l Filt
ro
Pasa
bajo
s
Figura 60. Respuesta del filtro pasabajos para una entrada paso de 100 g en el eje X a
- 90º. La figura anterior se observa que aparentemente la respuesta del filtro es subamortiguada, esto es debido a la inercia que sufre el extremo de la celda de cargar al soltar la pesa sobre este causando que no sea exactamente una entrada paso. En este caso se puede concluir que para fuerzas pequeñas la variación de la medida es muy reducida, lo cual podría llegar a asumirse como ruido por el control, por esta razón no se emprenderán acciones de control. 5.3. TIEMPO DE RECUPERACIÓN DE LA CELDA DE CARGA Cuando el sensor se somete a plena carga y esta es retirada, se esperaría que el voltaje sin carga aplica fuera el mismo; sin embrago esto no sucede, después de efecto durante un tiempo de 3 minutos se obtuvo la siguiente gráfica:

Tiempo de Recuperación de la celda de carga
0
50
100
150
0 3,24 6,48 9,72 13 16,2 19,4 22,7 25,9 29,2 32,4 35,6
Tiempo (s)Sa
lida
del F
iltro
Pa
saba
jos
Figura 61. Tiempo de recuperación de la cerda de carga.
El porcentaje de error en la salida del filtro en este caso de plena carga es del:
4,511%%100*133
127133=
−=E
5.4. RESPUESTA DEL CONTROL DE POSICIÓN Como fue mencionado en la sección 3.3.1.2, el control de posición implementado en el sistema fue un controlador tipo PID de algoritmo paralelo. Las pruebas que se van a mostrar a continuación fueron obtenidas usando el modulo de transmisión UART del microcontrolador 2. Debido a que el modula UART solo permite transmitir cadenas de 8bits los obtenidos pierden una resolución por la necesidad de escarizarlos a este tamaño. 5.4.1. PRUEBAS CONTROL DE POSICIÓN MOTOR 1 Las siguientes gráficas muestran la respuesta a entrada paso.

Control de Posición del motor 1 con el Brazo Extendido
5060708090
100110120130140
0 1 2 3 4 5 6Tiempo (s)
Valo
r de
Pote
nció
met
ro
Salida Set Point
Figura 62. Respuesta del motor 1 a entrada paso. En la figura 50 se puede apreciar el cambio de la salida a una entrada paso con el brazo extendido, esto refiriéndose brazo y el antebrazo paralelos a la superficie. Como se puede apreciar, la respuesta obtenida presenta un sobrepico del 40% y el tiempo de establecimiento es de 1.5s con un criterio del 5%. El error en estado estable es menor a la resolución que se comento anteriormente por lo tanto se puede asumir que este valor no es considerable.
Control de Posición del motor 1 con el Brazo Extendido
60708090
100110120130140150160
0 1 2 3 4 5 6 7 8
Tiempo (s)
Valo
r del
pot
enci
ómet
ro
Salida Set Point
Figura 63. Respuesta del motor 1 a entrada paso

En esta grafica se observa la respuesta del sistema a un cambio a entrada paso en sentido contrario de la figura 50, en esta se observa un sobrepico y un tiempo de establecimiento similar a lo obtenido anteriormente, como era de esperarse.
Control de Posición del Motor 1 con el Brazo Retraido
70
90
110
130
150
0 2 4 6Tiempo (s)
Valo
r del
Pot
enci
ómet
ro
Figura 64. Respuesta a entrada paso del motor 1
En la figura anterior se observa la respuesta a un entrada paso del motor 1 en la cual el motor 2 y 3, se ubicaron de tal manera que el brazo y antebrazo del robot quedaran lo mas cerca posible del eje de rotación del motor 1. De las misma manera que en las dos veces anteriores se puede ver un sobrepico y tiempo de establecimiento parecido. 5.4.2. RESPUESTA A ENTRADA PASO MOTOR 2 Las siguientes gráficas muestran la respuesta a entrada paso.
Posicion del Motor 2 Subiendo, Motor 3 Extendido
80
85
90
95
100
105
110
115
120
125
130
0 1 2 3 4
Tiempo (s)
Valo
r de
pote
ncio
met
ro
RespuestaSet Point
Figura 65. Respuesta a entrada paso del motor 2

