CONTROL TERRESTRE EN EL PROCESO FOTOGRAMÉTRICO...
118
1 CONTROL TERRESTRE EN EL PROCESO FOTOGRAMÉTRICO USANDO VEHÍCULOS AÉREOS NO TRIPULADOS CON FINES CARTOGRÁFICOS EN EL MUNICIPIO DE CÓMBITA ANGIE PAOLA RÍOS MONROY Y LAURA NATALIA PUERTO CARO TRABAJO DE TESIS DE PREGRADO PARA OPTAR EL TITULO DE INGENIERO CATASTRAL Y GEODESTA DIRECTOR: PhD ERIKA SOFÍA UPEGUI CARDONA UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ ́ DE CALDAS FACULTAD DE INGENIERÍA INGENIERÍA CATASTRAL Y GEODESIA BOGOTA D.C. 2019
Transcript of CONTROL TERRESTRE EN EL PROCESO FOTOGRAMÉTRICO...

1
CONTROL TERRESTRE EN EL PROCESO FOTOGRAMÉTRICO USANDO VEHÍCULOS AÉREOS NO TRIPULADOS CON FINES CARTOGRÁFICOS EN EL
MUNICIPIO DE CÓMBITA
ANGIE PAOLA RÍOS MONROY Y LAURA NATALIA PUERTO CARO
TRABAJO DE TESIS DE PREGRADO PARA OPTAR EL TITULO DE INGENIERO CATASTRAL Y GEODESTA
DIRECTOR: PhD ERIKA SOFÍA UPEGUI CARDONA
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
FACULTAD DE INGENIERÍA
INGENIERÍA CATASTRAL Y GEODESIA
BOGOTA D.C.
2019
2
Nota de aceptación
_________________________________
_________________________________
_________________________________
_________________________________
Presidente del Jurado
_________________________________
Jurado
Bogotá, 23 de mayo de 2019

3
DEDICATORIA
A nuestros padres que con gran esfuerzo nos han apoyado para
lograr todos nuestros proyectos.

4
AGRADECIMIENTOS
A Dios por darnos la sabiduría necesaria para realizar
nuestros estudios de ingeniera y cumplir esta meta.
A la Universidad Distrital Francisco José de Caldas por ser nuestra alma máter,
donde nos formamos como profesionales.
A la planta docente y administrativa del Proyecto curricular de Ingeniería Catastral y
Geodesia por aportar los equipos y laboratorios requeridos para este proyecto y por toda la
formación que nos dieron a lo largo de nuestra Carrera.
A la profesora Erika Upegui por ser una directora incondicional, que educa
e imparte conocimiento con amor y paciencia, por orientar los procesos desarrollados en esta investigación y
compartir su experiencia y conocimientos.
Al profesor Andrés Cárdenas por su orientación y apoyo a lo largo del
del proceso realizado.
A la familia Ríos Monroy por la colaboración y el
apoyo en el trabajo de campo.

5
CONTENIDO
Pág. 1. INTRODUCCIÓN ..................................................................................... 14
1.1. PROBLEMA DE INVESTIGACIÓN ....................................................... 15
1.1.1. Planteamiento del problema ........................................................... 15
1.1.2. Formulación del problema .............................................................. 16
1.2. OBJETIVOS DE LA INVESTIGACIÓN ................................................. 17
1.2.1. Objetivo general ............................................................................. 17
1.2.2. Objetivos específicos ..................................................................... 17
1.3. JUSTIFICACIÓN .................................................................................. 17
1.4. ALCANCES .......................................................................................... 18
1.4.1. Fotocontrol ..................................................................................... 20
1.4.2 Caso de estudio Colombia ............................................................. 22
2. MARCO TEÓRICO .................................................................................. 23
2.1. SISTEMAS DE VEHÍCULOS AÉREOS NO TRIPULADOS (VANT) Y
SISTEMAS DE AERONAVES PILOTADAS A DISTANCIA (RPA) ..................... 24
2.1.1. Clasificación de aeronaves ............................................................ 24
2.1.2. Modos de operación....................................................................... 25
2.2. FOTOGRAMETRÍA Y LOS VEHÍCULOS AÉREOS NO TRIPULADOS 26
2.2.1. Imagen obtenida de una fotografía aérea....................................... 27
2.2.2. Distribución espectral de la luz en levantamientos aéreos ............. 28
2.2.3. Aspectos Geométricos de la fotografía aérea ................................ 29
2.2.4. Condición de colinealidad .............................................................. 30
2.2.5. Orientación interior y exterior ......................................................... 33
2.2.6. Estructura desde el movimiento (Structure from Motion – SfM) ...... 36
2.2.7 Transformación de la característica invariante de la escala ........... 39
2.2.8 Productos fotogramétricos ............................................................. 40
2.2.9 Control terrestre (puntos de apoyo) ................................................ 44
2.2.10 Número y distribución de los puntos de control terrestre en la
fotogrametría convencional ............................................................................ 44

6
2.2.11 Señalización del control terrestre ................................................... 45
2.3 ESTÁNDARES DE PRECISIÓN POSICIONAL (ASPRS POSITIONAL
ACCURACY STANDARDS FOR DIGITAL GEOSPATIAL DATA) ..................... 46
2.3.1 Evaluación estadística de precisiones horizontales y verticales. .... 46
2.3.2 Estándares de precisión horizontal para datos geoespaciales. ...... 47
2.3.3 Estándares de precisión vertical para datos de elevación .............. 48
2.3.4 Requisitos de precisión para la triangulación aérea y la orientación
del sensor basada en INS de imágenes digitales. .......................................... 48
2.3.5 Prueba de normalidad Shapiro-Wilk .................................................. 49
2.4 GEODESIA SATELITAL Y SISTEMAS SATELITALES ........................ 50
2.4.1 El Sistema de Posicionamiento Global GPS .................................. 51
2.4.2 Constitución del Sistema GPS ....................................................... 51
2.5 NORMATIVIDAD .................................................................................. 53
2.5.1 Reglamentación aeronáutica: ......................................................... 53
2.5.2 Reglamentación cartográfica .......................................................... 57
3. MATERIALES Y MÉTODOS ................................................................... 58
3.1 ÁREA DE ESTUDIO ............................................................................. 59
3.2 VEHÍCULO AÉREO NO TRIPULADO (VANT) – DJI PHANTOM 4 ....... 64
3.3 CÁMARA Y GIMBAL ............................................................................ 65
3.4 Receptor GNSS .................................................................................... 66
3.5 NAVEGADOR GPS-GARMIN OREGON 750 ....................................... 66
3.6 ESTACIONES PERMANENTES DEL INSTITUTO GEOGRÁFICO
AGUSTÍN CODAZZI .......................................................................................... 67
3.7 SOFTWARE ......................................................................................... 67
3.8 METODOLOGÍA ................................................................................... 67
3.8.1 Etapa 1: Planeación del trabajo de campo ..................................... 69
3.8.2 Etapa 2: Ejecución de vuelos y control terrestre ............................. 74
3.8.3 Etapa 3: Procesamiento de información ......................................... 77
3.8.4 Etapa 4: Evaluación estadística de los proyectos fotogramétricos . 82
4 ANALISIS Y RESULTADOS ...................................................................... 84
CONCLUSIONES Y RECOMENDACIONES .................................................. 106
BIBLIOGRAFÍA.............................................................................................. 110

7
TABLA DE FIGURAS
Figura 1. Distribución de los puntos de control para los bloques fotogramétricos en la investigación de Tahar (2013). ................................................................. 20
Figura 2. Distribución y número de puntos de control terrestre. ........................ 22
Figura 3. Clasificación de aeronaves por su forma de sustentación ................. 25
Figura 4. Geometría de una fotografía aérea. ................................................... 30
Figura 5. Condición de colinealidad .................................................................. 31
Figura 6. Modelo de cámara estenopeica. ........................................................ 33
Figura 7. Structure from motion (SfM). En lugar de un solo par estéreo, la técnica SfM requiere múltiples fotografías superpuestas como entrada para la extracción de características y algoritmos de reconstrucción 3D. ..................... 36
Figura 8. (a) Modelo digital de Elevaciones. (b) Modelo digital de Superficie.... 41
Figura 9. TIN .................................................................................................... 41
Figura 10. MDE ráster. ..................................................................................... 42
Figura 11. Fases del proceso de realización de la ortofoto. .............................. 43
Figura 12. Interpolación por vecino más cercano. ............................................ 43
Figura 13. Interpolación bilineal. ....................................................................... 43
Figura 14. Interpolación bilineal. ....................................................................... 44
Figura 15. Distribución teórica de los puntos de control terrestre. ..................... 45
Figura 16. Segmento espacial. Constelación de satélites. ................................ 52
Figura 17. Segmento de control. Estaciones permanentes. .............................. 52
Figura 18. Espacialización del área de estudio a nivel departamental. ............. 59
Figura 19. Espacialización del área de estudio a nivel municipal. ..................... 60
Figura 20. . Espacialización del área de estudio a nivel veredal. ...................... 61
Figura 21. Fotografía del terreno analizado. ..................................................... 61
Figura 22. Fotografía del terreno analizado. ..................................................... 62
Figura 23. Partes del VANT DJI Phantom 4...................................................... 64
Figura 24. Gimbal de la cámara del VANT Phantom 4. .................................... 65
Figura 25. Componentes del Kit Topcon GR-5. ................................................ 66
Figura 26. Garmin Oregón 750. ........................................................................ 67
Figura 27. Flujo de trabajo general. .................................................................. 68
Figura 28. Flujo de trabajo etapa 1. .................................................................. 69
Figura 29. Captura de pantalla de delimitación del área del vuelo preliminar. .. 70
Figura 30. Diseño de las líneas de vuelo realizadas en los planes longitudinal y transversal en el software DroneDeploy. .......................................................... 73
Figura 31. Flujo de trabajo etapa 2. .................................................................. 75
Figura 32. Líneas de vuelo y posiciones iniciales de la cámara en la captura de las aerofotografías. ........................................................................................... 76
Figura 33. Flujo de trabajo etapa 3. .................................................................. 78
Figura 34. Distribución espacial de los PTC y las estaciones permanentes del IGAC en el software Topcon Tools. .................................................................. 79
8
Figura 35. Flujo de trabajo procesamiento digital de imágenes en Pix4D. ........ 81
Figura 36. Flujo de trabajo etapa 4. .................................................................. 83
Figura 37. Ortofotografía del vuelo preliminar. .................................................. 86
Figura 38. Diseño de la malla de puntos de control terrestre. ........................... 87
Figura 39. Diseños de las preseñales implementadas. ..................................... 88
Figura 40. Distribución de puntos de control terrestre superpuestos en la ortofotografía con el diseño de señalización asignada. ..................................... 89
Figura 41. Visualización de las señales en las imágenes capturadas. .............. 90
Figura 42. Ortofotografía de la configuración con mejores resultados estadísticos. ..................................................................................................... 99
Figura 43. Modelo digital de terreno de la configuración con mejores resultados estadísticos. ................................................................................................... 100
TABLA DE TABLAS
Tabla 1. Intervalos de longitud de onda de los colores ..................................... 28
Tabla 2. Estándares de precisión horizontal para datos geoespaciales. ........... 47
Tabla 3. Estándares de precisión vertical para datos digitales de elevación. .... 48
Tabla 4.Características técnicas de la cámara del VANT Phantom 4. .............. 65
Tabla 5. Características técnicas del plan de vuelo preliminar. ......................... 71
Tabla 6. Características técnicas del vuelo preliminar. ..................................... 85
Tabla 7. Características técnicas de los vuelos ejecutados. ............................. 89
Tabla 8. Coordenadas de los PCT capturadas a partir de GPS GR-5. ............. 92
Tabla 9. Coordenadas de los PCT a partir de navegador Garmin Oregón 750. 93
Tabla 10. Descripción del punto de control número 1. ...................................... 94
Tabla 11. Descripción de la distribución 1. ....................................................... 95
Tabla 12. Resultados estadísticos del procesamiento de la distribución 5. ....... 96
Tabla 13. Caracterización general de las 22 distribuciones. ............................. 96
Tabla 14. Resultados de la aplicación del test de Shapiro–Wilk. .................... 101
Tabla 15. Parámetros de evaluación estadística de precisión horizontal para las distribuciones ................................................................................................. 102
Tabla 16. Parámetros de evaluación estadística de precisión vertical para las distribuciones. ................................................................................................ 102
Tabla 17. Evaluación estadística de precisiones horizontales y verticales de las distribuciones. ................................................................................................ 103
Tabla 18. Comparación entre los valores de las coordenadas halladas con los equipos GNSS y el navegador, la ortofoto sin control y la ortofoto de la distribución 5. ................................................................................................. 105

9
GLOSARIO
Aerotiangulación: Es un proceso mediante el cual realiza el control fotogramétrico. Consiste en determinar el número suficiente de puntos que permita la formación de modelos estereoscópicos individuales por métodos fotogramétricos a partir de condiciones geométricas de la fotografía aérea existentes en un bloque y sus relaciones al fotocontrol obtenido (Froment).
Altimetría: Medida de la altitud o elevación. La altitud se mide sobre una
superficie de referencia (datum); la medida de profundidades bajo el agua se denomina batimetría (Felicísimo, 2015).
Altura absoluta de vuelo (Zo): Es la altura de vuelo, referida al nivel medio del
mar, donde Zm=altura del vuelo sobre el nivel del terreno y hm=altura del terreno con respecto al nivel medio del mar. Zo= Zm+hm (IGAC, 2015).
Altura media de terreno: Altura promedio del terreno referida al nivel del mar,
se determina promediando el valor de la cota máxima y mínima que se encuentren en cada zona (IGAC, 2015).
Cartografía: Conjunto de técnicas utilizadas para la construcción de mapas (Felicísimo, 2015). Producto de precisión obtenido a partir de procesos de fotogrametría analítica o digital, donde se muestran los rasgos naturales y topográficos de la superficie terrestre por medio de símbolos, líneas y polígonos (IGAC, 2015).
Coordenadas geográficas, geodésicas o elipsoidales: Expresiones angulares de la posición de un punto sobre la superficie de la tierra, usando coordenadas esféricas (latitud, longitud y altura) que está alineado con el eje de rotación de la tierra (IGAC, 2015).
Cota: Altitud asociada a un punto. Habitualmente, un mapa de elevaciones está
formado por curvas de nivel o isohipsas y por puntos acotados (Felicísimo, 2015). Datum: Sistema geometrico de referencia empleado para expresar
numericamente la posición geodesica de un punto sobre el terreno. Cada datum se define en función de un elipsoide y por un punto en el que el elipsoide y la Tierra son tangentes (Felicísimo, 2015).
Digitalización: Operación de codificar la información en cifras. La digitalización
se aplica habitualmente a la codificación de la información gráfica (mapas y planos convencionales) pero puede ser aplicada con propiedad a todo tipo de información para la construcción de bases de datos digitales (Felicísimo, 2015).

8
Diseño de un vuelo fotogramétrico: Determinar sobre un mapa topográfico de
escala menor que la de las aerofotografías, la localización de las líneas de vuelo, los puntos de cada toma fotográfica y la altura de vuelo en cada línea, a fin de lograr tomas aerofotográficas del terreno con el fin de emplearlas en la producción de cartografía por métodos fotogramétricos (IGAC, 2015).
Distancia focal: Distancia medida entre el eje óptico de la lente y el foco (o punto
focal) (IGAC, 2015).
Elipsoide: Descripción simplificada de la forma y dimensiones de la Tierra: los elipsoides se definen en función de un radio ecuatorial y de un radio polar (Felicísimo, 2015).
Fotogrametría: Conjunto de tecnicas implicadas en la obtención de datos
metricos a partir de fotografías. La fotogrametría es la forma más usual de generar modelos digitales de elevaciones, usando pares estereoscópicos y apoyos sobre el terreno (Felicísimo, 2015).
Georeferenciar: Asignar coordenadas geográficas a un objeto o estructura. El
concepto aplicado a una imagen digital implica un conjunto de operaciones geometricas que permiten asignar a cada pixel de la imagen un par de coordenadas (x,y) en un sistema de proyección (Felicísimo, 2015).
GPS: Acrónimo de global positioning system, o sistema de localización global;
hace referencia a un sistema mediante el cual es posible estimar las coordenadas actuales de una estación en tierra mediante la recepción simultánea de senales emitidas por varios satelites (llamados en conjunto constelación GPS) (Felicísimo, 2015).
Ground Sampling Distance – GSD: Tamaño que representa un píxel en el
terreno. Los parámetros utilizados para el cálculo de éste son la altura media de vuelo sobre terreno (H), la distancia focal (f) y el tamaño de píxel (p), se puede utilizar la siguiente expresión: GSD=p*H/f (IGAC, 2015).
Imagen Digital: Matriz bidimensional de píxeles, asignándosele a cada píxel un
nivel de gris o color. Representación gráfica de un objeto mediante una matriz regular que recoge valores de reflectancia (IGAC, 2015). Los valores de reflectancia suelen medirse mediante sensores sensibles a ciertos rangos de longitudes de onda de la luz; ejemplos de estos sensores son los transportados por plataformas aéreas (aviones o satélites) o los integrados en un escáner para la digitalización de documentos impresos (Felicísimo, 2015).
ISO: Orientacion integrada de sensores: GNSS/INS + Puntos de control.

9
Línea de vuelo o faja de aerofotografías: Sucesión de fotografías aéreas traslapadas tomadas con el mismo rumbo, dentro de proyectos fotogramétricos (IGAC, 2015).
Mapa: Modelo gráfico de la superficie terrestre donde se representan objetos
espaciales y sus propiedades metricas, topológicas y atributivas. Un mapa puede ser analógico (impreso sobre papel, por ejemplo) o digital (codificado en cifras, almacenado en un ordenador y presentado en una pantalla) existen mapas metricos, disenados para representar distancias, superficies o ángulos y mapa topológicos, disenados para representar vecindad, inclusión, conectividad y orden. En el contexto de los SIG, un mapa es la presentación de cualquier estructura de datos usada para reflejar cartográficamente una variable espacial (nominal o cuantitativa) independientemente del modelo de datos utilizado (vectorial o raster) (Felicísimo, 2015).
Modelo Digital de Terreno: Representación cuantitativa en formato digital de la
superficie terrestre, contiene información acerca de la posición (X,Y) y la altitud (Z) de los elementos de la superficie. La denominación MDT (modelos digitales de terreno) es la genérica para todos los modelos digitales, incluyendo los DEM (modelos digitales de elevación), en los cuales la coordenada Z se refiere siempre a la elevación sobre el terreno (Felicísimo, 2015).
Multirotor: Es un helicoptero o un vehiculo aéreo no tripulado con más de dos
motores. Navegación aérea: Proceso de mantener la dirección y altura deseada en un
avión en relación con la superficie de la tierra (IGAC, 2015). Ortofoto: Fotografía aerea modificada geometricamente para ajustarla a un
sistema de proyección geográfica en una ortofoto(grafía) se han eliminado las distorsiones debidas a la perspectiva, al movimiento de la cámara y al relieve de forma que posee las mismas propiedades metricas que un mapa (IGAC, 2015).
Plan de Vuelo fotogramétrico: Esquema en el que se indican las líneas de vuelo
proyectadas, el rumbo, las posiciones de cada exposición y la altura para tomar las aerofotografías (IGAC, 2015).
PPP (Precise Point Positioning): Posicionamiento preciso de puntos (PPP).
Proporciona posicionamiento sin la necesidad de un estación de referencia que utiliza un receptor GNSS independiente (Alkan, Ozulu, & Ilçi, 2016).
Sistema de coordenadas: Marco de referencia espacial que permite definir la
posición de un punto mediante coordenadas respecto de un punto denominado origen. Compuesto por un esferoide, datum, proyección y unidades las cuales

10
pueden ser grados, minutos y segundos (coordenadas geográficas) o en metros (coordenadas planas) (IGAC, 2015).
Solape lateral: Área común de las imágenes que pertenecen a fajas adyacentes
(IGAC, 2015). Solape longitudinal: Área común entre imágenes que pertenecen a una misma
faja de vuelo (IGAC, 2015). Solape o traslapo: Porcentaje del área común de terreno cubierta por dos o más
imágenes (IGAC, 2015). Vuelo Fotogramétrico: Consiste en sobrevolar la superficie terrestre tomando
imágenes aerofotográficas con cámaras métricas que cumplan con las especificaciones técnicas requeridas, las cuales se emplearan para adelantar trabajos de producción cartográfica por medios fotogramétricos (IGAC, 2015).
ACRONIMOS
ASPRS: Positional Accuracy Standards for Digital Geospatial Data GCP: Ground control point GNSS: Sistema mundial de navegación por satélite GPS: Sistema de posicionamiento global GSD: Ground simple distance Ha: Hectáreas IMU: Inertial muasurement unit INS: Inertial navigation system Mts: Metros OACI: Organización de Aviación Civil Internacional RMSE: Error medio cuadrático SfM: Structure from Motion SIFT: Scale Invariant Feature Transform UAEAC: Unidad Administrativa Especial de Aviación Civil URSS: Unión de Repúblicas Socialistas Soviéticas VANT: Vehículo aéreo no tripulado PCT: Punto de control terrestre OCS: Operational Control Segment MDE: Modelos digitales de Elevación MDT: Modelos digitales de Terreno MDS: Modelos digitales de Superficie MCS: Estación de Control Maestra MS: Estaciones de Monitoreo GA: Antenas Terrestre SURF: Speeded up Robust Features
11
RESUMEN Este documento es el resultado de un proceso de investigación que tiene como
propósito determinar la importancia del control terrestre en vuelos fotogramétricos utilizando vehículos aéreos no tripulados en el municipio de Cómbita, departamento de Boyacá, vereda Santa Bárbara como una etapa de proceso fotogramétrico en un área de trabajo de 38 hectáreas con lo cual se busca responder a la pregunta ¿Cuál es la importancia de la etapa de fotocontrol en el proceso fotogramétrico con VANTs y cuál es el proceso adecuado para realizarlo teniendo en cuenta las características propias de las cámaras no métricas, los VANTs, el propósito del levantamiento y las particularidades propias del terreno?
La metodología empleada en esta investigación es de enfoque cuantitavo, de
diseño experimental, desarrollado en cuatro etapas: la primera corresponde a la planeación del trabajo de campo, la segunda hace referencia a la ejecución de vuelos y control terrestre, la tercera pertenece al procesamiento de la información y la cuarta es la evaluación estadística de los valores obtenidos en los proyectos fotogramétricos. Para poder realizar esto, se establecieron 22 proyectos fotogramétricos, los cuales se validan estadísticamente, teniendo en cuenta los parámetros de la ASPRS, que permitieron identificar las distribuciones para la mejora de la eficacia del fotocontrol como etapa de la fotogrametría clásica.
Los equipos utilizados fueron GNSS Topcon GR5, un navegador Garmin Oregon
750 y un cuadricóptero de la serie Phantom 4, a través de los cuales se evidenció: que la configuración más eficiente para el fotocontrol del proyecto es aquella que contiene cuatro puntos de control ubicados en forma de cuadrado en los extremos de la ortofotografía; la identificación de las combinaciones blanco-negro y rojo-azul como las más adecuadas para la fotoidentificación del punto de interés, el cual se reconoció con mayor precisión en aquellas marcas cuya forma es de ele ‘L’, equis ‘X’ y/o cruz. La importancia del control terrestre en el desarrollo de los proyectos fotogramétricos se fundamenta en las comparaciones de los resultados obtenidos con los diferentes métodos de captura de coordenadas, donde se identificaron errores al nivel de los metros con los navegadores, al igual que sin fotocontrol –aunque estos son menores en el plano horizontal respecto al control con navegador, por lo tanto, para proyectos que requieran precisión submétrica se reconoce la necesidad de la implementación de equipos GNSS de alta precisión.
Palabras clave: fotogrametría, vehículo aéreo no tripulado, fotocontrol,
preseñalización, posicionamiento geodésico.

12
INTRODUCCIÓN
Los avances tecnológicos han permitido implementar nuevas técnicas de trabajo en el área de la ingeniería, fáciles de acceder, económicas y de buena calidad como es el caso de los vehículos aéreos no tripulados (VANT), que representan una herramienta innovadora y eficiente de apoyo a la adquisición de datos para los proyectos fotogramétricos. Debido a esto, es pertinente que la Ingeniería Catastral y Geodesia investigue respecto a su implementación y aporte recursos académicos que permitan utilizar eficientemente los nuevos desarrollos.
Actualmente, la implementación de VANT en los procesos ingenieriles se ha
incrementado con el desarrollo tecnológico y la fácil adquisición de sensores de buena calidad a bajo costo y de pequeño tamaño (Shi, et al., 2011); además ha permitido generar soluciones eficientes al mercado, como la implementación de las aeronaves remotamente tripuladas en la fotogrametría, lo que se representa en nuestro caso de estudio y que significa un avance en el campo tecnológico y en la Ingeniería Catastral y Geodesia, sin embargo, se requiere el análisis y la formulación de metodologías para el desarrollo exitoso de los nuevos procesos. Por lo anterior, se plantea el análisis de una de las etapas del proceso fotogramétrico que conlleve a mantener los estándares de precisión requeridos por la normatividad cartográfica con la implementación de los VANTs.
La presente investigación propone analizar la importancia de la etapa del proceso
de fotocontrol en los proyectos fotogramétricos con VANT y la manera adecuada de realizarla; por lo tanto, se analiza el tamaño, la forma, el color y la necesidad de marcas de preseñalización. Se utilizan diversos métodos de adquisición de coordenadas (equipos GNSS Topcon GR5, navegador Oregon GR-5 y sistema de posicionamiento del VANT Phantom 4), con el propósito de calcular los errores que se generan con cada método y además, se realizan diversas distribuciones de puntos de control terrestre para hallar la adecuada en cuanto a número y espacialización de acuerdo a los resultados de error medio cuadrático obtenido.
El estudio se realiza en el departamento de Boyacá, municipio de Cómbita,
vereda Santa Bárbara, predio Entre Ríos, área de estudio de 38 ha, dentro de las que se encuentran diversas coberturas como cultivos, vías, construcciones, pastos, bosques nativos y cuerpos de agua.
La investigación de este proceso surge del interés por hallar una metodología
adecuada para el levantamiento de información base de los proyectos fotogramétricos, es decir, la captura de imágenes y de puntos de control terrestre y la generación apropiada de productos fotogramétricos que permitan adquirir información cartográfica que cumpla con los estándares de calidad que rigen en el país desde una perspectiva académica y profesional, ya que como Ingenieros Catastrales y Geodestas tenemos la misión de ir a la vanguardia de las nuevas

13
tecnologías que nos permitan ofrecer soluciones eficientes a las problemáticas actuales de la sociedad. Es importante aclarar que los resultados expuestos corresponden a las condiciones del área de estudio, por lo tanto, se pueden alterar al realizar el estudio en una zona con características topográficas, geométricas o meteorológicas diferentes.
El documento está dividido en cuatro capítulos. El primero, de carácter
descriptivo, contiene la introducción al problema de investigación, los procesos que se deben realizar y la exposición de las razones por las cuales surgió el interés para analizar la etapa de fotocontrol en el proceso fotogramétrico con VANT y la manera adecuada para realizarla en cumplimiento a la normatividad vigente, teniendo en cuenta las características del área de estudio.
En el capítulo dos, se expone el marco teórico bajo los fundamentos técnicos
necesarios para comprender los procesos que se realizan en la investigación, dentro de este apartado se exponen temas de fotogrametría, vehículos aéreos no tripulados, geodesia y estadística, que son los ejes temáticos que orientan esta investigación, además se exponen las características del área de estudio y la normatividad bajo la cual se rigen los procesos llevados a cabo.
En el tercer capítulo, se describen los materiales requeridos para la ejecución del
proyecto y la metodología implementada para el trabajo de campo y de oficina; se encuentran detallados los equipos y los software utilizados y se precisan las cuatro etapas de la metodología las cuales son: la primera corresponde a la planeación del trabajo de campo basada en los presupuestos teóricos y metodológicos de los autores referenciados, con el propósito de tener en cuenta todos los factores tanto meteorológicos como humanos y de materiales y equipos, en este se incluyó la elaboración de un vuelo preliminar que permitió proyectar de una manera más eficiente la segunda etapa que consistió en la ejecución del trabajo de campo durante cuatro días, donde se realizaron dos vuelos y se capturaron los datos GNSS para calcular coordenadas reales de los puntos de control terrestre. La tercera etapa, de procesamiento de la información comprende procesos realizados mediante los softwares Topcon Tools, herramienta de procesamiento de datos GNSS y Pix4D, herramienta de procesamiento digital de imágenes. Finalmente, se realizó la validación estadística de los resultados y se cumplió a los objetivos del proyecto, especificado en la cuarta etapa de evaluación de la eficiencia del fotocontrol en los proyectos fotogramétricos con VANT.
En el capítulo cuatro se presentan los resultados obtenidos y sus respectivos
análisis de acuerdo con los procesos desarrollados en la metodología y confrontados con otros estudios que permiten evidenciar los alcances del fotocontrol en el proceso fotogramétrico con VANT. Finalmente, se exponen las conclusiones del estudio y las recomendaciones a partir de la experiencia adquirida gracias al desarrollo del estudio y las referencias bibliográficas en las que se apoyó
14
1. INTRODUCCIÓN

