Curso Propedéutico de Cálculo Sesión 6: Aplicaciones de la...
91
Integración Técnicas de Integración Sustitución Integración por Partes Aplicaciones a Probabilidad Variables Discretas Variables Continuas Valores Esperados Momentos Curso Propedéutico de Cálculo Sesión 6: Aplicaciones de la Integración Joaquín Ortega Sánchez Centro de Investigación en Matemáticas, CIMAT Guanajuato, Gto., Mexico
Transcript of Curso Propedéutico de Cálculo Sesión 6: Aplicaciones de la...

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Curso Propedéutico de CálculoSesión 6:
Aplicaciones de la Integración
Joaquín Ortega Sánchez
Centro de Investigación en Matemáticas, CIMATGuanajuato, Gto., Mexico

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Esquema
1 Técnicas de IntegraciónSustituciónIntegración por Partes
2 Aplicaciones a ProbabilidadVariables DiscretasVariables ContinuasValores EsperadosMomentos

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Esquema
1 Técnicas de IntegraciónSustituciónIntegración por Partes
2 Aplicaciones a ProbabilidadVariables DiscretasVariables ContinuasValores EsperadosMomentos

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Técnicas de Integración
Al contrario de lo que ocurre con las derivadas, no hayalgoritmos que permitan calcular cualquier integral quepodamos plantear.
Hay una serie de métodos que permiten calcular integralesen ciertos casos. Estos métodos son bastante generales ypermiten calcular muchas de las integrales que nosencontramos en la práctica. A continuación revisaremosalgunos de ellos.
Es importante recalcar, sin embargo, que no todas lasfunciones continuas definidas en un intervalo cerrado tienenuna primitiva que se pueda escribir en términos de lasfunciones elementales.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Sustitución
Método de SustituciónA partir de la regla de la cadena para las derivadaspodemos introducir un primer método de integración que seconoce como el método de sustitución o de cambio devariable
Comenzamos considerando el caso de la integral indefinida.
Sea g una función derivable y sea F una primitiva de f ,entonces ∫
f (g(x)) g′(x) dx = F (g(x)) + C.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Sustitución
La manera de utilizar el resultado anterior es la siguiente.En una integral del tipo∫
f (g(x)) g′(x) dx
hacemos el cambio de variable u = g(x), de modo que
du/dx = g′(x) y du = g′(x)dx .
La integral inicial se transforma en∫f (g(x)) g′(x)dx =
∫f (u) du = F (u) + C = F (g(x)) + C.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Sustitución
EjemploCalcule
∫x sen(x2) dx .
Usamos la sustitución u = x2 y entonces du = 2x dx
∫x sen(x2) dx =
∫12
sen(x2) 2x dx
=12
∫sen u du = −1
2cos u + C
= −12
cos(x2) + C.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Sustitución
EjemploCalcule
∫x sen(x2) dx .
Usamos la sustitución u = x2 y entonces du = 2x dx
∫x sen(x2) dx =
∫12
sen(x2) 2x dx
=12
∫sen u du = −1
2cos u + C
= −12
cos(x2) + C.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Sustitución
En el caso de las integrales definidas tenemos la siguienteversión del método de sustitución.
Sea g una función con derivada continua en [a,b] y sea funa función continua en el rango de g, entonces∫ b
af (g(x)) g′(x) dx =
∫ g(b)
g(a)f (u) du
donde u = g(x).
Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Sustitución
Ejemplo
Calcule∫ 1
0
x + 1(x2 + 2x + 6)2 dx .
Hacemos el cambio de variable u = x2 + 2x + 6, de modoque du = (2x + 2)dx = 2(x + 1)dx y vemos que cuandox = 0, u = 6 y cuando x = 1, u = 9. Por lo tanto∫ 1
0
x + 1(x2 + 2x + 6)2 dx =
12
∫ 1
0
2(x + 1)
(x2 + 2x + 6)2 dx
=12
∫ 9
6u−2du =
(− 1
2u
∣∣∣96
= − 118−( 1
12
)=
136

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Sustitución
Ejemplo
Calcule∫ 1
0
x + 1(x2 + 2x + 6)2 dx .
Hacemos el cambio de variable u = x2 + 2x + 6, de modoque du = (2x + 2)dx = 2(x + 1)dx y vemos que cuandox = 0, u = 6 y cuando x = 1, u = 9. Por lo tanto∫ 1
0
x + 1(x2 + 2x + 6)2 dx =
12
∫ 1
0
2(x + 1)
(x2 + 2x + 6)2 dx
=12
∫ 9
6u−2du =
(− 1
2u
∣∣∣96
= − 118−( 1
12
)=
136