En la grafica anterior se observa que el sobrepico de 52% y un tiempo de establecimiento de 2,5s aproximadamente.
Posicion del Motor 2 Bajando, Motor 3 Extendido
80
90
100
110
120
130
140
150
0 0,5 1 1,5 2 2,5 3
Tiempo (s)
Valo
r del
Pot
enci
omet
ro
RespuestaSet point
Figura 66. Respuesta a entrada paso del motor 2
En para esta entrada se obtuvo un sobre pico del 66% y un tiempo de establecimiento de 1,3s aproximadamente, en esta caso el sobre pico es mayor por que la fuerza de gravedad contribuye a que baje mas rápido evitando así el aumento exagerado de la acción de control, reduciendo así el tiempo de establecimiento.
Posicion del Motor 2 Subiendo, Motor 3 retraido
80
90
100
110
120
130
140
0 0,5 1 1,5 2 2,5 3Tiempo (s)
Valo
r del
Pot
enci
omet
ro
RespuestaSet Point
Figura 67. Respuesta a entrada paso del motor 2
Para este caso se obtuvo un sobrepico de 48% y un tiempo de establecimiento 1,2s aproximadamente.
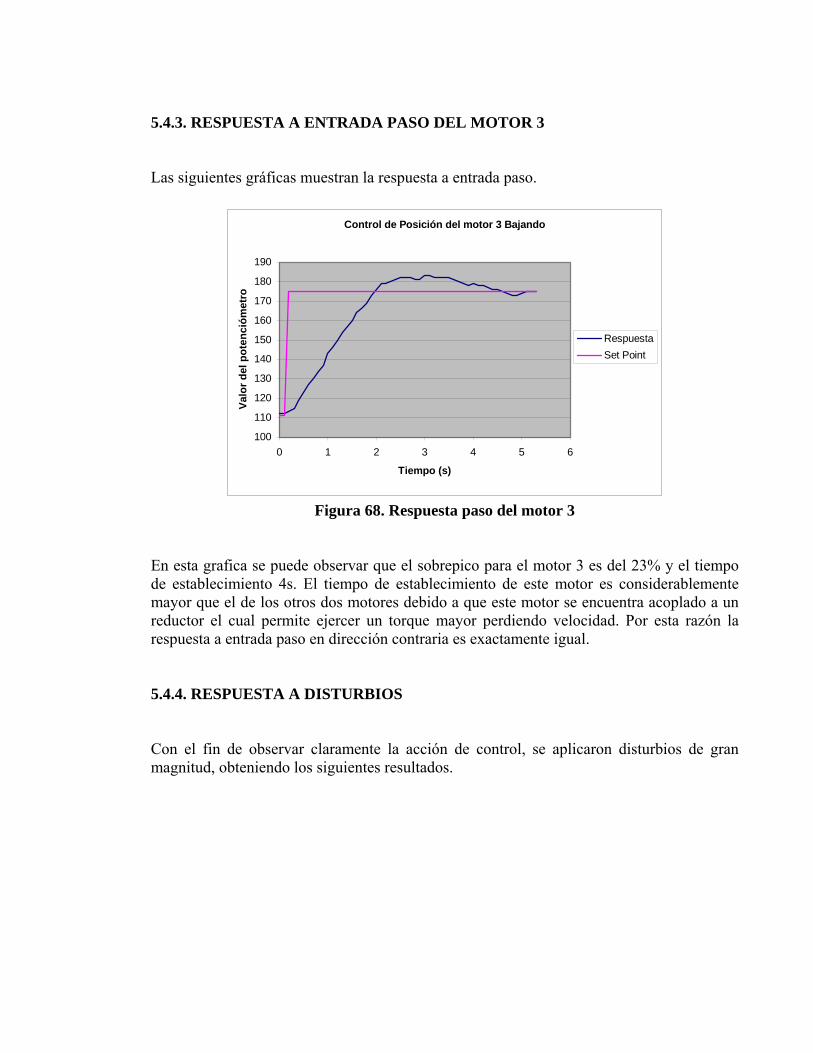
5.4.3. RESPUESTA A ENTRADA PASO DEL MOTOR 3 Las siguientes gráficas muestran la respuesta a entrada paso.
Control de Posición del motor 3 Bajando
100
110
120
130
140
150
160
170
180
190
0 1 2 3 4 5 6
Tiempo (s)
Valo
r del
pot
enci
ómet
ro
RespuestaSet Point
Figura 68. Respuesta paso del motor 3
En esta grafica se puede observar que el sobrepico para el motor 3 es del 23% y el tiempo de establecimiento 4s. El tiempo de establecimiento de este motor es considerablemente mayor que el de los otros dos motores debido a que este motor se encuentra acoplado a un reductor el cual permite ejercer un torque mayor perdiendo velocidad. Por esta razón la respuesta a entrada paso en dirección contraria es exactamente igual. 5.4.4. RESPUESTA A DISTURBIOS Con el fin de observar claramente la acción de control, se aplicaron disturbios de gran magnitud, obteniendo los siguientes resultados.

Respuesta a un Disturbio del Motor 1
100105110
115120125130
135140
0 1 2 3 4 5
Tiempo (s)
Valo
r del
pot
enci
ómet
ro
RespuestaSet Point
Figura 69. Respuesta a un Disturbio del motor 1
Respuesta a un Distubios del Motor 2
120
125
130
135
140
145
150
0 1 2 3 4 5
Tiempo (s)
Valo
r del
pot
enci
omet
ro
RespuestaSet Point
Figura 70. Respuesta a un Disturbio del motor 2
Debido a la existencia del reductor acoplado al motor 3 anteriormente mencionado no es posible ejercer un disturbio de magnitud considerable para ser observado.

5.5. PRUEBA DE LA TRANSFORMACIÓN DE COORDENADAS RELATIVAS A COORDENADAS GENERALES Como se trató en la sección 4.5, se implementó una transformación de coordenadas relativas a coordenadas generales, en las siguientes figuras se presentan las relaciones obtenidas para diferentes ubicaciones del Sistema Coordenado Relativo. Cabe notar que las gráficas de la izquierda corresponden al sistema relativo y las de la derecha al sistema general.
Figura 71. Fuerzas Relativas y Generales.
En la Figura 69 los Sistemas Coordenados son aproximadamente iguales y por lo tanto las fuerzas son similares. Una prueba interesante sería girar los ejes relativos 90º sobre el plano XY de tal suerte que el eje y relativo coincida con el eje x general, esto hecho se muestra en la siguiente gráfica.