15
1.1. PROBLEMA DE INVESTIGACIÓN
1.1.1. Planteamiento del problema Los VANTs representan un complemento útil para la fotogrametría aérea clásica
(Glowacki, et al., 2015), es por esto que dichos equipos cuentan con acogida e implementación en diversas áreas, una de ellas es la fotogrametría en donde se busca abrir campo a esta tecnología con el propósito de reducir costos y generar productos que igualen o superen los estándares creados con la fotogrametría convencional. Para lograr dar este paso, es necesario realizar estudios que permitan identificar las bondades de los VANTs, y los procesos que requiere su implementación en el área de los sensores remotos ya que existen cambios como el tipo de cámara, el procesamiento de las imágenes, las áreas de trabajo, las características de las plataformas y en general la reestructuración de un proceso fotogramétrico apropiado para VANTs.
A partir del estudio bibliográfico analizado sobre la fotogrametría VANT, se
evidencian diferentes puntos de vista respecto a la necesidad del fotocontrol en el proceso fotogramétrico, ya que autores como Martínez, et al. (2015), afirman que el control fotográfico de campo para esta tecnología es necesario cuando se requiere una georeferenciación de alta precisión para el producto final, mientras Tonkin y Midgley, afirman que es una etapa fundamental para generar productos de calidad (Tonkin & Midgley, 2016), sin embargo, varios artículos implementan el fotocontrol como una etapa del proceso sin profundizar en la técnica adecuada para hacerlo tales como (Lozano, et al. 2017), (Mátar G. G., 2014), (Avila R.P., 2013), (Pacheco P. D., 2017), (Zapata, 2003), además, desde la teoría de la fotogrametría clásica, se reconoce la importancia en el control terrestre de las fotografías capturadas con avión como se evidencia en (Pérez, 2001) (Mikrut, 2016) (GeoTool Box, 2018).
Teniendo en cuenta las posturas expuestas, se evidencia que el proceso de
fotocontrol es una etapa importante para la fotogrametría y es por esto necesario analizar la eficiencia de su implementación y la manera adecuada de ejecución, teniendo en cuenta las técnicas que han surgido con la fotogrametría VANTs y reconociendo al fotocontrol como una etapa esencial de la fotogrametría clásica.
Los cambios técnicos y tecnológicos en la fotogrametría con VANT han ido
evolucionando de manera exponencial, tanto así, que los últimos avances en esta ciencia se han enfocado a la mejora del uso e implementación de estas plataformas desde aspectos como la estabilidad, la autonomía, la capacidad de montar cámaras de mayor resolución espacial y espectral y la optimización de los algoritmos de procesamiento (Watts, et al., 2012). La utilización de estas aeronaves en la fotogrametría puede considerarse como una herramienta alternativa para el mapeo e interpretación de imágenes a través de la percepción remota (Nikolakopoulos, et al. 2017). Sin embargo, de manera análoga al desarrollo y empleo de estas
16
plataformas en la fotogrametría se ha desplegado el problema de la precisión en la aplicación de la georeferenciación directa usando el Sistema de Posicionamiento Global (GPS) y la Unidad de Medición Inercial (IMU) incorporado en la estructura y el sensor del VANT (Mostafa, et al. 2001). Sin embargo, de manera análoga al desarrollo y empleo de estas plataformas en la fotogrametría se ha desplegado el problema de la precisión en la aplicación de la georeferenciación directa usando el Sistema de Posicionamiento Global (GPS) y la Unidad de Medición Inercial (IMU) incorporado en la estructura y el sensor del VANT (Mostafa, et al. 2001) sin control terrestre, aunque esto depende netamente del enfoque del proyecto, la exactitud requerida y la escala de la imagen. En general, la georeferenciación directa sin control terrestre se utiliza para escalas medias y pequeñas, mientras que la georeferenciación directa con control terrestre se aplica a escalas grandes y medianas (Qtaishat, et al. 2006), lo que implica que necesariamente en el uso de VANT se debe realizar control terrestre para nivelar y escalar el modelo, ya que los productos fotogramétricos resultantes de la implementación y procesamiento con estos equipos están en escalas grandes. Otra consecuencia de esto, es creer que no es necesario el fotocontrol porque el equipo tiene incorporado en el sensor GPS/IMU y las imágenes quedan georeferenciadas, pero no se tiene en cuenta que la señal de estos dispositivos electrónicos realiza un largo viaje entre el satélite y estos, lo que puede estar afectada por el movimiento del VANT, el movimiento rotatorio y translaticio de la tierra y el movimiento del satélite emisor de la señal GPS (Karaim, et al. 2017) en el momento de la ejecución del vuelo y en la captura de imágenes, lo que afecta directamente la precisión. En consecuencia, se considera necesario analizar el fotocontrol como una etapa que complementa eficientemente el proceso fotogramétrico, para esto es necesario reconocer cómo hacerlo y qué se debe tener en cuenta para implementarlo.
Además de identificar la importancia del proceso de fotocontrol y la adecuada
metodología para realizarlo, el presente estudio se propone hacerlo de acuerdo a unas características topograficas representativas del país, ya que como se expone en los alcances, se han realizado diversos análisis al respecto en otros países pero se evidencia la necesidad de analizar la metodología de acuerdo al relieve del territorio Colombiano y profundizar en los procesos llevados a cabo en el país ya que a pesar de que esta tecnología ha tenido gran acogida en el país no se ha generado una regulación procedimental que guie la ejecución de proyectos fotogramétricos con VANT.
1.1.2. Formulación del problema ¿Cuál es la importancia de la etapa de fotocontrol en el proceso fotogramétrico
con vehículos aéreos no tripulados y cuál es el proceso adecuado para realizarlo teniendo en cuenta las características propias de las cámaras no métricas, los VANTs, el propósito del levantamiento y las particularidades propias del terreno?
17
1.2. OBJETIVOS DE LA INVESTIGACIÓN
1.2.1. Objetivo general
Determinar la importancia de la etapa de fotocontrol en el proceso fotogramétrico con vehículos aéreos no tripulados en el municipio de Cómbita departamento de Boyacá.
1.2.2. Objetivos específicos
Diseñar y ejecutar el vuelo con el vehículo aéreo no tripulado modelo DJI Phantom 4, teniendo en cuenta las condiciones propias del terreno a cartografiar, el área y la resolución de la cámara.
Procesar los datos capturados tanto fotográficos como geodésicos de la manera más adecuada y en cumplimiento a los parámetros establecidos.
Validar y evaluar los resultados de la investigación usando puntos de chequeo y estimadores estadísticos.
Identificar las diferencias entre el control terrestre con equipos GNSS de alta precisión y navegadores teniendo en cuenta el cumplimiento de estándares de precisión.
Implementar la metodología adecuada para la ejecución del proceso de fotocontrol desde la preseñalización hasta la cuantificación y distribución de los puntos de control terrestre.
Determinar la eficiencia de los VANTs en el desarrollo de proyectos fotogramétricos.
1.3. JUSTIFICACIÓN Actualmente, el uso de VANT en el ámbito civil ha aumentado considerablemente
en los últimos años debido a su mayor disponibilidad como herramientas de detección remota (Laliberte, et al., 2010), la inserción de estos como herramienta de apoyo para el estudio de la teledección ha tenido inmensas aplicaciones, a causa de que ha demostrado ser una alternativa confiable, robusta, precisa, de bajo costo y de bajo riesgo para la vida humana en la adquisición de imágenes de muy buena resolución. Las imágenes de VANT a menudo se capturan de forma aleatoria, es decir, líneas de vuelo con superposición variable y puntos de cruce; tiene grandes variaciones rotacionales y angulares entre las imágenes(Zhang, et al., 2011); la altitud de la plataforma es baja en relación con la variación de altura dentro de la escena, causando grandes distorsiones de perspectiva (Zhang, et al. 2011); y los parámetros de orientación exterior son desconocidos o, si se miden, es probable que sean inexactos debido a que el GPS tiene un rango de error en posicionamiento. Las imágenes de VANT a menudo tienen una alta variabilidad en la iluminación, oclusiones y variaciones en la resolución (Barazzetti, et al., 2010) que son

18
características más típicas de las presentadas habitualmente en aplicaciones de fotogrametría de corto alcance (Luhmann, et al., 2006). Por lo tanto, la fotografía VANT tiene características de fotografía aérea tradicional y fotografía terrestre, y hay oportunidades para usar algunos principios de fotogrametría, teniendo en cuenta que hay que realizar cambios que se adapten a estas plataformas, y algoritmos de procesamiento de imágenes que son aplicables a ambos tipos de imágenes. Por otra parte, las aeronaves tripuladas son eficientes para áreas extensas pero altamente costosas, sin embargo para el mapeo de zonas pequeñas y remotas, los VANT son una alternativa muy buena, fácil de movilizar y económica con la posibilidad de funcionar sin tener en cuenta factores humanos mediante el vuelo de modo control automático y de proporcionar imágenes de alta resolución y datos de posicionamiento/orientación desde los sensores de navegación GPS/GNSS e INS a bordo (Shi, et al., 2011), pero con algunos errores de exactitud posicional, otras dificultades que existen con las imágenes capturadas por medio de VANTs son las distorsiones que se generan por el ruido de las alas rotativas, dificultando su análisis y el hecho de capturar gran cantidad de datos exige la implementación de métodos automatizados que agilicen los procesos computacionales, sin embargo se han realizado diversas investigaciones con el propósito de generar algoritmos que solucionen y optimicen los procesos llevados a cabo con información adquirida mediante estas plataformas, un ejemplo es la implementación un método basado en objetos para la detección de cambios de imágenes VANT (Shi, et al., 2011) por medio de la transformación SIFT y procesos de segmentación, resultando ser una solución eficiente para corregir el error angular producido por la rotación del VANT al capturar las imágenes. En consecuencia a lo mencionado anteriormente, la investigación que se formula en el presente documento es el resultado de una búsqueda de información sobre teorías y/o estudios técnicos que regulan el proceso de fotocontrol con la implementación de VANTs (Kamarudin & Tahar, 2015), (Soares, et al., 2018) (Kamarudin & Tahar, 2016), debido a que el control terrestre en el área de estudio es un proceso importante para la fotogramétria convencional, ya que a partir de estos se determinan las coordenadas reales de cualquier punto en el terreno, de esta manera se plantea el estudio sobre el proceso de fotocontrol en la vereda de Santa Bárbara, municipio de Cómbita, departamento de Boyacá, cuyo propósito es identificar la distribución espacial más eficiente de los PCT en el modelo a partir del diseño de la grilla de puntos de control terrestre que represente una adecuada distribución en la zona de estudio, teniendo en cuenta su relación con la topografía del área, y las condiciones del VANT que se empleará.
1.4. ALCANCES Los vehículos aéreos no tripulados (VANT) se han utilizado principalmente para
aplicaciones militares (Turner, et al. 2012), sin embargo, hoy en día su uso civil ha incrementado aceleradamente en áreas como atención de emergencias o desastres (Alarcón & Brito, 2015), seguridad cibernética, privacidad y seguridad pública

19
(Vattapparamban, et al., 2016), arqueología (Sonnemann, et al., 2016), topografía (Lee & Choi, 2015), agricultura (Malvearux, et al., 2014), fotogrametría (Eisenbeiß, 2009), y muchas otras; dicho incremento se ha dado debido a que estas plataformas tienen muchas ventajas sobre los aviones tripulados tradicionales u otras plataformas de sensores remotos, ya que las imágenes satelitales tienen grandes restricciones como el clima, la disponibilidad de cobertura estéreo, el precio y la resolución temporal y geométrica. De igual forma el desarrollo de áreas como la de visión computacional desde hace décadas ha demostrado un gran impacto en los procesos fotogramétricos (Hartley & Mundy, 1993), (Granshaw & Fraser, 2015), se han implementado algoritmos fotogramétricos como el Operador Canny, el detector de esquinas de Harris, la transformación Hough, la costura de imágenes, las técnicas multi-view estéreo, entre muchas otras, al igual que en el área de la visión artificial se han dado nuevos desarrollos como RANSAC (Random Simple Concensus), SIFT (Scale Invariat Feature Transform), SfM (Structure from Motion) y SURF (Speeded up Robust Features), estas innovaciones unidas son las que han permitido que softwares como Agisoft Photoscan o Pix4D se incorporen al modelamiento fotogramétrico y generen soluciones eficientes desde la ciencia (visión artificial) para la ingeniería (fotogrametría).
Los software desarrollados para procesar proyectos que se realizan a partir de
datos capturados con vehículos aéreos no tripulados utilizan la técnica Structure from Motion (SfM), mediante la cual se crean las nubes de puntos tridimensionales (inicialmente en una referencia espacial arbitraria), que se transforman a un sistema coordenado real gracias a la georeferenciación por medio de puntos de control terrestre o por las estimación de las posiciones de la cámara, con una precisión espacial aproximada de 10-15 cm y de 65-120 cm respectivamente (Turner, et al. 2012). El procesamiento de imágenes comprende la identificación automática de las características de clave que son los “puntos de enlace” en las fotografías y al combinarse entre imágenes, realiza estimaciones iniciales de las coordenadas de los puntos 3D a partir de las observaciones bidimensionales (James, et al., 2017).
En cuanto a la fotogrametría con VANT se han generado muchas
investigaciones, sobre las diversas aplicaciones, como por ejemplo el mejor software de procesamiento, las plataformas más eficientes (Tahar & Ahmad, 2013), la calibración de los sensores no métricos, entre otras, sin embargo, en 2014 (Graça, et al., 2014) pusieron de manifiesto que la utilización de VANT presenta como dificultades para fines fotogramétricos: a) la inestabilidad de la plataforma durante el vuelo que hace que la superposición de la imagen a lo largo de la línea de vuelo y la línea lateral, para líneas de vuelo adyacentes, sea incorrecta; b) las imprecisiones de la medición directa de posición y orientación del sensor debido al uso de una Unidad de Medición Inercial (IMU) compacta y de bajo costo; c) el elevado número de imágenes debido al uso de cámaras digitales compactas y de bajo coste en alturas de vuelo bajas. Igualmente, en 2017 (Portero, et al., 2017) muestran que operativamente la adquisición de imágenes con VANT permite la interpretación visual, y los procesos en las imágenes asociados a la misma, pero

20
que aún no se tiene la calidad suficiente en estos productos para permitir la integración de modelos cuánticos y la estimación de variables físicas. Otro problema que se presenta en la fotogrametría realizada con VANT es el cambio del valor del ground sample distance (GSD), aunque proporcione una mejor métrica para las imágenes digitales, el GSD de colección, GSD de pantalla y GSD de producto, desde la misma fuente de imágenes digitales, puede ser muy diferente (Comer, et al., 1998). Debido a que, en casi todos los casos, el producto entregado al cliente ha sido remuestreado (por defecto dentro del procesamiento de las imágenes capturadas) y ha cambiado su escala original. En el procesamiento de las imágenes, es necesario aclarar que el GSD de colección (GSD en la escala original), es decir, la distancia muestreada en el suelo y el producto GSD, así como la pantalla GSD se consideran como tamaño de píxel de producto y tamaño de píxel de pantalla, después de haber sido remuestreada y procesada la imagen (Comer, et al., 1998), lo que implica un dilema en cuanto a la planificación del trabajo y entrega de productos fotogramétricos.
1.4.1. Fotocontrol
El estudio que se expone en la investigación propuesta en el presente documento
puntualmente analiza el impacto del fotocontrol en la vereda de Santa Bárbara, municipio de Cómbita, departamento de Boyacá, por tanto se hace importante indagar sobre las perspectivas que existen en este sentido; una de las investigaciones relacionadas la hace (Tahar, 2013) en donde analiza los mejores resultados fotogramétricos en función del número de puntos de control terrestre durante el procesamiento de una bloque de imágenes que fueron capturadas por medio de un VANT ala fija, la evaluación de los resultados la realizó con base en los valores obtenidos del error medio cuadrático residual de cada una de las seis configuraciones que estudió; la primer configuración cuenta con cuatro puntos de control (figura 1a), la segunda con cinco puntos de control (figura 1b), la tercera con seis puntos de control (figura 1c), la cuarta con siete puntos de control (figura 1d), la quinta con ocho puntos de control (figura 1e) y la sexta con nueve puntos de control (figura 1f); cada configuración da unos resultados del ajuste diferentes ya que la ubicación de los puntos varía. Los puntos de control utilizados fueron establecidos mediante posicionamiento cinemático en tiempo real con un tiempo de captura de dos a tres minutos.
(a) (b) (c) (d) (e) (f)
Figura 1. Distribución de los puntos de control para los bloques fotogramétricos en la investigación de Tahar (2013).
Fuente: (Tahar, 2013)

21
Según el estudio realizado por Tahar (2013), es necesario establecer mínimo tres puntos de control terrestre para poder realizar el proceso de triangulación aérea, sin embargo teniendo en cuenta los resultados que obtuvo, los mejores productos fotogramétricos se generan a partir de proyectos que utilizan 8 o 9 puntos de control terrestre, ya que tanto por el método de ajuste lineal como por RMSE generan los valores más adecuados, recomienda hacer este tipo de análisis con VANT tipo multirotor para poder analizar los cambios que se generan con estas plataformas. Sin embargo, existen otros estudios como el de (Agüera, et al., 2016) donde se realizaron análisis con el mismo propósito pero con características diferentes, en este caso se estudiaron los resultados de configuraciones con 4, 5, 6, 7, 8, 9, 10, 15 y 20 puntos de control terrestre en un área de 17,64 ha a partir de 160 imágenes capturadas con a 120 m de altura, la evaluación de los datos se realizó teniendo en cuenta el RMSE obtenido y como resultado se obtuvo que hay una tendencia de los valores medios de RMSE y de la desviación estándar (tanto horizontal como vertical) a disminuir a medida que aumenta el número de puntos de control terrestre, por tanto la precisión crece al incrementar los puntos de control, puntualmente, para estos autores (Agüera, et al., 2016) las mejores distribuciones son aquellas que implementaron 15 y 20 puntos de control; en otras investigaciones como la de (Hugenholtz, et al., 2015) se implementan 10 puntos de control y se obtuvieron buenos resultados de precisión comparables o mejores que los obtenidos con las pruebas realizadas con LIDAR en términos de precisión vertical, por su parte, (Castro & Urrego, 2018) analizaron 16 vuelos en cuatro terrenos con condiciones de relieve distintas y analizaron diversas configuraciones de puntos de control, el resultado de investigación fue que el número óptimo de puntos de control terrestre es de cuatro puntos en cada esquina de terrenos montañosos, más en el terreno plano se incluye un quinto punto central, por tanto, además contradicen las investigaciones anteriores, en el sentido en que afirman que la precisión no es directamente proporcional a la cantidad de puntos de control.
Por otro lado está la implementación de diversos sensores que permiten dar
precisión al proyecto fotogramétrico, los métodos convencionales se basan en la incorporación de puntos de control terrestre para dicho propósito, sin embargo, autores como (Chiang, et al., 2012) han estudiado diversos métodos de georeferenciación directa dentro de los que se encuentran los Sistemas de Navegación Inercial (INS), los Sistemas de Posicionamiento Global (GPS), los Sistemas de Microelectromecanica (MEMS) que proporcionen mediciones precisas sin utilizar puntos de control terrestre, sus resultados dan precisiones de posicionamiento horizontal en los ejes X e Y de alrededor de 5 m y en el eje Z de 10 m aproximadamente en vuelos a 300 m de altura con un VANT ala fija. Otra forma de aumentar la precisión, es mediante la captura de más imágenes, (James, et al., 2017), esto incrementa la correlación de imágenes ya que se generan mayor número de puntos de enlace mejorando la precisión en un orden de magnitud de captura de 100 imágenes en lugar de 10, sin embargo, en un orden de 1000 imágenes se podrían tener desventajas para la adquisición de las fotografías y el procesamiento ágil de datos, esto es posible gracias a la implementación de los

22
sistemas SfM que han facilitado cada vez más la adquisición y procesamiento de la información capturada.
1.4.2 Caso de estudio Colombia
Relacionado con esto, en Colombia, se encontró un estudio realizado por la
Universidad del Valle (Ortiz H & Hernández T, 2017), en el cual se produce un análisis de la influencia de los puntos de control terrestre sobre la exactitud posicional de ortofotomosaicos generados con imágenes obtenidas con un VANT multirotor, dentro de la investigación se obtienen 13 ortofotomosaicos haciendo uso de diferentes configuraciones, en cuanto a cantidad y forma de distribución de los puntos de control terrestre (figura 2), por último aplican la norma de estándares de precisión posicional APSRS 2014, la cual proporciona valores teóricos que se calculan a partir del RMSE de la posición de X, Y y Z cuantificadas a partir del procesamiento de las imágenes, GSD utilizado, la escala y el grado de exactitud que se necesita en el proyecto, esto con el fin de realizar una evaluación estadística del RMSE de la posición X, Y y Z de los puntos de control utilizados en cada configuración (ASPRS A. S., 2015).
Figura 2. Distribución y número de puntos de control terrestre.
Fuente: (Ortiz H & Hernández T, 2017)
El mejor resultado, teniendo en cuenta tanto posición horizontal como vertical,
fue el experimento 5 (figura 2), que se compone de la ubicación de 4 puntos de control en las esquinas y 1 punto de control en el centro, lo que garantiza el cumplimiento del test de calidad para escalas cartográficas 1:200 en adelante, según los estándares de precisión ASPRS (Ortiz H & Hernández T, 2017). En resumen, este estudio es una contra argumentación de las anteriores investigaciones, ya que la precisión está relacionada a un bajo número de puntos de control terrestre en el modelo.

23
2. MARCO TEÓRICO

24
2.1. SISTEMAS DE VEHÍCULOS AÉREOS NO TRIPULADOS (VANT) Y SISTEMAS DE AERONAVES PILOTADAS A DISTANCIA (RPA)
De acuerdo con la organización de Aviación civil Internacional (OACI), el hecho
de que la aeronave sea tripulada o no tripulada no afecta a su condición de aeronave. Cada categoría de aeronave tendrá posiblemente versiones no tripuladas en el futuro. Este punto es fundamental para todos los aspectos futuros relativos a los VANT y proporciona la base para tratar la aeronavegabilidad, el otorgamiento de licencias al personal, las normas de separación, etc. (Oñate, 2015).
Es decir, que las aeronaves no tripuladas son, ante todo, aeronaves, y por tanto
están sujetas a las mismas reglas y limitaciones que las aeronaves tripuladas. Del mismo documento de la OACI establece dos preceptos importantes que han de tenerse en cuenta, en primer lugar, la preferencia a considerar el sistema completo, integrado no solo por la propia aeronave, sino también por la estación de control en tierra («Ground Control Station» o GCS) y el enlace de comunicaciones entre esta y la aeronave. de esta manera se habla de VANT (sistemas de vehículos aéreos no tripulados) y de RPA (sistemas de aeronaves pilotadas a distancia) apartando los términos de aeronaves no tripuladas (VANT) y aeronaves pilotadas a distancia (RPA) a aquellas ocasiones en las que se quiere hacer referencia específica a las propias aeronaves; en segundo lugar, la distinción entre RPA y aeronaves completamente autónomas, en las que no existe control efectivo del piloto remoto sobre la aeronave, en todo o parte del vuelo queda pues claro que así como todos los RPA son VANT, no todos los VANT son RPA (Oñate, 2015).
2.1.1. Clasificación de aeronaves Existen muchas posibles formas de clasificar las aeronaves, es frecuente utilizar
una clasificación ateniendo a la forma en la que las aeronaves consiguen su sustentación en la atmósfera (Oñate, 2015). En la figura 3 se plantea una posible clasificación simplificada que muestra los principales tipos de aeronaves:

25
Figura 3. Clasificación de aeronaves por su forma de sustentación Fuente: (Oñate, 2015)
2.1.2. Modos de operación En esencia solo existen cuatro modos posibles de operación en cuanto a la forma
de pilotar una aeronave de forma remota (es frecuente introducir modos intermedios, que no son sino variantes de los cuatro siguientes), con un grado de automatización creciente:
- Modo manual: En este modo, el piloto remoto actúa sobre las superficies de
control y la potencia del motor o motores, a través de una emisora de radiocontrol.
Aerostato
Globo aereoestático
Dirigible
Aerodino
Ala fija
Avión
Planeador
Ala delta
Parapente
Paramotor
Ala rotatoria
Helicóptero
Miltirrotor
Autogiro

26
- Modo asistido: Es similar al modo manual, pero el piloto remoto no actúa directamente sobre las superficies de control o los motores, sino que indica sus intenciones (girar a la derecha, subir, etc.) en su puesto de radiocontrol y actúa un autopiloto que las transforma en actuaciones sobre las superficies de control o los motores que consigan ese propósito.
- Modo automático: El piloto remoto establece un «plan de vuelo», es decir,
un cierto número de puntos de paso («waypoints») de forma previa al inicio del vuelo. La aeronave cuenta con un autopiloto que ejecuta el plan previsto, realizando de forma automática las acciones requeridas en cada momento. Sin embargo, el piloto mantiene el control en todo momento, pudiendo modificar los puntos de paso durante el vuelo, ejecutar maniobras predeterminadas (como por ejemplo la «vuelta a casa» en caso de alerta) o incluso tomar el control directamente, bien sea de forma manual o asistida.
- Modo autónomo: Generalmente es similar al modo anterior, en cuanto que
se establece un plan de vuelo predeterminado, pero una vez iniciado el vuelo la aeronave ejecuta el plan de forma totalmente autónoma, sin requerir la intervención del piloto incluso en caso de producirse situaciones de emergencia. En el futuro es posible que incluso se elimine la necesidad de introducir plan de vuelo alguno, sino que la aeronave simplemente realice la misión completa, como puede ser seguir una infraestructura lineal mediante reconocimiento óptico, o dirigirse a un cierto punto evitando posibles obstáculos en el camino, etc.
2.2. FOTOGRAMETRÍA Y LOS VEHÍCULOS AÉREOS NO TRIPULADOS Una de las primeras definiciones de la fotogrametría la preciso la Sociedad
Americana de Fotogrametría y Teledetección (American Society for Photogrammetry and Remote Sensing) en 1942, que la explicó como la ciencia o el arte de obtener mediciones confiables por medio de la fotografía (ASPRS, 1942). Aunque en el 2014, la definen como el arte, la ciencia y la tecnología para obtener información confiable sobre los objetos físicos y el medio ambiente, a través de procesos de registro, medición e interpretación de imágenes y patrones de energía radiante electromagnética y otros fenómenos (ASPRS, 2014). La fotogrametría según Herrera (1987) se define como el arte, ciencia y tecnología orientada a obtener información relevante de diversos objetos físicos de la corteza terrestre y de su medio ambiente, a través de procesos de medición e interpretación de imágenes fotográficas y de patrones de energía electromagnética radiante (Herrera, 1987).
Usualmente la fotogrametría se divide en dos especialidades (Herrera, 1987) de
acuerdo con el tipo de fotografía utilizada, la primera división es la fotogrametría terrestre y es donde la fotografía es usada en una posición tal que el eje de la

27
cámara fotográfica resulta horizontal y paralelo al terreno o corteza terrestre, la segunda es fotogrametría aérea y es en donde las fotografías son obtenidas desde vehículos aéreos, en los cuales el eje óptico de la cámara fotográfica resulta sensiblemente perpendicular al terreno o corteza terrestre. Otra forma de clasificar la fotogrametría, es en función del instrumental utilizado y en función de la distancia al objeto (Quirós, 2014). Dependiendo del instrumental utilizado, se distinguen tres categorías (Quirós, 2014), la fotogrametría análoga que corresponde a la medición de fotogramas analógicos en un equipo también analógico, fotogrametría analítica que se refiere a la medición fotogramas analógicos con técnicas computacionales y la fotogrametría digital que corresponde a la medición de fotogramas digitales en sistemas fotogramétricos digitales. En función de la distancia al objeto, se reconocen tres categorías (Quirós, 2014), la fotogrametría espacial que hace referencia a la medición en imágenes de satélite, la fotogrametría aérea en la cual se realiza la medición en fotogramas aéreos (imágenes provenientes de aviones vehículos aéreos no tripulados) y la fotogrametría terrestre que corresponde a la medición en fotogramas obtenidos desde la superficie terrestre.
El empleo de los vehículos aéreos no tripulados en esta ciencia, se centra en la
última especialidad de la fotogrametría, es decir en la fotogrametría aérea, haciendo uso de las técnicas fotogramétricas, principios elementales necesarios para la manipulación técnica del material aerofotográfico y cartográfico que hace posible el desarrollo y aplicación de las mismas. La fotogrametría VANT, se convirtió en una técnica que permitió conocer las propiedades geométricas de un objeto o una superficie a partir de la información obtenida de las fotografías aéreas y para que un objeto pueda estar fielmente reconstruido, éste, debe de aparecer en un número suficiente de imágenes, es decir cumplir con el recubrimiento necesario en cada fotografía, que depende del GSD y la escala que se requiera , lo que permite extraer su estructura y obtener los productos fotogramétricos (Riaño R, 2018). En la actualidad, estos equipos son una tecnología que ofrece amplias posibilidades de aplicación al sector de la ingeniería y ayuda a los múltiples procesos de producción de cartografía, análisis y estudio de agricultura (Portero, et al., 2017) y superficies hidrológicas, control de calidad de aire (Hu, et al., 2019), prospección y explotación de recursos naturales, seguimiento fitosanitario de masas forestales (Sastoque, et al., 2017), extinción nocturna de incendios forestales, gestión del patrimonio y herencia, seguridad de control de frontera, entre otras aplicaciones, gracias a sus grandes ventajas para sobrevolar los campos, los cultivos y en general el terreno reduciendo costos y tiempo (Gonzalez T & Tsourdos, 2017).
2.2.1. Imagen obtenida de una fotografía aérea La imagen obtenida por medio de una fotografía aérea es una representación del
terreno en la que los aspectos fisiográficos: topografía, vegetación, drenajes, entre otros iluminados directamente por el sol y por la luz reflejada en las nubes aparecen diferenciados por tono, color, textura y patrón. Las radiaciones luminosas inciden

28
sobre el terreno en forma directa o indirecta iluminándolo. Cada punto recibe una determinada cantidad de luz, de la cual absorbe un cierto porcentaje y releja otro en función de las características físicas de las materias que lo componen. El sensor recoge el haz de rayos proveniente de un punto objeto y lo guía hacía el plano imagen donde teóricamente se forma un punto imagen. Como la imagen se ha formado estando el vehículo en movimiento y como la cámara está sujeta a una serie de vibraciones, habrá también un desplazamiento de la imagen que contribuye a reducir su nitidez (Ramirez & Deagostini R, 1971).
2.2.2. Distribución espectral de la luz en levantamientos aéreos La luz es una de las formas de energía emitida por el sol, parte de la cual es
radiada hacia la tierra, iluminando su superficie. Esta energía, conocida con el nombre de radiaciones electromagnéticas, tiene lugar en diferentes frecuencias y longitudes de ondas. De toda la variedad de radiaciones el intervalo más importante para nuestro estudio es el correspondiente a los rayos visibles, comúnmente utilizados en la toma de fotografías aéreas con cámaras convencionales. La parte visible del espectro es únicamente una pequeña porción comprendida entre los 0.4 micrón y 0.75 micrón que ha sido subdividida en varios intervalos, asociándole a cada uno un color. Teniendo en cuenta los límites anteriormente establecidos, la división Abney sería (Ramirez & Deagostini R, 1971):
Tabla 1. Intervalos de longitud de onda de los colores
Color Intervalo de longitud de
onda
Violeta 0.400 a 0.446 micrones
Índigo 0.446 a 0.464 micrones
Azul 0.464 a 0.500 micrones
Verde 0.500 a 0.578 micrones
Amarillo 0.578 a 0.592 micrones
Naranja 0.592 a 0.620 micrones
Rojo 0.620 a 0.750 micrones Fuente: Fotografías aéreas y planeación de vuelos. Bogotá: CIAF. Ramírez, C., & Deagostini R, D.
(1971).
La difusión de la luz no tiene lugar para todas las longitudes de onda en la misma
forma. Las radiaciones correspondientes al azul son fuertemente afectadas mientras que las correspondientes al rojo casi no son afectadas, de manera que, siendo la luz del sol rojiza, la luz difundida resulta más bien azulada. Como consecuencia de esta diferencia, las partes en sombre que recibe radiaciones indirectamente reflectadas por las nubes se ven favorecidas por la acción de esta iluminación azulada, apareciendo entonces menos oscuras en la fotografía. Los objetos pueden ser vistos y fotografiados porque reflejan parte de las radiaciones que inciden sobre ellos. Esta reflexión es en general selectiva (unos colores más que otros) y difusa. En el caso de las fotografías aéreas el objeto es el terreno y es
29
de fundamental importancia conocer sus propiedades reflejantes, ya que éstas constituyen la base para determinar la sensibilidad de la imagen (Ramirez & Deagostini R, 1971).
Los objetos fotografiados con cámaras aéreas pueden ser clasificados en tres
grandes grupos (Ramirez & Deagostini R, 1971), cada uno de los cuales incluiría los siguientes elementos con las propiedades que a continuación se detallan:
Grupo A: Objetos formados principalmente por materia inorgánica: arena, rocas,
edificios, carreteras. Estos objetos reflejan todas las longitudes de onda aproximadamente en la misma forma, siendo más reflejadas las longitudes de onda correspondientes al amarillo y rojo. Por el contrario, los objetos con alto contenido de materia orgánica son generalmente de color oscuro y refleja muy poco las radiaciones correspondientes al espectro visible (Ramirez & Deagostini R, 1971).
Grupo B: El segundo grupo está más integrado exclusivamente por formaciones
vegetales, caracterizadas por reflejar las radiaciones correspondientes a la banda del infrarrojo. La clorofila y la estructura interna de las hojas hacen que la reflexión de la vegetación sea mucho mayor en la banda infrarroja que en la parte visible del espectro, por lo que al utilizar una cámara infrarroja se tiene buena diferenciación de los tipos de vegetación (Ramirez & Deagostini R, 1971).
Grupo C: Pertenecen a este grupo todos aquellos elementos que tienen un alto
contenido de agua: ríos, arroyos, terrenos húmedos, etc. La reflectividad del agua es selectiva, refleja y difunde las radiaciones visibles del espectro, especialmente en la zona correspondiente al verde, y absorbe las radiaciones infrarrojas. La cámara infrarroja puede ser entonces convenientemente utilizada para delinear cursos de agua y separa áreas húmedas de áreas secas. Otro elemento sumamente útil para el reconocimiento de los objetos es la forma y tamaño de la sombra arrojada, razón por la cual es de gran importancia que los objetos fotografiados se encentren directamente iluminados por el sol y arrojen sombra (Ramirez & Deagostini R, 1971).
2.2.3. Aspectos Geométricos de la fotografía aérea
Los tipos de fotografías aéreas en función de la inclinación del eje de la cámara
son (Sánchez, 2006): Verticales: Cuando el ángulo que forma el eje óptico de cámara con la vertical
no supera los 3º. Oblicuas: Aquellas en las que el ángulo que forma el eje óptico de la cámara y
la vertical es superior a 3º. Panorámicas son las que en la fotografía aparece el horizonte. En fotogrametría aérea las fotografías utilizadas son las verticales, siendo
tomadas con una cámara aérea calibrada. Estas son cámaras cuyos elementos

