DESARROLLO DE CULTIVO AEROPÓNICO VERTICAL USANDO …desarrollo de cultivo aeropÓnico vertical...
163
DESARROLLO DE CULTIVO AEROPÓNICO VERTICAL USANDO SISTEMAS ELECTRÓNICOS JUAN CAMILO ROCHA CAICEDO JONATHAN DAVID SÁNCHEZ CALDERÓN UNIVERSIDAD CATÓLICA DE COLOMBIA INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES PROPUESTA TRABAJO DE GRADO BOGOTÁ D.C. NOVIEMBRE 6 DE 2017
Transcript of DESARROLLO DE CULTIVO AEROPÓNICO VERTICAL USANDO …desarrollo de cultivo aeropÓnico vertical...

DESARROLLO DE CULTIVO AEROPÓNICO
VERTICAL USANDO SISTEMAS ELECTRÓNICOS
JUAN CAMILO ROCHA CAICEDO JONATHAN DAVID SÁNCHEZ CALDERÓN
UNIVERSIDAD CATÓLICA DE COLOMBIA
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES PROPUESTA TRABAJO DE GRADO
BOGOTÁ D.C. NOVIEMBRE 6 DE 2017
DESARROLLO DE CULTIVO AEROPÓNICO
VERTICAL USANDO SISTEMAS ELECTRÓNICOS
JUAN CAMILO ROCHA CAICEDO (701996) JONATHAN DAVID SÁNCHEZ CALDERÓN (702016)
Propuesta de trabajo de grado para optar al título de
Ingeniero Electrónico y de Telecomunicaciones
Director Ing. BEATRIZ NATHALIA SERRATO PANQUEBA
Asesor
PhD. JUAN FERNANDO CORONEL RICO
UNIVERSIDAD CATÓLICA DE COLOMBIA
INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES PROPUESTA TRABAJO DE GRADO
BOGOTÁ D.C. NOVIEMBRE 6 DE 2017
3
4
Notas de aceptación
Aprobado por el comité de
grado en cumplimiento de los
requisitos exigidos por la
Universidad Católica de
Colombia para optar al título de
Ingeniero Electrónico y de
Telecomunicaciones.
________________________
Jurado
________________________
Jurado
Bogotá, 6 de noviembre 2017
5
AGRADECIMIENTOS
Hoy principalmente agradecemos a Dios por permitirnos vivir esta experiencia de vida en la Universidad Católica de Colombia y así prepararnos para grandes oportunidades en el futuro, también, queremos agradecer a nuestras familias por el apoyo incondicional que nos han brindado a lo largo de nuestra carrera y de igual forma a nuestros amigos y compañeros de carrera Arley Chaves y Yuli Bonilla. Gracias a la Ingeniera Natalia Serrato que hizo parte de nuestro proceso de formación académica como directora de proyecto de grado, también, a los ingenieros Luis Carvajal, Camilo Téllez, Juan Coronel ya que nos brindaron su ayuda en diferentes actividades, igualmente, queremos agradecer a la Red Tecnoparque Bogotá por prestarnos sus instalaciones, equipos y personal para que este proyecto se llevará a cabo.
6
TABLA DE CONTENIDO
DESARROLLO DE CULTIVO AEROPÓNICO ......................................................... 1
VERTICAL USANDO SISTEMAS ELECTRÓNICOS ............................................... 1
DESARROLLO DE CULTIVO AEROPÓNICO ......................................................... 2
VERTICAL USANDO SISTEMAS ELECTRÓNICOS ............................................... 2
LISTA DE FIGURAS ................................................................................................ 9
RESUMEN ............................................................................................................. 18
INTRODUCCIÓN ................................................................................................... 19
1. PLANTEAMIENTO Y FORMULACIÓN DEL PROBLEMA ................................. 20
2. OBJETIVOS ....................................................................................................... 22
2.1. OBJETIVO GENERAL .................................................................................... 22
2.2. OBJETIVOS ESPECÍFICOS ........................................................................... 22
3. JUSTIFICACIÓN ................................................................................................ 23
4. ANTECEDENTES .............................................................................................. 24
5. METODOLOGÍA ................................................................................................ 31
5.1. IDENTIFICAR SENSORES Y ACTUADORES REQUERIDOS PARA EL CULTIVO ............................................................................................................... 31
5.2. DISEÑAR SISTEMA DE CONTROL ............................................................... 31
5.3. DEFINIR UNA ESTRATEGIA DE TELEMEDICIÓN DE VARIABLES ............. 32
5.4. DISEÑAR INTERFAZ DE USUARIO PARA VISUALIZAR LAS VARIABLES DE CULTIVO ............................................................................................................... 33
5.5. REALIZAR UN PROTOTIPO INTEGRANDO LOS SISTEMAS DE CONTROL Y VISUALIZACIÓN .................................................................................................... 33
6. MARCO CONCEPTUAL .................................................................................... 34
6.1. HUERTO ......................................................................................................... 34
6.2. REQUERIMIENTOS EDALFOCLIMÁTICOS .................................................. 36
6.3. MÉTODOS DE CULTIVO ............................................................................... 36
6.4. SUSTENTABILIDAD ....................................................................................... 37
6.5. PRODUCCIÓN DE HORTALIZAS .................................................................. 38
6.6. NUTRIENTES MINERALES ........................................................................... 41
7. MARCO TEÓRICO ............................................................................................ 42
7.1. RED DE SENSORES ..................................................................................... 42
7.2. ACTUADOR .................................................................................................... 47
7
7.3. SISTEMA DE CONTROL ................................................................................ 50
7.4. TELECOMUNICACIONES .............................................................................. 52
8. EVALUACIÓN DE HORTALIZAS Y TECNOLOGÍAS PARA EL DESARROLLO DEL CULTIVO ....................................................................................................... 55
8.1. VARIABLES HORTALIZAS ............................................................................. 55
8.2. SENSORES .................................................................................................... 59
8.3. ACTUADORES ............................................................................................... 65
9. LINEALIZACIÓN Y PATRONAJE DE SENSORES ........................................... 73
9.1. SENSOR HUMEDAD “SOIL MOISTURE” ...................................................... 73
9.2. SENSOR PH MSP430 .................................................................................... 77
9.3. SENSOR LUMINOSIDAD LDR-720 ................................................................ 80
9.4. SENSOR HUMEDAD DHT11 ......................................................................... 83
10. CARACTERÍSTICAS ACTUADORES ............................................................. 86
10.1. ASPERSOR .................................................................................................. 86
10.2. BOMBA DE AGUA ........................................................................................ 88
10.3. ELECTROVÁLVULA ..................................................................................... 90
10.4. CINTA LED RGB .......................................................................................... 91
11. DISEÑO DE MÓDULOS AEROPÓNICOS DE CULTIVO ................................ 93
12. INSTRUMENTACIÓN .................................................................................... 104
12.1. SENSORES ................................................................................................ 104
12.2. ACTUADORES ........................................................................................... 107
13. DEFINICIÓN DE SISTEMA DE CONTROL ................................................... 110
13.1. CONTROL ON/OFF .................................................................................... 110
13.2. SISTEMA SERVO-CONTROLADO ............................................................ 111
13.3. DIAGRAMAS DE CONTROL DEL SISTEMA ............................................. 113
13.4. MICROCONTROLADOR ............................................................................ 116
13.5. DIAGRAMA DE HARDWARE ..................................................................... 118
14. ESTRATEGIA DE TELEMEDICIÓN .............................................................. 124
15. INTERFAZ DE USUARIO .............................................................................. 129
15.1. THINGSPEAK ............................................................................................. 129
15.2. LCD ............................................................................................................. 131
16. ANÁLISIS DE RESULTADOS ........................................................................ 133
17. CONCLUSIONES Y TRABAJOS FUTUROS ................................................. 135
8
17.1. CONCLUSIONES ....................................................................................... 135
17.2. TRABAJOS FUTUROS ............................................................................... 136
BIBLIOGRAFÍA .................................................................................................... 137
ANEXOS .............................................................................................................. 141
9
LISTA DE FIGURAS Figura 1. Lazo de control ....................................................................................... 25
Figura 2. Ensamble general de los elementos pertenecientes a la propuesta de
diseño de un sistema aeropónico vertical. ............................................................. 26
Figura 3. Vista general del sistema de cultivo basado en sustrato Aeropónico. .... 28
Figura 4. Interfaz del cultivo ................................................................................... 29
Figura 5. Tower Garden Community Garden ......................................................... 30
Figura 6. Actividades primer objetivo ..................................................................... 31
Figura 7. Actividades segundo objetivo ................................................................. 32
Figura 8. Actividades tercer objetivo ...................................................................... 32
Figura 9. Actividades quinto objetivo ..................................................................... 33
Figura 10. Huerto ................................................................................................... 34
Figura 11. Huerto familiar ...................................................................................... 35
Figura 12. Huerto urbano ....................................................................................... 35
Figura 13. Sistemas de cultivo ............................................................................... 37
Figura 14. Sustentabilidad ..................................................................................... 38
Figura 15. Aeroponía ............................................................................................. 39
Figura 16. Red de sensores ................................................................................... 42
Figura 17. Topologías de red ................................................................................. 43
Figura 18. Sensor humedad de suelo .................................................................... 44
Figura 19. Sensor de pH ........................................................................................ 45
Figura 20. Foto-resistencia. ................................................................................... 46
Figura 21. Termo-higrómetro ................................................................................. 46
Figura 22. Aspersor ............................................................................................... 47
Figura 23. Tipos de Bombas de agua .................................................................... 48
Figura 24. Electroválvula de accionamiento directo ............................................... 49
Figura 25. Electroválvula de accionamiento indirecto ............................................ 49
Figura 26. Diodo LED ............................................................................................ 50
Figura 27. Sistemas de control de válvulas ........................................................... 51
Figura 28. Sistema de control lazo abierto ............................................................. 51
10
Figura 29. Sistema de control lazo cerrado ........................................................... 52
Figura 30. Red inalámbrica .................................................................................... 53
Figura 31. Diagrama de fases. ............................................................................... 73
Figura 32. Toma de muestras con sensor de humedad de suelo .......................... 74
Figura 33. Secado de muestras. ............................................................................ 75
Figura 34. Gráfica regresión polinómica sensor humedad de suelo ...................... 76
Figura 35. Sensor de pH ........................................................................................ 77
Figura 36. Solución buffer para pH ........................................................................ 78
Figura 37. Gráfica regresión lineal sensor pH ........................................................ 78
Figura 38. Solución para nutrientes de plantas (Marca “Crecer 500”) ................... 79
Figura 39. Foto-resistencia .................................................................................... 80
Figura 40. Ajuste foto-resistencia ........................................................................... 81
Figura 41. Gráfica regresión logarítmica foto-resistencia ....................................... 82
Figura 42. Sensor de humedad relativa ................................................................. 83
Figura 43. Medición de humedad con higrómetro y DHT11 ................................... 84
Figura 44. Gráfica regresión lineal sensor humedad relativa ................................. 85
Figura 45. Aspersores ............................................................................................ 86
Figura 46. Gráfica gotero caudal vs presión .......................................................... 87
Figura 47. Bomba periférica ................................................................................... 90
Figura 48. Electroválvula de accionamiento directo ............................................... 90
Figura 49. Embolo electroválvula ........................................................................... 91
Figura 50. Cinta LED ............................................................................................. 92
Figura 51. Corte de tubo PVC ................................................................................ 93
Figura 52. Módulo aeropónico ............................................................................... 94
Figura 53. Módulos de cultivo ................................................................................ 94
Figura 54. Tapas Módulo cultivo ............................................................................ 95
Figura 55. Cortes bastidor ..................................................................................... 95
Figura 56. Soportes y tornillos ............................................................................... 96
Figura 57. Soportes de los módulos ...................................................................... 96
Figura 58. Marco del cultivo ................................................................................... 97
11
Figura 59. Instalación de módulos ......................................................................... 97
Figura 60. Sustrato y semillas ................................................................................ 98
Figura 61. Siembra ................................................................................................ 98
Figura 62. Uniones y manguera ............................................................................. 99
Figura 63. Conexiones. .......................................................................................... 99
Figura 64. Red de tubería .................................................................................... 100
Figura 65. Abrazaderas ....................................................................................... 100
Figura 66. Recopilación ....................................................................................... 101
Figura 67 . Bases de la cinta LED ........................................................................ 102
Figura 68. Base del tanque .................................................................................. 103
Figura 69. Tanque de suministro ......................................................................... 103
Figura 70. Montaje sensor pH .............................................................................. 104
Figura 71. Montaje sensor humedad de suelo ..................................................... 105
Figura 72. Montaje sensor humedad relativa ....................................................... 105
Figura 73. Montaje sensor de presencia .............................................................. 106
Figura 74. Montaje sensor luminosidad ............................................................... 106
Figura 75. Esquema de tuberías del cultivo ......................................................... 107
Figura 76. Montaje bomba de agua ..................................................................... 108
Figura 77. Montaje electroválvulas ...................................................................... 108
Figura 78. Montaje nebulizadores ........................................................................ 109
Figura 79. Montaje goteros .................................................................................. 109
Figura 80. Montaje cinta LED RGB ...................................................................... 109
Figura 81. Transistor estado On/OFF .................................................................. 110
Figura 82. Transistor Tip122 ................................................................................ 111
Figura 83. Servomotor SG90 ............................................................................... 112
Figura 84. Dimmer servo-controlado .................................................................... 113
Figura 85. Control intensidad PWM en cinta LED ................................................ 113
Figura 86. Diagrama de bloques de sección de pH ............................................. 114
Figura 87. Diagrama de bloques sección de riego por goteo ............................... 114
Figura 88. Diagrama de bloques sección de intensidad luminosa ....................... 115
12
Figura 89. Diagrama de bloques de sección de riego por nebulización ............... 115
Figura 90. Diagrama de bloques del sistema ....................................................... 116
Figura 91. Microcontrolador ATmega328p ........................................................... 117
Figura 92. Arduino UNO ...................................................................................... 118
Figura 93. Diagrama de hardware general .......................................................... 119
Figura 94. Diagrama de hardware específico “TARJETA DOWN” ....................... 119
Figura 95. Diagrama de hardware específico “TARJETA UP” ............................. 120
Figura 96. Diagrama de software ......................................................................... 120
Figura 97. Diagrama de flujo de control ............................................................... 121
Figura 98. Módulos WiFi ESP8266 y ESP32 ....................................................... 124
Figura 99. Estrategia de telemedición .................................................................. 125
Figura 100. Acceso a la red ................................................................................. 126
Figura 101. Conexión módulo ESP8266 con conversor USB a TTL .................... 126
Figura 102. Proceso de renovacion de Frimware del Módulo ESP8266-01 ........ 127
Figura 103. Campo de representación de una variable telemedida. .................... 130
Figura 104. API Key ............................................................................................. 130
Figura 105. Display LCD 16x2 adaptado módulo I2C .......................................... 131
Figura 106. Prueba visualización de datos .......................................................... 132
13
LISTA DE TABLAS Tabla 1. Relación colorante de lechuga en técnica de aeroponía ......................... 27
Tabla 2. Nutrientes ................................................................................................. 41
Tabla 3. Ponderación hortalizas ............................................................................. 58
Tabla 4. Ponderación sensor humedad de suelo ................................................... 60
Tabla 5. Ponderación humedad relativa ................................................................ 62
Tabla 6. Ponderación sensor luminosidad ............................................................. 63
Tabla 7. Ponderación sensor pH ............................................................................ 64
Tabla 8. Ponderación bomba de agua ................................................................... 67
Tabla 9. Ponderación nebulizador ......................................................................... 69
Tabla 10. Ponderación electroválvula ................................................................ 70
Tabla 11. Ponderación LED’s ................................................................................ 71
Tabla 12. Ajuste sensor humedad de suelo ........................................................... 75
Tabla 13. Relación Buffers y pH-metro .................................................................. 78
Tabla 14. Composición “Crecer 500” ..................................................................... 80
Tabla 15. Relación luxómetro y foto-resistencia .................................................... 81
Tabla 16. Tabla de estados de colores .................................................................. 83
Tabla 17. Relación DHT11 vs Higrómetro ............................................................. 84
Tabla 18. Características gotero ............................................................................ 87
Tabla 19. Características nebulizador .................................................................... 88
Tabla 20. Características bomba de agua ............................................................. 89
Tabla 21. Características válvula solenoide ........................................................... 91
Tabla 22. Características cinta LED ....................................................................... 92
Tabla 24. Características transistor TIP122 ......................................................... 111
Tabla 25. Servomotor SG90 ................................................................................ 112
Tabla 26. Dimmer leviton 6681 - trimatron ........................................................... 112
Tabla 27. Comparación ATmega 328p vs Raspberry pi revisión1 ....................... 116
Tabla 28. Características de módulo WiFi serial ESP8266 vs ESP32 ................. 125
14
LISTA DE CUADROS Cuadro 1. Técnicas de riego .................................................................................. 40
Cuadro 2. Tecnología escogida ............................................................................. 72
Cuadro 3. Determinación del contenido de humedad ............................................ 76
Cuadro 4. Ejemplo de valores nivel de iluminación. ............................................... 82
Cuadro 5. Comandos AT usados ......................................................................... 128
15
LISTA DE ANEXOS Anexo a. Alimentación UP ................................................................................... 141
Anexo b. Tirilla LED ............................................................................................. 141
Anexo c. Válvulas ................................................................................................ 142
Anexo d. Puerto sensores .................................................................................... 142
Anexo e. Comunicación ....................................................................................... 142
Anexo f. Microcontrolador .................................................................................... 143
Anexo g. Alimentación DOWN ............................................................................. 143
Anexo h. MOC’s ................................................................................................... 144
Anexo i. GPIO´s - potencia .................................................................................. 144
Anexo j. Tarjeta “DOWN” ..................................................................................... 145
Anexo k. Tarjeta Módulo “UP” .............................................................................. 146
Anexo l. Código del sistema de control y comunicación ...................................... 146
Anexo m. Datasheets ........................................................................................... 154
Anexo n. Instalación de prototipo de cultivo ......................................................... 156
Anexo o. Esquema de módulos de cultivo ........................................................... 157
Anexo p. Esquema de sistema de abastecimiento .............................................. 157
Anexo q. Alimentación del sistema ...................................................................... 158
Anexo r. Conexión tarjeta “DOWN” ...................................................................... 159
Anexo s. Conexión tarjeta “UP” ............................................................................ 160
Anexo t. Siembra ................................................................................................. 161
Anexo u. Mezcla de nutrientes ............................................................................. 161
Anexo v. Ajuste de tornillo ................................................................................... 162
Anexo w. Trasplante ............................................................................................ 162
16
GLOSARIO
ACTUADORES: un actuador es aquel que brinda una fuerza o “actúa” al proporcionarle como entrada una fuente neumática, hidráulica o eléctrica. AEROPÓNIA: un método de cultivo que utiliza el aire o niebla para la distribución de nutrientes a través de micropartículas de agua. AGRICULTURA: es una serie de actividades que se realizan en tierra para obtener productos vegetales. CULTIVO VERTICAL: este cultivo permite sembrar todo tipo de hortalizas usando una estructura vertical aprovechando un sustrato como medio nutricional. HORTALIZA: planta comestible que se cultiva en huertas, las cuales generalmente se siembran en ambientes fríos HUMEDAD DEL SUELO: cantidad de partículas de agua que se encuentran confinadas en un sustrato por volumen de tierra. HUMEDAD REALTIVA: cantidad de partículas de agua que se encuentran contenidas en el aire con relación a densidad de saturación del aire. IoT: se trata de una red de dispositivos conectados a internet que envía datos para que puedan ser procesados y visualizados. LUMINOSIDAD: cantidad de partículas de fotones que hay en un haz de luz que inciden por unidad de superficie y por unidad de tiempo. NEBULIZACIÓN: separación de gotas de agua en microgotas las cuales al tener un peso relativamente bajo se distribuyen en el ambiente en forma de vapor. pH: iones de hidrogeno concentrados en una determinada solución la cual mide el porcentaje de acidez y alcalinidad.
17
RIEGO: método donde se distribuye el agua para las plantas es fundamental para el crecimiento de las mismas. SENSOR: dispositivo electrónico que detecta estímulos externos de variables físicas y las relaciona con valores de voltaje, resistencia, capacitancia entre otras. SISTEMA DE CONTROL: sistema de procesamiento de señales que dependiendo de sus entradas genera una señal de control hacia un dispositivo externo. WLAN (Wireless Local Area Network): es una red de área local inalámbrica la cual permite la conexión de dispositivos a internet facilitando su accesibilidad desde cualquier lugar.
18
RESUMEN
Aprovechando que Colombia basa gran parte de su economía en la producción agrícola y teniendo en cuenta que en su mayoría los procesos no se encuentran tecnificados, se propone desarrollar un sistema de cultivo aeropónico monitoreado en tiempo real que posibilita una apropiada gestión de los recursos. Mediante los cultivos aeropónicos es posible la producción de alimento de forma ecológica y sustentable, ya que, se presenta un ahorro en los recursos naturales y aumento en la producción, su principal característica es no hacer uso del suelo, por lo que se usa un entorno aéreo donde los nutrientes son esparcidos en forma de niebla para posteriormente ser absorbidos por la raíz, a su vez, es necesario tener una en cuenta diferentes factores físicos y químicos que intervienen en el desarrollo de la planta. Teniendo en cuenta el factor climático de la sabana de Bogotá y la ponderación realizada entre diferentes tipos de hortalizas se define sembrar lechuga (Lactuca Sativa). Para un adecuado crecimiento de la planta se requiere buscar las variables que tiene mayor intervención en su desarrollo, siendo humedad relativa, humedad del suelo, pH e intensidad luminosa las escogidas. Mediante el manejo de estas variables se controlará el proceso de riego y luminosidad del cultivo. También, se plantea la transmisión de datos mediante una telemedición de variables haciendo uso del protocolo de comunicación WiFi. La información se transmitirá a través de una red área local inalámbrica (WLAN), de este modo el usuario podrá acceder a la información del cultivo utilizando un equipo con acceso a internet desde cualquier lugar. Los datos son subidos a un servidor web donde serán guardados y publicados en el servidor utilizado en este caso “ThingSpeak”, también mediante una interfaz gráfica en el prototipo el usuario podrá tener acceso a la información en caso de que falle su conexión a internet.
Palabras clave: Aeroponía, automatización, cultivo vertical, control de riego, horticultura, red de área local inalámbrica, red de sensores, servidor web, Sistema de comunicación, sistemas de control, telemedición.
19
INTRODUCCIÓN
En diversas partes del territorio nacional como Cundinamarca, Nariño, Antioquia, Norte de Santander y Valle del Cauca, agricultores sobreviven del consumo y venta de sus cosechas, pero factores climáticos como degradación del suelo, heladas y sequias influyen en la perdida de sus cultivos, por otro lado, la calidad de las cosechas se ven afectadas por actividades realizadas por los campesinos con el uso excesivo de químicos para el control de plagas y riego con aguas residuales esto para poder obtener su producto económico y sin contratiempos1. La expresión “traer el campo a la ciudad”2 hace referencia a fomentar el cultivo de plantas y vegetales en los habitantes de una zona urbana como Bogotá con el fin de que ellos puedan obtener su propio alimento, pero esto conlleva a la dedicación de varias horas del día en el cuidado de las plantas para que no se marchiten. Por eso, una opción para el control del crecimiento de las variables de cultivo es mediante el uso de un sistema electrónico, el cual podrá sensar variables de luminosidad, humedad relativa, humedad del suelo y pH, y así generar una cosecha más productiva. Pero en una zona urbana la producción de la cosecha será más baja a comparación de un área rural debido a factores como la iluminación y contaminación del medio, para compensar esto, la utilización del método de aeroponía mejora tiempos de producción, también al tomar un sentido vertical en la siembra se accede al aprovechamiento de espacios. Si el usuario está enterado del estado del cultivo, le brindará tranquilidad y confianza, por eso, una interface que muestre las variables sensadas ayuda a que la persona pueda supervisar el proceso. El manejo de esta información puede establecerse mediante un enlace de comunicación, esto, gracias a la evolución que se ha generado en el siglo XXI en las telecomunicaciones con el envío y recepción de datos mediante equipos con acceso a internet, dichos equipos también brindan entretenimiento y la posibilidad de manejo de información como afirma la UNESCO3.
1 DANE, Producción limpia de hortalizas, una mejor salud y bienestar, Bogotá, 2014. (06/12/2017). Disponible en web < https://goo.gl/CtSDtn> P.2. 2 UNIVERSIDAD NACIONAL DE COLOMBIA, Agricultura urbana: una forma de traer el campo a la ciudad, Bogotá, Agencia de noticias UN [En línea], 2012, (06/12/2017) disponible en web <https://goo.gl/jqJzY5> 3 UNESCO, El futuro del aprendizaje móvil [en línea], 2013, (06/12/2017) disponible en web< https://goo.gl/Ackn2Q > P.17.
20
1. PLANTEAMIENTO Y FORMULACIÓN DEL PROBLEMA
Internacionalmente existen crisis que se desean amortiguar como la pobreza, el impacto ambiental y la vida digna para todos, por eso la Organización de las Naciones Unidas (ONU) ha definido unos objetivos de desarrollo sostenible para suplir estas problemáticas, en este proyecto de grado se hace énfasis en dos metas. La primera meta, es el “hambre cero” cuyos fines pretenden aumentar significativamente la productividad agrícola para que los pequeños productores y cultivos familiares puedan obtener ingresos y a su vez, tener nuevas oportunidades de creación de mercados locales. También, incentivar la realización de prácticas agrícolas no tradicionales que aseguren la sustentabilidad y aumento de la productividad agrícola4. La segunda meta, es la de “producción y consumo responsable” que apoya la sustentabilidad en los recursos naturales cuyas metas son el ahorro de agua, ahorro de energía y la producción de alimentos, todo para que en el futuro el impacto ambiental no sea alto, se plantean investigaciones, políticas y organismos de cooperación para planificar un sistema donde los consumidores puedan intervenir para tener una vida sostenible5. A pesar de que el sector agrícola es uno de los mayores generadores de empleo y alimento, es también es uno de los sectores de la economía por el cual se puede vivir hoy en día, pues abastece al planeta de los alimentos, medicina y distintos productos que hacen posible el sustento de la vida, en nuestro país existen distintos problemas que hacen que esta tarea no se torne fácil, situaciones como el cambio climático, implementación de buenos métodos de producción, la falta de inversión agrícola y el desplazamiento forzado por situación de violencia hacen que los campesinos se tengan que trasladar a la ciudad para buscar otras alternativas de empleo, esto conlleva a que no se cumpla la demanda de alimentos. Por eso el plan de desarrollo nacional de Colombia (2014-2018)6 establece lineamientos para aumentar la productividad del país, estos son:
4 NACIONES UNIDAS. Objetivos de desarrollo sostenible. [En línea]. (25/04/2017). Disponible en web < https://goo.gl/F4isE5> 5 Ibíd., [En línea]. (25/04/2017). Disponible en web < https://goo.gl/HTV3oy />
6 DEPARTAMENTO NACIONAL DE PLANEACIÓN. ¿Qué es el plan de desarrollo? [en línea]. (25/04/2017) Disponible en web < https://goo.gl/TDmE9E >
21
Competitividad e infraestructura estratégicas.
Movilidad social.
Transformación del campo.
Seguridad justicia y democracia para la construcción de la paz.
Buen gobierno7. Por eso se enfocará el proyecto de grado en el objetivo tres (transformación del campo), que mediante la cadena productiva de agro-alimentos y con la tecnificación de procesos agrícolas se busca obtener eficiencia y calidad en el proceso y en el producto, esto, para que los agricultores puedan entrar a competir en mercados externos a través de tratados de libre comercio bajo el control de estándares de calidad 8. Uno de los productos que establece las cadenas de valor priorizadas son las hortalizas, las cuales son características de la región y se adaptan bien al piso térmico de la sabana de Bogotá donde se llevó a cabo el proyecto de grado. Por eso al considerarse la aeropónia un método de cultivo sustentable se plantea la siguiente pregunta. ¿Qué alternativa se puede proponer para realizar un cultivo aeropónico sustentable basado en sistemas electrónicos?
7 DEPARTAMENTO NACIONAL DE PLANEACIÓN. Bases de plan nacional de desarrollo 2014-2018 [En línea]. (06/12/2017). Disponible en web <https://goo.gl/1u1XGY> P. 101. 8 Ibíd., P. 73.
22
2. OBJETIVOS
2.1. OBJETIVO GENERAL
Desarrollar un sistema de control de un cultivo aeropónico vertical sustentable utilizando sistemas electrónicos y telemedición de variables.
2.2. OBJETIVOS ESPECÍFICOS
Identificar sensores y actuadores idóneos para el cultivo.
Diseñar sistema de control de variables para el cultivo.
Definir una estrategia de telemedición de variables.
Diseñar interfaz de usuario para la recepción y visualización de los datos de cultivo.
Integrar un prototipo el sistema de telemedición e interfaz de usuario.
23
3. JUSTIFICACIÓN
Aprovechando que Colombia es un país que basa gran parte de su economía en la agricultura y según cifras del CNA (Censo nacional agropecuario) la cual dice lo siguiente: “el área total sembrada de cultivos rurales es de un 6,3%, lo que equivale a 7 millones 115 hectáreas en Colombia, donde el área de cultivos permanente en 2014 es del 74,8% y actualmente el 15% son de cultivos transitorios”9 por ende, se ha considerado destinar esta propuesta de trabajo grado hacia la parte agrícola utilizando cultivos transitorios y no tradicionales como la aeropónia. La implementación de esta técnica de cultivo se realiza porque este método se considera seguro, ecológico y sustentable, también aumenta la cantidad de producción por tiempo y el ahorro de insumos con respecto a otros métodos como el hidropónico y el orgánico. El ahorro de energía, agua y nutrientes ayudarán a amortiguar la economía de las personas que implementen este método de cultivo familiar, y además podrán cultivar su propio alimento. Por eso es necesario que el cultivo crezca saludable, y una opción para hacer esto posible es con el uso de sistemas electrónicos para el control de las variables que intervienen en el crecimiento de la planta.
9 DANE, Entrega avance de resultados del 3er censo nacional agropecuario [En línea], (11/07/2016), Disponible en web < https://goo.gl/UFWJ7C >
24
4. ANTECEDENTES
Los procesos de mejoramiento, optimización e intervención en el sector agrícola se pueden lograr mediante el uso de la tecnología, como bien se sabe, por medio de ella es posible tener reducciones de tiempo en procesos, mano de obra y recursos naturales entre otras, estableciendo un fácil acceso a los distintos factores que favorecen la producción agrícola. La implementación de invernaderos en muchos lugares del planeta ha sido una estrategia de las personas que se dedican a la agricultura esto para adaptar las condiciones del medio haciéndolo ideal y necesario para el desarrollo de sus prácticas de cultivo, pero esto solo ha sido una parte de la solución a todos sus problemas. En este punto es donde puede intervenir el uso de la tecnología, complementando la agricultura con procesos de control automáticos o semiautomáticos.
Así es como el Ingeniero Julián Augusto, desarrolla un sistema de control para la automatización de un invernadero10, en donde toma la temperatura y la humedad como las dos principales variables físicas sobre las cuales trabajar como se muestra en el lazo de control de la figura 1, realizando mediciones mediante el uso de sensores y el almacenamiento y modelamiento de estos datos, con el objetivo de determinar las condiciones ambientales específicas en el proceso de vida de la planta, lo cual le permitiría conocer casi con exactitud la fecha en la que se dará la cosecha.
10 CORREA OSPINA, Julián. Estrategia de control para la automatización de un invernadero, Bogotá D.C., 2013, 42p. Trabajo de grado. Universidad Católica de Colombia. Facultad de Ingeniería.

25
Figura 1. Lazo de control
Fuente: CORREA OSPINA, Julián. Op. Cit., p. 37.
Según Julián, el desarrollo de esta estrategia con la gestión tecnológica que implementó resulta muy útil al momento en que se requiera realizar una producción eficiente y detallada, que siguiendo los cambios de temperatura y humedad permite así realizar una proyección de las fechas de cosecha.
Teniendo en cuenta que la tecnología no es el único medio para mejorar la producción agrícola, existen métodos más sencillos y convencionales como los cultivos hidropónico y aeropónico, que se caracterizan por brindar funciones mejoradas ecológicamente hablando como la no erosión de suelos, la reducción de agua, la calidad y limpieza de los alimentos, entre otros.
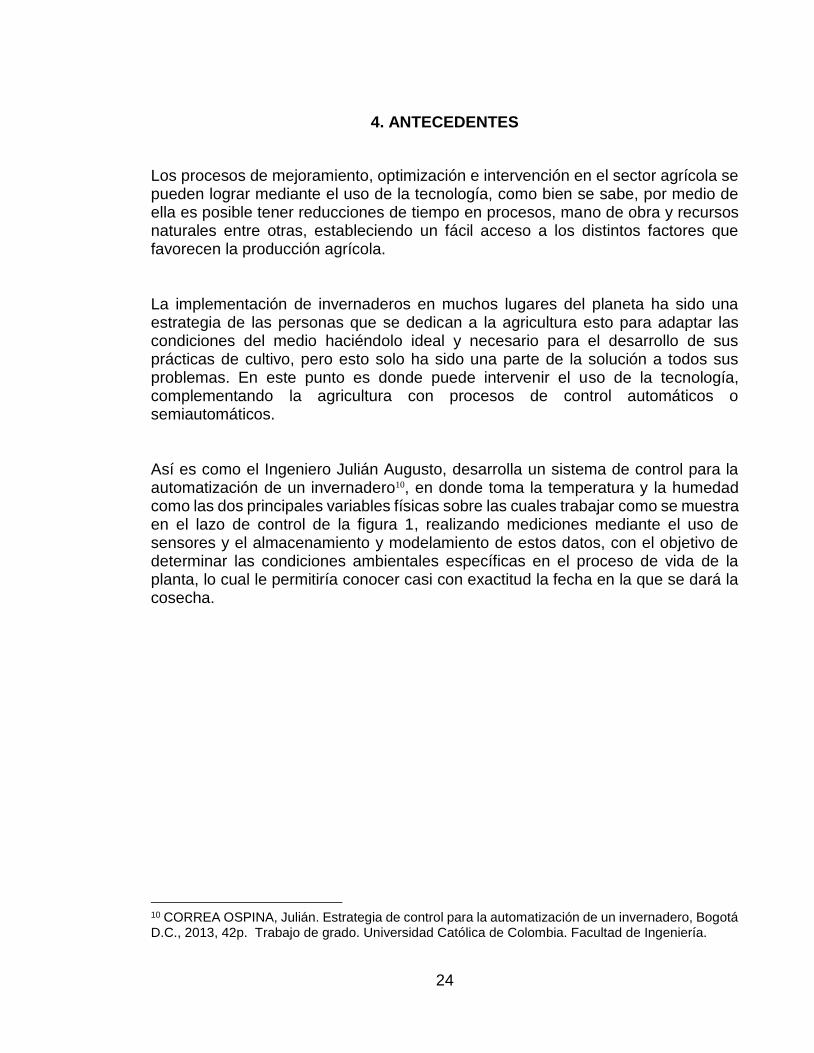
De este modo que, un diseño de un prototipo de un sistema de producción tipo aeropónico11, diseñado por Cristian Javier Hernández y Juan Sebastián Piñeros, las cuales aprovechando que en Colombia se conoce muy poco acerca de este sistema, realizaron y evaluaron distintos diseños de columnas de producción en un sistema de producción aeropónico. Fueron 12 alternativas en particular, y por último se eligió el mejor diseño tomando en cuenta factores de calidad, cantidad de producción, materiales y costos considerando una implementación posterior como se muestra en la figura 2.
11 HERNÁNDEZ SALAMANCA, Cristhian. Diseño de un prototipo de un sistema de producción tipo aeropónico, Bogotá D.C., 2013, 184p. Trabajo de grado. Universidad EAN. Facultad de ingeniería.
26
Figura 2. Ensamble general de los elementos pertenecientes a la propuesta de diseño de un sistema aeropónico vertical.
Fuente: HERNÁNDEZ SALAMANCA, Cristhian. Op. Cit., p. 66.
En consecuencia, con la implementación de estos sistemas de producción que no están completamente equipados, surge la necesidad de incorporar en ellos dispositivos que aportan un plus al desarrollo de la planta.
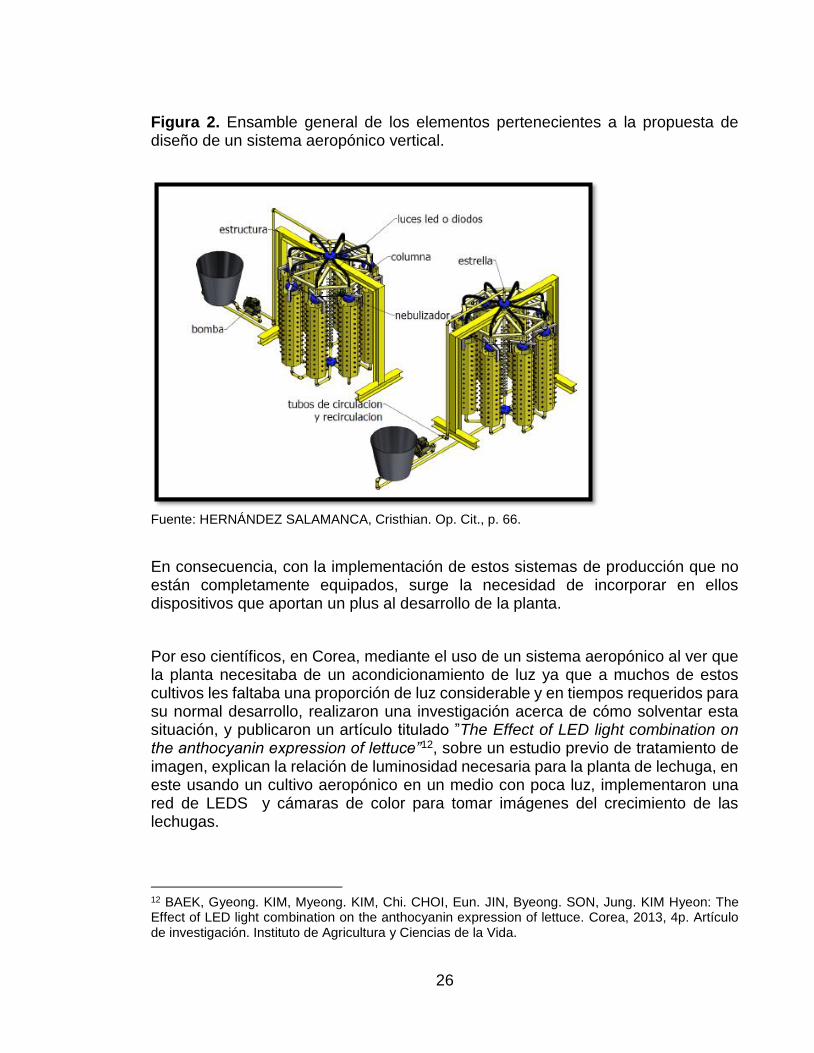
Por eso científicos, en Corea, mediante el uso de un sistema aeropónico al ver que la planta necesitaba de un acondicionamiento de luz ya que a muchos de estos cultivos les faltaba una proporción de luz considerable y en tiempos requeridos para su normal desarrollo, realizaron una investigación acerca de cómo solventar esta situación, y publicaron un artículo titulado ”The Effect of LED light combination on the anthocyanin expression of lettuce”12, sobre un estudio previo de tratamiento de imagen, explican la relación de luminosidad necesaria para la planta de lechuga, en este usando un cultivo aeropónico en un medio con poca luz, implementaron una red de LEDS y cámaras de color para tomar imágenes del crecimiento de las lechugas.
12 BAEK, Gyeong. KIM, Myeong. KIM, Chi. CHOI, Eun. JIN, Byeong. SON, Jung. KIM Hyeon: The Effect of LED light combination on the anthocyanin expression of lettuce. Corea, 2013, 4p. Artículo de investigación. Instituto de Agricultura y Ciencias de la Vida.
27
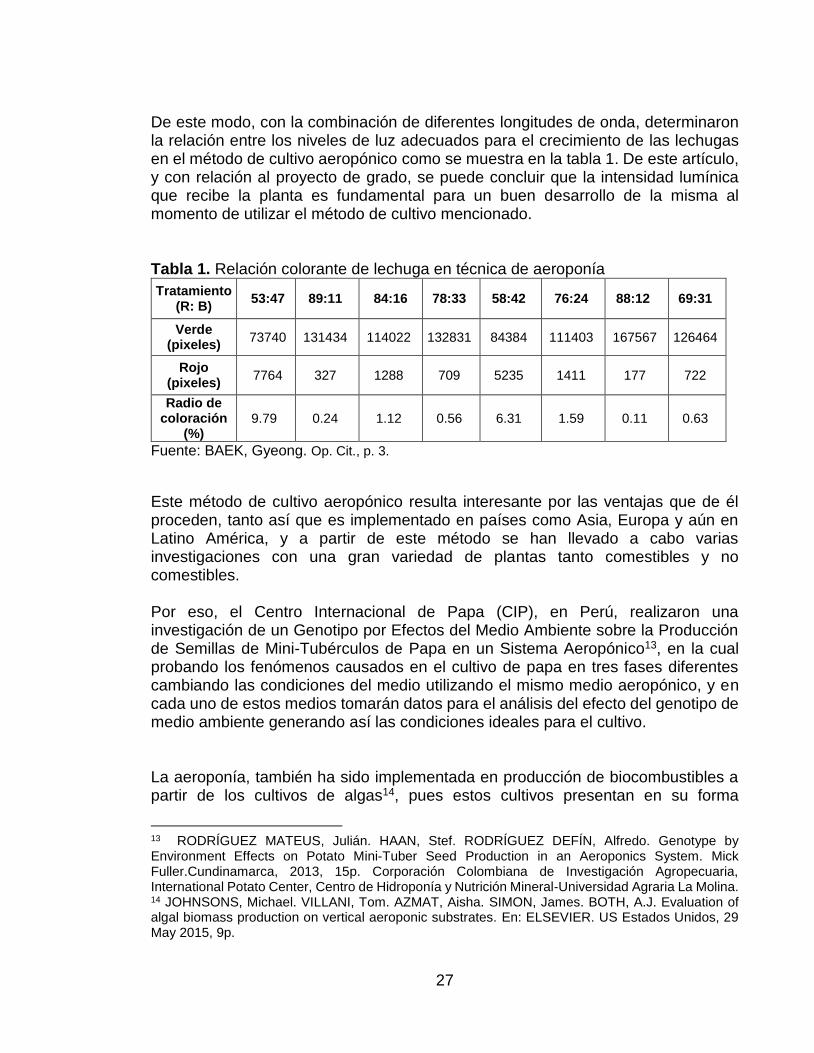
De este modo, con la combinación de diferentes longitudes de onda, determinaron la relación entre los niveles de luz adecuados para el crecimiento de las lechugas en el método de cultivo aeropónico como se muestra en la tabla 1. De este artículo, y con relación al proyecto de grado, se puede concluir que la intensidad lumínica que recibe la planta es fundamental para un buen desarrollo de la misma al momento de utilizar el método de cultivo mencionado. Tabla 1. Relación colorante de lechuga en técnica de aeroponía
Tratamiento (R: B)
53:47 89:11 84:16 78:33 58:42 76:24 88:12 69:31
Verde (pixeles)
73740 131434 114022 132831 84384 111403 167567 126464
Rojo (pixeles)
7764 327 1288 709 5235 1411 177 722
Radio de coloración
(%) 9.79 0.24 1.12 0.56 6.31 1.59 0.11 0.63
Fuente: BAEK, Gyeong. Op. Cit., p. 3.
Este método de cultivo aeropónico resulta interesante por las ventajas que de él proceden, tanto así que es implementado en países como Asia, Europa y aún en Latino América, y a partir de este método se han llevado a cabo varias investigaciones con una gran variedad de plantas tanto comestibles y no comestibles. Por eso, el Centro Internacional de Papa (CIP), en Perú, realizaron una investigación de un Genotipo por Efectos del Medio Ambiente sobre la Producción de Semillas de Mini-Tubérculos de Papa en un Sistema Aeropónico13, en la cual probando los fenómenos causados en el cultivo de papa en tres fases diferentes cambiando las condiciones del medio utilizando el mismo medio aeropónico, y en cada uno de estos medios tomarán datos para el análisis del efecto del genotipo de medio ambiente generando así las condiciones ideales para el cultivo. La aeroponía, también ha sido implementada en producción de biocombustibles a partir de los cultivos de algas14, pues estos cultivos presentan en su forma
13 RODRÍGUEZ MATEUS, Julián. HAAN, Stef. RODRÍGUEZ DEFÍN, Alfredo. Genotype by Environment Effects on Potato Mini-Tuber Seed Production in an Aeroponics System. Mick Fuller.Cundinamarca, 2013, 15p. Corporación Colombiana de Investigación Agropecuaria, International Potato Center, Centro de Hidroponía y Nutrición Mineral-Universidad Agraria La Molina. 14 JOHNSONS, Michael. VILLANI, Tom. AZMAT, Aisha. SIMON, James. BOTH, A.J. Evaluation of algal biomass production on vertical aeroponic substrates. En: ELSEVIER. US Estados Unidos, 29 May 2015, 9p.
28
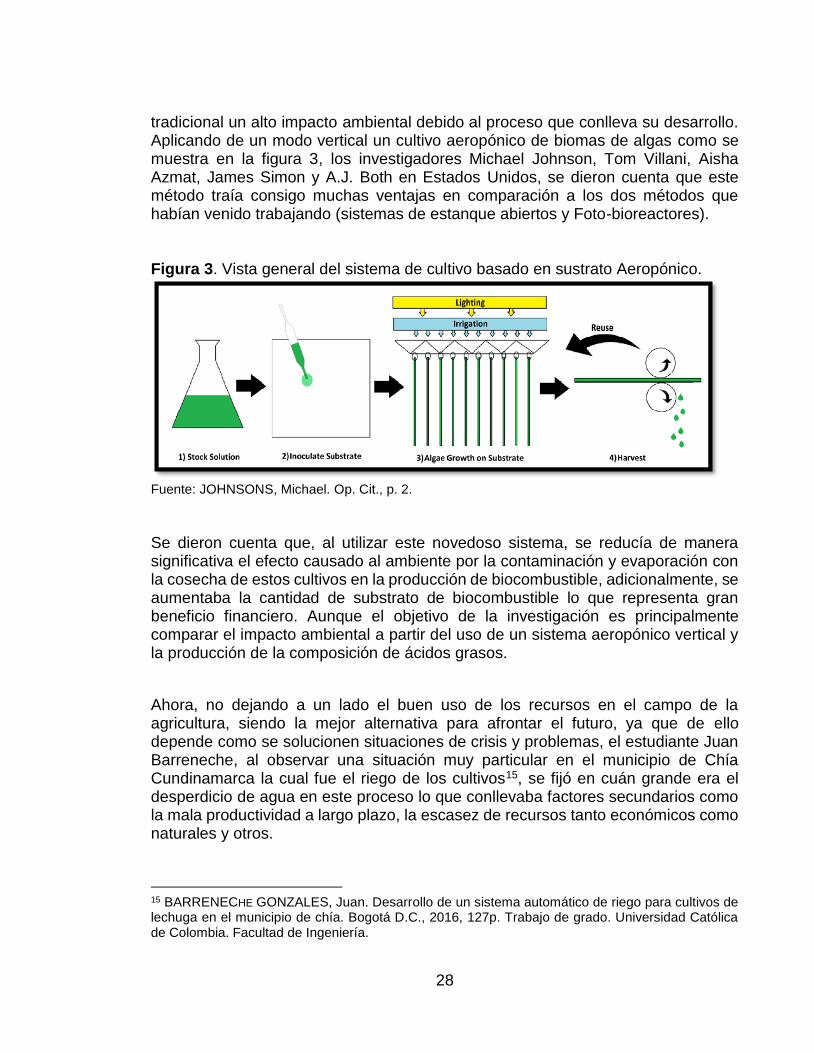
tradicional un alto impacto ambiental debido al proceso que conlleva su desarrollo. Aplicando de un modo vertical un cultivo aeropónico de biomas de algas como se muestra en la figura 3, los investigadores Michael Johnson, Tom Villani, Aisha Azmat, James Simon y A.J. Both en Estados Unidos, se dieron cuenta que este método traía consigo muchas ventajas en comparación a los dos métodos que habían venido trabajando (sistemas de estanque abiertos y Foto-bioreactores). Figura 3. Vista general del sistema de cultivo basado en sustrato Aeropónico.
Fuente: JOHNSONS, Michael. Op. Cit., p. 2.
Se dieron cuenta que, al utilizar este novedoso sistema, se reducía de manera significativa el efecto causado al ambiente por la contaminación y evaporación con la cosecha de estos cultivos en la producción de biocombustible, adicionalmente, se aumentaba la cantidad de substrato de biocombustible lo que representa gran beneficio financiero. Aunque el objetivo de la investigación es principalmente comparar el impacto ambiental a partir del uso de un sistema aeropónico vertical y la producción de la composición de ácidos grasos.
Ahora, no dejando a un lado el buen uso de los recursos en el campo de la agricultura, siendo la mejor alternativa para afrontar el futuro, ya que de ello depende como se solucionen situaciones de crisis y problemas, el estudiante Juan Barreneche, al observar una situación muy particular en el municipio de Chía Cundinamarca la cual fue el riego de los cultivos15, se fijó en cuán grande era el desperdicio de agua en este proceso lo que conllevaba factores secundarios como la mala productividad a largo plazo, la escasez de recursos tanto económicos como naturales y otros.
15 BARRENECHE GONZALES, Juan. Desarrollo de un sistema automático de riego para cultivos de lechuga en el municipio de chía. Bogotá D.C., 2016, 127p. Trabajo de grado. Universidad Católica de Colombia. Facultad de Ingeniería.
29
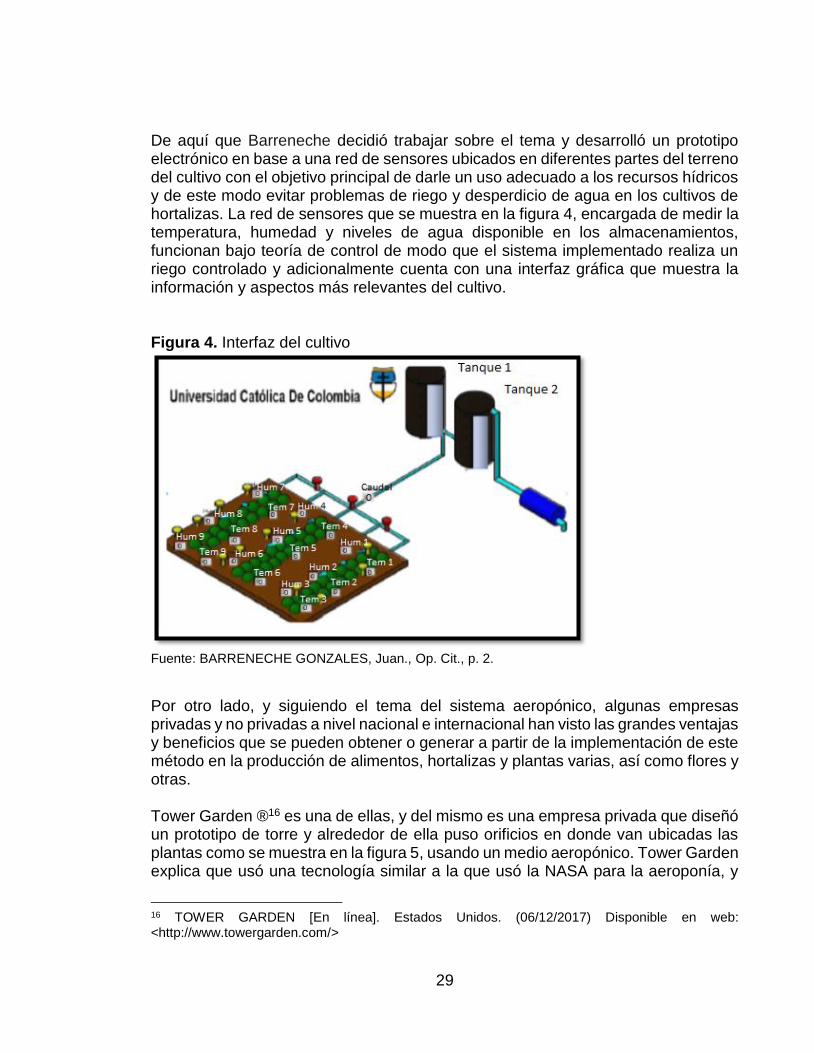
De aquí que Barreneche decidió trabajar sobre el tema y desarrolló un prototipo electrónico en base a una red de sensores ubicados en diferentes partes del terreno del cultivo con el objetivo principal de darle un uso adecuado a los recursos hídricos y de este modo evitar problemas de riego y desperdicio de agua en los cultivos de hortalizas. La red de sensores que se muestra en la figura 4, encargada de medir la temperatura, humedad y niveles de agua disponible en los almacenamientos, funcionan bajo teoría de control de modo que el sistema implementado realiza un riego controlado y adicionalmente cuenta con una interfaz gráfica que muestra la información y aspectos más relevantes del cultivo. Figura 4. Interfaz del cultivo
Fuente: BARRENECHE GONZALES, Juan., Op. Cit., p. 2.
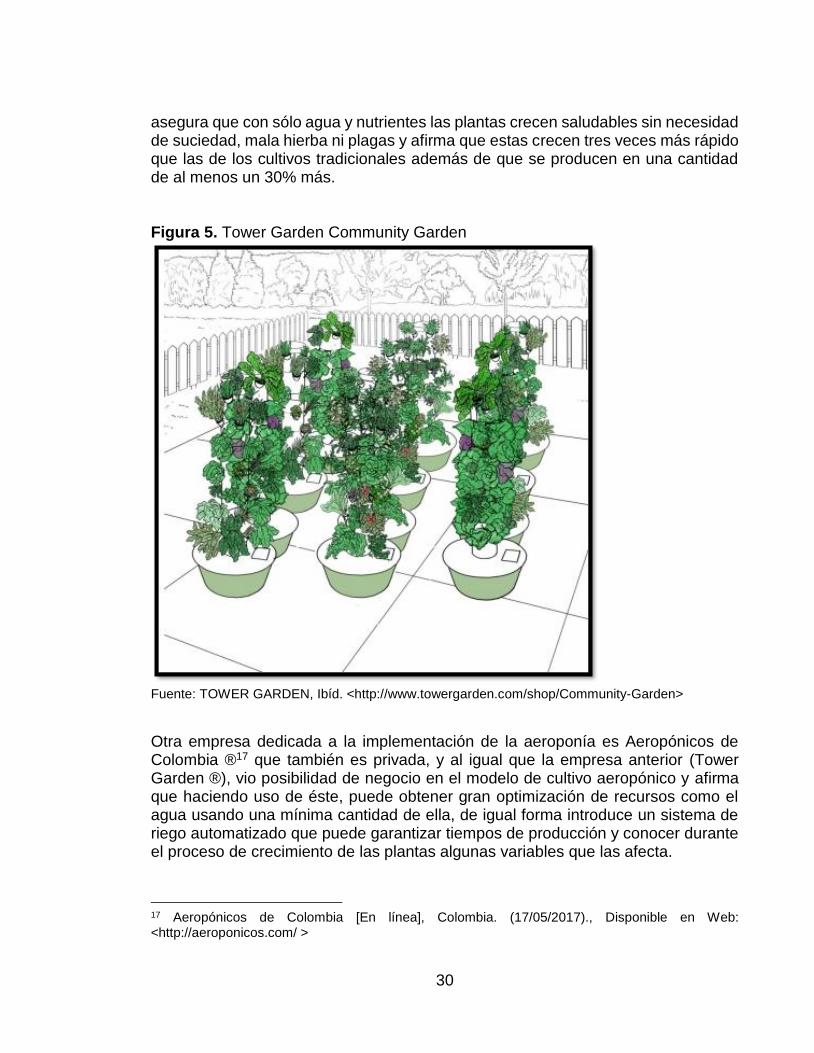
Por otro lado, y siguiendo el tema del sistema aeropónico, algunas empresas privadas y no privadas a nivel nacional e internacional han visto las grandes ventajas y beneficios que se pueden obtener o generar a partir de la implementación de este método en la producción de alimentos, hortalizas y plantas varias, así como flores y otras. Tower Garden ®16 es una de ellas, y del mismo es una empresa privada que diseñó un prototipo de torre y alrededor de ella puso orificios en donde van ubicadas las plantas como se muestra en la figura 5, usando un medio aeropónico. Tower Garden explica que usó una tecnología similar a la que usó la NASA para la aeroponía, y
16 TOWER GARDEN [En línea]. Estados Unidos. (06/12/2017) Disponible en web: <http://www.towergarden.com/>
30
asegura que con sólo agua y nutrientes las plantas crecen saludables sin necesidad de suciedad, mala hierba ni plagas y afirma que estas crecen tres veces más rápido que las de los cultivos tradicionales además de que se producen en una cantidad de al menos un 30% más. Figura 5. Tower Garden Community Garden
Fuente: TOWER GARDEN, Ibíd. <http://www.towergarden.com/shop/Community-Garden>
Otra empresa dedicada a la implementación de la aeroponía es Aeropónicos de Colombia ®17 que también es privada, y al igual que la empresa anterior (Tower Garden ®), vio posibilidad de negocio en el modelo de cultivo aeropónico y afirma que haciendo uso de éste, puede obtener gran optimización de recursos como el agua usando una mínima cantidad de ella, de igual forma introduce un sistema de riego automatizado que puede garantizar tiempos de producción y conocer durante el proceso de crecimiento de las plantas algunas variables que las afecta.
17 Aeropónicos de Colombia [En línea], Colombia. (17/05/2017)., Disponible en Web: <http://aeroponicos.com/ >
31
5. METODOLOGÍA
5.1. IDENTIFICAR SENSORES Y ACTUADORES REQUERIDOS PARA EL CULTIVO
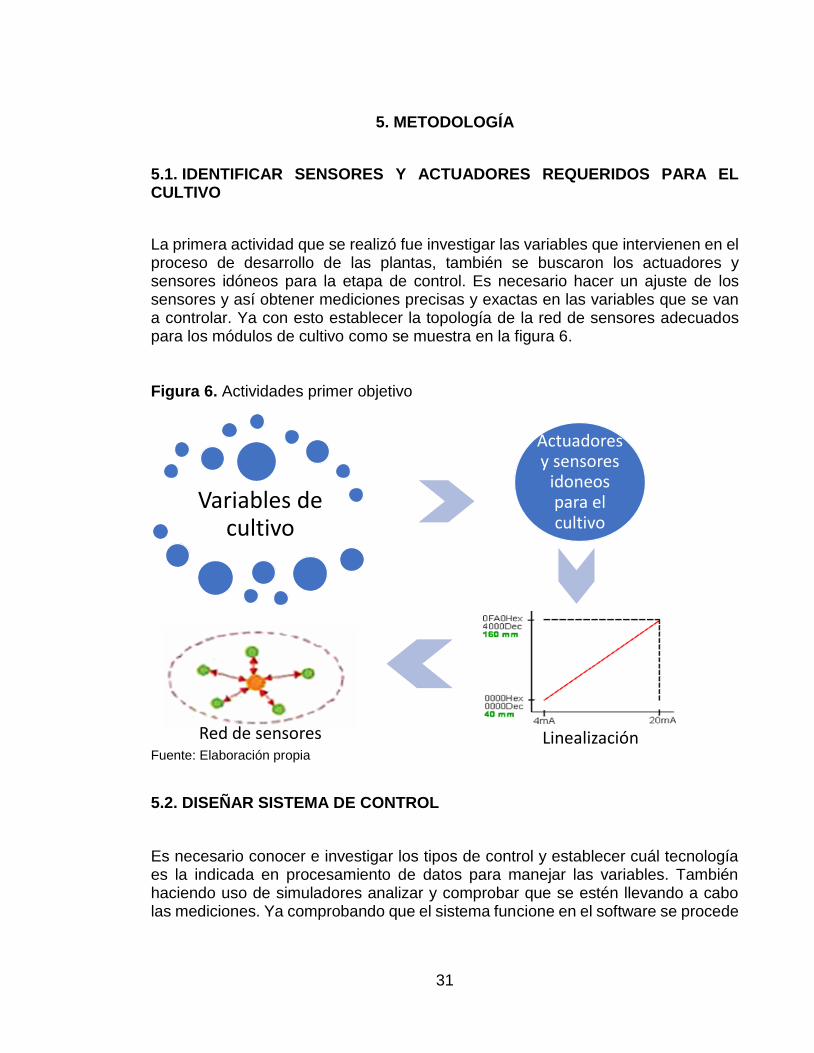
La primera actividad que se realizó fue investigar las variables que intervienen en el proceso de desarrollo de las plantas, también se buscaron los actuadores y sensores idóneos para la etapa de control. Es necesario hacer un ajuste de los sensores y así obtener mediciones precisas y exactas en las variables que se van a controlar. Ya con esto establecer la topología de la red de sensores adecuados para los módulos de cultivo como se muestra en la figura 6. Figura 6. Actividades primer objetivo
Fuente: Elaboración propia
5.2. DISEÑAR SISTEMA DE CONTROL
Es necesario conocer e investigar los tipos de control y establecer cuál tecnología es la indicada en procesamiento de datos para manejar las variables. También haciendo uso de simuladores analizar y comprobar que se estén llevando a cabo las mediciones. Ya comprobando que el sistema funcione en el software se procede
Variables de cultivo
Red de sensores
Actuadores y sensores
idoneos para el cultivo
Linealización
32
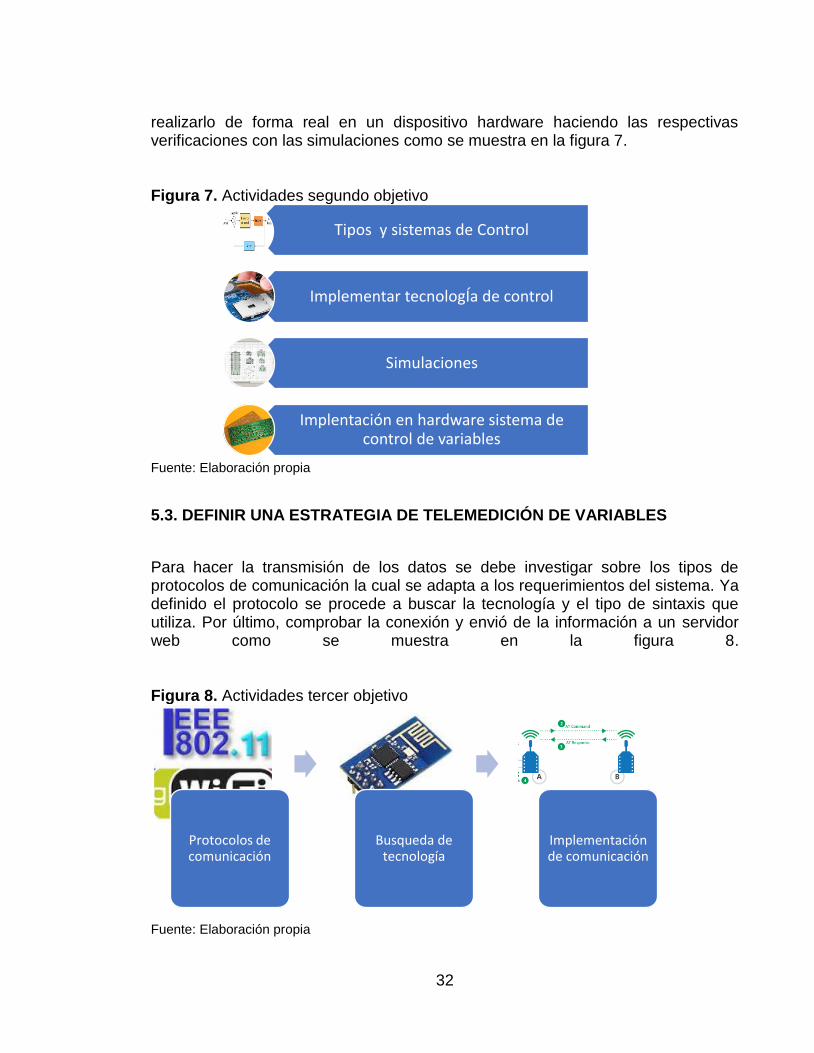
realizarlo de forma real en un dispositivo hardware haciendo las respectivas verificaciones con las simulaciones como se muestra en la figura 7. Figura 7. Actividades segundo objetivo
Fuente: Elaboración propia
5.3. DEFINIR UNA ESTRATEGIA DE TELEMEDICIÓN DE VARIABLES
Para hacer la transmisión de los datos se debe investigar sobre los tipos de protocolos de comunicación la cual se adapta a los requerimientos del sistema. Ya definido el protocolo se procede a buscar la tecnología y el tipo de sintaxis que utiliza. Por último, comprobar la conexión y envió de la información a un servidor web como se muestra en la figura 8. Figura 8. Actividades tercer objetivo
Fuente: Elaboración propia
Tipos y sistemas de Control
Implementar tecnologÍa de control
Simulaciones
Implentación en hardware sistema de control de variables
Protocolos de comunicación
Busqueda de tecnología
Implementación de comunicación
33
5.4. DISEÑAR INTERFAZ DE USUARIO PARA VISUALIZAR LAS VARIABLES DE CULTIVO
Seguido, se buscará la interfaz de usuario que se adapte a los requerimientos de visualización donde sus tiempos de retardo en el enlace de información no sea crítico. Así proceder a la etapa de programación de la interfaz de usuario. 5.5. REALIZAR UN PROTOTIPO INTEGRANDO LOS SISTEMAS DE CONTROL Y VISUALIZACIÓN
Para integrar las fases de control y comunicación es necesario implementar un prototipo de cultivo, así establecer la distribución de la red de sensores en el prototipo. Finalmente realizar los ajustes y pruebas pertinentes para un correcto funcionamiento del sistema como se muestra en la figura 9.
Figura 9. Actividades quinto objetivo
Fuente: Elaboración propia
Diseño Módulos de
cultivo
Integración de hardware y software en
prototipo
Ajustes y pruebas
34
6. MARCO CONCEPTUAL
6.1. HUERTO
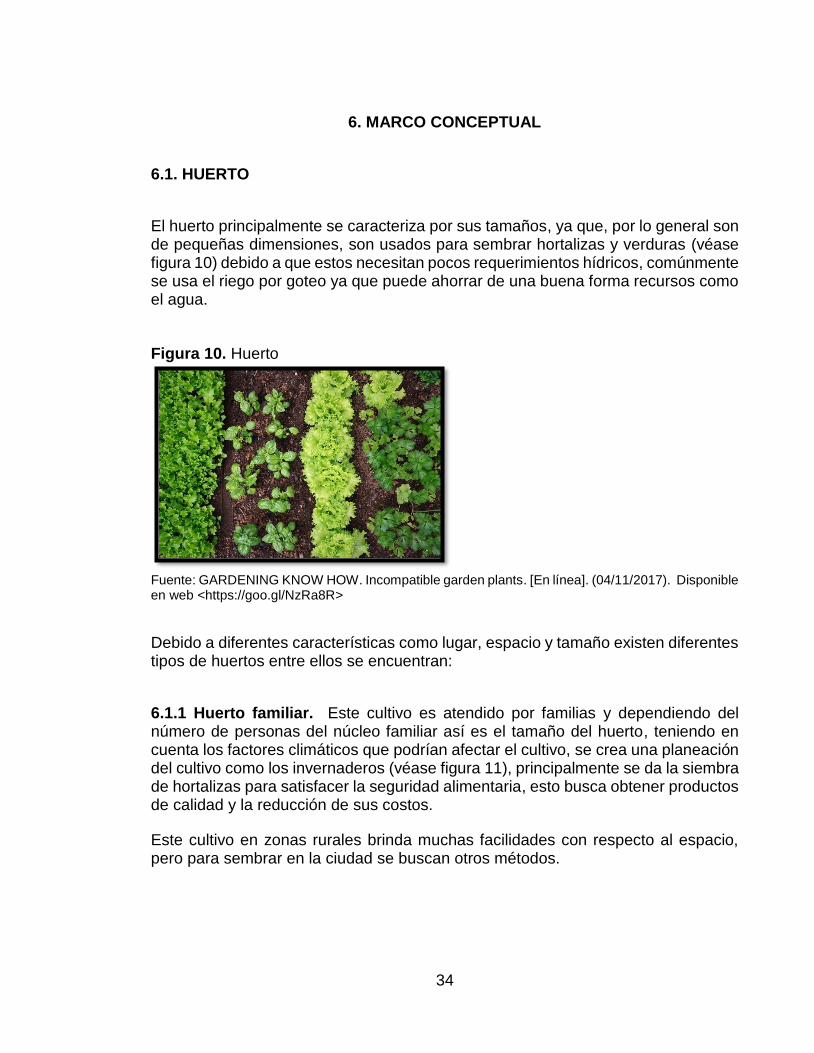
El huerto principalmente se caracteriza por sus tamaños, ya que, por lo general son de pequeñas dimensiones, son usados para sembrar hortalizas y verduras (véase figura 10) debido a que estos necesitan pocos requerimientos hídricos, comúnmente se usa el riego por goteo ya que puede ahorrar de una buena forma recursos como el agua.
Figura 10. Huerto
Fuente: GARDENING KNOW HOW. Incompatible garden plants. [En línea]. (04/11/2017). Disponible en web <https://goo.gl/NzRa8R>
Debido a diferentes características como lugar, espacio y tamaño existen diferentes tipos de huertos entre ellos se encuentran:
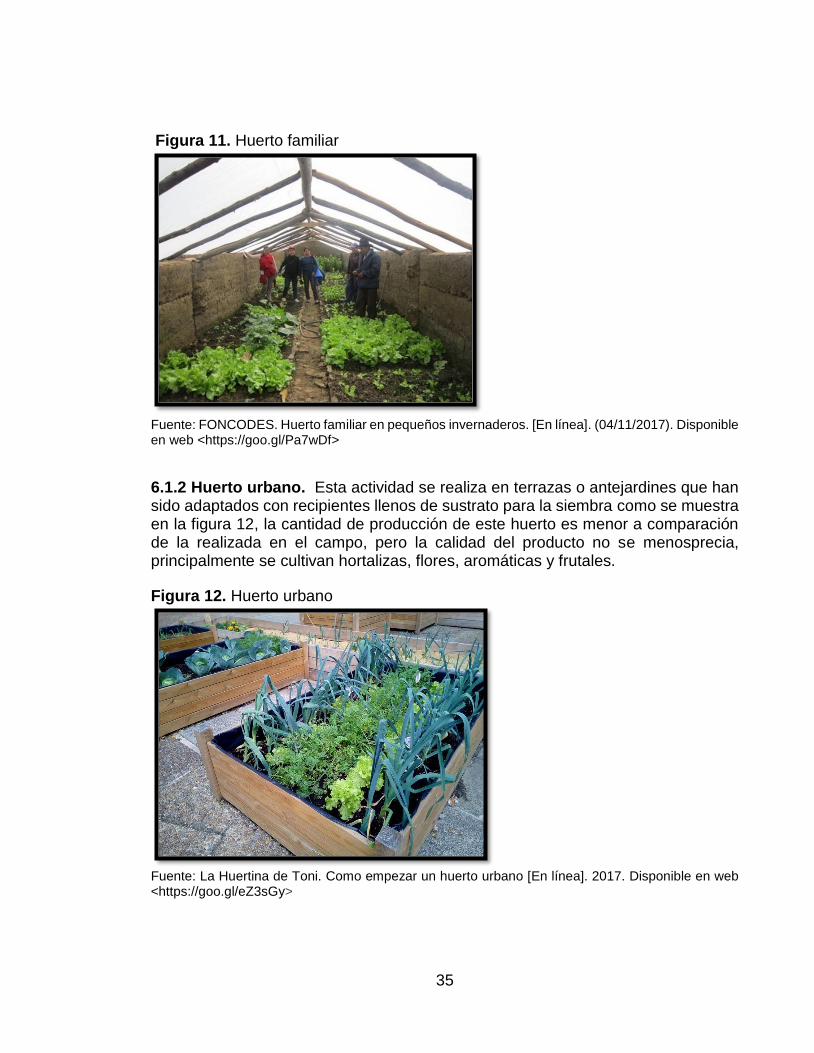
6.1.1 Huerto familiar. Este cultivo es atendido por familias y dependiendo del número de personas del núcleo familiar así es el tamaño del huerto, teniendo en cuenta los factores climáticos que podrían afectar el cultivo, se crea una planeación del cultivo como los invernaderos (véase figura 11), principalmente se da la siembra de hortalizas para satisfacer la seguridad alimentaria, esto busca obtener productos de calidad y la reducción de sus costos.
Este cultivo en zonas rurales brinda muchas facilidades con respecto al espacio, pero para sembrar en la ciudad se buscan otros métodos.
35
Figura 11. Huerto familiar
Fuente: FONCODES. Huerto familiar en pequeños invernaderos. [En línea]. (04/11/2017). Disponible en web <https://goo.gl/Pa7wDf>
6.1.2 Huerto urbano. Esta actividad se realiza en terrazas o antejardines que han sido adaptados con recipientes llenos de sustrato para la siembra como se muestra en la figura 12, la cantidad de producción de este huerto es menor a comparación de la realizada en el campo, pero la calidad del producto no se menosprecia, principalmente se cultivan hortalizas, flores, aromáticas y frutales.
Figura 12. Huerto urbano
Fuente: La Huertina de Toni. Como empezar un huerto urbano [En línea]. 2017. Disponible en web <https://goo.gl/eZ3sGy>