Figura 72. Plano XY Rotado 90º. En la Figura 71 se encuentran los resultados obtenidos al girar el plano YZ 90º; Como se esperaba al aplicar una fuerza en el eje Z relativo esta hace latente en el eje Y general, al igual cambios en el eje Y relativo causan cambios en el eje Z general. El eje relativo es equivalente al eje general para el eje X
Figura 73. Plano YZ Rotado 90º.

Figura 74. Sistema de Coordenadas Relativo disímil al Sistema General.
En el caso de la Figura 72 los ejes coordenados relativos no coinciden con los ejes generales, por lo tanto una fuerza ejercida en el eje Y relativo ocasiona cambios en las tres fuerzas del Sistema Coordenado General. En las Figuras 73 y 74 se aprecian los efectos de ejercer una fuerza en los ejes X y Z respectivamente, en el Sistema Coordenado General.
Figura 75. Fuerza Ejercida En El Eje X Relativo.

Figura 76. Fuerza Ejercida En El Eje Z Relativo.
5.6. RESPUESTA DEL CONTROL DE FUERZA Como fue mencionado en la sección 3.3.1.3, el control de fuerza implementado en el sistema fue un controlador tipo PID de algoritmo paralelo. Las pruebas que se muestran a continuación fueron obtenidas a partir de la interfaz gráfica creada en el programa LabVIEW. 5.6.1. RESPUESTAS A ENTRADA PASO La siguientes gráficas corresponden a entrada paso en las cuales las coordenadas relativas son iguales a las coordenadas generales. Únicamente se realizó la entrada paso a un eje coordenado a la vez. En la Figura 75 el setpoint de fuerza fue de [–4, 0, 0] para los ejes X, Y y Z respectivamente. Para el eje X no es posible alcanzar fuerzas superiores a éste valor debido a los torques inherentes a la planta mecánica.

Figura 77. Respuesta Paso Fuerza Eje X
En la gráfica se pueden observar algunos picos relacionados con el error de digitalización que es de un bit. También cabe resaltar que el tiempo de establecimiento es de 5 s aproximadamente.
Figura 78. Respuesta Paso Fuerza Eje Y.
El vector de entrada para obtener la repuesta paso de la Figura 76 fue [0,-10,0]. El tiempo de establecimiento es de 2 s. Aproximadamente.
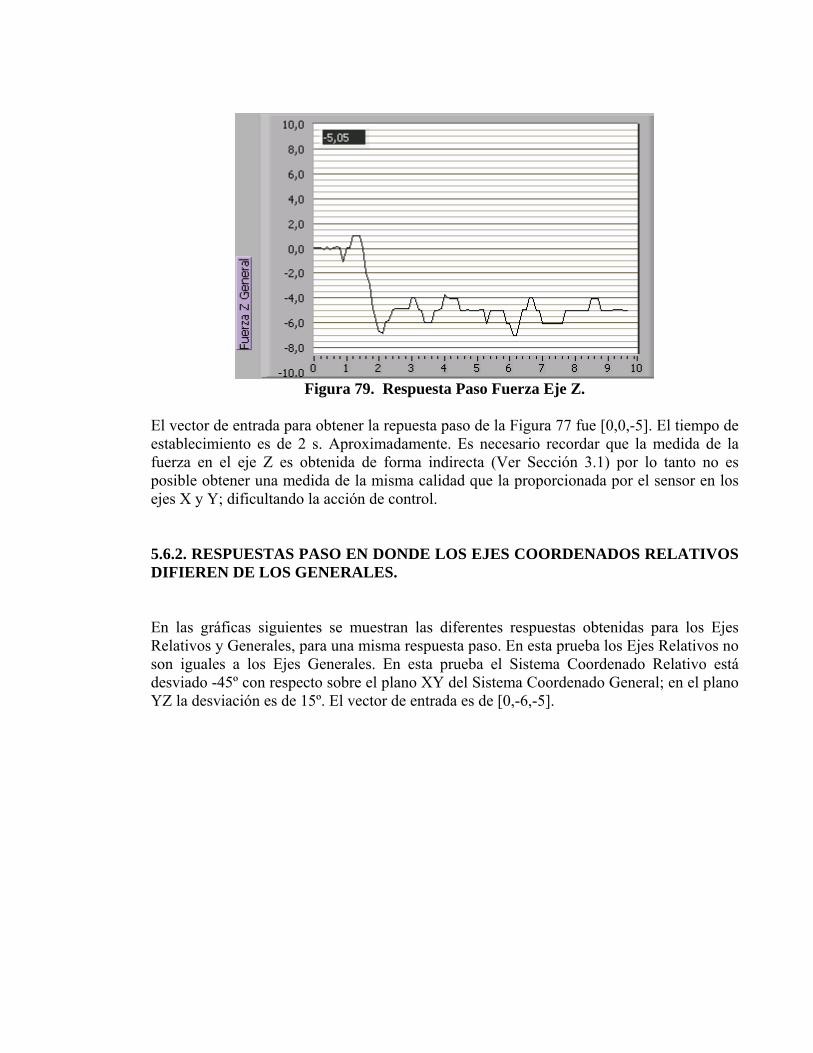
Figura 79. Respuesta Paso Fuerza Eje Z.
El vector de entrada para obtener la repuesta paso de la Figura 77 fue [0,0,-5]. El tiempo de establecimiento es de 2 s. Aproximadamente. Es necesario recordar que la medida de la fuerza en el eje Z es obtenida de forma indirecta (Ver Sección 3.1) por lo tanto no es posible obtener una medida de la misma calidad que la proporcionada por el sensor en los ejes X y Y; dificultando la acción de control. 5.6.2. RESPUESTAS PASO EN DONDE LOS EJES COORDENADOS RELATIVOS DIFIEREN DE LOS GENERALES. En las gráficas siguientes se muestran las diferentes respuestas obtenidas para los Ejes Relativos y Generales, para una misma respuesta paso. En esta prueba los Ejes Relativos no son iguales a los Ejes Generales. En esta prueba el Sistema Coordenado Relativo está desviado -45º con respecto sobre el plano XY del Sistema Coordenado General; en el plano YZ la desviación es de 15º. El vector de entrada es de [0,-6,-5].