30
internos son estables y perfectamente conocidos mediante procesos de calibración (Sánchez, 2006). La geometría de la fotografía (figura 4) consiste en que el plano horizontal que pasa por el vértice corta al plano de la imagen según una recta, que es la del horizonte, pero la posición en la imagen de esta intersección varía en cada caso. En general, la recta perpendicular al plano del terreno que pasa por el vértice, corta al plano de la imagen en un punto llamado nadir. La bisectriz del ángulo formado por la vertical y el eje óptico corta al plano de la fotografía en un punto llamado punto focal o isocentro. El isocentro tiene la propiedad de ser el único punto de la imagen en el que las rectas que pasan por él forman los mismos ángulos que las del plano del terreno a las que representan (Martin L, 1993).
Figura 4. Geometría de una fotografía aérea.
Fuente: (Martin L, 1993)
2.2.4. Condición de colinealidad
Esta condición facilita la transformación entre la posición de un punto en el
terreno y su posición sobre la imagen, vinculados por una única recta que pasa por el centro de proyección (CP). A la relación entre estos dos puntos que están alineados, se la conoce como ecuación de colinealidad o ecuación de la proyección central (Cheli, 2011). En esta ecuación de colinealidad aparecen una serie de variables que, en función de la condición y su propósito en cada momento, serán datos observados, parámetros conocidos o incógnitas. Se trata de un caso particular de la transformación proyectiva en la que los objetos del espacio tridimensional se proyectan en un plano bidimensional (De Mata, 2016).
La condición de colinealidad establece que, en una fotografía dada, su centro de
proyección, 𝑂, un punto imagen, 𝑎 y a un punto de objeto, 𝐴, están en la misma
recta, es decir, 𝑂, 𝑎 y 𝐴 deben ser colinealies, por lo que 𝑂𝐴 = 𝜆 ∗ 𝑂𝑎 . Esta

31
condición se ilustra en la figura 5, en donde se considera una aerofotografía con
cierta inclinación, en la que aparece un punto en terreno 𝐴, y sus proyecciones
ortogonales sobre los planos 𝑋𝑍, 𝑌𝑍, 𝐴’ y 𝐴’’, respectivamente. Igualmente, esas mismas proyecciones en el espacio imagen, 𝑎’ y 𝑎’’, del punto imagen 𝑎 (De Mata, 2016).
Figura 5. Condición de colinealidad
Fuente: (García C, 2000)
El factor de escala 𝜆𝑎 se obtiene por semenjanza de triángulos:
𝜆𝑎 = 𝑂𝐴
𝑂𝑎=𝑂𝐴′
𝑂𝑎′=𝑂𝐴′′
𝑂𝑎′′=
𝑂𝑁
𝑂𝑎′′′=
(𝑍𝐴− 𝑍𝑜)
(𝑍𝑎− 𝑍𝑜) (1)
De la misma forma,
𝜆𝑎 =𝑁𝐴′
𝑎′′′𝑎′=
(𝑋𝐴− 𝑋𝑜)
(𝑋𝑎− 𝑋𝑜) (2)
𝜆𝑎 =𝑁𝐴′′
𝑎′′′𝑎′′=
(𝑌𝐴− 𝑌𝑜)
(𝑌𝑎− 𝑌𝑜) (3)
Esta relación entre sistemas se puede expresar matricialmente como
[
(𝑋𝐴 − 𝑋𝑜)(𝑌𝐴 − 𝑌𝑜)
(𝑍𝐴 − 𝑍𝑜)] = 𝜆𝑎 [
(𝑋𝑎 − 𝑋𝑜)(𝑌𝑎 − 𝑌𝑜)
(𝑍𝑎 − 𝑍𝑜)] (4)

32
En donde, los elementos (𝑋𝑎 − 𝑋𝑜), (𝑌𝑎 − 𝑌𝑜), (𝑍𝑎 − 𝑍𝑜), son las coordenadas
imagen de (𝑥𝑎, 𝑦𝑎, 𝑧𝑎) que han sido transformadas por la matriz de rotación R, matriz
ortogonal 3 x 3, cuyos componentes son los valores 𝜔, 𝜑, 𝜅 con los que se puede establecer la ecuación 5. Además, el parámetro que representa la coordenada 𝑧𝑎 es el valor de la distancia focal 𝑓, pero con signo negativo:
[𝑋𝐴𝑌𝐴𝑍𝐴
] = 𝜆𝑎𝑅 [
𝑥𝑎𝑦𝑎−𝑓] + [
𝑋𝑜𝑌𝑜 𝑍𝑜
] (5)
Despejando 𝑥𝑎, 𝑦𝑎, −𝑓, con lo que 𝑟 = 𝑅−1, que, al ser ortogonal, la matriz
inversa es igual a la transpuesta y se añade la corrección del punto principal 𝑥𝑜, 𝑦𝑜, quedaría:
[
(𝑥𝑎 − 𝑥𝑜)(𝑦𝑎 − 𝑦𝑜)
(−𝑓)] =
1
𝜆𝑎𝑟 [
(𝑋𝐴 − 𝑋𝑜)(𝑌𝐴 − 𝑌𝑜)
(𝑍𝐴 − 𝑍𝑜)] (6)
Desarrollando,
𝑥𝑎 − 𝑥𝑜 =1
𝜆𝑎[𝑟11(𝑋𝐴 − 𝑋𝑜) + 𝑟12(𝑌𝐴 − 𝑌𝑜) + 𝑟13(𝑍𝐴 − 𝑍𝑜)] (7)
𝑦𝑎 − 𝑦𝑜 =1
𝜆𝑎[𝑟21(𝑋𝐴 − 𝑋𝑜) + 𝑟22(𝑌𝐴 − 𝑌𝑜) + 𝑟23 (𝑍𝐴 − 𝑍𝑜)] (7)
−𝑓 =1
𝜆𝑎[𝑟31 (𝑋𝐴 − 𝑋𝑜) + 𝑟32(𝑌𝐴 − 𝑌𝑜) + 𝑟33 (𝑍𝐴 − 𝑍𝑜)]
(7) Donde se puede dividir la primera y segunda fila entre la tercera fila en las
ecuaciones (7), para eliminar el factor común 1
𝜆𝑎 y llevando 𝑥𝑜, 𝑦𝑜, −𝑓 al término de
la derecha, se obtiene:
𝑥𝑎 = 𝑥𝑜 − 𝑓 (𝑟11 (𝑋𝐴− 𝑋𝑜)+ 𝑟12 (𝑌𝐴− 𝑌𝑜)+ 𝑟13(𝑍𝐴− 𝑍𝑜)
𝑟31(𝑋𝐴− 𝑋𝑜)+ 𝑟32(𝑌𝐴− 𝑌𝑜)+ 𝑟33 (𝑍𝐴− 𝑍𝑜)) (8)
(8)
𝑦𝑎 = 𝑦𝑜 − 𝑓 (𝑟21(𝑋𝐴− 𝑋𝑜)+ 𝑟22 (𝑌𝐴− 𝑌𝑜)+ 𝑟23(𝑍𝐴− 𝑍𝑜)
𝑟31(𝑋𝐴− 𝑋𝑜)+ 𝑟32(𝑌𝐴− 𝑌𝑜)+ 𝑟33 (𝑍𝐴− 𝑍𝑜)) (8)
La distancia focal es un valor normalmente conocido, (𝑥𝑎, 𝑦𝑎) también lo son, ya que son valores observados. Si en el sistema imagen se miden suficientes puntos de coordenadas conocidas en el sistema objeto, entonces las incógnitas serán giros (𝜔, 𝜑, 𝜅) y las coordenadas del centro de proyección (𝑋𝑜, 𝑌𝑜, 𝑍𝑜), este es el problema de resección especial. Si por el contrario, son conocidos los giros y las coordenadas de los centros de proyección de dos fotografías con recubrimiento y se efectúan
observaciones (𝑥𝑎, 𝑦𝑎) en ambas fotografías, se pueden calcular coordenadas en el

33
sistema objeto (𝑋𝐴, 𝑌𝐴, 𝑍𝐴), este problema es de la intersección espacial (De Mata, 2016).
Las ecuaciones de colinealidad, a pesar de describir matemáticamente una recta,
combinan parámetros lineales (las coordenadas) y angulares (coeficientes de la matriz de rotación), por lo cual habitualmente son linealizadas usando el teorema de Taylor. Ello involucra fijar valores aproximados a los parámetros que, mediante un cálculo iterativo, estarán cada vez más próximos a su valor verdadero y serán reintroducidos en la expresión, hasta que sus residuos sean mínimos (Cheli, 2011).
2.2.5. Orientación interior y exterior Los parámetros implicados en la planificación de vuelo incluyen los parámetros
teóricos de orientación externa, que incluyen las posiciones espacial y angular (𝑋0, 𝑌0, 𝑍0, ω, φ, κ) y los parámetros teóricos de la cámara interna, como el punto principal y la distancia principal ( 𝑥0, 𝑦0, c), que son proporcionados por el fabricante, que corresponden a los parámetros teóricos de orientación interna. Estos parámetros se usarán para calcular los parámetros de escala, la altura de vuelo, las superposiciones hacia adelante y hacia los lados de las imágenes, el número de fajas y el número de imágenes por faja (Fernández, et al., 2015).
Para poder realizar esto, el modelo matemático más utilizado de una cámara en
fotogrametría es el modelo de cámara estenopeica (figura 6). Es un modelo de proyección donde un rayo de luz pasa desde cada punto de un objeto a través del centro de una proyección y termina en el plano de la imagen. De acuerdo con este modelo matemático, el punto en el objeto, el centro de la proyección y el punto en el plano de la imagen son colineales (Gašparović & Jurjević, 2017).
Figura 6. Modelo de cámara estenopeica.
Fuente: (Gašparović & Jurjević, 2017).

34
El centro de la proyección está definido por el vector 𝑋0 en referencia al sistema
de coordenadas. El punto 𝑃 (vector 𝑋), ubicado en el objeto, se puede derivar en base al vector 𝑋0 y al vector 𝑋" de acuerdo con la ecuación (11). Vector 𝑋" se define con el punto en el objeto y el centro de proyección.
𝑋 = 𝑋0 + 𝑋" (11) Para realizar la orientación interior en las fotografías producidas por cámaras no
métricas usadas en los VANT se deben calibrar y se incluyen tres grupos de conjuntos de parámetros para modelar la orientación interior de una cámara en el modelo funcional básico (Hastedt & Luhmann, 2015):
- Puntos principales y distancia principal ( 𝑥0, 𝑦0, c) - Distorsión radial – simétrica de la lente - Distorsión de descentramiento
Para determinar las coordenadas del punto P, se requiere al menos una imagen
más del objeto dado desde una posición diferente. Por lo general, los parámetros de la orientación interior se establecen de forma constante para todas las imágenes de un proyecto fotogramétrico. Los parámetros de distorsión se definen con respecto al punto principal. Este tipo de proyección se describe con ecuaciones de colinealidad (Gašparović & Jurjević, 2017).
𝑋′ = 𝑥0 − 𝑐 (𝑟11(𝑋−𝑋𝑜)+𝑟21(𝑌−𝑌𝑜)+𝑟31(𝑍−𝑍𝑜)
𝑟13(𝑋−𝑋𝑜)+𝑟23(𝑌−𝑌𝑜)+𝑟33(𝑍−𝑍𝑜)) + Δ𝑥′ (12)
𝑌′ = 𝑦0 − 𝑐 (𝑟12(𝑋−𝑋𝑜)+𝑟22(𝑌−𝑌𝑜)+𝑟32(𝑍−𝑍𝑜)
𝑟13(𝑋−𝑋𝑜)+𝑟23(𝑌−𝑌𝑜)+𝑟33(𝑍−𝑍𝑜)) + Δ𝑦′ (12)
𝑟 = (
𝑐𝑜𝑠 𝜑 𝑐𝑜𝑠 𝜅 𝑐𝑜𝑠 𝜑 𝑠𝑒𝑛 𝜅 − 𝑠𝑒𝑛 𝜑 𝑠𝑒𝑛 𝜑 𝑠𝑒𝑛 𝜔 𝑐𝑜𝑠 𝜅 − 𝑐𝑜𝑠 𝜔 𝑠𝑒𝑛𝜅 𝑠𝑒𝑛 𝜑 𝑠𝑒𝑛 𝜔 𝑠𝑒𝑛 𝜅 + 𝑐𝑜𝑠 𝜔 𝑐𝑜𝑠 𝜅 𝑠𝑒𝑛 𝜔 𝑐𝑜𝑠 𝜑𝑠𝑒𝑛 𝜑 𝑐𝑜𝑠 𝜔 𝑐𝑜𝑠 𝜅 + 𝑠𝑒𝑛 𝜔 𝑠𝑒𝑛 𝜅 𝑠𝑒𝑛 𝜑 𝑐𝑜𝑠 𝜔 𝑠𝑒𝑛 𝜅 – 𝑠𝑒𝑛 𝜔 𝑐𝑜𝑠 𝜅 𝑐𝑜𝑠 𝜔 𝑐𝑜𝑠 𝜑
) (13)
Donde:
𝑋′, 𝑌′ = Coordenadas del punto P
𝑥0, 𝑦0 = Coordenadas de la imagen del Punto Principal de Autocolimación (PPA)
𝑐 = Distancia principal (constante de la cámara)
𝑟 =Matriz de rotación espacial
𝑟𝑖𝑗 = Parámetro de matriz rotacional espacial
𝑋, 𝑌, 𝑍 = Coordenadas del punto P en referencia al sistema de coordenadas

35
𝑋0, 𝑌0, 𝑍0 = Coordenadas del centro de proyección en referencia al sistema de coordenadas
𝛥𝑥′, 𝛥𝑦′ = Parámetros de distorsión La orientación interna, recrea la posición de los haces proyectivos en el momento
de la toma de la fotografía. Tratándose las coordenadas imagen como un sistema
tridimensional, se deben adoptar un valor para la coordenada 𝑧, la coordenada 𝑧 de la imagen de un punto cualquiera en un positivo es igual a la distancia principal negativa (−𝑓), mientras que, con un valor negativo, la distancia principal se considera positiva (𝑓).
La orientación exterior define la georeferenciación para cada imagen. Por lo
tanto, los parámetros de orientación exterior se observan a través de los sensores GPS e INS integrados en la plataforma (Cramer, 2001). A diferencia de las plataformas aéreas tripuladas (Haala, 2005), los VANT principalmente tienen sensores integrados de bajo costo, por lo tanto, brindan una visión global sobre la estrategia de integración de datos para el cálculo de la orientación exterior. Utilizando los sistemas de coordenadas definidos, para cada punto observado en la imagen (P), la relación entre la cámara y el sistema de coordenadas terrestres (T) se puede describir con la siguiente ecuación (Eisenbeiß, 2009):
(𝑋𝑌𝑍)
𝑇
= (𝑋0𝑌0𝑍0
)
𝑇
+ 𝜆𝑅𝑃𝑇(𝜔, 𝜑, 𝜅) (
(𝑥′ − 𝑥𝑝)
(𝑦′ − 𝑦𝑝)
−𝑓
)
𝑃
(14)
Ya que, los parámetros de la orientación exterior consisten en coordenadas del
centro de proyección en el sistema de coordenadas del objeto y la matriz de rotación, teniendo en cuenta la posición de la cámara, GPS e INS en el UAV, que son similares a los componentes montados en aviones tripulados (Cramer, 2001), la ecuación se puede definir como:
(𝑋𝑌𝑍)
𝑇
= (𝑋0𝑌0𝑍0
)
𝑇
+ 𝑅𝐼𝑁𝑆𝑇
(
𝜆𝑅𝑃
𝐼𝑁𝑆(
(𝑥′ − 𝑥𝑝)
(𝑦′ − 𝑦𝑝)
−𝑓
)
𝑃
+ (∆X𝑐𝑎𝑚∆Y𝑐𝑎𝑚∆Z𝑐𝑎𝑚
)+ (∆X𝐺𝑃𝑆∆Y𝐺𝑃𝑆∆Z𝐺𝑃𝑆
)
)
(15)
Donde:
(𝑋𝑌𝑍)
𝑇
= Punto del objeto en el sistema de coordenadas del objeto (coordenadas
globales o locales sistema)
(𝑋0𝑌0𝑍0
)
𝑇
= Posición GPS / INS en el sistema de coordenadas del objeto
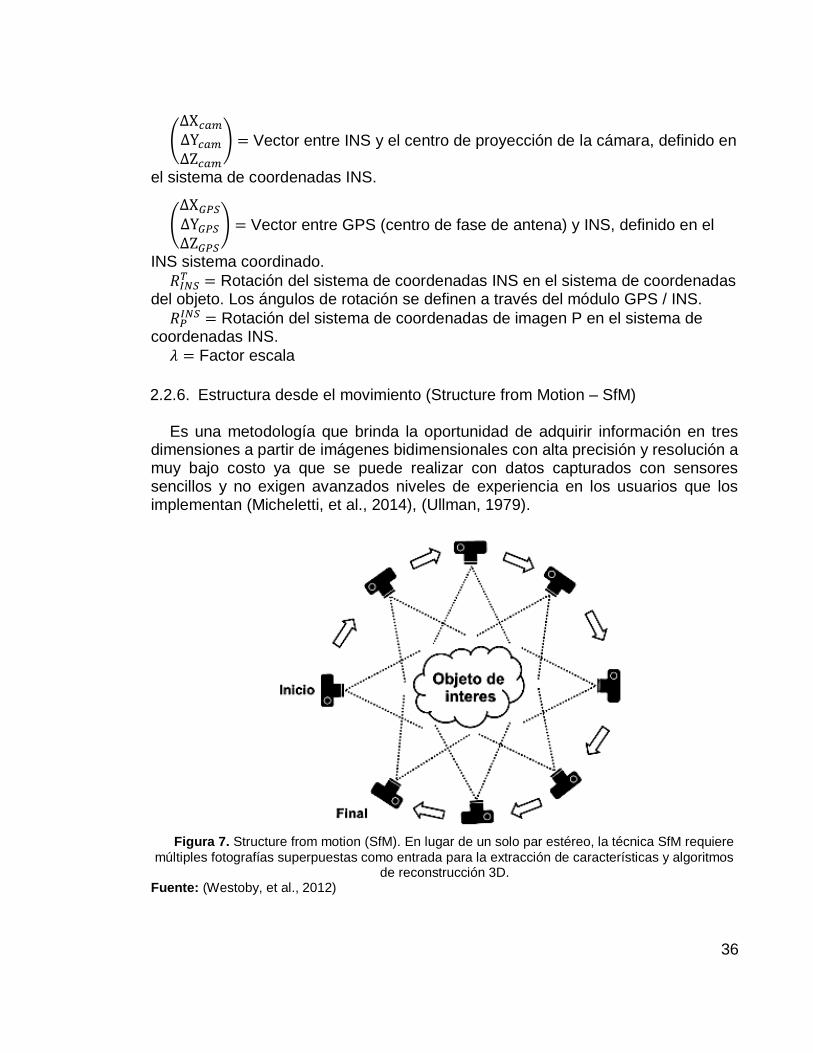
36
(∆X𝑐𝑎𝑚∆Y𝑐𝑎𝑚∆Z𝑐𝑎𝑚
) = Vector entre INS y el centro de proyección de la cámara, definido en
el sistema de coordenadas INS.
(∆X𝐺𝑃𝑆∆Y𝐺𝑃𝑆∆Z𝐺𝑃𝑆
) = Vector entre GPS (centro de fase de antena) y INS, definido en el
INS sistema coordinado.
𝑅𝐼𝑁𝑆𝑇 = Rotación del sistema de coordenadas INS en el sistema de coordenadas
del objeto. Los ángulos de rotación se definen a través del módulo GPS / INS.
𝑅𝑃𝐼𝑁𝑆 = Rotación del sistema de coordenadas de imagen P en el sistema de
coordenadas INS.
𝜆 = Factor escala
2.2.6. Estructura desde el movimiento (Structure from Motion – SfM) Es una metodología que brinda la oportunidad de adquirir información en tres
dimensiones a partir de imágenes bidimensionales con alta precisión y resolución a muy bajo costo ya que se puede realizar con datos capturados con sensores sencillos y no exigen avanzados niveles de experiencia en los usuarios que los implementan (Micheletti, et al., 2014), (Ullman, 1979).
Figura 7. Structure from motion (SfM). En lugar de un solo par estéreo, la técnica SfM requiere
múltiples fotografías superpuestas como entrada para la extracción de características y algoritmos de reconstrucción 3D.
Fuente: (Westoby, et al., 2012)

37
Este método requiere la superposición de imágenes que cubran la escena o el objeto de interés, sin embargo, difiere de la fotogrametría tradicional en la manera como se determina la geometría interna, la posición y la orientación de la cámara de manera automática, sin tener como requisito un conjunto predeterminado de puntos de control en tierra (Micheletti, et al., 2014),lo que hace es resolver la posición y la orientación de la cámara y la geometría de la escena de forma simultánea y automática por medio de un ajuste de un paquete altamente redundante (alta superposición) basado en características coincidentes de imágenes (Westoby, et al., 2012).
Para realizar la reconstrucción en tres dimensiones, se requieren imágenes con
alto grado de superposición, tomadas desde diversos ángulos bien sea por un sensor en movimiento o por una o diferentes cámaras desde diversas perspectivas. Las relaciones espaciales entre dichas imágenes se generan gracias a la Transformación de la característica invariante de la escala (Scale Invariant Feature Transformation – SIFT), que identifica los puntos clave de las imagenes y les asigna un sistema de coordenadas tridimensionales arbitrario para poder ubicarlos espacialmente y así formar la nube de puntos, sin embargo, dichas coordenadas deben alinearse a un sistema coordenado real por medio de una transformación de similitud 3D basada en un conjunto de puntos de control terrestre con coordenadas conocidas (Westoby, et al., 2012). El principio de colinealidad se mantiene para poder generar las relaciones matemáticas entre las imágenes y los objetos.
Los paquetes de software especializado como Agisoft Photoscan o Pix4D están
capacitados para identificar automáticamente los puntos clave del área de interés en diversas imágenes, usualmente, dichas características son esquinas o segmentos de línea fotoidentificables independientemente de la escala que se esté analizando.
Para que el proceso sea posible, se requiere que la escena se reconozca al
menos en tres imágenes, sin embargo se recomienda tener mayor cantidad de imágenes, realizar las capturas al mismo tiempo y con la misma cámara (esto no es de obligatorio cumplimiento, sin embargo, se propone para evitar generar conjuntos de datos inexactos), se recomienda utilizar cámara con enfoque fijo para mayor precisión, no es necesario adquirir imágenes desde la misma distancia o con la misma escala, por el contrario, se recomienda variar esta última siempre y cuando se garantice que la escena sea estática para lograr el detalle requerido y evitar oclusión. Usualmente las nubes de puntos en 3D se generan en un sistema de coordenadas relativo, sin embargo, con la implementación de los puntos de control terrestre, se pueden proyectar al sistema de coordenadas reales que el usuario requiera (Humboldt State University, 2017).
La nube de puntos se densifica gracias a técnicas Multi View Stereo (MVS) que
permiten generar conjuntos de datos de alta resolución y eliminan los errores graves, estos productos son comparables con los generados a partir de métodos

38
tradicionales mediante principios de estereoscopía y en donde el usuario está obligado a determinar los parámetros de orientación interior y exterior. La amplia gama de direcciones con que se capturan las imágenes crea un conjunto de datos con geometría sólida que permiten recuperar la orientación interna de la cámara y generar las coordenadas precisas. Si se aumenta el número de imágenes se producen mallas más densas, las cuales aumentan la precisión del modelo ya que ayudan a eliminar los valores atípicos a medida que se llega al número de imágenes suficiente. Cabe aclarar que los conjuntos de datos grandes no siempre son necesarios y requieren de un equipo de cómputo muy robusto, además del tiempo asociado al procesamiento con el que no siempre cuentan los usuarios, por esto es importante tener en cuenta el propósito del ejercicio ya que a partir de este se analiza el tipo de datos que se requieren para generar los productos finales (Micheletti, et al., 2014).
La fotogrametría SfM genera ventajas y riesgos, debido a que el control del
usuario tiende a centrarse en la visualización del producto final mas no en la calidad de los mismos, el SfM es una tecnología completamente automatizada que proporciona una “caja negra” que no requiere la supervisión de personal experto, sin embargo, debido a la baja participación del usuario en el proceso, se pierde control en la calidad de los datos y se dificulta la identificación de los orígenes del error que puedan tener.
A continuación, se describen algunas directrices dadas por (Micheletti, et al.,
2014): 1. Planificar la metodología de captura de datos teniendo en cuenta la cámara
y la escala que se va a trabajar. 2. Capturar la escena con una escala pequeña e irla aumentando para poder
evitar las oclusiones. 3. Asegurar la cobertura de la escena, teniendo en cuenta que cada punto debe
aparecer al menos en tres imágenes y que deben capturarse desde diversas posiciones.
4. La escena debe ser estática. 5. La iluminación debe ser consistente. 6. Evitar imágenes subexpuestas o sobrexpuestas. 7. Evitar imágenes borrosas cuidando la velocidad y los movimientos de la
cámara. 8. Evitar superficies transparentes, reflejantes u homogéneas.
La efectividad de los procesos llevados a cabo por medio de esta metodología
está directamente vinculada a la calidad de las imágenes que cubren la escena.

39
2.2.7 Transformación de la característica invariante de la escala (Scalar Invariant Feature Transform – SIFT)
Es un algoritmo que permite la extracción de puntos clave del conjunto de
imágenes que cubren la escena y permiten desarrollar los procesos fotogramétricos con SfM. Para poder aplicar el algoritmo, es necesario que las características clave elegidas sean invariables a la escala, a la rotación y a la traslación de la imagen, además no debe haber cambios por iluminación con el objetivo de que sean identificados correctamente en las imágenes.
El algoritmo fue propuesto por (Lowe, 2004) y el principio es lograr transformar la
imagen en un conjunto de puntos clave a partir de la transformación SIFT que permitan relacionar espacialmente todas las fotografías que conforman la escena. El proceso consiste en extraer todos los puntos clave, estos están identificados por un vector de características que describe el área que lo rodea. Según (Moranduzzo & Melgani, 2012) la transformación se realiza en cuatro pasos:
1. Detección de esquinas variando la escala.
Este paso se lleva a cabo mediante una convolución de un filtro gaussiano de escala variable expresado por la ecuación:
𝐿(𝑥, 𝑦, 𝜎) = 𝐼(𝑥, 𝑦) ∗1
2𝜋𝜎2𝑒(−𝑥2+𝑦2
2𝜎2) (16)
Donde ∗ es el operador de convolución y 𝜎 el factor de escala. 2. Detección de puntos estables.
Se realiza mediante la identificación de esquinas o segmentos de línea que no se alteran al variar la escala gracias a la función diferencial de Gauss (DoG) convuelta con la imagen anterior; este proceso se expresa mediante la siguiente ecuación:
𝐷(𝑥, 𝑦, 𝜎) = 𝐿(𝑥, 𝑦, 𝜎) − 𝐿(𝑥, 𝑦, 𝑘𝜎) (17)
Donde 𝑘 es un factor multiplicativo constante que refiere la escala de la imagen nueva con respecto a la imagen original.
Para identificar qué puntos sean clave, cada pixel en el DoG se compara con los
8 vecinos en la misma escala y con los otros 18 vecinos de las dos escalas vecinas, como resultado se debe tener que el punto seleccionado sea más grande o más pequeño que los otros 26 vecinos; estos se convierten en puntos clave candidatos.
3. Definición de puntos clave
Se deben eliminar los puntos generados por ruido, aquellos que generan bajo contraste o que están ubicados a lo largo de los bordes. Con esta eliminación se analizan los puntos candidatos invariantes de escala. La escala del punto se utiliza
para seleccionar la imagen Gaussiana suavizada 𝐿 con la escala más cercana, de forma que los cálculos se realicen de manera invariante. Para cada coordenada

40
(𝑥, 𝑦) de la imagen en la escala, la magnitud del gradiente (𝑥, 𝑦) y la orientación
(𝑥, 𝑦) se evalúa usando diferencias de pixeles. 4. Vectorización de puntos clave.
En cada punto clave se asigna un vector que contiene los gradientes de la imagen para proporcionar mayor invariancia. La magnitud del gradiente y la orientación en cada punto se calculan alrededor de cada punto clave para crear su descriptor que está compuesto por 128 características de la región circundante seleccionada. Finalmente se normaliza el descriptor a la longitud de una unidad para reducir los efectos de los cambios de iluminación.
Finalmente, a cada punto clave se le asocian dos vectores, el primero que
contiene cuatro valores: dos posiciones espaciales, uno de orientación y uno de escala, su propósito es determinar la posición espacial de los puntos clave dentro de la imagen; el segundo vector contiene las 128 características de los puntos clave y permite la clasificación de todos los detectores.
A partir de los puntos clave identificados con la transformación SIFT se puede
continuar el proceso SfM, gracias a esta metodología se pueden usar fotografías capturadas desde diversos ángulos y distancias sin conocimiento a priori de sus ubicaciones, además permite la implementación de VANTs en la fotogrametría ya que resuelve los problemas de deformación de las cámaras de bajo costo que se utilizan (Nissen, et al. 1978).
2.2.8 Productos fotogramétricos
2.2.8.1 Modelos digitales de Elevación (MDT): los modelos digitales del terreno se han definido (Doyle, 1978) como un conjunto de datos numéricos que describe la distribución espacial de una característica del territorio. Existen diversos tipos de MDT (Quirós, 2014):
- MDE, Modelo digital de Elevaciones (figura 6 (a)): Estructura numérica
de datos que representa la distribución espacial de la altitud de la superficie del terreno.
- MDS, Modelo digital de Superficie (figura 6 (b)): Incluye las altitudes de los elementos elevados de la superficie, tales como edificios, árboles, entre otros.

41
(a) (b) Figura 8. (a) Modelo digital de Elevaciones. (b) Modelo digital de Superficie.
Fuente: ArcGIS Pro.
La estructura de datos de MDT, en general, la unidad básica de información en
un modelo digital de elevaciones es un punto acotado, definido por una terna compuesta por un valor de la altitud (𝑍) al que acompañan los correspondientes
valores de 𝑋 e 𝑌. Los mapas convencionales, utilizan las curvas de nivel para representar la superficie del terreno, pero los MDE pueden ser de dos tipos fundamentalmente (Quirós, 2014).
MDT vectoriales: Se basan en entidades geométricas y además de las ya conocidas curvas de nivel mostradas en la figura 8, también podemos señalar los TIN (Triangulated irregular network) como modelos vectoriales de información (figura 9).
Figura 9. TIN
Fuente: GeoSolutions, Inc.
Estructuras Ráster: Se basan en la representación del terreno por medio de estructuras matriciales regulares y constantes. Su estructura es la misma que la de una imagen digital, en la que cada píxel muestra el valor de la elevación media del terreno en su superficie.