36
6.1.3 Cultivos transitorios. Estos cultivos por lo general tienen una vida menor a un año y para su cosecha tienen que removerse en su totalidad y para poder tener un nuevo ciclo productivo es necesario volver a sembrar la planta, entre estas plantas se encuentran: trigo, cebada, papa, algodón, flores y casi todas las hortalizas.
6.2. REQUERIMIENTOS EDALFOCLIMÁTICOS
Son los factores climáticos y de suelo que hay en una zona determinada, generalmente las plantas dependen de estos para su desarrollo estos generalmente son fertilización, temperatura, humedad relativa, humedad de suelo, intensidad luminosa, agua, pH, entre otros. Dependiendo del tipo de planta que se desee sembrar los valores de estos requerimientos varían. 6.3. MÉTODOS DE CULTIVO
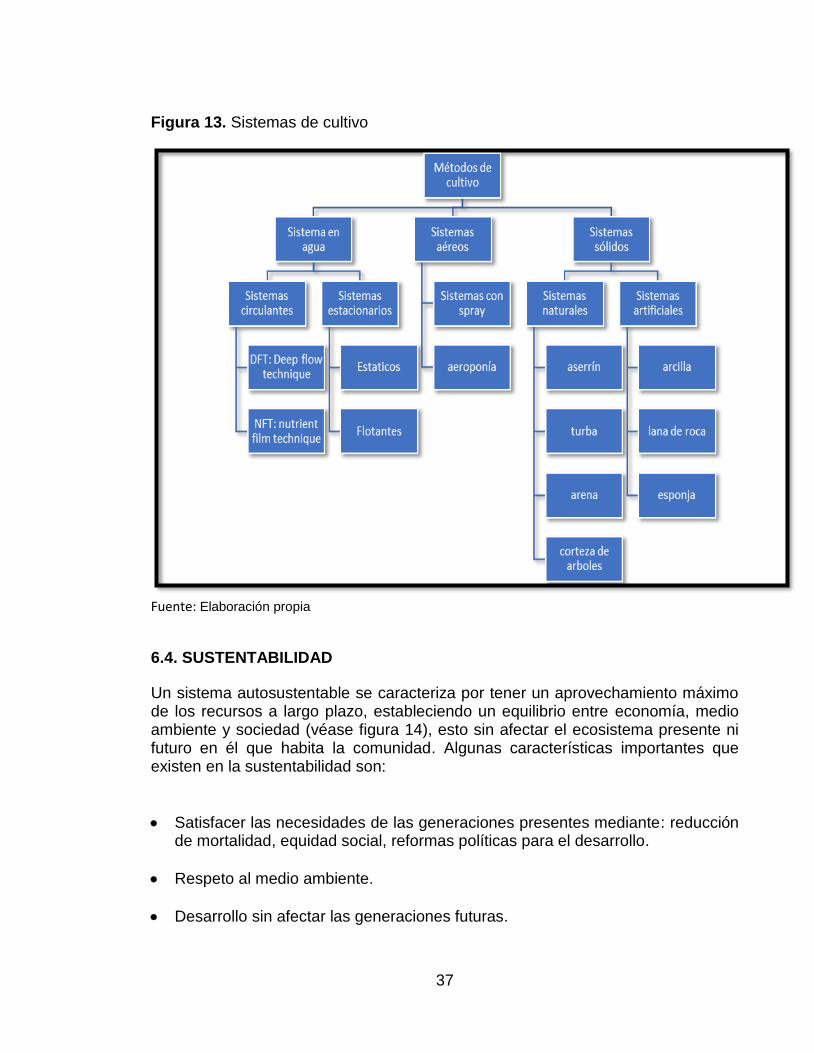
Es el aprovechamiento de cualquier recurso natural para sembrar una planta. Algunos de estos métodos son los sistemas en agua, las cuales hacen uso de la circulación de una solución nutritiva para el desarrollo de la planta; también están los sistemas aéreos la cual, por medio de neblina, transportan los nutrientes necesarios hacia la raíz de la planta por medio de un ambiente cerrado. Por último, están los sistemas solidos que hacen uso de medios naturales o artificiales y estos a su vez se dividen en orgánicos e inorgánicos y químicos. Cada uno de los métodos se caracteriza por sus sistemas de riego como se muestra en la figura 13.
37
Figura 13. Sistemas de cultivo
Fuente: Elaboración propia
6.4. SUSTENTABILIDAD
Un sistema autosustentable se caracteriza por tener un aprovechamiento máximo de los recursos a largo plazo, estableciendo un equilibrio entre economía, medio ambiente y sociedad (véase figura 14), esto sin afectar el ecosistema presente ni futuro en él que habita la comunidad. Algunas características importantes que existen en la sustentabilidad son:
Satisfacer las necesidades de las generaciones presentes mediante: reducción de mortalidad, equidad social, reformas políticas para el desarrollo.
Respeto al medio ambiente.
Desarrollo sin afectar las generaciones futuras.
38
Figura 14. Sustentabilidad
Fuente: UAN. Desarrollo sustentable [En línea]. (04/11/2017). Disponible en web <https://goo.gl/WUxuVu/>
6.5. PRODUCCIÓN DE HORTALIZAS
La producción de hortalizas en Colombia aún se realiza de manera muy rudimentaria usando siembras directas, de trasplante y almacigo, las cuales se llevan a cabo orgánicamente sobre un suelo previamente tratado. Pero, un factor importante de estos sistemas es el consumo de agua ya que en algunos casos dependiendo de la planta se necesita mayor cantidad de solución para nutrir la zona de producción, por eso, en diferentes escenarios se emplean técnicas de riego para ahorrar el preciado líquido. Una de ellas es la aeroponía.
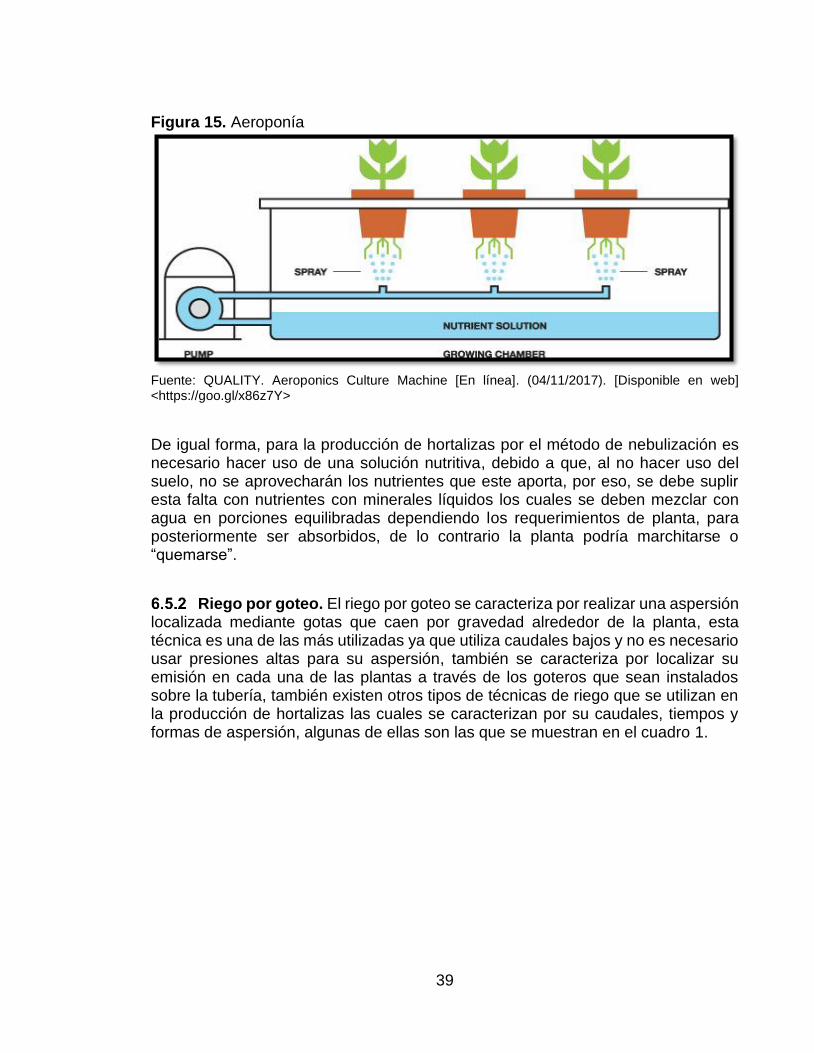
Aeroponía. Se caracteriza por no hacer uso de tierra para el desarrollo de una planta y más bien utilizar un entorno aéreo o de neblina para el desarrollo del cultivo donde todos los nutrientes que necesita la planta se transportan por este medio como se muestra en la figura 15, las gotas tienen que ser menor o igual a 50 micrómetros para que la raíz pueda absorber todos los nutrientes y mantenerse oxigenada. También este sistema brinda ventajas de ahorro de agua, energía y nutrientes e incrementa la producción hasta 4 veces más que otros métodos.
39
Figura 15. Aeroponía
Fuente: QUALITY. Aeroponics Culture Machine [En línea]. (04/11/2017). [Disponible en web] <https://goo.gl/x86z7Y>
De igual forma, para la producción de hortalizas por el método de nebulización es necesario hacer uso de una solución nutritiva, debido a que, al no hacer uso del suelo, no se aprovecharán los nutrientes que este aporta, por eso, se debe suplir esta falta con nutrientes con minerales líquidos los cuales se deben mezclar con agua en porciones equilibradas dependiendo los requerimientos de planta, para posteriormente ser absorbidos, de lo contrario la planta podría marchitarse o “quemarse”.
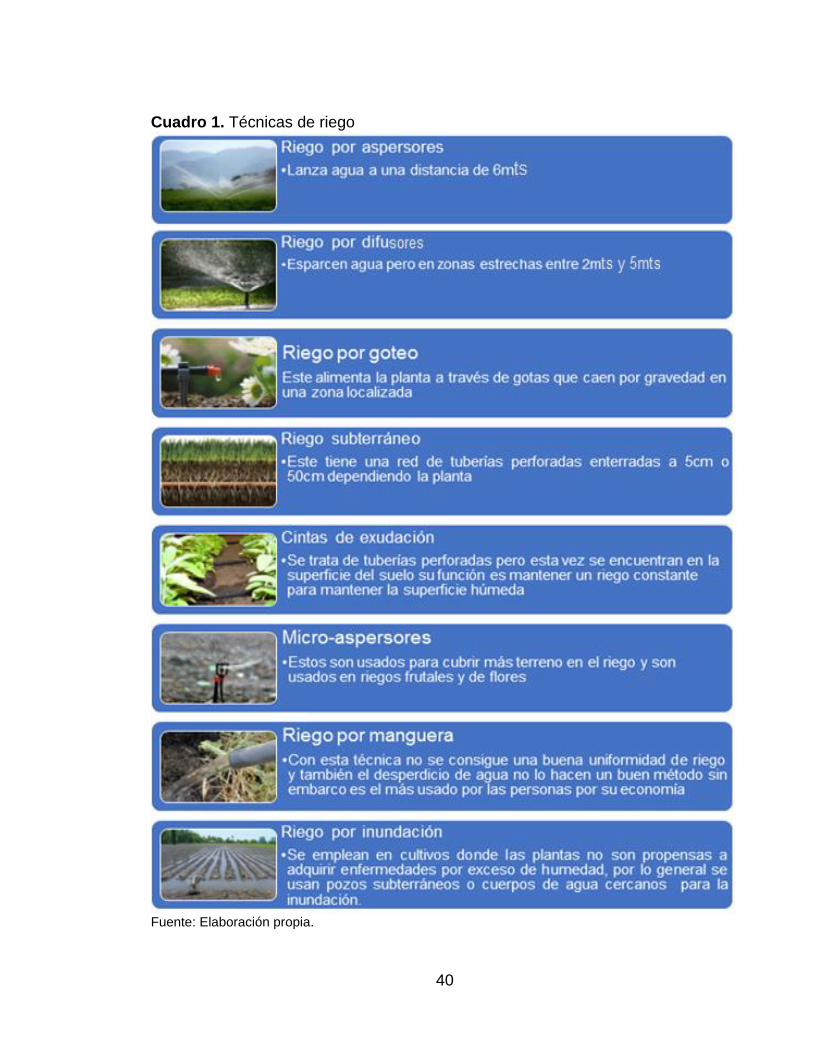
Riego por goteo. El riego por goteo se caracteriza por realizar una aspersión localizada mediante gotas que caen por gravedad alrededor de la planta, esta técnica es una de las más utilizadas ya que utiliza caudales bajos y no es necesario usar presiones altas para su aspersión, también se caracteriza por localizar su emisión en cada una de las plantas a través de los goteros que sean instalados sobre la tubería, también existen otros tipos de técnicas de riego que se utilizan en la producción de hortalizas las cuales se caracterizan por su caudales, tiempos y formas de aspersión, algunas de ellas son las que se muestran en el cuadro 1.
40
Cuadro 1. Técnicas de riego
Fuente: Elaboración propia.
41
6.6. NUTRIENTES MINERALES
Para que la planta pueda desarrollarse se requieren una serie de nutrientes las cuales están divididos en dos grupos:
Macronutrientes, estos se caracterizan porque son necesarios en mayores cantidades para el crecimiento de la planta entre estos se encuentran el Nitrógeno (N), Fosforo (P), Potasio (K), Magnesio (Mg), Azufre (S), Calcio (Ca).
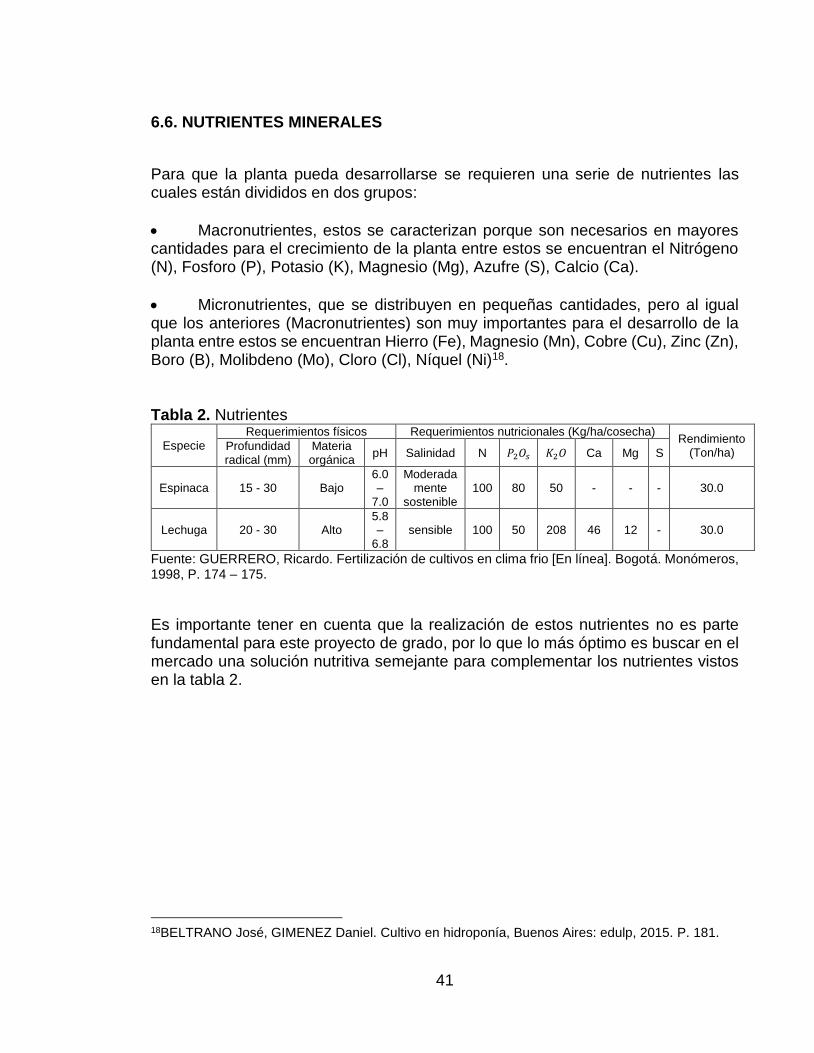
Micronutrientes, que se distribuyen en pequeñas cantidades, pero al igual que los anteriores (Macronutrientes) son muy importantes para el desarrollo de la planta entre estos se encuentran Hierro (Fe), Magnesio (Mn), Cobre (Cu), Zinc (Zn), Boro (B), Molibdeno (Mo), Cloro (Cl), Níquel (Ni)18. Tabla 2. Nutrientes
Especie
Requerimientos físicos Requerimientos nutricionales (Kg/ha/cosecha) Rendimiento
(Ton/ha) Profundidad radical (mm)
Materia orgánica
pH Salinidad N 𝑃2𝑂𝑠 𝐾2𝑂 Ca Mg S
Espinaca 15 - 30 Bajo 6.0 –
7.0
Moderadamente
sostenible 100 80 50 - - - 30.0
Lechuga 20 - 30 Alto 5.8 –
6.8 sensible 100 50 208 46 12 - 30.0
Fuente: GUERRERO, Ricardo. Fertilización de cultivos en clima frio [En línea]. Bogotá. Monómeros, 1998, P. 174 – 175.
Es importante tener en cuenta que la realización de estos nutrientes no es parte fundamental para este proyecto de grado, por lo que lo más óptimo es buscar en el mercado una solución nutritiva semejante para complementar los nutrientes vistos en la tabla 2.
18BELTRANO José, GIMENEZ Daniel. Cultivo en hidroponía, Buenos Aires: edulp, 2015. P. 181.
42
7. MARCO TEÓRICO
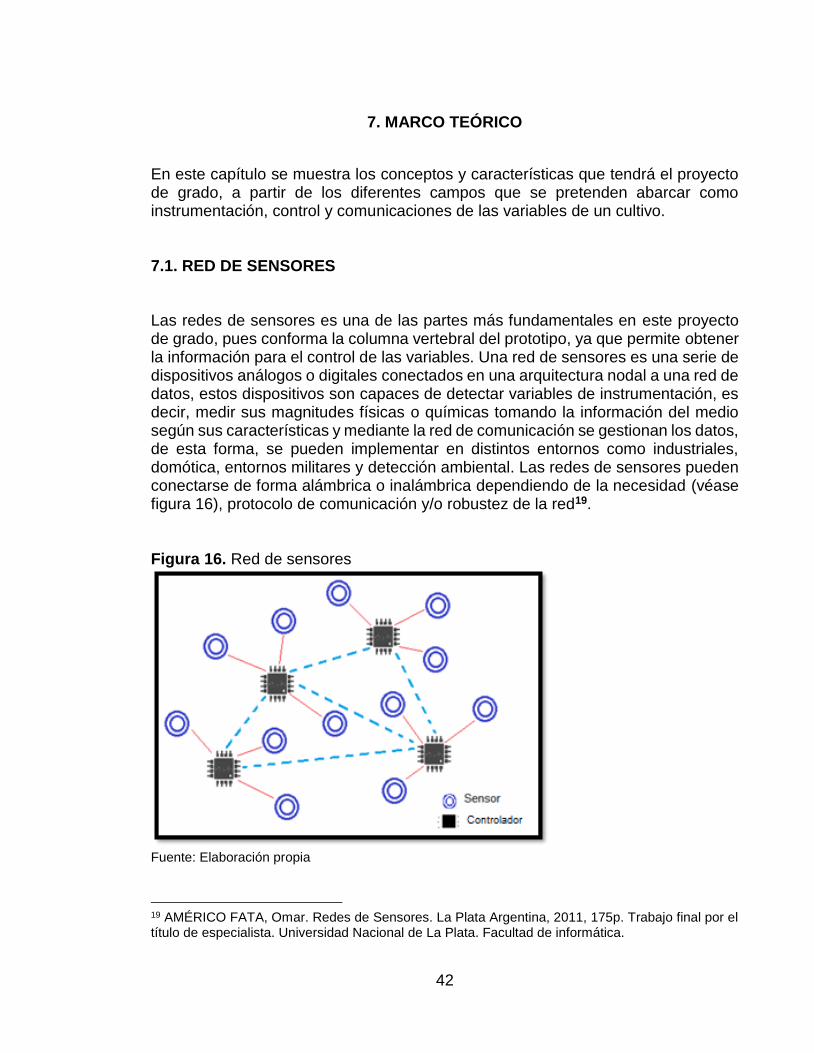
En este capítulo se muestra los conceptos y características que tendrá el proyecto de grado, a partir de los diferentes campos que se pretenden abarcar como instrumentación, control y comunicaciones de las variables de un cultivo. 7.1. RED DE SENSORES
Las redes de sensores es una de las partes más fundamentales en este proyecto de grado, pues conforma la columna vertebral del prototipo, ya que permite obtener la información para el control de las variables. Una red de sensores es una serie de dispositivos análogos o digitales conectados en una arquitectura nodal a una red de datos, estos dispositivos son capaces de detectar variables de instrumentación, es decir, medir sus magnitudes físicas o químicas tomando la información del medio según sus características y mediante la red de comunicación se gestionan los datos, de esta forma, se pueden implementar en distintos entornos como industriales, domótica, entornos militares y detección ambiental. Las redes de sensores pueden conectarse de forma alámbrica o inalámbrica dependiendo de la necesidad (véase figura 16), protocolo de comunicación y/o robustez de la red19. Figura 16. Red de sensores
Fuente: Elaboración propia
19 AMÉRICO FATA, Omar. Redes de Sensores. La Plata Argentina, 2011, 175p. Trabajo final por el título de especialista. Universidad Nacional de La Plata. Facultad de informática.
43
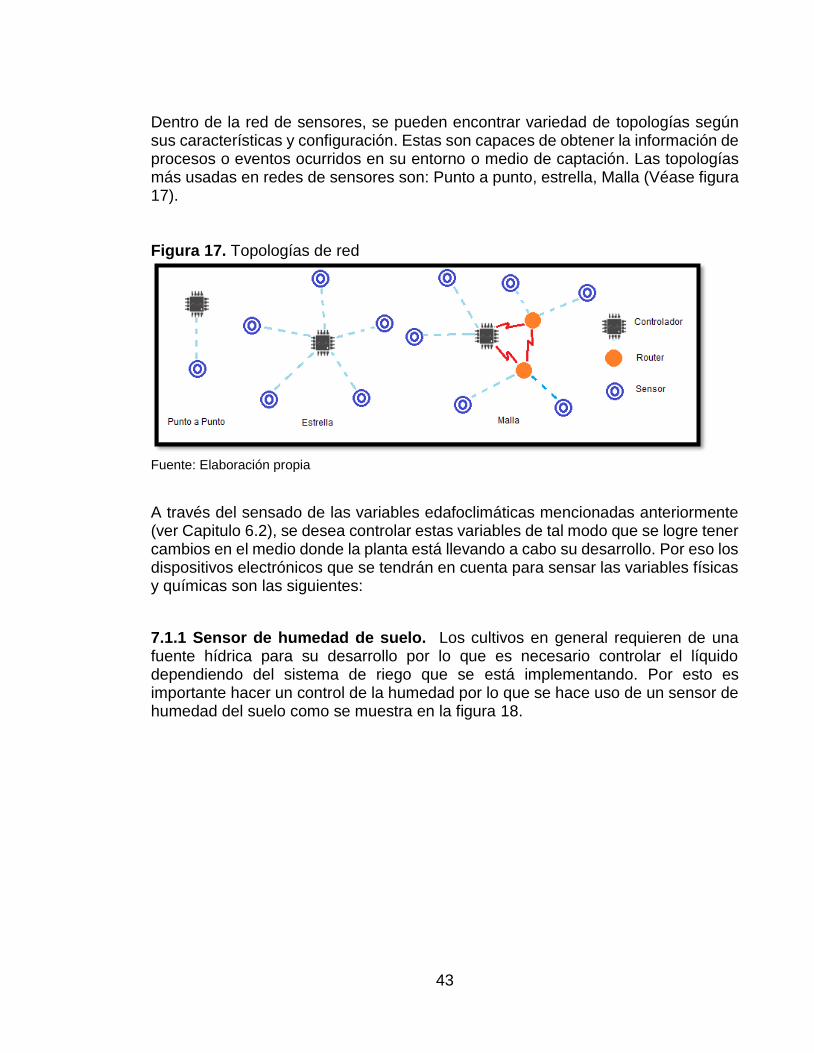
Dentro de la red de sensores, se pueden encontrar variedad de topologías según sus características y configuración. Estas son capaces de obtener la información de procesos o eventos ocurridos en su entorno o medio de captación. Las topologías más usadas en redes de sensores son: Punto a punto, estrella, Malla (Véase figura 17). Figura 17. Topologías de red
Fuente: Elaboración propia
A través del sensado de las variables edafoclimáticas mencionadas anteriormente (ver Capitulo 6.2), se desea controlar estas variables de tal modo que se logre tener cambios en el medio donde la planta está llevando a cabo su desarrollo. Por eso los dispositivos electrónicos que se tendrán en cuenta para sensar las variables físicas y químicas son las siguientes:
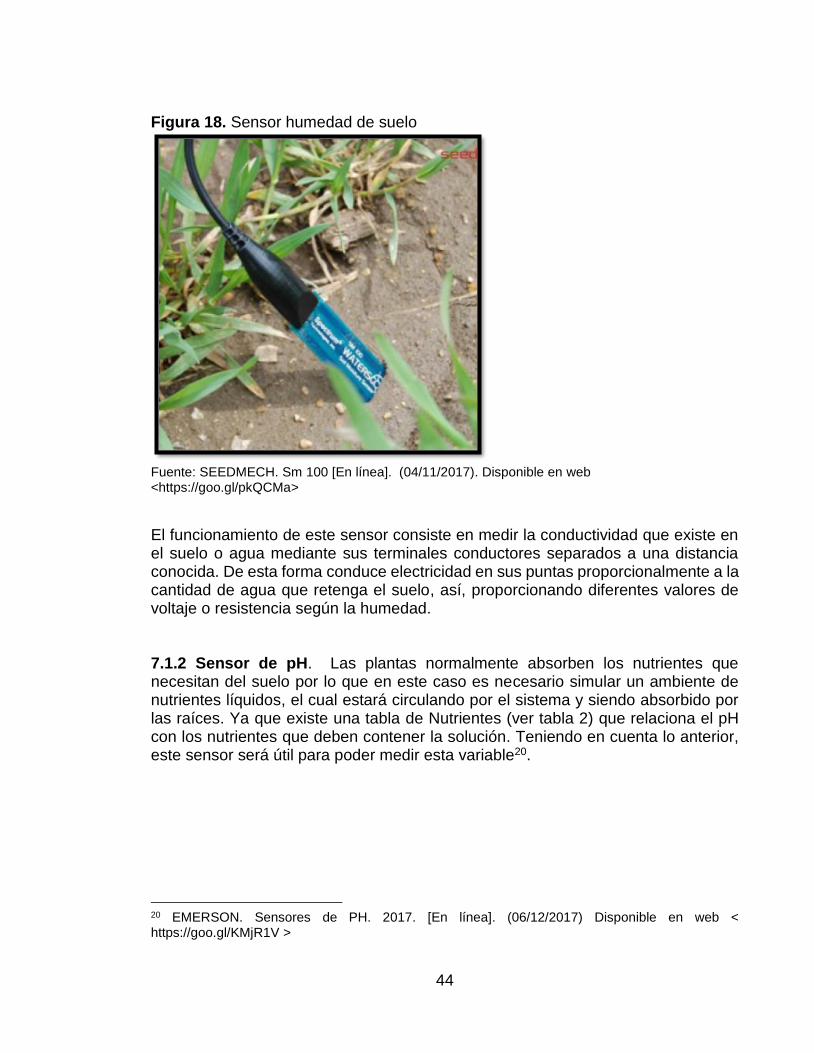
7.1.1 Sensor de humedad de suelo. Los cultivos en general requieren de una fuente hídrica para su desarrollo por lo que es necesario controlar el líquido dependiendo del sistema de riego que se está implementando. Por esto es importante hacer un control de la humedad por lo que se hace uso de un sensor de humedad del suelo como se muestra en la figura 18.
44
Figura 18. Sensor humedad de suelo
Fuente: SEEDMECH. Sm 100 [En línea]. (04/11/2017). Disponible en web <https://goo.gl/pkQCMa>
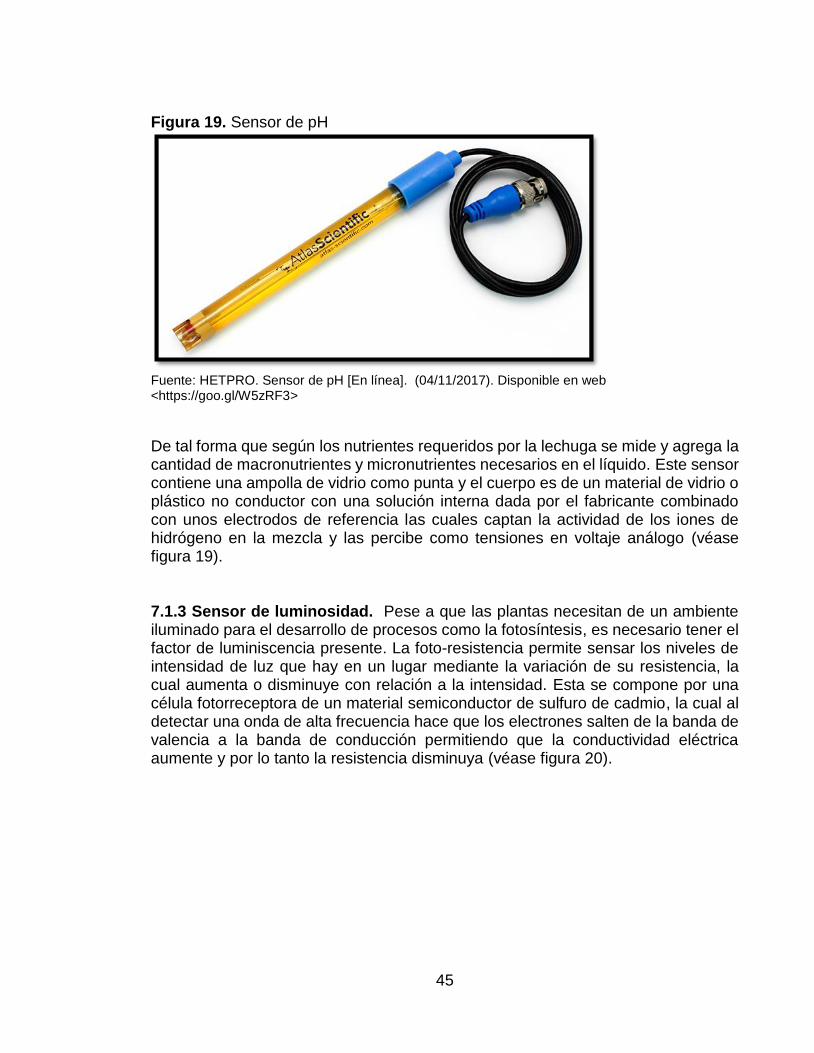
El funcionamiento de este sensor consiste en medir la conductividad que existe en el suelo o agua mediante sus terminales conductores separados a una distancia conocida. De esta forma conduce electricidad en sus puntas proporcionalmente a la cantidad de agua que retenga el suelo, así, proporcionando diferentes valores de voltaje o resistencia según la humedad. 7.1.2 Sensor de pH. Las plantas normalmente absorben los nutrientes que necesitan del suelo por lo que en este caso es necesario simular un ambiente de nutrientes líquidos, el cual estará circulando por el sistema y siendo absorbido por las raíces. Ya que existe una tabla de Nutrientes (ver tabla 2) que relaciona el pH con los nutrientes que deben contener la solución. Teniendo en cuenta lo anterior, este sensor será útil para poder medir esta variable20.
20 EMERSON. Sensores de PH. 2017. [En línea]. (06/12/2017) Disponible en web < https://goo.gl/KMjR1V >
45
Figura 19. Sensor de pH
Fuente: HETPRO. Sensor de pH [En línea]. (04/11/2017). Disponible en web <https://goo.gl/W5zRF3>
De tal forma que según los nutrientes requeridos por la lechuga se mide y agrega la cantidad de macronutrientes y micronutrientes necesarios en el líquido. Este sensor contiene una ampolla de vidrio como punta y el cuerpo es de un material de vidrio o plástico no conductor con una solución interna dada por el fabricante combinado con unos electrodos de referencia las cuales captan la actividad de los iones de hidrógeno en la mezcla y las percibe como tensiones en voltaje análogo (véase figura 19). 7.1.3 Sensor de luminosidad. Pese a que las plantas necesitan de un ambiente iluminado para el desarrollo de procesos como la fotosíntesis, es necesario tener el factor de luminiscencia presente. La foto-resistencia permite sensar los niveles de intensidad de luz que hay en un lugar mediante la variación de su resistencia, la cual aumenta o disminuye con relación a la intensidad. Esta se compone por una célula fotorreceptora de un material semiconductor de sulfuro de cadmio, la cual al detectar una onda de alta frecuencia hace que los electrones salten de la banda de valencia a la banda de conducción permitiendo que la conductividad eléctrica aumente y por lo tanto la resistencia disminuya (véase figura 20).