Figura 80. Fuerzas Generales.
Tal como se puede corroborar en la Figura 78, la fuerza en el eje X intentó permanecer en cero, pese a que en el eje X relativo se experimentó una fuerza apreciable, demostrando la validez de las conversiones trigonométricas. Como se esperaba tanto en el eje Y como en el eje Z generales, se presentaron respuestas paso acordes con la referencia dada. A continuación se muestran las gráficas de fuerza de los ejes relativos.

Figura 81. Fuerzas Relativas.
Como se esperaba, todos los ejes relativos experimentaron fuerzas (sin implicar cambios en las fuerzas experimentadas en los ejes generales), por otro lado, se puede apreciar que los valores iniciales de las fuerzas relativas no son cero como lo son en los Ejes Generales; esto se debe a que las fuerzas relativas no están referidas a un “cero” constante por el error inherente a las galgas (Ver sección 5.3). En el caso de las fuerzas generales es necesario ajustar un “cero” al inicio del control de fuerza ya que es indispensable adaptar el control al estado actual del puente de galgas. 5.6.3. PRUEBA DE FUERZA CERO En esta prueba se envía al sistema como referencia el vector [0,0,0], lo cual permite manipular el sensor de tal manera que el robot sea guiado por el usuario. Al tratar de mover el manipulador el sensor percibe una fuerza externa, el sistema intenta mantener el vector referencia cero, conllevando al comportamiento previamente indicado.

