
Convex Hull Divide y Venceras
49
Tema 3 G e o m e t r í a C o m p u t a c i o n a l La envolvente convexa Curso: 1º de Ingeniería Informática, Plan 2004 Profesora: Lidia Ortega Alvarado Departamento: Informática Curso académico: 2011/12 Ubicación: http://wwwdi.ujaen.es/asignaturas/gc/tema3.odp
-
Upload
david-alexis-espinoza -
Category
Documents
-
view
530 -
download
18
Transcript of Convex Hull Divide y Venceras
Tema 3G
eometría C
omp utac ional
La envolvente convexa
Curso: 1º de Ingeniería Informática, Plan 2004Profesora: Lidia Ortega AlvaradoDepartamento: InformáticaCurso académico: 2011/12Ubicación: http://wwwdi.ujaen.es/asignaturas/gc/tema3.odp
La en volve nte co nvex aÍndice
Definiciones de Envolvente Convexa Propiedades Algoritmos de cálculo
Algoritmo elemental El “scan” de Graham La marcha de Jarvis Quickhull Incremental Divide y Vencerás Diagrama Polar
Bibliografía
La en volve nte co nvex aIntroducción
Es uno de los cálculos más importantes en Geometría Computacional con aplicaciones en distintas áreas, dentro yfuera de la Geometría Computacional
EnvolventeConvexade objetos
recubrimiento o cobertura que encierra a todos los elementos
sin vértices cóncavos
de puntos, polígonos, círculos, objetos 3D, etc.
Estudiaremos el caso más sencillo: la envolvente convexade un conjunto de puntos en el plano
La en volve nte co nvex aDefiniciones
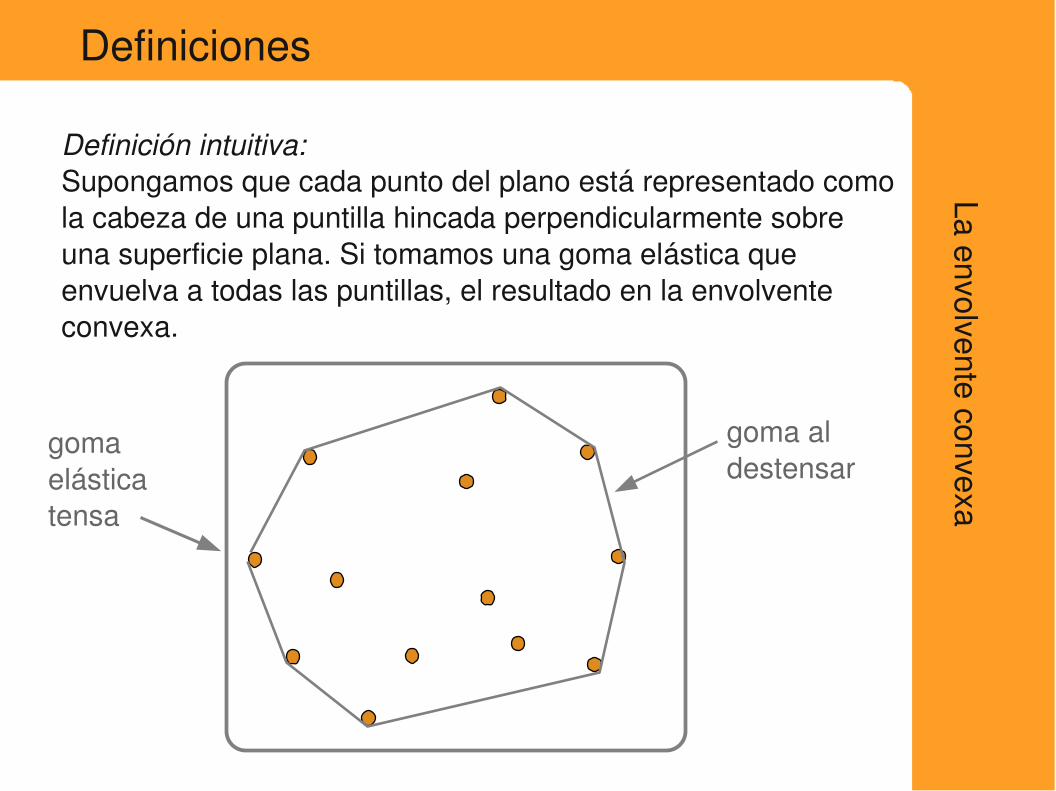
Definición intuitiva:Supongamos que cada punto del plano está representado comola cabeza de una puntilla hincada perpendicularmente sobreuna superficie plana. Si tomamos una goma elástica que envuelva a todas las puntillas, el resultado en la envolventeconvexa.
goma elásticatensa
goma al destensar
La en volve nte co nvex aDefiniciones
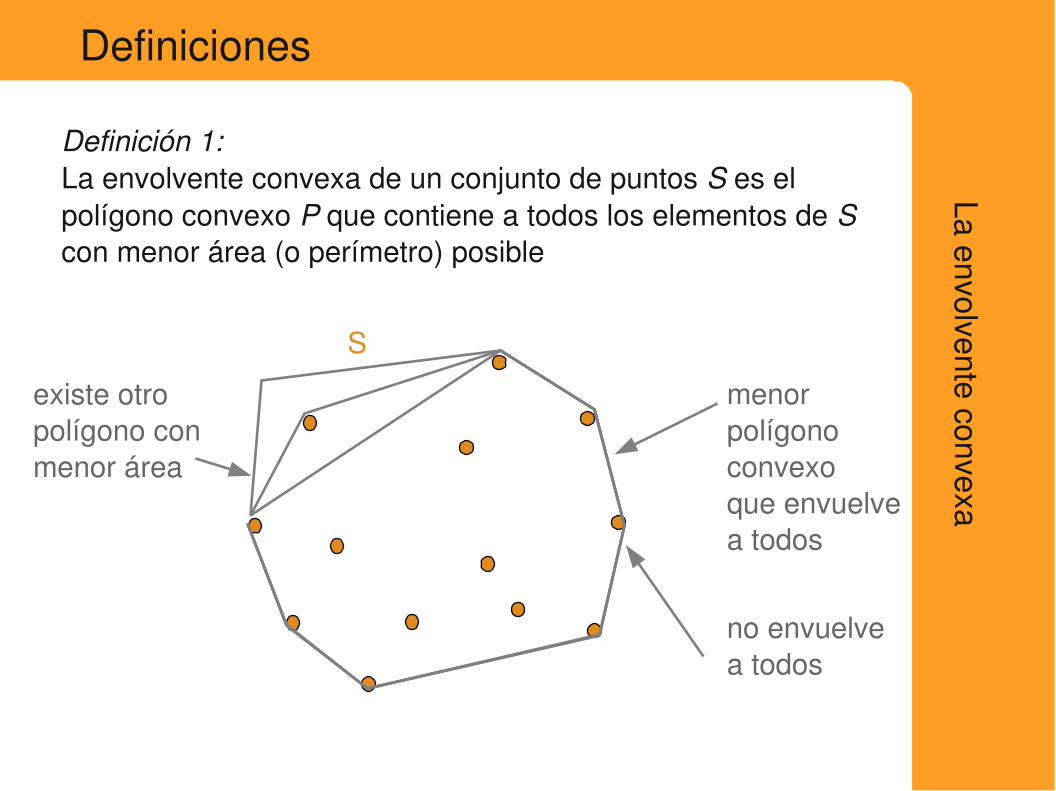
Definición 1:La envolvente convexa de un conjunto de puntos S es el polígono convexo P que contiene a todos los elementos de Scon menor área (o perímetro) posible
S
menorpolígonoconvexoque envuelvea todos
no envuelvea todos
existe otropolígono conmenor área
La en volve nte co nvex aDefiniciones
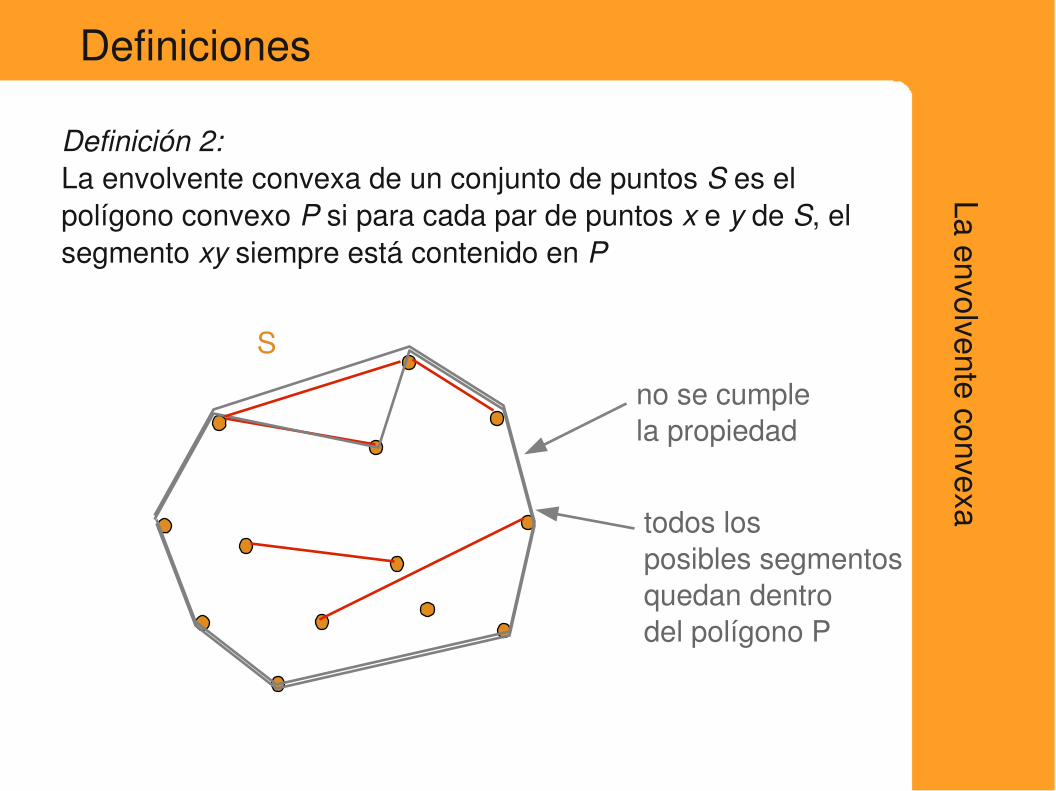
Definición 2:La envolvente convexa de un conjunto de puntos S es el polígono convexo P si para cada par de puntos x e y de S, elsegmento xy siempre está contenido en P
S
todos los posibles segmentos quedan dentro del polígono P
no se cumple la propiedad
La en volve nte co nvex aPropiedades
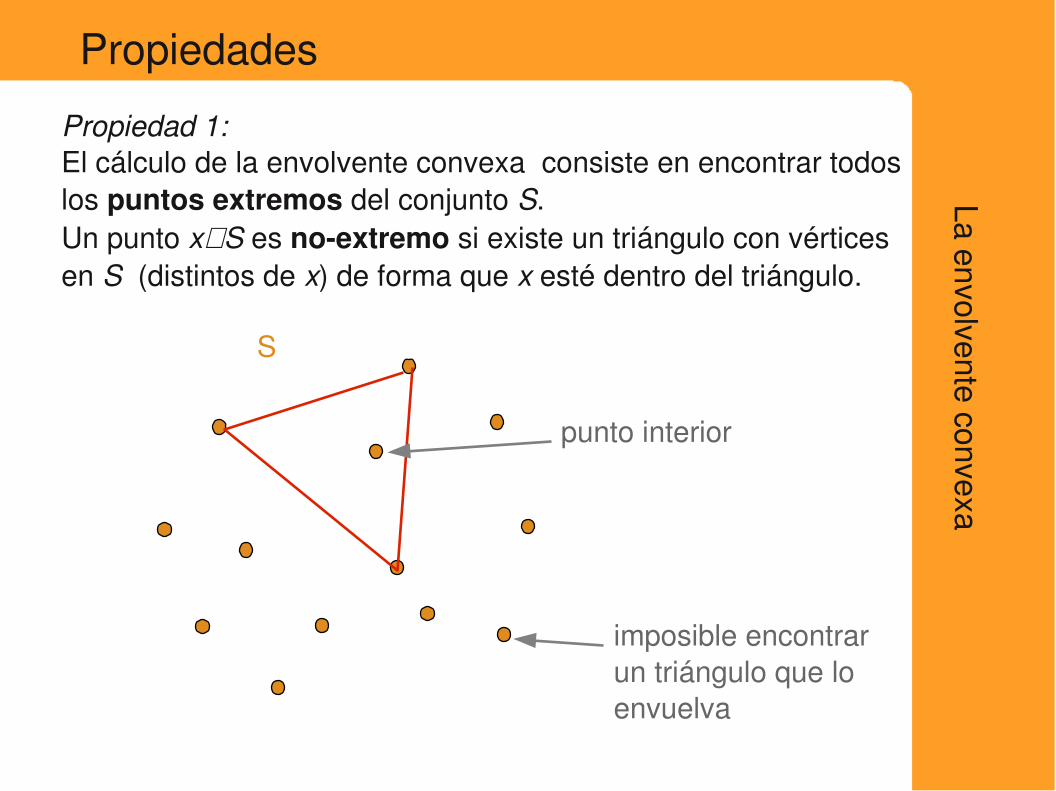
Propiedad 1:El cálculo de la envolvente convexa consiste en encontrar todoslos puntos extremos del conjunto S.Un punto x∈S es noextremo si existe un triángulo con vérticesen S (distintos de x) de forma que x esté dentro del triángulo.