46
Figura 20. Foto-resistencia.
Fuente: Elaboración propia
7.1.4 Sensor de humedad relativa. Los cultivos de cierto modo dependen del medio en el que se encuentran, por lo tanto, la humedad relativa es un factor que se debe tener en cuenta para el desarrollo de las plantas. El sensor de humedad es un dispositivo que mide la cantidad de vapor presente en el aire en relación con la cantidad de agua suficiente para saturar el aire (véase figura 21).
Figura 21. Termo-higrómetro
Fuente: AIRALIA. El mejor higrómetro [En línea]. (04/11/2017). Disponible en web <https://goo.gl/HLMSpN>.
47
Este elemento al ponerse en contacto con las partículas de agua en el aire, y dependiendo de la cantidad de estas partículas las cuales tienen una relación de 0% a 100% a una temperatura de 203°K a 323°K, cambiará su valor interno21.
7.2. ACTUADOR
En la industria, la mayor parte de los procesos en el área de producción depende de los sistemas electromecánicos que se encargan de realizar actividades repetitivas, de fuerza o manejo de algún recurso del proceso. En electrónica a estos dispositivos se les denomina actuadores. Un actuador, es un dispositivo esencialmente mecánico cuya función es utilizar la fuerza producida por su sistema para mover o actuar a otro elemento, este a su vez, obedece (esclavo) a un sistema de control (maestro) la cual envía pulsos eléctricos para su funcionamiento según la necesidad que se esté llevando a cabo. Dependiendo del origen de la fuerza el actuador se denomina “neumático”, “hidráulico” o “eléctrico”22.
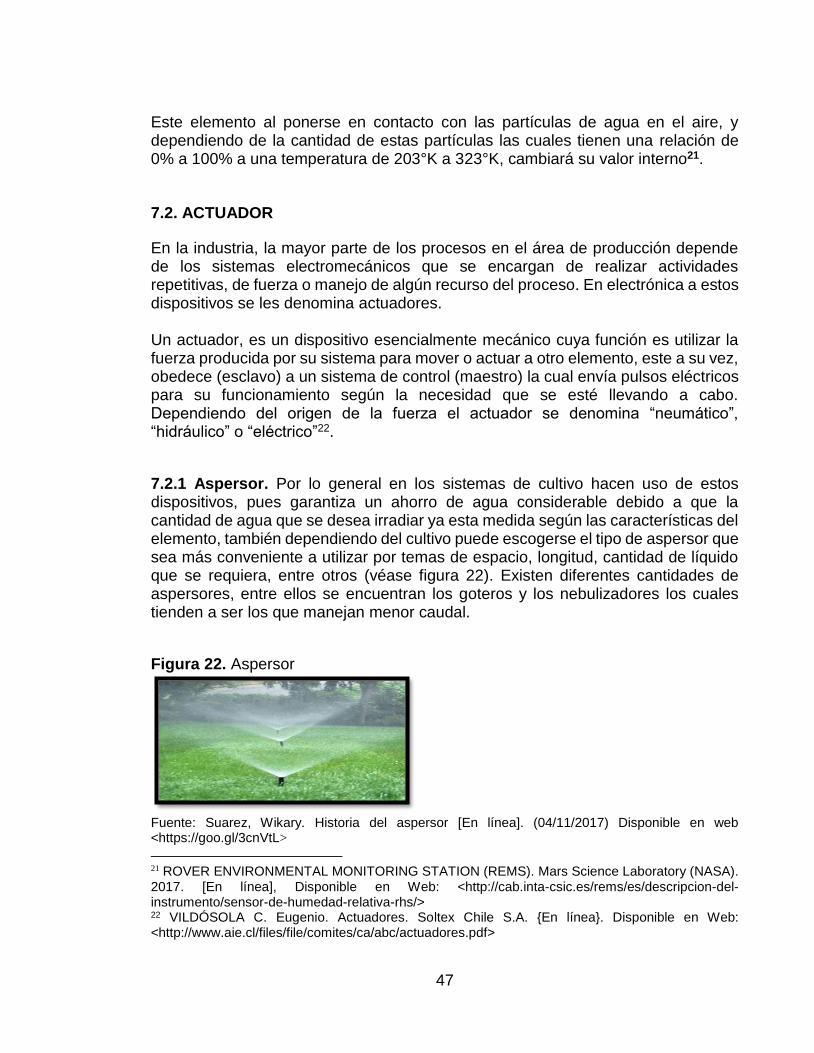
7.2.1 Aspersor. Por lo general en los sistemas de cultivo hacen uso de estos dispositivos, pues garantiza un ahorro de agua considerable debido a que la cantidad de agua que se desea irradiar ya esta medida según las características del elemento, también dependiendo del cultivo puede escogerse el tipo de aspersor que sea más conveniente a utilizar por temas de espacio, longitud, cantidad de líquido que se requiera, entre otros (véase figura 22). Existen diferentes cantidades de aspersores, entre ellos se encuentran los goteros y los nebulizadores los cuales tienden a ser los que manejan menor caudal.
Figura 22. Aspersor
Fuente: Suarez, Wikary. Historia del aspersor [En línea]. (04/11/2017) Disponible en web <https://goo.gl/3cnVtL>
21 ROVER ENVIRONMENTAL MONITORING STATION (REMS). Mars Science Laboratory (NASA). 2017. [En línea], Disponible en Web: <http://cab.inta-csic.es/rems/es/descripcion-del-instrumento/sensor-de-humedad-relativa-rhs/> 22 VILDÓSOLA C. Eugenio. Actuadores. Soltex Chile S.A. {En línea}. Disponible en Web: <http://www.aie.cl/files/file/comites/ca/abc/actuadores.pdf>
48
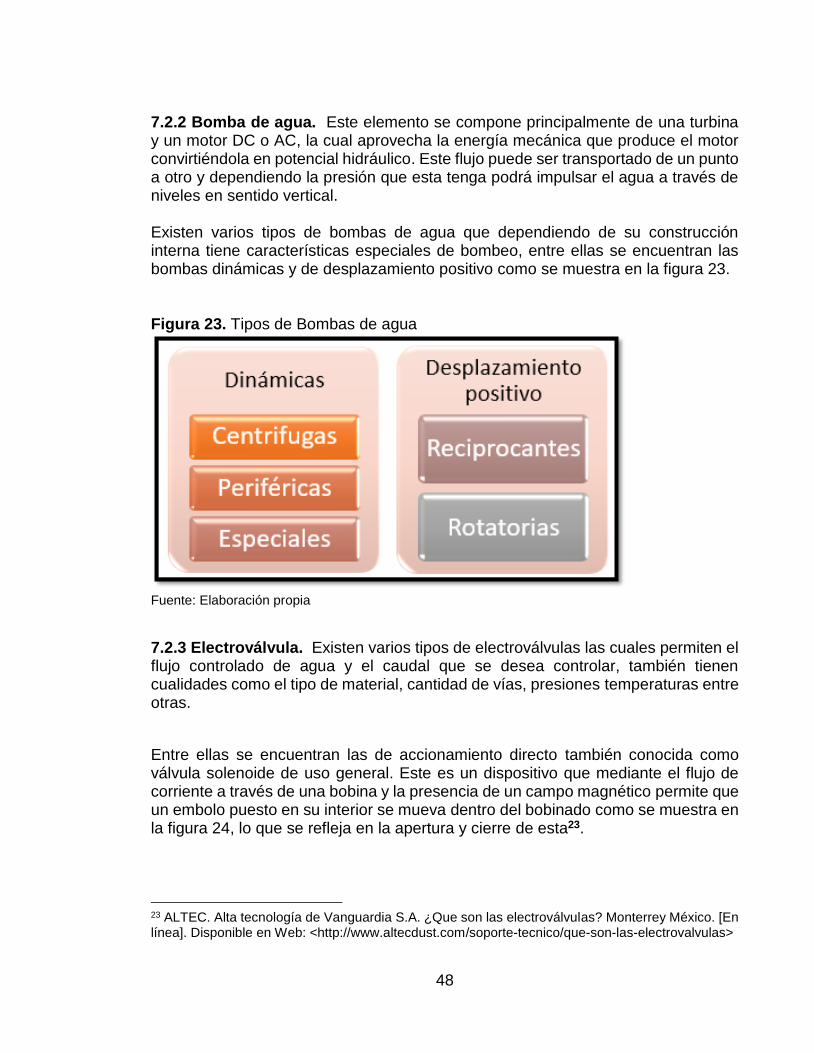
7.2.2 Bomba de agua. Este elemento se compone principalmente de una turbina y un motor DC o AC, la cual aprovecha la energía mecánica que produce el motor convirtiéndola en potencial hidráulico. Este flujo puede ser transportado de un punto a otro y dependiendo la presión que esta tenga podrá impulsar el agua a través de niveles en sentido vertical. Existen varios tipos de bombas de agua que dependiendo de su construcción interna tiene características especiales de bombeo, entre ellas se encuentran las bombas dinámicas y de desplazamiento positivo como se muestra en la figura 23. Figura 23. Tipos de Bombas de agua
Fuente: Elaboración propia
7.2.3 Electroválvula. Existen varios tipos de electroválvulas las cuales permiten el flujo controlado de agua y el caudal que se desea controlar, también tienen cualidades como el tipo de material, cantidad de vías, presiones temperaturas entre otras.
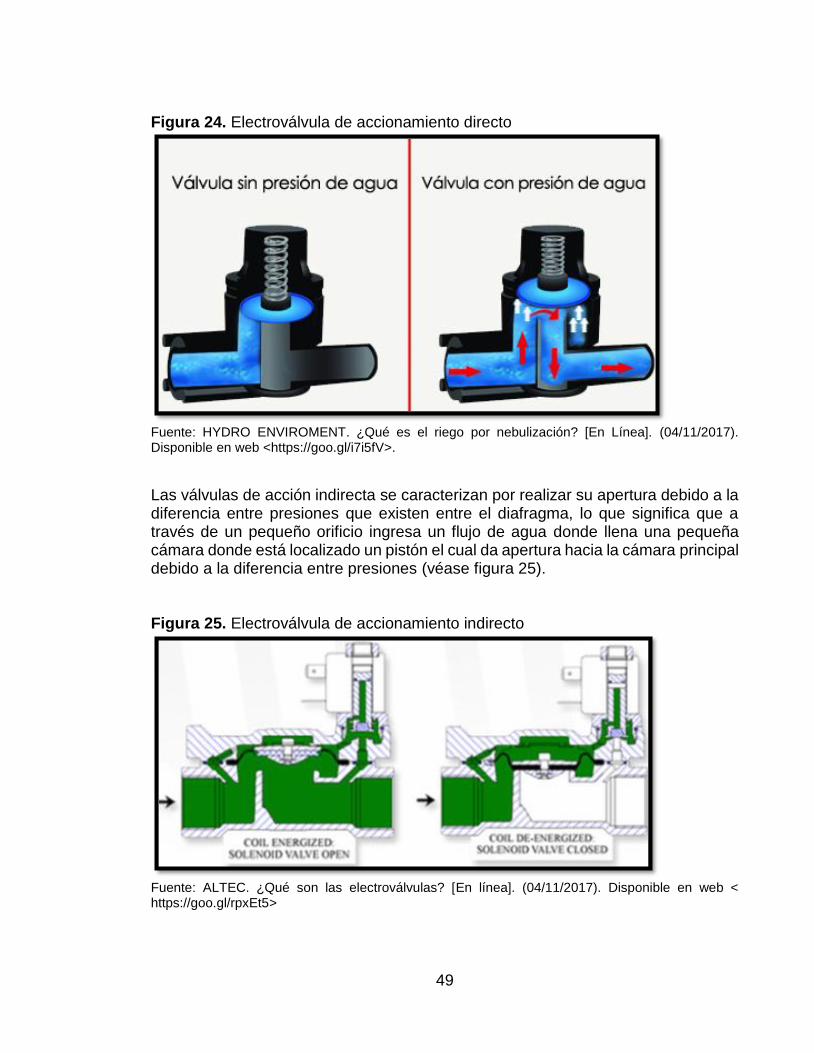
Entre ellas se encuentran las de accionamiento directo también conocida como válvula solenoide de uso general. Este es un dispositivo que mediante el flujo de corriente a través de una bobina y la presencia de un campo magnético permite que un embolo puesto en su interior se mueva dentro del bobinado como se muestra en la figura 24, lo que se refleja en la apertura y cierre de esta23.
23 ALTEC. Alta tecnología de Vanguardia S.A. ¿Que son las electroválvulas? Monterrey México. [En línea]. Disponible en Web: <http://www.altecdust.com/soporte-tecnico/que-son-las-electrovalvulas>
49
Figura 24. Electroválvula de accionamiento directo
Fuente: HYDRO ENVIROMENT. ¿Qué es el riego por nebulización? [En Línea]. (04/11/2017). Disponible en web <https://goo.gl/i7i5fV>.
Las válvulas de acción indirecta se caracterizan por realizar su apertura debido a la diferencia entre presiones que existen entre el diafragma, lo que significa que a través de un pequeño orificio ingresa un flujo de agua donde llena una pequeña cámara donde está localizado un pistón el cual da apertura hacia la cámara principal debido a la diferencia entre presiones (véase figura 25). Figura 25. Electroválvula de accionamiento indirecto
Fuente: ALTEC. ¿Qué son las electroválvulas? [En línea]. (04/11/2017). Disponible en web < https://goo.gl/rpxEt5>
50
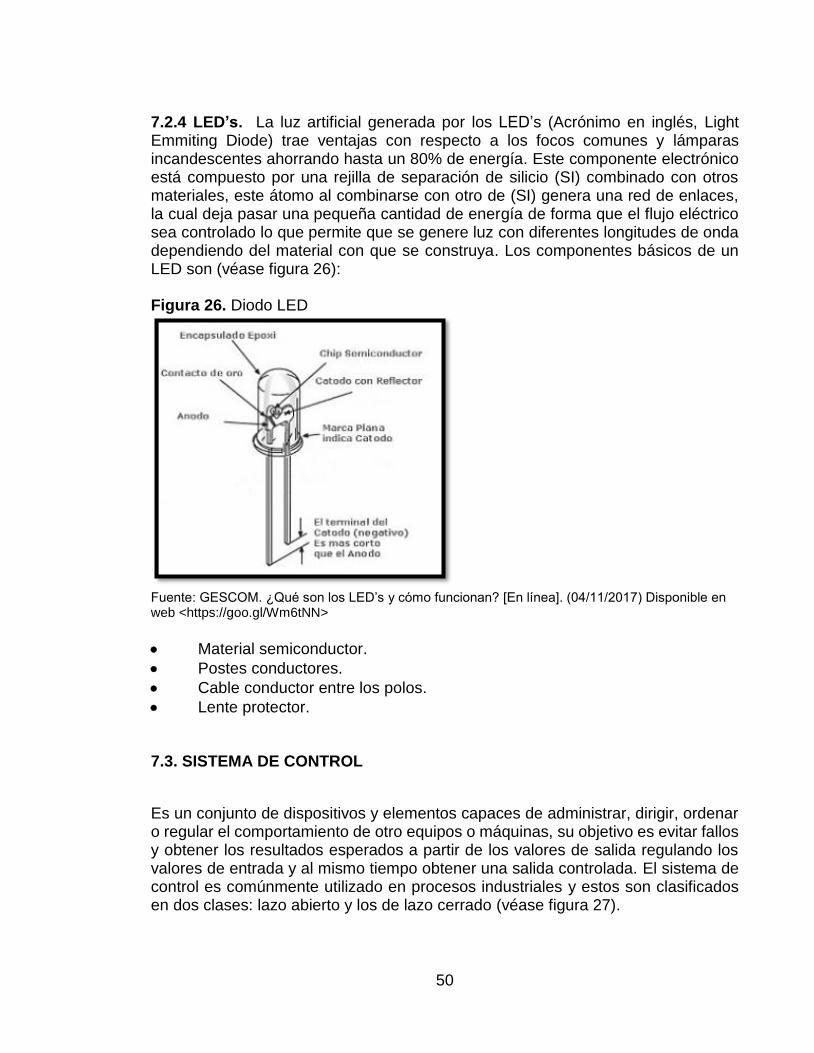
7.2.4 LED’s. La luz artificial generada por los LED’s (Acrónimo en inglés, Light Emmiting Diode) trae ventajas con respecto a los focos comunes y lámparas incandescentes ahorrando hasta un 80% de energía. Este componente electrónico está compuesto por una rejilla de separación de silicio (SI) combinado con otros materiales, este átomo al combinarse con otro de (SI) genera una red de enlaces, la cual deja pasar una pequeña cantidad de energía de forma que el flujo eléctrico sea controlado lo que permite que se genere luz con diferentes longitudes de onda dependiendo del material con que se construya. Los componentes básicos de un LED son (véase figura 26):
Figura 26. Diodo LED
Fuente: GESCOM. ¿Qué son los LED’s y cómo funcionan? [En línea]. (04/11/2017) Disponible en web <https://goo.gl/Wm6tNN>
Material semiconductor.
Postes conductores.
Cable conductor entre los polos.
Lente protector.
7.3. SISTEMA DE CONTROL
Es un conjunto de dispositivos y elementos capaces de administrar, dirigir, ordenar o regular el comportamiento de otro equipos o máquinas, su objetivo es evitar fallos y obtener los resultados esperados a partir de los valores de salida regulando los valores de entrada y al mismo tiempo obtener una salida controlada. El sistema de control es comúnmente utilizado en procesos industriales y estos son clasificados en dos clases: lazo abierto y los de lazo cerrado (véase figura 27).
51
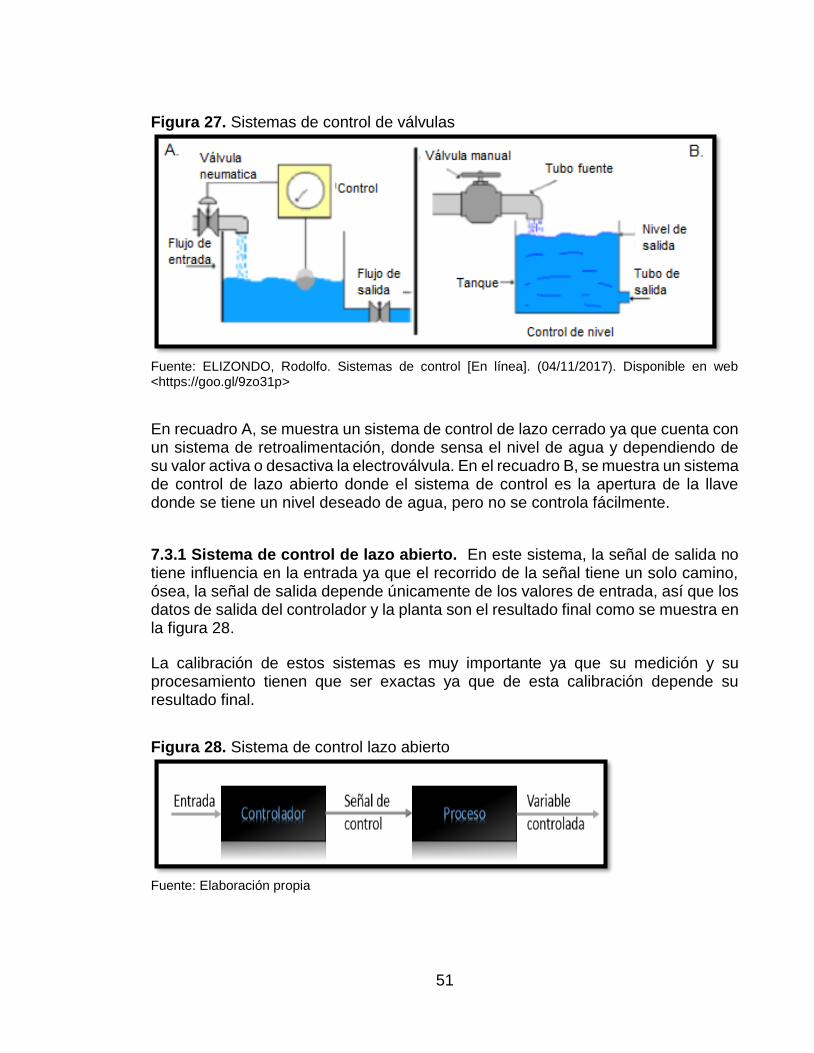
Figura 27. Sistemas de control de válvulas
Fuente: ELIZONDO, Rodolfo. Sistemas de control [En línea]. (04/11/2017). Disponible en web <https://goo.gl/9zo31p>
En recuadro A, se muestra un sistema de control de lazo cerrado ya que cuenta con un sistema de retroalimentación, donde sensa el nivel de agua y dependiendo de su valor activa o desactiva la electroválvula. En el recuadro B, se muestra un sistema de control de lazo abierto donde el sistema de control es la apertura de la llave donde se tiene un nivel deseado de agua, pero no se controla fácilmente.
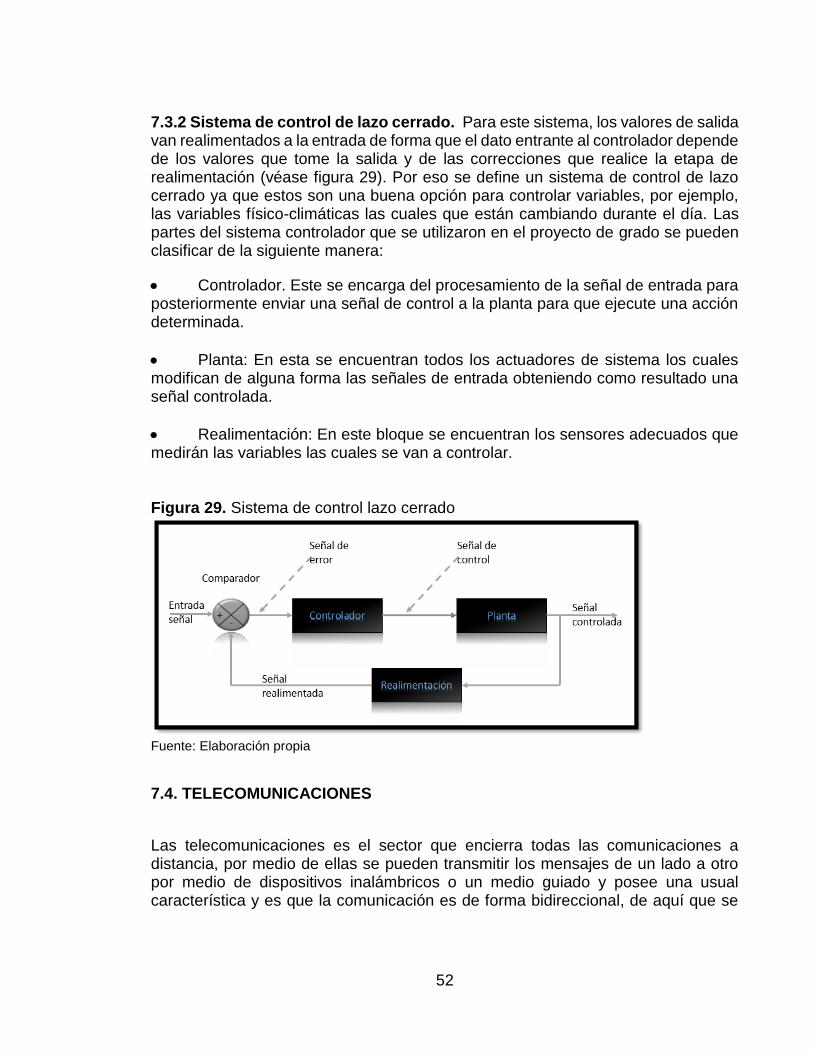
7.3.1 Sistema de control de lazo abierto. En este sistema, la señal de salida no tiene influencia en la entrada ya que el recorrido de la señal tiene un solo camino, ósea, la señal de salida depende únicamente de los valores de entrada, así que los datos de salida del controlador y la planta son el resultado final como se muestra en la figura 28.
La calibración de estos sistemas es muy importante ya que su medición y su procesamiento tienen que ser exactas ya que de esta calibración depende su resultado final.
Figura 28. Sistema de control lazo abierto
Fuente: Elaboración propia
52
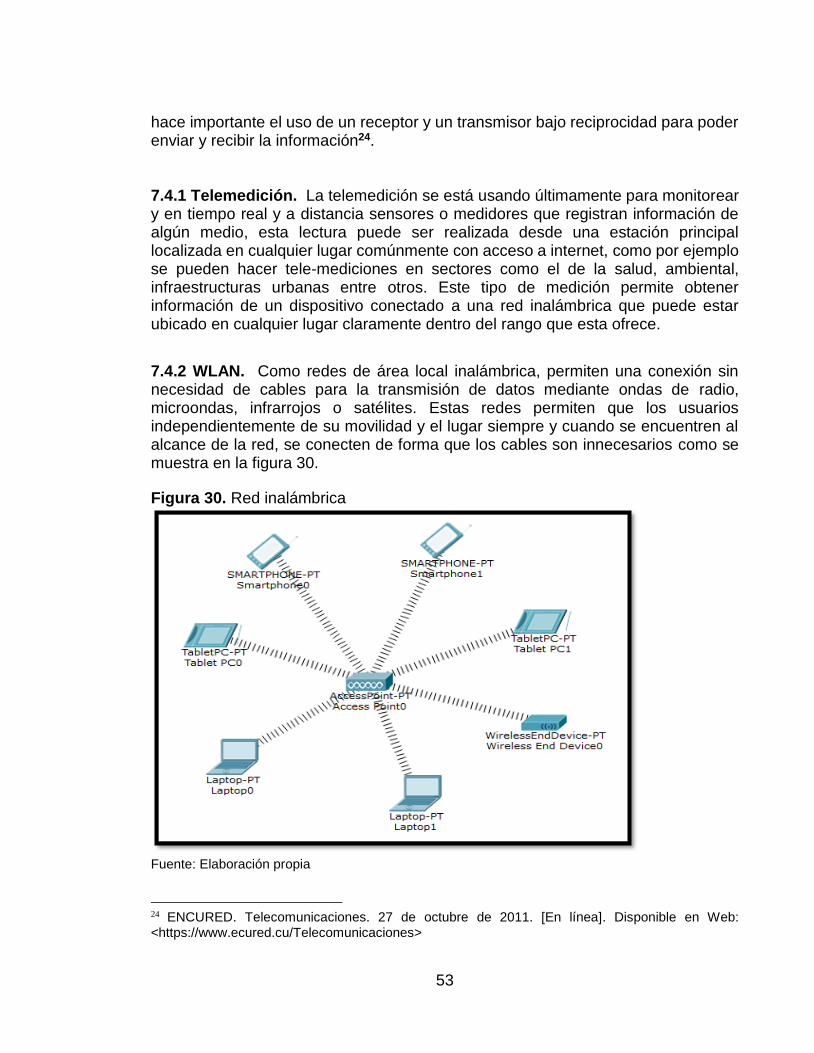
7.3.2 Sistema de control de lazo cerrado. Para este sistema, los valores de salida van realimentados a la entrada de forma que el dato entrante al controlador depende de los valores que tome la salida y de las correcciones que realice la etapa de realimentación (véase figura 29). Por eso se define un sistema de control de lazo cerrado ya que estos son una buena opción para controlar variables, por ejemplo, las variables físico-climáticas las cuales que están cambiando durante el día. Las partes del sistema controlador que se utilizaron en el proyecto de grado se pueden clasificar de la siguiente manera:
Controlador. Este se encarga del procesamiento de la señal de entrada para posteriormente enviar una señal de control a la planta para que ejecute una acción determinada.
Planta: En esta se encuentran todos los actuadores de sistema los cuales modifican de alguna forma las señales de entrada obteniendo como resultado una señal controlada.
Realimentación: En este bloque se encuentran los sensores adecuados que medirán las variables las cuales se van a controlar. Figura 29. Sistema de control lazo cerrado
Fuente: Elaboración propia
7.4. TELECOMUNICACIONES
Las telecomunicaciones es el sector que encierra todas las comunicaciones a distancia, por medio de ellas se pueden transmitir los mensajes de un lado a otro por medio de dispositivos inalámbricos o un medio guiado y posee una usual característica y es que la comunicación es de forma bidireccional, de aquí que se
53
hace importante el uso de un receptor y un transmisor bajo reciprocidad para poder enviar y recibir la información24. 7.4.1 Telemedición. La telemedición se está usando últimamente para monitorear y en tiempo real y a distancia sensores o medidores que registran información de algún medio, esta lectura puede ser realizada desde una estación principal localizada en cualquier lugar comúnmente con acceso a internet, como por ejemplo se pueden hacer tele-mediciones en sectores como el de la salud, ambiental, infraestructuras urbanas entre otros. Este tipo de medición permite obtener información de un dispositivo conectado a una red inalámbrica que puede estar ubicado en cualquier lugar claramente dentro del rango que esta ofrece.
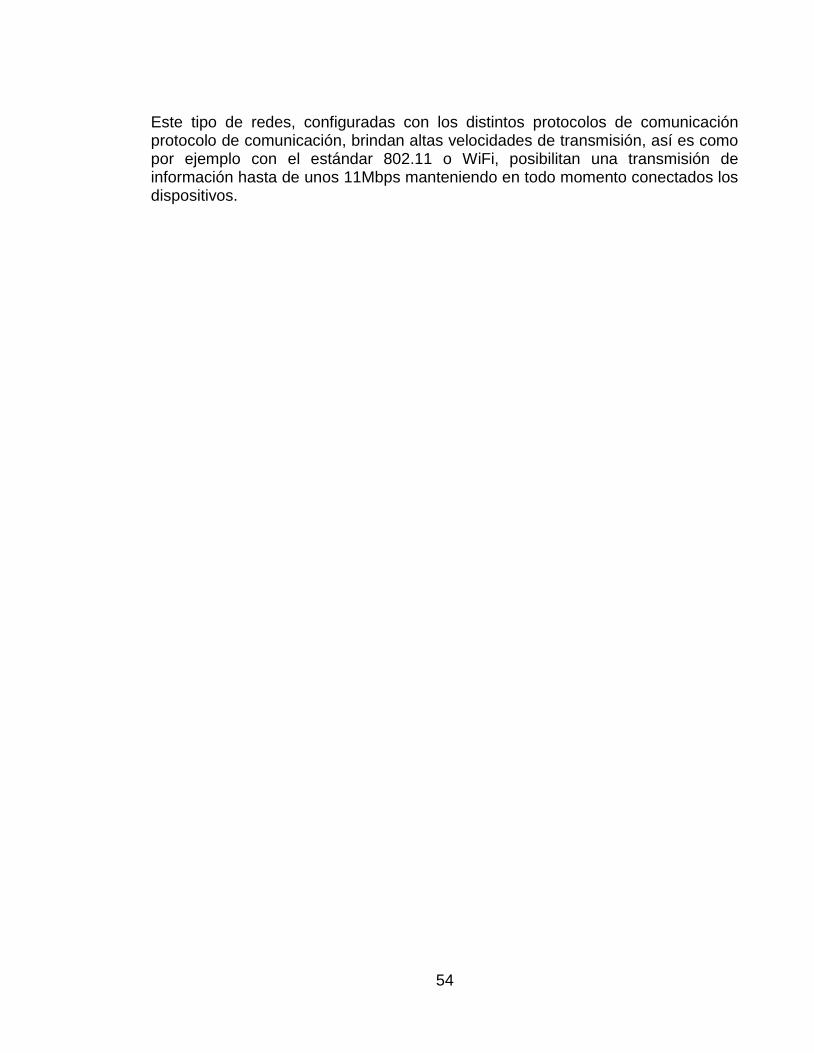
7.4.2 WLAN. Como redes de área local inalámbrica, permiten una conexión sin necesidad de cables para la transmisión de datos mediante ondas de radio, microondas, infrarrojos o satélites. Estas redes permiten que los usuarios independientemente de su movilidad y el lugar siempre y cuando se encuentren al alcance de la red, se conecten de forma que los cables son innecesarios como se muestra en la figura 30.
Figura 30. Red inalámbrica
Fuente: Elaboración propia
24 ENCURED. Telecomunicaciones. 27 de octubre de 2011. [En línea]. Disponible en Web: <https://www.ecured.cu/Telecomunicaciones>
54
Este tipo de redes, configuradas con los distintos protocolos de comunicación protocolo de comunicación, brindan altas velocidades de transmisión, así es como por ejemplo con el estándar 802.11 o WiFi, posibilitan una transmisión de información hasta de unos 11Mbps manteniendo en todo momento conectados los dispositivos.
55
8. EVALUACIÓN DE HORTALIZAS Y TECNOLOGÍAS PARA EL DESARROLLO DEL CULTIVO
Para la evaluación de las hortalizas y las tecnologías se realiza una ponderación la cual determina el elemento adecuado a utilizar, para determinar esta ponderación es necesario tener en cuenta el factor (peso relativo, PR), este se usa para asignar un porcentaje de importancia a la característica que se esté evaluando, para determinar este peso inicialmente se le otorgaran los mismos valores a cada una de las características, esto se hace dividiendo a 100 entre el número total de factores que se consideren importantes. Luego se le otorga un grado de importancia a cada una de ellas y se suma este porcentaje a pesos que se calcularon inicialmente. Grados de importancia
Muy alto= 10,0%
Alto= 7,5%
Medio= 0%
Bajo= -1%
Muy bajo= -2,5% Posteriormente se suman todos los pesos relativos si el resultado supera los 100 puntos el excedente se divide en el número de características que se tuvieron en cuenta y ese valor se le resta a cada una de ellas. Si el resultado es inferior a los 100 puntos el valor faltante se divide en el número de características que se tuvieron en cuenta y se le suma a cada una de ellas. Ahora, para asignar los valores de cada característica, a estos se les asigna una puntuación de 0 a 10, siendo cero el valor más bajo y diez el más alto, dicho valor será multiplicado por el peso relativo en porcentaje calculado, y posteriormente se suman los resultados de cada característica y se escoge la tecnología y planta que tenga mayor puntaje. 8.1. VARIABLES HORTALIZAS
Estas serán las variables bien sean físicas, químicas o climáticas que afectan el crecimiento y desarrollo normal de la planta. Las variables escogidas deben ser las que afectan más los cultivos urbanos “in-door” en la región de Bogotá. El tipo de planta que se escoge es de la familia de las hortalizas debido a que estas crecen en ambientes fríos como el de la región. Los aspectos que se tendrán en cuenta para escoger el peso relativo y la puntuación son donde son ponderados en la tabla 3.
56
Separación entre semillas. Tiene un peso relativo muy bajo porque solo se mantendrán allí hasta que cumplan con un tamaño requerido para posteriormente ser trasplantadas a los módulos aeropónicos, en el desarrollo las plantas no tendrán que disputar por los nutrientes como sucede en el cultivo orgánico, la separación que se toma con respecto al tamaño del vegetal en su fase de producción, por lo que se asignará un valor de 10 puntos para la planta que posea menor separación e irá descendiendo la puntación linealmente a medida que se encuentren valores más altos.
Porcentaje de germinación. Tiene peso relativo medio ya que de esto depende que germinen las plantas e inicie el cultivo, por lo que se asignará un valor de 10 puntos para la planta que posea mayor porcentaje e irá descendiendo la puntación linealmente a medida que se encuentren valores más bajos.
Humedad del suelo. Tiene un peso relativo alto porque es del agua y el suelo que la planta obtiene energía para su desarrollo, por lo que se asignará un valor de 10 puntos para la planta que posea suelo húmedo e irá descendiendo la puntación linealmente a medida que se encuentren diferentes humedades de suelo. Se usaron las siguientes abreviaciones. SF= Requiere suelo frio para germinar (fresco). ST= Requiere suelo tibio para germinar. TSF= Tolera suelo frio para germinar (fresco). SH= Requiere un suelo húmedo.
Cosecha tiempo de cosecha. Tiene peso relativo alto porque interesa que la planta tenga un ciclo corto de producción para tener un sistema de alta producción, por lo que se asignará un valor de 10 puntos para la planta que posea ciclo corto e irá descendiendo la puntación linealmente a medida que se encuentren valores más altos. Temperatura. Tiene un peso relativo bajo porque se busca que la hortaliza que se cultive crezca en temperaturas frías como la de Bogotá de 14°C a 22°C, por lo que se asignará un valor de 10 puntos para la planta que se ajuste más al clima e irá descendiendo la puntación linealmente a medida que se encuentren valores con poco ajuste. Humedad relativa. En la ciudad de Bogotá es del 60% al 80% y tiene un peso relativo muy alto porque es a través de la humedad las plantas hacen sus procesos de fotosíntesis y también esta ayuda para tener una buena oxigenación en las raíces la cual hace que aproveche mejor los nutrientes, por lo que se asignará un valor de 10 puntos para la planta que se ajuste mejor a la humedad e irá descendiendo la puntación linealmente a medida que se encuentren valores con poco ajuste.
57
Fotoperiodo. Tiene un peso relativo muy alto porque es a través de la luz que la planta toma energía para su desarrollo, pero hay que tener en cuenta que son aproximadamente 12 horas luz que posee nuestra región, por lo que se asignará un valor de 10 puntos para la planta que posea 12 horas e irá descendiendo la puntación linealmente a medida que se encuentren valores más altos. Requerimiento hídrico. Tiene un peso relativo muy alto porque este determina si el sistema es sustentable a través de la cantidad de insumos que se requieran, por lo que se asignará un valor de 10 puntos para la planta que posea menor requerimiento hídrico e irá descendiendo la puntación linealmente a medida que se encuentren valores más altos. Tamaño de la planta: Tiene un peso relativo bajo porque este solo determinará el espacio que ocupa una planta, por lo que se asignará un valor de 10 puntos para la planta que posea menor tamaño e irá descendiendo la puntación linealmente a medida que se encuentren valores más altos. Lugar de la siembra. Tiene un peso relativo muy bajo porque es donde se llevará a cabo el tipo de siembra de la planta que lo más factible es en semillero, por lo que se asignará un valor de 10 puntos para la planta que se siembre en semillero e irá descendiendo la puntación linealmente a medida que se encuentren diferentes lugares. pH. Tiene un peso relativo alto ya que es aquí donde se suministran los nutrientes a la planta y para determinar los nutrientes existen tablas comparativas con respecto a la acidez del líquido y se busca que tenga un pH neutro de 7, por lo que se asignará un valor de 10 puntos para la planta que posea este valor de pH e irá descendiendo la puntación linealmente a medida que se encuentren valores que no se ajusten.
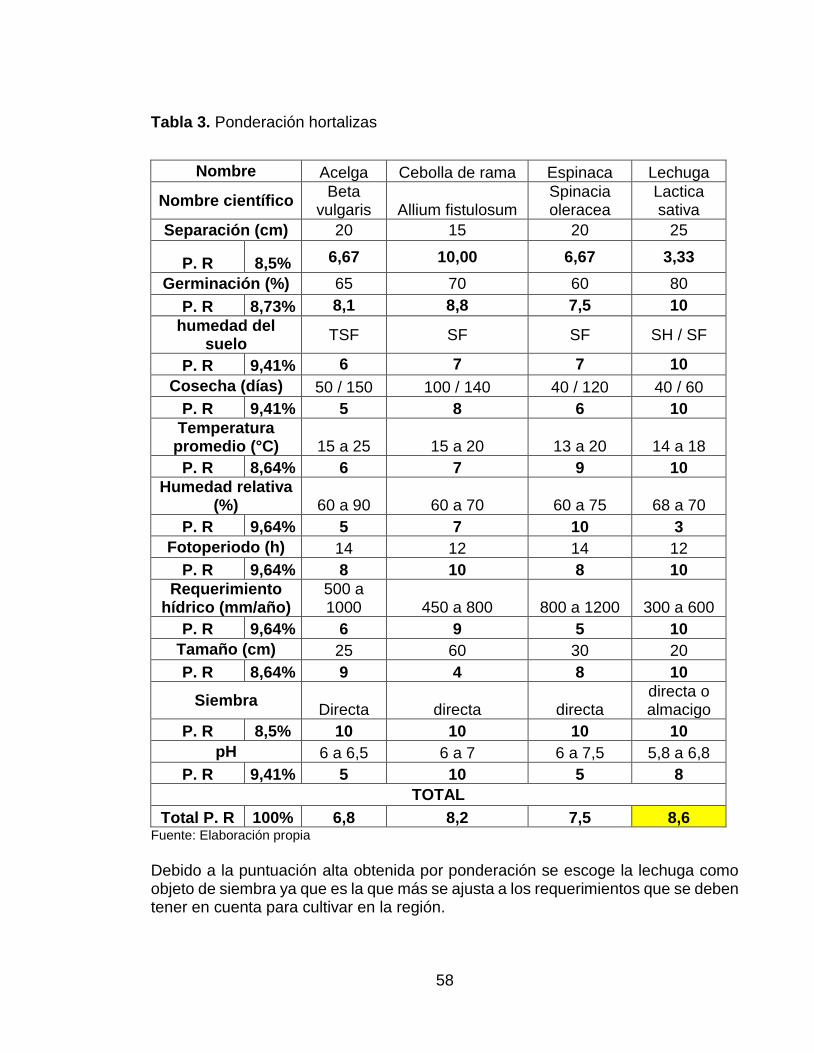
58
Tabla 3. Ponderación hortalizas
Nombre Acelga Cebolla de rama Espinaca Lechuga
Nombre científico Beta
vulgaris Allium fistulosum Spinacia oleracea
Lactica sativa
Separación (cm) 20 15 20 25
P. R 8,5% 6,67 10,00 6,67 3,33
Germinación (%) 65 70 60 80
P. R 8,73% 8,1 8,8 7,5 10
humedad del suelo
TSF SF SF SH / SF
P. R 9,41% 6 7 7 10
Cosecha (días) 50 / 150 100 / 140 40 / 120 40 / 60
P. R 9,41% 5 8 6 10
Temperatura promedio (°C) 15 a 25 15 a 20 13 a 20 14 a 18
P. R 8,64% 6 7 9 10
Humedad relativa (%) 60 a 90 60 a 70 60 a 75 68 a 70
P. R 9,64% 5 7 10 3
Fotoperiodo (h) 14 12 14 12
P. R 9,64% 8 10 8 10
Requerimiento hídrico (mm/año)
500 a 1000 450 a 800 800 a 1200 300 a 600
P. R 9,64% 6 9 5 10
Tamaño (cm) 25 60 30 20
P. R 8,64% 9 4 8 10
Siembra Directa directa directa
directa o almacigo
P. R 8,5% 10 10 10 10
pH 6 a 6,5 6 a 7 6 a 7,5 5,8 a 6,8
P. R 9,41% 5 10 5 8
TOTAL
Total P. R 100% 6,8 8,2 7,5 8,6 Fuente: Elaboración propia
Debido a la puntuación alta obtenida por ponderación se escoge la lechuga como objeto de siembra ya que es la que más se ajusta a los requerimientos que se deben tener en cuenta para cultivar en la región.
59
8.2. SENSORES
Son la fuente de recolección de datos de fenómenos físicos, químicos o ambientales. Las variables de instrumentación escogidas son las de peso relativo más alto de acuerdo con la tabla 3. Estas son: Humedad de suelo, Humedad relativa, Luminosidad, pH. Inicialmente, las siguientes características en la ponderación se tendrán en cuenta en la mayoría de los sensores debido a que es necesario que todos estos cumplan con los mismos parámetros, y posteriormente se evalúan las características especiales de cada elemento.
Lugar de venta. Tiene un peso relativo alto ya que el tiempo es fundamental para el desarrollo del proyecto y se busca que la adquisición sea rápida, por otro lado, también evitar sobrecostos de envíos e importaciones, por lo que se asignará un valor de 10 puntos para Colombia e irá descendiendo la puntación según el país donde se encuentre. Precio. Tiene un peso relativo medio porque es importante evitar tener sobrecostos en la adquisición del producto, por lo que se asignará un valor de 10 puntos para el sensor que tenga menor costo e irá descendiendo linealmente la puntación a medida se encuentren precios (pesos Colombianos COP) más altos. Tamaño. Tiene un peso relativo bajo porque el módulo de germinación tiene un tamaño de 76.2 mm pulgadas así que no podrá sobrepasar este valor, por lo que se asignará un valor de 10 puntos para el sensor que sea menor o igual a este tamaño e irá descendiendo linealmente la puntación a medida se encuentren valores más altos. Voltaje de entrada. Tiene un peso relativo alto porque se busca que maneje voltajes de 5 voltios esto para establecer un valor fijo para todos los sensores, por lo que se asignará un valor de 10 puntos para el sensor que su voltaje de entrada sea 5 voltios e irá descendiendo linealmente la puntación a medida se encuentren diferentes valores. Corriente. Tiene un peso relativo muy alto porque es necesario que él sensor tenga bajos niveles de consumo, por lo que se asignará un valor de 10 puntos para el sensor que maneje bajas corrientes e irá descendiendo linealmente la puntación a medida se encuentren valores más altos.
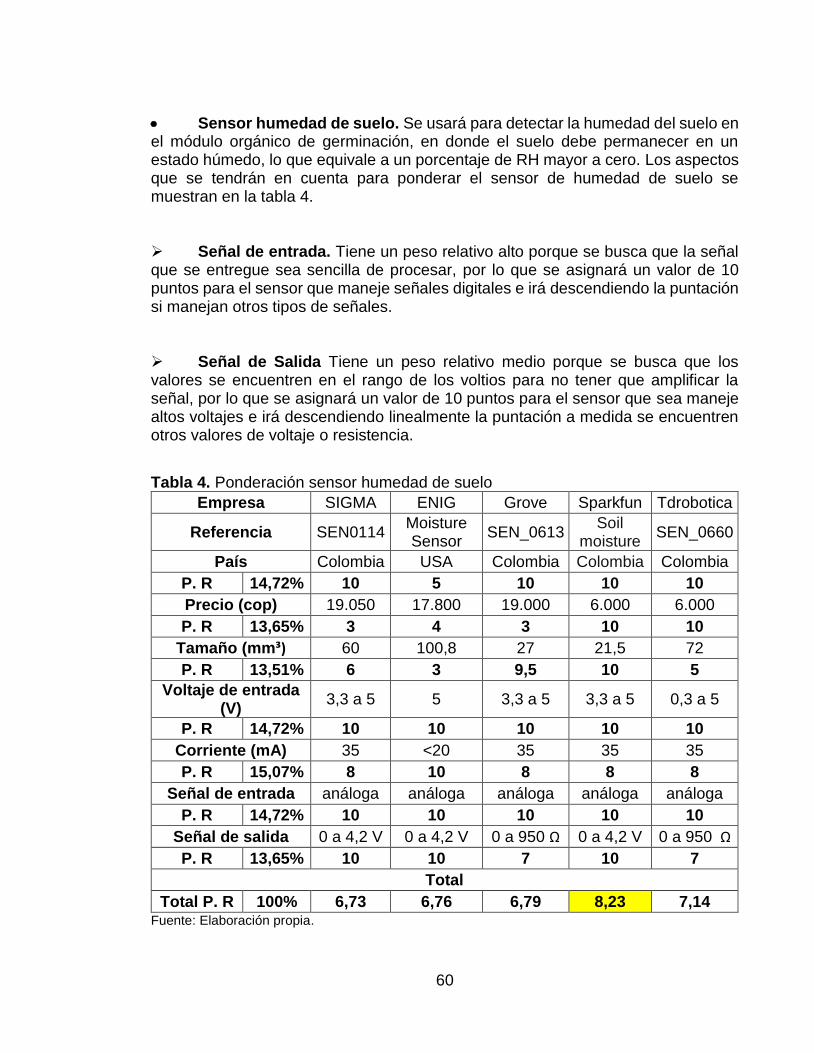
60
Sensor humedad de suelo. Se usará para detectar la humedad del suelo en el módulo orgánico de germinación, en donde el suelo debe permanecer en un estado húmedo, lo que equivale a un porcentaje de RH mayor a cero. Los aspectos que se tendrán en cuenta para ponderar el sensor de humedad de suelo se muestran en la tabla 4. Señal de entrada. Tiene un peso relativo alto porque se busca que la señal que se entregue sea sencilla de procesar, por lo que se asignará un valor de 10 puntos para el sensor que maneje señales digitales e irá descendiendo la puntación si manejan otros tipos de señales. Señal de Salida Tiene un peso relativo medio porque se busca que los valores se encuentren en el rango de los voltios para no tener que amplificar la señal, por lo que se asignará un valor de 10 puntos para el sensor que sea maneje altos voltajes e irá descendiendo linealmente la puntación a medida se encuentren otros valores de voltaje o resistencia.
Tabla 4. Ponderación sensor humedad de suelo
Empresa SIGMA ENIG Grove Sparkfun Tdrobotica
Referencia SEN0114 Moisture Sensor
SEN_0613 Soil
moisture SEN_0660
País Colombia USA Colombia Colombia Colombia
P. R 14,72% 10 5 10 10 10
Precio (cop) 19.050 17.800 19.000 6.000 6.000
P. R 13,65% 3 4 3 10 10
Tamaño (mm³) 60 100,8 27 21,5 72
P. R 13,51% 6 3 9,5 10 5
Voltaje de entrada (V)
3,3 a 5 5 3,3 a 5 3,3 a 5 0,3 a 5
P. R 14,72% 10 10 10 10 10
Corriente (mA) 35 <20 35 35 35
P. R 15,07% 8 10 8 8 8
Señal de entrada análoga análoga análoga análoga análoga
P. R 14,72% 10 10 10 10 10
Señal de salida 0 a 4,2 V 0 a 4,2 V 0 a 950 Ω 0 a 4,2 V 0 a 950 Ω
P. R 13,65% 10 10 7 10 7
Total
Total P. R 100% 6,73 6,76 6,79 8,23 7,14 Fuente: Elaboración propia.
61
Debido a la alta puntuación obtenida por ponderación se escoge el sensor “soil moisture” (Marca Sparkfun) como sensor de humedad de suelo ya que es el que más se ajusta a las necesidades del proyecto de grado.
Sensor Humedad relativa. Se usará para determinar el porcentaje de humedad que hay dentro de los módulos aeropónicos, debido a que la raíz necesita de un medio húmedo y oxigenado entre 68% y 70% de RH para que tenga un desarrollo normal, de igual forma es importante estos niveles para que el sistema radicular absorba sus nutrientes. Los aspectos que se tendrán en cuenta para ponderar el sensor de humedad de suelo se muestran en la tabla 5. Rango de humedad. Tiene un peso relativo muy alto porque es necesario los
rangos de humedad que entregue el sensor se ajusten a los que se necesitan (68%
a 70%), por lo que se asignará un valor de 10 puntos para el sensor que se ajuste
a estos valores e irá descendiendo linealmente la puntación a medida se encuentren
diferentes variaciones.
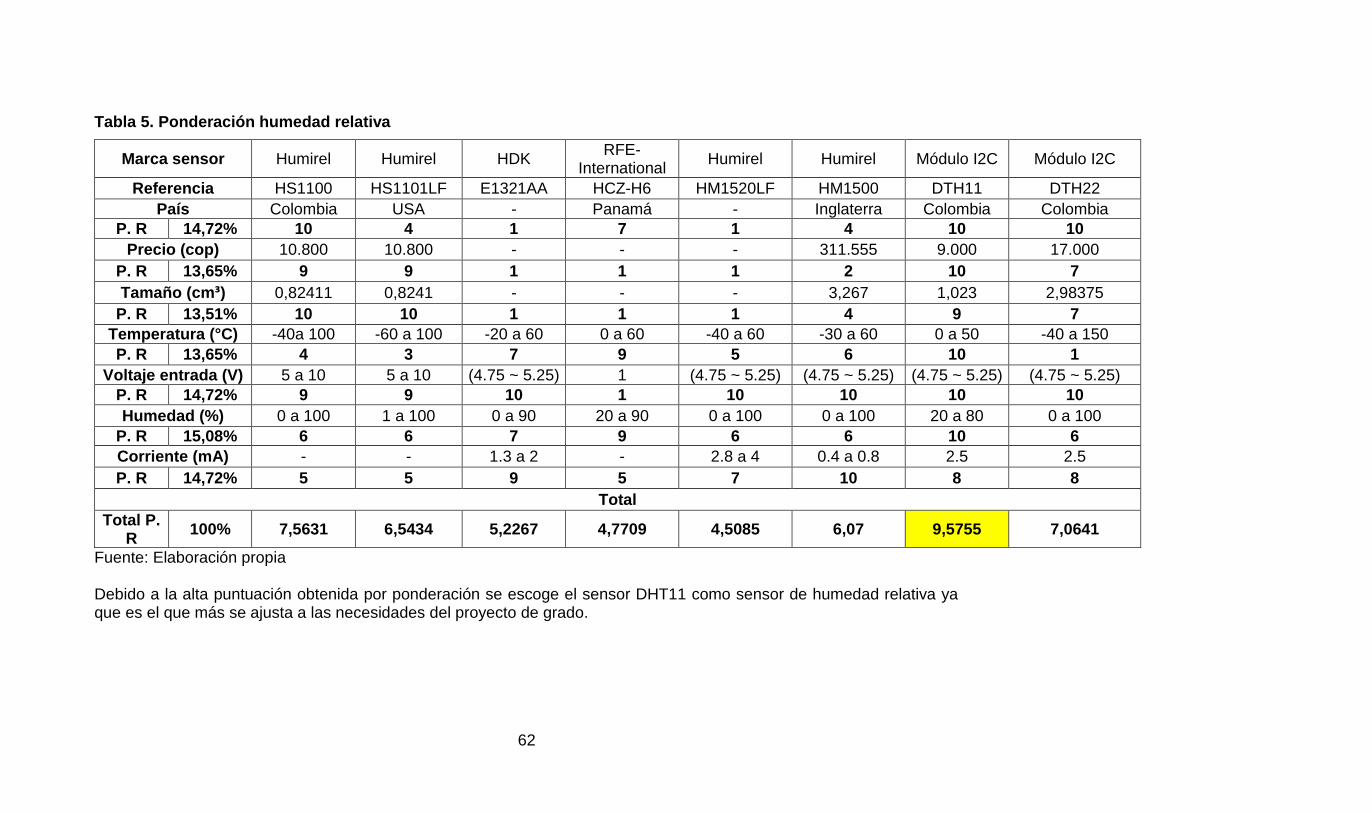
62
Tabla 5. Ponderación humedad relativa
Fuente: Elaboración propia Debido a la alta puntuación obtenida por ponderación se escoge el sensor DHT11 como sensor de humedad relativa ya que es el que más se ajusta a las necesidades del proyecto de grado.
Marca sensor Humirel Humirel HDK RFE-
International Humirel Humirel Módulo I2C Módulo I2C
Referencia HS1100 HS1101LF E1321AA HCZ-H6 HM1520LF HM1500 DTH11 DTH22
País Colombia USA - Panamá - Inglaterra Colombia Colombia
P. R 14,72% 10 4 1 7 1 4 10 10
Precio (cop) 10.800 10.800 - - - 311.555 9.000 17.000
P. R 13,65% 9 9 1 1 1 2 10 7
Tamaño (cm³) 0,82411 0,8241 - - - 3,267 1,023 2,98375
P. R 13,51% 10 10 1 1 1 4 9 7
Temperatura (°C) -40a 100 -60 a 100 -20 a 60 0 a 60 -40 a 60 -30 a 60 0 a 50 -40 a 150
P. R 13,65% 4 3 7 9 5 6 10 1
Voltaje entrada (V) 5 a 10 5 a 10 (4.75 ~ 5.25) 1 (4.75 ~ 5.25) (4.75 ~ 5.25) (4.75 ~ 5.25) (4.75 ~ 5.25)
P. R 14,72% 9 9 10 1 10 10 10 10
Humedad (%) 0 a 100 1 a 100 0 a 90 20 a 90 0 a 100 0 a 100 20 a 80 0 a 100
P. R 15,08% 6 6 7 9 6 6 10 6
Corriente (mA) - - 1.3 a 2 - 2.8 a 4 0.4 a 0.8 2.5 2.5
P. R 14,72% 5 5 9 5 7 10 8 8
Total
Total P. R
100% 7,5631 6,5434 5,2267 4,7709 4,5085 6,07 9,5755 7,0641
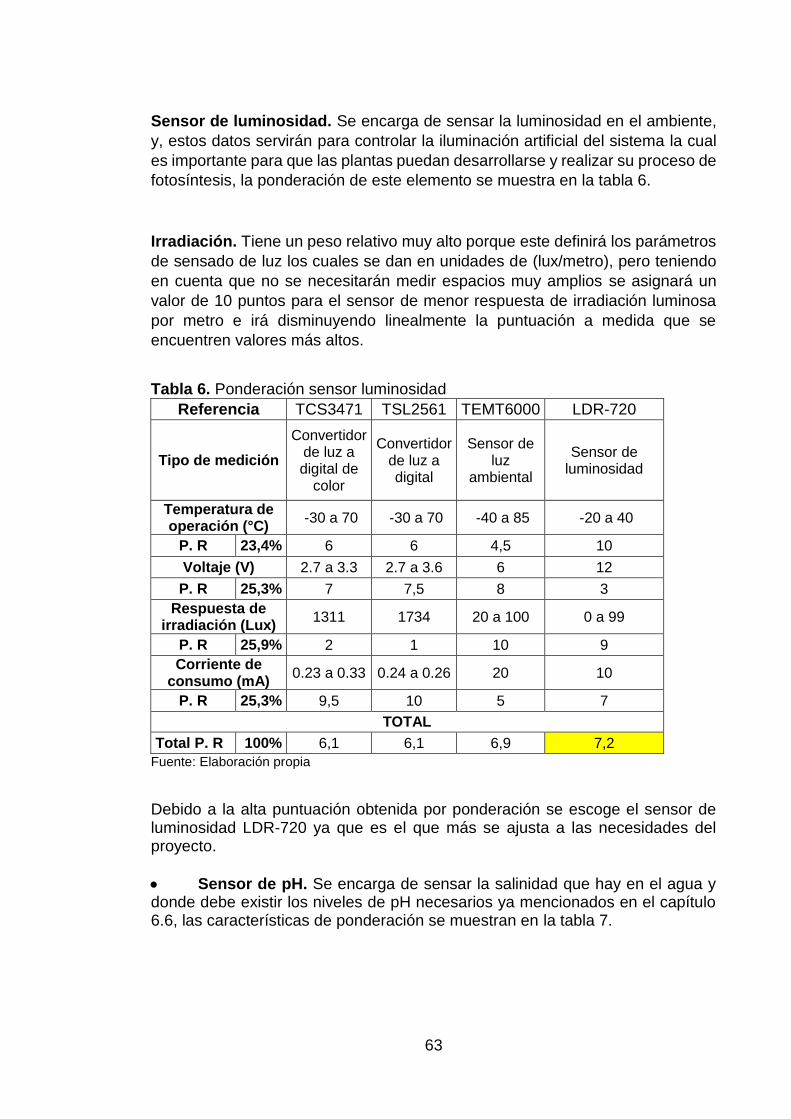
63
Sensor de luminosidad. Se encarga de sensar la luminosidad en el ambiente,
y, estos datos servirán para controlar la iluminación artificial del sistema la cual
es importante para que las plantas puedan desarrollarse y realizar su proceso de
fotosíntesis, la ponderación de este elemento se muestra en la tabla 6.
Irradiación. Tiene un peso relativo muy alto porque este definirá los parámetros
de sensado de luz los cuales se dan en unidades de (lux/metro), pero teniendo
en cuenta que no se necesitarán medir espacios muy amplios se asignará un
valor de 10 puntos para el sensor de menor respuesta de irradiación luminosa
por metro e irá disminuyendo linealmente la puntuación a medida que se
encuentren valores más altos.
Tabla 6. Ponderación sensor luminosidad
Referencia TCS3471 TSL2561 TEMT6000 LDR-720
Tipo de medición
Convertidor de luz a digital de
color
Convertidor de luz a digital
Sensor de luz
ambiental
Sensor de luminosidad
Temperatura de operación (°C)
-30 a 70 -30 a 70 -40 a 85 -20 a 40
P. R 23,4% 6 6 4,5 10
Voltaje (V) 2.7 a 3.3 2.7 a 3.6 6 12
P. R 25,3% 7 7,5 8 3
Respuesta de irradiación (Lux)
1311 1734 20 a 100 0 a 99
P. R 25,9% 2 1 10 9
Corriente de consumo (mA)
0.23 a 0.33 0.24 a 0.26 20 10
P. R 25,3% 9,5 10 5 7
TOTAL
Total P. R 100% 6,1 6,1 6,9 7,2
Fuente: Elaboración propia
Debido a la alta puntuación obtenida por ponderación se escoge el sensor de luminosidad LDR-720 ya que es el que más se ajusta a las necesidades del proyecto.
Sensor de pH. Se encarga de sensar la salinidad que hay en el agua y donde debe existir los niveles de pH necesarios ya mencionados en el capítulo 6.6, las características de ponderación se muestran en la tabla 7.
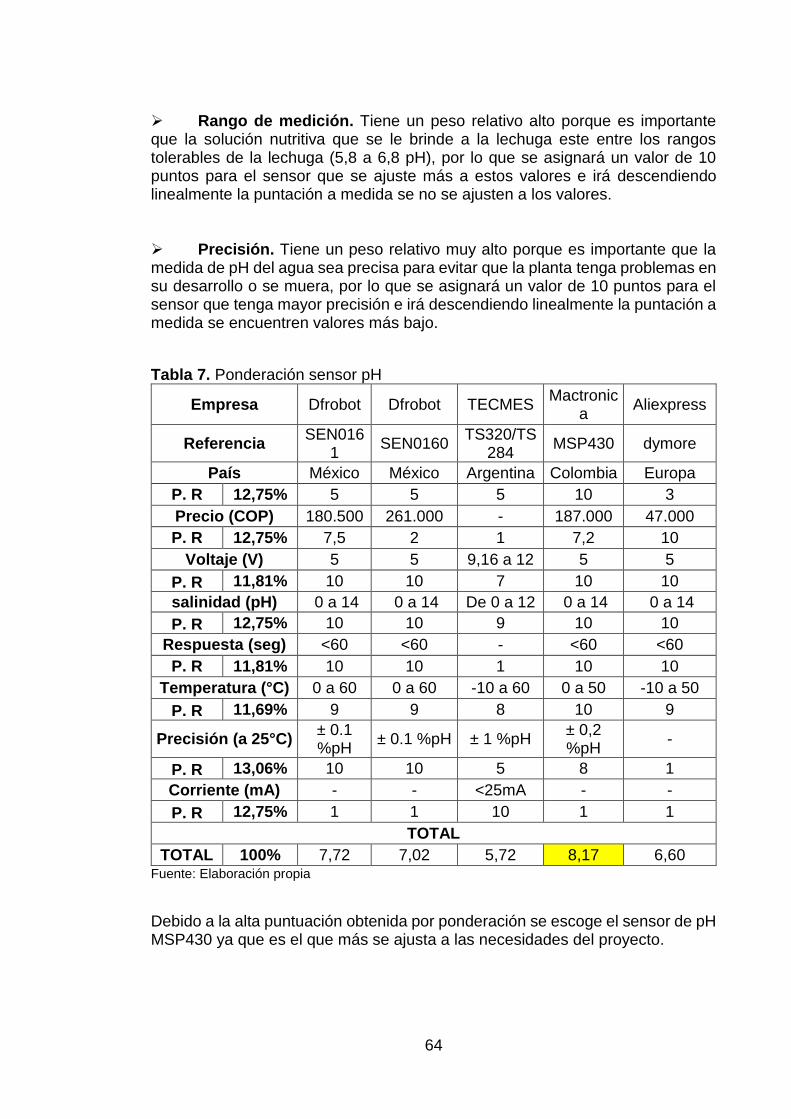
64
Rango de medición. Tiene un peso relativo alto porque es importante que la solución nutritiva que se le brinde a la lechuga este entre los rangos tolerables de la lechuga (5,8 a 6,8 pH), por lo que se asignará un valor de 10 puntos para el sensor que se ajuste más a estos valores e irá descendiendo linealmente la puntación a medida se no se ajusten a los valores. Precisión. Tiene un peso relativo muy alto porque es importante que la medida de pH del agua sea precisa para evitar que la planta tenga problemas en su desarrollo o se muera, por lo que se asignará un valor de 10 puntos para el sensor que tenga mayor precisión e irá descendiendo linealmente la puntación a medida se encuentren valores más bajo.
Tabla 7. Ponderación sensor pH
Empresa Dfrobot Dfrobot TECMES Mactronic
a Aliexpress
Referencia SEN016
1 SEN0160
TS320/TS284
MSP430 dymore
País México México Argentina Colombia Europa
P. R 12,75% 5 5 5 10 3
Precio (COP) 180.500 261.000 - 187.000 47.000
P. R 12,75% 7,5 2 1 7,2 10
Voltaje (V) 5 5 9,16 a 12 5 5
P. R 11,81% 10 10 7 10 10
salinidad (pH) 0 a 14 0 a 14 De 0 a 12 0 a 14 0 a 14
P. R 12,75% 10 10 9 10 10
Respuesta (seg) <60 <60 - <60 <60
P. R 11,81% 10 10 1 10 10
Temperatura (°C) 0 a 60 0 a 60 -10 a 60 0 a 50 -10 a 50
P. R 11,69% 9 9 8 10 9
Precisión (a 25°C) ± 0.1 %pH
± 0.1 %pH ± 1 %pH ± 0,2 %pH
-
P. R 13,06% 10 10 5 8 1
Corriente (mA) - - <25mA - -
P. R 12,75% 1 1 10 1 1
TOTAL
TOTAL 100% 7,72 7,02 5,72 8,17 6,60 Fuente: Elaboración propia
Debido a la alta puntuación obtenida por ponderación se escoge el sensor de pH MSP430 ya que es el que más se ajusta a las necesidades del proyecto.
65
8.3. ACTUADORES
Son los que realizan acciones al sistema y con esto modifiquen los datos de las variables sensadas. Los actuadores que se escojan serán los que logren modificar las variables ya estudiadas anteriormente y que también suplan los requerimientos que necesite el cultivo en su operación. Estos son: Bomba de agua, Microaspersor, Electroválvula, LED´s. Inicialmente, las siguientes características en la ponderación son las mismas en todos los actuadores ya que es necesario que todos estos cumplan con los mismos parámetros, y posteriormente se evalúan las características especiales de cada elemento. Lugar de venta. Tiene un peso relativo alto ya que el tiempo es fundamental para el desarrollo del proyecto y se busca que la adquisición sea rápida, por otro lado, también evitar sobrecostos de envíos e importaciones, por lo que se asignará un valor de 10 puntos para Colombia e irá descendiendo la puntación según el país donde se encuentre. Tamaño de la tubería. Tiene peso relativo medio ya que la dimensión tiene que ser muy parecida con la electroválvula para que los valores de presión no cambien mucho, pero se pueden usar adaptadores para su conexión en caso contrario, por lo que se asignará un valor de 10 puntos para la tubería de 3/8 e irá descendiendo linealmente la puntación a medida varíen los tamaños de las tuberías. Voltaje. El voltaje que maneja la motobomba tiene un peso relativo bajo porque se busca que sea el mismo de la electroválvula y los LED´s para no invertir en conversores de voltaje o en su defecto el de la red eléctrica, por lo que se asignará un valor de 10 puntos para la motobomba que posea 12 voltios e irá descendiendo la puntación linealmente a medida que se encuentren diferentes valores de voltaje.
Corriente. La corriente que maneja la motobomba tiene un peso relativo medio porque se busca que la motobomba genere trabajo para que exista una alta presión, por lo que se asignará un valor de 10 puntos para la motobomba que posea altas corrientes e irá descendiendo la puntación linealmente a medida que se encuentren valores más bajos. Caudal. Tiene un peso relativo alto ya que definirá el consumo de recursos y prevención de posibles inundaciones en el sistema, por lo que se asignará un valor de 10 puntos para la motobomba que posea valores de caudal
66
bajos e irá descendiendo la puntación linealmente a medida que se encuentren valores más altos.
Potencia. La potencia que maneja la motobomba tiene un peso relativo alto porque se busca que se manejen altas presiones para una buena nebulización, por lo que se asignará un valor de 10 puntos para la motobomba que posea mayor potencia e irá descendiendo la puntación linealmente a medida que se encuentren valores más bajos.
Bomba de agua. Se encarga de suministrar el líquido por las tuberías al sistema y maneja principalmente variables de presión y caudal que son los que me determinarán principalmente la calidad de la nebulización. Los aspectos que se tendrán en cuenta para ponderar el sensor de humedad de suelo se muestran en la tabla 8. Alcance de elevación del líquido. Tiene un peso relativo medio ya que el cultivo se encuentra aproximadamente a 2 metros sobre el suelo teniendo en cuenta que debe llegar el flujo con suficiente presión, por lo que se asignará un valor de 10 puntos para la motobomba que posea un alcance mucho mayor a 2 metros e irá descendiendo la puntación linealmente a medida que se encuentren diferentes alturas. Presión. La presión que maneja la bomba tiene peso relativo muy alto porque esta hace que la electroválvula conserve esta presión para luego ser liberada a el microaspersor, lo ideal es que maneje los mismos rangos que la electroválvula, por lo que se asignará un valor de 10 puntos para la motobomba que posea los valores semejantes de presión que la electroválvula y el aspersor e irá descendiendo la puntación linealmente a medida que se diferentes valores. Esta variable fue calculada teóricamente con la ecuación 1 (Eq1).
Eq1: 𝑃𝑟𝑒𝑠𝑖𝑜𝑛 (𝑏𝑎𝑟) =𝑃𝑜𝑡𝑒𝑛𝑐𝑖𝑎(𝑘𝑊)
𝐶𝑎𝑢𝑑𝑎𝑙(𝐿𝑡𝑠
min)
∗ 600
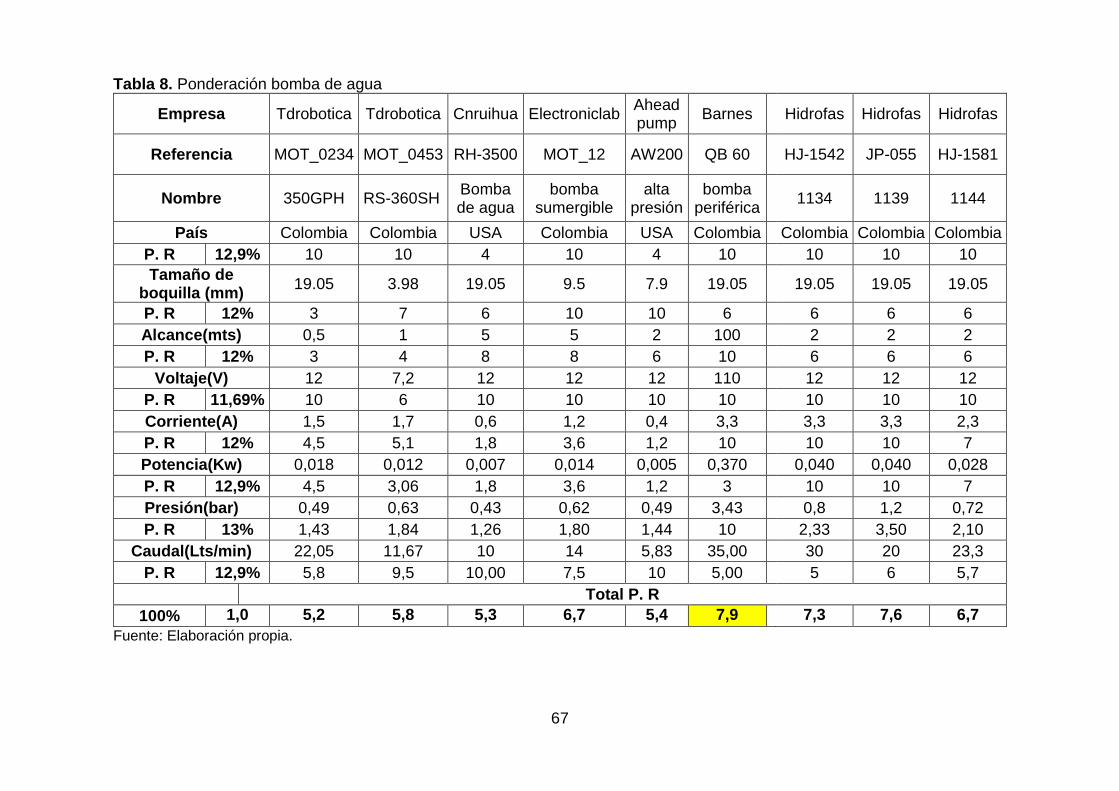
67
Tabla 8. Ponderación bomba de agua
Empresa Tdrobotica Tdrobotica Cnruihua Electroniclab Ahead pump
Barnes
Hidrofas Hidrofas Hidrofas
Referencia MOT_0234 MOT_0453 RH-3500 MOT_12 AW200 QB 60
HJ-1542 JP-055 HJ-1581
Nombre 350GPH RS-360SH Bomba de agua
bomba sumergible
alta presión
bomba periférica
1134 1139 1144
País Colombia Colombia USA Colombia USA Colombia Colombia Colombia Colombia
P. R 12,9% 10 10 4 10 4 10 10 10 10
Tamaño de boquilla (mm)
19.05 3.98 19.05 9.5 7.9 19.05
19.05 19.05 19.05
P. R 12% 3 7 6 10 10 6 6 6 6
Alcance(mts) 0,5 1 5 5 2 100 2 2 2
P. R 12% 3 4 8 8 6 10 6 6 6
Voltaje(V) 12 7,2 12 12 12 110 12 12 12
P. R 11,69% 10 6 10 10 10 10 10 10 10
Corriente(A) 1,5 1,7 0,6 1,2 0,4 3,3 3,3 3,3 2,3
P. R 12% 4,5 5,1 1,8 3,6 1,2 10 10 10 7
Potencia(Kw) 0,018 0,012 0,007 0,014 0,005 0,370 0,040 0,040 0,028
P. R 12,9% 4,5 3,06 1,8 3,6 1,2 3 10 10 7
Presión(bar) 0,49 0,63 0,43 0,62 0,49 3,43 0,8 1,2 0,72
P. R 13% 1,43 1,84 1,26 1,80 1,44 10 2,33 3,50 2,10
Caudal(Lts/min) 22,05 11,67 10 14 5,83 35,00 30 20 23,3
P. R 12,9% 5,8 9,5 10,00 7,5 10 5,00 5 6 5,7
Total P. R
100% 1,0 5,2 5,8 5,3 6,7 5,4 7,9 7,3 7,6 6,7
Fuente: Elaboración propia.
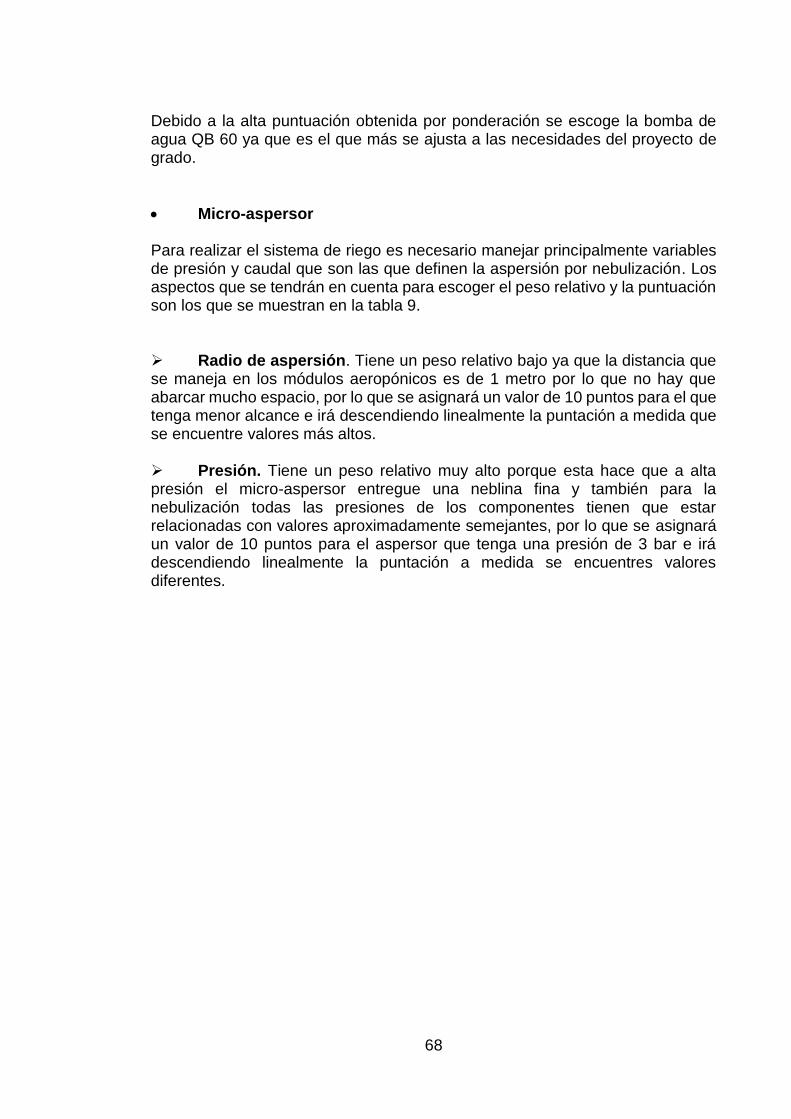
68
Debido a la alta puntuación obtenida por ponderación se escoge la bomba de agua QB 60 ya que es el que más se ajusta a las necesidades del proyecto de grado.
Micro-aspersor
Para realizar el sistema de riego es necesario manejar principalmente variables de presión y caudal que son las que definen la aspersión por nebulización. Los aspectos que se tendrán en cuenta para escoger el peso relativo y la puntuación son los que se muestran en la tabla 9. Radio de aspersión. Tiene un peso relativo bajo ya que la distancia que se maneja en los módulos aeropónicos es de 1 metro por lo que no hay que abarcar mucho espacio, por lo que se asignará un valor de 10 puntos para el que tenga menor alcance e irá descendiendo linealmente la puntación a medida que se encuentre valores más altos. Presión. Tiene un peso relativo muy alto porque esta hace que a alta presión el micro-aspersor entregue una neblina fina y también para la nebulización todas las presiones de los componentes tienen que estar relacionadas con valores aproximadamente semejantes, por lo que se asignará un valor de 10 puntos para el aspersor que tenga una presión de 3 bar e irá descendiendo linealmente la puntación a medida se encuentres valores diferentes.
69
Tabla 9. Ponderación nebulizador
Empresa
Aqua control
Grow shop Irrigaciones
Ltda. Irrigaciones
Ltda. Irrigaciones
Ltda. Sistemas e irrigaciones
Intecmecol & cia
Sistemas de riego
Referencia C4135 NA-1 MR-08 boquilla#6 07-082 1.5mm IT blue
Nombre Maxi-jets nebulizador con base
grapa
misters senningers
T-spray fan spay jet nebulizador
verde microaspersor
single piece jets
País Europa Brasil Colombia Colombia Colombia Colombia Colombia Colombia
P. R 20,9% 1 1 10 10 10 10 10 10
Tamaño boquilla (mm)
6.35 6.35 6.35 12.7 6.35 6.35 6.35 6.35
P. R 19,2% 10 10 10 - 10 10 10 10
Alcance (mts) 0,8 0,9 0,61 4,7 3,81 1 1 1,6 a 2,4
P. R 19,2% 6,89 5,25 10,00 - - 5,00 5,00 -
Presión (bar) 0,75 a 2,1 2 a 5 2.06 a 3,44 1,03 a 2,76 1 a 2,1 3,44 2,06 0,5 a 1,5
P. R 21,4% 6,18 7 10 7,11 6,18 9 6,06 4,41
Caudal (Lts/min) 0,3 0,11 a 0,19 0,42 a 0,54 3,71 a 6,17 0,56 a 2,76 0,8 0,75 0,42 a 2,5
P. R 19,4% 7 10 6 - 4 2,5 3 5
TOTAL
TOTAL P. R 100% 6,13 6,57 9,23 3,61 6,11 7,34 6,85 5,92 Fuente: Elaboración propia
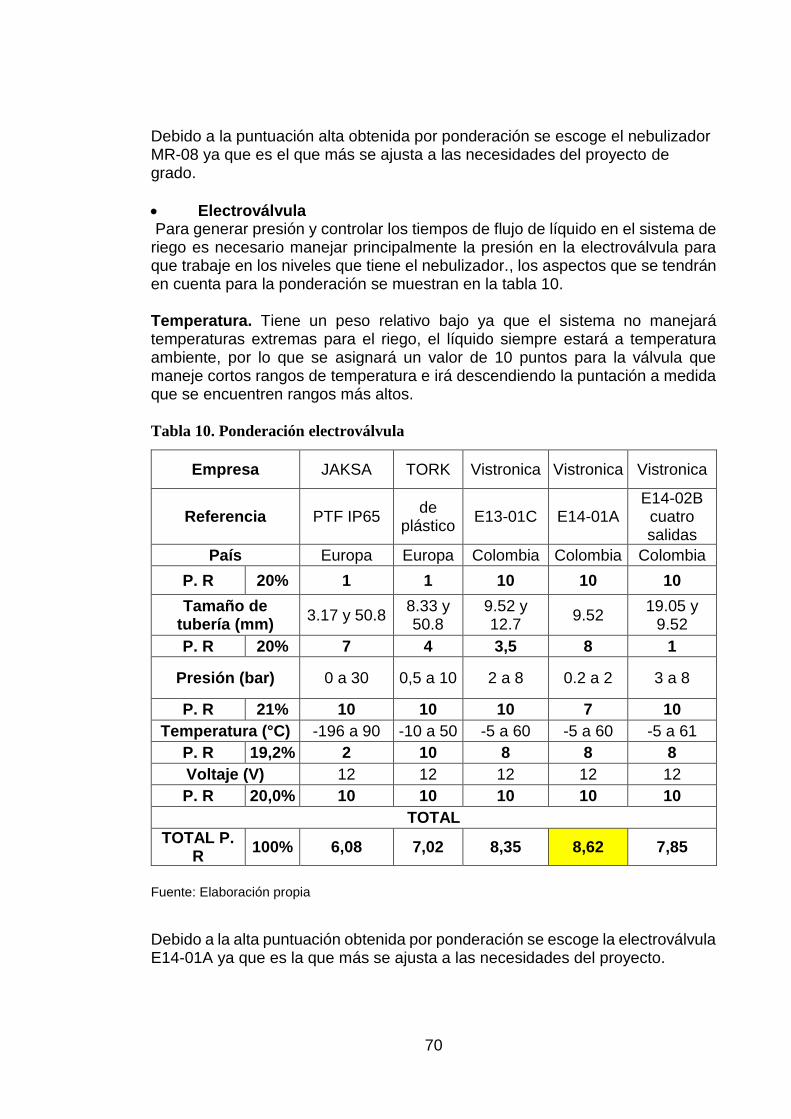
70
Debido a la puntuación alta obtenida por ponderación se escoge el nebulizador MR-08 ya que es el que más se ajusta a las necesidades del proyecto de grado.
Electroválvula Para generar presión y controlar los tiempos de flujo de líquido en el sistema de riego es necesario manejar principalmente la presión en la electroválvula para que trabaje en los niveles que tiene el nebulizador., los aspectos que se tendrán en cuenta para la ponderación se muestran en la tabla 10. Temperatura. Tiene un peso relativo bajo ya que el sistema no manejará temperaturas extremas para el riego, el líquido siempre estará a temperatura ambiente, por lo que se asignará un valor de 10 puntos para la válvula que maneje cortos rangos de temperatura e irá descendiendo la puntación a medida que se encuentren rangos más altos. Tabla 10. Ponderación electroválvula
Fuente: Elaboración propia
Debido a la alta puntuación obtenida por ponderación se escoge la electroválvula E14-01A ya que es la que más se ajusta a las necesidades del proyecto.
Empresa JAKSA TORK Vistronica Vistronica Vistronica
Referencia PTF IP65 de
plástico E13-01C E14-01A
E14-02B cuatro salidas
País Europa Europa Colombia Colombia Colombia
P. R 20% 1 1 10 10 10
Tamaño de tubería (mm)
3.17 y 50.8 8.33 y 50.8
9.52 y 12.7
9.52 19.05 y
9.52
P. R 20% 7 4 3,5 8 1
Presión (bar) 0 a 30 0,5 a 10 2 a 8 0.2 a 2 3 a 8
P. R 21% 10 10 10 7 10
Temperatura (°C) -196 a 90 -10 a 50 -5 a 60 -5 a 60 -5 a 61
P. R 19,2% 2 10 8 8 8
Voltaje (V) 12 12 12 12 12
P. R 20,0% 10 10 10 10 10
TOTAL
TOTAL P. R
100% 6,08 7,02 8,35 8,62 7,85
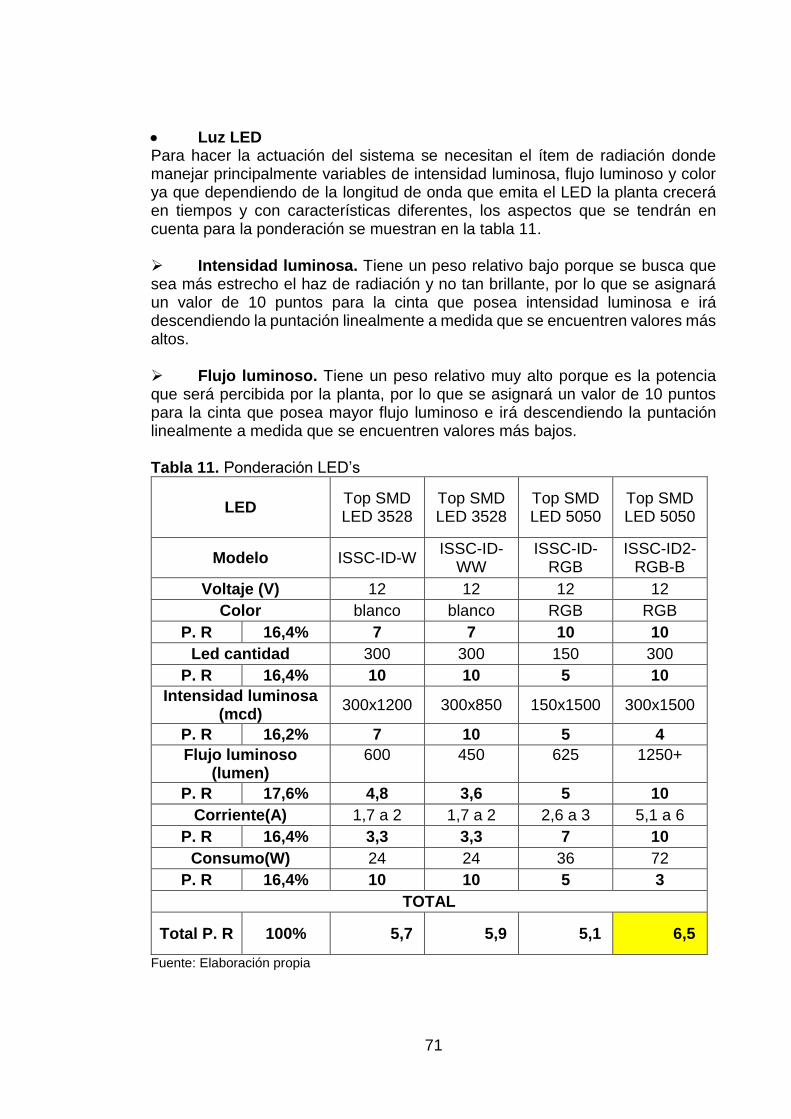
71
Luz LED Para hacer la actuación del sistema se necesitan el ítem de radiación donde manejar principalmente variables de intensidad luminosa, flujo luminoso y color ya que dependiendo de la longitud de onda que emita el LED la planta crecerá en tiempos y con características diferentes, los aspectos que se tendrán en cuenta para la ponderación se muestran en la tabla 11. Intensidad luminosa. Tiene un peso relativo bajo porque se busca que sea más estrecho el haz de radiación y no tan brillante, por lo que se asignará un valor de 10 puntos para la cinta que posea intensidad luminosa e irá descendiendo la puntación linealmente a medida que se encuentren valores más altos. Flujo luminoso. Tiene un peso relativo muy alto porque es la potencia que será percibida por la planta, por lo que se asignará un valor de 10 puntos para la cinta que posea mayor flujo luminoso e irá descendiendo la puntación linealmente a medida que se encuentren valores más bajos. Tabla 11. Ponderación LED’s
LED Top SMD LED 3528
Top SMD LED 3528
Top SMD LED 5050
Top SMD LED 5050
Modelo ISSC-ID-W ISSC-ID-
WW ISSC-ID-
RGB ISSC-ID2-
RGB-B
Voltaje (V) 12 12 12 12
Color blanco blanco RGB RGB
P. R 16,4% 7 7 10 10
Led cantidad 300 300 150 300
P. R 16,4% 10 10 5 10
Intensidad luminosa (mcd)
300x1200 300x850 150x1500 300x1500
P. R 16,2% 7 10 5 4
Flujo luminoso (lumen)
600 450 625 1250+
P. R 17,6% 4,8 3,6 5 10
Corriente(A) 1,7 a 2 1,7 a 2 2,6 a 3 5,1 a 6
P. R 16,4% 3,3 3,3 7 10
Consumo(W) 24 24 36 72
P. R 16,4% 10 10 5 3
TOTAL
Total P. R 100% 5,7 5,9 5,1 6,5
Fuente: Elaboración propia
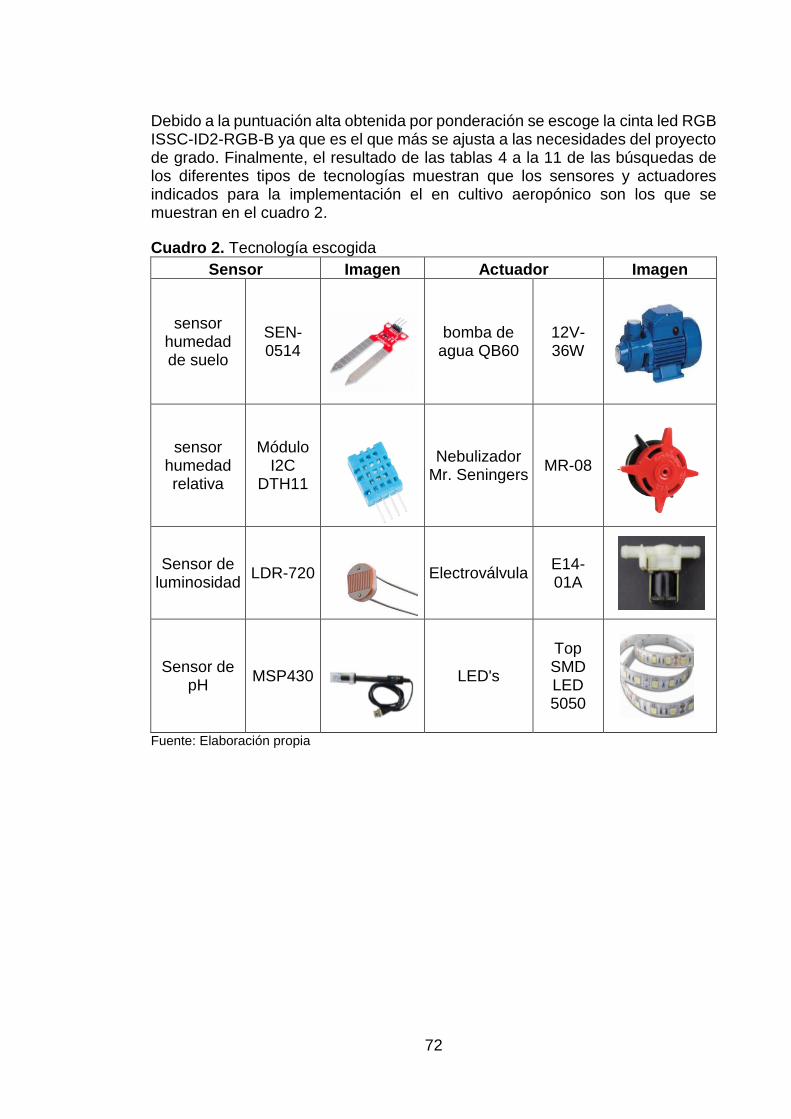
72
Debido a la puntuación alta obtenida por ponderación se escoge la cinta led RGB ISSC-ID2-RGB-B ya que es el que más se ajusta a las necesidades del proyecto de grado. Finalmente, el resultado de las tablas 4 a la 11 de las búsquedas de los diferentes tipos de tecnologías muestran que los sensores y actuadores indicados para la implementación el en cultivo aeropónico son los que se muestran en el cuadro 2.
Cuadro 2. Tecnología escogida
Sensor Imagen Actuador Imagen
sensor humedad de suelo
SEN-0514
bomba de agua QB60
12V-36W
sensor humedad relativa
Módulo I2C
DTH11
Nebulizador Mr. Seningers
MR-08
Sensor de luminosidad
LDR-720
Electroválvula E14-01A
Sensor de pH
MSP430
LED's
Top SMD LED 5050
Fuente: Elaboración propia
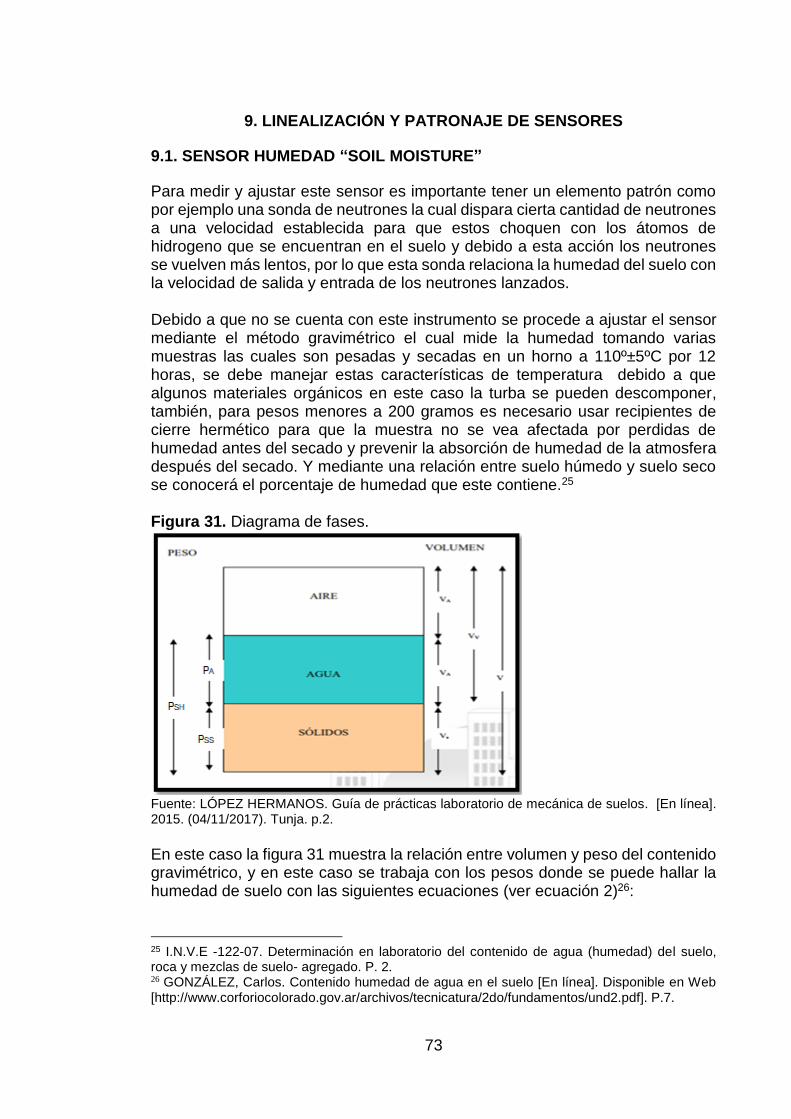
73
9. LINEALIZACIÓN Y PATRONAJE DE SENSORES
9.1. SENSOR HUMEDAD “SOIL MOISTURE”
Para medir y ajustar este sensor es importante tener un elemento patrón como por ejemplo una sonda de neutrones la cual dispara cierta cantidad de neutrones a una velocidad establecida para que estos choquen con los átomos de hidrogeno que se encuentran en el suelo y debido a esta acción los neutrones se vuelven más lentos, por lo que esta sonda relaciona la humedad del suelo con la velocidad de salida y entrada de los neutrones lanzados. Debido a que no se cuenta con este instrumento se procede a ajustar el sensor mediante el método gravimétrico el cual mide la humedad tomando varias muestras las cuales son pesadas y secadas en un horno a 110º±5ºC por 12 horas, se debe manejar estas características de temperatura debido a que algunos materiales orgánicos en este caso la turba se pueden descomponer, también, para pesos menores a 200 gramos es necesario usar recipientes de cierre hermético para que la muestra no se vea afectada por perdidas de humedad antes del secado y prevenir la absorción de humedad de la atmosfera después del secado. Y mediante una relación entre suelo húmedo y suelo seco se conocerá el porcentaje de humedad que este contiene.25 Figura 31. Diagrama de fases.
Fuente: LÓPEZ HERMANOS. Guía de prácticas laboratorio de mecánica de suelos. [En línea]. 2015. (04/11/2017). Tunja. p.2. En este caso la figura 31 muestra la relación entre volumen y peso del contenido gravimétrico, y en este caso se trabaja con los pesos donde se puede hallar la humedad de suelo con las siguientes ecuaciones (ver ecuación 2)26:
25 I.N.V.E -122-07. Determinación en laboratorio del contenido de agua (humedad) del suelo, roca y mezclas de suelo- agregado. P. 2. 26 GONZÁLEZ, Carlos. Contenido humedad de agua en el suelo [En línea]. Disponible en Web [http://www.corforiocolorado.gov.ar/archivos/tecnicatura/2do/fundamentos/und2.pdf]. P.7.