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Sustitución
Ejemplo
Calcule∫ π2/4
π2/9
cos√
x√x
dx .
Hacemos el cambio de variable u =√
x , de modo quedu = dx/(2
√x) y vemos que cuando x = π2/9,
u =√π2/9 = π/3 y cuando x = π2/4, u = π/2. Por lo tanto∫ π2/4
π2/9
cos√
x√x
dx = 2∫ π2/4
π2/9cos√
x1
2√
xdx
= 2∫ π/2
π/3cos u du =
(2 sen u
∣∣∣π/2
π/3
= 2−√
3.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Sustitución
Ejemplo
Calcule∫ π2/4
π2/9
cos√
x√x
dx .
Hacemos el cambio de variable u =√
x , de modo quedu = dx/(2
√x) y vemos que cuando x = π2/9,
u =√π2/9 = π/3 y cuando x = π2/4, u = π/2. Por lo tanto∫ π2/4
π2/9
cos√
x√x
dx = 2∫ π2/4
π2/9cos√
x1
2√
xdx
= 2∫ π/2
π/3cos u du =
(2 sen u
∣∣∣π/2
π/3
= 2−√
3.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Integración por Partes
Método de Integración por PartesEste método se basa en la regla de derivación paraproductos de funciones: Si f ,g son funciones diferenciables
Dx (fg) = g(x)Dx (f ) + f (x)Dx (g).
A partir de esta ecuación obtenemos
f (x)Dxg = Dx (fg)− g(x)Dx f .
Si integramos ahora obtenemos∫f (x)
dgdx
dx = f (x)g(x)−∫
g(x)dfdx
dx .

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Integración por Partes
Si ponemos u = f (x) y v = g(x) podemos escribir lafórmula anterior como∫
u dv = uv −∫
v du

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Integración por Partes
EjemploHalle la integral
∫log x dx .
Ponemos u = log x y v = x . Entonces du = (1/x)dx ydv = dx . Por lo tanto∫
log x dx =
∫u dv = uv −
∫v du
= x log x −∫
1 dx = x log x − x .

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Integración por Partes
EjemploHalle la integral
∫log x dx .
Ponemos u = log x y v = x . Entonces du = (1/x)dx ydv = dx . Por lo tanto∫
log x dx =
∫u dv = uv −
∫v du
= x log x −∫
1 dx = x log x − x .

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Integración por Partes
EjemploHalle
∫ex sen x dx .
Ponemos u = ex y dv = sen x dx . Entonces
du = ex dx y v = − cos x
Si llamamos I a la integral que queremos calcular tenemos
I = −ex cos x −∫−ex cos x dx
= −ex cos x +
∫ex cos x dx .
La integral en el segundo sumando es similar a la integralcon la que iniciamos, así que parece que no hemosavanzado mucho.
Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Integración por Partes
EjemploHalle
∫ex sen x dx .
Ponemos u = ex y dv = sen x dx . Entonces
du = ex dx y v = − cos x
Si llamamos I a la integral que queremos calcular tenemos
I = −ex cos x −∫−ex cos x dx
= −ex cos x +
∫ex cos x dx .
La integral en el segundo sumando es similar a la integralcon la que iniciamos, así que parece que no hemosavanzado mucho.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Integración por Partes
Volvemos a usar integración por partes para calcular lasegunda integral.
Ponemos t = ex dx y dz = cos x dx . Entonces
dt = ex dx y z = sen x .
La segunda integral es∫t dz = ex sen x −
∫ex sen x dx
y vuelve a aparecer la integral inicial I pero con un signomenos. Por lo tanto
I = ex sen x − ex cos x − I

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Integración por Partes
En consecuencia
2I = ex sen x − ex cos x
y
I =12
ex (sen x − cos x).
Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
Esquema
1 Técnicas de IntegraciónSustituciónIntegración por Partes
2 Aplicaciones a ProbabilidadVariables DiscretasVariables ContinuasValores EsperadosMomentos

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Un espacio de probabilidad es un trío de objetosmatemáticos que tienen como objetivo modelar unexperimento aleatorio, es decir, un experimento en el cual elresultado no puede predecirse.
El primer objeto de este trío es el espacio muestral, que esun conjunto que contiene todos los resultados posibles delexperimento.
La notación usual para este espacio es Ω. Sus elementosse conocen como los eventos elementales y los denotamospor ω.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
El segundo elemento es una colección de subconjuntos deΩ, que se conocen como eventos, y que satisfacen las doscondiciones siguientes:
1 Si A ⊂ Ω es un evento, entonces su complementoAc = Ω− A también es un evento.
2 Si A1,A2, . . . es una colección numerable de eventos,entonces su unión ∪n≥1An también es un evento.
La colección de eventos la denotaremos por F .