42
Figura 10. MDE ráster.
Fuente: QGIS
Los MDE (Udin, et al., 2012), en el campo de la fotogrametría digital con VANT,
se pueden obtener por distintos métodos:
Ponderación de distancia inversa: el algoritmo de ponderación de distancia inversa se utiliza para interpolar entre puntos. La interpolación del punto que se quiere calcular se realiza asignando pesos a los datos del entorno en función inversa de la distancia que los separa. Este método es recomendado para edificios.
Triangulación: se utiliza el algoritmo de triangulación basado en la triangulación de Delauney, que, dada una nube de puntos del plano, el objetivo es hallar una triangulación en la que puntos próximos estén conectados entre sí por una arista. O, dicho de otro modo, en la que los triángulos sean lo más regulares posible. Se trata de obtener una triangulación óptima, que permita una interpolación coherente entre los valores asociados (cotas o altitudes) a cada uno de los vértices; y así construir una red de triángulos irregulares (TIN), para la generación de modelos digitales de elevación (Priego de los Santos & Porres de la Haza, 2002). Este método se recomienda para áreas planas (campos agrícolas) y reservas.
2.2.8.2 Ortofotografía: es el método fotogramétrico de obtener fotomapas precisos, corregidos de las deformaciones producidas en la imagen fotográfica por el relieve y la inclinación de la fotografía, mediante la rectificación diferencial de la fotografía original. Para ello se hace necesaria la utilización del MDE. En el caso de fotogrametría aérea el proceso de generación de la ortofotografía digital se sintetiza en la siguiente figura 11 (Quirós, 2014):

43
Figura 11. Fases del proceso de realización de la ortofoto.
Fuente: (Quirós, 2014)
Por cada píxel del terreno, se obtiene su coordenada Z en el MDE. Conocida esa
cota y mediante la condición de colinealidad, se averigua el tono de gris del píxel correspondiente en la fotografía original que es el que se plasmará en la ortofotografía. En este proceso, se necesita interpolar en algunas zonas los niveles de gris a representar, porque la posición que devuelva la condición de colinealidad no tiene por qué ser el centro exacto de un píxel de la imagen original (Quirós, 2014).
Las interpolaciones más usualmente utilizadas son (Quirós, 2014):
Vecino más cercano: Solo tiene en cuenta un píxel: el más cercano al punto interpolado.
Figura 12. Interpolación por vecino más cercano.
Fuente: (Quirós, 2014).
Interpolación bilineal: Promedia los niveles de gris de los cuatro píxeles más próximos de la imagen original.
Figura 13. Interpolación bilineal.
Fuente: (Quirós, 2014).

44
Convolución bicúbica: Considera los niveles de gris de los 16 píxeles más próximos.
Figura 14. Interpolación bilineal.
Fuente: (Quirós, 2014)
2.2.9 Control terrestre (puntos de apoyo) En la fase de orientación absoluta se necesita conocer las coordenadas terrestres
de una serie de puntos, para poder ajustar la escala del modelo y realizar la nivelación de éste (Pérez, 2001). El número mínimo de puntos para poder efectuar esta operación es de tres, dos puntos en X, Y, Z (Planimétrico-Altimétrico) para poder llevar a cabo el ajuste de la escala del modelo y un tercero en Z (Altimétrico) de manera que sumados a los dos anteriores, hacen un total de tres puntos de coordenadas altimétricas conocidas, para poder efectuar la nivelación del modelo. La determinación de las coordenadas planimétricas (control horizontal) y altimétrica (control vertical) de estos puntos se conoce con el nombre de apoyo de campo. La realización de los trabajos topográficos y geodésicos que lleva consigo la fotogrametría, es necesario utilizar unos métodos y unos instrumentos que agilicen al máximo el levantamiento de los puntos de control (Pérez, 2001).
La determinación de los puntos de apoyo puede realizarse a través de la
utilización del Sistema de Posicionamiento Global (GPS). Estos aparatos agilizan mucho la toma de datos en campo, ya que no están condicionados a las observaciones clásicas de los instrumentos topográfico (Pérez, 2001).
2.2.10 Número y distribución de los puntos de control terrestre en la fotogrametría convencional
Anteriormente se ha hecho mención del número mínimo teórico de puntos de
apoyo en un modelo, pudiéndose añadir otros para tener un control del modelo. Se puede adoptar la distribución de la figura 15, donde aparecen conjuntamente ciertos puntos que son a la vez planimétrico y altimétrico; cuatro puntos con coordenadas X, Y, Z (planimétrico-altimétricos) teniendo, dos puntos de control para la puesta en escala del modelo, el quinto punto de coordenada Z (altimétrica), daría, unido a los cuatro anteriores un total de cinco puntos altimétricos, resultando dos de control,

45
permitiendo de este modo verificar los basculamientos del modelo y las deformaciones de la imagen, por medio del punto central (Pérez, 2001).
Figura 15. Distribución teórica de los puntos de control terrestre.
Fuente: (Pérez, 2001)
La distribución de los puntos de apoyo en las esquinas del modelo, viene
condicionada por el hecho de que estos deben servir de apoyo para la pasada superior e inferior, e igualmente para la fotografía antecedente y precedente, con el fin de obtener el mínimo de puntos precisos de control terrestre. También puede decirse en favor a esta distribución, el poder contar con las máximas distancias para dar escala al modelo y para corregir las inclinaciones longitudinales y transversales de la fase de orientación absoluta (Pérez, 2001).
2.2.11 Señalización del control terrestre La señalización del control terrestre suplementario por ser utilizado para dar
control a cada modelo, puede ser anterior o posterior a la toma de fotografías. Cuando la señalización es previa al vuelo – es decir preseñalizado, los puntos deben estar correctamente marcados en el terreno a fin de facilitar su identificación de las fotografías y será necesario que cada modelo tenga el número mínimo de puntos de control requeridos (Ramirez & Deagostini R, 1971).
En planos a escalas grandes, destinados principalmente a la ingeniería es
necesario tener en cuenta, a la hora de realizar la planificación del levantamiento, la fase de replanteo del proyecto. Planeado y realizado el vuelo, se deberá contar con los suficientes elementos que aseguren plasmar en el terreno el diseño realizado. Los elementos fotoidentificables, difícilmente se encontrarán en la naturaleza, y aunque la zona objeto del estudio ofrezca gran cantidad de detalles artificiales, muy pocos consiguen ser útiles para emplearse como puntos de control terrestre. La manera de salvar estos inconvenientes es mediante la preseñalización, consistiendo está en la materialización en campo de una serie de señales, previamente a la realización del vuelo, distribuidas según una densidad y forma, para poderlas utilizar como puntos de apoyo fotogramétricos. La forma de estas señales adoptada más generalmente es la cuadrada, en las que el material utilizado es de aluminio, contrachapado o cartón (Pérez, 2001).
46
Las dimensiones de estas señales variarán con la escala de la fotografía (Ramirez & Deagostini R, 1971):
Escalas pequenas (≈ 1:18000) 75 x 75 cm, aproximadamente.
Escalas medias (≈ 1:7500) 30 x 30 cm, aproximadamente.
Escalas grandes (≈ 1:3000) 15 x 15 cm, aproximadamente.
2.3 ESTÁNDARES DE PRECISIÓN POSICIONAL (ASPRS POSITIONAL ACCURACY STANDARDS FOR DIGITAL GEOSPATIAL DATA)
Esta norma fue desarrollada por el Grupo de Trabajo de Estándares de Precisión
de Mapas de ASPRS, un comité conjunto bajo la División de Aplicaciones de Fotogrametría, la División de Adquisición de Datos Primarios y la División Lidar, el objetivo de los Estándares de precisión posicional ASPRS para datos geoespaciales digitales es reemplazar los Estándares de precisión ASPRS existentes para mapas a gran escala (1990), y las Directrices ASPRS, Informes de precisión vertical para datos Lidar (2004) para abordar mejor las tecnologías actuales. Este estándar incluye estándares de precisión de posición para ortoimágenes digitales, datos planimétricos digitales y datos digitales de elevación. El estándar también incluye medidas de precisión adicionales, como precisión de triangulación aérea, precisión lidar relativa de franja a franja, densidad de pulso nominal mínima recomendada (NPD), precisión horizontal de los datos de elevación, delineación de baja confianza áreas para datos verticales, y el número requerido y la distribución espacial de los puntos de control según el área del proyecto (ASPRS A. S., 2015).
2.3.1 Evaluación estadística de precisiones horizontales y verticales. La precisión horizontal debe evaluarse utilizando las estadísticas de error
cuadrático medio (RMSE) en el plano horizontal, es decir, 𝑅𝑀𝑆𝐸𝑥, 𝑅𝑀𝑆𝐸𝑦, 𝑅𝑀𝑆𝐸𝑟.
La precisión vertical se debe evaluar solo en la dimensión 𝑍, para las pruebas de precisión vertical, se utilizan diferentes métodos en terrenos sin vegetación (donde los errores normalmente siguen una distribución normal adecuada para los análisis estadísticos RMSE) y en terrenos con vegetación (donde los errores no necesariamente siguen una distribución normal). Cuando los errores no pueden ser representados por una distribución normal, el valor del percentil de manera más justa precisión estimación un nivel de confianza del 95%. Con la excepción de los datos verticales en terrenos con vegetación, los umbrales de error establecidos en esta norma se presentan en términos del valor RMSE aceptable. Las estimaciones de precisión correspondientes al 95% de los valores de nivel de confianza se calculan utilizando el estándar nacional para la precisión de los datos espaciales (ASPRS A. S., 2015). Los 𝑅𝑀𝑆𝐸𝑥, 𝑅𝑀𝑆𝐸𝑦, 𝑅𝑀𝑆𝐸𝑧 y 𝑅𝑀𝑆𝐸𝑟 se definen a
continuación (ASPRS A. S., 2015):
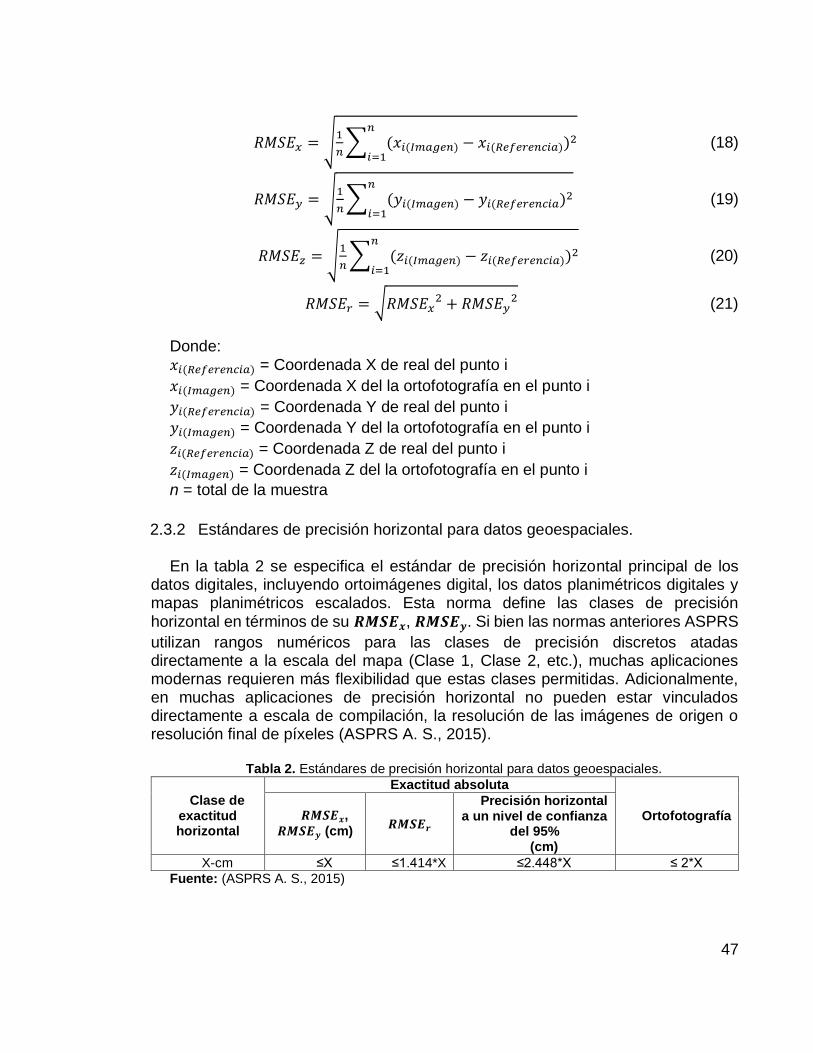
47
𝑅𝑀𝑆𝐸𝑥 = √1
𝑛∑ (𝑥𝑖(𝐼𝑚𝑎𝑔𝑒𝑛) − 𝑥𝑖(𝑅𝑒𝑓𝑒𝑟𝑒𝑛𝑐𝑖𝑎))2
𝑛
𝑖=1 (18)
𝑅𝑀𝑆𝐸𝑦 = √1
𝑛∑ (𝑦𝑖(𝐼𝑚𝑎𝑔𝑒𝑛) − 𝑦𝑖(𝑅𝑒𝑓𝑒𝑟𝑒𝑛𝑐𝑖𝑎)
2𝑛
𝑖=1 (19)
𝑅𝑀𝑆𝐸𝑧 = √1
𝑛∑ (𝑧𝑖(𝐼𝑚𝑎𝑔𝑒𝑛) − 𝑧𝑖(𝑅𝑒𝑓𝑒𝑟𝑒𝑛𝑐𝑖𝑎))2
𝑛
𝑖=1 (20)
𝑅𝑀𝑆𝐸𝑟 = √𝑅𝑀𝑆𝐸𝑥2 + 𝑅𝑀𝑆𝐸𝑦
2 (21)
Donde: 𝑥𝑖(𝑅𝑒𝑓𝑒𝑟𝑒𝑛𝑐𝑖𝑎) = Coordenada X de real del punto i
𝑥𝑖(𝐼𝑚𝑎𝑔𝑒𝑛) = Coordenada X del la ortofotografía en el punto i
𝑦𝑖(𝑅𝑒𝑓𝑒𝑟𝑒𝑛𝑐𝑖𝑎) = Coordenada Y de real del punto i
𝑦𝑖(𝐼𝑚𝑎𝑔𝑒𝑛) = Coordenada Y del la ortofotografía en el punto i
𝑧𝑖(𝑅𝑒𝑓𝑒𝑟𝑒𝑛𝑐𝑖𝑎) = Coordenada Z de real del punto i
𝑧𝑖(𝐼𝑚𝑎𝑔𝑒𝑛) = Coordenada Z del la ortofotografía en el punto i
n = total de la muestra
2.3.2 Estándares de precisión horizontal para datos geoespaciales. En la tabla 2 se especifica el estándar de precisión horizontal principal de los
datos digitales, incluyendo ortoimágenes digital, los datos planimétricos digitales y mapas planimétricos escalados. Esta norma define las clases de precisión horizontal en términos de su 𝑹𝑴𝑺𝑬𝒙, 𝑹𝑴𝑺𝑬𝒚. Si bien las normas anteriores ASPRS
utilizan rangos numéricos para las clases de precisión discretos atadas directamente a la escala del mapa (Clase 1, Clase 2, etc.), muchas aplicaciones modernas requieren más flexibilidad que estas clases permitidas. Adicionalmente, en muchas aplicaciones de precisión horizontal no pueden estar vinculados directamente a escala de compilación, la resolución de las imágenes de origen o resolución final de píxeles (ASPRS A. S., 2015).
Tabla 2. Estándares de precisión horizontal para datos geoespaciales.
Clase de
exactitud horizontal
Exactitud absoluta
Ortofotografía 𝑹𝑴𝑺𝑬𝒙, 𝑹𝑴𝑺𝑬𝒚 (cm)
𝑹𝑴𝑺𝑬𝒓
Precisión horizontal a un nivel de confianza
del 95% (cm)
X-cm ≤X ≤1.414*X ≤2.448*X ≤ 2*X
Fuente: (ASPRS A. S., 2015)

48
2.3.3 Estándares de precisión vertical para datos de elevación Precisión vertical se calcula utilizando estadísticas RMSE en terrenos sin
vegetación y 95º de estadística percentil en terreno vegetado. La convención actual para cada clase de precisión vertical está directamente asociada con el RMSE esperado del producto. La tabla 3 proporciona la clase vertical de precisión para la convención de nombres para cualquier dato digital de elevación. Los requisitos de precisión horizontal para los datos de elevación se especifican y reportan independientemente de los requisitos de precisión vertical (ASPRS A. S., 2015).
Tabla 3. Estándares de precisión vertical para datos digitales de elevación.
Clase de
precisión vertical
Exactitud absoluta
𝑹𝑴𝑺𝑬𝒛 en terrenos sin vegetación
(cm)
NVA a un nivel de confianza del 95%
(cm)
VVA en percentil 95
(cm)
X - cm ≤ X ≤1.96 * X ≤3.00 * X
Fuente: (ASPRS A. S., 2015)
La precisión vertical sin vegetación en el nivel de confianza del 95% en terreno
sin vegetación (NVA) se aproxima multiplicando el valor de precisión de la clase de
precisión vertical (𝑹𝑴𝑺𝑬𝒛) por 1.96. Este cálculo incluye puntos de control de levantamiento ubicados en terrenos abiertos tradicionales (suelo desnudo, arena, rocas y hierba corta) y terrenos urbanos (superficies de asfalto y concreto). El NVA,
basado en un multiplicador 𝑹𝑴𝑺𝑬𝒛, se debe usar solo en terrenos sin vegetación donde los errores de elevación normalmente siguen una distribución de error
normal. Las estadísticas basadas en 𝑹𝑴𝑺𝑬𝒛 no deben usarse para estimar la precisión vertical en terrenos con vegetación o donde los errores de elevación a menudo no siguen una distribución normal (ASPRS A. S., 2015). La exactitud con vegetación vertical en el nivel de confianza del 95% en terrenos con vegetación (VVA) se calcula como el percentil 95 del valor absoluto de errores verticales en todas las categorías de cobertura del suelo con vegetación combinado, incluyendo malas hierbas y cultivos altos, tierras de pincel, y totalmente Zonas boscosas. Para todas las clases de precisión vertical, el estándar VVA es 3.0 veces el valor de precisión de la clase de precisión vertical (ASPRS A. S., 2015).
2.3.4 Requisitos de precisión para la triangulación aérea y la orientación del sensor basada en INS de imágenes digitales.
La calidad y la precisión de la triangulación aérea y orientaciones del interior
(realizada con el INS) desempeñan un papel clave en la determinación de la precisión final de las imágenes. Para los conjuntos de datos fotogramétricos, la triangulación aérea y las precisiones de orientación directa basadas en INS deben ser de una precisión mayor que la necesaria para los productos finales, derivados. Para la orientación directa basada en el INS, la calidad de los ángulos de orientación

49
de la imagen se evaluará comparando las coordenadas del punto de verificación leídas de las imágenes (utilizando medidas fotogramétricas estéreo u otro método apropiado) con las coordenadas del punto de verificación según lo determinado a partir de los datos fuente de mayor precisión. Las precisiones de triangulación aérea se evaluarán utilizando uno de los siguientes métodos (ASPRS A. S., 2015):
1. Al comparar los valores de las coordenadas de los puntos de verificación
calculados en la solución de triangulación aérea con las coordenadas de los puntos de verificación según se determina a partir de los datos fuente de mayor precisión;
2. Al comparar los valores de las coordenadas leídas de las imágenes (utilizando medidas fotogramétricas estéreo u otro método apropiado) a las coordenadas del punto de verificación según se determinó para una fuente de datos de mayor precisión.
Para los proyectos que proporcionan entregables que solo se requieren para
cumplir con las precisiones en 𝑋 y 𝑌 (ortoimágenes o datos vectoriales bidimensionales), los errores de triangulación aérea en 𝑍 tienen un impacto menor
en el presupuesto de errores horizontales que los errores en 𝑋 y 𝑌. En tales casos, los requisitos de triangulación aérea para 𝑹𝑴𝑺𝑬𝒛 pueden ser poco exigentes. Por esta razón, la norma reconoce dos criterios diferentes para la precisión de triangulación aérea (ASPRS A. S., 2015):
1. Exactitud de la triangulación aérea diseñada para datos planimétricos digitales
(ortoimágenes o datos vectoriales bidimensionales) únicamente:
𝑅𝑀𝑆𝐸𝑥(𝐴𝑇) ó 𝑅𝑀𝑆𝐸𝑦(𝐴𝑇) = 12⁄ ∗ (𝑅𝑀𝑆𝐸𝑥(𝑚𝑎𝑝𝑎) ó 𝑅𝑀𝑆𝐸𝑦(𝑚𝑎𝑝𝑎)) (22)
𝑅𝑀𝑆𝐸𝑧(𝐴𝑇) = 2 ∗ ( 𝑅𝑀𝑆𝐸𝑥(𝑚𝑎𝑝𝑎) ó 𝑅𝑀𝑆𝐸𝑦(𝑚𝑎𝑝𝑎)) 𝑑𝑒 𝑙𝑎 𝑜𝑟𝑡𝑜𝑓𝑜𝑡𝑜𝑔𝑟𝑎𝑓í𝑎 (23)
Nota: La contribución exacta de los errores de triangulación aérea en z al
presupuesto de error horizontal general para los productos depende de la ubicación del punto de tierra en la imagen y otros factores. La relación establecida aquí para un 𝑅𝑀𝑆𝐸𝑧(𝐴𝑇) del doble del RMSE permisible en 𝑋 o 𝑌 es una estimación
conservadora que se adapta al rango típico de geometrías de cámara comunes y permite muchos otros factores que afectan el presupuesto de error horizontal.
2. Exactitud de la triangulación aérea diseñada para datos de elevación, o datos
planimétricos (ortoimágenes o mapas planimétricos digitales) y producción de datos de elevación:
𝑅𝑀𝑆𝐸𝑥(𝐴𝑇), 𝑅𝑀𝑆𝐸𝑦(𝐴𝑇), 𝑅𝑀𝑆𝐸𝑧(𝐴𝑇) = 12⁄ ∗ (𝑅𝑀𝑆𝐸𝑥(𝑚𝑎𝑝𝑎), 𝑅𝑀𝑆𝐸𝑦(𝑚𝑎𝑝𝑎), 𝑅𝑀𝑆𝐸𝑧(𝐷𝐸𝑀))(24)
2.3.5 Prueba de normalidad Shapiro-Wilk
Las pruebas de normalidad se utilizan para contrastar si los datos de la muestra pueden considerarse que proceden de una determinada distribución normal, es

50
decir, si la muestra está extraída aleatoriamente de una población que sigue un modelo de probabilidad ajustado a la distribución normal. La prueba de Shapiro-Wilk (Shapiro & Wilk, 1965) es prueba de normalidad más consolidadas y con mayor potencia estadística entre las existentes actualmente (Arcones & Wang, 2006). Su fundamento estadístico está basado en una gráfica de probabilidad en la que se considera la regresión de las observaciones sobre los valores esperados de la distribución hipotetizada, en donde su estadístico W representa el cociente de dos estimaciones de la varianza de una distribución normal. Esta prueba ha demostrado de manera general, resultados adecuados en comparación a las pruebas clásicas (Arcones & Wang, 2006), pero especial mente cuando se trabaja con distribuciones de colas cortas (Thadewald & Buning, 2007) y con un tamaño muestral inferior a 30, ya que muestra una alta variabilidad cuando se modifican tanto la simetría como el tamaño muestral de la distribución, especialmente entre 20 y 50 datos (Yazici & Yolacan, 2007). La prueba está definida por:
𝑊 = 1
𝑛𝑠2[∑ 𝑎𝑗,𝑛 (𝑥𝑛−𝑗+1 − 𝑥𝑗)𝑖=ℎ𝑖=1 ]
2 (22)
𝑛𝑠2 = ∑ (𝑥𝑖 − ��)2𝑖=𝑛
𝑖=1 (23)
Si 𝑛 es par:
ℎ =𝑛
2 (24)
Si n es impar:
ℎ =𝑛−1
2 (24)
Donde: 𝑎𝑗,𝑛 = son coeficientes predeterminados de la prueba
𝑥𝑗 es el valor ordenado en la muestra que ocupa el lugar 𝑗.
𝑛 = Tamaño de la muestra 𝑥 = Muestra
2.4 GEODESIA SATELITAL Y SISTEMAS SATELITALES La geodesia es una de las ciencias más antiguas cultivadas por el hombre
(Sevilla, M., 2012). El objeto de la geodesia es el estudio y determinación de la forma y dimensiones de la Tierra y de su campo de gravedad, y la representación de puntos de superficie (Sevilla, M.J., 1983). La geodesia satelital fue iniciada por la URSS (Unión de Repúblicas Socialistas Soviéticas) en octubre de 1957 con el lanzamiento del primer satélite artificial de la Tierra: el Sputnik I. Posteriormente, a partir de este lanzamiento, se pudo observar que determinando el corrimiento
51
Doppler de las señales radiodifundidas por el Sputnik, desde estaciones de posición conocidas, era posible establecer la órbita del satélite. Esto permitió el planteo inverso, es decir, si la órbita era conocida previamente sería posible obtener la posición de un receptor en una ubicación cualquiera. Para ello habría que realizar observaciones varias veces del satélite. Durante la década siguiente, las investigaciones se orientaron a desarrollar y perfeccionar los métodos básicos de observaciones satelitales y de cálculo de órbitas encaminados a implementar sistemas de posicionamiento y de determinación del campo de gravedad terrestre, lo que permitió crear el primer sistema de posicionamiento geodésico (Huerta, et al., 2005).
2.4.1 El Sistema de Posicionamiento Global GPS La implementación del programa NAVSTAR, GPS (Navigation System Timing
And Ranging, Global Positioning System) fue iniciada en diciembre de 1973, el desarrollo y mantenimiento del sistema estaba a cargo del Departamento de Defensa de los Estados Unidos, División Sistema Espacial. GPS es un sistema que tiene como objetivo la determinación de las coordenadas espaciales de puntos respecto de un sistema de referencia mundial. Los puntos pueden estar ubicados en cualquier lugar del planeta, pueden permanecer estáticos o en movimiento y las observaciones pueden realizarse en cualquier momento del día. Para la obtención de coordenadas el sistema se basa en la determinación simultánea de las distancias a cuatro satélites (como mínimo) de coordenadas conocidas. Estas distancias se obtienen a partir de las señales emitidas por los satélites, las que son recibidas por receptores especialmente diseñados. Las coordenadas de los satélites son provistas al receptor por el sistema (Huerta, et al., 2005).
Desde el punto de vista geodésico, el Sistema GPS responde a dos
requerimientos básicos (Huerta, et al., 2005):
Planteo directo o levantamiento: se tiene en el terreno un punto materializado, un pilar con placa y marca, un mojón, etc. Se piden sus coordenadas en un sistema de referencia prefijado.
Planteo inverso o replanteo: se dan las coordenadas de un punto en un sistema de referencia determinado y se pide la localización de dicho punto, que, de no estarlo ya, será materializado en el terreno.
2.4.2 Constitución del Sistema GPS Está constituido por tres segmentos fundamentales geodésico (Huerta, et al.,
2005) (Sevilla, M.J., 1983):
Segmento Espacial: El segmento espacial consiste en un conjunto de satélites operacionales que transmiten señales de radio a los usuarios. El segmento

52
espacial del sistema GPS consiste en hasta 32 satélites operacionales que orbitan la Tierra en 6 diferentes planos orbitales (de cuatro a cinco satélites). Esta disposición de 24 asegura que hay al menos cuatro satélites a la vista desde prácticamente cualquier punto del planeta.
Figura 16. Segmento espacial. Constelación de satélites.
Fuente: (Huerta, et al., 2005).
Segmento de Control: Las funciones principales del segmento de control, denominado internacionalmente con las siglas OCS (Operational Control Segment) son: monitoreo y control permanente de los satélites con el objeto de determinar y predecir las órbitas y los relojes de a bordo, la sincronización de los relojes de los satélites con el tiempo GPS y la transmisión, a cada satélite, de la información procesada. Está integrado por Estación de Control Maestra (MCS), varias Estaciones de Monitoreo (MS) y Antenas Terrestres (GA).
Figura 17. Segmento de control. Estaciones permanentes.
Fuente: (Huerta, Mangiaterra, & Noguera, 2005)
Segmento usuario: Está constituido por los instrumentos utilizados para recepcionar y procesar la señal emitida por los satélites. Estos

53
instrumentos están integrados esencialmente por una antena y un receptor. Un equipo complementario es usado, en ocasiones, para transferir datos entre receptores.
2.4.2.1 Información obtenida a partir de receptor: una vez en funcionamiento, el receptor puede ofrecer al operador una muy amplia y diversa información sobre el proceso de observación, mientras recibe las señales de los satélites. Aunque varía entre diferentes modelos, se suele disponer de la siguiente información (Huerta, et al., 2005).
Satélites localizados
Satélites en seguimiento
Intensidad de cada señal recibida
Condición de cada satélite en seguimiento
Posición de un punto: longitud, latitud, altitud
Calidad de la geometría de observación Según la precisión con que se pueden obtener los resultados, podemos
clasificarlos en receptores: geodésico, topográficos y navegadores.
2.5 NORMATIVIDAD
2.5.1 Reglamentación aeronáutica: con el transcurso del tiempo, ha evolucionado la regulación del uso de los vehículos aéreos no tripulados en el país y en el mundo; a nivel nacional, la entidad encargada de controlar y reglamentar este tipo de operaciones es la Unidad Especial de Aeronáutica Civil, por su parte la Organización de Aviación Civil Internacional hace sus veces a nivel mundial.
La primera vez que se incluyó éste tema en la legislación colombiana, fue en el año 2003 por medio de la Resolución 05545, la cual aplicó sobre Actividades Aéreas Deportivas y Recreativas, dentro de las cuales se concibieron los aeromodelos empleados a control remoto, la practica con dichos equipos debía estar limitada a los usos permitidos dentro de los clubes de aeromodelismo
No volar aeromodelos sobre áreas ni edificaciones o directamente sobre público o aglomeraciones de personas;
No volar aeromodelos, de ningún otro modo que se pueda crear un riesgo para las personas o propiedades en la superficie; particularmente cuando el viento fuerte o cualquier otro factor meteorológico, así como desperfectos mecánicos del aparato o del equipo de control, o falta de

54
pericia del operador puedan ocasionar que se pierda el control total sobre el mismo;
El peso máximo permitido para cualquier aeromodelo será de 25 kg. No deberán volarse en el espacio aéreo colombiano aparatos con peso superior, a menos que se informe sobre su existencia y propietario a la Dirección de Operaciones Aéreas y este cuente con un seguro de responsabilidad por eventuales daños a terceros;
No utilizar hélices metálicas de ningún tipo;
Ningún aeromodelo puede portar pesos útiles, diferentes a los elementos habitualmente requeridos para la práctica de ese deporte;
Ningún Aeromodelo será volado desde un aeropuerto real o en sus proximidades dentro de un radio de 5 Km. a la redonda, a menos que exista un permiso especial de la Dirección de Operaciones Aéreas de la UAEAC;
Ningún aeromodelo será volado a una altura superior a 500 pies sobre el terreno;
No deberá volarse ningún aeromodelo de modo que se aleje más de 750 metros de distancia del aeromodelista que lo opera ni del lugar de su lanzamiento o despegue;
Ningún aeromodelo será volado de modo que no exista o se pierda el contacto visual con quien lo opera. No deberán efectuarse tales operaciones cuando la visibilidad o las condiciones de luz solar se reduzcan de modo tal que se impida dicho contacto visual.
Los anteriores, fueron los primeros lineamientos relacionados a la implementación de vehículos aéreos no tripulados, sin embargo, la legislación ha evolucionado hasta tener las circulares 002 y 003 de la Unidad Administrativa Especial de Aeronáutica Civil y la Resolución 04201 de 2018, la circular 003 entra en vigencia en junio de 2019, sin embargo, a continuación se relacionan algunas de las disposiciones más relevantes que aplican a cualquier persona u organización interesadas en efectuar operaciones en el espacio aéreo colombiano con aeronaves pilotadas a distancia, con fines diferentes de recreación y deportes.
Condiciones de aeronavegabilidad (Aeronáutica civil de Colombia, 2015):
Hélices o rotores no podrán ser metálicas.
Debe estar equipado con al menos:
a. Sistema de piloto automático

55
b. Sistema GPS
c. Sistema de lanzamiento y recuperación en condiciones normales de operación.
d. Sistema de Seguridad en vuelo
Estación de pilotaje a distancia y un radio receptor para escucha de frecuencia aeronáutica de comunicaciones.
El sistema de radio control, de transmisión y recepción de datos o imagen no deberán causar interferencia a otros tipos de sistemas o actividades aeronáuticas o no aeronáuticas.
El sistema de moto propulsor no debe generar ruido excesivo o contaminación.
Contar con instructivos o manuales técnicos y de operación.
Los colores exteriores del VANT la hacen visible y detectable a distancia. Debe tener adherido un placard con el nombre del Explotador y datos de contacto para identificar la aeronave y el responsable en caso de accidente, incidente o violación a la norma.
Clasificación (Aeronáutica civil de Colombia, 2015):
Los VANT se clasifican en Colombia en las siguientes dos categorías:
a. Pequeños, aeronaves con peso máximo de despegue menor o igual a 25 kg.
b. Grandes, aeronaves con peso máximo de despegue mayor a 25 kg, las cuales hasta el momento tienen prohibida la operación civil.
Limitaciones de la operación RPAS en Colombia:
No se permitirá operación RPAS en Colombia para:
Volar sobre área congestionada, edificaciones o directamente sobre público o aglomeraciones de personas.
Volar de modo que se pueda crear un riesgo para las personas o propiedades en la superficie, particularmente, cuando el viento fuerte o cualquier otro factor meteorológico, así como desperfectos mecánicos del aparato o del equipo de control, o falta de pericia del operador, que puedan ocasionar que se pierda el control total sobre el mismo.