S
punto interior
imposible encontrarun triángulo que lo envuelva
La en volve nte co nvex aPropiedades
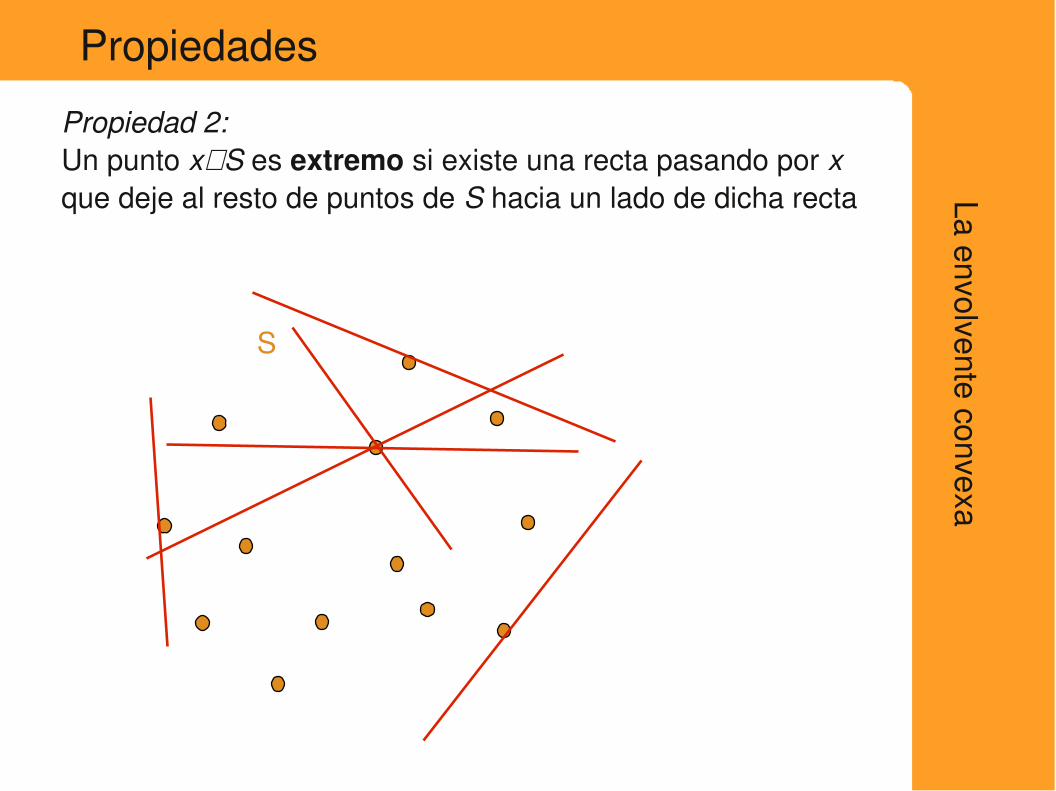
Propiedad 2:Un punto x∈S es extremo si existe una recta pasando por xque deje al resto de puntos de S hacia un lado de dicha recta
S
La en volve nte co nvex aAlgoritmos elementales
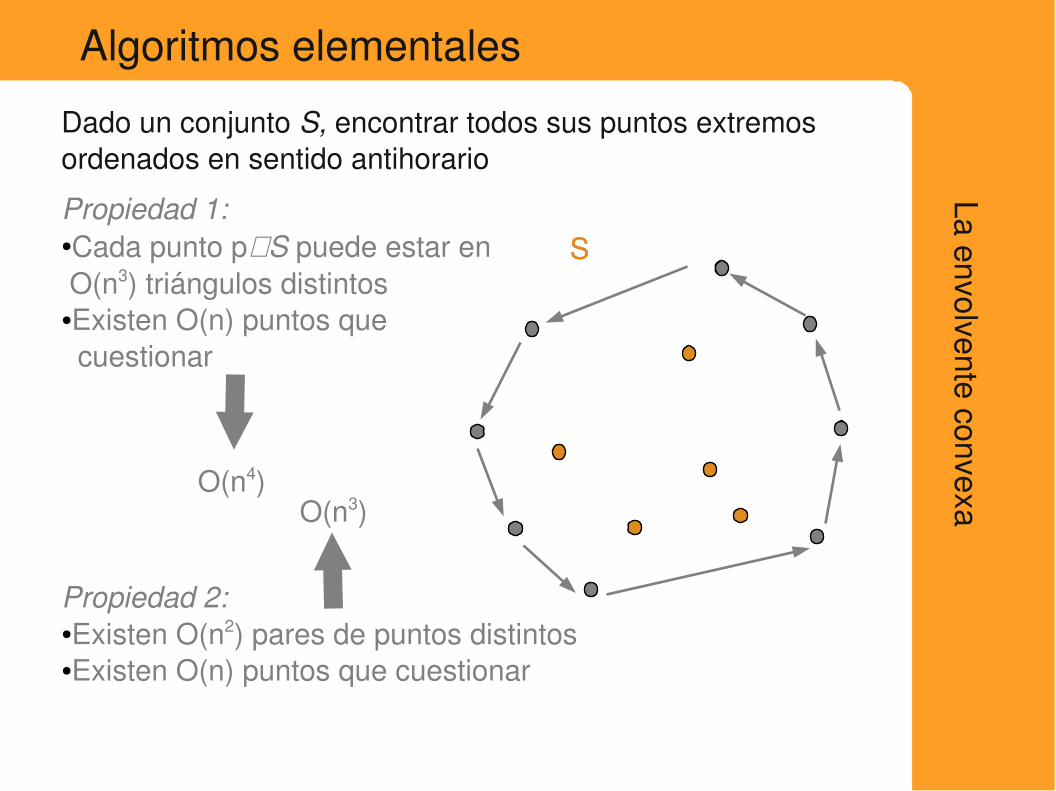
Dado un conjunto S, encontrar todos sus puntos extremos ordenados en sentido antihorario
SSPropiedad 1:Cada punto p∈S puede estar en O(n3) triángulos distintosExisten O(n) puntos que cuestionar
O(n4)
Propiedad 2:Existen O(n2) pares de puntos distintosExisten O(n) puntos que cuestionar
O(n3)
La en volve nte co nvex aAlgoritmo: Graham's scan
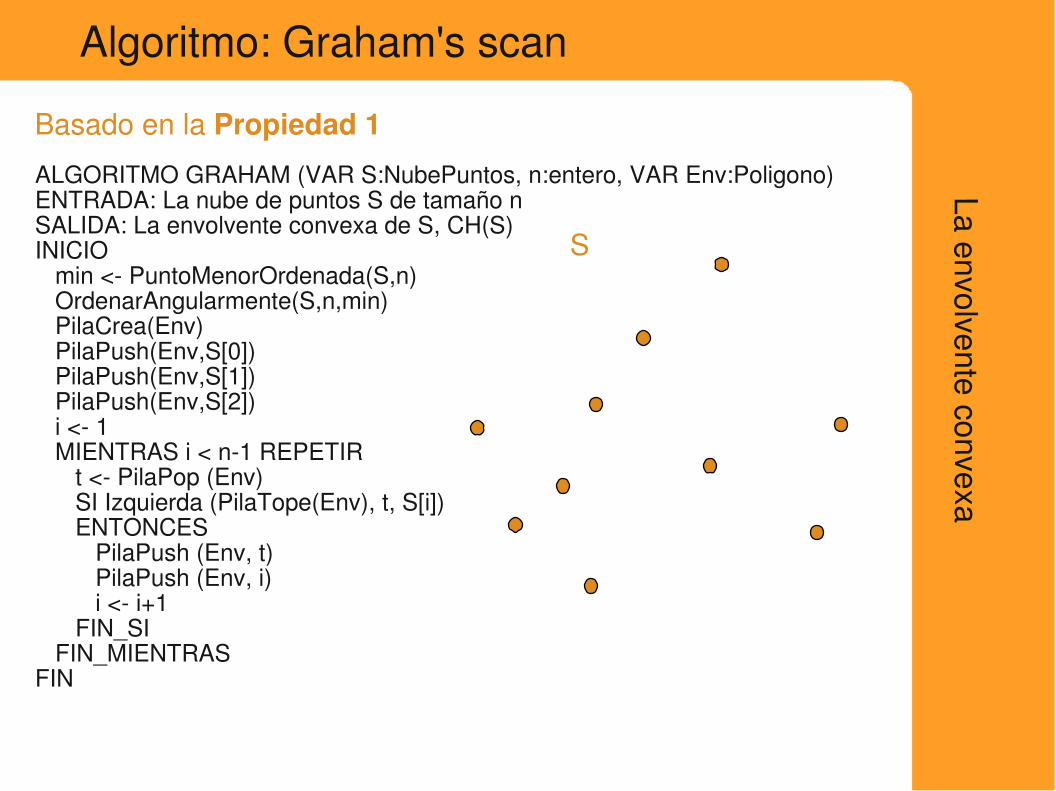
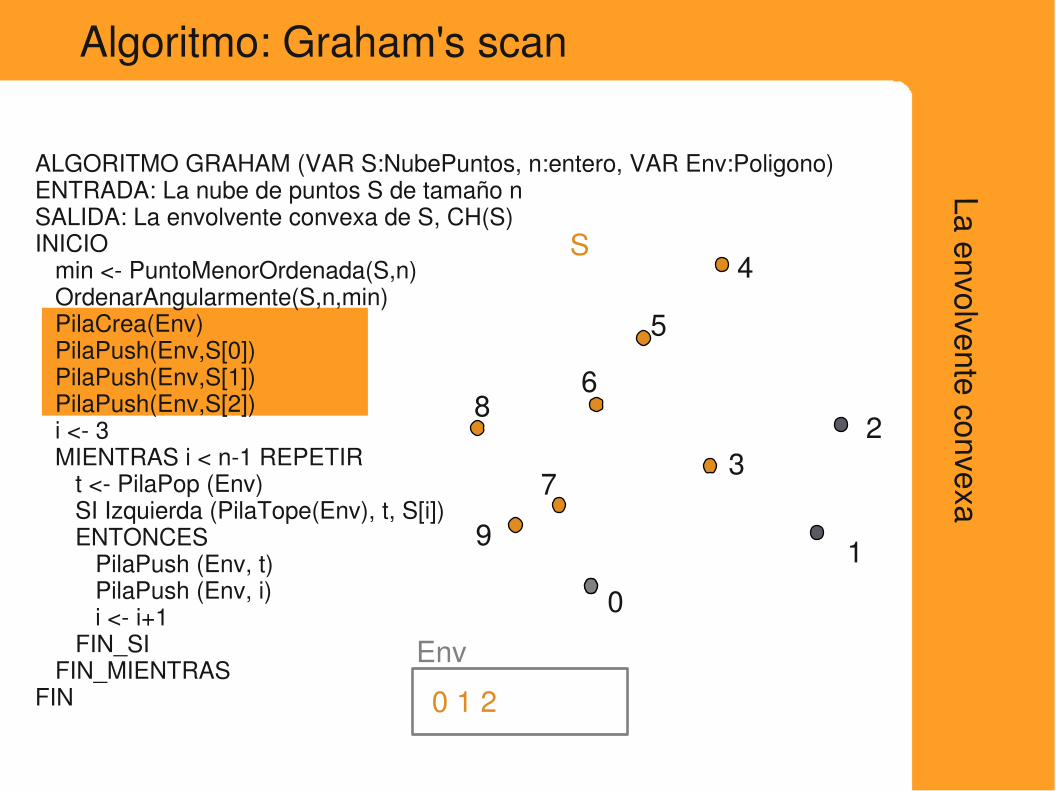
ALGORITMO GRAHAM (VAR S:NubePuntos, n:entero, VAR Env:Poligono)ENTRADA: La nube de puntos S de tamaño nSALIDA: La envolvente convexa de S, CH(S)INICIO min < PuntoMenorOrdenada(S,n) OrdenarAngularmente(S,n,min) PilaCrea(Env) PilaPush(Env,S[0]) PilaPush(Env,S[1]) PilaPush(Env,S[2]) i < 1 MIENTRAS i < n1 REPETIR t < PilaPop (Env) SI Izquierda (PilaTope(Env), t, S[i]) ENTONCES PilaPush (Env, t) PilaPush (Env, i) i < i+1 FIN_SI FIN_MIENTRASFIN
S
Basado en la Propiedad 1
La en volve nte co nvex aAlgoritmo: Graham's scan
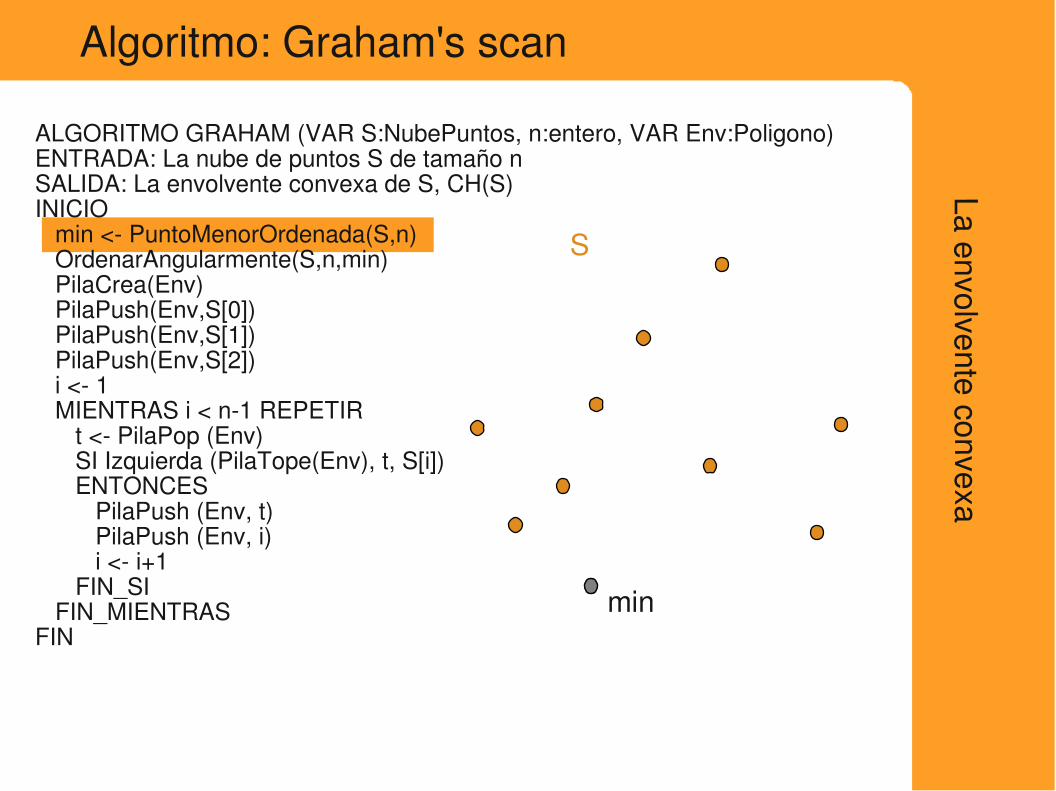
ALGORITMO GRAHAM (VAR S:NubePuntos, n:entero, VAR Env:Poligono)ENTRADA: La nube de puntos S de tamaño nSALIDA: La envolvente convexa de S, CH(S)INICIO min < PuntoMenorOrdenada(S,n) OrdenarAngularmente(S,n,min) PilaCrea(Env) PilaPush(Env,S[0]) PilaPush(Env,S[1]) PilaPush(Env,S[2]) i < 1 MIENTRAS i < n1 REPETIR t < PilaPop (Env) SI Izquierda (PilaTope(Env), t, S[i]) ENTONCES PilaPush (Env, t) PilaPush (Env, i) i < i+1 FIN_SI FIN_MIENTRASFIN
S
min
La en volve nte co nvex aAlgoritmo: Graham's scan
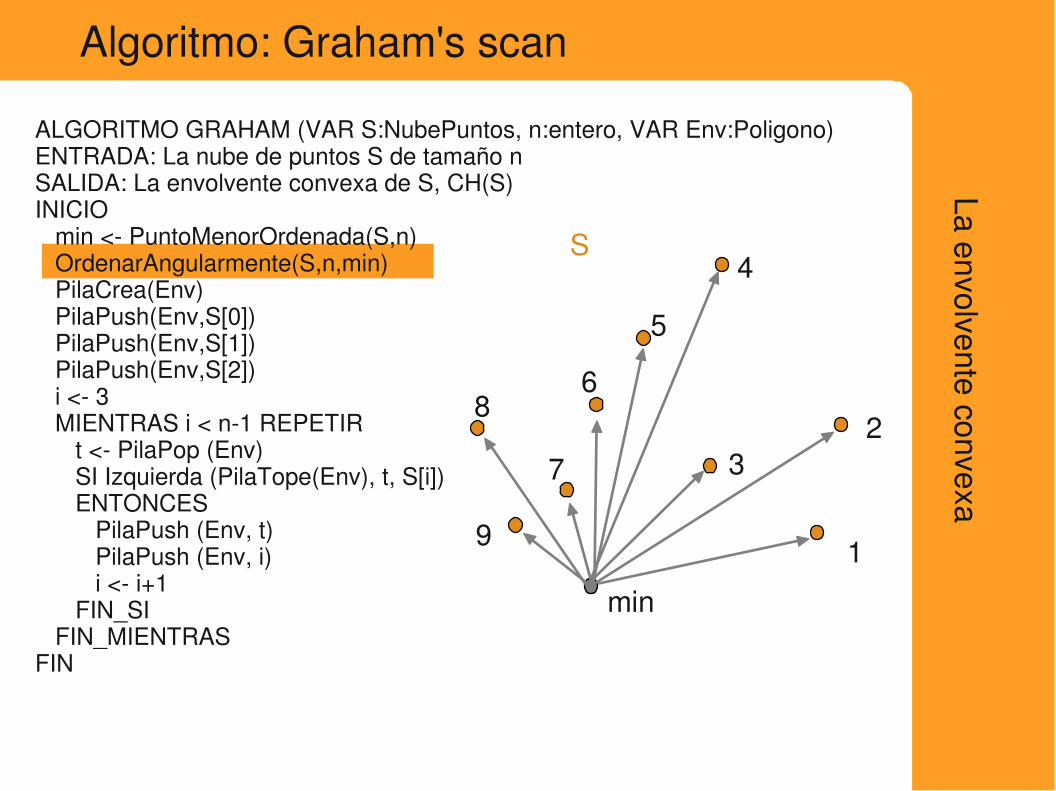
ALGORITMO GRAHAM (VAR S:NubePuntos, n:entero, VAR Env:Poligono)ENTRADA: La nube de puntos S de tamaño nSALIDA: La envolvente convexa de S, CH(S)INICIO min < PuntoMenorOrdenada(S,n) OrdenarAngularmente(S,n,min) PilaCrea(Env) PilaPush(Env,S[0]) PilaPush(Env,S[1]) PilaPush(Env,S[2]) i < 3 MIENTRAS i < n1 REPETIR t < PilaPop (Env) SI Izquierda (PilaTope(Env), t, S[i]) ENTONCES PilaPush (Env, t) PilaPush (Env, i) i < i+1 FIN_SI FIN_MIENTRASFIN
S
min
1
23
4
5
6
7
8
9
La en volve nte co nvex aAlgoritmo: Graham's scan