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
El tercer elemento para el modelo es la probabilidad.Esta es una función que a cada evento A ∈ F le asocia unnúmero entre 0 y 1 y satisface las siguientes condiciones:
1 0 ≤ P(A) ≤ 1, P(Ω) = 1.
2 Si An,n ≥ 1 es una colección de eventos disjuntosentonces
P(∪n≥1An) =∑n≥1
P(An).
A la colección (Ω,F ,P) la llamamos Espacio deProbabilidad.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
EjemploSi lanzamos una moneda al aire tenemos dos resultadosposibles, Aguila (A) y Sol (S). Podemos tomar comoespacio muestral al conjunto que contiene estas dos letras:
Ω = A,S.
Si no tenemos razón para suponer que la moneda no esbalanceada, asignamos a cada uno de estos resultados lamisma probabilidad. Por lo tanto
P(A) = P(S) =12

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Una variable aleatoria es una función definida sobre unespacio de probabilidad que toma valores reales.
Es usual denotar las variables aleatorias por letrasmayúsculas, como X ,Y o Z y a sus valores por letrasminúsculas, como x , y o z.
En el ejemplo del lanzamiento de una moneda al aire,podemos asignar a Sol el valor 1 y a Aguila el valor 0,por ejemplo:
X (S) = 1, X (A) = 0.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
A los valores de una variable aleatoria les podemos asociaruna probabilidad, que se conoce como la distribución de lavariable aleatoria, y que denotaremos por PX .
Si I es un intervalo de números reales, la probabilidadasociada a este intervalo es la probabilidad de que lavariable aleatoria X tome valores en él:
PX (I) = P(X ∈ I) = P(ω : X (ω) ∈ I)

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Una variable aleatoria es discreta si toma una cantidadfinita o numerable de valores.
La distribución de una variable aleatoria discreta sedescribe a través de su función de probabilidad : Si losvalores de la variable son x1, x2, . . . , la función deprobabilidad es una colección de números reales p1,p2, . . .que satisfacen pi ≥ 0,
p1 + p2 + · · · = 1
yP(X = xi) = pi .
Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
EjemploLanzamos un dado y llamamos X al resultado dellanzamiento.
X toma valores 1,2,3,4,5,6 con probabilidad 1/6 paracada valor.
La probabilidad de que el resultado sea par es
P(X ∈ 2,4,6) =36
=12

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
EjemploSi consideramos un experimento con dos resultadosposibles, como en el caso del lanzamiento de una moneda,siempre podemos asociarle una variable aleatoria que tomavalores 0 y 1.En este caso existe un número p ∈ [0,1] tal que
P(X = 1) = p, P(X = 0) = q = 1− p.
El valor 1 lo identificamos con un éxito en el experimentomientras que el valor 0 es un fracaso.Decimos que X es una variable aleatoria de Bernoulli conprobabilidad de éxito p.
Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Supongamos que realizamos n veces el experimento demanera independiente, es decir, que el resultado decualquiera de las realizaciones no afecta el resultado delresto, y llamamos Sn a número total de éxitos en los nensayos.Si Xi es el resultado del i-ésimo ensayo, entonces
Sn = X1 + X2 + · · ·+ Xn.
¿Cuál es la distribución de Sn?

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Para hallar P(Sn = k) tenemos que ver de cuántasmaneras se pueden obtener k éxitos en n ensayos y luegomultiplicar este número por la probabilidad de obtener kéxitos en n ensayos, en un orden particular.
Para ver de cuantas maneras podemos obtener k éxitosobservamos que tenemos n lugares para escoger dóndecolocar los k éxitos. Esto lo podemos hacer de(
nk
)maneras distintas.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Por otro lado la probabilidad de tener k éxitos y luego n − kfracasos es pkqn−k . Esta es la misma probabilidad decualquier orden particular. Así
P(Sn = k) =
(nk
)pk (1− p)n−k
Esta distribución se conoce como la distribución binomialcon parámetros n y p.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Antes de entrar a considerar variables continuas debemosintroducir dos conceptos. El primero de ellos es el de lafunción de distribución.
La función de distribución asociada a la variable aleatoriaX , que denotamos por FX (x), se define como
FX (x) = P(X ≤ x)
FX (x) es una función definida sobre los números reales quetoma valores en [0,1].