56
Aeronaves pilotadas a distancia con un peso máximo de despegue superior a 25 kg.
Aeronaves pilotadas a distancia que portan pesos útiles diferentes a los elementos que sean aprobados por la Dirección de Servicios a la Navegación Aérea (DSNA) para el vuelo a ser realizado.
Volar desde un aeródromo o en sus proximidades dentro de un radio de 2.7 NM o 5 KM a la redonda.
Volar a una altura superior a 500 pies o 152 metros aproximadamente sobre el terreno o sobre el agua.
Volar de modo que se aleje más de 750 metros de distancia del operador o del lugar de su lanzamiento o despegue.
Volar en operación nocturna o diurna bajo reglas de vuelo por instrumentos.
Volar al interior de una zona prohibida o restringida del espacio aéreo, publicada por la UAEAC.
Volar en las proximidades dentro de un radio de 1 milla náutica o 1.8 kilómetros a la redonda de cualquier lugar o donde se encuentra el Presidente de la República, Vicepresidente y otras autoridades nacionales y extranjeras.
Volar cerca de o sobre instalaciones militares, policiales o centros carcelarios.
Volar transportando animales.
Arrojar objeto alguno estando en vuelo.
Operar cerca de cualquier aeronave tripulada.
Efectuar operaciones autónomas, en el ámbito civil, haciendo uso de Vehículos Aéreos Autónomos, independientemente de su finalidad, excepto para su pronta recuperación en caso de fallas o emergencia.
Ningún sistema de aeronave pilotada a distancia podrá utilizarse en la navegación aérea internacional, o sobre alta mar. Tampoco podrán operar en cercanías de límites fronterizos con otros estados a menos de 5 millas náuticas o 9.2 kilómetros aproximadamente.
Tal cual se reafirma en la Resolución 04201 del 2018 la adopción de la norma RAC 91 de los Reglamentos Aeronáuticos de Colombia denominado “Operación
57
de sistemas de aeronaves no tripuladas UAS”, la cual contiene todas las generalidades (definiciones y abreviaturas, ámbitos de aplicación, clasificación de las operaciones con UAS, notificación de incidentes y accidentes, régimen sancionatorio), la caracterización de los UAS de Clase A, B y C, los lineamientos para autorizaciones de vuelos UAS, entre otros aspectos que rigen las operaciones de sistemas de aeronaves no tripuladas.
2.5.2 Reglamentación cartográfica
2.5.2.1 Resolución 643 de 2018 – Instituto Geográfico Agustín Codazzi
La Resolución 643 del 30 de mayo de 2018 es la que adopta las especificaciones técnicas de levantamiento planimétrico para las actividades de barrido predial masivo y las especificaciones del levantamiento topográfico o planimétrico para casos puntuales. Define los procesos a llevar a cabo para la georeferenciacion con equipos GNSS, los errores permitidos y los entregables que deben cumplir los proyectos topográficos. Establece que para el levantamiento se deben utilizar equipos GNSS de doble frecuencia y se debe emplear el método estático diferencial a partir de dos puntos geodésicos de la red pasiva, dos estaciones permanentes de la red MAGNA ECO o una combinación de ambas. El rastreo se debe realizar bajo los parámetros de rastreo GNSS (horizonte despejado, máscara de elevación y DOP adecuados) y en cumplimiento al tiempo establecido para distancias menores a ochenta kilómetros, cuya fórmula está determinada por la ecuación 25 (IGAC, 2018).
𝑡 = 65 𝑚𝑖𝑛 + (3 𝑚𝑖𝑛 ∗ (𝑑 − 10)) (25)
Donde:
𝑡 = tiempo de rastreo
𝑑 = distancia en kilómetros entre la base permanente y el punto de control
2.5.2.2 Resolución 1392 de 2016 – Instituto Geográfico Agustín Codazzi La resolución 1392 de 2016 contiene todas las especificaciones técnicas de
cartografía básica en temas de georeferenciación, sistemas de referencia y proyección cartográfica, calidad de los datos, salidas gráficas, ortoimagenes, modelos digitales de terreno, control terrestre y demás procesos que parametrizan las etapas ejecutadas en el proyecto presentado (IGAC, 2016).

58
3. MATERIALES Y MÉTODOS
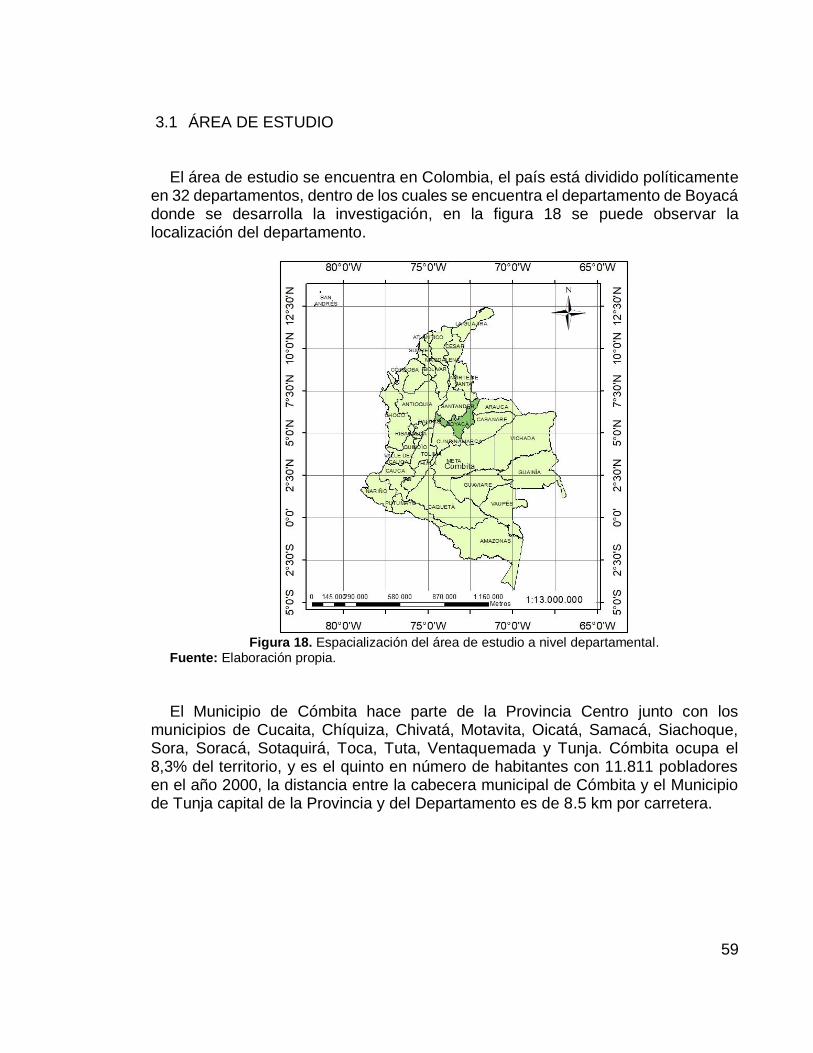
59
3.1 ÁREA DE ESTUDIO
El área de estudio se encuentra en Colombia, el país está dividido políticamente
en 32 departamentos, dentro de los cuales se encuentra el departamento de Boyacá donde se desarrolla la investigación, en la figura 18 se puede observar la localización del departamento.
Figura 18. Espacialización del área de estudio a nivel departamental.
Fuente: Elaboración propia.
El Municipio de Cómbita hace parte de la Provincia Centro junto con los municipios de Cucaita, Chíquiza, Chivatá, Motavita, Oicatá, Samacá, Siachoque, Sora, Soracá, Sotaquirá, Toca, Tuta, Ventaquemada y Tunja. Cómbita ocupa el 8,3% del territorio, y es el quinto en número de habitantes con 11.811 pobladores en el año 2000, la distancia entre la cabecera municipal de Cómbita y el Municipio de Tunja capital de la Provincia y del Departamento es de 8.5 km por carretera.

60
Figura 19. Espacialización del área de estudio a nivel municipal.
Fuente: Elaboración propia.
Cómbita se ubica a 2825 m.s.n.m, y se localiza a 5°39'25” de latitud Norte y a
73°20'00” al Oeste, con una temperatura promedio de 13°C. Limita por el norte con el municipio de Arcabuco y departamento de Santander; por el nororiente con el municipio de Sotaquirá; al oriente con los municipios de Tuta y Oicatá; por el sur con los municipios de Tunja y Motavita; por el occidente con los municipios de Arcabuco y Motavita. El Municipio a nivel regional se comunica con la capital de la provincia del Centro y de allí con el resto del país a través de la llamada Transversal de Boyacá o carretera del progreso (Alcaldía Municipal de Cómbita, 2018).
Cómbita está conformado por nueve veredas (La Concepción, San Rafael, San
Onofre, San Isidro, Las Mercedes, San Francisco, Santa Bárbara, San Martín y el Carmen) (figura 20) con un extensión rural de 14.853.62 ha y el perímetro urbano solo abarca 45.84 ha. Dentro del territorio del municipio existen vías carreteables que comunican al casco urbano con todas las veredas, sin embargo la mayoría presentan problemas por falta de mantenimiento. La Vereda de mayor extensión es Santa Bárbara con un área de 5.941.53 ha que representa el 40% del total municipal, con 1994 habitantes y con una densidad de 335.60 ha /Km. Esta ubicada en la parte norte y sus límites son: por el Oriente, con la Vereda Las mercedes y el municipio de Sotaquirá, por el occidente, el municipio de Arcabuco; por el norte, con la población de Gámbita Santander; por el sur con las veredas de San Rafael y las Mercedes (Alcaldía Municipal de Cómbita, 2018).

61
Figura 20. . Espacialización del área de estudio a nivel veredal.
Fuente: Elaboración propia.
Figura 21. Fotografía del terreno analizado.
Fuente: Elaboración propia.

62
Figura 22. Fotografía del terreno analizado.
Fuente: Elaboración propia.
Su territorio es bastante húmedo y cuenta con un buen número de quebradas,
entre las que se destacan El Río de Piedras, que tiene un origen en una de las lagunas que allí se encuentran. El Caudal de este río surte uno de los acueductos más largos que abastece el consumo de más de 300 familias, no solo del municipio de Cómbita sino también de Oicatá. Sobresalen además las quebradas Honda, Piedecuesta, Toledo, Quebraditas, Los Puentes y quebrada Los Garavito. Cuenta además con lagunas de agua cristalina de regular extensión, que le dan a la región una vegetación de bosques húmedos y una fauna especial que hacen del área una reserva ecológica natural (Alcaldía Municipal de Cómbita, 2018).
Clima Cómbita debido a su ubicación presenta clima semihúmedo y seco, la
temperatura presente en el municipio de Cómbita y de acuerdo a los datos de estación Tunja-UPTC fluctúa de 11,4 ºC temperatura mínima mensual (promedios anuales), y máxima de 14.7ºC anual; los meses que registran incremento en la temperatura son: febrero marzo y abril, octubre y noviembre; mientras que los meses que registran bajas temperaturas son mayo, junio, julio, agosto y septiembre. El piso térmico de páramo se extiende desde lo 3.000 hasta los 3.700 m.s.n.m. para la localidad, según varios autores y Cómbita posee parte de esta región hacia el oriente y norte del municipio, cuyas temperaturas oscilan entre 0º y 12ºC de las horas de la tarde al amanecer. El promedio mensual medios de precipitación es de 35,7 mm en el mes Agosto, los máximos en el mes de marzo con 141,0 mm y mínimo en el mes de enero con 0.5 mm de acuerdo a la figura el patrón de

63
distribución de lluvias es de tipo bimodal con un periodo de concentración de aproximadamente de 3 meses de duración. Se presentan dos periodos lluviosos (abril, a junio y octubre a noviembre), intercalados con dos periodos de baja pluviosidad (diciembre a marzo y julio a septiembre), donde se presentan meses secos como enero, febrero , julio y diciembre influenciado por la corriente seca del río Chicamocha y la humedad desde Arcabuco (Alcaldía Municipal de Cómbita, 2018).
Economía: En Cómbita, la actividad que más genera empleo en la región es la agropecuaria;
esta conformada por dos ramas: La agrícola y la Ganadera; la provincia produce especialmente productos transitorios (papa, cebada, trigo, maíz y arveja). En la Vereda Santa Bárbara, el clima es diferente, lo mismo la calidad de sus suelos, factores que hacen de está, junto con San Rafael y Las Mercedes, la despensa agrícola del municipio en productos de clima frío. Los cultivos son de carácter familiar, conformados por pequeñas extensiones, su manejo obedece a procesos tradicionales. En la Vereda Santa Bárbara los principales productos son papa y frutales como curuba, durazno, ciruela y en menor proporción, arveja, haba y maíz. Para el cultivo de papa tienen dos fechas especiales de siembra (taparla) que son: año grande (enero- febrero) y san pedrana (junio- julio), allí siembran diferentes variedades entre las que se encuentran parda pastusa, Puracé, ICA única y R12. La curuba en cambio se siembra cuando se puede (Alcaldía Municipal de Cómbita, 2018).
Actualmente, en la Vereda se ésta integrando la cooperativa Coagrocombita, que
trabaja especialmente con curuba, con el fin de ampliar y mejorar el mercado de éste producto.
La explotación pecuaria está orientada a ganadería de doble propósito las razas
predominantes en la explotación bovina son: criollo, holtstein y cruces de normando. En este momento, los ganaderos pretenden tecnificar esta actividad, mediante el análisis de la calidad de la leche producida y de esta manera comercializarla con grandes empresas de productos lácteos (Alcaldía Municipal de Cómbita, 2018).
Vías: La cabecera Municipal de Cómbita, está comunicada con la capital del
Departamento de Boyacá, por medio de un ramal que la une con la Troncal del Norte, la cual comunica a ésta capital con la ciudad de Sogamoso. El estado de ésta es bueno, se encuentra pavimentada. También comunica por vía destapada a la carretera central a Bucaramanga, la misma a Arcabuco. El Municipio de Cómbita se caracteriza por presentar una densa red vial rural. En ella se encuentran vías en diferentes estados de conservación (Alcaldía Municipal de Cómbita, 2018).

64
EQUIPOS Y MATERIALES
3.2 VEHÍCULO AÉREO NO TRIPULADO (VANT) – DJI PHANTOM 4 El uso del VANT es esencial para la captura de imágenes aéreas de la zona de
estudio, las cuales son uno de los insumos más importantes para la ejecución del proyecto. Se utiliza un Phantom 4 de la marca DJI, el cual es un cuadricóptero con características que aseguran la estabilidad que requiere un vuelo fotogramétrico. Este VANT tiene tres modos de vuelo. A continuación, se definen los detalles de cada modo de vuelo Fuente especificada no válida.:
P – mode (Posicionamiento): En este modo de vuelo, el vehículo utiliza el GPS y el sistema de detección de obstáculos para estabilizarse automáticamente, navegar entre los obstáculos o el seguimiento de un objeto en movimiento.
S – mode (Deporte): En este modo de vuelo, el vehículo es conducido manualmente y los valores de ganancia de conducción se ajustan con el fin de mejorar la maniobrabilidad de la aeronave en S – mode. La velocidad máxima de vuelo de la aeronave se aumenta a 20 m s en este modo. Tenga en cuenta que el sistema de detección de obstáculos se desactiva en este modo.
A – mode (Attitude): En este modo de vuelo, el vehículo no utiliza el GPS ni el sistema de detección de obstáculos está disponible, la aeronave sólo se hará uso de su barómetro de posicionamiento para controlar la altitud.
En la figura 23 se pueden identificar las partes del VANT: [1] GPS; [2] Hélice; [3] Motor; [4] LED Indicador frontal; [5] Gimbal y cámara; [6]
Sistema de detección de obstáculos; [7] Batería inteligente; [8] Indicador de estado; [9] Cámara/Vinculación Indicador de estado y Link Button; [10] Puerto Micro USB; [11] Ranura para tarjeta Micro SD de la cámara; [12] Sensores de posicionamiento.
Figura 23. Partes del VANT DJI Phantom 4
Fuente: Elaboración propia.

65
3.3 CÁMARA Y GIMBAL
La cámara de a bordo utiliza el sensor CMOS de 1/2,3 pulgadas para capturar
video (hasta 4096x2160 pa 24fps con el Phantom 4) e imágenes fijas de 12 megapíxeles. Los modos de disparo de la imagen disponibles incluyen ráfaga, continuo y a intervalos. En la tabla 4 se detallan las características de la cámara a bordo del Phantom 4.
Tabla 4.Características técnicas de la cámara del VANT Phantom 4.
CARACTERÍSTICA DESCRIPCIÓN
Sensor 1/2,3”. Pixeles efectivos: 12 M
Rango ISO Video: 100 – 3200; Fotografía: 100 –
1600
Velocidad de obturador electrónico
1/8000 seg.
Tamaño de la imagen 4000 x 3000
Modos de fotografía fija
Solo un disparo Ráfaga de disparos: 3, 5, 7 marcos
Exposición automática (AEB) 0.7 AV Bias
Entre lapsos de tiempo HDR
Sistemas de archivos compatibles
FAT32(<32GB); exFAT(<32GB)
Formato de fotografía JPEG, DNG(RAW)
Formato de vídeo MP4/MOV(MPEG – 4 AVC/H.264)
Temperatura de operación 32º a 104º F (0º a 40ºº C) Fuente: Fuente especificada no válida.
Este vehículo aéreo no tripulado, cuenta con un gimbal (figura 24) de 3 ejes que
proporciona una plataforma estable para la cámara acoplada, lo que permite capturar imágenes y videos estabilizados, éste también permite inclinar la cámara hasta 120 grados.
Figura 24. Gimbal de la cámara del VANT Phantom 4.
Fuente:Fuente especificada no válida..

66
3.4 Receptor GNSS
Para el desarrollo del proyecto se utilizan dos kits de receptores GNSS Topcon GR-5 de propiedad del laboratorio de topografía de la Universidad Distrital Francisco José de Caldas conformados por todos los equipos que se pueden observar en la figura 25.
Figura 25. Componentes del Kit Topcon GR-5.
Fuente: Elaboración propia.
3.5 NAVEGADOR GPS-GARMIN OREGON 750 Se utiliza un navegador GPS Garmin Oregón 750, para capturar coordenadas de
los puntos de control terrestre y luego compararlas con las capturadas con el receptor GNSS, se puede observar en la figura 26. Éste navegador recibe señal GPS y GLONASS, tiene brújula, acelerómetro, altímetro barométrico y cámara de 8 megapíxeles que geoetiqueta las fotos automáticamente. El equipo utilizado es propiedad del laboratorio de topografía de la Universidad Distrital Francisco José de Caldas.

67
Figura 26. Garmin Oregón 750.
Fuente: Fuente especificada no válida.
3.6 ESTACIONES PERMANENTES DEL INSTITUTO GEOGRÁFICO AGUSTÍN CODAZZI
Se utilizan dos estaciones permanentes de la Red Magna Eco para el
procesamiento de los datos GNSS capturados con los GPS Topcon GR-5 en cumplimiento con la Resolución 643 del 30 de mayo de 2018, las estaciones TUNA y FQNE son elegidas por su proximidad al área de estudio (18 y 56 km respectivamente). En el Anexo 1 se puede observar la distribución espacial de las estaciones permanentes y del área de estudio.
3.7 SOFTWARE
Los softwares utilizados fueron DroneDeploy para el diseño y la ejecución del
vuelo fotogramétrico, Pix4D para el procesamiento de las aerofotografías capturadas con el VANT DJI Phatom 4 con el propósito de generar productos fotogramétricos de precisión submétrica, Topcon Tools para el procesamiento de datos GNSS capturados con los receptores GR-5 y posterior cálculo de coordenadas, la Universidad Distrital Francisco José de Caldas cuenta con licencias vigentes de estos softwares.
3.8 METODOLOGÍA
En la figura 27 se expone el flujo de trabajo implementado en la presente investigación. Como se puede observar, el proceso se desarrolla en cuatro etapas, la primera, comprende las actividades previas a la ejecución del trabajo tales como la delimitación del área de trabajo, el diseño de la malla de puntos de control
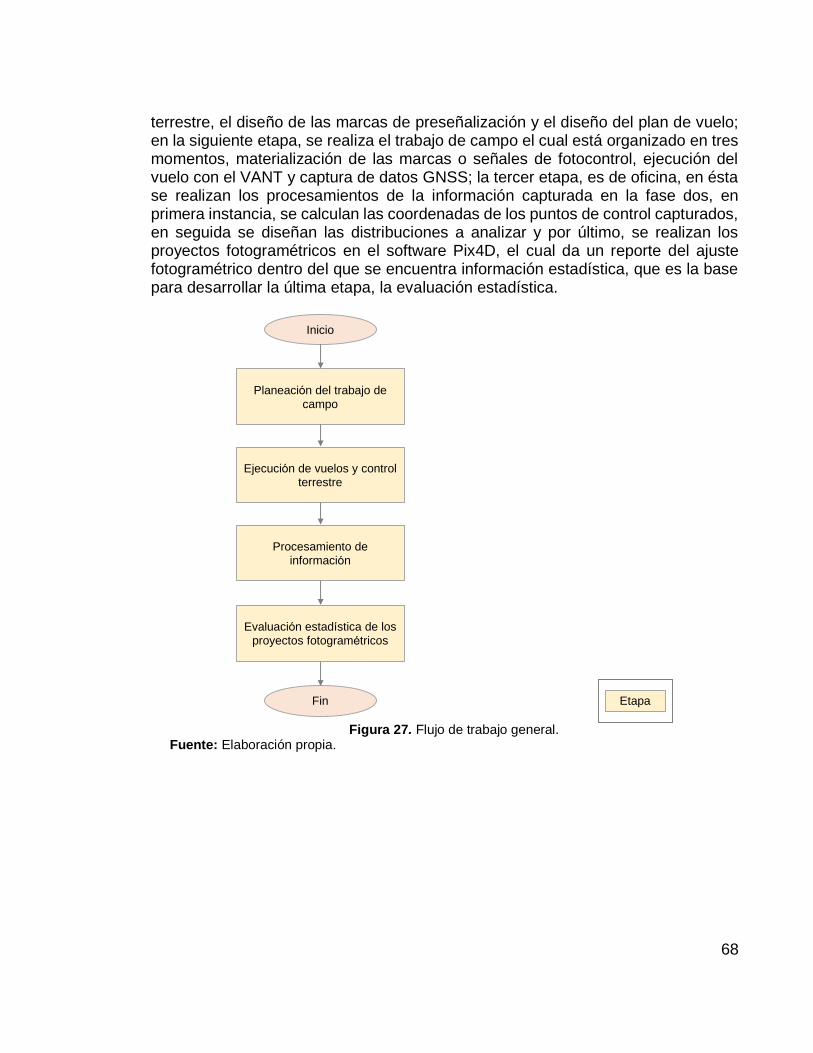
68
terrestre, el diseño de las marcas de preseñalización y el diseño del plan de vuelo; en la siguiente etapa, se realiza el trabajo de campo el cual está organizado en tres momentos, materialización de las marcas o señales de fotocontrol, ejecución del vuelo con el VANT y captura de datos GNSS; la tercer etapa, es de oficina, en ésta se realizan los procesamientos de la información capturada en la fase dos, en primera instancia, se calculan las coordenadas de los puntos de control capturados, en seguida se diseñan las distribuciones a analizar y por último, se realizan los proyectos fotogramétricos en el software Pix4D, el cual da un reporte del ajuste fotogramétrico dentro del que se encuentra información estadística, que es la base para desarrollar la última etapa, la evaluación estadística.
Figura 27. Flujo de trabajo general.
Fuente: Elaboración propia.
Inicio
Planeación del trabajo de campo
Ejecución de vuelos y control terrestre
Procesamiento de información
Evaluación estadística de los proyectos fotogramétricos
Fin Etapa

69
3.8.1 Etapa 1: Planeación del trabajo de campo
Figura 28. Flujo de trabajo etapa 1.
Fuente: Elaboración propia.

70
En la figura 28 se expone el flujo metodológico llevado a cabo en la primera etapa de investigación teniendo en cuenta la búsqueda bibliográfica realizada. Esta incluye la obtención de una ortofotografía de la zona, la delimitación del área de estudio, el establecimiento de la grilla de puntos de control terrestre, el diseño de las marcas de preseñalización, la programación del trabajo de campo para la adecuada captura de los datos GNSS y la planificación de los vuelos fotogramétricos en el software DroneDeploy. A continuación, se describe cada una de las fases desarrolladas en la etapa de planeación del trabajo de campo.
3.8.1.1 Ortofotografía preliminar: con el propósito de tener una imagen clara del área de estudio y debido a que las imágenes satelitales de la vereda Santa Bárbara contienen altos porcentajes de nubosidad se identifica la necesidad de obtener una ortofotografía preliminar que permitiera delimitar el área de estudio y diseñar la grilla de puntos de fotocontrol terrestre. Se realiza un vuelo preliminar teniendo en cuenta que cubra diversas coberturas para posteriormente delimitar el área de interés, en la figura 29 se ilustra el recuadro utilizado para planear dicho vuelo en el software DroneDeploy.
Figura 29. Captura de pantalla de la delimitación del área del vuelo preliminar.
Fuente: Elaboración propia.
El vuelo preliminar tiene las características expuestas en la tabla 5, estas se eligieron debido a que fue un vuelo experimental que permitió delimitar los

71
parámetros para definir los vuelos formales de la investigación. La ejecución del vuelo se realizó el día 6 de julio de 2018 bajo condiciones meteorológicas mayormente nubladas y con fuertes vientos
Tabla 5. Características técnicas del plan de vuelo preliminar realizado en DroneDeploy.
VUELO PRELIMINAR
Área a volar 20 ha
Altura de vuelo 80 mts
Velocidad de vuelo
15 mts/s
Traslape longitudinal
70%
Traslape lateral 70%
Fotografías 189
GSD 3,70 cm
Tiempo de vuelo 18 minutos Fuente: Datos de plan de vuelo en la aplicación DronDeploy.
Con las aerofotografías capturadas del vuelo preliminar, se realizó el
procesamiento digital de imágenes y se obtuvo la ortofotografía preliminar (figura 37) que se convierte en insumo base para la delimitación del área de estudio y el establecimiento de la grilla de puntos de control terrestre.
3.8.1.2 Delimitación del área de estudio: gracias a la ortofotografía obtenida, se delimita un área de 38 ha ubicada en la vereda Santa Bárbara del municipio de Cómbita departamento de Boyacá, con coordenadas geográficas 5°41'41.59"N 73°19'48.12"O a una altura aproximada sobre el nivel del mar de 3100m (figura 37), en donde se encuentran áreas de cultivo (papa), ganadería, vegetación, construcciones, cuerpos de agua. La zona se caracteriza por ser área de páramo con temperaturas entre los 0º y 12º C y un clima semihumedo y seco, con una topografía fuertemente ondulada, altas pendientes y redes fluviales (Evaluación EOT Cómbita, 2017).
3.8.1.3 Establecimiento de la grilla de puntos de control terrestre: con base en la ortofotografía del vuelo preliminar, se realizó una distribución basada en la toma de datos en geofísica del método por corrección topográfica para gravimetría denominado Grilla de adquisición circular de datos (Telford, et al., 1990). A partir de un punto central, se ubican tres circunferencias a 100 mts de distancia cada una, es decir, a 100, 200 y 300 metros del punto central cada una, sobre estas, se traza una línea con dirección al norte y otras siete cada 45º, en las intersecciones que se forman entre circunferencias y líneas se ubican los puntos de control, debido al relieve y al acceso a algunos puntos, se generan algunos desplazamientos en los puntos 18, 19, 20 y 21. En la figura 38 se ilustra el diseño de la malla de puntos de control.