ALGORITMO GRAHAM (VAR S:NubePuntos, n:entero, VAR Env:Poligono)ENTRADA: La nube de puntos S de tamaño nSALIDA: La envolvente convexa de S, CH(S)INICIO min < PuntoMenorOrdenada(S,n) OrdenarAngularmente(S,n,min) PilaCrea(Env) PilaPush(Env,S[0]) PilaPush(Env,S[1]) PilaPush(Env,S[2]) i < 3 MIENTRAS i < n1 REPETIR t < PilaPop (Env) SI Izquierda (PilaTope(Env), t, S[i]) ENTONCES PilaPush (Env, t) PilaPush (Env, i) i < i+1 FIN_SI FIN_MIENTRASFIN
S
0
1
23
4
5
6
7
8
9
0 1 2
Env
La en volve nte co nvex aAlgoritmo: Graham's scan
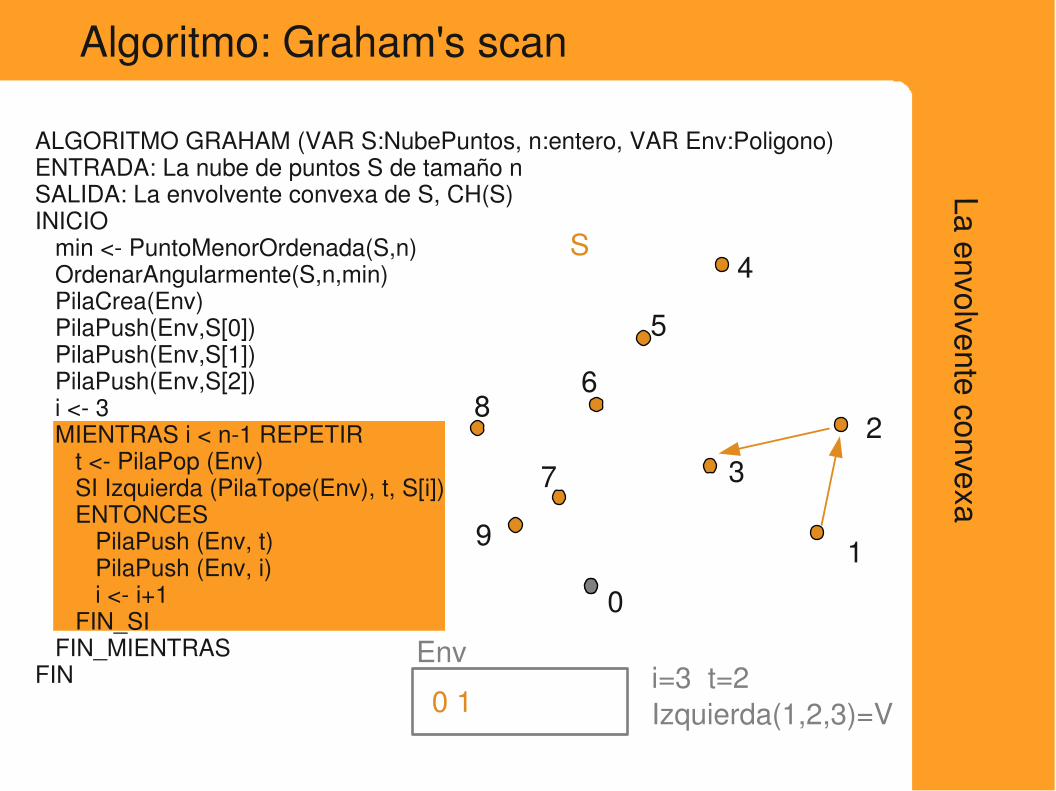
ALGORITMO GRAHAM (VAR S:NubePuntos, n:entero, VAR Env:Poligono)ENTRADA: La nube de puntos S de tamaño nSALIDA: La envolvente convexa de S, CH(S)INICIO min < PuntoMenorOrdenada(S,n) OrdenarAngularmente(S,n,min) PilaCrea(Env) PilaPush(Env,S[0]) PilaPush(Env,S[1]) PilaPush(Env,S[2]) i < 3 MIENTRAS i < n1 REPETIR t < PilaPop (Env) SI Izquierda (PilaTope(Env), t, S[i]) ENTONCES PilaPush (Env, t) PilaPush (Env, i) i < i+1 FIN_SI FIN_MIENTRASFIN
S
0
1
23
4
5
6
7
8
9
0 1
Envi=3 t=2Izquierda(1,2,3)=V
La en volve nte co nvex aAlgoritmo: Graham's scan
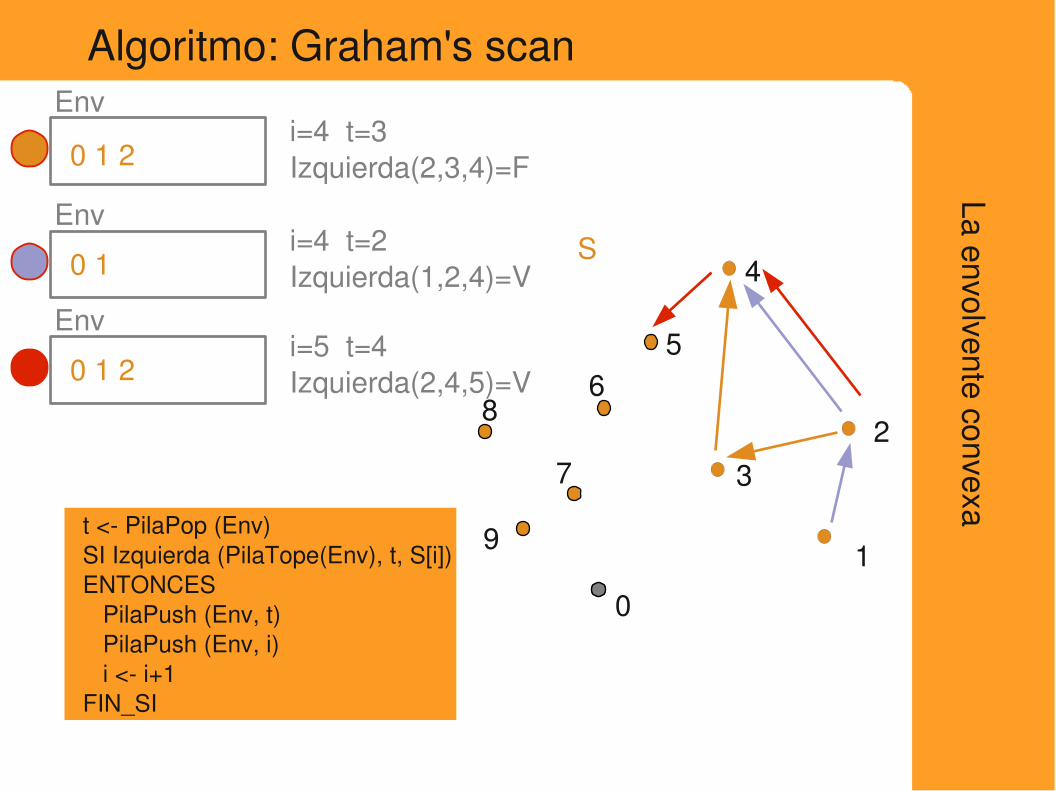
t < PilaPop (Env) SI Izquierda (PilaTope(Env), t, S[i]) ENTONCES PilaPush (Env, t) PilaPush (Env, i) i < i+1 FIN_SI
S
0
1
23
4
56
7
8
9
0 1 2
Envi=4 t=3Izquierda(2,3,4)=F
0 1
Envi=4 t=2Izquierda(1,2,4)=V
0 1 2
Envi=5 t=4Izquierda(2,4,5)=V
La en volve nte co nvex aAlgoritmo: Graham's scan
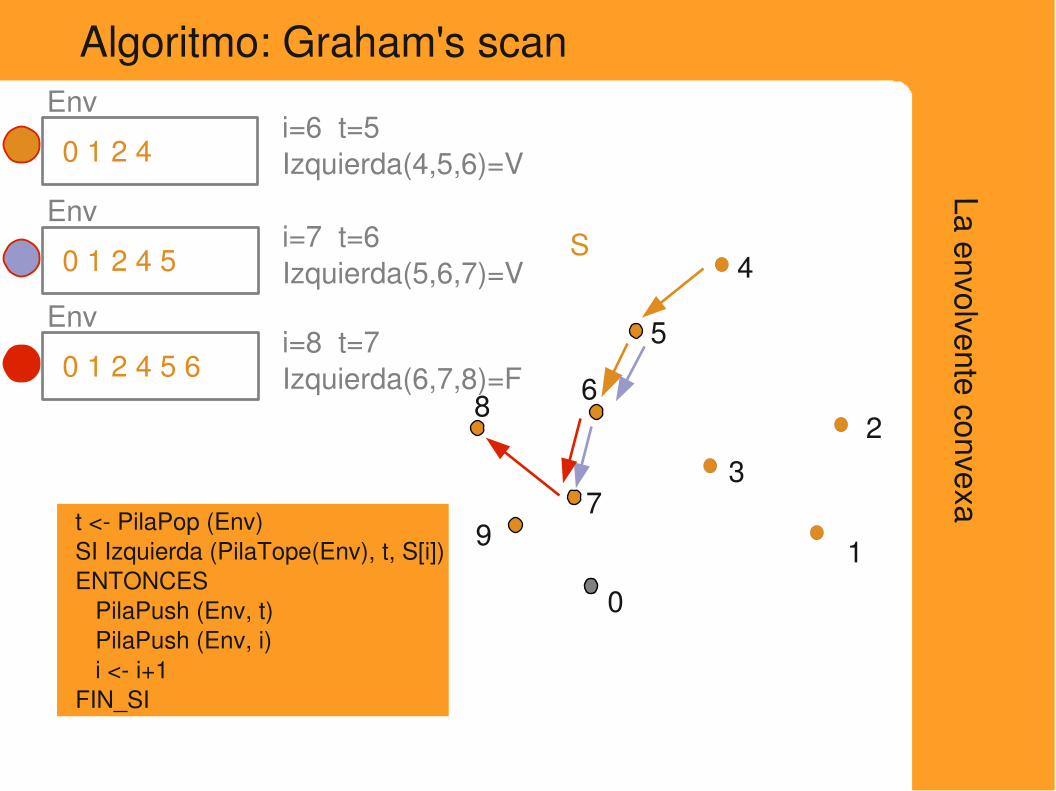
t < PilaPop (Env) SI Izquierda (PilaTope(Env), t, S[i]) ENTONCES PilaPush (Env, t) PilaPush (Env, i) i < i+1 FIN_SI
S
0
1
23
4
5
6
7
8
9
0 1 2 4
Envi=6 t=5Izquierda(4,5,6)=V
0 1 2 4 5
Envi=7 t=6Izquierda(5,6,7)=V
0 1 2 4 5 6
Envi=8 t=7Izquierda(6,7,8)=F
La en volve nte co nvex aAlgoritmo: Graham's scan
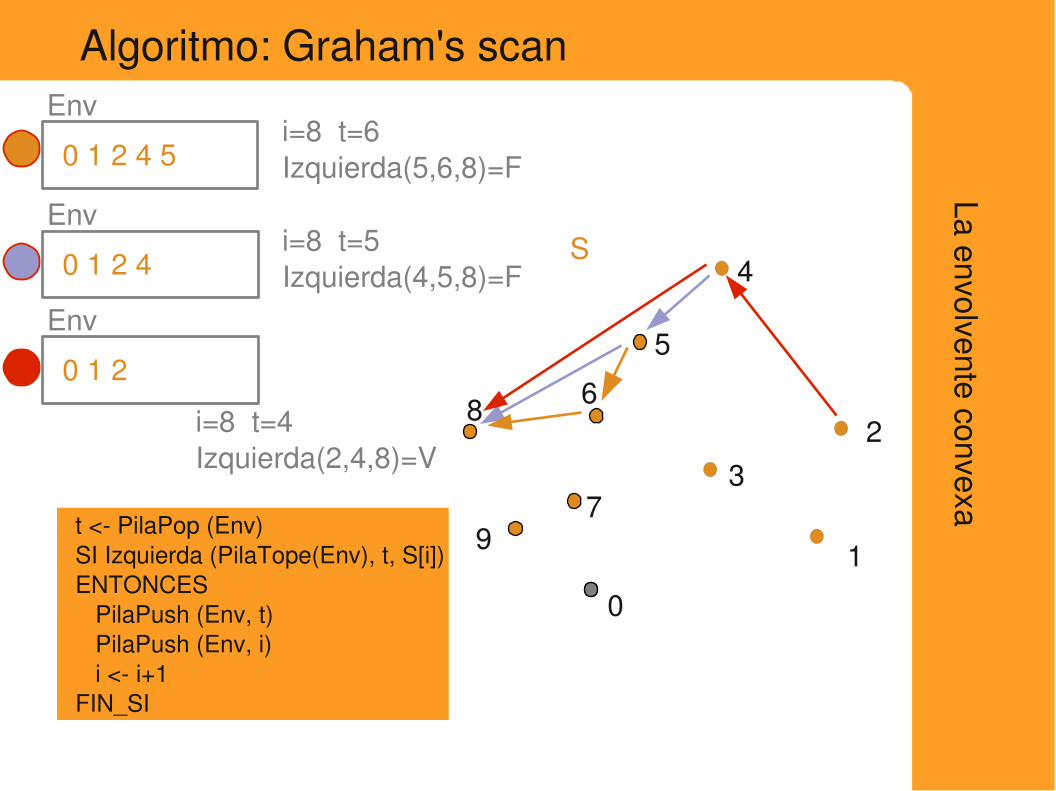
t < PilaPop (Env) SI Izquierda (PilaTope(Env), t, S[i]) ENTONCES PilaPush (Env, t) PilaPush (Env, i) i < i+1 FIN_SI
S
0
1
23
4
5
6
7
8
9
0 1 2 4 5
Envi=8 t=6Izquierda(5,6,8)=F
0 1 2 4
Envi=8 t=5Izquierda(4,5,8)=F
i=8 t=4Izquierda(2,4,8)=V
0 1 2
Env
La en volve nte co nvex aAlgoritmo: Graham's scan
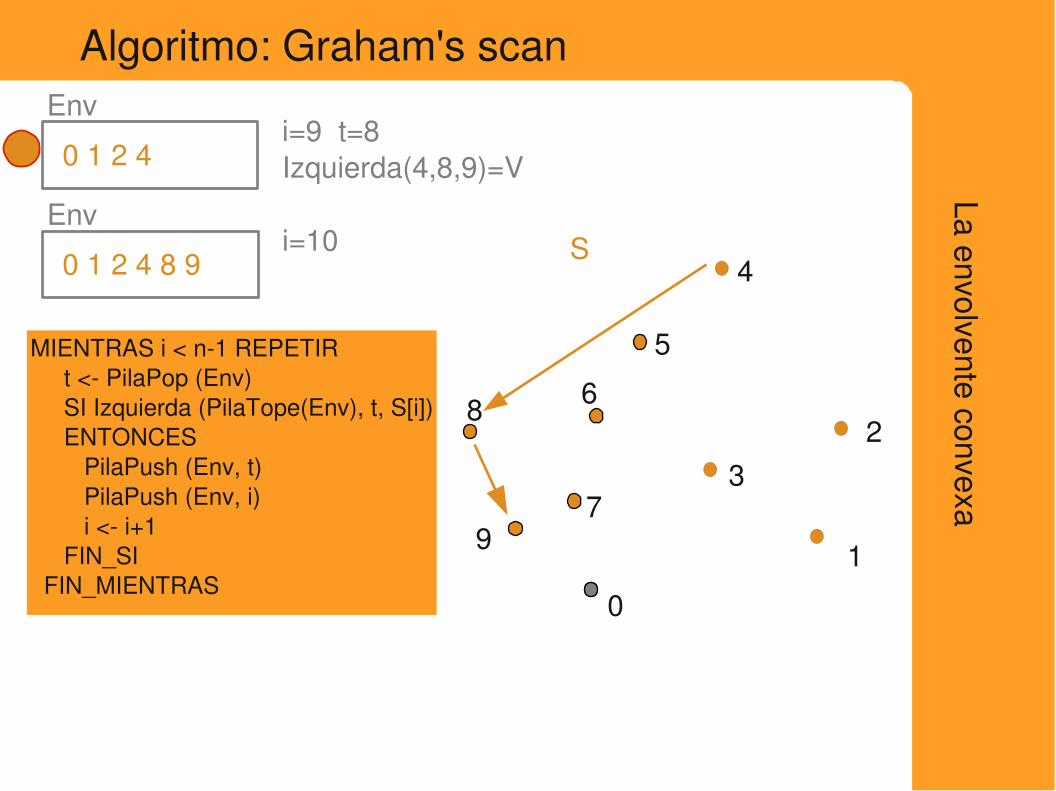
MIENTRAS i < n1 REPETIR t < PilaPop (Env) SI Izquierda (PilaTope(Env), t, S[i]) ENTONCES PilaPush (Env, t) PilaPush (Env, i) i < i+1 FIN_SI FIN_MIENTRAS
S
0
1
23
4
5
6
7
8
9
0 1 2 4
Envi=9 t=8Izquierda(4,8,9)=V
0 1 2 4 8 9
Envi=10
La en volve nte co nvex aAlgoritmo: Graham's scan
S
0
1
23
4
5
6
7
8
9
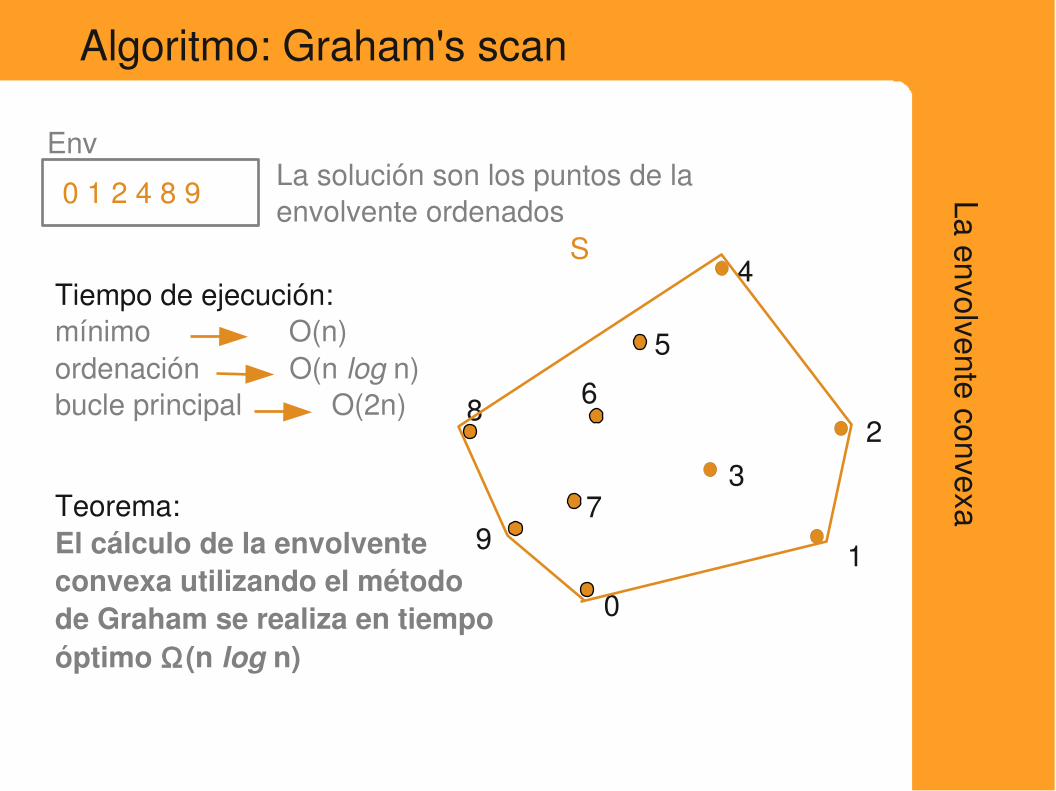
0 1 2 4 8 9