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Propiedades de las Funciones de Distribución.
1 Las funciones de distribución son crecientes (ensentido débil):
x < y ⇒ FX (x) ≤ FX (y).
2 Las funciones de distribución son continuas por laderecha y tienen límites por la izquierda.
3 limx→+∞
FX (x) = 1, limx→−∞
FX (x) = 0.
Es posible demostrar que si una función F tiene estas trespropiedades entonces es la función de distribución de unavariable aleatoria X .

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Propiedades de las Funciones de Distribución.
1 Las funciones de distribución son crecientes (ensentido débil):
x < y ⇒ FX (x) ≤ FX (y).
2 Las funciones de distribución son continuas por laderecha y tienen límites por la izquierda.
3 limx→+∞
FX (x) = 1, limx→−∞
FX (x) = 0.
Es posible demostrar que si una función F tiene estas trespropiedades entonces es la función de distribución de unavariable aleatoria X .

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
El otro concepto fundamental que necesitamos es el devalor esperado o esperanza de una variable aleatoria, quecorresponde al concepto empírico de promedio.
Si una variable aleatoria X toma valores x1, x2, . . . conprobabilidades respectivas p1,p2, . . . , definimos su valoresperado E(X ) como
E(X ) = p1x1 + p2x2 + · · ·+ xnpn + · · · =∞∑
n=1
xnpn
En el caso finito esto es simplemente el promedio de losvalores pesados por su probabilidad respectiva.
Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Ejemplos• En el caso de una variable X de Bernoulli conprobabilidad de éxito p tenemos
E(X ) = 1 · p + 0 · (1− p) = p.
• En el caso de un dado, los valores posibles son1,2,3,4,5,6 cada uno con l probabilidad 1/6. Por lo tanto
E(X ) =16
(1 + 2 + 3 + 4 + 5 + 6) =216
= 3.5
Observamos en ambos casos que el valor esperado de lasvariables no es un valor que la variable puede tomar.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Hasta ahora hemos supuesto que los valores que puedetomar una variable aleatoria están en un conjunto finito onumerable, pero en muchas ocasiones este no es el caso.
Por ejemplo, si medimos el tiempo de vida de uncomponente electrónico, la velocidad de un cometa, ladirección del viento o el voltaje de un circuito, el resultadopuede estar en un conjunto que no es numerable.
Así como las distribuciones de probabilidad de las variablesdiscretas se describen a través de una función deprobabilidad, en el caso de una variable continuanecesitamos función de densidad.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Una (función de) densidad es una función f definida sobreel conjunto de valores de X que satisface dos condiciones:
1 f (x) ≥ 0 para todo x .
2
∫ ∞−∞
f (x) dx = 1.
Si tenemos un intervalo [a,b] ⊂ R
P(X ∈ [a,b]) =
∫ b
af (x) dx .
La función de distribución de la variable X es
FX (x) = P(X ≤ x) =
∫ x
−∞f (t) dt

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
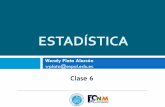
Ejemplo: La Distribución UniformeConsideremos una variable que toma valores en el intervalo[0,1] con densidad constante f (x) = k .
Como la integral de la densidad debe valer 1 y la integralcorresponde al área bajo la densidad, que es el área de unrectángulo de base 1, la altura también debe ser igual a 1.
Por lo tanto la densidad es la función
f (x) =
1 si 0 ≤ x ≤ 10 en otro caso.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Si 0 < a < b < 1, la probabilidad de obtener un valor de lavariable en [a,b] está dada por
P(X ∈ [a,b]) =
∫ b
af (x) dx = b − a,
es decir, es igual a la longitud del intervalo.
La función de distribución de esta variable está dada por
FX (x) = P(X ≤ x) =
∫ x
−∞f (t) dt
=
0 si x ≤ 0,x si 0 ≤ x ≤ 1,1 si x ≥ 1.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Si 0 < a < b < 1, la probabilidad de obtener un valor de lavariable en [a,b] está dada por
P(X ∈ [a,b]) =
∫ b
af (x) dx = b − a,
es decir, es igual a la longitud del intervalo.
La función de distribución de esta variable está dada por
FX (x) = P(X ≤ x) =
∫ x
−∞f (t) dt
=
0 si x ≤ 0,x si 0 ≤ x ≤ 1,1 si x ≥ 1.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
−0.5 0.0 0.5 1.0 1.50.
00.
40.
8
Densidad Uniforme
x
−0.5 0.0 0.5 1.0 1.5
0.0
0.4
0.8
Distribucion Uniforme
x