74
𝑃𝐴[%] = (𝑃𝑆𝐻 − 𝑃𝐿𝑉) − (𝑃𝑆𝑆 − 𝑃𝐿𝑉) Ec 2.
𝑊𝑇[%] =𝑃𝐴
𝑃𝑆𝑆−𝑃𝐿𝑉
∗ 10
𝑃𝐴 = 𝑝𝑒𝑠𝑜 𝑑𝑒𝑙 𝑎𝑔𝑢𝑎
𝑃𝑆𝑆 = 𝑝𝑒𝑠𝑜 𝑠𝑢𝑒𝑙𝑜 𝑠𝑒𝑐𝑜
𝑃𝑆𝐻 = 𝑝𝑒𝑠𝑜 𝑠𝑢𝑒𝑙𝑜 ℎ𝑢𝑚𝑒𝑑𝑜
𝑊𝑇 = ℎ𝑢𝑚𝑒𝑑𝑎𝑑
𝑃𝐿𝑉 = 𝑝𝑒𝑠𝑜 𝑑𝑒 𝑙𝑎𝑡𝑎 𝑣𝑎𝑐í𝑎 Se procede a tomar los pesos de 10 muestras inicialmente tomando los valores de las latas vacías, posteriormente añadiendo aproximadamente 27 gr de turba (Abono de la planta) a las latas se toma el segundo valor, seguido, añadiendo a la turba diferentes cantidades de agua con una probeta se hace la medición con el sensor de humedad de suelo y luego las muestras son pesadas en una balanza como se muestra en la figura 32. Figura 32. Toma de muestras con sensor de humedad de suelo
Fuente: Elaboración propia
Finalmente se procede a secar las muestras retirando las tapas de las latas y se colocan en un horno (véase figura 33) a la temperatura y tiempo indicado para posteriormente registrar el dato del peso de las muestras secas.
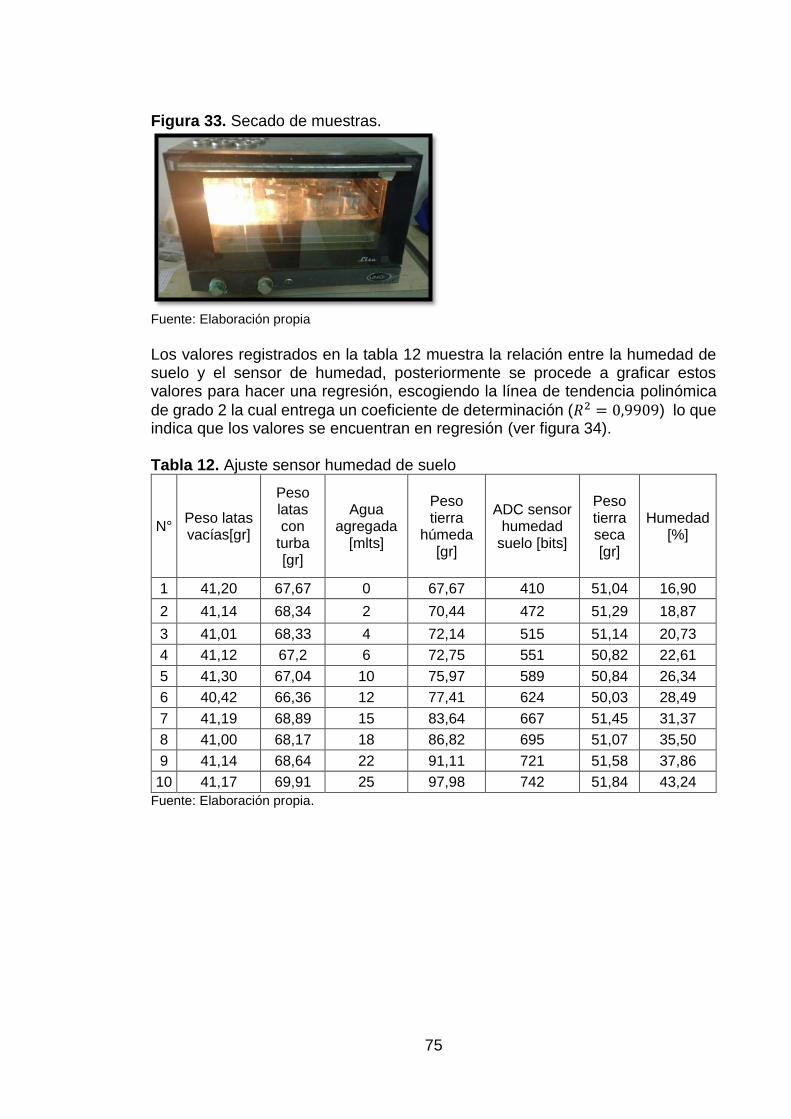
75
Figura 33. Secado de muestras.
Fuente: Elaboración propia
Los valores registrados en la tabla 12 muestra la relación entre la humedad de suelo y el sensor de humedad, posteriormente se procede a graficar estos valores para hacer una regresión, escogiendo la línea de tendencia polinómica
de grado 2 la cual entrega un coeficiente de determinación (𝑅2 = 0,9909) lo que indica que los valores se encuentran en regresión (ver figura 34). Tabla 12. Ajuste sensor humedad de suelo
N° Peso latas vacías[gr]
Peso latas con
turba [gr]
Agua agregada
[mlts]
Peso tierra
húmeda [gr]
ADC sensor humedad
suelo [bits]
Peso tierra seca [gr]
Humedad [%]
1 41,20 67,67 0 67,67 410 51,04 16,90
2 41,14 68,34 2 70,44 472 51,29 18,87
3 41,01 68,33 4 72,14 515 51,14 20,73
4 41,12 67,2 6 72,75 551 50,82 22,61
5 41,30 67,04 10 75,97 589 50,84 26,34
6 40,42 66,36 12 77,41 624 50,03 28,49
7 41,19 68,89 15 83,64 667 51,45 31,37
8 41,00 68,17 18 86,82 695 51,07 35,50
9 41,14 68,64 22 91,11 721 51,58 37,86
10 41,17 69,91 25 97,98 742 51,84 43,24
Fuente: Elaboración propia.
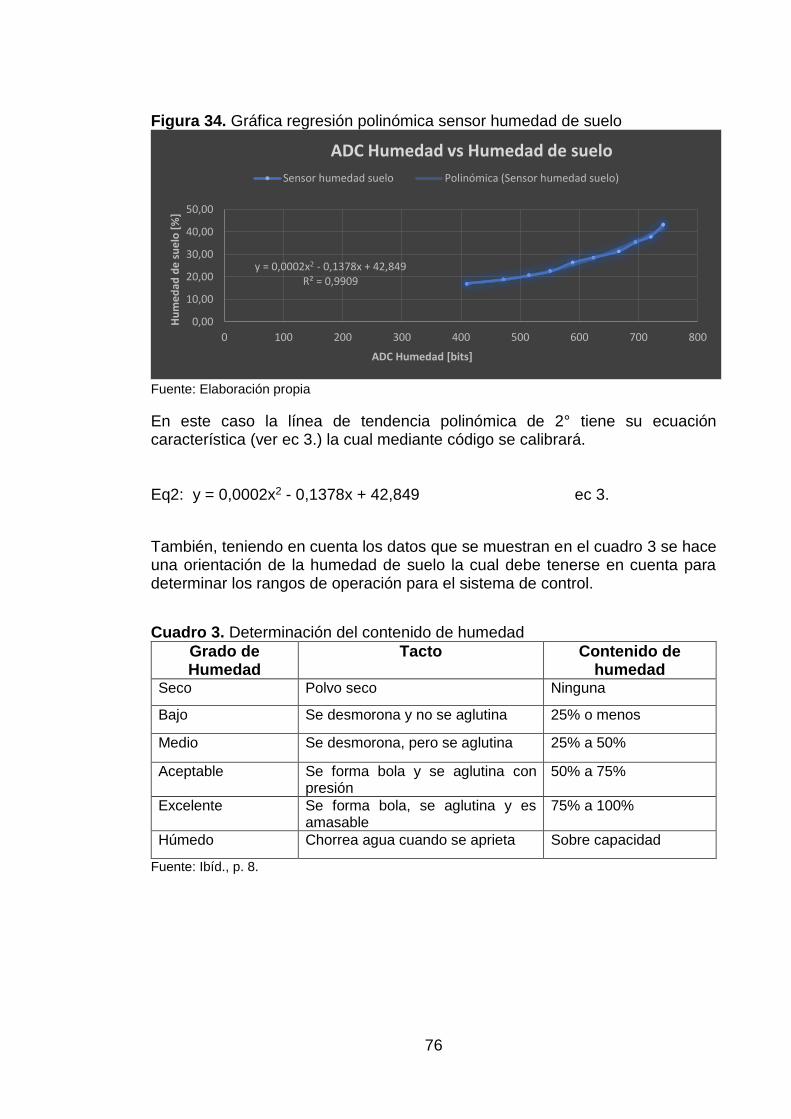
76
Figura 34. Gráfica regresión polinómica sensor humedad de suelo
Fuente: Elaboración propia
En este caso la línea de tendencia polinómica de 2° tiene su ecuación característica (ver ec 3.) la cual mediante código se calibrará. Eq2: y = 0,0002x2 - 0,1378x + 42,849 ec 3.
También, teniendo en cuenta los datos que se muestran en el cuadro 3 se hace una orientación de la humedad de suelo la cual debe tenerse en cuenta para determinar los rangos de operación para el sistema de control.
Cuadro 3. Determinación del contenido de humedad
Grado de Humedad
Tacto Contenido de humedad
Seco Polvo seco Ninguna
Bajo Se desmorona y no se aglutina 25% o menos
Medio Se desmorona, pero se aglutina 25% a 50%
Aceptable Se forma bola y se aglutina con presión
50% a 75%
Excelente Se forma bola, se aglutina y es amasable
75% a 100%
Húmedo Chorrea agua cuando se aprieta Sobre capacidad
Fuente: Ibíd., p. 8.
y = 0,0002x2 - 0,1378x + 42,849R² = 0,9909
0,00
10,00
20,00
30,00
40,00
50,00
0 100 200 300 400 500 600 700 800
Hu
me
dad
de
su
elo
[%
]
ADC Humedad [bits]
ADC Humedad vs Humedad de suelo
Sensor humedad suelo Polinómica (Sensor humedad suelo)