EnvLa solución son los puntos de la envolvente ordenados
Tiempo de ejecución:mínimo O(n)ordenación O(n log n)bucle principal O(2n)
Teorema:El cálculo de la envolventeconvexa utilizando el métodode Graham se realiza en tiempoóptimo Ω(n log n)
La en volve nte co nvex aAlgoritmo: La marcha de Jarvis (gift wrapping)
S
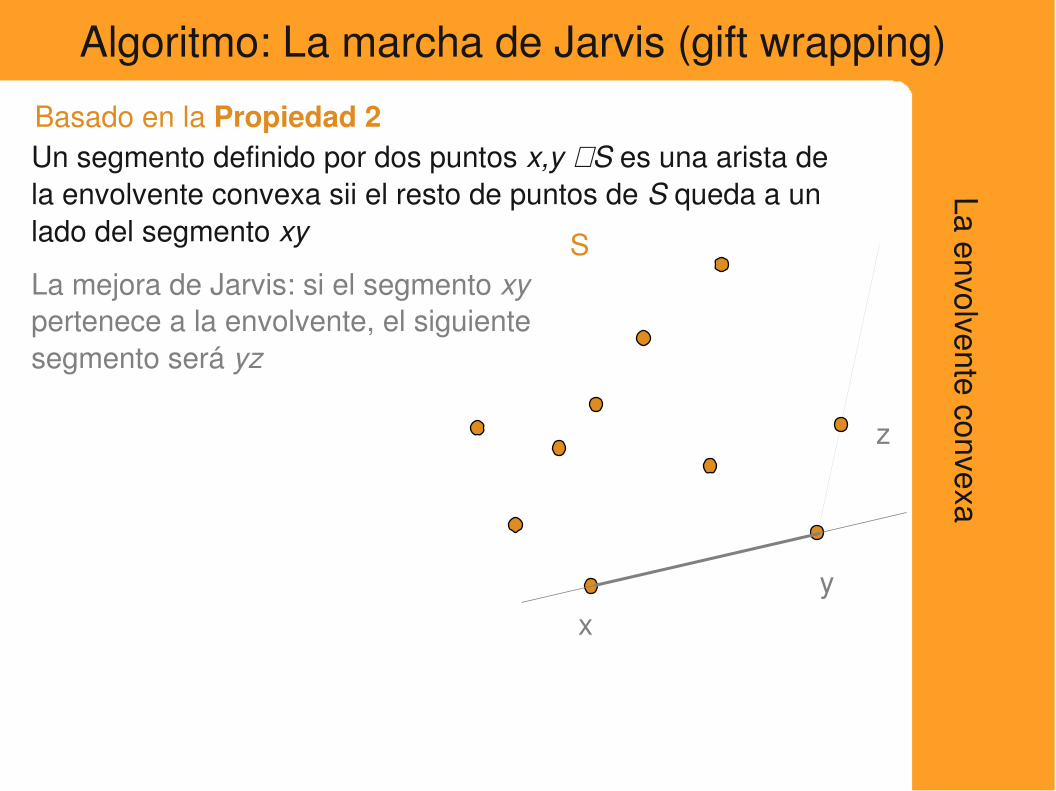
Basado en la Propiedad 2Un segmento definido por dos puntos x,y ∈S es una arista dela envolvente convexa sii el resto de puntos de S queda a un lado del segmento xy
La mejora de Jarvis: si el segmento xypertenece a la envolvente, el siguiente segmento será yz
xy
z
0
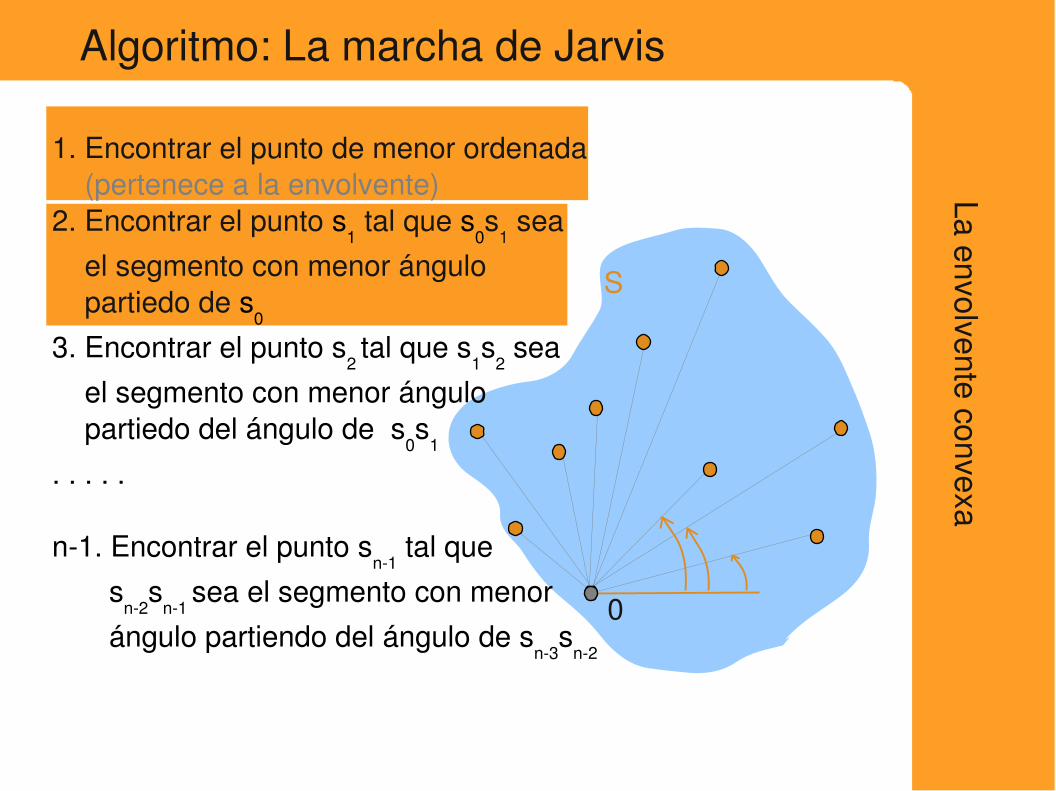
La en volve nte co nvex aAlgoritmo: La marcha de Jarvis
S
1. Encontrar el punto de menor ordenada (pertenece a la envolvente) 2. Encontrar el punto s
1 tal que s
0s
1 sea
el segmento con menor ángulo partiedo de s
0
3. Encontrar el punto s2 tal que s
1s
2 sea
el segmento con menor ángulo partiedo del ángulo de s
0s
1
. . . . .
n1. Encontrar el punto sn1
tal que s
n2s
n1 sea el segmento con menor
ángulo partiendo del ángulo de sn3
sn2
0
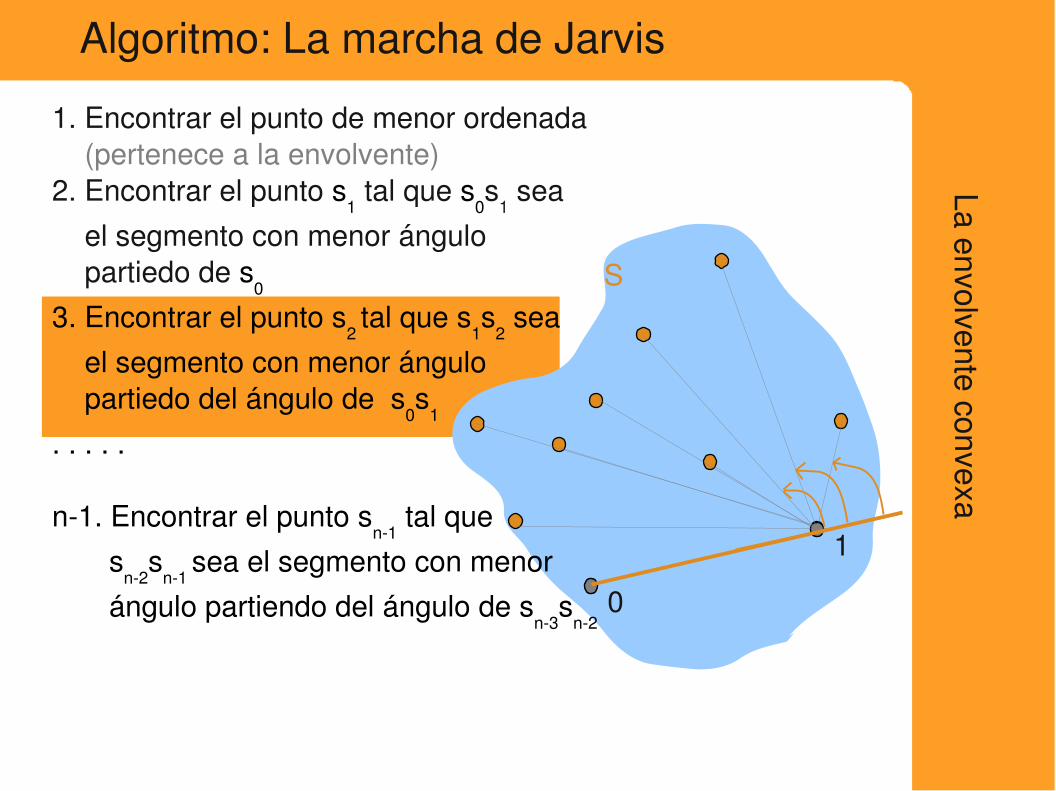
La en volve nte co nvex aAlgoritmo: La marcha de Jarvis
S
1. Encontrar el punto de menor ordenada (pertenece a la envolvente) 2. Encontrar el punto s
1 tal que s
0s
1 sea
el segmento con menor ángulo partiedo de s
0
3. Encontrar el punto s2 tal que s
1s
2 sea
el segmento con menor ángulo partiedo del ángulo de s
0s
1
. . . . .
n1. Encontrar el punto sn1
tal que s
n2s
n1 sea el segmento con menor
ángulo partiendo del ángulo de sn3
sn2
1
0
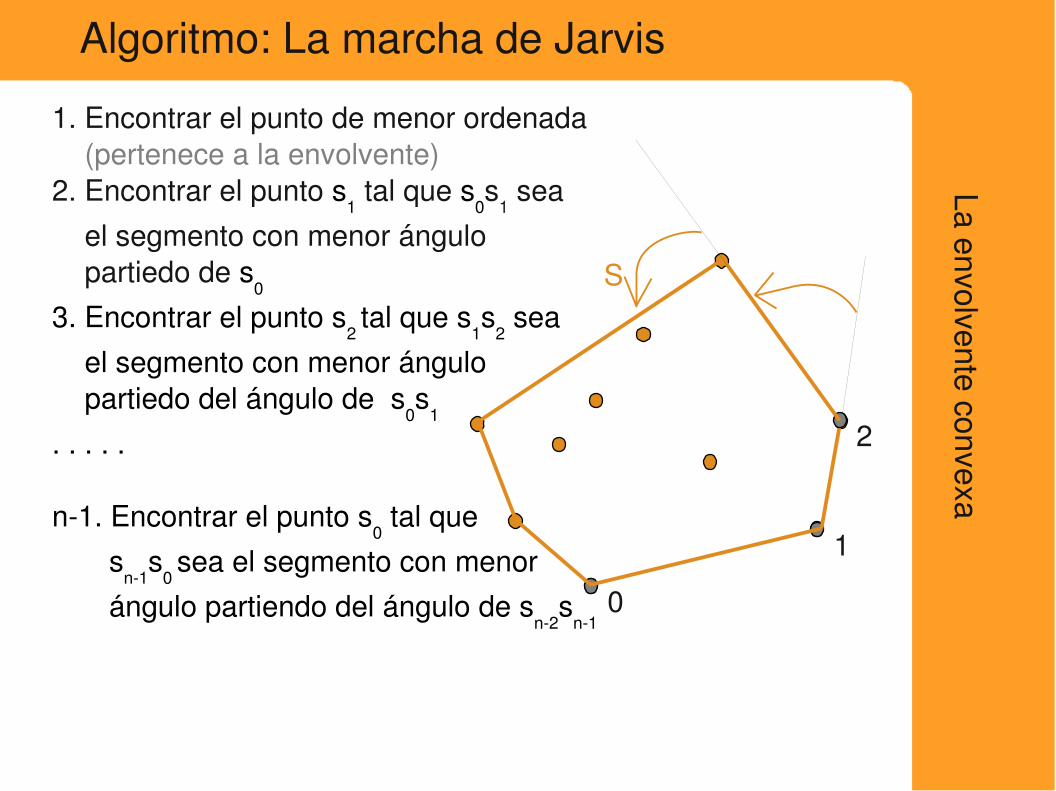
La en volve nte co nvex a
S
1. Encontrar el punto de menor ordenada (pertenece a la envolvente) 2. Encontrar el punto s
1 tal que s
0s
1 sea
el segmento con menor ángulo partiedo de s
0
3. Encontrar el punto s2 tal que s
1s
2 sea
el segmento con menor ángulo partiedo del ángulo de s
0s
1
. . . . .
n1. Encontrar el punto s0 tal que
sn1
s0 sea el segmento con menor
ángulo partiendo del ángulo de sn2
sn1
1
2
Algoritmo: La marcha de Jarvis
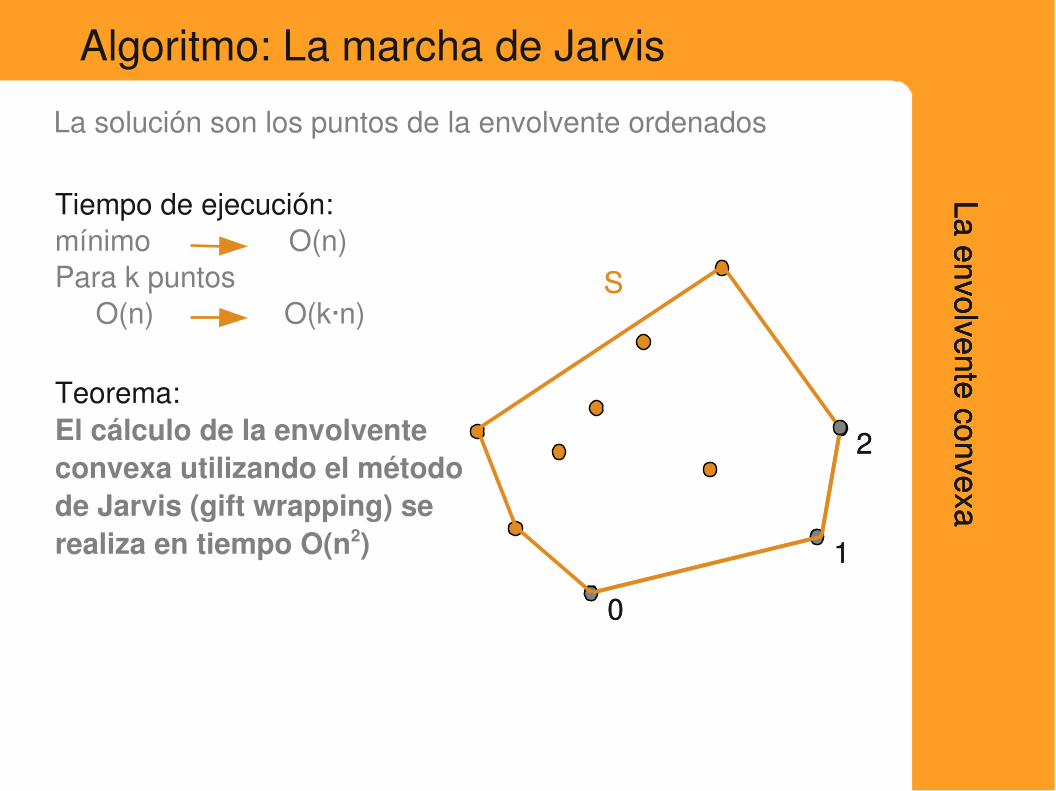
La en volve nte co nvex aLa solución son los puntos de la envolvente ordenados
0
La en volve nte co nvex a
S
1
2
Tiempo de ejecución:mínimo O(n)Para k puntos O(n) O(k∙n)
Teorema:El cálculo de la envolventeconvexa utilizando el métodode Jarvis (gift wrapping) se realiza en tiempo O(n2)
Algoritmo: La marcha de Jarvis
0
La en volve nte co nvex a
S
1
2