Figura 82. Fuerzas Generales (Prueba de Fuerza Cero).
En la Figura 80 se muestran las fuerzas en los Ejes Generales donde se aprecian los efectos causados por el usuario y las respuestas del control para tratar de mantener las fuerzas en cero. La Figura 81. corresponde a la trayectoria realizada por el robot durante la prueba.
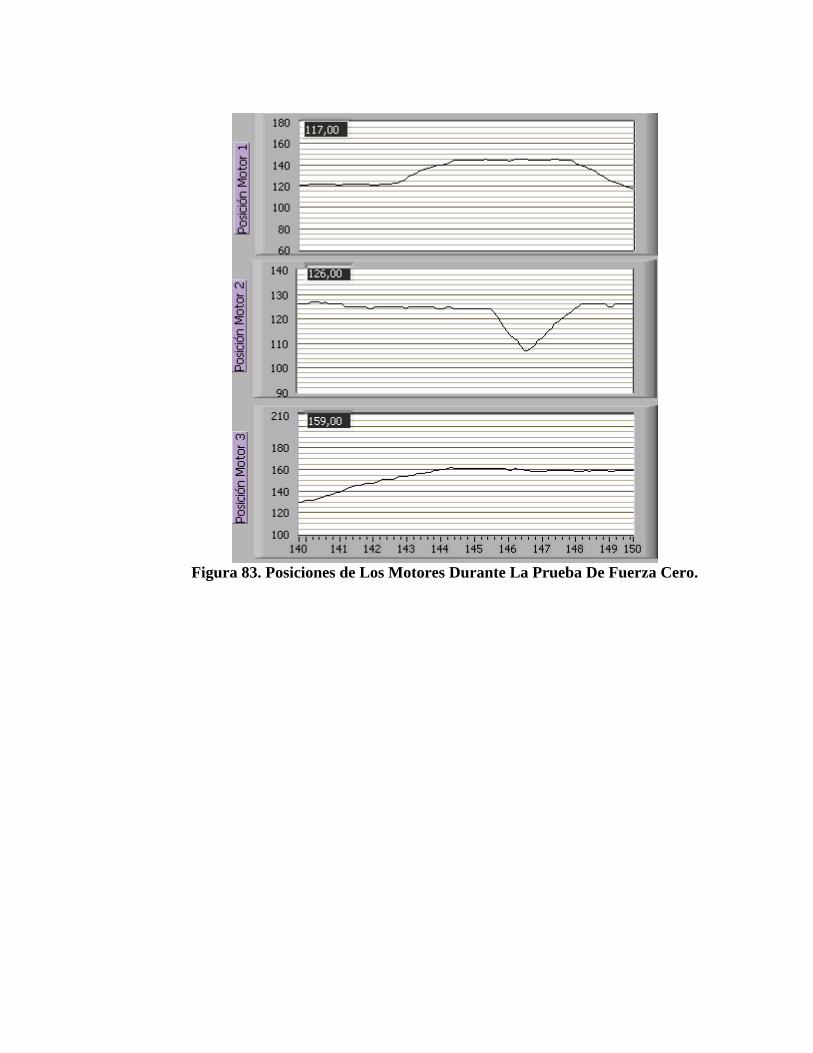
Figura 83. Posiciones de Los Motores Durante La Prueba De Fuerza Cero.
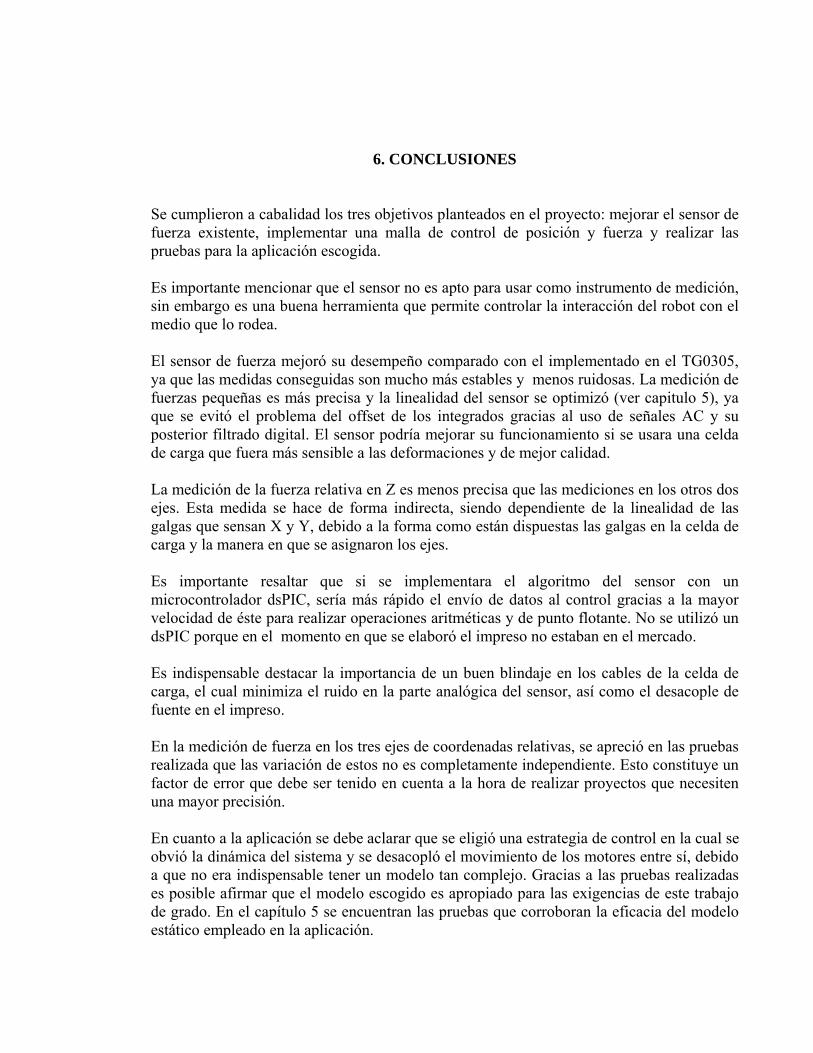
6. CONCLUSIONES Se cumplieron a cabalidad los tres objetivos planteados en el proyecto: mejorar el sensor de fuerza existente, implementar una malla de control de posición y fuerza y realizar las pruebas para la aplicación escogida. Es importante mencionar que el sensor no es apto para usar como instrumento de medición, sin embargo es una buena herramienta que permite controlar la interacción del robot con el medio que lo rodea. El sensor de fuerza mejoró su desempeño comparado con el implementado en el TG0305, ya que las medidas conseguidas son mucho más estables y menos ruidosas. La medición de fuerzas pequeñas es más precisa y la linealidad del sensor se optimizó (ver capitulo 5), ya que se evitó el problema del offset de los integrados gracias al uso de señales AC y su posterior filtrado digital. El sensor podría mejorar su funcionamiento si se usara una celda de carga que fuera más sensible a las deformaciones y de mejor calidad. La medición de la fuerza relativa en Z es menos precisa que las mediciones en los otros dos ejes. Esta medida se hace de forma indirecta, siendo dependiente de la linealidad de las galgas que sensan X y Y, debido a la forma como están dispuestas las galgas en la celda de carga y la manera en que se asignaron los ejes. Es importante resaltar que si se implementara el algoritmo del sensor con un microcontrolador dsPIC, sería más rápido el envío de datos al control gracias a la mayor velocidad de éste para realizar operaciones aritméticas y de punto flotante. No se utilizó un dsPIC porque en el momento en que se elaboró el impreso no estaban en el mercado. Es indispensable destacar la importancia de un buen blindaje en los cables de la celda de carga, el cual minimiza el ruido en la parte analógica del sensor, así como el desacople de fuente en el impreso. En la medición de fuerza en los tres ejes de coordenadas relativas, se apreció en las pruebas realizada que las variación de estos no es completamente independiente. Esto constituye un factor de error que debe ser tenido en cuenta a la hora de realizar proyectos que necesiten una mayor precisión. En cuanto a la aplicación se debe aclarar que se eligió una estrategia de control en la cual se obvió la dinámica del sistema y se desacopló el movimiento de los motores entre sí, debido a que no era indispensable tener un modelo tan complejo. Gracias a las pruebas realizadas es posible afirmar que el modelo escogido es apropiado para las exigencias de este trabajo de grado. En el capítulo 5 se encuentran las pruebas que corroboran la eficacia del modelo estático empleado en la aplicación.