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Una variable aleatoria tiene distribución uniforme en elintervalo [a,b] si su densidad está dada por
f (x) =
1
b−a si a ≤ x ≤ b,0 en otro caso.
La función de distribución es, en este caso
FX (x) =
0 si x ≤ a,x−ab−a si a ≤ x ≤ b,1 si x ≥ b.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Una variable aleatoria tiene distribución uniforme en elintervalo [a,b] si su densidad está dada por
f (x) =
1
b−a si a ≤ x ≤ b,0 en otro caso.
La función de distribución es, en este caso
FX (x) =
0 si x ≤ a,x−ab−a si a ≤ x ≤ b,1 si x ≥ b.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
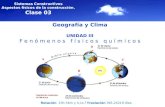
Ejemplo: La Distribución ExponencialUna variable X tiene distribución exponencial si tomavalores en [0,∞) y tiene densidad
f (x) =
λe−λx si x ≥ 0,0 en otro caso,
donde λ > 0 es el parámetro de la distribución.
La función de distribución de esta variable está dada por
FX (x) = P(X ≤ x) =
∫ x
−∞f (t) dt
=
0 si x ≤ 0,1− e−λx si x ≥ 0.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Ejemplo: La Distribución ExponencialUna variable X tiene distribución exponencial si tomavalores en [0,∞) y tiene densidad
f (x) =
λe−λx si x ≥ 0,0 en otro caso,
donde λ > 0 es el parámetro de la distribución.
La función de distribución de esta variable está dada por
FX (x) = P(X ≤ x) =
∫ x
−∞f (t) dt
=
0 si x ≤ 0,1− e−λx si x ≥ 0.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
0 2 4 6 8 100.
00.
40.
8
Densidad Exponencial
x
f(x)
0 2 4 6 8 10
0.0
0.4
0.8
Distribucion Exponencial
x
f(x)
Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
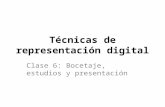
Ejemplo: La Distribución de CauchyDemuestre que
f (x) =1
π(1 + x2)para x ∈ R
es una densidad de probabilidad.
Tenemos que verificar dos condiciones: que la función espositiva y que su integral vale 1.
La primera es sencilla. Para la segunda recordamos que
Dx arctan x =1
1 + x2

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Ejemplo: La Distribución de CauchyDemuestre que
f (x) =1
π(1 + x2)para x ∈ R
es una densidad de probabilidad.
Tenemos que verificar dos condiciones: que la función espositiva y que su integral vale 1.
La primera es sencilla. Para la segunda recordamos que
Dx arctan x =1
1 + x2

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Por lo tanto∫ b
a
1π(1 + x2)
dx =1π
(arctan b − arctan a)
y si hacemos ahora a→ −∞ y b → +∞ obtenemos que
1π
(lim
b→∞arctan b − lim
a→−∞arctan a
)=
1π
(π2
+π
2
)= 1.
−10 −5 0 5 10
−1.
5−
0.5
0.5
1.5
x
arct
an(x
)

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
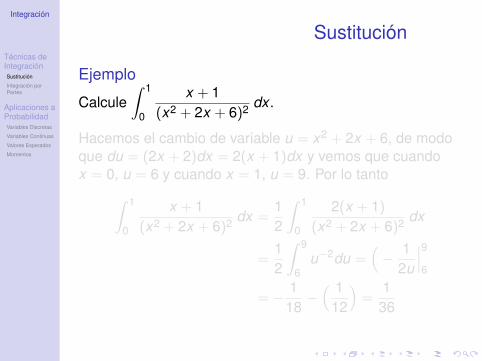
−10 −5 0 5 100.
000.
100.
200.
30
Densidad de Cauchy
x
f(x)
−10 −5 0 5 10
0.0
0.4
0.8
Distribucion de Cauchy
x
f(x)

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Si f es una función no negativa en R que tiene integral finita,podemos usarla para definir una densidad de probabilidad.
LlamemosK =
∫ ∞−∞
f (x) dx <∞
entonces la función
g(x) =1K
f (x)
es una densidad de probabilidad porque es no-negativa ysu integral vale 1.
Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Ejemplo: La Distribución Normal o GaussianaVeamos que
f (x) = e−x2/2, para x ∈ R
es una función no-negativa e integrable, que por lo tantopuede ’normalizarse’ para definir una densidad deprobabilidad.
En lugar de calcular esta integral sólo demostraremos quees convergente. Esto es suficiente para saber que existeuna constante que ’normaliza’ esta función para que seauna densidad.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
En primer lugar observamos que la función f es simétricaporque
f (−x) = e−(−x)2/2 = e−x2/2 = f (x)
y en consecuencia basta demostrar que la integral∫ ∞0
e−x2/2 dx
existe.
Observamos inicialmente que e−x2/2 en [0,∞) es unafunción decreciente que alcanza su máximo en x = 0.El máximo valor de la función es 1.
Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
−4 −2 0 2 4
0.0
0.4
0.8
x
f(x)