72
3.8.1.4 Diseño de las marcas de preseñalización: es posible incluir o no la preseñalización, su implementación es con el objetivo de incrementar la exactitud en la ubicación del punto en el software de procesamiento. También es viable tomar los puntos después del vuelo, teniendo en cuenta la ortofotografía, se identifican los detalles que más se reconozcan y se hace el levantamiento geodésico de dichos puntos.
A pesar de que la preseñalización no es una actividad obligatoria para el proyecto
fotogramétrico, en el presente estudio sí se tuvo en cuenta con algunos parámetros que permiten analizar la eficiencia y den cumplimiento a los estándares de precisión posicional ASPRS. Los diseños y los colores se eligen teniendo en cuenta la teoría de absorción y reflexión del color. Los colores que se utilizan para diseñar las señales son: negro, azul, blanco, amarillo y rojo; los dos primeros absorben, combinados con los tres últimos que reflejan ubicados sobre tonalidades verdes –teniendo en cuenta que en el área de estudio priman los verdes del pasto y los cultivos-. En cuanto a los diseños, se utilizan los más utilizados en la industria de la fotogrametría (DroneDeploy, 2019) ya que tienen la facilidad de identificar vértices, éstos son: cruz, equis, ele, ajedrez y diana. En cuanto al tamaño de las señales se usaron desde 30 cms (aproximadamente 3 veces el GSD) hasta 80 cms (aproximadamente 20 veces el GSD). Los diseños implementados se ilustran en la figura 39.
3.8.1.5 Programación de la captura de datos GNSS de los PCT: la captura de datos GNSS se organiza de acuerdo a los estándares establecidos por la Resolución 643 del 2018, por tanto, el tiempo mínimo de rastreo es de 1h 29m por punto de control terrestre para el presente estudio. La captura de coordenadas se planifica con 2 kit Topcon GR-5 y un navegador Garmin Oregón 750 descritos en el ítem de materiales. Para garantizar la adquisición adecuada de los datos en campo se esboza una plantilla que contiene la información sobre cada punto de control terrestre que incluye fecha de captura, tiempo atmosférico, altura de armada, hora de inicio y final de la lectura, identificador del receptor y del punto.
3.8.1.6 Planificación de los vuelos fotogramétricos: El plan de vuelo se diseñó en la aplicación DroneDeploy, la cual está diseñada para volar VANTs, permite automatizar despegue, vuelo, captura de imágenes y aterrizaje, además de realizar la transmisión en vivo en FPV. Para el desarrollo del proyecto, se realizaron tres vuelos debido a la autonomía del VANT utilizado, dos con el fin de cubrir el área de estudio en sentido longitudinal y otro de la zona con mayor cambio de pendiente en sentido transversal, ya que, de acuerdo con los resultados obtenidos por James, et al. (2017) el incremento del número de imágenes tiene una relación directa con el aumento de la precisión de los proyectos fotogramétricos lo cual es de interés para el presente estudio. La tabla 6 contiene los parámetros que definen los vuelos según la aplicación utilizada y la figura 30 ilustra la dirección de las líneas de los vuelos ejecutados, las cuales tienen una diferencia de 90º en cada vuelo, como se observa,

73
de acuerdo a los parámetros definidos, fueron necesarias 16 líneas de vuelo con una distancia aproximada de 30 mts para cubrir el área de estudio.
Tabla 6. Características técnicas del plan de vuelo realizado en DroneDeploy
VUELO TRANSVERSAL VUELO LONGITUDINAL
Área a volar 24 ha Área a volar 10 ha
Altura de vuelo 65mts Altura de vuelo 65mts
Velocidad de vuelo 10 m/s Velocidad de vuelo 10 m/s
Traslape longitudinal 70% Traslape longitudinal 70%
Traslape lateral 70% Traslape lateral 70%
Fotografías 365 Fotografías 191
GSD 3,98 cm GSD 3,98 cm
Tiempo de vuelo 27m Elevación (msnm) 3090-3150
Elevación (msnm) 3090-3150 Tiempo de vuelo 13m Fuente: Datos de plan de vuelo en la aplicación DronDeploy
Figura 30. Diseño de las líneas de vuelo realizadas en los planes longitudinal y transversal en
el software DroneDeploy. Fuente: Elaboración propia.
Teniendo en cuenta que una superposición superior garantiza mayor precisión y
que el tiempo de procesamiento es proporcional al número de imágenes –esto se evidenció al realizar los diferentes proyectos fotogramétricos de esta investigación- los parámetros anteriores fueron elegidos con el propósito de garantizar la viabilidad del trabajo.
74
Aunque con VANT se pueden hacer traslapes hasta del 95% sin aumentar significativamente los costos del trabajo de campo, el incremento se refleja en los requerimientos de hardware y software de procesamiento y en la cantidad de tiempo necesario para el postproceso –en el caso la presente investigación los proyectos con imágenes de ambos vuelos duraron alrededor de una hora y media más de procesamiento en comparación con los procesamientos de las imágenes de un solo vuelo-. Debido a esto y como resultado de una evaluación costo/beneficio se eligen traslapes longitudinal y transversal de 70%, los cuales garantizan la correlación de las imágenes permitiendo la correcta ejecución de los proyectos fotogramétricos en el software Pix4D además de que con la altura de vuelo de 65 mts se cumplen los requerimientos tanto en GSD como en número de imágenes capturadas con el propósito de facilitar la etapa de postproceso.
3.8.2 Etapa 2: Ejecución de vuelos y control terrestre
La etapa dos tiene como principales insumos la ortofotografía preliminar
generada y la grilla de puntos de control, estos son los elementos de orientación bajo los cuales se logra ubicar cada uno de los puntos de control en el terreno; también se realiza una descripción de la realización de los vuelos fotogramétricos y de los procesos llevados a cabo durante la captura de las coordenadas. En la figura 31 se expone el flujo de trabajo implementado en esta etapa.

75
Figura 31. Flujo de trabajo etapa 2.
Fuente: Elaboración propia.

76
3.8.2.1 Materialización y ubicación de la preseñalización de los PCT: De acuerdo con la malla de puntos de control diseñada en la etapa anterior (figura 38), se ubican los 29 puntos de control propuestos, 24 distribuidos en la grilla y cinco a un metro de los puntos de control número 1, 19, 20, 22 y 23 con el propósito de identificarlos fácilmente a pesar de su tamaño, ya que los que se ubicaron en pares eran de 30 o 40 centímetros. Está materialización se realiza antes de ejecutar el vuelo fotogramétrico con el propósito de identificar los puntos de control en las aerofotografías y de centrar los receptores GNSS de la manera más adecuada.
3.8.2.2 Ejecución de vuelos fotogramétricos: La captura de imágenes aéreas se inicia desde la parte más elevada del área de estudio, con un vehículo aéreo no tripulado DJI Phantom 4, a partir de dicho lugar –denominado “punto de despegue”– se realiza el vuelo asistido por GPS, el cual sigue el vuelo programado en la plataforma DroneDeploy de acuerdo a los parámetros descritos en la etapa 1. La altura de vuelo permanece constante respecto a la elevación del “punto de despegue”, por tanto, el GSD no es constante, sin embargo, ya que los cambios de elevación no son altos, dicho cambio no es representativo. Para el desarrollo del proyecto se capturaron imágenes en sentido transversal y longitudinal con el propósito de analizar si existen o no bondades de dicho proceso en el incremento de la precisión de los productos fotogramétricos. La figura 32 es una ilustración del reporte del ajuste del software Pix4D en la que se pueden observar las líneas de vuelo recorridas por la plataforma aérea y las posiciones iniciales de la cámara al momento de captura de cada una de las aerofotografías.
Figura 32. Líneas de vuelo y posiciones iniciales de la cámara en la captura de las
aerofotografías. Fuente: Reporte Pix4D.

77
3.8.2.3 Captura de datos GNSS: Para el cálculo de las coordenadas de los puntos de control terrestre se utiliza un navegador Garmin Oregón 750 y cuatro receptores Topcon GR-5, cada uno centrado y nivelado con respecto a las señales materializadas en el terreno. El trabajo de campo se desarrolló durante los días 10, 11, 12 y 22 de noviembre, condiciones meteorológicas fueron favorables para la toma de datos a pesar de tener cielo parcialmente nublado. Los puntos recibieron señal de las constelaciones Navstar GPS y GLONASS, el tiempo de recepción de datos de los puntos de control 2, 9 y 23 fue de 3h, el de los puntos 18, 11, 13 y 14 fue de 2h30m y el de los demás PCT fue de 1h30m esta variación de tiempos se realizó teniendo en cuenta los cálculos de la etapa 2 en la programación de captura de datos GNSS. Respecto al proceso llevado a cabo con el navegador Garmin Oregón 750, consistió en revisar la cantidad de satélites que se encontraban en la bóveda celeste por medio de la herramienta “satelites” del equipo y confirmar la recepción de suficiente cantidad de satélites como para calcular la coordenada, en seguida se procede a ubicar el equipo sobre el vértice de cada preseñal durante 0h5m luego de los cuales hace lectura del punto y se guarda en el equipo la información de la coordenada, este paso se realizó en los 24 PCT.
3.8.3 Etapa 3: Procesamiento de información
El flujo metodológico de la etapa tres se encuentra expuesto en la figura 33, los
insumos de esta fase son los archivos RINEX obtenidos en la etapa anterior a partir del proceso de captura de datos GNSS, la grilla de distribución de PCT generada en la etapa 1 y las aerofotografías tomadas durante los vuelos fotogramétricos.
A partir de la información enunciada anteriormente, se realizan tres procesos, el
primero es el procesamiento de datos GNSS en el software Topcon Tools, el siguiente es el diseño de las distribuciones de PCT y el último el procesamiento digital de imágenes mediante el software Pix4D. A continuación, se va a desarrollar cada uno de los procesos enunciados.

78
Figura 33. Flujo de trabajo etapa 3.
Fuente: Elaboración propia.

79
3.8.3.1 Procesamiento de datos GNSS: los insumos principales de este proceso son los archivos RINEX obtenidos durante la etapa 2 con los equipos Topcon GR-5 y los publicados por el IGAC de las estaciones permanentes TUNA y FQNE. A partir de dicha información se procede a realizar el postproceso en el software licenciado de la Universidad Distrital Francisco José de Caldas Topcon Tools. Para iniciar se crea un proyecto nuevo en el cual se configuran la tolerancia de los métodos a implementar (posicionamiento por punto preciso), las unidades lineales y angulares, el sistema de proyección, el datum y el geoide que se usarán para el procesamiento. En seguida se importan los archivos RINEX al proyecto y se visualiza la distribución de los PCT y las estaciones permanentes del IGAC tal como se puede observar en la figura 34. Es necesario definir la antena utilizada, el tipo de altura, la altura de armada e importar las efemérides precisas del día juliano trabajado, es decir, en la presente investigación los días 314, 315, 316 y 326 del año 2018.
Figura 34. Distribución espacial de los PTC y las estaciones permanentes del IGAC en el
software Topcon Tools. Fuente: Elaboración propia.
Al importar toda la información descrita, se activa la opción de procesamiento en
el software y se verifica el cambio de color de los vectores para asegurar que el procedimiento se ha realizado, finalmente se activa el ajuste de red y se genera el reporte del ajuste realizado en el cual se encuentran las coordenadas de los PCT.
3.8.3.2 Diseño de las distribuciones de PCT: cada distribución genera un ajuste diferente, por ende, se varían tanto el número de puntos de control utilizados como su ubicación en el área de estudio. Se generan 22 distribuciones que incluyen combinaciones de uno, dos, tres, cuatro, cinco, ocho, nueve, doce, dieciséis y veintitrés puntos de control que permiten realizar diversos experimentos para cumplir los objetivos de la investigación, los propósitos son:

80
Identificar el número mínimo de PCT para realizar el ajuste: 1,2, 3, 4, 5.
Análisis de la variación de la ubicación de las distribuciones manteniendo el mismo número de PCT: 4, 5, 7, 8 y 10.
Influencia del incremento del número de fotografías en el incremento de la precisión: 5, 6, 11, 12, 21 y 22.
Análisis de distribuciones geométricas: 13, 14, 16, 17, 18, 19 y 20.
Bondades de utilizar grilla densa de puntos y comparación de número de imágenes en los resultados de precisión de los productos fotogramétricos: 21 y 22.
Efectividad en la distribución para levantamiento de coberturas con geometría lineal (vía): 9.
Error generado por la implementación de navegador como herramienta de captura de coordenadas para el fotocontrol: 15.
3.8.3.3 Procesamiento digital de imágenes: a partir de cada una de las distribuciones diseñadas en el proceso anterior, se crea un proyecto fotogramétrico en el software Pix4D. De las 22 configuraciones, 3 se realizan con las aerografías capturadas en los vuelos transversal y longitudinal, las demás se procesan únicamente con las imágenes del vuelo transversal. En la figura 35 se puede observar el esquema metodológico implícito en el proceso fotogramétrico, este incluye en primera instancia en la que se realiza una evaluación de la calidad del conjunto de datos (imágenes, parámetros de optimización de la cámara, puntos clave, georeferenciación a partir del GPS del VANT), computa los puntos clave, los optimiza, realiza los enlaces de los puntos clave en las fotografías, georreferencia los datos con respecto a la información del GPS de la plataforma aérea y genera el reporte de calidad; en seguida se importan las coordenadas de los PCT y se marcan en cada una de las imágenes donde se fotoidentifican, a continuación se reoptimiza el proyecto para dar inicio a la segunda fase en la que el software genera la nube densa de puntos y la malla 3D para esto se requiere fijar los parámetros como la escala, la densidad, la cantidad mínima de enlaces y la resolución requerida para el procesamiento, de igual forma se selecciona el formato de salida de los productos; en esta etapa se realiza la SIFT para correlacionar todos los puntos clave encontrados y generar la nube densa de puntos y la malla 3D. Finalmente se generan los productos fotogramétricos que para el presente estudio fueron la ortofotografía y el modelo digital de superficie, además, el software genera un informe de procesamiento que contiene los índices del ajuste realizado, el GSD obtenido, el área cubierta, el número de puntos clave calculados por imagen, la cantidad de aerofotografías calculadas, los datos de optimización de la cámara, la cantidad de enlaces generados por imagen, la cantidad de PCT implementados, las posiciones iniciales de la cámara en el momento de la toma de imágenes y los datos del procesamiento de la nube densa de puntos, la malla 3D, el MDS y la ortofoto.

81
Figura 35. Flujo de trabajo procesamiento digital de imágenes en Pix4D. Fuente: Elaboración propia.

82
3.8.4 Etapa 4: Evaluación estadística de los proyectos fotogramétricos
Como primera parte de esta etapa, se miden de las coordenadas de los PCT a
partir de las ortofotografías (𝑥, 𝑦) y los MDE (𝑧), correspondientes a cada distribución. Posteriormente se aplica el test de Shapiro–Wilk que se usa para contrastar la normalidad las coordenadas de las diferentes distribuciones (tabla 34), en el cual se plantea como hipótesis nula que una muestra de coordenadas
𝑋1, . . . , 𝑋𝑛 proviene de una población normalmente distribuida, teóricamente se rechaza la hipótesis nula si el P-Valor asociado al test es igual o menor que el nivel
de significación establecido, que para este caso es 𝛼 = 0.05. Esta prueba de normalidad es utilizada para realizar la evaluación estadística con fundamento con los estándares de precisión horizontal y vertical ASPRS explicados en el marco teórico, así mismo, para la precisión de la aerotriangulación se tienen en cuenta el segundo criterio de la misma norma de estándares de precisión posicional, que dice que la exactitud de la triangulación aérea diseñada para datos de elevación y datos planimétricos debe ser la mitad de la clase de precisión horizontal y vertical, es decir 0.0375 m. La implementación de esta evaluación estadística se realiza para poder establecer la mejor distribución de los experimentos procesados con respecto a la exactitud que se debe tener en para cartografíar una zona. El flujo de trabajo de esta etapa se encuenta en la figura 36.

83
Figura 36. Flujo de trabajo etapa 4.
Fuente: Elaboración propia.
84
4 ANALISIS Y RESULTADOS
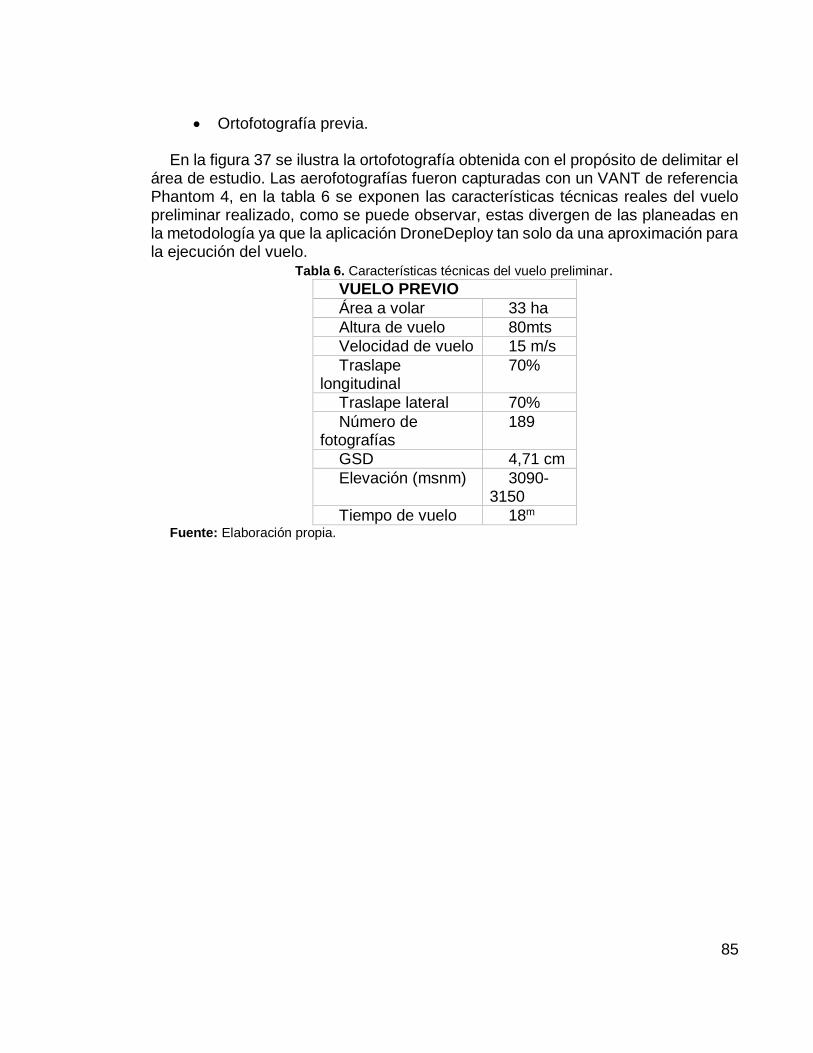
85
Ortofotografía previa. En la figura 37 se ilustra la ortofotografía obtenida con el propósito de delimitar el
área de estudio. Las aerofotografías fueron capturadas con un VANT de referencia Phantom 4, en la tabla 6 se exponen las características técnicas reales del vuelo preliminar realizado, como se puede observar, estas divergen de las planeadas en la metodología ya que la aplicación DroneDeploy tan solo da una aproximación para la ejecución del vuelo.
Tabla 6. Características técnicas del vuelo preliminar.
VUELO PREVIO
Área a volar 33 ha
Altura de vuelo 80mts
Velocidad de vuelo 15 m/s
Traslape longitudinal
70%
Traslape lateral 70%
Número de fotografías
189
GSD 4,71 cm
Elevación (msnm) 3090-3150
Tiempo de vuelo 18m Fuente: Elaboración propia.

86
Figura 37. Ortofotografía del vuelo preliminar.
Fuente: Elaboración propia.
La obtención de una ortofotografía base fue el insumo que permitió delimitar el área de estudio y realizar la distribución de los puntos de control terrestre, por lo tanto, representa un soporte esencial para el desarrollo de la investigación.
Malla de distribución de puntos de control. Tomando como base la ortofotografía generada en la etapa de delimitación del
área de estudio, se procede a generar la grilla de distribución de los puntos de control, en la figura 36 se expone la distribución de los 24 puntos de control terrestre propuestos para el desarrollo del estudio. La distribución de los puntos basada en la grilla de adquisición circular de datos (Telford, et al., 1990 fue adecuada para el análisis de la presente investigación, ya que permitió realizar las configuraciones propuestas.

87
Figura 38. Diseño de la malla de puntos de control terrestre.
Fuente: Elaboración propia.
Diseño de marcas de preseñalización En la figura 37 se ilustran las 15 marcas, ((a) Diseno de presenalización “L” en
color blanco y negro. (b) Diseno de presenalización “Ajedrez” en color blanco y negro. (c) Diseno de presenalización “Cruz” en color blanco y negro. (d) Diseño de presenalización “X” en color blanco y negro. (e) Diseno de presenalización “Diana” en color blanco y negro. (f) Diseno de presenalización “L” en color amarillo y negro. (g) Diseno de presenalización “Ajedrez” en color amarillo y negro. (h) Diseño de presenalización “Cruz” en color amarillo y negro. (i) Diseno de presenalización “X” en color amarillo y negro. (j) Diseno de presenalización “Diana” en color amarillo y negro, fondo amarillo. (k) Diseno de presenalización “L” en color azul y rojo. (l) Diseno de presenalización “Ajedrez” en color azul y rojo. (m) Diseño de
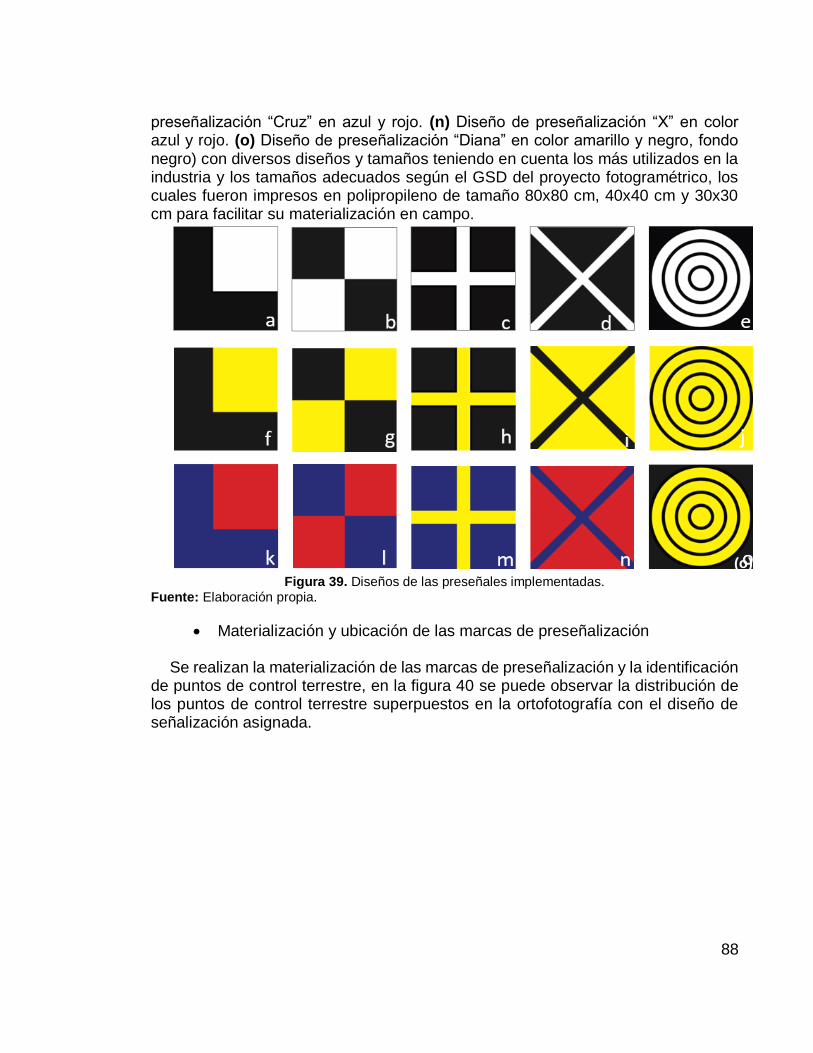
88
presenalización “Cruz” en azul y rojo. (n) Diseno de presenalización “X” en color azul y rojo. (o) Diseno de presenalización “Diana” en color amarillo y negro, fondo negro) con diversos diseños y tamaños teniendo en cuenta los más utilizados en la industria y los tamaños adecuados según el GSD del proyecto fotogramétrico, los cuales fueron impresos en polipropileno de tamaño 80x80 cm, 40x40 cm y 30x30 cm para facilitar su materialización en campo.
Figura 39. Diseños de las preseñales implementadas.
Fuente: Elaboración propia.
Materialización y ubicación de las marcas de preseñalización Se realizan la materialización de las marcas de preseñalización y la identificación
de puntos de control terrestre, en la figura 40 se puede observar la distribución de los puntos de control terrestre superpuestos en la ortofotografía con el diseño de señalización asignada.
(o)

89
Figura 40. Distribución de puntos de control terrestre superpuestos en la ortofotografía con el
diseño de señalización asignada. Fuente: Elaboración propia.
Ejecución del vuelo fotogramétrico En la tabla 7 se exponen las características técnicas de los vuelos realizados,
como resultado de esta fase, se capturan 556 aerofotografías en las cuales se pueden identificar eficientemente las preseñales materializadas en la fase anterior. En la figura 41 se observa cómo se ve cada una de las marcas de preseñalización en las imágenes.
Tabla 7. Características técnicas de los vuelos ejecutados.
VUELO TRANSVERSAL VUELO LONGITUDINAL
Área a volar 38 ha Área a volar 18ha
Altura de vuelo 65mts Altura de vuelo 65mts
Velocidad de vuelo 10 m/s Velocidad de vuelo 10 mts/s
Traslape longitudinal 70% Traslape longitudinal 70%
Traslape lateral 70% Traslape lateral 70%
Fotografías 365 Fotografías 192
GSD 4,13 cm GSD 4,13 cm
Elevación (msnm) 3090-3150 Elevación (msnm) 3090-3150
Tiempo de vuelo 32m Tiempo de vuelo 16m Fuente: Elaboración propia.
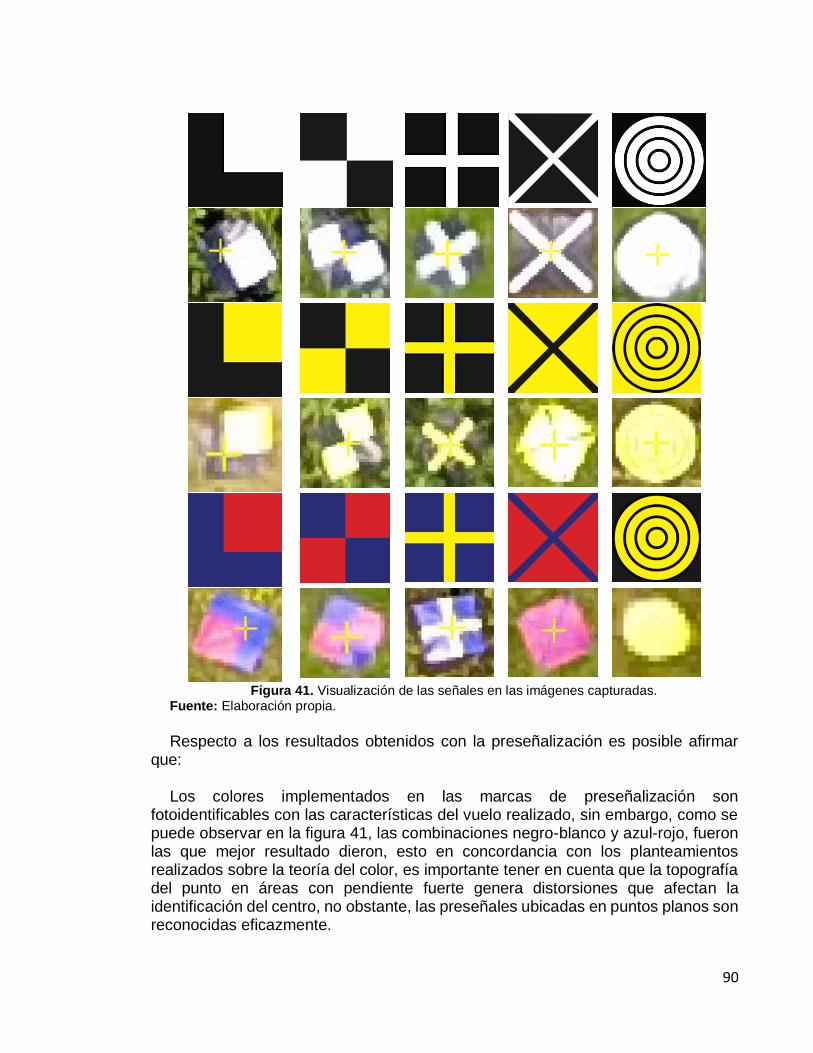
90
Figura 41. Visualización de las señales en las imágenes capturadas.
Fuente: Elaboración propia.
Respecto a los resultados obtenidos con la preseñalización es posible afirmar
que: Los colores implementados en las marcas de preseñalización son
fotoidentificables con las características del vuelo realizado, sin embargo, como se puede observar en la figura 41, las combinaciones negro-blanco y azul-rojo, fueron las que mejor resultado dieron, esto en concordancia con los planteamientos realizados sobre la teoría del color, es importante tener en cuenta que la topografía del punto en áreas con pendiente fuerte genera distorsiones que afectan la identificación del centro, no obstante, las preseñales ubicadas en puntos planos son reconocidas eficazmente.

91
El material utilizado para las preseñales –polipropileno- es adecuado para este
tipo de levantamientos debido a que no se daña con la humedad del terreno y se puede adecuar a este fácilmente, además son de bajo costo y fáciles de transportar.
En cuanto al tamaño de las marcas, teniendo en cuenta las preseñales
implementadas, es necesario utilizar longitudes de 20 veces el GSD con el propósito de identificar correctamente la señal (en el estudio se realizaron de diversos tamaños, sin embargo, las marcaciones de tamaño 5 y 10 veces el GSD no son fotoidentificables), la idea de realizar preseñales grandes respecto al GSD, es que la definición del punto central se pueda realizar de manera precisa, por ende es necesaria una adecuada resolución espacial.
En cuanto a la forma, en la figura 41, se destaca la ele “L” por su fácil
identificación del vertice, a pesar de que la cruz “+” y la equis “X” también son eficientes siempre y cuando el color dominante sea el que absorba (tonos oscuros) y el diseño en el tono reflectante sea fino/delgado, se descarta el uso de del diseño “Diana”, ya que a pesar de que el color absorbente sea el dominante, no se logra fotoidentificar el centro adecuadamente, contrario a lo que afirman Castro & Urrego, (2018) ya que éste fue el que obtuvo mejor resultado en su estudio, posiblemente, lo más indicado sea variar el ancho de los círculos para que los colores opacos no sean absorbidos completamente como se dio en el presente caso; de igual forma, sucede con el diseno de “Ajedrez”, en donde mantener la misma proporción de los colores claros y opacos genera distorsiones de las señales en la fotografía impidiendo la identificación clara del centro.
Captura de datos GNSS Debido a una falla en la ubicación del punto para la captura de datos, el punto de
control número 11 no pudo ser tenido en cuenta en el estudio debido a que se ubicó a un metro del vértice de la preseñal materializada en el punto, sin embargo se obtuvieron todos los archivos RINEX de la captura de los 23 puntos restantes.
De acuerdo a la experiencia tenida con el punto número 11, se evidenció que a
pesar de utilizar equipos de alta precisión, la inadecuada fotoidentificación del punto capturado genera errores superiores al metro en el ajuste fotogramétrico.
Procesamiento de datos GNSS Se obtienen las coordenadas de 23 puntos de control. En la tabla 8 se exponen
los resultados de las coordenadas adquiridas a partir de la captura de datos GNSS con los equipos Topcon GR-5 de cada uno de los puntos de control terrestre, de igual forma se realiza con los datos adquiridos a partir del navegador Garmin Oregón 750 en la tabla 9.

92
Tabla 8. Coordenadas de los PCT capturadas a partir de GPS GR-5.
NÚMERO DE PCT
NORTE ESTE ALTURA
1 1121456,897 1082870,938 3119,354
2 1121553,915 1082881,123 3115,722
3 1121533,507 1082941,383 3104,769
4 1121455,760 1082973,320 3108,968
5 1121387,532 1082956,899 3114,917
6 1121363,099 1082885,635 3129,924
7 1121363,047 1082798,664 3141,491
8 1121460,701 1082793,741 3128,024
9 1121525,646 1082810,920 3120,907
10 1121675,512 1082884,416 3093,231
11 1121594.307 1083016.458 3108.632
12 1121468,189 1083091,385 3116,004
13 1121328,075 1083006,613 3116,581
14 1121292,231 1082863,067 3137,262
15 1121326,552 1082729,834 3152,794
16 1121455,636 1082659,628 3117,939
17 1121617,182 1082715,894 3092,227
18 1121699,284 1082983,806 3102,335
19 1121377,579 1083148,357 3113,470
20 1121167,317 1082985,668 3123,069
21 1121221,229 1082793,909 3150,530
22 1121470,087 1082506,861 3124,268
23 1121649,065 1082647,779 3095,878
24 1121772,655 1082899,572 3104,989 Fuente: Elaboración propia.