Para conservar un sistema de coordenadas general para las fuerzas, fue necesario calcular unas transformaciones trigonométricas que permitieron expresar las coordenadas generales, en términos de las coordenadas del sensor o relativas. Este cambio de coordenadas tiene un comportamiento bastante aceptable (ver capítulo 5). Los controles PID son totalmente independientes tanto para el control de fuerza, como para el control de posición. La sintonización de los controles se hizo de tal forma que se llegara a un desempeño adecuado para las diferentes posiciones de los motores, sin embargo cuando el brazo está totalmente extendido, el motor 2 tiende a oscilar debido a la inercia. Los grandes cambios en la dinámica del sistema hacen que sea bastante complicado sintonizar los controles, por esta razón se optó por hacer un menú en la interfaz gráfica que permite modificar las constantes de los controles por el usuario. Cabe resaltar que el montaje no permite ejercer la fuerza necesaria para lograr la máxima variación en las fuerzas medidas por el sensor. Esto se debe en parte al contrapeso que se usa para reducir el consumo de corriente por parte del motor 2 y también a la relación de piñones existente. Así como este trabajo de grado tubo como punto de partida y referencia el sensor de fuerza realizado en el TG0305, esperamos que este trabajo de grado se la base para que futuros proyectos realicen un robot hexápodo capaz de desenvolverse eficientemente en cualquier tipo de ambiente basándose en los datos de fuerza y de posición que sensen cada una de sus extremidades.

7. BIBLIOGRAFIA
1. PAVA, Diego y otros. Sistema de Sensor de Fuerza para aplicaciones de Control Simples, Trabajo de grado Ingeniería Electrónica. 2003.
2. Microchip, PIC18FXX2 Datasheet
3. Microchip, dsPIC30F Family Reference Manual
4. OGATA, Katsuhiko. Ingeniería de control moderna. Editorial Prentice may. Mayo
1997.
5. OPPENHEIM, Alan et al. Señales y Sistemas. Editorial Prentice may. 1998.
6. FRANKLIN, Gene et al. Digital Control of Dynamic Systems. Editorial Addison Wesley. 1997.
7. PROAKIS, John G, Digital Signal Processing. Editorial Prentice Hall; 3ra edición.
1995.
8. CORRIPIO, Armando. Principles and Practice of Automatic Process Control, 2nd Edition. Editorial Wiley. 1997.
9. LUI, Jiming, Wu, Jianbing. Multi-Agent Robotics System. United State of
America. 2001. CRC, 304
10. NIKE B. Saeed, Introduction to Robotics Analysis, System, Applications. United State of America. 2001, 349p.
11. Proyecto Hamlet. http://www.mech.canterbury.ac.nz/research/hamlet/
12. Proyecto PuchoBot. http://www.iearobotics.com/personal/andres/proyectos/
13. Control y programacion de Robots. http://www.dea.icai.upco.es/noriol/
14. Morfología de Insectos. http://cariari.ucr.ac.cr/~insectos/QueEs/partes.htm
15. CRAIG, John, Introduction to Robotics Addison-Wesley Publishing Company,
1986.
16. T. YOSHIKAWA, “Force control of robot manipulators,” in Proc. IEEE Int.Conf. Robotics and Automation, vol. 1, 2000, pp. 220–226.