77
9.2. SENSOR PH MSP430 Las plantas normalmente absorben los nutrientes que necesitan del suelo por lo que en este caso es necesario simular un ambiente de nutrientes líquidos los cuales serán sensado y controlados mediante el sensor de pH27 (véase figura 35). Figura 35. Sensor de pH
Fuente: MACTRONICA. Sensor de pH MSP430 [En línea]. (04/11/2017). Disponible en web <https://goo.gl/7PtBcd>
De tal forma que según los nutrientes requeridos por la lechuga se mide y agrega la cantidad de macronutrientes y micronutrientes necesarios en el líquido. Este sensor contiene una ampolla de vidrio como punta y el cuerpo es de un material de vidrio o plástico no conductor con una solución interna dada por el fabricante combinado con unos electrodos de referencia los cuales captan la actividad de los iones de hidrógeno en la mezcla y las percibe como tensiones en voltaje análogo. Para el ajuste el sensor de pH lo comúnmente realizado es con 3 tipos de soluciones diferentes de pH hacer las mediciones y ajustarlo de forma precisa con estos datos, en este caso se usaron pH’s de 4, 7 y 10 y dos tipos diferentes de solución buffer para pH para hacer comparaciones entre valores de pH.
27 EMERSON. Sensores de PH. 2017. [En línea]. Disponible en Web: <http://www2.emersonprocess.com/es-ES/brands/rosemountanalytical/Liquid/Sensors/pH/Pages/index.aspx>
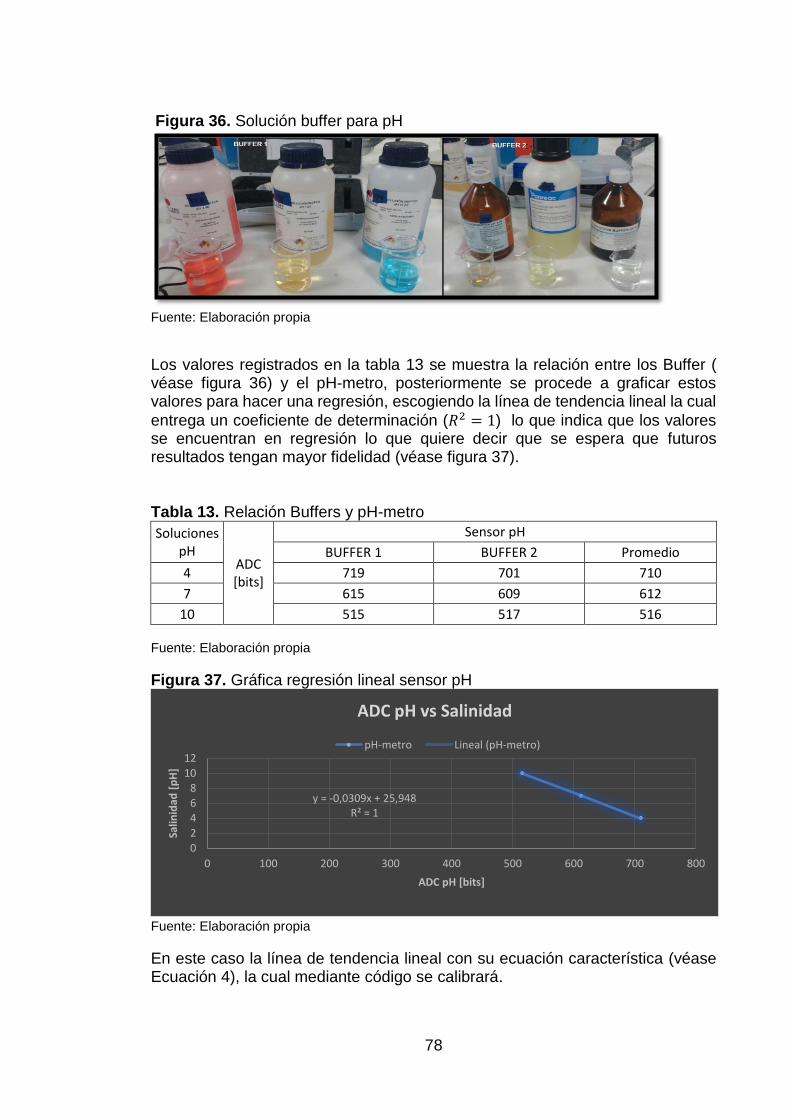
78
Figura 36. Solución buffer para pH
Fuente: Elaboración propia
Los valores registrados en la tabla 13 se muestra la relación entre los Buffer ( véase figura 36) y el pH-metro, posteriormente se procede a graficar estos valores para hacer una regresión, escogiendo la línea de tendencia lineal la cual
entrega un coeficiente de determinación (𝑅2 = 1) lo que indica que los valores se encuentran en regresión lo que quiere decir que se espera que futuros resultados tengan mayor fidelidad (véase figura 37). Tabla 13. Relación Buffers y pH-metro
Soluciones pH
ADC [bits]
Sensor pH
BUFFER 1 BUFFER 2 Promedio
4 719 701 710
7 615 609 612
10 515 517 516 Fuente: Elaboración propia
Figura 37. Gráfica regresión lineal sensor pH
Fuente: Elaboración propia
En este caso la línea de tendencia lineal con su ecuación característica (véase Ecuación 4), la cual mediante código se calibrará.
y = -0,0309x + 25,948R² = 1
0
2
46
810
12
0 100 200 300 400 500 600 700 800
Salin
idad
[p
H]
ADC pH [bits]
ADC pH vs Salinidad
pH-metro Lineal (pH-metro)
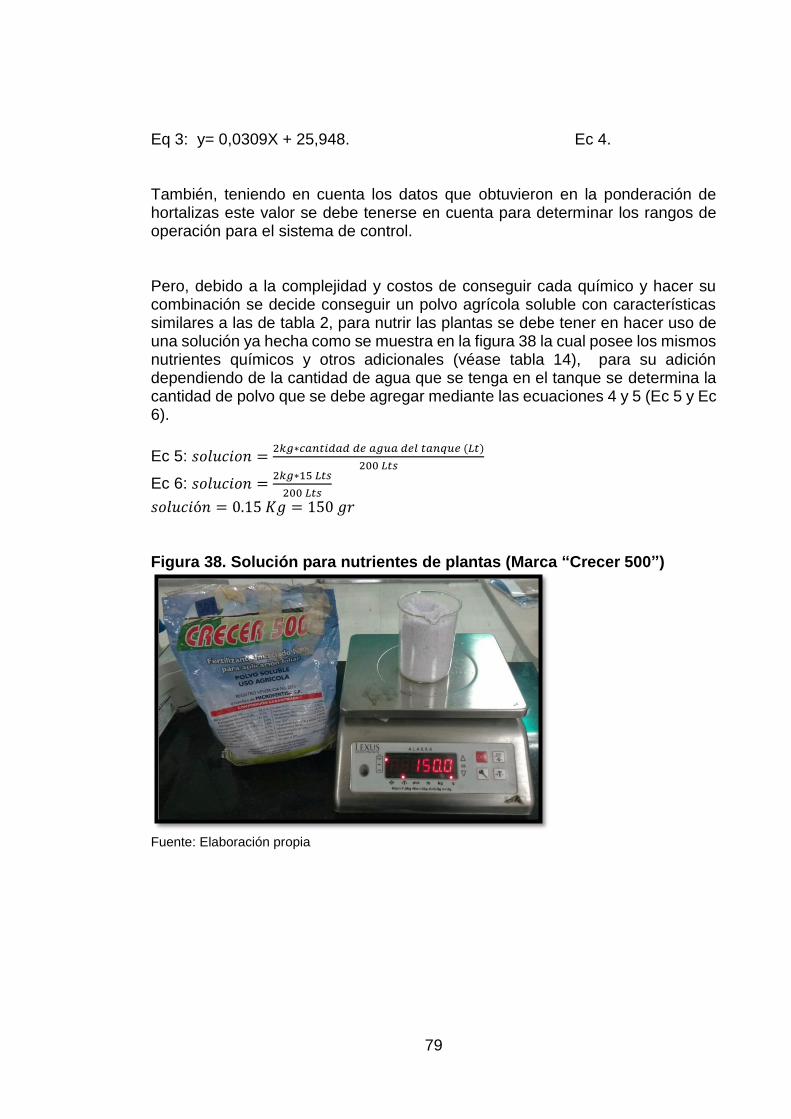
79
Eq 3: y= 0,0309X + 25,948. Ec 4. También, teniendo en cuenta los datos que obtuvieron en la ponderación de hortalizas este valor se debe tenerse en cuenta para determinar los rangos de operación para el sistema de control. Pero, debido a la complejidad y costos de conseguir cada químico y hacer su combinación se decide conseguir un polvo agrícola soluble con características similares a las de tabla 2, para nutrir las plantas se debe tener en hacer uso de una solución ya hecha como se muestra en la figura 38 la cual posee los mismos nutrientes químicos y otros adicionales (véase tabla 14), para su adición dependiendo de la cantidad de agua que se tenga en el tanque se determina la cantidad de polvo que se debe agregar mediante las ecuaciones 4 y 5 (Ec 5 y Ec 6).
Ec 5: 𝑠𝑜𝑙𝑢𝑐𝑖𝑜𝑛 =2𝑘𝑔∗𝑐𝑎𝑛𝑡𝑖𝑑𝑎𝑑 𝑑𝑒 𝑎𝑔𝑢𝑎 𝑑𝑒𝑙 𝑡𝑎𝑛𝑞𝑢𝑒 (𝐿𝑡)
200 𝐿𝑡𝑠
Ec 6: 𝑠𝑜𝑙𝑢𝑐𝑖𝑜𝑛 =2𝑘𝑔∗15 𝐿𝑡𝑠
200 𝐿𝑡𝑠
𝑠𝑜𝑙𝑢𝑐𝑖ó𝑛 = 0.15 𝐾𝑔 = 150 𝑔𝑟 Figura 38. Solución para nutrientes de plantas (Marca “Crecer 500”)
Fuente: Elaboración propia
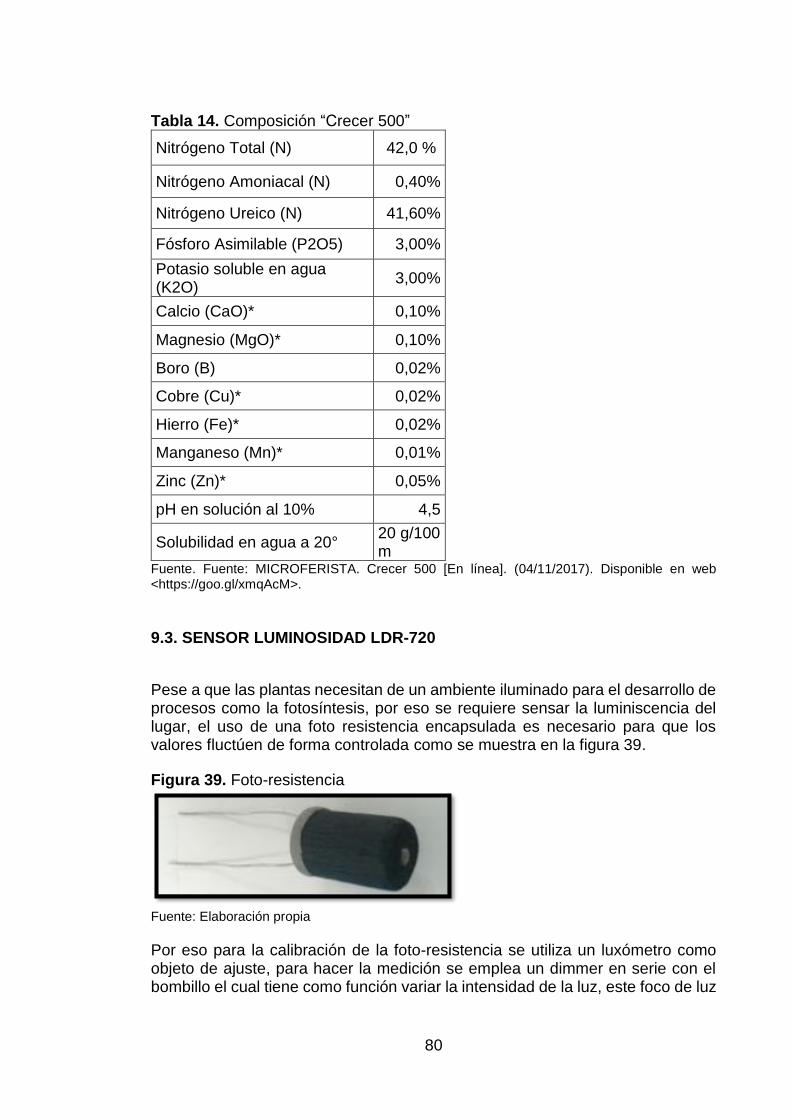
80
Tabla 14. Composición “Crecer 500”
Nitrógeno Total (N) 42,0 %
Nitrógeno Amoniacal (N) 0,40%
Nitrógeno Ureico (N) 41,60%
Fósforo Asimilable (P2O5) 3,00%
Potasio soluble en agua (K2O)
3,00%
Calcio (CaO)* 0,10%
Magnesio (MgO)* 0,10%
Boro (B) 0,02%
Cobre (Cu)* 0,02%
Hierro (Fe)* 0,02%
Manganeso (Mn)* 0,01%
Zinc (Zn)* 0,05%
pH en solución al 10% 4,5
Solubilidad en agua a 20° 20 g/100 m
Fuente. Fuente: MICROFERISTA. Crecer 500 [En línea]. (04/11/2017). Disponible en web <https://goo.gl/xmqAcM>. 9.3. SENSOR LUMINOSIDAD LDR-720
Pese a que las plantas necesitan de un ambiente iluminado para el desarrollo de procesos como la fotosíntesis, por eso se requiere sensar la luminiscencia del lugar, el uso de una foto resistencia encapsulada es necesario para que los valores fluctúen de forma controlada como se muestra en la figura 39.
Figura 39. Foto-resistencia
Fuente: Elaboración propia
Por eso para la calibración de la foto-resistencia se utiliza un luxómetro como objeto de ajuste, para hacer la medición se emplea un dimmer en serie con el bombillo el cual tiene como función variar la intensidad de la luz, este foco de luz
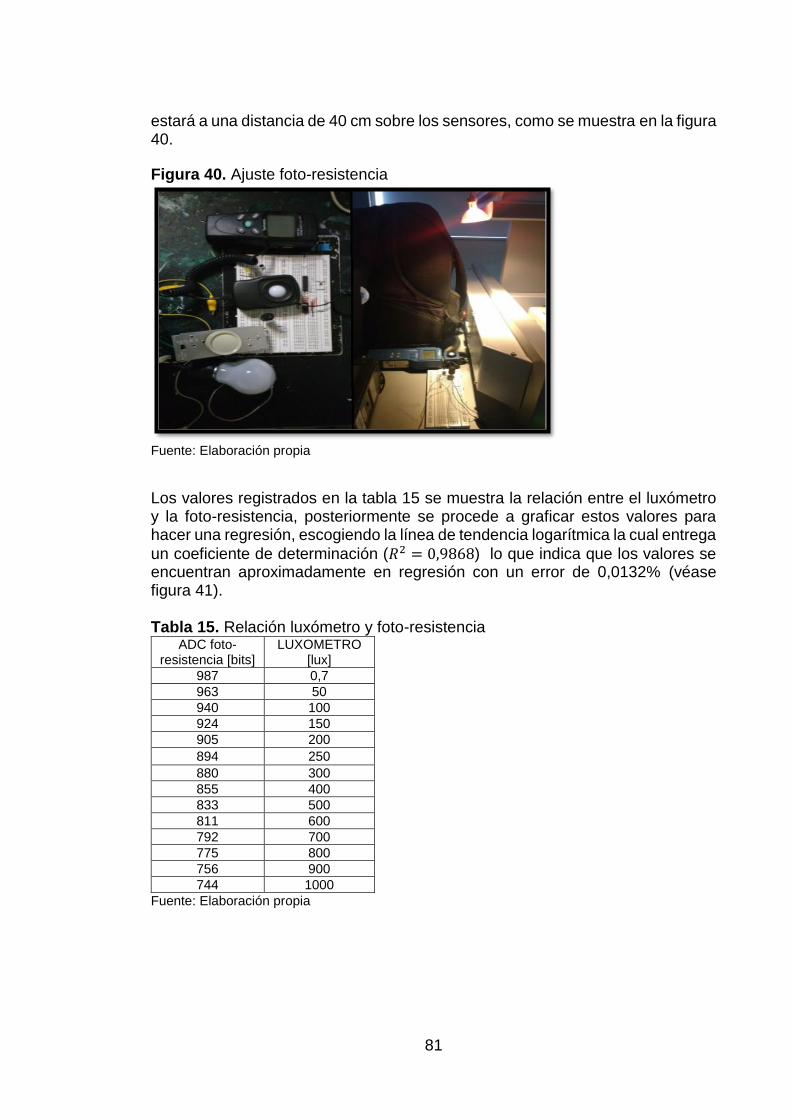
81
estará a una distancia de 40 cm sobre los sensores, como se muestra en la figura 40.
Figura 40. Ajuste foto-resistencia
Fuente: Elaboración propia
Los valores registrados en la tabla 15 se muestra la relación entre el luxómetro y la foto-resistencia, posteriormente se procede a graficar estos valores para hacer una regresión, escogiendo la línea de tendencia logarítmica la cual entrega
un coeficiente de determinación (𝑅2 = 0,9868) lo que indica que los valores se encuentran aproximadamente en regresión con un error de 0,0132% (véase figura 41). Tabla 15. Relación luxómetro y foto-resistencia
ADC foto-resistencia [bits]
LUXOMETRO [lux]
987 0,7
963 50
940 100
924 150
905 200
894 250
880 300
855 400
833 500
811 600
792 700
775 800
756 900
744 1000
Fuente: Elaboración propia
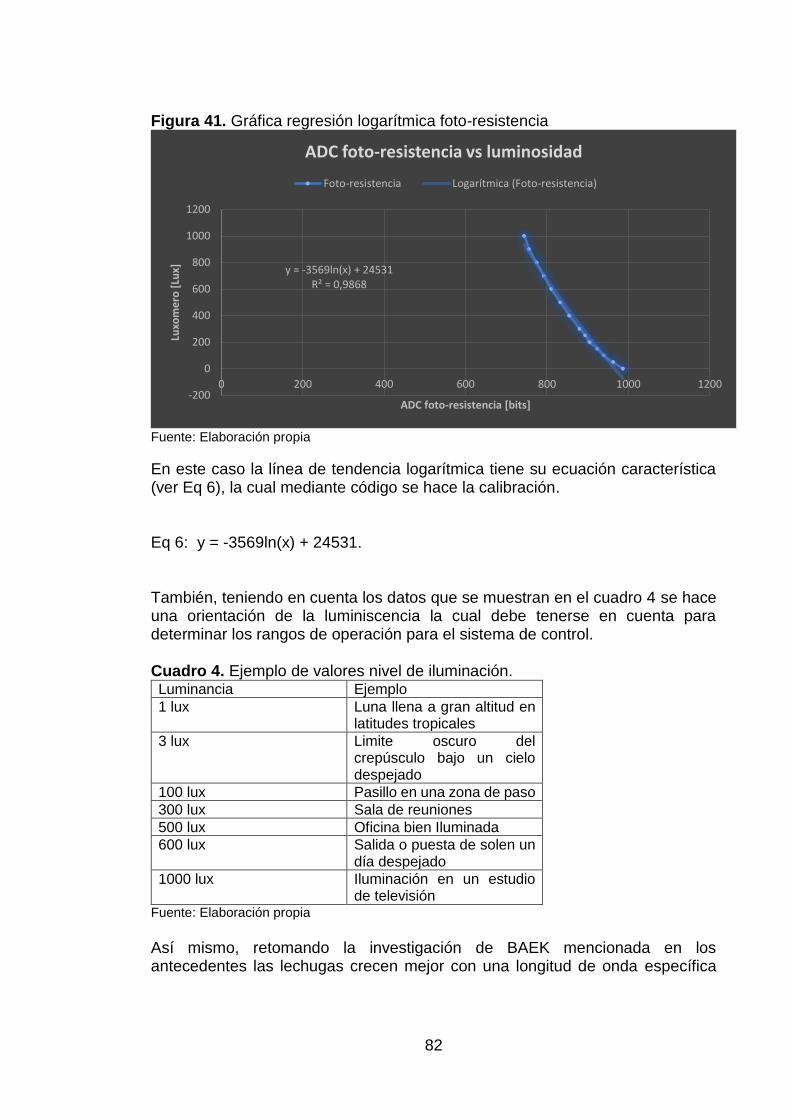
82
Figura 41. Gráfica regresión logarítmica foto-resistencia
Fuente: Elaboración propia
En este caso la línea de tendencia logarítmica tiene su ecuación característica (ver Eq 6), la cual mediante código se hace la calibración. Eq 6: y = -3569ln(x) + 24531. También, teniendo en cuenta los datos que se muestran en el cuadro 4 se hace una orientación de la luminiscencia la cual debe tenerse en cuenta para determinar los rangos de operación para el sistema de control. Cuadro 4. Ejemplo de valores nivel de iluminación. Luminancia Ejemplo
1 lux Luna llena a gran altitud en latitudes tropicales
3 lux Limite oscuro del crepúsculo bajo un cielo despejado
100 lux Pasillo en una zona de paso
300 lux Sala de reuniones
500 lux Oficina bien Iluminada
600 lux Salida o puesta de solen un día despejado
1000 lux Iluminación en un estudio de televisión
Fuente: Elaboración propia
Así mismo, retomando la investigación de BAEK mencionada en los antecedentes las lechugas crecen mejor con una longitud de onda específica
y = -3569ln(x) + 24531R² = 0,9868
-200
0
200
400
600
800
1000
1200
0 200 400 600 800 1000 1200
Luxo
me
ro [
Lux]
ADC foto-resistencia [bits]
ADC foto-resistencia vs luminosidad
Foto-resistencia Logarítmica (Foto-resistencia)
83
que en ese caso es el color magenta para la cinta RGB donde se muestra en la tabla 16 las combinaciones para obtener el color. Tabla 16. Tabla de estados de colores
COLOR RED GREEN BLUE
Negro 0 0 0
Verde 0 1 0
Rojo 1 0 0
Azul 0 0 1
Amarillo 1 1 0
Cian 0 1 1
Magenta 1 0 1
Blanco 1 1 1
Fuente: Elaboración propia
9.4. SENSOR HUMEDAD DHT11
Los cultivos de cierto modo dependen del medio en el que se encuentran, por lo tanto, la humedad relativa es un factor que se debe tener en cuenta para el desarrollo de las plantas. El sensor de humedad (véase figura 42) es un dispositivo electrónico que mide la cantidad de vapor presente en el aire en relación con la cantidad de agua suficiente para saturar el aire.
Figura 42. Sensor de humedad relativa
Fuente: BOXELECTRONICA. DHT11 humidity and temperature [En línea]. (04/11/2017). Disponible en la web <https://goo.gl/ukye8Y>
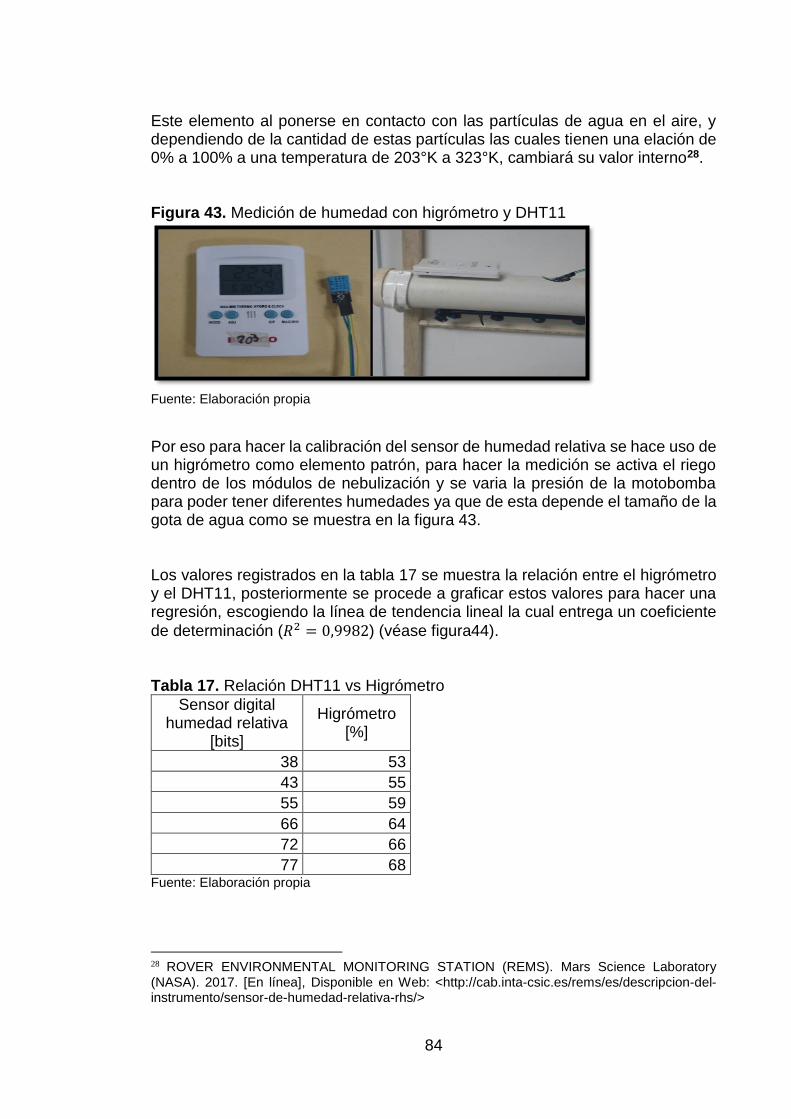
84
Este elemento al ponerse en contacto con las partículas de agua en el aire, y dependiendo de la cantidad de estas partículas las cuales tienen una elación de 0% a 100% a una temperatura de 203°K a 323°K, cambiará su valor interno28. Figura 43. Medición de humedad con higrómetro y DHT11
Fuente: Elaboración propia
Por eso para hacer la calibración del sensor de humedad relativa se hace uso de un higrómetro como elemento patrón, para hacer la medición se activa el riego dentro de los módulos de nebulización y se varia la presión de la motobomba para poder tener diferentes humedades ya que de esta depende el tamaño de la gota de agua como se muestra en la figura 43. Los valores registrados en la tabla 17 se muestra la relación entre el higrómetro y el DHT11, posteriormente se procede a graficar estos valores para hacer una regresión, escogiendo la línea de tendencia lineal la cual entrega un coeficiente
de determinación (𝑅2 = 0,9982) (véase figura44). Tabla 17. Relación DHT11 vs Higrómetro
Sensor digital humedad relativa
[bits]
Higrómetro [%]
38 53
43 55
55 59
66 64
72 66
77 68 Fuente: Elaboración propia
28 ROVER ENVIRONMENTAL MONITORING STATION (REMS). Mars Science Laboratory (NASA). 2017. [En línea], Disponible en Web: <http://cab.inta-csic.es/rems/es/descripcion-del-instrumento/sensor-de-humedad-relativa-rhs/>
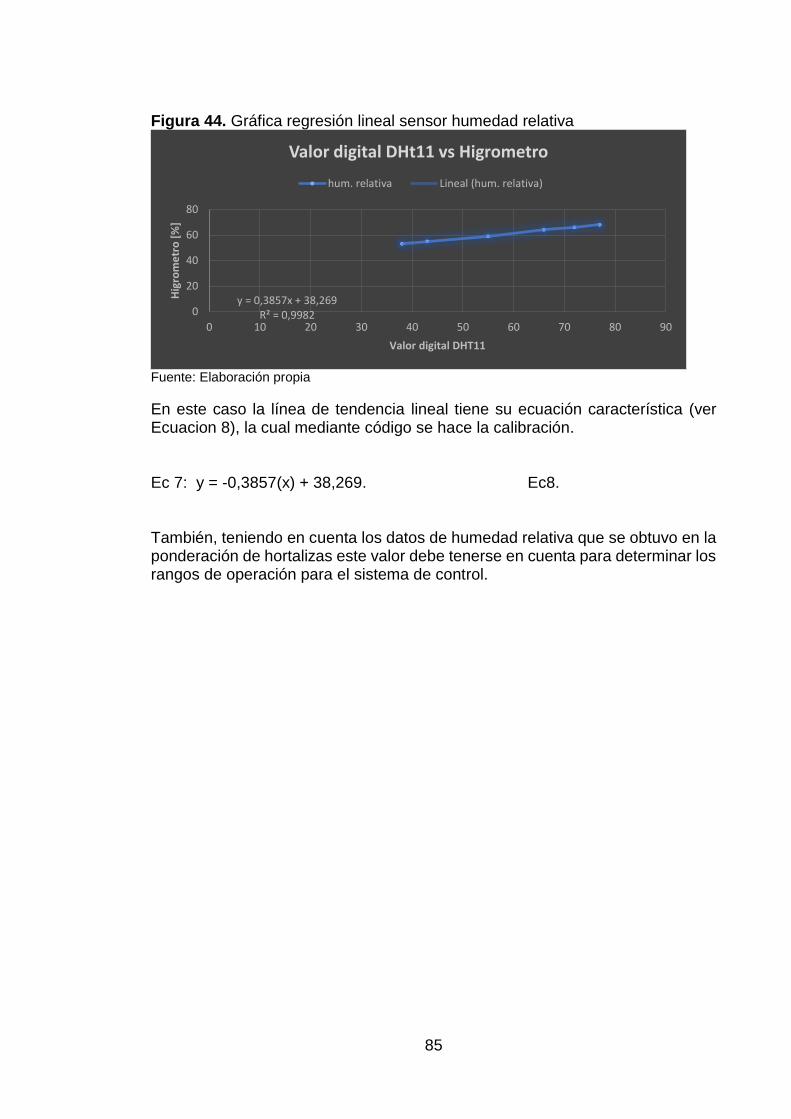
85
Figura 44. Gráfica regresión lineal sensor humedad relativa
Fuente: Elaboración propia
En este caso la línea de tendencia lineal tiene su ecuación característica (ver Ecuacion 8), la cual mediante código se hace la calibración. Ec 7: y = -0,3857(x) + 38,269. Ec8. También, teniendo en cuenta los datos de humedad relativa que se obtuvo en la ponderación de hortalizas este valor debe tenerse en cuenta para determinar los rangos de operación para el sistema de control.
y = 0,3857x + 38,269R² = 0,99820
20
40
60
80
0 10 20 30 40 50 60 70 80 90
Hig
rom
etr
o [
%]
Valor digital DHT11
Valor digital DHt11 vs Higrometro
hum. relativa Lineal (hum. relativa)
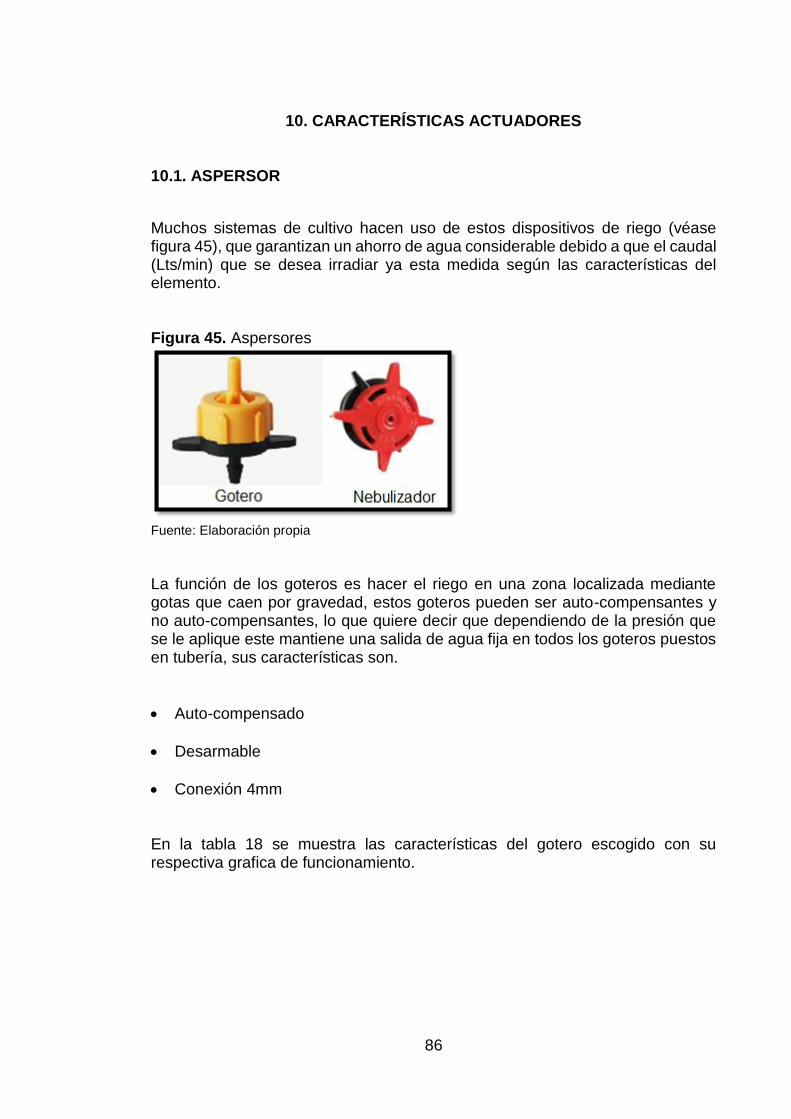
86
10. CARACTERÍSTICAS ACTUADORES 10.1. ASPERSOR
Muchos sistemas de cultivo hacen uso de estos dispositivos de riego (véase figura 45), que garantizan un ahorro de agua considerable debido a que el caudal (Lts/min) que se desea irradiar ya esta medida según las características del elemento. Figura 45. Aspersores
Fuente: Elaboración propia
La función de los goteros es hacer el riego en una zona localizada mediante gotas que caen por gravedad, estos goteros pueden ser auto-compensantes y no auto-compensantes, lo que quiere decir que dependiendo de la presión que se le aplique este mantiene una salida de agua fija en todos los goteros puestos en tubería, sus características son.
Auto-compensado
Desarmable
Conexión 4mm
En la tabla 18 se muestra las características del gotero escogido con su respectiva grafica de funcionamiento.
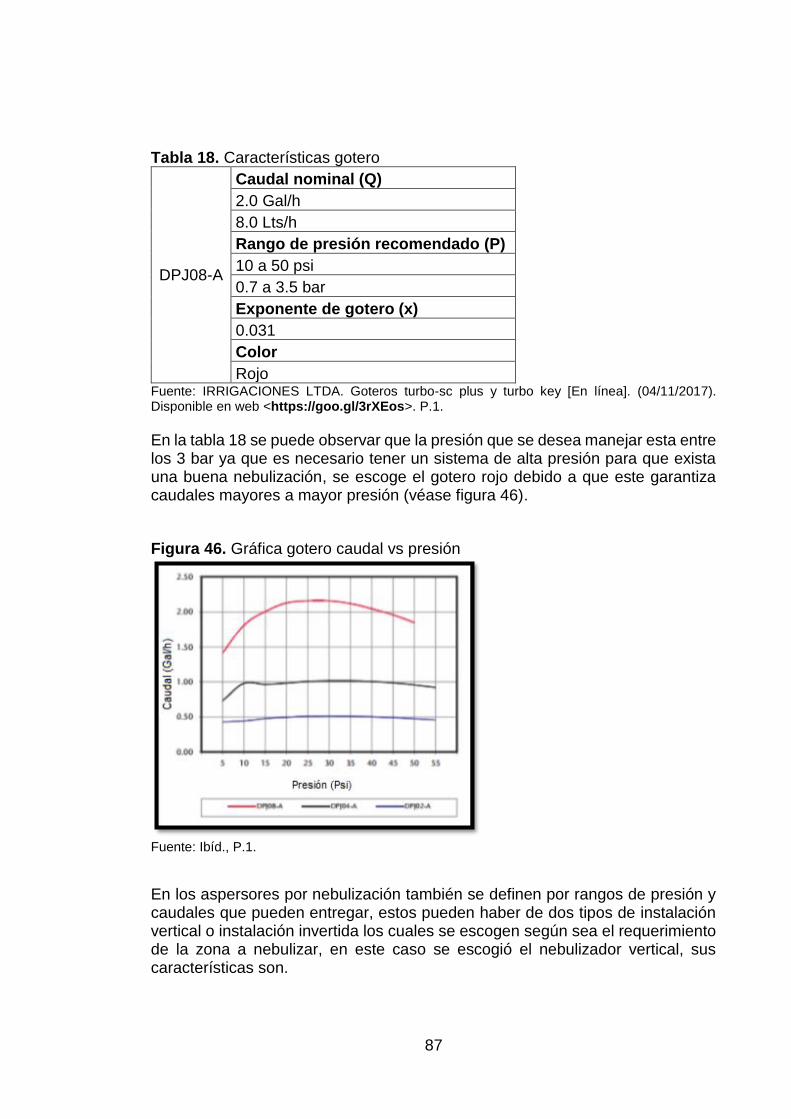
87
Tabla 18. Características gotero
DPJ08-A
Caudal nominal (Q)
2.0 Gal/h
8.0 Lts/h
Rango de presión recomendado (P)
10 a 50 psi
0.7 a 3.5 bar
Exponente de gotero (x)
0.031
Color
Rojo Fuente: IRRIGACIONES LTDA. Goteros turbo-sc plus y turbo key [En línea]. (04/11/2017). Disponible en web <https://goo.gl/3rXEos>. P.1.
En la tabla 18 se puede observar que la presión que se desea manejar esta entre los 3 bar ya que es necesario tener un sistema de alta presión para que exista una buena nebulización, se escoge el gotero rojo debido a que este garantiza caudales mayores a mayor presión (véase figura 46).
Figura 46. Gráfica gotero caudal vs presión
Fuente: Ibíd., P.1.
En los aspersores por nebulización también se definen por rangos de presión y caudales que pueden entregar, estos pueden haber de dos tipos de instalación vertical o instalación invertida los cuales se escogen según sea el requerimiento de la zona a nebulizar, en este caso se escogió el nebulizador vertical, sus características son.
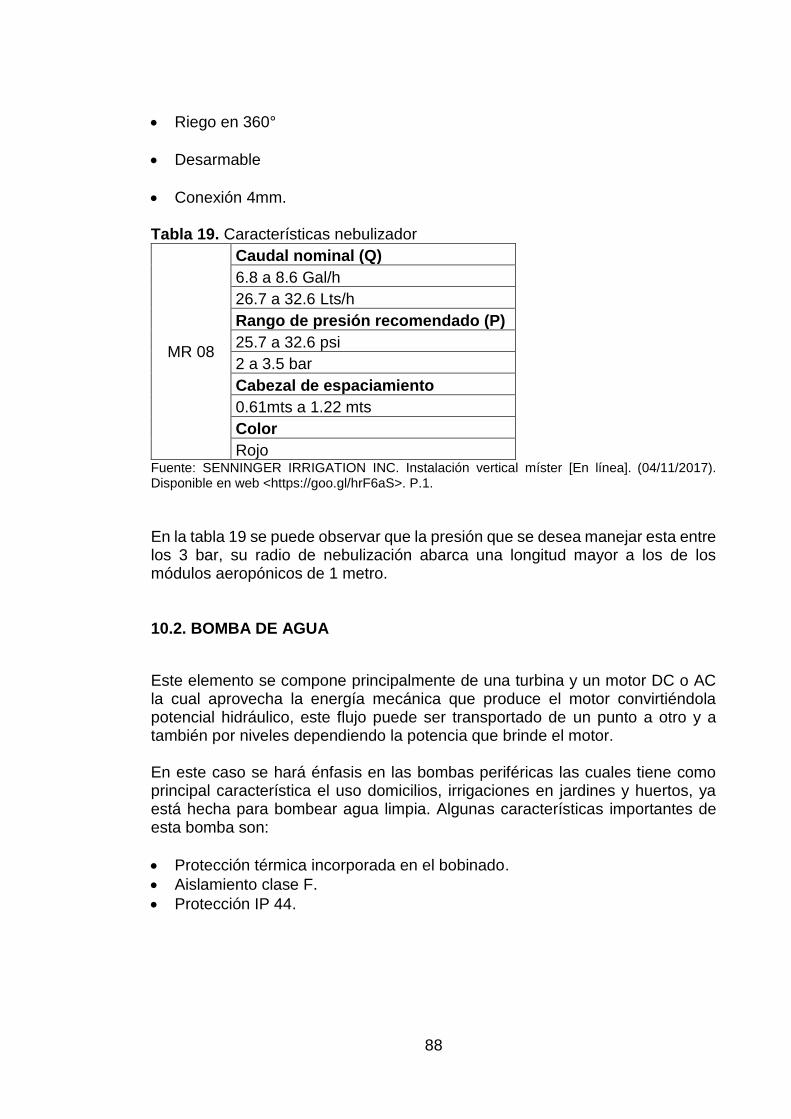
88
Riego en 360°
Desarmable
Conexión 4mm.
Tabla 19. Características nebulizador
MR 08
Caudal nominal (Q)
6.8 a 8.6 Gal/h
26.7 a 32.6 Lts/h
Rango de presión recomendado (P)
25.7 a 32.6 psi
2 a 3.5 bar
Cabezal de espaciamiento
0.61mts a 1.22 mts
Color
Rojo Fuente: SENNINGER IRRIGATION INC. Instalación vertical míster [En línea]. (04/11/2017). Disponible en web <https://goo.gl/hrF6aS>. P.1.
En la tabla 19 se puede observar que la presión que se desea manejar esta entre los 3 bar, su radio de nebulización abarca una longitud mayor a los de los módulos aeropónicos de 1 metro. 10.2. BOMBA DE AGUA
Este elemento se compone principalmente de una turbina y un motor DC o AC la cual aprovecha la energía mecánica que produce el motor convirtiéndola potencial hidráulico, este flujo puede ser transportado de un punto a otro y a también por niveles dependiendo la potencia que brinde el motor. En este caso se hará énfasis en las bombas periféricas las cuales tiene como principal característica el uso domicilios, irrigaciones en jardines y huertos, ya está hecha para bombear agua limpia. Algunas características importantes de esta bomba son:
Protección térmica incorporada en el bobinado.
Aislamiento clase F.
Protección IP 44.
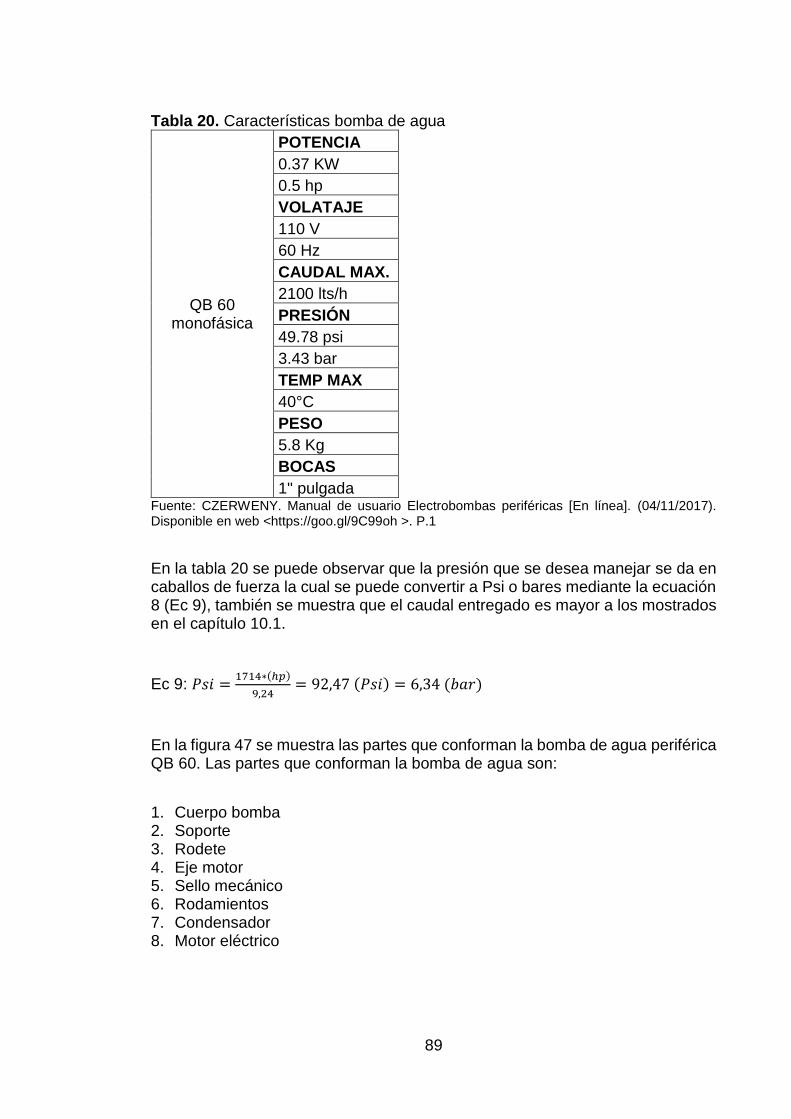
89
Tabla 20. Características bomba de agua
QB 60 monofásica
POTENCIA
0.37 KW
0.5 hp
VOLATAJE
110 V
60 Hz
CAUDAL MAX.
2100 lts/h
PRESIÓN
49.78 psi
3.43 bar
TEMP MAX
40°C
PESO
5.8 Kg
BOCAS
1" pulgada Fuente: CZERWENY. Manual de usuario Electrobombas periféricas [En línea]. (04/11/2017). Disponible en web <https://goo.gl/9C99oh >. P.1
En la tabla 20 se puede observar que la presión que se desea manejar se da en caballos de fuerza la cual se puede convertir a Psi o bares mediante la ecuación 8 (Ec 9), también se muestra que el caudal entregado es mayor a los mostrados en el capítulo 10.1.
Ec 9: 𝑃𝑠𝑖 =1714∗(ℎ𝑝)
9,24= 92,47 (𝑃𝑠𝑖) = 6,34 (𝑏𝑎𝑟)
En la figura 47 se muestra las partes que conforman la bomba de agua periférica QB 60. Las partes que conforman la bomba de agua son:
1. Cuerpo bomba 2. Soporte 3. Rodete 4. Eje motor 5. Sello mecánico 6. Rodamientos 7. Condensador 8. Motor eléctrico
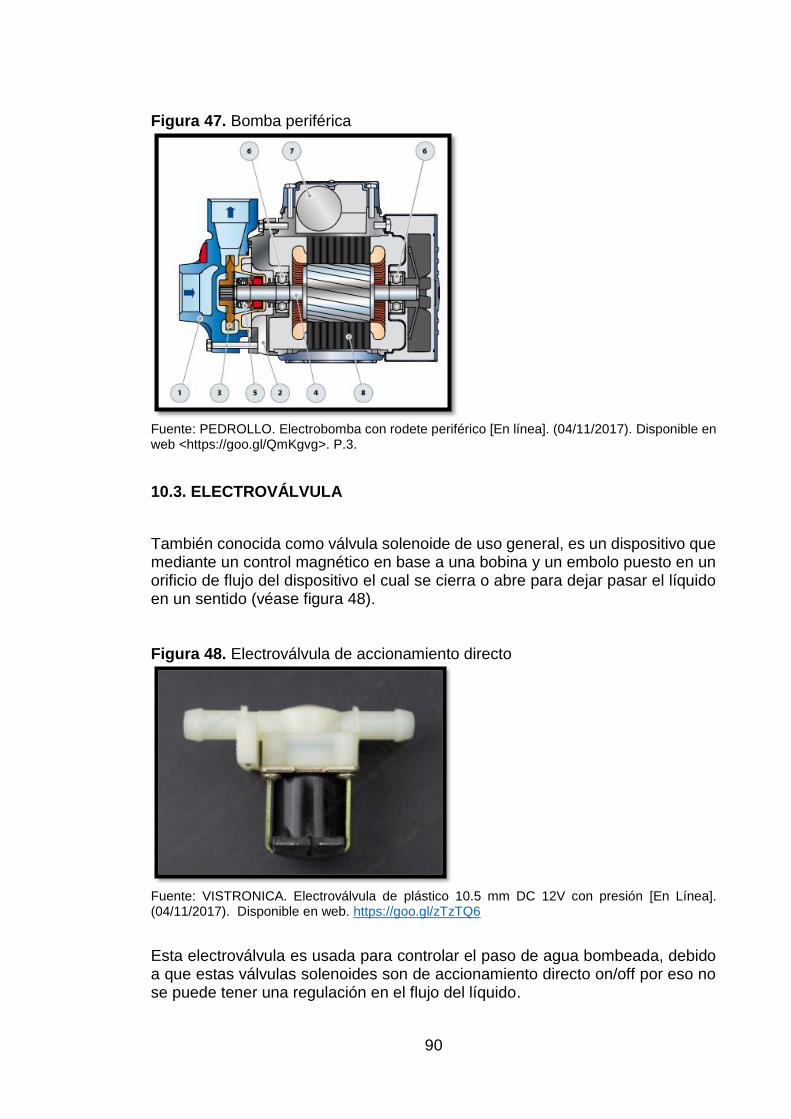
90
Figura 47. Bomba periférica
Fuente: PEDROLLO. Electrobomba con rodete periférico [En línea]. (04/11/2017). Disponible en web <https://goo.gl/QmKgvg>. P.3.
10.3. ELECTROVÁLVULA
También conocida como válvula solenoide de uso general, es un dispositivo que mediante un control magnético en base a una bobina y un embolo puesto en un orificio de flujo del dispositivo el cual se cierra o abre para dejar pasar el líquido en un sentido (véase figura 48). Figura 48. Electroválvula de accionamiento directo
Fuente: VISTRONICA. Electroválvula de plástico 10.5 mm DC 12V con presión [En Línea]. (04/11/2017). Disponible en web. https://goo.gl/zTzTQ6
Esta electroválvula es usada para controlar el paso de agua bombeada, debido a que estas válvulas solenoides son de accionamiento directo on/off por eso no se puede tener una regulación en el flujo del líquido.
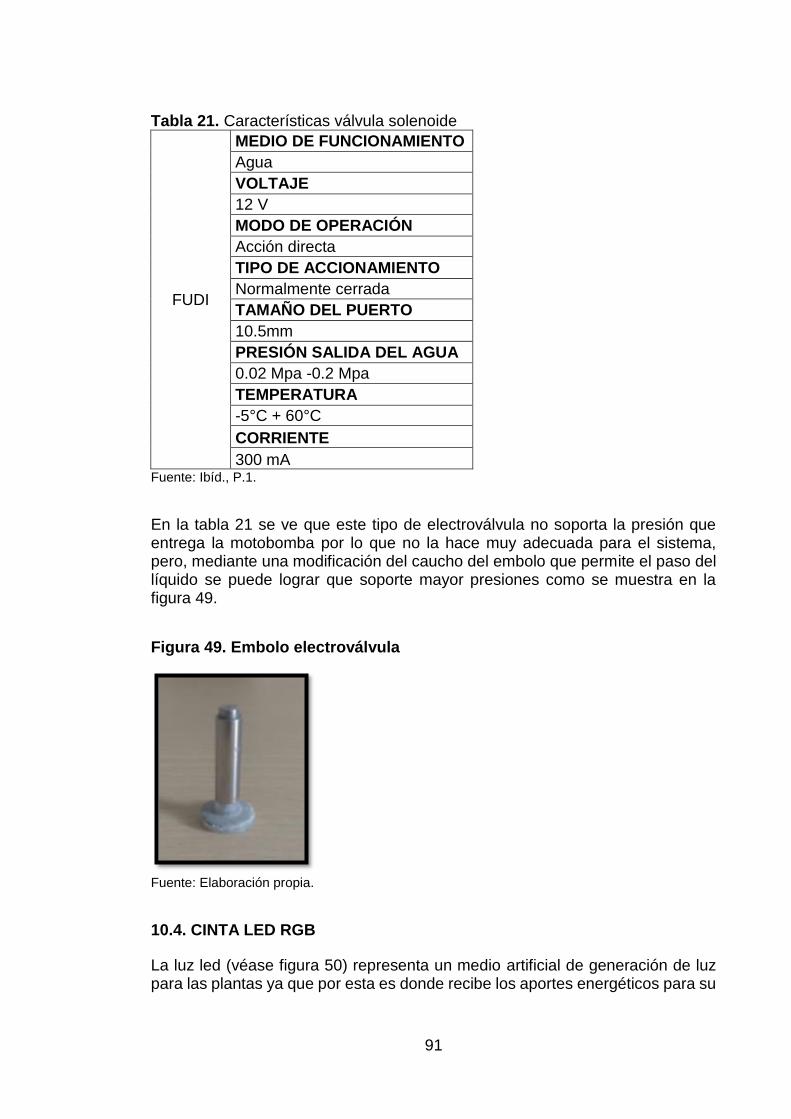
91
Tabla 21. Características válvula solenoide
FUDI
MEDIO DE FUNCIONAMIENTO
Agua
VOLTAJE
12 V
MODO DE OPERACIÓN
Acción directa
TIPO DE ACCIONAMIENTO
Normalmente cerrada
TAMAÑO DEL PUERTO
10.5mm
PRESIÓN SALIDA DEL AGUA
0.02 Mpa -0.2 Mpa
TEMPERATURA
-5°C + 60°C
CORRIENTE
300 mA Fuente: Ibíd., P.1.
En la tabla 21 se ve que este tipo de electroválvula no soporta la presión que entrega la motobomba por lo que no la hace muy adecuada para el sistema, pero, mediante una modificación del caucho del embolo que permite el paso del líquido se puede lograr que soporte mayor presiones como se muestra en la figura 49.
Figura 49. Embolo electroválvula
Fuente: Elaboración propia.
10.4. CINTA LED RGB
La luz led (véase figura 50) representa un medio artificial de generación de luz para las plantas ya que por esta es donde recibe los aportes energéticos para su
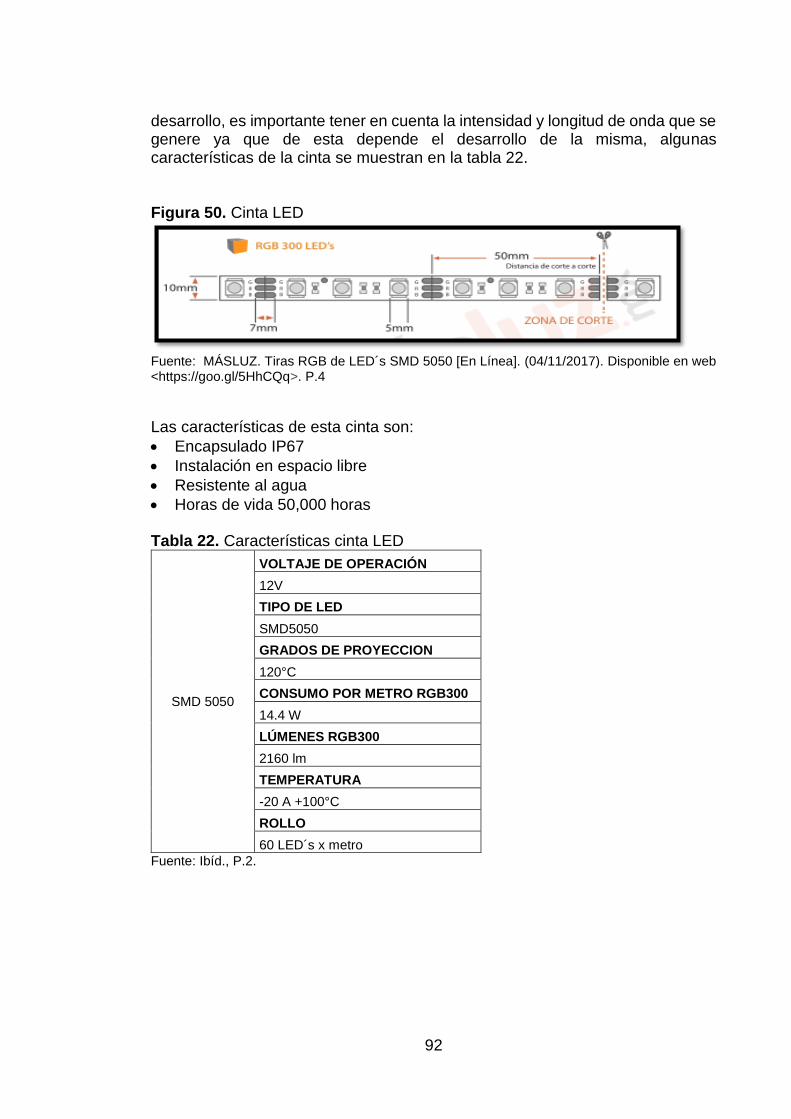
92
desarrollo, es importante tener en cuenta la intensidad y longitud de onda que se genere ya que de esta depende el desarrollo de la misma, algunas características de la cinta se muestran en la tabla 22. Figura 50. Cinta LED
Fuente: MÁSLUZ. Tiras RGB de LED´s SMD 5050 [En Línea]. (04/11/2017). Disponible en web <https://goo.gl/5HhCQq>. P.4
Las características de esta cinta son:
Encapsulado IP67
Instalación en espacio libre
Resistente al agua
Horas de vida 50,000 horas
Tabla 22. Características cinta LED
SMD 5050
VOLTAJE DE OPERACIÓN
12V
TIPO DE LED
SMD5050
GRADOS DE PROYECCION
120°C
CONSUMO POR METRO RGB300
14.4 W
LÚMENES RGB300
2160 lm
TEMPERATURA
-20 A +100°C
ROLLO
60 LED´s x metro
Fuente: Ibíd., P.2.
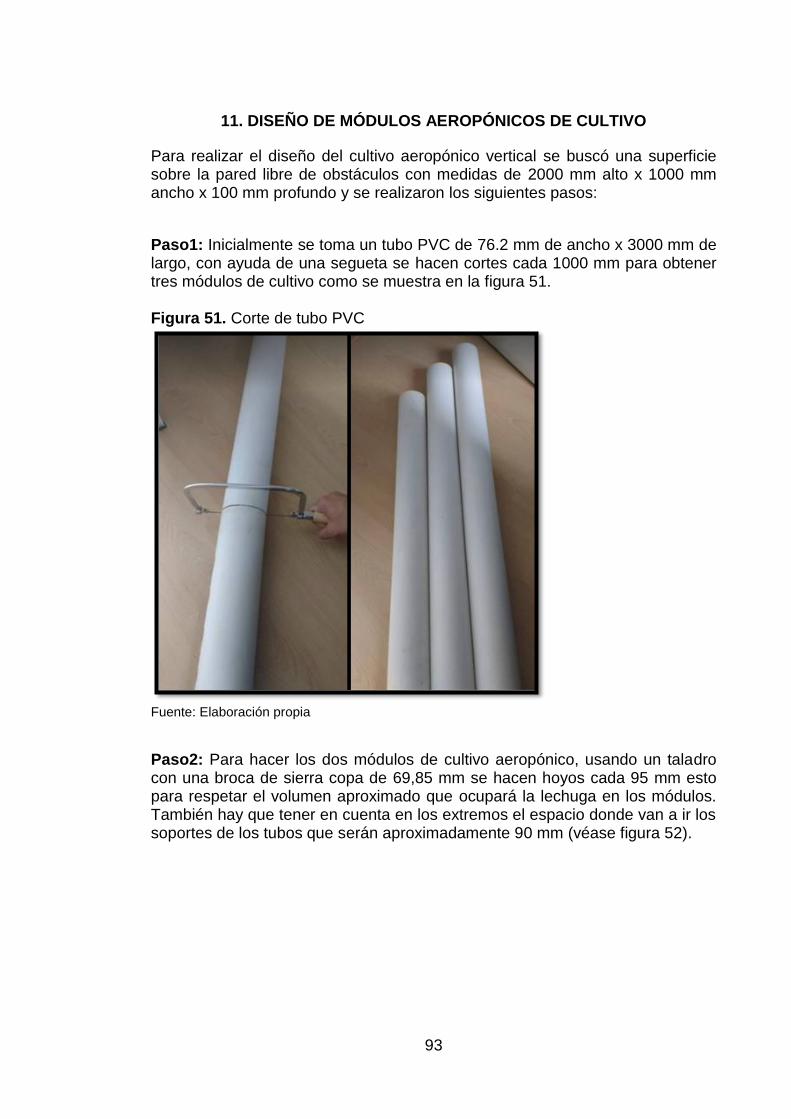
93
11. DISEÑO DE MÓDULOS AEROPÓNICOS DE CULTIVO
Para realizar el diseño del cultivo aeropónico vertical se buscó una superficie sobre la pared libre de obstáculos con medidas de 2000 mm alto x 1000 mm ancho x 100 mm profundo y se realizaron los siguientes pasos:
Paso1: Inicialmente se toma un tubo PVC de 76.2 mm de ancho x 3000 mm de largo, con ayuda de una segueta se hacen cortes cada 1000 mm para obtener tres módulos de cultivo como se muestra en la figura 51. Figura 51. Corte de tubo PVC
Fuente: Elaboración propia
Paso2: Para hacer los dos módulos de cultivo aeropónico, usando un taladro con una broca de sierra copa de 69,85 mm se hacen hoyos cada 95 mm esto para respetar el volumen aproximado que ocupará la lechuga en los módulos. También hay que tener en cuenta en los extremos el espacio donde van a ir los soportes de los tubos que serán aproximadamente 90 mm (véase figura 52).
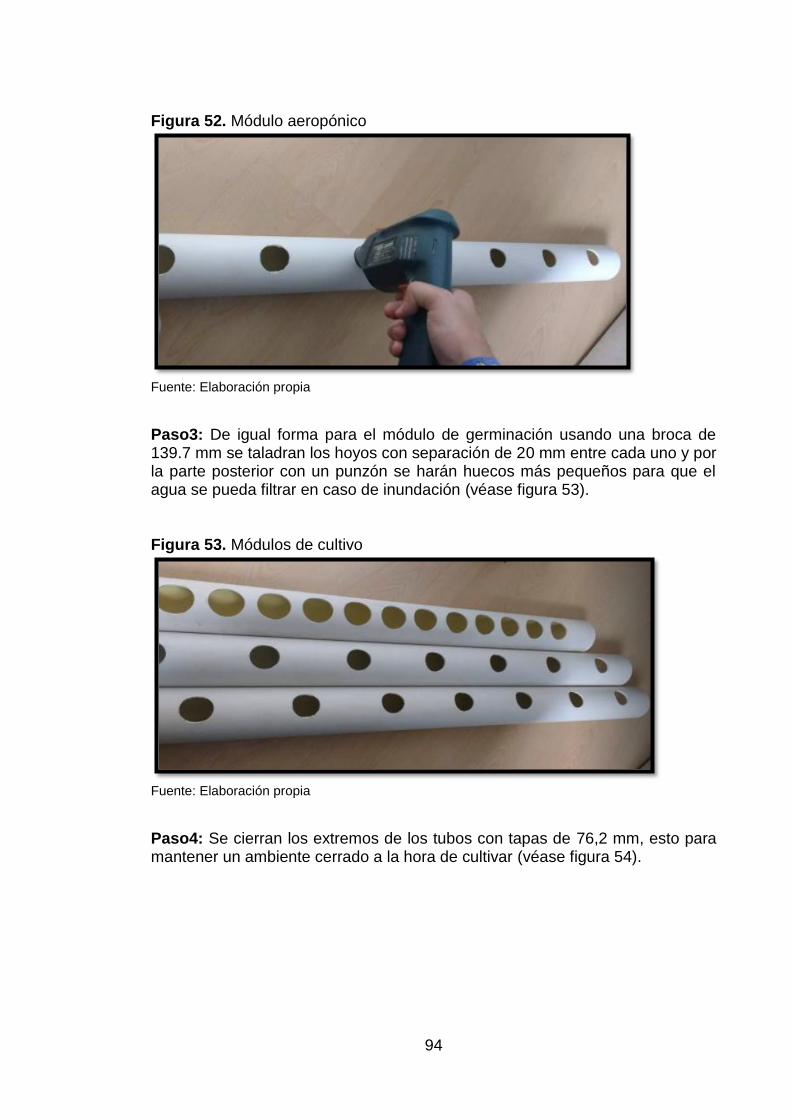
94
Figura 52. Módulo aeropónico
Fuente: Elaboración propia
Paso3: De igual forma para el módulo de germinación usando una broca de 139.7 mm se taladran los hoyos con separación de 20 mm entre cada uno y por la parte posterior con un punzón se harán huecos más pequeños para que el agua se pueda filtrar en caso de inundación (véase figura 53). Figura 53. Módulos de cultivo
Fuente: Elaboración propia
Paso4: Se cierran los extremos de los tubos con tapas de 76,2 mm, esto para mantener un ambiente cerrado a la hora de cultivar (véase figura 54).
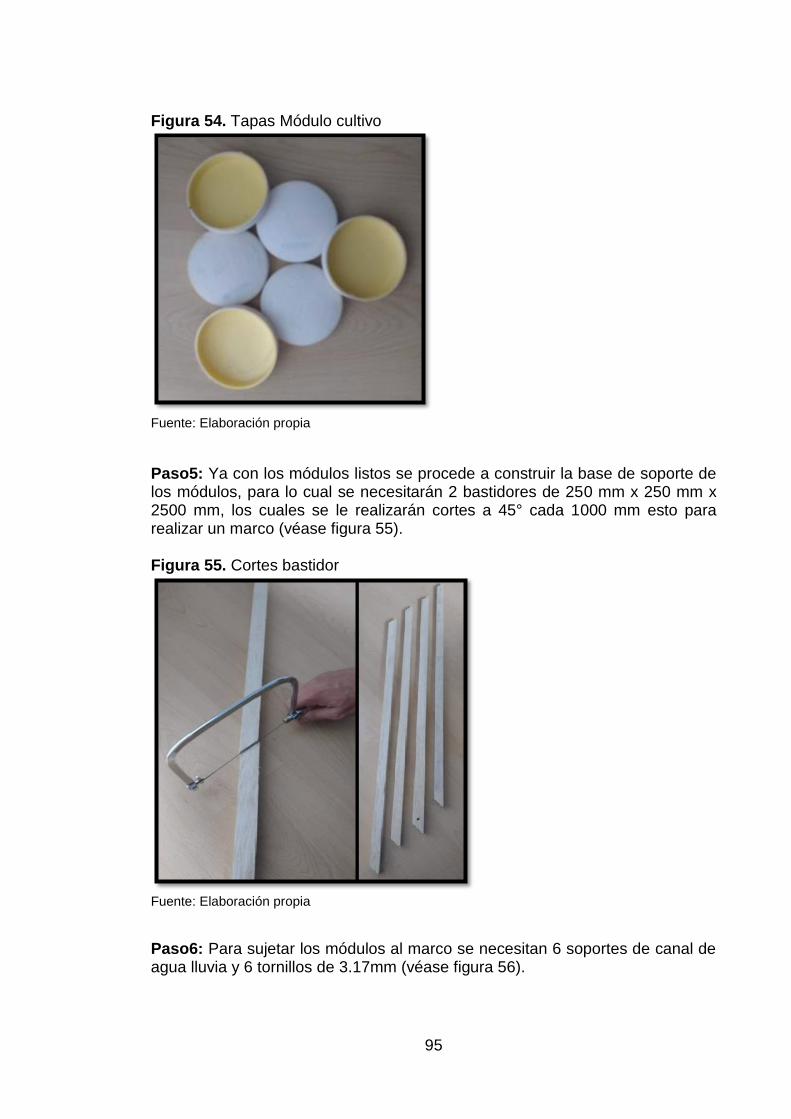
95
Figura 54. Tapas Módulo cultivo
Fuente: Elaboración propia
Paso5: Ya con los módulos listos se procede a construir la base de soporte de los módulos, para lo cual se necesitarán 2 bastidores de 250 mm x 250 mm x 2500 mm, los cuales se le realizarán cortes a 45° cada 1000 mm esto para realizar un marco (véase figura 55). Figura 55. Cortes bastidor
Fuente: Elaboración propia
Paso6: Para sujetar los módulos al marco se necesitan 6 soportes de canal de agua lluvia y 6 tornillos de 3.17mm (véase figura 56).
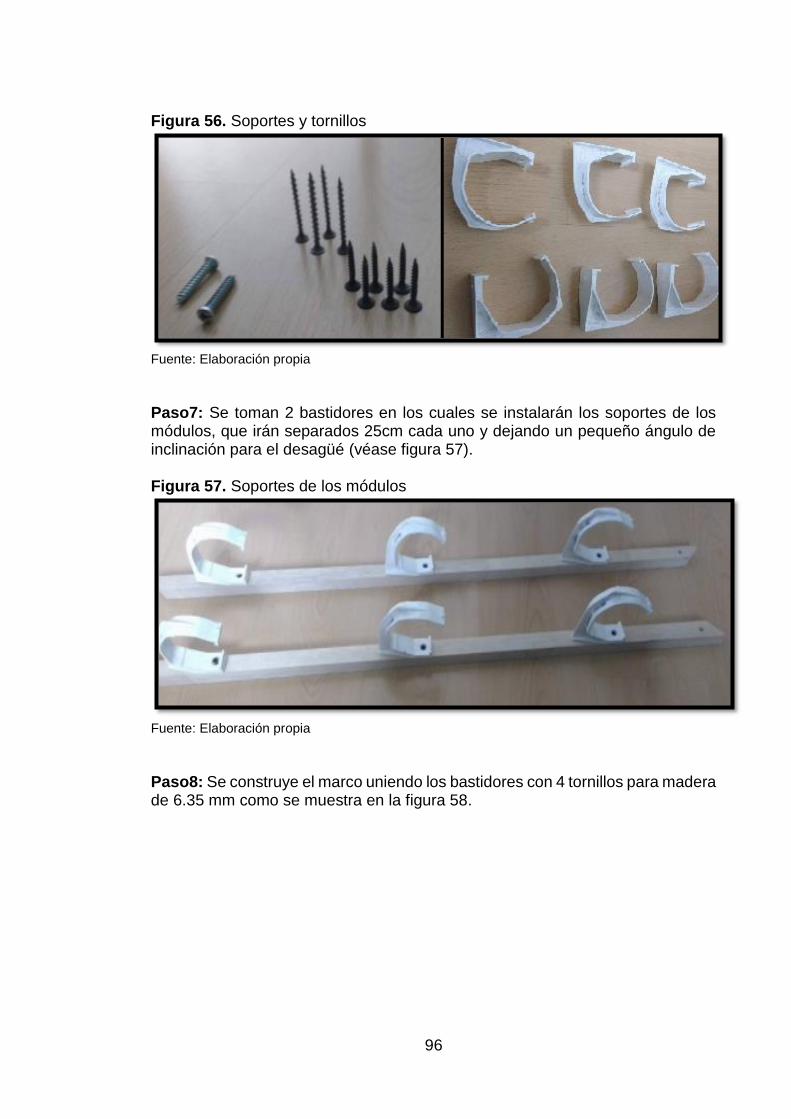
96
Figura 56. Soportes y tornillos
Fuente: Elaboración propia
Paso7: Se toman 2 bastidores en los cuales se instalarán los soportes de los módulos, que irán separados 25cm cada uno y dejando un pequeño ángulo de inclinación para el desagüé (véase figura 57). Figura 57. Soportes de los módulos
Fuente: Elaboración propia
Paso8: Se construye el marco uniendo los bastidores con 4 tornillos para madera de 6.35 mm como se muestra en la figura 58.
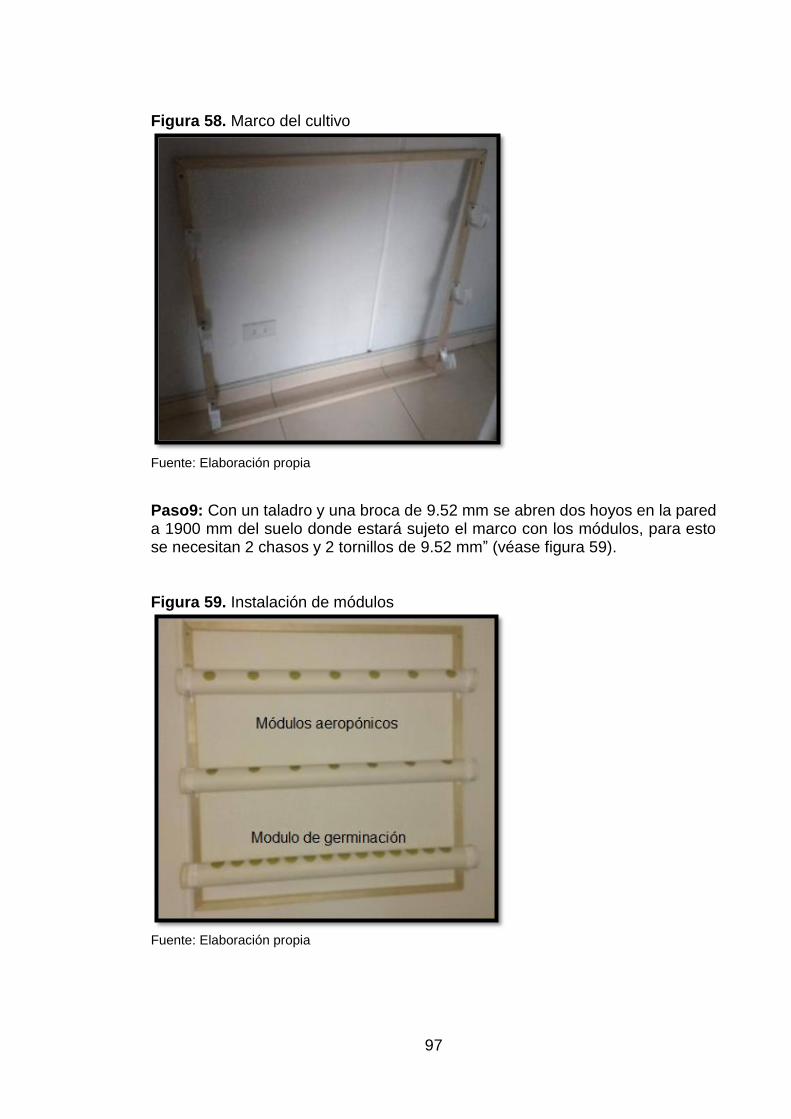
97
Figura 58. Marco del cultivo
Fuente: Elaboración propia
Paso9: Con un taladro y una broca de 9.52 mm se abren dos hoyos en la pared a 1900 mm del suelo donde estará sujeto el marco con los módulos, para esto se necesitan 2 chasos y 2 tornillos de 9.52 mm” (véase figura 59). Figura 59. Instalación de módulos
Fuente: Elaboración propia