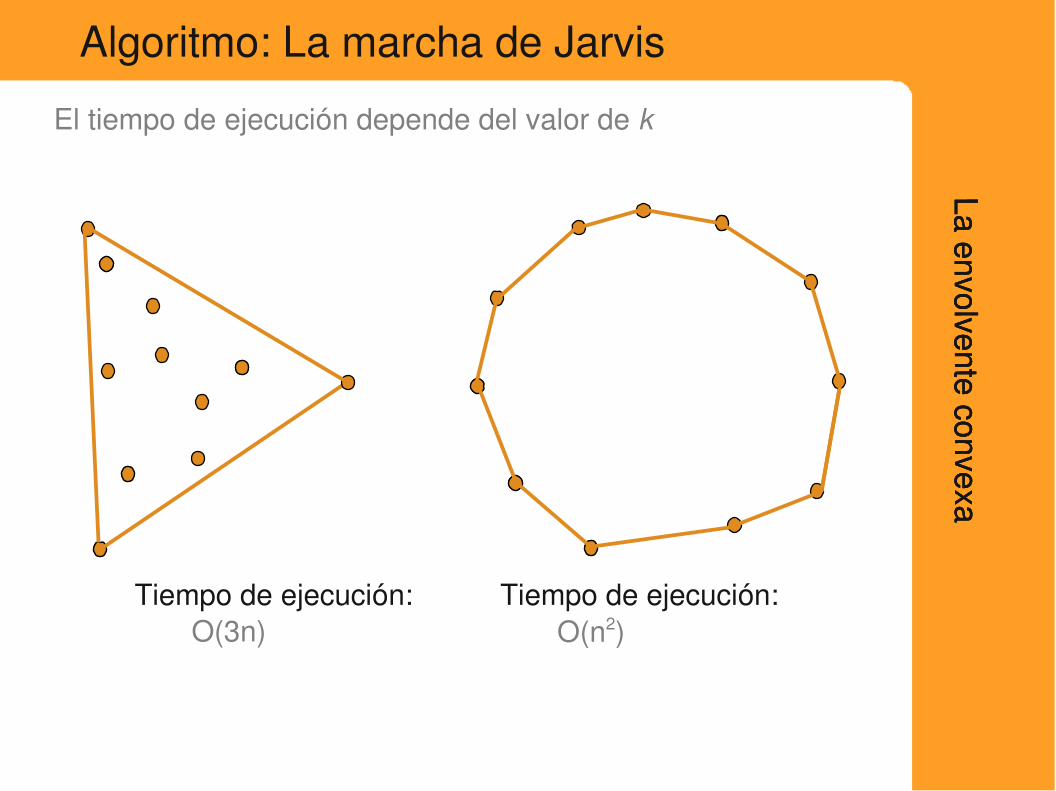
La en volve nte co nvex aEl tiempo de ejecución depende del valor de k
Tiempo de ejecución: O(n2)
La en volve nte co nvex aAlgoritmo: La marcha de Jarvis
La en volve nte co nvex a
Tiempo de ejecución: O(3n)
La en volve nte co nvex aLa en volve nte co nvex a
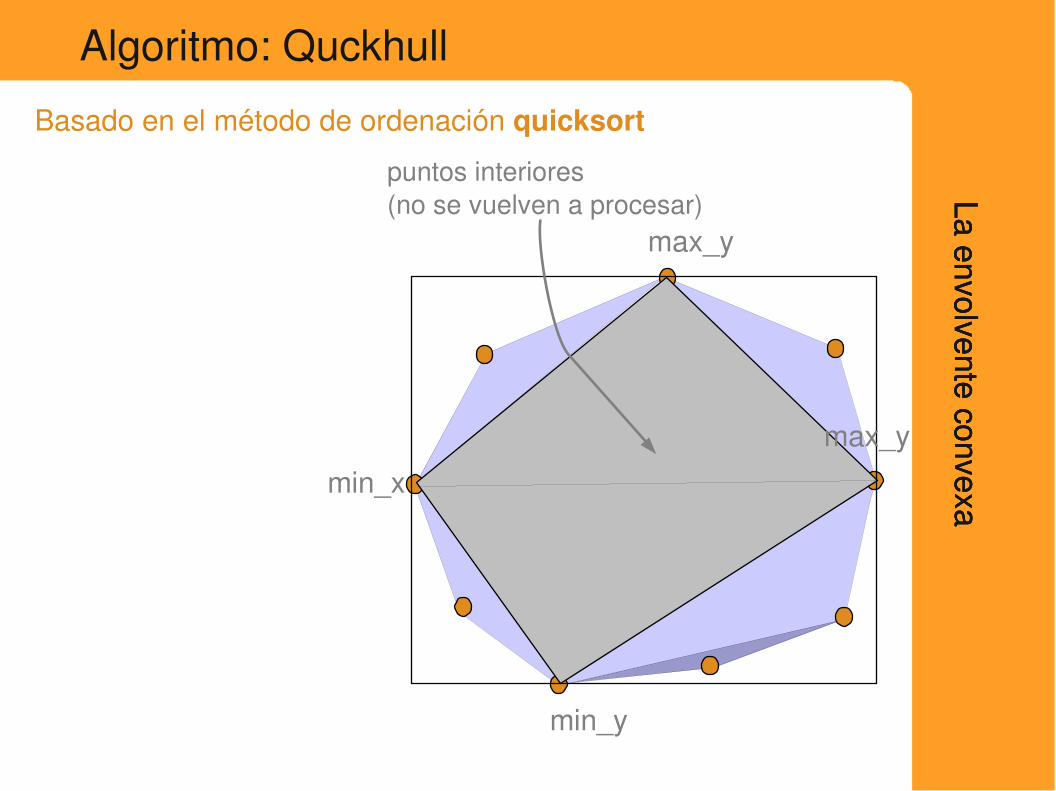
Algoritmo: QuckhullLa en volve nte co nvex a
Basado en el método de ordenación quicksort
min_y
min_x
max_y
max_y
puntos interiores(no se vuelven a procesar)
La en volve nte co nvex aLa en volve nte co nvex a
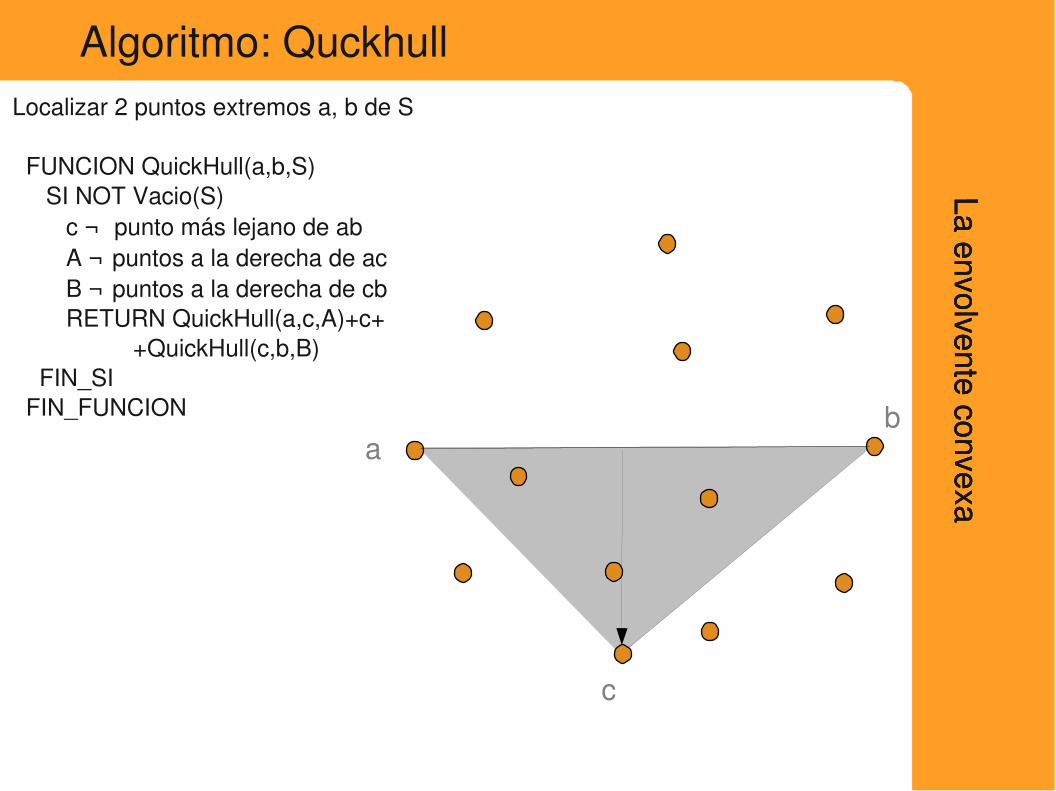
Algoritmo: QuckhullLa en volve nte co nvex a
Localizar 2 puntos extremos a, b de S
FUNCION QuickHull(a,b,S) SI NOT Vacio(S) c ¬ punto más lejano de ab A ¬ puntos a la derecha de ac B ¬ puntos a la derecha de cb RETURN QuickHull(a,c,A)+c+ +QuickHull(c,b,B) FIN_SI FIN_FUNCION a
b
c
a
b
c
a
b
c
La en volve nte co nvex aLa en volve nte co nvex a
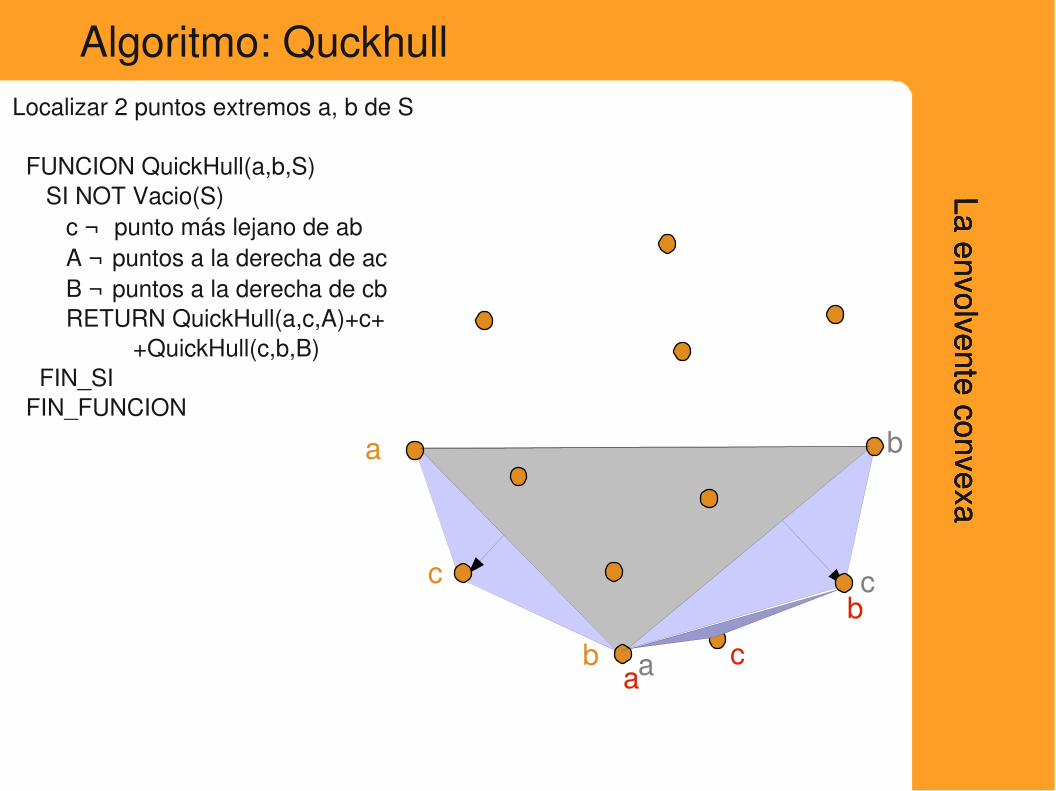
Algoritmo: QuckhullLa en volve nte co nvex a
Localizar 2 puntos extremos a, b de S
FUNCION QuickHull(a,b,S) SI NOT Vacio(S) c ¬ punto más lejano de ab A ¬ puntos a la derecha de ac B ¬ puntos a la derecha de cb RETURN QuickHull(a,c,A)+c+ +QuickHull(c,b,B) FIN_SI FIN_FUNCION
a
b
c
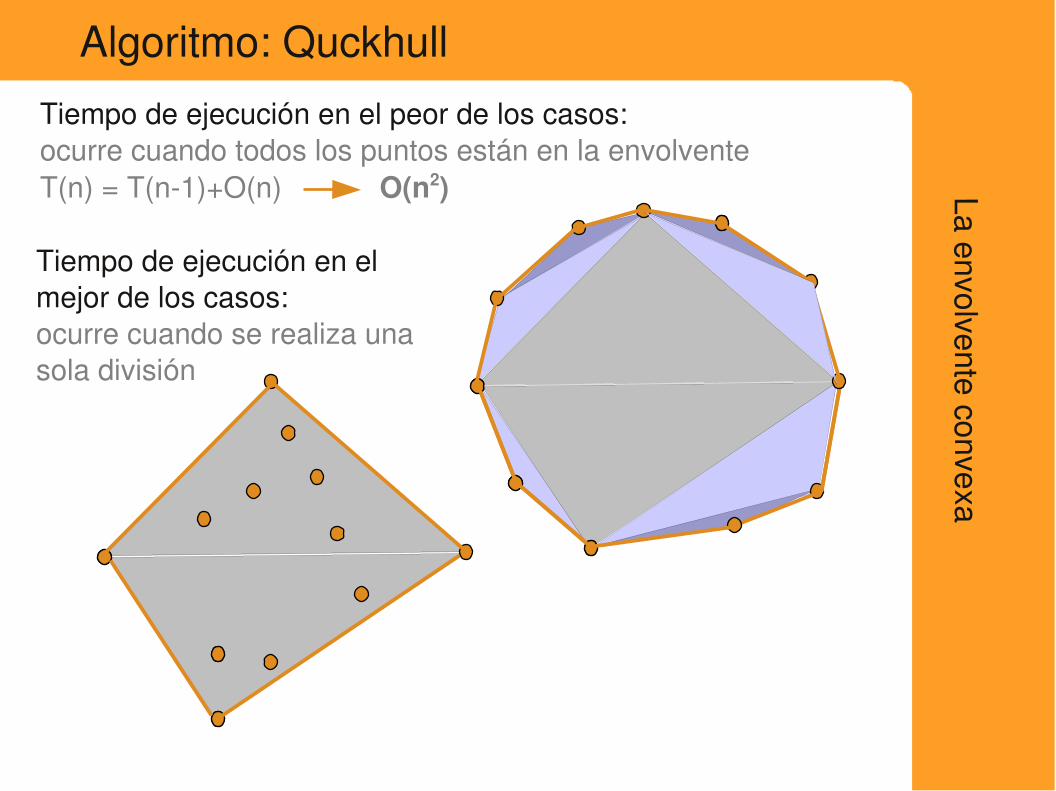
Algoritmo: Quckhull
Tiempo de ejecución en el peor de los casos:ocurre cuando todos los puntos están en la envolventeT(n) = T(n1)+O(n) O(n2)
Tiempo de ejecución en el mejor de los casos:ocurre cuando se realiza unasola división
La en volve nte co nvex a
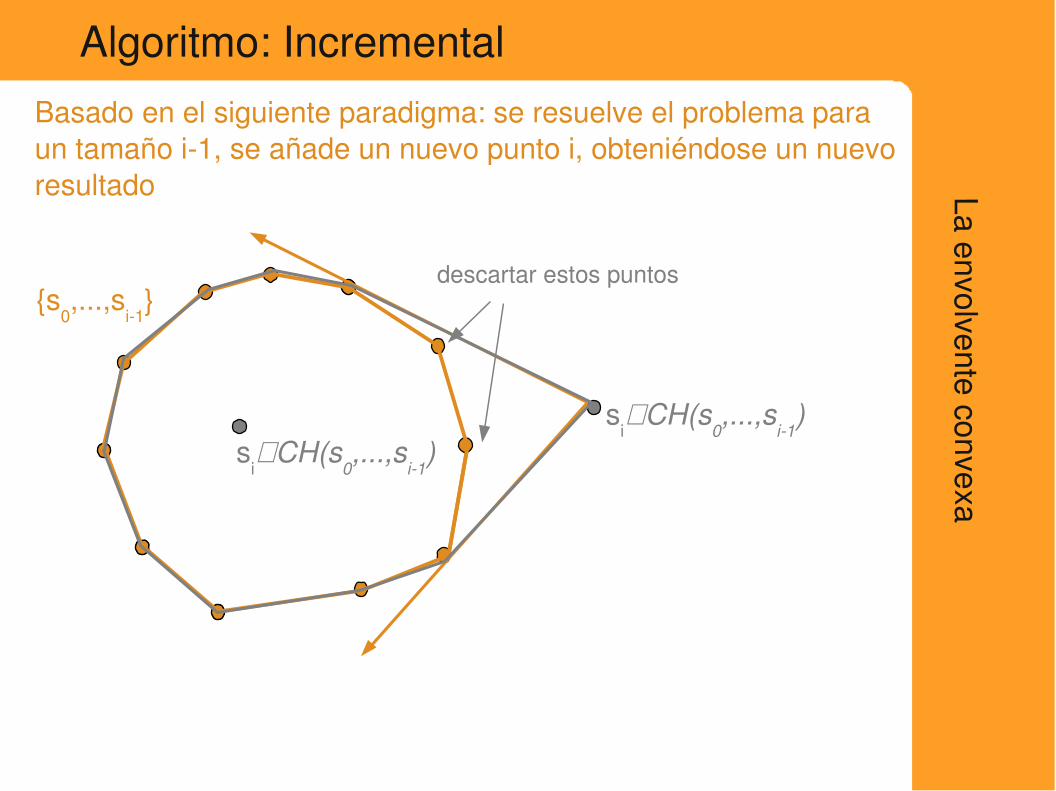
Algoritmo: IncrementalBasado en el siguiente paradigma: se resuelve el problema para un tamaño i1, se añade un nuevo punto i, obteniéndose un nuevoresultado
s0,...,s
i1
si⊄CH(s
0,...,s
i1)
si⊂CH(s
0,...,s
i1)
descartar estos puntos
La en volve nte co nvex a
Algoritmo: Incremental
s0,...,s
i1
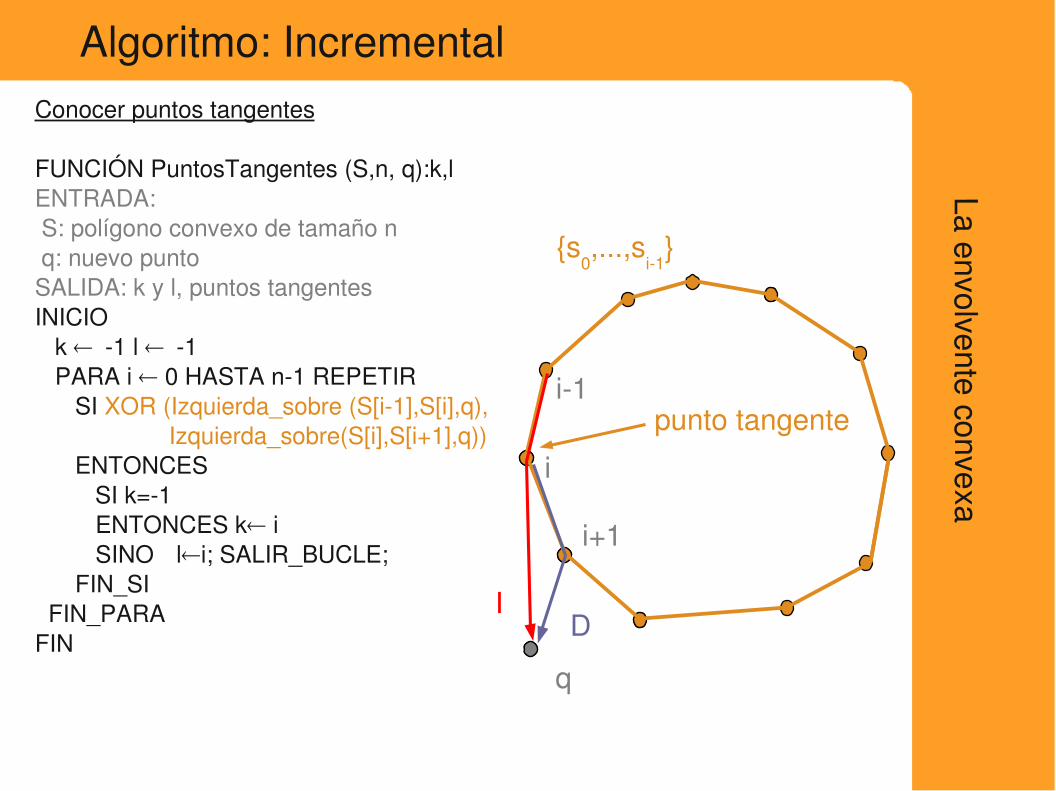
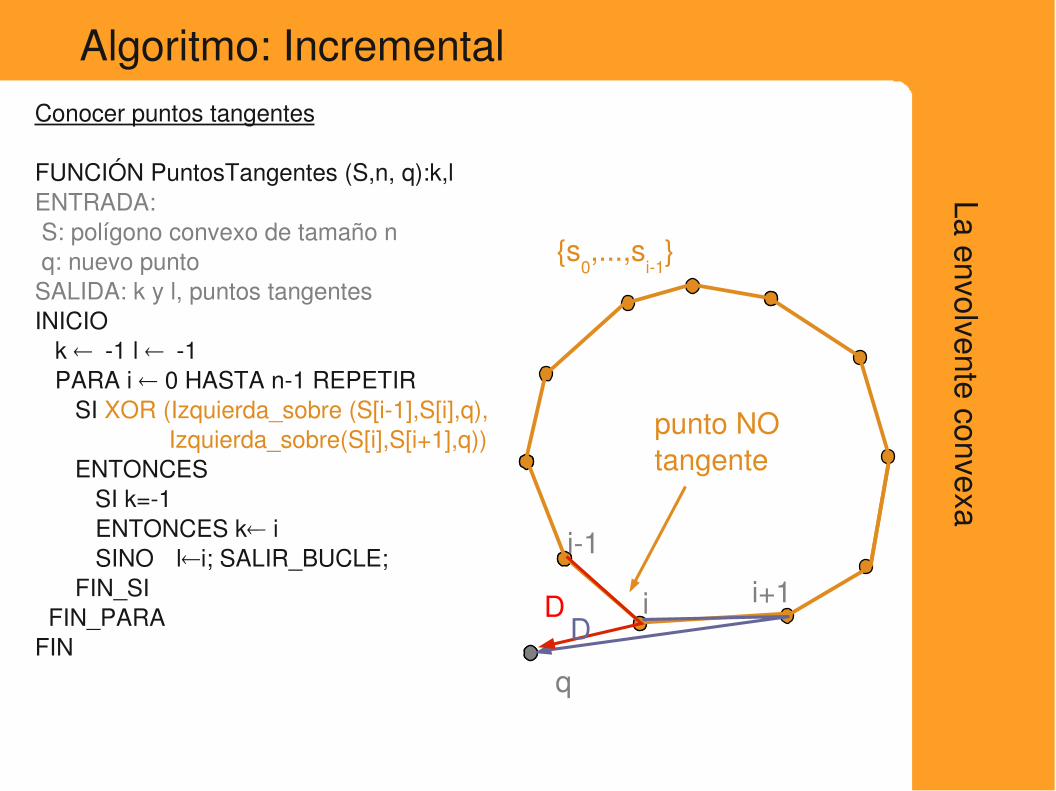
Conocer puntos tangentes
FUNCIÓN PuntosTangentes (S,n, q):k,lENTRADA: S: polígono convexo de tamaño n q: nuevo puntoSALIDA: k y l, puntos tangentesINICIO k ← 1 l ← 1 PARA i ← 0 HASTA n1 REPETIR SI XOR (Izquierda_sobre (S[i1],S[i],q), Izquierda_sobre(S[i],S[i+1],q)) ENTONCES SI k=1
ENTONCES k← i SINO l←i; SALIR_BUCLE;
FIN_SI FIN_PARAFIN
La en volve nte co nvex a
i
i1
i+1
q
ID
punto tangente
Algoritmo: Incremental
s0,...,s
i1
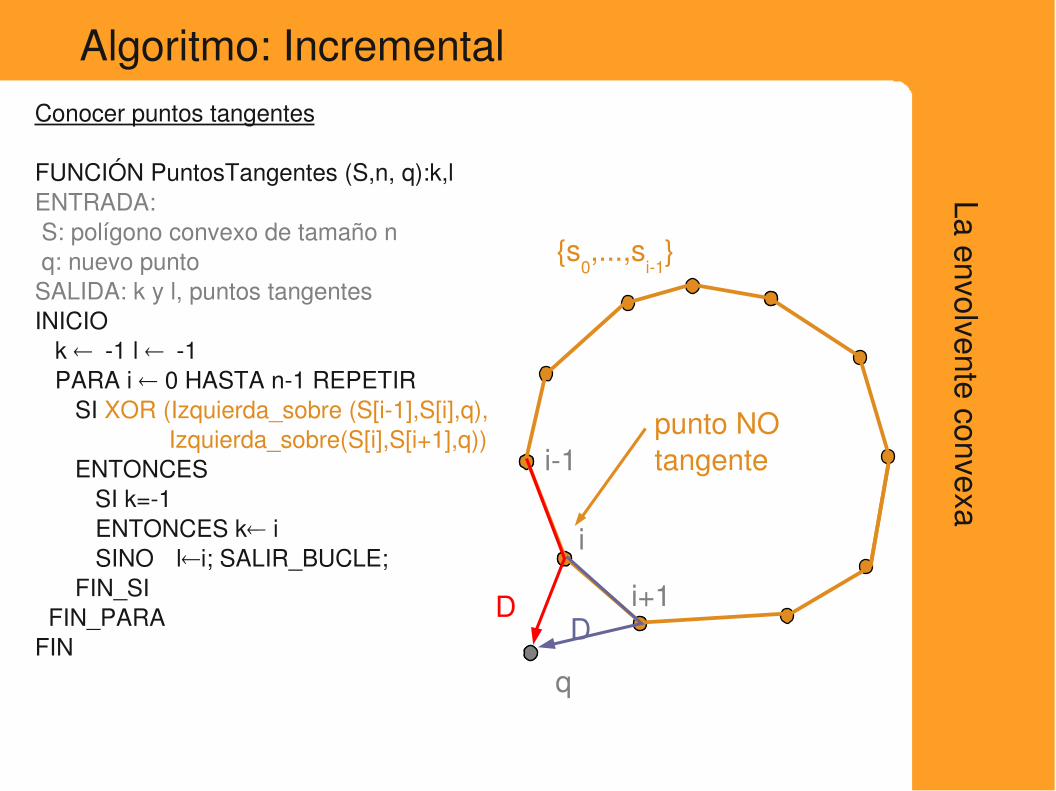
Conocer puntos tangentes