17. M. RAIBERT and J. Craig, “Hybrid position/force control of manipulators,”J.
Dynamic Syst., Measurement Contr., vol. 103, no. 2, pp.126–133, Feb. 1981.
18. T. YOSHIKAWA, “Dynamic hybrid position/force control of robot manipulators Description of hand constraints and calculation of joint driving force,” IEEE J. Robot. Automat., vol. RA-3, pp. 386–392, Oct. 1987.
19. R. VOLPE and P. Khosla, “A theoretical and experimental investigation of explicit
force control strategies for manipulators,” IEEE Trans. Automat.Contr., vol. 38, pp. 1634–1650, Nov. 1993.
20. www.microchip.com
21. www.national.com
22. www.analog.com
23. www.panasonic.com
24. www.fairchildsemi.com
ANEXOS
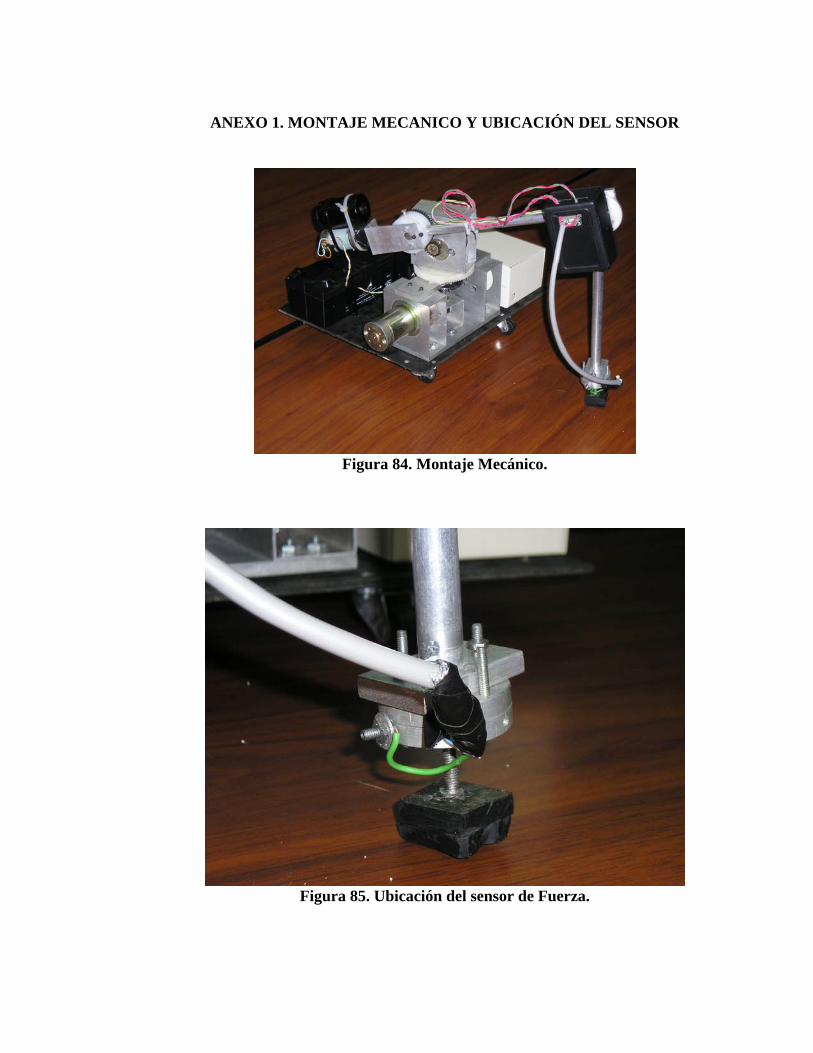
ANEXO 1. MONTAJE MECANICO Y UBICACIÓN DEL SENSOR
Figura 84. Montaje Mecánico.
Figura 85. Ubicación del sensor de Fuerza.

ANEXO 2. UBICACIÓN DE MOTORES
Figura 86. Vista superior.
Figura 87. Ubicación de Motores.

ANEXO 4. JUEGO DE PIÑONES
Figura 88. Piñones Motor 1.
Figura 89. Piñones Motor 2.

Figura 90. Piñones Motor 3

ANEXO 5. CIRCUITO SENSOR DE FUERZA
Figura 91. Circuito sensor de Fuerza.

ANEXO 6. TARJETA DE CONTROL
Figura 92. Tarjeta de Control.

0
R7360
R4
22
R12360
R9360
ANEXO 7. ESQUEMATICO SENSOR DE FUERZA
0
+5U4
Fx
+5U3
U4
AD623
1
23
4
5
6
7
8 RG
-VIN+VIN
V-
REF
VO
V+
RG
0
R1110
13
2
R242k
0
C2 1u
R3360 0
R171k
R181k
0
R81k
L2
BEAD
Puente 2
0
+5U5
R14
22
R25 18kL5
BEAD
Fuerza X
+5U3
0
U5
AD623
1
23
4
5
6
7
8 RG
-VIN+VIN
V-
REF
VO
V+
RG
+5U2
U6
AD623
1
23
4
5
6
7
8 RG
-VIN+VIN
V-
REF
VO
V+
RG
R1510
13
2
Rg
350
+5U5
SREF
0
R20
18k
+5V
R191k
Rg
350
+5V
C4 1u
+
-
U3A
MCP604/SO3
21
411+
-
U2B
MCP604/SO 5
67
411
0
Rg
350R510
13
2
C5 1u
0
XREF
ZREF
+5U4
C3 1u
+5V+5V
0
+5U2
0
+
-
U2A
MCP604/SO
3
21
411
+5V
L6
BEAD
C61u
0
YREF
Fuerza Y
+
-
U3B
MCP604/SO5
67
411
R21150k
0
L4
BEAD
+5U3
R10
22
+
-
U2C
MCP604/SO
10
98
411
R16360
0
R13360
+5U6
0
0
+5U2
Puente 1
0
+5U2
0
Fy
0
Fuerza X+
-
U3C
MCP604/SO10
98
411
L3
BEAD
0R23 18k
+5U3
R2330
0
Salida Cuadrada 5Hz
0
R222k
Fz
Rg
350
Fuerza Y
+5U6
R6360
Control Tx
Y1
10Mhz
+5U1
J5
1234
L7BEAD
C8
22p
Fx
+5U1
Clock SPI
C7
22p
RX USART
Control Tx
PGD
Tx SPI
+5V
JP2
HEADER 4
1234
Salida Cuadrada 5Hz
0
Fz
R110k
Rx SPI
Tx SPI
J2
ICD
123456
U7
PIC18LF452 TQFP
192021222324
89
101114151617
3536374243441
32
383940412345
252627
28 7
30 31 6 29
18
RA0/AN0RA1/AN1RA2/AN2/REF-RA3/AN3/VREF+RA4/T0CKIRA5/AN4/SS
RB0/INT0RB1/INT1RB2/INT2RB3/CCP2RB4RB5/PGMRB6/PGCRB7/PGD
RC1/T1OSI/CCP2RC2/CCP1
RC3/SCK/SCLRC4/SDI/SDA
RC5/SDORC6/TX/CKRC7/RX/DT
RC0/T1OSO/T1CK1
RD0/PSP0RD1/PSP1RD2/PSP2RD3/PSP3RD4/PSD4RD5/PSP5RD6/PSP6RD7/PSP7
RE0/RD/AN5RE1/WR/AN6RE2/CS/AN7
VD
D
VD
D1
OSC
1/C
LKIN
OSC
2/C
LKO
UT
GN
DG
NDMCRL/VPP
MCLR/VPP
Clock SPI
J6
Usart
12
PGC
MCLR/VPP
PGC
TX USART
TX USART
RX USART
PGD
FyRx SPI
Figura 93 Esquemático sensor de Fuerza