98
Paso10: Para empezar la siembra se compra fibra de coco y turba el cual será él sustrato donde crecerán las semillas de lechuga (véase figura 60). Figura 60. Sustrato y semillas
Fuente: Elaboración propia
Paso11: Se rellena el módulo de germinación con el sustrato y se procede a sembrar la semilla a una profundidad de aproximadamente tres veces el tamaño de la semilla (véase figura 61). Figura 61. Siembra
Fuente: Elaboración propia
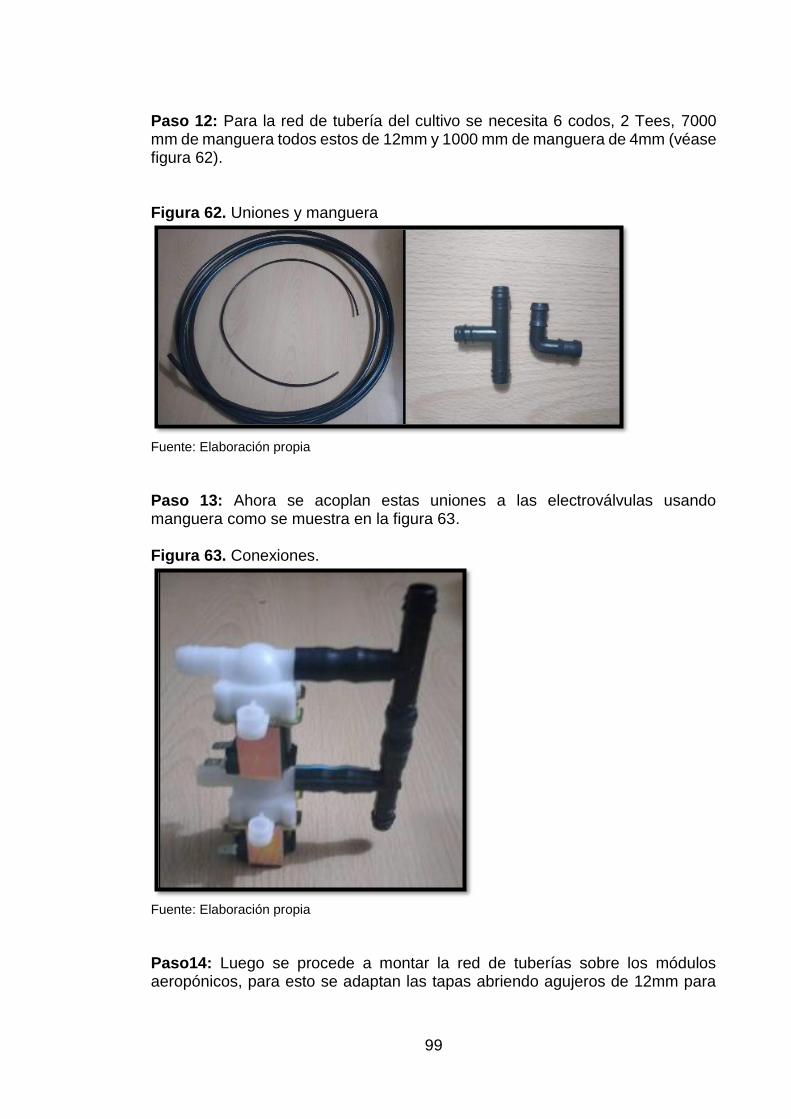
99
Paso 12: Para la red de tubería del cultivo se necesita 6 codos, 2 Tees, 7000 mm de manguera todos estos de 12mm y 1000 mm de manguera de 4mm (véase figura 62). Figura 62. Uniones y manguera
Fuente: Elaboración propia
Paso 13: Ahora se acoplan estas uniones a las electroválvulas usando manguera como se muestra en la figura 63. Figura 63. Conexiones.
Fuente: Elaboración propia
Paso14: Luego se procede a montar la red de tuberías sobre los módulos aeropónicos, para esto se adaptan las tapas abriendo agujeros de 12mm para
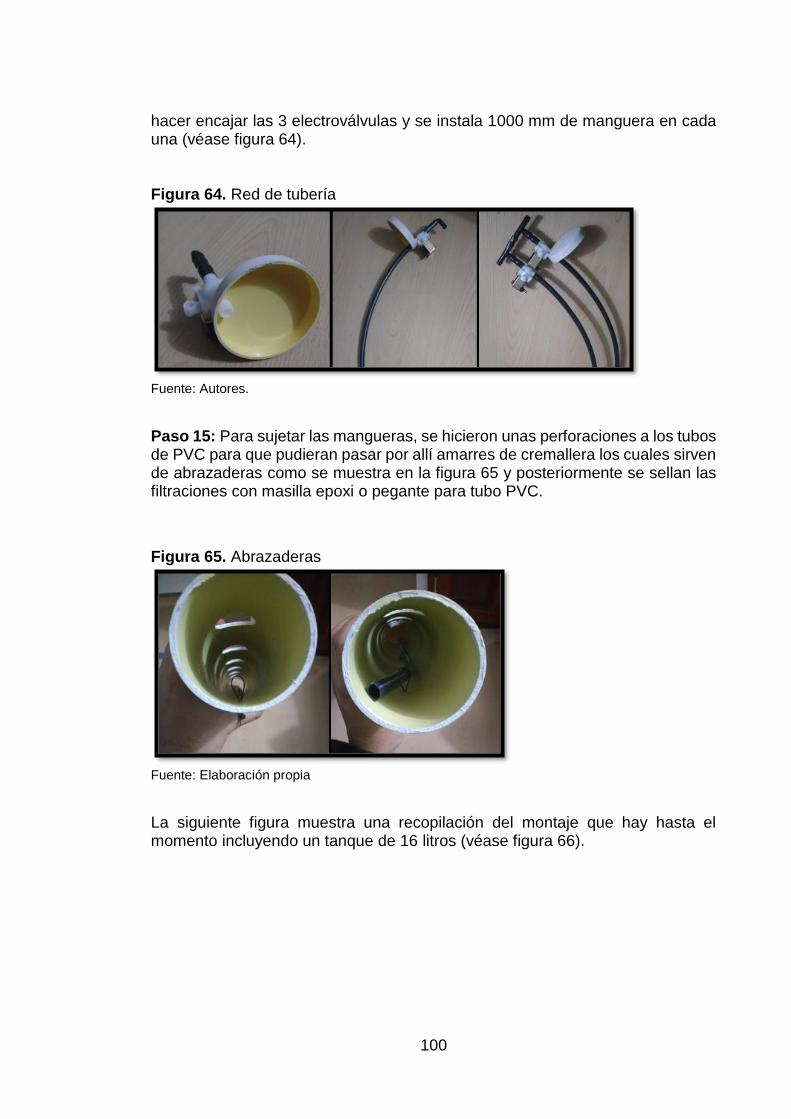
100
hacer encajar las 3 electroválvulas y se instala 1000 mm de manguera en cada una (véase figura 64). Figura 64. Red de tubería
Fuente: Autores.
Paso 15: Para sujetar las mangueras, se hicieron unas perforaciones a los tubos de PVC para que pudieran pasar por allí amarres de cremallera los cuales sirven de abrazaderas como se muestra en la figura 65 y posteriormente se sellan las filtraciones con masilla epoxi o pegante para tubo PVC.
Figura 65. Abrazaderas
Fuente: Elaboración propia
La siguiente figura muestra una recopilación del montaje que hay hasta el momento incluyendo un tanque de 16 litros (véase figura 66).
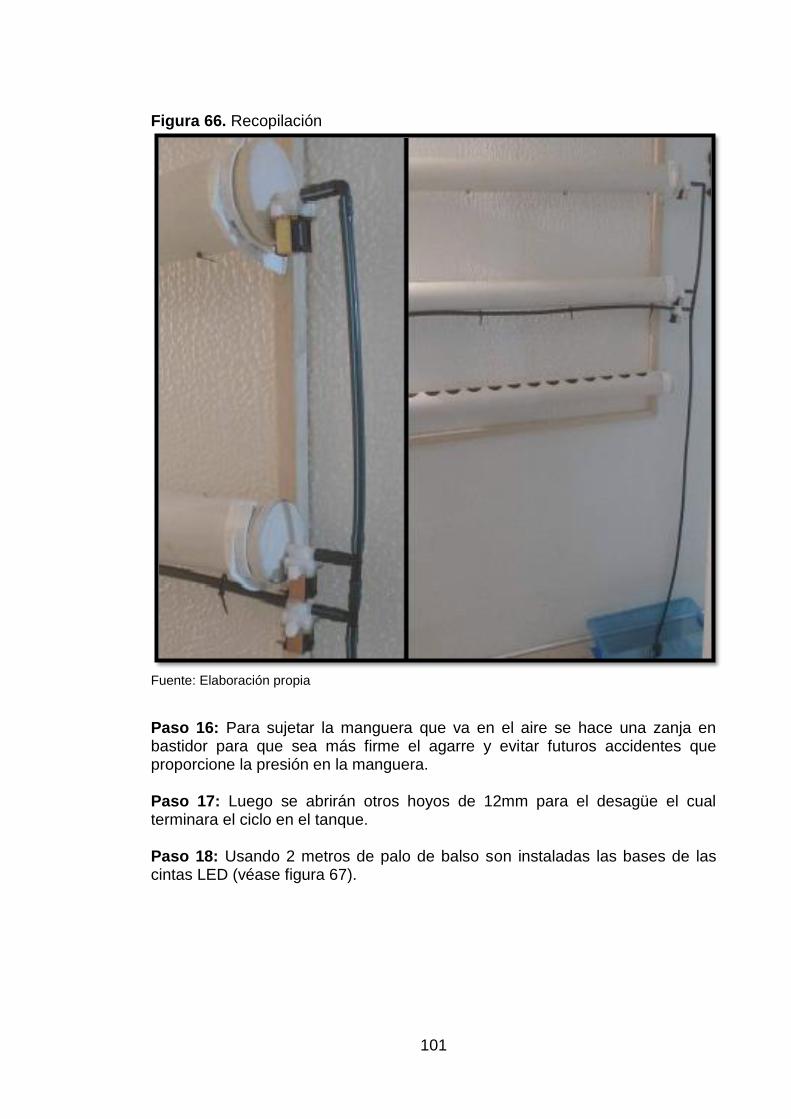
101
Figura 66. Recopilación
Fuente: Elaboración propia
Paso 16: Para sujetar la manguera que va en el aire se hace una zanja en bastidor para que sea más firme el agarre y evitar futuros accidentes que proporcione la presión en la manguera. Paso 17: Luego se abrirán otros hoyos de 12mm para el desagüe el cual terminara el ciclo en el tanque. Paso 18: Usando 2 metros de palo de balso son instaladas las bases de las cintas LED (véase figura 67).
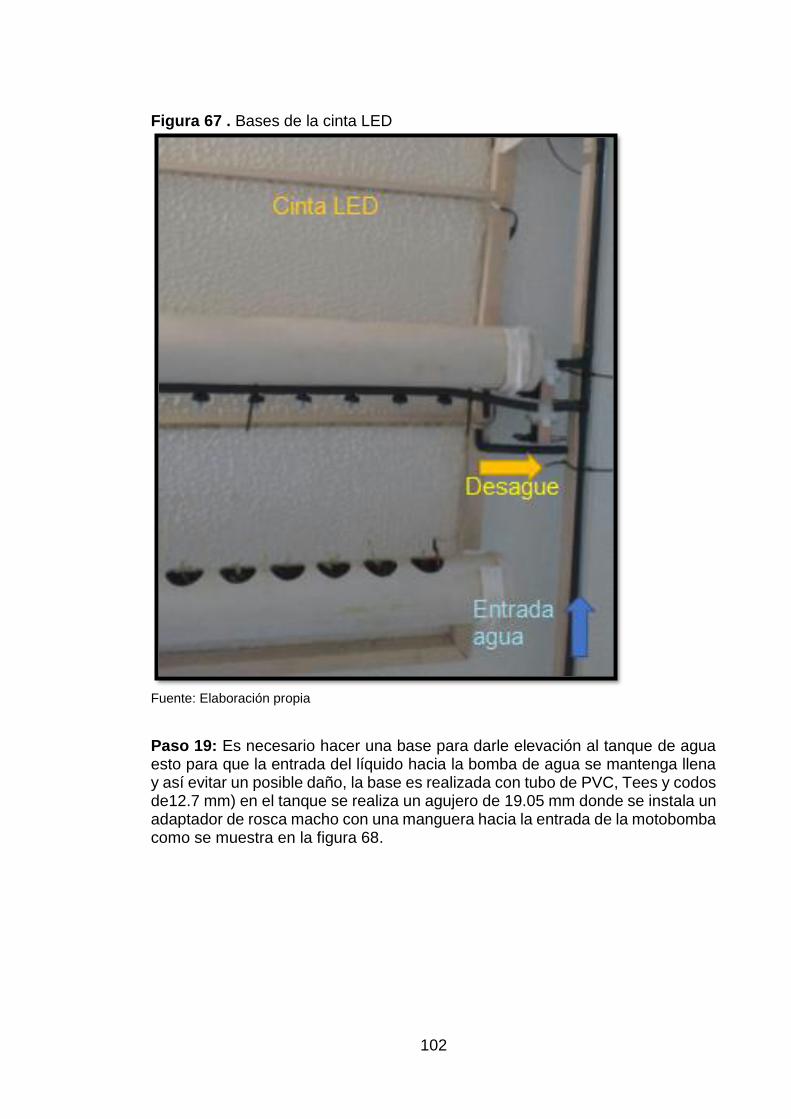
102
Figura 67 . Bases de la cinta LED
Fuente: Elaboración propia
Paso 19: Es necesario hacer una base para darle elevación al tanque de agua esto para que la entrada del líquido hacia la bomba de agua se mantenga llena y así evitar un posible daño, la base es realizada con tubo de PVC, Tees y codos de12.7 mm) en el tanque se realiza un agujero de 19.05 mm donde se instala un adaptador de rosca macho con una manguera hacia la entrada de la motobomba como se muestra en la figura 68.

103
Figura 68. Base del tanque
Fuente: Elaboración propia
Paso 20. Para la simulación el suministro de agua se dispuso un segundo tanque de almacenamiento el cual lleva una bomba de agua en su interior conectada a una electroválvula la cual hace las veces de grifo, esto para controlar el flujo de agua entrante (véase figura 69). Figura 69. Tanque de suministro
Fuente: Elaboración propia.
Ya con el montaje realizado de la estructura de los módulos aeropónicos de cultivo se procede a realizar la ubicación de los sensores y actuadores ponderados previamente.
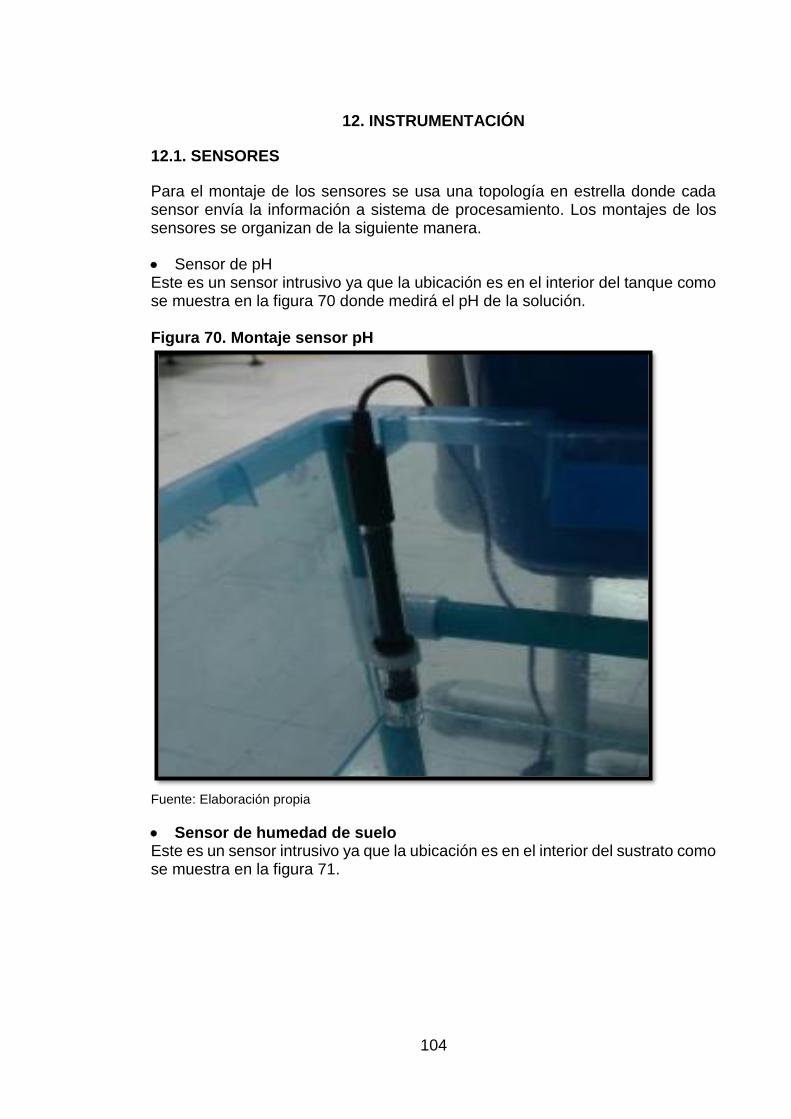
104
12. INSTRUMENTACIÓN
12.1. SENSORES
Para el montaje de los sensores se usa una topología en estrella donde cada sensor envía la información a sistema de procesamiento. Los montajes de los sensores se organizan de la siguiente manera.
Sensor de pH Este es un sensor intrusivo ya que la ubicación es en el interior del tanque como se muestra en la figura 70 donde medirá el pH de la solución. Figura 70. Montaje sensor pH
Fuente: Elaboración propia
Sensor de humedad de suelo Este es un sensor intrusivo ya que la ubicación es en el interior del sustrato como se muestra en la figura 71.
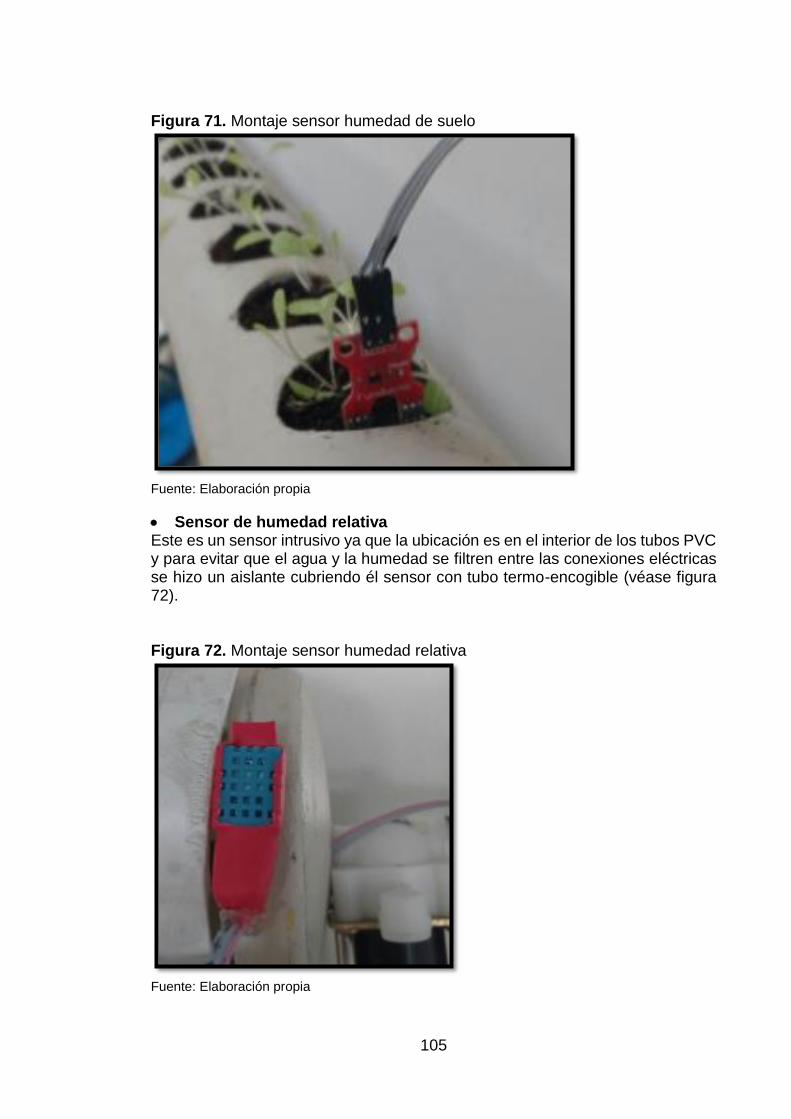
105
Figura 71. Montaje sensor humedad de suelo
Fuente: Elaboración propia
Sensor de humedad relativa Este es un sensor intrusivo ya que la ubicación es en el interior de los tubos PVC y para evitar que el agua y la humedad se filtren entre las conexiones eléctricas se hizo un aislante cubriendo él sensor con tubo termo-encogible (véase figura 72). Figura 72. Montaje sensor humedad relativa
Fuente: Elaboración propia
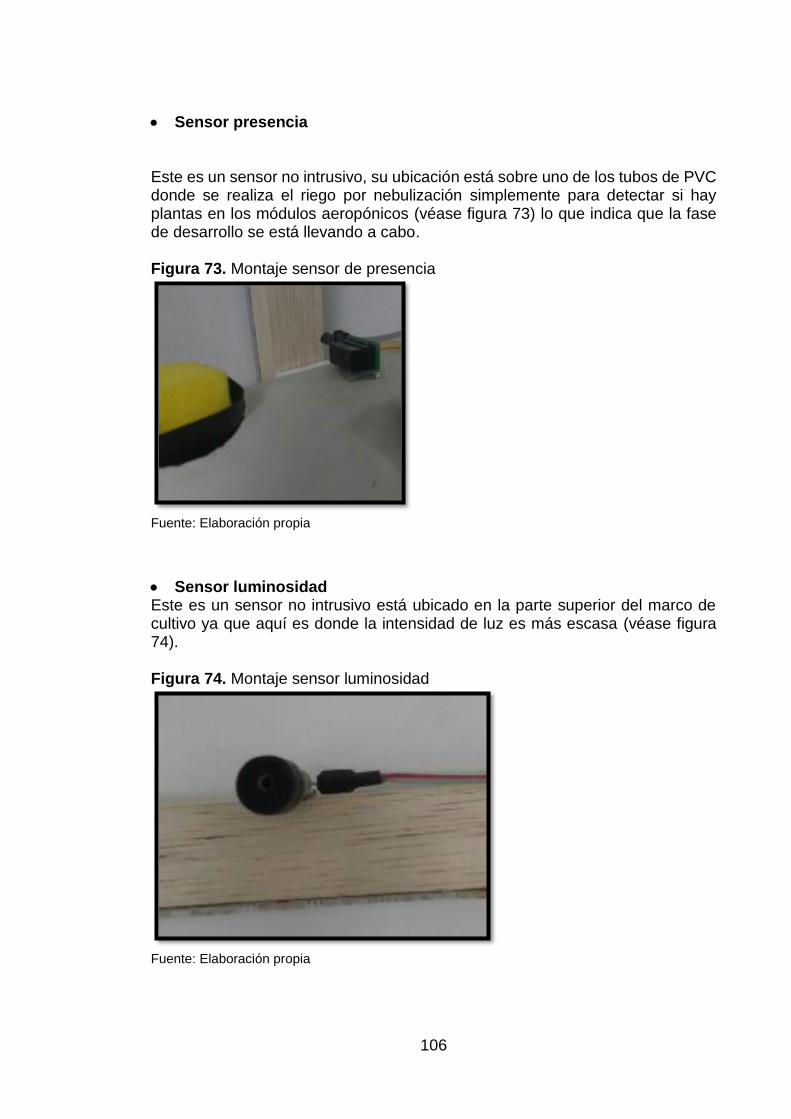
106
Sensor presencia Este es un sensor no intrusivo, su ubicación está sobre uno de los tubos de PVC donde se realiza el riego por nebulización simplemente para detectar si hay plantas en los módulos aeropónicos (véase figura 73) lo que indica que la fase de desarrollo se está llevando a cabo. Figura 73. Montaje sensor de presencia
Fuente: Elaboración propia
Sensor luminosidad Este es un sensor no intrusivo está ubicado en la parte superior del marco de cultivo ya que aquí es donde la intensidad de luz es más escasa (véase figura 74). Figura 74. Montaje sensor luminosidad
Fuente: Elaboración propia
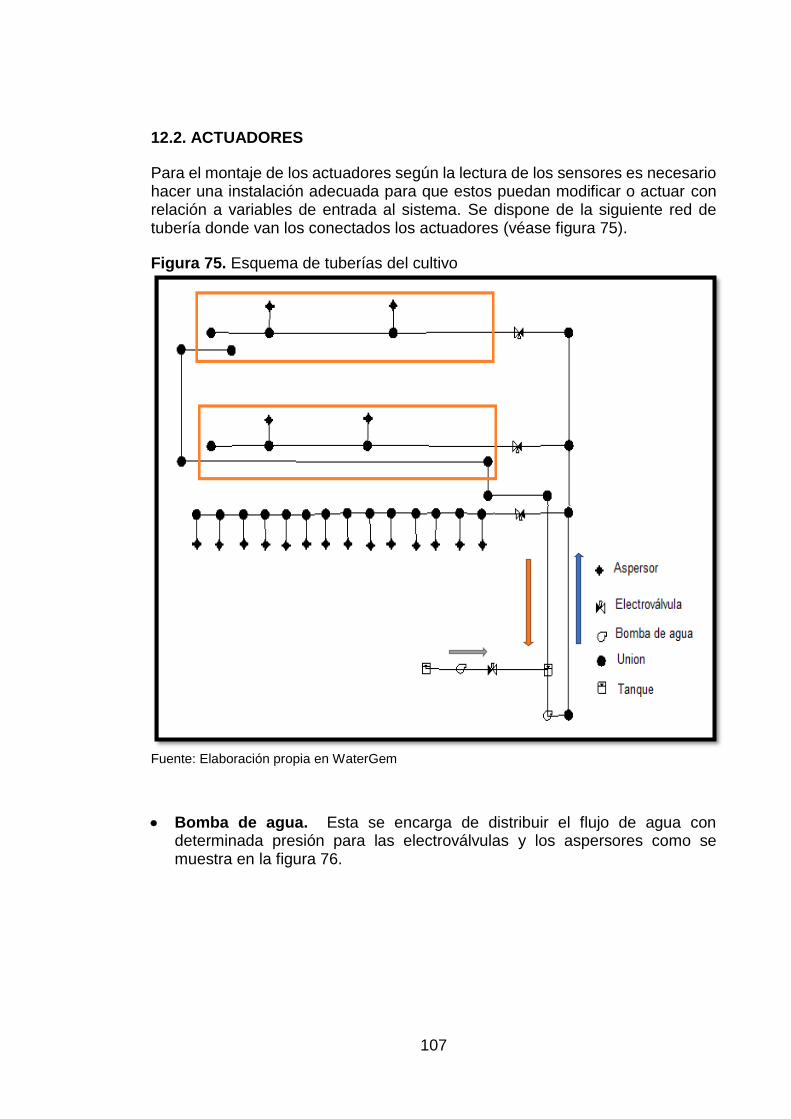
107
12.2. ACTUADORES
Para el montaje de los actuadores según la lectura de los sensores es necesario hacer una instalación adecuada para que estos puedan modificar o actuar con relación a variables de entrada al sistema. Se dispone de la siguiente red de tubería donde van los conectados los actuadores (véase figura 75).
Figura 75. Esquema de tuberías del cultivo
Fuente: Elaboración propia en WaterGem
Bomba de agua. Esta se encarga de distribuir el flujo de agua con determinada presión para las electroválvulas y los aspersores como se muestra en la figura 76.

108
Figura 76. Montaje bomba de agua
Fuente: Elaboración propia
Electroválvulas. Su función es abrir o cerrar el paso del líquido hacia los aspersores y hacia el tanque de almacenamiento (véase figura 77).
Figura 77. Montaje electroválvulas
Fuente: Elaboración propia
109
Aspersores. Estos son los que distribuyen el líquido según sus características de aspersión hacia las plantas como se muestra en la figura 78.
Figura 78. Montaje nebulizadores
Fuente: Elaboración propia
Figura 79. Montaje goteros
Fuente: Elaboración propia
Cinta LED Esta se encarga de entregar la fuente de energía lumínica a las plantas las cuales se desarrollarán mediante esta luz artificial. Figura 80. Montaje cinta LED RGB
Fuente: Elaboración propia
Ya con todos los sensores y actuadores dispuestos en el prototipo, lo siguiente es definir el sistema de control donde se van a intervenir las variables sensadas.
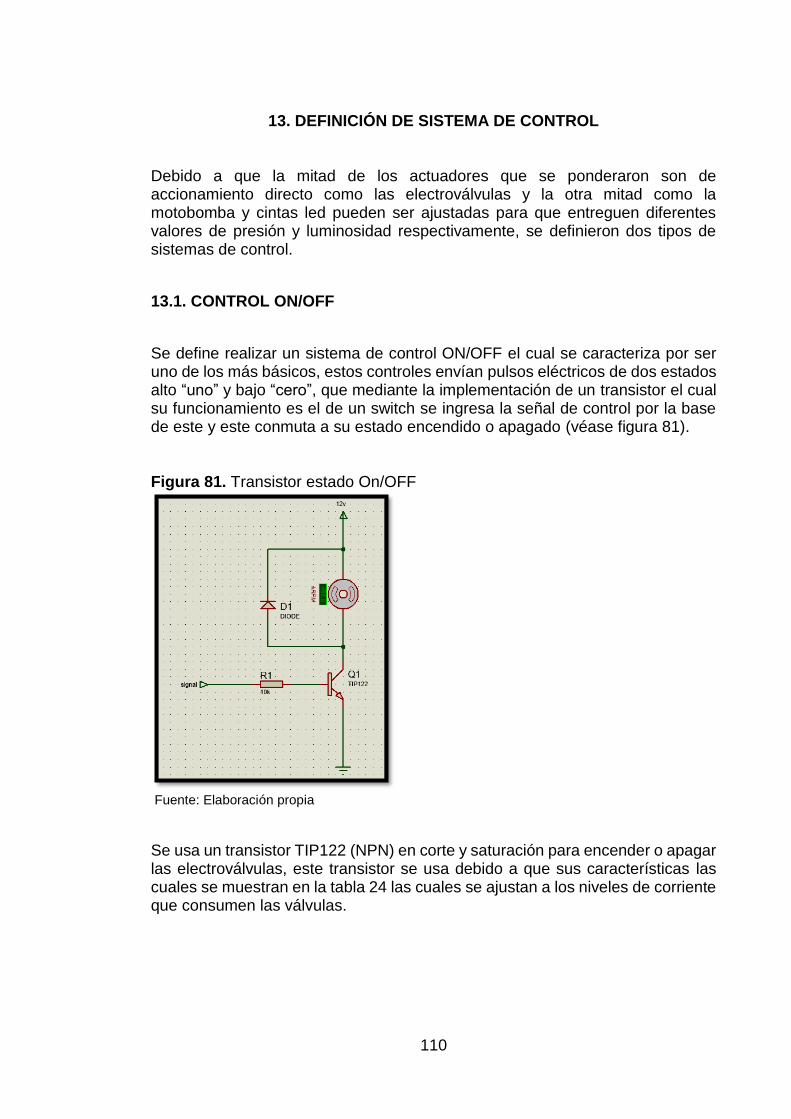
110
13. DEFINICIÓN DE SISTEMA DE CONTROL Debido a que la mitad de los actuadores que se ponderaron son de accionamiento directo como las electroválvulas y la otra mitad como la motobomba y cintas led pueden ser ajustadas para que entreguen diferentes valores de presión y luminosidad respectivamente, se definieron dos tipos de sistemas de control.
13.1. CONTROL ON/OFF
Se define realizar un sistema de control ON/OFF el cual se caracteriza por ser uno de los más básicos, estos controles envían pulsos eléctricos de dos estados alto “uno” y bajo “cero”, que mediante la implementación de un transistor el cual su funcionamiento es el de un switch se ingresa la señal de control por la base de este y este conmuta a su estado encendido o apagado (véase figura 81). Figura 81. Transistor estado On/OFF
Fuente: Elaboración propia
Se usa un transistor TIP122 (NPN) en corte y saturación para encender o apagar las electroválvulas, este transistor se usa debido a que sus características las cuales se muestran en la tabla 24 las cuales se ajustan a los niveles de corriente que consumen las válvulas.
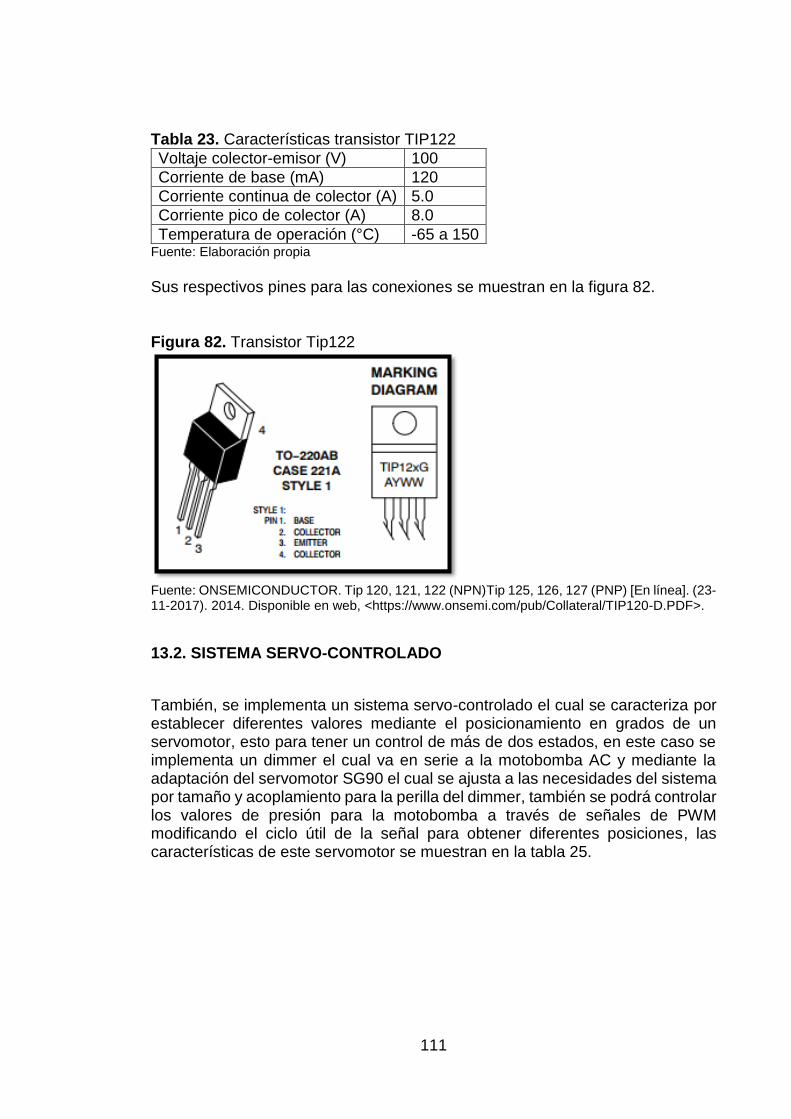
111
Tabla 23. Características transistor TIP122
Voltaje colector-emisor (V) 100
Corriente de base (mA) 120
Corriente continua de colector (A) 5.0
Corriente pico de colector (A) 8.0
Temperatura de operación (°C) -65 a 150 Fuente: Elaboración propia
Sus respectivos pines para las conexiones se muestran en la figura 82. Figura 82. Transistor Tip122
Fuente: ONSEMICONDUCTOR. Tip 120, 121, 122 (NPN)Tip 125, 126, 127 (PNP) [En línea]. (23-11-2017). 2014. Disponible en web, <https://www.onsemi.com/pub/Collateral/TIP120-D.PDF>.
13.2. SISTEMA SERVO-CONTROLADO
También, se implementa un sistema servo-controlado el cual se caracteriza por establecer diferentes valores mediante el posicionamiento en grados de un servomotor, esto para tener un control de más de dos estados, en este caso se implementa un dimmer el cual va en serie a la motobomba AC y mediante la adaptación del servomotor SG90 el cual se ajusta a las necesidades del sistema por tamaño y acoplamiento para la perilla del dimmer, también se podrá controlar los valores de presión para la motobomba a través de señales de PWM modificando el ciclo útil de la señal para obtener diferentes posiciones, las características de este servomotor se muestran en la tabla 25.
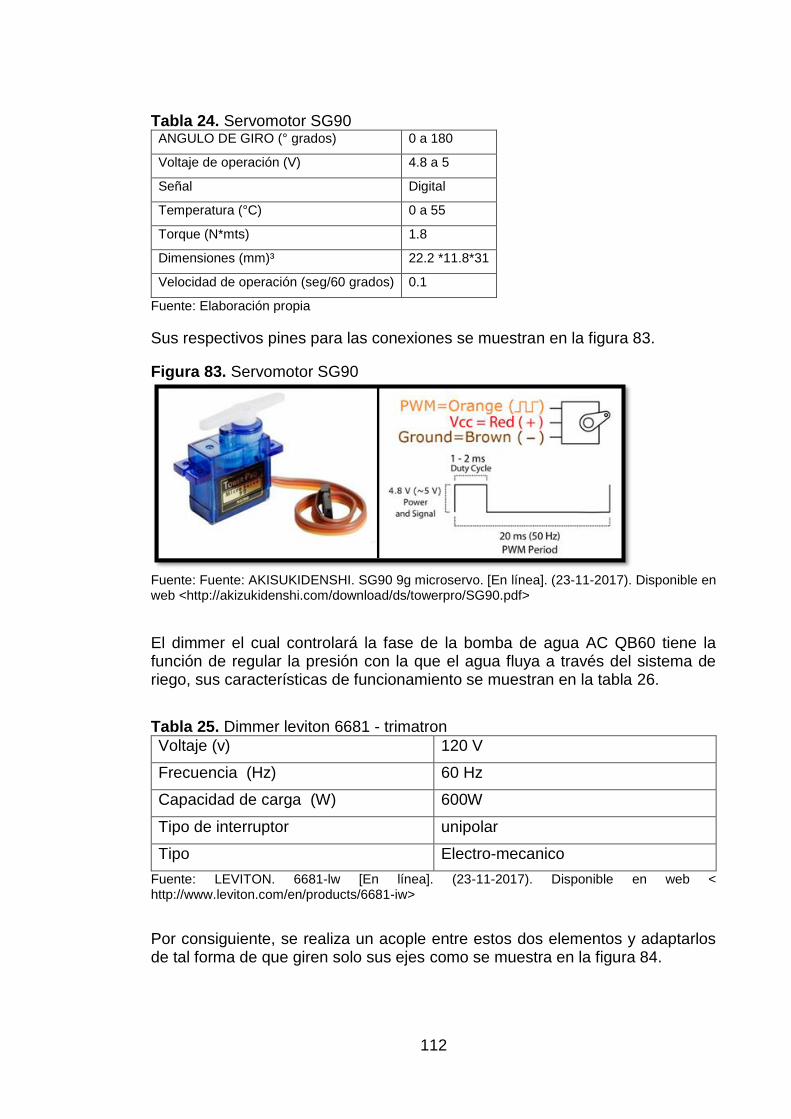
112
Tabla 24. Servomotor SG90 ANGULO DE GIRO (° grados) 0 a 180
Voltaje de operación (V) 4.8 a 5
Señal Digital
Temperatura (°C) 0 a 55
Torque (N*mts) 1.8
Dimensiones (mm)³ 22.2 *11.8*31
Velocidad de operación (seg/60 grados) 0.1
Fuente: Elaboración propia
Sus respectivos pines para las conexiones se muestran en la figura 83.
Figura 83. Servomotor SG90
Fuente: Fuente: AKISUKIDENSHI. SG90 9g microservo. [En línea]. (23-11-2017). Disponible en web <http://akizukidenshi.com/download/ds/towerpro/SG90.pdf>
El dimmer el cual controlará la fase de la bomba de agua AC QB60 tiene la función de regular la presión con la que el agua fluya a través del sistema de riego, sus características de funcionamiento se muestran en la tabla 26.
Tabla 25. Dimmer leviton 6681 - trimatron
Voltaje (v) 120 V
Frecuencia (Hz) 60 Hz
Capacidad de carga (W) 600W
Tipo de interruptor unipolar
Tipo Electro-mecanico
Fuente: LEVITON. 6681-lw [En línea]. (23-11-2017). Disponible en web <
http://www.leviton.com/en/products/6681-iw>
Por consiguiente, se realiza un acople entre estos dos elementos y adaptarlos de tal forma de que giren solo sus ejes como se muestra en la figura 84.
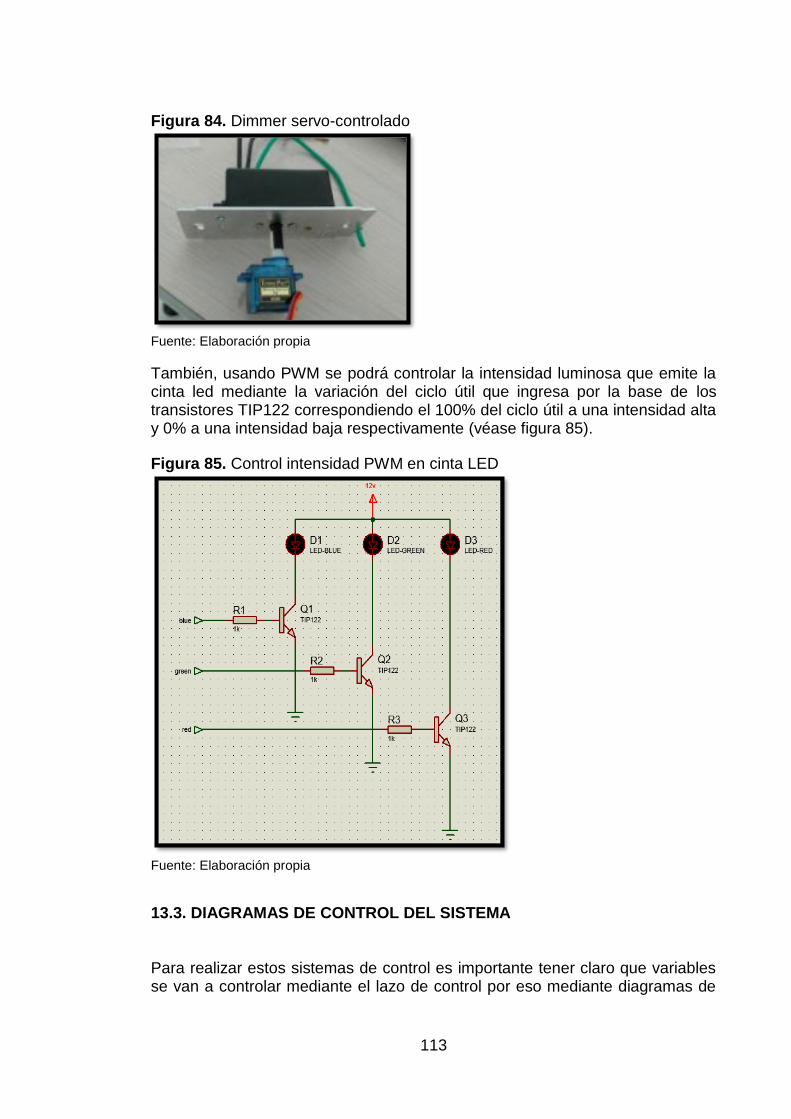
113
Figura 84. Dimmer servo-controlado
Fuente: Elaboración propia
También, usando PWM se podrá controlar la intensidad luminosa que emite la cinta led mediante la variación del ciclo útil que ingresa por la base de los transistores TIP122 correspondiendo el 100% del ciclo útil a una intensidad alta y 0% a una intensidad baja respectivamente (véase figura 85).
Figura 85. Control intensidad PWM en cinta LED
Fuente: Elaboración propia
13.3. DIAGRAMAS DE CONTROL DEL SISTEMA
Para realizar estos sistemas de control es importante tener claro que variables se van a controlar mediante el lazo de control por eso mediante diagramas de
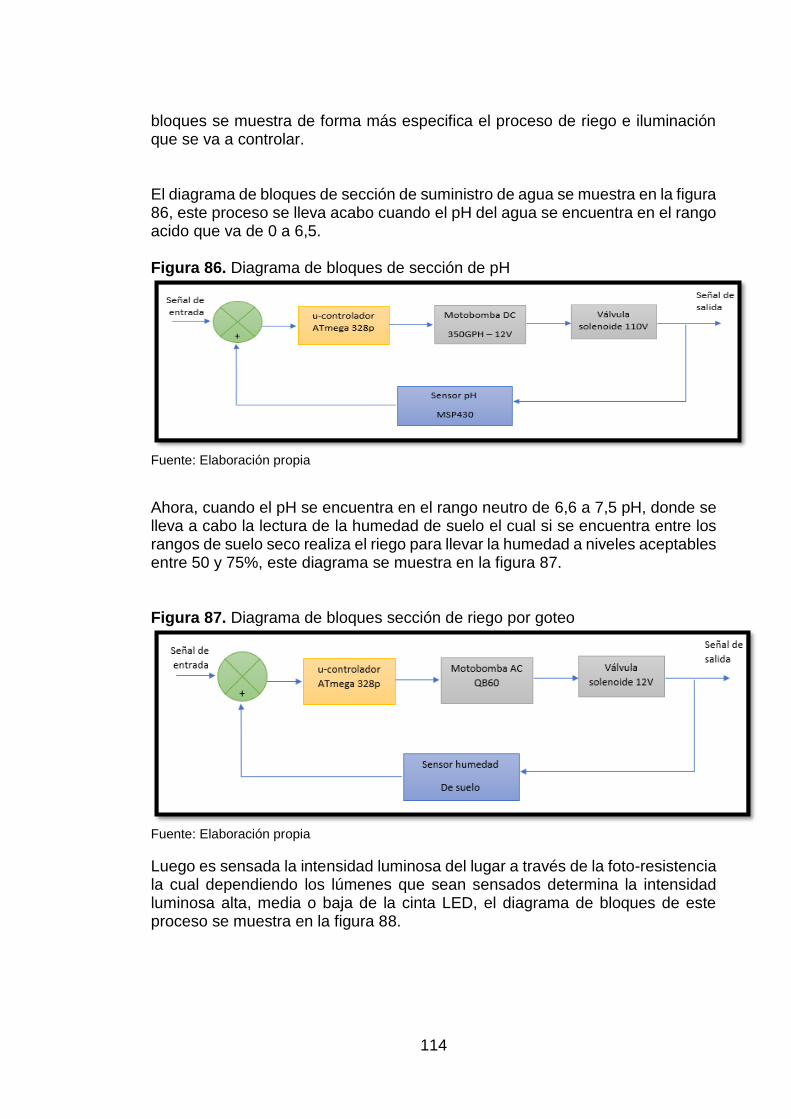
114
bloques se muestra de forma más especifica el proceso de riego e iluminación que se va a controlar. El diagrama de bloques de sección de suministro de agua se muestra en la figura 86, este proceso se lleva acabo cuando el pH del agua se encuentra en el rango acido que va de 0 a 6,5. Figura 86. Diagrama de bloques de sección de pH
Fuente: Elaboración propia
Ahora, cuando el pH se encuentra en el rango neutro de 6,6 a 7,5 pH, donde se lleva a cabo la lectura de la humedad de suelo el cual si se encuentra entre los rangos de suelo seco realiza el riego para llevar la humedad a niveles aceptables entre 50 y 75%, este diagrama se muestra en la figura 87. Figura 87. Diagrama de bloques sección de riego por goteo
Fuente: Elaboración propia
Luego es sensada la intensidad luminosa del lugar a través de la foto-resistencia la cual dependiendo los lúmenes que sean sensados determina la intensidad luminosa alta, media o baja de la cinta LED, el diagrama de bloques de este proceso se muestra en la figura 88.
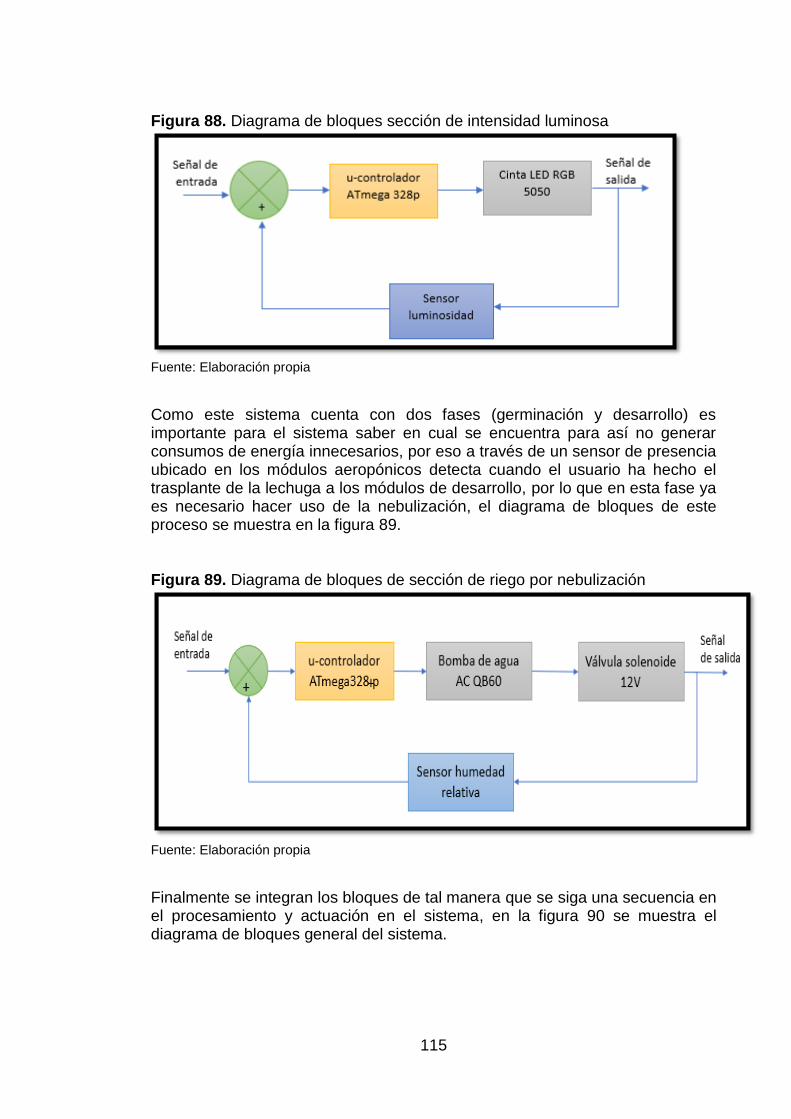
115
Figura 88. Diagrama de bloques sección de intensidad luminosa
Fuente: Elaboración propia
Como este sistema cuenta con dos fases (germinación y desarrollo) es importante para el sistema saber en cual se encuentra para así no generar consumos de energía innecesarios, por eso a través de un sensor de presencia ubicado en los módulos aeropónicos detecta cuando el usuario ha hecho el trasplante de la lechuga a los módulos de desarrollo, por lo que en esta fase ya es necesario hacer uso de la nebulización, el diagrama de bloques de este proceso se muestra en la figura 89. Figura 89. Diagrama de bloques de sección de riego por nebulización
Fuente: Elaboración propia
Finalmente se integran los bloques de tal manera que se siga una secuencia en el procesamiento y actuación en el sistema, en la figura 90 se muestra el diagrama de bloques general del sistema.
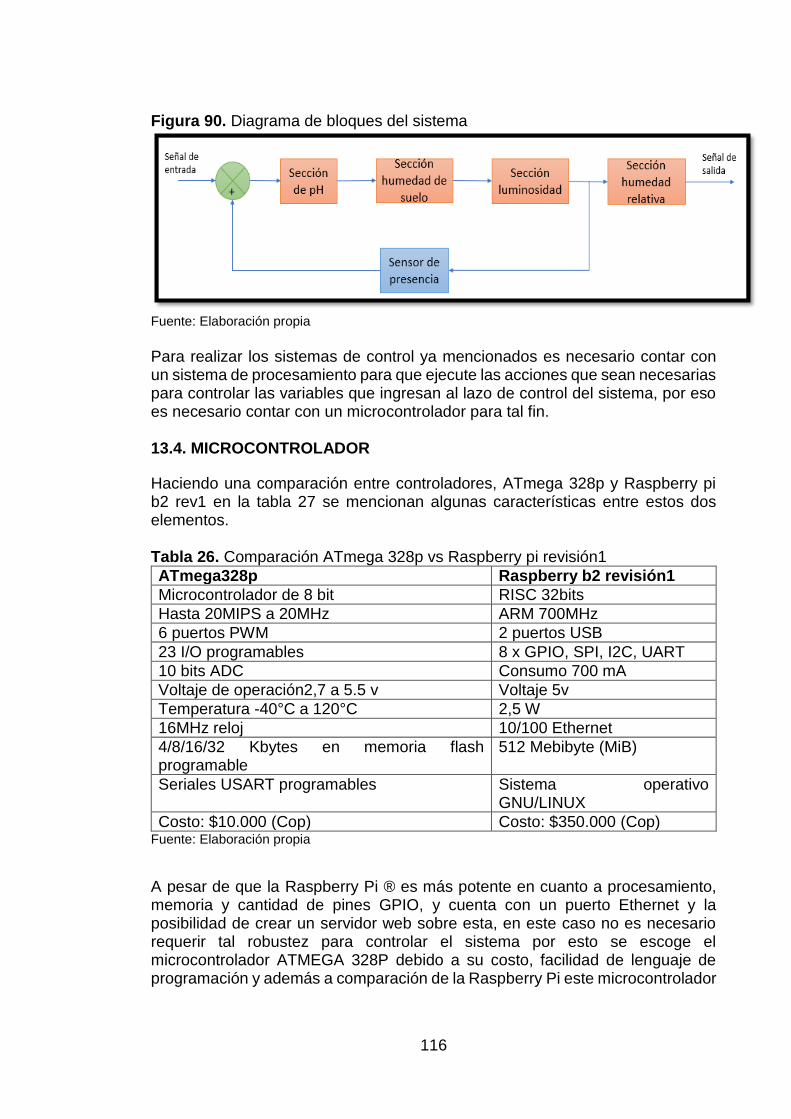
116
Figura 90. Diagrama de bloques del sistema
Fuente: Elaboración propia Para realizar los sistemas de control ya mencionados es necesario contar con un sistema de procesamiento para que ejecute las acciones que sean necesarias para controlar las variables que ingresan al lazo de control del sistema, por eso es necesario contar con un microcontrolador para tal fin. 13.4. MICROCONTROLADOR
Haciendo una comparación entre controladores, ATmega 328p y Raspberry pi b2 rev1 en la tabla 27 se mencionan algunas características entre estos dos elementos. Tabla 26. Comparación ATmega 328p vs Raspberry pi revisión1
ATmega328p Raspberry b2 revisión1
Microcontrolador de 8 bit RISC 32bits
Hasta 20MIPS a 20MHz ARM 700MHz
6 puertos PWM 2 puertos USB
23 I/O programables 8 x GPIO, SPI, I2C, UART
10 bits ADC Consumo 700 mA
Voltaje de operación2,7 a 5.5 v Voltaje 5v
Temperatura -40°C a 120°C 2,5 W
16MHz reloj 10/100 Ethernet
4/8/16/32 Kbytes en memoria flash programable
512 Mebibyte (MiB)
Seriales USART programables Sistema operativo GNU/LINUX
Costo: $10.000 (Cop) Costo: $350.000 (Cop) Fuente: Elaboración propia
A pesar de que la Raspberry Pi ® es más potente en cuanto a procesamiento, memoria y cantidad de pines GPIO, y cuenta con un puerto Ethernet y la posibilidad de crear un servidor web sobre esta, en este caso no es necesario requerir tal robustez para controlar el sistema por esto se escoge el microcontrolador ATMEGA 328P debido a su costo, facilidad de lenguaje de programación y además a comparación de la Raspberry Pi este microcontrolador
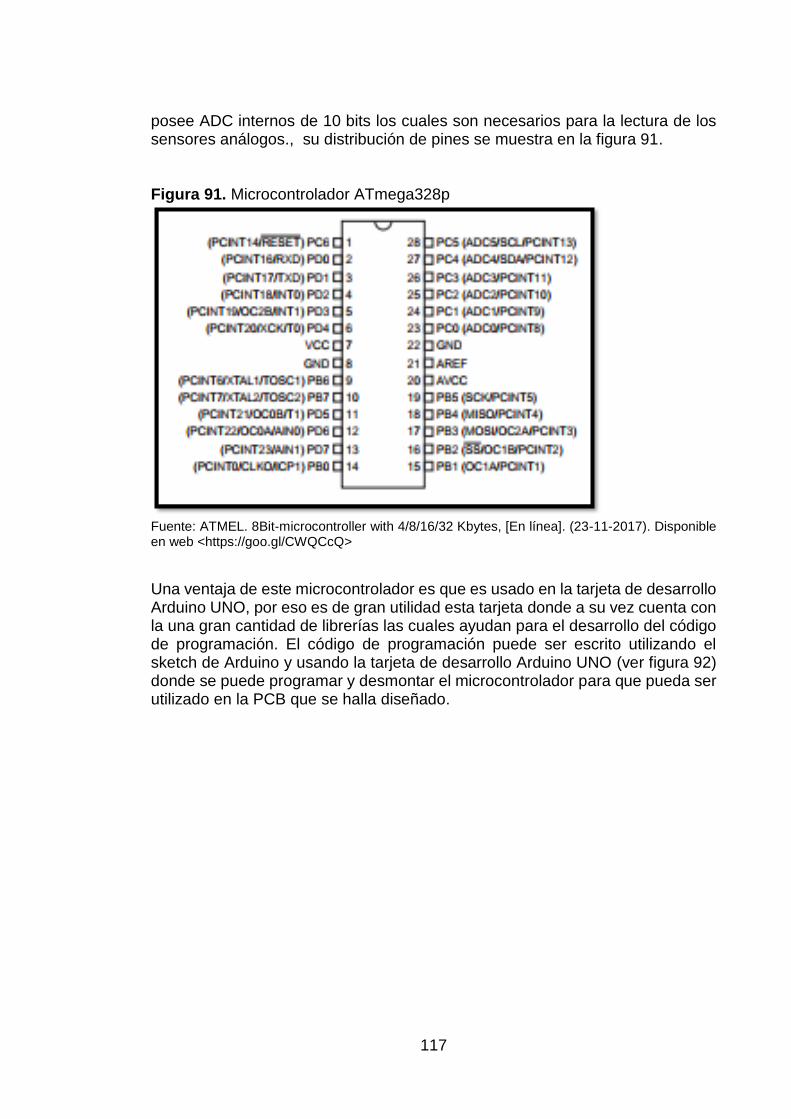
117
posee ADC internos de 10 bits los cuales son necesarios para la lectura de los sensores análogos., su distribución de pines se muestra en la figura 91. Figura 91. Microcontrolador ATmega328p
Fuente: ATMEL. 8Bit-microcontroller with 4/8/16/32 Kbytes, [En línea]. (23-11-2017). Disponible en web <https://goo.gl/CWQCcQ>
Una ventaja de este microcontrolador es que es usado en la tarjeta de desarrollo Arduino UNO, por eso es de gran utilidad esta tarjeta donde a su vez cuenta con la una gran cantidad de librerías las cuales ayudan para el desarrollo del código de programación. El código de programación puede ser escrito utilizando el sketch de Arduino y usando la tarjeta de desarrollo Arduino UNO (ver figura 92) donde se puede programar y desmontar el microcontrolador para que pueda ser utilizado en la PCB que se halla diseñado.