FUNCIÓN PuntosTangentes (S,n, q):k,lENTRADA: S: polígono convexo de tamaño n q: nuevo puntoSALIDA: k y l, puntos tangentesINICIO k ← 1 l ← 1 PARA i ← 0 HASTA n1 REPETIR SI XOR (Izquierda_sobre (S[i1],S[i],q), Izquierda_sobre(S[i],S[i+1],q)) ENTONCES SI k=1
ENTONCES k← i SINO l←i; SALIR_BUCLE;
FIN_SI FIN_PARAFIN
La en volve nte co nvex a
i
i1
i+1
q
DD
punto NOtangente
Algoritmo: Incremental
s0,...,s
i1
Conocer puntos tangentes
FUNCIÓN PuntosTangentes (S,n, q):k,lENTRADA: S: polígono convexo de tamaño n q: nuevo puntoSALIDA: k y l, puntos tangentesINICIO k ← 1 l ← 1 PARA i ← 0 HASTA n1 REPETIR SI XOR (Izquierda_sobre (S[i1],S[i],q), Izquierda_sobre(S[i],S[i+1],q)) ENTONCES SI k=1
ENTONCES k← i SINO l←i; SALIR_BUCLE;
FIN_SI FIN_PARAFIN
La en volve nte co nvex a
i
i1
i+1
q
DD
punto NOtangente
Algoritmo: Incremental
s0,...,s
i1
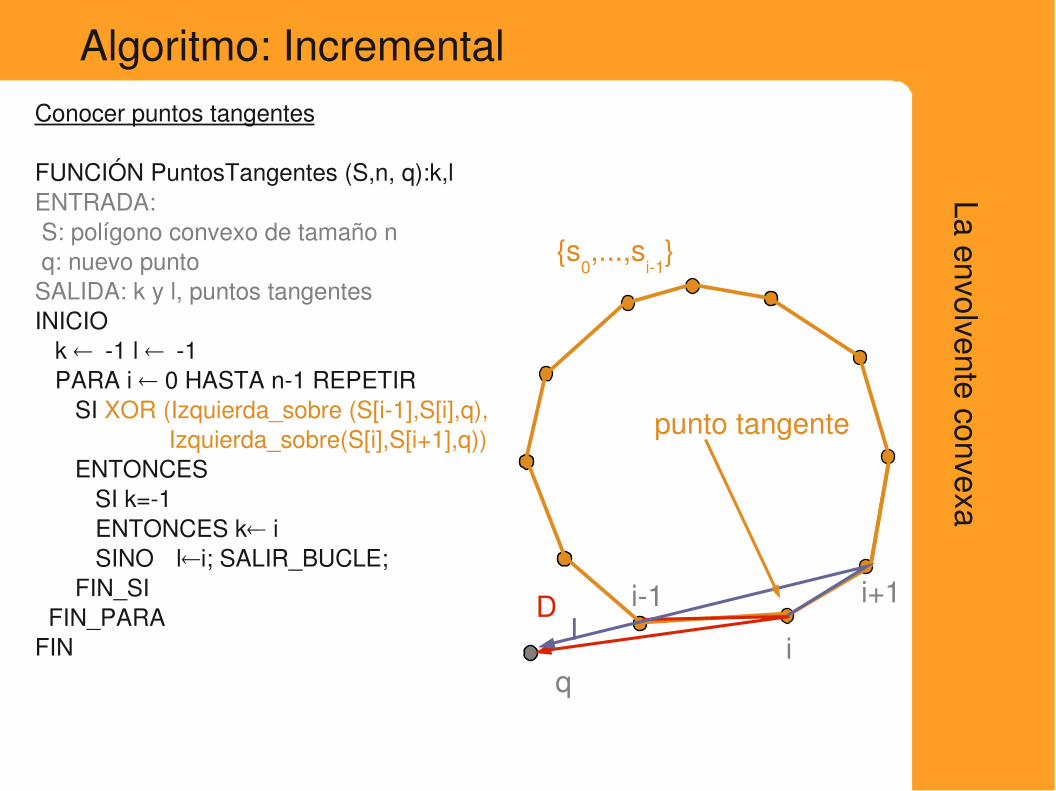
Conocer puntos tangentes
FUNCIÓN PuntosTangentes (S,n, q):k,lENTRADA: S: polígono convexo de tamaño n q: nuevo puntoSALIDA: k y l, puntos tangentesINICIO k ← 1 l ← 1 PARA i ← 0 HASTA n1 REPETIR SI XOR (Izquierda_sobre (S[i1],S[i],q), Izquierda_sobre(S[i],S[i+1],q)) ENTONCES SI k=1
ENTONCES k← i SINO l←i; SALIR_BUCLE;
FIN_SI FIN_PARAFIN
La en volve nte co nvex a
i
i1 i+1
q
D I
punto tangente
Algoritmo: Incremental
s0,...,s
i1
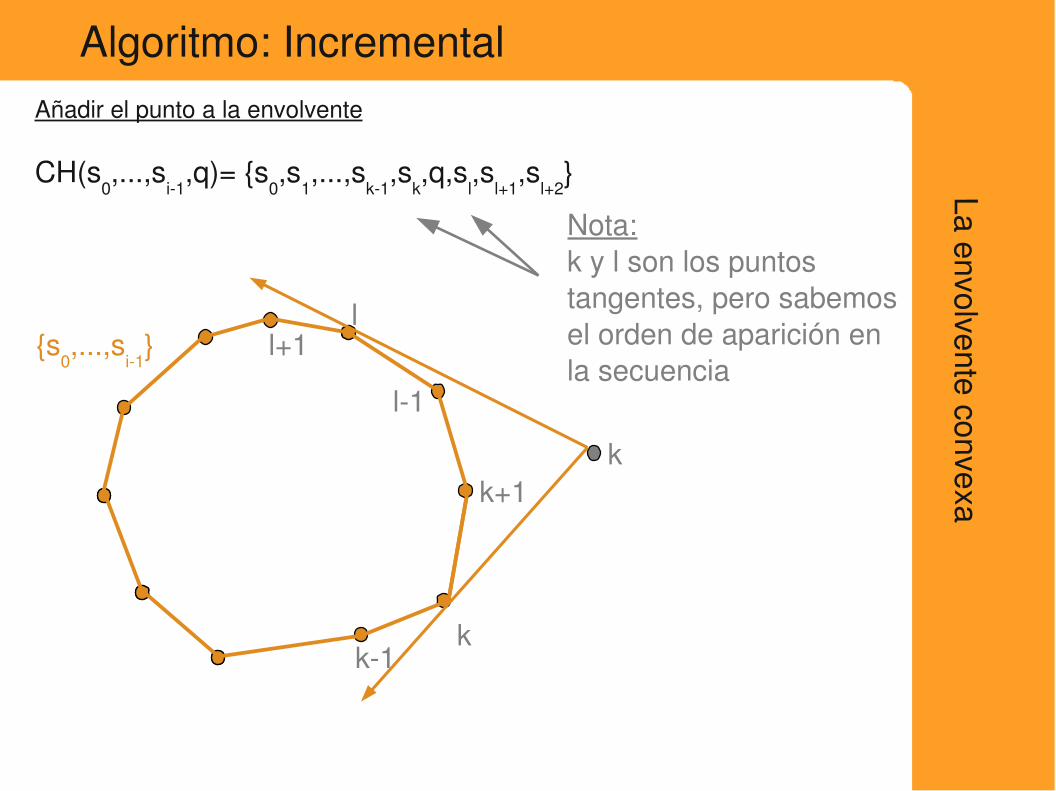
La en volve nte co nvex aAñadir el punto a la envolvente
CH(s0,...,s
i1,q)= s
0,s
1,...,s
k1,s
k,q,s
l,s
l+1,s
l+2
kk1
k+1k
l1
ll+1
Nota:k y l son los puntostangentes, pero sabemosel orden de aparición en la secuencia
Algoritmo: IncrementalLa en volve nte co nvex a
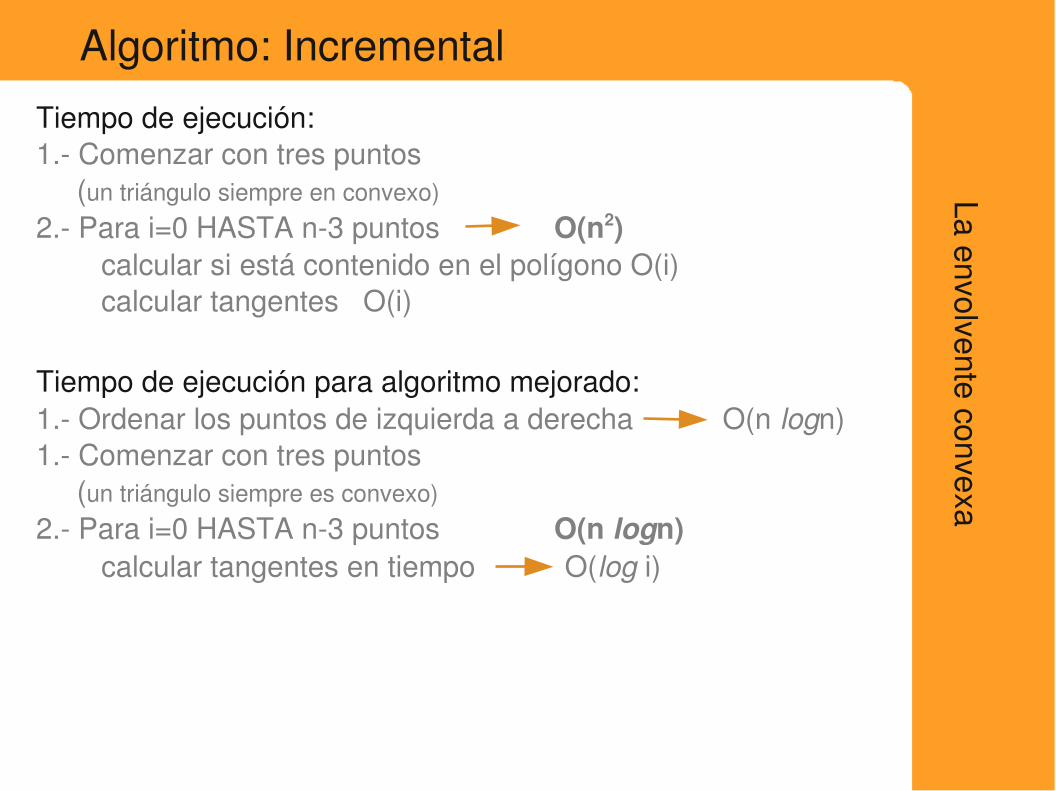
Tiempo de ejecución:1. Comenzar con tres puntos (un triángulo siempre en convexo)
2. Para i=0 HASTA n3 puntos O(n2) calcular si está contenido en el polígono O(i) calcular tangentes O(i)
Tiempo de ejecución para algoritmo mejorado:1. Ordenar los puntos de izquierda a derecha O(n logn)1. Comenzar con tres puntos (un triángulo siempre es convexo)
2. Para i=0 HASTA n3 puntos O(n logn) calcular tangentes en tiempo O(log i)
Algoritmo: Divide y Vencerás
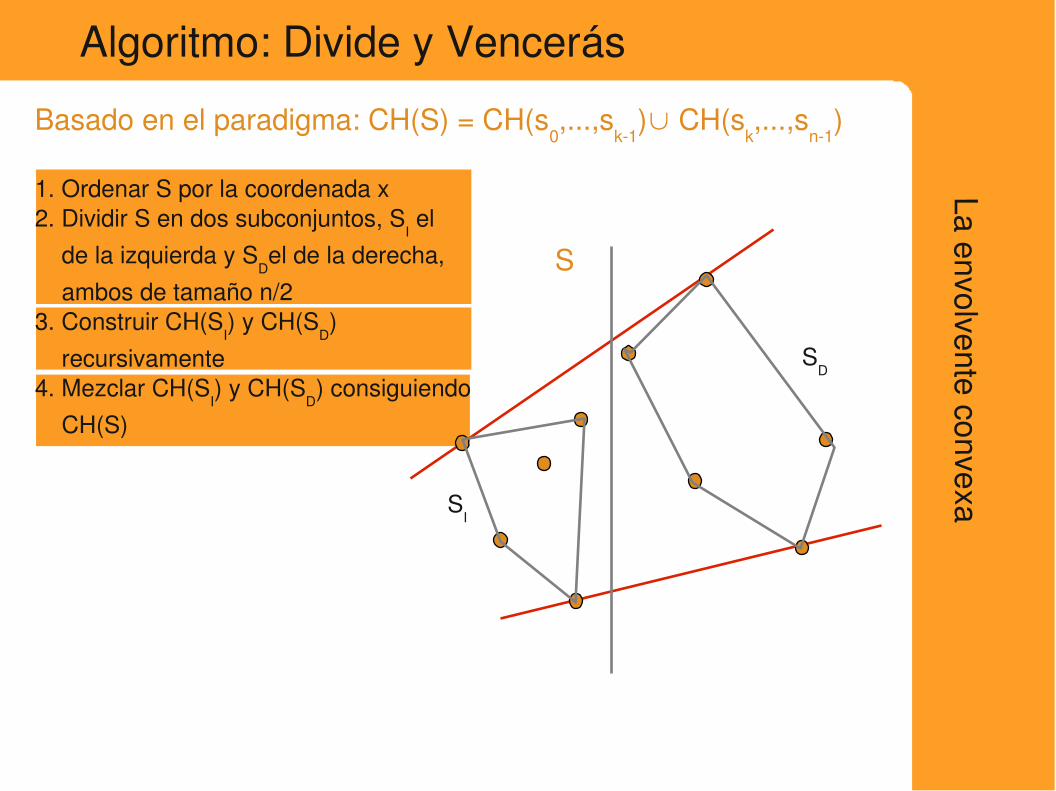
Basado en el paradigma: CH(S) = CH(s0,...,s
k1)∪ CH(s
k,...,s
n1)
La en volve nte co nvex a
S
1. Ordenar S por la coordenada x2. Dividir S en dos subconjuntos, S
I el
de la izquierda y SDel de la derecha,
ambos de tamaño n/23. Construir CH(S
I) y CH(S
D)
recursivamente4. Mezclar CH(S
I) y CH(S
D) consiguiendo
CH(S)
SI
SD