ANEXO 8. ESQUEMATICO TARJETA DE CONTROL
VCCa
PGD
0
V/2
VCC
VCC
VCCa
+
-
U6C
MCP604
10
98
41
1
R19
1k
U5
MCP3208
12345678
16
15
9 14
10
13
11
12
CH0CH1CH2CH3CH4CH5CH6CH7
VD
D
Vre
f
DG
ND
AG
ND/CS
CLK
Din
Do
R80.1
L4
BEAD
R6 1k
C2210nF
0
PWM3
L2
BEAD
C7
100nF
0
QBPWM5
R10 10k
R12 10k
JP5
SPI
123456
VX1
C410uF
R14
10k
VX1
VCC
0
R130.1
AN0
+
-
U6A
MCP604
3
21
41
1
D1
1N5817M/CYL
VCCa
V/2
ENABLE
C17
100nF
JP1PWM
1 2 3 4 5 6 7 8
U1
L6203
2
4
8
3
1
9
5
7
11
10
6
VS
CBOOT1
CBOOT2
OUT1
OUT2
Vref
IN1
IN2
ENABLE
SE
NS
E
GN
D
C20
100nF
C18
100nF
U7
L6203
2
4
8
3
1
9
5
7
11
10
6
VS
CBOOT1
CBOOT2
OUT1
OUT2
Vref
IN1
IN2
ENABLE
SE
NS
E
GN
D
C25100uF
JP2
HEADER 10
123456789
10
C9
0.1uF
VCC
C2410uF
V/2
QA
TX
VCC
+
-
U6B
MCP604
5
67
41
1
JP3
ICD
123456
JP4
rs232
123
VCCa
ENABLE
R11
10k
C1410uF
VCC
C3
100nF
R18
1k
VCCa
C11
100nF
JP7
analog
123456789
101112
/MCLR
PGC
0
C160.1uF
VCCa
U2
dspic2010
1
234567
1112
1415
262524232221
13
20
28
8 19
27
9 10
1817
16/MCLR
RB0/EMUD3/AN0/Vr+/CN2RB1/EMUC3/AN1/Vr-/CN3RB2/AN2/SS1/CN4RB3/AN3/INDX/CN5RB4/AN4/QEA/IC7/CN6RB5/AN5/QEB/IC8/CN7
RC13/EMUD1/SOSCI/T2CK/U1ATX/CN1RC14/EMUC1/SOSCO/T1CK/U1ARX/CN0
RD1/EMUD2/OC2/IC2/INT2RD0/EMUC2/OC1/IC1/INT1
PWM1L/RE0PWM1H/RE1PWM2L/RE2PWM2H/RE3PWM3L/RE4PWM3H/RE5
VD
D1
VD
D2
AV
DD
VS
S1
VS
S2
AV
SS
OS
C1
/CL
KI
OS
C2
/CL
KO
RF2/PGC/EMUC/U1RX/SDI/SDI1/SDARF3/PGD/EMUD/U1TX/SDI/SDO1/SCL
RE8/FLTA/INT0/SCK1/OCFA
RX
C15
10uF
VCC
0
0
VCCa
PWM1
0
0
VCCa
+
-
U9
mcp603
3
26
7 14 5
JP6
SPI
123456
VX1
+
-
U6D
MCP604
12
1314
41
1
VCCa
JP8
Vbat
12
R21k
JP9
IM
1234
R7 1k
VCCa
V/2
INDX
C8
100nF
RX
ENABLE
0
R10.1
R9
10k
R15 10k
C2
100nF
PWM2
0
VCCa
R31k
VX1
U4
L6203
2
4
8
3
1
9
5
7
11
10
6
VS
CBOOT1
CBOOT2
OUT1
OUT2
Vref
IN1
IN2
ENABLE
SE
NS
E
GN
D
C2610nF
AN2PWM4
L1
10uH
C1210pF
VCCa
V/2
PWM6
C1310pF
/MCLR
C10
.47u
R41k
C1910nF
C5.47u
C2710nF
U8
LM2594
7
8
4
6
5Vin
Out
Feed
gn
doff/on
R17 10k
VCC
R5
0
U3
SN65C3221
3 714
2 4 65
1113
98
1
10 12
16
15
V+ V-
GN
D
C1
+
C1
-
C2
-
C2
+
DinDout
RoutRin
/EN
/Inv Fon
/Foff
Vcc
L3
175uH
C1
100nF
Y1
10Mhz
VCC
R16
10k
C2368uF
0
ENABLE
TX
VCC1
VCC
C6.47u
C21100uF
AN1
Figura 94. Esquemático Tarjeta de Control
![Pavimento articulado[1]](https://static.fdocuments.es/doc/165x107/5563d83cd8b42a517c8b49f6/pavimento-articulado1.jpg)