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Tenemos∫ ∞0
e−x2/2 dx =
∫ 1
0e−x2/2 dx +
∫ ∞1
e−x2/2 dx
< 1 +
∫ ∞1
e−x/2 dx
= 1 +(− 2e−x/2∣∣∞
1 = 1 + 2√
e
Por lo tanto ∫ ∞−∞
e−x2/2 dx
existe.Es posible demostrar que el valor de esta integral es
√2π.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
La densidad
ϕ(x) =1√2π
e−x2/2, para x ∈ R
se conoce como la densidad normal o Gaussiana típica oestándar.
Su función de distribución es
Φ(x) =
∫ x
−∞ϕ(t) dt

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
−4 −2 0 2 40.
00.
10.
20.
30.
4
Densidad Normal
x
f(x)
−4 −2 0 2 4
0.0
0.4
0.8
Distribucion Normal
x
f(x)

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Ejemplo: La Distribución GammaVeamos que la función
f (x) = Cλαxα−1e−λx , para x > 0,
define una densidad de probabilidad si escogemos laconstante C adecuadamente.
La primera condición es que la función f sea positiva, locual es cierto. Falta ver que f es integrable.
De nuevo, no vamos a calcular la integral sino a demostrarque la integral existe.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Veamos primero que
limx→∞
xα−1e−λx = 0.
Si α ≤ 1 entonces tanto xα−1 como e−λx van a 0 cuandox →∞ .Si α > 1 tenemos que xα−1 →∞ y e−λx → 0 por lo que ellímite es una indeterminación. Para usar L’Hôpitalescribimos
limx→∞
xα−1e−λx = limx→∞
xα−1
eλx
Ahora tenemos una indeterminación de tipo∞/∞ ypodemos derivar numerador y denominador para hallar elvalor del límite.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Observamos que al derivar el numerador, la potencia α− 1desciende una unidad y aparece un factor igual a lapotencia.
Dnx xα−1 = (α− 1)(α− 2) · · · (α− n)xα−1−n
En cambio, cada vez que derivamos el denominadoraparece un factor igual a λ que multiplica la exponencialinicial.
Dnx eλx = λneλx
Por lo tanto, para hallar el límite derivamos numerador ydenominador tantas veces como sea necesario paraobtener una potencia negativa en el numerador.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Si k = [α] es el mayor entero menor o igual que α,derivando k veces obtenemos
limx→∞
Dkx xα−1
Dkx eλx
= limx→∞
(α− 1)(α− 2) · · · (α− k)xα−1−k
λkeλx
y ahora el numerador va a 0 mientras que el denominadorva a infinito, y el cociente converge a 0.
Por lo tantolim
x→∞xα−1e−λx = 0.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Cambiando λ por λ/2 obtenemos
xα−1e−λx/2 → 0 cuando x →∞.
Por el límite anterior existe m <∞ tal que para x > mxα−1eλx/2 < 1. Por lo tanto, para b > m,∫ b
0xα−1e−λx dx =
∫ m
0xα−1e−λx dx +
∫ b
mxα−1e−λx/2e−λx/2dx
<
∫ m
0xα−1e−λx dx +
∫ b
me−λx/2 dx
=
∫ m
0xα−1e−λx dx + (2/λ)e−λm/2
= C1
Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Por lo tanto la integral∫ ∞0
λαxα−1e−λx dx
existe y tiene un valor finito que llamaremos A. Si ponemosC = 1/A entonces
f (x) = Cλαxα−1e−λx , para x > 0,
define una densidad de probabilidad, que corresponde a ladistribución Gamma con parámetros α y λ.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Definimos la función Gamma por
Γ(α) =
∫ ∞0
λαxα−1e−λxdx =
∫ ∞0
uα−1e−u du.
La densidad de la distribución Gamma es ahora
f (x) =1
Γ(α)λαxα−1e−λx , para x > 0,
Si α es un entero positivo, integrando por partes se obtieneque Γ(n) = (n − 1)!.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
En el caso particular λ = 1/2 y α = n/2 para n ∈ N,
f (x) =1
2n/2Γ(n/2)x
n2−1e−x/2
que se conoce como la densidad Ji-cuadrado con n gradosde libertad y se denota χ2
n.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
DefiniciónSea X una variable aleatoria con densidad f . Si∫ ∞
−∞|x |f (x) dx <∞
entonces X tiene esperanza o valor esperado E(X ) definidopor
E(X ) =
∫ ∞−∞
xf (x) dx
También se usa la notación µ o µX para el valor esperadode X .