Algoritmo: Divide y VencerásLa en volve nte co nvex a
S
SI
SD
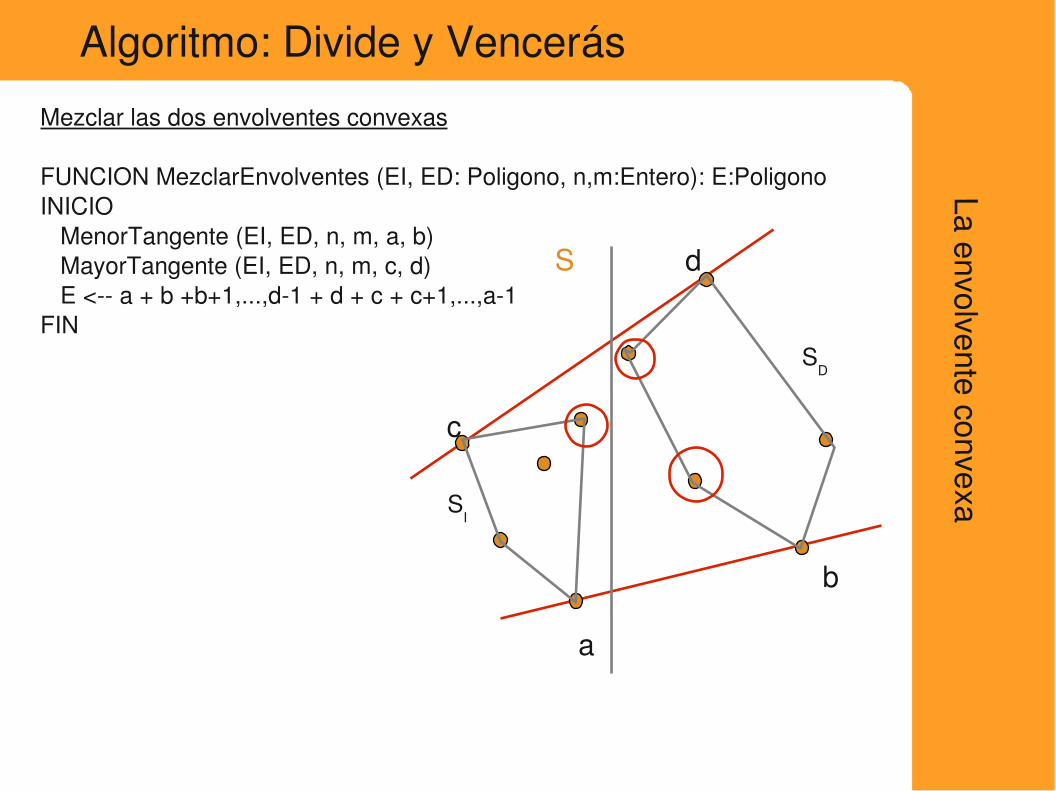
Mezclar las dos envolventes convexas
FUNCION MezclarEnvolventes (EI, ED: Poligono, n,m:Entero): E:PoligonoINICIO MenorTangente (EI, ED, n, m, a, b) MayorTangente (EI, ED, n, m, c, d) E < a + b +b+1,...,d1 + d + c + c+1,...,a1FIN
a
b
c
d
Algoritmo: Divide y VencerásLa en volve nte co nvex a
S
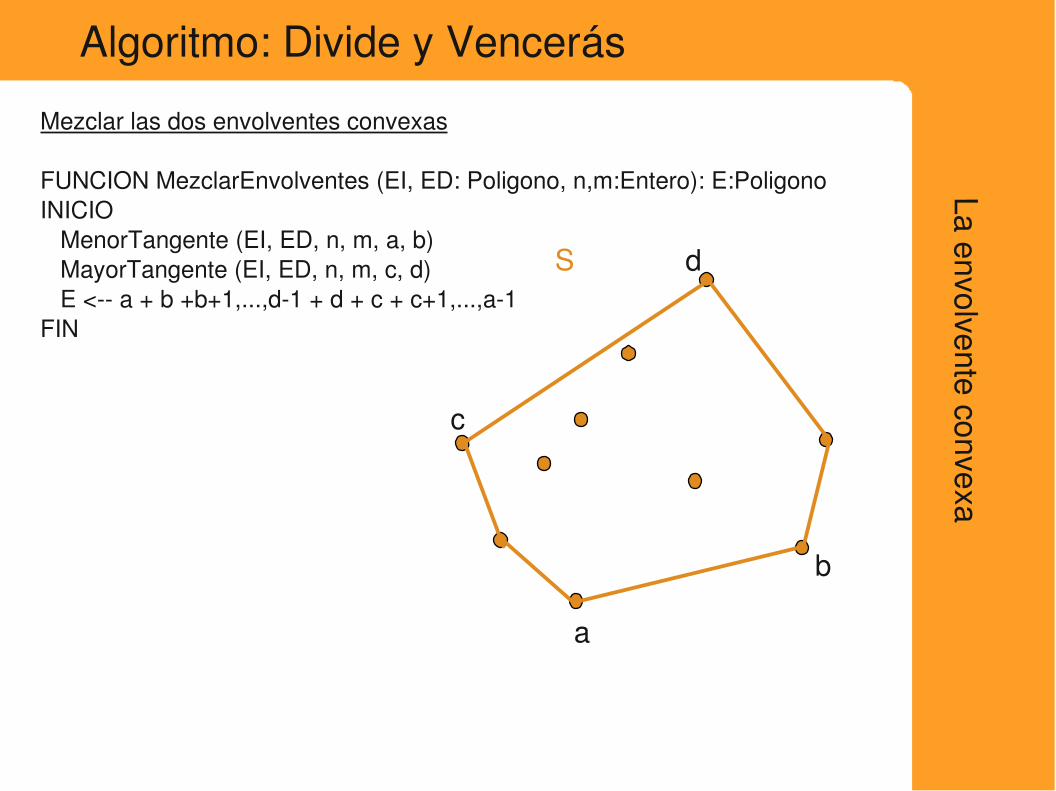
Mezclar las dos envolventes convexas
FUNCION MezclarEnvolventes (EI, ED: Poligono, n,m:Entero): E:PoligonoINICIO MenorTangente (EI, ED, n, m, a, b) MayorTangente (EI, ED, n, m, c, d) E < a + b +b+1,...,d1 + d + c + c+1,...,a1FIN
a
c
b
d
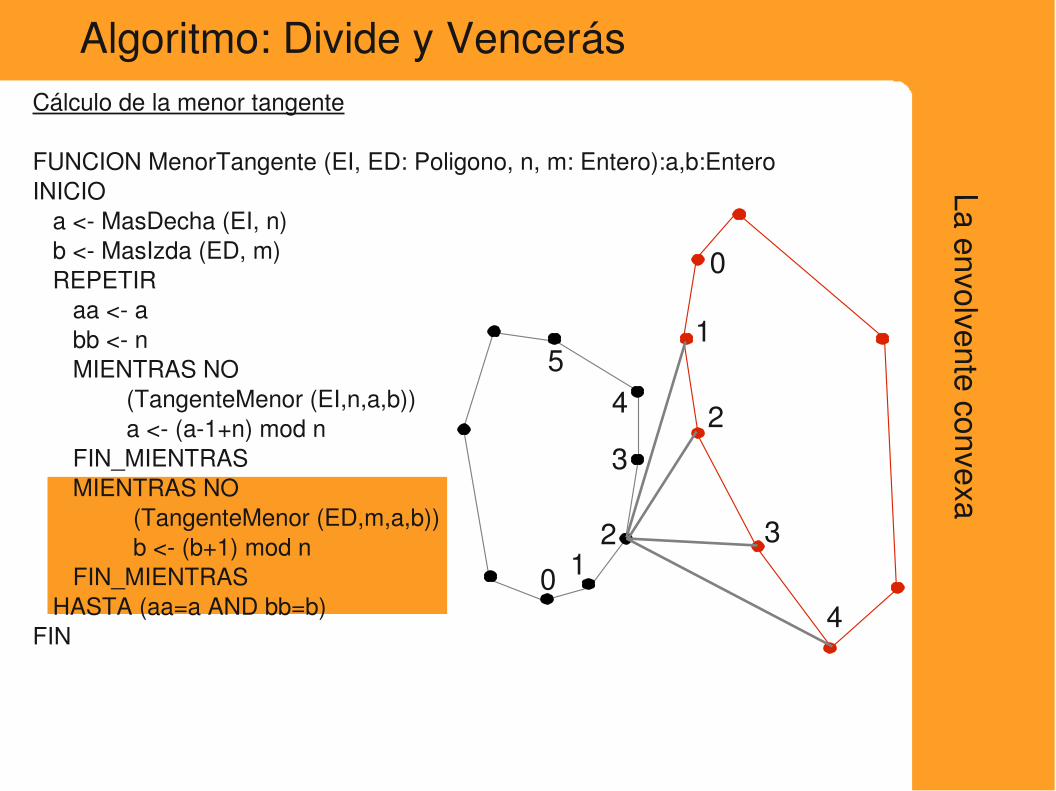
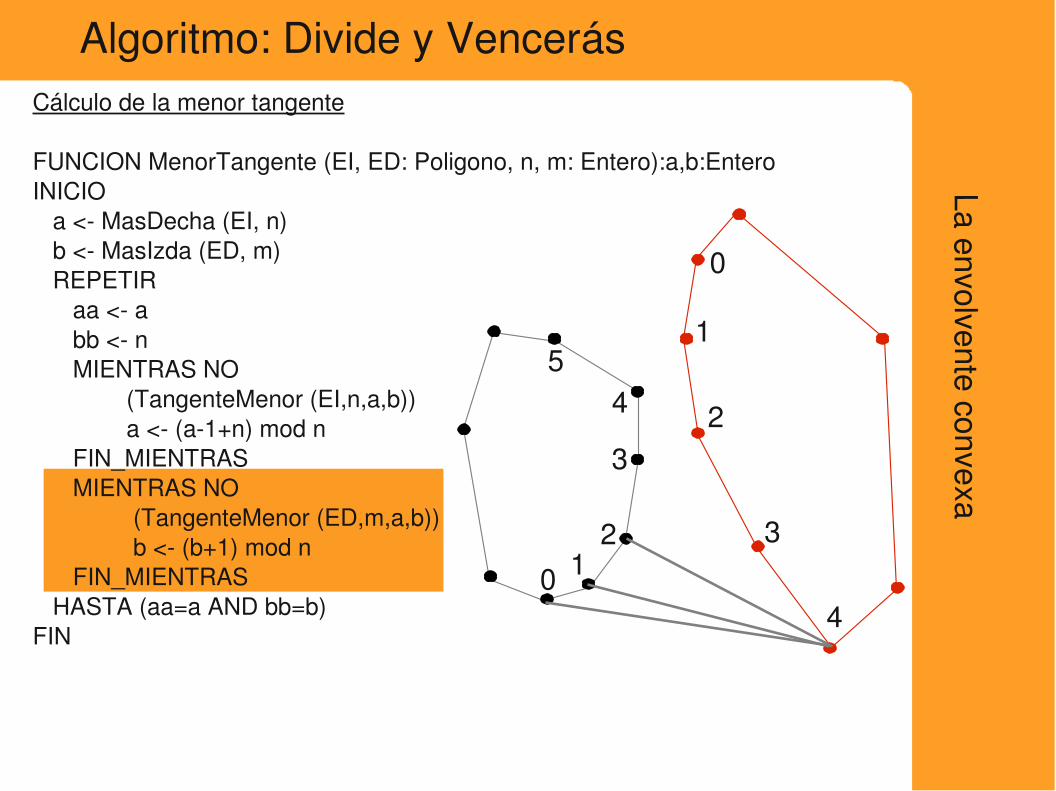
Algoritmo: Divide y VencerásLa en volve nte co nvex a
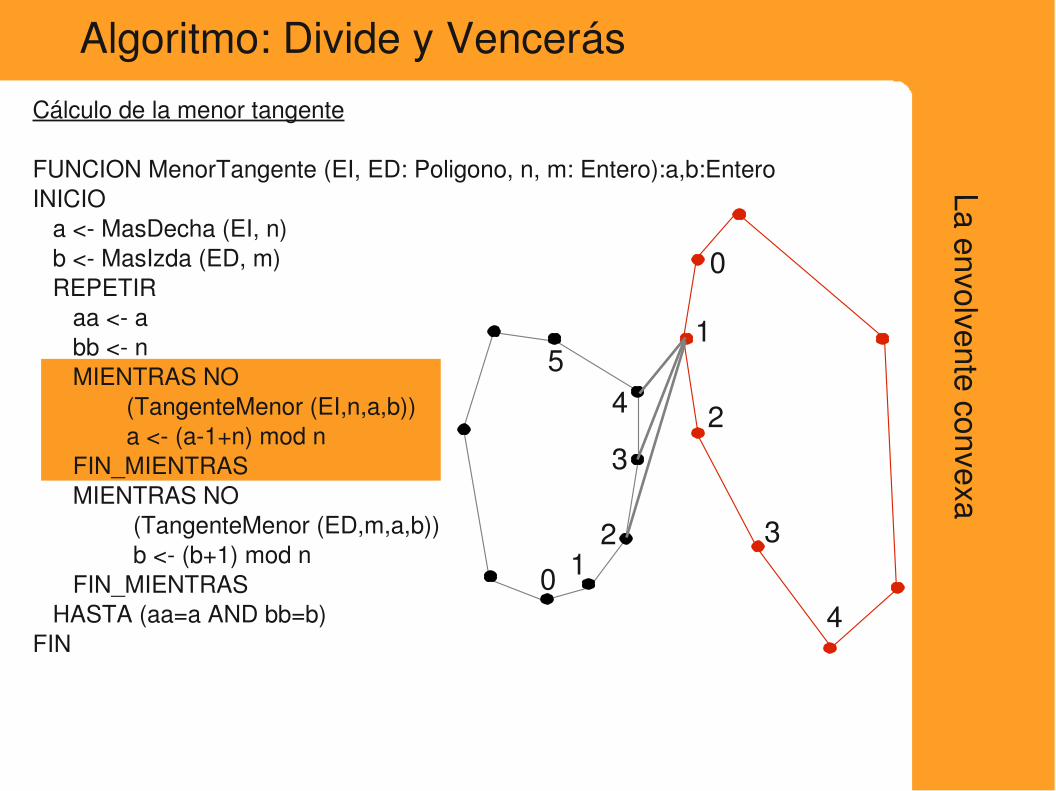
Cálculo de la menor tangente
FUNCION MenorTangente (EI, ED: Poligono, n, m: Entero):a,b:EnteroINICIO a < MasDecha (EI, n) b < MasIzda (ED, m) REPETIR aa < a bb < n MIENTRAS NO (TangenteMenor (EI,n,a,b)) a < (a1+n) mod n FIN_MIENTRAS MIENTRAS NO (TangenteMenor (ED,m,a,b)) b < (b+1) mod n FIN_MIENTRAS HASTA (aa=a AND bb=b)FIN
0 12
3
45
0
1
2
3
4
Algoritmo: Divide y VencerásLa en volve nte co nvex a
Cálculo de la menor tangente
FUNCION MenorTangente (EI, ED: Poligono, n, m: Entero):a,b:EnteroINICIO a < MasDecha (EI, n) b < MasIzda (ED, m) REPETIR aa < a bb < n MIENTRAS NO (TangenteMenor (EI,n,a,b)) a < (a1+n) mod n FIN_MIENTRAS MIENTRAS NO (TangenteMenor (ED,m,a,b)) b < (b+1) mod n FIN_MIENTRAS HASTA (aa=a AND bb=b)FIN
0 12
3
45
0
1
2
3
4
Algoritmo: Divide y VencerásLa en volve nte co nvex a
Cálculo de la menor tangente
FUNCION MenorTangente (EI, ED: Poligono, n, m: Entero):a,b:EnteroINICIO a < MasDecha (EI, n) b < MasIzda (ED, m) REPETIR aa < a bb < n MIENTRAS NO (TangenteMenor (EI,n,a,b)) a < (a1+n) mod n FIN_MIENTRAS MIENTRAS NO (TangenteMenor (ED,m,a,b)) b < (b+1) mod n FIN_MIENTRAS HASTA (aa=a AND bb=b)FIN
0 12
3
45
0
1
2
3
4
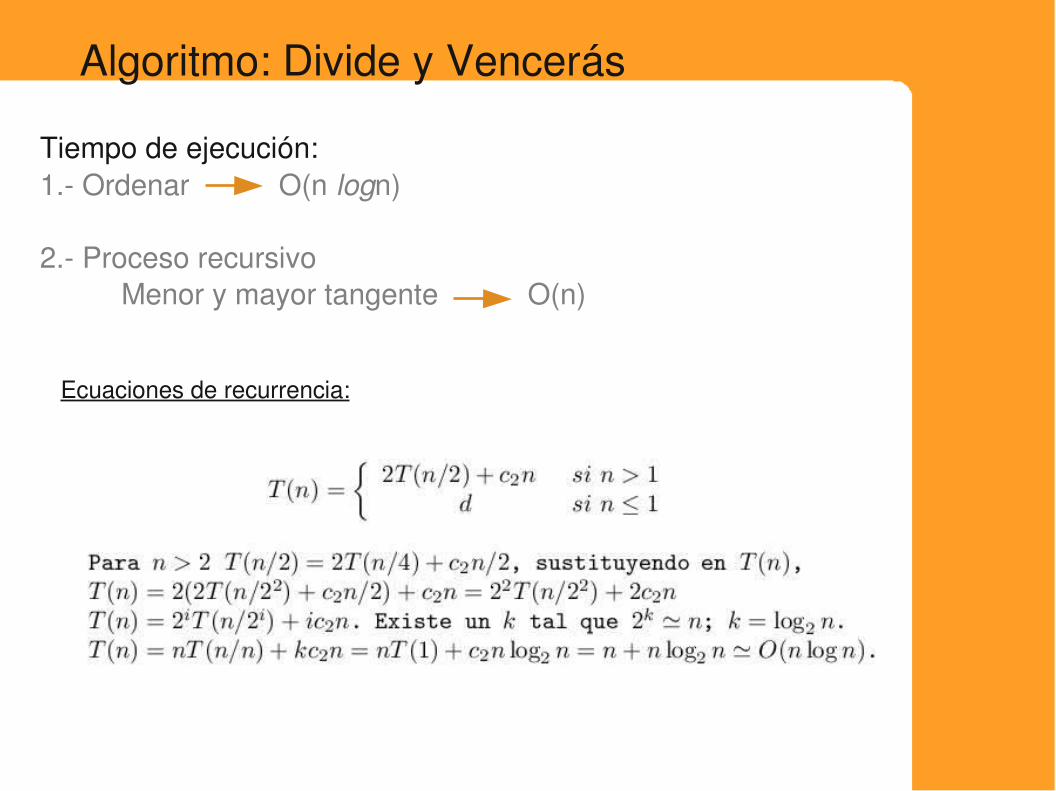
Algoritmo: Divide y Vencerás
Tiempo de ejecución:1. Ordenar O(n logn)
2. Proceso recursivo Menor y mayor tangente O(n)
Ecuaciones de recurrencia:
Algoritmo: diagrama polar
Basado en la Propiedad 2, pero mejorando la marcha de Jarvis
El diagrama polar es una teselación del plano que asigna una región polar a cada punto s
i de S, de modo que dicha región
es el lugar de los puntos más cercanos angularmente a si que
a ningún otro sj de S.