118
Figura 92. Arduino UNO
Fuente: Elaboración propia
Para entender un poco más la conexión y organización del sistema con todos sus componentes se hace uso de diagramas de conexión de hardware y de lógica de software. 13.5. DIAGRAMA DE HARDWARE
Para el sistema de control es esencial definir la organización y las conexiones entre los elementos que serán parte del sistema, los cuales conformarán posteriormente una red de hardware donde se llevarán a cabo todos los procesos de lectura, procesamiento y actuación. Estos diagramas se definen en:
13.3.1 Diagrama de hardware General. Este representa el funcionamiento interno general del sistema (véase figura 93), el cual define la organización y conexión entre los bloques que requiere el sistema para su funcionamiento, los cuales son:
Procesamiento
Sensado de variables
Actuación de la planta
Alimentación de los componentes
Comunicación de los datos
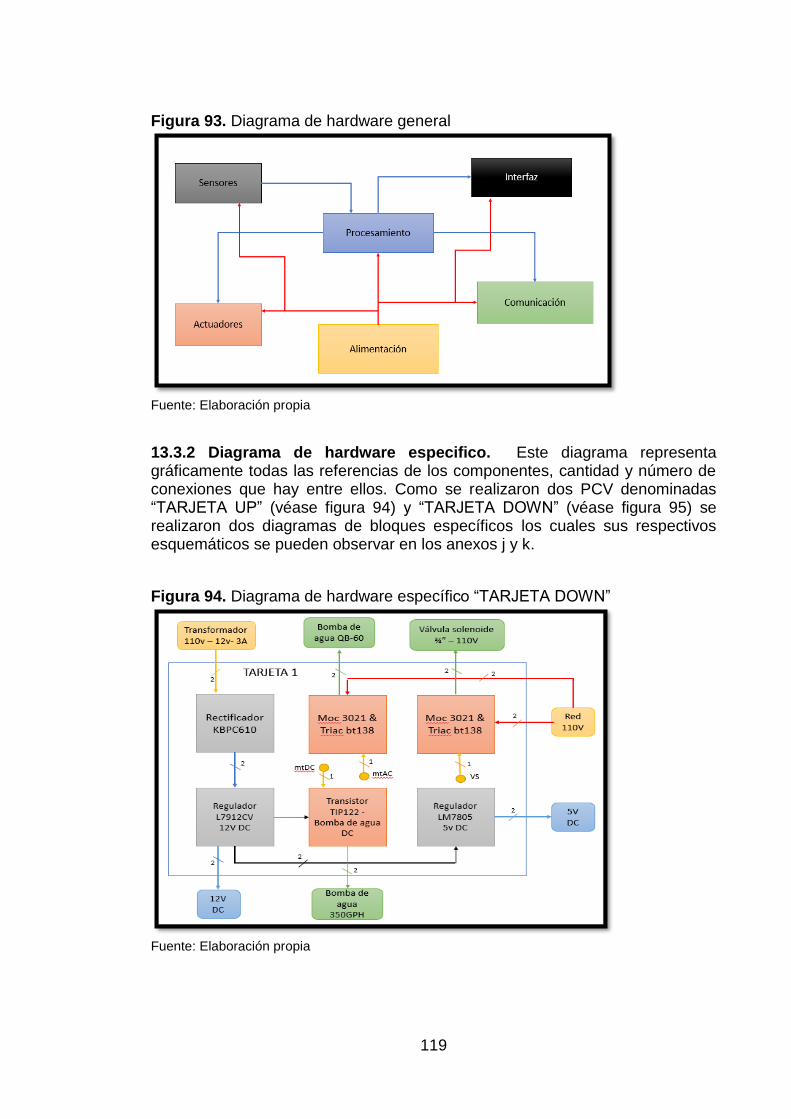
119
Figura 93. Diagrama de hardware general
Fuente: Elaboración propia
13.3.2 Diagrama de hardware especifico. Este diagrama representa gráficamente todas las referencias de los componentes, cantidad y número de conexiones que hay entre ellos. Como se realizaron dos PCV denominadas “TARJETA UP” (véase figura 94) y “TARJETA DOWN” (véase figura 95) se realizaron dos diagramas de bloques específicos los cuales sus respectivos esquemáticos se pueden observar en los anexos j y k.
Figura 94. Diagrama de hardware específico “TARJETA DOWN”
Fuente: Elaboración propia
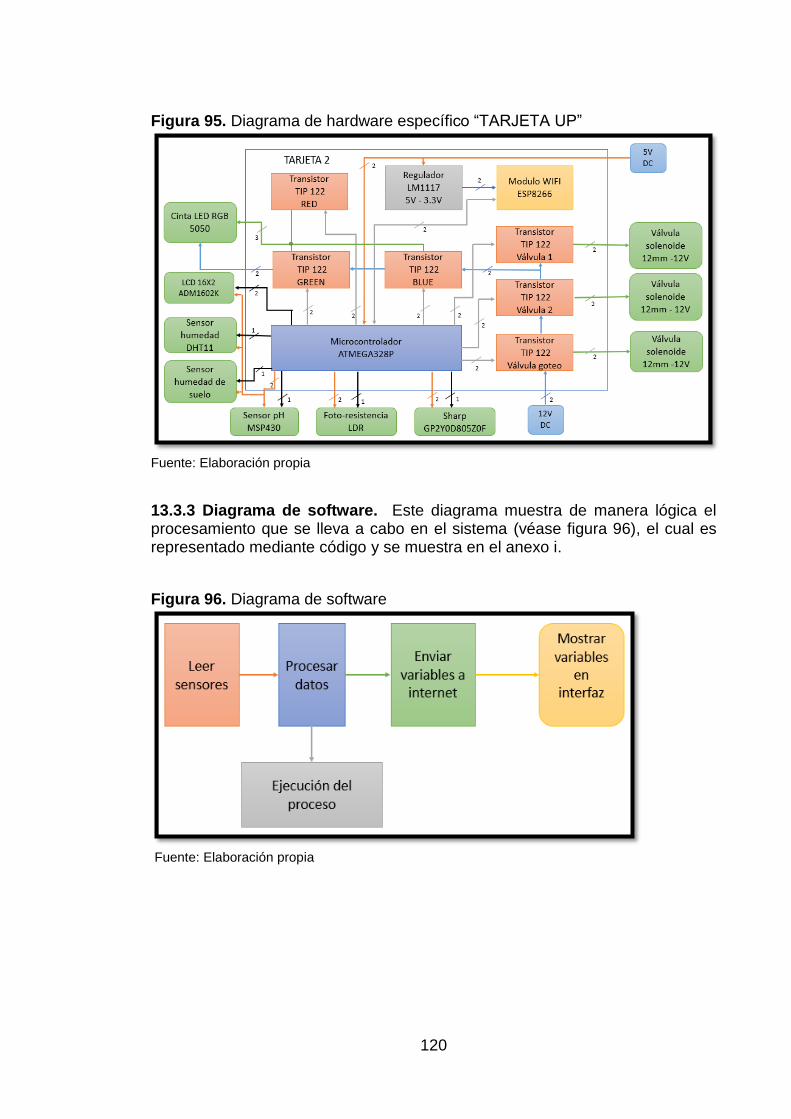
120
Figura 95. Diagrama de hardware específico “TARJETA UP”
Fuente: Elaboración propia
13.3.3 Diagrama de software. Este diagrama muestra de manera lógica el procesamiento que se lleva a cabo en el sistema (véase figura 96), el cual es representado mediante código y se muestra en el anexo i.
Figura 96. Diagrama de software
Fuente: Elaboración propia
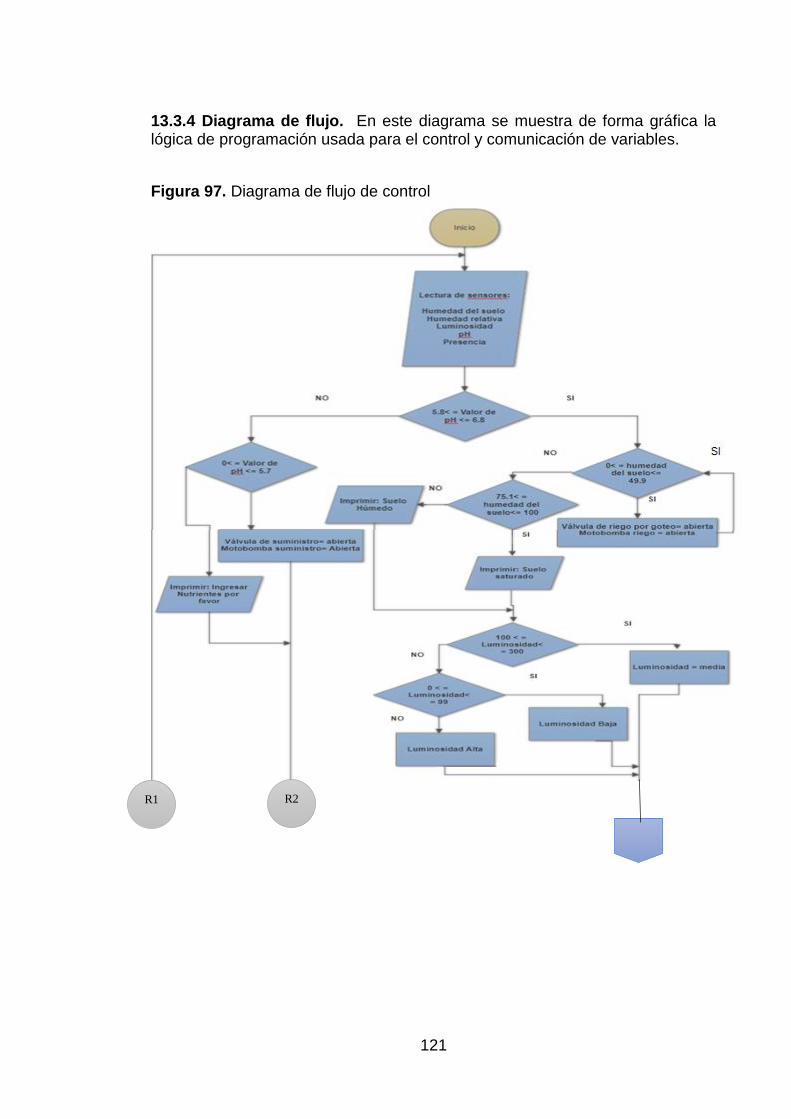
121
13.3.4 Diagrama de flujo. En este diagrama se muestra de forma gráfica la lógica de programación usada para el control y comunicación de variables.
Figura 97. Diagrama de flujo de control
R1 R2

122
Fuente: Elaboración propia
La lógica del sistema también se puede representar de forma más específica a través del uso de diagramas de flujo (véase figura 97) los cuales generalmente se realizan antes de empezar algún tipo de programación (ver anexo l).
Inicialmente se comienza declarando las variables edafoclimáticas que se fueron sensadas en el proyecto de grado, se empieza haciendo una comparación del valor de la variable más crítica del sistema que es el pH, ya que, de los valores tomados por el sensor, se hace o no el riego del cultivo.
Si el valor del pH está en un nivel adecuado de 7, se procede a realizar una nueva segunda toma de datos con el sensor de humedad de suelo debido a que la fase de germinación de la planta realiza primero. Seguido, al obtener el valor
R1
R2
123
de la humedad de suelo y si este se encuentra entre 0% y 50% de humedad, el sistema acciona la válvula de goteo y el servomotor da un giro de 0° lo que indica una presión es baja en la bomba de agua AC, si la humedad se encuentra entre 51% y 75% la humedad relativa es óptima para el cultivo.
Cumplida la condición anterior de humedad relativa se procede a sensar la luminosidad donde el sistema determina si la intensidad es baja (0 lux a 300 lux), media (301 lux a 500 lux) y alta (mayores que 500 lux) el sistema concluye el nivel adecuado de intensidad luminosa que debe generar mediante las luces LED.
Por otro lado, si la condición de pH es acido, se procede a abrir la válvula de suministro o y activar la bomba de agua DC o si el pH es alcalino se genera un aviso al usuario de que faltan nutrientes para la mezcla.
Para sensar la humedad relativa, es necesario saber si existen plantas los módulos aeropónicos, si es así, el sistema procede a sensar la humedad relativa dentro de los tubos donde si la humedad se encuentra entre 0% y 50% las válvulas 1 y 2, de igual modo el control servo regulado da un giro de 180° lo que significa aumento en la presión de bomba de agua AC. Este proceso se ejecutará en un bucle infinito mientras el sistema esté encendido.
Ya con el control de las variables que se desean intervenir en este proyecto, se tiene como objetivo la telemedición de estas mediante una estrategia donde se trasmita la información inalámbricamente.
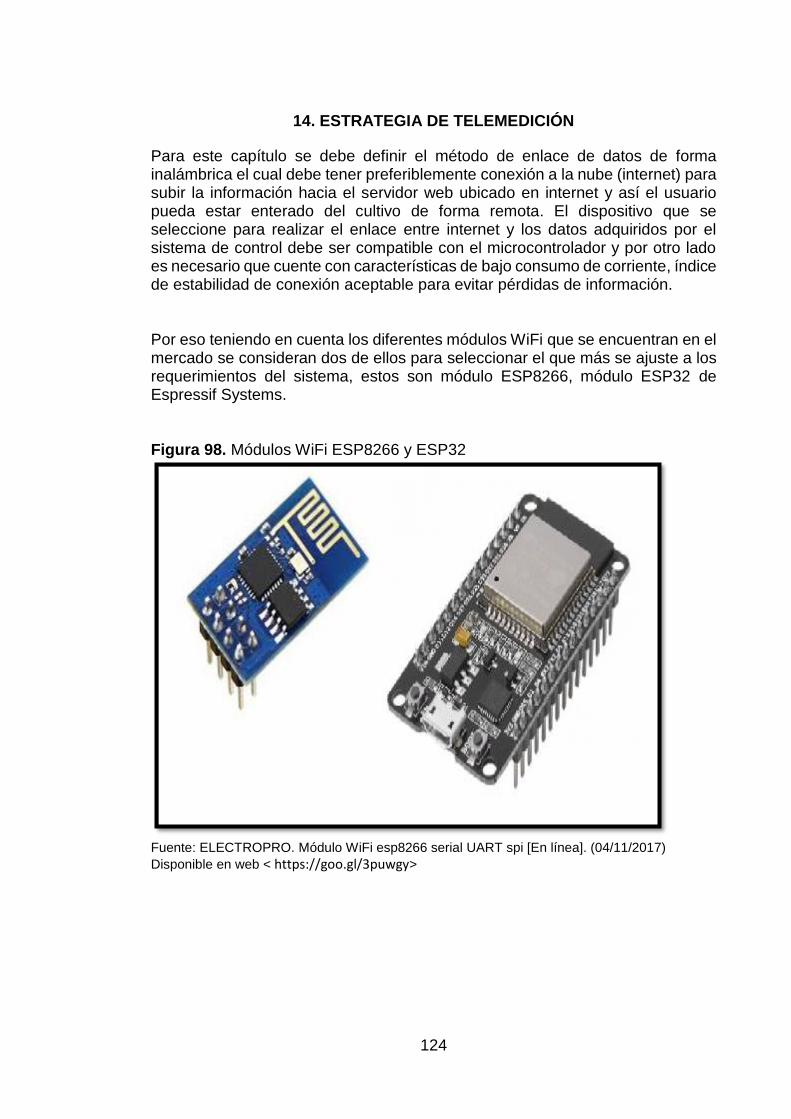
124
14. ESTRATEGIA DE TELEMEDICIÓN
Para este capítulo se debe definir el método de enlace de datos de forma inalámbrica el cual debe tener preferiblemente conexión a la nube (internet) para subir la información hacia el servidor web ubicado en internet y así el usuario pueda estar enterado del cultivo de forma remota. El dispositivo que se seleccione para realizar el enlace entre internet y los datos adquiridos por el sistema de control debe ser compatible con el microcontrolador y por otro lado es necesario que cuente con características de bajo consumo de corriente, índice de estabilidad de conexión aceptable para evitar pérdidas de información. Por eso teniendo en cuenta los diferentes módulos WiFi que se encuentran en el mercado se consideran dos de ellos para seleccionar el que más se ajuste a los requerimientos del sistema, estos son módulo ESP8266, módulo ESP32 de Espressif Systems. Figura 98. Módulos WiFi ESP8266 y ESP32
Fuente: ELECTROPRO. Módulo WiFi esp8266 serial UART spi [En línea]. (04/11/2017)
Disponible en web < https://goo.gl/3puwgy>
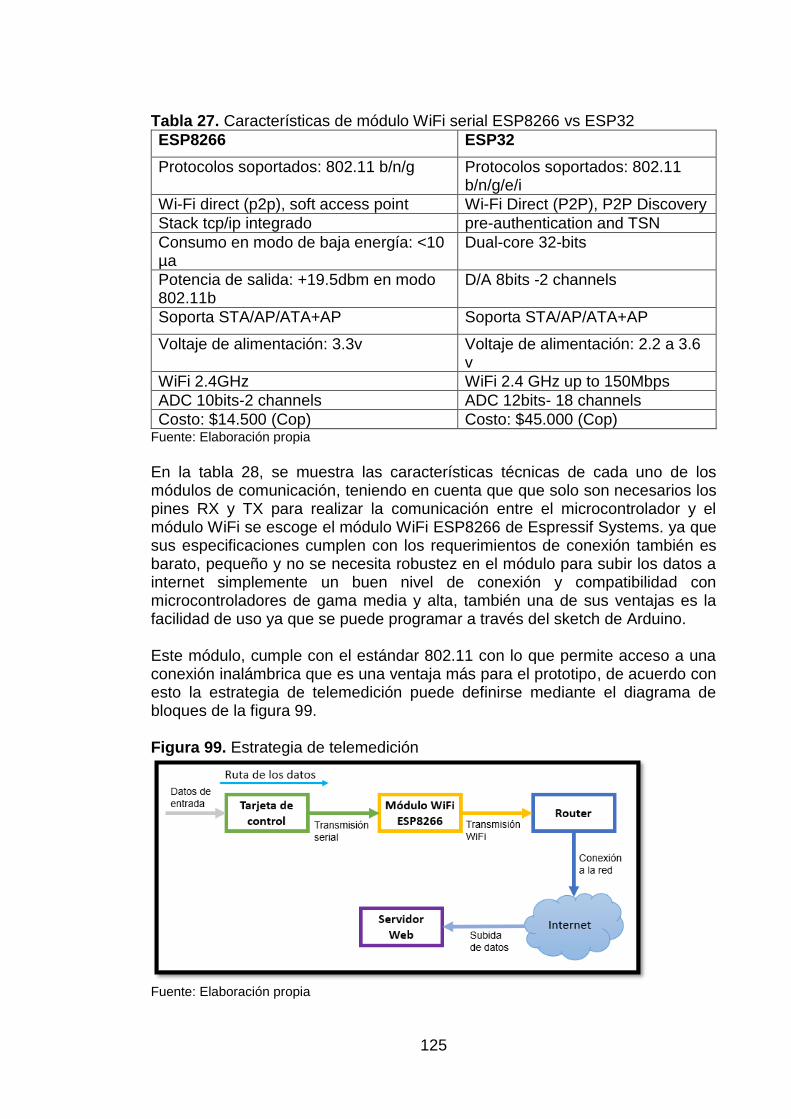
125
Tabla 27. Características de módulo WiFi serial ESP8266 vs ESP32
ESP8266 ESP32
Protocolos soportados: 802.11 b/n/g Protocolos soportados: 802.11 b/n/g/e/i
Wi-Fi direct (p2p), soft access point Wi-Fi Direct (P2P), P2P Discovery
Stack tcp/ip integrado pre-authentication and TSN
Consumo en modo de baja energía: <10 µa
Dual-core 32-bits
Potencia de salida: +19.5dbm en modo 802.11b
D/A 8bits -2 channels
Soporta STA/AP/ATA+AP Soporta STA/AP/ATA+AP
Voltaje de alimentación: 3.3v Voltaje de alimentación: 2.2 a 3.6 v
WiFi 2.4GHz WiFi 2.4 GHz up to 150Mbps
ADC 10bits-2 channels ADC 12bits- 18 channels
Costo: $14.500 (Cop) Costo: $45.000 (Cop) Fuente: Elaboración propia
En la tabla 28, se muestra las características técnicas de cada uno de los módulos de comunicación, teniendo en cuenta que que solo son necesarios los pines RX y TX para realizar la comunicación entre el microcontrolador y el módulo WiFi se escoge el módulo WiFi ESP8266 de Espressif Systems. ya que sus especificaciones cumplen con los requerimientos de conexión también es barato, pequeño y no se necesita robustez en el módulo para subir los datos a internet simplemente un buen nivel de conexión y compatibilidad con microcontroladores de gama media y alta, también una de sus ventajas es la facilidad de uso ya que se puede programar a través del sketch de Arduino. Este módulo, cumple con el estándar 802.11 con lo que permite acceso a una conexión inalámbrica que es una ventaja más para el prototipo, de acuerdo con esto la estrategia de telemedición puede definirse mediante el diagrama de bloques de la figura 99. Figura 99. Estrategia de telemedición
Fuente: Elaboración propia
126
Para tener una conexión a la red es importante tener un punto de acceso donde se conozca la ssid y password de la red como se muestra en la figura 100, también el módulo debe encontrarse dentro del área de cobertura que irradia el router y a su vez que el proveedor del servicio tenga una conexión estable con internet ya que esto es fundamental para garantizar él envió de información al servidor web. Figura 100. Acceso a la red
Fuente: Elaboración propia
Para la programación del módulo WiFi ESP8266, inicialmente en modo de fábrica solo puede ser programado mediante el conversor TTL a USB a través de comandos AT con un ID de programación instalado en el PC como se muestra en la figura 101. Figura 101. Conexión módulo ESP8266 con conversor USB a TTL
Fuente: Elaboración propia
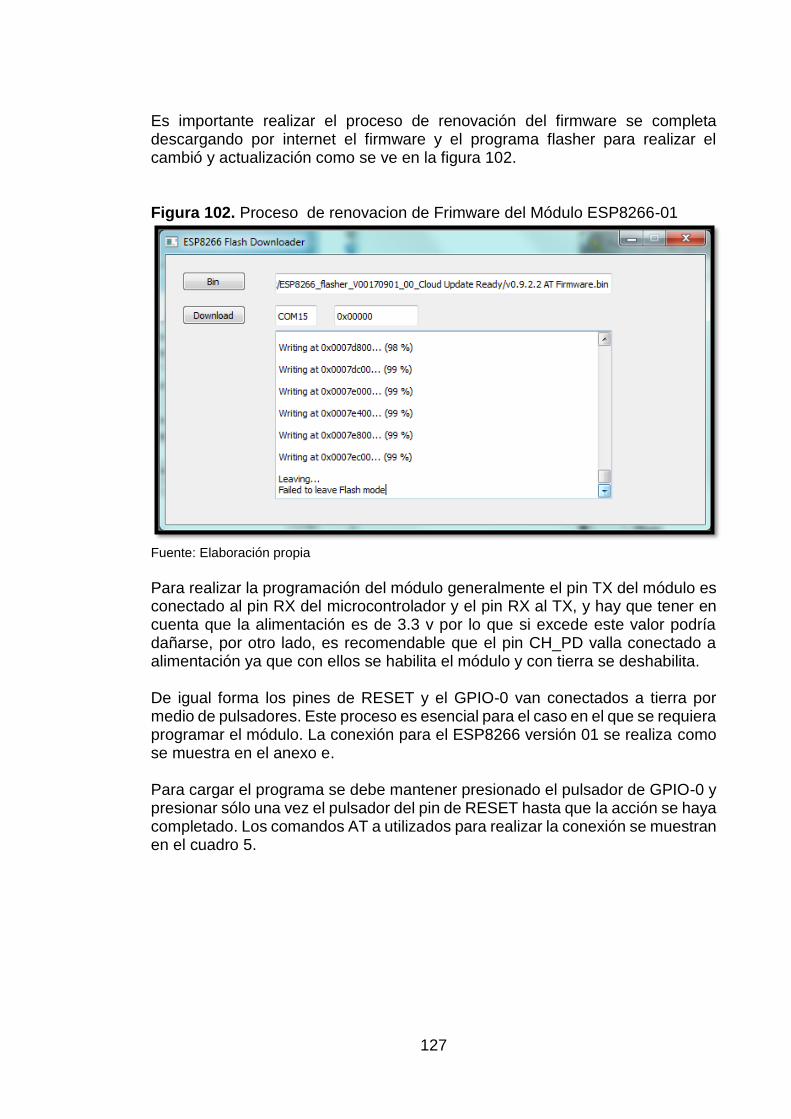
127
Es importante realizar el proceso de renovación del firmware se completa descargando por internet el firmware y el programa flasher para realizar el cambió y actualización como se ve en la figura 102. Figura 102. Proceso de renovacion de Frimware del Módulo ESP8266-01
Fuente: Elaboración propia Para realizar la programación del módulo generalmente el pin TX del módulo es conectado al pin RX del microcontrolador y el pin RX al TX, y hay que tener en cuenta que la alimentación es de 3.3 v por lo que si excede este valor podría dañarse, por otro lado, es recomendable que el pin CH_PD valla conectado a alimentación ya que con ellos se habilita el módulo y con tierra se deshabilita. De igual forma los pines de RESET y el GPIO-0 van conectados a tierra por medio de pulsadores. Este proceso es esencial para el caso en el que se requiera programar el módulo. La conexión para el ESP8266 versión 01 se realiza como se muestra en el anexo e. Para cargar el programa se debe mantener presionado el pulsador de GPIO-0 y presionar sólo una vez el pulsador del pin de RESET hasta que la acción se haya completado. Los comandos AT a utilizados para realizar la conexión se muestran en el cuadro 5.
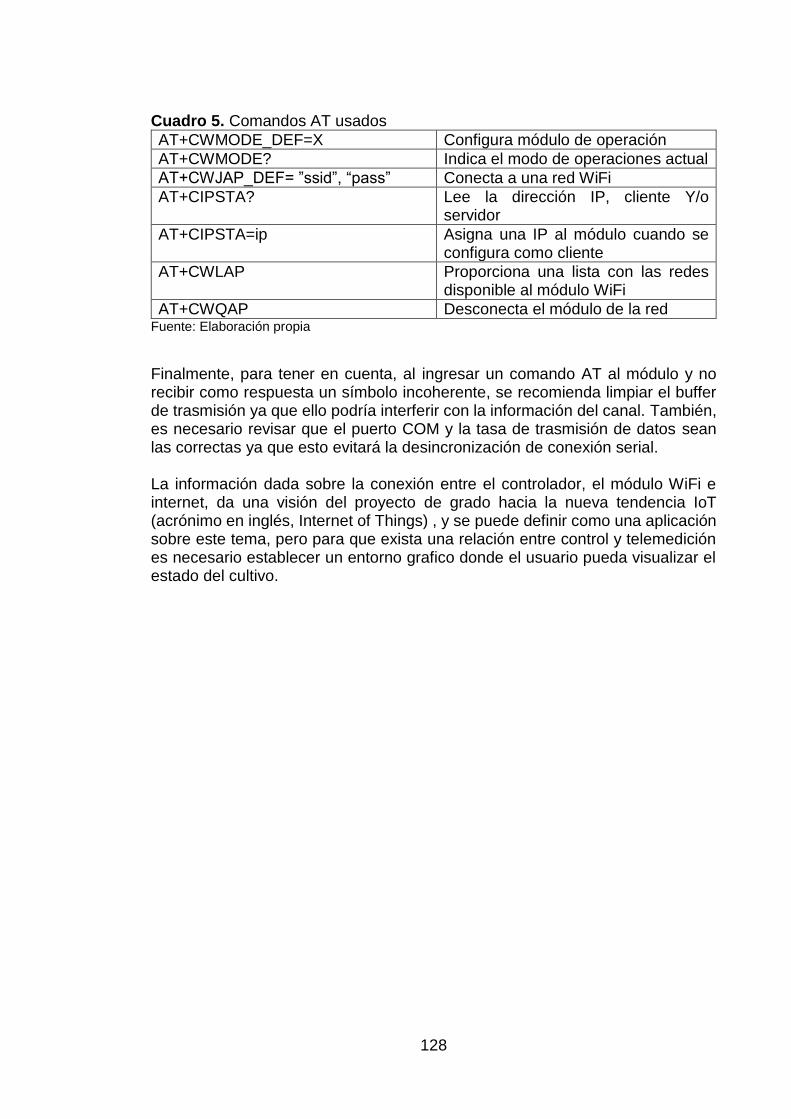
128
Cuadro 5. Comandos AT usados
AT+CWMODE_DEF=X Configura módulo de operación
AT+CWMODE? Indica el modo de operaciones actual
AT+CWJAP_DEF= ”ssid”, “pass” Conecta a una red WiFi
AT+CIPSTA? Lee la dirección IP, cliente Y/o servidor
AT+CIPSTA=ip Asigna una IP al módulo cuando se configura como cliente
AT+CWLAP Proporciona una lista con las redes disponible al módulo WiFi
AT+CWQAP Desconecta el módulo de la red Fuente: Elaboración propia
Finalmente, para tener en cuenta, al ingresar un comando AT al módulo y no recibir como respuesta un símbolo incoherente, se recomienda limpiar el buffer de trasmisión ya que ello podría interferir con la información del canal. También, es necesario revisar que el puerto COM y la tasa de trasmisión de datos sean las correctas ya que esto evitará la desincronización de conexión serial. La información dada sobre la conexión entre el controlador, el módulo WiFi e internet, da una visión del proyecto de grado hacia la nueva tendencia IoT (acrónimo en inglés, Internet of Things) , y se puede definir como una aplicación sobre este tema, pero para que exista una relación entre control y telemedición es necesario establecer un entorno grafico donde el usuario pueda visualizar el estado del cultivo.
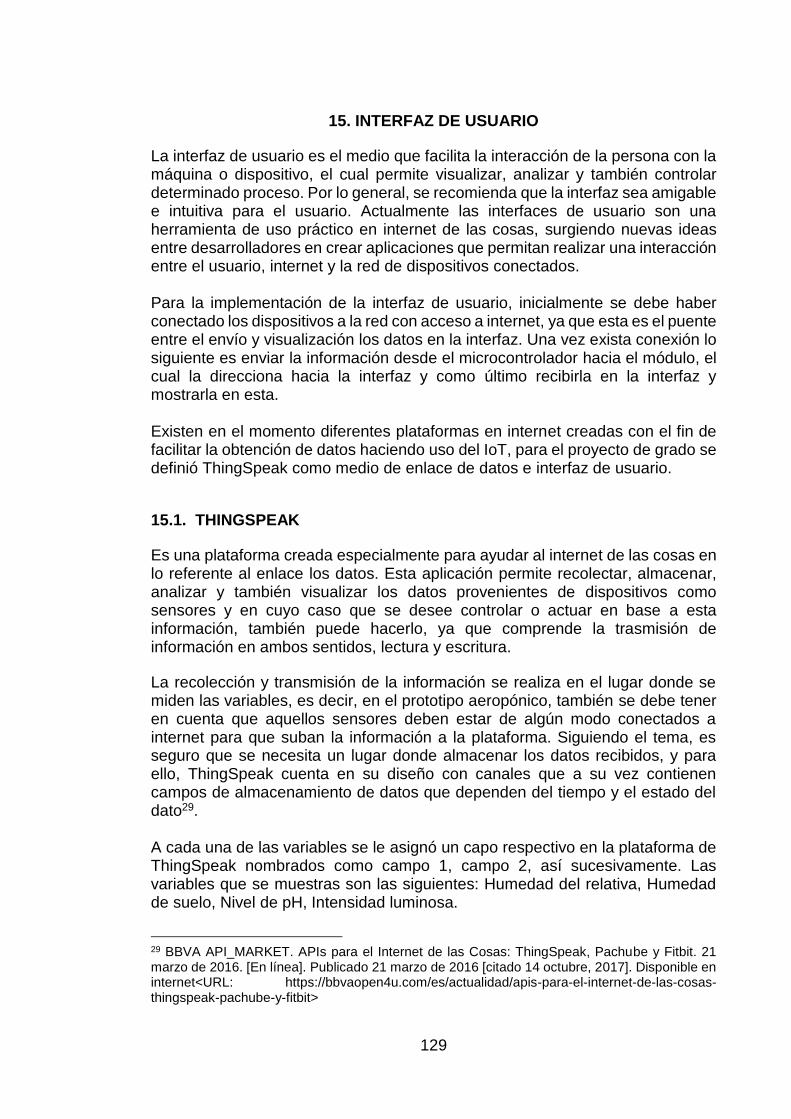
129
15. INTERFAZ DE USUARIO
La interfaz de usuario es el medio que facilita la interacción de la persona con la máquina o dispositivo, el cual permite visualizar, analizar y también controlar determinado proceso. Por lo general, se recomienda que la interfaz sea amigable e intuitiva para el usuario. Actualmente las interfaces de usuario son una herramienta de uso práctico en internet de las cosas, surgiendo nuevas ideas entre desarrolladores en crear aplicaciones que permitan realizar una interacción entre el usuario, internet y la red de dispositivos conectados. Para la implementación de la interfaz de usuario, inicialmente se debe haber conectado los dispositivos a la red con acceso a internet, ya que esta es el puente entre el envío y visualización los datos en la interfaz. Una vez exista conexión lo siguiente es enviar la información desde el microcontrolador hacia el módulo, el cual la direcciona hacia la interfaz y como último recibirla en la interfaz y mostrarla en esta. Existen en el momento diferentes plataformas en internet creadas con el fin de facilitar la obtención de datos haciendo uso del IoT, para el proyecto de grado se definió ThingSpeak como medio de enlace de datos e interfaz de usuario.
15.1. THINGSPEAK
Es una plataforma creada especialmente para ayudar al internet de las cosas en lo referente al enlace los datos. Esta aplicación permite recolectar, almacenar, analizar y también visualizar los datos provenientes de dispositivos como sensores y en cuyo caso que se desee controlar o actuar en base a esta información, también puede hacerlo, ya que comprende la trasmisión de información en ambos sentidos, lectura y escritura.
La recolección y transmisión de la información se realiza en el lugar donde se miden las variables, es decir, en el prototipo aeropónico, también se debe tener en cuenta que aquellos sensores deben estar de algún modo conectados a internet para que suban la información a la plataforma. Siguiendo el tema, es seguro que se necesita un lugar donde almacenar los datos recibidos, y para ello, ThingSpeak cuenta en su diseño con canales que a su vez contienen campos de almacenamiento de datos que dependen del tiempo y el estado del dato29. A cada una de las variables se le asignó un capo respectivo en la plataforma de ThingSpeak nombrados como campo 1, campo 2, así sucesivamente. Las variables que se muestras son las siguientes: Humedad del relativa, Humedad de suelo, Nivel de pH, Intensidad luminosa.
29 BBVA API_MARKET. APIs para el Internet de las Cosas: ThingSpeak, Pachube y Fitbit. 21 marzo de 2016. [En línea]. Publicado 21 marzo de 2016 [citado 14 octubre, 2017]. Disponible en internet<URL: https://bbvaopen4u.com/es/actualidad/apis-para-el-internet-de-las-cosas-thingspeak-pachube-y-fitbit>
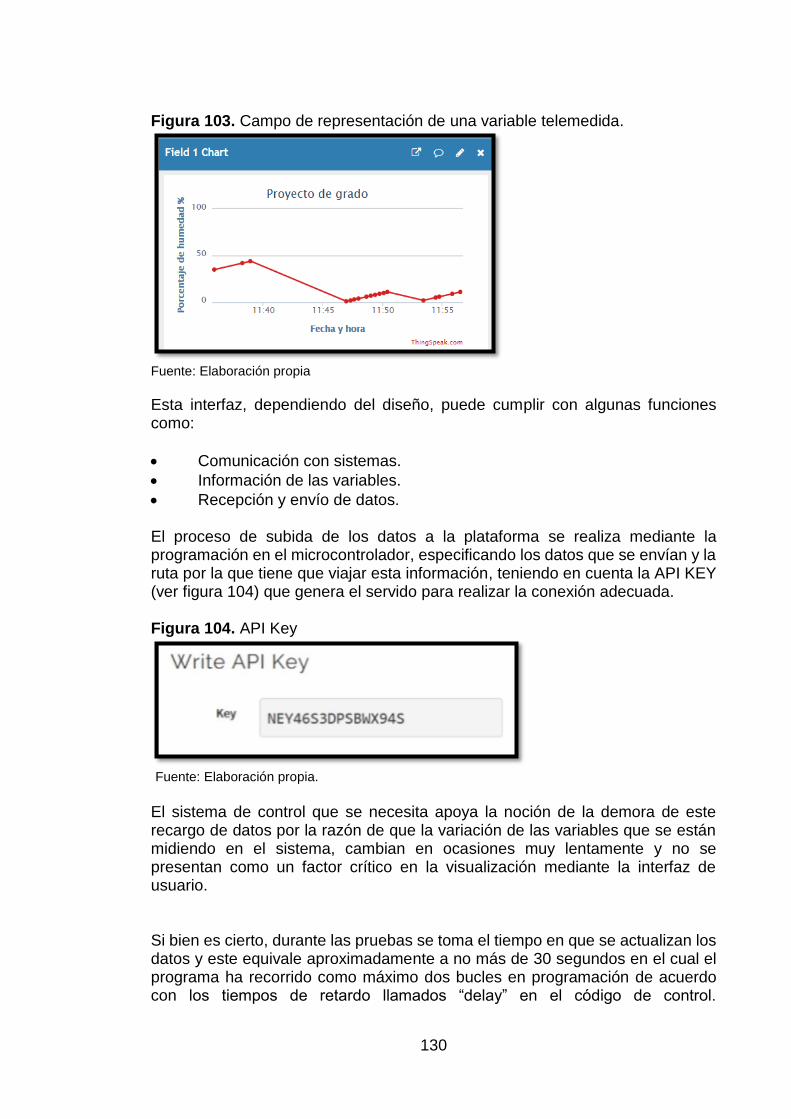
130
Figura 103. Campo de representación de una variable telemedida.
Fuente: Elaboración propia
Esta interfaz, dependiendo del diseño, puede cumplir con algunas funciones como:
Comunicación con sistemas.
Información de las variables.
Recepción y envío de datos. El proceso de subida de los datos a la plataforma se realiza mediante la programación en el microcontrolador, especificando los datos que se envían y la ruta por la que tiene que viajar esta información, teniendo en cuenta la API KEY (ver figura 104) que genera el servido para realizar la conexión adecuada. Figura 104. API Key
Fuente: Elaboración propia. El sistema de control que se necesita apoya la noción de la demora de este recargo de datos por la razón de que la variación de las variables que se están midiendo en el sistema, cambian en ocasiones muy lentamente y no se presentan como un factor crítico en la visualización mediante la interfaz de usuario. Si bien es cierto, durante las pruebas se toma el tiempo en que se actualizan los datos y este equivale aproximadamente a no más de 30 segundos en el cual el programa ha recorrido como máximo dos bucles en programación de acuerdo con los tiempos de retardo llamados “delay” en el código de control.

131
Adicionalmente, esta acción no influye en el control del sistema por lo que no represente problema para control normal de las variables por medio de los actuadores. Por otro lado, para complementar a la interfaz de usuario, se ha introducido al lado del prototipo una pantalla LCD para poder visualizar cuando se encuentre en casa, directamente el funcionamiento del sistema y sus variables.
15.2. LCD
Mediante el uso de una LCD de 16x2 se muestran los comentarios, características y variables del sistema, brindando una ayuda externa y en paralelo al usuario mediante esta interfaz de visualización, de modo que el usuario podrá estar pendiente de lo que sucede en el sistema y así actuar de la mejor forma para para el desarrollo de su cultivo. Para optimizar el uso de los GPIO del microcontrolador ya que normalmente la implementación de la LCD ocupa 6 pines los cuales son necesarios para la conexión de sensores y actuadores del sistema se opta por el uso del módulo serial I2C para display LCD el cual reduce a 2 el número de pines para la conexión al microcontrolador. Figura 105. Display LCD 16x2 adaptado módulo I2C
Fuente: Elaboración propia
Para un funcionamiento adecuado es necesario descargar la librería correspondiente al módulo con la cual se podrá imprimir el texto, también se debe tener en cuenta la dirección que el microcontrolador le asigna a la LCD por defecto, por lo general asigna 0x27, pero esto se puede confirmar mediante el escaneo del bus I2C el cual permite ver cuál es la dirección real asignada, también es importante tener en cuenta los pines de conexión al microcontrolador ya que se debe hacer a los dos pines especiales que tiene para esta comunicación los cuales son pin 27 (SDA) el cual es la línea de entrada y salida de datos de bus serial y pin 28 (SDL) el cual es el reloj del bus serial (ver figura 106).

132
Figura 106. Prueba visualización de datos
Fuente: Elaboración propia
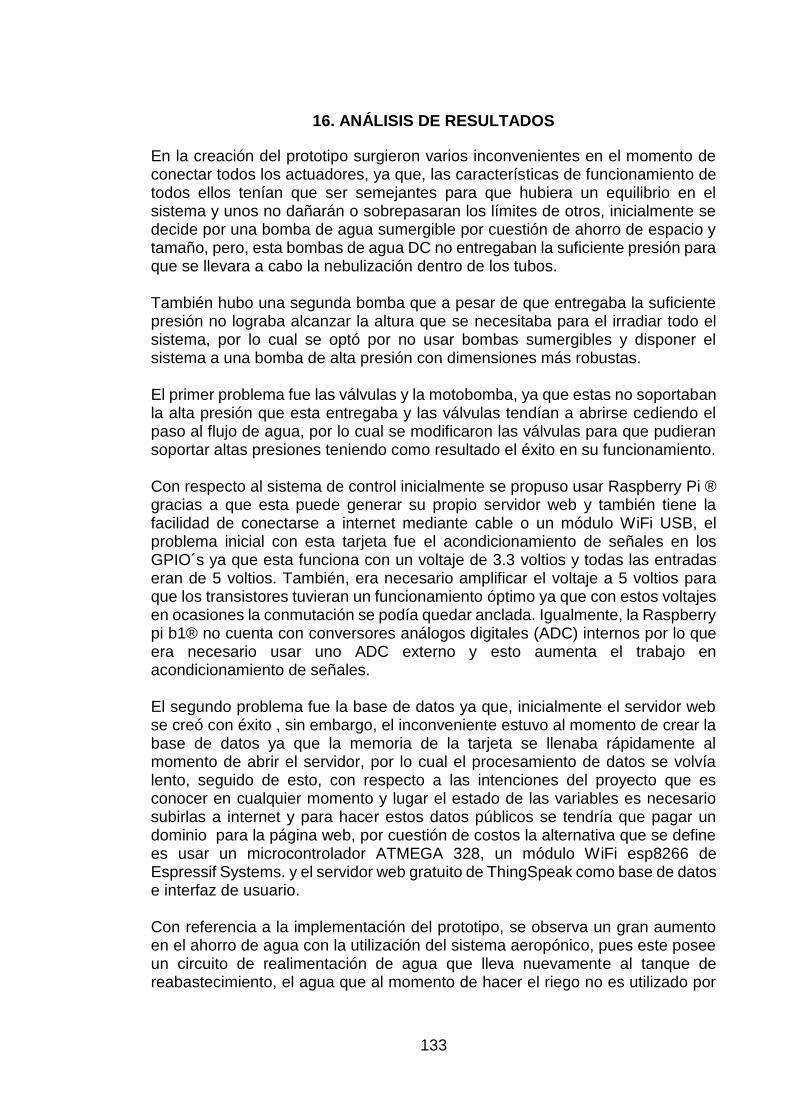
133
16. ANÁLISIS DE RESULTADOS
En la creación del prototipo surgieron varios inconvenientes en el momento de conectar todos los actuadores, ya que, las características de funcionamiento de todos ellos tenían que ser semejantes para que hubiera un equilibrio en el sistema y unos no dañarán o sobrepasaran los límites de otros, inicialmente se decide por una bomba de agua sumergible por cuestión de ahorro de espacio y tamaño, pero, esta bombas de agua DC no entregaban la suficiente presión para que se llevara a cabo la nebulización dentro de los tubos. También hubo una segunda bomba que a pesar de que entregaba la suficiente presión no lograba alcanzar la altura que se necesitaba para el irradiar todo el sistema, por lo cual se optó por no usar bombas sumergibles y disponer el sistema a una bomba de alta presión con dimensiones más robustas. El primer problema fue las válvulas y la motobomba, ya que estas no soportaban la alta presión que esta entregaba y las válvulas tendían a abrirse cediendo el paso al flujo de agua, por lo cual se modificaron las válvulas para que pudieran soportar altas presiones teniendo como resultado el éxito en su funcionamiento. Con respecto al sistema de control inicialmente se propuso usar Raspberry Pi ® gracias a que esta puede generar su propio servidor web y también tiene la facilidad de conectarse a internet mediante cable o un módulo WiFi USB, el problema inicial con esta tarjeta fue el acondicionamiento de señales en los GPIO´s ya que esta funciona con un voltaje de 3.3 voltios y todas las entradas eran de 5 voltios. También, era necesario amplificar el voltaje a 5 voltios para que los transistores tuvieran un funcionamiento óptimo ya que con estos voltajes en ocasiones la conmutación se podía quedar anclada. Igualmente, la Raspberry pi b1® no cuenta con conversores análogos digitales (ADC) internos por lo que era necesario usar uno ADC externo y esto aumenta el trabajo en acondicionamiento de señales. El segundo problema fue la base de datos ya que, inicialmente el servidor web se creó con éxito , sin embargo, el inconveniente estuvo al momento de crear la base de datos ya que la memoria de la tarjeta se llenaba rápidamente al momento de abrir el servidor, por lo cual el procesamiento de datos se volvía lento, seguido de esto, con respecto a las intenciones del proyecto que es conocer en cualquier momento y lugar el estado de las variables es necesario subirlas a internet y para hacer estos datos públicos se tendría que pagar un dominio para la página web, por cuestión de costos la alternativa que se define es usar un microcontrolador ATMEGA 328, un módulo WiFi esp8266 de Espressif Systems. y el servidor web gratuito de ThingSpeak como base de datos e interfaz de usuario. Con referencia a la implementación del prototipo, se observa un gran aumento en el ahorro de agua con la utilización del sistema aeropónico, pues este posee un circuito de realimentación de agua que lleva nuevamente al tanque de reabastecimiento, el agua que al momento de hacer el riego no es utilizado por
134
las plantas. Lo anterior no ocurre en los cultivos tradicionales, ya que cuando se realiza el riego en esos cultivos, el agua que no va directamente a las raíces de la planta, es simplemente absorbida por la tierra o simplemente luego evaporada. Con seguridad se puede decir que existe un ahorro de agua por encima del 80% con respecto al total de agua que se usa en el tiempo de riego. Adicionalmente, por la sensibilidad de los sensores, el control de riego es muy efectivo porque al llegar al punto de equilibrio de las variables, estos envían la información inmediatamente al microcontrolador, el cual se encargará de tomar las respectivas medidas de control de los actuadores. Al observar la interfaz de usuario ThingSpeak y la actualización de datos en este servidor, el tiempo máximo de retardo en subir la información es de 30 segundos, y el mínimo es de aproximadamente 5 segundos. La variación e inconsistencia en la demora en subir los datos se deben a los delay que se establecen en la programación que son aproximadamente 10 segundos, por lo que si se comparan estos tiempos el tiempo en el que ThingSpeak sube sus datos se verá desfasado. Finalmente, un éxito logrado fue el crecimiento de las plantas en el módulo de germinación y los módulos aeropónicos mediante el control del riego.
135
17. CONCLUSIONES Y TRABAJOS FUTUROS
17.1. CONCLUSIONES
Se identifica correctamente los sensores y actuadores idóneos para el cultivo, los cuales entregaron una respuesta adecuada logrando que fueran compatibles en características físicas con él sistema. Al diseñar el sistema de control de variables del cultivo presentaron dificultades para encontrar elementos patrones, y así, ajustar los sensores para que el control y procesamiento de datos fuera exacto, pero finalmente se logró diseñar con éxito el ajuste de los sensores dispuestos en él sistema con sus respectivas ecuaciones características. También, se presentó dificultades en la lectura de los sensores ya que las conexiones realizadas con los cables presentaban interferencia debido a la longitud de estos, por lo que los datos se perdían en el trayecto hasta la tarjeta de control. Por eso era importante tener una etapa de amplificación de la señal y la utilización de cables blindados para evitar estos inconvenientes. En la etapa de control del motor AC se implementó el cambio de velocidades mediante el cambio de fase con el dimmer por lo que esto provoca que se ingrese ruido a la red por esta carga inductiva, por lo que es necesario implementar un regulador de velocidades para este caso y hacer uso de un filtro Snubber para evitar atenuar el ruido. Definiendo la estrategia de telemedición de variables se planteó que las lecturas de las variables se pudieran hacer desde cualquier lugar por lo que era necesario subir los datos a internet, se presentó dificultades para la transmisión serial de los datos debido a que las variables sensadas presentaban interferencia en la recolección de los datos. El diseño de la interfaz de usuario para la recepción y visualización de los datos de cultivo se llevaron a cabo a través de servidor web ThingSpeak el cual se configura para que muestre gráficamente las variables que se crean en este servidor, también se dispone de una LCD en el prototipo para visualizar información relevante del cultivo, logrando con éxito la visualización y recepción de datos. Finalmente, la integración del prototipo con de telemedición e interfaz de usuario se logró satisfactoriamente dando como resultado un prototipo funcional.
136
17.2. TRABAJOS FUTUROS
En los trabajos futuros se pretende hacer la siembra de otros tipos de plantas las cuales tendrán sus características de edafoclimáticas, también, sensar y controlar la temperatura del cultivo ya que hay plantas que necesitan de temperaturas reguladas y también tener en cuenta la posible implementación del prototipo en diferentes ciudades teniendo en cuenta sus pisos térmicos. También, se desea agregar más variables a controlar como la oxigenación que debe tener los nutrientes y poder controlar el nivel de agua del tanque para tener un prototipo más robusto en cuanto a control.
137
BIBLIOGRAFÍA
Aeropónicos de Colombia. Colombia [En línea]. (04/11/2017). Disponible en web: <http://aeroponicos.com/> AIRALIA. El mejor higrómetro [En línea]. (04/11/2017). Disponible en web: <https://goo.gl/HLMSpN> AMÉRICO FATA, Omar. Redes de Sensores. La Plata Argentina, 2011, 175p. Trabajo final por el título de especialista. Universidad Nacional de La Plata. Facultad de informática. ALTEC. Alta tecnología de Vanguardia S.A. ¿Que son las electroválvulas? Monterrey México. [En línea]. (04/11/2017). Disponible en web: <http://www.altecdust.com/soporte-tecnico/que-son-las-electrovalvulas> AKISUKIDENSHI. SG90 9g microservo. [En línea]. (23-11-2017). Disponible en web <http://akizukidenshi.com/download/ds/towerpro/SG90.pdf> ATMEL. 8Bit-microcontroller with 4/8/16/32 Kbytes, [En línea]. (23-11-2017). Disponible en web <https://goo.gl/CWQCcQ> BAEK, Gyeong. KIM, Myeong. KIM, Chi. CHOI, Eun. JIN, Byeong. SON, Jung. KIM Hyeon: The Effect of LED light combination on the anthocyanin expression of lettuce. Corea, 2013, 4p. Artículo de investigación. Instituto de Agricultura y Ciencias de la Vida. BARRENECHE GONZALES, Juan. Desarrollo de un sistema automático de riego para cultivos de lechuga en el municipio de chía. Bogotá D.C., 2016, 127p. Trabajo de grado. Universidad Católica de Colombia. Facultad de Ingeniería. BELTRANO José, GIMENEZ Daniel. Cultivo en hidroponía, Buenos Aires: edulp, 2015. 181 h. BOXELECTRONICA. DHT11 humidity and temperature [En línea]. (04/11/2017). Disponible en la web: <https://goo.gl/ukye8Y> CORREA OSPINA, Julián. Estrategia de control para la automatización de un invernadero, Bogotá D.C., 2013, 42p. Trabajo de grado. Universidad Católica de Colombia. Facultad de Ingeniería. CZERWENY. Manual de usuario Electrobombas periféricas [En línea]. P.1 (04/11/2017). Disponible en web <https://goo.gl/9C99oh >. DANE, Producción limpia de hortalizas, una mejor salud y bienestar, Bogotá, 2014. P. 56. (11/12/2017) Disponible web < https://goo.gl/Qrshh5 >
138
DEPARTAMENTO NACIONAL DE PLANEACIÓN. ¿Qué es el plan de desarrollo? [En línea]. (22/02/2016). Disponible en web: <https://www.dnp.gov.co/Plan-Nacional-de-Desarrollo/Paginas/Que-es-el-Plan-Nacional-de-Desarrollo.aspx>. DEPARTAMENTO NACIONAL DE PLANEACIÓN. Bases de plan nacional de desarrollo 2014-2018 [En línea]. (06/12/2017). Disponible en web < https://goo.gl/1u1XGY> p. 793. ELECTROPRO. Módulo ESP8266 serial UART SPI [En línea]. (04/11/2017). Disponible en web <gttps://goo.gl/3puwgy> ELIZONDO, Rodolfo. Sistemas de control [En línea]. (04/11/2017). Disponible en web <https://goo.gl/9zo31p> ENCURED. Telecomunicaciones. 27 de octubre de 2011. [En línea]. Disponible en web: <https://www.ecured.cu/Telecomunicaciones> EMERSON. Sensores de PH. 2017. [En línea]. Disponible en web: <https://goo.gl/CTpbRR > GUERRERO, Ricardo. Fertilización de cultivos en clima frio [En línea]. Bogotá. Monómeros, 1998, P. 375. GESCOM. ¿Qué son los LED’s y cómo funcionan? [En línea]. (04/11/2017) Disponible en web <https://goo.gl/Wm6tNN> GONZÁLEZ, Carlos. Contenido humedad de agua en el suelo [En línea]. Disponible en web < https://goo.gl/eBXbQC>. 7p. HERNÁNDEZ SALAMANCA, Cristhian. Diseño de un prototipo de un sistema de producción tipo aeropónico, Bogotá D.C., 2013, 184p. Trabajo de grado. Universidad EAN. Facultad de ingeniería. HETPRO. Sensor de pH [En línea]. (04/11/2017). Disponible en web <https://goo.gl/W5zRF3> HYDRO ENVIROMENT. ¿Qué es el riego por nebulización? [En Línea]. (04/11/2017). Disponible en web <https://goo.gl/i7i5fV>. IRRIGACIONES LTDA. Goteros turbo-sc plus y turbo key [En línea]. (04/11/2017). Disponible en web <https://goo.gl/3rXEos>. 1p. JOHNSONS, Michael. VILLANI, Tom. AZMAT, Aisha. SIMON, James. BOTH, A.J. Evaluation of algal biomass production on vertical aeroponic substrates. En: ELSEVIER. US Estados Unidos, 29 May 2015, 9p.
139
La Huertina de Toni. Como empezar un huerto urbano [En línea]. 2017. Disponible en web <https://goo.gl/eZ3sGy> LEVITON. 6681-lw [En línea]. (23-11-2017). Disponible en web < http://www.leviton.com/en/products/6681-iw> LÓPEZ HERMANOS. Guía de prácticas laboratorio de mecánica de suelos. [En línea]. 2015. (04/11/2017). Tunja. p.2. MACTRONICA. Sensor de pH MSP430 [En línea]. (04/11/2017). Disponible en web <https://goo.gl/7PtBcd> MÁSLUZ. Tiras RGB de LED´s SMD 5050 [En Línea]. (04/11/2017). Disponible en web <https://goo.gl/5HhCQq>. P.4 MICROFERISTA. Crecer 500 [En línea]. (04/11/2017). Disponible en web <https://goo.gl/xmqAcM>. NACIONES UNIDAS. Objetivos de desarrollo sostenible. [En línea]. (25/03/2017}. Disponible en: < https://goo.gl/AXoAwK /> ONSEMICONDUCTOR. Tip 120, 121, 122 (NPN) Tip 125, 126, 127 (PNP) [En línea]. (23/11/2017). 2014. Disponible en web, <https://www.onsemi.com/pub/Collateral/TIP120-D.PDF>. PEDROLLO. Electrobomba con rodete periférico [En línea]. (04/11/2017). Disponible en web <https://goo.gl/QmKgvg>. P.3. QUALITY. Aeroponics Culture Machine [En línea]. (04/11/2017). Disponible en: <https://goo.gl/x86z7Y> RODRÍGUEZ MATEUS, Julián. HAAN, Stef. RODRÍGUEZ DEFÍN, Alfredo. Genotype by Environment Effects on Potato Mini-Tuber Seed Production in an Aeroponics System. Mick Fuller.Cundinamarca, 2013, 15p. Corporación Colombiana de Investigación Agropecuaria, International Potato Center, Centro de Hidroponía y Nutrición Mineral-Universidad Agraria La Molina. ROVER ENVIRONMENTAL MONITORING STATION (REMS). Mars Science Laboratory (NASA). 2017. [En línea], Disponible en Web: <http://cab.inta-csic.es/rems/es/descripcion-del-instrumento/sensor-de-humedad-relativa-rhs/> SEEDMECH. Sm 100 [En línea]. (04/11/2017). Disponible en: <https://goo.gl/pkQCMa> Suarez, Wikary. Historia del aspersor [En línea]. (04/11/2017) Disponible en web <https://goo.gl/3cnVtL>
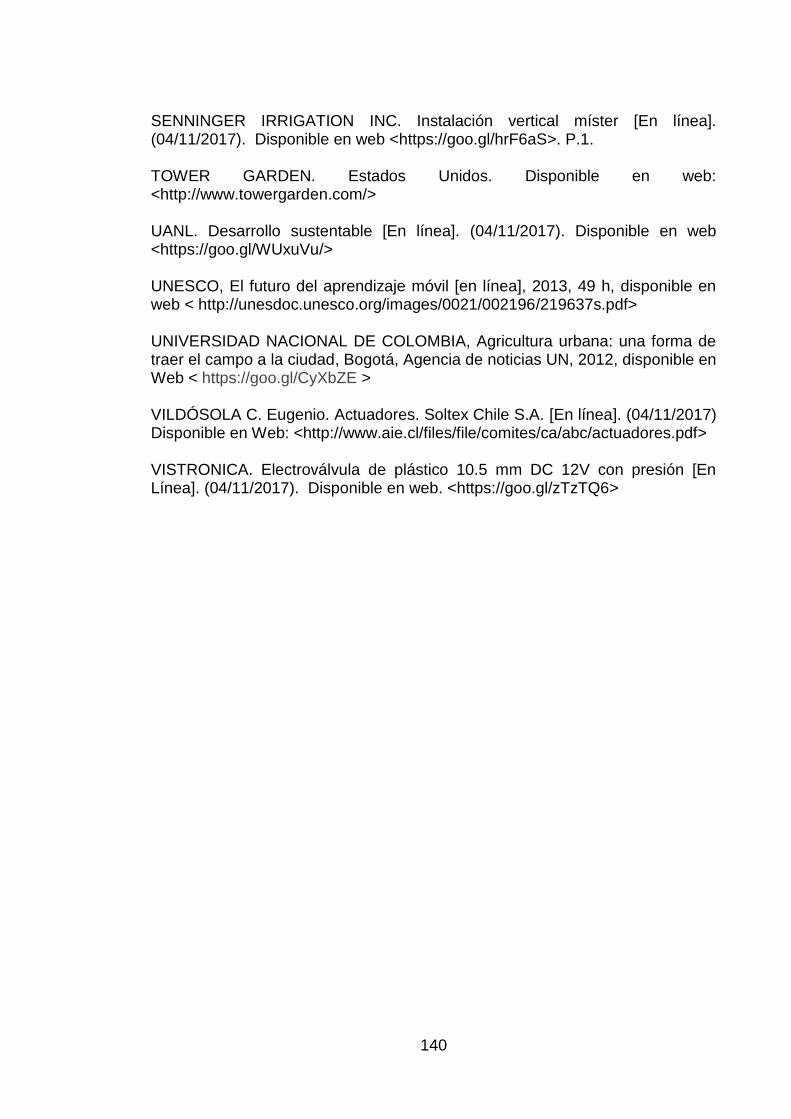
140
SENNINGER IRRIGATION INC. Instalación vertical míster [En línea]. (04/11/2017). Disponible en web <https://goo.gl/hrF6aS>. P.1. TOWER GARDEN. Estados Unidos. Disponible en web: <http://www.towergarden.com/> UANL. Desarrollo sustentable [En línea]. (04/11/2017). Disponible en web <https://goo.gl/WUxuVu/> UNESCO, El futuro del aprendizaje móvil [en línea], 2013, 49 h, disponible en web < http://unesdoc.unesco.org/images/0021/002196/219637s.pdf> UNIVERSIDAD NACIONAL DE COLOMBIA, Agricultura urbana: una forma de traer el campo a la ciudad, Bogotá, Agencia de noticias UN, 2012, disponible en Web < https://goo.gl/CyXbZE > VILDÓSOLA C. Eugenio. Actuadores. Soltex Chile S.A. [En línea]. (04/11/2017) Disponible en Web: <http://www.aie.cl/files/file/comites/ca/abc/actuadores.pdf> VISTRONICA. Electroválvula de plástico 10.5 mm DC 12V con presión [En Línea]. (04/11/2017). Disponible en web. <https://goo.gl/zTzTQ6>