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Ejemplo: Distribución UniformeSea X una v.a. con distribución uniforme en (a,b), condensidad
f (x) =1
b − apara a < x < b
y f (x) = 0 en otro caso. Entonces
E(X ) =
∫ ∞−∞
xf (x) dx =
∫ b
a
1b − a
x dx
=1
b − a
[x2
2
∣∣∣ba
=b2 − a2
2(b − a)
=b + a
2.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Ejemplo: Distribución ExponencialSea X una v.a. con distribución exponencial de parámetroλ, con densidad
f (x) = λe−λx para x > 0
y f (x) = 0 en otro caso. Entonces, integrando por partes
E(X ) =
∫ ∞−∞
xf (x) dx =
∫ ∞0
λxe−λx dx
=[− xe−λx
∣∣∣∞0
+
∫ ∞0
e−λx
=[− λ−1e−λx
∣∣∣∞0
= 1/λ.
Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Ejemplo: Distribución NormalSea X una v.a. con distribución normal típica, con densidad
f (x) =1√2π
e−x2/2 para x ∈ R.
Entonces
E(X ) =
∫ ∞−∞
xf (x) dx =
∫ ∞−∞
1√2π
xe−x2/2 dx
Antes de calcular esta integral vamos a demostrar unresultado general sobre integración de funciones pares eimpares.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Recordemos la definición. Una función es par sif (−x) = f (x) y es impar si f (−x) = −f (x), para todo x ∈ R.
Teorema(a) Si f es una función par, para cualquier a > 0,∫ 0
−af (x) dx =
∫ a
0f (x) dx .
En consecuencia∫ a
−af (x) dx = 2
∫ a
0f (x) dx .

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
(b) Si f es una función impar, para cualquier a > 0,∫ 0
−af (x) dx = −
∫ a
0f (x) dx .
En consecuencia ∫ a
−af (x) dx = 0.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Demostración.En la integral ∫ 0
−af (x) dx
hacemos el cambio de variable y = −x , dy = −dx yobtenemos ∫ 0
−af (x) dx = −
∫ 0
−af (−y) dy
=
∫ a
0f (−y) dy .

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Si f es par, tenemos∫ a
0f (−y) dy =
∫ a
0f (y) dy .
Si, en cambio, f es impar,∫ a
0f (−y) dy = −
∫ a
0f (y) dy .

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Ahora podemos usar este resultado para calcular laesperanza de una v.a. Gaussiana típica.
Observamos que la densidad
ϕ(x) =1√2π
e−x2/2
es una función par, y si la multiplicamos por x obtenemosuna función impar. Por lo tanto, para cualquier a > 0∫ 0
−a
1√2π
xe−x2/2 dx = −∫ a
0
1√2π
xe−x2/2 dx

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Si hacemos a→∞ obtenemos∫ 0
−∞
1√2π
xe−x2/2 dx = −∫ ∞
0
1√2π
xe−x2/2 dx
y en consecuencia∫ ∞−∞
xϕ(x) dx =
∫ 0
−∞xϕ(x) dx +
∫ ∞0
xϕ(x) dx = 0
Es decir,
E(X ) = 0