La cercanía angular debe ser considerada tomando un ángulode partida y una dirección de partida.
De algún modo el diagrama polar es un diagrama de Voronoi queutiliza el criterio del menor ángulo polar en vez de la menordistancia euclídea
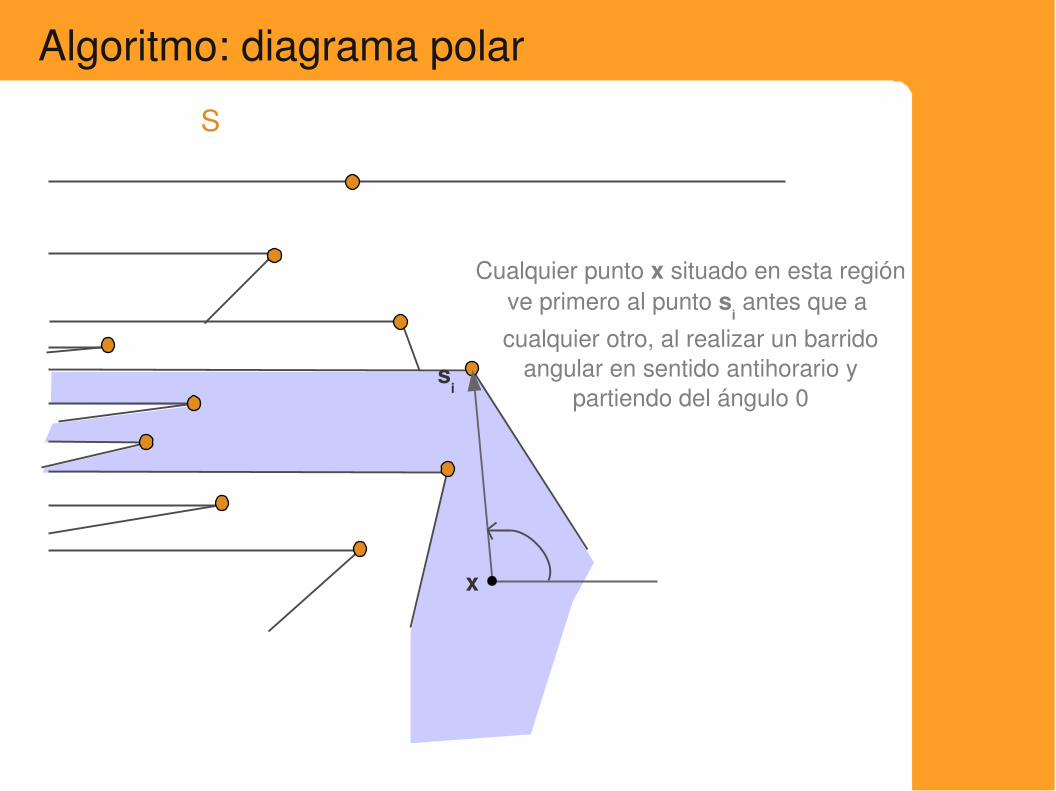
Cualquier punto x situado en esta regiónve primero al punto s
i antes que a
cualquier otro, al realizar un barridoangular en sentido antihorario y
partiendo del ángulo 0
Algoritmo: diagrama polar
S
si
x
Algoritmo: diagrama polar
S
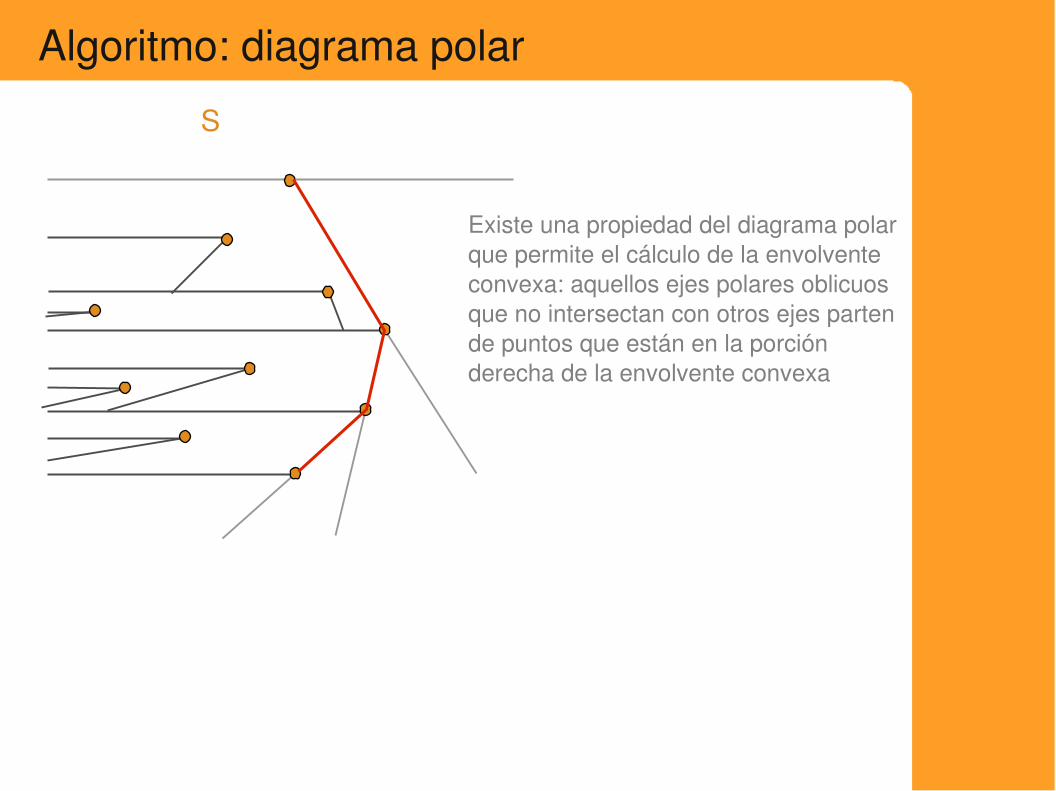
Existe una propiedad del diagrama polarque permite el cálculo de la envolventeconvexa: aquellos ejes polares oblicuosque no intersectan con otros ejes partende puntos que están en la porciónderecha de la envolvente convexa
Algoritmo: diagrama polar
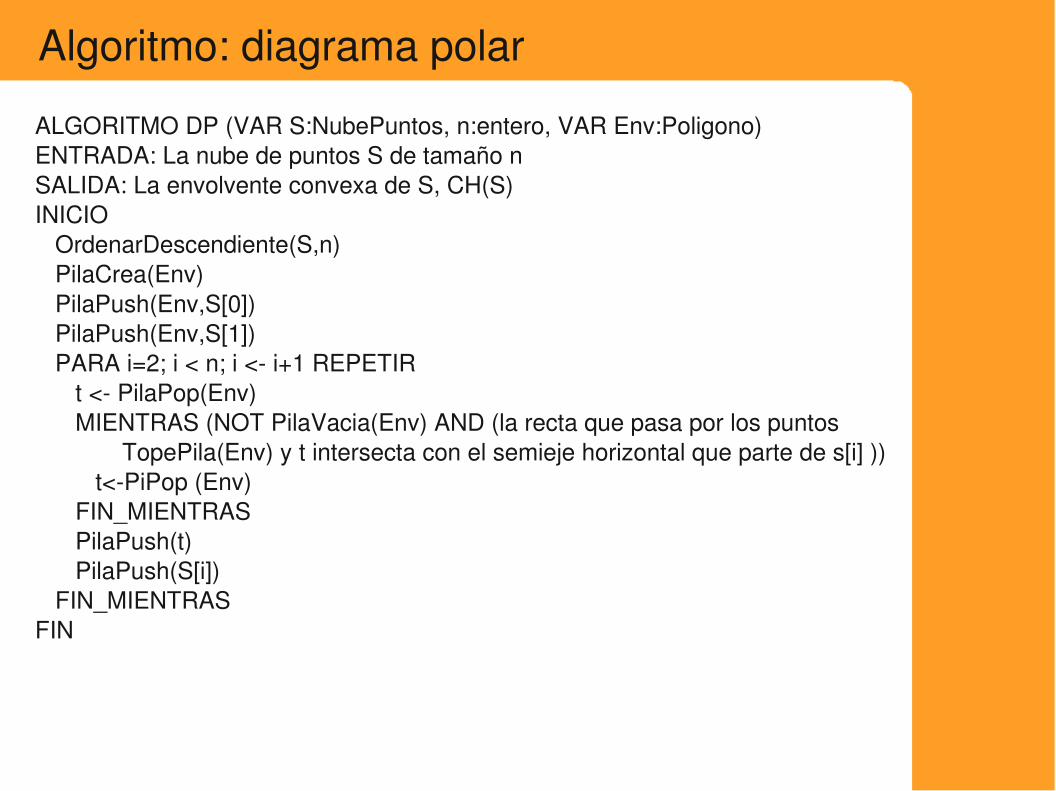
ALGORITMO DP (VAR S:NubePuntos, n:entero, VAR Env:Poligono)ENTRADA: La nube de puntos S de tamaño nSALIDA: La envolvente convexa de S, CH(S)INICIO OrdenarDescendiente(S,n) PilaCrea(Env) PilaPush(Env,S[0]) PilaPush(Env,S[1]) PARA i=2; i < n; i < i+1 REPETIR t < PilaPop(Env) MIENTRAS (NOT PilaVacia(Env) AND (la recta que pasa por los puntos TopePila(Env) y t intersecta con el semieje horizontal que parte de s[i] )) t<PiPop (Env) FIN_MIENTRAS PilaPush(t) PilaPush(S[i]) FIN_MIENTRASFIN
Algoritmo: diagrama polar
S
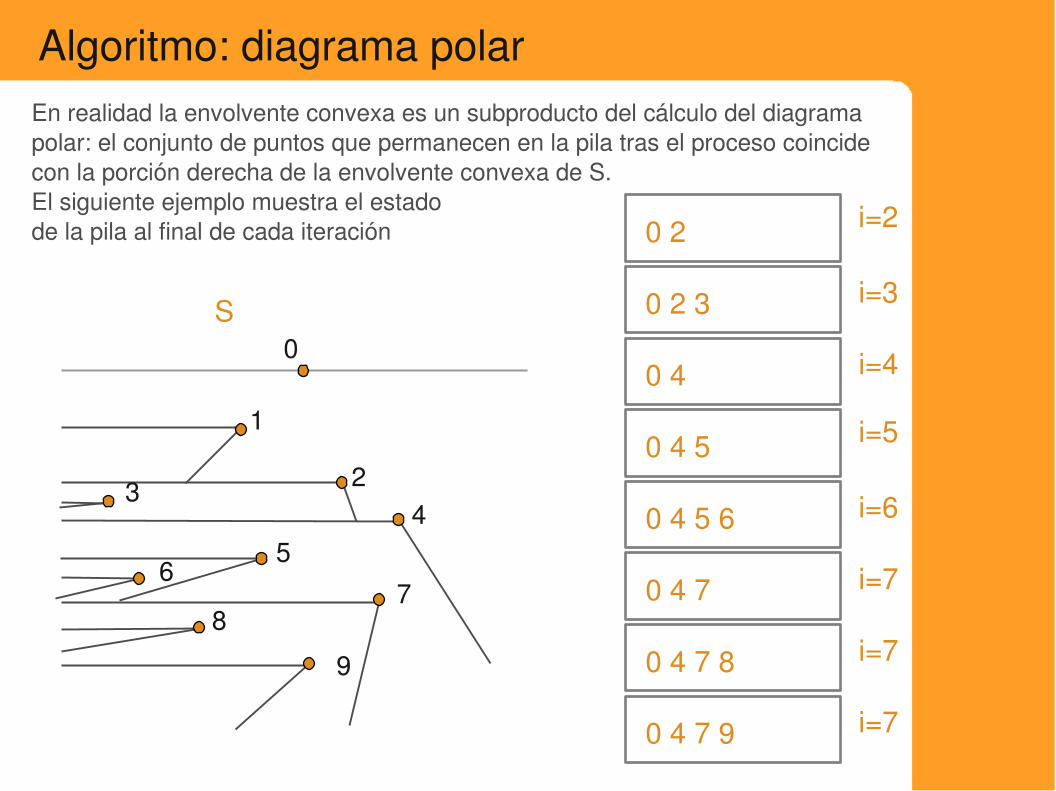
En realidad la envolvente convexa es un subproducto del cálculo del diagramapolar: el conjunto de puntos que permanecen en la pila tras el proceso coincidecon la porción derecha de la envolvente convexa de S. El siguiente ejemplo muestra el estado de la pila al final de cada iteración
0
1
234
56
78
9
0 2
0 2 3
0 4
i=2
i=3
i=4
0 4 5
0 4 5 6
0 4 7
i=5
i=6
i=7
0 4 7 8 i=7
0 4 7 9 i=7
BibliografíaLa en volve nte co nvex a
O´ROURKE Joseph. Computational Geometry in C. Cambridge University Press. 1998 (capítulo 3)
PREPARATA F.P., SHAMOS M.I. Computational Geometry. An Introduction. SpringerVerlag. 1985 (capítulo 3)








![Entropy numbers of convex hulls in Banach spaces and … · 2018. 6. 5. · arXiv:1211.1559v1 [math.FA] 7 Nov 2012 Entropy numbers of convex hulls in Banach spaces and applications](https://static.fdocuments.es/doc/165x107/606413862169234fa335377c/entropy-numbers-of-convex-hulls-in-banach-spaces-and-2018-6-5-arxiv12111559v1.jpg)