141
ANEXOS
a. Esquemáticos La primera PCV denominada “TARJETA UP” se conforma de los siguientes bloques de circuitos. Anexo a. Alimentación UP
Fuente: Elaboración propia
Anexo b. Tirilla LED
Fuente: Elaboración propia
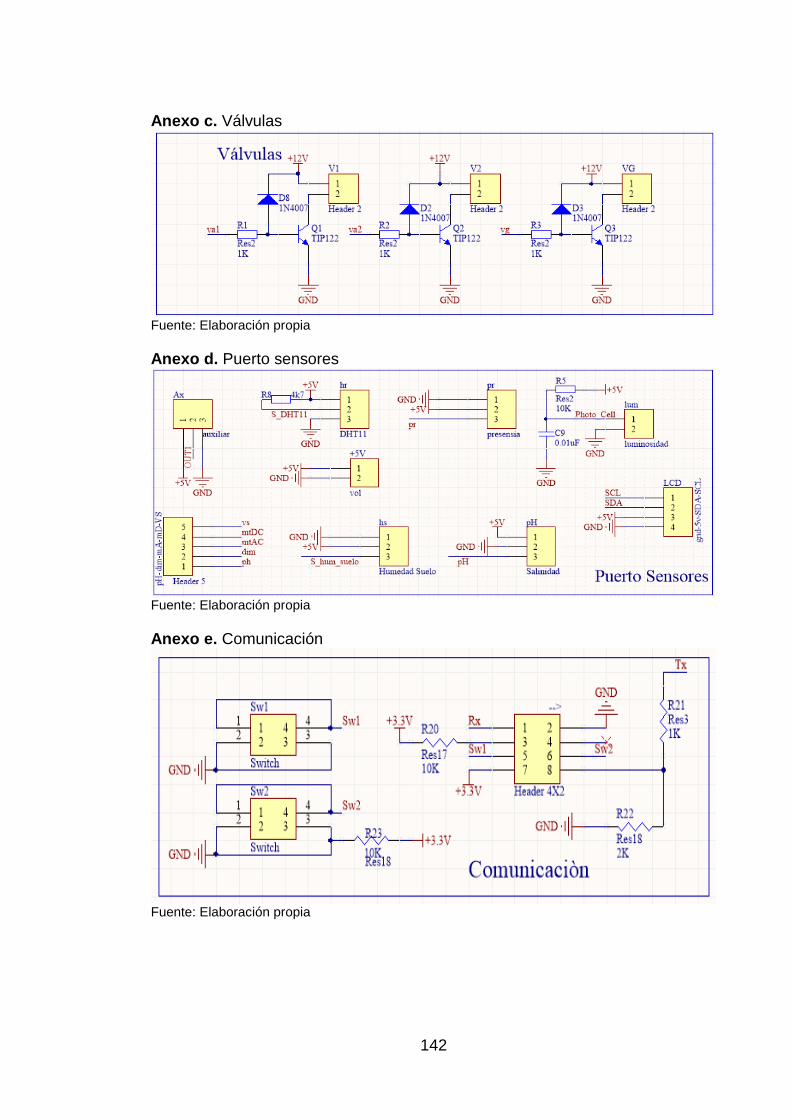
142
Anexo c. Válvulas
Fuente: Elaboración propia
Anexo d. Puerto sensores
Fuente: Elaboración propia
Anexo e. Comunicación
Fuente: Elaboración propia
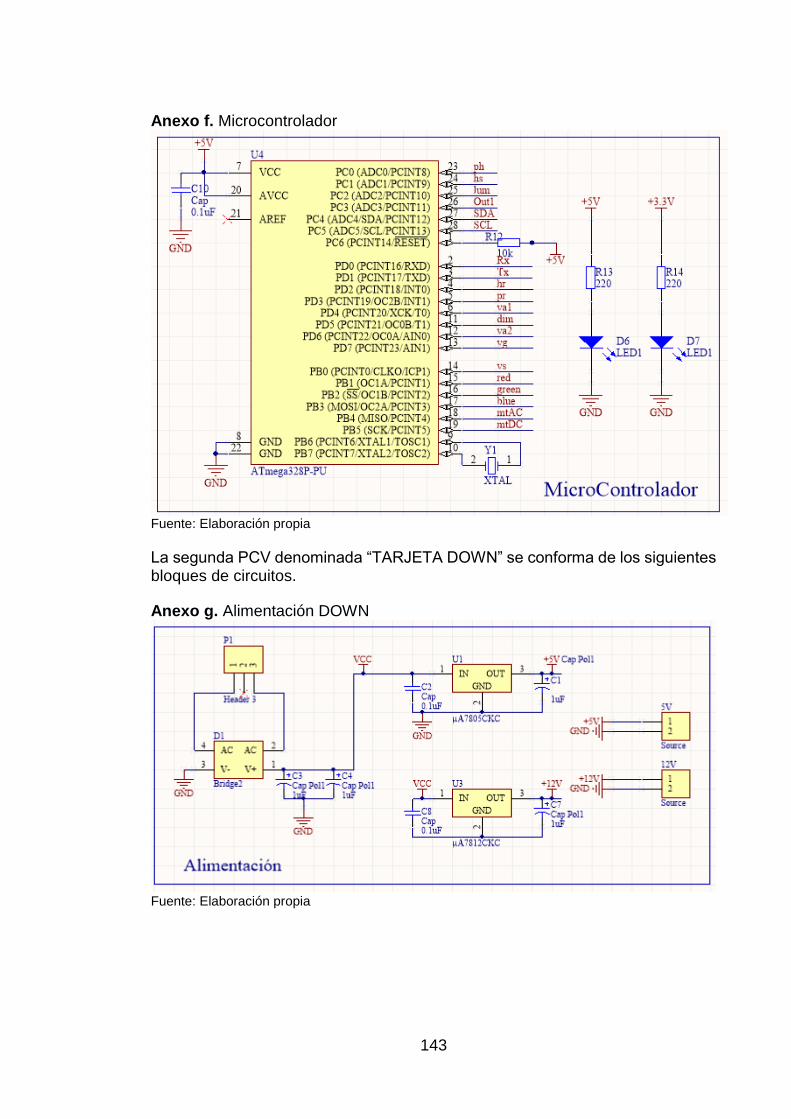
143
Anexo f. Microcontrolador
Fuente: Elaboración propia
La segunda PCV denominada “TARJETA DOWN” se conforma de los siguientes bloques de circuitos.
Anexo g. Alimentación DOWN
Fuente: Elaboración propia
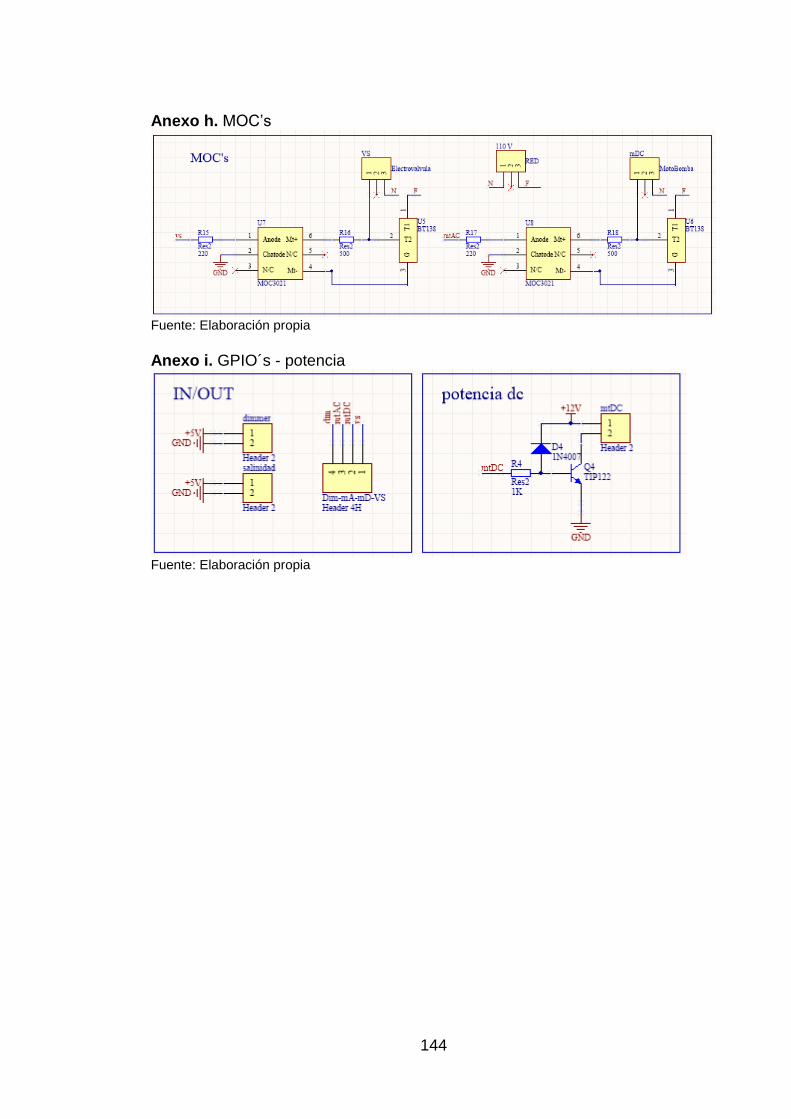
144
Anexo h. MOC’s
Fuente: Elaboración propia
Anexo i. GPIO´s - potencia
Fuente: Elaboración propia
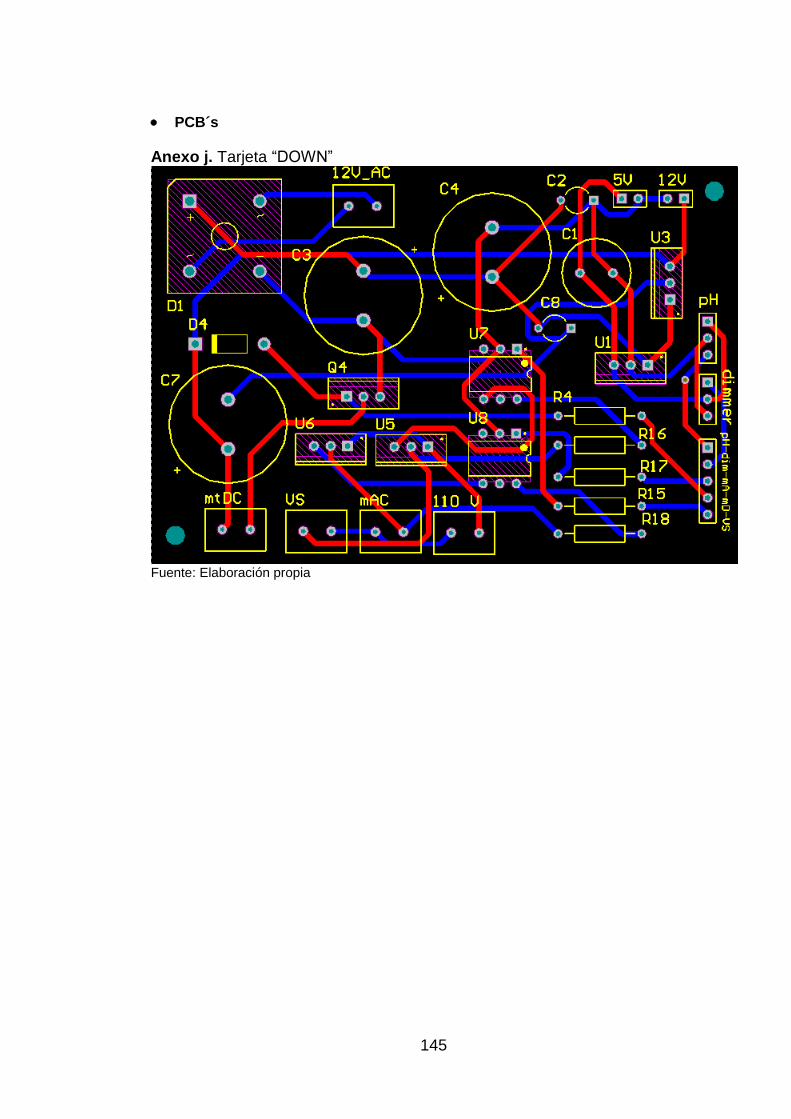
145
PCB´s
Anexo j. Tarjeta “DOWN”
Fuente: Elaboración propia
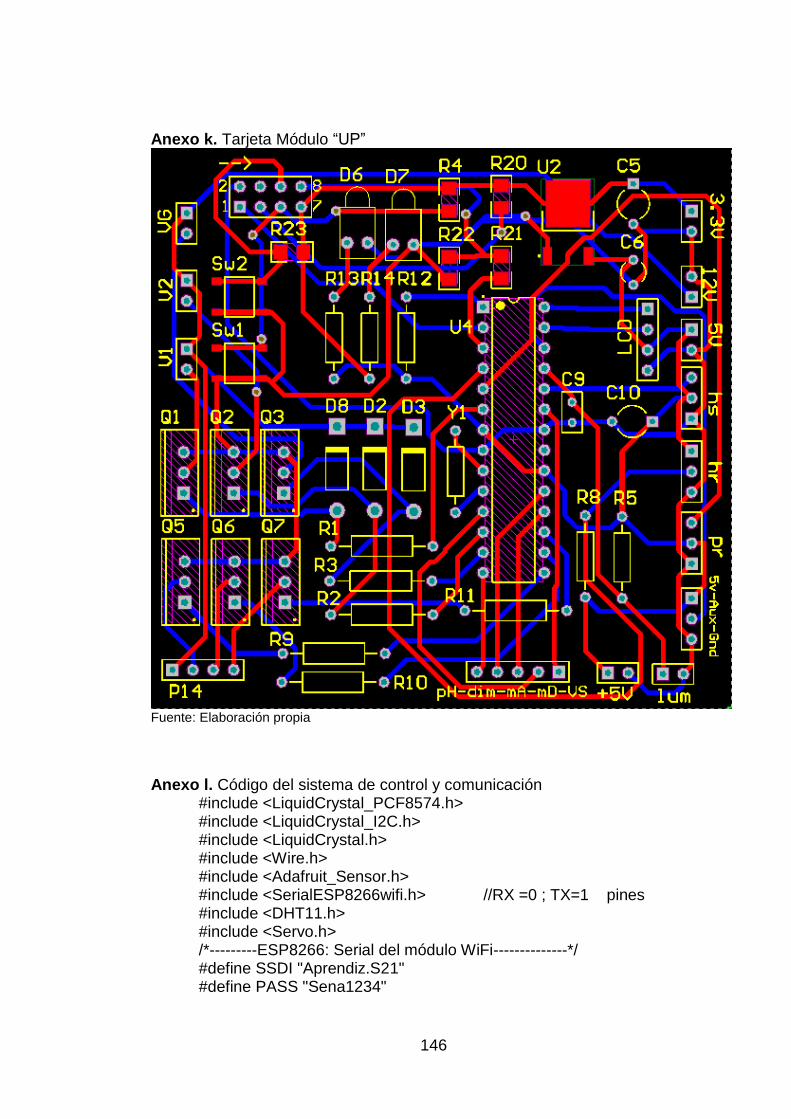
146
Anexo k. Tarjeta Módulo “UP”
Fuente: Elaboración propia
Anexo l. Código del sistema de control y comunicación #include <LiquidCrystal_PCF8574.h> #include <LiquidCrystal_I2C.h> #include <LiquidCrystal.h> #include <Wire.h> #include <Adafruit_Sensor.h> #include <SerialESP8266wifi.h> //RX =0 ; TX=1 pines #include <DHT11.h> #include <Servo.h> /*---------ESP8266: Serial del módulo WiFi--------------*/ #define SSDI "Aprendiz.S21" #define PASS "Sena1234"
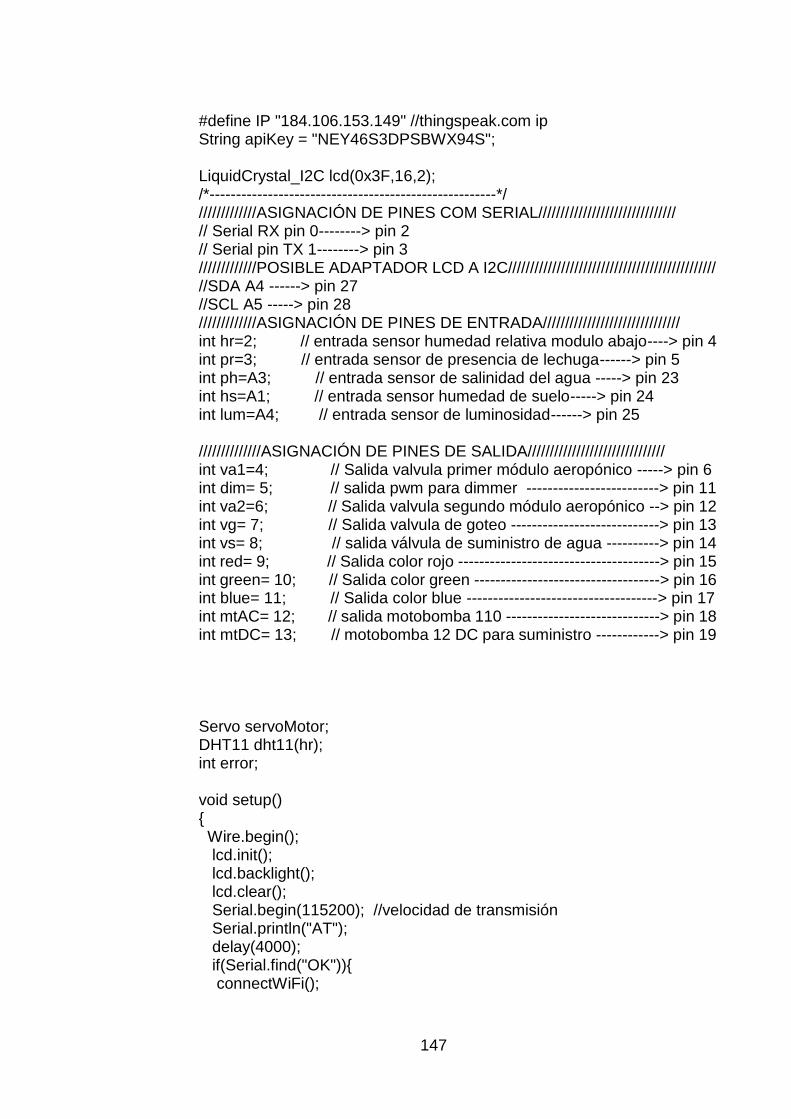
147
#define IP "184.106.153.149" //thingspeak.com ip String apiKey = "NEY46S3DPSBWX94S"; LiquidCrystal_I2C lcd(0x3F,16,2); /*------------------------------------------------------*/ /////////////ASIGNACIÓN DE PINES COM SERIAL/////////////////////////////// // Serial RX pin 0--------> pin 2 // Serial pin TX 1--------> pin 3 /////////////POSIBLE ADAPTADOR LCD A I2C/////////////////////////////////////////////// //SDA A4 ------> pin 27 //SCL A5 -----> pin 28 /////////////ASIGNACIÓN DE PINES DE ENTRADA/////////////////////////////// int hr=2; // entrada sensor humedad relativa modulo abajo----> pin 4 int pr=3; // entrada sensor de presencia de lechuga------> pin 5 int ph=A3; // entrada sensor de salinidad del agua -----> pin 23 int hs=A1; // entrada sensor humedad de suelo-----> pin 24 int lum=A4; // entrada sensor de luminosidad------> pin 25 //////////////ASIGNACIÓN DE PINES DE SALIDA/////////////////////////////// int va1=4; // Salida valvula primer módulo aeropónico -----> pin 6 int dim= 5; // salida pwm para dimmer -------------------------> pin 11 int va2=6; // Salida valvula segundo módulo aeropónico --> pin 12 int vg= 7; // Salida valvula de goteo ----------------------------> pin 13 int vs= 8; // salida válvula de suministro de agua ----------> pin 14 int red= 9; // Salida color rojo --------------------------------------> pin 15 int green= 10; // Salida color green -----------------------------------> pin 16 int blue= 11; // Salida color blue ------------------------------------> pin 17 int mtAC= 12; // salida motobomba 110 -----------------------------> pin 18 int mtDC= 13; // motobomba 12 DC para suministro ------------> pin 19 Servo servoMotor; DHT11 dht11(hr); int error; void setup() { Wire.begin(); lcd.init(); lcd.backlight(); lcd.clear(); Serial.begin(115200); //velocidad de transmisión Serial.println("AT"); delay(4000); if(Serial.find("OK")){ connectWiFi();
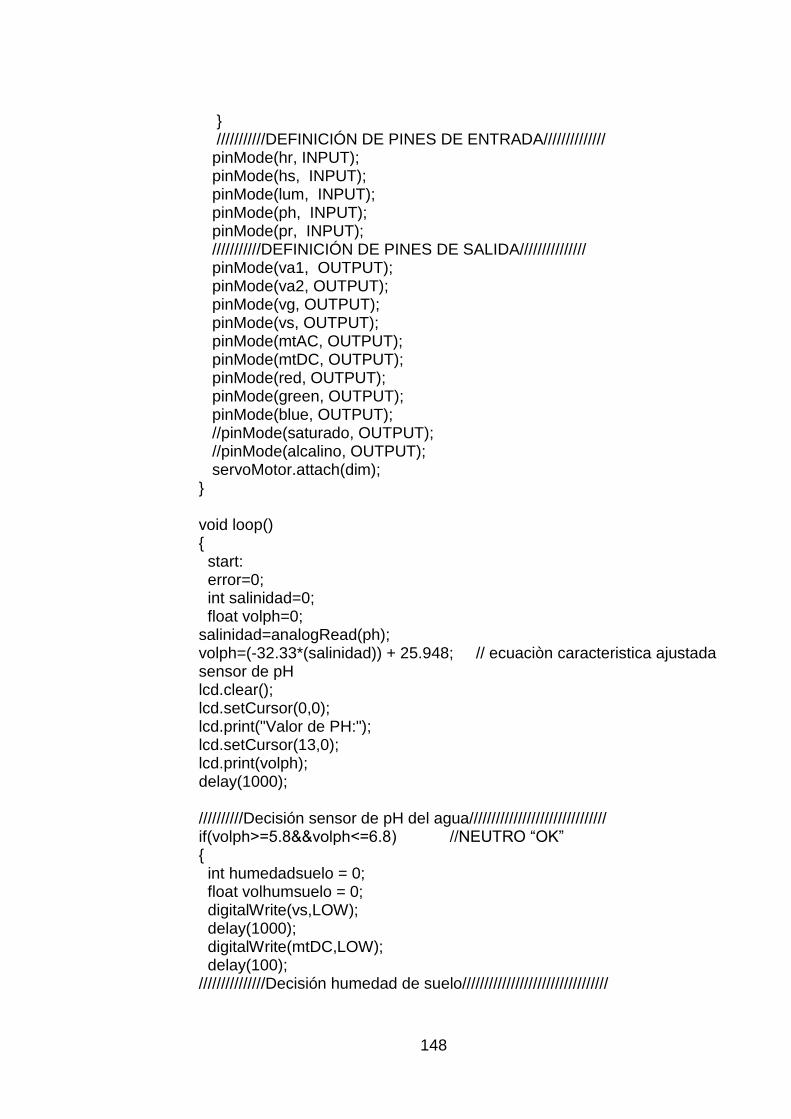
148
} ///////////DEFINICIÓN DE PINES DE ENTRADA////////////// pinMode(hr, INPUT); pinMode(hs, INPUT); pinMode(lum, INPUT); pinMode(ph, INPUT); pinMode(pr, INPUT); ///////////DEFINICIÓN DE PINES DE SALIDA/////////////// pinMode(va1, OUTPUT); pinMode(va2, OUTPUT); pinMode(vg, OUTPUT); pinMode(vs, OUTPUT); pinMode(mtAC, OUTPUT); pinMode(mtDC, OUTPUT); pinMode(red, OUTPUT); pinMode(green, OUTPUT); pinMode(blue, OUTPUT); //pinMode(saturado, OUTPUT); //pinMode(alcalino, OUTPUT); servoMotor.attach(dim); } void loop() { start: error=0; int salinidad=0; float volph=0; salinidad=analogRead(ph); volph=(-32.33*(salinidad)) + 25.948; // ecuaciòn caracteristica ajustada sensor de pH lcd.clear(); lcd.setCursor(0,0); lcd.print("Valor de PH:"); lcd.setCursor(13,0); lcd.print(volph); delay(1000); //////////Decisión sensor de pH del agua/////////////////////////////// if(volph>=5.8&&volph<=6.8) //NEUTRO “OK” { int humedadsuelo = 0; float volhumsuelo = 0; digitalWrite(vs,LOW); delay(1000); digitalWrite(mtDC,LOW); delay(100); ///////////////Decisión humedad de suelo/////////////////////////////////
149
humedadsuelo=analogRead(hs); volhumsuelo= (0.0002*pow(humedadsuelo , 2)) - (0.1378*(humedadsuelo)) + 42.849 ; //ecuación caracteristica ajustada sensor humedad de suelo lcd.setCursor(0,1); lcd.print("Hum.Suelo:"); lcd.setCursor(11,1); lcd.print(volhumsuelo); lcd.setCursor(16,1); lcd.print("%"); delay(1000); while (volhumsuelo>=0.0&&volhumsuelo<=24.9) //suelo seco { humedadsuelo=analogRead(hs); float volhumsuelo= (0.0002* pow(humedadsuelo , 2)) - (0.1378*(humedadsuelo)) + 42.849 ; digitalWrite(vg, HIGH); delay(500); analogWrite(dim, 0); delay(500); digitalWrite(mtAC, HIGH); lcd.clear(); lcd.setCursor(0,0); lcd.print("Hum.Suelo:"); lcd.setCursor(11,0); lcd.print(volhumsuelo); lcd.setCursor(16,0); lcd.print("%"); lcd.setCursor(0,1); lcd.print("Suelo seco"); delay(1000); } if(volhumsuelo>=50.1&&volhumsuelo<=100.0) //suelo saturado { lcd.clear(); lcd.setCursor(4,0); lcd.print("Cuidado!!!"); lcd.setCursor(1,1); lcd.print("Suelo Saturado"); delay(1000); }else //Suelo humedo "OK" { lcd.clear(); lcd.setCursor(0,0); lcd.print("Suelo Humedo:"); lcd.setCursor(0,1); lcd.print(humedadsuelo);
150
delay(1000); } digitalWrite(mtAC,LOW); delay(500); digitalWrite(vg, LOW); int luz; float volluz; luz=analogRead(lum); volluz=-3569*log(luz) + 24531; lcd.clear(); lcd.setCursor(0,0); lcd.print("Lum: "); lcd.setCursor(6,0); lcd.print(volluz); if(volluz>=100.0&&volluz<=300.0) //luminosidad media { analogWrite(red,190); analogWrite(blue,190); lcd.setCursor(0,1); lcd.print("Luminos. media"); delay(1000); }else { if(volluz>=0.0&&volluz<=99.0) //luminosidad baja { analogWrite(red,255); analogWrite(blue,255); lcd.setCursor(0,1); lcd.print("Luminos. baja"); delay(1000); }else // luminosidad alta { analogWrite(red,127); analogWrite(blue,127); lcd.setCursor(0,1); lcd.print("Luminos. alta"); delay(1000); } } //////////////verificar si hay planta en los módulos aeropónicos////////////////// int presencia; presencia=digitalRead(pr); //lectura digital del sensor de presencia
151
if(presencia==0) //si el sensor de presencia detecta algun objeto=0, si no detecta nada=1 { lcd.clear(); lcd.setCursor(0,0); lcd.print("FASE DESARROLLO!"); delay(1000); ////////////Decisión Sensor Humedad relativa de los modulos aeroponicos////////////////// int err; float temp, hum; float humedad=0; if((err=dht11.read(hum, temp))==0) { humedad = (0.3857*(hum)) + 38.269; lcd.clear(); lcd.setCursor(0,0); lcd.print("Hum. Relativa:"); lcd.setCursor(0,1); lcd.print(humedad); lcd.setCursor(7,1); lcd.print("%"); delay(1000); while (humedad>=0.0&&humedad<=59.0) //Rango de humedad relativa baja { dht11.read(hum, temp); humedad = (0.3857*(hum)) + 38.269; lcd.clear(); lcd.setCursor(0,0); lcd.print("H. Relativa baja"); lcd.setCursor(0,1); lcd.print(humedad); lcd.setCursor(7,1); lcd.print("%"); delay(1000); digitalWrite(va1,HIGH); delay(100); digitalWrite(va2,HIGH); delay(1000); analogWrite(dim,180); delay(1000); digitalWrite(mtAC,HIGH); delay(100); }
152
if(humedad>=70.0&&humedad<=100.0) // humedad relativa a la que deben estar las lechugas entre 60% y 70% HR { lcd.setCursor(0,0); lcd.print("H. Relativa alta"); lcd.setCursor(0,1); lcd.print(humedad); lcd.setCursor(7,1); lcd.print("%"); delay(1000); }else { lcd.clear(); lcd.setCursor(0,0); lcd.print("H.Relativa Media"); lcd.setCursor(0,1); lcd.print(humedad); lcd.setCursor(7,1); lcd.print("%"); delay(1000); } digitalWrite(mtAC,LOW); delay(500); digitalWrite(va1,LOW); delay(100); digitalWrite(va2,LOW); delay(100); } else { lcd.clear(); lcd.setCursor(0,0); lcd.print("Error Num:"); lcd.setCursor(0,1); lcd.print(err); delay(1000); } delay(2000); } else { lcd.clear(); lcd.setCursor(0,0); lcd.print("FASE GERMINACION"); delay(1000); digitalWrite(va1, LOW); }
153
}else{ if(volph>=0.0&&volph<=5.7) //ACIDO { digitalWrite(vs,HIGH); delay(500); digitalWrite(mtDC,HIGH); delay(100); }else { Serial.print("Alcalino favor ingresar nutrientes adecuados"); lcd.clear(); lcd.setCursor(0,0); lcd.print("pH Alcalino"); lcd.setCursor(0,1); lcd.print("Ingrese Nutrien."); delay(3000); } } updateVariable(); if(error==1){ goto start; } delay(60000); } void updateVariable(){ String cmd = "AT+CIPSTART=\"TCP\",\""; cmd += IP; cmd += "\",80"; Serial.println(cmd); delay(2000); if(Serial.find("Error")){ return; } //Las variables a mostrar: hr, pr, ph, hs, lum, saturado, alcalino. cmd = apiKey; cmd += "&field1="; cmd += hr; cmd += "&field2="; cmd += pr; cmd += "&field3="; cmd += ph; cmd += "&field4="; cmd += hs; cmd += "&field5="; cmd += lum; //cmd += "&field6="; //cmd += alcalino;
154
cmd += "\r\n"; Serial.print("AT+CIPSEND="); Serial.print(cmd.length()); if(Serial.find(">")){ Serial.println(cmd); } else{ Serial.println("AT+CIPCLOSE"); error = 1; } } //Se configura el nombre de la red y la clave mediante comando AT al módulo ESP8266, boolean connectWiFi(){ Serial.println("AT+CWMODE=1"); delay(2000); String cmd = "AT+CWJAP=\""; cmd += SSDI; cmd += "\",\""; cmd += PASS; cmd += "\""; Serial.println(cmd); delay(4000); if(Serial.find("OK")){ return true; } else{ return false } } }
} Anexo m. Datasheets
Los datasheets de los elementos electrónicos importantes como sensores y módulo de comunicación y microcontrolador se muestran en la carpeta “DataSheets” que se encuentra en el CD.
155
MANUAL DE USUARIO “Cultivo vertical aeropónico”
MENÚ
I. DESCRIPCIÓN GENERAL PROTOTIPO II. INSTALACIÓN DE EQUIPO III. CONEXIÓN DE LOS ELEMENTOS IV. SIEMBRA Y TRASPLANTE V. PRECAUCIONES Y PROBLEMAS FRECUENTES I. DESCRIPCIÓN GENERAL PROTOTIPO Este prototipo está compuesto por una estructura puesta sobre una pared o bien sea sobre algún soporte que sea capaz de sostenerlo verticalmente, sensores y actuadores escogidos previamente. El prototipo contiene además un sistema de riego por medio de un circuito de mangueras con sus aspersores que están distribuidas de tal modo que abastecen de agua a las plantas. Adicionalmente posee dos tanques de abastecimiento de agua, uno para el riego de agua y nutrientes para las plantas y el segundo para el suministro de agua al primer tanque. El prototipo está compuesto por los siguientes elementos y dispositivos: Módulos aeropónicos. Circuito de riego por mangueras. Sistema de nebulización de agua. Sistema de goteo de agua. 2 tanques de abastecimiento de agua. 2 bombas de agua para el sistema de riego. Sistema de control de variables. Sistema de alimentación del prototipo. Sensor de presencia de plantas. Sensor de humedad relativa. Sensor de humedad de suelo. Sensor de pH del agua. Sensor de luminosidad. Luces led de iluminación para espacios con poca luz. II. INSTALACIÓN DEL EQUIPO A continuación, se muestra un esquema general de instalación el cual en el transcurso de este manual se mostrarán como deben ir las conexiones de todos los elementos.

156
Anexo n. Instalación de prototipo de cultivo
Fuente: Elaboración propia
En el anexo n se muestra el esquema del sistema de módulos aeropónicos y de germinación de semillas, la red del sistema de riego, las electroválvulas y las cintas LED. Igualmente se muestra la ubicación de los sensores que medirán las variables de luminosidad, humedad relativa y humedad de suelo.
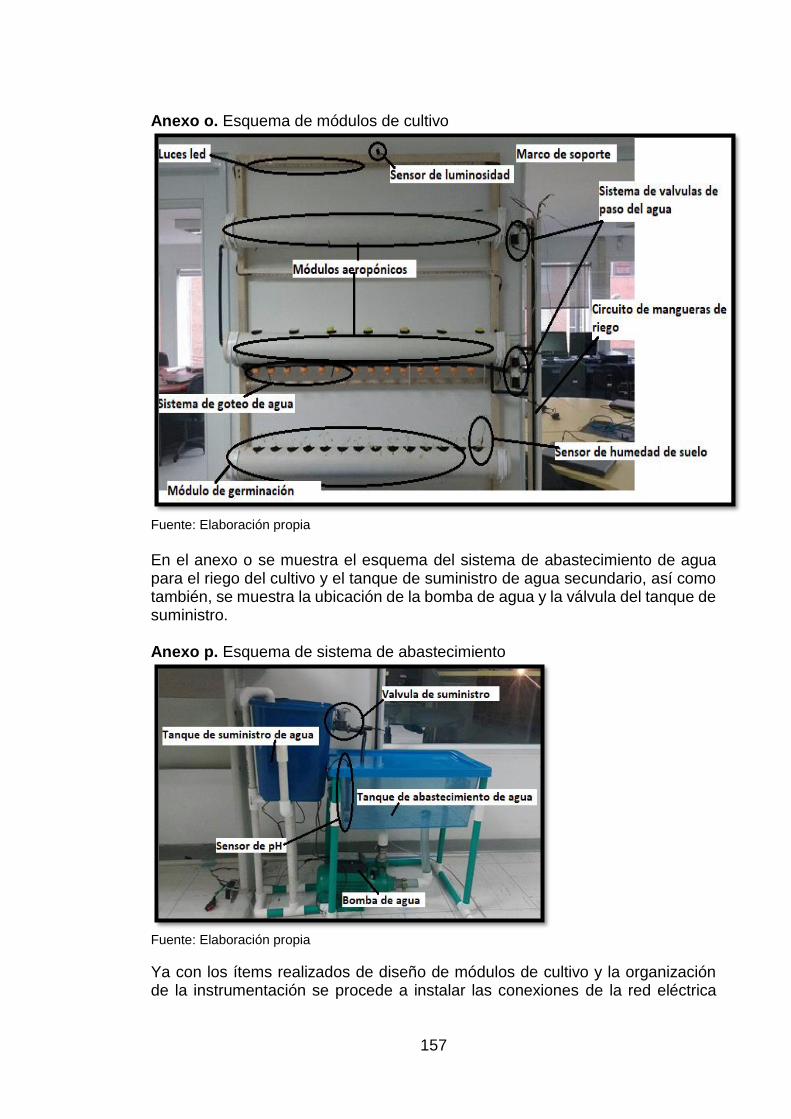
157
Anexo o. Esquema de módulos de cultivo
Fuente: Elaboración propia En el anexo o se muestra el esquema del sistema de abastecimiento de agua para el riego del cultivo y el tanque de suministro de agua secundario, así como también, se muestra la ubicación de la bomba de agua y la válvula del tanque de suministro. Anexo p. Esquema de sistema de abastecimiento
Fuente: Elaboración propia
Ya con los ítems realizados de diseño de módulos de cultivo y la organización de la instrumentación se procede a instalar las conexiones de la red eléctrica

158
como se muestra en el anexo p el cual consta de un switch de 110V, un conector macho de 110V y un fusible de 7A en serie el cual permite encender el sistema. Anexo q. Alimentación del sistema
Fuente: Elaboración propia

159
III. CONEXIÓN DE LOS ELEMENTOS
Las conexiones de la tarjeta “DOWN” las cuales consta de salidas y entradas de alimentación hacia la tarjeta “UP”, borneras donde se conectan los actuadores y el bus de datos para el control de los elementos se conectan como se muestra en el anexo r. Anexo r. Conexión tarjeta “DOWN”
Fuente: Elaboración propia
La conexión de la tarjeta “UP” consta de las entradas de alimentación, el bus de datos para la lectura y control de los elementos y los pines donde se conectan los actuadores y la LCD, también, debe tenerse en cuenta la posición en la cual va conectado el módulo WiFi como se muestra en el anexo s.
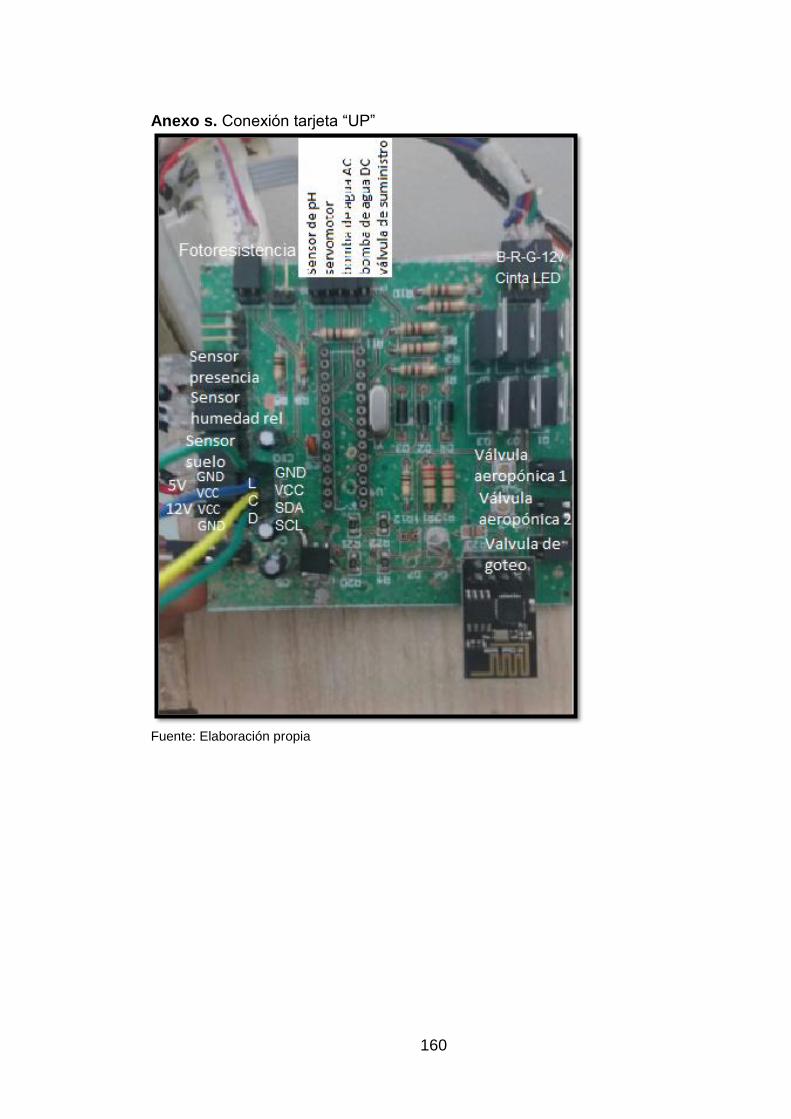
160
Anexo s. Conexión tarjeta “UP”
Fuente: Elaboración propia
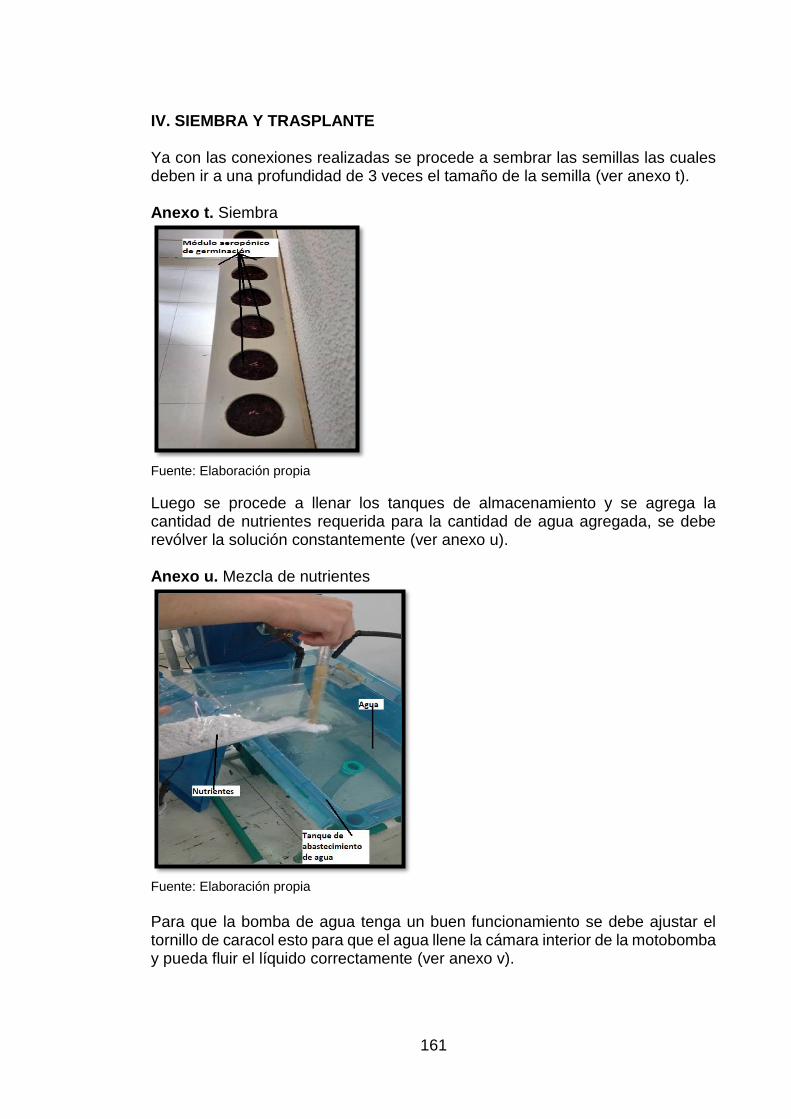
161
IV. SIEMBRA Y TRASPLANTE
Ya con las conexiones realizadas se procede a sembrar las semillas las cuales deben ir a una profundidad de 3 veces el tamaño de la semilla (ver anexo t). Anexo t. Siembra
Fuente: Elaboración propia
Luego se procede a llenar los tanques de almacenamiento y se agrega la cantidad de nutrientes requerida para la cantidad de agua agregada, se debe revólver la solución constantemente (ver anexo u). Anexo u. Mezcla de nutrientes
Fuente: Elaboración propia Para que la bomba de agua tenga un buen funcionamiento se debe ajustar el tornillo de caracol esto para que el agua llene la cámara interior de la motobomba y pueda fluir el líquido correctamente (ver anexo v).
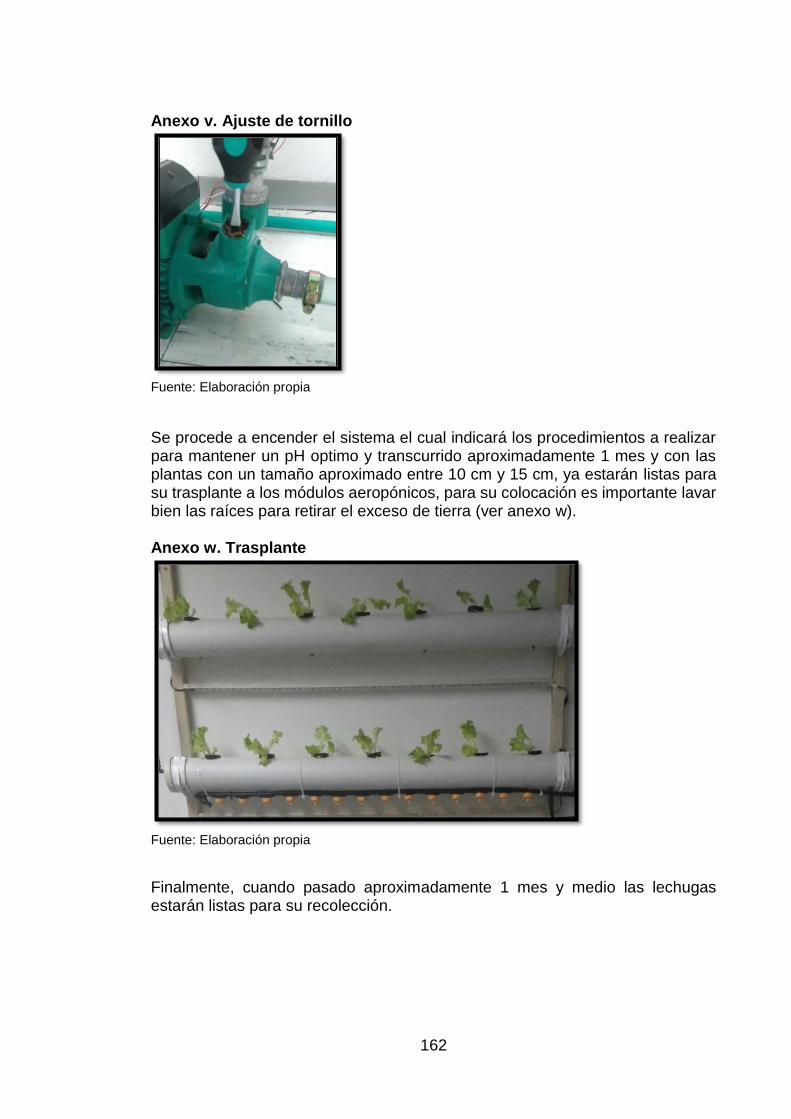
162
Anexo v. Ajuste de tornillo
Fuente: Elaboración propia
Se procede a encender el sistema el cual indicará los procedimientos a realizar para mantener un pH optimo y transcurrido aproximadamente 1 mes y con las plantas con un tamaño aproximado entre 10 cm y 15 cm, ya estarán listas para su trasplante a los módulos aeropónicos, para su colocación es importante lavar bien las raíces para retirar el exceso de tierra (ver anexo w). Anexo w. Trasplante
Fuente: Elaboración propia
Finalmente, cuando pasado aproximadamente 1 mes y medio las lechugas estarán listas para su recolección.
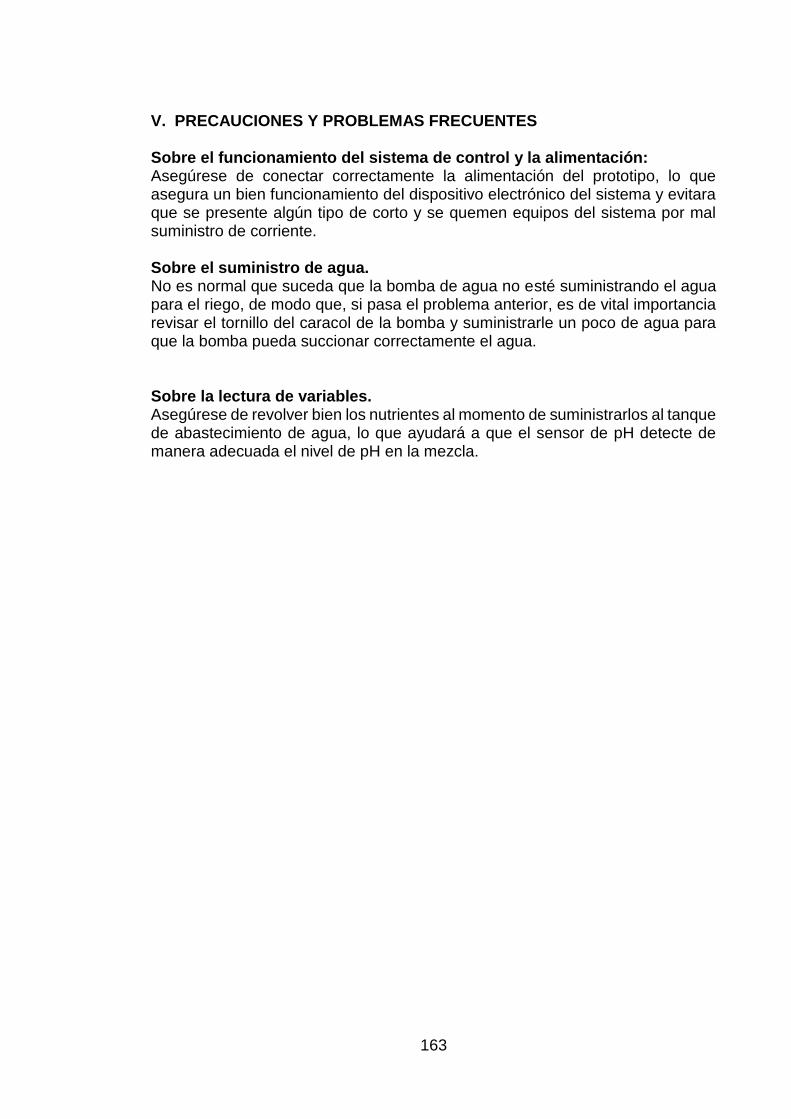
163
V. PRECAUCIONES Y PROBLEMAS FRECUENTES Sobre el funcionamiento del sistema de control y la alimentación: Asegúrese de conectar correctamente la alimentación del prototipo, lo que asegura un bien funcionamiento del dispositivo electrónico del sistema y evitara que se presente algún tipo de corto y se quemen equipos del sistema por mal suministro de corriente. Sobre el suministro de agua. No es normal que suceda que la bomba de agua no esté suministrando el agua para el riego, de modo que, si pasa el problema anterior, es de vital importancia revisar el tornillo del caracol de la bomba y suministrarle un poco de agua para que la bomba pueda succionar correctamente el agua. Sobre la lectura de variables. Asegúrese de revolver bien los nutrientes al momento de suministrarlos al tanque de abastecimiento de agua, lo que ayudará a que el sensor de pH detecte de manera adecuada el nivel de pH en la mezcla.