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Ejemplo: Distribución de CauchyLa densidad de Cauchy es
f (x) =1
π(1 + x2), para x ∈ R
que también es una densidad par. Por lo tanto, podríamosesperar que, al igual que en el caso Gaussiano, el valoresperado sea 0, pero en este caso el valor esperado noexiste, porque la integral∫ ∞
0
xπ(1 + x2)
dx
no converge.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Como el integrando es positivo en (0,∞),∫ ∞0
xπ(1 + x2)
dx ≥∫ ∞
1
xπ(1 + x2)
dx
Para x ∈ [1,∞), 1 ≤ x2 y en consecuencia∫ ∞1
xπ(1 + x2)
dx ≥∫ ∞
1
xπ(x2 + x2)
dx
=
∫ ∞1
x2πx2 dx =
12π
∫ ∞1
1x
dx
=1
2πlim
b→∞log(b) =∞.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
DefiniciónSi X es una variable aleatoria con densidad f , y k ∈ N, elmomento de orden k de X es
E(X k ) =
∫ ∞−∞
xk f (x) dx ,
siempre que la integral exista.
El momento centrado de orden k de X es
E((X − E(X ))k ) =
∫ ∞−∞
(x − µX )k f (x) dx
siempre que la integral exista.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Si k = 1, el momento de orden k no es más que el valoresperado.
En momento centrado de orden 2 se conoce como lavarianza de la variable aleatoria X , y es una medida de ladispersión o concentración de la densidad alrededor de lamedia. Usamos la notación σ2 = σ2
X = Var(X ).
La raíz cuadrada de la varianza se conoce como ladesviación típica.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
La siguiente fórmula resulta muy útil para el cálculo de lavarianza.
Var(X ) = E((X − µX )2) = E(X 2 − 2µX X + µ2X )
= E(X 2)− 2µX E(X ) + µ2X
= E(X 2)− µ2X

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Ejemplo: Distribución UniformeSi X tiene distribución uniforme en (a,b) sabemos queµX = (a + b)/2. Hallemos el segundo momento:
E(X 2) =
∫ ∞−∞
x2f (x) dx =1
b − a
∫ b
ax2 dx
=1
b − a
[x3
3
∣∣∣ba
=13
b3 − a3
b − a
=a2 + ab + b2
3y la varianza es
Var(X ) = E(X 2)− (E(X ))2 =a2 + ab + b2
3− (a + b)2
4
=(b − a)2
12.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Ejemplo: Distribución ExponencialSi X tiene distribución exponencial de parámetro λ > 0sabemos que µX = 1/λ. Hallemos el segundo momentointegrando por partes dos veces:
E(X 2) =
∫ ∞−∞
x2f (x) dx =
∫ ∞0
x2λe−λx dx
=[− x2e−λx
∣∣∣∞0
+
∫ ∞0
2xλe−λx dx
=[− 2λ
xe−λx∣∣∣∞0
+2λ
∫ ∞0
e−λx dx
=2λ2
y la varianza es
Var(X ) = E(X 2)− (E(X ))2 =2λ2 −
1λ2 =
1λ2

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Ejemplo: Distribución NormalSi X tiene distribución normal típica sabemos que µX = 0.Por lo tanto la varianza es igual al segundo momento:
E(X 2) =
∫ ∞−∞
x2f (x) dx =
∫ ∞−∞
x2 1√2π
e−x2/2 dx
=2√2π
∫ ∞0
x2e−x2/2 dx =2√2π
∫ ∞0
x(xe−x2/2) dx
=[− 2√
2πxe−x2/2
∣∣∣∞0
+2√2π
∫ ∞0
e−x2/2 dx
=
∫ ∞−∞
1√2π
e−x2/2 dx = 1
y la varianza es
Var(X ) = E(X 2)− (E(X ))2 = 1.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Supongamos que X es una v.a. con media µ y varianza σ2.Veamos cuales son la media y varianza de la funciónY = aX + b:
E(Y ) = E(aX + b) =
∫ ∞−∞
(ax + b)f (x) dx
= a∫ ∞−∞
xf (x) dx +
∫ ∞−∞
bf (x) dx
= a E(X ) + b.

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Var(Y ) = Var(aX + b) = E((aX + b − E(aX − b))2)
= E((aX + b − a E(X )− b)2)
= E(a2(X − E(X ))2)
=
∫ ∞−∞
a2(x − µX )2f (x) dx
= a2∫ ∞−∞
(x − µX )2f (x) dx
= a2 Var(X ).

Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
La Distribución NormalSea X una v.a. con distribución normal típica y ponemosY = σX + µ. Entonces es posible demostrar que Y tienedensidad
ϕ(x ;µ, σ2) =1√2πσ
exp(−(x − µ)2/(2σ2))
Por el resultado anterior tenemos que
E(Y ) = µ, Var(Y ) = σ2
Integración
Técnicas deIntegraciónSustitución
Integración porPartes
Aplicaciones aProbabilidadVariables Discretas
Variables Continuas
Valores Esperados
Momentos
AplicacionesProbabilidad
Decimos que Y tiene una distribución normal o Gaussianacon parámetros µ y σ2.
Usando transformaciones lineales podemos pasar de unadistribución Gaussiana a otra.
Por ejemplo, si Z tiene distribución normal de media µ yvarianza σ2, la variable X definida por
X =Z − µσ
tiene distribución normal típica.