93
Tabla 9. Coordenadas de los PCT a partir de navegador Garmin Oregón 750.
NÚMERO DE PCT
NORTE ESTE ALTURA
1 1121455,347 1082873,006 3129,728
2 1121555,898 1082882,405 3126,285
3 1121537,147 1082938,220 3122,301
4 1121457,553 1082972,976 3125,987
5 1121390,090 1082956,158 3132,294
6 1121351,348 1082930,008 3126,061
7 1121365,602 1082826,019 3133,787
8 1121465,074 1082794,627 3123,561
9 1121527,065 1082813,978 3135,280
10 1121678,660 1082878,860 3101,680
11 1121594,770 1083012,510 3141,214
12 1121469,890 1083090,430 3150,647
13 1121331,560 1083009,470 3112,354
14 1121290,930 1082864,760 3131,975
15 1121325,660 1082727,185 3180,412
16 1121460,480 1082663,620 3133,983
17 1121618,700 1082716,673 3100,551
18 1121701,800 1082981,063 3111,965
19 1121379,250 1083146,340 3126,910
20 1121168,950 1082986,860 3118,055
21 1121225,070 1082794,930 3150,760
22 1121471,340 1082506,390 3154,287
23 1121649,560 1082649,000 3101,671
24 1121770,300 1082898,053 3108,239
Fuente: Elaboración propia
Las coordenadas obtenidas con el GPS Topcon GR5 y con el navegador Garmin
Oregon 750, tienen diferencias en el orden de metros, evidenciando que para el cumplimiento de los estándares ASPRS las coordenadas reportadas por el navegador no cumplen, por lo tanto, impera la implementación de GPS de precisión en el proceso fotogramétrico.
Se realiza una descripción de cada uno de los puntos de control terrestre
implementados donde se informa la fecha de captura, el tiempo atmosférico durante la captura, el tiempo de captura, la hora inicial y final del rastreo, la altura de armada, la referencia del receptor, el diseño de la preseñal en el punto, las coordenadas geográficas generadas con el navegador, las coordenadas geográficas y planas Gauss Kruger y la ubicación general, tal como se puede observar en la tabla 10, las descripciones de los demás puntos se encuentran en libro de anexos del 2 al 48.

94
Tabla 10. Descripción del punto de control número 1.
Fuente: Elaboración propia.
Diseño de las distribuciones de fotocontrol Teniendo en cuenta los puntos capturados, se diseñan 22 distribuciones en la
etapa número tres, estas se encuentran descritas en los anexos 49 al 89, se enumeran los puntos utilizados, sus coordenadas y un plano de localización de sus puntos, en la tabla 11 se puede encontrar la descripción de la distribución número 1 en el mismo formato en que se encuentran las demás en el libro anexo.
PUNTO No. 1
FECHA DE CAPTURA
DÍA JULIANO TIEMPO
ATMOSFÉRICO TIEMPO DE CAPTURA
11 Nov 2018 315 Parcialmente nublado
2:06:43
HORA ALTURA ARMADA
INICIAL FINAL MEDICIÓN TIPO
16:01:47 18:08:30 1.415 Inclinada
MARCA RECEPTOR MODELO
RECEPTOR IDENTIFICADOR RECEPTOR
Topcon GR-5 1
COORDENADAS – OREGON GARMIN 750
LATITUD LONGITUD ALTURA
ELIPSOIDAL
5.6940427 -73.3294067 3123.543 COORDENADAS – RECEPTOR GR-5
LATITUD LONGITUD ALTURA
ELIPSOIDAL
5.694045072 -73.3294198694 3119.354
NORTE ESTE
1082870.938 1121456.897
UBICACIÓN GENERAL PRESEÑAL
(Anexo 2)

95
Tabla 11. Descripción de la distribución 1.
DISTRIBUCIÓN No. 1
Esta distribución está conformada por un punto de control, el central de la ortofotografía; las coordenadas utilizadas son las capturadas por los receptores Topcon GR-5.
Para este procesamiento se utiliza únicamente el vuelo de una pasada, es decir 365 aerofotografías.
El punto de control utilizado se puede identificar con el círculo naranja en la imagen de la izquierda.
La salida gráfica se puede observar en Anexo 25.
NÚMERO DE PUNTO
NORTE ESTE ALTURA
1 1121456,897 1082870,938 3119,354 Fuente: Elaboración propia.
Proyectos fotogramétricos. De la creación de los 22 proyectos fotogramétricos, se obtuvo un reporte con las
características del procesamiento, dentro de ellas se encuentran los resultados estadísticos por punto de control y del proyecto generados por el software Pix4D. En los anexos 90 al 110 se exponen dichos valores en cada proyecto. Que en términos generales exponen los errores horizontales y verticales por PCT implementado cada proyecto fotogramétrico, la media, la varianza y el error medio cuadrático del conjunto de puntos, además del error de la proyección y la cantidad de puntos verificados en el procesamiento. Estos valores son los insumos básicos para el desarrollo de la etapa 4, mediante la cual se logra cumplir con los objetivos de la investigación ya que se validan estadísticamente los índices para hallar la mejor distribución de PCT y conocer si el trabajo realizado cumple o no con los estándares establecidos. A continuación, se muestra un ejemplo de dichos índices, los demás se encuentran en el libro de anexos.
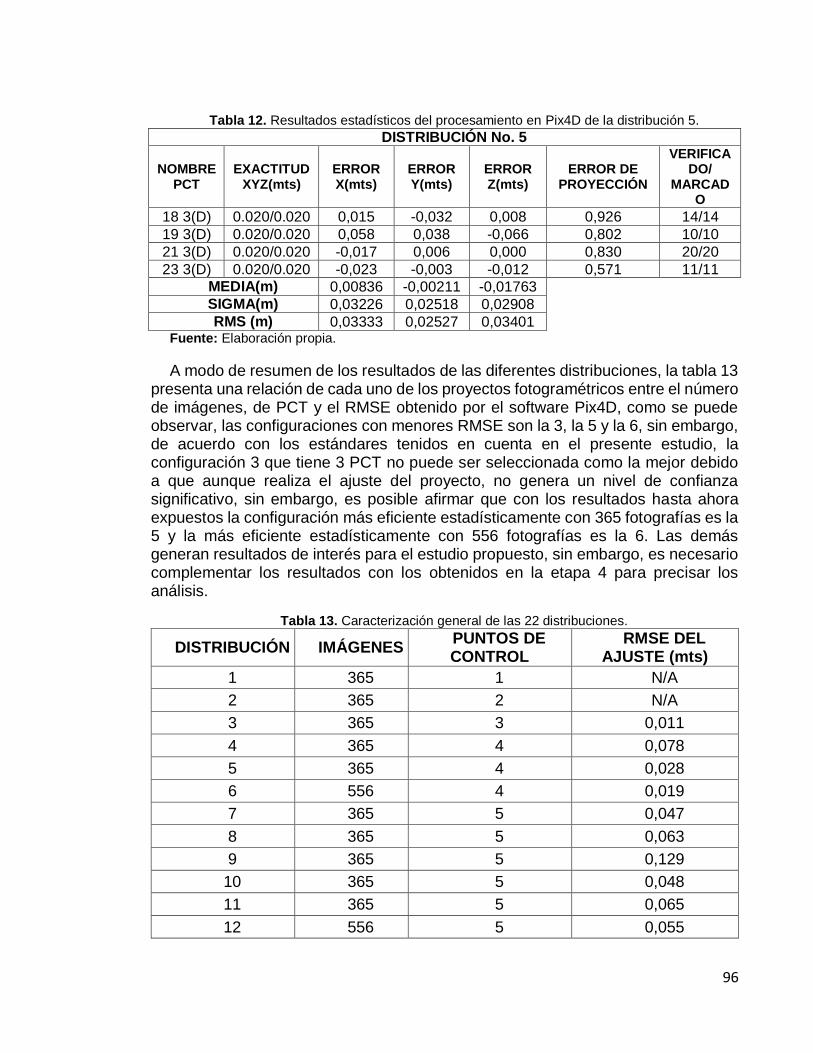
96
Tabla 12. Resultados estadísticos del procesamiento en Pix4D de la distribución 5.
DISTRIBUCIÓN No. 5
NOMBRE PCT
EXACTITUD XYZ(mts)
ERROR X(mts)
ERROR Y(mts)
ERROR Z(mts)
ERROR DE PROYECCIÓN
VERIFICADO/
MARCADO
18 3(D) 0.020/0.020 0,015 -0,032 0,008 0,926 14/14
19 3(D) 0.020/0.020 0,058 0,038 -0,066 0,802 10/10
21 3(D) 0.020/0.020 -0,017 0,006 0,000 0,830 20/20
23 3(D) 0.020/0.020 -0,023 -0,003 -0,012 0,571 11/11 MEDIA(m) 0,00836 -0,00211 -0,01763
SIGMA(m) 0,03226 0,02518 0,02908
RMS (m) 0,03333 0,02527 0,03401 Fuente: Elaboración propia.
A modo de resumen de los resultados de las diferentes distribuciones, la tabla 13 presenta una relación de cada uno de los proyectos fotogramétricos entre el número de imágenes, de PCT y el RMSE obtenido por el software Pix4D, como se puede observar, las configuraciones con menores RMSE son la 3, la 5 y la 6, sin embargo, de acuerdo con los estándares tenidos en cuenta en el presente estudio, la configuración 3 que tiene 3 PCT no puede ser seleccionada como la mejor debido a que aunque realiza el ajuste del proyecto, no genera un nivel de confianza significativo, sin embargo, es posible afirmar que con los resultados hasta ahora expuestos la configuración más eficiente estadísticamente con 365 fotografías es la 5 y la más eficiente estadísticamente con 556 fotografías es la 6. Las demás generan resultados de interés para el estudio propuesto, sin embargo, es necesario complementar los resultados con los obtenidos en la etapa 4 para precisar los análisis.
Tabla 13. Caracterización general de las 22 distribuciones.
DISTRIBUCIÓN IMÁGENES PUNTOS DE CONTROL
RMSE DEL AJUSTE (mts)
1 365 1 N/A
2 365 2 N/A
3 365 3 0,011
4 365 4 0,078
5 365 4 0,028
6 556 4 0,019
7 365 5 0,047
8 365 5 0,063
9 365 5 0,129
10 365 5 0,048
11 365 5 0,065
12 556 5 0,055

97
13 365 8 0,069
14 365 8 0,078
15 365 8 8,895
16 365 9 0,079
17 365 9 0,204
18 365 9 0,204
19 365 12 0,074
20 365 16 0,160
21 365 23 0,155
22 556 23 0,148
Fuente: Elaboración propia.
Como se puede observar en la tabla 13, los primeros valores del RMSE del ajuste no se encuentran relacionados debido a que con la implementación de un único punto de control terrestre, el software no genera un ajuste, de igual forma sucede con el fotocontrol de dos PCT, el software realiza un escalamiento de acuerdo a las coordenadas importadas pero no tiene el número suficiente de datos para ajustar el proyecto fotogramétrico.
También se identifica un valor de 8,895 mts que al compararse con los demás enlistados representa un valor atípico, demostrando las grandes diferencias de precisión obtenidas de acuerdo al tipo de equipo utilizado para la captura de datos, esto debido a que la configuración número 15 es la única que se procesa con las coordenadas calculadas con el navegador Garmin Oregon 750, mientras que las demás que dan resultados submetricos son procesadas con coordenadas capturadas con GPS doble frecuencia.
Productos fotogramétricos Como se explicó en la fase de creación de proyectos fotogramétricos, los
productos finales que se generaron en esta investigación fueron ortofotografías y modelos digitales de terreno, en la figura 42 se muestra la ortofotografía de la configuración con mejores resultados estadísticos del ajuste fotogramétrico, es decir, la configuración número cinco, la cual obtuvo un GSd de 0,0413 mts, la imagen cubre 38 ha, está a una escala 1:2000 y su sistema coordenado es Magna origen Bogotá.
Respecto al GSD obtenido, de acuerdo con los reportes del software Pix4D, se
obtuvo un valor de 0,0413 metros, este GSD se denomina GSD de producto, este valor es el resultado de los datos programados para la ejecución del vuelo y como permite observar la ortofotografía (figura 42), genera una resolución capaz de cumplir con los propósitos de levantamientos con fines prediales, es decir, hallar cabida y linderos, identificar las construcciones y hacer una buena aproximación de

98
su área y/o perímetro, identificación de coberturas como carreteras, cuerpos de agua, viviendas, cultivos; cuantificación de especies cultivadas (en el caso de estudio es fácilmente identificable la cantidad de especies de tilo y papa sembradas). Sin embargo en un levantamiento con propósitos más precisos como temas hidráulicos sería necesario disminuir la altura de vuelo, o utilizar una cámara con mejores características que permita disminuir el valor del GSD y por tanto obtener una ortofotografía con mayor resolución.
En la figura 43 se puede observar el modelo digital de terreno generado a partir
de la configuración 5, comparte el mismo sistema coordenado, la escala y el área que la ortofotografía, permite identificar las diferencias de elevación que hay en el área de estudio, siendo la más alta de 3162,62 m y la más baja de 3067,53 m.

99
Figura 42. Ortofotografía de la configuración con mejores resultados estadísticos.
Fuente: Elaboración propia.
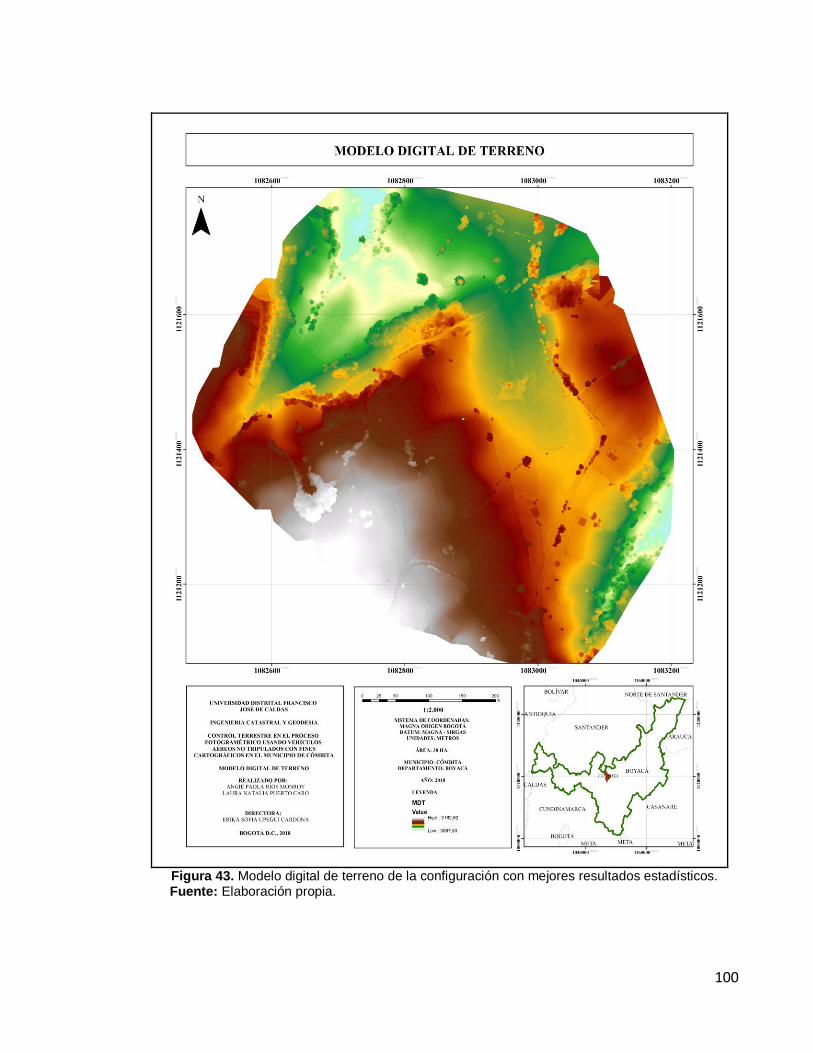
100
Figura 43. Modelo digital de terreno de la configuración con mejores resultados estadísticos. Fuente: Elaboración propia.

101
En la etapa cuatro, correspondiente a la evaluación estadística de las distribuciones se obtuvieron los resultados del test de normalidad por medio de la prueba Shapiro-Wilk expuestos en la tabla 14.
Tabla 14. Resultados de la aplicación del test de Shapiro–Wilk.
DISTRIBUCIÓN VALOR-P
𝑿𝒊 𝒀𝒊 𝒁𝒊 𝑿 𝒀 𝒁
1 0.9281 0.9211 0.4405 0.9279 0.9191 0.5073
2 0.9268 0.9195 0.5186 0.9279 0.9191 0.5073
3 0.7931 0.9843 0.6807 0.7927 0.9845 0.6792
4 0.5967 0.9104 0.4389 0.5971 0.9108 0.4263
5 0.9242 0.4681 0.2984 0.9242 0.4679 0.2899
6 0.9238 0.4682 0.3041 0.9242 0.4679 0.2899
7 0.5625 0.7412 0.4703 0.5635 0.7415 0.4601
8 0.9319 0.8297 0.6324 0.9312 0.8306 0.6190
9 0.4851 0.5355 0.7371 0.4878 0.535 0.7372
10 0.4877 0.3843 0.5257 0.4867 0.3844 0.5324
11 0.7310 0.3394 0.9276 0.7314 0.3356 0.9294
12 0.7310 0.3394 0.9276 0.7314 0.3356 0.9294
13 0.2183 0.2151 0.8581 0.2210 0.2138 0.8839
14 0.6345 0.3067 0.4661 0.6357 0.307 0.4726
15 0.9929 0.6466 0.1245 0.9944 0.6444 0.8150
16 0.6708 0.3203 0.3873 0.6720 0.3200 0.3958
17 0.8254 0.7139 0.3316 0.8245 0.7098 0.3264
18 0.8120 0.3265 0.5636 0.8117 0.3300 0.5747
19 0.0969 0.4649 0.9948 0.0977 0.466 0.9927
20 0.9940 0.6476 0.8079 0.9944 0.6444 0.8150
21 0.9268 0.9194 0.5071 0.9279 0.9191 0.5073
22 0.9269 0.9199 0.5145 0.9279 0.9191 0.5073
Fuente: Elaboración propia. El P-Valor resultante de la aplicación del test de Shapiro–Wilk para contrastar la
normalidad de las coordenadas correspondientes a cada distribución es mayor que el nivel de significación, es decir que no se rechaza la hipótesis nula que el conjunto de coordenadas de cada configuración proviene de una población normalmente distribuida.
También se debe tener en cuenta que la precisión horizontal debe evaluarse
utilizando las estadísticas de error cuadrático medio (RMSE) en el plano horizontal, es decir, 𝑅𝑀𝑆𝐸𝑥, 𝑅𝑀𝑆𝐸𝑦, 𝑅𝑀𝑆𝐸𝑟 y la precisión vertical debe evaluarse utilizando las
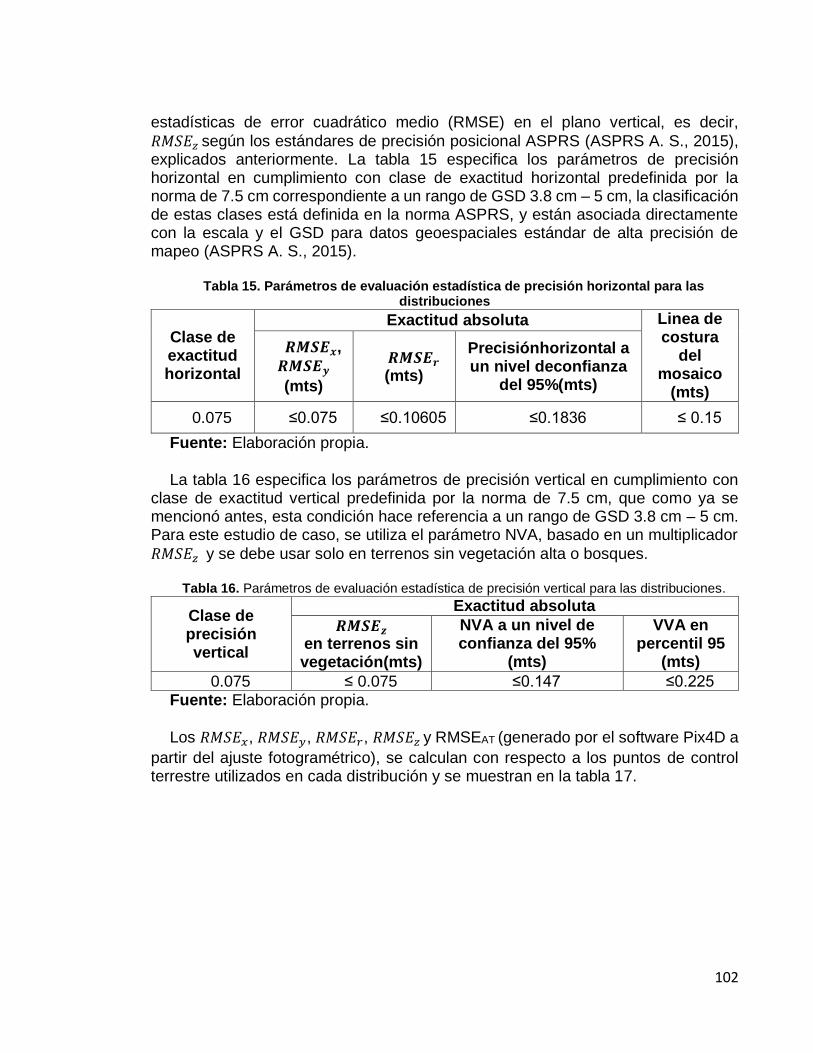
102
estadísticas de error cuadrático medio (RMSE) en el plano vertical, es decir,
𝑅𝑀𝑆𝐸𝑧 según los estándares de precisión posicional ASPRS (ASPRS A. S., 2015), explicados anteriormente. La tabla 15 especifica los parámetros de precisión horizontal en cumplimiento con clase de exactitud horizontal predefinida por la norma de 7.5 cm correspondiente a un rango de GSD 3.8 cm – 5 cm, la clasificación de estas clases está definida en la norma ASPRS, y están asociada directamente con la escala y el GSD para datos geoespaciales estándar de alta precisión de mapeo (ASPRS A. S., 2015).
Tabla 15. Parámetros de evaluación estadística de precisión horizontal para las
distribuciones
Clase de exactitud horizontal
Exactitud absoluta Linea de costura
del mosaico
(mts)
𝑹𝑴𝑺𝑬𝒙, 𝑹𝑴𝑺𝑬𝒚
(mts)
𝑹𝑴𝑺𝑬𝒓 (mts)
Precisiónhorizontal a un nivel deconfianza
del 95%(mts)
0.075 ≤0.075 ≤0.10605 ≤0.1836 ≤ 0.15
Fuente: Elaboración propia. La tabla 16 especifica los parámetros de precisión vertical en cumplimiento con
clase de exactitud vertical predefinida por la norma de 7.5 cm, que como ya se mencionó antes, esta condición hace referencia a un rango de GSD 3.8 cm – 5 cm. Para este estudio de caso, se utiliza el parámetro NVA, basado en un multiplicador
𝑅𝑀𝑆𝐸𝑧 y se debe usar solo en terrenos sin vegetación alta o bosques.
Tabla 16. Parámetros de evaluación estadística de precisión vertical para las distribuciones.
Clase de precisión vertical
Exactitud absoluta
𝑹𝑴𝑺𝑬𝒛 en terrenos sin vegetación(mts)
NVA a un nivel de confianza del 95%
(mts)
VVA en percentil 95
(mts)
0.075 ≤ 0.075 ≤0.147 ≤0.225 Fuente: Elaboración propia. Los 𝑅𝑀𝑆𝐸𝑥, 𝑅𝑀𝑆𝐸𝑦, 𝑅𝑀𝑆𝐸𝑟, 𝑅𝑀𝑆𝐸𝑧 y RMSEAT (generado por el software Pix4D a
partir del ajuste fotogramétrico), se calculan con respecto a los puntos de control terrestre utilizados en cada distribución y se muestran en la tabla 17.

103
Tabla 17. Evaluación estadística de precisiones horizontales y verticales de las distribuciones.
Num IMÁGENES NÚMERO DE PCT
𝑹𝑴𝑺𝑬(𝑨𝑻)
(mts)
𝑹𝑴𝑺𝑬𝑿 (mts)
𝑹𝑴𝑺𝑬𝒀 (mts)
𝑹𝑴𝑺𝑬𝒁 (mts)
𝑹𝑴𝑺𝑬𝑹 (mts)
1 365 1 N/A 2,8089 2,6257 5,8639 3,845
2 365 2 N/A 0,3665 0,2768 3,9116 0,459
3 365 3 0,011 0,0158 0,0299 0,0471 0,034
4 365 4 0,078 0,0585 0,0838 0,1330 0,102
5 365 4 0,028 0,0679 0,0417 0,1191 0,080
6 556 4 0,019 0,0957 0,0407 0,1460 0,104
7 365 5 0,047 0,0872 0,0297 0,1069 0,092
8 365 5 0,063 0,3287 0,0576 0,2150 0,334
9 365 5 0,129 0,1069 0,1267 0,0677 0,166
10 365 5 0,048 0,0861 0,0750 0,0659 0,114
11 365 5 0,065 0,0837 0,1042 0,0758 0,134
12 556 5 0,055 0,3706 0,5329 4,5181 0,649
13 365 8 0,069 0,1133 0,0807 0,0700 0,139
14 365 8 0,078 0,0797 0,0650 0,1446 0,103
15 365 8 8,895 2,1692 3,6970 12,3212 4,286
16 365 9 0,079 0,1255 0,0872 0,0654 0,153
17 365 9 0,204 0,2113 0,1967 0,2901 0,289
18 365 9 0,204 0,4095 0,2798 0,7942 0,496
19 365 12 0,074 0,2090 0,1480 0,1896 0,256
20 365 16 0,160 0,1385 0,1727 0,2256 0,221
21 365 23 0,155 0,1754 0,1351 0,1973 0,221
22 556 23 0,148 0,1885 0,1346 0,1691 0,232 Fuente: Elaboración propia.
Teniendo en cuenta los resultados anteriores, se evidencia que el desarrollo del
proceso de fotocontrol con un solo PCT genera errores que sobrepasan los metros, por lo tanto no resulta una práctica eficiente, aunque no supera los errores generados al realizar el control con navegador, ya que como se observa en los resultados de la configuración 15 los índices del error se incrementan exponencialmente con estos equipos; ambos experimentos representan una mala implementación del proceso de fotocontrol en los proyectos fotogramétricos. Sin embargo, de acuerdo con los resultados de las demás distribuciones la implementación de los VANTs en técnicas fotogramétricas genera errores submétricos tanto horizontales como verticales en la mayoría de los experimentos, las excepciones se encuentran en las distribuciones 2 y 12, lo que demuestra el planteamiento realizado anteriormente sobre el hecho de que dos PCT no son
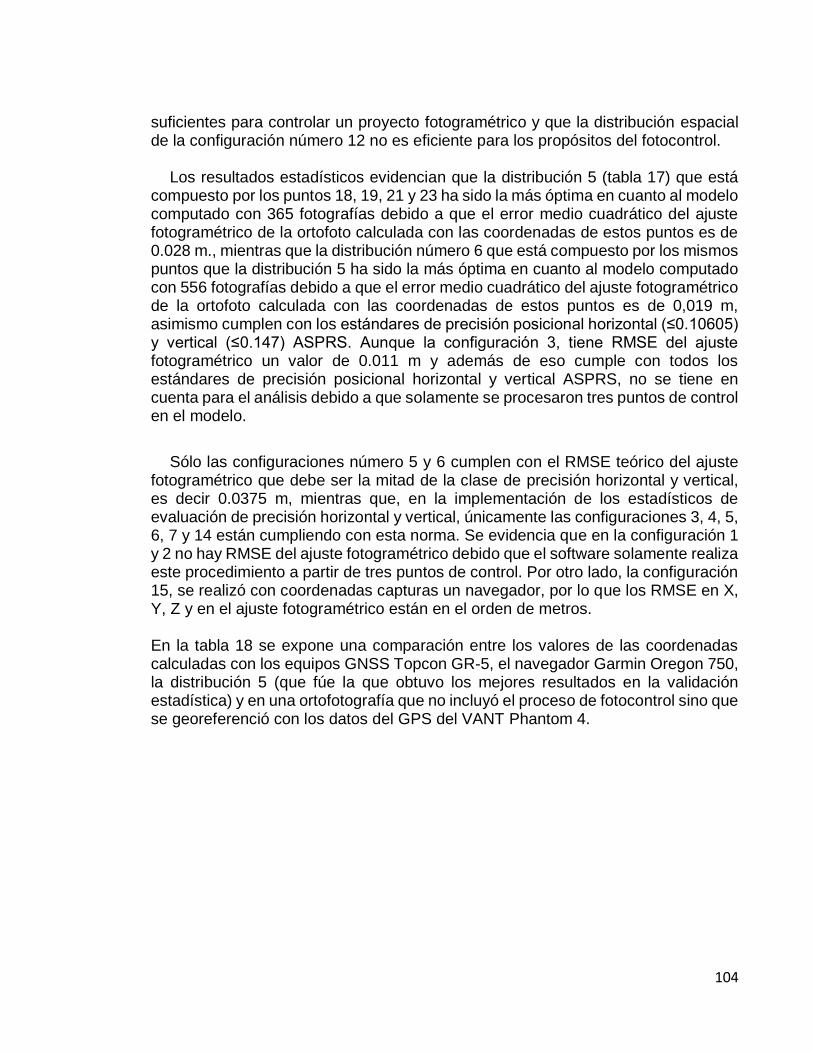
104
suficientes para controlar un proyecto fotogramétrico y que la distribución espacial de la configuración número 12 no es eficiente para los propósitos del fotocontrol.
Los resultados estadísticos evidencian que la distribución 5 (tabla 17) que está
compuesto por los puntos 18, 19, 21 y 23 ha sido la más óptima en cuanto al modelo computado con 365 fotografías debido a que el error medio cuadrático del ajuste fotogramétrico de la ortofoto calculada con las coordenadas de estos puntos es de 0.028 m., mientras que la distribución número 6 que está compuesto por los mismos puntos que la distribución 5 ha sido la más óptima en cuanto al modelo computado con 556 fotografías debido a que el error medio cuadrático del ajuste fotogramétrico de la ortofoto calculada con las coordenadas de estos puntos es de 0,019 m, asimismo cumplen con los estándares de precisión posicional horizontal (≤0.10605) y vertical (≤0.147) ASPRS. Aunque la configuración 3, tiene RMSE del ajuste fotogramétrico un valor de 0.011 m y además de eso cumple con todos los estándares de precisión posicional horizontal y vertical ASPRS, no se tiene en cuenta para el análisis debido a que solamente se procesaron tres puntos de control en el modelo.
Sólo las configuraciones número 5 y 6 cumplen con el RMSE teórico del ajuste fotogramétrico que debe ser la mitad de la clase de precisión horizontal y vertical, es decir 0.0375 m, mientras que, en la implementación de los estadísticos de evaluación de precisión horizontal y vertical, únicamente las configuraciones 3, 4, 5, 6, 7 y 14 están cumpliendo con esta norma. Se evidencia que en la configuración 1 y 2 no hay RMSE del ajuste fotogramétrico debido que el software solamente realiza este procedimiento a partir de tres puntos de control. Por otro lado, la configuración 15, se realizó con coordenadas capturas un navegador, por lo que los RMSE en X, Y, Z y en el ajuste fotogramétrico están en el orden de metros.
En la tabla 18 se expone una comparación entre los valores de las coordenadas calculadas con los equipos GNSS Topcon GR-5, el navegador Garmin Oregon 750, la distribución 5 (que fúe la que obtuvo los mejores resultados en la validación estadística) y en una ortofotografía que no incluyó el proceso de fotocontrol sino que se georeferenció con los datos del GPS del VANT Phantom 4.

105
Tabla 18. Comparación entre los valores de las coordenadas halladas con los equipos GNSS y
el navegador, la ortofoto sin control y la ortofoto de la distribución 5.
Fuente: Elaboración propia.
Por medio de la tabla 18 se realiza el análisis de los resultados obtenidos en la
investigación, tomando las coordenadas calculadas con los equipos GNSS como reales, al realizar la comparación con de estas con las generadas por el navegador se encuentran errores de 1,13 mts en el eje X, 2,82 mts en el eje Y y de 10,28 mts en el eje Z en promedio, confirmando que las coordenadas generadas por los navegadores Garmin Oregon 750 no son adecuadas para realizar el proceso de fotocontrol. Con respecto al cálculo a partir de las coordenadas de la ortofoto sin control, se evidencia que los resultados obtenidos en el eje X están dentro del límite de precisión requerida, sin embargo en el eje Y los errores superan el metro (1,05mts) y en el eje Z se da una diferencia de 40,54 mts debido a que el cálculo de esas coordenadas se dan durante el vuelo, es decir, a 65 mts del terreno y a que la precisión del GPS a bordo de la plataforma no es de alta precisión. A diferencia de los valores obtenidos por los métodos anteriormente descritos, la comparación realizada a partir de la ortofoto de la configuración 5 da valores submetricos que cumplen con los estándares de exactitud de posicionamiento, por lo tanto se evidencia que la implementación adecuada del fotocontrol en los proyectos fotogramétricos requiere obligatoriamente las técnicas de la geodesia satelital.
NORTE ESTE ALTURA NORTE ESTE ALTURA NORTE ESTE ALTURA
1,55 -2,07 -10,37 0,13 -1,25 -40,93 0,04 -0,41 -0,08
-1,98 -1,28 -10,56 0,34 -1,09 -41,51 -0,03 -0,32 0,22
-3,64 3,16 -17,53 0,34 -1,08 -41,54 0,02 -0,28 -0,40
-1,79 0,34 -17,02 0,05 -0,93 -39,82 0,03 -0,17 -0,13
-2,56 0,74 -17,38 -0,12 -0,92 -38,91 0,10 -0,18 -0,06
11,75 -44,37 3,86 -0,40 -0,81 -39,78 -0,07 -0,04 -0,27
-2,55 -27,35 7,70 -0,40 -1,11 -39,93 -0,09 -0,21 -0,08
-4,37 -0,89 4,46 -0,03 -1,37 -40,91 -0,15 -0,40 -0,18
-1,42 -3,06 -14,37 0,47 -1,13 -42,77 0,12 -0,18 0,20
-3,15 5,56 -8,45 1,00 -1,43 -42,18 0,14 -0,52 -0,33
-0,46 3,95 -32,58 -0,38 0,37 -42,19 -0,70 0,82 0,07
-1,70 0,96 -34,64 0,07 0,12 -41,97 0,11 0,34 -0,79
37,15 141,85 -15,39 -0,56 -0,30 -37,73 -0,06 0,29 -0,12
-39,33 -146,40 24,91 -0,66 -0,87 -38,14 -0,03 0,00 -0,13
0,89 2,65 -27,62 -0,22 -1,13 -40,24 0,18 -0,14 -0,68
-4,84 -3,99 -16,04 0,44 -2,48 -40,86 0,04 -0,90 -0,12
-1,52 -0,78 -8,32 1,08 -2,43 -41,74 0,09 -0,89 -0,26
-2,52 2,74 -9,63 0,61 -0,48 -43,68 -0,08 0,01 -0,03
-1,67 2,02 -13,44 -0,30 0,09 -38,70 0,00 0,13 -0,23
-1,63 -1,19 5,01 -1,04 -0,49 -34,91 0,13 0,24 -0,10
-3,84 -1,02 -0,23 -0,91 -1,02 -36,57 -0,03 -0,01 0,03
-1,25 0,47 -30,02 0,84 -2,81 -41,26 0,23 -0,97 -0,66
-0,50 -1,22 -5,79 1,16 -1,64 -41,76 -0,02 0,03 -0,02
2,35 1,52 -3,25 1,32 -1,05 -44,96 0,33 -0,54 -0,47
Promedio -1,13 -2,82 -10,28 0,12 -1,05 -40,54 0,01 -0,18 -0,19
GPS - CONFIGURACION 5GPS - NAVEGADOR GPS - ORTOFOTO SIN CONTROL

106
CONCLUSIONES Y RECOMENDACIONES

107
Respecto a los análisis planteados en la etapa 3 y a partir de los índices de la tabla 17 es posible concluir que:
El número mínimo de puntos de control terrestre para realizar el ajuste del proyecto fotogramétrico es de 3 PCT, dado que la distribución número uno no genera dicho proceso porque no tiene suficientes puntos para desarrollar el cálculo y la distribución numero dos demuestra que con solo dos PCT el software realiza únicamente el escalamiento del proyecto sin ajustarlo, sin embargo, las distribuciones con más de tres PCT generan el ajuste y los estadísticos para su validación.
De acuerdo a los valores obtenidos en la tabla 17, al realizar el análisis de los puntos 4, 5, 7, 8 y 10 respecto a la orientación de las distribuciones, se evidencia que la cantidad de puntos utilizados en estas distribuciones son eficientes, sin embargo el ubicarlas en los límites de la ortofotografía genera incrementos en el error, mientas que localizarlos en forma de cuadrado guardando una distancia prudente del borde de la ortofoto como la que representan las configuraciones cinco y/o diez, asegura buenos resultados del ajuste y bajos valores de error, además es posible afirmar que no hay un apoyo significativo en la implementación de PCT centrales ya que al comparar los experimentos 5 con 8 y 4 con 7 no se presentan variaciones significativas.
Al comparar los índices del error obtenido en las distribuciones realizadas con un vuelo y con dos, es decir 5 con 6, 11 con 12 y 21 con 22, se evidencia una disminución de los valores en los proyectos realizados con dos vuelos, es decir que los resultados obtenidos en la prente investicacion concuerdan con los planteamientos de Robson & Smith (2017).
Respecto a controlar los proyectos fotogramétricos con distribuciones con formas geométricas como la 13, 14, 16, 17, 18, 19 y 20 es posible concluir que no resultan un procedimiento eficiente ya que sus resultados estadísticos no divergen ampliamente ni aumentan la precisión de los proyectos fotogramétricos respecto a distribuciones como la 4 o la 5, más si significan grandes esfuerzos para realizar la etapa número dos de la metodología planteada para realizar proyectos fotogramétricos.
Sobre cubrir el área de estudio con una grilla densa, como las planteadas en los experimentos 21 y 22, se demuestra que no es una práctica eficiente, no existe relación directa entre el incremento del número de puntos de control y la disminución de los índices del error medio cuadrático tal como lo expone Agüera, et al. (2016).

108
De acuerdo con los productos fotogramétricos obtenidos a partir de las distribuciones 5 y 9, es posible afirmar que la calidad final de estos es optima para realizar el levantamiento eficiente de las coberturas que se encuentren en el area de estudio, en el caso de la vía, los resultados de medirla a partir de la ortofoto de la distribución 5 (193,01 mts) y de la 9 (192,67mts) divergen tan solo en 0,34 mts, teniendo en cuenta que la distribucion 9 se orientó exclusivamente a la identificación de la vía y que la distribución 5 no tuvo un proposito puntual, se evidencia que los productos finales son optimos para analizar toda el área y los objetos incluidos en la imagen.
A partir de los resultados estadísticos obtenidos de la distribución número 15 se evidencia que la implementación de navegadores en el proceso de obtención de coordenadas no es apta para el desarrollo del fotocontrol ya que los errores medios cuadráticos exceden los valores permitidos por los estándares de exactitud posicional.
Al analizar la diferencia entre los productos generados con control terrestre y los generados a partir de los sensores de VANT se puede concluir que el fotocontrol es una herramienta eficiente y necesaria para proyectos de precisión y el cumplimiento de los estándares de calidad cartográfica, sin embargo, la aproximación que se hace sin los puntos de control terrestre es adecuada para tener información base del terreno.
La preseñalización de los puntos de control es un apoyo eficiente en el proceso fotogramétrico, ya que los puntos se pueden identificar correctamente en el terreno y en las aerofotografías capturadas por el VANT, teniendo en cuenta los resultados obtenidos en la figura 39, se resalta la importancia de la combinación de colores en las señales y la forma de estas, que permita la fotoidentificacion del vértice de manera precisa.
Teniendo en cuenta los resultados de la investigación, es posible constatar que la implementación de los VANT para el desarrollo de proyectos fotogramétricos es una herramienta eficiente que reduce costos, tanto en tiempo, como en equipos necesarios para la adquisición de datos y que facilita el acceso a imágenes para pequeñas áreas en comparación con los requerimientos de la fotogrametría tradicional. Es importante recalcar que gracias a la metodología SfM, se facilita el procesamiento de los proyectos fotogramétricos, no se requiere explícitamente la implementación de puntos de control terrestre para la obtención de los productos fotogramétricos más si son esenciales para su orientación absoluta, además de proporcionar una manera de validar estadísticamente los resultados obtenidos y garantizar la precisión requerida para los productos fotogrametricos realizados.

109
Los vuelos fotogramétricos con VANT son una herramienta eficiente para el área de los sensores remotos, en el caso del presente estudio, el VANT Phantom 4, resultó ser una plataforma adecuada para la ejecución de los vuelos y la captura de datos que cumplen los estándares de calidad.
Por otra parte, la mejor distribución que se obtuvo con un modelo de 365 fotografías fue la 5 que está compuesto por los puntos 18, 19, 21 y 23 debido a que el error medio cuadrático del ajuste fotogramétrico de la ortofoto calculada con las coordenadas de estos puntos es de 0.028 m., mientras que la distribución 6 que está compuesto por los mismos puntos que la distribución 5 es la óptima en cuanto al modelo computado con 556 fotografías debido a que el error medio cuadrático del ajuste fotogramétrico de la ortofoto calculada con las coordenadas de estos puntos es de 0,019 m, asimismo, cumplen con los estándares ASPRS, esto también evidencia que entre mayor superposición de imágenes mayor precisión, en las que se disminuye el error del ajuste fotogramétrico y de los productos fotogramétricos generados con la superposición entre las fotografías del vuelo longitudinal con las del vuelo transversal.
De acuerdo a los resultados obtenidos, se recomienda la implementación de preseñalización en los proyectos fotogramétricos realizados con VANTs teniendo en cuenta que representa un apoyo para asegurar la precisión de los productos finales; se recomienda la verificación de los software utilizados para realizar el levantamiento de datos antes de la salida de campo ya que pueden existir problemas con licencias o actualizaciones, igualmente es importante la revisión de los datos capturados en campo tan pronto se capturan para identificar posibles problemas y de detectarlos poder solucionarlos de inmediato de ser posible. De igual forma se hace una invitación a la implementación de las técnicas de la geodesia satelital de alta precisión para desarrollar los procesos de fotocontrol ya que es escencial aprovechar los avances tecnológicos de la forma adecuada.
Dentro de la formación de la Ingeniería Catastral y Geodesia se reconocen habilidades en la generación, análisis y administración de datos espaciales que permitan planificar los recursos naturales para el uso sostenible de estos utilizando modernas tecnologías relacionadas con la geomática, en el caso expuesto, se presentan las bondades de la implementación de los VANTs en el cumplimiento del rol del Ingeniero Catastral y Geodesta ya que esta tecnología está siendo acogida con gran fuerza en el mercado actual y se evidencia su eficiencia en los procesos ingenieriles. De esta manera, se busca suministrar a los gobernantes y a la población en general información de fácil acceso para la correcta administración y planeación del recurso tierra y así cumplir con el desarrollo profesional de la Ingeniería Catastral y Geodesia.
110
BIBLIOGRAFÍA
Agüera, F., Carvajal, F., & Martínez, P. (2016). Assessment of photogrammetric mapping accuracy based on variation ground control points number using unmanned aerial vehicle. Elsevier, DOI: /10.1016/j.measurement.2016.12.002.
Alarcón, Á., & Brito, D. (2015). Utilidad del dron phantom fc40 en espacios de difícil acceso, para la identificación de víctimas en atención pre-hospitalaria, en la Ciudad de Quito del Distrito Metropolitano en el período febrero - julio del 2015. UCE, 84.
Alcaldía Municipal de Cómbita. (30 de Abril de 2018). Nuestro municipio. Obtenido de Descripción Geográfica: http://www.combita-boyaca.gov.co/municipio/nuestro-municipio
Alkan, R., Ozulu, İ., & Ilçi, V. (2016). Precise Point Positioning (PPP) Technique versus Network RTK GNSS. FIG Working Week 2016. Nueva Zelanda.
Arcones, M., & Wang, Y. (2006). Some new tests for normality based on U–processes. . Statistics and Probability Letters, 69–82.
ASPRS. (1942). Definitions Of Terms Used In Photogrammetric Surveying And Mapping. Photogrammetry Photogrammetric Engineering & Remote Sensing, 247-283.
ASPRS. (2014). ASPRS Guidel ines for Procurement of GeospatialMapping Products and Services. Photogrammetric Engineering & Remote Sensing, 582-599.
ASPRS, A. S. (2015). ASPRS Positional Accuracy Standards for Digital Geospatial Data. Photogrammetric Engineering & Remote Sensing, A1–A26.
Avila R.P. (2013). Integraçao de levantamento fotogramçetrico açereo com o uso de VANT e levantamento fotogramétrico terrestre para o mapeamento tridimensional das ruínas de Sao Miguel das Missoes. Puerto Alegre: Universidad Federal de Río Grande del sur.
Barazzetti, L.; Remondino, F.; Scaioni, M. (2010). Automation in 3D reconstruction: Results on different kinds of close-range blocks. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 38(5), 55–61.
Basso, B. (2014). Perspectivas y avances del uso de UAV en AP. Manfredi, Argentina. : 13º Curso Internacional de Agricultura de Precisión. INTA Manfredi. .
Boucher, C., Altamimi, Z., & Sillard, P. (1999). The International Terrestrial Reference Frame (ITRF97). (IERS Technical Note; 27) . Paris: Central Bureau of IERS - Observatoire de Paris.
Castro, A., & Urrego, J. (2018). Evaluación de la precisión de resultados obtenidos con el procesamiento de información generada con RPAS- (Remotely Piloted Aircraft System). Bogota: Universidad Distrital Francisco José de Caldas.

111
Cheli, A. E. (2011). Introducción a la Fotogrametria y su evolución. La Plata: Hespérides.
Chiang, K.-W., Tsai, M.-L., & Chu, C.-H. (2012). The developmment of an UAV borne dorect georeferenced photogrammetric platform for ground control point free applications. MDPI-Sensors, DOI: 10.3390/s120709161.
Comer., R., Kinn, G., Light, D., & Mondello, C. (1998). Talking digital. Photogrammetric Engineering and Remote Sensing, 1139–1142.
Cramer, M. (2001). Genauigkeitsuntersuchungen zur GPS/INS-Integration in der Aerophotogrammetrie. Universität Stuttgart.
De Mata, J. (2016). Calibración geométrica de cámaras no métricas. Estudio de metodologías y modelos matemáticos de distorsión. . Madrid: Universidad Politécnica de Madrid.
Doyle, F. (1978). Digital terrain models: an overview. Photogrammetric Engineering and Remote Sensing, 1481- 1485.
DroneDeploy. (2019). What are ground control points? Obtenido de https://blog.dronedeploy.com/what-are-ground-control-points-gcps-and-how-do-i-use-them-4f4c3771fd0b
Eisenbeiß, H. (2009). UAV Photogrammetry. Zurich: Escuela Politécnica Federal de Zúrich.
Evaluación EOT Cómbita. (2017). Evaluación del Esquema de Ordenamiento Territorial municipio de Cómbita. Cómbita.
Felicísimo, Á. M. (29 de Julio de 2015). Universidad de Extremadura. Obtenido de Glosario de Terminos Usados en el Trabajo con Sistemas de Información Geográfica: http://www6.uniovi.es/~feli/pdf/glosario.pdf
Fernández-Hernandez, J., González-Aguilera, D., Rodríguez-Gonzálvez, P., & Mancera-Taboada, J. (2015). mage-based modelling from Unmanned Aerial Vehicle (UAV) photogrammetry: An effective, low-cost tool for archaeological applications. Archaeometry, 128–145.
Froment, B. (s.f.). Fotogrametria. Costa Rica. García C, F. (2000). Condiciones de coplanaridad y colinealidad. . Madrid:
Universidad Politécnica de Madrid. Gašparović, M., & Jurjević, L. (2017). Gimbal Influence on the Stability of Exterior
Orientation Parameters of UAV Acquired Images. Sensors, 401. GeoTool Box. (12 de 10 de 2018). GeoTool Box Ibérica. Obtenido de
http://www.gtbi.net/wp-content/plugins/gallery/uploads/pdf/5201385112025.pdf
Gonzalez T, F., & Tsourdos, A. (2017). UAV-Based Remote Sensing. Sensors MDPI.
Graça., N., Mitishita, E., & Gonçalves, J. (2014). Photogrammetric mapping using unmanned aerial vehicle. ISPRS Technical Commission I Symposium. Colorado: The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences.
Granshaw, S., & Fraser, C. (2015). Computer vision and photogrammetry: interaction or introspection? The photogrammetric record, Remote sensing and photogrammetry society, 3-7.

112
Haala, N. (2005). Multi-Sensor-Photogrammetrie. Deutsche Geodätische Kommission, 103.
Hartley, R., & Mundy, J. (1993). Relationship between photogrammmetry and computer vision. Integrating Photogrammetric Techniques with Scene Analysis and Machine Vision, DOI: 10.1117/12.155818.
Hastedt , H., & Luhmann, T. (2015). Investigations on the quality of the interior orientation and its impact in object space for UAV photogrammetry. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 321-328 .
Hemav. (2018). Agricultura de Precisión: Teledetección satelital Vs Teledetección con Drones. Hemav. Obtenido de Hemav.
Herrera, B. H. (1987). Elementos de fotogrametría. México: Limusa. Héxagon, & NovAtel. (2000). GNSS Overview. Obtenido de Chapter 1: An
Introduction to GNSS Hu, Z., Bai, Z., Yang, Y., Zheng, Z., Bian, K., & Song, L. (2019). UAV Aided Aerial-
Ground IoT for Air Quality Sensing in Smart City: Architecture, Technologies, and Implementation. IEEE Network, 14-22.
Huerta, E., Mangiaterra, A., & Noguera, G. (2005). GPS Posicionamiento Satelital. Rosario: UNR Editora - Universidad Nacional de Rosario.
Hugenholtz, C., Walker, J., Brown, O., & Myshak, S. (2015). Earthwork volumetrics with an unmanned aerial vehicle and softcopy photogrammetry. Journal of Surveying Engineering, Vol 141, No. 1.
Humboldt State University. (2017). GSP 216, Introduction to remotes sensing. Obtenido de http://gsp.humboldt.edu/OLM/Courses/GSP_216_Online/lesson8-2/SfM.html
Hunt, E.R.J.; Hively, W.D.; Fujikawa, S.; Linden, D.; Daughtry, C.S.; McCarty, G. (2010). Acquisition of nir-green-blue digital photographs from unmanned aircraft for crop monitoring. Remote Sensing, 2, 290–305.
IGAC. (Noviembre de 2015). Diseño de Vuelos Fotogramétricos. Obtenido de Grupo Interno de Trabajo Imágenes Geoespaciales.
James, M., Robson, S., & Smith, M. (2017). 3D uncerinty-based topograpgic change detection with structure from motion photogrammetry: precision maps for ground control and directly georeferenced surveys. Earth surface processes and landforms, DOI: 10.1002/esp.4125.
Kamarudin, S. S., & Tahar, K. N. (2016). Assessment on UAV onboard positioning in ground control point establishment. 2016 IEEE 12th International Colloquium on Signal Processing & Its Applications (CSPA) (págs. 210-215). Malacca City: IEEE Xplore.
Kamarudin, S., & Tahar, K. (2015). Investigation on UAV positioning inertial navigation system. 2015 IEEE Conference on Systems, Process and Control (ICSPC) (págs. 96-100). Bandar Sunway, Malaysia: IEEE Xplore.
Karaim, M., Elsheikh, M., & Noureldin, A. (2017). GNSS Error Sources. En R. Rustamov, & A. Hashimov, Multifunctional Operation and Application of GPS (págs. 70-85). IntechOpen.

113
Laliberte, A., Herrick, J., Rango, A., & Winters, C. (2010). Acquisition, Orthorectification, and Object-based Classification of Unmanned Aerial Vehicle (UAV) Imagery for Rangeland Monitoring. Photogrammetric Engineering & Remote Sensing, 76(6), 661–672.
Lee, S., & Choi, Y. (2015). Topographic survey at small-scale open-pit mines using a popular rotary-wing unmanned aerial vehicle (drone). Tunnel and underground space, 462-469.
Lowe, D. G. (2004). Distinctive image features from "Scale Invariant Keypoints". Vancouver, Canada: University of British Columbia.
Lozano J. F. Alonso G. G. ARGEOL. (2017). Modelización ·D con tecnología VANT para la reproducción y preservación del registro arqueológico del proyecto de geoparque las loras (Palencia - Burgos). Arqueología en el valle del Duero: Del Paleolítico a la Edad Media. 5, 575.
Luhmann, T.; Robson, S.; Kyle, S.; Harley, I. (2006). Close Range Photogrammetry. UK: Whittles Publishing: Caithness.
Malveaux, C., Hall, S., & Price, R. (2014). Using drones in agriculture: unmanned aerial systems for agricultural remote sensing applications. American Society of Agricultural and Biological Engineers, doi: 10.13031/aim.20141911016.
Martin L, J. (1993). Fotointerpretación y Fotogrametría. Madrid: EUIT Topográfica. Martínez, P., Ojeda, D., & Bravo, F. (2015). Vehículos aéreos no tripulados (VANT)
en Cuba, aplicados a la geomática. Estado actual, perpectivas y desarrollo. Unidad Cientifico Técnica GEOCUBA Investigación y Consultoría.
Mátar G. G. (2014). ACURÁCIA DA MOSAICAGEM GERADA POR VEÍCULO AÉREO NÃO TRIPULADO UTILIZADO NA AGRICULTURA DE PRECISÃO. Jaboticabal.
Merrigan, M., Swift, E., Wong, R., & Saffer, J. (2002). A refinement to the World Geodetic System 1984 Reference Frame. Portland: Presented at the Institute of Navigation.
Micheletti, N., Chandler, J. H., & Lane, S. N. (2014). Investigating the geomorphological potential of freely available and accesible Structure-from-Motion photogrammetry using a smartphone. DOI: 10.1002/esp.3648.
Mikrut, S. (2016). Classical photogrammetry and UAV - selected aspects. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLI-B1, 947- 952.
Moranduzzo, T., & Melgani, F. (2012). A SIFT-SVM method for detecting cars in UAV images. Italia: Department of information engineering and computer science, University of Trento.
Mostafa, M., Hutton, J., & Lithopoulos, E. (2001). Airborne Direct Georeferencing of Frame Imagery: An Error Budget. The 3 rd International Symposium on Mobile Mapping Technology (págs. 3-5). Cairo, Egipto: Applanix Corporation.
Nebiker, S., Annena, A., Scherrerb, M., & Oeschc, D. (2008). A light-weight multispectral sensor for micro UAV—Opportunities for very high resolution

114
airborne remote sensing. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 37(1), 1193–1198.
Nikolakopoulos, K., Soura, K., Koukouvelas, I., & Argyropoulos, N. (2017). UAV vs classical aerial photogrammetry for archaeological studies. Journal of Archaeological Science: Reports, 758-773.
Nissen, E., Arrowsmith, R., & Crosby, C. (1978). The interpretation of structure from motion. Massachusetts Institute of Technology.
Onate, D. M. (2015). Tipología de aeronaves pilotadas por control remoto. En F. d. Madrid, Los Drones y su aplicación a ingeniería civil. Madrid: Dirección General de Industria, Energía y Minas de la Comunidad de Madrid.
Ortiz H, D., & Hernández T, F. (2017). Análisis de la influencia de los puntos de control terrestre en la exactitud posicional de ortofotomosaicos generados por medio de una vuelo fotogramétrico realizado por un vehículo aéreo no tripulado (VANT). Cali: Universidad de Valle.
Pacheco P. D. (2017). Drones en espacios urbanos: caso de estudio en parques, jardines y patrimonio edificado de Cuenca. Ecuador: Universidad de Azuay.
Pérez, J. (2001). Apuntes de fotogrametría III. Mérida: Universidad de Extremadura.
Portero, C., Salas, P., Mercadal, M., & Casterad, M. (2017). Experiencias en la adquisición de imágenes para agricultura a empresas de drones españolas. Congreso de la Asociación XVII Española de Teledetección. Nuevas Plataformas y Sensores Aplicados a la Gestión del Agua, la Agricultura y el Medio Ambiente. (págs. 461-464). Valencia: Universitat Politècnica de València.
Priego de los Santos, J., & Porres de la Haza, M. (2002). La triangulación de delaunay aplicada a los modelos digitales del terreno. Universidad Politécnica de Valencia. Departamento de Ingeniería Cartográfica, Geodesia y Fotogrametría.
Qtaishat, K., Smith, M., & Park, D. (2006). Assessing the Performance of Different Direct-Georeferencing Strategies. ASPRS 2006 Annual Conference . Reno, Nevada: ASPRS.
Quirós, E. (2014). Introducción a la Fotogrametría y Cartografía aplicadas a la Ingeniería Civil. Cáceres: Universidad de Extremadura. Servicio de Publicaciones.
Ramirez, C., & Deagostini R, D. (1971). Fotografías aéreas y planeación de vuelos. Bogotá: CIAF.
Riaño R, E. R. (2018). Metodología para el diseño de un vuelo fotogramétrico usando UAV. Bogotá D.C.: Universidad Distrital Francisco José de Caldas. Facultad de Medio Ambiente y Recursos Naturales.
Rodrigues, R., Pellegrino, S., & Pistori, H. (2012). Combining Color and Haar Wavelet Responses for Aerial Image Classification. Artificial Intelligence and Soft Computing. vol. 7267, L. Rutkowski, M. Korytkowski, R. Scherer, R. Tadeusiewicz, L. Zadeh, and J Zurada, Eds. (págs. 583-591). Berlin : Springer Berlin Heidelberg.

115
Sánchez R., L. (2004). Adopción del marco geocéntrico nacional de referencia MAGNA-SIRGAS como datum oficial de Colombia. Bogotá: IGAC.
Sánchez, J. (2006). Escuela Técnica Superior de Ingenieros de Caminos, Canales y Puertos. Obtenido de Cátedra de Topografía: Introducción a la fotogrametría
Sastoque, L., Gutiérrez, E., & Upegui, E. (2017). Espacialización del estrés biótico en los frailejones del Parque Natural Nacional Chingaza (Colombia) utilizando imágenes capturadas con un vehículo aéreo no tripulado. Congreso de la Asociación XVII Española de Teledetección. Nuevas Plataformas y Sensores Aplicados a la Gestión del Agua, la Agricultura y el Medio Ambiente. (págs. 465-468). Valencia: Universitat Politècnica de València.
Scaioni, M.; Barazzetti, L.; Brumana, R.; Cuca, B.; Fassi, F.; Prandi, F. (2009). Rc-Heli and Structure & Motion Techniques for the 3-D Reconstruction of a Milan Dome Spire. Proceedings of the 3rd ISPRS International Workshop 3D-ARCH 2009: “3D Virtual Reconstruction and Visualization of Complex Architectures”, (pág. 8). Trento, Italy.
Sevilla, M. (2012). Historias de Matemáticas Introducción Histórica a la Geodesia. Revista de Investigación: G.I.E. Pensamiento Matemático.
Sevilla, M.J. (1983). Geodesia por Satélites y Navegación. Seminario de Astronomía y Geodesia. Madrid: Técnica Topográfica.
Shapiro, S., & Wilk, M. (1965). An analysis of variance test for normality (complete samples). Biometrika, 591–611.
Shi, J., Wang, J., & Xu, Y. (2011). Object-based change detection using georeferenced UAV images. ISPRS-International archives of photogrammetry, Remote sensing and spatial information sciences, 177-182.
SIRGAS. (1997). Final Report Working Groups I and II - SIRGAS Relatório Final Grupos de Trabalho I e II. Río de Janeiro: Instituto Brasileiro de Geografia e Estatística.
Soares, G., Inocencio, L., Veronez, M., da Silveira, L., Bordin, F., & Marson, F. (2018). Analysis of Positional and Geometric Accuracy of Objects in Survey with Unmanned Aerial Vehicle (UAV). IGARSS 2018 - 2018 IEEE International Geoscience and Remote Sensing Symposium (págs. 5693-5696). Valencia: IEEE Xplore.
Sonnemann, T., Ulloa, J., & Hofman, C. (2016). Mapping Indigenous Settlement Topography in the Caribbean Using Drones. Remote Sensing, Special Issue Archaeological Prospecting and Remote Sensing, 791.
Tahar, K. (2013). An evaluation on different number of ground control points in unmanned aerial vehicle photogrammetric block. International archives of the photogrammetry, Remote sensing and spatial information sciences, 27-29.
Tahar, K., & Ahmad, A. (2013). An evaluation on fixed wing and multi-rotor UAV images using photogrammetric image processing. World academy of
116
science, engineering and technology, International journal of computer and information engineering, Vol 7, No 1.
Telford, W. M., Geldart, L. P., & Sheriff, R. E. (1990). Applied geophysics. New York: Cambridge University Press.
Thadewald, T., & Buning, H. (2007). Jarque-Bera Test and its Competitors for Testing Normality - A Power Comparison. . Journal of Applied Statistics, 87-105.
Tonkin, T., & Midgley, N. (2016). Ground - control networks for image based surface reconstruction: an investigation of optimum survey designs using UAV derived imagery and Structure-from-Morion photogrammetry. Remote sensing, MDPI, DOI:10.3390/rs8090786.
Turner, D., Lucieer, A., & Wats, C. (2012). An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle (UAV) Imagery, Based on Structure from Motion (SfM) Point Clouds. Remote Sensing, 4, 1392-1410.
Udin, W. S., Hassan, A. F., Ahmad, A., & Tahar, K. N. (2012). Digital Terrain Model extraction using digital aerial imagery of Unmanned Aerial Vehicle. 2012 IEEE 8th International Colloquium on Signal Processing and its Applications (págs. 272-275). Melaka: IEEE Xplore.
Ullman, S. (1979). The interpretation of structure from motion. Proceedings of the Royal Society, 405–426. .
Vanicek, P., & Krakiwski, E. (1996). Transformation of coordinates between two horizontal geodetic datums. Journal of Geodesy, 740 – 745.
Vattapparamban, E., Güvenç, I., Yrenkli, A. Î., Akkaya, K., & Uluağaç, S. (2016). Drones for smart cities: issues in cybersecurity, privacy, and public safety. IEEE Xplore, International Wireless Communications and Mobile Computing Conference, DOI:10.1109/IWCMC.2016.7577060.
Watts, A., Ambrosia, V., & Hinkley, E. (2012). Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sensing, 1671-1692.
Westoby, M., Brasington, J., Glasser, N. F., & Reynolds, M. J. (2012). Structure-from-Motion photogrammetry: A low-cost, effective tool for geooscience applications. Elsevier, 300-314.
Yazici, B., & Yolacan, S. (2007). A comparison of various tests of normality. Journal of Statistical Computation and Simulation, 175–183.
Zapata, O. O. (2003). Fundamentos de fotogrametría para imágenes de contacto y digitales. Medellín: Universidad Nacional de Colombia.
Zhang, Y.; Xiong, J.; Hao, L. (2011). Photogrammetric processing of low-altitude images acquired by unpiloted aerial vehicles. The Photogrammetric Record, 26, 190–211.